
ANÁLISE DA RASTREABILIDADE EM SISTEMAS PARA … · para obtenção do grau de Mestre em Metrologia...
148
UNIVERSIDADE FEDERAL DE SANTA CATARINA Programa de Pós-Graduação em Metrologia Científica e Industrial MAURÍCIO GILLER ANÁLISE DA RASTREABILIDADE EM SISTEMAS PARA CALIBRAÇÕES REMOTAS DE PADRÕES DE FREQÜÊNCIA Dissertação submetida à Universidade Federal de Santa Catarina para obtenção do grau de Mestre em Metrologia Orientador: Prof. Carlos Alberto Flesch, Dr. Eng. Florianópolis, março de 2007
Transcript of ANÁLISE DA RASTREABILIDADE EM SISTEMAS PARA … · para obtenção do grau de Mestre em Metrologia...
UNIVERSIDADE FEDERAL DE SANTA CATARINA
Programa de Pós-Graduação em Metrologia Científica e Industrial
MAURÍCIO GILLER
ANÁLISE DA RASTREABILIDADE EM SISTEMAS PARA CALIBRAÇÕES REMOTAS
DE PADRÕES DE FREQÜÊNCIA
Dissertação submetida à Universidade Federal de Santa Catarina para obtenção do grau de Mestre em Metrologia
Orientador: Prof. Carlos Alberto Flesch, Dr. Eng.
Florianópolis, março de 2007

ANÁLISE DA RASTREABILIDADE EM SISTEMAS PARA CALIBRAÇÕES REMOTAS
DE PADRÕES DE FREQÜÊNCIA
MAURÍCIO GILLER
Esta dissertação foi julgada adequada para a obtenção do título de
“MESTRE EM METROLOGIA”
e aprovada na sua forma final pelo
Programa de Pós-Graduação em Metrologia Científica e Industrial
Prof. Carlos Alberto Flesch, Dr. Eng – Orientador
Prof. Armando Albertazzi Gonçalves Jr., Dr.Eng – Coordenador do Curso
BANCA EXAMINADORA:
Prof. Armando Albertazzi Gonçalves Jr., Dr. Eng.
Prof. Ivan Mourilhe Silva, M. Sc.
Prof. Marcelo Ricardo Stemmer, Dr. Ing.
Prof. Marco Antonio Martins Cavaco, Ph. D.
AGRADECIMENTOS
Ao Programa Programa de Pós-Graduação em Metrologia Científica e
Industrial, que me proporcionou uma alta capacitação, e a todos os professores, que
muito contribuíram para isso.
Ao Instituto de Tecnologia do Paraná, por possibilitar e patrocinar a
realização do mestrado que resultou nesta dissertação.
Ao Serviço da Hora do Observatório Nacional do Rio de Janeiro,
pelo apoio técnico e logístico, imprescidível para a obtenção dos
resultados.
Ao Professor Carlos Alberto Flesch, pela dedicação, paciência e orientação
neste trabalho e por todo o apoio e amizade nesse período.
Aos membros da Banca, Prof. Armando Albertazzi Gonçalves Jr., Prof. Ivan
Mourilhe Silva, Prof. Marcelo Ricardo Stemmer e Prof. Marco Antonio Martins
Cavaco, pelas valiosas contribuições para a versão final desse documento.
Aos colegas de trabalho e à minha família, por proporcionarem o suporte
necessário em minhas ausências.

SUMÁRIO
LISTA DE ILUSTRAÇÕES.................................................................................................................................7
LISTA DE QUADROS ........................................................................................................................................9
LISTA DE ABREVIATURAS ............................................................................................................................11
RESUMO ..........................................................................................................................................................13
ABSTRACT ......................................................................................................................................................14
1 INTRODUÇÃO...............................................................................................................................................15
1.1 OBJETIVO DA DISSERTAÇÃO..................................................................................................................17
1.2 ESTRUTURA DA DISSERTAÇÃO .............................................................................................................18
2 CONCEITOS SOBRE TEMPO E FREQÜÊNCIA ..........................................................................................20
2.1 A RELAÇÃO ENTRE TEMPO E FREQÜÊNCIA.........................................................................................20
2.1.1 A Natureza do Tempo..............................................................................................................................20
2.1.2 Dependência entre o tempo e outras grandezas .....................................................................................21
2.1.3 O que é um relógio...................................................................................................................................22
2.2 CARACTERIZAÇÃO DE PADRÕES DE FREQÜÊNCIA ............................................................................24
2.2.1 O desvio em freqüência e a instabilidade em freqüência.........................................................................24
2.2.2 Tipos de ruídos presentes em osciladores...............................................................................................29
2.2.3 Variância de Allan como medida da instabilidade em freqüência ............................................................33
2.2.3.1 Flutuações aleatórias e não aleatórias..................................................................................................33
2.2.3.2 Análise dos dados no domínio do tempo ..............................................................................................34
2.2.3.3 Amostras sobrepostas e confiança da estimativa da variância de Allan ...............................................37
2.2.3.4 Determinação do número de graus de liberdade ..................................................................................38
2.2.3.5 Instabilidade nos domínios do tempo e da freqüência ..........................................................................40
2.2.3.6 Variância de Allan modificada...............................................................................................................41
2.2.4 Predição dos valores de freqüência e de instabilidade. ...........................................................................42
2.2.5 Técnicas de medição da instabilidade em freqüência..............................................................................44
2.2.5.1 Sistema de medição de diferença de tempo com misturador duplo (DMTD) ........................................44
2.2.5.2 Sistema de medição de intervalo de tempo com contador eletrônico ...................................................46
2.3 PADRÕES DE TEMPO E FREQÜÊNCIA...................................................................................................50
2.3.1 Padrões de quartzo..................................................................................................................................51
2.3.2 Padrões de césio .....................................................................................................................................53
2.3.3 Padrões de rubídio...................................................................................................................................54
2.3.4 Maser de hidrogênio ................................................................................................................................55
2.3.5 Comparação entre os padrões de freqüência ..........................................................................................55
2.4 SISTEMA DE POSICIONAMENTO GLOBAL GPS.....................................................................................56
2.4.1 Uma introdução ao sistema GPS.............................................................................................................56
2.4.2 Padrões de freqüência disciplinados por GPS.........................................................................................58
2.4.3 Características dos receptores GPS........................................................................................................60
2.5 GPS X GLONASS E GALILEO...................................................................................................................61
3 PROPOSTA DE ESTRUTURA DE UM SISTEMA PARA RASTREABILIDADE DE FREQÜÊNCIA............63
3.1 PRINCIPAIS MOTIVAÇÕES.......................................................................................................................63
3.2 DISSEMINAÇÃO DE TEMPO E FREQÜÊNCIA.........................................................................................64
3.2.1 Escalas de tempo ....................................................................................................................................64
3.2.2 Comparação entre relógios para determinação do UTC..........................................................................65
3.2.3 Métodos de transferência de tempo e freqüência usando GPS...............................................................65
3.2.3.1 Método GPS one-way ...........................................................................................................................65
3.2.3.2 Método GPS common-view ..................................................................................................................67
3.2.3.3 Método GPS Carrier-Phase ..................................................................................................................70
3.2.3.4 Comparação entre os métodos.............................................................................................................70
3.3 RASTREABILIDADE...................................................................................................................................71
3.3.1 Conceito de Rastreabilidade ....................................................................................................................71
3.3.2 Rastreabilidade para Tempo e Freqüência usando GPS.........................................................................73
3.3.2.1 O posicionamento Norte Americano .....................................................................................................75
3.3.2.2 O posicionamento no Reino Unido........................................................................................................79
3.3.2.3 O posicionamento da Comunidade Européia........................................................................................80
3.3.2.4 O posicionamento do Brasil ..................................................................................................................81
3.3.2.5 Conclusões sobre o uso do sistema GPS em calibrações....................................................................81
3.4 A PROPOSTA.............................................................................................................................................83
3.4.1 Configuração do sistema .........................................................................................................................83
3.4.1.1 Características desejáveis do software de controle. .............................................................................85
3.4.1.2 Análise e emissão dos resultados.........................................................................................................86
3.4.2 Validação do sistema...............................................................................................................................86
4 AVALIAÇÃO EXPERIMENTAL DO SISTEMA PROPOSTO ........................................................................88
4.1 DESCRIÇÃO DO PROCESSO EXPERIMENTAL REALIZADO .................................................................88
4.1.1 Equipamentos utilizados ..........................................................................................................................89
4.1.1.1 Equipamentos disponibilizados pelo TECPAR......................................................................................89
4.1.1.2 Equipamentos disponibilizados pelo ONRJ...........................................................................................90
4.1.1.3 Divisor de freqüências montado para o experimento ............................................................................90
4.1.2 Realização do experimento......................................................................................................................91
4.1.2.1 Sistema de medição com contador digital.............................................................................................93
4.1.2.2 Software de aquisição de dados desenvolvido na plataforma LabView. ...............................................96
4.1.2.3 Sistema de medição com método DMTD..............................................................................................97
4.1.3 Uso do software Stable32 para análise dos resultados ...........................................................................98
4.2 RESULTADOS OBTIDOS...........................................................................................................................99
4.2.1 Instabilidade em freqüência .....................................................................................................................99
4.2.2 Desvio de freqüência .............................................................................................................................101
4.2.3 Envelhecimento .....................................................................................................................................102
4.3 AVALIAÇÃO DAS INCERTEZAS DAS CALIBRAÇÕES...........................................................................103
4.3.1 Avaliação da incerteza para a instabilidade de freqüência.....................................................................104
4.3.2 Avaliação da incerteza para o desvio de freqüência ..............................................................................105
4.3.3 Avaliação da incerteza para o envelhecimento ......................................................................................110
4.4 COMPARAÇÕES ENTRE OS RESULTADOS .........................................................................................114
4.4.1 Instabilidade em freqüência ...................................................................................................................115
4.4.2 Desvio de freqüência .............................................................................................................................117
4.4.3 Envelhecimento .....................................................................................................................................118
5 CONCLUSÕES E PROPOSTAS DE FUTUROS TRABALHOS .................................................................120
5.1 CONCLUSÕES.........................................................................................................................................120
5.1.1 Posicionamento nacional sobre o uso do GPS ......................................................................................120
5.1.2 Método proposto ....................................................................................................................................121
5.1.3 Avaliação de incertezas em calibrações de freqüência..........................................................................121
5.1.4 Uso de aplicativos para automação das medições e cálculos ...............................................................122
5.1.5 Impactos sob a metrologia em tempo e freqüência no Brasil.................................................................122
5.2 PROPOSTAS DE TRABALHOS FUTUROS.............................................................................................123
5.2.1 Aplicação de filtros de Kalman...............................................................................................................123
5.2.2 Validação efetiva da proposta. ...............................................................................................................123
5.2.3 Elaboração de guia orientativo...............................................................................................................124
5.2.4 Uso da internet em calibrações remotas................................................................................................124
REFERÊNCIAS BIBLIOGRÁFICAS ..............................................................................................................126
APÊNDICE 1 – FOTOS DA AVALIAÇÃO EXPERIMENTAL REALIZADA NO ONRJ.................................135
APÊNDICE 2 – RESULTADOS COM USO DO SOFTWARE STABLE 32....................................................137
A2.1- Desvios de tempo e desvios de freqüência ...........................................................................................137
A2.2- Instabilidade em freqüência...................................................................................................................140
A2.3- Desvio de freqüência.............................................................................................................................145
A2.4- Envelhecimento.....................................................................................................................................147

LISTA DE ILUSTRAÇÕES
Figura 1: Módulos de um relógio....................................................................................................... 23
Figura 2: Oscilação senoidal com um período T............................................................................... 25
Figura 3: Determinação do desvio de freqüência a partir dos desvios de tempo.............................. 26
Figura 4: Sinais com distintas estabilidades em freqüência.............................................................. 27
Figura 5: Tipos de instabilidades em um sinal. ................................................................................. 28
Figura 6: Instabilidade de freqüência de curto e longo prazo............................................................ 29
Figura 7: Ruídos em osciladores no domínio do tempo.................................................................... 32
Figura 8: Ruídos em osciladores no domínio da freqüência ............................................................. 33
Figura 9: Desvios de tempo e de freqüências em um tempo τ. ........................................................ 35
Figura 10: Razão entre variância clássica e variância de Allan. ....................................................... 36
Figura 11: Sobreposições de amostras. ........................................................................................... 37
Figura 12: Maximização do uso dos dados utilizando amostras sobrepostas................................... 38
Figura 13: Gráfico logarítmico de σy(τ) versus τ .............................................................................. 41
Figura 14: Sistema DMTD. ............................................................................................................... 46
Figura 15: Sinais lógicos em um circuito de medição de intervalos de tempo. ................................. 46
Figura 16: Contador eletrônico como medidor de intervalo de tempo............................................... 47
Figura 17: Incerteza de ±1 dígito na medição de intervalo de tempo. .............................................. 47
Figura 18: Sistema de medição de diferença de tempo com contador. ............................................ 49
Figura 19: Diagrama em blocos de um padrão atômico passivo. ..................................................... 51
Figura 20: Efeitos que influenciam a freqüência de um cristal de quartzo. ....................................... 52
Figura 21: Diagrama de um padrão atômico de césio. ..................................................................... 53
Figura 22: Diagrama de um padrão atômico de rubídio. ................................................................... 54
Figura 23: Diagrama de um maser de hidrogênio............................................................................. 55
Figura 24: Agrupamentos do sistema GPS....................................................................................... 57
Figura 25: Esquema de um padrão disciplinado por GPS . .............................................................. 59
Figura 26: Aspecto dos satélites GPS, GLONASS E GALILEO........................................................ 62
Figura 27: Método de transferência GPS one-way. .......................................................................... 66
Figura 28: Método de transferência GPS common-view................................................................... 68
Figura 29: Esquema de um padrão disciplinado por GPS “rastreável” ............................................. 74
Figura 30: Rastreabilidade em tempo e freqüência por sinais de radiodifusão................................. 76
Figura 31: Método de calibração GPS common-view common clock. .............................................. 78
Figura 32: Aspecto das unidades FMAS e TMAS instaladas nos usuários....................................... 79
Figura 33: Configuração proposta para o sistema. ........................................................................... 84
Figura 34: Diagrama de blocos do circuito divisor de freqüências .................................................... 91
Figura 35: Avaliação experimental - medição por intervalos de tempo............................................. 93
Figura 36: Detalhe da conexão das entradas e saídas do scanner .................................................. 94
Figura 37: Diagrama de tempo do sistema de medição.................................................................... 95
Figura 38: Diagrama em blocos do software desenvolvido em LabView. ......................................... 96
Figura 39: Formato do arquivo de dados gerado. ............................................................................. 97
Figura 40: Painel frontal do software desenvolvido em LabView. ..................................................... 97
Figura 41: Avaliação experimental – medição com DMTD. .............................................................. 98
Figura 42: Gráfico da instabilidade de freqüência em curto prazo obtida. ...................................... 101
Figura 43: Gráfico da instabilidade de freqüência em longo prazo obtida....................................... 101
Figura 44: Determinação do resultado do mesurando e de sua incerteza segundo o GUM. .......... 104
Figura 45: Desvios de Allan obtidos em diferentes tempos de amostragem................................... 115
Figura 46: Desvios de freqüência obtidos. ...................................................................................... 117
Figura 47: Envelhecimentos obtidos com média de 10 s. ............................................................... 118
Figura 48: Envelhecimentos obtidos com média de 24 h................................................................ 119

LISTA DE QUADROS
Quadro 1: Tipos de ruídos versus graus de liberdade. ..................................................................... 40
Quadro 2: Tipos de ruídos e inclinações µ e α. ............................................................................... 41
Quadro 3: Inclinações da variância de Allan modificada................................................................... 42
Quadro 4: Valores de y e D para diferentes tipos de ruídos ............................................................. 43
Quadro 5: Comparação entre características dos padrões de freqüência. ....................................... 56
Quadro 6: Incertezas típicas dos métodos de transferência. ............................................................ 70
Quadro 7: Calibrações que fazem parte do experimento.................................................................. 92
Quadro 8: Seqüência de medições da avaliação experimental ........................................................ 95
Quadro 9: Resultados brutos resumidos da instabilidade em freqüência ....................................... 100
Quadro 10: Resumo dos resultados brutos do desvio de freqüência.............................................. 102
Quadro 11: Resultados brutos do envelhecimento em freqüência.................................................. 102
Quadro 12: Resultados finais da instabilidade em freqüência ........................................................ 105
Quadro 13: Balanço de incertezas de ∆f / f para a calibração 1..................................................... 108
Quadro 14: Balanço de incertezas de ∆f / f para a calibração 3..................................................... 108
Quadro 15: Balanço de incertezas de ∆f / f para a calibração 4..................................................... 108
Quadro 16: Balanço de incertezas de ∆f / f para a calibração 2..................................................... 109
Quadro 17: Resultado final da determinação dos desvios de freqüência ....................................... 110
Quadro 18: Resultados obtidos com a aplicação da equação (50)................................................. 111
Quadro 19: Balanço de incertezas para Df (calibração 1, τ=10 s) ................................................. 112
Quadro 20: Balanço de incertezas para Df (calibração 2 τ=10 s) .................................................. 112
Quadro 21: Balanço de incertezas para Df (calibração 3 τ=10 s) .................................................. 113
Quadro 22: Balanço de incertezas para Df (calibração 4 τ=10 s) .................................................. 113
Quadro 23: Balanço de incertezas para Df (calibração 1 τ=12 h) .................................................. 113
Quadro 24: Balanço de incertezas para Df (calibração 2 τ=12 h).................................................. 113
Quadro 25: Balanço de incertezas para Df (calibração 3 τ=12 h).................................................. 113
Quadro 26: Balanço de incertezas para Df (calibração 4 τ=12 h).................................................. 114
Quadro 27: Resultado final da determinação do envelhecimento................................................... 114

Quadro 28: Erro normalizado para a instabilidade em freqüência. ................................................. 115
Quadro 29: Erro normalizado para o desvio em freqüência............................................................ 117
Quadro 30: Erro normalizado para o envelhecimento..................................................................... 118

LISTA DE ABREVIATURAS
ABNT Associação Brasileira de Normas Técnicas
BIPM Bureau International des Poids et Mesures
CGCRE Coordenação Geral de Acreditação
CGPM Conferência Geral de Pesos e Medidas
CIPM Comitê Internacional de Pesos e Medidas
Cs Césio
CSV Comma-separated values
DICLA Divisão de Acreditação de Laboratórios
DMTD Medidor de diferença de tempo com misturador duplo
EA European Co-Operation for Accreditation
FMAS Frequency Measurement and Analysis Service
FTP File Transfer Protocol
GALILEO Sistema de posicionamento global por satélite europeu
GLONASS Global Navigation Satellite System
GPIB General Purpose Interface Bus
GPS Sistema de Posicionamento Global
GPSDO Oscilador disciplinado por sinais GPS
GUM Guia para a Expressão da Incerteza de Medição
IAAC InterAmerican Accreditation Cooperation
IEEE The Institute of Electrical and Electronics Engineers
IERS International Earth Rotation Service
ILAC International Laboratory Accreditation Cooperation
IMVP Institute of Metrology for Time and Space
INM Instituto Nacional de Metrologia
INMETRO Instituto Nacional de Metrologia, Normalização e Qualidade Industrial

IRD Instituto de Radioproteção e Dosimetria
ISO International Organization for Standardization
MJD Dia Juliano Modificado
MUX Multiplexador
NBS National Bureau of Standards
NIST National Institute of Standards and Technology
NPL National Physical Laboratory
NVLAP National Voluntary and Laboratory Accreditation Program
OCXO Oven Controlled Temperature Crystal Oscillator
ONRJ Observatório Nacional do Rio de Janeiro
PRN Ruído pseudo-aleatório
Rb Rubídio
RF Rádio Freqüência
RTXO Room Temperature Crystal Oscillator
SH Serviço da Hora
SI Sistema Internacional de Unidades
TAI Tempo Atômico Internacional
TCXO Temperature Compensated Crystal Oscillator
TECPAR Instituto de Tecnologia do Paraná
TMAS Time Measurement and Analysis Service
TTL Transistor Transistor Logic
TWSTFT Two-Way Time and Frequency Transfer
UKAS United Kingdom Accreditation Service
UTC Tempo Universal Coordenado
USB Universal Serial Bus
USNO United States Naval Observatory
VIM Vocabulário Internacional Termos Fundamentais e Gerais de Metrologia

RESUMO Padrões de tempo e freqüência são sensíveis às mudanças nas condições
ambientais, interrrupções de alimentação elétrica e vibrações mecânicas, o que
inviabiliza seu transporte para fins de calibração. Por essas razões,
preferenciamente, os laboratórios devem sempre realizá-las in loco. Atualmente no
Brasil, é inexistente a oferta de serviços de calibração remota ou nos locais de uso.
Uma das alternativas viáveis é fazer uso do Sistema de Posicionamento Global –
GPS, pois esse fornece sinais de freqüência, tempo e intervalos de tempo com
níveis de incerteza condizentes com os padrões dessas grandezas. O presente
trabalho discute a rastreabilidade de padrões de freqüência utilizando sinais GPS e
as aplicações e as limitações dos padrões disciplinados pelo sistema GPS. Discute
também técnicas para caracterização de padrões de tempo e freqüência, uso da
variância de Allan como medida da instabilidade dos padrões e métodos para a
avaliação de incertezas de calibrações de padrões de freqüência. Com base na
análise teórica realizada, propõe um sistema de calibração remota de freqüência,
fazendo uso de técnicas de medição simultânea de sinais de satélites, utilizadas
internacionalmente para a disseminação de tempo e freqüência. Mecanismos de
validação da proposta são sugeridos e descreve-se uma avaliação experimental
realizada no Serviço da Hora do Observatório Nacional do Rio de Janeiro.
Limitações do método proposto, suas vantagens econômicas e sua aplicação pelos
laboratórios de calibração acreditados na Rede Brasileira de Calibração são
analisadas. Os resultados alcançados mostram a viabilidade técnica da futura
implantação de um sistema de calibração remota no Brasil.
Palavras chave: padrões de freqüência, sistema GPS, padrões GPSDO,
rastreabilidade, variância de Allan.

ABSTRACT
Frequency and time standards are susceptible to environmental changes, electric
power failures and mechanical vibrations, what do not permit tranportations to be
viable for calibrations purposes. For these reasons, laboratories must perform them
in locus. Currently in Brazil, there are not remote or in locus calibrations services. A
good choice is making use of the The Global Positioning System - GPS, which
supplies frequency signals, time and time intervals with uncertainty levels that allow
them to be utilized as standards for these quantities. This work covers the frequency
standards traceability utilizing GPS signals and the GPS disciplined oscillator
applications and restrictions. It also discusses techniques to characterize time and
frequency standards, the use of Allan´s variance as measurement instability of the
standards and methods to evaluate the uncertainty of frequency standard
calibrations. Based on theorical analyses, a frequency remote calibration system is
proposed using a simultaneous measurement technique for satellite signals,
techniques internationally used for time and frequency dissemination. Some
mechanisms to validate this proposal are suggested and an experimental evaluation
performed at the Serviço da Hora do Observatório Nacional of Rio de Janeiro is
described. Restrictions to the proposed methodology, financial advantages and its
application by the accredited calibration laboratories of the Rede Brasileira de
Calibração are also discussed. The results show a future technical viability to bring in
life a remote calibration system in Brazil.
Key words: frequency standards, GPS system, GPSDO standards,
traceability, Allan´s variance.
.
15
1 INTRODUÇÃO
Padrões de tempo e freqüência estão relacionados com grande parte das
atividades cotidianas. Eles nos proporcionam três tipos de informação: a data e hora do
dia, o intervalo de tempo e a freqüência. A data e hora do dia indicam quando algum
fato acontece; elas podem ser usadas para registrar eventos ou garantir que os
mesmos estejam em sincronia. É muito fácil imaginar o impacto que a informação de
data e hora tem sobre a sociedade moderna, quer em situações corriqueiras, quer em
situações que demandam alta tecnologia. Por exemplo, ao transmitir um programa em
uma rede de televisão, a estação local deve estar pronta para receber transmissões de
outras estações (usualmente feitas por satélite) no exato momento em que a
informação chega. Isso requer perfeito sincronismo entre as estações da rede e
padrões de tempo.
Já o intervalo de tempo diz o quanto tempo leva para algum fato acontecer. Ele
é extremamente importante, por exemplo, para a tarifação de durações de conversas
telefônicas.
A última informação, a da freqüência, corresponde à taxa na qual algum fato
acontece. Freqüências exatas são críticas para as atuais redes de comunicação. De
forma a enviar e receber dados rapidamente, necessita-se de osciladores eletrônicos
localizados ao longo da rede que produzam praticamente a mesma freqüência; caso
contrário haverá perda de informação.
No âmbito do Sistema Internacional de Unidades, a grandeza tempo é a base
para a realização da unidade fundamental metro e também para uma série de outras
unidades derivadas, como velocidade, aceleração, potência, vazão e força, entre
outras. A grandeza freqüência por sua vez, participa da realização quântica do ohm e
do volt, onde são necessárias freqüências muito estáveis [ 1 ].
Para que todas essas atividades tornem-se possíveis e sejam confiáveis, os
muitos relógios e osciladores existentes devem ter seu funcionamento correto

16
assegurado. Para tanto, esses dispositivos devem ser periodicamente calibrados contra
um padrão internacionalmente reconhecido, para avaliar e corrigir os erros existentes e
garantir a rastreabilidade dos resultados. De acordo como o Sistema Internacional de
Unidades – SI, a definição da unidade tempo e, por conseqüência, a definição da
unidade derivada freqüência, são realizadas mediante o uso de padrões atômicos
primários de césio.
O conceito de rastreabilidade metrológica é bastante abrangente. Envolve a
comparação com padrões nacionais e internacionais, a emissão de certificados de
calibração, a avaliação da incerteza de medição, a evidência da competência técnica
do laboratório e, no âmbito internacional, a equivalência metrológica entre sistemas
nacionais de metrologia e de acreditação de laboratórios.
Idealmente, uma calibração de tempo e freqüência deveria ser realizada em um
mesmo laboratório, conectando os sinais do padrão de referência e do padrão sob
calibração a um mesmo comparador de fase, usualmente um contador de intervalos de
tempo. Entretanto, essa situação não é prática, pois padrões de tempo e freqüência
são sensíveis a choques, vibrações e mudanças nas condições ambientais. Também
necessitam serem mantidos energizados todo o tempo, inclusive durante os
deslocamentos, para que apresentem um desempenho apropriado. Outros pontos
desfavoráveis nesse processo são os elevados custos envolvidos com o transporte,
além da indisponibilidade do padrão para o laboratório durante o período em que se
realiza a calibração externa.
Como alternativa para eliminar esses inconvenientes, pode-se calibrar os
padrões de tempo e freqüência mediante a comparação simultânea de um mesmo sinal
de referência recebido em dois laboratórios localizados em diferentes posições
geográficas. Trata-se do método utilizado para a transferência de tempo e freqüência
no âmbito dos institutos nacionais de metrologia. Em alguns países, a exemplo dos
Estados Unidos e Inglaterra, esse método também é aplicado em laboratórios
secundários acreditados.
O Sistema de Posicionamento Global - GPS é a alternativa ideal para assegurar
a rastreabilidade desses padrões, mediante sua utilização como um padrão de
transferência, graças à estabilidade de longo prazo apresentada pelos sinais
transmitidos. Aliada a essa característica, uma nova geração de padrões de freqüência

17
disciplinados por GPS, conhecidos por GPSDO, apresentam desempenho próximo aos
padrões primários de césio, a um custo muitas vezes inferior.
Como os sinais GPS apresentam um sincronismo ao Tempo Universal
Coordenado, parece natural reconhecer a rastreabilidade de um padrão GPSDO ao SI,
atuando como uma referência primária para uma calibração direta. Entretanto, até o
momento, não existe consenso da comunidade metrológica internacional em
reconhecer a rastreabilidade diretamente do Sistema de Posicionamento Global. Da
mesma forma, não existem no Brasil estudos técnico-científicos mais aprofundados
acerca do tema que proporcionem qualquer embasamento para o organismo de
acreditação e para a comunidade metrológica nacional estabelecer sua posição.
Trata-se de tema de grande importância para a comunidade metrológica
brasileira, uma vez que a implantação de métodos de calibração remotos impacta em
redução de custos nas ações de rastreabilidade dos laboratórios de calibração
acreditados. Asseguram, também, a total disponibilidade ao laboratório do seu padrão
de referência e podem ser usadas como ferramentas para manter a confiabilidade
metrológica dos resultados emitidos.
1.1 OBJETIVO DA DISSERTAÇÃO
O objetivo principal desta dissertação de mestrado consiste em discutir técnicas
de obtenção de rastreabilidade na calibração remota em freqüência que sejam aceitas
no âmbito internacional e que possam ser implantadas por laboratórios brasileiros
acreditados. Pretende-se também, com este estudo, proporcionar subsídios para o
posicionamento da comunidade metrológica nacional quanto ao uso de padrões
disciplinados por GPS.
Para tanto, são analisadas ações de importantes institutos nacionais de
metrologia que proporcionam a argumentação necessária. Também se propõe a
discutir a estruturação de um sistema de calibração remota com base no sistema GPS.
Como premissas, são considerados os baixos custos envolvidos, a consistência técnica
e a viabilidade de aplicação pelos laboratórios de calibração acreditados.
Como o objetivo adicional deste trabalho, exemplifica-se a avaliação da
incerteza em calibrações de freqüência com base em dados obtidos de uma avaliação
experimental realizada. De forma a adequar os cálculos às especificidades da área de
18
tempo e freqüência, incorpora-se a aplicação da variância de Allan aos princípios
estabelecidos pelo Guia para a Expressão da Incerteza de Medição.
1.2 ESTRUTURA DA DISSERTAÇÃO
A dissertação está desenvolvida em 4 etapas que compreendem os capítulos 2
a 5. No capítulo 2 – Conceitos sobre tempo e freqüência - faz-se uma revisão da
literatura, abordando-se os principais conceitos envolvidos na caracterização de
padrões de freqüência. São discutidas técnicas para medições de desvios de
freqüência e métodos de avaliação da instabilidade de curto e longo prazo dos
osciladores, a partir da avaliação das características dos ruídos existentes e pela
determinação da variância de Allan de um conjunto de medições. Também é explicado
o funcionamento dos padrões atômicos de tempo e freqüência, como os de césio,
rubídio e maser de hidrogênio, enfatizando os recentes padrões disciplinados pelo
sistema de posicionamento global - GPS.
O capítulo 3 – Proposta de estrutura de um sistema para rastreabilidade de
freqüência - é dedicado ao estabelecimento de um sistema de calibração remota em
freqüência usando sinais GPS. Comentam-se as técnicas utilizadas internacionalmente
para a disseminação de tempo e freqüência usando satélites GPS, o conceito de
rastreabilidade e a aplicação do mesmo na área de tempo e freqüência. Discute-se o
posicionamento de diferentes organizações metrológicas internacionais quanto ao uso
de padrões disciplinados por GPS para a obtenção da rastreabilidade. Por fim, com
base nas discussões anteriores, detalha-se uma proposta de calibração remota,
utilizando o Sistema de Posicionamento Global como padrão de transferência.
Para comprovar a operacionalidade do sistema proposto, uma avaliação
experimental realizada nas instalações do Serviço da Hora do Observatório Nacional do
Rio de Janeiro é relatada no capítulo 4 - Avaliação experimental do sistema.
Descrevem-se todas as condições e configurações que foram necessárias para
desenvolver o experimento e detalham-se os softwares utilizados, sistemáticas de
cálculos e processos de avaliação de incertezas de medição. Proporciona-se a
comparação dos resultados obtidos com o método, utilizando o sistema GPS e outros
dois métodos reconhecidos.

19
Finalizando, o capítulo 5 – Conclusões e propostas de futuros trabalhos -
enfatiza a aplicabilidade do presente trabalho como um suporte técnico-científico para
questões de rastreabilidade em tempo e freqüência junto à comunidade metrológica
nacional, descrevem-se as imitações do método proposto, quais são as suas possíveis
aplicações e quais ações são necessárias para a implementação e reconhecimento
pela comunidade metrológica. Também são sugeridos futuros possíveis
desdobramentos deste trabalho.
20
2 CONCEITOS SOBRE TEMPO E FREQÜÊNCIA
2.1 A RELAÇÃO ENTRE TEMPO E FREQÜÊNCIA
2.1.1 A Natureza do Tempo
Várias mentes brilhantes como as de Newton, Descartes e Einstein passaram
anos estudando o tempo tentando defini-lo e, por mais que os cientistas tentem, até
hoje nenhum deles conseguiu uma resposta satisfatória [ 2 ]. A teoria mais famosa e
importante relativa ao tema, a teoria da relatividade de Einstein, descreve o tempo e o
espaço como quantidades dinâmicas em que cada objeto individual possui sua própria
medida de tempo e que depende de onde e como este objeto se desloca [ 3 ].
Segundo Jefersen [ 2 ], o tempo está presente em todo o lugar, mas não ocupa
nenhum espaço; ele pode ser medido, mas não pode ser visto, tocado ou colocado em
um recipiente; todos sabemos o que ele é mas ninguém está apto à defini-lo; nós
podemos “passar o tempo”, “desperdiçar o tempo” ou “matar o tempo”, entretanto, não
podemos detê-lo ou sequer mudá-lo” .
Jefersen também ressalta que o tempo é um componente necessário em muitas
fórmulas matemáticas e funções físicas. É uma das grandezas fundamentais do
Sistema Internacional de Unidades; diversas outras grandezas são derivadas do
tempo. Mas o tempo distingue-se das demais grandezas em vários aspectos, como,
por exemplo:
a) Podemos ver a distância e podemos sentir os efeitos da massa e da
temperatura, mas não podemos perceber o tempo por meios físicos; nós
apenas o reconhecemos por meio da consciência ou através da observação
de seus efeitos.

21
b) O tempo “passa” e move-se em somente uma direção. As distâncias podem
ser tomadas de um ponto “A” para um ponto “B” ou vice versa. Quando
pensamos no tempo, apenas poderemos pensar no “agora”, no antes de
“agora” e no depois do “agora”. Não podemos fazer nada no passado ou no
futuro. Podemos apenas fazê-lo no “agora”.
c) Como o “agora” está constantemente mudando, os relógios somente têm
utilidade se forem mantidos em funcionamento, diferentemente dos outros
instrumentos de medição [ 2 ].
Em função de sua natureza transitória e instável, a medição do tempo é mais
complexa que a de outras grandezas. Para medi-lo, também é importante fazer a
distinção entre os conceitos que estão associados ao tempo, ou seja, a data em que
um evento acontece e o intervalo de tempo ou o “comprimento” de tempo entre dois
eventos.
A medição do tempo com um relógio, também foge ao conceito tradicional de
uma medição, pois a grandeza tempo não é medida por um elemento transdutor,
“dispositivo que fornece uma grandeza de saída que tem uma correlação determinada
com a grandeza de entrada”, segundo o VIM [ 4 ].
No caso do relógio, um dispositivo oscilador simula o tempo na forma de eventos
periódicos (deslocamentos mecânicos, transição de níveis de tensão, transição de
níveis de energia de elétrons) relacionados à definição do segundo e que serão
medidos por um contador de eventos.
2.1.2 Dependência entre o tempo e outras grandezas
Dentre todas as unidades fundamentais do Sistema Internacional, a realização
do segundo, unidade para a grandeza tempo é a que apresenta a menor incerteza
relativa de realização.
O Sistema Internacional de unidades, ratificado pela 11a CGPM – Conferência
Geral de Pesos e Medidas - de 1960 e atualizado até a 20a CGPM, em 1995,
compreende sete unidades de base e outras unidades derivadas. As sete unidades de
base são: ampère, candela, quilograma, kelvin, mol, metro e segundo. A definição
vigente do segundo foi estabelecida na 13a CGPM em outubro de 1967. Nessa
conferência, o segundo foi definido como: “O segundo é a duração de 9 192 631 770

22
períodos da radiação correspondente aos dois níveis hiperfinos do estado básico dos
átomos de Césio 133”. Na sessão de 1997, o comitê internacional confirmou que essa
definição refere-se a um átomo de césio em repouso a uma temperatura de 0 K. O
padrão primário de referência de césio materializa essa definição com uma incerteza
que corresponde a um erro de ±1 s em aproximadamente de 63400 anos [ 5 ].
O tempo é a base de realização da unidade fundamental de comprimento,
definida como: “O metro é o comprimento do trajeto percorrido pela luz no vácuo,
durante um intervalo de tempo de 1/(299.792.458) do segundo”. Em outras grandezas
derivadas o tempo é fundamental, como na realização do volt, através do efeito
Josephson e na realização do ohm, através do efeito quântico Hall, ambas
dependentes de uma freqüência bastante estável [ 5 ].
A grandeza freqüência está diretamente relacionada à grandeza tempo como
sendo o número de ciclos de uma ocorrência periódica durante o intervalo de 1
segundo. Ou seja, um ciclo por segundo equivale a 1 Hz.
Sob o aspecto físico, dimensionalmente, a freqüência é o recíproco do intervalo
de tempo, conforme mostra a equação (1):
1t−=ν (1)
Onde : ν = freqüência em Hz;
t = tempo em s.
Por esse motivo, a disseminação da grandeza tempo pode ser usada para a
rastreabilidade em freqüência e a disseminação da freqüência pode ser útil para a
informação do tempo.
Da mesma forma, os conceitos que envolvem a medição e a rastreabilidade de
tempo e freqüência são profundamente relacionados e serão abordados em conjunto
neste trabalho.
2.1.3 O que é um relógio
Qualquer relógio pode ser considerado como um dispositivo composto de duas
partes, conforme observado na figura 1.
23
Oscilador(dispositivo gerador
de freqüência)
Contador(dispositivo de contagemde eventos periódicos)
Átomo de césio 133
CONTADOR ELETRÔNICODE ALTA VELOCIDADE
RelógioMecânico
RelógioAtômico=
=Oscilador
(dispositivo geradorde freqüência)
Contador(dispositivo de contagemde eventos periódicos)
Átomo de césio 133
CONTADOR ELETRÔNICODE ALTA VELOCIDADE
RelógioMecânico
RelógioAtômico=
=
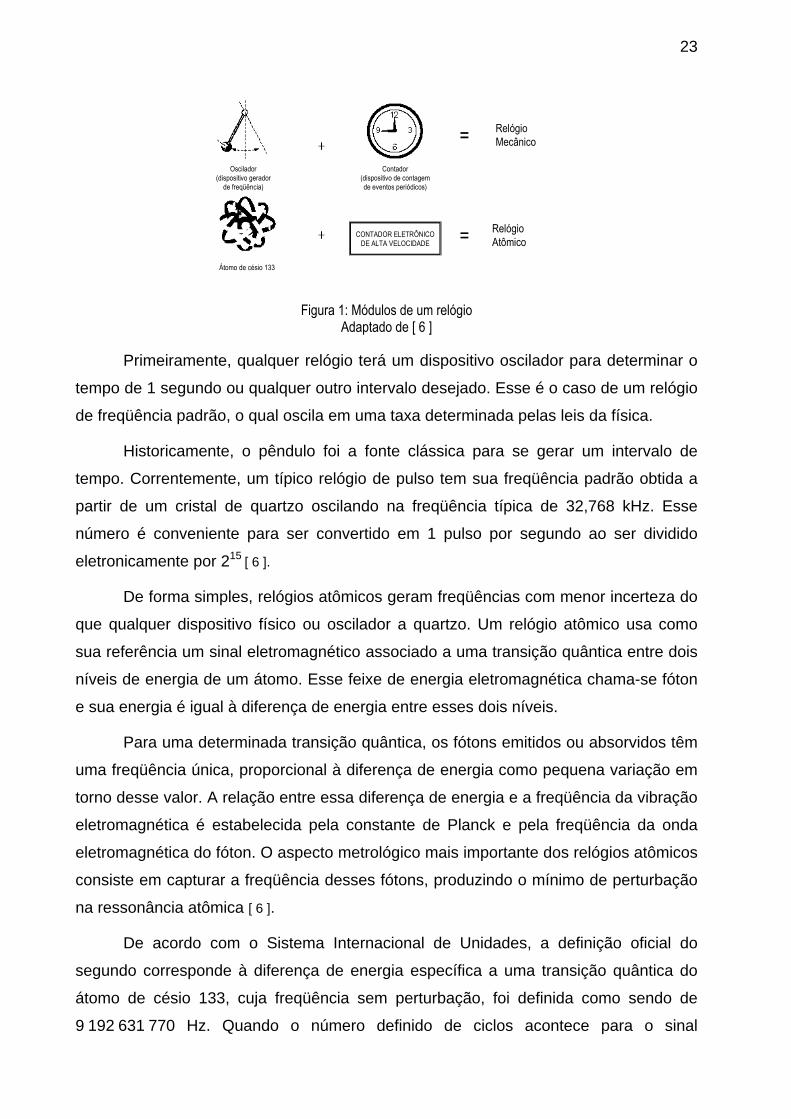
Figura 1: Módulos de um relógio Adaptado de [ 6 ]
Primeiramente, qualquer relógio terá um dispositivo oscilador para determinar o
tempo de 1 segundo ou qualquer outro intervalo desejado. Esse é o caso de um relógio
de freqüência padrão, o qual oscila em uma taxa determinada pelas leis da física.
Historicamente, o pêndulo foi a fonte clássica para se gerar um intervalo de
tempo. Correntemente, um típico relógio de pulso tem sua freqüência padrão obtida a
partir de um cristal de quartzo oscilando na freqüência típica de 32,768 kHz. Esse
número é conveniente para ser convertido em 1 pulso por segundo ao ser dividido
eletronicamente por 215 [ 6 ].
De forma simples, relógios atômicos geram freqüências com menor incerteza do
que qualquer dispositivo físico ou oscilador a quartzo. Um relógio atômico usa como
sua referência um sinal eletromagnético associado a uma transição quântica entre dois
níveis de energia de um átomo. Esse feixe de energia eletromagnética chama-se fóton
e sua energia é igual à diferença de energia entre esses dois níveis.
Para uma determinada transição quântica, os fótons emitidos ou absorvidos têm
uma freqüência única, proporcional à diferença de energia como pequena variação em
torno desse valor. A relação entre essa diferença de energia e a freqüência da vibração
eletromagnética é estabelecida pela constante de Planck e pela freqüência da onda
eletromagnética do fóton. O aspecto metrológico mais importante dos relógios atômicos
consiste em capturar a freqüência desses fótons, produzindo o mínimo de perturbação
na ressonância atômica [ 6 ].
De acordo com o Sistema Internacional de Unidades, a definição oficial do
segundo corresponde à diferença de energia específica a uma transição quântica do
átomo de césio 133, cuja freqüência sem perturbação, foi definida como sendo de
9.192.631.770 Hz. Quando o número definido de ciclos acontece para o sinal
24
eletromagnético associado ao fóton absorvido ou desprendido em sua transição
quântica, teremos oficialmente 1 segundo [ 5 ].
A segunda parte do relógio é um contador, algumas vezes chamado de
integrador, somador ou acumulador e determina o número de segundos ou de ciclos da
base de tempo que ocorreram. Em um relógio a pêndulo, essa parte é representada
pelas engrenagens e pelos ponteiros.
Em princípio, se um relógio for ajustado perfeitamente e se sua taxa ou
freqüência também for mantida de forma perfeita, pode-se manter o tempo correto
indefinidamente. Na prática isto é impossível por várias razões: o relógio não pode ser
ajustado perfeitamente, variações aleatórias e sistemáticas são intrínsecas a qualquer
oscilador e causam um comportamento inadequado. Também, o tempo é função da
posição e do movimento (efeitos relativísticos). Finalmente, mudanças no ambiente
provocam mudanças na freqüência do relógio em relação ao ideal.
Segundo Allan, Ashby e Hodge [ 6 ] , a qualidade de um relógio depende do seu
ajuste, do quanto sua base de tempo é instável e do quanto é influenciado pelas
condições ambientais. Utilizando técnicas modernas, um relógio acoplado a um
microprocessador e sensores pode compensar algumas instabilidades na determinação
do tempo.
2.2 CARACTERIZAÇÃO DE PADRÕES DE FREQÜÊNCIA
2.2.1 O desvio em freqüência e a instabilidade em freqüência
Um oscilador de freqüência senoidal fornece uma tensão que altera o seu valor
no tempo de forma senoidal, como mostra a figura 2. Esse sinal repete-se em um
período T e apresenta um ângulo de fase φ em um instante de tempo t. A freqüência ν
deste sinal é o número de ciclos por segundo, a qual é o recíproco do período
(segundos por ciclo).
A expressão que descreve a tensão instantânea V em função do tempo deste
oscilador senoidal, pode ser expressa pela equação (2):
( ))t(senV)t(V P φ⋅= (2)

25
Esta expressão é equivalente a equação (3):
( )t2senV)t(V P πν⋅= (3)
Onde, nas equações (2) e (3): V(t) = valor da tensão no tempo t;
VP = valor máximo do sinal ou valor de pico;
φ(t)= ângulo de fase em um ciclo em um tempo t;
ν = freqüência do sinal.
amplitude (V)
período (s)
ângulo (rad)
amplitude (V)
período (s)
ângulo (rad)
Figura 2: Oscilação senoidal com um período T Adaptado de [ 7 ]
Em termos práticos, a medida da freqüência de um sinal sempre envolve uma
comparação entre dois osciladores e, muitas vezes, um dos osciladores corresponde à
base de tempo de um contador eletrônico. Assim, para medirmos a instabilidade da
freqüência de um oscilador, ν1, realizamos a comparação com outra freqüência de
referência ν0, menos instável do que a primeira. Dessa maneira, podemos calcular o
desvio de freqüência relativa y(t) em relação à ν0, de acordo com a equação (4):
( )0
01
ννν −
=ty (4)
Onde: y(t) = desvio de freqüência relativa;
ν1 = freqüência de um oscilador a caracterizar;
ν0 = freqüência de referência.
A medida adimensional y(t) é muito útil para descrever o desempenho de um
oscilador e os desvios de tempo x(t) por um período de tempo t, são calculados pela
equação (5):
( ) ( )∫=t
0
dttytx (5)
Onde: y(t) = desvio de freqüência relativa;
t = tempo.
26
De acordo com Howe, Allan e Barnes [ 7 ], não se pode medir a freqüência
instantânea do sinal; assim, as medidas dos desvios de freqüência relativos sempre
dependem de um tempo de amostragem ∆t ou τ (tau), qualquer que seja ele, 1 ps, 1 s,
1 dia ou 1 semana. Então, quando se avalia uma freqüência relativa y(t), o que de fato
é determinado é o desvio de tempo que se inicia no tempo t e termina no tempo t+τ. A
diferença entre estes dois desvios de tempo, dividida por τ, proporciona a média da
freqüência relativa no período τ. Assim, têm-se a equação (6):
( ) ( ) ( )τ
τ txtxty −+= (6)
Onde: ( )ty = desvio de freqüência relativa;
x(t) é o desvio de fase no instante de tempo t;
x(t+τ) é o desvio de fase no instante de tempo t+τ ;
τ é o tempo entre as medições de desvios de fase.
O tempo tau, τ, pode ser chamado tempo de amostragem ou intervalo de
amostragem. Por exemplo, no caso de uma medição direta da freqüência com um
contador, este tempo é determinado pelo tempo de gatilhamento (gate time) ajustado.
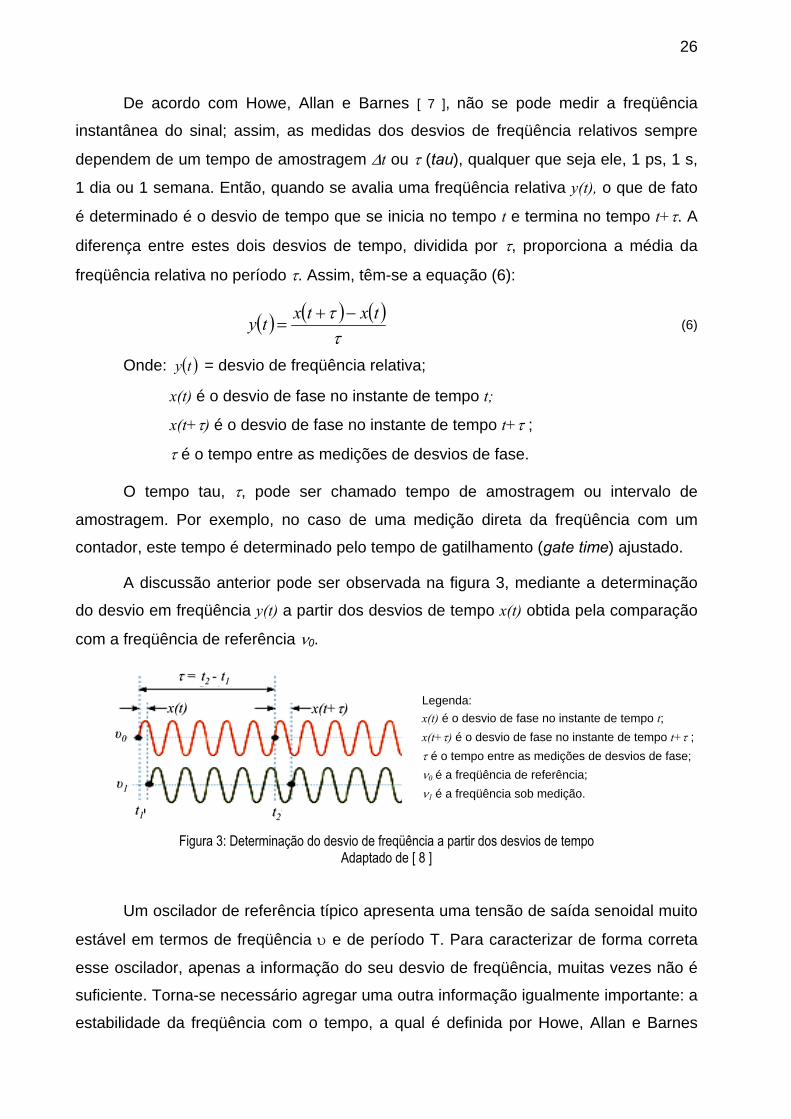
A discussão anterior pode ser observada na figura 3, mediante a determinação
do desvio em freqüência y(t) a partir dos desvios de tempo x(t) obtida pela comparação
com a freqüência de referência ν0.
x(t)x(t) x(t+x(t+ττ))
ττ = t= t2 2 -- tt11
υυ00
υυ11
tt11 tt22
x(t)x(t) x(t+x(t+ττ))
ττ = t= t2 2 -- tt11
υυ00
υυ11
tt11 tt22
Legenda: x(t) é o desvio de fase no instante de tempo t; x(t+τ) é o desvio de fase no instante de tempo t+τ ; τ é o tempo entre as medições de desvios de fase; ν0 é a freqüência de referência; ν1 é a freqüência sob medição.
Figura 3: Determinação do desvio de freqüência a partir dos desvios de tempo Adaptado de [ 8 ]
Um oscilador de referência típico apresenta uma tensão de saída senoidal muito
estável em termos de freqüência υ e de período T. Para caracterizar de forma correta
esse oscilador, apenas a informação do seu desvio de freqüência, muitas vezes não é
suficiente. Torna-se necessário agregar uma outra informação igualmente importante: a
estabilidade da freqüência com o tempo, a qual é definida por Howe, Allan e Barnes

