150-QS003E-PT-P, Controlador inteligente de motores SMC-50...
40
Controlador inteligente de motores SMC-50 Cód. cat.150 Início rápido Tradução de instruções originais
Transcript of 150-QS003E-PT-P, Controlador inteligente de motores SMC-50...

Controlador inteligente de motores SMC-50Cód. cat.150
Início rápidoTradução de instruções originais

Informações importantes para o usuário
Leia este documento e os documentos listados na seção de recursos adicionais a respeito da instalação, configuração e operação do equipamento antes de instalar, configurar, operar ou realizar manutenção no produto. Os usuários são obrigados a se familiarizar com instruções de instalação e de fiação, além de requisitos de todas as leis, normas e códigos aplicáveis.
Atividades incluindo a instalação, os ajustes, colocação em serviço, uso, montagem, desmontagem e manutenção devem ser realizadas por pessoal adequadamente treinado em conformidade com o código aplicável de práticas.
Se este produto for utilizado de maneira não especificada pelo fabricante, a proteção fornecida pelo equipamento poderá ser prejudicada.
Em nenhum caso, a Rockwell Automation, Inc. será responsável por danos indiretos ou resultantes do uso ou da aplicação deste equipamento.
Os exemplos e os diagramas presentes neste manual se destinam unicamente a fins ilustrativos. A Rockwell Automation, Inc. não se responsabiliza pelo uso real com base nos exemplos e nos diagramas, devido a variações e especificações diversas associadas a qualquer instalação específica.
Nenhuma responsabilidade de patente será assumida pela Rockwell Automation, Inc. no que diz respeito ao uso de informação, circuitos, equipamentos ou software descritos neste manual.
É proibida a reprodução parcial ou integral do conteúdo deste manual sem a permissão por escrito da Rockwell Automation, Inc.
Ao longo deste, sempre que necessário, serão utilizadas notas para alertá-lo sobre tópicos de segurança.
As etiquetas também podem estar sobre ou dentro do equipamento, para informar sobre precauções específicas.
ADVERTÊNCIA: Identifica informações sobre práticas ou circunstâncias que podem causar uma explosão na área classificada, o que pode levar a ferimentos pessoais ou morte, danos a propriedades e prejuízo econômico.
ATENÇÃO: Identifica informações sobre práticas ou circunstâncias que podem levar a ferimentos pessoais ou morte, danos a propriedades ou prejuízo econômico. Os símbolos de atenção ajudam você a identificar e evitar os perigos e reconhecer as consequências.
IMPORTANTE Identifica informações essenciais para a aplicação e a compreensão bem-sucedidas do produto.
PERIGO DE CHOQUE: As etiquetas podem estar dentro do equipamento, por exemplo, em um inversor ou um motor, para alertar sobre a presença de tensão perigosa.
PERIGO DE QUEIMADURA: As etiquetas podem estar dentro do equipamento, por exemplo, em um inversor ou um motor, para alertar sobre o fato de que as superfícies podem alcançar temperaturas perigosas.
PERIGO DE ARCO ELÉTRICO: As etiquetas podem estar dentro do equipamento, por exemplo, em um centro de controle de motores, para alertar sobre a possibilidade de arcos elétricos. Os arcos elétricos podem causar danos sérios ou morte. Use equipamento de proteção individual (EPI). Siga TODAS as especificações de regulamentação a respeito das práticas de trabalho seguro e do equipamento de proteção individual (EPI).

Sumário
Prefácio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3Sobre esta publicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Recursos adicionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Terminologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Precauções Gerais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Resumo das alterações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Capítulo 1Instalação Gabinetes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Requisitos de montagem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Dimensões. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9Fiação de alimentação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10Terminais de alimentação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Diagramas típicos de potência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12Fiação de comando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Borne de controle padrão. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13Especificações da fiação de comando. . . . . . . . . . . . . . . . . . . . . . . . . 13Exemplos de fiação típica do comando. . . . . . . . . . . . . . . . . . . . . . . 15
Fiação do ventilador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Unidades de bypass integrado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Unidades de estado sólido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Unidades atualizadas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Módulos opcionais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Operação de bypass e diagramas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Controladores SMC-50 com bypass interno . . . . . . . . . . . . . . . . . 19Controladores SMC-50 com bypass externo . . . . . . . . . . . . . . . . . 19
Capítulo 2Programação Configuração de parâmetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Configuração do parâmetro usando uma 20-HIM-A6 (FRN1.006 ou posterior). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Acesso básico ao parâmetro e estrutura de arquivo/categoria . . . . . . 24Acesso ao parâmetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24Estrutura do arquivo/categoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Configuração rápida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Capítulo 3Operação e localização de falhas Operação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Configuração do motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Ajuste do motor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Controle de carga resistiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30Localização de falhas com LEDs de diagnóstico . . . . . . . . . . . . . . . . . . 31
Indicador de status do LED do controlador . . . . . . . . . . . . . . . . . . 31Localização de falhas com equipamento de monitoramento . . . . . . . 31Localização de falhas através do código de falha – Listagem abreviada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 1

Sumário
Apêndice AClassificações SCCR Classificações SCCR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Prefácio
Sobre esta publicação Este guia de início rápido fornece as informações básicas necessárias para instalação, início e programação de seu SMC™-50 Soft Starter.
O SMC-50 soft starter é uma partida suave de tensão reduzida que usa um módulo de controle baseado em microprocessador de última geração. Ao utilizar seis SCRs back-to-back (dois por fase), o SMC-50 proporciona aceleração controlada, operação/execução e desaceleração de motores de indução assíncronos padrão. As estruturas de alimentação estão disponíveis com ou sem um contator bypass integrado (estado sólido).
As informações fornecidas neste guia de início rápido não substituem o manual do usuário. O guia de início rápido presume que o instalador é uma pessoa qualificada com experiência prévia e compreensão básica da terminologia elétrica, procedimentos de configuração, equipamento necessário e precauções de segurança.
Para segurança do pessoal de manutenção e outros que possam estar expostos a riscos elétricos associados às atividades de manutenção, siga todas as práticas locais de trabalho relacionadas à segurança (como NFPA 70E, Parte II nos Estados Unidos). O pessoal de manutenção deve ser treinado em práticas de segurança, procedimentos e solicitações relacionadas às respectivas atribuições do trabalho.
Recursos adicionais Estes documentos contêm informações adicionais sobre os produtos relacionados da Rockwell Automation.
É possível visualizar ou baixar publicações em http://www.rockwellautomation.com/global/literature-library/overview.page. Para pedir cópias impressas da documentação técnica, entre em contato com seu distribuidor local Allen-Bradley ou representante de vendas Rockwell Automation.
Terminologia Ao longo desta publicação, usamos como referência ao 'SMC-50 soft starter' também o termo controlador SMC-50. Esses termos são intercambiáveis.
Recurso Descrição
Manual do usuário do controlador SMC-50, publicação 150-UM011 Fornece informações abrangentes para o usuário do controlador SMC-50.
Guia de seleção do controlador SMC-50, publicação 150-SG010 Fornece informações abrangentes para escolha do controlador SMC-50 e seus acessórios.
PowerFlex™ 20-HIM-A6 e 20-HIM-C6S HIM (interface homem-máquina), publicação 20HIM-UM001
Fornece informações importantes para o usuário das interface homem-máquina 20-HIM.
Orientação sobre fiação de automação industrial e aterramento, publicação 1770-4.1 Fornece orientações gerais para instalar um sistema industrial Rockwell Automation.
Website de certificações de produto,http://www.rockwellautomation.com/global/certification/overview.page
Fornece declarações de conformidade, certificados e outros detalhes de certificação.
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 3
Prefácio
Precauções Gerais
ADVERTÊNCIA: • Somente pessoal familiarizado com o controlador e máquinas associadas deve planejar ou implementar a instalação, a partida e a subsequente
manutenção do sistema. A falha em fazê-lo pode resultar em ferimentos pessoais e/ou danos ao equipamento.
• Há tensão perigosa presente no circuito do motor mesmo quando o controlador SMC-50 está desligado. Para evitar riscos de choque, desconecte a alimentação principal antes de trabalhar no controlador, no motor e nos dispositivos de controle, tais como botões pulsadores de Partida-Parada. Os procedimentos que exigem energização das peças dos equipamentos durante a localização de falhas, os testes etc. devem ser realizados por pessoal adequadamente qualificado, utilizando práticas locais adequadas de segurança e medidas de precaução.
• A falha dos componentes do interruptor de estado sólido pode causar superaquecimento devido a uma condição monofásica no motor. Para evitar lesões pessoais ou danos ao equipamento, recomenda-se o uso de um contator de isolamento ou um disjuntor do tipo de desarme do disjuntor principal no lado da alimentação do controlador SMC. Este dispositivo deve ser capaz de interromper a corrente de rotor travado do motor.
• As tensões perigosas que podem causar choque, queimaduras ou morte são apresentadas no L1, L2, L3, T1, T2 e T3. Para unidades de desvio interno, as tensões perigosas também estão presentes no T4, T5 e T6. As tampas dos terminais de alimentação para unidades classificadas de 90 a 180 A (estado sólido) e 108 a 480 A (desvio integrado) podem ser instaladas para evitar contato inadvertido com os terminais. Desconecte a alimentação principal antes de fazer a manutenção do controlador do motor, no motor ou na fiação associada.
ATENÇÃO:
• Precauções de controle estático são necessárias ao instalar, testar, fazer manutenção ou reparo do conjunto. O controlador contém peças e conjuntos sensíveis à descarga eletrostática (ESD). Podem ocorrer danos nos componentes se os procedimentos de controle de ESD não forem seguidos. Caso não esteja familiarizado com os procedimentos de controle estático, consulte os manuais de proteção ESD aplicáveis.
• Modos de parada, tais como frenagem, não devem ser usados como parada de emergência. Você é responsável por determinar qual modo de parada melhor adapta-se à sua aplicação. Consulte os padrões aplicáveis para as solicitações de parada de emergência.
• Os modos de parada por desaceleração linear e bomba podem causar aquecimento do motor. Dependendo da dinâmica mecânica do sistema, escolha o menor ajuste de parâmetro do tempo de parada que pare o motor de modo satisfatório.
• A execução em baixa velocidade não se destina à operação contínua. Isso deve-se à redução do resfriamento do motor.
• Dois dispositivos periféricos podem ser conectados à porta da interface de programação direta (DPI™) localizada no módulo de controle. A corrente máxima de saída através da porta DPI é de 560 mA. NOTA: Uma interface homem-máquina (HIM) localizada na porta/moldura IHM do módulo de controle (veja Figura 9) também retira potência da porta DPI.
• Desconecte o controlador da fonte de alimentação ao instalar ou inspecionar os módulos capacitor e protetor. Estes módulos devem ser inspecionados periodicamente quanto a danos ou descoloração. Substitua o módulo se ele estiver danificado ou a vedação ou componentes transparentes estiverem descoloridos.
• Podem ser necessárias considerações adicionais para compatibilidade eletromagnética. Consulte Manual do usuário do controlador SMC-50, publicação 150-UM011.
4 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Prefácio
Material perclorato – manuseio especial pode ser aplicável. Consulte www.dtsc.ca.gov/hazardouswaste/perchlorate.
Esta advertência sobre perclorato aplica-se somente às células primárias ou baterias de dióxido de manganês de lítio (LiMnO2) e aos produtos que contêm essas células ou baterias, vendidos ou distribuídos na Califórnia, EUA.
Resumo das alterações Este manual inclui informações sobre o controlador SMC-50 com opção de bypass interno. Ele também atualiza e corrige informações das revisões anteriores.
ATENÇÃO:
• O controlador deve ser aplicado e instalado corretamente. Se aplicado ou instalado incorretamente, podem ocorrer danos aos componentes ou redução na vida útil do produto. O sistema pode apresentar falhas se ocorrerem os seguintes erros de fiação ou aplicação: subdimensionamento do motor, utilização de um controlador de dimensão inadequada, utilização de uma alimentação CA incorreta ou inadequada, temperatura ambiente excessiva ou qualidade de energia.
• Programe o parâmetro de Sobrecarga do Motor para fornecer a proteção adequada. A configuração de sobrecarga deve ser coordenada adequadamente com o motor.
• Este produto foi projetado e testado como equipamento Classe A quanto à compatibilidade eletromagnética (EMC). O uso deste produto em ambientes domésticos pode causar radiointerferência e, neste caso, o instalador pode precisar empregar métodos adequados de redução.
• Desconecte o controlador do motor antes de medir a resistência de isolamento (IR) dos enrolamentos do motor. As tensões usadas para o teste Megger podem causar falha no retificador controlado de silício (SCR). Não faça medições no controlador com uma resistência de isolamento (IR) ou um teste Megger.
• Para proteger o controlador inteligente de motores (SMC) e/ou o motor contra os surtos de tensão da linha, coloque módulos protetores na linha, carga ou nos dois lados do controlador SMC. Não coloque módulos protetores no lado da carga do controlador SMC ao utilizar uma conexão de motor triângulo ou com bomba, desaceleração linear ou controle de frenagem.
• O controlador pode ser instalado em um sistema com capacitores de correção do fator de potência (PFCC). Os PFCCs devem ficar somente no lado da alimentação do controlador SMC. A instalação dos PFCCs no lado da carga resulta em danos e falhas ao SCR.
• Um recurso de detecção de falta à terra do controlador SMC-50 é para fins de monitoramento e não serve como interruptor de circuito de falta à terra para proteção de pessoal, conforme definido no artigo 100 do código elétrico nacional. O recurso de detecção de falta à terra não foi avaliado quanto à conformidade com o UL 1053.
• Após a ocorrência de um curto-circuito, você deve verificar a funcionalidade do dispositivo.
Este produto contém uma bateria de lítio selada que pode necessitar de substituição durante a vida útil do produto.No final da sua vida útil, a bateria contida neste produto deve ser recolhida separadamente dos resíduos urbanos não triados.A coleta e reciclagem de baterias contribui para a proteção do ambiente e para a conservação dos recursos naturais à medida que são recuperados materiais valiosos.
ATENÇÃO: Há (perigo de explosão) se a bateria de lítio ou o módulo de relógio em tempo real neste produto for substituído incorretamente. Não substitua a bateria ou o módulo do relógio em tempo real a menos que a alimentação tenha sido removida e a área seja conhecida como não-perigosa.Substitua a bateria somente por uma bateria de célula do tipo moeda CR2032 equivalente.Não descarte a bateria de lítio ou o módulo do relógio em tempo real em fogo ou incinerador. Descarte as baterias usadas de acordo com as regulamentações locais.Para informações de segurança sobre o manuseio das baterias de lítio, incluindo manuseio e descarte de baterias que vazam, consulte as Diretrizes para manuseio das baterias de lítio, publicação AG 5-4.
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 5

