
ANDRES FARF´ AN PEL´ AEZ´ - lsi.usp.brlsi.usp.br/~dmpsv/download/DissertacaoVCO.pdf · Os testes...
103
ANDR ´ ES FARF ´ AN PEL ´ AEZ Projeto e Implementa¸ c˜ ao de um Oscilador Monol´ ıtico a 2,4 GHz em Tecnologia CMOS 0,35μm. . Disserta¸ c˜ ao apresentada ` a Escola Polit´ ecnica da Universidade de S˜ ao Paulo para obten¸ c˜ ao do T´ ıtulo de Mestre em Engenharia El´ etrica. S˜ ao Paulo 2003
Transcript of ANDRES FARF´ AN PEL´ AEZ´ - lsi.usp.brlsi.usp.br/~dmpsv/download/DissertacaoVCO.pdf · Os testes...

ANDRES FARFAN PELAEZ
Projeto e Implementacao de um Oscilador
Monolıtico a 2,4 GHz em Tecnologia CMOS
0,35µm.
. Dissertacao apresentada a Escola
Politecnica da Universidade de Sao
Paulo para obtencao do Tıtulo de
Mestre em Engenharia Eletrica.
Sao Paulo
2003

ANDRES FARFAN PELAEZ
Projeto e Implementacao de um Oscilador
Monolıtico a 2,4 GHz em Tecnologia CMOS
0,35µm.
. Dissertacao apresentada a Escola
Politecnica da Universidade de Sao
Paulo para obtencao do Tıtulo de
Mestre em Engenharia Eletrica.
Area de concentracao:
Microeletronica.
Orientador:
Prof. Wilhelmus A.M. Van Noije.
Sao Paulo
2003
.
Este exemplar foi revisado e alterado em relacao a versao original, sob responsa-
bilidade unica do autor e com a anuencia do seu orientador.
Sao Paulo, 15 de janeiro de 2004.
Assinatura do autor
Assinatura do orientador
FICHA CATALOGRAFICA
Farfan, Pelaez Andres.
Projeto e Implementacao de um Oscilador Monolıtico a 2,4 GHz em Tecnologia
CMOS 0,35µm/ Andres Farfan Pelaez. – Sao Paulo, 2003.
87 p.
Dissertacao (Mestrado) - Escola Politecnica da Universidade de Sao Paulo. De-
partamento de Engenharia Eletrica.
1. Microeletronica. 2. Osciladores. 3. Circuitos integrados. I.Universidade
de Sao Paulo. Escola Politecnica. Departamento de Engenharia de Sistemas
Eletronicos II. t.

.
Madre, padre, hermanita: gracias por
apoyarme en esta, otra, locura. Gracias
a Dios parece que acabamos esta pero
todavıa faltan mas.

AGRADECIMIENTOS
Agradezco a mi orientador, Profesor Wilhelmus A. M. Van Noije, por su ayuda
durante la elaboracion de este trabajo. A mi co-orientador, Joao Navarro Soares
Jr. por las discusiones, preguntas hechas e respuestas dadas durante todo este
tiempo.
Agradezco el apoyo del Conselho Nacional de Desenvolvimento Cientıfico e
Tecnologico (CNPq) que me otorgou una beca, a la Fundacao de Amparo a Pes-
quisa do Estado de Sao Paulo (FAPESP) que financio la fabricacion de los cir-
cuitos integrados, a las personas del Laboratorio de Sistemas Integraveis (LSI) e
a las personas del Laboratorio de Medidas del LME/EPUSP.
A Gustavo Adolfo Cerezo, ”el mejor amigo”que hizo la negociacion y ayudo
a que yo conociera estes lares, con quien , se quiera o no, se discute de todo.
A Ruben Darıo Echavarria, companero en esta travesıa, ejemplo y mal ejemplo,
ayuda pa’las buenas y pa’las malas. A Eduard, el hombre correcto del grupo. A
Angel, la persona ”motivadora”. A Elkim, el estudioso y serio. A Luiz Carlos
Moreira, ejemplo de disciplina. A los otros amigos del grupo, colombianos y
brasilenos que no puedo nombrar todos porque son bastantes.

Resumo
Na tentativa de obter produtos portaveis de comunicacao sem fio que sa-
tisfacam os requerimentos de tamanho, confiabilidade, consumo de potencia e
preco cada vez mais exigentes do mercado, a implementacao de circuitos trans-
ceptores RF integrados num so circuito e o objetivo de muitas pesquisas. Um dos
blocos destes transceptores e o oscilador que tera que gerar um sinal periodico
mais puro e estavel possıvel.
Neste trabalho descrevem-se o papel do VCO num circuito transceptor RF,
define-se o conceito de ruıdo de fase em osciladores, explica-se o efeito do ruıdo
de fase tanto na recepcao como na transmissao, explica-se dois modelos do ruıdo
de fase do oscilador, apresenta-se uma formula simples para o calculo das es-
pecificacoes do ruıdo de fase em funcao das especificacoes do sistema de radio,
projeta-se um oscilador visando cumprir as especificacoes do ruıdo de fase do
Bluetooth e realizam-se as simulacoes necessarias para a caracterizacao da faixa
de frequencia de operacao do circuito, do ruıdo de fase do circuito e da amplitude
de oscilacao do circuito projetado.
Projetou-se e implementou-se um oscilador controlado por tensao numa tec-
nologia 0,35 µm CMOS operando a 2,4 GHz. Foi escolhida uma topologia de
oscilador de Gm negativo NMOS para a implementacao. O projeto baseou-se na
obtencao de um indutor com as menores perdas possıveis. Para caracterizar o
indutor, simularam-se varias estruturas com o programa ASITIC. As simulacoes
do circuito mostram um consumo de potencia de 6,6 mW, amplitude de oscilacao
de 0,9 Volts, frequencia de operacao de 2,28 GHz ate 2,56 GHz e ruıdo de fase de
-128dBc/Hz@3MHz.
Os testes do circuito mostraram que o oscilador possui uma faixa de variacao
de frequencia de 2.21 GHz ate 2.53 GHz. Esta faixa esta proxima dos resultados
vistos na simulacao e ainda inclui a frequencia de oscilacao para a qual o circuito
foi projetado. Dos dados de amplitude de oscilacao observados no no de saıda
do buffer pode-se inferir que a amplitude do sinal na saıda do oscilador esta
proxima dos resultados vistos na simulacao. Os testes foram feitos com uma
fonte de alimentacao de 3,3 V e aplicando uma corrente de 2 mA ao oscilador,
estes valores de polarizacao foram os mesmos usados durante as simulacoes.

Abstract
In order to get portable wireless communication products driven by down-
sizing, reliability, power consumption and price requirements everyday stronger
in the market, the implementation of on-chip transceiver RF circuits has been
the aim of many research groups. A fundamental block of the transceiver is the
Voltage-Controlled-Oscillator, which must generate a pure and stable signal.
This work describes the role of the VCO in the transceiver RF circuits, defines
the phase noise concept in oscillators, explains the phase noise effect in the trans-
mission and reception process, presents a simple equation to estimate the phase
noise specification, presents the design of an oscillator considering as reference
the Bluetooth phase noise specification. Also, the simulation results of output
waveforms, tuning range and phase noise are shown.
A 2.4 GHz Voltage-Controlled-Oscillator was designed and processed in a 0.35
µm CMOS technology. A Negative-Gm NMOS topology was chosen and the de-
sign was based on the use of an inductor with low parasitic resistance. ASITIC
program was used to simulate a number of full-integrated planar inductor struc-
tures. Simulations of the final VCO show a power dissipation of 6.6 mW, 0.9 V os-
cillation amplitude, a 2.28 GHz - 2.56 GHz tuning range and -128dBc/Hz@3MHz
phase noise.
The experimental results of the circuit show a 2.21 GHz - 2.53 GHz tuning
range, range which includes the expected oscillation frequency. The measurement
of frequency range and oscillation amplitude are near the simulation results. The
test was done drawing 2 mA from a 3.3 V supply.

Sumario
1 Introducao 1
1.1 Motivacao e Justificativa . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 O Problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Organizacao do Documento . . . . . . . . . . . . . . . . . . . . . 7
2 Projeto do Circuito Oscilador 9
2.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Consideracoes sobre o Ruıdo de Fase em Osciladores . . . . . . . . 10
2.2.1 Ruıdo de Fase . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.2 O Espectro do Ruıdo de Fase . . . . . . . . . . . . . . . . 13
2.2.3 Modelo LTI . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2.4 Modelo LTV . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2.5 Especificacoes do Ruıdo de Fase . . . . . . . . . . . . . . . 22
2.3 Descricao do Circuito Oscilador . . . . . . . . . . . . . . . . . . . 27
2.3.1 Indutor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3.2 Varactor . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.3.3 Circuito Ativo . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.4 Implementacao e Simulacao do Circuito Oscilador . . . . . . . . . 39
2.4.1 Esquema Eletrico do Oscilador . . . . . . . . . . . . . . . 39
2.4.2 Layout do Circuito Oscilador . . . . . . . . . . . . . . . . 50
2.4.3 Simulacoes Pos-Layout . . . . . . . . . . . . . . . . . . . . 58
3 Resultados Experimentais do oscilador 69
3.1 Analise espectral do sinal de saıda . . . . . . . . . . . . . . . . . . 72
3.2 Faixa de variacao da Frequencia de oscilacao . . . . . . . . . . . . 72
3.3 Amplitude de Saıda . . . . . . . . . . . . . . . . . . . . . . . . . . 74
I

3.4 Ruıdo de fase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4 Conclusoes e Recomendacoes 77
4.1 Conclusoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4.2 Recomendacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
A Arquivo de Parametros da Tecnologia para ASITIC 80
Referencias Bibliograficas 83
II
Lista de Figuras
1.1. Ruıdo de fase de varios osciladores operando na faixa de frequencia
de 2 GHz, medido a 100 KHz da frequencia de oscilacao [1]. . . . 2
1.2. Circuito transceptor RF. . . . . . . . . . . . . . . . . . . . . . . . 3
1.3. Diagrama de blocos de um PLL . . . . . . . . . . . . . . . . . . . 3
1.4. Topologias de Osciladores: (a) Oscilador a cristal; (b) Oscilador de
relaxacao; (c) Oscilador em anel com inversores; (d) Oscilador LC. 5
2.1. Modelos do oscilador: (a) Dois terminais; (b) Um terminal. . . . . 10
2.2. Espectro de potencia de: (a)Um oscilador ideal; (b) Um oscilador
real. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3. Efeito do ruıdo de fase na recepcao: (a) Sinais antes de serem
misturados; (b) Sinais na saıda do mixer. . . . . . . . . . . . . . . 12
2.4. Efeito do ruıdo de fase na transmissao. . . . . . . . . . . . . . . . 12
2.5. Modelo de Leeson da densidade espectral de potencia do ruıdo de
fase em torno de ωo. . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.6. Oscilador LC basico. . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.7. (a) Impulso aplicado no pico do sinal; (b) Impulso aplicado no
cruzamento com zero. . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.8. Evolucao do espectro de potencia do ruıdo do circuito ate o espectro
de potencia do ruıdo de fase: (a) Densidade espectral da fonte de
ruıdo; (b) Densidade espectral da fase de oscilacao; (c) Densidade
espectral da tensao de saıda do oscilador. . . . . . . . . . . . . . . 21
2.9. Entrada de um receptor com fonte de tensao. . . . . . . . . . . . . 23
2.10. O fenomeno de Blocking . . . . . . . . . . . . . . . . . . . . . . . 23
2.11. Calculo simples do ruıdo de fase do circuito oscilador. . . . . . . . 24
2.12. Diagrama de um modulador GFSK. . . . . . . . . . . . . . . . . 26
III

2.13. Topologias de osciladores LC: (a) Par cruzado NMOS; (b) Par
cruzado CMOS; (c) Colpitts. . . . . . . . . . . . . . . . . . . . . . 27
2.14. Modelo tipo π completo do indutor. . . . . . . . . . . . . . . . . 30
2.15. Modelo tipo π do indutor gerado por ASITIC. . . . . . . . . . . . 31
2.16. Indutancia versus Diametro externo . . . . . . . . . . . . . . . . 32
2.17. Resistencia serie versus Indutancia . . . . . . . . . . . . . . . . . 32
2.18. Diodos varactores: (a) Esquema eletrico; (b) Estrutura fısica . . 33
2.19. Modelo de um terminal do oscilador. . . . . . . . . . . . . . . . . 36
2.20. Circuito para o calculo da impedancia do par cruzado. . . . . . . 36
2.21. Modelo de pequeno sinal do par cruzado. . . . . . . . . . . . . . . 37
2.22. Circuito equivalente da fonte de corrente. . . . . . . . . . . . . . 37
2.23. Modelo modificado de pequeno sinal do par cruzado. . . . . . . . 37
2.24. Esquema eletrico do VCO. . . . . . . . . . . . . . . . . . . . . . . 39
2.25. Capacitancia versus Indutancia com Fosc = 2, 4 GHz. . . . . . . . 40
2.26. Valores maximos de Reff em funcao de L para alcancar ruıdo de
fase de -121dBc/Hz@3MHz. . . . . . . . . . . . . . . . . . . . . . 42
2.27. Amplitude de oscilacao em funcao de L considerando o maximo
valor calculado de Reff para alcancar a especificacao de ruıdo de
fase -121dBc/Hz@3MHz. . . . . . . . . . . . . . . . . . . . . . . . 42
2.28 Modelo π gerado por ASITIC do indutor escolhido. . . . . . . . . 43
2.29. Diagrama esquematico do circuito oscilador completo (Dimensoes
dos transistores W/L em µm). . . . . . . . . . . . . . . . . . . . . 44
2.30. Buffer tipo seguidor de fonte: (a) Circuito eletrico; (b) Modelo de
pequeno sinal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.31. Modelo simplificado para altas frequencias do circuito seguidor de
fonte. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.32. Circuito de polarizacao. . . . . . . . . . . . . . . . . . . . . . . . 47
2.33. Ganho do circuito de polarizacao em funcao da relacao K = C/Cseg. 48
2.34. Curva Cin/Cseg em funcao do parametro K = C/Cseg. . . . . . . 49
2.35. Esquema eletrico do buffer para teste (Dimensoes dos transistores
W/L em µm). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.36. Circuito oscilador: (a) Diagrama Eletrico; (b) Layout. . . . . . . . 51
2.37. Layout dos indutores. . . . . . . . . . . . . . . . . . . . . . . . . 52
2.38. Varactor: (a) Estrutura fısica; (b)Layout. . . . . . . . . . . . . . . 54
IV

2.39. Par cruzado NMOS: (a) Diagrama eletrico; (b) Layout. . . . . . . 55
2.40. Layout da fonte de corrente. . . . . . . . . . . . . . . . . . . . . . 55
2.41. Layout do buffer. . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
2.42. Layout dos capacitores: (a) 600 fF; (b) 2,4 pF. . . . . . . . . . . 57
2.43. Layout do primeiro seguidor. . . . . . . . . . . . . . . . . . . . . 57
2.44. Layout do segundo seguidor. . . . . . . . . . . . . . . . . . . . . . 58
2.45. Simulacao no tempo para varios tipos de parametros de processo.
Formas de onda nas saıdas do: (a) Oscilador (typical); (b) Buffer
(typical); (c) Oscilador (slow); (d) Buffer (slow); (e) Oscilador
(fast); (f) Buffer(fast) . . . . . . . . . . . . . . . . . . . . . . . . 60
2.46. Simulacao em regime permanente para varios tipo de parametros
de processo. Formas de onda nas saıdas do: (a) Oscilador (typical);
(b) Buffer (typical); (c) Oscilador (slow); (d) Buffer (slow); (e)
Oscilador (fast); (f) Buffer(fast) . . . . . . . . . . . . . . . . . . . 61
2.47. Frequencia de oscilacao versus Tensao de controle. . . . . . . . . . 62
2.48. Amplitude de oscilacao versus tensao de controle . . . . . . . . . 63
2.49. Potencia de saıda versus tensao de controle . . . . . . . . . . . . 64
2.50. Frequencia de oscilacao versus corrente de polarizacao do oscila-
dor, com Vctrl=1,85 V. . . . . . . . . . . . . . . . . . . . . . . . . 65
2.51. Corrente de polarizacao do oscilador versus corrente de referencia
do espelho de corrente (Iosc). . . . . . . . . . . . . . . . . . . . . . 66
2.52. Amplitude de oscilacao versus corrente de polarizacao do oscilador 67
2.53 Ruıdo de fase do oscilador. . . . . . . . . . . . . . . . . . . . . . . 67
3.1. Microfotografia do chip fabricado. . . . . . . . . . . . . . . . . . . 70
3.2. Esquema da montagem para o teste do prototipo. . . . . . . . . . 71
3.3. Placa para teste do circuito. . . . . . . . . . . . . . . . . . . . . . 71
3.4. Espectro de potencia do oscilador, foto da tela do analisador de
espectro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.5. Frequencia de oscilacao versus Tensao de controle (Vctrl). . . . . . 74
3.6. Amplitude de oscilacao no no VNN versus Tensao de controle. . . 74
3.7. Espectro da potencia de saıda do oscilador. span=10 Mhz. . . . . 75
V

Lista de Tabelas
2.1 Especificacoes de Sinais de interferencia - Bluetooth . . . . . . . . 26
2.2 Resultados de simulacao do ruıdo de fase [dBc/Hz] . . . . . . . . 68
3.1 Equipamento utilizado para realizar os testes. . . . . . . . . . . . 69
VI

.
Lista de Sımbolos
ω0 Frequencia angular de oscilacao
φ(t) Variacao aleatoria na fase do sinal
L∆ω Ruıdo de fase medido a ∆ω da frequencia de oscilacao
∆ω Distancia da frequencia de oscilacao
Psig Potencia da portadora
k Constante de Boltzman
T Temperatura absoluta
F Fator de ruıdo do oscilador
Q Fator de qualidade do circuito ressonador
∆ω1/f3 Frequencia limite entre as regioes 1/∆ω3 e 1/∆ω2
GM,Rx Transcondutancia necessaria para repor as perdas da resistencia Rx e
obter uma funcao de transferencia com ganho exatamente igual a um
na frequencia de oscilacao
dV2
out,Rx Densidade do ruıdo gerado por Rx a frequencias
proximas da frequencia
de oscilacao
RP Resistencia em paralelo com o circuito tanque
df Variacao da frequencia de oscilacao
RL Resistencia parasitaria em serie com o indutor
RC Resistencia parasitaria em serie com o capacitor
Reff Resistencia efetiva, resistencia equivalente a todas as resistencias do circuito
FGMFator do ruıdo do amplificador
hφ(t, τ) Variacao da fase ao aplicar um impulso de corrente no instante t
Γ(x) Funcao de sensibilidade ao impulso (ISF)
qmax Maximo incremento de carga
u(t) Funcao passo unitario
cn Coeficiente n-esimo da ISF
VII

θn Fase da n-esima harmonica de ISF
i2n∆f
Densidade espectral de potencia da fonte de ruıdo
Γrms Valor RMS da ISF
SBL Potencia do sinal de bloqueio
SDes Potencia do sinal desejado
VA Amplitude de oscilacao
Iosc Corrente de polarizacao do oscilador
Vbias Tensao de polarizacao do buffer
IIbuff Corrente de polarizacao do buffer
VCTRL Tensao de controle de frequencia de oscilacao
VIII

.
Lista de Abreviaturas
BER Bit Error Ratio
FSK Frequency Shift Key
GFSK Gaussian Frequency Shift Key
ISF Impulse Sensitiviy Function
LAN Local Area Network
LNA Low Noise Amplifier
LO Local Oscillator
LTI Linear Time Invariant
LTV Linear Time Variant
PA Power Amplifier
PLL Phase-Locked Loop
RF Radio Frequency
SAWR Surface Acoustic Wave Resonator
SNR Signal-to-Noise Ratio
VCO Voltage Controlled Oscilator
RBW Resolution Bandwidth
IF Intermediate Frequency
IX

Capıtulo 1
Introducao
1.1 Motivacao e Justificativa
O crescimento rapido e contınuo do mercado de produtos de comunicacao sem fio
tais como pagers, telefones celulares, sistemas de comunicacao pessoal e comu-
nicacao em rede local (LAN) tem motivado as pesquisas nos circuitos integrados
para radio frequencia.
Os sistemas de comunicacao sem fio cresceram rapidamente durante os ultimos
anos devido a integracao de estrategias de codificacao digital e processamento
digital de sinais. Este avanco foi gerado pelo desenvolvimento de tecnologias
de alto desempenho e baixo custo, condicao que permitiu a implementacao de
funcoes complexas num so circuito integrado. Esta capacidade deu aos projetistas
a possibilidade de usar sistemas mais elaborados de modulacao/demodulacao e
deteccao/correcao de erros, tecnicas que deram origem a canais de comunicacao
mais confiaveis e com maior capacidade de transferencia.
Embora os circuitos comerciais atuais usem tecnologia BiCMOS ou Arseneto
de Galio, existe muito interesse na criacao de circuitos implementados totalmente
com tecnologia CMOS, devido aos seus custos mais baixos de producao e princi-
palmente a sua alta capacidade de integracao [2, 3].
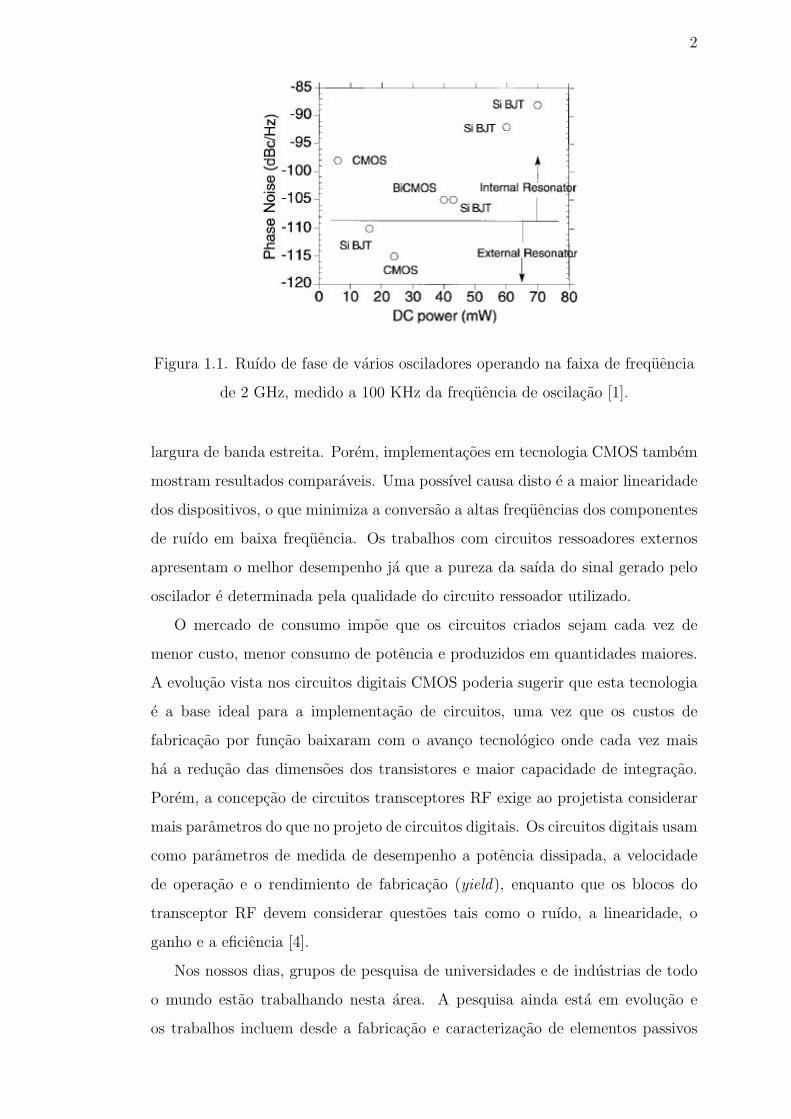
A Fig. 1.1 mostra o ruıdo de fase de varios VCO monolıticos operando na
faixa de frequencia de 2 GHz, medido a 100 KHz da frequencia de oscilacao,
em funcao do consumo de potencia [1]. Esta figura nao mostra uma tendencia
que permita a escolha de uma tecnologia otima para a implementacao do VCO.
Historicamente, implementacoes em tecnologia Si BJT foram preferidas por causa
dos menores nıveis de ruıdo 1/f, caracterıstica importante em aplicacoes com
1
2
Figura 1.1. Ruıdo de fase de varios osciladores operando na faixa de frequencia
de 2 GHz, medido a 100 KHz da frequencia de oscilacao [1].
largura de banda estreita. Porem, implementacoes em tecnologia CMOS tambem
mostram resultados comparaveis. Uma possıvel causa disto e a maior linearidade
dos dispositivos, o que minimiza a conversao a altas frequencias dos componentes
de ruıdo em baixa frequencia. Os trabalhos com circuitos ressoadores externos
apresentam o melhor desempenho ja que a pureza da saıda do sinal gerado pelo
oscilador e determinada pela qualidade do circuito ressoador utilizado.
O mercado de consumo impoe que os circuitos criados sejam cada vez de
menor custo, menor consumo de potencia e produzidos em quantidades maiores.
A evolucao vista nos circuitos digitais CMOS poderia sugerir que esta tecnologia
e a base ideal para a implementacao de circuitos, uma vez que os custos de
fabricacao por funcao baixaram com o avanco tecnologico onde cada vez mais
ha a reducao das dimensoes dos transistores e maior capacidade de integracao.
Porem, a concepcao de circuitos transceptores RF exige ao projetista considerar
mais parametros do que no projeto de circuitos digitais. Os circuitos digitais usam
como parametros de medida de desempenho a potencia dissipada, a velocidade
de operacao e o rendimiento de fabricacao (yield), enquanto que os blocos do
transceptor RF devem considerar questoes tais como o ruıdo, a linearidade, o
ganho e a eficiencia [4].
Nos nossos dias, grupos de pesquisa de universidades e de industrias de todo
o mundo estao trabalhando nesta area. A pesquisa ainda esta em evolucao e
os trabalhos incluem desde a fabricacao e caracterizacao de elementos passivos

