1794-UM001B-PT-P, Sistema FlexLogix Manual do...
164
Sistema FlexLogix 1794-L33, -L34 Manual do Usuário Spare Allen-Bradley Parts
Transcript of 1794-UM001B-PT-P, Sistema FlexLogix Manual do...
Sistema FlexLogix1794-L33, -L34
Manual do Usuário
Spare Allen-Bradley Parts
Informações Importantes ao Usuário
Por causa da diversidade de usos dos produtos descritos nesta publicação, os responsáveis pela aplicação e uso deste equipamento de controle devem certificar-se de que todas as etapas necessárias foram seguidas para garantir que cada aplicação e uso cumpram todos os requisitos de desempenho e segurança, incluindo todas as leis, regulamentações, códigos e padrões aplicáveis.
As ilustrações, gráficos, exemplos de programas e de layout mostrados neste manual são apenas para fins ilustrativos. Visto que há diversas tags e requisitos associados a qualquer instalação em especial, a Rockwell Automation não assume a responsabilidade (incluindo responsabilidade por propriedade intelectual) pelo uso real baseado nos exemplos mostrados nesta publicação.
A publicação Allen-Bradley SGI-1.1, Diretrizes de Segurança para Aplicação, Instalação e Manutenção dos Dispositivos de Controle de Estado Sólido (disponível no escritório local da Rockwell Automation), descreve algumas diferenças importantes entre os equipamentos eletrônicos e dispositivos eletromecânicos, que devem ser levadas em consideração ao utilizar produtos como os descritos nesta publicação.
É proibida a reprodução, parcial ou total, deste manual sem a permissão por escrito da Rockwell Automation.
Ao longo deste manual, usamos notas a fim de chamar sua atenção para algumas considerações de segurança:
As instruções de atenção ajudam você a:
• identificar e evitar um perigo
• reconhecer as conseqüências
Allen-Bradley é uma marca registrada da Rockwell Automation
ATENÇÃO
!Identifica as informações sobre práticas ou circunstâncias que podem causar danos pessoais ou morte, danos à propriedade ou perdas econômicas.
IMPORTANTE Identifica as informações críticas para aplicação e compreensão bem sucedidas do produto.
Prefácio
Propósito deste Manual Este manual orienta o desenvolvimento de projetos para os controladores FlexLogix. Ele fornece os procedimentos sobre como estabelecer comunicação:
• nas seguintes redes
– ControlNet
– DeviceNet
– serial
– DH-485
• com os seguintes dispositivos
– controladores
– E/S
– estações de trabalho
– Terminais PanelView
Este manual trabalha junto com o Logix5000 Controllers Common Procedures Programming Manual, publicação 1756-PM001, que cobre as seguintes tarefas:
• Gerenciar arquivos de projeto
• Organizar sua lógica
• Organizar tags
• Programar rotinas
• Testar um projeto
• Manusear falhas
Quem Deve usar Este Manual
Este manual é intencionado àqueles indivíduos que programam aplicações que usam os controladores FlexLogix, como:
• engenheiros de software
• engenheiros de controle
• engenheiros de aplicação
• técnicos de documentação
Quando Usar Este Manual Use este manual:
• quando estiver pronto para integrar sua aplicação com os dispositivos de E/S, controladores e redes em seu sistema.
• após realizar estas ações:
– desenvolver o código básico para sua aplicação
– realizar testes isolados de sua aplicação
Spare Allen-Bradley Parts
1 Publicação 1794-UM001B-PT-P - Novembro 2000
Prefácio 2
Como Usar Este Manual Este manual é dividido em tarefas básicas que você realiza enquanto programa um controlador FlexLogix. Cada capítulo cobre uma tarefa principal, como comunicação em uma rede específica. Para cada tarefa principal, o capítulo:
• lista o que é necessário
• descreve as etapas a serem seguidas para realizar a tarefa
• fornece detalhes para cada etapa, conforme necessário
• inclui exemplos de configurações do sistema
Publicação 1794-UM001B-PT-P - Novembro 2000
Resumo das Mudanças
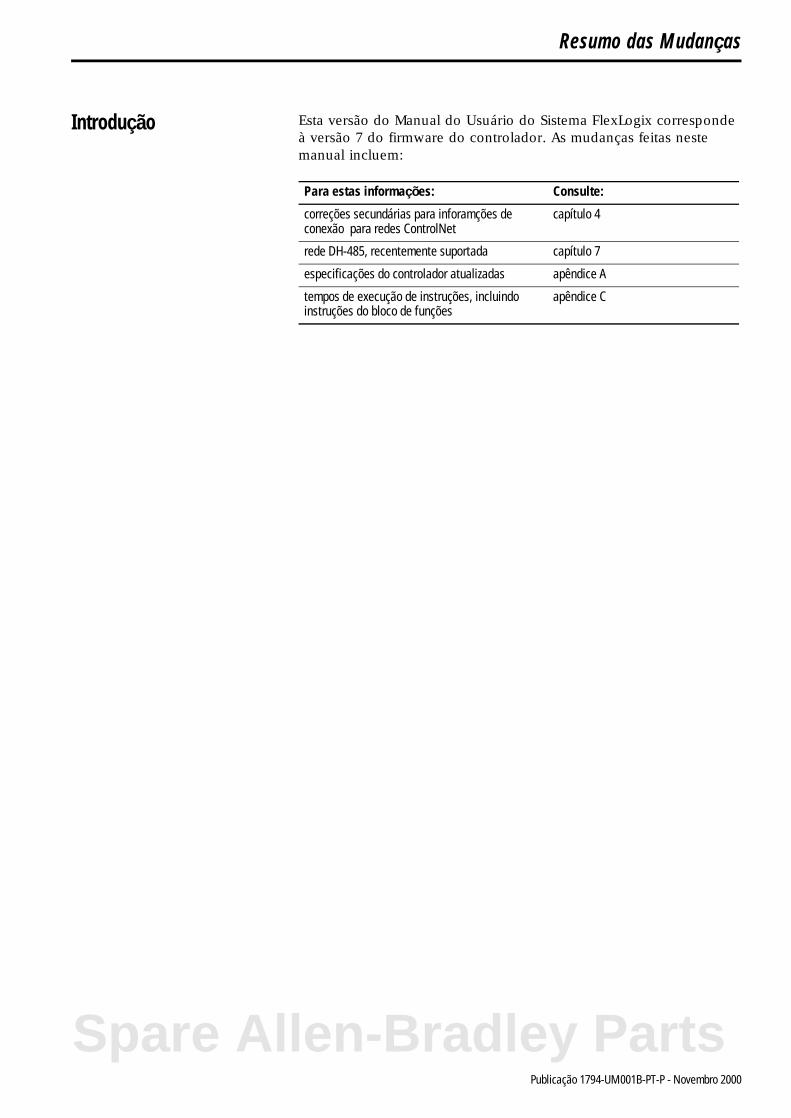
Introdução Esta versão do Manual do Usuário do Sistema FlexLogix corresponde à versão 7 do firmware do controlador. As mudanças feitas neste manual incluem:
Para estas informações: Consulte:
correções secundárias para inforamções de conexão para redes ControlNet
capítulo 4
rede DH-485, recentemente suportada capítulo 7
especificações do controlador atualizadas apêndice A
tempos de execução de instruções, incluindo instruções do bloco de funções
apêndice C
Spare Allen-Bradley Parts
1 Publicação 1794-UM001B-PT-P - Novembro 2000
2 Resumo das Mudanças
Notas:
Publicação 1794-UM001B-PT-P - Novembro 2000
Sumário
Capítulo 1Início Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
Criação e Descarregamento de um Projeto . . . . . . . . . . . . . 1-2Criação de um projeto. . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-3Alteração das propriedades do projeto . . . . . . . . . . . . . . . . 1-4Adição de um módulo de entrada local . . . . . . . . . . . . . . . 1-5Adição de um módulo de saída local . . . . . . . . . . . . . . . . . 1-7Adição de um módulo analógico local estendido . . . . . . . . 1-9Alteração das propriedades do módulo . . . . . . . . . . . . . . . 1-11Monitoração das variáveis de E/S. . . . . . . . . . . . . . . . . . . . 1-12Criação de outras tags . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-13Documentação da E/S com tags com alias . . . . . . . . . . . . . 1-14Inserção de lógica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-15Descarregamento de um projeto . . . . . . . . . . . . . . . . . . . . 1-17Monitoração do tempo de varredura do programa . . . . . . . 1-18Monitoração do uso da memória do controlador . . . . . . . . 1-19
Capítulo 2O que é FlexLogix? Uso Deste Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-1
Desenvolvimento de programas. . . . . . . . . . . . . . . . . . . . . 2-2Definição das tarefas . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3Definição dos programas . . . . . . . . . . . . . . . . . . . . . . . 2-5Definição das rotinas . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
Como o Sistema FlexLogix Usa as Conexões . . . . . . . . . . . 2-5Determinação de conexões programadas para módulos de E/S . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6Determinação de conexões não programadas para mensagens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-8Determinação de conexões programadas para tags produzidos/consumidos . . . . . . . . . . . . . . . . . . . . . . . . 2-9Determinação dos requisitos totais de conexão . . . . . . . 2-9
Seleção de uma Porcentagem de Atraso do Sistema . . . . . . 2-10
Capítulo 3Instalação e Configuração da E/S Local
Uso Deste Capítulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-1Instalação dos Módulos de E/S Local . . . . . . . . . . . . . . . . . 3-3Determinação de Quando o Controlador Atualiza a E/S . . . 3-4Configuração de um Trilho DIN. . . . . . . . . . . . . . . . . . . . . 3-6Configuração de Módulos de E/S Local . . . . . . . . . . . . . . . 3-7
Codificação eletrônica . . . . . . . . . . . . . . . . . . . . . . . . . 3-8Formatos de comunicação . . . . . . . . . . . . . . . . . . . . . . 3-9
Inibição da Operação do Módulo de E/S . . . . . . . . . . . . . . 3-11Acesso aos Dados de E/S . . . . . . . . . . . . . . . . . . . . . . . . . 3-14
Uso de aliases para simplificar os nomes dos tags . . . . . 3-16Monitoração dos Módulos de E/S. . . . . . . . . . . . . . . . . . . . 3-16
Configuração da reação do módulo a uma falha de conexão . . . . . . . . . . . . . . . . . . . . . . . . 3-16Monitoração de um módulo de E/S . . . . . . . . . . . . . . . 3-17Monitoração de uma conexão de gaveta otimizada . . . . 3-20Spare Allen-Bradley Parts
i Publicação 1794-UM001B-PT-P - Novembro 2000

Sumário ii
Capítulo 4Comunicação com Dispositivos em um Link ControlNet
Uso Deste Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1Configuração do Seu Sistema para um Link ControlNet. . . . 4-1
Etapa 1: Configure o hardware . . . . . . . . . . . . . . . . . . . 4-2Etapa 2: Configure o driver de comunicação . . . . . . . . . 4-3Etapa 3: Configure o cartão filho como parte do sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4Etapa 4: Programe a rede . . . . . . . . . . . . . . . . . . . . . . . 4-5
Configuração da E/S Remota . . . . . . . . . . . . . . . . . . . . . . . 4-6Acesso à E/S remota . . . . . . . . . . . . . . . . . . . . . . . . . . 4-8
Envio de Mensagens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-10Comunicação com outro controlador baseado em Logix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-11Comunicação com outros controladores pela ControlNet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-12Mapeamento de endereços. . . . . . . . . . . . . . . . . . . . . . 4-14
Produção e Consumo de Dados. . . . . . . . . . . . . . . . . . . . . 4-16Número máximo de tags produzidos e consumidos. . . . 4-16Limite do tamanho do tag produzido ou consumido . . . 4-17Produção de um tag. . . . . . . . . . . . . . . . . . . . . . . . . . . 4-18Consumo de um tag. . . . . . . . . . . . . . . . . . . . . . . . . . . 4-18
Diretrizes para Configuração das Conexões . . . . . . . . . . . . 4-19Determinação do API 4-20Exemplo 1: Controlador FlexLogix e E/S Remota . . . . . . . . 4-21
Exemplo 1: Controle de dispositivos remotos . . . . . . . . 4-21Exemplo 1: Conexões totais requisitadas pelo Flex1 . . . 4-21
Exemplo 2: Controlador FlexLogix para Controlador FlexLogix . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-22
Exemplo 2: Envio de uma instrução MSG . . . . . . . . . . . 4-22Exemplo 2: Produção e Consumo de tags . . . . . . . . . . . 4-23Exemplo 2: Conexões totais requisitadas pelo Flex1 . . . 4-24
Exemplo 3: Controlador FlexLogix para Outros Dispositivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-25
Exemplo 3: Envio de instruções MSG . . . . . . . . . . . . . . 4-25Exemplo 3: Produção e consumo de tags . . . . . . . . . . . 4-26Exemplo 3: conexões totais requisitadas pelo Flex1. . . . 4-29
Exemplo 4: Uso do FlexLogix como uma Ponte . . . . . . . . . 4-30Uso do RSLinx para selecionar o caminho de comunicação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-32
Publicação 1794-UM001B-PT-P - Novembro 2000

Sumário iii
Capítulo 5Comunicação com Dispositivos em um Link DeviceNet
Uso Deste Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1Configuração do Seu Sistema para um Link DeviceNet . . . . 5-1
Etapa 1: Instale o hardware . . . . . . . . . . . . . . . . . . . . . 5-2Etapa 2: Configure o dispositivo de conexão como parte do sistema . . . . . . . . . . . . . . . . . . . . . . . . . 5-3Etapa 3: Programe a rede ControlNet . . . . . . . . . . . . . . 5-4Etapa 4: Defina a lista de varredura DeviceNet . . . . . . . 5-5
Instalação dos Dispositivos DeviceNet . . . . . . . . . . . . . . . . 5-6Configuração da lista de varredura . . . . . . . . . . . . . . . . 5-6Definição dos blocos de dados. . . . . . . . . . . . . . . . . . . 5-7
Acesso aos Dispositivos DeviceNet . . . . . . . . . . . . . . . . . . 5-8Instalação de um Cartão de Comunicação no Modo Run . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-10Exemplo: Controlador FlexLogix e Dispositivos DeviceNet Remoto . . . . . . . . . . . . . . . . . . . . . 5-10
Criação da lista de varredura DeviceNet . . . . . . . . . . . . 5-11Criação de tags alias. . . . . . . . . . . . . . . . . . . . . . . . . . . 5-12
Capítulo 6Comunicação com Dispositivos em um Link Serial
Uso Deste Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1Configuração do Seu Sistema para um Link Serial. . . . . . . . 6-1
Etapa 1: Configure o hardware . . . . . . . . . . . . . . . . . . . 6-2Etapa 2: Configure a porta serial do controlador . . . . . . 6-5Etapa 3: Configure o driver de comunicação . . . . . . . . . 6-7
Exemplo 1: Estação de Trabalho Diretamente Conectada a um Controlador FlexLogix . . . . . . . . . . . . . . . 6-8
Configuração de uma estação ponto-a-ponto DF1 . . . . . 6-8Exemplo 2: Estação de Trabalho Conectada Remotamente a um Controlador FlexLogix . . . . . . . . . . . . . 6-9
Métodos de comunicação mestre/escravo . . . . . . . . . . . 6-10Configuração de uma estação escrava DF1 . . . . . . . . . . 6-11Configuração de uma estação mestre DF1. . . . . . . . . . . 6-11
Exemplo 3: Controlador FlexLogix para uma Leitora de Código de Barra . . . . . . . . . . . . . . . . . . . . . . . . 6-13
Conexão do dispositivo ASCII com o controlador . . . . . 6-14Configuração do modo do usuário . . . . . . . . . . . . . . . . 6-15Programação das instruções ASCII . . . . . . . . . . . . . . . . 6-15
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
Sumário iv
Capítulo 7Comunicação com Dispositivos em um Link DH-485
Uso Deste Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7-1Configuração de Seu Sistema para um Link DH-485 . . . . . . 7-1
Etapa 1: Configure o hardware . . . . . . . . . . . . . . . . . . 7-2Etapa 2: Configure a porta DH-485 do controlador . . . . 7-3
Planejamento de uma Rede DH-485. . . . . . . . . . . . . . . . . . 7-4rotação de token DH-485 . . . . . . . . . . . . . . . . . . . . . . . 7-4Inicialização da rede . . . . . . . . . . . . . . . . . . . . . . . . . . 7-5Número de nós e endereços de nó . . . . . . . . . . . . . . . . 7-5
Instalação de uma Rede DH-485 . . . . . . . . . . . . . . . . . . . . 7-6Aterramento e terminação de uma rede DH-485 . . . . . . 7-7
Exemplo: Controlador FlexLogix, Controlador ControlLogix e Controlador SLC na Mesma Rede DH-485 . . . . . . . . . . . . 7-8
Apêndice AEspecificações do Sistema FlexLogix
Uso Deste Apêndice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1Controlador FlexLogix . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1Adaptador Local Estendido FlexLogix 1794-FLA . . . . . . . . . A-3Bateria 1756-BA1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-4Cabos Seriais do Controlador FlexLogix . . . . . . . . . . . . . . . A-4LEDs do Controlador FlexLogix . . . . . . . . . . . . . . . . . . . . . A-6
Apêndice BManutenção da Bateria Uso deste Apêndice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-1
Armazenamento das Baterias Sobressalentes . . . . . . . . . . . B-1Duração da Bateria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-1 Substituição da Bateria . . . . . . . . . . . . . . . . . . . . . . . . . . . B-3
Apêndice CTempo de Execução Uso Deste Apêndice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-1
Estimativa do Tempo de Execução de uma Instrução de Lógica Ladder . . . . . . . . . . . . . . . . . . C-1Estimativa de Tempo de Execução de uma Rotina de Bloco de Funções . . . . . . . . . . . . . . . . C-12
Publicação 1794-UM001B-PT-P - Novembro 2000
Capítulo 1
Início
Introdução Este capítulo introduz o controlador FlexLogix e fornece uma rápida visão geral sobre a criação e descarregamento de um projeto. As etapas neste capítulo apresentam as características básicas do controlador FlexLogix.
O controlador FlexLogix oferece controle, comunicação e elementos de E/S de alta qualidade em um pacote de controle distribuído.
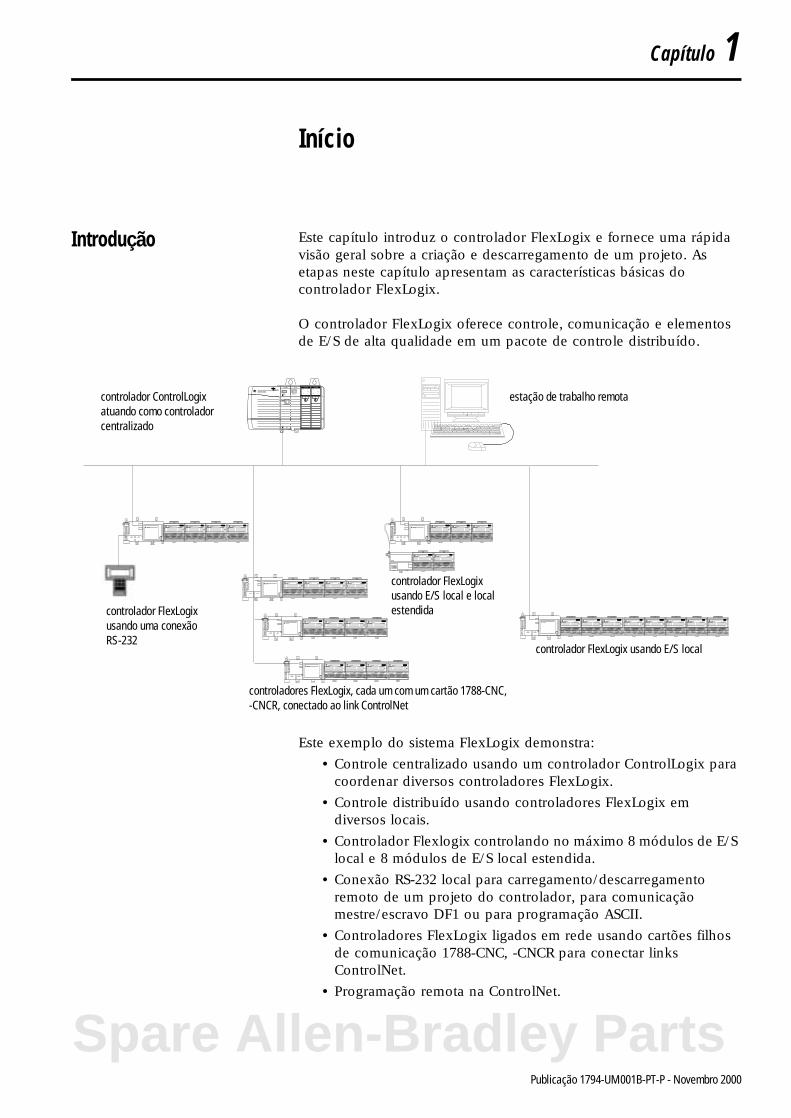
Este exemplo do sistema FlexLogix demonstra:
• Controle centralizado usando um controlador ControlLogix para coordenar diversos controladores FlexLogix.
• Controle distribuído usando controladores FlexLogix em diversos locais.
• Controlador Flexlogix controlando no máximo 8 módulos de E/S local e 8 módulos de E/S local estendida.
• Conexão RS-232 local para carregamento/descarregamento remoto de um projeto do controlador, para comunicação mestre/escravo DF1 ou para programação ASCII.
• Controladores FlexLogix ligados em rede usando cartões filhos de comunicação 1788-CNC, -CNCR para conectar links ControlNet.
• Programação remota na ControlNet.
controlador ControlLogix atuando como controlador centralizado
estação de trabalho remota
controlador FlexLogix usando uma conexão RS-232
controladores FlexLogix, cada um com um cartão 1788-CNC, -CNCR, conectado ao link ControlNet
controlador FlexLogix usando E/S local e local estendida
controlador FlexLogix usando E/S local
Spare Allen-Bradley Parts
1 Publicação 1794-UM001B-PT-P - Novembro 2000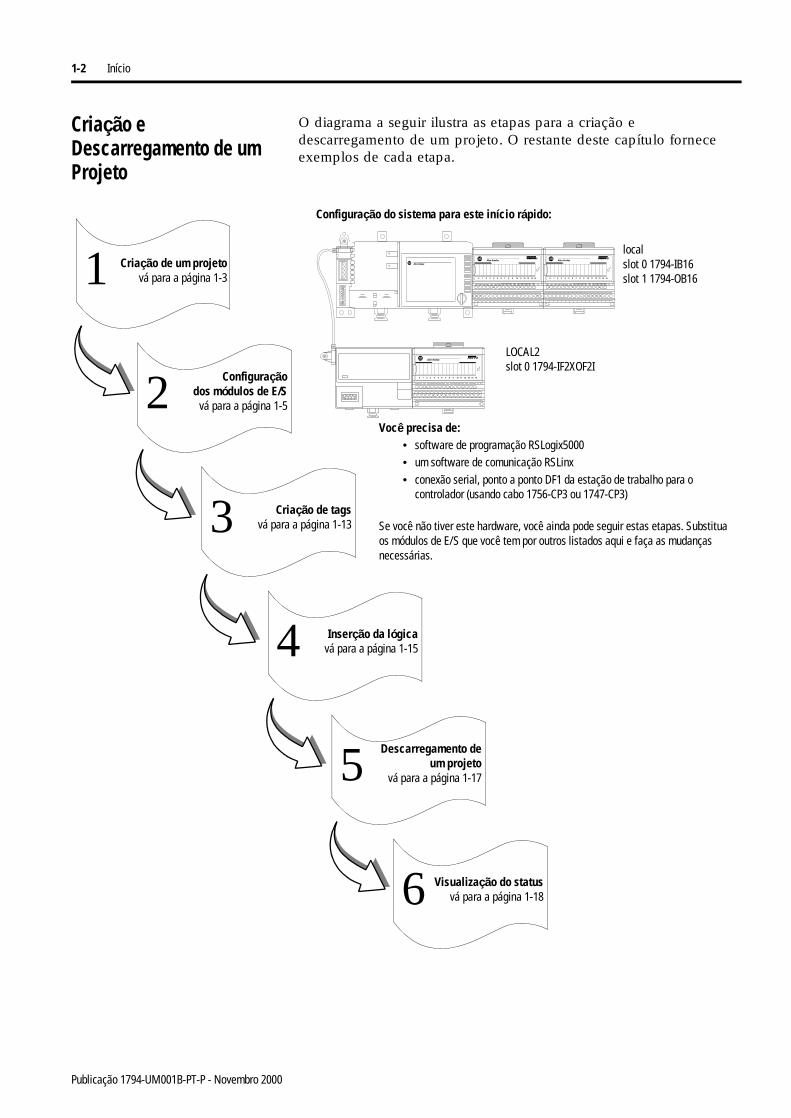
1-2 Início
Criação e Descarregamento de um Projeto
O diagrama a seguir ilustra as etapas para a criação e descarregamento de um projeto. O restante deste capítulo fornece exemplos de cada etapa.
Criação de um projetová para a página 1-31
Criação de tagsvá para a página 1-133
Inserção da lógicavá para a página 1-154
Visualização do statusvá para a página 1-186
Descarregamento deum projeto
vá para a página 1-175
Você precisa de:• software de programação RSLogix5000• um software de comunicação RSLinx• conexão serial, ponto a ponto DF1 da estação de trabalho para o
controlador (usando cabo 1756-CP3 ou 1747-CP3)
Se você não tiver este hardware, você ainda pode seguir estas etapas. Substitua os módulos de E/S que você tem por outros listados aqui e faça as mudanças necessárias.
Configuração do sistema para este início rápido:
localslot 0 1794-IB16slot 1 1794-OB16
Configuraçãodos módulos de E/S
vá para a página 1-52LOCAL2slot 0 1794-IF2XOF2I
Publicação 1794-UM001B-PT-P - Novembro 2000
Início 1-3
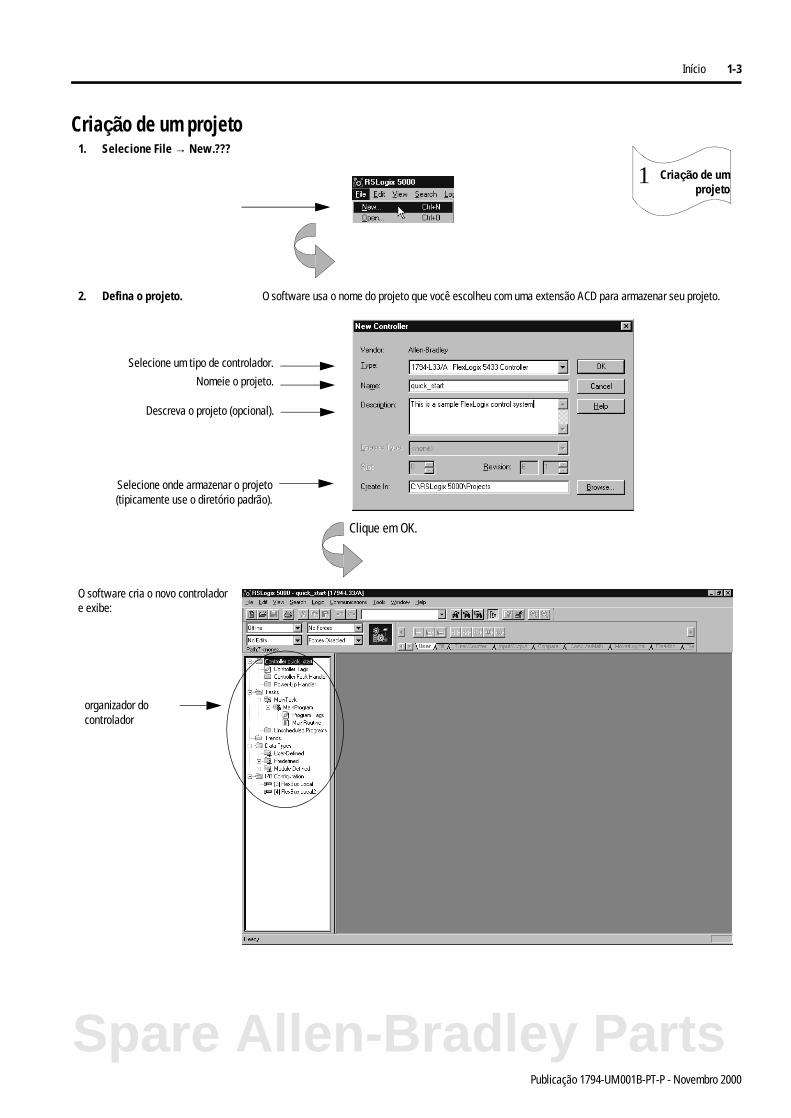
Criação de um projeto
Criação de umprojeto
11. Selecione File → New.???
Selecione um tipo de controlador.
Nomeie o projeto.
Descreva o projeto (opcional).
Selecione onde armazenar o projeto(tipicamente use o diretório padrão).
O software cria o novo controlador e exibe:
Clique em OK.
organizador do controlador
2. Defina o projeto. O software usa o nome do projeto que você escolheu com uma extensão ACD para armazenar seu projeto.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000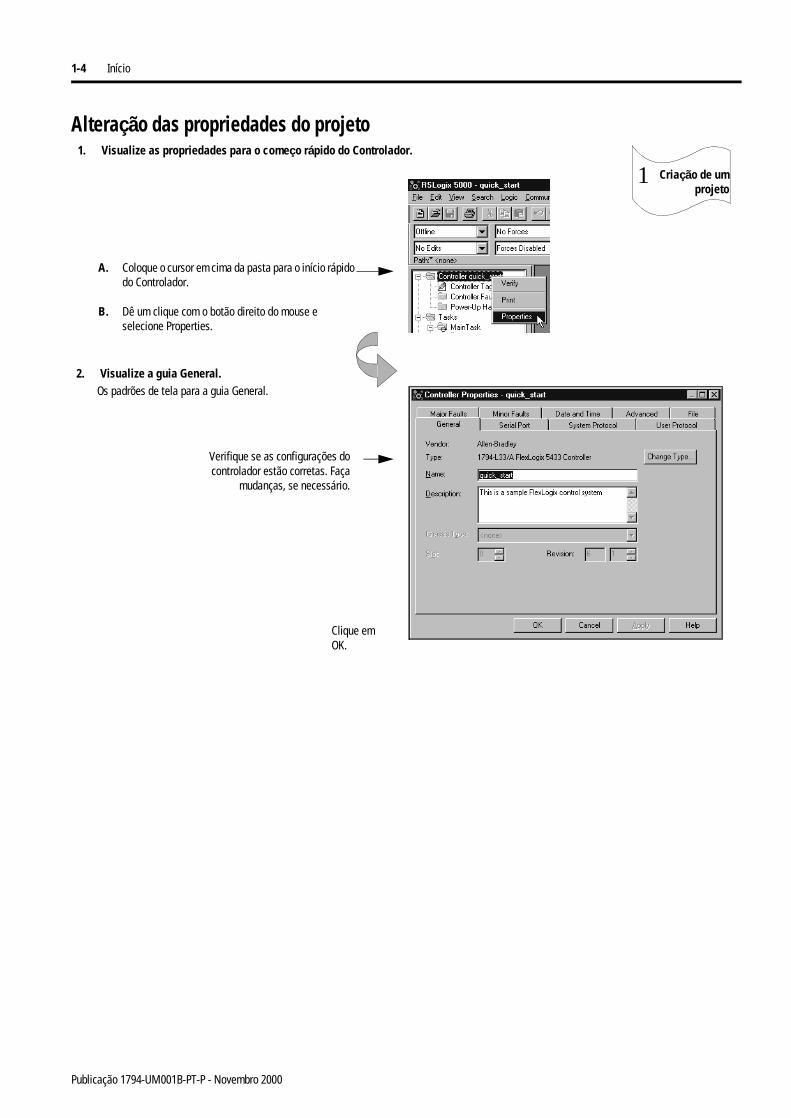
1-4 Início
Alteração das propriedades do projeto1. Visualize as propriedades para o começo rápido do Controlador.
2. Visualize a guia General. Os padrões de tela para a guia General.
Verifique se as configurações docontrolador estão corretas. Faça
mudanças, se necessário.
Criação de umprojeto
1
A. Coloque o cursor em cima da pasta para o início rápido do Controlador.
B. Dê um clique com o botão direito do mouse e selecione Properties.
Clique em OK.
Publicação 1794-UM001B-PT-P - Novembro 2000
Início 1-5
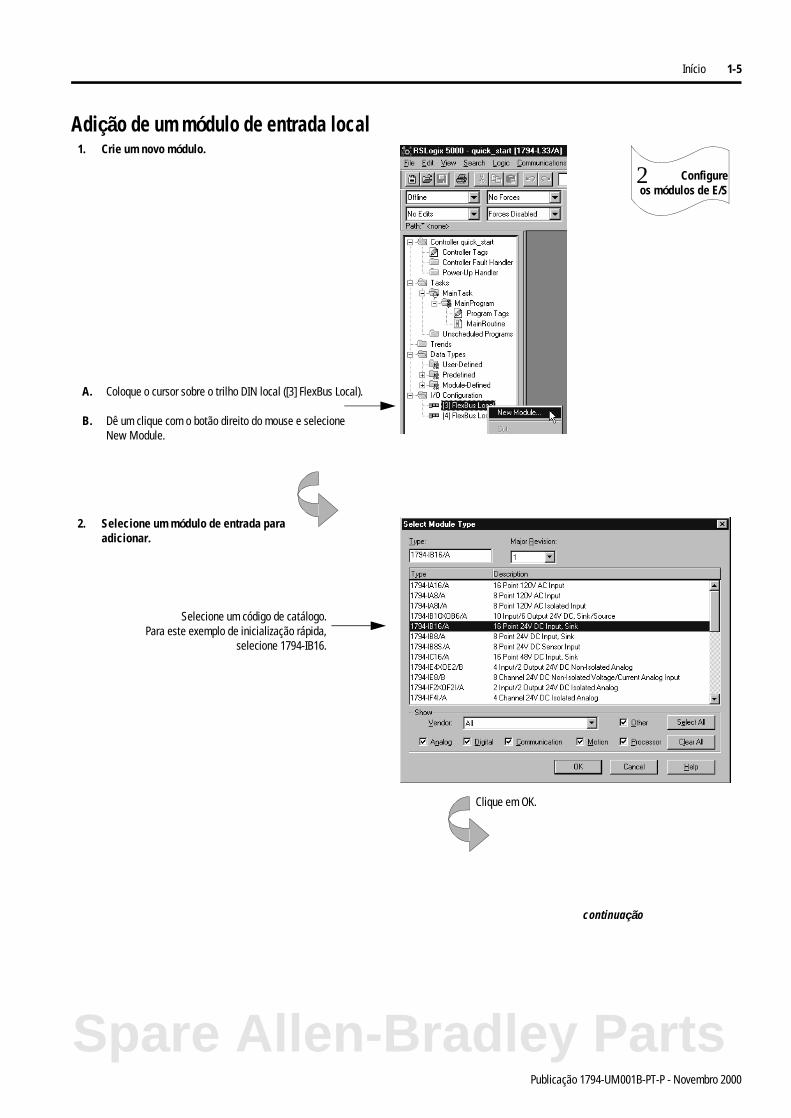
Adição de um módulo de entrada local
Configureos módulos de E/S2
1. Crie um novo módulo.
2. Selecione um módulo de entrada para adicionar.
Selecione um código de catálogo.Para este exemplo de inicialização rápida,
selecione 1794-IB16.
Clique em OK.
continuação
A. Coloque o cursor sobre o trilho DIN local ([3] FlexBus Local).
B. Dê um clique com o botão direito do mouse e selecione New Module.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000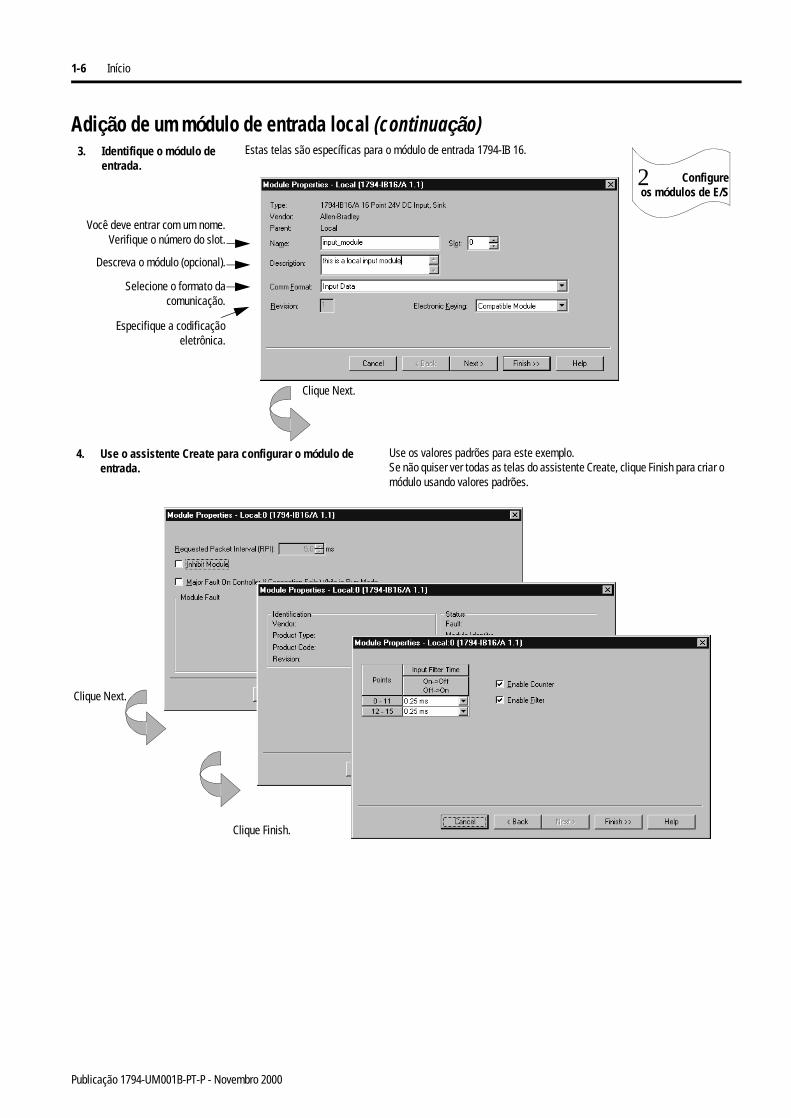
1-6 Início
Adição de um módulo de entrada local (continuação)
Configureos módulos de E/S2
3. Identifique o módulo de entrada.
Você deve entrar com um nome.Verifique o número do slot.
Descreva o módulo (opcional).
Especifique a codificaçãoeletrônica.
Selecione o formato dacomunicação.
Clique Next.
Estas telas são específicas para o módulo de entrada 1794-IB 16.
4. Use o assistente Create para configurar o módulo de entrada.
Use os valores padrões para este exemplo.Se não quiser ver todas as telas do assistente Create, clique Finish para criar o módulo usando valores padrões.
Clique Finish.
Clique Next.
Publicação 1794-UM001B-PT-P - Novembro 2000
Início 1-7
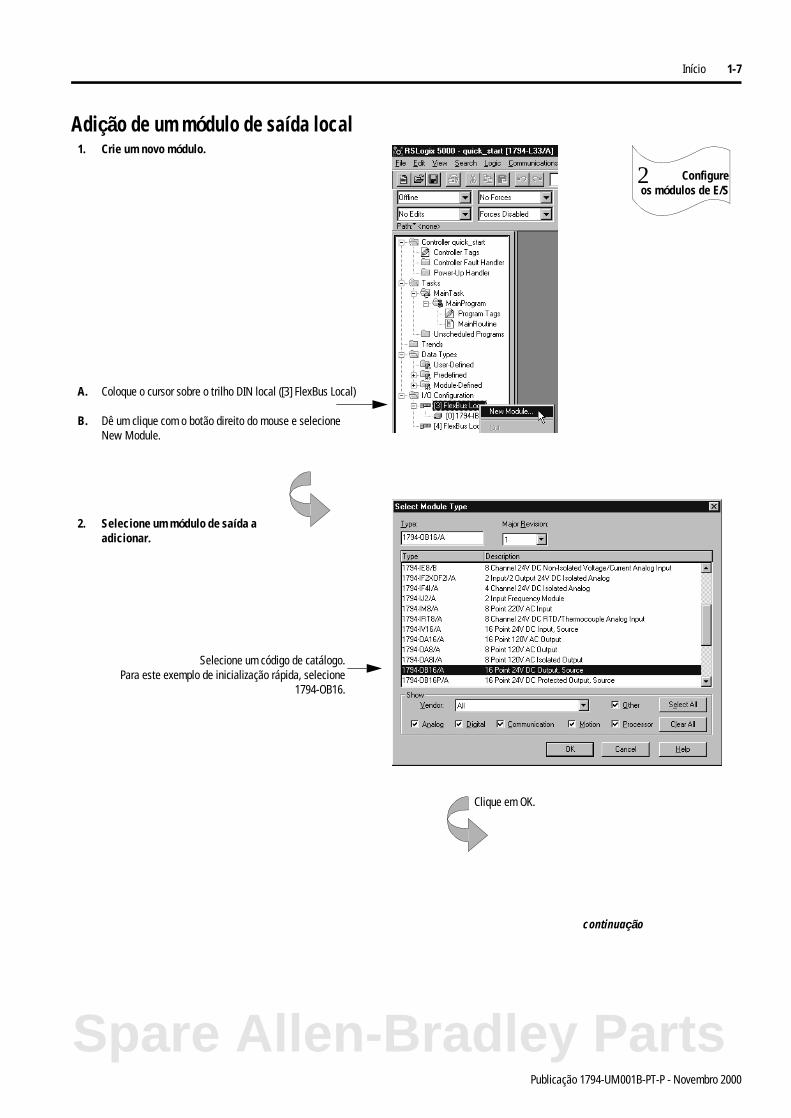
Adição de um módulo de saída local
Configureos módulos de E/S2
1. Crie um novo módulo.
2. Selecione um módulo de saída a adicionar.
Selecione um código de catálogo.Para este exemplo de inicialização rápida, selecione
1794-OB16.
Clique em OK.
continuação
A. Coloque o cursor sobre o trilho DIN local ([3] FlexBus Local)
B. Dê um clique com o botão direito do mouse e selecione New Module.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
1-8 Início
Adição de um módulo de saída (continuação)
Configureos módulos de E/S2
3. Identifique o módulo de saída.
Clique Next.
Estas telas são específicas para o módulo de saída 1794-OB16.
4. Use o assistente Create para configurar o módulo de saída.
Clique Finish.
Você deve entrar com um nome.Verifique o número do slot.
Descreva o módulo (opcional).
Especifique a codificaçãoeletrônica.
Selecione o formato dacomunicação.
Use os valores padrões para este exemplo.Se não quiser ver todas as telas do assistente Create, clique Finish para criar o módulo usando valores padrões.
Clique Next.
Publicação 1794-UM001B-PT-P - Novembro 2000
Início 1-9
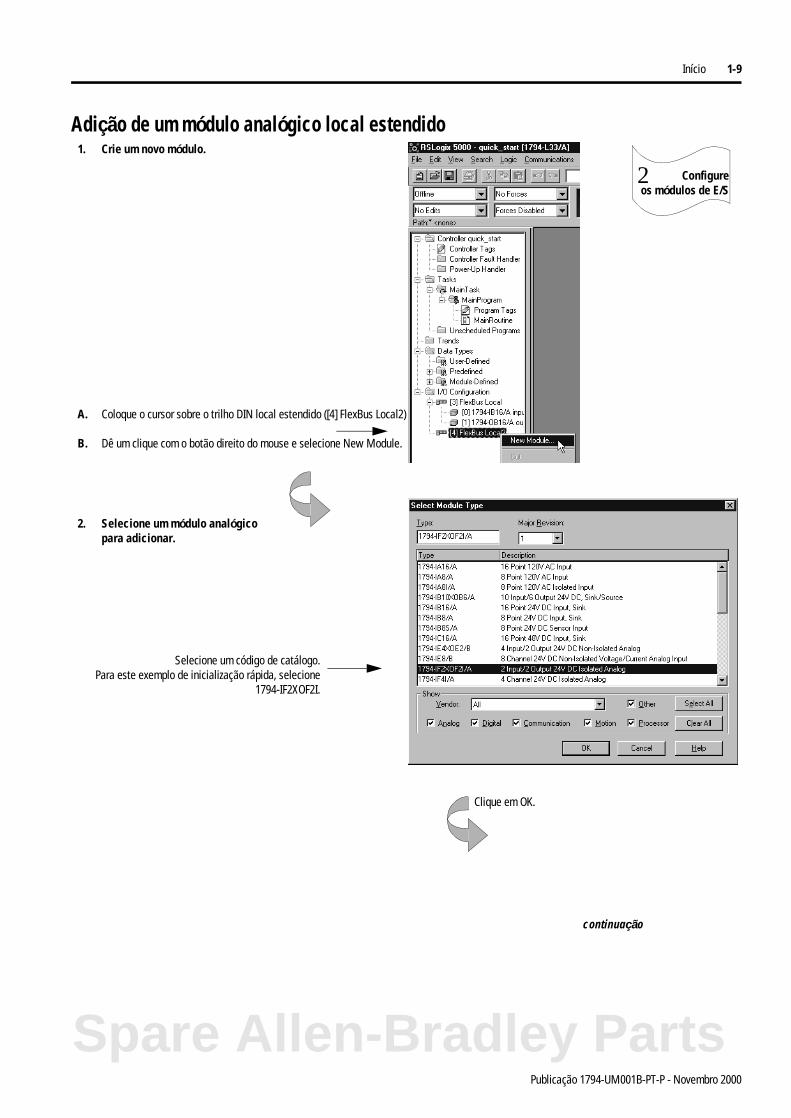
Adição de um módulo analógico local estendido
Configureos módulos de E/S2
1. Crie um novo módulo.
2. Selecione um módulo analógico para adicionar.
Selecione um código de catálogo.Para este exemplo de inicialização rápida, selecione
1794-IF2XOF2I.
Clique em OK.
continuação
A. Coloque o cursor sobre o trilho DIN local estendido ([4] FlexBus Local2)
B. Dê um clique com o botão direito do mouse e selecione New Module.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000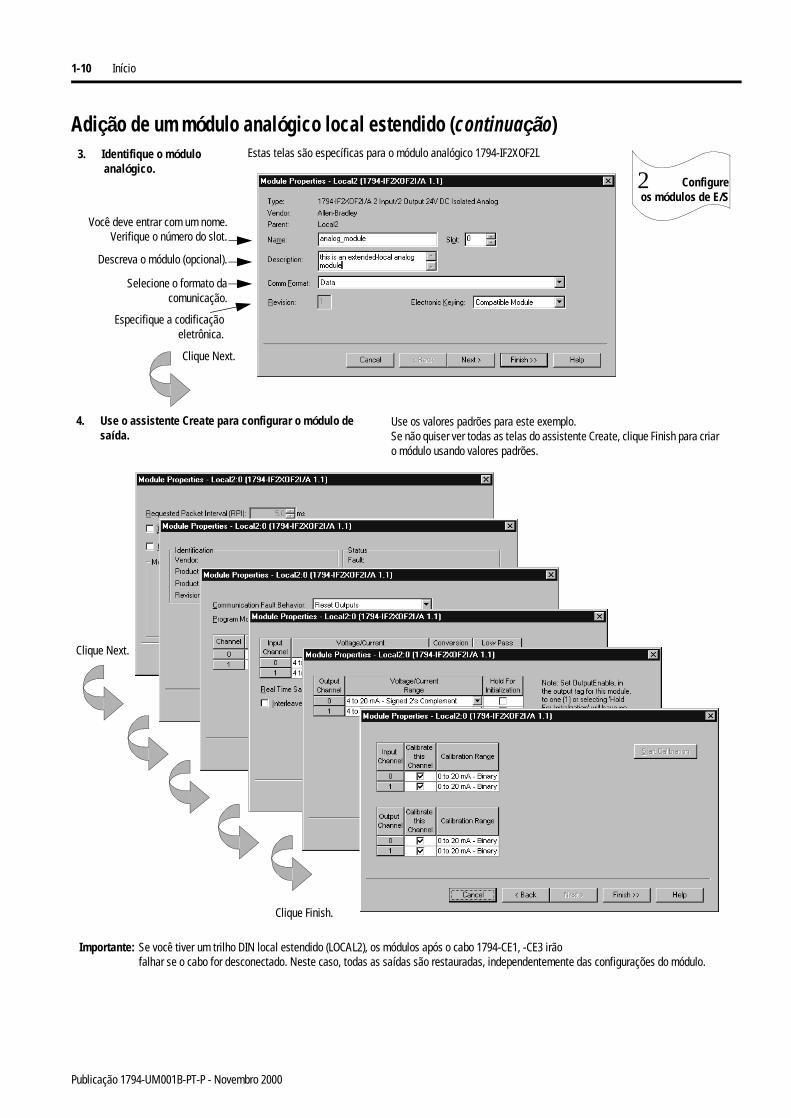
1-10 Início
Adição de um módulo analógico local estendido (continuação)
Configureos módulos de E/S2
3. Identifique o módulo analógico.
Clique Next.
Estas telas são específicas para o módulo analógico 1794-IF2XOF2I.
4. Use o assistente Create para configurar o módulo de saída.
Clique Finish.
Você deve entrar com um nome.Verifique o número do slot.
Descreva o módulo (opcional).
Especifique a codificaçãoeletrônica.
Selecione o formato dacomunicação.
Use os valores padrões para este exemplo.Se não quiser ver todas as telas do assistente Create, clique Finish para criar o módulo usando valores padrões.
Clique Next.
Importante: Se você tiver um trilho DIN local estendido (LOCAL2), os módulos após o cabo 1794-CE1, -CE3 irãofalhar se o cabo for desconectado. Neste caso, todas as saídas são restauradas, independentemente das configurações do módulo.
Publicação 1794-UM001B-PT-P - Novembro 2000
Início 1-11
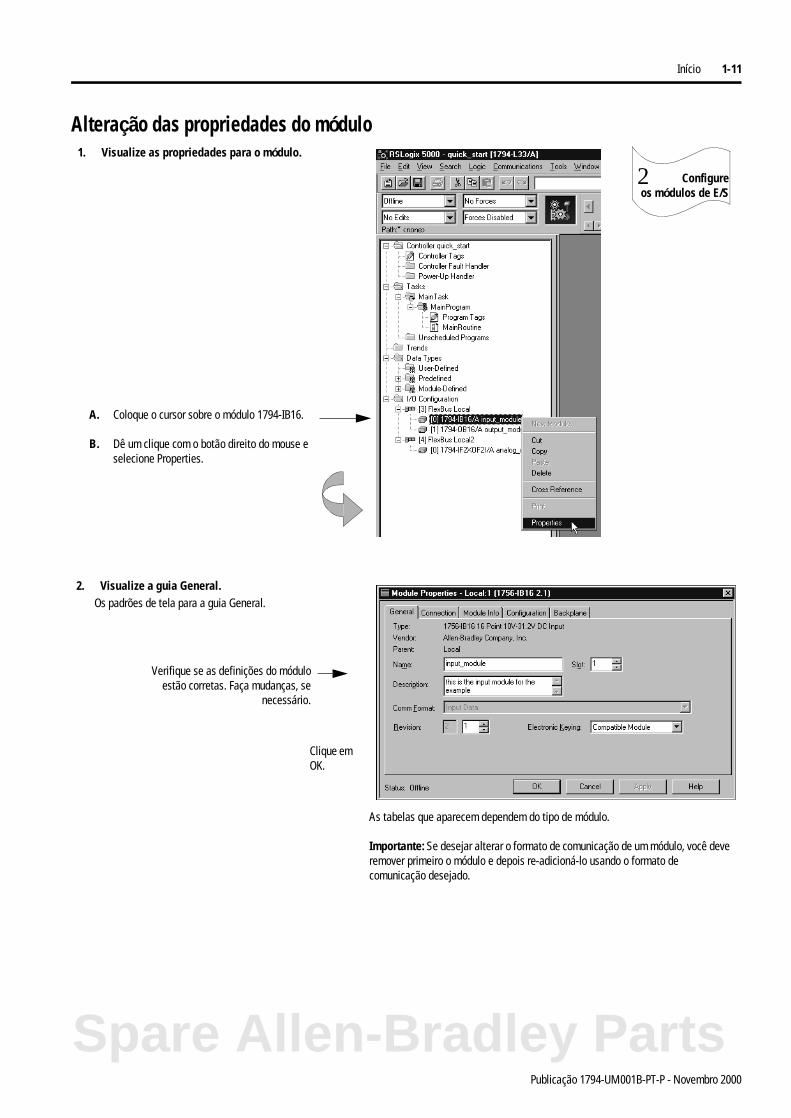
Alteração das propriedades do módulo1. Visualize as propriedades para o módulo.
2. Visualize a guia General.Os padrões de tela para a guia General.
Verifique se as definições do móduloestão corretas. Faça mudanças, se
necessário.
A. Coloque o cursor sobre o módulo 1794-IB16.
B. Dê um clique com o botão direito do mouse e selecione Properties.
Configureos módulos de E/S2
Clique em OK.
As tabelas que aparecem dependem do tipo de módulo.
Importante: Se desejar alterar o formato de comunicação de um módulo, você deve remover primeiro o módulo e depois re-adicioná-lo usando o formato de comunicação desejado.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000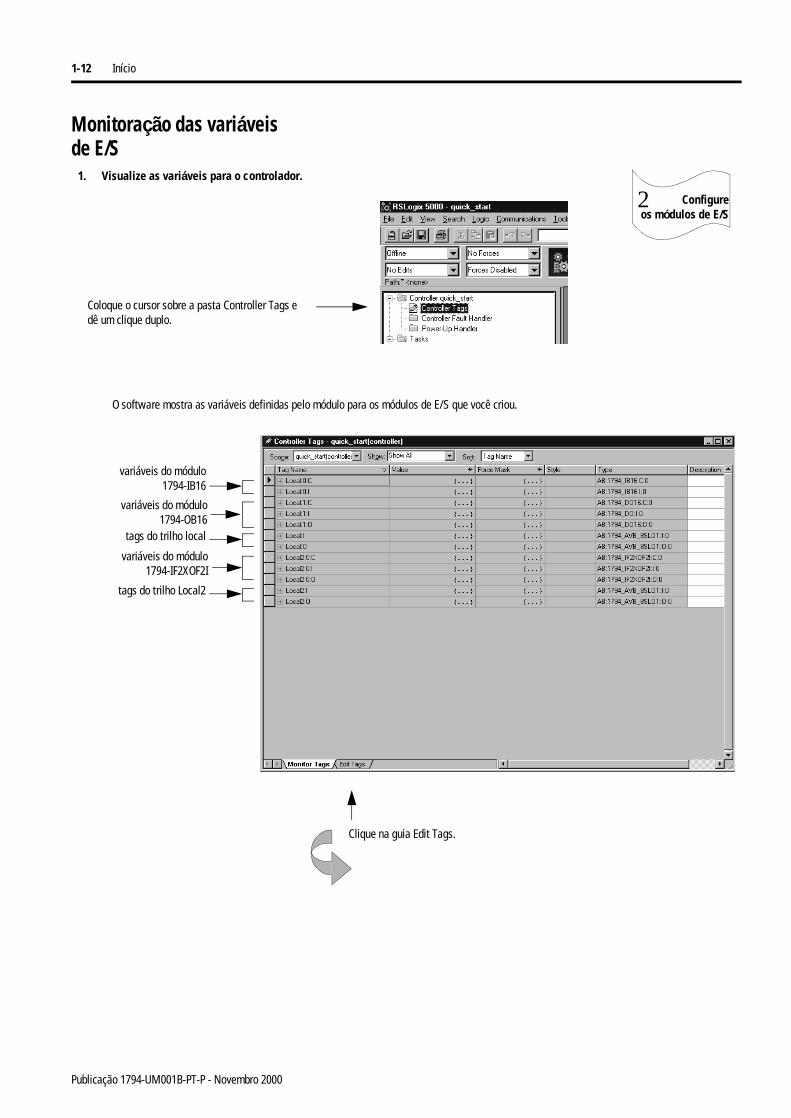
1-12 Início
Monitoração das variáveis de E/S
O software mostra as variáveis definidas pelo módulo para os módulos de E/S que você criou.
variáveis do módulo1794-IB16
variáveis do módulo1794-OB16
Clique na guia Edit Tags.
Coloque o cursor sobre a pasta Controller Tags e dê um clique duplo.
Configureos módulos de E/S2
1. Visualize as variáveis para o controlador.
variáveis do módulo1794-IF2XOF2I
tags do trilho local
tags do trilho Local2
Publicação 1794-UM001B-PT-P - Novembro 2000
Início 1-13
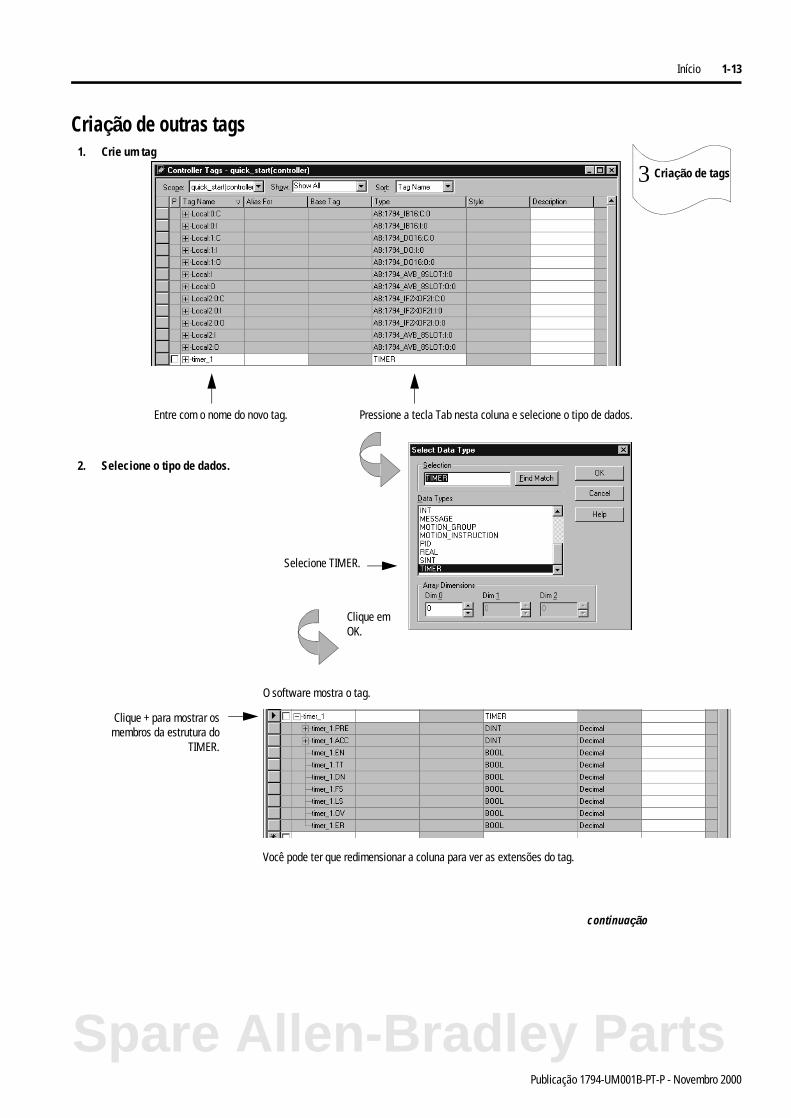
Criação de outras tags
Criação de tags31. Crie um tag
Entre com o nome do novo tag. Pressione a tecla Tab nesta coluna e selecione o tipo de dados.
2. Selecione o tipo de dados.
Selecione TIMER.
Clique em OK.
O software mostra o tag.
Clique + para mostrar osmembros da estrutura do
TIMER.
continuação
Você pode ter que redimensionar a coluna para ver as extensões do tag.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000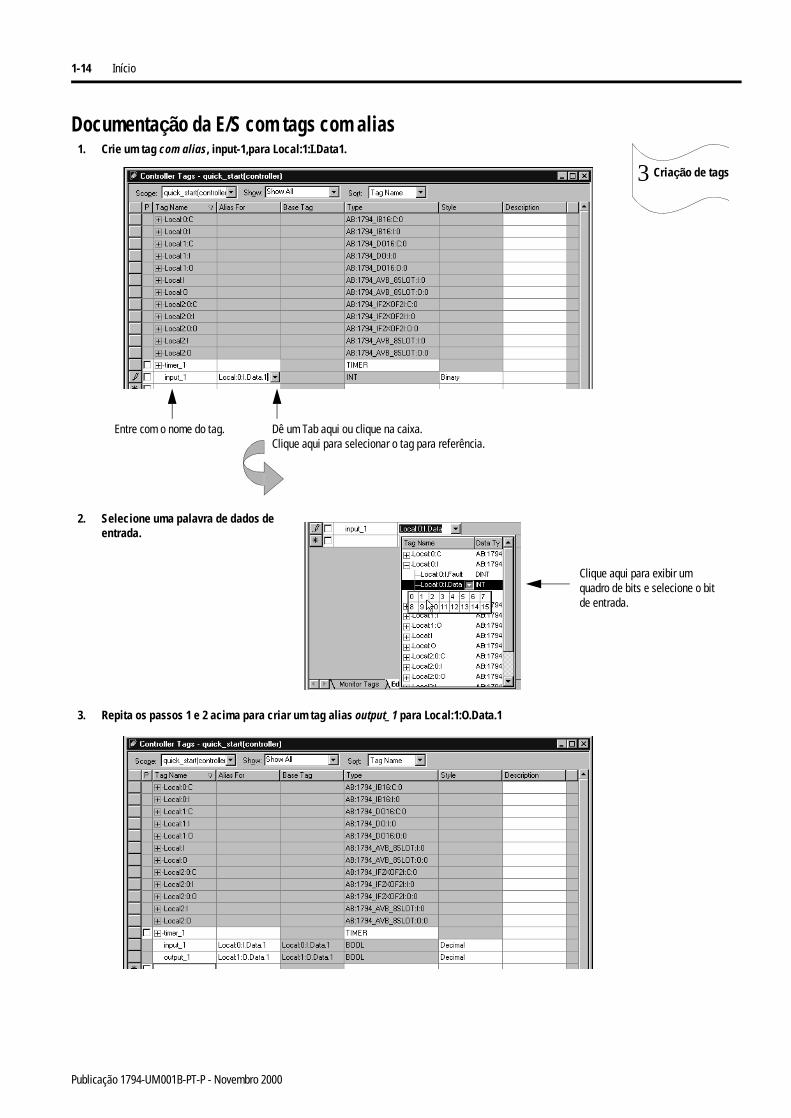
1-14 Início
Documentação da E/S com tags com alias1. Crie um tag com alias, input-1,para Local:1:I.Data1.
Entre com o nome do tag. Dê um Tab aqui ou clique na caixa.Clique aqui para selecionar o tag para referência.
2. Selecione uma palavra de dados de entrada.
Clique aqui para exibir um quadro de bits e selecione o bit de entrada.
Criação de tags3
3. Repita os passos 1 e 2 acima para criar um tag alias output_1 para Local:1:O.Data.1
Publicação 1794-UM001B-PT-P - Novembro 2000
Início 1-15
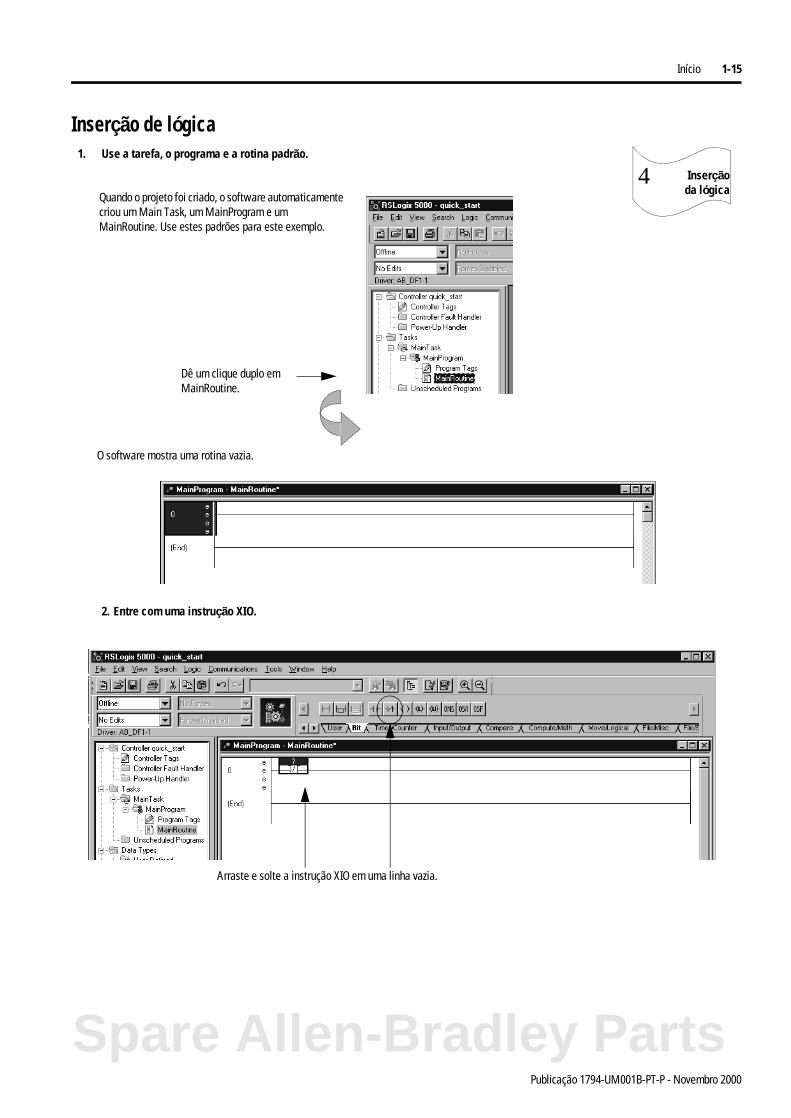
Inserção de lógica
Inserçãoda lógica
41. Use a tarefa, o programa e a rotina padrão.
Dê um clique duplo em MainRoutine.
Quando o projeto foi criado, o software automaticamente criou um Main Task, um MainProgram e um MainRoutine. Use estes padrões para este exemplo.
2. Entre com uma instrução XIO.
O software mostra uma rotina vazia.
Arraste e solte a instrução XIO em uma linha vazia.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000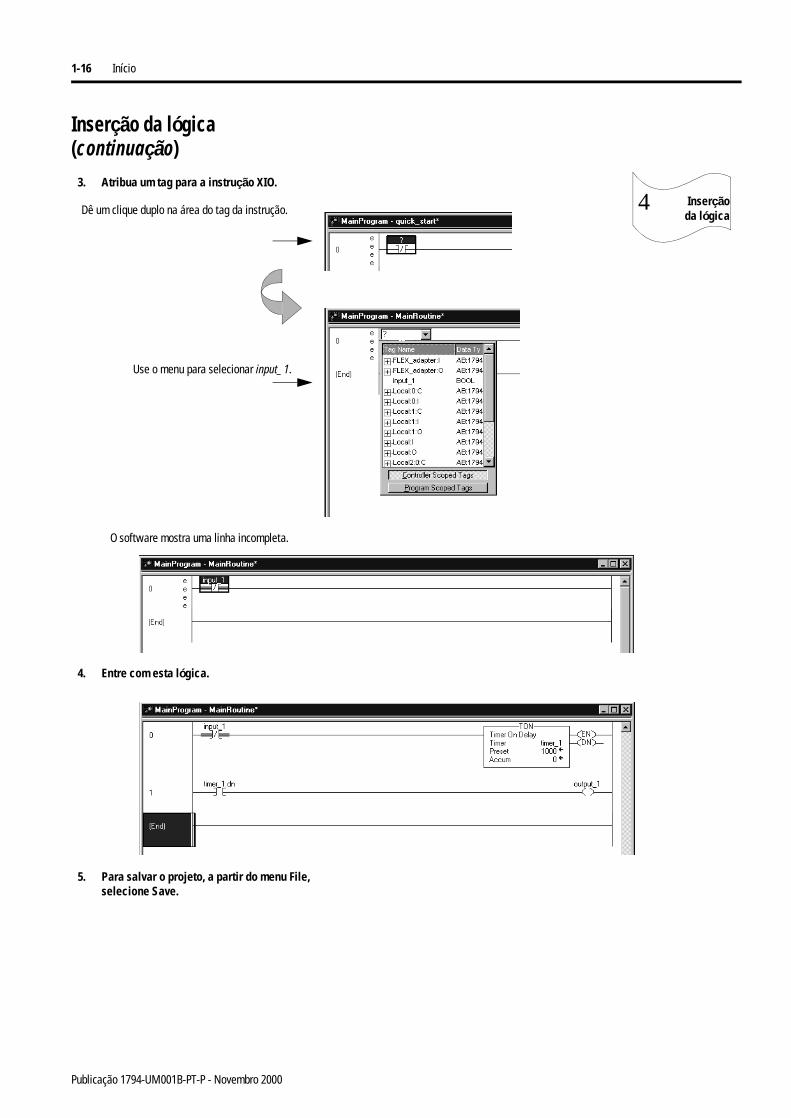
1-16 Início
Inserção da lógica (continuação)
Inserçãoda lógica
43. Atribua um tag para a instrução XIO.
Dê um clique duplo na área do tag da instrução.
4. Entre com esta lógica.
Use o menu para selecionar input_1.
O software mostra uma linha incompleta.