Prefácio
Note:
6 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Capítulo 1
Instalação
Gabinetes O projeto de estilo aberto do controlador SMC-50 exige a instalação em um gabinete.
Tabela 1 – Especificações do gabinete do controlador SMC-50
As diretrizes noTabela 2 resultam do projeto aberto do controlador SMC-50 e as especificações do espaço mínimo de 150 mm (6 in.) acima e abaixo do controlador.
Tabela 2 – Dimensão do gabinete do controlador SMC-50
IMPORTANTE A temperatura ambiente (ar livre) ou temperatura interna do gabinete sem redução deve ser mantida dentro da faixa especificada. Consulte Tabela 1.
Graus de proteção do gabineteGrau de proteção do dispositivo padrão: IP00 (NEMA tipo aberto NEMA)Gabinete mínimo necessário: IP23 (NEMA Tipo 1)Gabinete recomendado:(1)
(1) Consulte Tabela 2 para ver a dimensão mínima do gabinete
IP54 (NEMA Tipo 12)Faixa de temperatura ambiente (ar livre) ou faixa de temperatura interna do gabinete sem redução:
Bypass integral -20 a +50 °C (-4 a +122 °F)
Controle do motor -20 a +40 °C (-4 a 104 °F)
Orientação e espaçoOrientação de montagem: SOMENTE vertical
Espaço mínimo:Horizontal 0 cm (0 pol.)Vertical 15 cm (6 pol.)
Controlador SMC-50 com bypass interno
Código de catálogomm (pol.)(1)
(1) A dimensão real do gabinete muda dependendo da dissipação do calor, do ciclo de trabalho, da temperatura ambiente e do arrefecimento externo. Consulte o manual de usuário, publicação 150-UM011, para mais informações.
Largura Altura Profundidade150-S108…/150-S135… 609.6 (24.0) 762.0 (30.0) 304.8 (12.0)150-S201…/150-S251… 762.0 (30.0) 965.2 (38.0) 355.6 (14.0)
150-S317…/150-S361…/150-S480… 914.4 (36.0) 1295.4 (51.0) 355.6 (14.0)Controlador SMC-50 de estado sólido
Código de catálogo Configuraçãomm (pol.)(1)
Largura Altura Profundidade
150-SB…Linha/Estrela 609.6 (24.0) 762.0 (30.0) 304.8 (12.0)
Dentro-do-triângulo 762.0 (30.0) 965.2 (38.0) 355.6 (14.0)150-SC… Todos 762.0 (30.0) 965.2 (38.0) 355.6 (14.0)150-SD… Todos 914.4 (36.0) 1295.4 (51.0) 355.6 (14.0)
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 7

Capítulo 1 Instalação
Requisitos de montagem Todas as unidades são refrigeradas por ventilador. É importante localizar o controlador em uma posição que deixe o ar fluir verticalmente através do módulo de potência.
Consulte Tabela 2 para ver a dimensão mínima do gabinete.
Ao fazer perfurações ou instalações próximo à partida suave, certifique-se de que tenha tomado as medidas adequadas para proteger o dispositivo contra poeira e detritos, conforme mostrado em Figura 1.
Figura 1 – Proteção de instalação do controlador SMC-50
IMPORTANTE O controlador deve ficar instalado em um plano vertical e ter um mínimo de 6 pol. (150 mm) de espaço livre abaixo do controlador. A instalação horizontal do controlador SMC-50 não é permitida. O gabinete deve ser dimensionado de modo que sua temperatura interna permaneça dentro das capacidades especificadas do controlador.
8 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Instalação Capítulo 1
Dimensões As dimensões são em milímetros (polegadas). Todas as dimensões são aproximadas e não se destinam a fins de fabricação. Para ver os desenhos de dimensão completa, consulte o manual de usuário, publicação 150-UM011, ou consulte seu escritório local de vendas Rockwell Automation ou seu distribuidor Allen-Bradley.
Figura 2 – Partida suave SMC-50 com bypass integradoA
B
Cód. Nº Altura (B) Largura (A) Profundidade Peso aproximado de transporte
150-S108…/150-S135… 443.7 (17.47) 196.4 (7.74) 217.3 (8.56) 15,4 N (34,0 lb)150-S201…/150-S251… 560.0 (22.05) 225.0 (8.86) 277.4 (10.92) 30,8 N (68,0 lb)
150-S317…/150-S361…/150-S480… 600.0 (23.62) 290.0 (11.42) 310.1 (12.21) 46,2 N (102 lb)
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 9

Capítulo 1 Instalação
Figura 3 – Partida suave SMC-50 de estado sólido
Fiação de alimentação Consulte a placa de identificação do produto ou o manual do usuário do controlador SMC-50, publicação 150-UM011, para ver as informações específicas do dispositivo.
As estruturas de alimentação do controlador SMC-50 utilizam projetos de SCR de estado sólido capazes de fazer interface com motores de 200 a 480 Vca ou 200 a 690 Vca (linha de 690 VV e 600 V dentro do triângulo). Estão disponíveis as estruturas de alimentação em estado sólido e com bypass interno. Verifique as classificações da unidade antes da aplicação.
A estrutura de alimentação incorpora a proteção contra sobretemperatura e a detecção de corrente trifásica verdadeira. É possível utilizar um contator bypass externo se necessário para sua aplicação.
São fornecidas informações do kit de terminais do bloco de distribuição do triângulo, do terminal, do torque e da faixa do condutor em Tabela 3 até Tabela 6. Figura 4 fornece diagramas típicos de fiação de alimentação.
A
B
Cód. Nº Altura (B) Largura (A) Profundidade Peso aproximado de transporte 150-SB… 396.6 (15.62) 194.4 (7.65) 259.2 (10.21) 15,7 N (34,6 lb)150-SC… 638.5 (25.14) 273.1 (10.75) 272.9 (10.75) 47,6 N (105 lb)150-SD… 692.2 (27.25) 457.2 (18.00) 295.8 (11.64) 77,1 N (170 lb)
ATENÇÃO: Os controladores SMC-50 podem ser instalados em um sistema com capacitores de correção do fator de potência (PFCCs). Os PFCCs devem ficar somente no lado da alimentação do controlador. O posicionamento dos PFCCs no lado da carga do SMC resulta em danos aos SCRs no controlador SMC-50. Para detalhes adicionais, consulte o manual do usuário, publicação 150-UM011.
10 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Instalação Capítulo 1
Terminais de alimentação Os terminais de alimentação são necessários para dispositivos com correntes de 108 a 480 A (bypass interno) e 90 a 520 A (estado sólido). Esses terminais são vendidos em kits. Cada kit contém três terminais. Tabela 3 até Tabela 6 listam o número e tipo de terminais necessários.
Tabela 3 – Informações do terminal de conexão dos dispositivos bypass SMC-50 integrados
Tabela 4 – Informações do terminal de conexão dos dispositivos bypass SMC-50 integrados para motores conectados dentro do triângulo
Tabela 5 – Informações da fiação da alimentação do controlador SMC-50 de estado sólido, configurações linha/estrela e dentro -do -delta
Tabela 6 – Informações da fiação do bloco de distribuição do triângulo do controlador SMC-50 de estado sólido
Cód. Nº Capaci-dade [A]
Kit de termi-
nais Cód. Nº
Comprimento da decapagem
[mm]Bitola do condutor
Nº máx. terminais/polo Torque de aperto
Lado da linha
Lado da carga
Cabo – Terminal
Terminal – Barramento
150-S108…, 150-S135… 108 a 135 199-LF1 18 a 20 16 a 120 mm2
(nº 6 a 250 MCM) 1 1 31 N•m (275 lb•pol.)
17 N•m (150 lb•pol.)
150-S201…, 150-S251… 201 a 251 199-LF1 18 a 20 16 a 120 mm2
(nº 6 a 250 MCM) 2 2 31 N•m (275 lb•pol.)
23 N•m (200 lb•pol.)
150-S317…, 150-S361…, 150-S480… 317 a 480 199-LG1 18 a 25 25 a 240 mm2
(nº 4 a 500 MCM) 2 2 42 N•m (375 lb•pol.)
28 N•m (250 lb•pol.)
Cód. Nº Capacidade [A]Cód cat. do
kit de terminais
Bitola do condutor
Nº máx. terminais/polo Torque de aperto
Lado da linha Cabo – Terminal
Terminal – Barramento
150-S108…, 150-S135… 187 a 234 1494R-N15 25 a 240 mm2
(nº 4 a 500 MCM) 1 42 N•m (375 lb•pol.)
17 N•m (150 lb•pol.)
150-S201…, 150-S251… 348 a 435 1494R-N14 50 a 120 mm2
(1/0 a 250 MCM) 2 31 N•m (275 lb•pol.)
23 N•m (200 lb•pol.)
150-S317…, 150-S361…, 150-S480… 549 a 831 150-LG5MC 95 a 240 mm2
(3/0 a 500 MCM) 1 34 N•m (300 lb•pol.)
28 N•m (250 lb•pol.)
Cód. Nº Capacidade [A]Kit de
terminais Cód. Nº
Comprimento da
decapagem [mm]
Bitola do condutorNº máx. terminais/polo Torque de aperto
Lado da linha
Lado da carga
Cabo – Terminal
Terminal – Barramento
150-SB… 90 a 180 (Linha/estrela)155 a 311 (triângulo) 199-LF1 18 a 20 16 a 120 mm2
(nº 6 a 250 MCM) 1 1 31 N•m (275 lb•pol.)
23 N•m (200 lb•pol.)
150-SC…210 a 320
(Linha/estrela)363 a 554 (triângulo)
199-LF1 18 a 20 16 a 120 mm2
(nº 6 a 250 MCM) 2 2 31 N•m (275 lb•pol.)
23 N•m (200 lb•pol.)
150-SD…361 a 520
(Linha/estrela)625 a 900 (triângulo)
199-LG1 18 a 25 25 a 240 mm2
(nº 4 a 500 MCM) 2 2 42 N•m (375 lb•pol.)
28 N•m (250 lb•pol.)
Cód. NºTorque de aperto
QuantidadeBitola do condutor Comprimento da decapagem [mm] Cód. cat do
terminalLinha Carga Linha Carga Linha Carga
150-SB… 42 N•m (375 lb•pol.) 3 25 a 240 mm2
(nº 4 a 500 MCM) 35 35 Allen-Bradley 1492-BG
150-SC… 67,8 N•m (600 lb•pol.)
31 N•m (275 lb•pol.) 1 54 a 400 mm2
(1/0 a 750 MCM)16 a 120 mm2
(nº 6 a 250 MCM) 45 Linha superior = 23Linha inferior = 48
Produtos especiais Marathon 1353703
150-SD… 67,8 N•m (600 lb•pol.)
67,8 N•m (600 lb•pol.) 3 54 a 400 mm2
(1/0 a 750 MCM)54 a 400 mm2
(1/0 a 750 MCM) 45 45 Produtos especiais Marathon 1352702
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 11

