2 Monitoramento de Sensores · Monitoramento de Sensores 2.1. Sistemas de medição digital Um...
21
23 2 Monitoramento de Sensores 2.1. Sistemas de medição digital Um sistema de medição pode ser dividido em blocos funcionais que devem realizar uma ou mais funções específicas e são utilizados de acordo com a necessidade. Existem diversos modelos de sistemas de medição conhecidos e outros podem ser desenvolvidos de acordo com a necessidade da aplicação (Oliveira e Catunda, 2007). Esses sistemas são baseados na utilização ou aplicação de instrumentos elétricos ou eletrônicos que determinem o valor da grandeza analisada. A utilização de um sensor pode estar associada a um processo de aquisição da variação de uma grandeza física, e esta aquisição, na maioria dos casos, está associada a uma ação de controle que é realizada após algum tratamento do dado adquirido. Assim, um sistema de aquisição e controle de dados pode ser definido como um conjunto de recursos de hardware e de software destinado a providenciar uma representação pertinente de um sistema físico (Rocha e Nogueira, 2007). Oliveira e Catunda (2007) apresentam a configuração típica de um sistema de medição analógico e digital (ver Figura 1) mediante uma função de transferência estática (f SM ). Assim, o sistema de medição analógico pode ser representado pela seguinte equação: i c s SM f f f f o o = ou seja, ))) ( ( ( ) ( ˆ x f f f x f x s c i SM = = Já no sistema de medição digital a função de transferência estática (f SM ), desconsiderando a função de transferência do filtro de antibatimento, pode ser representada por: R AD c s SM f f f f f o o o = ou seja, )))) ( ( ( ( ) ( ˆ x f f f f x f x s c AD R SM = =
Transcript of 2 Monitoramento de Sensores · Monitoramento de Sensores 2.1. Sistemas de medição digital Um...
23
2 Monitoramento de Sensores
2.1. Sistemas de medição digital
Um sistema de medição pode ser dividido em blocos funcionais que devem
realizar uma ou mais funções específicas e são utilizados de acordo com a
necessidade. Existem diversos modelos de sistemas de medição conhecidos e
outros podem ser desenvolvidos de acordo com a necessidade da aplicação
(Oliveira e Catunda, 2007). Esses sistemas são baseados na utilização ou
aplicação de instrumentos elétricos ou eletrônicos que determinem o valor da
grandeza analisada.
A utilização de um sensor pode estar associada a um processo de
aquisição da variação de uma grandeza física, e esta aquisição, na maioria dos
casos, está associada a uma ação de controle que é realizada após algum
tratamento do dado adquirido. Assim, um sistema de aquisição e controle de
dados pode ser definido como um conjunto de recursos de hardware e de
software destinado a providenciar uma representação pertinente de um sistema
físico (Rocha e Nogueira, 2007).
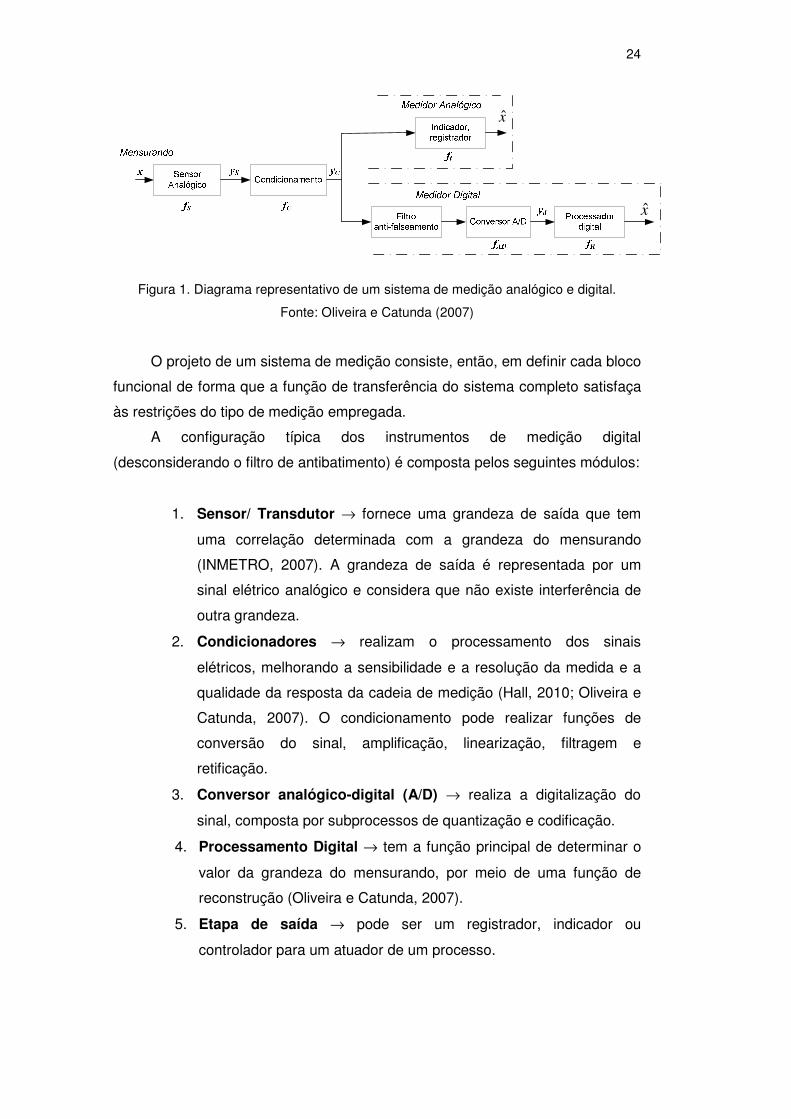
Oliveira e Catunda (2007) apresentam a configuração típica de um sistema
de medição analógico e digital (ver Figura 1) mediante uma função de
transferência estática (fSM). Assim, o sistema de medição analógico pode ser
representado pela seguinte equação:
icsSM ffff oo=
ou seja,
)))((()(ˆ xfffxfx sciSM ==
Já no sistema de medição digital a função de transferência estática (fSM ),
desconsiderando a função de transferência do filtro de antibatimento, pode ser
representada por:
RADcsSM fffff ooo=
ou seja,
))))(((()(ˆ xffffxfx scADRSM ==
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA
24
x
x
Figura 1. Diagrama representativo de um sistema de medição analógico e digital.
