
16° - Conic-Semespconic-semesp.org.br/anais/files/2016/trabalho-1000022600.pdf · regulador de...
6
16° TÍTULO: DESENVOLVIMENTO DE UM SISTEMA DE SIMULAÇÃO DINÂMICA DE TURBINA FRANCIS PARA REGULAÇÃO DE VELOCIDADE TÍTULO: CATEGORIA: EM ANDAMENTO CATEGORIA: ÁREA: ENGENHARIAS E ARQUITETURA ÁREA: SUBÁREA: ENGENHARIAS SUBÁREA: INSTITUIÇÃO: FACULDADE ENIAC INSTITUIÇÃO: AUTOR(ES): LEVI SOUZA SAMPAIO, SILAS SOARES SANTOS AUTOR(ES): ORIENTADOR(ES): MARCONES CLEBER CLEBER BRITO DA SILVA ORIENTADOR(ES):
-
Upload
truonghanh -
Category
Documents
-
view
213 -
download
0
Transcript of 16° - Conic-Semespconic-semesp.org.br/anais/files/2016/trabalho-1000022600.pdf · regulador de...
16°
TÍTULO: DESENVOLVIMENTO DE UM SISTEMA DE SIMULAÇÃO DINÂMICA DE TURBINA FRANCISPARA REGULAÇÃO DE VELOCIDADETÍTULO:
CATEGORIA: EM ANDAMENTOCATEGORIA:
ÁREA: ENGENHARIAS E ARQUITETURAÁREA:
SUBÁREA: ENGENHARIASSUBÁREA:
INSTITUIÇÃO: FACULDADE ENIACINSTITUIÇÃO:
AUTOR(ES): LEVI SOUZA SAMPAIO, SILAS SOARES SANTOSAUTOR(ES):
ORIENTADOR(ES): MARCONES CLEBER CLEBER BRITO DA SILVAORIENTADOR(ES):
TÍTULO PROVISÓRIO DO TCC: Desenvolvimento de um Sistema de Simulação Dinâmica de Turbina Francis Para Regulação de Velocidade Levi Souza Sampaio 236092011 Silas Soares Santos 319072011
1 Resumo – No sistema elétrico de potência, as cargas que estão conectadas aos diversos barramentos variam
constantemente, afetando o equilíbrio carga/geração. A energia cinética armazenada nos corpos girantes das
unidades geradoras tende a aumentar ou diminuir a rotação do conjunto durante a perturbação, o que alteraria
significativamente a frequência, se não fosse pelo regulador de velocidade. Este artigo tem por objetivo fornecer
ao meio acadêmico um sistema de simulação do funcionamento de usina hidrelétrica com ênfase na regulação de
velocidade em turbinas hidráulicas Francis. Esse simulador consiste em abordar diferentes condições de
operação do sistema e proporcionar ao usuário o controle das variáveis de processo: potência ativa, velocidade,
frequência e abertura do distribuidor, tudo por meio de interface gráfica. É demonstrado também o passo-a-passo
da confecção dos modelos no Matlab Simulink, a interface com o Arduino e o supervisório.
2 Introdução
Devido à alta demanda de energia do país, combinada com sua grande extensão territorial, produzir
energia elétrica com qualidade e confiabilidade desperta alguns desafios. O primeiro é gerar energia elétrica de
características técnicas aceitáveis, em termos mais específicos, uma frequência-padrão de 60 Hz, com variação
de ± 1%, distribuída em toda a rede de energia. Outro desafio está ligado à confiabilidade do sistema mecânico.
Para cumprir estes objetivos no projeto da máquina, é necessário definir uma frequência de rotação como ponto
ótimo de trabalho compatível com a rede que está interligada, e ainda projetar os componentes mecânicos que
suporte os esforços máximos a que são submetidos nos diversos regimes de trabalho.
James Watt, em meados do século XVII, criou o primeiro regulador de velocidade de uma máquina
motriz, tendo como principal objetivo melhorar o rendimento das máquinas a vapor da época. O conceito de Watt apesar de ser um modelo mecânico-hidráulico simples, resultou no aumento significativo da eficiência do
sistema em que foi introduzido, iniciando o controle da produção de energia das máquinas motrizes. Atualmente
a necessidade do regulador de velocidade nos sistemas produtores de energia é maior ainda, principalmente nas
grandes centrais, pois não só tem a finalidade primária de manter a frequência (mantendo assim o rendimento de
uma máquina independente da mesma), mas também de controlar a potência gerada (Souza, Fuchs, & Santos,
1983)
Para atender os requisitos operativos de frequência são utilizadas, normalmente, malhas de controle de
potência ativa – frequência (denominada usualmente como malha Pf, ou ainda, malha de controle de
carga/frequência). No projeto e operação desta malha, o problema da estabilidade dinâmica tem se mostrado de
crucial importância, sendo eu nesta esteira os ajustes adequados dos parâmetros dos sistemas de controle
permitem melhor desempenho para o sistema de potência.
