9. EXEMPLOS DE APLICAÇÃO DE DISPOSITIVOS FACTSantenor/pdffiles/it741/cap9.pdf · Esse modelo...
18
Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio LCEE-DSCE-FEEC-UNICAMP 9-1 9. EXEMPLOS DE APLICAÇÃO DE DISPOSITIVOS FACTS Neste capítulo são apresentadas algumas simulações de dispositivos que atuam como compensadores para regular o nível de tensão, amortecer oscilações de velocidade ou de potência, variações angulares, etc, que são funções típicas de dispositivos FACTS. 9.1 Simulação de CCT e RCT no meio de linha Consideremos o seguinte sistema constituído de uma máquina síncrona alimentando uma carga resistiva através de uma linha com baixas perdas, conforme mostrado na Figura 9.1: Compensado r (CCT/RCT ) L H H Figura 9.1 Sistema exemplo. No meio da linha iremos testar diferentes tipos de compensação, com capacitores shunt fixos ou dispositivos controlados, do tipo CCT ou RCT, para ver a sua forma de atuação. 9.1.1 Caso básico: sem compensação Considerando inicialmente que a chave no meio da linha esteja aberta, as tensões resultantes nas três barras são mostradas na Figura 9.2. Tim 100 50V 0V - 50V 0 50m 100m 150m 200m V1 Vm - L V Figura 9.2 Tensões nas três barras. Notar que a magnitude da tensão se reduz no sentido fonte → carga, conforme seria de se esperar. Pode-se também constatar que a abertura angular entre as tensões nodais aumenta no mesmo sentido, devido ao carregamento da linha.
-
Upload
nguyenquynh -
Category
Documents
-
view
217 -
download
0
Transcript of 9. EXEMPLOS DE APLICAÇÃO DE DISPOSITIVOS FACTSantenor/pdffiles/it741/cap9.pdf · Esse modelo...

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-1
9. EXEMPLOS DE APLICAÇÃO DE DISPOSITIVOS FACTS
Neste capítulo são apresentadas algumas simulações de dispositivos que atuam como
compensadores para regular o nível de tensão, amortecer oscilações de velocidade ou de potência,
variações angulares, etc, que são funções típicas de dispositivos FACTS.
9.1 Simulação de CCT e RCT no meio de linha
Consideremos o seguinte sistema constituído de uma máquina síncrona alimentando uma
carga resistiva através de uma linha com baixas perdas, conforme mostrado na Figura 9.1:
Compensador(CCT/RCT)
L
H H
Figura 9.1 Sistema exemplo.
No meio da linha iremos testar diferentes tipos de compensação, com capacitores shunt
fixos ou dispositivos controlados, do tipo CCT ou RCT, para ver a sua forma de atuação.
9.1.1 Caso básico: sem compensação
Considerando inicialmente que a chave no meio da linha esteja aberta, as tensões
resultantes nas três barras são mostradas na Figura 9.2.
T im
100
50V
0V
-50V
0 50m 100m 150m 200m
V1
Vm -
L V
Figura
9.2 Tensões nas três barras.
Notar que a magnitude da tensão se reduz no sentido fonte → carga, conforme seria de se
esperar. Pode-se também constatar que a abertura angular entre as tensões nodais aumenta no
mesmo sentido, devido ao carregamento da linha.

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-2
9.1.2 Caso 2: Capacitor fixo no meio da linha
C=100uF
L
Figura 9.3 Capacitor fixo no meio da linha.
Ligando-se um capacitor fixo no meio da linha, a tensão nesse ponto tende a subir devido à
sobre-compensação de reativos injetados pelo capacitor. O resultado é mostrado na Figura 9.4.
Observar que o efeito de correção da tensão no meio da linha também se manifesta no terminal da
carga.
40m 60m 80m 100m 120m 140m 160m 180m 200m
Tim
V1
Vm
200
100
0V
-
-
V L
Figura 9.4 Tensões nas barras com capacitor fixo no meio da linha.
9.1.3 Caso 3: CCT atuando e saída de 50% da carga
Inicialmente, com toda a carga ligada, o CCT está fora, sendo ligado na passagem da
tensão por zero em t=80ms. Em t=150ms metade da carga resistiva é desligada.
C=100uF
L
R3 R440 40
Figura 9.5 Entrada de CCT seguido de redução da carga.