Fonte: Oliveira e Catunda (2007)
O projeto de um sistema de medição consiste, então, em definir cada bloco
funcional de forma que a função de transferência do sistema completo satisfaça
às restrições do tipo de medição empregada.
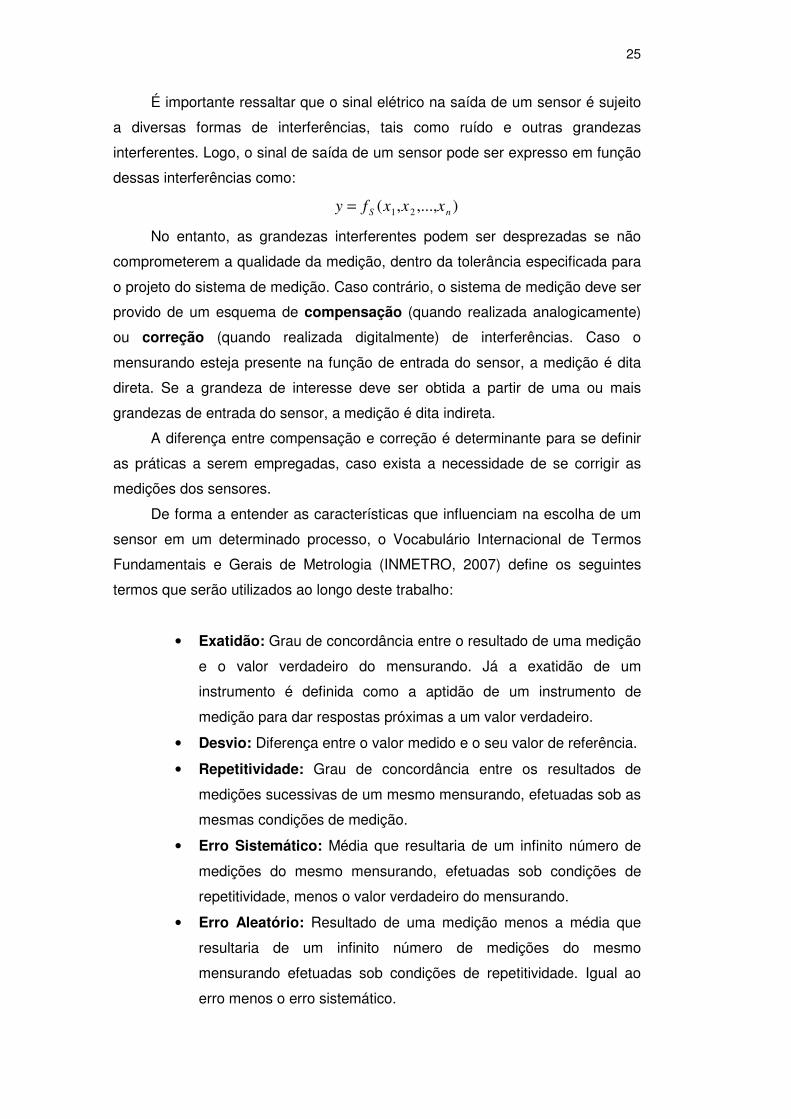
A configuração típica dos instrumentos de medição digital
(desconsiderando o filtro de antibatimento) é composta pelos seguintes módulos:
1. Sensor/ Transdutor → fornece uma grandeza de saída que tem
uma correlação determinada com a grandeza do mensurando
(INMETRO, 2007). A grandeza de saída é representada por um
sinal elétrico analógico e considera que não existe interferência de
outra grandeza.
2. Condicionadores → realizam o processamento dos sinais
elétricos, melhorando a sensibilidade e a resolução da medida e a
qualidade da resposta da cadeia de medição (Hall, 2010; Oliveira e
Catunda, 2007). O condicionamento pode realizar funções de
conversão do sinal, amplificação, linearização, filtragem e
retificação.
3. Conversor analógico-digital (A/D) → realiza a digitalização do
sinal, composta por subprocessos de quantização e codificação.
4. Processamento Digital → tem a função principal de determinar o
valor da grandeza do mensurando, por meio de uma função de
reconstrução (Oliveira e Catunda, 2007).
5. Etapa de saída → pode ser um registrador, indicador ou
controlador para um atuador de um processo.
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA
25
É importante ressaltar que o sinal elétrico na saída de um sensor é sujeito
a diversas formas de interferências, tais como ruído e outras grandezas
interferentes. Logo, o sinal de saída de um sensor pode ser expresso em função
dessas interferências como:
),...,,(21 nS xxxfy =
No entanto, as grandezas interferentes podem ser desprezadas se não
comprometerem a qualidade da medição, dentro da tolerância especificada para
o projeto do sistema de medição. Caso contrário, o sistema de medição deve ser
provido de um esquema de compensação (quando realizada analogicamente)
ou correção (quando realizada digitalmente) de interferências. Caso o
mensurando esteja presente na função de entrada do sensor, a medição é dita
direta. Se a grandeza de interesse deve ser obtida a partir de uma ou mais
grandezas de entrada do sensor, a medição é dita indireta.
A diferença entre compensação e correção é determinante para se definir
as práticas a serem empregadas, caso exista a necessidade de se corrigir as
medições dos sensores.
De forma a entender as características que influenciam na escolha de um
sensor em um determinado processo, o Vocabulário Internacional de Termos
Fundamentais e Gerais de Metrologia (INMETRO, 2007) define os seguintes
termos que serão utilizados ao longo deste trabalho:
• Exatidão: Grau de concordância entre o resultado de uma medição
e o valor verdadeiro do mensurando. Já a exatidão de um
instrumento é definida como a aptidão de um instrumento de
medição para dar respostas próximas a um valor verdadeiro.
• Desvio: Diferença entre o valor medido e o seu valor de referência.
• Repetitividade: Grau de concordância entre os resultados de
medições sucessivas de um mesmo mensurando, efetuadas sob as
mesmas condições de medição.
• Erro Sistemático: Média que resultaria de um infinito número de
medições do mesmo mensurando, efetuadas sob condições de
repetitividade, menos o valor verdadeiro do mensurando.
• Erro Aleatório: Resultado de uma medição menos a média que
resultaria de um infinito número de medições do mesmo
mensurando efetuadas sob condições de repetitividade. Igual ao
erro menos o erro sistemático.
