ANÁLISE ESTRUTURAL E ESTUDO DE CONFIGURAÇÃO DE UM …amelro/press_files/ARMelro_PDFC.pdf ·...
236
ANÁLISE ESTRUTURAL E ESTUDO DE CONFIGURAÇÃO DE UM MICRO-SATÉLITE Licenciatura em Engenharia Mecânica Opção de Construções Mecânicas 2003/2004 Trabalho realizado por: António Rui de Oliveira Santos Silva Melro Sob a orientação de: Professor Pedro Ponces Camanho
Transcript of ANÁLISE ESTRUTURAL E ESTUDO DE CONFIGURAÇÃO DE UM …amelro/press_files/ARMelro_PDFC.pdf ·...
ANÁLISE ESTRUTURAL E
ESTUDO DE CONFIGURAÇÃO
DE UM MICRO-SATÉLITE
Licenciatura em Engenharia Mecânica
Opção de Construções Mecânicas
2003/2004
Trabalho realizado por:
António Rui de Oliveira Santos Silva Melro
Sob a orientação de:
Professor Pedro Ponces Camanho


Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 1 -
Agradecimentos
Durante este último ano em que me vi envolvido neste projecto houve várias pessoas que me ajudaram na concretização deste trabalho.
Em primeiro lugar devo agradecer ao Prof. Pedro Camanho pela orientação preciosa neste trabalho e pela ajuda na resolução de muitos dos problemas que foram surgindo. Devo agradecer também aos dois alunos que no ano passado estiveram à frente do barco do SSETI aqui na FEUP – Pedro Portela e Pedro Bandeira. Deixaram um trabalho muito bom, bem como uma admiração enorme junto dos restantes colegas nas diversas universidades. Espero que tenha sido capaz de, pelo menos, manter essa admiração.
Um especial abraço para o britânico menos british que alguma vez conheci, Neil Melville, coordenador principal do projecto por parte da Agência Especial Europeia. Não há dúvida que sem ele a construção do SSETI Express não teria sido possível.
Um agradecimento também a todos os restantes membros envolvidos neste projecto especialmente aos que melhor simulavam uma batalha campal estilo aldeia gaulesa de Uderzo e Goscinny durante as múltiplas reuniões, quer via Internet, quer durante as workshops, mas que em muito contribuíram com vontade, suor e companheirismo para levar este projecto a bom porto.
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 2 -
Índice Índice .................................................................................2
Lista de Figuras....................................................................5
1. Introdução ...................................................................7
PARTE I – ESEO ...................................................................9
2. Objectivos e Requisitos ................................................ 10 2.1. Objectivos gerais do satélite.................................................10 2.2. Objectivos da equipa de Estruturas .......................................11
3. Caracterização dos principais componentes estruturais ..... 12
4. Modelação e geração da malha de elementos finitos......... 14 4.1. Elementos utilizados na modelação .......................................15 4.2. Breve abordagem aos elementos de contacto..........................16
4.2.1. Definição dos segmentos/superfícies de contacto .................16 4.2.2. Definição das propriedades de contacto ..............................17 4.2.3. Definição do par segmentos/superfícies em contacto ............17
5. Tipos de análise requeridas........................................... 18
6. Resultados obtidos ...................................................... 19
7. Considerações finais .................................................... 20
PARTE II – SSETI EXPRESS.................................................. 21
8. Definição dos subsistemas ............................................ 22 8.1. A Fase A mais rápida da história da engenharia aeroespacial.....22
8.1.1. Propulsão .......................................................................22 8.1.2. Energia ..........................................................................24 8.1.3. Controlo e Determinação da Atitude - ACDS ........................25 8.1.4. Análise da Missão ............................................................26 8.1.5. Comunicações.................................................................27 8.1.6. Interface de Controlo de Propulsão – ICU............................28 8.1.7. Computador de bordo – OBC.............................................28 8.1.8. Câmara..........................................................................29 8.1.9. Dispositivo de lançamento de Cubesats...............................30 8.1.10. Administração .................................................................31
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 3 -
8.1.11. Engenharia de Sistemas ...................................................32 8.1.12. Infra-estrutura................................................................32 8.1.13. Operações ......................................................................32 8.1.14. Relações Públicas ............................................................32 8.1.15. XI-V (lê-se SAI-5) [7] ......................................................33 8.1.16. NCUBE II [8] ..................................................................33 8.1.17. UWE-1 [9]......................................................................33
9. A Estrutura do SSETI Express – Fase B........................... 33 9.1. Modelação e geração da malha de elementos finitos ................35 9.2. Análises efectuadas.............................................................37 9.3. Resultados obtidos..............................................................38
10. O estudo de configuração do satélite.............................. 39
11. Fase C – A definição detalhada...................................... 44 11.1. Painéis de honeycomb .........................................................45 11.2. Ligações mecânicas.............................................................45 11.3. Anel de Titânio ...................................................................46 11.4. Painéis exteriores ...............................................................47 11.5. Outros componentes mecânicos ............................................47 11.6. Insertos ............................................................................48
12. Fase D – O fabrico dos componentes e entrega para integração e validação ............................................................... 50
13. Fase E – Preparação para o lançamento.......................... 51
14. Perspectivas Futuras para a Iniciativa SSETI e para a FEUP 52
15. Bibliografia ................................................................. 53
ANEXO A – Descrição do Último Modelo de Elementos Finitos para o Micro-satélite ESEO ......................................................... 54
ANEXO B – Soluções apresentadas para a Estrutura e Configuração do Micro-satélite SSETI Express ............................... 82
ANEXO C – Resultados da Análise de Elementos Finitos realizada ao Micro-satélite SSETI-Express................................... 101
ANEXO D – Modelo 3D do Micro-satélite SSETI-Express e cálculo do Centro de Gravidade e Matriz de Inércia ...................... 106
ANEXO E – Desenhos de definição dos Painéis de Honeycomb. 119
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 4 -
ANEXO F – Resultados de análises de Elementos Finitos sobre Elementos de Ligação do Micro-Satélite SSETI-Express ................ 130
ANEXO G – Desenhos de Definição dos Elementos de Ligação do Micro-satélite SSETI-Express................................................ 139
ANEXO H – Desenho de Definição do Anel de Titânio ............. 149
ANEXO I – Desenhos de Definição da Estrutura Secundária do Micro-satélite SSETI-Express .................................................... 152
ANEXO J – Desenhos de Definição da Estrutura Terciária do Micro-satélite SSETI-Express .................................................... 161
ANEXO K – Desenhos de Definição de Insertos utilizados no Micro-satélite SSETI-Express .................................................... 166
ANEXO L – Manual de Integração e Verificação do Micro-satélite SSETI-Express........................................................................ 178

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 5 -
Lista de Figuras
Figura 1 – Imagem do modelo 3D do satélite.................... 11
Figura 2 – Imagem do modelo 3D do satélite com algum equipamento escondido realçando a estrutura central ................ 12
Figura 3 – Exemplar de um painél de honeycomb em alumínio com pormenor do núcleo........................................................ 13
Figura 4 – Representação em “teia de aranha” do centro de gravidade de um equipamento.................................................................. 15
Figura 5 - Representação dos segmentos/superfícies de contacto .............................................................................. 17
Figura 6 – Exemplo de penetração do segmento slave num segmento master .................................................................. 17
Figura 7 - Pormenor da localização da OBDH_Nodebox....... 19
Figura 8 – Sistema de Propulsão ..................................... 23
Figura 9 – Sistema mecânico de prisão do tanque ............. 24
Figura 10 – Bateria ....................................................... 25
Figura 11 - PCU ............................................................ 25
Figura 12 – Esquema da trajectória do satélite ao longo das linhas de campo magnético terrestre ....................................... 26
Figura 13 – Antena de UHF ............................................ 27
Figura 14 – Receptor-Transmissor de UHF ........................ 27
Figura 15 - Sistema ICU ................................................ 28
Figura 16 – Computador de Bordo................................... 29
Figura 17 – Câmara ...................................................... 30
Figura 18 – P-POD ........................................................ 30
Figura 19 – T-POD ........................................................ 31
Figura 20 – Posição dos 12 parafusos relativamente à estrutura principal................................................................. 34
Figura 21 – Vista dos dois anéis (a base encontra-se em transparente para melhor visualização) .................................... 36
Figura 22 – Anel de Titânio (A base encontra-se a branco).. 36
Figura 23 – Anel de Separação (A base encontra-se a branco).......................................................................................... 37
Figura 24 – Pormenor de um dos pontos de fixação ........... 38

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 6 -
Figura 25 – Exemplo da Keyword *TIE, ADJUST=0 ............ 38
Figura 26 – Modelo 3D v1.0 ........................................... 40
Figura 27 – Modelo 3D v2.0 ........................................... 40
Figura 28 – Modelo 3D v3.0 ........................................... 41
Figura 29 – Modelo 3D v3.12.......................................... 41
Figura 30 – Modelo 3D v3.14.......................................... 42
Figura 31 – Modelo 3D v3.2.1......................................... 42
Figura 32 – Modelo 3D v3.2.2 – Versão de lançamento ...... 43
Figura 33 – Modelo 3D v3.2.2 – Versão de Voo ................. 43
Figura 34 – Porcas a serem utilizadas para fixação dos painéis exteriores ............................................................................ 47
Figura 35 – Inserto para sistema de activação eléctrica...... 48
Figura 36 – Inserto para Antena UHF............................... 48
Figura 37 – Inserto Base-Lateral ..................................... 49
Figura 38 – Inserto Topo-Lateral..................................... 50
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 7 -
1. Introdução
Em 2000, o Office for Educational Project Outreach Activities da Agência Espacial Europeia (ESA) iniciou um novo projecto – Student Space Exploration & Technology Initiative (SSETI). O objectivo principal desta nova iniciativa é a criação de uma rede de alunos, universidades e instituições às quais será incumbida a tarefa de, em conjunto, conceberem, dimensionarem, construírem e finalmente lançarem micro-satélites. Outros projectos mais ambiciosos como o desenvolvimento de um moon-rover e o apoio à construção e lançamento de cubesats estão também em preparação.
O projecto original desta iniciativa apresenta-se como o European Student Earth Orbiter – ESEO. Trata-se de um pequeno satélite pertencente à classe dos micro-satélites. Esta classe identifica-se por os seus elementos possuírem uma massa não superior a 120 kg e dimensões máximas de 600x600x800 mm.
O trabalho que irá ser aqui relatado, vem no seguimento do que tem vindo a ser feito no Departamento de Engenharia Mecânica (DEMEGI) desde 2001, data em que a Faculdade de Engenharia da Universidade do Porto (FEUP) se juntou ao projecto. Cabe à FEUP o dimensionamento, concepção e validação por via numérica da Estrutura do satélite.
A primeira fase no desempenho desta tarefa consistiu numa extensa pesquisa bibliográfica que permitisse aos alunos uma base de trabalho sólida em termos de conhecimentos na área da engenharia aeroespacial. No decurso desta fase, foi recolhida toda a informação necessária sobre o foguetão encarregue do lançamento do satélite – ARIANE 5 – bem como informações sobre materiais, critérios de dimensionamento e metodologias de trabalho impostas pelo European Cooperation for Space Standarization (ECSS).
A segunda fase do projecto consistiu na elaboração de um documento conhecido por Phase-A Study Report. Este documento apresenta os resultados dos estudos de exequibilidade deste projecto, realizados pelas diferentes universidades, cada uma na sua área de trabalho, e que, por unanimidade, concordaram que era possível levar este projecto até ao fim com sucesso.
No final do ano lectivo de 2002/2003 foi apresentado um relatório por dois alunos finalistas – Pedro Bandeira e Pedro Portela – onde era apresentado e justificado o trabalho realizado até então e que se inseria na terceira fase deste projecto. Esta fase é, sem dúvida, a mais demorada pois é nela que deverão ser definidos com
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 8 -
algum detalhe várias características do satélite sob o ponto de vista mecânico, eléctrico, de controlo, comunicação, propulsão, etc.
Este relatório pretende expor os avanços conseguidos durante este último ano ainda inseridos nesta fase do projecto.
No entanto, o trabalho realizado este ano lectivo distinguiu-se do anterior uma vez que em Dezembro de 2003 surgiu a hipótese de iniciar um novo projecto dentro da iniciativa SSETI. Dada a enorme vontade demonstrada por vários elementos do grupo SSETI, tanto por parte dos alunos como da própria ESA, deu-se início à construção e desenvolvimento de um segundo satélite, designado por SSETI Express.
A sua missão é fundamentalmente do foro educativo e destina-se a servir de plataforma de lançamento de nano-satélites (cubesats), tirar fotografias da Terra e servir como base de demonstração da tecnologia empregue no projecto complementar, ESEO.
Usando como base de trabalho o que já havia sido feito para o ESEO, e tirando partido da experiência acumulada até à altura, foi estabelecido um plano de trabalhos muito ousado, apontando para final de 2004 a existência de um satélite totalmente funcional e pronto para lançamento.
Este relatório divide-se assim em duas partes, tantas quantos os projectos em que o autor se viu envolvido: Parte I – ESEO; Parte II – SSETI Express.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 9 -
PARTE I – ESEO

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 10 -
2. Objectivos e Requisitos
2.1. Objectivos gerais do satélite
O primeiro satélite do grupo de trabalho SSETI destina-se a voar no foguetão Ariane 5 estando o seu lançamento a ser apontado. Deverá ser colocado numa órbita geostacionária (GTO) por um período de 14 dias durante os quais deverão ser atingidos os objectivos principais da missão:
• Realizar uma experiência de medição de plasma. Esta experiência irá medir a densidade de electrões e a temperatura do plasma espacial, bem como caracterizar o seu comportamento ao longo do tempo e espaço.
• Tirar fotografias da Terra e utilizá-las para alcançar, educar e cativar o público em geral. Para isso será usada uma Narrow Angle Camera (NAC).
• Experimentar um novo sistema de navegação que permita não só estabilizar o ESEO como possa servir de base de trabalho à navegação para futuras missões à Lua.
Após esse tempo, o satélite permanecerá em órbita por mais um mês e meio, durante o qual será testado e validado o sistema de propulsão. Este novo sistema baseado em Nitrogénio gasoso tem a grande vantagem de ser de baixo custo e de fácil manuseamento e controlo, oferecendo ao mesmo tempo elevadas garantias de sucesso graças às várias vezes que fora já utilizado em ambiente espacial.
No final destas experiências o satélite irá ser impulsionado até à Lua, realizar uma órbita em torno desta e regressar à Terra impulsionado pela gravidade lunar.
A missão é considerada um êxito caso todas as experiências científicas a bordo sejam completadas com sucesso.
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 11 -
2.2. Objectivos da equipa de Estruturas
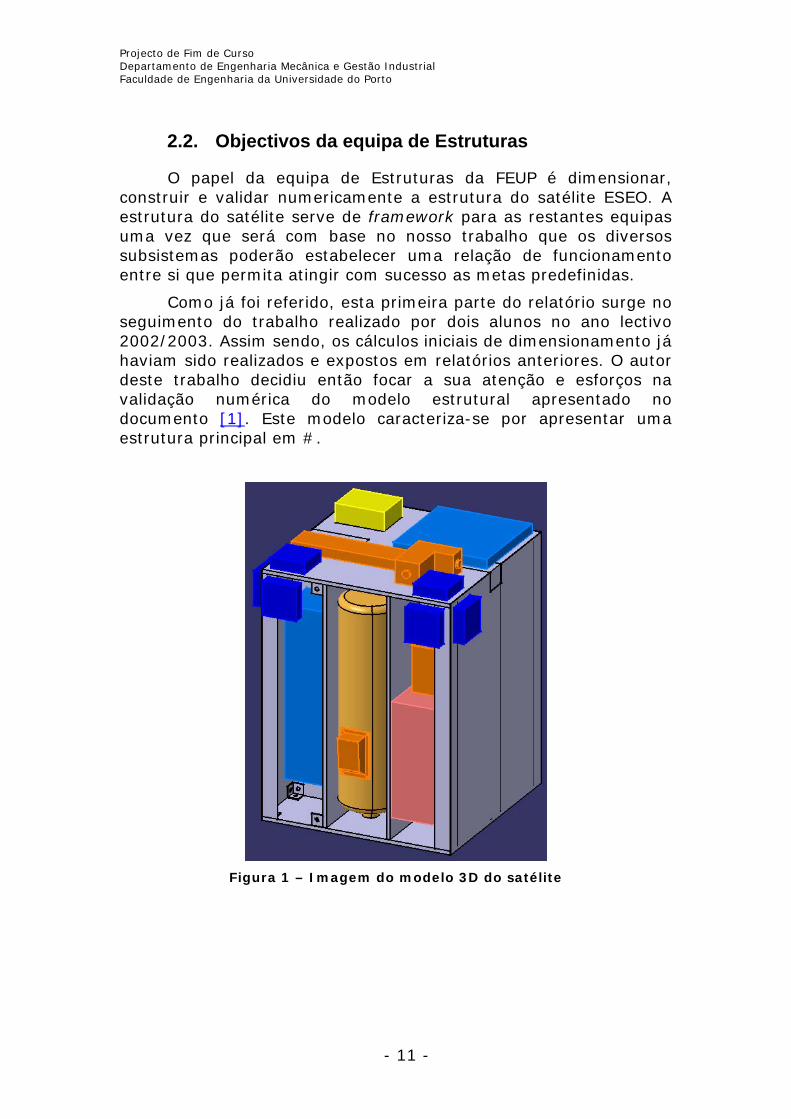
O papel da equipa de Estruturas da FEUP é dimensionar, construir e validar numericamente a estrutura do satélite ESEO. A estrutura do satélite serve de framework para as restantes equipas uma vez que será com base no nosso trabalho que os diversos subsistemas poderão estabelecer uma relação de funcionamento entre si que permita atingir com sucesso as metas predefinidas.
Como já foi referido, esta primeira parte do relatório surge no seguimento do trabalho realizado por dois alunos no ano lectivo 2002/2003. Assim sendo, os cálculos iniciais de dimensionamento já haviam sido realizados e expostos em relatórios anteriores. O autor deste trabalho decidiu então focar a sua atenção e esforços na validação numérica do modelo estrutural apresentado no documento [1]. Este modelo caracteriza-se por apresentar uma estrutura principal em #.
Figura 1 – Imagem do modelo 3D do satélite

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 12 -
Figura 2 – Imagem do modelo 3D do satélite com algum equipamento
escondido realçando a estrutura central
Em cada compartimento será introduzido um ou mais subsistemas, dependendo a sua distribuição de considerações de posição de centro de gravidade e matriz de inércia do satélite, da necessidade de proximidade entre alguns subsistemas e da necessidade de fácil acesso a alguns equipamentos durante a validação ou preparação para lançamento. Este trabalho foi realizado pela equipa de Configuração sedeada em Bilbao, Espanha, e encontra-se documentado em [1].
3. Caracterização dos principais componentes estruturais
A estrutura principal do satélite ESEO apresenta-se constituída por placas sandwich em alumínio. As duas peles da sandwich são simples chapas de alumínio com 0,3 mm de espessura. O núcleo apresenta-se sob a forma de honeycomb ou ninho de abelha. A Figura 3 apresenta melhor este tipo de laminado.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 13 -
Figura 3 – Exemplar de um painél de honeycomb em alumínio com
pormenor do núcleo
Esta estrutura em placas sandwich confere ao satélite um elevado rácio rigidez/massa cumprindo com um dos principais parâmetros na construção de satélites – elevada rigidez com baixa densidade (e massa, por consequência).
A base do satélite apresenta-se como o principal elemento em termos de capacidade de transmissão de cargas, uma vez que realiza a interface entre o anel de separação e o satélite. Por esse motivo, apresenta uma espessura de núcleo superior, tornando-a capaz de suportar a transmissão de cargas da estrutura em # para o anel de separação através de esforços de corte.
A placa no topo do satélite simboliza a face que estará permanentemente voltada para a Terra quando em órbita. Será nela que irá ser montado um conjunto de sensores e equipamento necessário ao cumprimento da missão (p. ex.: câmara), ao controlo da atitude e navegação do satélite (sensor do horizonte da Terra) e comunicação (antenas de baixo e alto ganho). Daqui se percebe a necessidade de ter estes equipamentos de medição e controlo sob uma plataforma estruturalmente estável e não sujeita a deformações que impossibilitem o bom funcionamento dos restantes equipamentos ou mesmo que ponha em causa o sucesso da missão. Logo, o uso de um painel em honeycomb é a solução mais plausível.
Para proteger o interior do satélite do impacto de poeira cósmica no equipamento, da radiação cósmica e do impacto eléctrico-magnético por ela causado e, sobretudo, para protecção térmica, foram colocados painéis laterais em torno do satélite. Estes painéis serão simples chapas de alumínio. Para conferir facilidade de
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 14 -
montagem a estes painéis e aumentar a estabilidade destes, foram colocados perfis em L nos cantos do satélite.
Estes são os aspectos principais da estrutura do satélite e será com base neles que se irá conceber o modelo de elementos finitos com fim à validação numérica desta estrutura.
4. Modelação e geração da malha de elementos finitos
Algumas simplificações e considerações foram assumidas antes de iniciar este trabalho:
• Devido à falta de informação no modelo tridimensional do satélite fornecido pela equipa de configuração, não foram considerados os painéis solares na análise por elementos finitos. Isto pode ser visto como uma falha grave, uma vez que uma grande parte das vezes estes elementos são responsáveis por modos locais de vibração nocivos para o comportamento dinâmico global do sistema satélite-foguetão.
• Nas análises anteriores não foi considerada nenhuma fronteira entre os diferentes painéis sendo necessário, durante a modelação de cada painel, ter em atenção como os diferentes painéis interagiam geometricamente entre si, e como os nós iriam ser colocados em cada painel devido a essa interacção. Isto provocava uma dificuldade acrescida na geração de malhas. Dada a elevada mutabilidade a que este tipo de projectos está sujeito, foi decidido estudar um novo sistema que permita considerar melhor a interacção dos painéis sem ser necessário perder muito tempo na geração de malhas. Este método será descrito mais à frente neste relatório.
• Os painéis laterais apresentavam algumas variações na sua espessura que foram consideradas neste modelo.
• Por razões de simplicidade do modelo, não foram consideradas as interfaces mecânicas com os diferentes equipamentos. Um simples esquema em “teia de aranha” foi considerado para modelar a ligação mecânica entre equipamento e painel.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 15 -
Figura 4 – Representação em “teia de aranha” do centro de gravidade de um
equipamento
• O software de pré e pós-processamento utilizado foi o FEMAP v8.1 enquanto o processamento do modelo foi realizado por ABAQUS v6.3.
4.1. Elementos utilizados na modelação
Como já foi referido, os itens principais da estrutura do satélite são simples painéis de sandwich ou simples chapa de alumínio. Por esse motivo, e fazendo fé em benchmark studies anteriormente realizados nesta área ([2]), decidiu-se utilizar elementos 2D de placa quadrangulares com 4 nós. Cada nó possui 6 graus de liberdade – 3 translações e 3 rotações. Para o caso dos painéis laterais, não foi necessário nenhum especial cuidado na definição das propriedades do elemento. Já no caso dos painéis sandwich foi necessário recorrer às propriedades de elementos laminados para definição das características materiais destes painéis. Foi assim definido um elemento laminado constituído por 3 camadas – pele em alumínio, núcleo de honeycomb e novamente pele de alumínio.
Para os perfis em L foram utilizados elementos de barra com 2 nós. Cada nó possui 3 graus de liberdade. A massa de cada equipamento é considerada concentrada num ponto situado nas mesmas coordenadas que o centro de gravidade do equipamento. Esse ponto é posteriormente conectado com o painel onde o equipamento respectivo irá ser montado através de elementos rígidos. Um elemento rígido permite estabelecer uma ligação cinemática rígida entre dois nós para que a deformação sofrida por um dos nós seja transmitida ao outro (ver Figura 4).

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 16 -
4.2. Breve abordagem aos elementos de contacto
Como foi dito anteriormente, um dos desafios a que o autor se propôs foi estudar a possibilidade de elaborar malhas de uma forma mais expedita, sem perder posteriormente em tempo de cálculo, e que ao mesmo tempo fornecesse resultados aceitáveis.
A resposta a este problema encontra-se numa combinação de elementos rígidos, já abordados, com elementos de contacto. Os elementos rígidos pretendem simular as ligações estruturais entre os diferentes painéis, enquanto os elementos de contacto, como o próprio nome indica, pretendem simular o contacto entre os painéis dispostos na perpendicular entre si e evitar que haja inter penetrações de diferentes painéis.
Convém no entanto referir algumas das propriedades dos elementos de contacto e como estes devem ser definidos correctamente em FEMAP e ABAQUS, uma vez que a sua má explicitação pode levar a complicações posteriores durante a resolução do sistema de equações, tais como a não consideração do contacto ou tendência de não convergência para uma solução.
Existem três passos no processo de criação de contacto:
• Definição dos segmentos/superfícies de contacto
• Definição das propriedades de contacto
• Definição do par de segmentos/superfícies em contacto.
4.2.1. Definição dos segmentos/superfícies de contacto
Para a definição dos segmentos/superfícies de contacto há que ter em linha de conta a geometria a modelar. No caso presente temos apenas contacto entre painéis que se encontram na perpendicular entre si. Para modelar este fenómeno deve ser considerado um segmento e uma superfície, como representado na Figura 5. O segmento deverá ser definido como o conjunto de nós pertencentes à placa designada por slave. A superfície será definida como a face dos elementos voltada para a placa slave onde é esperado que ocorra contacto – placa master.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 17 -
Figura 5 - Representação dos segmentos/superfícies de contacto
4.2.2. Definição das propriedades de contacto
Para a definição das propriedades de contacto foi considerado apenas o efeito de small sliding dado que estamos na presença de placas que não apresentam deslocamentos relativos muito elevados, logo podendo considerar-se que um nó slave irá interagir sempre com a mesma área local da superfície master durante a análise.
4.2.3. Definição do par segmentos/superfícies em contacto
Na Figura 5 foram definidos como placa slave e placa master os dois elementos em contacto. Esta designação não é aleatória. Na modelação de contacto é necessário definir de que forma o contacto se processa (propriedades de contacto) e qual das superfícies é passível de ‘trespassar’ a outra. No presente caso, é óbvio que o segmento slave no mundo real não pode penetrar a superfície master. Esta é assim definida como aquela que limita as deformações do segmento slave.
Figura 6 – Exemplo de penetração do segmento slave num segmento
master
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 18 -
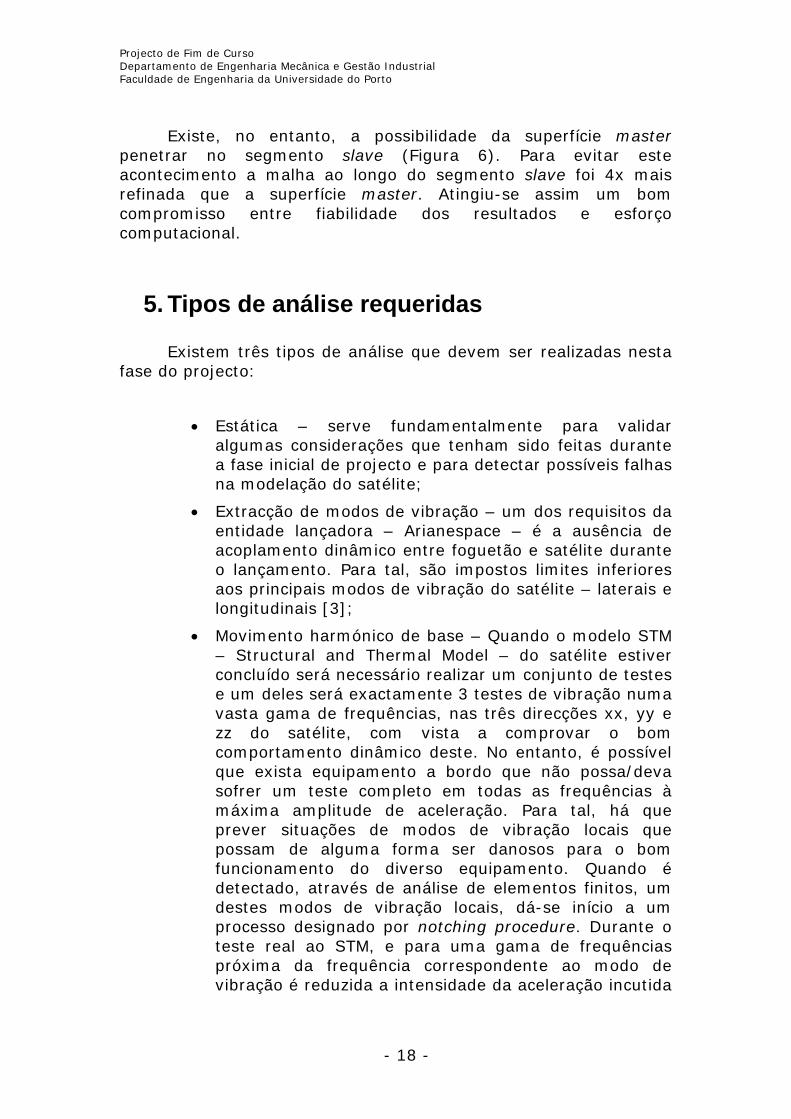
Existe, no entanto, a possibilidade da superfície master penetrar no segmento slave (Figura 6). Para evitar este acontecimento a malha ao longo do segmento slave foi 4x mais refinada que a superfície master. Atingiu-se assim um bom compromisso entre fiabilidade dos resultados e esforço computacional.
5. Tipos de análise requeridas
Existem três tipos de análise que devem ser realizadas nesta fase do projecto:
• Estática – serve fundamentalmente para validar algumas considerações que tenham sido feitas durante a fase inicial de projecto e para detectar possíveis falhas na modelação do satélite;
• Extracção de modos de vibração – um dos requisitos da entidade lançadora – Arianespace – é a ausência de acoplamento dinâmico entre foguetão e satélite durante o lançamento. Para tal, são impostos limites inferiores aos principais modos de vibração do satélite – laterais e longitudinais [3];
• Movimento harmónico de base – Quando o modelo STM – Structural and Thermal Model – do satélite estiver concluído será necessário realizar um conjunto de testes e um deles será exactamente 3 testes de vibração numa vasta gama de frequências, nas três direcções xx, yy e zz do satélite, com vista a comprovar o bom comportamento dinâmico deste. No entanto, é possível que exista equipamento a bordo que não possa/deva sofrer um teste completo em todas as frequências à máxima amplitude de aceleração. Para tal, há que prever situações de modos de vibração locais que possam de alguma forma ser danosos para o bom funcionamento do diverso equipamento. Quando é detectado, através de análise de elementos finitos, um destes modos de vibração locais, dá-se início a um processo designado por notching procedure. Durante o teste real ao STM, e para uma gama de frequências próxima da frequência correspondente ao modo de vibração é reduzida a intensidade da aceleração incutida

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 19 -
na base, de forma a minimizar danos para o equipamento em causa.
6. Resultados obtidos
O relatório com uma breve apresentação do modelo e análise dos resultados encontra-se no anexo A. Todas as considerações inicialmente ponderadas revelaram-se boas decisões, visto não haver resultados que fujam ao domínio do previsível.
Durante a realização deste trabalho, várias alterações e actualizações foram introduzidas no modelo de elementos finitos com vista a apresentar um modelo quão próximo da realidade quanto possível. O relatório presente no anexo A refere-se à última iteração neste modelo.
Um dos equipamentos – OBDH_nodebox – apresentava, no movimento harmónico de base segundo as direcções xx e yy, um comportamento algo excêntrico. Devido à sua geometria algo fora do comum e ao seu centro de massa não se encontrar simetricamente colocado em relação aos pontos de fixação Figura 7, surgia um modo de vibração local com um factor de participação nada negligenciável. Os seus efeitos são bastante visíveis, como se verifica por análise do relatório no anexo A.
Figura 7 - Pormenor da localização da OBDH_Nodebox
Este era um resultado bastante óbvio à partida e que foi comprovado ocorrer através do modelo de elementos finitos aqui
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 20 -
descrito, comprovando assim a validade dos restantes resultados obtidos.
7. Considerações finais
Uma pequena mancha nesta fase é a falta de uma análise de movimento aleatório de base, também ela normalmente realizada por elementos finitos e com a mesma finalidade que o movimento harmónico de base. Não foi possível realizar esta análise por falta de informação por parte da entidade lançadora que ainda não divulgou de que forma se manifestam as cargas acústicas e térmicas quer qualitativamente quer quantitativamente.
Estas cargas costumam ser apresentadas estatisticamente sob a forma de uma matriz de densidade espectral. Até à data os valores desta matriz para o foguetão Ariane 5 ainda não nos foram fornecidos pela Arianespace.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 21 -
PARTE II – SSETI EXPRESS
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 22 -
8. Definição dos subsistemas
8.1. A Fase A mais rápida da história da engenharia aeroespacial
Em finais de 2003 surgiu uma oportunidade de lançamento que foi imediatamente agarrada pelo grupo de trabalho SSETI. A este novo projecto deu-se o nome (óbvio) de SSETI EXPRESS. O grande objectivo seria ter um satélite pronto para lançamento em Dezembro de 2004, impondo assim um período de tempo de 1 ano para dimensionar, projectar, construir, integrar e validar todos os componentes do satélite, em separado e em conjunto.
A estratégia adoptada para fazer face a um tão curto espaço de tempo passa obrigatoriamente por usar a tecnologia que estava naquela altura a ser preparada para o ESEO, adaptá-la a esta nova missão e quando isto não pôde ser realizado, procurar equipas novas para o projecto capazes de responder a este novo desafio.
Com vista a arrancar com os trabalhos o mais cedo possível, foram realizadas duas longas reuniões durante a VI Workshop em Dezembro de 2003. Aqui foram distribuídas tarefas e elaborou-se um primeiro plano de trabalhos, estando cada universidade responsável por um certo equipamento ou aspecto da missão. Sob o autor pende a responsabilidade dos sistemas de Configuração e Estrutura. Os restantes sistemas são Propulsão – PROP, Energia – EPS, Controle e Determinação da Atitude – ACDS, Análise da Missão – MIAS, Comunicações (que, por sua vez, se divide em S-band e UHF), Interface de controlo (directamente relacionado com propulsão) – ICU, Computador de Bordo – OBC, Câmara – CAM, e o dispositivo de lançamento de Cubesats. Justifica-se pois uma breve descrição do funcionamento de cada um dos subsistemas.
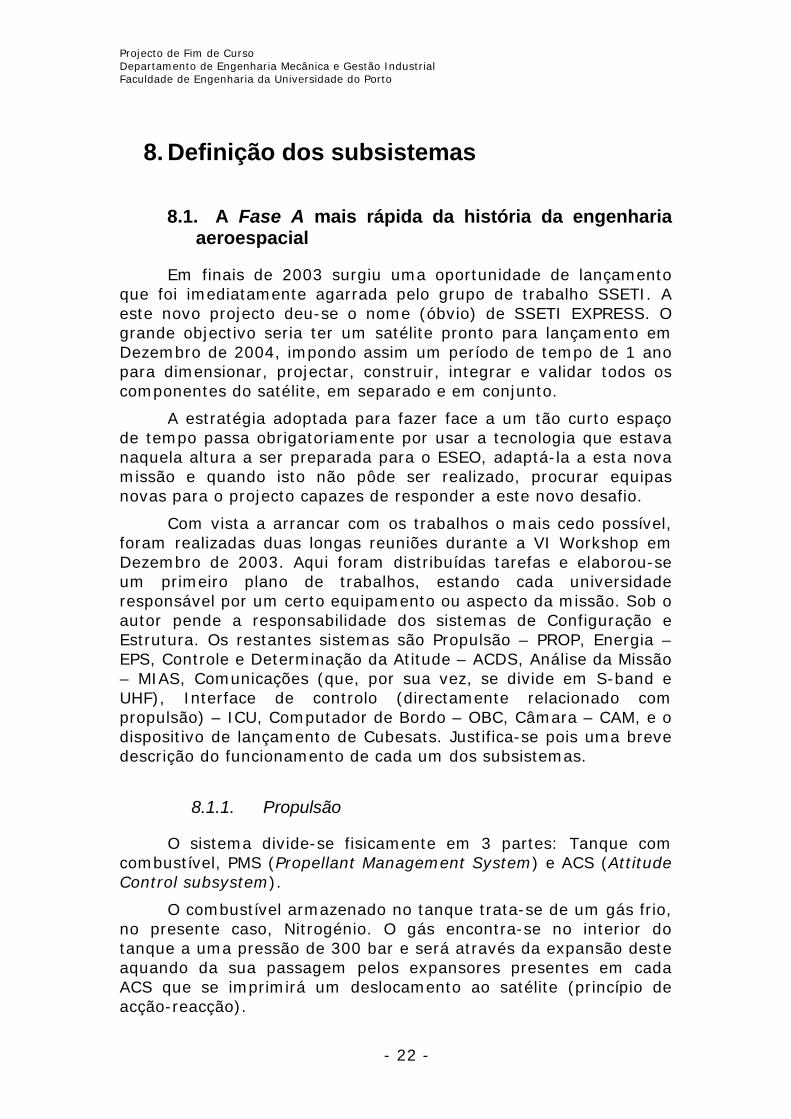
8.1.1. Propulsão
O sistema divide-se fisicamente em 3 partes: Tanque com combustível, PMS (Propellant Management System) e ACS (Attitude Control subsystem).
O combustível armazenado no tanque trata-se de um gás frio, no presente caso, Nitrogénio. O gás encontra-se no interior do tanque a uma pressão de 300 bar e será através da expansão deste aquando da sua passagem pelos expansores presentes em cada ACS que se imprimirá um deslocamento ao satélite (princípio de acção-reacção).
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 23 -
Figura 8 – Sistema de Propulsão
Para suportar esta elevada pressão, recorreu-se a tanques feitos de alumínio coberto por uma camada de fibra de carbono. A presença de um tanque em fibra de carbono fabricado por enrolamento filamentar pode acarretar alguns problemas devido exactamente a este processo de fabrico. A não existência de fibras orientadas segundo a geratriz do cilindro, combinado com a tendência que este tipo de reservatórios de pressão têm de se deformarem segundo a sua linha de eixo, tornava algo complexa a fixação destes elementos à estrutura. O sistema adoptado encontra-se representado na Figura 9. Este sistema consiste em ter duas correias de couro em redor do tanque, tensionadas por parafusos que fixam o tanque ao painel. Desta forma o tanque tem liberdade para se deformar durante o processo de enchimento quer na direcção radial, quer na direcção longitudinal.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 24 -
Figura 9 – Sistema mecânico de prisão do tanque
O crédito das imagens anteriores deve ser atribuído à equipa da Universidade de Estugarda responsável pela construção deste sistema.
8.1.2. Energia
Este sistema encontra-se sob a responsabilidade da equipa da Universidade de Nápoles. O seu papel é proporcionar aos diferentes equipamentos consumidores de energia a potência – corrente e voltagem – necessária para o seu correcto funcionamento. A bordo seguem quatro equipamentos para cumprir esta função: Unidade de Controlo de Energia (PCU), Unidade de Distribuição (PIN), Bateria e Células Solares.
A PCU destina-se a controlar a distribuição de energia pelos diversos sistemas através da PIN. A bateria funciona como fonte de energia principal a bordo do satélite. Será, após a separação do foguetão, a bateria o único sistema com energia e capaz de ligar todos os restantes sistemas por uma ordem precisa e previamente estabelecida no software da PCU. Quando o nível de energia da bateria se encontrar em valores muito baixos entram em acção as células solares, coladas aos painéis exteriores. Nestes períodos de tempo o satélite encontrar-se-á num consumo de energia mínimo,

