apostila de mecanismos.pdf
50
Apostila Prof. Patric Daniel Neis - Disciplina: MECANISMOS 1 UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL (UFRGS) DEPARTAMENTO DE ENGENHARIA MECÂNICA APOSTILA DE CAMES, QUATRO BARRAS, CURSOR MANIVELA, GARFO ESCOCÊS, MECANISMOS DE RETORNO RÁPIDO E MANIVELA ARTICULADA Disponível em: Apostila da disciplina mecanismos I (ENG03316) ministrada pelo Prof. Patric Daniel Neis no curso de Engenharia Mecânica da UFRGS Porto Alegre, 2012
-
Upload
adalberto-miranda -
Category
Documents
-
view
307 -
download
26
Transcript of apostila de mecanismos.pdf

Apostila Prof. Patric Daniel Neis - Disciplina: MECANISMOS 1
UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL (UFRGS) DEPARTAMENTO DE ENGENHARIA MECÂNICA
APOSTILA DE CAMES, QUATRO BARRAS, CURSOR MANIVELA, GARFO ESCOCÊS, MECANISMOS DE RETORNO RÁPIDO E
MANIVELA ARTICULADA
Disponível em:
Apostila da disciplina mecanismos I (ENG03316) ministrada pelo Prof. Patric Daniel Neis no curso de Engenharia Mecânica da UFRGS
Porto Alegre, 2012

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
2
Conceitos e definições de Mecanismos
Mecanismo é um conjunto de corpos rígidos de tal modo interligados que o movimento de um provoque o movimento dos restantes. Quando há uma fonte de energia associada aos elementos em movimento relativo, trata-se de uma máquina.
Quando não há especificado, dentre os elementos, qual é a base (frame) ou elemento fixo do sistema, esse sistema recebe o nome de cadeia cinemática. Uma vez definidos um ou mais elementos fixos, o sistema recebe o nome de mecanismo. Em outras palavras, em um mecanismo pelo menos um dos elementos deve ser o elemento fixo.
Além disso, para um mecanismo ser considerado útil, é ainda necessário que o mesmo possa produzir um movimento próprio, de forma que o projeto seja capaz de desempenhar a tarefa para o qual o mecanismo foi designado. A função de uma junta ou conexão é definir o movimento relativo entre os elementos acoplados.
Cinemática: estudo do movimento independentemente das forças que o originaram. São estudados, por exemplo, posição, geometria, deslocamento, rotação,velocidade e aceleração.
Pares cinemáticos são as conexões ou juntas entre as barras ou elementos de um sistema que transmite movimento de uma entrada para uma saída (pode ser de um mecanismo ou de uma cadeia cinemática). Pares cinemáticos podem ser de 2 tipos:
i) Pares inferiores (lower pairs): correspondem àqueles em que ocorre contato entre a área ou superfície de seus elementos. Exemplo: porca e parafuso, manivela-cursor, junta universal. Um sistema articulado (4 barras, por exemplo) é conectado somente por pares inferiores.
ii) Pares superiores (higher pairs): o contato ocorre entre pontos ou entre uma linha. Exemplos de pares superiores: par de engrenagens, uma roda rolando e/ou escorregando sobre uma superfície e um came em contato com seu seguidor.
A seguir, a Figura 1 mostra os 6 pares cinemáticos (ou conexões) inferiores:
Figura 1 – Pares cinemáticos inferiores: (a) par de revolução, (b) par prismático, (c) par helicoidal, (d) par cilíndrico, (e) par esférico e (f) par plano.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
3
A seguir, é mostrada a relação entre cada par cinemático e o seu respectivo número de graus de liberdade:
Figura 2 - Par de revolução: movimento circular - 1 grau de liberdade.
Figura 3 - Par prismático: movimento retilíneo - 1 grau de liberdade.
Figura 4 - Par helicoidal: movimento helicoidal - 1 grau de liberdade.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
4
Figura 5 - Par cilíndrico: movimento cilíndrico - 2 graus de liberdade.
Figura 6 - Par esférico: movimento esférico- 3 graus de liberdade.
Figura 7 - Par plano: movimento planar - 3 graus de liberdade.
Critério de Kutzbach: fornece a mobilidade ou grau de liberdade. A equação de Kutzbach está descrita a seguir:
M=3(n-1)-2j1-j2 Onde, M é o número de graus de liberdade, n é o número de elementos, j1 é o número de elementos de 1 grau de liberdade, j2 é o número de elementos de 2 graus de liberdade (pares superiores). Se m = 1, é preciso travar um único elemento para parar o mecanismo. Se m=2, é necessário travar 2 elementos.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
5
Se m=0, então o movimento é impossível e o mecanismo forma uma estrutura. Se m<0, então há restrições redundantes e a estrutura hiperestática.
Figura 8 – Graus da liberdade calculado de acordo com o critério de Kutzbach.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
6
Classificação de mecanismos Mecanismos se dividem em 3 categorias, de acordo com as características de movimentação entre seus elementos: i) Mecanismos planares: utilizam somente sistemas articulados planares. Maioria dos mecanismos se enquadram nesta categoria. Todos eixos são compostos por pares de revolução e prismáticos. Os pares de revolução são normais ao plano de movimento enquanto todos pares prismáticos são paralelos. São exemplos deste tipo de mecanismo: manivela-cursor, came seguidor e mecanismos de 4 barras.Todos movimentos deste tipo de mecanismo podem ser representados em uma vista única (coplanar). ii) Mecanismos esféricos: cada ponto descreve uma curva contida em uma esfera. As superfícies concêntricas definidas por vários pontos escolhidos arbitrariamente são todas concêntricas. Exemplo deste tipo de mecanismo é o eixo cardan ou junta universal. iii) Mecanismos espaciais: o movimento não é coplanar e nem esférico. Um mecanismo espacial pode ter partículas com localização de dupla curvatura. Qualquer sistema articulado que contenha um par de parafuso é, na verdade, um mecanismo espacial (movimento helicoidal). Observação: considere um mecanismo de 4 barras. O paralelismo entre suas barras é, na verdade, uma hipótese matemática e não é a realidade. Se há um desalinhamento elevado, o mecanismo só opera devido à flexibilidade dos seus elementos, produzindo sobrecarga nos rolamentos e mancais. Se os eixos são pouco desalinhados, o mecanismo opera devido às folgas dos mancais e flexibilidade das barras. Nestas condições, tal mecanismo planar é, ainda que em um grau baixo, um mecanismo espacial. Assim, a esmagadora maioria dos mecanismos são, na realidade, mecanismos espaciais.
Quanto ao tipo de função e de transformação de movimento, Torfason menciona 262 diferentes mecanismos, os quais são categorizados conforme segue:
1) Mecanismo de estalo (Figura 9): estão nesta categoria chaves comutadoras, mecanismos flip-flop usado como chaves e abraçadeiras.
Figura 9 – Típicos mecanismo de estalo.
2) Mecanismos de atuadores lineares:encontram-se nesta categoria os cilindros hidráulicos e pneumáticos bem como os parafusos e porcas.
3) Mecanismos de ajuste fino: mecanismos de rosca de parafuso, engrenagem sem-fim e sistemas de alavancas.
4) Mecanismos de abraçadeira (Figura 10): inclui abraçadeira C, morsa e abraçadeiras em geral.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
7
(a) (b)
Figura 10 – Típicos mecanismo de abraçadeira: (a) abraçadeira C e (b) morsa.
5) Mecanismos de catraca (Figura 11): são empregados em travas, mecanismos de alavanca, relógios e demais aplicações que requerem movimento intermitente.
Figura 11 – Típicos mecanismos de catraca.
Da esquerda para direita, o primeiro mecanismo permite rotação apenas em um sentido. O mecanismo apresentado ao meio possui o controle pela roda da esquerda, a qual gira continuamente e produz movimento intermitente na roda guiada, em direção oposta. O mecanismo da direita é empregado em relógios de pêndulo, no qual a catraca gira continuamente, produzindo o movimento oscilatório do pêndulo.
6) Mecanismos de indexação (Figura 12): da mesma forma que os mecanismos de catraca, os mecanismos de indexação também produzem movimento intermitente. Um exemplo clássico é o a roda de Genebra, que é muito usada em projetores de filme para apresentar uma imagem por vez. Outro exemplo é o mecanismo de engrenagens mostrado pela Figura 13.
Figura 12 – Roda de Genebra.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
8
Figura 13 – Mecanismo de indexação formado por engrenagens.
6) Mecanismos de balanço ou osciladores: o elemento de saída oscila em um ângulo geralmente menor do que 360º. Enquadram-se nesta classificação mecanismos de 4 barras (Figura 14) e mecanismos de came e seguidor, de acordo com a configuração mostrada na Figura 15. O sistema mostrado pela Figura 16, onde uma manivela (a) ligada a um elemento de ligação que possui uma cremalheira e faz a engrenagem (c) oscilar, também configura um oscilador. Por fim, o mecanismo de retorno rápido mostrado pela Figura 17 também é um exemplo de oscilador.
Figura 14 – Oscilador: mecanismo de 4 barras.
Figura 15 – Oscilador: mecanismo de cames.
Figura 16 – Oscilador: configuração formada por manivela (elemento a), cremalheira (elemento b) e engrenagem (elemento c).