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA

26
• Tendência: Erro sistemático da indicação de um instrumento de
medição.
• Correção: Valor adicionado algebricamente ao resultado não
corrigido de uma medição, de modo a compensar o erro
sistemático.
• Cadeia de medição: Sequência de elementos de um instrumento
ou sistema de medição que constitui o trajeto do sinal de medição
desde o estímulo até a resposta.
• Ajuste (de um instrumento de medição): Operação destinada a
fazer com que um instrumento de medição tenha desempenho
compatível com o seu uso.
• Faixa de medição: Conjunto de valores de um mensurando para o
qual se admite que o erro de um instrumento de medição mantém-
se dentro dos limites especificados.
• Sensibilidade: Variação da resposta de um instrumento de
medição dividida pela correspondente variação do estímulo obtida
de um instrumento padrão. Para uma função do sinal de saída do
sensor dada por )(xfys = , a sensibilidade S num ponto xo é dada
por (Oliveira e Catunda, 2007):
oxx
so
x
yxS
=∂
∂=)(
• Estabilidade: Aptidão de um instrumento de medição para
conservar constantes suas características metrológicas ao longo do
tempo.
• Deriva: Variação lenta de uma característica metrológica de um
instrumento de medição.
• Calibração: Conjunto de operações que estabelece, sob condições
especificadas, a relação entre os valores indicados de um
instrumento de medição ou sistema de medição, e os valores
correspondentes das grandezas estabelecidos por padrões.
Outra característica não definida no Vocabulário Internacional de Termos
Fundamentais e Gerais de Metrologia, mas que será usada neste trabalho é a
seguinte:
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA
27
• Envelhecimento: deriva da curva de calibração com o tempo,
geralmente apresentando uma diminuição da sensibilidade (Oliveira
e Catunda, 2007).
2.2. Monitoramento clássico de sensores na Indústria
A solução clássica para o monitoramento de sensores consiste em uma
série de etapas que abrangem desde o desenvolvimento dos cronogramas de
revisão e calibração até uma possível substituição do instrumento caso este seja
avaliado como descalibrado ou irreparável.
Os cronogramas clássicos de monitoramento geralmente demandam um
longo período de tempo para realizar a revisão, ajuste ou calibração do
equipamento de acordo com o tipo de falha encontrada. Na indústria é comum
que o especialista da instrumentação da planta elabore cronogramas de revisão
e calibração para todos os equipamentos que controlam os processos
(atuadores, sensores e controladores). A seguir são apresentadas as etapas do
monitoramento clássico de sensores, assim como uma breve descrição de cada
uma delas.
2.2.1. Agendamento de Revisões
O desenvolvimento de um cronograma de revisão dos instrumentos da
planta pode ser qualificado como uma das tarefas mais importantes no controle
dos processos, já que garante o correto funcionamento dos sensores e
atuadores. Um cronograma mal projetado pode gerar perdas desnecessárias de
tempo, tanto para o especialista como para o processo. Os cronogramas são
geralmente desenvolvidos com base na experiência do especialista, que designa
aos instrumentos mais críticos um período de revisão frequente (diária), de forma
a evitar qualquer tipo de falha no processo e, aos instrumentos menos críticos,
uma revisão menos frequente (semanal, mensal, semestral ou anual),
dependendo do seu estado.
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA
28
2.2.2. Revisão do Instrumento In-Situ
Na revisão do instrumento in-situ, dependendo do tipo de instrumento, o
sensor pode ser desconectado do canal de aquisição de sinais por um período
mínimo de tempo e ser revisado com a ajuda de ferramentas calibradas que
forneçam uma leitura real e confiável do processo. Outra forma de realizar a
revisão do instrumento in-situ é acoplar em paralelo (sem desconectar o sensor),
uma ferramenta que fornecerá as medidas efetuadas pelo instrumento durante o
período de revisão. Nesta etapa geralmente é utilizado como ferramenta de
revisão um calibrador de processos (Fluke, 2004) ou um Hand Held (ABB, 2006).
2.2.3. Ajuste do Instrumento In-Situ
Caso o sensor apresente leituras errôneas durante a fase de revisão, será
efetuado um ajuste das medições do processo, para que o sensor possa
fornecer leituras dentro da faixa de medição esperada. Geralmente, nessa etapa
o sensor é isolado do canal de aquisição para ser ajustado com as ferramentas
já mencionadas. Depois de efetuado o ajuste, o sensor é novamente conectado
ao canal de aquisição e o cronograma de calibração é modificado, atribuindo-se
ao sensor afetado uma revisão mais frequente.
2.2.4. Retirada do Instrumento
Caso o sensor não possa ser ajustado ou revisado in-situ ou não sejam
corrigidas suas leituras após a etapa de ajuste in-situ, deve-se agendar uma
parada do processo para desinstalar o instrumento e realizar a revisão e o ajuste
no laboratório.
2.2.5. Revisão e Ajuste do Instrumento em Laboratório
No laboratório, o instrumento é conectado aos módulos de teste que
fornecem as medidas quando um estímulo é aplicado no sensor para simular o
funcionamento do processo. Assim, com a ajuda desses módulos, o especialista
tentará ajustar o sensor na faixa de medição requerida.
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA
29
2.2.6. Substituição Momentânea ou Parcial do Instrumento
Depois de realizado o ajuste no laboratório, as medições do sensor são
avaliadas em função do erro permitido para o processo. Caso não seja possível
realizar um ajuste correto (desvio alto) do sensor no laboratório, agenda-se uma
nova calibração, substituindo momentaneamente o sensor defeituoso por outro.
2.2.7. Agendamento de uma nova Calibração
Uma nova calibração do instrumento é agendada em um laboratório
especializado em calibração de sensores, preferencialmente acreditado na RBC
(Rede Brasileira de Calibração). Neste caso, o tempo de calibração do
instrumento dependerá do tipo e da intensidade da falha. Geralmente, uma nova
calibração pode levar várias semanas para ser realizada; portanto, o especialista
deve estar preparado para substituir o instrumento durante esse período, além
de agendar uma nova parada do processo para a re-instalação do instrumento.