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 25 -
sendo a maior parte da energia proveniente das células solares enviada para a bateria, de modo a carregar esta última.
O crédito pelas imagens seguintes deve ser atribuído a esta equipa napolitana.
Figura 10 – Bateria
Figura 11 - PCU
8.1.3. Controlo e Determinação da Atitude - ACDS
Este foi um dos sistemas que não se encontrava disponível para satisfazer o prazo inicialmente estabelecido de um ano. Para fazer face à situação, um aluno de Mestrado da Universidade de Aalborg apresentou um sistema muito simples que permitia
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 26 -
controlar a órbita do satélite segundo dois eixos e permitia determinar a sua posição relativamente a três eixos.
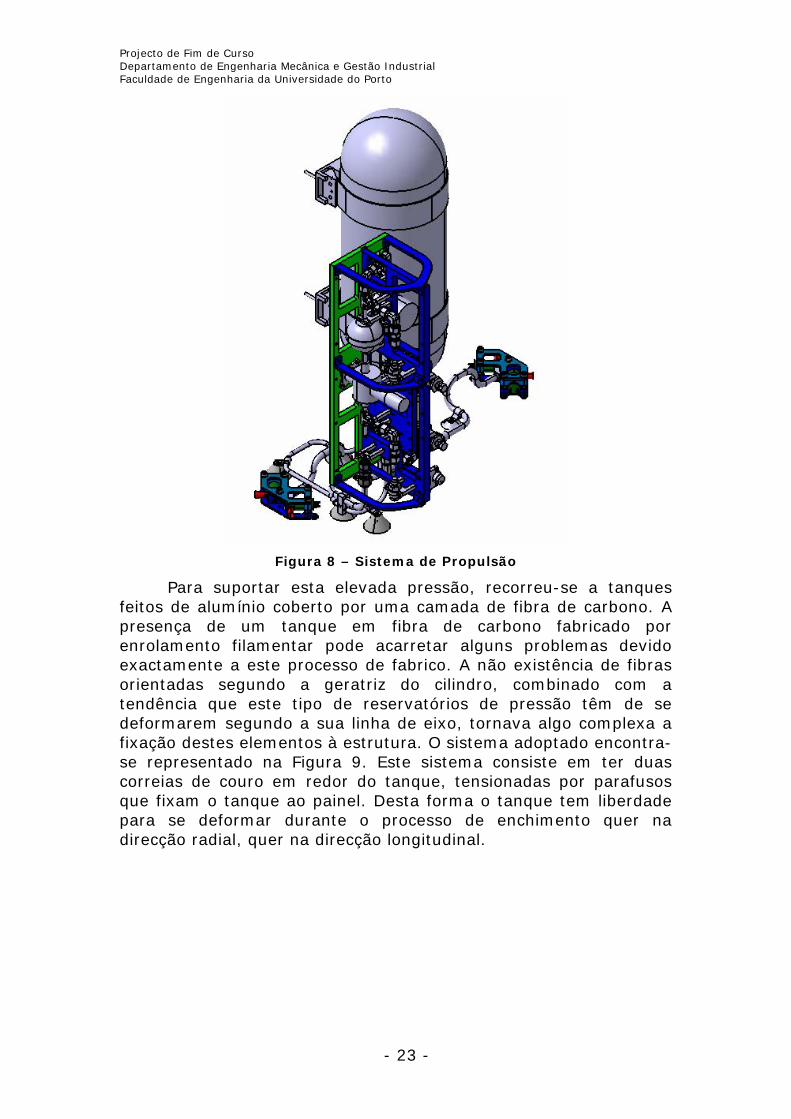
O sistema de controlo de atitude caracteriza-se por um simples íman passivo que provoca a estabilização do satélite ao longo das linhas do campo magnético terrestre. No entanto, ao passar pelos pólos magnéticos terrestres o satélite será forçado a realizar sobre si mesmo uma volta de 180º (Figura 12).
Figura 12 – Esquema da trajectória do satélite ao longo das linhas de
campo magnético terrestre
Para dissipar a energia cinética deste flip são colocadas duas bobinas electromagnéticas ao longo dos painéis laterais, que provocam um momento perpendicular ao provocado pelo íman.
Será aquando do flip sobre o pólo norte magnético que a câmara apontará na direcção da Terra e serão tiradas fotografias.
A determinação da atitude é conseguida com a ajuda de dois sensores de Sol colocados em lados opostos do satélite e de um magnetómetro que medirá a intensidade do campo magnético terrestre ao longo da órbita.
8.1.4. Análise da Missão
Trata-se de uma equipa que não se destina a produzir hardware. A sua missão é fornecer dados sobre o comportamento do satélite e prever a sua trajectória aquando em órbita. A base das estimativas realizadas é a posição geográfica do local de lançamento do foguetão, a sua altitude no momento de separação dos vários satélites a bordo e por que ordem essa separação ocorre.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 27 -
Esta equipa fornece também informação sobre as efemérides do satélite relativamente às duas estações terrestres – Aalborg (Dinamarca) e Svalbard (Noruega).
Tem também a missão de comprovar junto da entidade lançadora que a probabilidade de colisão dos cubesats com os restantes satélites a bordo do foguetão após lançamento tem tendência a diminuir após várias órbitas.
8.1.5. Comunicações
O sistema de comunicações encontra-se dividido em dois subsistemas – UHF e S-band – operando cada um deles a frequências diferentes.
O subsistema UHF destina-se a transmitir house kiping data criada pelo computador de bordo para a Terra e a receber telecomandos enviados da Terra para o satélite. Após o término da missão, o satélite não irá sofrer uma entrada forçada na atmosfera, mas sim, uma queda natural, o que poderá levar muitos anos até à desintegração completa na atmosfera. Assim sendo, e se a saúde dos restantes subsistemas a bordo o permitir, o satélite irá funcionar como receptor-transmissor para a comunidade de rádio amadores mundial usando as frequências de UHF definidas para este subsistema.
Figura 13 – Antena de UHF
Figura 14 – Receptor-Transmissor de UHF

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 28 -
O subsistema de S-band foi concebido apenas para comunicação no sentido satélite-Terra. Servirá fundamentalmente para enviar grandes quantidades de informação, nomeadamente as fotografias tiradas pela câmara.
8.1.6. Interface de Controlo de Propulsão – ICU
Permite estabelecer uma interface entre o computador de bordo e o sistema de propulsão. É através deste equipamento que são enviadas as ordens de comando para o sistema de Propulsão e são controladas todas as válvulas e thrusters a bordo.
Figura 15 - Sistema ICU
8.1.7. Computador de bordo – OBC
O nome diz tudo. O computador de bordo é o responsável pela interpretação de todos os telecomandos enviados a partir da Terra, compreensão da informação recebida, comando dos restantes equipamentos e confirmar que os restantes equipamentos receberam e compreenderam as ordens que lhes foram conferidas. Também é responsável por controlar o bom funcionamento do diverso equipamento a bordo e, caso detecte alguma anomalia, alterar entre os modos de funcionamento do satélite.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 29 -
Figura 16 – Computador de Bordo
Existem três modos de funcionamento:
• Safe Mode – O satélite encontra-se em baixo consumo de energia, estando apenas a PCU a ser alimentada através dos painéis solares e a bateria a carregar.
• Recovery Mode – Quando algo de errado aconteceu com o computador de bordo ou quando a bateria se encontra com um baixo nível de carga este modo entra em funcionamento. A PCU é responsável pela detecção de anomalias no funcionamento do computador de bordo.
• Nominal Mode – Todo o satélite encontra-se no seu funcionamento normal sendo os diversos equipamentos controlados pelo computador de bordo.
No entanto, é impraticável e muito arriscado ter a bordo um equipamento que controle tudo e não seja controlado por nada. Por isso, PCU e OBC mantêm uma ligação permanente entre si de controlo de funcionamento utilizando um simples sistema de Ping?Pong!.
8.1.8. Câmara
Trata-se de uma adaptação de um equipamento que havia sido utilizado com sucesso numa missão anterior – AAU Cubesat. A câmara tem o seu próprio sistema de tratamento de imagem com possibilidade de criação de thumbnails que permitem um download rápido para a Terra afim de se realizar uma rápida avaliação da
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 30 -
qualidade da imagem. Caso seja positiva essa avaliação envia-se o telecomando correspondente para que se dê início ao download da imagem em tamanho completo.
Figura 17 – Câmara
As imagens serão posteriormente codificadas utilizando tecnologia JPEG para divulgação através do website do projecto [4].
8.1.9. Dispositivo de lançamento de Cubesats
Este sistema sofreu grande evolução desde o início deste projecto. Inicialmente planeava-se utilizar um sistema designado por P-POD – Poly Picosat Orbital Deployer. Trata-se de um sistema simples e eficaz que permite o lançamento de 3 pico-satélites (ou cubesats) desenvolvido pelas Universidades da Califórnia (Cal Poly) e Stanford.
Figura 18 – P-POD
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 31 -
No entanto, e por razões de adaptabilidade, quer dos cubesats ao P-POD, quer do P-POD à configuração/estrutura do satélite optou-se por um novo sistema designado por NLS-TPOD – Nanosattelite Launch System desenvolvido em conjunto pelas universidades de Toronto e Tóquio e já experimentado com sucesso. A principal diferença apresenta-se no número de cubesats que cada equipamento pode lançar: um P-POD é capaz de transportar e lançar 3 cubesats enquanto um T-POD transporta 1 ou 2 cubesats consoante a configuração ser Simples ou Dupla.
Tornou-se então necessário ter a bordo 3 T-PODs e de os colocar a bordo de tal forma que o lançamento dos cubesats não provoque uma desestabilização grave do satélite, nem seja possível – ou pelo menos seja de probabilidade reduzida – uma colisão dos cubesats entre si ou com outros satélites lançados pelo mesmo foguetão.
Figura 19 – T-POD
Para além destas equipas de trabalho, existem outras que conferem ao projecto a necessária orientação, coordenação e exposição perante o público, isto apesar de não contribuírem com hardware para a missão. São elas Administração, Engenharia de sistemas, Infra-estruturas, Operações, Relações Públicas e equipa de Direito.
8.1.10. Administração
A tarefa de coordenação e orientação durante todas as fases do projecto está sob a alçada de dois membros do Education Office, Neil Melville e Marie de Cock. São eles os principais dinamizadores do projecto, negociadores do contrato de lançamento, quer com a ESA, quer com a agência espacial russa. Têm a responsabilidade de
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 32 -
incentivar e ajudar as várias equipas e proporcionar condições de trabalho em grupo que permita ultrapassar todos os sobressaltos que vão surgindo no caminho.
Também são eles os principais responsáveis pela manutenção e correcto manuseamento da sala limpa no ESTEC para onde os diversos componentes do satélite serão enviados e onde irá ser todo ele construído e validado do ponto de vista mecânico e eléctrico.
8.1.11. Engenharia de Sistemas
Principal responsável pela articulação técnica entre os diversos equipamentos. Duas pessoas estão a cargo dessa tarefa – Neil Melville e Jörg Schäfer. As interfaces mecânica, eléctrica, de software e outras entre os diversos equipamentos têm de ser homogéneas sob pena de não ser possível estabelecer comunicação entre eles. O resultado deste esforço de coordenação pode ser observado em [5] e [6].
8.1.12. Infra-estrutura
Sob a alçada de uma pequena equipa na Universidade de Viena, está a manutenção dos sistemas de comunicação, servidores e sistemas de backup que permitem um constante fluxo de informação via FTP, Web, IRC e Newsgroup.
8.1.13. Operações
Esta equipa da Universidade de Wroclaw, Polónia está encarregue de estabelecer todos os protocolos de comunicação entre os vários sistemas bem como coordenar o envio de instruções a partir da Estação Terrestre para o satélite. Por esse motivo estão também responsáveis pelo desenvolvimento, manipulação, manutenção e criação de software para o Computador de Controlo da Missão localizado em cada uma das Estações Terrestres já mencionadas.
8.1.14. Relações Públicas
É a equipa que desenvolve toda a apresentação e publicitação do projecto junto do público em geral, sendo responsável também pela manutenção do Website [4] em coordenação com a equipa de Infra-estruturas.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 33 -
De mencionar também as 3 equipas que se encontram a desenvolver os Cubesats que irão ser lançados a partir do SSETI-Express e respectivas missões:
8.1.15. XI-V (lê-se SAI-5) [7]
Após o sucesso da missão XI-IV, o primeiro nano-satélite da Universidade de Tóquio, deu-se início ao processo de testes do modelo de backup – o XI-V – para uso no SSETI-Express. A sua missão consiste em testar e validar em órbita um sistema de BUS usando componentes considerados de classe comercial. A frequência de operações encontra-se numa banda de comunicação amadora, podendo ser captadas por qualquer pessoa no mundo com capacidade de recepção e acondicionamento do sinal.
8.1.16. NCUBE II [8]
Também um cubesat de segunda geração após o sucesso do primeiro modelo, este nano-satélite encontra-se em desenvolvimento pela universidade de Oslo, Noruega. O objectivo desta iniciativa consiste fundamentalmente em oferecer aos estudantes noruegueses a possibilidade de trabalharem em projectos relacionados com a Engenharia Aeroespacial. A sua missão consiste em demonstrar um sistema de vigilância de tráfego marítimo a partir de uma órbita terrestre baixa (LEO – Low Earth Orbit) usando o Sistema de identificação Marítima Automático recentemente introduzido pela Organização Internacional do Mar.
8.1.17. UWE-1 [9]
Trata-se do primeiro satélite desenvolvido pela universidade de Würzburg na Alemanha. A sua missão consiste em testar e validar o uso de protocolos de Internet num ambiente espacial caracterizado por uma propagação lenta do sinal devido às grandes distâncias percorridas e níveis de ruído muito superiores comparados com os normais meios terrestres de comunicação.
9. A Estrutura do SSETI Express – Fase B
Como é normal neste tipo de projectos, houve uma grande evolução e, por vezes, até modificação, no desenho da estrutura até chegar à fase de construção. Serão aqui descritos os passos mais

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 34 -
importantes seguidos desde o desenho inicial descrito no anexo B até ao ponto em que se está pronto a mandar fabricar as diferentes partes. No anexo B pode ser encontrado o primeiro documento com uma proposta de estrutura apresentado em Janeiro durante a primeira SSETI Express workshop. Nele podem-se verificar algumas diferenças em relação ao que vai ser apresentado nas páginas seguintes, mas na sua essência, todas essas elas foram justificadas, quer por um ponto de vista estrutural, financeiro ou simplesmente de falta de tempo para ser possível fazer melhor – deve-se dizer de início que este foi o dilema fundamental durante todo o projecto: como construir um satélite com poucos recursos financeiros, pouca experiência na matéria e num tão curto espaço de tempo...
Mas concentremo-nos agora na Estrutura do SSETI Express. Um dos problemas que mais celeuma levantou – e ainda hoje levanta – na concepção do ESEO é como garantir uma distribuição de cargas homogénea pelos 12 parafusos que ligam o satélite ao anel de separação (Figura 20).
Figura 20 – Posição dos 12 parafusos relativamente à estrutura principal
Este problema tem sido largamente debatido devido à configuração da estrutura em # não passar perto de todos os 12 parafusos, mas apenas de 8.
Para resolver este problema recorreu-se a uma solução simples de pôr em prática sem implicar grandes alterações quer na

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 35 -
estrutura, quer no restante equipamento a bordo, principalmente na tubagem afecta ao sistema de propulsão.
A solução adoptada no SSETI Express, sem provocar grandes constrangimentos foi a seguinte: se aumentarmos a rigidez da zona circular onde se situam os 12 parafusos, haverá tendência para uma melhor homogeneização da carga transferida em cada parafuso. Assim sendo, optou-se por aumentar a rigidez nesta área através de um anel de titânio.
Para dimensionar correctamente este anel foram realizadas várias análises de elementos finitos. Os resultados dessas análises demonstraram, não só perante o grupo de trabalho SSETI, mas também junto da própria agência espacial europeia, mais exactamente a Arianespace, que este sistema permitia homogeneizar a distribuição de cargas pelos 12 parafusos. Esta demonstração foi um acontecimento importante na história do SSETI-Express uma vez que caso não se tivesse provado por via numérica que era possível uniformizar a distribuição de carga pelos 12 parafusos, não ia ser de todo possível lançar este satélite com a actual configuração da estrutura pondo em risco a própria possibilidade da existência de lançamento.
De seguida descreve-se o modelo de elementos finitos desenvolvido para validar este método de uniformização de carga.
9.1. Modelação e geração da malha de elementos finitos
A análise numérica foi realizada de forma semelhante ao que já havia sido feito para o ESEO relativamente aos componentes estruturais comuns aos dois satélites. No entanto, havia também a necessidade de modelar os dois anéis que iriam realizar a interface entre satélite e foguetão – anel de Titânio e anel de separação em Alumínio. O primeiro encontra-se no interior do satélite enquanto o segundo se situa do lado exterior – Figura 21.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 36 -
Figura 21 – Vista dos dois anéis (a base encontra-se em transparente
para melhor visualização)
Sendo o objectivo desta análise mostrar qual a evolução das tensões ao longo do anel de Titânio, tanto ao longo da sua altura como ao longo do seu perímetro, torna-se necessário modelar os dois anéis com elementos tridimensionais. Assim, foram seleccionados elementos tetraédricos de 10 nós com 3 graus de liberdade – translação – em cada nó. Este tipo de elementos permite uma análise bastante rigorosa da evolução do estado de tensão ao longo da espessura e do perímetro do anel.
Figura 22 – Anel de Titânio (A base encontra-se a branco)

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 37 -
Figura 23 – Anel de Separação (A base encontra-se a branco)
9.2. Análises efectuadas
Em última instância, o objectivo era calcular qual a força de reacção a que cada um dos 12 parafusos iria estar sujeito quando o satélite se encontra sujeito às cargas de lançamento.
Foram realizadas apenas análises estáticas ao comportamento do satélite, para diferentes dimensões do anel e para diferentes direcções de carregamento do satélite. Para simular o carregamento foram consideradas apenas as cargas quasi-estáticas, tal como aparecem descritas em [3]. Essas cargas no modelo foram definidas como acelerações aplicadas nos centros de massa de cada equipamento.
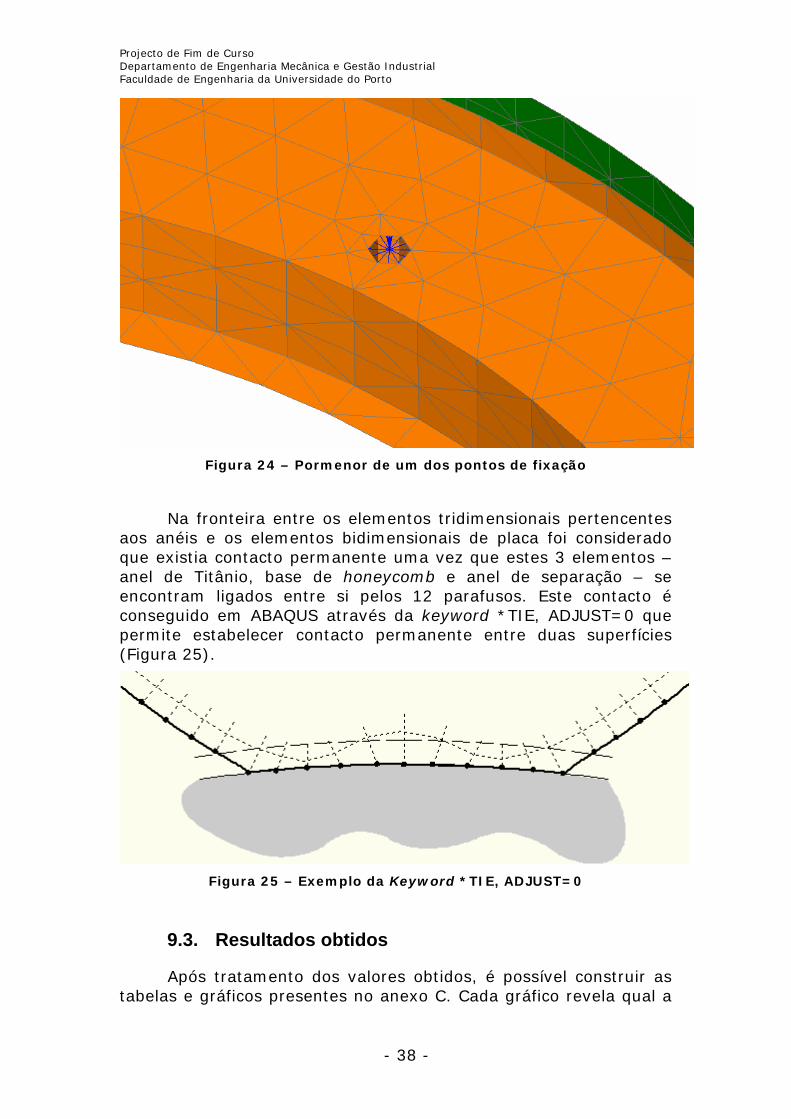
Ao longo das 12 posições onde devem ser alojados os 12 parafusos, foram colocados elementos rígidos estabelecendo uma ligação permanente nesses pontos (Figura 24). Ao nó master de cada um desses elementos rígidos encontra-se associada uma condição de fronteira de encastramento simulando a ligação satélite-foguetão.
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 38 -
Figura 24 – Pormenor de um dos pontos de fixação
Na fronteira entre os elementos tridimensionais pertencentes aos anéis e os elementos bidimensionais de placa foi considerado que existia contacto permanente uma vez que estes 3 elementos – anel de Titânio, base de honeycomb e anel de separação – se encontram ligados entre si pelos 12 parafusos. Este contacto é conseguido em ABAQUS através da keyword *TIE, ADJUST=0 que permite estabelecer contacto permanente entre duas superfícies (Figura 25).
Figura 25 – Exemplo da Keyword *TIE, ADJUST=0
9.3. Resultados obtidos
Após tratamento dos valores obtidos, é possível construir as tabelas e gráficos presentes no anexo C. Cada gráfico revela qual a

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 39 -
força de reacção em cada parafuso, para uma dada carga (aceleração) aplicada e para diferentes dimensões do anel de Titânio. Verifica-se, como seria de esperar, que à medida que as dimensões deste anel aumentam, principalmente a espessura, a uniformização das cargas se torna evidente.
Por razões de conservação da massa do satélite em valores baixos, não se procurou atingir uma uniformização completa das forças de reacção uma vez que isso implicava dimensões, e por consequência massa, que se podiam tornar incomportáveis para o projecto. Em vez disso, foi considerado que um valor de cerca de 30% de irregularidade na distribuição de cargas seria um valor aceitável para o prosseguimento do projecto. Assim sendo, as dimensões finais obtidas após este conjunto de análises foram estabelecidas em 15 mm de espessura, 130 mm de raio interior e 170 mm de raio exterior. A sua massa ronda os 2,5 kg.
De referir que este não é o sistema perfeito para uniformização de cargas. Outros métodos poderiam ter sido avaliados, outros sistemas poderiam ter sido considerados, até mesmo outras secções para este anel de Titânio poderiam ter sido estudadas com o intuito de conseguir uma peça capaz de melhor uniformização sem prejuízo para a massa final do satélite. Estes estudos mais aprofundados não puderam ser realizados uma vez mais devido ao curto espaço de tempo disponível para apresentar uma solução perante a Arianespace.
10. O estudo de configuração do satélite
Também sob a responsabilidade do autor estava o estudo de configuração do satélite. Este estudo reveste-se de especial importância para os diversos equipamentos, sobretudo aqueles que apresentam a necessidade de estabelecer contacto – eléctrico ou mecânico – com outros equipamentos. Também de vital importância é o controlo sobre a inércia do satélite. É imposto pela entidade lançadora um limite em relação à posição do centro de massa do satélite e à matriz de inércia. As dimensões globais do satélite também devem estar dentro de limites pré-acordados com a entidade lançadora. Também a equipa de ACDS necessita de ter informação constantemente actualizada em relação à inércia do satélite durante o desenvolvimento do projecto para correctamente dimensionar o seu sistema de controlo.
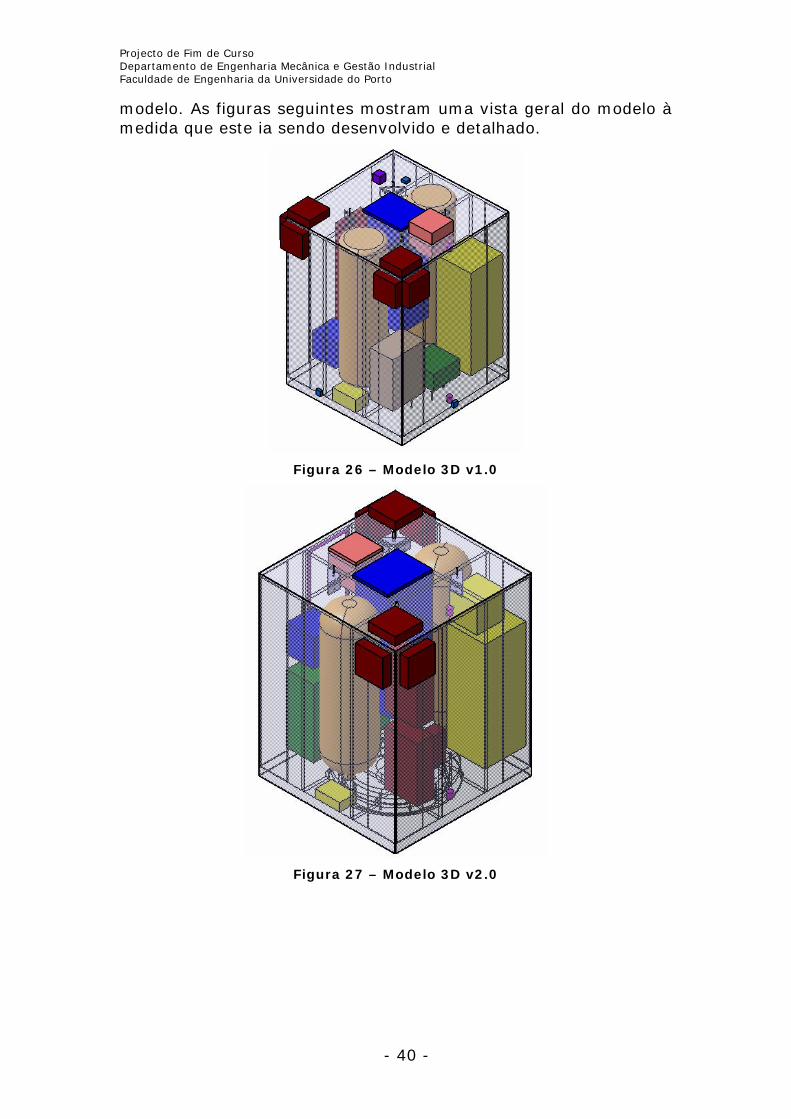
Com a ajuda de software de CAD/CAM foram desenvolvidos modelos tridimensionais da estrutura e dos vários equipamentos a bordo com o intuito de responder a todas estas questões. Com a evolução do projecto foram realizadas várias alterações a este
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
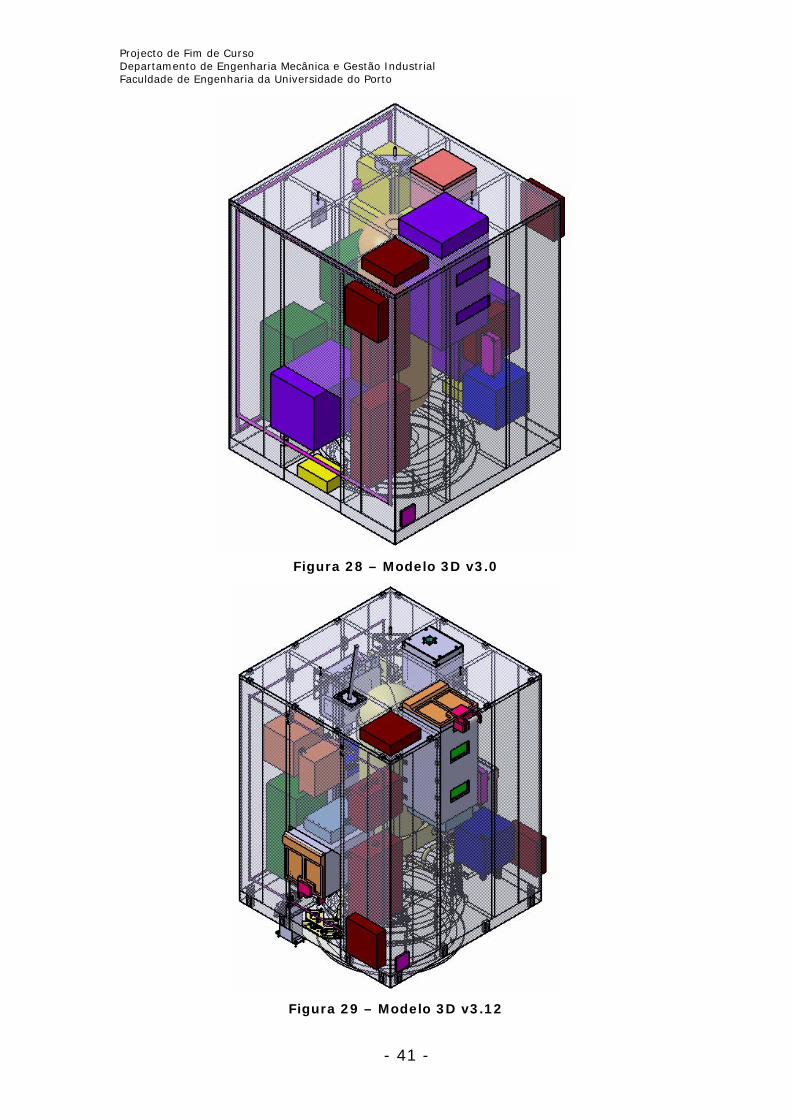
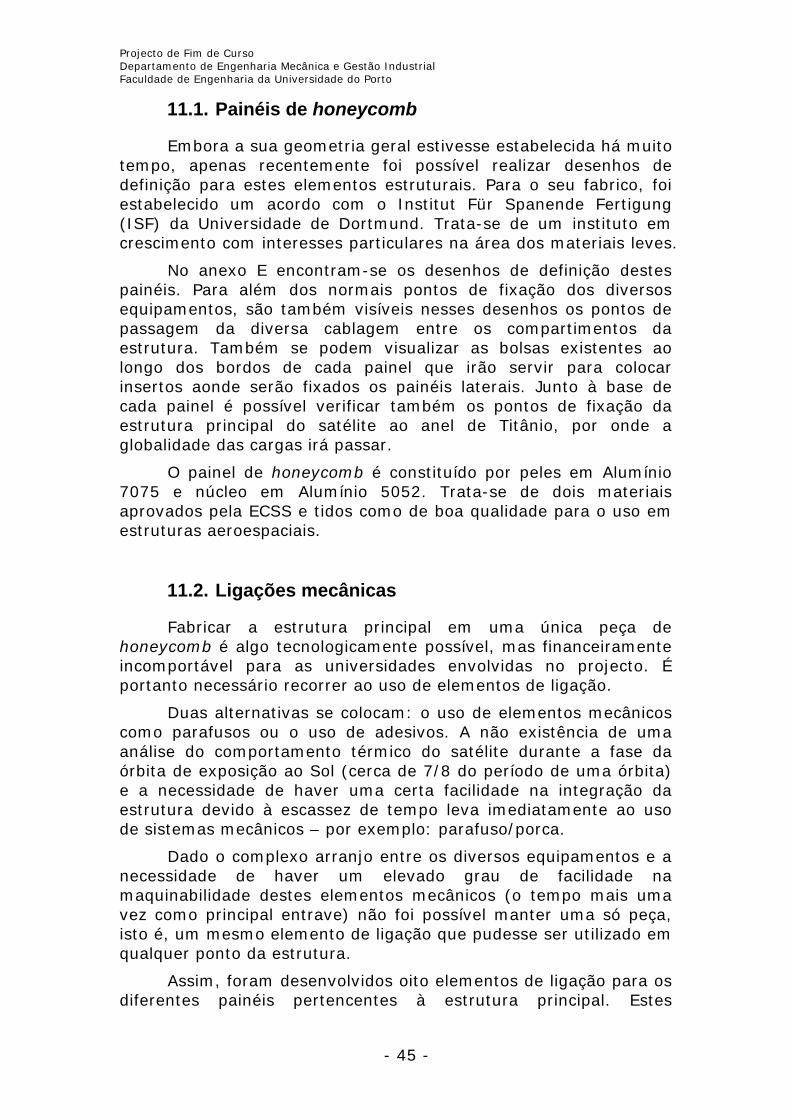
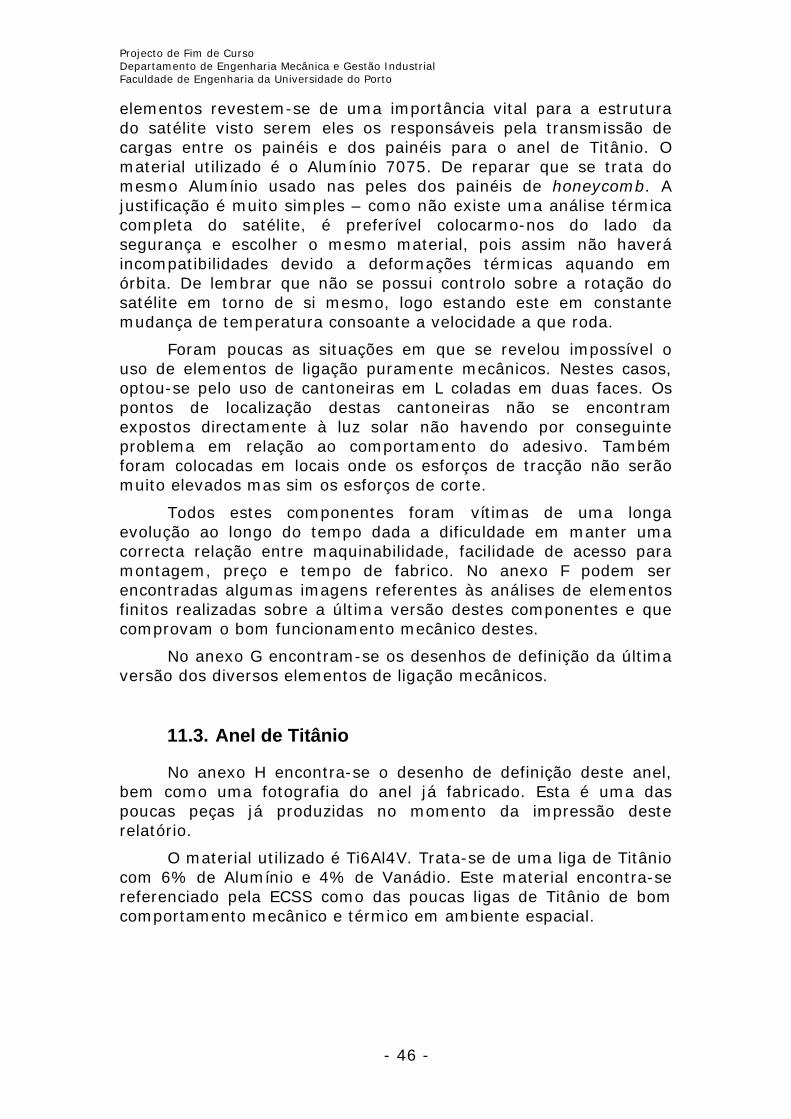
- 40 -
modelo. As figuras seguintes mostram uma vista geral do modelo à medida que este ia sendo desenvolvido e detalhado.
Figura 26 – Modelo 3D v1.0
Figura 27 – Modelo 3D v2.0
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 41 -
Figura 28 – Modelo 3D v3.0
Figura 29 – Modelo 3D v3.12

