
Apostila de Pneum tica FBE - files.mecatronicafbe.webnode...
63
Professor - Gilson Toscano Prestes 1 P N E U M A T I C A P N E - 2 5 3 Professor – Gilson Toscano Prestes Email – [email protected]
-
Upload
nguyenxuyen -
Category
Documents
-
view
216 -
download
0
Transcript of Apostila de Pneum tica FBE - files.mecatronicafbe.webnode...
Professor - Gilson Toscano Prestes 1
P N E U M A T I C A
P N E - 2 5 3
Professor – Gilson Toscano Prestes
Email – [email protected]

Professor - Gilson Toscano Prestes 2
1. INTRODUÇÃO O ar sempre esteve presente no dia a dia do ser humano. Além de ser o elemento vital para a sua sobrevivência, o homem sempre quis aproveitá-lo em aplicações técnicas onde a energia estivesse presente. Como meio de racionalização do trabalho, o ar comprimido vem encontrando cada vez mais espaço nas aplicações industriais. Atualmente, a utilização do ar comprimido supera os melhores graus de eficiência, executando operações sem fadiga, economizando tempo, ferramentas e materiais, além de fornecer segurança no trabalho. Para um conhecimento detalhado e estudo da energia pneumática vamos inicialmente entender o termo pneumática. Ele derivou-se da raiz grega Pneumo, que tem o significado de respiração ou sopro, por esta razão entendem-se por pneumática todos os fenômenos relacionados aos gases ou vácuos. É também o estudo da conversão da energia pneumática em energia mecânica, através dos respectivos elementos de trabalho.
2. CARACTERÍSTICAS DOS SISTEMAS PNEUMÁTICOS
Para a implantação de sistemas pneumáticos para realização de operações na área industrial, devemos levar em consideração que ele nos oferece vantagens e desvantagens que devem ser consideradas para que sua implantação seja bem sucedida.
As vantagens oferecidas são:
a) Incremento da produção com investimento relativamente pequeno; b) Redução de custos operacionais; c) Robustez dos equipamentos; d) Resistência a ambientes hostis; e) Simplicidade de manipulação; f) Segurança; g) Redução do número de acidentes.
Dentre as desvantagens, temos:
a) Necessidade de tratamento do ar comprimido antes da utilização; b) Desenvolvimento de pequenas forças quando comparadas a outros sistemas; c) Velocidades muito baixas são difíceis de conseguir com o ar comprimido; d) Devido a sua compressibilidade, é impossível obter-se velocidade constante e
paradas intermediárias; e) Poluidor sonoro.

Professor - Gilson Toscano Prestes 3
3. DEFINIÇÃO DE PRESSÃO Pressão é a força exercida em determinada superfície ( área ). Em pneumática, a pressão é expressa em Kgf/cm2 (quilogramas força por centímetro quadrado ). A pressão também pode ser expressa em psi ( libras por polegada quadrada ). No sistema internacional de unidades ( SI ) a pressão é expressa em N / m2 ( Newtons por metro quadrado ). A pressão também é criada quando temos uma coluna de um fluido. Por exemplo, sabemos que a cada 10 metros de coluna d’água, a pressão aumenta em 1,0 Kgf / cm2.
3.1 – COMO É CRIADA A PRESSÃO A pressão resulta da resistência oferecida ao fluxo do fluido. A resistência ocorre em função de:
a) Da carga de um atuador; b) De uma restrição (ou orifício) na tubulação.
A figura mostra um exemplo de carga sobre um atuador. O peso de 1000 quilos oferece uma resistência ao fluxo sob o pistão e cria uma pressão no óleo. Se o peso aumenta, o mesmo acontece com a pressão.
Figura – Pressão criada pela resistência ao fluxo (carga em atuador)

Professor - Gilson Toscano Prestes 4
A figura mostra um exemplo de um fluxo através de um orifício. Ao fecharmos o orifício, percebemos um incremento da pressão antes dele, pois ocorreu uma restrição ao fluxo do fluido.
Figura – Pressão criada pela resistência ao fluxo (orifício)
Professor - Gilson Toscano Prestes 5
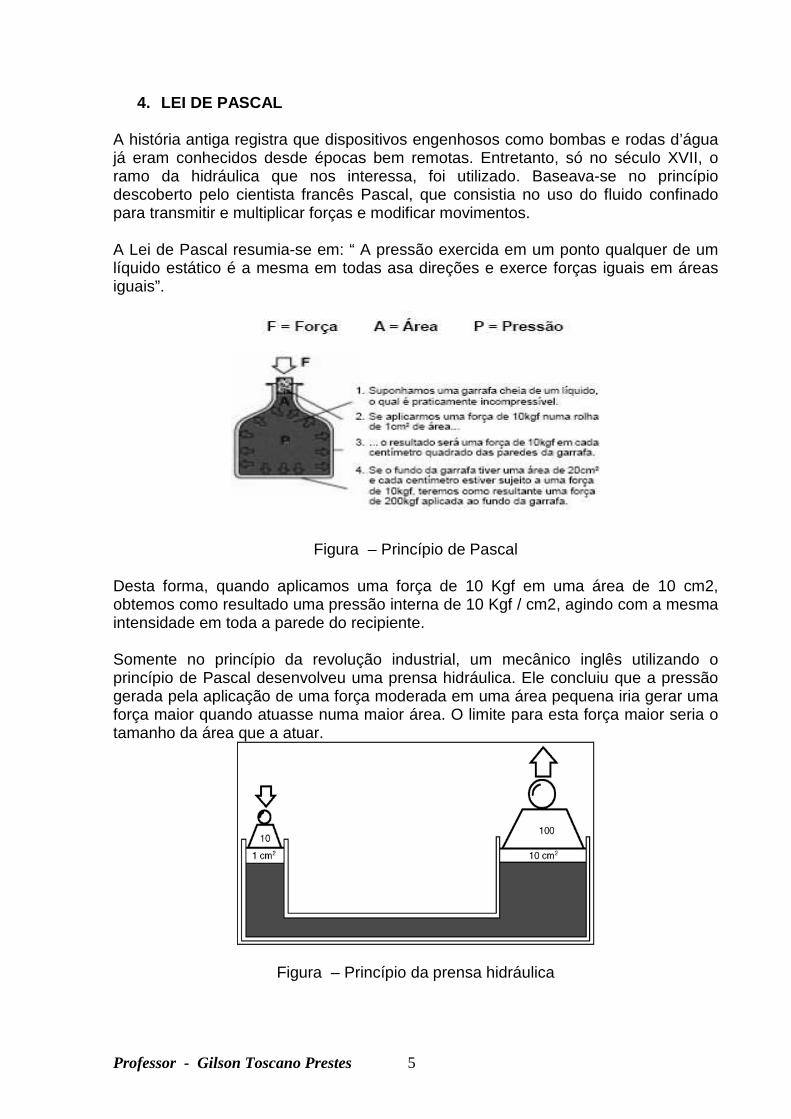
4. LEI DE PASCAL A história antiga registra que dispositivos engenhosos como bombas e rodas d’água já eram conhecidos desde épocas bem remotas. Entretanto, só no século XVII, o ramo da hidráulica que nos interessa, foi utilizado. Baseava-se no princípio descoberto pelo cientista francês Pascal, que consistia no uso do fluido confinado para transmitir e multiplicar forças e modificar movimentos. A Lei de Pascal resumia-se em: “ A pressão exercida em um ponto qualquer de um líquido estático é a mesma em todas asa direções e exerce forças iguais em áreas iguais”.
Figura – Princípio de Pascal Desta forma, quando aplicamos uma força de 10 Kgf em uma área de 10 cm2, obtemos como resultado uma pressão interna de 10 Kgf / cm2, agindo com a mesma intensidade em toda a parede do recipiente. Somente no princípio da revolução industrial, um mecânico inglês utilizando o princípio de Pascal desenvolveu uma prensa hidráulica. Ele concluiu que a pressão gerada pela aplicação de uma força moderada em uma área pequena iria gerar uma força maior quando atuasse numa maior área. O limite para esta força maior seria o tamanho da área que a atuar.
Figura – Princípio da prensa hidráulica

Professor - Gilson Toscano Prestes 6
Assim, ele construiu dois vasos comunicantes, um com área da seção transversal de 1 cm2 e o outro com área de 10 cm2. Aplicando uma força de 10 Kgf no êmbolo de área 10 cm2, foi gerada uma pressão de 10 Kgf / cm2. Pelo princípio de Pascal esta atua com a mesma intensidade em toda a extensão do líquido. Logo quando ela age numa área maior de 10 cm2 irá gerar uma força de: 10 Kgf / cm2 X 10 cm 2 = 100 Kgf Desta maneira, houve uma multiplicação de 10 vezes da força aplicada. Como podemos perceber, o mesmo valor da relação entre as áreas. 10 cm2 / 1 cm2 = 10
Desta experiência, concluímos que:
Vários exemplos podem ser citados como aplicação direta da lei de Pascal, a saber: Elevadores de automóveis hidro pneumáticos, prensas pneumáticas.
5. PROPRIEDADES FÍSICAS DO AR Através da resistência oferecida pelo ar, sentimos que ele ocupa um lugar no espaço. Assim, como um elemento material, o ar possui propriedades que estudaremos a seguir:
a) Compressibilidade O ar ocupa todo o volume em qualquer recipiente, adquirindo seu formato já que não possui forma própria. Desta maneira, podemos acondicioná-lo num recipiente com determinado volume e depois através de uma força externa reduzir o seu volume.
b) Elasticidade Uma vez cessada a força externa, o ar volta a ocupar o seu volume original.
c) Difusibilidade Propriedade que permite ao ar misturar-se homogeneamente a qualquer meio gasoso.
d) Expansibilidade O ar pode ocupar o volume integral de qualquer recipiente, adquirindo seu formato.
e) Peso do ar Um litro de ar a zero graus Celsius, ao nível do mar, pesa 0,001293 Kgf. O ar quente é mais leve que o ar frio.

Professor - Gilson Toscano Prestes 7
6. INSTALAÇÕES DE AR COMPRIMIDO Nos diversos processos industriais, os sistemas de ar comprimido desempenham papel fundamental na produção e representam parcela expressiva do consumo energético da instalação. Entretanto, nem sempre estas instalações recebem os cuidados devidos, passando a ser uma fonte constante de desperdícios. Um sistema de ar comprimido corretamente projetado irá proporcionar maior confiabilidade e eficiência nas ferramentas pneumáticas, bem como diminuirá os custos com energia. Esse sistema compreende três componentes principais: o compressor, a rede de distribuição e os pontos de consumo. 6.1) Compressor São máquinas destinadas a elevar a pressão de um certo volume de ar comprimido. Vários fatores influenciam a escolha de um compressor: vazão, pressão e qualidade requerida do ar.
Figura – Instalação de ar comprimido São duas as classificações fundamentais dos compressores:
a) De deslocamento positivo; b) De deslocamento dinâmico.

