
Análise limite em pórticos sylvio martins caro junior
65
ANÁLISE LIMITE EM PÓRTICOS Sylvio Martins Caro Júnior DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM ENGENHARIA MECÂNICA. Aprovada por: ________________________________________________ Profa. Lavinia Maria Sanabio Alves Borges, D.Sc. ________________________________________________ Prof. José Luis Lopes da Silveira, D.Sc. ________________________________________________ Profa. Angela Cristina Cardoso de Souza, D.Sc. ________________________________________________ Dra. Cyntia Gonçalves da Costa Matt, D.Sc. RIO DE JANEIRO, RJ - BRASIL JUNHO DE 2006
-
Upload
peterson-silva -
Category
Engineering
-
view
110 -
download
3
Transcript of Análise limite em pórticos sylvio martins caro junior

ANÁLISE LIMITE EM PÓRTICOS
Sylvio Martins Caro Júnior
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS
PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM
ENGENHARIA MECÂNICA.
Aprovada por:
________________________________________________
Profa. Lavinia Maria Sanabio Alves Borges, D.Sc.
________________________________________________ Prof. José Luis Lopes da Silveira, D.Sc.
________________________________________________ Profa. Angela Cristina Cardoso de Souza, D.Sc.
________________________________________________ Dra. Cyntia Gonçalves da Costa Matt, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
JUNHO DE 2006

ii
CARO JÚNIOR, SYLVIO MARTINS
Análise Limite em Pórticos [Rio de
Janeiro] 2006
VII, 58 p. 29,7 cm (COPPE/UFRJ,
M.Sc., Engenharia Mecânica, 2006)
Dissertação - Universidade Federal do
Rio de Janeiro, COPPE
1. Análise Limite em Pórticos
I. COPPE/UFRJ II. Título ( série )

iii
Por este trabalho agradeço a Deus que me
dirigiu a começar o mestrado e me fortaleceu em todos
os momentos, à minha esposa Sandra e ao meu filho
Daniel por terem suportado minha ausência em muitos
períodos e à minha orientadora, professora Lavinia,
pela paciência.

iv
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
ANÁLISE LIMITE EM PÓRTICOS
Sylvio Martins Caro Júnior
Junho / 2006
Orientadora: Lavinia Maria Sanabio Alves Borges
Programa: Engenharia Mecânica
Este trabalho tem como objetivo a proposição de um modelo de análise limite
para determinação da carga de colapso em pórticos, considerando a superfície de
escoamento na sua forma não linear. Mostra-se que, além das hipóteses clássicas da
teoria de vigas, nenhuma outra aproximação é necessária para a formulação discreta do
problema. Os esforços normais são incluídos na função de plastificação e esta também é
utilizada na sua forma não linear. Para a solução do problema, foi desenvolvido um
algoritmo cuja idéia básica é utilizar em cada iteração uma fórmula de Newton para a
solução do conjunto de igualdades que constituem as condições de otimalidade
associados ao problema de análise limite. Esta primeira fase é seguida de uma segunda
em que se realiza um relaxamento de passo e um escalonamento dos esforços, para
preservar as restrições de admissibilidade plástica ao final da iteração.

v
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
LIMIT ANALYSIS ON FRAMES
Sylvio Martins Caro Júnior
June / 2006
Advisor: Lavinia Maria Sanabio Alves Borges
Department: Mechanical Engineering
The aim of this work is to propose a model of limit analysis to determine the
collapse load on frames, considering the yield surface on its non linear form. It shows
that any approach, besides the classic hypotheses of the theory of beams, is necessary
for the discreet formulation of the problem. The normal efforts are included in the
plasticity function which is also considered on its non linear form. For the solutions of
the problem, was developed an algorithm whose basic idea is to use a Newton-like
formula on each iteration, for the solution of the set of equalities that forms the
optimality conditions associated to the limit analysis problem. This first stage is
followed by a second one in which is carried out a step relaxation and a stress scaling,
in order to preserve the plastic admissibility constraint at the end of the iteration.

vi
Sumário
1 Introdução..................................................................................................................... 1
2 Modelos de Vigas Retas ............................................................................................... 3
2.1 Equilíbrio .......................................................................................................... 3
2.2 Cálculo de Superfícies Limite de Escoamento em Perfis Simétricos
Submetidos à Flexão e Esforço Axial............................................................. 8
2.2.1 Cálculo da Superfície de Escoamento para Vigas Submetidas a Tração
e Flexão Combinadas ......................................................................... 9
2.2.2 Superfícies de Escoamento para Perfis Retangulares e
Tubulares .......................................................................................... 11
2.3 Dissipação Plástica em Vigas ......................................................................... 17
3 Análise Limite em Pórticos ........................................................................................ 18
3.1 Taxas de Deformação Elástica ....................................................................... 19
3.2 Teorema do Limite Inferior ............................................................................ 20
3.3 Teorema do Limite Superior........................................................................... 20
3.4 Caracterização Matemática do Problema ....................................................... 21
4 Algoritmo de Solução................................................................................................. 24
4.1 Primeiro Estágio, Estimativa de Incremento pela Fórmula de Newton ......... 26
4.2 Segundo Estágio, Relaxação do Passo e Escalonamento da Tensão.............. 31
4.3 Atualização ..................................................................................................... 33
4.4 Requisitos para a Inicialização ....................................................................... 34
4.5 Critério de Convergência................................................................................ 34
4.6 Resumo do Algoritmo para Análise Limite.................................................... 35
vii
5 Aplicações .................................................................................................................. 40
5.1 Aplicação 1 ..................................................................................................... 40
5.2 Aplicação 2 ..................................................................................................... 45
5.3 Aplicação 3 ..................................................................................................... 49
6 Conclusões.................................................................................................................. 55
Referências Bibliográficas.............................................................................................. 57

1
Capítulo 1
Introdução
O principal objetivo deste trabalho é a proposição de um modelo de análise
limite para determinação da carga de colapso em pórticos, considerando a superfície de
escoamento na sua forma não linear. Mostra-se que, além das hipóteses clássicas da
teoria de vigas, nenhuma outra aproximação é necessária para a formulação discreta do
problema.
A teoria de análise limite é uma teoria consagrada, tratada em diversos trabalhos
(Borges et al. 1996, Casciaro e Cascini, 1982, Cohn e Maier, 1977, Christiansen 1980,
1981 e 1996, Dang Hung, 1983, Frémond, 1980, Frémond e Friaa, 1982, Gao Yang,
1988, Gaudrat, 1991, Gill, 1970, Huh e Yang, 1991, Lubliner, 1990, Martin, 1975,
Panagiotopoulos, 1985, Romano e Sacco, 1985, Zouain et al, 1993), que fornece
ferramentas que permitem o cálculo direto das cargas sob as quais um corpo, que pode
ser aproximadamente modelado como elástico perfeitamente plástico ou que sofre um
processo de encruamento limitado, atinge um estado crítico. Entende-se por estado
crítico um estado no qual ocorrem grandes aumentos de deformação plástica, sem
nenhum aumento na carga. No caso de corpos perfeitamente plásticos, este estado é
chamado de fluxo plástico irrestrito ou colapso plástico, e o estado de carregamento no
qual isto se torna possível é chamado de carregamento limite.
A análise limite de estruturas sob carregamento proporcional consiste em achar o
fator de carga limite ℜ∈α de maneira que um corpo sofra colapso plástico quando
submetido a um sistema de cargas de referência amplificado uniformemente por α..
Na análise limite em vigas e pórticos é usual não incluir os esforços axiais na
condição de plastificação e, mesmo quando estes são incluídos, a superfície de
escoamento é aproximada por funções lineares (Hodge, 1959, Borges, 1984, Lubliner,
1990). Na proposta deste trabalho, os esforços normais são incluídos na função de
plastificação e esta é utilizada na sua forma não linear.
O problema de análise limite pode ser enunciado através de princípios de
otimização e, no caso de superfícies de escoamento lineares ou linearizadas, é usual

2
utilizar técnicas de programação linear para a solução (Casciaro e Cascini, 1982, Cohn e
Maier, 1977, Christiansen 1980, 1981, Lubliner, 1990, Martin, 1975, Borges, 1984).
No presente trabalho, para a solução do problema, foi desenvolvido um
algoritmo, considerando a superfície de escoamento não linear, e projetado para
aproveitar a estrutura particular do problema em questão. Este procedimento numérico é
baseado no proposto por Borges et al. (1996) para problemas de elementos finitos
bidimensionais.
A idéia básica do algoritmo é utilizar em cada iteração uma fórmula de Newton
para a solução do conjunto de igualdades que constituem as condições de otimalidade
dos problemas de otimização que, originalmente, são utilizados para enunciar o
problema de análise limite. Esta primeira fase é seguida de uma segunda em que se
realiza um relaxamento de passo e um escalonamento dos esforços, para preservar as
restrições de admissibilidade plástica ao final da iteração.
O conteúdo deste trabalho está dividido em cinco capítulos adicionais ao atual.
No Capítulo 2 são apresentados os princípios básicos que norteiam a formulação elasto-
plastica de vigas e pórticos, especificamente as condições de equilíbrio, cinemática e
equações constitutivas. Neste mesmo capítulo são apresentadas as equações que
definem a função de escoamento para barras retas de seção retangular e seção tubular.
Baseando-se nos conceitos enunciados no Capítulo 2, no terceiro capítulo é
apresentada a teoria geral de análise limite, incluindo a caracterização matemática do
fenômeno de colapso plástico, a apresentação dos princípios de otimização que resultam
desta caracterização, seguida de uma breve discussão sobre as características básicas do
problema a ser resolvido. No Capítulo 4 é apresentada toda a metodologia envolvida no
desenvolvimento do algoritmo proposto, além de um resumo da estrutura de
programação dentro do ambiente computacional Mathematica®.
Finalmente, visando validar a formulação apresentada, no Capítulo 5, alguns
resultados obtidos em aplicações clássicas são apresentados e comparados com os
obtidos na literatura.utilizada. No Capítulo 6 são apresentadas as conclusões
fundamentais do trabalho.

