5. O Processador – Datapath e Unidade de Controle ...ducatte/mc542/Arquitetura/arq_hp5.pdf ·...
54
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 112 5. O Processador – Datapath e Unidade de Controle • Datapath L Componente do processador que realiza operações aritméticas • Controle L Componente do processador que comanda o datapath, memória e dispositivos de E/S de acodo com as instruções de um programa • Independente da classe da instrução, as duas primeiras etapas para sua execução são as mesmas: • Enviar o PC para a memória e buscar ao instrução • Ler um ou dois registradores (usando o campo da instrução, para selecionar os registradores a serem lidos) • Os passos seguintes dependem da classe da instrução (referência à memória, lógica-aritmética e desvios) L estes passos são bastantes semelhantes e independem do opcode • Por exemplo, todas as instruções, independente da classe utilizam a ULA após a leitura de um registrador. Para uma instrução de referência à memória, utiliza para cálculo do endereço, lógica-aritmética para execução e desvios para comparação • Após a utilização da ULA, os passos são diferentes para as diferentes classes.
-
Upload
nguyencong -
Category
Documents
-
view
213 -
download
0
Transcript of 5. O Processador – Datapath e Unidade de Controle ...ducatte/mc542/Arquitetura/arq_hp5.pdf ·...

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 112
5. O Processador – Datapath e Unidade de Controle
• Datapath è Componente do processador que realizaoperações aritméticas
• Controle è Componente do processador que comanda odatapath, memória e dispositivos de E/S de acodo com asinstruções de um programa
• Independente da classe da instrução, as duas primeiras etapaspara sua execução são as mesmas:
• Enviar o PC para a memória e buscar ao instrução
• Ler um ou dois registradores (usando o campo dainstrução, para selecionar os registradores a seremlidos)
• Os passos seguintes dependem da classe da instrução(referência à memória, lógica-aritmética e desvios) è estespassos são bastantes semelhantes e independem do opcode
• Por exemplo, todas as instruções, independente da classeutilizam a ULA após a leitura de um registrador. Para umainstrução de referência à memória, utiliza para cálculo doendereço, lógica-aritmética para execução e desvios paracomparação
• Após a utilização da ULA, os passos são diferentes para asdiferentes classes.
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 113
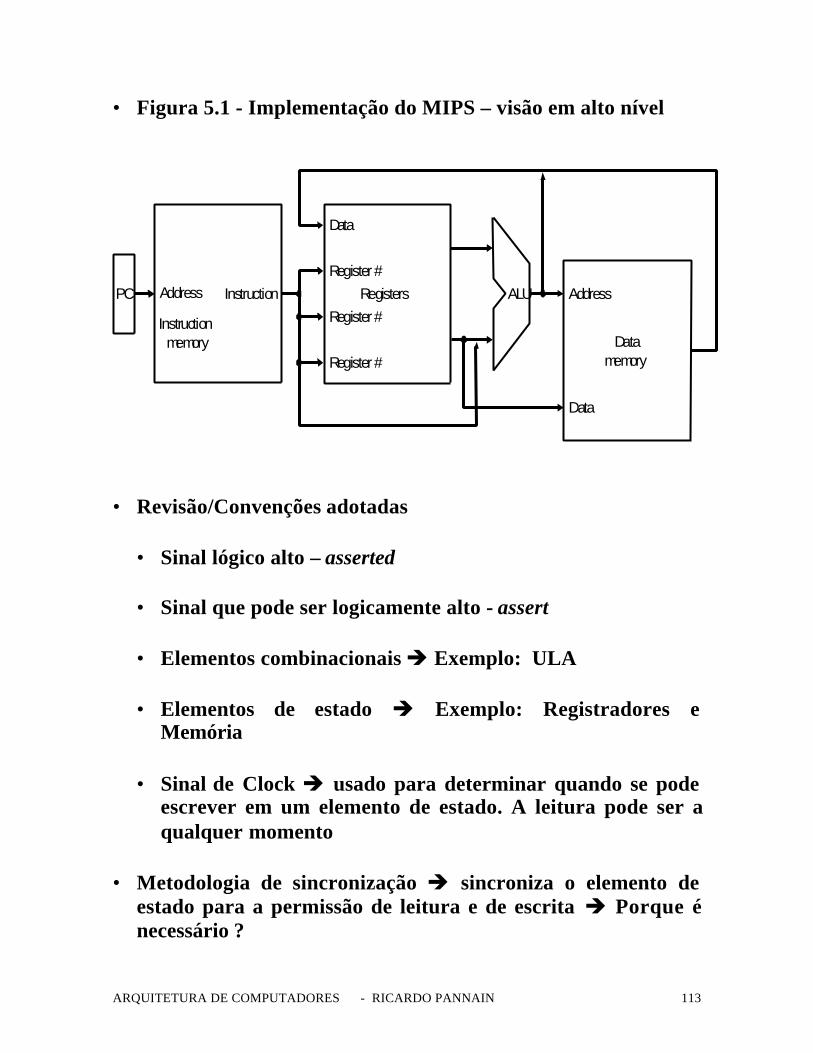
• Figura 5.1 - Implementação do MIPS – visão em alto nível
RegistersRegister #
Data
Register #
Datamemory
Address
Data
Register #
PC Instruction ALU
Instructionmemory
Address
• Revisão/Convenções adotadas
• Sinal lógico alto – asserted
• Sinal que pode ser logicamente alto - assert
• Elementos combinacionais è Exemplo: ULA
• Elementos de estado è Exemplo: Registradores eMemória
• Sinal de Clock è usado para determinar quando se podeescrever em um elemento de estado. A leitura pode ser aqualquer momento
• Metodologia de sincronização è sincroniza o elemento deestado para a permissão de leitura e de escrita è Porque énecessário ?

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 114
• Figura 5.2 – Lógica combinacional, elemento de estados eclock( sensível à subida).
Clock cycle
Stateelement
1Combinational logic
Stateelement
2
• Figura 5.3 – A metodologia edge-triggered permite a umelemento de estado ler e escrever no mesmo período de clock.
Stateelement Combinational logic
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 115
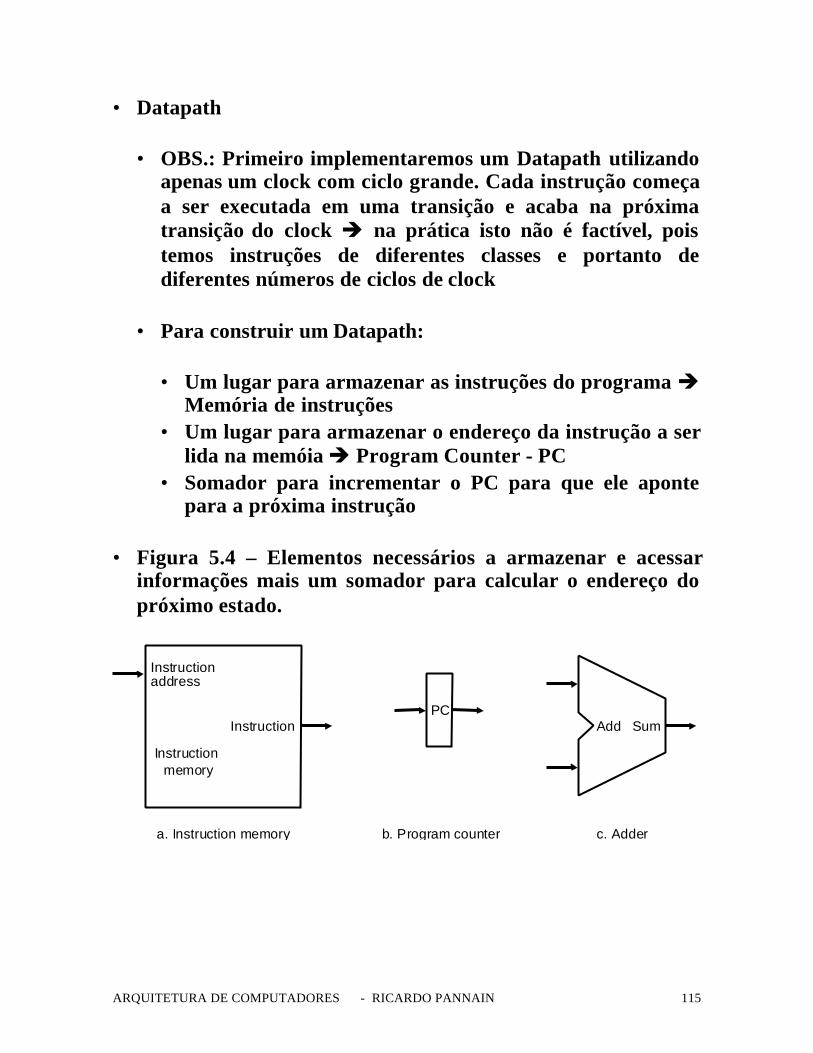
• Datapath
• OBS.: Primeiro implementaremos um Datapath utilizandoapenas um clock com ciclo grande. Cada instrução começaa ser executada em uma transição e acaba na próximatransição do clock è na prática isto não é factível, poistemos instruções de diferentes classes e portanto dediferentes números de ciclos de clock
• Para construir um Datapath:
• Um lugar para armazenar as instruções do programa èMemória de instruções
• Um lugar para armazenar o endereço da instrução a serlida na memóia è Program Counter - PC
• Somador para incrementar o PC para que ele apontepara a próxima instrução
• Figura 5.4 – Elementos necessários a armazenar e acessarinformações mais um somador para calcular o endereço dopróximo estado.
PC
Instructionmemory
Instructionaddress
Instruction
a. Instruction memory b. Program counter
Add Sum
c. Adder
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 116
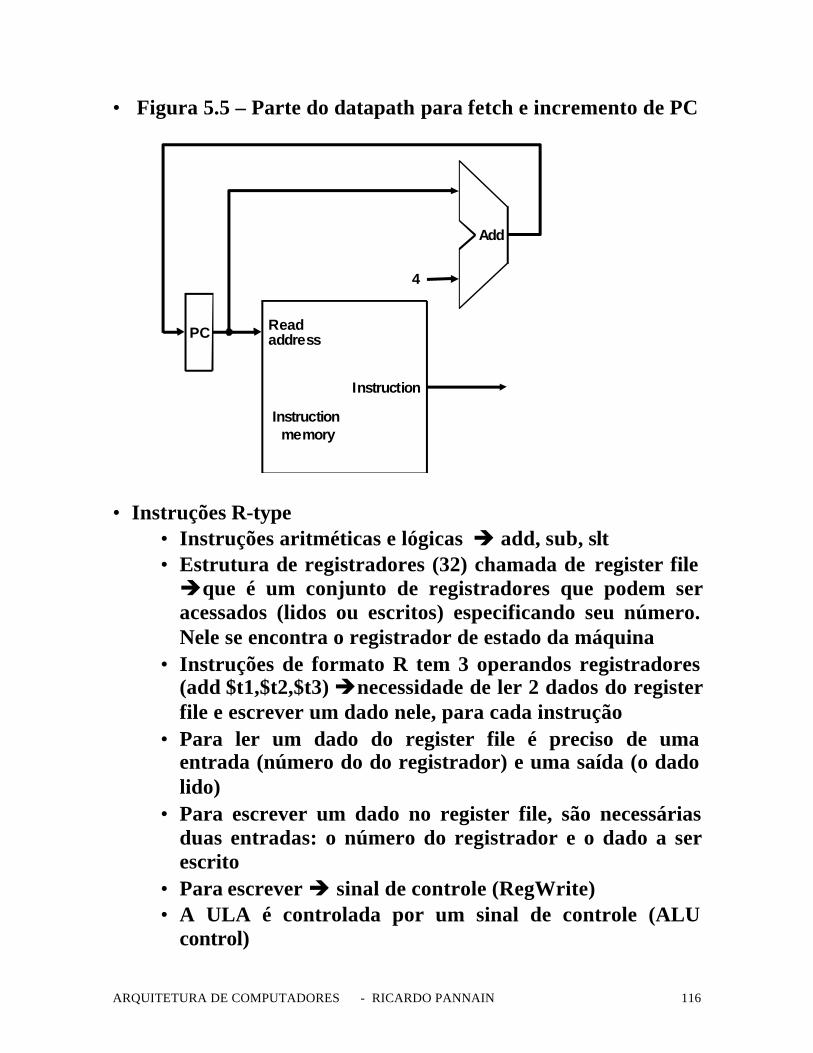
• Figura 5.5 – Parte do datapath para fetch e incremento de PC
PC
Instructionmemory
Readaddress
Instruction
4
Add
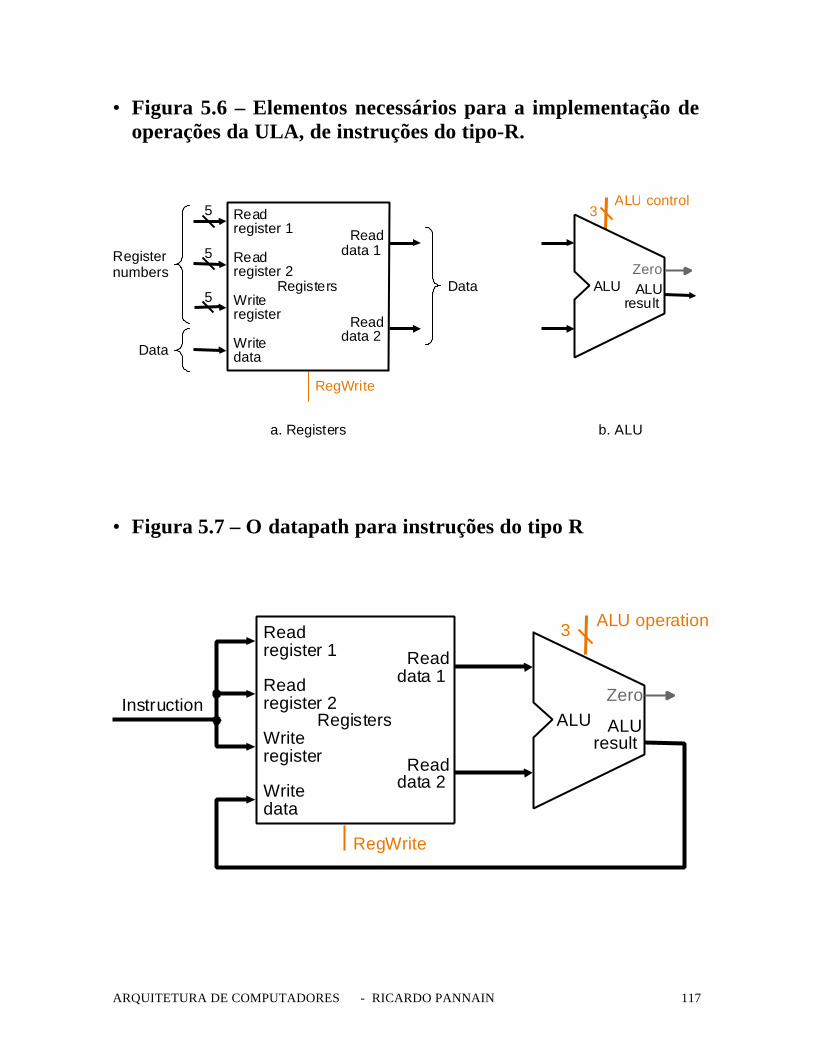
• Instruções R-type• Instruções aritméticas e lógicas è add, sub, slt• Estrutura de registradores (32) chamada de register fileèque é um conjunto de registradores que podem seracessados (lidos ou escritos) especificando seu número.Nele se encontra o registrador de estado da máquina
• Instruções de formato R tem 3 operandos registradores(add $t1,$t2,$t3) ènecessidade de ler 2 dados do registerfile e escrever um dado nele, para cada instrução
• Para ler um dado do register file é preciso de umaentrada (número do do registrador) e uma saída (o dadolido)
• Para escrever um dado no register file, são necessáriasduas entradas: o número do registrador e o dado a serescrito
• Para escrever è sinal de controle (RegWrite)• A ULA é controlada por um sinal de controle (ALU
control)
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 117
• Figura 5.6 – Elementos necessários para a implementação deoperações da ULA, de instruções do tipo-R.
ALU control
RegWrite
RegistersWriteregister
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Writedata
ALUresult
ALU
Data
Data
Registernumbers
a. Registers b. ALU
Zero5
5
5 3
• Figura 5.7 – O datapath para instruções do tipo R
InstructionRegisters
Writeregister
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Writedata
ALUresult
ALUZero
RegWrite
ALU operation3