Professor - Gilson Toscano Prestes 8
O compressor de deslocamento positivo admite o ar numa câmara isolada do meio exterior. Ao comprimir esta massa de ar e quando a pressão requerida é atingida, a válvula de descarga abre-se permitindo a passagem do ar comprimido para o tubo de descarga. Os compressores de deslocamento positivo podem ser: alternativos ou rotativos. Dentro os alternativos os mais utilizados são o de pistão e dentre os rotativos são os de palhetas e parafuso. Os compressores de pistões podem ser de simples ou de duplo efeito. Os de simples efeito admitem o ar somente através da câmara superior. Os de duplo efeito admitem o ar em ambas as câmaras superior e inferior, resultando num ar comprimido com menor pulsação da pressão.
Figura – Compressor de pistões, simples e duplo efeito.
Professor - Gilson Toscano Prestes 9
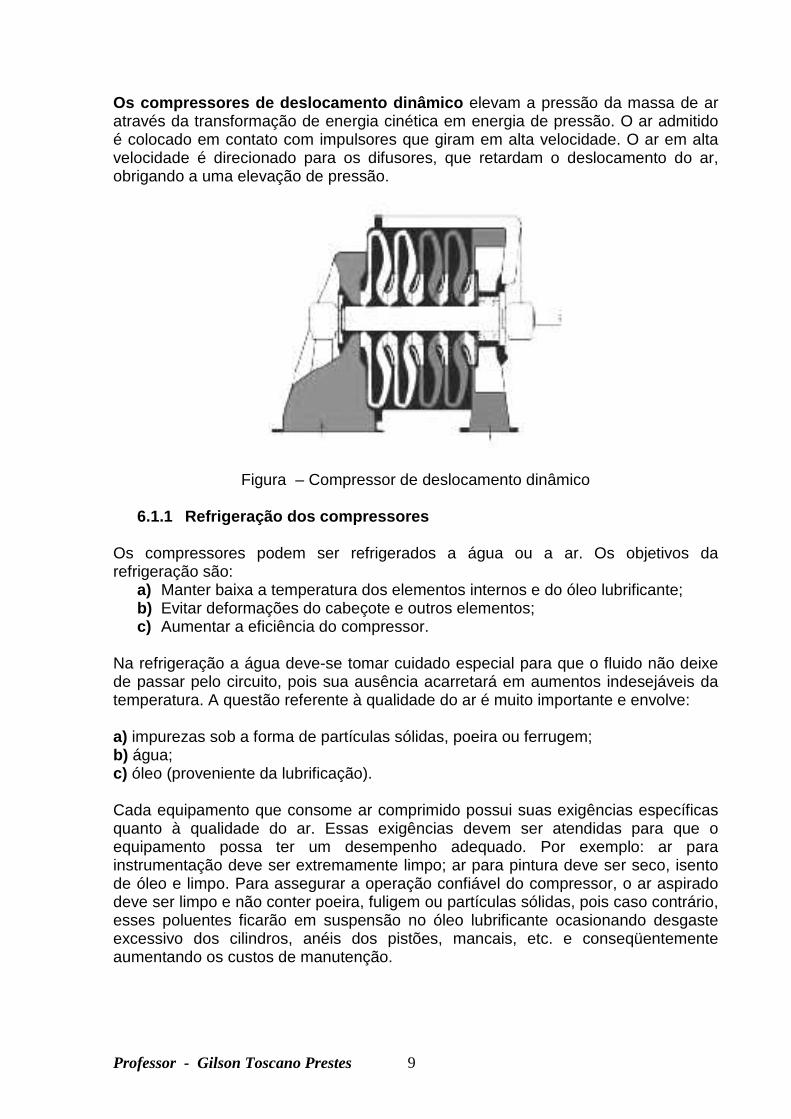
Os compressores de deslocamento dinâmico elevam a pressão da massa de ar através da transformação de energia cinética em energia de pressão. O ar admitido é colocado em contato com impulsores que giram em alta velocidade. O ar em alta velocidade é direcionado para os difusores, que retardam o deslocamento do ar, obrigando a uma elevação de pressão.
Figura – Compressor de deslocamento dinâmico
6.1.1 Refrigeração dos compressores Os compressores podem ser refrigerados a água ou a ar. Os objetivos da refrigeração são:
a) Manter baixa a temperatura dos elementos internos e do óleo lubrificante; b) Evitar deformações do cabeçote e outros elementos; c) Aumentar a eficiência do compressor.
Na refrigeração a água deve-se tomar cuidado especial para que o fluido não deixe de passar pelo circuito, pois sua ausência acarretará em aumentos indesejáveis da temperatura. A questão referente à qualidade do ar é muito importante e envolve: a) impurezas sob a forma de partículas sólidas, poeira ou ferrugem; b) água; c) óleo (proveniente da lubrificação). Cada equipamento que consome ar comprimido possui suas exigências específicas quanto à qualidade do ar. Essas exigências devem ser atendidas para que o equipamento possa ter um desempenho adequado. Por exemplo: ar para instrumentação deve ser extremamente limpo; ar para pintura deve ser seco, isento de óleo e limpo. Para assegurar a operação confiável do compressor, o ar aspirado deve ser limpo e não conter poeira, fuligem ou partículas sólidas, pois caso contrário, esses poluentes ficarão em suspensão no óleo lubrificante ocasionando desgaste excessivo dos cilindros, anéis dos pistões, mancais, etc. e conseqüentemente aumentando os custos de manutenção.

Professor - Gilson Toscano Prestes 10
Assim, deve-se evitar que a casa dos compressores fique localizada perto de chaminés, caldeiras, fornos ou equipamentos de jatos de areia. Sua localização Ideal é próxima dos principais pontos de consumo do ar, visando redução no custo da tubulação e menor perda de pressão. Outro aspecto importante para assegurar a aspiração de um ar limpo é a instalação no compressor de um filtro de admissão de ar (no mínimo a 2 metros acima do solo e 2,5 metros de distância de qualquer parede). Devem ser instalados diretamente na entrada do compressor. Em linhas de aspiração muito longas, poderá haver condensação de água e nesse caso, aconselha-se o uso de separadores de umidade antes do cilindro. No caso de várias máquinas deve-se usar de preferência, um duto para cada uma. Em relação à tubulação de descarga do ar, esta deve ser de diâmetro igual ou superior ao da saída do compressor e ser a mais curta possível até o resfriador posterior ou ao reservatório pulmão. Um compressor de ar deve ter necessariamente um sistema de regulagem de capacidade de tal ordem que adapte sua produção as condições de consumo. Os tipos básicos de regulagem para compressores de deslocamento positivo são: 1) Parada e partida O motor elétrico que aciona o compressor é desligado quando a pressão do reservatório atinge um determinado valor. Geralmente utilizado em compressores pequenos e serviço intermitente. 2) Velocidade constante O motor elétrico que aciona o compressor permanece sempre ligado. Quando a pressão do reservatório atinge determinado valor pré-fixado, a válvula de aspiração será deslocada e permanecerá aberta. A partir desse momento, todo ar aspirado será descarregado pela válvula. 3) Duplo controle
Permite operar o compressor dos dois modos (Parada/Partida e Velocidade Constante) por intermédio de uma chave seletora. Recomendada para casos de consumo irregular com picos de demanda por certo período e longos períodos de pouca ou nenhuma utilização de ar comprimido.Atualmente os sistemas de controle dos compressores utilizam a tecnologia dos inversores de freqüência. Desse modo, a velocidade do motor elétrico é continuamente ajustada dependendo da demanda de ar, resultando em considerável economia de energia. Isso elimina a necessidade de alterar o controle para "partida" e "parada" ou então promover uma atuação na válvula de sucção.

Professor - Gilson Toscano Prestes 11
6.2) Resfriador Posterior O ar aspirado pelo compressor contém um determinado teor de umidade. Posteriormente, à medida que o ar comprimido se resfriar na linha de distribuição, a umidade se condensará na tubulação, provocando corrosão, além de ser extremamente indesejável em certas aplicações como a pintura, transporte pneumático e na vida útil das ferramentas. Desse modo, após a compressão, torna-se necessário reter o vapor d’água existente no ar. Isso será feito no resfriador posterior que reduzirá a temperatura do ar comprimido a uma temperatura inferior a da linha de distribuição e conseqüentemente condensará esse vapor d’água. Junto a esse resfriador existirá um separador de condensado onde a umidade do ar será retirada manual ou automaticamente. O melhor local para o resfriamento é diretamente junto ao orifício de saída do ar. O sistema mais simples para os resfriadores posteriores é o de casco e tubos, onde o ar passa através dos tubos em sentido contrário ao percorrido pela água (a queda de pressão em um resfriador posterior é relativamente pequena). 6.3) Reservatório Pulmão Uma instalação de ar comprimido é normalmente equipada com um ou mais reservatórios de ar que têm pôr funções: armazenar o ar comprimido para consumo; equalizar as pressões das linhas de consumo; eliminar umidade do ar.Sua capacidade deve ser de 6 a 10 vezes a capacidade do compressor por segundo. Deve ser instalado fora da casa dos compressores e preferencialmente na sombra.Todo reservatório deve possuir válvulas de segurança, manômetro e termômetro.Outra questão é que os resfriadores posteriores e separadores de condensado, obtém uma eficiência na retenção da umidade em torno de 80-90%. O restante acompanha o ar comprimido até o reservatório, onde a velocidade é consideravelmente reduzida fazendo com que a maior parte dos condensados residuais deposite-se sobre as paredes e escorra para o fundo deste. Assim é muito importante a existência de uma tubulação de dreno na parte mais baixa do reservatório a fim de permitir a retirada dessa água (aproximadamente 5% da umidade é retida neste estágio). 6.4) Secadores de ar Consiste no terceiro estágio da separação da umidade contida no ar comprimido.Sua finalidade é manter o ponto de orvalho do ar, na pressão de saída do sistema, 10ºC abaixo da mínima temperatura do ambiente onde estão os instrumentos. Sua utilização é necessária quando um ar de altíssima qualidade é requerido (instrumentação). Os secadores podem ser por refrigeração ou com agentes secantes.
Professor - Gilson Toscano Prestes 12
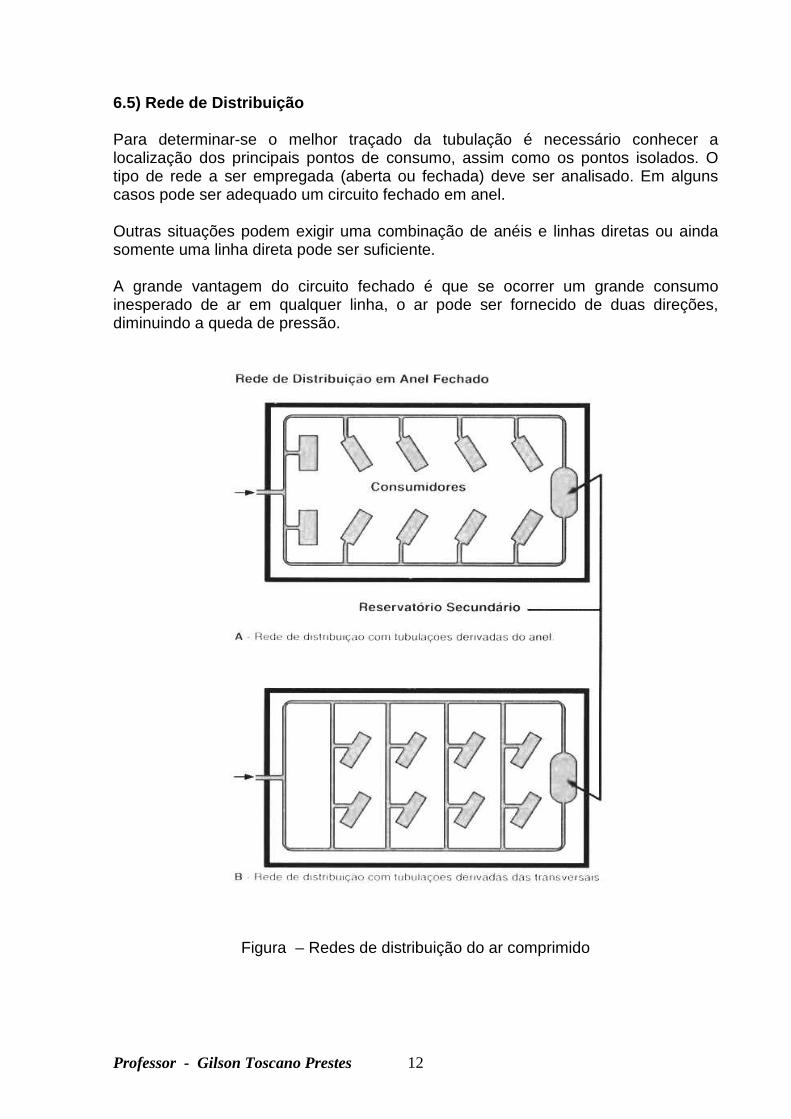
6.5) Rede de Distribuição Para determinar-se o melhor traçado da tubulação é necessário conhecer a localização dos principais pontos de consumo, assim como os pontos isolados. O tipo de rede a ser empregada (aberta ou fechada) deve ser analisado. Em alguns casos pode ser adequado um circuito fechado em anel. Outras situações podem exigir uma combinação de anéis e linhas diretas ou ainda somente uma linha direta pode ser suficiente. A grande vantagem do circuito fechado é que se ocorrer um grande consumo inesperado de ar em qualquer linha, o ar pode ser fornecido de duas direções, diminuindo a queda de pressão.
Figura – Redes de distribuição do ar comprimido
Professor - Gilson Toscano Prestes 13
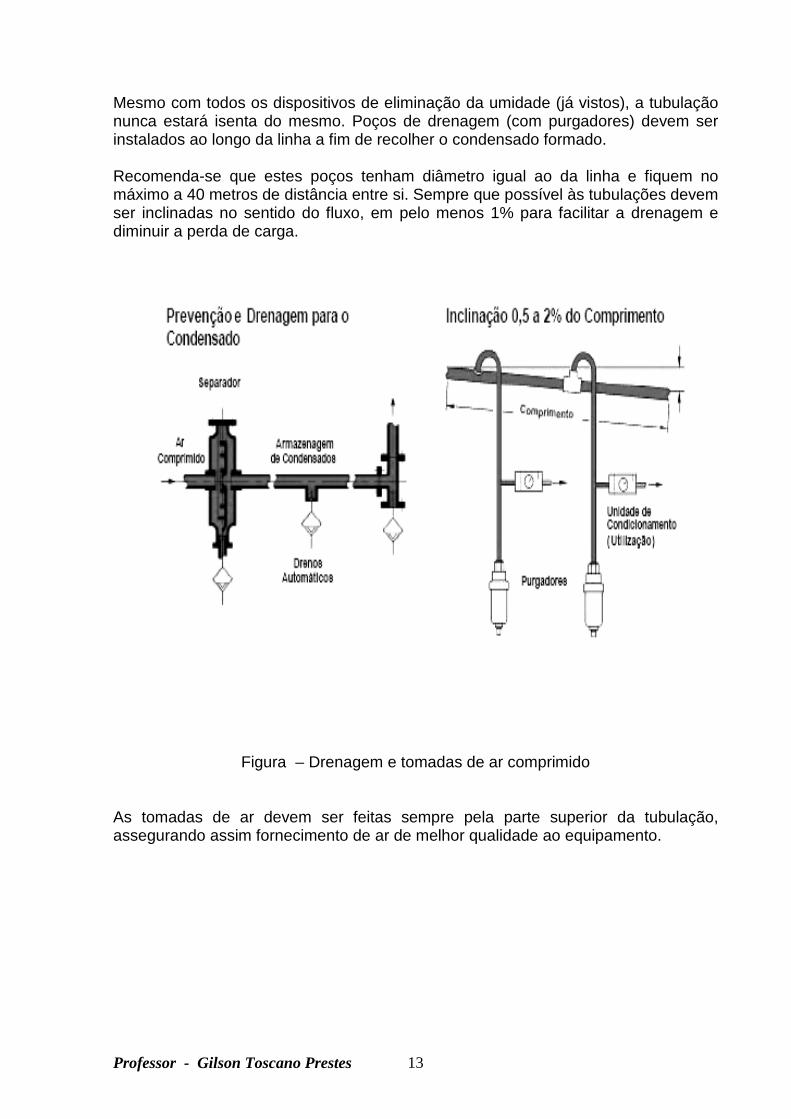
Mesmo com todos os dispositivos de eliminação da umidade (já vistos), a tubulação nunca estará isenta do mesmo. Poços de drenagem (com purgadores) devem ser instalados ao longo da linha a fim de recolher o condensado formado. Recomenda-se que estes poços tenham diâmetro igual ao da linha e fiquem no máximo a 40 metros de distância entre si. Sempre que possível às tubulações devem ser inclinadas no sentido do fluxo, em pelo menos 1% para facilitar a drenagem e diminuir a perda de carga.
Figura – Drenagem e tomadas de ar comprimido As tomadas de ar devem ser feitas sempre pela parte superior da tubulação, assegurando assim fornecimento de ar de melhor qualidade ao equipamento.

