
3) Raízes de Sistemas Lineares - comp.ita.brpauloac/cci22/cci22-cap3.pdf · Eliminação de Gauss,...
99
CCI-22 3) Raízes de Sistemas Lineares Eliminação de Gauss, Gauss-Jordan, Decomposição LU, Gauss-Jacobi, Gauss-Seidel
-
Upload
trinhkhuong -
Category
Documents
-
view
216 -
download
0
Transcript of 3) Raízes de Sistemas Lineares - comp.ita.brpauloac/cci22/cci22-cap3.pdf · Eliminação de Gauss,...
CCI-22
3) Raízes de Sistemas Lineares3) Raízes de Sistemas Lineares
Eliminação de Gauss, Gauss-Jordan, Decomposição LU, Gauss-Jacobi, Gauss-Seidel
CCICCI--2222
� Introdução
� Métodos diretos� Regra de Cramer
� Eliminação de Gauss
� Gauss-Jordan� Gauss-Jordan
� Resíduos e Condicionamento de Sistemas
� Decomposição LU
� Métodos iterativos� Gauss-Jacobi
� Gauss-Seidel
� Considerações finais
CCICCI--2222
� Introdução
� Métodos diretos� Regra de Cramer
� Eliminação de Gauss
� Gauss-Jordan� Gauss-Jordan
� Resíduos e Condicionamento de Sistemas
� Decomposição LU
� Métodos iterativos� Gauss-Jacobi
� Gauss-Seidel
� Considerações finais
Métodos de resoluçãoMétodos de resolução
� Para a resolução de um sistema linear de equações, há dois grupos de métodos:� Métodos diretos: a solução é obtida através da aplicação de um número finito de operações aritméticas
Regra de Cramer� Regra de Cramer� Eliminação de Gauss e de Gauss-Jordan� Decomposição LU
� Métodos iterativos: a solução é obtida através de uma sequência de aproximações sucessivas, até se alcançar uma resposta que satisfaça a precisão exigida� Gauss-Jacobi� Gauss-Seidel
Sistemas de Equações LinearesSistemas de Equações Lineares
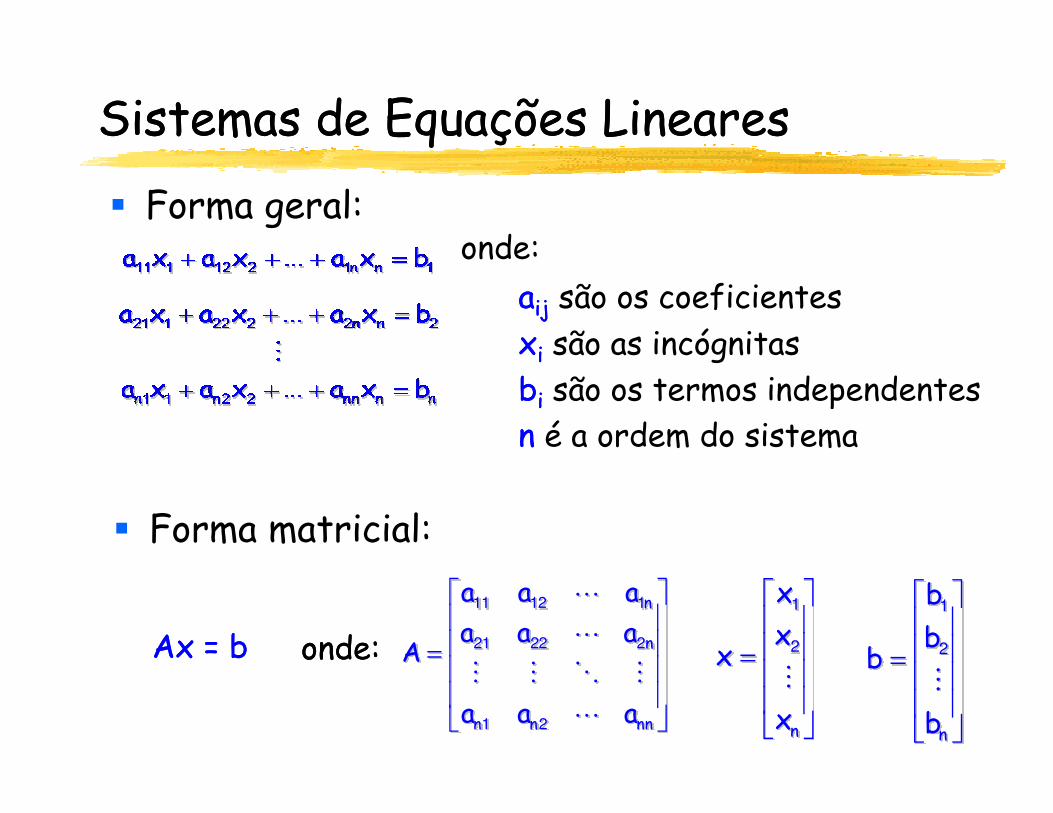
� Forma geral:onde:
aaijij são os coeficientesxxii são as incógnitasbbii são os termos independentesbbii são os termos independentesnn é a ordem do sistema
� Forma matricial:
Ax = bAx = b
=
nnnn
n
n
aaa
aaaaaa
A
L
MOMM
L
L
21
22221
11211
=
nb
bb
bM
2
1
=
nx
xx
xM
2
1
onde:onde:
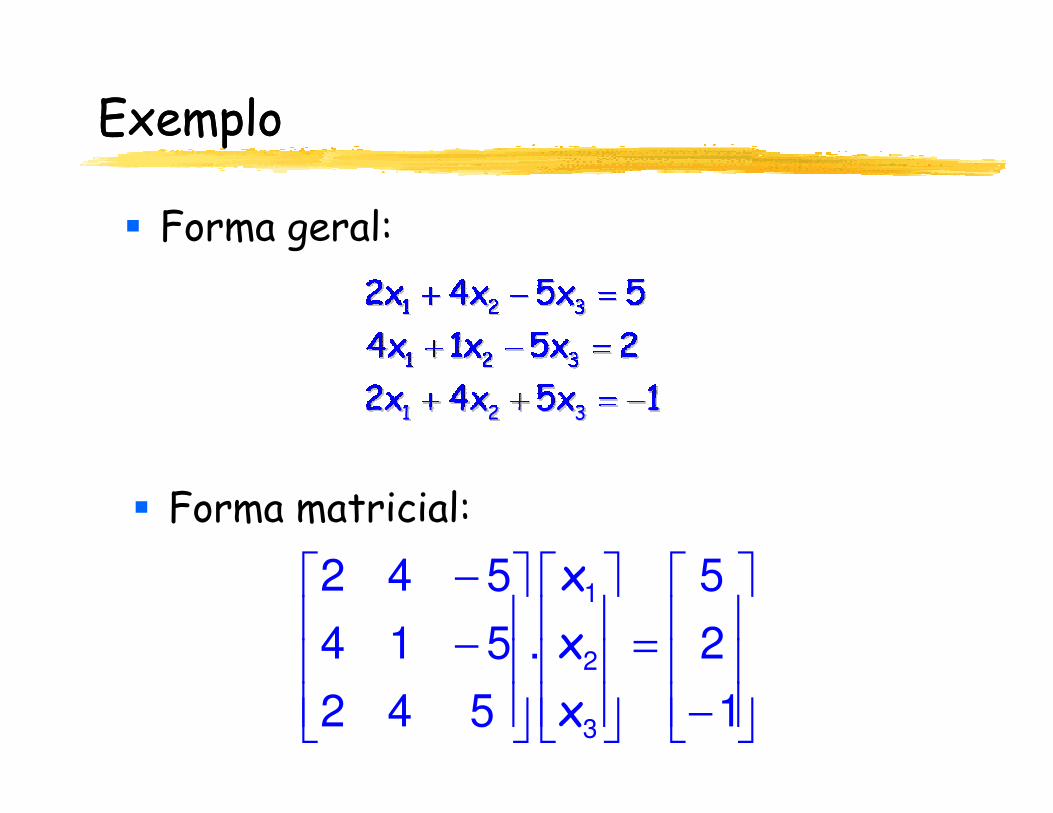
ExemploExemplo
� Forma geral:
1x5x4x2 321 −=++
� Forma matricial:
−
=
−
−
1
2
5
.
542
514
542
3
2
1
xxx
Cálculo das forças em uma treliçaCálculo das forças em uma treliça
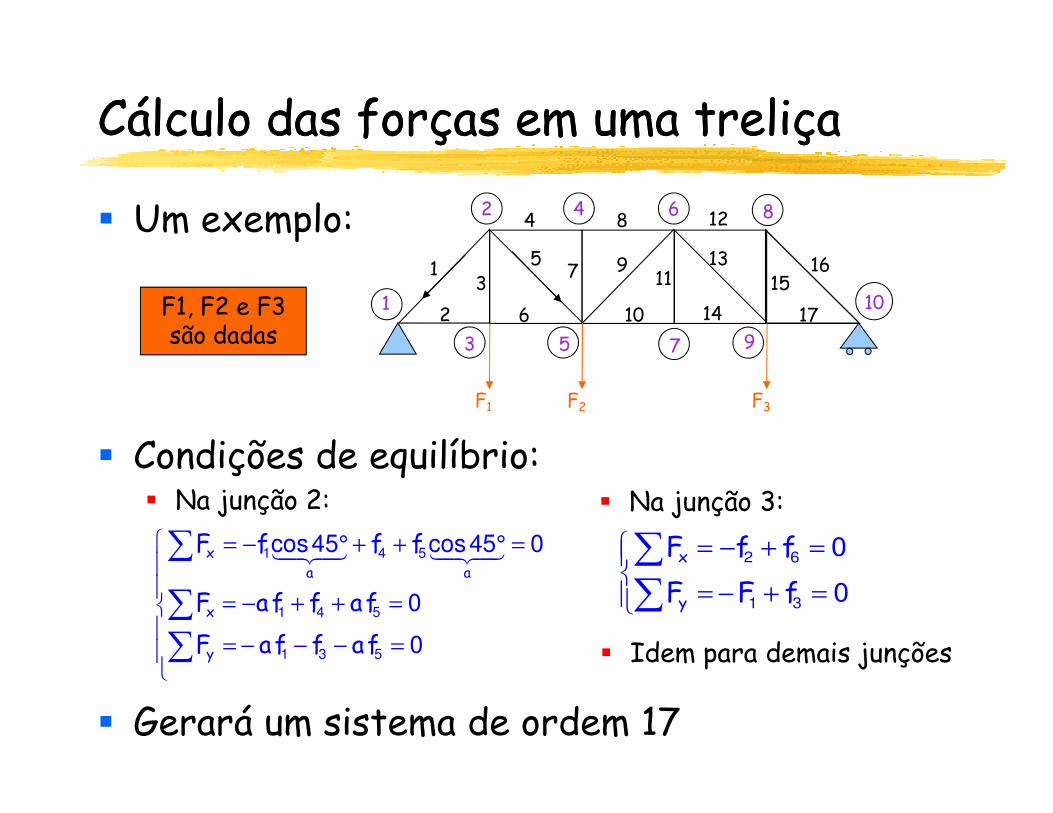
� Um exemplo:1
23
4
5
6
7
8
9
10
11
12
13
1415
16
171
2
3
4
5
6
7
8
9
10
F1 F2 F3
F1, F2 e F3 são dadas
F1 F2 F3
=−−−=
=++−=
=°++°−=
∑∑
∑
0
0
045cos45cos
531
541
541
faffaF
faffaF
fffF
y
x
aax 4342143421
� Condições de equilíbrio:� Na junção 2: � Na junção 3:
=+−=
=+−=
∑∑
0
0
31
62
fFF
ffF
y
x
� Idem para demais junções
� Gerará um sistema de ordem 17
CCICCI--2222
� Introdução
� Métodos diretos� Regra de Cramer
� Eliminação de Gauss
� Gauss-Jordan� Gauss-Jordan
� Resíduos e Condicionamento de Sistemas
� Decomposição LU
� Métodos iterativos� Gauss-Jacobi
� Gauss-Seidel
� Considerações finais
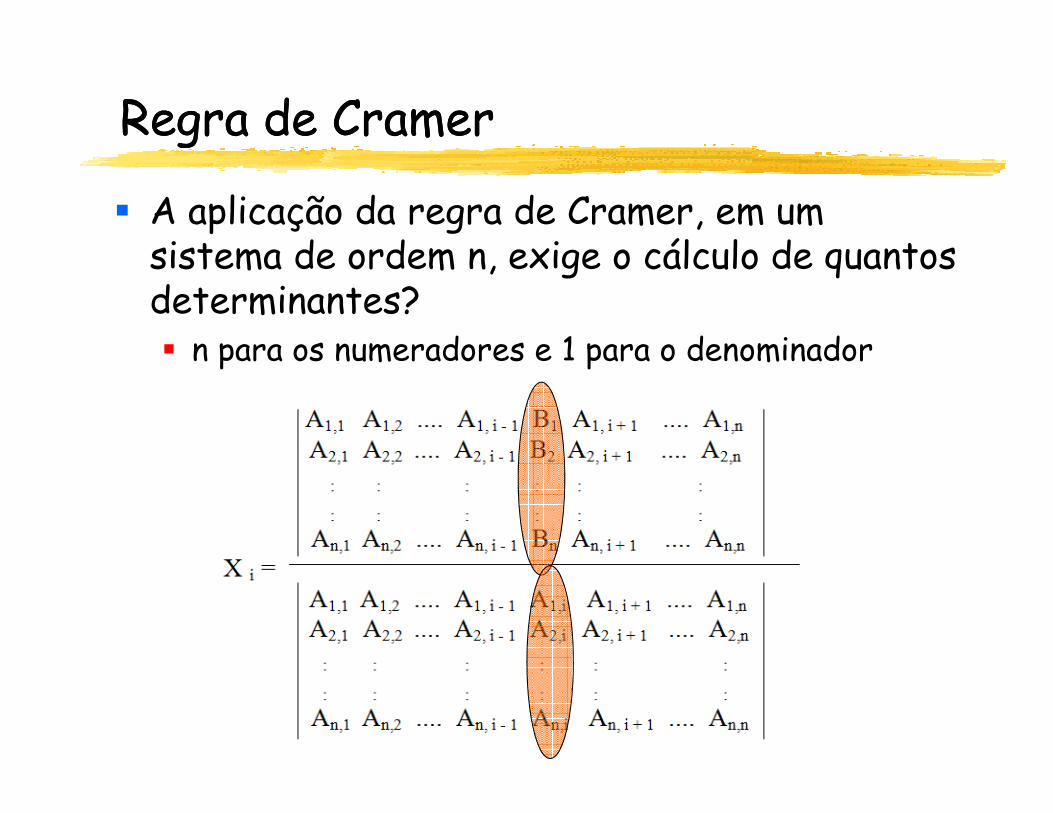
Regra de CramerRegra de Cramer
� A aplicação da regra de Cramer, em um sistema de ordem n, exige o cálculo de quantos determinantes?� n para os numeradores e 1 para o denominador
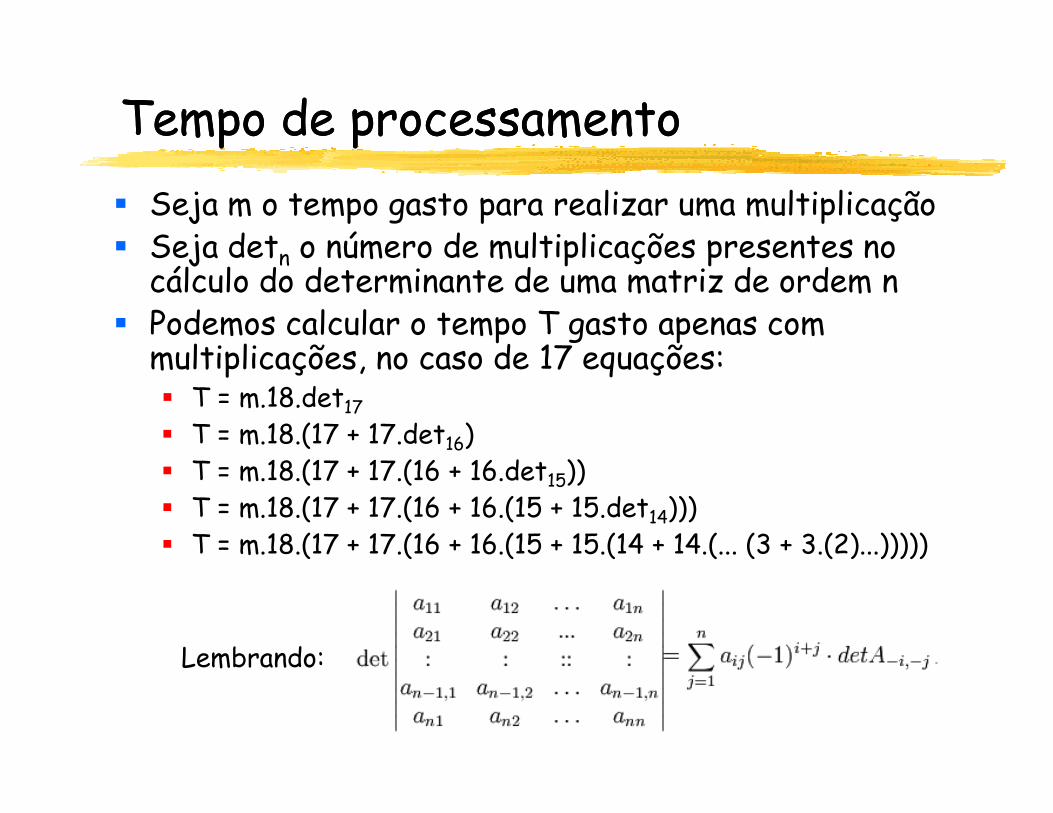
Tempo de processamentoTempo de processamento� Seja m o tempo gasto para realizar uma multiplicação� Seja detn o número de multiplicações presentes no
cálculo do determinante de uma matriz de ordem n� Podemos calcular o tempo T gasto apenas com
multiplicações, no caso de 17 equações:� T = m.18.det17� T = m.18.det17� T = m.18.(17 + 17.det16)� T = m.18.(17 + 17.(16 + 16.det15)) � T = m.18.(17 + 17.(16 + 16.(15 + 15.det14))) � T = m.18.(17 + 17.(16 + 16.(15 + 15.(14 + 14.(... (3 + 3.(2)...)))))
Lembrando:
Tempo de processamentoTempo de processamento
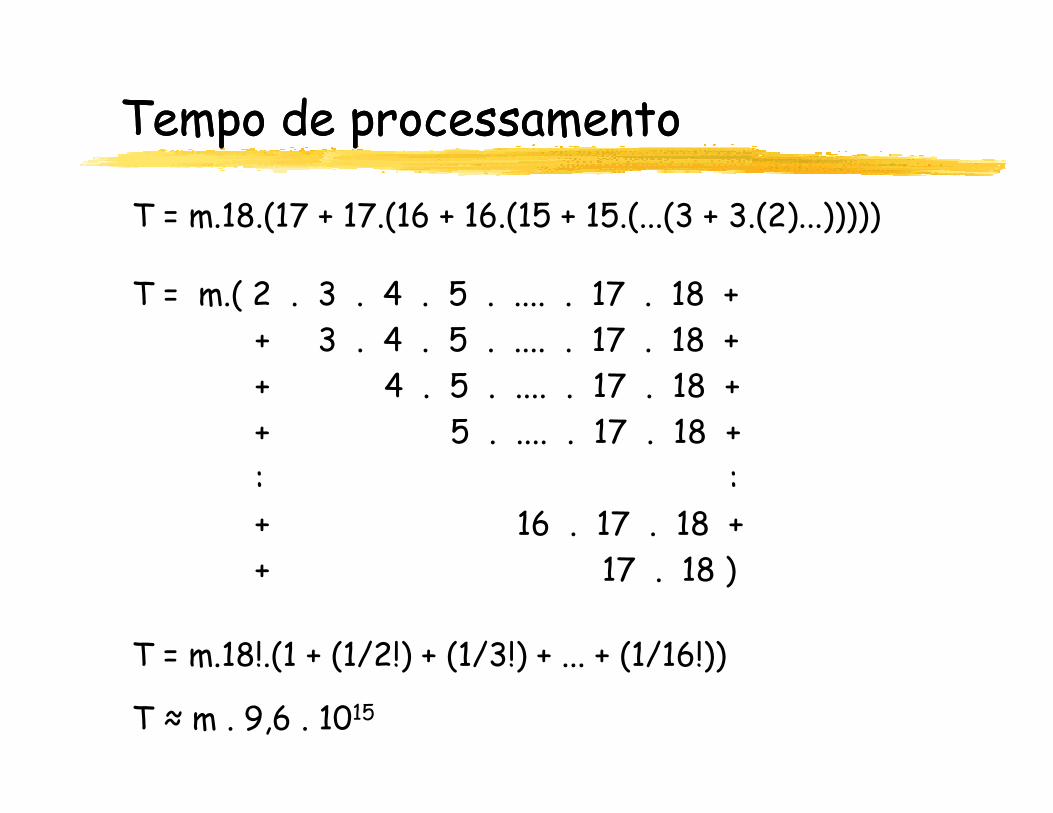
T = m.18.(17 + 17.(16 + 16.(15 + 15.(...(3 + 3.(2)...)))))
T = m.( 2 . 3 . 4 . 5 . .... . 17 . 18 ++ 3 . 4 . 5 . .... . 17 . 18 ++ 4 . 5 . .... . 17 . 18 + + 5 . .... . 17 . 18 + : :+ 16 . 17 . 18 ++ 17 . 18 )
T = m.18!.(1 + (1/2!) + (1/3!) + ... + (1/16!))
T ≈ m . 9,6 . 1015
Tempo de processamentoTempo de processamento
� Quantidade de multiplicações: ≈ 9,6 . 1015
� Utilizando um supercomputador atual:� 1011 multiplicações por segundo� Tempo gasto: 9,6 . 104 s ≈ 1 dia
� Se o sistema fosse de ordem 20, exigiria cerca de 28 anos de processamento nesse mesmo computador!
� Um algoritmo bem mais eficiente é o Método da Eliminação de Gauss, que gasta tempo O(n3)
CCICCI--2222
� Introdução
� Métodos diretos� Regra de Cramer
� Eliminação de Gauss
� Gauss-Jordan� Gauss-Jordan
� Resíduos e Condicionamento de Sistemas
� Decomposição LU
� Métodos iterativos� Gauss-Jacobi
� Gauss-Seidel
� Considerações finais
Método da Eliminação de GaussMétodo da Eliminação de Gauss
� Objetivo:� Transformação do sistema linear a ser resolvido
em um sistema linear triangular
� Operações válidas:Troca da ordem das linhas � Troca da ordem das linhas
� Troca da ordem das colunas (com exceção dos termos independentes)