Conforme especificado nas etapas anteriores, o método clássico de
monitoramento, detecção e correção de falhas em sensores é baseado na
verificação de um limite de erro de medição. No entanto, este tipo de método não
fornece um conhecimento profundo sobre o diagnóstico das falhas (Ni, K. et al.,
2009).
É possível concluir que o monitoramento de sensores demanda um alto
consumo de tempo e demanda um grande esforço para isolar, ajustar, calibrar e
re-instalar o sensor no processo. Considerando que o trabalho de monitoramento
deve ser estendido para o número total de instrumentos instalados na planta, o
tempo investido aumenta consideravelmente. Portanto, um monitoramento
automatizado de forma on-line que possa ajustar e identificar o sensor defeituoso
é extremamente útil para o gerenciamento de futuras calibrações e otimização
do tempo investido pelo especialista.
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA

30
2.3. Inteligência Computacional Aplicada em Instrumentação
2.3.1. Sensores Inteligentes
Na bibliografia científica atual, diversos termos são utilizados para designar
os dispositivos para os quais a Inteligência Computacional tem contribuído, tais
como “sensor/transdutor inteligente” ou “sensor adaptativo”. Entretanto, é
importante salientar que no Vocabulário Internacional de Metrologia (INMETRO,
2007) esses termos não existem. Taymanov e Sapozhnikoav (2009) explicam o
problema de se utilizarem esses termos e propõem para o VIM um novo termo
(russo) que inclui as características básicas da Inteligência Computacional nos
sensores industriais. Com o intuito de proporcionar uma definição adequada que
possa servir como ponto de partida para a padronização e o desenvolvimento de
sensores e transdutores qualificados como “Inteligentes”, no padrão IEEE 1452.2
define-se um transdutor/sensor inteligente como “um transdutor que provê
funções além das necessárias para gerar corretamente a representação de uma
grandeza sentida ou controlada. Essa funcionalidade tipicamente simplifica a
integração do transdutor em aplicações em um ambiente de redes” (Catunda,
2010). Assim, Rocha e Nogueira (2007) indicam que um sensor é considerado
inteligente se atende a pelo menos um dos seguintes requisitos:
1. Ajuste automático: capacidade de realizar automaticamente sua
calibração sem intervenção humana;
2. Processamento do sinal: capacidade de processar o sinal da
medição (medida) de forma a fornecer o valor final da grandeza;
3. Tomada de decisão: capacidade de ser autônomo na tomada de
decisões sem a necessidade de recorrer a comandos externos, ou
seja, o transdutor pode tomar decisões e realizar ações localmente;
4. Fusão com outros sensores: capacidade de combinar ou agregar
sinais de medição (medidas) obtidos de vários transdutores, com a
finalidade de se obter um resultado final mais exato;
5. Capacidade de aprendizado: capacidade de aprender com
operações passadas, usando, por exemplo, redes neurais ou outras
formas de representação de conhecimento.
É importante lembrar que o termo calibração é utilizado na Metrologia
como referente às operações que estabelecem a relação entre os valores
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA

31
indicados pelo instrumento e por um instrumento padrão, sob condições
específicas (temperatura e/ou umidade). Por exemplo, a temperatura do
laboratório de calibração deve ser mantida a 20 ±1 ºC antes de realizar alguma
calibração.
A inteligência computacional tem sido utilizada no desenvolvimento de
modelos para correção automática de erros de medição (auto-calibração) e de
algoritmos que verificam se aqueles modelos estão funcionando de forma correta
(auto-validação). Esses modelos, baseados em técnicas como Lógica Fuzzy (LF)
(Mendel, 1995), Redes Neurais (RN) (Haykin, 1998; Bishop, 1995) e Sistemas
Neuro-Fuzzy (SNF), aumentam consideravelmente a confiabilidade do sistema e
são geralmente aplicados no monitoramento de um único sensor ou para a
detecção de falhas em uma planta.
PhaniShankar et al. (2000) apresentam uma metodologia genérica para a
construção de um algoritmo de auto-validação de dados baseado na lógica
fuzzy. As funções de pertinência são criadas a partir do desvio padrão e da faixa
de variação dos dados analisados. A metodologia é simulada com dados de
temperatura de um forno cúpula (Cupola Furnace), utilizado para a fusão de
ferro, e gera como resposta o grau de confiabilidade dos dados de temperatura
analisados.
Pereira et al. (2006) desenvolveram algoritmos de auto-verificação, auto-
correção e auto-validação aplicando redes Multilayer Perceptron (MLP) de quatro
camadas para corrigir os erros ao longo do tempo de um sensor empiricamente
modelado. A rede utiliza como entradas as medições realizadas e o tempo de
operação do sensor. Além disso, desenvolveram uma rede recorrente para
aprender o comportamento do sistema onde será utilizada, excluindo o tempo de
operação do sensor. O modelo foi utilizado em um sensor, modelado de forma
empírica, que é usado na simulação de um controle de nível de água de um
tanque. O modelo visa a ser implementado no protocolo de comunicação
industrial Field Bus.
Bueno (2006) desenvolveu um sistema de monitoramento e detecção de
falhas em sensores de um reator nuclear tipo IEA-R1. A etapa de monitoramento
é baseada na implementação de um número de redes neurais MLP igual ao
número de variáveis que se deseja monitorar. Foram avaliadas doze variáveis do
reator IEA-R1. Já na etapa de detecção de falhas se utilizou a Lógica Fuzzy para
a implementação de um modelo especialista que identifique quando os sensores
apresentam uma falha.
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA
32
Oliveira et al. (2009) desenvolveram um algoritmo para auto-ajuste de
sensores inteligentes a partir do uso de redes neurais artificiais. Por meio de
dados gerados em uma calibração, o algoritmo aprende a corrigir os erros
sistemáticos encontrados. Para testar o modelo, os autores utilizaram um sensor
de temperatura Pt-100. O principal objetivo foi desenvolver uma rede neural
capaz de aprender a curva característica de resposta com poucos pontos.
Reyes et al. (2010) desenvolveram um sistema híbrido de auto-
compensação e auto-validação de instrumentos inteligentes industriais que
combina um modelo Neuro-Fuzzy, capaz de compensar os erros provocados por
instrumentos não calibrados ao longo do tempo, e um modelo de validação
baseado na Lógica Fuzzy, que fornece o nível de confiabilidade das medições. O
sistema proposto indica ao especialista o momento em que é necessário realizar
uma nova calibração no laboratório. O algoritmo é simulado em um instrumento
real de pressão diferencial modelo 3051S da marca Rosemount, utilizado em
mineração para o controle dos processos de nível e pressão.