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 118
• Instruções LOAD e STORE
• lw $t1,offset_value($t2) e sw $t1,offset_value,($t2)• Endereço de memória = value_offset + $t2• Value_offset èoffset sinalizado de 16 bits• É preciso de um register file e uma ULA• Unidade que transforme valor de 16 bits sinalizado em
um valor de 32 bits• Unidade de memória de dados com controle de leitura
(MemRead) e escrita (MemWrite)
• Figura 5.8 – Unidades para implementação de lw e sw
16 32Sign
extend
b. Sign-extension unit
MemRead
MemWrite
Datamemory
Writedata
Readdata
a. Data memory unit
Address

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 119
• Figura 5.9 – Datapath para instruções lw e sw.
Instruction
16 32
RegistersWriteregister
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Datamemory
Writedata
Readdata
Writedata
Signextend
ALUresult
ZeroALU
Address
MemRead
MemWrite
RegWrite
ALU operation3
• Instrução beq
• beq $t1,$t2,offset è2 registradores que são comparadose um offset de 16 bits usado para calcular o endereçorelativo, alvo do branch
• A base para o cálculo do endereço alvo de branch é oendereço da próxima instrução em relação à instruçãobranch
• O campo offset é deslocado de 2 bits para aumentar oalcance do desvio (multiplicado por 4)
• Além do cálculo do endereço do branch, deve-sedeterminar qual endereço será escolhido, o do branch(taken) ou o armazenado em PC (not taken) dependendodo resultado da comparação
• OBS.: Instrução jump èos 28 bits menos significativosde PC são substituídos pelos 26 bits do imediato,deslocado de 2 bits ( X 4 ).

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 120
• Figura 5.10 – Datapath para branchs
16 32Sign
extend
ZeroALU
Sum
Shiftleft 2
To branchcontrol logic
Branch target
PC + 4 from instruction datapath
Instruction
Add
RegistersWriteregister
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Writedata
RegWrite
ALU operation3
• Datapath geral - Instruções de memória + instruções R-type(instruções da ULA)
Instruction
16 32
RegistersWriteregister
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Datamemory
Writedata
Readdata
Mux
MuxWrite
data
Signextend
ALUresult
ZeroALU
Address
RegWrite
ALU operation3
MemRead
MemWrite
ALUSrcMemtoReg
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 121
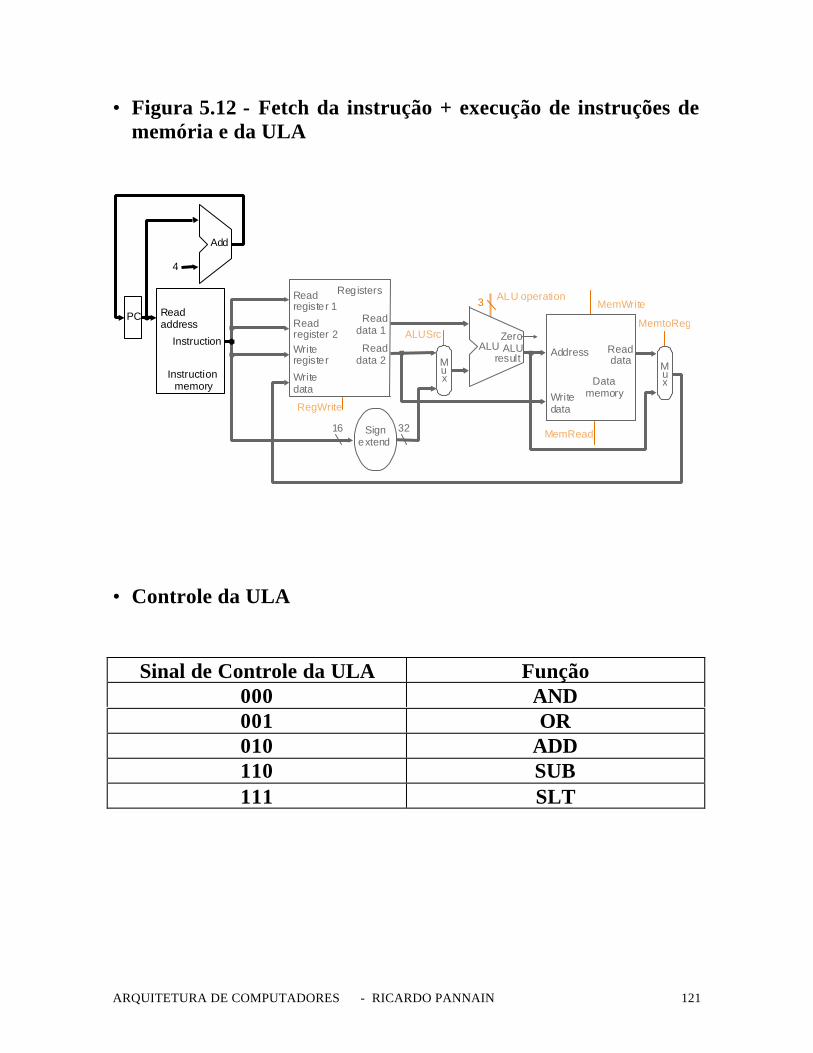
• Figura 5.12 - Fetch da instrução + execução de instruções dememória e da ULA
PC
Instructionmemory
Readaddress
Instruction
16 32
Registers
Writeregister
Writedata
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Signextend
ALUresult
Zero
Datamemory
Address
Writedata
Readdata M
ux
4
Add
Mux
ALU
RegWrite
ALU operation3
MemRead
MemWrite
ALUSrcMemtoReg
• Controle da ULA
Sinal de Controle da ULA Função000 AND001 OR010 ADD110 SUB111 SLT
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 122
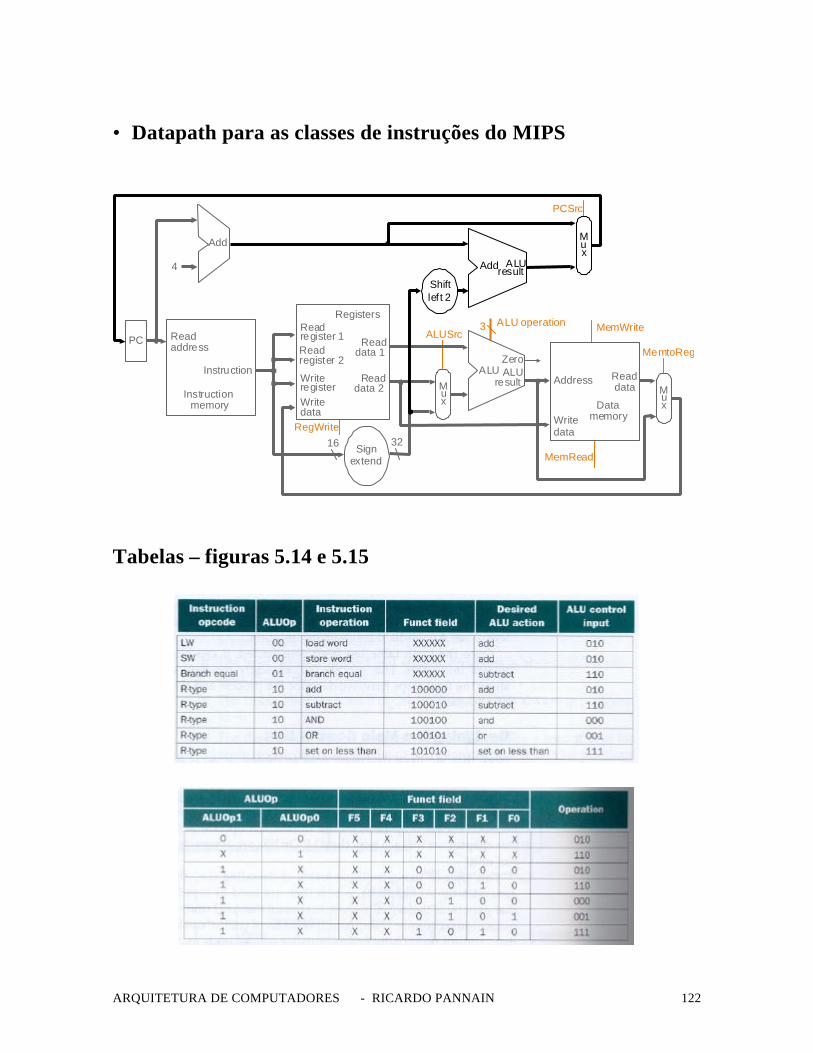
• Datapath para as classes de instruções do MIPS
PC
Instructionmemory
Readaddress
Instruction
16 32
Add ALUresult
Mux
Registers
WriteregisterWritedata
Readdata 1
Readdata 2
Readregister 1Readregister 2
Shiftlef t 2
4
Mux
ALU operation3
RegWrite
MemRead
MemWrite
PCSrc
ALUSrc
MemtoReg
ALUresult
ZeroALU
Datamemory
Address
Writedata
Readdata M
ux
Signextend
Add
Tabelas – figuras 5.14 e 5.15

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 123
• Projeto da Unidade de Controle Principal
Figura 5.16 – Classes de instruções - tipo-R, load&store ebranch)
• O campo opcode èbits 31-26
• Os dois registradores a serem lidos èrs e rt è bits 25-21e 20-16
• O registrador base (load e store) èbits 15-0
• O valor a ser guardado no PC que pode vir do cálculo deum endereço de salto ou simplesmente do PC + 4.
• O registrador destino (a ser escrito), que deverá serselecionado dentre 2 opções, o que requer ummultiplexador:
• para um load è bits 20-16 (rt)• para instruções R-type è bits 15-11 (rd)
• O valor guardado no banco de registradores que pode virda ALU (R-type) ou da memória (sw)

