Apostila Sistemas de Controle
96
APOSTILA DE SISTEMAS DE CONTROLE SUMÁRIO CAPÍTULO 1 - GENERALIDADES SOBRE SISTEMAS DE CONTROLE 1.1- INTRODUÇÃO ___________________________________________________________ I-1 1.2- DEFINIÇÕES BÁSICAS ___________________________________________________ I-1 1.2.1- CONTROLE EM MALHA-FECHADA E MALHA-ABERTA___________________ I-2 1.3- CLASSIFICAÇÃO DOS SISTEMAS DE CONTROLE __________________________ I-3 1.4- COMENTÁRIOS A RESPEITO DO CONTROLE DE UM SISTEMA _____________ I-4 CAPÍTULO 2 - REVISÃO MATEMÁTICA 2.1- INTRODUÇÃO ___________________________________________________________ II-1 2.2- DEFINIÇÃO DE VARIÁVEL COMPLEXA E FUNÇÃO COMPLEXA ____________ II-1 2.3- FUNÇÕES ANALÍTICAS __________________________________________________ II-2 2.4- TEOREMA DE EULER ____________________________________________________ II-2 2.5- TRANSFORMADA DE LAPLACE __________________________________________ II-3 2.5.1- OBTENÇÃO DA TRANSF. DE LAPLACE DE ALGUMAS FUNÇÕES __________ II-3 a) Função Exponencial___________________________________________________________ II-3 b) Função Degrau ______________________________________________________________ II-4 c) Função Rampa_______________________________________________________________ II-4 d) Função Senoidal _____________________________________________________________ II-4 e) Função Co-senoidal___________________________________________________________ II-5 2.5.2- TEOREMAS DA TRANSFORMADA DE LAPLACE__________________________ II-6 a) Função Transladada___________________________________________________________ II-6 b) Função Pulso ________________________________________________________________ II-7 c) Função Impulso ______________________________________________________________ II-7 d) Multiplicação de f(t) por e -αt ____________________________________________________ II-8 e) Mudança de escala de tempo____________________________________________________ II-8 f) Demonstração do teorema da diferenciação ________________________________________ II-8 g) Teorema do Valor Final ______________________________________________________ II-10
-
Upload
brunoeihara -
Category
Documents
-
view
551 -
download
3
Transcript of Apostila Sistemas de Controle

APOSTILA DE SISTEMAS DE CONTROLE
SUMÁRIO
CAPÍTULO 1 - GENERALIDADES SOBRE SISTEMAS DE CONTROLE
1.1- INTRODUÇÃO ___________________________________________________________I-1
1.2- DEFINIÇÕES BÁSICAS ___________________________________________________I-1
1.2.1- CONTROLE EM MALHA-FECHADA E MALHA-ABERTA___________________ I-2
1.3- CLASSIFICAÇÃO DOS SISTEMAS DE CONTROLE __________________________I-3
1.4- COMENTÁRIOS A RESPEITO DO CONTROLE DE UM SISTEMA _____________I-4
CAPÍTULO 2 - REVISÃO MATEMÁTICA
2.1- INTRODUÇÃO ___________________________________________________________II-1
2.2- DEFINIÇÃO DE VARIÁVEL COMPLEXA E FUNÇÃO COMPLEXA ____________ II-1
2.3- FUNÇÕES ANALÍTICAS __________________________________________________II-2
2.4- TEOREMA DE EULER ____________________________________________________II-2
2.5- TRANSFORMADA DE LAPLACE __________________________________________II-3
2.5.1- OBTENÇÃO DA TRANSF. DE LAPLACE DE ALGUMAS FUNÇÕES __________II-3
a) Função Exponencial___________________________________________________________II-3
b) Função Degrau ______________________________________________________________II-4
c) Função Rampa_______________________________________________________________II-4
d) Função Senoidal _____________________________________________________________II-4
e) Função Co-senoidal___________________________________________________________II-5
2.5.2- TEOREMAS DA TRANSFORMADA DE LAPLACE__________________________II-6
a) Função Transladada___________________________________________________________II-6
b) Função Pulso ________________________________________________________________II-7
c) Função Impulso ______________________________________________________________II-7
d) Multiplicação de f(t) por e-αt ____________________________________________________II-8
e) Mudança de escala de tempo____________________________________________________II-8
f) Demonstração do teorema da diferenciação ________________________________________II-8
g) Teorema do Valor Final ______________________________________________________II-10

h) Teorema do Valor Inicial______________________________________________________II-11
2.6- TRANSFORMADA INVERSA DE LAPLACE ________________________________II-11
2.6.1- MÉTODO DE EXPANSÃO EM FRAÇÕES PARCIAIS_______________________II-12
DETERMINAÇÃO DOS RESÍDUOS ASSOCIADOS AOS PÓLOS _____________II-12
a) Pólos Reais e Distintos _______________________________________________________II-12
b) Pólos Reais Múltiplos_______________________________________________II-14
c) Pólos Complexos Conjugados _________________________________________________II-15
2.7- SOLUÇÃO DE EQUAÇÕES DIFERENCIAIS, LINEARES E INVARIANTES NOTEMPO ATRAVÉS DE T.L. ___________________________________________________II-16
CAPÍTULO 3 - CONCEITOS FUNDAMENTAIS
3.1- INTRODUÇÃO __________________________________________________________III-1
3.2- FUNÇÃO DE TRANSFERÊNCIA___________________________________________III-1
COMENTÁRIOS SOBRE FUNÇÃO DE TRANSFERÊNCIA _______________________III-1
3.3- DIAGRAMA DE BLOCOS ________________________________________________III-2
- Blocos e Fluxo de Sinais _______________________________________________________III-2
- Ponto de Soma ______________________________________________________________III-2
- Pontos de Ramificações________________________________________________________III-2
3.4- DIAGRAMA DE BLOCOS DE UM SISTEMA EM MALHA FECHADA _________ III-3
3.5- SISTEMA EM MALHA-FECHADA SUJEITO A PERTURBAÇÕES_____________III-4
3.6- REGRAS DA ÁLGEBRA DO DIAGRAMA DE BLOCOS ______________________III-5
3.7- GRÁFICOS DE FLUXO DE SINAL _________________________________________III-6
DEFINIÇÕES DOS TERMOS USADOS EM GRÁF. DE FLUXO DE SINAIS __________III-7
ÁLGEBRA DO GRÁFICO DE FLUXO DE SINAIS_________________________________III-7
3.8- FÓRMULA DO GANHO DE MASON_______________________________________III-8
3.9- INTRODUÇÃO A TEORIA DE MODELOS DE VARIÁVEIS DE ESTADO _______ III-9
3.10- FORMA PADRÃO DE REPRESENTAÇÃO DO MODELO
DE VARIÁVEIS DE ESTADO DE UM SISTEMA________________________________III-12
3.11- OBTENÇÃO DO MODELO DE ESTADO DE UM SISTEMA A PARTIR DASEQUAÇÕES DIFERENCIAIS_________________________________________________III-13