Capítulo 1 Instalação
Diagramas típicos de potência
Figura 4 – Diagramas de fiação de alimentação
(1) O contator deve ser dimensionado para motor HP/kW e FLA.(2) Para aplicações norte-americanas, dimensione o contator de acordo com o motor HP e FLA. Para aplicações IEC, dimensione o
contator de acordo com o motor e categoria de utilização AC-1 ou AC-3. A capacidade de curto-circuito do contator deve ser similar àquela do SMC-50.
T1 T2 T3
K1
L1 L2 L3
K1
L1 L2 L3
T4T5
L1 L2 L3
K1
T1 T2 T3T4 T5T6
L1 L2 L3
1 3 5
2 4 6
1 3 5
2 4 6W1U1
1 3 5
L1 L2 L3
1 3 5
2 4 61 3 5
2 4 6K1
W2
U2
V2
L1 L2 L3
1 3 5
1 3 52 4 6
2 4 6
1 3 5
4V
6W
2U
K1
V1
2 4 6W1U1 V1
2 4 6
W U V
K1
1 3 5
2 2 2
T1 T2 T3
T6
Diagramas de acordo com a simbologia NEMA
Controlador SMC-50 de estado sólido
Controlador SMC-50 com bypass interno
Controlador SMC-50 de estado sólido
Controlador SMC-50 com bypass interno
Diagramas de acordo com a simbologia IEC
Controlador SMC-50
Controlador SMC-50
Controlador SMC-50
Controlador SMC-50
Controlador SMC-50
Controlador SMC-50
Conexão de linha com contator de isolamento
(modo padrão)
Conexão de linha com contator de isolamento
(modo padrão)
Conexão dentro-do-triângulo com contator de isolamento
(modo opcional)
Conexão dentro-do-triângulo com contator de isolamento
(modo opcional)
Conexão triângulo com proteção SCR curtocircuitada
(modo opcional)
Conexão triângulo com proteção SCR curtocircuitada (modo
opcional)
Motor Motor Motor
3~Motor
3~Motor
3~Motor
(1) (1)
(2)
(1) (1)
(2)
12 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017
Instalação Capítulo 1
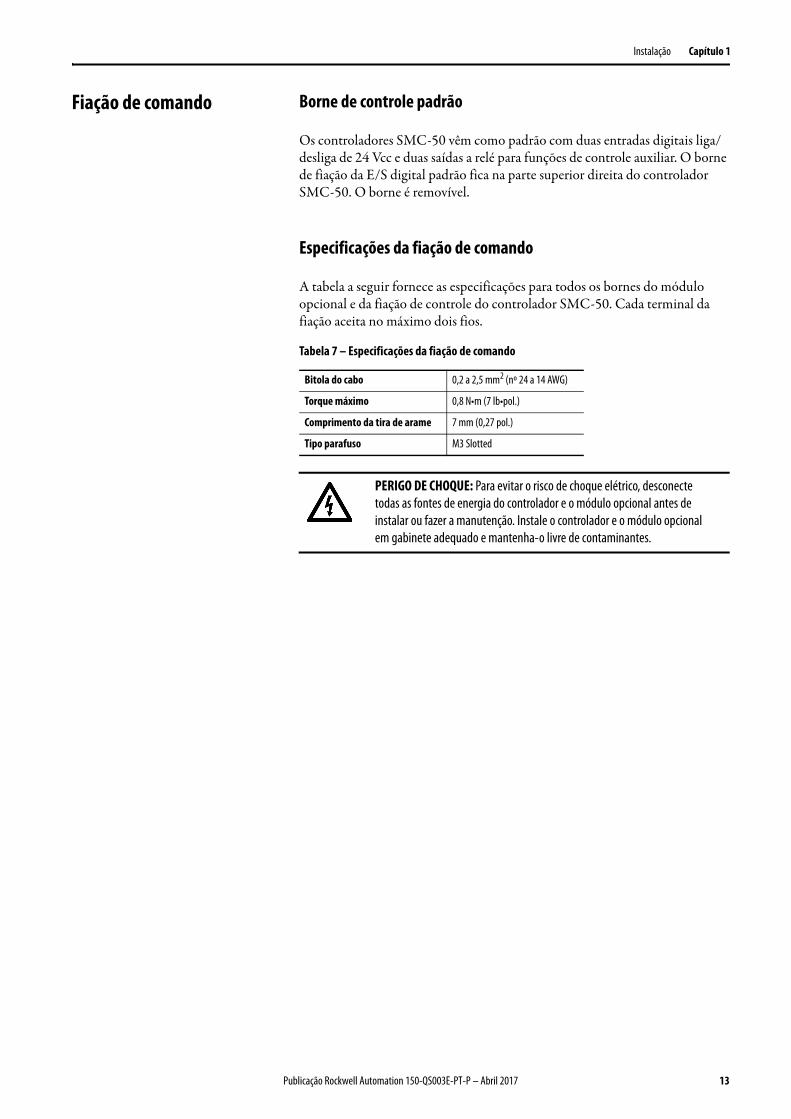
Fiação de comando Borne de controle padrão
Os controladores SMC-50 vêm como padrão com duas entradas digitais liga/desliga de 24 Vcc e duas saídas a relé para funções de controle auxiliar. O borne de fiação da E/S digital padrão fica na parte superior direita do controlador SMC-50. O borne é removível.
Especificações da fiação de comando
A tabela a seguir fornece as especificações para todos os bornes do módulo opcional e da fiação de controle do controlador SMC-50. Cada terminal da fiação aceita no máximo dois fios.
Tabela 7 – Especificações da fiação de comando
Bitola do cabo 0,2 a 2,5 mm2 (nº 24 a 14 AWG)
Torque máximo 0,8 N•m (7 lb•pol.)
Comprimento da tira de arame 7 mm (0,27 pol.)
Tipo parafuso M3 Slotted
PERIGO DE CHOQUE: Para evitar o risco de choque elétrico, desconecte todas as fontes de energia do controlador e o módulo opcional antes de instalar ou fazer a manutenção. Instale o controlador e o módulo opcional em gabinete adequado e mantenha-o livre de contaminantes.
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 13