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
9
Figura 17 – Oscilador: mecanismo de retorno rápido.
Uma particularidade de mecanismos de retorno rápido é a razão dos tempos R, definida pela relação entre os tempos relativos ao curso de avanço e retorno da manivela ou simplesmente pela relação entre os ângulos de avanço (α) e de retorno (β) do mecanismo. Assim, pela Equação 1 tem-se que:
(1)
São também muitas vezes considerados mecanismos de retorno rápido o manivela-biela desalinhada e o mecanismo de barras ilustrado pela Figura 18.
Figura 18- Mecanismo de retorno rápido.
7) Mecanismos de movimento recíproco ou vai e vem (reciprocating) ou alternado: movimento retilíneo de vai e vem pode ser obtido por cilindros, sistema de porca e parafuso, sistemas de came e seguidor, manivela-cursor, mecanismo de garfo escocês e mecanismo Whitworth de retorno rápido. A Figura 19 apresenta alguns exemplos de mecanismos de vai e vem.
Figura 19 – Típico mecanismo de movimento recíproco: mecanismo whitworth de retorno rápido (configuração normal e invertida).
8) Mecanismos de reversão: tratam-se de sistemas capazes de entregar a rotação de saída em direções opostas. Eixos de entrada podem girar em direções opostas e um sistema de