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 124
• Figura 5.17 - Datapath com os multiplexadores necessários
MemtoReg
MemRead
MemWrite
ALUOp
ALUSrc
RegDst
PC
Instructionmemory
Readaddress
Instruction[31– 0]
Instruction [20– 16]
Instruction [25– 21]
Add
Instruction [5– 0]
RegWrite
4
16 32Instruction [15– 0]
0Registers
WriteregisterWritedata
Writedata
Readdata 1
Readdata 2
Readregister 1Readregister 2
Signextend
ALUresult
Zero
Datamemory
Address Readdata M
ux
1
0
Mux
1
0
Mux
1
0
Mux
1
Instruction [15– 11]
ALUcontrol
Shiftleft 2
PCSrc
ALU
Add ALUresult
• Sinais de controle – Tabela da figura 5.18
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 125
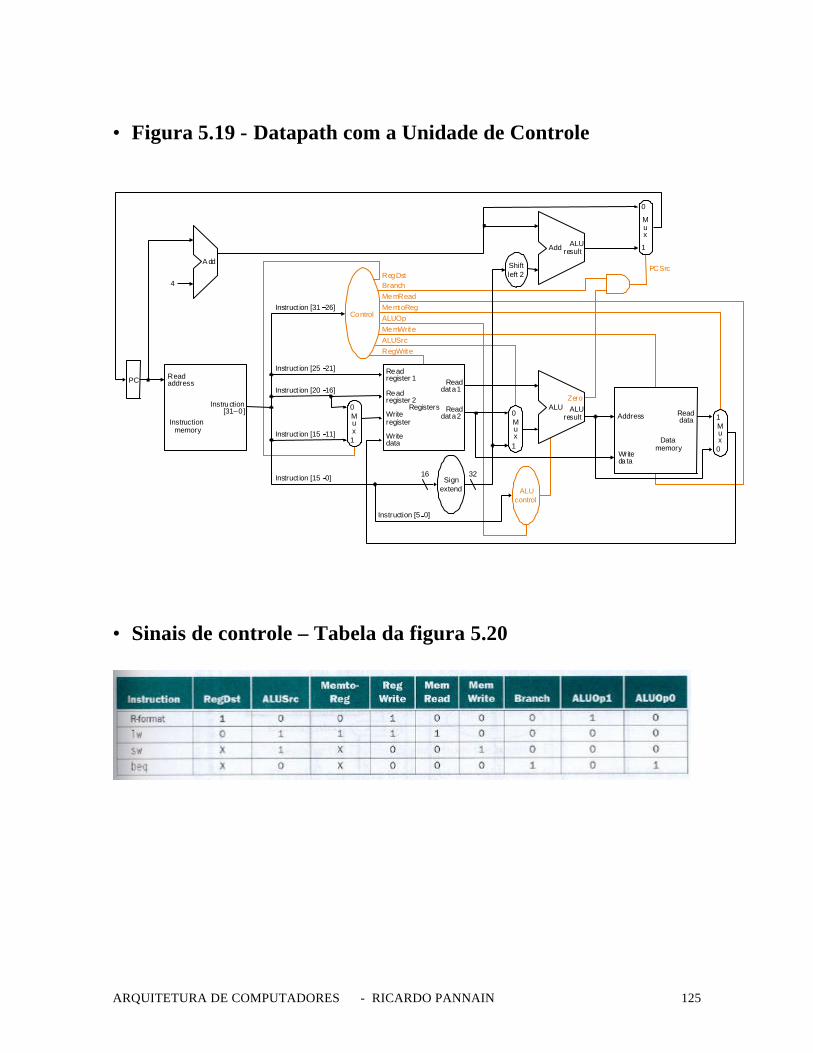
• Figura 5.19 - Datapath com a Unidade de Controle
PC
Instructionmemory
Readaddress
Instruction[31–0]
Instruct ion [20 16]
Instruct ion [25 21]
A dd
Instruction [5 0]
MemtoRegALUOpMemWrite
RegWrite
MemReadBranchRegDst
ALUSrc
Instruct ion [31 26]
4
16 32Instruct ion [15 0]
0
0Mux
0
1
Control
Add ALUresult
Mux
0
1
RegistersWriteregister
Writedata
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Signextend
Mux1
ALUresult
Zero
PCSrc
Datamemory
Writedata
Readdata
Mux
1
Instruct ion [15 11]
ALUcontrol
Shiftleft 2
ALUAddress
• Sinais de controle – Tabela da figura 5.20
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 126
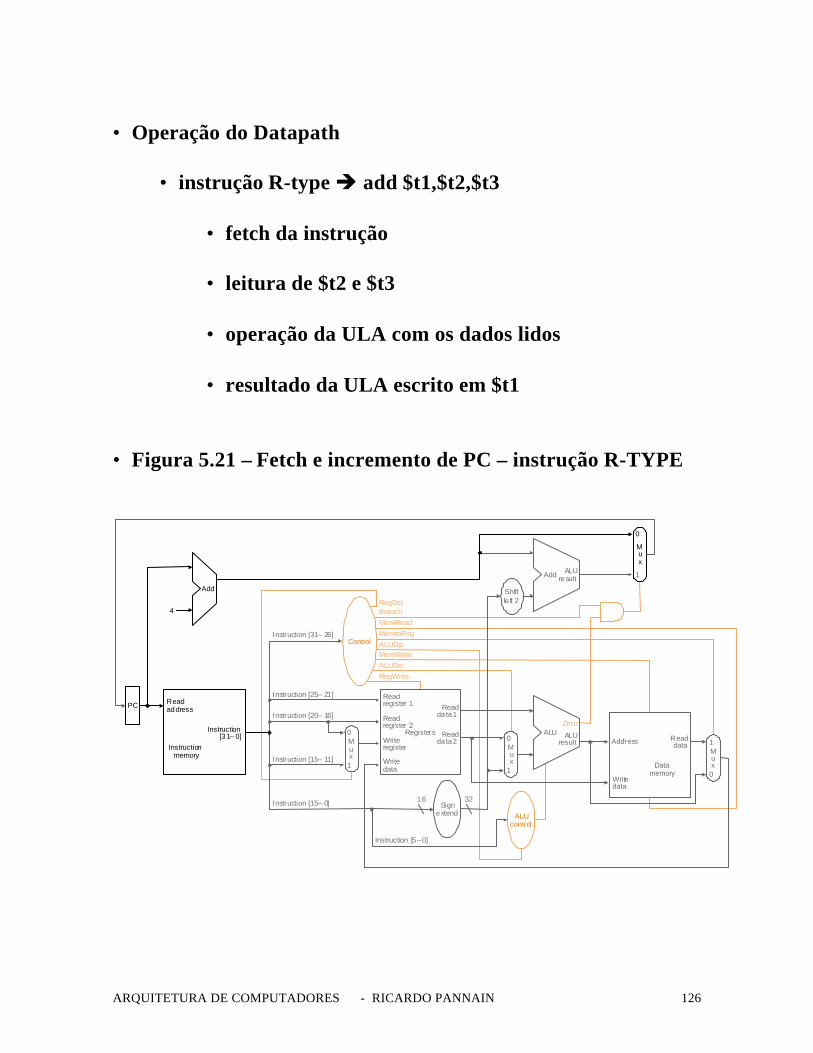
• Operação do Datapath
• instrução R-type è add $t1,$t2,$t3
• fetch da instrução
• leitura de $t2 e $t3
• operação da ULA com os dados lidos
• resultado da ULA escrito em $t1
• Figura 5.21 – Fetch e incremento de PC – instrução R-TYPE
PC
Instructionmemory
Readaddress
Instruction[31– 0]
Instruction [20– 16]
Instruction [25– 21]
Add
Instruction [5–0]
MemtoRegALUOpMemWrite
RegWrite
MemReadBranchRegDst
ALUSrc
Instruction [31– 26]
4
16 32Instruction [15– 0]
0
0Mux
0
1
Control
Add ALUresult
Mux
0
1
RegistersWriteregister
Writedata
Readda ta 1
Readda ta 2
Readregister 1
Readregister 2
Signextend
Shiftle ft 2
Mux
1
ALUresult
Zero
Datamemory
Writedata
Readdata
Mux
1
Instruction [15– 11]
ALUcontrol
ALUAddress