5. Para salvar o projeto, a partir do menu File, selecione Save.
Publicação 1794-UM001B-PT-P - Novembro 2000
Início 1-17
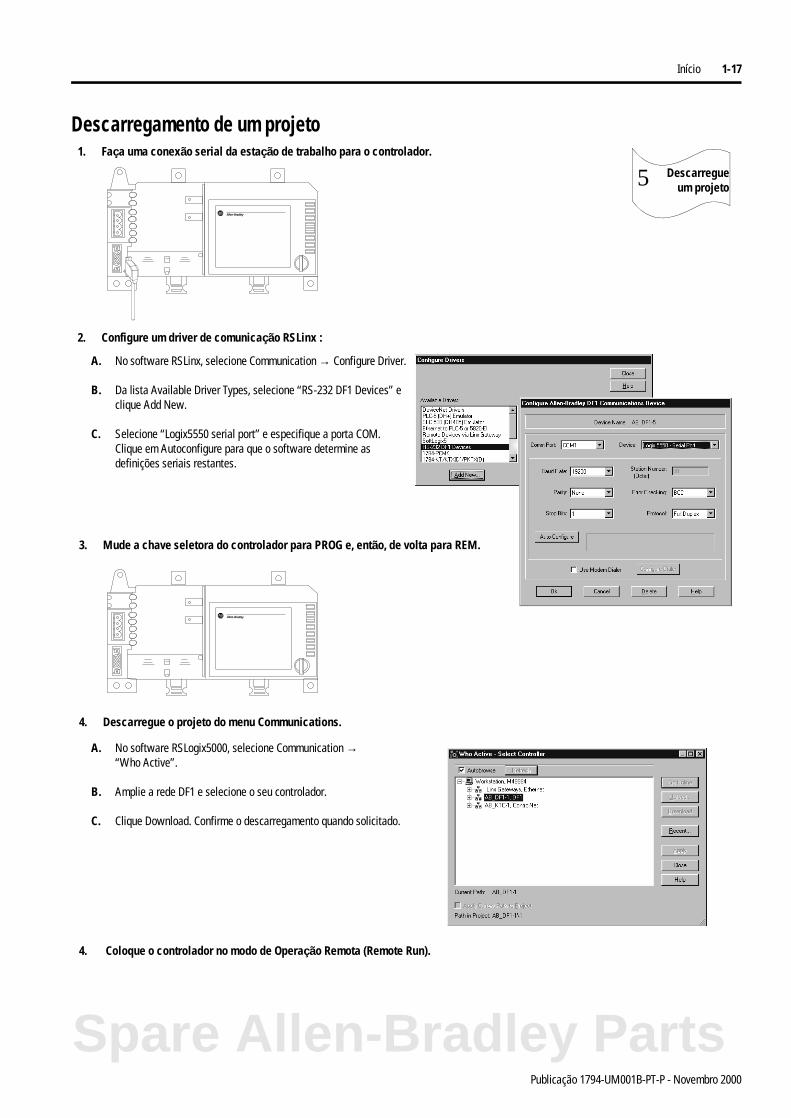
Descarregamento de um projeto
Descarregueum projeto5
1. Faça uma conexão serial da estação de trabalho para o controlador.
2. Configure um driver de comunicação RSLinx :
A. No software RSLinx, selecione Communication → Configure Driver.
B. Da lista Available Driver Types, selecione “RS-232 DF1 Devices” e clique Add New.
C. Selecione “Logix5550 serial port” e especifique a porta COM. Clique em Autoconfigure para que o software determine as definições seriais restantes.
3. Mude a chave seletora do controlador para PROG e, então, de volta para REM.
4. Descarregue o projeto do menu Communications.
4. Coloque o controlador no modo de Operação Remota (Remote Run).
A. No software RSLogix5000, selecione Communication → “Who Active”.
B. Amplie a rede DF1 e selecione o seu controlador.
C. Clique Download. Confirme o descarregamento quando solicitado.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000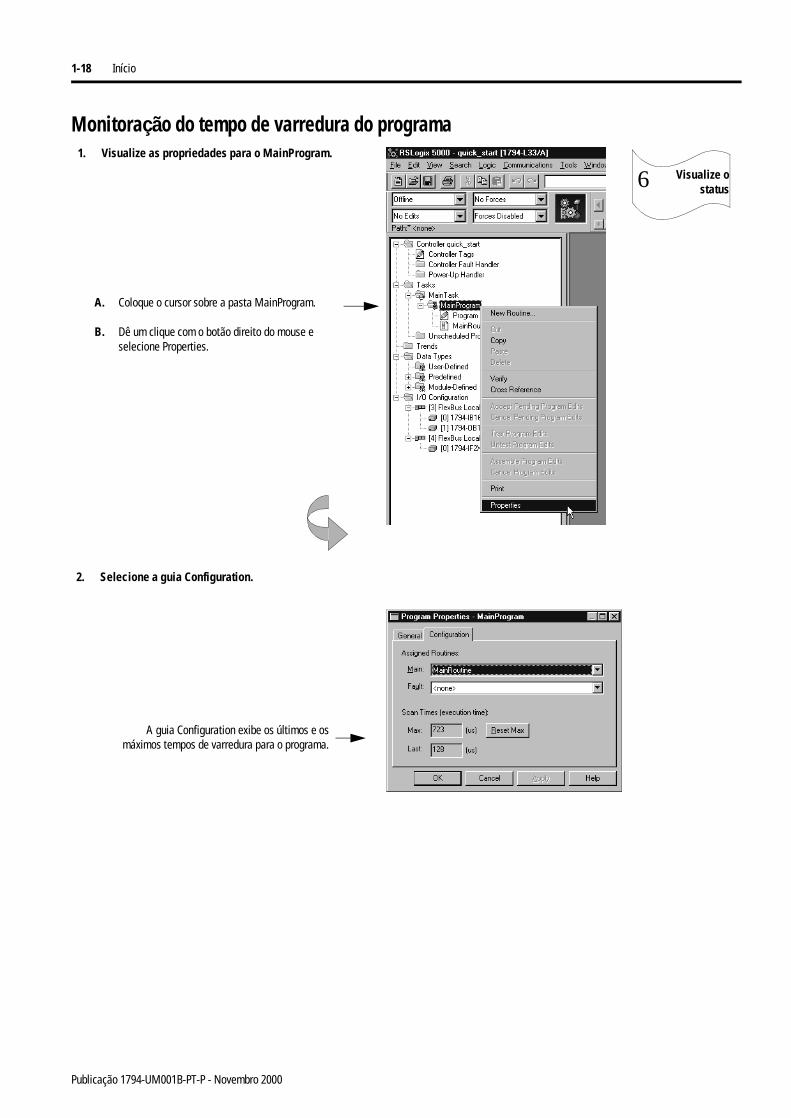
1-18 Início
Monitoração do tempo de varredura do programa
Visualize ostatus6
1. Visualize as propriedades para o MainProgram.
2. Selecione a guia Configuration.
A guia Configuration exibe os últimos e osmáximos tempos de varredura para o programa.
A. Coloque o cursor sobre a pasta MainProgram.
B. Dê um clique com o botão direito do mouse e selecione Properties.
Publicação 1794-UM001B-PT-P - Novembro 2000
Início 1-19
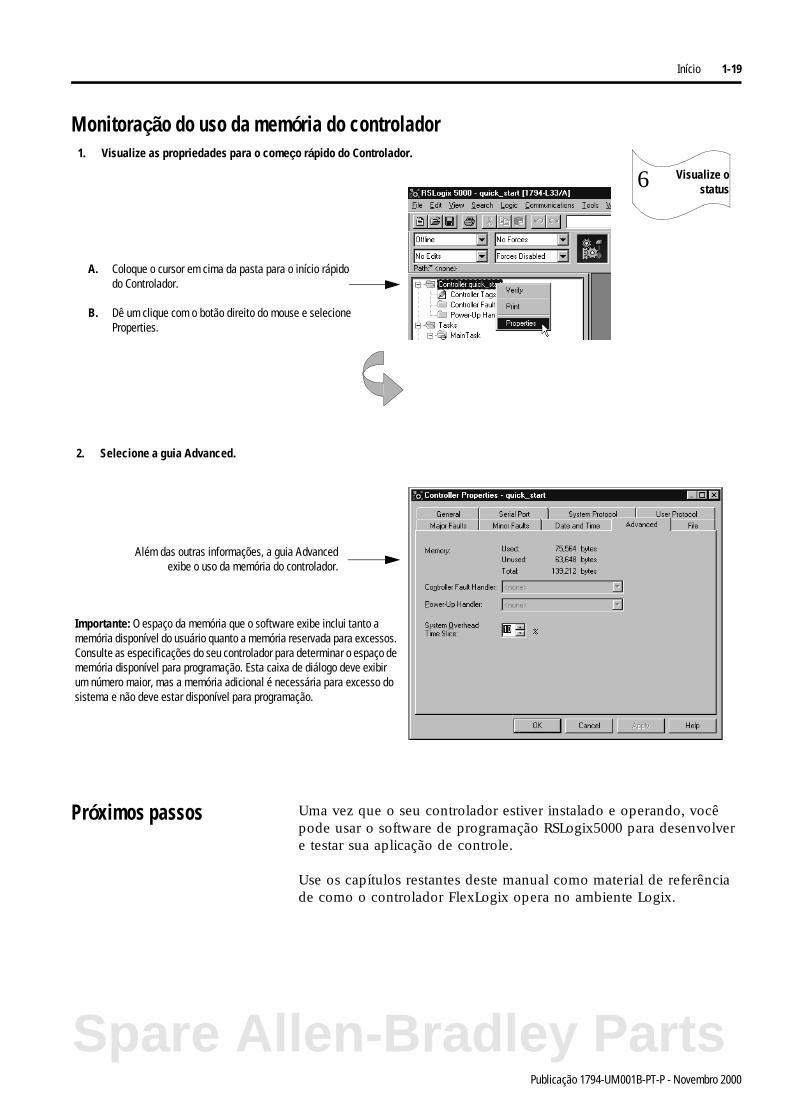
Monitoração do uso da memória do controlador
Próximos passos Uma vez que o seu controlador estiver instalado e operando, você pode usar o software de programação RSLogix5000 para desenvolver e testar sua aplicação de controle.
Use os capítulos restantes deste manual como material de referência de como o controlador FlexLogix opera no ambiente Logix.
Visualize ostatus6
2. Selecione a guia Advanced.
Além das outras informações, a guia Advancedexibe o uso da memória do controlador.
1. Visualize as propriedades para o começo rápido do Controlador.
A. Coloque o cursor em cima da pasta para o início rápido do Controlador.
B. Dê um clique com o botão direito do mouse e selecione Properties.
Importante: O espaço da memória que o software exibe inclui tanto a memória disponível do usuário quanto a memória reservada para excessos. Consulte as especificações do seu controlador para determinar o espaço de memória disponível para programação. Esta caixa de diálogo deve exibir um número maior, mas a memória adicional é necessária para excesso do sistema e não deve estar disponível para programação.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
1-20 Início
Notas:
Publicação 1794-UM001B-PT-P - Novembro 2000
Capítulo 2
O que é FlexLogix?
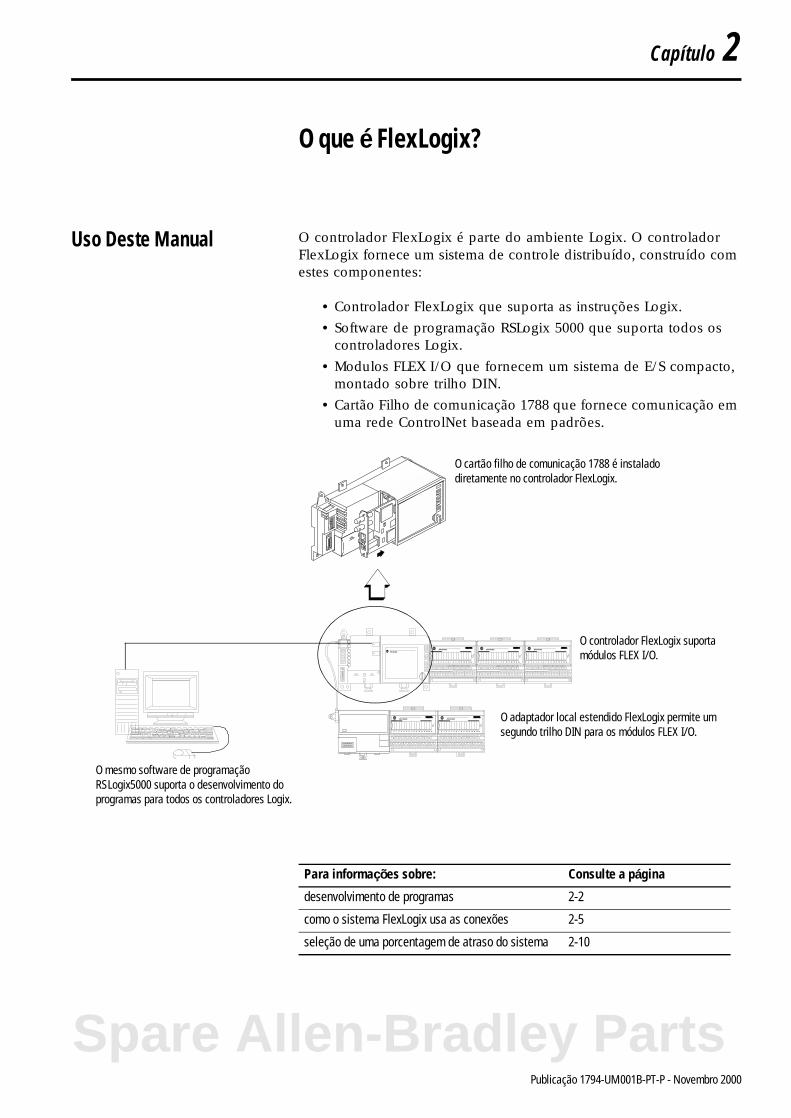
Uso Deste Manual O controlador FlexLogix é parte do ambiente Logix. O controlador FlexLogix fornece um sistema de controle distribuído, construído com estes componentes:
• Controlador FlexLogix que suporta as instruções Logix.
• Software de programação RSLogix 5000 que suporta todos os controladores Logix.
• Modulos FLEX I/O que fornecem um sistema de E/S compacto, montado sobre trilho DIN.
• Cartão Filho de comunicação 1788 que fornece comunicação em uma rede ControlNet baseada em padrões.
O controlador FlexLogix suporta módulos FLEX I/O.
O cartão filho de comunicação 1788 é instalado diretamente no controlador FlexLogix.
O adaptador local estendido FlexLogix permite um segundo trilho DIN para os módulos FLEX I/O.
O mesmo software de programação RSLogix5000 suporta o desenvolvimento do programas para todos os controladores Logix.
Para informações sobre: Consulte a página
desenvolvimento de programas 2-2
como o sistema FlexLogix usa as conexões 2-5
seleção de uma porcentagem de atraso do sistema 2-10
Spare Allen-Bradley Parts
1 Publicação 1794-UM001B-PT-P - Novembro 2000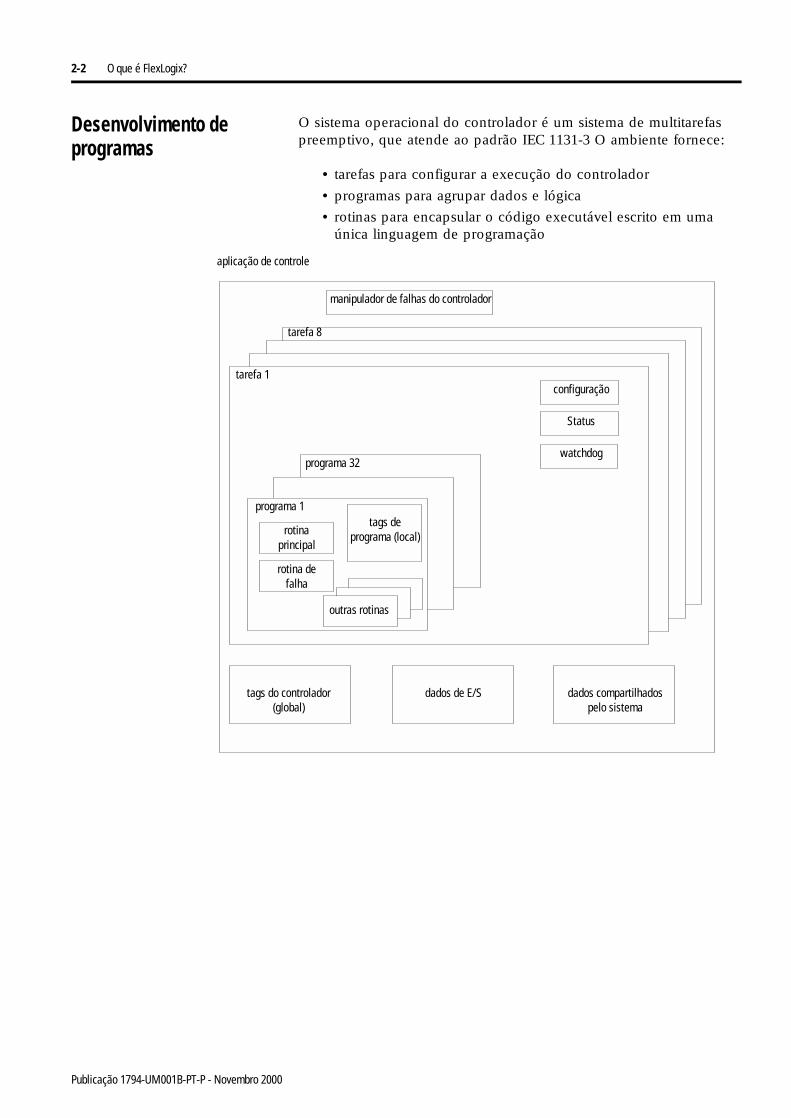
2-2 O que é FlexLogix?
Desenvolvimento de programas
O sistema operacional do controlador é um sistema de multitarefas preemptivo, que atende ao padrão IEC 1131-3 O ambiente fornece:
• tarefas para configurar a execução do controlador
• programas para agrupar dados e lógica
• rotinas para encapsular o código executável escrito em uma única linguagem de programação
aplicação de controle
manipulador de falhas do controlador
tarefa 8
tarefa 1configuração
Status
watchdogprograma 32
programa 1
rotina principal
rotina de falha
tags de programa (local)
outras rotinas
tags do controlador (global)
dados de E/S dados compartilhados pelo sistema
Publicação 1794-UM001B-PT-P - Novembro 2000

O que é FlexLogix? 2-3
Definição das tarefas
Uma tarefa fornece programação e informações de prioridade para um conjunto de um ou mais programas. Você pode configurar tarefas como contínuas ou periódicas. O controlador FlexLogix suporta até 8 tarefas, somente uma delas pode ser contínua.
Uma tarefa pode ter até 32 programas separados, cada um com suas próprias rotinas executáveis e tags do programa. Uma vez que uma tarefa é inicializada (ativada), todos os programas definidos para a tarefa são executados, na ordem na qual eles foram agrupados. Os programas só podem aparecer uma vez no Organizador do Controlador e não podem ser compartilhados por tarefas múltiplas.
Especificação das prioridades de tarefa
Cada tarefa no controlador tem um nível de prioridade. O sistema operacional usa o nível de prioridade para determinar qual tarefa executar quando tarefas múltiplas são inicializadas. Existem 15 níveis de prioridade configuráveis para tarefas periódicas, que vão de 1 a 15, sendo 1 a maior prioridade e 15 sendo a menor prioridade. Uma tarefa de prioridade maior interromperá uma tarefa de prioridade menor. A tarefa contínua tem prioridade menor e é sempre interrompida por uma tarefa periódica.
O controlador FlexLogix usa uma tarefa periódica dedicada na prioridade 7 para processar os dados de E/S. Esta tarefa periódica é executada no RPI mais rápido do que você programou para o sistema FlexLogix. Seu tempo de execução total é o tempo que leva para executar a varredura dos módulos de E/S configurados.
A maneira que você configura as tarefas afeta o modo como o controlador recebe os dados de E/S. As tarefas nas prioridades 1 – 6 podem esgotar a tarefa de E/S dedicada; as tarefas na prioridade 8 – 15 podem ser esgotadas pela tarefa de E/S dedicada.
NOTA Por exemplo, se seu programa precisar reagir a entradas e saídas de controle a uma taxa determinada, configure uma tarefa periódica com uma prioridade superior a 7. Isto previne a tarefa de E/S dedicada de esgotar sua E/S. Porém, se seu programa contiver muitas manipulações de dados e matemática, coloque esta lógica em uma tarefa com prioridade inferior a 7, como a tarefa contínua, para que a tarefa de E/S dedicada não se esgote completamente pelo seu programa.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000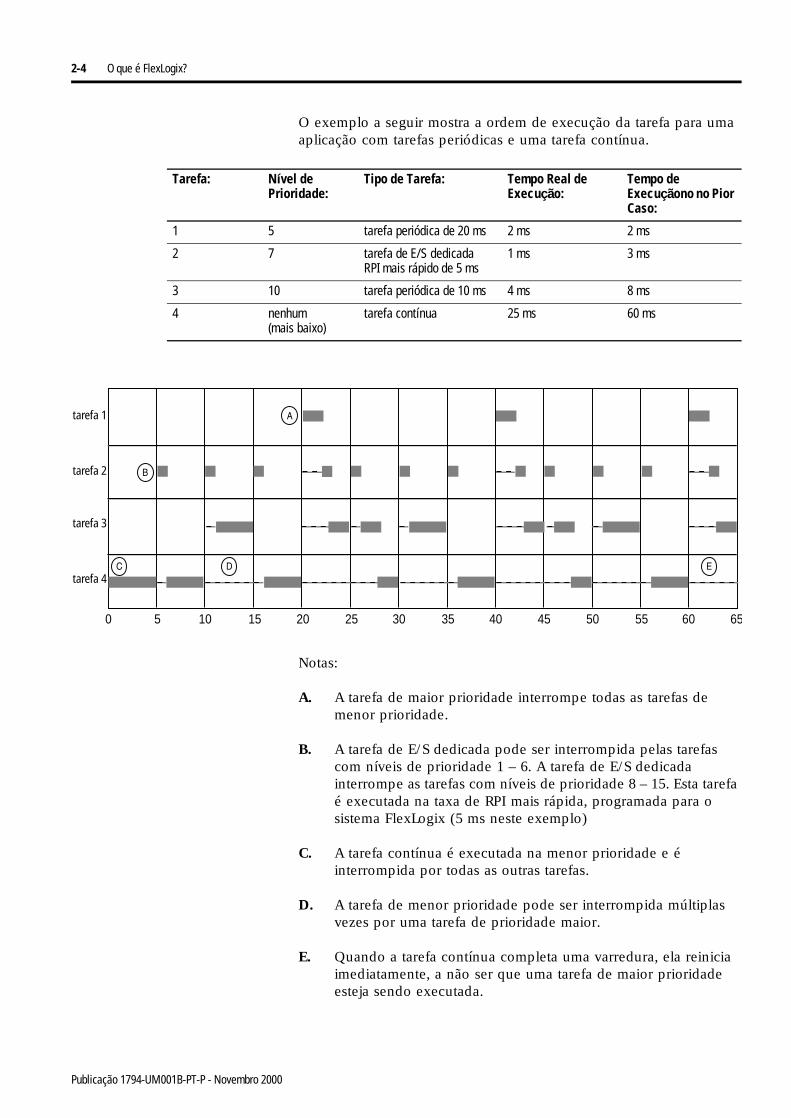
2-4 O que é FlexLogix?
O exemplo a seguir mostra a ordem de execução da tarefa para uma aplicação com tarefas periódicas e uma tarefa contínua.
Notas:
A. A tarefa de maior prioridade interrompe todas as tarefas de menor prioridade.
B. A tarefa de E/S dedicada pode ser interrompida pelas tarefas com níveis de prioridade 1 – 6. A tarefa de E/S dedicada interrompe as tarefas com níveis de prioridade 8 – 15. Esta tarefa é executada na taxa de RPI mais rápida, programada para o sistema FlexLogix (5 ms neste exemplo)
C. A tarefa contínua é executada na menor prioridade e é interrompida por todas as outras tarefas.
D. A tarefa de menor prioridade pode ser interrompida múltiplas vezes por uma tarefa de prioridade maior.
E. Quando a tarefa contínua completa uma varredura, ela reinicia imediatamente, a não ser que uma tarefa de maior prioridade esteja sendo executada.
Tarefa: Nível de Prioridade:
Tipo de Tarefa: Tempo Real de Execução:
Tempo de Execuçãono no Pior Caso:
1 5 tarefa periódica de 20 ms 2 ms 2 ms
2 7 tarefa de E/S dedicadaRPI mais rápido de 5 ms
1 ms 3 ms
3 10 tarefa periódica de 10 ms 4 ms 8 ms
4 nenhum (mais baixo)
tarefa contínua 25 ms 60 ms
0 30252015105 454035 50 656055
tarefa 1
tarefa 2
tarefa 3
tarefa 4
Publicação 1794-UM001B-PT-P - Novembro 2000
O que é FlexLogix? 2-5
Definição dos programas
Cada programa contém tags de programa, uma rotina principal executável, outras rotinas e uma rotina opcional de falha. Cada tarefa pode programar até 32 programas.
Os programas definidos dentro de uma tarefa são executados para a conclusão a partir do primeiro até o último. Os programas que não estiverem encaixados em nenhuma tarefa aparecem como programas não definidos. Você deve especificar (definir) um programa dentro de uma tarefa antes que o controlador possa varrer o programa.
Definição das rotinas
Uma rotina é uma série de instruções lógicas em uma única linguagem de programação, como a lógica ladder. As rotinas fornecem o código executável para o projeto em um controlador. Uma rotina é semelhande a um arquivo de programa ou sub-rotina em um controlador CLP ou SLC.
Cada programa tem uma rotina principal. Esta é a primeira rotina a ser executada quando o controlador inicializa a tarefa associada e chama o programa associado. Use a lógica, como a instrução JSR, para chamar outras rotinas.
Você também pode especificar uma rotina opcional de falhas de programa. O controlador executa esta rotina se ela encontrar uma falha de execução de instrução dentro de qualquer rotina no programa associado.
Como o Sistema FlexLogix Usa as Conexões
O sistema FlexLogix usa uma conexão para estabelecer um link de comunicação entre dois dispositivos. As conexões têm muitas formas:
• módulos de E/S local estendida e local
• módulos de comunicação remota e de E/S remota
• tags produzidos e consumidos
• instruções de mensagem (MSG)
Você determina indiretamente o número de conexões que o controlador requisita através de como você configura o controlador para se comunicar com outros dispositivos no sistema.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
2-6 O que é FlexLogix?
O sistema FlexLogix suporta tanto as conexões programadas como as não programadas.
Cada módulo no sistema FlexLogix suporta um número limitado de conexões programadas. Leve estes limites de conexão em conta quando estiver projetando seu sistema. Estes módulos suportam este número de conexões programadas:
Determinação de conexões programadas para módulos de E/S
O sistema FlexLogix usa conexões diretas e conexões de gaveta otimizada para transmitir dados de E/S.
Conexão: Descrição:
programada A conexão programada identifica um dispositivo específico e permite que você envie e recebe dados repetidamente em uma taxa pré-determinada, que é o RPI – requested packet interval (intervalo requesitado do pacote). Por exemplo, uma conexão para um módulo de E/S é uma conexão programada pois você recebe repetidamente os dados do módulo. Outras conexões programadas incluem conexões com:
• dispositivos de comunicação• tags produzidos/consumidos
Você deve usar o RSNetWorx for ControlNet para habilitar todas as conexões programadas e estabelecer um NUT – network update time (tempo de atualização da rede) para a rede.
não programada Uma conexão não programada é uma transferência de mensagem entre os controladores, que é disparada pelo programa (isto é, a instrução MSG). O envio de mensagens não programadas permite que se envie e receba dados quando necessário.
Dispositivo: Descrição: Conexões Possíveis por Módulo:
Módulos de E/S 1794 Módulos FLEX I/O 1 conexão direta por módulo
1788-CNC1788-CNCR
Cartão Filho de comunicação ControlNet
10 conexões
1756-CNB1756-CNBR
Módulo de comunicação ControlNet ControlLogix
64 conexões
1794-ACN151794-ACNR15
Módulo adaptador ControlNet FLEX
9 conexões
Conexão: Descrição:
direta Uma conexão direta é um link em tempo real, de transferência de dados entre o controlador e um módulo de E/S. O controlador mantém e monitora a conexão entre o controlador e o módulo de E/S. Qualquer interrupção na conexão, como uma falha de módulo ou a remoção de um módulo sob alimentação, faz com que o controlador energize os bits de status de falha na área de dados associada ao módulo.
gaveta otimizada Para módulos de E/S digital, você pode selecionar a comunicação de gaveta otimizada. Uma conexão de gaveta otimizada consolida o uso da conexão entre o controlador e todos os módulos de E/S digital em um gaveta (ou trilho DIN). Ao invés de ter conexões diretas, individuais para cada módulo de E/S, existe uma conexão para toda a gaveta (ou trilho DIN).
Publicação 1794-UM001B-PT-P - Novembro 2000
O que é FlexLogix? 2-7
Conexões para módulos de E/S local estendida e local
O controlador FlexLogix atribui automaticamente uma conexão de gaveta otimizada ara o trilho DIN local e uma conexão de gaveta otimizada para o trilho DIN local estendido. Então, você configura cada módulo de E/S em um trilho DIN para usar a conexão de gaveta otimizada ou a conexão direta. A conexãoi de gaveta otimizada para cada trilho DIN existe mesmo que você não configiure os módulos de E/S para usarem aquela conexão de gaveta otimizada.
A conexão de gaveta otimizada permite que você organize todos os módulos de E/S digital em um trilho DIN dentro de uma conexão com o controlador. Ou você pode escolher configurar cada módulo de E/S para ter uma conexão direta com o controlador. Os módulos de E/S analógica devem ter uma conexão direta com o controlador.
Não é tão crítico administrar o número de conexões para os módulos de E/S local e local estendida como é com os dispositivos remotos, pois o controlador pode manusear uma conexão direta para cada dispositivo de E/S local e local estendida possível.
Conexões para dispositivos remotos
Para conservar o número de conexões disponíveis, coloque a E/S digital, remota, no mesmo local e use uma conexão de gaveta otimizada para o dispositivo de comunicação remota que conecta a E/S remota ao sistema FlexLogix. Para selecionar uma conexão de gaveta otimizada para um dispositivo de comunicação remota, selecione uma opção “rack-optimized” para o formato de comunicação.
Se você tiver módulos de E/S analógica remota ou desejar uma conexão direta com os módulos de E/S remota específica, você não precisa criar a conexão de gaveta otimizada para o dispositivo de comunicação remota. Para usar conexões diretas com a E/S remota, selecione “none” para o formato de comunicação do dispositivo de comunicação remota.
IMPORTANTE O limite de conexões programadas para E/S remota depende do dispositivo de comunicação que o controlador usa para controlar a E/S. Cada cartão filho de comunicação 1788-CNx suporta 10 conexões programadas.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000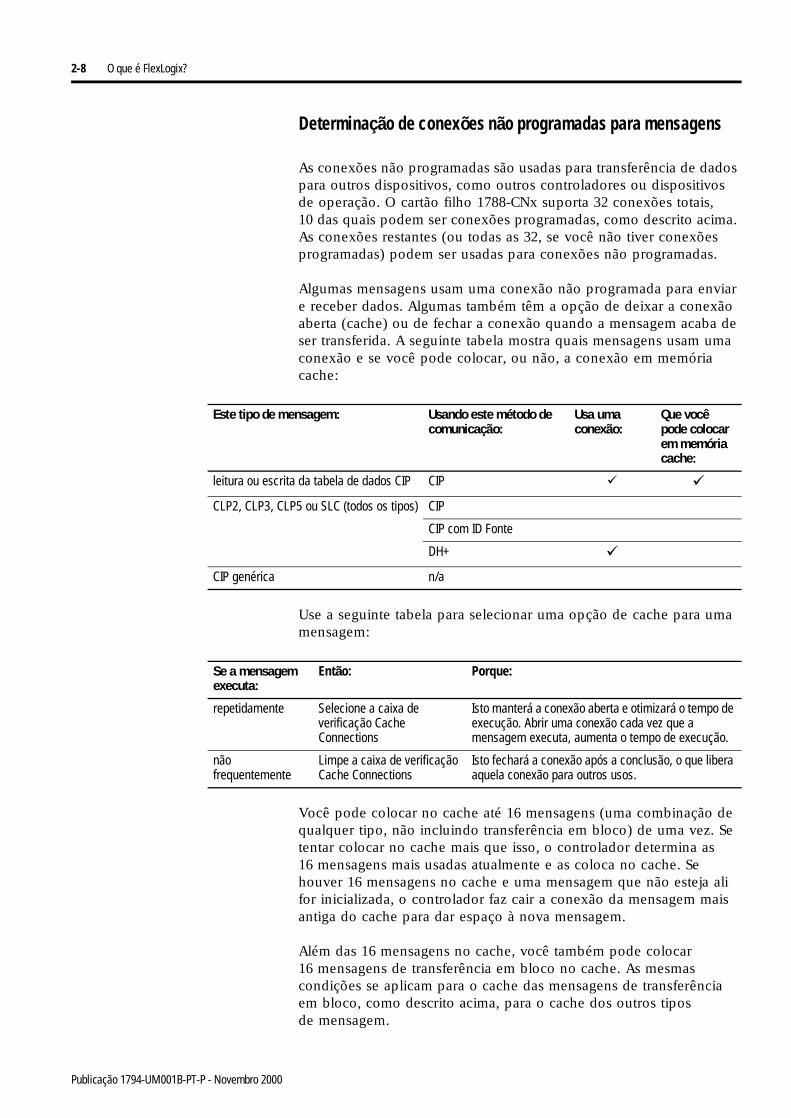
2-8 O que é FlexLogix?
Determinação de conexões não programadas para mensagens
As conexões não programadas são usadas para transferência de dados para outros dispositivos, como outros controladores ou dispositivos de operação. O cartão filho 1788-CNx suporta 32 conexões totais, 10 das quais podem ser conexões programadas, como descrito acima. As conexões restantes (ou todas as 32, se você não tiver conexões programadas) podem ser usadas para conexões não programadas.
Algumas mensagens usam uma conexão não programada para enviar e receber dados. Algumas também têm a opção de deixar a conexão aberta (cache) ou de fechar a conexão quando a mensagem acaba de ser transferida. A seguinte tabela mostra quais mensagens usam uma conexão e se você pode colocar, ou não, a conexão em memória cache:
Use a seguinte tabela para selecionar uma opção de cache para uma mensagem:
Você pode colocar no cache até 16 mensagens (uma combinação de qualquer tipo, não incluindo transferência em bloco) de uma vez. Se tentar colocar no cache mais que isso, o controlador determina as 16 mensagens mais usadas atualmente e as coloca no cache. Se houver 16 mensagens no cache e uma mensagem que não esteja ali for inicializada, o controlador faz cair a conexão da mensagem mais antiga do cache para dar espaço à nova mensagem.
Além das 16 mensagens no cache, você também pode colocar 16 mensagens de transferência em bloco no cache. As mesmas condições se aplicam para o cache das mensagens de transferência em bloco, como descrito acima, para o cache dos outros tipos de mensagem.
Este tipo de mensagem: Usando este método de comunicação:
Usa uma conexão:
Que você pode colocar em memória cache:
leitura ou escrita da tabela de dados CIP CIP � �
CLP2, CLP3, CLP5 ou SLC (todos os tipos) CIP
CIP com ID Fonte
DH+ �
CIP genérica n/a
Se a mensagem executa:
Então: Porque:
repetidamente Selecione a caixa de verificação Cache Connections
Isto manterá a conexão aberta e otimizará o tempo de execução. Abrir uma conexão cada vez que a mensagem executa, aumenta o tempo de execução.
não frequentemente
Limpe a caixa de verificação Cache Connections
Isto fechará a conexão após a conclusão, o que libera aquela conexão para outros usos.
Publicação 1794-UM001B-PT-P - Novembro 2000
O que é FlexLogix? 2-9
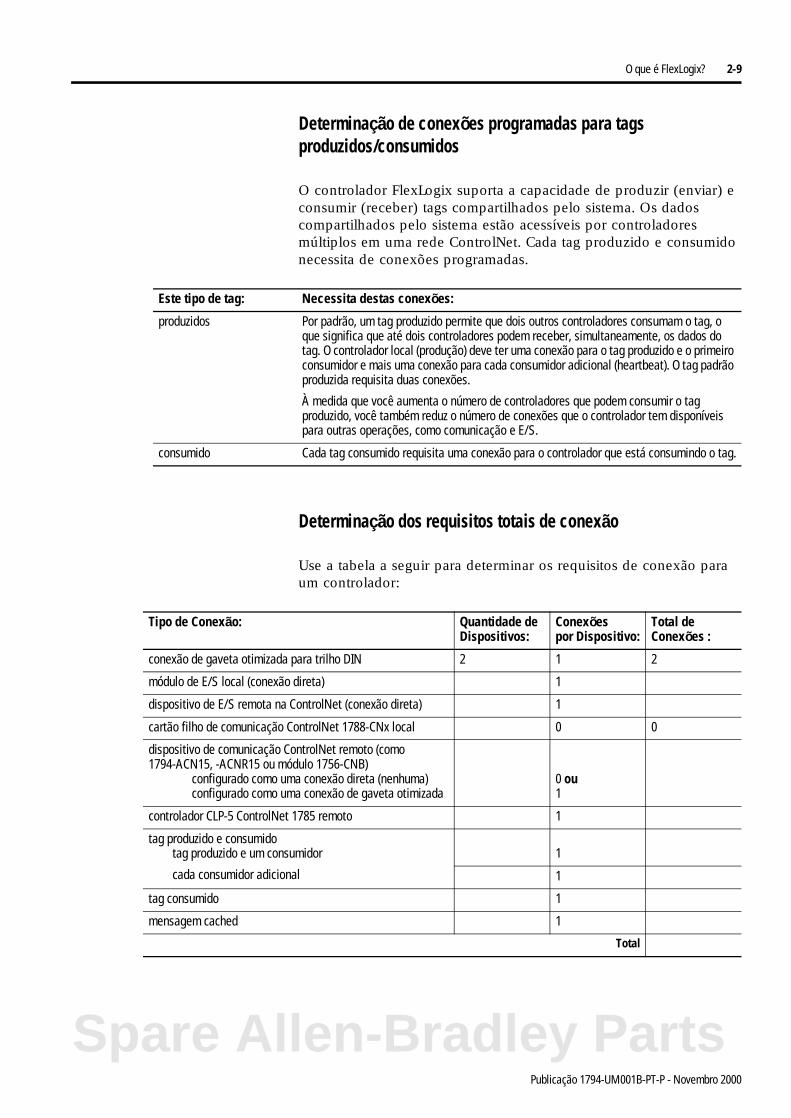
Determinação de conexões programadas para tags produzidos/consumidos
O controlador FlexLogix suporta a capacidade de produzir (enviar) e consumir (receber) tags compartilhados pelo sistema. Os dados compartilhados pelo sistema estão acessíveis por controladores múltiplos em uma rede ControlNet. Cada tag produzido e consumido necessita de conexões programadas.
Determinação dos requisitos totais de conexão
Use a tabela a seguir para determinar os requisitos de conexão para um controlador:
Este tipo de tag: Necessita destas conexões:
produzidos Por padrão, um tag produzido permite que dois outros controladores consumam o tag, o que significa que até dois controladores podem receber, simultaneamente, os dados do tag. O controlador local (produção) deve ter uma conexão para o tag produzido e o primeiro consumidor e mais uma conexão para cada consumidor adicional (heartbeat). O tag padrão produzida requisita duas conexões.
À medida que você aumenta o número de controladores que podem consumir o tag produzido, você também reduz o número de conexões que o controlador tem disponíveis para outras operações, como comunicação e E/S.
consumido Cada tag consumido requisita uma conexão para o controlador que está consumindo o tag.
Tipo de Conexão: Quantidade de Dispositivos:
Conexões por Dispositivo:
Total de Conexões :
conexão de gaveta otimizada para trilho DIN 2 1 2
módulo de E/S local (conexão direta) 1
dispositivo de E/S remota na ControlNet (conexão direta) 1
cartão filho de comunicação ControlNet 1788-CNx local 0 0
dispositivo de comunicação ControlNet remoto (como 1794-ACN15, -ACNR15 ou módulo 1756-CNB)
configurado como uma conexão direta (nenhuma)configurado como uma conexão de gaveta otimizada
0 ou1
controlador CLP-5 ControlNet 1785 remoto 1
tag produzido e consumidotag produzido e um consumidor
cada consumidor adicional
1
1
tag consumido 1
mensagem cached 1
Total
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000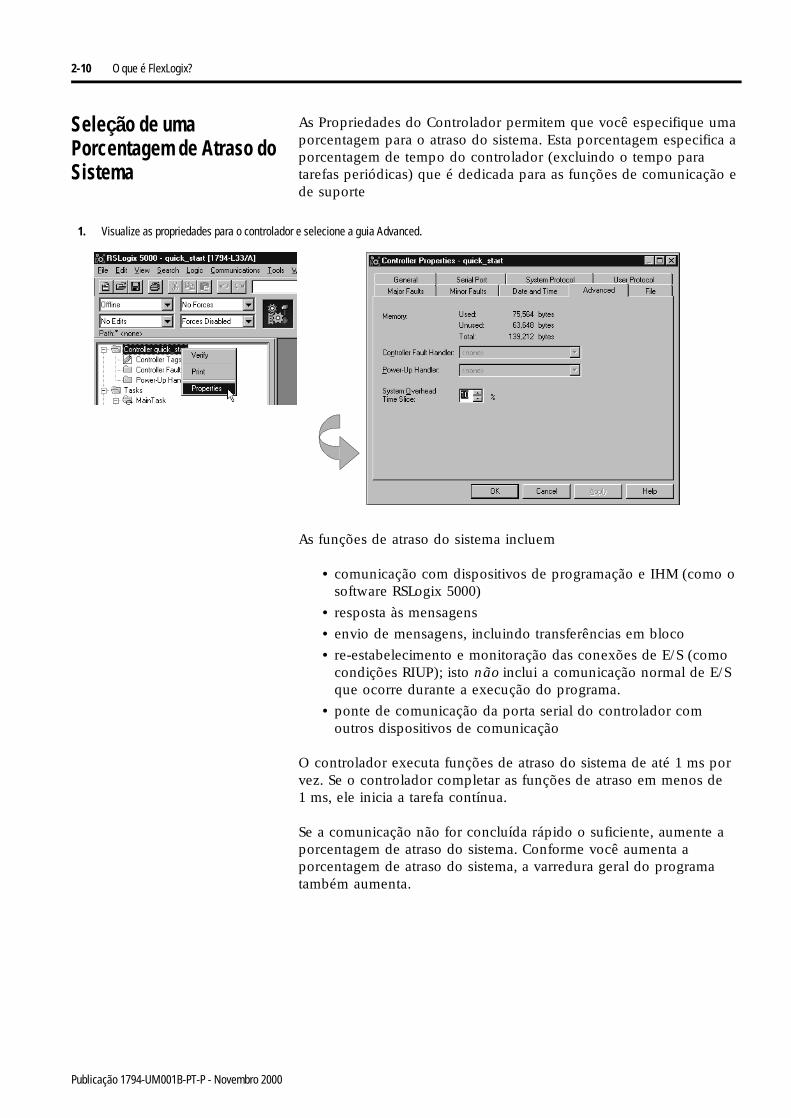
2-10 O que é FlexLogix?
Seleção de uma Porcentagem de Atraso do Sistema
As Propriedades do Controlador permitem que você especifique uma porcentagem para o atraso do sistema. Esta porcentagem especifica a porcentagem de tempo do controlador (excluindo o tempo para tarefas periódicas) que é dedicada para as funções de comunicação e de suporte
As funções de atraso do sistema incluem
• comunicação com dispositivos de programação e IHM (como o software RSLogix 5000)
• resposta às mensagens
• envio de mensagens, incluindo transferências em bloco
• re-estabelecimento e monitoração das conexões de E/S (como condições RIUP); isto não inclui a comunicação normal de E/S que ocorre durante a execução do programa.
• ponte de comunicação da porta serial do controlador com outros dispositivos de comunicação
O controlador executa funções de atraso do sistema de até 1 ms por vez. Se o controlador completar as funções de atraso em menos de 1 ms, ele inicia a tarefa contínua.
Se a comunicação não for concluída rápido o suficiente, aumente a porcentagem de atraso do sistema. Conforme você aumenta a porcentagem de atraso do sistema, a varredura geral do programa também aumenta.
1. Visualize as propriedades para o controlador e selecione a guia Advanced.
Publicação 1794-UM001B-PT-P - Novembro 2000
O que é FlexLogix? 2-11
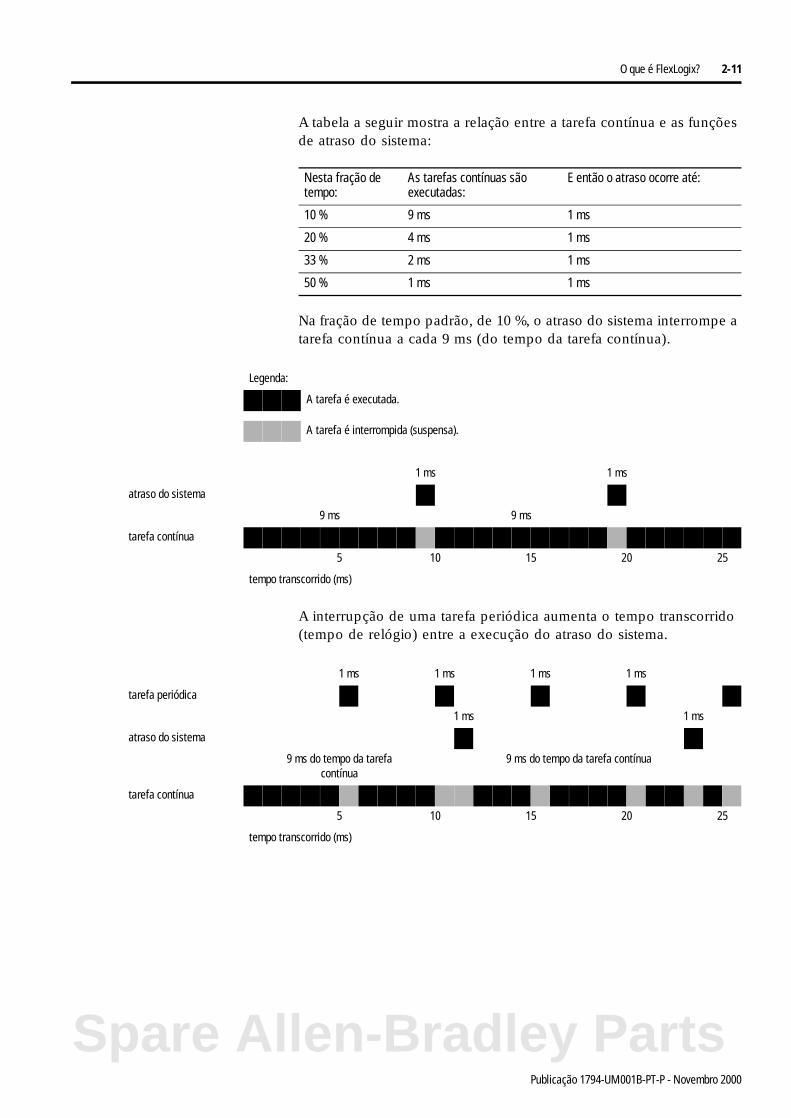
A tabela a seguir mostra a relação entre a tarefa contínua e as funções de atraso do sistema:
Na fração de tempo padrão, de 10 %, o atraso do sistema interrompe a tarefa contínua a cada 9 ms (do tempo da tarefa contínua).
A interrupção de uma tarefa periódica aumenta o tempo transcorrido (tempo de relógio) entre a execução do atraso do sistema.
Nesta fração de tempo:
As tarefas contínuas são executadas:
E então o atraso ocorre até:
10 % 9 ms 1 ms
20 % 4 ms 1 ms
33 % 2 ms 1 ms
50 % 1 ms 1 ms
Legenda:
A tarefa é executada.
A tarefa é interrompida (suspensa).
1 ms 1 ms
atraso do sistema
9 ms 9 ms
tarefa contínua
5 10 15 20 25
tempo transcorrido (ms)
1 ms 1 ms 1 ms 1 ms
tarefa periódica
1 ms 1 ms
atraso do sistema
9 ms do tempo da tarefa contínua
9 ms do tempo da tarefa contínua
tarefa contínua
5 10 15 20 25
tempo transcorrido (ms)
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000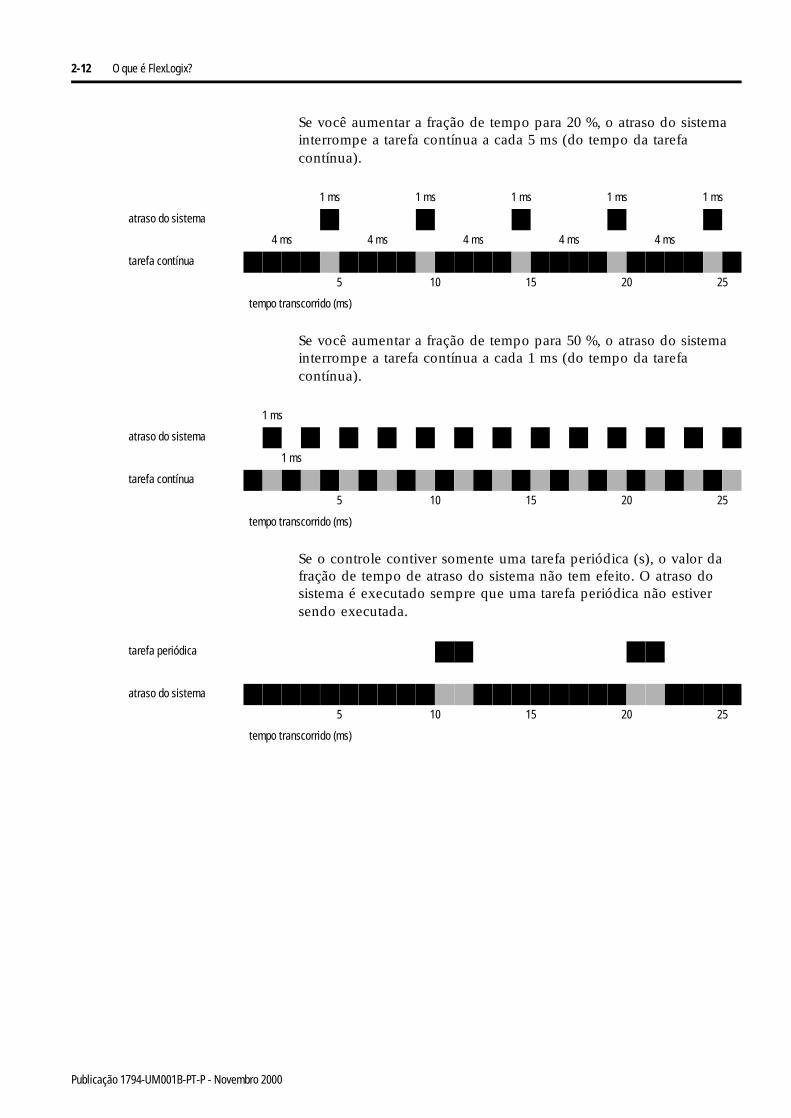
2-12 O que é FlexLogix?
Se você aumentar a fração de tempo para 20 %, o atraso do sistema interrompe a tarefa contínua a cada 5 ms (do tempo da tarefa contínua).
Se você aumentar a fração de tempo para 50 %, o atraso do sistema interrompe a tarefa contínua a cada 1 ms (do tempo da tarefa contínua).
Se o controle contiver somente uma tarefa periódica (s), o valor da fração de tempo de atraso do sistema não tem efeito. O atraso do sistema é executado sempre que uma tarefa periódica não estiver sendo executada.
1 ms 1 ms 1 ms 1 ms 1 ms
atraso do sistema
4 ms 4 ms 4 ms 4 ms 4 ms
tarefa contínua
5 10 15 20 25
tempo transcorrido (ms)
1 ms
atraso do sistema
1 ms
tarefa contínua
5 10 15 20 25
tempo transcorrido (ms)
tarefa periódica
atraso do sistema
5 10 15 20 25
tempo transcorrido (ms)
Publicação 1794-UM001B-PT-P - Novembro 2000
Capítulo 3
Instalação e Configuração da E/S Local
Uso Deste Capítulo
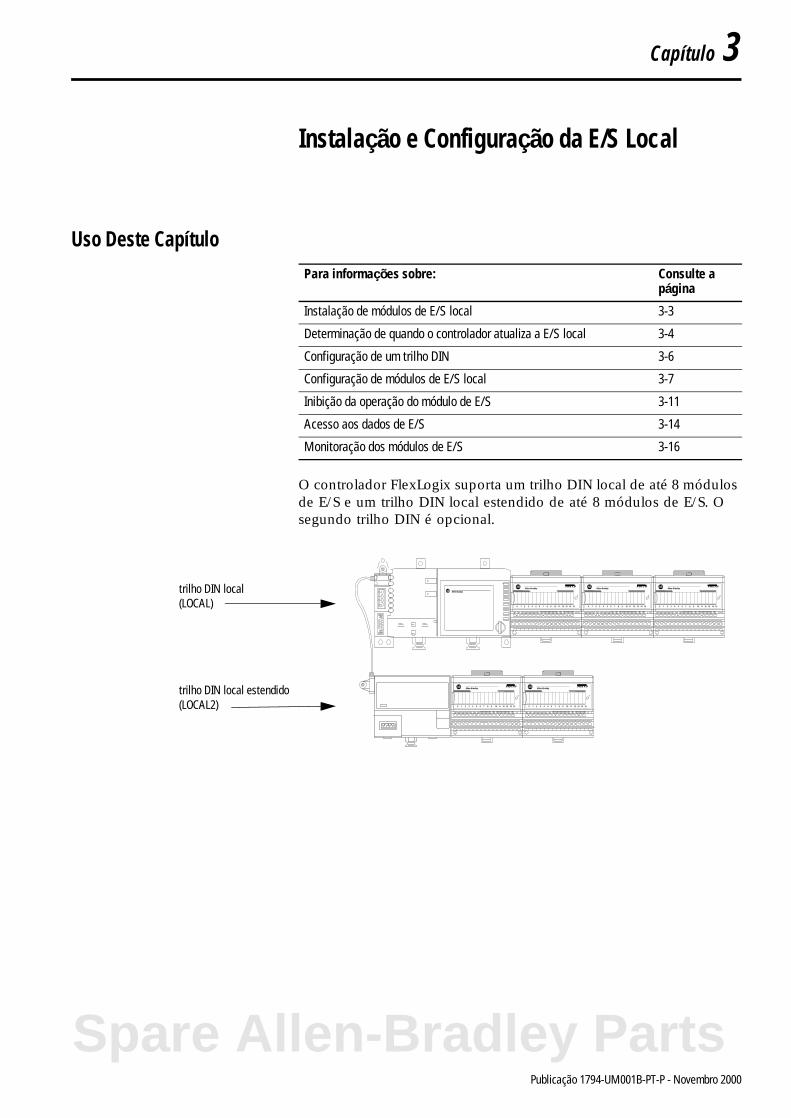
O controlador FlexLogix suporta um trilho DIN local de até 8 módulos de E/S e um trilho DIN local estendido de até 8 módulos de E/S. O segundo trilho DIN é opcional.
Para informações sobre: Consulte a página
Instalação de módulos de E/S local 3-3
Determinação de quando o controlador atualiza a E/S local 3-4
Configuração de um trilho DIN 3-6
Configuração de módulos de E/S local 3-7
Inibição da operação do módulo de E/S 3-11
Acesso aos dados de E/S 3-14
Monitoração dos módulos de E/S 3-16
trilho DIN local(LOCAL)
trilho DIN local estendido(LOCAL2)
Spare Allen-Bradley Parts
1 Publicação 1794-UM001B-PT-P - Novembro 2000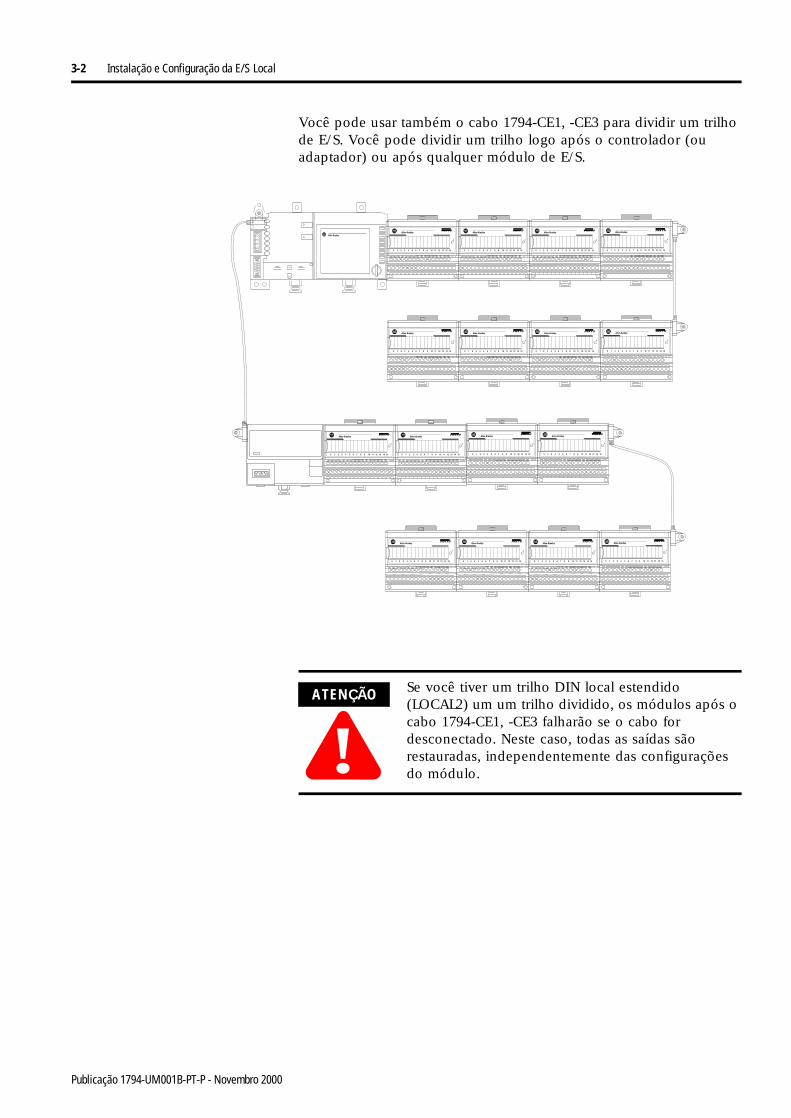
3-2 Instalação e Configuração da E/S Local
Você pode usar também o cabo 1794-CE1, -CE3 para dividir um trilho de E/S. Você pode dividir um trilho logo após o controlador (ou adaptador) ou após qualquer módulo de E/S.
ATENÇÃO
!Se você tiver um trilho DIN local estendido (LOCAL2) um um trilho dividido, os módulos após o cabo 1794-CE1, -CE3 falharão se o cabo for desconectado. Neste caso, todas as saídas são restauradas, independentemente das configurações do módulo.
Publicação 1794-UM001B-PT-P - Novembro 2000
Instalação e Configuração da E/S Local 3-3
Instalação dos Módulos de E/S Local
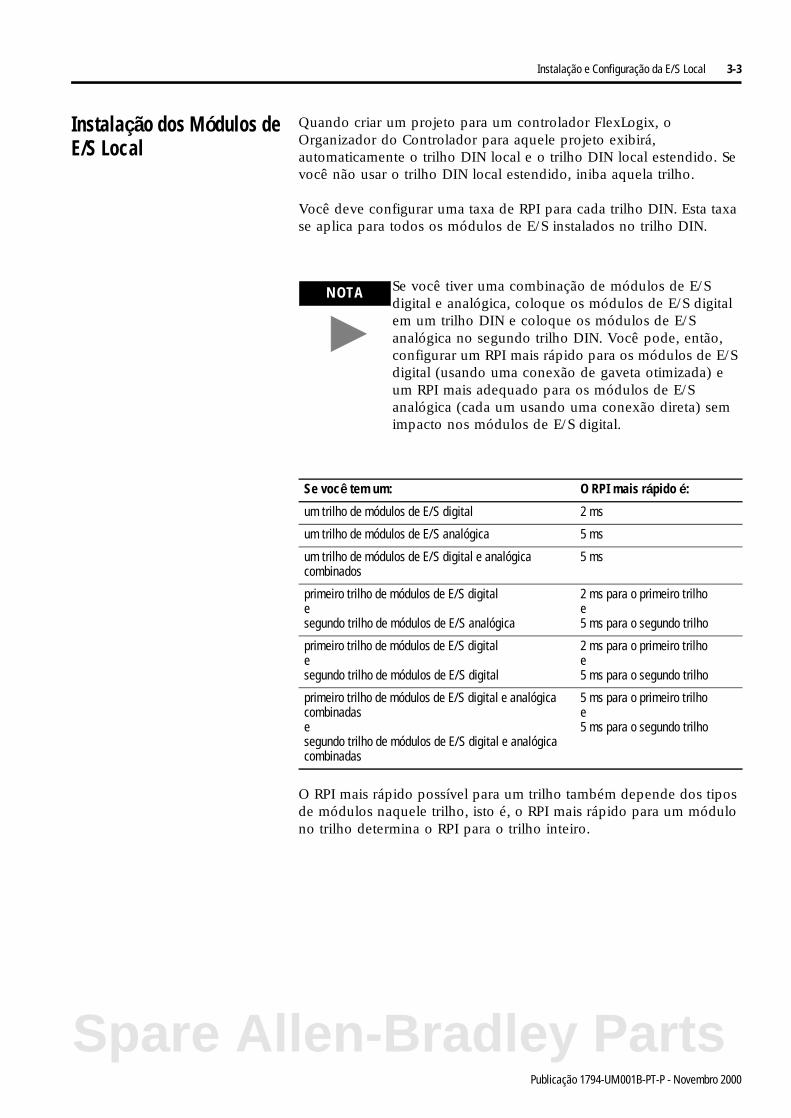
Quando criar um projeto para um controlador FlexLogix, o Organizador do Controlador para aquele projeto exibirá, automaticamente o trilho DIN local e o trilho DIN local estendido. Se você não usar o trilho DIN local estendido, iniba aquela trilho.
Você deve configurar uma taxa de RPI para cada trilho DIN. Esta taxa se aplica para todos os módulos de E/S instalados no trilho DIN.
O RPI mais rápido possível para um trilho também depende dos tipos de módulos naquele trilho, isto é, o RPI mais rápido para um módulo no trilho determina o RPI para o trilho inteiro.
NOTA Se você tiver uma combinação de módulos de E/S digital e analógica, coloque os módulos de E/S digital em um trilho DIN e coloque os módulos de E/S analógica no segundo trilho DIN. Você pode, então, configurar um RPI mais rápido para os módulos de E/S digital (usando uma conexão de gaveta otimizada) e um RPI mais adequado para os módulos de E/S analógica (cada um usando uma conexão direta) sem impacto nos módulos de E/S digital.
Se você tem um: O RPI mais rápido é:
um trilho de módulos de E/S digital 2 ms
um trilho de módulos de E/S analógica 5 ms
um trilho de módulos de E/S digital e analógica combinados
5 ms
primeiro trilho de módulos de E/S digitalesegundo trilho de módulos de E/S analógica
2 ms para o primeiro trilhoe5 ms para o segundo trilho
primeiro trilho de módulos de E/S digitalesegundo trilho de módulos de E/S digital
2 ms para o primeiro trilhoe5 ms para o segundo trilho
primeiro trilho de módulos de E/S digital e analógica combinadasesegundo trilho de módulos de E/S digital e analógica combinadas
5 ms para o primeiro trilhoe5 ms para o segundo trilho
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000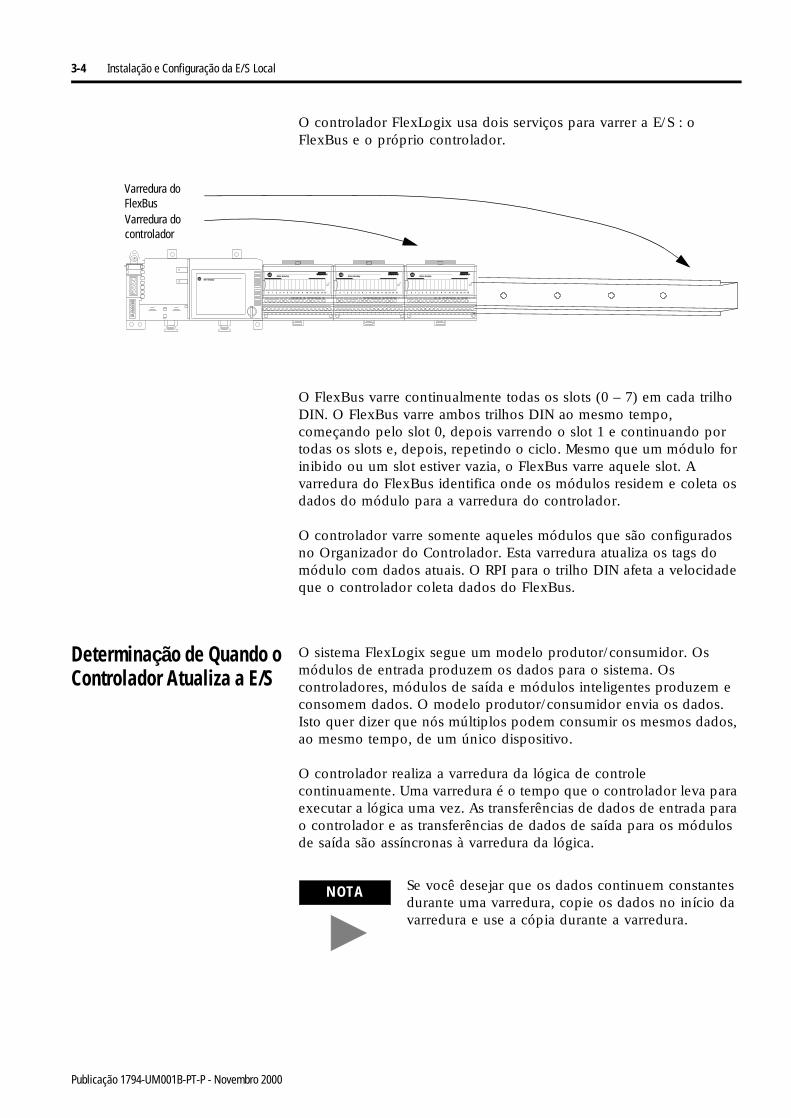
3-4 Instalação e Configuração da E/S Local
O controlador FlexLogix usa dois serviços para varrer a E/S : o FlexBus e o próprio controlador.
O FlexBus varre continualmente todas os slots (0 – 7) em cada trilho DIN. O FlexBus varre ambos trilhos DIN ao mesmo tempo, começando pelo slot 0, depois varrendo o slot 1 e continuando por todas os slots e, depois, repetindo o ciclo. Mesmo que um módulo for inibido ou um slot estiver vazia, o FlexBus varre aquele slot. A varredura do FlexBus identifica onde os módulos residem e coleta os dados do módulo para a varredura do controlador.
O controlador varre somente aqueles módulos que são configurados no Organizador do Controlador. Esta varredura atualiza os tags do módulo com dados atuais. O RPI para o trilho DIN afeta a velocidade que o controlador coleta dados do FlexBus.
Determinação de Quando o Controlador Atualiza a E/S
O sistema FlexLogix segue um modelo produtor/consumidor. Os módulos de entrada produzem os dados para o sistema. Os controladores, módulos de saída e módulos inteligentes produzem e consomem dados. O modelo produtor/consumidor envia os dados. Isto quer dizer que nós múltiplos podem consumir os mesmos dados, ao mesmo tempo, de um único dispositivo.
O controlador realiza a varredura da lógica de controle continuamente. Uma varredura é o tempo que o controlador leva para executar a lógica uma vez. As transferências de dados de entrada para o controlador e as transferências de dados de saída para os módulos de saída são assíncronas à varredura da lógica.
Varredura do controlador
Varredura do FlexBus
NOTA Se você desejar que os dados continuem constantes durante uma varredura, copie os dados no início da varredura e use a cópia durante a varredura.