3.12- OBTENÇÃO DO MODELO DE ESTADO DE UM SISTEMA A PARTIR DAFUNÇÃO DE TRANSFERÊNCIA _____________________________________________III-13
3.13- OBTENÇÃO DA FUNÇÃO DE TRANSFERÊNCIA DE UM SISTEMA, A PARTIRDAS EQUAÇÕES DE ESTADO _______________________________________________III-14
3.14- TRANSFORMAÇÃO DE EQUAÇÕES DE ESTADO E VARIÁVEIS DE ESTADOIII-15
CAPÍTULO 4 - MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS
4.1- INTRODUÇÃO __________________________________________________________IV-1
4.2- MODELAGEM MATEMÁTICA DE SISTEMAS MECÂNICOS ________________ IV-1
- Massa _____________________________________________________________________IV-1
- Força ______________________________________________________________________IV-2
- Torque_____________________________________________________________________IV-2
- Deslocamento, Velocidade e Aceleração __________________________________________IV-2
- Deslocamento Angular, Velocidade Angular e Aceleração Angular______________________IV-2
LEIS DE NEWTON___________________________________________________________IV-3
- Segunda lei de Newton (Translação) _____________________________________________IV-3
- Segunda lei de Newton (Rotação)________________________________________________IV-3
4.2.1- SISTEMAS MECÂNICOS DE TRANSLAÇÃO______________________________IV-3
- Elemento de Inércia (Massa)____________________________________________________IV-3
- Elemento de Amortecimento (Amortecedor) _______________________________________IV-4
- Elemento de Elasticidade (Mola) ________________________________________________IV-4
4.2.2- SISTEMAS MECÂNICOS DE ROTAÇÃO _________________________________IV-6
- Elementos de inércia (Momento de Inércia) ________________________________________IV-7
- Elemento de Amortecimento (Amortecedor) _______________________________________IV-7
- Elemento de Elasticidade (Mola) ________________________________________________IV-7
4.3- MODELAGEM MATEMÁTICA DE SISTEMAS ELÉTRICOS _________________ IV-8
4.3.1- CIRCUITO RLC________________________________________________________IV-8
4.4- SISTEMAS ANÁLOGOS __________________________________________________IV-9
4.4.1- ANALOGIA ENTRE SISTEMAS ELÉTRICOS E MECÂNICOS_______________IV-9
a) Analogia Força-Tensão _______________________________________________________IV-9
b) Analogia Força-Corrente_____________________________________________________IV-10
4.5 - SISTEMAS ELETROMECÂNICOS _______________________________________IV-11

4.5.1- SERVOMOTORES DE CORRENTE CONTÍNUA __________________________IV-11
4.5.1.1- CONTROLE PELA ARMADURA DE SERVOMOTORES CC ______________IV-12
4.5.1.2- GERADOR CC ______________________________________________________IV-16
4.6- TRANSFORMADORES E ENGRENAGENS ________________________________IV-17
4.7- LINEARIZAÇÃO DE MODELOS MATEMÁTICOS NÃO-LINEARES _________ IV-18
CAPÍTULO 5 - AÇÕES BÁSICAS DE CONTROLE E CONTROLADORESAUTOMÁTICOS INDUSTRIAIS
5.1- AÇÕES BÁSICAS DE CONTROLE _________________________________________V-1
5.1.1- AÇÃO DE CONTROLE ON-OFF OU DE DUAS POSIÇÕES ___________________V-1
5.1.2- AÇÃO DE CONTROLE PROPORCIONAL__________________________________V-2
5.1.3- AÇÃO DE CONTROLE INTEGRAL _______________________________________V-2
5.1.4- AÇÃO DE CONTROLE PROPORCIONAL-INTEGRAL ______________________V-3
5.1.5- AÇÃO DE CONTROLE PROPORCIONAL-DERIVATIVO ____________________V-4
5.1.6- AÇÃO DE CONTROLE PROPORCIONAL-INTEGRAL-DERIVATIVO_________ V-4
5.2- CONTROLE PROPORCIONAL APLICADO A UM SISTEMA DE 1 a ORDEM _____V-5
5.2.1- IMPLEMENTAÇÃO DO CONTROLADOR PROPORCIONAL ________________V-6
5.2.2- IMPLEMENTAÇÃO DO CONTROLADOR PROPORCIONAL-DERIVATIVO___ V-6
5.2.3- IMPLEMENTAÇÃO DO CONTROLADOR PROPORCIONAL-INTEGRAL _____ V-7
5.3- EFEITOS DAS AÇÕES DE CONTROLE INTEGRAL E DERIVATIVA NODESEMPENHO DO SISTEMA _________________________________________________V-8
5.3.1- AÇÃO DE CONTROLE INTEGRAL _______________________________________V-8
5.3.2- RESPOSTA DE UM SISTEMA COM CONTROLE PROPORCIONAL APERTURBAÇÃO _____________________________________________________________V-9
5.3.3- RESPOSTA DE UM SISTEMA COM CONTROLE “P-I” A PERTUBAÇÕES ____ V-9
CAPÍTULO 6 - ANÁLISE DA RESPOSTA TRANSITÓRIA, DO ERRO DEREGIME PERMANENTE E DA ESTABILIDADE DE SISTEMAS
6.1- INTRODUÇÃO __________________________________________________________VI-1