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 127
• Figura 5.22 – Leitura dos registradores e decodificação –instrução R-TYPE
PC
Instructionmemory
Readaddress
Instruction[31– 0]
Instruction [20– 16]
Instruction [25– 21]
Add
Instruction [5– 0]
MemtoRegALUOpMemWrite
RegWrite
MemReadBranchRegDst
ALUSrc
Instruction [31– 26]
4
16 32Instruction [15– 0]
0
0Mux
0
1
Control
Add ALUresult
Mux
0
1
RegistersWr iteregister
Wr itedata
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Signextend
Shiftleft 2
Mux
1
ALUresult
Z ero
Datamemory
Writedata
Readdata
Mux
1
Instruction [15– 11]
ALUcontrol
ALUAddress
• Figura 5.23 – operação da ULA – instrução R-TYPE
PC
Instructionmemory
Readaddress
Instruction[31– 0]
Instruction [20 16]
Instruction [25 21]
Add
Instruction [5 0]
MemtoRegALUOpMemWrite
RegWrite
MemReadBranchRegDst
ALUSrc
Instruction [31 26]
4
16 32Instruction [15 0]
0
0Mux
0
1
ALUcontrol
Control
Add ALUresult
Mux
0
1
RegistersWriteregister
Writedata
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Signextend
Mux
1
ALUresult
Zero
Datamemory
ReaddataAddress
Writedata
Mux
1
Instruction [15 11]
ALU
Shiftleft 2
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 128
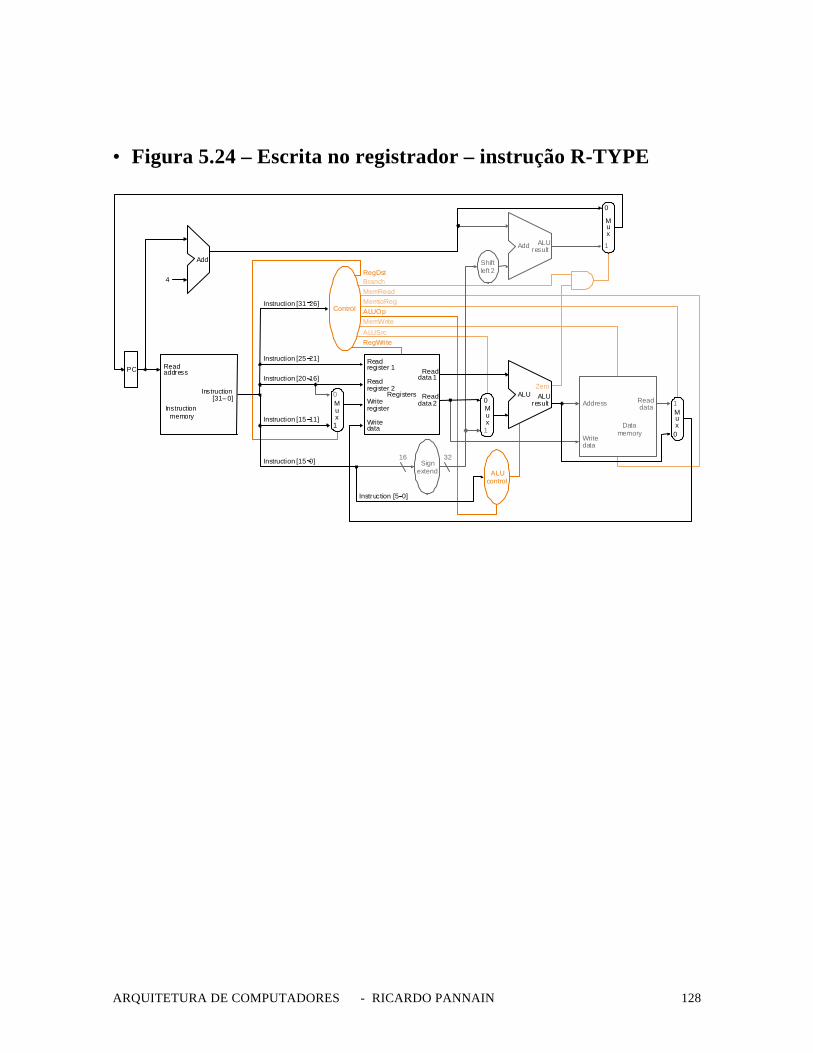
• Figura 5.24 – Escrita no registrador – instrução R-TYPE
PC
Instructionmemory
Readaddress
Instruction[31– 0]
Instruction [20 16]
Instruction [25 21]
Add
Instruction [5 0]
MemtoRegALUOpMemWrite
RegWrite
MemReadBranchRegDst
ALUSrc
Instruction [31 26]
4
16 32Instruction [15 0]
0
0Mux
0
1
ALUcontrol
Control
Shiftleft 2
Add ALUresult
Mux
0
1
RegistersWriteregister
Writedata
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Signextend
Mux
1
ALUresult
Zero
Datamemory
Writedata
Readdata
Mux
1
Instruction [15 11]
ALUAddress
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 129
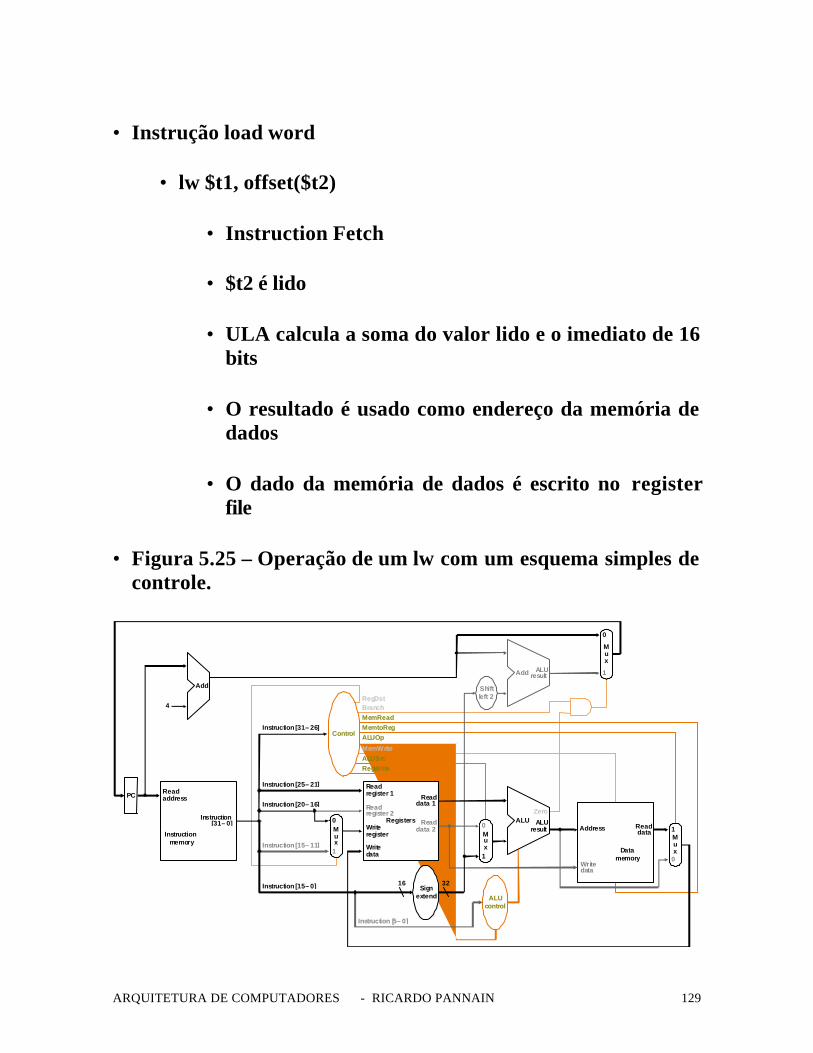
• Instrução load word
• lw $t1, offset($t2)
• Instruction Fetch
• $t2 é lido
• ULA calcula a soma do valor lido e o imediato de 16bits
• O resultado é usado como endereço da memória dedados
• O dado da memória de dados é escrito no registerfile
• Figura 5.25 – Operação de um lw com um esquema simples decontrole.
PC
Instructionmemory
Readaddress
Instruction[31– 0]
Instruction [15– 11]
Instruction [20– 16]
Instruction [25– 21]
Add
Instruction [5– 0]
MemtoRegALUOp
MemWrite
RegWrite
MemReadBranchRegDst
ALUSrc
Instruction [31– 26]
4
16 32Instruction [15– 0]
0
0Mux
0
1
ALUcontrol
Control
Shiftleft 2
Add ALUresult
Mux
0
1
RegistersWriteregister
Writedata
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Signextend
Mux
1
ALUresult
Zero
Datamemory
Writedata
Readdata
Mux
1ALU
Address
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 130
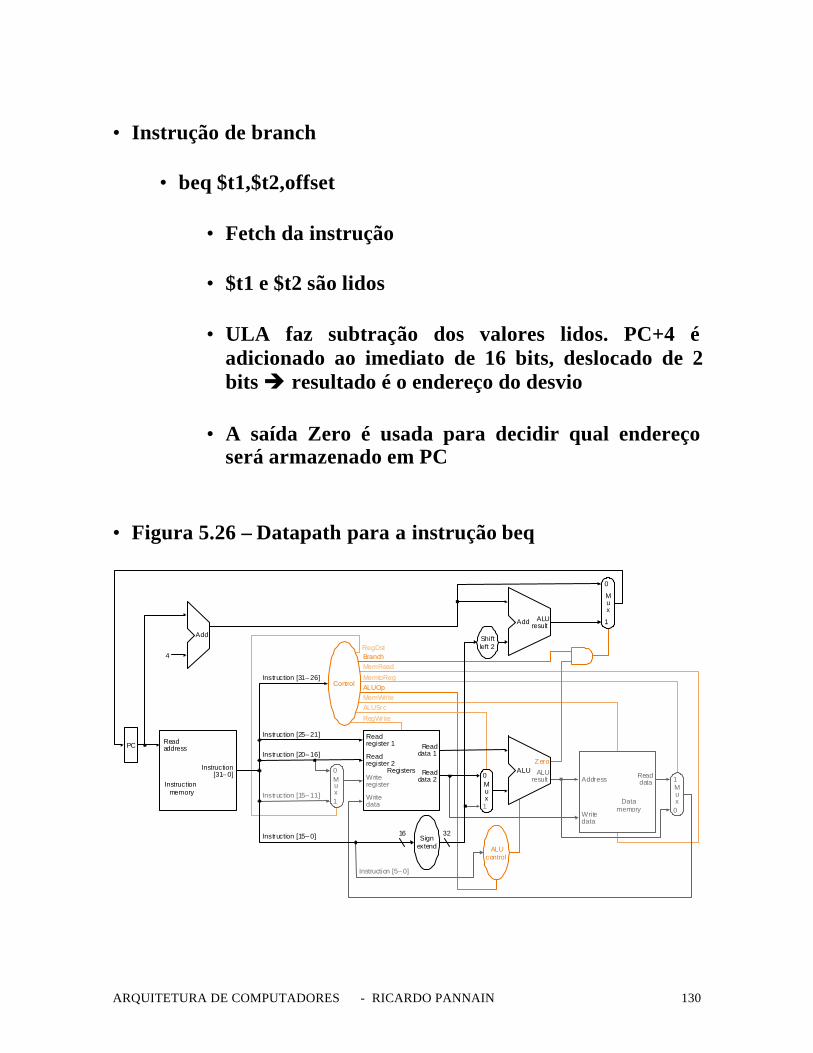
• Instrução de branch
• beq $t1,$t2,offset
• Fetch da instrução
• $t1 e $t2 são lidos
• ULA faz subtração dos valores lidos. PC+4 éadicionado ao imediato de 16 bits, deslocado de 2bits è resultado é o endereço do desvio
• A saída Zero é usada para decidir qual endereçoserá armazenado em PC
• Figura 5.26 – Datapath para a instrução beq
PC
Instructionmemory
Readaddress
Instruction[31– 0]
Instruction [15– 11]
Instruction [20– 16]
Instruction [25– 21]
Add
Instruction [5– 0]
MemtoRegALUOpMemWrite
RegWrite
MemReadBranchRegDst
ALUSrc
Instruction [31– 26]
4
16 32Instruction [15– 0]
Shiftleft 2
0Mux
0
1
ALUcontrol
Control
RegistersWriteregister
Writedata
Readdata 1
Readregister 1
Readregister 2
Signextend
1
ALUresult
Zero
Datamemory
Writedata
ReaddataM
ux
Readdata 2
Add ALUresult
Mux
0
1
Mux
1
0
ALUAddress
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 131
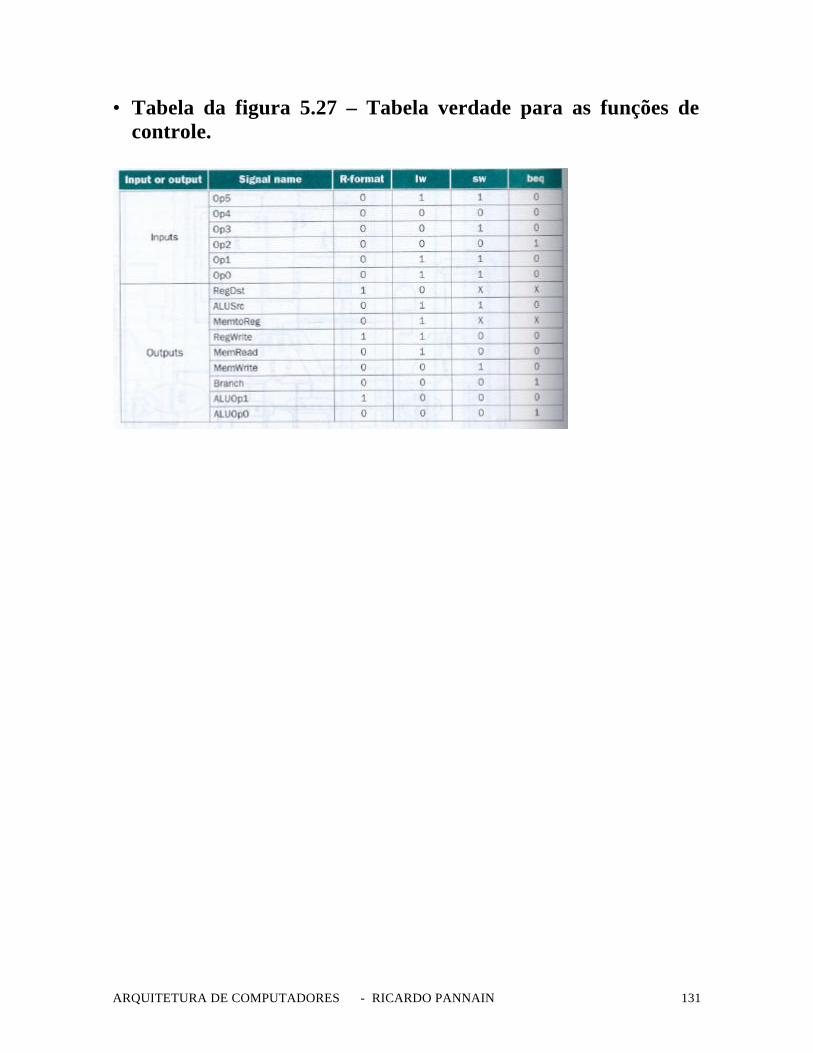
• Tabela da figura 5.27 – Tabela verdade para as funções decontrole.
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 132
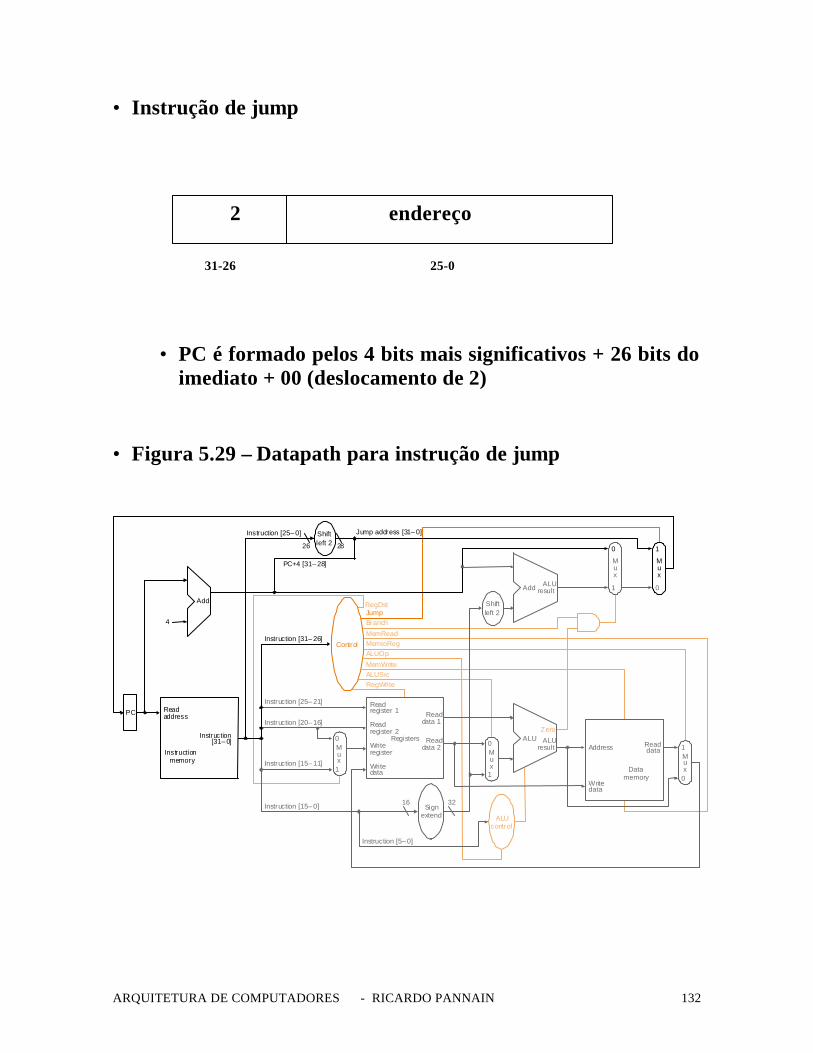
• Instrução de jump
• PC é formado pelos 4 bits mais significativos + 26 bits doimediato + 00 (deslocamento de 2)
• Figura 5.29 – Datapath para instrução de jump
Shiftleft 2
PC
Instructionmemory
Readaddress
Instruction[31– 0]
Datamemory
Readdata
Writedata
RegistersWriteregister
Writedata
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Instruction [15– 11]
Instruction [20– 16]
Instruction [25– 21]
Add
ALUresult
Zero
Instruction [5– 0]
MemtoRegALUOp
MemWrite
RegWrite
MemRead
BranchJumpRegDst
ALUSrc
Instruction [31– 26]
4
Mux
Instruction [25– 0] Jump address [31– 0]
PC+4 [31– 28]
Signextend
16 32Instruction [15– 0]
1
Mux
1
0
Mux
0
1
Mux
0
1
ALUcontrol
Control
Add ALUresult
Mux
0
1 0
ALU
Shiftleft 226 28
Address
2 endereço
31-26 25-0
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 133
• Implementação em um ciclo de clock ènão usada
• Funciona corretamente mas não é eficiente
• Para single-cycle èo ciclo do clock deve ter o mesmocomprimento para todas as instruções è CPI = 1 è paraisto, o ciclo de clock é determinado pelo maior caminho nodatapath da máquina ( instrução de load que usa 5unidades funcionais em série: instruction memory, registerfile, ULA, data memory e register file)
Exemplo.
Sejam os seguintes tempos de operação:
• unidade de memória : 2 ns• ULA e somadores: 2ns• register file (read ou write) : 1 ns• unidade de controle, multiplexadores, acesso ao PC,
circuito para extensão do sinal e linhas não tem atraso,quais das seguintes implementações seria mais rápida equanto ?
1. Uma implementação na qual cada instrução opera emum ciclo de clock de tamanho fixo
2. Uma implementação onde cada instrução é executadausando clock de tamanho de ciclo variável(exatamente do tamanho necessário para a execuçãoda respectiva instrução è também não utilizado naprática)
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 134
Para comparar a performance, assuma que o seguinteconjunto de instruções : 24% de loads, 12% de store,44% instruções tipo R, 18% de branches e 2% de jumps.
Solução:tempo de execução CPU = número de instruções XCPI X período do clock
CPI = 1 è tempo de execução CPU = número deinstruções X período do clock
Temos que encontrar o período do clock para as duasimplementações, pois o número de instruções e a CPIsão iguais para ambas implementações.
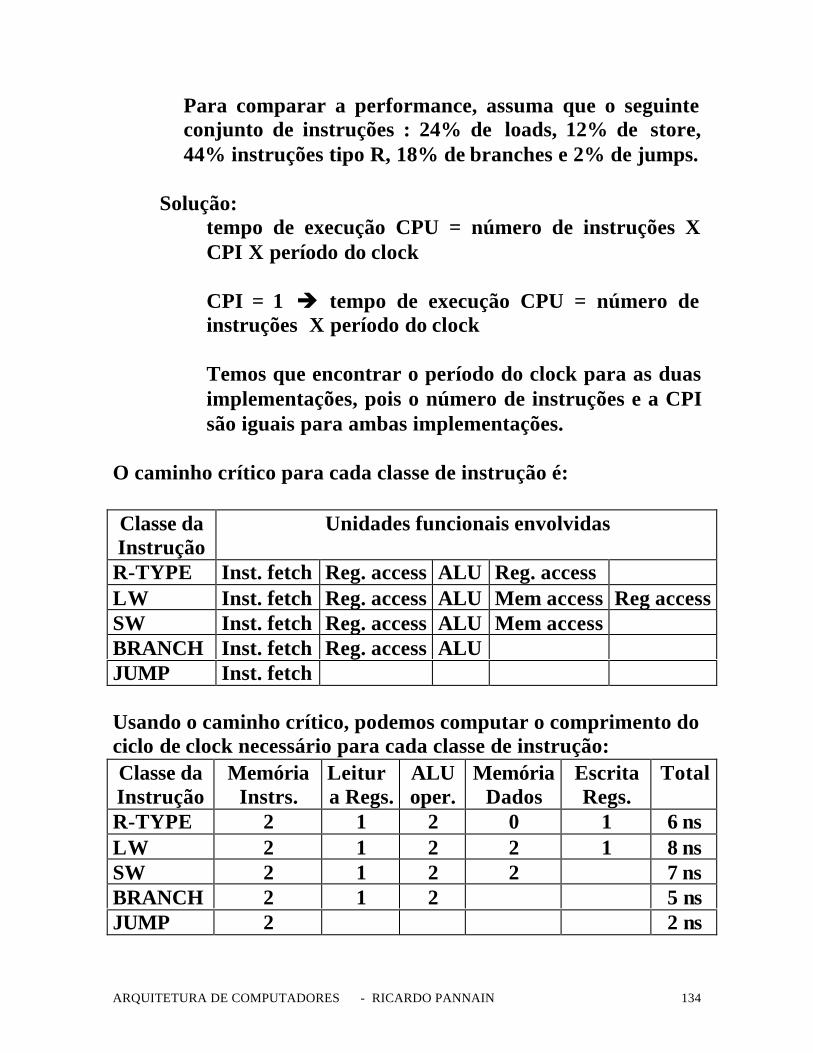
O caminho crítico para cada classe de instrução é:
Classe daInstrução
Unidades funcionais envolvidas
R-TYPE Inst. fetch Reg. access ALU Reg. accessLW Inst. fetch Reg. access ALU Mem access Reg accessSW Inst. fetch Reg. access ALU Mem accessBRANCH Inst. fetch Reg. access ALUJUMP Inst. fetch
Usando o caminho crítico, podemos computar o comprimento dociclo de clock necessário para cada classe de instrução:Classe daInstrução
MemóriaInstrs.
Leitura Regs.
ALUoper.
MemóriaDados
EscritaRegs.
Total
R-TYPE 2 1 2 0 1 6 nsLW 2 1 2 2 1 8 nsSW 2 1 2 2 7 nsBRANCH 2 1 2 5 nsJUMP 2 2 ns
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 135
O período do clock para a máquina com um único clock édeterminado pela maior instrução è 8ns
A máquina com clock variável, terá seus períodos de clockvariando entre 2ns e 8ns. O clcock médio será:
Tempo de clock da CPU = 8 X 24% + 7 X 12% + 6 X 44% + 5 X18 % + 2 X 2% = 6.3ns
CPU perfomancevc / CPU perfomancesc =
= tempo de execução CPUsc / tempo de execução CPUvc =
= IC X período de clock da CPUsc / IC X período de clock daCPUvc =
= período de clock da CPUsc / período de clock da CPUvc =
= 8 / 6.3 = 1.27
• Exemplo
• FP unit è 8ns para add e 16ns para mul• todos os loads tem o mesmo tempo e são 33% das instruções• todos os stores tem mesmo tempo e são 21% das instruções• instruções tipo R são 27 % das instruções• Branches são 5 % e jumps 2% das instruções• FP add e sub tem o mesmo tempo e juntos tem 7% das
instruções• FP mul e div tem o mesmo tempo e &5 das instruções
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 136
Solução
CPU perfomancevc / CPU perfomancesc == tempo de execução CPUsc / tempo de execução CPUvc
Para a máquina de único clock è período do clock = ciclo dainstrução FP mul (mais longa) è 2+1+16+1 = 20ns
Para a máquina de clock variável:
período do clock CPU = 8 X 31% + 7 X 21% + 6 X 27% + 5 X5% = 7.0 ns
Portanto:
CPU perfomancevc / CPU perfomancesc == tempo de execução CPUsc / tempo de execução CPUvc = 20/7= 2.9
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 137
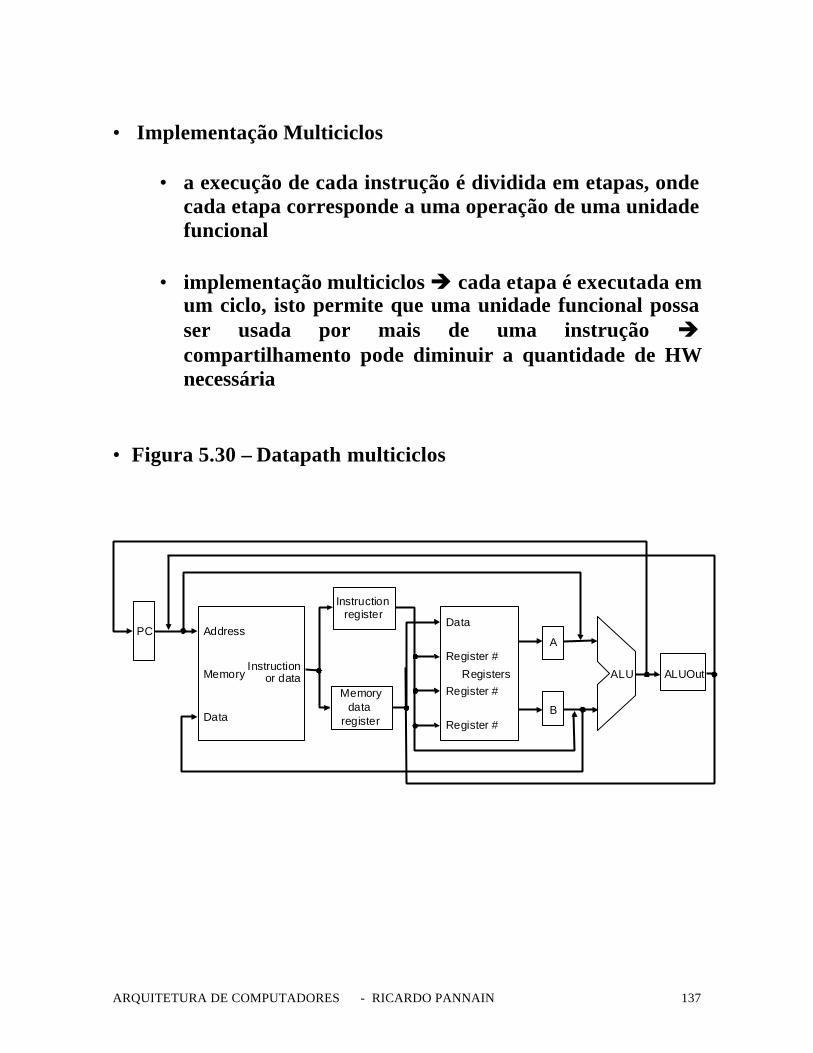
• Implementação Multiciclos
• a execução de cada instrução é dividida em etapas, ondecada etapa corresponde a uma operação de uma unidadefuncional
• implementação multiciclos è cada etapa é executada emum ciclo, isto permite que uma unidade funcional possaser usada por mais de uma instrução ècompartilhamento pode diminuir a quantidade de HWnecessária
• Figura 5.30 – Datapath multiciclos
PC
Memory
Address
Instructionor data
Data
Instructionregister
RegistersRegister #
Data
Register #
Register #
ALU
Memorydata
register
A
B
ALUOut
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 138
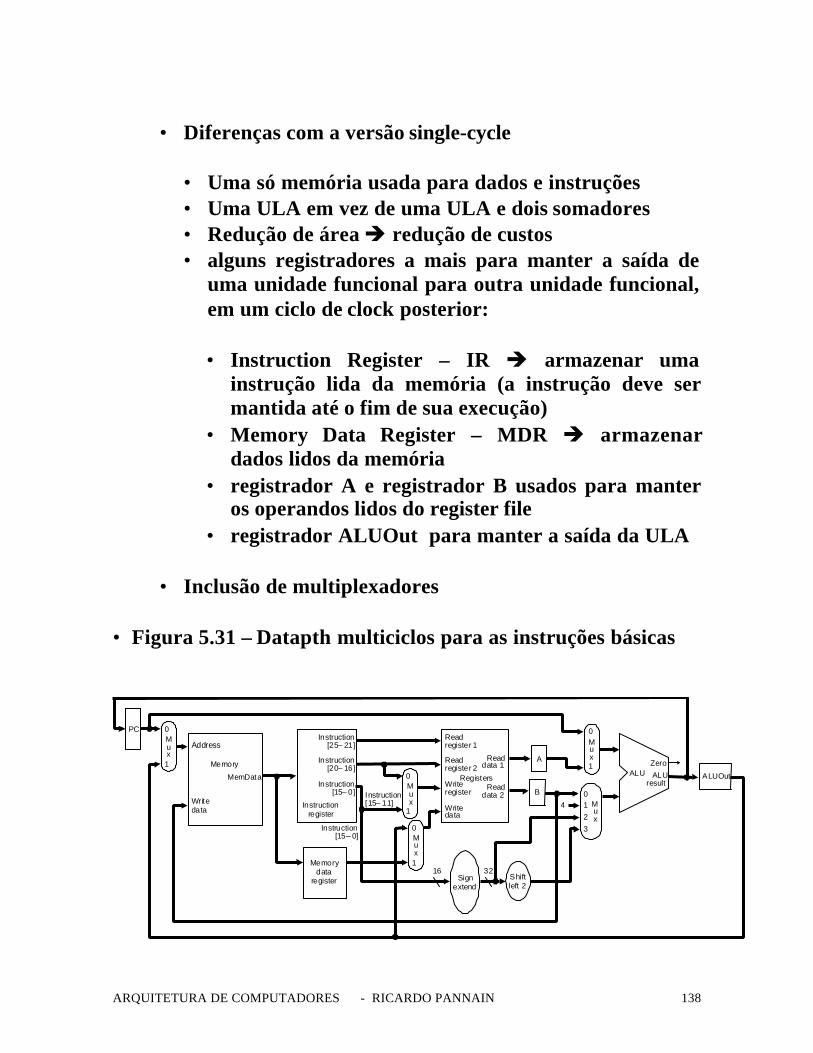
• Diferenças com a versão single-cycle
• Uma só memória usada para dados e instruções• Uma ULA em vez de uma ULA e dois somadores• Redução de área è redução de custos• alguns registradores a mais para manter a saída de
uma unidade funcional para outra unidade funcional,em um ciclo de clock posterior:
• Instruction Register – IR è armazenar umainstrução lida da memória (a instrução deve sermantida até o fim de sua execução)
• Memory Data Register – MDR è armazenardados lidos da memória
• registrador A e registrador B usados para manteros operandos lidos do register file
• registrador ALUOut para manter a saída da ULA
• Inclusão de multiplexadores
• Figura 5.31 – Datapth multiciclos para as instruções básicas
Shiftleft 2
PC
Memory
MemData
Writedata
Mux
0
1
RegistersWriteregister
Writedata
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Mux
0
1
Mux
0
1
4
Instruction[15– 0]
Signextend
3216
Instruction[25– 21]
Instruction[20– 16]
Instruction[15– 0]
Instructionregister
1 Mux
0
3
2
Mux
ALUresult
ALUZero
Memorydata
register
Instruction[15– 11]
A
B
ALUOut
0
1
Address