Professor - Gilson Toscano Prestes 14
6.6) Unidades de condicionamento (lubrefil) Após a passagem por todas as fases que vimos anteriormente, o ar comprimido necessita de um último tratamento antes de ser enviado aos pontos de consumo: máquinas, ferramentas. Próximo ao ponto de consumo,e ele passa pelo lubrefil que irá :
a) Filtrar; b) Regular a pressão; c) Introduzir uma pequena quantidade de óleo para lubrificar os componentes
dos pontos de utilização.
Figura – Unidade de condicionamento – Lubrefil A filtragem consiste na aplicação de dispositivos para reter as impurezas ainda contidas e suspensas no fluxo do ar e em diminuir a umidade presente no ar. O elemento filtrante pode ser em bronze sintetizado ou malha de nylon. Drenos localizados na parte inferior dos copos de policarbonato eliminam a umidade retirada do ar.

Professor - Gilson Toscano Prestes 15
A regulagem de pressão é necessária para :
a) Compensar automaticamente o volume de ar requerido pelos equipamentos pneumáticos;
b) Manter constante a pressão nos pontos de consumo; c) Funcionar como válvula de segurança.
Figura – Regulador de pressão e manômetro

Professor - Gilson Toscano Prestes 16
A lubrificação do ar comprimido é fundamental para aumento da vida útil dos elementos dos pontos de consumo. Para isso o sistema lubrefil conta com um lubrificador, que funciona de acordo ao princípio de venturi. O fluxo do ar comprimido passa através dele arrastando uma certa quantidade de óleo que ira acompanhar o ar até os pontos de consumo.
Figura – Lubrificador Outros acessórios de linha estão presentes na instalação. São eles:
a) Purgadores
Eliminador automático da água que se acumula nas diferentes partes da instalação de ar comprimido. O mais indicado é do tipo eliminador de bóia, que abre somente para descarregar a água, fechando hermeticamente após a sua eliminação.
b) Separadores de umidade
Os purgadores se encarregam de descarregar a água acumulada no fundo do tubo principal ou em qualquer ponto da instalação; nada pode fazer com relação à neblina de gotículas de água que podem estar suspensa no ar. Os separadores de umidade cumprem esta missão.

Professor - Gilson Toscano Prestes 17
c) Mangueiras
Ferramentas pneumáticas e outros dispositivos acionados a ar comprimido são em geral ligados à rede de ar através de mangueiras. Essas mangueiras devem ser leves, flexíveis e suportar a pressão do ar (4 a 5 vezes a pressão máxima de trabalho) e resistir as intempéries. É formada pôr uma camada externa de borracha, uma camada intermediária de lona e uma camada interna bastante lisa a fim de apresentar a mínima resistência possível para o ar. Mangueiras de 1” ou mais devem ser preferencialmente ser fixadas no solo.
d) Engates rápidos
As mangueiras são ligadas à rede e as ferramentas através de engates de acoplamento. Quando a mangueira fica perfeitamente ligada à ferramenta, emprega-se com freqüência o engate tipo rosca. O engate de garras é muito empregado e oferece grande possibilidade de combinação visto que as garras são de igual tamanho para vários diâmetros da tubulação ou mangueira.
7. VÁLVULAS DIRECIONAIS As válvulas direcionais têm por função orientar o fluxo de ar para o ponto do circuito onde desejamos realizar o trabalho. As válvulas direcionais são classificadas de acordo com suas características principais, tais como :
a) Tipo de carretel interno : pistão ou esfera; carretel deslizante ou rotativo. b) Métodos de operação : alavancas manuais, roletes, solenóides, pressão
hidráulica. c) Número de vias : Número de passagens de fluxo existentes. Duas vias, quatro
vias, etc. d) Tamanho : Bitola nominal de conexão da válvula ou sua capacidade de vazão
em LPM (litros por minuto). (7.1) Identificação de uma válvula direcional Elas são representadas nos circuitos hidráulicos através de símbolos gráficos. Para identificação da simbologia, devemos considerar:
a) Número de posições b) Número de vias c) Posição normal d) Tipo de acionamento
Professor - Gilson Toscano Prestes 18
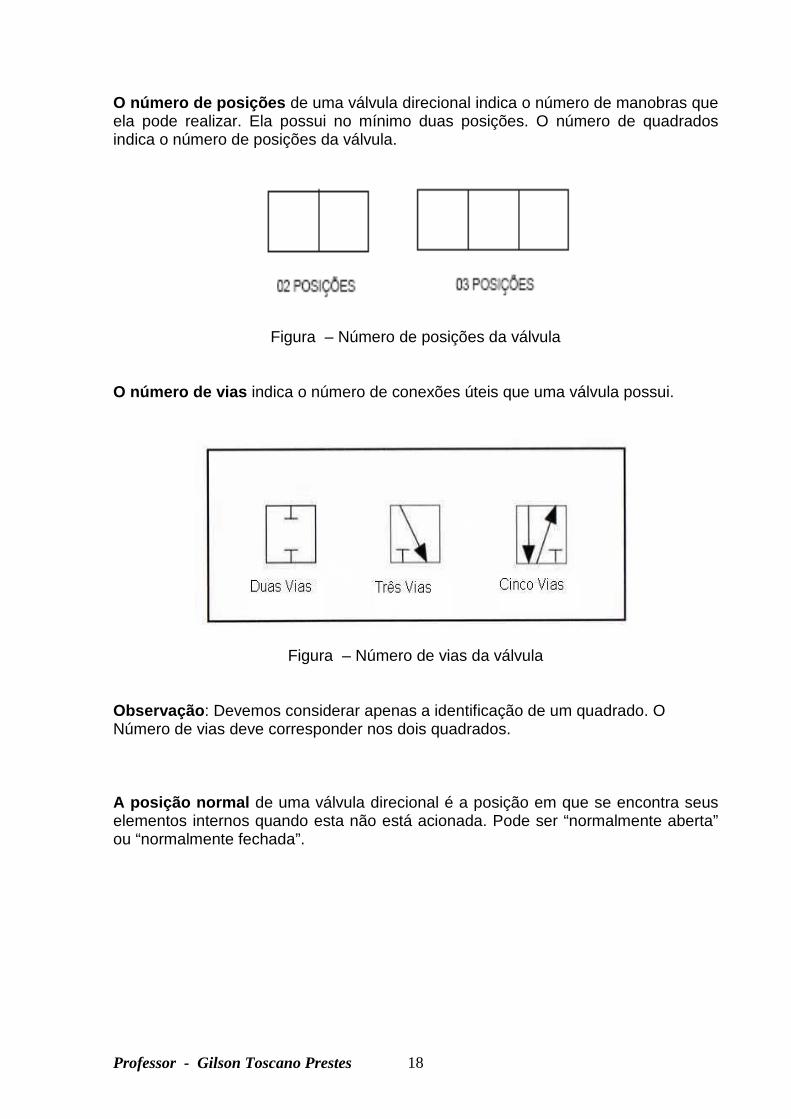
O número de posições de uma válvula direcional indica o número de manobras que ela pode realizar. Ela possui no mínimo duas posições. O número de quadrados indica o número de posições da válvula.
Figura – Número de posições da válvula
O número de vias indica o número de conexões úteis que uma válvula possui.
Figura – Número de vias da válvula Observação : Devemos considerar apenas a identificação de um quadrado. O Número de vias deve corresponder nos dois quadrados. A posição normal de uma válvula direcional é a posição em que se encontra seus elementos internos quando esta não está acionada. Pode ser “normalmente aberta” ou “normalmente fechada”.

Professor - Gilson Toscano Prestes 19
O tipo de acionamento define sua aplicação no circuito. Pode ser muscular, mecânico, pneumático, elétrico.
Figura – Alguns tipos de acionamento em válvulas direcionais
7.2 – Válvulas direcionais mais comumente usadas
a) Válvulas de duas e três vias
NF – Normalmente fechada NA – Normalmente aberta
Figura – Válvulas de duas e três vias

Professor - Gilson Toscano Prestes 20
b) Válvulas de cinco vias.
Figura – Válvulas de cinco vias 7.3 – Válvulas direcionais no circuito pneumático
Figura – Válvulas direcionais atuando no circuito pneumático 8. ATUADORES PNEUMÁTICOS
Os atuadores pneumáticos são os elementos no circuito que irão transformar a energia de pressão em energia mecânica. Estes atuadores podem ser de três tipos:
a) Atuadores lineares ou cilindros pneumáticos; b) Atuadores rotativos ou motores pneumáticos; c) Atuadores oscilantes. 8.1 Atuadores Lineares

Professor - Gilson Toscano Prestes 21
Os atuadores lineares podem ser de simples ou dupla ação. É de simples ação quando a pressão do ar atua em um só lado do cilindro. E, de dupla ação quando a pressão do ar atua em ambos os lados do cilindro. Os atuadores lineares geram “força” para o sistema.
Figura – Cilindros de simples e dupla ação 8.1.1 Elementos construtivos
Figura – Componentes do atuador linear

Professor - Gilson Toscano Prestes 22
8.2 Atuadores Rotativos Existem vários modelos de atuadores rotativos. Os mais utilizados são os de palhetas, cujo funcionamento vemos na figura abaixo. O ar sob pressão entra numa das câmaras do rotor, gerando uma força e girando o eixo com torque determinado em função da área das palhetas. Os motores são reversíveis, podem girar em ambos os sentidos.
Figura – Componentes e funcionamento do atuador rotativo 8.2.1 Características principais dos atuadores Rota tivos
1. Dimensões inferiores às de um motor elétrico de mesma capacidade; 2. Pode ser colocado em condição ater que pare sem danificar-se; 3. São reversíveis, giram em ambos os sentidos; 4. Partidas contínuas sem danos 5. Peso bastante inferior ao do motor elétrico de mesma capacidade.
9. VÁLVULAS DE BLOQUEIO
Estas válvulas impedem o fluxo do ar comprimido em determinada direção, deixando o fluxo passar somente em um sentido. Elas podem ser:
a) Válvulas de retenção Estas válvulas são utilizadas no circuito pneumático para permitir a passagem do ar comprimido em apenas um sentido. Sua construção interna possui um êmbolo que é atuado por uma mola contra uma sede de vedação.
Figura – Válvula de retenção – funcionamento básico
Percebemos que o fluxo do ar só é permitido da esquerda para a direita. No sentido inverso, o êmbolo interno bloqueia a passagem.

Professor - Gilson Toscano Prestes 23
A válvula de retenção é representada assim no circuito hidráulico.
b) Válvula de escape rápido Utilizadas quando desejamos velocidades elevadas no curso dos atuadores. Ela funciona direcionando o ar diretamente para a atmosfera, não oferecendo assim resistência ao movimento do atuador.