� Multiplicação de uma equação por um número real não nulo
� Substituição de uma equação por uma combinação linear entre ela mesma e outra equação
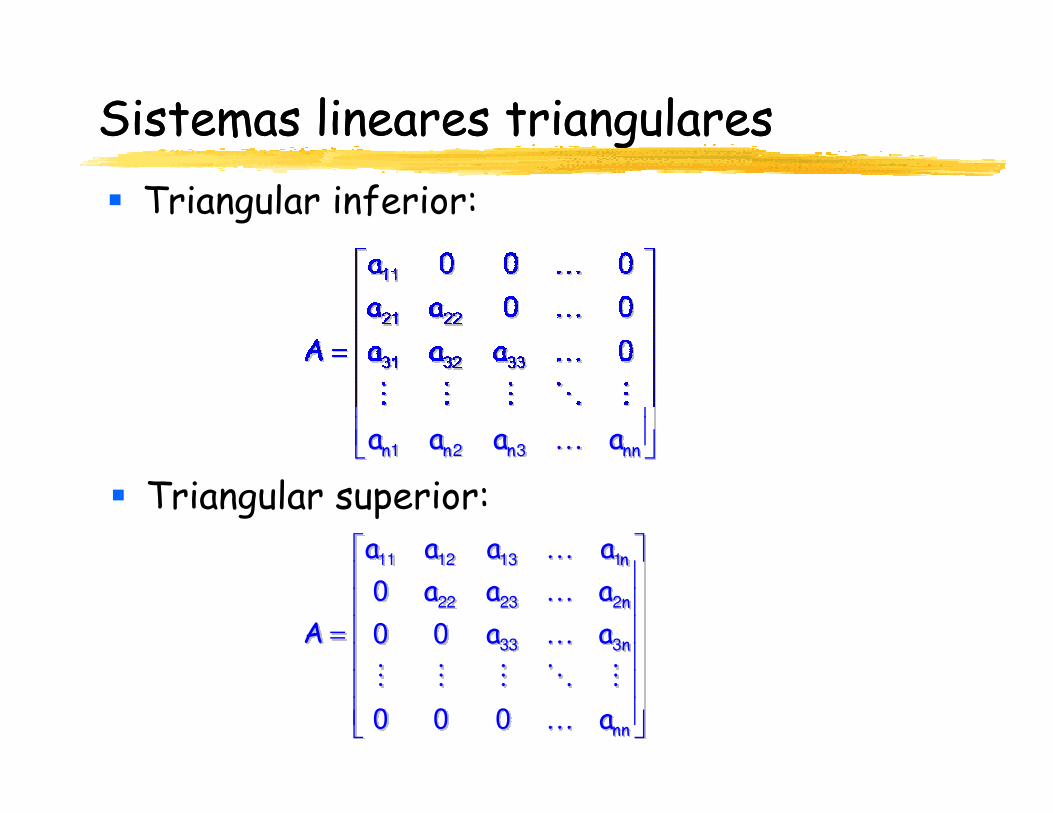
Sistemas lineares triangularesSistemas lineares triangulares� Triangular inferior:
� Triangular superior:
=
nn
n
n
n
a
aaaaaaaaa
A
K
MOMMM
K
K
K
000
00
0
333
22322
1131211
nnnnn aaaa K
MOMMM
321
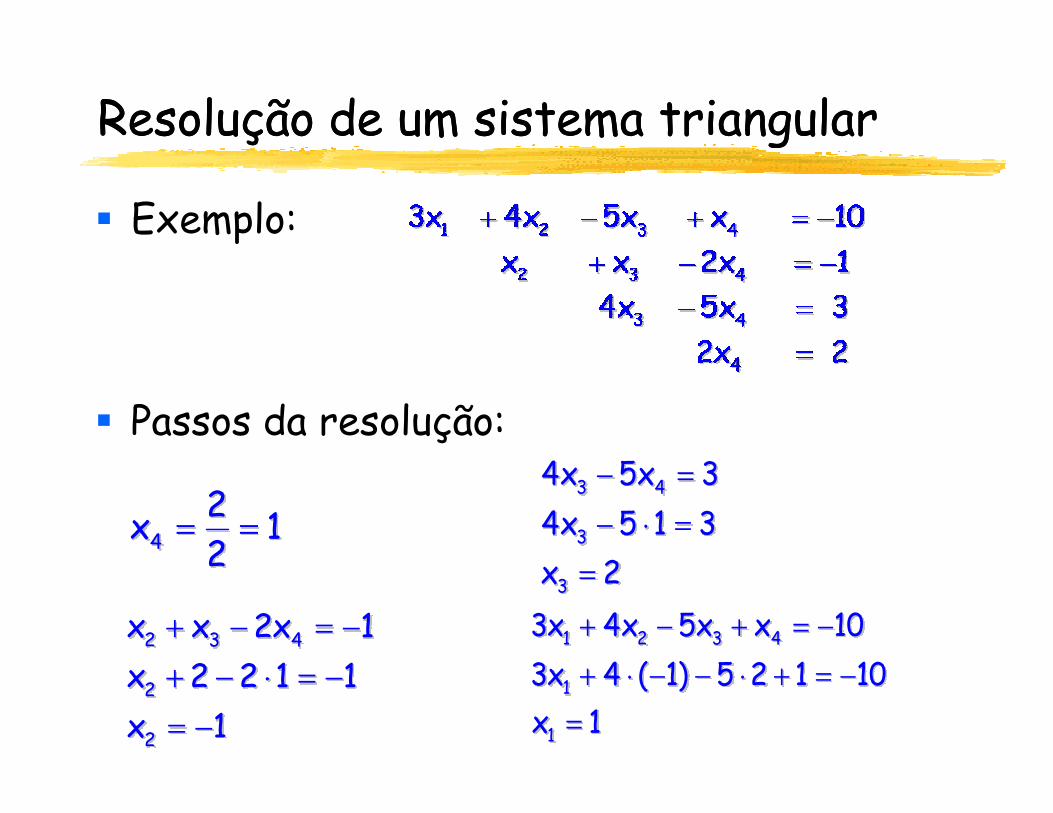
Resolução de um sistema triangularResolução de um sistema triangular
� Exemplo:
� Passos da resolução:� Passos da resolução:
2x315x43x5x4
3
3
43
=
=⋅−
=−
1x1122x1x2xx
2
2
432
−=
−=⋅−+
−=−+
1x10125)1(4x3
10xx5x4x3
1
1
4321
=
−=+⋅−−⋅+
−=+−+
122x4 ==
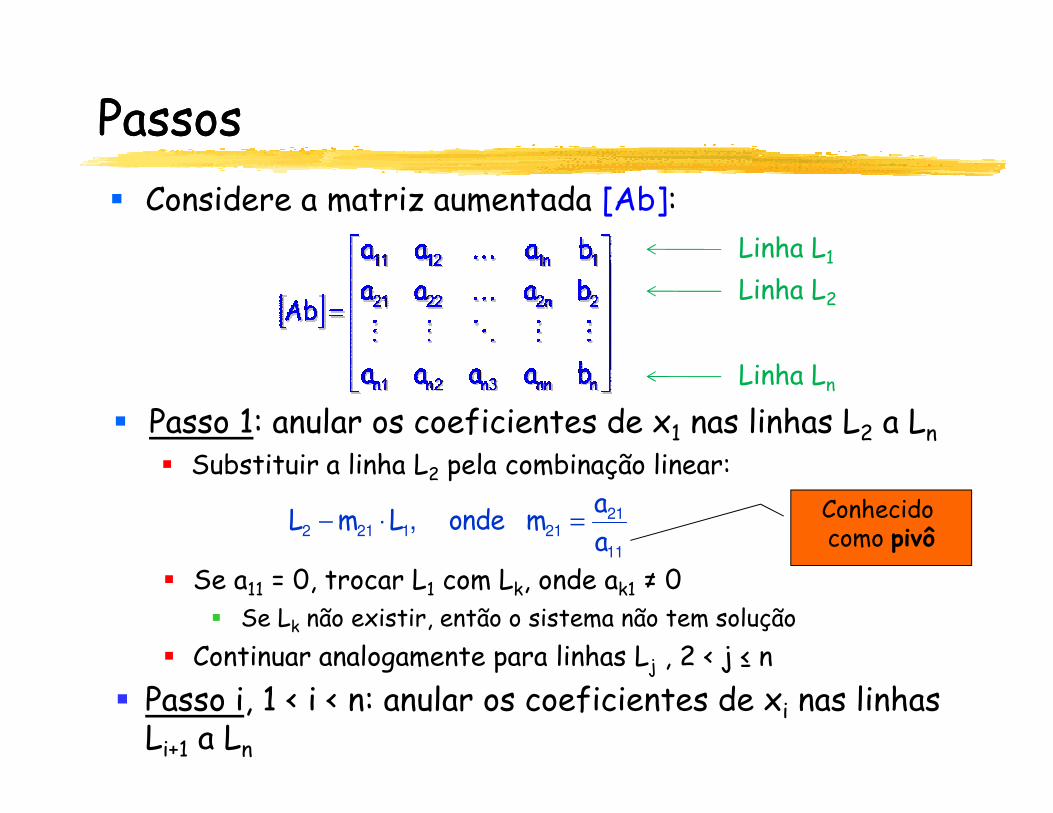
PassosPassos� Considere a matriz aumentada [Ab]:
� Passo 1: anular os coeficientes de x nas linhas L a L
Linha L1Linha L2
Linha Ln� Passo 1: anular os coeficientes de x1 nas linhas L2 a Ln
� Substituir a linha L2 pela combinação linear:
11
21211212 ,
aamondeLmL =⋅−
� Se a11 = 0, trocar L1 com Lk, onde ak1 ≠ 0� Se Lk não existir, então o sistema não tem solução
� Continuar analogamente para linhas Lj , 2 < j ≤ n� Passo i, 1 < i < n: anular os coeficientes de xi nas linhas Li+1 a Ln
Conhecido como pivô
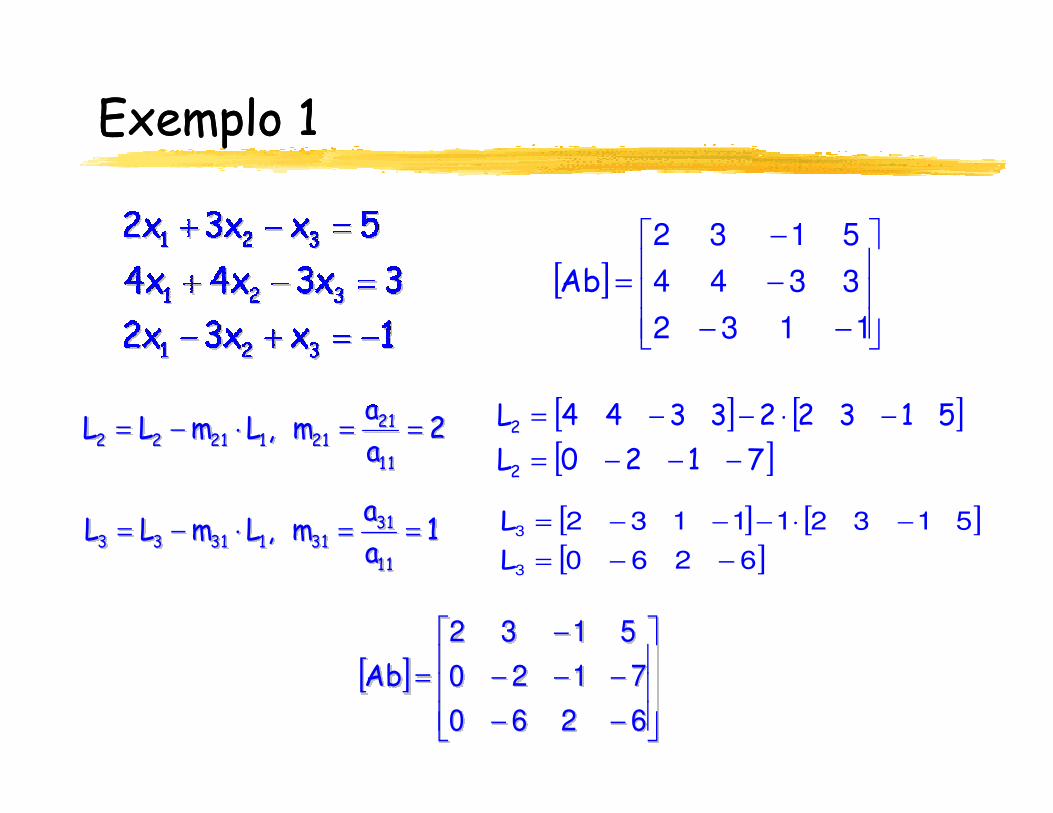
Exemplo 1Exemplo 1
[ ]
−−
−
−
=
1132
3344
5132
Ab
[ ] [ ]513223344L −⋅−−=2aam,LmLL11
212112122 ==⋅−= [ ] [ ]
[ ]7120L513223344L
2
2
−−−=
−⋅−−=
1aam,LmLL11
313113133 ==⋅−= [ ] [ ]
[ ]6260
513211132
3
3
−−=
−⋅−−−=
LL
[ ]
−−
−−−
−
=
6260
7120
5132
Ab
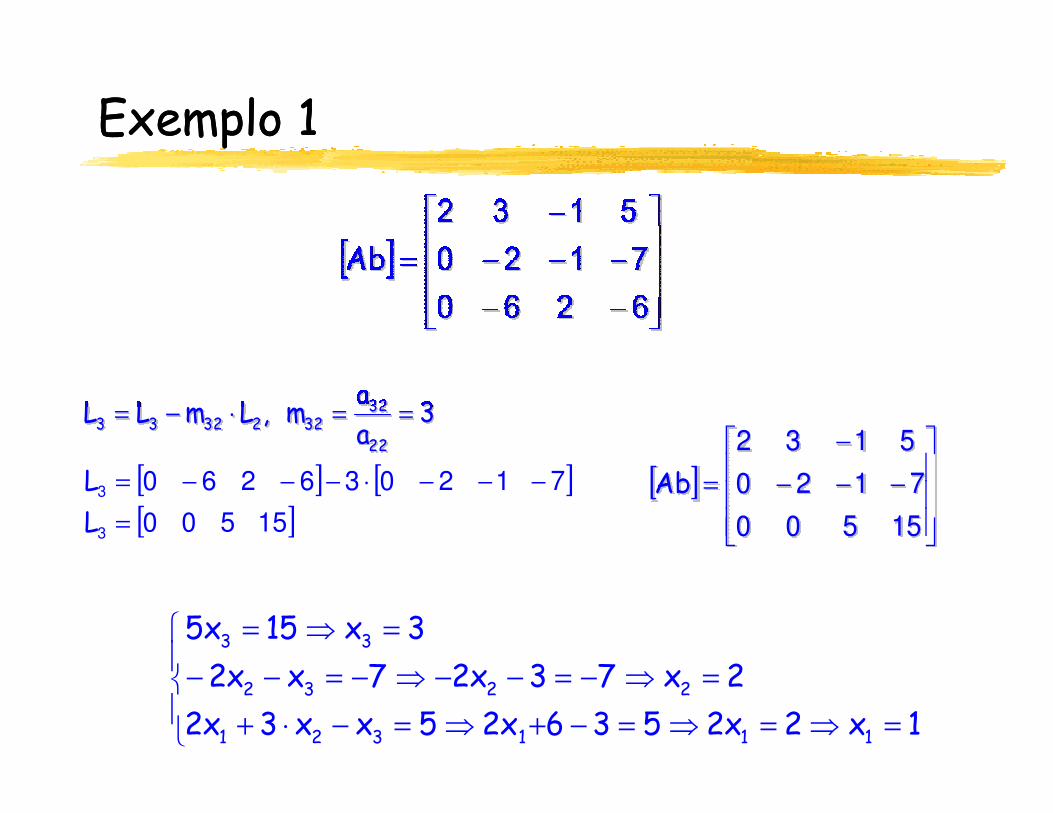
Exemplo 1Exemplo 1
3aam,LmLL22
323223233 ==⋅−=
[ ] [ ][ ]15500
712036260
3
3
=
−−−⋅−−−=
LL [ ]
−−−
−
=
15500
7120
5132
Ab
=⇒=⇒=−+⇒=−⋅+
=⇒−=−−⇒−=−−
=⇒=
1x2x2536x25xx3x22x73x27xx2
3x15x5
111321
2232
33
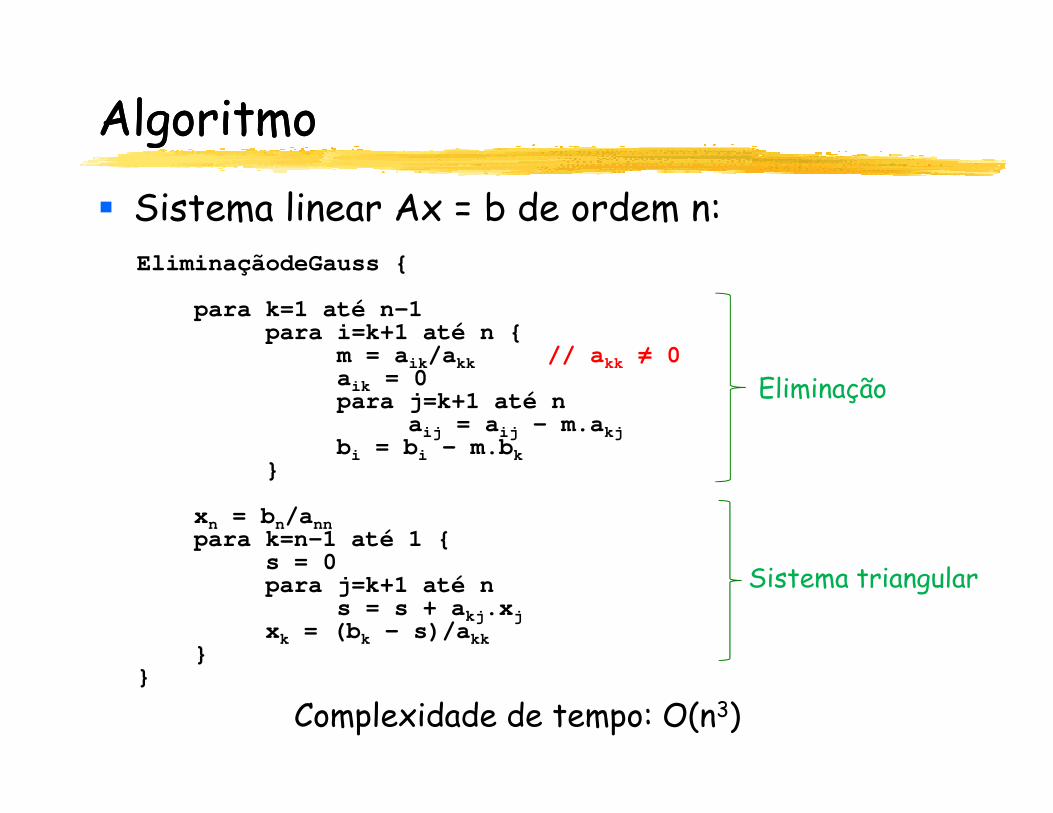
� Sistema linear Ax = b de ordem n:
AlgoritmoAlgoritmo
EliminaçãodeGauss {
para k=1 até n-1 para i=k+1 até n {
m = aik/akk // akk ≠ 0aik = 0para j=k+1 até n Eliminaçãopara j=k+1 até n
aij = aij – m.akjbi = bi – m.bk
}
xn = bn/annpara k=n-1 até 1 {
s = 0para j=k+1 até n
s = s + akj.xjxk = (bk – s)/akk
}}
Sistema triangular
Complexidade de tempo: O(n3)
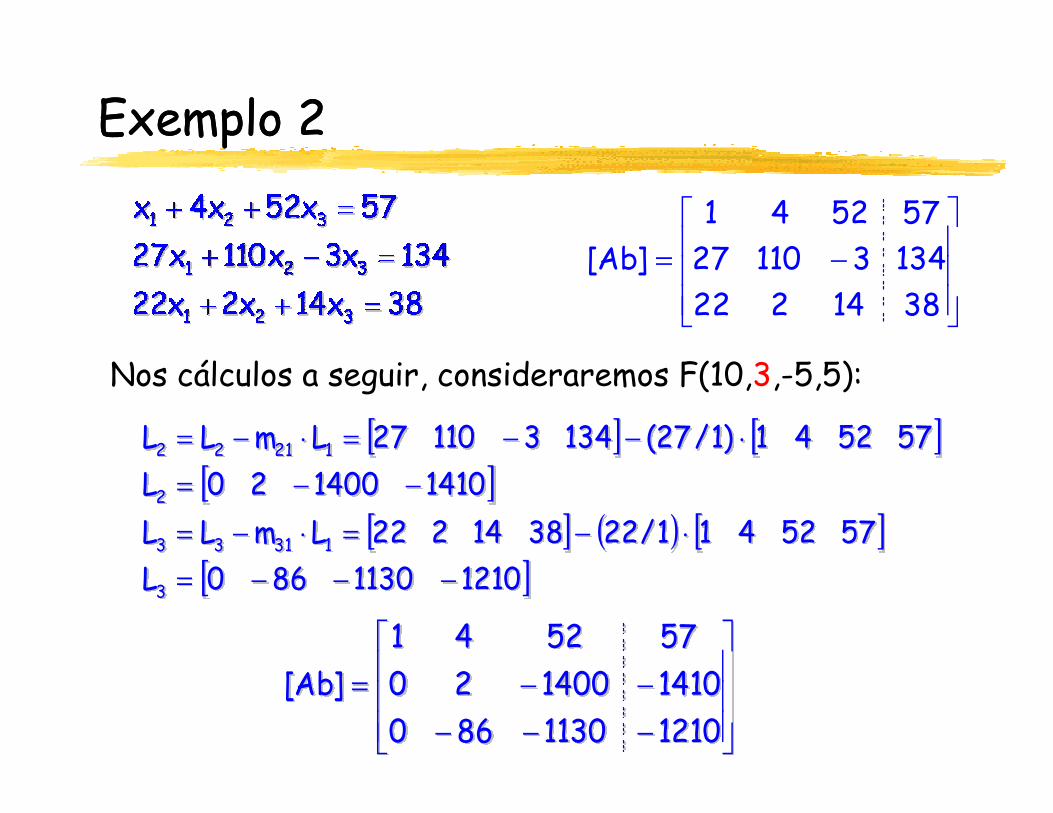
Exemplo 2Exemplo 2
−=
3814222134311027575241
]Ab[
Nos cálculos a seguir, consideraremos F(10,3,-5,5):
[ ] [ ][ ]
[ ] ( ) [ ][ ]12101130860L
5752411/223814222LmLL1410140020L
575241)1/27(134311027LmLL
3
13133
2
12122
−−−=
⋅−=⋅−=
−−=
⋅−−=⋅−=
−−−
−−=
121011308601410140020575241
]Ab[
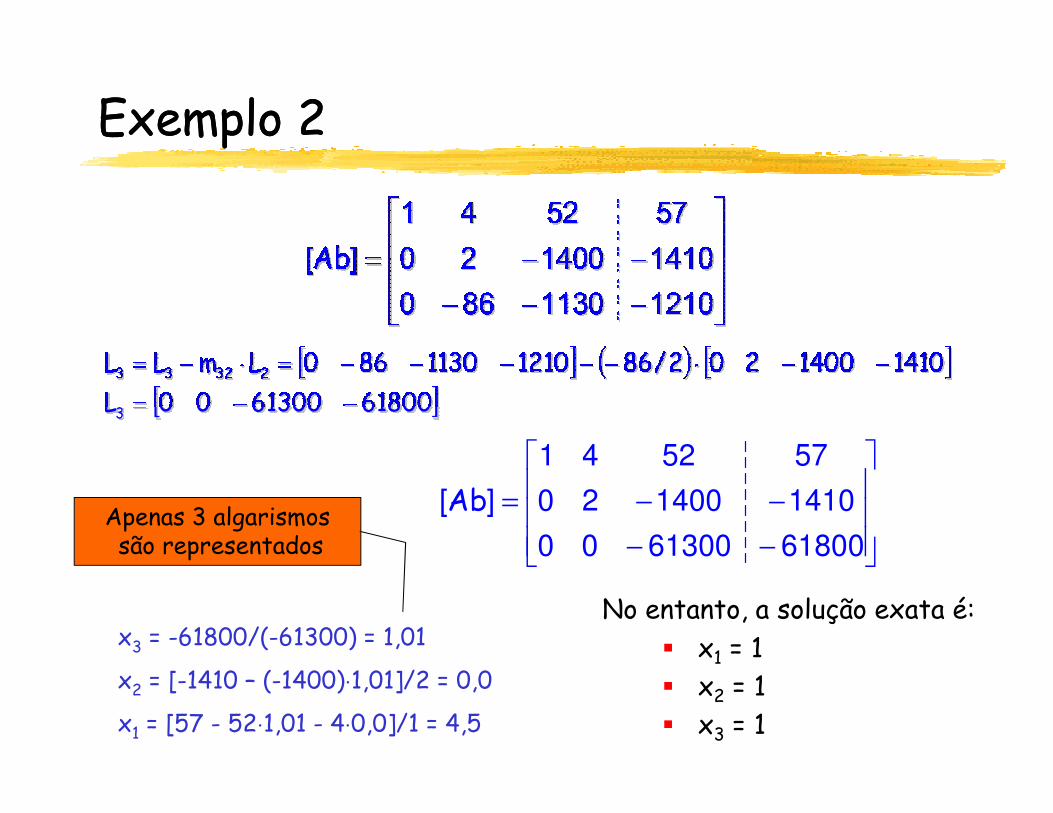
Exemplo 2Exemplo 2
[ ]618006130000L3 −−=
−−
−−=
618006130000
1410140020
575241
][Ab
x3 = -61800/(-61300) = 1,01
x2 = [-1410 – (-1400)⋅1,01]/2 = 0,0
x1 = [57 - 52⋅1,01 - 4⋅0,0]/1 = 4,5
No entanto, a solução exata é:� x1 = 1� x2 = 1� x3 = 1
Apenas 3 algarismossão representados
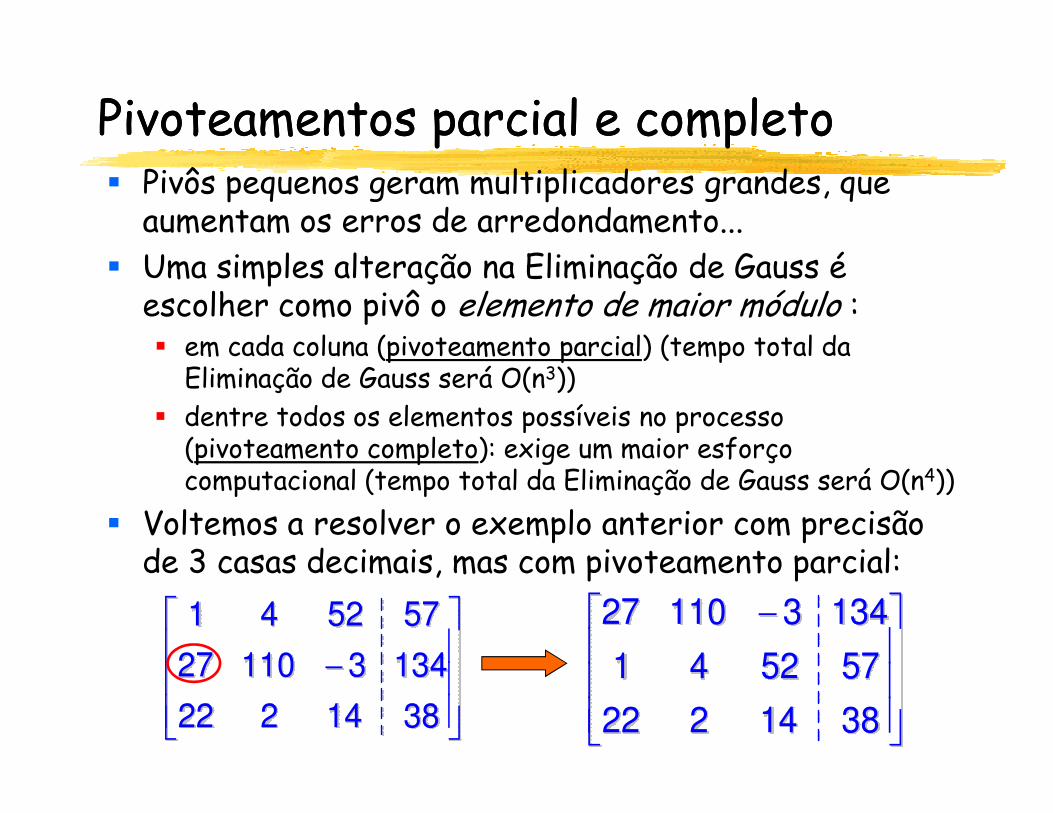
PivoteamentosPivoteamentos parcial e completoparcial e completo� Pivôs pequenos geram multiplicadores grandes, que
aumentam os erros de arredondamento...� Uma simples alteração na Eliminação de Gauss é
escolher como pivô o elemento de maior módulo :� em cada coluna (pivoteamento parcial) (tempo total da
Eliminação de Gauss será O(n3))� dentre todos os elementos possíveis no processo � dentre todos os elementos possíveis no processo
(pivoteamento completo): exige um maior esforço computacional (tempo total da Eliminação de Gauss será O(n4))
� Voltemos a resolver o exemplo anterior com precisão de 3 casas decimais, mas com pivoteamento parcial:
−
3814222
134311027
575241
−
3814222
575241
134311027
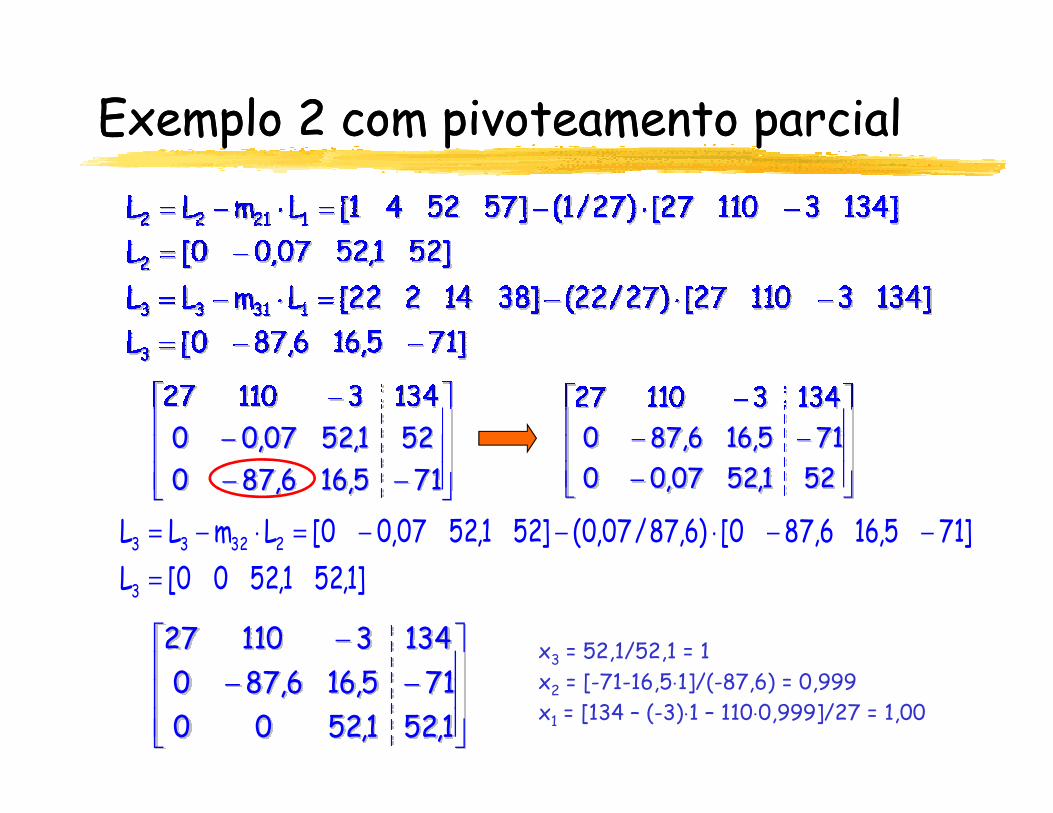
Exemplo 2 com Exemplo 2 com pivoteamentopivoteamento parcialparcial
−−
−
−
715,166,870521,5207,00134311027
−
−−
−
521,5207,00715,166,870
134311027
]1,521,5200[L]715,166,870[)6,87/07,0(]521,5207,00[LmLL
3
23233
=
−−⋅−−=⋅−=
−−
−
1,521,5200715,166,870
134311027 x3 = 52,1/52,1 = 1x2 = [-71-16,5⋅1]/(-87,6) = 0,999x1 = [134 – (-3)⋅1 – 110⋅0,999]/27 = 1,00
CCICCI--2222
� Introdução
� Métodos diretos� Regra de Cramer
� Eliminação de Gauss
� Gauss-Jordan� Gauss-Jordan
� Resíduos e Condicionamento de Sistemas
� Decomposição LU
� Métodos iterativos� Gauss-Jacobi
� Gauss-Seidel
� Considerações finais
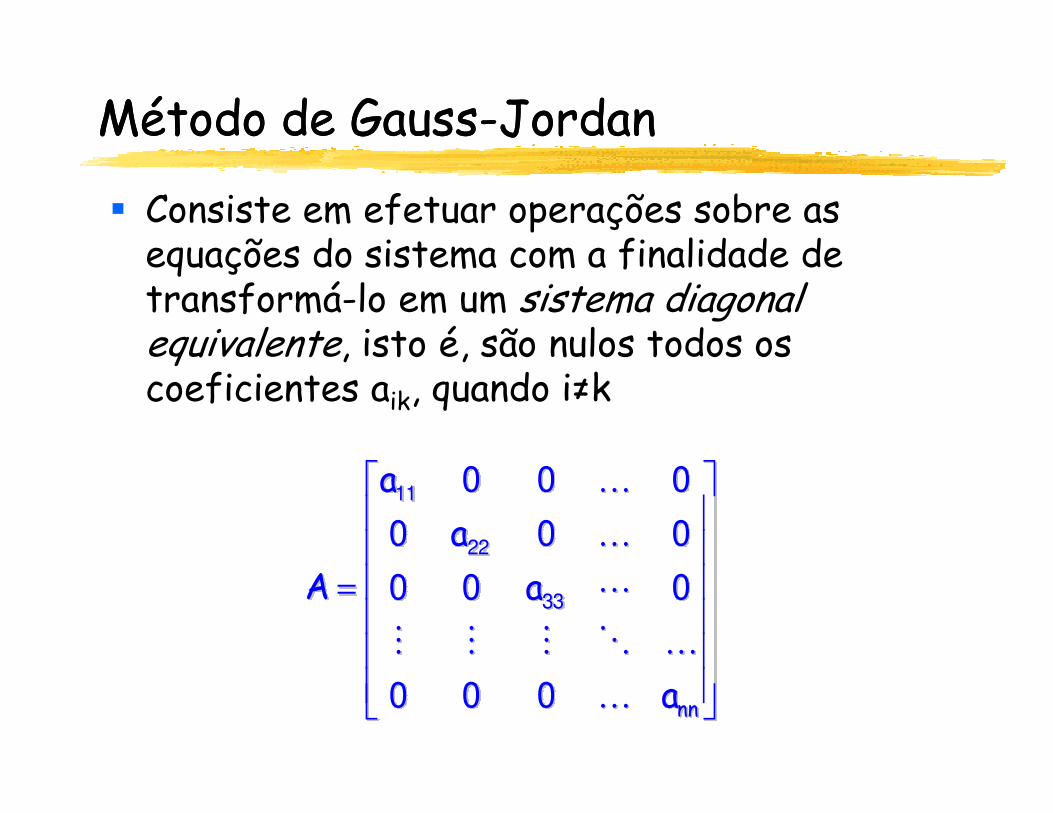
Método de GaussMétodo de Gauss--JordanJordan
� Consiste em efetuar operações sobre as equações do sistema com a finalidade de transformá-lo em um sistema diagonal equivalente, isto é, são nulos todos os coeficientes aik, quando i≠kcoeficientes aik, quando i≠k
=
nna
aa
a
A
K
KOMMM
L
K
K
000
000
000
000
33
22
11
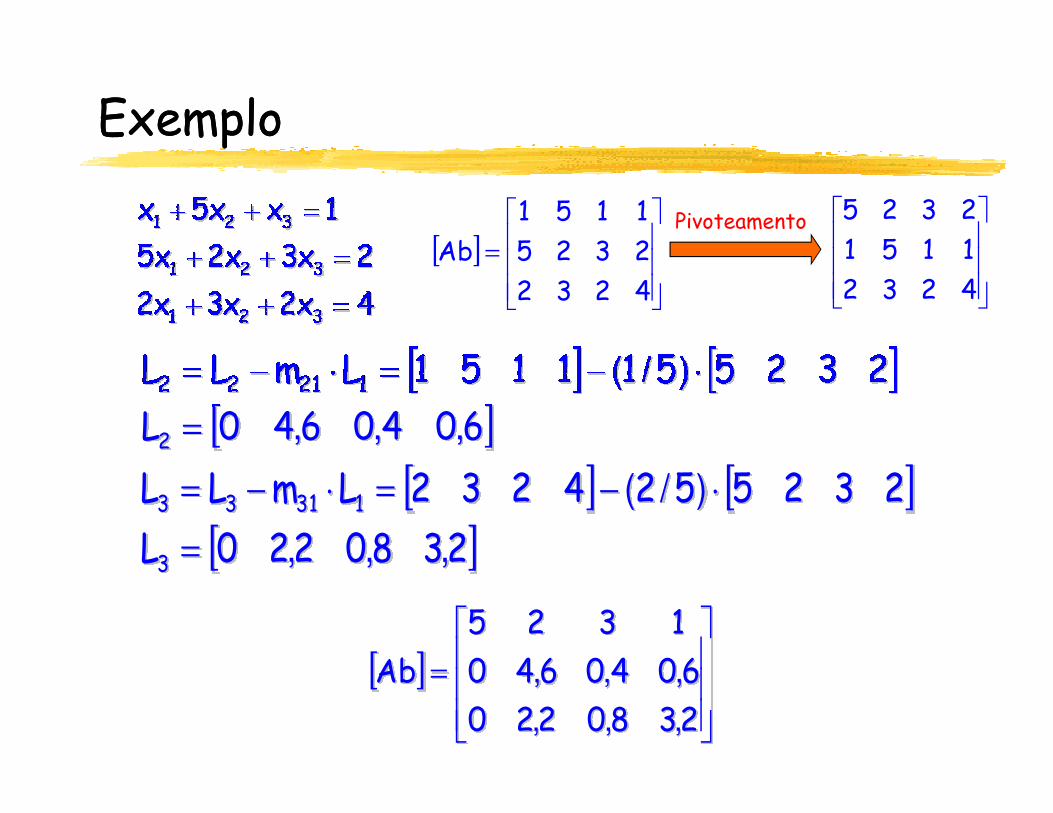
ExemploExemplo
[ ]
=
423223251151
Ab
423211512325Pivoteamento
[ ]6040640L2 ,,,=
[ ] [ ][ ]2380220L
2325524232LmLL
3
13133
,,,
)/(
=
⋅−=⋅−=
[ ]
=
238022060406401325
Ab,,,
,,,
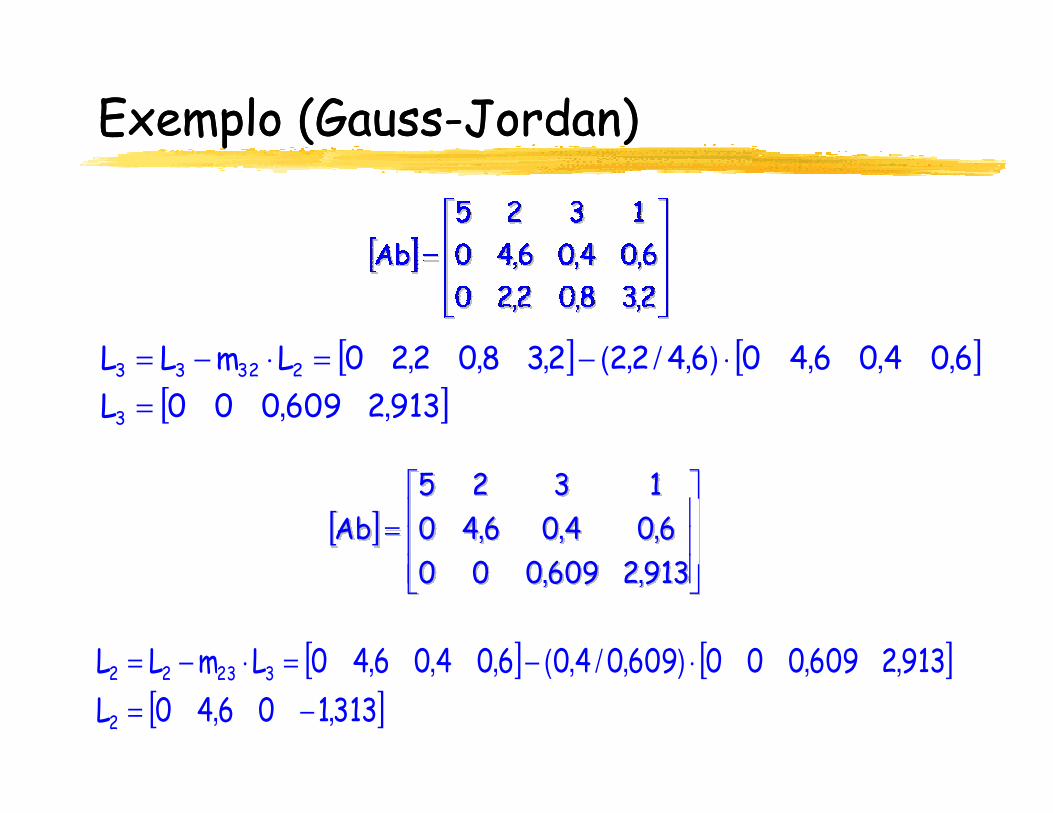
Exemplo (GaussExemplo (Gauss--Jordan)Jordan)
[ ] [ ][ ]9132609000L
604064064222380220LmLL
3
23233
,,