3
integrados [5-9] ate o projeto e implementacao de sistemas completos de trans-
missao/recepcao [10-12].
A Fig. 1.2 apresenta um circuito completo de transmissao e recepcao, e mostra
os principais blocos que o compoem, tais como o amplificador de baixo ruıdo
(LNA), o amplificador de potencia (PA), o mixer, o oscilador local (LO), os
filtros, o conversor A/D, o conversor D/A e o sistema de processamento digital
de sinais.
1.2 O Problema
Um sistema transceptor de radiofrequencia e mostrado na Fig. 1.2 [13], observa-
se que tanto a transmissao quanto a recepcao requerem um oscilador local que
seja ajustado com passos bem definidos dentro de uma banda de frequencia.
Para aplicacoes moveis integradas em silıcio este sintetizador de frequencia e
implementado tıpicamente como um PLL (Phase-Locked Loop).
FiltroDuplexor
PA
Filtro Passabanda
Filtro Passabanda
Sintetizadorde Frequência VCO
ConversorD/A
ConversorA/D Sistema
deProcessamento
Digital
deSinais
LNA
Mixer
Mixer
LO
Figura 1.2. Circuito transceptor RF.
Detectorde Fase
Fref Fout
Fdiv
Filtro
Divisor de
/NFreqüência
VCO
Figura 1.3. Diagrama de blocos de um PLL
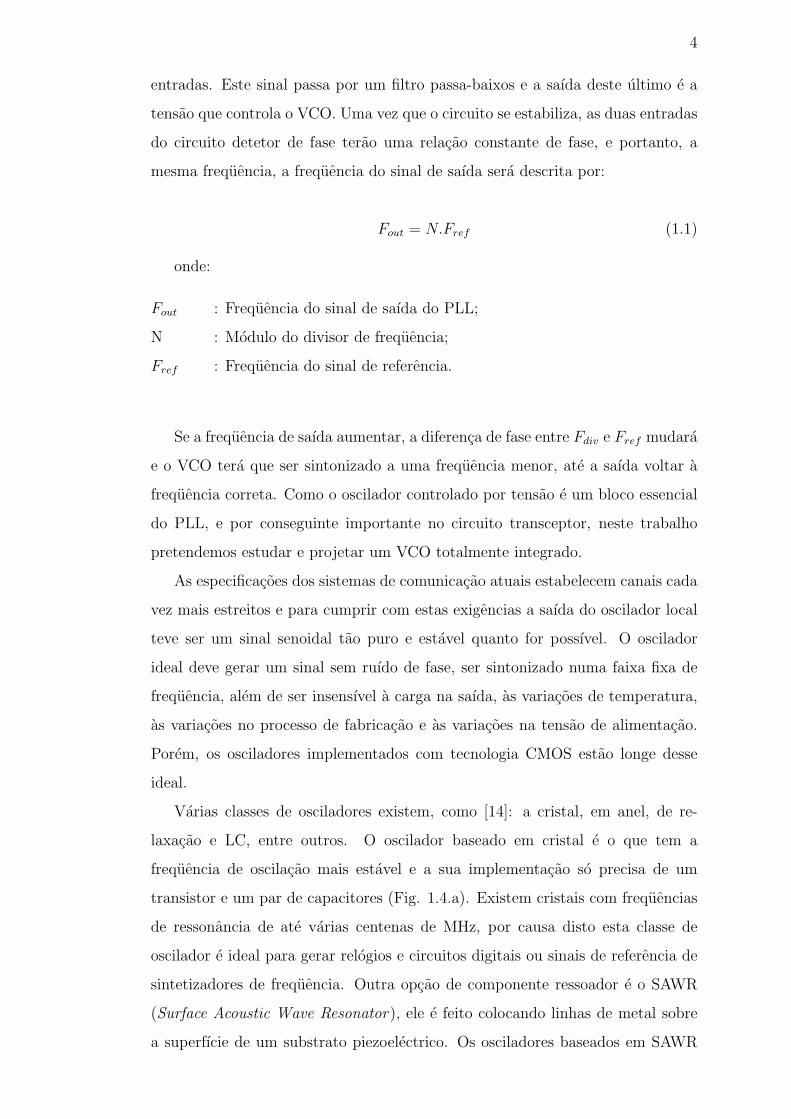
A Fig. 1.3 mostra um diagrama de blocos de um PLL, nessa classe de circuitos
a frequencia do sinal de saıda de um oscilador controlado por tensao (VCO -
Voltage Controlled Oscillator) e dividida por uma variavel N. O sinal resultante
(Fdiv) e comparado com um sinal com frequencia de referencia (Fref ) no detetor
de fase, o qual da um sinal proporcional a diferenca de fase entre as suas duas
4
entradas. Este sinal passa por um filtro passa-baixos e a saıda deste ultimo e a
tensao que controla o VCO. Uma vez que o circuito se estabiliza, as duas entradas
do circuito detetor de fase terao uma relacao constante de fase, e portanto, a
mesma frequencia, a frequencia do sinal de saıda sera descrita por:
Fout = N.Fref (1.1)
onde:
Fout : Frequencia do sinal de saıda do PLL;
N : Modulo do divisor de frequencia;
Fref : Frequencia do sinal de referencia.
Se a frequencia de saıda aumentar, a diferenca de fase entre Fdiv e Fref mudara
e o VCO tera que ser sintonizado a uma frequencia menor, ate a saıda voltar a
frequencia correta. Como o oscilador controlado por tensao e um bloco essencial
do PLL, e por conseguinte importante no circuito transceptor, neste trabalho
pretendemos estudar e projetar um VCO totalmente integrado.
As especificacoes dos sistemas de comunicacao atuais estabelecem canais cada
vez mais estreitos e para cumprir com estas exigencias a saıda do oscilador local
teve ser um sinal senoidal tao puro e estavel quanto for possıvel. O oscilador
ideal deve gerar um sinal sem ruıdo de fase, ser sintonizado numa faixa fixa de
frequencia, alem de ser insensıvel a carga na saıda, as variacoes de temperatura,
as variacoes no processo de fabricacao e as variacoes na tensao de alimentacao.
Porem, os osciladores implementados com tecnologia CMOS estao longe desse
ideal.
Varias classes de osciladores existem, como [14]: a cristal, em anel, de re-
laxacao e LC, entre outros. O oscilador baseado em cristal e o que tem a
frequencia de oscilacao mais estavel e a sua implementacao so precisa de um
transistor e um par de capacitores (Fig. 1.4.a). Existem cristais com frequencias
de ressonancia de ate varias centenas de MHz, por causa disto esta classe de
oscilador e ideal para gerar relogios e circuitos digitais ou sinais de referencia de
sintetizadores de frequencia. Outra opcao de componente ressoador e o SAWR
(Surface Acoustic Wave Resonator), ele e feito colocando linhas de metal sobre
a superfıcie de um substrato piezoelectrico. Os osciladores baseados em SAWR

5
Q1
C1
C2
X1
Vdd
(a)
INV1 INV2 INV3
(c)
M1 M2
M3 M4
M5 M6
C
Vdd
VNcon
VPcon
I1 I2
(b)
M1 M2
C1
L1 L2
Vdd
(d)
Figura 1.4. Topologias de Osciladores: (a) Oscilador a cristal; (b) Oscilador de
relaxacao; (c) Oscilador em anel com inversores; (d) Oscilador LC.
nao oferecem a estabilidade ante mudancas de temperatura que um oscilador a
cristal possui, mas tem ruıdo de fase menor, menos sensibilidade a vibracoes e
frequencias de ressonancia da ordem de Gigahertz [15, 16]. Tanto os oscilado-
res baseados em cristal e nem os osciladores baseados em SAWR sao totalmente
integraveis, entao nao serao levados em consideracao neste trabalho.
O oscilador de relaxacao (Fig. 1.4.b) consta de um capacitor C que e carregado
alternadamente pelas correntes I1 e I2. A frequencia de oscilacao e modificada
variando a corrente de carga. O problema desta topologia e que para diminuir
o ruıdo de fase e preciso aumentar o consumo de potencia do circuito, condicao
que nao permite que seja util em dispositivos portateis.
O oscilador em anel com inversores (Fig. 1.4.c) e o mais simples e o mais facil
de ser integrado de todos. A frequencia e modificada controlando os atrasos dos
inversores pelo controle da corrente mudando a polarizacao dos transistores. O
problema deste oscilador e seu ruıdo de fase devido a comutacao contınua dos
inversores, ou seja, este oscilador e inadequado para aplicacoes RF.

6
Embora os osciladores de relaxacao e em anel alcancem frequencias de operacao
da ordem de GigaHertz, quando implementados em tecnologias submicrometricas,
e nao precisem de componentes externos para suas operacoes, seus desempenhos
em ruıdo de fase deixam muito a desejar. A reducao do ruıdo de fase implicaria
em um incremento na potencia consumida, tornando estes circuitos improprios
para aplicacoes de comunicacao portatil.
O oscilador sintonizado LC (Fig. 1.4.d) e uma opcao que prove uma solucao
totalmente integravel. Dado que sua resposta em frequencia depende de um cir-
cuito tanque LC, espera-se que, no caso de ter uma boa implementacao destes
elementos, isto e, implementacao que minimize os componentes parasitarios e pro-
cure obter o melhor fator de qualidade dentro dos limites dados pela tecnologia,
o espectro em frequencia seja mais puro do que aquele alcancado com osciladores
do tipo relaxacao ou anel.
Por outro lado, a implementacao de indutores integrados CMOS com um fator
de qualidade alto nao e facil. Como o indutor e um elemento para armazenar
energia magnetica, os fatores que diminuem esta energia sao considerados elemen-
tos parasitarios. Isto e o que acontece com a resistencia e capacitancia inerentes
a uma implementacao em tecnologia CMOS. O resistor dissipa energia por causa
das suas perdas ohmicas e o capacitor armazena energia em suas placas redu-
zindo o fator de qualidade. Para melhorar o fator de qualidade dos indutores,
tanto novas caracterısticas de tecnologia como novas estrategias de projeto tem
sido utilizadas: o uso de multiplas camadas de metal [17] e fios de ligacao entre
PADs internos do circuito como indutores [18] para reduzir sua resistencia; o uso
de substratos de alta resistividade [19], de oxido espesso, de estruturas “pattern
ground shielding” [20] ou de corrosao do substrato por baixo do indutor [21] para
diminuir as perdas por correntes surgidas no substrato; o uso de simuladores
eletromagneticos 2D e 3D [22] ou de simuladores mais simples especialmente pro-
jetados [6] para obter as caracterısticas eletricas do indutor. A implementacao
do indutor ainda e um tema de estudos. Procura-se produzir um indutor com
o menor efeito de elementos parasitarios e implementado num processo CMOS
padrao sem passos de fabricacao adicionais.
O PLL controla eletronicamente a frequencia de oscilacao do VCO, para per-
mitir essa variacao de frequencia e preciso contar com um varactor que mude
a frequencia de ressonancia do circuito tanque. Este varactor e implementado

7
tipicamente das seguintes maneiras: 1) Diodo, regiao P+ sobre poco N por exem-
plo, polarizado reversamente [23]; 2) Transistor operando em inversao [23]; 3)
Transistor operando em acumulacao [7], [24]. A comparacao entre os diferentes
varactores e feita em funcao da porcentagem de variacao de capacitancia permi-
tida e do seu fator de qualidade.
Existem diversos trabalhos publicados sobre modelos de ruıdo do oscilador,
sobre implementacoes de VCO’s e sobre tecnicas para reduzir o ruıdo de fase. Este
trabalho pretende explorar as diversas teorias do ruıdo de fase, obter criterios para
o desenho e implementar um oscilador totalmente integrado que opere a 2,4 GHz.
1.3 Objetivos
O objetivo geral deste trabalho e o estudo e implementacao de um oscilador
controlado por tensao, totalmente integrado, que opere na frequencia de 2,4 GHz,
projetado com a tecnologia CMOS de 0,35µm (4 nıveis de metal e 2 nıveis de
polisilicio)[25].
Os objetivos especıficos para cumprir o objetivo geral sao:
• Estudo do modelo de ruıdo de fase do oscilador;
• Projeto e implementacao do oscilador para operar na frequencia esperada;
• Determinacao da tecnica de teste do oscilador e avaliacao do circuito pro-
jetado.
1.4 Organizacao do Documento
O capıtulo 1 apresentou as razoes que motivaram fazer este trabalho, o papel do
oscilador dentro de um sistema transceptor como um bloco essencial do sinteti-
zador de frequencia e uma comparacao das caracterısticas de algumas classes de
osciladores visando determinar a melhor opcao para a integracao de um VCO em
tecnologia CMOS.
O capıtulo 2 apresenta o projeto do circuito oscilador. O capıtulo esta divi-
dido em secoes que descrevem: os modelos de um terminal e de dois terminais
do oscilador; a definicao, os efeitos na transmissao e recepcao, e a modelagem do

8
ruıdo de fase; a topologia do oscilador escolhido para a implementacao e a mode-
lagem de cada um dos seus componentes; o layout do oscilador implementado e
os resultados das simulacoes feitas.
O capıtulo 3 apresenta os resultados experimentais do circuito oscilador.
O capıtulo 4 lista as conclusoes finais do trabalho e resume as recomendacoes
a ter em conta para o projeto de circuitos osciladores integrados.

Capıtulo 2
Projeto do Circuito Oscilador
2.1 Introducao
Neste capıtulo, inicialmente sao apresentados os modelos de um terminal e de dois
terminais do oscilador. A secao 2.2 mostra a definicao do ruıdo de fase, os seus
efeitos na transmissao e recepcao, o modelo empırico da sua densidade espectral,
um modelo Linear Invariante no Tempo (LTI), um outro modelo Linear Variante
no Tempo (LTV) e o calculo da especificacao do ruıdo de fase do oscilador. A
seguir, a secao 2.3 descreve o oscilador escolhido para a implementacao e o mode-
lamento de cada um dos seus componentes. E por ultimo, a secao 2.4 apresenta
o oscilador implementado e os resultados das simulacoes feitas.
O oscilador e um circuito sem entrada alguma, uma vez ligado oscila e gera um
sinal periodico, geralmente em forma de tensao. A energia aplicada no momento
do circuito ser ligado dara inıcio a oscilacao, apos, a amplitude de oscilacao sera
limitada e estabilizada pelas caracterısticas nao lineares do circuito.
O circuito oscilador pode ser visto como um sistema realimentado de dois
terminais como mostra a Fig. 2.1.a [13], que e descrito pela funcao:
Y (s)
X(s)=
H(s)
1−H(s)(2.1)
Segundo o criterio de Barkhausen, o sistema permanecera oscilando com
frequencia s = jω0 quando e satisfeita a seguinte condicao: o modulo do ga-
nho da malha, |H(jω0)|, e igual ou maior que 1 e, a diferenca de fase na malha,
∠H(jω0), e zero, tendo realimentacao positiva. Com base neste criterio, qualquer
sistema realimentado pode oscilar se o ganho e a fase da malha forem escolhidos
adequadamente.
9

10
Outra forma de representar o oscilador e o modelo de um terminal [13]. Neste
modelo o oscilador e visto como duas redes de um terminal ligadas entre si (vide
Fig. 2.1.b). O modelo consta de um circuito ressonante e um circuito ativo. Um
circuito ressonante tıpico e um circuito tanque LC. Se os componentes desse cir-
cuito fossem ideais, ele oscilaria indefinidamente, mas, devido as perdas inerentes
dos componentes, uma quantidade de energia e dissipada a cada ciclo ate deter
a oscilacao. O circuito ativo e projetado para repor esta energia perdida a cada
ciclo e manter a oscilacao.
H(s)CircuitoAtivo
CircuitoRessonador
−RR
Y(s)X(s)
(a) (b)
Figura 2.1. Modelos do oscilador: (a) Dois terminais; (b) Um terminal.
2.2 Consideracoes sobre o Ruıdo de Fase em Os-
ciladores
2.2.1 Ruıdo de Fase
O ruıdo causado pelos componentes do oscilador ou por fatores externos influencia
tanto a fase quanto a amplitude do sinal gerado. Para descrever o sinal produzido
por um oscilador real e possıvel usar a seguinte expressao:
V (t) = A(t)f(ω0t + φ(t)) (2.2)
onde: A(t) e a variacao da amplitude do sinal; f e uma funcao senoidal de
perıodo 2π/ω0; φ(t) e a variacao aleatoria na fase do sinal, o que tambem pode
ser visto como a variacao do perıodo ou a diferenca no tempo entre os ponto de
cruzamento com zero do sinal gerado e um sinal ideal de frequencia invariavel.
Enquanto o espectro em frequencia de um oscilador ideal e um impulso (Fig.
2.2.a), as variacoes em A(t) e φ(t) fazem com que o espectro em frequencia da
saıda do oscilador real seja um impulso com bandas laterais (Fig. 2.2.b). Estas

11
bandas refletem principalmente a variacao no φ(t), o que e denominado ruıdo de
fase.
-ω
6
Potencia
ω0
(a)
-ω
6
Potencia
ω0
(b)
Figura 2.2. Espectro de potencia de: (a)Um oscilador ideal; (b) Um oscilador
real.
Para quantificar o ruıdo de fase considera-se uma largura de banda de 1 Hz
separada ∆ω da frequencia de oscilacao ω0, calcula-se a potencia do ruıdo nesta
banda e expressa-se a diferenca, em decibeis, entre esta potencia e a potencia do
sinal a frequencia de oscilacao (portadora).
L∆ω = 10.log
[Pbanda lateral(ω0 + ∆ω, 1Hz)
Pportadora
](2.3)
onde: L∆ω e o ruıdo de fase medido a ∆ω da frequencia de oscilacao; ω0
e a frequencia angular de oscilacao; Pbanda lateral(ω0 + ∆ω, 1Hz) e a potencia de
banda lateral calculada numa largura de banda de 1 Hz, a uma frequencia ∆ω
separada da frequencia de oscilacao ω0; PPortadora e a potencia da portadora.
Este ruıdo de fase se expressa em “decibeis abaixo da portadora por Hertz”
ou dBc/Hz, especificado a uma distancia ∆ω da frequencia de oscilacao ω0. Por
exemplo, poder-se-ia dizer que um oscilador de 2,4 GHz possui um ruıdo de fase
de “-110 dBc/Hz a 3 MHz de offset”. A obtencao da especificacao do ruıdo de
fase envolve a relacao sinal-ruıdo do sistema de radio, a potencia dos sinais em
canais adjacentes e a largura do canal, este calculo sera mostrado na secao 2.2.5.
Para entender o efeito do ruıdo de fase do oscilador no sistema transceptor,
o espectro dos sinais na transmissao e recepcao serao analisados. No caso ideal,
o espectro em frequencia tanto do sinal do oscilador como do sinal recebido sao
raias. Apos a conversao, o resultado e uma raia em uma frequencia nova. Por
outro lado, no receptor real o oscilador possui bandas laterais e existem sinais
12
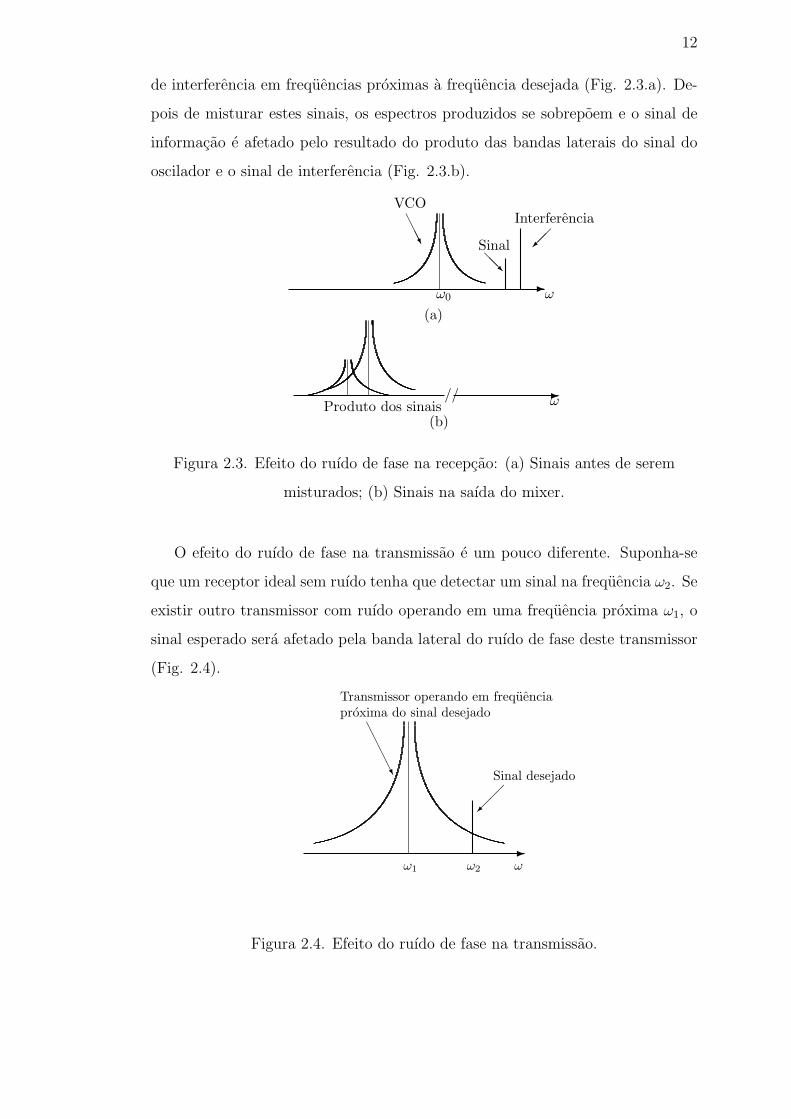
de interferencia em frequencias proximas a frequencia desejada (Fig. 2.3.a). De-
pois de misturar estes sinais, os espectros produzidos se sobrepoem e o sinal de
informacao e afetado pelo resultado do produto das bandas laterais do sinal do
oscilador e o sinal de interferencia (Fig. 2.3.b).
-ω
VCOAAAU
ω0
InterferenciaSinal
@@R
(a)
-ω//
Produto dos sinais(b)
Figura 2.3. Efeito do ruıdo de fase na recepcao: (a) Sinais antes de serem
misturados; (b) Sinais na saıda do mixer.
O efeito do ruıdo de fase na transmissao e um pouco diferente. Suponha-se
que um receptor ideal sem ruıdo tenha que detectar um sinal na frequencia ω2. Se
existir outro transmissor com ruıdo operando em uma frequencia proxima ω1, o
sinal esperado sera afetado pela banda lateral do ruıdo de fase deste transmissor
(Fig. 2.4).
-ω
Transmissor operando em frequenciaproxima do sinal desejado
AAAAU
ω1
Sinal desejado
ω2
Figura 2.4. Efeito do ruıdo de fase na transmissao.

13
2.2.2 O Espectro do Ruıdo de Fase
Varias teorias tem sido propostas para modelar o ruıdo do oscilador. Leeson [26]
propos um modelo empırico para descrever o comportamento do ruıdo de fase.
Neste modelo a densidade espectral de potencia do ruıdo de fase tem tres regioes
como e mostrado na Fig. 2.5.
-∆ω
6L∆ωAAAAA
1/∆ω3
HHHHH
HH
1/∆ω2
∆ω1/f3ω0
2Q
10.log[
2FkTPsig
]
Figura 2.5. Modelo de Leeson da densidade espectral de potencia do ruıdo de
fase em torno de ωo.
Na primeira regiao, para valores pequenos de ∆ω a densidade espectral e
proporcional a 1/∆ω3 (uma inclinacao de 30dB por decada). Na segunda regiao,
a densidade espectral de potencia e proporcional a 1/∆ω2 (uma queda de 20
dB por decada). Na ultima regiao, o ruıdo medido fica plano para frequencias
distantes da frequencia de oscilacao.
O modelo proposto por Leeson e descrito pela equacao a seguir:
L∆ω = 10.log
[2FkT
Psig
1 +
(ω0
2Q∆ω
)2(
1 +∆ω1/f3
|∆ω|
)](2.4)
onde:
Psig : Potencia da portadora;
k : Constante de Boltzman;
T : Temperatura absoluta;
F : Fator de ruıdo do oscilador;
ω0 : Frequencia de oscilacao;
Q : Fator de qualidade do circuito ressonador;
∆ω : Distancia da frequencia de oscilacao;
∆ω1/f3 : Frequencia limite entre as regioes 1/∆ω3 e 1/∆ω2

14
E importante notar que o ruıdo de fase e inversamente proporcional ao factor
de qualidade do circuito ressonador. Por esta razao uma das preocupacoes no
projeto de osciladores LC e a obtencao de indutores e capacitores com o maior Q
possıvel.
2.2.3 Modelo LTI
Craninckx e Steyaert [14] fazem uma analise do ruıdo do oscilador partindo de um
modelo linear e invariante no tempo, denominado LTI (Linear Time Invariant).
A analise usa um oscilador LC basico como mostrado na Fig. 2.6. O circuito
ativo e representado pelo transcondutor GM , o circuito tanque tem um capacitor
(C) e um indutor (L). As perdas ohmicas do circuito estao representadas pelas
resistencias em serie com o indutor (RL) e com o capacitor (RC), e pela resistencia
em paralelo com o circuito tanque (RP ). Esta resistencia RP e equivalente ao
paralelo entre a resistencia de saıda do transcondutor e a resistencia em paralelo
com o indutor e o capacitor. Ja que o modelo considera um circuito linear, um
ganho do transcondutor GM sera assumido de forma que o ganho de malha aberta
GM .H(s) na frequencia de ressonancia seja igual a 1.
L.C.
RP
RC RL
VOUT
+
−
..GM
Z(s)
Figura 2.6. Oscilador LC basico.
A analise considera cada uma das resistencias parasitarias do circuito tanque,
inclui a fonte de ruıdo causada por cada resistencia, calcula o ganho GM,Rx ne-
cessario para repor as perdas da resistencia e obter uma funcao de transferencia
com ganho exatamente igual a um na frequencia de oscilacao ω0. Depois calcula
a funcao de transferencia da fonte de ruıdo, de cada resistencia, para a saıda do
circuito, e calcula a densidade do ruıdo a frequencias proximas da frequencia de
oscilacao como sendo dV2
out,Rx(ω0 + ∆ω).