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 42 -
Figura 30 – Modelo 3D v3.14
Figura 31 – Modelo 3D v3.2.1

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 43 -
Figura 32 – Modelo 3D v3.2.2 – Versão de lançamento
Figura 33 – Modelo 3D v3.2.2 – Versão de Voo

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 44 -
Estes modelos foram utilizados durante a negociação do lançamento, para produção de documentação técnica relativa ao funcionamento do satélite, fornecem informação relativamente às interfaces mecânicas entre os diversos equipamentos e a estrutura, possibilitam o cálculo bastante eficiente da posição do centro de gravidade e matriz de inércia e servem como cartão de visita a quem navega até ao website do projecto [4]. Os resultados do cálculo do Centro de Gravidade e Matriz de Inércia para três fases distintas da missão são apresentados no anexo D.
As Figura 31 eFigura 33 representam a última versão do modelo. Como é observável, houve a necessidade de realizar dois modelos uma vez que a configuração em lançamento é bastante diferente da configuração de voo. A diferença está no lançamento dos cubesats e na alteração que este acontecimento provoca na posição do centro de massa e matriz de inércia.
Não esquecer que para a entidade lançadora apenas importa a inércia quando o satélite é lançado, enquanto que para a equipa de ACDS apenas importa a inércia durante o voo. Daí a necessidade de ter dois modelos actualizados, cada um para diferentes momentos da missão – lançamento e voo.
No anexo D é possível encontrar um conjunto de imagens tiradas a cada conjunto de três compartimentos segundo cada um dos três eixos globais do satélite. A figura pequena na parte superior de cada página diz qual o conjunto de compartimentos apresentados na figura da mesma página. Também no anexo D se podem encontrar resumos dos relatórios de inércia do satélite para as duas configurações.
11. Fase C – A definição detalhada
Esta provou-se ser a fase mais complicada de todo o projecto. Devido à distribuição de tarefas pelos quatro cantos da Europa e à dependência directa da Estrutura e Configuração do trabalho que ia sendo desenvolvido nos outros subsistemas, nem sempre foi pacífico o dimensionamento dos componentes estruturais.
Houve necessidade de alterar por várias vezes os diferentes elementos de ligação de forma a salvaguardar a integridade estrutural do satélite – apenas a título de exemplo, alguns elementos atingiram a 4ª versão no seu desenvolvimento. Neste relatório será apresentada apenas a última versão de cada peça.
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 45 -
11.1. Painéis de honeycomb
Embora a sua geometria geral estivesse estabelecida há muito tempo, apenas recentemente foi possível realizar desenhos de definição para estes elementos estruturais. Para o seu fabrico, foi estabelecido um acordo com o Institut Für Spanende Fertigung (ISF) da Universidade de Dortmund. Trata-se de um instituto em crescimento com interesses particulares na área dos materiais leves.
No anexo E encontram-se os desenhos de definição destes painéis. Para além dos normais pontos de fixação dos diversos equipamentos, são também visíveis nesses desenhos os pontos de passagem da diversa cablagem entre os compartimentos da estrutura. Também se podem visualizar as bolsas existentes ao longo dos bordos de cada painel que irão servir para colocar insertos aonde serão fixados os painéis laterais. Junto à base de cada painel é possível verificar também os pontos de fixação da estrutura principal do satélite ao anel de Titânio, por onde a globalidade das cargas irá passar.
O painel de honeycomb é constituído por peles em Alumínio 7075 e núcleo em Alumínio 5052. Trata-se de dois materiais aprovados pela ECSS e tidos como de boa qualidade para o uso em estruturas aeroespaciais.
11.2. Ligações mecânicas
Fabricar a estrutura principal em uma única peça de honeycomb é algo tecnologicamente possível, mas financeiramente incomportável para as universidades envolvidas no projecto. É portanto necessário recorrer ao uso de elementos de ligação.
Duas alternativas se colocam: o uso de elementos mecânicos como parafusos ou o uso de adesivos. A não existência de uma análise do comportamento térmico do satélite durante a fase da órbita de exposição ao Sol (cerca de 7/8 do período de uma órbita) e a necessidade de haver uma certa facilidade na integração da estrutura devido à escassez de tempo leva imediatamente ao uso de sistemas mecânicos – por exemplo: parafuso/porca.
Dado o complexo arranjo entre os diversos equipamentos e a necessidade de haver um elevado grau de facilidade na maquinabilidade destes elementos mecânicos (o tempo mais uma vez como principal entrave) não foi possível manter uma só peça, isto é, um mesmo elemento de ligação que pudesse ser utilizado em qualquer ponto da estrutura.
Assim, foram desenvolvidos oito elementos de ligação para os diferentes painéis pertencentes à estrutura principal. Estes
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 46 -
elementos revestem-se de uma importância vital para a estrutura do satélite visto serem eles os responsáveis pela transmissão de cargas entre os painéis e dos painéis para o anel de Titânio. O material utilizado é o Alumínio 7075. De reparar que se trata do mesmo Alumínio usado nas peles dos painéis de honeycomb. A justificação é muito simples – como não existe uma análise térmica completa do satélite, é preferível colocarmo-nos do lado da segurança e escolher o mesmo material, pois assim não haverá incompatibilidades devido a deformações térmicas aquando em órbita. De lembrar que não se possui controlo sobre a rotação do satélite em torno de si mesmo, logo estando este em constante mudança de temperatura consoante a velocidade a que roda.
Foram poucas as situações em que se revelou impossível o uso de elementos de ligação puramente mecânicos. Nestes casos, optou-se pelo uso de cantoneiras em L coladas em duas faces. Os pontos de localização destas cantoneiras não se encontram expostos directamente à luz solar não havendo por conseguinte problema em relação ao comportamento do adesivo. Também foram colocadas em locais onde os esforços de tracção não serão muito elevados mas sim os esforços de corte.
Todos estes componentes foram vítimas de uma longa evolução ao longo do tempo dada a dificuldade em manter uma correcta relação entre maquinabilidade, facilidade de acesso para montagem, preço e tempo de fabrico. No anexo F podem ser encontradas algumas imagens referentes às análises de elementos finitos realizadas sobre a última versão destes componentes e que comprovam o bom funcionamento mecânico destes.
No anexo G encontram-se os desenhos de definição da última versão dos diversos elementos de ligação mecânicos.
11.3. Anel de Titânio
No anexo H encontra-se o desenho de definição deste anel, bem como uma fotografia do anel já fabricado. Esta é uma das poucas peças já produzidas no momento da impressão deste relatório.
O material utilizado é Ti6Al4V. Trata-se de uma liga de Titânio com 6% de Alumínio e 4% de Vanádio. Este material encontra-se referenciado pela ECSS como das poucas ligas de Titânio de bom comportamento mecânico e térmico em ambiente espacial.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 47 -
11.4. Painéis exteriores
No anexo I podem ser encontrados os desenhos de definição destes elementos estruturais. Trata-se de simples chapa de alumínio furada e cortada de molde a possibilitar o acesso ao interior do satélite e determinados pontos durante a integração, validação e preparação para lançamento.
A estes painéis é conferida alguma estabilidade adicional através de cantoneiras a toda a altura do satélite. Os desenhos de definição destes elementos também se apresentam no anexo I.
No entanto, os painéis exteriores deverão ser os últimos elementos a ser colocados no processo de integração do satélite. Para tal, são utilizadas porcas especiais que não necessitam de acesso dos dois lados do ponto de montagem. A Figura 34 revela como funcionam estas porcas.
Figura 34 – Porcas a serem utilizadas para fixação dos painéis exteriores
11.5. Outros componentes mecânicos
Durante a execução do projecto foi necessário por vezes auxiliar outras equipas no desenvolvimento das suas housings para o seu equipamento. Várias outras peças foram assim desenvolvidas para realizar funções de montagem ou simples manutenção, transporte, etc. Os desenhos de definição destes componentes encontram-se no anexo J.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 48 -
11.6. Insertos
Na globalidade do projecto existem 3 tipos diferentes de insertos: aqueles que foram seleccionados a partir de uma determinada norma regulamentadora das suas dimensões e uso, aqueles que não têm nenhuma semelhança geométrica com os primeiros, mas realizam basicamente a mesma função e aqueles cuja existência se deve à necessidade de haver um equipamento fixo a um lado de um painel de honeycomb, mas com uma ligação, por exemplo, eléctrica, ao lado oposto do mesmo painel. Nesta última situação encontram-se dois equipamentos: a antena UHF e o sistema de activação eléctrica.
Para estes dois últimos equipamentos foram concebidos 2 insertos capazes de realizar a função acima descrita (Figura 35 e Figura 36).
Figura 35 – Inserto para sistema de activação eléctrica
Figura 36 – Inserto para Antena UHF
No anexo K podem ser encontrados os desenhos de definição destes dois insertos.

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 49 -
Os primeiros insertos acima referidos são os que se enquadram dentro da categoria de insertos abrangidos por normas de fabrico. O livro [10] estabelece as regras de dimensionamento destes insertos, processos de fabrico tanto dos insertos como do painel onde o inserto vai ser alojado e a aplicação dos insertos nos painéis por via de adesivo.
No entanto, não foi possível adquirir estes insertos junto dos fabricantes visto só existir em stock insertos com dimensões segundo o sistema métrico imperial – o que trazia óbvias complicações mais tarde durante a integração – e o tempo de fabrico de novos insertos segundo o sistema métrico era simplesmente incomportável para o projecto. Foi decidido então fabricar nós mesmos estes insertos, tendo como base as normas NAS 1834 e NAS 1836. É certo que este não é o melhor método já que os insertos deveriam ser peças cuidadosamente fabricadas segundo regras muito rígidas. No entanto, também é verdade que num sistema de inserto (constituído pelo próprio inserto, o painel e o adesivo) é o adesivo o elo mais fraco no comportamento mecânico do sistema. Será sobre o adesivo e a sua injecção durante a integração que devem recair as principais preocupações.
Para além destes, foi também necessário fabricar insertos que possibilitassem a montagem dos painéis laterais nos bordos da base, topo e nos painéis verticais, como se pode ver nas Figura 37 e Figura 38:
Figura 37 – Inserto Base-Lateral

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 50 -
Figura 38 – Inserto Topo-Lateral
Os desenhos de definição destes insertos encontram-se no anexo K.
12. Fase D – O fabrico dos componentes e entrega para integração e validação
A maior parte dos componentes estruturais encontram-se já em produção. Alguns ainda não chegaram a essa fase devido a modificações de última hora dada a inclusão de alguns novos equipamentos e necessidade de alterar a sequência de integração do satélite.
Já foi feita referência ao ISF, onde foi maquinado o anel de Titânio e estão agora a ser trabalhados os painéis de honeycomb. A maioria dos insertos foi maquinada pela empresa portuguesa Tecnogial. Os restantes componentes estruturais estão a ser produzidos pela empresa holandesa Machinefabriek West End BV [11].
Todos os componentes neste momento em produção deverão chegar ao ESTEC no final do mês de Setembro. Nesta altura proceder--se-á à colagem dos insertos nos painéis de honeycomb.
Existirão duas cópias exactas da estrutura. Uma será enviada para a Universidade de Estugarda onde o sistema de propulsão está a ser concebido. Aí, este sistema será integrado conjuntamente com a Estrutura e o tanque será pressurizado. Posteriormente será realizado um primeiro teste de vibrações apenas com o tanque pressurizado e o restante equipamento de propulsão montados na

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 51 -
estrutura. Caso os resultados sejam positivos, será nesta cópia da estrutura que irão ser montados todos os restantes equipamentos e será este o Flight Model.
No anexo L pode ser encontrado o documento com instruções detalhadas para a correcta integração da estrutura e dos diversos equipamentos desde a simples colagem dos insertos até à ordem exacta pela qual os subsistemas devem ser integrados.
A outra cópia será utilizada como STM. Será com ela que se irá criar um modelo estrutural em tudo semelhante ao modelo final – centro de gravidade, matriz de inércia, massa total, etc. Esta cópia será enviada em Novembro para Plesetsk onde irá ser realizado um fit--check conjuntamente com todos os outros satélites que serão lançados no mesmo voo. As suas dimensões, massa e inércia serão verificadas pela entidade lançadora. No final, todos os STMs dos satélites serão colocados na plataforma de lançamento e será realizado um simulacro de lançamento, sendo a plataforma sujeita a testes de vibração segundo os 3 eixos.
13. Fase E – Preparação para o lançamento
Assim que a cópia da estrutura utilizada no teste de vibrações do sistema de Propulsão regressar ao ESTEC, os restantes equipamentos serão montados nesta e será assim concebido o Flight Model.
O modelo final será enviado para o centro espacial de Plesetsk durante o período L-8 semanas e L-4 semanas (em que L significa dia do lançamento). Uma vez em Plesetsk, o satélite poderá ser acedido para abastecimento de tanque e últimos testes de funcionamento do equipamento até L-5 dias. Após esse período apenas pessoal autorizado do centro poderá aproximar-se do satélite. Será nesta altura que o SSETI-Express e os restantes 4 satélites irão ser colocados na plataforma de lançamento que por sua vez irá para o topo do foguetão. O foguetão pertence à classe COSMOS-3M. Trata-se de um foguetão cuja origem está na guerra-fria e no arsenal balístico da União Soviética. Após a Perestroika, e dada a incapacidade financeira da Rússia de manter esse arsenal, estes foguetões foram convertidos em equipamento civil ao dispor daqueles que desejam colocar em órbitas baixas os seus satélites, a preços bastante acessíveis.
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 52 -
14. Perspectivas Futuras para a Iniciativa SSETI e para a FEUP
O lançamento do SSETI Express abre portas a todo um conjunto de alunos de toda a Europa que sempre desejaram trabalhar na área da Engenharia Aeroespacial. O ESEO será o segundo satélite inteiramente elaborado por alunos europeus a ser colocado em órbita. Mas outras missões estão já em fase de estudo, tais como missões à Lua, quer em órbitas lunares quer mesmo em alunagens.
Uma segunda vaga onde o conhecimento agora adquirido pode ser aplicado é em satélites de pequenas dimensões como é o caso de cubesats. Enquanto os micro-satélites se apresentam como grandes investimentos financeiros para grupos pequenos como universidades isoladas, os cubesats oferecem uma alternativa bastante acessível para o lançamento de pequenas experiências.
Várias foram já as universidades pelo mundo fora que apostaram nesta iniciativa com elevado sucesso. Universidade de Tóquio no Japão, Universidade de Aalborg na Dinamarca, Universidade de Oslo na Noruega, Universidade de Otava no Canadá, Universidade de Surrey no Reino Unido, e a impulsionadora deste projecto, a Universidade de Stanford nos Estados Unidos são apenas alguns dos exemplos de Universidades que já aderiram a esta iniciativa, oferecendo aos seus alunos a possibilidade de trabalhar num projecto aeroespacial, real e capaz de abrir inúmeras portas nas mais variadas áreas do conhecimento tecnológico.
Em relação ao SSETI e à participação da FEUP neste projecto, há boas perspectivas à continuação do bom trabalho que tem vindo a ser realizado. Com a conclusão do SSETI Express existe agora uma base de trabalho que pode ser aproveitada para o ESEO. A experiência acumulada, os conhecimentos reunidos, os processos desenvolvidos podem e devem servir como rampa de lançamento para o ESEO e outros projectos que se venham a iniciar na área da engenharia aeroespacial.
A abertura do corpo docente para este tipo de iniciativas extracurriculares é hoje maior e o interesse dos alunos por projectos reais, inovadores e com os quais possam desenvolver-se enquanto futuros profissionais tem vindo a aumentar. As condições estão hoje reunidas para lançar o sonho...

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 53 -
15. Bibliografia
[1]. ESEO_B_CONF_031028_01_DesignJustification.doc
[2]. ESEO_B_STRU+P_020220_honeyc.doc – Numerical Simulation of Sandwich Composite Plates
[3]. Ariane 5 Structure for Auxiliary Payload User’s Manual
[4]. www.sseti.net
[5]. FBD – Functional Block Diagram – Ex-Sys-FBD-C-Draft_9-040818-1.pdf
[6]. MDD – Mission and Data Description – Ex-Sys-MDD-Draft_2-040818-3.pdf
[7]. www.space.t.u-tokyo.ac.jp/cubesat/index-e.html
[8]. http://128.39.102.180/index.html
[9]. http://132.187.101.163/index
[10]. PSS_03_1202, Issue1 (June_1987) – Insert Design Handbook
[11]. www.westendBV.nl
[12]. ECSS Space Standards
[13]. Hexcel Composites Product Data Sheets
[14]. ESA PSS-03-203 Issue 1 – Structural Materials Handbook
[15]. ESA PSS-03-208 – Guidelines for Threaded Fasteners
[16]. ESA PSS-03-204 – Structural Acoustics Design Manual
[17]. www.loctiteaero.com
[18]. www.sherex.com
[19]. ESA PSS-01-202 Issue 1 June 1983 – Preservation, storage, handling and transportation of ESA spacecraft hardware
[20]. Fortescue, Peter and Stark, John – Spacecraft Systems Engineering, Second Edition

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 54 -
ANEXO A – Descrição do Último Modelo de Elementos Finitos para o Micro-satélite
ESEO

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
Prepared by: António Melro Date: November 2003 Checked by: Date: Approved by: Date: SSETI, ESA-ESTEC, ADM-RE P.O. Box 299, 2200 AG Noordwijk, The Netherlands Tel. (31) 71 565 4603 - Fax. (31) 71 565 5590 E-mail: [email protected]
EEuurrooppeeaann SSttuuddeenntt EEaarrtthh OOrrbbiitteerr ((EESSEEOO))
ESEO-B-Stru+P_Sdmm06-FEModel description
Ref.: ESEO_B_STRU+P_031125_2_sdmm06.doc
Issue: 2
Date: 25/11/2003
-

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 1 -
Document Change Record Issue Date Changes 1 19/10/2003 First Draft 2 25/11/2003 Harmonic Response added
Actualization of some mass values on table 1

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 2 -
Index Document Change Record.........................................................................................................................1
Index............................................................................................................................................................2
1. Scope and summary..........................................................................................................................3
2. References..........................................................................................................................................4 Applicable documents..............................................................................................................................4 Reference Documents ..............................................................................................................................4
3. Model Overview ................................................................................................................................5 Mass budget and CoG´s...........................................................................................................................7 Material Data ..........................................................................................................................................8 Analysis code and pre/post processors....................................................................................................8 ABAQUS parameters ...............................................................................................................................9 Units ........................................................................................................................................................9 Coordinate systems..................................................................................................................................9
4. Model description ...........................................................................................................................10 Numbering and model size.....................................................................................................................10 S/C interface ..........................................................................................................................................11 Geometrical and material properties ....................................................................................................12 Description of some submodels .............................................................................................................13
Tank support .....................................................................................................................................13
5. FEM model checks..........................................................................................................................15 Pre-run checks.......................................................................................................................................15 Normal mode analysis ...........................................................................................................................15 Frequency response results ...................................................................................................................17
6. Appendix 1 - Modal analysis results’ summary ...........................................................................18
7. Appendix 2 - Frequency response results .....................................................................................22

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 3 -
1. Scope and summary This report describes the ABAQUS FE model of the ESEO spacecraft for the Ariane 5 launch vehicle. The model represents the configuration status from 10th October 2003 (see CATIA_10.zip file on the SSETI FTP folder). These are the latest configuration files provided by the design team in Bilbao. The purpose of this analysis was to show that the current design has enough stiffness and complies with the minimum fundamental frequencies requirements specified in [AD1]. It is also intended to demonstrate that the new # configuration for the central structure provides a better way to fulfil those requirements. We also wish to retrieve information on how the structure and the several sub-systems will behave when the interface of the satellite with the ASAP is subjected to a harmonic solicitation. The total mass of ESEO is (as of now) 85.23 kg. This is just part of the entire satellite mass. At least one subsystem was not accounted for (solar panels), and the mass relatively to non-structural elements like cables and other elements was also not take into consideration. Following analysis were performed with ABAQUS 6.3-1
• Normal modes analysis of S/C • Steady State Dynamics Analysis – Base motion on degree of freedom 1 (x-axis) • Steady State Dynamics Analysis – Base motion on degree of freedom 2 (y-axis) • Steady State Dynamics Analysis – Base motion on degree of freedom 3 (z-axis)
The main results from the modal analysis are: • First normal modes are the lateral ones at 52.4 Hz and 52.8 Hz, • Longitudinal mode is at 196.33 Hz.
Both these results comply with specifications on [AD1].
Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 4 -
2. References
Applicable documents
[AD1] - ASAP5 User’s Manual [AD2] - SSETI Teams, ESEO, Phase A Study Report, May 2001 [AD3] - ESA, Structures and Mechanisms division, ESA-PSS-03-203-Structural Materials Handbook, April 1995 [AD4] - Hexcel Composites Co., HexWeb CR III, Corrosion Specific Grade Aluminum Honeycomb [AD5] - STRU-P, sdmm02-Sandwich composite materials trade study, Pedro M. Portela [AD6] - STRU-P, sdmm03-FE extraction of satellite’s eigenmodes of vibration, Pedro Portela [AD7] - STRU-P, sdmm04-Modal & Dynamic Analysis, Pedro M. Portela, João Soares [AD8] - STRU-P, sdmm05-FEModel description, Pedro M. Portela [AD9] - ESEO_B_CONF_031028_01_DesignJustification [AD10] - ESEO_C_PROP_031031_Budgets.xls
Reference Documents [RF1] - Abaqus/Standard User’s Manual Vol. I, II, III [RF2] - Abaqus Theory Manual [RF3] - Abaqus/Keywords Manual

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 5 -
3. Model Overview The FE model as described below reflects the preliminary status of the configuration (October 2003).
S
Figure 1: 3D view of the CATIA model as of 10/2003
Since some results were shared during the elaboration of this report, the configurdrawing suffered a small change not represented on the above picture: the Startrawas translated from its position, being now next to the central structure. For information on this please refer to [AD9].
tartracker
ation cker
more

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 6 -
For the Femap/ABAQUS model a combination of bar-, shell-, rigid-, contact- and mass elements were used to represent the various components of the structure. The units and single masses situated on the ESEO interior panels and upper and lower deck panels are modeled with point masses and connected to their I/F points through rigid (Cinematic link) elements. Other components as MLI, harness, etc. were NOT considered.
Figure 2: Isometric view of the FE model
Sandwich panels were modeled using laminate type elements, while the corner ‘L’ profiles were modeled with beam elements. The side panels are simple plate elements. In dark blue are visible the rigid elements in an attempt to simulate the joints between the structural elements. The mass elements simulating the several subsystems are represented in green. Contact elements are not visible on the above picture. These were used to simulate contact between the different panels.
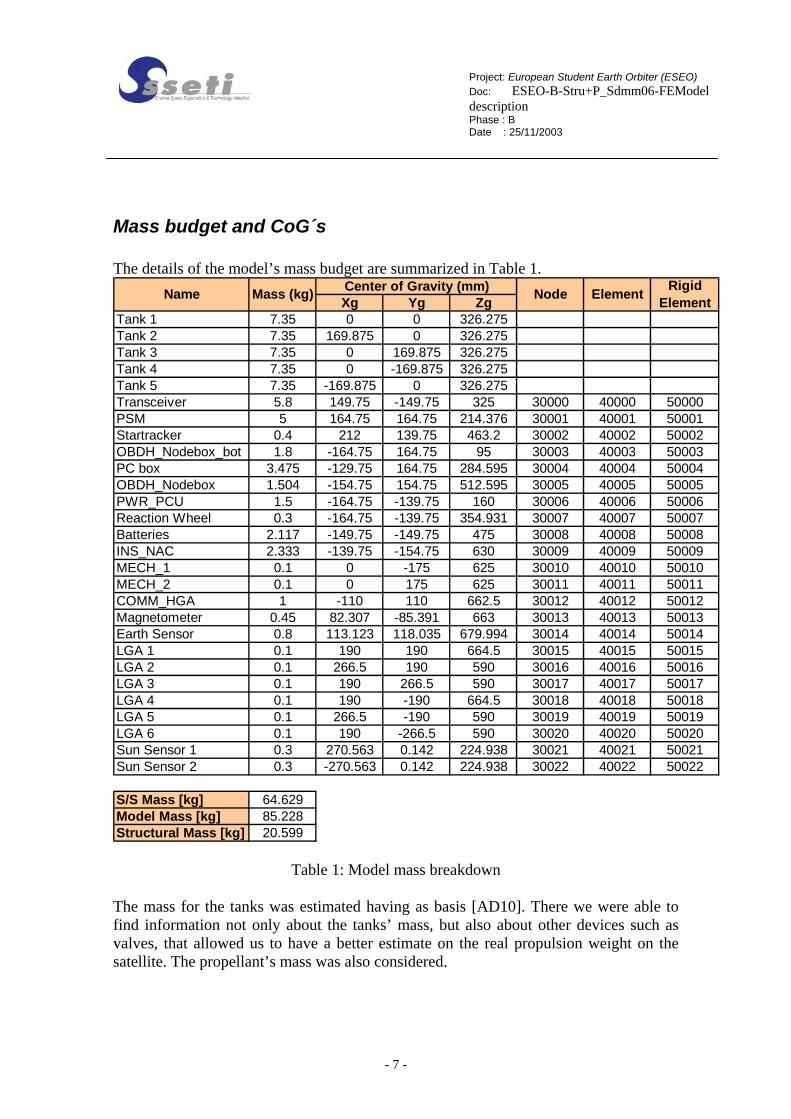
Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 7 -
Mass budget and CoG´s The details of the model’s mass budget are summarized in Table 1.
Xg Yg ZgTank 1 7.35 0 0 326.275Tank 2 7.35 169.875 0 326.275Tank 3 7.35 0 169.875 326.275Tank 4 7.35 0 -169.875 326.275Tank 5 7.35 -169.875 0 326.275Transceiver 5.8 149.75 -149.75 325 30000 40000 50000PSM 5 164.75 164.75 214.376 30001 40001 50001Startracker 0.4 212 139.75 463.2 30002 40002 50002OBDH_Nodebox_bot 1.8 -164.75 164.75 95 30003 40003 50003PC box 3.475 -129.75 164.75 284.595 30004 40004 50004OBDH_Nodebox 1.504 -154.75 154.75 512.595 30005 40005 50005PWR_PCU 1.5 -164.75 -139.75 160 30006 40006 50006Reaction Wheel 0.3 -164.75 -139.75 354.931 30007 40007 50007Batteries 2.117 -149.75 -149.75 475 30008 40008 50008INS_NAC 2.333 -139.75 -154.75 630 30009 40009 50009MECH_1 0.1 0 -175 625 30010 40010 50010MECH_2 0.1 0 175 625 30011 40011 50011COMM_HGA 1 -110 110 662.5 30012 40012 50012Magnetometer 0.45 82.307 -85.391 663 30013 40013 50013Earth Sensor 0.8 113.123 118.035 679.994 30014 40014 50014LGA 1 0.1 190 190 664.5 30015 40015 50015LGA 2 0.1 266.5 190 590 30016 40016 50016LGA 3 0.1 190 266.5 590 30017 40017 50017LGA 4 0.1 190 -190 664.5 30018 40018 50018LGA 5 0.1 266.5 -190 590 30019 40019 50019LGA 6 0.1 190 -266.5 590 30020 40020 50020Sun Sensor 1 0.3 270.563 0.142 224.938 30021 40021 50021Sun Sensor 2 0.3 -270.563 0.142 224.938 30022 40022 50022
S/S Mass [kg] 64.629Model Mass [kg] 85.228Structural Mass [kg] 20.599
Rigid Element
Center of Gravity (mm)Mass (kg)Name Node Element
Table 1: Model mass breakdown
The mass for the tanks was estimated having as basis [AD10]. There we were able to find information not only about the tanks’ mass, but also about other devices such as valves, that allowed us to have a better estimate on the real propulsion weight on the satellite. The propellant’s mass was also considered.

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 8 -
The analysis code calculated the following for the model’s CoG and inertia matrix
CoG: [mm]X-axis 0.091676Y-axis 4.145617Z-axis 329.9224
4.523065 7.47E-03 9.86E-027.47E-03 4.542565 0.19818439.86E-02 0.1981843 3.733913
Inertia Matrix: [m2 kg]
Material Data The material stiffness properties used for the analysis were derived from materials database (www.matls.com). A damping factor of 2% was considered for the steady state analysis. Material 1 - al_skins Type ISOTROPIC Density = 2780. Damping = 0.02 Ref Temp 0. STIFFNESS E= 72400000000. G= 28000000000. Nu =0.33 Material 2 - al_honeycomb Type 2D ORTHOTROPIC Density =37. Damping =0.02 Ref Temp 0. STIFFNESS E1 =1000. G12 =100. Nu12= 0.3 E2= 1000. G1z =220000000. G2z =112000000.
Analysis code and pre/post processors For all analysis, ABAQUS/ Standard Version 6.3-1 was used. Femap V8 was used for pre-processing. Post-processing was done in ABAQUS Viewer.

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 9 -
ABAQUS parameters The mesh, once defined was exported to an ABAQUS input file. Following parameters were then added to the bottom of the file to produce the desired results:
The first 50 eigenfrequencies greater then 1 were extracted. This prevents the occurrence of any eventual rigid body modes. (unconnected point mass)
Figure 3: ABAQUS analysis parameters for eigenmodes analysis (ST(STEPs 2, 3 and 4)
Units The analysis was prepared with a consistent set of SI unmeters, material properties are in Pascal.
Coordinate systems The coordinate system is the one defined in the System Engdocument: center in the lower deck panel.
The model was fixed at the interface point to reflect conditions in the ASAP User’sManual
Sine vibration, frequency range0 Hz to 600 Hz (includes most important eigenfrequencies). Forcing function is a base motion in a specific degree of freedom (DOF) of type acceleration and with no variation with frequency (amplitude defined above is a unit function). Three STEPs were defined, one in each DOF.EP 1) and harmonic response
its. Geometric units are in
ineering Management Plan

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 10 -
4. Model description The main changes included in this new model are:
• The central structure has suffered significant changes: the central shear panels in X configuration were replaced by honeycomb panels in a # configuration.
• Only the solar panels were not simulated on this new model since on the CATIA file previously mentioned they were not included.
• The tanks were modelled with beam type elements due to their interaction with the central and side panels. It was considered that this interaction only occurred on the top and base of each tank.
• The connection between the different structure elements was changed from ‘shared nodes’ to a combination of rigid and contact elements. The first were used to simulate the ‘L’ shape joints between structural elements and the last to prevent penetration between those same panels.
• The Inertia matrix of the subsystems was considered while defining the properties to be used on the mass elements.
• The different thicknesses of the side panels were also taken into consideration.
• Since at this time there isn’t a complete agreement on the size of the holes for the subsystems I/F’s, we decided not to include them.
Numbering and model size The model was layered according to the next table.
Table 2: Model's layers

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 11 -
The model has 8530 nodes and 7918 elements.
S/C interface The interface with the launcher was simulated by attaching the interface nodes on the base to a fixed point. This was done through rigid elements.

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 12 -
Geometrical and material properties The following tables define the property values for the main structural elements like the lower and upper deck panels, the lateral panels and the central panels.

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 13 -
Description of some submodels
Tank support Because of the mechanical interface between the panels, both lateral and central, and the five tanks, the last were modelled using beam elements. The inside tank was also modelled with a beam element. The properties used for the beam elements were adjusted so that their mass and stiffness were representative of those of the propulsion sub-system. Data for the geometry was gathered from documentation provided by the propulsion team [AD10].
Interface with lateral panels
Figure 4: Detail of the tank support and attachment system

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 14 -
Figure 5: Tanks modelled with beam elements (in yellow) and connected with rigid elements (in
blue) to the central and lateral panels
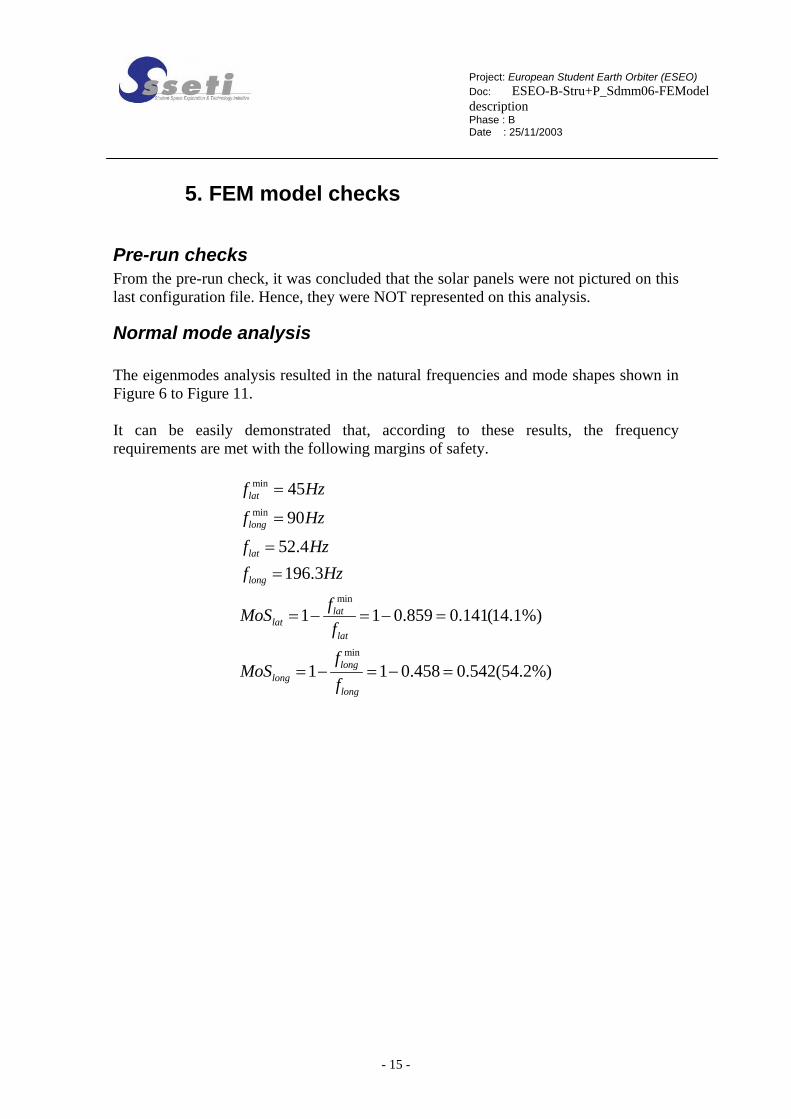
Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 15 -
5. FEM model checks
Pre-run checks From the pre-run check, it was concluded that the solar panels were not pictured on this last configuration file. Hence, they were NOT represented on this analysis.
Normal mode analysis The eigenmodes analysis resulted in the natural frequencies and mode shapes shown in Figure 6 to Figure 11. It can be easily demonstrated that, according to these results, the frequency requirements are met with the following margins of safety.
min
min
min
min
45
90
52.4196.3
1 1 0.859 0.141(14.1%)
1 1 0.458 0.542(54.2%)
lat
long
lat
long
latlat
lat
longlong
long
f Hz
f Hz
f Hzf Hz
fMoSf
fMoS
f
=
=
==
= − = − =
= − = − =

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 16 -
Figure 6: 52.4 Hz (Y direction)
Figure 7: 52.8 Hz (X direction)
Figure 8: 169.4 Hz (torsion mode)
Figure 9: 196.3 Hz (Z-direction)
Figure 10: 264.9 Hz (local PC-box)
Figure 11: 291.3 Hz (local OBDH-nodebox mode)

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 17 -
Frequency response results A plot of the frequency response is presented next. On this graph, is visible that the response, as expected, peaks at the eigenfrequencies. Appendix 2 presents other graphs.
This graph shows the acceleration along the x-axis when a base motion with an amplitude equal to 1 is applied also on the x-axis. The peak in the centre occurs for 291.3 Hz and corresponds to the 6th mode of vibration shown above (local OBDH-nodebox mode). The output database file created by ABAQUS can provide the acceleration on any direction for any given base motion. Appendix 2 provides some more graphs.