,,,),/,(,,,
=
⋅−=⋅−=
[ ]9132609000L3 ,,=
[ ]
=
913260900060406401325
Ab,,
,,,
[ ] [ ][ ]31310640L
91326090006090406040640LmLL
2
32322
,,
,,),/,(,,,
−=
⋅−=⋅−=
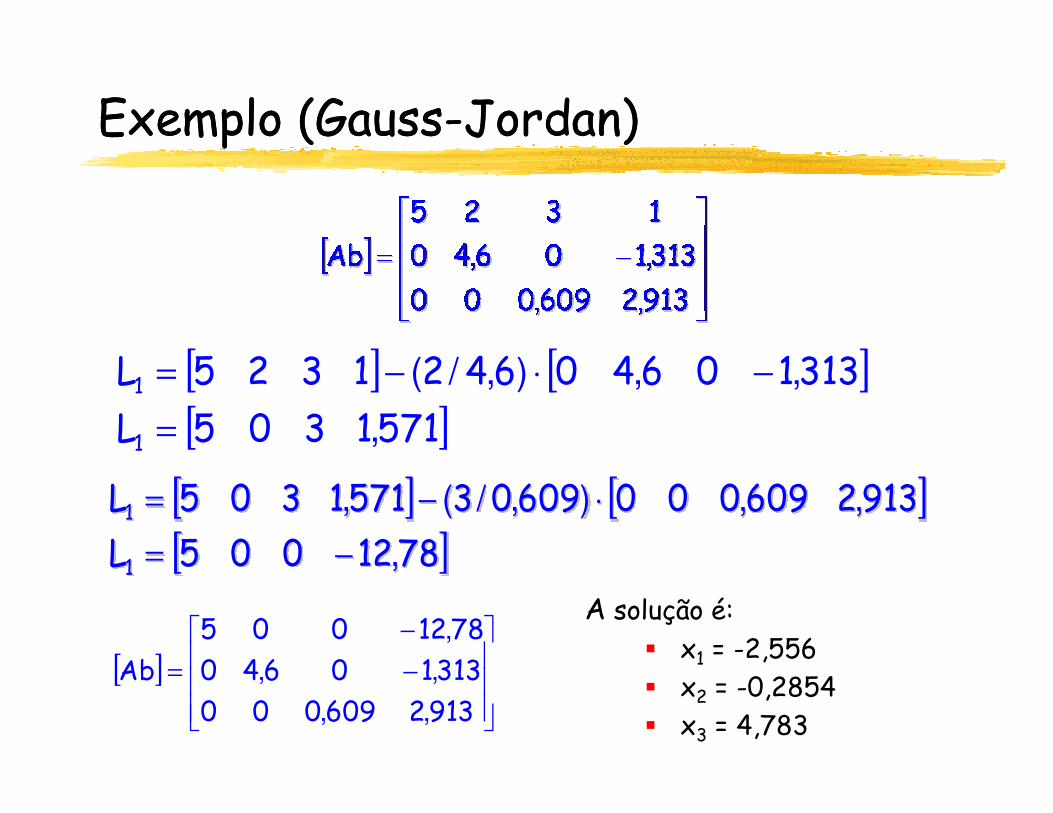
Exemplo (GaussExemplo (Gauss--Jordan)Jordan)
[ ] [ ][ ]5711305L
313106406421325L1 ,,),/(
=
−⋅−=
[ ]5711305L1 ,=
[ ] [ ][ ]7812005L
9132609000609035711305L
1
1
,
,,),/(,
−=
⋅−=
[ ]
−
−
=
9132609000313106407812005
Ab,,
,,
,A solução é:
� x1 = -2,556� x2 = -0,2854� x3 = 4,783
Outra aplicaçãoOutra aplicação
� Uma variação do método de Gauss-Jordan pode ser utilizada para se encontrar a inversa de uma matriz A quadrada de ordem n
� Basta transformar a matriz A na correspondente matriz identidade, aplicando correspondente matriz identidade, aplicando essas mesmas operações em uma matriz identidade de ordem n
[A|I] [I|A-1]Gauss-Jordan
CCICCI--2222
� Introdução
� Métodos diretos� Regra de Cramer
� Eliminação de Gauss
� Gauss-Jordan� Gauss-Jordan
� Resíduos e Condicionamento de Sistemas
� Decomposição LU
� Métodos iterativos� Gauss-Jacobi
� Gauss-Seidel
� Considerações finais
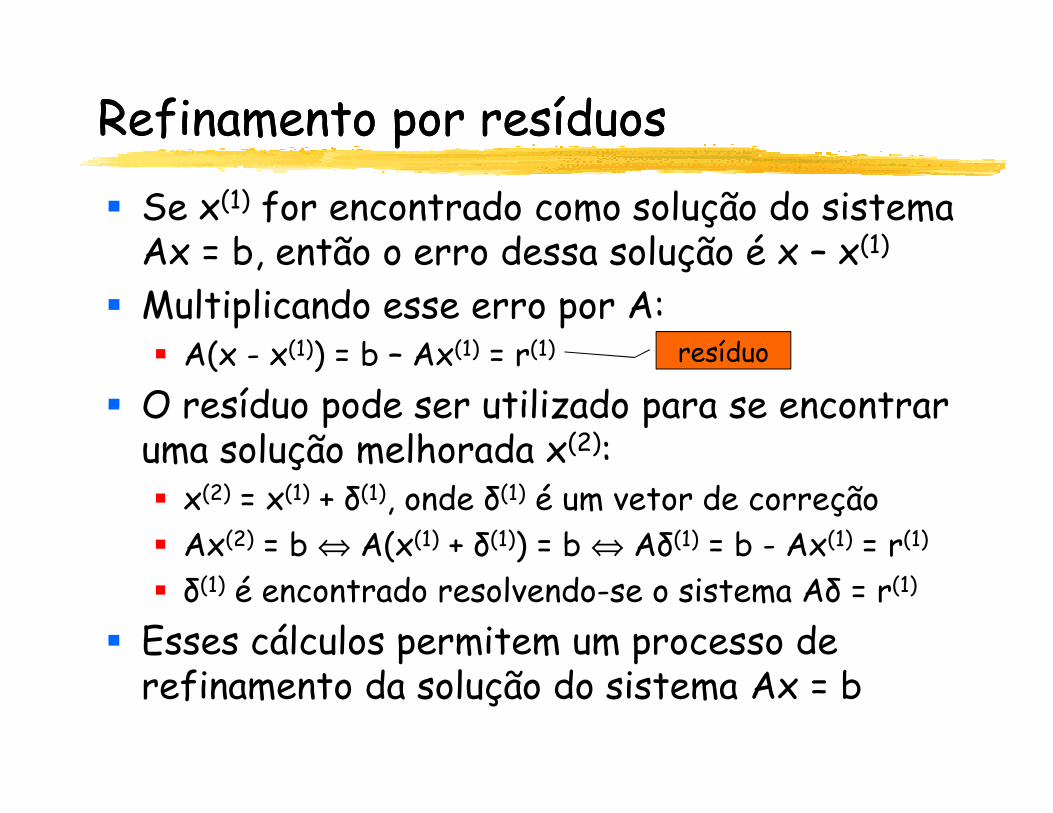
Refinamento por resíduosRefinamento por resíduos
� Se x(1) for encontrado como solução do sistema Ax = b, então o erro dessa solução é x – x(1)
� Multiplicando esse erro por A:� A(x - x(1)) = b – Ax(1) = r(1)
� O resíduo pode ser utilizado para se encontrar resíduo
� O resíduo pode ser utilizado para se encontrar uma solução melhorada x(2):� x(2) = x(1) + δ(1), onde δ(1) é um vetor de correção� Ax(2) = b ⇔ A(x(1) + δ(1)) = b ⇔ Aδ(1) = b - Ax(1) = r(1)
� δ(1) é encontrado resolvendo-se o sistema Aδ = r(1)
� Esses cálculos permitem um processo de refinamento da solução do sistema Ax = b
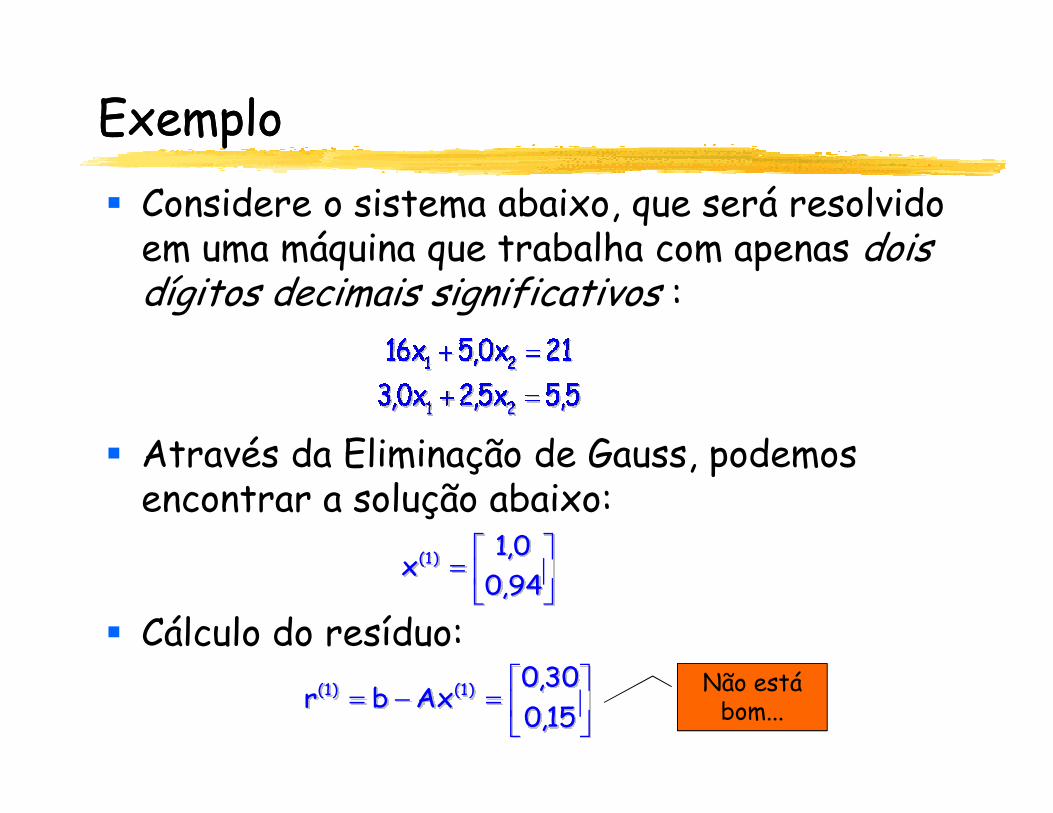
ExemploExemplo� Considere o sistema abaixo, que será resolvido em uma máquina que trabalha com apenas dois dígitos decimais significativos :
5,5x5,2x0,3 21 =+
� Através da Eliminação de Gauss, podemos encontrar a solução abaixo:
� Cálculo do resíduo:
=−=
15,030,0
Axbr )1()1( Não estábom...
=
94,00,1
x )1(
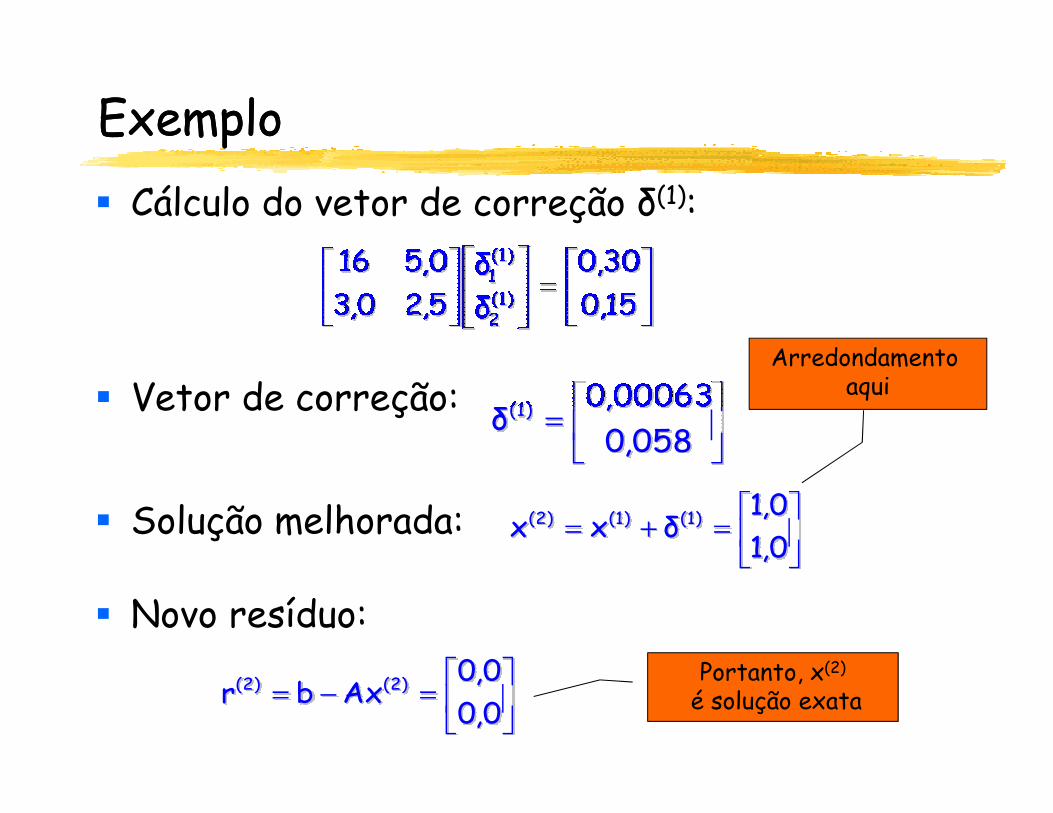
ExemploExemplo� Cálculo do vetor de correção δ(1):
� Vetor de correção:Arredondamento
aqui� Vetor de correção:
=
058,000063,0
δ )1(
� Solução melhorada:
=+=
0,10,1
δxx )1()1()2(
� Novo resíduo:Portanto, x(2)
é solução exata
=−=
0,00,0
Axbr )2()2(
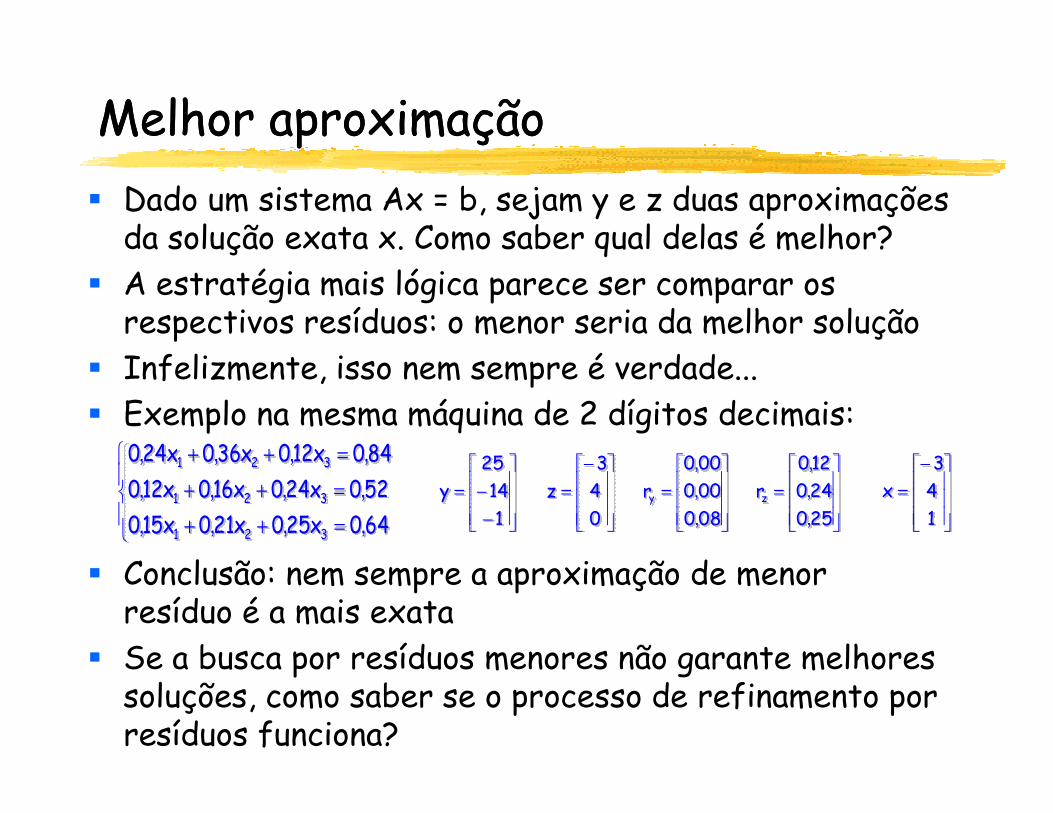
Melhor aproximaçãoMelhor aproximação� Dado um sistema Ax = b, sejam y e z duas aproximações
da solução exata x. Como saber qual delas é melhor?� A estratégia mais lógica parece ser comparar os
respectivos resíduos: o menor seria da melhor solução� Infelizmente, isso nem sempre é verdade...� Exemplo na mesma máquina de 2 dígitos decimais:� Exemplo na mesma máquina de 2 dígitos decimais:
=++
=++
=++
640x250x210x150520x240x160x120840x120x360x240
321
321
321
,,,,
,,,,
,,,,
� Conclusão: nem sempre a aproximação de menor resíduo é a mais exata
� Se a busca por resíduos menores não garante melhores soluções, como saber se o processo de refinamento por resíduos funciona?
−
−=
11425
y
−
=
043
z
=
080000000
ry,
,
,
=
250240120
rz,
,
,
−
=
143
x
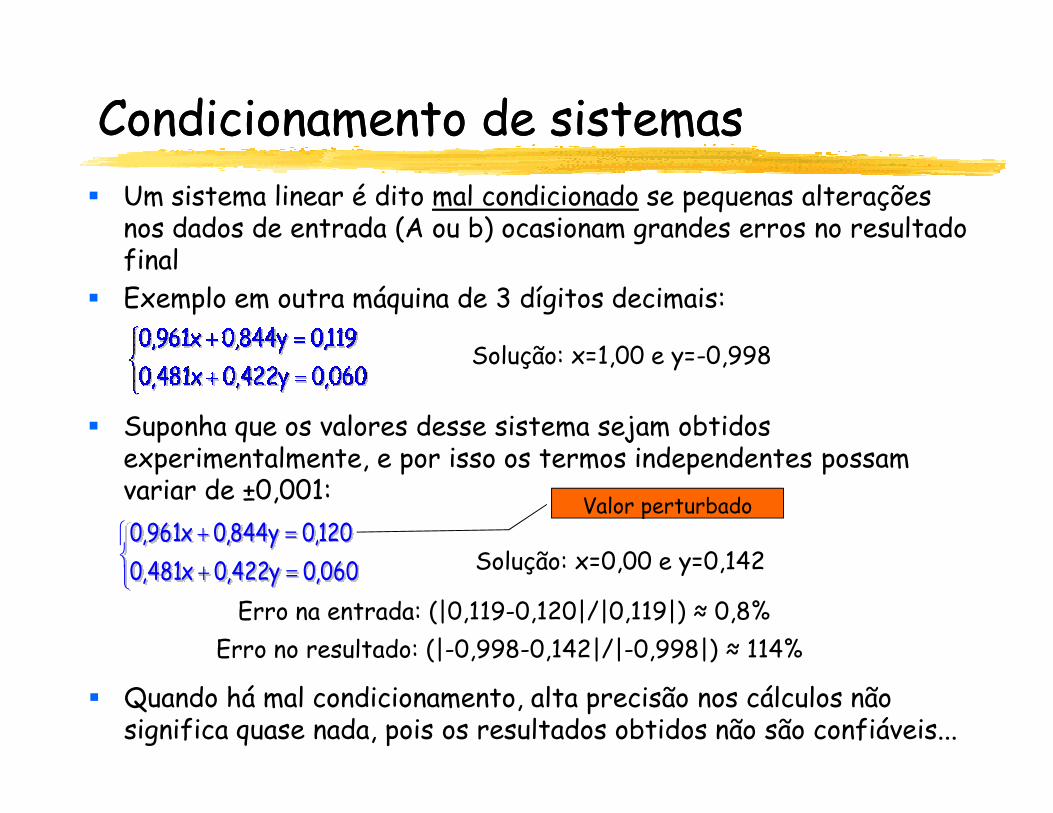
Condicionamento de sistemasCondicionamento de sistemas� Um sistema linear é dito mal condicionado se pequenas alterações
nos dados de entrada (A ou b) ocasionam grandes erros no resultado final
� Exemplo em outra máquina de 3 dígitos decimais:
Solução: x=1,00 e y=-0,998
Suponha que os valores desse sistema sejam obtidos � Suponha que os valores desse sistema sejam obtidos experimentalmente, e por isso os termos independentes possam variar de ±0,001:
=+
=+
060,0y422,0x481,0120,0y844,0x961,0
Valor perturbado
Solução: x=0,00 e y=0,142
Erro na entrada: (|0,119-0,120|/|0,119|) ≈ 0,8%Erro no resultado: (|-0,998-0,142|/|-0,998|) ≈ 114%
� Quando há mal condicionamento, alta precisão nos cálculos não significa quase nada, pois os resultados obtidos não são confiáveis...
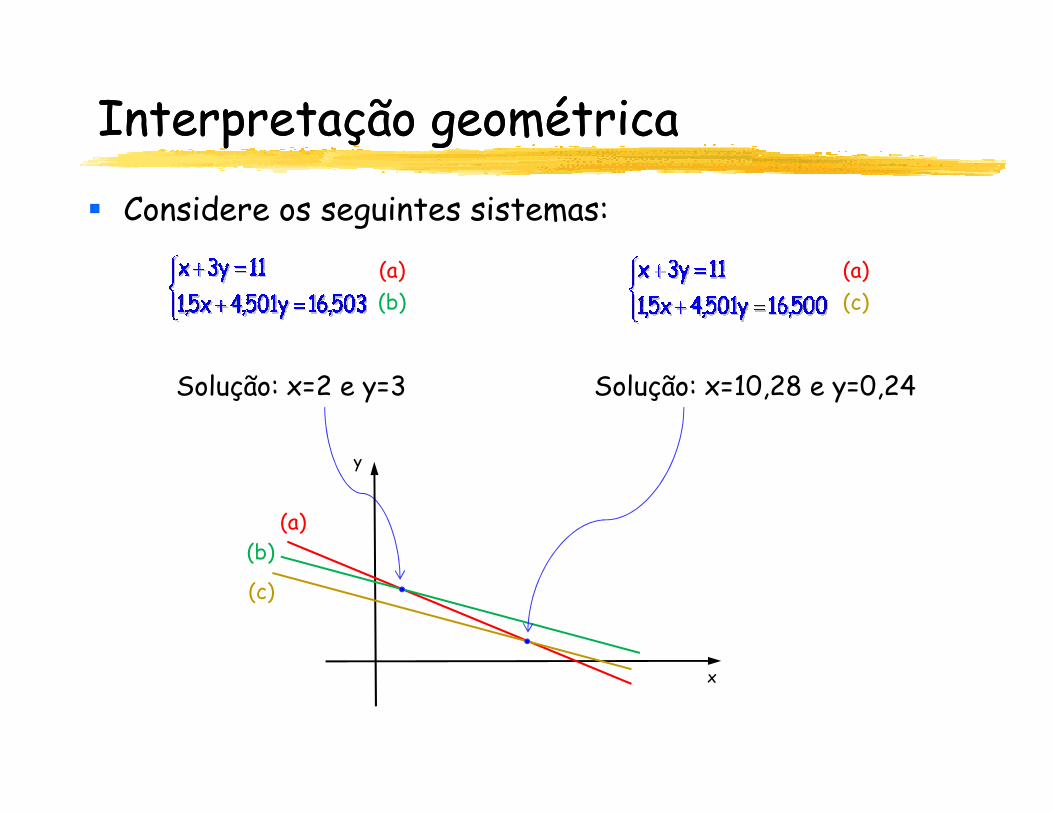
Interpretação geométricaInterpretação geométrica
� Considere os seguintes sistemas:
Solução: x=2 e y=3 Solução: x=10,28 e y=0,24
(a)(b)
(a)(c)
x
y
(a)
(c)
(b)
Uma métrica de condicionamentoUma métrica de condicionamento
� Em máquinas com grande precisão, geralmente não faz sentido refinar os resultados...
� No entanto, empiricamente, os refinamentos ajudam a identificar o condicionamento de um sistema linear:� Se as correções δ(1), δ(2), ..., δ(n) forem grandes, então o � Se as correções δ , δ , ..., δ forem grandes, então o
sistema será mal condicionado
� Em sistemas bem condicionados, bastam dois refinamentos: δ(3), ..., δ(n) serão próximos do épsilon da máquina
� Importante: nesse processo de verificação, o vetor b não pode ser nulo � Caso contrário, mesmo em um sistema mal condicionado, a
solução exata será nula, com correções também nulas...
