4. Forças Distribuídas: Centróides de Centros de … · Secção de Mecânica Estrutural e...
20
Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07 4. Forças Distribuídas: Centróides de Centros de Gravidade 4.1 Generalidades A atracção da Terra sobre um determinado corpo é constituída por um sistema de forças distribuídas aplicadas em cada partícula do corpo. Considerando tratar-se de um corpo rígido, a acção gravítica pode ser substituída pela acção da sua resultante – o peso P do corpo, aplicada no centro de gravidade do corpo. Exemplos de cargas (acções) gravíticas em edifícios.
-
Upload
truongmien -
Category
Documents
-
view
218 -
download
0
Transcript of 4. Forças Distribuídas: Centróides de Centros de … · Secção de Mecânica Estrutural e...

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
4. Forças Distribuídas: Centróides de Centros de Gravidade
4.1 Generalidades
A atracção da Terra sobre um determinado corpo é constituída por um sistema de forças distribuídas aplicadas em cada partícula do corpo. Considerando tratar-se de um corpo rígido, a acção gravítica pode ser substituída pela acção da sua resultante – o peso P do corpo, aplicada no centro de gravidade do corpo.
Exemplos de cargas (acções) gravíticas em edifícios.

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
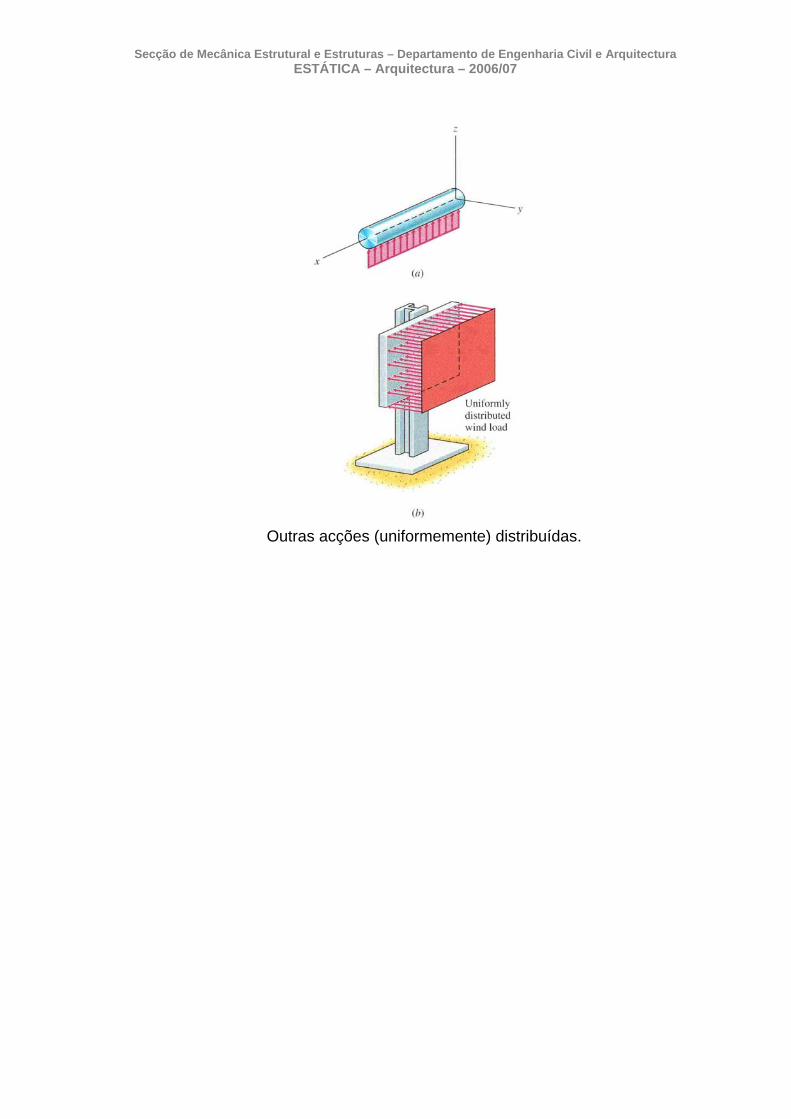
O mesmo se passa com outras forças distribuídas como, por exemplo, a acção do vento sobre uma superfície, a acção da pressão hidrostática sobre superfícies submersas, etc..
Acção do vento (pressão).
Acção da pressão hidrostática. Substituição pela resultante.
Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
Outras acções (uniformemente) distribuídas.