15
O resumo dos resultados obtidos sao listados a seguir. Para o caso em que a
resistencia paralela for a unica fonte de ruıdo:
GM,RP=
1
RP
(2.5)
dV2
out,RP(ω0 + ∆ω) = kT.
1
RP .(ω0C)2
( ω0
∆ω
)2
.df (2.6)
onde ω0 = 1/√
LC e a frequencia angular de oscilacao, ∆ω pequena variacao
da frequencia de oscilacao, k e a constante de Boltzman, T e a temperatura
absoluta, RP e a resistencia em paralelo com o circuito tanque, df e a variacao
da frequencia.
No caso de considerar a resistencia parasitaria do indutor como a unica fonte
de ruıdo:
GM,RL= RL.
C
L= RL.(ω0C)2 (2.7)
dV2
out,RL(ω0 + ∆ω) = kT.RL
( ω0
∆ω
)2
.df (2.8)
onde RL e a resistencia serie com o indutor.
No caso de considerar a resistencia parasitaria do capacitor como a unica fonte
de ruıdo:
GM,RC= RC .
C
L= RC .(ω0C)2 (2.9)
dV2
out,RP(ω0 + ∆ω) = kT.RC
( ω0
∆ω
)2
.df (2.10)
onde RC e a resistencia serie com o capacitor.
Ja que os resultados obtidos para as tres resistencias parasitarias sao analogos,
e possıvel definir Reff como a resistencia efetiva, resistencia equivalente a todas
as resistencias do circuito e resumir as equacoes anteriores a:
Reff = RC + RL +1
RP .(ω0C)2(2.11)
GM = Reff .(ω0C)2 (2.12)
dV2
out,R(ω0 + ∆ω) = kT.Reff
( ω0
∆ω
)2
.df (2.13)

16
So resta calcular o ruıdo gerado pelo elemento ativo. Este ruıdo e modelado
como uma fonte de corrente di2
GMigual a:
di2
GM= 4kT.FGM
.GM .df (2.14)
onde GM e dado por 2.12, FGMe o fator do ruıdo do amplificador usado. A
fonte do ruıdo do amplificador se comporta da mesma maneira que a fonte de
ruıdo de RP , por isto, analogamente, o ruıdo causado por este elemento e:
dV2
out,GM(ω0 + ∆ω) = kT.
1
(ω0C)2.FGM
.GM
( ω0
∆ω
)2
.df (2.15)
Os circuitos reais usam uma transcondutancia maior do que o circuito precisa
teoricamente, isto para garantir que a oscilacao comecara. Para incluir este ruıdo
no calculo, usa-se um fator empırico α para expressar a quantidade a mais de
ruıdo que o amplificador gera comparado com um amplificador ideal. Ao definir
A = α.FGMe com a definicao de GM de 2.12:
dV2
out,GM(ω0 + ∆ω) = kT.Reff.A
( ω0
∆ω
)2
.df (2.16)
Os calculos anteriores podem se resumir em:
dV2(ω0 + ∆ω) = kT.Reff.[1 + A]
( ω0
∆ω
)2
.df (2.17)
Para calcular a densidade espectral de ruıdo de fase na saıda do oscilador
deve ser integrada em uma largura de banda de 1Hz e dividida pela potencia da
portadora, o resultado desta operacao e:
L∆ω = 10.log
[k.T.Reff.[1 + A]
(ω0
∆ω
)2V 2
A/2
](2.18)
onde VA e a amplitude em tensao do sinal de oscilacao.
Este modelo expressa o ruıdo de fase da regiao 1/ω2 em funcao das resistencias
parasitarias do circuito ressonador, das caracterısticas do amplificador e da am-
plitude do sinal. Porem, o modelo ainda usa um parametro A que deve ser
determinado para cada oscilador, situacao que diminui a capacidade do uso deste
modelo para projetar o oscilador.

17
2.2.4 Modelo LTV
O modelo de Craninckx assume condicoes de linearidade e invariancia no tempo,
porem, estas condicoes devem ser reconsideradas.
A nao linearidade e uma propriedade intrınseca do oscilador, ja que e ne-
cessaria para limitar a amplitude de oscilacao. A aparicao de ruıdo de baixas
frequencias em frequencias proximas da frequencia de oscilacao tem dado origem
a teorias baseadas em modelos nao lineares, mas estes modelos nao conseguem
descrever totalmente o efeito visto [27].
O autor do modelo LTV [28] propoe que a nao linearidade, produzida pelo
controle de amplitude, afeta o ruıdo de fase so como um reflexo do seu efeito na
forma de onda do sinal. As perturbacoes sao consideradas de magnitude muito
menor a amplitude do sinal, e supoe que se uma certa perturbacao produzira uma
variacao na fase, entao uma perturbacao com o dobro de magnitude produzira o
dobro da variacao na fase antes obtida. Isto e, considera linear a relacao entre o
ruıdo e a fase.
Ao falar de linearidade e preciso especificar as variaveis de entrada e saıda
que estao sendo relacionadas. Num sistema e possıvel ter relacoes lineares entre
um par de variaveis enquanto entre outras nao. A analise da relacao ruıdo-fase e
feita quando o sinal ja alcancou o estado estavel, o qual ja tem em conta o efeito
das nao linearidades do circuito. Entao, a hipotese de linearidade ruıdo-fase nao
contradiz a nao linearidade produto do controle de amplitude de oscilacao.
Para demostrar que a condicao de invariancia no tempo suposta no modelo
do Craninckx nao e verdadeira, e suficiente aplicar um pulso de corrente a um
sistema tanque LC e observar sua resposta. Assume-se que antes do impulso, o
circuito oscila com frequencia e amplitude constante. O pulso aplicado produzira
uma variancao abrupta na tensao do capacitor mas a corrente do indutor ficara
estavel. A variacao da tensao sera ∆V = ∆Q/C, onde ∆Q e a carga total
aplicada pelo impulso e C e a capacitancia total do no.
Se o pulso for aplicado no pico da oscilacao, a amplitude variara mas a fase
continuara igual. Se o pulso for aplicado no ponto onde o sinal cruza o zero, pro-
duzira o maximo de perturbacao na fase e uma mınima perturbacao na amplitude
de oscilacao conforme ilustra a Fig. 2.7.
Para verificar que a adocao da condicao de linearidade e correta, Hajimiri
simulou dois osciladores, um em anel e um Colpitts, aplicando um pulso de cor-

18
-t
6Vout
-t
6it 6
(a)
-t
6Vout
-t
6it 6
(b)
Figura 2.7. (a) Impulso aplicado no pico do sinal; (b) Impulso aplicado no
cruzamento com zero.
rente no momento em que o sinal cruza por zero e observou a variacao gerada
na fase do sinal [28]. Varias simulacoes foram feitas injetando diferentes car-
gas e observando uma relacao linear entre a carga injetada e o excesso de fase
gerado. A funcao de transferencia corrente-fase e linear embora os elementos te-
nham comportamento tensao-corrente nao linear. Entretanto, a nao linearidade
dos elementos do circuito definem os limites do ciclo de oscilacao e influenciam o
ruıdo de fase.
As simulacoes feitas por Hajimiri nao pareciam ser suficientes para demostrar
a condicao de lineariadade que o autor propoe, e a primeira vista e difıcil de
acreditar que o ruıdo de fase do oscilador presenta o comportamento descrito
na Fig. 2.7 de maneira que foram feitas diversas simulacoes para comprovar esse
comportamento. Simulou-se um oscilador afetado por pulsos de corrente en certos
instantes de tempo e mediu-se a variacao gerada na fase do sinal, as simulacoes
incluiram situacoes tais como: (a) Simular a variacao de fase gerada por pulsos
de diversas magnitudes aplicados no mesmo instante de tempo; (b) Aplicar um
pulso positivo e tempo depois aplicar um pulso negativo da mesma magnitude;
(c) Aplicar dois pulsos positivos, um pulso negativo e comparar a variacao de
fase gerada com a variacao obtida num oscilador afetado somente por um pulso
da mesma magnitude utilizada no primeiro caso. Os resultados das simulucoes
comprovaram a condicao de linearidade proposta por Hajimiri.
Dado que a entrada tipo impulso produz uma mudanca abrupta na fase, que
responde com um degrau cuja amplitude depende periodicamente do tempo τ no
local da aplicacao do pulso. A variacao de fase pode ser descrita por:
hφ(t, τ) =Γ(ω0τ)
qmax
u(t− τ) (2.19)
onde qmax e o maximo incremento de carga no capacitor do no (este termo

19
divide Γ(x) para normalizar a funcao), u(t) e o passo unitario e Γ(x) a funcao de
sensibilidade ao impulso (ISF Impulse Sensitiviy Function). Γ(x) e uma funcao
sem dimensoes, independente da frequencia e amplitude, de perıodo 2π que des-
creve a variacao de fase gerada por um pulso unitario aplicado em t = τ .
Depois de obter a ISF pode-se calcular a variacao de fase por meio do uso
da integral de superposicao, opcao valida ja que a superposicao esta ligada a
linearidade e nao a invariancia no tempo. Assim, a variacao da fase pode ser
dada por:
φ(t) =
∫ ∞
−∞hφ(t, τ)i(τ)dτ =
1
qmax
∫ t
−∞Γ(ω0τ)i(τ)dτ (2.20)
onde i(τ) e a fonte de corrente de ruıdo aplicada no no de interesse.
Para expressar esta equacao de uma forma mais pratica, a funcao periodica
ISF pode ser escrita como uma serie de Fourier:
Γ(ω0τ) =c0
2+
∞∑n=1
cncos(nω0τ + θn) (2.21)
onde os coeficientes cn sao reais e θn e a fase da n-esima harmonica de ISF.
Os termos θn sao ignorados porque se assume que os componentes do ruıdo sao
nao-correlacionados, por isto, a fase relativa deles e irrelevante.
Ao substituir Γ(ω0τ) em 2.20 e depois de trocar a ordem entre a somatoria e
a integral, se obtem:
φ(t) =1
qmax
[c0
2
∫ t
−∞i(τ)dτ +
∞∑n=1
cn
∫ t
−∞i(τ)cos(nω0τ)dτ
](2.22)
A equacao 2.22 permite o calculo de φ(t) para uma fonte de corrente aplicada
em qualquer no do circuito, depois de ter os coeficientes da ISF.
Com o intiuito de demostrar que um circuito linear, variavel no tempo pode
gerar componentes espectrais de frequencias diferentes, o autor assume uma fonte
de corrente senoidal cuja frequencia e proxima ao multiplo inteiro m da frequencia
de oscilacao, aplicada num no qualquer do circuito:
i(t) = Imcos[(mω0 + ∆ω)t] (2.23)
onde ∆ω w0.
Ao substituir 2.23 em 2.22, depois de assumir que a contribuicao a integral
dos termos para os quais n 6= m e desprecıvel, o resultado aproxima-se a:

20
φ(t) ≈ Imcmsin(∆ωt)
2qmax∆ω(2.24)
Observe-se que o espectro resultante consta de duas bandas laterais em ±∆ω,
embora a frequencia da corrente injetada estivesse proxima de um multiplo inteiro
de ω0. Com isto, foi possıvel explicar a conversao de frequencia observada no
oscilador sem precisar o conceito de nao linearidade.
A equacao 2.24 consegue descrever o espectro de φ(t), mas o objetivo prin-
cipal e achar o espectro da saıda de tensao do oscilador. Para achar a relacao
entre estes dois espectros, aproximou-se a saıda do oscilador a um sinal senoidal
vout = cos[ω0t+φ(t)], funcao que pode ser considerada um conversor fase-tensao.
Esta conversao e nao linear pois e basicamente a modulacao de fase de um sinal
senoidal. Dado isto, uma fonte de ruıdo i(t) = Incos[(nω0 + ∆ω)t] produzira
duas bandas laterais na frequencia ω0 ± ∆ω no espectro da tensao de saıda do
oscilador. A potencia desta banda lateral relativa a portadora sera dada por:
PSBC(∆ω) = 10.log
(In.cn
4.qmax∆ω
)2
(2.25)
onde:
In : Amplitude da fonte de ruıdo i(t);
cn : Coeficiente n-esimo da ISF. (Eq. 2.21 );
qmax : Maximo incremento de carga no capacitor do no onde a fonte de
ruıdo for aplicada;
∆ω : Offset da frequencia de oscilacao ω0.
O passo seguinte e considerar uma fonte de ruıdo in(t), cuja densidade es-
pectral possui uma regiao plana e uma regiao 1/f (Fig. 2.8.a). Com base na
equacao 2.25, os componentes de ruıdo proximos das frequencias multiplas intei-
ras da frequencia de oscilacao sao trasladadas para as bandas laterais de baixa
frequencia no espectro de Sφ(ω) (Fig. 2.8.b). Componentes que serao transfor-
mados nas bandas laterais proximas da frequencia de oscilacao no espectro da
tensao de saıda do oscilador SV (ω) (Fig. 2.8.c).
O espectro total de Sφ(w) e a soma das contribuicoes das frequencias proximas
das harmonicas de ω0 ponderadas pelos coeficientes cn (Fig. 2.8). As observacoes
de Leeson previram regioes 1/f3, 1/f2 e 1/f no espectro do ruıdo de fase. O ruıdo

21
-ω
6i2n∆f (ω)
ω0 2ω0 4ω0
(a)
-ω
6Sφ(ω)
(b)
-ω
6SV (ω)
ω0 2ω0 4ω0
(c)
QQs
?
c0
+
c1)
c29
c3
Figura 2.8. Evolucao do espectro de potencia do ruıdo do circuito ate o espectro de
potencia do ruıdo de fase: (a) Densidade espectral da fonte de ruıdo; (b) Densidade
espectral da fase de oscilacao; (c) Densidade espectral da tensao de saıda do oscilador.
de baixa frequencia, como o flicker, e modificado pelo coeficiente c0 e mostra
uma dependencia 1/f3 com o ∆ω. Outras fontes de ruıdo branco sao modificadas
pelos outros coeficientes cn e originam a regiao 1/f2 no espectro do ruıdo de fase.
Aparentemente, se a fonte de ruıdo i(t) tivesse termos em 1/fn, estes termos
apareceriam dependendo de 1/fn+2 no espectro do ruıdo de fase.
Hajimiri apresentou uma expressao do espectro do ruıdo de fase na regiao de
1/f2, dada por:
L∆ω = 10.log
i2n∆f
Γ2rms
2.q2max∆ω2
(2.26)
onde:
i2n∆f
: Densidade espectral de potencia da fonte de ruıdo;
Γrms : Valor RMS da ISF;
∆ω : Distancia da frequencia de oscilacao;
qmax : Maxima variacao de carga.
Da Fig. 2.8 e facil observar que o fato de minimizar os coeficientes cn, o que
significa minimizar ISF, minimizara o ruıdo de fase. Esta mesma conclusao pode
ser vista na equacao 2.26, onde a reducao de Γrms implicara na reducao do ruıdo
de fase.

22
O autor deste modelo [28] apresenta como uma caracterıstica notavel do seu
trabalho que a expressao do ruıdo de fase nao precise de fatores de ajuste. Porem,
na verdade os metodos para a obtencao da ISF sao baseados na simulacao do cir-
cuito todo ou precisam de calculos complexos, situacao que nao ajuda no projeto.
A vantagem do modelo e que consegue descrever como e quais dos componentes
do espectro do ruıdo do circuito sao levados a tensao de saıda em frequencias
proximas de ω0. O modelo pode ser usado para optimizar um circuito feito ou
criar criterios para o projeto do oscilador.
2.2.5 Especificacoes do Ruıdo de Fase
A especificacao de ruıdo de fase do oscilador esta ligada as especificacoes do sis-
tema de radio para o qual esta sendo projetado. Os paragrafos seguintes definem
as especificacoes de um sistema receptor que serao usadas para o calculo da es-
pecificacao do ruıdo de fase do nosso oscilador.
• BER
O BER, da sigla em ingles Bit Error Ratio, e a razao de bits recebidos
errados com relacao ao numero total de bits recebidos.
• Sensibilidade
O nıvel de sensibilidade, especificado em dBm, e a mınima potencia de si-
nal detectavel na entrada do receptor de tal forma que a relacao sinal a
ruıdo (SNR) na saıda seja suficiente para uma aplicacao dada [29]. Porem,
a entrada do receptor esta casada a uma impedancia RIN (Fig. 2.9) e a
consideracao da tensao da fonte VS ou a tensao nos terminais de entrada
do receptor VIN pode dar origem a duas especificacoes diferentes de sensi-
bilidade. Para evitar confusoes e dado que a maioria dos equipamentos e
sistemas receptores estao casados a 50 Ω, a sensibilidade e definida como a
potencia fornecida a entrada do receptor sob condicoes de casamento.
Finalmente, o nıvel de sensibilidade de um sistema de radio e a mınima
potencia de sinal fornecida na entrada do sistema tal que seja obtido uma
relacao sinal-ruıdo (SNR) necessaria para alcancar o BER requerido.
• Sinais de Interferencia

23
RIN
Rs
VINVs
Receptor
Figura 2.9. Entrada de um receptor com fonte de tensao.
-ω
6
Potencia
Sinal nao desejado
Saıda na presenca desinal nao desejado
Nıvel de saıda normalSinal desejado
Figura 2.10. O fenomeno de Blocking
A especificacao de Sinais de interferencia ou sinais de bloqueio (Blocking)
do sistema e sua capacidade se opor a sinais de interferencia localizados
em canais adjacentes. No caso de existir sinais mais potentes na entrada
do receptor, estes sinais podem desensibilizar o receptor, ou seja, reduzir a
potencia aparente do sinal desejado que ele teria se o sinal de interferencia
nao estiver presente. Esta situacao e mostrada na Fig. 2.10 [30].
Calculo da especificacao do ruıdo de fase
A especificacao de ruıdo de fase e uma medida da pureza do espectro do oscilador
local usado no circuito. O sinal gerado pelo oscilador local do circuito recep-
tor sera usado pelo mixer para trasladar o espectro do sinal desejado, em alta
frequencia, ate uma frequencia menor. Porem, neste processo as bandas late-
rais do espectro do oscilador local serao multiplicadas pelos sinais em frequencias
proximas da portadora, este produto representara interferencia na banda do sinal
desejado.
Um metodo simples para calcular a especificacao de ruıdo de fase do oscilador
e assumir que o canal do receptor nao possui ruıdo e que a unica interferencia
produzida na banda do sinal desejado sera causada pelo ruıdo de fase do oscilador.
Isto significa que a unica inteferencia considerada sera o produto da mistura das

24
bandas laterais do espectro do oscilador com os sinais bloqueadores fora da banda
do sinal. A Fig. 2.11 apresenta o metodo citado anteriormente [29].
Sinal Desejado
Espectro do sinalde Entrada
∆ω//
Interferência
Potência
ω
L∆ω
ω 0
Espectro doOscilador
//
//
∆ω ω
Potência
SinalDesejado
Saída doReceptor
C/I min
Interferência
ω
Receptor
LO
SaídaSinal
BW
Figura 2.11. Calculo simples do ruıdo de fase do circuito oscilador.
O espectro do ruıdo de fase medido a uma frequencia ∆f separado da por-
tadora e considerado plano dentro da banda de interesse. A potencia da inter-
ferencia, produto da multiplicacao dos sinais de bloqueio com as bandas laterais
do espectro do oscilador, e comparada com a potencia da mistura entre o sinal
desejado e a energia da portadora. O ruıdo de fase e calculado com base na
relacao sinal-ruıdo requerido na saıda do mixer (SNR), na potencia dos sinais de
bloqueio separados ∆f do sinal desejado (SBL) e a potencia do sinal desejado
(SDes) (Eq. 2.27).
L∆f[dBc
Hz
]= (SDes − SBL)− SNR− 10log(BW ) (2.27)
onde:
L∆f : Ruıdo de fase;
SBL : Potencia do sinal de bloqueio;
SDes : Potencia do sinal desejado;
SNR : Relacao de Sinal-Ruıdo;

25
BW : Largura de banda do sinal desejado.
Especificacao do ruıdo de fase do oscilador para Bluetooth
A seguir sera calculada a especificacao do ruıdo de fase do oscilador a partir das
especificacoes de um sistema de comunicacao padrao. Para o nosso trabalho,
tomou-se como base a especificacao do Bluetooth [31], ja que ele e especificado
para operar na banda ISM (Industrial Scientific Medical) de 2,4 GHz e projetado
para comunicacoes para distancias curtas com baixo consumo.
Na maioria dos paıses, a banda de operacao do Bluetooth e 2,400 GHz a
2,4835 GHz. As frequencias de canal sao F = (2402 + k) MHz, com k = 0,
1,...,78. O sistema especifica uma banda de guarda inferior de 2 MHz, banda de
guarda superior de 3,5 MHz e espacamento entre canais de 1 MHz. Bluetooth
exige obter um BER de 0,1% com um nıvel de sensibilidade de -70 dBm.
Na modulacao FSK (Frequency Shift Key) o bit 0 e representado por um
sinal de frequencia f0 e o bit 1 e representado por um sinal de frequencia f1,
ambos durante um intervalo de T segundos. O modulador FSK usa um VCO
controlado pela tensao gerada pelo bit de informacao, mas esta entrada digital
gera uma grande quantidade de harmonicas na saıda e uma ampla largura de
banda e ocupada.
Na modulacao GFSK (Gaussian FSK ) os bits ’0’ e ’1’ sao convertidos para
sinais com valores -1 e +1, passam por um filtro Gaussiano e a saıda do filtro
e ligada a tensao de controle do VCO (Fig. 2.12). O fato de usar um filtro
Gaussiano reduz a largura de banda tanto na entrada do VCO quanto na sua
saıda, aproveitando melhor o espectro do que no caso da modulacao FSK [32]. O
Bluetooth usa modulacao GFSK com BT=0,5 e indice de modulacao (Mi) entre
0,28 e 0,35. As definicoes de BT e Mi sao dadas a seguir [32, 33]:
BT = BW.T (2.28)
Mi = 2.fd.T (2.29)
onde:
BT : Largura da banda relativa;
BW : Largura da banda do filtro;

26
T : Perıodo do bit;
Mi : Indice de modulacao;
fd : Desvio da frequencia. Desvio maximo da frequencia da portadora
quando um bit ’1’ ou ’0’ sao transmitidos.
Filtro Gaussianocom BT=0,5
Conversor a −1 .. +1 VCOBITS Saida
Figura 2.12. Diagrama de um modulador GFSK.
Para achar a especificacao do ruıdo de fase, e preciso transformar a especi-
ficacao do BER requerido ao valor de SNR correspondente, tentou-se achar a
expressao para este calculo mas so foram achados valores especificados por De-
sign Kits para projetos de sistemas para Bluetooth. Adotou-se o valor de 21 dB
(modulacao GFSK, Mi=0,28) [32, 34].
O ultimo parametro necessario para o calculo da especificacao do ruıdo de
fase e a relacao de potencia entre o sinal desejado e os sinais de interferencia em
canais adjacentes (SBL − SDes), esta informacao e fornecida pelas especificacoes
do sistema. As especificacoes desta relacao, para o Bluetooth, sao mostradas na
tabela 2.1.
Tabela 2.1: Especificacoes de Sinais de interferencia - Bluetooth
Requerimento Relacao Sinal/Interferencia
Interferencia no mesmo canal (C/Ico−channel) 11 dB
Interferencia em canal adjacente 1 MHz (C/I1MHz) 0 dB
Interferencia em canal adjacente 2 MHz (C/I2MHz) -30 dB
Interferencia em canal adjacente ≥ 3 MHz (C/I3MHz) -40 dB
Usando a equacao 2.27 e substituindo os valores pelos dados obtidos das es-
pecificacoes de Bluetooth, temos:
L1 MHz[dBc
Hz
]= 0 dB − 21 dB − 10.log(1 MHz) = −81 dBc/Hz
L2 MHz[dBc
Hz
]= −30 dB − 21 dB − 10.log(1 MHz) = −111 dBc/Hz
L3 MHz[dBc
Hz
]= −40 dB − 21 dB − 10.log(1 MHz) = −121 dBc/Hz

27
2.3 Descricao do Circuito Oscilador
Para a implementacao escolheu-se um oscilador LC, uma vez que e um circuito que
permite a integracao total na tecnologia CMOS e possui um espectro mais puro
que outras topologias sem implicar em dissipacao de potencia exagerada. Topolo-
gias tıpicas de osciladores LC sao: o oscilador de par cruzado NMOS, o oscilador
de par cruzado CMOS e o oscilador Colpitts. Os diagramas esquematicos dos
circuitos sao mostrados na Fig. 2.13. O oscilador Colpitts e raramente usado de-
vido ao fato de ser um circuito single-ended o faz mais sensıvel ao ruıdo da fonte
de alimentacao e ao ruıdo do substrato. Os osciladores de par cruzado NMOS
e CMOS possuem o mesmo princıpio de operacao, porem, quanto maior for o
numero de transistores maior sera o numero de fontes de ruıdo. A topologia de
oscilador com par cruzado NMOS e comumente usada em publicacoes recentes
e mesmo sendo uma estrutura simples, permite a analise completa das carac-
terısticas dos circuitos osciladores. Neste trabalho, o oscilador de par cruzado
NMOS foi escolhido para a implementacao.
M1 M2
C1 C2
L1 L2
I1
Vdd
Vctrl
(a)
VN VP
M1M2
M3 M3
C1
L1
I1
Vdd
(b)
VN VP
M1 C1
C2
L1
I1
R1
Vdd
Vbias
(c)
Figura 2.13. Topologias de osciladores LC: (a) Par cruzado NMOS; (b) Par
cruzado CMOS; (c) Colpitts.
O circuito oscilador de par cruzado NMOS consta de um circuito tanque, sin-
tonizado na frequencia de operacao, e um circuito ativo cuja funcao e repor as
perdas causadas pelas resistencias parasitarias do circuito ressonante. O circuito
tanque e formado pelos indutores L1, L2 e os varactores C1, C2. A funcao dos
varactores e permitir o controle da frequencia de oscilacao, isto e feito mudando
o valor da tensao de controle VCTRL. Os transistores NMOS em configuracao de
28
par cruzado constituem o circuito ativo do oscilador. Por ultimo, a fonte I1 pro-
porciona a corrente necessaria para a polarizacao do circuito e foi implementada
com um transistor PMOS. O circuito possui saıda diferencial de tensao entre os
nos VP e VN .
Esta secao esta dedicada a descricao do circuito oscilador implementado. Dado
que o desempenho dos osciladores LC esta ligado as caracterısticas do circuito
ressonante, as proximas duas subsecoes descrevem os problemas que apresenta
a implementacao de indutores e varactores integrados, os modelos usados para
representa-los, e as consideracoes tomadas para o projeto do circuito. A terceira
e ultima subsecao apresenta o projeto do circuito ativo.
2.3.1 Indutor
Os indutores integrados podem ser implementados com circuitos ativos ou circui-
tos passivos [35]. A implementacao com circuitos ativos consta de um capacitor
e dispositivos ativos que mudam a sua impedancia de entrada para que o circuito
se comporte como um indutor. A vantagem desta implementacao e o alto fator
de qualidade que pode ser alcancado mas isto e obtido com o custo de um alto
ruıdo causado pelo ruıdo inerente aos elementos ativos [36].
Os indutores passivos podem ser implementados como fios ligados entre pads
do circuito (bonding wires) ou como indutores planares.
Os fios de ligacao sao usados para conectar os PADs do circuito aos pinos
do encapsulamento, mas aos construı-los entre dois PADs do circuito e possıvel
obter um indutor. A vantagen desta classe de indutores e o alto fator de qualidade
que possui, ja que a resistencia serie e pequena, determinada pela resistencia do
material condutor usado, normalmente um fio de ouro, e o valor da indutancia e
geralmente 1 nH por milımetro de comprimento [14]. O problema deste tipo de
estrutura e a dificuldade no calculo da sua indutancia, pois, durante o processo de
fabricacao nao se consegue controlar totalmente a geometria do indutor: Os fios
estao separados numa distancia desconhecida do substrato, o fio nao e exatamente
uma linha reta e o diametro do fio pode variar.
Os indutores planos integrados sao conexoes metalicas com forma espiral, fei-
tas em uma ou mais camadas de metal disponıveis na tecnologia. Estas estruturas
sao de fabricacao simples e com poucas variacoes. A desvantagem destes indutores
e o baixo fator de qualidade que possuem, pois a resistencia serie e determinada