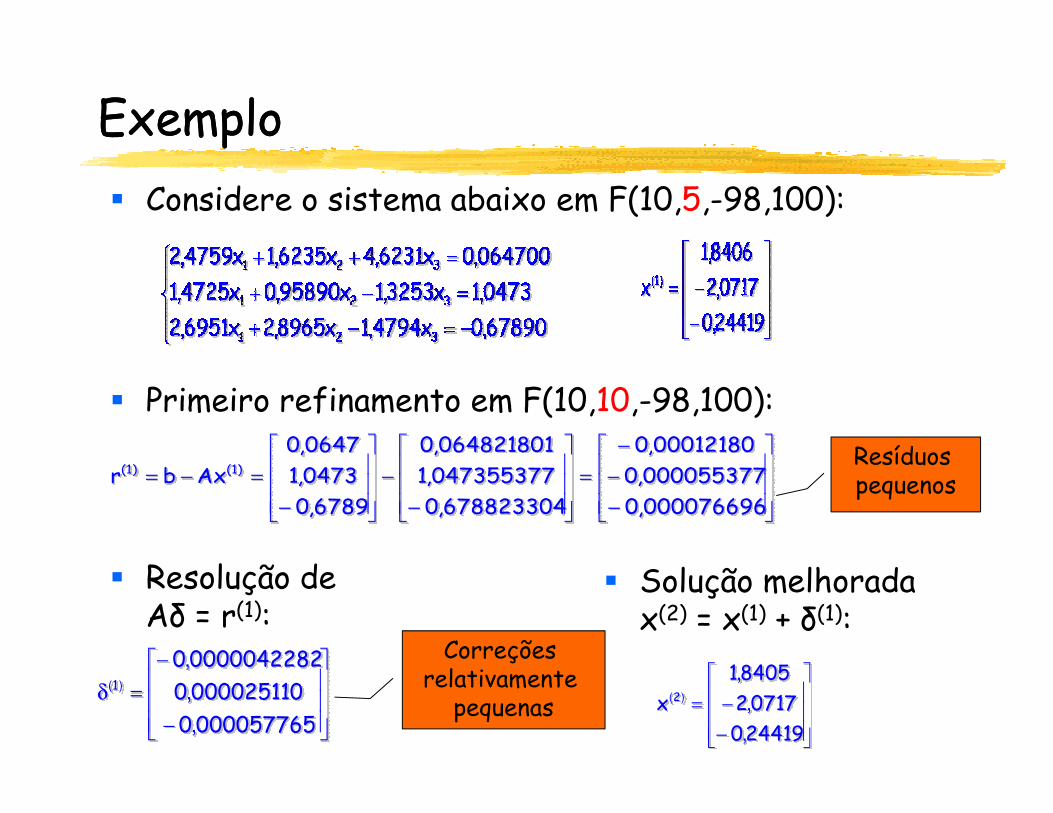
ExemploExemplo� Considere o sistema abaixo em F(10,5,-98,100):
� Primeiro refinamento em F(10,10,-98,100):
� Resolução de Aδ = r(1):
� Primeiro refinamento em F(10,10,-98,100):
−
−
−
=
−
−
−
=−=
000076696,0000055377,000012180,0
678823304,0047355377,1064821801,0
6789,00473,10647,0
Axbr )1()1(
−
−
=δ
0000577650000025110000000422820
1
,
,
,)(
� Solução melhorada x(2) = x(1) + δ(1):
−
−=
24419007172
84051x 2
,
,
,)(
Resíduos pequenos
Correções relativamente
pequenas
Outra métrica de condicionamentoOutra métrica de condicionamento� Mostraremos agora outra maneira de identificar o mal
condicionamento de um sistema linear não singular Ax = b� Vamos supor que os dados estão sujeitos a certas
perturbações, e analisaremos seus efeitos na solução� Inicialmente, seja b + ∆b uma perturbação no vetor de
termos independentestermos independentes� Desse modo, a solução também será perturbada, ou seja,
teremos A(x + ∆x) = b + ∆b� Desejamos encontrar uma relação entre ∆x e ∆b, pois,
conhecendo o tamanho da perturbação ∆b, poderemos estimar ∆x, e verificar então se o sistema é ou não mal condicionado
� Para isso, teremos que rever o conceito de normas
Normas de vetoresNormas de vetores
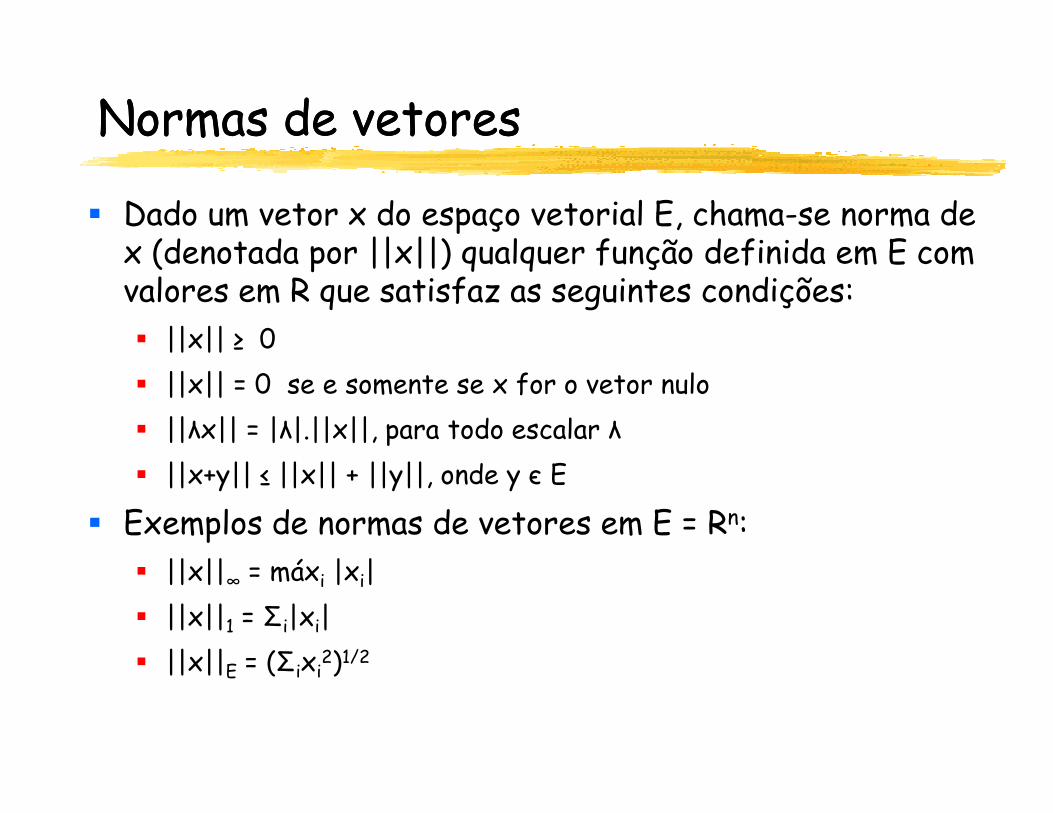
� Dado um vetor x do espaço vetorial E, chama-se norma de x (denotada por ||x||) qualquer função definida em E com valores em R que satisfaz as seguintes condições: � ||x|| ≥ 0� ||x|| = 0 se e somente se x for o vetor nulo� ||λx|| = |λ|.||x||, para todo escalar λ� ||x+y|| ≤ ||x|| + ||y||, onde y є E
� Exemplos de normas de vetores em E = Rn:� ||x||∞ = máxi |xi|� ||x||1 = Σi|xi|� ||x||E = (Σixi
2)1/2
Normas de matrizesNormas de matrizes
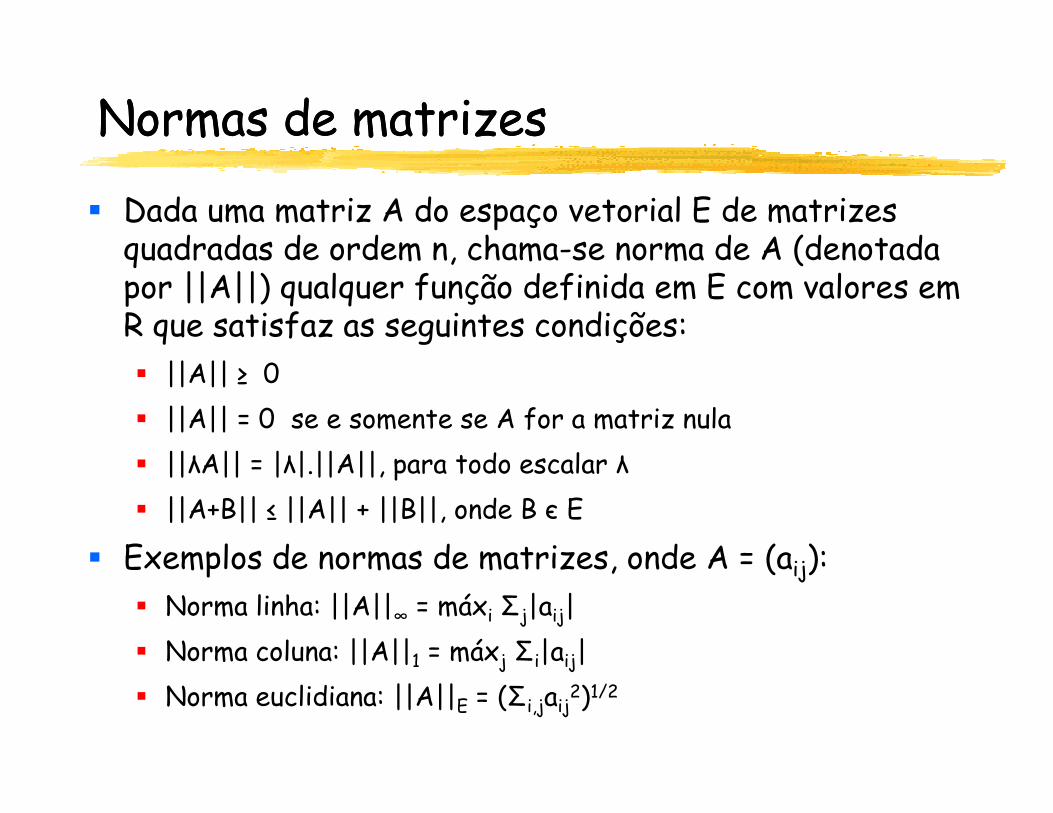
� Dada uma matriz A do espaço vetorial E de matrizes quadradas de ordem n, chama-se norma de A (denotada por ||A||) qualquer função definida em E com valores emR que satisfaz as seguintes condições: � ||A|| ≥ 0� ||A|| = 0 se e somente se A for a matriz nula� ||A|| = 0 se e somente se A for a matriz nula� ||λA|| = |λ|.||A||, para todo escalar λ� ||A+B|| ≤ ||A|| + ||B||, onde B є E
� Exemplos de normas de matrizes, onde A = (aij):� Norma linha: ||A||∞ = máxi Σj|aij| � Norma coluna: ||A||1 = máxj Σi|aij| � Norma euclidiana: ||A||E = (Σi,jaij2)1/2
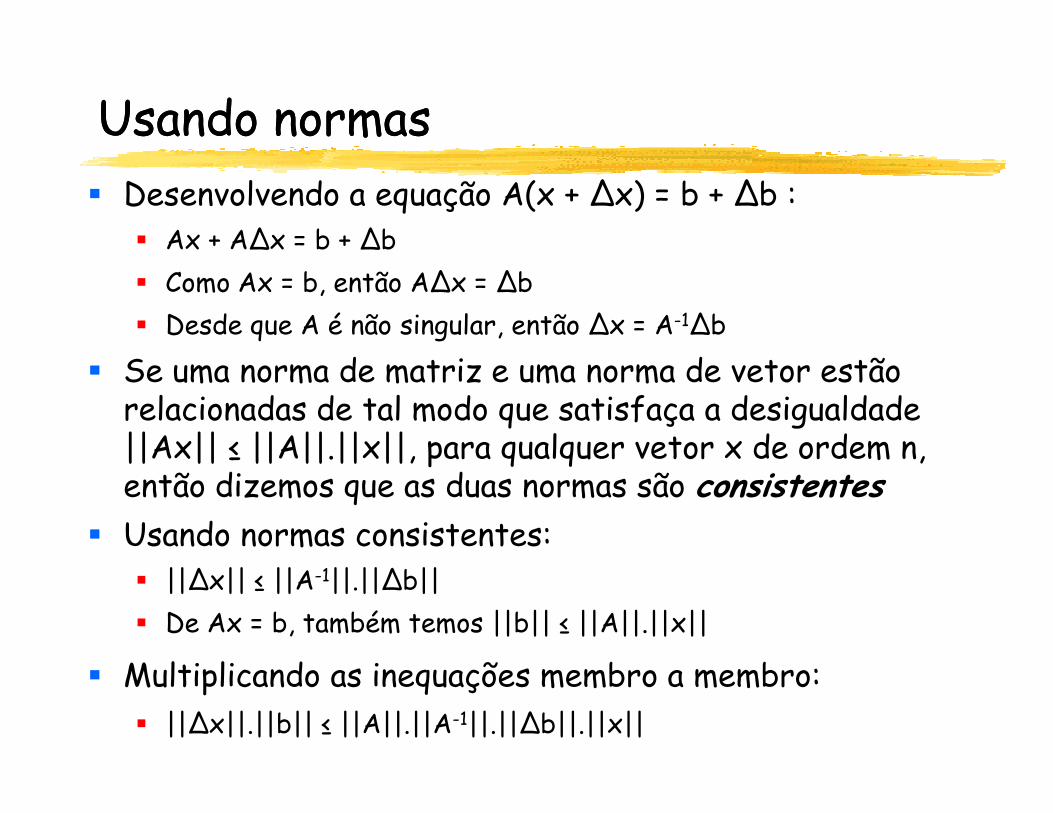
Usando normasUsando normas� Desenvolvendo a equação A(x + ∆x) = b + ∆b :
� Ax + A∆x = b + ∆b� Como Ax = b, então A∆x = ∆b� Desde que A é não singular, então ∆x = A-1∆b
� Se uma norma de matriz e uma norma de vetor estão relacionadas de tal modo que satisfaça a desigualdade relacionadas de tal modo que satisfaça a desigualdade ||Ax|| ≤ ||A||.||x||, para qualquer vetor x de ordem n, então dizemos que as duas normas são consistentes
� Usando normas consistentes:� ||∆x|| ≤ ||A-1||.||∆b||� De Ax = b, também temos ||b|| ≤ ||A||.||x||
� Multiplicando as inequações membro a membro:� ||∆x||.||b|| ≤ ||A||.||A-1||.||∆b||.||x||
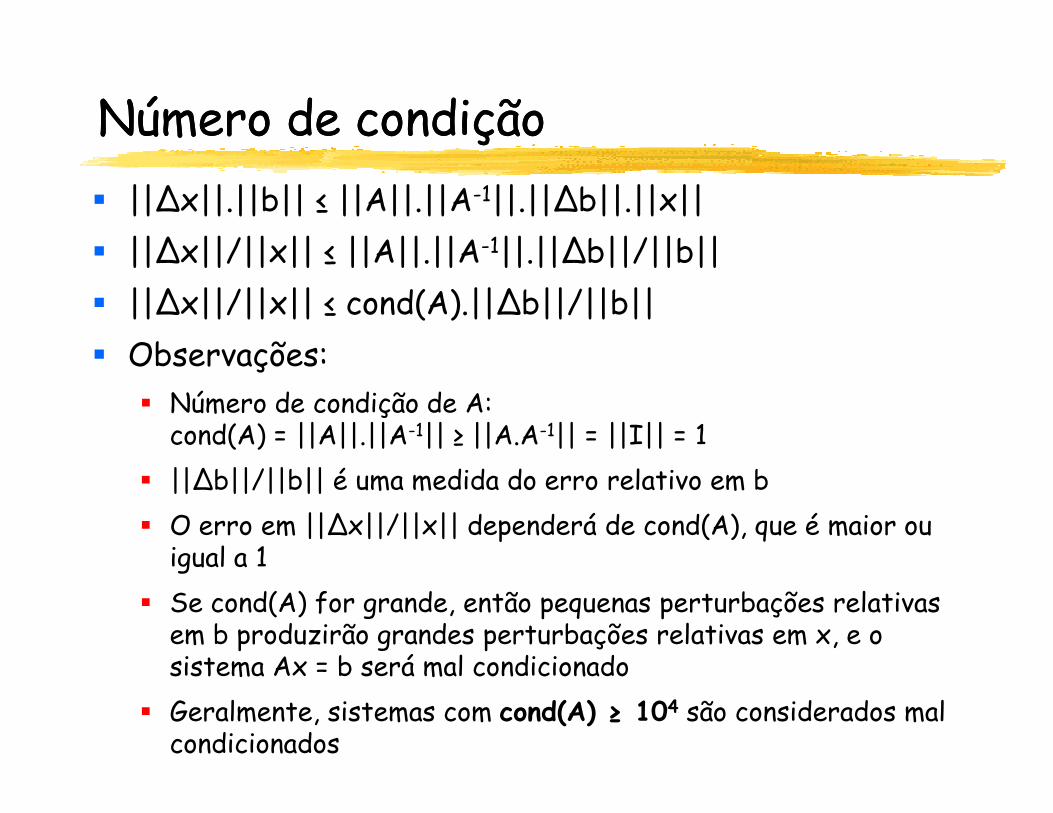
Número de condiçãoNúmero de condição� ||∆x||.||b|| ≤ ||A||.||A-1||.||∆b||.||x||� ||∆x||/||x|| ≤ ||A||.||A-1||.||∆b||/||b||� ||∆x||/||x|| ≤ cond(A).||∆b||/||b||� Observações:
� Número de condição de A: � Número de condição de A: cond(A) = ||A||.||A-1|| ≥ ||A.A-1|| = ||I|| = 1
� ||∆b||/||b|| é uma medida do erro relativo em b� O erro em ||∆x||/||x|| dependerá de cond(A), que é maior ou
igual a 1� Se cond(A) for grande, então pequenas perturbações relativas
em b produzirão grandes perturbações relativas em x, e o sistema Ax = b será mal condicionado
� Geralmente, sistemas com cond(A) ≥ 104 são considerados mal condicionados
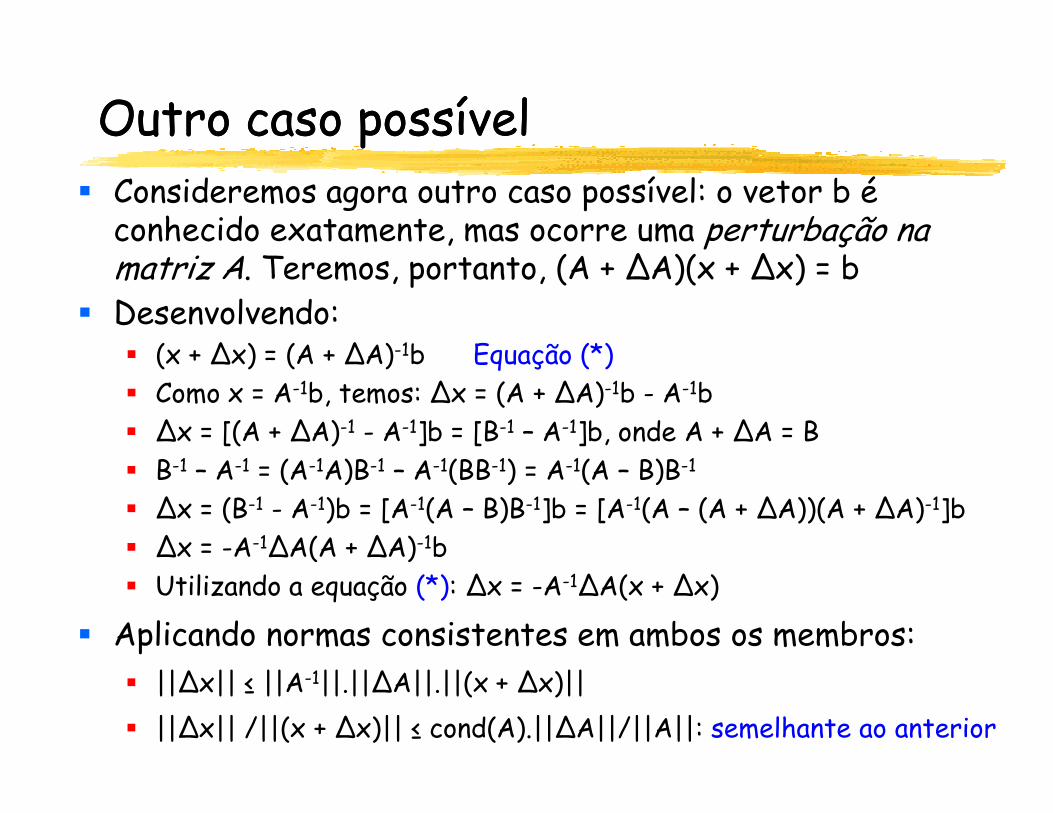
Outro caso possívelOutro caso possível� Consideremos agora outro caso possível: o vetor b é
conhecido exatamente, mas ocorre uma perturbação na matriz A. Teremos, portanto, (A + ∆A)(x + ∆x) = b
� Desenvolvendo:� (x + ∆x) = (A + ∆A)-1b Equação (*)� Como x = A-1b, temos: ∆x = (A + ∆A)-1b - A-1b� Como x = A b, temos: ∆x = (A + ∆A) b - A b� ∆x = [(A + ∆A)-1 - A-1]b = [B-1 – A-1]b, onde A + ∆A = B� B-1 – A-1 = (A-1A)B-1 – A-1(BB-1) = A-1(A – B)B-1
� ∆x = (B-1 - A-1)b = [A-1(A – B)B-1]b = [A-1(A – (A + ∆A))(A + ∆A)-1]b� ∆x = -A-1∆A(A + ∆A)-1b� Utilizando a equação (*): ∆x = -A-1∆A(x + ∆x)
� Aplicando normas consistentes em ambos os membros: � ||∆x|| ≤ ||A-1||.||∆A||.||(x + ∆x)||� ||∆x|| /||(x + ∆x)|| ≤ cond(A).||∆A||/||A||: semelhante ao anterior
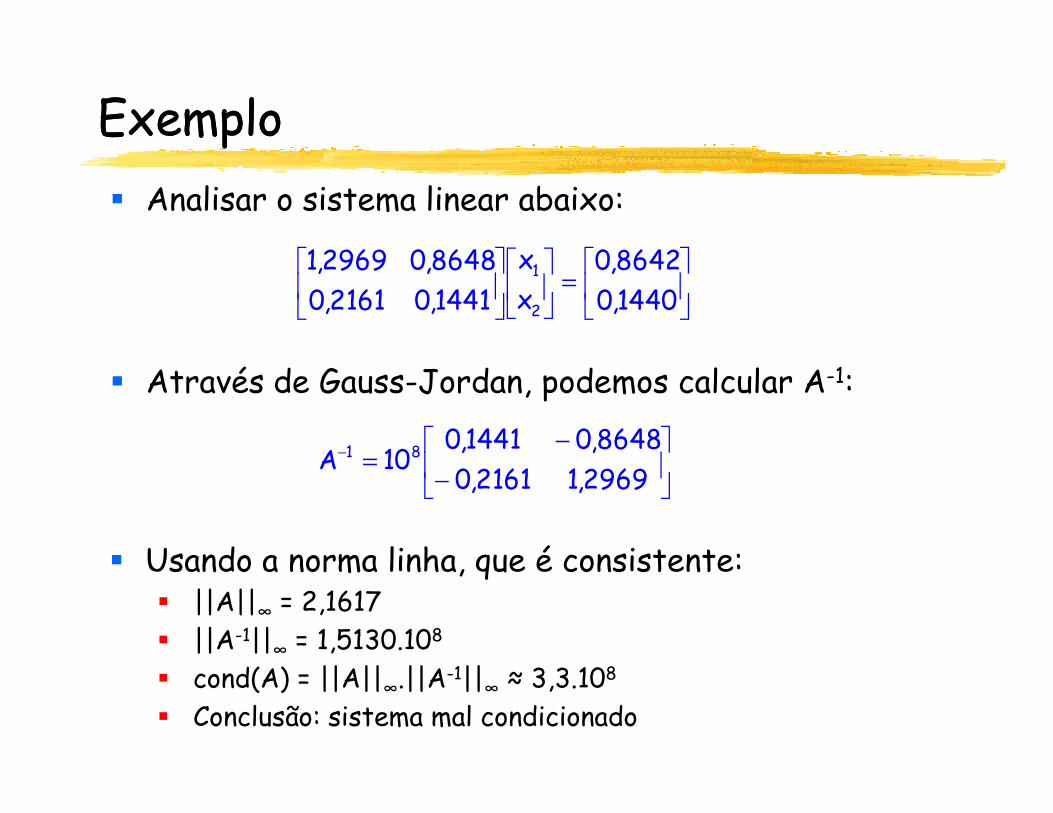
ExemploExemplo� Analisar o sistema linear abaixo:
� Através de Gauss-Jordan, podemos calcular A-1:
=
1440,08642,0
xx
1441,02161,08648,02969,1
2
1
−
−=−
2969,12161,08648,01441,0
10A 81
� Usando a norma linha, que é consistente:� ||A||∞ = 2,1617� ||A-1||∞ = 1,5130.108
� cond(A) = ||A||∞.||A-1||∞ ≈ 3,3.108
� Conclusão: sistema mal condicionado
� Um sistema é mal condicionado se for excessivamente sensível a perturbações em seus dados de entrada
� A solução de um sistema mal condicionado, mesmo calculada com grande precisão, pode ser pouco exata
� Geralmente, essa situação pode ser detectada quando: � no processo de refinamento, as correções permanecem grandes
Alguns comentáriosAlguns comentários
� no processo de refinamento, as correções permanecem grandes � o número de condição da matriz A for muito maior que a unidade
� Importante:� Resíduos pequenos não garantem a qualidade de uma solução� A precisão da máquina influi no condicionamento do sistema� Há sistemas lineares em que o processo de refinamento
converge para uma solução, mas a matriz A tem um número de condição grande (por exemplo, da ordem de 102 ou 103). Nestes casos, o sistema está próximo de ser mal condicionado, ou seja, a solução encontrada pode não ser confiável...
CCICCI--2222
� Introdução
� Métodos diretos� Regra de Cramer
� Eliminação de Gauss
� Gauss-Jordan� Gauss-Jordan
� Resíduos e Condicionamento de Sistemas
� Decomposição LU
� Métodos iterativos� Gauss-Jacobi
� Gauss-Seidel
� Considerações finais
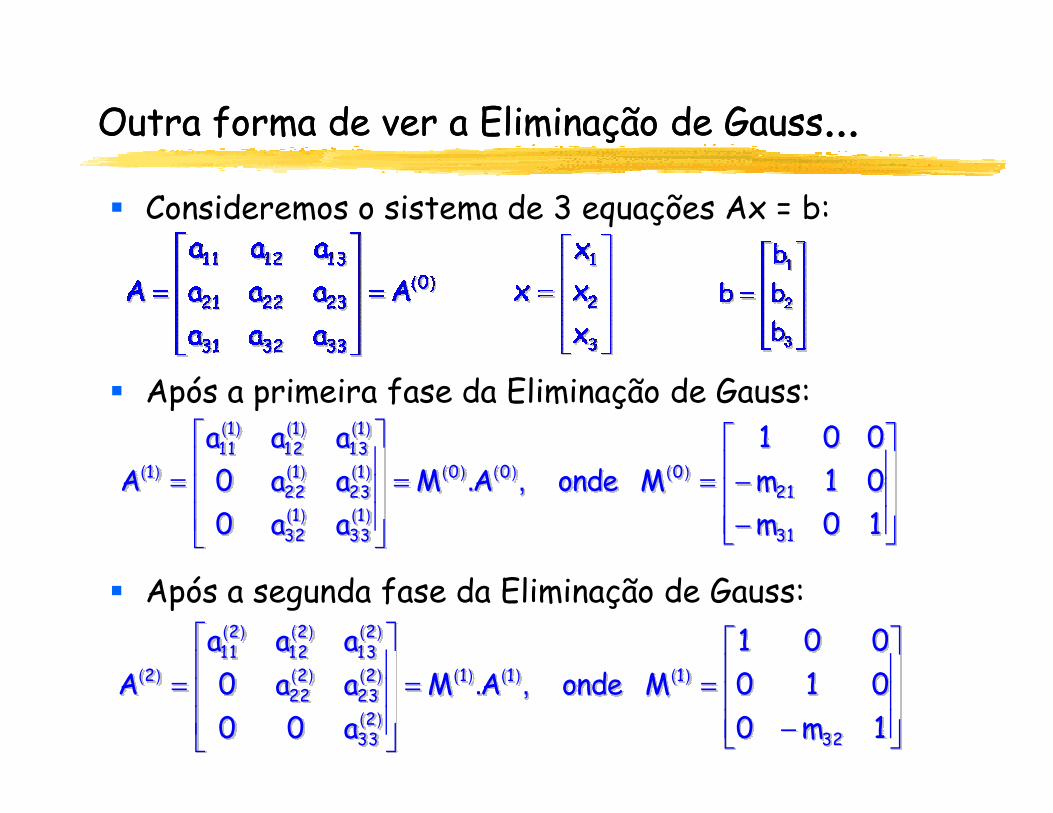
Outra forma de ver a Eliminação de GaussOutra forma de ver a Eliminação de Gauss......
� Consideremos o sistema de 3 equações Ax = b:
� Após a primeira fase da Eliminação de Gauss:� Após a primeira fase da Eliminação de Gauss:
−
−==
=
10m01m001
MondeAMaa0aa0aaa
A
31
21000
133
132
123
122
113
112
111
1 )()()(
)()(
)()(
)()()(
)( ,.
� Após a segunda fase da Eliminação de Gauss:
−
==
=
1m0010001
MondeAMa00aa0aaa
A
32
111
233
223
222
213
212
211
2 )()()(
)(
)()(
)()()(
)( ,.