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
4.2 Centro de Gravidade e Centróide de Corpo Bidimensional
Centro de Gravidade Considere-se o caso restrito de superfícies planas (“placas”) ou de linhas (“arames”) no plano. No caso duma placa, subdividindo-a em N pequenos elementos cuja posição é descrita por (xi, yi) e cujo peso é dado por ΔPi, o peso total P da placa é:
∑=
=N
1iiPP Δ
O ponto de aplicação da resultante (“peso”) pode ser determinado igualando os momentos produzidos por ambos os sistemas de forças (distribuídas e concentrada) relativamente aos eixos ordenados x e y do plano da placa, ou seja:
sMy =∑ ∑=
=N
1iii xPxP Δ
sMx =∑ ∑=
=N
1iii yPyP Δ
No limite, decompondo a placa em elementos infinitesimais, ter-se-ia:
∫= dPP
e
∫= ydPyP ∫= xdPxP
em que ( )yx, descrevem as coordenadas do centro de gravidade da placa.

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
As equações anteriores podem ser generalizadas a um arame (neste caso o domínio de integração é a linha que descreve o arame). Centróide Tratando-se duma placa delgada homogénea com espessura uniforme t, tem-se:
γΔΔ ii AtP =
pelo que
γΔ tAPPN
1ii == ∑
=
em que as equações anteriores que permitiam a determinação do centro de gravidade degeneram em:
sMy =∑ ∑=
=N
1iii xAxA Δ
sMy =∑ ∑=
=N
1iii yAyA Δ
Neste caso, o ponto de coordenadas ( )yx, é designado por centróide da placa. Estes resultados podem ser generalizados a placas decompostas em elementos infinitesimais.
∫= dAA
e
∫= ydAyA ∫= xdAxA
No caso da placa não ser homogénea o centróide deixa de coincidir com o centro de gravidade.