27
[ 7 ] como uma medida do grau em que um sinal de um oscilador produz o mesmo valor
de freqüência para qualquer intervalo ∆t e por um certo tempo.
Naturalmente, as flutuações na freqüência corresponderão a flutuações em
período e a grande maioria dos sistemas de medição de freqüência avalia justamente
essas flutuações da fase ou do período. Assim, a determinação da estabilidade
depende da quantidade de tempo utilizado para medição.
Analisando as duas formas de onda da figura 4, conclui-se que elas possuem a
mesma estabilidade até o instante de tempo t2 no centro do gráfico. Após esse instante,
a primeira torna-se mais instável que a segunda.
FreqFreqüüência instência instáávelvel
FreqFreqüüência estência estáávelvel TempoTempo
TempoTempo
FreqFreqüüência instência instáávelvel
FreqFreqüüência estência estáávelvel TempoTempo
TempoTempo
Legenda: t1 é o instante de tempo 1; t2 é o instante de tempo 2; t3 é o instante de tempo 3.
Figura 4: Sinais com distintas estabilidades em freqüência. Adaptado de [ 7 ]
Praticamente todas as referências bibliográficas consultadas abordam o conceito
de “estabilidade de freqüência”. Entretanto, passa-se a adotar, a partir deste ponto, a
terminologia definida pela IEEE Std 1139-1999 [ 9 ] que recomenda o termo
“instabilidade” em freqüência ao invés do termo “estabilidade”.
Assim, ao se estabelecer um oscilador para trabalhar em uma freqüência de
referência ν0, muitos fatores construtivos e fatores externos irão provocar instabilidades
na freqüência, as quais poderão apresentar características aleatórias ou sistemáticas.
Assim, considerando esses componentes, pode-se reescrever a equação (3) e obter a
equação (7):
( ) ( )[ ] ( )( )tt2sentVtV 00 φπνε +⋅+= (7)
Onde: V0 é o valor de pico nominal;
ε(t) é um desvio na amplitude;
ν0 é a freqüência fundamental nominal;
φ(t) é um desvio na fase do valor nominal.
28
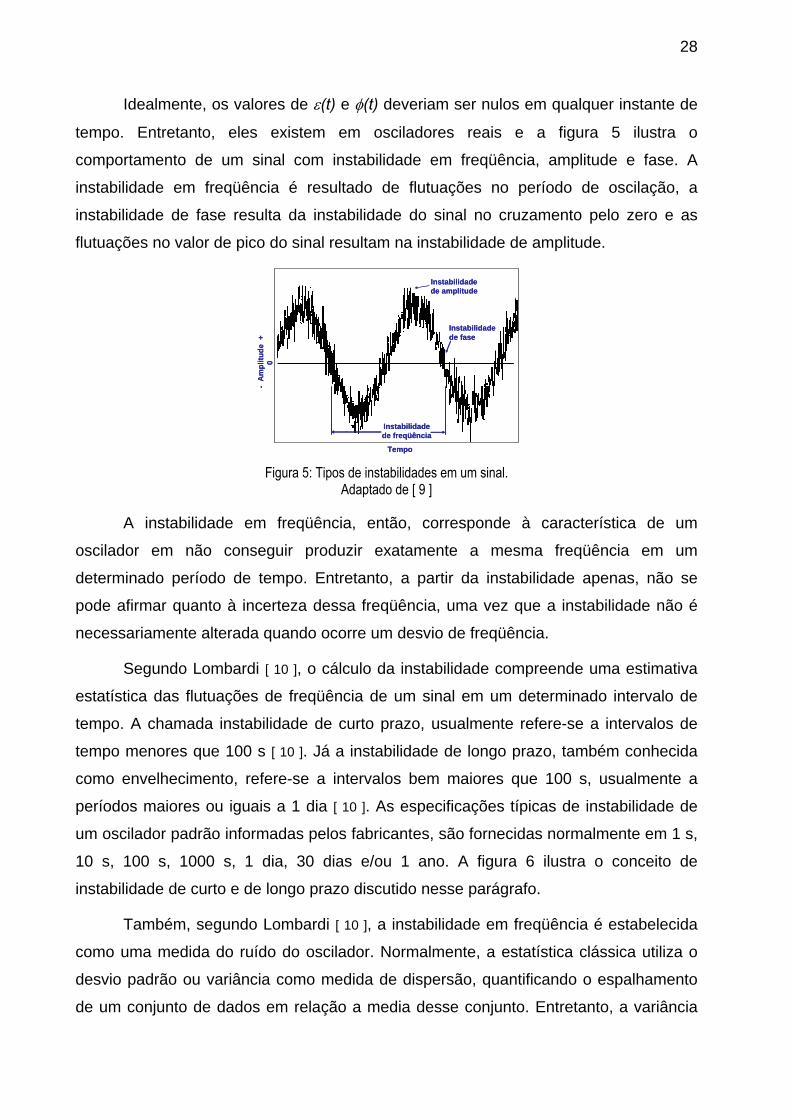
Idealmente, os valores de ε(t) e φ(t) deveriam ser nulos em qualquer instante de
tempo. Entretanto, eles existem em osciladores reais e a figura 5 ilustra o
comportamento de um sinal com instabilidade em freqüência, amplitude e fase. A
instabilidade em freqüência é resultado de flutuações no período de oscilação, a
instabilidade de fase resulta da instabilidade do sinal no cruzamento pelo zero e as
flutuações no valor de pico do sinal resultam na instabilidade de amplitude.
Instabilidadede amplitude
Instabilidadede freqüência
Instabilidadede fase
-A
mpl
itude
+0
Tempo
Instabilidadede amplitude
Instabilidadede freqüência
Instabilidadede fase
-A
mpl
itude
+0
Tempo Figura 5: Tipos de instabilidades em um sinal.
Adaptado de [ 9 ]
A instabilidade em freqüência, então, corresponde à característica de um
oscilador em não conseguir produzir exatamente a mesma freqüência em um
determinado período de tempo. Entretanto, a partir da instabilidade apenas, não se
pode afirmar quanto à incerteza dessa freqüência, uma vez que a instabilidade não é
necessariamente alterada quando ocorre um desvio de freqüência.
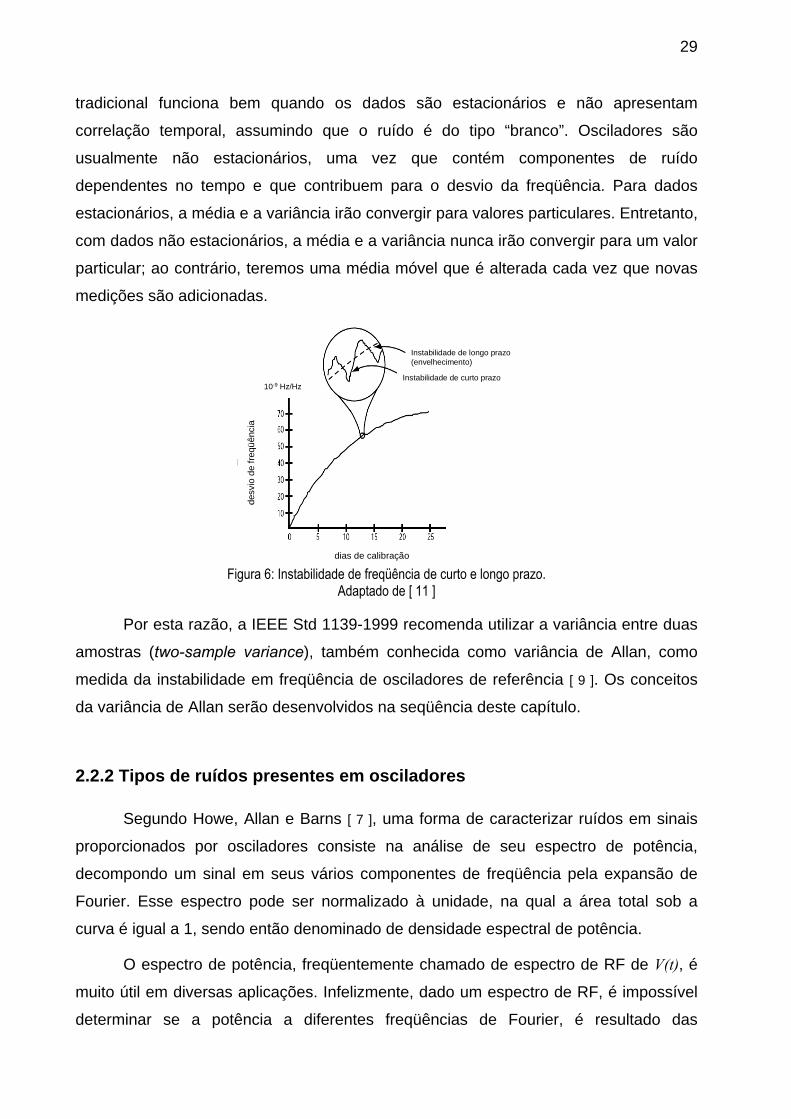
Segundo Lombardi [ 10 ], o cálculo da instabilidade compreende uma estimativa
estatística das flutuações de freqüência de um sinal em um determinado intervalo de
tempo. A chamada instabilidade de curto prazo, usualmente refere-se a intervalos de
tempo menores que 100 s [ 10 ]. Já a instabilidade de longo prazo, também conhecida
como envelhecimento, refere-se a intervalos bem maiores que 100 s, usualmente a
períodos maiores ou iguais a 1 dia [ 10 ]. As especificações típicas de instabilidade de
um oscilador padrão informadas pelos fabricantes, são fornecidas normalmente em 1 s,
10 s, 100 s, 1000 s, 1 dia, 30 dias e/ou 1 ano. A figura 6 ilustra o conceito de
instabilidade de curto e de longo prazo discutido nesse parágrafo.
Também, segundo Lombardi [ 10 ], a instabilidade em freqüência é estabelecida
como uma medida do ruído do oscilador. Normalmente, a estatística clássica utiliza o
desvio padrão ou variância como medida de dispersão, quantificando o espalhamento
de um conjunto de dados em relação a media desse conjunto. Entretanto, a variância
29
tradicional funciona bem quando os dados são estacionários e não apresentam
correlação temporal, assumindo que o ruído é do tipo “branco”. Osciladores são
usualmente não estacionários, uma vez que contém componentes de ruído
dependentes no tempo e que contribuem para o desvio da freqüência. Para dados
estacionários, a média e a variância irão convergir para valores particulares. Entretanto,
com dados não estacionários, a média e a variância nunca irão convergir para um valor
particular; ao contrário, teremos uma média móvel que é alterada cada vez que novas
medições são adicionadas.
dias de calibração
desv
io d
e fre
qüên
cia
Instabilidade de curto prazo
Instabilidade de longo prazo(envelhecimento)
10-9 Hz/Hz
dias de calibração
desv
io d
e fre
qüên
cia
Instabilidade de curto prazo
Instabilidade de longo prazo(envelhecimento)
10-9 Hz/Hz
dias de calibração
desv
io d
e fre
qüên
cia
Instabilidade de curto prazo
Instabilidade de longo prazo(envelhecimento)
10-9 Hz/Hz
Figura 6: Instabilidade de freqüência de curto e longo prazo.
Adaptado de [ 11 ]
Por esta razão, a IEEE Std 1139-1999 recomenda utilizar a variância entre duas
amostras (two-sample variance), também conhecida como variância de Allan, como
medida da instabilidade em freqüência de osciladores de referência [ 9 ]. Os conceitos
da variância de Allan serão desenvolvidos na seqüência deste capítulo.
2.2.2 Tipos de ruídos presentes em osciladores
Segundo Howe, Allan e Barns [ 7 ], uma forma de caracterizar ruídos em sinais
proporcionados por osciladores consiste na análise de seu espectro de potência,
decompondo um sinal em seus vários componentes de freqüência pela expansão de
Fourier. Esse espectro pode ser normalizado à unidade, na qual a área total sob a
curva é igual a 1, sendo então denominado de densidade espectral de potência.
O espectro de potência, freqüentemente chamado de espectro de RF de V(t), é
muito útil em diversas aplicações. Infelizmente, dado um espectro de RF, é impossível
determinar se a potência a diferentes freqüências de Fourier, é resultado das
30
flutuações de amplitude a(t) ou das flutuações de fase φ(t). Assim, o espectro de RF
pode ser separado em dois espectros independentes, sendo um deles, o de densidade
espectral de flutuações de fase. Para os propósitos desta discussão, os componentes
de flutuação de fase são os de maior interesse.
A densidade espectral das flutuações de fase é denotada por Sφ(f), onde f é a
freqüência de Fourier. Em geral, são muito comuns casos onde a densidade espectral
de potência em modulação de amplitude é desprezível e a modulação total resultante
também das flutuações de fase apresenta um valor muito pequeno. Neste caso, o
espectro de RF tem aproximadamente a mesma forma da densidade espectral de
flutuações de fase.
Entretanto, surge uma questão: de que forma a freqüência se altera com as
flutuações de fase? Afinal, a instabilidade em freqüência de um oscilador é a principal
característica a ser levada em consideração na grande maioria das aplicações. Sabe-
se que a freqüência é igual à taxa de mudança de fase em uma onda senoidal. Isto
quer dizer que as flutuações na freqüência de saída de um oscilador estão
relacionadas às flutuações de fase, uma vez que devemos ter uma mudança na fase
φ(t) para obter uma mudança em ν(t), a freqüência em um tempo t [ 7 ].
Deduz-se que o desvio de freqüência y(t) é determinado pela equação (8):
( )0
0)t(tyν
νν −= (8)
A equação (8) é equivalente à equação (9):
( )02)t(ty
πνφ
= (9)
Onde, nas equações (8) e (9): y(t) é o desvio de freqüência;
φ(t) é a fase do sinal em um instante de tempo t;
ν(t) é a freqüência em um tempo t;
ν0 é a freqüência de referência.
A densidade espectral dos desvios de freqüência y(t), denotada por Sy(f) e a
densidade espectral de desvios de fase φ(t), denotada por Sφ(f), mantém relação
estabelecida pela equação (10) onde f é a freqüência de Fourier.

31
( ) )f(SffS2
0y φν ⎟⎟
⎠
⎞⎜⎜⎝
⎛= (10)
De acordo com Howe, Allan e Barns [ 7 ], essa relação é importante para a
caracterização de osciladores, uma vez que certos tipos de ruídos característicos
produzem inclinações particulares no gráfico da densidade espectral de fase φ(t).
Frequentemente, esses ruídos são classificados em 5 categorias de acordo com seu
espectro de Sφ(f):
• Ruído random walk de freqüência (random walk FM), o espectro de Sφ(f)
declina com f -4.
• Ruído flicker de freqüência (flicker FM), o espectro de Sφ(f) declina com f -3.
• Ruído branco de freqüência (white FM), o espectro de Sφ(f) declina com f -2.
• Ruído flicker de fase (flicker PM), o espectro de Sφ(f) declina com f -1.
• Ruído branco de fase (white PM), o espectro de Sφ(f) é plano [ 7 ].
Allan [ 12 ] descreve estes ruídos da seguinte forma:
• O ruído random walk de freqüência é difícil de ser medido, uma vez que
acontece muito próximo à portadora. Ele está relacionado ao ambiente físico
do oscilador, como choque mecânico, vibração ou efeito da temperatura que
causam deslocamentos aleatórios na portadora.
• A causa física para o ruído flicker de freqüência não é completamente
conhecida, mas tipicamente está relacionado ao mecanismo físico de
ressonância em um oscilador ativo, aos componentes eletrônicos ou ao
ambiente. É comum em osciladores de alta qualidade, mas pode ser
“mascarado” pelo ruído branco de freqüência ou ruído flicker de fase em
osciladores de mais baixa qualidade.
• Já o ruído branco de freqüência é um tipo comum de ruído encontrado em
padrões de freqüência que utilizam um dispositivo ressonante passivo. Estes
padrões são constituídos por osciladores disciplinados, comumente quartzo,
o qual é sincronizado a um dispositivo que tem o comportamento de filtro de
elevado fator Q. Padrões de césio e rubídio apresentam este tipo de ruído.

32
• O ruído flicker de fase pode estar relacionado ao mecanismo de ressonância
de um oscilador, usualmente adicionado a ruídos eletrônicos. Esse tipo de
ruído é comum, principalmente em osciladores de altíssima qualidade,
devido à existência de amplificadores de sinal que são utilizados para
adequar os níveis de saída. O ruído flicker de fase pode ser introduzido
nesses estágios. Ele também pode ser introduzido em um multiplicador de
freqüência e, para reduzi-lo, é necessário utilizar arquiteturas de
amplificação de baixo ruído, como a realimentação negativa e a seleção de
semicondutores e demais componentes eletrônicos.
• O ruído branco de fase está pouco relacionado ao mecanismo de
ressonância. É provavelmente produzido por um fenômeno similar ao do
ruído flicker de fase e gerado nos estágios de amplificação. Pode ser
reduzido pela seleção dos componentes eletrônicos, pela filtragem da saída
ou aumentando-se a potencia da fonte de freqüência.
A densidade espectral na saída de diferentes tipos de osciladores é, em geral,
uma combinação de diferentes processos de ruídos. É possível que um oscilador
apresente todos os cinco tipos de ruídos, mas, na prática, apenas dois ou três são
dominantes.
A determinação do tipo de ruído presente em osciladores é feita a partir da
avaliação da inclinação da densidade espectral de fase em uma particular faixa de
freqüências, ambas em escala logarítmica. A figura 7 e a figura 8 mostram a densidade
espectral de fase para os cinco tipos de ruídos no domínio do tempo e no domínio da
freqüência, respectivamente.
Figura 7: Ruídos em osciladores no domínio do tempo
Adaptado de [ 7 ]

33
Densidade espectral de fase
Freqüência de Fourier
f -4
f -3
f -2
f -1
f 0
Densidade espectral de fase
Freqüência de Fourier
Densidade espectral de fase
Freqüência de Fourier
f -4
f -3
f -2
f -1
f 0
Figura 8: Ruídos em osciladores no domínio da freqüência Adaptado de [ 7 ]
2.2.3 Variância de Allan como medida da instabilidade em freqüência
Em 1965, James Barnes e David Allan publicaram um trabalho descrevendo as
dificuldades estatísticas associadas ao estabelecimento de uma medida para a
variância em osciladores a quartzo, os quais apresentavam componentes de ruído a
longo prazo com comportamento em f -1. Eles notaram que a aplicação da estatística
convencional, a qual parte do pressuposto de um espectro com ruído branco, não
permitia a convergência de valores das medidas de dispersão com o ruído flicker de
fase. Assim, esse trabalho descreveu os procedimentos estatísticos a serem utilizados
para se obter resultados úteis.
Segundo Sullivan [ 13 ], os trabalhos de Allan e Barnes obtiveram ampla
aceitação no meio científico e a variância entre duas amostras passou a ser chamada
de variância de Allan. A variância de Allan foi incorporada pela IEEE em aplicações em
tempo e freqüência e tornou-se um padrão para fabricantes informarem especificações
de instabilidade em freqüência de osciladores de referência.
2.2.3.1 Flutuações aleatórias e não aleatórias
Dado um conjunto de dados de desvios de freqüência ou de desvios de tempo
entre um par de osciladores é possível caracterizar as flutuações existentes de acordo
34
com modelos adequados de desempenho. É usual separar as flutuações em aleatórias
e em não aleatórias.
Flutuações não aleatórias são, usualmente, a principal causa do desvio do
tempo “verdadeiro” ou da freqüência “verdadeira” a longo prazo. Se, por exemplo, o
valor de uma freqüência em um determinado período de tempo apresenta um desvio
em relação a um valor nominal, o erro na fase do sinal irá se acumulando como uma
rampa. Se o valor da freqüência apresenta uma deriva linear, as flutuações de tempo
acontecerão de forma quadrática [ 12 ].
Em quase todos os osciladores, os efeitos sistemáticos são a causa primária do
desvio da freqüência. Uma aproximação útil para determinar o desvio em freqüência é
calcular a média simples do conjunto de dados ou determinar o valor da deriva
calculando o ajuste linear pelo método dos mínimos quadrados da freqüência [ 12 ].
Após avaliar ou estimar os efeitos sistemáticos de um conjunto de dados, esses
podem ser subtraídos do sinal, permanecendo apenas as flutuações aleatórias e que
podem ser caracterizadas estatisticamente. As flutuações aleatórias dos osciladores
podem ser bem modeladas pela lei de densidade espectral, conforme a equação (11):
αα fhfS y =)( (11)
Onde: Sy(f) = densidade espectral unilateral das flutuações de freqüência;
hα = coeficiente que indica a intensidade do tipo de ruído;
f = freqüência de Fourier na qual a densidade é obtida;
α = número de mais apropriado da lei de potência espectral para os dados.
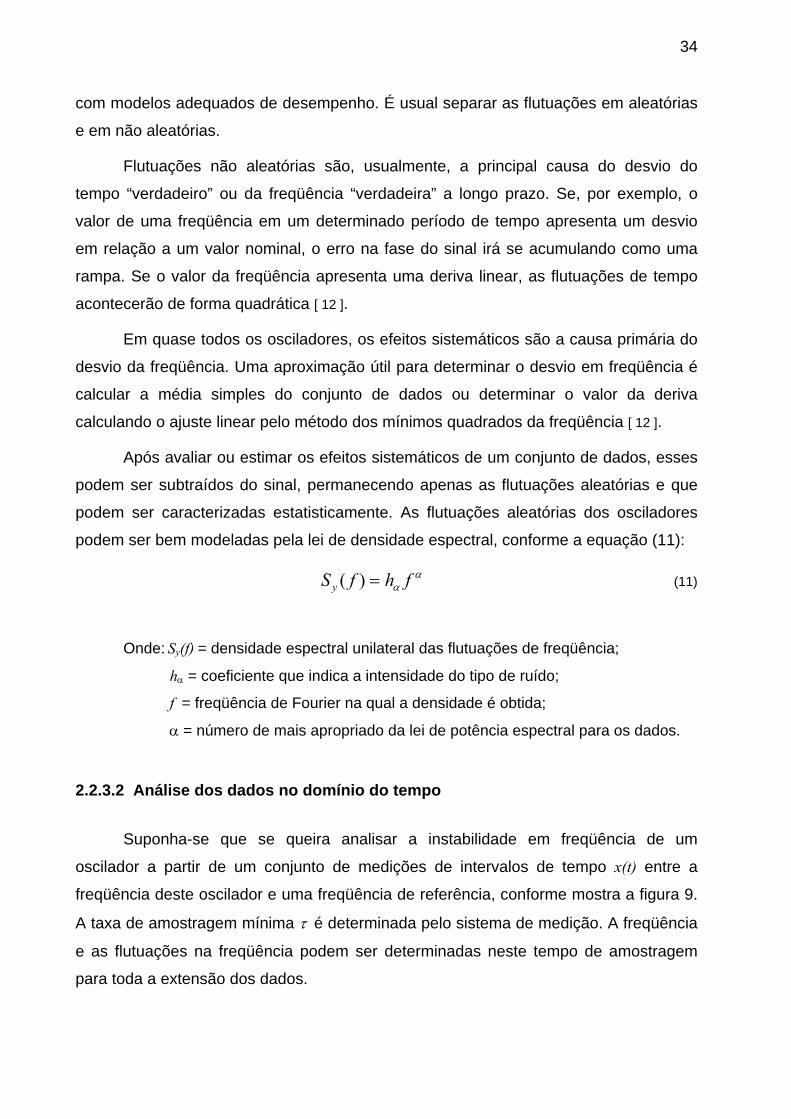
2.2.3.2 Análise dos dados no domínio do tempo
Suponha-se que se queira analisar a instabilidade em freqüência de um
oscilador a partir de um conjunto de medições de intervalos de tempo x(t) entre a
freqüência deste oscilador e uma freqüência de referência, conforme mostra a figura 9.
A taxa de amostragem mínima τ é determinada pelo sistema de medição. A freqüência
e as flutuações na freqüência podem ser determinadas neste tempo de amostragem
para toda a extensão dos dados.
35
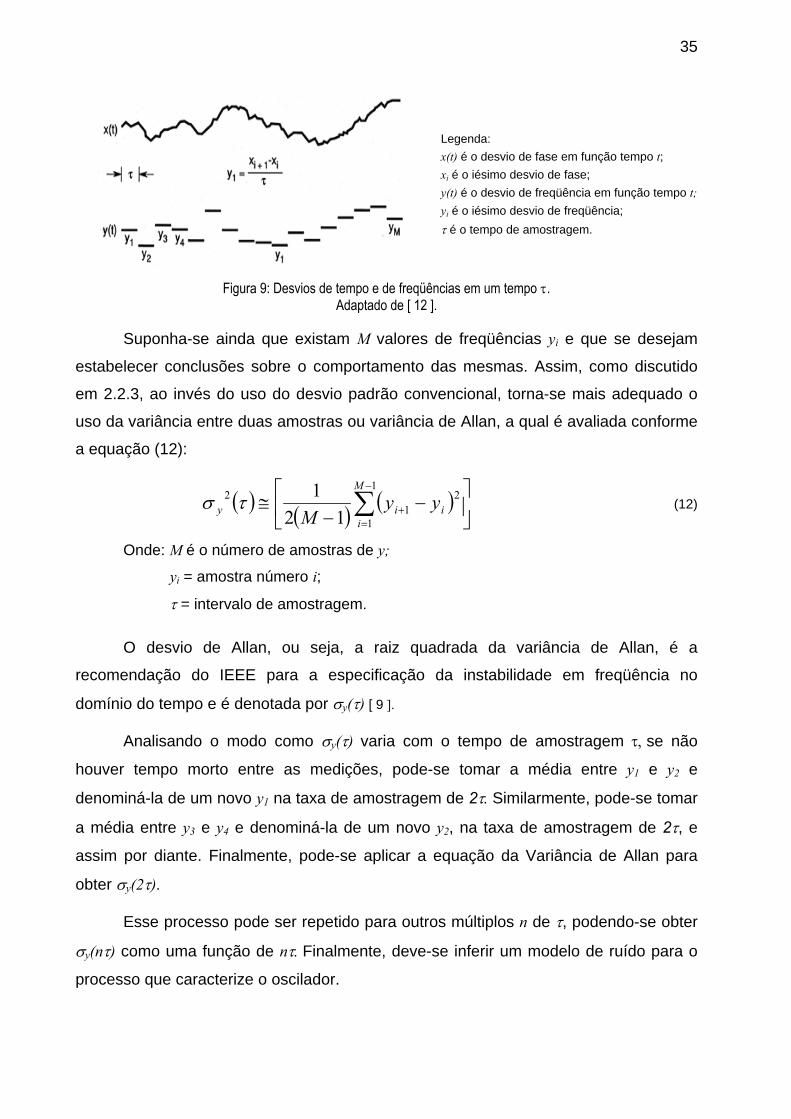
Legenda: x(t) é o desvio de fase em função tempo t; xi é o iésimo desvio de fase; y(t) é o desvio de freqüência em função tempo t; yi é o iésimo desvio de freqüência; τ é o tempo de amostragem.
Figura 9: Desvios de tempo e de freqüências em um tempo τ. Adaptado de [ 12 ].
Suponha-se ainda que existam M valores de freqüências yi e que se desejam
estabelecer conclusões sobre o comportamento das mesmas. Assim, como discutido
em 2.2.3, ao invés do uso do desvio padrão convencional, torna-se mais adequado o
uso da variância entre duas amostras ou variância de Allan, a qual é avaliada conforme
a equação (12):
( ) ( ) ( ) ⎥⎦
⎤⎢⎣
⎡−
−≅ ∑
−
=+
1
1
21
2
121 M
iiiy yy
Mτσ (12)
Onde: M é o número de amostras de y;
yi = amostra número i;
τ = intervalo de amostragem.
O desvio de Allan, ou seja, a raiz quadrada da variância de Allan, é a
recomendação do IEEE para a especificação da instabilidade em freqüência no
domínio do tempo e é denotada por σy(τ) [ 9 ].
Analisando o modo como σy(τ) varia com o tempo de amostragem τ, se não
houver tempo morto entre as medições, pode-se tomar a média entre y1 e y2 e
denominá-la de um novo y1 na taxa de amostragem de 2τ. Similarmente, pode-se tomar
a média entre y3 e y4 e denominá-la de um novo y2, na taxa de amostragem de 2τ, e
assim por diante. Finalmente, pode-se aplicar a equação da Variância de Allan para
obter σy(2τ).
Esse processo pode ser repetido para outros múltiplos n de τ, podendo-se obter
σy(nτ) como uma função de nτ. Finalmente, deve-se inferir um modelo de ruído para o
processo que caracterize o oscilador.
36
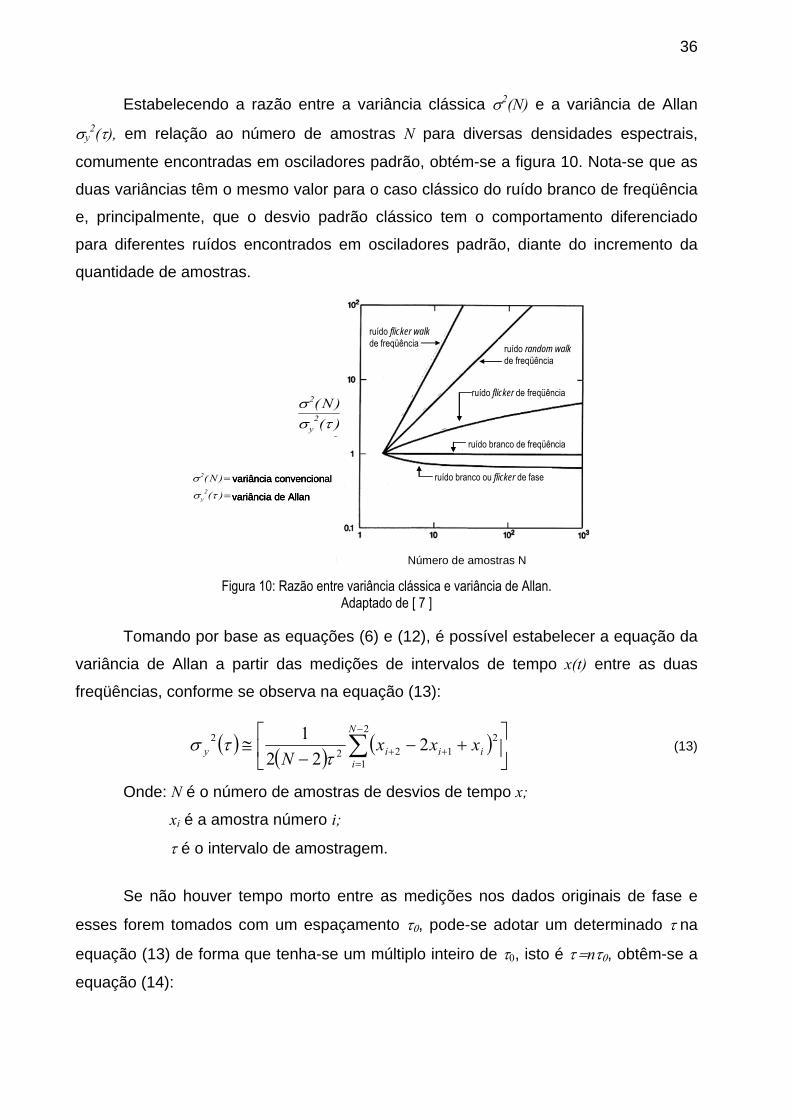
Estabelecendo a razão entre a variância clássica σ2(N) e a variância de Allan
σy2(τ), em relação ao número de amostras N para diversas densidades espectrais,
comumente encontradas em osciladores padrão, obtém-se a figura 10. Nota-se que as
duas variâncias têm o mesmo valor para o caso clássico do ruído branco de freqüência
e, principalmente, que o desvio padrão clássico tem o comportamento diferenciado
para diferentes ruídos encontrados em osciladores padrão, diante do incremento da
quantidade de amostras.
)()N(
2y
2
τσσ
Número de amostras N
ruído branco de freqüência
ruído branco ou flicker de fase
ruído flicker de freqüência
ruído random walkde freqüência
ruído flicker walkde freqüência
=)(2y τσ variância de Allan
=)N(2σ variância convencional
)()N(
2y
2
τσσ
Número de amostras N
ruído branco de freqüência
ruído branco ou flicker de fase
ruído flicker de freqüência
ruído random walkde freqüência
ruído flicker walkde freqüência
=)(2y τσ variância de Allan=)(2y τσ variância de Allan
=)N(2σ variância convencional=)N(2σ variância convencional
Figura 10: Razão entre variância clássica e variância de Allan.
Adaptado de [ 7 ]
Tomando por base as equações (6) e (12), é possível estabelecer a equação da
variância de Allan a partir das medições de intervalos de tempo x(t) entre as duas
freqüências, conforme se observa na equação (13):
( ) ( ) ( ) ⎥⎦
⎤⎢⎣
⎡+−
−≅ ∑
−
=++
2
1
2122
2 222
1 N
iiiiy xxx
N ττσ (13)
Onde: N é o número de amostras de desvios de tempo x;
xi é a amostra número i;
τ é o intervalo de amostragem.
Se não houver tempo morto entre as medições nos dados originais de fase e
esses forem tomados com um espaçamento τ0, pode-se adotar um determinado τ na
equação (13) de forma que tenha-se um múltiplo inteiro de τ0, isto é τ =nτ0, obtêm-se a
equação (14):

37
( )( )
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡+−
−≅ ∑
−
=++
nN
iininiy xxx
nnN
2
1
222
02
2 2221
ττσ (14)
Onde: τ0 é o intervalo de amostragem incial;
n é um múltiplo inteiro de τ0.
2.2.3.3 Amostras sobrepostas e confiança da estimativa da variância de Allan
Supondo 3 medições de desvios de tempo ou de freqüência, igualmente
espaçadas no tempo, têm-se dois valores adjacentes de desvios de freqüência,
conforme mostra a figura 11 e para os quais se pode calcular a variância de Allan de
duas amostras. Essa variância não apresenta elevada confiança, uma vez que é
baseada em apenas uma amostra.
1° par 2° par
par médio
1° par 2° par
par médio
Legenda:
=ff∆ desvio de freqüência
t = tempo
Figura 11: Sobreposições de amostras. Adaptado de [ 2 ]
Conceitualmente, pode-se imaginar a repetição desse experimento por muitas
vezes e determinar a distribuição de valores. Como a primeira diferença dos desvios de
freqüência, na grande maioria dos osciladores, apresenta-se conforme a distribuição
normal, a variância dos desvios apresentar-se-á conforme a distribuição chi-quadrado,
com um grau de liberdade [ 7 ].
Tomando agora cinco medições de valores de desvio de fase e calculando
quatro valores consecutivos de valores de freqüência relativa como mostra a figura 11,
pode-se então, tomar o primeiro par e calcular a variância e, em seguida, calcular uma
segunda variância a partir do segundo par. A média destas duas variâncias
proporcionará uma melhor estimativa da variância de Allan “real” e pode-se esperar um
intervalo de confiança mais estreito daquele obtido com o primeiro exemplo. Isto pode
ser constatado pelo uso da distribuição chi-quadrado para dois graus de liberdade.
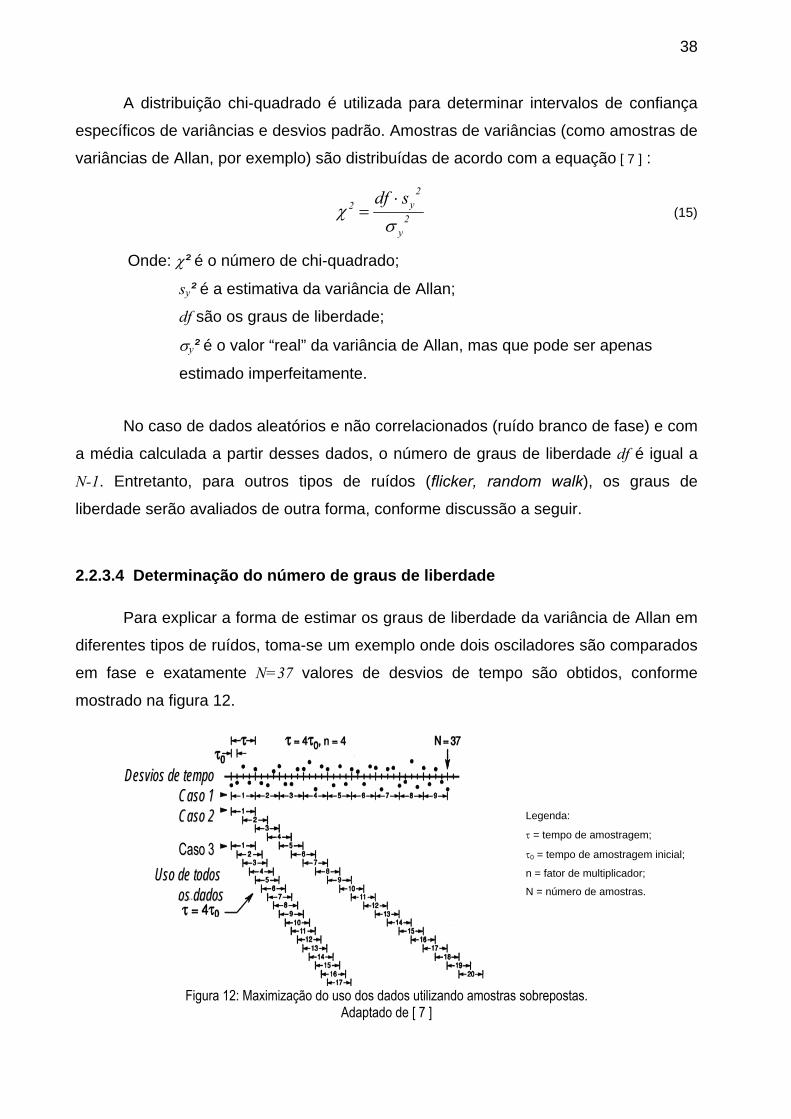
38
A distribuição chi-quadrado é utilizada para determinar intervalos de confiança
específicos de variâncias e desvios padrão. Amostras de variâncias (como amostras de
variâncias de Allan, por exemplo) são distribuídas de acordo com a equação [ 7 ] :
2y
2y2 sdf
σχ
⋅= (15)
Onde: χ² é o número de chi-quadrado;
sy² é a estimativa da variância de Allan;
df são os graus de liberdade;
σy² é o valor “real” da variância de Allan, mas que pode ser apenas
estimado imperfeitamente.
No caso de dados aleatórios e não correlacionados (ruído branco de fase) e com
a média calculada a partir desses dados, o número de graus de liberdade df é igual a
N-1. Entretanto, para outros tipos de ruídos (flicker, random walk), os graus de
liberdade serão avaliados de outra forma, conforme discussão a seguir.
2.2.3.4 Determinação do número de graus de liberdade
Para explicar a forma de estimar os graus de liberdade da variância de Allan em
diferentes tipos de ruídos, toma-se um exemplo onde dois osciladores são comparados
em fase e exatamente N=37 valores de desvios de tempo são obtidos, conforme
mostrado na figura 12.
Desvios de tempoDesvios de tempoCaso 1Caso 1Caso 2Caso 2
Caso 3Caso 3Uso de todos Uso de todos
os dadosos dados
Desvios de tempoDesvios de tempoCaso 1Caso 1Caso 2Caso 2
Caso 3Caso 3Uso de todos Uso de todos
os dadosos dados
Legenda:
τ = tempo de amostragem;
τ0 = tempo de amostragem inicial;
n = fator de multiplicador;
N = número de amostras.
Figura 12: Maximização do uso dos dados utilizando amostras sobrepostas. Adaptado de [ 7 ]

39
Assume-se também que esses dados são obtidos em intervalos de tempo τ0
igualmente espaçados. Para esses N valores, podem-se obter N-1 valores consecutivos
da média de desvios de freqüência utilizando a equação (6) e pode-se calcular N-2
amostras individuais da variância de Allan para τ = τ0 , nem todas independentes. Para
esses N-2 valores, podem-se obter uma média que estima a variância de Allan em τ =
τ0. Utilizando o mesmo conjunto de dados, é possível também estimar a variância de
Allan para múltiplos inteiros do intervalo de amostragem τ = nτ0. Serão obtidas
exatamente N-2n amostras de variâncias de Allan para, τ = nτ0. No exemplo da figura
12, por exemplo, adotou-se n = 4.
O caso 1 da figura 12 mostra que a freqüência relativa pode ser obtida com os
dados tomados de forma consecutiva, obtendo-se 9 valores da mesma. Entretanto,
pode-se otimizar as medições, utilizando-se a sobreposição de dados (overlapping),
como é mostrado nos casos 2 e 3 da figura 12. Desta forma, obtém-se dezessete
valores de freqüência relativa no caso 2 e um número maior ainda no caso 3. Howe,
Allan e Barns [ 7 ] afirmam que, com a sobreposição de dados grande parte dos desvios
de freqüência obtidos com as situações 2 e 3, haverá uma forte correlação entre eles.
Mesmo assim, o uso dessa sistemática com todos os dados é perfeitamente
justificável.
O problema na otimização dos dados pelo método de sobreposição está na
estimativa dos graus de liberdade para estabelecer o nível de confiança das variâncias
obtidas. Em princípio, é possível determinar analiticamente a equação dos graus de
liberdade para todos os casos de interesse. Entretanto, essa análise mostrou-se muito
complicada e, como alternativa, utilizaram-se simulações matemáticas [ 7 ]. Algoritmos
computacionais exatos foram estabelecidos para os casos de ruído branco de fase,
ruído branco de freqüência e ruído randon walk de freqüência. Para os dois casos de
ruído flicker (fase e freqüência), uma aproximação completamente empírica foi
utilizada. Os resultados obtidos encontram-se no quadro 1.
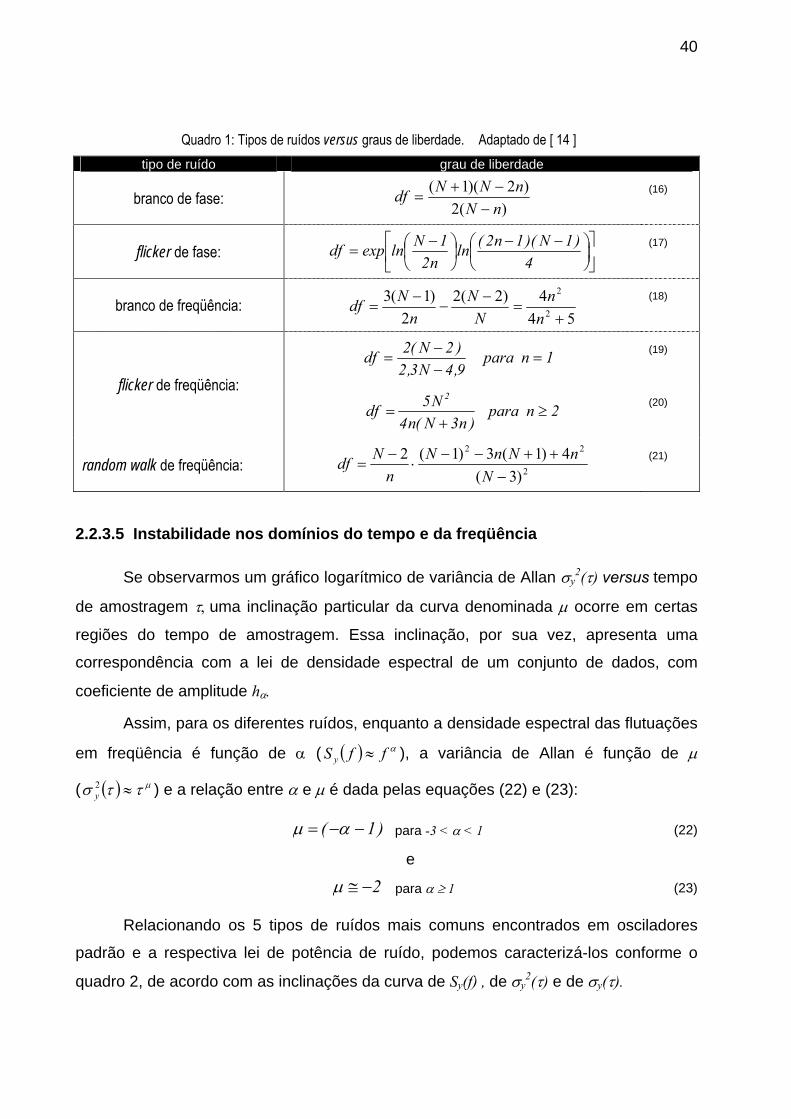
40
Quadro 1: Tipos de ruídos versus graus de liberdade. Adaptado de [ 14 ] tipo de ruído grau de liberdade
branco de fase: )(2)2)(1(
nNnNNdf
−−+
= (16)
flicker de fase: ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −−
⎟⎠⎞
⎜⎝⎛ −
=4
)1N)(1n2(lnn2
1Nlnexpdf (17)
branco de freqüência: 54
4)2(22
)1(32
2
+=
−−
−=
nn
NN
nNdf
(18)
1n para 9,4N3,2)2N(2df =
−−
= (19)
flicker de freqüência: 2n para
)n3N(n4N5 fd
2
≥+
= (20)
random walk de freqüência: 2
22
)3(4)1(3)1(2
−++−−
⋅−
=N
nNnNn
Ndf (21)
2.2.3.5 Instabilidade nos domínios do tempo e da freqüência
Se observarmos um gráfico logarítmico de variância de Allan σy2(τ) versus tempo
de amostragem τ, uma inclinação particular da curva denominada µ ocorre em certas
regiões do tempo de amostragem. Essa inclinação, por sua vez, apresenta uma
correspondência com a lei de densidade espectral de um conjunto de dados, com
coeficiente de amplitude hα.
Assim, para os diferentes ruídos, enquanto a densidade espectral das flutuações
em freqüência é função de α ( ( ) αffS y ≈ ), a variância de Allan é função de µ
( ( ) µττσ ≈2y ) e a relação entre α e µ é dada pelas equações (22) e (23):
)1( −−= αµ para -3 < α < 1 (22)
e
2−≅µ para α ≥ 1 (23)
Relacionando os 5 tipos de ruídos mais comuns encontrados em osciladores
padrão e a respectiva lei de potência de ruído, podemos caracterizá-los conforme o
quadro 2, de acordo com as inclinações da curva de Sy(f) , de σy2(τ) e de σy(τ).