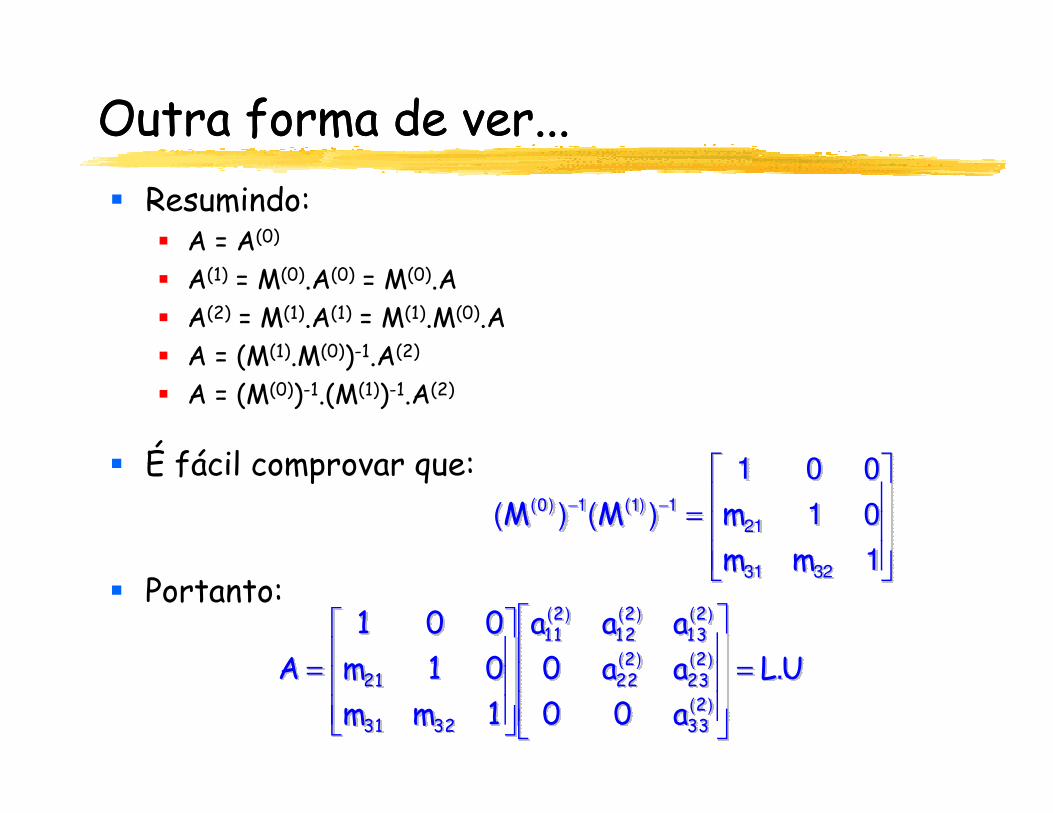
Outra forma de ver...Outra forma de ver...� Resumindo:
� A = A(0)
� A(1) = M(0).A(0) = M(0).A� A(2) = M(1).A(1) = M(1).M(0).A� A = (M(1).M(0))-1.A(2)
� A = (M(0))-1.(M(1))-1.A(2)� A = (M ) .(M ) .A
� É fácil comprovar que:
=−−
1
01
001
)()(
3231
21
1)1(1)0(
mmmMM
� Portanto:
ULa00aa0aaa
1mm01m001
A233
223
222
213
212
211
3231
21 .)(
)()(
)()()(
=
=
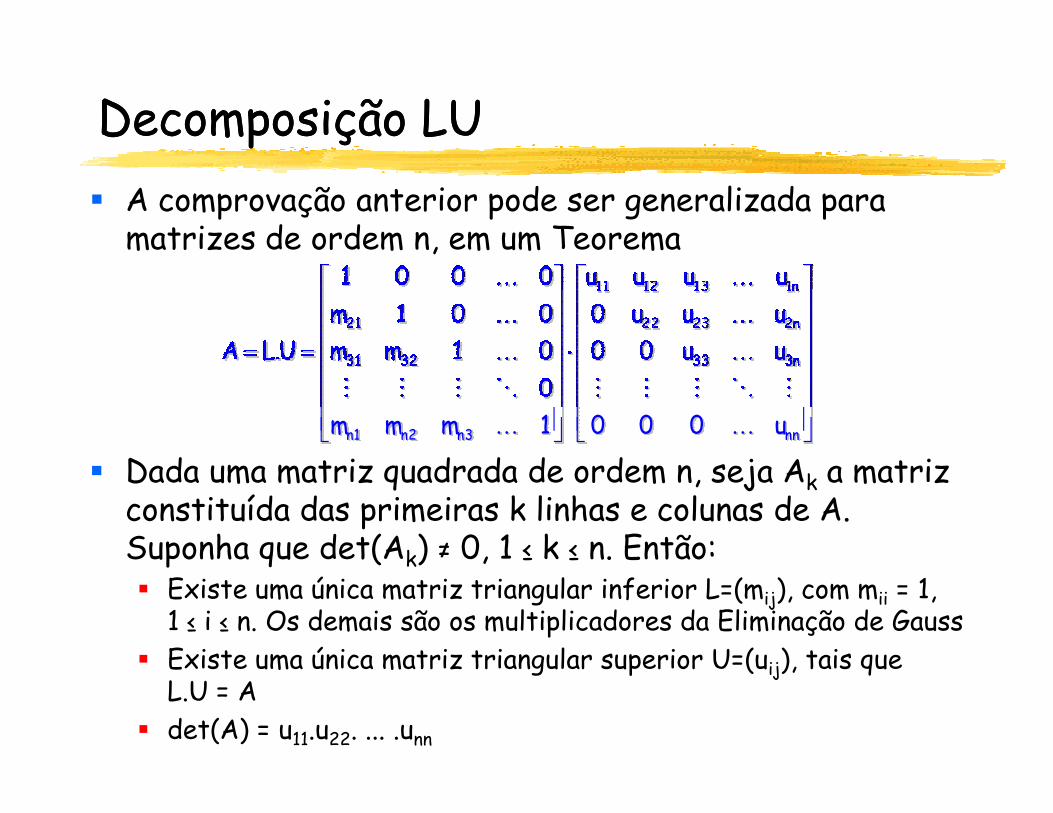
Decomposição LUDecomposição LU� A comprovação anterior pode ser generalizada para
matrizes de ordem n, em um Teorema
nn3n2n1n u0001mmm KK
� Dada uma matriz quadrada de ordem n, seja Ak a matriz constituída das primeiras k linhas e colunas de A. Suponha que det(Ak) ≠ 0, 1 ≤ k ≤ n. Então:� Existe uma única matriz triangular inferior L=(mij), com mii = 1,
1 ≤ i ≤ n. Os demais são os multiplicadores da Eliminação de Gauss � Existe uma única matriz triangular superior U=(uij), tais que
L.U = A� det(A) = u11.u22. ... .unn
Decomposição LU Decomposição LU –– Resolução do SistemaResolução do Sistema� Portanto, dados o sistema linear Ax = b e a
decomposição (ou fatoração) LU da matriz A, temos:� Ax = b ⇔ (L.U)x = b
� Chamando Ux = y, o sistema original passa a ser Ly = b, ou seja, surgem dois sistemas triangulares
� Por outro lado, é fácil verificar que y = L-1.b é o vetor b acumulando as operações da Eliminação de Gauss
� Por outro lado, é fácil verificar que y = L .b é o vetor b acumulando as operações da Eliminação de Gauss
� Por exemplo, no caso de um sistema com 3 equações:� Como L = (M(0))-1.(M(1))-1, então L-1 = M(1).M(0)
� Portanto, y = M(1).M(0).b� Vantagem da decomposição A = L.U: uma vez calculadas
as matrizes L e U (em tempo cúbico), resolvemos mais rapidamente (em tempo quadrático) outros sistemas com a mesma matriz A. Isso é útil, por exemplo, no refinamento por resíduos
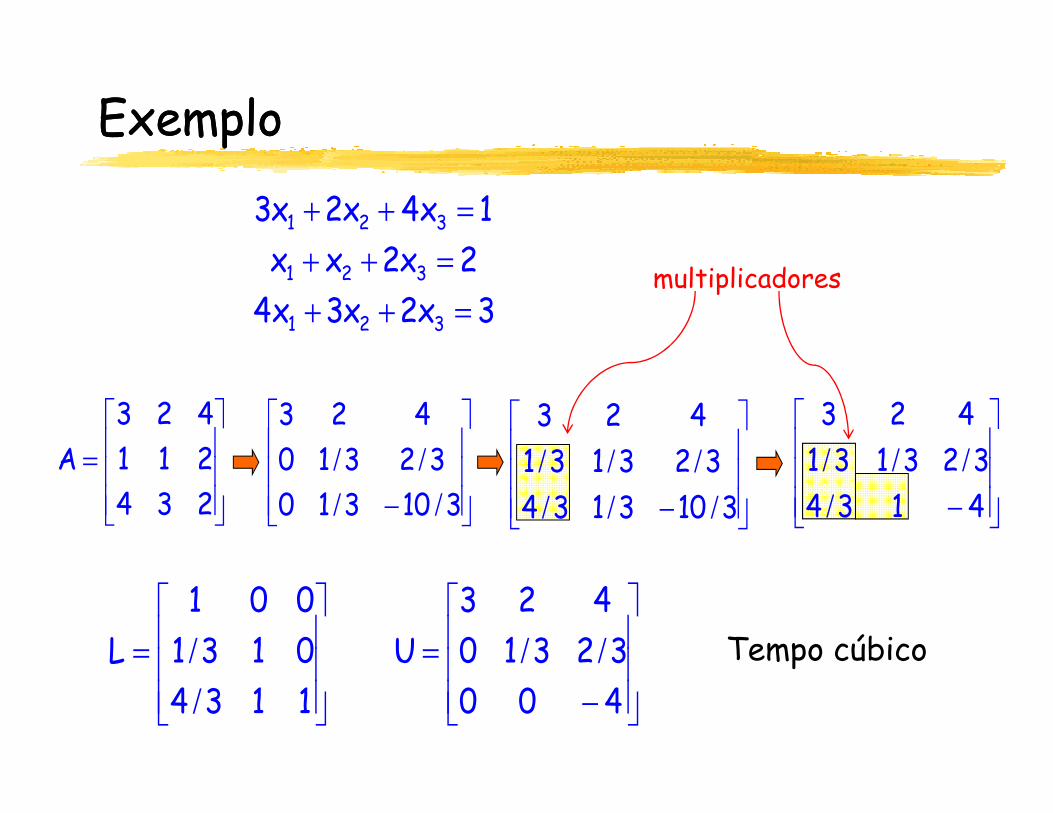
ExemploExemplo
3x2x3x42x2xx1x4x2x3
321
321
321
=++
=++
=++
423 423 423 423
multiplicadores
=
234211423
A
− 31031032310
423
//
//
− 4134323131
423
/
///
=
11340131001
L/
/
−
=
40032310
423U //
− 3103134323131
423
///
///
Tempo cúbico
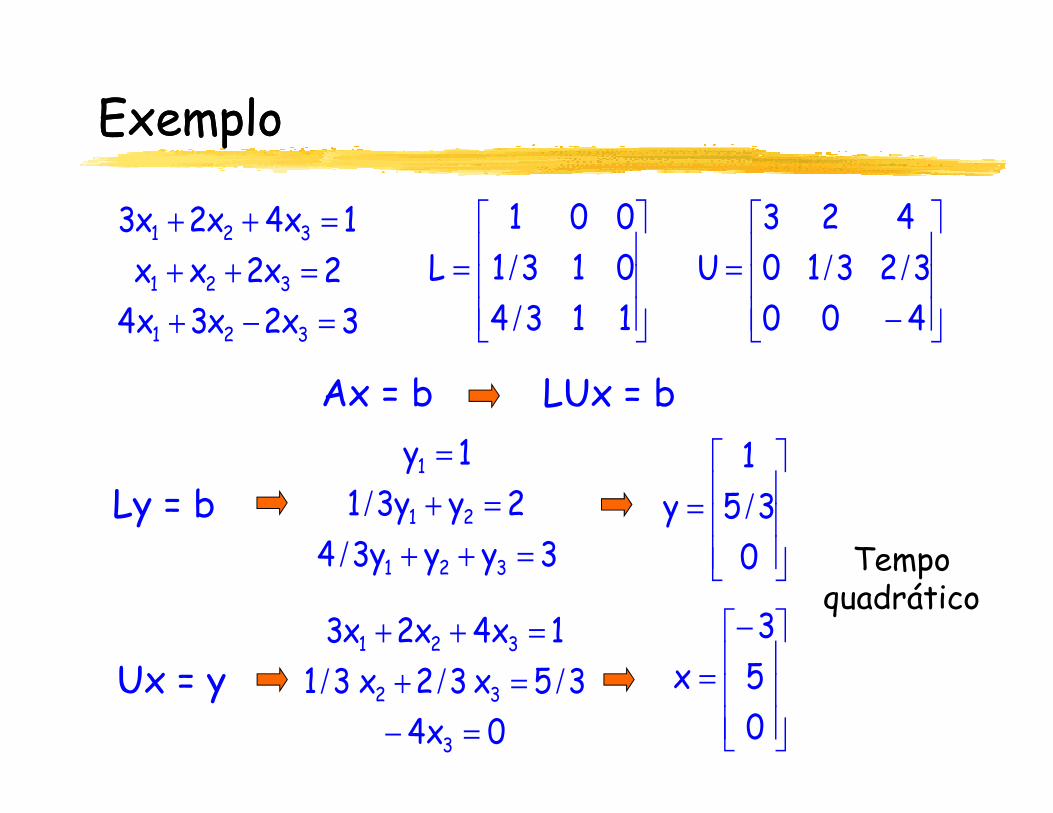
ExemploExemplo
3x2x3x42x2xx1x4x2x3
321
321
321
=−+
=++
=++
=
11340131001
L/
/
−
=
40032310
423U //
Ax = b LUx = b
3yyy342yy31
1y
321
21
1
=++
=+
=
/
/
=
035
1y /
−
=
053
x0x4
35x32x311x4x2x3
3
32
321
=−
=+
=++
///
Ax = b LUx = b
Ly = b
Ux = y
Tempo quadrático
Outra aplicação Outra aplicação -- InversaInversa
� A decomposição LU também é útil no cálculo da matriz inversa
� Resolver o sistema AX = B, onde A, X e B são matrizes de ordem n, é o mesmo que resolver n sistemas Ax = b, onde x e b são vetores de n sistemas Ax = b, onde x e b são vetores de tamanho n
� A inversa A-1 da matriz A pode ser encontrada através da resolução do sistema AX = I, onde I é a matriz identidade
� Nesse caso, basta realizar uma única vez a decomposição LU da matriz A, e depois utilizá-la na resolução de n sistemas
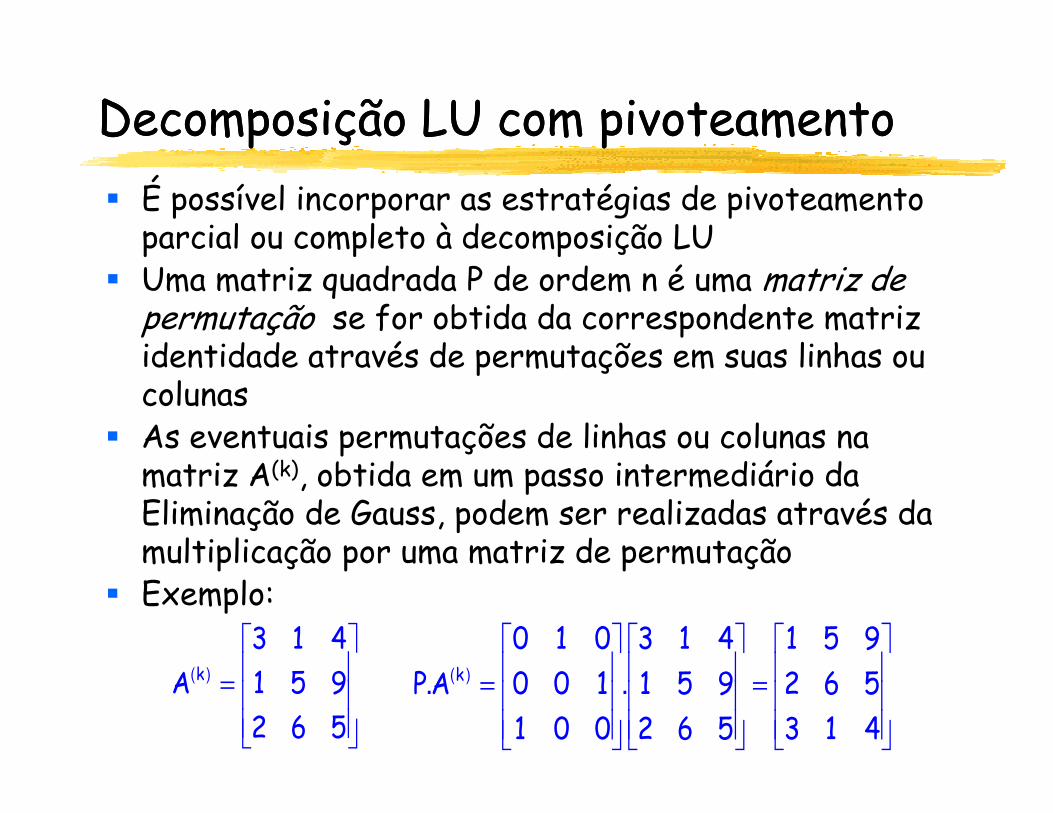
Decomposição LU com pivoteamentoDecomposição LU com pivoteamento� É possível incorporar as estratégias de pivoteamento
parcial ou completo à decomposição LU� Uma matriz quadrada P de ordem n é uma matriz de
permutação se for obtida da correspondente matriz identidade através de permutações em suas linhas ou colunascolunas
� As eventuais permutações de linhas ou colunas na matriz A(k), obtida em um passo intermediário da Eliminação de Gauss, podem ser realizadas através da multiplicação por uma matriz de permutação
� Exemplo:
=
=
413562951
562951413
001100010
AP k .. )(
=
562951413
A k )(
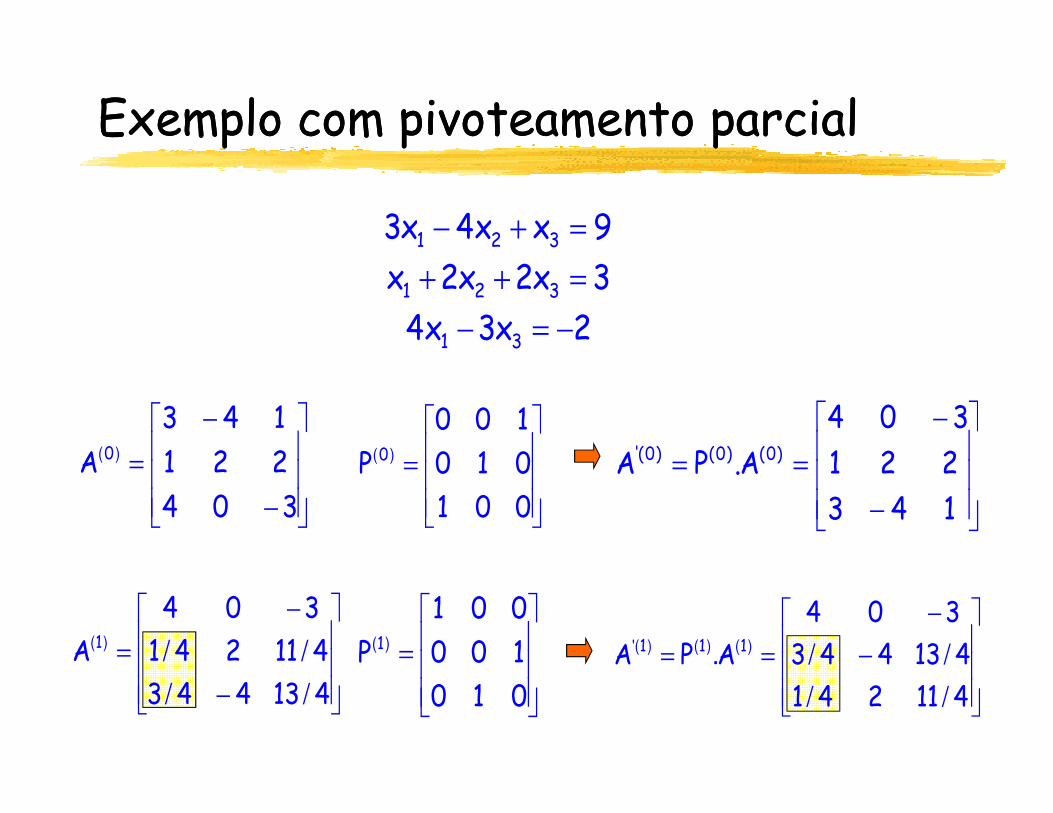
Exemplo com pivoteamento parcialExemplo com pivoteamento parcial
2x3x43x2x2x9xx4x3
31
321
321
−=−
=++
=+−
− 143 100 −304
−
−
=
304221143
A 0)(
−
−
=
413443411241304
A 1
//
//)(
=
001010100
P 0)(
−
−
==
143221304
A.PA )0()0()0('
=
010100001
P 1)(
−
−
==
411241413443304
APA 111
//
//. )()()('
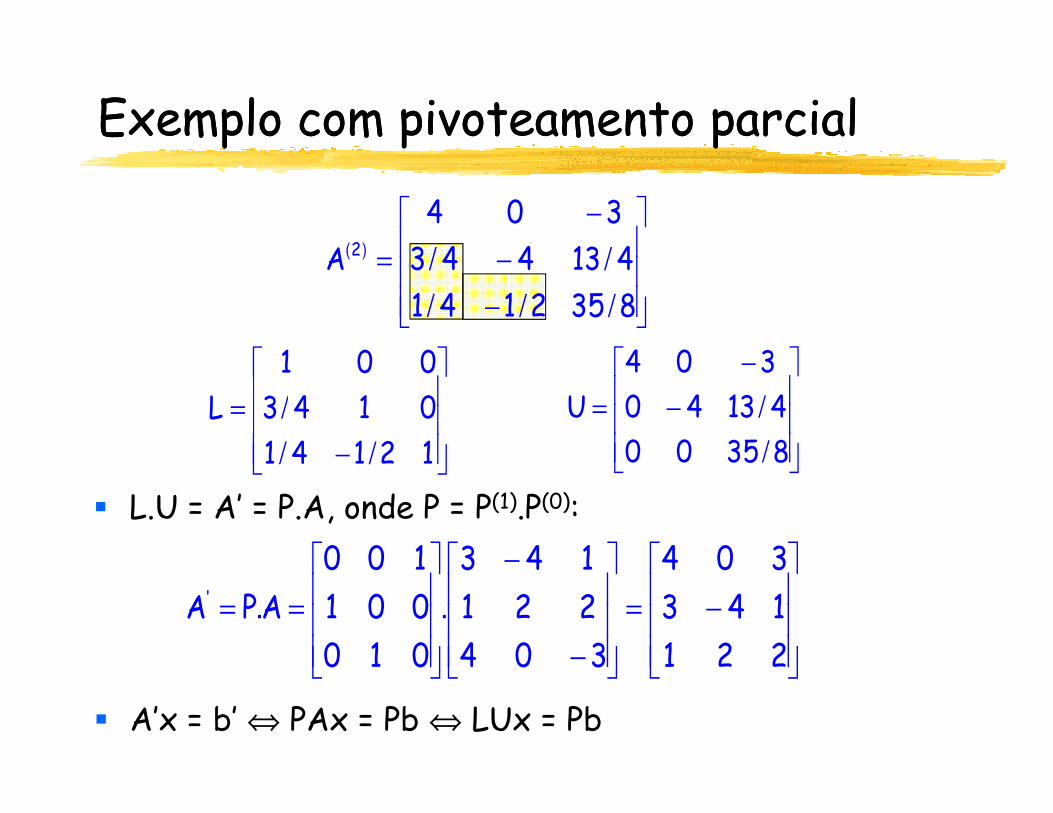
Exemplo com pivoteamento parcialExemplo com pivoteamento parcial
−
−
−
=
8352141413443304
A 2
///
//)(
= 0143001
L /
−
−
= 41340304
U /
−
=
121410143L
//
/
−=
8350041340U
/
/
� L.U = A’ = P.A, onde P = P(1).P(0):
−=
−
−
==
221143304
304221143
010001100
APA ..'
� A’x = b’ ⇔ PAx = Pb ⇔ LUx = Pb
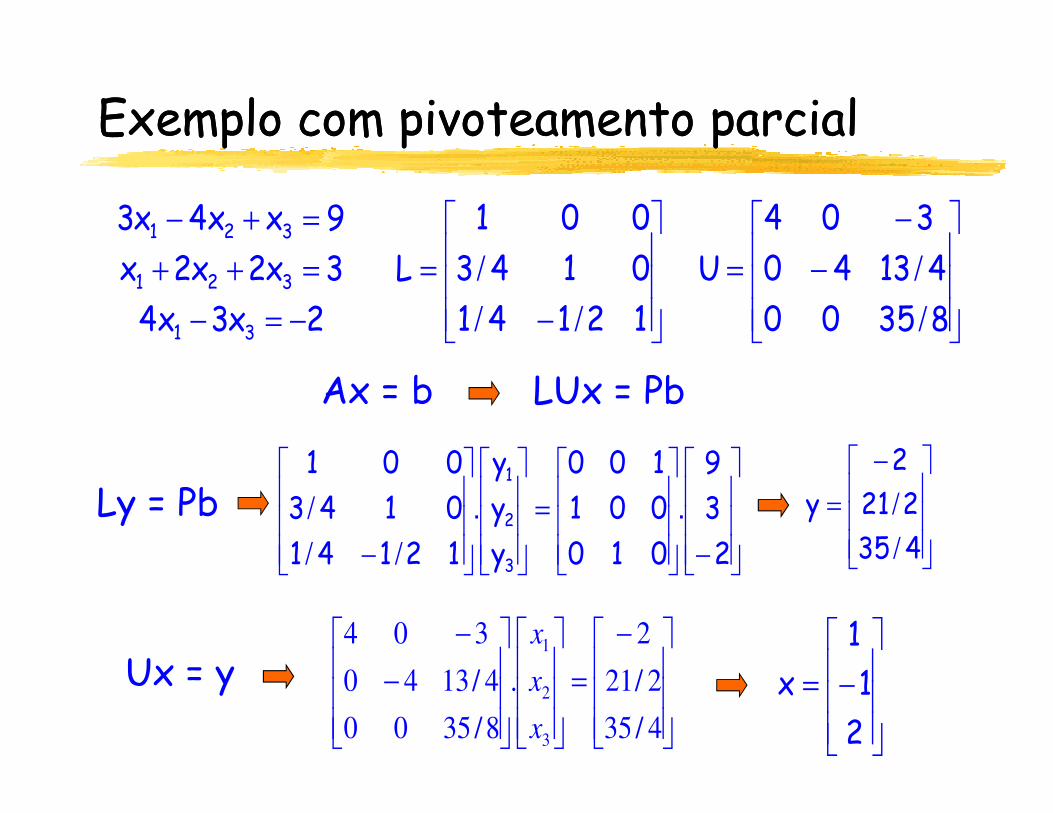
Exemplo com pivoteamento parcialExemplo com pivoteamento parcial
2x3x43x2x2x9xx4x3
31
321
321
−=−
=++
=+−
−
=
121410143001
L//
/
−
−
=
8350041340304
U/
/
Ax = b LUx = Pb
−
=
4352212
y/
/
−=
211
x
−
=
− 239
010001100
yyy
121410143001
3
2
1
..
//
/
−
=
−
−
4/35
2/21
2
.
8/3500
4/1340
304
3
2
1
x
x
x
Ax = b LUx = Pb
Ly = Pb
Ux = y
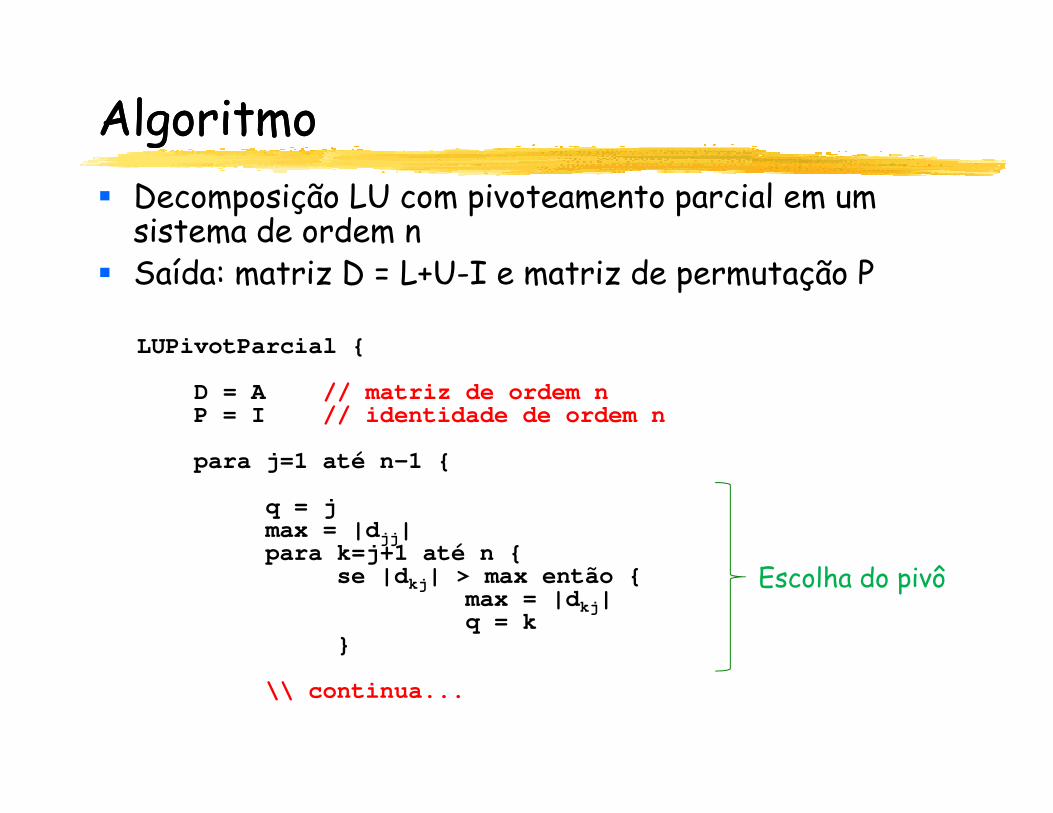
� Decomposição LU com pivoteamento parcial em um sistema de ordem n
� Saída: matriz D = L+U-I e matriz de permutação P
AlgoritmoAlgoritmo
LUPivotParcial {
D = A // matriz de ordem nP = I // identidade de ordem nP = I // identidade de ordem n
para j=1 até n-1 {
q = jmax = |djj|para k=j+1 até n {
se |dkj| > max então {max = |dkj|q = k
}
\\ continua...