3
Capítulo 2
Modelos de Vigas Retas
Neste capítulo é apresentado o modelo discreto de vigas, definido a partir das
condições de equilíbrio de um elemento de viga reta. A partir destas condições são
deduzidos a matriz de equilíbrio BT e um sistema que representa a forma discreta do
equilíbrio para pórticos e vigas. Neste aspecto, a definição do modelo discreto não
envolve nenhuma aproximação.
Em seguida, são deduzidas as expressões das superfícies de escoamento para
perfis retangulares e tubulares, sendo mostrado que são praticamente idênticas.
2.1 Equilíbrio
Nesta seção será mostrado um processo de discretização, baseado no princípio
de Mínima Energia Complementar, aplicado a um elemento de viga reta. Toda teoria é
baseada nos princípios básicos de equilíbrio que são impostos de forma exata.
A primeira parte do processo consiste em descrever o conjunto de campos
equilibrados αS por um sistema definido por um número finito de equações. Para tal,
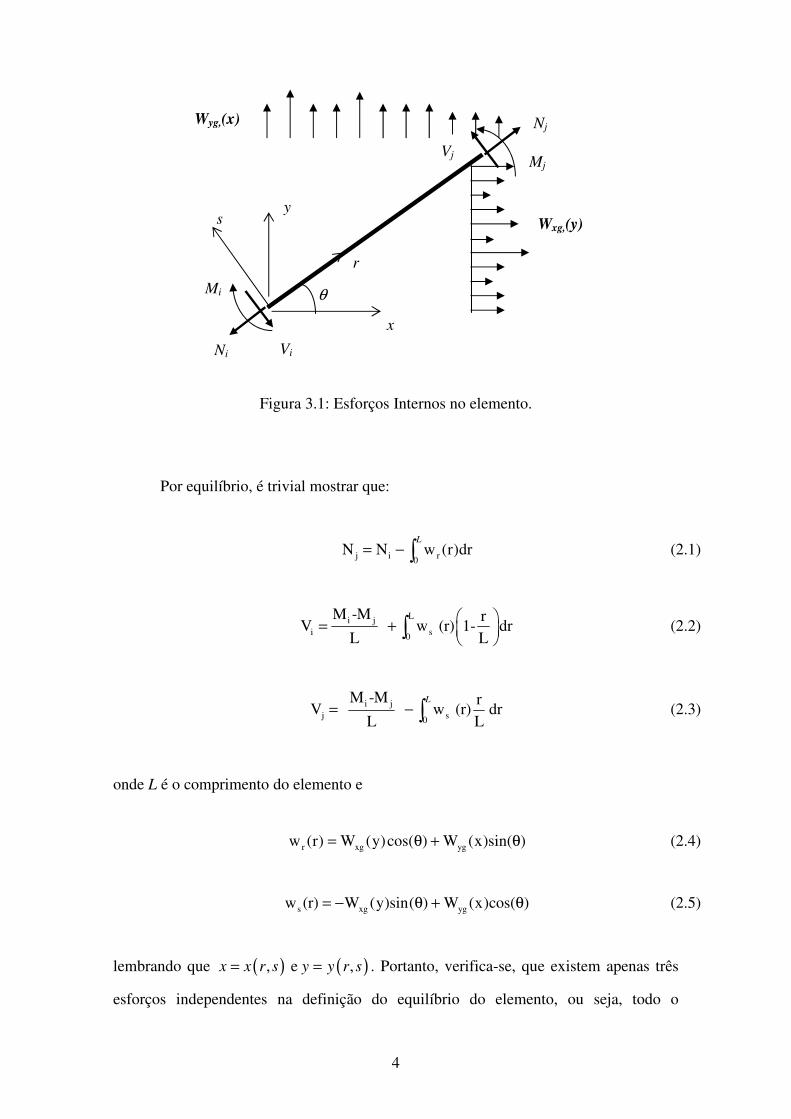
considera-se a Figura 3.1, onde estão representandos os esforços internos no sistema
local de coordenadas e carga distribuída W(x, y)=(Wxg,( y), Wyg(x)), orientada na direção
do sistema global (x, y). Os esforços internos são definidos de acordo com a Figura 3.1,
onde:
Ni, Nj - são os esforços axiais nos nós inicial i e final j ;
Vi, Vj - são os esforços cortantes nos nós inicial i e final j ;
Mi, Mj - são os momentos fletores nos nós inicial i e final j .
4
Figura 3.1: Esforços Internos no elemento.
Por equilíbrio, é trivial mostrar que:
j i r0N N w (r)dr
L= − � (2.1)
Li j
i s0
M -M rV w (r) 1- dr
L L� �= + � �� �
� (2.2)
i jj s0
M -M rV w (r) dr
L L
L= − � (2.3)
onde L é o comprimento do elemento e
r xg ygw (r) W (y)cos( ) W (x)sin( )= θ + θ (2.4)
s xg ygw (r) W (y)sin( ) W (x)cos( )= − θ + θ (2.5)
lembrando que ( ) ( ), e ,x x r s y y r s= = . Portanto, verifica-se, que existem apenas três
esforços independentes na definição do equilíbrio do elemento, ou seja, todo o
Vi
x
y
r
s
θ
Mi
Mj
Wxg,(y)
Wyg,(x)
Vj
Nj
Ni

5
equilíbrio é descrito apenas por três parâmetros e mais um termo independente que é
função do carregamento distribuído e da posição da seção no elemento (Borges, 1984).
Por conveniência, foram escolhidos os esforços Ni, Mi e Mj como os parâmetros
independentes e, desta forma, o vetor de parâmetros do modelo, para cada elemento e, é
dado por:
, ,Te
i i jQ N M M� = � (2.6)
Definindo-se o vetor de esforços internos dos elementos por:
( )
( )( )
er
N rQ r
M r�
= � �
(2.7)
as Eqs. (2.1)-(2.3) podem ser reescritas na forma:
( ) ( ) ( )e er wQ r r Q Q r= Υ + (2.8)
onde
0
0 0
1 0 0 ( )( ) ( )1
0 ( )( ) ( )(1 )
r
r
w r L
s s
w dr Q rr r
w r d r w dL L L
ξ ξ
ξξ ξ ξ ξ ξ
� −� � � Υ = =− � � − − −� � �
�
� � (2.9)
Por equilíbrio, pode-se também estabelecer a relação entre os esforços internos
elementares e os externos, representados por eLR
e T e eL LR B Q W= + (2.10)
sendo TLB denominada matriz de equilíbrio.
As componentes de eLR no sistema global de coordenadas são obtidas pela
transformação:

6
e eT eG LR T R= (2.11)
sendo T a matriz de rotação do sistema local para o global. Substituindo (2.10) em
(2.11) obtém-se a equação de equilíbrio elementar descrita em relação ao sistema global
de coordenadas, ou seja,
e eT e eG gR B Q W= + (2.12)
onde
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
-cos - 0 cos 0- cos -1 - cos 0
-cos 0 -cos 1
e
sen sen
B sen L L sen L L
sen L L sen L L
θ θ θ θθ θ θ θθ θ θ θ
� � = � � �
(2.13)
( )
( )
( ) ( )
( ) ( )
0
0
0 0
0 0
( ) 1-
cos ( ) 1-
0
cos ( ) sin ( )
( ) cos ( )
0
L
s
L
s
eg
L L
r s
L L
r s
rsen w r dr
L
rw r dr
L
Wr
w r dr w r drLr
sen w r dr w r drL
θ
θ
θ θ
θ θ
� � �− � �� � ��
� � �� � �
� �� � = � � − −� � � − +� � �
�
�
� �
� �
(2.14)
Define-se agora o vetor de forças F, de dimensão igual ao número de graus de
liberdade não restritos da estrutura (ngl), contendo todas as cargas e momentos nodais
aplicados à estrutura, descritos em relação ao sistema global de coordenadas, ou seja,
F=[Fxgi, Fygi, FMi]T para i= 1....ngl. (2.15)
Para associar as variáveis elementares e da estrutura serão utilizadas as matrizes
Booleanas, ou seja:

7
e e e eu QU L U Q L Q= = (2.16)
onde Ue representa o vetor de deslocamentos nodais elementares e U da estrutura,
ambos referidos ao sistema global de coordenadas. O vetor Q contém os esforços
internos de todos os elementos da estrutura. Cabe ressaltar que, ao contrário dos
deslocamentos que são contínuos nos nós, os esforços são considerados descontínuos
entre elementos. Desta forma, o vetor Q é obtido simplesmente coletando-se
seqüencialmente os vetores Qe, tendo assim dimensão igual a 3 nel, sendo nel o número
total de elementos da estrutura.
O equilíbrio global da estrutura pode agora ser obtido aplicando-se o Princípio
dos Trabalhos Virtuais, escrito agora como:
* * *
1
.nel
e eG
n
R U F U U V=
⋅ = ∀ ∈� (2.17)
ou
* * * * *
1 1
. ( ) .nel nel
e T e e T eT e eu G u Q g
n n
L R U F U L B L Q W U F U U= =
⋅ = � + ⋅ = ∀� � (2.18)
Sendo U* o conjunto de todos os deslocamentos virtuais admissíveis. (Feijóo, 1981).
Desta forma, o equilíbrio da estrutura pode ser escrito como:
* *( ) 0TgB Q W F U U+ − ⋅ = ∀ (2.19)
onde
T e T eT e e T eu Q g u gB L B L W L W= = (2.20)
Cabe observar que a simbologia adotada em (2.20) representa a montagem das matrizes
globais na forma usual dos métodos de análise matricial de estruturas e no método dos
elementos finitos.

8
Como U* é um vetor de deslocamento arbitrário, a igualdade anterior é
equivalente a impor:
T
gB Q F W= − (2.21)
O sistema (2.21) representa a forma discreta do equilíbrio para pórticos e vigas. Deve-se
observar que a proposição deste sistema não envolve nenhuma aproximação adicional
às hipóteses básicas da teoria clássica de vigas.
Em resumo, o conjunto αS que contém todos os esforços internos equilibrados
com uma carga externa, representada pelo vetor gWFR −= , amplificada pelo
parâmetro α, pode agora ser escrito como:
( ){ }TgS Q B Q F Wα α= = − (2.22)
2.2 Cálculo de Superfícies Limite de Escoamento em Perfis
Simétricos Submetidos à Flexão e Esforço Axial
Nesta seção serão apresentadas as equações que definem as superfícies de
escoamento vigas tendo seções transversais retangulares e/ou tubulares, submetidas a
esforços axiais e de flexão.
Seja M0 o momento que plastifica toda a seção quanto está submetida somente à
flexão e N0 a tensão que plastifica toda a seção quanto está submetida a esforço axial
puro. Para perfis simétricos em relação a y e z e constituídos de material em que a
tensão limite de escoamento a tração é idêntica a tensão limite de escoamento a
compressão, a superfície limite de vigas pode ser definida a partir das condições de
equilíbrio e distribuição de tensão de colapso apresentada na Figura 3.2. Assim, obtém-
se:
0 YN Aσ= (2.23)
0 YM Acσ= (2.24)

9
Figura 3.2 - Perfil Simétrico em relação a y e z. (a) Distribuição de tensão quando
submetida ao esforço M0, (b) Distribuição de tensão quando submetida ao esforço N0.
onde Yσ a tensão limite de escoamento em tração pura, A é a área da seção transversal e
c o centróide da semi-área da seção em relação a um eixo que passa pelo centróide da
seção.
2.2.1 Cálculo da Superfície de Escoamento para Vigas Submetidas a
Tração e Flexão Combinadas
Para o estudo da interação entre os esforços axiais e de flexão na situação de
colapso, as equações serão consideradas apenas para o caso de esforços de momento
positivos. Os demais casos podem ser obtidos por simetria.
Comparando as Figuras 3.2 e 3.3, observamos que o esforço normal age no
sentido de diminuir o valor de M0, deslocando a linha neutra de uma quantidade e. Com
isto, podemos calcular a influência do esforço normal considerando o deslocamento da
linha neutra quando em flexão pura (no caso coincidente com o eixo z), para uma
posição (-e), no caso de termos tração ou (+e) no caso de termos compressão.