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 18 -
6. Appendix 1 - Modal analysis results’ summary These are the results for the satellite’s 50 first eigenfrequencies.
MODE Nº FREQUENCIES [Hz]
GENERALIZED MASS
COMPOSITE MODAL DAMPING
1 52.423 38.879 0.48%2 52.796 39.205 0.48%3 169.37 22.397 0.61%4 196.33 62.843 0.44%5 264.95 48.553 0.20%6 291.25 36.682 0.04%7 346.84 10.380 0.40%8 357.37 14.298 0.53%9 379.35 22.171 0.79%
10 384.09 12.715 1.22%11 394.98 21.160 1.00%12 403.83 38.062 0.78%13 409.54 16.228 0.96%14 442.14 27.629 0.57%15 448.82 32.427 0.20%16 472.59 0.87613 0.98%17 482.5 0.88852 0.20%18 491.81 0.84853 1.42%19 498.65 0.80096 1.39%20 516.14 13.261 0.75%21 521.54 14.344 0.70%22 534.94 10.178 0.05%23 566.84 33.030 0.89%24 572.72 12.724 1.66%25 587.58 0.76942 1.34%26 598.22 42.885 0.93%27 603.96 12.246 1.56%28 614.51 0.83231 1.69%29 642.77 0.47701 1.63%30 656.55 0.73077 1.41%31 667.57 0.79858 1.26%32 670.14 0.90728 1.54%33 687.2 20.589 1.03%34 692.34 0.71948 0.81%35 695.2 13.701 1.43%36 708.65 0.75219 1.22%37 716.28 0.76203 1.33%38 720.58 0.90134 1.77%39 733.82 12.907 1.29%40 736.39 17.041 1.06%41 748.74 0.65821 0.24%42 765.81 0.76168 0.59%43 775.03 0.88864 0.87%44 783.56 0.89664 0.88%45 812.48 0.73019 1.15%46 826.94 0.34625 1.17%47 835.99 0.82406 1.42%48 843.11 0.61477 1.54%49 851.94 0.91446 1.68%50 856.08 0.85789 1.29%

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 19 -
Although both lateral and longitudinal frequencies comply with the requirements specified on [AD1], it should be noted that the total mass of the satellite is still far from its real value, which means that those frequency values will drop when we add the solar panels and the non-structural mass. This should be taken into consideration for the next configuration model. Next we present the participation factors and the effective mass for each mode of vibration.
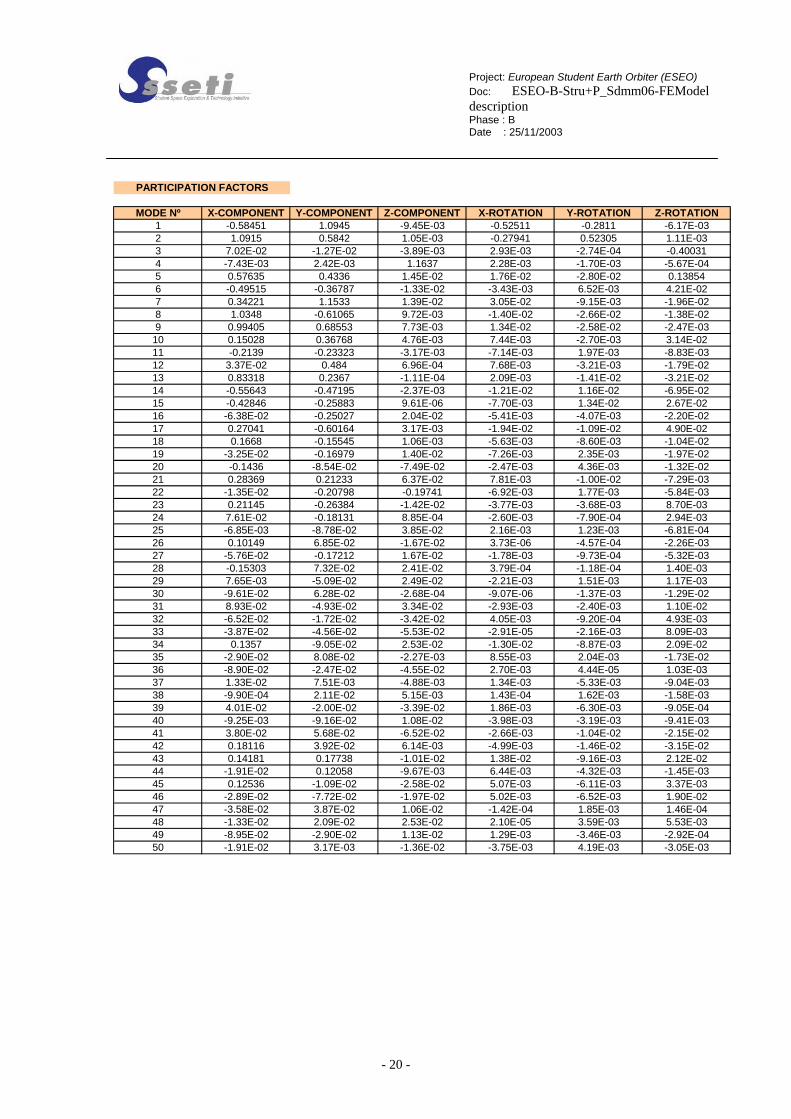
Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 20 -
MODE Nº X-COMPONENT Y-COMPONENT Z-COMPONENT X-ROTATION Y-ROTATION Z-ROTATION1 -0.58451 1.0945 -9.45E-03 -0.52511 -0.2811 -6.17E-032 1.0915 0.5842 1.05E-03 -0.27941 0.52305 1.11E-033 7.02E-02 -1.27E-02 -3.89E-03 2.93E-03 -2.74E-04 -0.400314 -7.43E-03 2.42E-03 1.1637 2.28E-03 -1.70E-03 -5.67E-045 0.57635 0.4336 1.45E-02 1.76E-02 -2.80E-02 0.138546 -0.49515 -0.36787 -1.33E-02 -3.43E-03 6.52E-03 4.21E-027 0.34221 1.1533 1.39E-02 3.05E-02 -9.15E-03 -1.96E-028 1.0348 -0.61065 9.72E-03 -1.40E-02 -2.66E-02 -1.38E-029 0.99405 0.68553 7.73E-03 1.34E-02 -2.58E-02 -2.47E-03
10 0.15028 0.36768 4.76E-03 7.44E-03 -2.70E-03 3.14E-0211 -0.2139 -0.23323 -3.17E-03 -7.14E-03 1.97E-03 -8.83E-0312 3.37E-02 0.484 6.96E-04 7.68E-03 -3.21E-03 -1.79E-0213 0.83318 0.2367 -1.11E-04 2.09E-03 -1.41E-02 -3.21E-0214 -0.55643 -0.47195 -2.37E-03 -1.21E-02 1.16E-02 -6.95E-0215 -0.42846 -0.25883 9.61E-06 -7.70E-03 1.34E-02 2.67E-0216 -6.38E-02 -0.25027 2.04E-02 -5.41E-03 -4.07E-03 -2.20E-0217 0.27041 -0.60164 3.17E-03 -1.94E-02 -1.09E-02 4.90E-0218 0.1668 -0.15545 1.06E-03 -5.63E-03 -8.60E-03 -1.04E-0219 -3.25E-02 -0.16979 1.40E-02 -7.26E-03 2.35E-03 -1.97E-0220 -0.1436 -8.54E-02 -7.49E-02 -2.47E-03 4.36E-03 -1.32E-0221 0.28369 0.21233 6.37E-02 7.81E-03 -1.00E-02 -7.29E-0322 -1.35E-02 -0.20798 -0.19741 -6.92E-03 1.77E-03 -5.84E-0323 0.21145 -0.26384 -1.42E-02 -3.77E-03 -3.68E-03 8.70E-0324 7.61E-02 -0.18131 8.85E-04 -2.60E-03 -7.90E-04 2.94E-0325 -6.85E-03 -8.78E-02 3.85E-02 2.16E-03 1.23E-03 -6.81E-0426 0.10149 6.85E-02 -1.67E-02 3.73E-06 -4.57E-04 -2.26E-0327 -5.76E-02 -0.17212 1.67E-02 -1.78E-03 -9.73E-04 -5.32E-0328 -0.15303 7.32E-02 2.41E-02 3.79E-04 -1.18E-04 1.40E-0329 7.65E-03 -5.09E-02 2.49E-02 -2.21E-03 1.51E-03 1.17E-0330 -9.61E-02 6.28E-02 -2.68E-04 -9.07E-06 -1.37E-03 -1.29E-0231 8.93E-02 -4.93E-02 3.34E-02 -2.93E-03 -2.40E-03 1.10E-0232 -6.52E-02 -1.72E-02 -3.42E-02 4.05E-03 -9.20E-04 4.93E-0333 -3.87E-02 -4.56E-02 -5.53E-02 -2.91E-05 -2.16E-03 8.09E-0334 0.1357 -9.05E-02 2.53E-02 -1.30E-02 -8.87E-03 2.09E-0235 -2.90E-02 8.08E-02 -2.27E-03 8.55E-03 2.04E-03 -1.73E-0236 -8.90E-02 -2.47E-02 -4.55E-02 2.70E-03 4.44E-05 1.03E-0337 1.33E-02 7.51E-03 -4.88E-03 1.34E-03 -5.33E-03 -9.04E-0338 -9.90E-04 2.11E-02 5.15E-03 1.43E-04 1.62E-03 -1.58E-0339 4.01E-02 -2.00E-02 -3.39E-02 1.86E-03 -6.30E-03 -9.05E-0440 -9.25E-03 -9.16E-02 1.08E-02 -3.98E-03 -3.19E-03 -9.41E-0341 3.80E-02 5.68E-02 -6.52E-02 -2.66E-03 -1.04E-02 -2.15E-0242 0.18116 3.92E-02 6.14E-03 -4.99E-03 -1.46E-02 -3.15E-0243 0.14181 0.17738 -1.01E-02 1.38E-02 -9.16E-03 2.12E-0244 -1.91E-02 0.12058 -9.67E-03 6.44E-03 -4.32E-03 -1.45E-0345 0.12536 -1.09E-02 -2.58E-02 5.07E-03 -6.11E-03 3.37E-0346 -2.89E-02 -7.72E-02 -1.97E-02 5.02E-03 -6.52E-03 1.90E-0247 -3.58E-02 3.87E-02 1.06E-02 -1.42E-04 1.85E-03 1.46E-0448 -1.33E-02 2.09E-02 2.53E-02 2.10E-05 3.59E-03 5.53E-0349 -8.95E-02 -2.90E-02 1.13E-02 1.29E-03 -3.46E-03 -2.92E-0450 -1.91E-02 3.17E-03 -1.36E-02 -3.75E-03 4.19E-03 -3.05E-03
PARTICIPATION FACTORS

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 21 -
MODE Nº X-COMPONENT Y-COMPONENT Z-COMPONENT X-ROTATION Y-ROTATION Z-ROTATION1 13.283 46.572 3.48E-03 10.721 3.0721 1.48E-032 46.706 13.38 4.29E-05 3.0608 10.726 4.85E-053 0.11029 3.64E-03 3.38E-04 1.92E-04 1.68E-06 3.58914 3.47E-03 3.67E-04 85.102 3.26E-04 1.81E-04 2.02E-055 1.6128 0.91282 1.02E-03 1.51E-03 3.81E-03 9.32E-026 0.89934 0.49641 6.50E-04 4.32E-05 1.56E-04 6.51E-037 1.2156 13.807 2.02E-03 9.65E-03 8.68E-04 3.99E-038 15.312 5.3318 1.35E-03 2.81E-03 1.01E-02 2.72E-039 2.1908 1.0419 1.32E-04 3.98E-04 1.47E-03 1.35E-05
10 2.87E-02 0.1719 2.88E-05 7.03E-05 9.27E-06 1.25E-0311 9.68E-02 0.1151 2.12E-05 1.08E-04 8.21E-06 1.65E-0412 4.33E-03 0.89164 1.84E-06 2.24E-04 3.91E-05 1.22E-0313 1.1265 9.09E-02 2.01E-08 7.11E-06 3.20E-04 1.67E-0314 0.85546 0.61539 1.55E-05 4.07E-04 3.70E-04 1.33E-0215 0.59529 0.21723 3.00E-10 1.92E-04 5.83E-04 2.31E-0316 3.57E-03 5.49E-02 3.65E-04 2.56E-05 1.45E-05 4.25E-0417 6.50E-02 0.32162 8.95E-06 3.35E-04 1.06E-04 2.14E-0318 2.36E-02 2.05E-02 9.61E-07 2.69E-05 6.27E-05 9.12E-0519 8.46E-04 2.31E-02 1.56E-04 4.22E-05 4.44E-06 3.12E-0420 2.73E-02 9.67E-03 7.44E-03 8.09E-06 2.53E-05 2.31E-0421 0.11544 6.47E-02 5.82E-03 8.75E-05 1.44E-04 7.63E-0522 1.86E-04 4.40E-02 3.97E-02 4.87E-05 3.19E-06 3.47E-0523 0.14768 0.22992 6.65E-04 4.69E-05 4.47E-05 2.50E-0424 7.37E-03 4.18E-02 9.98E-07 8.63E-06 7.94E-07 1.10E-0525 3.61E-05 5.93E-03 1.14E-03 3.60E-06 1.16E-06 3.56E-0726 4.42E-02 2.01E-02 1.19E-03 5.98E-11 8.97E-07 2.18E-0527 4.07E-03 3.63E-02 3.43E-04 3.90E-06 1.16E-06 3.46E-0528 1.95E-02 4.46E-03 4.83E-04 1.19E-07 1.15E-08 1.64E-0629 2.79E-05 1.24E-03 2.95E-04 2.32E-06 1.08E-06 6.48E-0730 6.75E-03 2.88E-03 5.23E-08 6.01E-11 1.37E-06 1.21E-0431 6.36E-03 1.94E-03 8.89E-04 6.87E-06 4.62E-06 9.59E-0532 3.85E-03 2.68E-04 1.06E-03 1.49E-05 7.67E-07 2.20E-0533 3.09E-03 4.29E-03 6.29E-03 1.74E-09 9.60E-06 1.35E-0434 1.32E-02 5.90E-03 4.62E-04 1.22E-04 5.66E-05 3.13E-0435 1.15E-03 8.95E-03 7.06E-06 1.00E-04 5.69E-06 4.12E-0436 5.96E-03 4.59E-04 1.56E-03 5.48E-06 1.48E-09 8.03E-0737 1.35E-04 4.30E-05 1.82E-05 1.38E-06 2.16E-05 6.23E-0538 8.83E-07 4.01E-04 2.39E-05 1.85E-08 2.37E-06 2.26E-0639 2.08E-03 5.16E-04 1.49E-03 4.45E-06 5.11E-05 1.06E-0640 1.46E-04 1.43E-02 1.98E-04 2.70E-05 1.73E-05 1.51E-0441 9.51E-04 2.12E-03 2.80E-03 4.64E-06 7.14E-05 3.03E-0442 2.50E-02 1.17E-03 2.87E-05 1.89E-05 1.62E-04 7.55E-0443 1.79E-02 2.80E-02 9.09E-05 1.70E-04 7.45E-05 3.99E-0444 3.26E-04 1.30E-02 8.39E-05 3.72E-05 1.67E-05 1.90E-0645 1.15E-02 8.67E-05 4.86E-04 1.88E-05 2.73E-05 8.30E-0646 2.89E-04 2.07E-03 1.35E-04 8.74E-06 1.47E-05 1.26E-0447 1.06E-03 1.23E-03 9.22E-05 1.65E-08 2.81E-06 1.75E-0848 1.09E-04 2.69E-04 3.92E-04 2.71E-10 7.94E-06 1.88E-0549 7.33E-03 7.71E-04 1.18E-04 1.52E-06 1.10E-05 7.81E-0850 3.14E-04 8.64E-06 1.60E-04 1.20E-05 1.51E-05 7.98E-06
TOTAL 84.607 84.615 85.185 13.799 13.817 3.724
EFFECTIVE MASS
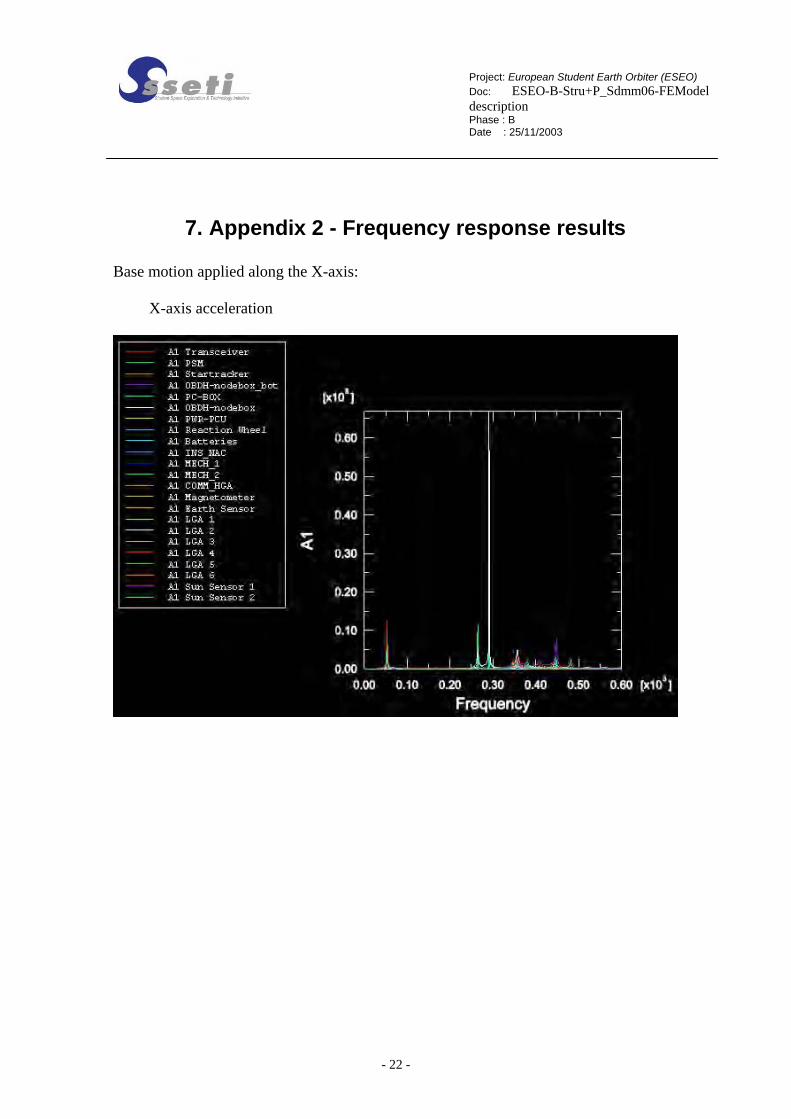
Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 22 -
7. Appendix 2 - Frequency response results Base motion applied along the X-axis:
X-axis acceleration
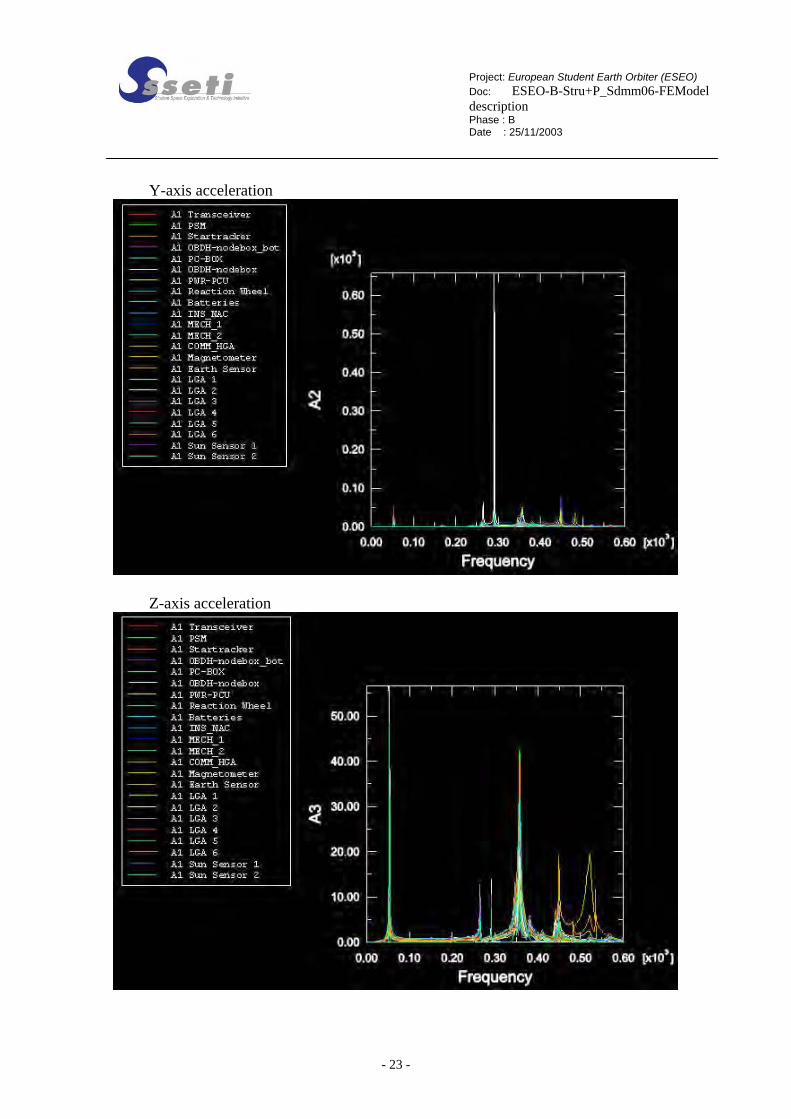
Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 23 -
Y-axis acceleration
Z-axis acceleration

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 24 -
Base motion applied along the Y-axis: X-axis acceleration
Y-axis acceleration

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 25 -
Z-axis acceleration
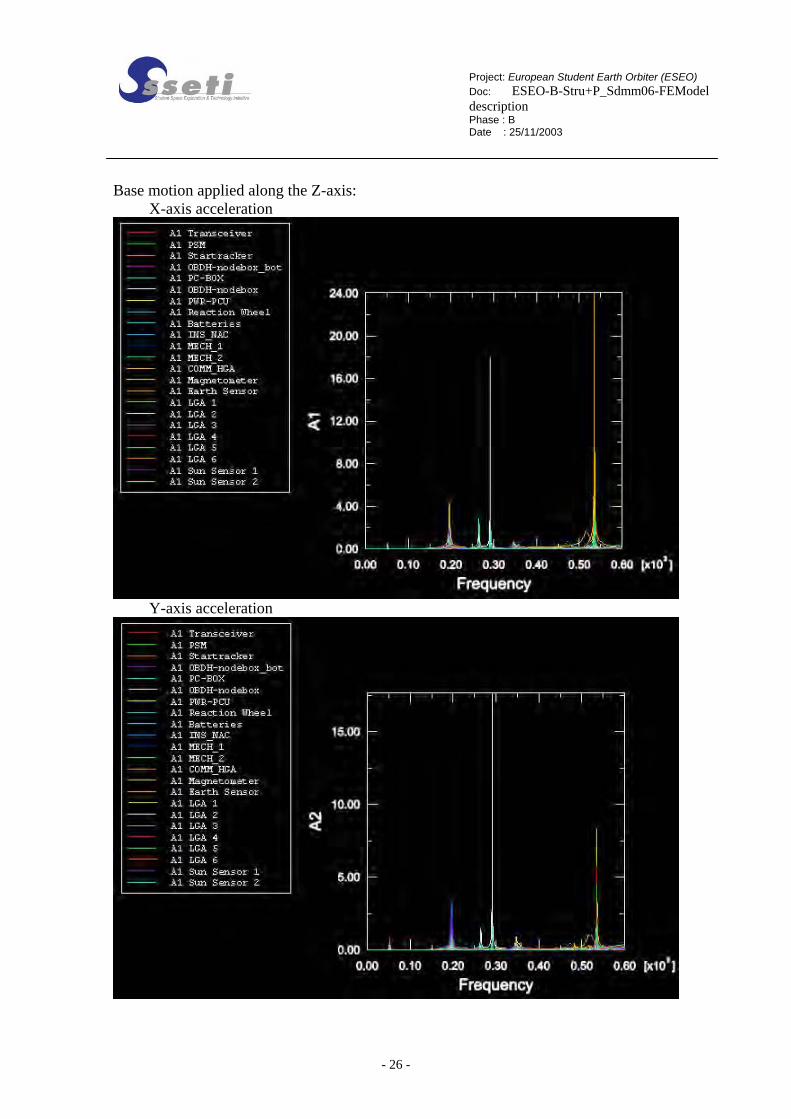
Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 26 -
Base motion applied along the Z-axis: X-axis acceleration
Y-axis acceleration

Project: European Student Earth Orbiter (ESEO) Doc: ESEO-B-Stru+P_Sdmm06-FEModel description Phase : B Date : 25/11/2003
- 27 -
Z-axis acceleration

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 82 -
ANEXO B – Soluções apresentadas para a Estrutura e Configuração do Micro-satélite
SSETI Express

Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
SSSSEETTII EExxpprreessss
SSETI Express Structures/Configuration Design Solutions
Ref.: EXPRESS_B_STRU+CONF_240104_02_Design Solutions.doc Issue: 2.0
Date: 24-01-2004
Prepared by: António Melro Date: 24-01-2004 Checked by: Date: Approved by: Date: SSETI, ESA-ESTEC, ADM-AE P.O. Box 299, 2200 AG Noordwijk, The Netherlands Tel. (31) 71 565 4603 - Fax. (31) 71 565 5590 E-mail: [email protected]

Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
1 DOCUMENT CHANGE RECORD
Version Change By Date
01 First draft António Melro Pedro Portela
16/12/03
02 António Melro 24/01/04
Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
2 TABLE OF CONTENT
1 DOCUMENT CHANGE RECORD ....................................................1
2 TABLE OF CONTENT .......................................................................2
3 REFERENCE AND APPLICABLE DOCUMENTS ..........................3
4 INTRODUCTION................................................................................4
5 OVERVIEW ON CURRENT CONFIGURATION ............................5
5.1 Problems needing attention .............................................................................8
6 OVERVIEW ON CURRENT STRUCTURE....................................10
7 PERSONNEL INVOLVED ...............................................................14
8 TIMELINE .........................................................................................15
Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
3 REFERENCE AND APPLICABLE DOCUMENTS
[RD1] EXPRESS_A_ESA_081203_01_Design_Solutions [RD2] EXPRESS_C_PROPPAYLOAD_120104_01_SSETI_Express_KickOff [RD3] 040119 PROPPAYLOAD System Overview [RD4] P-Pod Deployer Requirements [RD5] P-Pod Mechanical Assembly Procedures [RD6] P-Pod research [RD7] P-Pod Vibration Qualification Test (PVQ) [RD8] ASAP5 User’s Manual
3
Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
4 INTRODUCTION
This document describes the design solutions for Structure/Configuration team for the SSETI Express satellite.
For starting point, it was decided that the ESEO satellite structure should be used. The fact that its study is considerably advanced (near PDR) and that all the Finite Element Analysis have been performed for it, makes it a good basis for a fast work.
The Configuration for SSETI Express will be under ESEO-STRU team responsibility. It shall be worked out in close contact with System Engineering team. Configuration work for the SSETI Express orbiter shall also be done by members of the structures team in Porto. It is believed that this should also help speed up the design process.
4

Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
5 OVERVIEW ON CURRENT CONFIGURATION
From the Design Solutions document developed during last workshop on ESTEC (December 2003) [RD1], it is easily recognized that the Propulsion sub-system and the deployment system for the Cubesats (dubbed P-POD) are the main design drivers for the final configuration. As such, and for an initial iteration, the propulsion system will consist of 2 propellant storage tanks placed in the same configuration as the ones of ESEO. The central tank, number 5, will be replaced by the P-POD box. A quick fit-check was performed and this solution appears to be valid. The questions of the opening P-POD door and the deployment of the Cubesats need to be better studied. However, it is foreseen that the P-POD door will open to an angle of less than 180º and the Cubesats will be deployed in the +Z direction.
P-POD
Transceiver
CAM
Magnetometer
LGA
Passive Magnet
Tank
PMS
OBC
Batteries
Sensor Array Passive Magnet
PWR_PCUACS Thruster
5

Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
Figure 1
For the sake of simplicity, the Structure is represented transparent in Figure 1.
CATIA V5R11 has been used to produce the configuration work. The model uses, inasmuch as it is possible, a coherent naming convention and harmonized with the one used for ESEO models. CATIA will be used to produce outputs for the mass budget and the bill of materials and to check the satellite’s total mass and CoG. The axis system used will be the one used in ESEO models – origin at bottom center plate and the axis oriented as shown in Figure 1.
Table 1exhibits the masses currently available as well the position of the center of gravity of each subsystem.
6

Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
Component Volume[m3] Mass[kg] Gx[mm] Gy[mm] Gz[mm]
z0 plate 0,00739929 7,39929 1,70E-15 5,76E-15 15,3reinforcement panel.1 0,0042256 4,2256 -1,39E-13 85,65 335,398reinforcement panel.2 0,0042256 4,2256 0 -85,65 335,398lateral panel.1 0,00065 0,65 -251 -8,05E-13 325lateral panel.2 0,00065 0,65 1,94E-13 -251 325lateral panel.3 0,00065 0,65 251 5,55E-14 325lateral panel.4 0,00065 0,65 -3,89E-13 251 325z+ plate 0,00233592 2,33592 -3,33E-13 -6,4548 644,73_hole_bracket 5,73E-05 0,450571 8,57E-11 111,072 43,7943_hole_bracket.1 5,73E-05 0,450571 4,59E-13 -111,072 43,7941_hole_bracket 1,07E-05 0,0844302 -129,038 86,2242 41,3661_hole_bracket.1 1,07E-05 0,0844302 -129,038 -86,2242 41,3661_hole_bracket.2 1,07E-05 0,0844302 129,038 86,2242 41,3661_hole_bracket.3 1,07E-05 0,0844302 129,038 -86,2242 41,366support bracket.1 0,000273399 0,740911 -70,1252 -171,3 366,9support bracket.2 0,000273399 0,740911 70,1252 -171,3 366,9support bracket.3 0,000273399 0,740911 70,1252 -1,84E-11 366,9support bracket.4 0,000273399 0,740911 -70,1252 2,69E-10 366,9support bracket.5 0,000273399 0,740911 70,1252 171,3 366,9support bracket.6 0,000273399 0,740911 -70,1252 171,3 366,9top bracket.1 1,34E-05 0,0363143 -101,709 113,609 629,799top bracket.2 1,34E-05 0,0363143 -101,709 -113,609 629,799top bracket.3 1,34E-05 0,0363143 101,709 -113,609 629,799top bracket.4 1,34E-05 0,0363143 101,709 113,609 629,799corner_bracket 0,000244387 0,66229 -223,587 -223,587 335corner_bracket.1 0,000244387 0,66229 -223,587 223,587 335corner_bracket.2 0,000244387 0,66229 223,587 -223,587 335corner_bracket.3 0,000244387 0,66229 223,587 223,587 335P-POD.1 0,00800761 4,99976 5,27E-13 -1,38751 456,951CAM.1 0,001 1 -1,04E-13 144,6 644,4tanque.1 0,0104245 3,60017 159,4 2,73E-10 370,299tanque.2 0,0104245 3,60017 -159,4 2,73E-10 370,299ACS thruster cluster.1 0,0003 0,25 220 -8,08E-14 55,6ACS thruster cluster.2 0,0003 0,25 -220 -6,66E-14 55,6PMS Box.1 0,009 2,5 -155,7 167,6 294,4LGA antenna.1 0,00027075 0,0999077 200,5 200,5 665LGA antenna.2 0,00027075 0,0999077 200,5 -200,5 665LGA antenna.3 0,00027075 0,0999077 200,5 -265 591,9LGA antenna.4 0,00027075 0,0999077 200,5 265 591,9LGA antenna.5 0,00027075 0,0999077 265 200,5 591,9LGA antenna.6 0,00027075 0,0999077 265 -200,5 591,9Transceiver.1 0,00648 4,8 4,44E-13 -154,6 319,4Batterie.1 0,000929419 1,80081 -1,34E-10 153,85 126,65PWR_PCUpower.1 0,003 1,5 155,7 142,6 194,4
Magnetometer box.1 2,70E-05 0,027 -95,7 -167,169 665OBDH.1 0,001 1 140,7 -142,6 152,86Passive magnet unit.1 6,28E-06 0,00628319 4,41E-14 225 629,4Passive magnet unit.2 6,28E-06 0,00628319 -2,01E-14 225 40,6Sensor array.1 4,00E-06 0,004 -235 -235 -5Sensor array.2 4,00E-06 0,004 -150,269 -102,6 655Sensor array.3 4,00E-06 0,004 -115,654 -257 40,6Sensor array.4 4,00E-06 0,004 10 257 40,6Sensor array.5 4,00E-06 0,004 257 -102,6 40,6Sensor array.6 4,00E-06 0,004 -257 -102,6 40,6SSETI - Express 0,0762764 55,3359 2,09989 2,55823 305,755
Table 1
7

Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
The distance of the satellite’s center of gravity to the z-Axis is 3.31 mm, well inside the 5 mm radius imposed by Arianespace in [RD8]. The z-coordinate also complies with the limit established in [RD8].
It should be noted that the total mass indicated in Table 1 is not the final value. More accurate values are needed from each team regarding this parameter, as well about the placement of each box. Nevertheless, being considered the most important mass items in the satellite, we can conclude that the final value of the total mass will be well under the 120 kg limit for this class of satellites.
From Figure 1, it can also be noticed that there is too much space available. For example, the –x/-y corner is completely empty. It should be considered the possibility of reducing the height of the tanks, in order to have a more compact satellite.
5.1 Problems needing attention
Besides the already referenced problem of some lack of information regarding the mass budget of each subsystem, the Configuration team faced other problems while preparing the CATIA file here presented. The questions are presented in a subsystem by subsystem form.
ADCS
• Are there any restrains about the position of the sensor arrays relatively to each other and to the satellite?
• Is the position of the magnetometer box decided? The same question for the magnetometer coil.
• Do the two passive magnets units have to be along the z-Axis (not possible because of the P-POD position) or in any place as long they are parallel to the z-Axis?
• What are the influences of all this elements on the electronic devices? How close can they be to them?
8

Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
OBC
• Do you have any idea of what will be the final weight of your subsystem?
• Could it be possible to join your computer with Power computer in the same box (hence reducing in one the number of housings needed)?
9
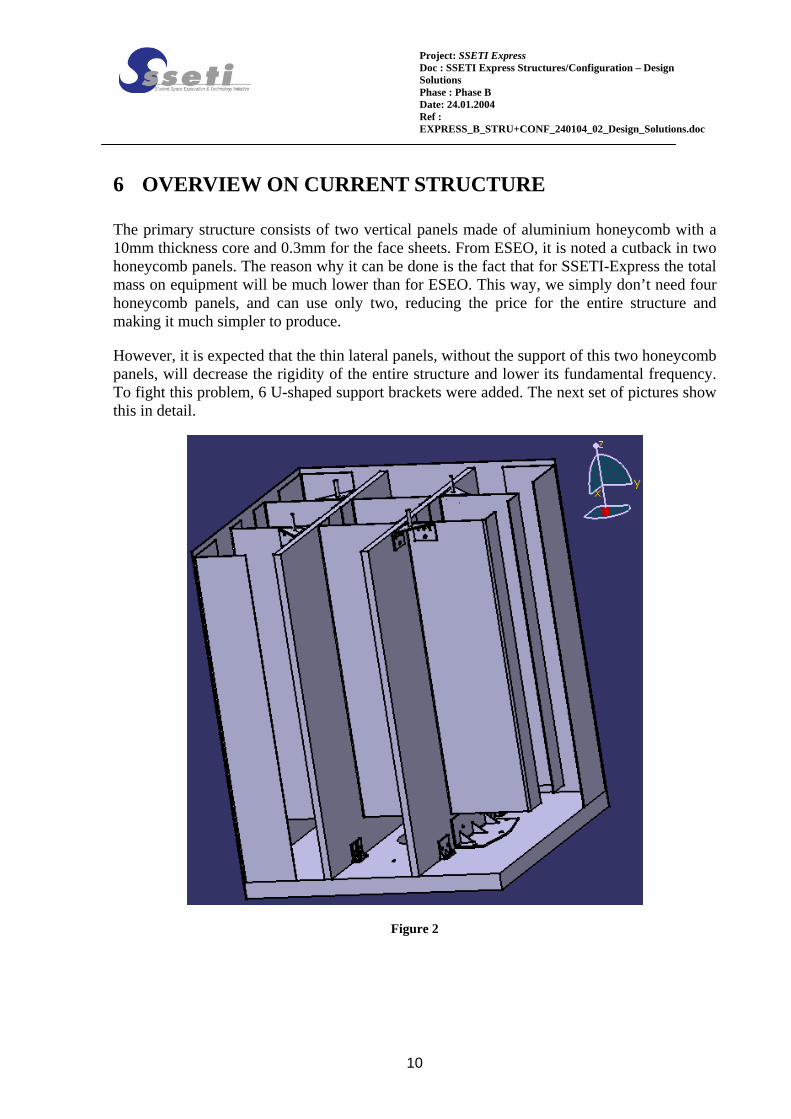
Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
6 OVERVIEW ON CURRENT STRUCTURE
The primary structure consists of two vertical panels made of aluminium honeycomb with a 10mm thickness core and 0.3mm for the face sheets. From ESEO, it is noted a cutback in two honeycomb panels. The reason why it can be done is the fact that for SSETI-Express the total mass on equipment will be much lower than for ESEO. This way, we simply don’t need four honeycomb panels, and can use only two, reducing the price for the entire structure and making it much simpler to produce.
However, it is expected that the thin lateral panels, without the support of this two honeycomb panels, will decrease the rigidity of the entire structure and lower its fundamental frequency. To fight this problem, 6 U-shaped support brackets were added. The next set of pictures show this in detail.
Figure 2
10

Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
Figure 3
Since these U-shaped brackets don’t go all the way down to the base, they add to the structure the interesting capability of not interfering with most of the piping needed by propulsion team. This way we were able to reduce significantly the complexity necessary for it in terms of interfaces and structural cuttings needed.
The base plate will also be made of honeycomb, but its thickness shall be higher due to rigidity reasons. The final value is still to be defined.
The top plate is also made of aluminium honeycomb. Its thickness in ESEO structure is the same as the primary structure, but for SSETI Express, and since the amount of equipment placed on the top side of the satellite is lower, it shall not require the same thickness. Its value is still to be defined but it should be less than 10 mm.
The lateral panels are solid aluminium. Their thickness for ESEO is now 2mm, but since we are planning on using body mounted solar panels, this value will surely be reviewed.
11

Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
From the last workshop, one small problem came up with this structure and its interface with the separation ring. It was found that 4 of the 12 bolts used for this interface were non load bearing bolts. Currently, and after restudying the structural joints, the number of ‘not-load bearing’ bolts is two (the two bolts immediately positioned under the tanks). The next pictures show the structural joints in more detail.
Figure 4 – Bottom joint
Figure 5 – Bottom joint
12
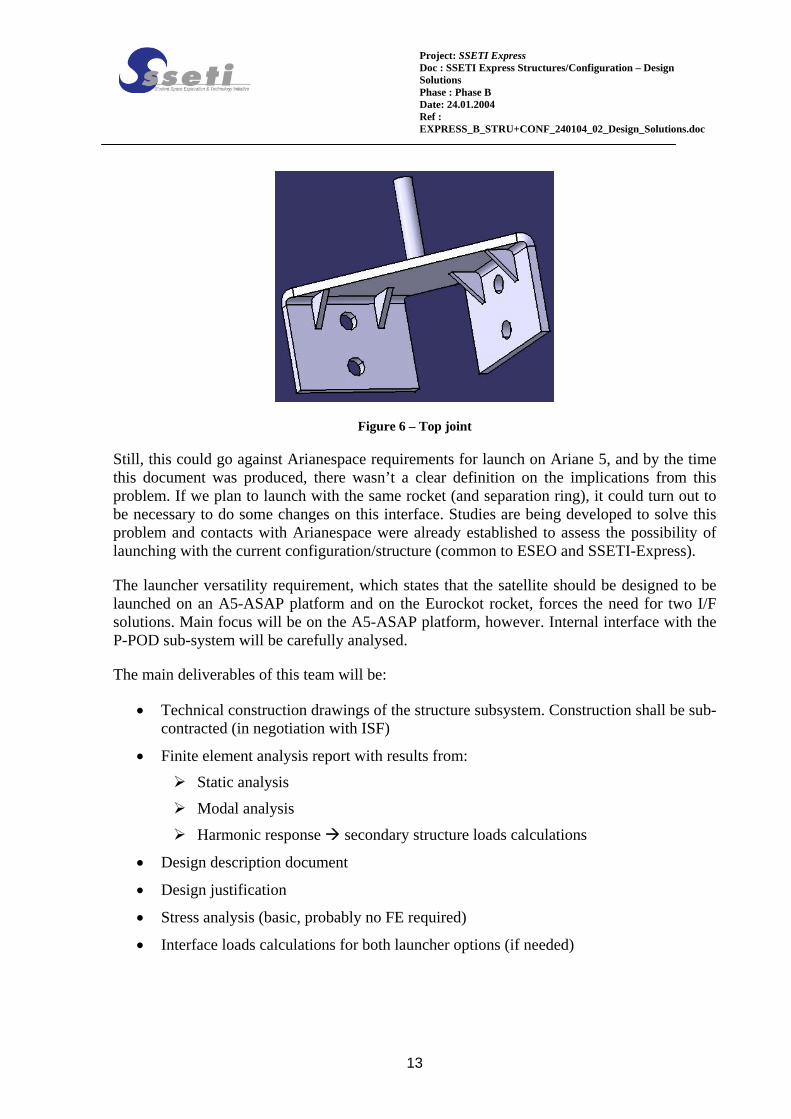
Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
Figure 6 – Top joint
Still, this could go against Arianespace requirements for launch on Ariane 5, and by the time this document was produced, there wasn’t a clear definition on the implications from this problem. If we plan to launch with the same rocket (and separation ring), it could turn out to be necessary to do some changes on this interface. Studies are being developed to solve this problem and contacts with Arianespace were already established to assess the possibility of launching with the current configuration/structure (common to ESEO and SSETI-Express).
The launcher versatility requirement, which states that the satellite should be designed to be launched on an A5-ASAP platform and on the Eurockot rocket, forces the need for two I/F solutions. Main focus will be on the A5-ASAP platform, however. Internal interface with the P-POD sub-system will be carefully analysed.
The main deliverables of this team will be:
• Technical construction drawings of the structure subsystem. Construction shall be sub-contracted (in negotiation with ISF)
• Finite element analysis report with results from:
Static analysis
Modal analysis
Harmonic response secondary structure loads calculations
• Design description document
• Design justification
• Stress analysis (basic, probably no FE required)
• Interface loads calculations for both launcher options (if needed)
13

Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
7 PERSONNEL INVOLVED
This is a list of the students involved in SSETI-Express Configuration and Structures teams and their responsibilities inside the team.
NAME E-MAIL CONTACT SUB-TEAM António Melro [email protected] +351 93 386 29 34 STRU/CONF –
general coordinator / structural finite element analysis
Pedro Portela [email protected] +351 91 617 35 55 STRU/CONF – general coordinator
Pedro Bandeira [email protected] +351 91 900 31 29 STRU – development of structural parts
Raphael Marques [email protected] +351 96 487 00 64 CONF – technical drawings of structural parts
Ricardo Bencatel [email protected] +351 91 879 66 63 CONF – general configuration drawings
14
Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
8 TIMELINE
JANUARY
• Gathering information from the different subsystems about mass and dimensions first estimates.
• Study of the new structural joints.
• Elaboration of the new CATIA configuration file.
• Establishing first contacts with ISF for possible cooperation in building the satellite’s structure.
• Preparation of Design Solutions document for ‘go/no go’ decision on 26th January meeting in ESTEC.
FEBRUARY
• Preparing data about structural parts in order to establish close relations with ISF in the 23rd February meeting.
• Preparing possible solutions for ASAP5 separation ring problem and discussion with experts in ESTEC (date to be determined).
• Final definition of satellite’s Configuration.
MARCH & APRIL
• Finite Element Analysis on the all structure and definition of main parameters for sine-vibration tests.
MAY
• Building of the satellite’s structure, supposing it will be done by ISF.
• If previous point is not possible, then the satellite’s panels will have to be bought and final assembly could be done here at the University of Porto’s laboratories.
JUNE
• Vibration tests: this is also a point that has to be determined on the 23rd February meeting with ISF.
• If the ISF can’t perform the vibration tests on the satellite, they can be performed at the University of Porto’s laboratories, free of charge.
JULY
15
Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
• Final delivery of the assembled satellite.
9 COSTS
This point is dependent on the results from the 23rd February meeting with ISF.
16
Project: SSETI Express Doc : SSETI Express Structures/Configuration – Design Solutions Phase : Phase B Date: 24.01.2004 Ref : EXPRESS_B_STRU+CONF_240104_02_Design_Solutions.doc
10 TESTING
This point is dependent on the results from the 23rd February meeting with ISF.
However, if an agreement is not possible on this point, the final sine-vibration and random tests can be performed here at University of Porto’s laboratories, free of any cost.
17

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 101 -
ANEXO C – Resultados da Análise de Elementos Finitos realizada ao Micro-
satélite SSETI-Express

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 102 -

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 103 -

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 104 -

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 105 -

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 106 -
ANEXO D – Modelo 3D do Micro-satélite SSETI-Express e cálculo do Centro de
Gravidade e Matriz de Inércia
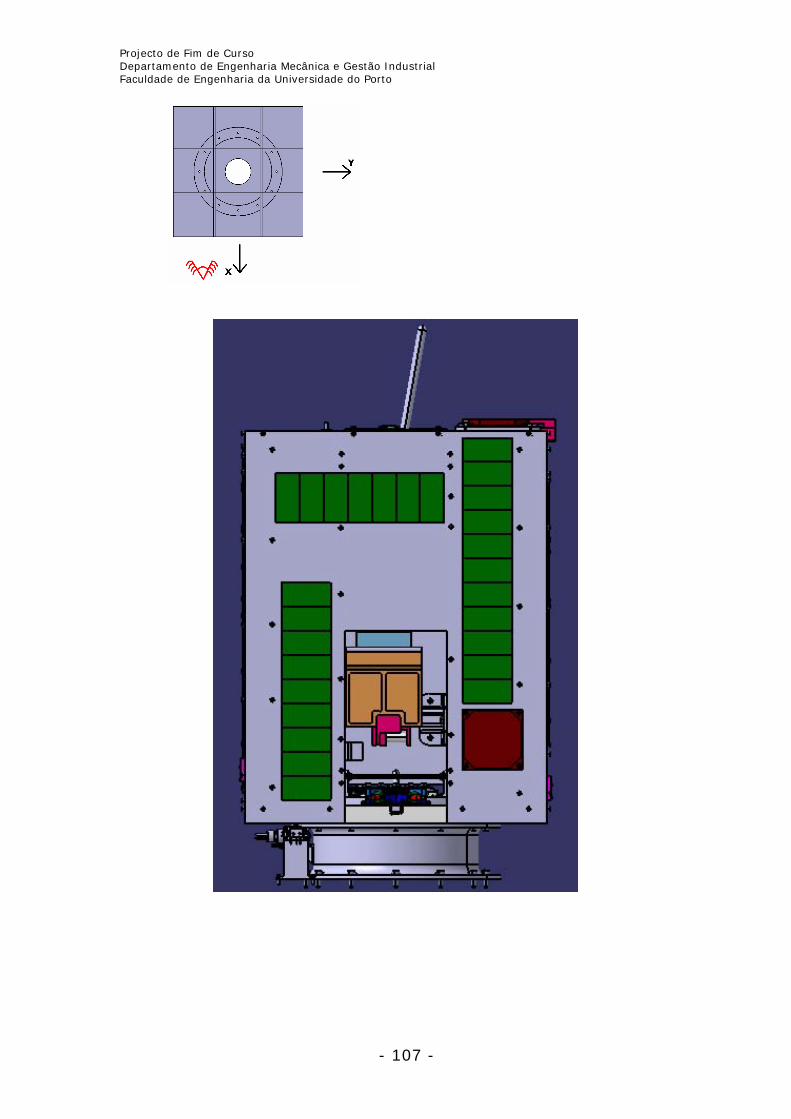
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 107 -

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 108 -

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 109 -
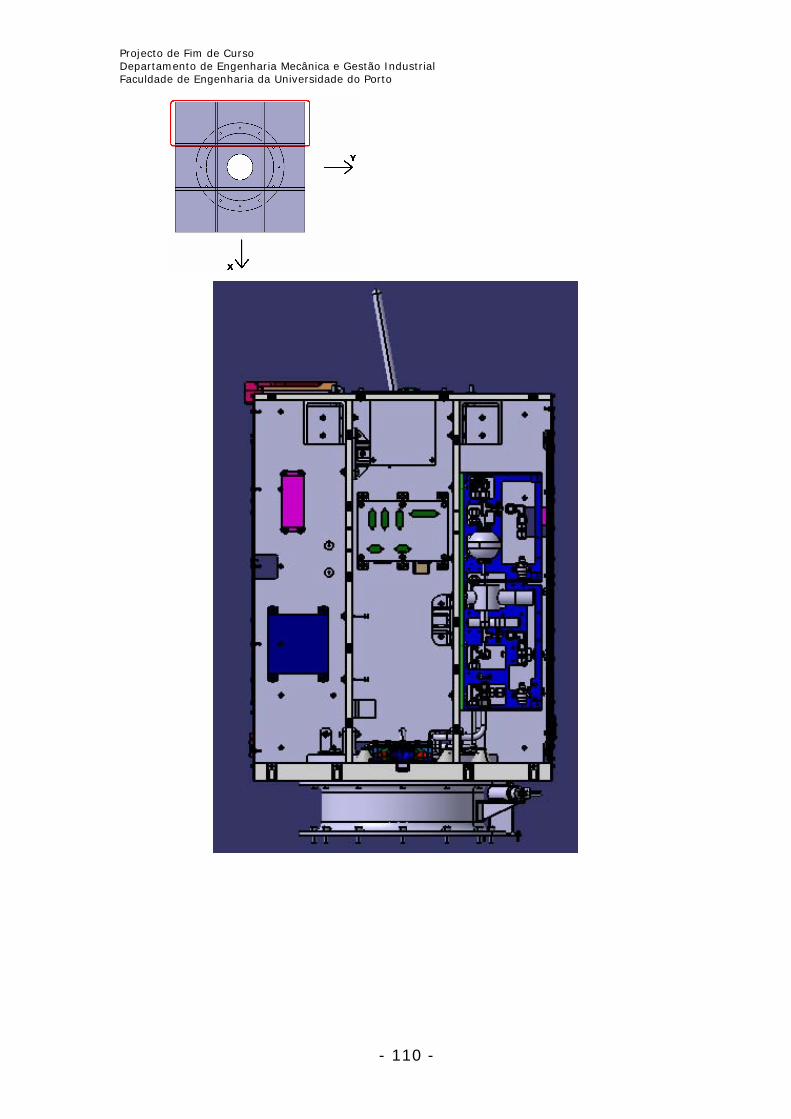
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 110 -

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 111 -

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 112 -
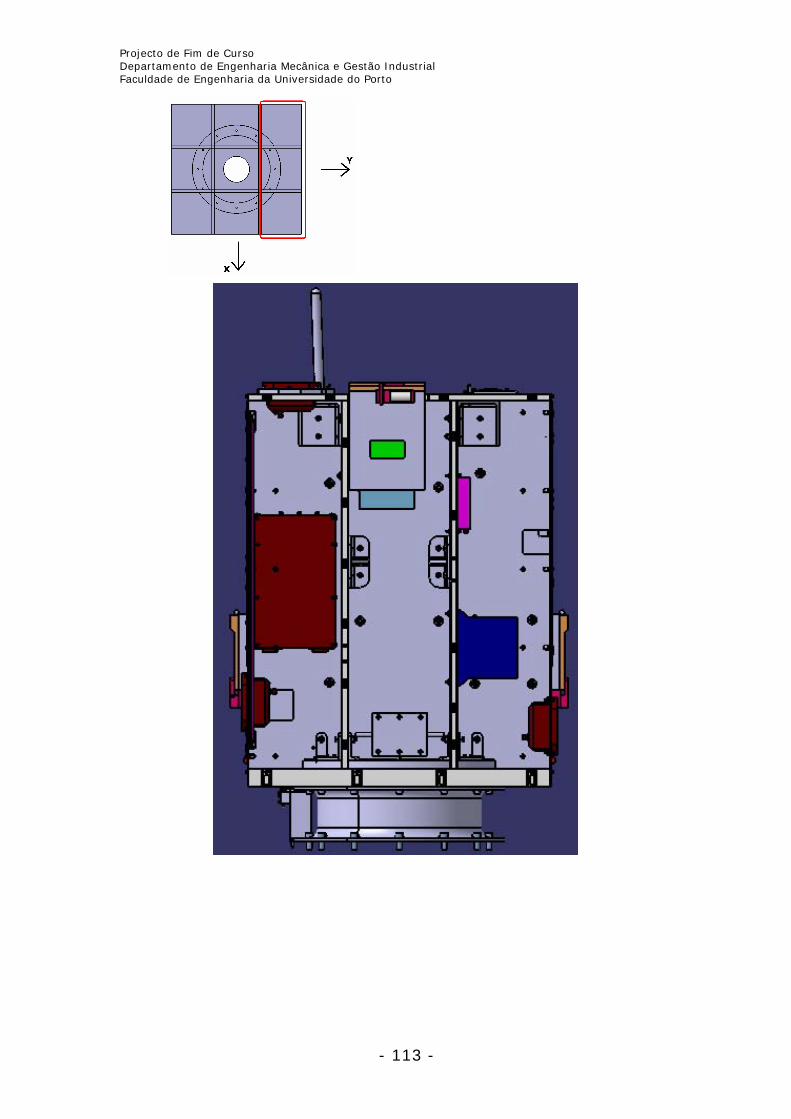
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 113 -

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 114 -

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 115 -

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 116 -
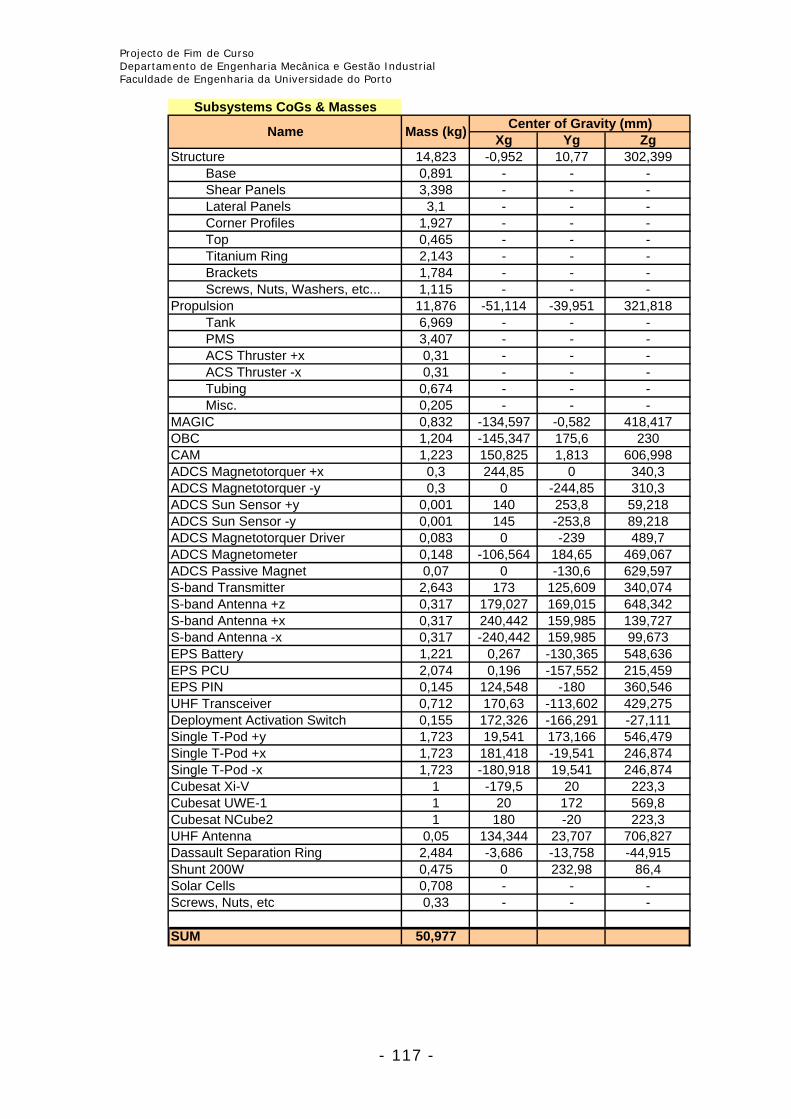
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 117 -
Xg Yg Zg14,823 -0,952 10,77 302,399
Base 0,891 - - -Shear Panels 3,398 - - -Lateral Panels 3,1 - - -Corner Profiles 1,927 - - -Top 0,465 - - -Titanium Ring 2,143 - - -Brackets 1,784 - - -Screws, Nuts, Washers, etc... 1,115 - - -
11,876 -51,114 -39,951 321,818Tank 6,969 - - -PMS 3,407 - - -ACS Thruster +x 0,31 - - -ACS Thruster -x 0,31 - - -Tubing 0,674 - - -Misc. 0,205 - - -
0,832 -134,597 -0,582 418,4171,204 -145,347 175,6 230
CAM 1,223 150,825 1,813 606,998ADCS Magnetotorquer +x 0,3 244,85 0 340,3ADCS Magnetotorquer -y 0,3 0 -244,85 310,3ADCS Sun Sensor +y 0,001 140 253,8 59,218ADCS Sun Sensor -y 0,001 145 -253,8 89,218ADCS Magnetotorquer Driver 0,083 0 -239 489,7ADCS Magnetometer 0,148 -106,564 184,65 469,067ADCS Passive Magnet 0,07 0 -130,6 629,597S-band Transmitter 2,643 173 125,609 340,074S-band Antenna +z 0,317 179,027 169,015 648,342S-band Antenna +x 0,317 240,442 159,985 139,727S-band Antenna -x 0,317 -240,442 159,985 99,673EPS Battery 1,221 0,267 -130,365 548,636EPS PCU 2,074 0,196 -157,552 215,459EPS PIN 0,145 124,548 -180 360,546UHF Transceiver 0,712 170,63 -113,602 429,275Deployment Activation Switch 0,155 172,326 -166,291 -27,111Single T-Pod +y 1,723 19,541 173,166 546,479Single T-Pod +x 1,723 181,418 -19,541 246,874Single T-Pod -x 1,723 -180,918 19,541 246,874Cubesat Xi-V 1 -179,5 20 223,3Cubesat UWE-1 1 20 172 569,8Cubesat NCube2 1 180 -20 223,3UHF Antenna 0,05 134,344 23,707 706,827Dassault Separation Ring 2,484 -3,686 -13,758 -44,915Shunt 200W 0,475 0 232,98 86,4Solar Cells 0,708 - - -Screws, Nuts, etc 0,33 - - -
SUM 50,977
Subsystems CoGs & Masses
Mass (kg) Center of Gravity (mm)
OBC
Name
Structure
Propulsion
MAGIC

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 118 -
Propriedades de Inércia
• Configuração de lançamento
Mass [kg] 50,977
CoG [mm]x -5,89556y 4,96653z 310,124
MoI [kgm2]2,92908 -0,078466 -0,020934
3,03742 -0,108888Sym. 1,99622
• Configuração de voo com tanque cheio
Mass [kg] 46,3115
CoG [mm]x -7,25067y 2,48519z 322,787
MoI [kgm2]2,53773 -0,083448 -0,025125
2,61937 -0,035253Sym. 1,84865
• Configuração de voo com tanque vazio
Mass [kg] 44,0561
CoG [mm]x -7,62187y 2,56122z 319,568
MoI [kgm2]2,4948 -0,083474 -0,024044
2,57632 -0,035474Sym. 1,84373

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 119 -
ANEXO E – Desenhos de definição dos Painéis de Honeycomb






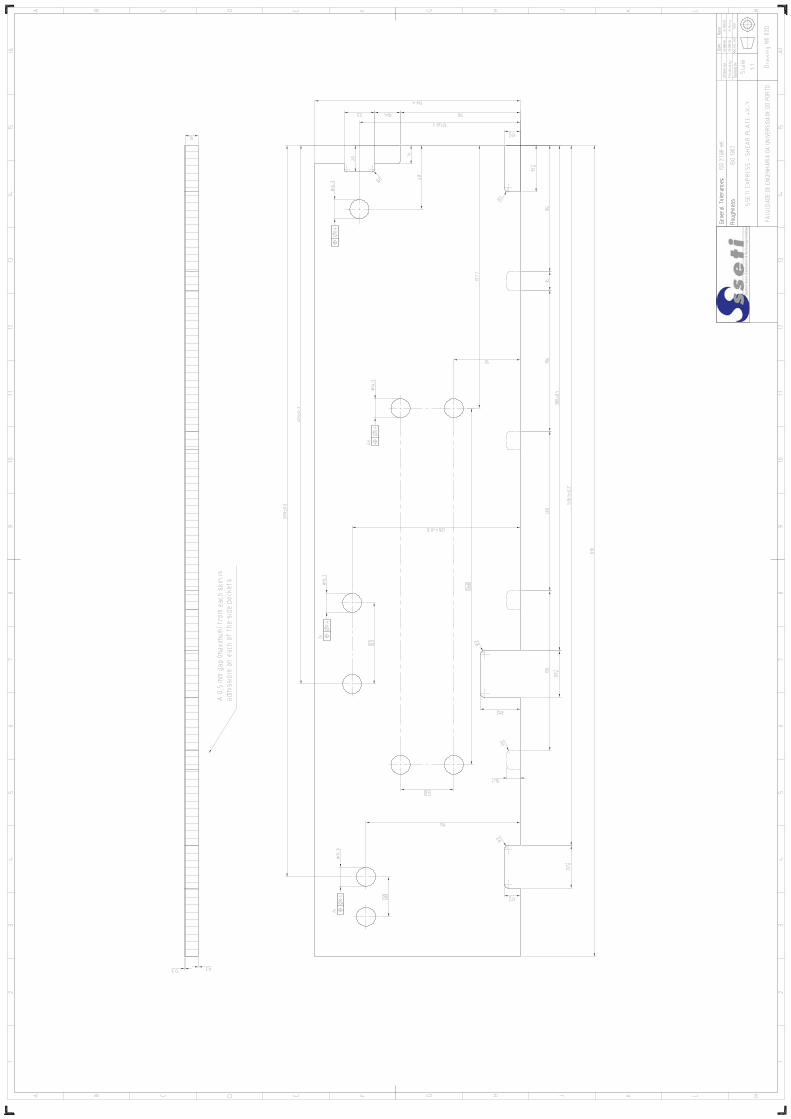

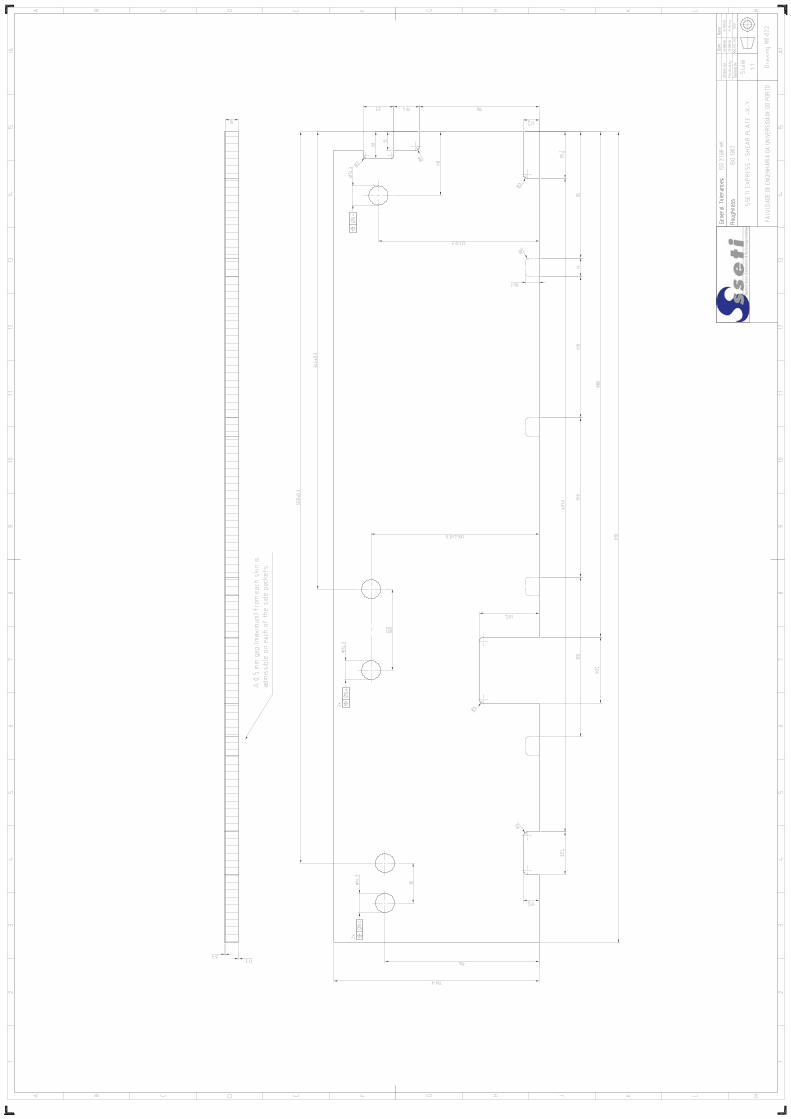

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 130 -
ANEXO F – Resultados de análises de Elementos Finitos sobre Elementos de
Ligação do Micro-Satélite SSETI-Express
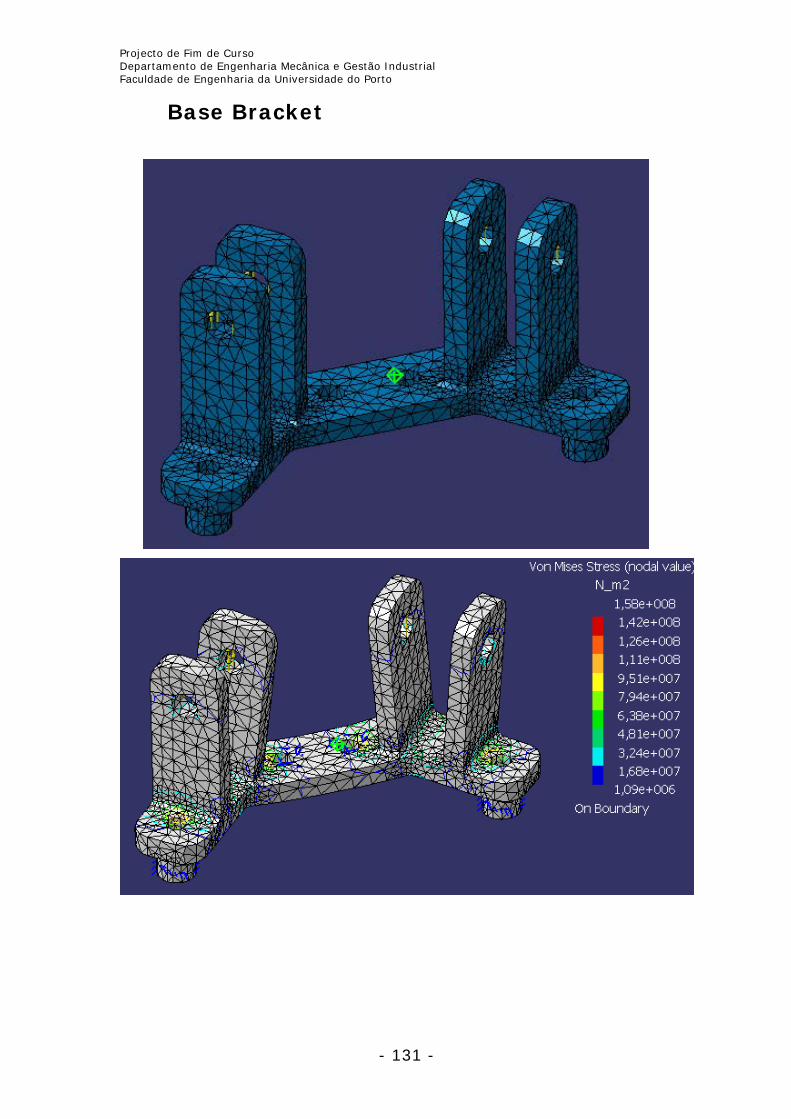
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 131 -
Base Bracket
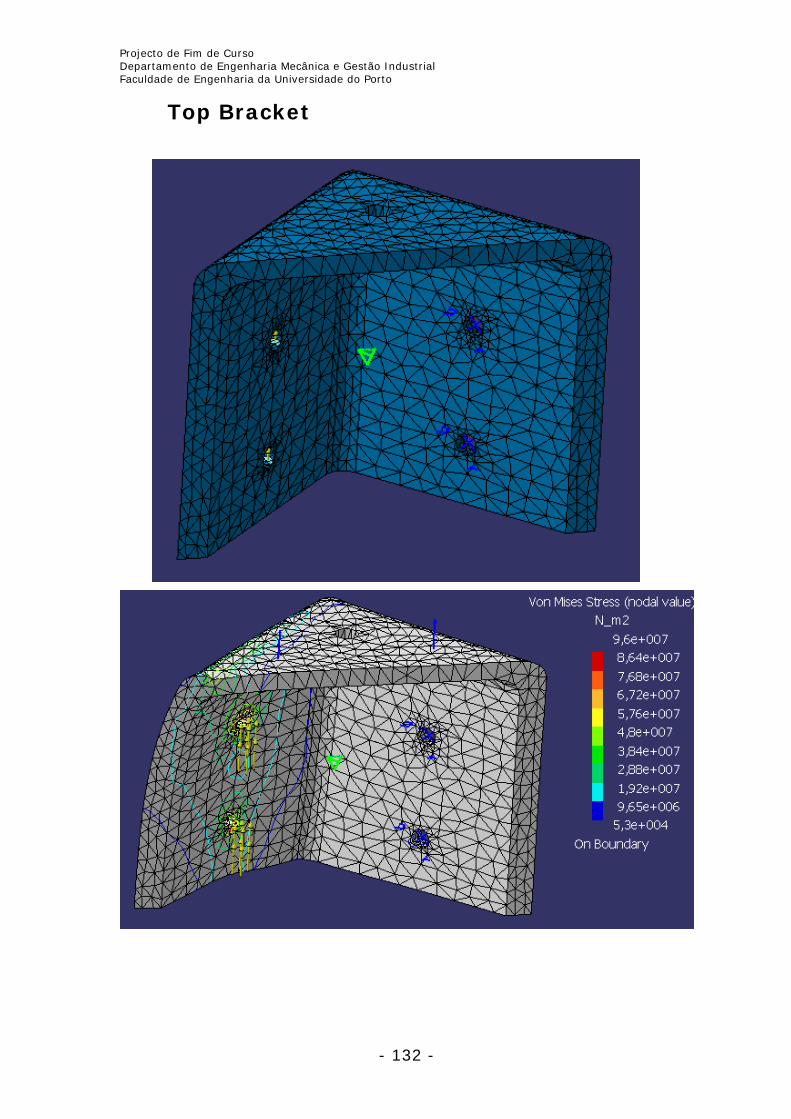
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 132 -
Top Bracket