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 139
• Figura 5.32 - Datapath para implementação multiciclos comsinais de controle
Shiftleft 2
MemtoReg
IorD MemRead MemWrite
PC
Memory
MemData
Writedata
Mux
0
1
RegistersWriteregister
Writedata
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Instruction[15– 11]
Mux
0
1
Mux
0
1
4
ALUOpALUSrcB
RegDst RegWrite
Instruct ion[15– 0]
Instruct ion [5– 0]
Signex tend
3216
Ins truction[25– 21]
Ins truction[20– 16]
Ins truction[15–0]
Instructionregis ter
1 Mux
0
32
ALUcontrol
Mux
0
1ALU
resultALU
ALUSrcA
ZeroA
B
ALUOut
IRWrite
Address
Memorydata
regis ter
• Figura 5.33 - Datapath para implementação multiciclos comsinais de controle – completo incluindo atualização do PC
Shiftleft 2
PCMux
0
1
RegistersWriteregister
Writedata
Readdata 1
Readdata 2
Readregister 1
Readregister 2
Instruction[15– 11]
Mux
0
1
Mux
0
1
4
Instruction[15– 0]
Signextend
3216
Instruction[25– 21]
Instruction[20– 16]
Instruction[15– 0]
Instructionregister
ALUcontrol
ALUresult
ALUZero
Memorydata
register
A
B
IorD
MemRead
MemWri te
MemtoReg
PCWriteCond
PCWrite
IRWri te
ALUOp
ALUSrcB
ALUSrcA
RegDst
PCSource
RegWri te
Control
Outputs
Op[5–0]
Instruction[31-26]
Instruction [5– 0]
Mux
0
2
Jum paddress [31-0]Instruction [25– 0] 26 28
S hiftleft 2
PC [31- 28]
1
1 Mux
0
3
2
Mux
0
1ALUOut
Memory
MemData
Writedata
Address

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 140
• Figura 5.34 tabela com Sinais de Controle
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 141
• Divisão da execução de uma instrução em ciclos de clocke respectivos sinais de controle
1. Instruction fetch
O incremento do PC e leitura da da instrução è emparalelo:IR = Memory[PC];PC = PC + 4;Sinais ativados è MemRead (1), Irwrite (1), IorD (0 –PC como endereço), ALUSrcA (0 – PC para ULA),ALUSrcB (01 – 4 para a ULA), ALUOp (00 – add) ePCWrite (1 – o novo valor de PC não é visível até opróximo ciclo de clock).
2. Instruction decode e register fetch
Como temos regularidade no formato das instruções,podemos, sem saber a natureza da instrução, fazer:
• ler dois registradores do register file, mesmoque eles não sejam utilizados e armazená-losnos registradores A e B;
• computar os endereços de branch e guardá-lose ALUOut, mesmo que a instrução não venhaa ser um branch.
A = Reg[IR[25-21]];B = Reg[IR[20-16]];ALUOut = PC + (sign-extend (IR[15-0] << 2)
Sinais ativados: ALUSrcA (0 – PC vai para aULA), ALUSrcB (11- sign extended e shiftedenviado a UAL) e ALUOp (00 – add).
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 142
3. Execution, memory address computation ou branchcompletion
Primeira etapa determinada pelo tipo de instrução.Para cada classe temos:
• Referência à memória:
ALUOut = A + sign-extend (IR[15-0]);
Sinais ativados: ALUSrcA (1 - A para ULA),ALUSrcB (10 – saida da unidade sign-extensionpara a ULA) e ALUOp (00 - add).
• Instruções Aritméticas-lógicas ( R-type)
ALUOut = A op B;
Sinais ativados: ALUSrcA (1 - A para ULA),ALUSrcB (00 – B para a ULA) e ALUOp (10 – ocampo funct é usado para determinar os sianis decontrole da ULA).
• Branch
if ( A == B ) PC = ALUOut;
Sinais ativados: ALUSrcA (1 - A para ULA),ALUSrcB (00 – B para a ULA) e ALUOp (01 – subpara teste de igualdade), PCCondWrite (1 seZero=1) e PCSource (01 – PC recebe dado vindo deALUOut).