6.2- SISTEMAS DE PRIMEIRA ORDEM________________________________________VI-1
a) Resposta ao degrau __________________________________________________________VI-1
b) Resposta a Rampa Unitária ____________________________________________________VI-2
6.3- SISTEMAS DE 2a ORDEM ________________________________________________VI-3
a) Pólos Reais ________________________________________________________________VI-3
b) Pólos Complexos____________________________________________________________VI-3
1o Caso: SISTEMA SUBAMORTECIDO __________________________________________VI-3
2o Caso: SISTEMA CRITICAMENTE AMORTECIDO _______________________________VI-4
3o Caso: SISTEMA SUPERAMORTECIDO ________________________________________VI-5
6.3.1- ESPECIFICAÇÕES DO TEMPO DE RESPOSTA ___________________________VI-6
- Tempo de Subida “tr” _________________________________________________________VI-6
- Tempo de Pico “tp”___________________________________________________________VI-6
- Tempo de Acomodação “ts” ____________________________________________________VI-6
- Overshoot Máximo “Mp” ______________________________________________________VI-6
6.4- SISTEMAS DE ORDEM SUPERIOR / RESPOSTA TRANSITÓRIA _____________VI-8
6.5 - ERRO DE REGIME PERMANENTE PARA UM SISTEMA DE 2a ORDEM ASSOCIADA AUM COMPENSADOR PROPORCIONAL _______________________________________VI-9
6.6- CONTROLADOR “P-D” APLICADO A UM SISTEMA DE 2 a ORDEM _________VI-10
6.7- CRITÉRIO DE ESTABILIDADE DE ROUTH-HURWITZ_____________________VI-11
6.8- ERROS EM REGIME PERMANENTE _____________________________________VI-12
6.8.1- ERRO PARA UMA ENTRADA DO TIPO DEGRAU UNITÁRIO _____________VI-13
6.8.2- ERRO PARA UMA ENTRADA DO TIPO RAMPA UNITÁRIA_______________VI-136.8.3- ERRO PARA UMA ENTRADA DO TIPO PARÁBOLA _____________________VI-14
QUADRO RESUMO_________________________________________________________VI-15
CAPÍTULO 7 - ANÁLISE DO LUGAR DAS RAÍZES
7.1- INTRODUÇÃO _________________________________________________________VII-1
7.2- MÉTODO DO LUGAR DAS RAÍZES ______________________________________VII-1
7.2.1- PRINCÍPIOS BÁSICOS DO MÉTODO DO LUGAR DAS RAÍZES____________VII-1
7.2.2- DEFINIÇÃO GERAL DO LUGAR DAS RAÍZES ___________________________VII-3

7.3- REGRAS GERAIS PARA CONSTRUÇÃO DOS LUGARES ___________________VII-5

Apostila de Sistemas de Controle I-1
&$3Ì78/2 ,
“ GENERALIDADES SOBRE SISTEMAS DE CONTROLE ”
1.1- INTRODUÇÃO
Embora muitas vezes não percebemos, todos os dias participamos ativa ou passivamente dediversos sistemas de controle. Sempre que o ser humano participa de um determinado processo coma função de monitorá-lo, está participando do fechamento de uma malha. Como exemplos desistemas de controle, pode-se citar:
- Ato de guiar um automóvel (malha fechada);
- Ato de utilizar um liqüidificador (malha fechada);
- Ato de utilizar um máquina de lavar (malha aberta);
- Ato de utilizar um microondas (malha aberta).
Atualmente os sistemas de controle têm assumido um papel progressivamente importante nodesenvolvimento da civilização moderna. Praticamente todos aspectos de nossa atividade diária sãoafetados por algum tipo de sistema de controle. A busca da qualidade, eficiência e precisão,praticamente exige a presença de sistemas de controle em malha fechada sem a presença do operadorhumano, isto é, CONTROLE AUTOMÁTICO.
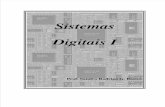
O primeiro dispositivo que utilizava controle em malha fechada que se tem notícia, é orelógio de água inventado dois séculos antes de cristo.
O tempo era medido pelo volume deágua acumulada no reservatório inferior, o qualrecebia os pingos de água com uma vazãoconstante de um reservatório para o outro. Istoera conseguido, graças a válvula flutuante doprimeiro reservatório que possuía a função degarantir sempre o mesmo nível de água noprimeiro reservatório. Esta válvula apresentavaas funções de sensor e atuador do sistema.
1.2- DEFINIÇÕES BÁSICAS
A seguir são introduzidas as definições básicas a respeito das denominações utilizadas nateoria de controle.
- Planta:A planta de um sistema de controle é definida como sendo a parte do sistema a ser
controlada. Ex: reator químico, caldeira, gerador, etc.
- Processo:O processo é definido como sendo a operação a ser controlada na planta. Ex: processo
químico, físico, biológico, etc.

Apostila de Sistemas de Controle I-2
- Perturbações:São sinais que tendem a afetar o valor da saída de um sistema. Se a perturbação é gerada
dentro do sistema, ela é denominada interna. Caso contrário, é considerada como um sinal de entradado sistema.
- Controle Realimentado:É a operação que na presença de perturbações externas, tende a reduzir a diferença entre a
saída do sistema e a entrada de referência.
- Sistema de Controle Realimentado:É um sistema que tende a manter uma relação preestabelecida entre o sinal de saída e a
entrada de referência, comparando-as e utilizando a diferença entre estes sinais como um meio decontrole do sinal de saída.
Ex: sistema de controle de temperatura de uma sala. Pela comparação da temperatura da sala(saída) com a temperatura desejada (entrada), um termostato abre ou fecha, com o objetivo deigualar os sinais.
Outro exemplo é o controle de velocidade de um automóvel pelo motorista. Para que oautomóvel não ultrapasse uma velocidade predefinida, o motorista deve comparar continuamente avelocidade do veículo (saída) com a velocidade estabelecida (entrada).
- Servo Mecanismo:É um sistema de controle realimentado no qual a saída do sistema é uma posição mecânica,
velocidade ou aceleração.
- Sistema Regulador Automático:É um sistema de controle cujas saída e entrada de referência são constantes, ou variam
lentamente, e o objetivo do sistema é manter a saída em um valor desejado mesmo na presença deperturbações. Ex: controle de pressão e temperatura em um processo químico.
1.2.1- CONTROLE EM MALHA-FECHADA E MALHA-ABERTA
O controle em malha fechada é o mesmo que controle realimentado. A diferença entre osinal de entrada (referência) e o sinal de saída realimentado, chamado de sinal de erro, é introduzidono controlador que atua na planta ou no processo de forma a reduzir o erro e manter a saída em umvalor desejado.
Conforme já foi mencionado anteriormente, existem dois tipos de controle em malha fechada(realimentado), definidos como controle manual e controle automático. No controle automático, ooperador é substituído por dispositivos que desempenham as suas funções de formas mais eficientese precisas.
Já nos sistemas de controle em malha aberta, a saída não tem efeito na ação de controle, istoé, a saída não é medida nem realimentada para comparação com a entrada. Para cada entrada dereferência haverá uma condição preestabelecida de operação. Qualquer sistema que opere em umabase de tempo é um sistema em malha aberta.
A operação em malha aberta deve ser usada, quando se conhece a relação entre entrada-saídae o sistema não apresentar nenhum tipo de perturbação.