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-3
O resultado é mostrado na Figura 9.6. Nota-se a elevação da tensão e um pequeno
transitório no momento da conexão (a tensão no meio da linha em 80ms não é exatamente zero).
Notar também o surto de tensão que aparece sobre a carga, devido à indutância da linha.
Ao conectar o CCT, as correntes nos dois ramos das linhas tornam-se distintas em amplitude e
fase, o que fica ainda mais acentuado com a saída parcial da carga. Observar a corrente capacitiva
(adiantada) que o CCT injeta.
50m 100m 150m 200mTim
V1 Vm
VL
-
132.93
I(L1
I(L2
10
-50m 100m 150m 200m
Tim
Figura 9.6 Tensões nas barras (acima) e correntes nas linhas (abaixo).
9.1.4 Caso 4: CCT atuando, saída de carga e atuação de RCT.
Uma vez que a tensão sobe com a redução da carga, vamos ligar um RCT para compensar
o efeito de variação da carga, como mostrado na Figura 9.7. O controle do RCT será fixo, com
ângulo de disparo tal que a tensão se mantenha no nível anterior à variação da carga.
C=100uF
L
R3 R4
40 40 RCT
100mH
Figura 9.7 Conexão de RCT no meio da linha.

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-4
As curvas resultantes são mostradas na Figura 9.8. Pode-se notar a entrada do RCT a partir
de aproximadamente t=160ms, restabelecendo a tensão que havia antes da carga sair em t=100ms.
As formas de onda descontínuas da corrente no RCT provocam elevado nível de distorção
harmônica, perceptível até mesmo na tensão.
200
300m50m 100m 150m 200m 250m20m Tim
V1
Vm
VL
-
I(RCTI(L1
I(L2
10
-50m 100m 150m 200m 250m20m Tim 300m
Figura 9.8 Tensões e correntes com RCT atuando após t=160ms.
Para ver melhor o que está ocorrendo, a Figura 9.9 mostra detalhes da distorção harmônica
introduzida pelo RCT.
250m 260m 270m 280m 290m 300m
V 1
V m
V L
200
-
I(R C T
I(L 1I(L2
4 .0
-
Figura 9.9 Detalhe da distorção introduzida pelo RCT (correntes acima, tensões abaixo).