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 143
• Jump
PC = PC[31-28] || (IR[25-0]<<2)
Sinais ativados: PCSource(10- jump address paraPC) e PCWrite (1).
4. Memory access or R-type instruction completion
Nesta etapa, uma instrução de load ou store acessa amemória ou uma instrução R-type escreve seuresultado.
• Referência à memória
MDR = Memory [ALUOut]; - load
ou
Memory [ALUOut] = B; - store
Sinais ativados: MemRead (1 - para load) ouMemWrite (1 - para store), IorD ( 1 para load, paraque o endereço de memória venha da ULA).
• instruções R-type
Reg[IR[15-11]] = ALUOut;
Sinais ativados: RegDst ( 1 – campo rd (15-11)usado como entrada do register file para escrita),RegWrite (1) e Memto Reg (0 – para saida da ULAser escrita).
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 144
5. Memory read completion
• Load
Reg[IR[20-16]] = MDR;
Sinais ativados: MemtoReg ( 1 – para escrver oresultado da memória), RegWrite ( 1- escrita noregister file) e RegDst ( 0 – para escolher rt (20-16)como número do registrador).
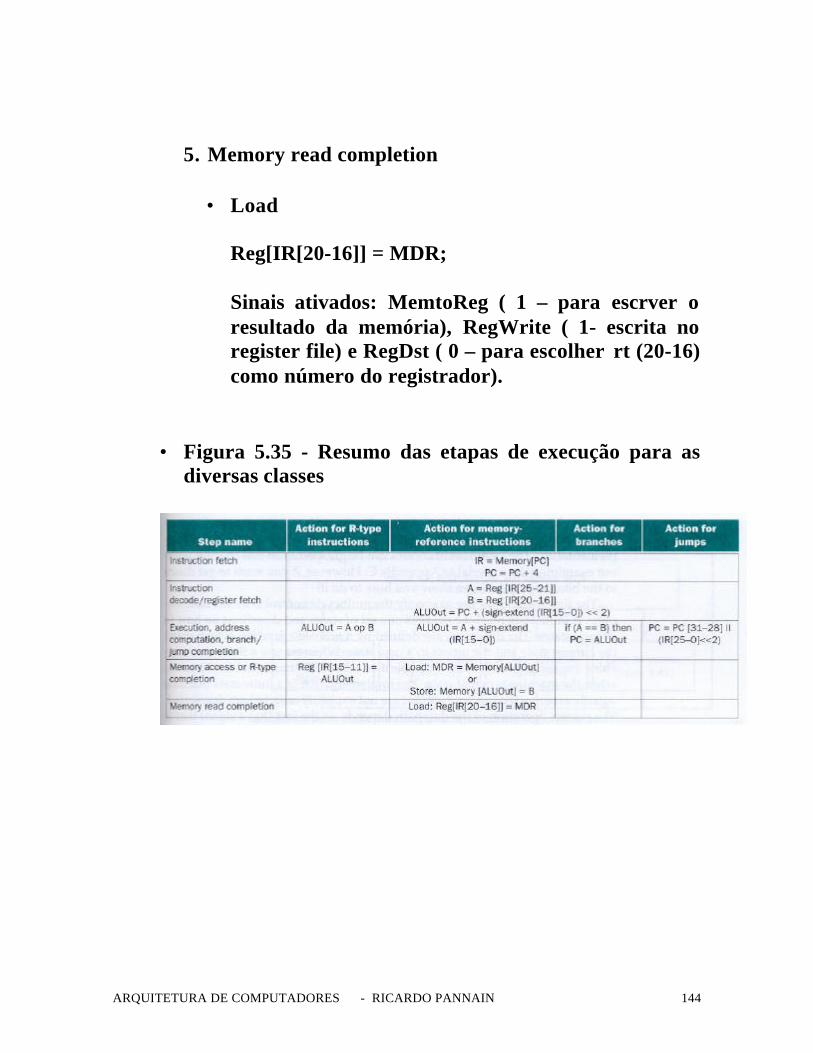
• Figura 5.35 - Resumo das etapas de execução para asdiversas classes
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 145
• Projeto da Unidade de Controle
• Máquinas de estados finitos è conjunto de estados ecomo estes estados podem mudar ( esta mudança àpróximo estado).
• Controle de estados finitos corresponde às cincoetapas de execução de uma instrução, onde cada etapaé executada em um ciclo de clock.
• Unidade de Controle implementada como máquina deestados finitos:
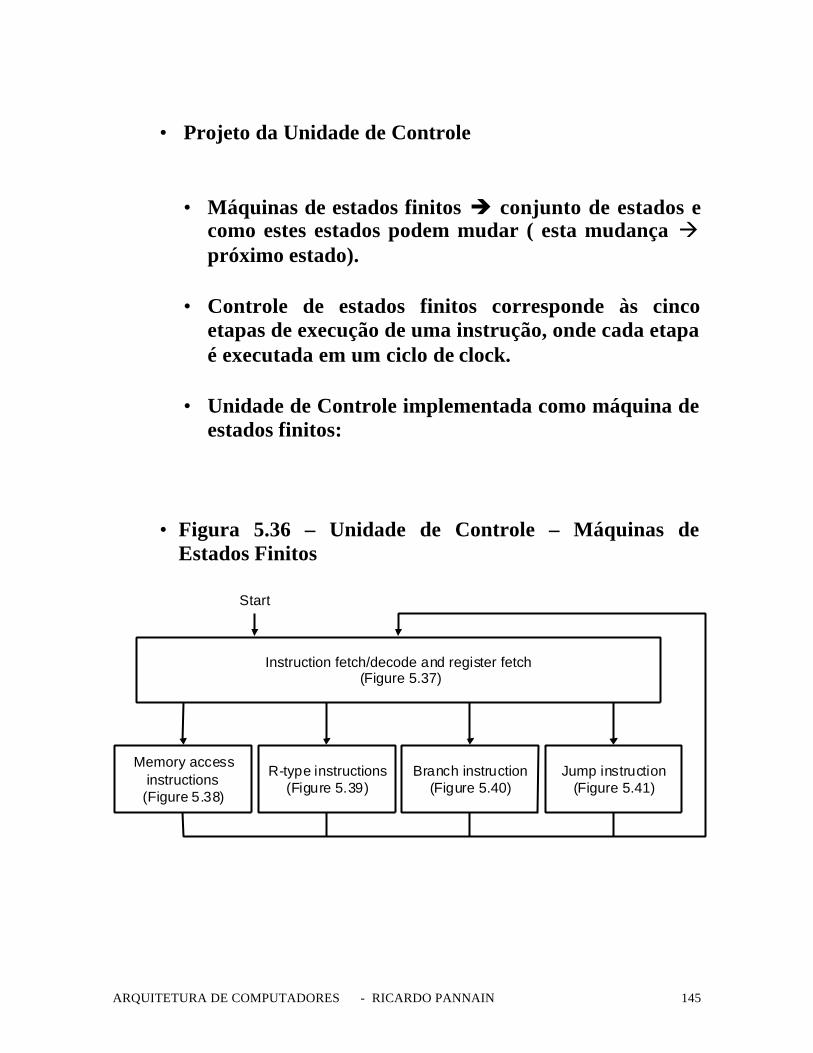
• Figura 5.36 – Unidade de Controle – Máquinas deEstados Finitos
Memory accessinstructions
(Figure 5.38)
R-type instructions(Figure 5.39)
Branch instruction(Figure 5.40)
Jump instruction(Figure 5.41)
Instruction fetch/decode and register fetch(Figure 5.37)
Start

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 146
• Figura 5.37 – Diagrama de estados - Instruction fetch einstruction decode/register fetch
ALUSrcA = 0ALUSrcB = 11ALUOp = 00
MemReadALUSrcA = 0
IorD = 0IRWrite
ALUSrcB = 01ALUOp = 00
PCWritePCSource = 00
Instruction fetchInstruction decode/
Register fetch
(Op = 'LW') or (Op = 'SW') (Op = R-typ
e)
(Op
= 'B
EQ')
(Op
= 'J
MP
')
01
Start
Memory reference FSM(Figure 5.38)
R-type FSM(Figure 5.39)
Branch FSM(Figure 5.40)
Jump FSM(Figure 5.41)
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 147
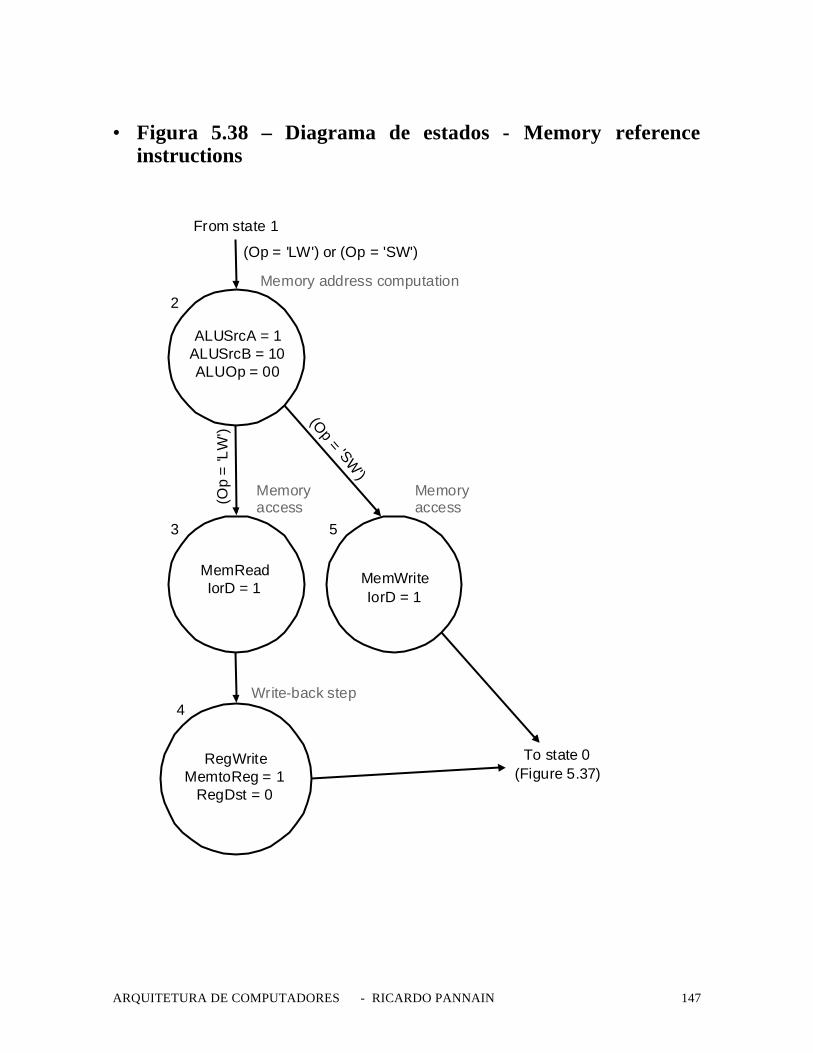
• Figura 5.38 – Diagrama de estados - Memory referenceinstructions
MemWriteIorD = 1
MemReadIorD = 1
ALUSrcA = 1ALUSrcB = 10ALUOp = 00
RegWriteMemtoReg = 1
RegDst = 0
Memory address computation
(Op = 'LW') or (Op = 'SW')
Memoryaccess
Write-back step
(Op = 'SW')
(Op
= 'L
W')
4
2
53
From state 1
To state 0(Figure 5.37)
Memoryaccess
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 148
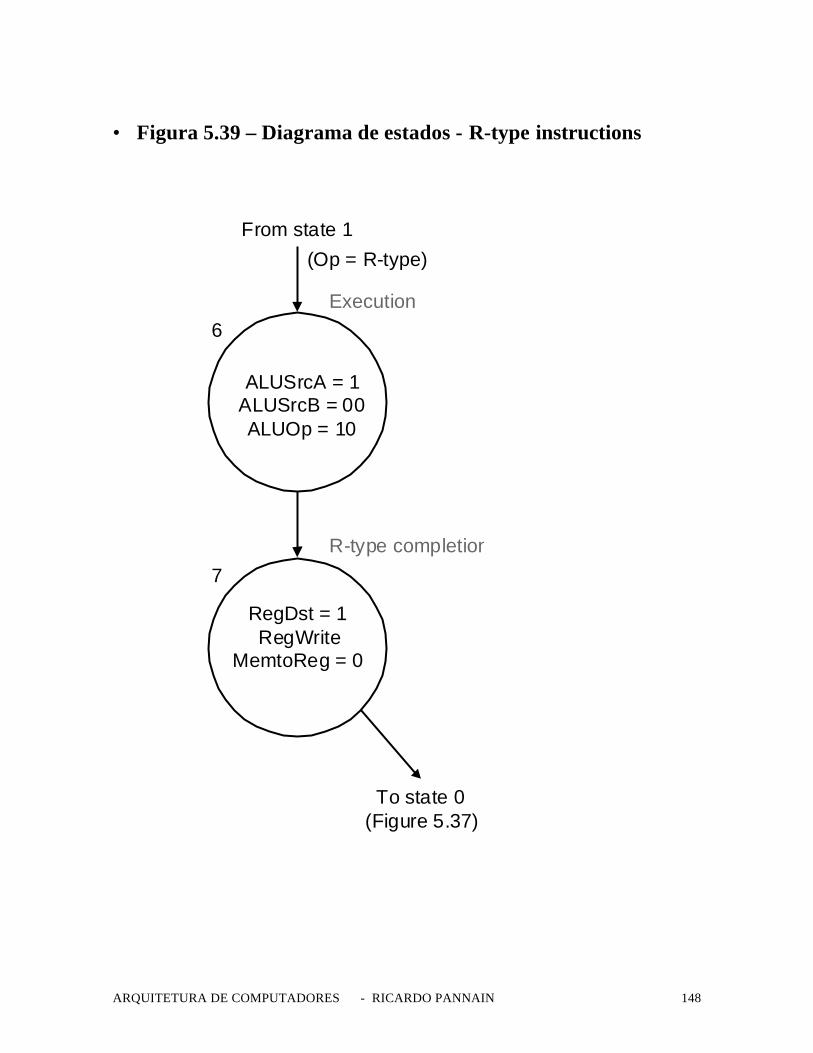
• Figura 5.39 – Diagrama de estados - R-type instructions
ALUSrcA = 1ALUSrcB = 00ALUOp = 10
RegDst = 1RegWrite
MemtoReg = 0
Execution
R-type completion
6
7
(Op = R-type)
From state 1
To state 0(Figure 5.37)