Publicação 1794-UM001B-PT-P - Novembro 2000
Instalação e Configuração da E/S Local 3-5
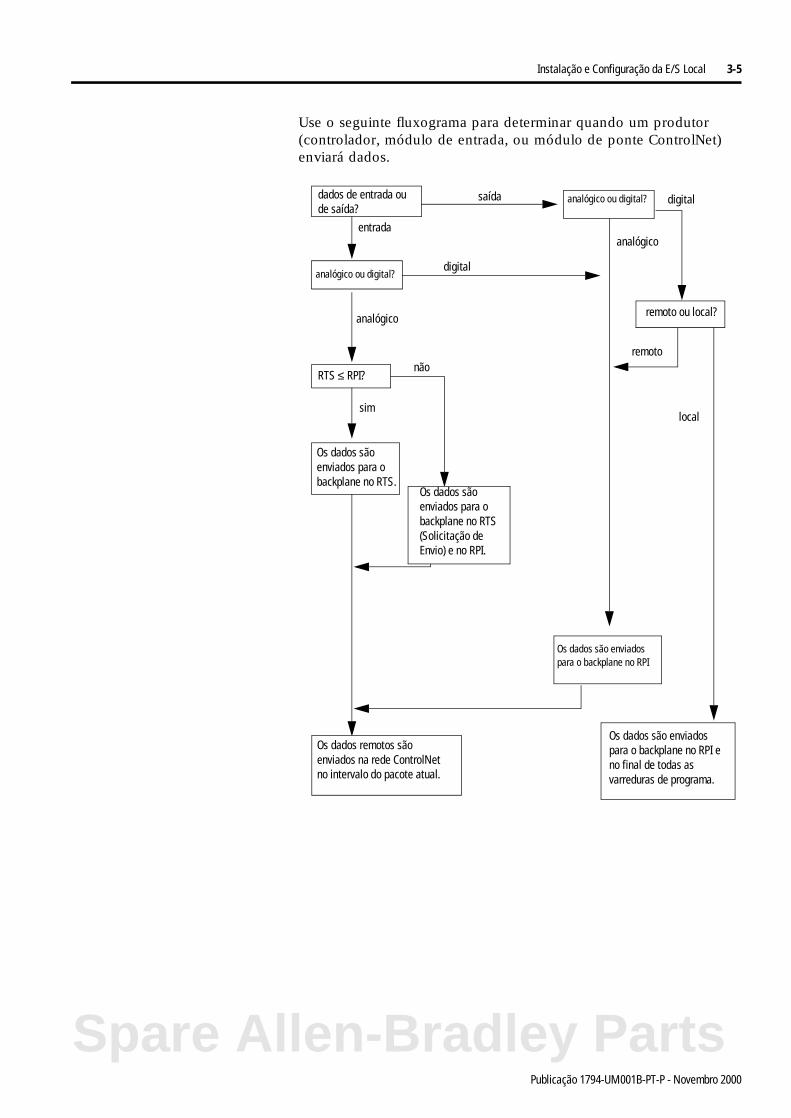
Use o seguinte fluxograma para determinar quando um produtor (controlador, módulo de entrada, ou módulo de ponte ControlNet) enviará dados.
dados de entrada ou de saída?
entrada
saída
Os dados são enviados para o backplane no RPI
remoto ou local?analógico
Os dados são enviados para o backplane no RPI e no final de todas as varreduras de programa.
Os dados são enviados para o backplane no RTS (Solicitação de Envio) e no RPI.
Os dados são enviados para o backplane no RTS.
analógico ou digital?
analógico
digital
local
remoto
digital
Os dados remotos são enviados na rede ControlNet no intervalo do pacote atual.
sim
nãoRTS ≤ RPI?
analógico ou digital?
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000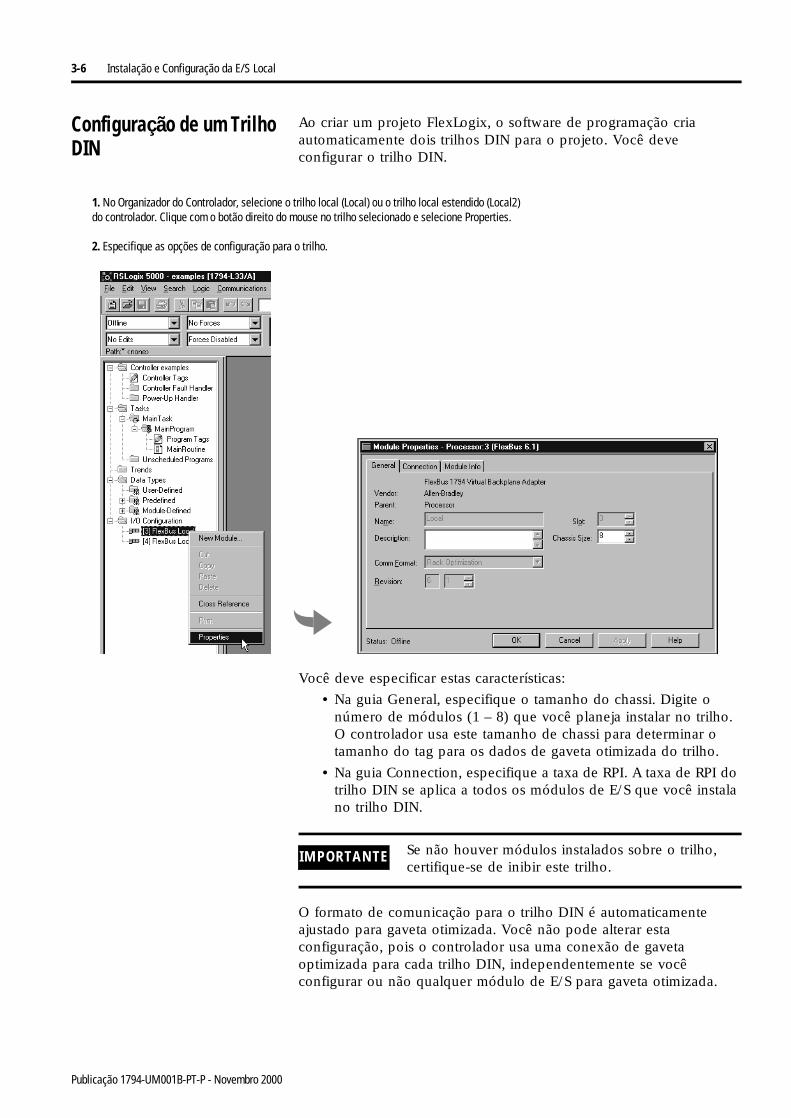
3-6 Instalação e Configuração da E/S Local
Configuração de um Trilho DIN
Ao criar um projeto FlexLogix, o software de programação cria automaticamente dois trilhos DIN para o projeto. Você deve configurar o trilho DIN.
Você deve especificar estas características:
• Na guia General, especifique o tamanho do chassi. Digite o número de módulos (1 – 8) que você planeja instalar no trilho. O controlador usa este tamanho de chassi para determinar o tamanho do tag para os dados de gaveta otimizada do trilho.
• Na guia Connection, especifique a taxa de RPI. A taxa de RPI do trilho DIN se aplica a todos os módulos de E/S que você instala no trilho DIN.
O formato de comunicação para o trilho DIN é automaticamente ajustado para gaveta otimizada. Você não pode alterar esta configuração, pois o controlador usa uma conexão de gaveta optimizada para cada trilho DIN, independentemente se você configurar ou não qualquer módulo de E/S para gaveta otimizada.
1. No Organizador do Controlador, selecione o trilho local (Local) ou o trilho local estendido (Local2) do controlador. Clique com o botão direito do mouse no trilho selecionado e selecione Properties.
2. Especifique as opções de configuração para o trilho.
IMPORTANTE Se não houver módulos instalados sobre o trilho, certifique-se de inibir este trilho.
Publicação 1794-UM001B-PT-P - Novembro 2000
Instalação e Configuração da E/S Local 3-7
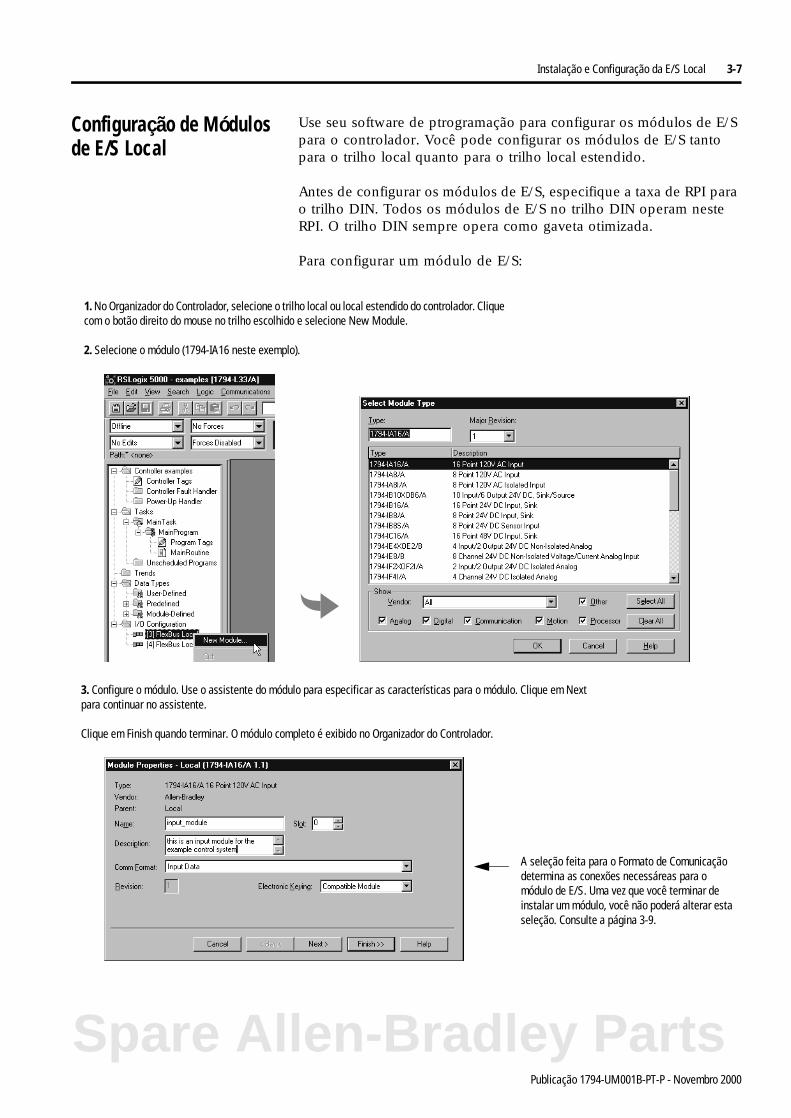
Configuração de Módulos de E/S Local
Use seu software de ptrogramação para configurar os módulos de E/S para o controlador. Você pode configurar os módulos de E/S tanto para o trilho local quanto para o trilho local estendido.
Antes de configurar os módulos de E/S, especifique a taxa de RPI para o trilho DIN. Todos os módulos de E/S no trilho DIN operam neste RPI. O trilho DIN sempre opera como gaveta otimizada.
Para configurar um módulo de E/S:
1. No Organizador do Controlador, selecione o trilho local ou local estendido do controlador. Clique com o botão direito do mouse no trilho escolhido e selecione New Module.
2. Selecione o módulo (1794-IA16 neste exemplo).
3. Configure o módulo. Use o assistente do módulo para especificar as características para o módulo. Clique em Next para continuar no assistente.
Clique em Finish quando terminar. O módulo completo é exibido no Organizador do Controlador.
A seleção feita para o Formato de Comunicação determina as conexões necessáreas para o módulo de E/S. Uma vez que você terminar de instalar um módulo, você não poderá alterar esta seleção. Consulte a página 3-9.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000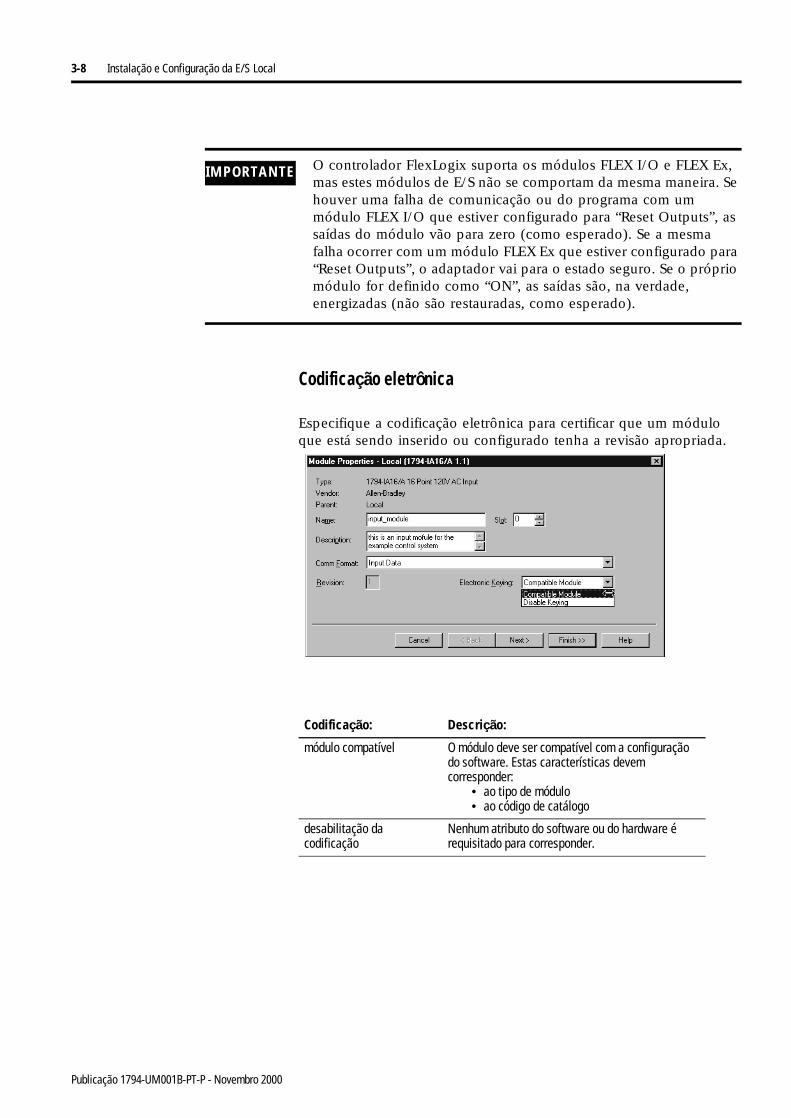
3-8 Instalação e Configuração da E/S Local
Codificação eletrônica
Especifique a codificação eletrônica para certificar que um módulo que está sendo inserido ou configurado tenha a revisão apropriada.
IMPORTANTE O controlador FlexLogix suporta os módulos FLEX I/O e FLEX Ex, mas estes módulos de E/S não se comportam da mesma maneira. Se houver uma falha de comunicação ou do programa com um módulo FLEX I/O que estiver configurado para “Reset Outputs”, as saídas do módulo vão para zero (como esperado). Se a mesma falha ocorrer com um módulo FLEX Ex que estiver configurado para “Reset Outputs”, o adaptador vai para o estado seguro. Se o próprio módulo for definido como “ON”, as saídas são, na verdade, energizadas (não são restauradas, como esperado).
Codificação: Descrição:
módulo compatível O módulo deve ser compatível com a configuração do software. Estas características devem corresponder:
• ao tipo de módulo• ao código de catálogo
desabilitação da codificação
Nenhum atributo do software ou do hardware é requisitado para corresponder.
Publicação 1794-UM001B-PT-P - Novembro 2000
Instalação e Configuração da E/S Local 3-9
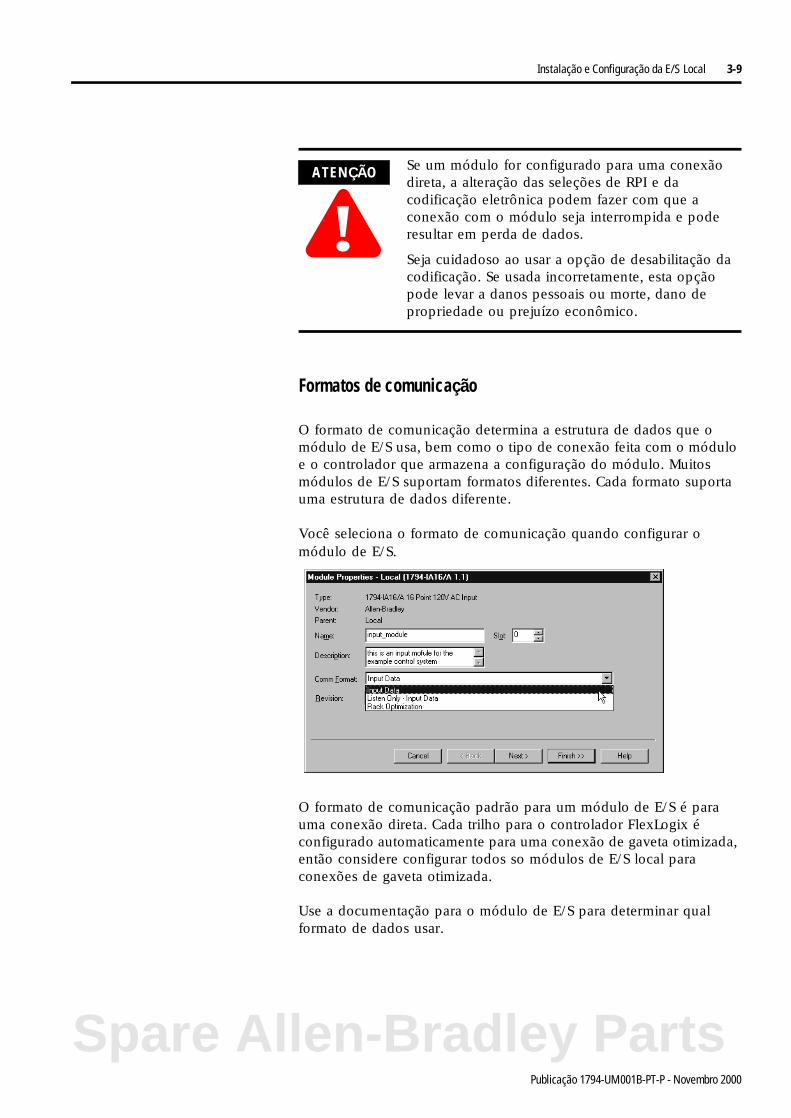
Formatos de comunicação
O formato de comunicação determina a estrutura de dados que o módulo de E/S usa, bem como o tipo de conexão feita com o módulo e o controlador que armazena a configuração do módulo. Muitos módulos de E/S suportam formatos diferentes. Cada formato suporta uma estrutura de dados diferente.
Você seleciona o formato de comunicação quando configurar o módulo de E/S.
O formato de comunicação padrão para um módulo de E/S é para uma conexão direta. Cada trilho para o controlador FlexLogix é configurado automaticamente para uma conexão de gaveta otimizada, então considere configurar todos so módulos de E/S local para conexões de gaveta otimizada.
Use a documentação para o módulo de E/S para determinar qual formato de dados usar.
ATENÇÃO
!Se um módulo for configurado para uma conexão direta, a alteração das seleções de RPI e da codificação eletrônica podem fazer com que a conexão com o módulo seja interrompida e pode resultar em perda de dados.
Seja cuidadoso ao usar a opção de desabilitação da codificação. Se usada incorretamente, esta opção pode levar a danos pessoais ou morte, dano de propriedade ou prejuízo econômico.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000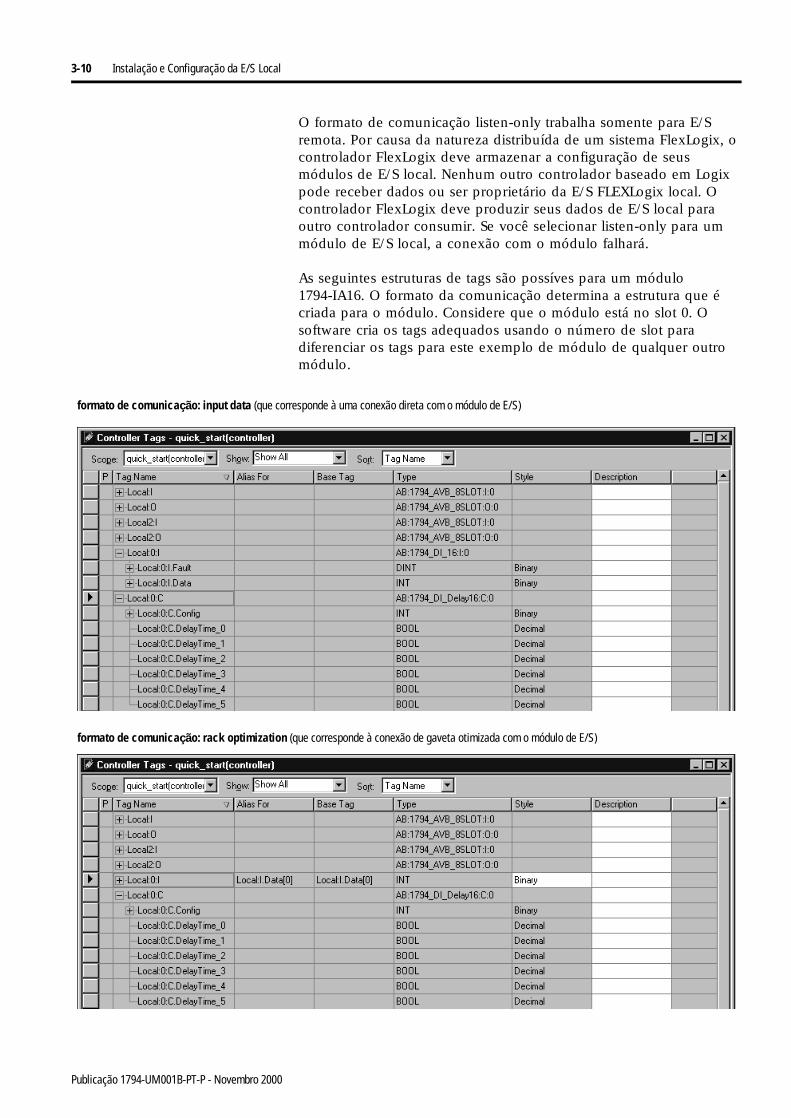
3-10 Instalação e Configuração da E/S Local
O formato de comunicação listen-only trabalha somente para E/S remota. Por causa da natureza distribuída de um sistema FlexLogix, o controlador FlexLogix deve armazenar a configuração de seus módulos de E/S local. Nenhum outro controlador baseado em Logix pode receber dados ou ser proprietário da E/S FLEXLogix local. O controlador FlexLogix deve produzir seus dados de E/S local para outro controlador consumir. Se você selecionar listen-only para um módulo de E/S local, a conexão com o módulo falhará.
As seguintes estruturas de tags são possíves para um módulo 1794-IA16. O formato da comunicação determina a estrutura que é criada para o módulo. Considere que o módulo está no slot 0. O software cria os tags adequados usando o número de slot para diferenciar os tags para este exemplo de módulo de qualquer outro módulo.
formato de comunicação: input data (que corresponde à uma conexão direta com o módulo de E/S)
formato de comunicação: rack optimization (que corresponde à conexão de gaveta otimizada com o módulo de E/S)
Publicação 1794-UM001B-PT-P - Novembro 2000
Instalação e Configuração da E/S Local 3-11
Os tags de gaveta otimizada são criados como aliases no tag da matriz Local:I, que é a matriz para módulos de entrada no trilho local. Esta matriz contém um elemento para cada slot no trilho (baseado no tamanho do chassi especificado durante a configuração do trilho). Você pode tendereçar o módulo de gaveta otimizada pelo tag alias (que usa o número do slot) ou pelo elemento de matriz no tag do trilho. Se você inserir o tag alias na sua lógica, o software de programação exibe o tag base.
O Local:I contém um elemento para cada slot possível no trilho, independentemente de você realmente instalar ou não um módulo de entrada. O Local:O também contém um elemento para cada slot possível. Se você configurar um módulo no trilho local como conexão direta, não use o elemento de matriz associado no Local:I ou Local:O. Use o tag que o software cria para o módulo (que usa o número do slot).
Inibição da Operação do Módulo de E/S
Em algumas situações, como quando estiver comissionando inicialmente um sistema, é útil desablitar partes de um sistema de controle e habilitá-las assim que você conectar o sistema de controle. O controlador permite a inibição de módulos individuais e grupos de módulos, o que evita que o controlador tente se comunicar com os módulos. A inibição de um módulo interrompe a conexão do controlador com o módulo.
Quando você configura um módulo de E/S, ele se padroniza para não ser inibido. Você pode mudar as propriedades de um módulo individual para inibir um módulo.
Mesmo se você inibir um módulo de E/S, o FlexBus ainda varrerá o módulo a cada sequência de varredura.
ATENÇÃO
!Inibir um módulo faz com que a conexão com o módulo seja interrompida e evita a comunicação dos dados de E/S.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000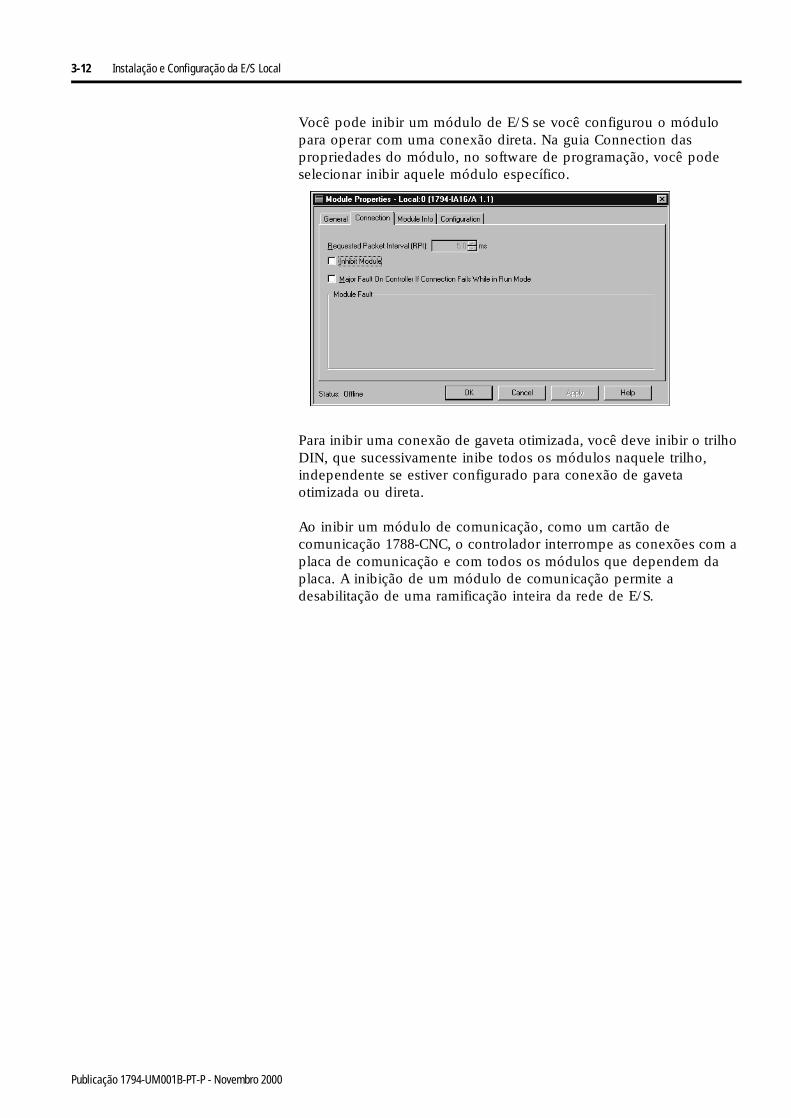
3-12 Instalação e Configuração da E/S Local
Você pode inibir um módulo de E/S se você configurou o módulo para operar com uma conexão direta. Na guia Connection das propriedades do módulo, no software de programação, você pode selecionar inibir aquele módulo específico.
Para inibir uma conexão de gaveta otimizada, você deve inibir o trilho DIN, que sucessivamente inibe todos os módulos naquele trilho, independente se estiver configurado para conexão de gaveta otimizada ou direta.
Ao inibir um módulo de comunicação, como um cartão de comunicação 1788-CNC, o controlador interrompe as conexões com a placa de comunicação e com todos os módulos que dependem da placa. A inibição de um módulo de comunicação permite a desabilitação de uma ramificação inteira da rede de E/S.
Publicação 1794-UM001B-PT-P - Novembro 2000
Instalação e Configuração da E/S Local 3-13
Ao selecionar a inibição do módulo, o organizador do controlador
exibe um símbolo amarelo de atenção no módulo.
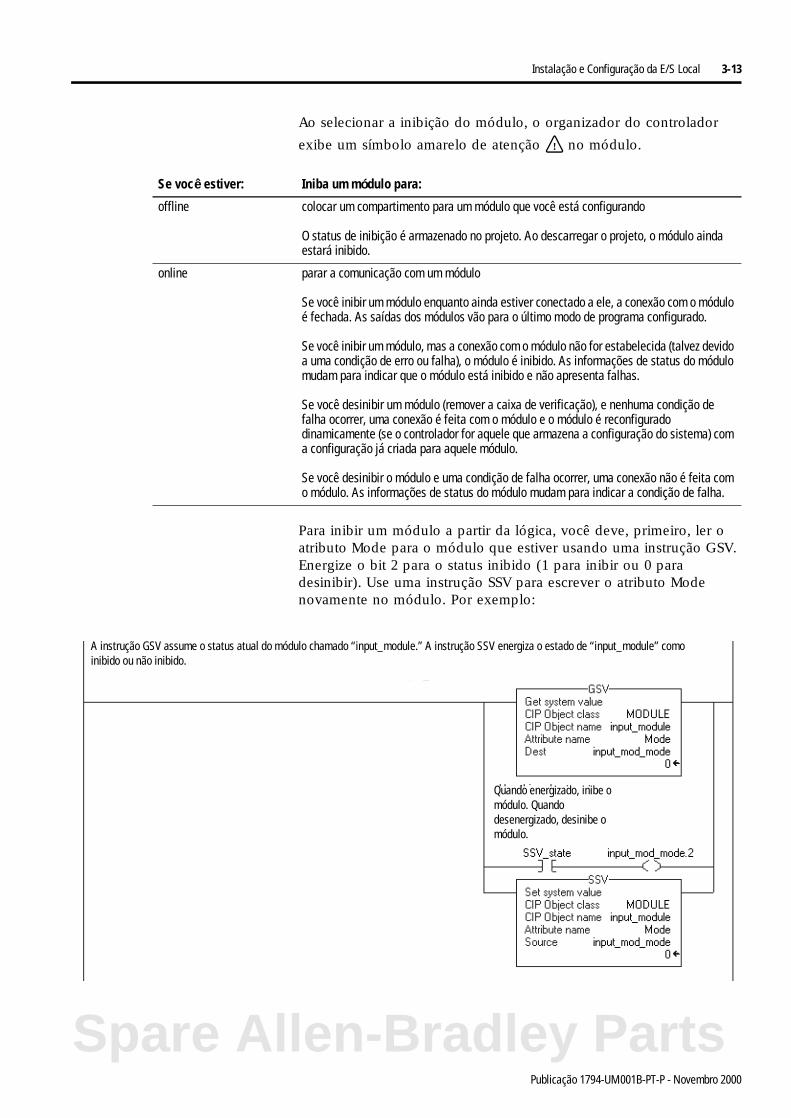
Para inibir um módulo a partir da lógica, você deve, primeiro, ler o atributo Mode para o módulo que estiver usando uma instrução GSV. Energize o bit 2 para o status inibido (1 para inibir ou 0 para desinibir). Use uma instrução SSV para escrever o atributo Mode novamente no módulo. Por exemplo:
!
Se você estiver: Iniba um módulo para:
offline colocar um compartimento para um módulo que você está configurando
O status de inibição é armazenado no projeto. Ao descarregar o projeto, o módulo ainda estará inibido.
online parar a comunicação com um módulo
Se você inibir um módulo enquanto ainda estiver conectado a ele, a conexão com o módulo é fechada. As saídas dos módulos vão para o último modo de programa configurado.
Se você inibir um módulo, mas a conexão com o módulo não for estabelecida (talvez devido a uma condição de erro ou falha), o módulo é inibido. As informações de status do módulo mudam para indicar que o módulo está inibido e não apresenta falhas.
Se você desinibir um módulo (remover a caixa de verificação), e nenhuma condição de falha ocorrer, uma conexão é feita com o módulo e o módulo é reconfigurado dinamicamente (se o controlador for aquele que armazena a configuração do sistema) com a configuração já criada para aquele módulo.
Se você desinibir o módulo e uma condição de falha ocorrer, uma conexão não é feita com o módulo. As informações de status do módulo mudam para indicar a condição de falha.
A instrução GSV assume o status atual do módulo chamado “input_module.” A instrução SSV energiza o estado de “input_module” como inibido ou não inibido.
Quando energizado, inibe o módulo. Quando desenergizado, desinibe o módulo.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
3-14 Instalação e Configuração da E/S Local
Acesso aos Dados de E/S O software de programação exibe os dados de E/S como estruturas de tags múltiplos que dependem das características específicas do módulo de E/S. Os nomes das estruturas de dados são baseados na localização do módulo de E/S. O software de programação cria automaticamente as estruturas e os tags necessários quando você configura o módulo. Cada tag segue este formato:
Location:Number:Type.MemberName.SubMemberName.Bit
onde:
Este tagde endereço: É:
Location Identifica o local da redeLOCAL = trilho DIN local ou chassiLOCAL2 = trilho DIN local estendidoADAPTER_NAME = identifica o adaptador remoto ou ponte
SlotNumber Número do slot do módulo de E/S em seu chassi
Type Tipo de dadosI = entradaO = saídaC = configuraçãoS = status
MemberName Dados específicos do módulo de E/S; depende do tipo de dado que o módulo pode armazenar
Por exemplo, Data e Fault são campos de dados possíveis para um módulo de E/S. Data é o nome comum para valores que são enviados ou recebidos de pontos de E/S.
SubMemberName Dados específicos relacionados a MemberName
Bit (opcional) Ponto específico no módulo de E/S; depende do tamanho do módulo de E/S (de 0 a 31 para um módulo com 32 pontos)
Publicação 1794-UM001B-PT-P - Novembro 2000
Instalação e Configuração da E/S Local 3-15
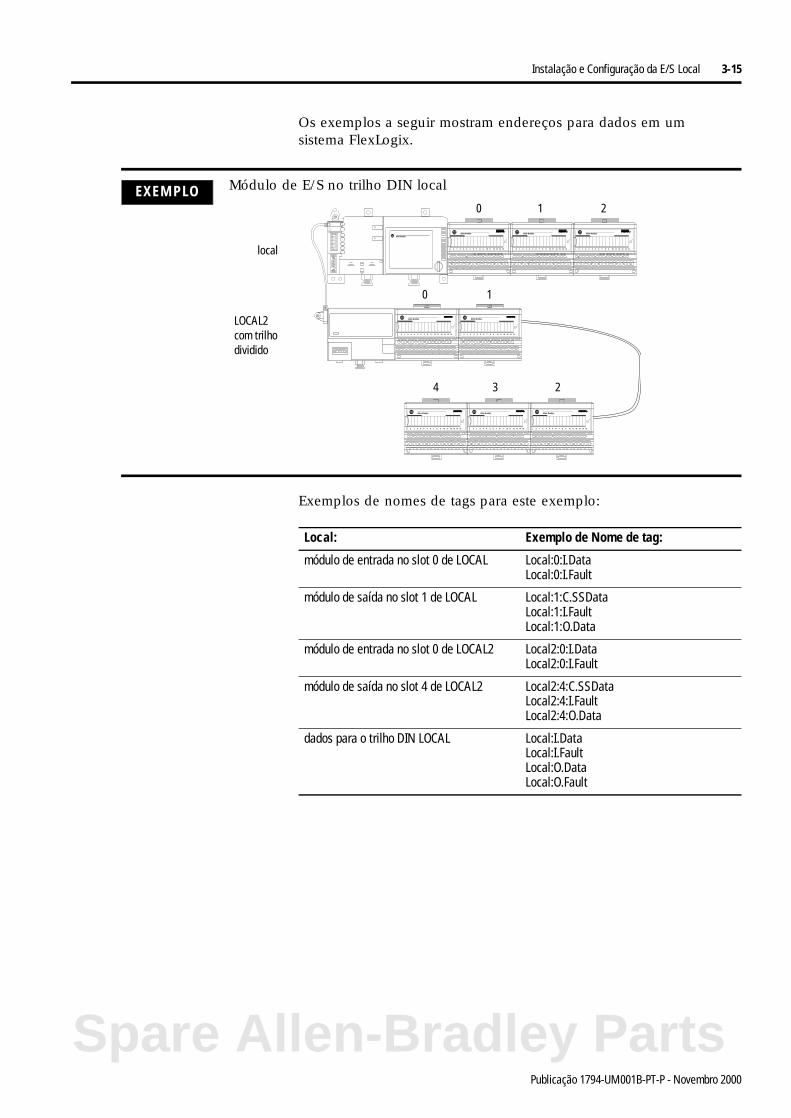
Os exemplos a seguir mostram endereços para dados em um sistema FlexLogix.
Exemplos de nomes de tags para este exemplo:
EXEMPLO Módulo de E/S no trilho DIN local
0 1 2
0 1
4 3 2
local
LOCAL2com trilho dividido
Local: Exemplo de Nome de tag:
módulo de entrada no slot 0 de LOCAL Local:0:I.DataLocal:0:I.Fault
módulo de saída no slot 1 de LOCAL Local:1:C.SSDataLocal:1:I.FaultLocal:1:O.Data
módulo de entrada no slot 0 de LOCAL2 Local2:0:I.DataLocal2:0:I.Fault
módulo de saída no slot 4 de LOCAL2 Local2:4:C.SSDataLocal2:4:I.FaultLocal2:4:O.Data
dados para o trilho DIN LOCAL Local:I.DataLocal:I.FaultLocal:O.DataLocal:O.Fault
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000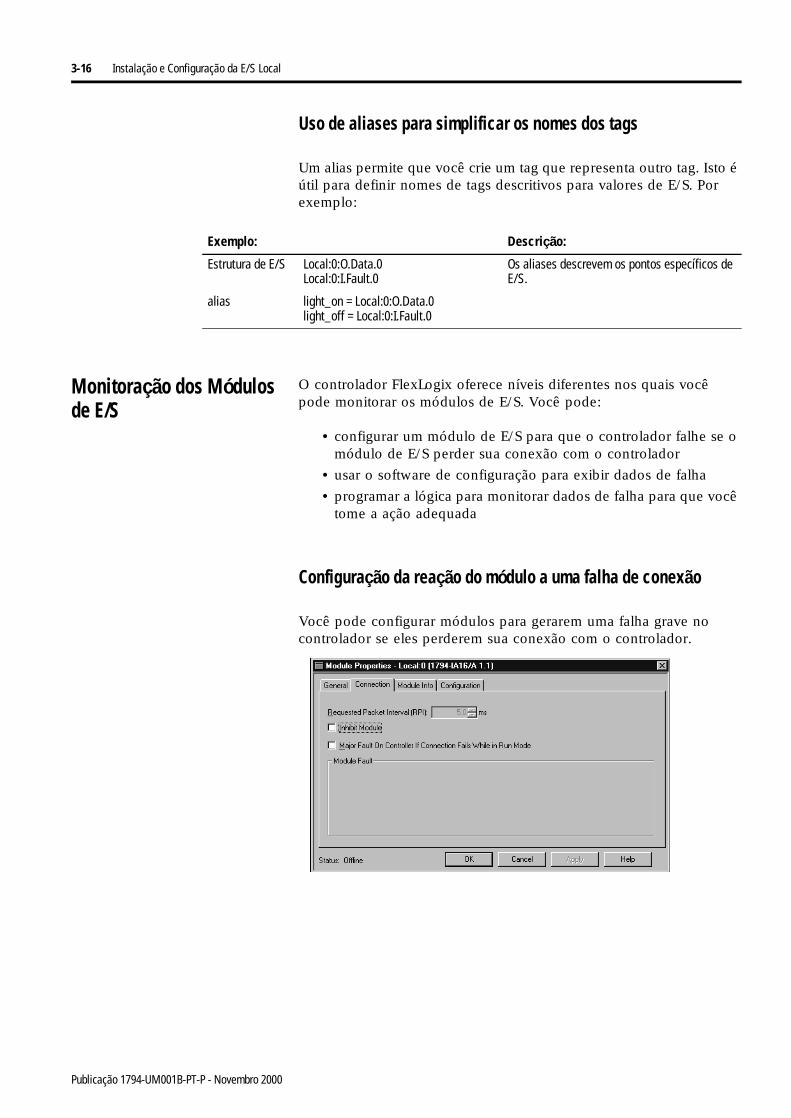
3-16 Instalação e Configuração da E/S Local
Uso de aliases para simplificar os nomes dos tags
Um alias permite que você crie um tag que representa outro tag. Isto é útil para definir nomes de tags descritivos para valores de E/S. Por exemplo:
Monitoração dos Módulos de E/S
O controlador FlexLogix oferece níveis diferentes nos quais você pode monitorar os módulos de E/S. Você pode:
• configurar um módulo de E/S para que o controlador falhe se o módulo de E/S perder sua conexão com o controlador
• usar o software de configuração para exibir dados de falha
• programar a lógica para monitorar dados de falha para que você tome a ação adequada
Configuração da reação do módulo a uma falha de conexão
Você pode configurar módulos para gerarem uma falha grave no controlador se eles perderem sua conexão com o controlador.
Exemplo: Descrição:
Estrutura de E/S Local:0:O.Data.0Local:0:I.Fault.0
Os aliases descrevem os pontos específicos de E/S.
alias light_on = Local:0:O.Data.0light_off = Local:0:I.Fault.0
Publicação 1794-UM001B-PT-P - Novembro 2000
Instalação e Configuração da E/S Local 3-17
Se você não fizer a configuração para que uma falha grave ocorra, você deve monitorar o status do módulo. Se um módulo perder sua conexão com o controlador:
• as saídas vão para o estado de falha configurado
• as entradas continuam no último estado sem falha
Configure módulos de E/S crítica para gerarem uma falha grave no controlador quando estes perderem as conexões com o controlador. Você pode, também, monitorar o status dos módulos de E/S.
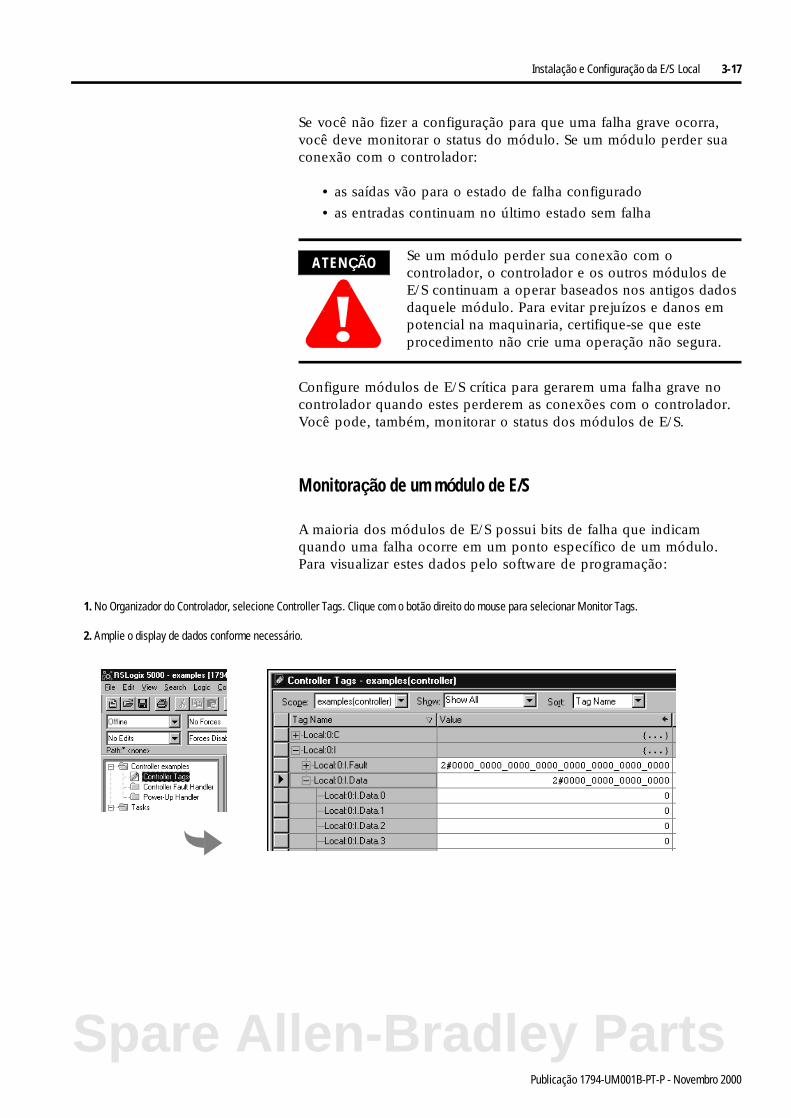
Monitoração de um módulo de E/S
A maioria dos módulos de E/S possui bits de falha que indicam quando uma falha ocorre em um ponto específico de um módulo. Para visualizar estes dados pelo software de programação:
ATENÇÃO
!Se um módulo perder sua conexão com o controlador, o controlador e os outros módulos de E/S continuam a operar baseados nos antigos dados daquele módulo. Para evitar prejuízos e danos em potencial na maquinaria, certifique-se que este procedimento não crie uma operação não segura.
1. No Organizador do Controlador, selecione Controller Tags. Clique com o botão direito do mouse para selecionar Monitor Tags.
2. Amplie o display de dados conforme necessário.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000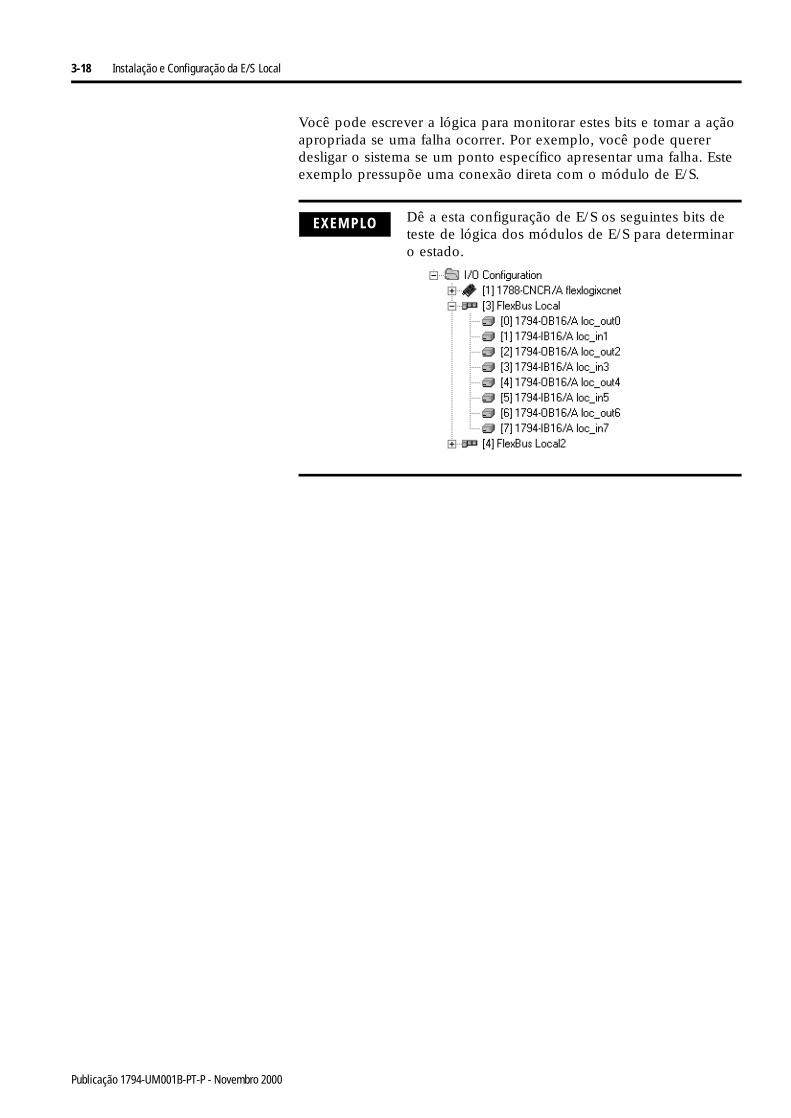
3-18 Instalação e Configuração da E/S Local
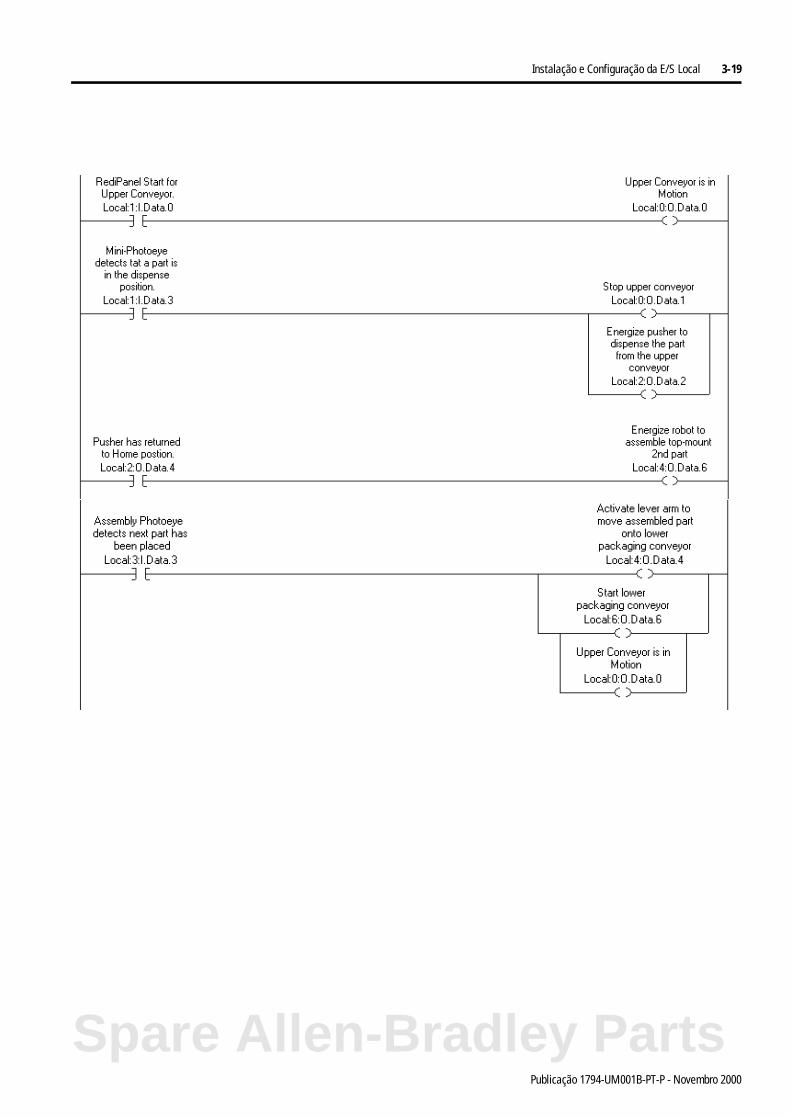
Você pode escrever a lógica para monitorar estes bits e tomar a ação apropriada se uma falha ocorrer. Por exemplo, você pode querer desligar o sistema se um ponto específico apresentar uma falha. Este exemplo pressupõe uma conexão direta com o módulo de E/S.
EXEMPLO Dê a esta configuração de E/S os seguintes bits de teste de lógica dos módulos de E/S para determinar o estado.
Publicação 1794-UM001B-PT-P - Novembro 2000
Instalação e Configuração da E/S Local 3-19
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000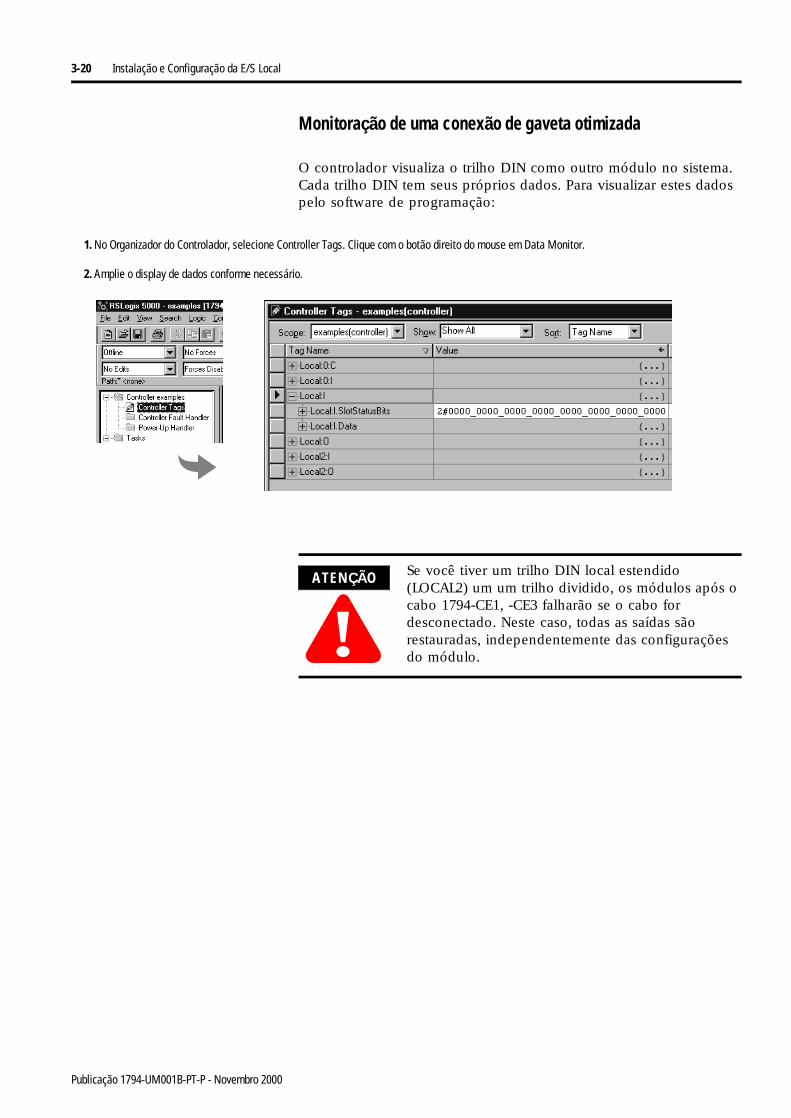
3-20 Instalação e Configuração da E/S Local
Monitoração de uma conexão de gaveta otimizada
O controlador visualiza o trilho DIN como outro módulo no sistema. Cada trilho DIN tem seus próprios dados. Para visualizar estes dados pelo software de programação:
1. No Organizador do Controlador, selecione Controller Tags. Clique com o botão direito do mouse em Data Monitor.
2. Amplie o display de dados conforme necessário.
ATENÇÃO
!Se você tiver um trilho DIN local estendido (LOCAL2) um um trilho dividido, os módulos após o cabo 1794-CE1, -CE3 falharão se o cabo for desconectado. Neste caso, todas as saídas são restauradas, independentemente das configurações do módulo.
Publicação 1794-UM001B-PT-P - Novembro 2000
Instalação e Configuração da E/S Local 3-21
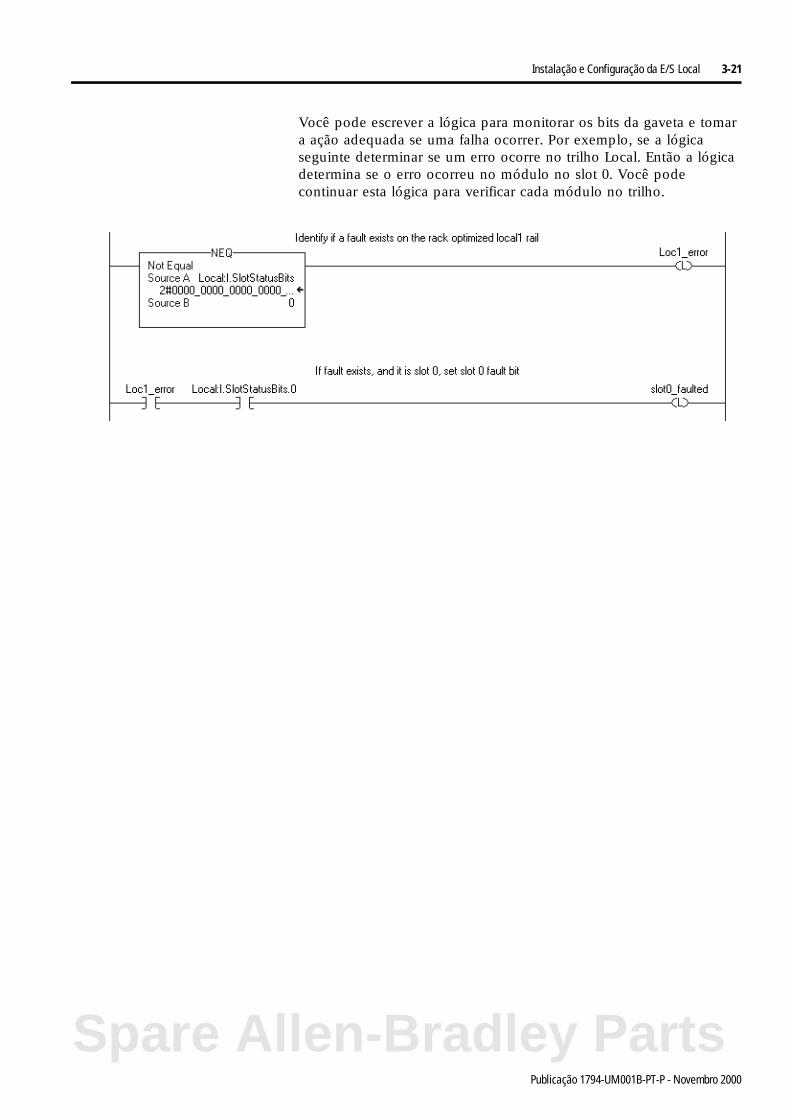
Você pode escrever a lógica para monitorar os bits da gaveta e tomar a ação adequada se uma falha ocorrer. Por exemplo, se a lógica seguinte determinar se um erro ocorre no trilho Local. Então a lógica determina se o erro ocorreu no módulo no slot 0. Você pode continuar esta lógica para verificar cada módulo no trilho.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
3-22 Instalação e Configuração da E/S Local
Notas:
Publicação 1794-UM001B-PT-P - Novembro 2000
Capítulo 4
Comunicação com Dispositivos em um Link ControlNet
Uso Deste Manual
Configuração do Seu Sistema para um Link ControlNet
Para o controlador FlexLogix operar em uma rede ControlNet, você precisa:
• uma estação de trabalho com um cartão filho de comunicação ControlNet adequado
• um cartão filho de comunicação 1788-CNx instalado no slot de comunicação FlexLogix
• o software RSLinx para configurar o driver de comunicação ControlNet
• o software de programação RSLogix5000 para configurar o cartão filho de comunicação 1788-CNx como parte do sistema FlexLogix
• o software RSNetWorx para programar o sistema FlexLogix na rede
Para informações sobre: Consulte a página
Configuração do seu sistema para um link ControlNet 4-1
Configuração da E/S remota 4-6
Envio de mensagens 4-10
Produção e consumo de dados 4-16
Diretrizes para configuração das conexões 4-19
Exemplo 1: controlador FlexLogix e E/S remota 4-21
Exemplo 2: controlador FlexLogix para controlador FlexLogix 4-22
Exemplo 3: controlador FlexLogix para outros dispositivos 4-25
Exemplo 4: Uso do FlexLogix como uma ponte 4-30
Spare Allen-Bradley Parts
1 Publicação 1794-UM001B-PT-P - Novembro 2000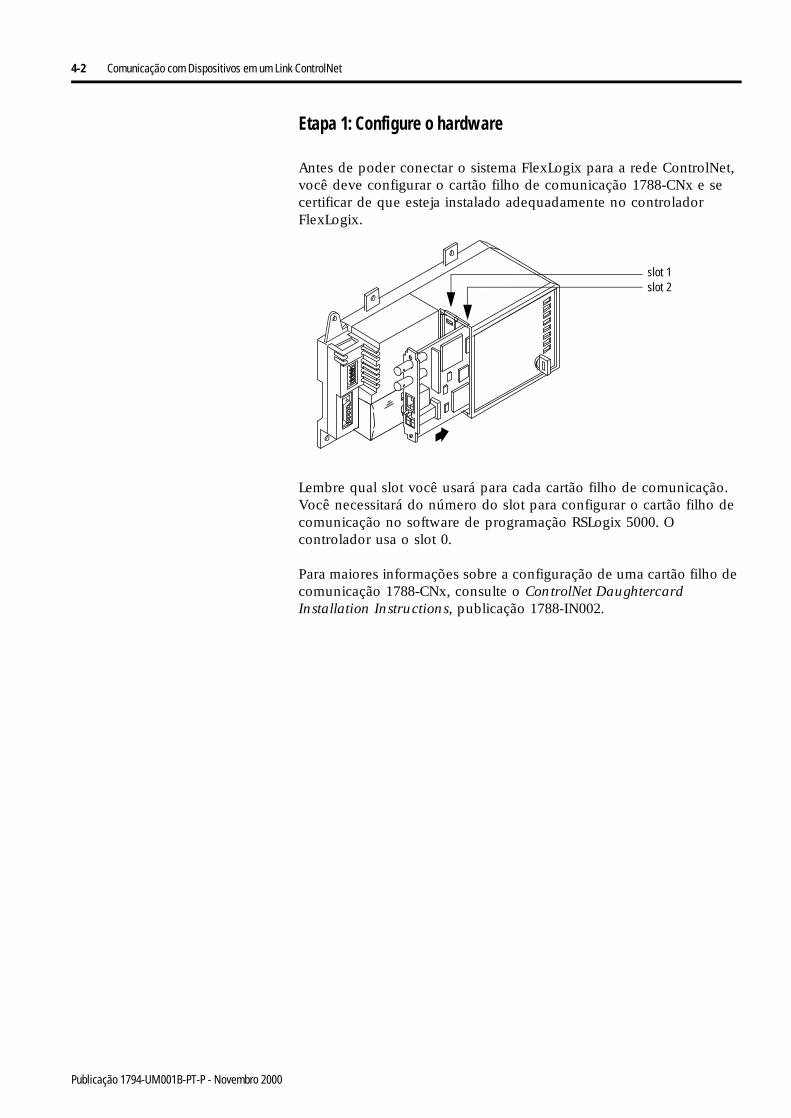
4-2 Comunicação com Dispositivos em um Link ControlNet
Etapa 1: Configure o hardware
Antes de poder conectar o sistema FlexLogix para a rede ControlNet, você deve configurar o cartão filho de comunicação 1788-CNx e se certificar de que esteja instalado adequadamente no controlador FlexLogix.
Lembre qual slot você usará para cada cartão filho de comunicação. Você necessitará do número do slot para configurar o cartão filho de comunicação no software de programação RSLogix 5000. O controlador usa o slot 0.
Para maiores informações sobre a configuração de uma cartão filho de comunicação 1788-CNx, consulte o ControlNet Daughtercard Installation Instructions, publicação 1788-IN002.
slot 1slot 2
Publicação 1794-UM001B-PT-P - Novembro 2000
Comunicação com Dispositivos em um Link ControlNet 4-3
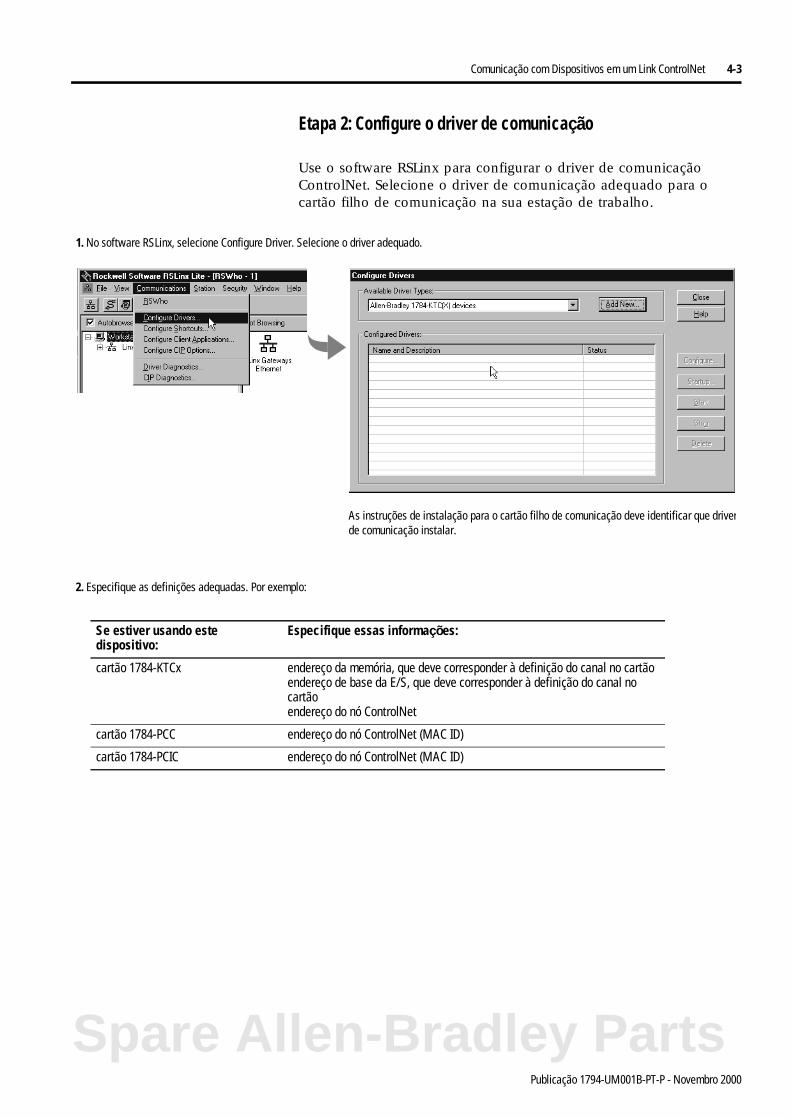
Etapa 2: Configure o driver de comunicação
Use o software RSLinx para configurar o driver de comunicação ControlNet. Selecione o driver de comunicação adequado para o cartão filho de comunicação na sua estação de trabalho.
1. No software RSLinx, selecione Configure Driver. Selecione o driver adequado.
As instruções de instalação para o cartão filho de comunicação deve identificar que driverde comunicação instalar.
2. Especifique as definições adequadas. Por exemplo:
Se estiver usando este dispositivo:
Especifique essas informações:
cartão 1784-KTCx endereço da memória, que deve corresponder à definição do canal no cartãoendereço de base da E/S, que deve corresponder à definição do canal no cartãoendereço do nó ControlNet
cartão 1784-PCC endereço do nó ControlNet (MAC ID)
cartão 1784-PCIC endereço do nó ControlNet (MAC ID)
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000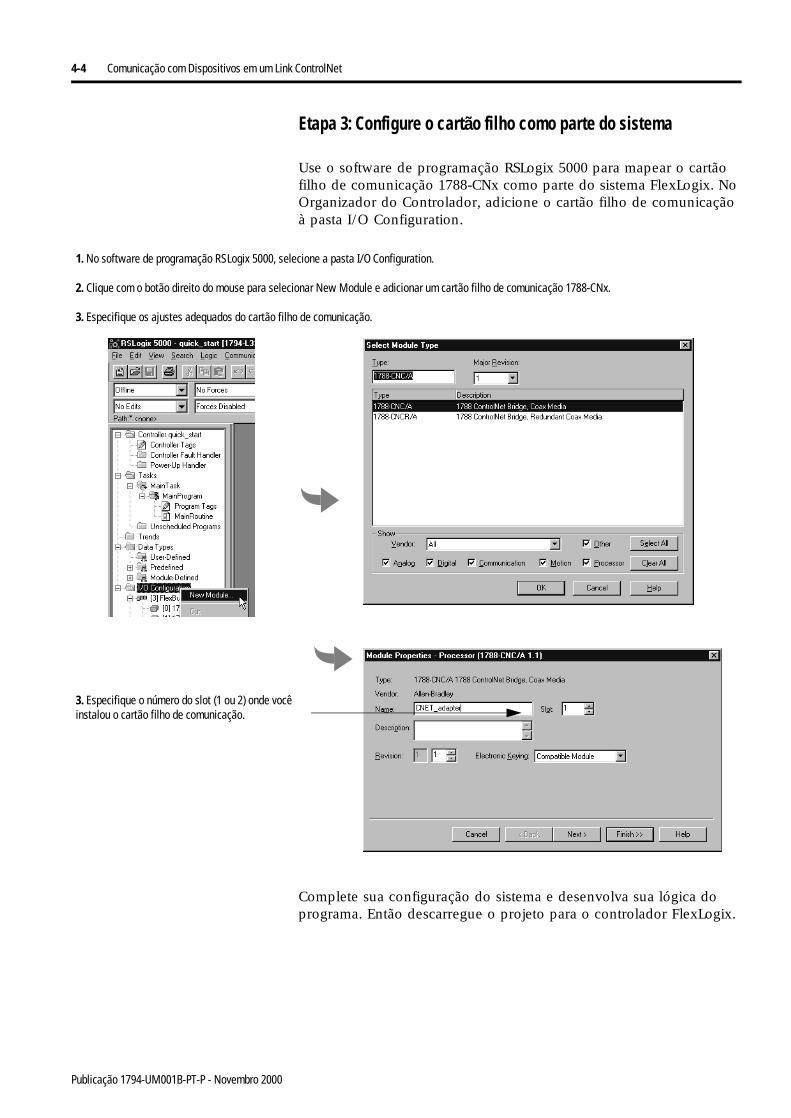
4-4 Comunicação com Dispositivos em um Link ControlNet
Etapa 3: Configure o cartão filho como parte do sistema
Use o software de programação RSLogix 5000 para mapear o cartão filho de comunicação 1788-CNx como parte do sistema FlexLogix. No Organizador do Controlador, adicione o cartão filho de comunicação à pasta I/O Configuration.
Complete sua configuração do sistema e desenvolva sua lógica do programa. Então descarregue o projeto para o controlador FlexLogix.