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
10
embreagens acopla o eixo de saída de acordo com a direção do movimento desejado. Transmissão automotiva também é um exemplo de mecanismo de reversão.
9) Acoplamento e conectores: são elementos para transmitir movimento entre eixos. Engrenagens, correias, 4 barras e juntas de diversos tipos (universal, Reuleaux).
10) Parada, pausa e hesitação mecanismo: em um motor automotivo, uma válvula precisa abrir, permanecer aberta por um curto espaço de tempo e então fechar. Dentro desta categoria, existem os mecanismos para e permanece, para e retorna e para e avança. Cames, mecanismos de indexação, mecanismos de catracas, engrenagens com embreagens e sistemas articulados no limite de seus movimentos.
11) Mecanismos geradores de curva: composto por sistema de barras articuladas, como um quatro barras.
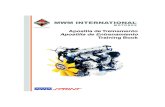
12) Mecanismos geradores de reta: durante o século XVII, antes do desenvolvimento do processo de fresagem, era extremamente difícil de se obter superfícies planas. Por consequencia, isso dificultava a obtenção de uma conexão ou junta prismática sem folgas. Assim, especial atenção foi dada ao desenvolvimento de geradores de reta a partir de sistemas articulados. Esses mecanismos poderiam ser assim empregados como guia de peças móveis em máquinas. A Figura 20-a apresenta o mecanismo de Watt,o qual é capaz de gerar uma boa aproximação para uma linha reta. Outro gerador de retas é o mecanismo de Robert (Figura 20-b). Neste mecanismo, o ponto P é usado para gerar a traço. As linhas tracejadas sobre a referida figura servem para mostrar que o mecanismo de Robert consiste de uma configuração de 3 triângulos isósceles. O sistema articulado descrito pela Figura 20-c é o mecanismo de Chebychev. O traço de P descreve uma linha reta. Finalmente, o sistema articulado descrito pela Figura 20-d trata-se do mecanismo de Peaucillier inversor. O traço do ponto P deste mecanismo é gerador de linha reta. Pantógrafo é também um exemplo de mecanismo traçador de linhas retas.
Figura 20 – Traçadores de linha reta: (a) Mecanismo de Watt, (b) Mecanismo de Robert, (c) Mecanismo de Chebychev e (d) Mecanismo de Peaucillier inversor.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
11
Mecanismo manivela-biela ou manivela-cursor
É um mecanismo planar de movimento alternativo, empregado para transformar movimento rotativo em alternativo (Ex.: Compressores, onde a entrada do movimento dá-se pela manivela; Bombas manuais; Serras de pedras) ou movimento alternativo em rotativo (Ex.: Motores a combustão interna; Motor rotativo usado na aviação antiga).
Aplicações: Compressores, locomotivas a vapor, motores rotativos, bomba de água manual, motores a combustão interna, bomba extratora de petróleo, moinho, prensas, molinete de pesca e serras de madeira.
Um mecanismo manivela-biela pode ser alinhado (Figura 21) ou desalinhado (Figura 22) em relação ao centro do eixo da manivela ao centro do eixo do cursor. No mecanismo manivela-biela alinhado, o movimento não é harmônico. Porém, o tempo de avanço e retorno são iguais. No desalinhado, o tempo de retorno é diferente do tempo de avanço. O mecanismo manivela-biela traz como benefício o fato de que é mais difícil de ocorrer o trancamento, uma vez que suas barras (manivela e biela) nunca estarão alinhadas a 180º. N
Figura 21 – Mecanismo de manivela-biela alinhado.
Figura 22 – Mecanismo de manivela-biela desalinhado.
A distância máxima percorrida pelo cursor do mecanismo manivela biela é chamada de curso, sendo seu máximo deslocamento conhecido como PMS (ponto morto superior) e seu mínimo deslocamento como PMI (ponto morto inferior). No caso do mecanismo manivela-biela alinhado, PMS= L+R, PMI=L-R e curso=2R.
Equacionamento do manivela biela alinhado, em função de θ. Caso seja necessário colocar a equação em função de tempo, basta fazer θ=ωt.
Posição:
Em x: ( ) ( ) ( ) ( )

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
12
Em y: ( ) ( ) ( )
( ) ( )
(3)
Da identidade trigonométrica:
( ) ( ) ( )
( ) √ ( ) ( )
Substituindo (3) em (5), temos:
( ) √ ( ( )
)
( )
Substituindo (6) em (1), consegue-se deixar toda a equação em função de θ:
( ) ( ) √ ( ( )
)
Velocidade:
A velocidade é a derivada da posição em relação ao tempo, o que faz aparecer o termo de velocidade angular ω multiplicando d/dθ:
[ ( ) √ (
( )
)
] ( )
[
( ) ( ) ( )
[ ( ( ))
]
]
( )
Aceleração:
A aceleração é igual a derivada da velocidade em relação ao tempo, o que faz aparecer o termo de velocidade angular ao quadrado ω²:
{
[
( ) ( ) ( )
[ ( ( ))
]
]
}

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
13
Observação: pode-se usar o maple para encontrar as derivadas de X e V. Os comandos em maple para se encontrar essas derivadas são descritos a seguir:
> restart;
> x(theta):= R*cos(theta)+L*sqrt(1-((R^2/L^2)*sin(theta)^2));
> V:=omega*diff(x(theta),theta);
> Acel:=(omega)*diff(V,theta);
Equacionamento do manivela biela desalinhado (veja Figura 21):
Posição:
Em x: ( ) ( ) ( ) ( )
Em y: ( ) ( ) ( )
( ) ( )
(3)
Da identidade trigonométrica:
( ) ( ) ( )
( ) √ ( ) ( )
Substituindo (3) em (5), temos:
( ) √ ( ( )
)
( )
Substituindo (6) em (1), consegue-se deixar toda a equação em função de θ:
( ) ( ) √ ( ( )
)
Observação: o sinal do desalinhamento “e” modifica-se conforme se o desalinhamento é para cima ou para baixo em relação a linha de centro da manivela.
Velocidade e aceleraçao: A velocidade e a aceleração calculadas, respectivamente, como sendo a derivada da posição e da velocidade em relação ao tempo, e determinadas pelo programa maple (linha de comando e equação) é igual a:
:= Acel 2
R ( )cos R
4( )sin
2( )cos
2
L3
1R
2( )sin
2
L2
3
2
R2
( )cos 2
L 1R
2( )sin
2
L2
R2
( )sin 2
L 1R
2( )sin
2
L2

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
14
> restart;
> x(theta):= R*cos(theta)+L*sqrt(1-((R/L)*sin(theta)-(e/L))^2);
>
> V:=omega*diff(x(theta),theta);
> Acel:=(omega)*diff(V,theta);
Inversões do manivela-biela:
Inversões manivela-cursor: o processo de escolha de diferentes elementos para ser o elemento fixo se chama inversão. Lembrando que um mecanismo de manivela-cursor possui 4 elementos (manivela, biela, cursor e cilindro), são possíveis 4 diferentes inversões:
Para “visualizar” as inversões, é preciso decompor o mecanismo de manivela-biela em 4 elementos: estrutura, cursor, manivela e biela.
1) O elemento fixo é a estrutura de apoio: a estrutura de apoio refere-se ao cilindro externo e o ponto de apoio da manivela. É o caso típico de motores a combustão interna (Figura 23). No caso da entrada de energia se der pela manivela, o mecanismo é um compressor.
Figura 23 – Inversão do mecanismo de manivela-curso com elemento fixo no cilindro: motores à combustão interna.
:= ( )x R ( )cos L 1
R ( )sin
L
e
L
2
:= V
R ( )sin
R ( )sin
L
e
LR ( )cos
1
R ( )sin
L
e
L
2
Acel 2 R ( )cos
R ( )sin
L
e
L
2
R2 ( )cos 2
1
R ( )sin
L
e
L
2( )/3 2
L
R2 ( )cos 2
1
R ( )sin
L
e
L
2
L
:=
R ( )sin
L
e
LR ( )sin
1
R ( )sin
L
e
L
2