Apostila de Sistemas de Controle I-3
Nem sempre, os sistemas em malha fechada são aconselháveis. Nos sistemas em que asentradas são conhecidas e não estão sujeitas a perturbações, a operação em malha aberta deve serpreferida. Entretanto, quando o sistema estiver sujeito a perturbações e variações imprevisíveis deve-se preferir a operação em malha fechada. Porém, estes sistemas devem ser analisados e projetadoscom bastante cuidado, visto que outros problemas podem ser gerados como por exemplo,instabilidade e oscilações.
1.3- CLASSIFICAÇÃO DOS SISTEMAS DE CONTROLE
- Sistemas de Controle Linear e Não-LinearPraticamente todos os sistemas físicos existentes na prática são não-lineares. Entretanto,
quando os módulos dos sinais dos sistemas de controle são limitados a uma certa faixa de valores, naqual os componentes do sistema exibem características lineares, o sistema é dito linear. Quando osmódulos dos sinais se estendem fora da faixa linear de operação, o sistema deverá ser consideradocomo não-linear.
No geral o sistema é dito linear, quando o princípio da superposição pode ser aplicado.
- Sistemas de Controle Invariante no tempo e Variante no tempoUm sistema de controle é dito invariante no tempo quando seus parâmetros são estacionários
com relação ao tempo, isto é, não variam com o tempo. A resposta do sistema independe do instantede tempo no qual a entrada é aplicada.
Por outro lado, um sistema de controle é dito variante no tempo, quando um ou maisparâmetros variam com o tempo e a resposta do sistema depende do instante de tempo no qual aentrada é aplicada. Um exemplo de um sistema de controle variante no tempo é o controle de ummíssil teleguiado, no qual a massa do mesmo diminui com o tempo, já que combustível é consumidodurante o vôo.
- Sistemas de Controle Contínuos e DiscretosUm sistema é dito contínuo, quando todas as variáveis do sistema são conhecidas em todos
os instantes de tempo.Um sistema é dito discreto, quando pelo menos uma variável do sistema só é conhecida em
alguns instantes de tempo.
- Sistemas de Controle “uma entrada - uma saída” e “várias entradas - várias saídas”Um exemplo claro de um sistema “uma entrada - uma saída” é o sistema de controle de
velocidade de um motor elétrico, onde a entrada é a velocidade desejada e a saída é a velocidadeatual.
Como exemplo de sistemas “várias entradas - várias saídas” pode-se citar o controle depressão e temperatura de um caldeira, que apresenta duas grandezas de entrada e de saída (pressão etemperatura).
- Sistemas de Controle Clássico e Sistemas de Controle ModernoA teoria de controle clássico utiliza exaustivamente o conceito de função de transferência,
onde a análise e o projeto de um sistema são feitos no domínio de freqüência, isto é, no domínio “S”.Esta teoria fornece resultados satisfatórios somente para sistemas do tipo “uma entrada - uma saída”.

Apostila de Sistemas de Controle I-4
A teoria de controle moderno é baseado na abordagem de espaço de estado, que utilizaexaustivamente os conceitos de matriz de transferência e a análise e o projeto de um sistema sãofeitos no domínio do tempo.
1.4- COMENTÁRIOS A RESPEITO DO CONTROLE DE UM SISTEMA
- Requisitos de um Sistema de ControleA exigência fundamental de um sistema de controle é ser estável, isto é, apresentar
estabilidade absoluta. Deve também, apresentar um boa estabilidade relativa, isto é, a velocidadede resposta deve ser rápida e esta resposta deve apresentar um bom amortecimento. O sistema decontrole deve ser capaz de reduzir os erros para zero ou para algum valor pequeno tolerável.
As exigências de uma ótima estabilidade relativa e erro zero em regime, muitas vezes sãoincompatíveis. Deve-se portanto buscar um ponto ótimo entre estas exigências.
- Modelagem MatemáticaOs componentes e dispositivos presentes nos mais diversos sistemas de controle são
geralmente de natureza totalmente distintas, como por exemplo, eletromecânicos, hidráulicos,pneumáticos, eletrônicos, etc. Para que haja uma uniformidade na análise estes componentes e/oudispositivos são substituídos pelos seus modelos matemáticos.
Um dos primeiros problemas que nos deparamos quando vamos projetar um sistema decontrole, é na obtenção de modelos matemáticos precisos para os dispositivos físicos. Estesmodelos devem representar os aspectos essenciais destes dispositivos.
A análise do desempenho do sistema baseado no seu modelo matemático deve serrazoavelmente precisa. Sistemas aparentemente diferentes podem ser descritos pelo mesmo modelomatemático. É baseado neste fato que a teoria de sistemas de controle é uma abordagem única einterdisciplinar.
Devido a facilidade de se manipular e analisar os sistemas lineares, muitos dispositivos emque a relação entre entrada-saída não são lineares, normalmente são linearizados em torno do pontode operação através das técnicas disponíveis.
- Análise, Projeto e Síntese de um Sistema de ControleA análise de um sistema de controle significa a investigação do desempenho do sistema, cujo
modelo matemático é conhecido sob certas condições especificadas. Esta, deve começar peladescrição matemática de cada dispositivo que o compõe. Uma vez que o modelo matemático dosistema é obtido, a análise do mesmo independe de sua natureza física (eletrônico, pneumático, etc.).
No geral, a análise de um sistema é feita sob dois aspectos: análise da resposta transitória eanálise de regime permanente.
Projetar um sistema, significa determiná-lo de modo a desempenhar uma dada tarefa. Se ascaracterísticas da resposta transitória e do regime permanente não forem satisfatórias, deve-seadicionar um componente ao sistema, com o objetivo de compensar o desempenho indesejado domesmo. Este componente adicional é conhecido como compensador. Em geral o projeto de umcompensador, na teoria de controle clássico, é baseado nos métodos da resposta em freqüência e/oudo lugar das raízes.
Síntese de um sistema, é a sua determinação através de um procedimento direto que faça comque funcione com uma característica específica. Geralmente, este procedimento é puramentematemático.
Atualmente, os computadores têm tido um papel importante na análise, projeto e operação desistema de controle, tanto na parte de simulação do sistema e projeto orientado, como tambémfazendo parte do sistema atuando como um controlador digital.- Abordagem Básica para Projetos de Sistema de Controle

Apostila de Sistemas de ControleI-5
Geralmente o projeto de um sistema de controle envolve métodos de tentativa e erro. Isto sedeve principalmente, as não-linearidades do sistema e também as imprevisões e simplificaçõesadotadas na determinação dos modelos característicos dos dispositivos do sistema.
Na prática, o projetista de posse da planta a ser controlada, projeta o resto do sistema paraque atenda as especificações solicitadas, como por exemplo, Amortecimento, Precisão em RegimePermanente, Confiabilidade e Custo.
As especificações podem ser solicitadas explicitamente ou não. Caso sejam solicitadas, oprojetista deve, dentro do possível, obtê-las. Caso contrário, deve obter as especificações que julgarconveniente. As especificações devem ser analisadas em termos matemáticos. Deve-se salientar, queas especificações devem ser realísticas.
- Metodologia de projeto De posse da planta a ser controlada, deve-se escolher qual o melhor sensor e atuador a serutilizado. Após, deve-se obter os modelos matemáticos da planta , sensor e atuador. A seguir,define-se o modelos matemático do controlador, para que o sistema em malha fechada satisfaça asespecificações do projeto.
Uma vez que o projetista tenha em mãos o modelo matemático completo do sistema, devesimulá-lo para avaliar o seu desempenho em relação a variações do sinal de entrada e também napresença perturbações. Nesta fase é que devem ser feitos os ajustes no sistema, para que a respostado mesmo atenda as especificações solicitadas.
Após, deve-se construir o protótipo físico do sistema, para que o mesmo seja testado e paraque sejam feitos os ajustes práticos.