1. No software de programação RSLogix 5000, selecione a pasta I/O Configuration.
2. Clique com o botão direito do mouse para selecionar New Module e adicionar um cartão filho de comunicação 1788-CNx.
3. Especifique os ajustes adequados do cartão filho de comunicação.
3. Especifique o número do slot (1 ou 2) onde você instalou o cartão filho de comunicação.
Publicação 1794-UM001B-PT-P - Novembro 2000
Comunicação com Dispositivos em um Link ControlNet 4-5
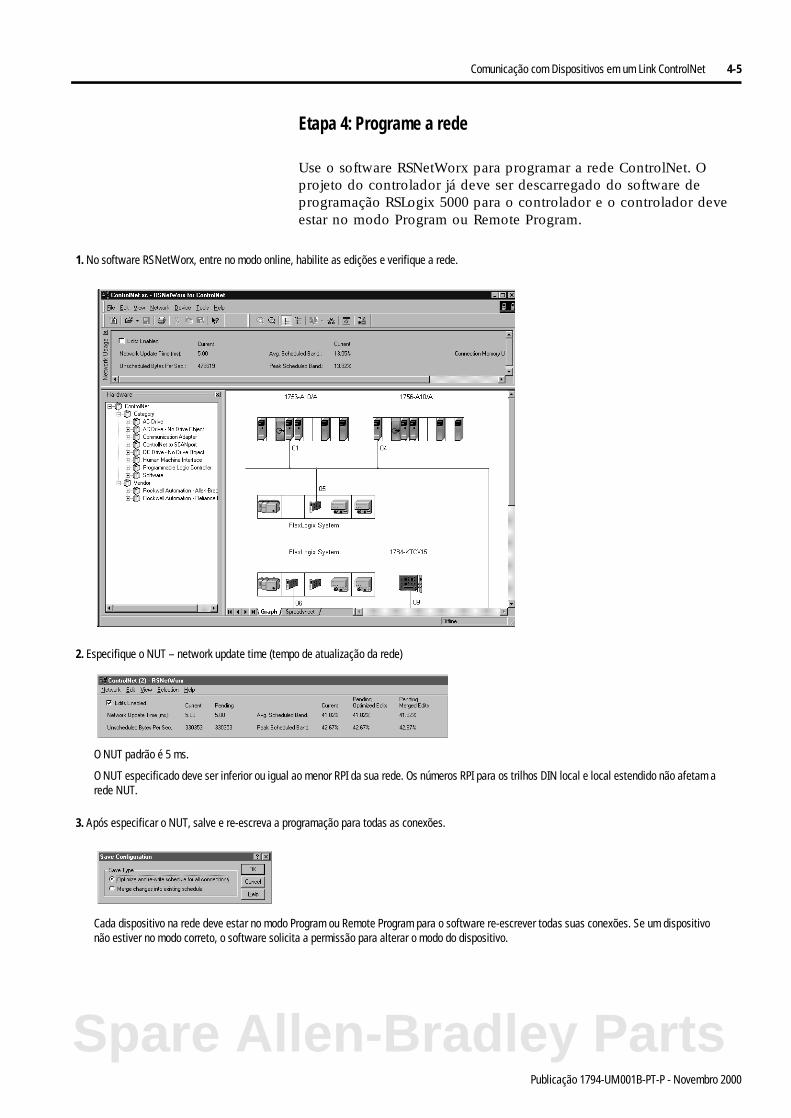
Etapa 4: Programe a rede
Use o software RSNetWorx para programar a rede ControlNet. O projeto do controlador já deve ser descarregado do software de programação RSLogix 5000 para o controlador e o controlador deve estar no modo Program ou Remote Program.
1. No software RSNetWorx, entre no modo online, habilite as edições e verifique a rede.
3. Após especificar o NUT, salve e re-escreva a programação para todas as conexões.
2. Especifique o NUT – network update time (tempo de atualização da rede)
O NUT padrão é 5 ms.
O NUT especificado deve ser inferior ou igual ao menor RPI da sua rede. Os números RPI para os trilhos DIN local e local estendido não afetam a rede NUT.
Cada dispositivo na rede deve estar no modo Program ou Remote Program para o software re-escrever todas suas conexões. Se um dispositivo não estiver no modo correto, o software solicita a permissão para alterar o modo do dispositivo.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000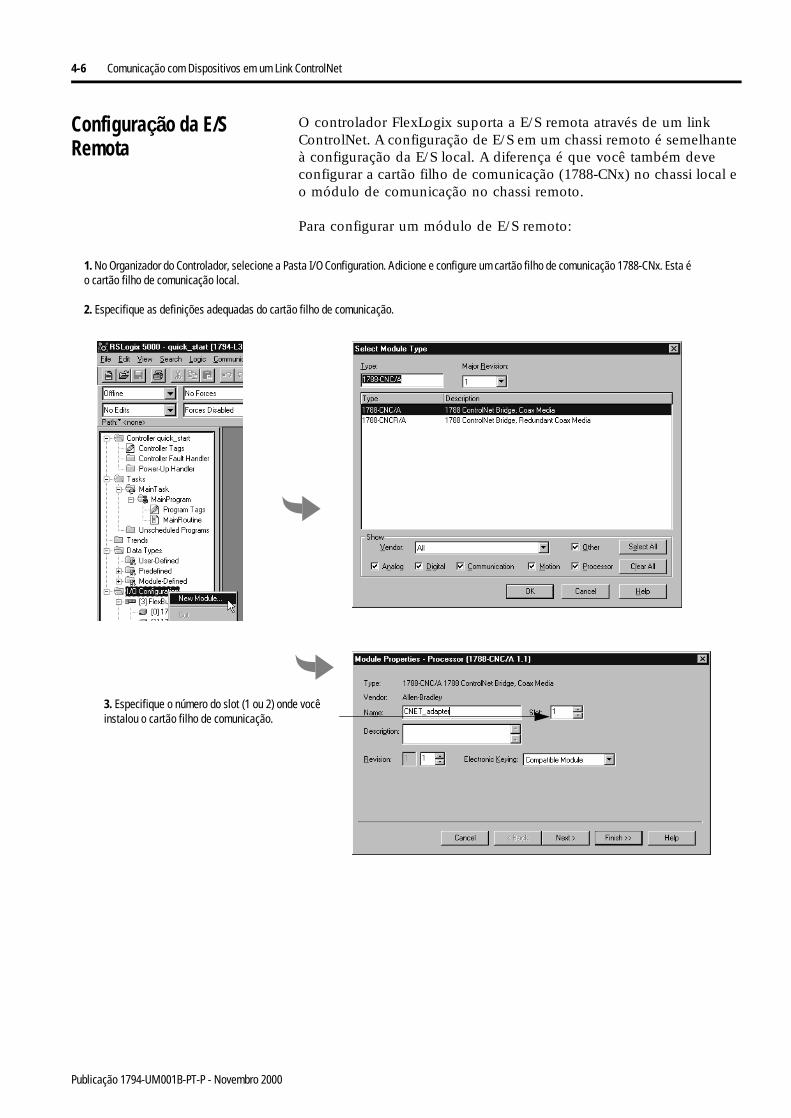
4-6 Comunicação com Dispositivos em um Link ControlNet
Configuração da E/S Remota
O controlador FlexLogix suporta a E/S remota através de um link ControlNet. A configuração de E/S em um chassi remoto é semelhante à configuração da E/S local. A diferença é que você também deve configurar a cartão filho de comunicação (1788-CNx) no chassi local e o módulo de comunicação no chassi remoto.
Para configurar um módulo de E/S remoto:
1. No Organizador do Controlador, selecione a Pasta I/O Configuration. Adicione e configure um cartão filho de comunicação 1788-CNx. Esta é o cartão filho de comunicação local.
2. Especifique as definições adequadas do cartão filho de comunicação.
3. Especifique o número do slot (1 ou 2) onde você instalou o cartão filho de comunicação.
Publicação 1794-UM001B-PT-P - Novembro 2000
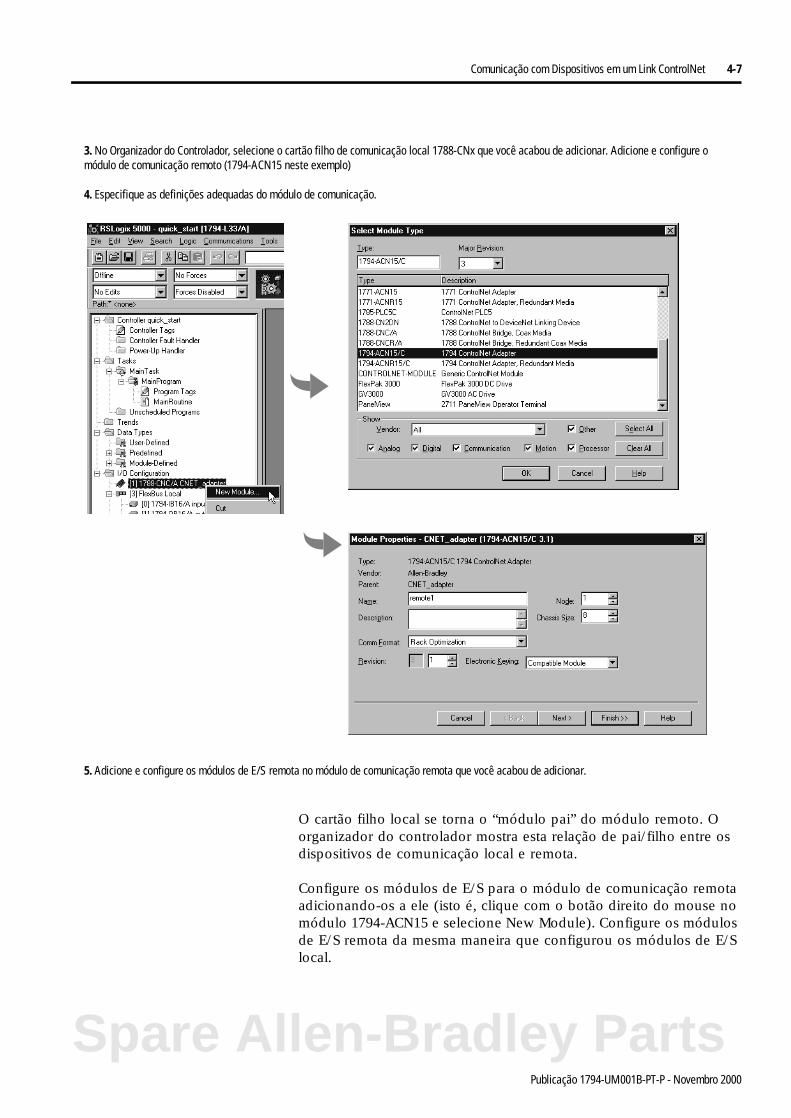
Comunicação com Dispositivos em um Link ControlNet 4-7
O cartão filho local se torna o “módulo pai” do módulo remoto. O organizador do controlador mostra esta relação de pai/filho entre os dispositivos de comunicação local e remota.
Configure os módulos de E/S para o módulo de comunicação remota adicionando-os a ele (isto é, clique com o botão direito do mouse no módulo 1794-ACN15 e selecione New Module). Configure os módulos de E/S remota da mesma maneira que configurou os módulos de E/S local.
3. No Organizador do Controlador, selecione o cartão filho de comunicação local 1788-CNx que você acabou de adicionar. Adicione e configure o módulo de comunicação remoto (1794-ACN15 neste exemplo)
4. Especifique as definições adequadas do módulo de comunicação.
5. Adicione e configure os módulos de E/S remota no módulo de comunicação remota que você acabou de adicionar.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000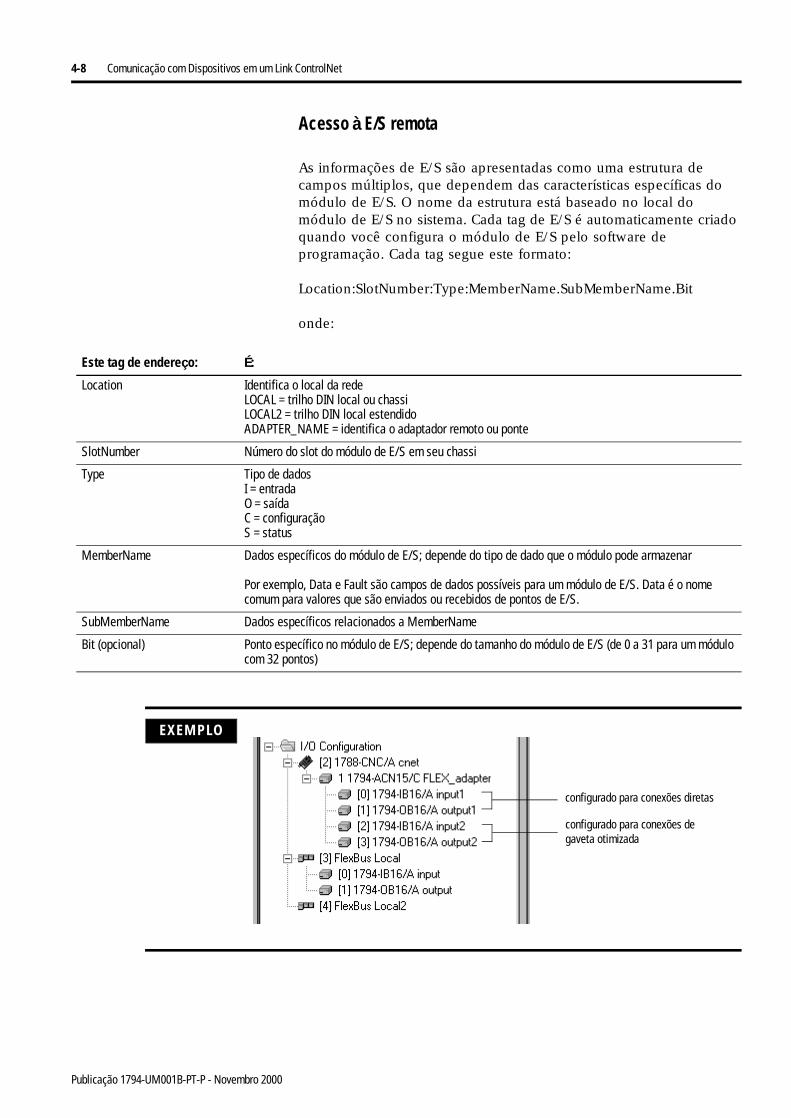
4-8 Comunicação com Dispositivos em um Link ControlNet
Acesso à E/S remota
As informações de E/S são apresentadas como uma estrutura de campos múltiplos, que dependem das características específicas do módulo de E/S. O nome da estrutura está baseado no local do módulo de E/S no sistema. Cada tag de E/S é automaticamente criado quando você configura o módulo de E/S pelo software de programação. Cada tag segue este formato:
Location:SlotNumber:Type:MemberName.SubMemberName.Bit
onde:
Este tag de endereço: É:
Location Identifica o local da redeLOCAL = trilho DIN local ou chassiLOCAL2 = trilho DIN local estendidoADAPTER_NAME = identifica o adaptador remoto ou ponte
SlotNumber Número do slot do módulo de E/S em seu chassi
Type Tipo de dadosI = entradaO = saídaC = configuraçãoS = status
MemberName Dados específicos do módulo de E/S; depende do tipo de dado que o módulo pode armazenar
Por exemplo, Data e Fault são campos de dados possíveis para um módulo de E/S. Data é o nome comum para valores que são enviados ou recebidos de pontos de E/S.
SubMemberName Dados específicos relacionados a MemberName
Bit (opcional) Ponto específico no módulo de E/S; depende do tamanho do módulo de E/S (de 0 a 31 para um módulo com 32 pontos)
EXEMPLO
configurado para conexões diretas
configurado para conexões de gaveta otimizada
Publicação 1794-UM001B-PT-P - Novembro 2000
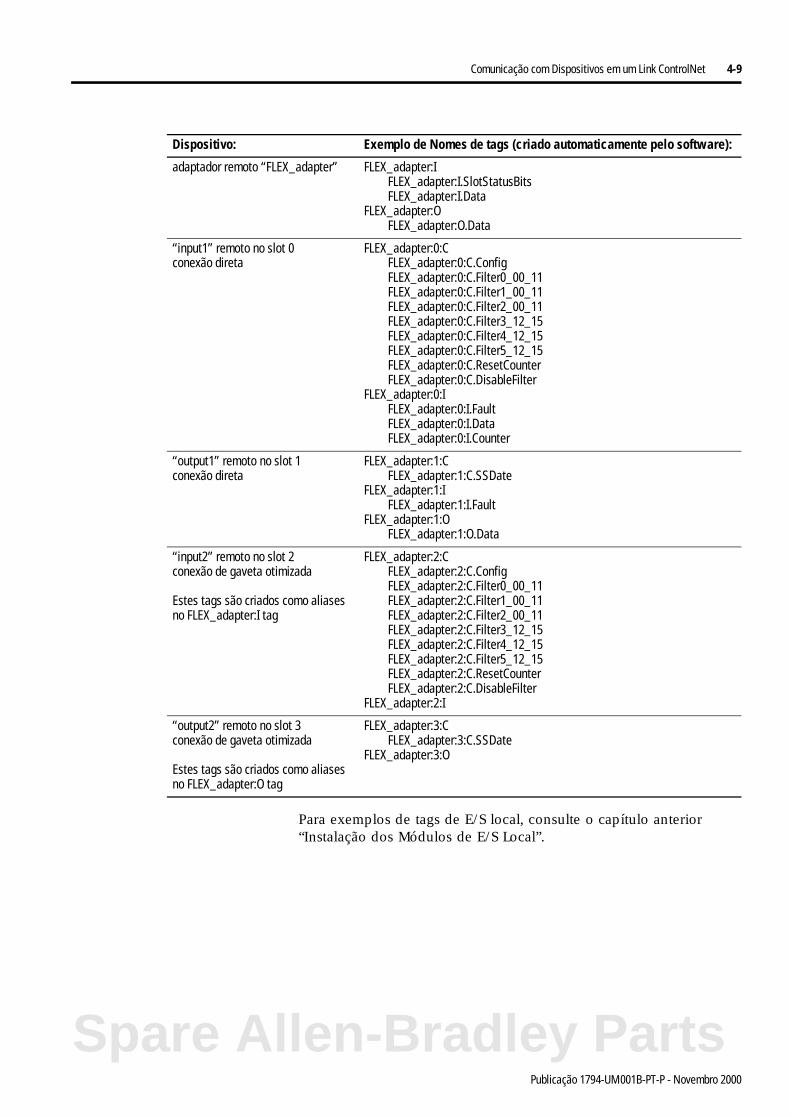
Comunicação com Dispositivos em um Link ControlNet 4-9
Para exemplos de tags de E/S local, consulte o capítulo anterior “Instalação dos Módulos de E/S Local”.
Dispositivo: Exemplo de Nomes de tags (criado automaticamente pelo software):
adaptador remoto “FLEX_adapter” FLEX_adapter:IFLEX_adapter:I.SlotStatusBitsFLEX_adapter:I.Data
FLEX_adapter:OFLEX_adapter:O.Data
“input1” remoto no slot 0conexão direta
FLEX_adapter:0:CFLEX_adapter:0:C.ConfigFLEX_adapter:0:C.Filter0_00_11FLEX_adapter:0:C.Filter1_00_11FLEX_adapter:0:C.Filter2_00_11FLEX_adapter:0:C.Filter3_12_15FLEX_adapter:0:C.Filter4_12_15FLEX_adapter:0:C.Filter5_12_15FLEX_adapter:0:C.ResetCounterFLEX_adapter:0:C.DisableFilter
FLEX_adapter:0:IFLEX_adapter:0:I.FaultFLEX_adapter:0:I.DataFLEX_adapter:0:I.Counter
“output1” remoto no slot 1conexão direta
FLEX_adapter:1:CFLEX_adapter:1:C.SSDate
FLEX_adapter:1:IFLEX_adapter:1:I.Fault
FLEX_adapter:1:OFLEX_adapter:1:O.Data
“input2” remoto no slot 2conexão de gaveta otimizada
Estes tags são criados como aliases no FLEX_adapter:I tag
FLEX_adapter:2:CFLEX_adapter:2:C.ConfigFLEX_adapter:2:C.Filter0_00_11FLEX_adapter:2:C.Filter1_00_11FLEX_adapter:2:C.Filter2_00_11FLEX_adapter:2:C.Filter3_12_15FLEX_adapter:2:C.Filter4_12_15FLEX_adapter:2:C.Filter5_12_15FLEX_adapter:2:C.ResetCounterFLEX_adapter:2:C.DisableFilter
FLEX_adapter:2:I
“output2” remoto no slot 3conexão de gaveta otimizada
Estes tags são criados como aliases no FLEX_adapter:O tag
FLEX_adapter:3:CFLEX_adapter:3:C.SSDate
FLEX_adapter:3:O
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000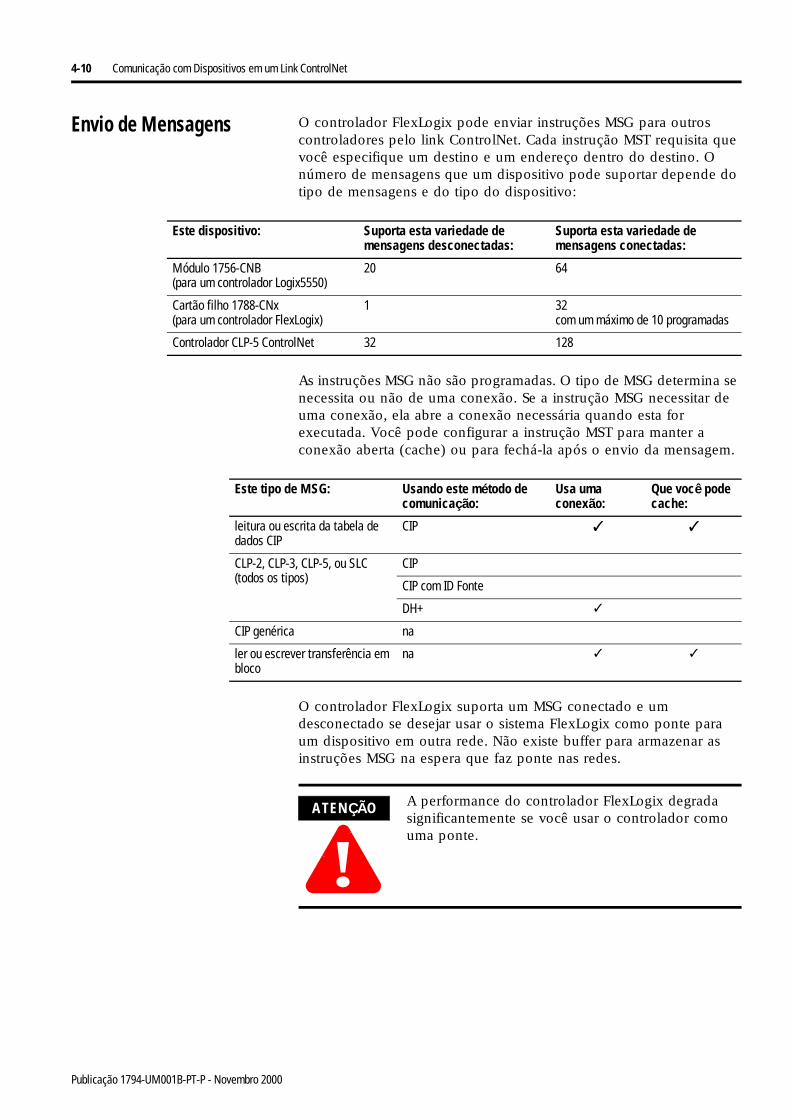
4-10 Comunicação com Dispositivos em um Link ControlNet
Envio de Mensagens O controlador FlexLogix pode enviar instruções MSG para outros controladores pelo link ControlNet. Cada instrução MST requisita que você especifique um destino e um endereço dentro do destino. O número de mensagens que um dispositivo pode suportar depende do tipo de mensagens e do tipo do dispositivo:
As instruções MSG não são programadas. O tipo de MSG determina se necessita ou não de uma conexão. Se a instrução MSG necessitar de uma conexão, ela abre a conexão necessária quando esta for executada. Você pode configurar a instrução MST para manter a conexão aberta (cache) ou para fechá-la após o envio da mensagem.
O controlador FlexLogix suporta um MSG conectado e um desconectado se desejar usar o sistema FlexLogix como ponte para um dispositivo em outra rede. Não existe buffer para armazenar as instruções MSG na espera que faz ponte nas redes.
Este dispositivo: Suporta esta variedade de mensagens desconectadas:
Suporta esta variedade de mensagens conectadas:
Módulo 1756-CNB(para um controlador Logix5550)
20 64
Cartão filho 1788-CNx(para um controlador FlexLogix)
1 32com um máximo de 10 programadas
Controlador CLP-5 ControlNet 32 128
Este tipo de MSG: Usando este método de comunicação:
Usa uma conexão:
Que você pode cache:
leitura ou escrita da tabela de dados CIP
CIP ✓ ✓
CLP-2, CLP-3, CLP-5, ou SLC (todos os tipos)
CIP
CIP com ID Fonte
DH+ ✓
CIP genérica na
ler ou escrever transferência em bloco
na ✓ ✓
ATENÇÃO
!A performance do controlador FlexLogix degrada significantemente se você usar o controlador como uma ponte.
Publicação 1794-UM001B-PT-P - Novembro 2000
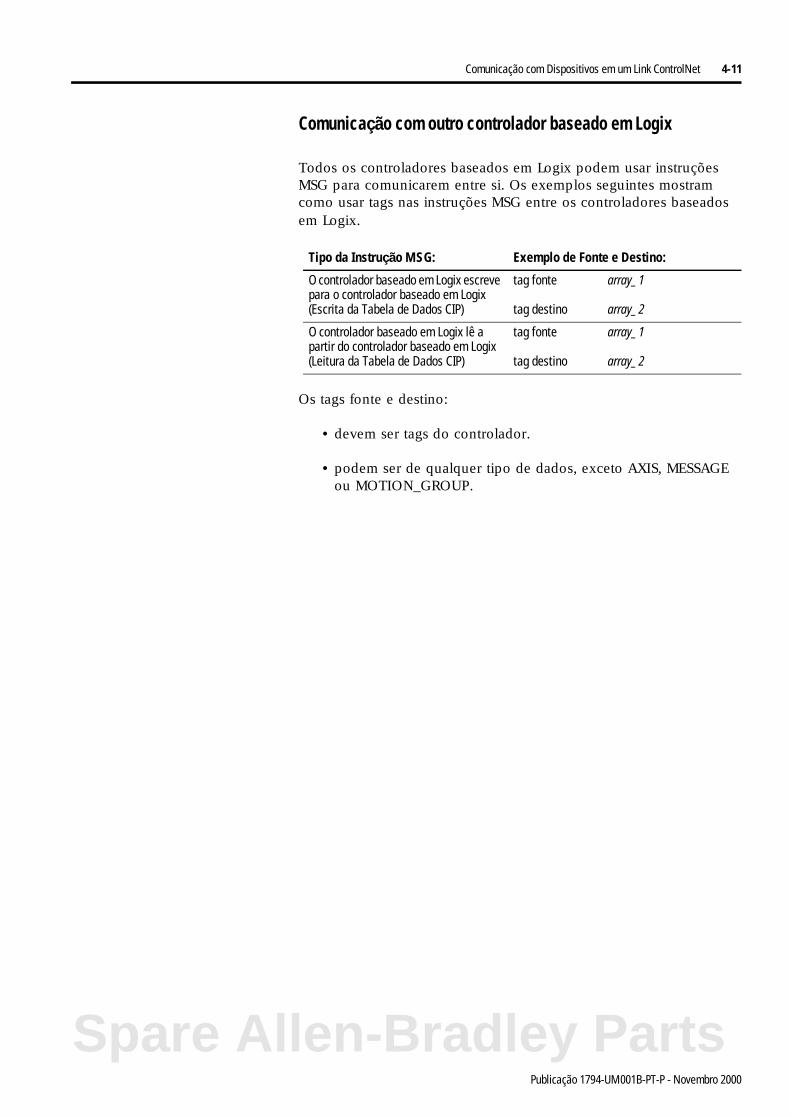
Comunicação com Dispositivos em um Link ControlNet 4-11
Comunicação com outro controlador baseado em Logix
Todos os controladores baseados em Logix podem usar instruções MSG para comunicarem entre si. Os exemplos seguintes mostram como usar tags nas instruções MSG entre os controladores baseados em Logix.
Os tags fonte e destino:
• devem ser tags do controlador.
• podem ser de qualquer tipo de dados, exceto AXIS, MESSAGE ou MOTION_GROUP.
Tipo da Instrução MSG: Exemplo de Fonte e Destino:
O controlador baseado em Logix escreve para o controlador baseado em Logix(Escrita da Tabela de Dados CIP)
tag fonte
tag destino
array_1
array_2
O controlador baseado em Logix lê a partir do controlador baseado em Logix(Leitura da Tabela de Dados CIP)
tag fonte
tag destino
array_1
array_2
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000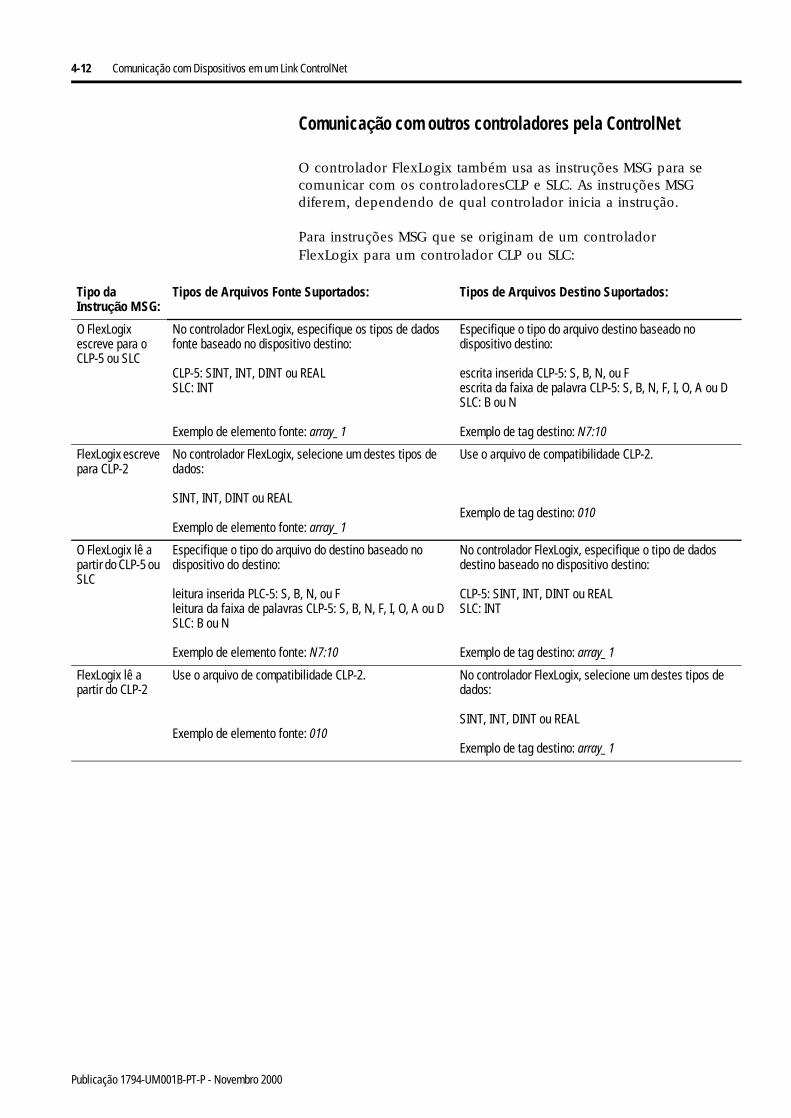
4-12 Comunicação com Dispositivos em um Link ControlNet
Comunicação com outros controladores pela ControlNet
O controlador FlexLogix também usa as instruções MSG para se comunicar com os controladoresCLP e SLC. As instruções MSG diferem, dependendo de qual controlador inicia a instrução.
Para instruções MSG que se originam de um controlador FlexLogix para um controlador CLP ou SLC:
Tipo da Instrução MSG:
Tipos de Arquivos Fonte Suportados: Tipos de Arquivos Destino Suportados:
O FlexLogix escreve para o CLP-5 ou SLC
No controlador FlexLogix, especifique os tipos de dados fonte baseado no dispositivo destino:
CLP-5: SINT, INT, DINT ou REALSLC: INT
Exemplo de elemento fonte: array_1
Especifique o tipo do arquivo destino baseado no dispositivo destino:
escrita inserida CLP-5: S, B, N, ou Fescrita da faixa de palavra CLP-5: S, B, N, F, I, O, A ou DSLC: B ou N
Exemplo de tag destino: N7:10
FlexLogix escreve para CLP-2
No controlador FlexLogix, selecione um destes tipos de dados:
SINT, INT, DINT ou REAL
Exemplo de elemento fonte: array_1
Use o arquivo de compatibilidade CLP-2.
Exemplo de tag destino: 010
O FlexLogix lê a partir do CLP-5 ou SLC
Especifique o tipo do arquivo do destino baseado no dispositivo do destino:
leitura inserida PLC-5: S, B, N, ou Fleitura da faixa de palavras CLP-5: S, B, N, F, I, O, A ou DSLC: B ou N
Exemplo de elemento fonte: N7:10
No controlador FlexLogix, especifique o tipo de dados destino baseado no dispositivo destino:
CLP-5: SINT, INT, DINT ou REALSLC: INT
Exemplo de tag destino: array_1
FlexLogix lê a partir do CLP-2
Use o arquivo de compatibilidade CLP-2.
Exemplo de elemento fonte: 010
No controlador FlexLogix, selecione um destes tipos de dados:
SINT, INT, DINT ou REAL
Exemplo de tag destino: array_1
Publicação 1794-UM001B-PT-P - Novembro 2000
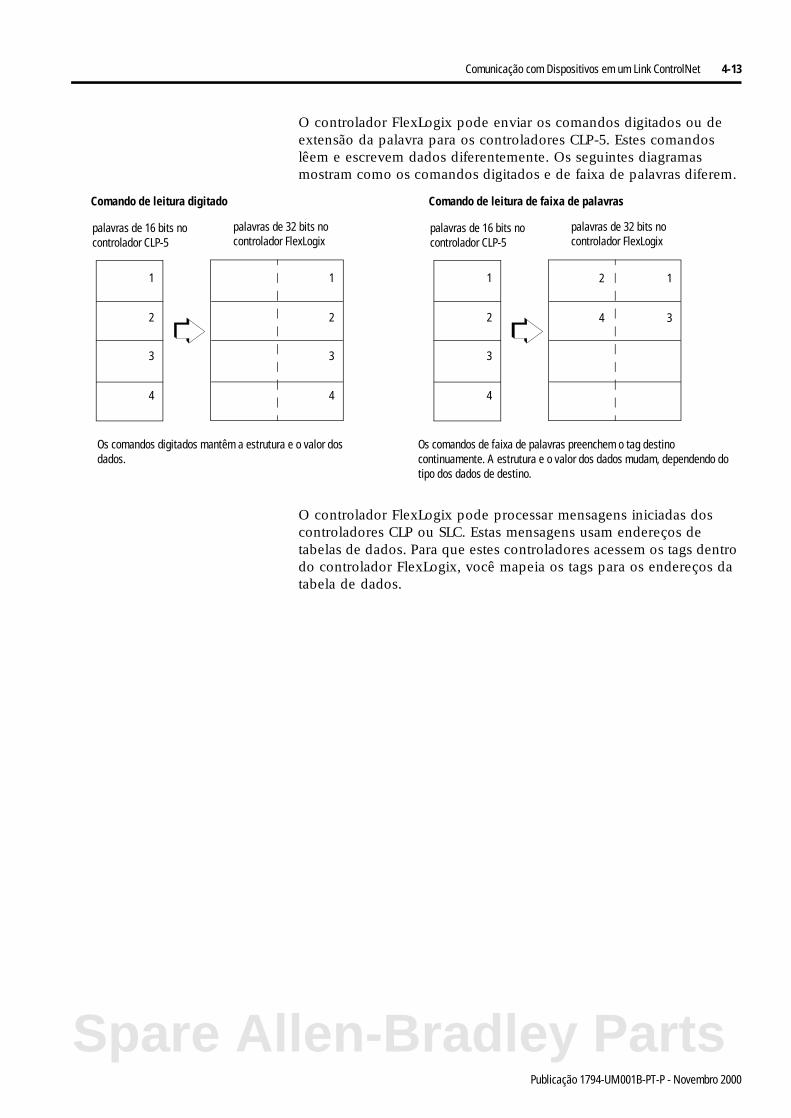
Comunicação com Dispositivos em um Link ControlNet 4-13
O controlador FlexLogix pode enviar os comandos digitados ou de extensão da palavra para os controladores CLP-5. Estes comandos lêem e escrevem dados diferentemente. Os seguintes diagramas mostram como os comandos digitados e de faixa de palavras diferem.
O controlador FlexLogix pode processar mensagens iniciadas dos controladores CLP ou SLC. Estas mensagens usam endereços de tabelas de dados. Para que estes controladores acessem os tags dentro do controlador FlexLogix, você mapeia os tags para os endereços da tabela de dados.
palavras de 16 bits no controlador CLP-5
palavras de 32 bits no controlador FlexLogix
Os comandos digitados mantêm a estrutura e o valor dos dados.
1
2
3
4
Comando de leitura digitado
1
2
3
4
palavras de 16 bits no controlador CLP-5
palavras de 32 bits no controlador FlexLogix
Os comandos de faixa de palavras preenchem o tag destino continuamente. A estrutura e o valor dos dados mudam, dependendo do tipo dos dados de destino.
1
2
3
4
Comando de leitura de faixa de palavras
1
3
2
4
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000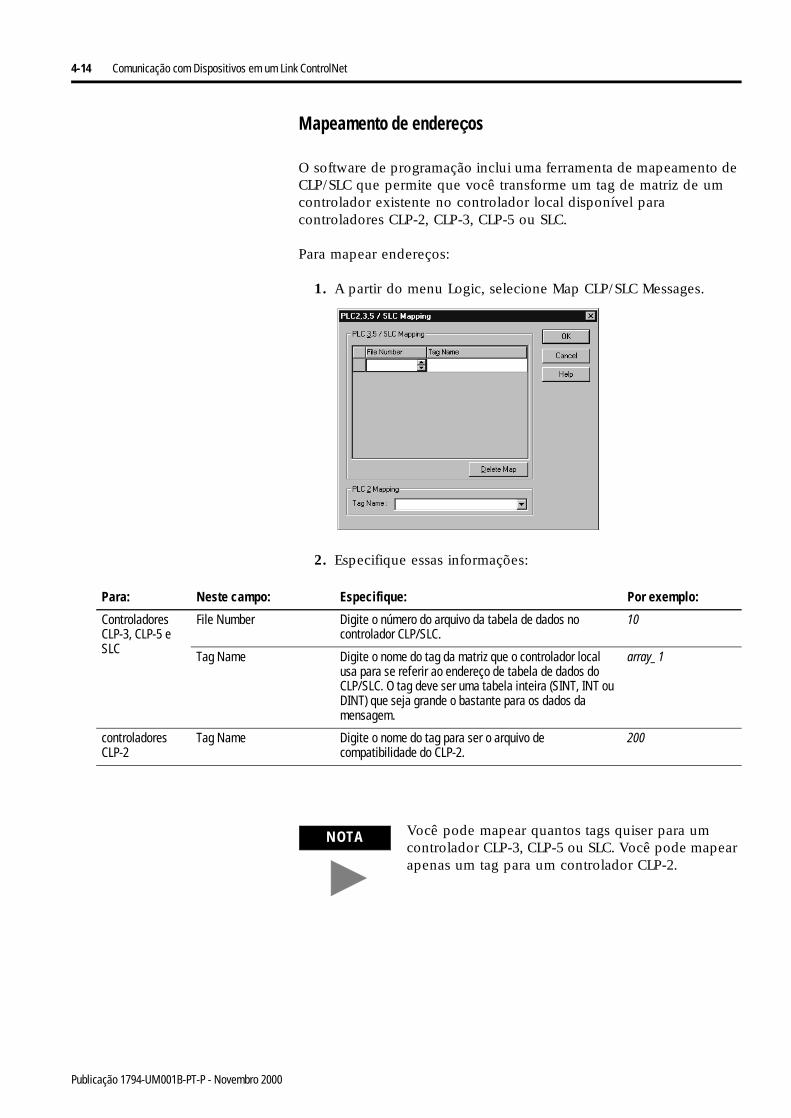
4-14 Comunicação com Dispositivos em um Link ControlNet
Mapeamento de endereços
O software de programação inclui uma ferramenta de mapeamento de CLP/SLC que permite que você transforme um tag de matriz de um controlador existente no controlador local disponível para controladores CLP-2, CLP-3, CLP-5 ou SLC.
Para mapear endereços:
1. A partir do menu Logic, selecione Map CLP/SLC Messages.
2. Especifique essas informações:
Para: Neste campo: Especifique: Por exemplo:
Controladores CLP-3, CLP-5 e SLC
File Number Digite o número do arquivo da tabela de dados no controlador CLP/SLC.
10
Tag Name Digite o nome do tag da matriz que o controlador local usa para se referir ao endereço de tabela de dados do CLP/SLC. O tag deve ser uma tabela inteira (SINT, INT ou DINT) que seja grande o bastante para os dados da mensagem.
array_1
controladores CLP-2
Tag Name Digite o nome do tag para ser o arquivo de compatibilidade do CLP-2.
200
NOTA Você pode mapear quantos tags quiser para um controlador CLP-3, CLP-5 ou SLC. Você pode mapear apenas um tag para um controlador CLP-2.
Publicação 1794-UM001B-PT-P - Novembro 2000
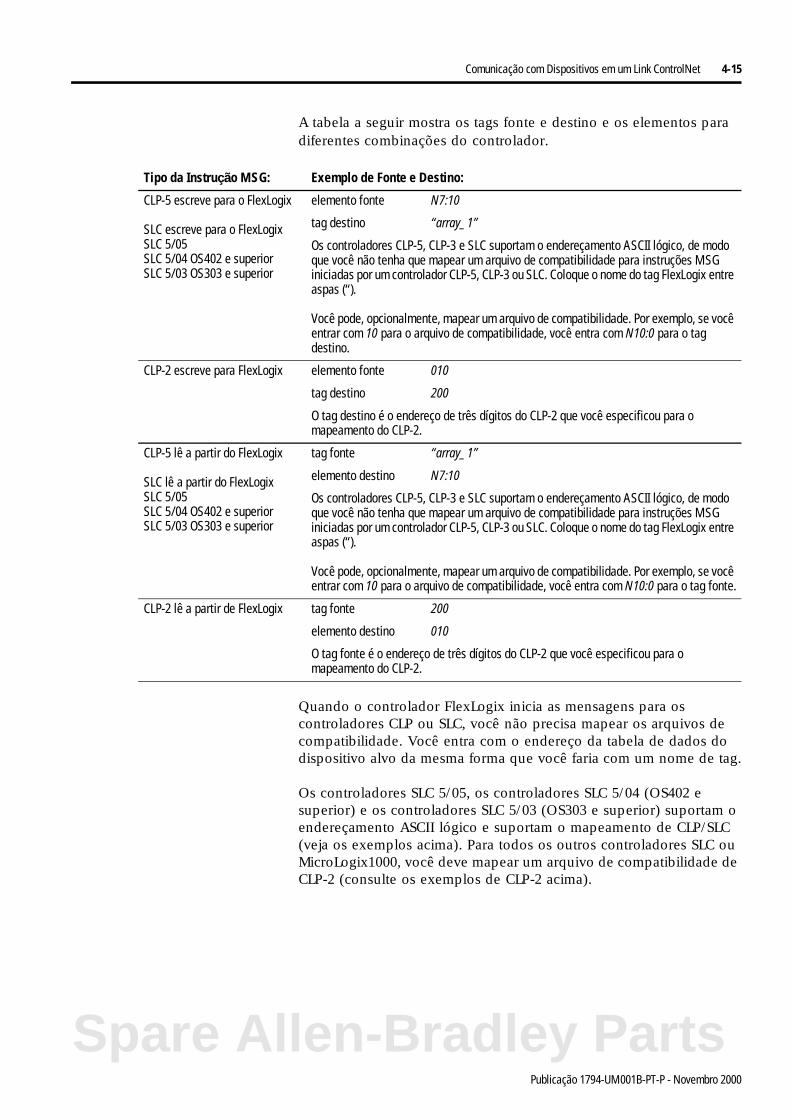
Comunicação com Dispositivos em um Link ControlNet 4-15
A tabela a seguir mostra os tags fonte e destino e os elementos para diferentes combinações do controlador.
Quando o controlador FlexLogix inicia as mensagens para os controladores CLP ou SLC, você não precisa mapear os arquivos de compatibilidade. Você entra com o endereço da tabela de dados do dispositivo alvo da mesma forma que você faria com um nome de tag.
Os controladores SLC 5/05, os controladores SLC 5/04 (OS402 e superior) e os controladores SLC 5/03 (OS303 e superior) suportam o endereçamento ASCII lógico e suportam o mapeamento de CLP/SLC (veja os exemplos acima). Para todos os outros controladores SLC ou MicroLogix1000, você deve mapear um arquivo de compatibilidade de CLP-2 (consulte os exemplos de CLP-2 acima).
Tipo da Instrução MSG: Exemplo de Fonte e Destino:
CLP-5 escreve para o FlexLogix
SLC escreve para o FlexLogixSLC 5/05SLC 5/04 OS402 e superiorSLC 5/03 OS303 e superior
elemento fonte N7:10
tag destino “array_1”
Os controladores CLP-5, CLP-3 e SLC suportam o endereçamento ASCII lógico, de modo que você não tenha que mapear um arquivo de compatibilidade para instruções MSG iniciadas por um controlador CLP-5, CLP-3 ou SLC. Coloque o nome do tag FlexLogix entre aspas (“).
Você pode, opcionalmente, mapear um arquivo de compatibilidade. Por exemplo, se você entrar com 10 para o arquivo de compatibilidade, você entra com N10:0 para o tag destino.
CLP-2 escreve para FlexLogix elemento fonte 010
tag destino 200
O tag destino é o endereço de três dígitos do CLP-2 que você especificou para o mapeamento do CLP-2.
CLP-5 lê a partir do FlexLogix
SLC lê a partir do FlexLogixSLC 5/05SLC 5/04 OS402 e superiorSLC 5/03 OS303 e superior
tag fonte “array_1”
elemento destino N7:10
Os controladores CLP-5, CLP-3 e SLC suportam o endereçamento ASCII lógico, de modo que você não tenha que mapear um arquivo de compatibilidade para instruções MSG iniciadas por um controlador CLP-5, CLP-3 ou SLC. Coloque o nome do tag FlexLogix entre aspas (“).
Você pode, opcionalmente, mapear um arquivo de compatibilidade. Por exemplo, se você entrar com 10 para o arquivo de compatibilidade, você entra com N10:0 para o tag fonte.
CLP-2 lê a partir de FlexLogix tag fonte 200
elemento destino 010
O tag fonte é o endereço de três dígitos do CLP-2 que você especificou para o mapeamento do CLP-2.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000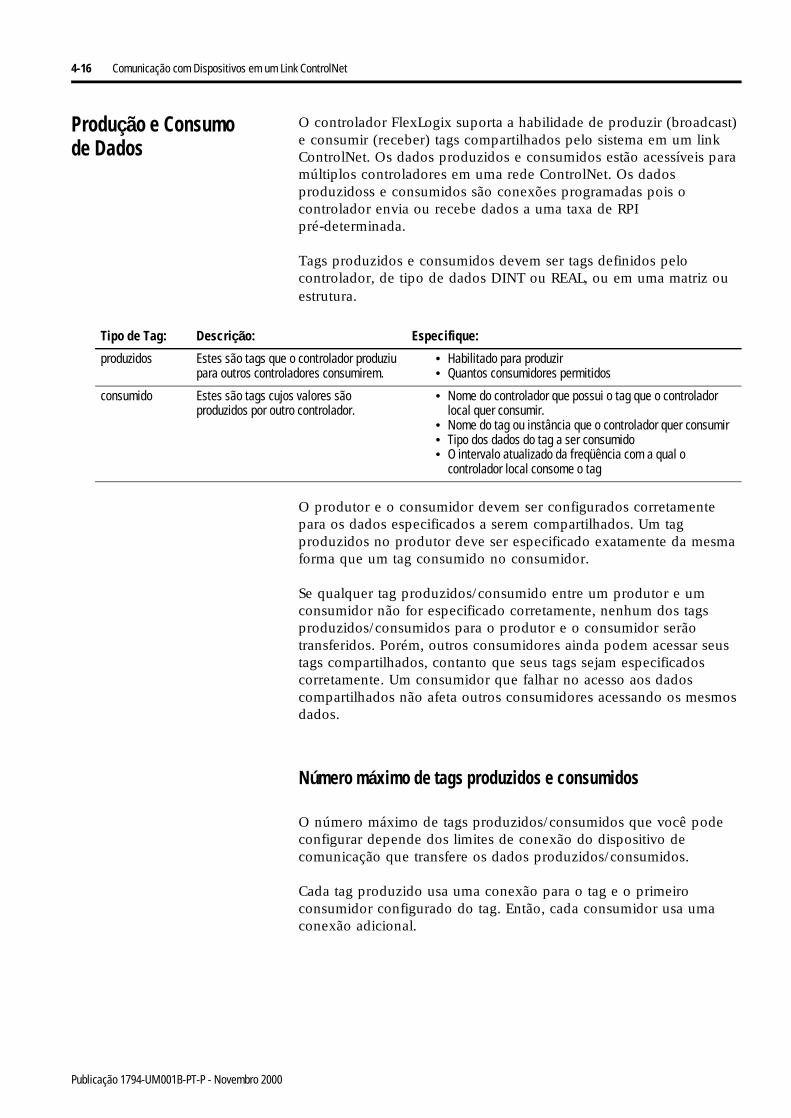
4-16 Comunicação com Dispositivos em um Link ControlNet
Produção e Consumo de Dados
O controlador FlexLogix suporta a habilidade de produzir (broadcast) e consumir (receber) tags compartilhados pelo sistema em um link ControlNet. Os dados produzidos e consumidos estão acessíveis para múltiplos controladores em uma rede ControlNet. Os dados produzidoss e consumidos são conexões programadas pois o controlador envia ou recebe dados a uma taxa de RPI pré-determinada.
Tags produzidos e consumidos devem ser tags definidos pelo controlador, de tipo de dados DINT ou REAL, ou em uma matriz ou estrutura.
O produtor e o consumidor devem ser configurados corretamente para os dados especificados a serem compartilhados. Um tag produzidos no produtor deve ser especificado exatamente da mesma forma que um tag consumido no consumidor.
Se qualquer tag produzidos/consumido entre um produtor e um consumidor não for especificado corretamente, nenhum dos tags produzidos/consumidos para o produtor e o consumidor serão transferidos. Porém, outros consumidores ainda podem acessar seus tags compartilhados, contanto que seus tags sejam especificados corretamente. Um consumidor que falhar no acesso aos dados compartilhados não afeta outros consumidores acessando os mesmos dados.
Número máximo de tags produzidos e consumidos
O número máximo de tags produzidos/consumidos que você pode configurar depende dos limites de conexão do dispositivo de comunicação que transfere os dados produzidos/consumidos.
Cada tag produzido usa uma conexão para o tag e o primeiro consumidor configurado do tag. Então, cada consumidor usa uma conexão adicional.
Tipo de Tag: Descrição: Especifique:
produzidos Estes são tags que o controlador produziu para outros controladores consumirem.
• Habilitado para produzir• Quantos consumidores permitidos
consumido Estes são tags cujos valores são produzidos por outro controlador.
• Nome do controlador que possui o tag que o controlador local quer consumir.
• Nome do tag ou instância que o controlador quer consumir• Tipo dos dados do tag a ser consumido• O intervalo atualizado da freqüência com a qual o
controlador local consome o tag
Publicação 1794-UM001B-PT-P - Novembro 2000
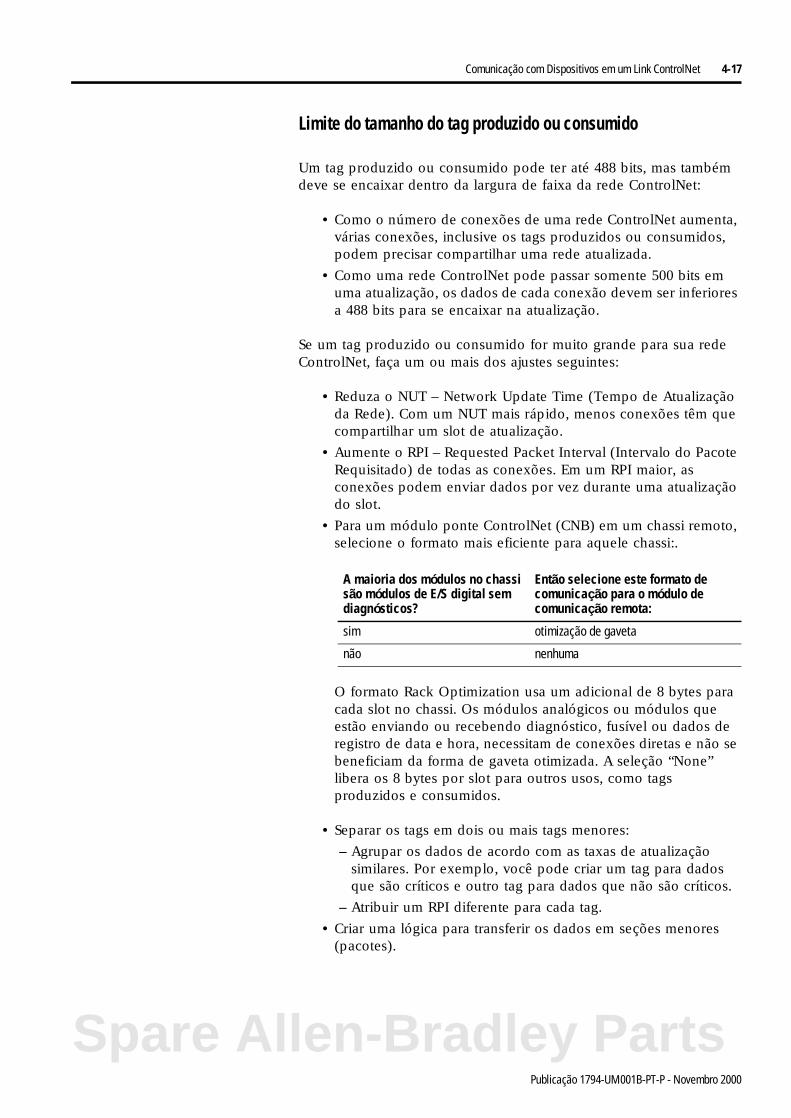
Comunicação com Dispositivos em um Link ControlNet 4-17
Limite do tamanho do tag produzido ou consumido
Um tag produzido ou consumido pode ter até 488 bits, mas também deve se encaixar dentro da largura de faixa da rede ControlNet:
• Como o número de conexões de uma rede ControlNet aumenta, várias conexões, inclusive os tags produzidos ou consumidos, podem precisar compartilhar uma rede atualizada.
• Como uma rede ControlNet pode passar somente 500 bits em uma atualização, os dados de cada conexão devem ser inferiores a 488 bits para se encaixar na atualização.
Se um tag produzido ou consumido for muito grande para sua rede ControlNet, faça um ou mais dos ajustes seguintes:
• Reduza o NUT – Network Update Time (Tempo de Atualização da Rede). Com um NUT mais rápido, menos conexões têm que compartilhar um slot de atualização.
• Aumente o RPI – Requested Packet Interval (Intervalo do Pacote Requisitado) de todas as conexões. Em um RPI maior, as conexões podem enviar dados por vez durante uma atualização do slot.
• Para um módulo ponte ControlNet (CNB) em um chassi remoto, selecione o formato mais eficiente para aquele chassi:.
O formato Rack Optimization usa um adicional de 8 bytes para cada slot no chassi. Os módulos analógicos ou módulos que estão enviando ou recebendo diagnóstico, fusível ou dados de registro de data e hora, necessitam de conexões diretas e não se beneficiam da forma de gaveta otimizada. A seleção “None” libera os 8 bytes por slot para outros usos, como tags produzidos e consumidos.
• Separar os tags em dois ou mais tags menores:
– Agrupar os dados de acordo com as taxas de atualização similares. Por exemplo, você pode criar um tag para dados que são críticos e outro tag para dados que não são críticos.
– Atribuir um RPI diferente para cada tag.
• Criar uma lógica para transferir os dados em seções menores (pacotes).
A maioria dos módulos no chassi são módulos de E/S digital sem diagnósticos?
Então selecione este formato de comunicação para o módulo de comunicação remota:
sim otimização de gaveta
não nenhuma
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
4-18 Comunicação com Dispositivos em um Link ControlNet
Produção de um tag
Os dados produzidoss devem ser de tipo de dados DINT ou REAL, ou uma matriz ou estrutura. Você pode usar uma estrutura definida pelo usuário para agrupar dados BOOL, SINT e DINT a serem produzidos. Para criar um tag produzido:
1. Você deve estar programando no modo offline.
2. No organizador do controlador, clique com o botão direito do mouse na pasta Controller Tags e depois clique na guia Edit Tags.
3. Selecione o tag que você deseja produzir ou digite um novo tag e exiba a tela Tag Properties.
4. Certifique-se de que o tag está no escopo do controlador.
5. Selecione a caixa de verificação “Produce this tag”. Especifique quantos controladores podem consumir o tag.
Você pode produzir um tag base, alias ou consumido.
O tag consumido em um controlador de recepção deve ter o mesmo tipo de dados do tag produzido no controlador de origem. O controlador executa a verificação do tipo para garantir que os dados adequados estão sendo recebidos.
tags produzidos requisitam conexões. O número de conexões dependem de quantos controladores estão consumindo os tags. O controlador requisita uma conexão para o tag produzido e para o primeiro consumidor. Então, o controlador necessita de uma conexão adicional para cada consumidor subsequente.
Consumo de um tag
um tag consumido representa os dados que são produzidos (enviados) por um controlador e recebidos e armazenados por um controlador de consumo. Para criar um tag consumido:
1. Você deve estar programando no modo offline.
2. No organizador do controlador, clique com o botão direito do mouse na pasta Controller Tags e depois clique na guia Edit Tags.
Publicação 1794-UM001B-PT-P - Novembro 2000
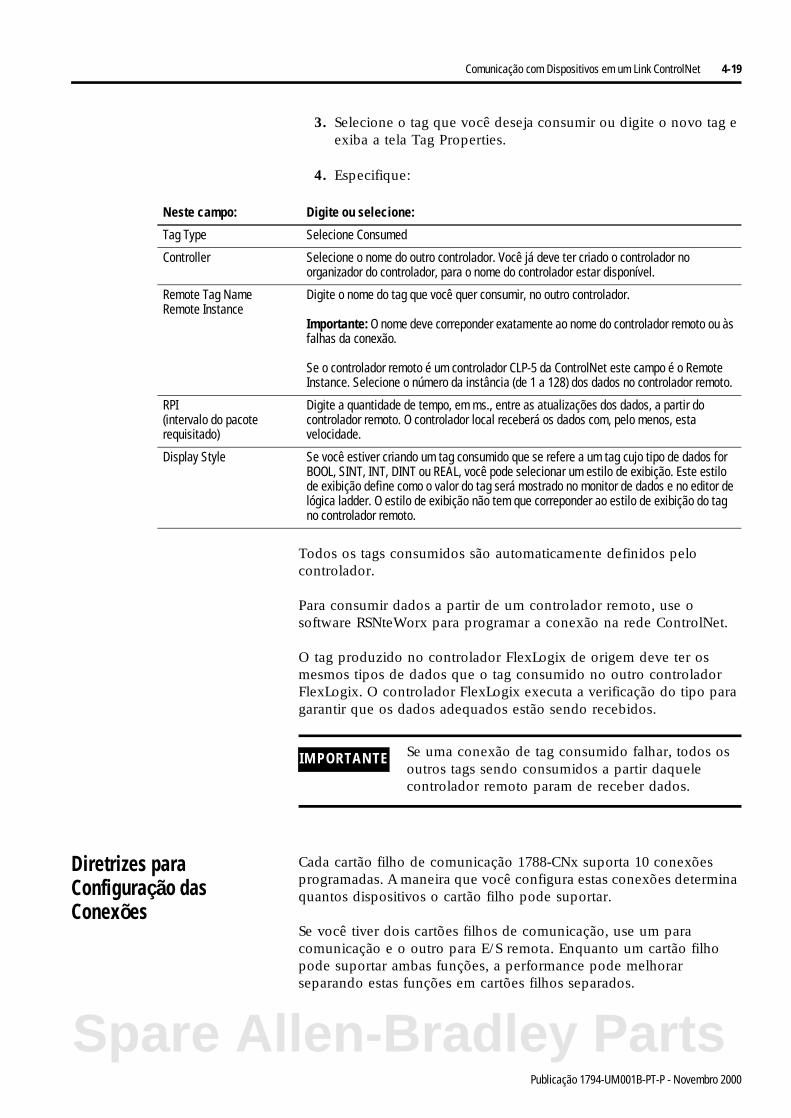
Comunicação com Dispositivos em um Link ControlNet 4-19
3. Selecione o tag que você deseja consumir ou digite o novo tag e exiba a tela Tag Properties.
4. Especifique:
Todos os tags consumidos são automaticamente definidos pelo controlador.
Para consumir dados a partir de um controlador remoto, use o software RSNteWorx para programar a conexão na rede ControlNet.
O tag produzido no controlador FlexLogix de origem deve ter os mesmos tipos de dados que o tag consumido no outro controlador FlexLogix. O controlador FlexLogix executa a verificação do tipo para garantir que os dados adequados estão sendo recebidos.
Diretrizes para Configuração das Conexões
Cada cartão filho de comunicação 1788-CNx suporta 10 conexões programadas. A maneira que você configura estas conexões determina quantos dispositivos o cartão filho pode suportar.
Se você tiver dois cartões filhos de comunicação, use um para comunicação e o outro para E/S remota. Enquanto um cartão filho pode suportar ambas funções, a performance pode melhorar separando estas funções em cartões filhos separados.
Neste campo: Digite ou selecione:
Tag Type Selecione Consumed
Controller Selecione o nome do outro controlador. Você já deve ter criado o controlador no organizador do controlador, para o nome do controlador estar disponível.
Remote Tag NameRemote Instance
Digite o nome do tag que você quer consumir, no outro controlador.
Importante: O nome deve correponder exatamente ao nome do controlador remoto ou às falhas da conexão.
Se o controlador remoto é um controlador CLP-5 da ControlNet este campo é o Remote Instance. Selecione o número da instância (de 1 a 128) dos dados no controlador remoto.
RPI(intervalo do pacote requisitado)
Digite a quantidade de tempo, em ms., entre as atualizações dos dados, a partir do controlador remoto. O controlador local receberá os dados com, pelo menos, esta velocidade.
Display Style Se você estiver criando um tag consumido que se refere a um tag cujo tipo de dados for BOOL, SINT, INT, DINT ou REAL, você pode selecionar um estilo de exibição. Este estilo de exibição define como o valor do tag será mostrado no monitor de dados e no editor de lógica ladder. O estilo de exibição não tem que correponder ao estilo de exibição do tag no controlador remoto.
IMPORTANTE Se uma conexão de tag consumido falhar, todos os outros tags sendo consumidos a partir daquele controlador remoto param de receber dados.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000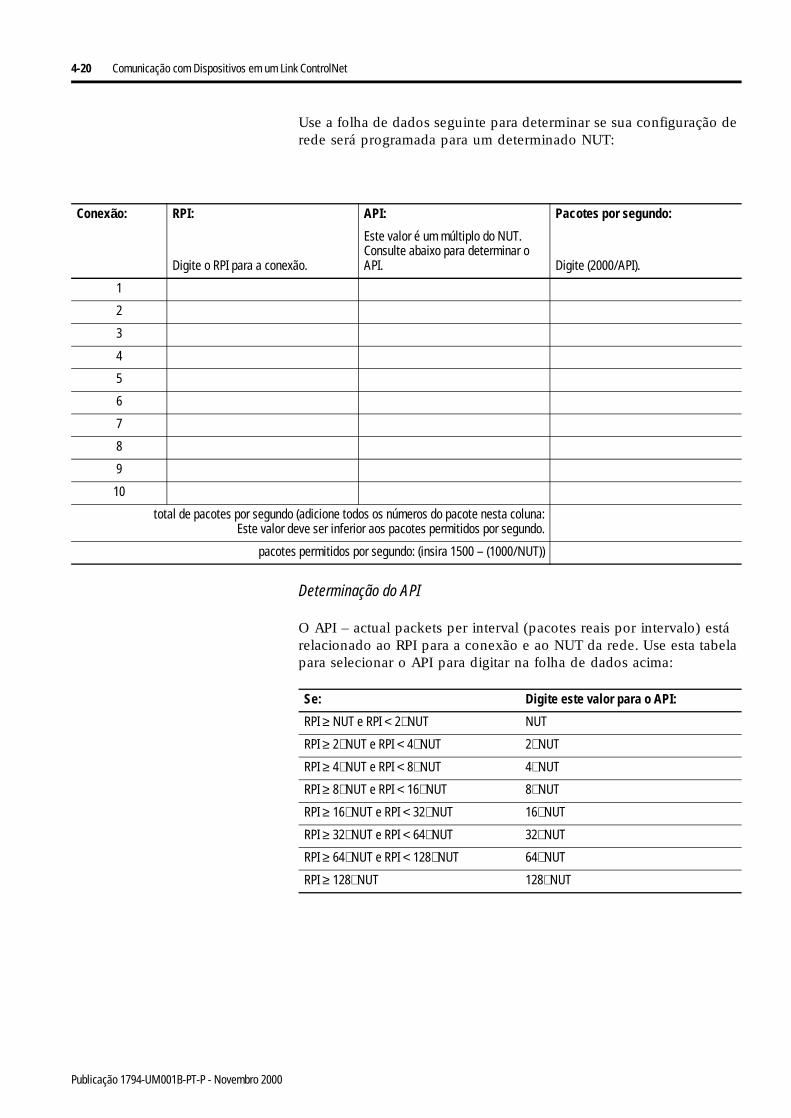
4-20 Comunicação com Dispositivos em um Link ControlNet
Use a folha de dados seguinte para determinar se sua configuração de rede será programada para um determinado NUT:
Determinação do API
O API – actual packets per interval (pacotes reais por intervalo) está relacionado ao RPI para a conexão e ao NUT da rede. Use esta tabela para selecionar o API para digitar na folha de dados acima:
Conexão: RPI: API: Pacotes por segundo:
Digite o RPI para a conexão.
Este valor é um múltiplo do NUT. Consulte abaixo para determinar o API. Digite (2000/API).
1
2
3
4
5
6
7
8
9
10
total de pacotes por segundo (adicione todos os números do pacote nesta coluna:Este valor deve ser inferior aos pacotes permitidos por segundo.
pacotes permitidos por segundo: (insira 1500 – (1000/NUT))
Se: Digite este valor para o API:
RPI ≥ NUT e RPI < 2∗ NUT NUT
RPI ≥ 2∗ NUT e RPI < 4∗ NUT 2∗ NUT
RPI ≥ 4∗ NUT e RPI < 8∗ NUT 4∗ NUT
RPI ≥ 8∗ NUT e RPI < 16∗ NUT 8∗ NUT
RPI ≥ 16∗ NUT e RPI < 32∗ NUT 16∗ NUT
RPI ≥ 32∗ NUT e RPI < 64∗ NUT 32∗ NUT
RPI ≥ 64∗ NUT e RPI < 128∗ NUT 64∗ NUT
RPI ≥ 128∗ NUT 128∗ NUT
Publicação 1794-UM001B-PT-P - Novembro 2000
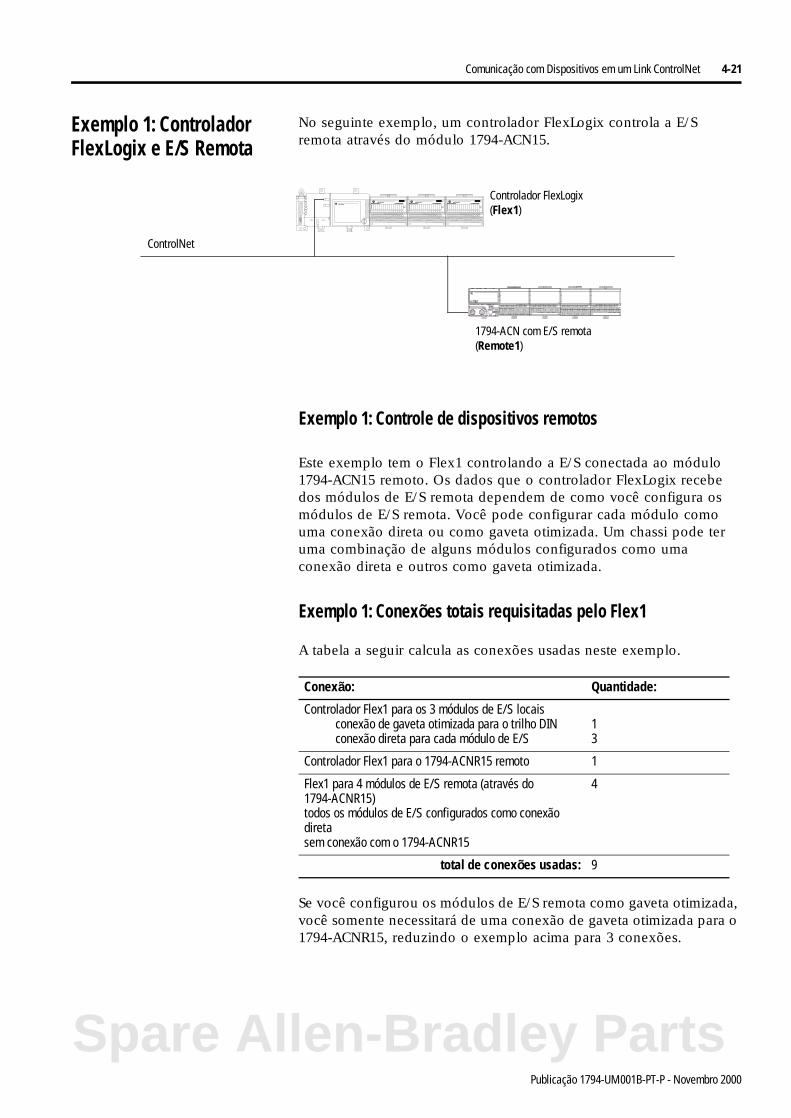
Comunicação com Dispositivos em um Link ControlNet 4-21
Exemplo 1: Controlador FlexLogix e E/S Remota
No seguinte exemplo, um controlador FlexLogix controla a E/S remota através do módulo 1794-ACN15.