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 133 -
Top Bracket TPOD
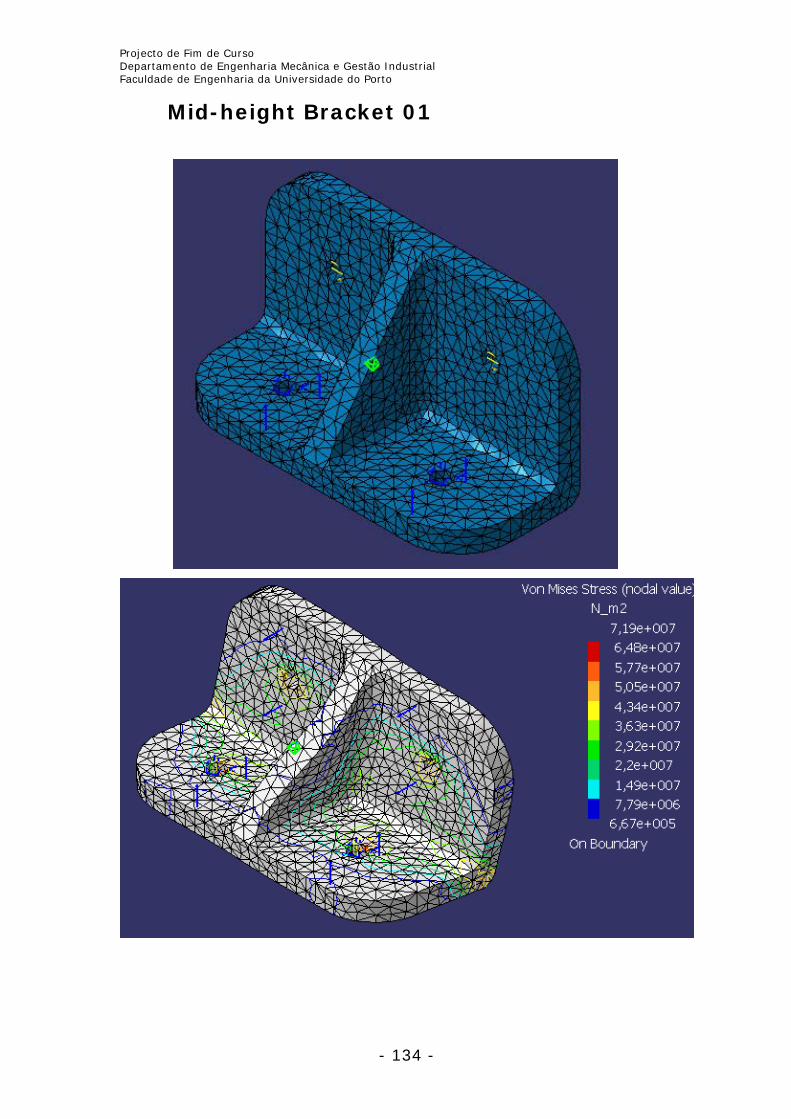
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 134 -
Mid-height Bracket 01

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 135 -
Mid-Height Bracket 02
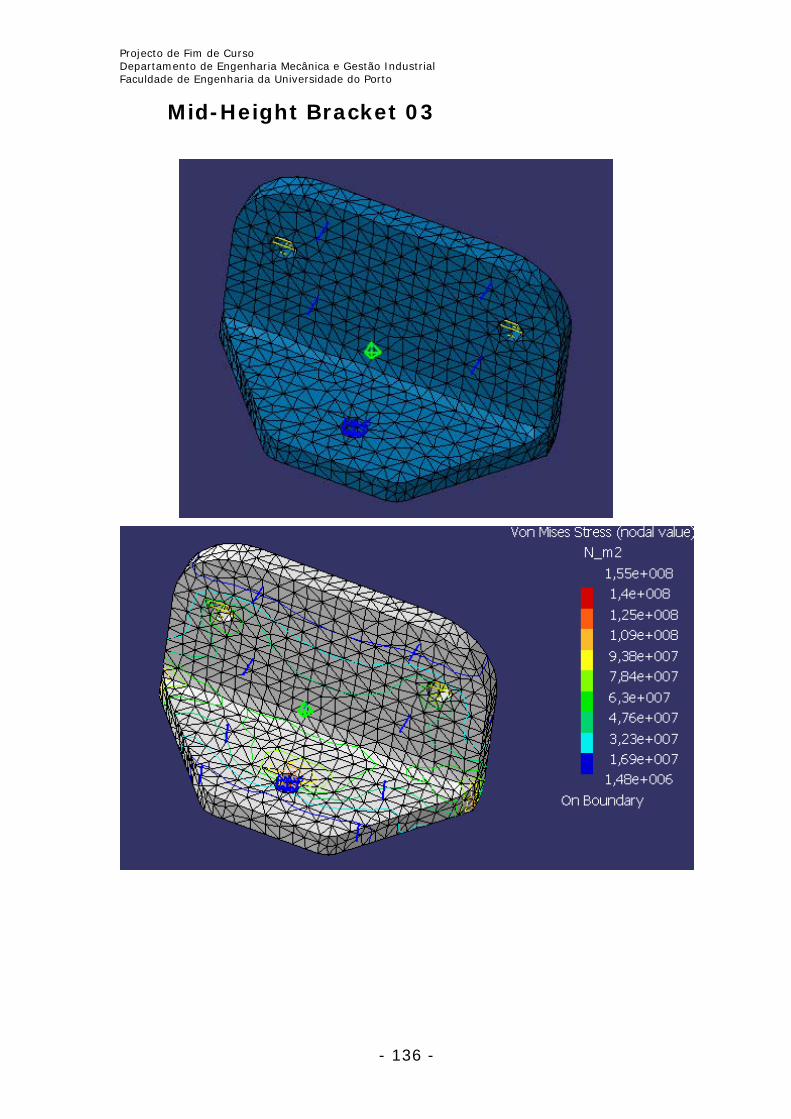
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 136 -
Mid-Height Bracket 03
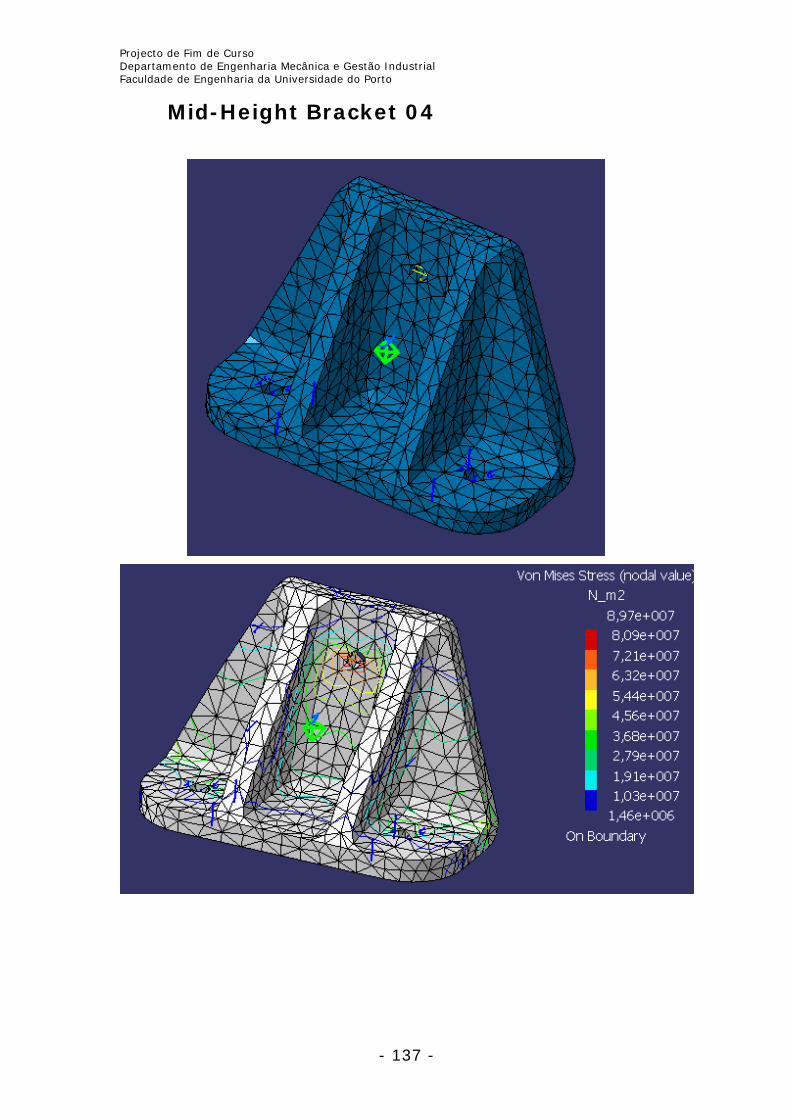
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 137 -
Mid-Height Bracket 04

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 138 -
Mid-Height Bracket 05

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 139 -
ANEXO G – Desenhos de Definição dos Elementos de Ligação do Micro-satélite
SSETI-Express
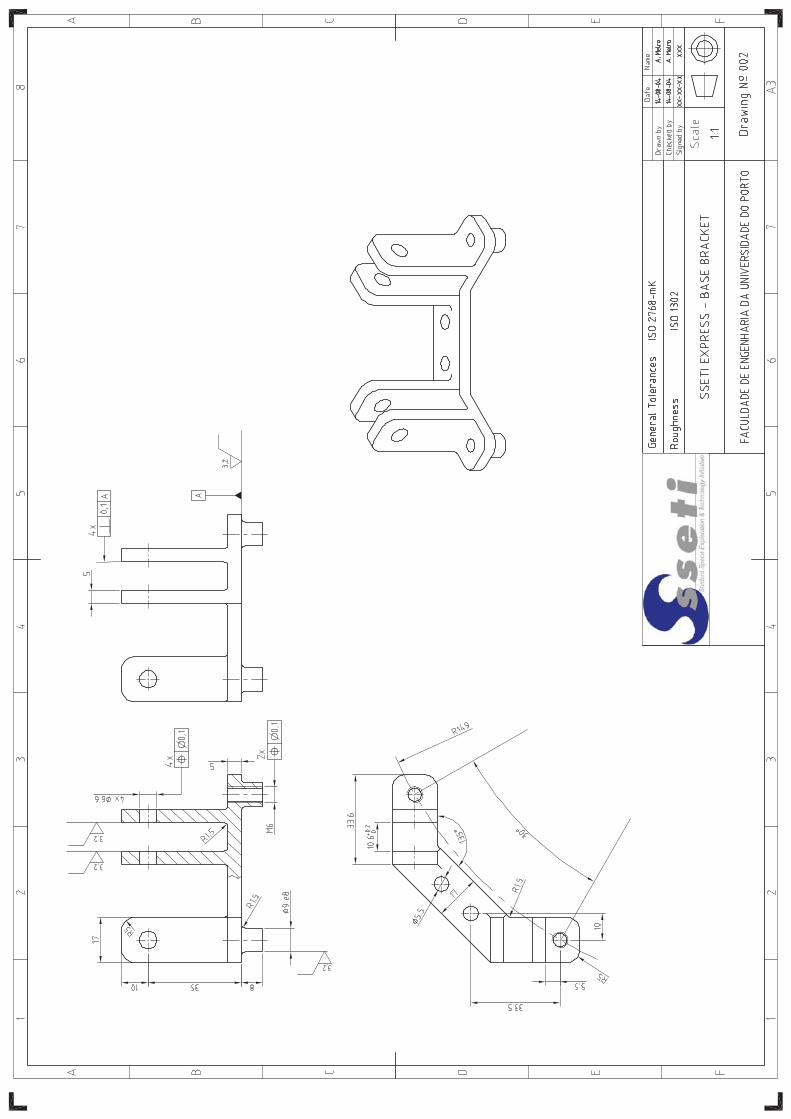

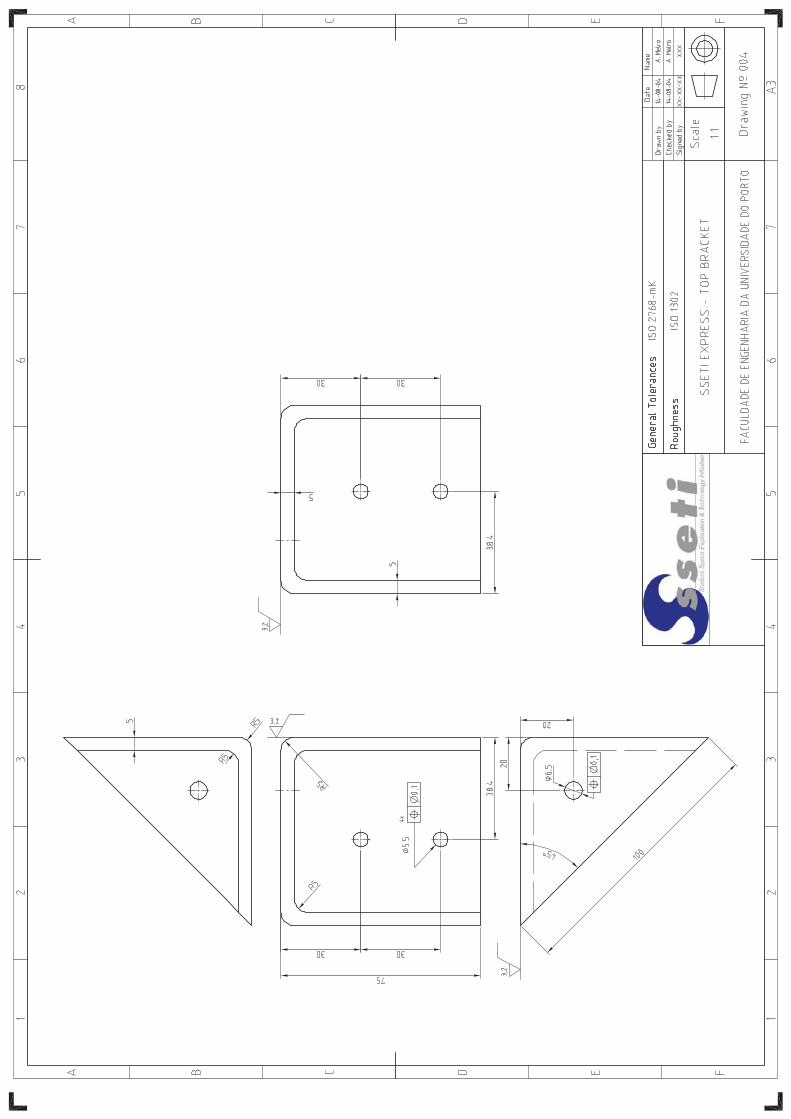





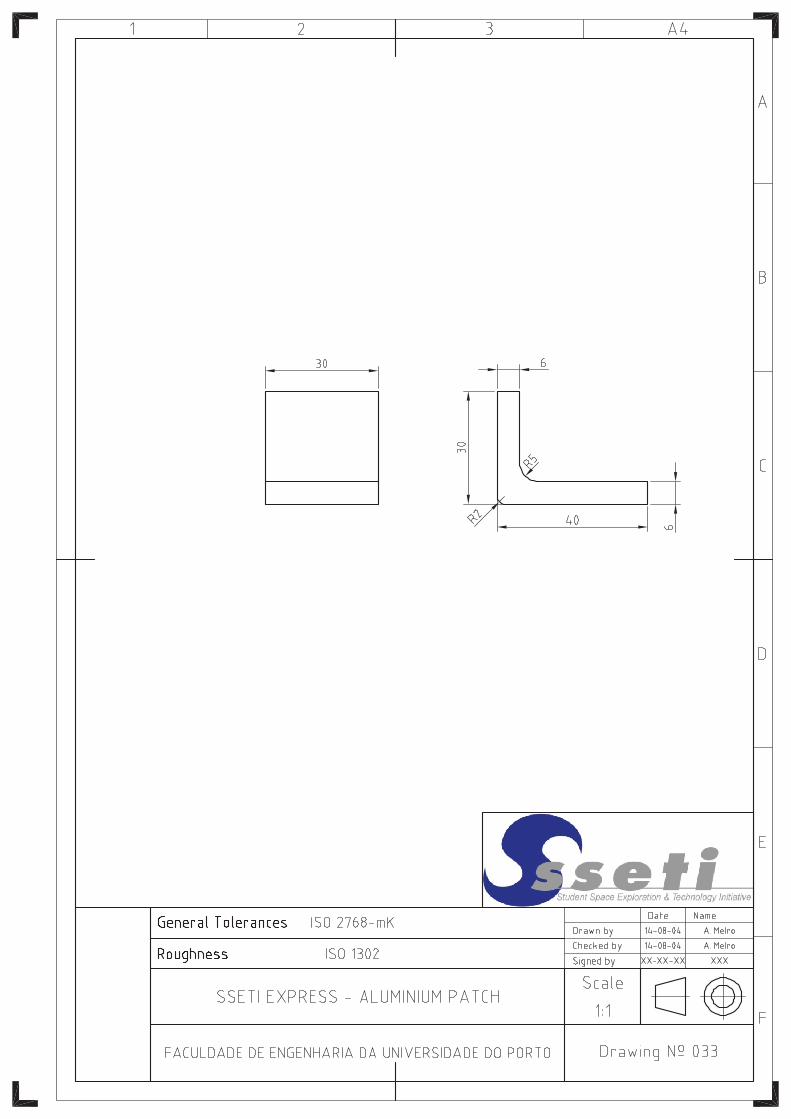

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 149 -
ANEXO H – Desenho de Definição do Anel de Titânio


Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 151 -

Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 152 -
ANEXO I – Desenhos de Definição da Estrutura Secundária do Micro-satélite
SSETI-Express

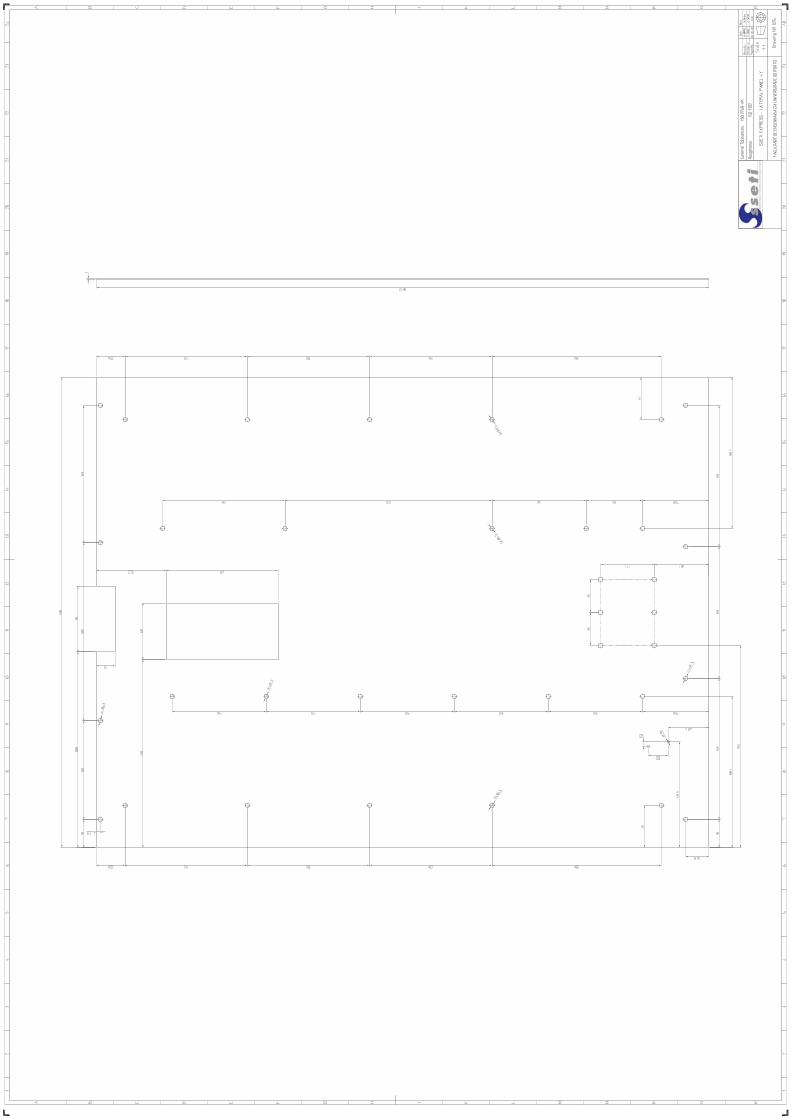
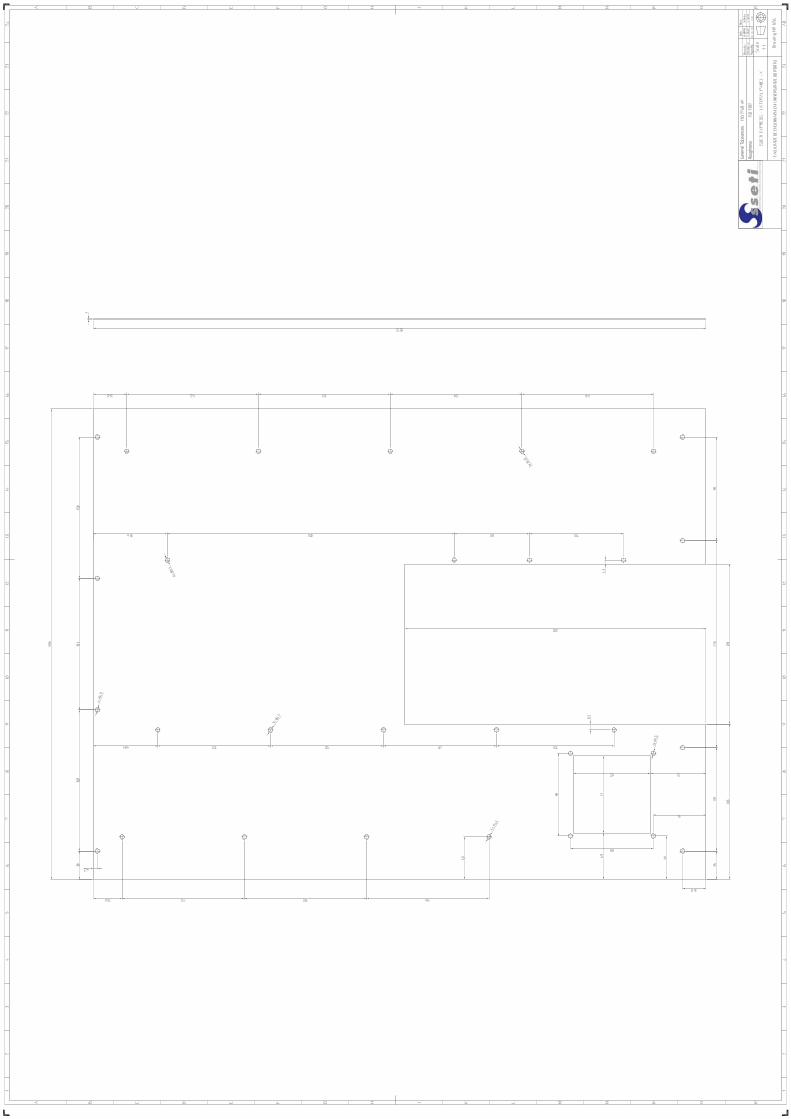

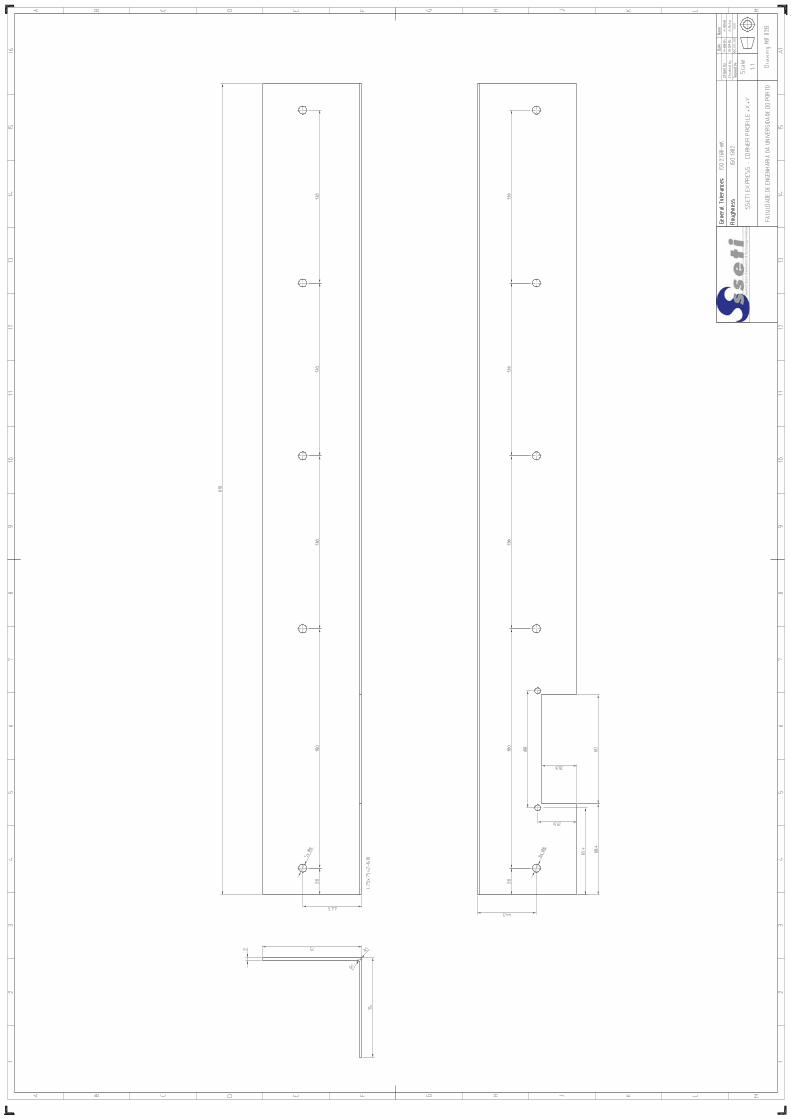
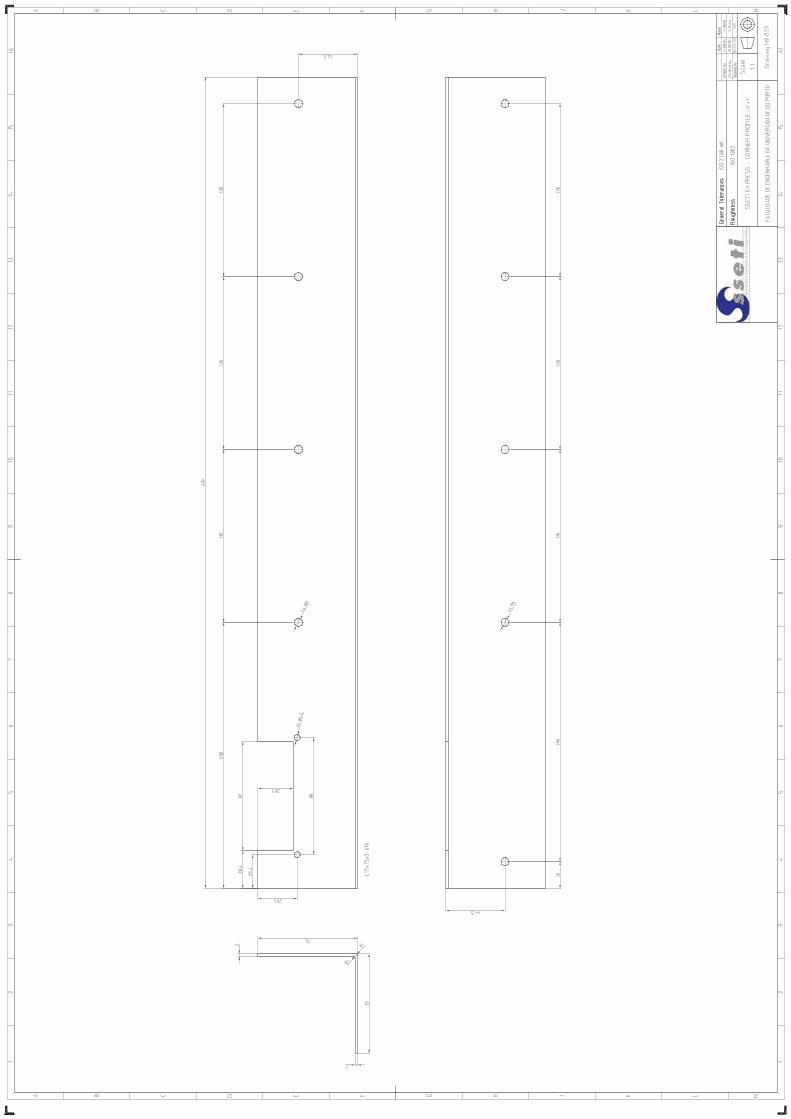



Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 161 -
ANEXO J – Desenhos de Definição da Estrutura Terciária do Micro-satélite SSETI-
Express



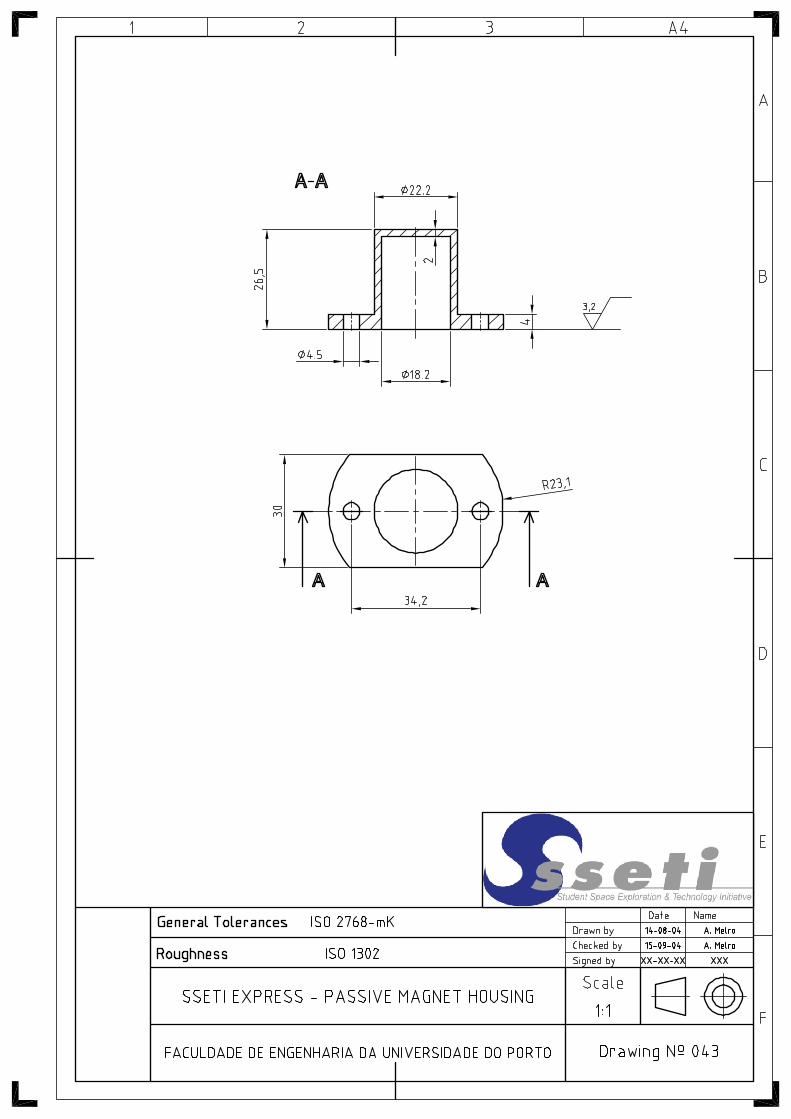
Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 166 -
ANEXO K – Desenhos de Definição de Insertos utilizados no Micro-satélite SSETI-
Express
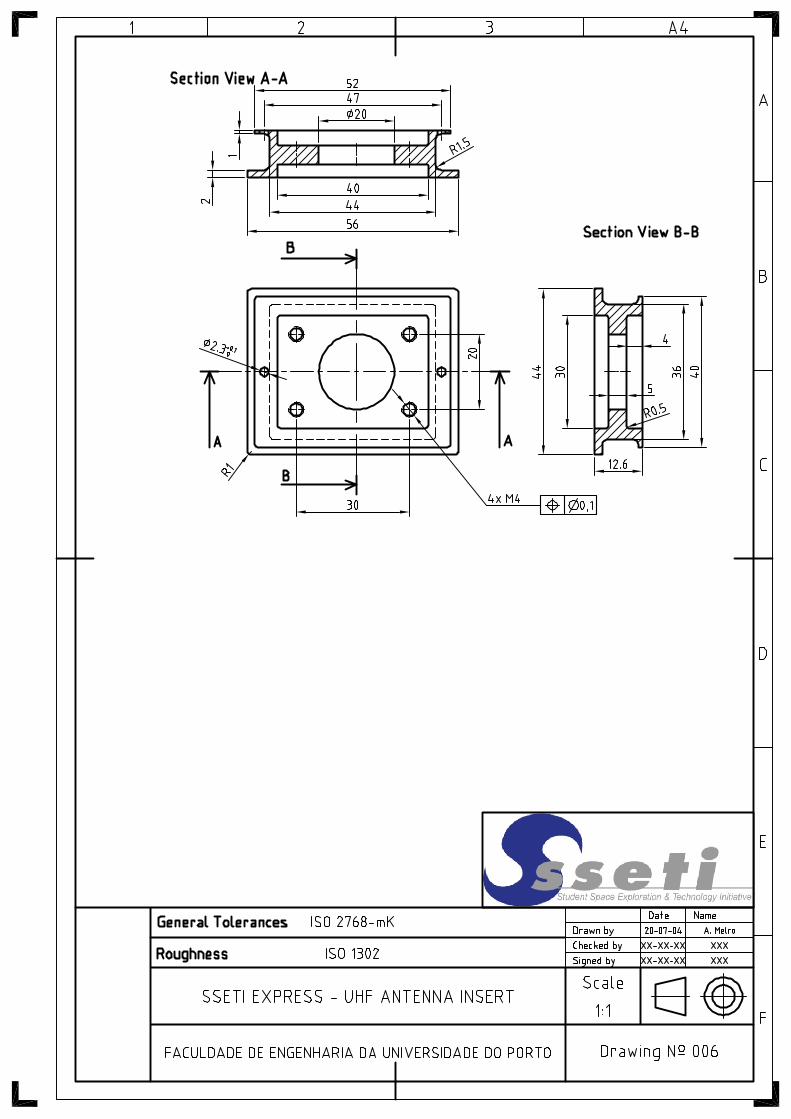
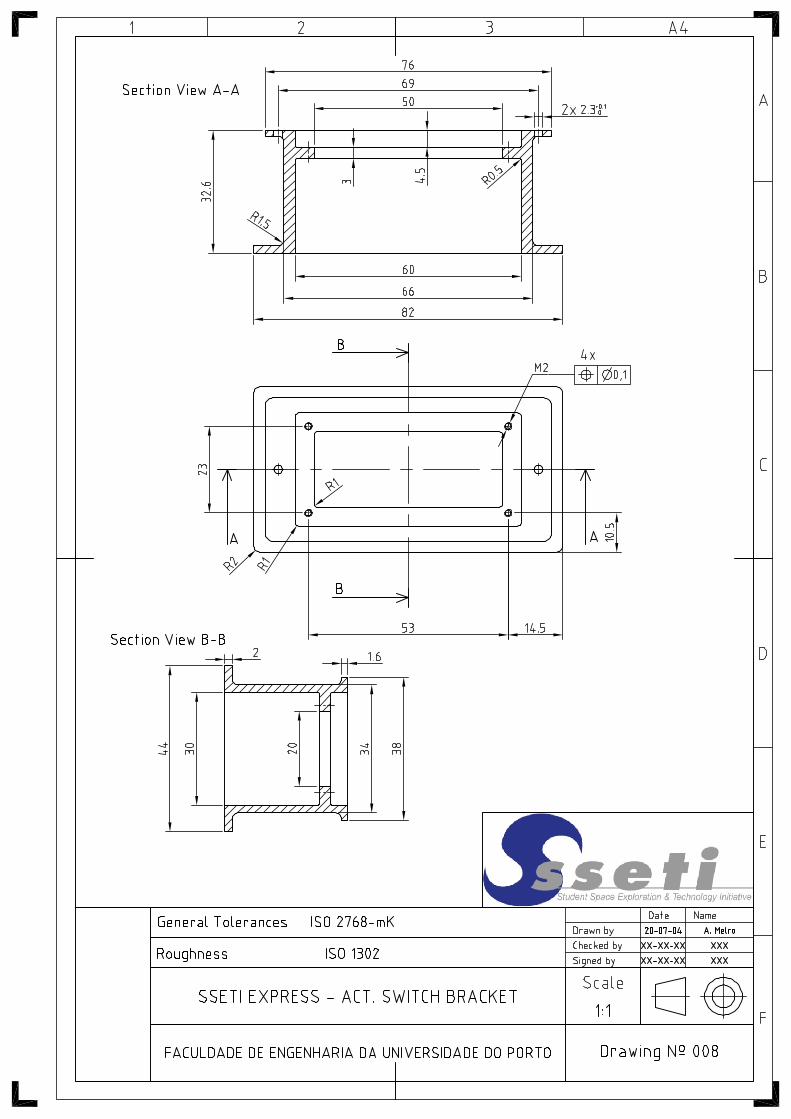