41
Quadro 2: Tipos de ruídos e inclinações µ e α. Adaptado de [ 15 ].
Tipos de ruído em Sy(f) inclinação em Sy(f)
inclinação em σy
2(τ) inclinação em σy(τ)
random walk de freqüência f -2 α = -2 µ = 1 µ' = ½
flicker de freqüência f -1 α = -1 µ = 0 µ' = 0
branco de freqüência f 0 α = 0 µ = -1 µ' = -½
flicker de fase f 1 α = 1 µ = -2 µ' = -1
branco de fase f 2 α = 2 µ = -2 µ' = -1
A figura 13 mostra o gráfico de σy(τ) vesus τ para os 5 tipos de ruídos e suas
respectivas inclinações.
0 0 2 2 4 4 6 6 8 8 1010
--99
--1111
--1313
--1515
loglog ττ
loglogσσyy((ττ))
Branco de faseFlicker de fase
Branco de freqüência
Flicker defreqüência
Randon walkde freqüência
envelhecimento
ττ --11
ττ --0.50.5 ττ 0.50.5ττ 00
ττ 11
0 0 2 2 4 4 6 6 8 8 1010
--99
--1111
--1313
--1515
loglog ττ
loglogσσyy((ττ))
Branco de faseFlicker de fase
Branco de freqüência
Flicker defreqüência
Randon walkde freqüência
envelhecimento
ττ --11
ττ --0.50.5 ττ 0.50.5ττ 00
ττ 11
Legenda:
τ = tempo de amostragem;
σy(τ)= desvio de Allan.
Figura 13: Gráfico logarítmico de σy(τ) versus τ Adaptado de [ 16 ]
2.2.3.6 Variância de Allan modificada
Na prática, verifica-se que a variância de Allan não consegue distinguir o ruído
flicker de fase do ruído branco de fase. Esta é uma característica do espectro do ruído
que pode ser avaliada apenas determinando-se o espectro de potência dos sinais.
Entretanto, como a variância de Allan trabalha no domínio do tempo, Allan e Barnes
[ 13 ] desenvolveram a variância de Allan modificada, modσy2(τ), que utiliza mais
recursos computacionais do que a variância de Allan, mas resolve a indeterminação
para α >0.
A variância de Allan modificada pode ser avaliada pela equação (24):
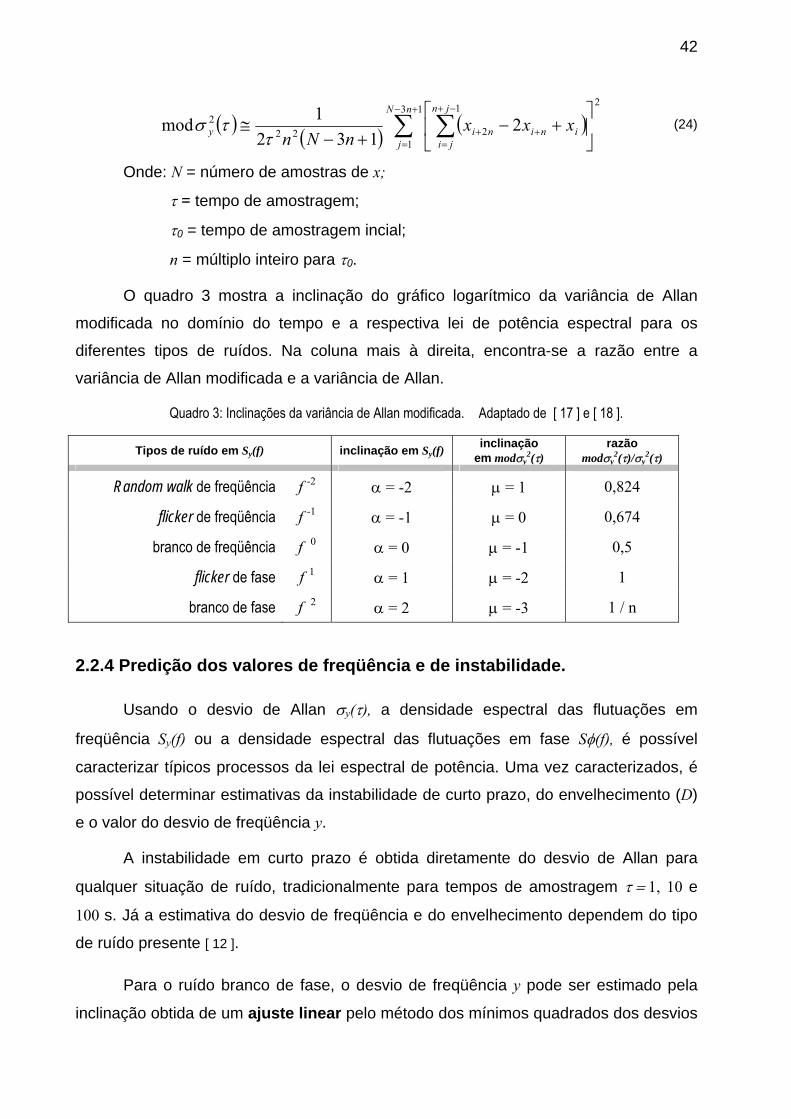
42
( ) ( ) ( )∑ ∑+−
=
−+
=++ ⎥
⎦
⎤⎢⎣
⎡+−
+−≅
13
1
21
2222 2
1321mod
nN
j
jn
jiininiy xxx
nNnττσ (24)
Onde: N = número de amostras de x;
τ = tempo de amostragem;
τ0 = tempo de amostragem incial;
n = múltiplo inteiro para τ0.
O quadro 3 mostra a inclinação do gráfico logarítmico da variância de Allan
modificada no domínio do tempo e a respectiva lei de potência espectral para os
diferentes tipos de ruídos. Na coluna mais à direita, encontra-se a razão entre a
variância de Allan modificada e a variância de Allan.
Quadro 3: Inclinações da variância de Allan modificada. Adaptado de [ 17 ] e [ 18 ].
Tipos de ruído em Sy(f) inclinação em Sy(f) inclinação
em modσy2(τ)
razão modσy
2(τ)/σy2(τ)
Random walk de freqüência f -2 α = -2 µ = 1 0,824
flicker de freqüência f -1 α = -1 µ = 0 0,674
branco de freqüência f 0 α = 0 µ = -1 0,5
flicker de fase f 1 α = 1 µ = -2 1
branco de fase f 2 α = 2 µ = -3 1 / n
2.2.4 Predição dos valores de freqüência e de instabilidade.
Usando o desvio de Allan σy(τ), a densidade espectral das flutuações em
freqüência Sy(f) ou a densidade espectral das flutuações em fase Sφ(f), é possível
caracterizar típicos processos da lei espectral de potência. Uma vez caracterizados, é
possível determinar estimativas da instabilidade de curto prazo, do envelhecimento (D)
e o valor do desvio de freqüência y.
A instabilidade em curto prazo é obtida diretamente do desvio de Allan para
qualquer situação de ruído, tradicionalmente para tempos de amostragem τ = 1, 10 e
100 s. Já a estimativa do desvio de freqüência e do envelhecimento dependem do tipo
de ruído presente [ 12 ].
Para o ruído branco de fase, o desvio de freqüência y pode ser estimado pela
inclinação obtida de um ajuste linear pelo método dos mínimos quadrados dos desvios
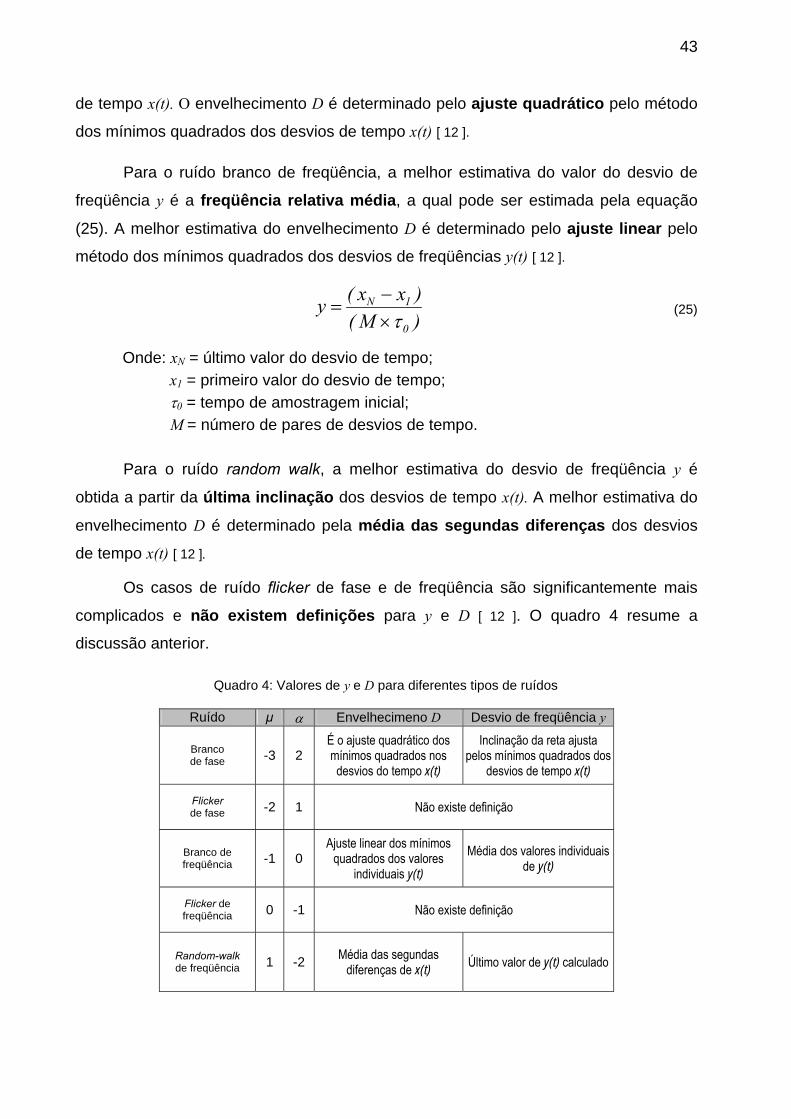
43
de tempo x(t). O envelhecimento D é determinado pelo ajuste quadrático pelo método
dos mínimos quadrados dos desvios de tempo x(t) [ 12 ].
Para o ruído branco de freqüência, a melhor estimativa do valor do desvio de
freqüência y é a freqüência relativa média, a qual pode ser estimada pela equação
(25). A melhor estimativa do envelhecimento D é determinado pelo ajuste linear pelo
método dos mínimos quadrados dos desvios de freqüências y(t) [ 12 ].
)M()xx(y
0
1N
τ×−
= (25)
Onde: xN = último valor do desvio de tempo; x1 = primeiro valor do desvio de tempo; τ0 = tempo de amostragem inicial; M = número de pares de desvios de tempo.
Para o ruído random walk, a melhor estimativa do desvio de freqüência y é
obtida a partir da última inclinação dos desvios de tempo x(t). A melhor estimativa do
envelhecimento D é determinado pela média das segundas diferenças dos desvios
de tempo x(t) [ 12 ].
Os casos de ruído flicker de fase e de freqüência são significantemente mais
complicados e não existem definições para y e D [ 12 ]. O quadro 4 resume a
discussão anterior.
Quadro 4: Valores de y e D para diferentes tipos de ruídos
Ruído µ α Envelhecimeno D Desvio de freqüência y
Branco de fase -3 2
É o ajuste quadrático dos mínimos quadrados nos desvios do tempo x(t)
Inclinação da reta ajusta pelos mínimos quadrados dos
desvios de tempo x(t)
Flicker de fase -2 1 Não existe definição
Branco de freqüência -1 0
Ajuste linear dos mínimos quadrados dos valores
individuais y(t) Média dos valores individuais
de y(t)
Flicker de freqüência 0 -1 Não existe definição
Random-walk de freqüência 1 -2 Média das segundas
diferenças de x(t) Último valor de y(t) calculado
44
2.2.5 Técnicas de medição da instabilidade em freqüência
Existem várias técnicas para a medição da instabilidade em freqüência ao longo
do tempo. Neste trabalho, entretanto, serão discutidas apenas duas dessas técnicas,
as quais foram identificadas como as mais usuais pelos laboratórios de calibração.
2.2.5.1 Sistema de medição de diferença de tempo com misturador duplo (DMTD)
Um sistema de medição de diferenças de tempo com misturador duplo tem seu
diagrama de blocos mostrado na figura 14. A grande vantagem desse método consiste
na medição de intervalo de tempo ou de suas flutuações diretamente a partir da
informação de freqüência do sinal. Dessa forma, pode-se calcular o desvio ou a
instabilidade da freqüência com uma informação do tempo com comportamento bem
conhecido e sem o “tempo morto” entre as medições, existente em outras técnicas de
medição [ 7 ].
A técnica DMTD de inferência da freqüência a partir de informações de tempo
tornou-se exeqüível atualmente graças ao incremento da resolução dos contadores
digitais e permite a avaliação da instabilidade em curtos tempos de amostragem, na
ordem de alguns milisegundos [ 7 ].
Para explicar este sistema de medição, considera-se na figura 14 a freqüência ν1
do oscilador 1 (OSC#1) como sendo a freqüência sob calibração e a freqüência ν2 do
oscilador 2 (OSC #2) como sendo uma freqüência de referência. Esses sinais são então
aplicados a um par de misturadores balanceados e um terceiro oscilador (XFER OSC),
com saídas simétricas de freqüência ν0, que alimenta as outras duas entradas do par
de misturadores.
Na saída dos dois misturadores irão surgir duas freqüências de batimento
resultantes, com uma defasagem proporcional à diferença de tempo entre os
osciladores 1 e 2, excluindo-se o diferencial em fase que pode ser introduzido. Além
disso, as freqüências de batimento irão diferir uma da outra de um valor igual à
diferença entre os osciladores 1 e 2.
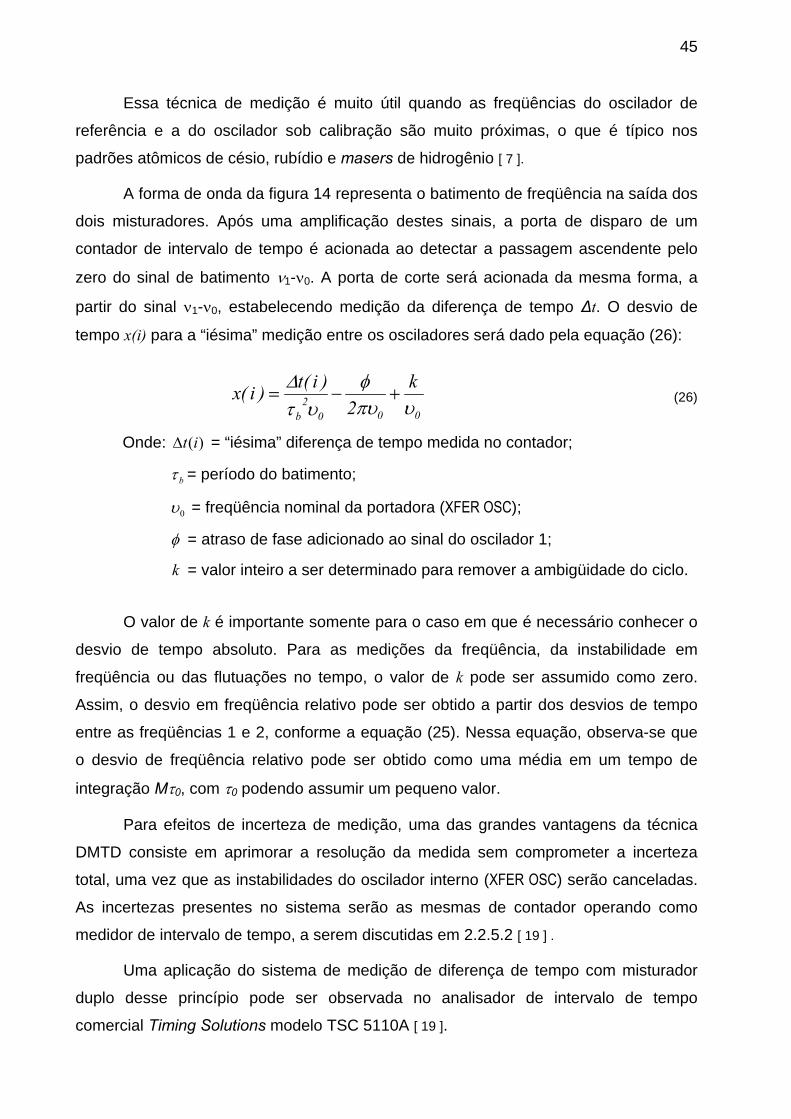
45
Essa técnica de medição é muito útil quando as freqüências do oscilador de
referência e a do oscilador sob calibração são muito próximas, o que é típico nos
padrões atômicos de césio, rubídio e masers de hidrogênio [ 7 ].
A forma de onda da figura 14 representa o batimento de freqüência na saída dos
dois misturadores. Após uma amplificação destes sinais, a porta de disparo de um
contador de intervalo de tempo é acionada ao detectar a passagem ascendente pelo
zero do sinal de batimento ν1-ν0. A porta de corte será acionada da mesma forma, a
partir do sinal ν1-ν0, estabelecendo medição da diferença de tempo ∆t. O desvio de
tempo x(i) para a “iésima” medição entre os osciladores será dado pela equação (26):
0002
b
k2
)i(t)i(xυπυ
φυτ
∆+−= (26)
Onde: )(it∆ = “iésima” diferença de tempo medida no contador;
bτ = período do batimento;
0υ = freqüência nominal da portadora (XFER OSC);
φ = atraso de fase adicionado ao sinal do oscilador 1;
k = valor inteiro a ser determinado para remover a ambigüidade do ciclo.
O valor de k é importante somente para o caso em que é necessário conhecer o
desvio de tempo absoluto. Para as medições da freqüência, da instabilidade em
freqüência ou das flutuações no tempo, o valor de k pode ser assumido como zero.
Assim, o desvio em freqüência relativo pode ser obtido a partir dos desvios de tempo
entre as freqüências 1 e 2, conforme a equação (25). Nessa equação, observa-se que
o desvio de freqüência relativo pode ser obtido como uma média em um tempo de
integração Mτ0, com τ0 podendo assumir um pequeno valor.
Para efeitos de incerteza de medição, uma das grandes vantagens da técnica
DMTD consiste em aprimorar a resolução da medida sem comprometer a incerteza
total, uma vez que as instabilidades do oscilador interno (XFER OSC) serão canceladas.
As incertezas presentes no sistema serão as mesmas de contador operando como
medidor de intervalo de tempo, a serem discutidas em 2.2.5.2 [ 19 ] .
Uma aplicação do sistema de medição de diferença de tempo com misturador
duplo desse princípio pode ser observada no analisador de intervalo de tempo
comercial Timing Solutions modelo TSC 5110A [ 19 ].
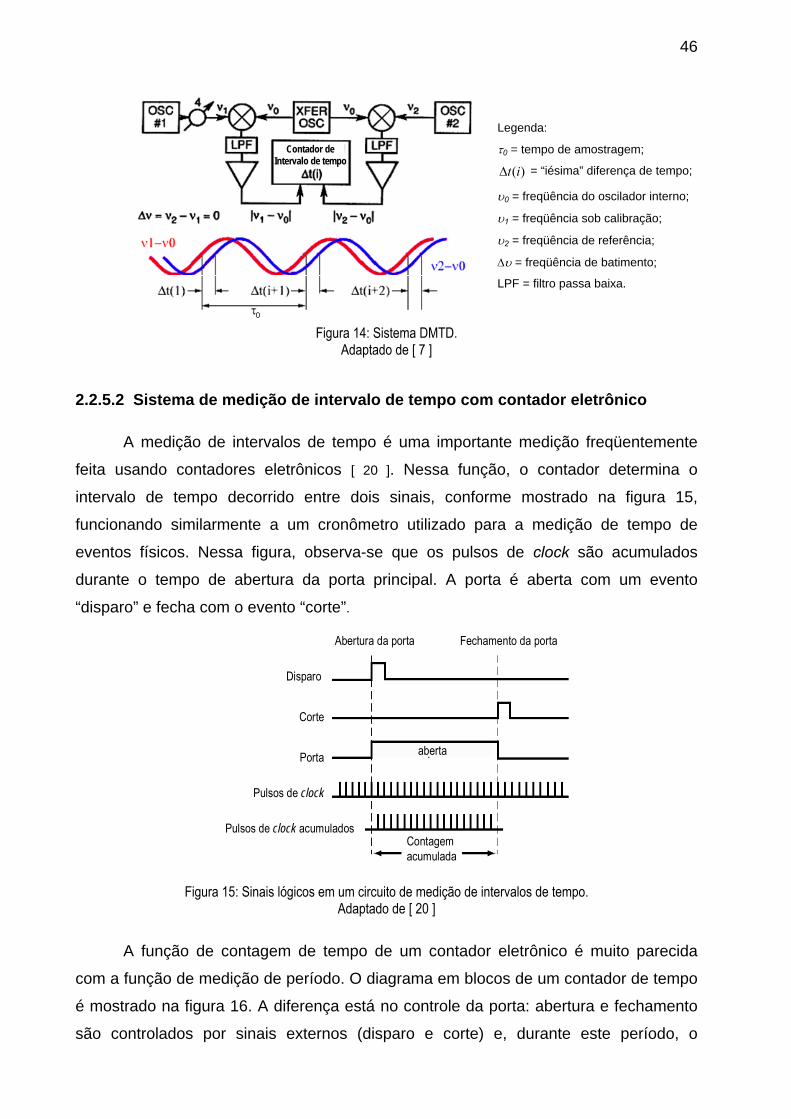
46
Contador deIntervalo de tempo
0
Contador deIntervalo de tempo
Contador deIntervalo de tempo
0
Legenda:
τ0 = tempo de amostragem;
)(it∆ = “iésima” diferença de tempo;
υ0 = freqüência do oscilador interno;
υ1 = freqüência sob calibração;
υ2 = freqüência de referência;
∆υ = freqüência de batimento;
LPF = filtro passa baixa.
Figura 14: Sistema DMTD. Adaptado de [ 7 ]
2.2.5.2 Sistema de medição de intervalo de tempo com contador eletrônico
A medição de intervalos de tempo é uma importante medição freqüentemente
feita usando contadores eletrônicos [ 20 ]. Nessa função, o contador determina o
intervalo de tempo decorrido entre dois sinais, conforme mostrado na figura 15,
funcionando similarmente a um cronômetro utilizado para a medição de tempo de
eventos físicos. Nessa figura, observa-se que os pulsos de clock são acumulados
durante o tempo de abertura da porta principal. A porta é aberta com um evento
“disparo” e fecha com o evento “corte”.
Abertura da porta Fechamento da porta
Disparo
Corte
Porta
Pulsos de clock
Porta
Pulsos de clock acumuladosContagem acumulada
aberta
Abertura da porta Fechamento da porta
Disparo
Corte
Porta
Pulsos de clock
Porta
Pulsos de clock acumuladosContagem acumulada
aberta
Figura 15: Sinais lógicos em um circuito de medição de intervalos de tempo. Adaptado de [ 20 ]
A função de contagem de tempo de um contador eletrônico é muito parecida
com a função de medição de período. O diagrama em blocos de um contador de tempo
é mostrado na figura 16. A diferença está no controle da porta: abertura e fechamento
são controlados por sinais externos (disparo e corte) e, durante este período, o

47
contador passa a contar pulsos da referência de tempo. A contagem acumulada
fornece o intervalo de tempo entre os eventos disparo e corte [ 21 ].
Amp entrada / trigger
Amp entrada / trigger
Oscilador daBase de tempo
Porta principalFlip-Flop
Registrador decontagem
Divisor daBase de tempo
PortaPrincipal
AberturaDisparo
Corte
Fechamento
Canal A
Canal B
Mostrador
Amp entrada / trigger
Amp entrada / trigger
Oscilador daBase de tempo
Porta principalFlip-Flop
Registrador decontagem
Divisor daBase de tempo
PortaPrincipal
AberturaDisparo
Corte
Fechamento
Canal A
Canal B
Mostrador
Figura 16: Contador eletrônico como medidor de intervalo de tempo Adaptado de [ 21 ].
As principais fontes de incertezas associadas a uma medição de intervalos de
tempo consistem de: incerteza de ±1 contagem, incerteza da base de tempo, incerteza
de trigger e outros efeitos sistemáticos combinados [ 22 ].
A incerteza de ±1 contagem ocorre quando qualquer contador eletrônico efetua
uma medição de intervalo de tempo e consiste em um efeito ambíguo na contagem que
afeta o dígito menos significativo. Essa incerteza é freqüentemente atribuída ao erro de
quantização e tem características randômicas. A ambigüidade pode ocorrer a partir de
uma incoerência entre o sinal interno da freqüência clock e o sinal de entrada,
conforme ilustrado na figura 17. Pode-se observar que a porta principal abre-se durante
o mesmo instante de tempo tm em ambos os casos, entretanto, a incoerência entre o
sinal de clock e o sinal de entrada pode causar duas contagens válidas: uma para o
caso 1 e duas para o caso 2 [ 21 ].
Contagem acumulada
Sinal de entrada na porta principal
Abertura da porta – caso 1
Abertura da porta – caso 2
Contagem acumulada
Sinal de entrada na porta principal
Abertura da porta – caso 1
Abertura da porta – caso 2
Legenda:
tm = tempo de medição
Figura 17: Incerteza de ±1 dígito na medição de intervalo de tempo. Adaptado de [ 21 ].
Já a incerteza da base de tempo implica que qualquer desvio de freqüência
entre o valor atual da freqüência da base de tempo e seu valor nominal é traduzido
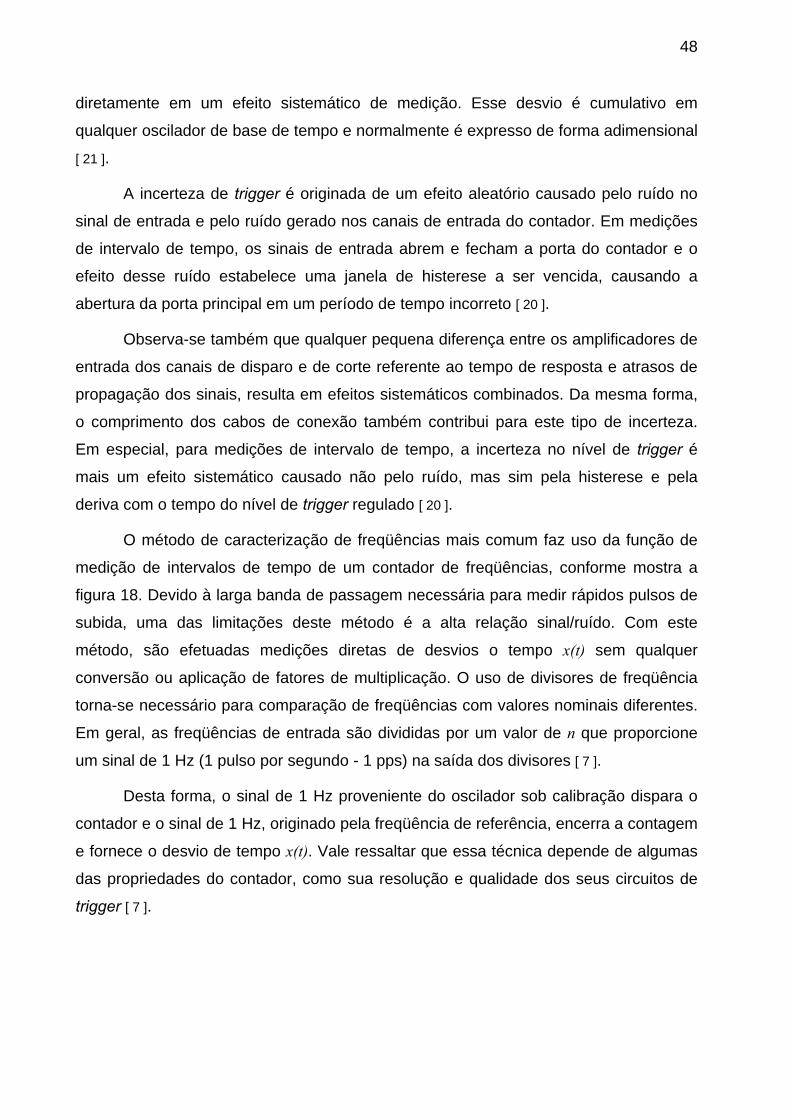
48
diretamente em um efeito sistemático de medição. Esse desvio é cumulativo em
qualquer oscilador de base de tempo e normalmente é expresso de forma adimensional
[ 21 ].
A incerteza de trigger é originada de um efeito aleatório causado pelo ruído no
sinal de entrada e pelo ruído gerado nos canais de entrada do contador. Em medições
de intervalo de tempo, os sinais de entrada abrem e fecham a porta do contador e o
efeito desse ruído estabelece uma janela de histerese a ser vencida, causando a
abertura da porta principal em um período de tempo incorreto [ 20 ].
Observa-se também que qualquer pequena diferença entre os amplificadores de
entrada dos canais de disparo e de corte referente ao tempo de resposta e atrasos de
propagação dos sinais, resulta em efeitos sistemáticos combinados. Da mesma forma,
o comprimento dos cabos de conexão também contribui para este tipo de incerteza.
Em especial, para medições de intervalo de tempo, a incerteza no nível de trigger é
mais um efeito sistemático causado não pelo ruído, mas sim pela histerese e pela
deriva com o tempo do nível de trigger regulado [ 20 ].
O método de caracterização de freqüências mais comum faz uso da função de
medição de intervalos de tempo de um contador de freqüências, conforme mostra a
figura 18. Devido à larga banda de passagem necessária para medir rápidos pulsos de
subida, uma das limitações deste método é a alta relação sinal/ruído. Com este
método, são efetuadas medições diretas de desvios o tempo x(t) sem qualquer
conversão ou aplicação de fatores de multiplicação. O uso de divisores de freqüência
torna-se necessário para comparação de freqüências com valores nominais diferentes.
Em geral, as freqüências de entrada são divididas por um valor de n que proporcione
um sinal de 1 Hz (1 pulso por segundo - 1 pps) na saída dos divisores [ 7 ].
Desta forma, o sinal de 1 Hz proveniente do oscilador sob calibração dispara o
contador e o sinal de 1 Hz, originado pela freqüência de referência, encerra a contagem
e fornece o desvio de tempo x(t). Vale ressaltar que essa técnica depende de algumas
das propriedades do contador, como sua resolução e qualidade dos seus circuitos de
trigger [ 7 ].
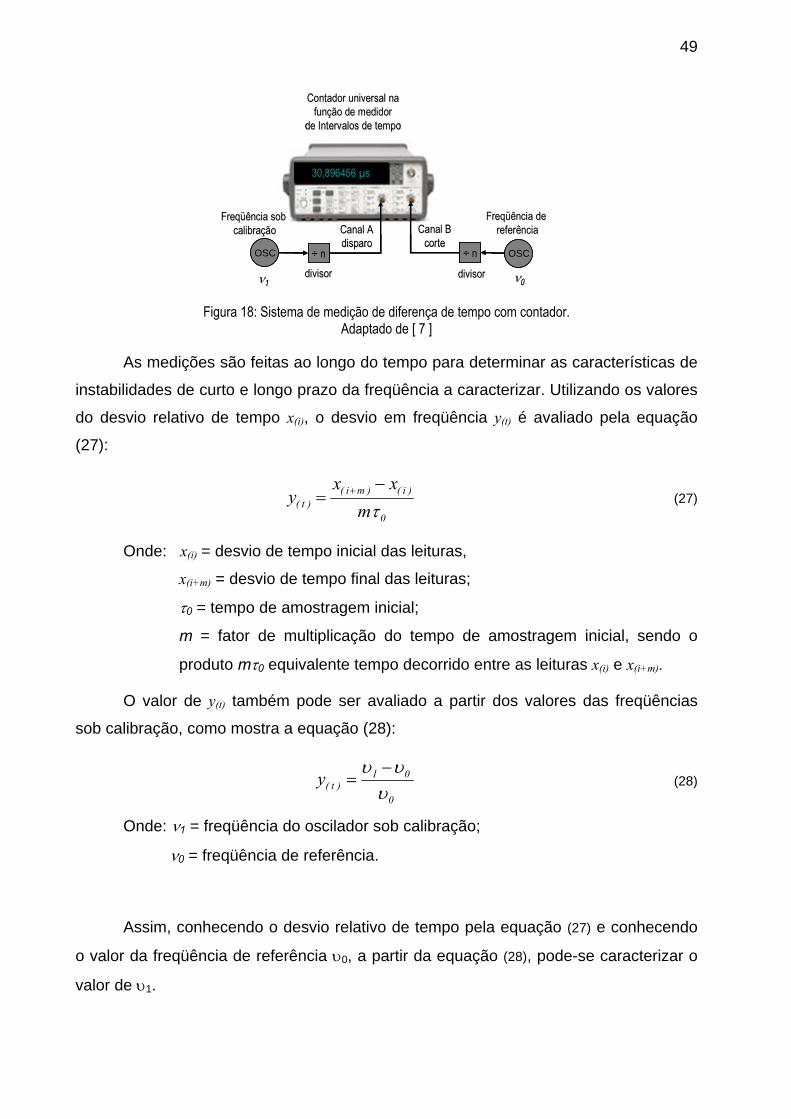
49
FreqFreqüüência de ência de referênciareferência
OSC ÷ n ÷ n OSC
30,896456 µs
FreqFreqüüência sob ência sob calibracalibraççãoão
Contador universal naContador universal nafunfunçção de medidorão de medidor
de Intervalos de tempode Intervalos de tempo
divisordivisordivisordivisor
Canal ACanal Adisparodisparo
Canal BCanal Bcortecorte
νν00νν11
FreqFreqüüência de ência de referênciareferência
OSC ÷ n ÷ n OSC
30,896456 µs
FreqFreqüüência sob ência sob calibracalibraççãoão
Contador universal naContador universal nafunfunçção de medidorão de medidor
de Intervalos de tempode Intervalos de tempo
divisordivisordivisordivisor
Canal ACanal Adisparodisparo
Canal BCanal Bcortecorte
νν00νν11
Figura 18: Sistema de medição de diferença de tempo com contador. Adaptado de [ 7 ]
As medições são feitas ao longo do tempo para determinar as características de
instabilidades de curto e longo prazo da freqüência a caracterizar. Utilizando os valores
do desvio relativo de tempo x(i), o desvio em freqüência y(t) é avaliado pela equação
(27):
0
)i()mi()t( m
xxy
τ−
= +(27)
Onde: x(i) = desvio de tempo inicial das leituras,
x(i+m) = desvio de tempo final das leituras;
τ0 = tempo de amostragem inicial;
m = fator de multiplicação do tempo de amostragem inicial, sendo o
produto mτ0 equivalente tempo decorrido entre as leituras x(i) e x(i+m).
O valor de y(t) também pode ser avaliado a partir dos valores das freqüências
sob calibração, como mostra a equação (28):
0
01)t(y
υυυ −
= (28)
Onde: ν1 = freqüência do oscilador sob calibração;
ν0 = freqüência de referência.
Assim, conhecendo o desvio relativo de tempo pela equação (27) e conhecendo
o valor da freqüência de referência υ0, a partir da equação (28), pode-se caracterizar o
valor de υ1.
50
2.3 PADRÕES DE TEMPO E FREQÜÊNCIA
A qualidade de um padrão de tempo e freqüência está relacionada à exatidão e
à instabilidade da freqüência de oscilação e de sua imunidade às variações das
condições ambientais. Conforme o elemento ressonante, os padrões de tempo e
freqüência são classificados em: padrões de quartzo e padrões atômicos de rubídio,
césio e maser de hidrogênio. Outra classificação que pode ser feita está relacionada à
definição da grandeza tempo pelo Sistema Internacional de Unidades. Desta forma,
classifica-se o padrão de césio como um padrão primário de tempo e freqüência e os
demais como padrões secundários [ 23 ].
A instabilidade em freqüência indica o quanto a freqüência de oscilação do
padrão pode mudar em um período de tempo para outro. Um relógio pode ter um
desvio em freqüência elevado e apresentar-se muito estável. Isto quer dizer que a taxa
de desvio permanece a mesma com o passar do tempo. Padrões atômicos como o de
césio e o maser apresentam características de instabilidade e de exatidão bem
diferentes. O maser tem uma instabilidade menor do que um césio, se esta for avaliada
segundo a segundo ou de hora em hora. Esse fato já não acontece se o intervalo de
tempo for de mês em mês, ou maior, uma vez que a definição do segundo está
baseada no padrão de césio, o que torna, por definição, nulo o envelhecimento do
césio. Osciladores a quartzo apresentam pequenas instabilidades a curto prazo, mas
seu desvio em freqüência ao longo do tempo é significativamente maior do que os
desvios dos padrões atômicos [ 24 ].
O princípio básico de funcionamento de um padrão atômico é mostrado na figura
19. O oscilador escravo é geralmente um oscilador a quartzo com freqüência de
oscilação de 5 ou 10 MHz e com excelente desempenho de instabilidade de curto
prazo. O sinal de microondas que excita os átomos na cavidade ressonante e que está
na faixa de GHz é gerado em um sintetizador de freqüência a partir da freqüência do
oscilador de quartzo. Um detector sensível às mudanças de fase é usado para
disciplinar a freqüência do oscilador de quartzo, de forma a produzir a máxima resposta
do sinal atômico, fechando o elo de realimentação. A saída do oscilador é também
usada como saída do padrão, combinado os desempenhos de curto prazo do oscilador
de quartzo com o excelente desempenho de estabilidade de longo prazo do ressonador
atômico [ 24 ].
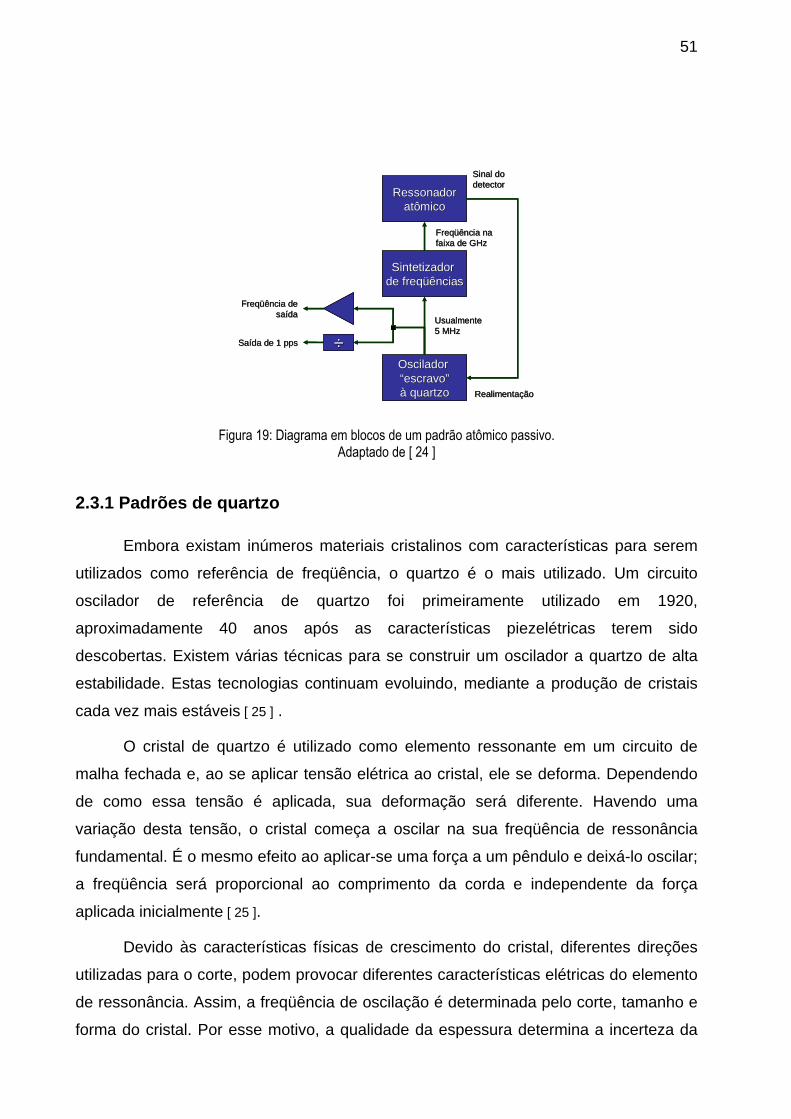
51
RessonadorRessonadoratômicoatômico
Sintetizador Sintetizador de freqde freqüüênciasências
Oscilador Oscilador ““escravoescravo””àà quartzoquartzo
FreqFreqüüência deência desasaíídada
SaSaíída de 1 da de 1 ppspps ÷÷UsualmenteUsualmente5 MHz5 MHz
FreqFreqüüência naência nafaixa de GHzfaixa de GHz
RealimentaRealimentaççãoão
Sinal doSinal dodetectordetector
RessonadorRessonadoratômicoatômico
Sintetizador Sintetizador de freqde freqüüênciasências
Oscilador Oscilador ““escravoescravo””àà quartzoquartzo
FreqFreqüüência deência desasaíídada
SaSaíída de 1 da de 1 ppspps ÷÷UsualmenteUsualmente5 MHz5 MHz
FreqFreqüüência naência nafaixa de GHzfaixa de GHz
RealimentaRealimentaççãoão
Sinal doSinal dodetectordetector
Figura 19: Diagrama em blocos de um padrão atômico passivo. Adaptado de [ 24 ]
2.3.1 Padrões de quartzo
Embora existam inúmeros materiais cristalinos com características para serem
utilizados como referência de freqüência, o quartzo é o mais utilizado. Um circuito
oscilador de referência de quartzo foi primeiramente utilizado em 1920,
aproximadamente 40 anos após as características piezelétricas terem sido
descobertas. Existem várias técnicas para se construir um oscilador a quartzo de alta
estabilidade. Estas tecnologias continuam evoluindo, mediante a produção de cristais
cada vez mais estáveis [ 25 ] .
O cristal de quartzo é utilizado como elemento ressonante em um circuito de
malha fechada e, ao se aplicar tensão elétrica ao cristal, ele se deforma. Dependendo
de como essa tensão é aplicada, sua deformação será diferente. Havendo uma
variação desta tensão, o cristal começa a oscilar na sua freqüência de ressonância
fundamental. É o mesmo efeito ao aplicar-se uma força a um pêndulo e deixá-lo oscilar;
a freqüência será proporcional ao comprimento da corda e independente da força
aplicada inicialmente [ 25 ].
Devido às características físicas de crescimento do cristal, diferentes direções
utilizadas para o corte, podem provocar diferentes características elétricas do elemento
de ressonância. Assim, a freqüência de oscilação é determinada pelo corte, tamanho e
forma do cristal. Por esse motivo, a qualidade da espessura determina a incerteza da

52
freqüência fundamental. Ajustes finais são realizados adicionando pequenas
quantidades de ouro ao quartzo, podendo alcançar variações de até duas partes em
107. Harmônicos da freqüência fundamental podem estar presentes no sinal e são
utilizados para gerar freqüências mais altas [ 26 ].
Vários efeitos de origem interna e externa podem provocar variações na
freqüência de oscilação de um cristal. Dentre eles estão: variações de temperatura,
vibrações, choques mecânicos, ações de energização e desenergização do circuito
(causando retraço1), acelerações (inclusive da gravidade), instabilidades na fonte de
alimentação do cristal e campos eletromagnéticos. A primeira delas, a temperatura, é a
que tem a maior influência. Dentre as características intrínsecas que afetam a
freqüência de oscilação do cristal estão o envelhecimento e a instabilidade de curto
prazo. A figura 20 ilustra a ação desses efeitos sob a freqüência de oscilação de um
cristal [ 25 ].
tempo
retraço
envelhecimento
vibração
choquemecânico
desliga liga
Freqüênciade oscilação
mudançade temperatura
tempo
retraço
envelhecimento
vibração
choquemecânico
desliga liga
Freqüênciade oscilação
mudançade temperatura
Figura 20: Efeitos que influenciam a freqüência de um cristal de quartzo. Adaptado de [ 25 ]
De forma a minimizar os efeitos da temperatura sobre o cristal, três tipos de
configurações são utilizadas [ 26 ]:
• Room temperature crystal oscillator (RTXO) - construídos para terem pouca
alteração com variações de temperatura dentro de seus limites de
especificação.
• Temperature compensated crystal oscillator (TCXO) - circuitos externos ao
cristal são utilizados para compensar as variações de temperatura, podendo
1 O efeito do retraço corresponde à característica de um cristal oscilar em uma determinada freqüência (ao ser
ligado) com valor diferente da freqüência que apresentava antes de ser desligado pela última vez.

53
ocorrer pequenas variações da freqüência por ocasião da correção do
circuito.
• Oven controlled temperature crystal oscillator (OCXO) - nesta configuração,
o cristal é colocado em um ambiente no qual a temperatura é controlada no
ponto onde a variação de temperatura resulta em uma pequena variação da
freqüência.
2.3.2 Padrões de césio
As referências dos relógios atômicos de césio-133 são atualmente as
referências primárias para as grandezas tempo e freqüência e, em conseqüência disso,
assume-se, por definição, que apresentam um envelhecimento desprezível [ 27 ].
IonizadorIonizadorMagneto Magneto ““BB””
AbsorvedorAbsorvedor
ColetorColetorde de IonsIons
CorrenteCorrente dedeSaSaíídada
AlimentaAlimentaççãoãodo detectordo detector
AlimentaAlimentaççãoão dodoCampo magnCampo magnééticotico
DCDCBlindagemBlindagem magnmagnééticatica
Campo magnCampo magnéético tico ““CC””
FeixeFeixe de Csde Cs
cavidadecavidade
EntradaEntrada de de freqfreqüüênciaência99 192192 631631 770 Hz770 Hz
EncasulamentoEncasulamentoàà vváácuocuo
Alimentaçãodo forno
AlimentaAlimentaççãoãodo do fornoforno
Magneto Magneto ““AA””
AbsorvedorAbsorvedor
FonteFontede Csde Cs FeixeFeixe de Csde Cs
ColimadorColimador
FeixeFeixe de Csde Cs
IonizadorIonizadorMagneto Magneto ““BB””
AbsorvedorAbsorvedor
ColetorColetorde de IonsIons
CorrenteCorrente dedeSaSaíídada
AlimentaAlimentaççãoãodo detectordo detector
AlimentaAlimentaççãoão dodoCampo magnCampo magnééticotico
DCDCBlindagemBlindagem magnmagnééticatica
Campo magnCampo magnéético tico ““CC””
FeixeFeixe de Csde Cs
cavidadecavidade
EntradaEntrada de de freqfreqüüênciaência99 192192 631631 770 Hz770 Hz
EncasulamentoEncasulamentoàà vváácuocuo
Alimentaçãodo forno
AlimentaAlimentaççãoãodo do fornoforno
Magneto Magneto ““AA””
AbsorvedorAbsorvedor
FonteFontede Csde Cs FeixeFeixe de Csde Cs
ColimadorColimador
FeixeFeixe de Csde Cs
Figura 21: Diagrama de um padrão atômico de césio. Adaptado de [ 24 ]
Com é observado na figura 21, os átomos de césio emitidos por uma fonte
radioativa são acomodados em feixe por um colimador. O campo eletromagnético não
uniforme fornecido pelo magneto “A” difrata o feixe e átomos que se encontram nos
subníveis adequados, passam por uma cavidade de microondas. Os demais deixam o
feixe e são absorvidos. Na cavidade, o feixe passa por um campo eletromagnético
uniforme “C”, sendo então submetidos à excitação por este campo. A partir daí, o feixe
atravessa outro campo eletromagnético “B”, idêntico ao existente em “A”.
Os átomos que receberam muita energia e deixaram o subnível adequado,
deixam o feixe principal e são absorvidos. O feixe de átomos no subnível atômico
adequado passa a seguir por um coletor de íons gerando uma informação de corrente.
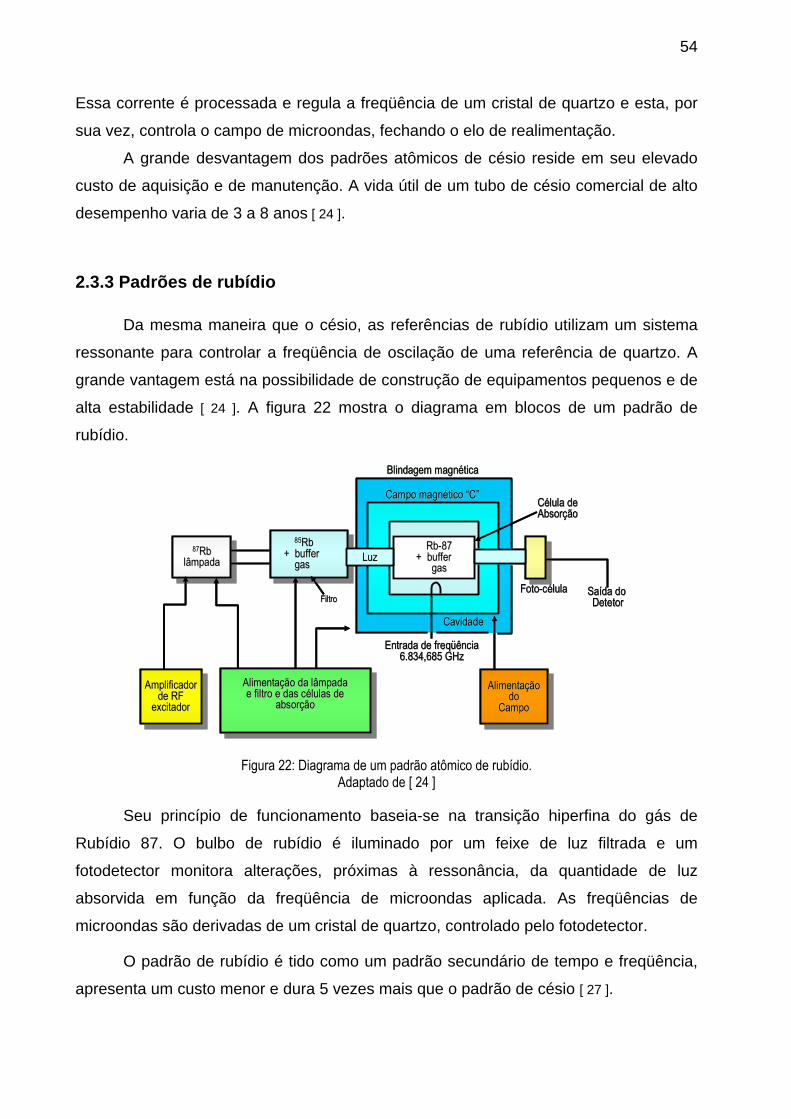
54
Essa corrente é processada e regula a freqüência de um cristal de quartzo e esta, por
sua vez, controla o campo de microondas, fechando o elo de realimentação.
A grande desvantagem dos padrões atômicos de césio reside em seu elevado
custo de aquisição e de manutenção. A vida útil de um tubo de césio comercial de alto
desempenho varia de 3 a 8 anos [ 24 ].
2.3.3 Padrões de rubídio
Da mesma maneira que o césio, as referências de rubídio utilizam um sistema
ressonante para controlar a freqüência de oscilação de uma referência de quartzo. A
grande vantagem está na possibilidade de construção de equipamentos pequenos e de
alta estabilidade [ 24 ]. A figura 22 mostra o diagrama em blocos de um padrão de
rubídio.
BlindagemBlindagem magnmagnééticatica
Campo Campo magnmagnééticotico ““CC”” CCéélulalula dedeAbsorAbsorççãoão
8787RbRblâmpadalâmpada
AmplificadorAmplificadorde RFde RF
excitadorexcitador
AlimentaAlimentaççãoão da da lâmpadalâmpadae e filtrofiltro e das e das ccéélulaslulas de de
absorabsorççãoão
FiltroFiltro
8585RbRb+ buffer+ buffer
gasgas
CavidadeCavidade
FotoFoto--ccéélulalula SaSaíídada do do DetetorDetetor
AlimentaAlimentaççãoãododo
CampoCampo
EntradaEntrada de de freqfreqüüênciaência6.834,685 GHz6.834,685 GHz
RbRb--8787+ buffer+ buffer
gasgasLuzLuz
BlindagemBlindagem magnmagnééticatica
Campo Campo magnmagnééticotico ““CC”” CCéélulalula dedeAbsorAbsorççãoão
8787RbRblâmpadalâmpada
AmplificadorAmplificadorde RFde RF
excitadorexcitador
AlimentaAlimentaççãoão da da lâmpadalâmpadae e filtrofiltro e das e das ccéélulaslulas de de
absorabsorççãoão
FiltroFiltro
8585RbRb+ buffer+ buffer
gasgas
CavidadeCavidade
FotoFoto--ccéélulalula SaSaíídada do do DetetorDetetor
AlimentaAlimentaççãoãododo
CampoCampo
EntradaEntrada de de freqfreqüüênciaência6.834,685 GHz6.834,685 GHz
RbRb--8787+ buffer+ buffer
gasgasLuzLuz
Figura 22: Diagrama de um padrão atômico de rubídio. Adaptado de [ 24 ]
Seu princípio de funcionamento baseia-se na transição hiperfina do gás de
Rubídio 87. O bulbo de rubídio é iluminado por um feixe de luz filtrada e um
fotodetector monitora alterações, próximas à ressonância, da quantidade de luz
absorvida em função da freqüência de microondas aplicada. As freqüências de
microondas são derivadas de um cristal de quartzo, controlado pelo fotodetector.
O padrão de rubídio é tido como um padrão secundário de tempo e freqüência,
apresenta um custo menor e dura 5 vezes mais que o padrão de césio [ 27 ].

55
2.3.4 Maser de hidrogênio
O termo maser significa: microwave amplification by stimulated emission of
radiation. O maser de hidrogênio é o padrão mais estável atualmente, ou seja, sua
instabilidade de curto prazo é melhor de que a do césio. O mesmo não acontece com
sua instabilidade de longo prazo (envelhecimento). Ele possui um invólucro de
hidrogênio separado por um campo eletromagnético que permite a passagem apenas
dos átomos de maior energia para um bulbo de quartzo [ 27 ].
Este bulbo está imerso em um campo de microondas, que interage com os
átomos a uma freqüência de aproximadamente 1 segundo. A figura 23 mostra um
diagrama em blocos de um maser de hidrogênio.
Saída demicroondas
Bulbo de armazenamentorevestido com teflon
Cavidade de microondas
Entrada demicroondas
Campo eletromagnético
Átomos deHidrgênio
Saída demicroondas
Bulbo de armazenamentorevestido com teflon
Cavidade de microondas
Entrada demicroondas
Campo eletromagnético
Átomos deHidrgênio
Figura 23: Diagrama de um maser de hidrogênio. Adaptado de [ 24 ]
2.3.5 Comparação entre os padrões de freqüência
Mediante a consideração de valores típicos, é possível comparar as principais
características dos diversos padrões de freqüência existentes, conforme mostrado no
quadro 5.
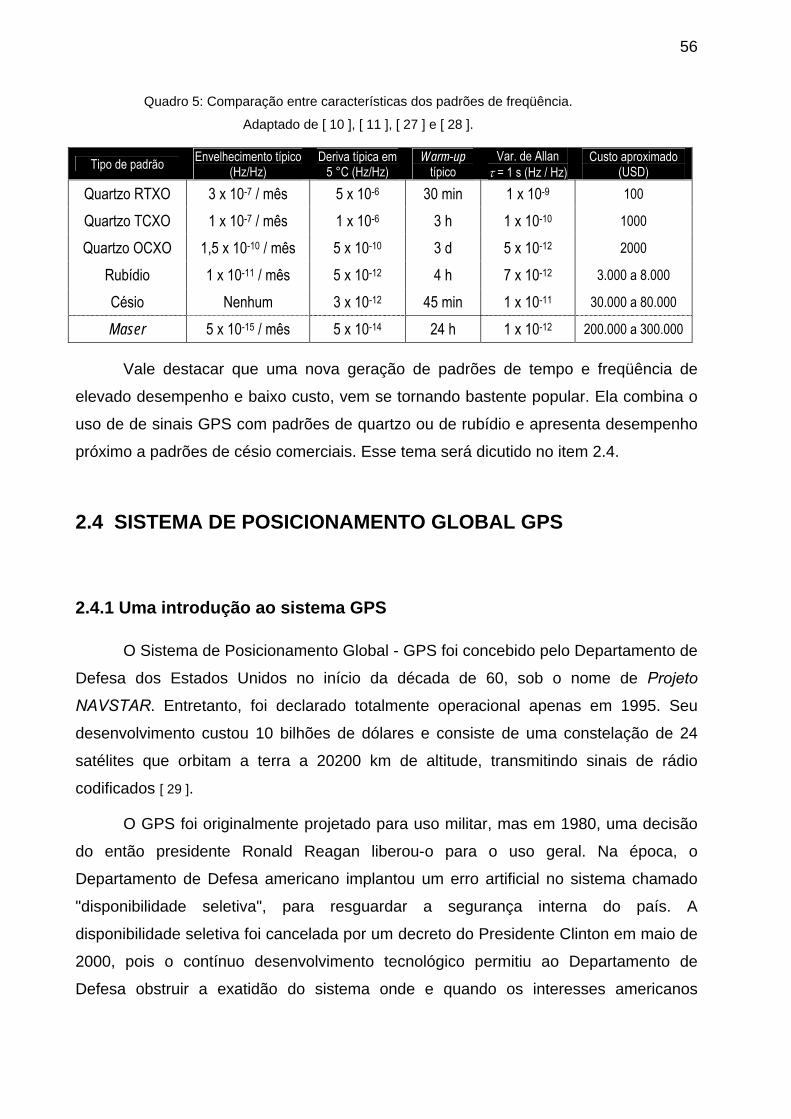
56
Quadro 5: Comparação entre características dos padrões de freqüência.
Adaptado de [ 10 ], [ 11 ], [ 27 ] e [ 28 ].
Tipo de padrão Envelhecimento típico (Hz/Hz)
Deriva típica em 5 °C (Hz/Hz)
Warm-up típico
Var. de Allan τ = 1 s (Hz / Hz)
Custo aproximado (USD)
Quartzo RTXO 3 x 10-7 / mês 5 x 10-6 30 min 1 x 10-9 100
Quartzo TCXO 1 x 10-7 / mês 1 x 10-6 3 h 1 x 10-10 1000
Quartzo OCXO 1,5 x 10-10 / mês 5 x 10-10 3 d 5 x 10-12 2000
Rubídio 1 x 10-11 / mês 5 x 10-12 4 h 7 x 10-12 3.000 a 8.000
Césio Nenhum 3 x 10-12 45 min 1 x 10-11 30.000 a 80.000
Maser 5 x 10-15 / mês 5 x 10-14 24 h 1 x 10-12 200.000 a 300.000
Vale destacar que uma nova geração de padrões de tempo e freqüência de
elevado desempenho e baixo custo, vem se tornando bastente popular. Ela combina o
uso de de sinais GPS com padrões de quartzo ou de rubídio e apresenta desempenho
próximo a padrões de césio comerciais. Esse tema será dicutido no item 2.4.
2.4 SISTEMA DE POSICIONAMENTO GLOBAL GPS
2.4.1 Uma introdução ao sistema GPS
O Sistema de Posicionamento Global - GPS foi concebido pelo Departamento de
Defesa dos Estados Unidos no início da década de 60, sob o nome de Projeto
NAVSTAR. Entretanto, foi declarado totalmente operacional apenas em 1995. Seu
desenvolvimento custou 10 bilhões de dólares e consiste de uma constelação de 24
satélites que orbitam a terra a 20200 km de altitude, transmitindo sinais de rádio
codificados [ 29 ].
O GPS foi originalmente projetado para uso militar, mas em 1980, uma decisão
do então presidente Ronald Reagan liberou-o para o uso geral. Na época, o
Departamento de Defesa americano implantou um erro artificial no sistema chamado
"disponibilidade seletiva", para resguardar a segurança interna do país. A
disponibilidade seletiva foi cancelada por um decreto do Presidente Clinton em maio de
2000, pois o contínuo desenvolvimento tecnológico permitiu ao Departamento de
Defesa obstruir a exatidão do sistema onde e quando os interesses americanos

57
exigissem. Com o decreto, a incerteza na localização do receptor então de 100 m ficou
dez vezes menor [ 30 ].
A maior parte das descrições do sistema GPS foca seu uso como um sistema
que proporciona exatidão na informação da latitude, longitude e altitude e,
freqüentemente, é usado para a determinação da velocidade. De uma forma genérica,
pode ser descrito como um sistema dinâmico que proporciona informações brutas
necessárias à navegação. Este é o uso fundamental do sistema GPS, mas está longe
de ser o único [ 30 ].
Sem uma estimativa do tempo com incertezas na ordem de nanosegundos,
torna-se impossível estabelecer o posicionamento na forma com que é feito na
atualidade. O sistema GPS proporciona, antes de qualquer outro dado, informações de
freqüência, tempo e intervalos de tempo, em qualquer parte da superfície terrestre e
com incertezas mais do que adequadas para uma série de aplicações. O acesso
contínuo a essas informações, em qualquer ponto onde sejam necessárias, é um
desenvolvimento revolucionário, principalmente para a área de telecomunicações [ 29 ].
O sistema de posicionamento pode ser dividido em 3 grandes agrupamentos:
controle, satélites e instrumentos dos usuários [ 29 ], conforme pode ser observado na
figura 24.
Estação demonitoramento
Estação decontrole
Antenaterrestre
Instrumentos dosusuários
Satélites
Controle
Estação demonitoramento
Estação decontrole
Antenaterrestre
Estação demonitoramento
Estação decontrole
Antenaterrestre
Estação demonitoramento
Estação decontrole
Antenaterrestre
Instrumentos dosusuários
Satélites
Controle
Figura 24: Agrupamentos do sistema GPS.
Adaptado de [ 29 ]
O agrupamento “controle” consiste de 1 estação de controle principal nos
Estados Unidos e mais 5 estações de monitoramento ao redor do mundo. A estação de
controle principal rastreia, monitora e controla os satélites GPS [ 29 ].