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
As equações anteriores definem os chamados momentos estáticos (ou momentos de primeira ordem) da superfície relativamente aos eixos ordenados. Estes são referenciados por Sx e Sy e determinam-se através de:
∫== ydAyASx ∫== xdAxASy
Das equações anteriores se conclui que as coordenadas do centróide duma superfície podem ser determinadas dividindo os momentos estáticos relativamente aos eixos ordenados pela área da superfície. Como consequência, se o centróide duma superfície se situa sobre um determinado eixo, é nulo o seu momento estático relativamente ao mesmo eixo. De igual forma se conclui que se o momento estático relativamente a um determinado eixo é nulo, então o centróide da superfície situa-se sobre o eixo. As conclusões anteriores podem ser generalizadas para o caso de linhas no plano (arames). Simetria Simetria relativamente a eixo. Quando uma superfície é simétrica relativamente a um eixo, o seu momento estático relativamente ao eixo é nulo e o seu centróide situa-se sobre o eixo.
Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
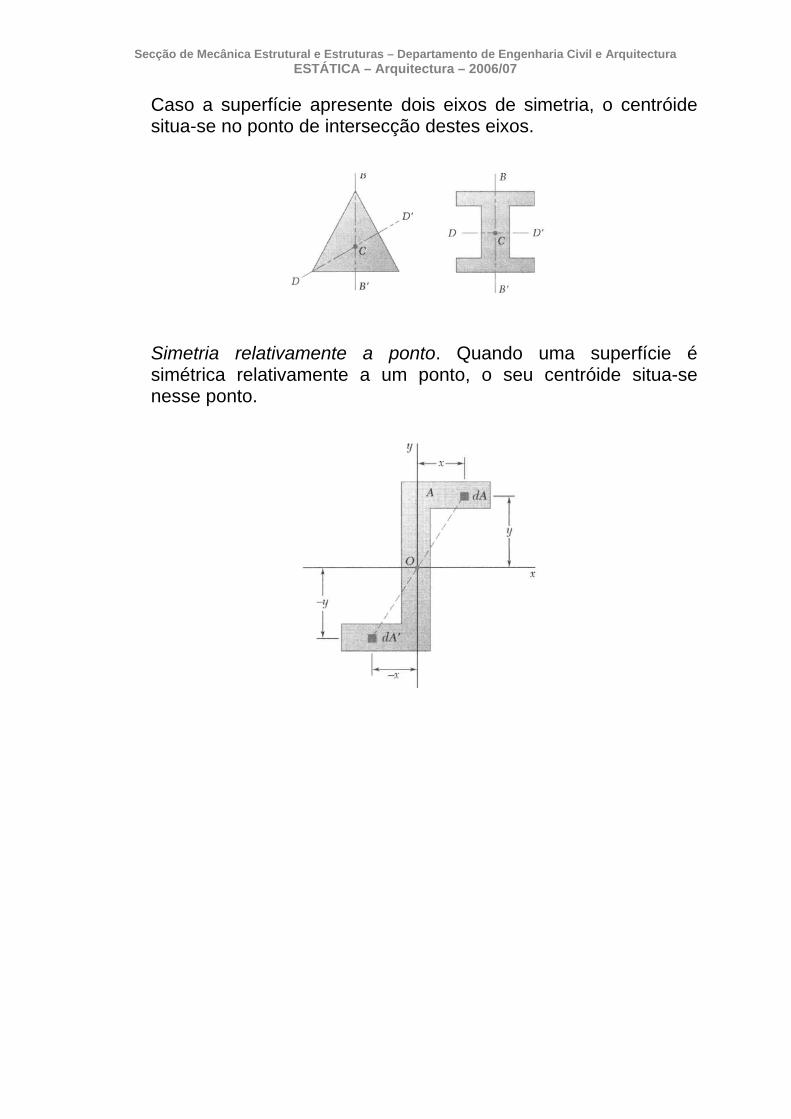
Caso a superfície apresente dois eixos de simetria, o centróide situa-se no ponto de intersecção destes eixos.
Simetria relativamente a ponto. Quando uma superfície é simétrica relativamente a um ponto, o seu centróide situa-se nesse ponto.

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
4.3 Determinação de Centróides por Integração
Quando se trate da determinação do centróide de uma superfície delimitada por curvas cujas expressões analíticas são conhecidas, torna-se possível proceder à integração com vista à determinação dos momentos estáticos e da área. A integração pode ser realizada por três processos diferentes: • Integração dupla em coordenadas cartesianas dxdydA =
Ex: triângulo rectângulo
∫ ∫∫ ==H
0
B
H/Byy xdxdyxdAS
Ω
Bx =
Hy =∫ ∫∫ ==H
0
B
H/BydxdydAA
Ω
AS
x y=
• Integração dupla em coordenadas polares θrdrddA =
Ex: quarto de círculo
( ) θθπ
ΩrdrdcosrxdAS
2/
0
R
0y ∫ ∫∫ ==
Bx =
R
θπ
ΩrdrddAA
2/
0
R
0∫ ∫∫ ==
AS
x y=

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
• Integração simples considerando o método das fatias (ou das faixas)
( )∫∫ ==Ω
H
ely dyygygdAxS0
)(2/)(
Exercício: determinar a posição do centróide sob um arco parabólico pelo método das faixas. No caso de uma linha, a posição do centróide pode ainda ser determinada por integração através de
Cuja integração pode ser realizada indistintamente em coordenadas cartesianas ou polares
que podem ser explicitados em termos da variável considerada como independente (em relação à qual a integração é realizada)
( )ygx =H
∫∫ ==H
0dy)y(gdAA
Ω
( ) 2/ygxel =
dy
AS
x y=
LS
x y=∫Ω
= xdLSy ∫Ω
= dLL
( )22 θrddrdL +=22 dydxdL +=
dy1dydxdL
2
+⎟⎠
⎞⎜⎝
⎛=dx
dxdy1dL
2
⎟⎠⎞
⎜⎝⎛+=
drdrdr1dL
22 ⎟
⎠⎞
⎜⎝⎛+=
θθ
θdr
ddrdL 2
2
+⎟⎠⎞
⎜⎝⎛=