10
Figura 3.3: Perfil Simétrico – Tração e Flexão combinadas.
(a) Distribuição de tensão submetido a Tração e Flexão combinadas.
(b) e (c) Decomposição em flexão e tração, respectivamente.
Assim,
( )2Y n nM Ac A cσ= − (2.25)
e
2Y nN Aσ= (2.26)
onde nA é a área submetida apenas a tração e nc é o centróide da porção central da viga
submetida apenas a tração. Como 0 0 e Y YM Ac N Aσ σ= = ,
0
21 n nA c
M MAc
� �= −� �� �
(2.27)
0
2 nAN N
A= (2.28)
ou,
0 0
1nM N cM N c
+ = (2.29)

11
2.2.2 Superfícies de Escoamento para Perfis Retangulares e Tubulares
As equações anteriores serão utilizadas para definir a superfície limite de seções
retangulares e tubulares.
Figura 3.4: Perfil retangular.
Considerando o perfil retangular da Figura 3.4, então 2n
ec = e
4h
c = e,
conseqüentemente,
2nc e
c h= (2.30)
Como 2 2 e nA b e A bh= = ,
2 2 ne Ah A
= (2.31)
e
0
2nc e Nc h N
= = (2.32)
Substituindo (2.32) em (2.29), tem-se a superfície de escoamento para o perfil
retangular dada por:

12
2
0 0
1M NM N
� �+ =� �� �
(2.33)
Definindo as variáveis adimensionais m e n por
0M
Mm = ,
0NN
n = , (2.34)
tem-se:
12 =+ nm (2.35)
Considerando, agora, o perfil tubular da Figura 3.5,
Figura 3.5: Perfil tubular.
onde mA é a área submetida apenas a flexão e mc é o centróide da porção central da viga
submetida apenas a flexão, tem-se:
( )2
1dt
Aπα += ,
dt2
1−=α , mn AA
A −=2
e mmnn cAcA
Ac −=2
(2.36)
t

13
Utilizando as expressões (2.36d) e (2.36c) em (2.27) e (2.28), respectivamente tem-se
0 0
2 2, 1m m mM A c N A
M Ac N A= = − (2.37)
onde,
( ) ( ) ( ) ( )
222 22 cos
arccos cos cos4 2m
sendA
γ γγ α γ α γ
α� �� �
= − − + −� �� �� �� �� �
, (2.38)
( ) ( )( )3 33 22 cos
12m md
c A sen γ α γ� �
= − −� �� �
. (2.39)
A substituição de (2.38) e (2.39) em (2.37) resulta em
( ) ( )( )33 22
30
cos
1
senMM
γ α γ
α
� �− −� �
� �=−
(2.40)
( ) ( ) ( ) ( )
( )
22 2
20
cos2 2 2 arccos 2cos cos
11
senNN
γγ γ α γ α γ
αα π
� �− − + −� �
� �= −−
(2.41)
As superfícies de escoamento para barras de seção retangular e tubular estão
representadas graficamente na Figura 3.6. Podemos verificar que, apesar da diferença
marcante entre as funções analíticas que definem estas superfícies, geometricamente
elas diferem muito pouco.

14
Figura 3.6: Superfícies de escoamento para barra retangular e barra tubular sob tração e
flexão combinadas.
Em muitas aplicações práticas em elastoplasticidade e análise limite, estas
superfícies não-lineares, como a das barras retangulares e tubulares, são aproximadas
por segmentos lineares (Onat e Prager, 1954, Borges, 1984), introduzindo uma
aproximação ao modelo. Neste trabalho, esta aproximação não será considerada.
Por outro lado, como evidenciado na Figura 3.6, as superfícies de escoamento
para elementos de viga de seções retangulares e tubulares diferem muito pouco, sendo
quase coincidentes. Assim sendo, por simplicidade, a equação da superfície de
escoamento para a seção tubular será sempre aproximada por uma forma quadrática
como a da seção retangular, utilizando os valores de 00 e MN da seção tubular.
Assim, no algoritmo que será definido no próximo capítulo, como função que
define a superfície de colapso ou superfície limite será definida a forma quadrática
(2.33), ou seja,
1),(2
00
−���
����
�+=
NN
M
MNMf (2.42)
onde M significa “+” se M > 0 e “-” se M < 0. Esta notação foi introduzida para
compactar em uma única expressão os dois modos de plastificação.
A forma matricial, mais conveniente para implementação computacional, é
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
n
m
barra retangular barra tubular

15
( )( )
( )( )
( )( ) 1
10
)(0001
),(0
20 −
�
�
� �
�
�+ �
�
�⋅ �
�
� �
�
�=
rM
rNM
rMrM
rN
rM
rNNNMf . (2.43)
ou, compactamente
( )( ) ( ) ( ) ( ) 1e e e er r r rf Q r CQ r Q r A Q r= ⋅ + ⋅ − (2.44)
onde
�
�
�=
0001 2
0NC ,
�
�
�=
0
0MM
A . (2.45)
Utilizando Eq. (2.8) em (2.44), obtém-se
( ) ( ) ( ) ( )rKQraQQrcQrf eeee ,,,, ααα −⋅+⋅= (2.46)
onde
( ) CrYCrYrc T == )()( , (2.47)
( ), 2 ( ) ( , ) ( )α α= +T Twa r Y r CQ r Y r A , (2.48)
( ) [ ]1),()(),()()(, −⋅+⋅,−= rQArYrQrQCrYrK wT
wwT αααα . (2.49)
A forma (2.46), escrita em relação aos parâmetros do modelo discreto, será a
efetivamente utilizada no algoritmo desenvolvido no trabalho, por incorporar à
definição da superfície limite a representação discreta dos esforços internos associados
ao modelo de viga. Estas restrições devem então ser impostas em “nk” pontos dentro de
cada elemento, adequadamente selecionados, para garantir a não violação da
admissibilidade das tensões em qualquer ponto da estrutura.
No caso de estruturas carregadas estritamente com cargas nodais, em cada
elemento, a verificação da admissibilidade plástica apenas nos nós garante a verificação

16
em toda a estrutura, tendo em vista a conexidade de f e a linearidade da distribuição de
esforços. No caso de cargas distribuídas, é preciso escolher pontos distribuídos ao longo
dos elementos, mas não é trivial uma escolha adequada para garantir a admissibilidade
estrita em toda a estrutura.
Por simplicidade, a notação 0)( ≤Qf será utilizada para expressar o conjunto
das nk x nel restrições de admissibilidade plástica dos esforços impostas à estrutura.
Assim, cada componente do vetor )(Qf contém a restrição associada a um ponto de
verificação e a desigualdade deve ser entendida componente a componente, ou seja:
[ ] nkknelerQfQfQf ke
rek �� 1,10))(()(0)( ==≤=≡≤ (2.50)
Finalmente, cabe observar que o parâmetro de amplificação de carga α aparece
na função de plastificação somente nos casos em que o carregamento distribuído é
considerado como carga viva e amplificado na mesma proporção das cargas
concentradas. Este é o caso, por exemplo, quando α é visto como um fator de segurança
em relação ao colapso plástico.
No algoritmo será também necessário o cálculo do gradiente e da matriz
Hessiana da função de plastificação, computados a partir da derivada de (2.46) em
relação a eQ e α, ou seja:
( ) ( ) ( ), , 2 ,ee e
Qf r Q c r Q a rα α∇ = + (2.51)
( ) ( ) ( , ), , ,e e dK r
f r Q a r Qdα ααα αα
∇ = ∇ ⋅ − (2.52)
( ) ( )rcQrf eQe 2,,2 =∇ α (2.53)
( ) ( ) ( )raQrfd
rKdQrf e
Qe
e ,,,),(
,, 22
2 ααααα ααα ∇=∇=∇ (2.54)

17
2.3 Dissipação Plástica em Vigas
Finalmente, cabe lembrar que aqui, a dissipação plástica é definida em função dos
esforços generalizados )(rQer e das taxas de deformação generalizada,
( ) 0 ( ) ( )TpD r r k rε� = �
�� onde 0ε� é a taxa de deformação da linha neutra e k� é a taxa de
deformação de curvatura. Assim, em cada elemento a dissipação é dada por:
( ) ],0[0),()(),(max)(L
0
LrrQfdrrDrQD er
per
Q
per
∈∀≤⋅=ℵ � αα (2.55)
Como nas vigas a plastificação é definida por deformações plásticas localizadas, a
expressão (2.55) é reduzida à soma da dissipação plásticas que ocorre em cada pondo
onde a tensão atingiu a superfície limite e se desenvolvem rótulas e/ ou expansões
plásticas. Assim,
( ) 0)(,)()()(1
=⋅=ℵ �=
ker
nk
kk
pk
er
p rQfrDrQD α (2.56)
onde rk representa a coordenada local dos nk pontos do elemento onde ocorrem rótulas
( pθ�∆ ) e expansões plásticas ( pu�∆ ), simbolicamente representados pelo vetor
+
−=
�
�
�
∆∆
= )()( kp
p
kp rU
urD �
�
�
θ (2.57)
onde +
−)( krU� representa o salto nas taxas nos campos de velocidades em rk .
Pode-se mostrar que as condições de ótimo do problema (2.55) são equivalentes
a lei da normalidade (Borges et al., 1996, Christiansen, 1980, Lubliner, 1990):
( )1 1
,αλ α= =
= ∇�� �nel nel
kP ek e
e k
D f Q (2.58)
( ) ( ) nkkneleQfQf ek
ek
ek
ek ���� 1,10,00, ===≥≤ λαλα (2.59)

18
Capítulo 3
Análise Limite em Pórticos
A teoria de análise limite fornece ferramentas que permitem o cálculo direto das
cargas sob as quais um corpo, que pode ser aproximadamente modelado como elástico
perfeitamente plástico ou que sofre um processo de encruamento limitado, atinge um
estado crítico. Entende-se por estado crítico um estado no qual ocorrem grandes
aumentos de deformação plástica, consideravelmente maiores que as deformações
elásticas, sem nenhum aumento na carga. No caso de corpos perfeitamente plásticos,
este estado é chamado de fluxo plástico irrestrito ou colapso plástico, e o estado de
carregamento no qual isto se torna possível é chamado de carregamento limite.
Pode ser mostrado que no estado de fluxo plástico irrestrito a taxa de
deformação elástica é nula e, então, uma teoria baseada em comportamento rígido-
plástico é válida também para corpos elasto-plásticos.
A prova do teorema de análise limite é baseada no princípio da máxima
dissipação plástica, e conseqüentemente, ele é válido somente para materiais padrão.
O estado de colapso plástico iminente é o estado em que ocorre uma taxa
deformação não nula ( 0PD ≠ ) sob carregamento constante ( 0=−= WFR ��� ). A
classificação de “iminente” é importante por estarmos olhando para o início de um
estado onde a deformação inicial é da mesma ordem de magnitude da deformação
elástica, assim as mudanças de geometria podem ser desconsideradas e a aceleração
também, e o problema pode ser tratado como quase estático.
Apesar da generalidade dos conceitos que serão apresentados, toda teoria de
análise limite será aqui formulada no âmbito restrito de estruturas como pórticos e
vigas, utilizando a notação apresentada no capítulo anterior.