Capítulo 1 Instalação
Figura 5 – Identificação doborne de controle padrão
(1) Consulte a placa de identificação do controlador para verificar as potências nominais (120/240 Vca ou 24 Vcc).
ATENÇÃO: IN1 DC (terminal 11) e IN2 DC (terminal 10) são entradas CC de 24 Vcc e controladores classificados em 120/240 Vca e nos controladores classificados como 24 Vcc. As tensões que ultrapassam a faixa de entrada especificada podem causar danos ao controlador.
Número do terminal Descrição
1 (1) (2)
(1) Os amortecedores RC são necessários quando as cargas indutoras são conectadas ao terminal.(2) Consulte a placa de identificação do controlador para verificar as potências nominais (120/240 Vca ou 24 Vcc)
Tensão de comando +L1
2(1)(2) Tensão de comando comum -L2
3 Terra – Para conectar o ponto de terra do controle/sistema.
4 (1)(3)
(3) Quando definido para o modo de bypass externo, o contato auxiliar é usado para controlar um contator externo adequadamente dimensionado e sobrecarga assim que o motor estiver em velocidade total.
Contato de relé auxiliar nº 1 – corrente nominal 3 A a 120 Vca, 1,5 A a 240 Vca
5 (1)(3) Contato de relé auxiliar nº 1 – corrente nominal 3 A a 120 Vca, 1,5 A a 240 Vca
6 (1)(3) Contato de relé auxiliar nº 2 – corrente nominal 3 A a 120 Vca, 1,5 A a 240 Vca
7 (1)(3) Contato de relé auxiliar nº 2 – corrente nominal 3 A a 120 Vca, 1,5 A a 240 Vca
8 Potência CC de E/S interna, Comum CC
9 Habilitar E/S
10 (1)(4)
(4) Não conecte nenhuma carga adicional a este terminal. As cargas parasitas podem causar problemas com operação.
Entrada nº 2 (24 Vcc) (intervalo de 15 a 30 Vcc)
11 (1)(4) Entrada nº 1 (24 Vcc) (intervalo de 15 a 30 Vcc)
12 Alimentação de E/S +24 Vcc interna
-L2 +L1
12 11 10 9 8 7 6 5 4 3 2 1
Entradas de 24 Vcc Saídas a reléTerra e potência de controle (1)
Inter
na +
24 Vc
c
In1 D
C
In2 D
C
Habil
itar E
/S
CC co
mum
inte
rna
Aux 2 Aux 1
14 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017
Instalação Capítulo 1
Exemplos de fiação típica do comando
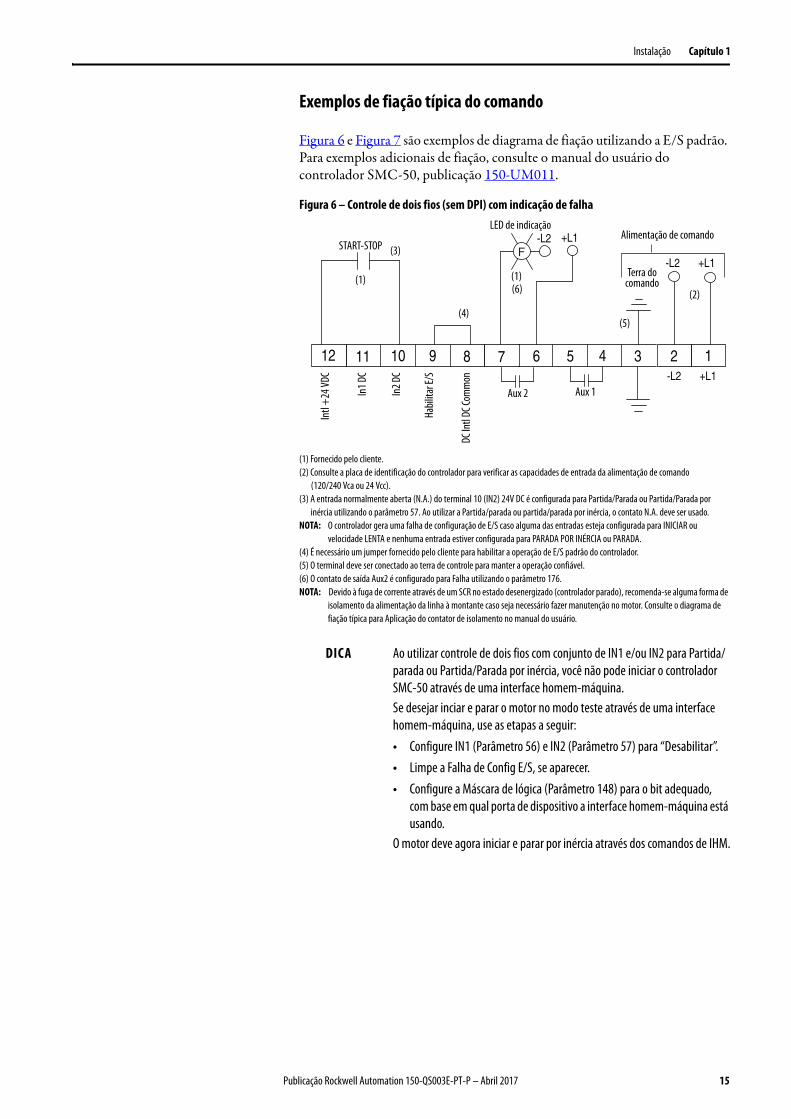
Figura 6 e Figura 7 são exemplos de diagrama de fiação utilizando a E/S padrão. Para exemplos adicionais de fiação, consulte o manual do usuário do controlador SMC-50, publicação 150-UM011.
Figura 6 – Controle de dois fios (sem DPI) com indicação de falha
(1) Fornecido pelo cliente.(2) Consulte a placa de identificação do controlador para verificar as capacidades de entrada da alimentação de comando
(120/240 Vca ou 24 Vcc).(3) A entrada normalmente aberta (N.A.) do terminal 10 (IN2) 24V DC é configurada para Partida/Parada ou Partida/Parada por
inércia utilizando o parâmetro 57. Ao utilizar a Partida/parada ou partida/parada por inércia, o contato N.A. deve ser usado.NOTA: O controlador gera uma falha de configuração de E/S caso alguma das entradas esteja configurada para INICIAR ou
velocidade LENTA e nenhuma entrada estiver configurada para PARADA POR INÉRCIA ou PARADA. (4) É necessário um jumper fornecido pelo cliente para habilitar a operação de E/S padrão do controlador.(5) O terminal deve ser conectado ao terra de controle para manter a operação confiável.(6) O contato de saída Aux2 é configurado para Falha utilizando o parâmetro 176.NOTA: Devido à fuga de corrente através de um SCR no estado desenergizado (controlador parado), recomenda-se alguma forma de
isolamento da alimentação da linha à montante caso seja necessário fazer manutenção no motor. Consulte o diagrama de fiação típica para Aplicação do contator de isolamento no manual do usuário.
DICA Ao utilizar controle de dois fios com conjunto de IN1 e/ou IN2 para Partida/parada ou Partida/Parada por inércia, você não pode iniciar o controlador SMC-50 através de uma interface homem-máquina.Se desejar inciar e parar o motor no modo teste através de uma interface homem-máquina, use as etapas a seguir:• Configure IN1 (Parâmetro 56) e IN2 (Parâmetro 57) para “Desabilitar”.• Limpe a Falha de Config E/S, se aparecer.• Configure a Máscara de lógica (Parâmetro 148) para o bit adequado,
com base em qual porta de dispositivo a interface homem-máquina está usando.
O motor deve agora iniciar e parar por inércia através dos comandos de IHM.
-L2 +L1
-L2 +L1
-L2 +L1
12 11 10 9 8 7 6 5 4 3 2 1
Intl
+24
VDC
In1 D
C
In2 D
C
Habil
itar E
/S
DC In
tl DC
Com
mon
Aux 2 Aux 1
Terra do comando
Alimentação de comandoSTART-STOP
LED de indicação
(3)
(1)
(4)
(1)(6)
(5)
(2)
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 15

Capítulo 1 Instalação
Figura 7 – Controle de três fios (com ou sem DPI) com indicação até a velocidade e contator de isolamento
(1) Fornecido pelo cliente.(2) Consulte a placa de identificação do controlador para verificar as capacidades de entrada da alimentação de comando
(120/240 Vca ou 24 Vcc).(3) Terminal 11 (IN1) 24V DC está configurado para entrada INICIAR utilizando o parâmetro 56.(4) Terminal 10 (IN2) 24V DC está configurado para Parada por inércia, Opção de parada etc. utilizando o parâmetro 57. NOTA: O controlador gera uma falha de configuração de E/S caso alguma das entradas esteja configurada para INICIAR ou
velocidade LENTA e nenhuma entrada estiver configurada para PARADA POR INÉRCIA ou PARADA. (5) É necessário um jumper fornecido pelo cliente para habilitar a operação de E/S padrão do controlador.(6) O contato de saída Aux2 é configurado para UTS do motor utilizando o parâmetro 176.(7) O contato de saída Aux1 é configurado para Normal (fechado com comando de Iniciar, Aberto com comando de Parar) utilizando o
parâmetro 172.
(8) O terminal deve ser conectado ao terra de comando para manter a operação confiável.NOTA: Devido à fuga de corrente através de um SCR no estado desenergizado (controlador parado), recomenda-se alguma forma de
isolamento da alimentação da linha à montante caso seja necessário fazer manutenção no motor. Consulte os diagramas elétricos típicos para Aplicação do contator de isolamento no manual do usuário.
IC-L2 +L1
-L2 +L1
-L2 +L1 +L1-L2
12 11 10 9 8 7 6 5 4 3 2 1
UTS
Intl
+24
VDC
In1 D
C
In2 D
C
Habil
itar E
/S
DC In
tl DC
Com
mon
Aux 2 Aux 1
Terra do comando
Alimentação de comando
(3)
(1)
(4)
(6)
(5)
(2)
(1)
(1) (1) (7)
(8)
Parar
START
Indicação até velocidade
Contator de isolamento
16 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Instalação Capítulo 1
Fiação do ventilador Os ventiladores para os controladores SMC-50 devem ser conectados de acordo com as instruções nesta seção.
Unidades de bypass integrado
Para unidades com bypass integrado, você deve conectar os ventiladores conforme mostrado em Figura 8.
Figura 8 – Fiação do ventilador – Unidades de bypass integrado
Unidades de estado sólido
As unidades de estado sólido não exigem fiação adicional. Os ventiladores são conectados internamente.
Unidades atualizadas
Para as atualizações de controle do controlador SMC Flex com o controlador SMC-50, os ventiladores permanecem conectados como se estivessem no controlador SMC Flex. Não é necessário alterar a fiação.
Módulos opcionais Os controladores SMC-50 possuem três portas de expansão. Essas portas oferecem a capacidade de adicionar módulos opcionais (entradas e saídas (E/S) adicionais), configuração simples do parâmetro de início/parada, falta à terra etc.).
• Nota: os módulos de comunicação 20-COMM-X podem residir somente na porta 9.
1
4
3
2
~1
4
3
2
~
—
+
120 Vca (Conjunto de fábrica) 240 Vca (opcional)
24 Vcc
120 Vca, monofásica
240 Vca, monofásica
24 Vcc
Usando módulo 150-SCMD (Controle de CA 120 a 240 Vca)
Usando módulo 150-SCMRControlador 24 Vcc
Usando módulo 150-SCMD (Controle de CA 120 a 240 Vca)
ATENÇÃO: Há potencial de existência de valores de tensão acima de 220 Vca nos módulos opcionais. Antes de remover a capa do módulo de controle para acessar os módulos opcionais, desconecte TODA a alimentação do controlador SMC-50. Não remova ou acrescente módulos opcionais enquanto houver alimentação.
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 17

Capítulo 1 Instalação
Figura 9 – Identificação do número da porta
Tabela 8 – Localização da porta para módulos opcionais compatíveis
Porta 7
Porta 8
Porta 9
Moldura da IHM
Porta da IHM
Módulo de controle SMC-50 (mostrado sem tampa)Porta 4
Módulo opcional
Cód. cat. NºNome do módulo Descrição
Porta do módulo de controle compatível
Máx. número deste tipo de
módulo opcional por módulo de
controlePorta 7 Porta 8 Porta 9
150-SM2 PTC, falta à terra(1) e interface do transformador de corrente
• Conectividade com os sensores do PTC do motor• Conectividade com os sensores externos de falta à
terra(2) • Conectividade com os sensores externos de corrente(2)
Sim Sim Não 1
150-SM3 E/S analógica • 2 entradas analógicas• 2 saídas analógicas Sim Sim Sim 3
150-SM4 E/S digital • 4 entradas digitais• 3 saídas de relé Sim Sim Sim 3
150-SM6 Módulo de configuração de parâmetro• Três conjuntos de minisseletoras de 8 posições e cinco
conjuntos de chaves rotativas de 16 posições usados para simples programação.
Sim Sim Sim 1
20-COMM-X(3)(4) Módulos de comunicação • Estão disponíveis vários módulos de comunicação Não Não Sim 1
20-HIM-A6 Melhorado, display LCD, teclado numérico completo
• Pode ser instalado no módulo de controle em moldura/berço (porta DPI 1) ou conectado ao cabo com a porta DPI 2.
– – – 1(5)
20-IHM-C6S Remoto (montagem no painel), display LCD, teclado numérico completo
• Normalmente montado em porta ou painel e conectado com cabo à porta DPI 2. – – – 1(5)
(1) O recurso de detecção de falta à terra do controlador SMC-50 destina-se somente para fins de monitoramento.(2) Podem ser necessários componentes externos. Consulte o manual do usuário do controlador SMC-50, publicação 150-UM011, para informações adicionais.(3) Consulte o guia de seleção do Controlador SMC-50, publicação 150-SG010, ou a publicação do manual de usuário do controlador SMC-50, publicação 150-UM011, para uma lista de módulos de
comunicação compatíveis 20-COMM-X.(4) Quando instalado em um controlador SMC-50, os módulos 20-COMM-X residem fisicamente no espaço atribuído à porta 9, mas conectam-se à porta DPI 4 com um cabo flexível que é fornecido com o
módulo de comunicação.(5) Para a maioria dos sistemas, é usado um único dispositivo de IHM. É possível utilizar múltiplas IHMs utilizando a porta DPI 2 e um expansor de porta DPI. Consulte o manual do usuário do controlador
SMC-50, publicação 150-UM011, para ver informações adicionais.
ATENÇÃO: Um recurso de detecção de falta à terra do controlador SMC-50 é para fins de monitoramento e não serve como interruptor de circuito de falta à terra para proteção de pessoal, conforme definido no artigo 100 do código elétrico nacional. O recurso de detecção de falta à terra não foi avaliado quanto à conformidade com o UL 1053.
18 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Instalação Capítulo 1
Operação de bypass e diagramas
A operação de bypass varia entre o controlador SMC-50 com bypass interno e o controlador de estado sólido.
Controladores SMC-50 com bypass interno
Controladores SMC-50 com bypass interno possuem um ou mais contatores integrados quando o motor alcança a velocidade. Isso reduz o calor porque a corrente do motor agora está fluindo através do(s) contator(es) de bypass internos e não através das SCRs.
Controladores SMC-50 com bypass externo
Para operação de bypass externo, é necessário fornecer um contator de bypass. Um contato de relé auxiliar programado para bypass externo é usado para controlar um contator externo adequadamente dimensionado assim que o motor estiver em velocidade total.
Você pode atingir a proteção contra sobrecarga de várias formas. Tabela 9 fornece um resumo das opções de proteção contra sobrecarga do motor.
Tabela 9 – Opções de proteção contra sobrecarga do motor
Tipo estrutura de potência
Código de catálogo
Opção de proteção contra sobrecarga
150-SM2 e 825-MCM180
150-SM2, 825-MCM20 e CTs
externasKit de
bypassSobrecarga
externa
Bypass integral
150-S108…X(1)
(1) Não disponível para aplicações dentro-do-triângulo.
– – X150-S135…150-S201…
– X(1) – X150-S251…150-S317…
– X(1) – X150-S361…150-S480…
Controle do motor
150-SB… X – – X150-SC… – X X X150-SD… – X X X
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 19