Apostila de Sistemas de ControleII-1
&$3Ì78/2 ,,
“REVISÃO MATEMÁTICA”
2.1- INTRODUÇÃO
Este capítulo tem por objetivo revisar alguns fundamentos matemáticos necessários para oestudo da teoria de controle.
Inicialmente, defini-se o que vem a ser uma variável complexa e uma função complexa. Após,revisa-se os teoremas de Euler. Por fim revisa-se os conceitos relativos a Transformação de Laplace.
O domínio da Transformação de Laplace é fundamental para o entendimento da teoria deControle Clássico.
2.2- DEFINIÇÃO DE VARIÁVEL COMPLEXA E FUNÇÃO COMPLEXA
- Variável Complexa
É um número complexo, cujas partes real e ou imaginária são variáveis. A variável complexa“S” é expressa em coordenadas retangulares, como mostrado a seguir:
S j1 1 1= +τ ω Onde: τ = Re( )s
ω = Im( )s- Função Complexa
Uma função complexa F(s), é uma função de “S” com parte real e imaginária; podendo serexpressa como:
F(s) = Fx + jFy Onde: Fx e Fy são reais
Ex:VARIÁVEL COMPLEXA FUNÇÃO COMPLEXA
Plano “S” Plano F(s)
F s F F
tgFy
F
X Y
X
( ) = 2 2
1
+
= −θ
O conjugado da função Complexa F(s) é :
2.3- FUNÇÕES ANALÍTICAS
F s Fx jFy( )= −

Apostila de Sistemas de Controle II-2
Uma função é dita Analítica, quando ela e suas derivadas são definidas para um dado valor de“S” ou um dado ponto no plano “S”.
Quando a função F(s) ou suas derivadas tendem ao infinito para um dado valor de “S”, diz-seque a função não é analítica para aquele ponto.
Seja a seguinte função F(s): F s S( ) ( )= +
11
A derivada desta função em relação a “S”, é dada por:
d
dSF s
S( )
( )=
−+1
1 2
Tanto a função F(s), como sua derivada, são definidas para todos os pontos do plano “S”,exceto para o ponto S = −1. Neste ponto, F(s) e sua derivada se aproximam do infinito. Portanto, afunção F(s) é Analítica em todo o Plano “S”, exceto no Ponto S = −1.
Os pontos no plano “S”, onde a função F(s) é analítica são chamados PONTOS ORDINÁRIOS,enquanto que os pontos onde F(s) não é analítica, são chamados PONTOS SINGULARES. Os pontossingulares são também chamados de PÓLOS DA FUNÇÃO (S = −1 é um pólo da função F(s)).
Seja uma função F(s) qualquer. Se F(s) tende a infinito quando S = −p e se a funçãoF s s pn( ).( )+ onde n = 1, 2, 3..., é um valor finito não nulo para o ponto S = −p, então: S = −p échamado de PÓLO DE ORDEM “n”.
- Se n = 1 ⇒ Pólo simples;
- Se n = 2 ⇒ Pólo de 2a ordem;
- Se n = 3 ⇒ Pólo de 3a ordem.
Os valores de “S” em que a função F(s) é igual a zero, são chamados de ZEROS DA FUNÇÃO.
Ex:
F(s)K(S )(S )
S(S )(S )(S )=
+ ++ + +
2 10
1 5 15 2
Esta função tem zeros em S = −2 e S = −10 e pólos simples em: S = 0, S = −1 e S = −5 e umpólo de 2a ordem em S = −15.
Caso S → ∞, G sKsS
( )→∞
= 3 e G s
S( )
→∞= 0. Portanto, se forem considerados pontos no infinito, a
função passa a ter 5 zeros sendo um de 3a ordem, em S = ∞.
2.4- TEOREMA DE EULER
O teorema de Euler, é definido por:
e jjθ θ θ= +cos sen
Pelo uso deste teorema, podemos expressar funções em seno e co-seno, na forma de umafunção exponencial.
Se e-jθ = cosθ - j senθ então, e-jθ é o conjugado complexo de ejθ .

Apostila de Sistemas de Controle II-3
Utilizando-se o teorema de Euler, pode-se definir as seguintes expressões para o senθ e parao cos θ.
( )cosθ θ θ= + −1
2e ej j ( )senθ θ θ= − −1
2je ej j
2.5- TRANSFORMADA DE LAPLACE - T.L.
A transformada de laplace, é a ferramenta matemática utilizada para converter um sinal dodomínio de tempo em um função de variáveis complexas. Diversas funções, como por exemplo fun-ções senoidais, exponenciais, etc.., podem ser convertidas para funções algébricas da variável com-plexa “S”.
O uso do método de transformada de laplace, simplifica os cálculos para a obtenção da res-posta do sistema.
Operações complicadas no domínio de tempo, como por exemplo integração e diferenciação,são substituídas por operações algébricas básicas no domínio da freqüência (plano complexo). Umavez resolvida a expressão algébrica no domínio “S”, a resposta da equação diferencial no domínio detempo é obtida através do uso das tabelas de transformadas de laplace ou pelas técnicas de expansãoem frações parciais.
A transformada de laplace, caracteriza completamente a resposta exponencial de uma funçãolinear invariante no tempo.
Esta transformação é gerada através do processo de multiplicação de um sinal linear f(t) pelosinal “e-St ” e integrando-se este produto, no intervalo de tempo compreendido entre (0, +∞).
Sejam as seguintes definições:
f(t) ⇒ É uma função no domínio de tempo Linear e Invariante no tempo, tal que f(t) = 0 para t < 0.
S ⇒ Variável Complexa./ ⇒ Operador transformada de laplace. Indica que a função temporal f(t) associa-
da, será transformada pela integral de Laplace: e dtST−+∞∫0
.
F(s) ⇒ Transformada de laplace da função f(t).
/ f t F s e dt f t f t e dtST ST( ) = = =− −∞∞ ∫∫( ) ( ) ( )00
Obs: Não esquecer que S j= +τ ω.
Se as funções f(t), f1(t) e f2(t) apresentam T.L., então:
* . ( ) ( ) */ /A f t A f t=
* / / /f t f t f t f t1 2 1 2( ) ( ) ( ) ( ) *+ = +
2.5.1- OBTENÇÃO DA TRANSF. DE LAPLACE DE ALGUMAS FUNÇÕES
a) Função Exponencial para t < 0 para t ≥ 0 A,α → são constantes.
f t
f t A e T
( )
( ) .
=
=
−
0α