19
3.1 Taxas de Deformação Elástica
Assume-se que as equações de equilíbrio e as condições de contorno de tensão
podem ser diferenciadas em relação ao tempo sem mudança de forma,
conseqüentemente o princípio dos trabalhos virtuais é válido também em relação às
taxas de tensão.
Seja um campo de deslocamentos virtuais tUδ� e um campo de taxa deformação
virtual pD , sendo U� um campo de velocidade atual e δt um pequeno incremento de
tempo. No colapso iminente então,
0)()()()()()(1 1 0
1-
1 0
= �
�
�⋅+⋅==⋅ � � ���
= ==
nel
e
nk
k
Ler
erk
Pk
er
nel
e
Ler drrQrQrDrQrDrQUR ���� C (3.1)
onde C é matriz que contem as constantes elásticas do material e Q�-1C é a parcela
elástica da deformação. A positividade da energia elástica, isto é 0-1 ≥⋅ QQ ��C ,
combinada com a inequação de Drucker 0)()(1
≥⋅�=
kP
nk
kk
er rDrQ , determina que no
colapso iminente as taxas de tensão desaparecem, então pe DDD == e 0 .
Em outras palavras, um corpo sofrendo colapso plástico se comporta como se
fosse rígido-plástico ao invés de elasto-plástico (Lubliner, 1990). Este resultado,
primeiramente observado por Drucker et al. (1951), torna possível a aplicação do
teorema de análise limite, previamente formulado para corpos rígido-plásticos, a corpos
elasto-plásticos.
Adicionalmente, caracteriza-se como estando em colapso iminente um corpo
submetido a um campo de tensões Q, equilibradas com o carregamento externo
representado pelo vetor R, e associadas via relação constitutiva a um campo de taxas de
deformações D, puramente plásticas e compatíveis com um campo de velocidades U� .
Para caracterizar matematicamente este problema, serão enunciados a seguir os dois
teoremas fundamentais da análise limite: o teorema do limite inferior e do limite
superior.

20
3.2 Teorema do Limite Inferior
Se, de alguma maneira, pode-se determinar o campo de tensões Q*,
plasticamente admissíveis e equilibradas com a carga R* = (1/αs)R, onde αs é um fator
numérico, então, a partir do Princípio das Potências Virtuais,
[ ] )(1
)()(111
11 1
* ���== =
ℵ=⋅=⋅=⋅=⋅nel
e
Pe
s
nel
e
nk
kk
Pk
er
sss
DrDrQUBQURUBQαααα
����� (3.2)
lembrando que )( pe Dℵ representa a dissipação plástica em cada elemento como
definido em (2.56). Por outro lado, pelo Princípio da Máxima Dissipação Plástica
(Drucker et al., 1951, Lubliner, 1990), a partir de (2.56) tem-se:
UBQrDrQDnel
e
nel
e
nk
kk
Pk
er
Pe �⋅=⋅≥ℵ� ��= = =
*
1 1 1
* )()()( (3.3)
Comparando (3.3) e (3.2) verifica-se então que αs ≥ 1. Em outras palavras, o fator αs,
dito multiplicador de carga estático, é um fator de segurança.
3.3 Teorema do Limite Superior
Supõem-se agora que, ao invés de Q*, seja possível determinar um mecanismo
de colapso, isto é, um campo de velocidades *U� cinematicamente admissível e
compatível com um campo de taxas de deformação puramente plásticas D* = Dp* e
associado ao carregamento R*.
O Princípio da Máxima Dissipação Plástica implica que
* *
1 1 1
( ) ( ) ( )
para ( ) ( ) 0 1 1
nel nel nke e
r k ke e k
e er k r
D Q r D r
Q r f Q k nk e nel= = =
ℵ ≥ ⋅
∀ ≤ = =
� ��
� �
(3.4)
21
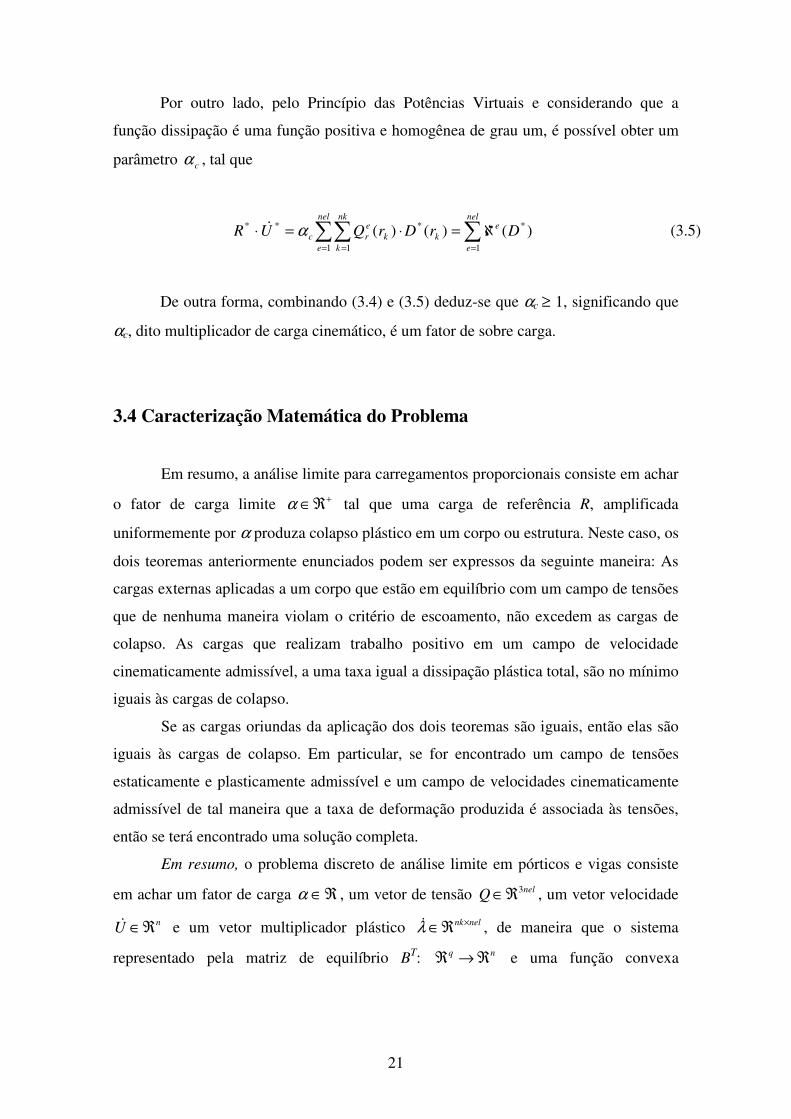
Por outro lado, pelo Princípio das Potências Virtuais e considerando que a
função dissipação é uma função positiva e homogênea de grau um, é possível obter um
parâmetro cα , tal que
���== =
ℵ=⋅=⋅nel
e
enel
e
nk
kkk
erc DrDrQUR
1
*
1 1
*** )()()(α� (3.5)
De outra forma, combinando (3.4) e (3.5) deduz-se que αc ≥ 1, significando que
αc, dito multiplicador de carga cinemático, é um fator de sobre carga.
3.4 Caracterização Matemática do Problema
Em resumo, a análise limite para carregamentos proporcionais consiste em achar
o fator de carga limite +ℜ∈α tal que uma carga de referência R, amplificada
uniformemente por α produza colapso plástico em um corpo ou estrutura. Neste caso, os
dois teoremas anteriormente enunciados podem ser expressos da seguinte maneira: As
cargas externas aplicadas a um corpo que estão em equilíbrio com um campo de tensões
que de nenhuma maneira violam o critério de escoamento, não excedem as cargas de
colapso. As cargas que realizam trabalho positivo em um campo de velocidade
cinematicamente admissível, a uma taxa igual a dissipação plástica total, são no mínimo
iguais às cargas de colapso.
Se as cargas oriundas da aplicação dos dois teoremas são iguais, então elas são
iguais às cargas de colapso. Em particular, se for encontrado um campo de tensões
estaticamente e plasticamente admissível e um campo de velocidades cinematicamente
admissível de tal maneira que a taxa de deformação produzida é associada às tensões,
então se terá encontrado uma solução completa.
Em resumo, o problema discreto de análise limite em pórticos e vigas consiste
em achar um fator de carga ℜ∈α , um vetor de tensão nelQ 3ℜ∈ , um vetor velocidade
nU ℜ∈� e um vetor multiplicador plástico nelnk×ℜ∈λ� , de maneira que o sistema
representado pela matriz de equilíbrio BT: nq ℜ→ℜ e uma função convexa

22
( ) nelnkRQf ×∈ entra em colapso plástico sob alguma carga proporcional a um dado vetor
de força nR ℜ∈ .
Assume-se que todos os movimentos de corpo rígido são governados por
deslocamentos cinemáticos prescritos, assim o núcleo da matriz B contém somente o
vetor velocidade nulo.
As quatro formulações seguintes são expressões equivalentes do problema de
análise limite discreto em virtude da convexidade de ( )Qf (Cohn e Maier, 1977,
Christiansen 1980, Borges et al., 1996):
(i) Formulação Estática
0),(max
**
***
3* ≤
−=
×ℜ∈ℜ∈ Qf
RQBT
Q nel αα
ααα
(3.6)
(ii) Formulação Cinemática
�=ℜ∈
=⋅ℵ=nel
e
e
UURUB
n1
1)(min ���
α (3.7)
onde
nkkrQfUBrQUB ke
nk
k
eek
e
rQ
e
ke
��� 10))(()(max)(1)(
=≤⋅=ℵ �=
(3.8)
(iii) Condições de Otimalidade
( ) 0, =∇− λα �� QfUB Q (3.9)
0=− RQBT α (3.10)
1),(. =⋅∇+ λαα�� QfUR (3.11)
( ) ( ) nkkneleQfQf ek
ek
ek
ek ���� 1,10,00, ===≥≤ λαλα (3.12)

23
Todas as versões discretizadas das formulações de análise limite (i), (ii) e (iii)
levam a um tipo único de problema dimensional finito, entretanto, os campos de tensões
e velocidades não são únicos. A unicidade é restrita ao fator de colapso.

24
Capítulo 4
Algoritmo de Solução
Para resolver o problema de análise limite discreto será utilizado um algoritmo
proposto por Borges et al. (1996), aqui adaptado para o modelo de vigas e pórticos.
Cada interação do algoritmo consiste em usar a fórmula de Newton para solução do
sistema formado pelo conjunto de igualdades pertencentes às condições de otimalidade
(3.9)-(3.12), seguidas por uma relaxação no passo e um escalonamento de tensão para
preservar a condição de admissibilidade plástica.
As condições de otimalidade (3.9)-(3.12), podem ser escritas na forma:
( ) ( )0; , Q 0; e 0g x f α λ= ≤ ≥� (4.1)
onde
( )
( )
0
,1),(.
,
)( =
�
�����
�
−⋅∇+−
∇−
=
λαλα
αλα
α�
��
��
QG
QfUR
RQB
QfUB
xgT
Q
(4.2)
�
����
�
=
λα�
�U
Q
x (4.3)
nkkneleQfdiagQG ek �� 1,1)),((),( === αα (4.4)
sendo a matriz B definida pela Eq. (2.20) e as componentes dos gradientes ( )QfQ ,α∇ e
),( Qf αα∇ dadas por (2.51) e (2.52), respectivamente. Deste ponto em diante a
referência em relação aos modos de plastificação ( nkknele �� 1,1 == ) serão
simplesmente designados por nknelm ×= �1 .

25
Utiliza-se um procedimento de dois estágios para achar uma nova iteração x a
partir do valor atual x (incógnitas do problema). No primeiro estágio, defini-se uma
estimativa de incremento 0xd para x realizando uma iteração de Newton para as
equações não lineares ( ) 0=xg . Então, a estimativa intermediária para x é
00xdxx += (4.5)
No segundo estágio, o incremento de tensão 0Qd é reduzido por um escalar s,
chamado fator de relaxação, e a tensão resultante é escalonada por um fator p, de
maneira a garantir que ao final da iteração os esforços definidos por
( )0QsdQpQ += (4.6)
satisfaçam a condição de admissibilidade plástica.
Da mesma forma, o fator de colapso α é também modificado pela mesma regra,
( )0ααα sdp += (4.7)
a fim de manter a condição de equilíbrio satisfeita ao longo de todo o processo. Este
passo de relaxação e escalonamento é repetido até que αα > .
A nova interação é
[ ]TUQx λα 0�= (4.8)
onde 0U� é obtido no primeiro estágio e α e Q no segundo. As componentes de λ são
as mesmas de 0λ� , exceto para as não positivas, que são substituídas por um número
positivo pequeno.