58
O agrupamento “satélites” consiste em uma constelação de 24 satélites em
órbitas semi-sincronizadas a cada 11 h e 58 min em torno da terra e que transmitem
sinais codificados de rádio em freqüências com duas portadoras: L1 em 1,57542 GHz e
L2 em 1,2276 GHz. Cada satélite transmite as portadoras L1 e L2 em uma forma de
onda spread-spectrum chamada código de ruído pseudo-aleatório (PRN), o qual
identifica cada satélite. Existem 2 tipos de códigos PRN: o primeiro é um código de
aquisição grosseiro (coarse acquisition - C/A) transmitido em L1 e o segundo é um
código de precisão (precision - P), transmitido em L1 e L2 [ 31 ].
As órbitas dos satélites são estabelecidas de forma tal que pelo menos 4
satélites estejam visíveis em qualquer ponto da superfície terrestre, a qualquer hora do
dia. O fornecimento do tempo e da freqüência com reduzidas incertezas é obtida com a
existência de dois padrões de césio e dois padrões de rubídio em cada um desses
satélites e são as referências para as portadoras L1 e L2 e para os códigos PRN. Os
padrões a bordo são controlados pelo Departamento de Defesa dos Estados Unidos e
são referenciados ao tempo universal coordenado – UTC, mantido pelo Observatório
Naval dos Estados Unidos – USNO. Por intermédio de um acordo mútuo, o UTC do
NIST e do USNO são mantidos dentro de 100 ns entre si e o desvio de freqüência entre
eles é menor 10-13 Hz/Hz [ 31 ].
Finalmente, o agrupamento “instrumentos dos usuários” corresponde a uma
variedade de instrumentos com receptores e processadores específicos, destinados a
receber, decodificar e processar códigos GPS e mensagens de navegação. Existem
dois níveis de instrumentos: aqueles com acesso ao serviço de posicionamento padrão
(código C/A) e os com acesso ao serviço de posicionamento exato (código P). Esse
segundo nível é destinado quase que exclusivamente para fins militares [ 29 ].
2.4.2 Padrões de freqüência disciplinados por GPS
O desenvolvimento de receptores de informações de tempo do sistema GPS que
sincronizam osciladores de quartzo ou rubídio, são chamados osciladores disciplinados
por GPS ou GPSDO (GPS - disciplinated oscillator). Como o nome sugere, esse
instrumento contém um oscilador de baixa instabilidade de curto prazo que segue de
muito perto as freqüências derivadas do GPS, as quais apresentam grande
estabilidade de longo prazo. Em um período de 1 dia ou mais, a saída desse oscilador

59
pode fornecer freqüências com instabilidade na ordem de uma parte em 1014,
característica equivalente a um padrão de césio [ 32 ].
O diagrama em blocos de um padrão disciplinado por GPS comercial típico é
mostrado na figura 25. Ele contém um módulo de recepção dos sinais GPS, um
oscilador local e um módulo de controle. O módulo receptor consiste em um receptor
de rádio, um demodulador e um microcontrolador que interpreta a informação recebida
dos satélites em termos de posição e de tempo e gera pulsos de 1 Hz. Esse sinal de 1
Hz tem uma elevada taxa de ruído e instabilidade de curto prazo na ordem de 10-7
Hz/Hz. A recepção simultânea de sinais de diversos satélites GPS, proporcionando a
média das informações de tempo, reduz o ruído [ 32 ].
Receptor GPS
Receptor Receptor GPSGPS
Comparador de fase
Comparador Comparador de fasede fase
Oscilador local
Oscilador Oscilador locallocal
Sinal localSinal local
Sinal Sinal GPSGPS
Sinal deSinal decontrolecontrole
Sinal deSinal desasaíídada
GPSDOGPSDO
AntenaAntena
Receptor GPS
Receptor Receptor GPSGPS
Comparador de fase
Comparador Comparador de fasede fase
Oscilador local
Oscilador Oscilador locallocal
Sinal localSinal local
Sinal Sinal GPSGPS
Sinal deSinal decontrolecontrole
Sinal deSinal desasaíídada
GPSDOGPSDO
AntenaAntena
Figura 25: Esquema de um padrão disciplinado por GPS . Adaptado de [ 32 ].
Para combinar as melhores características de longo e curto prazo, o oscilador
local consiste de um padrão de rubídio ou de quartzo controlado por tensão, o qual é
continuamente comparado com o sinal GPS. A constante de tempo adequada para
controle do oscilador local é de horas para o rubídio e de minutos para o quartzo [ 32 ].
A incerteza em freqüência de um padrão disciplinado por GPS depende do
tempo de amostragem em que ela é medida. No tempo de amostragem de 24 h, na
grande maioria dos GPSDO, a incerteza gira em torno de 10-12 Hz/Hz. Em curtos
tempos de amostragem, ela depende do algoritmo de disciplina e da qualidade do
oscilador local. Por exemplo, para 100 s, a instabilidade de um GPSDO de rubídio
permanece em torno de 10-12 Hz/Hz, mas para um quartzo OCXO ela está entre 10-10 e
10-11 Hz/Hz [ 32 ].

60
2.4.3 Características dos receptores GPS
Segundo o NIST [ 33 ], os receptores GPS comercializados atualmente como
padrões de tempo e freqüência compartilham de algumas características, como:
• Alguns receptores selecionam automaticamente o satélite utilizado para
fornecer o tempo e a freqüência, o que os torna práticos para uso.
Entretanto, diferentes algoritmos são usados para essa seleção e cada
receptor apresenta seus próprios limiares para níveis de sinal recebido para
manter, suprimir ou adquirir o sinal de outro satélite. Alguns algoritmos
escolhem os satélites que proporcionam uma menor incerteza no
posicionamento; em outros, os satélites que estão em uma posição mais
elevada no céu é que são selecionados. O número de satélites que são
utilizados pelo algoritmo também varia entre receptores, compreendendo
desde um único satélite até mesmo 12 satélites. Por esses motivos, dois
receptores podem produzir resultados muito diferentes quando conectados
na mesma antena em uma posição geográfica fixa.
• Muitos dos receptores apresentam uma instabilidade de curto prazo muito
ruim. Os melhores receptores são os que utilizam osciladores a quartzo
OCXO ou rubídio. Entretanto, muitos receptores não disciplinam seus
osciladores. Ao contrário, dividem a freqüência fornecida por um oscilador a
quartzo TCXO para obter 1 Hz e o sincronizam ao sinal GPS. Esse oscilador
modifica naturalmente a freqüência até acumular um valor pré-definido de
desvio. Nesse momento, gera-se uma correção que desloca a fase do sinal,
diminuindo o erro. Como resultado, obtém-se um péssimo desempenho da
instabilidade de curto prazo.
• Alguns receptores são adequados apenas para trabalharem como padrão de
tempo por apresentarem bom desempenho nessa grandeza. O mesmo não
acontece com o desempenho do mesmo receptor para freqüência.
• Alguns receptores avaliam sua posição inicial e a mantém fixa ao longo do
tempo de uso, sem qualquer correção. Esse procedimento não é adequado
para a operação do receptor como um padrão de freqüência, pois, apesar da
antena estar em uma posição fixa, devido às variações no meio de
transmissão, o sistema as percebe como se a antena estivesse em
61
movimento. Assim, os erros de posição irão contribuir para grandes
flutuações na freqüência.
• Cada satélite está visível em uma determinada localização por um tempo
limitado. Todos os receptores GPS devem adicionar ou remover informações
do grupo de satélites para os quais se obtém as informações. A remoção ou
acréscimo das informações dos satélites causam mudanças instantâneas na
freqüência gerada pelo padrão. Alguns receptores possuem algoritmos
melhores que outros para compensar esse fato.
• O tratamento de falhas de operação dos satélites GPS é diferente de
receptor para receptor. Alguns deles ignoram a ocorrência dessas falhas, o
que pode proporcionar perda no desempenho do padrão.
2.5 GPS x GLONASS E GALILEO
Semelhante ao sistema GPS, existe em operação efetiva desde 1982, um
sistema de navegação operado pelo governo Russo chamado Global Navigation
Satellite System – GLONASS. Entretanto, o amplo uso do sistema para fins
metrológicos foi prejudicado ao longo desses anos pela indisponibilidade de receptores
comerciais. Atualmente, estão disponíveis receptores que operam tanto no sistema
GPS quanto no sistema GLONASS [ 34].
O sistema GLONASS oferece uma série de vantagens em relação ao sistema
GPS, principalmente no que se refere à inexistência de erros introduzidos no sinal,
tornando-o igual para uso militar e civil. Da mesma forma que o GPS, a informação de
tempo e freqüência dos satélites são referenciadas ao Tempo Universal Coordenado -
UTC gerado pelo Institute of Metrology for Time and Space - IMVP da Rússia e que é
rastreado ao BIPM [ 34 ].
É importante relatar também a existência de um consórcio de diversas agências
européias que está trabalhando em um sistema similar ao GPS, que será chamado de
GALILEO. Apesar do sistema ainda estar na fase de projeto, a configuração preliminar
prevê o uso de 30 satélites em três planos orbitais. Ao contrário do GPS e do
GLONASS, os quais foram inicialmente concebidos para aplicações militares, o projeto
inicial do GALILEO enfatiza as aplicações civis. O sistema irá referenciar-se ao UTC,
entretanto detalhes de como isso será feito ainda não estão estabelecidos [ 35 ].
62
No presente trabalho, optou-se pelo uso do GPS, uma vez que a grande maioria
dos receptores disponíveis no mercado opera com esse sistema. Já existem alguns
fabricantes que comercializam receptores que recebem sinais com o GPS e o
GLONASS e, quando o sistema GALILEO estiver operacional, a tendência natural é
que existirão receptores compatíveis com os todos os sistemas simultaneamente.
A figura 26 mostra o aspecto dos satélites GPS, GLONASS e GALILEO.
Satélite GPS
Satélite GLONASS
Satélite GALILEO
Figura 26: Aspecto dos satélites GPS, GLONASS E GALILEO.
Adaptado de [ 36 ]

63
3 PROPOSTA DE ESTRUTURA DE UM SISTEMA PARA RASTREABILIDADE DE FREQÜÊNCIA
3.1 PRINCIPAIS MOTIVAÇÕES
Em muitas áreas da calibração, a rastreabilidade é estabelecida encaminhando-
se o padrão ao instituto nacional de metrologia ou a um laboratório formalmente
acreditado. Uma segunda possibilidade consiste no laboratório de referência realizar a
calibração nas próprias instalações do usuário, fazendo uso de padrões itinerantes.
Entretanto, nenhuma das situações anteriores é prática quando se tratam de
calibrações de padrões de tempo e freqüência. Os osciladores são sensíveis às
mudanças nas condições ambientais e, sobretudo, quando são energizados e
desenergizados. Caso um oscilador seja calibrado e então desligado, a calibração pode
tornar-se inválida no momento em que o oscilador é novamente ligado, levando-se em
conta a existência do retraço. Adicionalmente, vibrações e variações de temperatura
durante o transporte também podem alterar os resultados. Por essa razão, os
laboratórios devem sempre realizar as calibrações desses padrões in loco [ 10 ].
Felizmente, é possível fazer uso de padrões de transferência para levar
informações do tempo e da freqüência padrão do Instituto Nacional de Metrologia ao
laboratório de calibração. Neste caso, os padrões de transferência são dispositivos que
recebem e processam os sinais de rádio originados pelo INM. Diversos sinais estão
disponíveis em alguns países, incluindo estações de rádio WWV, WWVH e WWVB
difundidas pelo NIST e sinais de radionavegação LORAN-C e, em especial, o GPS, que
é mantido em sincronismo com os padrões no NIST [ 31 ].
Entretanto, sob o enfoque da norma NBR ISO/IEC 17025 - Requisitos Gerais
para a Competência de Laboratórios de Ensaio e Calibração e das organizações que

64
fornecem reconhecimento de competência de laboratórios, surgem algumas dúvidas,
como, por exemplo:
• Uma vez que as informações de tempo do sistema GPS originam-se do UTC
[ 37 ], um laboratório de calibração, ao fazer uso de um padrão de referência
para freqüência GPSDO, pode-se considerar plenamente atendido o
requisito 5.6 – Rastreabilidade da Medição - da norma NBR ISO/IEC 17025,
sem nenhuma calibração adicional desse padrão?
• Se o requisito não for considerado atendido, quais seriam as condições
práticas necessárias para a rastreabilidade usando os sinais GPS?
Estas questões consistem no foco do presente trabalho e nesse capítulo serão
discutidas todas as condições necessárias para estruturar e validar um sistema remoto
de rastreabilidade para calibração de padrões de freqüência que seja tecnicamente
viável, prático e econômico.
3.2 DISSEMINAÇÃO DE TEMPO E FREQÜÊNCIA
3.2.1 Escalas de tempo
Uma escala de tempo para uso mundial apresenta dois elementos essenciais:
realização da unidade de tempo e; manutenção de uma referência temporal [ 38 ].
A realização e disseminação das escalas de tempo internacionais estão sob a
responsabilidade do Setor de Tempo, Freqüência e Gravimetria do BIPM. O Tempo
Atômico Internacional - TAI consiste de uma escala uniforme que é mantida o mais
próxima possível da definição do segundo pelo SI. O TAI é calculado pelo BIPM
utilizando dados de aproximadamente 200 relógios atômicos, localizados em 50
institutos nacionais de metrologia. Esses relógios atômicos são, na grande maioria,
padrões de césio comerciais; em um número menor, são masers de hidrogênio e
alguns poucos são padrões primários de césio de laboratório [ 39 ].
A instabilidade de longo prazo do TAI é obtida de forma que os dados dos
melhores relógios de césio dos laboratórios participantes tenham um maior peso de
participação nessa escala. Assim, o TAI é uniforme e estável, mas não acompanha a
leve irregularidade da rotação terrestre [ 38 ].
65
Para aplicações públicas e propósitos práticos, a partir de 1º de janeiro de 1972,
passou-se a utilizar o Tempo Universal Coordenado – UTC, que consiste de uma
escala atômica idêntica ao TAI, exceto no fato de apresentar a inserção ou omissão de
1 segundo (chamado leap second) para assegurar que, na média de 1 ano, o sol cruze
o meridiano de Greenwich ao meio dia com um erro máximo de 0,9 s. Desta forma, o
UTC segue a rotação da terra dentro do segundo. As datas para a aplicação do leap
second são de responsabilidade do International Earth Rotation Service - IERS [ 40 ].
Realizações locais do UTC são estabelecidas pelos institutos nacionais de
metrologia e correspondem à sua hora legal. Essa hora legal é chamada de UTC(k)
onde k representa a instituição do país. No caso do Brasil, temos o UTC(ONRJ),
gerado pelo Observatório Nacional do Rio de Janeiro.
As escalas atômicas TAI e UTC são disseminadas mensalmente pelo BIPM
através da publicação “Circular T” que pode ser acessadas pela internet [ 38 ].
3.2.2 Comparação entre relógios para determinação do UTC
Um dos importantes usos do sistema GPS, além da navegação, tem sido a sua
utilização pela comunidade metrológica internacional para gerar as escalas de tempo
atômicas TAI e UTC. Em alguns casos, o GPS serve como uma ferramenta primária de
transferência; em outros, é utilizado como sistema redundante ao sistema de
transferência principal [ 41 ].
Os métodos de transferência de tempo e freqüência utilizados para a
comparação entre os relógios dos diversos institutos nacionais de metrologia que
contribuem para a geração das escalas atômicas de tempo são: GPS common-view e
two-way time and frequency transfer – TWSTFT [ 42 ].
3.2.3 Métodos de transferência de tempo e freqüência usando GPS
3.2.3.1 Método GPS one-way
A forma mais comum de transferir uma informação de tempo é por meio da
transmissão de um sinal por radiodifusão e o método mais simples de fazê-lo (e
também o mais limitado em desempenho) é chamado one-way [ 43 ].
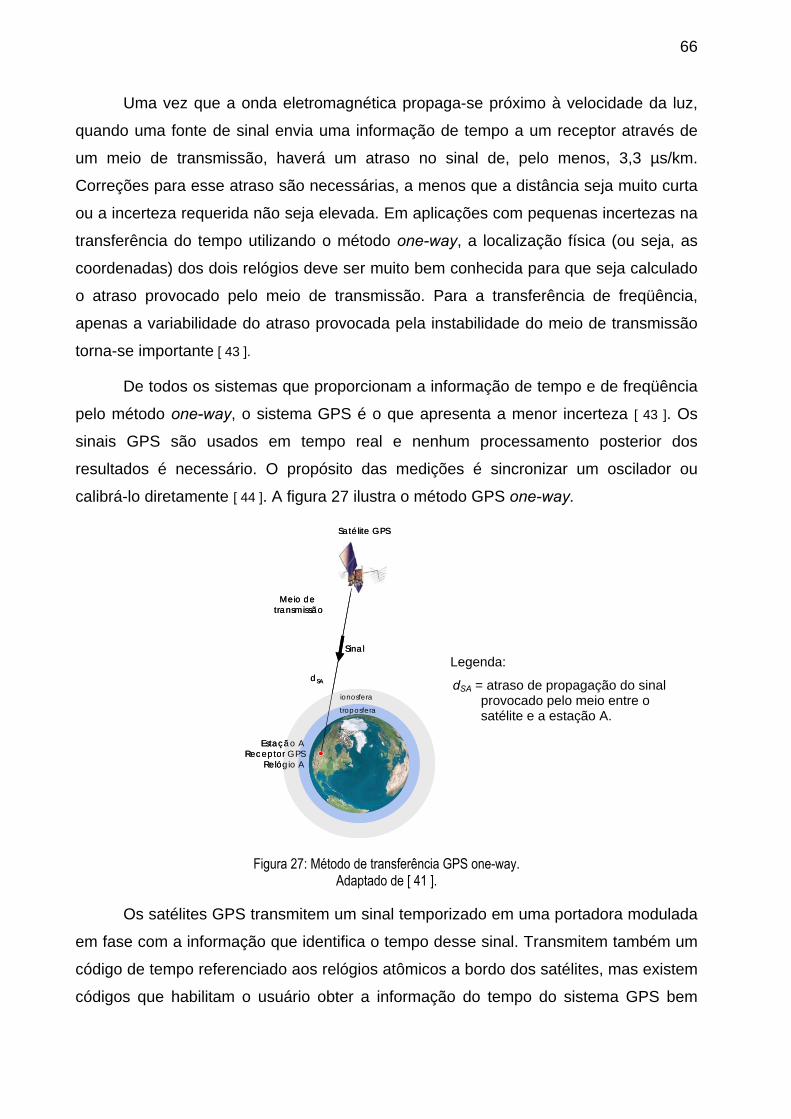
66
Uma vez que a onda eletromagnética propaga-se próximo à velocidade da luz,
quando uma fonte de sinal envia uma informação de tempo a um receptor através de
um meio de transmissão, haverá um atraso no sinal de, pelo menos, 3,3 µs/km.
Correções para esse atraso são necessárias, a menos que a distância seja muito curta
ou a incerteza requerida não seja elevada. Em aplicações com pequenas incertezas na
transferência do tempo utilizando o método one-way, a localização física (ou seja, as
coordenadas) dos dois relógios deve ser muito bem conhecida para que seja calculado
o atraso provocado pelo meio de transmissão. Para a transferência de freqüência,
apenas a variabilidade do atraso provocada pela instabilidade do meio de transmissão
torna-se importante [ 43 ].
De todos os sistemas que proporcionam a informação de tempo e de freqüência
pelo método one-way, o sistema GPS é o que apresenta a menor incerteza [ 43 ]. Os
sinais GPS são usados em tempo real e nenhum processamento posterior dos
resultados é necessário. O propósito das medições é sincronizar um oscilador ou
calibrá-lo diretamente [ 44 ]. A figura 27 ilustra o método GPS one-way.
troposfera
Satélite GPS
Estação AReceptor GPS
Relógio A
ionosfera
Meio detransmissão
Sinal
dSA
troposfera
Satélite GPS
Estação AReceptor GPS
Relógio A
ionosfera
Meio detransmissão
Sinal
dSA
Legenda:
dSA = atraso de propagação do sinal provocado pelo meio entre o satélite e a estação A.
Figura 27: Método de transferência GPS one-way. Adaptado de [ 41 ].
Os satélites GPS transmitem um sinal temporizado em uma portadora modulada
em fase com a informação que identifica o tempo desse sinal. Transmitem também um
código de tempo referenciado aos relógios atômicos a bordo dos satélites, mas existem
códigos que habilitam o usuário obter a informação do tempo do sistema GPS bem
67
como do UTC(USNO). Os receptores podem comparar a informação de tempo do sinal
GPS com o relógio local utilizando um contador de intervalos de tempo [ 43 ].
O maior desafio do receptor consiste em calcular o atraso de propagação do
sinal dSA. O atraso geométrico é obtido a partir da posição do receptor (o qual pode ser
obtido do sistema GPS) e do próprio posicionamento dos satélites. De forma geral, o
sistema GPS pode, na transferência do tempo, atingir incertezas em tempo na ordem
de nanosegundos [ 43 ].
A ionosfera e a troposfera apresentam um significativo impacto no tempo de
propagação. Os sinais de navegação transmitidos pelos satélites GPS contêm
informações sobre a modelagem do tempo de atraso provocado pela ionosfera [ 43 ].
Uma vez que a freqüência dos sinais GPS é muito estável, são as instabilidades
que ocorrem no meio de transmissão que provocam as flutuações na freqüência
recebida. Essas instabilidades ocorrem porque a distância entre o satélite e o receptor
está constantemente mudando. Esse fato torna o sistema GPS inadequado como um
padrão para medições de instabilidades de curto prazo. Entretanto, para medições em
longo prazo, o sistema GPS torna-se bastante apropriado, uma vez que essas
flutuações são praticamente eliminadas pela ação da média [ 10 ].
Existem formas de aperfeiçoar as correções pelos efeitos do meio de
transmissão, a serem discutidas nos métodos de transferência a seguir descritos.
3.2.3.2 Método GPS common-view
Uma abordagem que melhora as características do método GPS one-way é a
técnica de transferência de tempo pelo método GPS common-view. Esse procedimento
permite a comparação entre dois relógios em posições geográficas distintas [ 45 ]. A
figura 28 ilustra a configuração genérica desse método.
Como se pode observar na figura 28, duas estações A e B recebem um mesmo
sinal transmitido pelo satélite GPS com o objetivo de determinar as diferenças de
tempo entre esse sinal e a informação dos seus relógios locais, xA-GPS e xB-GPS. A seguir,
os dados medidos são intercambiados entre as estações A e B, utilizando um método
apropriado como, por exemplo, e-mail ou FTP.
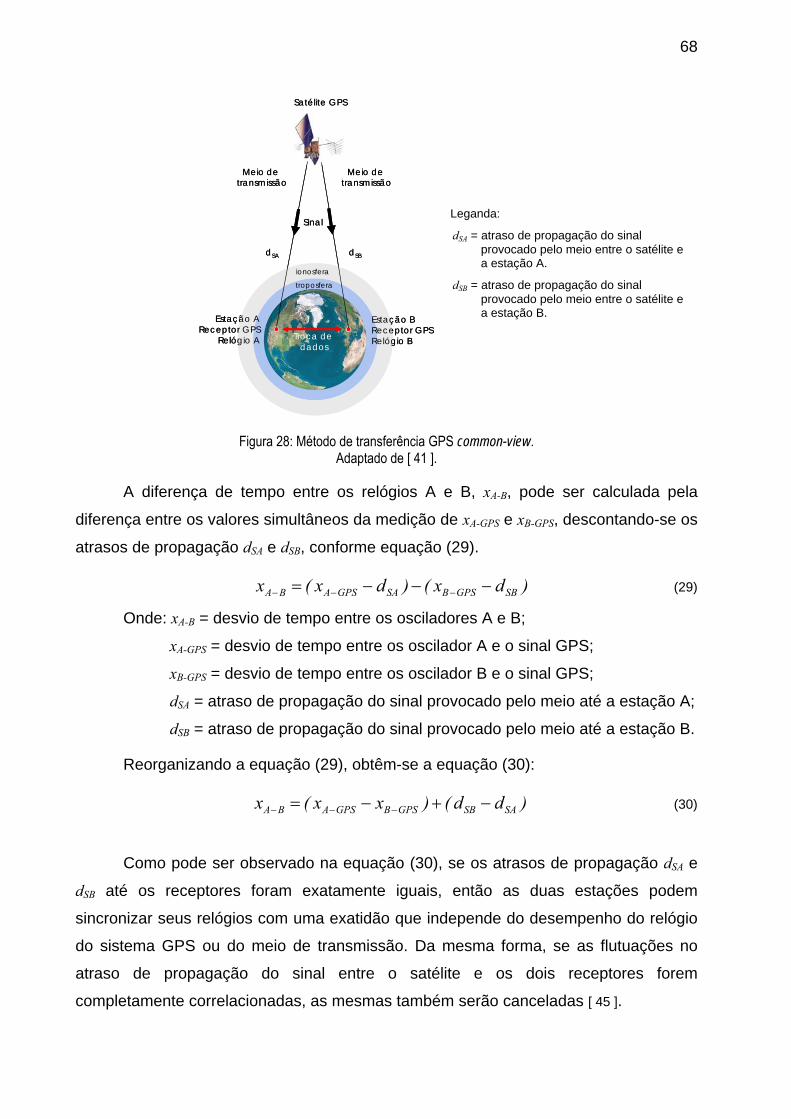
68
troposfera
Satélite GPS
Estação AReceptor GPS
Relógio A
ionosfera
Meio detransmissão
Sinal
dSA dSB
Meio detransmissão
Estação BReceptor GPSRelógio BTroca de
dados
troposfera
Satélite GPS
Estação AReceptor GPS
Relógio A
ionosfera
Meio detransmissão
Sinal
dSA dSB
Meio detransmissão
Estação BReceptor GPSRelógio BTroca de
dados
Leganda:
dSA = atraso de propagação do sinal provocado pelo meio entre o satélite e a estação A.
dSB = atraso de propagação do sinal provocado pelo meio entre o satélite e a estação B.
Figura 28: Método de transferência GPS common-view. Adaptado de [ 41 ].
A diferença de tempo entre os relógios A e B, xA-B, pode ser calculada pela
diferença entre os valores simultâneos da medição de xA-GPS e xB-GPS, descontando-se os
atrasos de propagação dSA e dSB, conforme equação (29).
)dx()dx(x SBGPSBSAGPSABA −−−= −−− (29)
Onde: xA-B = desvio de tempo entre os osciladores A e B;
xA-GPS = desvio de tempo entre os oscilador A e o sinal GPS;
xB-GPS = desvio de tempo entre os oscilador B e o sinal GPS;
dSA = atraso de propagação do sinal provocado pelo meio até a estação A;
dSB = atraso de propagação do sinal provocado pelo meio até a estação B.
Reorganizando a equação (29), obtêm-se a equação (30):
)dd()xx(x SASBGPSBGPSABA −+−= −−− (30)
Como pode ser observado na equação (30), se os atrasos de propagação dSA e
dSB até os receptores foram exatamente iguais, então as duas estações podem
sincronizar seus relógios com uma exatidão que independe do desempenho do relógio
do sistema GPS ou do meio de transmissão. Da mesma forma, se as flutuações no
atraso de propagação do sinal entre o satélite e os dois receptores forem
completamente correlacionadas, as mesmas também serão canceladas [ 45 ].
69
Essa situação ideal não pode ser realizada na prática, mas o método funciona
bem quando os meios de transmissão são bem parecidos e quando as flutuações nos
tempos de atraso dSA e dSB são muito correlacionadas. Uma vez que o atraso do meio é
afetado por vários parâmetros ambientais, como a temperatura, por exemplo, o método
GPS common-view funciona melhor se a distância entre as estações receptoras é
pequena em relação à distância entre cada receptor e o satélite [ 45 ].
Uma das desvantagens do método common-view reside na necessidade de
haver troca de dados entre as duas estações; logo, não se trata de um sistema de
transferência em tempo real [ 41 ]. No caso da geração da escala atômica de tempo
UTC, na qual diversos institutos nacionais utilizam o método GPS common-view, os
resultados são publicados pelo BIPM com valores correspondentes a 3 semanas
anteriores à data de publicação [ 37 ].
É possível estabelecer dois tipos de medições GPS common-view: canal único
(single-channel) e múltiplos canais (multi-channel) [ 44 ].
As medições com canal único exigem receptores GPS que possam executar um
rastreamento planejado de satélites que informa quando se devem iniciar as medições
e qual satélite deve ser rastreado. As informações de cada satélite são monitoradas em
intervalos de 13 min, devido à velocidade de transmissão das mensagens de
navegação do sistema GPS. Um receptor em outro local realiza as medições de acordo
com o mesmo plano e os dados em ambas as localidades são intercambiados e
comparados. Apesar dos receptores atuais permitirem rastrear simultaneamente vários
satélites, a técnica de canal único é ainda amplamente usada para comparações
internacionais. Já as medições com múltiplos canais não necessitam de planejamento.
O receptor simplesmente registra dados de todos os satélites que estão visíveis e,
desta forma, não existirão descontinuidades nos dados de medição. As medições com
múltiplos canais também são aceitas pelo BIPM como contribuições para o UTC,
entretanto, é necessário o armazenamento de dados em rastreamentos de 13 min para
tornar possível a comparação com os dados obtidos com os antigos receptores de
canal único [ 44 ].

70
3.2.3.3 Método GPS Carrier-Phase
Originalmente usado para transferência de freqüência, este método usa as
freqüências das portadoras L1 e L2 do sistema GPS ao contrário dos códigos
transmitidos pelos satélites. É importante notar que as medições podem ser efetuadas
no modo one-way em tempo real ou modo common-view. Uma vez que a freqüência da
portadora é 1000 vezes maior que a freqüência dos códigos transmitidos, a resolução
obtida como o método carrier-phase é muito maior. Entretanto, para se obter as
vantagens desse sistema, são necessárias diversas correções devidas ao meio de
transmissão, o que requer um pós-processamento extensivo dos dados coletados,
tornando o método pouco prático para uso diário.
Como esse método apresenta a menor incerteza dentre todos os métodos, ele é
usado para comparações internacionais entre padrões primários quando o objetivo é
obter a menor incerteza possível. Uma rede de receptores pode ser utilizada para
aperfeiçoar a técnica [ 44 ].
3.2.3.4 Comparação entre os métodos
O quadro 6 faz uma comparação entre os métodos de transferência de tempo e
freqüência usando satélites GPS, indicando as incertezas típicas para cada caso.
Quadro 6: Incertezas típicas dos métodos de transferência. Adaptado de [ 44 ].
Incerteza na transferência de tempo (média de 24 h a 95% de
confiança)
Incerteza na transferência de freqüência (média de 24 h a 95%
de confiança)
GPS one-way < 20 ns < 2 x 10-13 Hz/Hz GPS single-channel common-view ≈ 10 ns ≈ 1 x 10-13 Hz/Hz GPS multi-channel common-view < 5 ns < 5 x 10-14 Hz/Hz GPS carrier-phase common-view < 500 ps < 5 x 10-15 Hz/Hz
71
3.3 RASTREABILIDADE
3.3.1 Conceito de Rastreabilidade
O mercado globalizado e os tratados de livre comércio entre as nações exigem o
reconhecimento de seus sistemas metrológicos e respectivas capacidades de medição
com bases aceitas internacionalmente. Como uma das conseqüências deste fato,
metrologistas em todo o mundo vêm buscando aprimorar o conceito envolvido com o
termo ratreabilidade metrológica. Classicamente, a rastreabilidade proporciona uma
forma de relacionar os resultados de uma medição ou valores de um padrão a padrões
superiores. Esses padrões superiores correspondem a padrões nacionais (mantidos
pelos institutos nacionais de metrologia) ou a padrões internacionais, apresentando
incertezas de medição bem conhecidas [ 31 ].
Assim, a rastreabilidade torna-se uma característica inerente a cada medição.
Segundo o VIM, a rastreabilidade é definida como a “propriedade do resultado de uma
medição ou do valor de um padrão estar relacionado a referências estabelecidas,
geralmente a padrões nacionais ou internacionais, através de uma cadeia contínua de
comparações, todas tendo incertezas estabelecidas” [ 4 ]. Normalmente, nos diversos
países, essa “cadeia contínua de comparações” origina-se no Instituto Nacional de
Metrologia e pode envolver diversos laboratórios intermediários.
A norma ABNT NBR ISO/IEC 17025 - Requisitos Gerais Para a Competência de
Laboratórios de Ensaios e Calibração, torna o conceito de rastreabilidade mais amplo.
Em seu requisito 5.6 estabelece a rastreabilidade da medição como a ligação aos
padrões primários para as unidades correspondentes do Sistema Internacional de
Unidades, por meio de uma cadeia ininterrupta de calibrações, até o padrão nacional.
No caso do padrão nacional não consistir de realizações primárias das unidades SI ou
representações acordadas das unidades SI baseadas em constantes físicas
fundamentais, esses podem ser padrões secundários que devem ser calibrados por
outro instituto nacional de metrologia que mantenha o padrão primário dessa grandeza
[ 46 ].
Ainda de acordo com esse mesmo requisito 5.6, quando laboratórios de
calibração ou de ensaios que prestam serviços a clientes e são acreditados de acordo
com essa norma, ao utilizarem serviços externos de calibração, “a rastreabilidade da
72
medição deve ser assegurada pela utilização de serviços de calibração de laboratórios
que possam demonstrar competência, capacidade de medição e rastreabilidade. Os
certificados de calibração emitidos por esses laboratórios devem conter os resultados
da medição, incluindo a incerteza de medição e/ou uma declaração de conformidade
com uma especificação metrológica identificada” [ 46 ].
Sob a ótica dos organismos que reconhecem competência e dos acordos de
reconhecimento mútuo, o posicionamento quanto à rastreabilidade torna-se específico.
No Brasil, o INMETRO é legalmente responsável pela acreditação de laboratórios de
calibração e de ensaios e mantém documentos orientativos para a interpretação de
alguns conceitos importantes que evolvem o processo.
O documento DOC-CGCRE-003 do INMETRO, estabelece a interpretação para
os elementos necessários à rastreabilidade de laboratórios. Esse documento relata que
“para caracterizar a rastreabilidade de uma medição, não é suficiente que o laboratório
calibre seus equipamentos e disponha dos certificados de calibração correspondentes.
É preciso ir além disso, pois um certificado de calibração não fornece,
necessariamente, informações sobre a competência dos laboratórios que realizam as
calibrações que formam a cadeia de rastreabilidade” [ 47 ].
De acordo com o INMETRO, para que se possa afirmar que o resultado de uma
medição é rastreável, além da demonstração da competência, é preciso que se
considere também:
• uma cadeia contínua de comparações, conduzindo até um padrão nacional
ou internacional;
• uma referência à unidade SI, na qual a cadeia de comparações deve
alcançar padrões primários para a realização das unidades do SI;
• a repetição das calibrações em intervalos apropriados, definidos em função
de diversos fatores que incluem: a incerteza requerida, freqüência e modo
de uso dos instrumentos de medição e a estabilidade dos equipamentos;
• a avaliação da incerteza de medição a cada passo da cadeia de
rastreabilidade [ 47 ].
A interpretação do INMETRO sobre a demonstração da competência é descrita
no documento NIT-DICLA-030. De acordo com esse documento, são considerados
competentes:

73
• laboratórios integrantes do INMETRO, do Serviço da Hora do Observatório
Nacional (SH/ON) ou do Instituto de Radioproteção e Dosimetria (IRD);
• institutos nacionais de metrologia de outros países que sejam signatários de
acordos de reconhecimento mútuo do CIPM e que participem das
comparações chave (key comparisons) organizadas pelo BIPM ou por
organizações regionais de metrologia;
• institutos de calibração acreditados pelo INMETRO para a calibração
específica;
• laboratórios de calibração, que sejam acreditados para a calibração
específica, por organismos de acreditação signatários dos acordos de
reconhecimento mútuo da ILAC e/ou da EA e/ou da IAAC [ 48 ].
3.3.2 Rastreabilidade para Tempo e Freqüência usando GPS
Como discutido em 3.2.2, os satélites GPS têm um importante papel como
padrões de transferência na rastreabilidade em tempo e freqüência em nível
internacional e também para o estabelecimento da escala de Tempo Universal
Coordenado – UTC. Medições com o método GPS common-view, são reconhecidas
pelo BIPM para a transferência dessas grandezas.
Mediante as facilidades apresentadas em 2.4.2, os receptores GPSDO vêm se
tornando padrões de tempo e freqüência usuais na indústria e em laboratórios de
calibração. Em uma abordagem muito simplista, a rastreabilidade com o uso desses
padrões também parece ser automática e imediata. Por exemplo, Parker e Matsakis
[ 41 ] do NIST e do USNO, respectivamente, afirmam que o tempo UTC derivado do
GPS é considerado completamente rastreável a padrões internacionais para aplicações
legais e civis, sujeito aos erros do equipamento do usuário. Segundo os autores, essa
colocação é fundamentada no fato de que o UTC(USNO), o qual é sincronizado ao
UTC(NIST), estabelece a referência externa para o sistema GPS [ 41 ].
Em um posicionamento mais criterioso, Johansson e Coombes [ 32 ] afirmam que
um oscilador disciplinado por GPS não é automaticamente rastreável a padrões
internacionais, apesar dos sinais transmitidos derivados dos relógios de césio a bordo
dos satélites GPS estarem rastreados ao USNO e NIST. A abordagem desses autores
leva em consideração que, para haver rastreabilidade, existe a necessidade de

74
evidenciar os resultados documentados da comparação entre o oscilador local e um
padrão externo de freqüência (nesse caso, os sinais GPS) e a quantificação da
incerteza da medição.
Como modificação ao esquema da figura 25 da página 59, Johansson e
Coombes [ 32 ] sugerem uma unidade GPSDO “rastreável” de acordo a configuração
mostrada na figura 29.
Esta concepção apresenta um sistema interno de calibração, que, na opinião
dos autores, cumpre com os requisitos de rastreabilidade. A parte mais importante da
configuração é o contador de intervalo de tempo de alta resolução que monitora
continuamente a diferença de tempo entre o sinal GPS e o oscilador local quartzo ou
rubídio disciplinado. Os resultados são armazenados internamente e encontram-se
disponíveis em uma saída compatível com o padrão de interface RS232 para conexão
com um microcomputador externo. Um microprocessador interno é responsável por
gerenciar o sistema e avaliar o desvio relativo de freqüência em um tempo de
amostragem específico. Um mostrador pode ser utilizado para indicar informações e
medições importantes avaliadas pelo microprocessador [ 32 ].
A conexão de um computador à unidade via interface RS232C, mediante o uso
de um software apropriado, torna possível obter as medições armazenadas,
caracterizar o padrão local, estabelecer as incertezas e emitir o certificado de
calibração. Assim, esse arranjo proposto aproxima-se mais do conceito de
rastreabilidade estabelecido pela NBR ISO/IEC 17025 e é utilizado, inclusive, como um
forte argumento de marketing [ 49 ].
Receptor GPSReceptor GPSReceptor GPSContador de
intervalo de tempo de alta resolução
Contador de Contador de intervalo de tempo intervalo de tempo de alta resolude alta resoluççãoão
Oscilador localOscilador localOscilador local
Sinal localSinal local
Sinal Sinal GPSGPS
Sinal de controleSinal de controle
Sinal de saSinal de saíídadaOscilador localOscilador local
AntenaAntena
MicroprocessadorMicroprocessadorMicroprocessadorArmazenamentodos dados
ArmazenamentoArmazenamentodos dadosdos dados
MostradorMostradorMostrador
Sinal GPSSinal GPS
RS232RS232
Receptor GPSReceptor GPSReceptor GPSContador de
intervalo de tempo de alta resolução
Contador de Contador de intervalo de tempo intervalo de tempo de alta resolude alta resoluççãoão
Oscilador localOscilador localOscilador local
Sinal localSinal local
Sinal Sinal GPSGPS
Sinal de controleSinal de controle
Sinal de saSinal de saíídadaOscilador localOscilador local
AntenaAntena
MicroprocessadorMicroprocessadorMicroprocessadorArmazenamentodos dados
ArmazenamentoArmazenamentodos dadosdos dados
MostradorMostradorMostrador
Sinal GPSSinal GPS
RS232RS232
Figura 29: Esquema de um padrão disciplinado por GPS “rastreável” Adaptado de [ 32 ].

75
A rastreabilidade em tempo é mais complicada de ser realizada do que a
rastreabilidade em freqüência, uma vez que existe a necessidade de haver o
sincronismo entre o tempo fornecido pelo padrão de referência e o tempo fornecido
pelo padrão sob calibração. No caso de um receptor GPSDO, deve-se conhecer e
compensar os efeitos do atraso existente no cabo que conecta a antena ao receptor.
Para tanto, é necessário fazer uso de um segundo conjunto receptor GPS, cabos e
antena calibrados para determinar o valor desse atraso.
Passa-se agora a analisar o posicionamento quanto à rastreabilidade em tempo
e freqüência utilizando o sistema GPS de importantes institutos nacionais de metrologia
e de organizações para reconhecimento de competência de laboratórios.
3.3.2.1 O posicionamento Norte Americano
Segundo Lombardi da Divisão de Tempo e Freqüência do NIST, existem duas
cadeias possíveis para se obter a rastreabilidade em tempo e freqüência utilizando a
radiodifusão de sinais, como por exemplo, sinais GPS [ 50 ]. Essas cadeias estão
mostradas nas situações 1 e 2 da figura 30.
A situação 1 ocorre quando o serviço de radiodifusão é controlado pelo INM. A
ligação “A” conecta o BIPM ao INM e os resultados da diferença entre o UTC e o
UTC(k) encontram-se disponíveis na publicação do BIPM denominada Circular T,
disponível na internet [ 51 ]. A ligação “B” corresponde ao controle sob o serviço de
radiodifusão proporcionado pelo INM, onde alguns desses serviços são conectados
diretamente à escala de tempo mantida pelo INM; outros se encontram em localidades
remotas e são regularmente comparados com o UTC [ 50 ].
A ligação “C” da situação 1 conecta o serviço de radiodifusão ao usuário e a
ligação “D” conecta o UTC(INM) aos padrões ou instrumentos desse usuário. Nessa
última ligação, existem várias fontes de incerteza intrínsecas à mesma, como, por
exemplo, aquelas originadas no receptor, sistema de antena, software, equipamentos
auxiliares e procedimentos de calibração. As incertezas das ligações “C” e “D” são
muito maiores que as incertezas das ligações “A” e “B”, podendo ser desconsideradas
na grande maioria das aplicações [ 50 ].
A rastreabilidade em tempo e freqüência utilizando sinais radiodifundidos não
controlados pelo INM é mostrada na situação 2 da figura 30. A situação 2 é muito