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 149
• Figura 5.40 – Diagrama de estados - Branch instructions
Branch completion8
(Op = 'BEQ')From state 1
To state 0(Figure 5.37)
ALUSrcA = 1ALUSrcB = 00ALUOp = 01PCWriteCond
PCSource = 01
• Figura 5.41 – Diagrama de estados - Jump instructions
Jump completion9
(Op = 'J')From state 1
To state 0(Figure 5.37)
PCWritePCSource = 10

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 150
• Figura 5.42 – Diagrama de estados - Figura Unidade deControle completa
PCWritePCSource = 10
ALUSrcA = 1ALUSrcB = 00ALUOp = 01PCWriteCond
PCSource = 01
ALUSrcA =1ALUSrcB = 00ALUOp = 10
RegDst = 1RegWrite
MemtoReg = 0
MemWriteIorD = 1
MemReadIorD = 1
ALUSrcA = 1ALUSrcB = 10ALUOp = 00
RegDst =0RegWrite
MemtoReg =1
ALUSrcA = 0ALUSrcB = 11ALUOp = 00
MemReadALUSrcA = 0
IorD = 0IRWrite
ALUSrcB = 01ALUOp = 00
PCWritePCSource = 00
Instruction fetchInstruction decode/
register fetch
Jumpcompletion
BranchcompletionExecution
Memory addresscomputation
Memoryaccess
Memoryaccess R-type completion
Write-back step
(Op = 'LW') or (Op = 'SW') (Op = R-type)
(Op
= 'B
EQ')
(Op
= 'J
')
(Op = 'SW
')
(Op
= 'L
W')
4
01
9862
753
Start
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 151
• CPI em uma CPU multicycles
Exemplo:
Usando a figura anterior o conjunto de instruções abaixo,qual a CPI, assumindo que cada estado necessita de 1 clicode clock ?
conjunto de instruções: 22% loads, 11% de stores, 49% deR-type, 16% de branches e 2% de jumps ( gcc ).
Solução:
O número de ciclos de clocks para cada classe é (da figuraanteiror):
• loads: 5• stores: 4• R-type : 4• branches : 3• jumps: 3
CPI = ciclos de clock da CPU / número de instruções èCPI = Σ (num. de instruçõesi X CPIi) / num. de instruçõesCPI = Σ ((num. de instruçõesi/ num. de instruções) X CPIi)
CPI = 0.22 X 5 + 0.11 X 4 + 0.49 X 4 + 0.16 X 3 + 0.02 X 3CPI = 4.04
4.04 é melhor que a CPI de uma CPU em que todas asinstruções tivessem o mesmo número de ciclos de clock (CPI pior caso = 5).

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 152
• Figura 5.43 - Implementação de uma Unidade de Controlecom máquina de estados finitos
Datapath control outputs
State registerInputs from instructionregister opcode field
Outputs
Combinationalcontrol logic
Inputs
Next state

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 153
• Microprogramação – Projeto simplificado da Unidade deControle
• Representação gráfica útil para pequenas máquinasde estados.
• Cada microinstrução tem o efeito de ativar os sinaisde controle especificados por elas
• Um microprograma é uma representação simbólicada unidade de controle que será traduzida por umprograma para a lógica de controle.
• O formato da microinstrução deve ser escolhida de talforma a simplificar sua representação.
• Para evitar microinstruções inconsistentes, cadacampo da microinstrução deve especificar umconjunto de sinais que não acontecemsimultaneamente.
• Figura 5.44 – Tabela com os sete campos da microinstrução

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 154
• As microinstruções são colocadas em uma ROM ouPLA.
• O endereçamento da microinstrução é dadoseqüencialmente.
• Existem 3 modos diferentes para escolher a próximamicroinstrução:
1. Incrementar o endereço da microinstruçãocorrente para obter ao endereço da próximamicroinstrução. Este comportamento é indicado,colocando Seq no campo de Seqüência.
2. Desviar para a microinstrução que inicia aexecução da próxima instrução (estado 0 - fetch).Este comportamento é indicado colocando Fetch nocampo de Seqüência.
3. Escolher a próxima microinstrução baseada ementradas da unidade de controle. Estecomportamento é chamado dispatch e é usualmenteimplementado criando uma tabela (implementadaem ROM ou PLA) contendo os endereços dasmicroinstruções alvo. Geralmente existe muitastabelas, neste caso temos duas a do estado 1 e a doestado 2. Isto é indicado no campo Seqüência porDispatch i, onde i é o número da tabela.
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 155
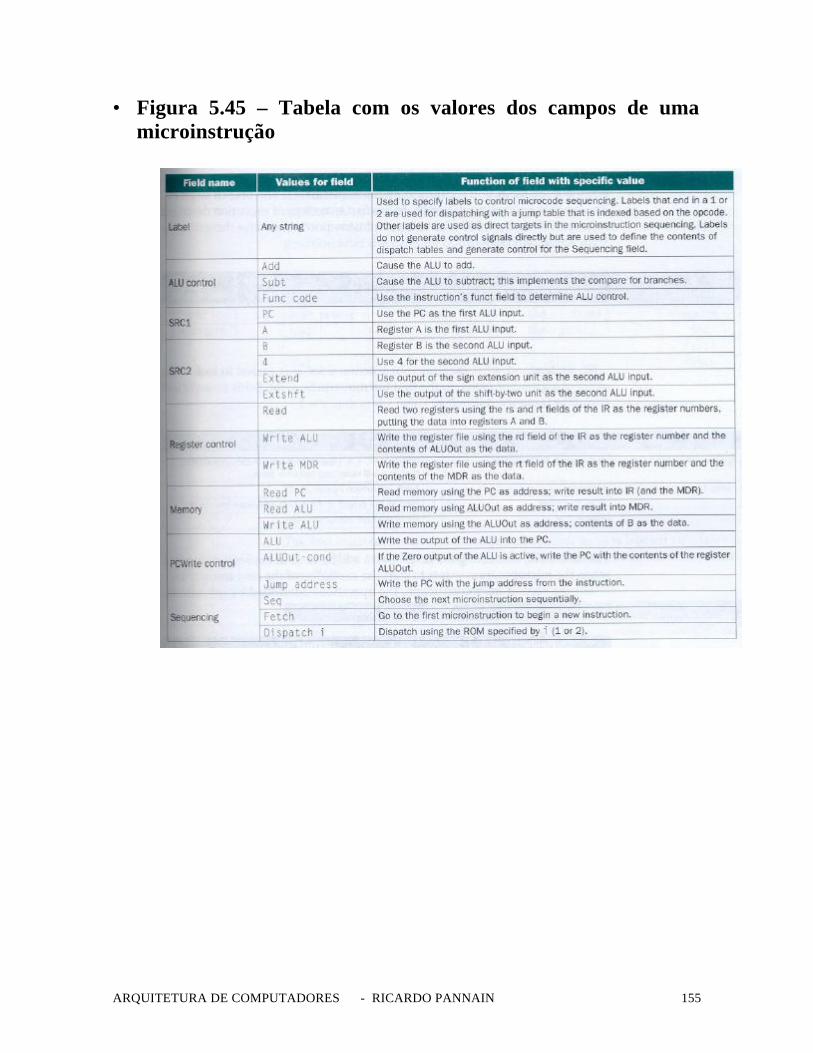
• Figura 5.45 – Tabela com os valores dos campos de umamicroinstrução
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 156
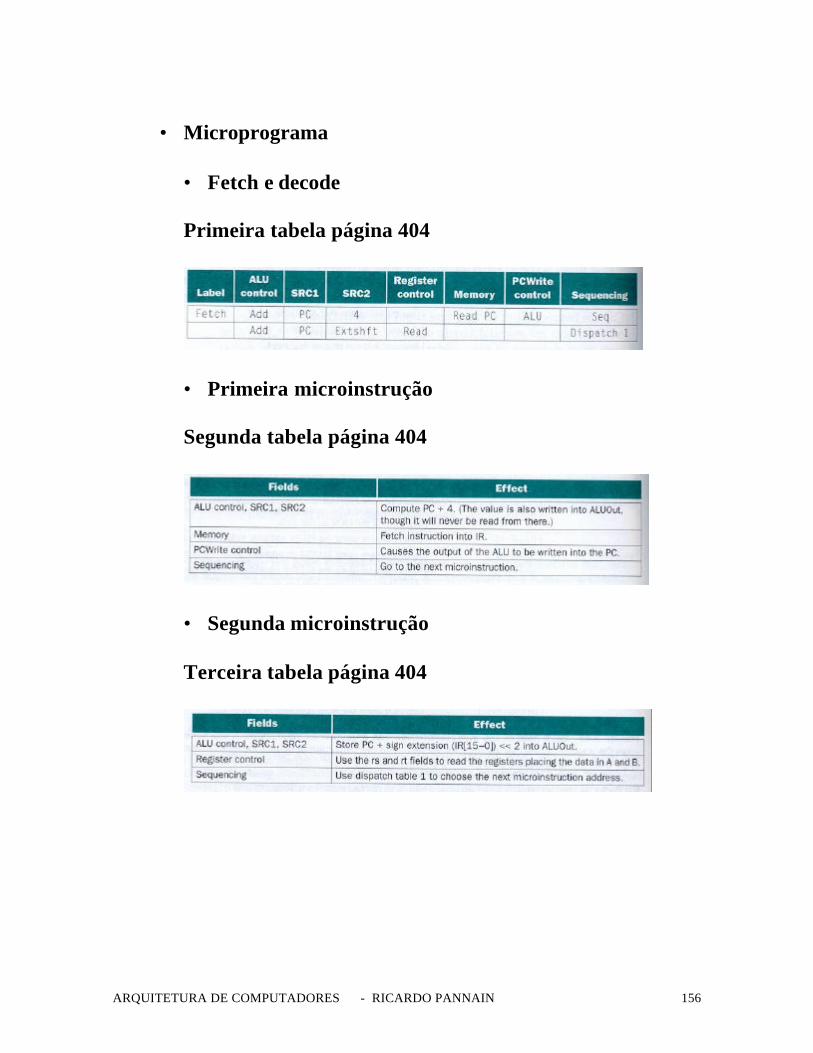
• Microprograma
• Fetch e decode
Primeira tabela página 404
• Primeira microinstrução
Segunda tabela página 404
• Segunda microinstrução
Terceira tabela página 404

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 157
• Dispatch table 1 é usada para selecionar uma das 4seqüências de microinstruções:
• Mem1 è instruções de referência à memória• Rformat1 è instruções R-type• BEQ1 è instruções beq• JUMP1 è instruções de jump
• Microprograma para Mem1
Tabelas da página 405 e primeira tabela da página 406
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 158
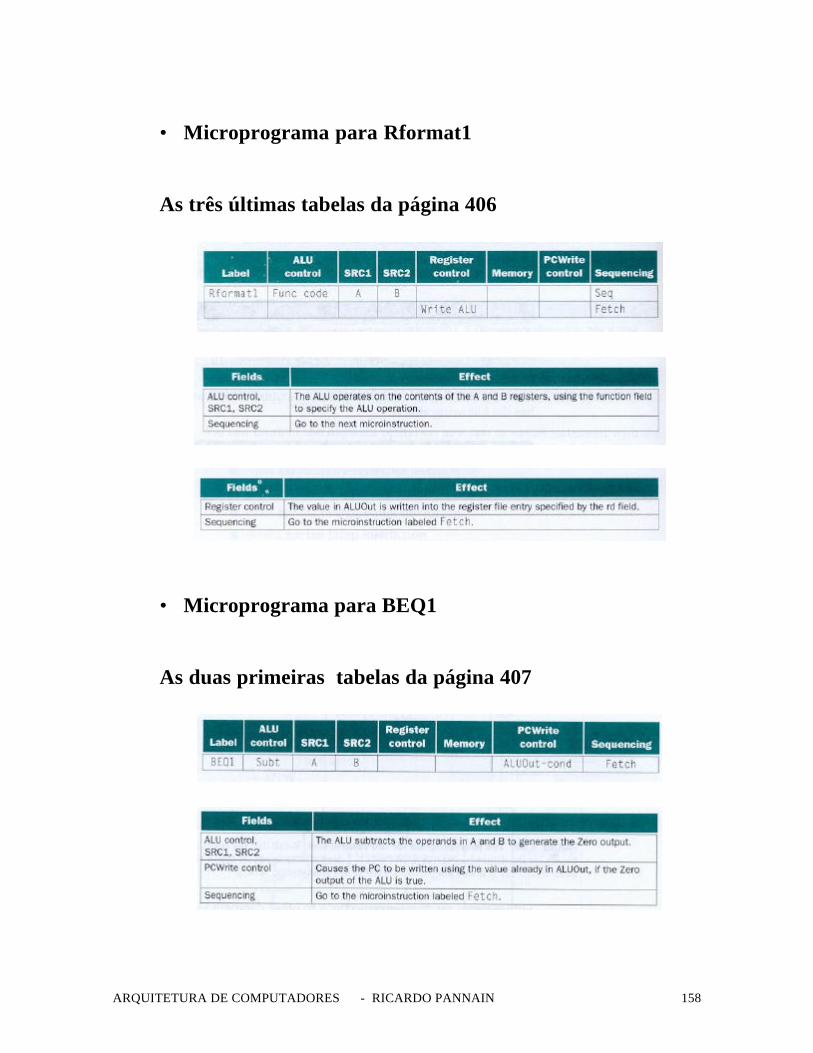
• Microprograma para Rformat1
As três últimas tabelas da página 406
• Microprograma para BEQ1
As duas primeiras tabelas da página 407

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 159
• Microprograma para JUMP1
As duas últimas tabelas da página 407
• Figura 5.46 - Microprograma para unidade de controle

ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 160
• Figura 5.47 - Implementação, em ROM, da Unidade decontrole microprogramada.
Microprogram counter
Address select logic
Adder
1
Input
Datapathcontroloutputs
Microcodestorage
Inputs from instructionregister opcode field
Outputs
Sequencingcontrol
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 161
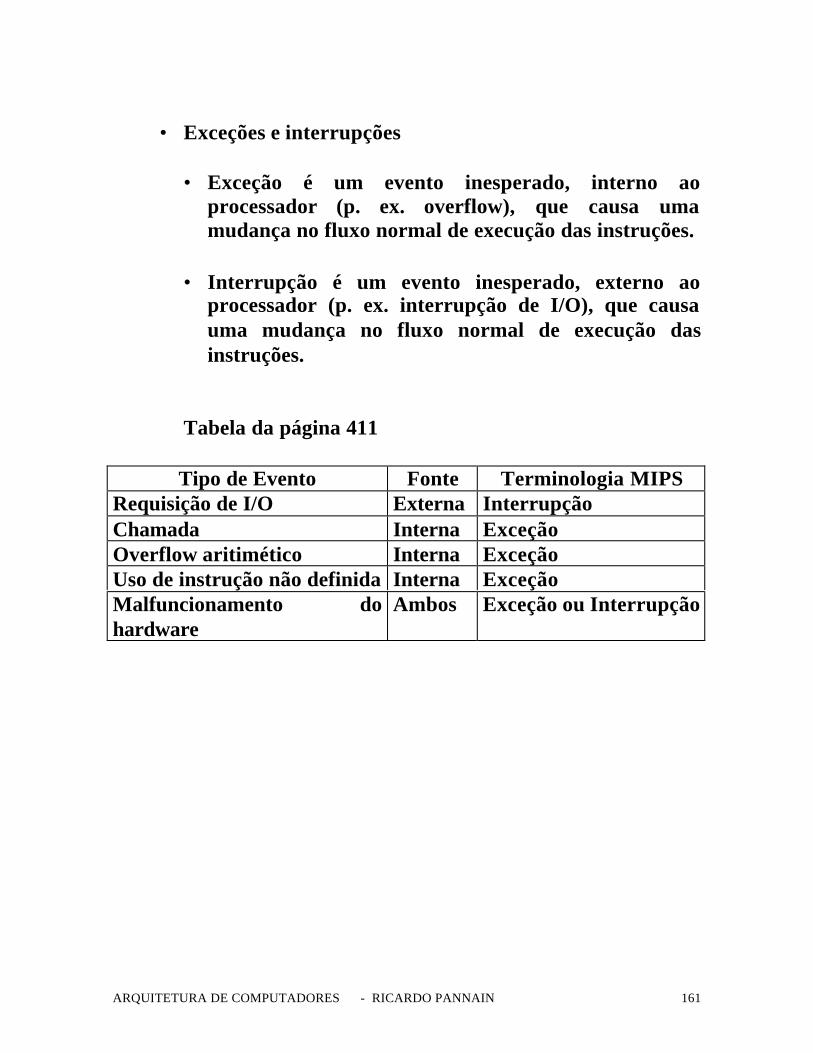
• Exceções e interrupções
• Exceção é um evento inesperado, interno aoprocessador (p. ex. overflow), que causa umamudança no fluxo normal de execução das instruções.
• Interrupção é um evento inesperado, externo aoprocessador (p. ex. interrupção de I/O), que causauma mudança no fluxo normal de execução dasinstruções.
Tabela da página 411
Tipo de Evento Fonte Terminologia MIPSRequisição de I/O Externa InterrupçãoChamada Interna ExceçãoOverflow aritimético Interna ExceçãoUso de instrução não definida Interna ExceçãoMalfuncionamento dohardware
Ambos Exceção ou Interrupção
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 162
• Detecção de exceção
• Dois tipos de exceção serão tratados: execução de umainstrução não definida e overflow aritmético.
• Quando ocorre uma exceção, o endereço da instruçãoafetada é guardada no EPC (exception programcounter) e o controle transferido ao sistemaoperacional em um endereço especificado.Dependendo da atitude do SO e do tipo de exceção, oprograma pode ser interrompido ou reiniciado apartir do endereço armazenado em EPC.
• Para o SO tratar a exceção, ele tem que conhecer qualé a exceção. Há duas maneiras:
• status register (Cause), que tem um campo queespecifica a exceção e
• vectored interrupts è o SO sabe a razão daexceção pelo endereço de entrada no vetor. O SOsabe a razão da exceção pelo endereço passadopara ele.
Tabela da página 412
Tipo de exceção Endereço no vetor de exçeções(hexa)Intrução não definida C0 00 00 00hex
Overflow aritimético C0 00 00 20hex
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 163
• Para tratar a exceção vamos supor o primeiro método.
• Temos 2 registradores extra: EPC de 32 bits, usadopara manter o endereço da instrução afetada e Cause(32 bits), usado para armazenar a causa da exceção.Vamos assumir que o bit menos significativo sejausado para codificar a causa da exceção ( instruçãoindefinida = 0 e overflow = 1)
• Precisamos de dois sinais de controle EPCWrite eCauseWrite, o sinal do bit menos significativo deCause – IntCause. Precisamos também escrever oendereço de exceção, no qual o SO entra para tratar amesma (supor C000000016).
• O multiplexador de entrada de PC dever ser alteradode 3 para 4 entradas (entrada C000000016).
• A ULA deve subtrair 4 do valor de PC para poderguardar em EPC.
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 164
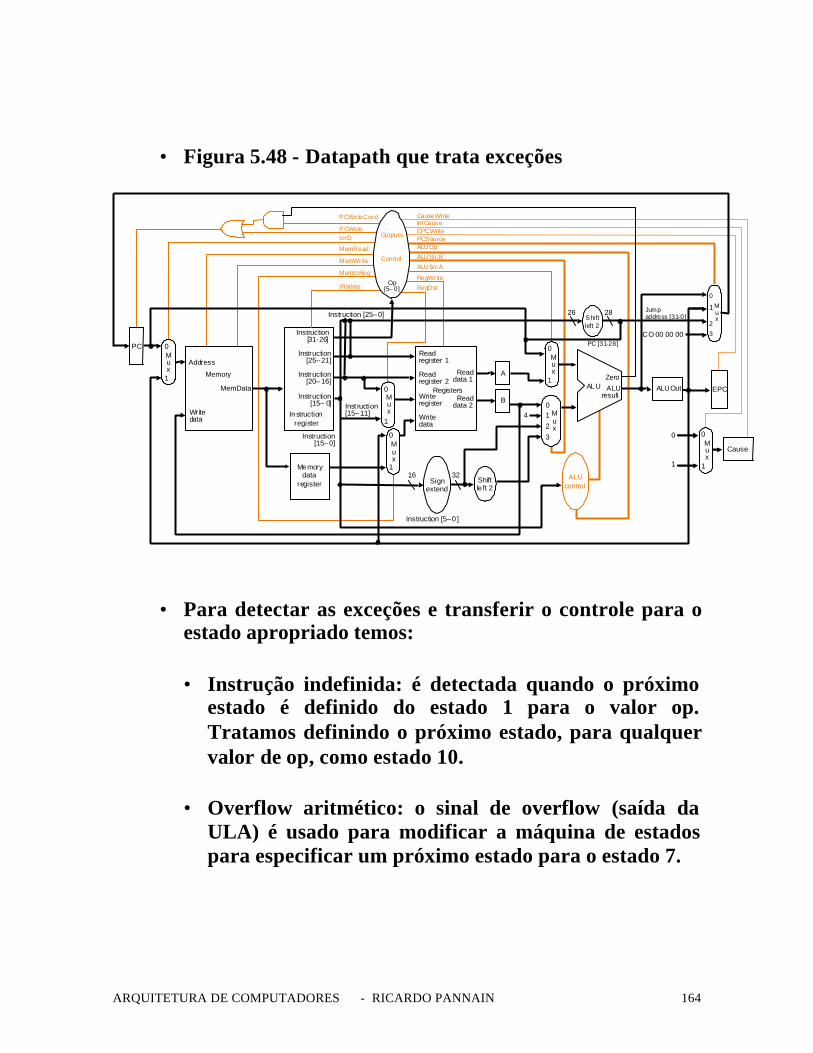
• Figura 5.48 - Datapath que trata exceções
Shiftle ft 2
Memory
MemData
Writedata
Mux
0
1
Inst ruction[15–11]
Mux
0
1
4
Instruction[15–0]
Signextend
3216
Instruction[25–21]
Instruction[20–16]
Instruction[15– 0]
Instructionregister
ALUcontrol
ALUresult
ALUZero
Memorydata
register
A
B
IorD
MemRead
MemWr ite
MemtoReg
PCWriteCond
PCWrite
IRWrite
Control
Outputs
Op[5– 0]
Instruction[31-26]
Instruction [5–0 ]
Mux
0
2
Jumpaddress [31-0]Instruction [25–0] 26 28
Shiftleft 2
PC [31-28]
1
Address
EPC
CO 00 00 00 3
Cause
ALUOp
ALUSrcB
ALUSrcA
RegDst
PCSource
RegWr ite
EPCWriteIntCauseCauseWrite
1
0
1 Mux
0
3
2
Mux
0
1
Mux
0
1
PC
Mux
0
1
RegistersWriteregister
Writedata
Readdata 1
Readdata 2
Readregister 1
Readregister 2
ALUOut
• Para detectar as exceções e transferir o controle para oestado apropriado temos:
• Instrução indefinida: é detectada quando o próximoestado é definido do estado 1 para o valor op.Tratamos definindo o próximo estado, para qualquervalor de op, como estado 10.
• Overflow aritmético: o sinal de overflow (saída daULA) é usado para modificar a máquina de estadospara especificar um próximo estado para o estado 7.
ARQUITETURA DE COMPUTADORES - RICARDO PANNAIN 165
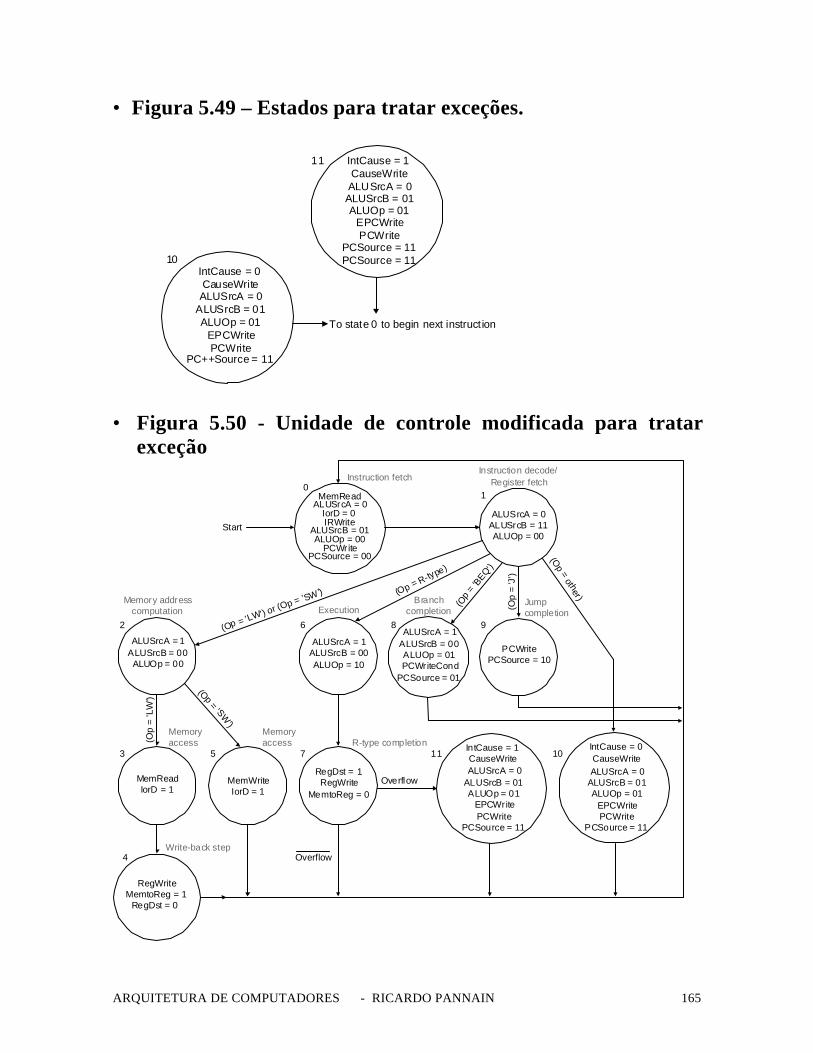
• Figura 5.49 – Estados para tratar exceções.
11
10
To state 0 to begin next instruct ion
PC++Source = 11
ALUSrcA = 0ALUSrcB = 01ALUOp = 01
EPCWritePCWrite
IntCause = 0CauseWrite
ALUSrcA = 0ALUSrcB = 01ALUOp = 01
EPCWritePCWrite
PCSource = 11PCSource = 11
IntCause = 1CauseWrite
• Figura 5.50 - Unidade de controle modificada para tratarexceção
ALUSrcA = 1ALUSrcB = 00ALUOp = 01PCWriteCond
PCSource = 01
ALUSrcA = 1ALUSrcB = 00ALUOp = 10
RegDst = 1RegWrite
MemtoReg = 0MemWriteIorD = 1
MemReadIorD = 1
ALUSrcA = 1ALUSrcB = 00ALUOp = 00
RegWriteMemtoReg = 1
RegDst = 0
ALUSrcA = 0ALUSrcB = 11ALUOp = 00
MemReadALUSrcA = 0
IorD = 0IRWrite
ALUSrcB = 01ALUOp = 00
PCWritePCSource = 00
Instruction fetchInstruction decode/
Register fetch
Jumpcompletion
BranchcompletionExecution
Memory addresscomputation
Memoryaccess
Memoryaccess R-type completion
Write-back step
(Op = 'LW') or (Op = 'SW') (Op = R-type)
(Op =
'BEQ')
(Op
= 'J
')
(Op = 'SW')
(Op
= 'L
W')
4
01
9862
7 11 1053
Start
(Op = other)
Overflow
Overflow
ALUSrcA = 0ALUSrcB = 01ALUOp = 01
EPCWritePCWrite
PCSource = 11
IntCause = 0CauseWrite
ALUSrcA = 0ALUSrcB = 01ALUOp = 01
EPCWritePCWrite
PCSource = 11
IntCause = 1CauseWrite
PCWritePCSource = 10








![O Consumo de Energia da Arquitetura DTSVLIW fileconsumo de energia do processador Alpha 21264 [2] com o consumo de uma implementação hipotética da arquitetura DTSVLIW equivalente,](https://static.fdocumentos.com/doc/165x107/5c5ec59709d3f2515c8cada5/o-consumo-de-energia-da-arquitetura-de-energia-do-processador-alpha-21264-2-com.jpg)