26
4.1 Primeiro Estágio, Estimativa de Incremento pela Fórmula de
Newton
Esta subseção apresenta em maior detalhe as etapas do primeiro estágio da
iteração. Um incremento 0xd em x é computado utilizando a seguinte fórmula de
iteração relacionada a ( ) 0g x = :
( ) ( )0xI x d g x= − (4.9)
onde, de acordo com fórmula de Newton, ( ) ( )I x g x= ∇ . Neste caso,
0
0
00)( =
�
�����
�
∇−∇Λ−∇−−−−
−∇−−−
=
Gff
fHRH
RB
fHBH
xI
Q
TTTQ
TQQQQ
α
αααα
α
(4.10)
sendo
nelnkmdiag m ×==Λ �1)(λ (4.11)
e
2 2 2QQ m QQ m Q m Q m m m
m m m
H f H f H fα α αα ααλ λ λ= ⋅∇ = ⋅∇ = ⋅∇� � � (4.12)
onde os gradientes estão definidos em (2.53) e (2.54).
A matriz HQQ é, geralmente, positiva semi-definida. Para obter uma versão
positiva definida desta matriz, conveniente para o desenvolvimento do algoritmo,
propõe-se uma pequena perturbação na matriz HQQ, que passa a ser escrita como:
� +∇⋅=m
mQQmQQ MfH )( 2 ελ (4.13)

27
onde ε é um número prescrito pequeno e M é uma matriz fixa preestabelecida. Esta
fórmula geral pode ser simplificada para os casos de vigas e pórticos, tendo em vista
que de acordo com (2.47),
( )
�
�����
�
===∇000000
001
)()(
20
2N
rYCrYrcf TmQQ (4.14)
Assim mQQ f2∇ pode ser aproximada simplesmente por:
�
�������
�
=∇
20
20
20
2
00
00
001
N
N
N
fmQQ
ε
ε (4.15)
onde ε deve ser um parâmetro pequeno quando comparado com a unidade (ε << 1).
Expandindo as condições na Eq. (4.9), associadas aos sistemas, (4.2), (4.3) e
(4.10), e assumindo que o equilíbrio nos nós livres é exatamente satisfeito para os
valores atuais de Q e α, conduz ao seguinte sistema de equações:
0 0 0 0 0α αλ− + ∇ + =��QQ Q Q QH d BU f H d (4.16)
0 0 0α− =TQB d d R (4.17)
0 0 0 0 1α α αα α λ+ ⋅ + + ∇ ⋅ =��TQ QH d R U d H f (4.18)
e 0 0 0 0α α λΛ∇ + ∇ + =�T
Q Qf d f d G (4.19)

28
onde 0 0 e Qd dα são estimativas de incremento para Q e α respectivamente, enquanto,
0 0 e λ��U são estimativas para e λ��U .
Este sistema linear de equações deve ser resolvido para as incógnitas 0 0 0 0, , e α λ��Qd U d a fim de achar a estimativa de incremento 0
xd .
O termo 0QQ QH d iguala a diferença entre as taxas de deformação plástica e as
totais em (4.16). A Eq. (4.17) representa o equilíbrio incremental, enquanto a Eq. (4.18)
impõe a necessidade de que a potência externa seja igual a um. O significado da Eq.
(4.19) será explicado mais adiante, na próxima seção.
Existem algumas características em comum na estrutura das matrizes
, , , eα αα α∇ ∇QQ Q QH H H f f e o vetor R, decorrentes da estrutura do modelo discreto,
que facilitam a solução do sistema (4.16)-(4.19). Por exemplo, a matriz QQH é
composta por blocos quadrados disjuntos entre elementos. Porque os parâmetros de
esforços internos são desacoplados, isto é, cada parâmetro está associado a um único
elemento.
Assim, sendo a matriz QQH uma matriz bloco-diagonal e positiva definida,
pode-se eliminar a incógnita 0Qd do sistema linear, fazendo uso de (4.16).
( )0 1 0 0 0α αλ−= − ∇ −��
QQQ Q Qd H BU f H d (4.20)
A Eq. (4.20), e várias das que estão por vir, envolvem quantidades e operações
referentes a um elemento finito por vez. Com a intenção de simplificar, está sendo
omitido, sempre que possível, o índice que denota o elemento.
A Eq. (4.20) é agora substituída em (4.19). Também multiplica-se (4.19) por 1−Λ , assumindo-se que λ�m é estritamente positivo para qualquer modo plástico m. Esta
consideração será garantida pela regra de atualização, realizada no final da iteração.
Assim,
( ) ( )1 1 0 1 1 0 1 0α α αλ− − − − −∇ ∇ − Λ + Λ ∇ − ∇ = ∇� �T T T
Q QQ Q Q QQ Q Q QQf H f G f f H H d f H BU (4.21)
Conseqüentemente, define-se

29
1 1 1 1 , α α α− − − −= ∇ ∇ − Λ = Λ ∇ − ∇T T
Q Q QQ Q Q QQ QW f H f G W f f H H (4.22)
e
1−= ∇QQ
TQT H f (4.23)
Foi provado em Zouain et al. (1993) que a matriz simétrica QW é positiva
definida, sob certas hipóteses a respeito da função plástica f, que podem ser fisicamente
interpretadas. Então, de (4.21)-(4.23),
0 1 0 0α αλ − � = − �
� �TQW T BU W d (4.24)
Introduzindo esta expressão em (4.20), obtem-se
0 0 0α α= +�ep T
Qd BU T W d� (4.25)
onde
1 1− −= −ep TQQH TW T� (4.26)
A Eq. (4.25) pode ser interpretada como uma relação tangente entre os esforços
internos e a deformação, representada por �BU , com ep� sendo a matriz de módulo
elasto-plástico “fictícia”. Foi provado em Zouain et al. (1993) que ep� é positiva semi-
definida.
Substituindo (4.25) em (4.17) conduz a
0 0α=� �KU d R (4.27)
onde a matriz K é obtida montando a contribuição de cada elemento na seguinte
expressão:
T epK B B= � (4.28)

30
e
α= −� T TR R B T W (4.29)
Pode-se interpretar K como uma rigidez elasto-plástica variável em cada iteração.
Usa-se (4.27) e (4.18) para deduzir a seguinte seqüência, com intuito de calcular 0 0 e α�d U :
Primeiro resolve-se
ˆ ,=U �K R (4.30)
em seguida, U é usado para obter
( ) 10 ˆα
−= ⋅�d R U (4.31)
e, finalmente, faz-se
0 0 ˆα=�U d U (4.32)
As incógnitas remanescentes 0 0 e Qd λ� são obtidas em termos elementares,
substituindo 0�U em (4.25) e (4.24).
31
4.2 Segundo Estágio, Relaxação do Passo e Escalonamento da
Tensão
O único requisito para gerar um algoritmo de pontos interiores é garantir a
viabilidade em relação às restrições das inequações ( ) 0 e 0f Q λ≤ ≥ ao final da
iteração. Nesta seção é descrito o procedimento utilizado para determinar os esforços
finais, que são plasticamente admissíveis. A aproximação do fator de carga α é
devidamente definida, de maneira que o equilíbrio seja sempre satisfeito. A condição
0, . . 0,i eλ λ≥ ≥� é garantida pelo critério de atualização utilizado ao final da iteração,
que modifica 0λ� , eliminando as componentes não-positivas.
De início, escolhe-se um fator de relaxamento s para o incremento de 0Qd . A
admissibilidade é garantida através do escalonamento dos esforços, i.e.
( )0QQ p Q sd= + (4.33)
sendo o fator de escalonamento p computado restringindo cada modo da função de
escoamento a ser estritamente negativo.
A tensão Q e o fator plástico α satisfazem o equilíbrio ao início da iteração. Por causa
da Eq. (4.17), 0 0 e Qd dα satisfazem, também, os requisitos de equilíbrio.
Consequentemente, as condições de equilíbrio
0α− =TB Q R (4.34)
serão preservadas em cada iteração se o fator de colapso é escalonado e relaxado da
mesma maneira que a tensão, ou seja, se
( )0p sdαα α= + (4.35)
Assim,

32
( )( ) ( )0 0min |m m m Q f mmp p f p sd Q sd f Qαα γ= + + + = (4.36)
onde ( )0,1fγ ∈ é dado por
0 0min ,f f dαγ γ α� = � (4.37)
e ( )0 0,1fγ ∈ é um parâmetro de controle fornecido. Esta regra previne que qualquer
função plástica se torne exatamente ativa em uma única iteração, enquanto pode se
aproximar de zero em poucas iterações.
Discutimos a seguir algumas propriedades das aproximações geradas a fim de se
determinar um critério apropriado para escolher o fator de relaxamento do passo s.
Em vista das condições de equilíbrio entre 0 0 e Qd dα e da restrição da potência
externa unitária (4.18), temos
0 0 0α = ⋅� �d KU U (4.38)
onde K é positiva semi-definida. Assim 0dα é não-negativa e ( )0 0,Qd dα é uma direção
ascendente para a função objetivo α da formulação estática (3.6).
Por outro lado, considerando a equação vetorial (4.19) em forma de componente,
0 0λ λ∇ = −� �Tm m Q m mf d f (4.39)
conclui-se que
00 0= � ∇ =Tm m Qf f d (4.40)
pela hipótese de λ�m ser estritamente positivo. Isto significa que 0Qd é tangente à
superfície 0=mf se este modo estiver ativo.
As propriedades de 0 0 e Qd dα mencionadas acima, permitem afirmar que é sempre
possível obter um fator de relaxamento s, pequeno o suficiente para garantir a condição

33
de ascendência também para a tensão modificada Q , porque a cada iteração ( )Q Q−
torna-se mais próximo à direção de ascendência 0Qd .
Baseado nisto, estabelece-se a seguinte estratégia para determinar o fator s. No
começo assume-se 1s = , então é encontrada uma primeira estimativa para p, de acordo
com (4.36). Se para esta estimativa α computada por (4.35) for menor que α, substitui-
se s por ssγ , onde ( )0,1sγ ∈ é um parâmetro pré-estabelecido. Para este novo s o fator
de escalonamento p é computado novamente. Este procedimento é repetido até que se
tenha α α≥ . Um bom processo de convergência apresentará valores de s e p próximos
de um nas últimas iterações.
4.3 Atualização
O conjunto de variáveis , , e α λ��T U deve ser atualizado para se realizar, se
necessário, uma nova iteração. Primeiro atualiza-se e Q α com os já computados
e Q α . Nota-se que não há necessidade de atualizar o vetor velocidade.
Finalmente atualiza-se λ� , levando em consideração que deve ser estritamente
positivo, de maneira que a matriz Λ possa ser invertida.
( )0 0max , λλ λ λ γ λ∞
← =� � �m m m (4.41)
e
0min , Qd
Qλ λγ γ�
= � � �
(4.42)
onde 0λγ é uma tolerância prescrita, ⋅ é a norma Euclidiana e
∞⋅ é a norma do
máximo valor absoluto das componentes. Esta regra permite que λ�m convirja a um valor
de multiplicador de Lagrange positivo, se este for o caso para 0λ�m , enquanto estão sendo
ajustados a um valor positivo pequeno, esses parâmetros λ�m , correspondendo a 0λ�m ,
tendem a zero.