29
pela resistencia da trilha metalica e existem outros componentes parasitarios re-
lacionados com o oxido e o substrato sobre o qual o indutor e fabricado.
Os indutores planos sao especificados pelas caracterısticas geometricas, a sa-
ber:
N : Numero de voltas das espiras;
W : Largura da trilha;
S : Espacamento entre os elementos das espiras;
D : Diametro Externo, diametro interno ou a media desses diametros;
NL: Numero de lados.
Sao muitos os parametros que definem a qualidade do indutor. O valor da
indutancia esta determinado pelas caracterısticas geometricas do indutor, e o
valor das componentes parasitas depende das caracterısticas geometricas e dos
parametros da tecnologia usada, portanto, a selecao das dimensoes do indutor
exige o trabalho com muitas relacoes custo/beneficio. O problema do modela-
mento dos indutores tem sido abordado de tres formas diferentes [37]:
• Solucionador de equacoes de campos electromagneticos: A solucao
das equacoes de Maxwell e o enfoque que oferece maior precisao para a
analise de um sistema eletrico distribuıdo. Programas tais como Sonnet
[38] e MagNet [39] sao simuladores electromagneticos que solucionam estas
equacoes com metodos numericos. Estes programas sao adequados para
a simulacao de estruturas simples, mas no caso de estruturas como os in-
dutores, obter uma resposta pode demorar horas ou ate dias, e exige ter
acesso a um computador com grande capacidade de procesamento e grande
quantidade de memoria.
Para diminuir os tempos de simulacao dos indutores surgiram programas
desenvolvidos especificamente para a analise de indutores, programas que
usam equacoes de Maxwell simplificadas. Entre estas ferramentas podemos
listar: ASITIC [40] e FastHenry [41].
• Modelo de circuitos segmentados: Uma representacao mais simples
do indutor e criar um modelo π para cada um dos segmentos do indutor,
modelando a indutancia do segmento, a sua resistencia parasita, as suas ca-
pacitancias e a indutancia mutua entre segmentos [42, 5]. O problema desta
30
classe de modelos e a alta complexidade que ele significa para o simulador
eletrico.
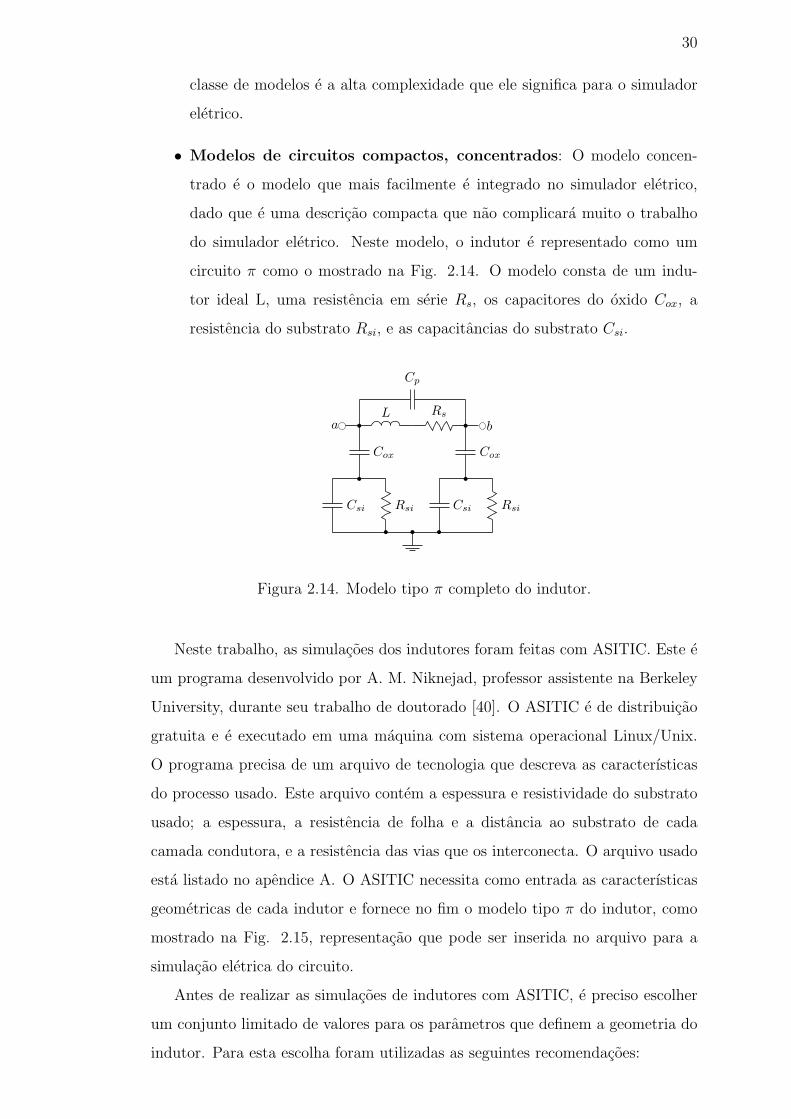
• Modelos de circuitos compactos, concentrados: O modelo concen-
trado e o modelo que mais facilmente e integrado no simulador eletrico,
dado que e uma descricao compacta que nao complicara muito o trabalho
do simulador eletrico. Neste modelo, o indutor e representado como um
circuito π como o mostrado na Fig. 2.14. O modelo consta de um indu-
tor ideal L, uma resistencia em serie Rs, os capacitores do oxido Cox, a
resistencia do substrato Rsi, e as capacitancias do substrato Csi.
aRs
Rsi Rsi
CoxCox
Csi Csi
Cp
Lb
Figura 2.14. Modelo tipo π completo do indutor.
Neste trabalho, as simulacoes dos indutores foram feitas com ASITIC. Este e
um programa desenvolvido por A. M. Niknejad, professor assistente na Berkeley
University, durante seu trabalho de doutorado [40]. O ASITIC e de distribuicao
gratuita e e executado em uma maquina com sistema operacional Linux/Unix.
O programa precisa de um arquivo de tecnologia que descreva as caracterısticas
do processo usado. Este arquivo contem a espessura e resistividade do substrato
usado; a espessura, a resistencia de folha e a distancia ao substrato de cada
camada condutora, e a resistencia das vias que os interconecta. O arquivo usado
esta listado no apendice A. O ASITIC necessita como entrada as caracterısticas
geometricas de cada indutor e fornece no fim o modelo tipo π do indutor, como
mostrado na Fig. 2.15, representacao que pode ser inserida no arquivo para a
simulacao eletrica do circuito.
Antes de realizar as simulacoes de indutores com ASITIC, e preciso escolher
um conjunto limitado de valores para os parametros que definem a geometria do
indutor. Para esta escolha foram utilizadas as seguintes recomendacoes:

31
aRs
Rsi Rsi
Cs2Cs1
Lb
Figura 2.15. Modelo tipo π do indutor gerado por ASITIC.
• Limitar a largura da trilha de metal. Primeiro, se uma area fixa for consi-
derada, o fato de usar linhas mais largas reduz o numero de voltas possıveis
e a indutancia. Segundo, nas altas frequencias de operacao, por causa do
efeito pelicular, o fluxo de corrente estara limitado as zonas superficiais do
condutor, e embora a largura da trilha de metal aumentasse a resistencia
serie alcancara seu limite mınimo.
• Usar o menor espaco possıvel entre linhas adjacentes. Isto maximizara a
indutancia mutua entre linhas e a indutancia total. Na maioria dos casos,
a capacitancia lateral entre os segmentos e desprezıvel se o espacamento for
da ordem de 2 µm e o fator de qualidade nao sera afetado.
• Nao preencher o indutor ate o centro do dispositivo. Por causa das correntes
Eddy, as voltas no centro do indutor possuem uma alta resistencia, enquanto
sua contribuicao a indutancia e muito pequena.
• Limitar a area ocupada pelo indutor. No caso de substratos condutivos, a
altas frequencias, o campo magnetico gerado pelo indutor gera correntes no
substrato que produzem perdas resistivas e reduzem o valor da indutancia
e o fator de qualidade.
• Em processos multicamadas usar os nıveis de metal mais externos possıveis.
Geralmente o metal no nıvel mais externo da tecnologia possui a menor re-
sistencia por quadrado, significando uma menor resistencia serie no indutor,
e o fato de ficar mas afastado do substrato implicara em uma capacitancia
parasitaria menor.
Seguindo estas indicacoes, foram feitas simulacoes de varias estruturas. Os
indutores simulados foram estruturas quadradas, implementados com duas cama-
das de metal dos nıveis superiores, MET3 e MET4, ligados em paralelo; variando
32
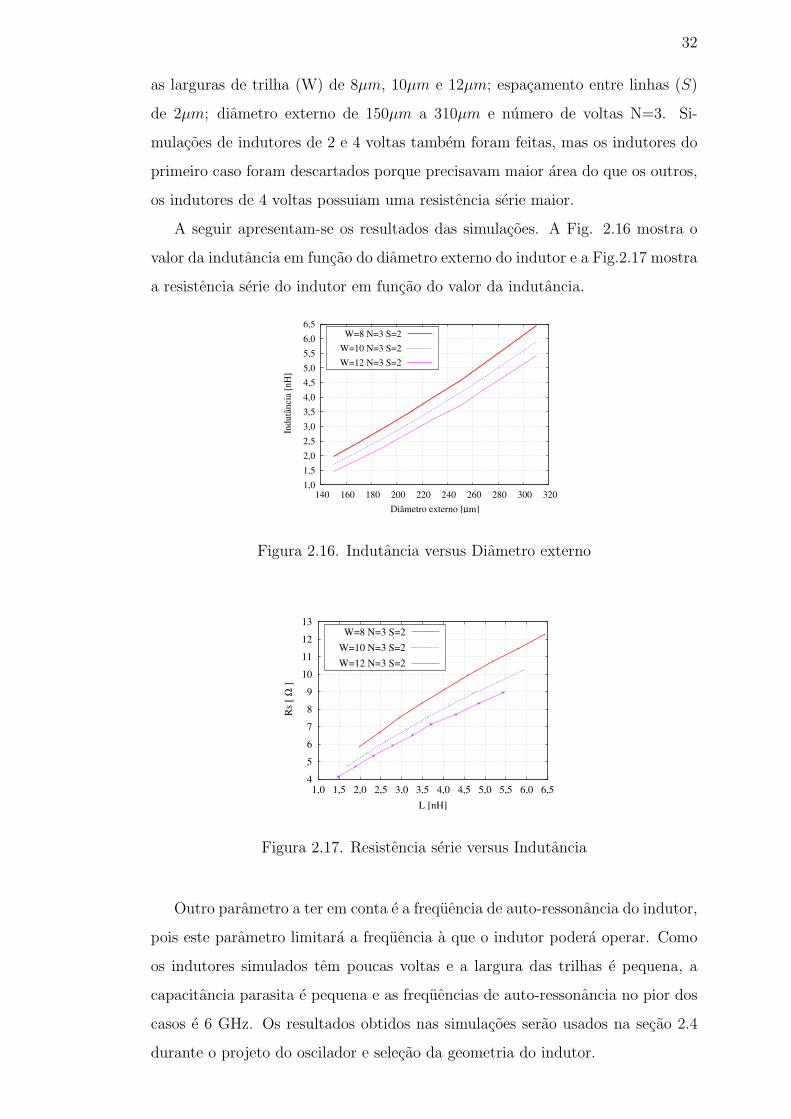
as larguras de trilha (W) de 8µm, 10µm e 12µm; espacamento entre linhas (S)
de 2µm; diametro externo de 150µm a 310µm e numero de voltas N=3. Si-
mulacoes de indutores de 2 e 4 voltas tambem foram feitas, mas os indutores do
primeiro caso foram descartados porque precisavam maior area do que os outros,
os indutores de 4 voltas possuiam uma resistencia serie maior.
A seguir apresentam-se os resultados das simulacoes. A Fig. 2.16 mostra o
valor da indutancia em funcao do diametro externo do indutor e a Fig.2.17 mostra
a resistencia serie do indutor em funcao do valor da indutancia.
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
140 160 180 200 220 240 260 280 300 320
Indu
tânc
ia [n
H]
Diâmetro externo [µm]
W=8 N=3 S=2W=10 N=3 S=2W=12 N=3 S=2
Figura 2.16. Indutancia versus Diametro externo
4
5
6
7
8
9
10
11
12
13
1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0 5,5 6,0 6,5
Rs
[ Ω ]
L [nH]
W=8 N=3 S=2W=10 N=3 S=2W=12 N=3 S=2
Figura 2.17. Resistencia serie versus Indutancia
Outro parametro a ter em conta e a frequencia de auto-ressonancia do indutor,
pois este parametro limitara a frequencia a que o indutor podera operar. Como
os indutores simulados tem poucas voltas e a largura das trilhas e pequena, a
capacitancia parasita e pequena e as frequencias de auto-ressonancia no pior dos
casos e 6 GHz. Os resultados obtidos nas simulacoes serao usados na secao 2.4
durante o projeto do oscilador e selecao da geometria do indutor.

33
2.3.2 Varactor
Existem varias opcoes para a implementacao de varactores em tecnologia CMOS
padrao, entre estas opcoes estao os dispositivos tıpicos, tais como o diodo de
juncao e o capacitor MOS, e outras estruturas novas como o capacitor MOS
modo acumulacao e o capacitor MOS modo inversao. O estudo de estruturas
de varactores visam obter uma faixa de variacao de capacitancia maior, o que
permitira uma maior faixa de variacao na frequencia de oscilacao, e um fator de
qualidade maior, para o varator nao deteriorar o fator de qualidade do circuito
tanque. O problema do uso de estruturas novas com transistores MOS como
circuito varactor e que no momento do projeto nao se contava com os modelos para
a simulacao nem ferramenta com capacidade de fazer a extracao dos dispositivos.
Finalmente decidiu-se implementar um diodo de juncao como varactor, P+
sobre poco N, polarizado reversamente. Um estudo comparativo das estruturas de
diodos varactores [43] mostra que a estrutura diferencial apresenta o melhor fator
de qualidade, alcancando Q=155 operando a 1GHz em dispositivos fabricados
em tecnologia CMOS 0,5 µm. A Fig. 2.18 apresenta a estrutura dos diodos
varactores.
CTRLV
VS−
Diffusão P+ Poço N Diffusão N+
CTRLV
VS−
VS+
VS+
(a)
(b)
Figura 2.18. Diodos varactores: (a) Esquema eletrico; (b) Estrutura fısica
A capacitancia de juncao do diodo pode ser dada por:
C =W ∗ L ∗ CJ(1 + V
PB
)MJ+
2 ∗ (W + L) ∗ CJSW(1 + V
PB
)MJSW(2.30)
onde:
C : Capacitancia de juncao do diodo;
W e L : Lados do retangulo da area do capacitor;

34
CJ : Capacitancia por unidade de area com polarizacao de tensao zero;
CJSW : Capacitancia por unidade lateral com polarizacao de tensao zero;
PB : Potencial de juncao;
MJ : Coeficiente de gradacao da juncao de area;
MJSW: Coeficiente de gradacao da juncao lateral;
V : Tensao de polarizacao reversa.
A variacao da tensao do diodo esta determinada pelos limites das tensoes
aplicadas nos nos de saıda do oscilador (anodos dos diodos) e o no de aplicacao
da tensao de controle (catodos dos diodos). Para garantir a polarizacao reversa
dos diodos, a tensao de controle de frequencia VCTRL tera que ser maior ou igual
a tensao nos nos de saıda do oscilador. Para estimar a variacao da capacitancia
dos diodos varactores, consideramos que os nos de saıda terao um valor maximo
de 1 Volt e que o valor maximo de VCTRL e o valor da tensao de alimentacao 3,3
V. Isto resulta em uma faixa de variacao da tensao reversa de 0 a 2,3 V. Com
estes valores de tensao, o calculo de variacao da capacitancia de estruturas de
L=2µm e W≥10*L apresenta uma relacao Cvmax/Cvmin = 1, 87.
Definimos Cv como o valor da capacitancia quando o varactor e polarizado
no ponto medio da faixa da variacao da tensao (1,15 V) e com a curva obtida a
partir da equacao 2.30 obtem-se expressoes para a capacitancia maxima e mınima
do varactor em funcao de Cv, dadas por:
Cvmax = 1, 47.Cv (2.31)
Cvmin = 0, 78.Cv (2.32)
O oscilador e especificado para operar a 2,4 GHz e visando obter uma faixa
de variacao de frequencia que supere o possıvel desvio da frequencia por causa da
variacao dos componentes, adotou-se uma frequencia mınima de oscilacao (fmin)
de 2,2 GHz e uma frequencia maxima ((fmax)) de 2,6 GHz. Com estes limites de
frequencia, obteve-se os valores maximos e mınimos da capacitancia de oscilacao.
2.π.fmax =1√
L.Cmin
2.π.fmin =1√
L.Cmax
Das duas equacoes anteriores e considerando fmax/fmin = 2, 6/2, 2, tem-se:

35
2.π.fmax
2.π.fmin
=
1√L.Cmin
1√L.Cmax
fmax
fmin
=
√Cmax
Cmin
Cmax ≈ 1, 4.Cmin (2.33)
A equacao 2.33 estabelece que para conseguir a faixa de variacao desejada, a
capacitancia de oscilacao deve ter uma relacao Cmax/Cmin ≈ 1, 4. A capacitancia
de oscilacao C e formada pela capacitancia do varactor (Cv) e as capacitancias
parasitas (Cp), conforme descrito na equacao 2.34.
C = Cv + Cp (2.34)
onde Cp sao todas as capacitancias associadas as interconexoes e nao depen-
dem da polarizacao entre seus terminais.
Usando as equacoes 2.33 e 2.34, achamos a relacao maxima permitida entre
as capacitancias parasitas e a capacitancia do varactor.
Cmax = Cp + Cvmax
Cmin = Cp + Cvmin
Cmax
Cmin
=Cp + Cvmax
Cp + Cvmin
1, 4.(Cp + Cvmin) = Cp + Cvmax
1, 4.(Cp + 0, 78.Cv) = Cp + 1, 47.Cv
Cp(1, 4− 1) = Cv(1, 47− (1, 4)(0, 78))
Cp = 0, 9Cv (2.35)
A equacao 2.35 estabelece que para garantir a faixa de variacao de frequencia
desejada com as caracterısticas do diodo varactor disponıvel na tecnologia, as
capacitancias parasitas devem ser, no maximo, 90% do valor da capacitancia do
diodo varactor.
2.3.3 Circuito Ativo
A analise para o calculo das dimensoes dos transistores comeca com o modelo de
um terminal do oscilador (Fig. 2.1), neste modelo representa-se o oscilador como

36
um circuito ressonador com perdas e um circuito ativo ligados entre si. Na topo-
logia escolhida, o circuito ressonador e formado pelo indutor (L), o capacitor (C)
e a resistencia em paralelo (Rp) que representa as perdas do circuito. O circuito
ativo deve ser projetado de tal forma que seja equivalente a uma resistencia ne-
gativa (RNMOS), que forneca a energia dissipada por Rp a cada ciclo de oscilacao
e a oscilacao seja mantida (Fig. 2.19).
LRp C RNMOS
Circuito Ressonador Circuito Ativo
Figura 2.19. Modelo de um terminal do oscilador.
O circuito ativo e formado pelo par cruzado de transistores NMOS, o valor
absoluto da resistencia negativa que ele representa deve ser menor ou igual ao
valor da resistencia equivalente em paralelo com o circuito tanque para o circuito
oscilar (|RNMOS| ≤ Rp).
A inequacao anterior poderia gerar confusao ao leitor, pois inicialmente poder-
se-ia pensar que e preciso uma resistencia negativa com valor absoluto maior o
igual do que a resistencia Rp para contrarrestar as perdas e garantir a oscilacao.
Porem e preciso anotar que no modelo utilizado (Fig. 2.19) as resistencias estao
ligadas em paralelo e ao fazer o calculo da resistencia equivalente observa-se que
efetivamente deve-se satisfazer que |RNMOS| ≤ Rp para obter uma resistencia
equivalente, em paralelo com o circuito tanque, de valor menor o igual a zero.
O valor da resistencia do par cruzado e determinado ao calcular o valor da
resistencia RNMOS visto entre os seus terminais como e mostrado no circuito da
Fig. 2.20. O modelo de pequeno sinal do circuito e mostrado na Fig. 2.21.
Vo1 Vo2
M1 M2
RNMOS
Figura 2.20. Circuito para o calculo da impedancia do par cruzado.
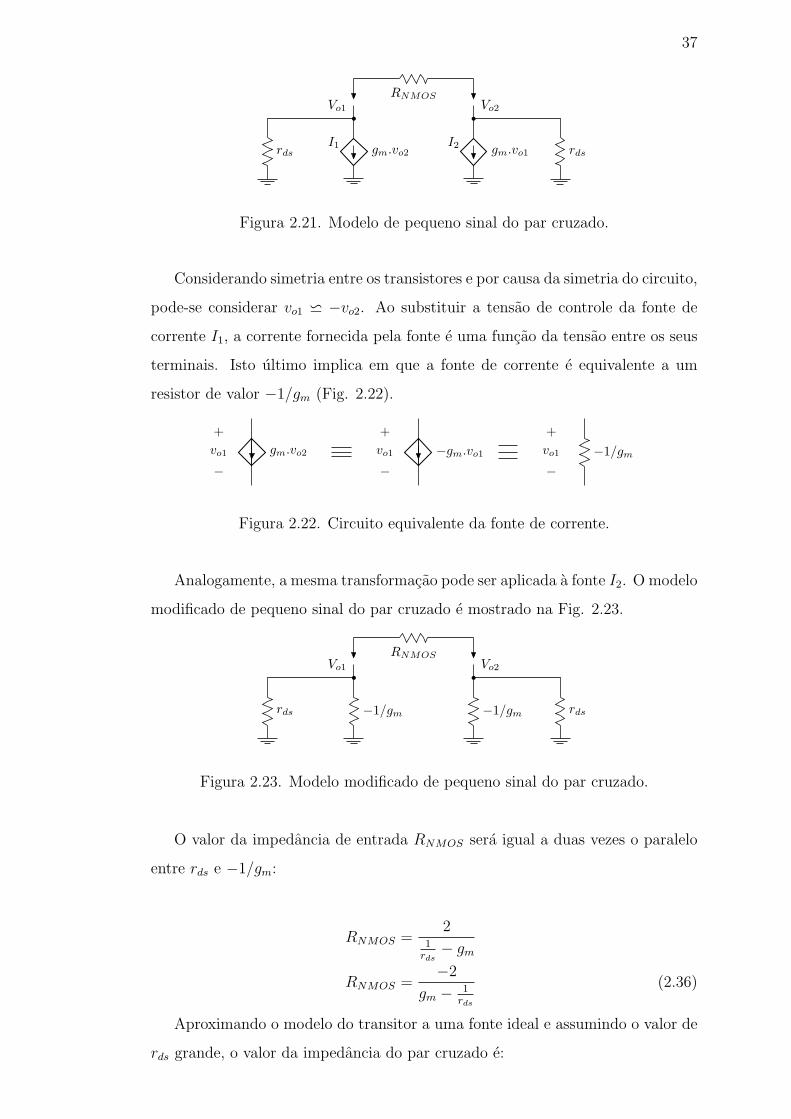
37
Vo1 Vo2
I1 I2gm.vo2 gm.vo1
RNMOS
rds rds
Figura 2.21. Modelo de pequeno sinal do par cruzado.
Considerando simetria entre os transistores e por causa da simetria do circuito,
pode-se considerar vo1 w −vo2. Ao substituir a tensao de controle da fonte de
corrente I1, a corrente fornecida pela fonte e uma funcao da tensao entre os seus
terminais. Isto ultimo implica em que a fonte de corrente e equivalente a um
resistor de valor −1/gm (Fig. 2.22).
+vo1
−
+vo1
−
+vo1
−gm.vo2 −gm.vo1 −1/gm
Figura 2.22. Circuito equivalente da fonte de corrente.
Analogamente, a mesma transformacao pode ser aplicada a fonte I2. O modelo
modificado de pequeno sinal do par cruzado e mostrado na Fig. 2.23.
Vo1 Vo2
RNMOS
−1/gm −1/gmrds rds
Figura 2.23. Modelo modificado de pequeno sinal do par cruzado.
O valor da impedancia de entrada RNMOS sera igual a duas vezes o paralelo
entre rds e −1/gm:
RNMOS =2
1rds− gm
RNMOS =−2
gm − 1rds
(2.36)
Aproximando o modelo do transitor a uma fonte ideal e assumindo o valor de
rds grande, o valor da impedancia do par cruzado e:

38
RNMOS ≈−2
gm
(2.37)
Ou, visto como condutancia:
GNMOS ≈−gm
2(2.38)
onde gm e a transconductancia de cada um dos transistores do par cruzado
e GNMOS e a conductancia do par cruzado. Por causa da equacao anterior, os
osciladores com esta topologia sao denominados “osciladores de Gm negativo”.
Para garantir a oscilacao, o valor absoluto de RNMOS tem que ser menor
ou igual a resistencia paralela do circuito tanque, ou expressado em termos de
condutancia, o valor absoluto de GNMOS tem que ser maior ou igual ao GM (Eq.
2.12) do circuito tanque.
| GNMOS |> GM
|−gm
2| > GM
gm > 2.Reff .(w.C)2 (2.39)
Para garantir a oscilacao foi usado um fator de seguranca de 3, logo, a trans-
conductancia mınima dos transistores NMOS tera o valor requerido dado por:
gm = 6.Reff .(w.C)2 (2.40)
Para calcular as dimensoes do transistor, usa-se a expressao de gm em funcao
dos parametros do processo, corrente de polarizacao e geometria do transistor
[44], dada por:
gm =
√2.µn.Cox.
W
L.IDS (2.41)
Da equacao 2.41, expressando W em funcao das outras variaveis:
W =g2
m.L
2.µn.Cox.IDS
(2.42)
Esta expressao sera usada no projeto do oscilador uma vez determinado o valor
do indutor e a corrente de polarizacao. A capacitancia de oxido e a mobilidade
serao parametros fixos da tecnologia usada.