76
parecida com a situação 1, diferindo apenas no fato de que a ligação “B” não é de
controle, mas sim de monitoramento. De forma a manter a cadeia contínua de
rastreabilidade, esse monitoramento também deve ser permanente e ininterrupto [ 50 ].
Segundo Lombardi [ 50 ], uma vez estabelecida a rastreabilidade a um INM, ela
deve ser reconhecida em outros países da mesma forma, levando-se em consideração
as cooperações regionais em metrologia e os atuais acordos de mútuo reconhecimento
que são referendados pelo BIPM.
No caso do GPS, o NIST compara a freqüência obtida do sistema contra os
padrões nacionais 24 h por dia para estabelecer uma rastreabilidade contínua. O sinal
transmitido de cada satélite é monitorado todo tempo em que o mesmo é visível nos
laboratórios do NIST e os resultados dessa comparação são publicados em bancos de
dados disponíveis na internet e com atualizações diárias. Os dados são obtidos
utilizando um receptor GPS típico e avalia-se o desvio de freqüência de cada satélite
GPS, bem como a média de toda a constelação ao longo de 24 h [ 33 ].
Sistema Internacional de Unidades - definição
do segundo: UTC ( BIPM )
Sistema Internacional de Unidades - definição
do segundo: UTC ( BIPM )
Instituto Nacional de Metrologia UTC ( INM )
Instituto Nacional de Metrologia UTC ( INM )
Radiodifusão do UTC ( INM )
pelo INM
Radiodifusão do UTC ( INM )
pelo INM
Recepção do UTC( INM )pelo usuário
Recepção do UTC( INM )pelo usuário
Calibração do padrão de referência, padrão detrabalho ou instrumento
de medição
Calibração do padrão de referência, padrão detrabalho ou instrumento
de medição
SituaSituaçção 1ão 1
Ligação A
Ligação B
Ligação C
Ligação D
Sistema Internacional de Unidades - definição
do segundo: UTC ( BIPM )
Sistema Internacional de Unidades - definição
do segundo: UTC ( BIPM )
Instituto Nacional de Metrologia UTC ( INM )
Instituto Nacional de Metrologia UTC ( INM )
Radiodifusão do UTC ( INM )
pelo INM
Radiodifusão do UTC ( INM )
pelo INM
Recepção do UTC( INM )pelo usuário
Recepção do UTC( INM )pelo usuário
Calibração do padrão de referência, padrão detrabalho ou instrumento
de medição
Calibração do padrão de referência, padrão detrabalho ou instrumento
de medição
SituaSituaçção 1ão 1
Ligação A
Ligação B
Ligação C
Ligação D
Sistema Internacional de Unidades - definição do segundo: UTC BIPM
Sistema Internacional de Unidades - definição do segundo: UTC BIPM
Instituto Nacional de Metrologia UTC ( INM )
Instituto Nacional de Metrologia UTC ( INM )
Sinal de radiodifusão do UTC ( INM )
monitorado pelo INM
Sinal de radiodifusão do UTC ( INM )
monitorado pelo INM
Recepção do sinalUTC ( INM )pelo usuário
Recepção do sinalUTC ( INM )pelo usuário
Calibração do padrão de referência, padrão detrabalho ou instrumento
de medição
Calibração do padrão de referência, padrão detrabalho ou instrumento
de medição
SituaSituaçção 2ão 2
Ligação A
Ligação C
Ligação D
Ligação B
Sistema Internacional de Unidades - definição do segundo: UTC BIPM
Sistema Internacional de Unidades - definição do segundo: UTC BIPM
Instituto Nacional de Metrologia UTC ( INM )
Instituto Nacional de Metrologia UTC ( INM )
Sinal de radiodifusão do UTC ( INM )
monitorado pelo INM
Sinal de radiodifusão do UTC ( INM )
monitorado pelo INM
Recepção do sinalUTC ( INM )pelo usuário
Recepção do sinalUTC ( INM )pelo usuário
Calibração do padrão de referência, padrão detrabalho ou instrumento
de medição
Calibração do padrão de referência, padrão detrabalho ou instrumento
de medição
SituaSituaçção 2ão 2
Ligação A
Ligação C
Ligação D
Ligação B
Figura 30: Rastreabilidade em tempo e freqüência por sinais de radiodifusão Adaptado de [ 50 ].
Como conclusão, o NIST apresenta o seguinte posicionamento quanto ao uso
de sinais GPS para fins de rastreabilidade em freqüência, declarada em sua página na
internet [ 33 ]: “Um receptor GPS apropriado pode ser utilizado para demonstrar
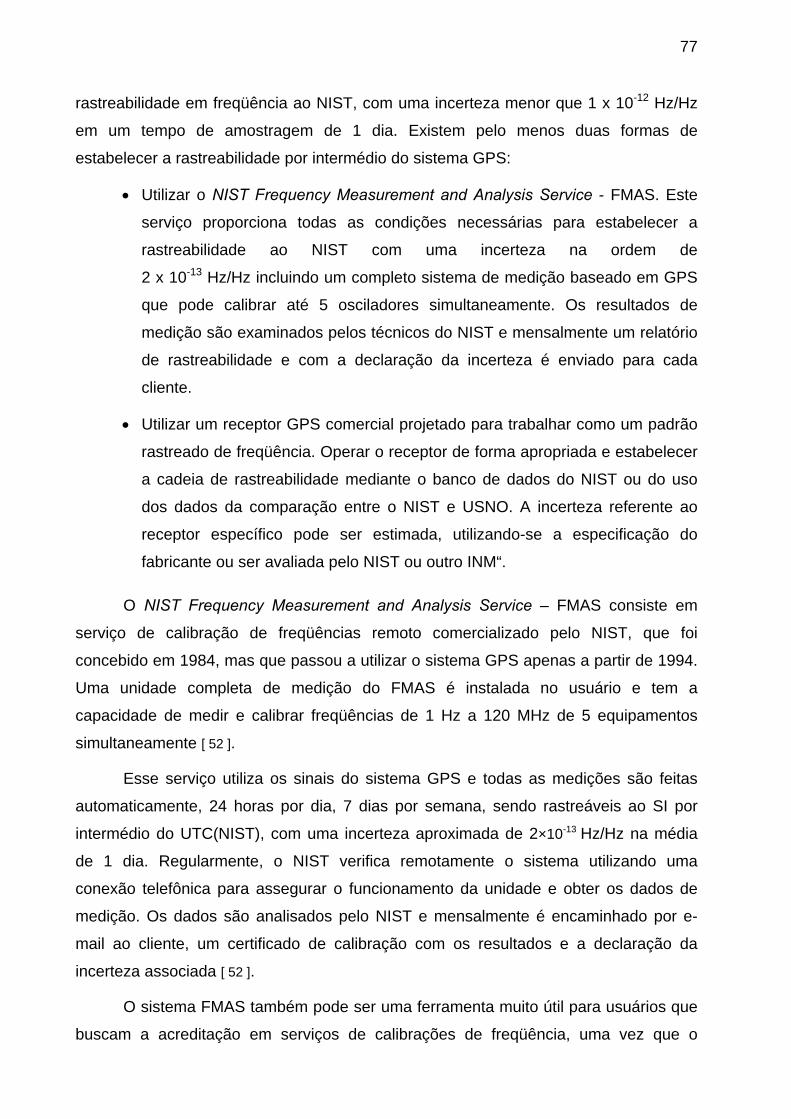
77
rastreabilidade em freqüência ao NIST, com uma incerteza menor que 1 x 10-12 Hz/Hz
em um tempo de amostragem de 1 dia. Existem pelo menos duas formas de
estabelecer a rastreabilidade por intermédio do sistema GPS:
• Utilizar o NIST Frequency Measurement and Analysis Service - FMAS. Este
serviço proporciona todas as condições necessárias para estabelecer a
rastreabilidade ao NIST com uma incerteza na ordem de
2 x 10-13 Hz/Hz incluindo um completo sistema de medição baseado em GPS
que pode calibrar até 5 osciladores simultaneamente. Os resultados de
medição são examinados pelos técnicos do NIST e mensalmente um relatório
de rastreabilidade e com a declaração da incerteza é enviado para cada
cliente.
• Utilizar um receptor GPS comercial projetado para trabalhar como um padrão
rastreado de freqüência. Operar o receptor de forma apropriada e estabelecer
a cadeia de rastreabilidade mediante o banco de dados do NIST ou do uso
dos dados da comparação entre o NIST e USNO. A incerteza referente ao
receptor específico pode ser estimada, utilizando-se a especificação do
fabricante ou ser avaliada pelo NIST ou outro INM“.
O NIST Frequency Measurement and Analysis Service – FMAS consiste em
serviço de calibração de freqüências remoto comercializado pelo NIST, que foi
concebido em 1984, mas que passou a utilizar o sistema GPS apenas a partir de 1994.
Uma unidade completa de medição do FMAS é instalada no usuário e tem a
capacidade de medir e calibrar freqüências de 1 Hz a 120 MHz de 5 equipamentos
simultaneamente [ 52 ].
Esse serviço utiliza os sinais do sistema GPS e todas as medições são feitas
automaticamente, 24 horas por dia, 7 dias por semana, sendo rastreáveis ao SI por
intermédio do UTC(NIST), com uma incerteza aproximada de 2×10-13 Hz/Hz na média
de 1 dia. Regularmente, o NIST verifica remotamente o sistema utilizando uma
conexão telefônica para assegurar o funcionamento da unidade e obter os dados de
medição. Os dados são analisados pelo NIST e mensalmente é encaminhado por e-
mail ao cliente, um certificado de calibração com os resultados e a declaração da
incerteza associada [ 52 ].
O sistema FMAS também pode ser uma ferramenta muito útil para usuários que
buscam a acreditação em serviços de calibrações de freqüência, uma vez que o
78
sistema proporciona um método documentado e controlado para obter a rastreabilidade
[ 33 ].
Um dos maiores organismos de acreditação de laboratórios nos Estados Unidos,
National Voluntary and Laboratory Accreditation Program – NVLAP declara que “o
FMAS pode beneficiar clientes que procuram a acreditação na área de calibração em
freqüência. Em alguns casos ele pode eliminar ou reduzir a necessidade de testes de
proficiência (e os custos envolvidos) na área de calibrações em freqüência“ [ 53 ].
Assim como o sistema FMAS, para calibrações em tempo, o NIST disponibiliza o
sistema de calibração remota Time Measurement and Analysis Service - TMAS desde o
fim de 2006. Esse serviço monitora o padrão de tempo local, comparando-o
continuamente ao padrão nacional de tempo e relata ao usuário o resultado da
comparação quase em tempo real. O sistema TMAS emprega o método GPS common-
view para comparar padrões de tempo localizados em posições geográficas distintas e
utiliza a internet para controlar e obter os dados do sistema remoto. Segundo suas
especificações, pode-se obter uma incerteza padrão combinada menor que 15 ns em
tempo e menor que 1 x 10-13 Hz/Hz em freqüência para uma amostragem de 24 h [ 54 ].
Antes das unidades serem instaladas, são calibradas no NIST pelo método
common-view common-clock, conforme o diagrama mostrado na figura 31.
Contador de Intervalo de tempo
Início fim
Contador de Intervalo de tempo
Início fim
ReceptorGPS referência
ReceptorGPS referência
UTC ( NIST )
Contador de Intervalo de tempo
Início fim
Contador de Intervalo de tempo
Início fim
ReceptorGPS TMASReceptor
GPS TMAS
6 m Antena GPSTMAS
Antena GPS
referência
1 Hz1 Hz
1 Hz
Satélite GPS
Contador de Intervalo de tempo
Início fim
Contador de Intervalo de tempo
Início fim
ReceptorGPS referência
ReceptorGPS referência
UTC ( NIST )
Contador de Intervalo de tempo
Início fim
Contador de Intervalo de tempo
Início fim
ReceptorGPS TMASReceptor
GPS TMAS
6 m Antena GPSTMAS
Antena GPS
referência
1 Hz1 Hz
1 Hz
Satélite GPS
Figura 31: Método de calibração GPS common-view common clock. Adaptado de [ 54 ].
79
O receptor do sistema TMAS sob teste e o sistema de referência são
comparados com o sinal de 1 Hz proveniente da escala de tempo UTC(NIST). A
unidade do TMAS é instalada no NIST, usando a antena e cabo que serão enviados ao
usuário. Como o NIST tem acesso irrestrito ao sistema GPS, as posições das antenas
são conhecidas dentro com uma incerteza de 20 cm. A partir das medições de
intervalos de tempo dos sinais das duas antenas e do UTC(NIST), determina-se o
atraso existente no cabo que conecta a antena ao receptor do sistema TMAS. Assim,
esse atraso pode ser compensado, tornando possível sincronizar o padrão de tempo do
usuário ao UTC [ 54 ].
A figura 32 mostra as últimas versões das unidades dos sistemas FMAS e
TMAS que são instaladas nos usuários.
NIST FMAS NIST TMAS
Figura 32: Aspecto das unidades FMAS e TMAS instaladas nos usuários.
[ 52 ] e [ 54 ].
3.3.2.2 O posicionamento no Reino Unido
Segundo Davis e Furlong [ 55 ] do NPL – National Physical Laboratory, os
padrões GPSDO atuais, operando no modo one-way, não são aceitos como padrões
rastreáveis aos padrões nacionais de tempo e freqüência do Reino Unido. Esta é a
posição adotada pelo organismo de acreditação UKAS – United Kingdom Accreditation
Service e respaldada pelo NPL.
Esse posicionamento foi baseado em um extensivo estudo sobre padrões
GPSDO, desenvolvido pelo próprio NPL em 1997 [ 55 ] motivado pelas características
dos receptores discutidas em 2.4.3. Foram avaliados 15 modelos disponíveis no
mercado da época, adquiridos de 11 fabricantes diferentes e gerou-se uma série de
recomendações para o uso de padrões GPSDO para fins de rastreabilidade [ 55 ].
80
Assim como o NIST, o NPL oferece um serviço que “proporciona explícita
rastreabilidade aos padrões nacionais” em tempo e freqüência e utiliza o método GPS
common-view como técnica de transferência. Esse serviço estabelece a calibração in
loco, comparando regularmente o relógio local ao UTC(NPL). Os resultados da
comparação são analisados pelo corpo técnico do NPL e semanalmente é emitido um
relatório com resultados e incertezas de medição. A cada 3 meses, o receptor é
revalidado remotamente e um relatório de desempenho é emitido [ 56 ].
Antes do sistema entrar em operação, o NPL calibra e testa o receptor GPS que
ficará nas instalações do cliente. Após sua instalação definitiva, ocorre uma validação
remota do sistema. Para operações como padrão de tempo, periodicamente o NPL
encaminha ao laboratório um segundo receptor calibrado e o usa em paralelo para
recalibrar o sistema in situ. O receptor de referência retorna ao NPL e é novamente
calibrado para garantir os resultados. Então, novo relatório é emitido [ 56 ].
3.3.2.3 O posicionamento da Comunidade Européia
Com base nos estudos do NPL [ 55 ], o comitê técnico para corrente contínua e
baixas freqüências da Cooperação Européia para a Acreditação prepara um guia
orientativo para as equipes de avaliação de laboratórios no tema específico para a
rastreabilidade em tempo e freqüência mediante o uso de satélites GPS [ 57 ].
Atualmente (fevereiro de 2007), esse guia encontra-se ainda em fase de discussão,
mas a tendência dos textos preliminares recomenda a utilização do sistema GPS como
um padrão de transferência e não como uma referência primária.
Ao que tudo indica, o posicionamento anterior deverá prevalecer no documento
final e a melhor solução para a rastreabilidade de padrões de freqüência envolverá a
aplicação de calibrações remotas. Para atender completamente ao conceito de
rastreabilidade, as medições devem ser avalizadas pelo laboratório que proverá a
rastreabilidade, mediante a captação direta dos dados medidos no usuário,
caracterização adequada dos parâmetros do padrão, estimativa das incertezas de
medição e emissão de certificados de calibração.
81
3.3.2.4 O posicionamento do Brasil
No Brasil, o laboratório designado pelo INMETRO como responsável por manter
os padrões de tempo e freqüência nacionais e disseminar a rastreabilidade nessas
unidades é a Divisão do Serviço da Hora do Observatório Nacional no Rio de Janeiro.
As formas adotadas para a calibração de padrões secundários de laboratórios
acreditados, consistem na calibração por comparação direta aos padrões do
Observatório Nacional. Essas calibrações são realizadas nas instalações da Divisão do
Serviço da Hora ou nas próprias instalações do cliente, utilizando um padrão de césio
itinerante. Vale ressaltar que essa última situação não vem mais sendo executada por
motivos de ordem operacional [ 37 ].
Atualmente, não são ofertados serviços de rastreabilidade remota e não há
qualquer posicionamento formal do organismo de acreditação brasileiro quanto à
rastreabilidade direta de osciladores disciplinados por GPS. Informalmente, existe um
consenso entre os avaliadores de laboratórios de calibração para a área em tempo e
freqüência em não reconhecer a rastreabilidade direta de padrões GPSDO. Como um
dos objetivos desse trabalho, espera-se proporcionar o respaldo necessário para a
formalização dessa posição.
Além do INMETRO e do Serviço da Hora do Observatório Nacional, existem
atualmente 15 laboratórios acreditados, com base em dados de fevereiro de 2007 [ 58 ],
que são potenciais interessados na formalização de um posicionamento nacional sobre
a rastreabilidade em tempo e freqüência. O principal foro para discussões e eventuais
posicionamentos quanto ao assunto em questão, consiste nas comissões técnicas da
Divisão de Acreditação de Laboratórios do INMETRO – DICLA. Essas comissões são
de caráter permanente e consultivo e são constituídas por técnicos especialistas em
uma ou mais áreas da calibração. Têm por função auxiliar a DICLA nos assuntos
relacionados à acreditação e o quesito rastreabilidade é de grande importância para o
processo [ 59 ].
3.3.2.5 Conclusões sobre o uso do sistema GPS em calibrações
Até agora, apesar dos padrões de freqüência disciplinados por GPS
demonstrarem desempenho superior a padrões similares que utilizam transmissões de
rádio, eles não são reconhecidos por alguns dos organismos nacionais de metrologia

82
como forma de manter a rastreabilidade operando em modo GPS one-way. Nota-se
que existem posicionamentos mais “liberais” e outros mais “conservadores” em relação
a este tema [ 60 ].
Diante do exposto anteriormente, podem-se resumir as principais condições
necessárias do uso do GPS para atender às interpretações atuais dos organismos
nacionais de metrologia quanto à rastreabilidade em tempo e freqüência:
• Utilizar receptores GPS projetados para trabalhar como padrões de
freqüência.
• Obter resultados medições com elevados tempos de amostragem,
tradicionalmente 24 h, devido ao ruído do sistema GPS.
• Utilizar o sistema GPS como um padrão de transferência e não como uma
referência primária.
• Utilizar o método GPS common-view (ou uma variação sobre o mesmo), uma
vez que múltiplos e complexos componentes de incerteza estão associados
com o uso de satélites GPS. Alguns deles podem ser corretamente avaliados
apenas mediante uma comparação síncrona dos satélites [ 61 ].
• Utilizar um sistema de calibração remota, onde o laboratório que provê a
rastreabilidade analisa os resultados e emite um certificado de calibração que
contemple a incerteza de medição. Deve existir um comprometimento formal
de quem provê a rastreabilidade com os resultados, mediante a emissão de
um certificado de calibração devidamente aprovado.
• Para calibrações em tempo, é necessário estabelecer a calibração do atraso
de propagação do cabo que conecta a antena ao receptor. Um segundo
sistema GPS calibrado pode ser necessário para esta avaliação.
Mediante essas colocações, propõe-se na seqüência desse trabalho,
estabelecer uma configuração adequada que possa ser utilizada para implementar a
rastreabilidade de padrões, especificamente na calibração de padrões de freqüência.
83
3.4 A PROPOSTA
Como visto anteriormente, a melhor e mais adequada alternativa para a
calibração de padrões de tempo e freqüência consiste na utilização de um sistema de
calibração remota. Como a grande maioria dos possíveis usuários desse serviço no
Brasil é interessada apenas na rastreabilidade em freqüência, limitar-se-á a aplicação
da proposta apenas para essa grandeza.
Aliada às características do sistema que foram definidas no item 3.3.2.5 e
levando-se em consideração questões econômicas, é desejável que esse sistema
apresente um menor custo possível.
A proposta irá fazer uso da cadeia de rastreabilidade sugerida na situação 2 da
figura 30, onde o sistema GPS atua como um padrão de transferência entre o
laboratório provedor da rastreabilidade e o usuário.
3.4.1 Configuração do sistema
O sistema proposto é mostrado na figura 33. Em síntese, trata-se do método
GPS common-view associado a uma pequena modificação, onde serão utilizados
dados médios de 24 h de observação da constelação de satélites GPS visíveis no
laboratório. O método GPS common-view clássico faz uso dos resultados comparações
individuais com os satélites visíveis. Esta modificação é motivada pelo fato de que
receptores GPS para os quais é possível programar os satélites a utilizar, são muito
mais caros do que receptores que selecionam automaticamente satélites com o maior
sinal no momento da recepção. O experimento prático realizado e que será descrito no
capítulo 4, comprova que os resultados obtidos com esta modificação apresentam
incertezas apropriadas.
A Divisão do Serviço da Hora do Observatório Nacional no Rio de Janeiro,
responsável por manter os padrões nacionais, é o laboratório de referência apropriado
para compor esse sistema. Entretanto, esse serviço pode ser operacionalizado por
outros laboratórios que disponham da infra-estrutura necessária para proporcionar
incertezas adequadas. As medições a serem realizadas nesse laboratório de referência
consistem na monitoração do sistema GPS por um padrão de césio rastreado ao SI.
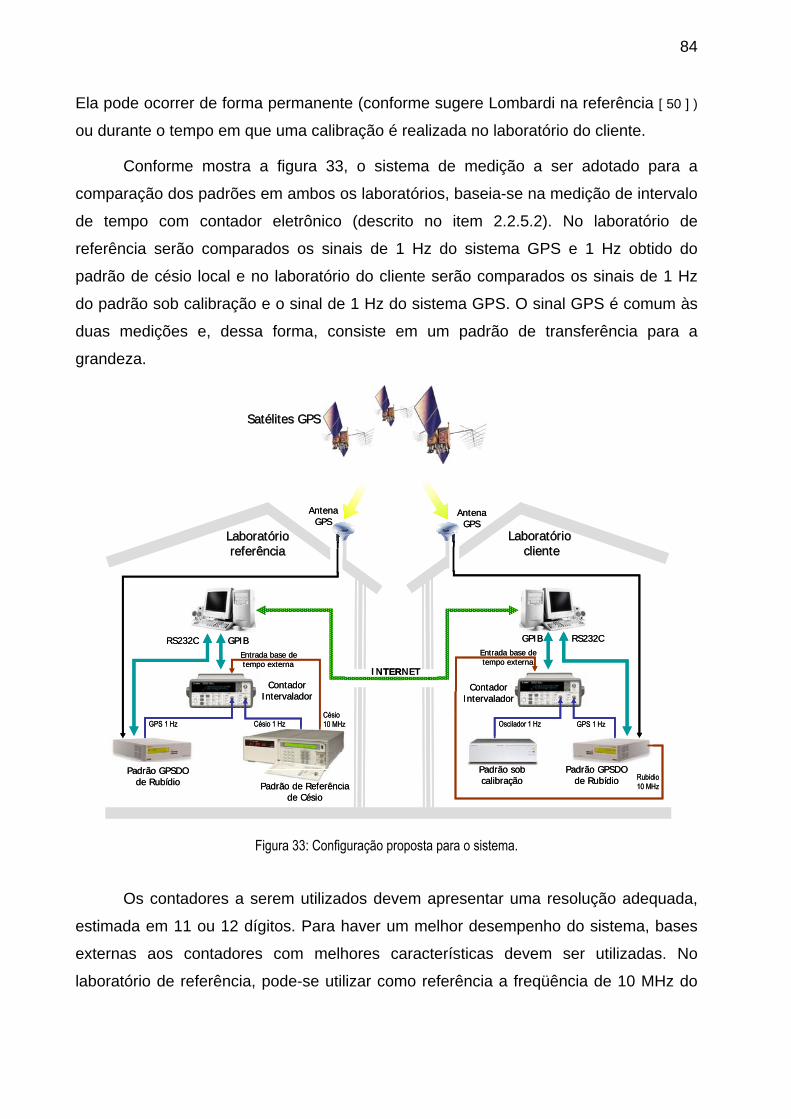
84
Ela pode ocorrer de forma permanente (conforme sugere Lombardi na referência [ 50 ] )
ou durante o tempo em que uma calibração é realizada no laboratório do cliente.
Conforme mostra a figura 33, o sistema de medição a ser adotado para a
comparação dos padrões em ambos os laboratórios, baseia-se na medição de intervalo
de tempo com contador eletrônico (descrito no item 2.2.5.2). No laboratório de
referência serão comparados os sinais de 1 Hz do sistema GPS e 1 Hz obtido do
padrão de césio local e no laboratório do cliente serão comparados os sinais de 1 Hz
do padrão sob calibração e o sinal de 1 Hz do sistema GPS. O sinal GPS é comum às
duas medições e, dessa forma, consiste em um padrão de transferência para a
grandeza.
Padrão GPSDOde Rubídio
SatSatéélites GPSlites GPS
Padrão de Referência de Césio
Padrão GPSDO de Rubídio
Padrão sob calibração
ContadorIntervalador
ContadorIntervalador
Césio 1 HzCésio 10 MHzGPS 1 Hz GPS 1 HzOscilador 1 Hz
Antena GPS
LaboratLaboratóóriorioclientecliente
LaboratLaboratóóriorioreferênciareferência
GPIBGPIB RS232CRS232C
Rubídio10 MHz
Entrada base detempo externa
Entrada base detempo externa
Antena GPS
INTERNET
Padrão GPSDOde Rubídio
SatSatéélites GPSlites GPS
Padrão de Referência de Césio
Padrão GPSDO de Rubídio
Padrão sob calibração
ContadorIntervalador
ContadorIntervalador
Césio 1 HzCésio 10 MHzGPS 1 Hz GPS 1 HzOscilador 1 Hz
Antena GPS
LaboratLaboratóóriorioclientecliente
LaboratLaboratóóriorioreferênciareferência
GPIBGPIB RS232CRS232C
Rubídio10 MHz
Entrada base detempo externa
Entrada base detempo externa
Antena GPS
INTERNET
Figura 33: Configuração proposta para o sistema.
Os contadores a serem utilizados devem apresentar uma resolução adequada,
estimada em 11 ou 12 dígitos. Para haver um melhor desempenho do sistema, bases
externas aos contadores com melhores características devem ser utilizadas. No
laboratório de referência, pode-se utilizar como referência a freqüência de 10 MHz do
85
padrão de césio e nas instalações do cliente, a saída de 10 MHz do padrão GPSDO
operando em modo “disciplinado”.
Para se obter melhores resultados, é desejável utilizar os mesmos modelos de
padrões GPSDO e antenas nos dois laboratórios [ 44 ]. Deve-se assegurar que as
antenas estejam corretamente instaladas e possam visualizar os satélites sem
obstáculos. O padrão GPSDO deve proporcionar acesso à informação de 1 Hz
fornecida diretamente dos sinais do sistema GPS.
Como se trata de um sistema de operação remota existe a necessidade de dois
microcomputadores, um em cada laboratório, com dedicação exclusiva para a
realização das medições. Eles têm por objetivo adquirir os dados de intervalo de tempo
provenientes dos contadores e da informação da hora fornecida pelo sistema GPS,
para haver um sincronismo entre os laboratórios e obter as medições de forma
simultânea. Sugere-se o uso de interfaces GPIB e/ou serial para a comunicação com
os instrumentos. O microcomputador disposto nas instalações do cliente é controlado
via internet pelo microcomputador instalado no laboratório de referência, mediante o
uso de ferramentas de programação aplicadas a esta finalidade.
Estima-se que o tempo de medição deverá ser de, pelo menos, 7 dias para
padrões de rubídio e 30 dias para padrões GPSDO ou de césio. Em uma situação
ideal, é possível que o sistema esteja permanentemente monitorando o padrão sob
calibração. Finalmente, é desejável que exista um sistema de alimentação ininterrupta
em ambos os laboratórios para evitar perda de dados e eventuais retrabalhos.
3.4.1.1 Características desejáveis do software de controle.
Uma das importantes características do sistema de medição a ser instalado no
usuário é manutenção da confidencialidade e integridade dos resultados obtidos por
meios informatizados, conforme requerido pelo item 5.4.7.2 da NBR ISO/IEC 17025
[ 46 ]. Assim, é imprescindível que apenas o laboratório de referência tenha acesso às
medições e não exista nenhuma interferência do cliente no processo. O software a ser
desenvolvido deverá proporcionar o atendimento a essas condições. Como será
utilizada a internet como meio de comunicação, é recomendável que existam
ferramentas de proteção aplicadas à rede onde os computadores estarão conectados.
86
O sistema deve indicar quaisquer falhas no processo de medição, quer sejam
falhas de comunicação entre os computadores ou entre esses e os instrumentos de
medição.
Para o desenvolvimento do software, sugere-se o uso de um aplicativo que seja
de fácil programação, esteja voltado à automação e comunicação com instrumentos via
interfaces GPIB e RS232C e apresente ferramentas para o controle dos mesmos via
internet. Uma das ferramenta comerciais que reúne todas essas características é o
aplicativo LabView da National Instruments.
Uma vez desenvolvido, torna-se necessária que exista a validação do software,
conforme também requerido pelo item 5.4.7.2 da NBR ISO/IEC 17025 [ 46 ].
3.4.1.2 Análise e emissão dos resultados.
A análise dos dados deve ser efetuada pelo laboratório de referência. Pode-se
optar pelo desenvolvimento de aplicativos específicos ou pela utilização de softwares
comerciais destinados a medições em tempo e freqüência, a exemplo do software
Stable32, a ser detalhado no item 4.1.3. Mediante a utilização de um software
comercial, elimina-se a necessidade de validar cálculos gerados por rotinas
desenvolvidas.
O certificado de calibração emitido deve atender aos requisitos estabelecidos no
item 5.10 da norma NBR ISO/IEC 17025 [ 46 ]. Como resultados, devem ser
apresentados o desvio relativo em freqüência para uma média de 24 h e, no caso de
padrões de rubídio e quartzo, deve ser fornecida uma estimativa do envelhecimento do
padrão. A instabilidade de longo prazo deve ser avaliada em 24 h e será utilizada como
um dos componentes da incerteza do desvio relativo de freqüência. A instabilidade de
curto prazo não tem condições de ser determinada corretamente devido ao elevado
ruído do sistema GPS. A incerteza dos resultados deve ser avaliada de acordo as
orientações do Guia para a Expressão da Medição [ 62 ].
3.4.2 Validação do sistema
Para efetuar a validação do sistema proposto, pode-se utilizar uma das ações
estabelecidas pela nota 2 do item 5.4.5.2 da NBR ISO/IEC 17025, que recomenda a
87
comparação de resultados obtidos com a aplicação de um método alternativo para a
calibração de um mesmo item [ 46 ]. Assim, propõe-se a realização de uma calibração
de um padrão de freqüência de rubídio, padrão GPSDO ou, idealmente, um padrão de
césio, utilizando o método convencional de comparação direta, a ser realizado nas
instalações do laboratório de referência. Esse mesmo item deverá ser calibrado
utilizando o método proposto e, mediante as técnicas estatísticas adequadas, será
verificada a compatibilidade entre os resultados.
Um exemplo prático de aplicação será estabelecido no capítulo 4 deste trabalho
e pode servir como referência para a implantação e validação do mesmo. Pode-se
tomar por base também, toda a sistemática para análise das medições, o procedimento
adotado para a avaliação da incerteza e a forma de análise da comparação de
resultados para fins de validação.
88
4 AVALIAÇÃO EXPERIMENTAL DO SISTEMA PROPOSTO
4.1 DESCRIÇÃO DO PROCESSO EXPERIMENTAL REALIZADO
Com o objetivo de estabelecer uma avaliação experimental do sistema para
rastreabilidade de padrões de freqüência utilizando os sinais recebidos dos satélites
GPS, desenvolveu-se um experimento prático constituído de 5 calibrações. Esse
experimento será detalhado nesse capítulo e que pode ser utilizado como base para a
validação do sistema proposto.
Como discutido no capítulo 3, uma validação completa envolveria a participação
efetiva de dois laboratórios localizados em distintas posições geográficas, o
desenvolvimento de software para o controle remoto das medições, dois receptores
GPS, padrões de freqüência e contadores digitais. Em função de diversas limitações de
ordem operacional, principalmente quanto à disponibilidade limitada para o uso das
instalações e equipamentos dos laboratórios e a inexistência de dois padrões GPSDO
iguais, o presente trabalho limitou-se a uma avaliação experimental em apenas um dos
laboratórios.
A Divisão do Serviço da Hora do Observatório Nacional do Rio de Janeiro -
ONRJ, responsável pela manutenção e disseminação das referências metrológicas
nacionais para a área de tempo e freqüência, apresentou-se disponível para auxiliar o
desenvolvimento do tema. Para tanto, gentilmente foi cedido um espaço físico em suas
instalações e foi disponibilizado acesso a um padrão de césio e a um analisador de
intervalos de tempo.
Os demais equipamentos foram fornecidos pela Divisão de Metrologia do
Instituto de Tecnologia do Paraná, Instituição patrocinadora do mestrando e principal

89
interessada na aplicação dos resultados obtidos. Todos os equipamentos foram
transportados ao Rio de Janeiro e instalados no laboratório de padrões da Divisão do
Serviço da Hora.
4.1.1 Equipamentos utilizados
Para a realização da avaliação experimental do sistema foram utilizados os
equipamentos disponibilizados pelo TECPAR e pelo Observatório Nacional do Rio de
Janeiro, relacionados a seguir.
4.1.1.1 Equipamentos disponibilizados pelo TECPAR
• Padrão atômico de rubídio GPSDO FLUKE 910R. Este padrão de rubídio
disciplinado por GPS apresenta dois modos de operação: modo
disciplinado (locked to GPS) e modo não disciplinado (holdover). Quando
em modo não disciplinado, funciona como dois equipamentos distintos:
um receptor GPS, que fornece em sua saída uma freqüência de 1 Hz,
obtida dos sinais GPS e um padrão de rubídio, que fornece em sua saída
uma freqüência de 10 MHz [ 63 ].
• Contador digital AGILENT 53132A. Trata-se de um contador universal
com capacidade de medições de freqüências de até 225 MHz nos canais
1 e 2. Além da freqüência, as demais medições incluem período, largura
de pulso, duty cycle, tempo de subida e descida, intervalo de tempo, taxa
de freqüência, totalização e medida de fase. Apresenta entradas para
base de tempo e arming externas [ 64 ].
• Unidade de aquisição de dados AGILENT 34970A com módulo
multiplexador (mux) de RF 34905A. A função da unidade com este
módulo é chavear até 4 entradas em uma saída comum. Este módulo
apresenta 2 canais [ 65 ].
• Circuitos divisores de freqüência. Utilizado para compatibilizar os sinais
para os sistemas de medição e proporcionar medições simultâneas entre
os diversos padrões. Foi necessária a montagem de dois divisores de
freqüências, detalhados no item 4.1.1.3.
90
• Microcomputador com aplicativo Labview, interface RS232C e interface
GPIB. Necessário para automatizar a aquisição e armazenamento de
dados e controle dos equipamentos nas medições de intervalo de tempo
com contador.
4.1.1.2 Equipamentos disponibilizados pelo ONRJ
• Padrão atômico de césio HP5071A. Trata-se de um padrão atômico
comercial com saídas de 1 Hz e 10 MHz. Sua função é proporcionar a
rastreabilidade aos padrões nacionais e internacionais [ 66 ].
• Analisador de intervalo de tempo TSC 5110A. Seu funcionamento está
baseado na medição de diferença de tempos com misturador duplo
(DMTD) e consiste em um sistema de medição redundante para confirmar
os resultados obtidos na medição de intervalo de tempo com contador
eletrônico [ 19 ].
• Microcomputador, interface RS232C e software de comunicação serial.
Necessário para adquirir e armazenar os dados do analisador de intervalo
de tempo TSC 5110A.
4.1.1.3 Divisor de freqüências montado para o experimento
Para compatibilizar os sinais fornecidos pelos padrões com o sistema de
medição por intervalo de tempo foi necessário montar dois circuitos divisores de
freqüência de acordo como o diagrama de blocos mostrado na figura 34. Nesta figura,
pode-se observar que o sinal é aplicado a um circuito amplificador de RF sintonizado
em 10 MHz, para proporcionar a amplificação e filtragem do sinal. Após essa etapa, o
sinal é modelado para níveis TTL pelo módulo Schmitt Trigger (estabelecido pelo
circuito integrado 74LS14 [ 67 ]) e posteriormente dividido pelos contadores de décadas
em cascata (estabelecidos pelo circuito integrado 74LS290 [ 68 ]), até ser obtida a
freqüência de 1 Hz. Mediante um multivibrador monoestável (estabelecido pelo circuito
integrado MC4538 [ 69 ]), a forma de onda quadrada TTL de 1 Hz é convertida em um
sinal pulsante de também 1 Hz, com tempo de duração do nível alto de 20 µs. Esse é o
pulso característico da saída de 1 pulso por segundo de padrões atômicos. Em outra
saída, parte do sinal de 10 Hz é dividida 25 vezes para se obter 0,4 Hz, necessários à
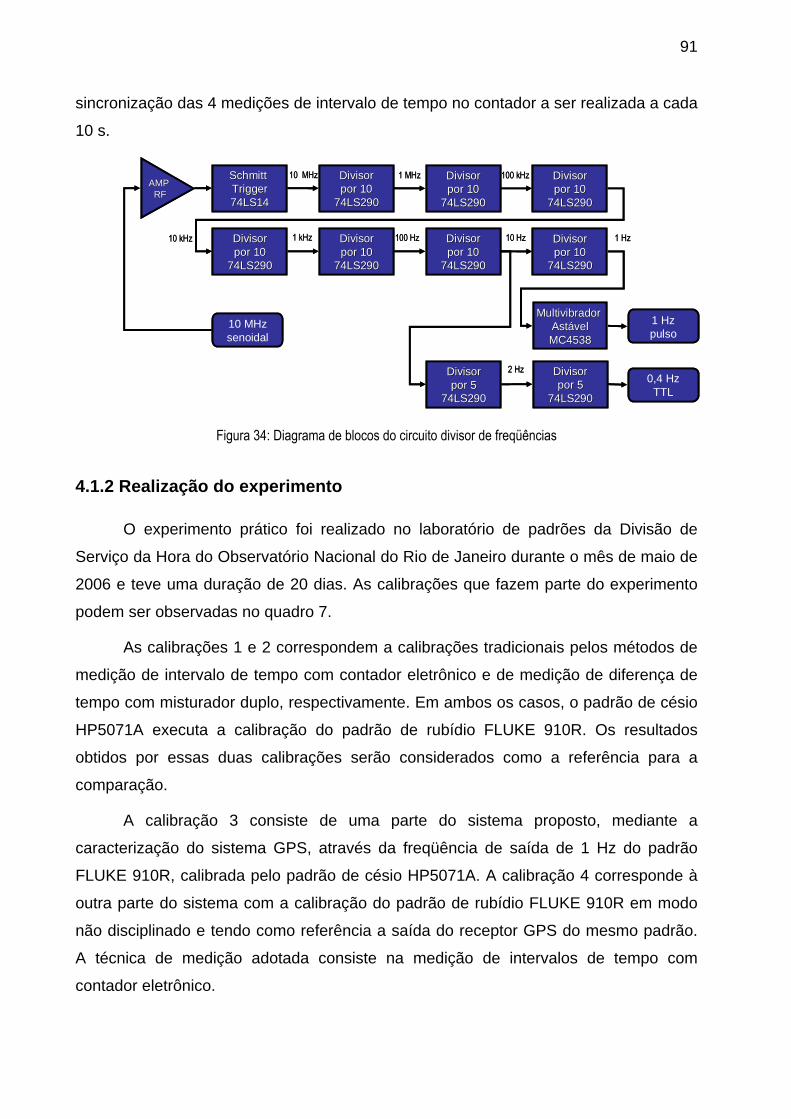
91
sincronização das 4 medições de intervalo de tempo no contador a ser realizada a cada
10 s.
10 MHzsenoidal
Schmitt Schmitt TriggerTrigger74LS1474LS14
AMP AMP RFRF
DivisorDivisorpor 10por 10
74LS29074LS290
DivisorDivisorpor 10por 10
74LS29074LS290
DivisorDivisorpor 10por 10
74LS29074LS290
DivisorDivisorpor 10por 10
74LS29074LS290
DivisorDivisorpor 10por 10
74LS29074LS290
DivisorDivisorpor 10por 10
74LS29074LS290
DivisorDivisorpor 10por 10
74LS29074LS290
10 MHz 1 MHz 100 kHz
10 kHz 1 kHz 100 Hz 10 Hz 1 Hz
MultivibradorMultivibradorAstAstáávelvelMC4538MC4538
DivisorDivisorpor 5por 5
74LS29074LS290
DivisorDivisorpor 5por 5
74LS29074LS290
1 Hzpulso
0,4 HzTTL
2 Hz
10 MHzsenoidal
Schmitt Schmitt TriggerTrigger74LS1474LS14
AMP AMP RFRF
DivisorDivisorpor 10por 10
74LS29074LS290
DivisorDivisorpor 10por 10
74LS29074LS290
DivisorDivisorpor 10por 10
74LS29074LS290
DivisorDivisorpor 10por 10
74LS29074LS290
DivisorDivisorpor 10por 10
74LS29074LS290
DivisorDivisorpor 10por 10
74LS29074LS290
DivisorDivisorpor 10por 10
74LS29074LS290
10 MHz 1 MHz 100 kHz
10 kHz 1 kHz 100 Hz 10 Hz 1 Hz
MultivibradorMultivibradorAstAstáávelvelMC4538MC4538
DivisorDivisorpor 5por 5
74LS29074LS290
DivisorDivisorpor 5por 5
74LS29074LS290
1 Hzpulso
0,4 HzTTL
2 Hz
Figura 34: Diagrama de blocos do circuito divisor de freqüências
4.1.2 Realização do experimento
O experimento prático foi realizado no laboratório de padrões da Divisão de
Serviço da Hora do Observatório Nacional do Rio de Janeiro durante o mês de maio de
2006 e teve uma duração de 20 dias. As calibrações que fazem parte do experimento
podem ser observadas no quadro 7.
As calibrações 1 e 2 correspondem a calibrações tradicionais pelos métodos de
medição de intervalo de tempo com contador eletrônico e de medição de diferença de
tempo com misturador duplo, respectivamente. Em ambos os casos, o padrão de césio
HP5071A executa a calibração do padrão de rubídio FLUKE 910R. Os resultados
obtidos por essas duas calibrações serão considerados como a referência para a
comparação.
A calibração 3 consiste de uma parte do sistema proposto, mediante a
caracterização do sistema GPS, através da freqüência de saída de 1 Hz do padrão
FLUKE 910R, calibrada pelo padrão de césio HP5071A. A calibração 4 corresponde à
outra parte do sistema com a calibração do padrão de rubídio FLUKE 910R em modo
não disciplinado e tendo como referência a saída do receptor GPS do mesmo padrão.
A técnica de medição adotada consiste na medição de intervalos de tempo com
contador eletrônico.

92
Quadro 7: Calibrações que fazem parte do experimento
Calibração 1 Calibração 2 Calibração 3 Calibração 4 Calibração 5
Padrão de referência
Padrão de Césio HP5071A
Padrão de Césio
HP5071A
Padrão de Césio
HP5071A
Receptor GPS Fluke 910R
Padrão de Césio
HP5071A
Padrão sob calibração
Padrão de Rubídio
Fluke 910R
Padrão de Rubídio Fluke 910R
Receptor GPS Fluke 910R
Padrão de Rubídio
Fluke 910R
Padrão de Césio
HP5071A
Meio de medida
Contador Agilent HP53132A Analisador
TSC 5110A
Contador
Agilent HP53132A
Contador
Agilent HP53132A Contador
Agilent HP53132A
Técnica de medição Intervalo de tempo DMTD Intervalo de tempo Intervalo de tempo Intervalo de tempo
A calibração 5 consiste de uma avaliação do sistema de medição de intervalo de
tempo, calibrando-se o padrão de césio HP5071A contra ele próprio. Com essa
calibração, é possível estabelecer a combinação entre o nível de ruído do padrão de
referência e do sistema de medição utilizando o contador.
Todas as medições foram efetuadas em instantes de tempo muito próximos. As
quatro medições que envolveram o contador estão separadas entre si de 2,5 s e são
sincronizadas por um pulso de 0,4 Hz, obtido do padrão de césio. Dessa forma, a cada
10 s, tem-se uma repetição das calibrações 1, 3, 4 e 5, nesta ordem. Isso corresponde
a um tempo de amostragem mínimo (τ0) de 10 s em todos os casos. A calibração 2,
pelo método de diferença de tempo com misturador duplo, foi realizada
simultaneamente às demais, mas sem o sincronismo dos casos anteriores.
Todo o gerenciamento dos instrumentos e a aquisição de dados das calibrações
1, 3, 4 e 5 foi efetuado mediante um aplicativo desenvolvido em LabView. A aquisição
de dados referente à calibração 2 foi efetuada mediante software comercial de
comunicação serial em um segundo computador.
Mediante as informações de desvios de tempo e de fase e fazendo uso de um
software apropriado para análise dos dados obtidos das cinco calibrações, foi possível

93
caracterizar ruídos a curto prazo, desvios de freqüência e envelhecimento dos padrões.
Aplicando-se procedimentos apropriados, avaliaram-se as incertezas de medição dos
valores obtidos e efetuou-se uma comparação dos resultados. Estas etapas estão
detalhadas nos itens 4.1.2.1, 4.1.2.2, 4.1.2.3 e 4.1.3.
4.1.2.1 Sistema de medição com contador digital
Para as medições dos padrões por intervalos de tempo com contador digital, os
equipamentos foram conectados conforme a figura 35.
Contador Contador AGILENT AGILENT 53132A53132A
GPSDO RubGPSDO Rubíídio FLUKE dio FLUKE 910R (modo 910R (modo holdoverholdover))
C1C1GPIBGPIB
GPIBGPIB
C2C2
SatSatéélites GPSlites GPS
Antena Antena GPSGPS
÷1.107
Circuito divisorCircuito divisorde freqde freqüüênciasências
Padrão de CPadrão de Céésio sio HP5071AHP5071A
÷2,5.107
com 2com 2com 1com 1
12 e 2212 e 22 1111 13 e 2113 e 21
RubRubíídiodio10 MHz10 MHz
GPSGPS1 Hz1 Hz RubRubíídiodio
1 Hz1 Hz
CCéésiosio1 Hz1 Hz
CCéésiosio10 MHz10 MHz
CCéésiosio0,4 Hz0,4 Hz
Entrada base deEntrada base detempo externatempo externa
Entrada deEntrada deARM externoARM externo
Unidade de AquisiUnidade de AquisiççãoãoAGILENT 34970A AGILENT 34970A MUX RF 34905AMUX RF 34905A
GPIBGPIB
Antena INAntena IN
MicrocomputadorMicrocomputadorcom interface GPIB USBcom interface GPIB USB
Circuito divisorCircuito divisorde freqde freqüüênciasências
RS232CRS232C
Contador Contador AGILENT AGILENT 53132A53132A
GPSDO RubGPSDO Rubíídio FLUKE dio FLUKE 910R (modo 910R (modo holdoverholdover))
C1C1GPIBGPIB
GPIBGPIB
C2C2
SatSatéélites GPSlites GPS
Antena Antena GPSGPS
÷1.107
Circuito divisorCircuito divisorde freqde freqüüênciasências
Padrão de CPadrão de Céésio sio HP5071AHP5071A
÷2,5.107
com 2com 2com 1com 1
12 e 2212 e 22 1111 13 e 2113 e 21
RubRubíídiodio10 MHz10 MHz
GPSGPS1 Hz1 Hz RubRubíídiodio
1 Hz1 Hz
CCéésiosio1 Hz1 Hz
CCéésiosio10 MHz10 MHz
CCéésiosio0,4 Hz0,4 Hz
Entrada base deEntrada base detempo externatempo externa
Entrada deEntrada deARM externoARM externo
Unidade de AquisiUnidade de AquisiççãoãoAGILENT 34970A AGILENT 34970A MUX RF 34905AMUX RF 34905A
GPIBGPIB
Antena INAntena IN
MicrocomputadorMicrocomputadorcom interface GPIB USBcom interface GPIB USB
Circuito divisorCircuito divisorde freqde freqüüênciasências
RS232CRS232C
Figura 35: Avaliação experimental - medição por intervalos de tempo
Para o correto funcionamento do padrão GPSDO, a antena foi instalada em um
local externo adequado à visibilidade dos satélites e conectada ao receptor. O padrão
GPSDO apresenta duas saídas de sinais: saída de pulsos de 1 Hz, obtida dos satélites
GPS; saída senoidal de 10 MHz, derivadas do padrão de rubídio interno. Como o
padrão foi colocado em modo não disciplinado (holdover), esses sinais são
independentes [ 63 ].
Para fazer uso da técnica de medição de intervalo de tempo com contador,
foram comparados os sinais de 1 Hz provenientes dos padrões. Assim, houve a
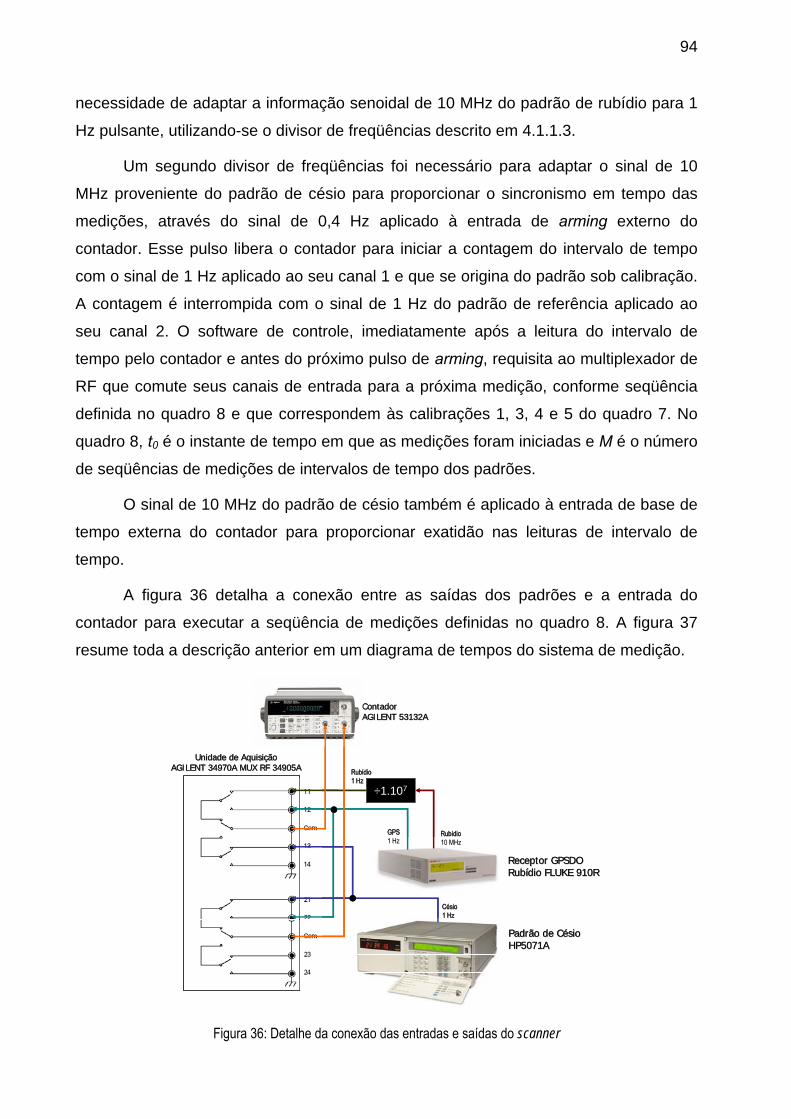
94
necessidade de adaptar a informação senoidal de 10 MHz do padrão de rubídio para 1
Hz pulsante, utilizando-se o divisor de freqüências descrito em 4.1.1.3.
Um segundo divisor de freqüências foi necessário para adaptar o sinal de 10
MHz proveniente do padrão de césio para proporcionar o sincronismo em tempo das
medições, através do sinal de 0,4 Hz aplicado à entrada de arming externo do
contador. Esse pulso libera o contador para iniciar a contagem do intervalo de tempo
com o sinal de 1 Hz aplicado ao seu canal 1 e que se origina do padrão sob calibração.
A contagem é interrompida com o sinal de 1 Hz do padrão de referência aplicado ao
seu canal 2. O software de controle, imediatamente após a leitura do intervalo de
tempo pelo contador e antes do próximo pulso de arming, requisita ao multiplexador de
RF que comute seus canais de entrada para a próxima medição, conforme seqüência
definida no quadro 8 e que correspondem às calibrações 1, 3, 4 e 5 do quadro 7. No
quadro 8, t0 é o instante de tempo em que as medições foram iniciadas e M é o número
de seqüências de medições de intervalos de tempo dos padrões.
O sinal de 10 MHz do padrão de césio também é aplicado à entrada de base de
tempo externa do contador para proporcionar exatidão nas leituras de intervalo de
tempo.
A figura 36 detalha a conexão entre as saídas dos padrões e a entrada do
contador para executar a seqüência de medições definidas no quadro 8. A figura 37
resume toda a descrição anterior em um diagrama de tempos do sistema de medição.
Receptor GPSDOReceptor GPSDORubRubíídio FLUKE 910Rdio FLUKE 910R
Padrão de CPadrão de Céésio sio HP5071AHP5071A
Unidade de AquisiUnidade de AquisiççãoãoAGILENT 34970A MUX RF 34905AAGILENT 34970A MUX RF 34905A
÷1.107
ContadorContadorAGILENT 53132AAGILENT 53132A
CCéésiosio1 Hz1 Hz
GPSGPS1 Hz1 Hz
RubRubíídiodio10 MHz10 MHz
RubRubíídiodio1 Hz1 Hz
Receptor GPSDOReceptor GPSDORubRubíídio FLUKE 910Rdio FLUKE 910R
Padrão de CPadrão de Céésio sio HP5071AHP5071A
Unidade de AquisiUnidade de AquisiççãoãoAGILENT 34970A MUX RF 34905AAGILENT 34970A MUX RF 34905A
÷1.107
ContadorContadorAGILENT 53132AAGILENT 53132A
CCéésiosio1 Hz1 Hz
GPSGPS1 Hz1 Hz
RubRubíídiodio10 MHz10 MHz
RubRubíídiodio1 Hz1 Hz
Figura 36: Detalhe da conexão das entradas e saídas do scanner