Capítulo 1 Instalação
Contator bypass com proteção contra sobrecarga externa
Todos os controladores SMC-50, independente da estrutura de potência, podem usar um contator bypass externo com um dispositivo externo de proteção contra sobrecarga.
Figura 10 – Diagrama de fiação com contator bypass com sobrecarga externa
(1) Fornecido pelo cliente.(2) Devido à fuga de corrente através de um SCR no estado desenergizado (controlador parado), recomenda-se alguma forma de isolamento da alimentação da linha à montante caso
seja necessário fazer manutenção no motor. Consulte as Aplicações do contator de isolamento para mais detalhes.(3) O bypass deve ser controlado por um contato auxiliar do controlador SMC-50 configurado para o bypass externo.(4) O contator bypass deve ser dimensionado para motor HP/kW e FLA.NOTA: Além da pequena quantidade de corrente de fuga fluindo através de um SCR no estado desenergizado, a falha de um ou mais componentes de chaveamento em estado sólido
permite a passagem descontrolada de corrente para o(s) enrolamento(s) do motor. Isso pode resultar em superaquecimento ou danos no motor. Para evitar ferimentos pessoais ou danos ao equipamento, recomenda-se a instalação de um contator de isolamento ou de um disjuntor do tipo desarme do disjuntor principal capaz de interromper a corrente do motor bloqueada no lado da alimentação do controlador SMC-50. A operação do dispositivo de isolamento deve ser coordenada usando um dos contatos auxiliares do controlador SMC-50 configurados para NORMAL.
T1/2
T2/4
T3/6
L1/1
L2/3
L3/5
Motor (1) (2)
Dispositivo de proteção do circuito Alimentação CA trifásica
Contator bypass (1) (3) (4)
(1)
Controlador SMC-50
Sobrecarga (1)
20 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Instalação Capítulo 1
Contator bypass com módulo conversor e cód. de cat. 150-SM2 módulo opcional
Todos os controladores SMC-50, independente da estrutura de alimentação, podem usar um contator bypass com um módulo conversor cód. cat. 825 e módulo opcional nº de cat 150-SM2. Esses componentes permitem que o controlador SMC-50 execute uma função de sobrecarga.
Figura 11 – Diagrama de fiação utilizando módulo conversor 825 e dispositivos 150-SM2 com contator bypass
(1) Fornecido pelo cliente.(2) Devido à fuga de corrente através de um SCR no estado desenergizado (controlador parado), recomenda-se alguma forma de isolamento da alimentação da linha à montante caso
seja necessário fazer manutenção no motor. Consulte as Aplicações do contator de isolamento para mais detalhes.(3) Na operação EXECUÇÃO contator bypass, o módulo 825-MCM e o 150-SM2 proporcionam recursos de realimentação protetora com base em corrente, incluindo sobrecarga.
Somente o cabo fornecido com o conversor 825-MCM pode ser usado nesta configuração. O comprimento máximo do cabo é de 4 m, assim, o 825-MCM deve estar localizado dentro de 4 m do controlador SMC-50.
(4) A ordem dos números de terminal para o módulo 150-SM2 pode ser invertida, dependendo de qual slot de expansão ele está localizado no módulo de controle. Entretanto, a função associada ao número de terminal permanece a mesma.
(5) O bypass deve ser controlado por um contato auxiliar do controlador SMC-50 configurado para o bypass externo.(6) Na América do Norte, dimensione o contator bypass de acordo com o HP do motor e FLA. Para a IEC, dimensione o contator bypass de acordo com a categoria de utilização AC-1.
A capacidade do curto-circuito do contator bypass deve ser similar àquela do controlador SMC-50.(7) Dependendo da corrente nominal do controlador, podem ser necessários transformadores de corrente externos.NOTA: Além da pequena quantidade de corrente de fuga fluindo através de um SCR no estado desenergizado, a falha de um ou mais componentes do interruptor de estado sólido
permite a vazão de corrente descontrolada para o(s) enrolamento(s) do motor. Isso pode resultar em superaquecimento ou danos no motor. Para evitar ferimentos pessoais ou danos ao equipamento, recomenda-se a instalação de um contator de isolamento ou de um disjuntor do tipo desarme do disjuntor principal capaz de interromper a corrente do motor bloqueada no lado da alimentação do controlador SMC-50. A operação do dispositivo de isolamento deve ser coordenada usando um dos contatos auxiliares do controlador SMC-50 configurado para NORMAL.
T1/2
T2/4
T3/6
L1/1
L2/3
L3/5
TB2TB2 TB3 TB4
TB3 TB4
(3)(7)
Motor (1) (2)
825-
MCM
xx
Contator bypass (1) (5) (6)
Módulo opção 150-SM2 (4)(7)
(3)
(1)
(1)Controlador SMC-50Fusíveis SCR de ação rápida (opcional)
Dispositivo de proteção do circuito Alimentação CA trifásica
RG25UFêmeaRG25UMacho
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 21

Capítulo 1 Instalação
Contator bypass com kit bypass SMC-50 (SOMENTE controladores de estado sólido)
Controladores SMC-50 de carcaça C e D com estrutura de potência em estado sólido (cód. cat 150-SC e 150-SD) podem usar um kit bypass opcional. Este kit bypass permite que o controlador SMC-50 execute a função de sobrecarga e elimina a necessidade do módulo conversor cód. cat 825 e módulo opcional 150-SM2.
Figura 12 – Diagrama elétrico para Carcaça C (Cód. Cat. 150-SC…) ou Carcaça D (Cód. Cat. 150-SD…) Dispositivos com contator bypass e kit de barramento bypass
(1) Fornecido pelo cliente.(2) Kit de barramento bypass do controlador SMC-50 Cód. Cat. 150-SCBK (Carcaça C; Cód. Cat. 150-SC…) ou 150-SDBK (Carcaça D; Cód. Cat. 150-SD…).NOTA: É necessário o controlador FRN 3.001 ou superior.(3) Devido à fuga de corrente através de um SCR no estado desenergizado (controlador parado), recomenda-se alguma forma de isolamento da alimentação da linha à montante caso
seja necessário fazer manutenção no motor. Consulte as Aplicações do contator de isolamento para mais detalhes.(4) O bypass deve ser controlado por um contato auxiliar do controlador SMC-50 que esteja configurado para o bypass externo.(5) Na América do Norte, dimensione o contator bypass de acordo com o HP do motor e FLA. Nas aplicações IEC, dimensione o contator bypass de acordo com a categoria de utilização
AC-1. A capacidade do curto-circuito do contator bypass deve ser similar àquela do controlador SMC-50.NOTA: Além da pequena quantidade de corrente de fuga fluindo através de um SCR no estado desenergizado, a falha de um ou mais componentes de chaveamento em estado sólido
permite a passagem descontrolada de corrente para o(s) enrolamento(s) do motor. Isso pode resultar em superaquecimento ou danos no motor. Para evitar ferimentos pessoais ou danos ao equipamento, recomenda-se a instalação de um contator de isolamento ou de um disjuntor do tipo desarme do disjuntor principal capaz de interromper a corrente do motor bloqueada no lado da alimentação do controlador SMC-50. A operação do dispositivo de isolamento deve ser coordenada usando um dos contatos auxiliares do controlador SMC-50 configurados para NORMAL.
T1/2
T2/4
T3/6
L1/1
L2/3
L3/5
Motor (1) (3)
Dispositivo de proteção do circuito Alimentação CA trifásica
Contator bypass (1) (4) (5)
(1)
Controlador SMC-50
(2)
22 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Capítulo 2
Programação
Configuração de parâmetro Configuração do parâmetro usando uma 20-HIM-A6 (FRN1.006 ou posterior)
É possível configurar todos os parâmetros do controlador SMC-50 usando o módulo 20-HIM-A6 (NEMA Tipo 1) ou o 20-HIM-C6S ( NEMA Tipo 4X/12 de montagem remota). O módulo sob cód. de cat. 20-HIM-A6 normalmente é instalado na porta/moldura da IHM, localizada no canto superior direito do controlador SMC-50 (Consulte Figura 9). Para operação temporária portátil, é possível conectar a IHM na porta DPI nº 2, no topo do módulo de controle. Você precisará de um cabo cód. cat. 20-HIM-H10 para esta operação temporária.
O texto a seguir descreve a tela básica as funções do teclado do módulo cód. cat. 20-HIM-A6. Para detalhes adicionais sobre a instalação e uso dos módulos 20-HIM-A6 ou 20-HIM-C6S, consulte o manual do usuário, publicação 20HIM-UM001.
Teclas de função simples da IHM
As quatro teclas de função simples executam apenas suas funções específicas, não importando qual tela o modo de entrada de dados está sendo usado.
Figura 13 – Teclas de função simples da IHM
START Pastas Controles Parar
Chave Função
Start Inicia o controlador caso a máscara de lógica SMC-50 seja habilitada para a porta à qual está conectada a IHM.(1)
Pastas Acessa pastas para parâmetros, diagnósticos, funções de memória, preferências e outros testes.
Controles Acessa funções de jog, automática/manual e outras funções de controle.
Parar Interrompe o controlador SMC-50 ou zera uma falha. A tecla Stop está sempre ativa.
(1) Se o dispositivo (porta) estiver habilitado e for removido enquanto estiver energizado ou um dispositivo de expansão for removido, será gerada uma falha. A localização do bit (como 0, 1, 2 etc.) corresponde aos números da porta DPI.
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 23