Escolha do pivô
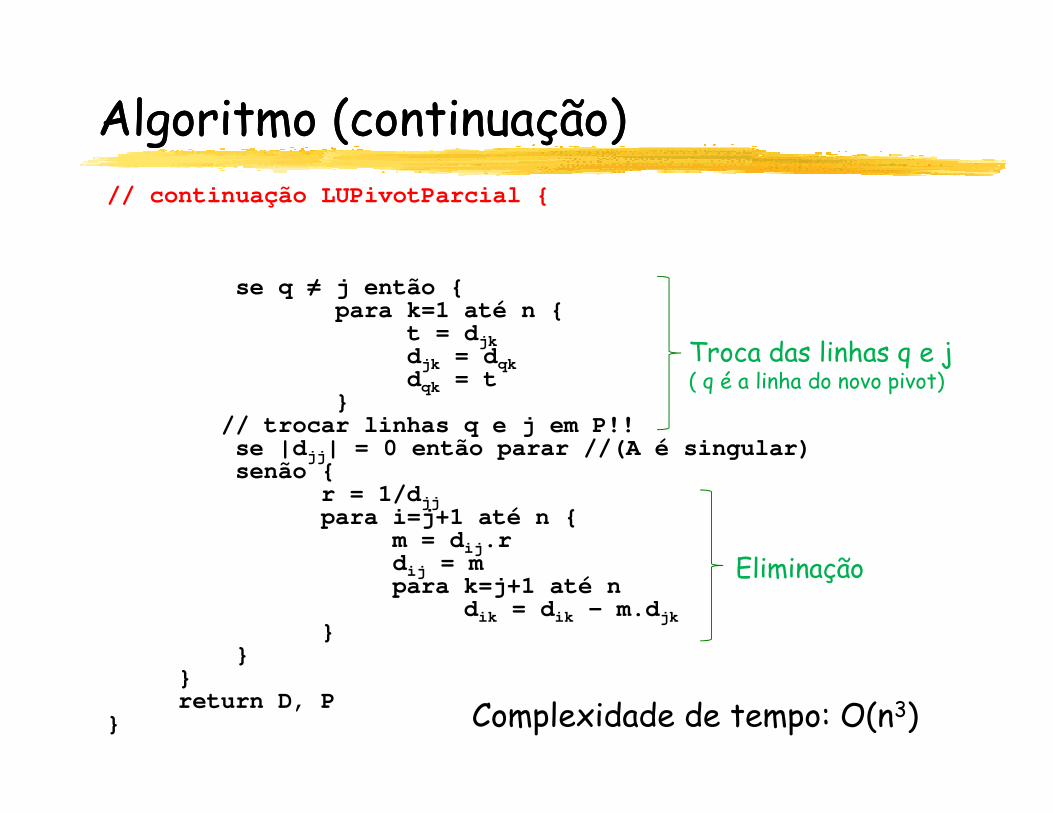
Algoritmo (continuação)Algoritmo (continuação)// continuação LUPivotParcial {
se q ≠ j então {para k=1 até n {
t = djkdjk = dqkdqk = t
}
Troca das linhas q e j ( q é a linha do novo pivot)
}// trocar linhas q e j em P!!se |djj| = 0 então parar //(A é singular)senão {
r = 1/djjpara i=j+1 até n {
m = dij.rdij = mpara k=j+1 até n
dik = dik – m.djk}
}}return D, P
}
Eliminação
Complexidade de tempo: O(n3)
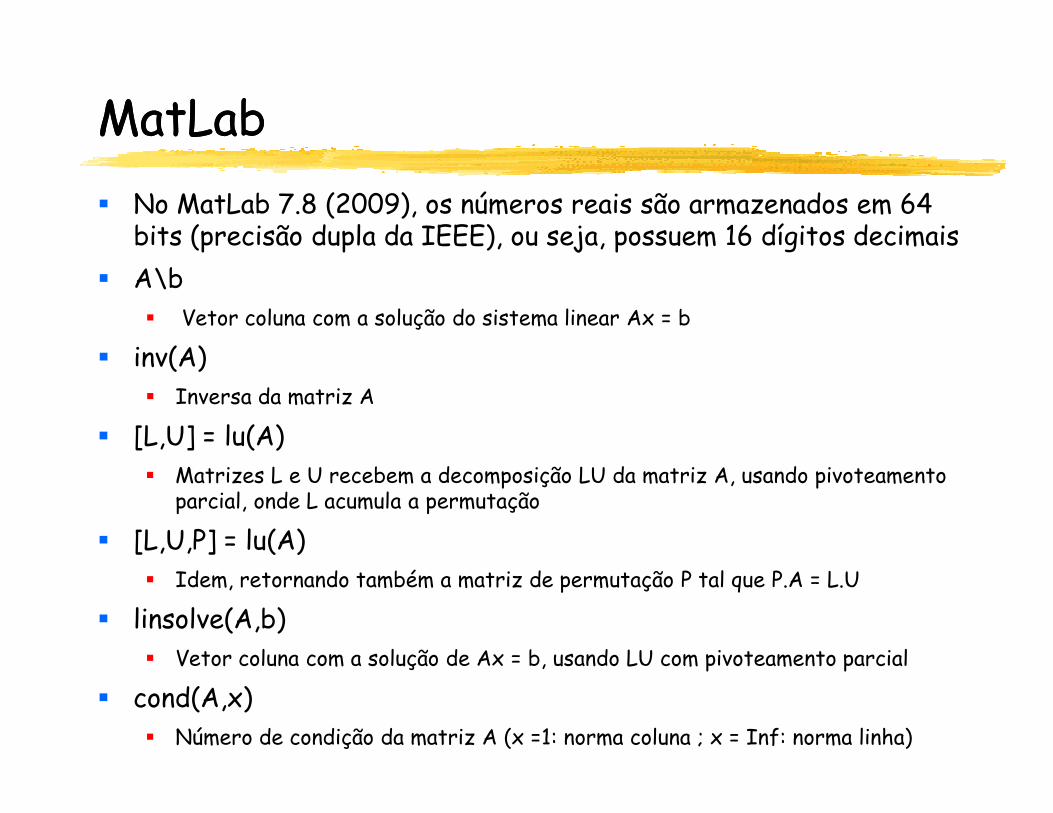
� No MatLab 7.8 (2009), os números reais são armazenados em 64 bits (precisão dupla da IEEE), ou seja, possuem 16 dígitos decimais
� A\b� Vetor coluna com a solução do sistema linear Ax = b
� inv(A)� Inversa da matriz A
MatLabMatLab
� Inversa da matriz A
� [L,U] = lu(A)� Matrizes L e U recebem a decomposição LU da matriz A, usando pivoteamento
parcial, onde L acumula a permutação
� [L,U,P] = lu(A)� Idem, retornando também a matriz de permutação P tal que P.A = L.U
� linsolve(A,b)� Vetor coluna com a solução de Ax = b, usando LU com pivoteamento parcial
� cond(A,x)� Número de condição da matriz A (x =1: norma coluna ; x = Inf: norma linha)
MatrizesMatrizes EspeciaisEspeciais
� Há matrizes especiais que tem métodos de resolução mais eficientes que LU, dois exemplos são:� Matrizes de Banda
� Algoritmo de Thomas
� Matrizes Simétricas
� Vejamos um método especial para Matrizes Simétricas: Fatoração de Cholesky
FatoraçãoFatoração de de CholeskyCholesky
� A fatoração de Cholesky é aplicável apenas a um tipo particular de matriz, a matriz simétrica e definida positiva� Uma matriz é dita simétrica, se a = a para todo i e jUma matriz é dita definida positiva, isto é se os � Uma matriz é dita definida positiva, isto é se os determinantes das submatrizes principais forem todos positivos. Formalmente:� seja Ak a matriz constituída das primeiras k linhas e colunas de A. Se det(Ak) > 0, 1 ≤ k ≤ n. então A é definida positiva
� Se aplicável, a fatoração de Cholesky é muito mais eficiente que a fatoração LU
FatoraçãoFatoração de de CholeskyCholesky
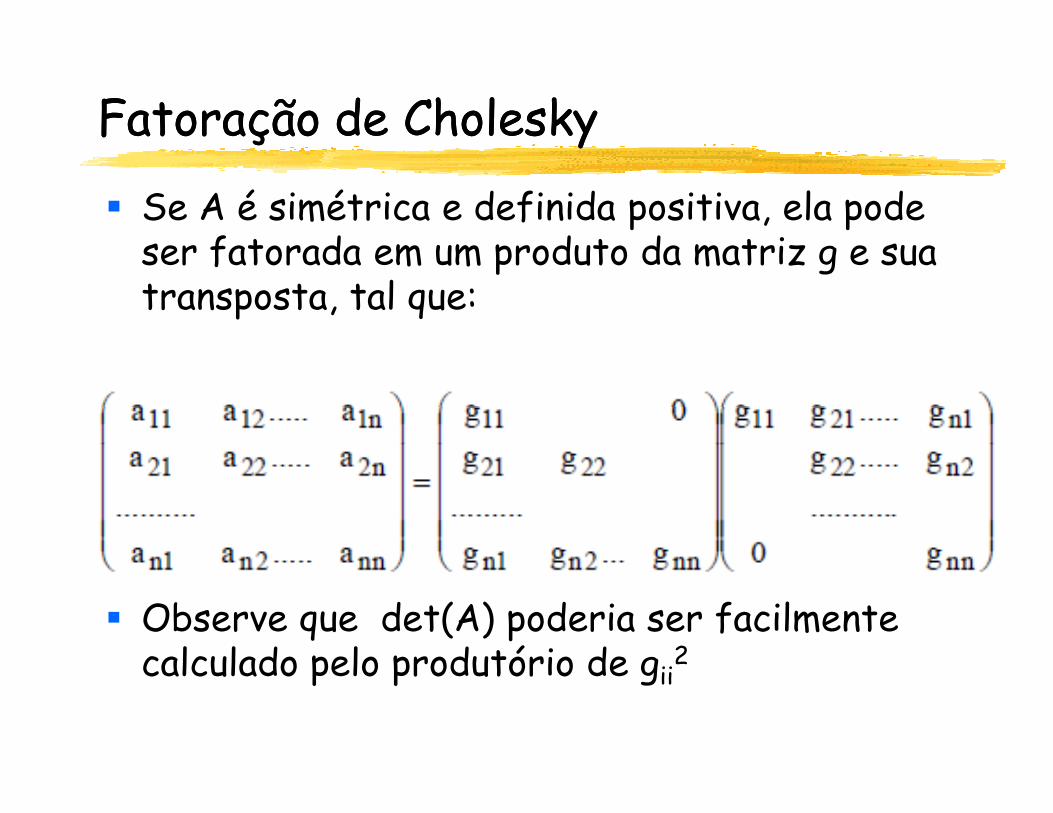
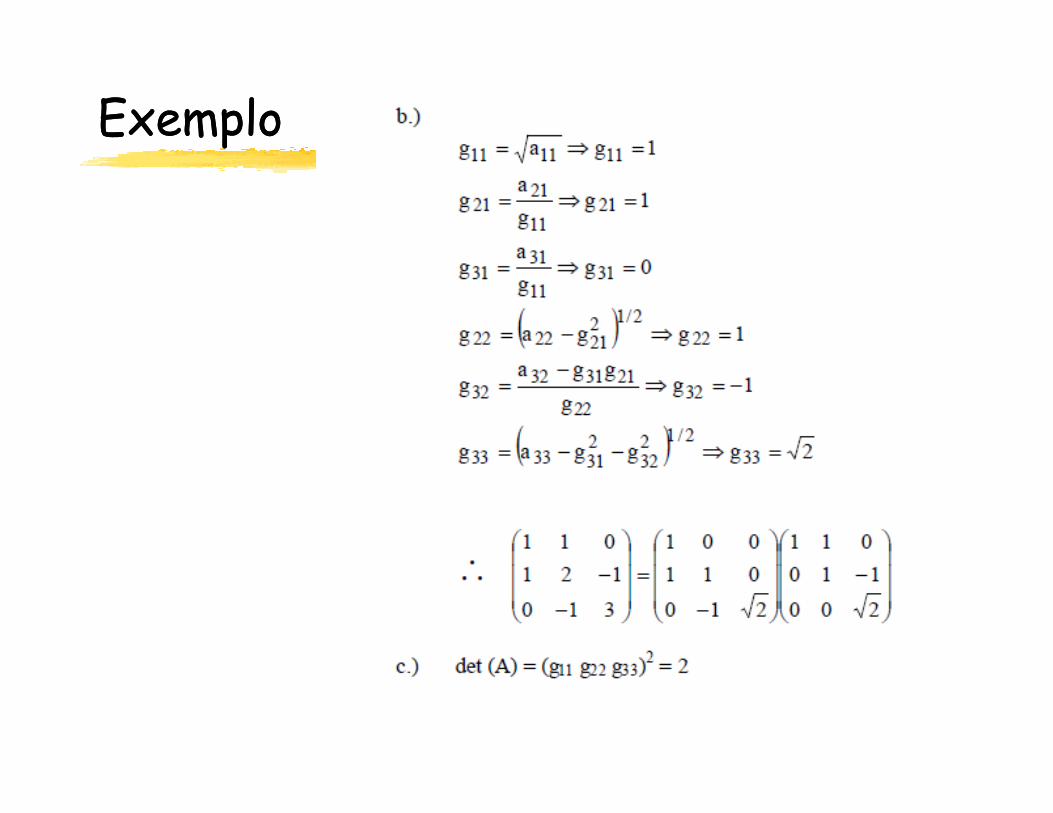
� Se A é simétrica e definida positiva, ela pode ser fatorada em um produto da matriz g e sua transposta, tal que:
� Observe que det(A) poderia ser facilmente calculado pelo produtório de gii2
FatoraçãoFatoração de de CholeskyCholesky
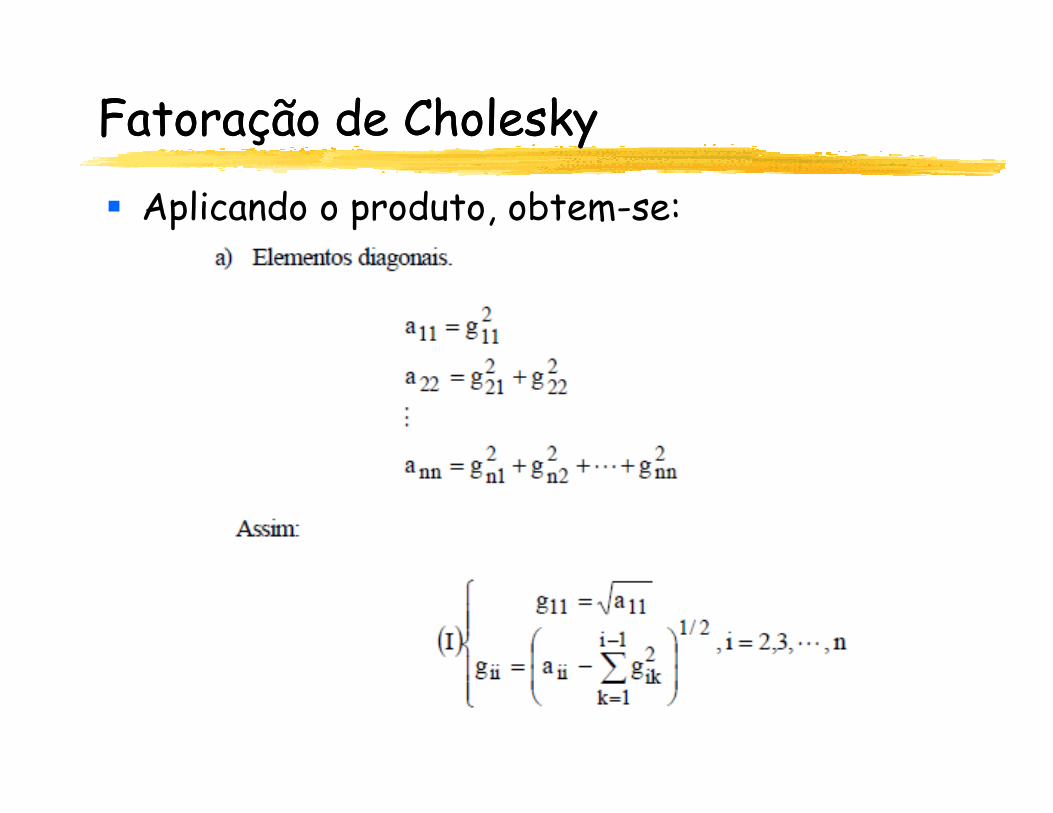
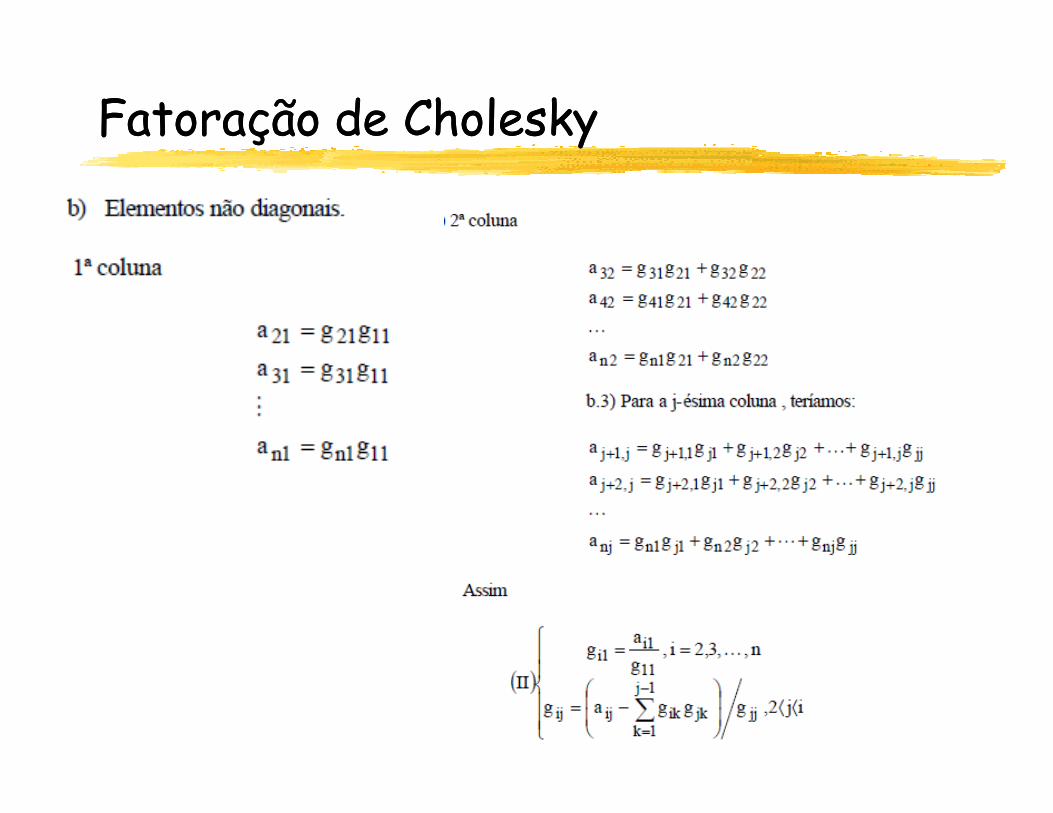
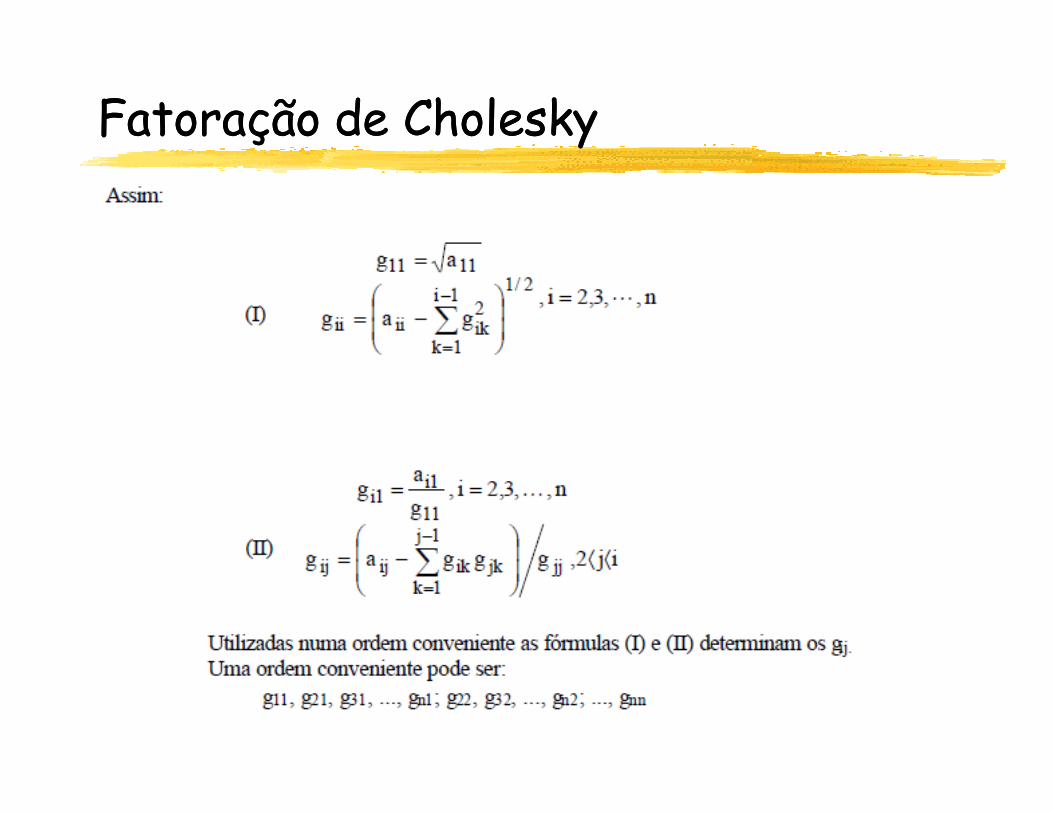
� Aplicando o produto, obtem-se:
FatoraçãoFatoração de de CholeskyCholesky
FatoraçãoFatoração de de CholeskyCholesky
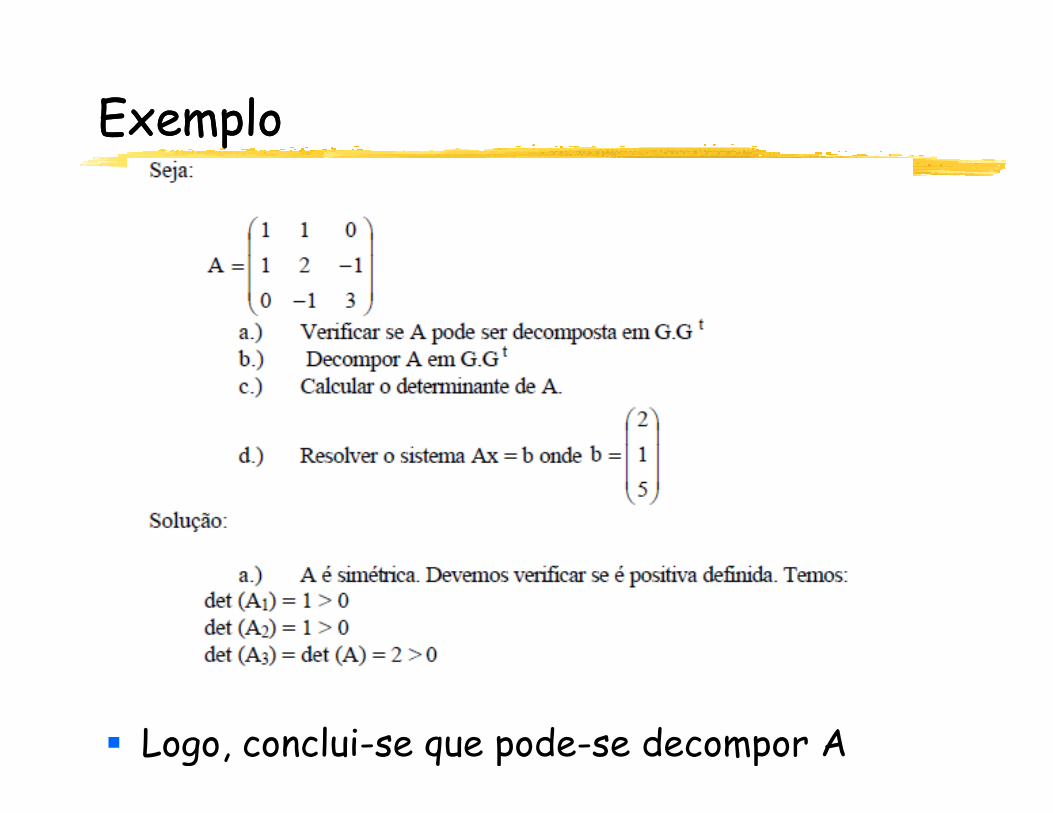
ExemploExemplo
� Logo, conclui-se que pode-se decompor A
ExemploExemplo
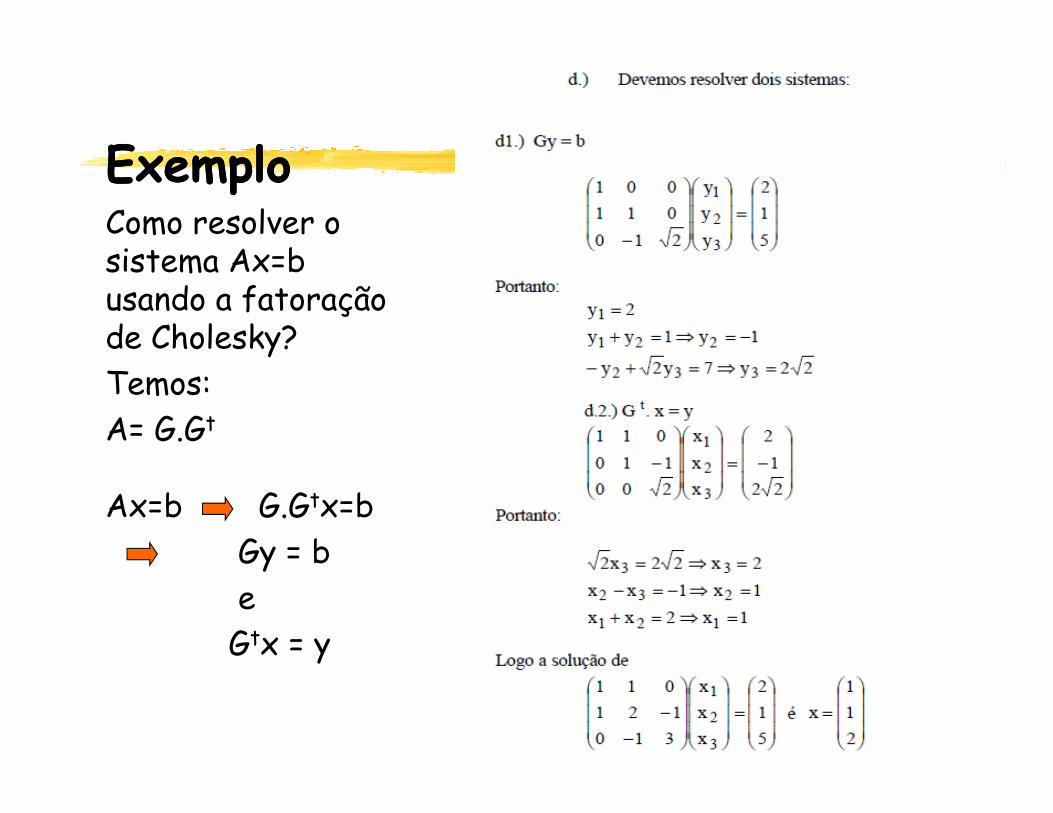
ExemploExemploComo resolver o sistema Ax=b usando a fatoração de Cholesky?Temos:A= G.GA= G.Gt
Ax=b G.Gtx=b Gy = beGtx = y
Para Para pensarpensar emem casa…casa…
� Dada uma matriz A com determinante não zero mas que seja não simétrica e definida positiva…
� Seria possível achar um sistema equivalente a � Seria possível achar um sistema equivalente a Ax=b, onde a matriz de coeficientes fosse simétrica e definida positiva?
CCICCI--2222
� Introdução
� Métodos diretos� Regra de Cramer
� Eliminação de Gauss
� Gauss-Jordan� Gauss-Jordan
� Resíduos e Condicionamento de Sistemas
� Decomposição LU
� Métodos iterativos� Gauss-Jacobi
� Gauss-Seidel
� Considerações finais
Métodos iterativosMétodos iterativos
� Como foi inicialmente comentado, os métodos iterativos para resolução de sistemas lineares consistem em encontrar uma sequência de aproximações sucessivas
� Dada uma estimativa inicial x(0), calcula-se a sequência x(1), x(2), x(3) ..., até que determinado critério de parada seja satisfeitoseja satisfeito
� O sistema Ax = b é transformado em x(k) = Cx(k-1) + g, k>0, onde C é uma matriz e g um vetor
� Possíveis critérios de parada:� máximo erro absoluto ou relativo
� número de iterações
� Principais métodos: Gauss-Jacobi e Gauss-Seidel
CCICCI--2222
� Introdução
� Métodos diretos� Regra de Cramer
� Eliminação de Gauss
� Gauss-Jordan� Gauss-Jordan
� Resíduos e Condicionamento de Sistemas
� Decomposição LU
� Métodos iterativos� Gauss-Jacobi
� Gauss-Seidel
� Considerações finais
Método de GaussMétodo de Gauss--JacobiJacobi
� Considere o sistema linear em sua forma inicial:
nnnn22n11n bxaxaxa =+++ ...