95
Quadro 8: Seqüência de medições da avaliação experimental
Canal C1 do contador Canal C2 do contador
Calibração Instante de tempo Entrada do MUX Padrão Entrada do MUX Padrão
1 t0 11 Rubídio 21 Césio 3 t0 + 2,5 s 12 GPS 21 Césio 4 t0 + 5 s 11 Rubídio 22 GPS 5 t0 + 7,5 s 13 Césio 21 Césio 1 t0 + 10 s 11 Rubídio 21 Césio 3 t0 + 12,5 s 12 GPS 21 Césio 4 t0 + 15 s 11 Rubídio 22 GPS 5 t0 + 17,5 s 13 Césio 21 Césio
1 t0 + M 11 Rubídio 21 Césio 3 t0 + M +2,5 s 12 GPS 21 Césio 4 t0 + M + 5 s 11 Rubídio 22 GPS 5 t0 + M + 7,5 s 13 Césio 21 Césio
2,5 s 2,5 s 2,5 s 2,5 s 2,5 s 2,5 s 10 s
2,5 s 2,5 s 2,5 s 2,5 s 2,5 s 2,5 s 10 s
Figura 37: Diagrama de tempo do sistema de medição
A aquisição de dados do contador e controle do multiplexador de RF foi efetuada
via interface GPIB, mediante um aplicativo desenvolvido que será detalhado no item
4.1.2.2. Para identificar o início de cada novo ciclo de medição, este mesmo aplicativo
obteve, via interface serial, a informação de data e hora do padrão GPSDO.
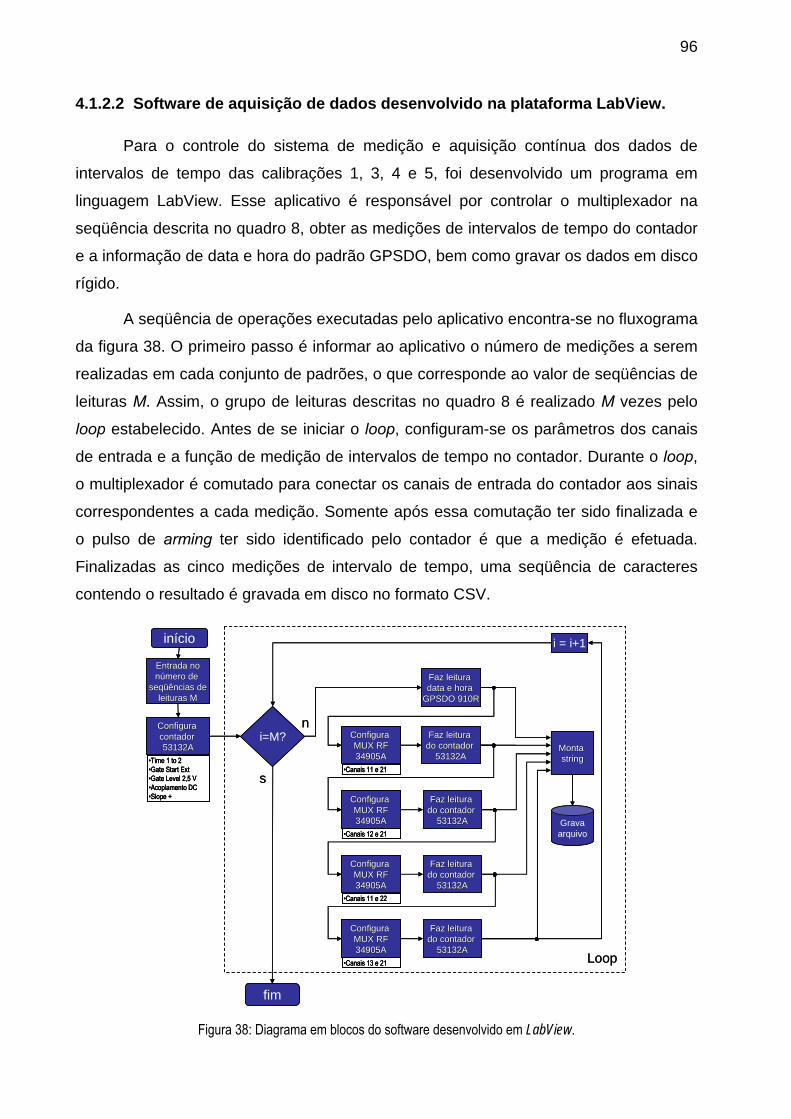
96
4.1.2.2 Software de aquisição de dados desenvolvido na plataforma LabView.
Para o controle do sistema de medição e aquisição contínua dos dados de
intervalos de tempo das calibrações 1, 3, 4 e 5, foi desenvolvido um programa em
linguagem LabView. Esse aplicativo é responsável por controlar o multiplexador na
seqüência descrita no quadro 8, obter as medições de intervalos de tempo do contador
e a informação de data e hora do padrão GPSDO, bem como gravar os dados em disco
rígido.
A seqüência de operações executadas pelo aplicativo encontra-se no fluxograma
da figura 38. O primeiro passo é informar ao aplicativo o número de medições a serem
realizadas em cada conjunto de padrões, o que corresponde ao valor de seqüências de
leituras M. Assim, o grupo de leituras descritas no quadro 8 é realizado M vezes pelo
loop estabelecido. Antes de se iniciar o loop, configuram-se os parâmetros dos canais
de entrada e a função de medição de intervalos de tempo no contador. Durante o loop,
o multiplexador é comutado para conectar os canais de entrada do contador aos sinais
correspondentes a cada medição. Somente após essa comutação ter sido finalizada e
o pulso de arming ter sido identificado pelo contador é que a medição é efetuada.
Finalizadas as cinco medições de intervalo de tempo, uma seqüência de caracteres
contendo o resultado é gravada em disco no formato CSV.
Configura Configura contador contador 53132A53132A
•Time 1 to 2•Gate Start Ext•Gate Level 2,5 V •Acoplamento DC•Slope +
início
Configura Configura MUX RFMUX RF34905A34905A
•Canais 11 e 21
Configura Configura MUX RFMUX RF34905A34905A
•Canais 12 e 21
Faz leitura Faz leitura do contador do contador
53132A53132A
Faz leitura Faz leitura do contador do contador
53132A53132A
Configura Configura MUX RFMUX RF34905A34905A
•Canais 11 e 22
Faz leitura Faz leitura do contador do contador
53132A53132A
Configura Configura MUX RFMUX RF34905A34905A
•Canais 13 e 21
Faz leitura Faz leitura do contador do contador
53132A53132A
Gravaarquivo
i=M?
fim
Entrada noEntrada nonnúúmero de mero de
seqseqüüências deências deleituras Mleituras M
i = i+1
Monta Monta stringstring
Loop
Faz leitura Faz leitura data e hora data e hora
GPSDO 910RGPSDO 910R
s
nConfigura Configura contador contador 53132A53132A
•Time 1 to 2•Gate Start Ext•Gate Level 2,5 V •Acoplamento DC•Slope +
Configura Configura contador contador 53132A53132A
•Time 1 to 2•Gate Start Ext•Gate Level 2,5 V •Acoplamento DC•Slope +
início
Configura Configura MUX RFMUX RF34905A34905A
•Canais 11 e 21
Configura Configura MUX RFMUX RF34905A34905A
•Canais 11 e 21
Configura Configura MUX RFMUX RF34905A34905A
•Canais 12 e 21
Configura Configura MUX RFMUX RF34905A34905A
•Canais 12 e 21
Faz leitura Faz leitura do contador do contador
53132A53132A
Faz leitura Faz leitura do contador do contador
53132A53132A
Configura Configura MUX RFMUX RF34905A34905A
•Canais 11 e 22
Configura Configura MUX RFMUX RF34905A34905A
•Canais 11 e 22
Faz leitura Faz leitura do contador do contador
53132A53132A
Configura Configura MUX RFMUX RF34905A34905A
•Canais 13 e 21
Configura Configura MUX RFMUX RF34905A34905A
•Canais 13 e 21
Faz leitura Faz leitura do contador do contador
53132A53132A
Gravaarquivo
i=M?
fim
Entrada noEntrada nonnúúmero de mero de
seqseqüüências deências deleituras Mleituras M
i = i+1
Monta Monta stringstring
Loop
Faz leitura Faz leitura data e hora data e hora
GPSDO 910RGPSDO 910R
s
n
Figura 38: Diagrama em blocos do software desenvolvido em LabView.
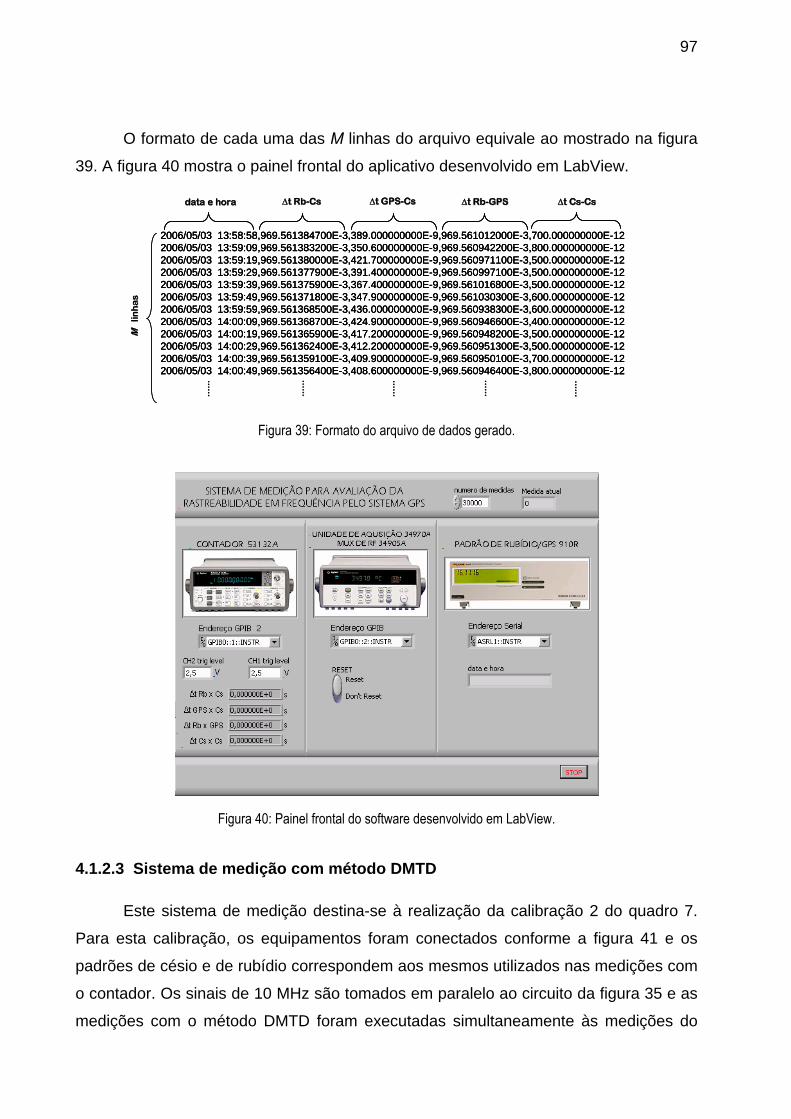
97
O formato de cada uma das M linhas do arquivo equivale ao mostrado na figura
39. A figura 40 mostra o painel frontal do aplicativo desenvolvido em LabView.
MMlin
ha
slin
ha
s
............
2006/05/03 13:58:58,969.561384700E-3,389.000000000E-9,969.561012000E-3,700.000000000E-122006/05/03 13:59:09,969.561383200E-3,350.600000000E-9,969.560942200E-3,800.000000000E-122006/05/03 13:59:19,969.561380000E-3,421.700000000E-9,969.560971100E-3,500.000000000E-122006/05/03 13:59:29,969.561377900E-3,391.400000000E-9,969.560997100E-3,500.000000000E-122006/05/03 13:59:39,969.561375900E-3,367.400000000E-9,969.561016800E-3,500.000000000E-122006/05/03 13:59:49,969.561371800E-3,347.900000000E-9,969.561030300E-3,600.000000000E-122006/05/03 13:59:59,969.561368500E-3,436.000000000E-9,969.560938300E-3,600.000000000E-122006/05/03 14:00:09,969.561368700E-3,424.900000000E-9,969.560946600E-3,400.000000000E-122006/05/03 14:00:19,969.561365900E-3,417.200000000E-9,969.560948200E-3,500.000000000E-122006/05/03 14:00:29,969.561362400E-3,412.200000000E-9,969.560951300E-3,500.000000000E-122006/05/03 14:00:39,969.561359100E-3,409.900000000E-9,969.560950100E-3,700.000000000E-122006/05/03 14:00:49,969.561356400E-3,408.600000000E-9,969.560946400E-3,800.000000000E-12
∆∆t t RbRb--CsCsdata e horadata e hora ∆∆t t GPSGPS--CsCs ∆∆t t RbRb--GPSGPS ∆∆t t CsCs--CsCs
........................
........................
MMlin
ha
slin
ha
s
............
2006/05/03 13:58:58,969.561384700E-3,389.000000000E-9,969.561012000E-3,700.000000000E-122006/05/03 13:59:09,969.561383200E-3,350.600000000E-9,969.560942200E-3,800.000000000E-122006/05/03 13:59:19,969.561380000E-3,421.700000000E-9,969.560971100E-3,500.000000000E-122006/05/03 13:59:29,969.561377900E-3,391.400000000E-9,969.560997100E-3,500.000000000E-122006/05/03 13:59:39,969.561375900E-3,367.400000000E-9,969.561016800E-3,500.000000000E-122006/05/03 13:59:49,969.561371800E-3,347.900000000E-9,969.561030300E-3,600.000000000E-122006/05/03 13:59:59,969.561368500E-3,436.000000000E-9,969.560938300E-3,600.000000000E-122006/05/03 14:00:09,969.561368700E-3,424.900000000E-9,969.560946600E-3,400.000000000E-122006/05/03 14:00:19,969.561365900E-3,417.200000000E-9,969.560948200E-3,500.000000000E-122006/05/03 14:00:29,969.561362400E-3,412.200000000E-9,969.560951300E-3,500.000000000E-122006/05/03 14:00:39,969.561359100E-3,409.900000000E-9,969.560950100E-3,700.000000000E-122006/05/03 14:00:49,969.561356400E-3,408.600000000E-9,969.560946400E-3,800.000000000E-12
∆∆t t RbRb--CsCsdata e horadata e hora ∆∆t t GPSGPS--CsCs ∆∆t t RbRb--GPSGPS ∆∆t t CsCs--CsCs
2006/05/03 13:58:58,969.561384700E-3,389.000000000E-9,969.561012000E-3,700.000000000E-122006/05/03 13:59:09,969.561383200E-3,350.600000000E-9,969.560942200E-3,800.000000000E-122006/05/03 13:59:19,969.561380000E-3,421.700000000E-9,969.560971100E-3,500.000000000E-122006/05/03 13:59:29,969.561377900E-3,391.400000000E-9,969.560997100E-3,500.000000000E-122006/05/03 13:59:39,969.561375900E-3,367.400000000E-9,969.561016800E-3,500.000000000E-122006/05/03 13:59:49,969.561371800E-3,347.900000000E-9,969.561030300E-3,600.000000000E-122006/05/03 13:59:59,969.561368500E-3,436.000000000E-9,969.560938300E-3,600.000000000E-122006/05/03 14:00:09,969.561368700E-3,424.900000000E-9,969.560946600E-3,400.000000000E-122006/05/03 14:00:19,969.561365900E-3,417.200000000E-9,969.560948200E-3,500.000000000E-122006/05/03 14:00:29,969.561362400E-3,412.200000000E-9,969.560951300E-3,500.000000000E-122006/05/03 14:00:39,969.561359100E-3,409.900000000E-9,969.560950100E-3,700.000000000E-122006/05/03 14:00:49,969.561356400E-3,408.600000000E-9,969.560946400E-3,800.000000000E-12
∆∆t t RbRb--CsCsdata e horadata e hora ∆∆t t GPSGPS--CsCs ∆∆t t RbRb--GPSGPS ∆∆t t CsCs--CsCs
........................
........................
Figura 39: Formato do arquivo de dados gerado.
Figura 40: Painel frontal do software desenvolvido em LabView.
4.1.2.3 Sistema de medição com método DMTD
Este sistema de medição destina-se à realização da calibração 2 do quadro 7.
Para esta calibração, os equipamentos foram conectados conforme a figura 41 e os
padrões de césio e de rubídio correspondem aos mesmos utilizados nas medições com
o contador. Os sinais de 10 MHz são tomados em paralelo ao circuito da figura 35 e as
medições com o método DMTD foram executadas simultaneamente às medições do

98
método de intervalo de tempo com contador. Um segundo microcomputador foi
utilizado para adquirir as medições do analisador de intervalos de tempo via interface
RS232C.
CCéésiosio10 MHz10 MHzRubRubíídiodio
10 MHz10 MHz
Padrão de CPadrão de Céésio sio HP5071AHP5071A
Receptor GPSDOReceptor GPSDORubRubíídio FLUKE 910Rdio FLUKE 910R
Analisador de Intervalo Analisador de Intervalo de Tempo TSC 5110Ade Tempo TSC 5110A
MicrocomputadorMicrocomputador
RS 232CRS 232C
CCéésiosio10 MHz10 MHzRubRubíídiodio
10 MHz10 MHz
Padrão de CPadrão de Céésio sio HP5071AHP5071A
Receptor GPSDOReceptor GPSDORubRubíídio FLUKE 910Rdio FLUKE 910R
Analisador de Intervalo Analisador de Intervalo de Tempo TSC 5110Ade Tempo TSC 5110A
MicrocomputadorMicrocomputador
RS 232CRS 232C
Figura 41: Avaliação experimental – medição com DMTD.
O apêndice 1 mostra fotos da realização do experimento nas instalações do
Observatório Nacional do Rio de Janeiro.
4.1.3 Uso do software Stable32 para análise dos resultados
O software Stable32 consiste de um programa comercial na plataforma Microsoft
Windows para a análise de instabilidade de freqüência. Ele permite importar, editar,
simular, analisar e imprimir dados de medidas de desvios de fase e de freqüência, bem
como avaliá-los estatisticamente e estabelecer gráficos de instabilidades de fase,
freqüência e tempo.
Esse software é amplamente utilizado por diversos laboratórios comerciais e
governamentais em todo o mundo [ 70 ] e diversas publicações voltadas à metrologia
em tempo e freqüência fazem referências à sua utilização para análise de resultados
de medições em padrões atômicos e de quartzo.
Os fatos citados anteriormente, aliados ao posicionamento da Norma NBR
ISO/IEC 17025, a qual, em nota do requisito 5.4.7.2, estabelece que softwares
comerciais sejam considerados suficientemente validados [ 46 ], tornam o aplicativo
confiável para uso no presente trabalho.

99
Todo o armazenamento de dados e cálculos no software Stable32 é efetuado
com dupla precisão numérica para uma grande quantidade de dados medidos. Outros
benefícios do Stable32 consistem na conversão entre dados de fase em dados de
freqüência e vice-versa, análise estatística de instabilidade utilizando a variância de
Allan e variância de Allan modificada, análise do tipo de ruído em função do tempo de
amostragem, estabelecimento do intervalo de confiança para as medições de
instabilidade, gráficos de desvios de Allan, geração de histogramas, entre outros [ 70 ].
4.2 RESULTADOS OBTIDOS
Entre os dias 08/05/2006 (53863 MJD2) às 08 h 02 min 49 s até o dia 19/05/2006
(53874 MJD2) às 10 h 15 min 09 s, foram executadas as calibrações definidas no
quadro 7, perfazendo um total de 95834 determinações de desvios de tempo em cada
calibração.
A partir desses resultados e como visto na discussão teórica estabelecida no
item 2, foi possível determinar a instabilidade da freqüência a curto e longo prazo, o
desvio da freqüência e o envelhecimento em cada um dos casos. Para tanto, os dados
correspondentes às calibrações 1, 3, 4 e 5, obtidos com o aplicativo relatado em 4.1.2.2
e os dados adquiridos na calibração 2, foram analisados mediante a utilização do
software Stable32, cujos resultados completos encontram-se no apêndice 2 deste
trabalho.
Nos itens seguintes, discute-se a compilação resumida dos resultados na forma
de gráficos e tabelas.
4.2.1 Instabilidade em freqüência
Conforme discutido no item 2.2.3, a variância de Allan consiste na medida da
instabilidade ou do ruído dos padrões de freqüência, relacionados a um determinado
tempo de amostragem. Sua avaliação, além de proporcionar a medida da incerteza tipo
“A” do desvio de freqüência, a ser discutida posteriormente, pode ser utilizada para
2 MJD é a sigla de Dia Juliano Modificado. “Trata-se de uma seqüência de números inteiros, um para cada dia,
simplificando a tarefa de determinar o número de dias transcorridos entre duas datas. O MJD 0 designa a meia-noite entre 16 e 17 de novembro de 1858. Pode-se inserir quantas casas decimais após a vírgula para representar a fração do dia com a precisão desejada” [ 71 ].

100
confirmar o desempenho de instabilidade de curto prazo dos padrões declarado pelos
fabricantes. Para a avaliação da instabilidade dos resultados neste trabalho, optou-se
em utilizar a variância de Allan com sobreposição (overlapping) dos desvios de tempo
obtidos, conforme discutido no item 2.2.3.4.
A inclinação do gráfico do desvio de Allan em diversos tempos de amostragem
define o tipo de ruído presente (conforme quadro 2) e a forma de cálculo do desvio de
freqüência e do envelhecimento (conforme quadro 4).
Quadro 9: Resultados brutos resumidos da instabilidade em freqüência
Calibração 1 Rb-Cs (contador)
Calibração 2 Rb-Cs (DMTD)
Calibração 3 GPS-Cs (contador)
Calibração 4 Rb-GPS (contador)
Calibração 5 Cs-Cs (contador)
Desvio de Allan σy(τ=10 s) 1,615E-10 Hz/Hz 1,821E-11 Hz/Hz 5,247E-09 Hz/Hz 5,296E-09 Hz/Hz 2,027E-11 Hz/Hz Número de medições 95833 95832 95833 95833 95809 Graus de liberdade 58576 115394 58576 58576 58571
Máx σy(τ=10 s) (χ²,95%) 1,622E-10 Hz/Hz 1,827E-11 Hz/Hz 5,272E-09 Hz/Hz 5,322E-09 Hz/Hz 2,036E-11 Hz/Hz Tipo de ruído Flicker de fase
α = 1 Branco de freqüência
α = 0 Flicker de fase
α = 1 Flicker de fase
α = 1 Flicker de fase
α = 1
Desvio de Allan σy(τ=100 s) 1,666E-11 Hz/Hz 6,471E-12 Hz/Hz 5,312E-10 Hz/Hz 5,413E-10 Hz/Hz 2,044E-12 Hz/Hz Número de medições 95815 95814 95815 95815 95791 Graus de liberdade 47913 25641 47913 47913 47909
Máx σy (τ=100 s) (χ²,95%) 1,675E-11 Hz/Hz 6,518E-12 5,340 E-10 5,441 E-10 2,054962e-12 Tipo de ruído Branco de fase
α = 2 Branco de freqüência
α = 0 Branco de fase
α = 2 Branco de fase
α = 2 Branco de fase
α = 2 Desvio de Allan
σy(τ=1000s) 2,487E-12 Hz/Hz 3,573E-12 Hz/Hz 5,326E-11 Hz/Hz 5,603E-11 Hz/Hz 2,065E-13 Hz/Hz Número de medições 95635 95634 95635 95635 95611 Graus de liberdade 1194 1435 47867 47867 47863
Máx σy (τ=1000 s) (χ²,95%) 2,573E-12 Hz/Hz 3,687E-12 Hz/Hz 5,354E-11 Hz/Hz 5,633E-11 Hz/Hz 2,076E-13 Hz/Hz Tipo de ruído Flicker de freqüência
α = -1 Branco de freqüência
α = 0 Branco de fase
α = 2 Branco de fase
α = 2 Branco de fase
α = 2
Desvio de Allan σy(τ=24 h) 1,495E-12 Hz/Hz 1,582E-12 Hz/Hz 6,153E-13 Hz/Hz 1,632E-12 Hz/Hz 2,433E-15 Hz/Hz Número de medições 78555 78554 78555 78555 78532 Graus de liberdade 14 28 43169 14 340
Máx σy (τ=24 h) (χ²,95%) 2,161E-12 Hz/Hz 2,034E-12 Hz/Hz 6,187E-13 Hz/Hz 2,359E-12 Hz/Hz 2,597E-15 Hz/Hz Tipo de ruído Branco de freqüência
α = 0 Branco de freqüência
α = 0 Branco de fase
α = 2 Branco de freqüência
α = 0 Flicker de fase
α = 1
O quadro 9 mostra o resumo dos desvios de Allan obtidos para cada uma das
calibrações nos tempos de amostragem σy(τ) de 10 s, 100 s, 1000 s e 86400 s (24 h).
Podem ser observados também nesta tabela, os graus de liberdade (calculados
conforme quadro 1), o desvio de Allan máximo (avaliado conforme discussão do item
2.2.3.3) e o tipo de ruído característico no tempo de amostragem.
Para melhor visualização dos resultados de instabilidade em freqüência das
calibrações detalhados no apêndice 2, os cinco gráficos dos desvios de Allan foram
agrupados em um gráfico de instabilidade de curto prazo (101 a 103 s) e outro de longo
prazo (104 a 106 s), conforme mostram, respectivamente, a figura 42 e figura 43.

101
0τ
1.E-13
1.E-12
1.E-11
1.E-10
1.E-09
1.E-081 10 100 1000 10000
Rb-Cs (DMTD)
Rb-Cs (Contador)
Rb-GPS (Contador)
Cs-Cs (Contador)
Tempo de amostragem τ [ s ]
Desv
io de
Alla
n σy(τ
)[ H
z/Hz ]
GPS-Cs (Contador)
0τ
1.E-13
1.E-12
1.E-11
1.E-10
1.E-09
1.E-081 10 100 1000 10000
Rb-Cs (DMTD)
Rb-Cs (Contador)
Rb-GPS (Contador)
Cs-Cs (Contador)
Tempo de amostragem τ [ s ]
Desv
io de
Alla
n σy(τ
)[ H
z/Hz ]
GPS-Cs (Contador)
Figura 42: Gráfico da instabilidade de freqüência em curto prazo obtida.
1.E-13
1.E-12
1.E-1110000 100000 1000000
Rb-Cs (DMTD)
Rb-Cs (Contador)
Rb-GPS (Contador)
Cs-Cs (Contador)
GPS-Cs (Contador)
Tempo de amostragem τ [ s ]
Desv
io de
Alla
n σy(τ
)[ H
z/Hz ]
24 h (86400 s)
Rb-Cs (Contador)
Rb-GPS (Contador)
1.E-13
1.E-12
1.E-1110000 100000 1000000
Rb-Cs (DMTD)
Rb-Cs (Contador)
Rb-GPS (Contador)
Cs-Cs (Contador)
GPS-Cs (Contador)
Tempo de amostragem τ [ s ]
Desv
io de
Alla
n σy(τ
)[ H
z/Hz ]
24 h (86400 s)
Rb-Cs (Contador)
Rb-GPS (Contador)
Figura 43: Gráfico da instabilidade de freqüência em longo prazo obtida.
4.2.2 Desvio de freqüência
Apesar do cálculo do desvio de freqüência ser independente do tempo de
amostragem e sua forma de avaliação estar relacionada apenas ao tipo de ruído, para
determiná-lo nas calibrações 1 a 4 e efetuar a posterior comparação entre os
resultados, optou-se em utilizar uma região em que o comportamento das calibrações
1, 2 e 4 fosse equivalente. Conforme visto no item anterior, este fato ocorreu a partir de

102
30000 s e o tempo de amostragem selecionado foi de 24 h. Nesse tempo de
amostragem constata-s que o ruído presente é identificado como sendo branco de
fase.
O quadro 10 apresenta o resumo dos resultados obtidos para os desvios de
freqüência encontrados no apêndice 2.
Quadro 10: Resumo dos resultados brutos do desvio de freqüência
Calibração 1 Rb-Cs (contador)
Calibração 2 Rb-Cs (DMTD)
Calibração 3 GPS-Cs (contador)
Calibração 4 Rb-GPS (contador)
Desvio da freqüência ∆f / f -2,730E-10 Hz/Hz -2,723E-10 Hz/Hz 1,952E-14 Hz/Hz -2,707E-10 Hz/Hz
Número de medições 95834 95834 95835 95834
Forma de cálculo média dos desvios de freqüência relativos
média dos desvios de freqüência relativos
inclinação do ajuste linear dos desvios de
tempo relativos média dos desvios de freqüência relativos
4.2.3 Envelhecimento3
O envelhecimento em freqüência é avaliado de acordo com o tipo de ruído e é
fornecido em relação a um determinado tempo específico, por exemplo,
envelhecimento de freqüência por hora, dia, mês ou ano. Para este trabalho e para
permitir a comparação com as especificações fornecidas pelos fabricantes foi
padronizado avaliar o envelhecimento em 24 h a partir de medições do envelhecimento
em 10 s e 12 h. Estes dois tempos foram adotados em função da discussão a ser
estabelecida em 4.3.3.
O quadro 11 apresenta o resumo dos resultados obtidos para o envelhecimento
de freqüência em 10 s e 12 h, encontrados no apêndice 2.
Quadro 11: Resultados brutos do envelhecimento em freqüência
Calibração 1 Rb-Cs (contador)
Calibração 2 Rb-Cs (DMTD)
Calibração 3 GPS-Cs (contador)
Calibração 4 Rb-GPS (contador)
Envelhecimento Df por 10 s (95834 medições) -2,801E-17 Hz/Hz -2,564E-17 Hz/Hz 2,177E-19 Hz/Hz -2,448E-17 Hz/Hz
Envelhecimento Df por 12 h (22 medições) -1,149E-13 Hz/Hz -1,109E-13 Hz/Hz 6,427E-15 Hz/Hz -1.034E-13 Hz/Hz
Forma de cálculo inclinação do ajuste linear dos desvios de freqüência relativos
inclinação do ajuste linear dos desvios de freqüência relativos
inclinação do ajuste quadrático dos desvios
de tempo relativos
inclinação do ajuste linear dos desvios de freqüência relativos
3 Em tempo e freqüência, a denominação envelhecimento da freqüência está associada a sua deriva temporal.

103
De forma a permitir a comparação dos resultados das calibrações, torna-se necessário
avaliar as incertezas envolvidas em cada determinação, tema a ser desenvolvido no
item subseqüente.
4.3 AVALIAÇÃO DAS INCERTEZAS DAS CALIBRAÇÕES
Para avaliação da incerteza das calibrações foram utilizados os conceitos
estabelecidos pelo Guia para Expressão da Incerteza de Medição - ISO GUM [ 62 ]. Os
principais passos descritos pelo ISO GUM para a determinação da incerteza são:
a) estabelecimento do mensurando;
b) determinação das grandezas de entrada ou quantidades de influência que
o mensurando é dependente;
c) estabelecimento da função de medição que relaciona matematicamente o
mensurando a todas as grandezas de entrada;
d) obtenção das estimativas das grandezas de entrada e suas incertezas;
e) resolução do modelo matemático para estimar o mensurando a partir das
grandezas de entrada;
f) determinação da incerteza da estimativa do mensurando a partir das
incertezas das grandezas de entrada.
O resultado do mesurando e sua incerteza, obtida a partir das informações de
entrada, é avaliado conforme o roteiro mostrado na figura 44.
Normalmente, o detalhamento deste roteiro é realizado na forma de um arranjo
organizado das grandezas, denominada de balanço de incertezas e que será utilizada
neste trabalho [ 73 ].
Outro fato importante a ser considerado e que está previsto no próprio GUM,
refere-se ao fato de que as variações aleatórias nas grandezas de entrada, no caso os
desvios relativos de tempo, são correlacionadas no tempo. Assim, o GUM recomenda o
uso da variância de Allan para tratar esta situação [ 62 ].
Mediante a aplicação desses conceitos, a avaliação das incertezas de cada uma
das medições efetuadas será discutida nos próximos itens.
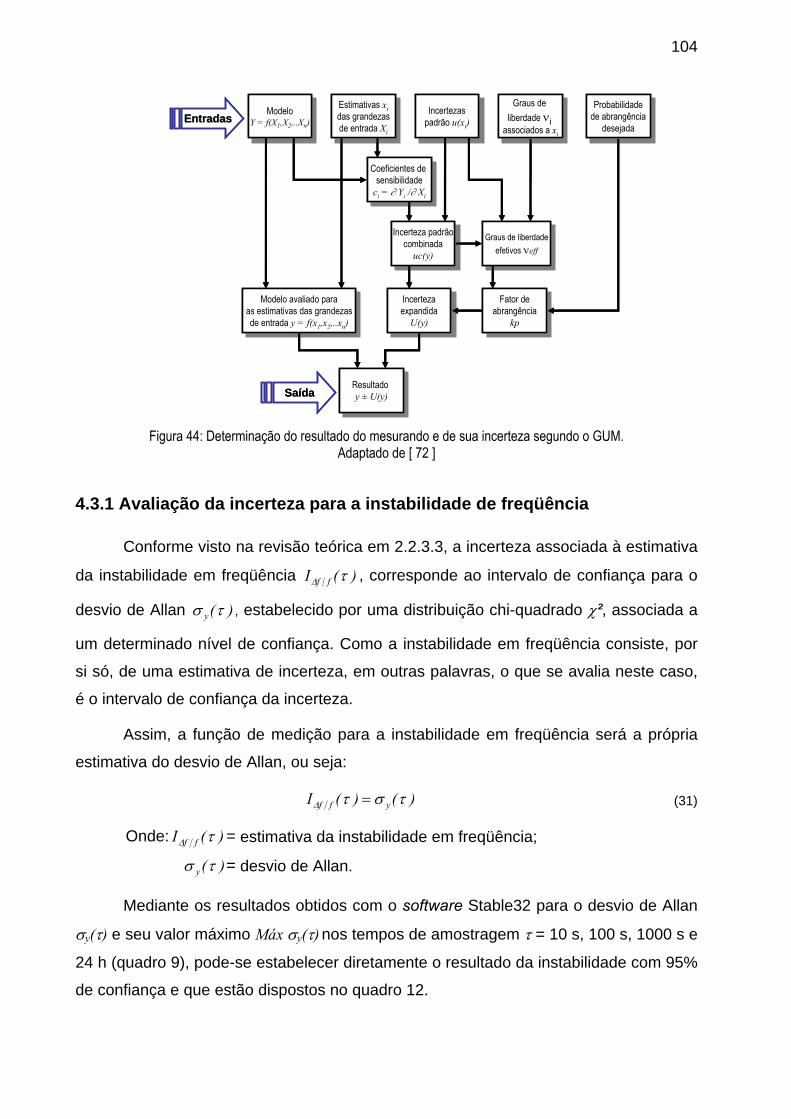
104
Estimativas xidas grandezasde entrada Xi
Estimativas xidas grandezasde entrada Xi
Incertezaspadrão u(xi)Incertezas
padrão u(xi)Modelo
Y = f(X1,X2,..Xn)
ModeloY = f(X1,X2,..Xn)
Graus de liberdade νi
associados a xi
Graus de liberdade νi
associados a xi
Probabilidadede abrangência
desejada
Probabilidadede abrangência
desejadaEntradasEntradas
Coeficientes de sensibilidade
ci = ∂ Yi /∂ Xi
Coeficientes de sensibilidade
ci = ∂ Yi /∂ Xi
Incerteza padrãocombinada
uc(y)
Incerteza padrãocombinada
uc(y)
Fator deabrangência
kp
Fator deabrangência
kp
Incertezaexpandida
U(y)
Incertezaexpandida
U(y)
Graus de liberdadeefetivos νeff
Graus de liberdadeefetivos νeff
Modelo avaliado paraas estimativas das grandezasde entrada y = f(x1,x2,..xn)
Modelo avaliado paraas estimativas das grandezasde entrada y = f(x1,x2,..xn)
Resultadoy ± U(y)
Resultadoy ± U(y)Saída
Estimativas xidas grandezasde entrada Xi
Estimativas xidas grandezasde entrada Xi
Incertezaspadrão u(xi)Incertezas
padrão u(xi)Modelo
Y = f(X1,X2,..Xn)
ModeloY = f(X1,X2,..Xn)
Graus de liberdade νi
associados a xi
Graus de liberdade νi
associados a xi
Probabilidadede abrangência
desejada
Probabilidadede abrangência
desejadaEntradasEntradas
Coeficientes de sensibilidade
ci = ∂ Yi /∂ Xi
Coeficientes de sensibilidade
ci = ∂ Yi /∂ Xi
Incerteza padrãocombinada
uc(y)
Incerteza padrãocombinada
uc(y)
Fator deabrangência
kp
Fator deabrangência
kp
Incertezaexpandida
U(y)
Incertezaexpandida
U(y)
Graus de liberdadeefetivos νeff
Graus de liberdadeefetivos νeff
Modelo avaliado paraas estimativas das grandezasde entrada y = f(x1,x2,..xn)
Modelo avaliado paraas estimativas das grandezasde entrada y = f(x1,x2,..xn)
Resultadoy ± U(y)
Resultadoy ± U(y)Saída
Figura 44: Determinação do resultado do mesurando e de sua incerteza segundo o GUM.
Adaptado de [ 72 ]
4.3.1 Avaliação da incerteza para a instabilidade de freqüência
Conforme visto na revisão teórica em 2.2.3.3, a incerteza associada à estimativa
da instabilidade em freqüência )(I ff τ∆ , corresponde ao intervalo de confiança para o
desvio de Allan )(y τσ , estabelecido por uma distribuição chi-quadrado χ², associada a
um determinado nível de confiança. Como a instabilidade em freqüência consiste, por
si só, de uma estimativa de incerteza, em outras palavras, o que se avalia neste caso,
é o intervalo de confiança da incerteza.
Assim, a função de medição para a instabilidade em freqüência será a própria
estimativa do desvio de Allan, ou seja:
)()(I yff τστ∆ = (31)
Onde: )(I ff τ∆ = estimativa da instabilidade em freqüência;
)(y τσ = desvio de Allan.
Mediante os resultados obtidos com o software Stable32 para o desvio de Allan
σy(τ) e seu valor máximo Máx σy(τ) nos tempos de amostragem τ = 10 s, 100 s, 1000 s e
24 h (quadro 9), pode-se estabelecer diretamente o resultado da instabilidade com 95%
de confiança e que estão dispostos no quadro 12.

105
Quadro 12: Resultados finais da instabilidade em freqüência
Calibração 1 Rb-Cs (contador)
Calibração 2 Rb-Cs (DMTD)
Calibração 3 GPS-Cs (contador)
Calibração 4 Rb-GPS (contador)
Calibração 5 Cs-Cs (contador)
ffI∆ (10 s) [Hz/Hz] (1,615±0,007)E-10 (1,821±0,006)E-11 (5,25±0,03)E-09 (5,30±0,03)E-09 (2,027±0,009)E-11
ffI∆ (100 s) [Hz/Hz] (1,666±0,009)E-11 (6,47±0,05)E-12 (5,31±0,03)E-10 (5,41±0,03)E-10 (2,04±0,01)E-12
ffI∆ (1000 s) [Hz/Hz] (2,49±0,07)E-12 (3,6±0,1)E-12 (5,33±0,03)E-11 (5,60±0,03)E-11 (2,07±0,01)E-13
ffI∆ (24h) [Hz/Hz] (1,5±0,7)E-12 (1,6±0,5)E-12 (6,15±0,03)E-13 (1,6±0,7)E-12 (2,4±0,2)E-15
4.3.2 Avaliação da incerteza para o desvio de freqüência
Para as calibrações 1, 3 e 4 realizadas com o uso do contador, pode-se
estabelecer a seguinte função de medição:
)Dref()refff()cont(m yyyyff δδδ∆
∆ +++= (32)
Onde: ff∆ =desvio relativo da freqüência do oscilador em relação à freqüência de
referência avaliada com informações obtidas em um determinado intervalo de tempo nτ0 = 86400 s (24 h);
my =freqüência relativa medida para um intervalo de tempo nτ0 = 86400 s obtida no quadro 10. A incerteza da freqüência relativa estimada a partir dainstabilidade de freqüência (desvio de Allan) σy(τ) em um tempo nτ0 = 86400 s, com seus respectivos graus de liberdade (quadro 9);
)cont(yδ =correções combinadas relativas aos efeitos sistemáticos e aleatórios docontador, conforme discussão a seguir;
)refff(y ∆δ =correção da freqüência devido ao desvio da freqüência de referência emrelação ao UTC. Para as calibrações 1 e 3, esta correção é estimada apartir da calibração do padrão de césio HP5071A do ONRJ e igual a ∆f/f = (-1,35±0,36) E-13 Hz/Hz (k = 2,1 e graus de liberdade ν = 18). Para a calibração 4, os valores desta correção e de sua incerteza são avaliados pela calibração 3;
)Dref(yδ =correção da freqüência relativa devido ao envelhecimento da freqüência dereferência. Para as calibrações 1 e 3, esta correção é estimada a partir dohistórico de calibrações do padrão de césio HP5071A do ONRJ e estimada como sendo ±3,4.E-15 Hz/Hz com uma distribuição retangular para operíodo das medições efetuadas. Para a calibração 4, os valores destacorreção e de sua incerteza associada são considerados como zero, poisas calibrações são executadas ao mesmo tempo.
O componente )cont(yδ incorpora todos os efeitos sistemáticos e aleatórios que
são originados pelo contador. Utilizando a equação (6), pode-se avaliar de forma
106
simplificada o valor da freqüência relativa iy em um intervalo de tempo τ conforme a
equação (33):
( ) ( )τ
δδ iiiii
xxxxy +−+−= ++ 11 (33)
Onde: iy =freqüência relativa;
ix =iésimo valor de desvio de tempo entre a freqüência sob calibração e a freqüência de referência;
τ =tempo de amostragem; δx =correções aplicáveis aos desvios de tempo x.
Reorganizando a equação (33), obtém-se as equações (34) e (35):
⎟⎠⎞
⎜⎝⎛ −
+−
−= ++
τδδ
τi1ii1i
ixxxxy (34)
⎟⎠⎞
⎜⎝⎛ −
−= +
τδδ i1i
iixx'yy (35)
Onde: 'iy =freqüência relativa sem correções;
Uma vez que os valores de xi+1 e xi são muito próximos, as contribuições para a
incerteza correlacionadas de efeitos sistemáticos resultantes do contador tendem a se
cancelar, a exemplo dos erros de trigger e efeitos da temperatura. Assim, a incerteza
de yi será determinada apenas por parâmetros não correlacionados e resultantes de
efeitos aleatórios, como os valores estimados pela instabilidade em freqüência )(τσ y e
de efeitos da resolução finita do contador. Dessa forma, função de medição da
equação (32) pode ser reescrita como a equação (36):
)Dref()refff(0
)res(i)res(1im yy
nxx
yff δδ
τδδ∆
∆ ++⎟⎟⎠
⎞⎜⎜⎝
⎛ −−= +
(36)
Onde: )()(1 , resiresi xx δδ + =correção nas indicações dos desvios de tempo devido à resoluçãofinita do contador utilizado para as leituras. A estimativa desta correção é igual a zero e sua incerteza igual a metade da resoluçãode 10-10 s apresentada pelo contador utilizado com uma distribuiçãode probabilidade retangular;
107
0τ =intervalo de tempo mínimo entre as leituras proporcionado pelo pulso de sincronismo na entrada de ARM externo do contador e proveniente do sinal de 10 MHz do padrão. A estimativa de 0τ é de 10 s como uma incerteza associada de 3x10-9 s (k = 2 e graus de liberdade ν = ∞), originada a partir do certificado de calibração dodivisor de freqüências;
n =valor de multiplicação do intervalo de tempo entre as leituras 0τ . Para um tempo de amostragem de 24 h, n é considerado exatamente 8640.
A partir da equação (36), determinam-se os coeficientes de sensibilidade Cn para
cada uma das grandezas de entrada, conforme equações (37) a (46):
m1 y
ffC∂
∂=
∆ (37)
1C1 = (38)
)res(2 x
ffCδ∆
∂∂
= (39)
02 n
1Cτ
= (40)
03
ffCτ
∆∂
∂= (41)
20
)res(i)res(1i3 n
xxC
τδδ −
= + (42)
)refff(4 y
ffC∆δ
∆∂
∂= (43)
1C4 = (44)
)Dref(5 y
ffCδ∆
∂∂
= (45)
1C5 = (46)
Onde, nas equações (37) a (46): ff∆ =desvio relativo da freqüência do oscilador em relação à
freqüência de referência;
my =freqüência relativa medida;
)res(i)res(1i)res( x,x,x δδδ + =correções nas indicações dos desvios de tempo devido àresolução finita do contador.
0τ =intervalo de tempo mínimo entre as leituras; n =valor de multiplicação do intervalo de tempo entre as
leituras 0τ ;
)refff(y ∆δ =correção da freqüência devido ao desvio da freqüência dereferência em relação ao UTC;
)Dref(yδ =correção da freqüência relativa devido ao envelhecimentoda freqüência de referência.
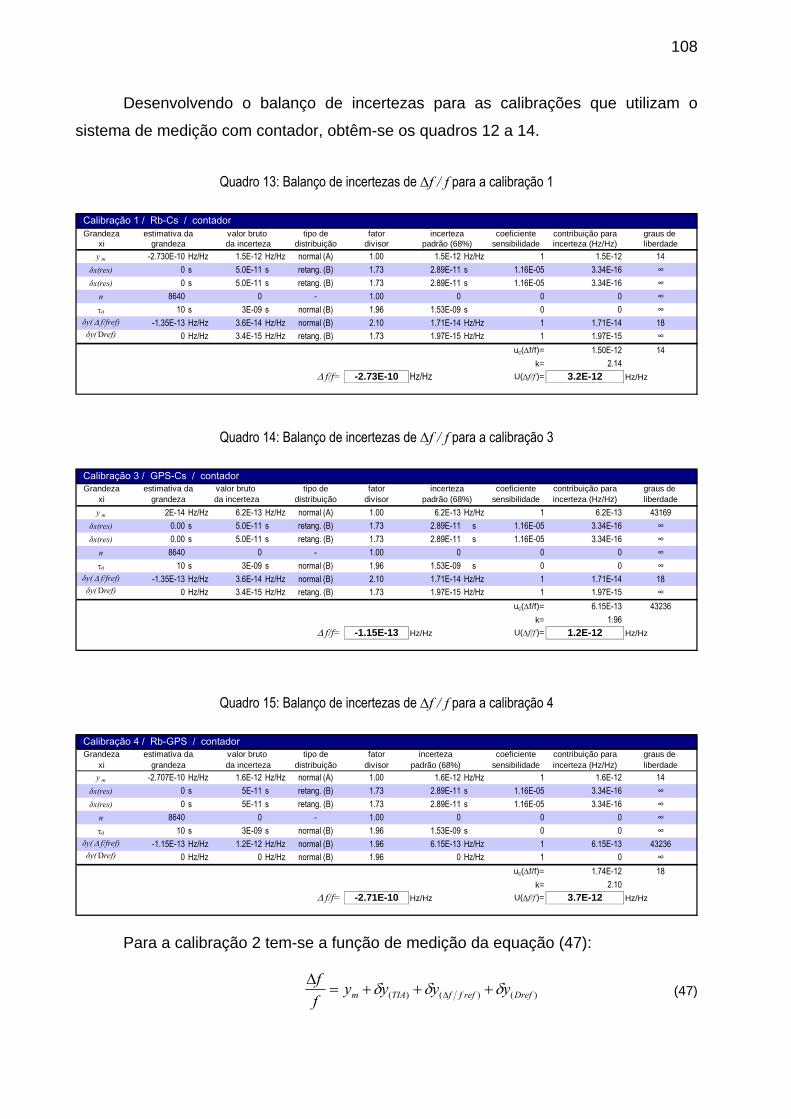
108
Desenvolvendo o balanço de incertezas para as calibrações que utilizam o
sistema de medição com contador, obtêm-se os quadros 12 a 14.
Quadro 13: Balanço de incertezas de ∆f / f para a calibração 1
Calibração 1 / Rb-Cs / contador
Grandeza tipo de fator coeficiente contribuição para graus de xi distribuição divisor sensibilidade incerteza (Hz/Hz) liberdade
y m -2.730E-10 Hz/Hz 1.5E-12 Hz/Hz normal (A) 1.00 1.5E-12 Hz/Hz 1 1.5E-12 14δx(res) 0 s 5.0E-11 s retang. (B) 1.73 2.89E-11 s 1.16E-05 3.34E-16 ∞δx(res) 0 s 5.0E-11 s retang. (B) 1.73 2.89E-11 s 1.16E-05 3.34E-16 ∞
n 8640 0 - 1.00 0 0 0 ∞τ0 10 s 3E-09 s normal (B) 1.96 1.53E-09 s 0 0 ∞
δy( ∆ f/fref) -1.35E-13 Hz/Hz 3.6E-14 Hz/Hz normal (B) 2.10 1.71E-14 Hz/Hz 1 1.71E-14 18δy( Dref) 0 Hz/Hz 3.4E-15 Hz/Hz retang. (B) 1.73 1.97E-15 Hz/Hz 1 1.97E-15 ∞
uc(∆f/f)= 1.50E-12 14k= 2.14
∆ f/f= -2.73E-10 Hz/Hz U(∆f/f )= 3.2E-12 Hz/Hz
padrão (68%)incertezavalor bruto
da incertezaestimativa da
grandeza
Quadro 14: Balanço de incertezas de ∆f / f para a calibração 3
Calibração 3 / GPS-Cs / contador
Grandeza valor bruto tipo de fator coeficiente contribuição para graus de xi da incerteza distribuição divisor sensibilidade incerteza (Hz/Hz) liberdade
y m 2E-14 Hz/Hz 6.2E-13 Hz/Hz normal (A) 1.00 6.2E-13 Hz/Hz 1 6.2E-13 43169δx(res) 0.00 s 5.0E-11 s retang. (B) 1.73 2.89E-11 s 1.16E-05 3.34E-16 ∞δx(res) 0.00 s 5.0E-11 s retang. (B) 1.73 2.89E-11 s 1.16E-05 3.34E-16 ∞
n 8640 0 - 1.00 0 0 0 ∞τ0 10 s 3E-09 s normal (B) 1.96 1.53E-09 s 0 0 ∞
δy( ∆ f/fref) -1.35E-13 Hz/Hz 3.6E-14 Hz/Hz normal (B) 2.10 1.71E-14 Hz/Hz 1 1.71E-14 18δy( Dref) 0 Hz/Hz 3.4E-15 Hz/Hz retang. (B) 1.73 1.97E-15 Hz/Hz 1 1.97E-15 ∞
uc(∆f/f)= 6.15E-13 43236k= 1.96
∆ f/f= -1.15E-13 Hz/Hz U(∆f/f )= 1.2E-12 Hz/Hz
padrão (68%)incertezaestimativa da
grandeza
Quadro 15: Balanço de incertezas de ∆f / f para a calibração 4
Calibração 4 / Rb-GPS / contadorGrandeza tipo de fator incerteza coeficiente contribuição para graus de
xi distribuição divisor padrão (68%) sensibilidade incerteza (Hz/Hz) liberdadey m -2.707E-10 Hz/Hz 1.6E-12 Hz/Hz normal (A) 1.00 1.6E-12 Hz/Hz 1 1.6E-12 14
δx(res) 0 s 5E-11 s retang. (B) 1.73 2.89E-11 s 1.16E-05 3.34E-16 ∞δx(res) 0 s 5E-11 s retang. (B) 1.73 2.89E-11 s 1.16E-05 3.34E-16 ∞
n 8640 0 - 1.00 0 0 0 ∞τ0 10 s 3E-09 s normal (B) 1.96 1.53E-09 s 0 0 ∞
δy( ∆ f/fref) -1.15E-13 Hz/Hz 1.2E-12 Hz/Hz normal (B) 1.96 6.15E-13 Hz/Hz 1 6.15E-13 43236δy( Dref) 0 Hz/Hz 0 Hz/Hz normal (B) 1.96 0 Hz/Hz 1 0 ∞
uc(∆f/f)= 1.74E-12 18k= 2.10
∆ f/f= -2.71E-10 Hz/Hz U(∆f/f )= 3.7E-12 Hz/Hz
estimativa dagrandeza da incerteza
valor bruto
Para a calibração 2 tem-se a função de medição da equação (47):
)()()( DrefrefffTIAm yyyyff δδδ +++=
∆∆ (47)