Capítulo 2 Programação
Acesso básico ao parâmetro e estrutura de arquivo/categoria
Acesso ao parâmetro
Os parâmetros do SMC-50 são estruturados em cinco categorias:
1. Monitoramento
2. Configuração
3. Proteção do motor
4. Comunicações
5. Utilitário
O módulo sob cód. cat. 20-HIM-A6 pode acessar qualquer um ou todos os parâmetros que residem em qualquer categoria. Os exemplos a seguir mostram como acessar os parâmetros SMC-50 com o 20-HIM-A6.
Para detalhes adicionais sobre esses procedimentos, consulte o manual de usuário do módulo 20-HIM-A6 ou 20-HIM-C6S, publicação 20HIM-UM001.
EXEMPLO Para efetuar uma busca de número de parâmetro e sua modificação, faça o seguinte.1. Certifique-se de que a IHM e a tela de energização da IHM do SMC-50 aparecem da
seguinte forma:
2. Utilizando a tecla PAR#, digite o número de parâmetro desejado para exibição, pressione ENTER e, em seguida, EDIT. Aparecerá a seguinte tela.
NOTA: Para acessar PAR# próximo/anterior daquele atualmente exibido, use as teclas de seta PARA CIMA/PARA BAIXO para exibir o parâmetro a ser modificado.
3. Pressione ENTER para carregar o valor alterado na memória.
AUTOF
09
Stopped 0 Amps
Allen-Bradley
ESC
PORTS00 SMC-5002 20-HIM-x603 1203-USB09 SMC-50 Option
PROPERTIES
AUTOStopped 0 Amps
Allen-Bradley
ESC ENTER
00
SMC-50Jump to Param #
1
24 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017
Programação Capítulo 2
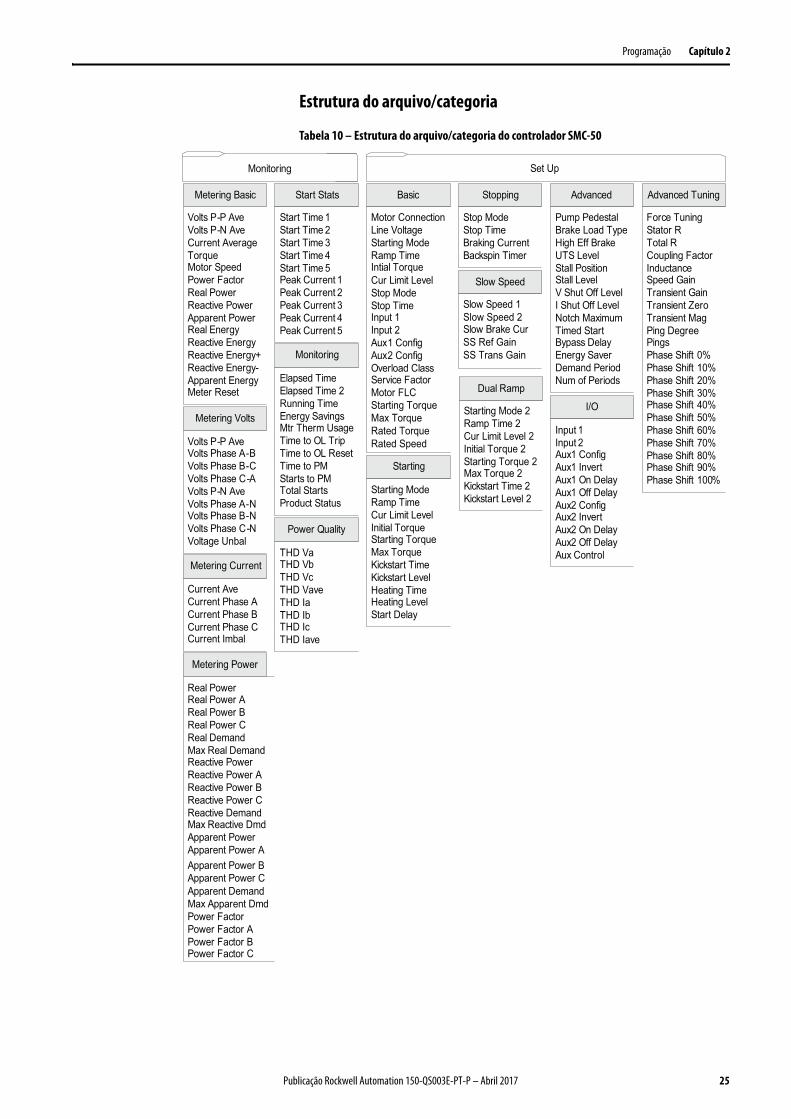
Estrutura do arquivo/categoria
Tabela 10 – Estrutura do arquivo/categoria do controlador SMC-50.
Monitoring Set Up
Volts P-P AveVolts P-N AveCurrent AverageTorqueMotor SpeedPower FactorReal PowerReactive PowerApparent PowerReal EnergyReactive EnergyReactive Energy+Reactive Energy-Apparent EnergyMeter Reset
Metering Basic Basic
Motor ConnectionLine VoltageStarting ModeRamp TimeIntial TorqueCur Limit LevelStop ModeStop TimeInput 1Input 2Aux1 ConfigAux2 ConfigOverload ClassService FactorMotor FLCStarting TorqueMax TorqueRated TorqueRated Speed
Starting
Starting ModeRamp TimeCur Limit LevelInitial TorqueStarting TorqueMax TorqueKickstart Time Kickstart LevelHeating TimeHeating LevelStart Delay
Stopping
Stop ModeStop TimeBraking CurrentBackspin Timer
Slow Speed
Slow Speed 1Slow Speed 2Slow Brake CurSS Ref GainSS Trans Gain
Advanced
Pump PedestalBrake Load TypeHigh Eff BrakeUTS LevelStall PositionStall LevelV Shut Off LevelI Shut Off LevelNotch MaximumTimed StartBypass DelayEnergy SaverDemand PeriodNum of Periods
I/O
Input 1Input 2Aux1 ConfigAux1 InvertAux1 On DelayAux1 Off DelayAux2 ConfigAux2 InvertAux2 On DelayAux2 Off DelayAux Control
Advanced Tuning
Force TuningStator RTotal RCoupling FactorInductanceSpeed GainTransient GainTransient ZeroTransient MagPing DegreePingsPhase Shift 0%Phase Shift 10%Phase Shift 20%Phase Shift 30%Phase Shift 40%Phase Shift 50%Phase Shift 60%Phase Shift 70%Phase Shift 80%Phase Shift 90%Phase Shift 100%
Dual Ramp
Starting Mode 2 Ramp Time 2 Cur Limit Level 2Initial Torque 2 Starting Torque 2Max Torque 2 Kickstart Time 2 Kickstart Level 2
Elapsed TimeElapsed Time 2Running TimeEnergy SavingsMtr Therm UsageTime to OL TripTime to OL ResetTime to PMStarts to PMTotal StartsProduct Status
Monitoring
Start Stats
Start Time 1Start Time 2Start Time 3Start Time 4Start Time 5Peak Current 1Peak Current 2Peak Current 3Peak Current 4Peak Current 5
THD VaTHD VbTHD VcTHD VaveTHD IaTHD IbTHD IcTHD Iave
Power Quality
Volts P-P AveVolts Phase A-BVolts Phase B-CVolts Phase C-AVolts P-N AveVolts Phase A-NVolts Phase B-NVolts Phase C-NVoltage Unbal
Metering Volts
Current AveCurrent Phase ACurrent Phase BCurrent Phase CCurrent Imbal
Metering Current
Real PowerReal Power AReal Power BReal Power CReal DemandMax Real DemandReactive PowerReactive Power AReactive Power BReactive Power CReactive DemandMax Reactive DmdApparent PowerApparent Power AApparent Power BApparent Power CApparent DemandMax Apparent DmdPower FactorPower Factor APower Factor BPower Factor C
Metering Power
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 25

Capítulo 2 Programação
Tabela 11 – Estrutura do arquivo/categoria (continuação)
Motor Protection
Overload
Underload
Undervoltage
Overvoltage
Voltage Imbal
Jam
Stall
Restart
Motor Fault EnMotor Alarm EnMotor Restart EnOverload ClassOverload Class 2Service FactorMotor FLCOL Reset LevelOL Shunt TimeOL Inhibit TimeOverload A LvlOverload ConfigLocked Rtr LevelLocked Rtr Time
Motor Fault EnMotor Alarm EnMotor Restart EnUnderload F LvlUnderload F DlyUnderload A LvlUnderload A Dly
Starter Fault EnStarter Alarm EnStrtr Restart EnUndervolt F LvlUndervolt F DlyUndervolt A LvlUndervolt A Dly
Starter Fault EnStarter Alarm EnStrtr Restart EnOvervolt F LvlOvervolt F DlyOvervolt A LvlOvervolt A Dly
Starter Fault EnStarter Alarm EnStrtr Restart EnVolt Imbal F LvlVolt Imbal F DlyVolt Imbal A LvlVolt Imbal A Dly
Motor Fault EnMotor Alarm EnMotor Restart EnJam F LvlJam F DlyJam A LvlJam A Dly
Motor Fault EnMotor Alarm EnMotor Restart EnStall Delay
Motor Restart EnStrtr Restart EnRestart AttemptsRestart Delay
Maintenance
Motor Fault EnMotor Alarm EnMotor Restart EnPM HoursPM StartsTime to PMStarts to PMStarts Per Hour
Line Frequncy
Starter Fault EnStarter Alarm EnStrtr Restart EnFreq High F LvlFreq High F DlyFreq High A LvlFreq High A DlyFreq Low F LvlFreq Low F DlyFreq Low A LvlFreq Low A Dly
History
Fault 1Fault 2Fault 3Fault 4Fault 5Alarm 1Alarm 2Alarm 3Alarm 4Alarm 5
Communications
Comm Masks
Data Links
Logic MaskLogic Mask ActWrite Mask CfgWrite Mask ActPort Mask Act
Data In A1Data In A2Data In B1Data In B2Data In C1Data In C2Data In D1Data In D2Data Out A1Data Out A2Data Out B1Data Out B2Data Out C1Data Out C2Data Out D1Data Out D2
Utility
Motor Data
Preferences
LanguageFan ConfigMotor ConfigParameter Mgt
Motor ConnectionLine VoltageMotor FLCRated TorqueRated SpeedUser CT RatioFactory CT RatioVoltage RatioParameter Mgt
Real Power
Motor Fault EnMotor Alarm EnMotor Restart EnMwatts Ov F LvlMwatts Ov F Dlt Mwatts Ov A LvlMwatts Ov A DlyMwatts Un F LvlMwatts Un F DlyMwatts Un A LvlMwatts Un A Dly Expansion
Exp A ConfigExp B ConfigExp C Config
Voltage THD
Starter Fault EnStarter Alarm EnStrtr Restart EnTHD V F LvlTHD V F DlyTHD V A LvlTHD V A Dly
Reactive+ Power
Motor Fault EnMotor Alarm EnMotor Restart En+MVAR Ov F Lvl+MVAR Ov F Dly+MVAR Ov A Lvl+MVAR Ov A Dly+MVAR Un F Lvl+MVAR Un F Dly+MVAR Un A Lvl+MVAR Un A Dly
Current Imbal
Motor Fault EnMotor Alarm EnMotor Restart EnCur Imbal F LvlCur Imbal F DlyCur Imbal A LvlCur Imbal A Dly
Current THD
Motor Fault EnMotor Alarm EnMotor Restart EnTHD I F LvlTHD I F DlyTHD I A LvlTHD I A Dly
Apparent Power
Motor Fault EnMotor Alarm EnMotor Restart EnMVA Ov F LvlMVA Ov F DlyMVA Ov A LvlMVA Ov A DlyMVA Un F LvlMVA Un F DlyMVA Un A LvlMVA Un A Dly
Leading PF
Motor Fault EnMotor Alarm EnMotor Restart EnLead PF Ov F LvlLead PF Ov F DlyLead PF Ov A LvlLead PF Ov A DlyLead PF Un F LvlLead PF Un F DlyLead PF Un A LvlLead PF Un A Dly
Reactive- Power
Motor Fault EnMotor Alarm EnMotor Restart En-MVAR Ov F Lvl-MVAR Ov F Dly-MVAR Ov A Lvl-MVAR Ov A Dly-MVAR Un F Lvl-MVAR Un F Dly-MVAR Un A Lvl-MVAR Un A Dly
Lagging PF
Motor Fault EnMotor Alarm EnMotor Restart EnLag PF Ov F LvlLag PF Ov F DlyLag PF Ov A LvlLag PF Ov A DlyLag PF Un F LvlLag PF Un F DlyLag PF Un A LvlLag PF Un A Dly
Locked Rotor
Motor Fault EnMotor Alarm EnMotor Restart EnLocked Rtr F LvlLocked Rtr F DlyLocked Rtr A LvlLocked Rtr A Dly
26 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Programação Capítulo 2
Configuração rápida
Acesso ao grupo de configuração básica de programação na categoria Configuração. Este grupo fornece um conjunto de parâmetros limitados, que permite a partida rápida com mínimos ajustes.
Tabela 12 – Parâmetros de partida rápida
Número do parâmetro
Nome do parâmetro Descrição/Função Valor(es) Padrão
46 Tensão de linha Insira o valor da tensão de linha trifásica do sistema. Um valor deve ser inserido para que a proteção contra tensão funcione adequadamente.
0 a 700 V 480
47 Torque nominal Use para modo de partida em rampa do torque. Insira o torque máximo do motor em Newton metro.
1 a 1000 N•m 10
48 Velocidade nominal
Use para modo de partida em rampa do torque. Insira a velocidade nominal do motor. 750, 900, 1500, 1800, 3500, 3600 RPM
1800
49 Modo de partida Insira o modo de partida desejado para a aplicação.Parâmetros relacionados ao modo de partida:Tensão plena: NenhumLimite de corrente: Nível de limite de corrente, Tempo da rampa, Tempo de kickstart, Nível de kickstartPartida suave: Torque inicial, Tempo de rampa, Limite de corrente, Tempo de kickstart, Nível de kickstartVelocidade linear Torque inicial, Tempo da rampa, Limite de corrente Rampa do torque: Torque inicial, Torque máximo, Tempo da rampa, Limite de corrente, Tempo de kickstart, Nível de kickstartPartida de bomba:Torque inicial, Tempo da rampa
Tensão plena, Limite de corrente, Partida suave, Velocidade linear, Rampa de torque, Partida da bomba
Partida suave
50 Tempo da rampa Insira a quantidade desejada de tempo que a rampa de partida do motor deve levar. 0,0 a 1000 segundos 1051 Torque inicial Nível de torque do motor no qual a rampa de partida começa. 0 a 90%LRT 70
52 Torque máximo Use o modo de partida da rampa de torque. Insira o torque máximo do motor ao final da rampa de partida necessária para a aplicação.
0 a 300% 250
53 Nível de limite de corrente
Insira o valor da corrente máxima permitida durante o tempo de rampa. 50 a 600% FLC 350
56 Entrada 1 Permite a seleção de como a entrada 1 (CM terminal nº 11) afeta a função do controlador SMC-50. Desabilitar, Iniciar, Parar por Inércia, Opção Parar, Iniciar/parar por inércia, Iniciar/parar, Baixa Velocidade, Rampa Dupla, Seleção de OL, Falha, Falha NC, Limpar falha, Operação de emergência, Aquecedor do motor
Iniciar/Parar por inércia
57 Entrada 2 Permite a seleção de como a entrada 2 (CM terminal nº 10) afeta a função do controlador SMC-50. Desabilitar
65 Modo Desliga Insira o modo Desliga desejado para a aplicação.Parâmetros relacionados ao modo Desliga:Parar por inércia: Nenhum Parada suave: Tempo de paradaVelocidade linear: Tempo de parada, Limite de corrente Parada da bomba: Tempo de paradaFrenagem inteligente do motor (SMB): Corrente de frenagem Ext. Freio: Tempo de parada
Parada por inércia, Parada suave, Velocidade linear, Parada da bomba, frenagem inteligente de motor (SMB), Ext. Freio
Parada por inércia
66 Tempo de parada Define o tempo desejado da rampa da execução à parada para um modo Desliga específico. Para modo Freio Ext., o Tempo de Parada = o tempo que o Contato Aux está fechado para energizar um freio externo.
0 a 999 segundos 0
75 Classe de sobrecarga
Insira a classe de desarme desejada para a sobrecarga do motor. 5 a 30 10
77 Fator de serviço Insira o fator de serviço do motor. 0,01 a 1,99 1,1578 FLC do motor Insira o valor de Corrente de carga total (FLC) especificada para o motor. Este valor deve ser
inserido e o controlador pode fornecer proteção de corrente adequada ao motor (como sobrecarga).
1,0 a 2.200,0 A 1,0
172 Aux1 Configuração
Permite a seleção da operação para o contato nº 1 de saída do relé auxiliar (módulo de controle terminais 4 e 5).(1)
Normal, UTS, Falha, Alarme, Bypass externo, Freio externo, Controle auxiliar, Rede 1, Rede 2, Rede 3, Rede 4, Controle do ventilador
Normal
176 Aux 2 Configuração
Permite a seleção da operação para o contato nº 1 de saída do relé auxiliar (módulo de controle terminais 6 e 7).(1)
Normal
(1) Normal = O contato é fechado quando o comando Iniciar é dado e permanece fechado durante uma manobra de parada. Após a parada ser concluída, o contato abre.
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 27