Apostila de Sistemas de Controle II-4
( )/ /f t A e e dt A e A e dtt st t S t( ) = = =- - - +. . . . .− ∞ ∞∫ ∫α α α
0 0
( )( )
( )( ) ( )( )/ A e
A
Se
A
Se et S t S S. . .- - + - + - +=
- + - +-=α α α α
α α∞
∞ ∞
0
b) Função Degrau
para t < 0 para t ≥ 0
( )/ A.µ µµ
( ) . ( ).. ( )
. . .t A t e dtA t
Se
A
Se eSt St S S= =
−=
−−− −
∞∞ − ∞ −∫00
0
/ A t AS
. ( )µ =
c) Função Rampa
para t < 0 para t ≥ 0
/ A.t = −∞∫A t e dtSt. .0
Utilizando a definição de Integração por partes tem-se: µ ϑ µϑ ϑ µ0 0 0
t t td d∫ ∫= −. .
Seja: µ µ= → =t d dt e d e dtStϑ = − ⇒ ϑ = eS
St−
−
A t e dt A te
S
e
SdtSt
St St
. . . . . .−− ∞ −
∞∞=
−−
−
∫∫0 00
/ A tA
S
e
S
A
S S
St
. . .=−
=− ∞
0
1 / A tA
S. = 2
d) Função Senoidal
para t < 0 para t ≥ 0
Utilizando o teorema de Euler, tem-se:
( ) ( )sen . senθ ωθ θ ω ω= − ∴ = −− −1
2
1
2je e t
je ej j j t j t
/ A eA
St. - =
+α
α
f t
f t A t
( )
( ) . ( )
==
0
µ
f t
f t A t
( )
( ) .
==
0
f t
f t A t
( )
( ) .sen
==
0
ω
10
0
10

Apostila de Sistemas de Controle II-5
/ f t A t e dtSt( ) .sen .=∞ −∫0
ω
( )/ f tA
je e e dtj t j t St( ) . .= −
∞ − −∫ 20
ω ω
( ) ( )/ f tA
je dt
A
je dtS j t S j t( ) . . . .= −
∞ − − ∞ − +∫ ∫2 20 0
ω ω
( )
( )( )
( ) / f tA
j
e
S j
e
S j
S j t S j t
( ) .=− −
−− +
− − ∞ − + ∞
2 0 0
ω ω
ω ω
/ f tA
j S j S j
A
j
j
S( ) . .=
−−
+
=
+2
1 1
2
22 2ω ω
ωω
/ A sen tA
S.
.ω ωω
=+2 2
e) Função Co-senoidal
para t < 0 para t ≥ 0
( )/ f tA
e e e dtj t j t St( ) . .= + −∞ −∫ 20
ω ω
( ) ( )/ f tA
e dtA
e dtS j t S j t( ) . .= +− −∞ ∞ − +∫ ∫2 20 0
ω ω
( )
( )( )
( )/ f tA e
S j
e
S j
S j t S j t
( ) =− −
+− +
− − ∞ − + ∞
2 0 0
ω ω
ω ω
/ f tA
S j S j
A S
S( ) =
−+
+
=+
2
1 1
2
22 2ω ω ω
/ A tA S
S.cos
.ωω
=+2 2
Embora o procedimento para a obtenção da transformada de laplace de funções temporaisseja simples, existem tabelas prontas para as funções que freqüentemente aparecem na análise desistemas de controle.
Ex:Dada a função f(t) abaixo, obtenha a T.L. da mesma.
f t
f t A t
( )
( ) .cos
==
0
ω ( )cosω ω ωt e ej t j t= + −1
2

Apostila de Sistemas de Controle II-6
( ) ( )f t t e t= + −5 3 2. . .µ
( ) ( ) / / /f t t e t= + −5 3 2. . .µ
( ) a tS
) . . / 55µ = b e
St) . / 3
3
22− =
+
( ) / f tS S
= ++
∴5 3
2 ( ) ( )/ f t
S
S S= +
+8 10
2
2.5.2- TEOREMAS DA TRANSFORMADA DE LAPLACE
a) Função Transladada
Sejam as funções f(t) e f(t - α), mostradas a seguir:
Sabendo-se que “µ(t)” é a função Degrau unitário, podemos escrever as funções f(t) e f(t-α)como:
f(t) = f(t). µ(t) e f(t-α) = f(t-α).µ.(t-α)
A transformada da função f(t-α).µ.(t-α) é dada por:
( ) ( ) ( ) ( )/ f t t f t t e dtst− − = − −∞ −∫α µ α α µ α. . . .0
Chamando t − =α τ , tem-se: dτ = dt, já que α é uma constante.
( ) ( ) ( ) ( ) ( )/ f f e dsτ τ τ τ τµ µα
τ α. . .=−
∞ − +∫
Como a função só é válida para t > α, então quando substituí-se t− →α τ , deve-se trocar olimite inferior da integral 0 → − α. Porém, quando t = +α, τ = 0.
Portanto:
( ) ( ) ( ) ( ) ( )/ f f e dsτ τ τ τ τµ µ τ α. . . .=∞ − +∫0
( ) ( ) ( )/ f f e e ds sτ τ τ τµ τ α. . . .=∞ − −∫0
1

Apostila de Sistemas de Controle II-7
( ) ( ) ( )/ f e f e d e F ss s sτ τ τ τµ α τ α. . . . ( )= =− ∞ − −∫0
( ) ( ) / f t t e F ss− − = −α µ α α. . ( )
Caso particular:
α = 0 ⇒ / f t t F s( ) ( ) ( ).µ =
Comparando-se as expressões acima, concluí-se que transladar no tempo uma função f(t)qualquer, significa multiplicar a transformada de laplace de f(t), F(s), por e-Sα onde α, significa atranslação sofrida por f(t).
b) Função Pulso
f(t) = A 0 < t < t0
f(t) = 0 t < 0 e t > t0
f(t) = A.µ(t) - A. µ(t - t0)
µ(t) = 1(t) e µ(t - t0) = 1(t - t0)
( ) ( )( )/ / /f t A t A t t( ) . .( ) . .= − −1 1 0
( )/ A tA
S. ( )1 = e ( )( )/ A t t
A
Se S t. . . .1 0
0− = − ’
( )/ f tA
Se S t( ) .= − −1 0
c) Função Impulso
A Função Impulso é um caso especial da função pulso, onde o período de duração do impul-
so tende a zero(t0), e a amplitude tende a infinitoAt0
. Se f(t) é a função impulso, a sua transformada
será:
( )/ OLPf tA
t Se
tS t( )
.
.= −
→
−
0 0 01 0
( )( )/ OLPf t
d
d tA e
d
d tt S
A S
SA
t
S t
( ) . .
.
..
.
=−
= =→
−
0 0
0
0
1 0
0
Esta função é chamada de FUNÇÃO IMPULSO UNITÁRIO ou FUNÇÃO DELTA DE DIRAC, se A =1.