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
15
2) O elemento fixo é a manivela: um exemplo típico deste mecanismo são os motores rotativos empregados na aviação antiga, conforme mostra a Figura 24.
Figura 24 – Inversão do mecanismo de manivela-cursor com elemento fixo na manivela: motores rotativos empregados na aviação antiga.
3) O elemento fixo é a biela ou barra de ligação: um exemplo típico deste mecanismo são os motores empregados nas locomotivas a vapor antiga e também em motores de navios, conforme mostra a Figura 25.
Figura 25 – Inversão do mecanismo de manivela-cursor com elemento fixo na biela.
4) O elemento fixo é o cilindro: um exemplo típico deste mecanismo são as bombas de água manuais empregadas em jardins, conforme mostra a Figura 26. Atenção para a diferença da inversão do primeiro elemento, a barra 1 (chamada de estrutura). Nesse caso, ela não é fixa, apenas o cilindro.
Figura 26 – Inversão do mecanismo de manivela-cursor com elemento fixo no cursor: aplicação em bombas de água manuais.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
16
Garfo escocês ou Scotch-Yoke ou par senoidal
É um mecanismo que se encontra na categoria de mecanismo planar de movimento alternativo. A saída do movimento de um garfo escocês é um movimento harmônico simples. Utilizado em mesas vibratórias, agitadores, geradores de seno e cosseno.
Figura 27 – Mecanismo de garfo escocês.
Equacionamento:
Considerando o ponto P da Figura 27-b:
Posição: ( ) ( ) ( )
Velocidade: ( ) ( ) ( )
Aceleração:
( ) ( ) ( )
Mecanismos de retorno rápido
Esses mecanismos enquadram-se na categoria de mecanismos planares osciladores. Mecanismos de retorno rápido possuem uma característica importante, chamada de razão dos tempos R, definida pela relação entre os tempos relativos ao curso de avanço e retorno da manivela ou simplesmente pela relação entre os ângulos de avanço (α) e de retorno (β) do mecanismo. Assim, pela Equação 1 tem-se que:
(1)
Pra R=1, tem-se tempo de avanço igual ao tempo de retorno. Para R<1, tem-se um tempo de avanço menor que o de retorno, configurando um mecanismo de avanço rápido. Para R>1, tem-se o tempo de avanço maior do que o de retorno,o que configura um mecanismo de retorno rápido. Observe que a simples inversão do sentido de giro faz o retorno rápido se tornar avanço rápido ou vice-versa.
A Figura 28 apresenta um mecanismo de retorno rápido, onde é possível visualizar a relação entre os ângulos de avanço e retorno. Neste mecanismo, o elemento número 2 é a manivela, o elemento 3 é uma guia e o elemento 4 é chamado de balancim. Uma particularidade específica

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
17
deste mecanismo é que quanto mais próximo o ponto de pivotamento O4 do balancim, maior a diferença entre os tempos de avanço e retorno do mecanismo.
Figura 28 – Mecanismo de retorno rápido.
São também muitas vezes considerados mecanismos de retorno rápido o manivela-biela desalinhada, o mecanismo de Whitworth (Figura 29) e o mecanismo de barras ilustrado na Fig. 29. O mecanismo de Whitworth é empregado em máquinas do tipo plaina limadora.
Figura 29- Mecanismo de retorno rápido whitworth, empregado em plainas limadoras.
Figura 30- Mecanismo de barras para retorno rápido.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
18
Mecanismo de alavanca articulada
Emprega-se um mecanismo de alavanca articulada (Fig. 30) quando é necessário superar uma grande resistência a custa de uma diminuta força motriz. É um mecanismo muito utilizado em britadoras, prensas e máqiuinas de rebitar.
Figura 31- Mecanismo de alavanca articulada.
Considerando a Figura 31, onde a força F é a força de entrada e a força P é a força de saída do mecanismo de alavanca articulada, tem-se a Equação (1). Repare que para pequenos ângulos α entre as barras, a força de saída P tende a infinito.
(1)

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
19
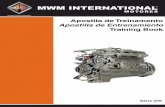
Cames Came ou camo é um elemento mecânico usado para comandar um outro elemento, chamado seguidor, através de um movimento específico por meio de contato direto. O conjunto formado pelos 2 elementos citados é chamado “came-seguidor”. Cames são muito usados pelas seguintes características: baixo custo, poucas partes móveis e pouco espaço requerido. Como desvantagem, as cames podem apresentar elevado desgaste, aquecimento e problemas de flutuação do seguidor, o qual será explicado mais adiante. Classificação das cames De acordo com a forma (geometria), as cames são classificadas de acordo com a ilustração da Figura 32: - Came radial ou de disco (a),(b),(c) e (d) - Came linear ou em cunha (e) - Came cilíndrica (f) - Came de face ou extremidade (g) - Came de forqueta (h) O tipo mais comumente usado é a came radial e a menos empregada é a came linear devido à necessidade de movimento alternado como entrada. Existe ainda a came invertida, que é o exemplo da alavanca de câmbio de um automóvel em relação ao caminho que deve ser percorrido pela mesma sobre os sulcos. Chama-se came invertida porque a entrada do movimento dá-se pelo seguidor (a alavanca de marchas), o qual segue o perfil dos sulcos da transmissão de um veículo. Quanto à característica de movimento do seguidor, as cames podem ser classificadas como: - Seguidor de translação (a), (b), (c), (d), (f), (g) e (h) - Seguidor oscilante (b) e (f) Quanto à forma do seu seguidor, as cames podem ser classificadas como: - Seguidor de ponta ou seguidor de aresta/ponta de faca (c) - Seguidor de face plana, prato ou chato (a) - Seguidor de rolete (d), (e), (f), (g) e (h) - Seguidor de face esférica (b) Uma última classificação diz respeito à posição da haste do seguidor, podendo ser de 2 formas: - Deslocada (a), (d) - Radial (b), (c) e (h) A descrição completa de cada item da Figura 32 é indicada a seguir:
(a) came radial e seguidor de translação de face plana deslocado; (b) came radial e seguidor oscilante de face esférica; (c) came radial e seguidor de aresta de faca e translação; (d) came de dois lóbulos radiais e seguidor de rolete de translação deslocado; (e) came de cunha e seguidor de rolete de translação; (f) came cilíndrico e seguidor de rolete oscilante; (g) came de face ou extremidade e seguidor de rolete de translação; (h) came de forqueta e seguidor de rolete de translação.
Como exemplos típicos de aplicação, cames podem ser empregadas em comando de válvulas de veículos e maquinas em geral (indústria têxtil, empacotadoras, etc).