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-5
9.1.5 Caso 5: Conexão de filtro sintonizado
A presença de 3a. Harmônica no caso anterior é nítida. As demais harmônicas ímpares,
associadas com a operação do RCT estão com nível mais baixo. Para observar o efeito de um
filtro sintonizado, vamos acrescentar um filtro de terceira harmônica, junto ao RCT.
L
R3 R4
40 40 RCT
Filtro 3h
100mH
Figura 9.10 Inserção de filtro sintonizado na 3a. harmônica.
Com atuação do filtro de terceira harmônica a partir de t=250ms resultam as curvas da
Figura 9.11. Notar a presença da corrente de 3a. harmônica no gráfico superior.
220m 240m 260m 280m 300m 315m
V1
Vm
VL
200
-
i(L1 i(L2
i(h3
i(RCT
10
-
Figura 9.11 Efeito do filtro de 3a. harmônica após t=250ms.
A atuação do filtro não é instantânea, mas as ondas de tensão e de corrente tornam-se
praticamente senoidais após t=300ms.
Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-6
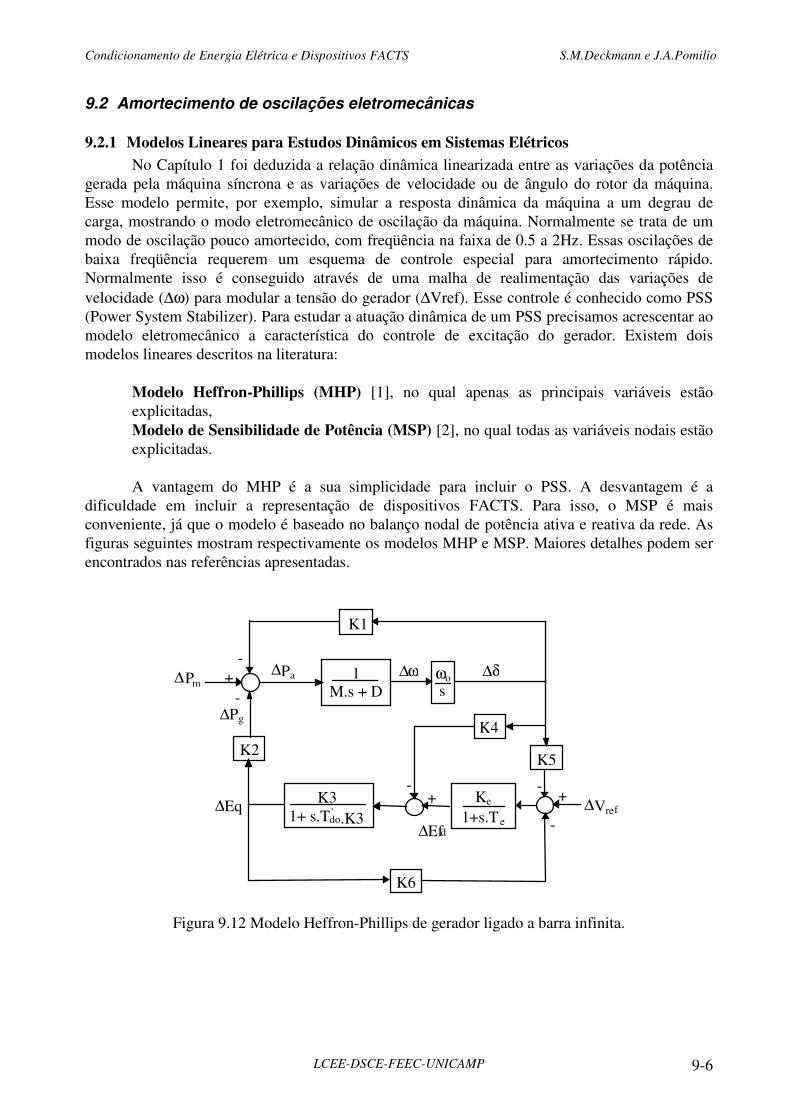
9.2 Amortecimento de oscilações eletromecânicas
9.2.1 Modelos Lineares para Estudos Dinâmicos em Sistemas Elétricos
No Capítulo 1 foi deduzida a relação dinâmica linearizada entre as variações da potência
gerada pela máquina síncrona e as variações de velocidade ou de ângulo do rotor da máquina.
Esse modelo permite, por exemplo, simular a resposta dinâmica da máquina a um degrau de
carga, mostrando o modo eletromecânico de oscilação da máquina. Normalmente se trata de um
modo de oscilação pouco amortecido, com freqüência na faixa de 0.5 a 2Hz. Essas oscilações de
baixa freqüência requerem um esquema de controle especial para amortecimento rápido.
Normalmente isso é conseguido através de uma malha de realimentação das variações de
velocidade (∆ω) para modular a tensão do gerador (∆Vref). Esse controle é conhecido como PSS
(Power System Stabilizer). Para estudar a atuação dinâmica de um PSS precisamos acrescentar ao
modelo eletromecânico a característica do controle de excitação do gerador. Existem dois
modelos lineares descritos na literatura:
Modelo Heffron-Phillips (MHP) [1], no qual apenas as principais variáveis estão
explicitadas,
Modelo de Sensibilidade de Potência (MSP) [2], no qual todas as variáveis nodais estão
explicitadas.
A vantagem do MHP é a sua simplicidade para incluir o PSS. A desvantagem é a
dificuldade em incluir a representação de dispositivos FACTS. Para isso, o MSP é mais
conveniente, já que o modelo é baseado no balanço nodal de potência ativa e reativa da rede. As
figuras seguintes mostram respectivamente os modelos MHP e MSP. Maiores detalhes podem ser
encontrados nas referências apresentadas.
-
∆ P a
∆ P g
∆ P m + 1
M.s + D ω o s
∆ δ ∆ ω
∆ V re f 1+ s.T ’ do
K e 1+s.T e
∆ Ef d
K5
K6
K2
K1
K4
K3
.K3
- +
-
-
-
+ ∆ Eq
Figura 9.12 Modelo Heffron-Phillips de gerador ligado a barra infinita.