Exemplo 1: Controle de dispositivos remotos
Este exemplo tem o Flex1 controlando a E/S conectada ao módulo 1794-ACN15 remoto. Os dados que o controlador FlexLogix recebe dos módulos de E/S remota dependem de como você configura os módulos de E/S remota. Você pode configurar cada módulo como uma conexão direta ou como gaveta otimizada. Um chassi pode ter uma combinação de alguns módulos configurados como uma conexão direta e outros como gaveta otimizada.
Exemplo 1: Conexões totais requisitadas pelo Flex1
A tabela a seguir calcula as conexões usadas neste exemplo.
Se você configurou os módulos de E/S remota como gaveta otimizada, você somente necessitará de uma conexão de gaveta otimizada para o 1794-ACNR15, reduzindo o exemplo acima para 3 conexões.
Controlador FlexLogix (Flex1)
ControlNet
1794-ACN com E/S remota (Remote1)
Conexão: Quantidade:
Controlador Flex1 para os 3 módulos de E/S locaisconexão de gaveta otimizada para o trilho DINconexão direta para cada módulo de E/S
13
Controlador Flex1 para o 1794-ACNR15 remoto 1
Flex1 para 4 módulos de E/S remota (através do 1794-ACNR15)todos os módulos de E/S configurados como conexão diretasem conexão com o 1794-ACNR15
4
total de conexões usadas: 9
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000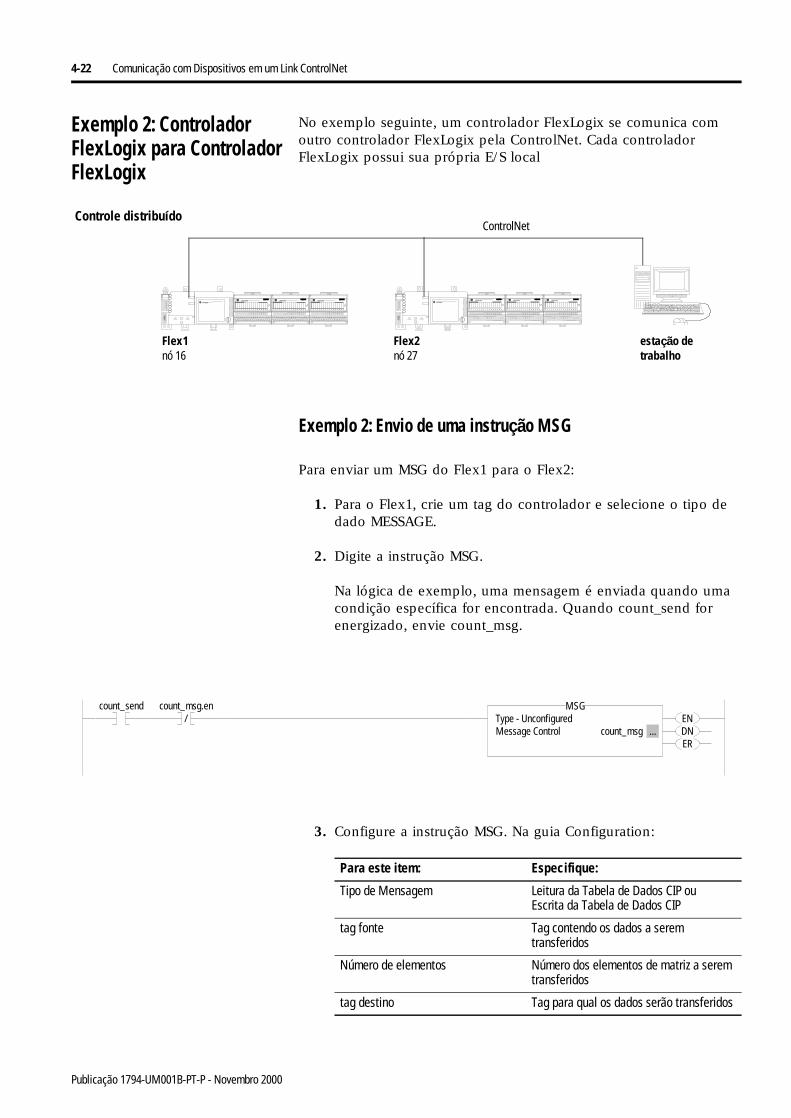
4-22 Comunicação com Dispositivos em um Link ControlNet
Exemplo 2: Controlador FlexLogix para Controlador FlexLogix
No exemplo seguinte, um controlador FlexLogix se comunica com outro controlador FlexLogix pela ControlNet. Cada controlador FlexLogix possui sua própria E/S local
Exemplo 2: Envio de uma instrução MSG
Para enviar um MSG do Flex1 para o Flex2:
1. Para o Flex1, crie um tag do controlador e selecione o tipo de dado MESSAGE.
2. Digite a instrução MSG.
Na lógica de exemplo, uma mensagem é enviada quando uma condição específica for encontrada. Quando count_send for energizado, envie count_msg.
3. Configure a instrução MSG. Na guia Configuration:
Flex1nó 16
Flex2nó 27
ControlNetControle distribuído
estação de trabalho
count_send
/count_msg.en
ENDNER
Type - UnconfiguredMessage Control count_msg ...
MSG
Para este item: Especifique:
Tipo de Mensagem Leitura da Tabela de Dados CIP ou Escrita da Tabela de Dados CIP
tag fonte Tag contendo os dados a serem transferidos
Número de elementos Número dos elementos de matriz a serem transferidos
tag destino Tag para qual os dados serão transferidos
Publicação 1794-UM001B-PT-P - Novembro 2000
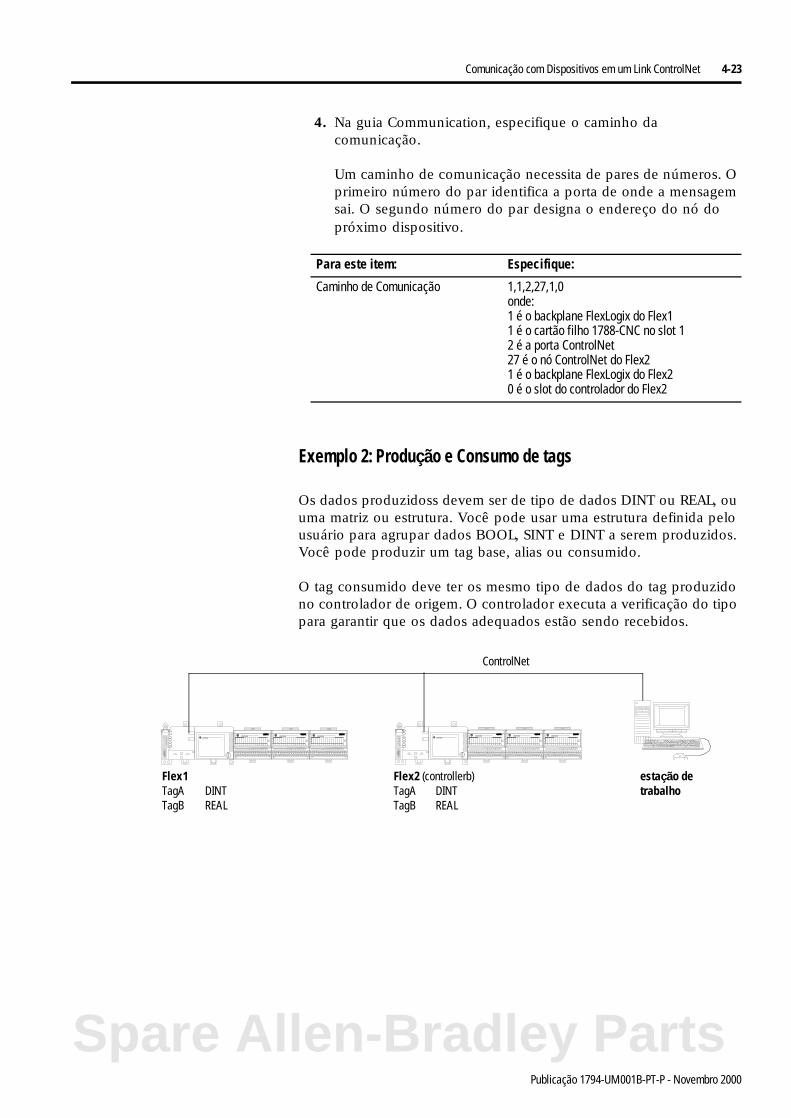
Comunicação com Dispositivos em um Link ControlNet 4-23
4. Na guia Communication, especifique o caminho da comunicação.
Um caminho de comunicação necessita de pares de números. O primeiro número do par identifica a porta de onde a mensagem sai. O segundo número do par designa o endereço do nó do próximo dispositivo.
Exemplo 2: Produção e Consumo de tags
Os dados produzidoss devem ser de tipo de dados DINT ou REAL, ou uma matriz ou estrutura. Você pode usar uma estrutura definida pelo usuário para agrupar dados BOOL, SINT e DINT a serem produzidos. Você pode produzir um tag base, alias ou consumido.
O tag consumido deve ter os mesmo tipo de dados do tag produzido no controlador de origem. O controlador executa a verificação do tipo para garantir que os dados adequados estão sendo recebidos.
Para este item: Especifique:
Caminho de Comunicação 1,1,2,27,1,0onde:1 é o backplane FlexLogix do Flex11 é o cartão filho 1788-CNC no slot 12 é a porta ControlNet27 é o nó ControlNet do Flex21 é o backplane FlexLogix do Flex20 é o slot do controlador do Flex2
Flex1TagA DINTTagB REAL
Flex2 (controllerb)TagA DINTTagB REAL
ControlNet
estação de trabalho
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000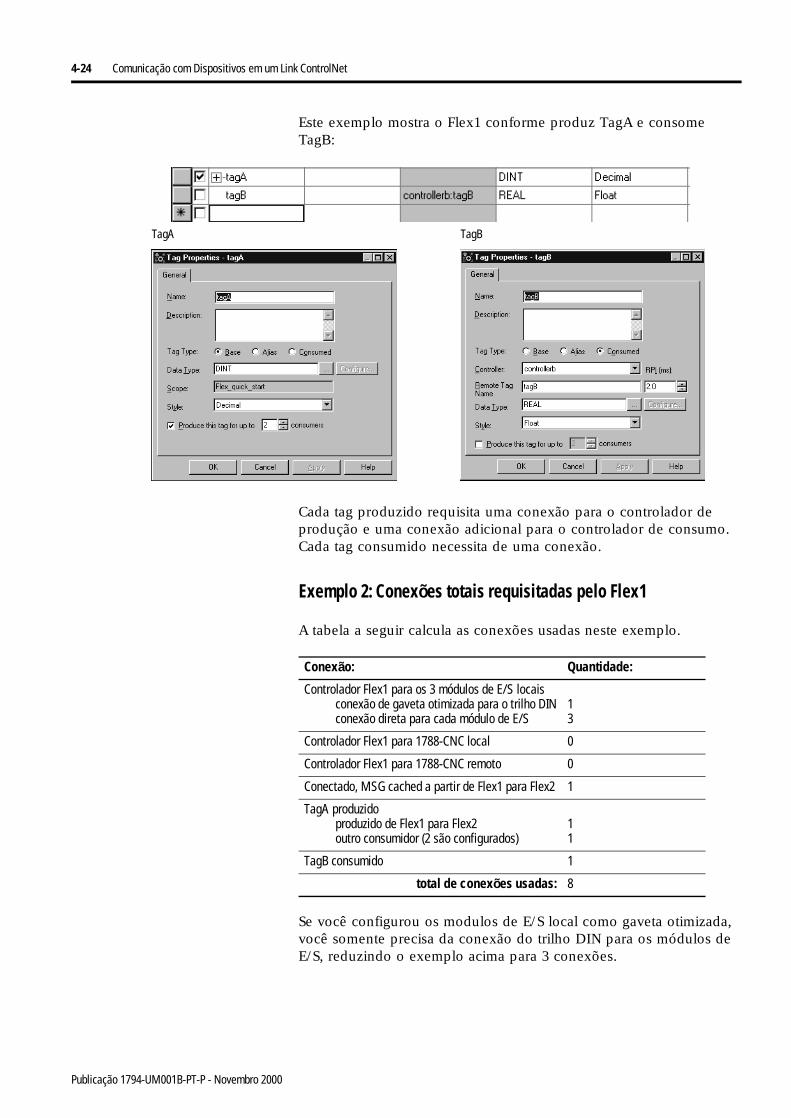
4-24 Comunicação com Dispositivos em um Link ControlNet
Este exemplo mostra o Flex1 conforme produz TagA e consome TagB:
Cada tag produzido requisita uma conexão para o controlador de produção e uma conexão adicional para o controlador de consumo. Cada tag consumido necessita de uma conexão.
Exemplo 2: Conexões totais requisitadas pelo Flex1
A tabela a seguir calcula as conexões usadas neste exemplo.
Se você configurou os modulos de E/S local como gaveta otimizada, você somente precisa da conexão do trilho DIN para os módulos de E/S, reduzindo o exemplo acima para 3 conexões.
TagA TagB
Conexão: Quantidade:
Controlador Flex1 para os 3 módulos de E/S locaisconexão de gaveta otimizada para o trilho DINconexão direta para cada módulo de E/S
13
Controlador Flex1 para 1788-CNC local 0
Controlador Flex1 para 1788-CNC remoto 0
Conectado, MSG cached a partir de Flex1 para Flex2 1
TagA produzidoproduzido de Flex1 para Flex2outro consumidor (2 são configurados)
11
TagB consumido 1
total de conexões usadas: 8
Publicação 1794-UM001B-PT-P - Novembro 2000
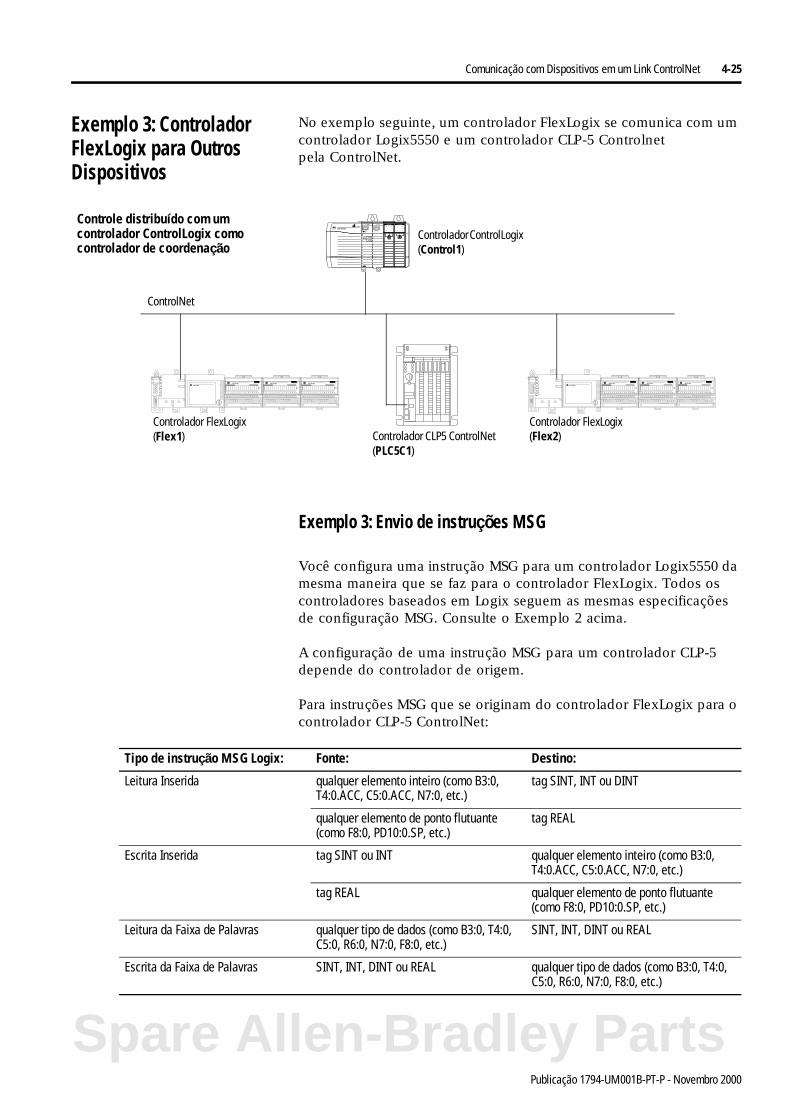
Comunicação com Dispositivos em um Link ControlNet 4-25
Exemplo 3: Controlador FlexLogix para Outros Dispositivos
No exemplo seguinte, um controlador FlexLogix se comunica com um controlador Logix5550 e um controlador CLP-5 Controlnet pela ControlNet.
Exemplo 3: Envio de instruções MSG
Você configura uma instrução MSG para um controlador Logix5550 da mesma maneira que se faz para o controlador FlexLogix. Todos os controladores baseados em Logix seguem as mesmas especificações de configuração MSG. Consulte o Exemplo 2 acima.
A configuração de uma instrução MSG para um controlador CLP-5 depende do controlador de origem.
Para instruções MSG que se originam do controlador FlexLogix para o controlador CLP-5 ControlNet:
Controlador FlexLogix (Flex1)
ControlNet
Controlador ControlLogix (Control1)
Controlador CLP5 ControlNet (PLC5C1)
Controlador FlexLogix (Flex2)
Controle distribuído com um controlador ControlLogix como controlador de coordenação
Tipo de instrução MSG Logix: Fonte: Destino:
Leitura Inserida qualquer elemento inteiro (como B3:0, T4:0.ACC, C5:0.ACC, N7:0, etc.)
tag SINT, INT ou DINT
qualquer elemento de ponto flutuante (como F8:0, PD10:0.SP, etc.)
tag REAL
Escrita Inserida tag SINT ou INT qualquer elemento inteiro (como B3:0, T4:0.ACC, C5:0.ACC, N7:0, etc.)
tag REAL qualquer elemento de ponto flutuante (como F8:0, PD10:0.SP, etc.)
Leitura da Faixa de Palavras qualquer tipo de dados (como B3:0, T4:0, C5:0, R6:0, N7:0, F8:0, etc.)
SINT, INT, DINT ou REAL
Escrita da Faixa de Palavras SINT, INT, DINT ou REAL qualquer tipo de dados (como B3:0, T4:0, C5:0, R6:0, N7:0, F8:0, etc.)
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000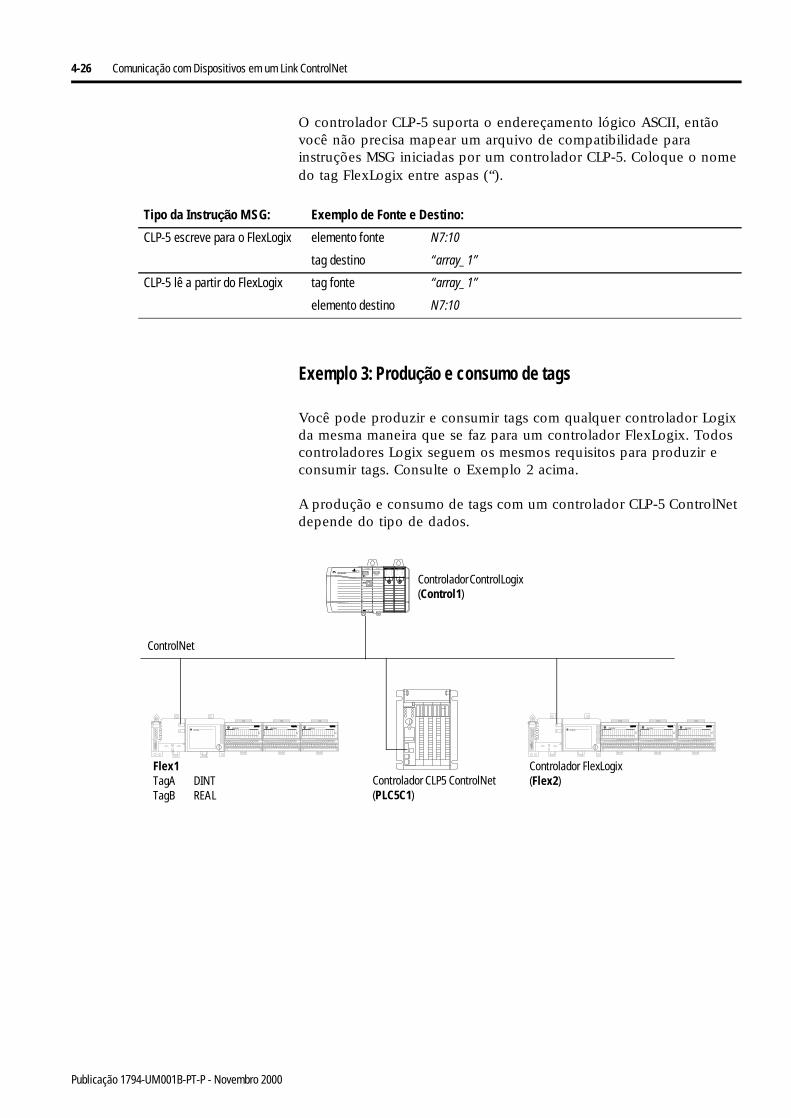
4-26 Comunicação com Dispositivos em um Link ControlNet
O controlador CLP-5 suporta o endereçamento lógico ASCII, então você não precisa mapear um arquivo de compatibilidade para instruções MSG iniciadas por um controlador CLP-5. Coloque o nome do tag FlexLogix entre aspas (“).
Exemplo 3: Produção e consumo de tags
Você pode produzir e consumir tags com qualquer controlador Logix da mesma maneira que se faz para um controlador FlexLogix. Todos controladores Logix seguem os mesmos requisitos para produzir e consumir tags. Consulte o Exemplo 2 acima.
A produção e consumo de tags com um controlador CLP-5 ControlNet depende do tipo de dados.
Tipo da Instrução MSG: Exemplo de Fonte e Destino:
CLP-5 escreve para o FlexLogix elemento fonte N7:10
tag destino “array_1”
CLP-5 lê a partir do FlexLogix tag fonte “array_1”
elemento destino N7:10
Flex1TagA DINTTagB REAL
ControlNet
Controlador ControlLogix (Control1)
Controlador CLP5 ControlNet (PLC5C1)
Controlador FlexLogix (Flex2)
Publicação 1794-UM001B-PT-P - Novembro 2000
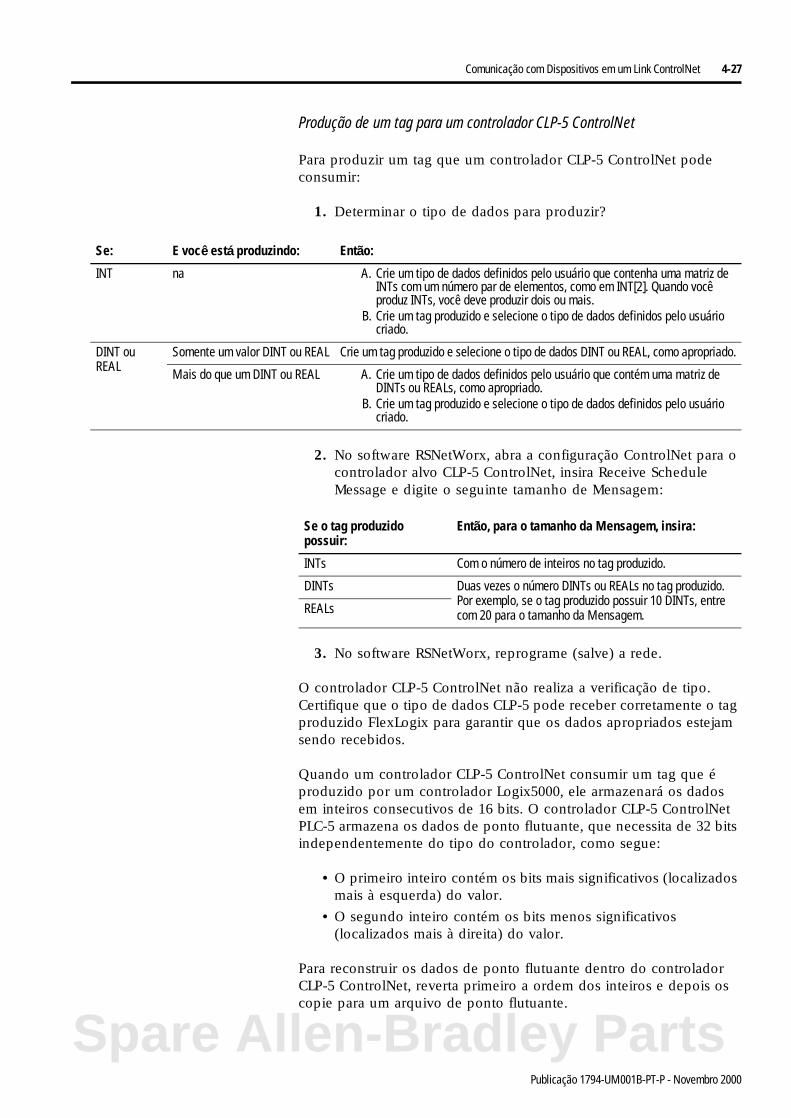
Comunicação com Dispositivos em um Link ControlNet 4-27
Produção de um tag para um controlador CLP-5 ControlNet
Para produzir um tag que um controlador CLP-5 ControlNet pode consumir:
1. Determinar o tipo de dados para produzir?
2. No software RSNetWorx, abra a configuração ControlNet para o controlador alvo CLP-5 ControlNet, insira Receive Schedule Message e digite o seguinte tamanho de Mensagem:
3. No software RSNetWorx, reprograme (salve) a rede.
O controlador CLP-5 ControlNet não realiza a verificação de tipo. Certifique que o tipo de dados CLP-5 pode receber corretamente o tag produzido FlexLogix para garantir que os dados apropriados estejam sendo recebidos.
Quando um controlador CLP-5 ControlNet consumir um tag que é produzido por um controlador Logix5000, ele armazenará os dados em inteiros consecutivos de 16 bits. O controlador CLP-5 ControlNet PLC-5 armazena os dados de ponto flutuante, que necessita de 32 bits independentemente do tipo do controlador, como segue:
• O primeiro inteiro contém os bits mais significativos (localizados mais à esquerda) do valor.
• O segundo inteiro contém os bits menos significativos (localizados mais à direita) do valor.
Para reconstruir os dados de ponto flutuante dentro do controlador CLP-5 ControlNet, reverta primeiro a ordem dos inteiros e depois os copie para um arquivo de ponto flutuante.
Se: E você está produzindo: Então:
INT na A. Crie um tipo de dados definidos pelo usuário que contenha uma matriz de INTs com um número par de elementos, como em INT[2]. Quando você produz INTs, você deve produzir dois ou mais.
B. Crie um tag produzido e selecione o tipo de dados definidos pelo usuário criado.
DINT ou REAL
Somente um valor DINT ou REAL Crie um tag produzido e selecione o tipo de dados DINT ou REAL, como apropriado.
Mais do que um DINT ou REAL A. Crie um tipo de dados definidos pelo usuário que contém uma matriz de DINTs ou REALs, como apropriado.
B. Crie um tag produzido e selecione o tipo de dados definidos pelo usuário criado.
Se o tag produzido possuir:
Então, para o tamanho da Mensagem, insira:
INTs Com o número de inteiros no tag produzido.
DINTs Duas vezes o número DINTs ou REALs no tag produzido. Por exemplo, se o tag produzido possuir 10 DINTs, entre com 20 para o tamanho da Mensagem.REALs
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000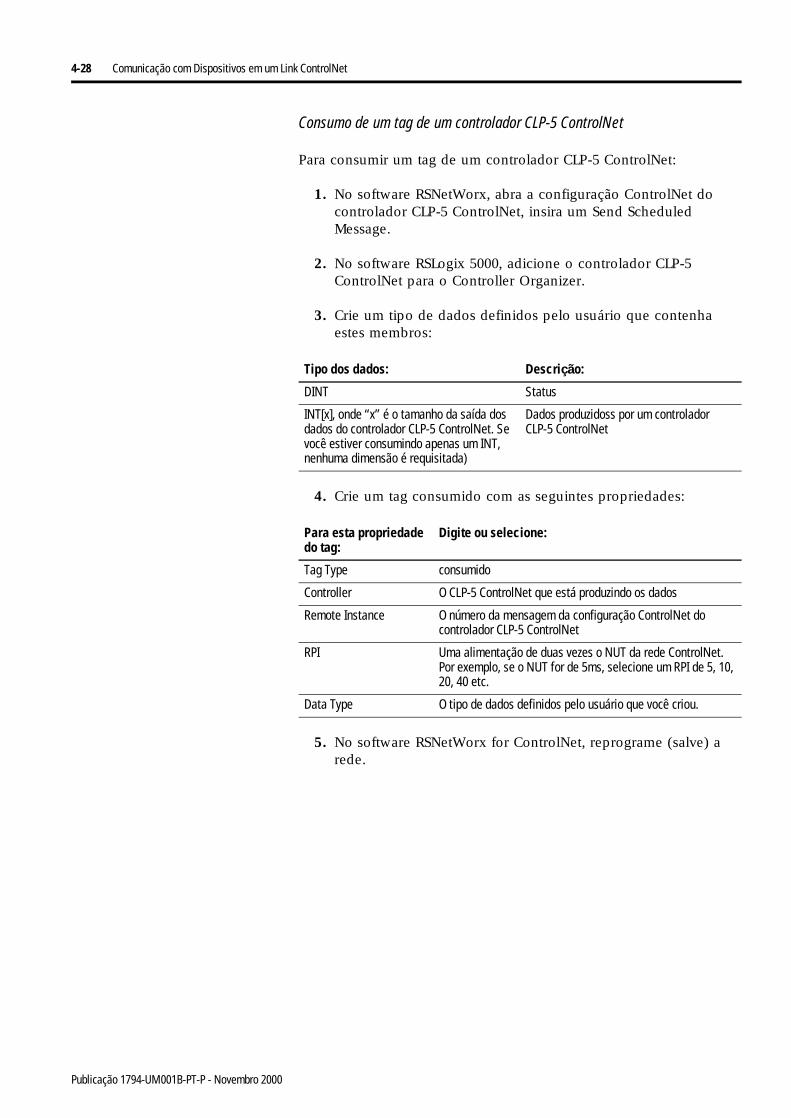
4-28 Comunicação com Dispositivos em um Link ControlNet
Consumo de um tag de um controlador CLP-5 ControlNet
Para consumir um tag de um controlador CLP-5 ControlNet:
1. No software RSNetWorx, abra a configuração ControlNet do controlador CLP-5 ControlNet, insira um Send Scheduled Message.
2. No software RSLogix 5000, adicione o controlador CLP-5 ControlNet para o Controller Organizer.
3. Crie um tipo de dados definidos pelo usuário que contenha estes membros:
4. Crie um tag consumido com as seguintes propriedades:
5. No software RSNetWorx for ControlNet, reprograme (salve) a rede.
Tipo dos dados: Descrição:
DINT Status
INT[x], onde “x” é o tamanho da saída dos dados do controlador CLP-5 ControlNet. Se você estiver consumindo apenas um INT, nenhuma dimensão é requisitada)
Dados produzidoss por um controlador CLP-5 ControlNet
Para esta propriedade do tag:
Digite ou selecione:
Tag Type consumido
Controller O CLP-5 ControlNet que está produzindo os dados
Remote Instance O número da mensagem da configuração ControlNet do controlador CLP-5 ControlNet
RPI Uma alimentação de duas vezes o NUT da rede ControlNet. Por exemplo, se o NUT for de 5ms, selecione um RPI de 5, 10, 20, 40 etc.
Data Type O tipo de dados definidos pelo usuário que você criou.
Publicação 1794-UM001B-PT-P - Novembro 2000
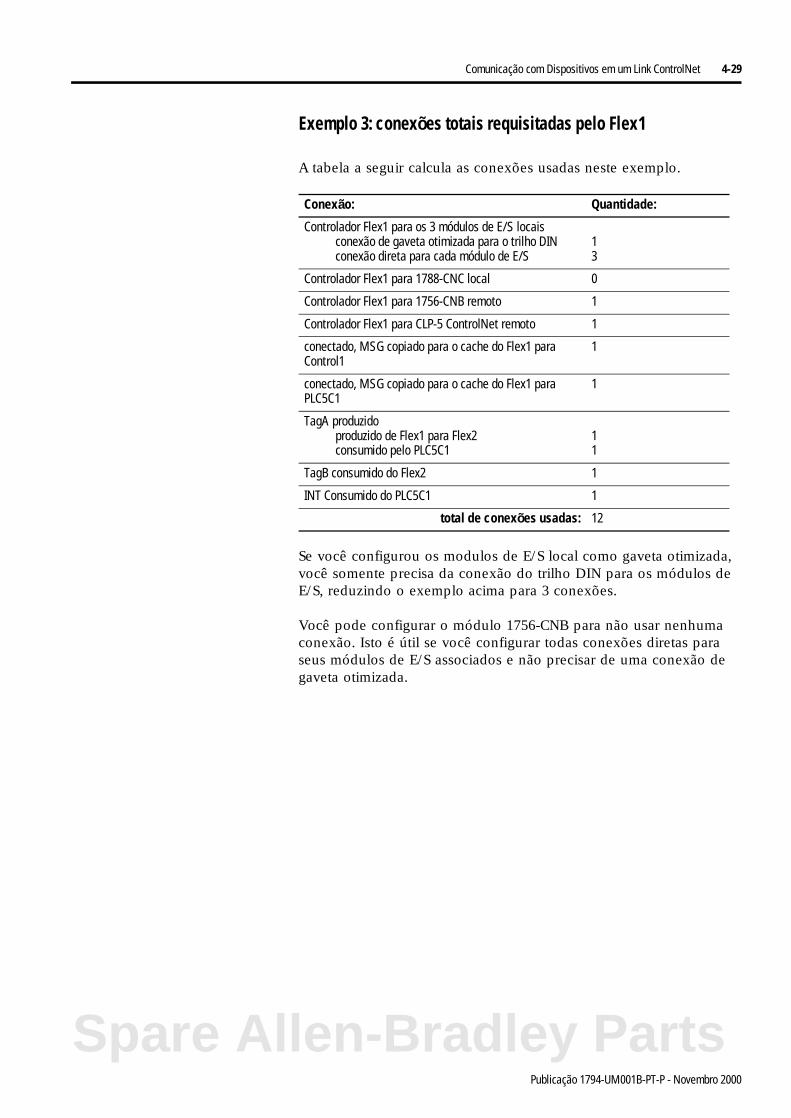
Comunicação com Dispositivos em um Link ControlNet 4-29
Exemplo 3: conexões totais requisitadas pelo Flex1
A tabela a seguir calcula as conexões usadas neste exemplo.
Se você configurou os modulos de E/S local como gaveta otimizada, você somente precisa da conexão do trilho DIN para os módulos de E/S, reduzindo o exemplo acima para 3 conexões.
Você pode configurar o módulo 1756-CNB para não usar nenhuma conexão. Isto é útil se você configurar todas conexões diretas para seus módulos de E/S associados e não precisar de uma conexão de gaveta otimizada.
Conexão: Quantidade:
Controlador Flex1 para os 3 módulos de E/S locaisconexão de gaveta otimizada para o trilho DINconexão direta para cada módulo de E/S
13
Controlador Flex1 para 1788-CNC local 0
Controlador Flex1 para 1756-CNB remoto 1
Controlador Flex1 para CLP-5 ControlNet remoto 1
conectado, MSG copiado para o cache do Flex1 para Control1
1
conectado, MSG copiado para o cache do Flex1 para PLC5C1
1
TagA produzidoproduzido de Flex1 para Flex2consumido pelo PLC5C1
11
TagB consumido do Flex2 1
INT Consumido do PLC5C1 1
total de conexões usadas: 12
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
4-30 Comunicação com Dispositivos em um Link ControlNet
Exemplo 4: Uso do FlexLogix como uma Ponte
O controlador FlexLogix suporta um MSG conectado e um desconectado se desejar usar o sistema FlexLogix como ponte para um dispositivo em outra rede. Não existe buffer para armazenar as instruções MSG na espera que faz ponte nas redes.
A tabela seguinte lista que dispositivos podem ser usados para fazer a ponte:
ATENÇÃO
!A performance do controlador FlexLogix degrada significantemente se você usar o controlador como uma ponte.
O controlador FlexLogix pode conectar para este dispositivo pela ControlNet:
E enviar um mensagem para além desta rede, para um terceiro dispositivo:
Sistema FlexLogix ControlNet
Sistema ControlLogix ControlNet
Ethernet
DH+
Publicação 1794-UM001B-PT-P - Novembro 2000
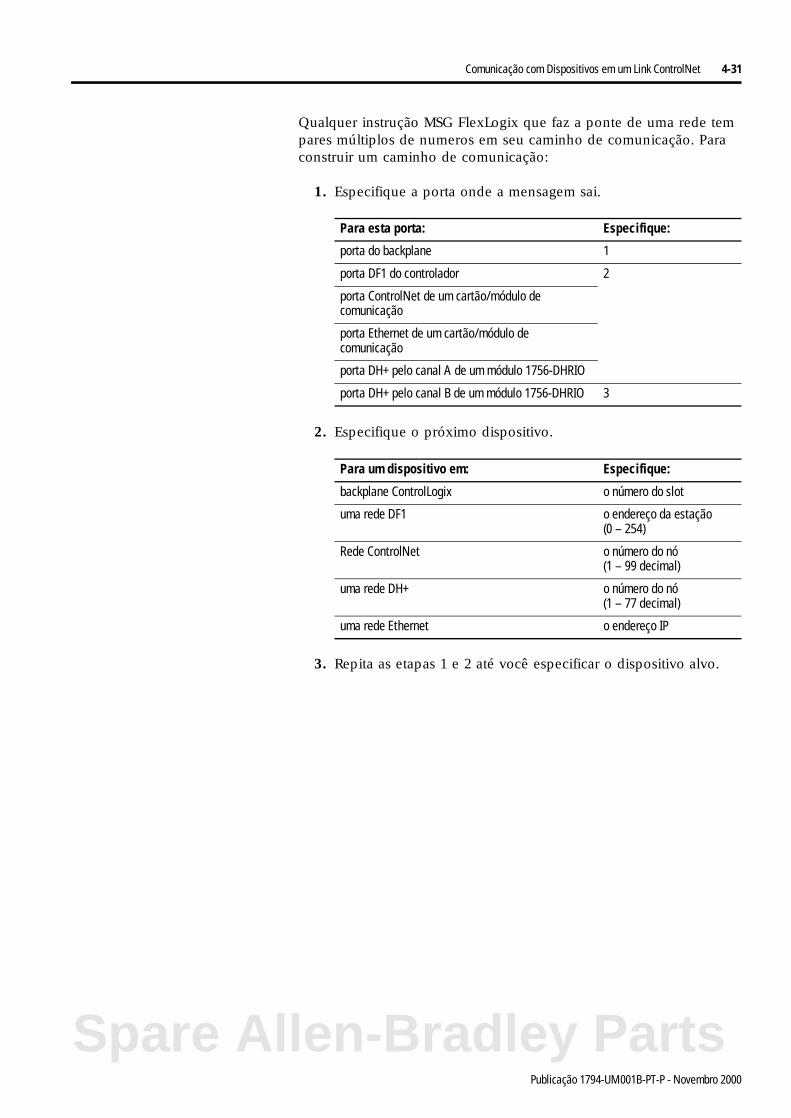
Comunicação com Dispositivos em um Link ControlNet 4-31
Qualquer instrução MSG FlexLogix que faz a ponte de uma rede tem pares múltiplos de numeros em seu caminho de comunicação. Para construir um caminho de comunicação:
1. Especifique a porta onde a mensagem sai.
2. Especifique o próximo dispositivo.
3. Repita as etapas 1 e 2 até você especificar o dispositivo alvo.
Para esta porta: Especifique:
porta do backplane 1
porta DF1 do controlador 2
porta ControlNet de um cartão/módulo de comunicação
porta Ethernet de um cartão/módulo de comunicação
porta DH+ pelo canal A de um módulo 1756-DHRIO
porta DH+ pelo canal B de um módulo 1756-DHRIO 3
Para um dispositivo em: Especifique:
backplane ControlLogix o número do slot
uma rede DF1 o endereço da estação (0 – 254)
Rede ControlNet o número do nó (1 – 99 decimal)
uma rede DH+ o número do nó (1 – 77 decimal)
uma rede Ethernet o endereço IP
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000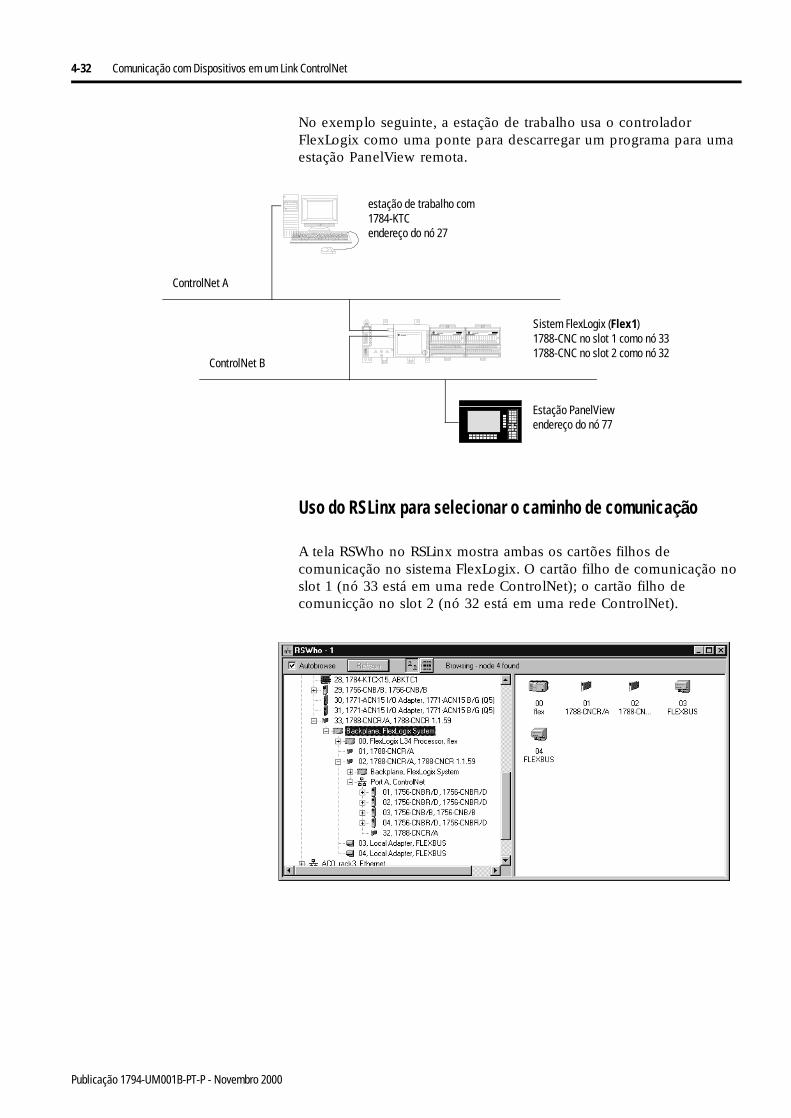
4-32 Comunicação com Dispositivos em um Link ControlNet
No exemplo seguinte, a estação de trabalho usa o controlador FlexLogix como uma ponte para descarregar um programa para uma estação PanelView remota.
Uso do RSLinx para selecionar o caminho de comunicação
A tela RSWho no RSLinx mostra ambas os cartões filhos de comunicação no sistema FlexLogix. O cartão filho de comunicação no slot 1 (nó 33 está em uma rede ControlNet); o cartão filho de comunicção no slot 2 (nó 32 está em uma rede ControlNet).
Sistem FlexLogix (Flex1)1788-CNC no slot 1 como nó 331788-CNC no slot 2 como nó 32
ControlNet A
Estação PanelViewendereço do nó 77
estação de trabalho com 1784-KTCendereço do nó 27
ControlNet B
Publicação 1794-UM001B-PT-P - Novembro 2000
Capítulo 5
Comunicação com Dispositivos em um Link DeviceNet
Uso Deste Manual
Configuração do Seu Sistema para um Link DeviceNet
Para o controlador FlexLogix operar em uma rede DeviceNet, você precisa:
• um dispositivo de conexão 1788-CN2DN do ControlNet para DeviceNet
Como ponte, o dispositivo de conexão encaminha os dados de envio de mensagem e E/S com um atraso de 5 ms. Como dispositivo ControlNet, oferece um tempo de atualização da rede de 2 ms. Como dispositivo DeviceNet, fornece compatibilidade total di Scanner DML DeviceNet.
• uma cartão de comunicação 1788-CNx instalada no slot de comunicação FlexLogix para a rede ControlNet
• software de programação RSLogix5000 para configurar o módulo de dispositivo de conexão como parte do sistema FlexLogix
• software RSNetWorx para ControlNet para configurar o dispositivo 1788-CN2DN na rede ControlNet
• software RSNetWorx para DeviceNet para configurar o dispositivo 1788-CN2DN na rede DeviceNet
Para informações sobre: Consulte a página
Configuração do seu sistema para um link DeviceNet 5-1
Instalação dos dispositivos DeviceNet 5-6
Acesso aos dispositivos DeviceNet 5-8
Instalação do cartão do dispositivo de conexão no modo Run 5-10
Exemplo: controlador FlexLogix e dispositivos DeviceNet remotos 5-10
Spare Allen-Bradley Parts
1 Publicação 1794-UM001B-PT-P - Novembro 2000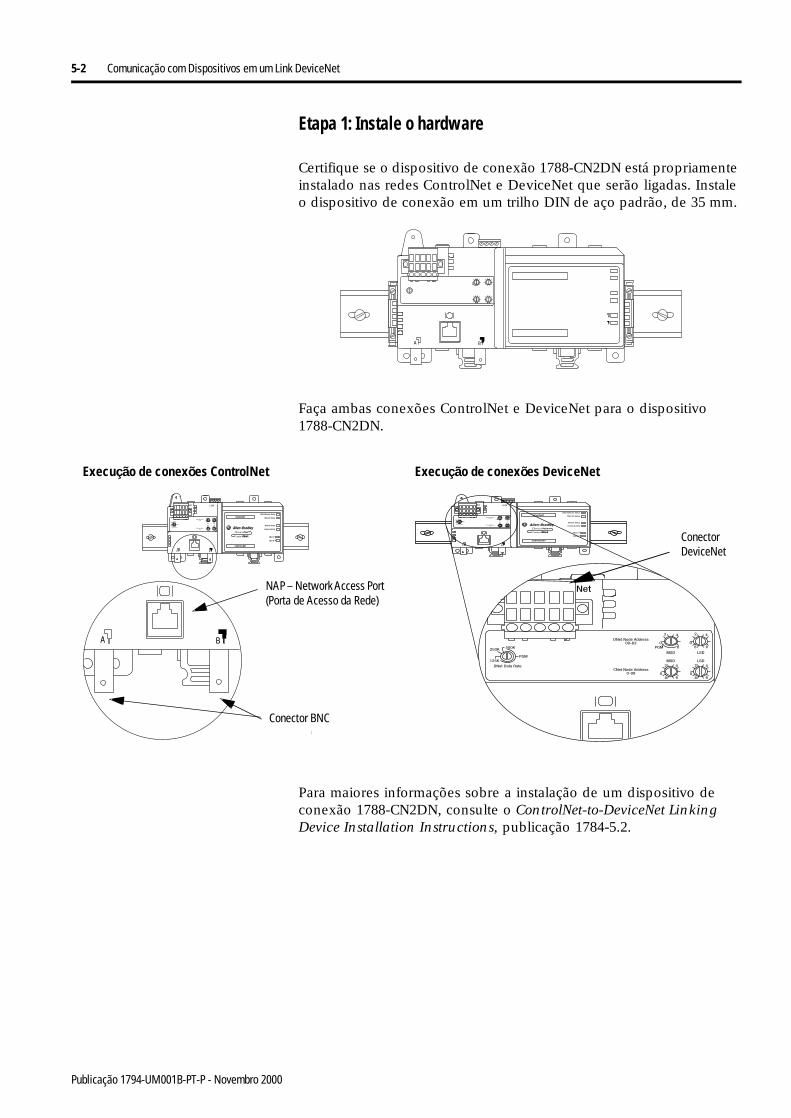
5-2 Comunicação com Dispositivos em um Link DeviceNet
Etapa 1: Instale o hardware
Certifique se o dispositivo de conexão 1788-CN2DN está propriamente instalado nas redes ControlNet e DeviceNet que serão ligadas. Instale o dispositivo de conexão em um trilho DIN de aço padrão, de 35 mm.
Faça ambas conexões ControlNet e DeviceNet para o dispositivo 1788-CN2DN.
Para maiores informações sobre a instalação de um dispositivo de conexão 1788-CN2DN, consulte o ControlNet-to-DeviceNet Linking Device Installation Instructions, publicação 1784-5.2.
30904-M30902-M
Execução de conexões ControlNet Execução de conexões DeviceNet
Conector DeviceNet
Conector BNC
NAP – Network Access Port (Porta de Acesso da Rede)
Publicação 1794-UM001B-PT-P - Novembro 2000
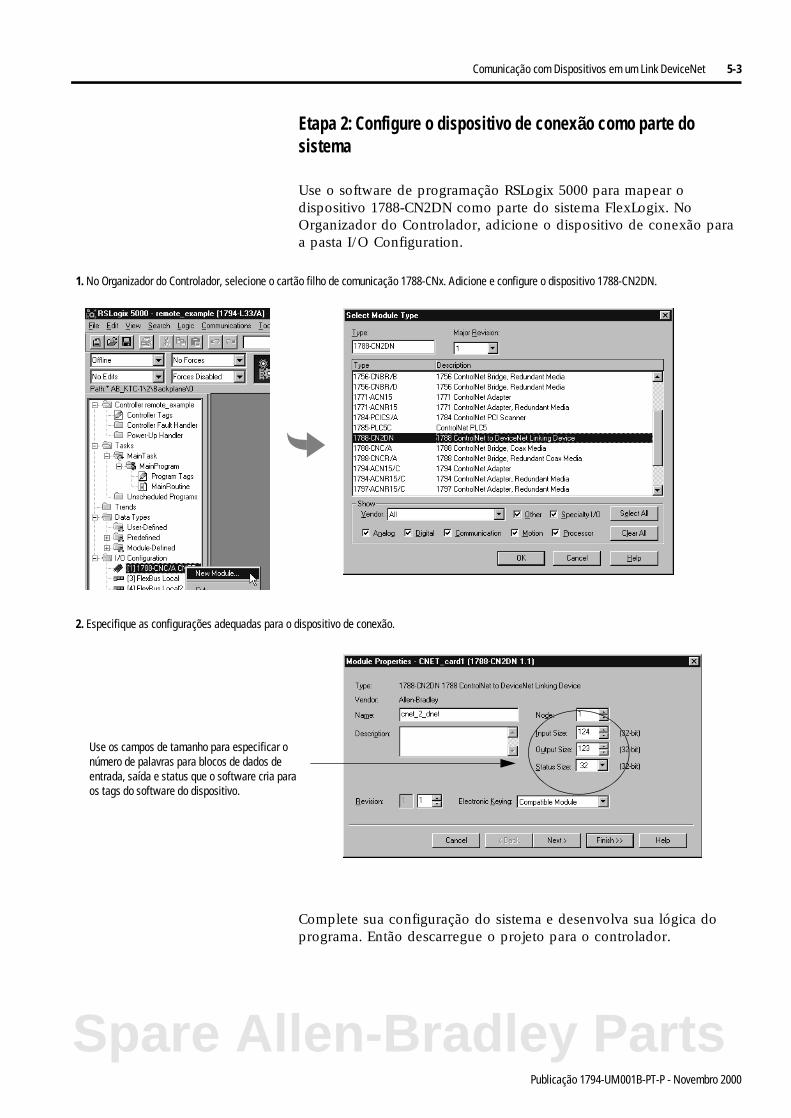
Comunicação com Dispositivos em um Link DeviceNet 5-3
Etapa 2: Configure o dispositivo de conexão como parte do sistema
Use o software de programação RSLogix 5000 para mapear o dispositivo 1788-CN2DN como parte do sistema FlexLogix. No Organizador do Controlador, adicione o dispositivo de conexão para a pasta I/O Configuration.
Complete sua configuração do sistema e desenvolva sua lógica do programa. Então descarregue o projeto para o controlador.
1. No Organizador do Controlador, selecione o cartão filho de comunicação 1788-CNx. Adicione e configure o dispositivo 1788-CN2DN.
2. Especifique as configurações adequadas para o dispositivo de conexão.
Use os campos de tamanho para especificar o número de palavras para blocos de dados de entrada, saída e status que o software cria para os tags do software do dispositivo.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000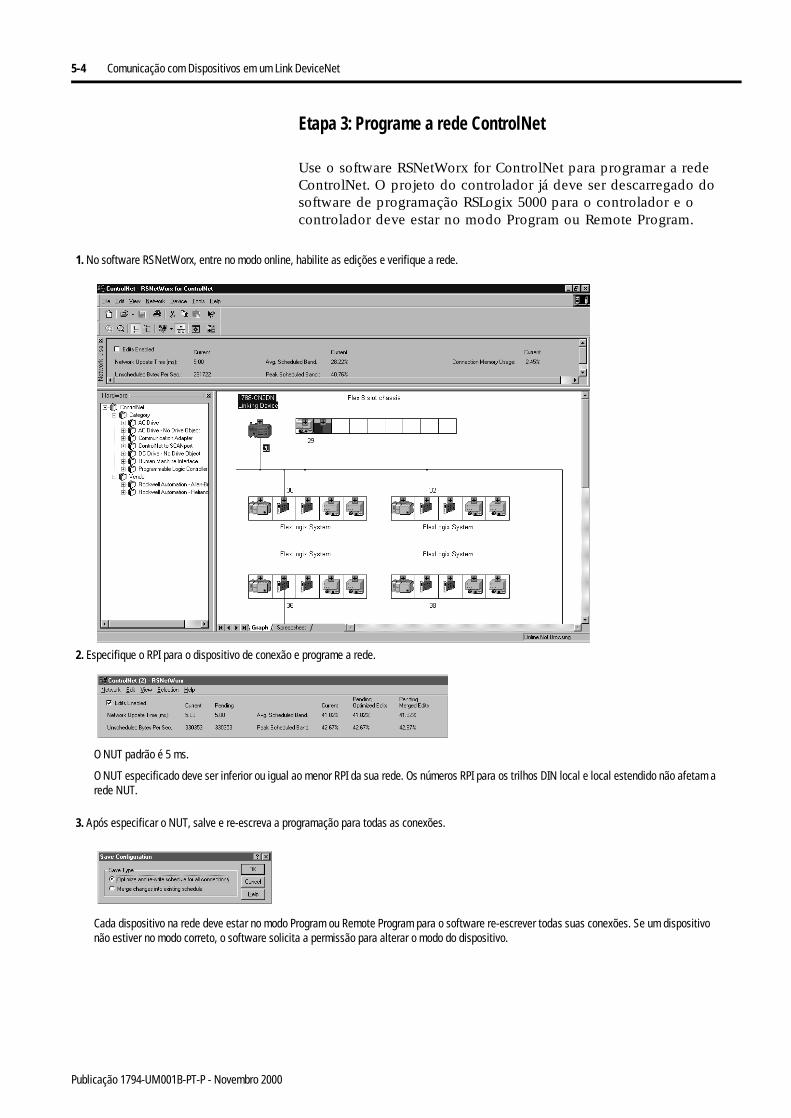
5-4 Comunicação com Dispositivos em um Link DeviceNet
Etapa 3: Programe a rede ControlNet
Use o software RSNetWorx for ControlNet para programar a rede ControlNet. O projeto do controlador já deve ser descarregado do software de programação RSLogix 5000 para o controlador e o controlador deve estar no modo Program ou Remote Program.
1. No software RSNetWorx, entre no modo online, habilite as edições e verifique a rede.
3. Após especificar o NUT, salve e re-escreva a programação para todas as conexões.
2. Especifique o RPI para o dispositivo de conexão e programe a rede.
O NUT padrão é 5 ms.
O NUT especificado deve ser inferior ou igual ao menor RPI da sua rede. Os números RPI para os trilhos DIN local e local estendido não afetam a rede NUT.
Cada dispositivo na rede deve estar no modo Program ou Remote Program para o software re-escrever todas suas conexões. Se um dispositivo não estiver no modo correto, o software solicita a permissão para alterar o modo do dispositivo.
Publicação 1794-UM001B-PT-P - Novembro 2000
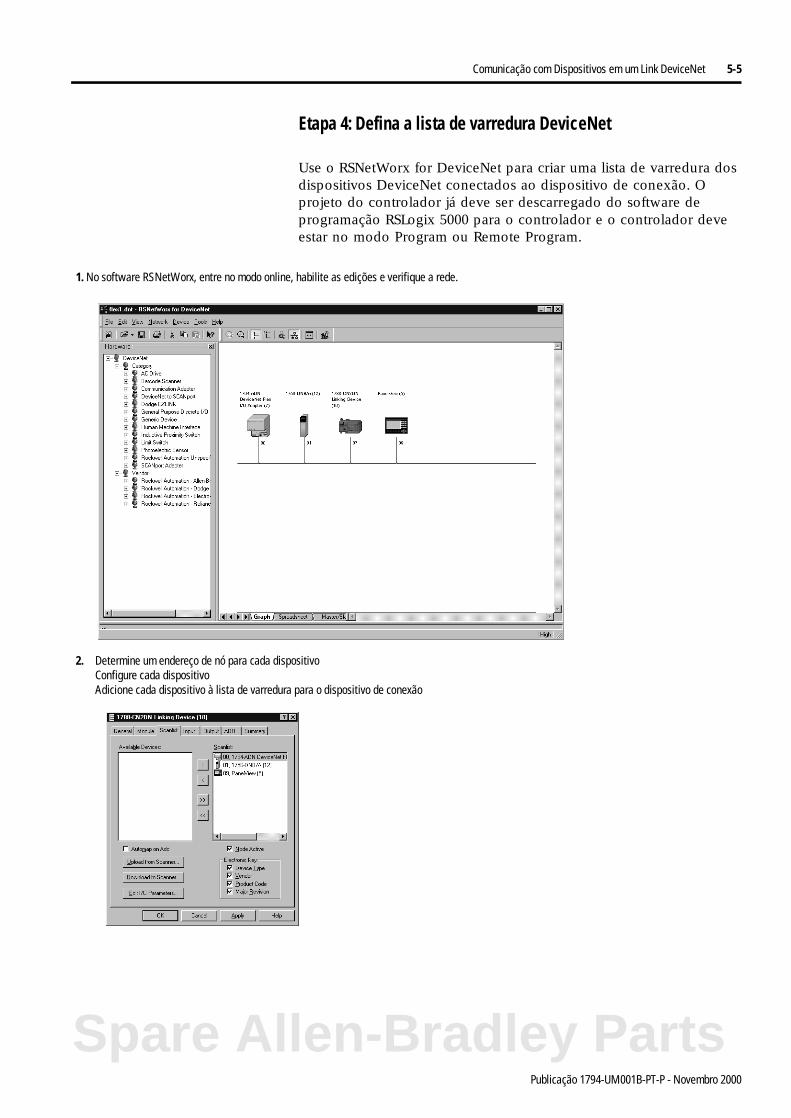
Comunicação com Dispositivos em um Link DeviceNet 5-5
Etapa 4: Defina a lista de varredura DeviceNet
Use o RSNetWorx for DeviceNet para criar uma lista de varredura dos dispositivos DeviceNet conectados ao dispositivo de conexão. O projeto do controlador já deve ser descarregado do software de programação RSLogix 5000 para o controlador e o controlador deve estar no modo Program ou Remote Program.
1. No software RSNetWorx, entre no modo online, habilite as edições e verifique a rede.
2. Determine um endereço de nó para cada dispositivoConfigure cada dispositivoAdicione cada dispositivo à lista de varredura para o dispositivo de conexão
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000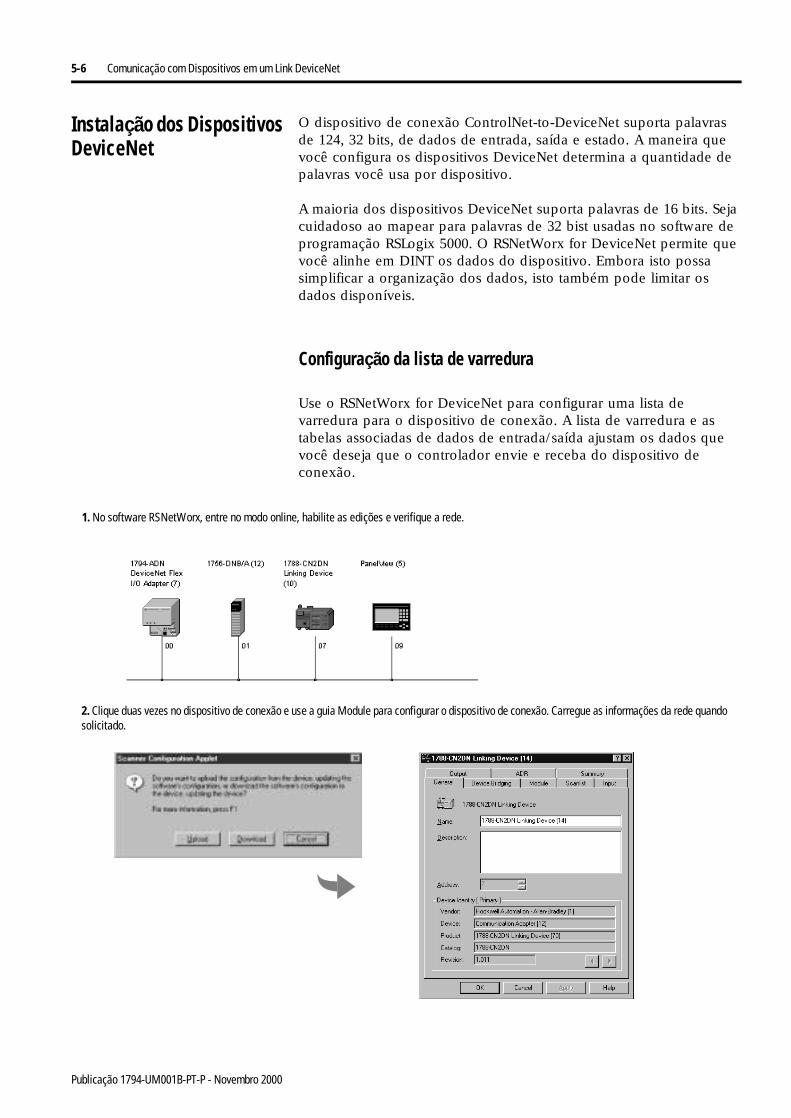
5-6 Comunicação com Dispositivos em um Link DeviceNet
Instalação dos Dispositivos DeviceNet
O dispositivo de conexão ControlNet-to-DeviceNet suporta palavras de 124, 32 bits, de dados de entrada, saída e estado. A maneira que você configura os dispositivos DeviceNet determina a quantidade de palavras você usa por dispositivo.
A maioria dos dispositivos DeviceNet suporta palavras de 16 bits. Seja cuidadoso ao mapear para palavras de 32 bist usadas no software de programação RSLogix 5000. O RSNetWorx for DeviceNet permite que você alinhe em DINT os dados do dispositivo. Embora isto possa simplificar a organização dos dados, isto também pode limitar os dados disponíveis.
Configuração da lista de varredura
Use o RSNetWorx for DeviceNet para configurar uma lista de varredura para o dispositivo de conexão. A lista de varredura e as tabelas associadas de dados de entrada/saída ajustam os dados que você deseja que o controlador envie e receba do dispositivo de conexão.
1. No software RSNetWorx, entre no modo online, habilite as edições e verifique a rede.
2. Clique duas vezes no dispositivo de conexão e use a guia Module para configurar o dispositivo de conexão. Carregue as informações da rede quando solicitado.
Publicação 1794-UM001B-PT-P - Novembro 2000
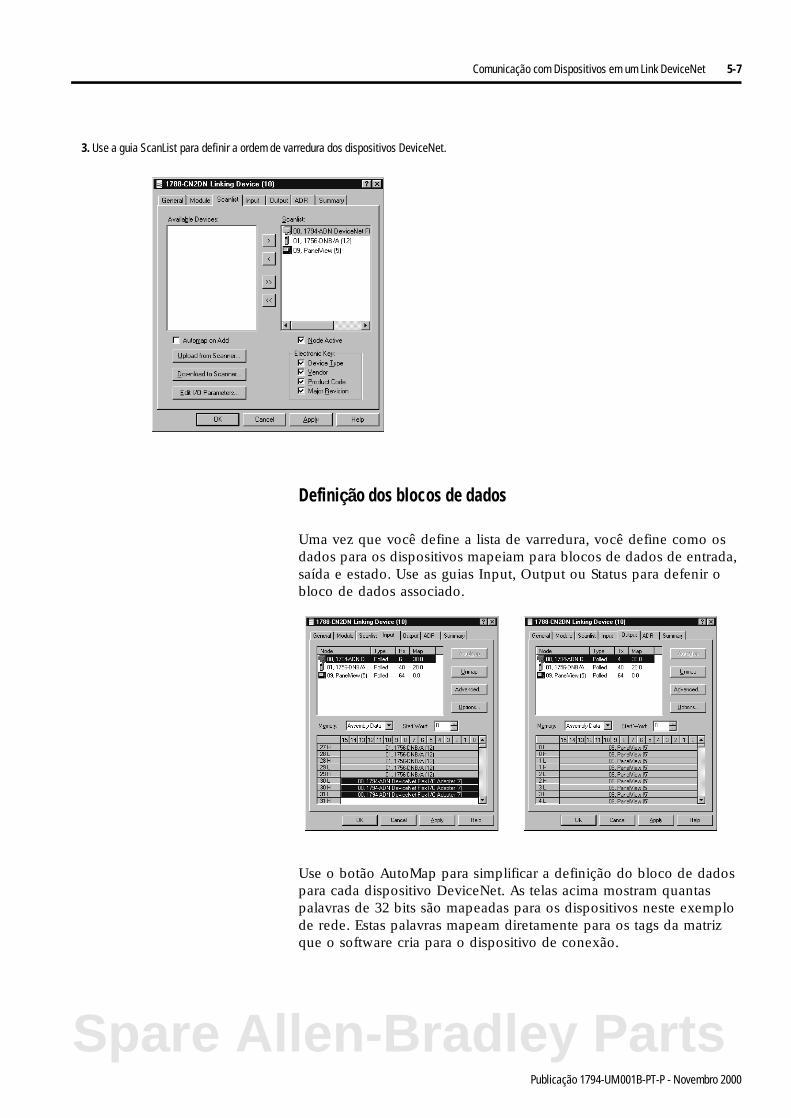
Comunicação com Dispositivos em um Link DeviceNet 5-7
Definição dos blocos de dados
Uma vez que você define a lista de varredura, você define como os dados para os dispositivos mapeiam para blocos de dados de entrada, saída e estado. Use as guias Input, Output ou Status para defenir o bloco de dados associado.
Use o botão AutoMap para simplificar a definição do bloco de dados para cada dispositivo DeviceNet. As telas acima mostram quantas palavras de 32 bits são mapeadas para os dispositivos neste exemplo de rede. Estas palavras mapeam diretamente para os tags da matriz que o software cria para o dispositivo de conexão.
3. Use a guia ScanList para definir a ordem de varredura dos dispositivos DeviceNet.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000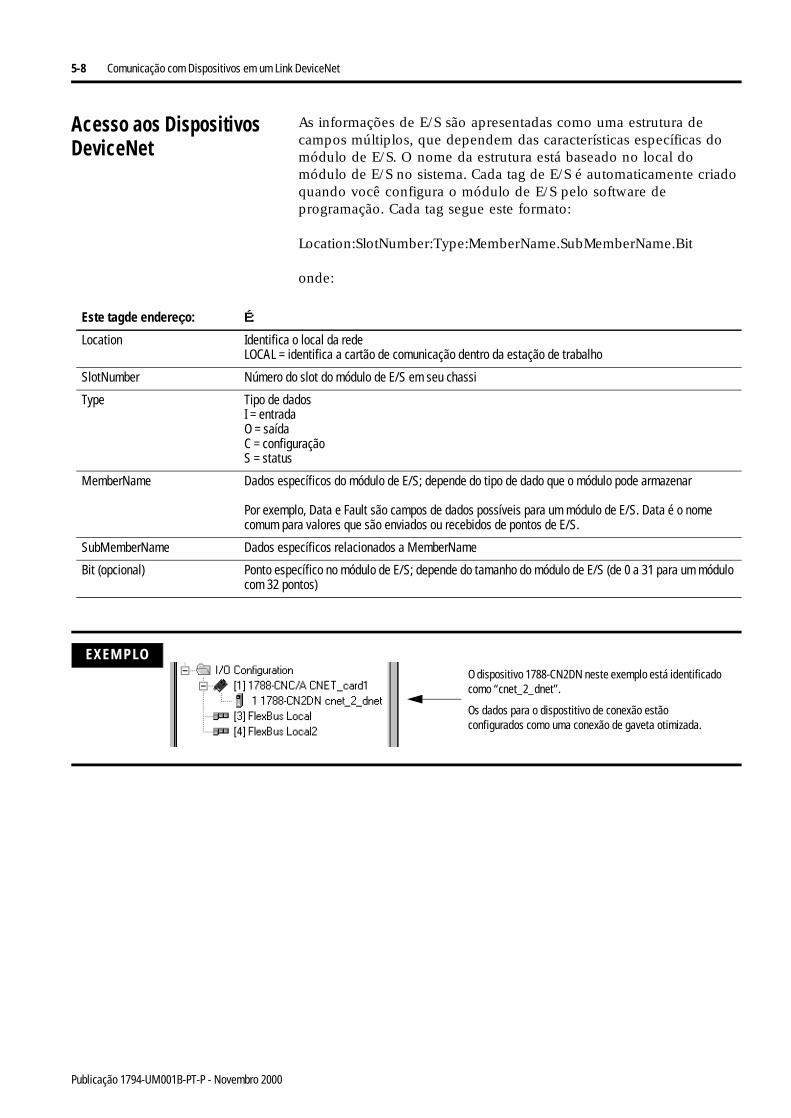
5-8 Comunicação com Dispositivos em um Link DeviceNet
Acesso aos Dispositivos DeviceNet
As informações de E/S são apresentadas como uma estrutura de campos múltiplos, que dependem das características específicas do módulo de E/S. O nome da estrutura está baseado no local do módulo de E/S no sistema. Cada tag de E/S é automaticamente criado quando você configura o módulo de E/S pelo software de programação. Cada tag segue este formato:
Location:SlotNumber:Type:MemberName.SubMemberName.Bit
onde:
Este tagde endereço: É:
Location Identifica o local da redeLOCAL = identifica a cartão de comunicação dentro da estação de trabalho
SlotNumber Número do slot do módulo de E/S em seu chassi
Type Tipo de dadosI = entradaO = saídaC = configuraçãoS = status
MemberName Dados específicos do módulo de E/S; depende do tipo de dado que o módulo pode armazenar
Por exemplo, Data e Fault são campos de dados possíveis para um módulo de E/S. Data é o nome comum para valores que são enviados ou recebidos de pontos de E/S.