39
2.4 Implementacao e Simulacao do Circuito Os-
cilador
2.4.1 Esquema Eletrico do Oscilador
O esquema eletrico do circuito oscilador e mostrado na Fig. 2.24.
M1 M2
C1 C2
L1 L2
I1
Vdd
Vctrl
(a)
VN VP
Figura 2.24. Esquema eletrico do VCO.
Inicia-se o projeto definindo o valor do indutor. Segundo o modelo LTI, na
secao 2.2.3, o ruıdo de fase e proporcional a resistencia efetiva do circuito tan-
que e para reduzir esta ultima e preciso ter um indutor com as menores perdas
possıveis, pois, a resistencia efetiva e dominada pela resistencia serie do indutor.
Para ter um indutor com uma resistencia serie pequena poderia se pensar em
usar um indutor com uma espira de diametro pequeno ou de apenas uma volta.
Porem, o uso de um valor de indutancia pequeno implicaria em um valor alto
da capacitancia na frequencia de oscilacao desejada (ωo = 1/√
LC) e, isto por
sua vez, implicaria em um alto consumo de potencia ja que a transconductancia
necessaria para garantir a oscilacao e proporcional a capacitancia, vide equacao
2.12.
Por outro lado, quanto maior for a indutancia, menor sera o valor da capa-
citancia necessaria para conseguir a frequencia de oscilacao. Esta capacitancia
consiste das capacitancias parasitas e da capacitancia do varactor, quanto maior
for a capacitancia do varactor maior sera a variacao possıvel da frequencia do
oscilador. A Fig. 2.25 apresenta a curva da capacitancia em funcao do valor da

40
indutancia para obter uma frequencia de oscilacao de 2,4 GHz.
0
500
1000
1500
2000
2500
3000
3500
4000
4500
1 2 3 4 5 6 7 8 9 10C
[fF]
L [nH]
Figura 2.25. Capacitancia versus Indutancia com Fosc = 2, 4 GHz.
Para determinar o valor do indutor consideraremos a especificacao de ruıdo
de fase, o consumo de potencia do circuito, o valor da indutancia e a resistencia
serie do mesmo. O modelo de Craninckx, secao 2.2.3, apresenta uma equacao
para o calculo aproximado do ruıdo de fase, a equacao e reescrita a seguir:
L∆ω = 10.log
[k.T.Reff.[1 + A]
(ω0
∆ω
)2V 2
A/2
](2.43)
Onde:
Reff : Resistencia efetiva do circuito tanque;
VA : Amplitude de oscilacao;
k : Constante de Boltzman;
T : Temperatura absoluta;
A : Fator empırico de ajuste (Valor usado A=3);
ω0 : Frequencia angular de oscilacao;
∆ω : Distancia da frequencia de oscilacao.
O valor do fator A foi determinado por meio de simulacao. Simulou-se o
circuito e achou-se o valor de A para o qual o ruıdo de fase obtido na simulacao
estivesse mais proximo do valor calculado pela equacao.
Com esta equacao e calculado o valor maximo da resistencia efetiva permitida
de forma tal que o oscilador ainda cumpra as especificacoes do ruıdo de fase. Da
equacao 2.18, ao expressar o valor da resistencia efectiva em funcao das outras
variaveis, obteve-se:
41
Reff =10
L∆ω10 .
(V 2
A
2
)k.T.[1 + A].( ω0
∆ω)2
(2.44)
Porem, a amplitude de saıda depende da corrente de polarizacao e a resistencia
em paralelo com o circuito tanque1 [46]. Assim,
VA =2
π.Rp.Iosc (2.45)
Para o calculo da resistencia paralela Rp considerou-se que o valor da re-
sistencia efetiva do tanque (Reff) e aproximadamente igual ao valor da re-
sistencia serie do indutor, e que o valor de Rp pode ser calculado ao realizar
a conversao de um circuito com um indutor e um resistor em serie (Reff ) a um
circuito equivalente com o indutor e um resistor (Rp) ligados em paralelo. O valor
de Rp sera:
Rp =(ω.L)2
Reff
(2.46)
Substituindo o valor de Rp em 2.45, temos:
VA =2
π.
((ω.L)2
Reff
).Iosc (2.47)
Por ultimo, ao substituir o valor de VA em 2.44, obtemos uma expressao para
Reff que leva em conta a especificacao de ruıdo de fase esperado, a indutancia
do circuito tanque e a corrente de polarizacao do oscilador, ou seja:
Reff =
(10
L∆ω10 .2.I2
osc.(∆ω)2.ω2.L4
k.T.π2.[1 + A]
)1/3
(2.48)
onde:
Iosc : Corrente de polarizacao do oscilador;
L : Indutancia do circuito tanque.
Das especificacoes de ruıdo de fase, a mais difıcil de alcancar e -121dBc/Hz@3MHz.
Desta forma, esta especificacao foi tomada como referencia a ser atingida e dela
se calcula o valor maximo de Reff para valores de indutancia na faixa de 1 nH
ate 10 nH e considerando como parametro as correntes de polarizacao de 1, 2 e 3
mA. Os resultados dos calculos sao mostrados na Fig. 2.26 e Fig. 2.27.
1Aproximacao valida para pequenas correntes quando o oscilador opera na regiao current-
limited [45].

42
05
101520253035
1 2 3 4 5 6 7 8 9 10
Rs
[ Ω ]
L [nH]
I=1mAI=2mAI=3mA
Figura 2.26. Valores maximos de Reff em funcao de L para alcancar ruıdo de
fase de -121dBc/Hz@3MHz.
0,000,200,400,600,801,001,201,40
1 2 3 4 5 6 7 8 9 10
VA
[ V
olts
]
L [nH]
I=1mAI=2mAI=3mA
Figura 2.27. Amplitude de oscilacao em funcao de L considerando o maximo
valor calculado de Reff para alcancar a especificacao de ruıdo de fase
-121dBc/Hz@3MHz.
Para determinar o valor do indutor e preciso analisar a informacao das curvas
de indutancia e capacitancia de oscilacao (Fig. 2.25), da resistencia serie versus
indutancia (Fig. 2.17), do valor maximo de Reff versus indutancia do circuito
tanque (Fig. 2.26) e da amplitude de oscilacao versus indutancia do circuito
tanque (Fig. 2.27). Ainda, considerou-se que o valor da resistencia efetiva e
dominado pela resistencia serie do indutor.
Da Fig. 2.25, pode-se observar se o valor de indutancia for entre 5 e 8 nH a
capacitancia deve ser entre 880 e 550 fF para a frequencia de 2,4 GHz.
O circuito oscilador precisa de dois indutores iguais conectados em serie para
guardar simetria no circuito, portanto, os valores de indutancia e resistencia serie
devem ser considerados com o dobro dos valores obtidos nos resultados da si-
mulacoes de ASITIC. Da Fig. 2.17, resultados das simulacoes com ASITIC,

43
indutancias de valores entre 2,5 e 4 nH tem resistencias series entre 5 e 9 Ω.
Estes valores de resistencias estao dentro dos valores adequados para alcancar a
especificacao de ruıdo de fase com correntes de polarizacao de 2 e 3 mA.
Uma primeira tentativa foi feita usando dois indutores de 3,5 nH em serie,
resistencia serie de 7,5 Ω, os calculos e simulacoes iniciais mostraram a viabilidade
do circuito, mas ao considerar as capacitancias parasitas, a faixa de variacao de
frequencia se reduzıa a 100MHz.
Decidiu-se reduzir a indutancia a um valor proximo de 3,1 nH, para assim
permitir que a capacitancia seja maior e em consequencia o mesmo para o valor
do varactor que desta forma aumentara a sua relacao comparada com as capa-
citancias parasitas, e portanto, a faixa de variacao de frequencia. Era preciso
escolher a geometria do indutor adequada, entre os resultados das simulacoes
escolheu-se o indutor com largura de linha W=10 µm, espacamento entre linhas
de 2 µm, diametro externo D=210 µm e numero de voltas N=3. O indutor de
mesmo valor (3,1 nH) com W=8 µm tinha maior resistencia serie, e o indutor
com W=12 µm de mesmo valor tinha uma resistencia menor mas ocupava uma
area 10% maior. Da simulacao com ASITIC, a frequencia de auto-ressonancia do
indutor escolhido foi reportada como 10 GHz, que e um valor adequado para a
nossa aplicacao. O modelo completo do indutor e mostrado na Fig. 2.28.
3,1 nH 6, 8Ω
68 fF 94 fF
1, 4KΩ 1, 2KΩ
aRs
Rsi2 Rsi1
Csi2Csi1
Lb
Figura 2.28: Modelo π gerado por ASITIC do indutor escolhido.
Para o calculo das dimensoes do transistores, foi usada a equacao 2.42, onde
os parametros µn e Cox sao caracterısticos do processo, o comprimento do canal
L e o mınimo permitido para ter o maximo valor de gm. O valor mınimo de gm
esta determinado pelas perdas do circuito tanque, logo, so e possıvel determinar a
corrente de polarizacao. Trabalhos publicados de outros osciladores, operando em
frequencias proximas, apresentam consumos de potencia na faixa de 6 a 13 mW.
A tensao de alimentacao da tecnologia disponıvel para nossa implementacao e de
3,3 V, portanto, estabelecemos uma corrente de polarizacao de 2 mA para ter uma

44
dissipacao de potencia de 6,6 mW. Logo, a corrente media de cada transistor sera
de 1 mA. Com estas consideracoes, obteve-se transistores de dimensoes W=100
µm e L=0,35 µm.
A tensao nos nos de saıda tem um nıvel DC de 0,7 V e uma tensao pico de
0,5 V, aproximadamente, o que produz uma tensao pico de 1,2 V. Para garantir
uma tensao maxima de polarizacao nos diodos de 0 V, e manter os diodos em
polarizacao reversa, o valor mınimo da tensao de controle de frequencia do os-
cilador, VCTRL, sera de 1,2 V. Como valor maximo de VCTRL foi considerado a
tensao de alimentacao do circuito, 3,3 V. O valor do varactor foi ajustado para
obter uma frequencia de oscilacao de 2,4 GHz ao aplicar um valor de tensao no
meio da faixa de variacao de VCTRL, ou seja, 2,1 Volts.
A fonte de corrente deve fornecer a corrente de polarizacao do circuito, para
isto foi usado um transistor PMOS entre a fonte de alimentacao (Vdd) e o no
comum dos indutores e incluiu-se um outro transistor PMOS com as mesmas
dimensoes como espelho de corrente. A fonte de corrente faz parte do circuito
oscilador completo da Fig. 2.29, a corrente de referencia Iosc aplicada ao transis-
tor M4 sera aproximadamente a mesma corrente dreno-fonte do transistor M3.
Usaram-se transistores com comprimento de canal L=0,5 µm para aumentar a
resistencia do canal e obter uma fonte de corrente menos sensıvel as variacoes da
tensao dreno-fonte do transistor. O diagrama esquematico do circuito oscilador
completo com as dimensoes finais e mostrado na Fig. 2.29.
M1 M2
M3M4
D1 D2
L1 L2
Iosc
VddVdd
Vctrl
VN VP
100/0,35 100/0,35
60/0,560/0,5
3,1 nH 3,1 nH
Figura 2.29. Diagrama esquematico do circuito oscilador completo (Dimensoes
dos transistores W/L em µm).
Para realizar os testes, o circuito tera que suportar a carga de 50 Ω dos
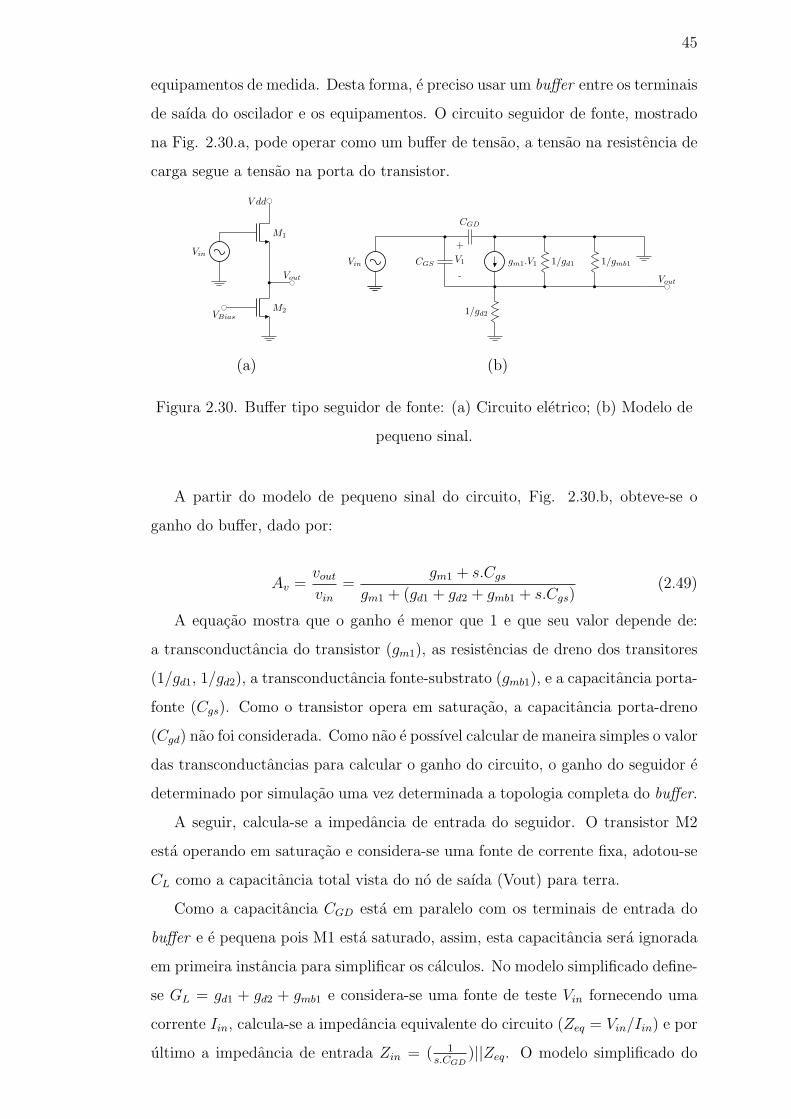
45
equipamentos de medida. Desta forma, e preciso usar um buffer entre os terminais
de saıda do oscilador e os equipamentos. O circuito seguidor de fonte, mostrado
na Fig. 2.30.a, pode operar como um buffer de tensao, a tensao na resistencia de
carga segue a tensao na porta do transistor.
M1
M2
Vin
V dd
Vout
VBias
(a)
V1
+
-Vin gm1.V1 1/gd1 1/gmb1
1/gd2
CGD
CGS
Vout
(b)
Figura 2.30. Buffer tipo seguidor de fonte: (a) Circuito eletrico; (b) Modelo de
pequeno sinal.
A partir do modelo de pequeno sinal do circuito, Fig. 2.30.b, obteve-se o
ganho do buffer, dado por:
Av =vout
vin
=gm1 + s.Cgs
gm1 + (gd1 + gd2 + gmb1 + s.Cgs)(2.49)
A equacao mostra que o ganho e menor que 1 e que seu valor depende de:
a transconductancia do transistor (gm1), as resistencias de dreno dos transitores
(1/gd1, 1/gd2), a transconductancia fonte-substrato (gmb1), e a capacitancia porta-
fonte (Cgs). Como o transistor opera em saturacao, a capacitancia porta-dreno
(Cgd) nao foi considerada. Como nao e possıvel calcular de maneira simples o valor
das transconductancias para calcular o ganho do circuito, o ganho do seguidor e
determinado por simulacao uma vez determinada a topologia completa do buffer.
A seguir, calcula-se a impedancia de entrada do seguidor. O transistor M2
esta operando em saturacao e considera-se uma fonte de corrente fixa, adotou-se
CL como a capacitancia total vista do no de saıda (Vout) para terra.
Como a capacitancia CGD esta em paralelo com os terminais de entrada do
buffer e e pequena pois M1 esta saturado, assim, esta capacitancia sera ignorada
em primeira instancia para simplificar os calculos. No modelo simplificado define-
se GL = gd1 + gd2 + gmb1 e considera-se uma fonte de teste Vin fornecendo uma
corrente Iin, calcula-se a impedancia equivalente do circuito (Zeq = Vin/Iin) e por
ultimo a impedancia de entrada Zin = ( 1s.CGD
)||Zeq. O modelo simplificado do

46
circuito apresenta-se na Fig. 2.31.
+ V1 −
Vin
Iin
gm1.V1 1/GL
CGS
CL
Vout
Figura 2.31. Modelo simplificado para altas frequencias do circuito seguidor de
fonte.
Somando as tensoes de cada um dos nos, temos:
Vin =Iin
s.CGS
+ Iin.
(1 +
gm
s.CGS
).
(1
GL
|| 1
s.CL
)(2.50)
Logo Vin/Iin e dado por:
Vin
Iin
= Zeq =1
s.CGS
+
(1 +
gm
s.CGS
).
(1
GL
|| 1
s.CL
)Zeq =
1
s.CGS
+ .
(1
GL
|| 1
s.CL
)+
(gm
s.CGS
).
(1
GL
|| 1
s.CL
)(2.51)
Daı, para a impedancia de entrada do circuito, temos:
Zin =
(1
s.CGD
||Zeq
)(2.52)
Da equacao 2.52, a capacitancia de entrada do seguidor e aproximadamente
igual ao paralelo entre a capacitancia CGD e o valor da capacitancia serie entre
a capacitancia CGS e capacitancia no no de saıda CL. Porem, o resultado da
conexao serie entre dois capacitores sempre sera um capacitor com valor menor
do que o menor deles. Logo, o valor da capacitancia de entrada do seguidor sera,
com uma aproximacao pessimista, a capacitancia paralela entre CGS e CGD. E
importante ter um valor aproximado da capacitancia de entrada do seguidor, pois
esta capacitancia modificara a capacitancia nos nos de saıda do oscilador.
Os sinais de saıda do oscilador em cada um dos nos de saıda Vp e Vn, refe-
renciados a terra, tem uma amplitude de aproximadamente 0,5 V pico e um nıvel
DC de aproxidamente 0,7 V. Portanto, e preciso aumentar o nıvel DC deste sinal
para polarizar o transistor e garantir sua operacao em saturacao. Uma rede de
polarizacao formada por um capacitor e um resistor foi usada para este proposito,
o circuito e mostrado na Fig. 2.32.

47
Rbias
Cx
C
Cy Cseg
Vin Vout
Vbias
Figura 2.32. Circuito de polarizacao.
As capacitancias Cx e Cy sao as capacitancias parasitarias formadas entre as
placas do capacitor e o substrato, Cseg e a capacitancia de entrada do seguidor
de fonte. Na frequencia de operacao, com um valor suficientemente grande de
Rbias, o circuito e equivalente a um divisor capacitivo e a tensao em Vout sera
aproximadamente:
Vout = Vin.
(C
C + (Cy + Cseg)
)(2.53)
Para ter Vout ≈ Vin deve-se satisfazer que: C Cy + Cseg. Porem, o valor da
capacitancia parasitas por unidade de area da placa de POLY1 e POLY2 para
substrato sao 13,8% e 12,2% da capacitancia por unidade de area da capacitancia
entre as placas [25], respectivamente. Portanto, considerando que a placa de
POLY2 e ligada a porta do seguidor e que o valor de C e K vezes o valor da
capacitancia de entrada do seguidor Cseg, temos que:
Cseg ≈ (C/K) (2.54)
Cx ≈ 0, 138.C (2.55)
Cy ≈ 0, 122.C (2.56)
Logo, o valor da tensao no no de saıda sera:
Vout ≈ Vin.
(C
C + (Cy + Cseg)
)Vout ≈ Vin.
(C
C + (0, 122.C + ( CK
)
)
Vout ≈ Vin.
(K
1, 122.K + 1
)(2.57)
O ganho do circuito de polarizacao, Vout/Vin , em funcao da relacao K =
C/Cseg e mostrado na Fig. 2.33. Este ganho sempre sera menor que 1.

48
0,45
0,50
0,55
0,60
0,65
0,70
0,75
0,80
0,85
0,90
0 5 10 15 20 25 30
Vou
t/Vin
K
Figura 2.33. Ganho do circuito de polarizacao em funcao da relacao
K = C/Cseg.
O circuito de polarizacao e o circuito seguidor de fonte sao ligados nos nos
de saıda do oscilador, VP e VN , portanto e importante conhecer o valor da capa-
citancia que estes circuitos adicionam. Esta capacitancia e dada por:
Cin =
[(Cy + Cseg).C
(Cy + Cseg) + C
]+ Cx (2.58)
Ao expressar todas as capacitancias em funcao da capacitancia de entrada do
seguidor:
C ≈ K.Cseg (2.59)
Cx ≈ 0, 138.(K.Cseg) (2.60)
Cy ≈ 0, 122.(K.Cseg) (2.61)
Substituindo os valores de C, Cx e Cy na equacao 2.58, temos:
Cin ≈ (Cseg + 0, 122.K.Cseg).K.Cseg
K.Cseg + (Cseg + 0, 122.K.Cseg)+ 0, 138.K.Cseg
Cin ≈ (Cseg + 0, 122.K.Cseg).K
K + (1 + 0, 122.K)+ 0, 138.K.Cseg
Cin ≈ Cseg.
[(1 + 0, 122.K).K
1 + 1, 122.K+ 0, 138.K
](2.62)
A curva Cin/Cseg em funcao do parametro K e mostrada na Fig. 2.34, observa-
se que a capacitancia de entrada Cin e aproximadamente o valor da capacitancia
de entrada do seguidor (Cseg) multiplicada por uma constante.

49
0,0
1,0
2,0
3,0
4,0
5,0
6,0
7,0
8,0
9,0
0 5 10 15 20 25 30
Cin
/Cse
g
K
Figura 2.34. Curva Cin/Cseg em funcao do parametro K = C/Cseg.
Uma vez obtidas as equacoes para esbocar o ganho do seguidor e a capacitancia
que ele adicionara ao circuito oscilador, continuou-se com a definicao de uma
arquitetura do circuito. A impedancia de carga do buffer sera a resistencia de
50Ω do equipamento de medida em paralelo com as capacitancias do PAD. Porem,
um seguidor de fonte capaz de suportar essa baixa impedancia precisa um valor
grande de W/L, e a capacitancia adicionada no oscilador por causa do buffer nao
pode ser muito alta porque mudaria a frequencia de oscilacao. Portanto, optou-se
por usar um buffer formado por dois seguidores de fonte, cada um com sua rede de
polarizacao e optou-se usar a largura do transistor do segundo seguidor 10 vezes a
largura do primeiro. Com a simulacao eletrica determinaram-se as dimensoes dos
transistores, como tambem o ponto de polarizacao otimo. O circuito do buffer
completo com suas dimensoes e mostrado na Fig. 2.35.
M1
M2
M3
M4
M5
R1
C1
C2
R2
Vdd
Vin
VIbuff
VBias
Vout
30/0,35
30/0,35
60/0,35
300/0,35
600/0,35
600fF
2,4pF
10KΩ
10KΩ
Figura 2.35. Esquema eletrico do buffer para teste (Dimensoes dos transistores
W/L em µm).
50
Foi usada uma tensao de polarizacao Vbias de 2,5 V e uma fonte de corrente
IIbuff de 3 mA para as simulacoes. Estes pontos de polarizacao foram ligados a
um PAD do circuito para permitir o ajuste dos seus valores durante a realizacao
das medidas.
Simulou-se o buffer usando o modelo BSIM3V3 do transistor, o ganho Vout/Vin ≈
0, 095. Causado pelo produto das atenuacoes: 0,843 no primeiro capacitor (C1),
0,351 no primeiro seguidor de fonte, 0,807 no segundo capacitor (C2) e 0,4 no
segundo seguidor.
Para ver se o ruıdo de fase do sinal de saıda do oscilador era diferente do ruıdo
de fase do buffer fizeram-se duas simulacoes: obteve-se o ruıdo de fase tanto na
entrada como na saıda do buffer, e observou-se que o ruıdo de fase aumentou
1dBc; aplicou-se FFT aos sinais de entrada e saıda do buffer, os espectros de
potencia obtidos mostravam que o sinal era atenuado, mas a forma era a mesma.
2.4.2 Layout do Circuito Oscilador
O diagrama eletrico e o layout do circuito oscilador e mostrado na Fig. 2.36.
Para garantir simetria do sinal gerado, o circuito deve guardar a maior simetria
possıvel. Os indutores L1 e L2 sao identicos, um e simetrico ao outro sobre um
eixo vertical. A fonte de corrente esta na parte superior entre os dois indutores.
Os transistores sao projetados como uma estrutura de dedos intercalados e estao
localizados no centro do circuito entre os dois buffers para teste. Os diodos
varactores tambem foram projetados como uma estrutura de dedos intercalados
e estao no centro do circuito, identificados como bloco C na figura.
Na distribuicao dos PADs das saıdas, sinais de controle e polarizacao tambem
foi mantida a simetria. Na parte superior do desenho estao as entradas do VCO:
a tensao de controle de frequencia (VCTRL), a corrente de polarizacao (Iosc) e a
tensao de alimentacao (Vdd). Os sinais de polarizacao do buffer estao localizados
na parte inferior do desenho: tensao de polarizacao (Vbia), corrente de referencia
(Ibuf ) e tensao de alimentacao (Vdd).
Os nos de saıda VN e VP estao localizados nos lados esquerdo e direito,
respectivamente. Cada uma destas saıdas tem dois PADs ligados a terra do
circuito, com uma separacao de 200 µm entre os centros. Desta forma pode-se
ligar a ponta de teste tipo cascade (Terra - Sinal - Terra). As linhas de Vdd e Vss
(Terra) contornam o circuito todo. Foram roteadas em metal nos nıveis 1 e 2,

51
M1 M2
M3M4
D1 D2
L1 L2
Iosc
Vdd
Vctrl
M1P
M2P
M3P
M4P
M5P
R1P
C1P
C2P
R2P
Ibuff
Vbias
VPP
M1N
M2N
M3N
M4N
M5N
R1N
C1N
C2N
R2N
Ibuff
Vbias
VNN
VN VP
100/0,35 100/0,35
60/0,560/0,5
3,1 nH 3,1 nH
30/0,35
30/0,35
60/0,35
300/0,35
600/0,35
600fF
2,4pF
10KΩ
10KΩ
30/0,35
30/0,35
60/0,35
300/0,35
600/0,35
600fF
2,4pF
10KΩ
10KΩ
(a)
(b)
Figura 2.36. Circuito oscilador: (a) Diagrama Eletrico; (b) Layout.
MET1 e MET2, respectivamente, isto com o intuito de criar um capacitor entre
elas para absorver parte do ruıdo gerado no circuito e melhorar a estabilidade da
tensao de alimentacao.
Os componentes que fazem parte do propio VCO ocupariam somente a me-
tade da area usada no projeto, mas, a area ocupada maior se deve aos sinais de
polarizacao e ao espacamento mınimo necessario entre eles para permitir a po-
larizacao do circuito no laboratorio de medidas. Assim, o circuito ocupou uma
area de 1,3 mm2.