Apostila de Sistemas de Controle II-8
d) Multiplicação de f(t) por e- ααt
( )/ e f t e f t e dt f t e dtt t st S t− −∞ − − +∞= =∫ ∫α α α. ( ) . ( ). . ( ). .
0 0
( ) ( )/ e f t t e dt F St S t− ∞ − += = +∫α α α. ( ) ( ). . f0
Ex:Seja:
f(t) = sen ωt ( )F sS
( ) =+ω
ω2 2
Portanto:
f1(t) = e tt−α ω.sen ( )( )F SS
+ =+ +
αω
α ω2 2
e) Mudança de escala de tempo
Se o tempo t é modificado para tα , a função f(t) é alterada para ( )f t
α . Seja a seguinte trans-
formação de Laplace.
( ) ( )/ f e dtt t St
α α=∞ −∫ f0
. .
Seja t tα = 1 e αS S= 1, onde α é uma constante. Desta forma:
( ) / f t e d tt S t
α α=∞ −∫ f0 1 1
1 1( ). . ( . ).
( ) ( )/ f t e dt F St S t
α α α= =∞ −∫ f0 1 1 1
1 1. . . ( ).
( ) ( )/ f F Stα α α= .
Ex:
Seja f(t) = e-t e ( )f et t
50 2= − ,
( ) / /f tS
fS
t( ) ;.
=+1
1
5
5 15 =
+
f) Demonstração do teorema da diferenciação
Seja a T.L. da derivada primeira da função f(t):
δ(t) δ(t-t0)ou

Apostila de Sistemas de Controle II-9/ d
dtf t S F s f. ( ) . ( ) ( )
= − 0
Seja também, a função f(t).
/ f t f t e dt F sSt( ) ( ). . ( )= =∞ −∫0
Integrando-se por partes a expressão acima, temos:
µ ϑ µϑ ϑ µd dt t t
0 0 0∫ ∫= −
F s f te
S
e
Sd f t
dt
dt
St St
( ) ( ). . . ( ).=−
−−
− ∞ −∞
∫0 0
F s f te
S
d
dtf t
e
Sdt
St St
( ) ( ). . ( ) . .=−
−
−
− ∞ −∞
∫0 0
F sf
S S
d
dtf t( )
( ). . ( )= +
∴0 1 / / d
dtf t S F s f. ( ) . ( ) ( )
= − 0
Para a derivada segunda, temos:/ d
dtf t S F s Sf f
2
22 0 0. ( ) ( ) ( )
,( )
= − −
( )Seja: g td
dtf t= . ( )
Portanto:/ /d
dtf t
d
dtg t
2
2. ( ) . ( )
=
/ / /d
dtg t S G s g G s g t
d
dtf t. ( ) . ( ) ( ) ( ) ( ) . ( )
= − → = =
0 ;
gd
dtf f( ) ( )
,( )0 0 0= =/ /d
dtf t S
d
dtf t f
2
20. ( ) . . ( )
,( )
=
−
/ d
dtf t S S F s f f
2
20 0. ( ) . . ( ) ( )
,( )
= − −
f t d df t
d e dt e
SSt
St
( ) ( )= → =
= → = −−
−µ µ
ϑ ϑ

Apostila de Sistemas de Controle II-10/ d
dtf t S F s S f f
2
22 0 0. ( ) . ( ) . ( )
,( )
= − −
g) Teorema do Valor Final
Este teorema, permite que se conheça o valor da função f(t) no tempo t = ∞, através da fun-ção F(s), isto é, o comportamento de f(t) em regime permanente é igual ao comportamento de S.F(s)na vizinhança de S = 0.
Entretanto, este teorema só é aplicável se e somente se: “OLPt
f t→∞
( ) ” existir.
O OLPt
f t→∞
( ) existe, se todos os pólos de S.F(s) estiverem no semi-plano esquerdo do plano S.
Se “S.F(s)” tiver pólos no eixo imaginário ou no semi-plano direto, a função f(t) será oscila-tória ou crescerá exponencialmente. Portanto o OLP
tf t
→∞( ) não existirá.
Um exemplo, bastante elucidativo deste fato, são as funções sen ωt e cos ωt, onde S.F(s)apresenta pólos em S = ± jω.
O Teorema do Valor Final, diz que: se f(t) e ddt f t( ) são transformáveis segundo Laplace, se
o “OLPt
f t→∞
( ) ” existe e F(s) é a T.L. de f(t), então:OLP OLPt S
f t S F s→∞ →
=( ) . ( )0
PROVA:Seja a seguinte T.L. da função g t d
dtf t( ) ( )= :/ d
dtf t g t e dt
d
dtf t e dtSt St. ( ) ( ) . ( ) . ..
= =
−∞ −∞
∫ ∫0 0
Se “S” tender a zero, resulta:OLP OLPS
St
S
Std
dtf t e dt e
→
−
→
−∞
→ =∫0 01
0. ( ) : . onde
Portanto: OLPS
Std
dtf t e dt
d
dtf t dt f t
→
−∞ ∞ ∞
= =∫ ∫0 0 0 01. ( ) . . ( ). ( )OLP
S
Std
dtf t e dt f f
→
−∞
= ∞ −∫0 00. ( ) . ( ) ( ) “1”
Por outro lado:
OLP OLPS
St
S
d
dtf t e dt S F s f
→
−∞
→
= −∫0 000. ( ) . . ( ) ( )OLP OLP
S
St
S
d
dtf t e dt S F s f
→
−∞
→
= −∫0 000. ( ) . . ( ) ( ) “2”