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
20
Figura 32 – Exemplos de cames.
A Figura 33 apresenta um outro exemplo de came cilídrica e seguidor tipo esférico de translação (acima) e tipo rolete oscilante (abaixo).
Figura 33 – Exemplos de cames cilídricas.
O seguidor pode ser vinculado ao cames por:
- mola - gravidade - vínculo mecânico

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
21
Em altas rotações, um problema comum com cames é a flutuação do seguidor. Dependendo da geometria (perfil da came), do tipo de vínculo e rotação da came, a mesma pode saltar e/ou o seguidor poderá ficar sujeito a altas acelerações. Um exemplo de came com vínculo ou restrição mecânica é mostrado pela Figura 34. Trata-se de uma came de disco com seguidor do tipo de face plana e movimento de translação, que possui 2 pontos de contato como vínculo. O vínculo impede a flutuação do seguidor, porém essa configuração pode ter aquecimento elevado. Além disso, caso os materiais da came e do seguidor forem feitos de materiais diferentes, pode haver dilatações térmcias diferentes, levando o mecanismo a quebra. O uso de molas também pode ser considerada uma alternativa que minimiza a possibilidade de flutuação do seguidor (Figura 35).
Figura 34 – Cames de disco com seguidor de face plana, de translação e vínculo mecânico.
Figura 35 – Cames de disco e seguidor de face plana, de translação e vínculo por molas. Tipos de movimento do seguidor Na rotação do cames, o seguidor executa os seguintes eventos, conforme ilustra a Figura 36:
- elevação - repouso - retorno
Figura 36 – Diagrama de deslocamento de uma came, mostrando os eventos de elevação,
repouco e retorno.
Como existem várias formas de elevação e retorno, os diagramas de deslocamentos deverão ser construídos para os movimentos:
- uniforme (ou velocidade constante) - parabólicos (ou aceleração constante) - harmônico simples

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
22
- cicloidais O movimento do seguidor de uma came pode ser de 4 tipos diferentes: a) Movimento uniforme ou velocidade constante:
As curvas da velocidade, aceleração e impulso são mostradas na Figura 37-a, enquanto logo abaixo é apresentado um gráfico resumo deste tipo de movimento.
Figura 37 - Movimento uniforme.
No caso da velocidade constante, o deslocamento do seguidor é simplesmente uma função constante do ângulo da came.
y=ax+b
onde: y – deslocamento do seguidor a – coeficiente angular da reta b – constante Como passa pela origem , b=0. Designando a elevação total d, correspondente a um ângulo de cames de β rad, tem-se
y=(d/β)θ
onde: d – elevação máxima do seguidor β – ângulo de máxima elevação do seguidor Essa é a equação para o movimento uniforme. A velocidade e aceleração do seguidor são a primeira e a segunda derivada respectivamente.
Velocidade
d
dt
ddy

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
23
Aceleração 0
dt
ddy
ω é a velocidade angular do cames e é constante, portanto sua derivada é igual a zero, exceto no início e fim da elevação onde vai imediatamente ao infinito.
Para construção de uma came com o perfil que gere um movimento uniforme, é construir uma came de disco cujo tamanho de raio aumente linearmente com o ângulo.
b) Movimento com aceleração constante ou parabólico
As curvas da velocidade, aceleração e impulso são mostradas na Figura 38. A curva de deslocamento é uma parabola, equação de 2º grau. Essa curva possui uma descontinuidade no ponto de inflexão
Figura 38- Relações de deslocamento, velocidade, aceleração e aceleração segunda para o
movimento parabólico.
No caso do movimento parabólico, o deslocamento do seguidor segue uma função do segundo grau do ângulo da came.
y=ax²+b
onde: y – deslocamento do seguidor x – é a variável (nesse caso x é θ) a – coeficiente angular da curva

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
24
b – constante Como passa pela origem , b=0. Designando a elevação total na primeira metade d/2, correspondente a um ângulo de cames de β/2 rad, tem-se
d/2=a(β/2)² a=2d/ β² onde: d/2 – elevação máxima do seguidor na metade do curso β/2 – ângulo onde ocorre a máxima elevação do seguidor Substituindo a em y=a θ²
2
d2y
A velocidade e aceleração do seguidor são a primeira e a segunda derivada respectivamente.
Velocidade
2
4dy
Aceleração 2
2d4y
A aceleração é constante e a velocidade máxima ocorre no ponto de inflexão onde θ= β/2.
dy
2max
Para a segunda metade do deslocamento usa-se a equação de segundo grau completa: y=C1+C2 θ+C3 θ² Derivando, temos a velocidade:
y = C2 ω + 2C3 ω θ
Condições de contorno: y(θ= β)=d
y (θ= β/2)=
d2(a velocidade é máxima quando θ= β/2)
y (θ= β)= 0
Fazendo y (θ= β)= 0 na equação da velocidade:
0= C2 ω + 2C3 ω β C2 = -2C3 β
Fazendo y (θ= β/2)=
d2na equação da velocidade e substituindo C2:
d2= -2C3 β ω + 2C3 ω β/2