34
4.4 Requisitos para a Inicialização
Foi assumido em (4.9) que a equação de equilíbrio é exatamente satisfeita para
os valores iniciais de cada iteração. Além disto, os incrementos de tensão e do fator de
carga computados também estão relacionados pelo equilíbrio como conseqüência de
(4.17). Então, basta inicializar o algoritmo com o par ( ),Q α em concordância com as
condições de equilíbrio para obter-se aproximações de carga e tensão equilibradas em
todo o processo de convergência.
A admissibilidade plástica das tensões no início de cada iteração também foi
assumida, e é preservada no final em virtude do escalonamento de tensão descrito na
seção anterior.
Consequentemente, escolhe-se
( )1
0, 0 e 0
α λ −= = =�mm
Qf
(4.43)
como valores iniciais para o algoritmo, viáveis com respeito à admissibilidade plástica e
o equilíbrio.
4.5 Critério de Convergência
Para testar se a convergência foi ou não alcançada, considera-se o conjunto de
condições de otimalidade (3.9)–(3.12) e o equilíbrio, Eq. (3.10). A igualdade da
potência externa (3.11) e a restrição da admissibilidade plástica (3.12a) são garantidas
no procedimento de iteração. Então, utiliza-se 0 0 e λ��U para checar se o presente valor
de Q concorda com as Eqs. (3.9), (3.12b) e (3.12c). Assim, a convergência é alcançada
se o seguinte critério for satisfeito:
0 0 0λ ε∞∞
− ∇ ≤�� �m DBU f BU (4.44)
0 0 , m 1, ,λλ ε λ∞
≥ − =� � �m k (4.45)

35
e
( )0 0 , se < 0λλ ε λ ε∞
≤ −� �m m f mf f (4.46)
onde os parâmetros , e D fλε ε ε são tolerâncias prescritas.
As observações finais sobre o algoritmo dizem respeito à possibilidade de se
detectar singularidade ou um mau condicionamento na pseudo matriz de rigidez K.
Recorda-se que foi provado que K é somente positiva semi-definida, apesar de
que todos os movimentos rígidos foram eliminados em B. Além disto, a Eq. (4.27) deve
ser satisfeita, na solução, para a velocidade de colapso e dα igualado a zero, em
conseqüência, K necessariamente tende a se tornar singular.
A questão é se a singularidade de K é ou não condição suficiente para a
convergência. Obviamente, um resultado teórico para esta questão seria muito útil. De
qualquer maneira, precisa-se inserir um teste quanto a singularidade na decomposição
de K.
4.6 Resumo do Algoritmo para Análise Limite
Apresenta-se agora um resumo do algoritmo utilizado para resolver o problema
de análise limite. Por simplicidade, este resumo será restrito aos casos onde não há
cargas distribuídas. Neste caso, os subíndices Q e α ,que aparecem na notação dos
gradientes e Hessianas (Eq. (4.10)), podem ser dispensados, tendo em vista que só o
parâmetro Q é considerado nos cálculos das derivadas e, portanto, não há possibilidade
de conflito nas definições.
Como mencionado anteriormente, cada elemento finito é associado, numa
relação de um para um, a um subconjunto de parâmetros de esforços globais e a um
subconjunto de restrições de admissibilidade plástica globais. Assim, a estrutura
matemática do modelo de pórticos permite que se realize todos os cálculos no âmbito
elementar. A única equação global a ser montada é a que aparece no sistema linear
(4.30). Entretanto, por brevidade e por não gerar maiores conflitos de notação, o
superíndice e, indicando o elemento, não foi adotado.
Os parâmetros do algoritmo e os valores típicos usados nas aplicações deste
trabalho foram os seguintes:

36
Parâmetros de controle:
0 2 0 4 -710 , 10 a 10 , 0.3, 0.5 ou 0.7f sλγ γ γ− −= = =
Perturbação para ( )2kf Q∇ :
3 510 a 10ε − −=
Parâmetros para checar a convergência:
3 12 3 310 a 10 , 10 , 10D fλε ε ε− − − −= = =
O algoritmo foi implementado no programa Mathematica, versão 5.0 de 2003,
utilizando-se funções básicas de programação, tais como IF, FOR, WHILE, GOTO.

37
I) INICIALIZAÇÃO
00
==
α
eQ
for cada modo plástico:
( )10m
mfλ −=�
end for
II) ESTIMATIVA DO INCREMENTO
for cada elemento e
( )( ) 11 2
1
1
1 1
D
Monte em
QQ QQ
m m
Q
TQ Q
ep TQ
e T ep
e
H f M
T H f
W T f G
D H TW T
K B B
K K
λ ε−
−
−
−
− −
= ∇ +
= ∇
= ∇ − Λ
= −
=
� �
end for
Decompor K
if algum elemento da diagonal de K se tornar menor ou igual a zero
then terminate

38
solve ˆKU R= �
( ) 10
0 0
ˆ.
ˆ
d RU
d U
α
α
−=
=U
�
�
for cada elemento 0 1 0T
QW T BUλ −=� �
end for
III) TESTE DE CONVERGÊNCIA
If 0 0 0DBU f BUλ ε
∞∞− ∇ ≤�� �
and
for cada modo plástico em cada elemento
0 0m λλ ε λ
∞≤� �
or
( )0m f mf fε≥
end for
then terminate (com a convergência alcançada)
IV) ESTIMATIVA DO INCREMENTO DE TENSÃO
for cada elemento e 0 0epQd D BU= �
end for
39
V) RELAXAMENTO DO PASSO E ESCALONAMENTO DA TENSÃO
=fγ min �
�
�
αγ α
00 ,
df
s=1
repeat until α α>
00ααα sd+=
for cada elemento
0Q
s sdQQ +=
for cada modo plástico encontre mp tal que
( )( ) ( )0sm m f mf p Q f Qα γ+ =
end for
end for
=p min mp
ss
p
sγαα
←= 0
end repeat
VI) ATUALIZAÇÃO
αα ←
=λγ min
�
��
�
Q
dQ0
0 ,λγ
for cada elemento
spQQ ←
for cada modo plástico
mλ ←� max ( )0 0,m λλ γ λ∞
� �
end for
end for

40
Capítulo 5
Aplicações
A fim de validar o algoritmo utilizado, foram realizadas algumas aplicações
conhecidos da literatura.
5.1 Aplicação 1
A primeira aplicação, retirada da seção 6.3.2 de Lubliner (1990), consiste em
uma barra de comprimento L engastada na extremidade esquerda e apoiada na direita,
com duas cargas pontuais proporcionais a um determinado parâmetro β como mostra a
Figura 5.1 .
Figura 5.1: Barra engastada na extremidade esquerda e apoiada na direita.
A viga foi modelada com 3 elementos de viga reta e seção quadrada, idênticos,
mesma seção, comprimento, esforço axial de colapso 0N e momento de colapso 0M , e
nós no engaste, em L/3, 2L/3 e no apoio em L. Os pontos de verificação foram os
próprios nós.
De acordo com Lubliner (1990), a relação entre o fator de colapso α e o
momento de colapso M0 deve ser:
βF (1-β)F
L/3 L/3 L/3

41
015 2 , para 1
1 3MLF
α ββ
= < <+
(5.1)
e
012 2 , para 0<
2 3MLF
α ββ
= <−
(5.2)
Uma outra maneira de apresentar o resultado seria considerando as cargas
aplicadas em L/3 e 2L/3 como independentes, sendo respectivamente, F1 e F2. Desta
forma chega-se, através da análise do equilíbrio e considerando 0M M= no engaste, a
duas inequações,
,152
,122
021
021
LM
FF
LM
FF
≤+
≤+ (5.3)
representadas graficamente na Figura 5.2. Na região interna às retas, não ocorre colapso
plástico. O fator de colapso α é o multiplicador que leva ao ponto de interseção da reta
que passa pela origem e o ponto formado pelas nossas cargas, com as retas das
inequações.
Figura 5.2: Diagrama de interação entre as cargas.
0
5
10
0 5 10
2 0F L M
1 0F L M
β=0.7
β=0.3

42
Utilizando 0 0
0
15, 1.67 e 0.7M MFL N L
β= = = , resulta em 08.8235MFL
α = .
O resultado do algoritmo foi um fator de colapso 08.8173MFL
α = em 9 iterações,
como mostra o gráfico da Figura 5.3, onde se pode notar que a partir da quinta iteração
os valores de α estabilizaram.
Figura 5.3: Fator de colapso versus número de iterações para 0.7β = .
Identifica-se uma rótula plástica no engaste e outra em L/3. A Figura 5.5(a)
mostra o mecanismo de colapso resultante com as respectivas rótulas, indo de encontro
ao apresentado por Lubliner (1990). Os resultados dos momentos também foram bem
coerentes, dando 0M em 0 e 3L , zero em L e 0.93 0M em 2 3L .
Considerando agora, 0.3β = para a mesma relação 0 0
0
15 e 1.67M MFL N L
= = ,
tem-se 07.0588MFL
α = . O algoritmo apresentou como resultado 07.0500MFL
α = em 8
iterações, convergindo de forma estável a partir da quarta iteração, como mostra a
Figura 5.4
0
FLM
α
Iteração
6
7
8
9
0 3 6 9
43
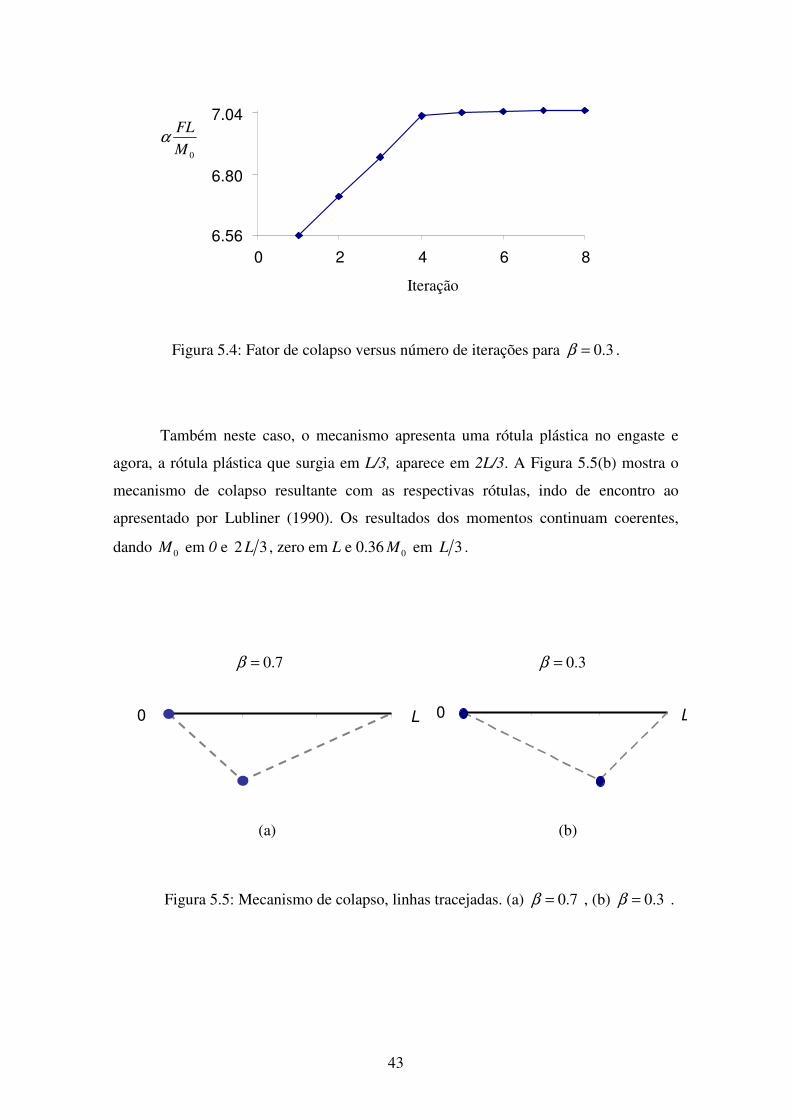
Figura 5.4: Fator de colapso versus número de iterações para 0.3β = .
Também neste caso, o mecanismo apresenta uma rótula plástica no engaste e
agora, a rótula plástica que surgia em L/3, aparece em 2L/3. A Figura 5.5(b) mostra o
mecanismo de colapso resultante com as respectivas rótulas, indo de encontro ao
apresentado por Lubliner (1990). Os resultados dos momentos continuam coerentes,
dando 0M em 0 e 2 3L , zero em L e 0.36 0M em 3L .
Figura 5.5: Mecanismo de colapso, linhas tracejadas. (a) 0.7β = , (b) 0.3β = .
0.7β = 0.3β =
0 L 0 L
(a) (b)
0
FLM
α
Iteração
6.56
6.80
7.04
0 2 4 6 8