Almeida et al. (2010) implementaram em um microcontrolador um sistema
para auto-calibração e linearização de sensores utilizando redes de funções de
base radiais (RBF) (Haykin, 1998) empregando um treinamento multiobjetivo que
calcula o menor erro quadrático e a menor norma dos pesos ajustados durante o
treinamento. A vantagem do treinamento multiobjetivo no contexto de
linearização de sensores é determinar uma rede adequada para o problema que
apresente baixa complexidade estrutural, reduzindo o custo da projeção em
hardware. Neste caso os pesquisadores realizaram testes em um termopar tipo
S e em uma balança de precisão (que calcula o peso em função da variação da
capacitância), simulando os pontos de calibração para cada caso e gravando os
pesos da rede em um microcontrolador. No entanto, foi necessário um grande
número de neurônios para poder chegar a resultados próximos aos desejados.
2.3.2. Instrumentação Inteligente na Indústria
A instrumentação deve ter uma capacidade de operação em tempo real,
essencial para-se lidar com a rápida evolução dos sistemas e do ambiente. A
exatidão e a medição da incerteza das saídas são importantes em muitas
aplicações práticas como, por exemplo, no monitoramento e controle de
sistemas quando uma decisão crítica deve ser tomada e um comportamento
normal (sem distúrbios) é desejável. Além disso, o custo econômico pode ser
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA

33
crítico em aplicações de produção em massa e quando a margem de lucro é de
pequeno porte (Ablameyko et al., 2003).
Os sistemas de instrumentação e medição convencionais são baseados
em componentes dedicados com alguns parâmetros ajustáveis, os quais
permitem uma calibração adequada e adaptação às condições de operação.
Esses sistemas podem ser aplicados para o monitoramento de processos e na
detecção de eventos. Um sensor utilizado para detecção de eventos está
interessado apenas em detectar a ocorrência de um determinado estado. Já no
monitoramento dos processos, os dados são constantemente coletados e
utilizados em aplicações práticas e científicas (Ni, K. et al., 2009). No entanto,
aqueles sensores convencionais possuem uma "inteligência" limitada, ou seja,
uma capacidade limitada de extrair conhecimento a partir do mundo real para
definir e modificar seu próprio comportamento. Em particular, eles não são
capazes de entender ou aprender o comportamento desejado a partir da análise
das amostras coletadas; além disso, eles não são capazes de se adaptar
dinamicamente às mudanças das condições de funcionamento do processo
(Ablameyko, et al., 2003).
Com o aumento da capacidade de processamento dos dados e da
velocidade de execução de programas dos computadores, houve uma grande
evolução na aplicação de técnicas de inteligência computacional para realizar a
validação de sinal. O uso da Inteligência Computacional permite alcançar a
flexibilidade e adaptabilidade requeridas. No caso de sinais muito complexos,
variáveis no tempo e não-lineares, em que as medições confiáveis são muito
complexas e os modelos matemáticos clássicos não podem ser obtidos,
diferentes métodos foram propostos por pesquisadores.
Uma das primeiras aplicações foi realizada na área nuclear,
especificamente no reator regenerador experimental EBR-II, localizado em
Idaho, nos Estados Unidos. Upaddhyaya et al. (1992) aplicaram redes neurais
artificiais ao reator com o propósito de monitorar o estado das medições. O
modelo implementado utiliza duas redes neurais, uma para o circuito primário e
outra para o circuito secundário do reator nuclear, para monitoração de algumas
variáveis da instalação.
Hines et al. (1997) implementaram um modelo de validação de sinais
utilizando o modelo hibrido Neuro-Fuzzy ANFIS - Adaptative Network based
Fuzzy Inference System (Jang, 1993). Este sistema foi desenvolvido utilizando
dados fornecidos pela planta de potência nuclear de Crystal River unidade 3,
localizado no estado da Flórida, nos Estados Unidos. O modelo é baseado na
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA
34
implementação de um número de redes ANFIS igual ao numero de variáveis que
se deseja monitorar. As variáveis monitoradas pelo sistema foram: o nível do
gerador de vapor do loop A, a temperatura da perna quente do loop A e a vazão
de água do loop A.
Em Na et al. (2002) é desenvolvido um sistema de validação de sinal
hetero-associativo que utiliza um modelo híbrido Neuro-Fuzzy ANFIS para
monitorar cada uma das variáveis em toda sua faixa de medição. Além disso, a
metodologia proposta faz uso de algoritmos genéticos para a seleção das
variáveis de entrada do modelo que ajudem na previsão dos sinais avaliados. O
modelo é testado nas medições de nível e pressão do pressurizador e na
temperatura da água de um simulador de planta nuclear localizado na Coréia do
Sul.
Oliveira (2005) desenvolveu um modelo hetero-associativo de validação de
sinais baseado em redes do tipo ANFIS. O modelo é baseado na implementação
de um número de redes ANFIS igual ao número de variáveis que se deseja
monitorar. Na simulação empregada nesta pesquisa, foi escolhida a potência e a
temperatura da água na perna quente da planta nuclear Angra I. Além disso, o
modelo implementado utiliza um modelo baseado na lógica fuzzy que indica
quando os sinais estimados apresentam falhas. É importante salientar que o
modelo proposto realiza uma correção dos sinais quando apresentam falhas
inferiores a 5% da faixa de medição dos sensores. Cumpre salientar que o
sistema de monitoramento proposto emite falsos alarmes e em alguns casos não
identifica as falhas.
Com base nessas pesquisas desenvolvidas na indústria, percebe-se a
necessidade de desenvolvimento de um sistema de monitoramento automático,
baseado em inteligência computacional, que ajuste e valide o estado do sensor.
O sistema proposto neste trabalho tem como objetivo prover os sensores de um
esquema de auto-correção on-line das medições que apresentem falhas e
realizar uma auto-validação dos sinais avaliados, fornecendo ao especialista
um grau de confiabilidade das medições e uma avaliação da qualidade do
sistema quando os sensores apresentem falhas.
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA

35
2.4. Tipos de Falha em Sensores
Um sensor é considerado com falha se a medição das grandezas fornece
uma representação incorreta do mensurando, ou seja, e existem dados
anômalos que excedem o comportamento normal esperado do sensor (Ni, K. et
al., 2009).