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-7
9.2.2 Estabilizador de oscilações (PSS)
Como já foi dito, a ação do PSS é introduzida através da realimentação das variações de
velocidade do gerador (∆ω) para modular a tensão de referência do sistema de excitação. Uma
função de transferência adequada deve permitir o ajuste do ganho e a compensação do atraso de
fase introduzido pelo sistema de excitação. Para isso é usado um circuito de avanço/atraso
(lead/lag) de segunda ordem. Além disso, um filtro passa-alta (washout) também é necessário para
eliminar o efeito de desvios em regime permanente.
∆Vt
-
∆(Q/V)
∆E’q
∆δ
∆θ
∆θ ∆P
∆Vref
∆Pac
∆Pg
∆Pm
-
-
-
-
-
+
+
+
+ +
+ + +
+
+
+
+ Ke
1+s.Te
A2e
A3g
A1g A2g
A1g
R1e
R1g
R2g
KA KV
X’d / Xd
1+s.T’do.X
’d / Xd
1
R2e - R3g
1
A1g + A1e
1
M.s + D ωo
s
-
reativo ativo
lento
rápido
∆δ ∆ω
∆Efd
Figura 9.13 Modelo de Sensibilidade de Potência para gerador ligado a barra infinita.
A Figura 9.14 representa a função típica de um PSS:
∆ω KPSS ∆Vtpss
ganhowash-out lead-lag1 lead-lag2
Tw.s
1+Tw.s
1+T1.s
1+T2.s1+T3.s
1+T4.s
Figura 9.14 Função de transferência de um PSS.
Os valores dos parâmetros devem ser ajustados cuidadosamente para proporcionar a ação
de amortecimento desejada. Em geral Tw é da ordem de 10s, enquanto que T1 e T2 dependem do

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-8
avanço de fase requerido na freqüência de oscilação pela malha de controle de atuação. Para haver
avanço de fase, é necessário que a relação
aT
T= 1
2
(9.1)
seja maior do que 1 (T1>T2). Nessa condição, o avanço de fase φ será dado por:
sena
aφ =
−
+
1
1 (9.2)
9.2.3 Exemplo: Gerador ligado a barramento infinito
Para mostrar como esses processos de compensação dinâmica são eficazes, vamos utilizar
um sistema simples para simular uma perturbação de torque mecânico em um gerador síncrono de
polos lisos com reatância transitória X'd, ligado a um sistema infinito por meio de uma linha sem
perdas e com reatância Xe.
E'q∠δ
jXejX'd
Vt∠θt V0∠0
Figura 9.15 Gerador ligado a barramento infinito.
Para uma dada condição de operação, o modelo Heffron-Phillips resulta nos seguintes
parâmetros para simulação no PSpice:
Pm
Pe
Pss
Figura 9.16 MHP para obter a resposta em malha aberta.

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-9
A figura 9.17 mostra a resposta em freqüência do modelo H-P em malha aberta
(∆Pe/∆Pm). Fica claro que se trata de um modo característico com freqüência de ressonância em
torno de 1Hz.
Figura 9.17 Resposta em malha aberta do MHP.
A figura 9.18 mostra as oscilações de velocidade e ângulo do rotor em relação ao valor de regime.
Figura 9.18 Modo eletromecânico de oscilação devido a degrau de carga.
Para mostrar a atuação do PSS vamos acrescentar a malha de realimentação necessária
entre ∆ω e ∆Vref. A figura 9.19 mostra o esquema que será utilizado. Para ajustar os parâmetros
dos blocos lead-lag temos que saber qual a resposta em freqüência do sistema através do caminho
de atuação do controle. A figura 9.20 mostra o MHP com o PSS. A figura 9.21 representa as
diversas respostas em freqüência para a compensação de fase requerida.

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-10
Ganho
W ash-out
Lead-lag1 Lead-lag2
∆ω
∆ Pss
>
<
Figura 9.19 Esquema para representar o PSS.
∆ω ∆δ
∆ Pss
∆ Pm
∆ Pe
Figura 9.20 Modelo H-P com malha do PSS.