3 OBJETIVOS
Este trabalho tem por objetivo fornecer ao meio industrial e acadêmico um sistema de simulação do
funcionamento de usina hidrelétrica com ênfase na regulação de velocidade em turbinas hidráulicas Francis. Esse
simulador consiste em abordar diferentes condições de operação do sistema e proporcionar ao usuário o controle
das variáveis como potência ativa tudo por meio de interface gráfica.
4 Metodologia
Para que esse simulador fosse desenvolvido, foram realizadas pesquisas sobre princípio da conservação de
energia, geração de energia e controle de velocidade. Também foram implementados os modelos matemáticos que compõem diferentes partes do sistema no MATLAB como o distribuidor hidráulico de uma turbina Francis e
seu eixo, e que através de um toolbox é descarregado a aplicação em um arduino que tem a função de receber
sinais de entrada e saída e abrigar as lógicas. Um controlador lógico programável é responsável por coletar e
enviar dados para o arduino e também serve como gateway para um sistema supervisório permitindo a
comunicação entra as partes. Com o sistema implementado o usuário pode entender o comportamento do
regulador de velocidade frente diferentes situações operacionais como o descarte de carga, bem como realizar
diferentes ajustes para o controle do sistema.
Click t
o BUY N
OW!PDF-XChange Editor
tracker-software.com Click t
o BUY N
OW!PD
F-XChange Editor
tracker-software.com
5 Desenvolvimento
Para simulação é considerado a seguinte equação:
P = Tm ∗ ωr
Onde:
P = Potência ativa em W
Tm = Torque em Nm
wr = A rotação em rad/s
Observa-se que a potência gerada é diretamente proporcional ao torque e a rotação da turbina, portanto,
fatores desejados para a manutenção da frequência que a velocidade ou “wr” permaneça constante, com
alteração apenas do torque “Tm”. O princípio da conservação de energia estabelece que a quantidade de energia demandada no sistema,
incluindo as perdas, deve ser igual a quantidade de energia gerada. No sistema elétrico de potência as cargas
estão ligadas aos diversos barramentos variam em tempo real, e o estado de equilíbrio carga/geração é sempre