109
Onde: ff∆ =desvio relativo da freqüência do oscilador em relação à freqüência dereferência avaliada com informações obtidas em um determinado intervalo detempo nτ0 = 86400 s (24 h);
my =freqüência relativa medida para um intervalo de tempo nτ0 = 86400 s obtida no quadro 10. A incerteza da freqüência relativa estimada a partir da instabilidadede freqüência (desvio de Allan) σy(τ) em um tempo nτ0 = 86400 s, com seus respectivos graus de liberdade (quadro 9);
)(TIAyδ =correção devido ao ruído introduzido pelo analisador de intervalos de tempo.Ele é estimado com informações do fabricante, correspondendo a ±2,5E-14 Hz/Hz (desvio de Allan, 68,3% de confiança) [ 19 ];
)refff(y ∆δ =correção da freqüência devido ao desvio da freqüência de referência emrelação ao UTC. Para as calibrações 1 e 3, esta correção é estimada a partirda calibração do padrão de césio HP5071A do ONRJ e igual a ∆f/f = (-1,35±0,36) E-13 Hz/Hz (k = 2,1 e graus de liberdade ν = 18). Para a calibração 4, os valores desta correção e de sua incerteza são avaliados pelacalibração 3;
)Dref(yδ =correção da freqüência relativa devido ao envelhecimento da freqüência dereferência. Para as calibrações 1 e 3, esta correção é estimada a partir dohistórico de calibrações do padrão de césio HP5071A do ONRJ e estimadacomo sendo ±3,4.E-15 Hz/Hz com uma distribuição retangular para o período das medições efetuadas. Para a calibração 4, os valores desta correção e desua incerteza associada são considerados como zero, pois as calibrações sãoexecutadas ao mesmo tempo.
A partir da derivada parcial da equação (47) em relação a cada grandeza de
entrada, determinam-se os coeficientes de sensibilidade Cn. Neste caso, todos os
coeficientes de sensibilidade são unitários.
Desenvolvendo o balanço de incertezas da calibração 2, obtêm-se o quadro 16.
Quadro 16: Balanço de incertezas de ∆f / f para a calibração 2
Calibração 2 / Rb-Cs / DMTDGrandeza distribuição fator coeficiente contribuição para graus de
xi divisor sensibilidade incerteza (Hz/Hz) liberdadey m -2.723E-10 Hz/Hz 1.6E-12 Hz/Hz normal (A) 1.00 1.6E-12 Hz/Hz 1 1.6E-12 28
dy(TIA) 0 Hz/Hz 2.5E-14 Hz/Hz retang. (B) 1.00 2.5E-14 Hz/Hz 1 2.5E-14 ∞δy( ∆ f/fref) -1.35E-13 Hz/Hz 3.6E-14 Hz/Hz normal (B) 2.10 1.7E-14 Hz/Hz 1 1.7E-14 18δy( Dref) 0 Hz/Hz 3.4E-15 Hz/Hz retang. (B) 1.73 2.0E-15 Hz/Hz 1 2.0E-15 ∞
uc(∆f/f)= 1.58E-12 28k= 2.05
∆ f/f= -2.72E-10 Hz/Hz U(∆f/f )= 3.2E-12 Hz/Hz
incertezapadrão (68%)
valor bruto da incerteza
estimativa dagrandeza
Por fim, pode-se estabelecer um resumo dos resultados finais das calibrações
dos desvios de freqüência do padrão de rubídio,conforme mostrado no quadro 17.
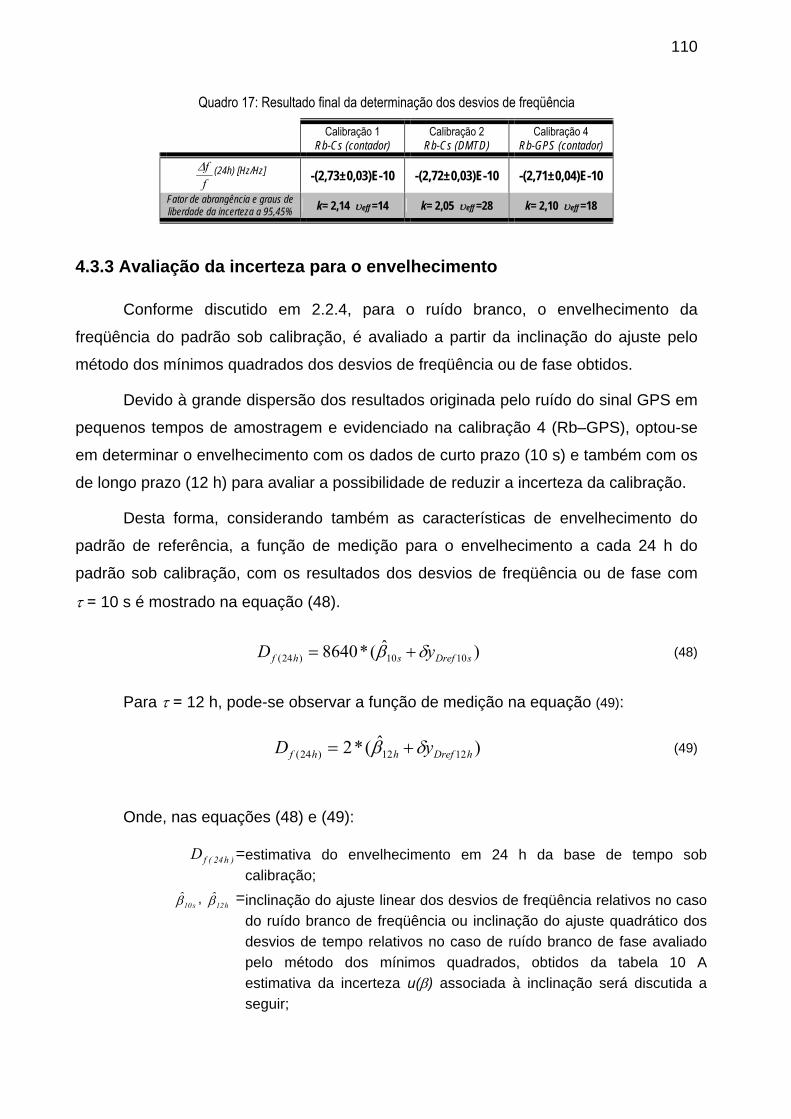
110
Quadro 17: Resultado final da determinação dos desvios de freqüência
Calibração 1 Rb-Cs (contador)
Calibração 2 Rb-Cs (DMTD)
Calibração 4 Rb-GPS (contador)
ff∆ (24h) [Hz/Hz] -(2,73±0,03)E-10 -(2,72±0,03)E-10 -(2,71±0,04)E-10
Fator de abrangência e graus de liberdade da incerteza a 95,45% k= 2,14 υeff =14 k= 2,05 υeff =28 k= 2,10 υeff =18
4.3.3 Avaliação da incerteza para o envelhecimento
Conforme discutido em 2.2.4, para o ruído branco, o envelhecimento da
freqüência do padrão sob calibração, é avaliado a partir da inclinação do ajuste pelo
método dos mínimos quadrados dos desvios de freqüência ou de fase obtidos.
Devido à grande dispersão dos resultados originada pelo ruído do sinal GPS em
pequenos tempos de amostragem e evidenciado na calibração 4 (Rb–GPS), optou-se
em determinar o envelhecimento com os dados de curto prazo (10 s) e também com os
de longo prazo (12 h) para avaliar a possibilidade de reduzir a incerteza da calibração.
Desta forma, considerando também as características de envelhecimento do
padrão de referência, a função de medição para o envelhecimento a cada 24 h do
padrão sob calibração, com os resultados dos desvios de freqüência ou de fase com
τ = 10 s é mostrado na equação (48).
)ˆ(*8640 1010)24( sDrefshf yD δβ += (48)
Para τ = 12 h, pode-se observar a função de medição na equação (49):
)ˆ(*2 1212)24( hDrefhhf yD δβ += (49)
Onde, nas equações (48) e (49):
)h24(fD =estimativa do envelhecimento em 24 h da base de tempo sobcalibração;
s10β , h12β =inclinação do ajuste linear dos desvios de freqüência relativos no casodo ruído branco de freqüência ou inclinação do ajuste quadrático dosdesvios de tempo relativos no caso de ruído branco de fase avaliadopelo método dos mínimos quadrados, obtidos da tabela 10 A estimativa da incerteza u(β) associada à inclinação será discutida a seguir;
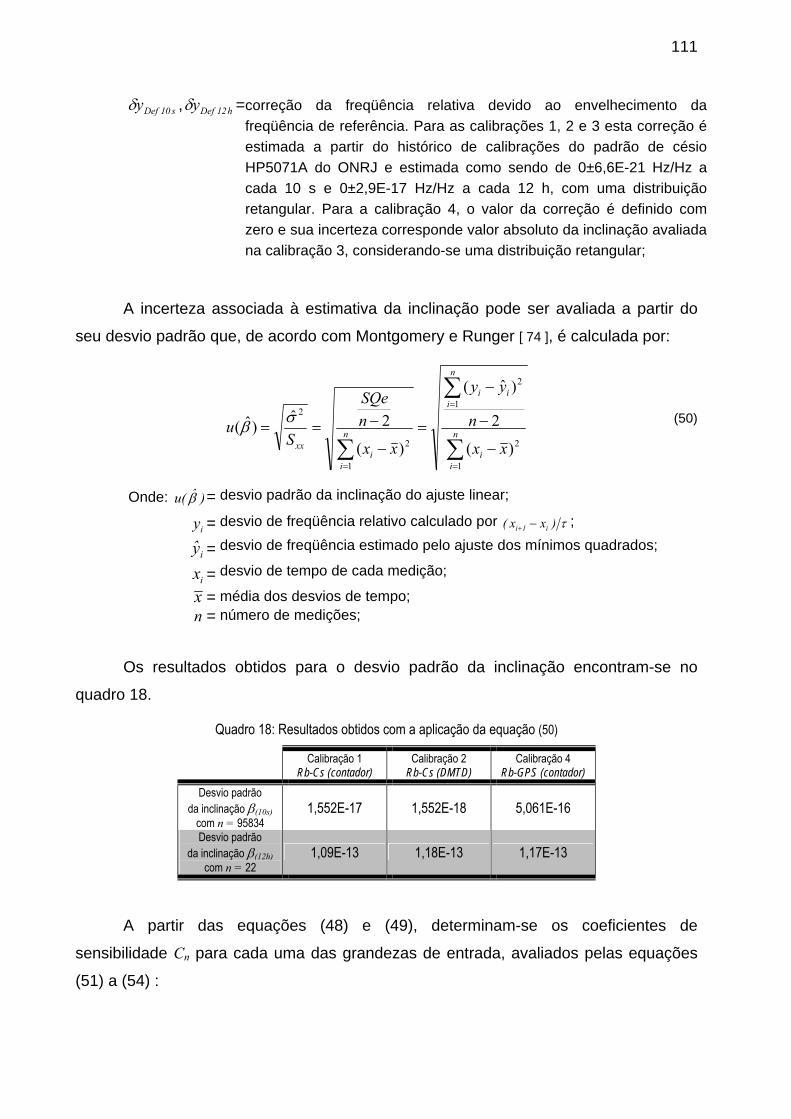
111
s10Defyδ , h12Defyδ =correção da freqüência relativa devido ao envelhecimento dafreqüência de referência. Para as calibrações 1, 2 e 3 esta correção éestimada a partir do histórico de calibrações do padrão de césioHP5071A do ONRJ e estimada como sendo de 0±6,6E-21 Hz/Hz a cada 10 s e 0±2,9E-17 Hz/Hz a cada 12 h, com uma distribuição retangular. Para a calibração 4, o valor da correção é definido comzero e sua incerteza corresponde valor absoluto da inclinação avaliadana calibração 3, considerando-se uma distribuição retangular;
A incerteza associada à estimativa da inclinação pode ser avaliada a partir do
seu desvio padrão que, de acordo com Montgomery e Runger [ 74 ], é calculada por:
∑
∑
∑=
=
=
−
−
−
=−
−== n
ii
n
iii
n
ii
xx xx
n
yy
xx
nSQe
Su
1
2
1
2
1
2
2
)(
2
)ˆ(
)(
2ˆ)ˆ( σβ (50)
Onde: )ˆ(u β = desvio padrão da inclinação do ajuste linear;
iy = desvio de freqüência relativo calculado por τ)xx( i1i −+;
iy = desvio de freqüência estimado pelo ajuste dos mínimos quadrados;
ix = desvio de tempo de cada medição;
x = média dos desvios de tempo; n = número de medições;
Os resultados obtidos para o desvio padrão da inclinação encontram-se no
quadro 18.
Quadro 18: Resultados obtidos com a aplicação da equação (50)
Calibração 1 Rb-Cs (contador)
Calibração 2 Rb-Cs (DMTD)
Calibração 4 Rb-GPS (contador)
Desvio padrão da inclinação β(10s)
com n = 95834
1,552E-17 1,552E-18 5,061E-16
Desvio padrão da inclinação β(12h)
com n = 22
1,09E-13 1,18E-13 1,17E-13
A partir das equações (48) e (49), determinam-se os coeficientes de
sensibilidade Cn para cada uma das grandezas de entrada, avaliados pelas equações
(51) a (54) :
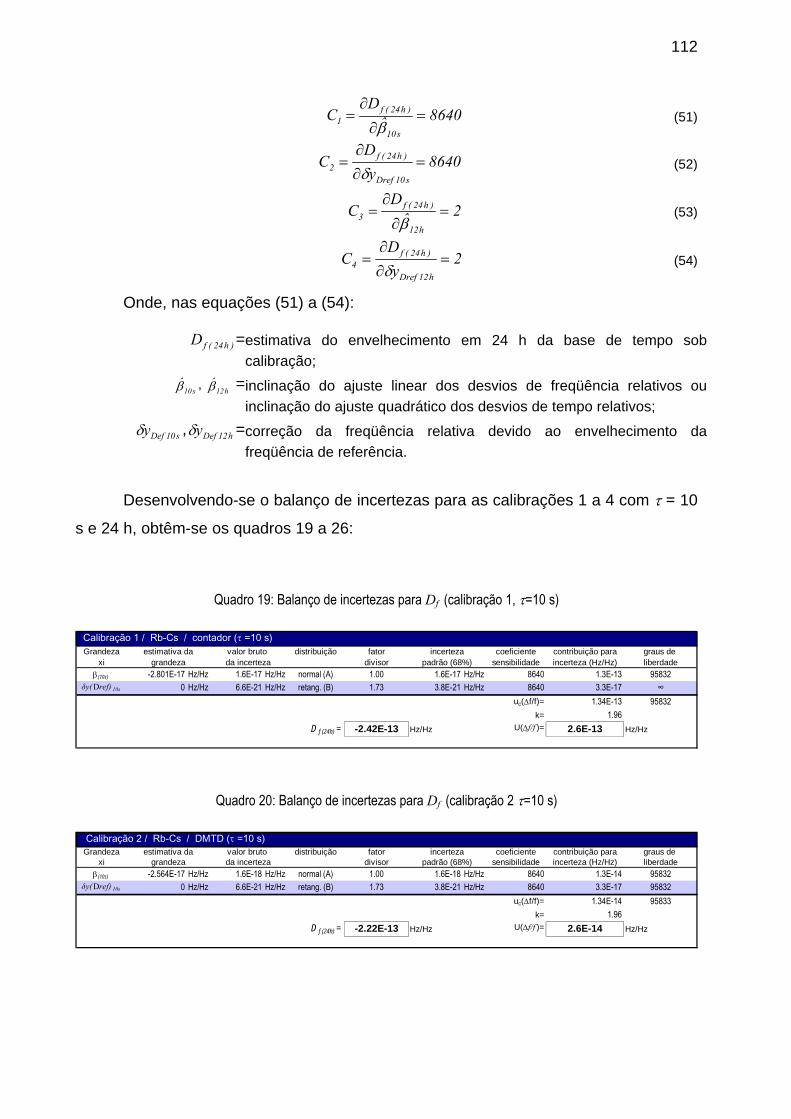
112
8640ˆD
Cs10
)h24(f1 =
∂
∂=
β(51)
8640y
DC
s10Dref
)h24(f2 =
∂∂
=δ (52)
2ˆD
Ch12
)h24(f3 =
∂
∂=
β(53)
2y
DC
h12Dref
)h24(f4 =
∂∂
=δ
(54)
Onde, nas equações (51) a (54):
)h24(fD =estimativa do envelhecimento em 24 h da base de tempo sobcalibração;
s10β , h12β =inclinação do ajuste linear dos desvios de freqüência relativos ouinclinação do ajuste quadrático dos desvios de tempo relativos;
s10Defyδ , h12Defyδ =correção da freqüência relativa devido ao envelhecimento da freqüência de referência.
Desenvolvendo-se o balanço de incertezas para as calibrações 1 a 4 com τ = 10
s e 24 h, obtêm-se os quadros 19 a 26:
Quadro 19: Balanço de incertezas para Df (calibração 1, τ=10 s)
Calibração 1 / Rb-Cs / contador (τ =10 s)Grandeza distribuição fator coeficiente contribuição para graus de
xi divisor sensibilidade incerteza (Hz/Hz) liberdadeβ(10s) -2.801E-17 Hz/Hz 1.6E-17 Hz/Hz normal (A) 1.00 1.6E-17 Hz/Hz 8640 1.3E-13 95832
δy( Dref) 10s 0 Hz/Hz 6.6E-21 Hz/Hz retang. (B) 1.73 3.8E-21 Hz/Hz 8640 3.3E-17 ∞uc(∆f/f)= 1.34E-13 95832
k= 1.96D f (24h) = -2.42E-13 Hz/Hz U(∆f/f )= 2.6E-13 Hz/Hz
estimativa da valor bruto incertezagrandeza da incerteza padrão (68%)
Quadro 20: Balanço de incertezas para Df (calibração 2 τ=10 s)
Calibração 2 / Rb-Cs / DMTD (τ =10 s)Grandeza distribuição fator coeficiente contribuição para graus de
xi divisor sensibilidade incerteza (Hz/Hz) liberdadeβ(10s) -2.564E-17 Hz/Hz 1.6E-18 Hz/Hz normal (A) 1.00 1.6E-18 Hz/Hz 8640 1.3E-14 95832
δy( Dref) 10s 0 Hz/Hz 6.6E-21 Hz/Hz retang. (B) 1.73 3.8E-21 Hz/Hz 8640 3.3E-17 95832uc(∆f/f)= 1.34E-14 95833
k= 1.96D f (24h) = -2.22E-13 Hz/Hz U(∆f/f )= 2.6E-14 Hz/Hz
estimativa da valor bruto incertezagrandeza da incerteza padrão (68%)
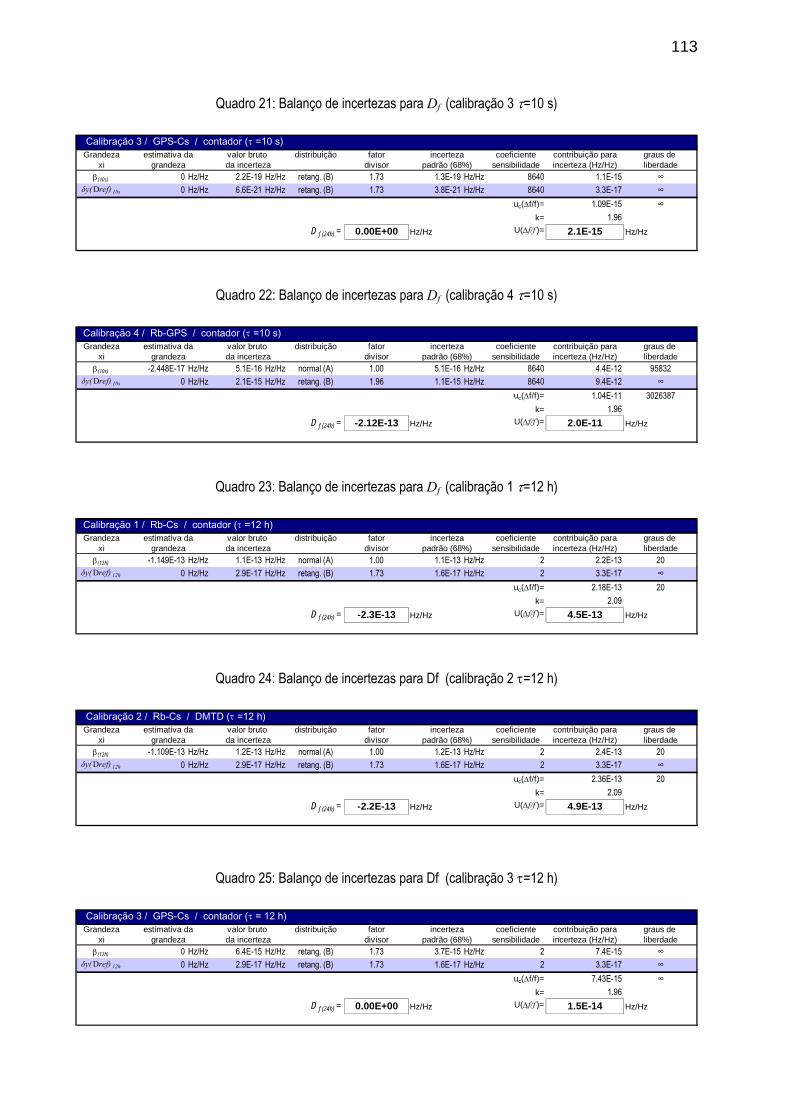
113
Quadro 21: Balanço de incertezas para Df (calibração 3 τ=10 s)
Calibração 3 / GPS-Cs / contador (τ =10 s)Grandeza distribuição fator coeficiente contribuição para graus de
xi divisor sensibilidade incerteza (Hz/Hz) liberdadeβ(10s) 0 Hz/Hz 2.2E-19 Hz/Hz retang. (B) 1.73 1.3E-19 Hz/Hz 8640 1.1E-15 ∞
δy( Dref) 10s 0 Hz/Hz 6.6E-21 Hz/Hz retang. (B) 1.73 3.8E-21 Hz/Hz 8640 3.3E-17 ∞uc(∆f/f)= 1.09E-15 ∞
k= 1.96D f (24h) = 0.00E+00 Hz/Hz U(∆f/f )= 2.1E-15 Hz/Hz
estimativa da valor bruto incertezagrandeza da incerteza padrão (68%)
Quadro 22: Balanço de incertezas para Df (calibração 4 τ=10 s)
Calibração 4 / Rb-GPS / contador (τ =10 s)
Grandeza distribuição fator coeficiente contribuição para graus de xi divisor sensibilidade incerteza (Hz/Hz) liberdade
β(10s) -2.448E-17 Hz/Hz 5.1E-16 Hz/Hz normal (A) 1.00 5.1E-16 Hz/Hz 8640 4.4E-12 95832δy( Dref) 10s 0 Hz/Hz 2.1E-15 Hz/Hz retang. (B) 1.96 1.1E-15 Hz/Hz 8640 9.4E-12 ∞
uc(∆f/f)= 1.04E-11 3026387k= 1.96
D f (24h) = -2.12E-13 Hz/Hz U(∆f/f )= 2.0E-11 Hz/Hz
estimativa da valor bruto incertezagrandeza da incerteza padrão (68%)
Quadro 23: Balanço de incertezas para Df (calibração 1 τ=12 h)
Calibração 1 / Rb-Cs / contador (τ =12 h)
Grandeza distribuição fator coeficiente contribuição para graus de xi divisor sensibilidade incerteza (Hz/Hz) liberdade
β(12h) -1.149E-13 Hz/Hz 1.1E-13 Hz/Hz normal (A) 1.00 1.1E-13 Hz/Hz 2 2.2E-13 20δy( Dref) 12h 0 Hz/Hz 2.9E-17 Hz/Hz retang. (B) 1.73 1.6E-17 Hz/Hz 2 3.3E-17 ∞
uc(∆f/f)= 2.18E-13 20k= 2.09
D f (24h) = -2.3E-13 Hz/Hz U(∆f/f )= 4.5E-13 Hz/Hz
estimativa da valor bruto incertezagrandeza da incerteza padrão (68%)
Quadro 24: Balanço de incertezas para Df (calibração 2 τ=12 h)
Calibração 2 / Rb-Cs / DMTD (τ =12 h)
Grandeza distribuição fator coeficiente contribuição para graus de xi divisor sensibilidade incerteza (Hz/Hz) liberdade
β(12h) -1.109E-13 Hz/Hz 1.2E-13 Hz/Hz normal (A) 1.00 1.2E-13 Hz/Hz 2 2.4E-13 20δy( Dref) 12h 0 Hz/Hz 2.9E-17 Hz/Hz retang. (B) 1.73 1.6E-17 Hz/Hz 2 3.3E-17 ∞
uc(∆f/f)= 2.36E-13 20k= 2.09
D f (24h) = -2.2E-13 Hz/Hz U(∆f/f )= 4.9E-13 Hz/Hz
estimativa da valor bruto incertezagrandeza da incerteza padrão (68%)
Quadro 25: Balanço de incertezas para Df (calibração 3 τ=12 h)
Calibração 3 / GPS-Cs / contador (τ = 12 h)Grandeza distribuição fator coeficiente contribuição para graus de
xi divisor sensibilidade incerteza (Hz/Hz) liberdadeβ(12h) 0 Hz/Hz 6.4E-15 Hz/Hz retang. (B) 1.73 3.7E-15 Hz/Hz 2 7.4E-15 ∞
δy( Dref) 12h 0 Hz/Hz 2.9E-17 Hz/Hz retang. (B) 1.73 1.6E-17 Hz/Hz 2 3.3E-17 ∞uc(∆f/f)= 7.43E-15 ∞
k= 1.96D f (24h) = 0.00E+00 Hz/Hz U(∆f/f )= 1.5E-14 Hz/Hz
estimativa da valor bruto incertezagrandeza da incerteza padrão (68%)
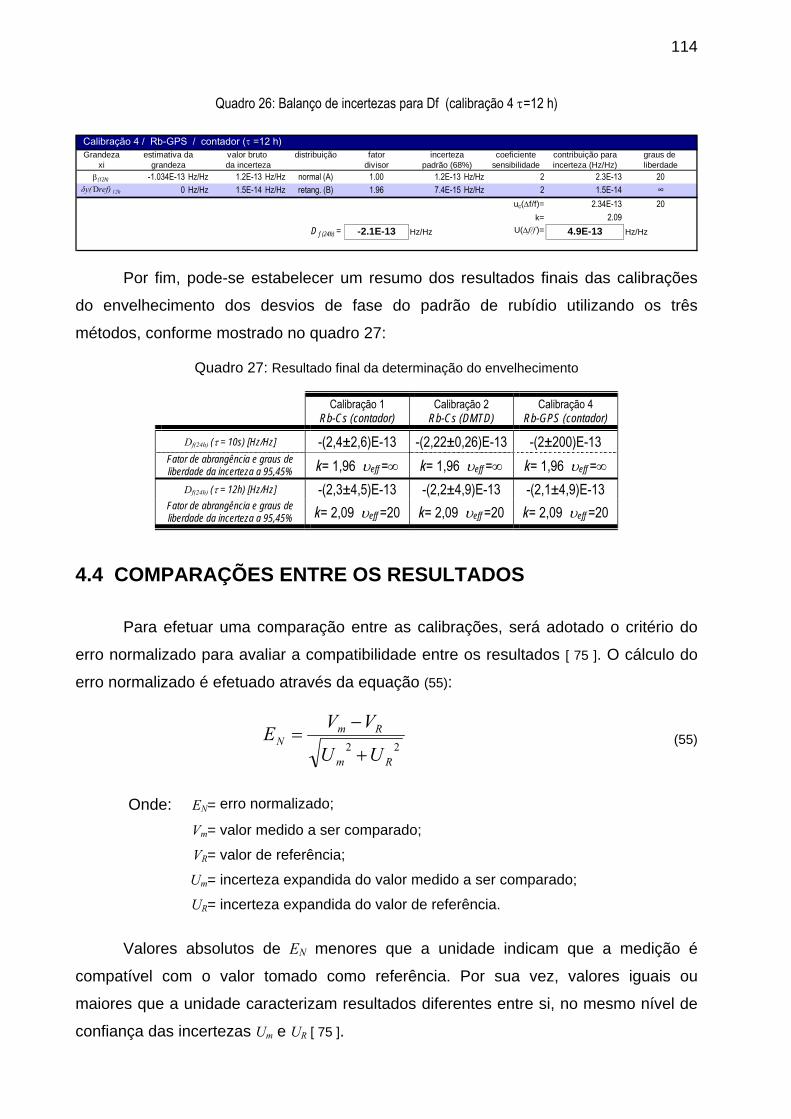
114
Quadro 26: Balanço de incertezas para Df (calibração 4 τ=12 h)
Calibração 4 / Rb-GPS / contador (τ =12 h)Grandeza distribuição fator coeficiente contribuição para graus de
xi divisor sensibilidade incerteza (Hz/Hz) liberdadeβ(12h) -1.034E-13 Hz/Hz 1.2E-13 Hz/Hz normal (A) 1.00 1.2E-13 Hz/Hz 2 2.3E-13 20
δy( Dref) 12h 0 Hz/Hz 1.5E-14 Hz/Hz retang. (B) 1.96 7.4E-15 Hz/Hz 2 1.5E-14 ∞uc(∆f/f)= 2.34E-13 20
k= 2.09D f (24h) = -2.1E-13 Hz/Hz U(∆f/f )= 4.9E-13 Hz/Hz
estimativa da valor bruto incertezagrandeza da incerteza padrão (68%)
Por fim, pode-se estabelecer um resumo dos resultados finais das calibrações
do envelhecimento dos desvios de fase do padrão de rubídio utilizando os três
métodos, conforme mostrado no quadro 27:
Quadro 27: Resultado final da determinação do envelhecimento
Calibração 1 Rb-Cs (contador)
Calibração 2 Rb-Cs (DMTD)
Calibração 4 Rb-GPS (contador)
Df(24h) (τ = 10s) [Hz/Hz] -(2,4±2,6)E-13 -(2,22±0,26)E-13 -(2±200)E-13 Fator de abrangência e graus de liberdade da incerteza a 95,45% k= 1,96 υeff =∞ k= 1,96 υeff =∞ k= 1,96 υeff =∞
Df(24h) (τ = 12h) [Hz/Hz] -(2,3±4,5)E-13 -(2,2±4,9)E-13 -(2,1±4,9)E-13 Fator de abrangência e graus de liberdade da incerteza a 95,45% k= 2,09 υeff =20 k= 2,09 υeff =20 k= 2,09 υeff =20
4.4 COMPARAÇÕES ENTRE OS RESULTADOS
Para efetuar uma comparação entre as calibrações, será adotado o critério do
erro normalizado para avaliar a compatibilidade entre os resultados [ 75 ]. O cálculo do
erro normalizado é efetuado através da equação (55):
22Rm
RmN
UU
VVE+
−= (55)
Onde: EN= erro normalizado;
Vm= valor medido a ser comparado;
VR= valor de referência;
Um= incerteza expandida do valor medido a ser comparado;
UR= incerteza expandida do valor de referência.
Valores absolutos de EN menores que a unidade indicam que a medição é
compatível com o valor tomado como referência. Por sua vez, valores iguais ou
maiores que a unidade caracterizam resultados diferentes entre si, no mesmo nível de
confiança das incertezas Um e UR [ 75 ].
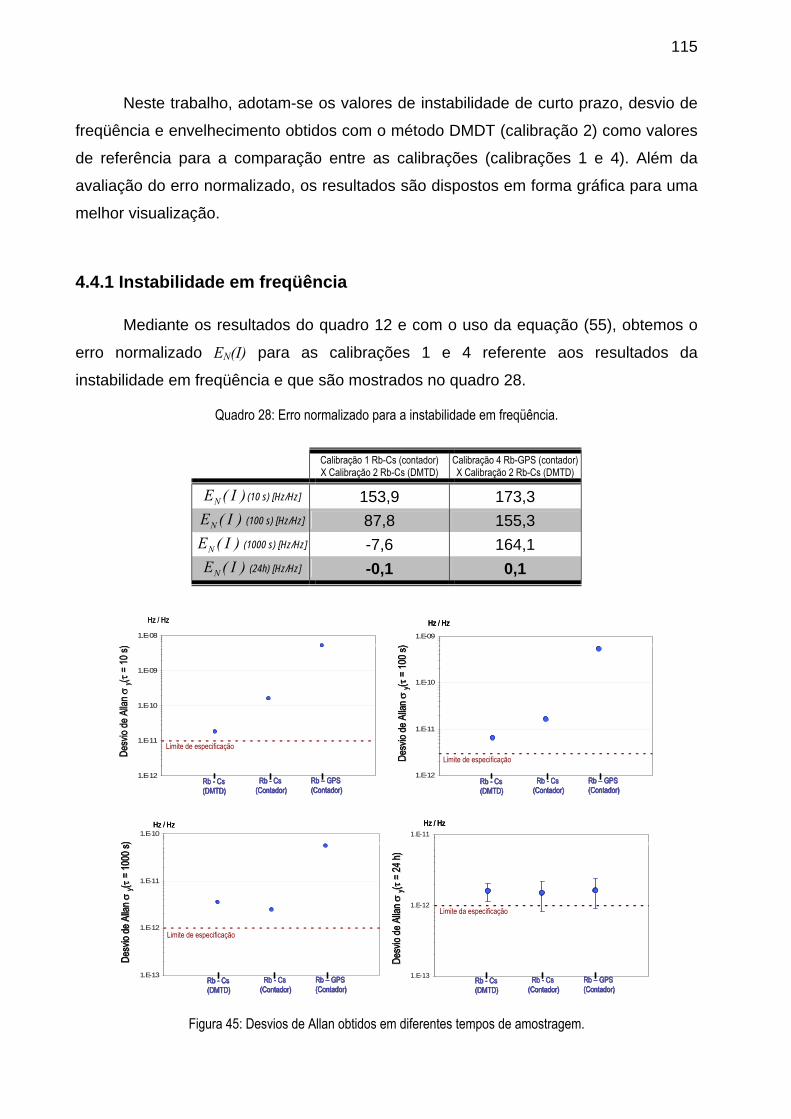
115
Neste trabalho, adotam-se os valores de instabilidade de curto prazo, desvio de
freqüência e envelhecimento obtidos com o método DMDT (calibração 2) como valores
de referência para a comparação entre as calibrações (calibrações 1 e 4). Além da
avaliação do erro normalizado, os resultados são dispostos em forma gráfica para uma
melhor visualização.
4.4.1 Instabilidade em freqüência
Mediante os resultados do quadro 12 e com o uso da equação (55), obtemos o
erro normalizado EN(I) para as calibrações 1 e 4 referente aos resultados da
instabilidade em freqüência e que são mostrados no quadro 28.
Quadro 28: Erro normalizado para a instabilidade em freqüência.
Calibração 1 Rb-Cs (contador) X Calibração 2 Rb-Cs (DMTD)
Calibração 4 Rb-GPS (contador) X Calibração 2 Rb-Cs (DMTD)
)I(EN (10 s) [Hz/Hz] 153,9 173,3 )I(EN (100 s) [Hz/Hz] 87,8 155,3 )I(EN (1000 s) [Hz/Hz] -7,6 164,1 )I(EN (24h) [Hz/Hz] -0,1 0,1
1.E-12
1.E-11
1.E-10
1.E-09
1.E-080 0.5 1 1.5 2 2.5 3 3.5 4
Hz / Hz
Limite de especificação
Desv
io de
Alla
n De
svio
de A
llan σσ
yy(( ττ=
10 s)
= 10
s)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
1.E-12
1.E-11
1.E-10
1.E-09
1.E-080 0.5 1 1.5 2 2.5 3 3.5 4
Hz / Hz
Limite de especificação
Desv
io de
Alla
n De
svio
de A
llan σσ
yy(( ττ=
10 s)
= 10
s)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
1.E-12
1.E-11
1.E-10
1.E-090 0.5 1 1.5 2 2.5 3 3.5 4
Limite de especificaçãoDesv
io de
Alla
n De
svio
de A
llan σσ
yy(( ττ=
100 s
)=
100 s
)
Hz / Hz
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
1.E-12
1.E-11
1.E-10
1.E-090 0.5 1 1.5 2 2.5 3 3.5 4
Limite de especificaçãoDesv
io de
Alla
n De
svio
de A
llan σσ
yy(( ττ=
100 s
)=
100 s
)
Hz / Hz
1.E-12
1.E-11
1.E-10
1.E-090 0.5 1 1.5 2 2.5 3 3.5 4
Limite de especificaçãoDesv
io de
Alla
n De
svio
de A
llan σσ
yy(( ττ=
100 s
)=
100 s
)
Hz / Hz
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
1.E-13
1.E-12
1.E-11
1.E-100 0.5 1 1.5 2 2.5 3 3.5 4
Hz / Hz
Limite de especificação
Desv
io de
Alla
n De
svio
de A
llan σσ
yy(( ττ=
1000
s)=
1000
s)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
1.E-13
1.E-12
1.E-11
1.E-100 0.5 1 1.5 2 2.5 3 3.5 4
Hz / Hz
Limite de especificação
Desv
io de
Alla
n De
svio
de A
llan σσ
yy(( ττ=
1000
s)=
1000
s)
1.E-13
1.E-12
1.E-11
1.E-100 0.5 1 1.5 2 2.5 3 3.5 4
Hz / Hz
Limite de especificação
Desv
io de
Alla
n De
svio
de A
llan σσ
yy(( ττ=
1000
s)=
1000
s)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
1.E-13
1.E-12
1.E-110 0.5 1 1.5 2 2.5 3 3.5 4
Limite da especificação
Desv
io de
Alla
n De
svio
de A
llan σσ
yy(( ττ=
24 h)
= 24
h)
Hz / Hz
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
1.E-13
1.E-12
1.E-110 0.5 1 1.5 2 2.5 3 3.5 4
Limite da especificação
Desv
io de
Alla
n De
svio
de A
llan σσ
yy(( ττ=
24 h)
= 24
h)
Hz / Hz
1.E-13
1.E-12
1.E-110 0.5 1 1.5 2 2.5 3 3.5 4
Limite da especificação
Desv
io de
Alla
n De
svio
de A
llan σσ
yy(( ττ=
24 h)
= 24
h)
Hz / Hz
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
Figura 45: Desvios de Allan obtidos em diferentes tempos de amostragem.

116
A figura 45 mostra o comportamento da instabilidade para as calibrações 1 (Rb-
Cs / contador), 2 (Rb-Cs / DMTD) e 4 (Rb-GPS / contador) nos tempos de amostragem
de 10 s, 100 s, 1000 s e 24 h. Observa-se também a confrontação dos resultados
contra os limite de especificação informados no manual do fabricante do padrão de
rubídio.
Mediante estes resultados, pode-se chegar às seguintes conclusões imediatas
com respeito à instabilidade em freqüência obtida:
a) Como era esperado, o ruído de curto prazo inserido nas calibrações 3 e 4
pelo sinal GPS é significativamente maior do que o ruído do sistema de
medição e do padrão que está sendo comparado. O ruído do sistema
GPS somente passa a ser desprezível em tempos de amostragem acima
de 20000 s, conforme observado na figura 43 pelo resultado da calibração
GPS-Cs. Esse fato também fica evidente na figura 45.
b) Em grandes tempos de amostragem (a partir de 30000 s, como mostra a
figura 43), as calibrações 1, 2 e 4, ou seja, as que caracterizam o padrão
de rubídio, apresentam aproximadamente o mesmo comportamento. No
quadro 28 este fato também pode ser comprovado mediante a
compatibilidade dos valores em 24h.
c) Os resultados obtidos com a calibração 5 foram utilizados apenas para
validar o sistema de medição com contador digital. Os ruídos
apresentados (de 2E-11 Hz/Hz em 10 s - figura 42 e 3E-15 Hz/Hz em
24 h - figura 42 e figura 43) sempre se mantiveram abaixo dos ruídos das
demais calibrações, sem proporcionar uma contribuição para o ruído
global que foi gerado pelos demais padrões e pelos divisores de
freqüência.
d) Em relação à conclusão anterior, esperava-se um comportamento de
curto prazo semelhante entre as calibrações 1 e 2 (de 10 a 100 s), o que
não ocorreu. Posteriormente ao experimento, evidenciou-se que a fonte
de alimentação de um dos divisores utilizados, o divisor por 107 da figura
35, estava sendo responsável por uma grande parcela de ruído em baixa
freqüência (60 Hz) e que refletia em uma grande instabilidade de curto
prazo na calibração 1. Entretanto, esse fato não invalida as conclusões

117
deste trabalho uma vez que o ruído do GPS é muito significativo nessa
faixa de tempos de amostragem.
e) Não foi possível comprovar a especificação do fabricante a partir das
medições feitas conforme mostrado na figura 45. Os valores obtidos nas
três calibrações sempre foram superiores ao limite especificado. Conclui-
se que o padrão em questão apresenta um ruído superior ao
estabelecido.
Como todos os desvios de freqüência e envelhecimentos foram avaliados em
intervalos de tempo em que o ruído foi identificado como ruído branco de freqüência ou
branco de fase, não foi necessário avaliar a variância de Allan modificada.
4.4.2 Desvio de freqüência
Mediante os resultados do quadro 17 e com o uso da equação (55), obtemos o
erro normalizado EN(∆f / f) para as calibrações 1 e 4 referente aos resultados do desvio
de freqüência e que são mostrados no quadro 29.
Quadro 29: Erro normalizado para o desvio em freqüência.
Calibração 1 Rb-Cs (contador) X Calibração 2 Rb-Cs (DMTD)
Calibração 4 Rb-GPS (contador) X Calibração 2 Rb-Cs (DMTD)
)ff(EN ∆ [Hz/Hz] -0,15 0,33
A figura 46 mostra o desvio de freqüência para as calibrações 1 (Rb-Cs/
contador), 2 (Rb-Cs/DMTD) e 4 (Rb-GPS/contador) nos tempo de amostragem de 24 h.
-2.78E-10
-2.76E-10
-2.74E-10
-2.72E-10
-2.70E-10
-2.68E-10
-2.66E-100 0.5 1 1.5 2 2.5 3 3.5
Hz / Hz
ff∆D
esvi
o de
freq
Des
vio
de fr
eqüü ê
ncia
ênci
a
ττ=
24 h
= 24
h
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
-2.78E-10
-2.76E-10
-2.74E-10
-2.72E-10
-2.70E-10
-2.68E-10
-2.66E-100 0.5 1 1.5 2 2.5 3 3.5
Hz / Hz
ff∆D
esvi
o de
freq
Des
vio
de fr
eqüü ê
ncia
ênci
a
ττ=
24 h
= 24
h
-2.78E-10
-2.76E-10
-2.74E-10
-2.72E-10
-2.70E-10
-2.68E-10
-2.66E-100 0.5 1 1.5 2 2.5 3 3.5
Hz / Hz
ff∆D
esvi
o de
freq
Des
vio
de fr
eqüü ê
ncia
ênci
a
ττ=
24 h
= 24
h
-2.78E-10
-2.76E-10
-2.74E-10
-2.72E-10
-2.70E-10
-2.68E-10
-2.66E-100 0.5 1 1.5 2 2.5 3 3.5
Hz / Hz
ff∆D
esvi
o de
freq
Des
vio
de fr
eqüü ê
ncia
ênci
a
ττ=
24 h
= 24
h
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)RbRb -- CsCs
(Contador)(Contador)RbRb –– GPS GPS (Contador)(Contador)RbRb –– GPS GPS (Contador)(Contador)
Figura 46: Desvios de freqüência obtidos.

118
Observa-se no quadro 29 que os resultados das 3 calibrações são compatíveis e
apresentam níveis de incerteza muito semelhantes, considerando o tempo de
amostragem de 24 h.
4.4.3 Envelhecimento
Com os resultados do quadro 27 e com o uso da equação (55), obteve-se o erro
normalizado EN(D) para as calibrações 1 e 4 referente aos resultados do desvio de
freqüência e que são mostrados no quadro 30.
Quadro 30: Erro normalizado para o envelhecimento.
Calibração 1 Rb-Cs (contador) X Calibração 2 Rb-Cs (DMTD)
Calibração 4 Rb-GPS (contador) X Calibração 2 Rb-Cs (DMTD)
)D(E s10N [Hz/Hz] -0,078 0,000 )D(E h24N [Hz/Hz] -0,012 0,022
A figura 47 mostra o envelhecimento para as calibrações 1 (Rb-Cs / contador), 2
(Rb-Cs / DMTD) e 4 (Rb-GPS / contador) nos tempo de amostragem de 10 s. Observa-
se também a confrontação dos resultados contra os limite de especificação informados
no manual do fabricante do padrão de rubídio.
-1.E-11
-8.E-12
-6.E-12
-4.E-12
-2.E-12
0.E+00
2.E-12
4.E-12
6.E-12
8.E-12
1.E-11
0.5 1 1. 5 2 2. 5 3 3. 5
Enve
lhec
imen
to
Enve
lhec
imen
to DD
(( ττ=1
0 s)
=10
s)
Limite da especificação
Limite da especificação
Hz / Hz
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
-1.E-11
-8.E-12
-6.E-12
-4.E-12
-2.E-12
0.E+00
2.E-12
4.E-12
6.E-12
8.E-12
1.E-11
0.5 1 1. 5 2 2. 5 3 3. 5
Enve
lhec
imen
to
Enve
lhec
imen
to DD
(( ττ=1
0 s)
=10
s)
Limite da especificação
Limite da especificação
Hz / Hz
-1.E-11
-8.E-12
-6.E-12
-4.E-12
-2.E-12
0.E+00
2.E-12
4.E-12
6.E-12
8.E-12
1.E-11
0.5 1 1. 5 2 2. 5 3 3. 5
Enve
lhec
imen
to
Enve
lhec
imen
to DD
(( ττ=1
0 s)
=10
s)
Limite da especificação
Limite da especificação
Hz / Hz
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)RbRb -- CsCs
(Contador)(Contador)RbRb –– GPS GPS (Contador)(Contador)RbRb –– GPS GPS (Contador)(Contador)
Figura 47: Envelhecimentos obtidos com média de 10 s.
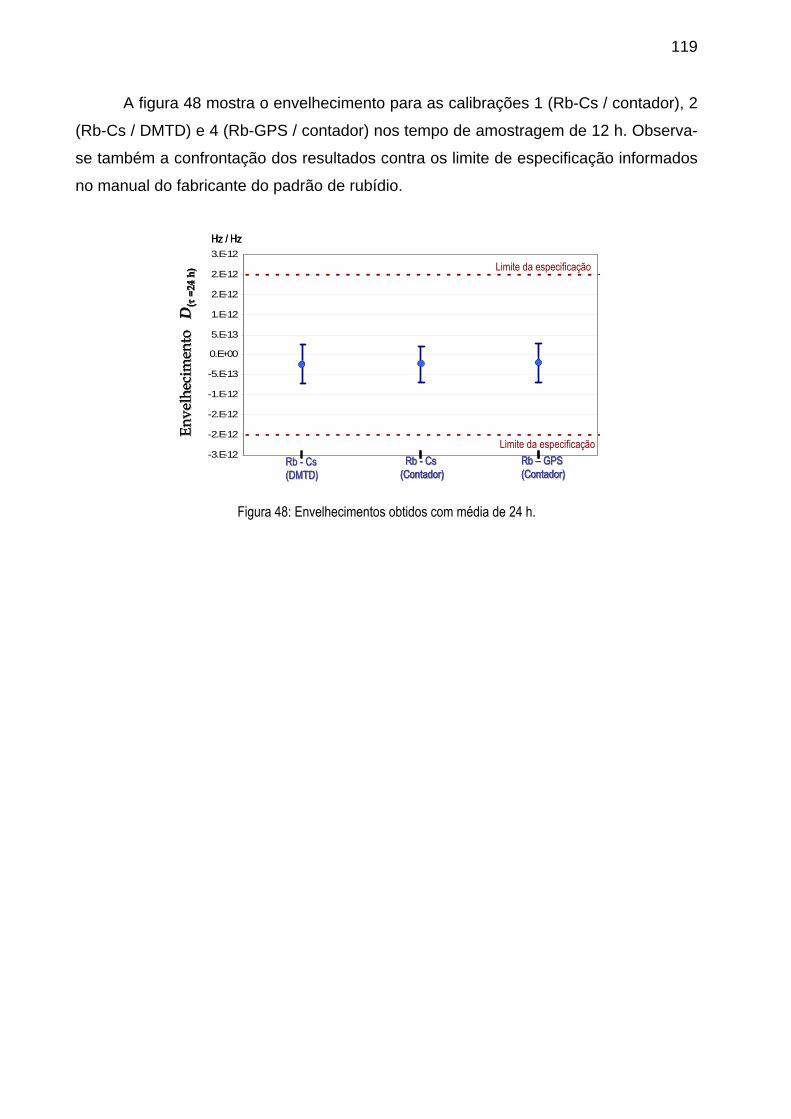
119
A figura 48 mostra o envelhecimento para as calibrações 1 (Rb-Cs / contador), 2
(Rb-Cs / DMTD) e 4 (Rb-GPS / contador) nos tempo de amostragem de 12 h. Observa-
se também a confrontação dos resultados contra os limite de especificação informados
no manual do fabricante do padrão de rubídio.
-3.E-12
-2.E-12
-2.E-12
-1.E-12
-5.E-13
0.E+00
5.E-13
1.E-12
2.E-12
2.E-12
3.E-12
0.5 1 1.5 2 2. 5 3 3.5
Enve
lhec
imen
to
Enve
lhec
imen
to DD
(( ττ=2
4 h)
=24
h)
Hz / Hz
Limite da especificação
Limite da especificaçãoRbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
-3.E-12
-2.E-12
-2.E-12
-1.E-12
-5.E-13
0.E+00
5.E-13
1.E-12
2.E-12
2.E-12
3.E-12
0.5 1 1.5 2 2. 5 3 3.5
Enve
lhec
imen
to
Enve
lhec
imen
to DD
(( ττ=2
4 h)
=24
h)
Hz / Hz
Limite da especificação
Limite da especificação-3.E-12
-2.E-12
-2.E-12
-1.E-12
-5.E-13
0.E+00
5.E-13
1.E-12
2.E-12
2.E-12
3.E-12
0.5 1 1.5 2 2. 5 3 3.5
Enve
lhec
imen
to
Enve
lhec
imen
to DD
(( ττ=2
4 h)
=24
h)
Hz / Hz
Limite da especificação
Limite da especificaçãoRbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)
RbRb –– GPS GPS (Contador)(Contador)
RbRb -- CsCs(DMTD)(DMTD)
RbRb -- CsCs(Contador)(Contador)RbRb -- CsCs
(Contador)(Contador)RbRb –– GPS GPS (Contador)(Contador)RbRb –– GPS GPS (Contador)(Contador)
Figura 48: Envelhecimentos obtidos com média de 24 h.

120
5 CONCLUSÕES E PROPOSTAS DE FUTUROS TRABALHOS
5.1 CONCLUSÕES
Neste capítulo são estabelecidas as principais conclusões e recomendações
sobre o uso do sistema GPS para fins de rastreabilidade em tempo e freqüência e
quais serão os possíveis benefícios de sua aplicação nos laboratórios de calibração.
Da mesma forma, comenta-se sobre o método proposto como uma alternativa viável
aos usuários de padrões de freqüência e a consistência da avaliação experimental
desenvolvida. São apresentadas também algumas propostas para trabalhos futuros em
temas relacionados a esta dissertação.
5.1.1 Posicionamento nacional sobre o uso do GPS
Apesar dos sinais GPS estarem sendo constantemente monitorados pelo NIST e
esse acompanhamento ser publicado na internet, o problema central em reconhecer a
rastreabilidade por intermédio de padrões GPSDO reside nas características dos
receptores GPS comerciais disponíveis discutidos em 2.4.3 e avalizados pelos estudos
conduzidos pelo NIST citados em 3.3.2.2.
Assim, com base no guia internacional em desenvolvimento sob o tema, relatado
em 3.3.2.3 e nas discussões estabelecidas em 3.3.2.4 e 3.3.2.5, identifica-se a
necessidade de elaborar documentos orientativos em nível nacional, no âmbito da
comissão técnica de eletricidade CT-8 do INMETRO, onde a atividade de tempo e
freqüência está contemplada. Esses documentos servirão para tornar homogêneo o
processo de acreditação de laboratórios de calibração nessa área.
121
5.1.2 Método proposto
Para a implantação do sistema de calibração remota de freqüência descrito em
3.4, estimam-se valores na ordem de cento e trinta mil reais. Esses investimentos
incorporam custos com aquisição de padrões GPSDO de rubídio, contadores de
intervalos de tempo, microcomputadores e interfaces de comunicação. Não estão
computados nessa estimativa os valores de aquisição do software para o
desenvolvimento do aplicativo de comunicação e do software para análise de dados.
Para o caso de um monitoramente contínuo, os custos poderiam ser divididos
entre as instituições interessadas e a instituição de referência, sendo necessário,
entretanto, a padronização do modelo do padrão GPSDO para obter o melhor
desempenho do sistema.
A avaliação experimental desenvolvida no Serviço da Hora do Observatório
Nacional demonstrou resultados muito satisfatórios. Estima-se que, ao validar o método
em posições geográficas distintas, os resultados serão muito semelhantes aos do
experimento executado.
Da mesma forma, como foi evidenciado na avaliação experimental e discutido
em algumas conclusões parciais no item 4.4.1, a instabilidade em freqüência de curto
prazo não pode ser determinada com o uso do GPS sem o devido tratamento dos
dados, devido ao elevado ruído que esse sistema apresenta. Fato semelhante ocorre
com o envelhecimento, mas que pode ser contornado pela ação do aumento do tempo
de amostragem e pelo aumento da quantidade de medições. No item 5.2.1, serão
discutidas ações futuras que podem ser implementadas para aprimorar esse processo.
5.1.3 Avaliação de incertezas em calibrações de freqüência
Apesar do GUM [ 62 ] recomendar o uso da variância de Allan em cálculos de
incertezas que envolvam a área de tempo e freqüência, são praticamente inexistentes
na literatura exemplos específicos que, simultaneamente, estejam consistentes com a
sistemática estabelecida por esse Guia e que façam uso dessa medida de dispersão. O
item 4.3 deste trabalho descreve a avaliação da incerteza para as calibrações de
padrões de freqüência realizadas na avaliação experimental com base na abordagem
do GUM em conjunto com a variância de Allan.
122
Acredita-se que os exemplos apresentados podem se tornar fontes de
referências para laboratórios de calibração que realizam esse tipo de serviço e
necessitam de uma base técnica para efetuar suas avaliações.
5.1.4 Uso de aplicativos para automação das medições e cálculos
Na estruturação da avaliação experimental, o software LabView demonstrou ser
uma poderosa ferramenta para a aquisição dos dados medidos e para o controle dos
instrumentos de medição. A implementação do aplicativo foi bastante simples e
necessitou apenas de conhecimentos básicos na ferramenta para ser desenvolvido.
Em futuros trabalhos com o uso da internet propostos em 5.2.4, mais uma vez o
software Labview pode tornar-se bastante útil, uma vez que dispõe de ferramentas
práticas e específicas para este fim.
Da mesma forma, o software comercial Stable32, dedicado à análise de
medições em tempo e freqüência, contribuiu significativamente para a simplificação do
processo de obtenção dos resultados finais. Sem o uso desse software, demandar-se-
iam muitas horas em atividades de programação e validação, caso fosse necessário o
desenvolvimento de rotinas de cálculos em alguma linguagem de programação.
5.1.5 Impactos sob a metrologia em tempo e freqüência no Brasil
A possibilidade realizar calibrações em tempo e freqüência sem necessidade de
deslocamento dos padrões representará significativa redução de custos e de riscos
para esses equipamentos. Seu emprego poderá ser disseminado por todo o país e,
considerando as dimensões continentais do Brasil, mostra-se uma alternativa bastante
viável.
Eventuais investimentos nos laboratórios de calibração e de ensaios usuários de
padrões de tempo e freqüência também podem ser adequadamente planejados com
base nas definições formais sobre a rastreabilidade mediante o uso do sistema GPS.
Finalmente, espera-se que a presente dissertação contribua de forma
significativa para a metrologia brasileira, incentivando a discussão do tema
rastreabilidade em tempo e freqüência, estimulando o desenvolvimento de sistemas de
123
calibrações remotas e sensibilizando as entidades de fomento científico-tecnológico
para investimentos tão necessários nessa área.
5.2 PROPOSTAS DE TRABALHOS FUTUROS
5.2.1 Aplicação de filtros de Kalman
Segundo Carvalho e Freitas [ 76 ], “quando o sistema GPS é utilizado com o
objetivo de se calibrar um padrão de freqüência, o ruído devido ao sistema GPS deve
ser filtrado dos dados obtidos, pois esse ruído pode mascarar a caracterização de
instabilidade do padrão e a estimativa da posição da sua freqüência”. Para tanto, os
autores sugerem a aplicação de filtros de Kalman para remover esses ruídos.
O filtro de Kalman, formalizado em 1960 por R. E. Kalman em um artigo
publicado no Journal of Basic Engineering, constitui-se de um conjunto de equações
matemáticas que proporcionam uma forma computacional recursiva eficiente para
estimar o estado de um processo minimizando a média dos erros quadráticos. Com
uma grande vantagem, a aplicação de filtros de Kalman não necessita do
conhecimento preciso quanto a modelagem do sistema [ 77 ].
No trabalho em que descrevem a calibração de um padrão de césio diretamente
aos sinais GPS pelo método GPS one-way, Carvalho e Freitas [ 76 ] aplicaram a
filtragem dos sinais pelo método de Kalman e obtiveram resultados apropriados para
calibrações em freqüência desse padrão.
Como desenvolvimentos futuros, estudos semelhantes de aplicação de filtragem
de sinais pelo método de Kalman podem ser conduzidos para aprimorar o método de
rastreabilidade proposto no item 3.4.
5.2.2 Validação efetiva da proposta.
O sistema proposto não foi amplamente validado pela a avaliação experimental
desenvolvida no capítulo 4, uma vez que não consistiu de uma calibração remota que
deveria contemplar o uso de dois receptores GPS e de software apropriado. Assim, um
124
dos possíveis desdobramentos desse trabalho está ligado à realização de um trabalho
de validação do método, tema discutido no item 3.4.2.
5.2.3 Elaboração de guia orientativo
Conforme recomendação feita no item 5.1.1, uma possível continuidade deste
trabalho poderia se constituir na geração do documento orientativo para a área de
tempo e freqüência a ser levado à discussão pela comissão técnica de eletricidade CT8
da DICLA.
Esse documento orientativo poderia abordar, por exemplo, os seguintes
aspectos importantes para a área:
• Posicionamento nacional quanto ao uso de padrões GPSDO para a
rastreabilidade.
• Definição de terminologias específicas para a área de tempo e freqüência,
com base nas recomendações da norma IEEE Std 1139-1999 [ 9 ].
• Recomendações formais sobre o uso da variância de Allan como media da
instabilidade em freqüência, também baseadas na norma IEEE Std 1139-1999
[ 9 ] e o uso dessa variância na avaliação de incertezas de medição em calibrações
de padrões de freqüência.
• Recomendações aos fabricantes quanto à homogeneização de
especificações técnicas de desempenho de instrumentos e padrões para a
área de tempo e freqüência.
5.2.4 Uso da internet em calibrações remotas
Torna-se evidente que existirá uma forte tendência em proporcionar cada vez
mais acesso remoto via internet a distintos serviços de calibração [ 78 ]. A maneira na
qual a internet será utilizada irá depender das características do serviço. Em alguns
casos, medições serão obtidas em um local remoto, possivelmente sob a supervisão de
um especialista. Os dados da medição poderão ser obtidos para análise e o certificado
de calibração autenticado, ser emitido eletronicamente para o cliente, na forma como
foi proposto em 3.4.1. Entretanto, diversas variações nesse tema são possíveis em
outros tipos de calibração.