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
4.4 Placas e Arames Compostos
Uma forma eficiente de determinar a posição do centro de gravidade (ou do centróide) duma superfície consiste em decompor esta em formas simples (triângulos, círculos, rectângulos, etc.) cujas características (área e centróide ou centro de gravidade) sejam previamente conhecidas. Com efeito,
NN2211N21
y xA..xAxAxdA..xdAxdAxdAxAS ++=+++=== ∫∫∫∫ΩΩΩΩ
pelo que
∑
∑∑
=
== == N
1nn
N
1nnn
N
1nnn
A
xA
A
xAx
o mesmo se passando com a determinação de y , ou seja
∑
∑∑
=
== == N
1nn
N
1nnn
N
1nnn
A
yA
A
yAy
As equações anteriores são extensíveis, com as devidas adaptações à determinação do centróide de curvas compostas.
∑
∑∑
=
== == N
1nn
N
1nnn
N
1nnn
L
xL
L
xLx
∑
∑∑
=
== == N
1nn
N
1nnn
N
1nnn
L
yL
L
yLy
Para a determinação das áreas (ou comprimentos) e posições dos centróides dos elementos que compõe a superfície (ou linha) deverão consultar-se Tabelas (por exemplo, as tabelas do Beer&Jonhston, 7ª Edição, Figs. 5.8A e B, anteriormente apresentadas).
Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
4.5 Teoremas de Pappus-Guldinus
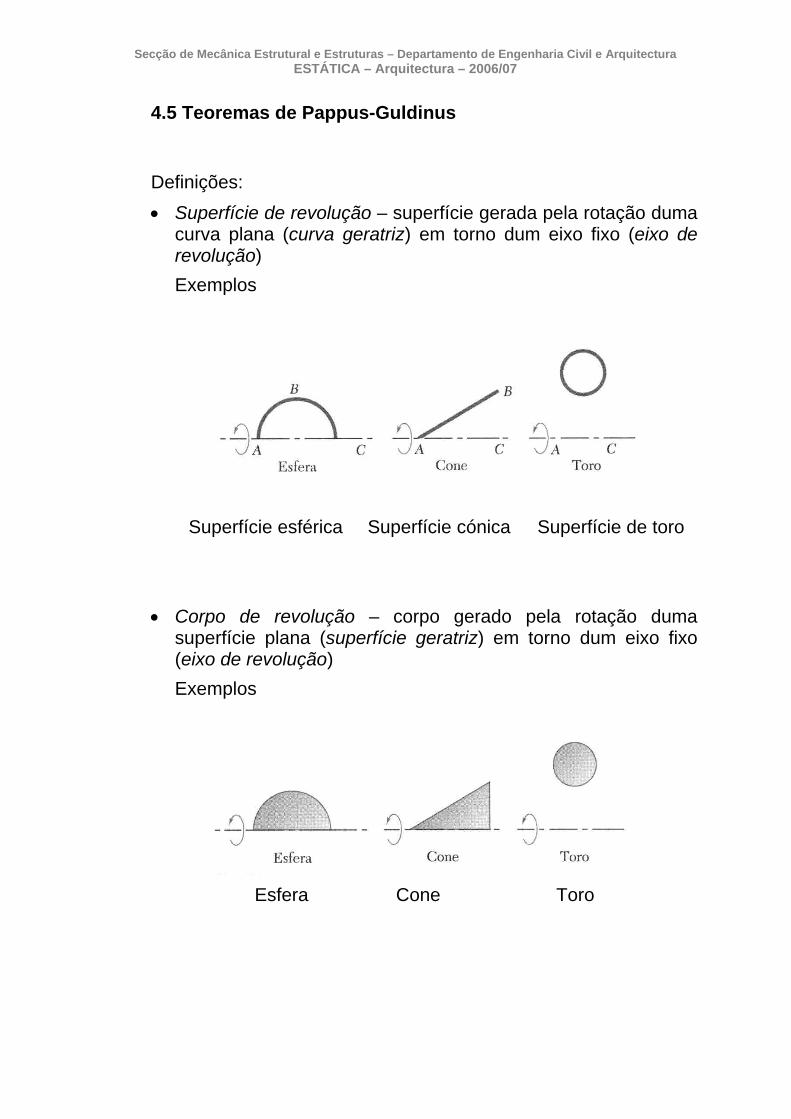
Definições: • Superfície de revolução – superfície gerada pela rotação duma
curva plana (curva geratriz) em torno dum eixo fixo (eixo de revolução) Exemplos
Superfície esférica Superfície cónica Superfície de toro • Corpo de revolução – corpo gerado pela rotação duma
superfície plana (superfície geratriz) em torno dum eixo fixo (eixo de revolução) Exemplos
Esfera Cone Toro