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
25
d2= -C3 β ω
C3=-2d/β²
Substituindo C3 em C2 = -2C3 β: C2=-2(-2d/β²) β = 4d/β C2 = 4d/β Por último, falta encontrar C1. Fazendo y(θ= β)=d na equação do deslocamento y = C1 + C2θ + C3θ²
d= C1 + (4d/β) β + (-2d/β²) β ² = C1 + 4d – 2d => C1 = -d
Logo, a equação completa do deslocamento é:
y=(-d) + (4d/β) θ+ (-2d/β²) θ² A equação da velocidade é:
y = (4d/β)ω + 2 ω (-2d/β²) θ
A equação da aceleração é igual a:
y = -4 ω² (d/β²)
Para construção do diagrama do deslocamento do movimento parabólico, são usadas 6 ou 8 divisoes em x. Uma sequencia de números (6 ou 8 ) é usada para cada divisão. No caso da sequencia de 6 números, divide-se por 18 pequenas divisões ou em 32 pequenas divisões para a sequencia de 8. As partes divididas são proporcionais à:
- 1,3,5,5,3,1 para 6 divisões na escala X - 1,3,5,7,7,5,3,1 para 8 divisões
Figura 39 - Movimento parabólico
c) Movimento harmônico simples
As curvas da velocidade, aceleração e impulso são mostradas na Figura 40. A curva de deslocamento segue um cosseno.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
26
Figura 40 - Relações de deslocamento, velocidade, aceleração e aceleração segunda para o movimento harmônico simples
Ao contrário do movimento parabólico, não há descontinuidade no ponto de inflexão. A curva de deslocamento está baseada na relação de cosseno por: y = a Cos(θπ/β) + b (quando θ=90° é β/2 e quando θ=180° é β) Dadas as condições de contorno
y(θ=β/2)=d/2 e y(θ=β)=d
Tem-se que:
d/2=a Cos(π/2) + b
b=d/2
d = a Cos(π) + d/2
d/2 = a (-1)
a = -d/2
Logo, a equação do deslocamento de um seguidor cujo movimento é harmônico simples é:
y = -d/2 Cos(θπ/β) + d/2
A equação da velocidade é:

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
27
y = πd ω /2β Sen(θπ/β)
A equação da aceleração é igual a:
y = π²d ω² /2β² Cos(θπ/β)
Para construção do diagrama de deslocamento da came com, movimento harmônico simples, constrói-se um semi-cículo de diâmetro igual ao deslocamento do seguidor, conforme mostra a Figura 41.
Figura 41 - Movimento harmônico simples
d) Movimento cicloidal
As curvas da velocidade, aceleração e impulso são mostradas na Figura 42. O movimento cicloidal tem uma curva senoidal para a aceleração.Utiliza-se o mesmo procedimento do movimento parabólico para as deduções das equações do deslocamento, velocidade e aceleração.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
28
Figura 42 - Relações de deslocamento, velocidade, aceleração e aceleração segunda para o
movimento cicloidal
Deslocamento
2sen
2
1dy
Velocidade
2cos1
dy
Aceleração
2send2y
2
No movimento cicloidal, a aceleração segunda é finita, sendo, portanto, o melhor dos movimentos apresentados. Aceita altas velocidades de rotação.
Para a construção do diagrama de deslocamento do movimento cicloidal de um seguidor, rola-se sem deslizamento um círculo de diâmetro igual a L/2π. Os pontos daordenada são ligados a absissa de acordo com o passo (divisões) escolhido. Faz-se 4 cículos dentro da elevação da came, à esquerda do gráfico. Cada círculo conterá um ponto a 120º, os quais serão ligados aos pontos 2,4,6 do gráfico. Os pontos 1 e 5 (60 e 300º) são traçados paralelos a linha que liga o ponto 3 em relação ao círculo superior direito.
A Figura 43 apresenta um exemplo de construção do referido diagrama.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
29
Figura 43 - Movimento cicloidal
Desenvolvimento de cames:
Figura 44 - Desenvolvimento de um came de placa do diagrama de deslocamento. (a)
nomenclatura do came; (b) diagrama de deslocamento Círculo de base: menor círculo tangente à superfície do came. Ponto de traçado: ponto teórico sobre o seguidor, usado para gerar a curva primitiva. Ângulo de pressão: é o ângulo entre a direção do movimento do seguidor e uma normal à curva primitiva. Ponto primitivo: indica a localização do máximo ângulo de pressão. Círculo primitivo (pitch): seu centro coincide com o do came e passa pelo ponto primitivo.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
30
Círculo principal(prime): é o menor círculo com centro coincidente com o centro do seguidor (no caso de rolete) ou simplesmente com a face (no caso de seguidor do tipo de face), passando pela curva primitiva. As divisões dos ângulos são feitas com relação ao circulo rpincipal.
Para desenvolver uma came cujo seguidor é de face plana (Figura 45), deve-se marcar os pontos (distância) sobre as retas em relação ao círculo de primário, que coincide com o primário nesse caso. Depois traça-se o perfil da came, que é tangente ao perfil faceado do seguidor, não coincidindo com os pontos marcados. Note que a curva primitiva passa pelos pontos, mas não coincide com o perfil da came.
Figura 45 - Desenvolvimento de uma curva de cames para um seguidor de translação de
face plana
Equação de cames radiais excêntricas com seguidor não deslocado
Equação de uma came de disco excêntrica, de excentricidade “e” , inciando o deslocamento do seguidor em 0º.
Posição do seguidor:
( ) ( )
Velocidade do seguidor:
( ) ( )
Aceleração do seguidor:
( ) ( )
Observe que o máximo deslocamento de uma came excêntrica é igual a 2e, ou seja, duas vezes a sua excentricidade.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
31
Mecanismo 4 barras O mecanismo de 4 barras é uma mecanismo planar de movimento oscilatório. É também chamado de quadrilátero articulado. Basicamente um mecanismo 4 barras possui 3 funções:
1) Transformar movimento oscilante em rotacional. 2) Ampliar ou reduzir o movimento/deslocamento ou a força.
3)Transformar o movimento rotacional em oscilante. Em uma configuração especial, o mecanismo de 4 barras pode funcionar como traçador de retas, como no caso do mecanismo de Watt.
Figura 46 – Mecanismo de Watt.
Aplicações de 4 barras: braços robóticos, pantógrafos, luminárias de arquitetos, alicate de pressão, mola aérea de portas e traçadores de retas.. Dependendo da configuração ou dimensionamento das peças podem ocorrer pontos mortos do mecanismo, que são os pontos onde o mecanismo trava. Volantes e contrapesos ajudam a impedir os pontos mortos, uma vez que evitam o alinhamento das barras. O mecanismo 4 barras é constituído de uma barra fixa de comprimento R1, a qual não translada; de uma barra acionadora ou motriz de comprimento R2; de uma barra de ligação ou acopladora de comprimento R3 e por uma barra movida ou seguidora de comprimento R4.
Equacionamento e desenho (Figura 47) do mecanismo de 4 barras:
Figura 47 – Mecanismo de 4 barras.
Onde: ângulo de entrada Z: Linha imaginária que serve para dar semelhança entre os triângulos = ângulo de saída
ângulo de transmissão
ângulos auxiliares