52
Indutores
Os indutores foram fabricados usando as duas camadas dos nıves superiores de
metal (MET3, MET4) ligadas em paralelo por vias colocadas em toda a area
do indutor. Esta ligacao em paralelo de camadas foi feita visando reduzir a
resistencia serie do indutor. O diametro externo dos indutores e 210 µm, a largura
das trilhas e 10 µm e o espacamento entre as espiras e 2 µm. Implementou-se o
terminal de saıda do centro do indutor com MET2. A Fig. 2.37 mostra o layout
dos indutores.
Figura 2.37. Layout dos indutores.
Para minimizar o efeito dos campos gerados em linhas metalicas em volta dos
indutores, situacao que reduz o valor da indutancia, manteve-se uma distancia
mınima de 5 vezes a largura de trilha do indutor (50 µm), entre o indutor e as
estruturas proximas a ele. Tambem foi usada a camada NOFILL do processo
sobre os indutores e sua area adjacente para evitar a presenca de estruturas
metalicas dummy. Estas estruturas poderiam ser geradas pelo fabricante para
conseguir a densidade de metal exigida pelas regras da tecnologia. Porem, depois
de receber o circuito, percebeu-se que a regra de densidade de metal foi ignorada
pelo fabricante e que nao foram geradas estruturas metalicas em lugar nenhum
do circuito.
Com o objetivo de garantir a maior simetria possıvel no circuito, adotou-se
a seguinte estrategia: se uma linha de metal passasse perto de um indutor, uma
estrutura com a mesma geometria era posicionada proxima do outro indutor.
Um exemplo desta situacao e a ligacao do sinal de tensao de controle do varactor
(Vctrl) do PAD para o varactor: o PAD esta na parte esquerda superior do
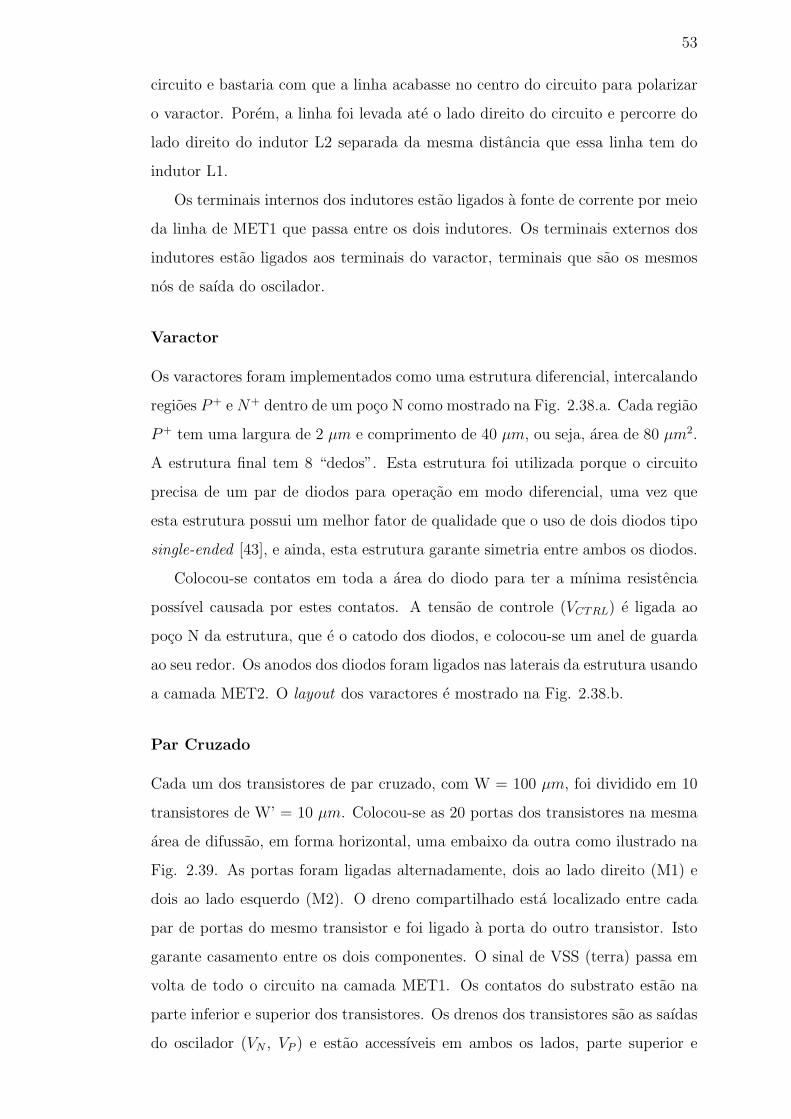
53
circuito e bastaria com que a linha acabasse no centro do circuito para polarizar
o varactor. Porem, a linha foi levada ate o lado direito do circuito e percorre do
lado direito do indutor L2 separada da mesma distancia que essa linha tem do
indutor L1.
Os terminais internos dos indutores estao ligados a fonte de corrente por meio
da linha de MET1 que passa entre os dois indutores. Os terminais externos dos
indutores estao ligados aos terminais do varactor, terminais que sao os mesmos
nos de saıda do oscilador.
Varactor
Os varactores foram implementados como uma estrutura diferencial, intercalando
regioes P+ e N+ dentro de um poco N como mostrado na Fig. 2.38.a. Cada regiao
P+ tem uma largura de 2 µm e comprimento de 40 µm, ou seja, area de 80 µm2.
A estrutura final tem 8 “dedos”. Esta estrutura foi utilizada porque o circuito
precisa de um par de diodos para operacao em modo diferencial, uma vez que
esta estrutura possui um melhor fator de qualidade que o uso de dois diodos tipo
single-ended [43], e ainda, esta estrutura garante simetria entre ambos os diodos.
Colocou-se contatos em toda a area do diodo para ter a mınima resistencia
possıvel causada por estes contatos. A tensao de controle (VCTRL) e ligada ao
poco N da estrutura, que e o catodo dos diodos, e colocou-se um anel de guarda
ao seu redor. Os anodos dos diodos foram ligados nas laterais da estrutura usando
a camada MET2. O layout dos varactores e mostrado na Fig. 2.38.b.
Par Cruzado
Cada um dos transistores de par cruzado, com W = 100 µm, foi dividido em 10
transistores de W’ = 10 µm. Colocou-se as 20 portas dos transistores na mesma
area de difussao, em forma horizontal, uma embaixo da outra como ilustrado na
Fig. 2.39. As portas foram ligadas alternadamente, dois ao lado direito (M1) e
dois ao lado esquerdo (M2). O dreno compartilhado esta localizado entre cada
par de portas do mesmo transistor e foi ligado a porta do outro transistor. Isto
garante casamento entre os dois componentes. O sinal de VSS (terra) passa em
volta de todo o circuito na camada MET1. Os contatos do substrato estao na
parte inferior e superior dos transistores. Os drenos dos transistores sao as saıdas
do oscilador (VN , VP ) e estao accessıveis em ambos os lados, parte superior e
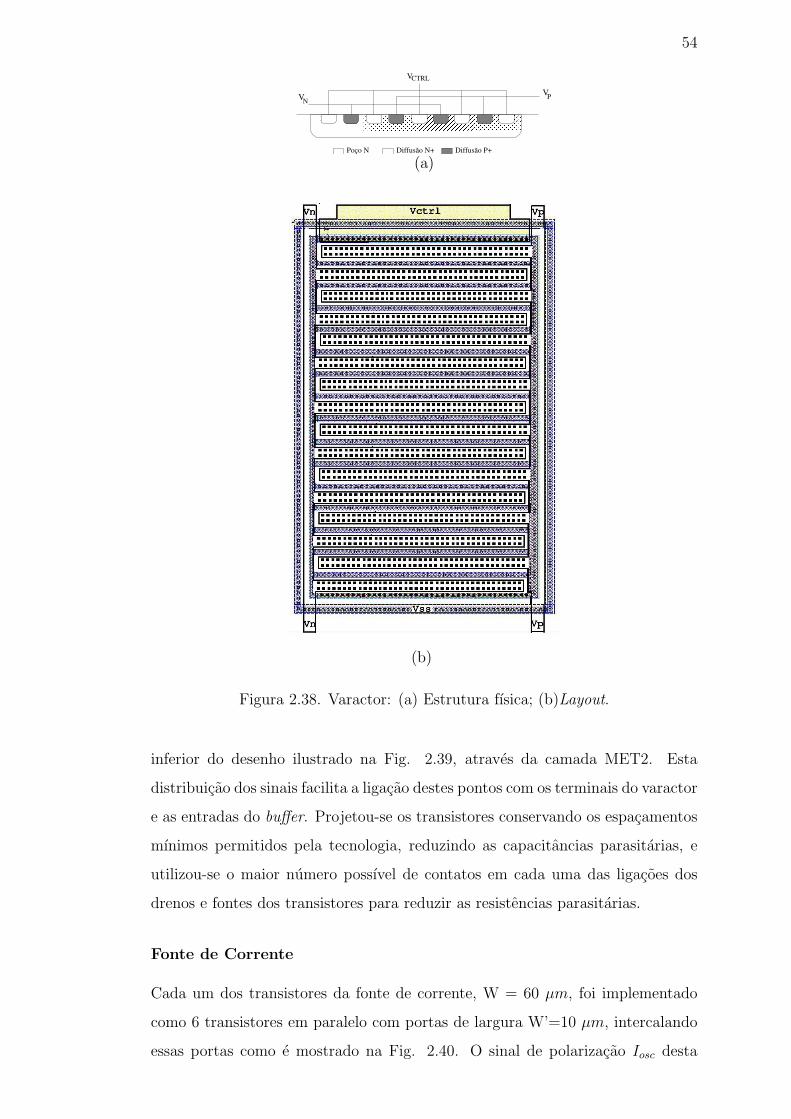
54
CTRLV
Diffusão P+ Poço N Diffusão N+
VNVP
(a)
(b)
Figura 2.38. Varactor: (a) Estrutura fısica; (b)Layout.
inferior do desenho ilustrado na Fig. 2.39, atraves da camada MET2. Esta
distribuicao dos sinais facilita a ligacao destes pontos com os terminais do varactor
e as entradas do buffer. Projetou-se os transistores conservando os espacamentos
mınimos permitidos pela tecnologia, reduzindo as capacitancias parasitarias, e
utilizou-se o maior numero possıvel de contatos em cada uma das ligacoes dos
drenos e fontes dos transistores para reduzir as resistencias parasitarias.
Fonte de Corrente
Cada um dos transistores da fonte de corrente, W = 60 µm, foi implementado
como 6 transistores em paralelo com portas de largura W’=10 µm, intercalando
essas portas como e mostrado na Fig. 2.40. O sinal de polarizacao Iosc desta

55
M1 M2
VN VP
(a) (b)
Figura 2.39. Par cruzado NMOS: (a) Diagrama eletrico; (b) Layout.
fonte, que esta ligado na parte superior do circuito, chega as portas de ambos os
transistores e ao dreno do transitor do espelho de corrente. As regioes fontes dos
transistores estao ligadas a Vdd usando a camada MET2. A corrente de saıda e
levada via o MET1 pela parte inferior do circuito ate os indutores.
A maxima densidade de corrente da camada MET1 e de 1mA/µm [25]. As
conexoes de metal aos drenos e fontes dos transistores foram feitos atraves de 3
trilhas de largura 2 µm para que as linhas possam suportar uma corrente de ate
6 mA, sem exceder o limite permitido pela tecnologia.
Figura 2.40. Layout da fonte de corrente.

56
Buffer para Teste
O layout completo do buffer e mostrado na Fig. 2.41. Observando da esquerda
para direita, o primeiro circuito e a rede de polarizacao (R1,C1). A seguir te-
mos a resistencia R2, o transistor do espelho de corrente (M1) e os transistores
do primeiro seguidor (M2, M3). Logo depois o capacitor da segunda rede de
polarizacao (C2) e por ultimo, ao lado direito da figura, os dois transistores do
segundo seguidor (M4,M5).
Figura 2.41. Layout do buffer.
Os resistores de polarizacao foram implementados numa estrutura tipo zig-
zag na camada POLY2 de 1 µm de largura e 196,4 µm de comprimento. Como
a corrente que passa por estes resistores e quase nula, a largura da trilha foi a
mınima permitida pela tecnologia.
Os capacitores foram implementados com as camadas POLY1 e POLY2. Os
contatos de ambas as placas foram distribuıdos na area toda, e para que os con-
tatos atingissem a camada inferior (POLY1) foi preciso fazer buracos na camada
superior (POLY2). Esta estrutura possui uma capacitancia menor do que uma
estrutura com as placas paralelas completas e contatos nas laterais, mas garante
o mesmo potencial na area toda do capacitor.
O capacitor C1 e uma estrutura quadrada de 27 µm de lado. Com estas
dimensoes, o dispositivo apresenta uma capacitancia proximo do valor esperado,
600 fF. Para projetar o capacitor C2, 2,4 pF, utilizou-se um arranjo de 2x2 da
estrutura usada para implementar o capacitor C1. O layout dos capacitores e
ilustrado na Fig. 2.42.
O layout do primeiro seguidor do buffer e o transistor espelho de corrente e
mostrado na Fig. 2.43, ou seja, e uma ampliacao da parte esquerda da Fig. 2.41.
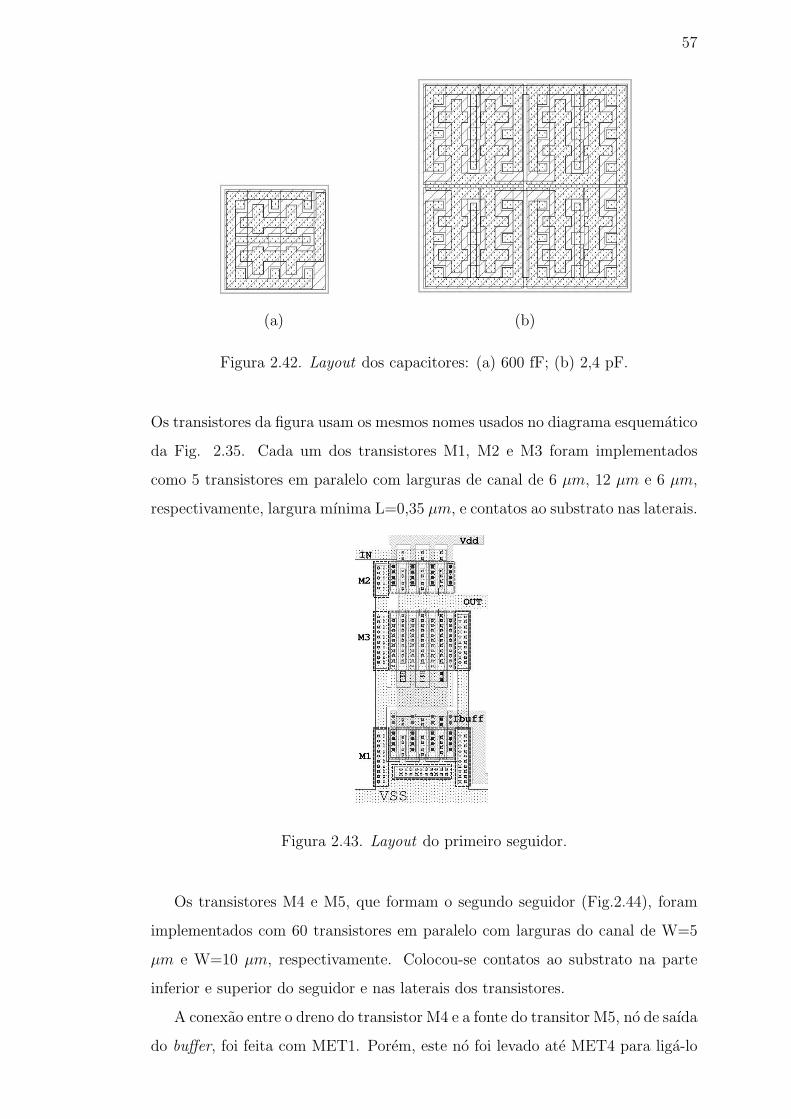
57
(a) (b)
Figura 2.42. Layout dos capacitores: (a) 600 fF; (b) 2,4 pF.
Os transistores da figura usam os mesmos nomes usados no diagrama esquematico
da Fig. 2.35. Cada um dos transistores M1, M2 e M3 foram implementados
como 5 transistores em paralelo com larguras de canal de 6 µm, 12 µm e 6 µm,
respectivamente, largura mınima L=0,35 µm, e contatos ao substrato nas laterais.
Figura 2.43. Layout do primeiro seguidor.
Os transistores M4 e M5, que formam o segundo seguidor (Fig.2.44), foram
implementados com 60 transistores em paralelo com larguras do canal de W=5
µm e W=10 µm, respectivamente. Colocou-se contatos ao substrato na parte
inferior e superior do seguidor e nas laterais dos transistores.
A conexao entre o dreno do transistor M4 e a fonte do transitor M5, no de saıda
do buffer, foi feita com MET1. Porem, este no foi levado ate MET4 para liga-lo

58
Figura 2.44. Layout do segundo seguidor.
ao PAD de saıda. Desta forma, o intuito e reduzir as capacitancias parasitarias
entre a linha e o substrato, e ainda reduzir as capacitancias parasitarias nos nos
de saıda do circuito. A estrutura do PAD, celula fornecida pela foundry, gera
uma capacitancia parasitaria de 400 fF do no de saıda para VSS (terra).
2.4.3 Simulacoes Pos-Layout
Com o intuito de caracterizar o comportamento do oscilador, foram feitas as
simulacoes descritas a seguir. A ferramenta utilizada para simulacao foi Eldo RF
de Mentor Graphics [47]. O programa permite realizar a analise do circuito em
regime senoidal permanente, steady-state, para o calculo do conteudo espectral e
da forma de onda em cada no do circuito. Possui funcoes para o tratamento de
circuitos operando a altas frequencias e oferece o calculo de ruıdo de fase usando
comandos simples [48], [49].
Como ja mencionado antes, o circuito foi projetado na tecnologia C35B4,
CMOS 0,35 µm de AustriaMicroSystems (AMS), processo com 4 camadas de
metal e 2 nıveis de polisilıcio [25]. Durante o projeto, nao se contou com a ultima
versao completa do Design Kit do fabricante, mas teve-se acesso aos documentos
atualizados da tecnologia e aos modelos de simulacao. O arquivo para a ex-
tracao de componentes e capacitancias parasitarias foi criado a partir do arquivo
correspondente do processo CSD, CMOS 0,35 µm da mesma foundry, processo
precursor do C35B4 com tres camadas de metal.
A tecnologia ainda esta em desenvolvimento, razao pela qual a AMS disponi-
bilizou atualizacoes dos parametros do processo e modelos de simulacao durante
o ultimo ano. O modelo usado para o transistor e o modelo BSIM3v3. A AMS
59
fornece um modelo para operacao do transistor ate 1 GHz e um outro modelo para
a operacao do transistor em frequencia de ate 6 GHz. Estes modelos possuem
parametros para a modelagem tanto do ruıdo termico como do ruıdo flicker. Os
parametros de ruıdo usado pela foundry, os metodos de extracao dos parametros
e as curvas caracterısticas do ruıdo dos transistores estao conteudos nos docu-
mentos de descricao da tecnologia [50].
Forma de onda de saıda do oscilador
Para verificar o funcionamento do oscilador, a simulacao mais simples e polarizar o
circuito e observar a forma de onda nas saıdas do circuito. Realizou-se simulacoes
no tempo e no domınio da frequencia, e analisou-se as formas de onda em cada
uma das saıdas do oscilador (VN, VP), na saıda diferencial do oscilador (VP-VN)
e nas saıdas do buffer (VNN, VPP). As saıdas do buffer foram carregadas com a
resistencia de carga do equipamento de medida (50 Ω).
Polarizou-se o circuito com tensao de alimentacao de Vdd = 3,3 V, corrente
do oscilador Iosc= 2 mA, corrente de polarizacao do buffer de 3 mA e tensao de
polarizacao do buffer Vbias = 2,5 V. A amplitude da saıda diferencial do oscilador
(Vp-Vn) obtida foi de 0,9 V ao simular com parametros tıpicos, 0,8 V simulando
com parametros slow e 0,75 V com parametros fast. A forma de onda vista no no
de saıda do buffer para teste apresenta amplitudes de oscilacao de 50 mV, 25 mV
e 75 mV para simulacoes com parametros typical, slow e fast, respectivamente.
Ao simular o circuito com resposta no tempo, e preciso esperar que o circuito se
estabilize. Por esta razao, simulou-se o circuito por 500 ns e observou-se os ultimos
ciclos do sinal, ver Fig. 2.45. Por outro lado, as formas de ondas geradas pela
simulacao no domınio da frequencia e a tıtulo de comparacao foram convertidas
para uma representacao no ”tempo” que Eldo permite, e sao graficadas a partir do
tempo zero, como e mostrado na Fig. 2.46. Tanto as formas de onda produzidas
pelas simulacao no tempo como as produzidas pela simulacao no domınio da
frequencia apresentaram as mesmas amplitudes, como era esperado.
Simulou-se o circuito durante 500 µs para detectar se existia algum tipo de mo-
dulacao de amplitude ou de frequencia produzido por um sinal de baixa frequencia
que nao fosse detectavel pela simulacao no domınio da frequencia. A simulacao
nao mostrou modulacao alguma.

60
−1,00−0,80−0,60−0,40−0,20
0,000,200,400,600,801,001,20
497,0 497,5 498,0 498,5 499,0 499,5 500,0
Ten
são
[V]
Tempo [ns]
Vn Vp Vp−Vn
(a)
−1,00−0,80−0,60−0,40−0,20
0,000,200,400,600,801,001,20
497,0 497,5 498,0 498,5 499,0 499,5 500,0
Ten
são
[V]
Tempo [ns]
Vn Vp Vp−Vn
(c)
−0,80
−0,60
−0,40
−0,20
0,00
0,20
0,40
0,60
0,80
1,00
497,0 497,5 498,0 498,5 499,0 499,5 500,0
Ten
são
[V]
Tempo [ns]
Vn Vp Vp−Vn
(e)
−0,20
−0,10
0,00
0,10
0,20
0,30
0,40
0,50
0,60
497,0 497,5 498,0 498,5 499,0 499,5 500,0
Ten
são
[V]
Tempo [ns]
Vnn Vpp Vpp−Vnn
(b)
−0,05
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
497,0 497,5 498,0 498,5 499,0 499,5 500,0
Ten
são
[V]
Tempo [ns]
Vnn Vpp Vpp−Vnn
(d)
−0,20−0,10
0,000,100,200,300,400,500,600,700,80
497,0 497,5 498,0 498,5 499,0 499,5 500,0
Ten
são
[V]
Tempo [ns]
Vnn Vpp Vpp−Vnn
(f)
Figura 2.45. Simulacao no tempo para varios tipos de parametros de processo.
Formas de onda nas saıdas do: (a) Oscilador (typical); (b) Buffer (typical); (c)
Oscilador (slow); (d) Buffer (slow); (e) Oscilador (fast); (f) Buffer(fast)
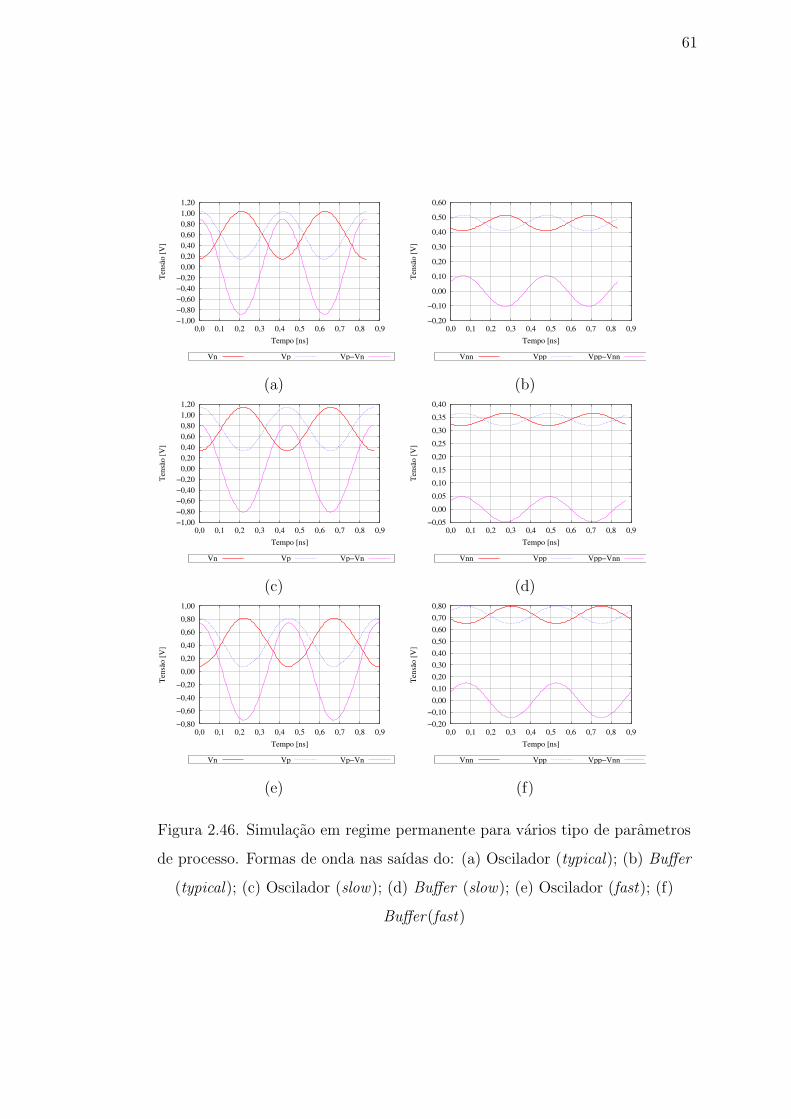
61
−1,00−0,80−0,60−0,40−0,20
0,000,200,400,600,801,001,20
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
Ten
são
[V]
Tempo [ns]
Vn Vp Vp−Vn
(a)
−1,00−0,80−0,60−0,40−0,20
0,000,200,400,600,801,001,20
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
Ten
são
[V]
Tempo [ns]
Vn Vp Vp−Vn
(c)
−0,80
−0,60
−0,40
−0,20
0,00
0,20
0,40
0,60
0,80
1,00
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
Ten
são
[V]
Tempo [ns]
Vn Vp Vp−Vn
(e)
−0,20
−0,10
0,00
0,10
0,20
0,30
0,40
0,50
0,60
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
Ten
são
[V]
Tempo [ns]
Vnn Vpp Vpp−Vnn
(b)
−0,05
0,00
0,05
0,10
0,15
0,20
0,25
0,30
0,35
0,40
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
Ten
são
[V]
Tempo [ns]
Vnn Vpp Vpp−Vnn
(d)
−0,20−0,10
0,000,100,200,300,400,500,600,700,80
0,0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9
Ten
são
[V]
Tempo [ns]
Vnn Vpp Vpp−Vnn
(f)
Figura 2.46. Simulacao em regime permanente para varios tipo de parametros
de processo. Formas de onda nas saıdas do: (a) Oscilador (typical); (b) Buffer
(typical); (c) Oscilador (slow); (d) Buffer (slow); (e) Oscilador (fast); (f)
Buffer(fast)

62
Frequencia de oscilacao versus Tensao de controle
Variou-se a tensao de controle Vctrl de 1,2 ate 3,3 volts e observou-se a variacao
da frequencia de oscilacao. O valor mınimo da faixa de varredura foi determinado
pela tensao mınima possıvel antes do diodo ser polarizado diretamente. O valor
maximo de frequencia da faixa de varredura corresponde ao valor da tensao de
alimentacao.
2,00
2,10
2,20
2,30
2,40
2,50
2,60
2,70
2,80
1,0 1,5 2,0 2,5 3,0 3,5
Freq
üênc
ia d
e os
cila
ção
[GH
z]
Tensão de controle [Volts]
TYPICALFAST
SLOW
Figura 2.47. Frequencia de oscilacao versus Tensao de controle.
O oscilador, simulado com parametros tıpicos de processo, apresenta uma faixa
de variacao de frequencia de 280 MHz, ou seja, a frequencia mınima e de 2,28 GHz
e a maxima de 2,56 GHz, A frequencia de oscilacao de 2,4 GHz, frequencia para
o qual o circuito foi projetado, foi obtida aplicando-se uma tensao de controle
igual a 1,85 V.
A simulacao com parametros slow possibilita uma faixa de sintonia de 2,15
GHz ate 2,47 GHz, e a simulacao com parametros fast mostra uma variacao de
frequencia de 2,15 GHz ate 2,32 GHz. Cabe ressaltar que estes valores foram ob-
tidos usando-se o modelo para altas frequencias, nao disponıvel durante o projeto
na sua fase inicial e nem antes do envio do layout para fabricacao.
A variacao das faixas de frequencia dos osciladores simulados com modelos
slow e fast e produzida, entre outros fatores, por causa da variacao de capacitancia
de porta dos transistores e a variacao da tensao media entre os terminais dos
varactores.
No modelo slow a espessura do oxido de porta e maior, a capacitancia de
porta sera menor e poder-se-ia esperar frequencia de oscilacao maior do que a
obtida com os parametros tıpicos. Porem, os sinais em cada um dos nos VP e

63
VN do circuito simulado com os parametros slow tera um nıvel DC maior do que
o nıvel DC achado no circuito com parametros tıpicos (vide Fig. 2.45.a e Fig.
2.45.c). Isto produzira uma tensao de polarizacao reversa dos diodos menor e
maior capacitancia gerada pelo varactor. Este incremento da capacitancia impli-
cara em uma diminuicao da frequencia de oscilacao. No modelo FAST, enquanto
que as capacitancias de porta dos transistores sao maiores, as capacitancias ge-
radas pelos diodos varactores sao menores do que as obtidas no circuito simulado
com parametros tıpicos.
Amplitude de oscilacao versus Tensao de controle
Observou-se que a variacao da tensao de controle, alem de variar a frequencia
de oscilacao, tambem provoca uma variacao da amplitude pico-a-pico do sinal
diferencial entre os nos de saıda do oscilador VP e VN . A curva da Fig. 2.48
apresenta esta analise. A eq. 2.45 mostra que a amplitude de oscilacao depende
da resistencia em paralelo equivalente do circuito tanque (Rp), e o valor desta
resistencia muda com a frequencia de oscilacao. Logo, o incremento da frequencia
de oscilacao implica num incremento da amplitude de oscilacao.
0,50
0,60
0,70
0,80
0,90
1,00
1,0 1,5 2,0 2,5 3,0 3,5
Am
plitu
de d
e os
cila
ção
[Vol
ts]
Tensão de controle [Volts]
TYPICALFAST
SLOW
Figura 2.48. Amplitude de oscilacao versus tensao de controle
Ao simular com parametros tıpicos, a amplitude pico a pico do sinal de saıda
do oscilador e de 0,78 V com tensao de controle de 1,2 V, e a amplitude maxima
de oscilacao e de 0,91 V quando a tensao de controle for de 3,3 V. A simulacao
com parametros slow mostra uma variacao de amplitude de 0,65 V ate 0,85 V.
Os resultados da simulacao com parametros fast mostram uma variacao de 0,69
V a 0,76 V.