Professor - Gilson Toscano Prestes 24
c) Válvula de isolamento (elemento “OU”) Dotada de duas conexões de pressão e uma de utilização, esta válvula permite enviar sinais de ar comprimido para o mesmo ponto de utilização de locais distintos.
Figura – Circuito com elemento “OU”

Professor - Gilson Toscano Prestes 25
d) Válvula de simultaneidade (elemento “E”) Dotada de duas conexões de pressão e uma de utilização, esta válvula somente permite que o ar comprimido chegue ao atuador quando as duas conexões de pressão recebem o ar comprimido. Bastante utilizadas em circuitos para segurança de operadores, onde precisam acionar a válvula com as duas mãos.
Figura – Circuito com elemento “E”

Professor - Gilson Toscano Prestes 26
10. VÁLVULAS DE CONTROLE DE FLUXO
Estas válvulas são utilizadas para controlar a quantidade de ar comprimido que irá chegar até aos atuadores. Isto faz com que consigamos regular sua velocidade.
Figura – Funcionamento e simbologia da válvula de controle de fluxo
11. VÁLVULAS DE CONTROLE DA PRESSÃO Estas válvulas têm a função influenciar ou serem influenciadas pela pressão do sistema. Caso ela ultrapasse o valor pré-ajustado, ocorre uma descarga de ar comprimido para a atmosfera, mantendo-se o valor de pressão desejado. Elas subdividem-se em:
a) Válvulas de alívio; b) Válvulas reguladoras da pressão; c) Válvulas de seqüência.
Professor - Gilson Toscano Prestes 27
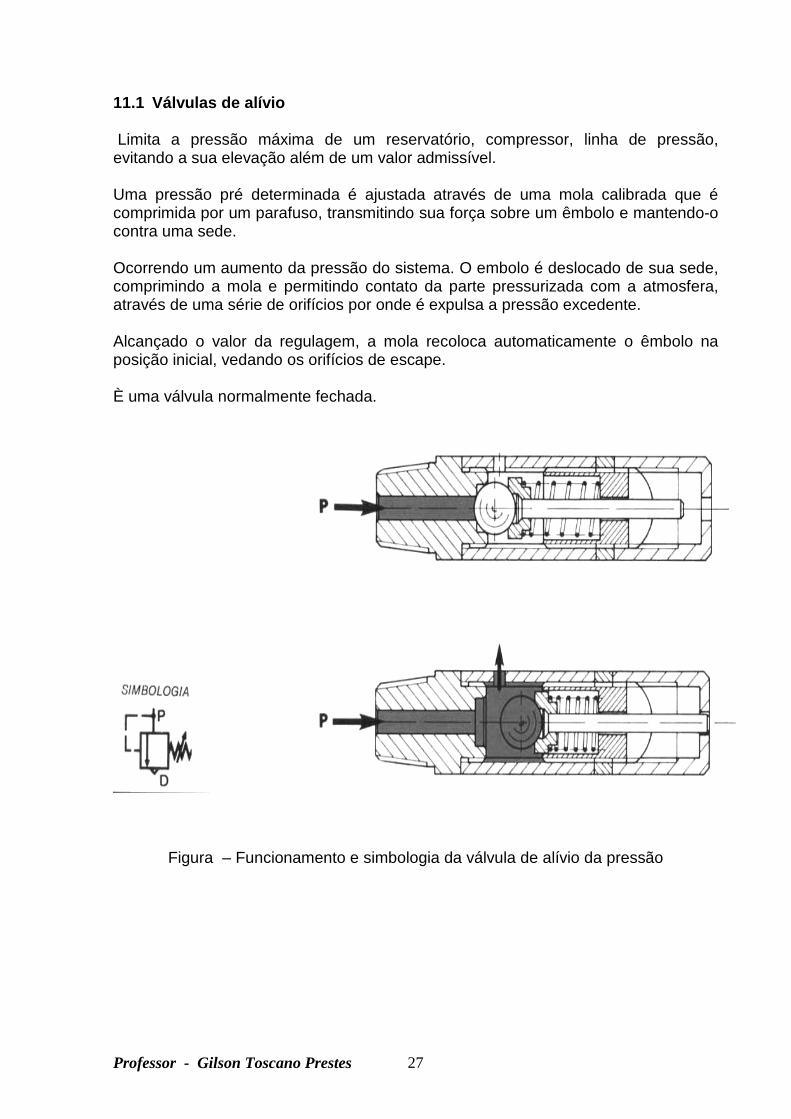
11.1 Válvulas de alívio Limita a pressão máxima de um reservatório, compressor, linha de pressão, evitando a sua elevação além de um valor admissível. Uma pressão pré determinada é ajustada através de uma mola calibrada que é comprimida por um parafuso, transmitindo sua força sobre um êmbolo e mantendo-o contra uma sede. Ocorrendo um aumento da pressão do sistema. O embolo é deslocado de sua sede, comprimindo a mola e permitindo contato da parte pressurizada com a atmosfera, através de uma série de orifícios por onde é expulsa a pressão excedente. Alcançado o valor da regulagem, a mola recoloca automaticamente o êmbolo na posição inicial, vedando os orifícios de escape. È uma válvula normalmente fechada.
Figura – Funcionamento e simbologia da válvula de alívio da pressão

Professor - Gilson Toscano Prestes 28
11.2 Válvulas reguladoras da pressão Já mencionadas anteriormente, porém ressalte-se que é de grande importância no circuito, devendo manter a pressão na sua saída constante, independente das flutuações que possam existir na entrada. Elas podem ser de dois tipos:
a) Reguladora de pressão com escape
Regulada para uma determinada pressão, mantendo-a praticamente constante. Ocorrendo elevação na intensidade da pressão, o excesso é eliminado para a atmosfera, através de um orifício existente no centro do diafragma, onde está apoiado o conjunto haste-disco.
b) Reguladora de pressão sem escape.

Professor - Gilson Toscano Prestes 29
Regulada para uma determinada pressão, mantendo-a praticamente constante. Ocorrendo elevação na intensidade da pressão, o fluxo de alimentação é cortado até que seja retomado o equilíbrio. O diafragma não possui furo. 11.3 Válvulas de seqüência A válvula de seqüência permite passagem de ar comprimido quando a pressão de entrada vencer a força opositora da mola, pré-regulada, fluindo para a conexão de utilização. São válvulas pouco utilizadas nos circuitos pneumáticos, pois oferecem pouca confiabilidade em sua utilização.
12. TEMPORIZADOR PNEUMÁTICO Permite o retardo de um sinal pneumático; um período de tempo ajustável que passa entre o aparecimento do sinal de controle pneumático e o sinal de saída. O ajuste é obtido através da rotação de um botão graduado. A faixa de ajuste é completada por uma revolução completa do botão. Faixas de ajuste : 0 a 3 segundos; 0 a 30 segundos; 0 a 180 segundos.
Figura – Temporizador

Professor - Gilson Toscano Prestes 30
13. CAPTADOR DE QUEDA DE PRESSÃO
Este acessório tem a sensibilidade da pressão atuante nos atuadores pneumáticos. São instalados diretamente nas conexões dos atuadores. Desta maneira, quando o atuador chega no fim de curso, a pressão do retorno do ar ( P2 ) cai bruscamente, fazendo com que a pressão do sistema ( P ) vença o diafragma interno do captador, indo atuar no ponto de utilização do circuito( S ). Assim, este acessório pode ser usado com fim de curso sem a necessidade de cames ou roletes.
Figura - Captador de queda de pressão – funcionamento
14. CONTADOR PNEUMÁTICO Estes elementos são utilizados em circuitos pneumáticos com operações seqüenciais. São capazes de demonstrar números precisos, que podem identificar uma quantidade de peças produzidas, número de ciclos de produção. Quando atinge-se o valor pré-ajustado, ele emite um sinal de saída que é usado para iniciar outro ciclo do processo ou operação.

Professor - Gilson Toscano Prestes 31
15. MÓDULO DE SEGURANÇA BIMANUAL Este módulo de segurança bimanual envia um sinal pneumático, quando dois sinais são aplicados em pontos diferentes., dentro de um intervalo de tempo menor que 0,3 segundos. São utilizados principalmente para a proteção das mãos de operadores de prensas. Desta maneira a prensa só é acionada quando o operador pressiona o comando com as duas mãos, evitando que uma das mãos esteja em contato com área de risco da máquina, evitando acidentes.
Figura - Módulo de segurança bimanual
Professor - Gilson Toscano Prestes 32
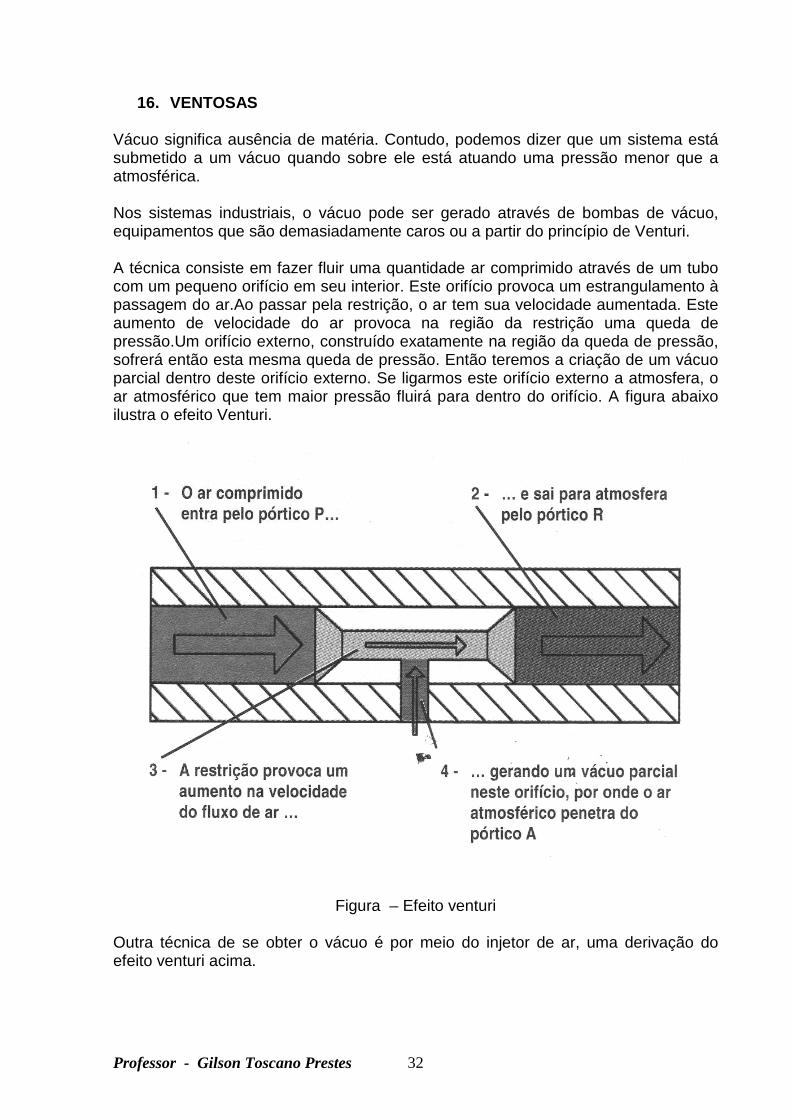
16. VENTOSAS Vácuo significa ausência de matéria. Contudo, podemos dizer que um sistema está submetido a um vácuo quando sobre ele está atuando uma pressão menor que a atmosférica. Nos sistemas industriais, o vácuo pode ser gerado através de bombas de vácuo, equipamentos que são demasiadamente caros ou a partir do princípio de Venturi. A técnica consiste em fazer fluir uma quantidade ar comprimido através de um tubo com um pequeno orifício em seu interior. Este orifício provoca um estrangulamento à passagem do ar.Ao passar pela restrição, o ar tem sua velocidade aumentada. Este aumento de velocidade do ar provoca na região da restrição uma queda de pressão.Um orifício externo, construído exatamente na região da queda de pressão, sofrerá então esta mesma queda de pressão. Então teremos a criação de um vácuo parcial dentro deste orifício externo. Se ligarmos este orifício externo a atmosfera, o ar atmosférico que tem maior pressão fluirá para dentro do orifício. A figura abaixo ilustra o efeito Venturi.
Figura – Efeito venturi Outra técnica de se obter o vácuo é por meio do injetor de ar, uma derivação do efeito venturi acima.

Professor - Gilson Toscano Prestes 33
17. MÉTODOS DE PROJETOS PARA CIRCUITOS ELETROPNEUMÁTICO S Serão descritos adiante dois métodos para o projeto de um circuito pneumático:
Método intuitivo
e método passo-a-passo. Se a seqüência de acionamento for direta podemos usar o método intuitivo, caso contrário (seqüência indireta) devemos usar o método passo-a-passo para evitar o problema de sobreposição de sinais que será descrito adiante.
Método Intuitivo
Considere o projeto de um circuito pneumático que execute a seqüência direta A+B+A-B-. A seguir descrevemos as etapas para o projeto desse circuito usando o método intuitivo. 1. Etapa : desenhar os elementos de trabalho
2. Etapa : desenhar as válvulas de comando principal
3. Etapa : desenhar os elementos de sinal.