44
Nesta aplicação o resultado é idêntico ao da referência, pois o esforço axial é
nulo e a linearização da superfície de escoamento proposta em Lubliner (1990) não
influi no resultado.
45
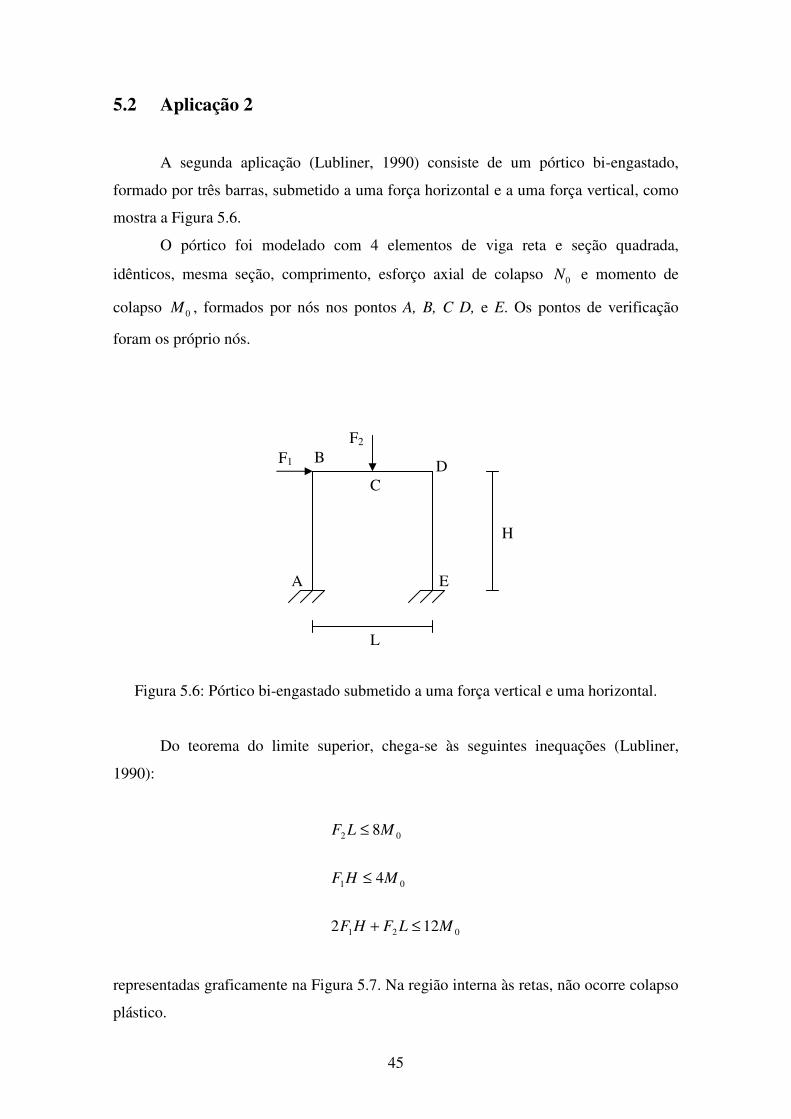
5.2 Aplicação 2
A segunda aplicação (Lubliner, 1990) consiste de um pórtico bi-engastado,
formado por três barras, submetido a uma força horizontal e a uma força vertical, como
mostra a Figura 5.6.
O pórtico foi modelado com 4 elementos de viga reta e seção quadrada,
idênticos, mesma seção, comprimento, esforço axial de colapso 0N e momento de
colapso 0M , formados por nós nos pontos A, B, C D, e E. Os pontos de verificação
foram os próprio nós.
Figura 5.6: Pórtico bi-engastado submetido a uma força vertical e uma horizontal.
Do teorema do limite superior, chega-se às seguintes inequações (Lubliner,
1990):
021
01
02
122
4
8
MLFHF
MHF
MLF
≤+
≤
≤
representadas graficamente na Figura 5.7. Na região interna às retas, não ocorre colapso
plástico.
H
L
F2
F1
A
B
C D
E

46
Escolhendo, por exemplo, 2 0 5F L M = e 1 0 2F H M = para
0
0
1.5 e 12.5,H ML N L
= = leva a um fator de colapso α = 1.33, através da interseção da
reta que passa pela origem e o ponto (2,5), com as retas das inequações, Figura 5.7 .
Deve-se levar em conta que Lubliner (1990) não considerou a contribuição do esforço
axial de colapso N0 .
Figura 5.7: Diagrama de interação entre as cargas.
O resultado do algoritmo foi um fator de colapso α = 0.85 em 7 iterações, como
mostra o gráfico da Figura 5.8, onde pode-se notar que a partir da quarta iteração os
valores de α estabilizaram. Este valor é coerente por ser menor do que o valor que não
considera o esforço axial de colapso N0 .
0
4
8
0 4 8
02 MLF
01 MHF

47
Figura 5.8: Fator de colapso versus número de iterações.
No colapso foram geradas três rótulas plásticas, uma em cada engaste e outra no
centro da segunda barra. O mecanismo de colapso, Figura: 5.9(a), assemelha-se ao
apresentado por Lubliner (1990).
Os resultados dos momentos também foram coerentes, dando 0M nos engastes e
no centro da barra horizontal e 0.06 0M nos pontos B e D. Indo de encontro ao diagrama
de momento fletor proveniente da teoria, Figura 5.9(b).
0,83
0,84
0,85
1 2 3 4 5 6 7
Iteração
α

48
(a)
(b)
Figura: 5.9: (a) Mecanismo de colapso, linhas tracejadas,
(b) diagrama de momento fletor.
M0
M0 M0

49
5.3 Aplicação 3
Esta aplicação consiste em um arco circular de raio r, bi-apoiado, de tal forma
que os apoios apenas permitem rotação, submetido a uma determinada força vertical F
na parte superior central, como mostrado na Figura 5.10 .
Figura 5.10: Arco bi-apoiado.
O arco foi modelado por elementos de viga reta e seção tubular, foram utilizados
4 elementos idênticos, ou seja, com mesma seção, comprimento, esforço axial de
colapso 0N e momento de colapso 0M . Os elementos foram distribuídos
uniformemente ao longo da geometria do arco. A Figura 5.11 mostra os elementos e os
respectivos nós numerados, modelados no algoritmo. Os pontos de verificação foram os
próprios nós.
F

50
Figura 5.11: Modelagem com 4 elementos.
O resultado do algoritmo para a relação 0 0
0
14.4 e 30.5M MN R FR
= = foi um fator
de colapso α = 0.63 em 3 iterações, sendo as duas últimas idênticas, mostrando
estabilidade na convergência como pode ser observado na Figura 5.12 .
Figura 5.12: Fator de colapso versus número de iterações.
F
1
2 3
4
5
α
0,62
2 3 1
Iteração
0,63

51
O resultado apresentado por Lubliner (1990) é um fator de colapso
α = 0.49. Entretanto, ele utiliza uma aproximação linear para a superfície de
escoamento.
Também é apresentada por Lubliner (1990), uma equação para os momentos ao
longo do arco variando com um ângulo φ , que vai de zero radianos em F, a 2π no
apoio. O gráfico desta equação é mostrado na Figura 5.13 .
Figura 5.13: Momento ao longo do arco.
Os momentos resultantes do algoritmo foram: zero nos apoios, nós 1 e 5, 0M
nos nós 2 e 4 e zero no nó 3. As rótulas resultaram nos nós 2 e 4, sendo coerente com o
valor máximo dos momentos resultantes nestes nós, 0M . Pelo gráfico da Figura 5.13, o
valor máximo do momento ocorre em 0.93 radianos, consequentemente onde se forma
rótula. O nó mais próximo do modelo está em 4 0.79π = radianos, no caso o nó 2, e
também o 4 por simetria. Pelo gráfico, 0.79 radianos equivale a 95% de 0M . A Figura
5.14 apresenta o gráfico dos momentos obtidos pelo algoritmo.
0.25 0.5 0.75 1 1.25 1.5
-1
-0.5
0.5
1
φ (rd)
M(φ)/M0