Capítulo 2 Programação
Note:
28 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017
Capítulo 3
Operação e localização de falhas
Operação Os controladores SMC-50 com bypass integrado podem operar motores de indução padrão conectados em linha com corrente de 27 a 480 A ou motores tipo estrela-triângulo com correntes de 47 a 831 A que são operados dentro do triângulo.
Os controladores SMC-50 de estado sólido podem operar motores de indução conectados em linha com corrente de 30 a 520 A ou motores tipo estrela-triângulo com correntes de 52 a 900 A operados dentro do triângulo.
Configuração do motor As configurações de motor estrela conectado em linha, triângulo conectado em linha e dentro do triângulo são possíveis com o controlador SMC-50. O recurso de ajuste do motor do controlador SMC-50 determina automatica-mente a conexão do motor. O ajuste do motor é feito automaticamente pelo controlador na partida inicial do motor ou forçado pelo usuário. É possível também inserir a configuração da conexão do motor, parâmetro 44, no contro-lador SMC-50. Você deve inserir a tensão nominal da linha do motor, parâme-tro 46, para habilitar os recursos de proteção do motor (padrão 480 V).
Ajuste do motor O controlador SMC-50 realiza o processo de ajuste do motor na sequência de partida inicial do motor. O ajuste do motor inclui a identificação dos parâmetros do motor e a detecção do tipo de conexão do motor (linha ou triângulo). O controlador SMC-50 utiliza os dados de ajuste do motor em seu algoritmo de controle.
Durante o processo de ajuste, o motor emite um ruído audível, incluindo pulsação e zumbido. O tempo para completar o processo de ajuste é de aproximadamente 10 a 20 segundos, variando com base no tamanho e características do motor individual que está sendo usado. Após a conclusão bem-sucedida do processo de ajuste, o motor é iniciado com base no perfil de partida programada pelo usuário. Se você interromper o processo de sintonia emitindo um comando de parada ou removendo a energia da unidade, o processo de ajuste será repetido no próximo comando de partida. As partidas subsequentes do motor após um ajuste bem-sucedido não realizam o processo de auto-ajuste.
Após o ajuste inicial bem-sucedido do motor, você pode reiniciá-lo através de um dos seguintes métodos:
IMPORTANTE Verifique os valores de tensão de comando e de linha no produto antes de energizar.
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 29
Capítulo 3 Operação e localização de falhas
1. Altere o status do Forçar ajuste, parâmetro 194, para VERDADEIRO usando uma ferramenta de configuração (como IHM) com o motor parado. Durante o próximo ciclo de partida, ocorre o processo de ajuste e o parâmetro 194 muda novamente para FALSO.
2. Pressione o botão “SEGURAR PARA TESTE/ PRESSIONAR PARA RESTAURAR” (HOLD TO TEST/PUSH TO RESET), na frente do controlador, durante dez segundos com o motor parado. O processo de ajuste ocorre durante o próximo ciclo de partida. O LED de status pisca na cor âmbar, indicando que o ajuste ocorre no próximo ciclo de partida.
3. Quando o controlador processa um comando “Carregar padrões de fábrica” através do gerenciamento de parâmetros, parâmetro 229.
NOTA: Ao usar um motor menor ou maior que o normal para o teste inicial do sistema, você deve executar um ciclo de ajuste no motor que é usado na instalação final.
Controle de carga resistiva O controlador SMC-50 pode controlar diretamente as cargas resistivas conectadas utilizando o controle do ângulo de fase que baseia-se em um valor de referência. Selecione este método de controle através de um novo parâmetro Carregar tipo. A seleção de um tipo de carga resistiva modifica o procedimento de ajuste do motor padrão e permite que o controlador SMC-50 varie a tensão de saída em resposta à fonte de referência (Saída V Ref, Entrada analógica ou DeviceLogix™) em forma de porcentagem da faixa de tensão plena. Você pode alterar o valor da fonte de referência enquanto o controlador SMC-50 estiver em estado de operação.
NOTA: Utilizar o controle de carga resistiva não é recomendado para unidades de bypass interno devido aos possíveis desarmes de sobretemperatura.
Para informações adicionais sobre este modo de operação, consulte o manual do usuário do controlador SMC-50, publicação 150-UM011.
30 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Operação e localização de falhas Capítulo 3
Localização de falhas com LEDs de diagnóstico
Indicador de status do LED do controlador
O Indicador de status do LED multicolorido do controlador SMC-50 e o botão HOLD TO TEST, PUSH TO RESET localizam-se abaixo da porta da moldura da IHM. O LED de status indica o status e as condições de falha do controlador SMC-50.
Tabela 13 – Cores do LED correspondente e condições de falha
O botão SEGURAR PARA TESTE, PRESSIONAR PARA RESTAURAR permite restaurar um alarme/falha, testar uma condição de falha e iniciar o modo de ajuste.
Tabela 14 – Iniciação da função do botão SEGURAR PARA TESTE, PRESSIONAR PARA RESTAURAR
Localização de falhas com equipamento de monitoramento
O controlador SMC-50 possui códigos de falha de diagnósticos detalhados integrados e funções de estação de medição. Você pode acessar esses códigos de falha e funções de estação de medição através de um módulo local 20-HIM-A6 ou remoto 20-HIM-C6S ou ainda utilizando um tamanho de software do Inversor de Frequência Rockwell Automation, como o Connected Components Workbench™ software.
Localização de falhas através do código de falha – Listagem abreviada
A tabela a seguir contém uma listagem abreviada dos códigos de falha disponíveis. Para uma lista completa da localização de falhas, códigos de falhas, descrições e dicas, consulte o manual de usuário do controlador SMC-50, publicação 150-UM011.
Cor do LED de status Modo do dispositivo
Status do SMC
Verde Em operação Em operação sem alarme
Verde/âmbar Em operação Em operação com alarme
Verde piscando Pronto Pronto (sem inibição e sem falha) sem um alarme
Âmbar piscando Pronto Pronto (sem inibição e sem falha) com ajuste habilitado na próxima partida
Âmbar Pronto Pronto com alarme (sem ajuste habilitado)
Vermelho/Âmbar Inibição Inibido; impossível iniciar devido a um comando de Parar
Vermelho Com falha Ocorreu uma falha não reinicializável
Vermelho piscando Com falha Ocorreu uma falha reinicializável
Vermelho e verde Download O download do firmware está em andamento
Função Tempo necessário para pressionar o botão
Restaurar falha Momentânea (menos de 2 segundos)
Falha de teste Maior que 3 segundos, mas menor que 10 segundos
Iniciar modo de ajuste Maior que 10 segundos(1)
(1) O motor deve ser desligado.
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 31