Professor - Gilson Toscano Prestes 34
4. Etapa : desenhar todas as linhas de trabalho, pilotagem, alimentação de ar e exaustão.
5. Etapa : de acordo com os passos da seqüência de movimento, desenhar os acionadores dos elementos de sinal e representar a posição de cada uma das válvulas piloto entre os cilindros. 1º passo : acionando um botão de partida, deverá ocorrer o avanço do cilindro A, que é o primeiro passo da seqüência de movimentos

Professor - Gilson Toscano Prestes 35
2º passo : quando o cilindro A alcançar o final do curso de avanço, acionará o rolete de outro elemento de sinal cuja função é pilotar o avanço do cilindro B, que é o segundo passo da seqüência de movimentos.
3º passo : quando o cilindro B alcançar o final do curso de avanço, será acionado o rolete de outro elemento de sinal cuja função é pilotar o retorno do cilindro A, que é o terceiro passo da seqüência de movimentos
Professor - Gilson Toscano Prestes 36
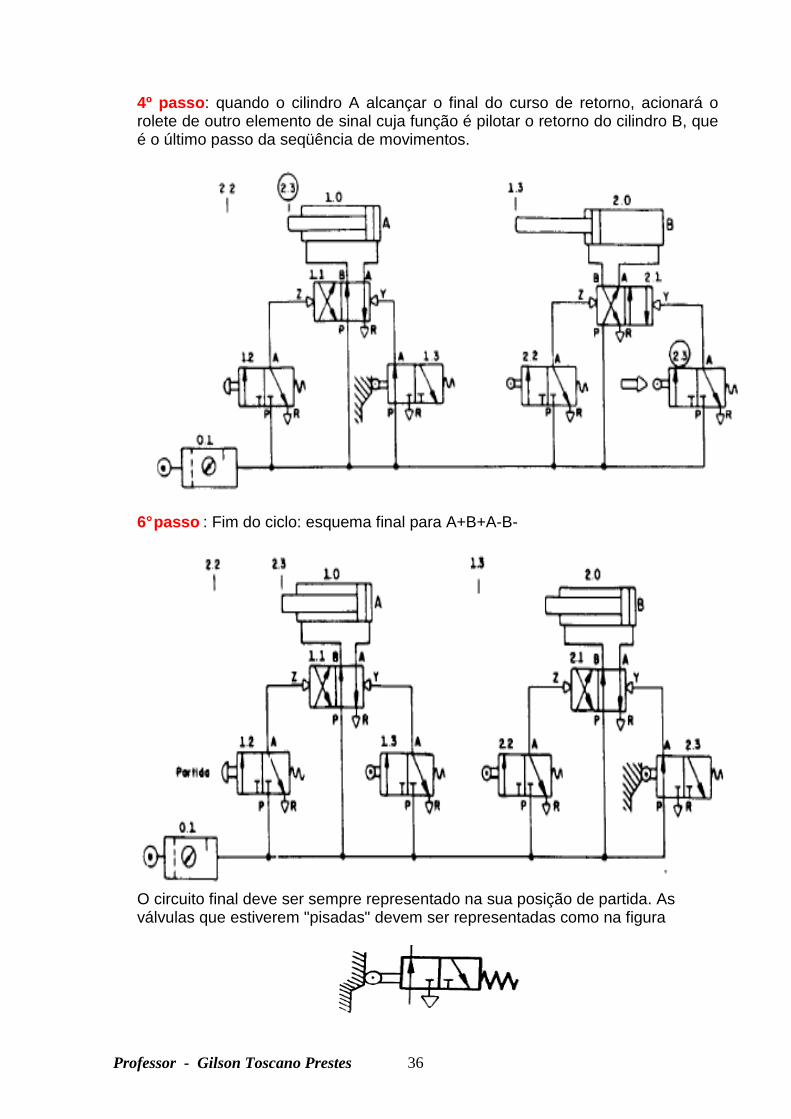
4º passo : quando o cilindro A alcançar o final do curso de retorno, acionará o rolete de outro elemento de sinal cuja função é pilotar o retorno do cilindro B, que é o último passo da seqüência de movimentos.
6° passo : Fim do ciclo: esquema final para A+B+A-B-
O circuito final deve ser sempre representado na sua posição de partida. As válvulas que estiverem "pisadas" devem ser representadas como na figura

Professor - Gilson Toscano Prestes 37
18. CONTROLADORES PROGRAMÁVEIS NO COMANDO DE ATUAD ORES
PNEUMATICOS
INTRODUÇÃO CONCEITUAL – HISTÓRICO
O Controlador Lógico Programável ( C.L.P. ) nasceu praticamente dentro da indústria automobilística americana, especificamente na Hydronic Division da General Motors , em 1968, devido a grande dificuldade demudar a lógica de controla de painéis de comando a cada mudança na linha de montagem. Tais mudanças implicavam em altos gastos de tempo e dinheiro.Sob a liderança do engenheiro Richard Morley, foi preparada uma especificação que refletia as necessidades de muitos usuários de circuitos à reles, não só da indústria automobilística, como de toda a indústria manufatureira. Nascia assim, um equipamento bastante versátil e de fácil utilização, que vem se aprimorando constantemente, diversificando cada vez mais os setores industriais e suas aplicações, o que justifica hoje ( junho / 1998 ) um mercado mundial estimado em 4 bilhões de dólares anuais.Desde o seu aparecimento, até hoje, muita coisa evoluiu nos controladores lógicos, como a variedade de tipos de entradas e saídas, o aumento da velocidade de processamento, a inclusão de blocos lógicos complexos para tratamento das entradas e saídas e principalmente o modo de programação e a interface com o usuário.
DIVISÃO HISTÓRICA
Podemos didaticamente dividir os CLPs historicamente de acordo com o sistema de programação por ele utilizado : 1a. Geração : Os CLPs de primeira geração se caracterizam pela programação intimamente ligada ao hardware do equipamento. A linguagem utilizada era o Assembly que variava de acordo com o processador utilizado no projeto do CLP, ou seja , para poder programar era necessário conhecer a eletrônica do projeto do CLP. Assim a tarefa de programação era desenvolvida por uma equipe técnica altamente qualificada, gravando - se o programa em memória EPROM , sendo realizada normalmente no laboratório junto com a construção do CLP. 2a. Geração : Aparecem as primeiras “Linguagens de Programação” não tão dependentes do hardware do equipamento, possíveis pela inclusão de um “Programa Monitor “ no CLP , o qual converte ( no jargão técnico ,Compila), as instruções do programa , verifica o estado das entradas, compara com as instruções do programa do usuário e altera o estados das saídas. Os Terminais de Programação ( ou Maletas, como eram conhecidas ) eram na verdade Programadores de Memória EPROM . As memórias depois de programadas eram colocadas no CLP para que o programa do usuário fosse executado.

Professor - Gilson Toscano Prestes 38
3a. Geração : Os CLPs passam a ter uma Entrada de Programação, onde um Teclado ou Programador Portátil é conectado, podendo alterar, apagar, gravar o programa do usuário, além de realizar testes (Debug) no equipamento e no programa. A estrutura física também sofre alterações sendo a tendência para os Sistemas Modulares com Bastidores ou Racks. 4a. Geração: Com a popularização e a diminuição dos preços dos micro - computadores (normalmente clones do IBM PC), os CLPs passaram a incluir uma entrada para a comunicação serial. Com o auxílio do microcomputadores a tarefa de programação passou a ser realizada nestes. As vantagens eram a utilização de várias representações das linguagens, possibilidade de simulações e testes, treinamento e ajuda por parte do software de programação, possibilidade de armazenamento de vários programas no micro, etc. 5a. Geração : Atualmente existe uma preocupação em padronizar protocolos de comunicação para os CLPs, de modo a proporcionar que o equipamento de um fabricante “converse” com o equipamento outro fabricante, não só CLPs, como Controladores de Processos, Sistemas Supervisórios, Redes Internas de Comunicação e etc., proporcionando uma integração a fim de facilitar a automação, gerenciamento e desenvolvimento de plantas industriais mais flexíveis e normalizadas, fruto da chamada Globalização. Existe uma Fundação Mundial para o estabelecimento de normas e protocolos de comunicação.
VANTAGENS DO USO DE CONTROLADORES LÓGICOS PROGRAMÁVEIS
- Ocupam menor espaço; - Requerem menor potência elétrica; - Podem ser reutilizados; - São programáveis, permitindo alterar os parâmetros de controle; - Apresentam maior confiabilidade; - Manutenção mais fácil e rápida; - Oferecem maior flexibilidade; - Apresentam interface de comunicação com outros CLPs e computadores de controle; - Permitem maior rapidez na elaboração do projeto do sistema.
Professor - Gilson Toscano Prestes 39
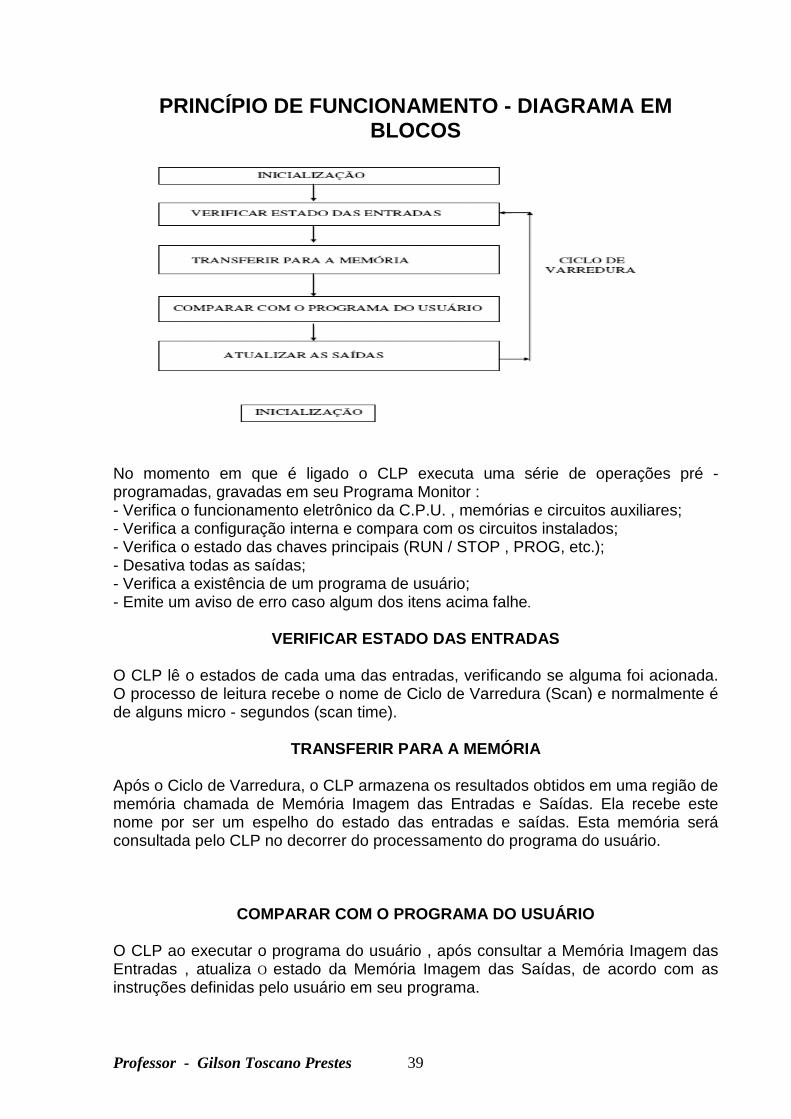
PRINCÍPIO DE FUNCIONAMENTO - DIAGRAMA EM BLOCOS
No momento em que é ligado o CLP executa uma série de operações pré - programadas, gravadas em seu Programa Monitor : - Verifica o funcionamento eletrônico da C.P.U. , memórias e circuitos auxiliares; - Verifica a configuração interna e compara com os circuitos instalados; - Verifica o estado das chaves principais (RUN / STOP , PROG, etc.); - Desativa todas as saídas; - Verifica a existência de um programa de usuário; - Emite um aviso de erro caso algum dos itens acima falhe.
VERIFICAR ESTADO DAS ENTRADAS
O CLP lê o estados de cada uma das entradas, verificando se alguma foi acionada. O processo de leitura recebe o nome de Ciclo de Varredura (Scan) e normalmente é de alguns micro - segundos (scan time).
TRANSFERIR PARA A MEMÓRIA
Após o Ciclo de Varredura, o CLP armazena os resultados obtidos em uma região de memória chamada de Memória Imagem das Entradas e Saídas. Ela recebe este nome por ser um espelho do estado das entradas e saídas. Esta memória será consultada pelo CLP no decorrer do processamento do programa do usuário.
COMPARAR COM O PROGRAMA DO USUÁRIO
O CLP ao executar o programa do usuário , após consultar a Memória Imagem das Entradas , atualiza O estado da Memória Imagem das Saídas, de acordo com as instruções definidas pelo usuário em seu programa.