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-11
∆ ∆ω Pe /
Graus
Figura 9.21 Resposta em freqüência, malha aberta, do sistema com compensação.
A figura 9.22 mostra a resposta ao degrau com e sem a atuação do PSS. Notar que tanto a
velocidade como a posição angular se estabilizam rapidamente com a ação do PSS.
Figura 9.22 Atuação do PSS
Esse método de controle é eficiente para as oscilações dos geradores ou seja para os modos
locais. No entanto, existem também modos de oscilação inter-áreas (entre conjuntos de
máquinas). Esses modos em geral são de freqüência ainda mais baixa (0.2-0.5Hz) e para
amortecer esses modos, que envolvem máquinas distantes entre si, é necessário instalar
compensadores nas linhas de interligação sujeitas às oscilações de potência. Essa é uma das
aplicações dos compensadores série controlados.
Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-12
9.3 Compensação série
As primeiras aplicações de compensação série de linhas de transmissão utilizaram
capacitores fixos e serviam para "encurtar" eletricamente as linhas longas. Essas estruturas de
compensação fixa acarretavam algumas dificuldades de proteção durante transitórios decorrentes
das grandes variações de corrente durante curto-circuito, que se convertiam em sobretensões na
rede.
Com o uso de tiristores surgiu a possibilidade do chaveamento rápido, permitindo desviar
as correntes através de chaves eletrônicas, como no compensador série chaveado por tiristores
(CSChT):
C1
I
Cn
I
Figura 9.23 Módulos de capacitores série chaveados por tiristores.
Da mesma forma que no compensador "shunt", os tiristores só podem ser chaveados sob
tensão nula para evitar picos de corrente. Isto restringe a operação desse tipo de compensador a
variações dinâmicas lentas. Por outro lado, modos de oscilação de baixa freqüência podem ser
excitados por esse chaveamento, tais como ressonância sub-síncrona (10-30Hz) e mesmo
oscilações eletromecânicas (1-2Hz).
Uma maneira de se melhorar a resposta de um CSChT é acrescentar um reator em série
com os tiristores. Nessa configuração sabemos que os tiristores podem ser controlados
continuamente na faixa entre 90 e 180°, resultando o compensador série controlado por tiristores
(CSCoT).
C
I
L
Figura 9.24 Compensador série controlado por tiristores.
Neste caso pode-se dimensionar o par capacitor/indutor de forma que resulte uma
compensação reativa nos dois quadrantes (indutivo ou capacitivo), dependendo do ângulo de
disparo dos tiristores. Por exemplo, supondo que para disparo em 120° a reatância indutiva
equivalente seja igual à reatância capacitiva, resultará compensação capacitiva para disparos
acima (entre 120 e 180°) e compensação indutiva para disparos abaixo (entre 90 e 120°). Devido
à faixa de controle contínuo, esse tipo de compensador série não apresenta os problemas de
sobretensões e pode amortecer as oscilações de potência na linha.
Por outro lado, são produzidos harmônicos pelo RCT dessa estrutura. Sistemas práticos
mostraram, no entanto, que as indutâncias das linhas e transformadores atuam como filtros,
evitando que tais harmônicos se manifestem em níveis significativos ao longo da rede. Isso torna

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-13
essa estrutura bastante atraente como compensador série reativo controlado em altas potências
devido à já consagrada tecnologia dos tiristores.
9.3.1 Compensação da reatância série
As aplicações de dispositivos FACTS como estabilizadores prevêem a instalação de
compensadores série controlados (CSC) que tenham a capacidade de modular a reatância série da
linha de modo a atenuar as oscilações do fluxo de potência através da mesma. No nosso exemplo
é inserido um CSCT no meio da linha com a função de amortecer as oscilações de potência ativa,
de origem eletromecânica.
XL
XcVm1Vm2
E'q∠δ
X'd
Vt∠θt
Xe/2 Xe/2
V0∠0
CSCT
Figura 9.25 Sistema teste para compensação série.
Sabemos que a potência ativa na linha sem compensador é dada por:
PeVt Vo
Xesin t=
.( )θ (9.3)
Com compensador reativo teremos uma variação da reatância série ∆Xe, resultando:
PeVt Vo
Xe Xesin t=
+
.( )
∆θ (9.4)
onde ∆Xe é a variável de controle usada para amortecer as oscilações de potência através do
CSCT. Como sintetizar esse controle?
Da equação (9.3) podemos obter a relação de sensibilidade entre o fluxo de potência na
linha e a reatância série:
SPe
Xe
Vt Vo
Xesin
Pe
XePX t= = − = −
∂
∂θ
.( )
2 (9.5)
que permite estabelecer uma lei de controle linearizada em torno do ponto de operação, da
seguinte forma:
∆ ∆Pe S XePX= − . (9.6)
∆∆
∆XePe
S
Xe
PePe
PX
= − = 0
0
. (9.7)