64
Potencia de saıda versus tensao de controle
Usando os dados de amplitude de saıda do oscilador obtidos na simulacao e
possıvel calcular uma estimativa da potencia de saıda do oscilador considerando
uma resistencia de carga RL = 50 Ω. A potencia de saıda esta dada por:
Pout =V 2
ef
RL
(2.63)
Pout =
(Vp√
2
)2
.1
RL
(2.64)
onde:
Pout : Potencia de saıda em Watts;
Vef : Voltagem efetiva;
Vp : Voltagem pico;
RL : Resistencia de carga.
Para expressar a potencia de saıda do oscilador em dBm (PdBm) usa-se a
expressao:
PdBm = 10.log
(Pout
1mW
)(2.65)
A Fig. 2.49 mostra a estimativa da potencia de saıda considerando uma
resistencia de carga de 50 Ω em funcao da tensao de controle.
6,0
6,5
7,0
7,5
8,0
8,5
9,0
9,5
1,0 1,5 2,0 2,5 3,0 3,5
Potê
ncia
de
saíd
a [d
Bm
]
Tensão de controle [Volts]
TYPICALFAST
SLOW
Figura 2.49. Potencia de saıda versus tensao de controle

65
Frequencia de oscilacao versus Corrente de polarizacao do oscilador
Outro fator que provoca variacao na frequencia de oscilacao e a alteracao da
corrente de polarizacao (Iosc). Ou seja, a tensao media dos nos de saıda do
oscilador (Vn, Vp) depende desta corrente Iosc. Ao incrementar a corrente Iosc, a
tensao nos anodos dos diodos varactores aumentara e como a tensao de controle
da frequencia Vctrl foi mantida constante, a tensao entre os terminais dos diodos
entao diminuira. Esta diminuicao de tensao implica numa capacitancia maior e,
por conseguinte, uma frequencia de oscilacao menor. A dependencia da frequencia
de oscilacao em funcao da corrente de polarizacao e mostrada na Fig. 2.50.
2,10
2,15
2,20
2,25
2,30
2,35
2,40
2,45
2,0 2,5 3,0 3,5 4,0 4,5 5,0 5,5 6,0 6,5
Freq
üênc
ia d
e os
cila
ção
[GH
z]
Corrente de Polarização do oscilador [mA]
TYPICALFAST
SLOW
Figura 2.50. Frequencia de oscilacao versus corrente de polarizacao do oscilador,
com Vctrl=1,85 V.
Aplicou-se uma corrente de referencia Iosc de 2 mA, valor da corrente para
o qual o circuito foi projetado, ate 6 mA, a corrente maxima dentro dos limites
de densidade de corrente permitida das linhas de metal dos transistores da fonte
de corrente. A tensao de controle Vctrl foi mantida fixa em 1,85 V, valor para o
qual a frequencia de oscilacao atingida e 2,4 GHz com Iosc = 2 mA. Os resultados
da simulacao com parametros tıpicos mostram uma variacao da frequencia de
oscilacao de 2,40 GHz ate 2,29 GHz. O que significa que para incrementar Iosc
sera preciso aumentar Vctrl para atingir 2,4 GHz como frequencia de oscilacao. A
simulacao com parametros slow apresenta uma variacao da frequencia de oscilacao
de 2,29 GHz ate 2,21 GHz. A frequencia de oscilacao obtida da simulacao do
circuito com parametros fast varia entre 2,23 GHz e 2,13 GHz. Destas simulacoes
podemos ver que o incremento em Iosc de 2 mA para 6 mA, implica numa reducao
de aproximadamente 100 MHz da frequencia de oscilacao.

66
A corrente de referencia do espelho de corrente, Iosc, nao e exatamente a
mesma corrente de polarizacao do oscilador. Isto se deve a diferenca entre as
tensoes dreno-fonte dos transistores e o efeito de modulacao de canal. A corrente
de polarizacao do oscilador varia em funcao da fonte de referencia do espelho de
corrente conforme ilustra a Fig. 2.51.
2,0
2,5
3,0
3,5
4,0
4,5
5,0
5,5
6,0
6,5
2,0 2,5 3,0 3,5 4,0 4,5 5,0 5,5 6,0
Cor
rent
e de
Pol
ariz
ação
do
osci
lado
r [m
A]
Corrente de Referência do Espelho de Corrente (Iosc) [mA]
TYPICALFAST
SLOW
Figura 2.51. Corrente de polarizacao do oscilador versus corrente de referencia
do espelho de corrente (Iosc).
Amplitude de oscilacao versus Corrente de polarizacao do oscilador
A analise por simulacao da variacao da amplitude pico-a-pico de oscilacao em
funcao da corrente de polarizacao do oscilador e mostrada na Fig. 2.52. A
amplitude de oscilacao e diretamente proporcional a corrente de polarizacao [46]
quando o circuito opera na regiao de current limited, onde os transistores estao
operando em saturacao.
Variou-se a corrente Iosc de 2mA ate 6 mA. A simulacao com parametros
tıpicos mostra que a amplitude varia de 0,85 V ate 1,63 V. A simulacao com
parametros slow mostra uma variacao na amplitude de 0,75 V ate 1,64 V, e por
ultimo, a simulacao com parametros fast mostra uma variacao da amplitude de
0,72 V ate 1,35 V.
Ruıdo de Fase
Aproveitou-se a capacidade de simulacao no dominio da frequencia do Eldo para
realizar o calculo do ruıdo de fase do oscilador. A curva da Fig. 2.53 mostra o
ruıdo de fase em funcao de ∆F = Frequencia - Frequencia de oscilacao.

67
0,70
0,80
0,90
1,00
1,10
1,20
1,30
1,40
1,50
1,60
1,70
2,0 2,5 3,0 3,5 4,0 4,5 5,0 5,5 6,0 6,5
Am
plitu
de d
e O
scila
ção
[V]
Corrente de Polarização do oscilador [mA]
TYPICALFAST
SLOW
Figura 2.52. Amplitude de oscilacao versus corrente de polarizacao do oscilador
Variou-se ∆F de 1 Hz ate 100 MHz para identificar as duas primeiras regioes
de densidade espectral de potencia do ruıdo de fase descritas no modelo proposto
por Lesson (Fig. 2.5): a primeira regiao proporcionl a 1/∆ω3 (inclinacao de 30
dB por decada) para as frequencias proximas da frequencia de oscilacao e uma
segunda regiao proporcional a 1/∆ω2 (inclinacao de 20 dB por decada). O ponto
de mudanca da inclinacao esta proximo de ∆F=200 KHz. Isto significa que a
influencia do ruıdo flicker dos transistores do oscilador so sera significativa em
frequencias ate 200 KHz distanciadas da frequencia de oscilacao.
−200
−150
−100
−50
0
50
1e+00 1e+01 1e+02 1e+03 1e+04 1e+05 1e+06 1e+07 1e+08
Ruí
do d
e Fa
se [d
Bc/
Hz]
∆F [Hz]
TYPICALFAST
SLOW
Figura 2.53: Ruıdo de fase do oscilador.
Simulou-se ainda o ruıdo de fase de osciladores com a mesma corrente de pola-
rizacao (Iosc= 2 mA ) e tensao de controle (Vctrl = 1,85 V), usando-se os modelos
slow e fast dos transistores. A frequencia de oscilacao destes dois osciladores e
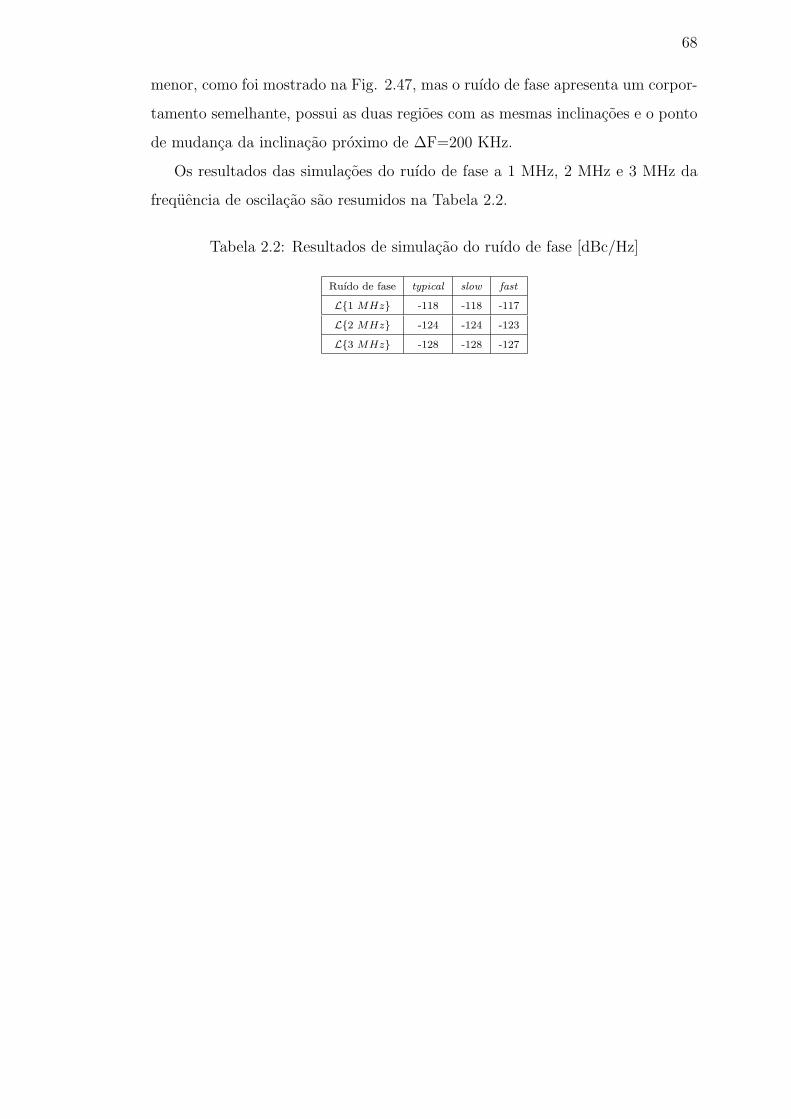
68
menor, como foi mostrado na Fig. 2.47, mas o ruıdo de fase apresenta um corpor-
tamento semelhante, possui as duas regioes com as mesmas inclinacoes e o ponto
de mudanca da inclinacao proximo de ∆F=200 KHz.
Os resultados das simulacoes do ruıdo de fase a 1 MHz, 2 MHz e 3 MHz da
frequencia de oscilacao sao resumidos na Tabela 2.2.
Tabela 2.2: Resultados de simulacao do ruıdo de fase [dBc/Hz]
Ruıdo de fase typical slow fast
L1 MHz -118 -118 -117
L2 MHz -124 -124 -123
L3 MHz -128 -128 -127
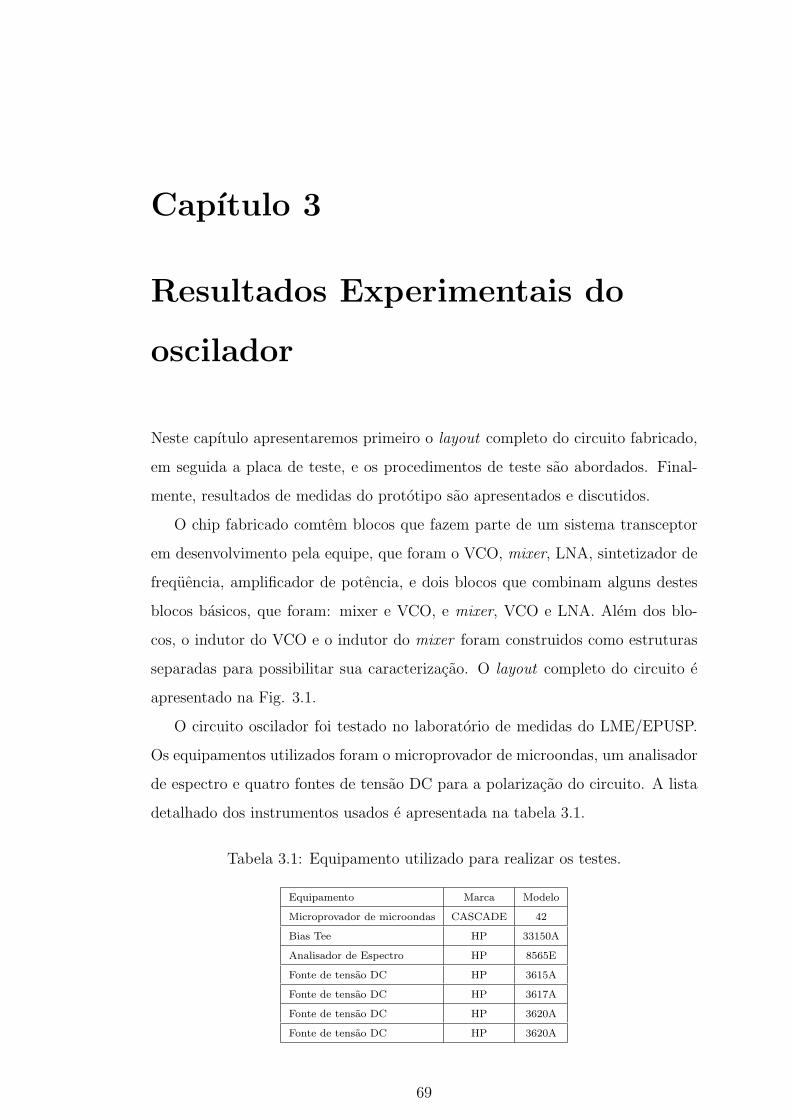
Capıtulo 3
Resultados Experimentais do
oscilador
Neste capıtulo apresentaremos primeiro o layout completo do circuito fabricado,
em seguida a placa de teste, e os procedimentos de teste sao abordados. Final-
mente, resultados de medidas do prototipo sao apresentados e discutidos.
O chip fabricado comtem blocos que fazem parte de um sistema transceptor
em desenvolvimento pela equipe, que foram o VCO, mixer, LNA, sintetizador de
frequencia, amplificador de potencia, e dois blocos que combinam alguns destes
blocos basicos, que foram: mixer e VCO, e mixer, VCO e LNA. Alem dos blo-
cos, o indutor do VCO e o indutor do mixer foram construidos como estruturas
separadas para possibilitar sua caracterizacao. O layout completo do circuito e
apresentado na Fig. 3.1.
O circuito oscilador foi testado no laboratorio de medidas do LME/EPUSP.
Os equipamentos utilizados foram o microprovador de microondas, um analisador
de espectro e quatro fontes de tensao DC para a polarizacao do circuito. A lista
detalhado dos instrumentos usados e apresentada na tabela 3.1.
Tabela 3.1: Equipamento utilizado para realizar os testes.
Equipamento Marca Modelo
Microprovador de microondas CASCADE 42
Bias Tee HP 33150A
Analisador de Espectro HP 8565E
Fonte de tensao DC HP 3615A
Fonte de tensao DC HP 3617A
Fonte de tensao DC HP 3620A
Fonte de tensao DC HP 3620A
69

70
Figura 3.1. Microfotografia do chip fabricado.
O diagrama de montagem do equipamento e ilustrado na Fig. 3.2. As fontes
estao ligadas nos PADs de polarizacao do circuito, a seguir: fonte de alimentacao
(Vdd), tensao de controle de frequencia (Vctrl), tensao de polarizacao do buffer
(Vbias) e tensao de polarizacao da fonte de corrente do buffer (Ibuff). O PAD Iosc
foi ligado a um resistor variavel para controlar a tensao da porta do transistor
espelho de corrente. Utilizou-se uma ponta de prova tipo cascode casada com
50 Ω adequada para tese de sinais RF (Terra-Sinal-Terra pitch 200 µm) para
ligar a saıda do circuito ao analisador de espectro. Foi projetada e fabricada
uma placa de teste e foi feita microsolda entre os PADs de Vbias, Vctrl e Vdd e
linhas metalicas da placa para facilitar a polarizacao do circuito VCO. Utilizou-se
pontas secas para conectar as fontes de tensao as linhas de polarizacao e PADs
do circuito. Estas pontas sao simplesmente agulhas que podem ser encostadas
nos PADs do circuito para polariza-lo mas elas nao tem nenhum tipo de filtro
que garanta a estabilidade da tensao aplicada.
A placa foi projetada pensando em soldar capacitores que estabilizassem as
tensoes de polarizacao do circuito. Porem, como a placa foi projetada para a
polarizacao de varios circuitos existentes no mesmo chip, a quantidade de linhas
de polarizacao e alto. Isto implica em trilhas finas e pouco espaco para a soldagem
de capacitores. O desenho completo da placa, onde as trilhas usadas para a
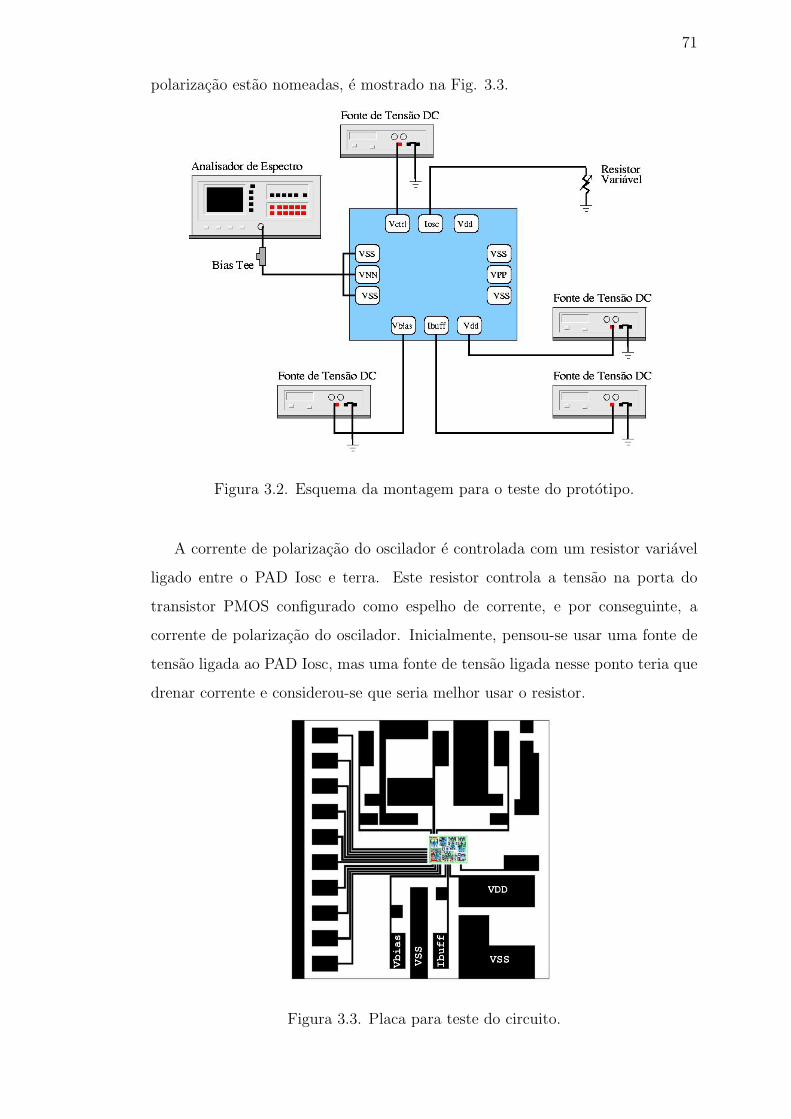
71
polarizacao estao nomeadas, e mostrado na Fig. 3.3.
Figura 3.2. Esquema da montagem para o teste do prototipo.
A corrente de polarizacao do oscilador e controlada com um resistor variavel
ligado entre o PAD Iosc e terra. Este resistor controla a tensao na porta do
transistor PMOS configurado como espelho de corrente, e por conseguinte, a
corrente de polarizacao do oscilador. Inicialmente, pensou-se usar uma fonte de
tensao ligada ao PAD Iosc, mas uma fonte de tensao ligada nesse ponto teria que
drenar corrente e considerou-se que seria melhor usar o resistor.
Figura 3.3. Placa para teste do circuito.

72
3.1 Analise espectral do sinal de saıda
A saıda do circuito foi observada no analisador de espectro. E preciso eliminar o
nıvel DC da saıda do oscilador pois o equipamento so suporta ate 0,2 V DC na
sua entrada e os resultados da simulacao mostraram que o nıvel DC da saıda e
proximo de 0,5 V. Para proteger a entrada do equipamento, utilizou-se um bias
tee conectado na entrada do sintetizador. Devido a simetria do circuito, tanto a
saıda VNN como VPP podem ser observadas, o esquema da Fig. 3.2 mostra a
ligacao no PAD VNN apenas como um exemplo.
O valor de Vdd foi estabelecido em 3,3 V, tensao de alimentacao da tecnologia
usada. Mudou-se o valor do resistor ate atingir uma corrente de polarizacao do
oscilador Iosc igual a 2 mA. O valor da fonte ligada ao PAD Ibuff foi ajustada ate
obter uma corrente de 3 mA passando pelo espelho de corrente de cada buffer.
A tensao do no Vbias foi ajustada para obter a maior tensao na saıda. A tensao
de controle (Vctrl) foi ajustada para obter uma frequencia de oscilacao de 2,4
GHz. A Fig. 3.4 mostra o espectro de potencia do sinal medido. O espectro de
potencia medido mostra que o oscilador atinge a frequencia de oscilacao desejada
e a amplitude de saıda no no VNN esta proximo do valor obtido nas simulacoes.
Porem, o sinal esta acompanhado de muito ruıdo, ou seja, o espectro se ve afetado
pelo ruıdo.
Considera-se que as possıveis causas deste ruıdo sao: (1) Uma ”terra” nao
muito estavel, ou seja, componentes AC de altas frequencias existentes nao fil-
tradas. O circuito nao tem um PAD exclusivo para a ligacao a terra. A terra do
circuito esta sendo ligada atraves da ponta tipo cascode de RF ligada no PAD
de saıda do circuito; (2) Variacao na tensao de controle de frequencia. O sinal
Vctrl esta sendo aplicado usando uma ponta seca, mas nao existe capacitor ligado
neste no; (3) O oscilador medido foi um oscilador que faz parte do sintetizador de
frequencia, o circuito anexo poderia estar introduzindo ruıdo no oscilador. Du-
rante os primeiros testes do VCO, por causa do pouco cuidado na manipulacao
do circuito o buffer apresentou falhas e nao possuia o ganho esperado.
3.2 Faixa de variacao da Frequencia de oscilacao
Mudou-se a tensao de controle de frequencia, Vctrl, de 1,2 V ate 3,3 V e polarizou-
se o oscilador com 2 mA da mesma maneira como foi feita a simulacao do circuito.
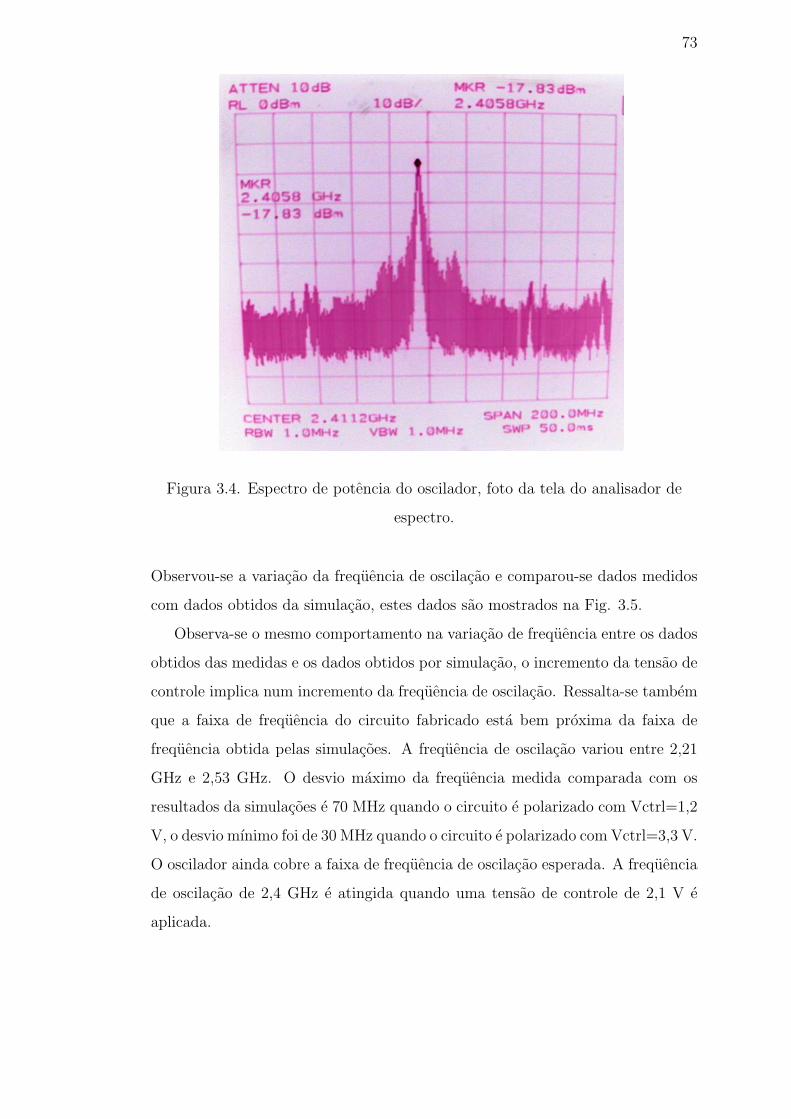
73
Figura 3.4. Espectro de potencia do oscilador, foto da tela do analisador de
espectro.
Observou-se a variacao da frequencia de oscilacao e comparou-se dados medidos
com dados obtidos da simulacao, estes dados sao mostrados na Fig. 3.5.
Observa-se o mesmo comportamento na variacao de frequencia entre os dados
obtidos das medidas e os dados obtidos por simulacao, o incremento da tensao de
controle implica num incremento da frequencia de oscilacao. Ressalta-se tambem
que a faixa de frequencia do circuito fabricado esta bem proxima da faixa de
frequencia obtida pelas simulacoes. A frequencia de oscilacao variou entre 2,21
GHz e 2,53 GHz. O desvio maximo da frequencia medida comparada com os
resultados da simulacoes e 70 MHz quando o circuito e polarizado com Vctrl=1,2
V, o desvio mınimo foi de 30 MHz quando o circuito e polarizado com Vctrl=3,3 V.
O oscilador ainda cobre a faixa de frequencia de oscilacao esperada. A frequencia
de oscilacao de 2,4 GHz e atingida quando uma tensao de controle de 2,1 V e
aplicada.