Professor - Gilson Toscano Prestes 40
ATUALIZAR O ESTADO DAS SAÍDAS O CLP escreve o valor contido na Memória das Saídas , atualizando as interfaces ou módulos de saída. Inicia - se então, um novo ciclo de varredura.
ESTRUTURA INTERNA DO C.L.P.
O C.L.P. é um sistema microprocessado , ou seja, constituí - se de um microprocessador (ou microcontrolador), um Programa Monitor , uma Memória de Programa , uma Memória de Dados, uma ou mais Interfaces de Entrada, uma ou mais Interfaces de Saída e Circuitos Auxiliares.
DESCRIÇÃO DOS PRINCIPAIS ITENS
FONTE DE ALIMENTAÇÃO :
A Fonte de Alimentação tem normalmente as seguintes funções básicas : - Converter a tensão da rede elétrica (110 ou 220 VCA) para a tensão de alimentação dos circuitos eletrônicos ,(+ 5VCC para o microprocessador , memórias e circuitos auxiliares e +/- 12 VCC para a comunicação com o programador ou computador); - Manter a carga da bateria, nos sistemas que utilizam relógio em tempo real e Memória do tipo R.A.M.; - Fornecer tensão para alimentação das entradas e saídas (12 ou 24 VCC).

Professor - Gilson Toscano Prestes 41
UNIDADE DE PROCESSAMENTO :
BATERIA :
As baterias são usadas nos CLPs para manter o circuito do Relógio em Tempo Real, reter parâmetros ou programas (em memórias do tipo RAM) ,mesmo em caso de corte de energia , guardar configurações de equipamentos etc. Normalmente são utilizadas baterias recarregáveis do tipo Ni - Ca ou Li. Neste casos , incorporam se circuitos carregadores.
MEMÓRIA DO PROGRAMA MONITOR :
O Programa Monitor é o responsável pelo funcionamento geral do CLP. Ele é o responsável pelo gerenciamento de todas as atividades do CLP. Não pode ser alterado pelo usuário e fica armazenado em memórias do tipo PROM , EPROM ou EEPROM . Ele funciona de maneira similar ao Sistema Operacional dos microcomputadores. É o Programa Monitor que permite a transferência de programas entre um microcomputador ou Terminal de Programação e o CLP, gerênciar o estado da bateria do sistema, controlar os diversos opcionais etc.
MEMÓRIA DO USUÁRIO:
É onde se armazena o programa da aplicação desenvolvido pelo usuário. Pode ser alterada pelo usuário, já que uma das vantagens do uso de CLPs é a flexibilidade de programação. Inicialmente era constituída de memórias do tipo EPROM , sendo hoje utilizadas memórias do tipo RAM (cujo programa é mantido pelo uso de baterias) ,
Professor - Gilson Toscano Prestes 42
EEPROM e FLASH-EPROM , sendo também comum o uso de cartuchos de memória, que permite a troca do programa com a troca do cartucho de memória. A capacidade desta memória varia bastante de acordo com o marca/modelo do CLP, sendo normalmente dimensionadas em Passos de Programa.
MEMÓRIA DE DADOS :
É a região de memória destinada a armazenar os dados do programa do usuário. Estes dados são valores de temporizadores, valores de contadores, códigos de erro, senhas de acesso, etc. São normalmente partes da memória RAM do CLP. São valores armazenados que serão consultados e ou alterados durante a execução do programa do usuário. Em alguns CLPs , utiliza - se a bateria para reter os valores desta memória no caso de uma queda de energia.
MEMÓRIA IMAGEM DAS ENTRADAS / SAÍDAS : Sempre que a CPU executa um ciclo de leitura das entradas ou executa uma modificação nas saídas, ela armazena o estados da cada uma das entradas ou saídas em uma região de memória denominada Memória Imagem das Entradas / Saídas. Essa região de memória funciona como uma espécie de “tabela” onde a CPU irá obter informações das entradas ou saídas para tomar as decisões durante o processamento do programa do usuário.
CIRCUITOS AUXILIARES :
São circuitos responsáveis para atuar em casos de falha do CLP. Alguns deles são : - POWER ON RESET : Quando se energiza um equipamento eletrônico digital, não é possível prever o estado lógico dos circuitos internos. Para que não ocorra um acionamento indevido de uma saída , que pode causar um acidente , existe um circuito encarregado de desligar as saídas no instante em que se energiza o equipamento. Assim que o microprocessador assume o controle do equipamento esse circuito é desabilitado. - POWER - DOWN : O caso inverso ocorre quando um equipamento é subitamente desenergizado . O conteúdo das memórias pode ser perdido. Existe um circuito responsável por monitorar a tensão de alimentação, e em caso do valor desta cair abaixo de um limite pré - determinado, o circuito é acionado interrompendo o processamento para avisar o microprocessador e armazenar o conteúdo das memórias em tempo hábil. - WATCH - DOG - TIMER : Para garantir no caso de falha do microprocessador , o programa não entre em “loop” , o que seria um desastre, existe um circuito denominado “Cão de Guarda” , que deve ser acionado em intervalos de tempo pré - determinados . Caso não seja acionado , ele assume o controle do circuito sinalizando um falha geral.
MÓDULOS OU INTERFACES DE ENTRADA :

Professor - Gilson Toscano Prestes 43
São circuitos utilizados para adequar eletricamente os sinais de entrada para que possa ser processado pela CPU (ou microprocessador) do CLP . Temos dois tipos básicos de entrada : as digitais e as analógicas. ENTRADAS DIGITAIS : São aquelas que possuem apenas dois estados possíveis, ligado ou desligado ,e alguns dos exemplos de dispositivos que podem ser ligados a elas são : - Botoeiras; - Chaves (ou micro) fim de curso; - Sensores de proximidade indutivos ou capacitivos; - Chaves comutadoras; - Termostatos; - Pressostatos; - Controle de nível (bóia); - Etc. As entradas digitais podem ser construídas para operarem em corrente contínua (24 VCC) ou em corrente alternada (110 ou 220 VCA). Podem ser também do tipo N (NPN) ou do tipo P (PNP). No caso do tipo N, é necessário fornecer o potencial negativo (terra ou neutro) da fonte de alimentação ao borne de entrada para que a mesma seja ativada. No caso do tipo P é necessário fornecer o potencial positivo (fase) ao borne de entrada. Em qualquer dos tipos é de praxe existir uma isolação galvânica entre o circuito de entrada e a CPU.Esta isolação é feita normalmente através de optoacopladores. As entradas de 24 VCC são utilizadas quando à distância entre os dispositivos de entrada e o CLP não excedam 50 m. Caso contrário , o nível de ruído pode provocar disparos acidentais.
Exemplo de circuito de entrada digital 24 VCC :
Exemplo de circuito de entrada digital 110 / 220 VCA:

Professor - Gilson Toscano Prestes 44
ENTRADAS ANALÓGICAS :
As Interfaces de Entrada Analógica permitem que o CLP possa manipular grandezas analógicas, enviadas normalmente por sensores eletrônicos. As grandezas analógicas elétricas tratadas por estes módulos são normalmente tensão e corrente. No caso de tensão as faixas de utilização são : 0 á 10 VCC, 0 á 5 VCC, 1 á 5 VCC, -5 á +5 VCC, -10 á +10 VCC (no caso as interfaces que permitem entradas positivas e negativas são chamadas de Entradas Diferenciais), e no caso de corrente, as faixas utilizadas são : 0 á 20 mA , 4 á 20 mA.
Os principais dispositivos utilizados com as entrad as analógicas são : - Sensores de pressão manométrica; - Sensores de pressão mecânica (strain gauges - utilizados em células de carga); Entrada 24 VCC C.P.U 110/220 VCA . - Taco - geradores para medição rotação de eixos; - Transmissores de temperatura; - Transmissores de umidade relativa; -Etc. Uma informação importante a respeito das entradas analógicas é a sua resolução. Esta é normalmente medida em Bits. Uma entrada analógica com um maior número de bits permite uma melhor representação da grandeza analógica. Por exemplo: Uma placa de entrada analógica de 0 á 10 VCC com uma resolução de 8 bits permite uma sensibilidade de 39,2 mV , enquanto que a mesma faixa em uma entrada de 12 bits permite uma sensibilidade de 2,4 mV e uma de 16 bits permite uma sensibilidade de 0,2 mV.
Exemplo de um circuito de entrada analógico :
MÓDULOS ESPECIAIS DE ENTRADA