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
32
Pela lei dos cossenos:
(1)
(2) Assim, igualando (1) e (2):
[
] (3)
[
] [
(
)
] (4)
Da figura:
(5)
(6)
[
](7) [
](8)
( )(9)
[
] (10)
Como (11) Então:
[
] (12)
Exercício: Dado o mecanismo de 4 barras com R1 = 0.8m, R2 = 0.4, R3 = 1.8 e R4 = 1.5m.
R:
Vantagem mecânica para mecanismo de 4 barras: é a razão do torque de saída
exercido pela barra principal movida pelo torque de entrada da barra motora.
Figura 48 – Esquema do mecanismo de 4 barras utilizado para o cálculo da vantagem mecânica.
Desconsiderando perdas e dado que .
(perpendicularismo)
Quando ou a vantagem mecânica tende ao infinito e o mecanismo pode ser usado como grampo (Figura 49).
Quando ou =>

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
33
Figura 49 – Esquema do 4 barras na condição de VM tendendo ao infinito.
Lei de Grashoff “Para uma articulação plana de 4 barras, a soma das barras maior e menor não pode ser maior que a soma das barras restantes se for desejável uma rotação contínua de pelo menos uma barra. Matematicamente, temos que:
M = maior, m = menor, a+b = demais.
Obs: Essa lei vale apenas para uma avaliação rápida se o mecanismo pode fazer uma revolução completa em pelo menos uma das barras. Entretanto, caso o mecanismo em geral não satisfaça Grashoff, ou seja, caso , este pode oscilar. Dado R1= 7cm, R2 = 3cm, R3 = 8cm, R4 = 6cm e
, encontre ang. transmissão, saída, VM e desenhe.
Resolução de um quatro barras pelo método da malha fechada Exemplo: Encontre ângulo de transmissão e saída para o caso do exemplo acima, onde R1= 7cm, R2 = 3cm, R3 = 8cm, R4 = 6cm e
, encontre ang. transmissão, saída, VM e desenhe. Veja desenho da Figura 50.
Figura 50 –Representação vetorial para cálculo do 4 barras. Passos para solução: i) Soma vetorial: R2+R3-R4-R1=0 ii) Inicialmente fazer a soma direta entre R2 e R1 (na verdade pelo sentido convencionado, é uma subtração de R2-R1), encontrando a resultante Res.
Figura 51 – Esquema para determinação da resultante entre R2 e R1. Vetor Res é igual a 6,08cm e θres=154,7º. Então, agora passamos a ter Res +R3-R4 = 0
R1
R2
R3
R4
R1
R2 Res

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
34
iii) Passar equação vetorial para o sistema de , onde é Rcos(θ) + i sen(θ)
Res + R3 - R4 = 0
iv) Dividir toda a equação pelo termo de que é conhecido:
6,08
+ 8
- 6
= 0
6,08 + 8 - 6 v) Transformar toda a equação em cos e sen: 6,08 + 8 cos(θ3-154,7) = 6 cos(θ4 -154,7) 8 sen(θ3-154,7) = 6 sen(θ4 -154,7) vi) Elevar os 2 lados das esquaçoes de sen e de cos ao quadrado: 36,97 + 97,28 cos(θ3-154,7) + 64 cos²(θ3-154,7) = 36 cos²(θ4 -154,7) 64 sen²(θ3-154,7) = 36 sen²(θ4 -154,7) vii) Somar as duas equações, lembrando que sen²θ + cos² θ =1: 36,97 + 97,28 cos(θ3-154,7) + 64 = 36 cos(θ3-154,7) = -0,667 (aplica-se cos
-1 nos 2 lados)
θ3-154,7 = ±131,90 θ3 = 289,60º ou θ3 = 22,8º (sempre haverá dois, escolhe-se um deles. Nesse caso 22,8º, de acordo com o desenho inicial) viii) Para encontrar θ4, basta substituir θ3 = 22,8º em uma das equações: 8 sen(22,8-154,7) = 6 sen(θ4 -154,7) -5,95 / 6= sen(θ4 -154,7) - 82,93 + 154,7 = θ4 θ4 = 71,76 ix) Para encontrar Ƴ, faz-se θ4 – θ3 =Ƴ (veja Figura 52 para melhor compressão).
Figura 52 – Esquema representativo dos ângulos que compõe ângulo de transmissão. Logo, θ4 – θ3 =Ƴ 71,76 – 22,8 = 48,96º Para encontrar o ângulo Ф entre as barras 2 e 3, faça 180 – (θ4 – θ3). Fazendo as contas, chega-se a 142,8º. E para encontrar a velocidade, dado ω2:
i) Deriva-se R1 + R3 + R3 - R4 = 0
R1ω1 + R2 ω2 + R3 ω3 - R4ω4 = 0
θ3
θ4
θ4 θ3 Ƴ