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-14
isto é, para um ponto de operação específico {Xe0, Pe0}, a correção da reatância série será
proporcional à variação da potência na linha.
O compensador deverá introduzir uma susceptância equivalente que é o inverso de ∆Xe:
BXe
B BCγ σ= = −1
∆( ) (9.8)
onde Bc corresponde a uma parcela fixa de compensação capacitiva série. Portanto, a susceptância
a ser sintetizada pelo compensador vale:
B B BPe
Xe PeCc( ) .σ γ ω= + = +0
0
1
∆ (9.9)
1/∆Pe KPe
Xeγ = 0
0
Função
linearizadora
Geração
dos
pulsos
Bσ σ α
α + π
αmax
αmin
αBγ
Bc
++
1/∆Pemin
1/∆Pemax
Figura 9.26 Controle do CSCT para amortecer oscilações de potência.
Esse controle requer uma zona morta para não atuar quando as variações de potência são
muito pequenas. Além disso, devido à função inversa na entrada, é preciso limitar o sinal na
passagem de ∆Pe por zero. Com isso resulta uma característica interessante que é um controle tipo
bang-bang. O controle faz com que o compensador chaveie ±∆Xe até que a oscilação seja
eliminada. Em aplicações práticas se verificou que basta chavear 2 a 3 vezes para amortecer as
oscilações. Além disso, basta uma pequena compensação (∆Xe da ordem de 5%) para obter o
amortecimento necessário.
0
- 0 . 2 5
- 0 . 2
- 0 . 1 5
- 0 . 1
- 0 . 0 5
0 . 0 5
0 . 1
0 2 4 6 8 1 0
s e c
o s c i l a ç ã o d o a n g u l o d o r o t o r
1
2
1 - s e m c o m p e n s a d o r
2 - c o m c o m p e n s a d o r δ δ
Figura 9.27 Oscilações do ângulo do gerador sem/com estabilizador.

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-15
-0.1
-0.05
0
0.05
0 2 4 6 8 10
Xe (CSC) ∆ Pu
sec
Variável de controle
Figura 9.28 Variação da reatância da linha durante estabilização.
Neste exemplo a reatância da linha era Xe = 0,4pu. Da Figura 9.28 se observa que a
variação máxima de ∆Xe foi de 0,02pu, ou seja de 5%. Após 4 chaveamentos a oscilação foi
eliminada. Como o ganho de controle utilizado foi baixo, não ocorreu a ação do limitador.
Ao se utilizar tiristores para chavear elementos reativos na linha, consegue-se praticamente mudar
a reatância equivalente e portanto afetar apenas a abertura angular sem mudar significativamente o
perfil de tensões da linha. Já vimos anteriormente essa situação através dos diagramas vetoriais
das Figuras 5.24a e b.
9.3.2 Controle da abertura angular
Uma outra forma de amortecer as oscilações inter-áreas é fazer o controle da abertura
angular da linha. A vantagem desse controle é que se pode estabelecer o valor médio do fluxo de
potência através da linha , porém é necessário medir a diferença angular das tensões nas
extremidades da linha (medição remota).
Para ilustrar como esse controle atua vamos usar o esquema de simulação da Figura 9.29.
A idéia é introduzir um capacitor série (CSC) na linha que compense as variações angulares
medidas. Neste exemplo, as oscilações de potência na linha serão impostas pela modulação da
carga ativa. Um esquema de medição da abertura angular e filtragem é usado para gerar o sinal de
realimentação ao CSC.
Carga modulada
Detetor de defasagem
Filtro passa-baixas
Figura 9.29 Controle da abertura angular usando CSC.