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
Teorema I . A área duma superfície de revolução é igual ao produto do comprimento da curva geratriz pelo caminho percorrido pelo centróide da curva durante o movimento de rotação que gera a superfície.
Demonstração: considerando a superfície dA gerada por um segmento da curva geratriz dL
dLz2dA π=
Considerando agora a totalidade da superfície de revolução
Lz2S2dLz2dAA y πππ ==== ∫∫
Nota: a curva geratriz não pode intersectar o eixo (geraria área negativa) Aplicações: • Determinar a área duma superfície de revolução conhecida a
posição do centróide da curva geratriz; • Determinar a posição do centróide, conhecida a área da
superfície de revolução.
Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
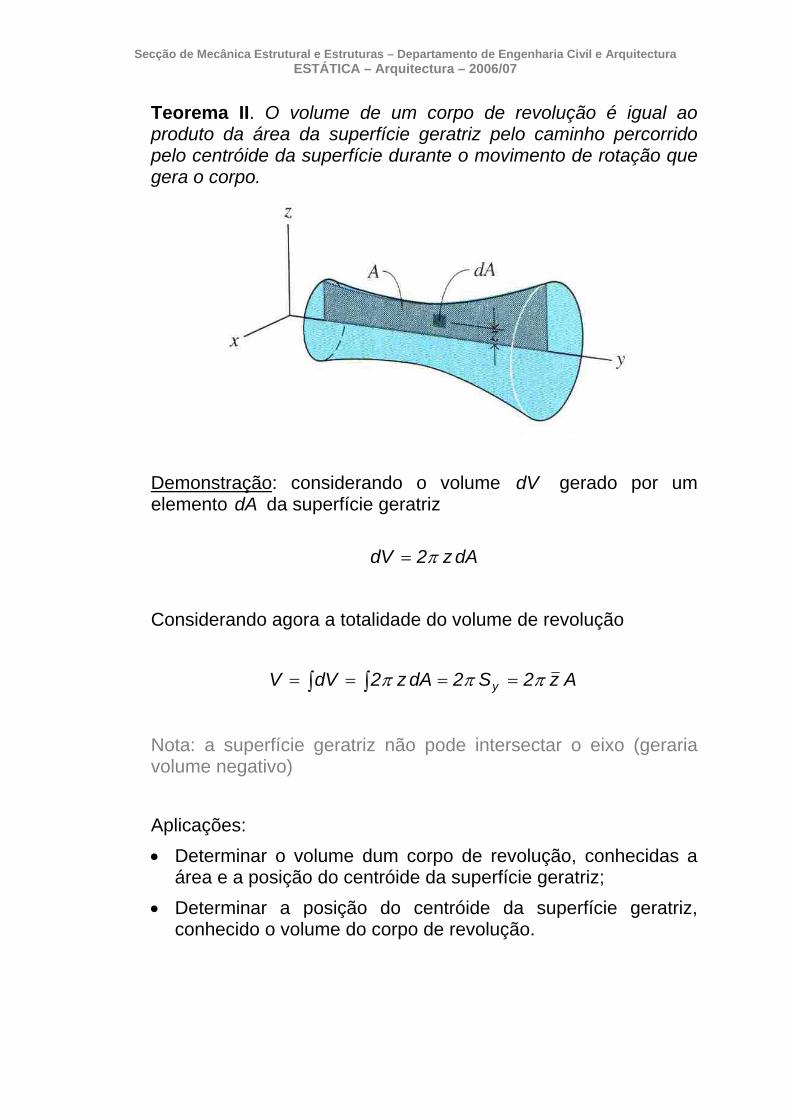
Teorema II. O volume de um corpo de revolução é igual ao produto da área da superfície geratriz pelo caminho percorrido pelo centróide da superfície durante o movimento de rotação que gera o corpo.
Demonstração: considerando o volume dV gerado por um elemento da superfície geratriz dA
dAz2dV π=
Considerando agora a totalidade do volume de revolução
Az2S2dAz2dVV y πππ ==== ∫∫
Nota: a superfície geratriz não pode intersectar o eixo (geraria volume negativo) Aplicações: • Determinar o volume dum corpo de revolução, conhecidas a
área e a posição do centróide da superfície geratriz; • Determinar a posição do centróide da superfície geratriz,
conhecido o volume do corpo de revolução.