Professor - Gilson Toscano Prestes 45
Existem módulos especiais de entrada com funções bastante especializadas. Alguns exemplos são : - Módulos Contadores de Fase Única; - Módulos Contadores de Dupla Fase; - Módulos para Encoder Incremental; - Módulos para Encoder Absoluto; - Módulos para Termopares (Tipo J, K, L , S, etc); - Módulos para Termoresistências (PT-100, Ni-100, Cu-25 ,etc); - Módulos para Sensores de Ponte Balanceada do tipo Strain - Gauges; - Módulos para leitura de grandezas elétricas (KW , KWh , KQ, KQh, cos Fi, I,V, etc).
MÓDULOS OU INTERFACES DE SAÍDA :
Os Módulos ou Interfaces de Saída adequam eletricamente os sinais vindos do microprocessador para que possamos atuar nos circuitos controlados . Existem dois tipos básicos de interfaces de saída : as digitais e as analógicas .
SAÍDAS DIGITAIS :
As saídas digitais admitem apenas dois estados : ligado e desligado. Podemos com elas controlar dispositivos do tipo : - Reles ; - Contatores ; - Reles de estato-sólido - Solenóides; - Válvulas ; - Inversores de freqüência; - Etc.
ENTRADA C.P.U. As saídas digitais podem ser construídas de três formas básicas : Saída digital a Relê , Saída digital 24 VCC e Saída digital a Triac. Nos três casos, também é de praxe , prover o circuito de um isolamento galvânico, normalmente opto - acoplado.
Exemplo de saída digital à relê :
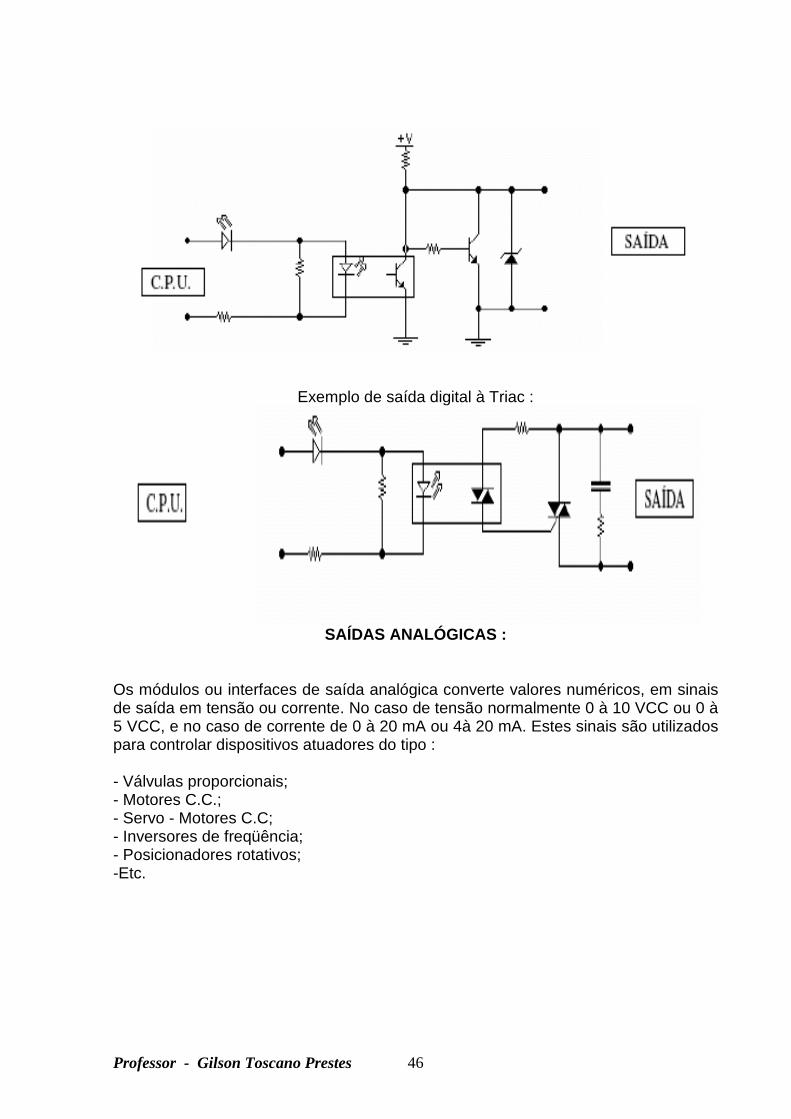
Exemplo de saída digital à transistor :
Professor - Gilson Toscano Prestes 46
Exemplo de saída digital à Triac :
SAÍDAS ANALÓGICAS :
Os módulos ou interfaces de saída analógica converte valores numéricos, em sinais de saída em tensão ou corrente. No caso de tensão normalmente 0 à 10 VCC ou 0 à 5 VCC, e no caso de corrente de 0 à 20 mA ou 4à 20 mA. Estes sinais são utilizados para controlar dispositivos atuadores do tipo : - Válvulas proporcionais; - Motores C.C.; - Servo - Motores C.C; - Inversores de freqüência; - Posicionadores rotativos; -Etc.
Professor - Gilson Toscano Prestes 47
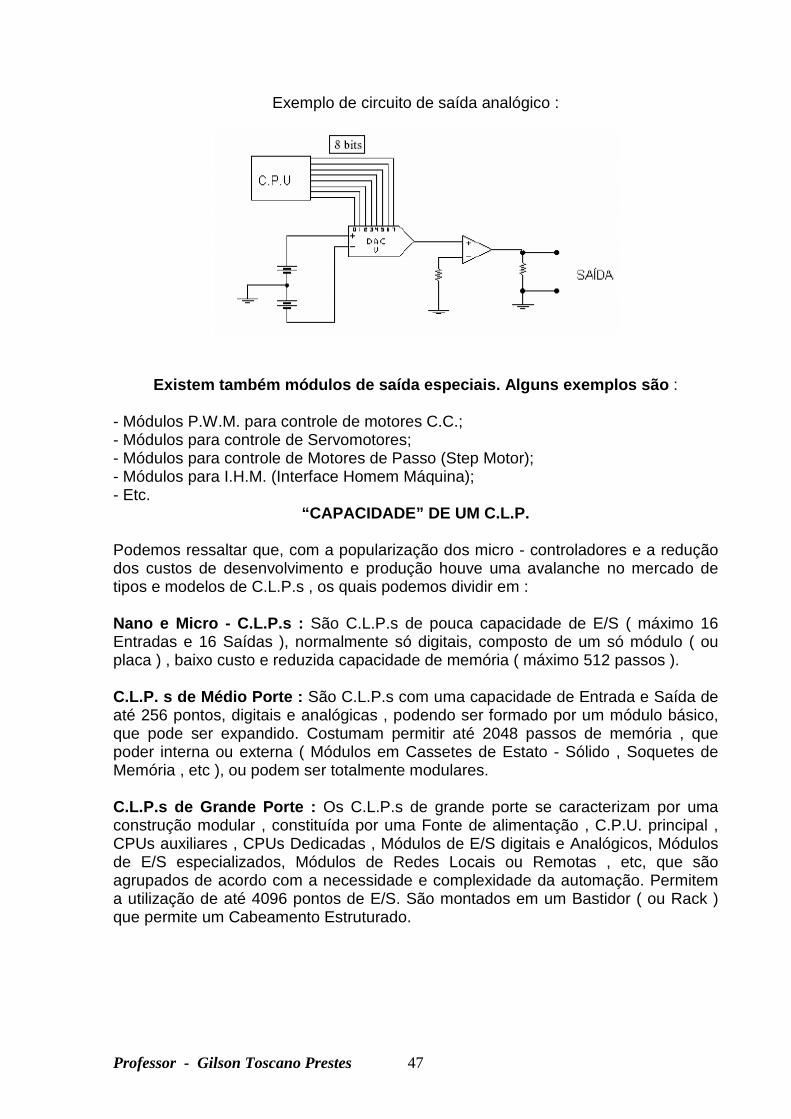
Exemplo de circuito de saída analógico :
Existem também módulos de saída especiais. Alguns e xemplos são : - Módulos P.W.M. para controle de motores C.C.; - Módulos para controle de Servomotores; - Módulos para controle de Motores de Passo (Step Motor); - Módulos para I.H.M. (Interface Homem Máquina); - Etc.
“CAPACIDADE” DE UM C.L.P.
Podemos ressaltar que, com a popularização dos micro - controladores e a redução dos custos de desenvolvimento e produção houve uma avalanche no mercado de tipos e modelos de C.L.P.s , os quais podemos dividir em : Nano e Micro - C.L.P.s : São C.L.P.s de pouca capacidade de E/S ( máximo 16 Entradas e 16 Saídas ), normalmente só digitais, composto de um só módulo ( ou placa ) , baixo custo e reduzida capacidade de memória ( máximo 512 passos ). C.L.P. s de Médio Porte : São C.L.P.s com uma capacidade de Entrada e Saída de até 256 pontos, digitais e analógicas , podendo ser formado por um módulo básico, que pode ser expandido. Costumam permitir até 2048 passos de memória , que poder interna ou externa ( Módulos em Cassetes de Estato - Sólido , Soquetes de Memória , etc ), ou podem ser totalmente modulares. C.L.P.s de Grande Porte : Os C.L.P.s de grande porte se caracterizam por uma construção modular , constituída por uma Fonte de alimentação , C.P.U. principal , CPUs auxiliares , CPUs Dedicadas , Módulos de E/S digitais e Analógicos, Módulos de E/S especializados, Módulos de Redes Locais ou Remotas , etc, que são agrupados de acordo com a necessidade e complexidade da automação. Permitem a utilização de até 4096 pontos de E/S. São montados em um Bastidor ( ou Rack ) que permite um Cabeamento Estruturado.