alterado. Isto obriga o constante restabelecimento do estado de equilíbrio, que é exercido através de sistemas de
controle. (Helmo Lemos, 2002)
Portanto o objetivo elementar do regulador de velocidade é manter a rotação constante para quaisquer
variações de carga no sistema. Quando o sistema de geração supre uma carga isolada, os reguladores de
velocidade atuam para controle da rotação com a variação da carga. Todavia para operação em sincronismo com
outras fontes geradoras a velocidade é imposta pelo sistema, devido sua robustez, portanto nessa situação a
malha de controle atua para controlar a potência, desde que não ocorra distúrbios na rede. A malha de controle do regulador de velocidade calcula a abertura necessária para manter a velocidade
ou potência desejada naturbina. Este comando é informado para a parte hidráulica através da chamada “interface
eletro-hidráulica”. O componente principal desta interface é a válvula proporcional. A abertura e fechamento dos
servomotores são comandos preferencialmente através dos sinais de corrente de 4 a 20mA ou alternativamente,
na tensão entre -10V a +10V.
Sabendo que a potência gerada é diretamente proporcional ao torque e a rotação da turbina chega-se à conclusão
que a turbina é modelada e simulada conforme equação a seguir:
Onde: Pmec = Potência mecânica no eixo da turbina em (p.u);
At= coeficiente de transformação entre potência do gerador e da turbina;
ℎ = Altura de queda líquida do reservatório em (p.u);
q = Vazão em (p.u);
qnoload = Vazão necessária para suprir as perdas da turbina a vazio em (p.u); Da = Coeficiente de perdas de rendimento por desvio da velocidade (“water turbine
damping”);
G = Abertura do distribuidor em (p.u);
ω = Rotação em (p.u)
∆ω= Desvio da rotação nominal em (p.u)
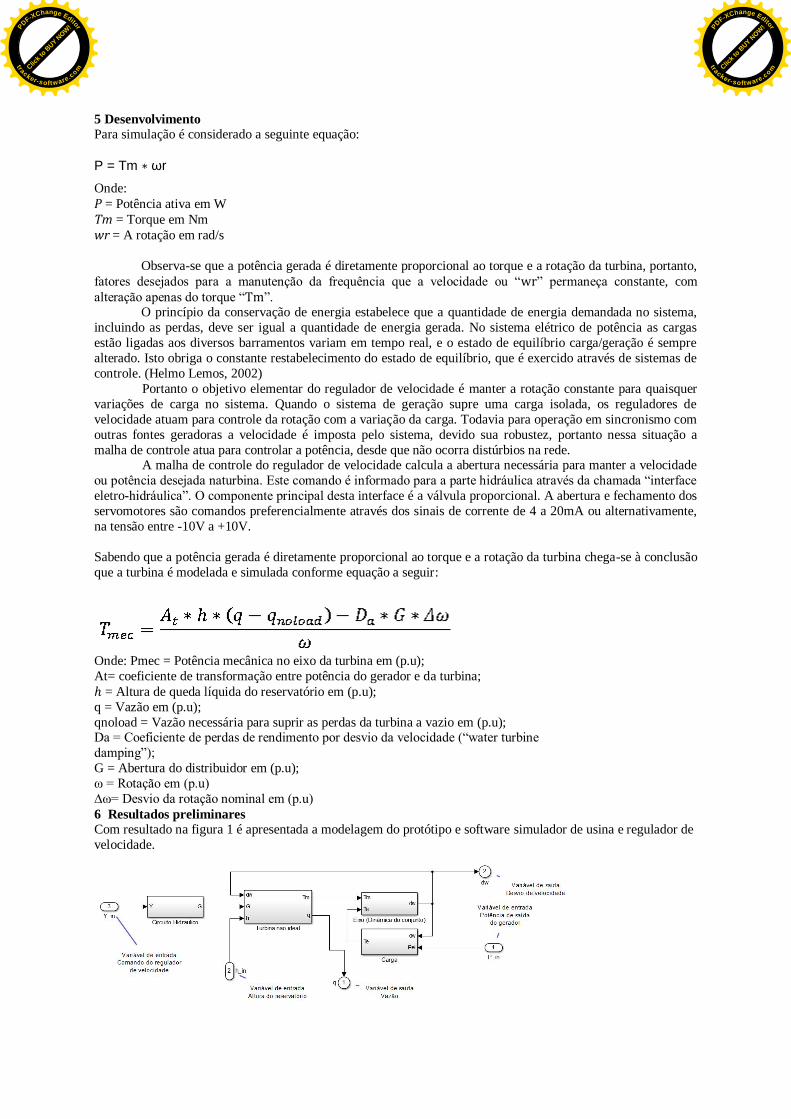
6 Resultados preliminares Com resultado na figura 1 é apresentada a modelagem do protótipo e software simulador de usina e regulador de
velocidade.
Click t
o BUY N
OW!PDF-XChange Editor
tracker-software.com Click t
o BUY N
OW!PD
F-XChange Editor
tracker-software.com
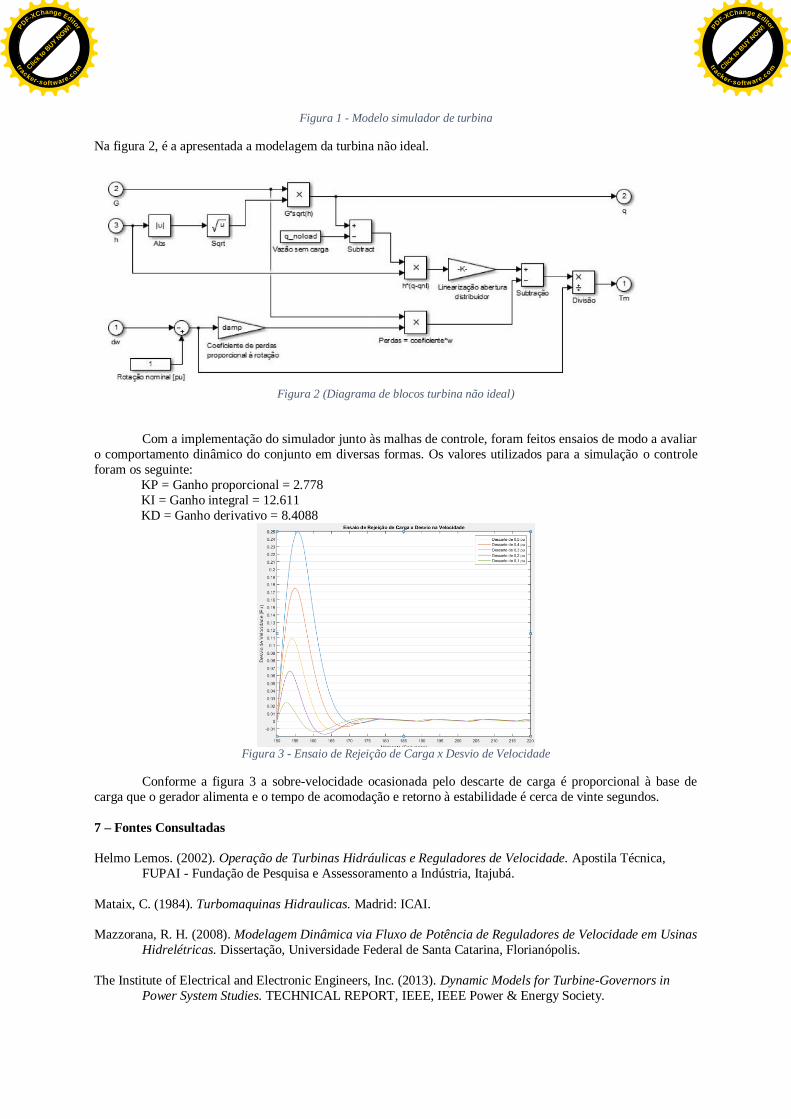
Figura 1 - Modelo simulador de turbina
Na figura 2, é a apresentada a modelagem da turbina não ideal.