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
Nota final: Ambos os teoremas (I e II) são aplicáveis superfícies/volumes de revolução incompletos (com rotação 0<θ<2π em torno do eixo geratriz).
Exercício extraído de Engineering Mechanics: Statics. RILEY, William F.; STURGES, Leroy. John Wiley and Sons, 1996
Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
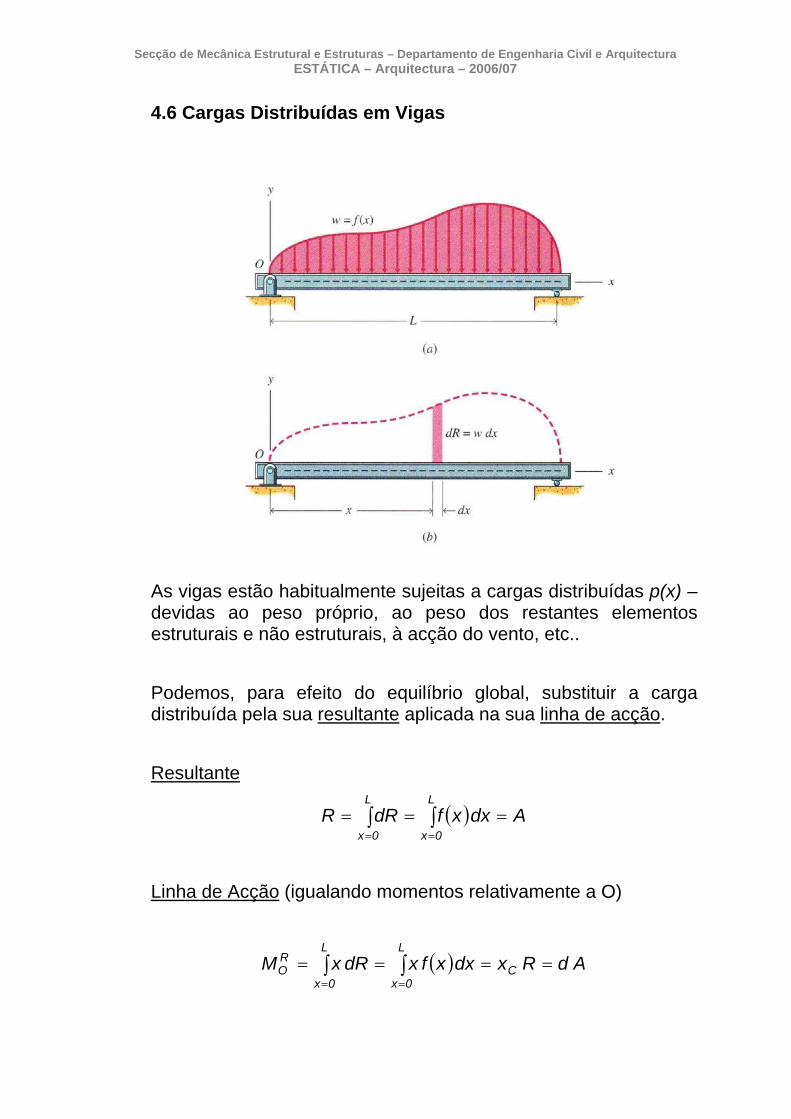
4.6 Cargas Distribuídas em Vigas
As vigas estão habitualmente sujeitas a cargas distribuídas p(x) –devidas ao peso próprio, ao peso dos restantes elementos estruturais e não estruturais, à acção do vento, etc.. Podemos, para efeito do equilíbrio global, substituir a carga distribuída pela sua resultante aplicada na sua linha de acção. Resultante
( ) AdxxfdRRL
0x
L
0x=== ∫∫
==
Linha de Acção (igualando momentos relativamente a O)
( ) AdRxdxxfxdRxM C
L
0x
L
0x
RO ==== ∫∫
==