74
2,20
2,25
2,30
2,35
2,40
2,45
2,50
2,55
2,60
1,00 1,50 2,00 2,50 3,00 3,50
Freq
üênc
ia d
e os
cila
ção
[Hz]
Tensão de Controle (Vctrl) [V]
TesteSimulação
Figura 3.5. Frequencia de oscilacao versus Tensao de controle (Vctrl).
3.3 Amplitude de Saıda
Conservou-se as mesmas condicoes de polarizacao do teste anterior. Mudou-se a
tensao de controle de frequencia (Vctrl) entre 1,2 V e 3,3 V e fixou-se a corrente
de polarizacao em 2 mA. Nao e possıvel medir a amplitude de saıda do no de saıda
do oscilador propriamente dito (VN ou VP), mas e possıvel apenas observar a
amplitude da saıda do buffer e comparar com os dados obtidos na simulacao.
Do analisador de espectro foram tomados dados de potencia do sinal de saıda
do buffer, medidos em dBm, para cada um dos valores de Vctrl com incremento de
0,1 V. Transformou-se esses dados a valores de amplitude do sinal de saıda, em
volts, e comparou-se estes dados com os dados obtidos na simulacao. Os dados
medidos e os dados obtidos na simulacao sao apresentados nas curvas da Fig. 3.6.
0,075
0,080
0,085
0,090
0,095
0,100
0,105
0,110
1,00 1,50 2,00 2,50 3,00 3,50
Am
plitu
de d
e os
cila
ção
da s
aida
VN
N [V
]
Tensão de Controle (Vctrl) [V]
SimulaçãoTeste
Figura 3.6. Amplitude de oscilacao no no VNN versus Tensao de controle.
Os dados da Fig. 3.6 mostram que a amplitude de saıda medida esta proxima
dos resultados da simulacao, mostrando um desvıo da ordem de 10 %. Conside-
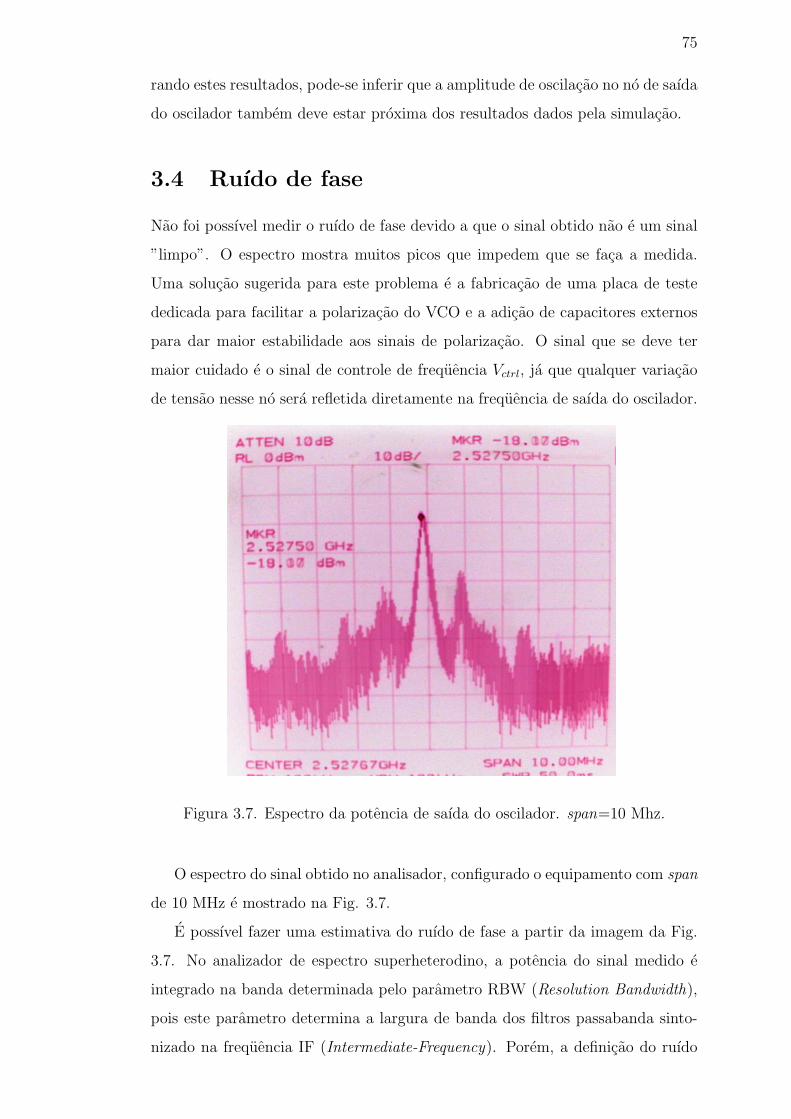
75
rando estes resultados, pode-se inferir que a amplitude de oscilacao no no de saıda
do oscilador tambem deve estar proxima dos resultados dados pela simulacao.
3.4 Ruıdo de fase
Nao foi possıvel medir o ruıdo de fase devido a que o sinal obtido nao e um sinal
”limpo”. O espectro mostra muitos picos que impedem que se faca a medida.
Uma solucao sugerida para este problema e a fabricacao de uma placa de teste
dedicada para facilitar a polarizacao do VCO e a adicao de capacitores externos
para dar maior estabilidade aos sinais de polarizacao. O sinal que se deve ter
maior cuidado e o sinal de controle de frequencia Vctrl, ja que qualquer variacao
de tensao nesse no sera refletida diretamente na frequencia de saıda do oscilador.
Figura 3.7. Espectro da potencia de saıda do oscilador. span=10 Mhz.
O espectro do sinal obtido no analisador, configurado o equipamento com span
de 10 MHz e mostrado na Fig. 3.7.
E possıvel fazer uma estimativa do ruıdo de fase a partir da imagem da Fig.
3.7. No analizador de espectro superheterodino, a potencia do sinal medido e
integrado na banda determinada pelo parametro RBW (Resolution Bandwidth),
pois este parametro determina a largura de banda dos filtros passabanda sinto-
nizado na frequencia IF (Intermediate-Frequency). Porem, a definicao do ruıdo
76
de fase considera a potencia do ruıdo integrado numa largura de banda de 1 Hz,
portanto e preciso fazer a correcao ao valor medido na tela do equipamento, como
e mostrado a continuacao:
L∆F = ∆P − 10.log(RBW ) (3.1)
onde:
L∆F : Ruıdo de fase medido a ∆F da frequencia de oscilacao;
∆P : Diferencia em potencia entre a portadora e a banda lateral;
RBW Resolution Bandwith. Largura de banda do filtro IF.
No analizador de espectro utilizado, ao estabelecer um SPAN de 10 MHz e
utilizar a configuracao automatica do RBW, o RBW e fixado em 100 KHz. A
diferencia de potencia ∆P vista na tela, a 3 MHz da frequencia da portadora
e aproximadamente -50 dBc. Com estes valores, o ruıdo de fase a 3 MHz da
frequencia de oscilacao esta dado por:
L3MHz = −50dBc− 10.log(100K) = −100dBc@3MHz (3.2)
O valor de ruıdo de fase estimado mostra que embora a montagem usada para
a medida do ruıdo de fase nao foi a melhor, a resposta do circuito esta proxima
de atingir a especificacao de ruıdo de fase para a qual foi projetado.

Capıtulo 4
Conclusoes e Recomendacoes
4.1 Conclusoes
Apresentou-se a funcao do circuito oscilador dentro de um sistema transceptor
de radio frequencia. Explicou-se o conceito de ruıdo de fase e abordou-se dois
modelos usados para explicar o ruıdo de fase em osciladores.
Implementou-se um oscilador controlado por tensao a 2,4 GHz, em tecnologia
0,35 µm CMOS com 4 camadas de metal e 2 de polisilıcio, sem o uso de nenhum
componente externo. O projeto foi feito visando satisfazer o parametro de ruıdo
de fase calculado a partir das especificacoes do sistema de radio Bluetooth.
O indutor, componente crıtico do circuito, foi implementado como uma estru-
tura planar nas duas ultimas camadas de metal de quatro nıveis disponıveis na
tecnologia. Utilizou-se o programa ASITIC para a modelagem de indutores com
diversas geometrias e escolheu-se a estrutura apropriada para o circuito com base
na resistencia parasitaria da estrutura, a faixa de variacao de frequencia atingida
pelo circuito e a amplitude do sinal de saıda do oscilador. Usou-se um diodo de
juncao como elemento sintonizador da frequencia. Implementou-se este compo-
nente como uma estrutura diferencial que garante um melhor fator de qualidade
do que o uso de dois diodos com estrutura single-ended. O layout foi feito tendo
cuidados para que o circuito fosse tao simetrico quanto possıvel para garantir
simetria do sinal gerado.
Das simulacoes pos-layout obteve-se uma faixa de variacao de frequencia de
2,28 GHz ate 2,56 GHz, faixa que inclui a frequencia requerida de 2,4 GHz, o ruıdo
de fase de -128dBc/Hz@3MHz e a amplitude de oscilacao de 0,9 V. O circuito
oscilador e alimentado com uma fonte de 3,3 V e consome 2 mA.
77

78
Os testes do circuito mostraram que o oscilador possui uma faixa de variacao
de frequencia de 2,21 GHz ate 2,53 GHz. Esta faixa esta proxima dos resultados
vistos na simulacao e ainda inclui a frequencia de oscilacao para a qual o circuito
foi projetado. Dos dados de amplitude de oscilacao observados no no de saıda
do buffer pode-se inferir que a amplitude do sinal na saıda do oscilador esta
proxima dos resultados vistos na simulacao. Os testes foram feitos com uma
fonte de alimentacao de 3,3 V e aplicando uma corrente de 2 mA ao oscilador,
estes valores de polarizacao foram os mesmos usados durante as simulacoes.
A caracterıstica de ruıdo de fase do circuito nao foi satisfactoria. Considera-se
que a causa desse ruıdo sao as variacoes dos sinais de polarizacao do circuito, em
especial, a tensao do no Vctrl. Estas variacoes poder-se-iam reduzir com o projeto
de uma placa de teste dedicada para a polarizacao do oscilador.
4.2 Recomendacoes
Como os indutores sao uma parte essencial dos circuitos osciladores LC e de
outros blocos dos sistemas de transmissao e recepcao RF, e fundamental caracte-
rizar muito bem estes elementos usando a simulacao, fabricacao e validacao dos
parametros esperados. Uma vez validado a ferramenta de simulacao e ajusta-
dos os parametros para uma tecnologia dada, o projeto de circuitos que usarem
estes elementos sera muito mais facil e confiavel. A mesma situacao acontece
com os varactores, no nosso grupo ainda nenhum trabalho tinha sido feito na
caracterizacao destes elementos.
Uma vez conhecidos os passos para o projeto e implementacao do oscilador, a
implementacao de um trabalho futuro que involva a interacao com o PLL , mixer
ou onde o oscilador faca parte de um transceptor completo, caracterısticas de am-
plitude de oscilacao e consumo podem ser mudadas para melhorar o desempenho
do circuito inteiro.
Para obter uma melhor resposta do circuito seria preciso criar uma placa que
permita o facil acesso aos sinais de polarizacao e a soldagem de componentes
externos que proporcionem maior estabilidade aos sinais de polarizacao e adicio-
nem protecao ao circuito. O uso de capacitores soldados sobre a placa de teste
permitiria a reducao de variacao dos sinais de polarizacao e garantiria um si-
nal de saıda com menor ruıdo. O fato da protecao e importante porque para a

79
polarizacao do circuito esta-se accesando a portas de transistores. A espessura
do oxido numa tecnologia como a usada e muito fina e o circuito e facilmente
destruıdo por manipulacao.
Finalmente, e importante que sejam caracterizados os blocos que combinam
o VCO com outros, tambem disponıveis no chip prototipo, entre eles: VCO e
mixer, VCO, LNA e mixer, e o circuito sintetizador de frequencia.

Apendice A
Arquivo de Parametros da
Tecnologia para ASITIC
;-------------------------------------------------------------------------------; C35B4C3 0.35um CMOS technology file;-------------------------------------------------------------------------------; Based on documentation of AMS - Austria Micro Systeme International AG; Document ENG-182 Rev 2; DMPSV - LSI - USP; Last changed on 15/07/2003;-------------------------------------------------------------------------------<chip>
chipx=512 ; dimensions of the chip in x directionchipy=512 ; dimensions of the chip in y directionfftx=256 ; x-fft size (must be a power of 2)ffty=256 ; y-fft sizeTechFile=c35.tekTechPath=.freq=2.4 ; Frequency of operationeddy=0 ; layer 0 defined below is conductive
<layer> 0 ; p(-) bulk layerrho = 19 ; ohm-cmt = 725 ; micronseps = 11.9
<layer> 1 ; Oxiderho = 1e10 ; ohm-cmt = 5.835 ; micronseps = 3.9
<metal> 0layer = 1 ; poly1rsh = 8000 ; sheet resistance Mili-Ohms/Squaret = 0.282 ; thickness (microns)d = 0.2976 ; dist from bottom of layer (at surface)name = POLY1color = Red
<via> 0 ; metal 1 to polytop = 1 ; via connects up to this metal layerbottom = 0 ; via connectsdown to this metal layer
80

81
r = 2 ; resistance per viawidth = .4 ; width of viaspace = .5 ; minimum spacing between viasoverplot1 = .1 ; minimum dist to top layeroverplot2 = .2 ; minimum dist to bottom layername = CONTcolor = blue
<metal> 1layer = 1 ; metal1rsh = 80 ; sheet resistance Mili-Ohms/Squaret = 0.665 ; thickness (microns)d = 0.935 ; dist from bottom of layer (at surface)name = MET1color = light blue
<via> 1 ; metal 2 to metal 1top = 2 ; via connects up to this metal layerbottom = 1 ; via connectsdown to this metal layerr = 1.2 ; resistance per viawidth = .5 ; width of viaspace = .5 ; minimum spacing between viasoverplot1 = .1 ; minimum dist to topoverplot2 = .2 ; minimum dist to bottomname = VIAcolor = Magenta
<metal> 2layer = 1 ; metal2rsh = 80 ; sheet resistance Mili-Ohms/Squaret = 0.640 ; thickness (microns)d = 1.935 ; dist from bottom of layer (at surface)name = MET2color = dark blue
<via> 2 ; metal 3 to metal 2top = 3bottom = 2r = 1.2width = .5space = .5overplot1 = .2overplot2 = .1name = VIA2color = cyan1
<metal> 3layer = 1 ; metal3rsh = 80 ; sheet resistance Mili-Ohms/Squaret = 0.640 ; thickness (microns)d = 2.935 ; dist from bottom of layer (at surface)name = MET3color = Sienna
<via> 3 ; metal 4 to metal 3top = 4bottom = 3r = 1.2width = .5space = .5overplot1 = .2

82
overplot2 = .1name = VIA3color = cyan1
<metal> 4layer = 1 ; metal4rsh = 40 ; sheet resistance Mili-Ohms/Squaret = 0.925 ; thickness (microns)d = 3.935 ; dist from bottom of layer (at surface)name = MET4color = Green
;-------------------------------------------------------------------------------

Referencias Bibliograficas
[1] L. E. Larson, “Integrated circuit technology options for rfic’s present status
and future directions,” IEEE J. Solid-State Circuits, vol. 33, pp. 387–399,
Mar. 1998.
[2] M. Steyaert, “Single chip CMOS RF transceivers: wishful thinking or rea-
lity,” in Low Power IC Design (Ref. No. 2001/042), IEE Seminar on, Jan.
2001, pp. 1/6–6/6.
[3] A. Abidi et al., “The future of CMOS wireless transceivers,” in IEEE ISSC
Conference Dig. Tech. Papers, Feb. 1997, pp. 118–119,440.
[4] B. Ackland, L. R. Carley, B. Kaiser, H. Kalter, K. Soumyanath, C. Svensson,
and P. Vasudev, “RF integration into CMOS and deep-submicron challen-
ges,” IEEE Des. Test. Comput., vol. 16, pp. 112–116, Jul.-Sep. 1999.
[5] J. R. Long and M. A. Copeland, “The modeling, characterization, and design
of monolithic inductors for silicon RF IC’s,” IEEE J. Solid-State Circuits,
vol. 32, pp. 736–745, May. 1997.
[6] A. M. Niknejad and R. Meyer, “Analysis, design and optimization of spiral
inductors and transformers for Si RF IC’s,” IEEE J. Solid-State Circuits,
vol. 33, pp. 329–330, Oct. 1998.
[7] F. Svelto, S. P. Erratico, and R.Castello, “A Metal-Oxide-Semiconductor
varactor,” IEEE Electron Device Lett., vol. 20, pp. 164–166, Apr. 1999.
[8] F. Svelto, S.Manzini, and R.Castello, “A three terminal varactor for RF IC’s
in standard CMOS technology,” IEEE Trans. Electron Devices, vol. 47, pp.
893–895, Apr. 2000.
[9] P. Andreani and S. Mattisson, “On the use of MOS in RF VCO’s,” IEEE
Trans. Electron Devices, vol. 35, pp. 905–910, Jun. 2000.
83

84
[10] A. Zolfaghari and B. Razavi, “A Low-Power 2.4-GHz transmitter/receiver
CMOS IC,” IEEE J. Solid-State Circuits, vol. 38, pp. 176–183, Feb. 2003.
[11] S. Mahdavi and A. Abidi, “Fully integrated 2.2-mW CMOS Front End for
900-MHz wireless receiver,” IEEE J. Solid-State Circuits, vol. 37, pp. 662–
669, May. 2002.
[12] A. Rofougaram et al., “A 2.4-GHz CMOS transceiver for bluetooth,” IEEE
J. Solid-State Circuits, vol. 36, pp. 2016–2024, Dec. 2001.
[13] B. Razavi, RF Microelectronics. McGraw-Hill, 1998.
[14] J. Craninckx and M. Steyaert, Wireless CMOS frequency synthesizer design.
Kluwer Academic Publishers, 1998.
[15] R. W. Rhea, Oscillator Design and Computer Simulation. Noble Publishing
Corporation, 1995.
[16] R. P. Bernardo, “Saw voltage-controlled oscillators,” Microwave Journal,
pp. 166–177, Sept. 2002. Disponıvel em: http://www.mwjournal.com
[17] J. Burghartz, M. Souyer, and K. Jenkins, “Multilevel-spiral inductors using
VLSI interconnect technology,” IEEE Electron Device Lett., vol. 17, pp. 428–
430, Sept. 1996.
[18] J. Craninckx and M. S. J. Steyaert, “A 1.8-GHz CMOS low-phase-noise
voltage-controlled oscillator with prescaler,” IEEE J. Solid-State Circuits,
vol. 30, pp. 1474–1482, Dec. 1995.
[19] L.Zu et al., “High Q-factor inductors integrated on MCM Si substrates,”
IEEE Trans. Comp., Packag., Manufact. Technol. B, vol. 19, pp. 635–643,
Aug. 1996.
[20] C. P. Yue and S. S. Wong, “On-Chip spiral inductors with patterned ground
shields for Si-based RF IC’s,” IEEE J. Solid-State Circuits, vol. 33, pp. 743–
732, May. 1998.
[21] J. Chang, A. Abidi, and M. Gaitan, “Large suspended inductors on silicon
and their use on 2µm CMOS RF amplifier,” IEEE Electron Device Lett.,
vol. 14, pp. 246–248, May. 1993.

85
[22] J. Craninckx and M. S. J. Steyaert, “A 1.8-GHz low-phase-noise CMOS
VCO using optimized hollow spiral inductors,” IEEE J. Solid-State Circuits,
vol. 32, pp. 736–744, May. 1997.
[23] P. Andreani, “A comparison between two 1.8GHz CMOS VCOs tuned by
different varactors,” in Proc. European Solid State Circuits Conf., Sept. 1998,
pp. 380–383.
[24] T. Soorapanth et al., “Analysis and optimization of accumulation-mode va-
ractor for RF ICs,” in Digest of Technical Papers. Symposium on VLSI Cir-
cuits, Jun. 1998, pp. 32–33.
[25] AustriaMicroSystems. 0.35µm CMOS process technology. Disponıvel
em: http://www.austriamicrosystems.com/05foundry/indexc35.htm. Aces-
sado em: Jun., 2003.
[26] D. B. Leeson, “A simple model of feedback oscillator noise spectrum,”
PROC. IEEE, vol. 54, pp. 329–330, Feb. 1966.
[27] B. Razavi, “A study of phase noise in CMOS oscillators,” IEEE J. Solid-
State Circuits, vol. 31, pp. 331–343, Mar. 1996.
[28] A. Hajimiri and T. H. Lee, “A general theory of phase noise in electrical
oscillators,” IEEE J. Solid-State Circuits, vol. 33, pp. 179–194, Feb. 1998.
[29] J. Rudell, P. Gray, J. Weldon, J. Ou, and L. Lin, An integrated GSM/DECT
Receiver: Design Specifications. UCB Electronics Research Laboratory Me-
morandum, 1998.
[30] J. J. Carr, Secrets of RF circuit design. Mc Graw Hill, 1997.
[31] Bluetooth TM, Bluetooth Specification Version 1.1, Feb. 2001. Disponıvel
em: http://www.bluetooth.com/
[32] R. Schiphorst, “Channel selection requirement for bluetooth receivers
using a simple demodulation algorithm,” in ProRISC Workshop 2001,
Veldhoven, The Netherlands, Nov. 2001, pp. 1–8. Disponıvel em:
http://www.stw.nl/prorisc/proc-2001/toc.html
[33] L. Larson, RF and MIcrowave circuit design for wireless communication.
Artech House, INC., 1997.
86
[34] Ansoft Corporation, Designing RFIC Modules for 2.4 GHz wireless applica-
tion, Jun. 2002.
[35] L. C. Moreira, “Estruturas de indutores monolıticos para circuitos RF na
tecnologia MOS,” Tese de Doutorado, Escola Politecnica da Universidade de
Sao Paulo, Brasil, 2002.
[36] J. Craninckx and M. S. J. Steyaert, “Low-noise voltage-controlle oscillators
using enhanced LC-tanks,” IEEE Trans. Circuits Syst. II, vol. 42, pp. 794–
804, Dec. 1995.
[37] S. S. Mohan, “The design, modeling and optimization of on-chip inductor
and transformer circuits,” Tese de Doutorado, Stanford University, U.S.A,
Feb. 1999.
[38] Sonnet Software. Sonnet suites release 9. Disponıvel em:
http://www.sonnetusa.com/products/em/index.asp Acessado em: Aug.,
2003.
[39] Infolytica Corporation. Magnet software. Disponıvel em:
http://www.infolytica.com/en/products/magnet6/ Acessado em: Ago,
2003.
[40] A. M. Niknejad. Asitic: Analysis and simulation of spiral inductors and
transformers for ics. Disponıvel em: http://formosa.eecs.berkeley.edu/ nik-
nejad/asitic.html. Acessado em: Jul., 2003.
[41] Massachusets Institute of Technology. Fast field solvers. Disponıvel em:
http://www.fastfieldsolvers.com/ Acessado em: Out, 2003.
[42] H. Green, “Design of planar rectangular microelectronic inductors,” IEEE
Trans. Parts, Hybrids, Packag., vol. 10, pp. 1001–1009, Jun. 1974.
[43] A.-S. Porret, T. Melly, C. Enz, and E. A. Vittoz, “Design of high-Q varactors
for low-power wireless applications using a standard CMOS process,” IEEE
J. Solid-State Circuits, vol. 35, pp. 337–345, Mar. 2000.
[44] R. Gregorian and G. C. Temes, Analog MOS integrated circuits for signal
processing. Wiley, 1986.

87
[45] A. Hajimiri and T. H. Lee, “Design issues in CMOS differential LC oscilla-
tors,” IEEE J. Solid-State Circuits, vol. 34, pp. 717–724, May. 1999.
[46] R. Aparicio and A. Hajimiri, “A noise-shifting diferential Colpitts VCO,”
IEEE J. Solid-State Circuits, vol. 37, pp. 1728–1736, Dec. 2002.
[47] Mentor Graphics Corporation. Eldo rf. Disponıvel em:
http://www.mentor.com/ams/eldorf.html. Acessado em: Nov., 2003.
[48] Mentor Graphics Corporation, Eldo RF User’s Manual. Mentor Graphics
Corporation, 2002.
[49] Mentor Graphics Corporation, VCO Simulations with Eldo RF
(tuning range and phase noise), Aug. 2000. Disponıvel em:
http://www.mentor.com/dsm/techpapers/
[50] Austria Microsystems, 0.35 µm CMOS C35 Noise Parameters, Apr. 2002.


