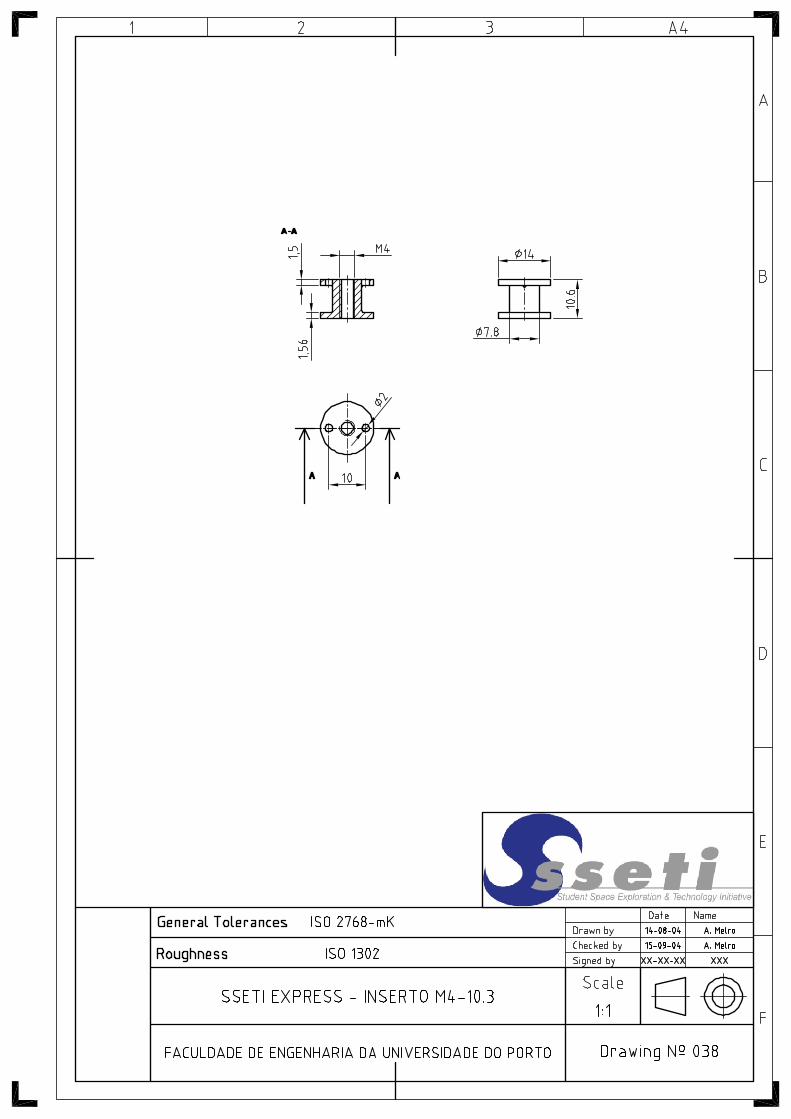
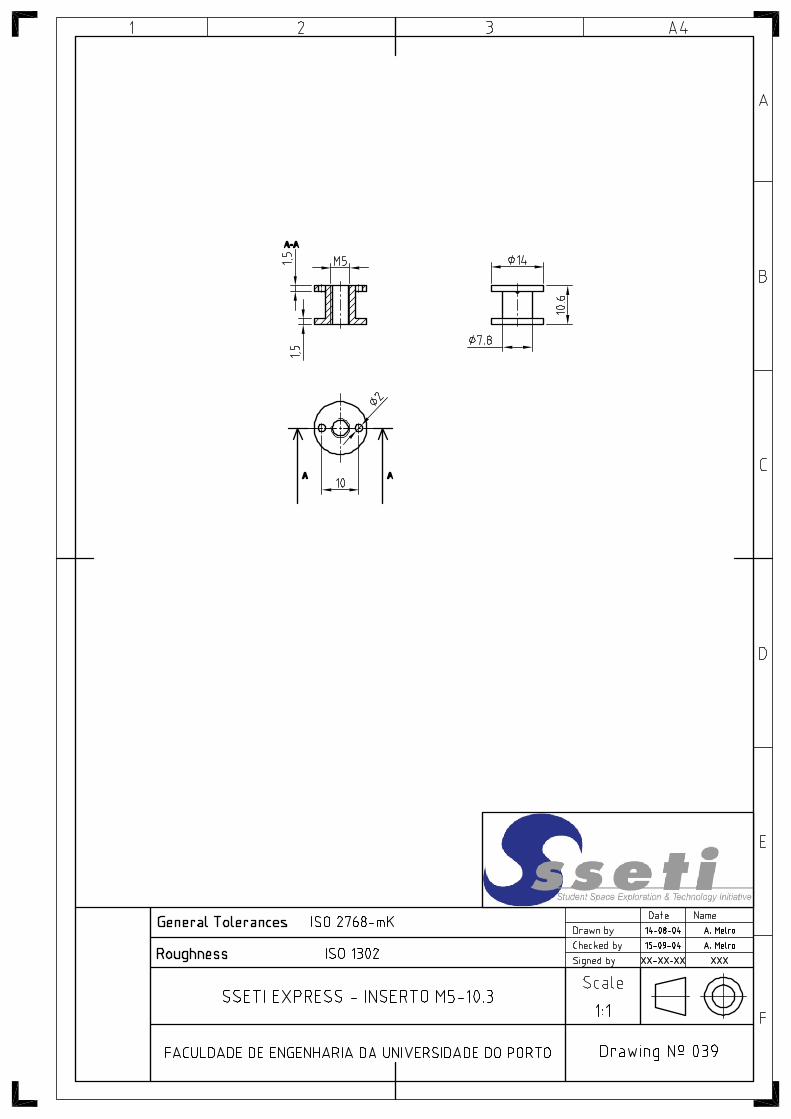
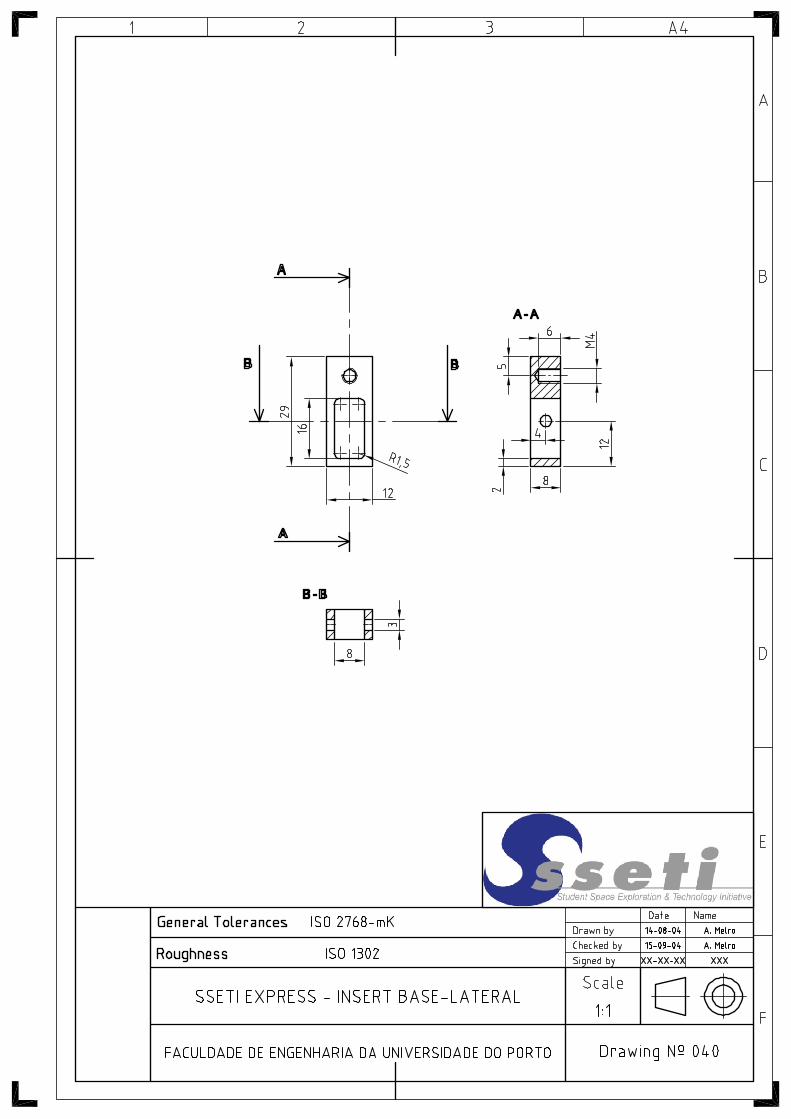


Projecto de Fim de Curso Departamento de Engenharia Mecânica e Gestão Industrial Faculdade de Engenharia da Universidade do Porto
- 178 -
ANEXO L – Manual de Integração e Verificação do Micro-satélite SSETI-
Express

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
Prepared by: António Melro Date: 26 September 2004 Checked by: {checked by} Date: Approved by: {approved by} Date: SSETI, ESA-ESTEC, ADM-RE P.O. Box 299, 2200 AG Noordwijk, The Netherlands Tel. (31) 71 565 4603 - Fax. (31) 71 565 5590 E-mail: [email protected]
SSSSEETTII EExxpprreessss
Integration Manual
Ref.: Express_D_STRU+CONF_040926_02_Integration_Manual.doc
Issue: Draft02
Date: 27/09/2004
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
1
Document Change Record Issue Date Changes Draft01 21-Sep-04 First Draft Draft02 26-Sep-04 Added Instructions for all Integration Effort

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
2
Table of Contents
Document Change Record..........................................................................................................1
Table of Contents .......................................................................................................................2
1 Introduction ........................................................................................................................4
2 Related Documents.............................................................................................................5
2.1 Applicable Documents ...............................................................................................5 2.2 Reference Documents.................................................................................................5
3 Insert Potting ......................................................................................................................6
3.1 Selection of adhesive..................................................................................................6 3.2 Position of different inserts on the sandwich panels ..................................................7
3.2.1 Base Panel ..........................................................................................................8 3.2.2 Shear Panel +y....................................................................................................9 3.2.3 Shear Panel -y...................................................................................................11 3.2.4 Shear Panel +x0y..............................................................................................13 3.2.5 Shear Panel -x0y...............................................................................................14 3.2.6 Shear Panel +x+y..............................................................................................15 3.2.7 Shear Panel +x-y...............................................................................................16 3.2.8 Shear Panel -x+y...............................................................................................17 3.2.9 Shear Panel -x-y ...............................................................................................18 3.2.10 Top Plate...........................................................................................................19
4 Primary Structure Assembly.............................................................................................21
4.1 Introduction ..............................................................................................................21 4.2 First parts of primary structure (Step 1) ...................................................................21 4.3 Integration of ACS Clusters, piping and tank (Step 2).............................................25 4.4 Primary Structure Integration – 2nd phase (Step 3) ..................................................28 4.5 Finishing the integration of the Central Primary Structure (Step4)..........................31 4.6 Final integration of Propulsion subsystem (Step 5) .................................................33 4.7 Top plate and lifting eye nuts (Step 6) .....................................................................34
5 Internal Subsystems Integration .......................................................................................35
5.1 Integration of Magnetometer ....................................................................................35 5.2 Integration of Camera...............................................................................................36 5.3 Integration of Passive Magnet ..................................................................................36 5.4 Integration of PCU and Battery ................................................................................37 5.5 Integration of T-Pods................................................................................................38 5.6 Integration of OBC ...................................................................................................39

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
3
5.7 Integration of S-band Transmitter and +z antenna ...................................................40 5.8 Integration of UHF ...................................................................................................41 5.9 Integration of PIN.....................................................................................................42 5.10 Integration of Propulsion ICU ..................................................................................43 5.11 Activation Switch .....................................................................................................44
6 Secondary Structure..........................................................................................................45
6.1 Corner Profiles..........................................................................................................45 6.2 Lateral Panels ...........................................................................................................46
6.2.1 Lateral Panel +x................................................................................................46 6.2.2 Lateral Panel –y................................................................................................47 6.2.3 Lateral Panel -x.................................................................................................48 6.2.4 Lateral Panel +y................................................................................................49
6.3 Integration of Secondary Structure...........................................................................50
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
4
1 Introduction This Integration Manual pretends to establish the integration steps to be followed during the assembly of the SSETI Express satellite. The document contains information regarding needed materials and tools for the integration effort, guidelines on how to use them based on distributor’s data sheets and consecutive steps to be followed during integration. The information presented on this document should be regarded has complementary data to the 3D model of SSETI Express. This model can be found on the ftp file server with the name Express_3D_model_3.2.2. All the pictures presented on this report were collected from that same model.

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
5
2 Related Documents
2.1 Applicable Documents
2.2 Reference Documents [RD1] – Express_C_Proppayload_040605_02_IntegrationPlan.pdf [RD2] – Integration_Tracking_18092004.xls
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
6
3 Insert Potting
3.1 Selection of adhesive An insert system is constituted by 3 elements: Insert, Sandwich Structure and Potting compound. The first two elements are already manufactured and shall not be subject of further considerations. However, the potting compound hasn’t been selected yet. The standard potting material is a liquid two-component epoxy resin of reduced weight and simultaneously improved viscosity. Characteristic properties of this resin are that it can only be applied by injection with an air-pressurised gun and that it will not flow after injection, provided the correct viscosity is maintained. The basic properties of a typical resin compound can be found on Table 1: Density 0.6 – 0.7 kg/dm3 Tensile Strength 14 N/mm2 Compressive Strength 36 N/mm2 Shear Strength 10 N/mm2 Tensile Modulus 2300 N/mm2 Temperature Resistance Up to 100 ºC Table 1 – Potting Material Properties There are four adhesives which can be used for this operation:
• Shur-Lok Resin System SLE 3010 – This is especially suitable for inserts. The resin and hardener components which are separately contained in the cartridge cases are mixed according to the attached preparation instructions and can then be processed in the original cartridge. For more details refer to product data SLE 3010 7-29-70.
• Lekutherm X227 + T3 hardener – This adhesive requires, after mixing these two
components, the addition of microballoons B23-500 in order to increase viscosity. It also requires a Senco cartridge without cavities with a orifice nozzle of about 2 mm diameter.
• REDUX 830 (Hexcel Composites® company) – This is a low density, self
extinguishing, room temperature curing, two-part, epoxy paste adhesive.
• HYSOL® – There are a number of Epoxy Paste Adhesives that could be used on this task. Good gap filler capability, low density and moderate viscosity are some of their qualities. HYSOL® belongs now to LOCTITE ® Company. It is possible to see on their website not only the product data sheets but also information on custom
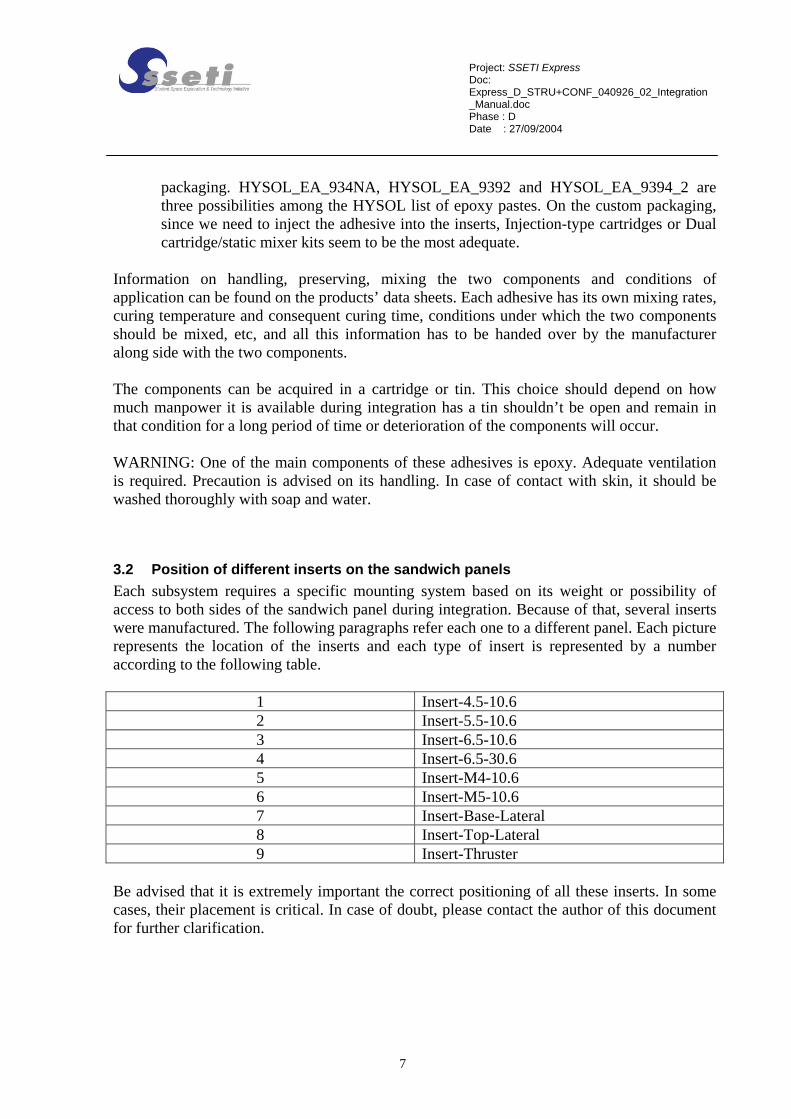
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
7
packaging. HYSOL_EA_934NA, HYSOL_EA_9392 and HYSOL_EA_9394_2 are three possibilities among the HYSOL list of epoxy pastes. On the custom packaging, since we need to inject the adhesive into the inserts, Injection-type cartridges or Dual cartridge/static mixer kits seem to be the most adequate.
Information on handling, preserving, mixing the two components and conditions of application can be found on the products’ data sheets. Each adhesive has its own mixing rates, curing temperature and consequent curing time, conditions under which the two components should be mixed, etc, and all this information has to be handed over by the manufacturer along side with the two components. The components can be acquired in a cartridge or tin. This choice should depend on how much manpower it is available during integration has a tin shouldn’t be open and remain in that condition for a long period of time or deterioration of the components will occur. WARNING: One of the main components of these adhesives is epoxy. Adequate ventilation is required. Precaution is advised on its handling. In case of contact with skin, it should be washed thoroughly with soap and water.
3.2 Position of different inserts on the sandwich panels Each subsystem requires a specific mounting system based on its weight or possibility of access to both sides of the sandwich panel during integration. Because of that, several inserts were manufactured. The following paragraphs refer each one to a different panel. Each picture represents the location of the inserts and each type of insert is represented by a number according to the following table.
1 Insert-4.5-10.6 2 Insert-5.5-10.6 3 Insert-6.5-10.6 4 Insert-6.5-30.6 5 Insert-M4-10.6 6 Insert-M5-10.6 7 Insert-Base-Lateral 8 Insert-Top-Lateral 9 Insert-Thruster
Be advised that it is extremely important the correct positioning of all these inserts. In some cases, their placement is critical. In case of doubt, please contact the author of this document for further clarification.

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
8
3.2.1 Base Panel

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
9
3.2.2 Shear Panel +y

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
10
For reasons of space on this page, these two pictures do not represent the entirety of the panel. However, all inserts along the edges shown are to be considered with the same orientation. Each picture contains a reference system which corresponds to the actual orientation of the sandwich panel according to the satellite’s general reference axis. Looking at the two pictures on this page, it is visible that the insert signaled with (8) is not symmetrical. Therefore, its orientation is very important when potting this kind of insert. This warning is to be considered for all panels that require inserts (8).

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
11
3.2.3 Shear Panel -y
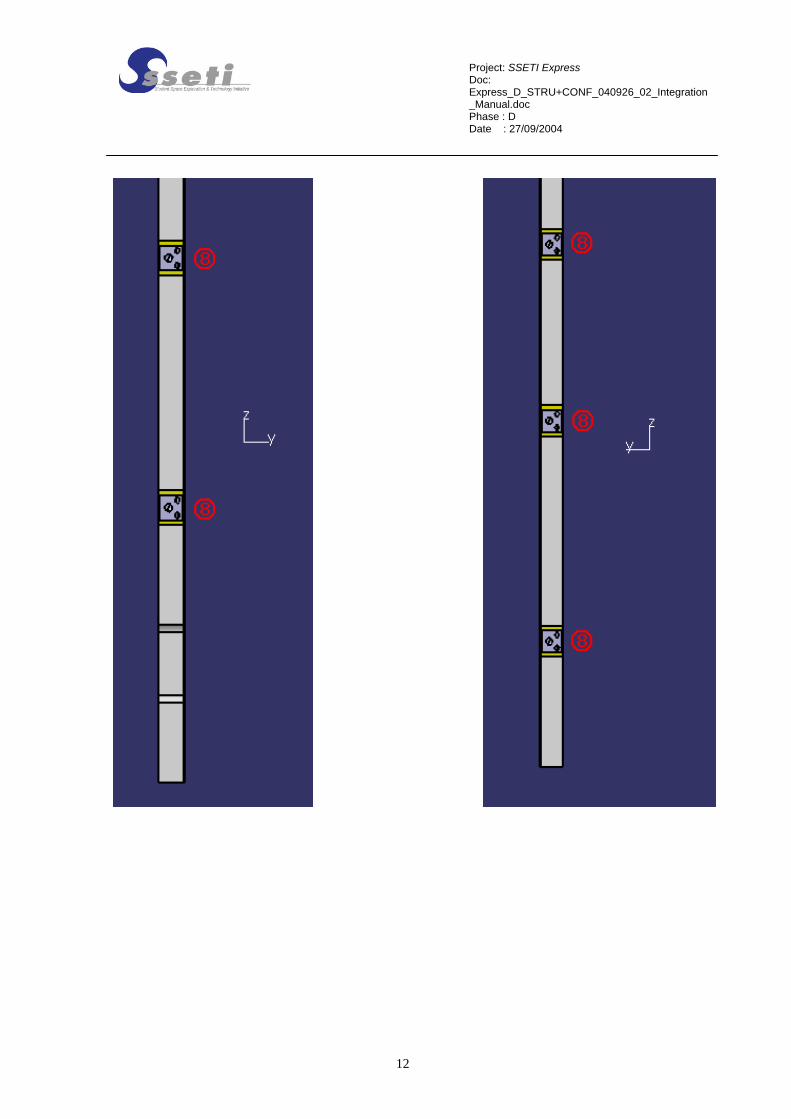
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
12

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
13
3.2.4 Shear Panel +x0y

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
14
3.2.5 Shear Panel -x0y

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
15
3.2.6 Shear Panel +x+y
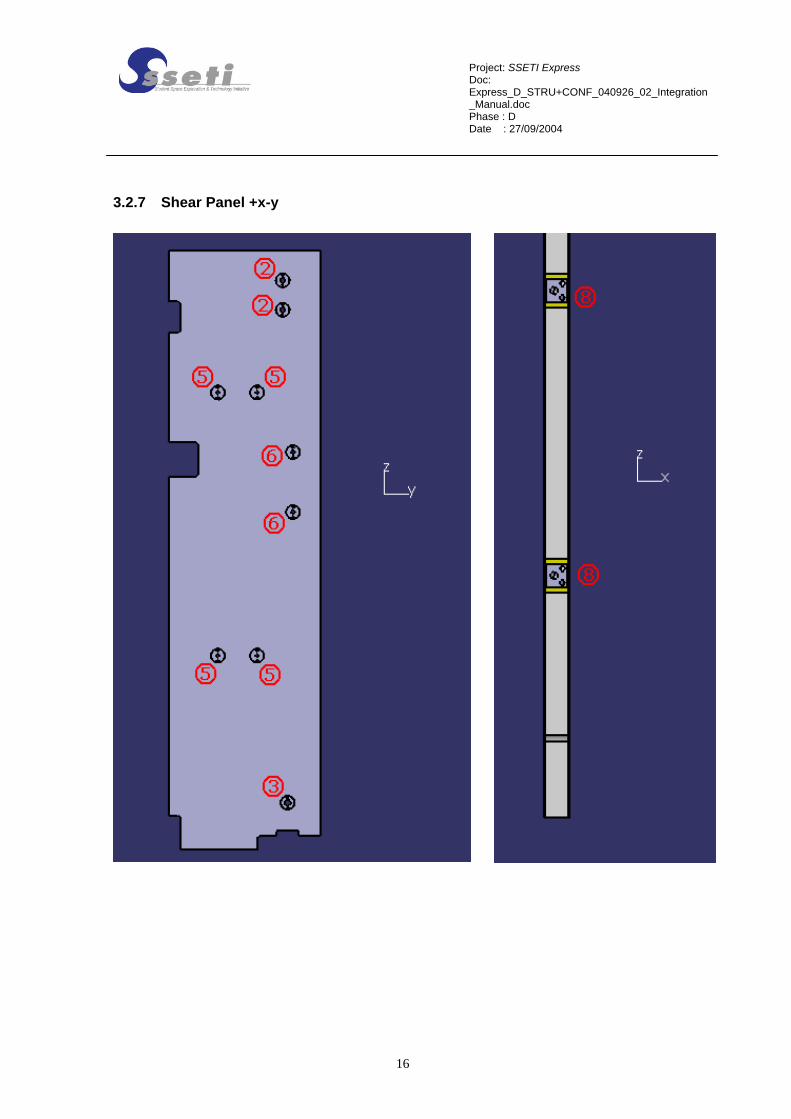
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
16
3.2.7 Shear Panel +x-y

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
17
3.2.8 Shear Panel -x+y

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
18
3.2.9 Shear Panel -x-y
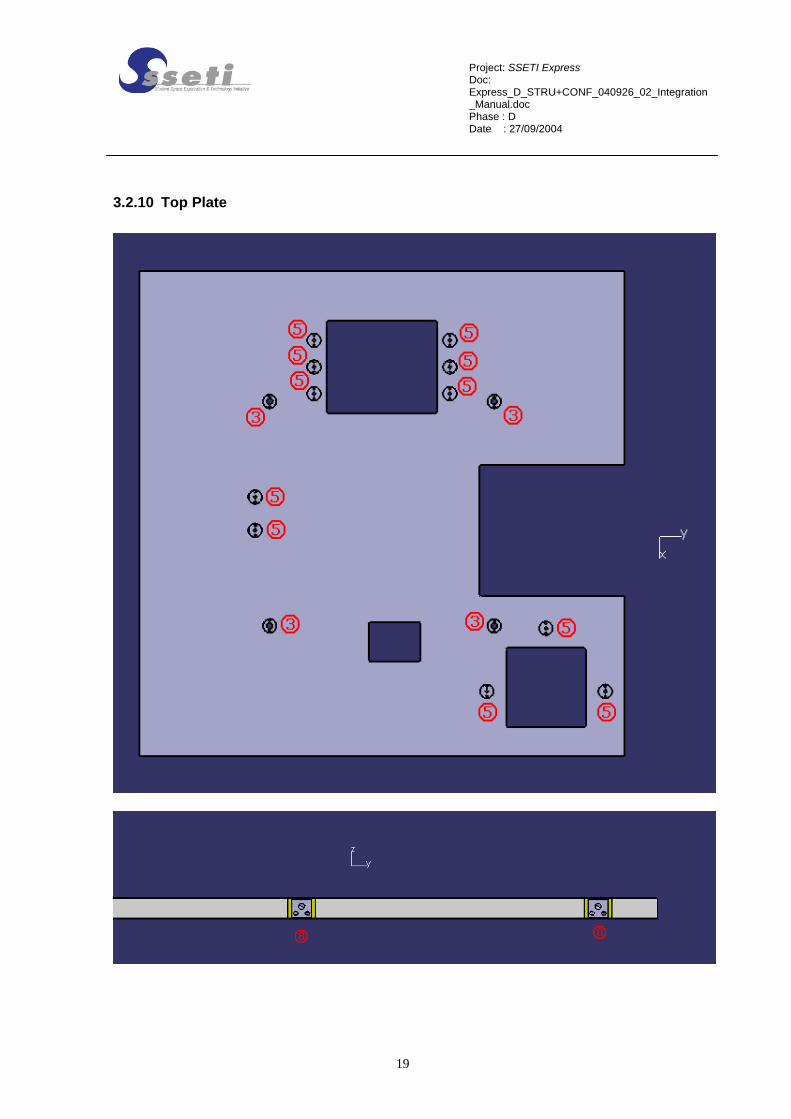
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
19
3.2.10 Top Plate

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
20
Besides these inserts, there are two others that must also be placed during this phase. The insert for the UHF antenna on the top plate and the insert for the activation switch on the base plate.
Figure 1 - Activation Switch Insert
Figure 2 - UHF Antenna Insert
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
21
4 Primary Structure Assembly
4.1 Introduction Due to its tic-tac-toe configuration, the central compartment is of difficult access when all the panels are up on their places. In other words, whatever subsystem/equipment is to be placed there, it must be done during integration of main structural elements. If not, there is the possibility of not being able to add that item later on. Because of this, the tank and its associated tubing, as well as the rest of the Propulsion system – Propellant Management System (PMS) and ACS Thrusters - must be integrated altogether with the Primary Structure. This is the reason why the structure for the flight model should not be assembled at ESTEC, but in Stuttgart, where the Propulsion subsystem is being developed. This chapter is intended to be followed when assembling the primary structure of the satellite and integrating the Propulsion system to it. There is little room for mistakes as it could force one to disassemble everything and going back to square one.
4.2 First parts of primary structure (Step 1) The following pictures were taken from the 3D model of the launch configuration of the satellite SSETI Express. They are meant to provide an integration sequence for the primary structure alongside with the propulsion system. Figure 3 represents the separation ring, the base plate, the titanium ring and the 4 base brackets. This is the starting point of the integration. A set of 12 M6x55 screws is to be placed from bottom to up passing by separation ring, base plate and titanium ring. Another set of 8 M4x16 screws is to be placed on the bottom brackets, 2 screws per bracket. These will hold the brackets to the titanium ring during changing of the separation ring at launch site and provide better stability on the brackets mechanical behaviour.

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
22
Figure 3
Next step is to place three sandwich panels. The panels are: Shear Panel +y, Shear Panel +x+y and Shear Panel –x+y. Please notice that Shear Panel +y is exactly the one where the tank is mounted. With these three panels, two middle-height brackets and two top brackets are to be used, along with the base brackets already installed - Figure 4. The connection base brackets <–> shear panels requires M6x30 screws and nuts, one pair for each shear panel. For middle brackets, there are to be used M5x16 screws alone. As for the top brackets the integration process turns out to be a bit trickier. On the +x+y corner of the structure, the special top bracket for the TPOD, designated on the 3D model as Top_bracket_TPOD_v2.0, is to be used. As for the –x+y corner, a normal top bracket applies. It is probably easier if these three shear panels are pre-integrated and then integrated into the already assembled components.

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
23
Figure 4
For the special top bracket represented on Figure 5, there is the need to use three screws: two M5x25 and one M5x16. The need to use screws with different lengths is justified by the presence of one of the TPODs on the other side of the Shear Panel +x+y, and the impossibility of using a nut here. This is why the M5x16 screws directly on the insert. The other two M5x25 screws require a washer and a nut each. The washers to be used on the satellite should all belong to the Large category. This occurs because there is the need to have a washer with a diameter bigger than the diameter of the potting system, thus providing a correct transmission of loads from the screw/nut to the skin of the sandwich panel.
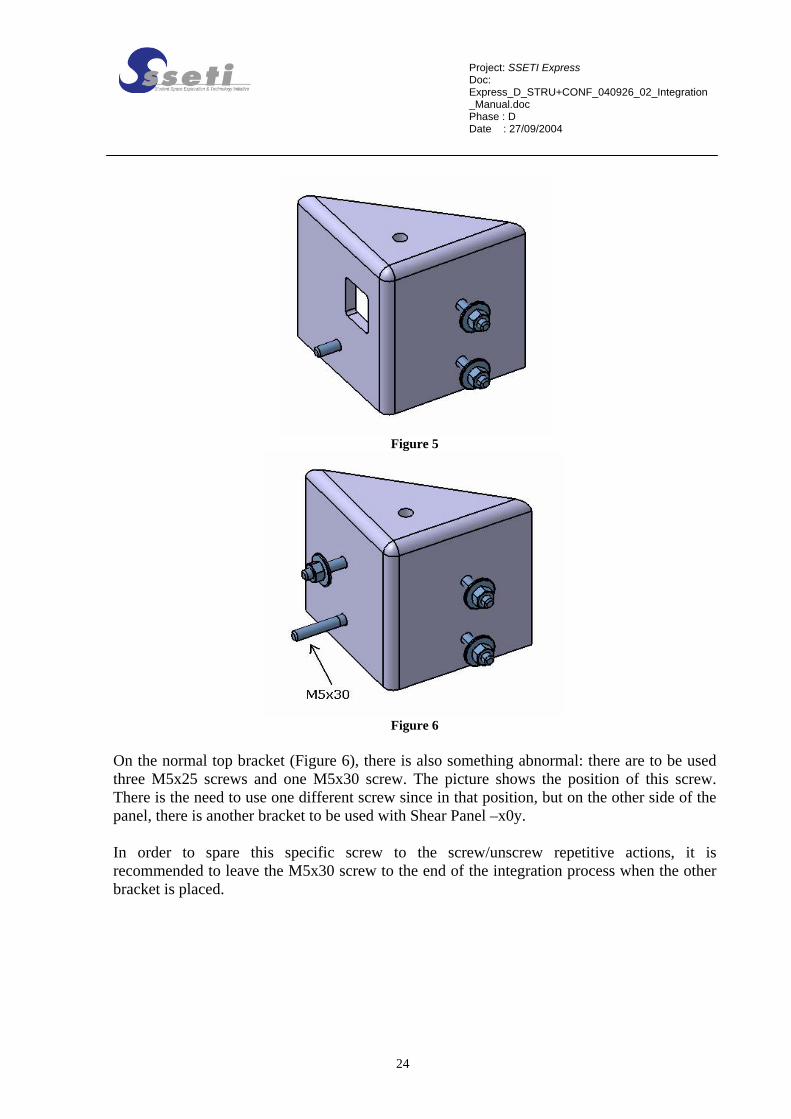
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
24
Figure 5
Figure 6
On the normal top bracket (Figure 6), there is also something abnormal: there are to be used three M5x25 screws and one M5x30 screw. The picture shows the position of this screw. There is the need to use one different screw since in that position, but on the other side of the panel, there is another bracket to be used with Shear Panel –x0y. In order to spare this specific screw to the screw/unscrew repetitive actions, it is recommended to leave the M5x30 screw to the end of the integration process when the other bracket is placed.