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
Conclusão: “uma carga distribuída actuante numa viga pode ser substituída por uma carga concentrada; a intensidade desta carga única é igual à área da superfície sob a curva de carregamento e a sua linha de acção passa pelo centróide do carregamento” Exemplos: carga uniformemente distribuída (rectangular), carga linear (triangular ou trapezoidal). Exercícios: Determine os valores das resultantes (e localização) para os seguintes carregamentos distribuídos sobre vigas.
Exercício extraído de Engineering Mechanics: Statics. RILEY, William F.; STURGES, Leroy. John Wiley and Sons, 1996

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
4.6 Centro de Gravidade de Corpo Tridimensional
Considere-se o caso restrito de volumes (“corpos”) tridimensionais. Subdivida-se o corpo em pequenos corpos elementares cujo peso é
r e cuja posição é descrita por r3eWW
r.
rΔΔ −=
Pretende-se que o sistema de forças (pesos) distribuídos seja estaticamente equivalente a uma força única – resultante 3eW
r− ,
aplicada no centro de gravidade ( )zyxG ,,≡ do corpo. Considerando elementos de volume infinitesimais, a condição anterior implica: Igualdade da resultante
∫= dWW
Igualdade do momento resultante (relativamente a O, por exemplo)
( ) (∫ ×−=−×= 33GRO edWreWrM
rrrrr)

Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
Do último conjunto de equações se conclui:
∫= dWxWx ∫= dWyWy ∫= dWzWz
que definem as coordenadas do centro de gravidade do centro de gravidade do corpo. Caso se trate dum corpo homogéneo com um peso específico γ, tem-se:
dVdW γ=
e VW γ=
pelo que reformulando as equações anteriores se obtém
∫= dVxVx ∫= dVyVy ∫= dVzVz
equações que definem a posição do centróide, coincidente com o centro de gravidade quando se trate dum corpo homogéneo. De igual forma as equações anteriores definem os momentos estáticos (ou momentos de primeira ordem) relativamente aos planos coordenados. SIMETRIA Simetria relativamente um plano. Quando volume é simétrico relativamente a um plano, o seu momento estático relativamente ao plano é nulo e o seu centróide situa-se no plano de simetria. Caso o volume apresente dois planos de simetria, o centróide situa-se na recta definida pela intersecção destes planos.
Secção de Mecânica Estrutural e Estruturas – Departamento de Engenharia Civil e Arquitectura ESTÁTICA – Arquitectura – 2006/07
Caso o volume apresente três planos de simetria que se intersectam num ponto, o centróide situa-se nesse ponto. DETERMINAÇÃO DE CENTRÓIDES POR INTEGRAÇÃO Quando se trate da determinação do centróide de um volume delimitado por curvas cujas expressões analíticas são conhecidas, torna-se possível proceder à integração com vista à determinação dos momentos estáticos relativamente aos planos coordenados, assim como do seu volume. A integração pode ser realizada por dois processos diferentes: • Integração tripla em coordenadas cartesianas • Integração simples através do método das fatias (faixas).
Considerando um volume de revolução obtido em torno do eixo y