SubMemberName Dados específicos relacionados a MemberName
Bit (opcional) Ponto específico no módulo de E/S; depende do tamanho do módulo de E/S (de 0 a 31 para um módulo com 32 pontos)
EXEMPLOO dispositivo 1788-CN2DN neste exemplo está identificado como “cnet_2_dnet”.
Os dados para o dispostitivo de conexão estão configurados como uma conexão de gaveta otimizada.
Publicação 1794-UM001B-PT-P - Novembro 2000
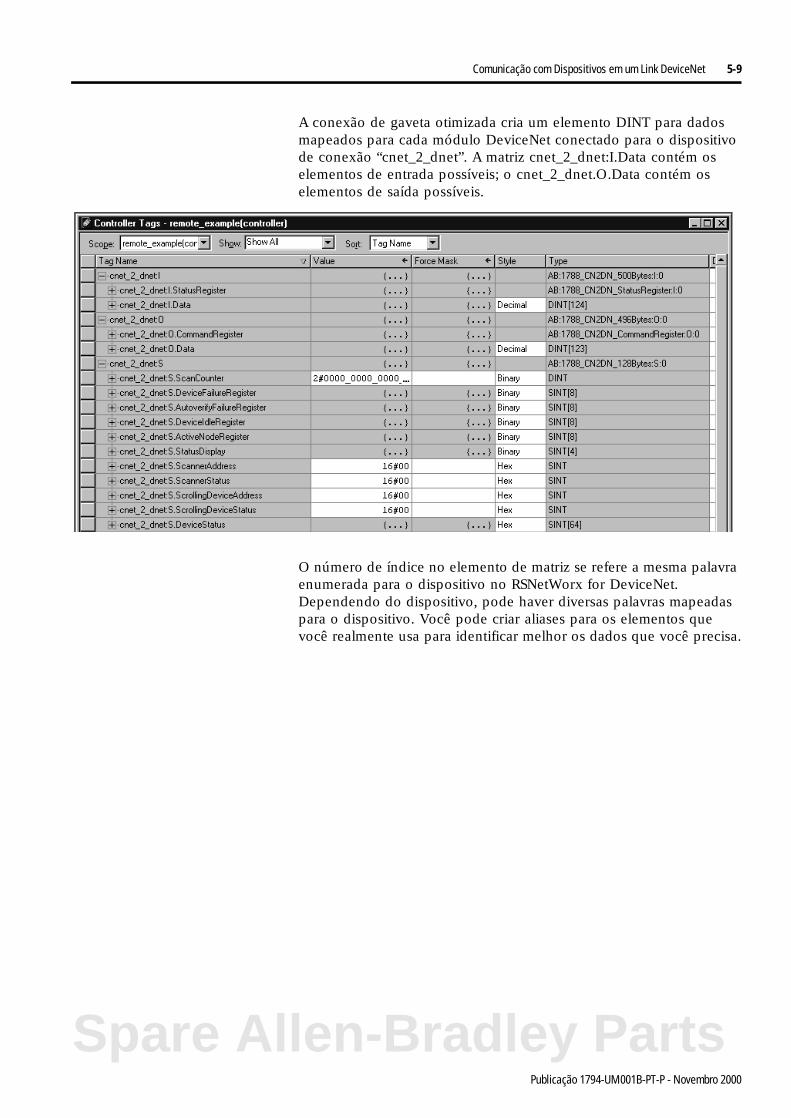
Comunicação com Dispositivos em um Link DeviceNet 5-9
A conexão de gaveta otimizada cria um elemento DINT para dados mapeados para cada módulo DeviceNet conectado para o dispositivo de conexão “cnet_2_dnet”. A matriz cnet_2_dnet:I.Data contém os elementos de entrada possíveis; o cnet_2_dnet.O.Data contém os elementos de saída possíveis.
O número de índice no elemento de matriz se refere a mesma palavra enumerada para o dispositivo no RSNetWorx for DeviceNet. Dependendo do dispositivo, pode haver diversas palavras mapeadas para o dispositivo. Você pode criar aliases para os elementos que você realmente usa para identificar melhor os dados que você precisa.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000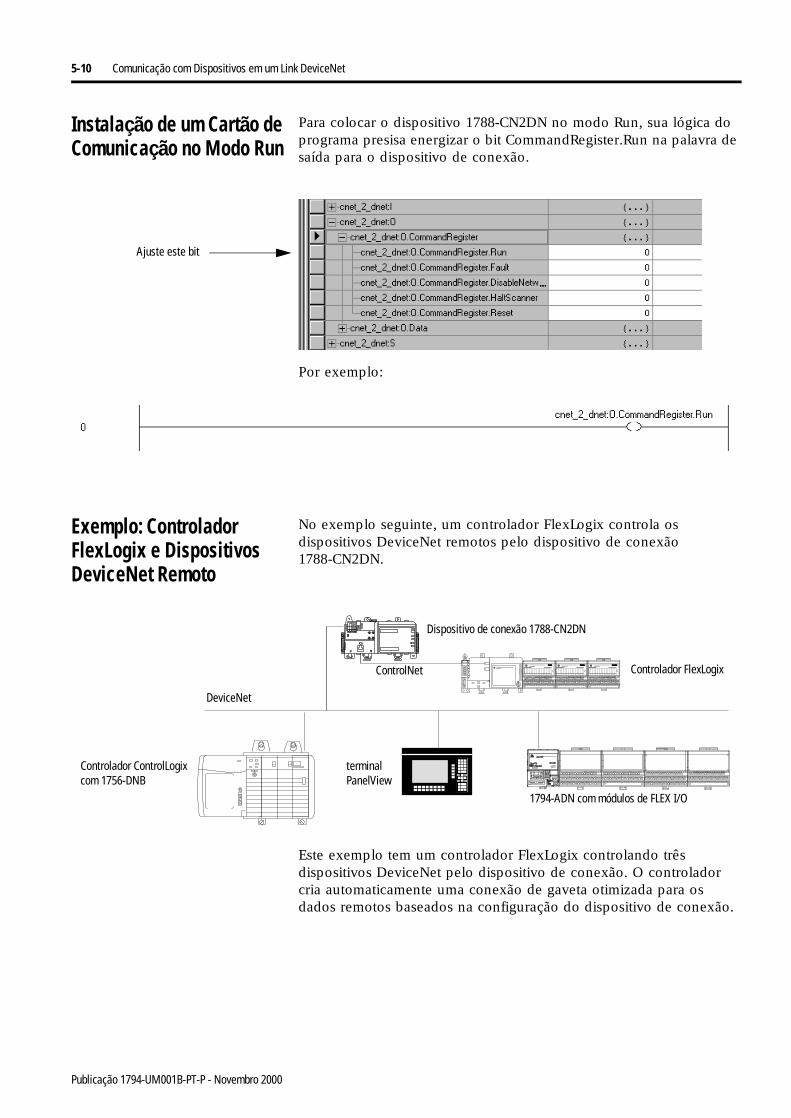
5-10 Comunicação com Dispositivos em um Link DeviceNet
Instalação de um Cartão de Comunicação no Modo Run
Para colocar o dispositivo 1788-CN2DN no modo Run, sua lógica do programa presisa energizar o bit CommandRegister.Run na palavra de saída para o dispositivo de conexão.
Por exemplo:
Exemplo: Controlador FlexLogix e Dispositivos DeviceNet Remoto
No exemplo seguinte, um controlador FlexLogix controla os dispositivos DeviceNet remotos pelo dispositivo de conexão 1788-CN2DN.
Este exemplo tem um controlador FlexLogix controlando três dispositivos DeviceNet pelo dispositivo de conexão. O controlador cria automaticamente uma conexão de gaveta otimizada para os dados remotos baseados na configuração do dispositivo de conexão.
Ajuste este bit
Controlador FlexLogix
DeviceNet
Dispositivo de conexão 1788-CN2DN
ControlNet
Controlador ControlLogix com 1756-DNB
terminal PanelView
1794-ADN com módulos de FLEX I/O
Publicação 1794-UM001B-PT-P - Novembro 2000
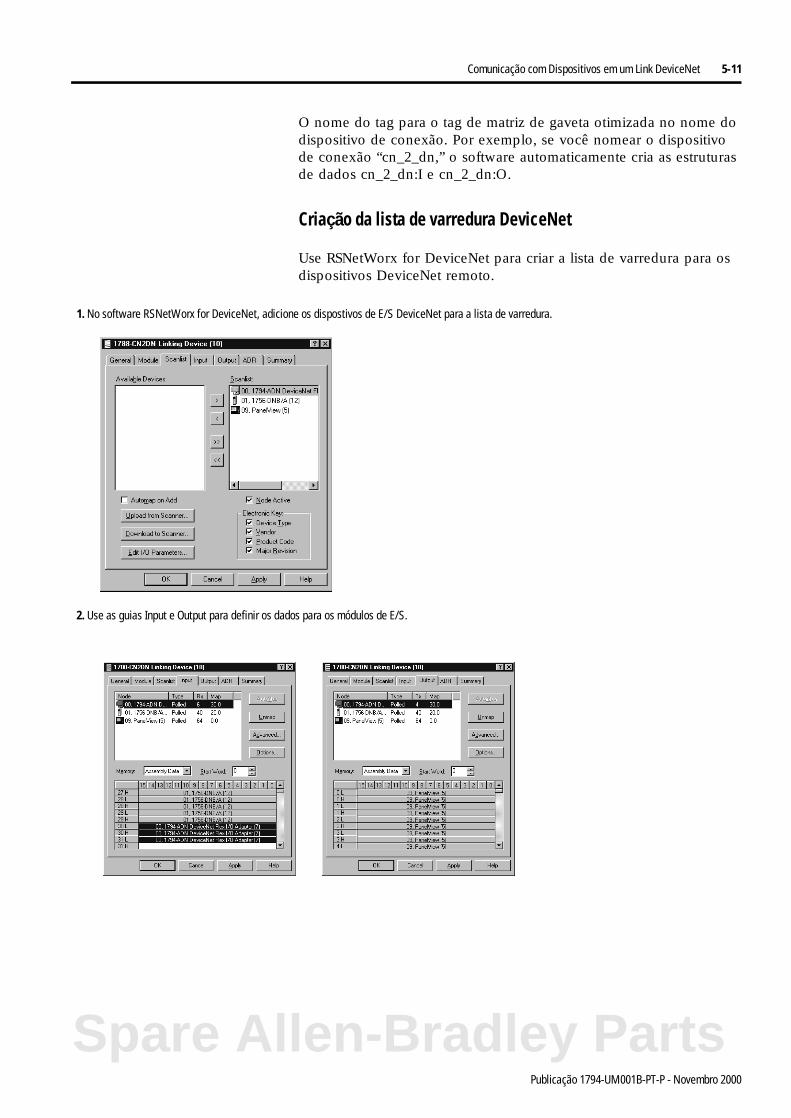
Comunicação com Dispositivos em um Link DeviceNet 5-11
O nome do tag para o tag de matriz de gaveta otimizada no nome do dispositivo de conexão. Por exemplo, se você nomear o dispositivo de conexão “cn_2_dn,” o software automaticamente cria as estruturas de dados cn_2_dn:I e cn_2_dn:O.
Criação da lista de varredura DeviceNet
Use RSNetWorx for DeviceNet para criar a lista de varredura para os dispositivos DeviceNet remoto.
1. No software RSNetWorx for DeviceNet, adicione os dispostivos de E/S DeviceNet para a lista de varredura.
2. Use as guias Input e Output para definir os dados para os módulos de E/S.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000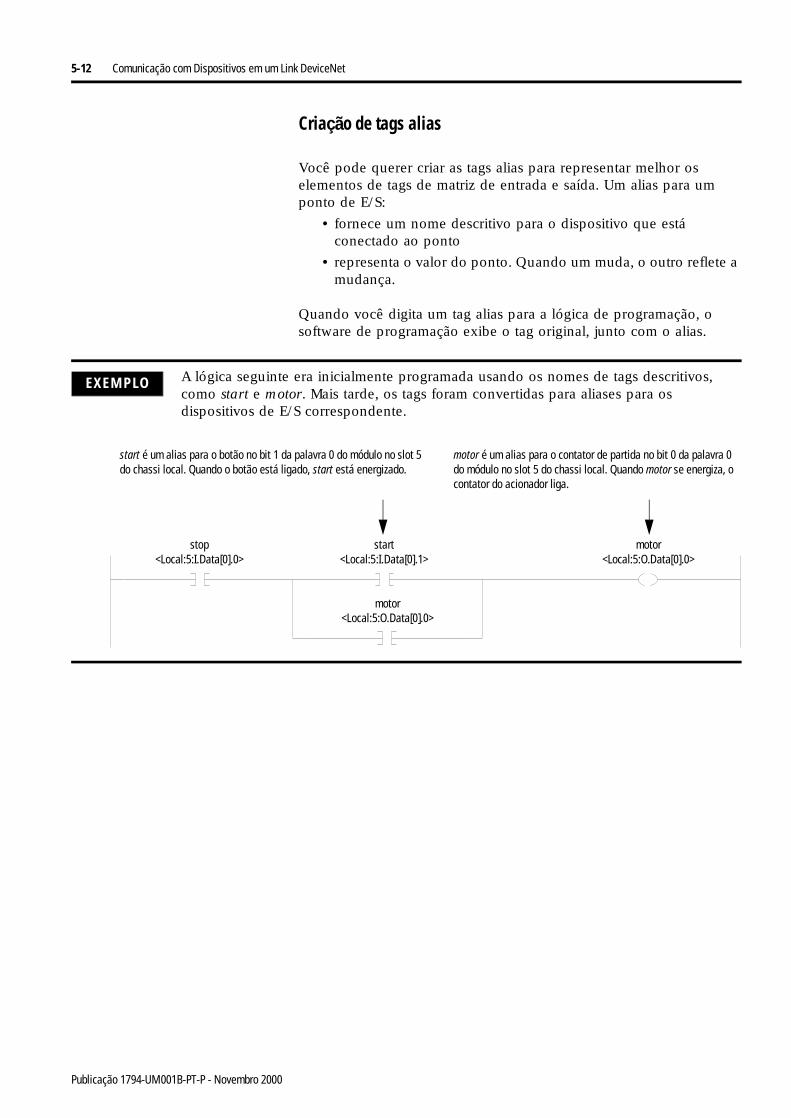
5-12 Comunicação com Dispositivos em um Link DeviceNet
Criação de tags alias
Você pode querer criar as tags alias para representar melhor os elementos de tags de matriz de entrada e saída. Um alias para um ponto de E/S:
• fornece um nome descritivo para o dispositivo que está conectado ao ponto
• representa o valor do ponto. Quando um muda, o outro reflete a mudança.
Quando você digita um tag alias para a lógica de programação, o software de programação exibe o tag original, junto com o alias.
EXEMPLO A lógica seguinte era inicialmente programada usando os nomes de tags descritivos, como start e motor. Mais tarde, os tags foram convertidas para aliases para os dispositivos de E/S correspondente.
start é um alias para o botão no bit 1 da palavra 0 do módulo no slot 5 do chassi local. Quando o botão está ligado, start está energizado.
motor é um alias para o contator de partida no bit 0 da palavra 0 do módulo no slot 5 do chassi local. Quando motor se energiza, o contator do acionador liga.
motor<Local:5:O.Data[0].0>
motor<Local:5:O.Data[0].0>
start<Local:5:I.Data[0].1>
stop<Local:5:I.Data[0].0>
Publicação 1794-UM001B-PT-P - Novembro 2000
Capítulo 6
Comunicação com Dispositivos em um Link Serial
Uso Deste Manual
Configuração do Seu Sistema para um Link Serial
Para que o controlador FlexLogix opere em uma rede serial, você precisa:
• de uma estação de trabalho com uma porta serial
• de um software RSLinx para configurar o driver de comunicação serial
• de um software de programação RSLogix5000 para configurar a porta serial do controlador
Para informações sobre: Consulte a página
Configuração do seu sistema para um link serial 6-1
Exemplo 1: estação de trabalho conectada diretamente a um controlador FlexLogix
6-8
Exemplo 2: estação de trabalho conectada remotamente a um controlador FlexLogix
6-9
Exemplo 3: controlador FlexLogix conmunicando-se com uma leitora de código de barras
6-13
IMPORTANTE Limite do tamanho dos cabos seriais (RS-232) de 15,2 m (50 pés).
Spare Allen-Bradley Parts
1 Publicação 1794-UM001B-PT-P - Novembro 2000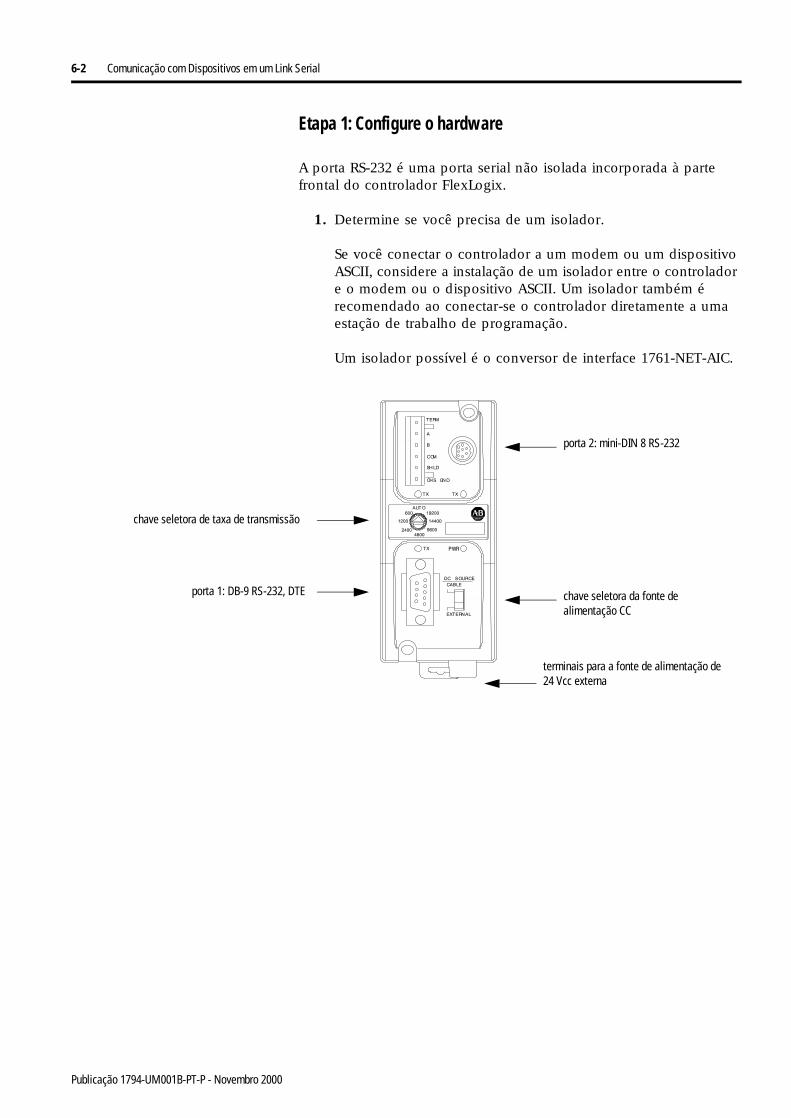
6-2 Comunicação com Dispositivos em um Link Serial
Etapa 1: Configure o hardware
A porta RS-232 é uma porta serial não isolada incorporada à parte frontal do controlador FlexLogix.
1. Determine se você precisa de um isolador.
Se você conectar o controlador a um modem ou um dispositivo ASCII, considere a instalação de um isolador entre o controlador e o modem ou o dispositivo ASCII. Um isolador também é recomendado ao conectar-se o controlador diretamente a uma estação de trabalho de programação.
Um isolador possível é o conversor de interface 1761-NET-AIC.
porta 1: DB-9 RS-232, DTE
chave seletora de taxa de transmissão
porta 2: mini-DIN 8 RS-232
chave seletora da fonte de alimentação CC
terminais para a fonte de alimentação de 24 Vcc externa
Publicação 1794-UM001B-PT-P - Novembro 2000
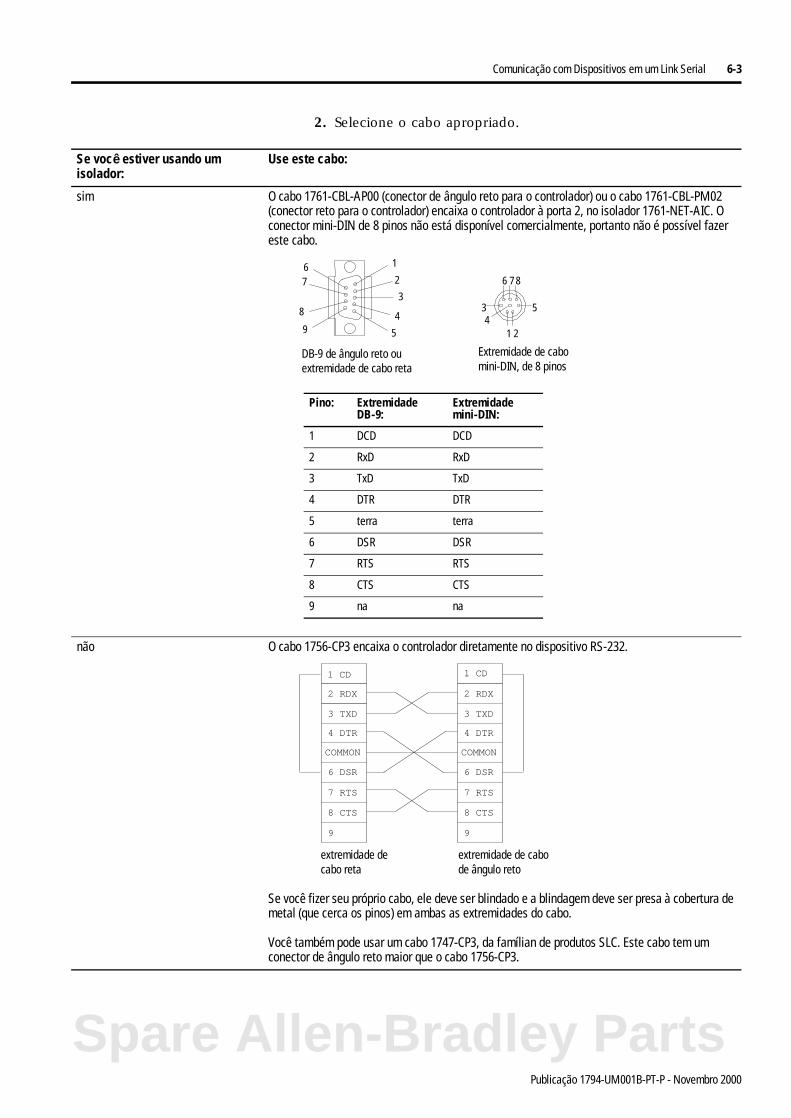
Comunicação com Dispositivos em um Link Serial 6-3
2. Selecione o cabo apropriado.
Se você estiver usando um isolador:
Use este cabo:
sim O cabo 1761-CBL-AP00 (conector de ângulo reto para o controlador) ou o cabo 1761-CBL-PM02 (conector reto para o controlador) encaixa o controlador à porta 2, no isolador 1761-NET-AIC. O conector mini-DIN de 8 pinos não está disponível comercialmente, portanto não é possível fazer este cabo.
não O cabo 1756-CP3 encaixa o controlador diretamente no dispositivo RS-232.
Se você fizer seu próprio cabo, ele deve ser blindado e a blindagem deve ser presa à cobertura de metal (que cerca os pinos) em ambas as extremidades do cabo.
Você também pode usar um cabo 1747-CP3, da famílian de produtos SLC. Este cabo tem um conector de ângulo reto maior que o cabo 1756-CP3.
1 2
34
5
6 7 867
8
9
1
2
3
4
5
DB-9 de ângulo reto ou extremidade de cabo reta
Extremidade de cabo mini-DIN, de 8 pinos
Pino: Extremidade DB-9:
Extremidade mini-DIN:
1 DCD DCD
2 RxD RxD
3 TxD TxD
4 DTR DTR
5 terra terra
6 DSR DSR
7 RTS RTS
8 CTS CTS
9 na na
2 RDX
3 TXD
4 DTR
COMMON
6 DSR
7 RTS
8 CTS
9
1 CD
2 RDX
3 TXD
4 DTR
COMMON
6 DSR
7 RTS
8 CTS
9
1 CD
extremidade de cabo reta
extremidade de cabo de ângulo reto
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000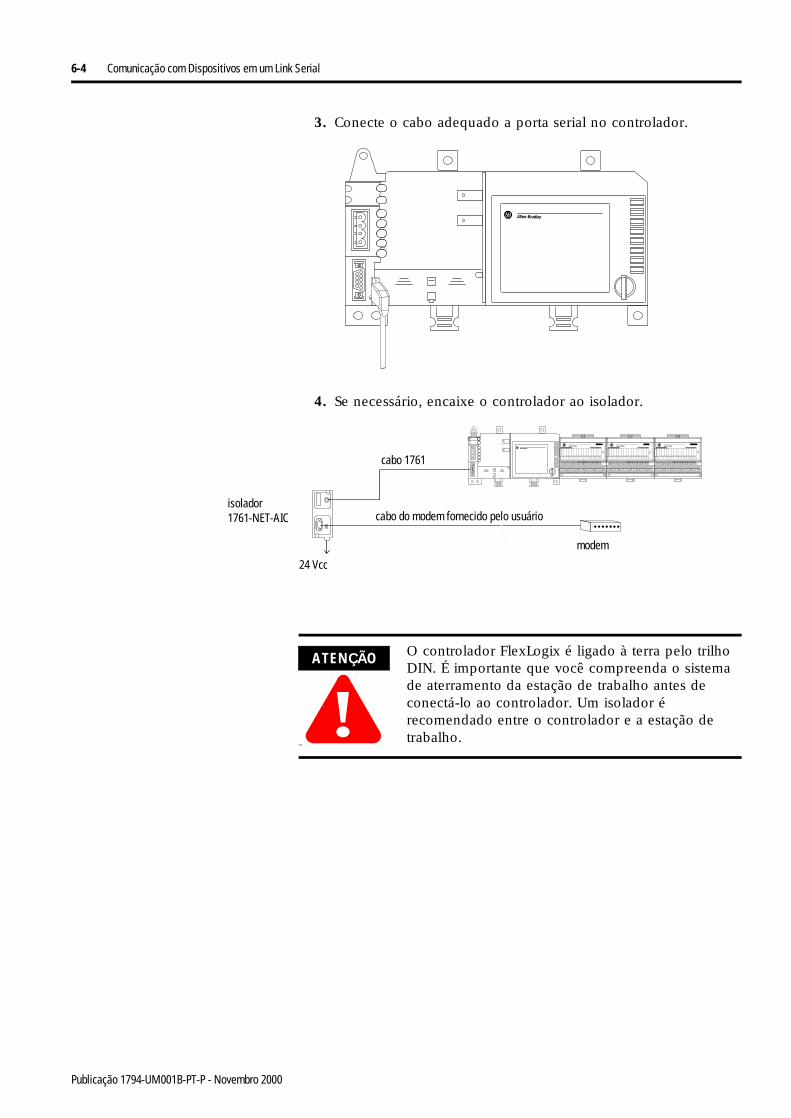
6-4 Comunicação com Dispositivos em um Link Serial
3. Conecte o cabo adequado a porta serial no controlador.
4. Se necessário, encaixe o controlador ao isolador.
modem
isolador 1761-NET-AIC
24 Vcc
cabo do modem fornecido pelo usuário
cabo 1761
ATENÇÃO
!CH
O controlador FlexLogix é ligado à terra pelo trilho DIN. É importante que você compreenda o sistema de aterramento da estação de trabalho antes de conectá-lo ao controlador. Um isolador é recomendado entre o controlador e a estação de trabalho.
Publicação 1794-UM001B-PT-P - Novembro 2000
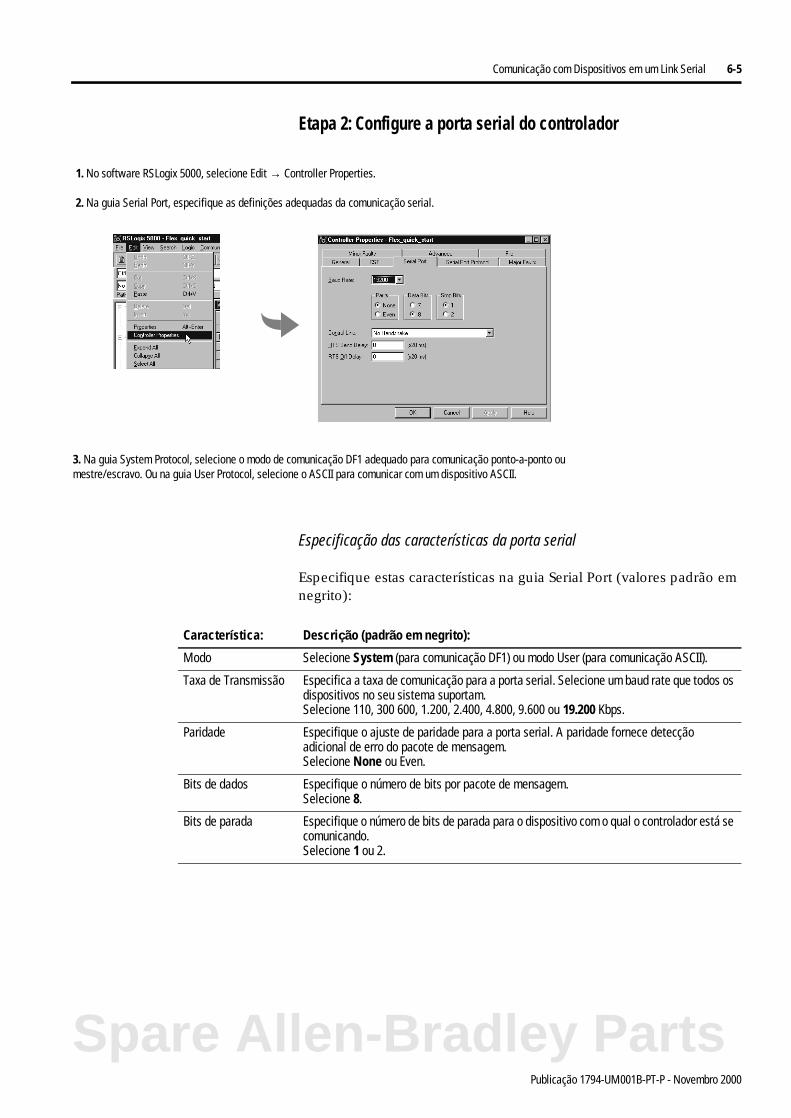
Comunicação com Dispositivos em um Link Serial 6-5
Etapa 2: Configure a porta serial do controlador
Especificação das características da porta serial
Especifique estas características na guia Serial Port (valores padrão em negrito):
1. No software RSLogix 5000, selecione Edit → Controller Properties.
2. Na guia Serial Port, especifique as definições adequadas da comunicação serial.
3. Na guia System Protocol, selecione o modo de comunicação DF1 adequado para comunicação ponto-a-ponto ou mestre/escravo. Ou na guia User Protocol, selecione o ASCII para comunicar com um dispositivo ASCII.
Característica: Descrição (padrão em negrito):
Modo Selecione System (para comunicação DF1) ou modo User (para comunicação ASCII).
Taxa de Transmissão Especifica a taxa de comunicação para a porta serial. Selecione um baud rate que todos os dispositivos no seu sistema suportam.Selecione 110, 300 600, 1.200, 2.400, 4.800, 9.600 ou 19.200 Kbps.
Paridade Especifique o ajuste de paridade para a porta serial. A paridade fornece detecção adicional de erro do pacote de mensagem.Selecione None ou Even.
Bits de dados Especifique o número de bits por pacote de mensagem.Selecione 8.
Bits de parada Especifique o número de bits de parada para o dispositivo com o qual o controlador está se comunicando.Selecione 1 ou 2.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
6-6 Comunicação com Dispositivos em um Link Serial
Especificação das características do protocolo do sistema
Os modos de sistema disponíveis são:
Linha de controle Especifique o modo no qual o driver serial opera.Selecione No Handshake, Full-Duplex, Half-Duplex with Continuous Carrier ou Half-Duplex without Continuous Carrier.Se não estiver usando um modo, selecione No HandshakeSe ambos os modens em um link ponto-a-ponto forem full-duplex, selecione Full-Duplex para ambos os controladoresSe o modem mestre for full duplex e o modem escravo for half-duplex, selecione Full-Duplex para que o controlador mestre e selecione Half-Duplex with Continuous Carrier para o controlador escravo.Se todos os modens no sistema forem half-duplex, selecione Half-Duplex without Continuous Carrier para o controlador.
RTS envia atraso Digite um pulso que representa o número de períodos de 20 ms do tempo que atrasa entre a asserção do sinal RTS e o início de uma transmissão de mensagem. Este atraso de tempo permite o modem a preparar a transmissão de uma mensagem. O sinal CTS deve ser alto para que a transmissão ocorra.A faixa é de períodos de 0 – 32.767.
atraso sem RTS Digite um pulso que representa o número de períodos de 20 ms do tempo que atrasa entre o fim de uma transmissão de mensagem e a de-asserção do sinal RTS. Este atraso de tempo é um buffer para certificar que o modem transmite a mensagem inteira com sucesso.A faixa é de períodos de 0 – 32.767. Normalmente deixe em zero.
Característica: Descrição (padrão em negrito):
Use este modo: Para: Consulte a página:
DF1 ponto a ponto a comunicação entre o controlador e um outro dispositivo compatível com o protocolo DF1.
Este é o modo de sistema padrão.Este modo é normalmente usado para programar o controlador pela sua porta serial.
6-8
modo mestre DF1 controle de transmissão de polling e mensagem entre os nós mestre e escravo.
A rede mestre/escravo inclui um controlador configurado como o nó mestre e até 254 nós escravos. Nós escravos de link que usam modens ou drivers de linha.Uma rede mestre/escravo pode ter números de nós de 0 a 254. Cada nó deve ter um único endereço. Além disso, pelo menos 2 nós devem existir para definir seu link como uma rede (1 mestre e 1 escravo são os dois nós).
6-11
modo escravo DF1 usando um controlador como uma estação escrava em uma rede de comunicação serial mestre/escravo.
Quando houver estações escravas múltiplas na rede, conecte as estações escravas usando os modems ou os drivers de linha. Quando você tem uma única estação escrava na rede, você não precisa de um modem para conectar a estação escrava à mestra; você pode configurar os parâmetros de controle para “no handshaking”. Você pode conectar de 2 a 255 nós em um único link. No modo DF1 escravo, um controlador usa o protocolo DF1 half-duplex.
Um nó está designado como o mestre e ele controla quem tem acesso ao link. Todos os outros nós são estações escravas e devem esperar pela permissão do mestre antes de transmitir.
6-11
Modo do usuário comunicando com dispositivos ASCII
Isto requer que sua lógica de programa para usar as instruções ASCII para ler e escrever dados de e para um dispositivo ASCII.
6-14
Publicação 1794-UM001B-PT-P - Novembro 2000
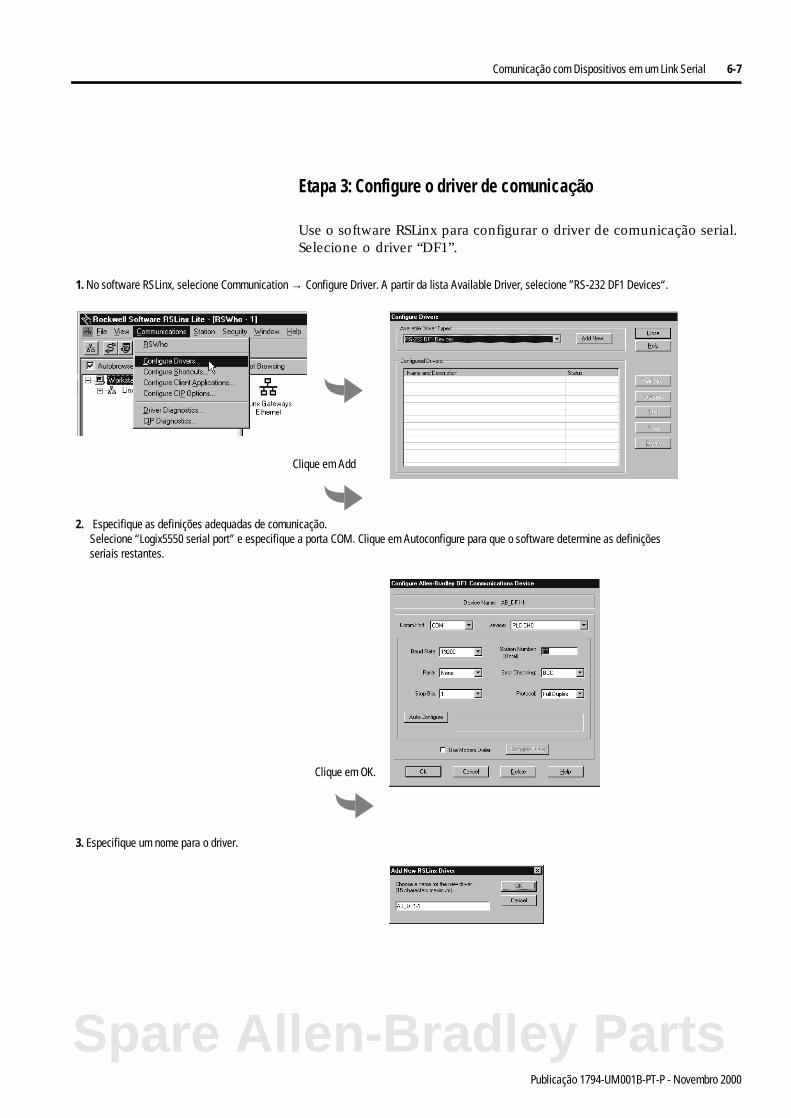
Comunicação com Dispositivos em um Link Serial 6-7
Etapa 3: Configure o driver de comunicação
Use o software RSLinx para configurar o driver de comunicação serial. Selecione o driver “DF1”.
2. Especifique as definições adequadas de comunicação.Selecione “Logix5550 serial port” e especifique a porta COM. Clique em Autoconfigure para que o software determine as definiçõesseriais restantes.
1. No software RSLinx, selecione Communication → Configure Driver. A partir da lista Available Driver, selecione ”RS-232 DF1 Devices“.
3. Especifique um nome para o driver.
Clique em OK.
Clique em Add
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000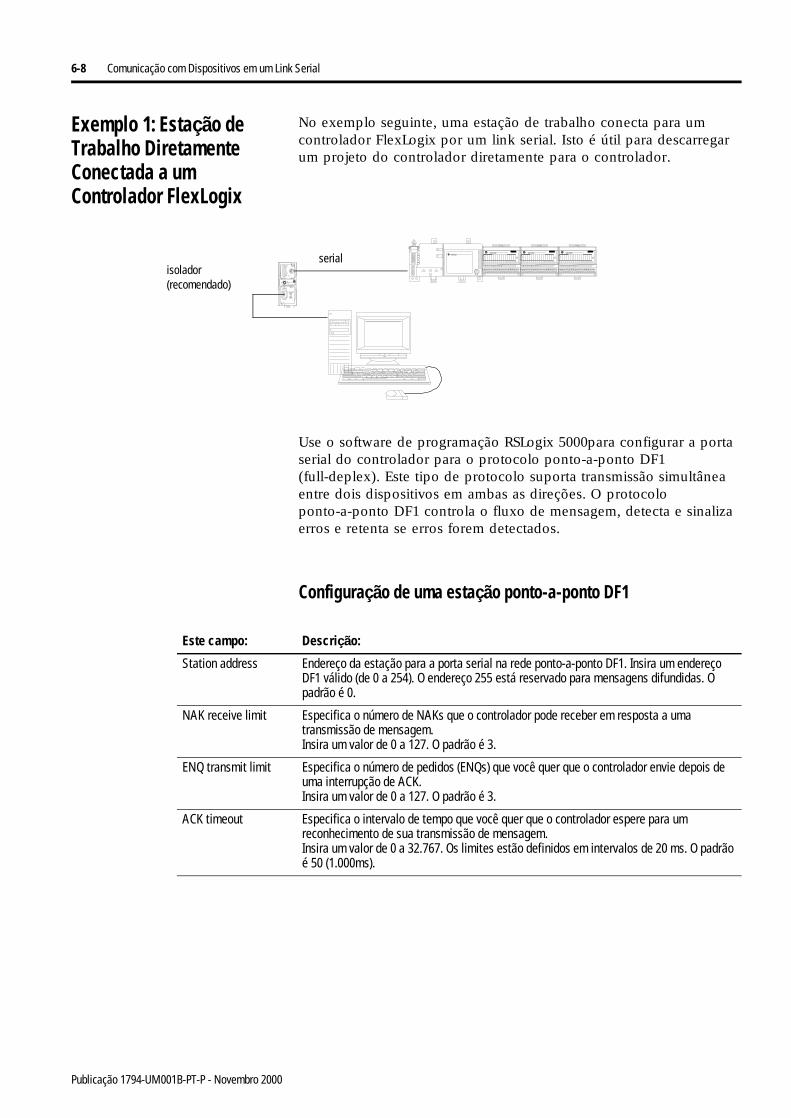
6-8 Comunicação com Dispositivos em um Link Serial
Exemplo 1: Estação de Trabalho Diretamente Conectada a um Controlador FlexLogix
No exemplo seguinte, uma estação de trabalho conecta para um controlador FlexLogix por um link serial. Isto é útil para descarregar um projeto do controlador diretamente para o controlador.
Use o software de programação RSLogix 5000para configurar a porta serial do controlador para o protocolo ponto-a-ponto DF1 (full-deplex). Este tipo de protocolo suporta transmissão simultânea entre dois dispositivos em ambas as direções. O protocolo ponto-a-ponto DF1 controla o fluxo de mensagem, detecta e sinaliza erros e retenta se erros forem detectados.
Configuração de uma estação ponto-a-ponto DF1
serialisolador (recomendado)
Este campo: Descrição:
Station address Endereço da estação para a porta serial na rede ponto-a-ponto DF1. Insira um endereço DF1 válido (de 0 a 254). O endereço 255 está reservado para mensagens difundidas. O padrão é 0.
NAK receive limit Especifica o número de NAKs que o controlador pode receber em resposta a uma transmissão de mensagem.Insira um valor de 0 a 127. O padrão é 3.
ENQ transmit limit Especifica o número de pedidos (ENQs) que você quer que o controlador envie depois de uma interrupção de ACK.Insira um valor de 0 a 127. O padrão é 3.
ACK timeout Especifica o intervalo de tempo que você quer que o controlador espere para um reconhecimento de sua transmissão de mensagem.Insira um valor de 0 a 32.767. Os limites estão definidos em intervalos de 20 ms. O padrão é 50 (1.000ms).
Publicação 1794-UM001B-PT-P - Novembro 2000
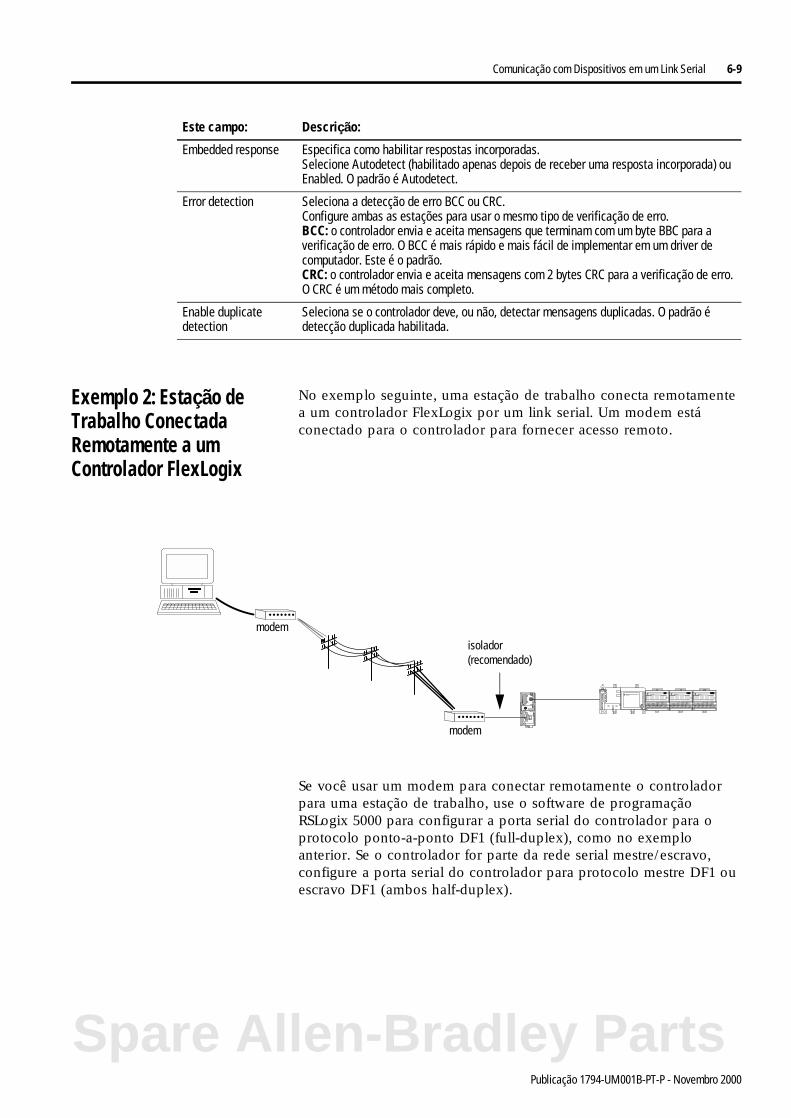
Comunicação com Dispositivos em um Link Serial 6-9
Exemplo 2: Estação de Trabalho Conectada Remotamente a um Controlador FlexLogix
No exemplo seguinte, uma estação de trabalho conecta remotamente a um controlador FlexLogix por um link serial. Um modem está conectado para o controlador para fornecer acesso remoto.
Se você usar um modem para conectar remotamente o controlador para uma estação de trabalho, use o software de programação RSLogix 5000 para configurar a porta serial do controlador para o protocolo ponto-a-ponto DF1 (full-duplex), como no exemplo anterior. Se o controlador for parte da rede serial mestre/escravo, configure a porta serial do controlador para protocolo mestre DF1 ou escravo DF1 (ambos half-duplex).
Embedded response Especifica como habilitar respostas incorporadas.Selecione Autodetect (habilitado apenas depois de receber uma resposta incorporada) ou Enabled. O padrão é Autodetect.
Error detection Seleciona a detecção de erro BCC ou CRC.Configure ambas as estações para usar o mesmo tipo de verificação de erro.BCC: o controlador envia e aceita mensagens que terminam com um byte BBC para a verificação de erro. O BCC é mais rápido e mais fácil de implementar em um driver de computador. Este é o padrão.CRC: o controlador envia e aceita mensagens com 2 bytes CRC para a verificação de erro. O CRC é um método mais completo.
Enable duplicate detection
Seleciona se o controlador deve, ou não, detectar mensagens duplicadas. O padrão é detecção duplicada habilitada.
Este campo: Descrição:
reface
modem
modem
isolador (recomendado)
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
6-10 Comunicação com Dispositivos em um Link Serial
Métodos de comunicação mestre/escravo
Uma estação mestra pode se comunicar com uma estação escrava de duas maneiras:
Nome: Esse método: Benefícios:
modo de comunicação padrão
inicia pacotes de polling para estações escravas, de acordo com sua posição na(s) matriz(es) de polling.Os pacotes de polling são formados com base nos conteúdos da matriz de polling normal e na matriz de polling prioritária.
Esse método de comunicação é mais frequentemente usado para configurações ponto-a-multiponto.Esse método fornece estas capacidades:
• estações escravas podem enviar mensagens para a estação mestra (com polling reportado por exceção)
• estações escravas podem enviar mensagens entre si através da mestra
• a mestra mantém uma matriz de estação ativaA matriz de polling reside em um arquivo de dados designados pelo usuário. Você pode configurar a mestra:
• para enviar mensagens durante sua vez na matriz de pollingou
• para realizar pollings entre as estações (a mestra transmite qualquer mensagem que ela precisa enviar antes de fazer um polling para a próxima estação escrava).
Em qualquer caso, configure a mestra para receber mensagens múltiplas ou uma única mensagem por varredura, a partir de cada estação escrava.
modo de comunicação baseado em mensagem
inicia a comunicação para as estações escravas usando apenas instruções de mensagem programadas pelo usuário (MSG).Cada pedido de dados, a partir de uma estação escrava, deve ser programado através de uma instrução MSG.A mestra faz um polling para a estação escrava para responder uma mensagem, depois de esperar por um período de tempo configurado pelo usuário. O período de espera dá tempo para a estação escrava formular uma resposta e preparar a resposta para a transmissão. Depois que todas as mensagens na fila de espera para saída de mensagens da mestra foram transmitidas, a fila escrava-para-escrava é verificada quanto às mensagens a serem enviadas.
Se a sua aplicação usa transmissão por satélite ou transmissão por rede pública ligada a um telefone, considere a opção de comunicação com base em mensagens. A comunicação para uma estação escrava pode ser iniciada assim que necessário.Escolha, também, este método se você precisar se comunicar com unidades terminais remotas não inteligentes. (RUTs).
Publicação 1794-UM001B-PT-P - Novembro 2000
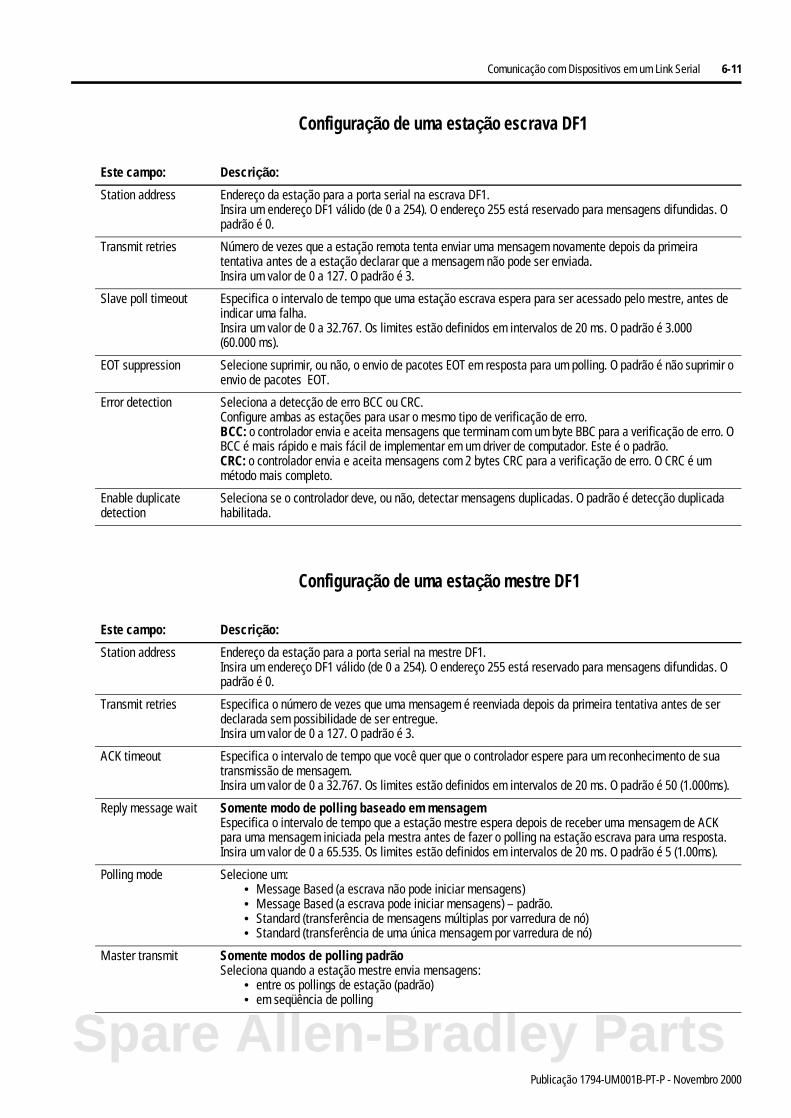
Comunicação com Dispositivos em um Link Serial 6-11
Configuração de uma estação escrava DF1
Configuração de uma estação mestre DF1
Este campo: Descrição:
Station address Endereço da estação para a porta serial na escrava DF1.Insira um endereço DF1 válido (de 0 a 254). O endereço 255 está reservado para mensagens difundidas. O padrão é 0.
Transmit retries Número de vezes que a estação remota tenta enviar uma mensagem novamente depois da primeira tentativa antes de a estação declarar que a mensagem não pode ser enviada.Insira um valor de 0 a 127. O padrão é 3.
Slave poll timeout Especifica o intervalo de tempo que uma estação escrava espera para ser acessado pelo mestre, antes de indicar uma falha.Insira um valor de 0 a 32.767. Os limites estão definidos em intervalos de 20 ms. O padrão é 3.000 (60.000 ms).
EOT suppression Selecione suprimir, ou não, o envio de pacotes EOT em resposta para um polling. O padrão é não suprimir o envio de pacotes EOT.
Error detection Seleciona a detecção de erro BCC ou CRC.Configure ambas as estações para usar o mesmo tipo de verificação de erro.BCC: o controlador envia e aceita mensagens que terminam com um byte BBC para a verificação de erro. O BCC é mais rápido e mais fácil de implementar em um driver de computador. Este é o padrão.CRC: o controlador envia e aceita mensagens com 2 bytes CRC para a verificação de erro. O CRC é um método mais completo.
Enable duplicate detection
Seleciona se o controlador deve, ou não, detectar mensagens duplicadas. O padrão é detecção duplicada habilitada.
Este campo: Descrição:
Station address Endereço da estação para a porta serial na mestre DF1.Insira um endereço DF1 válido (de 0 a 254). O endereço 255 está reservado para mensagens difundidas. O padrão é 0.
Transmit retries Especifica o número de vezes que uma mensagem é reenviada depois da primeira tentativa antes de ser declarada sem possibilidade de ser entregue.Insira um valor de 0 a 127. O padrão é 3.
ACK timeout Especifica o intervalo de tempo que você quer que o controlador espere para um reconhecimento de sua transmissão de mensagem.Insira um valor de 0 a 32.767. Os limites estão definidos em intervalos de 20 ms. O padrão é 50 (1.000ms).
Reply message wait Somente modo de polling baseado em mensagemEspecifica o intervalo de tempo que a estação mestre espera depois de receber uma mensagem de ACK para uma mensagem iniciada pela mestra antes de fazer o polling na estação escrava para uma resposta.Insira um valor de 0 a 65.535. Os limites estão definidos em intervalos de 20 ms. O padrão é 5 (1.00ms).
Polling mode Selecione um:• Message Based (a escrava não pode iniciar mensagens)• Message Based (a escrava pode iniciar mensagens) – padrão.• Standard (transferência de mensagens múltiplas por varredura de nó)• Standard (transferência de uma única mensagem por varredura de nó)
Master transmit Somente modos de polling padrãoSeleciona quando a estação mestre envia mensagens:
• entre os pollings de estação (padrão)• em seqüência de polling
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000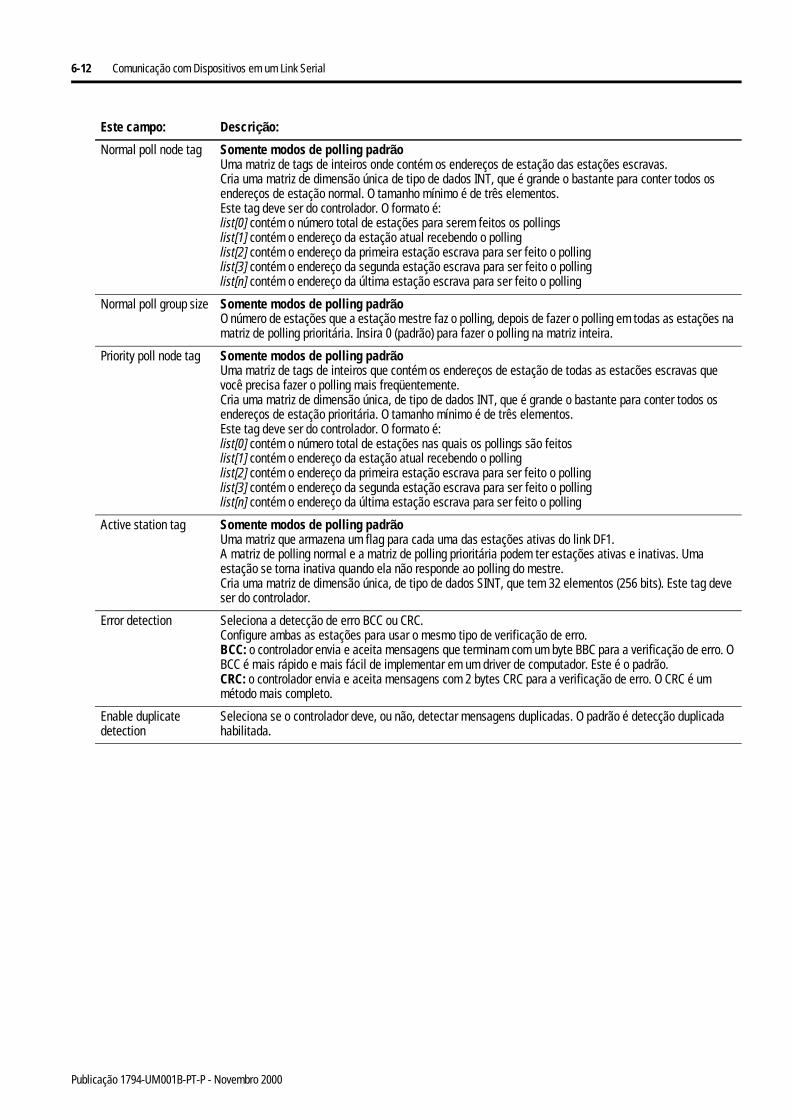
6-12 Comunicação com Dispositivos em um Link Serial
Normal poll node tag Somente modos de polling padrãoUma matriz de tags de inteiros onde contém os endereços de estação das estações escravas.Cria uma matriz de dimensão única de tipo de dados INT, que é grande o bastante para conter todos os endereços de estação normal. O tamanho mínimo é de três elementos.Este tag deve ser do controlador. O formato é:list[0] contém o número total de estações para serem feitos os pollingslist[1] contém o endereço da estação atual recebendo o pollinglist[2] contém o endereço da primeira estação escrava para ser feito o pollinglist[3] contém o endereço da segunda estação escrava para ser feito o pollinglist[n] contém o endereço da última estação escrava para ser feito o polling
Normal poll group size Somente modos de polling padrãoO número de estações que a estação mestre faz o polling, depois de fazer o polling em todas as estações na matriz de polling prioritária. Insira 0 (padrão) para fazer o polling na matriz inteira.
Priority poll node tag Somente modos de polling padrãoUma matriz de tags de inteiros que contém os endereços de estação de todas as estacões escravas que você precisa fazer o polling mais freqüentemente.Cria uma matriz de dimensão única, de tipo de dados INT, que é grande o bastante para conter todos os endereços de estação prioritária. O tamanho mínimo é de três elementos.Este tag deve ser do controlador. O formato é:list[0] contém o número total de estações nas quais os pollings são feitoslist[1] contém o endereço da estação atual recebendo o pollinglist[2] contém o endereço da primeira estação escrava para ser feito o pollinglist[3] contém o endereço da segunda estação escrava para ser feito o pollinglist[n] contém o endereço da última estação escrava para ser feito o polling
Active station tag Somente modos de polling padrãoUma matriz que armazena um flag para cada uma das estações ativas do link DF1.A matriz de polling normal e a matriz de polling prioritária podem ter estações ativas e inativas. Uma estação se torna inativa quando ela não responde ao polling do mestre.Cria uma matriz de dimensão única, de tipo de dados SINT, que tem 32 elementos (256 bits). Este tag deve ser do controlador.
Error detection Seleciona a detecção de erro BCC ou CRC.Configure ambas as estações para usar o mesmo tipo de verificação de erro.BCC: o controlador envia e aceita mensagens que terminam com um byte BBC para a verificação de erro. O BCC é mais rápido e mais fácil de implementar em um driver de computador. Este é o padrão.CRC: o controlador envia e aceita mensagens com 2 bytes CRC para a verificação de erro. O CRC é um método mais completo.
Enable duplicate detection
Seleciona se o controlador deve, ou não, detectar mensagens duplicadas. O padrão é detecção duplicada habilitada.
Este campo: Descrição:
Publicação 1794-UM001B-PT-P - Novembro 2000
Comunicação com Dispositivos em um Link Serial 6-13
Se você escolher um dos modos de polling padrão
A estação mestre faz o polling nas estações escravas nesta ordem:
1. todas as estações que estão ativas na matriz de polling prioritária
2. uma estação que está inativa na matriz de polling prioritária
3. o número especificado (tamanho normal do grupo de polling) de estações ativas na matriz de polling normal
4. uma estação inativa, depois que todas as estações ativas na matriz de polling normal passaram por um polling
Use o software de programação para mudar o estilo do display da matriz da estação ativa para binário, de modo que você possa vizualizar quais estações estão ativas.
Exemplo 3: Controlador FlexLogix para uma Leitora de Código de Barra
No exemplo seguinte, uma estação de trabalho conecta a uma leitora de código de barra. Uma leitora de código de barra é um dispositivo ASCII, então você configura a porta serial diferentemente dos exemplos anteriores. Configure a porta serial para modo do usuário, ao invés do modo DF1.
isolador (recomendado)
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000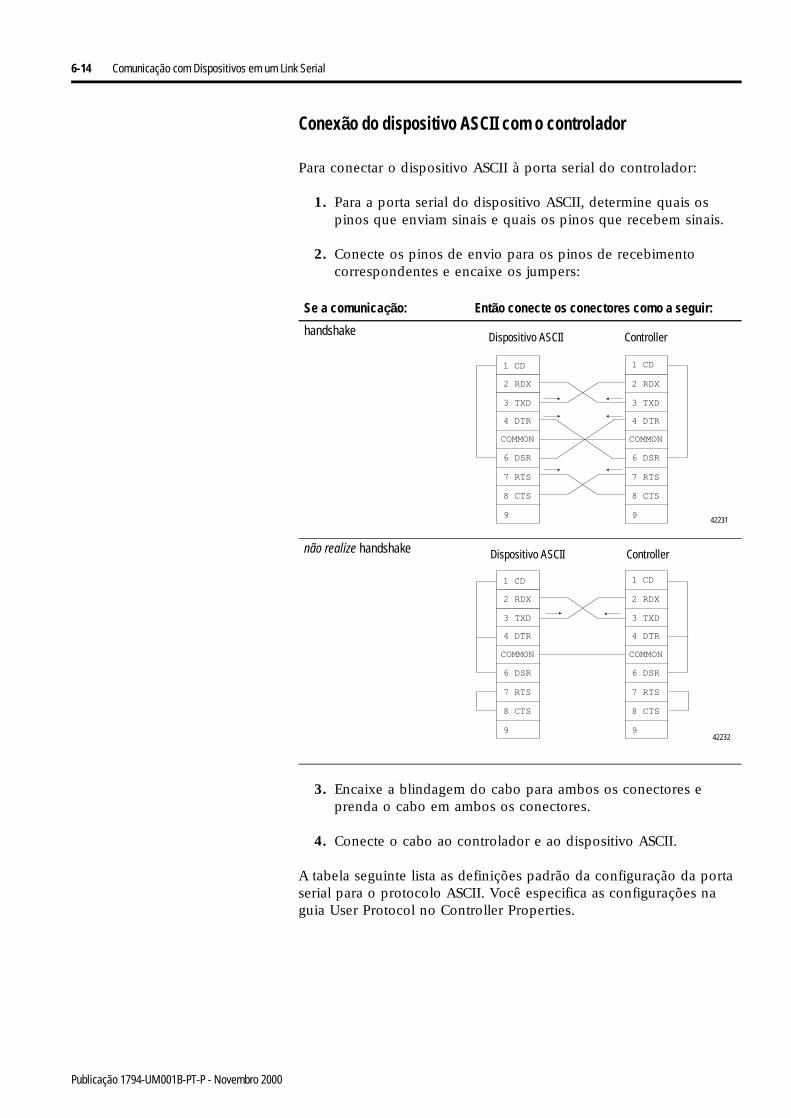
6-14 Comunicação com Dispositivos em um Link Serial
Conexão do dispositivo ASCII com o controlador
Para conectar o dispositivo ASCII à porta serial do controlador:
1. Para a porta serial do dispositivo ASCII, determine quais os pinos que enviam sinais e quais os pinos que recebem sinais.
2. Conecte os pinos de envio para os pinos de recebimento correspondentes e encaixe os jumpers:
3. Encaixe a blindagem do cabo para ambos os conectores e prenda o cabo em ambos os conectores.
4. Conecte o cabo ao controlador e ao dispositivo ASCII.
A tabela seguinte lista as definições padrão da configuração da porta serial para o protocolo ASCII. Você especifica as configurações na guia User Protocol no Controller Properties.
Se a comunicação: Então conecte os conectores como a seguir:
handshake
não realize handshake
2 RDX
3 TXD
4 DTR
COMMON
6 DSR
7 RTS
8 CTS
9
1 CD
2 RDX
3 TXD
4 DTR
COMMON
6 DSR
7 RTS
8 CTS
9
1 CD
Dispositivo ASCII Controller
42231
2 RDX
3 TXD
4 DTR
COMMON
6 DSR
7 RTS
8 CTS
9
1 CD
2 RDX
3 TXD
4 DTR
COMMON
6 DSR
7 RTS
8 CTS
9
1 CD
Dispositivo ASCII Controller
42232
Publicação 1794-UM001B-PT-P - Novembro 2000
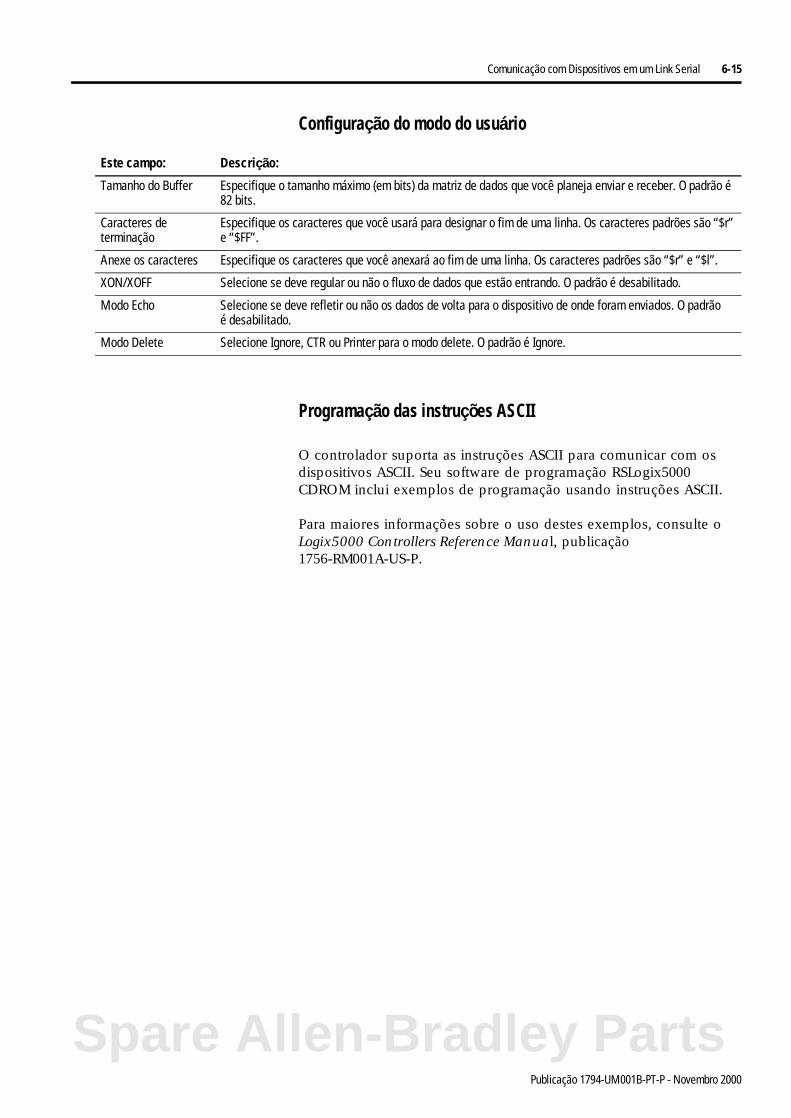
Comunicação com Dispositivos em um Link Serial 6-15
Configuração do modo do usuário
Programação das instruções ASCII
O controlador suporta as instruções ASCII para comunicar com os dispositivos ASCII. Seu software de programação RSLogix5000 CDROM inclui exemplos de programação usando instruções ASCII.