Os sensores fornecem informações sobre os fenômenos ou eventos em
um maior nível de detalhamento do que antigamente. No intuito de tomar
decisões significativas com os dados dos sensores, a qualidade dos dados
recebidos deve ser assegurada. Embora o uso de redes de sensores em
aplicações de sensoriamento tenha crescido ultimamente, as ferramentas de
análise da integridade desses dados não acompanhou esse crescimento. Uma
causa disso é a falta de compreensão sobre os tipos de falhas e as
características associadas às falhas que podem ocorrer nos sensores. Portanto,
o objetivo desta seção é fornecer uma taxonomia sistemática das falhas comuns
nas medições dos sensores.
As falhas têm significados diferentes quanto a sua interpretação final
e a sua importância. Dependendo do contexto e da aplicação, algumas falhas
podem ter valor informativo, enquanto outras são descartadas. A Tabela 1
resume os tipos de falhas, suas definições, duração, indicação e possíveis
causas, além do impacto que podem gerar nas medições. A Tabela 1 segue a
Taxonomia proposta por Ni, K. et al. (2009).
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA

36
Tabela 1. Taxonomia de Falhas: Definições, Possíveis Causas e Impacto (Ni et al., 2009)
Falha Definição e Duração Indicações e Possíveis Causas
Impacto da Falha
Outlier Dados isolados inesperados. Ocorrem aleatoriamente.
A distância entre outras medições é maior do que a esperada. O gradiente muda rapidamente quando ocorre um outlier.
Ele pode distorcer significativamente a média, variância, gradiente e outros parâmetros de dados se não forem detectadas.
Picos
Múltiplos dados com uma taxa de variação maior do que esperado.
Mudança brusca no gradiente maior que o esperado. Pouca correlação temporal entre dados históricos e os picos. Falha de bateria e outros equipamentos ou falhas de conexão.
Os picos não geram valores informativos e podem ser descartados. Isso resulta em uma perda de dados de rendimento do sensor.
“Stuck-at”
Sensores apresentam uma variância próxima a zero em um inesperado período de tempo.
Variância é próxima de zero ou zero. A causa freqüente dessa falha é uma avaria no hardware dos sensores.
Se a causa é pela mudança do ambiente, ainda tem valor informativo e os dados podem ser interpretados com baixa fidelidade. Caso contrário, os dados podem ser descartados.
Ruído ou Variância
Sensores apresentam uma alta variância ou ruído. Geralmente não temporárias.
A variação é maior do que o esperado. Devido a uma falha de hardware, ambiente fora da faixa, ou um enfraquecimento da bateria de abastecimento.
Se os dados ruidosos acompanham a tendência de outros sensores, então os dados ainda oferecem informação e não devem ser descartados.
Calibração
Os sensores reportam valores que estão fora da realidade. A falha se mantém até ser consertada.
Os erros de calibração e os desvios em sensores são as causas deste tipo de falha. Um sensor pode estar deslocado (offset) ou ter um ganho diferente do valor adequado. A maioria das falhas deste tipo pode piorar com o tempo.
Os dados não devem ser descartados. Os dados não calibrados podem fornecer informação relevante. Uma fórmula apropriada de calibração pode corrigir os dados.
Conexão ou
Hardware
Um mal funcionamento no hardware do sensor pode causar uma leitura de dados inexatos. Falha permanente uma vez que ocorre.
Dados anormalmente inferiores ou superiores aos esperados. Perturbações ambientais e a idade do sensor indicam maiores probabilidades de falha. Curto-circuito ou mal conexão do cabo alimentador.
Os dados são sem sentido devido ao fato de que o sensor não está funcionando como projetado. Devem ser descartados.
Baixa Bateria
A tensão da bateria cai a um ponto onde o sensor não fornece dados confiáveis. Permanente até a troca da bateria.
O estado da bateria do sensor é um indicador do desempenho do sensor. Um comportamento comum inclui um gradiente inesperado seguido por uma falta de dados ou de variância zero. Também pode incluir ruído excessivo.
Comumente esta falha leva a dados que devem ser descartados. A exceção é se o comportamento do sensor em baixa tensão possui ruído aditivo, então ainda pode dar valores informativos.
Ambiente fora do
intervalo
O ambiente excede o intervalo de sensibilidade do transdutor. As leituras voltam à normalidade quando o sensor volta a atuar dentro do intervalo.
Pode existir um ruído muito alto nos dados. Também pode ser um sinal de uma calibração mal realizada.
Ainda guarda informação nos dados. No valor mínimo indica que o sensor ultrapassou os limites de sensibilidade no ambiente.
Clipping (Recorte)
O sinal de saída do sensor atinge no máximo os limites do conversor A/D. Volta à normalidade quando o ambiente volta ao intervalo correto.
Os dados exibem saturação nos pontos extremos. Isto é devido ao ambiente que excede os limites do conversor A/D.
Ainda guarda informação nos dados.
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA
37
Esse trabalho se concentra em um conjunto de falhas de sensores que têm
sido observadas em implementações reais. Assim, três tipos de falhas (deriva,
ruído e deslocamento) categorizadas como falhas de calibração, estudadas
neste trabalho, causam um desvio das leituras dos sensores com relação aos
padrões normais (ou sem falha). Estas falhas foram observadas em várias
implementações reais (Hines, 2001, Sharma et al., 2010; Oliveira, 2005) e,
portanto, é importante entender sua prevalência para desenvolver técnicas
automatizadas e inteligentes para detectá-las. Como resultado de erros de
calibração, obtém-se uma menor acurácia, não necessariamente uma baixa
precisão. Assim, serão descritas brevemente os três tipos de falhas de
calibração utilizadas neste trabalho.
• Falhas de Deslocamento: Comumente chamada de offset; os
dados são deslocados das medições reais por um valor constante.
Os dados ainda exibem padrões normais durante um período
prolongado de tempo.
• Falha de Deriva: Ao longo do trabalho de um sensor, por vezes, o
desempenho pode afastar-se dos parâmetros de calibração
original. Ou seja, o deslocamento ou o parâmetro de ganho pode
mudar com o tempo.