Professor - Gilson Toscano Prestes 48
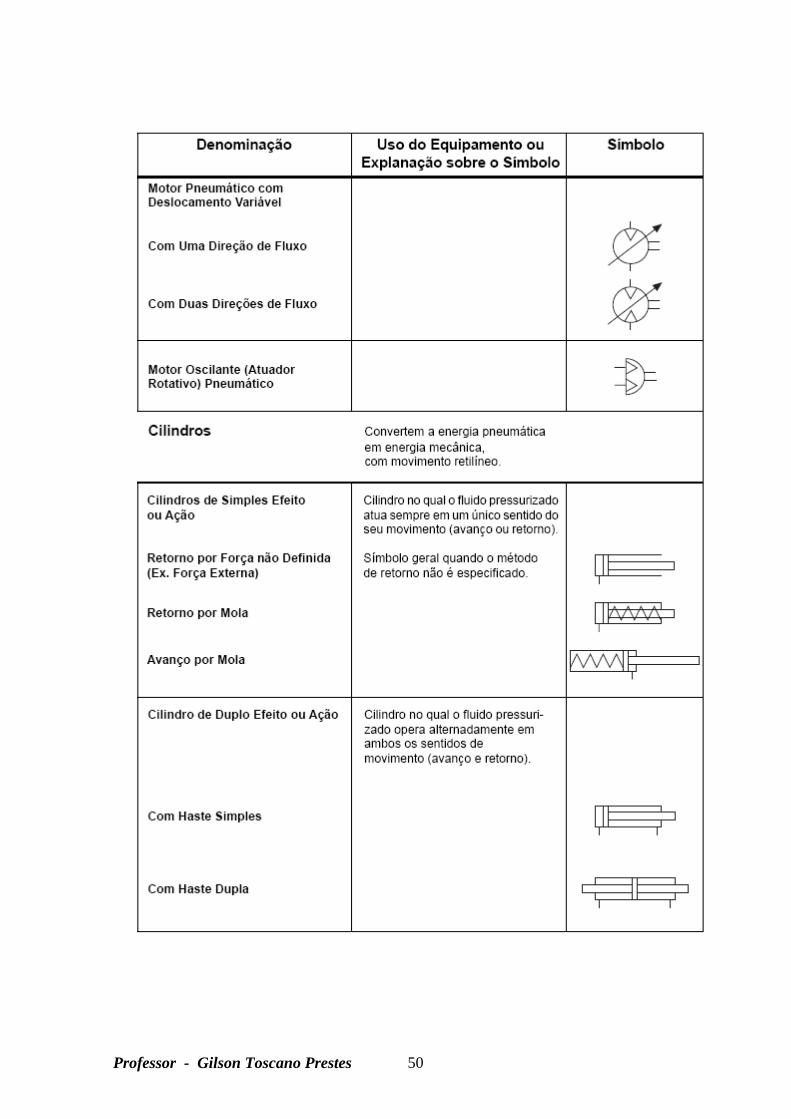
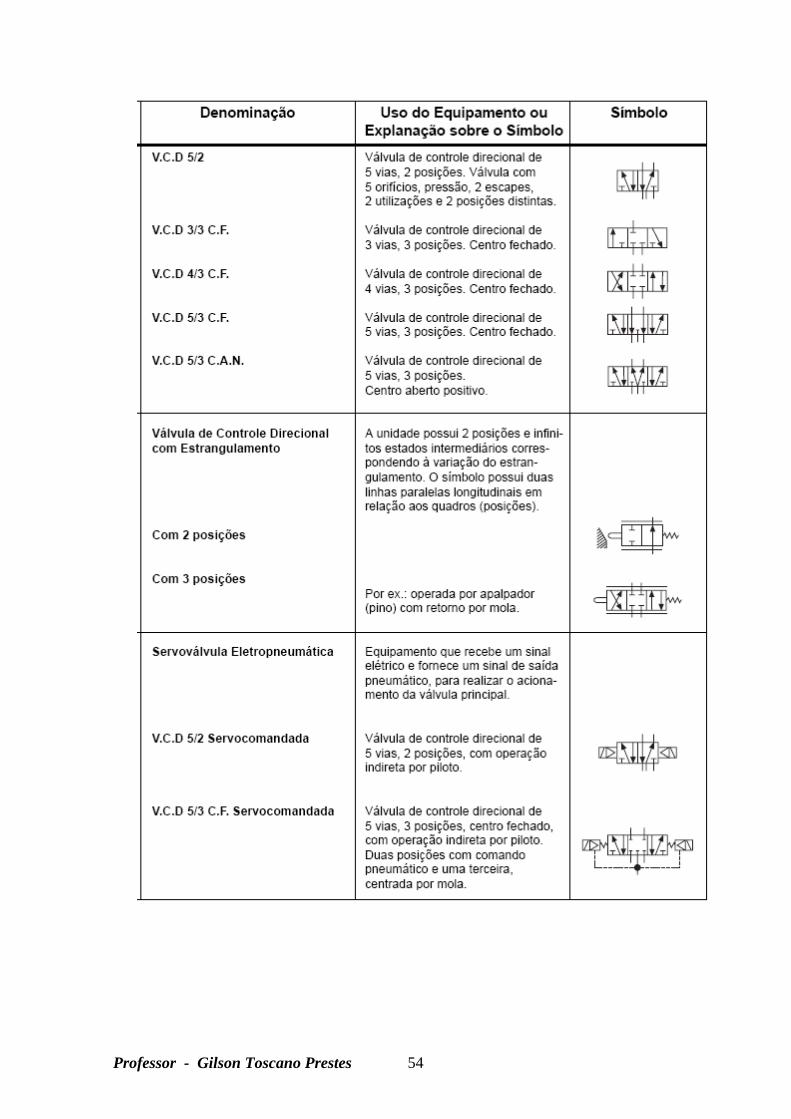
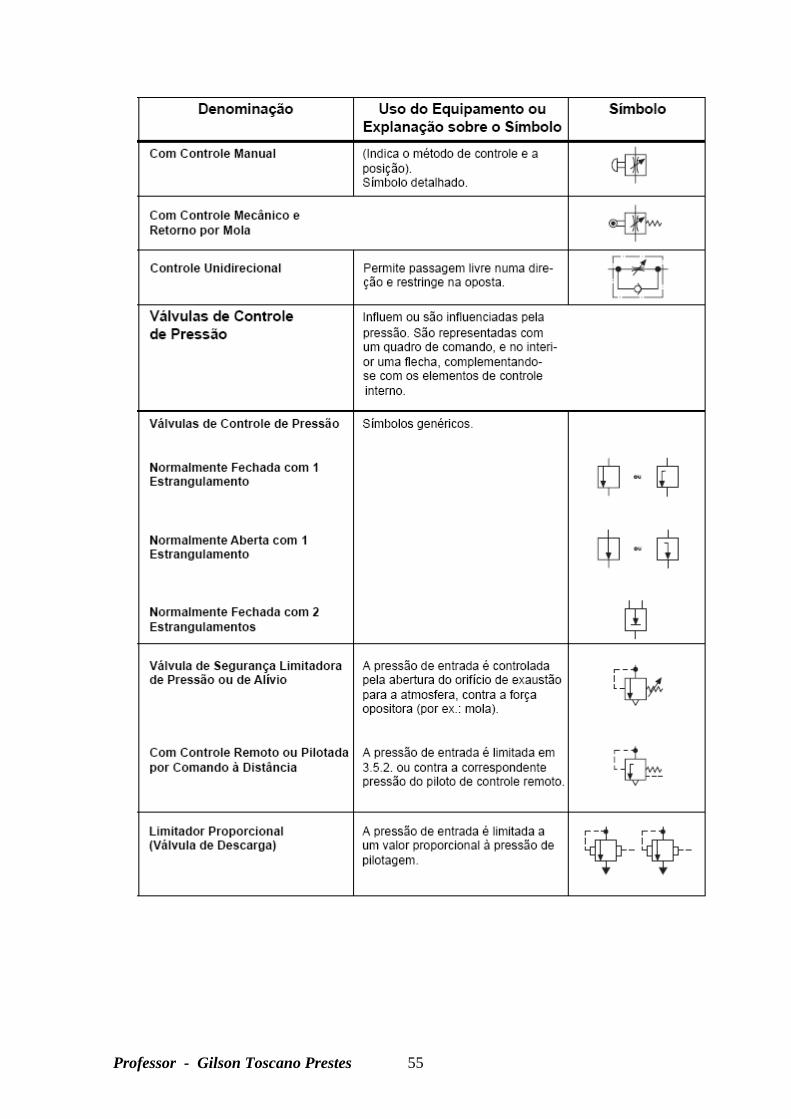
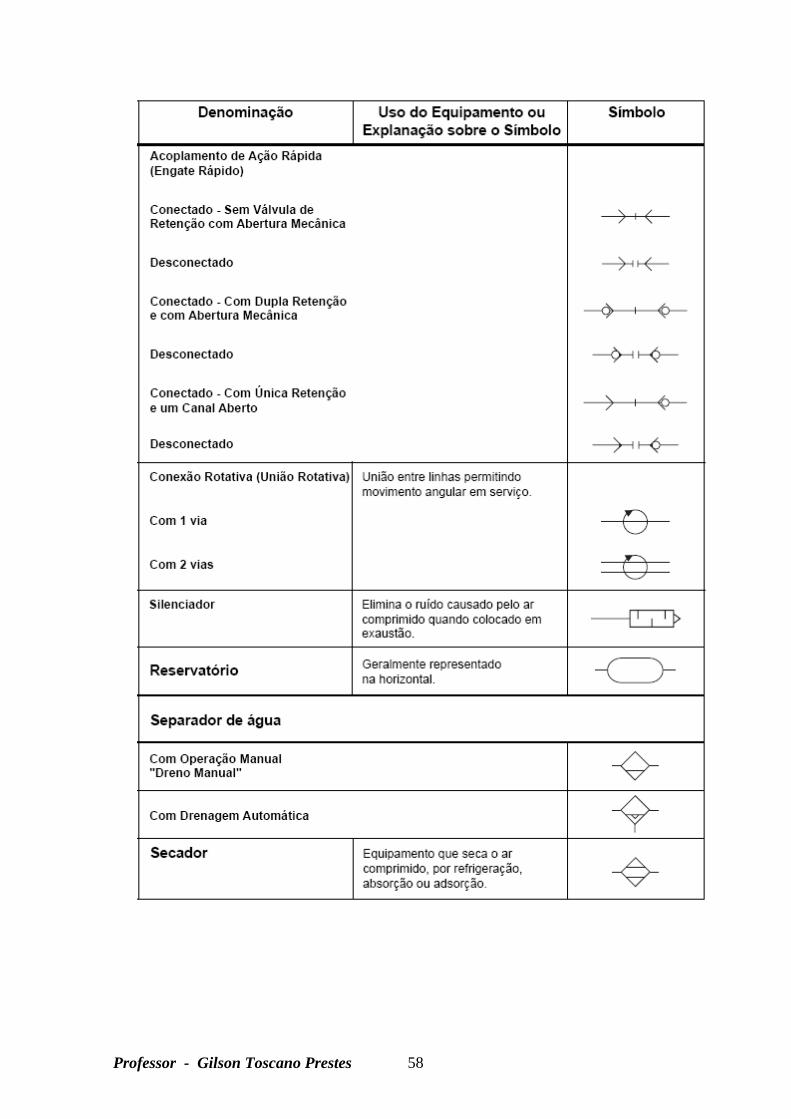
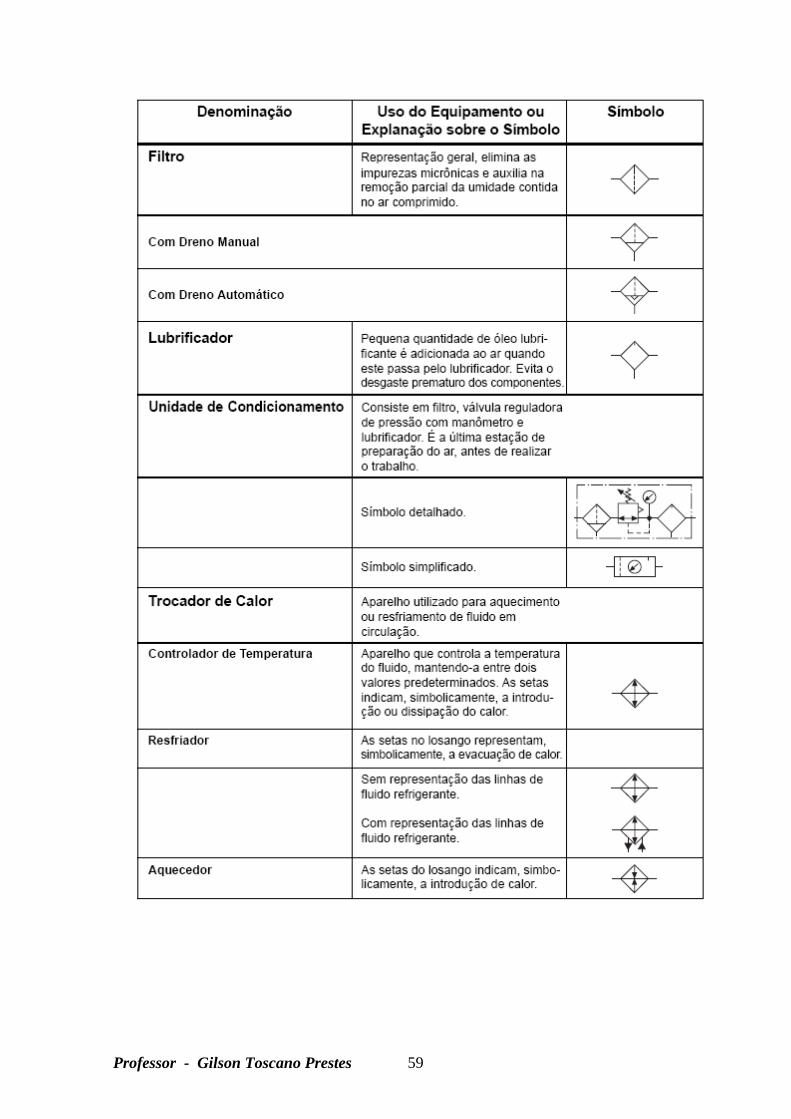
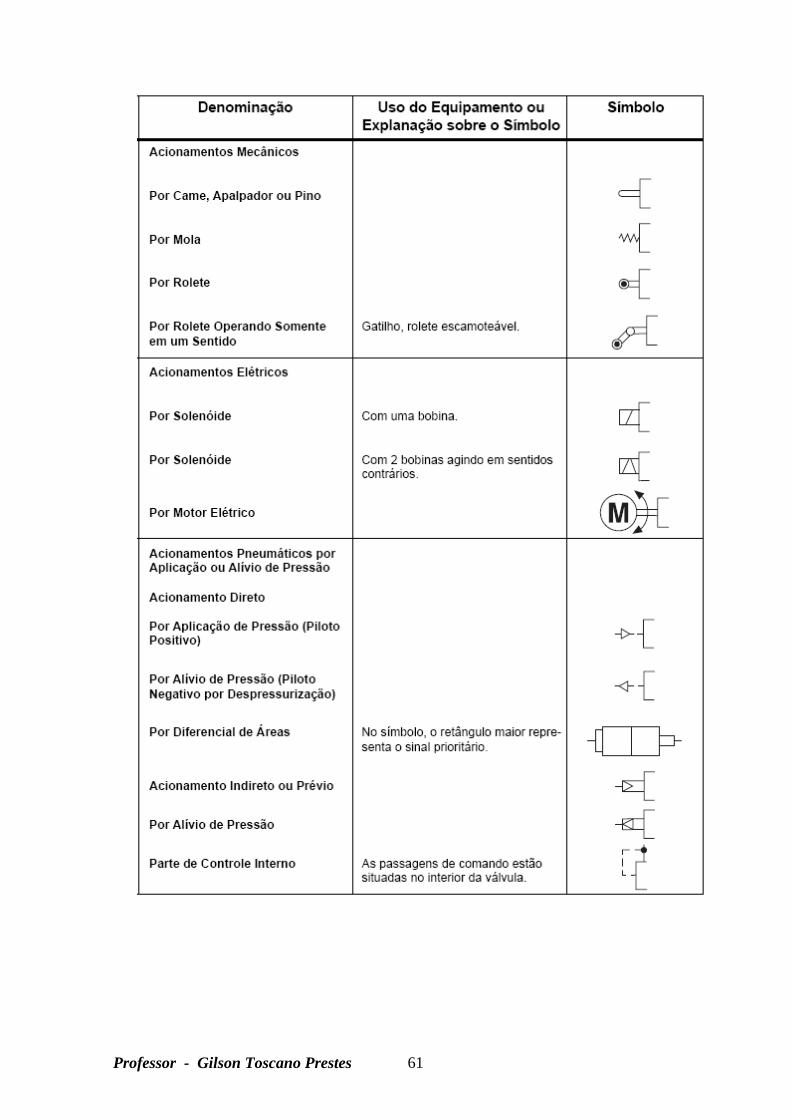
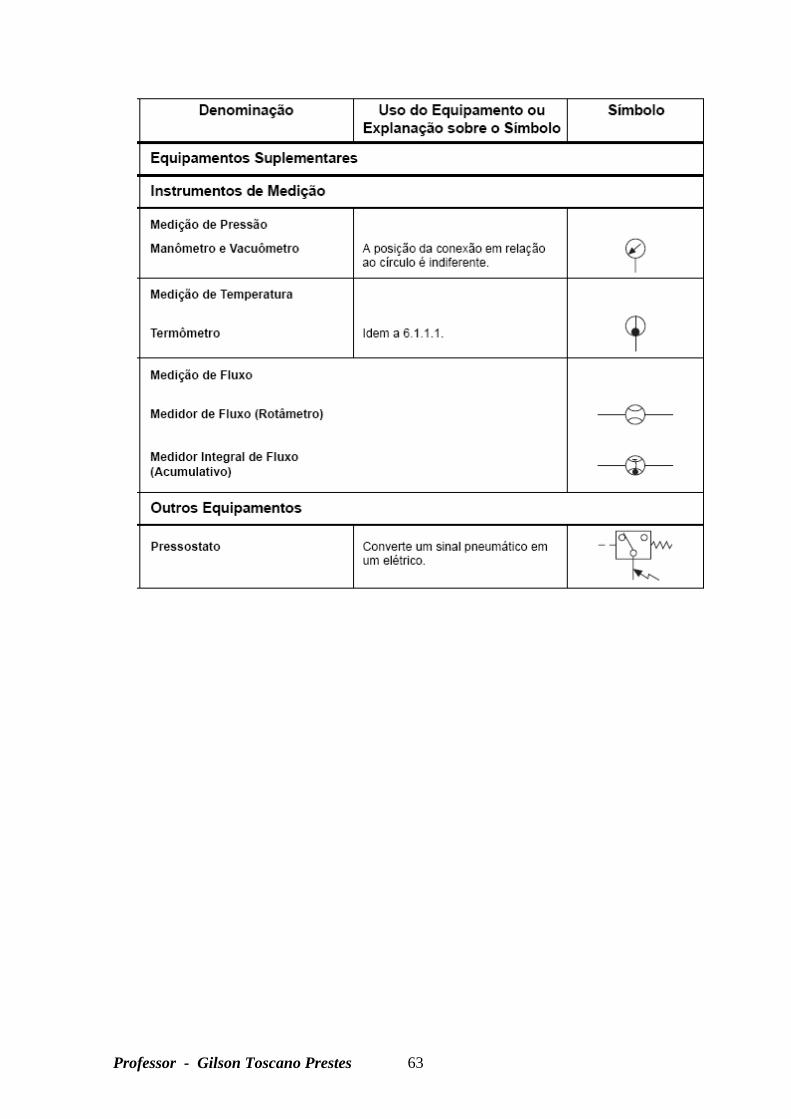
19. SIMBOLOGIA

Professor - Gilson Toscano Prestes 49
Professor - Gilson Toscano Prestes 50

Professor - Gilson Toscano Prestes 51

Professor - Gilson Toscano Prestes 52

Professor - Gilson Toscano Prestes 53
Professor - Gilson Toscano Prestes 54
Professor - Gilson Toscano Prestes 55

Professor - Gilson Toscano Prestes 56

Professor - Gilson Toscano Prestes 57
Professor - Gilson Toscano Prestes 58
Professor - Gilson Toscano Prestes 59

Professor - Gilson Toscano Prestes 60
Professor - Gilson Toscano Prestes 61

Professor - Gilson Toscano Prestes 62
Professor - Gilson Toscano Prestes 63
