Para maiores informações sobre o uso destes exemplos, consulte o Logix5000 Controllers Reference Manual, publicação 1756-RM001A-US-P.
Este campo: Descrição:
Tamanho do Buffer Especifique o tamanho máximo (em bits) da matriz de dados que você planeja enviar e receber. O padrão é 82 bits.
Caracteres de terminação
Especifique os caracteres que você usará para designar o fim de uma linha. Os caracteres padrões são “$r” e “$FF”.
Anexe os caracteres Especifique os caracteres que você anexará ao fim de uma linha. Os caracteres padrões são “$r” e “$l”.
XON/XOFF Selecione se deve regular ou não o fluxo de dados que estão entrando. O padrão é desabilitado.
Modo Echo Selecione se deve refletir ou não os dados de volta para o dispositivo de onde foram enviados. O padrão é desabilitado.
Modo Delete Selecione Ignore, CTR ou Printer para o modo delete. O padrão é Ignore.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
6-16 Comunicação com Dispositivos em um Link Serial
Notas:
Publicação 1794-UM001B-PT-P - Novembro 2000
Capítulo 7
Comunicação com Dispositivos em um Link DH-485
Uso Deste Manual O protocolo DH-485 usa o half-duplex RS-485 como sua interface física. (RS-485 é definição de características elétricas; não é um protocolo.) Você pode configurar a porta RS-232 do controlador FlexLogix para agir como uma interface DH-485.
Configuração de Seu Sistema para um Link DH-485
Para que o controlador FlexLogix opere em uma rede DH-485, você precisa:
• De um conversor 1761-NET-AIC+ para cada controlador FlexLogix que quiser colocar na rede DH-485.
Você pode ter dois controladores por conversor 1761-NET-AIC+, mas você precisaria de um cabo para cada controlador. Conecte um controlador à porta 1 (conector de 9 pinos) e um controlador à porta 2 (conector mini-DIN).
• O software de programação RSLogix5000 para configurar a porta serial do controlador para comunicação DH-485
Para informações sobre: Consulte a página
Configuração do seu sistema para um link DH-485 7-1
Planejamento de uma rede DH-485 7-4
Instalação de uma rede DH-485 7-6
Exemplo 1: Controlador FlexLogix, controlador ControlLogix e controlador SLC na mesma rede DH-485
7-8
IMPORTANTE Uma rede DH-485 consiste em múltiplos segmentos de cabo. Limite o comprimento total de todos os segmentos para 1.219 m (4.000 pés.).
Spare Allen-Bradley Parts
1 Publicação 1794-UM001B-PT-P - Novembro 2000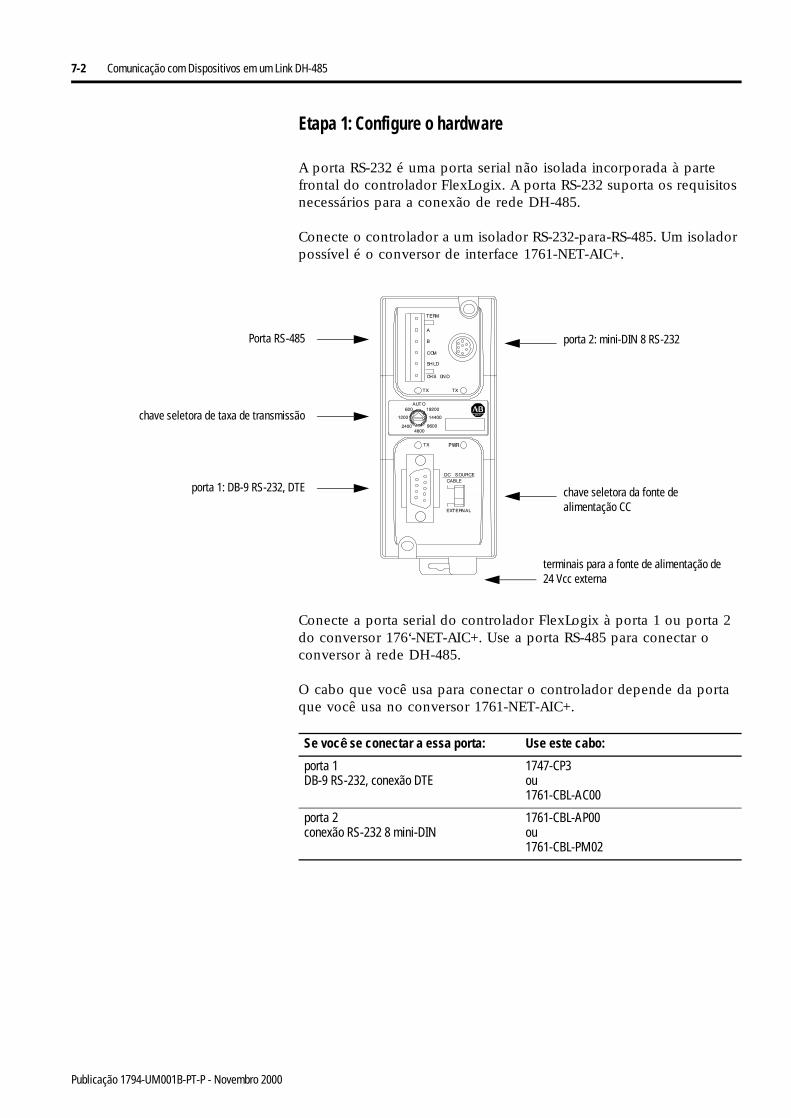
7-2 Comunicação com Dispositivos em um Link DH-485
Etapa 1: Configure o hardware
A porta RS-232 é uma porta serial não isolada incorporada à parte frontal do controlador FlexLogix. A porta RS-232 suporta os requisitos necessários para a conexão de rede DH-485.
Conecte o controlador a um isolador RS-232-para-RS-485. Um isolador possível é o conversor de interface 1761-NET-AIC+.
Conecte a porta serial do controlador FlexLogix à porta 1 ou porta 2 do conversor 176‘-NET-AIC+. Use a porta RS-485 para conectar o conversor à rede DH-485.
O cabo que você usa para conectar o controlador depende da porta que você usa no conversor 1761-NET-AIC+.
porta 1: DB-9 RS-232, DTE
chave seletora de taxa de transmissão
porta 2: mini-DIN 8 RS-232
chave seletora da fonte de alimentação CC
terminais para a fonte de alimentação de 24 Vcc externa
Porta RS-485
Se você se conectar a essa porta: Use este cabo:
porta 1DB-9 RS-232, conexão DTE
1747-CP3ou1761-CBL-AC00
porta 2conexão RS-232 8 mini-DIN
1761-CBL-AP00ou1761-CBL-PM02
Publicação 1794-UM001B-PT-P - Novembro 2000
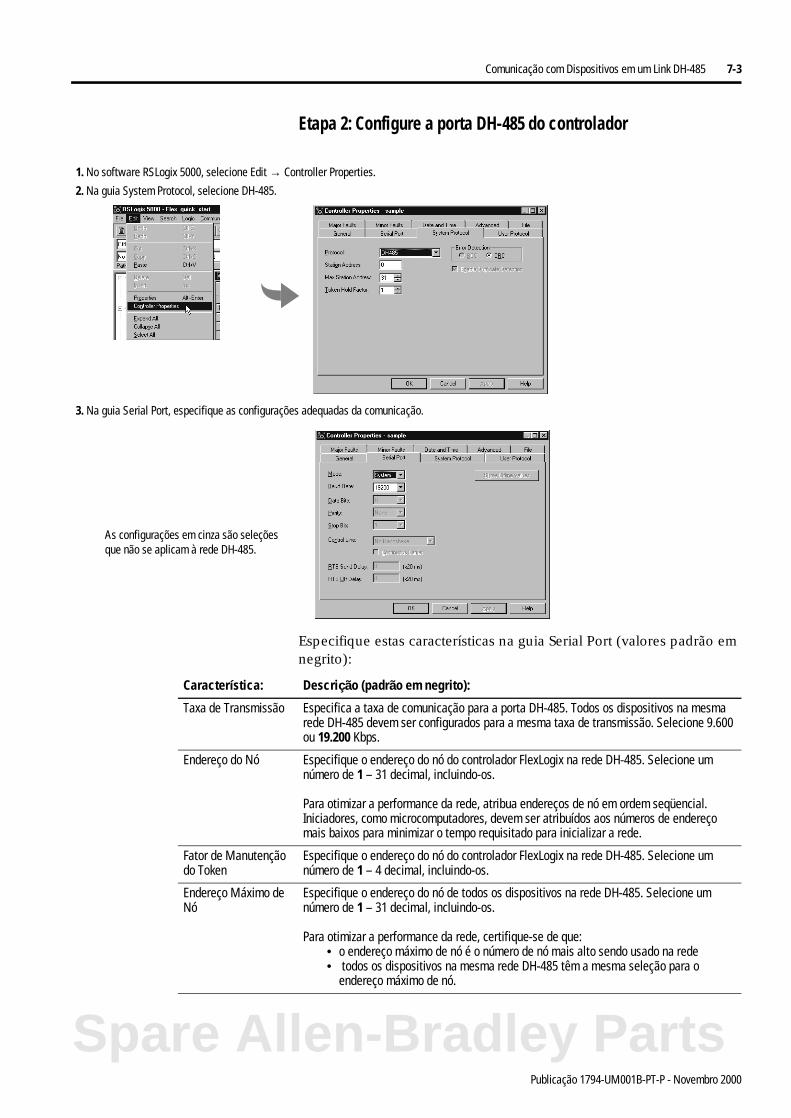
Comunicação com Dispositivos em um Link DH-485 7-3
Etapa 2: Configure a porta DH-485 do controlador
Especifique estas características na guia Serial Port (valores padrão em negrito):
1. No software RSLogix 5000, selecione Edit → Controller Properties.
2. Na guia System Protocol, selecione DH-485.
3. Na guia Serial Port, especifique as configurações adequadas da comunicação.
As configurações em cinza são seleções que não se aplicam à rede DH-485.
Característica: Descrição (padrão em negrito):
Taxa de Transmissão Especifica a taxa de comunicação para a porta DH-485. Todos os dispositivos na mesma rede DH-485 devem ser configurados para a mesma taxa de transmissão. Selecione 9.600 ou 19.200 Kbps.
Endereço do Nó Especifique o endereço do nó do controlador FlexLogix na rede DH-485. Selecione um número de 1 – 31 decimal, incluindo-os.
Para otimizar a performance da rede, atribua endereços de nó em ordem seqüencial. Iniciadores, como microcomputadores, devem ser atribuídos aos números de endereço mais baixos para minimizar o tempo requisitado para inicializar a rede.
Fator de Manutenção do Token
Especifique o endereço do nó do controlador FlexLogix na rede DH-485. Selecione um número de 1 – 4 decimal, incluindo-os.
Endereço Máximo de Nó
Especifique o endereço do nó de todos os dispositivos na rede DH-485. Selecione um número de 1 – 31 decimal, incluindo-os.
Para otimizar a performance da rede, certifique-se de que:• o endereço máximo de nó é o número de nó mais alto sendo usado na rede• todos os dispositivos na mesma rede DH-485 têm a mesma seleção para o
endereço máximo de nó.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
7-4 Comunicação com Dispositivos em um Link DH-485
Planejamento de uma Rede DH-485
A rede DH-485 oferece:
• interconexão de 32 dispositivos
• capacidade multi-master
• controle de acesso de “token pass”
• a habilidade de adicionar ou remover nós sem perturbar a rede
• comprimento máximo da rede de 1.219 m (4.000 pés)
O protocolo DH-485 suporta duas classes de dispositivos: iniciadores e respondedores. Todos os iniciadores na rede têm a chance de iniciar transferências de mensagens. O protocolo DH-485 usa um algoritimo de passagem de token para determinar qual iniciador tem o direito de transmitir.
Rotação de token DH-485
Um nó segurando o token pode enviar qualquer pacote válido para a rede. Cada nó faz apenas uma transmissão (mais duas tentativas) a cada vez que recebe o token. Depois que um nó envia um pacote de mensagens, ele tenta fornecer ao token seu sucessor, enviando um pacote de “passagem de token” para seu sucessor.
Se nenhuma atividade na rede ocorrer, o iniciador envia o pacote de passagem de token novamente. Após duas tentativas (um total de três) o iniciador tenta encontrar um novo sucessor.
A faixa permissível do endereço de nó de um iniciador é de 0 a 31. A faixa de endereço permissível para todos os respondedores é de 1 a 31. Deve haver pelo menos um iniciador na rede.
IMPORTANTE O endereço máximo que o inicador procura antes de começar novamente do zero é o valor no parâmetro configurável “maximum node address”. O valor padrão para esse parâmetro é 31 para todos os iniciadores e respondedores.
Publicação 1794-UM001B-PT-P - Novembro 2000
Comunicação com Dispositivos em um Link DH-485 7-5
Inicialização da rede
A rede requisita pelo menos um iniciador para inicializá-la. A inicialização da rede começa quando um iniciador na rede detecta um período de inatividade que excede o tempo de um período de espera de um link. Quando o tempo de espera de um link é excedido, geralmente o iniciador com o menor endereço pede pelo token. Quando um iniciador tiver o token, ele começará a construir a rede.
Construir uma rede começa quando o iniciador que pediu pelo token passa o token para o nó sucessor. Se a tentativa de passar o token falhar ou se o iniciador não tiver um sucessor estabelecido (por exemplo, na energização) ele começa uma busca linear por um sucessor, começando com o nó acima dele no endereçamento.
Quando o iniciador encontra outro iniciador ativo, ele passa o token para aquele nó, que repete o processo até que o token seja passado por todo o caminho da rede até o primeiro nó. Neste ponto, a rede está em um estado de operação normal.
Número de nós e endereços de nó
O número de nós na rede afeta diretamente o tempo de transferência de dados entre os nós. Nós desnecessários (como um segundo terminal de programação que não está sendo usado) retardam a taxa de transferência de dados. O número máximo de nós na rede é 32.
Se os endereços de nós para os controladores forem atribuídos em seqüência, começando do nó 1 (com o nó 0 deixado para um terminal de programação), ele é eficiente em deixar o endereço de nó máximo em 31, assim como é para diminui-lo para o endereço de nó mais alto na rede. Então, adicionar dispositivos à rede posteriormente não requisitará a modificação do endereço máximo de nó em cada dispositivo na rede. O endereço máximo de nó deve ser o mesmo para todos os dispositivos na rede DH-485 para a operação otimizada.
A melhor performance da rede ocorre quando os endereços de nó começam em 0 e são atribuídos em ordem seqüencial. O controlador é padronizado para o endereço de nó 1 (os controladores não podem ter nó 0). Iniciadores, como microcomputadores, devem ser atribuídos aos endereços numerados mais baixos para minimizar o tempo requisitado para inicializar a rede.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000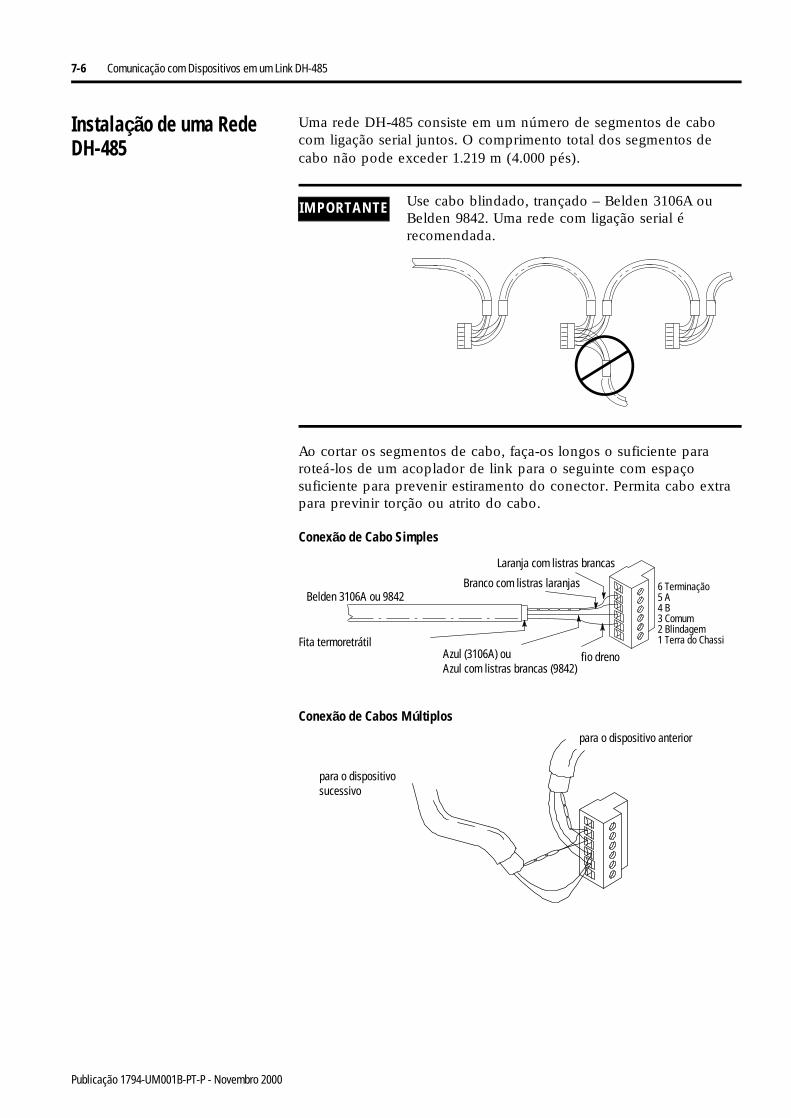
7-6 Comunicação com Dispositivos em um Link DH-485
Instalação de uma Rede DH-485
Uma rede DH-485 consiste em um número de segmentos de cabo com ligação serial juntos. O comprimento total dos segmentos de cabo não pode exceder 1.219 m (4.000 pés).
Ao cortar os segmentos de cabo, faça-os longos o suficiente para roteá-los de um acoplador de link para o seguinte com espaço suficiente para prevenir estiramento do conector. Permita cabo extra para previnir torção ou atrito do cabo.
Conexão de Cabo Simples
Conexão de Cabos Múltiplos
IMPORTANTE Use cabo blindado, trançado – Belden 3106A ou Belden 9842. Uma rede com ligação serial é recomendada.
Laranja com listras brancas
Branco com listras laranjas
fio drenoAzul (3106A) ou Azul com listras brancas (9842)
Fita termoretrátil
6 Terminação5 A4 B3 Comum2 Blindagem1 Terra do Chassi
Belden 3106A ou 9842
para o dispositivo sucessivo
para o dispositivo anterior
Publicação 1794-UM001B-PT-P - Novembro 2000
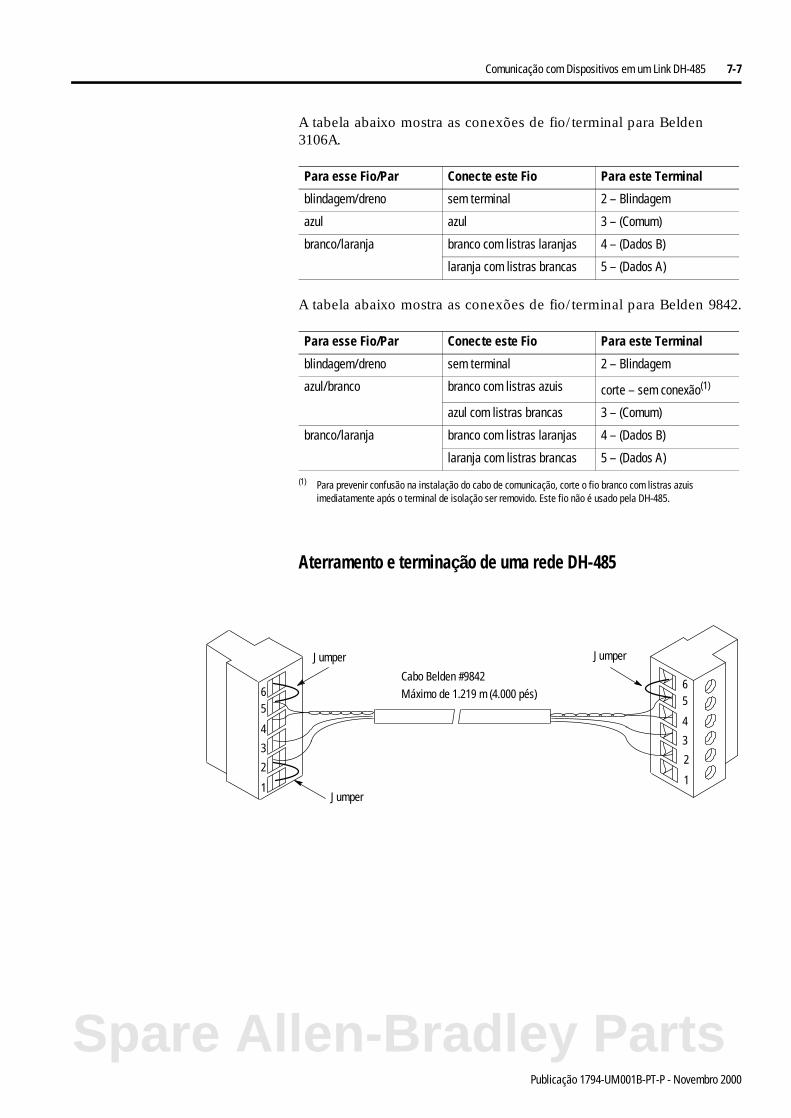
Comunicação com Dispositivos em um Link DH-485 7-7
A tabela abaixo mostra as conexões de fio/terminal para Belden 3106A.
A tabela abaixo mostra as conexões de fio/terminal para Belden 9842.
Aterramento e terminação de uma rede DH-485
Para esse Fio/Par Conecte este Fio Para este Terminal
blindagem/dreno sem terminal 2 – Blindagem
azul azul 3 – (Comum)
branco/laranja branco com listras laranjas 4 – (Dados B)
laranja com listras brancas 5 – (Dados A)
Para esse Fio/Par Conecte este Fio Para este Terminal
blindagem/dreno sem terminal 2 – Blindagem
azul/branco branco com listras azuis corte – sem conexão(1)
(1) Para prevenir confusão na instalação do cabo de comunicação, corte o fio branco com listras azuis imediatamente após o terminal de isolação ser removido. Este fio não é usado pela DH-485.
azul com listras brancas 3 – (Comum)
branco/laranja branco com listras laranjas 4 – (Dados B)
laranja com listras brancas 5 – (Dados A)
1
2
3
4
56
1
2
3
4
56
Cabo Belden #9842 Máximo de 1.219 m (4.000 pés)
JumperJumper
Jumper
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000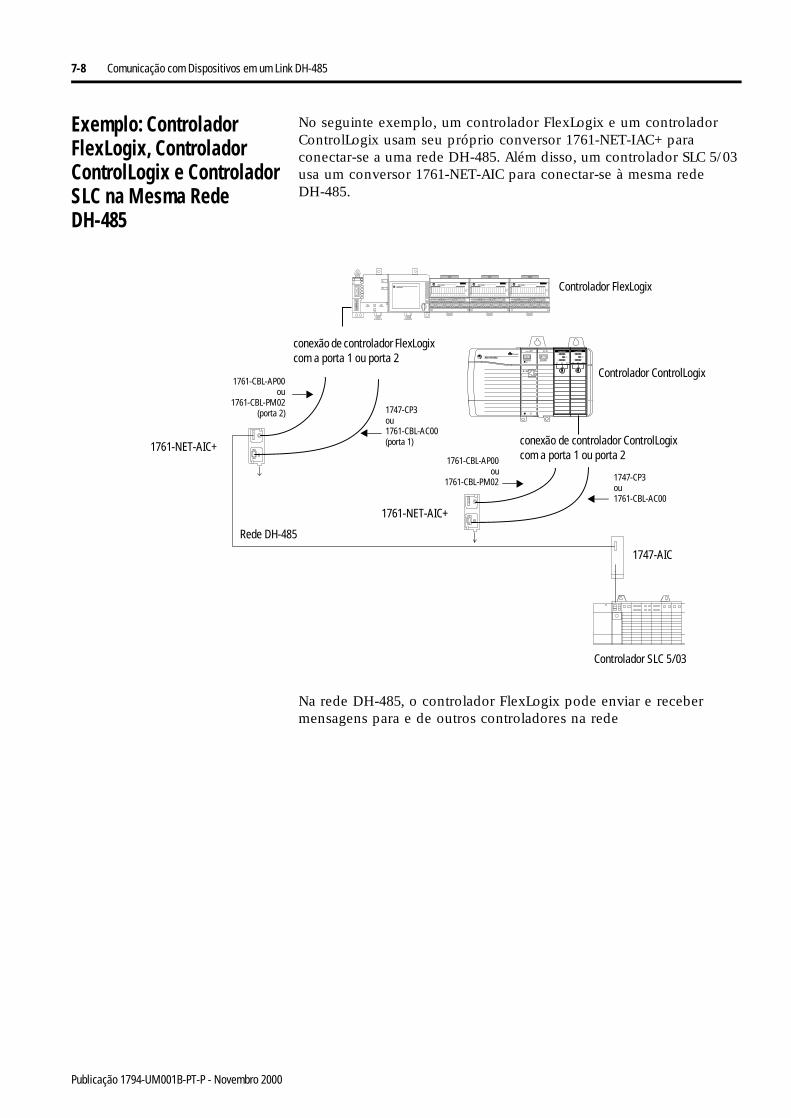
7-8 Comunicação com Dispositivos em um Link DH-485
Exemplo: Controlador FlexLogix, Controlador ControlLogix e Controlador SLC na Mesma Rede DH-485
No seguinte exemplo, um controlador FlexLogix e um controlador ControlLogix usam seu próprio conversor 1761-NET-IAC+ para conectar-se a uma rede DH-485. Além disso, um controlador SLC 5/03 usa um conversor 1761-NET-AIC para conectar-se à mesma rede DH-485.
Na rede DH-485, o controlador FlexLogix pode enviar e receber mensagens para e de outros controladores na rede
conexão de controlador FlexLogix com a porta 1 ou porta 2
conexão de controlador ControlLogix com a porta 1 ou porta 2
Controlador FlexLogix
Controlador ControlLogix
Controlador SLC 5/03
1761-NET-AIC+
1761-NET-AIC+
1747-AIC
Rede DH-485
1761-CBL-AP00ou
1761-CBL-PM02(porta 2) 1747-CP3
ou1761-CBL-AC00(porta 1)
1761-CBL-AP00ou
1761-CBL-PM02 1747-CP3ou1761-CBL-AC00
Publicação 1794-UM001B-PT-P - Novembro 2000
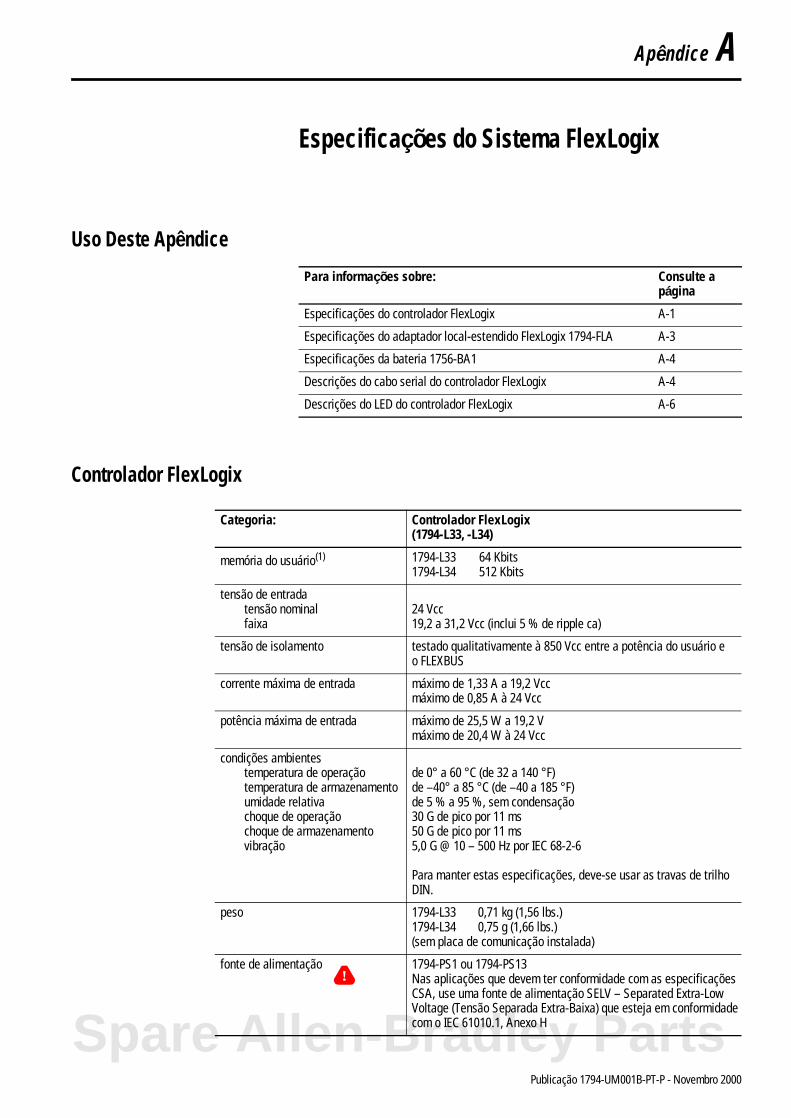
Apêndice A
Especificações do Sistema FlexLogix
Uso Deste Apêndice
Controlador FlexLogix
Para informações sobre: Consulte a página
Especificações do controlador FlexLogix A-1
Especificações do adaptador local-estendido FlexLogix 1794-FLA A-3
Especificações da bateria 1756-BA1 A-4
Descrições do cabo serial do controlador FlexLogix A-4
Descrições do LED do controlador FlexLogix A-6
Categoria: Controlador FlexLogix(1794-L33, -L34)
memória do usuário(1) 1794-L33 64 Kbits1794-L34 512 Kbits
tensão de entradatensão nominalfaixa
24 Vcc19,2 a 31,2 Vcc (inclui 5 % de ripple ca)
tensão de isolamento testado qualitativamente à 850 Vcc entre a potência do usuário e o FLEXBUS
corrente máxima de entrada máximo de 1,33 A a 19,2 Vccmáximo de 0,85 A à 24 Vcc
potência máxima de entrada máximo de 25,5 W a 19,2 Vmáximo de 20,4 W à 24 Vcc
condições ambientestemperatura de operaçãotemperatura de armazenamentoumidade relativachoque de operaçãochoque de armazenamentovibração
de 0° a 60 °C (de 32 a 140 °F)de –40° a 85 °C (de –40 a 185 °F)de 5 % a 95 %, sem condensação30 G de pico por 11 ms50 G de pico por 11 ms5,0 G @ 10 – 500 Hz por IEC 68-2-6
Para manter estas especificações, deve-se usar as travas de trilho DIN.
peso 1794-L33 0,71 kg (1,56 lbs.)1794-L34 0,75 g (1,66 lbs.)(sem placa de comunicação instalada)
fonte de alimentação 1794-PS1 ou 1794-PS13 Nas aplicações que devem ter conformidade com as especificações CSA, use uma fonte de alimentação SELV – Separated Extra-Low Voltage (Tensão Separada Extra-Baixa) que esteja em conformidade com o IEC 61010.1, Anexo H
!
Spare Allen-Bradley Parts
1 Publicação 1794-UM001B-PT-P - Novembro 2000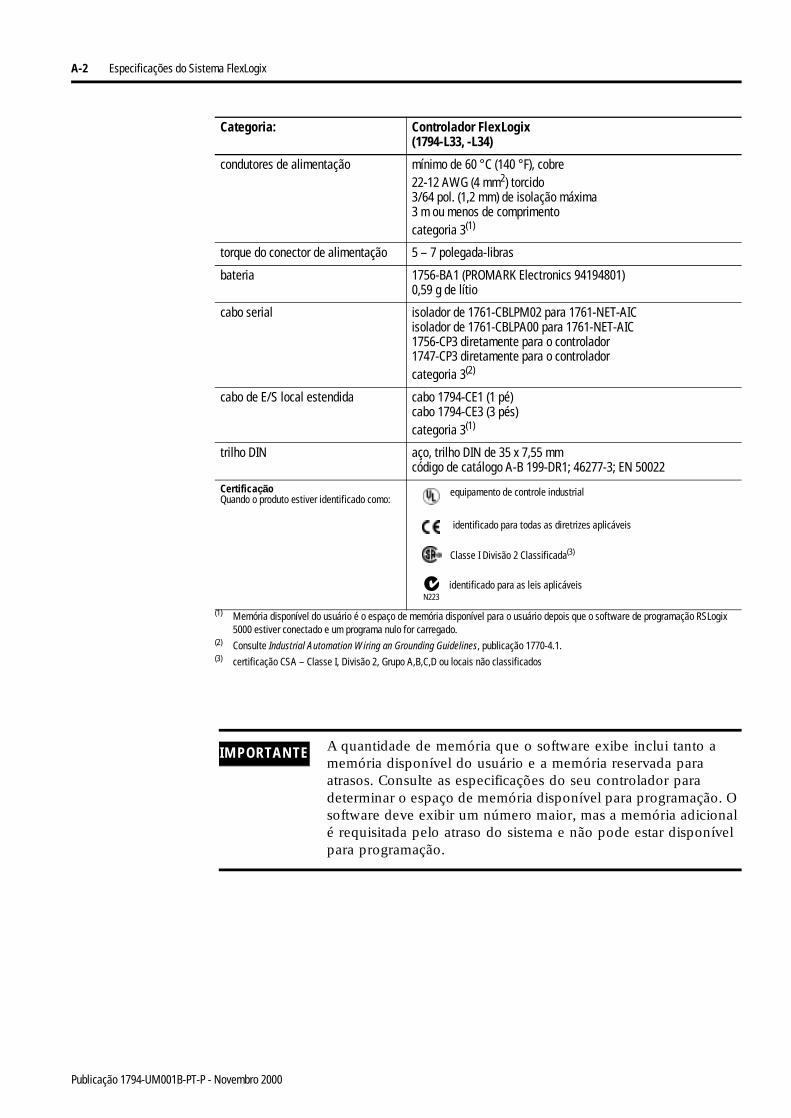
A-2 Especificações do Sistema FlexLogix
condutores de alimentação mínimo de 60 °C (140 °F), cobre22-12 AWG (4 mm2) torcido3/64 pol. (1,2 mm) de isolação máxima3 m ou menos de comprimentocategoria 3(1)
torque do conector de alimentação 5 – 7 polegada-libras
bateria 1756-BA1 (PROMARK Electronics 94194801)0,59 g de lítio
cabo serial isolador de 1761-CBLPM02 para 1761-NET-AICisolador de 1761-CBLPA00 para 1761-NET-AIC1756-CP3 diretamente para o controlador1747-CP3 diretamente para o controladorcategoria 3(2)
cabo de E/S local estendida cabo 1794-CE1 (1 pé)cabo 1794-CE3 (3 pés)categoria 3(1)
trilho DIN aço, trilho DIN de 35 x 7,55 mmcódigo de catálogo A-B 199-DR1; 46277-3; EN 50022
CertificaçãoQuando o produto estiver identificado como:
equipamento de controle industrial
identificado para todas as diretrizes aplicáveis
Classe I Divisão 2 Classificada(3)
identificado para as leis aplicáveis
(1) Memória disponível do usuário é o espaço de memória disponível para o usuário depois que o software de programação RSLogix 5000 estiver conectado e um programa nulo for carregado.
(2) Consulte Industrial Automation Wiring an Grounding Guidelines, publicação 1770-4.1.(3) certificação CSA – Classe I, Divisão 2, Grupo A,B,C,D ou locais não classificados
Categoria: Controlador FlexLogix(1794-L33, -L34)
N223
IMPORTANTE A quantidade de memória que o software exibe inclui tanto a memória disponível do usuário e a memória reservada para atrasos. Consulte as especificações do seu controlador para determinar o espaço de memória disponível para programação. O software deve exibir um número maior, mas a memória adicional é requisitada pelo atraso do sistema e não pode estar disponível para programação.
Publicação 1794-UM001B-PT-P - Novembro 2000
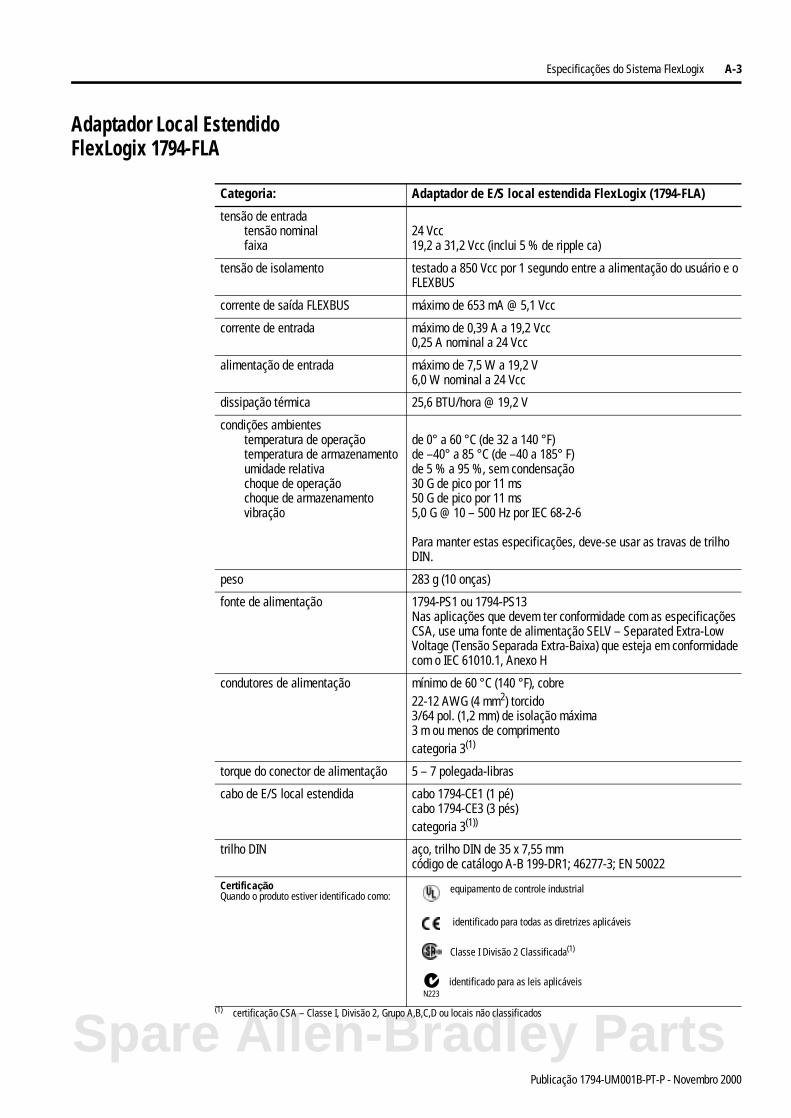
Especificações do Sistema FlexLogix A-3
Adaptador Local Estendido FlexLogix 1794-FLA
Categoria: Adaptador de E/S local estendida FlexLogix (1794-FLA)
tensão de entradatensão nominalfaixa
24 Vcc19,2 a 31,2 Vcc (inclui 5 % de ripple ca)
tensão de isolamento testado a 850 Vcc por 1 segundo entre a alimentação do usuário e o FLEXBUS
corrente de saída FLEXBUS máximo de 653 mA @ 5,1 Vcc
corrente de entrada máximo de 0,39 A a 19,2 Vcc0,25 A nominal a 24 Vcc
alimentação de entrada máximo de 7,5 W a 19,2 V6,0 W nominal a 24 Vcc
dissipação térmica 25,6 BTU/hora @ 19,2 V
condições ambientestemperatura de operaçãotemperatura de armazenamentoumidade relativachoque de operaçãochoque de armazenamentovibração
de 0° a 60 °C (de 32 a 140 °F)de –40° a 85 °C (de –40 a 185° F)de 5 % a 95 %, sem condensação30 G de pico por 11 ms50 G de pico por 11 ms5,0 G @ 10 – 500 Hz por IEC 68-2-6
Para manter estas especificações, deve-se usar as travas de trilho DIN.
peso 283 g (10 onças)
fonte de alimentação 1794-PS1 ou 1794-PS13 Nas aplicações que devem ter conformidade com as especificações CSA, use uma fonte de alimentação SELV – Separated Extra-Low Voltage (Tensão Separada Extra-Baixa) que esteja em conformidade com o IEC 61010.1, Anexo H
condutores de alimentação mínimo de 60 °C (140 °F), cobre22-12 AWG (4 mm2) torcido3/64 pol. (1,2 mm) de isolação máxima3 m ou menos de comprimentocategoria 3(1)
torque do conector de alimentação 5 – 7 polegada-libras
cabo de E/S local estendida cabo 1794-CE1 (1 pé)cabo 1794-CE3 (3 pés)categoria 3(1))
trilho DIN aço, trilho DIN de 35 x 7,55 mmcódigo de catálogo A-B 199-DR1; 46277-3; EN 50022
CertificaçãoQuando o produto estiver identificado como:
equipamento de controle industrial
identificado para todas as diretrizes aplicáveis
Classe I Divisão 2 Classificada(1)
identificado para as leis aplicáveis
(1) certificação CSA – Classe I, Divisão 2, Grupo A,B,C,D ou locais não classificados
N223
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000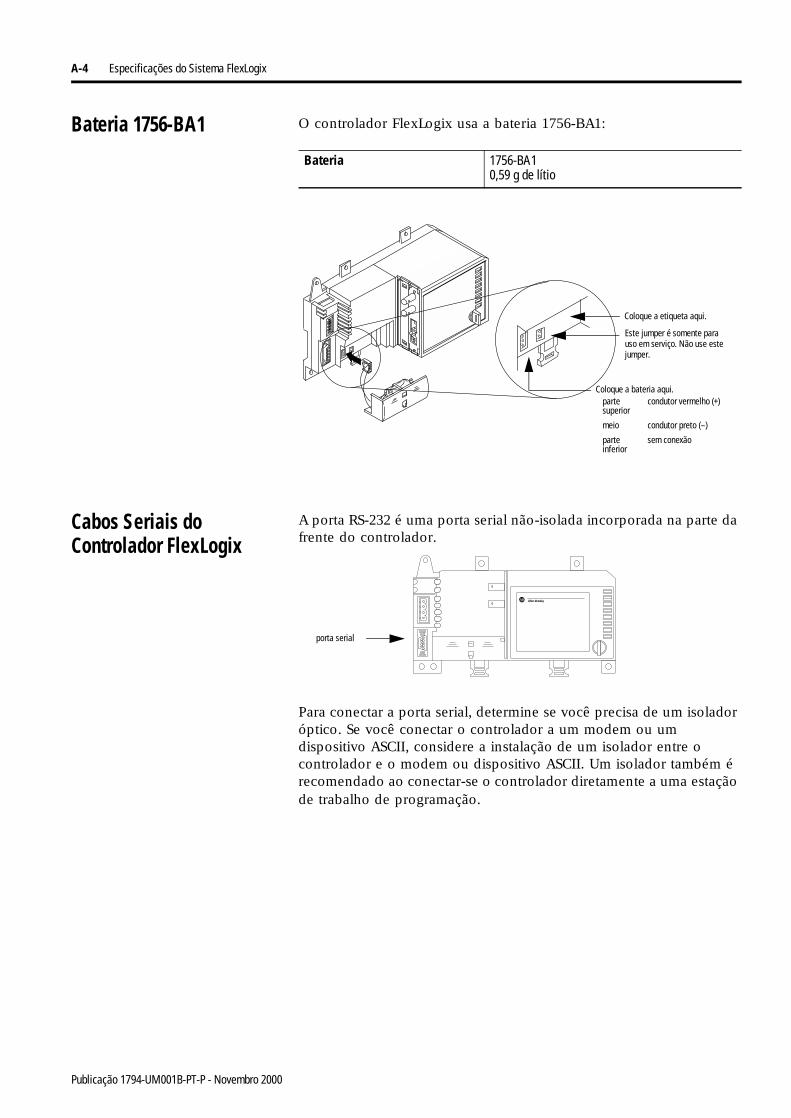
A-4 Especificações do Sistema FlexLogix
Bateria 1756-BA1 O controlador FlexLogix usa a bateria 1756-BA1:
Cabos Seriais do Controlador FlexLogix
A porta RS-232 é uma porta serial não-isolada incorporada na parte da frente do controlador.
Para conectar a porta serial, determine se você precisa de um isolador óptico. Se você conectar o controlador a um modem ou um dispositivo ASCII, considere a instalação de um isolador entre o controlador e o modem ou dispositivo ASCII. Um isolador também é recomendado ao conectar-se o controlador diretamente a uma estação de trabalho de programação.
Bateria 1756-BA10,59 g de lítio
Coloque a bateria aqui.parte superior
condutor vermelho (+)
meio condutor preto (–)
parte inferior
sem conexão
Coloque a etiqueta aqui.
Este jumper é somente para uso em serviço. Não use este jumper.
porta serial
Publicação 1794-UM001B-PT-P - Novembro 2000
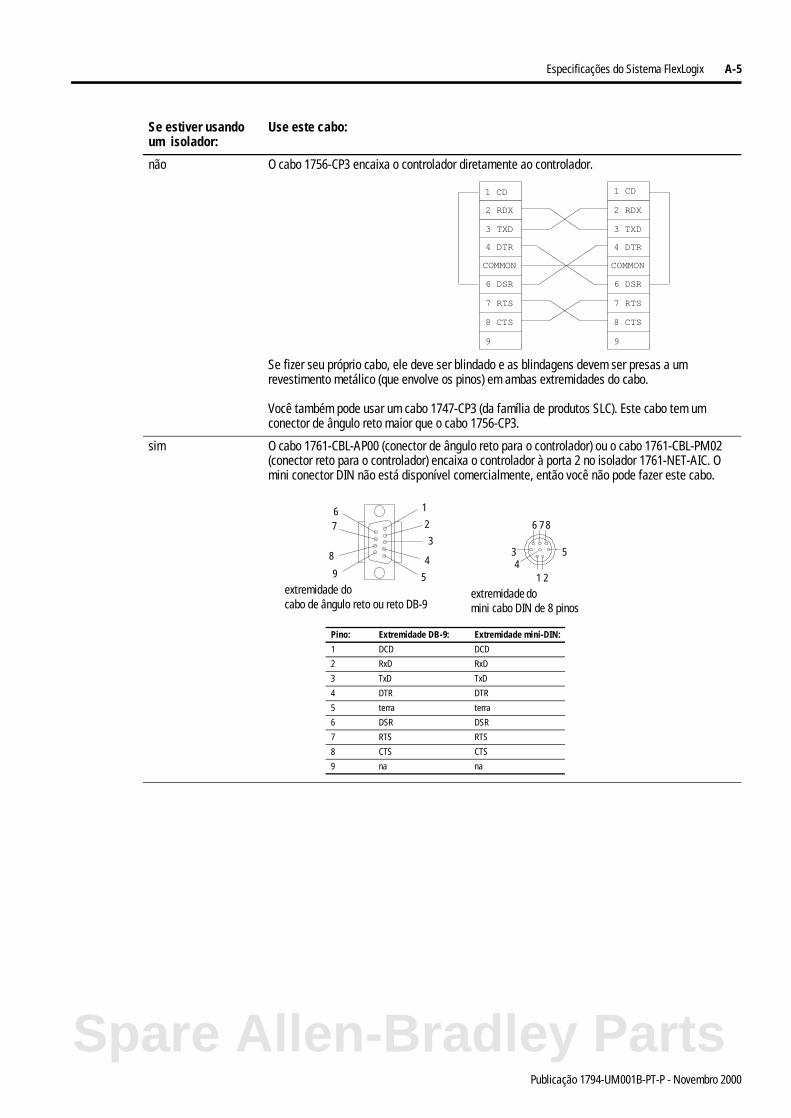
Especificações do Sistema FlexLogix A-5
Se estiver usando um isolador:
Use este cabo:
não O cabo 1756-CP3 encaixa o controlador diretamente ao controlador.
Se fizer seu próprio cabo, ele deve ser blindado e as blindagens devem ser presas a um revestimento metálico (que envolve os pinos) em ambas extremidades do cabo.
Você também pode usar um cabo 1747-CP3 (da família de produtos SLC). Este cabo tem um conector de ângulo reto maior que o cabo 1756-CP3.
sim O cabo 1761-CBL-AP00 (conector de ângulo reto para o controlador) ou o cabo 1761-CBL-PM02 (conector reto para o controlador) encaixa o controlador à porta 2 no isolador 1761-NET-AIC. O mini conector DIN não está disponível comercialmente, então você não pode fazer este cabo.
2 RDX
3 TXD
4 DTR
COMMON
6 DSR
7 RTS
8 CTS
9
1 CD
2 RDX
3 TXD
4 DTR
COMMON
6 DSR
7 RTS
8 CTS
9
1 CD
1 2
34
5
6 7 867
8
9
1
2
3
4
5extremidade do cabo de ângulo reto ou reto DB-9
extremidade do mini cabo DIN de 8 pinos
Pino: Extremidade DB-9: Extremidade mini-DIN:
1 DCD DCD
2 RxD RxD
3 TxD TxD
4 DTR DTR
5 terra terra
6 DSR DSR
7 RTS RTS
8 CTS CTS
9 na na
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000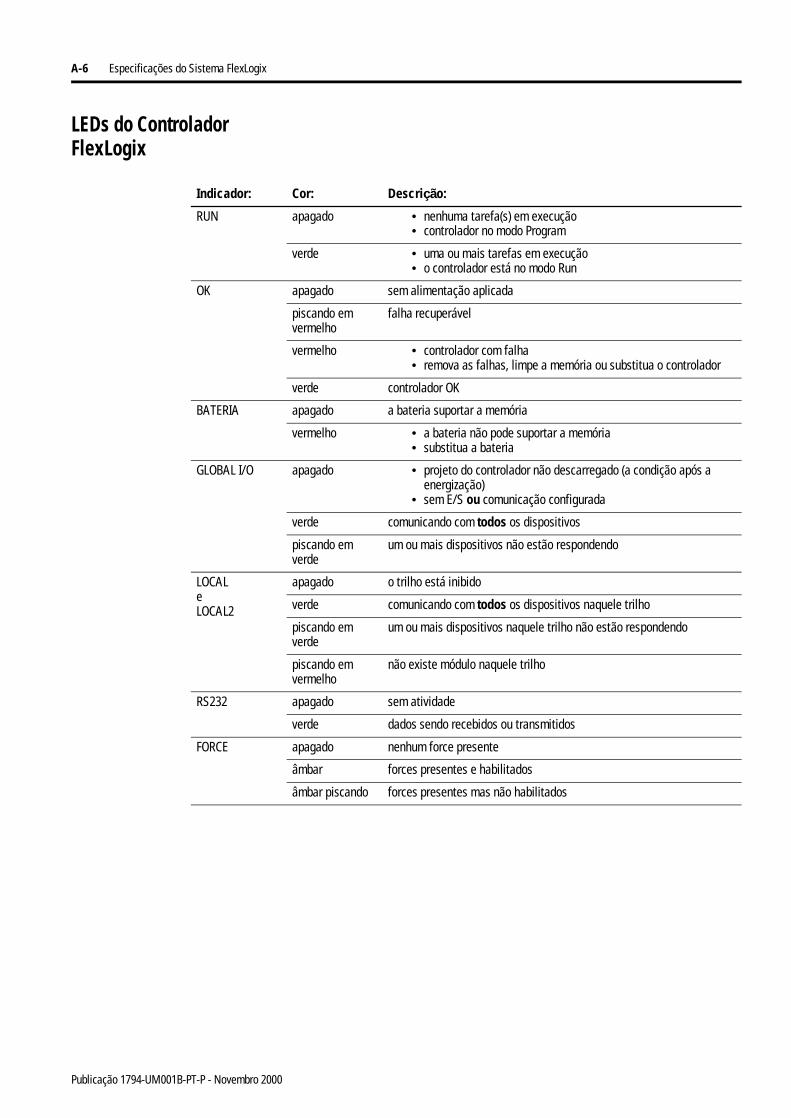
A-6 Especificações do Sistema FlexLogix
LEDs do Controlador FlexLogix
Indicador: Cor: Descrição:
RUN apagado • nenhuma tarefa(s) em execução• controlador no modo Program
verde • uma ou mais tarefas em execução• o controlador está no modo Run
OK apagado sem alimentação aplicada
piscando em vermelho
falha recuperável
vermelho • controlador com falha• remova as falhas, limpe a memória ou substitua o controlador
verde controlador OK
BATERIA apagado a bateria suportar a memória
vermelho • a bateria não pode suportar a memória• substitua a bateria
GLOBAL I/O apagado • projeto do controlador não descarregado (a condição após a energização)
• sem E/S ou comunicação configurada
verde comunicando com todos os dispositivos
piscando em verde
um ou mais dispositivos não estão respondendo
LOCALeLOCAL2
apagado o trilho está inibido
verde comunicando com todos os dispositivos naquele trilho
piscando em verde
um ou mais dispositivos naquele trilho não estão respondendo
piscando em vermelho
não existe módulo naquele trilho
RS232 apagado sem atividade
verde dados sendo recebidos ou transmitidos
FORCE apagado nenhum force presente
âmbar forces presentes e habilitados
âmbar piscando forces presentes mas não habilitados
Publicação 1794-UM001B-PT-P - Novembro 2000
Apêndice B
Manutenção da Bateria
Uso deste Apêndice
Armazenamento das Baterias Sobressalentes
Como uma bateria pode apresentar vazamento de substâncias químicas potencialmente perigosas se armazenada inapropriadamente, armazene-a da seguinte forma:
Duração da Bateria Quando a bateria está cerca de 95 % descarregada, o controlador fornece as seguintes advertências:
• Na parte da frente do controlador, o LED BATTERY liga (sólido vermelho).
• Uma falha de advertência ocorre (tipo 10, código 10).
Para informações sobre: Consulte a página
Armazenamento de baterias sobressalentes B-1
Estimativa de Vida da Bateria B-1
Substituição das baterias B-3
ATENÇÃO
!Armazene a bateria em um ambiente seco e fresco. Recomendamos 25 °C com 40 % a 60 % de umidade relativa. Você pode armazenar as baterias por até 30 dias entre –45° a 85 °C, como, por exemplo, durante o transporte. Para evitar possíveis vazamentos, não armazene as baterias em um ambiente com mais de 60 °C por mais de 30 dias.
Spare Allen-Bradley Parts
1 Publicação 1794-UM001B-PT-P - Novembro 2000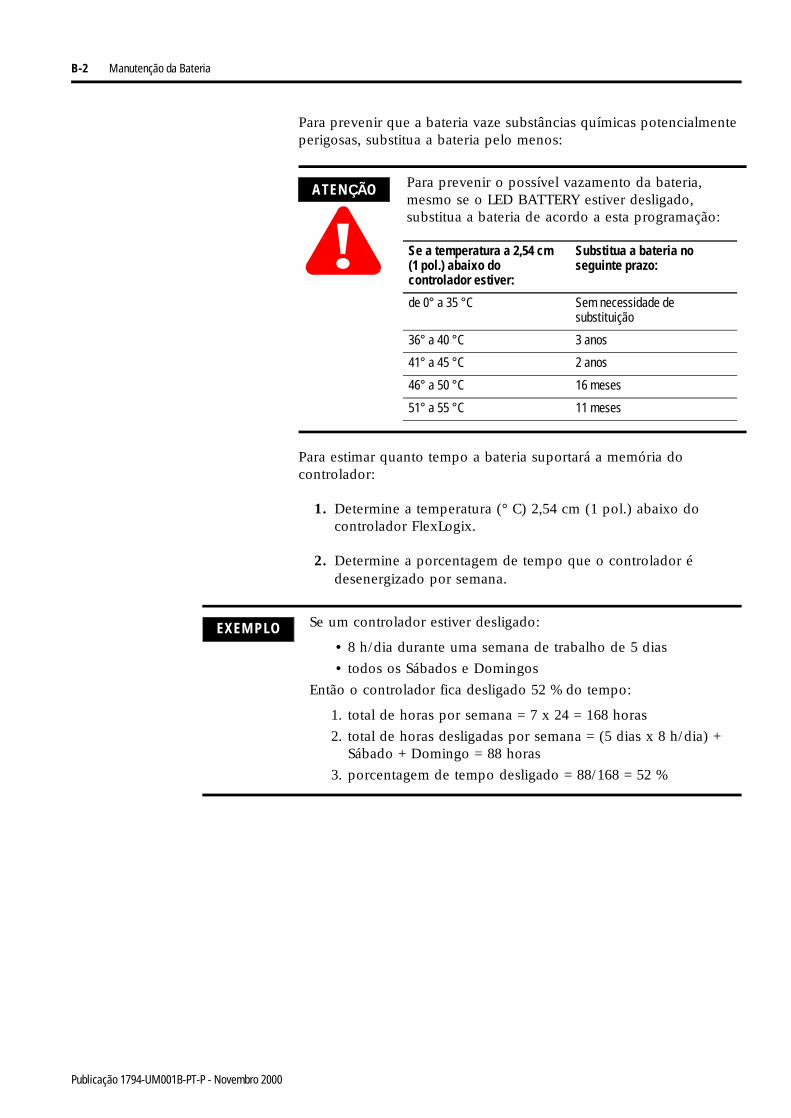
B-2 Manutenção da Bateria
Para prevenir que a bateria vaze substâncias químicas potencialmente perigosas, substitua a bateria pelo menos:
Para estimar quanto tempo a bateria suportará a memória do controlador:
1. Determine a temperatura (° C) 2,54 cm (1 pol.) abaixo do controlador FlexLogix.
2. Determine a porcentagem de tempo que o controlador é desenergizado por semana.
ATENÇÃO
!Para prevenir o possível vazamento da bateria, mesmo se o LED BATTERY estiver desligado, substitua a bateria de acordo a esta programação:
Se a temperatura a 2,54 cm(1 pol.) abaixo do controlador estiver:
Substitua a bateria no seguinte prazo:
de 0° a 35 °C Sem necessidade de substituição
36° a 40 °C 3 anos
41° a 45 °C 2 anos
46° a 50 °C 16 meses
51° a 55 °C 11 meses
EXEMPLO Se um controlador estiver desligado:
• 8 h/dia durante uma semana de trabalho de 5 dias
• todos os Sábados e Domingos
Então o controlador fica desligado 52 % do tempo:
1. total de horas por semana = 7 x 24 = 168 horas
2. total de horas desligadas por semana = (5 dias x 8 h/dia) + Sábado + Domingo = 88 horas
3. porcentagem de tempo desligado = 88/168 = 52 %
Publicação 1794-UM001B-PT-P - Novembro 2000
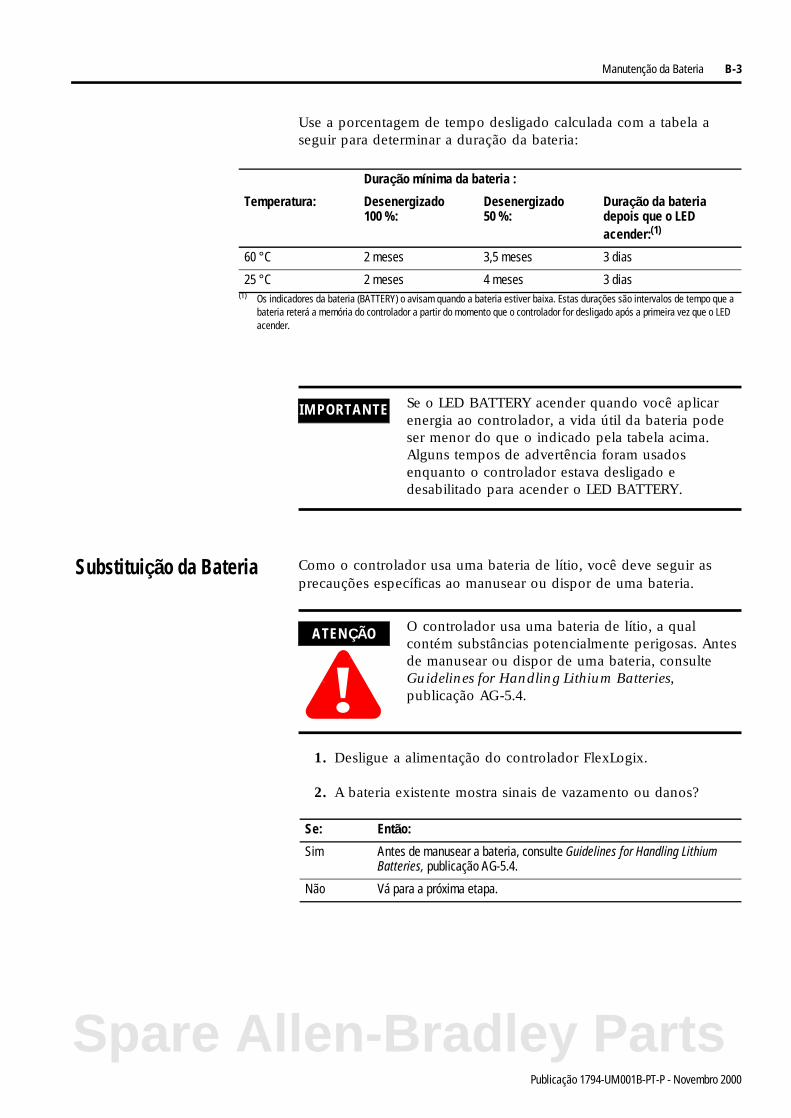
Manutenção da Bateria B-3
Use a porcentagem de tempo desligado calculada com a tabela a seguir para determinar a duração da bateria:
Substituição da Bateria Como o controlador usa uma bateria de lítio, você deve seguir as precauções específicas ao manusear ou dispor de uma bateria.
1. Desligue a alimentação do controlador FlexLogix.
2. A bateria existente mostra sinais de vazamento ou danos?
Duração mínima da bateria :
Temperatura: Desenergizado 100 %:
Desenergizado 50 %:
Duração da bateria depois que o LED acender:(1)
60 °C 2 meses 3,5 meses 3 dias
25 °C 2 meses 4 meses 3 dias(1) Os indicadores da bateria (BATTERY) o avisam quando a bateria estiver baixa. Estas durações são intervalos de tempo que a
bateria reterá a memória do controlador a partir do momento que o controlador for desligado após a primeira vez que o LED acender.
IMPORTANTE Se o LED BATTERY acender quando você aplicar energia ao controlador, a vida útil da bateria pode ser menor do que o indicado pela tabela acima. Alguns tempos de advertência foram usados enquanto o controlador estava desligado e desabilitado para acender o LED BATTERY.
ATENÇÃO
!O controlador usa uma bateria de lítio, a qual contém substâncias potencialmente perigosas. Antes de manusear ou dispor de uma bateria, consulte Guidelines for Handling Lithium Batteries, publicação AG-5.4.
Se: Então:
Sim Antes de manusear a bateria, consulte Guidelines for Handling Lithium Batteries, publicação AG-5.4.
Não Vá para a próxima etapa.
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000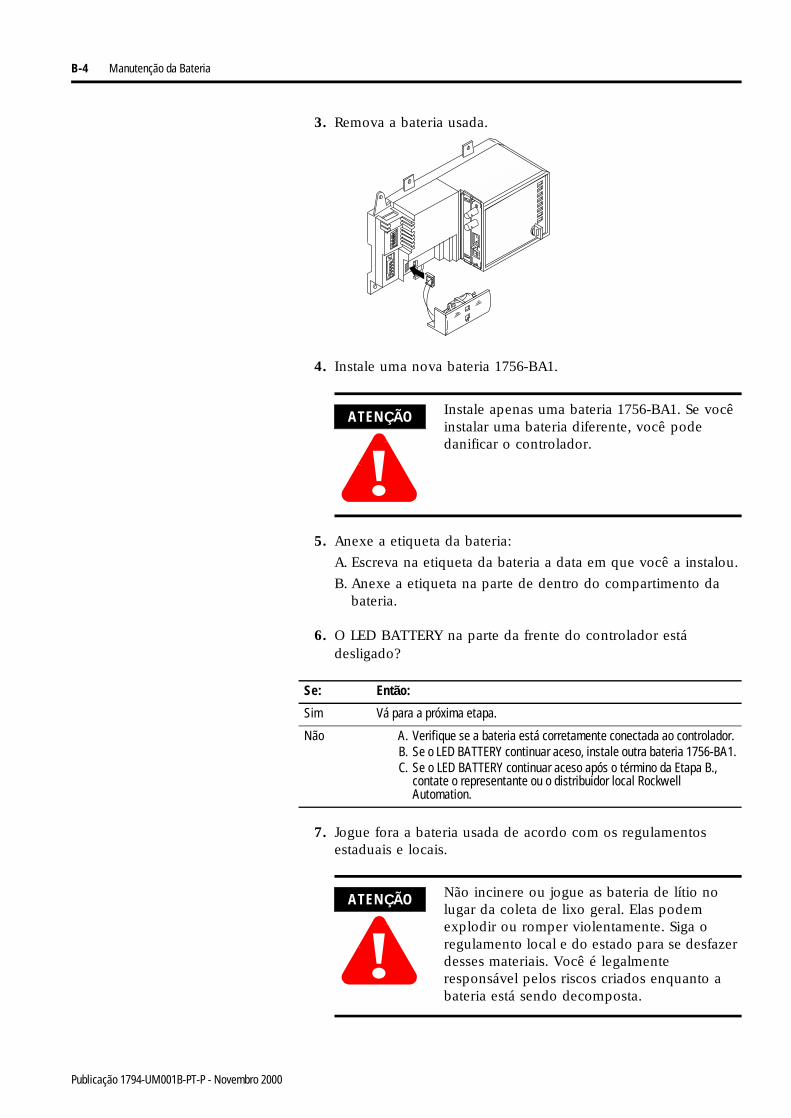
B-4 Manutenção da Bateria
3. Remova a bateria usada.
4. Instale uma nova bateria 1756-BA1.
5. Anexe a etiqueta da bateria:
A. Escreva na etiqueta da bateria a data em que você a instalou.
B. Anexe a etiqueta na parte de dentro do compartimento da bateria.
6. O LED BATTERY na parte da frente do controlador está desligado?
7. Jogue fora a bateria usada de acordo com os regulamentos estaduais e locais.
ATENÇÃO
!Instale apenas uma bateria 1756-BA1. Se você instalar uma bateria diferente, você pode danificar o controlador.
Se: Então:
Sim Vá para a próxima etapa.
Não A. Verifique se a bateria está corretamente conectada ao controlador.B. Se o LED BATTERY continuar aceso, instale outra bateria 1756-BA1.C. Se o LED BATTERY continuar aceso após o término da Etapa B.,
contate o representante ou o distribuidor local Rockwell Automation.
ATENÇÃO
!Não incinere ou jogue as bateria de lítio no lugar da coleta de lixo geral. Elas podem explodir ou romper violentamente. Siga o regulamento local e do estado para se desfazer desses materiais. Você é legalmente responsável pelos riscos criados enquanto a bateria está sendo decomposta.
Publicação 1794-UM001B-PT-P - Novembro 2000
Apêndice C
Tempo de Execução
Uso Deste Apêndice Use este apêndice para calcular o tempo necessário para a execução de uma instrução. Os tempos são para um controlador FlexLogix (1794-L33, -L34) e um software de programação RSLogix 5000, versão 7.0.
Estimativa do Tempo de Execução de uma Instrução de Lógica Ladder
Para calcular o tempo de execução de uma instrução:
1. Use Tabela C.B na página C-3 para encontrar o tempo base para uma instrução.
2. Ao tempo normal da instrução, some o tempo para expressões, subscritos e conversões de dados:
Para estimar o tempo de execução de uma: Consulte a página:
instrução de lógica ladder C-1
rotina de bloco de funções C-12
IMPORTANTE Os tempos de execução atuais podem variar por causa da configuração de seu projeto e a versão do software RSLogix 5000 adotada.
IMPORTANTE Estes tempos de execução foram medidos com os trilhos locais e locais estendidos inibidos e sem qualquer cartão filho ControlNet instalado.
Se um operando: Então some tempo para: Usando esta tabela:
contém uma expressão cada operação na expressão. Para cada operação, use o tempo para a instrução correspondente.