Capítulo 3 Operação e localização de falhas
Tabela 15 – Códigos de falhas do controlador SMC-50
Falha do display Código de falha do software ou da IHM
Habilitado Causas possíveis Soluções possíveis
Falha da linha com indicação de fase
1, 2, 3 Pré-partida e operação
• Fase de alimentação ausente• Motor não conectado adequadamente• Instabilidade da tensão trifásica de
admissão
• Verificar linha aberta (fusível queimado)• Verificar condutor de carga aberto• Verificar qualidade da alimentação
SCR em curto com a indicação de fase
4, 5, 6 Todos • Em curto com o módulo de alimentação • Verificar SCR em curto, substituir o módulo de alimentação, se necessário
Abrir Porta com indicação de fase
7, 8, 9 Iniciar ou parar
• Abrir circuito da porta• Condutor da porta solto
• Executar a verificação da resistência; substitua o módulo de alimentação, se necessário
• Verificar as conexões do terminal da porta com o módulo de controle
Sobretemperatura do SCR e polo de alimentação do PTC
10 ou 60 • Ventilação do controlador bloqueada• Ciclo de trabalho do controlador excedido• Falha do ventilador• Limite da temperatura ambiente foi
excedido• Termistor com falha
• Verificar a ventilação adequada• Verificar o ciclo de trabalho da aplicação• Aguardar até o motor resfriar ou fornecer refrigeração externa• Substituir o módulo de energia ou o módulo de controle, conforme
necessário• Substituir ventilador
Abrir bypass 11, 12, 13 Em operação
• Tensão de comando está baixa• Bypass do módulo de alimentação
inoperante
• Verificar fonte de alimentação da tensão de comando• Verificar módulo de controle TB2 a TB4 e TB5 a TB7 quanto à segurança• Certificar-se de que AUX1 ou AUX2 não estejam definidos para bypass
externo• Substituir módulo de alimentação
Sem falha de carga 14, 15, 16, 17 Somente pré-partida
• Perda da fiação de alimentação do lado da carga com indicação de fase (15=A, 17=C)
• Comando Iniciar ligou e desligou inesperadamente com o motor em operação
• Verificar todas as conexões de alimentação do lado da carga• Verificar os enrolamentos do motor
Desequilíbrio de tensão e/ou desequilíbrio de corrente
18 e/ou 42 Em operação
• O desequilíbrio da alimentação é maior que o valor programado pelo usuário
• O tempo de atraso é curto demais para a aplicação
• Verificar o sistema de alimentação e corrigir, se necessário, em seguida corrigir o valor programado pelo usuário
• Estender o tempo de atraso para corresponder às especificações da aplicação
Sobretensão 19 Em operação
• O desequilíbrio da alimentação é maior que o valor programado pelo usuário
• O tempo de atraso é curto demais para a aplicação
• Verificar o sistema de alimentação e corrigir, se necessário, caso contrário, corrigir o valor programado pelo usuário
• Estender o tempo de atraso para corresponder às especificações da aplicação
SUBTENSÃO 20 Em operação
• A tensão de alimentação é maior que o valor programado pelo usuário
• O tempo de atraso é curto demais para a aplicação
• Verificar o sistema de alimentação e corrigir, se necessário, caso contrário, corrigir o valor programado pelo usuário
• Estender o tempo de atraso para corresponder às especificações da aplicação
Sobrecarga 21 Em operação
• Sobrecarga do motor• Os parâmetros de sobrecarga não
correspondem ao motor
• Verificar condição de sobrecarga do motor• Verificar valores da classe de sobrecarga e FLC do motor e verificar
consumo de corrente do motor
Subcarga 22 Em operação
• Bits de ferramenta, correias, eixos etc quebrados no motor.
• Cavitação da bomba• Configuração incorreta de usuário
• Verificar sistema da bomba, componentes de acionamento da máquina e carregamento
• Verificar configurações• Reparar ou substituir o motor
Emperramento 23 Em operação
• A corrente do motor ultrapassou o nível de emperramento programado pelo usuário
• Corrigir a fonte do emperramento ou carga excessiva e verificar valor do tempo programado
Parada 24 Em operação
• Motor não atingiu a velocidade total até o final do tempo da rampa programado
• Configuração incorreta de usuário
• Verificar sistema da bomba, componentes de acionamento da máquina e carregamento. Reparar ou substituir o motor, se necessário.
• Verificar configurações
Reversão de fase 25 Somente pré-partida
• A tensão de alimentação que entra não é a sequência ABC esperada
• Verificar fiação de alimentação e corrigir, se necessário
Perda de rede e com x026, x027, x028 (consulteTabela 16)
Todos • Perda da rede da DPI• Desconexão de comunicação na porta
serial
• Verificar os adaptadores de comunicação e verificar a conexão com o SMC.
• Conectar novamente cada dispositivo DPI conectado
32 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Operação e localização de falhas Capítulo 3
No Tabela 15, a IHM ou os códigos de falha que começam com “x” baseiam-se nos valores que são automaticamente inseridos pelo controlador. A letra “x” denota os valores de atribuição de porta individual, conforme mostrado em Tabela 16.
Tabela 16 – Atribuição de portas
Falhas do sistema e em 24 V interna
36, 37 Todos • Condição de linha baixa• Carga excessiva na alimentação interna
de 24 V
• Verificar a alimentação de controle e verificar se está dentro da especificação; verificar as conexões e o aterramento com os terminais de controle do SMC
• Substituir o módulo de controle
Qualidade de alimentação da linha com indicação de fase
52, 53, 54 Iniciar ou parar
• Instabilidade ou distorção da tensão trifásica de entrada
• Conexão de alta impedância
• Verificar a tensão de alimentação quanto a capacidade de iniciar/parar o motor; verificar se há conexões soltas no lado da alimentação ou no lado do motor dos fios de alimentação
• Verificar e corrigir a qualidade de alimentação de entrada
Falta à terra x058 (consulteTabela 16)
Em operação
• O nível de corrente de falta à terra excedeu o valor programado
• O tempo de atraso é curto demais para a aplicação
• Verificar sistema de alimentação e motor, corrigir, se necessário. Verificar os níveis programados de falta à terra para que correspondam às especificações da aplicação
• Estender o tempo de atraso para corresponder às especificações da aplicação
PTC do motor 59 Em operação
• Ventilação do motor bloqueada• Ciclo de trabalho do motor excedido• PTC aberto ou em curto
• Verificar a ventilação adequada• Verificar o ciclo de trabalho da aplicação• Aguardar até o motor resfriar ou fornecer refrigeração externa, depois
verificar resistência do PTC
Falha do display Código de falha do software ou da IHM
Habilitado Causas possíveis Soluções possíveis
Número da porta Fonte
0 Módulo de controle
1 IHM localizada na moldura do controlador (opcional)
2 ou 3 DPI remota
4 20-COMM-X (opcional)
7, 8, 9 Porta de expansão 7, 8, 9 (módulo opcional)
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 33

Capítulo 3 Operação e localização de falhas
Note:
34 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Apêndice A
Classificações SCCR
Classificações SCCRTabela 17 – Classificações elétricas da SCCR (falha de alta capacidade) para unidades de bypass integradas
Coordenação tipo 1(1)
Desempenho do SCPD(2) Fusível Classe J ou Classe L(3) Disjuntor de tempo de inversão (termomagnético)(4)
Tipo de conexão do motor Cód. Nº
Corrente nominal
[A]
Falha máxima disponível (600 V)
[kA]Máx. Corrente [A]
Máximo de 480V, 65 kABul. 140G Tamanho
de carcaça
Máx. Corrente
[A]Cód. Nº Plugue de classe de
corrente
Linha
150-S108N… 108
70
200
Pendente(5)
150-S135N… 135 225150-S201N… 201 350150-S251N… 251 400150-S317N.… 317
69500
150-S361N… 361 600150-S480N… 480 800
Dentro-do-triângulo
150-S108N… 187
70
300150-S135N… 234 400150-S201N… 348 600150-S251N… 435 800150-S317N… 549
691000
150-S361N… 625 1200150-S480N… 831 1600
(1) Especificações básicas para coordenação tipo 1: Sob condição de curto-circuito, a partida não poderá oferecer perigo às pessoas ou à instalação. A partida pode não ser adequada para outros serviços sem reparo ou substituição das peças. Para outros detalhes, consulte UL508/CSA C22.2 Nº 14 e EN 60947-4-2.
(2) Consulte os códigos locais para ver o dimensionamento adequado da proteção contra curto-circuito.(3) Taxas de falha de alta capacidade quando usado com um fusível retardado Classe J ou fusível retardado Classe L.(4) O disjuntor deve ser do tamanho de carcaça 140G designado.(5) Outros disjuntores pendentes.
Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 35

Apêndice A Classificações SCCR
Tabela 18 – Classificações elétricas da SCCR (falha de alta capacidade) para unidades de estado sólido
Coordenação tipo 1(1)
Desempenho do SCPD(2) Fusível Classe J ou Classe L(3) Disjuntor de tempo de inversão (termomagnético)(4)
Tipo de conexão do motor Cód. Nº
Corrente nominal
[A]
Falha máxima disponível (600 V)
[kA]
Corrente [A] Máximo de 480V, 65 kA
Típico Máx.Bul. 140G Tamanho
de carcaça
Máx. Corrente
[A]Cód. Nº Plugue de classe de
corrente
Linha
150-SB1N… 90
100
150 200
K
350 140G-K6F3-D40 –150-SB2N… 110 175 225 300 140G-K6F3-D30 –150-SB3N… 140 225 300 400 140G-K6F3-D40 –150-SB4N… 180 300 400 400 140G-K6F3-D40 –150-SC1N… 210 350 450
M600 140G-M6F3-D60 –
150-SC2N… 260 450 500 700 140G-M6F3-D80 –150-SC3N… 320 500 700 800 140G-M6F3-D80 –150-SD1N… 361 601 800
N1000 140G-N6HE-E12 140G-NRP3-E10
150-SD2N… 420 700 800 1200 140G-N6HE-E12 –150-SD3N… 520 800 1000 1200 140G-N6HE-E12 –
Dentro do triângulo
150-SB1N… 155
65
250 300
M
450 140G-M6F3-D60 –150-SB2N… 190 300 400 500 140G-M6F3-D60 –150-SB3N… 242 400 500 700 140G-M6F3-D80 –150-SB4N… 311 500 600 700 140G-M6F3-D80 –150-SC1N… 363 601 800
N1000 140G-N6HE-E12 140G-NRP3-E10
150-SC2N… 450 700 1000 1200 140G-N6HE-E12 –150-SC3N… 554 800 1200 1200 140G-N6HE-E12 –150-SD1N… 625 1000 1200
Pendente(5)150-SD2N… 727 1200 1600150-SD3N… 900 1200 2000
(1) Especificações básicas para coordenação tipo 1: Sob condição de curto-circuito, a partida não poderá oferecer perigo às pessoas ou à instalação. A partida pode não ser adequada para outros serviços sem reparo ou substituição das peças. Para outros detalhes, consulte UL508/CSA C22.2 Nº 14 e EN 60947-4-2.
(2) Consulte os códigos locais para ver o dimensionamento adequado da proteção contra curto-circuito.(3) Taxas de falha de alta capacidade quando usado com um fusível retardado Classe J ou fusível retardado Classe L.(4) O disjuntor deve ser do tamanho de carcaça 140G designado.(5) Outros disjuntores pendentes.
36 Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017

Publicação Rockwell Automation 150-QS003E-PT-P – Abril 2017 Copyright © 2017 Rockwell Automation, Inc. Todos os direitos reservados. Impresso nos E.U.A.
Suporte da Rockwell AutomationUse os seguintes recursos para acessar as informações de suporte.
Comentários sobre a documentaçãoSeus comentários nos ajudarão a adaptar melhor a documentação às suas necessidades. Caso tenha sugestões para melhoria deste documento, preencha o formulário Como estamos nos saindo? em http://literature.rockwellautomation.com/idc/groups/literature/documents/du/ra-du002_-en-e.pdf.
Centro de suporte técnicoArtigos de knowledgebase, Vídeos explicativos, FAQs, Bate-papo, Fóruns de usuários e atualizações de notificação de produtos.
https://rockwellautomation.custhelp.com/
Números de telefones para suporte técnico local
Localize o número de telefone do seu país. http://www.rockwellautomation.com/global/support/get-support-now.page
Códigos de discagem diretaEncontre o código de discagem direta para seu produto. Use o código para encaminhar sua ligação diretamente a um engenheiro de suporte técnico.
http://www.rockwellautomation.com/global/support/direct-dial.page
Literature Library Instruções de instalação, manuais, folhetos e dados técnicos. http://www.rockwellautomation.com/global/literature-library/overview.page
Compatibilidade de produtos e centro de download (PCDC)
Obtenha ajuda para determinar como os produtos interagem, verificar recursos e capacidades e encontrar o firmware associado.
http://www.rockwellautomation.com/global/support/pcdc.page
Allen-Bradley, Connected Component Workbench, DeviceLogix, DPI, PowerFlex, Rockwell Software, Rockwell Automation, SMB, SMC e TechConnect são marcas comerciais da Rockwell Automation, Inc.As marcas comerciais que não pertencem à Rockwell Automation são propriedade de suas respectivas empresas.
A Rockwell Automation mantém as informações ambientais atualizadas dos produtos no site em http://www.rockwellautomation.com/rockwellautomation/about-us/sustainability-ethics/product-environmental-compliance.page.