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
25
4.3 Integration of ACS Clusters, piping and tank (Step 2) The Propulsion system can now be started to be integrated onto the primary structure. The first integrated parts should be the ACS clusters and their corresponding tubing (Figure 7). This step is in accordance with [RD1]. The ACS clusters are to be integrated using each four M4x10 screws and one M4x35 onto the base plate. This last one is bigger and is the one closer to the edge of the base plate. It is supposed to pass through all the ACS cluster height.
Figure 7

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
26
Next step to be taken is the integration of the tank using two tank mountings. These mountings are to be screwed onto the Shear Panel +y as depictured in Figure 8. Four M5 screws are to be used in the tank integration along with their respective washers and nuts. The maximum length of these screws on the other side of the panel is 13.4 mm since on the other side there is one of the T-PODs. The distance mentioned is exactly the distance between the Shear Panel +y and the wall of the T-POD.
Figure 8

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
27
Now, the High Pressure Tubing can be integrated both on the tank and be hard mounted on the base plate using the correct pipe mountings (Figure 9).
Figure 9
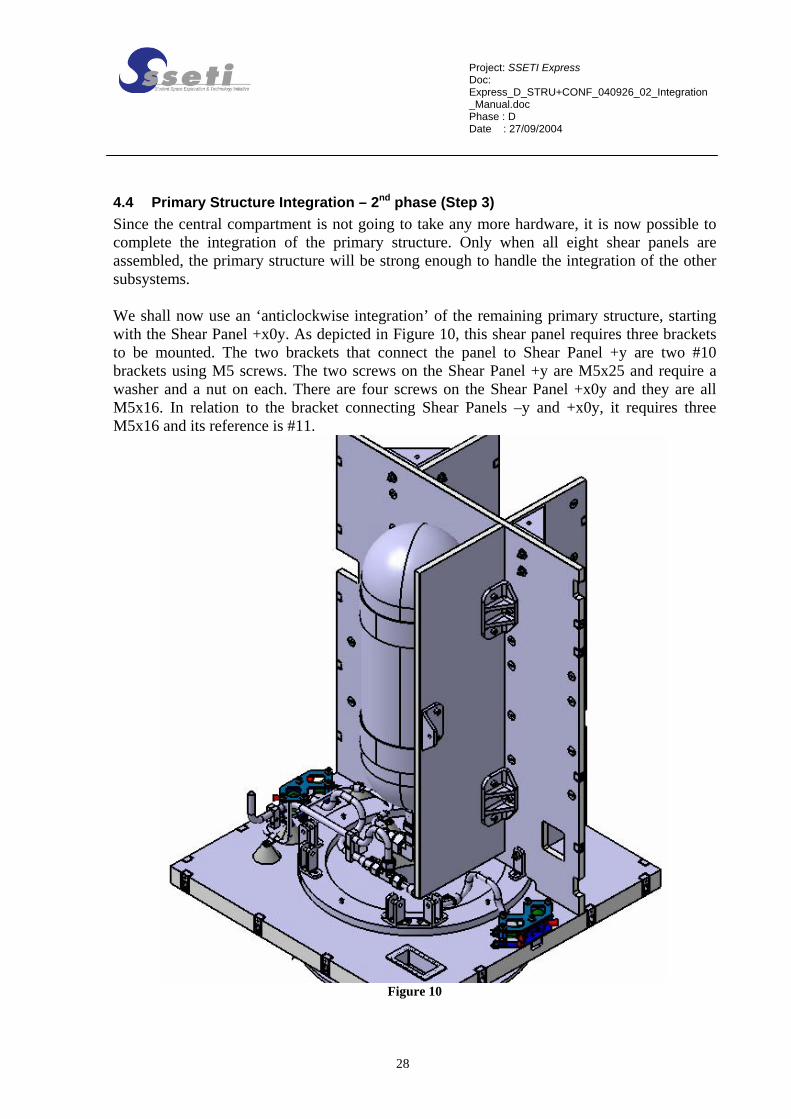
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
28
4.4 Primary Structure Integration – 2nd phase (Step 3) Since the central compartment is not going to take any more hardware, it is now possible to complete the integration of the primary structure. Only when all eight shear panels are assembled, the primary structure will be strong enough to handle the integration of the other subsystems. We shall now use an ‘anticlockwise integration’ of the remaining primary structure, starting with the Shear Panel +x0y. As depicted in Figure 10, this shear panel requires three brackets to be mounted. The two brackets that connect the panel to Shear Panel +y are two #10 brackets using M5 screws. The two screws on the Shear Panel +y are M5x25 and require a washer and a nut on each. There are four screws on the Shear Panel +x0y and they are all M5x16. In relation to the bracket connecting Shear Panels –y and +x0y, it requires three M5x16 and its reference is #11.
Figure 10
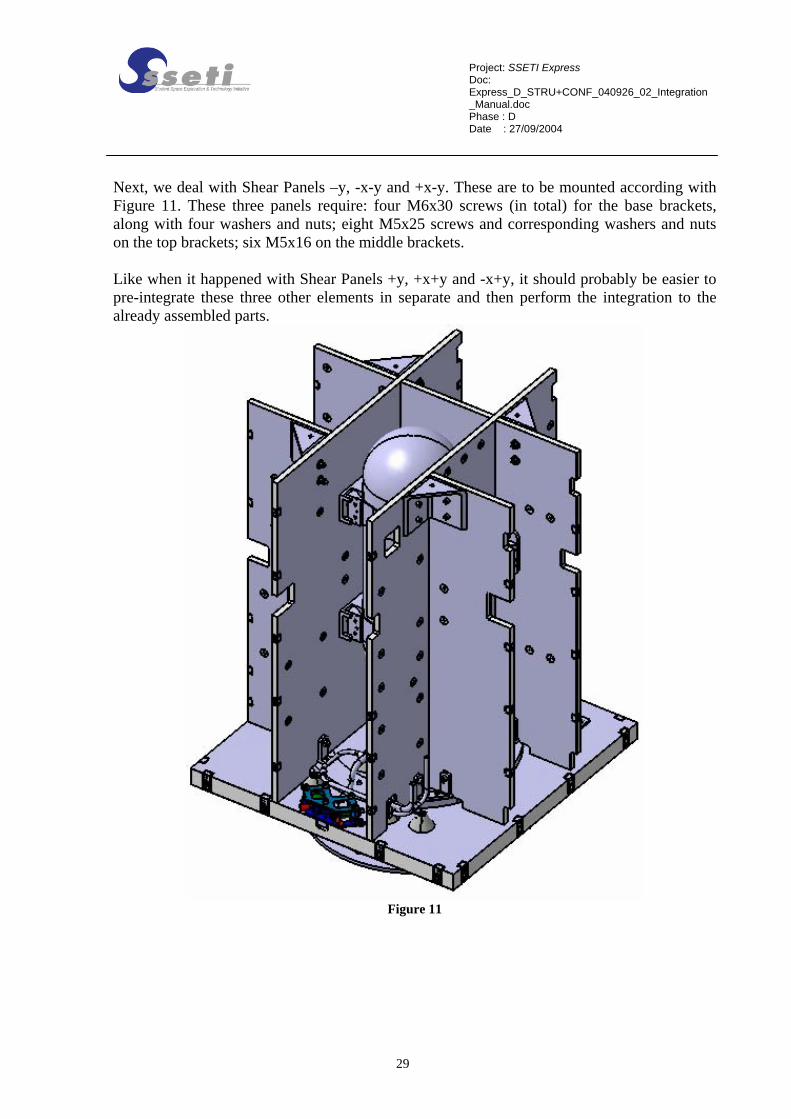
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
29
Next, we deal with Shear Panels –y, -x-y and +x-y. These are to be mounted according with Figure 11. These three panels require: four M6x30 screws (in total) for the base brackets, along with four washers and nuts; eight M5x25 screws and corresponding washers and nuts on the top brackets; six M5x16 on the middle brackets. Like when it happened with Shear Panels +y, +x+y and -x+y, it should probably be easier to pre-integrate these three other elements in separate and then perform the integration to the already assembled parts.
Figure 11

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
30
The last integration move on this step is to place the Shear Panel -x0y (Figure 12). This panel is placed using the two remaining mid-height brackets. Bracket #13 is the one that shares one mounting point with the Top-bracket -x+y. It also requires one M5x16 and one M5x25. This last one also uses one M5 washer and nut. Bracket #12 requires three M5x16 screws only.
Figure 12

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
31
4.5 Finishing the integration of the Central Primary Structure (Step4) After all these steps, it is recommended that a thorough check of all the mounting points is performed. Every structural panel should be checked for scratches or other damage that could have occurred during the integration effort. To finalize the integration of the Primary structure, there are four aluminium brackets to be placed in four specific places, connecting two different shear panels. These brackets are not to be screwed but glued on the panels. Their positions are represented in the next three figures. WARNING: Since these brackets are to be glued, once they are integrated, there is no turning back. Caution is advised when performing this operation since it will be impossible to remove these brackets after the glue is dry.
Figure 13

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
32
Figure 14
Figure 15

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
33
4.6 Final integration of Propulsion subsystem (Step 5) To finish the integration of the Propulsion subsystem, the only thing left to be mounted is the Propellant Management System. It requires ten M4x25 screws along with ten washers and nuts.
Figure 16

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
34
4.7 Top plate and lifting eye nuts (Step 6) The Top Plate can now be placed in order for the primary structure to achieve the maximum strength, and to have available all of its mounting space. With the Top Plate on its place, it will also be possible to move around the satellite using its lifting frame. This lifting frame is to lift the satellite using the four M6x30 screws and respective M6 lifting eye nuts.
Figure 17

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
35
5 Internal Subsystems Integration Now that the primary structure is complete, the several subsystems which are to be mounted on it can finally be integrated. The integration order used on this chapter is not rigid. If, for some reason, one certain equipment is not ready to be integrated, it is possible to move forward with the integration effort. Whenever it is absolutely necessary to respect the integration order here presented, so will be told and the reason for such explained. This integration order takes into consideration [RD2]. It is advised to perform first all the mechanical mounting of the subsystems, and only after to set up the electrical wiring between them.
5.1 Integration of Magnetometer It requires four M4x20 and four nuts.
Figure 18 - Magnetometer

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
36
5.2 Integration of Camera The camera housing requires only six M4x16 screws.
Figure 19 - Camera
5.3 Integration of Passive Magnet Requires only two M4x10. This element must be placed before the battery does since it would be quite problematic to have access to the screws with the battery already mounted.
Figure 20 – Passive Magnet

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
37
5.4 Integration of PCU and Battery PCU requires four M4x16 as well as the battery.
Figure 21 – PCU
Figure 22 – Battery

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
38
5.5 Integration of T-Pods Each of them requires four M5x40, along with four washers and nuts. The T-Pod on –x side of the satellite should be mounted before the OBC due to accessibility to the screws/nuts.
Figure 23 – General view of the three T-Pods
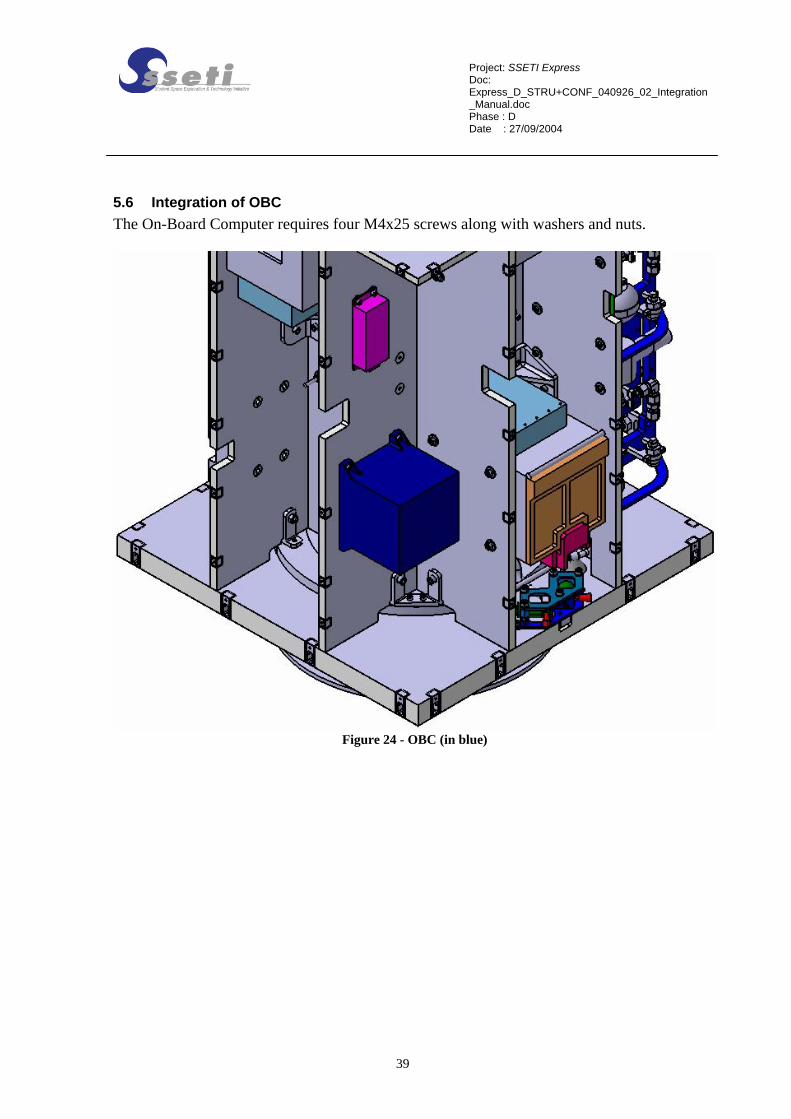
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
39
5.6 Integration of OBC The On-Board Computer requires four M4x25 screws along with washers and nuts.
Figure 24 - OBC (in blue)

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
40
5.7 Integration of S-band Transmitter and +z antenna The S-band antenna on the top plate requires an antenna mounting interface with the panel. This interface uses three M4x16. The antenna is mounted on this interface with four M4x8.
Figure 25 – S-band +z antenna
Figure 26 - S-band Transmitter

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
41
5.8 Integration of UHF The UHF antenna requires four M4x8 screws and it is mounted on the UHF Antenna Insert glued previously on the top plate.
Figure 27 - UHF Antenna
The UHF transceiver is mounted with six M4x10.
Figure 28 - UHF Transceiver
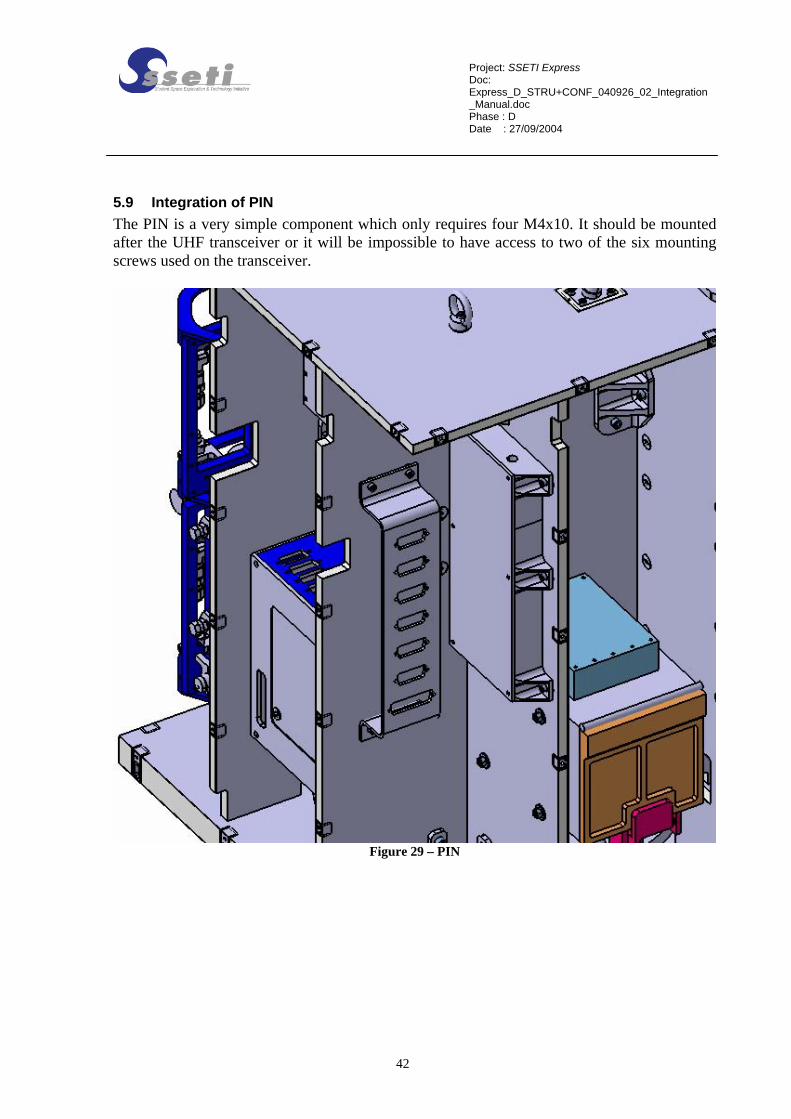
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
42
5.9 Integration of PIN The PIN is a very simple component which only requires four M4x10. It should be mounted after the UHF transceiver or it will be impossible to have access to two of the six mounting screws used on the transceiver.
Figure 29 – PIN

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
43
5.10 Integration of Propulsion ICU This subsystem requires six M4x16 screws for integration
Figure 30 - Propulsion ICU
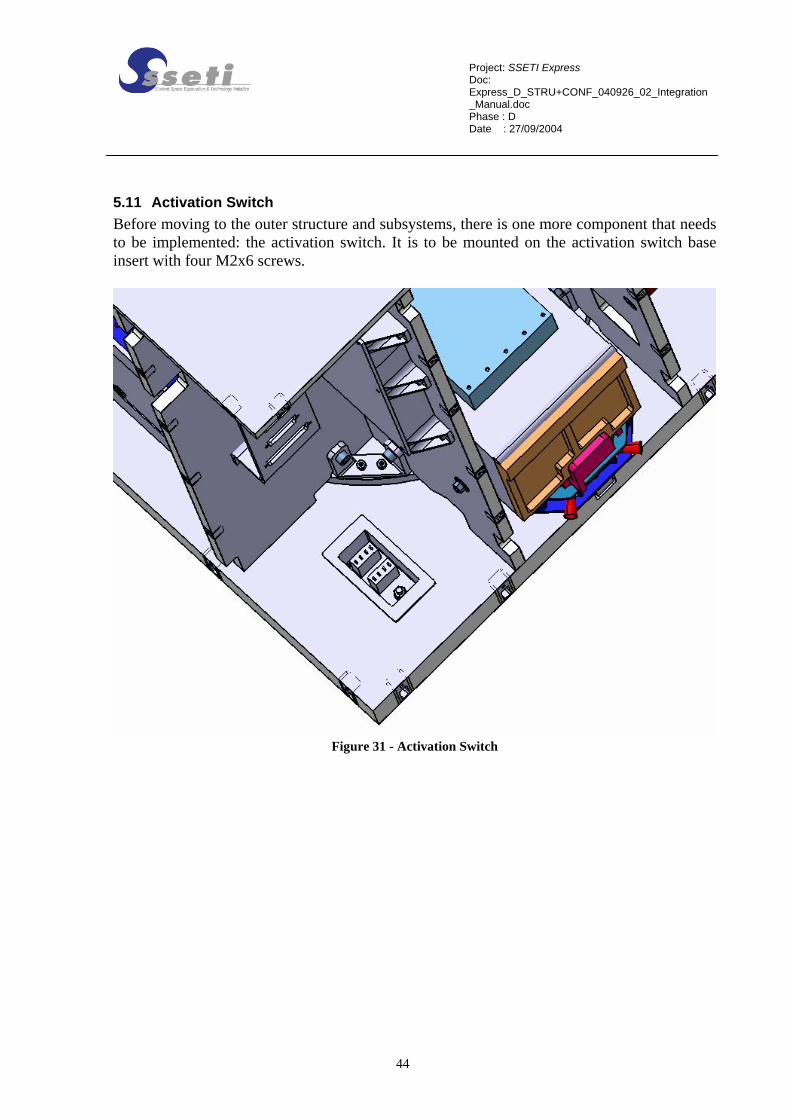
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
44
5.11 Activation Switch Before moving to the outer structure and subsystems, there is one more component that needs to be implemented: the activation switch. It is to be mounted on the activation switch base insert with four M2x6 screws.
Figure 31 - Activation Switch

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
45
6 Secondary Structure Since there are several items attached on each of the four lateral panels, and it is also necessary to mount the corner profiles, this step of the integration effort has to be performed with some caution. First, the panels should be laid out next to the structure in order to be easy to perform all electrical wiring. It must be in this position that all equipment will be mounted on the laterals. After this, the panels shall be lifted and screwed on the primary structure. When this is done, there will be no more possibility to access the interior of the satellite, except on those areas covered by the cuts on the lateral panels – PMS and T-PODs. Before closing the satellite, it is advised to perform a thorough inspection on both mechanical and electrical connections.
6.1 Corner Profiles The corner profiles can be easily pre-integrated. This process only requires implementing the rivet nuts along the corner profiles. A special tool for this purpose is required. Normally, a pneumatic tool is used, but a simple tool with possibility to rotate in both directions can also be used if handled with care, since the torque produced is much higher. Be advised that some literature uses the designation ‘threaded inserts’ for this fastening solution. In order to avoid misunderstandings, the designation ‘rivet nut’ is used on this text. These rivet nuts are to be applied along all of the four profiles in all the Ø6 mm holes. A video of the installation process is available on the ftp.
Figure 32 – Close up on one of the corner profiles
Be advised that some holes on these profiles are NOT to have this kind of rivet nuts. These are easily distinguishable as they present a smaller diameter (Figure 32). Due to the length of these structural elements, it is also required to clamp the profiles on at least two clamps before installing the rivet nuts.

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
46
6.2 Lateral Panels It is now possible to start integrating equipment on the lateral panels themselves. The order by which the panels should be integrated on the primary structure is the same order used here to present the different panels.
6.2.1 Lateral Panel +x This panel has to provide access to T-Pod +x, allowing for introduction of a cubesat and charging of T-Pod’s electronic box and offer an open wall for one of the ACS thrusters. Other equipment mounted on it are the solar cells (elements that exist in every lateral panel), one S-band antenna and one magnetotorquer coil.
Figure 33 - Lateral Panel +x. Left: outside view; Right: inside view
The two associated corner profiles should be mounted on this panel in first place. The solar cells are to be glued onto the panel. The S-band antenna is mounted using four special M4 screws. These screws must allow for the mounting and un-mounting of the protective caps. The magnetotorquer coil is to be placed using four coil clamps with M4x8 screws and nuts.
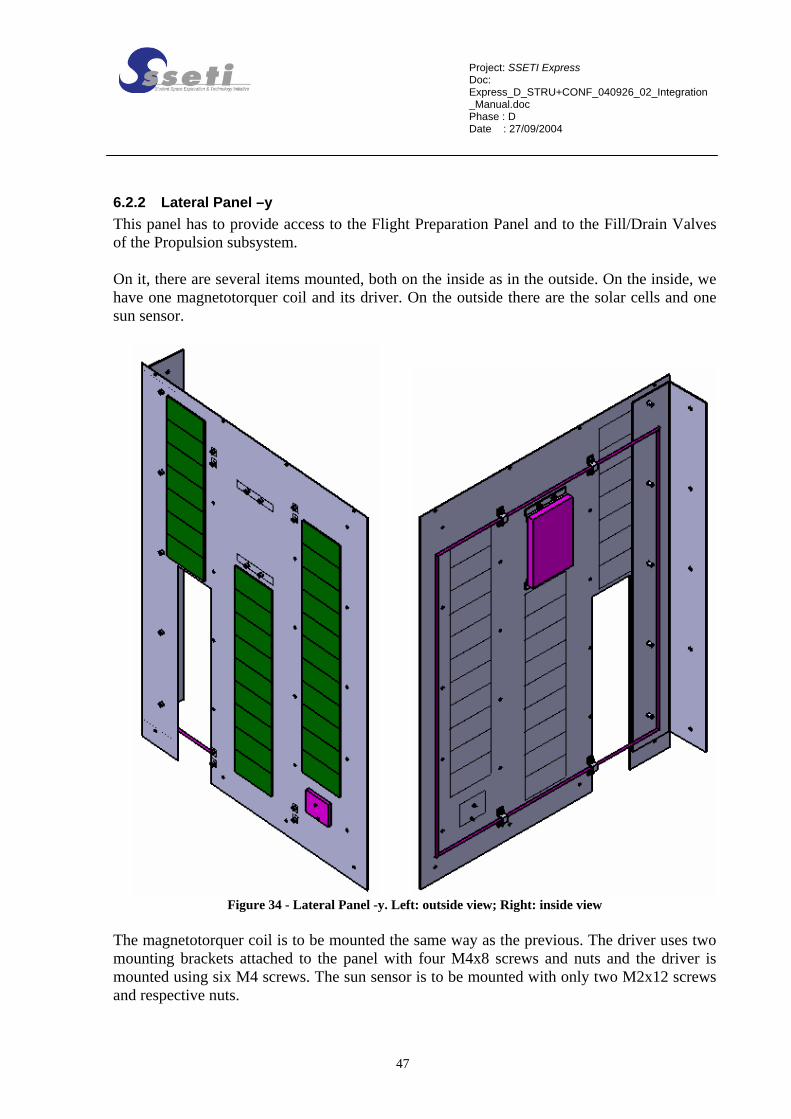
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
47
6.2.2 Lateral Panel –y This panel has to provide access to the Flight Preparation Panel and to the Fill/Drain Valves of the Propulsion subsystem. On it, there are several items mounted, both on the inside as in the outside. On the inside, we have one magnetotorquer coil and its driver. On the outside there are the solar cells and one sun sensor.
Figure 34 - Lateral Panel -y. Left: outside view; Right: inside view
The magnetotorquer coil is to be mounted the same way as the previous. The driver uses two mounting brackets attached to the panel with four M4x8 screws and nuts and the driver is mounted using six M4 screws. The sun sensor is to be mounted with only two M2x12 screws and respective nuts.
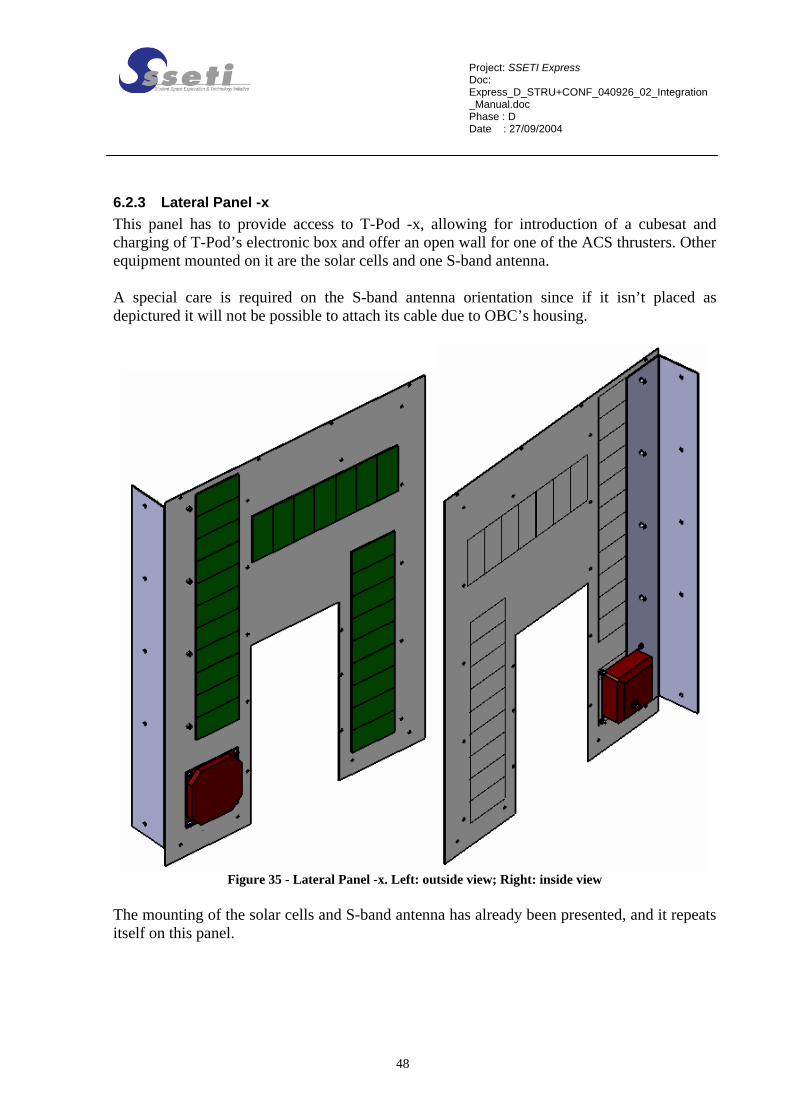
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
48
6.2.3 Lateral Panel -x This panel has to provide access to T-Pod -x, allowing for introduction of a cubesat and charging of T-Pod’s electronic box and offer an open wall for one of the ACS thrusters. Other equipment mounted on it are the solar cells and one S-band antenna. A special care is required on the S-band antenna orientation since if it isn’t placed as depictured it will not be possible to attach its cable due to OBC’s housing.
Figure 35 - Lateral Panel -x. Left: outside view; Right: inside view
The mounting of the solar cells and S-band antenna has already been presented, and it repeats itself on this panel.
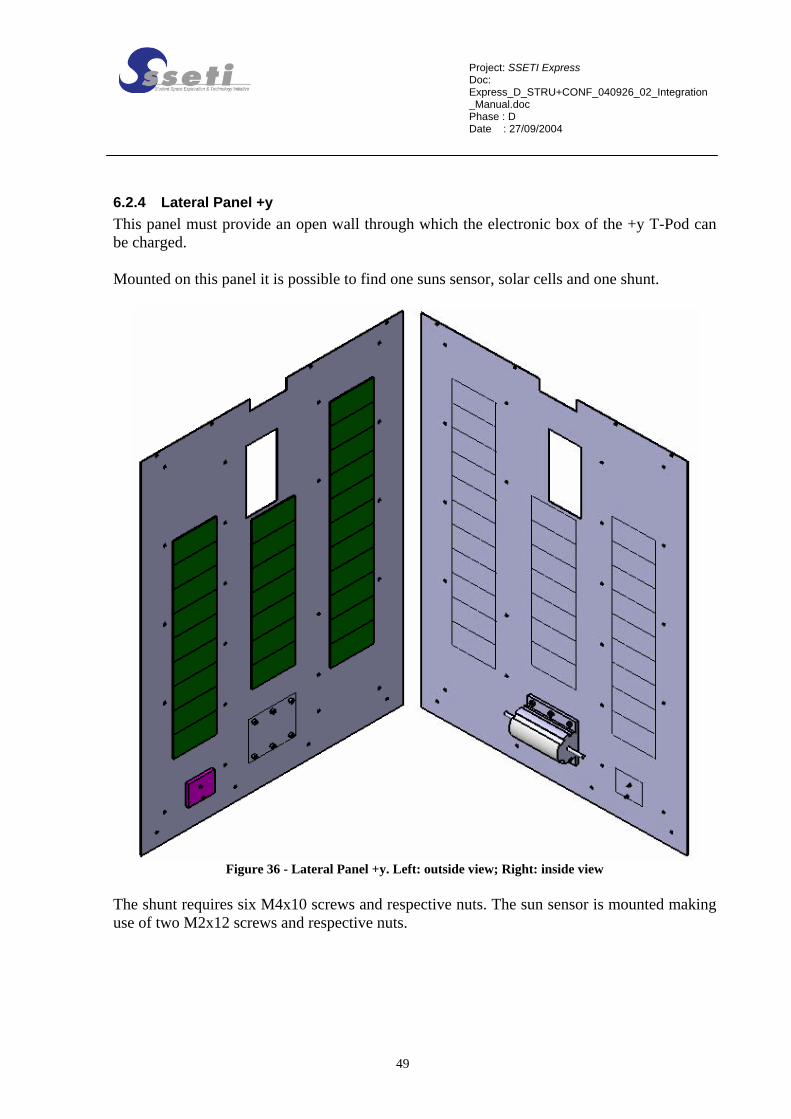
Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
49
6.2.4 Lateral Panel +y This panel must provide an open wall through which the electronic box of the +y T-Pod can be charged. Mounted on this panel it is possible to find one suns sensor, solar cells and one shunt.
Figure 36 - Lateral Panel +y. Left: outside view; Right: inside view
The shunt requires six M4x10 screws and respective nuts. The sun sensor is mounted making use of two M2x12 screws and respective nuts.

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
50
6.3 Integration of Secondary Structure The integration of the four pre-assembled parts previously referenced should be executed by the following order: Lateral Panel +x, Lateral Panel –y, Lateral Panel –x, Lateral Panel +y. The following pictures represent the four steps to assemble the secondary structure.
Figure 37 – Step 1

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
51
Figure 38 - Step 2

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
52
Figure 39 - Step 3

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
53
Figure 40 - Step 4

Project: SSETI Express Doc: Express_D_STRU+CONF_040926_02_Integration_Manual.doc Phase : D Date : 27/09/2004
54
Appendix A – Structure’s Bill of Material Quantity/sat Part Name Quantity Total Available Status
1 Base 2 1 In Production16 Base - Lateral Insert 32 35 Ready2 Thruster Insert 4 0 To be Ordered
12 Insert-6.5-30.6 24 30 Ready33 Insert-M5-10.3 66 50 To be Ordered1 Titanium Ring 2 2 Ready1 Shear Panel +y 2 0 In Production
52 Lateral - Shear Insert 104 110 Ready16 Insert-6.5-10.6 32 40 Ready33 Insert-5.5-10.6 66 60 To be Ordered28 Insert-4.5-10.6 56 90 Ready1 Shear Panel -y 2 0 In Production
36 Insert-M4-10.3 72 70 To be Ordered1 Shear Panel +x 0y 2 1 In Production1 Shear Panel -x 0y 2 1 In Production1 Shear Panel +x +y 2 1 In Production1 Shear Panel -x +y 2 1 In Production1 Shear Panel +x -y 2 1 In Production1 Shear Panel -x -y 2 1 In Production1 Top plate 2 1 In Production4 Base bracket 8 0 In Production1 Top Bracket TPOD v2. 2 0 In Production3 Top Bracket v2.0 6 0 In Production2 Mid-height Bracket 01 4 0 In Production4 Mid-height Bracket 02 8 0 In Production1 Mid-height Bracket 03 2 0 In Production1 Mid-height Bracket 04 2 0 In Production1 Mid-height Bracket 05 2 0 In Production1 Lateral Panel +x 2 0 To be Ordered1 Lateral Panel +y 2 0 To be Ordered1 Lateral Panel -x 2 0 To be Ordered1 Lateral Panel -y 2 0 To be Ordered1 Corner Profile +x+y 2 0 To be Ordered1 Corner Profile -x+y 2 0 To be Ordered1 Corner Profile -x-y 2 0 To be Ordered1 Corner Profile +x-y 2 0 To be Ordered8 Coil Clamp Bracket 16 0 In Production1 UHF Antenna Insert 2 0 In Production2 Coil Driver Bracket 4 0 In Production1 Activation Switch Insert 2 0 In Production1 S-band Antenna Interface 2 0 In Production4 Aluminium 'Patch' 8 0 In Production1 Passive Magnet Housing 2 0 To be Ordered
39 Rivet Nuts - TU-SSM4UKO30 78 0 In Production11 ISO 4762 SCREW M4x16 STEEL HEXAGON SOCKET HEAD CAP 22 23 Ready12 ISO 4762 SCREW M6x30 STEEL HEXAGON SOCKET HEAD CAP 24 25 Ready8 ISO 4032 NUT M6 STEEL GRADE A HEXAGON 16 27 Ready
26 ISO 4762 SCREW M5x16 STEEL HEXAGON SOCKET HEAD CAP 52 53 Ready16 ISO 4762 SCREW M5x25 STEEL HEXAGON SOCKET HEAD CAP 32 0 In Production1 ISO 4762 SCREW M5x30 STEEL HEXAGON SOCKET HEAD CAP 2 32 Ready
16 ISO 7093-1 WASHER 5x15 STEEL GRADE A PLAIN LARGE SERIES 32 33 Ready17 ISO 4032 NUT M5 STEEL GRADE A HEXAGON 34 35 Ready88 ISO 4762 SCREW M4x8 STEEL HEXAGON SOCKET HEAD CAP 176 0 In Production39 ISO 4762 SCREW M4x10 STEEL HEXAGON SOCKET HEAD CAP 78 0 In Production4 ISO 7093-1 WASHER 6x18 STEEL GRADE A PLAIN LARGE SERIES 8 9 Ready
20 ISO 4032 NUT M4 STEEL GRADE A HEXAGON 40 41 Ready4 LIFTING EYE NUT 8 0 To be Ordered