125
Trabalhos que envolvam o uso da internet para o desenvolvimento de
calibrações remotas, principalmente na área de eletricidade e de tempo e freqüência,
onde o nível de automação é grande, podem consistir em contribuição significativa ao
desenvolvimento técnico-cientifico.
126
REFERÊNCIAS BIBLIOGRÁFICAS
[ 1 ] ROZEMBERG, I. M. O Sistema Internacional de Unidades - SI. São Paulo:
Instituto Mauá de Tecnologia. 2ª ed. 2002.
[ 2 ] JESFERSEN, J.; FITS-HANDOLPH, J. From Sundials to Atomic Clocks –
Undertanding Time and Frequency. Estados Unidos: NIST. 1999.
[ 3 ] HAWKING, S. Breve História do Tempo. 1ª ed. Brasil: Editora Albert Einstein.
1997.
[ 4 ] INSTITUTO NACIONAL DE METROLOGIA NORMALIZAÇÃO E QUALIDADE
INDUSTRIAL - INMETRO. VIM: Vocabulário Internacional de Termos
Fundamentais e Gerais de Metrologia. Brasília, 2000.
[ 5 ] INSTITUTO NACIONAL DE METROLOGIA NORMALIZAÇÃO E QUALIDADE
INDUSTRIAL- INMETRO. Sistema Internacional de Unidades. 6. ed. Brasília:
SENAI/DN. Convênio SENAI/DN/INMETRO, 2000
[ 6 ] ALLAN, D.W.; ASHBY, N.; HODGE, C. The Science of Timekeeping -
Application Note 1289. Estados Unidos: Hewlett-Packard Company. 1997.
[ 7 ] HOWE D.A.; ALLAN D.W.; BARNES J.A. Properties Of Oscillator Signals
And Measurement Methods. In: 35º Simpósio Anual em Controle de
Freqüência, 1981. Anais. Estados Unidos: Simpósio Anual em Controle de
Freqüência.
[ 8 ] STAFFAN J. Counter/timer accurately calibrates frequency. Test &
Measurement World. Estados Unidos. 2002.
[ 9 ] THE INSTITUTE OF ELECTRICAL AND ELECTRONICS ENGINEERS. IEEE
Std 1139-1999: IEEE Standard Definitions of Physical Quantities for
Fundamental Frequency and Time Metrology - Random Instabilities. Estados
Unidos: IEEE. 1999.
127
[ 10 ] LOMBARDI, M. A. An Introduction to Frequency Calibration: Part I. CalLab:
The International Journal of Metrology. p 17-28. Estados Unidos,
Jan/Fev1996.
[ 11 ] BECHTOLD, J. Calibration of Time Base Oscillator: Bench Briefs Service
Information from Hewlett-Packard. Hewlett-Packard Company Estados Unidos.
Vol 34, 1994.
[ 12 ] ALLAN, D.W. Time and Frequency (Time-Domain) Characterization,
Estimation and Prediction of Precision Clocks and Oscilators: IEEE
Transactions on Ultrassonics, Ferroelectrics, and Frequency Control. Estados
Unidos. Vol UFCC-34. nº 6, 1987.
[ 13 ] SULLIVAN, D.B. Time and Frequency Measurements at NIST: The First 100
Years: IEEE International Frequency Control Symposium and PDA Exhibition.
Estados Unidos, 2001.
[ 14 ] STEIN, S. R. Frequency and Time – Their Measurement and
Characterization. Precision Frequency Control. Estados Unidos. Vol.2. p.191-
416, 1985.
[ 15 ] INTERNATIONAL RADIO CONSULTIVE COMMITTEE – C.C.I.R.
Characterization of Frequency an Phase Noise. Report 580:. Estados
Unidos. p142-150, 1986.
[ 16 ] RILEY, W.J. Techniques for Frequency Stability Analysis. Hamilton
Technical Services. Disponível em: <http://www.wriley.com/#papers>. Acesso
em: 02 out. 2006.
[ 17 ] LESAGE, P.; AYI, T. Characterization of Frequency Stability: Analysis of
the Modified Allan Variance and Properties of Its Estimate. IEEE
Transactions on Instrumentation and Measurements, Vol. IM33. n.4. p.332-336,
1984.
[ 18 ] ALLAN, D.W.; BARNES J.A.. A modified “Allan Variance” with Increased
Oscillator Characterization Ability. 35th Annual Frequency Control
Symposium. Estados Unidos,1981.

128
[ 19 ] TIMING SOLUTIONS CORPORATION. 5110A Time Interval Analyzer
Operations and Maintenance Manual.Disponível em:< http://www.timing.com/
products/testsets.php>. Acesso em: 02 out. 2006.
[ 20 ] AGILENT TECHNOLOGIES. Fundamentals of Time Interval Measurements -
Application Note 200-3. Estados Unidos: Hewlett-Packard Company, 1997.
[ 21 ] AGILENT TECHNOLOGIES. Fundamentals of the electronic counters -
Application Note 200. Estados Unidos: Hewlett-Packard Company, 1997.
[ 22 ] AGILENT TECHNOLOGIES. Understanding Frequency Counter
Specifications - Application Note 200-4. Estados Unidos: Hewlett-Packard
Company, 1997.
[ 23 ] ITANO, W. M.; RAMSEY, N. Accurate Measurement of Time. Scientific
Americam. Estados Unidos. p. 56-65, 1993.
[ 24 ] LEWIS, L. An Introduction to Frequency Standards. Proceedings of the
IEEE, Vol 79, No.7. p. 927-935. Julho de 1991.
[ 25 ] AGILENT TECHNOLOGIES. Fundamentals of Quartz Oscilators -
Application Note 200-2. Estados Unidos: Hewlett-Packard Company, 1997.
[ 26 ] VIG, J. R. Quartz Crystal Resonators and Oscillators for Frequency
Control and Timing Applications - A Tutorial. Disponível em:
<http://www.ieee-uffc.org> Acesso em: 17 dez. 2004.
[ 27 ] KAMAS, G.; LOMBARDI, M.A. Time and Frequency Users Manual – NIST
Special Publication 559. Estados Unidos: NIST, 1990.
[ 28 ] PERCIVAL, R. Time and Frequency Standards. Applied Microwave &
Wireless. p.36-48. Reino Unido, 1992.
[ 29 ] AGILENT TECHNOLOGIES. GPS and Precision Timing Applications -
Application Note 1272-2. Estados Unidos: Hewlett-Packard Company, 1996.
129
[ 30 ] GABOR, M. Global Positioning System Overview. Disponível em <http://
www.utexas.edu/ftp/pub/grg/gcraft/notes/gps/gps.html> Acesso em: 17 dez.
2006.
[ 31 ] NATIONAL INSTITUTE OF STANDARDS AND TECHNOLOGY - NIST. NIST
Frequency Measurement and Analysis System: Operator Manual.
Disponível em: <http://tf.nist.gov/timefreq/service/fms.htm> Acesso em: 19 out.
2006.
[ 32 ] JOHANSSON, S.; COOMBES D. Traceable calibration of a GPS Disciplined.
FLUKE LTD. Disponível em <http://www.fluke.co.uk/comx/applications/
dc_ncsl00. pdf> Acesso em: 12 out. 2006.
[ 33 ] NATIONAL INSTITUTE OF STANDARDS AND TECHNOLOGY - NIST. Using
a Global Positioning System (GPS) receiver as a NIST traceable frequency
reference. Disponível em <http://tf.nist.gov/service/gpscal.htm>. Acesso em: 28
dez. 2006.
[ 34 ] PERCIVAL, R. A New GPS-Glonass disciplined Rubidium Time and
Frequency Standard. Disponível em <www.quartzlock.com/resources/
SPQL05.pdf>. Acesso em: 12 out. 2006.
[ 35 ] JUDAH, L. Time and frequency distribution using satellites. Institute of
Physics Publishing. Reports on Progress in Physics 65. p.1119–1164. Estados
Unidos, 2002.
[ 36 ] STACEY, P. Information and Update on GNSSs. Disponível em
<http://www.npl.co.uk/time/club/meeting5/peter_stacey.pdf.> Acesso em: 23
jan. 2007.
[ 37 ] SILVA, P.M.; SILVA, I. M.; STEINHAGEN, M. M. Padrões de Freqüência e o
Sistema GPS. Anais do 2º Seminário Internacional de Metrologia Elétrica.
Brasil, 1996.
[ 38 ] BUREAU INTERNATIONAL DES POIDS ET MESURES. International Atomic
Time. Disponível em: <http://www.bipm.org/en/scientific/tai/tai.html>. Acesso
em 17 dez. 2006.
130
[ 39 ] BUREAU INTERNATIONAL DES POIDS ET MESURES. Time. Disponível em:
<http://www.bipm.org/en/scientific/time>. Acesso em: 17 dez. 2006.
[ 40 ] CARVALHO, R. J.; OSÓRIO, P. L. M. Estabelecimento da Escala de Tempo
Atômica Brasileira. Anais do 2º Seminário Internacional de Metrologia Elétrica.
Brasil, 1996.
[ 41 ] PARKER, T. E.; MATSAKIS, D. Time and Frequency Dissemination –
Advances in GPS Transfer Techniques. GPS Word. Estados Unidos. p.32-
38. Novembro/2004.
[ 42 ] BUREAU INTERNATIONAL DES POIDS ET MESURES. Clock Comparisons.
Disponível em: <http://www.bipm.org/en/scientific/tai/clock_comparisons.html>.
Acesso em: 17 dez. 2006.
[ 43 ] NATIONAL INSTITUTE OF STANDARDS AND TECHNOLOGY - NIST. On
Way GPS Time Transfer. Disponível em: <http://tf.nist.gov/timefreq/time/
oneway.htm>. Acesso em: 19 out. 2006.
[ 44 ] LOMBARDI, M. A.; NELSON, L. M., NOVICK, A. N., ZHANG, V. S. Time and
Frequency Measurements Using Global Positioning System. CalLab: The
International Journal of Metrology. p 26-33. Estados Unidos, Jul/Ago/Set 2001.
[ 45 ] NATIONAL INSTITUTE OF STANDARDS AND TECHNOLOGY - NIST. On
Way GPS Time Transfer. Disponível em: <http://tf.nist.gov/timefreq/time/
commonviewgps.htm>. Acesso em: 19 out. 2006.
[ 46 ] ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. ABNT NBR ISO/IEC
17025:2005 - Requisitos Gerais Para a Competência de Laboratórios de
Ensaios e Calibração, 2005.
[ 47 ] INSTITUTO NACIONAL DE METROLOGIA NORMALIZAÇÃO E QUALIDADE
INDUSTRIAL - INMETRO. Orientações Sobre Calibração e Rastreabilidade
das Medições em Laboratórios de Calibração e de Ensaio - DOQ-CGCRE-
003 - Revisão: 00 - Nov/03. Disponível em: <http://www.inmetro.gov.br/
credenciamento/laboratórios/calibEnsaios.asp>. Acesso em: 27 out. 2006.

131
[ 48 ] INSTITUTO NACIONAL DE METROLOGIA NORMALIZAÇÃO E QUALIDADE
INDUSTRIAL - INMETRO. Rastreabilidade ao sistema Internacional de
Unidades na Acreditação de Laboratórios - NIT-DICLA-030 – Revisão 01 –
Jul/03. Disponível em: <http://www.inmetro.gov.br/credenciamento/
laboratórios/calibEnsaios.asp>. Acesso em: 27 out. 2006.
[ 49 ] FLUKE CORPORATION. 910/910R GPS Controlled Frequency Standards.
Disponível em: <http://www.fluke.com.br/brpt/products/910+910R.htm>. Acesso
em: 23 jan. 2007.
[ 50 ] LOMBARDI, M. A. Traceability in Time and Frequency Metrology. CalLab:
The International Journal of Metrology. p.33-40. set/out 1999.
[ 51 ] BUREAU INTERNATIONAL DES POIDS ET MEASURES - BIPM. FTP server
of the Time, Frequency and Gravimetry Section. Disponível em:
<http://www.bipm.org/jsp/en/TimeFtp.jsp?TypePub=publication#TAIPubFormPubli2
>. Acesso em: 13 fev. 2007.
[ 52 ] LOMBARDI, M. A. Remote Frequency Calibrations: The NIST Frequency
Measurement and Analysis Service (NIST Special Publication 250-29).
National Institute of Standards and Technology – NIST. Estados Unidos, 2004.
[ 53 ] NATIONAL INSTITUTE OF STANDARDS AND TECHNOLOGY - NIST.
Calibration Laboratories: Technical Guide for Time and Frequency
Measurements. NAVLAP. NIST Handboock 150-2C. Estados Unidos, 2001.
[ 54 ] LOMBARDI, M. A.; NOVICK, A. N. Remote Time Calibrations via the NIST
Time Measurement and Analysis Service. Measure: The Journal of
Measurement Science, vol. 1, no. 4, p. 50-59, Estados Unidos, Dezembro 2006.
[ 55 ] DAVIS, J. A., FURLONG J. M. Report on the Study to Determine the
Suitability of GPS Disciplined Oscillators as Time and Frequency
Standards Traceable to the UK National Time Scale UTC(NPL) - NPL
Report CTM No 1, National Physical Laboratory – NPL. Reino Unido, 1997.
132
[ 56 ] NATIONAL PHYSICAL LABORATORY - NPL. Hi Accuracy GPS Common-
View Time and Frequency Transfer Service. Disponível em:
<http://www.npl.co.uk/time/measurement_services/cvservice.html>. Acesso em:
20 set. 2006.
[ 57 ] EUROPEAN CO-OPERATION FOR ACCREDITATION - EA. Outline for EA
Guide to the assessment of calibration laboratories using the GPS
satellites for frequency and time traceability – Draft 1. EA DC LF Expert
group. Viena, 2003.
[ 58 ] INSTITUTO NACIONAL DE METROLOGIA NORMALIZAÇÃO E QUALIDADE
INDUSTRIAL - INMETRO. Sistema de Consulta Online ao Catálogo da Rede
Brasileira de Calibração – RBC. Disponível em:
<http://www.inmetro.gov.br/laboratorios/rbc/index.asp>. Acesso em 06 fev.
2007.
[ 59 ] INSTITUTO NACIONAL DE METROLOGIA NORMALIZAÇÃO E QUALIDADE
INDUSTRIAL - INMETRO. Regimento Interno das Comissões Técnicas e
Grupos de Trabalho da DICLA - NIT-DICLA-014. Revisão 01. Rio de Janeiro,
2001.
[ 60 ] AGILENT TECHNOLOGIES. Metrology Forum : News Consolidation 1997 -
Frequency Traceability via GPS-DO: NPL Publishes Report. Disponível em:
<http://metrologyforum.tm.agilent.com/news1997.shtml>. Acesso em: 10 jan.
2007.
[ 61 ] AGILENT TECHNOLOGIES. GPS Disciplined Oscillator Traceability.
<Disponível em http://metrologyforum.tm.agilent.com/gps-do.shtml>. Acesso
em: 10 jan. 2007.
[ 62 ] ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. Guia para a
Expressão da Incerteza de Medição. 3ª Ed. Rio de Janeiro: ABNT,
INMETRO, 2003.
[ 63 ] FLUKE LTD. GPS-Controled Frequency Standards 910R Manual Operator
4ª ed. Suécia: Pendulum Instruments, 2000.
133
[ 64 ] AGILENT TECHNOLOGIES. HP 53131A/132A 225 MHz Universal Counter
Operating Guide. Estados Unidos: Hewlett-Packard Company, 1998.
[ 65 ] AGILENT TECHNOLOGIES. Data Acquisition/Switch Unit Agilent 34970A
Operating Guide. Estados Unidos: Agilent Technologies, 2005.
[ 66 ] AGILENT TECHNOLOGIES. HP 5071A Primary Frequency Standard –
Operating and Programming Manual. Estados Unidos: Hewlett-Packard
Company, 2000.
[ 67 ] MOTOROLA. Schmitt Triggers Hex Inverter 74LS14 Data Sheet. Disponível
em: <www.datasheetcatalog.net>. Acesso em: 12 out. 2006.
[ 68 ] MOTOROLA. Decade Counter 74LS290 Data Sheet. Disponível em:
<www.datasheetcatalog.net>. Acesso em: 12 out. 2006.
[ 69 ] MOTOROLA. Dual Precision Monostable Multivibrator MC4538 Data Sheet.
Disponível em: <www.datasheetcatalog.net>. Acesso em: 12 out. 2006.
[ 70 ] HAMILTON TECHNICAL SERVICES. Stable - Frequency Stability Analysis
Program. Disponível em <http://www.wriley.com>. Acesso em: 19 out. 2006.
[ 71 ] ASTRONOMIA NO ZÊNITE. Dia Juliano. Disponível em:
<http://www.zenite.nu/tema/>. Acesso em: 19 out. 2006.
[ 72 ] LANDGRAF, W.R.; CHARLES R. STEMPNIAK, C. R. Simulação de Monte
Carlo e Ferramentas para Avaliação da Incerteza de Medição. Anais do
METROSUL IV. Rede Paranaense de Metrologia, 2004.
[ 73 ] INSTITUTO NACIONAL DE METROLOGIA NORMALIZAÇÃO E QUALIDADE
INDUSTRIAL - INMETRO. Versão Brasileira do Documento de Referência
EA-4/02 - Expressão da Incerteza de Medição na Calibração. Brasília, 1999.
[ 74 ] MONTGOMERY, D. C.; RUNGER, G.C. Estatística Aplicada e Probabilidade
para Engenheiros. 2 ed. Editora LTC, 2003.
134
[ 75 ] INSTITUTO NACIONAL DE METROLOGIA NORMALIZAÇÃO E QUALIDADE
INDUSTRIAL - INMETRO. Orientações para a Organização de
Comparações Interlaboratoriais pelas Comissões Técnicas da DICLA
DOQ-CGCRE-005. Revisão 00. Rio de Janeiro, 2002.
[ 76 ] CARVALHO, R. J.; FREITAS, R. P. A. Calibrações Remotas de Tempo e
Freqüência. Anais do 3º Seminário Internacional de Metrologia Elétrica. Brasil,
1998.
[ 77 ] WELSH, G.; BISHOP, G. An introduction to the Kalman Filter. Disponível
em: <http://www.cs.unc.edu/~welch/media/pdf/kalman_intro.pdf>. Acesso em
26 mar. /03/2006.
[ 78 ] NATIONAL PHYSICAL LABORATORY - NPL. Use of the Internet by
Calibration Services. Disponível em: <http://www.npl.co.uk/ssfm/theme5/
project5_1/>. Acesso em: 29 out. 2006.

135
APÊNDICE 1 – FOTOS DA AVALIAÇÃO EXPERIMENTAL
REALIZADA NO ONRJ
Foto 1 – Vista frontal do sistema de medição utilizado para a realização do esperimento prático
Foto 2 – Vista lateral do sistema de medição utilizado para a realização do esperimento prático
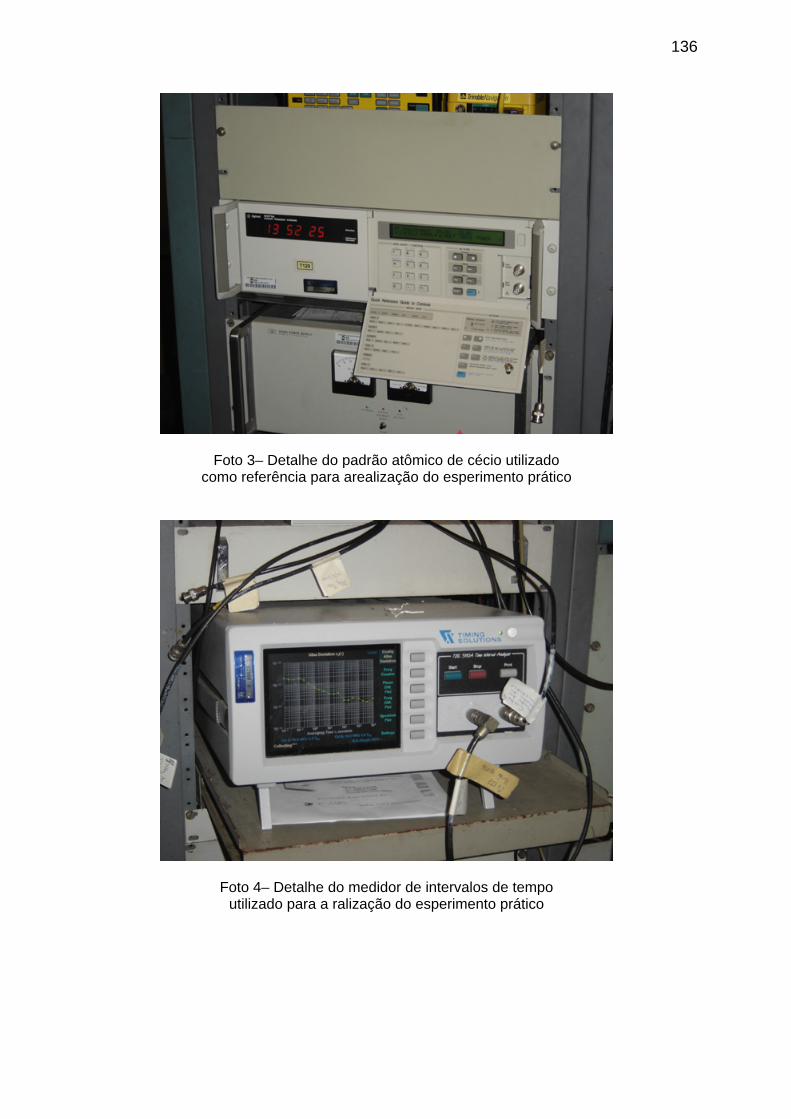
136
Foto 3– Detalhe do padrão atômico de cécio utilizado como referência para arealização do esperimento prático
Foto 4– Detalhe do medidor de intervalos de tempo utilizado para a ralização do esperimento prático
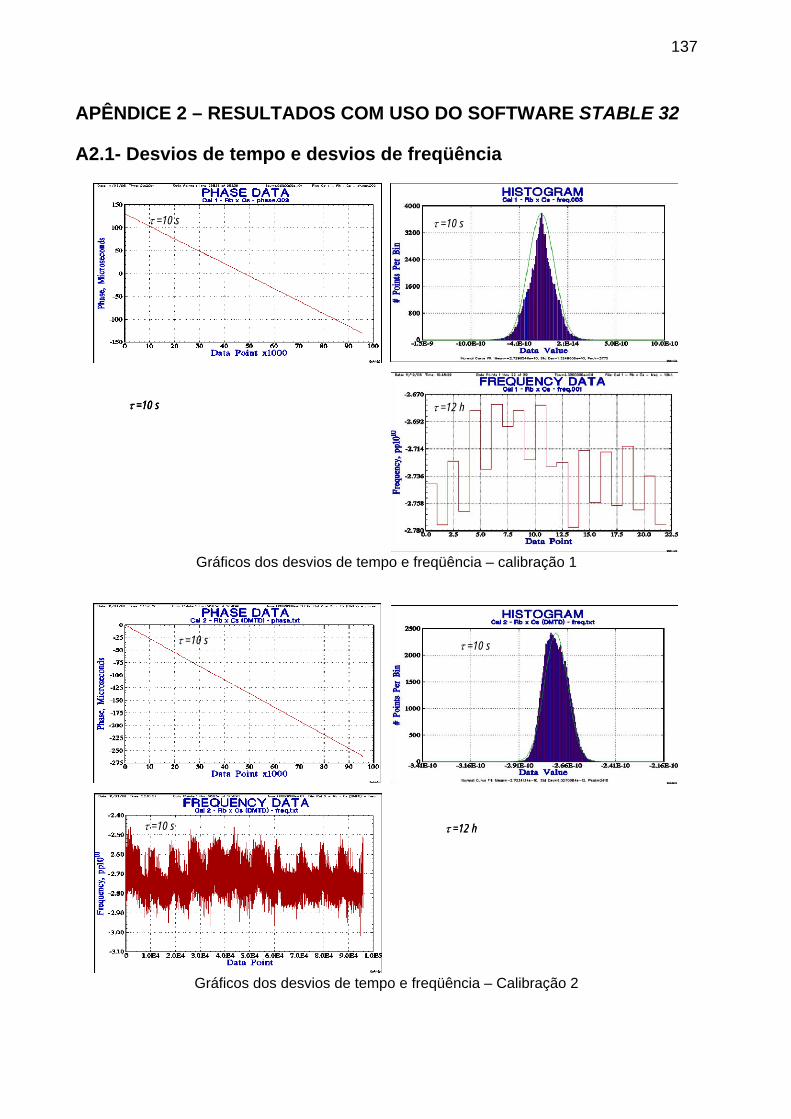
137
APÊNDICE 2 – RESULTADOS COM USO DO SOFTWARE STABLE 32
A2.1- Desvios de tempo e desvios de freqüência
τ =10 s
τ =10 s τ =12 h
τ =10 sτ =10 s
τ =10 sτ =10 s τ =12 h
τ =10 sτ =10 s
Gráficos dos desvios de tempo e freqüência – calibração 1
τ =10 s
τ =10 s
τ =10 s
τ =12 h
τ =10 s
τ =10 s
τ =10 s
τ =12 h
Gráficos dos desvios de tempo e freqüência – Calibração 2
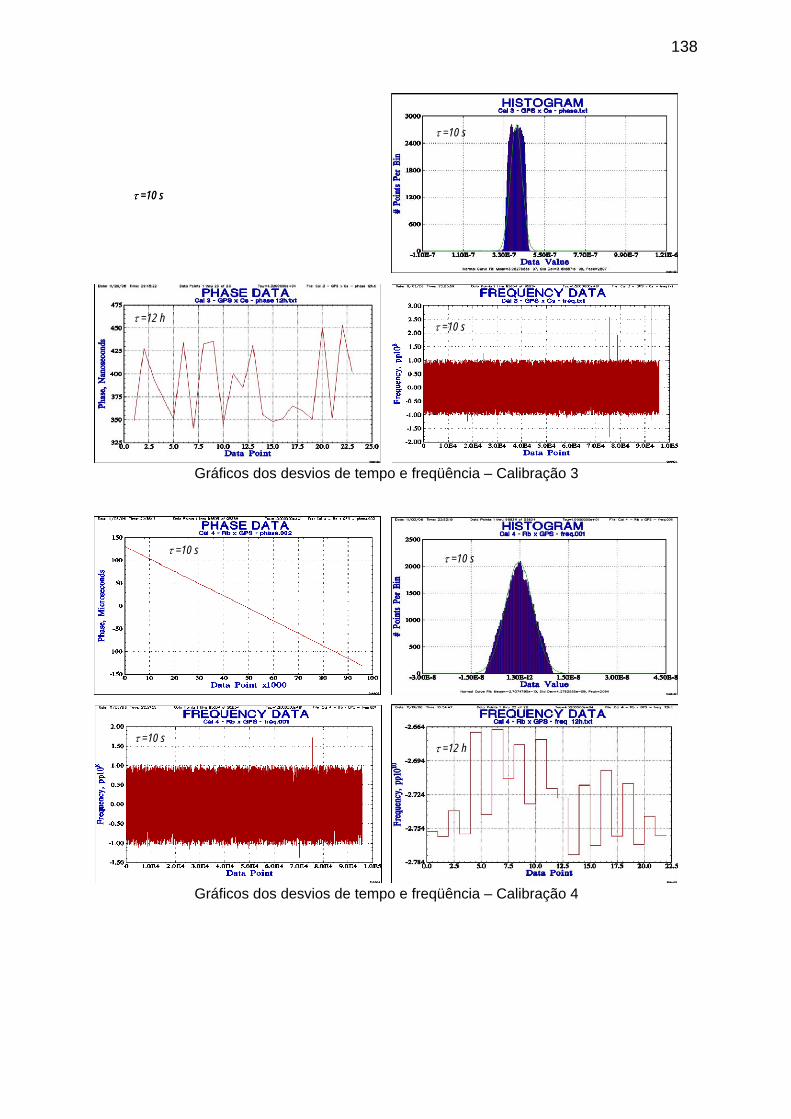
138
τ =10 s
τ =10 s
τ =10 s
τ =12 hτ =10 s
τ =10 s
τ =10 s
τ =12 h
Gráficos dos desvios de tempo e freqüência – Calibração 3
τ =10 sτ =10 s
τ =10 sτ =12 h
τ =10 sτ =10 s
τ =10 sτ =12 h
Gráficos dos desvios de tempo e freqüência – Calibração 4

139
τ =10 sτ =10 s
τ =10 sτ =10 s
τ =10 sτ =10 s
τ =10 sτ =10 s
Gráficos dos desvios de tempo e freqüência – Calibração 5
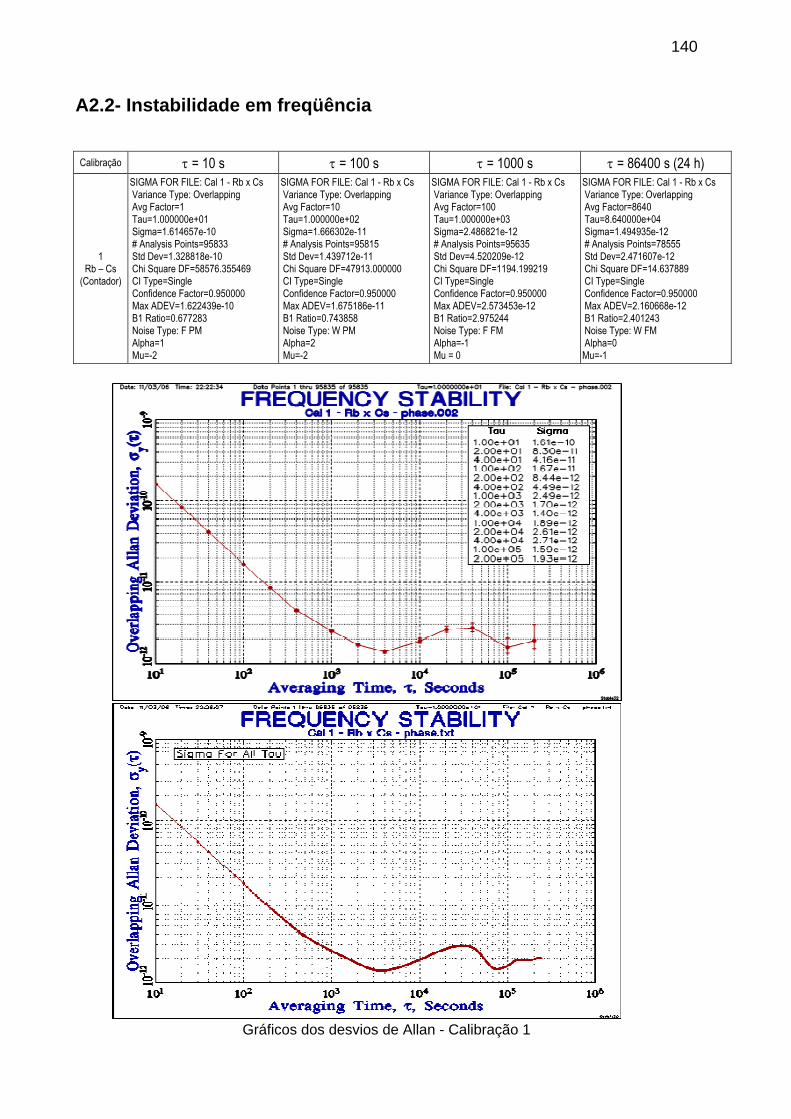
140
A2.2- Instabilidade em freqüência
Calibração τ = 10 s τ = 100 s τ = 1000 s τ = 86400 s (24 h)
1 Rb – Cs
(Contador)
SIGMA FOR FILE: Cal 1 - Rb x Cs Variance Type: Overlapping Avg Factor=1 Tau=1.000000e+01 Sigma=1.614657e-10 # Analysis Points=95833 Std Dev=1.328818e-10 Chi Square DF=58576.355469 CI Type=Single Confidence Factor=0.950000 Max ADEV=1.622439e-10 B1 Ratio=0.677283 Noise Type: F PM Alpha=1 Mu=-2
SIGMA FOR FILE: Cal 1 - Rb x Cs Variance Type: Overlapping Avg Factor=10 Tau=1.000000e+02 Sigma=1.666302e-11 # Analysis Points=95815 Std Dev=1.439712e-11 Chi Square DF=47913.000000 CI Type=Single Confidence Factor=0.950000 Max ADEV=1.675186e-11 B1 Ratio=0.743858 Noise Type: W PM Alpha=2 Mu=-2
SIGMA FOR FILE: Cal 1 - Rb x Cs Variance Type: Overlapping Avg Factor=100 Tau=1.000000e+03 Sigma=2.486821e-12 # Analysis Points=95635 Std Dev=4.520209e-12 Chi Square DF=1194.199219 CI Type=Single Confidence Factor=0.950000 Max ADEV=2.573453e-12 B1 Ratio=2.975244 Noise Type: F FM Alpha=-1 Mu = 0
SIGMA FOR FILE: Cal 1 - Rb x Cs Variance Type: Overlapping Avg Factor=8640 Tau=8.640000e+04 Sigma=1.494935e-12 # Analysis Points=78555 Std Dev=2.471607e-12 Chi Square DF=14.637889 CI Type=Single Confidence Factor=0.950000 Max ADEV=2.160668e-12 B1 Ratio=2.401243 Noise Type: W FM Alpha=0 Mu=-1
Gráficos dos desvios de Allan - Calibração 1

141
Calibração τ = 10 s τ = 100 s τ = 1000 s τ = 86400 s (24 h)
2 Rb – Cs (DMTD)
SIGMA FOR FILE: Cal 2 - Rb x Cs Variance Type: Overlapping Avg Factor=1 Tau=1.000000e+01 Sigma=1.821191e-11 # Analysis Points=95832 Std Dev=2.011218e-11 Chi Square DF=115394.445313 CI Type=Single Confidence Factor=0.950000 Max ADEV=1.827435e-11 B1 Ratio=1.219571 Noise Type: W FM Alpha=0 Mu=-1
SIGMA FOR FILE: Cal 2 - Rb x Cs Variance Type: Overlapping Avg Factor=10 Tau=1.000000e+02 Sigma=6.471205e-12 # Analysis Points=95814 Std Dev=8.814036e-12 Chi Square DF=25641.431641 CI Type=Single Confidence Factor=0.950000 Max ADEV=6.518465e-12 B1 Ratio=1.695353 Noise Type: W FM Alpha=0 Mu=-1
SIGMA FOR FILE: Cal 2 - Rb x Cs Variance Type: Overlapping
Avg Factor=100 Tau=1.000000e+03
Sigma=3.573425e-12 # Analysis Points=95634 Std Dev=5.582998e-12
Chi Square DF=1435.315674 CI Type=Single
Confidence Factor=0.950000 Max ADEV=3.686602e-12
B1 Ratio=2.399296 Noise Type: W FM
Alpha=0 Mu=-1
SIGMA FOR FILE: Cal 2 - Rb x Cs Variance Type: Overlapping Avg Factor=8640 Tau=8.640000e+04 Sigma=1.582468e-12 # Analysis Points=78554 Std Dev=2.422519e-12 Chi Square DF=28.050890 CI Type=Single Confidence Factor=0.950000 Max ADEV=2.034497e-12 B1 Ratio=1.582203 Noise Type: W FM Alpha=0 Mu=-1
Gráficos dos desvios de Allan - Calibração 2

142
Calibração τ = 10 s τ = 100 s τ = 1000 s τ = 86400 s (24 h)
3 GPS – Cs (Contador)
SIGMA FOR FILE: Cal 3 - GPS x Cs Variance Type: Overlapping Avg Factor=1 Tau=1.000000e+01 Sigma=5.247073e-09 # Analysis Points=95833 Std Dev=4.289303e-09 Chi Square DF=58576.355469 CI Type=Single Confidence Factor=0.950000 Max ADEV=5.272359e-09 B1 Ratio=0.668251 Noise Type: F PM Alpha=1 Mu=-2
SIGMA FOR FILE: Cal 3 - GPS x Cs Variance Type: Overlapping Avg Factor=10 Tau=1.000000e+02 Sigma=5.311654e-10 # Analysis Points=95815 Std Dev=4.360841e-10 Chi Square DF=47913.000000 CI Type=Single Confidence Factor=0.950000 Max ADEV=5.339973e-10 B1 Ratio=0.664656 Noise Type: W PM Alpha=2 Mu=-2
SIGMA FOR FILE: Cal 3 - GPS x Cs Variance Type: Overlapping Avg Factor=100 Tau=1.000000e+03 Sigma=5.325816e-11 # Analysis Points=95635 Std Dev=4.263080e-11 Chi Square DF=47867.945313 CI Type=Single Confidence Factor=0.950000 Max ADEV=5.354223e-11 B1 Ratio=0.686737 Noise Type: W PM Alpha=2 Mu=-2
SIGMA FOR FILE: Cal 3 - GPS x Cs Variance Type: Overlapping Avg Factor=8640 Tau=8.640000e+04 Sigma=6.152516e-13 # Analysis Points=78555 Std Dev=5.763096e-13 Chi Square DF=43169.890625 CI Type=Single Confidence Factor=0.950000 Max ADEV=6.187084e-13 B1 Ratio=0.732685 Noise Type: W PM Alpha=2 Mu=-2
Gráficos dos desvios de Allan - Calibração 3

143
Calibração τ = 10 s τ = 100 s τ = 1000 s τ = 86400 s (24 h)
4 Rb – GPS (Contador)
SIGMA FOR FILE: Cal 4 - Rb x GPS Variance Type: Overlapping Avg Factor=1 Tau=1.000000e+01 Sigma=5.296403e-09 # Analysis Points=95833 Std Dev=4.334192e-09 Chi Square DF=58576.355469 CI Type=Single Confidence Factor=0.950000 Max ADEV=5.321926e-09 B1 Ratio=0.669660 Noise Type: F PM Alpha=1 Mu=-2
SIGMA FOR FILE: Cal 4 - Rb x GPS Variance Type: Overlapping Avg Factor=10 Tau=1.000000e+02 Sigma=5.412632e-10 # Analysis Points=95815 Std Dev=4.469414e-10 Chi Square DF=47913.000000 CI Type=Single Confidence Factor=0.950000 Max ADEV=5.441489e-10 B1 Ratio=0.681871 Noise Type: W PM Alpha=2 Mu=-2
SIGMA FOR FILE: Cal 4 - Rb x GPS Variance Type: Overlapping Avg Factor=100 Tau=1.000000e+03 Sigma=5.602653e-11 # Analysis Points=95635 Std Dev=4.891543e-11 Chi Square DF=47867.945313 CI Type=Single Confidence Factor=0.950000 Max ADEV=5.632537e-11 B1 Ratio=0.668946 Noise Type: W PM Alpha=2 Mu=-2
SIGMA FOR FILE: Cal 4 - Rb x GPS Variance Type: Overlapping Avg Factor=8640 Tau=8.640000e+04 Sigma=1.632415e-12 # Analysis Points=78555 Std Dev=2.545427e-12 Chi Square DF=14.637889 CI Type=Single Confidence Factor=0.950000 Max ADEV=2.359373e-12 B1 Ratio=2.099043 Noise Type: W FM Alpha=0 Mu=-1
Gráficos dos desvios de Allan - Calibração 4
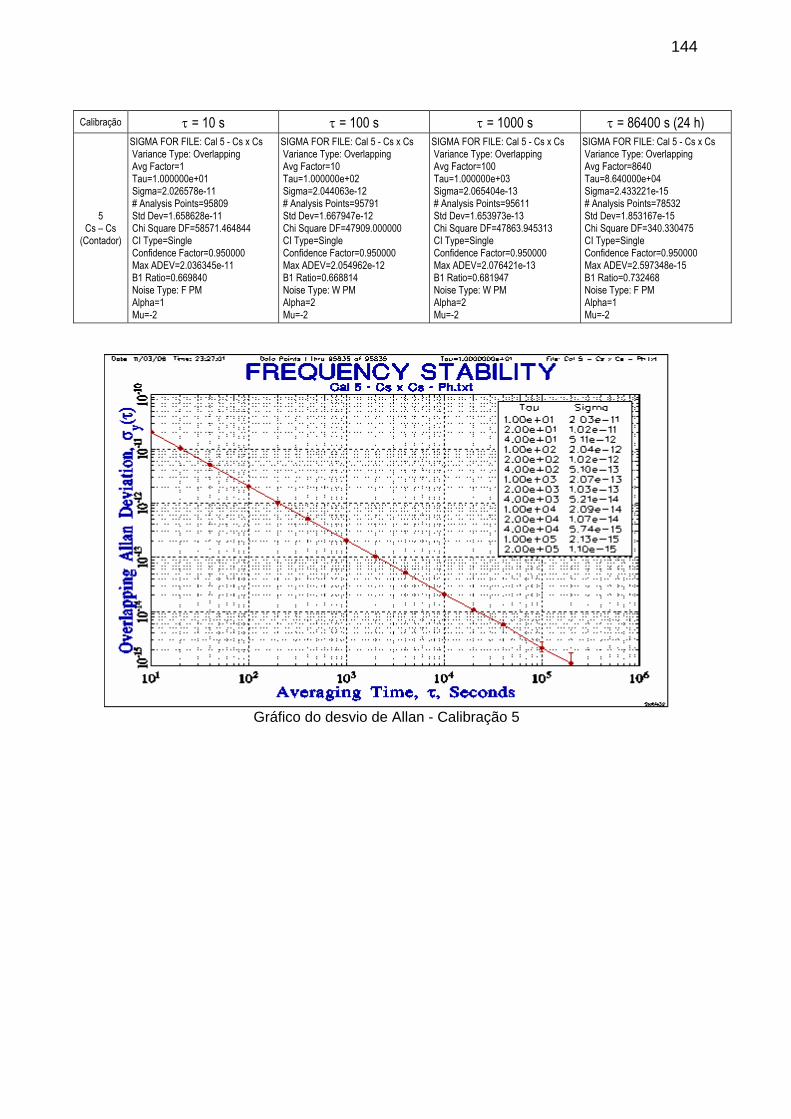
144
Calibração τ = 10 s τ = 100 s τ = 1000 s τ = 86400 s (24 h)
5 Cs – Cs
(Contador)
SIGMA FOR FILE: Cal 5 - Cs x Cs Variance Type: Overlapping Avg Factor=1 Tau=1.000000e+01 Sigma=2.026578e-11 # Analysis Points=95809 Std Dev=1.658628e-11 Chi Square DF=58571.464844 CI Type=Single Confidence Factor=0.950000 Max ADEV=2.036345e-11 B1 Ratio=0.669840 Noise Type: F PM Alpha=1 Mu=-2
SIGMA FOR FILE: Cal 5 - Cs x Cs Variance Type: Overlapping Avg Factor=10 Tau=1.000000e+02 Sigma=2.044063e-12 # Analysis Points=95791 Std Dev=1.667947e-12 Chi Square DF=47909.000000 CI Type=Single Confidence Factor=0.950000 Max ADEV=2.054962e-12 B1 Ratio=0.668814 Noise Type: W PM Alpha=2 Mu=-2
SIGMA FOR FILE: Cal 5 - Cs x Cs Variance Type: Overlapping Avg Factor=100 Tau=1.000000e+03 Sigma=2.065404e-13 # Analysis Points=95611 Std Dev=1.653973e-13 Chi Square DF=47863.945313 CI Type=Single Confidence Factor=0.950000 Max ADEV=2.076421e-13 B1 Ratio=0.681947 Noise Type: W PM Alpha=2 Mu=-2
SIGMA FOR FILE: Cal 5 - Cs x Cs Variance Type: Overlapping Avg Factor=8640 Tau=8.640000e+04 Sigma=2.433221e-15 # Analysis Points=78532 Std Dev=1.853167e-15 Chi Square DF=340.330475 CI Type=Single Confidence Factor=0.950000 Max ADEV=2.597348e-15 B1 Ratio=0.732468 Noise Type: F PM Alpha=1 Mu=-2
Gráfico do desvio de Allan - Calibração 5

145
A2.3- Desvio de freqüência
τ = 10 s
τ = 12 h
Gráficos do desvio de freqüência - Calibração 1
τ = 10 s
τ = 12 h
Gráficos do desvio de freqüência - Calibração 2

146
Calibração τ = 10 s τ = 12 h
3 GPS – Cs (Contador)
DRIFT FOR FILE: Cal 3 - GPS x Cs - phase.txt Frequency Data Points 1 thru 95835 of 95835 Drift Type: Linear a=3.869228e-07 b=1.952460e-13 c=0.000000e+00 Slope=1.952460e-13 Drift: 1.952460e-14
DRIFT FOR FILE: Cal 3 - GPS x Cs - phase.txt Frequency Data Points 1 thru 23 of 23 Drift Type: Linear a=3.837348e-07 b=2.130435e-10 c=0.000000e+00 Slope=2.130435e-10
Tebela do desvio de freqüência - Calibração 3
τ = 10 s
τ = 12 h
Gráficos do desvio de freqüência - Calibração 4
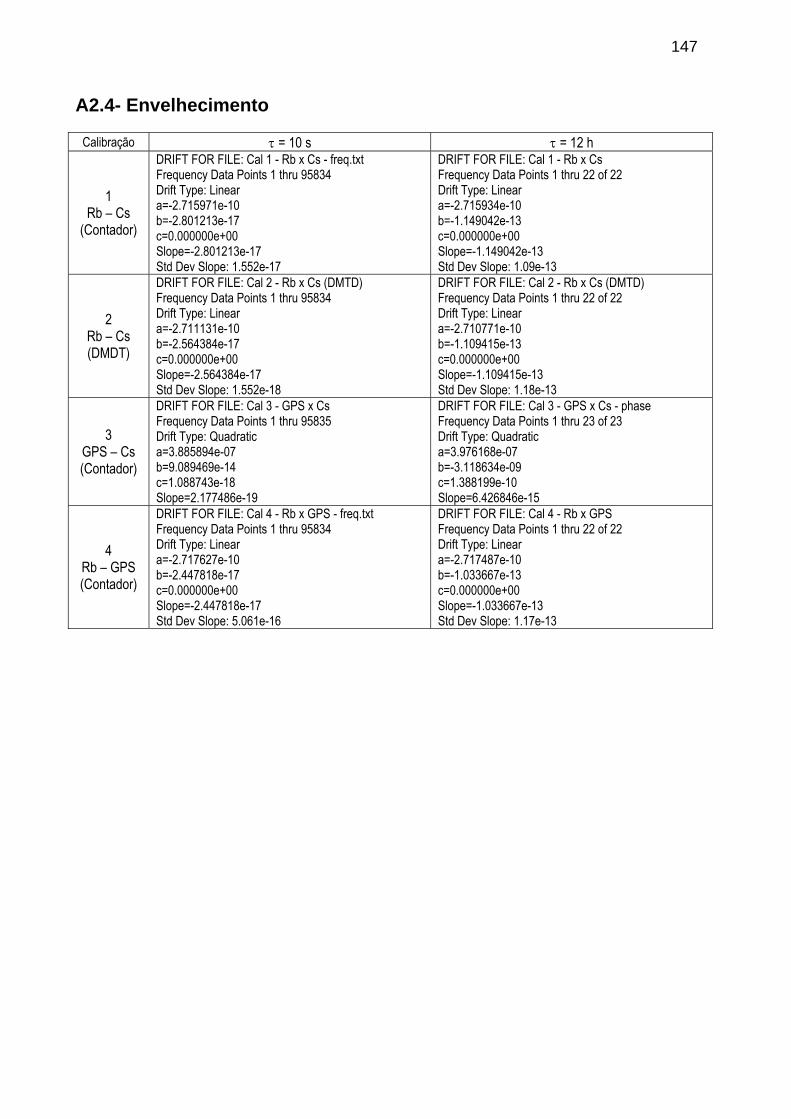
147
A2.4- Envelhecimento
Calibração τ = 10 s τ = 12 h
1 Rb – Cs
(Contador)
DRIFT FOR FILE: Cal 1 - Rb x Cs - freq.txt Frequency Data Points 1 thru 95834 Drift Type: Linear a=-2.715971e-10 b=-2.801213e-17 c=0.000000e+00 Slope=-2.801213e-17 Std Dev Slope: 1.552e-17
DRIFT FOR FILE: Cal 1 - Rb x Cs Frequency Data Points 1 thru 22 of 22 Drift Type: Linear a=-2.715934e-10 b=-1.149042e-13 c=0.000000e+00 Slope=-1.149042e-13 Std Dev Slope: 1.09e-13
2 Rb – Cs (DMDT)
DRIFT FOR FILE: Cal 2 - Rb x Cs (DMTD) Frequency Data Points 1 thru 95834 Drift Type: Linear a=-2.711131e-10 b=-2.564384e-17 c=0.000000e+00 Slope=-2.564384e-17 Std Dev Slope: 1.552e-18
DRIFT FOR FILE: Cal 2 - Rb x Cs (DMTD) Frequency Data Points 1 thru 22 of 22 Drift Type: Linear a=-2.710771e-10 b=-1.109415e-13 c=0.000000e+00 Slope=-1.109415e-13 Std Dev Slope: 1.18e-13
3 GPS – Cs (Contador)
DRIFT FOR FILE: Cal 3 - GPS x Cs Frequency Data Points 1 thru 95835 Drift Type: Quadratic a=3.885894e-07 b=9.089469e-14 c=1.088743e-18 Slope=2.177486e-19
DRIFT FOR FILE: Cal 3 - GPS x Cs - phase Frequency Data Points 1 thru 23 of 23 Drift Type: Quadratic a=3.976168e-07 b=-3.118634e-09 c=1.388199e-10 Slope=6.426846e-15
4 Rb – GPS (Contador)
DRIFT FOR FILE: Cal 4 - Rb x GPS - freq.txt Frequency Data Points 1 thru 95834 Drift Type: Linear a=-2.717627e-10 b=-2.447818e-17 c=0.000000e+00 Slope=-2.447818e-17 Std Dev Slope: 5.061e-16
DRIFT FOR FILE: Cal 4 - Rb x GPS Frequency Data Points 1 thru 22 of 22 Drift Type: Linear a=-2.717487e-10 b=-1.033667e-13 c=0.000000e+00 Slope=-1.033667e-13 Std Dev Slope: 1.17e-13


