Figura 2 (Diagrama de blocos turbina não ideal)
Com a implementação do simulador junto às malhas de controle, foram feitos ensaios de modo a avaliar
o comportamento dinâmico do conjunto em diversas formas. Os valores utilizados para a simulação o controle
foram os seguinte:
KP = Ganho proporcional = 2.778
KI = Ganho integral = 12.611
KD = Ganho derivativo = 8.4088
Figura 3 - Ensaio de Rejeição de Carga x Desvio de Velocidade
Conforme a figura 3 a sobre-velocidade ocasionada pelo descarte de carga é proporcional à base de
carga que o gerador alimenta e o tempo de acomodação e retorno à estabilidade é cerca de vinte segundos.
7 – Fontes Consultadas
Helmo Lemos. (2002). Operação de Turbinas Hidráulicas e Reguladores de Velocidade. Apostila Técnica,
FUPAI - Fundação de Pesquisa e Assessoramento a Indústria, Itajubá.
Mataix, C. (1984). Turbomaquinas Hidraulicas. Madrid: ICAI.
Mazzorana, R. H. (2008). Modelagem Dinâmica via Fluxo de Potência de Reguladores de Velocidade em Usinas
Hidrelétricas. Dissertação, Universidade Federal de Santa Catarina, Florianópolis.
The Institute of Electrical and Electronic Engineers, Inc. (2013). Dynamic Models for Turbine-Governors in
Power System Studies. TECHNICAL REPORT, IEEE, IEEE Power & Energy Society.
Click t
o BUY N
OW!PDF-XChange Editor
tracker-software.com Click t
o BUY N
OW!PD
F-XChange Editor
tracker-software.com
01/09/2016 EniacVirtual Declaração de Matrícula
http://perseu1.eniac.com.br/lewebweb/secretaria/declaracaoMatriculaCN/declaracaoMatriculaFaculdade.jsf?cid=2 1/1
DECLARAÇÃO DE MATRÍCULA
Declaramos para os devidos fins que LEVI SOUZA SAMPAIO éaluno(a) regularmente matriculado(a) no 10º período do curso deEngenharia de Controle e Automação , período letivo 20162F nestaInstituição de Ensino Superior, com matrícula no. 236092011.
O horário das aulas é das 18:00h às 20:30h de segunda à sextafeira eaos sábados das 7h50 às 12h10. A carga horária total do curso é de 4600horas. Com duração de 10 semestres letivos.
Informamos ainda, que o curso de Engenharia de Controle eAutomação tem Reconhecimento pela Portaria SERES Nº 605 de19/11/2013 D.O.U. de 20/11/2013.
Guarulhos, 01 de Setembro de 2016
Fernanda de Oliveira Henrique Secretária Geral
Click t
o BUY N
OW!PDF-XChange Editor
tracker-software.com Click t
o BUY N
OW!PD
F-XChange Editor
tracker-software.com
01/09/2016 EniacVirtual Declaração de Matrícula
http://perseu1.eniac.com.br/lewebweb/secretaria/declaracaoMatriculaCN/declaracaoMatriculaFaculdade.jsf?cid=2 1/1
DECLARAÇÃO DE MATRÍCULA
Declaramos para os devidos fins que SILAS SOARES SANTOS éaluno(a) regularmente matriculado(a) no 10º período do curso deEngenharia de Controle e Automação , período letivo 20162F nestaInstituição de Ensino Superior, com matrícula no. 319072011.
O horário das aulas é das 18:00h às 20:30h de segunda à sextafeira eaos sábados das 7h50 às 12h10. A carga horária total do curso é de 4600horas. Com duração de 10 semestres letivos.
Informamos ainda, que o curso de Engenharia de Controle eAutomação tem Reconhecimento pela Portaria SERES Nº 605 de19/11/2013 D.O.U. de 20/11/2013.
Guarulhos, 01 de Setembro de 2016
Fernanda de Oliveira Henrique Secretária Geral
Click t
o BUY N
OW!PDF-XChange Editor
tracker-software.com Click t
o BUY N
OW!PD
F-XChange Editor
tracker-software.com


