• Falha de Ruído: Este componente de erro aleatório pode ser
devido a eventos externos que influenciam nas leituras dos
sensores ou a outros eventos transientes difíceis de prever. Em
alguns casos, as medições de ruído podem ser modeladas usando
uma distribuição normal como a Gaussiana (Bychkovskiy et al.,
2003).
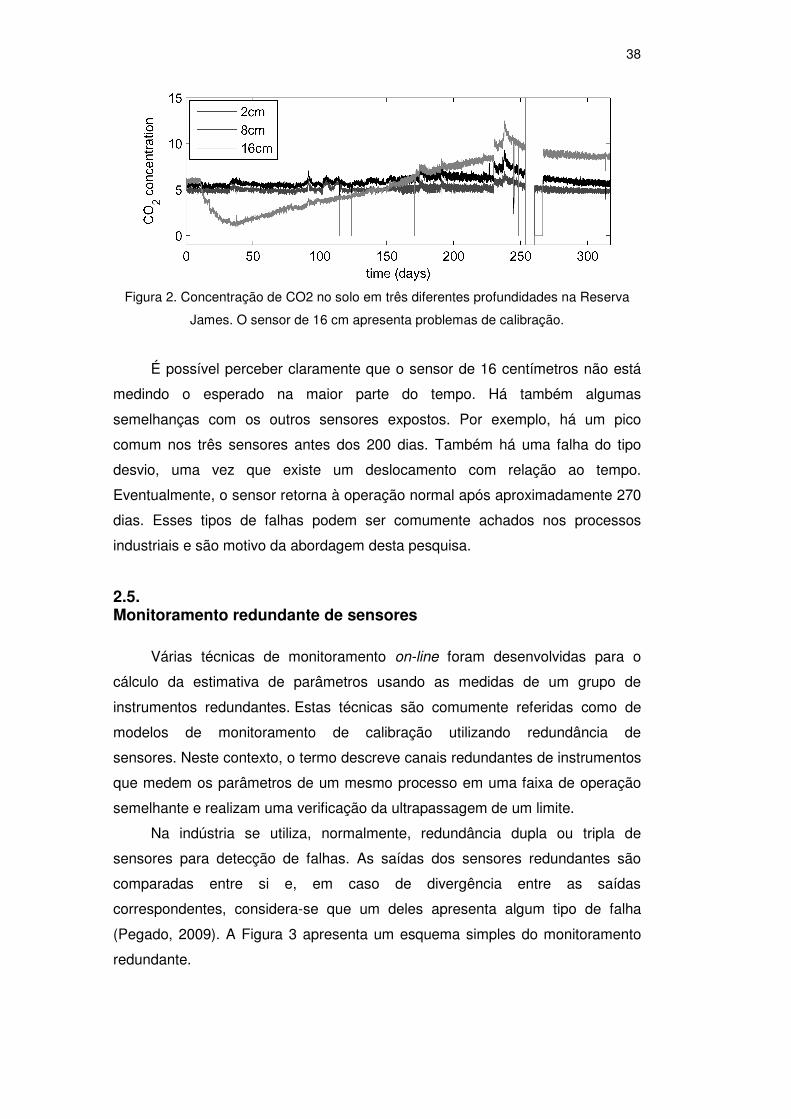
Na Figura 2 é apresentado um exemplo (Ramanathan et al. (2006)) que
considera uma falha por calibração em um dos três sensores do monitoramento
da concentração de dióxido de carbono do solo em diversos níveis de
profundidade. Neste caso o sensor apresenta medições pouco usuais em
relação aos outros sensores.
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA
38
Figura 2. Concentração de CO2 no solo em três diferentes profundidades na Reserva
James. O sensor de 16 cm apresenta problemas de calibração.
É possível perceber claramente que o sensor de 16 centímetros não está
medindo o esperado na maior parte do tempo. Há também algumas
semelhanças com os outros sensores expostos. Por exemplo, há um pico
comum nos três sensores antes dos 200 dias. Também há uma falha do tipo
desvio, uma vez que existe um deslocamento com relação ao tempo.
Eventualmente, o sensor retorna à operação normal após aproximadamente 270
dias. Esses tipos de falhas podem ser comumente achados nos processos
industriais e são motivo da abordagem desta pesquisa.
2.5. Monitoramento redundante de sensores
Várias técnicas de monitoramento on-line foram desenvolvidas para o
cálculo da estimativa de parâmetros usando as medidas de um grupo de
instrumentos redundantes. Estas técnicas são comumente referidas como de
modelos de monitoramento de calibração utilizando redundância de
sensores. Neste contexto, o termo descreve canais redundantes de instrumentos
que medem os parâmetros de um mesmo processo em uma faixa de operação
semelhante e realizam uma verificação da ultrapassagem de um limite.
Na indústria se utiliza, normalmente, redundância dupla ou tripla de
sensores para detecção de falhas. As saídas dos sensores redundantes são
comparadas entre si e, em caso de divergência entre as saídas
correspondentes, considera-se que um deles apresenta algum tipo de falha
(Pegado, 2009). A Figura 3 apresenta um esquema simples do monitoramento
redundante.
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA

39
Figura 3. Monitoramento Redundante – Técnica tradicional
Em geral, as técnicas redundantes são mais intuitivas do que as técnicas
não redundantes. Os modelos redundantes também podem ser mais fáceis de
projetar. Esta simplicidade faz com que órgãos reguladores favoreçam as
técnicas redundantes em relação aos modelos mais simples não redundantes.
Uma fraqueza percebida das técnicas redundantes é que, ao contrário de muitas
das técnicas não-redundantes, a maioria delas é incapaz de detectar falhas de
modo comum que se manifestam em uma taxa comum durante um ciclo de
trabalho. No entanto, esses tipos de falhas de modo comum são extremamente
raros, com poucas ocorrências ao longo de várias décadas de experiência
operacional (Hines, 2007). Além disso, entre suas desvantagens mais
importantes está o aumento de custo, espaço e complexidade de incorporar
hardware redundante.
A técnica mais simples de redundância em sensores é a média das
medições. No entanto, quando é utilizada, se um sensor começa a se degradar,
a previsão também irá se degradar, mas a uma taxa inferior. Esta característica
indesejável de desvio em uma previsão, causado pelo desvio de uma entrada do
modelo, é denominada spillover (Hines, 2007).