� Isolando a i-ésima incógnita na i-ésima equação:� x1 = (b1 - a12 x2 - ... - a1n xn)/a11� x2 = (b2 - a21 x1 - ... - a2n xn)/a22...� xn = (bn - an1 x1 - ... - an,n-1 xn-1)/ann
Método de GaussMétodo de Gauss--JacobiJacobi
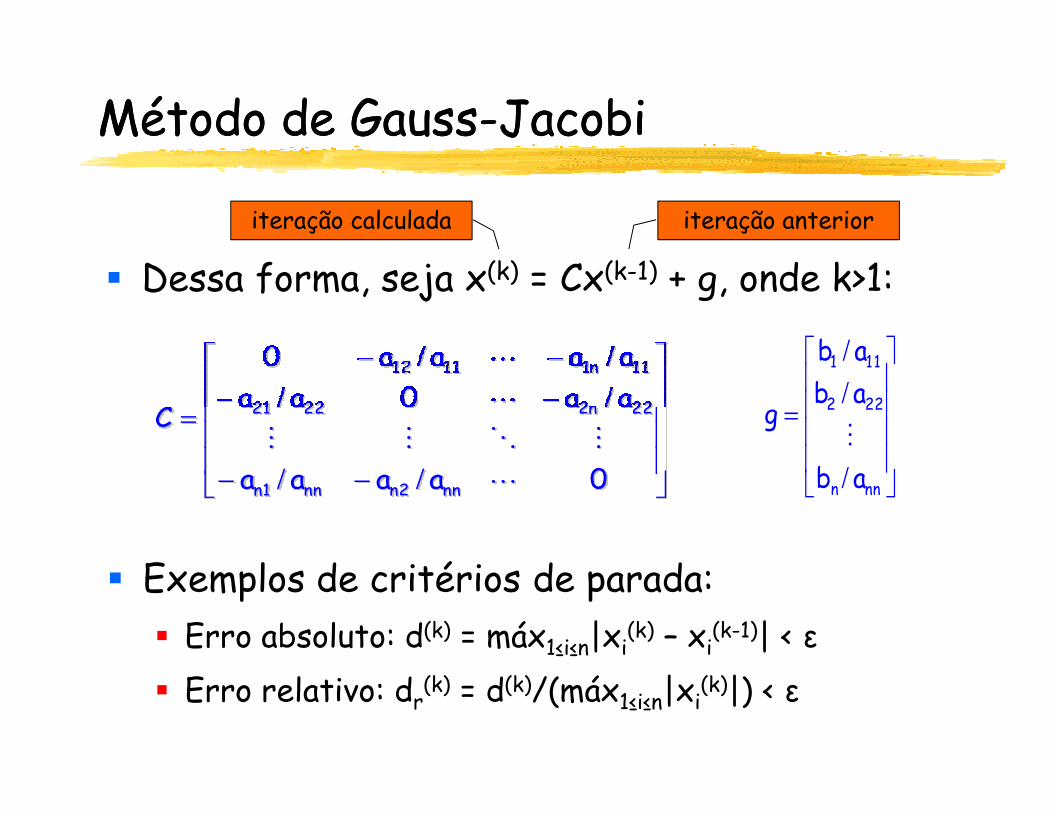
� Dessa forma, seja x(k) = Cx(k-1) + g, onde k>1:
=222
111
abab
g/
/
iteração calculada iteração anterior
−−
−−=
0aaaa
aa0aaC
nn2nnn1n
22n22221
L
MOMM
L
//
//
=
nnn
222
ab
abg
/
/
M
� Exemplos de critérios de parada:� Erro absoluto: d(k) = máx1≤i≤n|xi
(k) – xi(k-1)| < ε
� Erro relativo: dr(k) = d(k)/(máx1≤i≤n|xi
(k)|) < ε
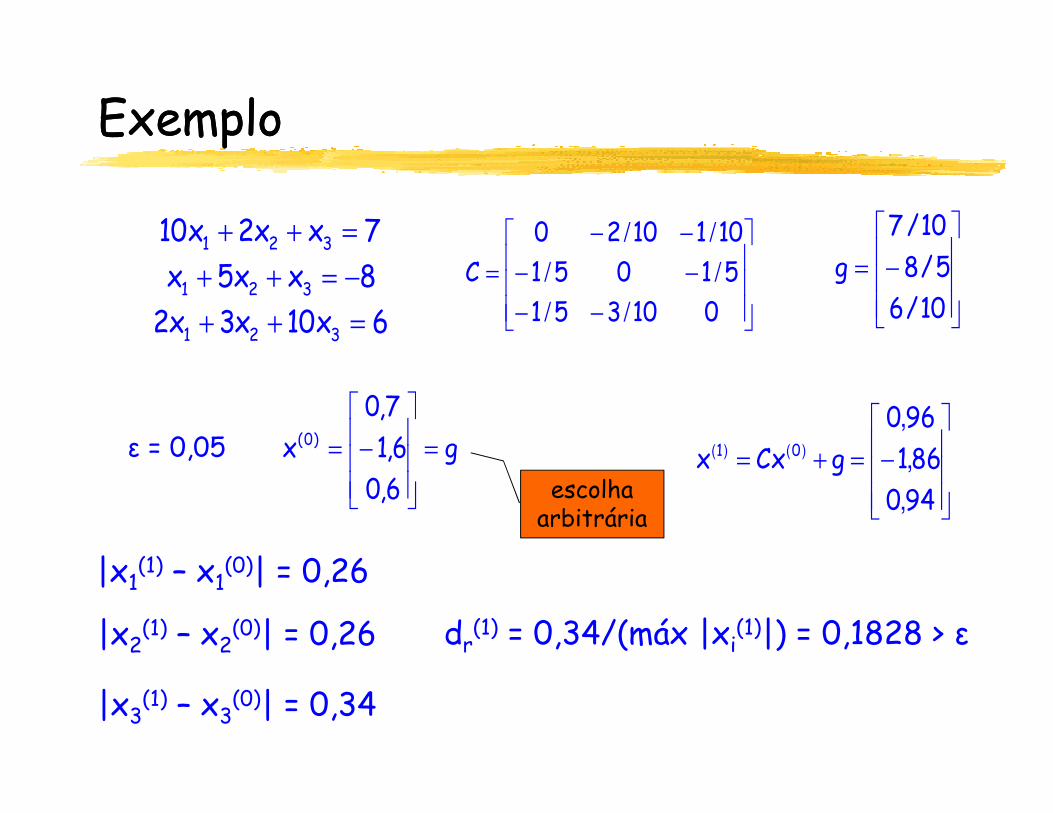
ExemploExemplo
7,0
−−
−−
−−
=
010351510511011020
C//
//
//
−=
10/65/8
10/7g
6x10x3x28xx5x7xx2x10
321
321
321
=++
−=++
=++
960,g
6,06,17,0
x )0( =
−=ε = 0,05
−=+=
940861960
gCxx 01
,
,
,)()(
|x1(1) – x1
(0)| = 0,26
|x2(1) – x2
(0)| = 0,26
|x3(1) – x3
(0)| = 0,34
dr(1) = 0,34/(máx |xi
(1)|) = 0,1828 > ε
escolha arbitrária
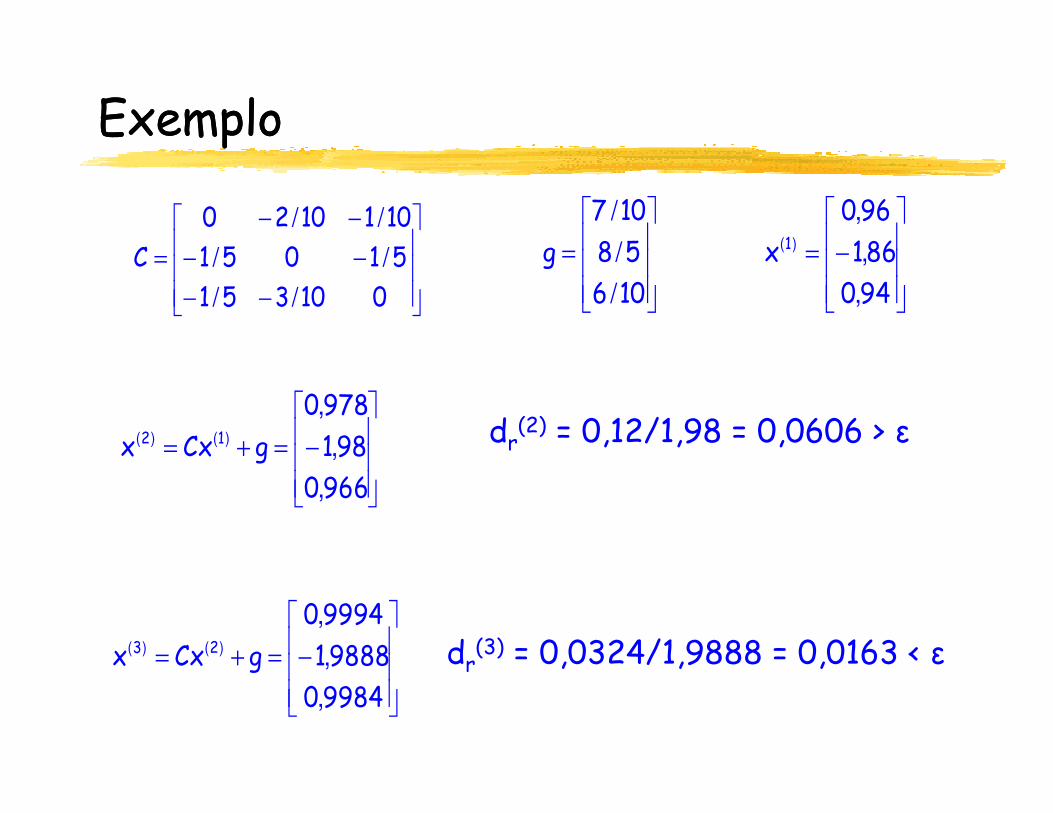
ExemploExemplo
−−
−−
−−
=
010351510511011020
C//
//
//
=
10658107
g/
/
/
−=
940861960
x 1
,
,
,)(
9780,d = 0,12/1,98 = 0,0606 > ε
−=+=
9660981
9780gCxx 12
,
,
,)()( dr
(2) = 0,12/1,98 = 0,0606 > ε
dr(3) = 0,0324/1,9888 = 0,0163 < ε
−=+=
998409888199940
gCxx 23
,
,
,)()(
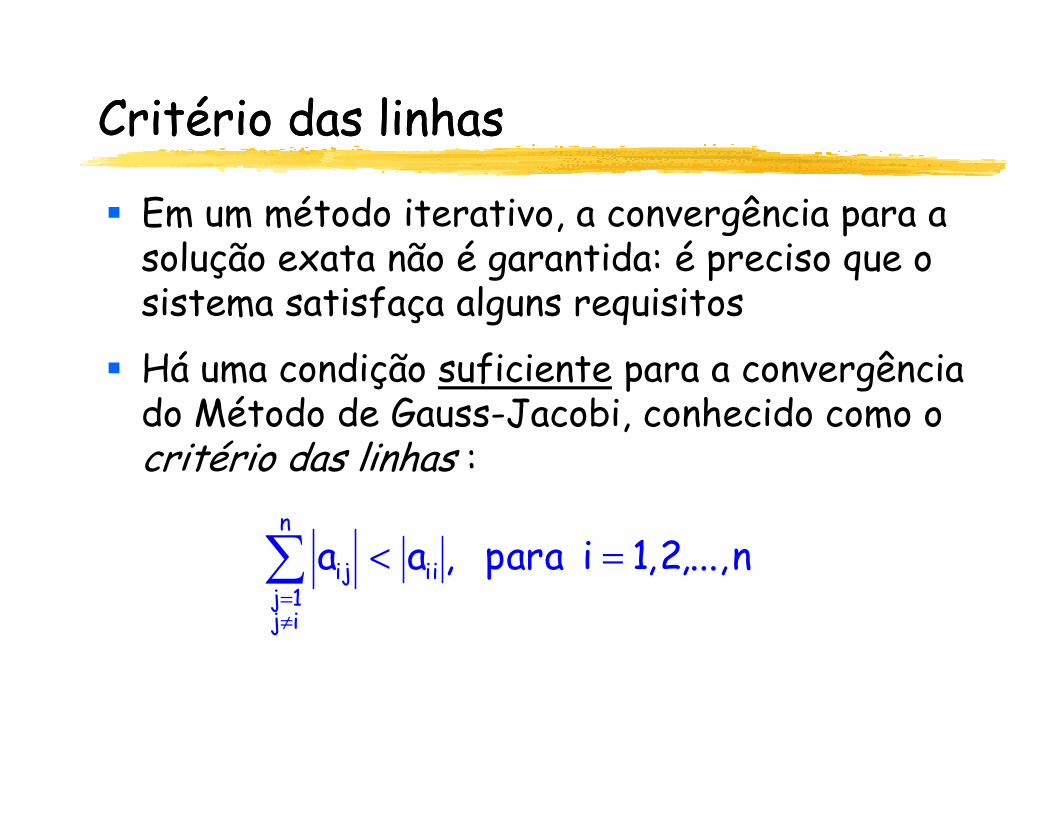
Critério das linhasCritério das linhas
� Em um método iterativo, a convergência para a solução exata não é garantida: é preciso que o sistema satisfaça alguns requisitos
� Há uma condição suficiente para a convergência do Método de Gauss-Jacobi, conhecido como o do Método de Gauss-Jacobi, conhecido como o critério das linhas :
n,...,2,1ipara,aa ii
n
ij1j
ij =<∑≠=
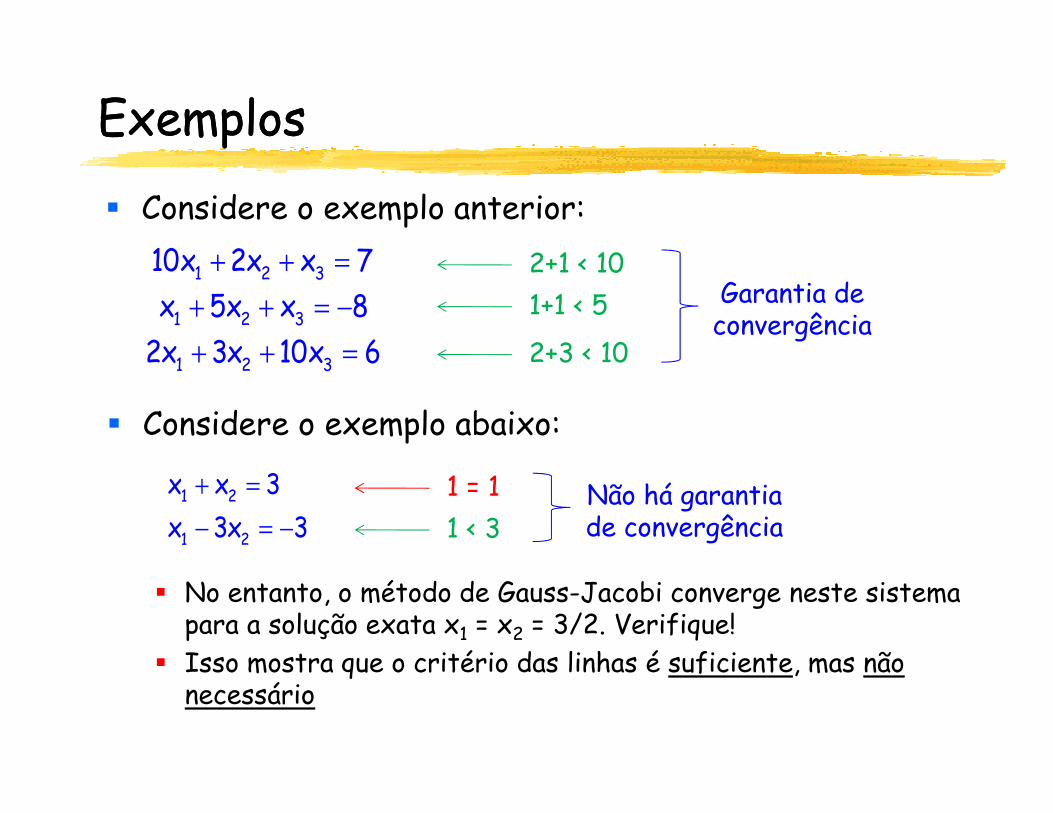
ExemplosExemplos
6x10x3x28xx5x7xx2x10
321
321
321
=++
−=++
=++
� Considere o exemplo anterior:2+1 < 101+1 < 5
2+3 < 10
Garantia de convergência
� Considere o exemplo abaixo:
3x3x3xx
21
21
−=−
=+
� Considere o exemplo abaixo:
1 = 11 < 3
Não há garantia de convergência
� No entanto, o método de Gauss-Jacobi converge neste sistema para a solução exata x1 = x2 = 3/2. Verifique!
� Isso mostra que o critério das linhas é suficiente, mas não necessário
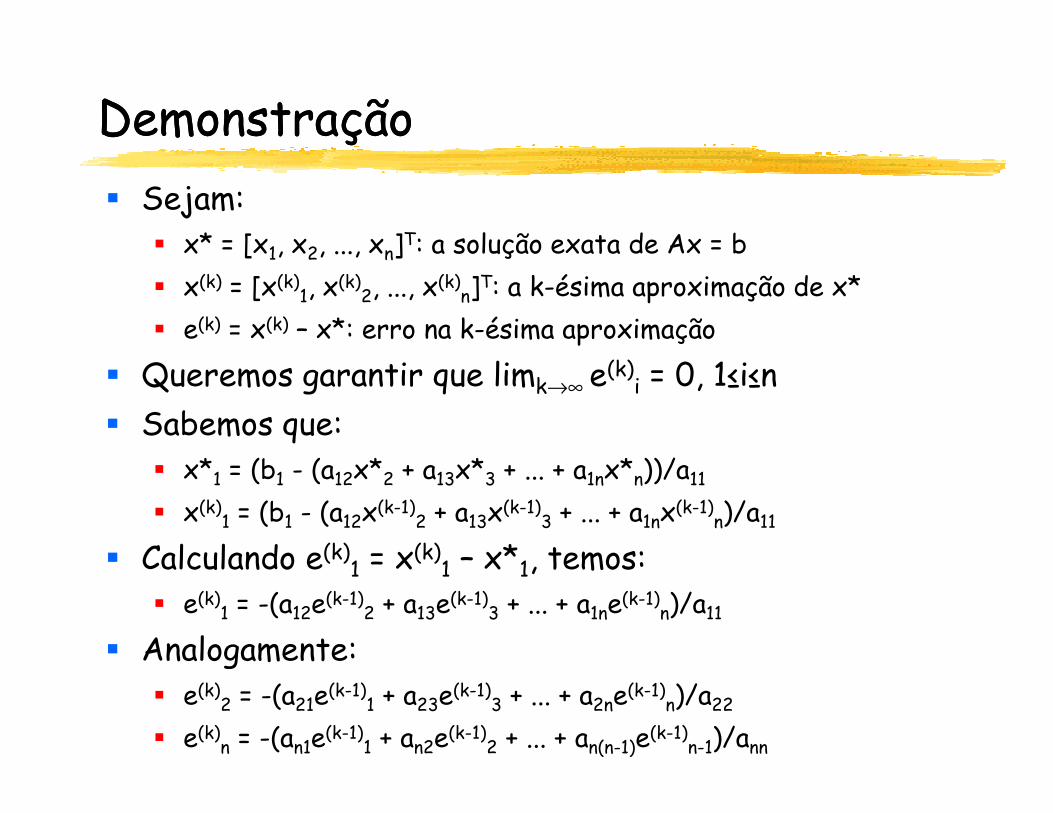
DemonstraçãoDemonstração� Sejam:
� x* = [x1, x2, ..., xn]T: a solução exata de Ax = b� x(k) = [x(k)
1, x(k)2, ..., x(k)
n]T: a k-ésima aproximação de x*� e(k) = x(k) – x*: erro na k-ésima aproximação
� Queremos garantir que limk→∞ e(k)i = 0, 1≤i≤n� Sabemos que:� Sabemos que:
� x*1 = (b1 - (a12x*2 + a13x*3 + ... + a1nx*n))/a11� x(k)
1 = (b1 - (a12x(k-1)2 + a13x(k-1)
3 + ... + a1nx(k-1)n)/a11
� Calculando e(k)1 = x(k)1 – x*1, temos:
� e(k)1 = -(a12e(k-1)2 + a13e(k-1)3 + ... + a1ne(k-1)n)/a11� Analogamente:
� e(k)2 = -(a21e(k-1)1 + a23e(k-1)3 + ... + a2ne(k-1)n)/a22� e(k)n = -(an1e(k-1)1 + an2e(k-1)2 + ... + an(n-1)e(k-1)n-1)/ann
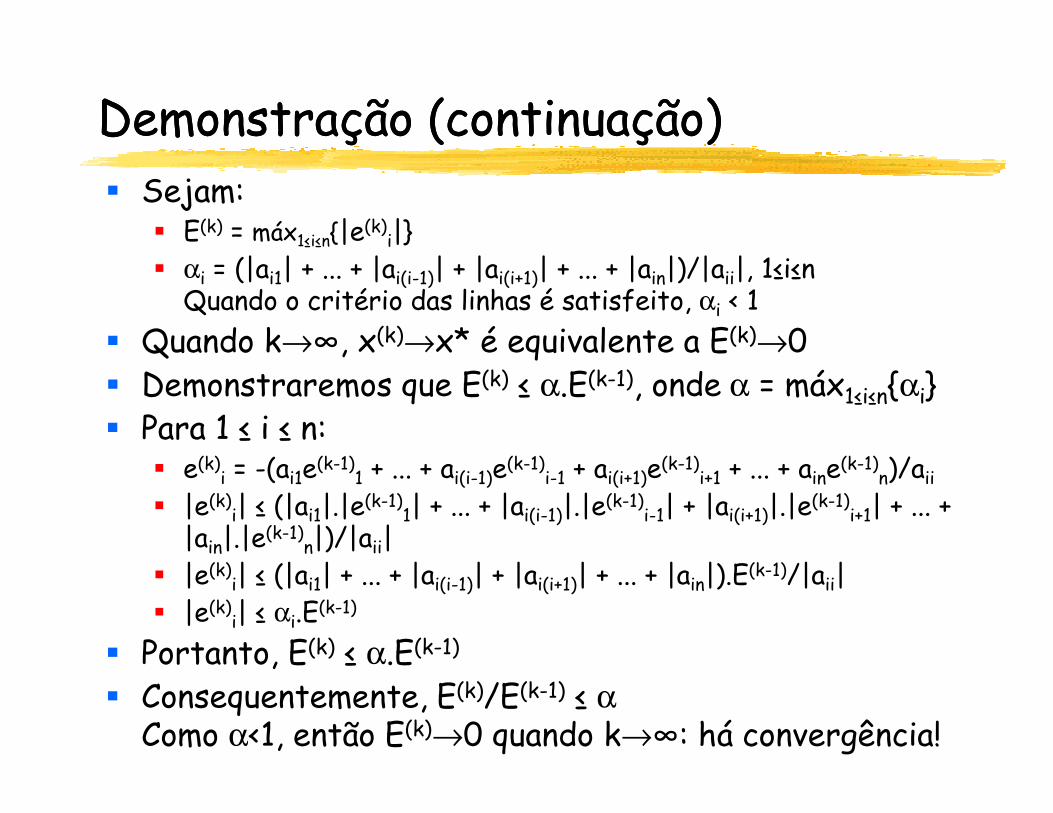
Demonstração (continuação)Demonstração (continuação)� Sejam:
� E(k) = máx1≤i≤n{|e(k)i|}� αi = (|ai1| + ... + |ai(i-1)| + |ai(i+1)| + ... + |ain|)/|aii|, 1≤i≤n
Quando o critério das linhas é satisfeito, αi < 1� Quando k→∞, x(k)→x* é equivalente a E(k)→0� Demonstraremos que E(k) ≤ α.E(k-1), onde α = máx1≤i≤n{αi}
Para 1 ≤ i ≤ n:1≤i≤n i
� Para 1 ≤ i ≤ n:� e(k)i = -(ai1e(k-1)1 + ... + ai(i-1)e(k-1)i-1 + ai(i+1)e(k-1)i+1 + ... + aine(k-1)n)/aii� |e(k)i| ≤ (|ai1|.|e(k-1)1| + ... + |ai(i-1)|.|e(k-1)i-1| + |ai(i+1)|.|e(k-1)i+1| + ... +
|ain|.|e(k-1)n|)/|aii|� |e(k)i| ≤ (|ai1| + ... + |ai(i-1)| + |ai(i+1)| + ... + |ain|).E(k-1)/|aii|� |e(k)i| ≤ αi.E(k-1)
� Portanto, E(k) ≤ α.E(k-1)
� Consequentemente, E(k)/E(k-1) ≤ αComo α<1, então E(k)→0 quando k→∞: há convergência!
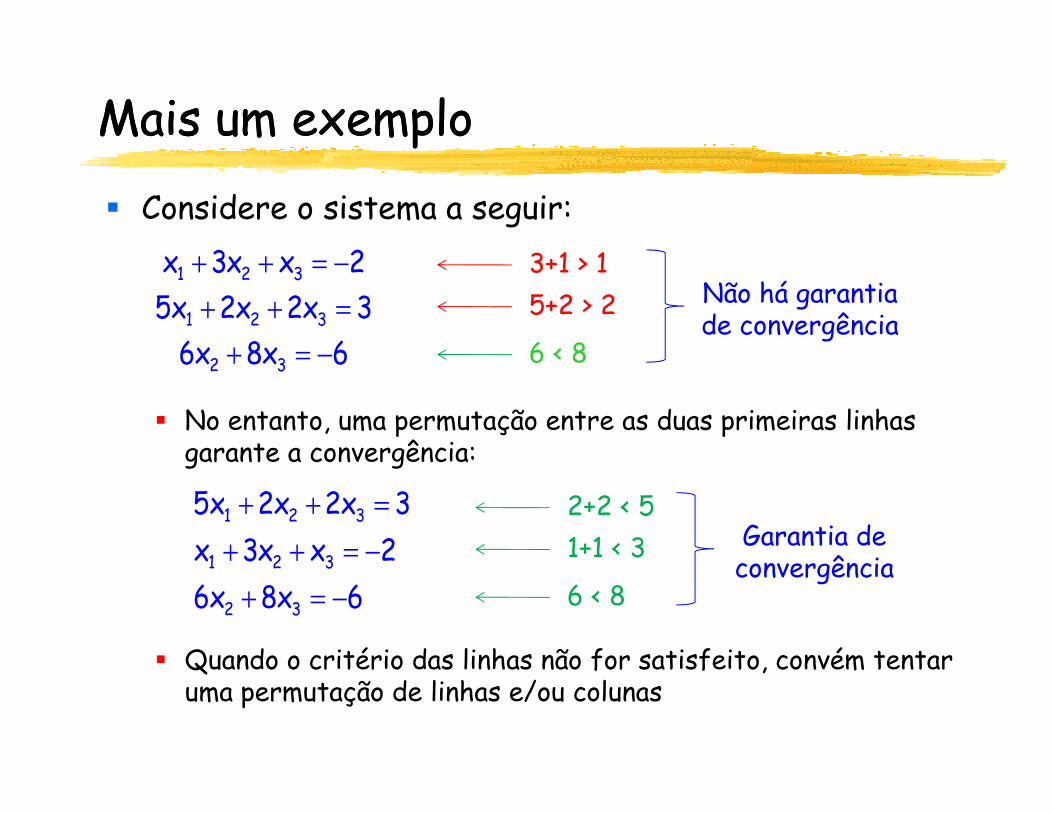
Mais um exemploMais um exemplo
6x8x63x2x2x52xx3x
32
321
321
−=+
=++
−=++
� Considere o sistema a seguir:3+1 > 15+2 > 2
6 < 8
Não há garantia de convergência
� No entanto, uma permutação entre as duas primeiras linhas � No entanto, uma permutação entre as duas primeiras linhas garante a convergência:
6x8x62xx3x3x2x2x5
32
321
321
−=+
−=++
=++ 2+2 < 51+1 < 3
6 < 8
Garantia de convergência
� Quando o critério das linhas não for satisfeito, convém tentar uma permutação de linhas e/ou colunas
CCICCI--2222
� Introdução
� Métodos diretos� Regra de Cramer
� Eliminação de Gauss
� Gauss-Jordan� Gauss-Jordan
� Resíduos e Condicionamento de Sistemas
� Decomposição LU
� Métodos iterativos� Gauss-Jacobi
� Gauss-Seidel
� Considerações finais
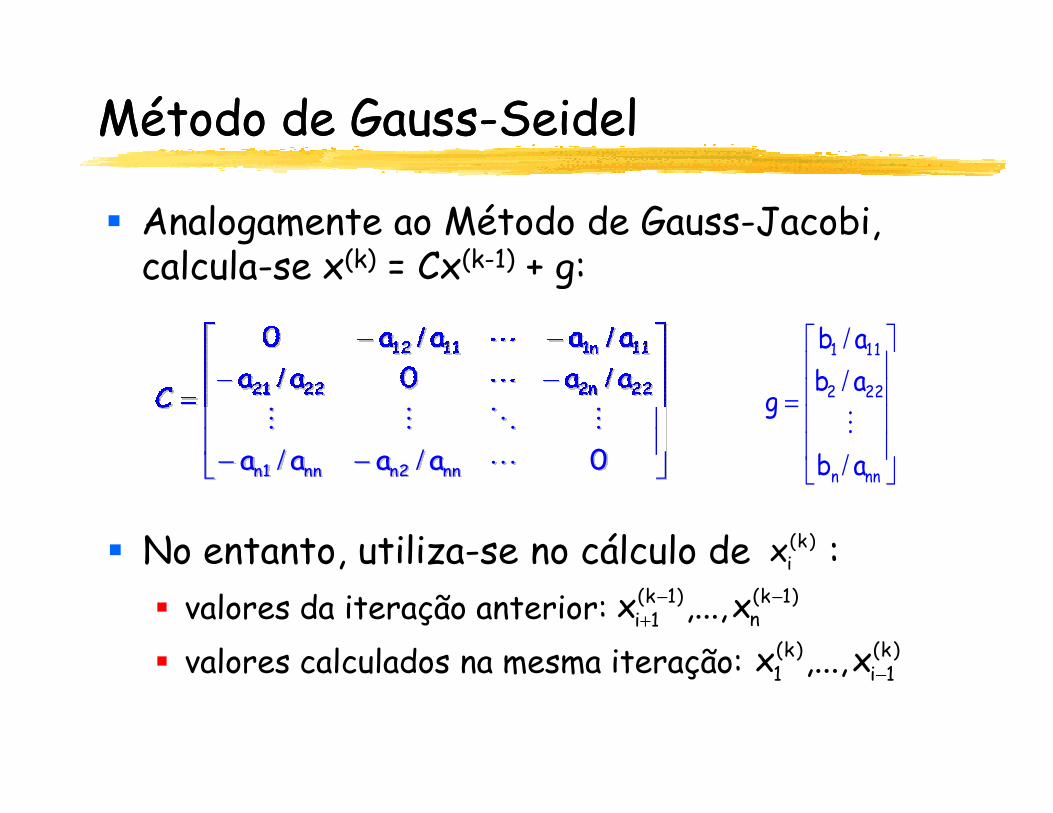
Método de Método de GaussGauss--SeidelSeidel
� Analogamente ao Método de Gauss-Jacobi, calcula-se x(k) = Cx(k-1) + g:
=222
111
abab
g/
/
−−
=
0aaaa
C
nn2nnn1n L
MOMM
//
=
nnn ab
g
/
M
� No entanto, utiliza-se no cálculo de :� valores da iteração anterior: � valores calculados na mesma iteração:
)k(ix
)k(1i
)k(1 x,...,x −
)1k(n
)1k(1i x,...,x −−
+
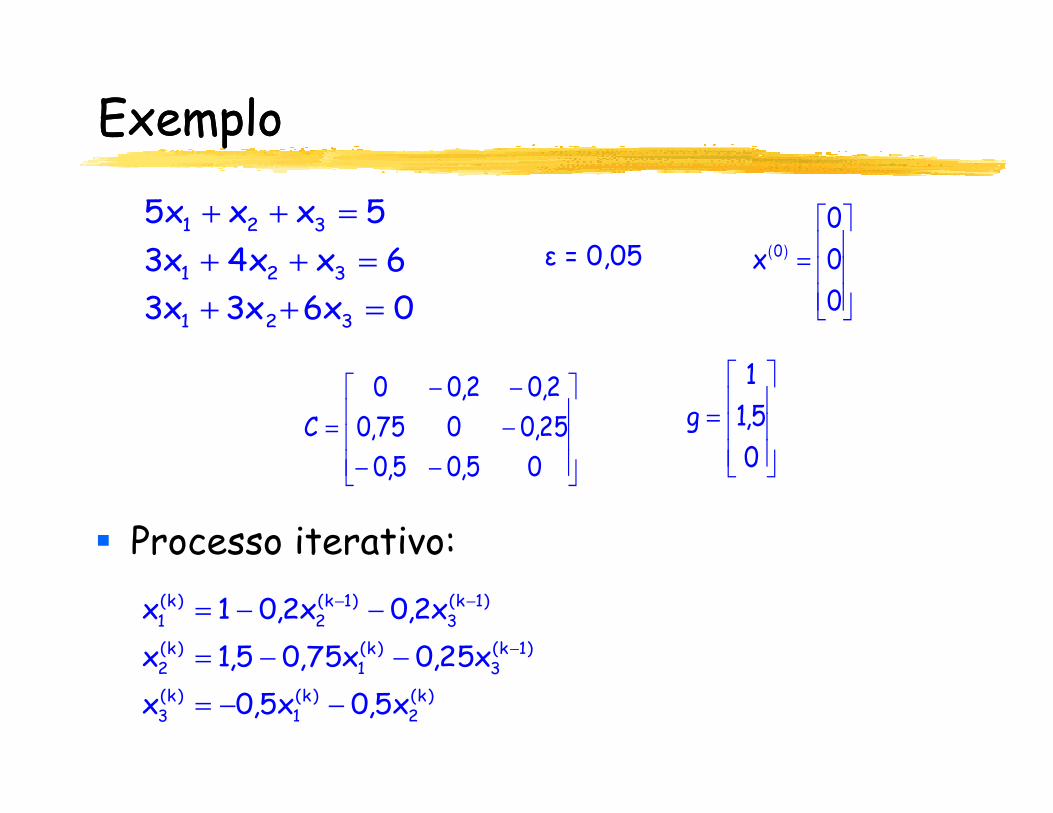
ExemploExemplo
=
000
x 0)(ε = 0,05
0x6x3x36xx4x3
5xxx5
321
321
321
=++
=++
=++
−−
25,0075,02,02,00
C
= 5,11
g
� Processo iterativo:
)k(2
)k(1
)k(3
)1k(3
)k(1
)k(2
)1k(3
)1k(2
)k(1
x5,0x5,0xx25,0x75,05,1x
x2,0x2,01x
−−=
−−=
−−=
−
−−
−−
−=
05,05,025,0075,0C
=
05,1g
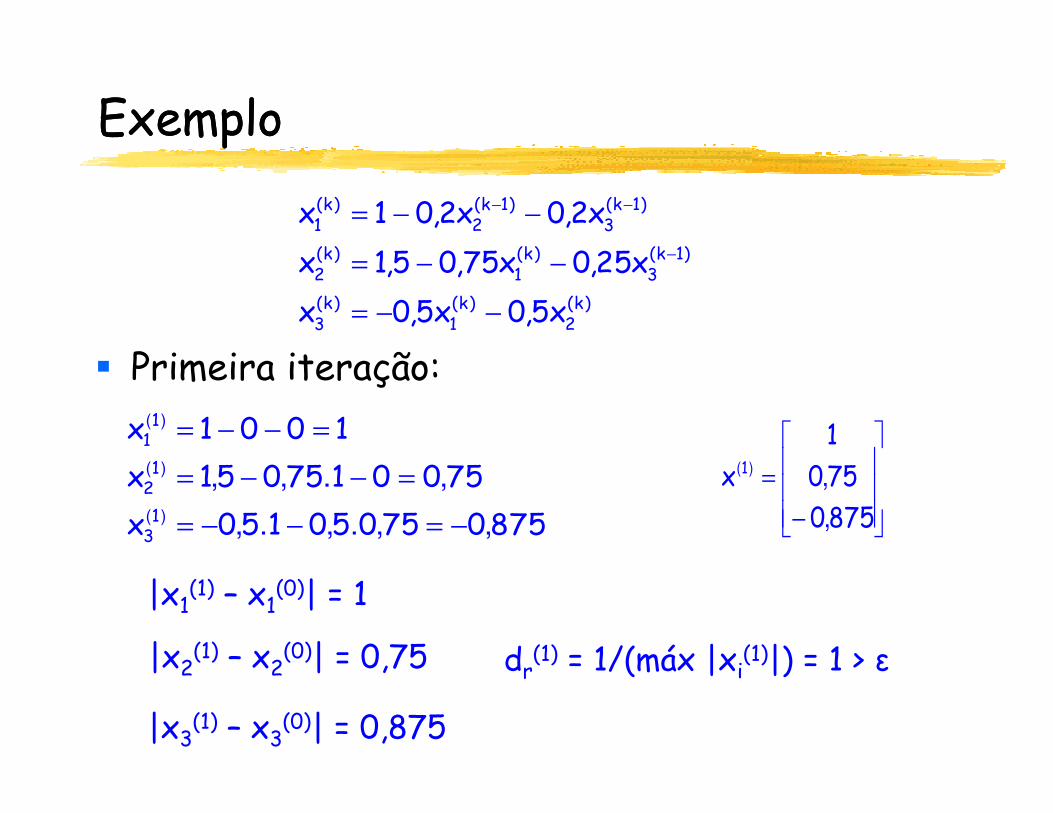
ExemploExemplo
� Primeira iteração:
)k(2
)k(1
)k(3
)1k(3
)k(1
)k(2
)1k(3
)1k(2
)k(1
x5,0x5,0xx25,0x75,05,1x
x2,0x2,01x
−−=
−−=
−−=
−
−−
875075050150x7500175051x
1001x
13
12
11
,,.,.,
,.,,
)(
)(
)(
−=−−=
=−−=
=−−=
|x1(1) – x1
(0)| = 1
|x2(1) – x2
(0)| = 0,75
|x3(1) – x3
(0)| = 0,875
dr(1) = 1/(máx |xi
(1)|) = 1 > ε
−
=
87507501
x 1
,
,)(
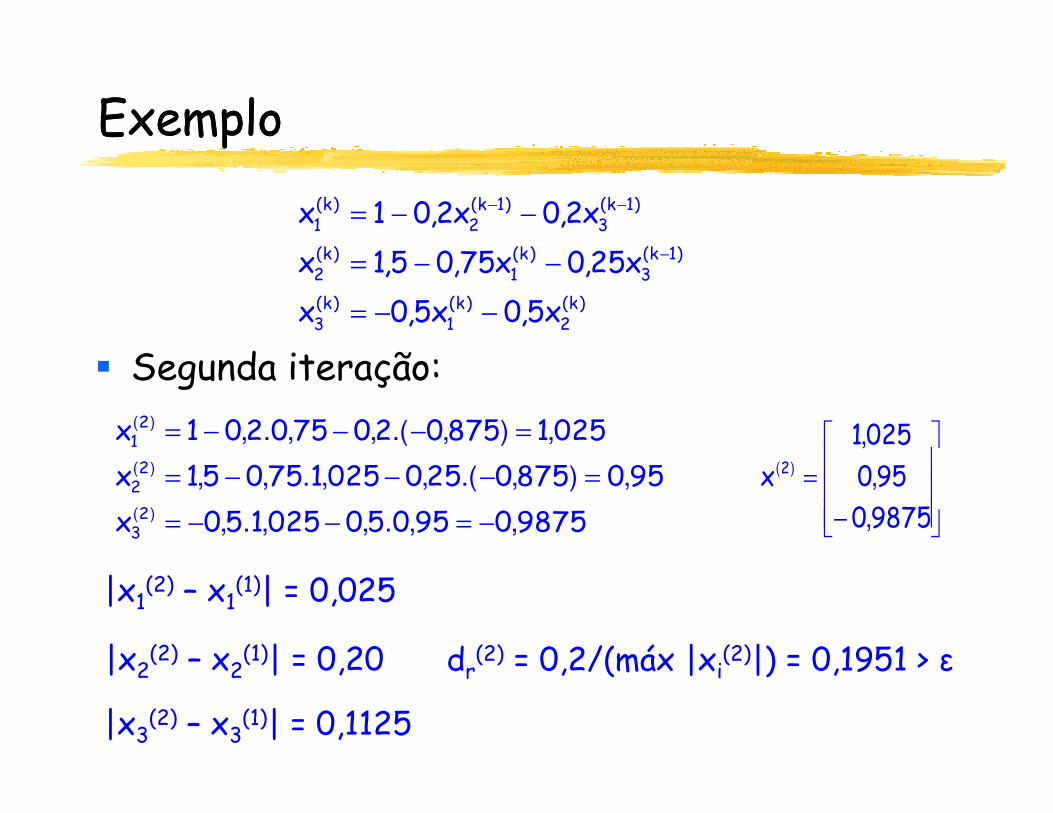
ExemploExemplo
� Segunda iteração:
)k(2
)k(1
)k(3
)1k(3
)k(1
)k(2
)1k(3
)1k(2
)k(1
x5,0x5,0xx25,0x75,05,1x
x2,0x2,01x
−−=
−−=
−−=
−
−−
9875095050025150x9508750250025175051x
0251875020750201x
23
22
21
,,.,,.,
,),.(,,.,,
,),.(,,.,
)(
)(
)(
−=−−=
=−−−=
=−−−=
|x1(2) – x1
(1)| = 0,025
|x2(2) – x2
(1)| = 0,20
|x3(2) – x3
(1)| = 0,1125
dr(2) = 0,2/(máx |xi
(2)|) = 0,1951 > ε
−
=
987509500251
x 2
,
,
,)(
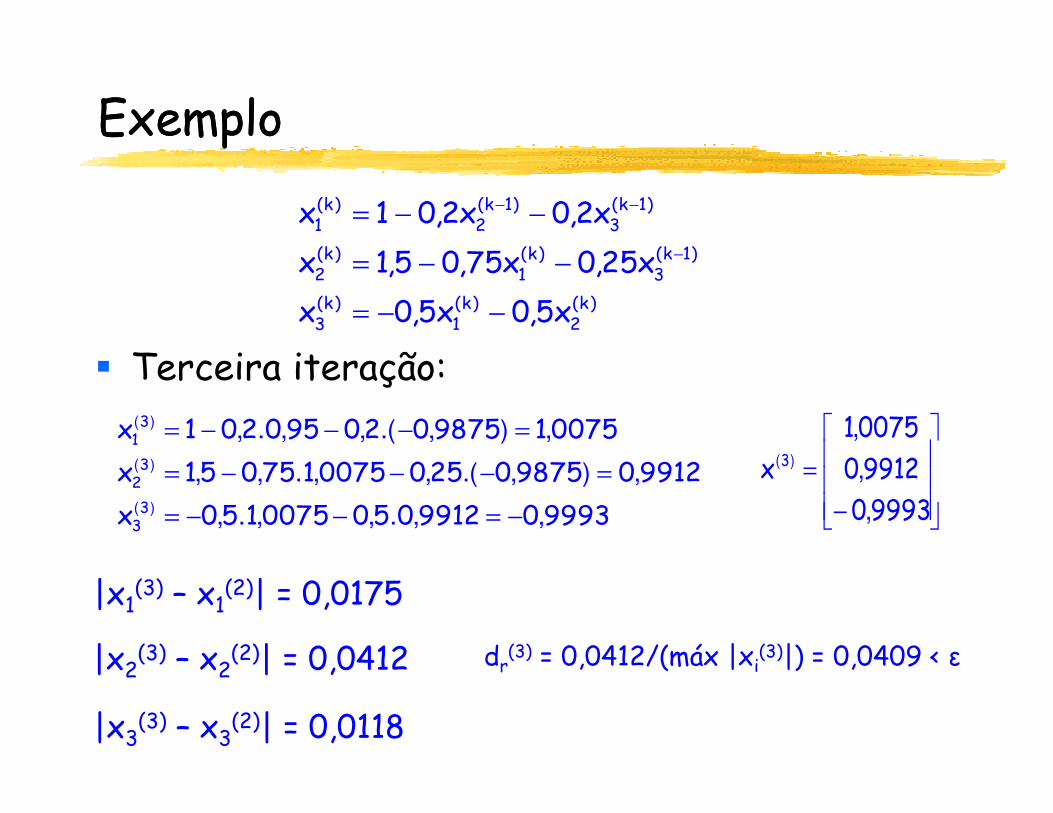
ExemploExemplo
� Terceira iteração:
)k(2
)k(1
)k(3
)1k(3
)k(1
)k(2
)1k(3
)1k(2
)k(1
x5,0x5,0xx25,0x75,05,1x