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-16
A Figura 9.30 mostra o efeito de modulação da carga sobre a tensão. Essa variação da
amplitude em 1Hz pode provocar o efeito flicker.
Figura 9.30 Variação da tensão devido à modulação da carga.
A Figura 9.31 mostra as tensões nas duas extremidades da linha sem a compensação série.
Figura 9.31 Tensões terminais da linha sem compensação.
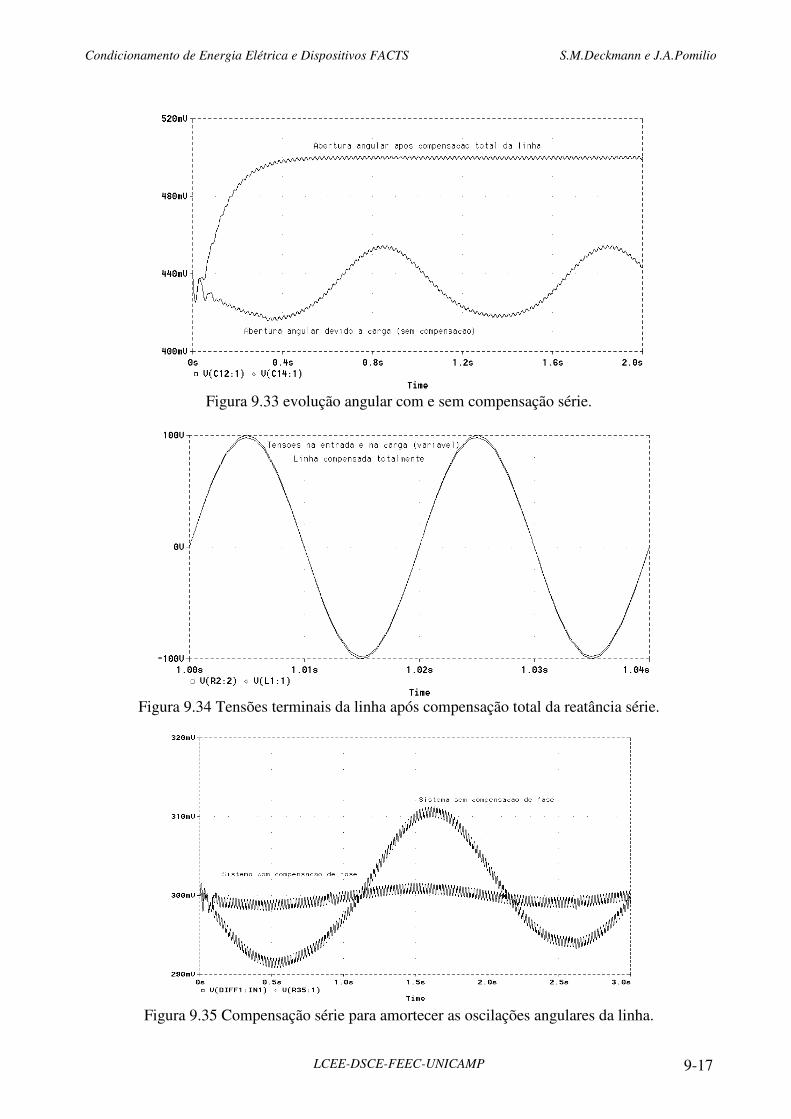
A figura 9.32 mostra como evolui a abertura angular antes da compensação e depois. Notar
que desapareceram as oscilações, porém o ângulo de operação mudou. Abertura angular zero
corresponde aproximadamente a 500mV do sinal.
A Figura 9.34 mostra as tensões terminais após a compensação série total. O fato da
abertura angular ter-se reduzido e as magnitude serem quase iguais mostra que de fato houve
compensação total da reatância da linha.
Pode-se modificar o controle para absorver apenas as oscilações da potência, de modo que
a abertura angular média seja mantida constante. O resultado desse controle é mostrado na Figura
9.35.
Notar que a oscilação neste caso particular é de 0.5 Hz. Observando-se o que ocorre com
as tensões terminais da linha, percebe-se que apenas a oscilação angular foi eliminada. Tomando-
se dois casos extremos separados de meio período da oscilação, por exemplo, em 0.5 e 1.5
segundos, percebe-se que a compensação atuou no sentido de manter a abertura angular constante.
Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-17
Figura 9.33 evolução angular com e sem compensação série.
Figura 9.34 Tensões terminais da linha após compensação total da reatância série.
Figura 9.35 Compensação série para amortecer as oscilações angulares da linha.

Condicionamento de Energia Elétrica e Dispositivos FACTS S.M.Deckmann e J.A.Pomilio
LCEE-DSCE-FEEC-UNICAMP 9-18
Tensão de entrada
Tensão s/ compensação
Tensão c/ compensação
t=0,5s
Figura 9.36 Tensões terminais para ponto de mínima abertura.
Tensão de entrada
Tensão s/ compensação
Tensão c/ compensação
t=1,5s
Figura 9.37 Tensões terminais para máxima abertura angular.
9.4 Referências Bibliográficas
[1] De Mello, F.P. e Concordia, C. "Concepts of Synchronous Machine Stability as Affected
by Excitation Control". IEEE Transactions on Power Apparatus and Ssystems, Apr. 1969
[2] Deckmann, S.M. e da Costa, V.F. “Power Sensitivity Model for Eletro-mechanical
Oscillation Studies”. IEEE Trans. Power System, Vol 9, No. 3, May 1994.