52
Figura 5.14: Momento ao longo do arco apresentado pelo algoritmo.
O mecanismo de colapso, com as respectivas rótulas, está apresentado na Figura
5.15, pelas linhas tracejadas. A única diferença é que, segundo Lubliner (1990), deve
aparecer uma rótula também no centro do arco, nó 3, o que pode ser notado pelo gráfico
dos momentos, Figura 5.13. Em 0φ = o momento também é máximo, 0M . O
mecanismo de colapso é idêntico ao apresentado por Lubliner (1990).
Figura 5.15: Mecanismo de colapso, linhas tracejadas..
M(φ)/M0
-1
-0,5
00 0,25 0,5 0,75 1 1,25 1,5
φ(rd)
F
53
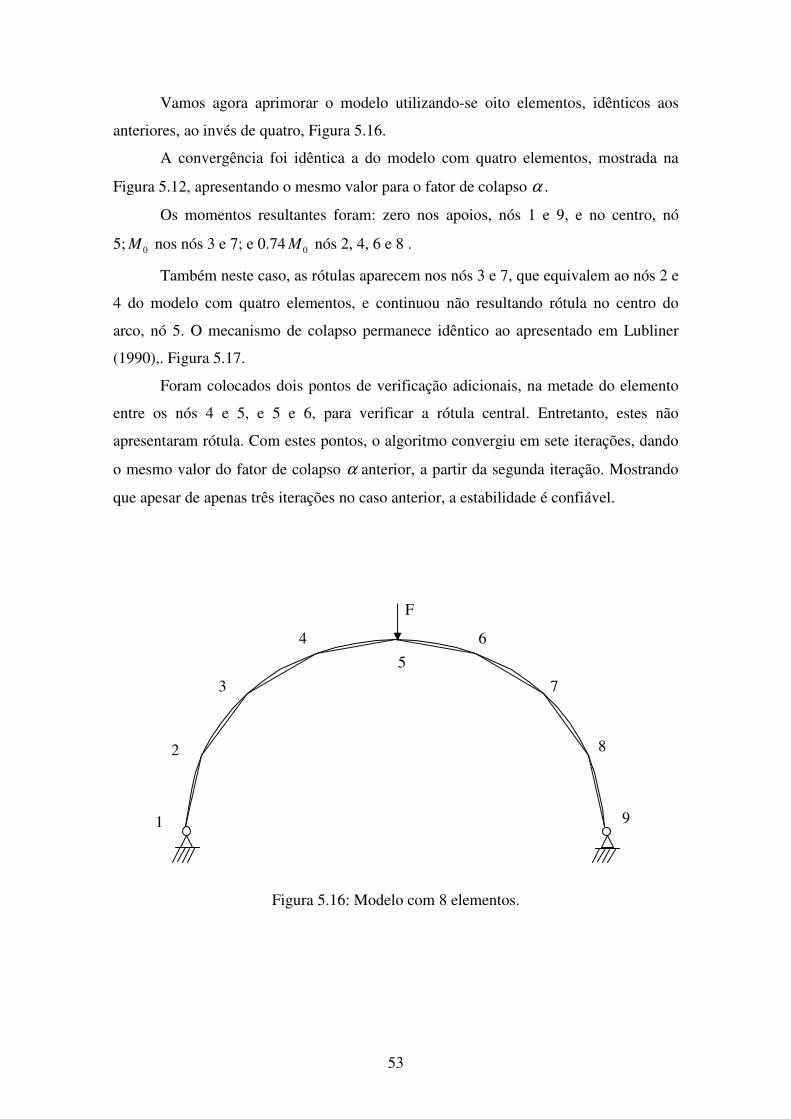
Vamos agora aprimorar o modelo utilizando-se oito elementos, idênticos aos
anteriores, ao invés de quatro, Figura 5.16.
A convergência foi idêntica a do modelo com quatro elementos, mostrada na
Figura 5.12, apresentando o mesmo valor para o fator de colapso α .
Os momentos resultantes foram: zero nos apoios, nós 1 e 9, e no centro, nó
5; 0M nos nós 3 e 7; e 0.74 0M nós 2, 4, 6 e 8 .
Também neste caso, as rótulas aparecem nos nós 3 e 7, que equivalem ao nós 2 e
4 do modelo com quatro elementos, e continuou não resultando rótula no centro do
arco, nó 5. O mecanismo de colapso permanece idêntico ao apresentado em Lubliner
(1990),. Figura 5.17.
Foram colocados dois pontos de verificação adicionais, na metade do elemento
entre os nós 4 e 5, e 5 e 6, para verificar a rótula central. Entretanto, estes não
apresentaram rótula. Com estes pontos, o algoritmo convergiu em sete iterações, dando
o mesmo valor do fator de colapso α anterior, a partir da segunda iteração. Mostrando
que apesar de apenas três iterações no caso anterior, a estabilidade é confiável.
Figura 5.16: Modelo com 8 elementos.
1
2
3
4 5
6
7
8
9
F

54
Figura 5.17: Mecanismo de colapso para 8 elementos, linhas tracejadas.
F

55
Capítulo 6
Conclusões
Neste trabalho foi apresentada uma formulação para análise limite em pórticos
planos que inclui o desenvolvimento de um algoritmo do tipo Newton para solução do
problema. No modelo proposto não foram incluídas outras aproximações além das
usuais previstas nas hipóteses clássicas de vigas. A superfície de escoamento adotada
considera a influência do esforço normal no critério de plastificação e foi tratada na sua
forma não linear.
A vantagem em se utilizar superfícies não lineares não se limita à possibilidade
de redução no número de restrições impostas ao modelo mas, principalmente, à
eliminação das aproximações induzidas por estas linearizações. Muitas vezes, estas
linearizações induzem à aproximações sem significado físico claro e podem ser de
difícil concepção. Como exemplo, cita-se o caso de superfícies linearizadas para perfis
tubulares (Borges, 1984).
O algoritmo se mostrou confiável para o cálculo de cargas e da distribuição de
esforços no colapso, identificando mecanismos de colapso idênticos aos previstos pela
teoria, com rótulas plásticas bastante coerentes em relação às soluções analíticas
encontradas na literatura (Lubliner, 1990).
O procedimento se mostrou robusto tanto para o cálculo de colapso em
estruturas onde o esforço axial é nulo, como foi o caso do exemplo apresentado na seção
5.1, como nos casos onde o esforço axial foi considerado. Quando não há esforços
axiais, o resultado é exatamente o mesmo obtido em soluções analíticas
(Lubliner,1990).
Na aplicação 2, o fator de colapso divergiu do encontrado pela teoria de
referência, sendo 64% do apresentado por Lubliner (1990). Este resultado é previsível,
pois Lubliner não considera o esforço axial nas restrições plásticas, o que
necessariamente conduz a um valor superestimado para o fator de colapso.
Adicionalmente, observa-se que nos exemplos estudados a convergência foi
estável. Em particular, no exemplo apresentado na seção 5.3, o número de iterações para

56
a convergência do algoritmo aumentou de três para sete, quando foram considerados
dois pontos de verificação adicionais.
Em geral, para o estudo de análise limite em vigas, os esforços axiais não são
preponderantes e, portanto, o modelo que limita apenas o valor máximo do esforço
fletor, oferece uma boa aproximação. Entretanto, este modelo não é adequado quando se
deseja verificar a influência do esforço normal, como é o caso de vigas curvas, onde a
presença do esforço axial tem maior influência no comportamento estrutural. O modelo
de vigas curvas é particularmente importante para os estudos de linhas de tubulações
onde, além da pressão interna, outros esforços podem ter atuação significativa no
sistema.
Neste sentido é que foi pensada a análise mostrada na seção 5.3, onde um arco
de 180° foi modelado com elementos retos. O fator de colapso calculado através da
metodologia aqui proposta foi 28% maior que o de Lubliner (1990). A solução analítica
proposta por Lubliner (1990) considera o esforço axial de colapso e uma linearização da
superfície limite. Foi observado que, mesmo tendo–se em conta a aproximação
geométrica do arco por elementos retos, a diferença entre os fatores de colapso
computado e o apresentado por Lubliner foi menor nos arcos do que no pórtico
apresentado na seção 5.2.
No caso do arco, o fato de não ter sido apresentado rótula no centro, prevista por
Lubliner, atribui-se a utilização de elementos de viga reta para a modelagem
geométrica. Por outro lado, as duas rótulas simétricas foram previstas perfeitamente.
Uma proposta para futuros trabalhos, seria utilizar modelo de viga curva para a
modelagem, o que, provavelmente, trará melhores resultados para aplicações em vigas
curvas.
O estudo aqui proposto fornece uma primeira idéia para, futuramente, combinar
os efeitos da pressão interna em dutos com os carregamentos adicionais que estes
sofrem, como os considerados aqui neste trabalho, para análise limite em linhas de
tubulação.
Finalmente, é importante mencionar que futuramente o modelo aqui proposto
deve incluir, no conjunto de restrições, critérios de projeto baseados na condição de
estabilidade geométrica, sob pena de falhar na previsão do colapso como um todo. Na
presença de esforços axiais, em muitos casos a carga que provoca instabilidade
geométrica pode ser bem mais crítica do que a carga que provoca colapso plástico.

57
Referências Bibliográficas
Borges, L. A., 1984. Análise Limite de Pórticos Planos via Otimização. Dissertação de
M.Sc., PUC, Rio de Janeiro, Brasil.
Borges, L. A., Zouain, N., Huespe, A. E., 1996. A Nonlinear Optimization Procedure
for Limit Analysis. Eur. J. Mech., A/Solids, 15(3): 487-512.
Casciaro, R., Cascini, L., 1982. A Mixed Formulation and Mixed Finite Elements for
Limit Analysis. Int. J. for Numerical Methods in Engineering, 18: 211-243.
Christiansen, E., 1980. Limit Analysis in Plasticity as a Mathematical Programming
Problem. Calcolo, 17: 41-65.
Christiansen, E., 1981. Computation of Limit Loads. Int. J. for Numerical Methods in
Engineering, 17: 1547-1570.
Cohn, M. Z., Maier, G., 1977. Engineering Plasticity by Mathematical Programming.
Proc. of the NATO Advanced study Institute. Ontario.
Dang Hung, N., 1983. Sur la Plasticité et le Calcul des États Limites par Éléments
Finis. Thesis Doc. Esp. Université de Liége.
Drucker, D. C., Greenberg, H. J., Prager, W., 1951. J. Appl. Mech, 18: 371.
Feijóo, R. A., Taroco, E., 1981. Curso de Mecânica Teórica e Aplicada. LCC, CNPq.
Frémond, M., 1980. Le Matériau Viscoplastique de Norton-Hoff. Curso na II Escola de
Matemática Aplicada. Laboratório Nacional de Computação Científica. Rio de
Janeiro.
58
Frémond, M., Friaa, A., 1982. Les Méthodes Statique et Cinématique en Calcul à la
Rupture et en Analyse Limite. Eur. J. Appl. Comp. Mech, 1(5): 881-905.
Gao Yang, 1988. Panpenalty Finite Element Programming for Plastic Limit Analysis.
Computers and Structures, 28(6): 749-755.
Gaudrat, V. F., 1991. A Newton-Type Algorithm for Plastic Limit Analysis. Comp.
Meth. In App. Mechanics and Engineering, 88: 207-224.
Hodge, P. G., 1959. Plastic Analysis of Structures. New York. McGraw-Hill.
Huh, H., Yang, W. H., 1991. A General Algorithm for Limit Solutions of Plane Stress
Problems. Int. J. Solids Structures, 28(6): 727-738.
Lubliner, J., 1990. Plasticity Theory. New York. Macmillan.
Martin, J. B., 1975. Plasticity: Fundamentals and General Results. Cambridge. MIT
Press.
Onat, E. T., Prager, W., 1955. In: Proc. 1st Midwestern Conf. Solid. Mech. 40. Urbana.
Panagiotopoulos, P.D., 1985. Inequality Problems in Mechanics and Aplications.
Boston. Birkhaüser.
Romano, G., Sacco, E., 1985. Convex Problems in Mechanics. In: Eds. Del Piero G.
and Maceri F. Unilateral Problems in Structural Analysis 2. CISM Courses no. 304.
Springer-Verlag, 279-297.
Zouain, N., Herskovits, J., Borges, L. A., Feijóo, R. A., 1993. An Iterative Algorithm
for Limit Analysis with Nonlinear Yield Functions. Int. J. Solids Structures. 30(10):
1397-1417.














![ANÁLISE DINÂMICA NÃO-LINEAR DE PÓRTICOS ESPACIAIS ...€¦ · Análise Dinâmica Não-Linear de Pórticos Espaciais Utilizando a Formulação Corrotacional [Distrito Federal]](https://static.fdocumentos.com/doc/165x107/5f34826ec4c1be762324b47c/anlise-dinmica-nfo-linear-de-prticos-espaciais-anlise-dinmica-no-linear.jpg)