x2,0x2,01x
−−=
−−=
−−=
−
−−
9993099120500075150x99120987502500075175051x
007519875020950201x
33
32
31
,,.,,.,
,),.(,,.,,
,),.(,,.,
)(
)(
)(
−=−−=
=−−−=
=−−−=
|x1(3) – x1
(2)| = 0,0175
|x2(3) – x2
(2)| = 0,0412
|x3(3) – x3
(2)| = 0,0118
dr(3) = 0,0412/(máx |xi
(3)|) = 0,0409 < ε
−
=
999309912000751
x 3
,
,
,)(
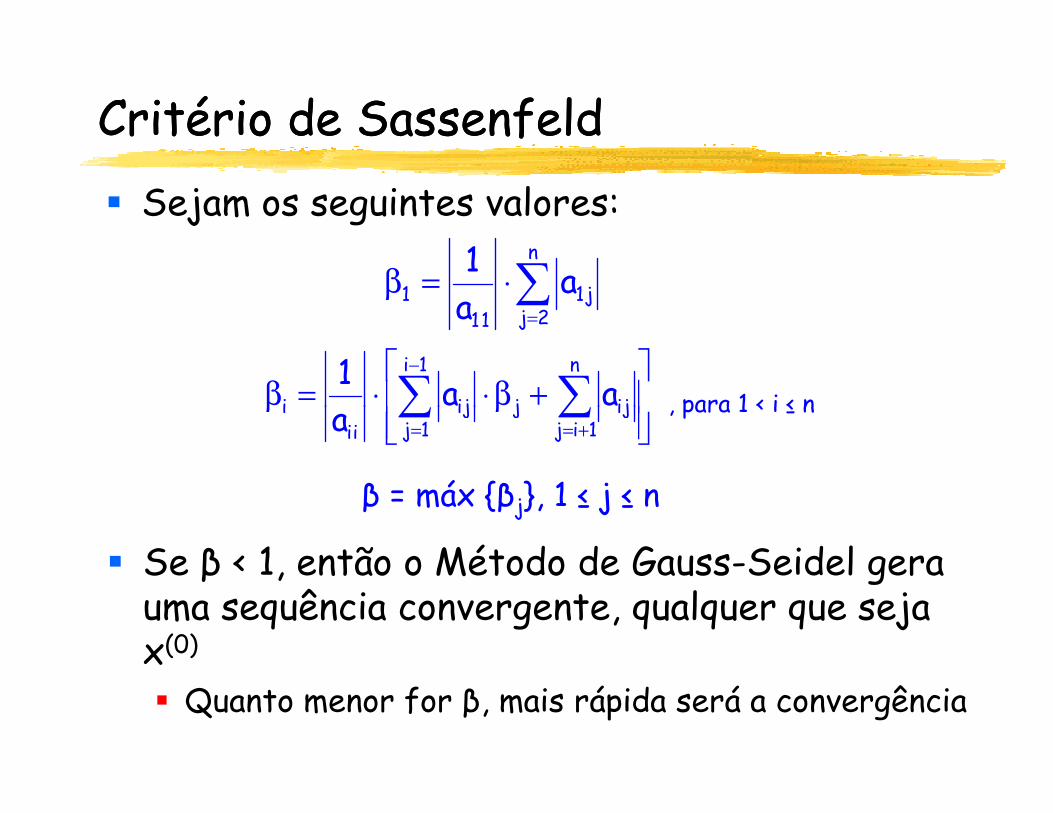
Critério de SassenfeldCritério de Sassenfeld� Sejam os seguintes valores:
∑=
⋅=βn
2jj1
111 a
a1
+β⋅⋅=β ∑∑− n
ij
1i
jiji aaa1
, para 1 < i ≤ n
� Se β < 1, então o Método de Gauss-Seidel gera uma sequência convergente, qualquer que seja x(0)
� Quanto menor for β, mais rápida será a convergência
+β⋅⋅=β ∑∑+== 1ij
ij1j
jijii
i aaa , para 1 < i ≤ n
β = máx {βj}, 1 ≤ j ≤ n
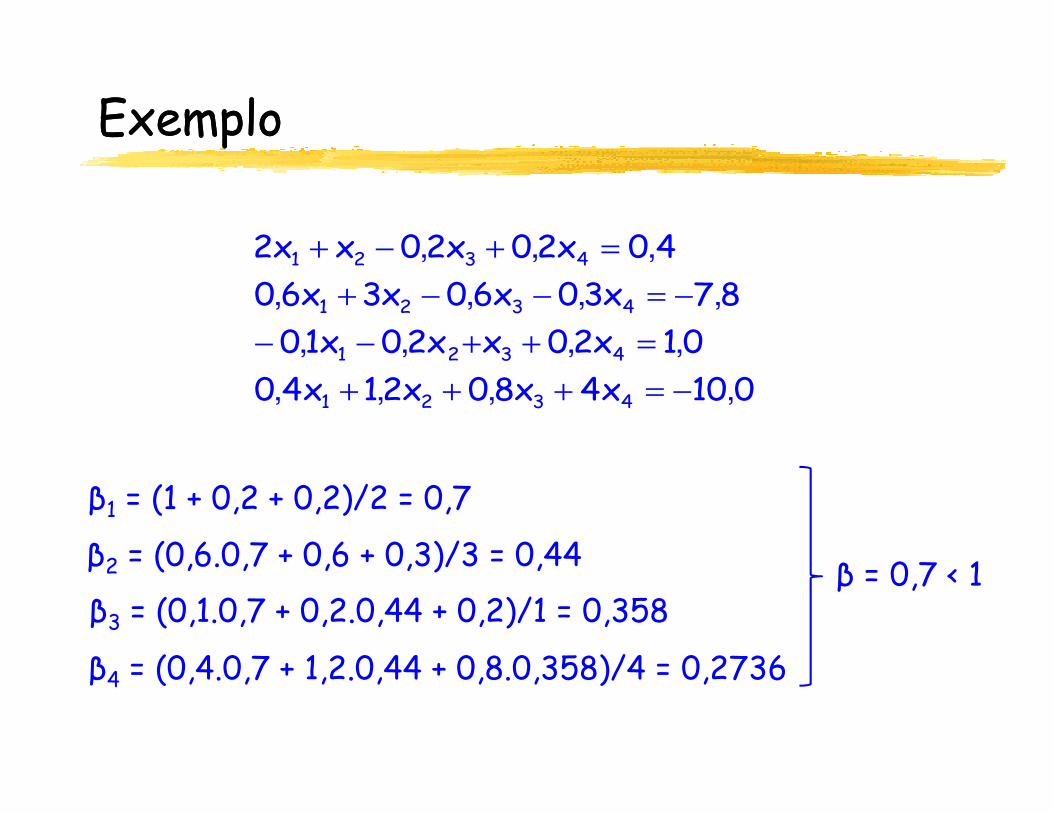
ExemploExemplo
010x4x80x21x4001x20xx20x10
87x30x60x3x6040x20x20xx2
4321
4321
4321
4321
,,,,
,,,,
,,,,
,,,
−=+++
=++−−
−=−−+
=+−+
010x4x80x21x40 4321 −=+++
β1 = (1 + 0,2 + 0,2)/2 = 0,7
β2 = (0,6.0,7 + 0,6 + 0,3)/3 = 0,44
β3 = (0,1.0,7 + 0,2.0,44 + 0,2)/1 = 0,358
β4 = (0,4.0,7 + 1,2.0,44 + 0,8.0,358)/4 = 0,2736
β = 0,7 < 1
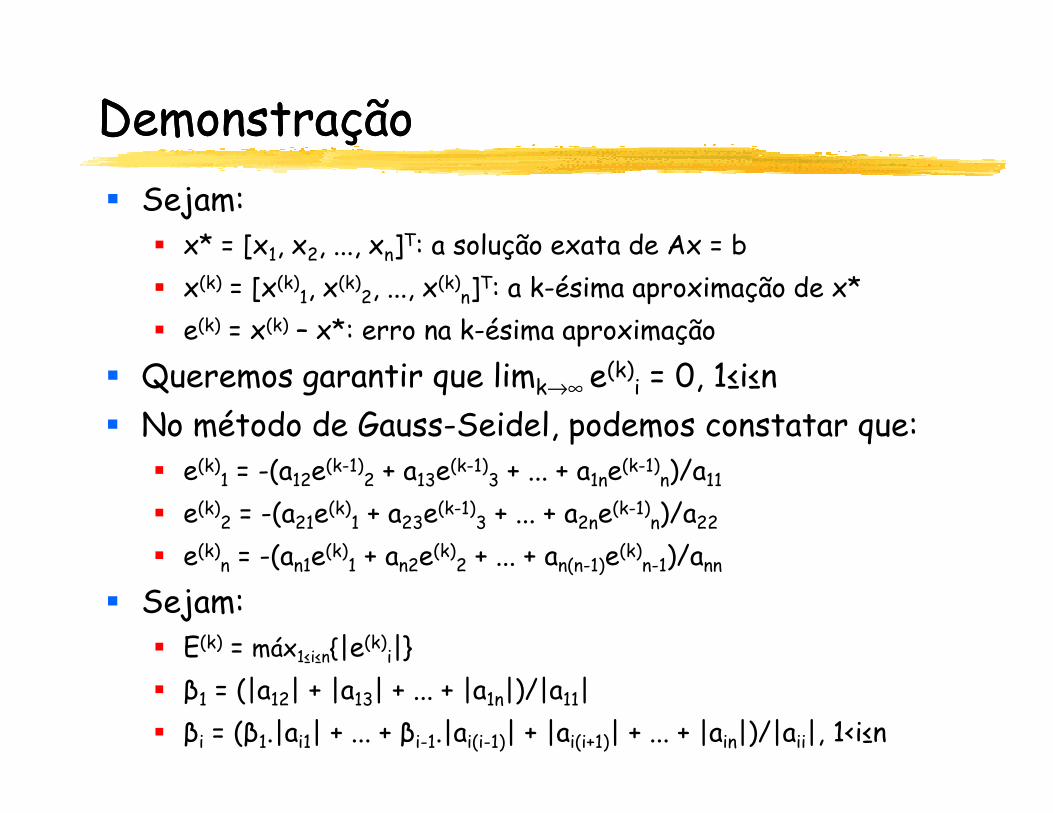
DemonstraçãoDemonstração� Sejam:
� x* = [x1, x2, ..., xn]T: a solução exata de Ax = b� x(k) = [x(k)
1, x(k)2, ..., x(k)
n]T: a k-ésima aproximação de x*� e(k) = x(k) – x*: erro na k-ésima aproximação
� Queremos garantir que limk→∞ e(k)i = 0, 1≤i≤nNo método de Gauss-Seidel, podemos constatar que: � No método de Gauss-Seidel, podemos constatar que: � e(k)1 = -(a12e(k-1)2 + a13e(k-1)3 + ... + a1ne(k-1)n)/a11� e(k)2 = -(a21e(k)1 + a23e(k-1)3 + ... + a2ne(k-1)n)/a22� e(k)n = -(an1e(k)1 + an2e(k)2 + ... + an(n-1)e(k)n-1)/ann
� Sejam:� E(k) = máx1≤i≤n{|e(k)i|}� β1 = (|a12| + |a13| + ... + |a1n|)/|a11|� βi = (β1.|ai1| + ... + βi-1.|ai(i-1)| + |ai(i+1)| + ... + |ain|)/|aii|, 1<i≤n
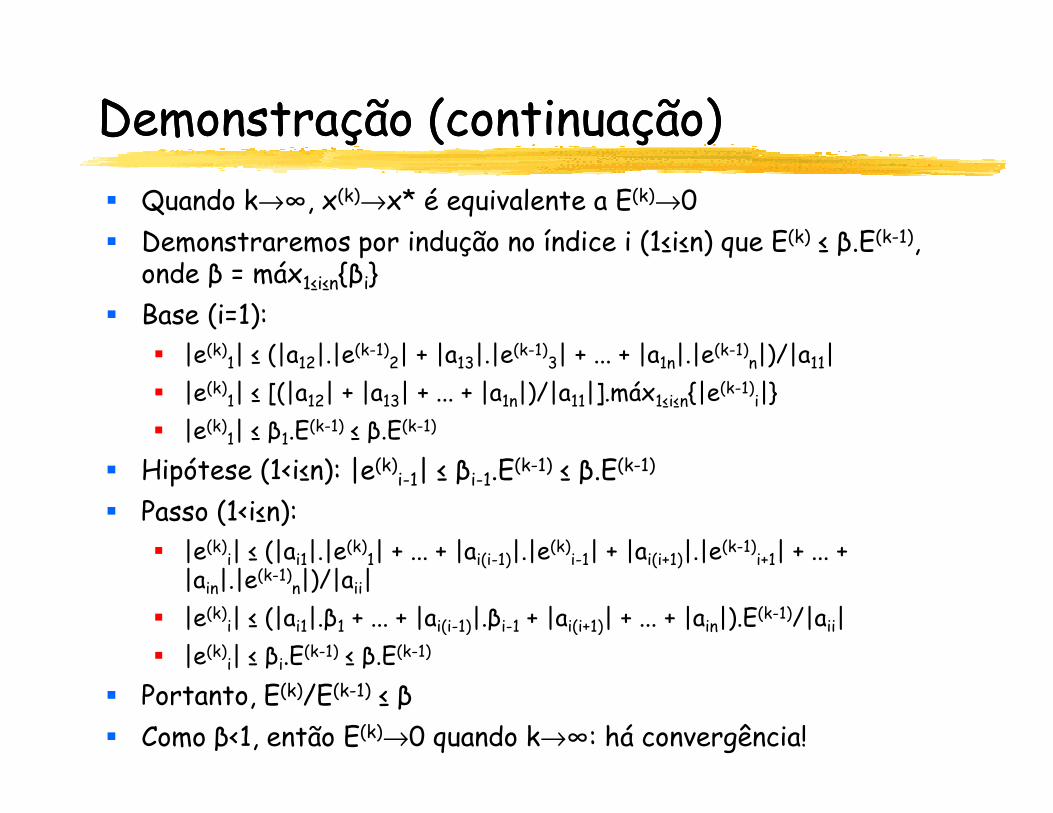
Demonstração (continuação)Demonstração (continuação)� Quando k→∞, x(k)→x* é equivalente a E(k)→0� Demonstraremos por indução no índice i (1≤i≤n) que E(k) ≤ β.E(k-1),
onde β = máx1≤i≤n{βi}� Base (i=1):
� |e(k)1| ≤ (|a12|.|e(k-1)2| + |a13|.|e(k-1)3| + ... + |a1n|.|e(k-1)n|)/|a11|� |e(k)1| ≤ [(|a12| + |a13| + ... + |a1n|)/|a11|].máx1≤i≤n{|e(k-1)i|}|e 1| ≤ [(|a12| + |a13| + ... + |a1n|)/|a11|].máx1≤i≤n{|e i|}� |e(k)1| ≤ β1.E(k-1) ≤ β.E(k-1)
� Hipótese (1<i≤n): |e(k)i-1| ≤ βi-1.E(k-1) ≤ β.E(k-1)
� Passo (1<i≤n):� |e(k)i| ≤ (|ai1|.|e(k)1| + ... + |ai(i-1)|.|e(k)i-1| + |ai(i+1)|.|e(k-1)i+1| + ... +
|ain|.|e(k-1)n|)/|aii|� |e(k)i| ≤ (|ai1|.β1 + ... + |ai(i-1)|.βi-1 + |ai(i+1)| + ... + |ain|).E(k-1)/|aii|� |e(k)i| ≤ βi.E(k-1) ≤ β.E(k-1)
� Portanto, E(k)/E(k-1) ≤ β� Como β<1, então E(k)→0 quando k→∞: há convergência!
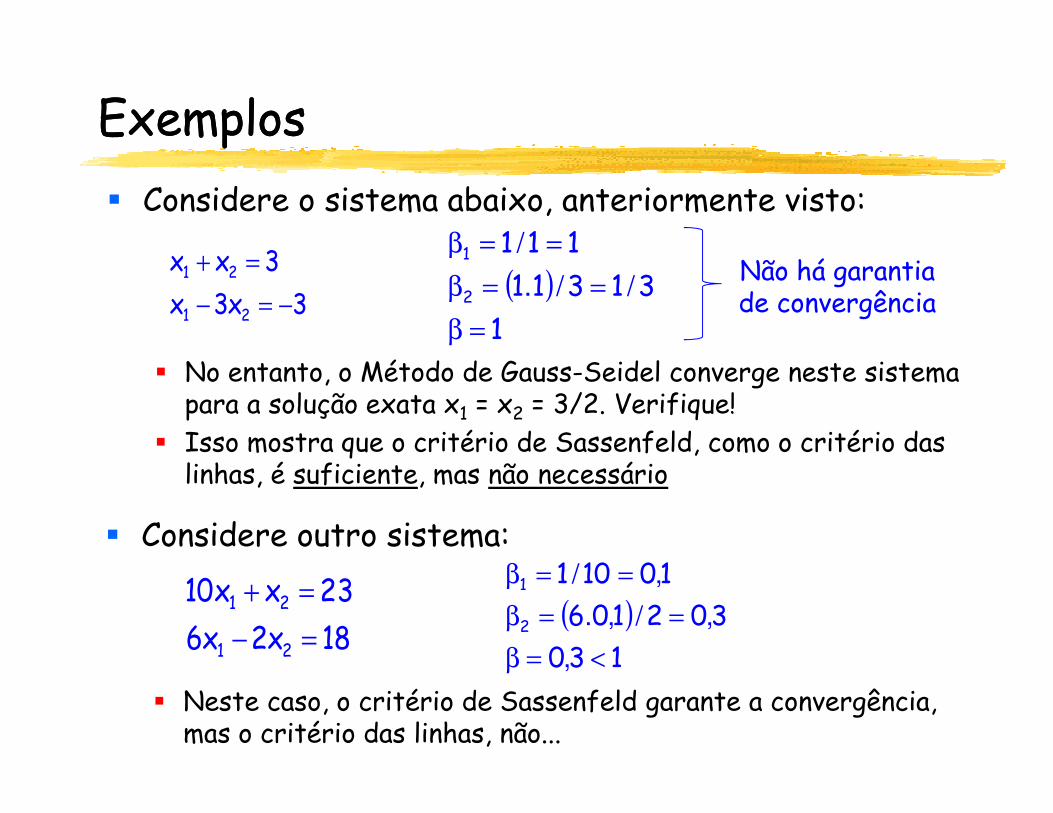
ExemplosExemplos
3x3x3xx
21
21
−=−
=+
� Considere o sistema abaixo, anteriormente visto:
� No entanto, o Método de Gauss-Seidel converge neste sistema para a solução exata x1 = x2 = 3/2. Verifique!
( )1
31311111
2
1
=β
==β
==β
//.
/Não há garantia de convergência
para a solução exata x1 = x2 = 3/2. Verifique!� Isso mostra que o critério de Sassenfeld, como o critério das
linhas, é suficiente, mas não necessário
18x2x623xx10
21
21
=−
=+
� Considere outro sistema:
( )130
30210610101
2
1
<=β
==β
==β
,
,/,.
,/
� Neste caso, o critério de Sassenfeld garante a convergência, mas o critério das linhas, não...
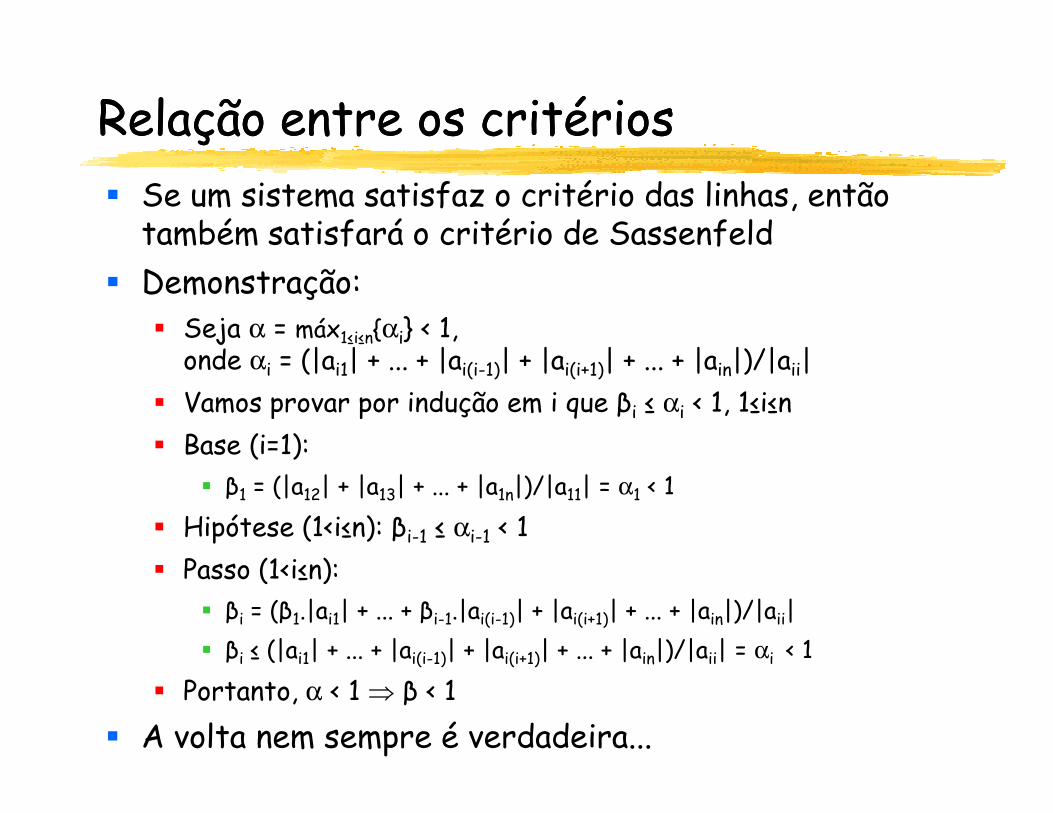
Relação entre os critériosRelação entre os critérios� Se um sistema satisfaz o critério das linhas, então
também satisfará o critério de Sassenfeld� Demonstração:
� Seja α = máx1≤i≤n{αi} < 1, onde αi = (|ai1| + ... + |ai(i-1)| + |ai(i+1)| + ... + |ain|)/|aii|
� Vamos provar por indução em i que βi ≤ αi < 1, 1≤i≤n� Vamos provar por indução em i que βi ≤ αi < 1, 1≤i≤n� Base (i=1):
� β1 = (|a12| + |a13| + ... + |a1n|)/|a11| = α1 < 1
� Hipótese (1<i≤n): βi-1 ≤ αi-1 < 1� Passo (1<i≤n):
� βi = (β1.|ai1| + ... + βi-1.|ai(i-1)| + |ai(i+1)| + ... + |ain|)/|aii|� βi ≤ (|ai1| + ... + |ai(i-1)| + |ai(i+1)| + ... + |ain|)/|aii| = αi < 1
� Portanto, α < 1 ⇒ β < 1
� A volta nem sempre é verdadeira...
CCICCI--2222
� Introdução
� Métodos diretos� Regra de Cramer
� Eliminação de Gauss
� Gauss-Jordan� Gauss-Jordan
� Resíduos e Condicionamento de Sistemas
� Decomposição LU
� Métodos iterativos� Gauss-Jacobi
� Gauss-Seidel
� Considerações finais
Considerações finaisConsiderações finais
� Tanto o critério das linhas como o critério de Sassenfeld são condições suficientes para a convergência, mas não necessárias
� Em sistemas esparsos (com grande número de coeficientes nulos), o Método da Eliminação de coeficientes nulos), o Método da Eliminação de Gauss não é apropriado, pois não preserva esta vantajosa qualidade. Nesses casos, convém utilizar métodos iterativos
� Os métodos iterativos são menos suscetíveis ao acúmulo de erros de arredondamento
Métodos diretos Métodos diretos versusversus iterativositerativos
� Convergência� Diretos: não faz sentido considerar essa questão, pois calculam a solução exata
� Iterativos: ocorre sob determinadas condições
� Esparsidade da matriz de coeficientes� Esparsidade da matriz de coeficientes� Diretos: alteram a estrutura da matriz� Iterativos: utilizam sempre a matriz inicial
� Erros de arredondamento� Diretos: ocorrem a cada etapa e acumulam-se� Iterativos: somente os erros da última etapa afetam a solução


![cci22-cap4.ppt [Modo de Compatibilidade]alonso/ensino/CCI22/cci22-cap4.pdf · Sejam duas cargas elétricas A e B de mesmo sinal, distantes 2 metros entre si. Coloca-se, à distância](https://static.fdocumentos.com/doc/165x107/5c0b36f609d3f2411a8c0eb8/cci22-cap4ppt-modo-de-compatibilidade-alonsoensinocci22cci22-cap4pdf.jpg)









![cci22-cap2.ppt [Modo de Compatibilidade]alonso/ensino/CCI22/cci22-cap2.pdf · n vezes. Sistemmp fas de ponto flutuante Como vimos,,p um sistema de ponto flutuante é uma quádrupla](https://static.fdocumentos.com/doc/165x107/5bf3122309d3f2f85f8b9b30/cci22-cap2ppt-modo-de-compatibilidade-alonsoensinocci22cci22-cap2pdf.jpg)

![Trabalho Lei de Gauss[2]](https://static.fdocumentos.com/doc/165x107/553c4f334a79593e298b4891/trabalho-lei-de-gauss2.jpg)