Tabela C.B na página C-3
é um elemento de uma matriz e um ou mais dos subscritos é um tag (ex.: tag_c[tag_d])
o cálculo do subscrito da matriz Tabela C.E na página C-11
é convertido pela extensão do sinal
a conversão dos dados Tabela C.A na página C-2
contém um tag SINT ou INT no subscrito da matriz
a conversão do SINT ou INT para um DINT
Spare Allen-Bradley Parts
1 Publicação 1794-UM001B-PT-P - Novembro 2000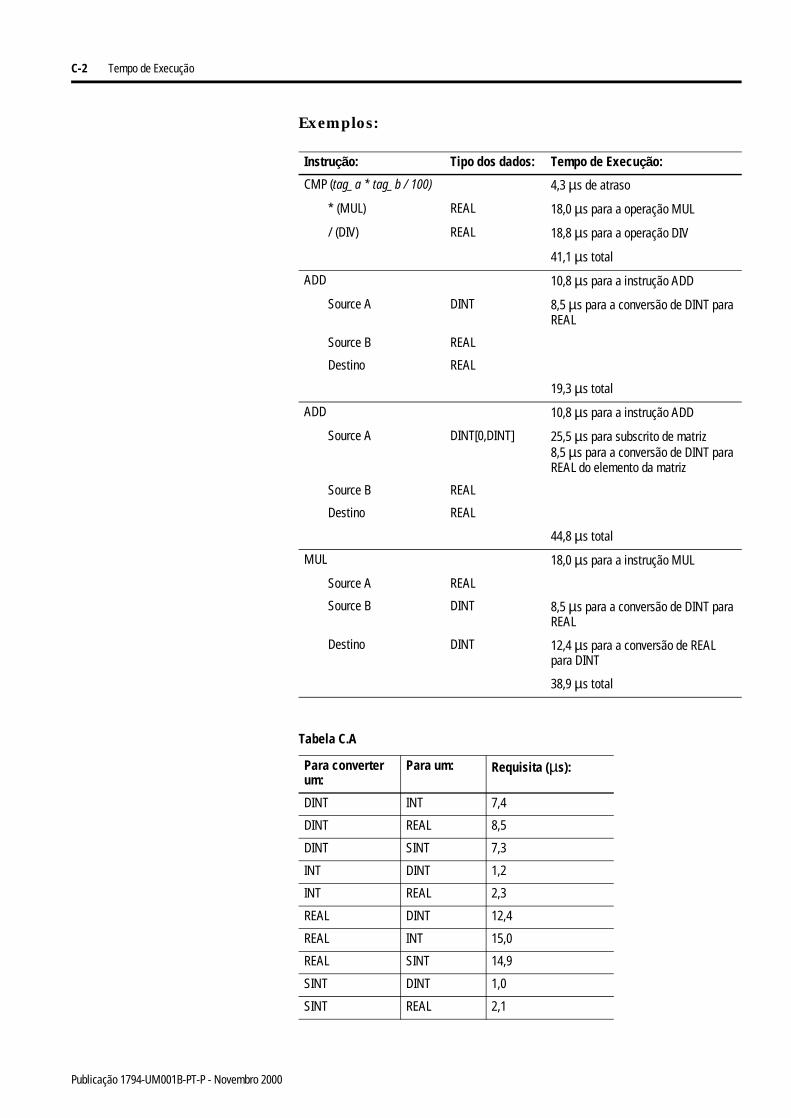
C-2 Tempo de Execução
Exemplos:
Instrução: Tipo dos dados: Tempo de Execução:
CMP (tag_a * tag_b / 100) 4,3 µs de atraso
* (MUL) REAL 18,0 µs para a operação MUL
/ (DIV) REAL 18,8 µs para a operação DIV
41,1 µs total
ADD 10,8 µs para a instrução ADD
Source A DINT 8,5 µs para a conversão de DINT para REAL
Source B REAL
Destino REAL
19,3 µs total
ADD 10,8 µs para a instrução ADD
Source A DINT[0,DINT] 25,5 µs para subscrito de matriz8,5 µs para a conversão de DINT para REAL do elemento da matriz
Source B REAL
Destino REAL
44,8 µs total
MUL 18,0 µs para a instrução MUL
Source A REAL
Source B DINT 8,5 µs para a conversão de DINT para REAL
Destino DINT 12,4 µs para a conversão de REAL para DINT
38,9 µs total
Tabela C.A
Para converter um:
Para um: Requisita (µs):
DINT INT 7,4
DINT REAL 8,5
DINT SINT 7,3
INT DINT 1,2
INT REAL 2,3
REAL DINT 12,4
REAL INT 15,0
REAL SINT 14,9
SINT DINT 1,0
SINT REAL 2,1
Publicação 1794-UM001B-PT-P - Novembro 2000
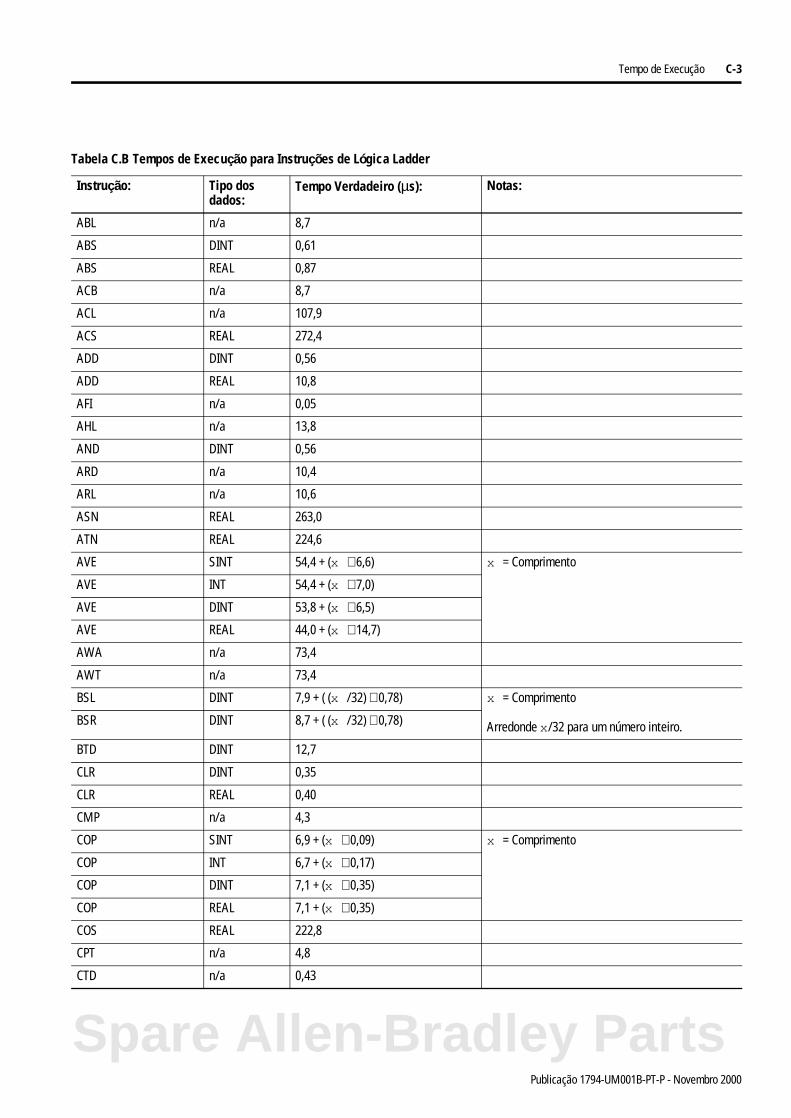
Tempo de Execução C-3
Tabela C.B Tempos de Execução para Instruções de Lógica Ladder
Instrução: Tipo dos dados:
Tempo Verdadeiro (µs): Notas:
ABL n/a 8,7
ABS DINT 0,61
ABS REAL 0,87
ACB n/a 8,7
ACL n/a 107,9
ACS REAL 272,4
ADD DINT 0,56
ADD REAL 10,8
AFI n/a 0,05
AHL n/a 13,8
AND DINT 0,56
ARD n/a 10,4
ARL n/a 10,6
ASN REAL 263,0
ATN REAL 224,6
AVE SINT 54,4 + (x ∗ 6,6) x = Comprimento
AVE INT 54,4 + (x ∗ 7,0)
AVE DINT 53,8 + (x ∗ 6,5)
AVE REAL 44,0 + (x ∗ 14,7)
AWA n/a 73,4
AWT n/a 73,4
BSL DINT 7,9 + ( (x /32) ∗ 0,78) x = Comprimento
Arredonde x/32 para um número inteiro.BSR DINT 8,7 + ( (x /32) ∗ 0,78)
BTD DINT 12,7
CLR DINT 0,35
CLR REAL 0,40
CMP n/a 4,3
COP SINT 6,9 + (x ∗ 0,09) x = Comprimento
COP INT 6,7 + (x ∗ 0,17)
COP DINT 7,1 + (x ∗ 0,35)
COP REAL 7,1 + (x ∗ 0,35)
COS REAL 222,8
CPT n/a 4,8
CTD n/a 0,43
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000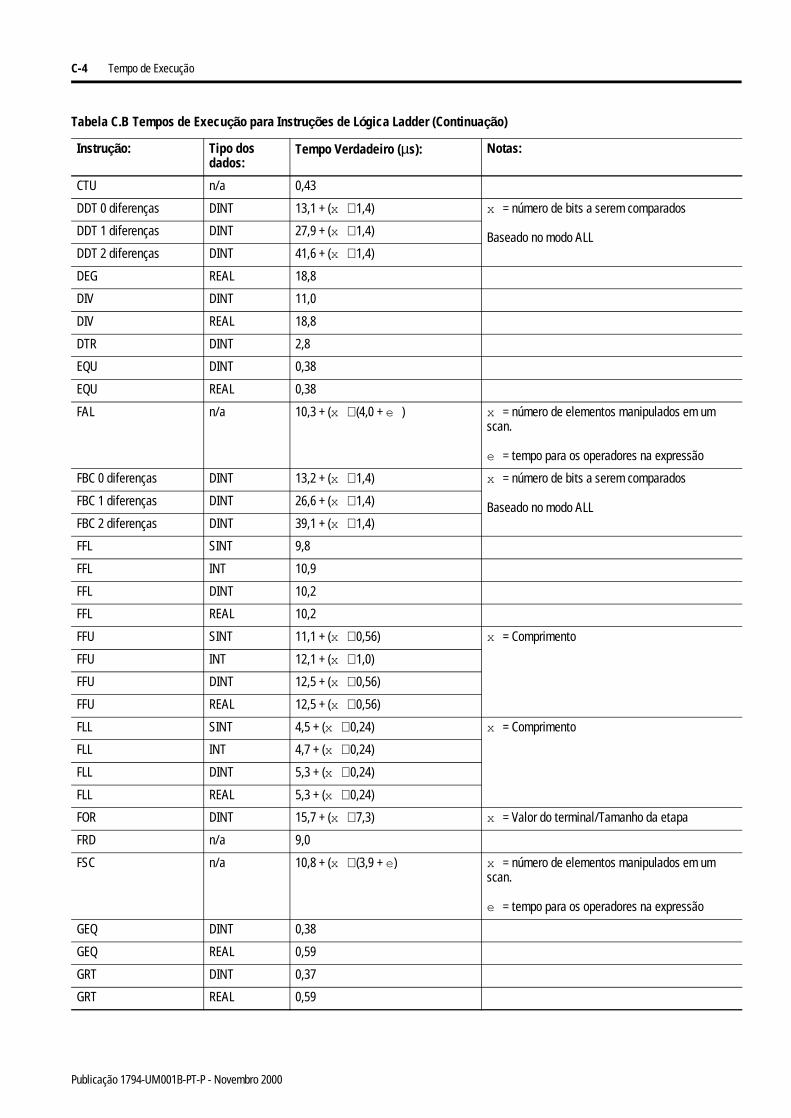
C-4 Tempo de Execução
CTU n/a 0,43
DDT 0 diferenças DINT 13,1 + (x ∗ 1,4) x = número de bits a serem comparados
Baseado no modo ALLDDT 1 diferenças DINT 27,9 + (x ∗ 1,4)
DDT 2 diferenças DINT 41,6 + (x ∗ 1,4)
DEG REAL 18,8
DIV DINT 11,0
DIV REAL 18,8
DTR DINT 2,8
EQU DINT 0,38
EQU REAL 0,38
FAL n/a 10,3 + (x ∗ (4,0 + e ) x = número de elementos manipulados em um scan.
e = tempo para os operadores na expressão
FBC 0 diferenças DINT 13,2 + (x ∗ 1,4) x = número de bits a serem comparados
Baseado no modo ALLFBC 1 diferenças DINT 26,6 + (x ∗ 1,4)
FBC 2 diferenças DINT 39,1 + (x ∗ 1,4)
FFL SINT 9,8
FFL INT 10,9
FFL DINT 10,2
FFL REAL 10,2
FFU SINT 11,1 + (x ∗ 0,56) x = Comprimento
FFU INT 12,1 + (x ∗ 1,0)
FFU DINT 12,5 + (x ∗ 0,56)
FFU REAL 12,5 + (x ∗ 0,56)
FLL SINT 4,5 + (x ∗ 0,24) x = Comprimento
FLL INT 4,7 + (x ∗ 0,24)
FLL DINT 5,3 + (x ∗ 0,24)
FLL REAL 5,3 + (x ∗ 0,24)
FOR DINT 15,7 + (x ∗ 7,3) x = Valor do terminal/Tamanho da etapa
FRD n/a 9,0
FSC n/a 10,8 + (x ∗ (3,9 + e) x = número de elementos manipulados em um scan.
e = tempo para os operadores na expressão
GEQ DINT 0,38
GEQ REAL 0,59
GRT DINT 0,37
GRT REAL 0,59
Tabela C.B Tempos de Execução para Instruções de Lógica Ladder (Continuação)
Instrução: Tipo dos dados:
Tempo Verdadeiro (µs): Notas:
Publicação 1794-UM001B-PT-P - Novembro 2000
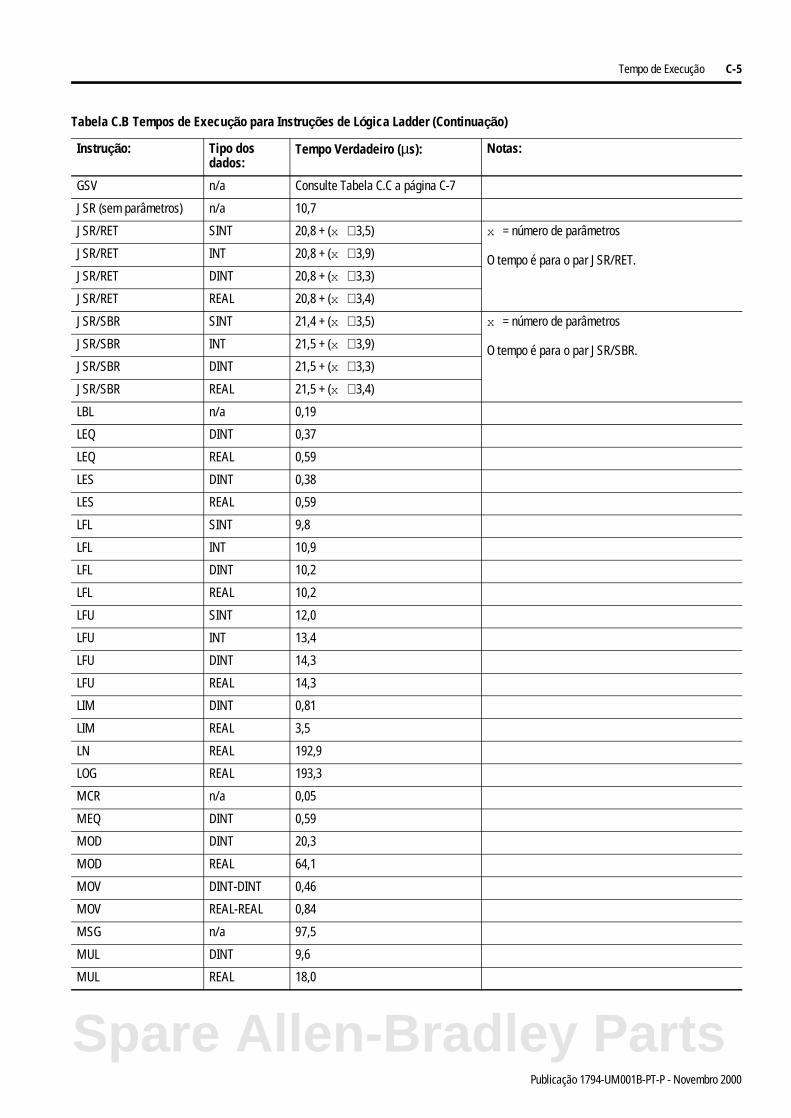
Tempo de Execução C-5
GSV n/a Consulte Tabela C.C a página C-7
JSR (sem parâmetros) n/a 10,7
JSR/RET SINT 20,8 + (x ∗ 3,5) x = número de parâmetros
O tempo é para o par JSR/RET.JSR/RET INT 20,8 + (x ∗ 3,9)
JSR/RET DINT 20,8 + (x ∗ 3,3)
JSR/RET REAL 20,8 + (x ∗ 3,4)
JSR/SBR SINT 21,4 + (x ∗ 3,5) x = número de parâmetros
O tempo é para o par JSR/SBR.JSR/SBR INT 21,5 + (x ∗ 3,9)
JSR/SBR DINT 21,5 + (x ∗ 3,3)
JSR/SBR REAL 21,5 + (x ∗ 3,4)
LBL n/a 0,19
LEQ DINT 0,37
LEQ REAL 0,59
LES DINT 0,38
LES REAL 0,59
LFL SINT 9,8
LFL INT 10,9
LFL DINT 10,2
LFL REAL 10,2
LFU SINT 12,0
LFU INT 13,4
LFU DINT 14,3
LFU REAL 14,3
LIM DINT 0,81
LIM REAL 3,5
LN REAL 192,9
LOG REAL 193,3
MCR n/a 0,05
MEQ DINT 0,59
MOD DINT 20,3
MOD REAL 64,1
MOV DINT-DINT 0,46
MOV REAL-REAL 0,84
MSG n/a 97,5
MUL DINT 9,6
MUL REAL 18,0
Tabela C.B Tempos de Execução para Instruções de Lógica Ladder (Continuação)
Instrução: Tipo dos dados:
Tempo Verdadeiro (µs): Notas:
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000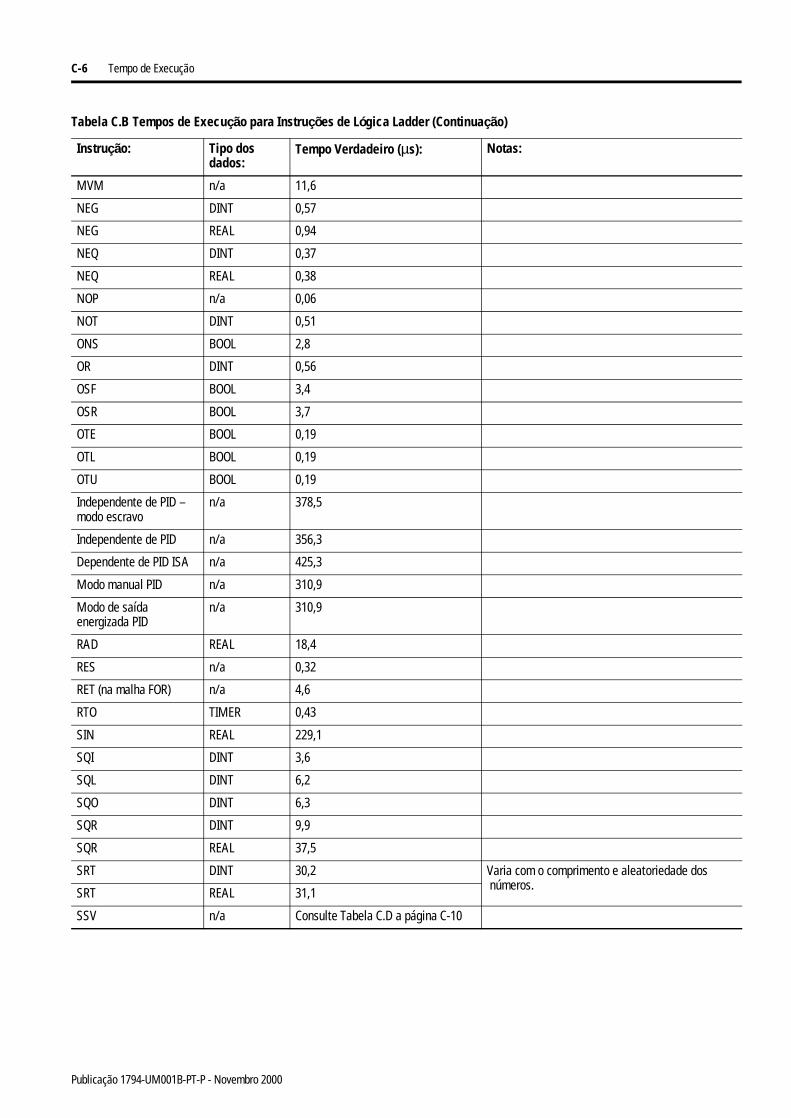
C-6 Tempo de Execução
MVM n/a 11,6
NEG DINT 0,57
NEG REAL 0,94
NEQ DINT 0,37
NEQ REAL 0,38
NOP n/a 0,06
NOT DINT 0,51
ONS BOOL 2,8
OR DINT 0,56
OSF BOOL 3,4
OSR BOOL 3,7
OTE BOOL 0,19
OTL BOOL 0,19
OTU BOOL 0,19
Independente de PID – modo escravo
n/a 378,5
Independente de PID n/a 356,3
Dependente de PID ISA n/a 425,3
Modo manual PID n/a 310,9
Modo de saída energizada PID
n/a 310,9
RAD REAL 18,4
RES n/a 0,32
RET (na malha FOR) n/a 4,6
RTO TIMER 0,43
SIN REAL 229,1
SQI DINT 3,6
SQL DINT 6,2
SQO DINT 6,3
SQR DINT 9,9
SQR REAL 37,5
SRT DINT 30,2 Varia com o comprimento e aleatoriedade dos números.
SRT REAL 31,1
SSV n/a Consulte Tabela C.D a página C-10
Tabela C.B Tempos de Execução para Instruções de Lógica Ladder (Continuação)
Instrução: Tipo dos dados:
Tempo Verdadeiro (µs): Notas:
Publicação 1794-UM001B-PT-P - Novembro 2000
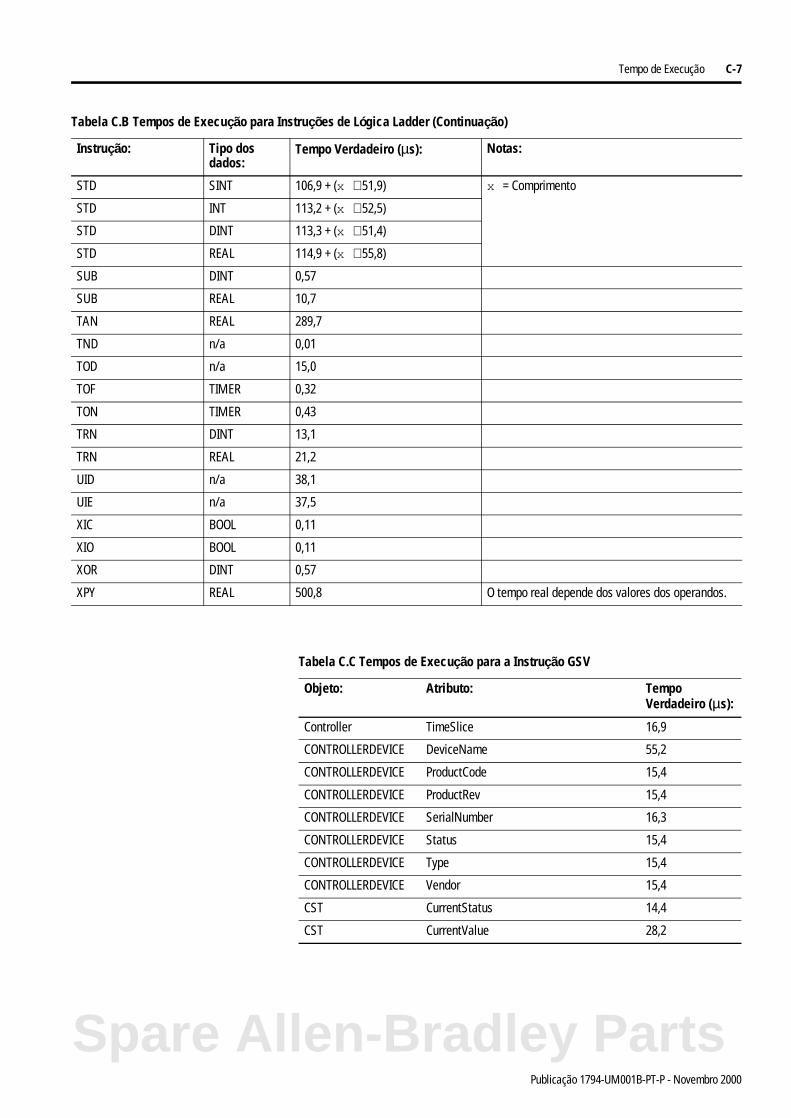
Tempo de Execução C-7
STD SINT 106,9 + (x ∗ 51,9) x = Comprimento
STD INT 113,2 + (x ∗ 52,5)
STD DINT 113,3 + (x ∗ 51,4)
STD REAL 114,9 + (x ∗ 55,8)
SUB DINT 0,57
SUB REAL 10,7
TAN REAL 289,7
TND n/a 0,01
TOD n/a 15,0
TOF TIMER 0,32
TON TIMER 0,43
TRN DINT 13,1
TRN REAL 21,2
UID n/a 38,1
UIE n/a 37,5
XIC BOOL 0,11
XIO BOOL 0,11
XOR DINT 0,57
XPY REAL 500,8 O tempo real depende dos valores dos operandos.
Tabela C.B Tempos de Execução para Instruções de Lógica Ladder (Continuação)
Instrução: Tipo dos dados:
Tempo Verdadeiro (µs): Notas:
Tabela C.C Tempos de Execução para a Instrução GSV
Objeto: Atributo: Tempo Verdadeiro (µs):
Controller TimeSlice 16,9
CONTROLLERDEVICE DeviceName 55,2
CONTROLLERDEVICE ProductCode 15,4
CONTROLLERDEVICE ProductRev 15,4
CONTROLLERDEVICE SerialNumber 16,3
CONTROLLERDEVICE Status 15,4
CONTROLLERDEVICE Type 15,4
CONTROLLERDEVICE Vendor 15,4
CST CurrentStatus 14,4
CST CurrentValue 28,2
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000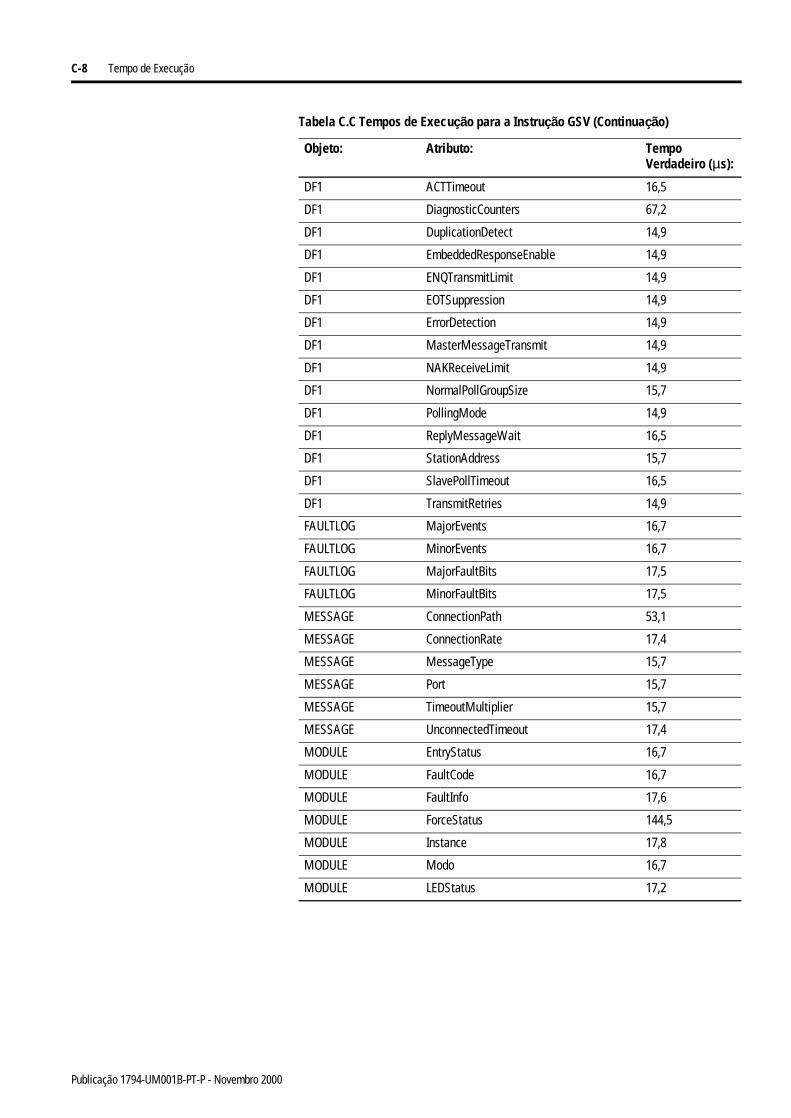
C-8 Tempo de Execução
DF1 ACTTimeout 16,5
DF1 DiagnosticCounters 67,2
DF1 DuplicationDetect 14,9
DF1 EmbeddedResponseEnable 14,9
DF1 ENQTransmitLimit 14,9
DF1 EOTSuppression 14,9
DF1 ErrorDetection 14,9
DF1 MasterMessageTransmit 14,9
DF1 NAKReceiveLimit 14,9
DF1 NormalPollGroupSize 15,7
DF1 PollingMode 14,9
DF1 ReplyMessageWait 16,5
DF1 StationAddress 15,7
DF1 SlavePollTimeout 16,5
DF1 TransmitRetries 14,9
FAULTLOG MajorEvents 16,7
FAULTLOG MinorEvents 16,7
FAULTLOG MajorFaultBits 17,5
FAULTLOG MinorFaultBits 17,5
MESSAGE ConnectionPath 53,1
MESSAGE ConnectionRate 17,4
MESSAGE MessageType 15,7
MESSAGE Port 15,7
MESSAGE TimeoutMultiplier 15,7
MESSAGE UnconnectedTimeout 17,4
MODULE EntryStatus 16,7
MODULE FaultCode 16,7
MODULE FaultInfo 17,6
MODULE ForceStatus 144,5
MODULE Instance 17,8
MODULE Modo 16,7
MODULE LEDStatus 17,2
Tabela C.C Tempos de Execução para a Instrução GSV (Continuação)
Objeto: Atributo: Tempo Verdadeiro (µs):
Publicação 1794-UM001B-PT-P - Novembro 2000
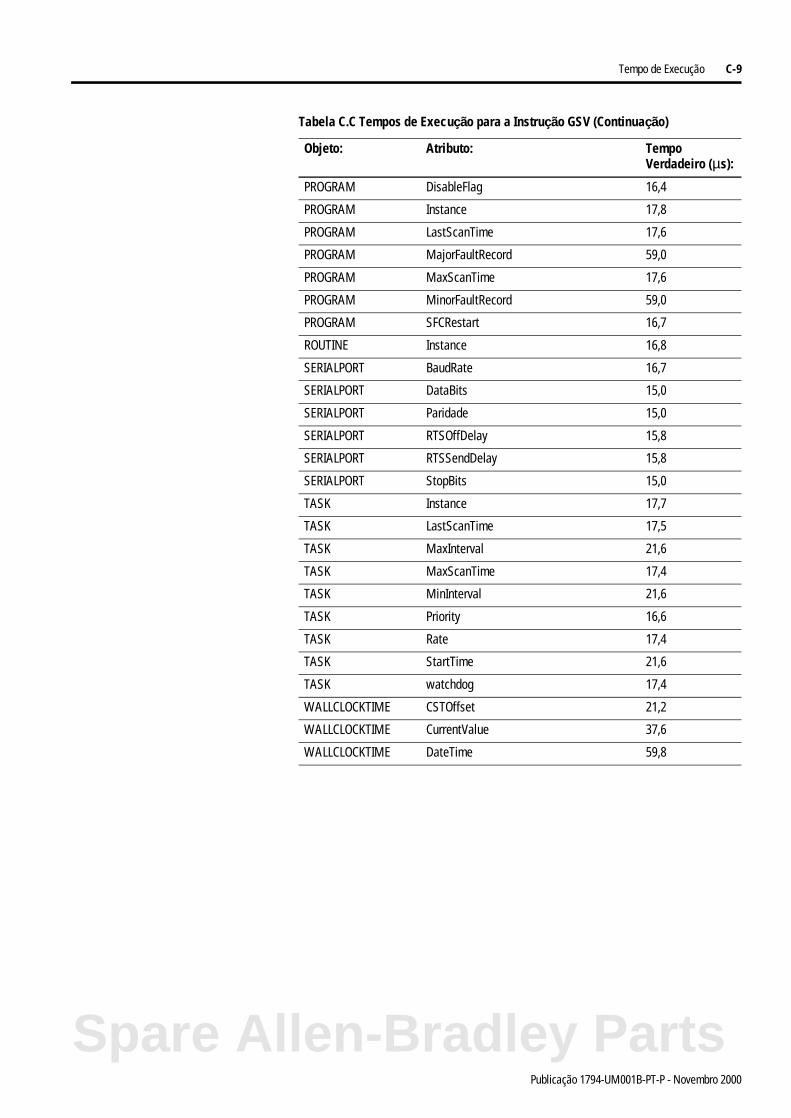
Tempo de Execução C-9
PROGRAM DisableFlag 16,4
PROGRAM Instance 17,8
PROGRAM LastScanTime 17,6
PROGRAM MajorFaultRecord 59,0
PROGRAM MaxScanTime 17,6
PROGRAM MinorFaultRecord 59,0
PROGRAM SFCRestart 16,7
ROUTINE Instance 16,8
SERIALPORT BaudRate 16,7
SERIALPORT DataBits 15,0
SERIALPORT Paridade 15,0
SERIALPORT RTSOffDelay 15,8
SERIALPORT RTSSendDelay 15,8
SERIALPORT StopBits 15,0
TASK Instance 17,7
TASK LastScanTime 17,5
TASK MaxInterval 21,6
TASK MaxScanTime 17,4
TASK MinInterval 21,6
TASK Priority 16,6
TASK Rate 17,4
TASK StartTime 21,6
TASK watchdog 17,4
WALLCLOCKTIME CSTOffset 21,2
WALLCLOCKTIME CurrentValue 37,6
WALLCLOCKTIME DateTime 59,8
Tabela C.C Tempos de Execução para a Instrução GSV (Continuação)
Objeto: Atributo: Tempo Verdadeiro (µs):
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000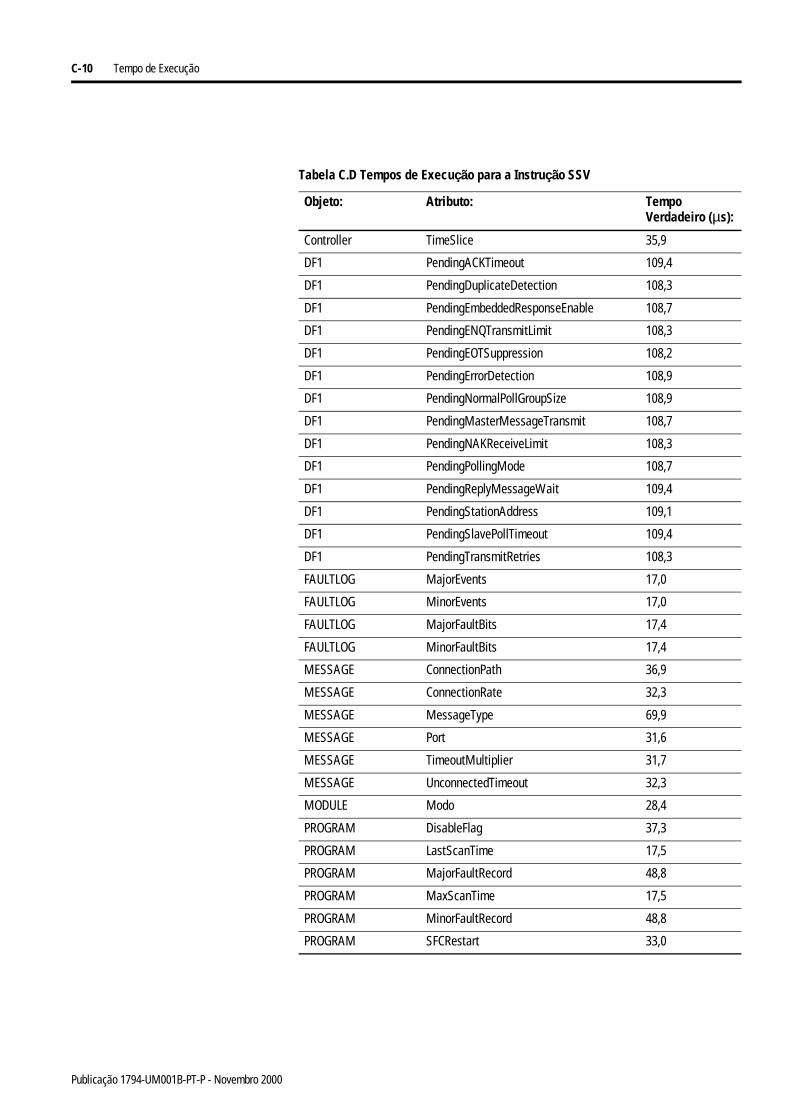
C-10 Tempo de Execução
Tabela C.D Tempos de Execução para a Instrução SSV
Objeto: Atributo: Tempo Verdadeiro (µs):
Controller TimeSlice 35,9
DF1 PendingACKTimeout 109,4
DF1 PendingDuplicateDetection 108,3
DF1 PendingEmbeddedResponseEnable 108,7
DF1 PendingENQTransmitLimit 108,3
DF1 PendingEOTSuppression 108,2
DF1 PendingErrorDetection 108,9
DF1 PendingNormalPollGroupSize 108,9
DF1 PendingMasterMessageTransmit 108,7
DF1 PendingNAKReceiveLimit 108,3
DF1 PendingPollingMode 108,7
DF1 PendingReplyMessageWait 109,4
DF1 PendingStationAddress 109,1
DF1 PendingSlavePollTimeout 109,4
DF1 PendingTransmitRetries 108,3
FAULTLOG MajorEvents 17,0
FAULTLOG MinorEvents 17,0
FAULTLOG MajorFaultBits 17,4
FAULTLOG MinorFaultBits 17,4
MESSAGE ConnectionPath 36,9
MESSAGE ConnectionRate 32,3
MESSAGE MessageType 69,9
MESSAGE Port 31,6
MESSAGE TimeoutMultiplier 31,7
MESSAGE UnconnectedTimeout 32,3
MODULE Modo 28,4
PROGRAM DisableFlag 37,3
PROGRAM LastScanTime 17,5
PROGRAM MajorFaultRecord 48,8
PROGRAM MaxScanTime 17,5
PROGRAM MinorFaultRecord 48,8
PROGRAM SFCRestart 33,0
Publicação 1794-UM001B-PT-P - Novembro 2000
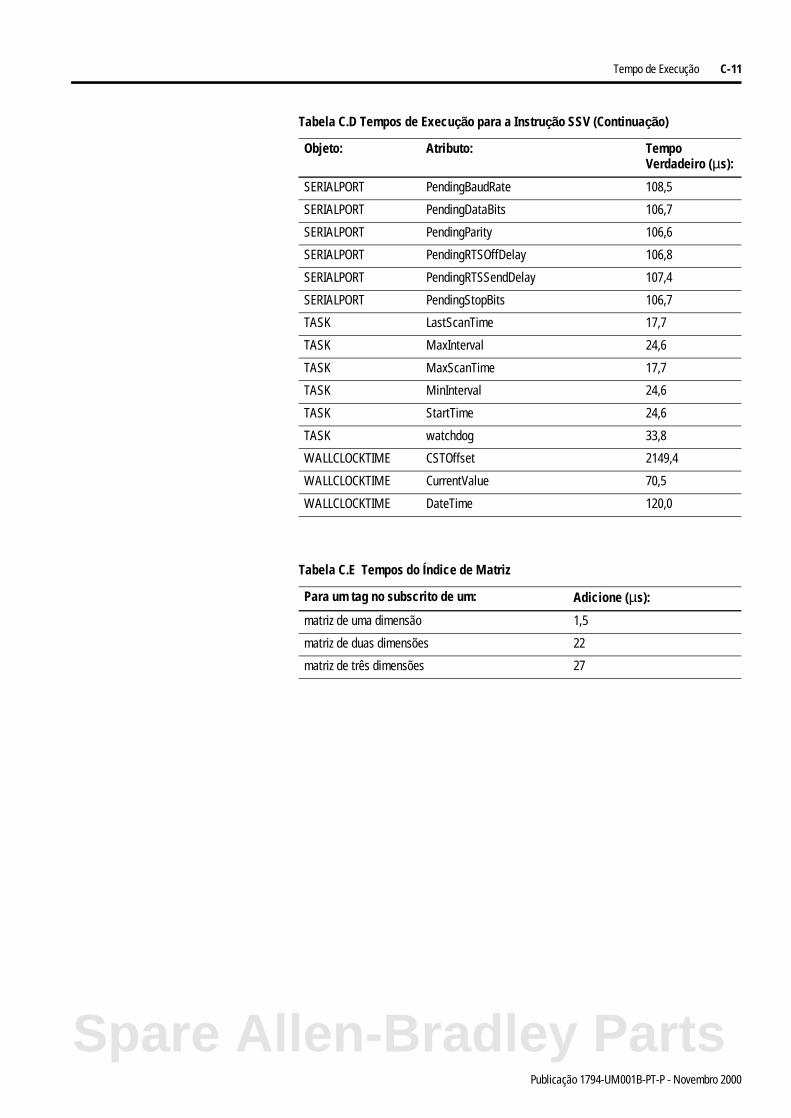
Tempo de Execução C-11
SERIALPORT PendingBaudRate 108,5
SERIALPORT PendingDataBits 106,7
SERIALPORT PendingParity 106,6
SERIALPORT PendingRTSOffDelay 106,8
SERIALPORT PendingRTSSendDelay 107,4
SERIALPORT PendingStopBits 106,7
TASK LastScanTime 17,7
TASK MaxInterval 24,6
TASK MaxScanTime 17,7
TASK MinInterval 24,6
TASK StartTime 24,6
TASK watchdog 33,8
WALLCLOCKTIME CSTOffset 2149,4
WALLCLOCKTIME CurrentValue 70,5
WALLCLOCKTIME DateTime 120,0
Tabela C.E Tempos do Índice de Matriz
Para um tag no subscrito de um: Adicione (µs):
matriz de uma dimensão 1,5
matriz de duas dimensões 22
matriz de três dimensões 27
Tabela C.D Tempos de Execução para a Instrução SSV (Continuação)
Objeto: Atributo: Tempo Verdadeiro (µs):
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000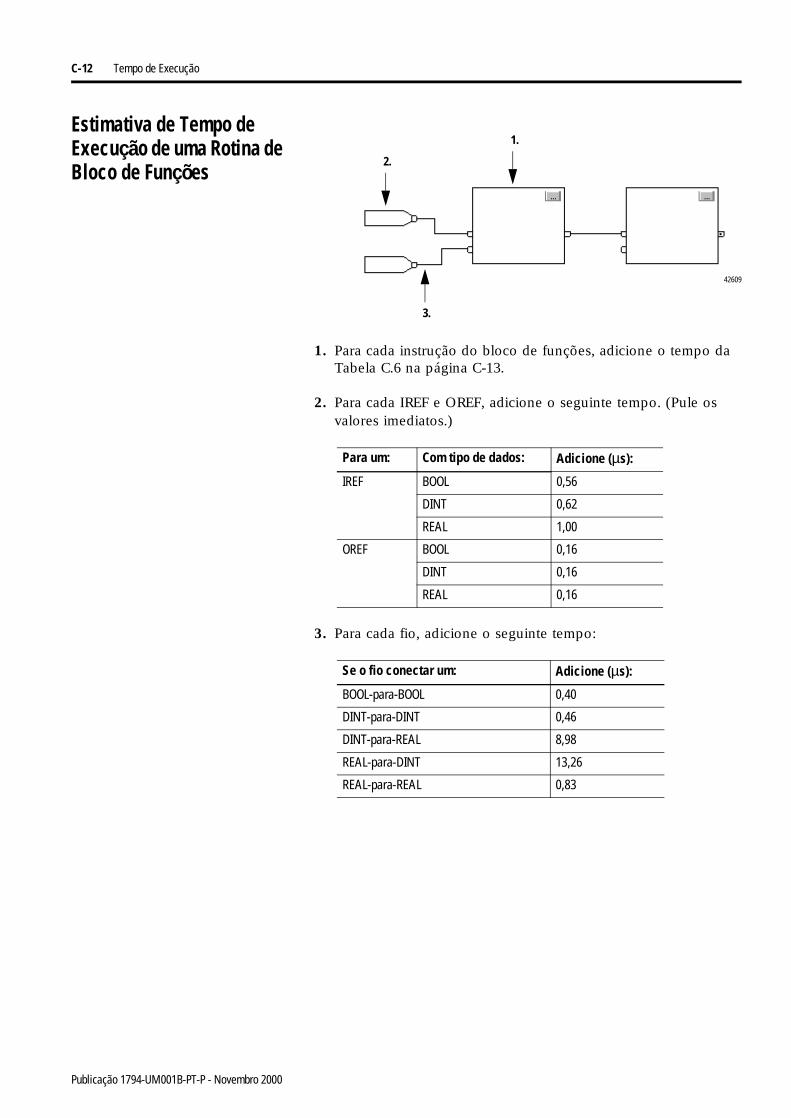
C-12 Tempo de Execução
Estimativa de Tempo de Execução de uma Rotina de Bloco de Funções
1. Para cada instrução do bloco de funções, adicione o tempo da Tabela C.6 na página C-13.
2. Para cada IREF e OREF, adicione o seguinte tempo. (Pule os valores imediatos.)
3. Para cada fio, adicione o seguinte tempo:
Para um: Com tipo de dados: Adicione (µs):
IREF BOOL 0,56
DINT 0,62
REAL 1,00
OREF BOOL 0,16
DINT 0,16
REAL 0,16
Se o fio conectar um: Adicione (µs):
BOOL-para-BOOL 0,40
DINT-para-DINT 0,46
DINT-para-REAL 8,98
REAL-para-DINT 13,26
REAL-para-REAL 0,83
42609
1.
2.
3.
Publicação 1794-UM001B-PT-P - Novembro 2000
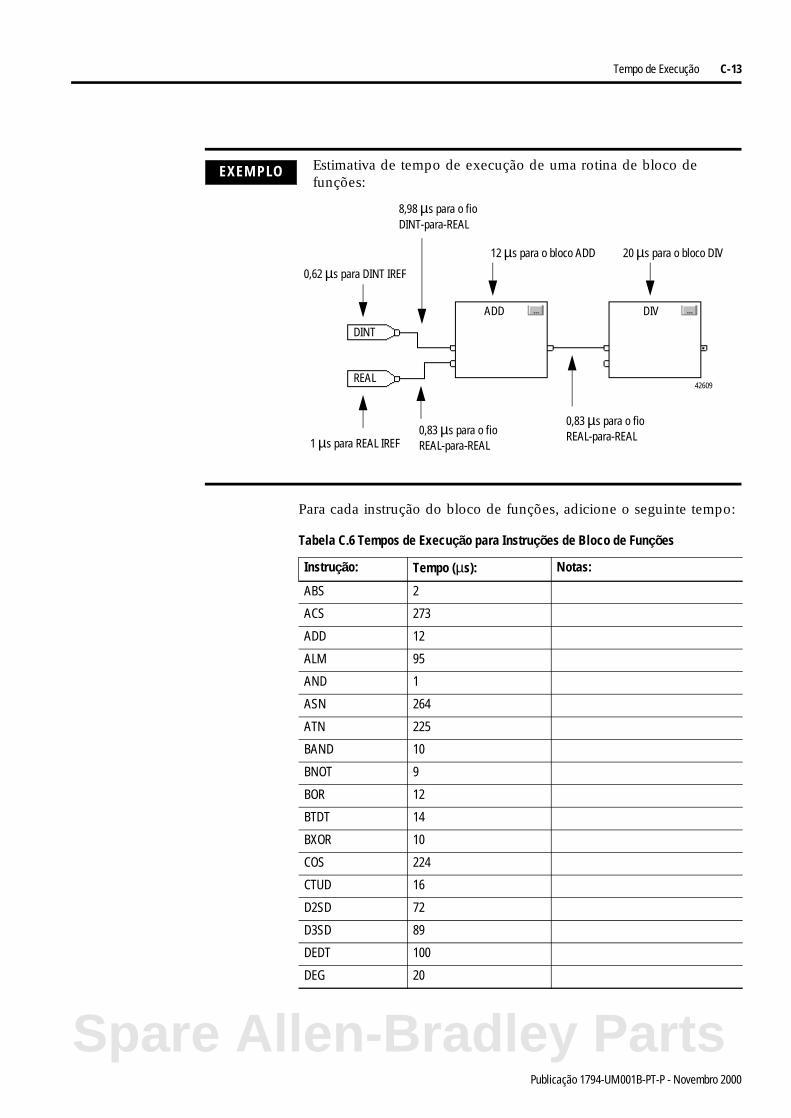
Tempo de Execução C-13
Para cada instrução do bloco de funções, adicione o seguinte tempo:
EXEMPLO Estimativa de tempo de execução de uma rotina de bloco de funções:
42609
12 µs para o bloco ADD
0,62 µs para DINT IREF
ADD
DINT
REAL
20 µs para o bloco DIV
DIV
8,98 µs para o fio DINT-para-REAL
0,83 µs para o fio REAL-para-REAL0,83 µs para o fio
REAL-para-REAL1 µs para REAL IREF
Tabela C.6 Tempos de Execução para Instruções de Bloco de Funções
Instrução: Tempo (µs): Notas:
ABS 2
ACS 273
ADD 12
ALM 95
AND 1
ASN 264
ATN 225
BAND 10
BNOT 9
BOR 12
BTDT 14
BXOR 10
COS 224
CTUD 16
D2SD 72
D3SD 89
DEDT 100
DEG 20
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000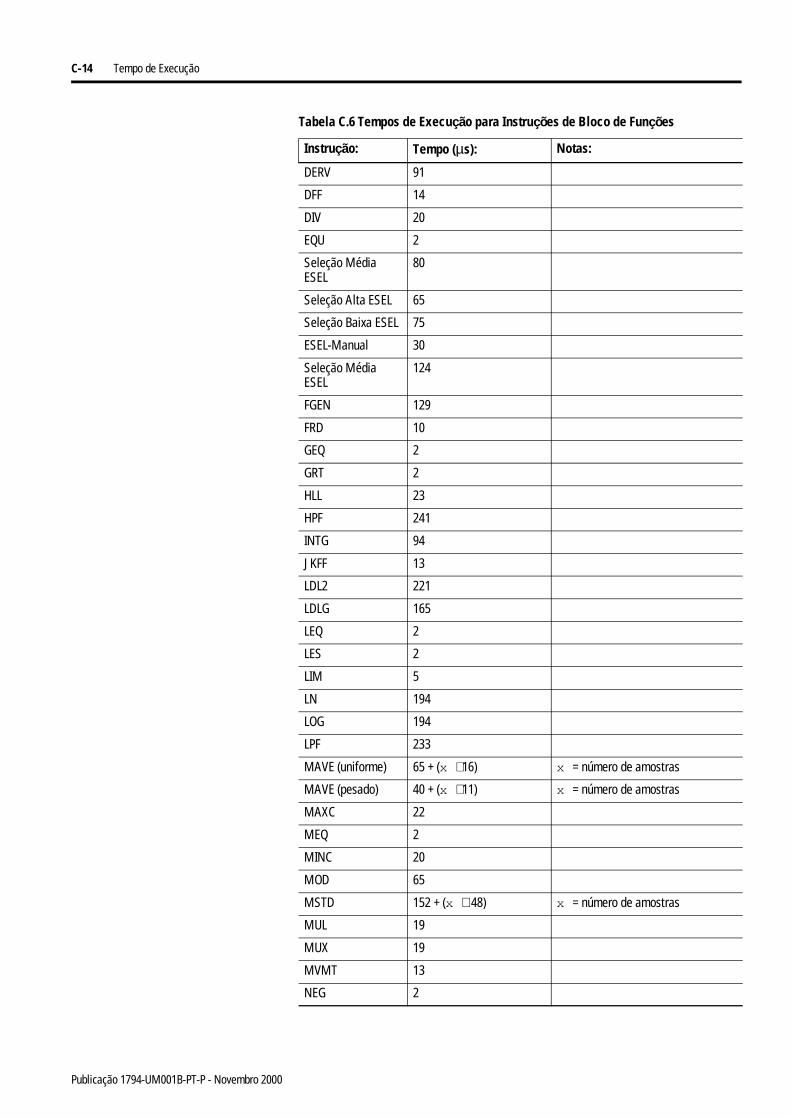
C-14 Tempo de Execução
DERV 91
DFF 14
DIV 20
EQU 2
Seleção Média ESEL
80
Seleção Alta ESEL 65
Seleção Baixa ESEL 75
ESEL-Manual 30
Seleção Média ESEL
124
FGEN 129
FRD 10
GEQ 2
GRT 2
HLL 23
HPF 241
INTG 94
JKFF 13
LDL2 221
LDLG 165
LEQ 2
LES 2
LIM 5
LN 194
LOG 194
LPF 233
MAVE (uniforme) 65 + (x ∗ 16) x = número de amostras
MAVE (pesado) 40 + (x ∗ 11) x = número de amostras
MAXC 22
MEQ 2
MINC 20
MOD 65
MSTD 152 + (x ∗ 48) x = número de amostras
MUL 19
MUX 19
MVMT 13
NEG 2
Tabela C.6 Tempos de Execução para Instruções de Bloco de Funções
Instrução: Tempo (µs): Notas:
Publicação 1794-UM001B-PT-P - Novembro 2000
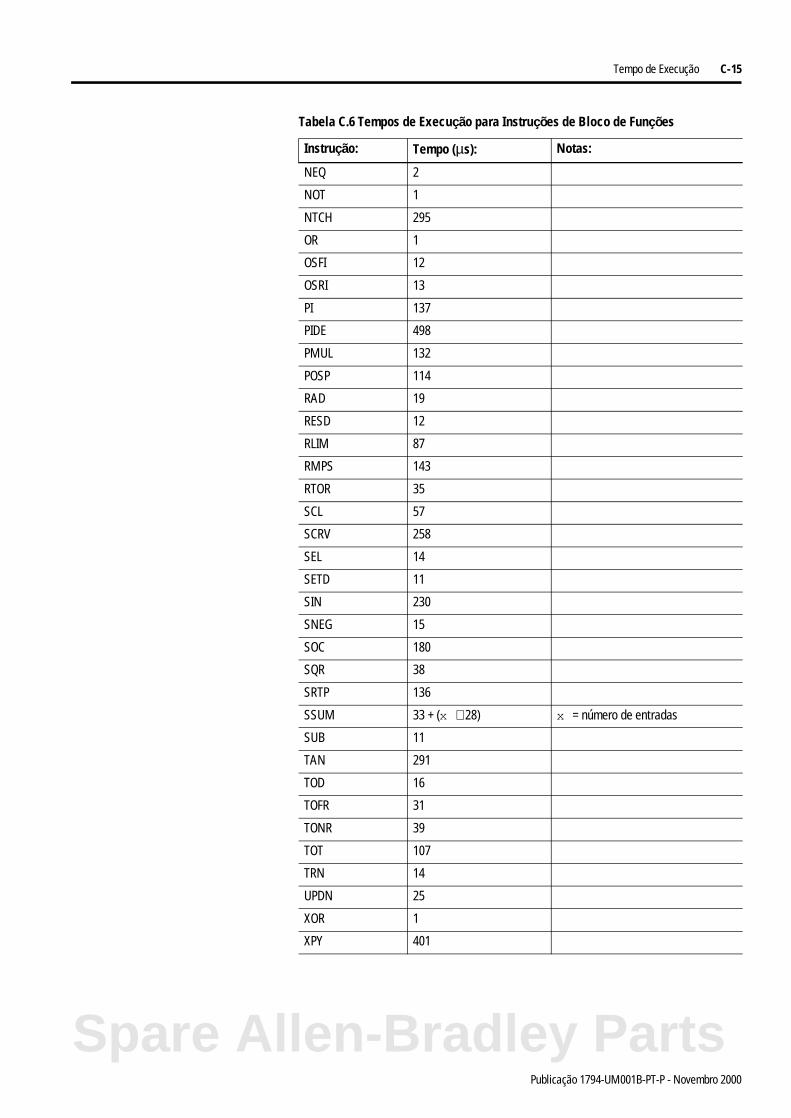
Tempo de Execução C-15
NEQ 2
NOT 1
NTCH 295
OR 1
OSFI 12
OSRI 13
PI 137
PIDE 498
PMUL 132
POSP 114
RAD 19
RESD 12
RLIM 87
RMPS 143
RTOR 35
SCL 57
SCRV 258
SEL 14
SETD 11
SIN 230
SNEG 15
SOC 180
SQR 38
SRTP 136
SSUM 33 + (x ∗ 28) x = número de entradas
SUB 11
TAN 291
TOD 16
TOFR 31
TONR 39
TOT 107
TRN 14
UPDN 25
XOR 1
XPY 401
Tabela C.6 Tempos de Execução para Instruções de Bloco de Funções
Instrução: Tempo (µs): Notas:
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
C-16 Tempo de Execução
Notas:
Publicação 1794-UM001B-PT-P - Novembro 2000
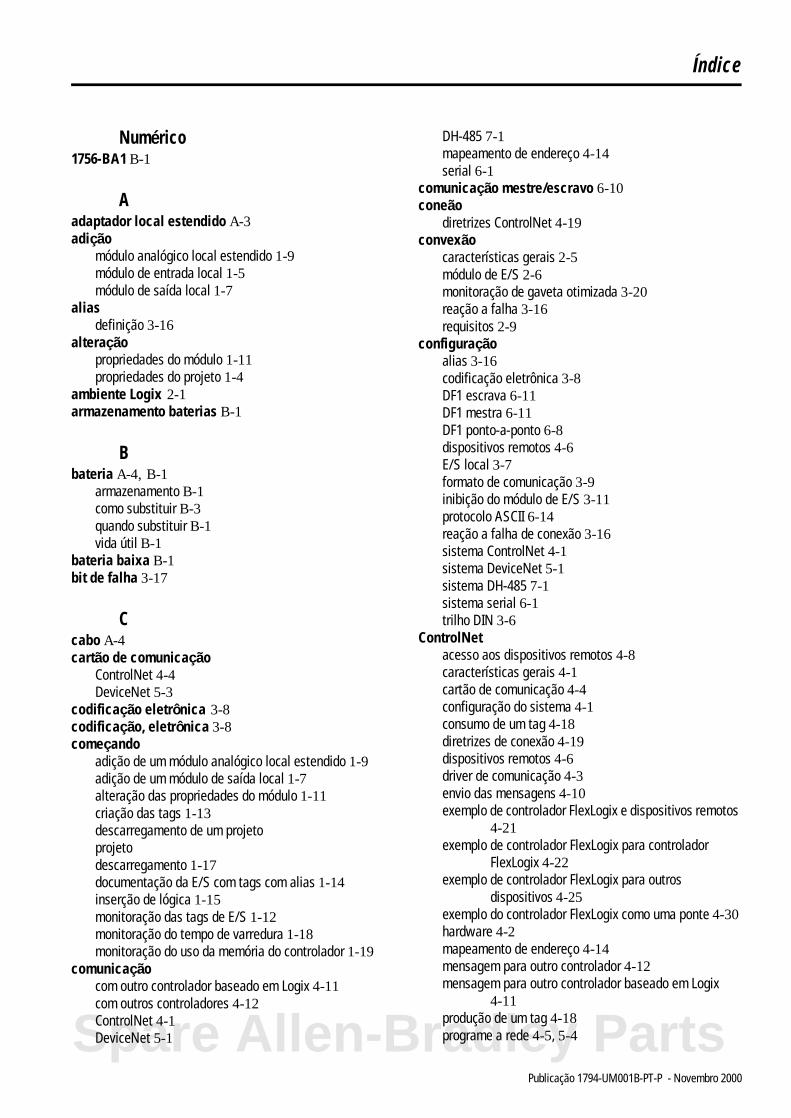
Índice
Numérico1756-BA1 B-1
Aadaptador local estendido A-3adição
módulo analógico local estendido 1-9módulo de entrada local 1-5módulo de saída local 1-7
aliasdefinição 3-16
alteraçãopropriedades do módulo 1-11propriedades do projeto 1-4
ambiente Logix 2-1armazenamento baterias B-1
Bbateria A-4, B-1
armazenamento B-1como substituir B-3quando substituir B-1vida útil B-1
bateria baixa B-1bit de falha 3-17
Ccabo A-4cartão de comunicação
ControlNet 4-4DeviceNet 5-3
codificação eletrônica 3-8codificação, eletrônica 3-8começando
adição de um módulo analógico local estendido 1-9adição de um módulo de saída local 1-7alteração das propriedades do módulo 1-11criação das tags 1-13descarregamento de um projetoprojetodescarregamento 1-17documentação da E/S com tags com alias 1-14inserção de lógica 1-15monitoração das tags de E/S 1-12monitoração do tempo de varredura 1-18monitoração do uso da memória do controlador 1-19
comunicaçãocom outro controlador baseado em Logix 4-11com outros controladores 4-12ControlNet 4-1DeviceNet 5-1
DH-485 7-1mapeamento de endereço 4-14serial 6-1
comunicação mestre/escravo 6-10coneão
diretrizes ControlNet 4-19convexão
características gerais 2-5módulo de E/S 2-6monitoração de gaveta otimizada 3-20reação a falha 3-16requisitos 2-9
configuraçãoalias 3-16codificação eletrônica 3-8DF1 escrava 6-11DF1 mestra 6-11DF1 ponto-a-ponto 6-8dispositivos remotos 4-6E/S local 3-7formato de comunicação 3-9inibição do módulo de E/S 3-11protocolo ASCII 6-14reação a falha de conexão 3-16sistema ControlNet 4-1sistema DeviceNet 5-1sistema DH-485 7-1sistema serial 6-1trilho DIN 3-6
ControlNetacesso aos dispositivos remotos 4-8características gerais 4-1cartão de comunicação 4-4configuração do sistema 4-1consumo de um tag 4-18diretrizes de conexão 4-19dispositivos remotos 4-6driver de comunicação 4-3envio das mensagens 4-10exemplo de controlador FlexLogix e dispositivos remotos
4-21exemplo de controlador FlexLogix para controlador
FlexLogix 4-22exemplo de controlador FlexLogix para outros
dispositivos 4-25exemplo do controlador FlexLogix como uma ponte 4-30hardware 4-2mapeamento de endereço 4-14mensagem para outro controlador 4-12mensagem para outro controlador baseado em Logix
4-11produção de um tag 4-18programe a rede 4-5, 5-4Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
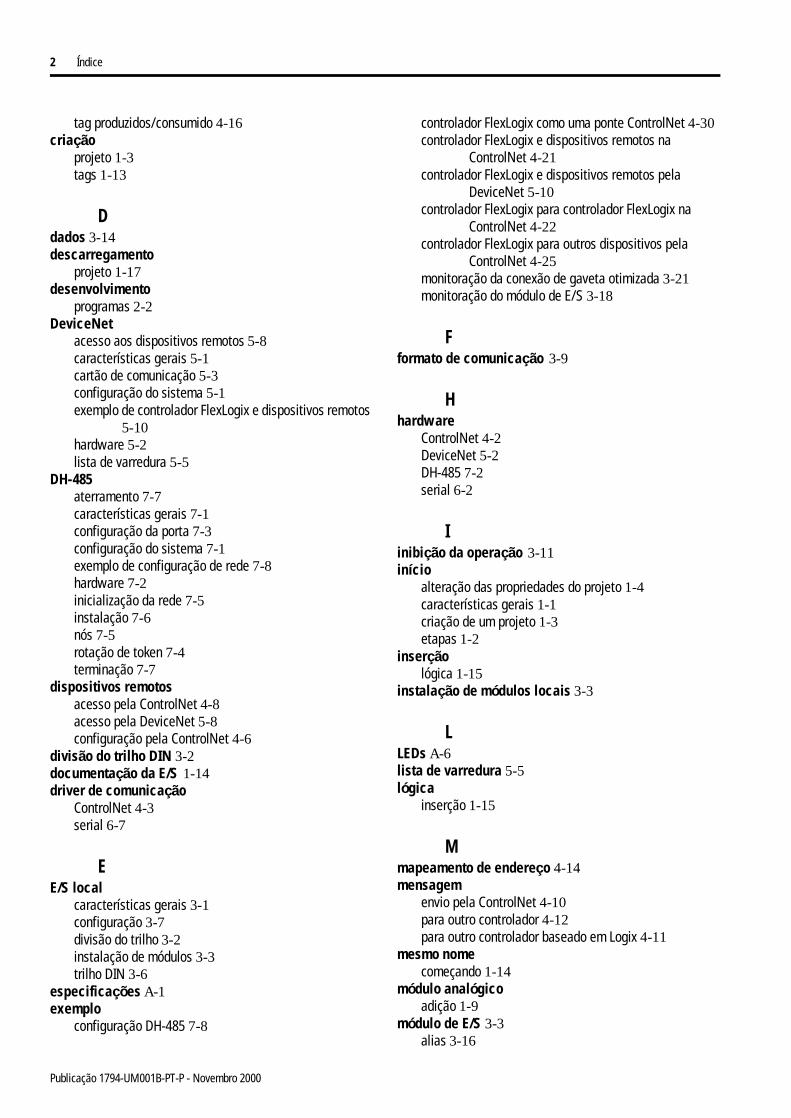
2 Índice
tag produzidos/consumido 4-16criação
projeto 1-3tags 1-13
Ddados 3-14descarregamento
projeto 1-17desenvolvimento
programas 2-2DeviceNet
acesso aos dispositivos remotos 5-8características gerais 5-1cartão de comunicação 5-3configuração do sistema 5-1exemplo de controlador FlexLogix e dispositivos remotos
5-10hardware 5-2lista de varredura 5-5
DH-485aterramento 7-7características gerais 7-1configuração da porta 7-3configuração do sistema 7-1exemplo de configuração de rede 7-8hardware 7-2inicialização da rede 7-5instalação 7-6nós 7-5rotação de token 7-4terminação 7-7
dispositivos remotosacesso pela ControlNet 4-8acesso pela DeviceNet 5-8configuração pela ControlNet 4-6
divisão do trilho DIN 3-2documentação da E/S 1-14driver de comunicação
ControlNet 4-3serial 6-7
EE/S local
características gerais 3-1configuração 3-7divisão do trilho 3-2instalação de módulos 3-3trilho DIN 3-6
especificações A-1exemplo
configuração DH-485 7-8
controlador FlexLogix como uma ponte ControlNet 4-30controlador FlexLogix e dispositivos remotos na
ControlNet 4-21controlador FlexLogix e dispositivos remotos pela
DeviceNet 5-10controlador FlexLogix para controlador FlexLogix na
ControlNet 4-22controlador FlexLogix para outros dispositivos pela
ControlNet 4-25monitoração da conexão de gaveta otimizada 3-21monitoração do módulo de E/S 3-18
Fformato de comunicação 3-9
Hhardware
ControlNet 4-2DeviceNet 5-2DH-485 7-2serial 6-2
Iinibição da operação 3-11início
alteração das propriedades do projeto 1-4características gerais 1-1criação de um projeto 1-3etapas 1-2
inserçãológica 1-15
instalação de módulos locais 3-3
LLEDs A-6lista de varredura 5-5lógica
inserção 1-15
Mmapeamento de endereço 4-14mensagem
envio pela ControlNet 4-10para outro controlador 4-12para outro controlador baseado em Logix 4-11
mesmo nomecomeçando 1-14
módulo analógicoadição 1-9
módulo de E/S 3-3alias 3-16
Publicação 1794-UM001B-PT-P - Novembro 2000
Índice 3
bits de falha 3-17características gerais locais 3-1codificação eletrônica 3-8conexão 2-6configuração local 3-7divisão do trilho DIN 3-2exemplo de lógica para monitoração da conexão de
gaveta otimizada 3-21formato de comunicação 3-9lógica de exemplo para monitoração do módulo 3-18monitoração 3-16trilho DIN 3-6
módulo de entradaadição 1-5
módulo de saídaadição 1-7
monitoraçãoconexão de gaveta otimizada 3-20exemplo de lógica para conexão de gaveta otimizada
3-21lógica de exemplo para módulo de E/S 3-18módulo de E/S 3-16tags de E/S 1-12tempo de varredura 1-18uso da memória do controlador 1-19
Ppreparação
adição de um módulo de entrada local 1-5prioridade 2-3programa
definição 2-5desenvolvimento 2-2
programe a rede 4-5, 5-4projeto
criação 1-3desenvolvimento 2-2programa 2-5propriedades 1-4rotina 2-5tarefa 2-3
propriedade do controlador 3-9protocolo ASCII 6-14protocolo DF1
escrava 6-11escravo 6-6mestra 6-11
mestre 6-6métodos mestre/escravo 6-10ponto-a-ponto 6-6, 6-8
Rrotina
definição 2-5
Sserial
cabos A-4características gerais 6-1configuração da porta 6-5configuração do sistema 6-1driver de comunicação 6-7escrava 6-11hardware 6-2mestra 6-11ponto-a-ponto 6-8protocolo ASCII 6-14
substituição da bateriacomo B-3
substuição da bateriaquando B-1
Ttag
alias 3-16alias de amostra 1-14características gerais do produzido/consumido 4-16consumo 4-18criação 1-13monitoração 1-12nomes 3-14produção 4-18
tag produzido/consumidocaracterísticas gerais 4-16
tarefadefinição 2-3prioridade 2-3
tempo de varredura 1-18trilho DIN
configuração 3-6divisão 3-2
Spare Allen-Bradley Parts
Publicação 1794-UM001B-PT-P - Novembro 2000
4 Índice
Uuso da memória 1-19, C-1
Publicação 1794-UM001B-PT-P - Novembro 2000

Publicação 1794-UM001B-PT-P - Novembro 2000 7 PN 957464-95Substitui publicação 1794-UM001A-PT-P - Agosto 2000 © 2000 Rockwell International Corporation
Capa de Trás






![Clp allen bradley[1]](https://static.fdocumentos.com/doc/165x107/555dcec8d8b42aec698b51b4/clp-allen-bradley1.jpg)