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA
40
2.6. Monitoramento não redundante de sensores
Quando não se dispõe de um número suficiente de sinais redundantes
para se realizar uma comparação, a técnica de redundância por hardware é dita
inadequada e, então, um modelo não redundante é utilizado para gerar os “sinais
redundantes”.
Os modelos não redundantes calculam a estimativa dos parâmetros
usando medições correlacionadas, mas não redundantes, de um grupo de
instrumentos. No entanto, caso existam canais redundantes (grupo de sensores
redundantes), estes podem ser incluídos nos grupos modelados. Pesquisas
anteriores concluíram que essas técnicas parecem ser viáveis para a aplicação
em sistemas de monitoramento (Hines, 2000; Najafi, 2004; Oliveira, 2005;
Marseguerra, 2006).
Esta técnica se baseia na aquisição de sinais de um conjunto de sensores,
a princípio correlacionados com o sensor a ser validado, que fornecem sinais
diferentes do sinal monitorado. Como exemplo, pode-se citar a obtenção da
potência consumida pelo compressor de um chiller (máquina térmica) utilizando
os sinais de temperatura de água no condensador, a temperatura e o fluxo de
água no evaporador (Najafi, 2004). Assim, a validação do sinal do sensor é feita
com a comparação entre a estimativa da variável do processo e a medida
fornecida pela instrumentação (Oliveira, 2005).
Os modelos não redundantes baseiam-se no uso de medidas históricas do
funcionamento da planta, e pressupõem que os dados armazenados estão livres
de falhas e cobrem todo o intervalo de trabalho do processo. Os dados, antes de
serem utilizados, devem ser pré-processados. Geralmente, são utilizados filtros
para remover o ruído acoplado às medidas. Os modelos não redundantes
utilizam equações empíricas, baseadas na experiência dos especialistas e
descrevendo o comportamento do sensor na planta. Atualmente as pesquisas
em modelos para validação de sinais de sensores têm sido direcionadas para
modelos empíricos, por meio da utilização da inteligência computacional, com
aplicações de redes neurais (Pegado, 2009; Rivera et all, 2007; Pereira, 2006)
lógica fuzzy (Murphey et al, 2003; Osowski et al, 2004) e sistemas especialistas
(Angeli, 2010). A Figura 4 resume o que foi abordado nesta seção.
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA

41
Figura 4. Monitoramento não redundante – Metodologia atual
2.6.1. Modelos Inferenciais, Hetero-Associativos e Auto-Associativos
Uma classificação adicional usada para descrever modelos empíricos
separa-os em inferencial, hetero-associativo ou auto-associativo. Um modelo
inferencial usa um conjunto de variáveis que ajudam a inferir sobre os valores da
variável de saída (cf. Figura 5a). Por exemplo, em um motor de combustão
interna, a pressão do refrigerante do motor e a temperatura do óleo do motor
podem ajudar a inferir a pressão dos gases no cárter do motor.
1y1x
2x
3x
mx
2y
3y
py
1y
1x
2x
3x
mx
1x1x
2x
3x
mx
2x
3x
mx
Figura 5. Diagrama esquemático dos modelos (a) Inferencial (b) Hetero-Associativo
e (c) Modelo Auto-Associativo
Este modelo pode ser expandido para um modelo hetero-associativo,
tendo múltiplas entradas e múltiplas saídas, onde a leitura de diferentes
variações de entrada permite inferir diferentes variáveis de saída. Por exemplo,
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA
42
em um motor de combustão interna, a pressão do refrigerante do motor e a
temperatura do óleo do motor também podem inferir sobre a temperatura em
cada um dos cilindros onde se realiza a combustão. A diferença entre os
modelos inferenciais e os hetero-associativos é que o inferencial produz uma
variável, enquanto os modelos hetero-associativos são capazes de produzir
múltiplas saídas (cf. Figura 5b). Portanto, os modelos inferenciais e os hetero-
associativos são geralmente implementados em situações em que a
dependência das variáveis é conhecida e os parâmetros de uma medição são
comparados com os modelos de previsão para identificar uma mudança na
dependência.
Já em um modelo auto-associativo, as saídas são usadas para emular as
entradas dentro de uma faixa dinâmica apropriada (cf. Figura 5c). Como
geralmente as medidas de uma planta são corrompidas por ruído, derivas e
offsets, uma implementação do modelo auto-associativo pode ser utilizado para
estimar o valor real dos parâmetros de entrada. Neste caso o termo “real” refere-
se aos valores coletados durante a operação normal da planta, os quais serão
utilizados para o treinamento do modelo, ou uma versão filtrada das medições
livre de falhas. Ou seja, o modelo auto-assocativo (não redundante) estima os
valores corretos de entrada usando as correlações incluídas no modelo durante
o treinamento. O valor estimado pelo modelo auto-associativo pode então ser
comparado com os parâmetros atuais para determinar se um sensor possui uma
deriva ou alguma degradação resultante de uma falha interna.
2.6.2. Modelagem Empírica em Sistemas de Monitoramento para calibrações
Conforme explicado, a modelagem empírica é inserida no sistema de
monitoramento não redundante para calibrações dos sensores. Este sistema
pode ser explicado considerando o diagrama de monitoramento para calibrações
de instrumentos da Figura 6.
É possível observar na Figura 6 que a primeira etapa para desenvolver um
sistema de monitoramento é coletar dados que servirão para o treinamento do
modelo empírico (não redundante). Posteriormente, medidas do processo são
apresentadas ao modelo desenvolvido, o qual corrigirá os dados errôneos. Os
valores medidos são subtraídos dos valores corrigidos (os valores corrigidos
referem-se a estimativas do modelo), fornecendo o erro de previsão do modelo
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA

43
(resíduo). O valor do resíduo é comparado com os limites aceitáveis de
calibração e, se o limite for excedido, a condição do sensor deve ser investigada.
Após esta investigação, uma das três possibilidades pode ser considerada:
• Não Calibrar
• Agendar uma calibração
• Declarar o sensor como inoperável para o processo
.
Figura 6. Sistema de Monitoramento de Calibração Genérico
Desta discussão é possível perceber que o modelo empírico executa a
tarefa mais crítica do sistema de monitoramento de calibrações, calculando os
parâmetros estimados para um determinado sistema. Além disso, o modelo
empírico executa uma ação de correção.
DBD
PUC-Rio - Certificação Digital Nº 0912926/CA