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
35
Como ω1 = 0 e R2 ω2 é uma constante C:
C + R3 ω3 - R4ω4 = 0 Temos 2 incógnitas, ω3 e ω4. E os passos seguintes são os mesmos a partir do passo iv do deslocamento. Mobilidade ou Graus de liberdade de um mecanismo Graus de liberdade de um mecanismo diz repeito ao número de movimentos independentes que ele possui. A mobilidade de um mecanismo pode ser definida como o número mínimo de parâmetros requeridos para especificar o a localização de cada elemento dentro de um mecanismo. Mecanismo de 1 grau de liberdade:

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
36
Lista de exercícios garfo escocês, cursor manivela, alavanca articulada e mecanismo de retorno rápido
1) Considerando um garfo escocês com velocidade de rotação de 300rpm e manivela de
5cm:
a) Desenhe o gráfico da aceleração vs ângulo para um ciclo completo, considerando
um passo de 45°
b) Determine os ângulos e os tempos em que ocorrem as máximas acelerações
negativa e positiva
c) Desenhe o gráfico da velocidade vs ângulo para um ciclo completo, considerando
um passo de 45°
d) Determine os ângulos e os tempos em que ocorrem as máximas velocidades
negativa e positiva
e) Desenhe o gráfico da velocidade vs tempo para um ciclo completo, considerando
um passo de tempo (em s) correspondente a um ângulo de 45°
2) Se a peça 2 do mecanismo de Garfo Escocês gira a 100 rpm, determine a velocidade
máxima e a aceleração máxima da peça 4 para um curso de 10 mm.
3) Num mecanismo biela-manivela, com R=1m, L=5m e Omega=π rad/s, uma aceleração nula do cursor é alcançada quando o ângulo da manivela é de 79° e 281°. A máxima aceleração do cursor vale -11,84m/s² e ocorre quando a manivela encontra-se em 0° e
360°. A partir destas informações, calcule a máxima velocidade do cursor. Lembrando que a equação que descreve a velocidade é
2
22
2
sen cossen
1 sen
Rx R
RL
L
.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
37
4) Dado o gráfico de aceleração de um mecanismo de manivela-biela, com raio de
manivela de 0,5m e comprimento da biela de 4m
Calcule a máxima velocidade do cursor desse mecanismo, dado que a manivela
leva 1s para dar uma volta completa. Lembrando que a equação que descreve a
velocidade é 2
22
2
sen cossen
1 sen
Rx R
RL
L
.
5) Para um mecanismo biela-manivela com manivela de 25mm, barra de união de 25cm e
dado que o tempo para a manivela alcançar 90° é de 0,025s. a) Desenhe o gráfico da posição vs ângulo para um ciclo completo (passo de 45°) b) Desenhe o gráfico da posição vs tempo para um ciclo completo
Lembrando que a equação que descreve o deslocamento é
2
2
2cos 1 sen
Rx R L
L .
6) Para o mecanismo de alavanca articulada abaixo, o que ocorre com a carga P caso o
ângulo alfa seja muito pequeno? E caso alfa seja próximo a 90°, o que ocorre com a carga P?
7) Dê oito (8) exemplos para o uso do mecanismo biela-manivela diferentes de motores
de combustão interna e de compressores. Desenhe se necessário.
1,4486 4,8346

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
38
8) O que é razão dos tempos? De um exemplo através de um desenho.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
39

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
40

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
41

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
42

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
43

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
44
Lista de exercícios quatro barras e cames
1) Como podem ser classificadas as cames? Desenhe um exemplo para 3 casos distintos.
2) Verifique se pelo menos uma das barras do mecanismo de quatro barras da figura a
seguir será capaz de dar uma revolução completa: Dados: a = 50 cm; b = 20 cm; c = 35
cm; d = 15 cm.

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
45
3) Represente graficamente e explique o movimento de um seguidor radial de uma came
de disco com de 60 mm de diâmetro e excentricidade de 18 mm. Passo de 45°.
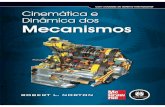
4) Desenher a came a partir do gráfico de deslocamento de um seguidor dado abaixo:
5)Verifique se o mecanismo de quatro barras irá emperrar quando a barra motora for
posta para girar: Dados: r1 = 40 cm; r2 = 15 cm; r3 = 40 cm; r4 = 25 cm.
6) Ainda para o mecanismo de quatro barras da questão anterior, determine o ângulo de
transmissão se o ângulo de entrada for igual a 52°. Calcule também a vantagem mecânica
e desenhe o mecanismo.
Formulário:
2 2 2
2 1 1 2 22 cosz r r rr ; 2 2 2
3 4 3 42 cosz r r r r ; 2 2 2
3 4
3 4
arccos2
z r r
r r
;
4 180
2 2 2
4 3
4
arccos2
z r r
zr
;
2 2 2
1 2
1
arccos2
z r r
zr
;
2 2 2
3 43
3
arccos2
z r r
zr
0
2
4
6
8
10
12
0 45 90 135 180 225 270 315 360 405
De
slo
cam
en
to s
egu
ido
r [m
m]
Angulo [graus]

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
46

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
47

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
48

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
49
/

Prof. Patric Daniel Neis - MECANISMOS - Universidade Federal do Rio Grande do Sul
50
REFERÊNCIAS American National Standard Gear Nomenclature (AGMA) 1012-F90. Definitions of Terms with Symbols, Estados Unidos, 1990. SHIEGLEY, J.; Mischke, E.; Budynas, C.R. Projeto de Engenharia Mecânica, Bookman Uicker, J.J.; Pennock, G. R.;J.; Shigley, J. E. Theory of Machines and Mechanisms, Oxford University Press.