Apostila de Sistemas de Controle II-11
“1” = “2” ∴ f f t S F st S
( ) ( ) . . ( )∞ = =→ →OLP OLP
0 0 “3”
Ex:Seja a seguinte T.L.: F(s) = 1
1S S( )+Qual é o valor de OLP
tf t
→∞( ) ?
A função S.F(s), apresenta um pólo no semi-plano esquerdo do plano “S” e portanto,OLPt
f t→∞
( ) existe. Então, utilizando a expressão “3” , acima resulta:OLP OLP OLPt S S→∞ → →
= =+
=. ( ) . . ( )f t S F sS0 0
1
11
Este resultado, pode ser verificado aplicando-se transformação inversa de Laplace, onde:
h) Teorema do Valor Inicial
Ao contrário do teorema do valor final, este não apresenta limitações quanto a posição dospólos de S.F(s). Através deste teorema, é possível que se conheça o valor de uma função f(t) no ins-tante t = 0+, diretamente da T.L. de f(t).
Se a função f(t) e df t
dt
( ) são transformáveis por Laplace e se OLP
sS F s
→∞. ( ) existe, então:
f S F ss
( ) . ( )0+
→∞=OLP
PROVA:
Seja a função g(t) = d
dtf t. ( ) e:
/ +
∞ −
∞ −= =+ +∫ ∫g t g t e dtd
dtf t e dtSt St( ) ( ) . ( ). .
0 0
OLP/ OLP OLPS S
St
Sg t
d
dtf t e dt S F s f
→∞ + →∞
∞ −
→∞
+= = − =+∫( ) . ( ) . ( ) ( ). .0
0 0
OLPS
S F s f→∞
+− =. ( ) ( )0 0 ∴ f S F sS
( ) . ( )0+
→∞=OLP
2.6- TRANSFORMADA INVERSA DE LAPLACE ⇒ / −1
É o processo inverso da transformação de Laplace, isto é, a partir de uma expressão no do-mínio “S” encontra-se a expressão no domínio de tempo correspondente.
/ −
− ∞
+= = ∫1 1
2F s f t
jF s e dS
c j
c jSt( ) ( ) ( ).π
ω
f(t) = 1 - e-t e OLPt
f t→∞
( )= 1

Apostila de Sistemas de Controle II-12
Embora o procedimento matemático que permite encontrar a transformada inversa de Lapla-ce seja um pouco complicado, esta pode ser encontrada através do uso das tabelas de transforma-das de Laplace. Porém, isto requer que a função F(s) esteja na tabela. Muitas vezes isto não aconte-ce, fazendo com que seja necessário expandir F(s) em frações parciais, tornando a função F(s) for-mada por termos simples e conhecidos.
2.6.1- MÉTODO DE EXPANSÃO EM FRAÇÕES PARCIAIS
Geralmente na análise de sistemas de controle, a função F(s) aparece na seguinte forma:
F sB s
A s( )
( )
( )= Onde: A(s), B(s) → - São polinômios em “S”;
- O grau de B(s) é sempre menor que A(s);
Se F(s) é expandido em partes, então:
( ) ( ) ( ) ( )
F s F s F s F s
F s F s F s F s
f t f t f t f t
n
n
n
( ) ( ) ( ) ......... ( )
( ) ( ) ( ) ......... ( )
( ) ( ) ( ) .......... ( )
= + + +
= + + +
= + + +
− − − −
1 2
1 11
12
1
1 2
/ / / /Porém para que possamos aplicar este método numa função do tipo F s B s
A s( ) ( )
( )= , é necessário
que o grau do polinômio B(s) seja menor que o grau do polinômio A(s). Se isto não ocorrer, é ne-cessário que se divida os polinômios com o objetivo de diminuir o grau do numerador.
“Qualquer função racional B sA s
( )( )
, onde “B(s)” e “A(s)” são Polinômios, com o grau de B(s)
menor que o grau de A(s), pode ser escrito como a soma de funções racionais (frações parciais),tendo as seguintes formas: ”
( ) ( )A
aS b
AS B
aS bS cR R+
+
+ + ou
2Onde: R = 1, 2, 3,....
Encontrando-se a transformada inversa de laplace para cada fração, temos a / −
1 B s
A s
( )
( ).
DETERMINAÇÃO DOS RESÍDUOS ASSOCIADOS AOS PÓLOS
a) Pólos Reais e Distintos
Seja a função ( )( ) ( )( )( ) ( )F s
B s
A s
K S Z S Z S Z
S P S P S P
m
n
( )( )
( )
......
.......= =
+ + +
+ + +1 2
1 2 Onde: “m < n”
Se os pólos de F(s) são distintos, então F(s) pode ser expandido em :

Apostila de Sistemas de Controle II-13
( ) ( ) ( )F sa
S P
a
S P
a
S Pn
n
( ) .........=+
++
++
1
1
2
2
O coeficiente ai é chamado de resíduo do pólo S Pi= − .
( )a S PiB s
A s S Pii = +
= −
.( )
( )
Ex1:
( )( )F sS
S S( ) =
++ +
3
1 2
F sa
S
a
S( ) =
++
+1 2
1 2
( ) ( )( )( )a S
S
S S
S
SS S
1
1
11
13
1 2
3
22= +
++ +
∴ = ++
==− =−
. a
( )( )
( )( )a SS
S SSS
S S2
2
22
23
1 231
11
1= ++
+ +
∴ =++
=
+− = −
=− =−
. a
Portanto:
F sS S
( ) =+
−+
2
1
1
2/ 1 2
12
Se t
+
= −. / 1 21
21
Se t
+
= −.
f t e et t( ) .= −− −2 2 t ≥ 0
Ex2:
F sS S S
S S( )
( )( )=
+ + ++ +
3 25 9 7
1 2
S
S S S S SS S S S
S SS S
3 2 2
3 2
2
2
5 9 7 3 23 2 2
2 7 72 6 4
3
+ + + + +− − − +
+ +− − −
+
Com isto a função F(s), é escrita da seguinte forma:
Como o numerador apresenta um grau superiorao denominador, deve-se dividir os Polinômios.

Apostila de Sistemas de Controle II-14
F s SS
S S( ) ( )
( )( )= + +
++ +
23
1 2Portanto:
/ / / /− − − −= + + ++ +
1 1 1 123
1 2F s S
S
S S( )
( )( )
/ /− −⇒1 1 1S S. ∴ / − =1 1Sd t
dt.
( )δ
/ / /− − −⇒ = =1 1 121 21 22 . . . ( )δ t/ − ++ +
=1 3
1 2
( )
( )( )
S
S S Esta parcela é igual ao exemplo anterior.
b) Pólos Reais Múltiplos
Seja a seguinte função F sB s
A s
B s
S P S P( )
( )
( )
( )
( ) ( )= =
+ +13
2
Então F(s), será expandido na seguinte forma:
F sa
S P
a
S P
a
S P
a
S P( )
( ) ( ) ( ) ( )=
++
++
++
+13
13
12
12
11
1
2
2
Onde:
a S PB s
A s S P13 1
3
1
=
=−
( ) .( )
( )+ ( )a
d
dSS P
B s
A s S P12 1
31
11
= +
=−!
.( )
( )
( )ad
dSS P
B s
A sS P
11
2
2 1
31
21
= +
=−!
.( )
( )
( )a S PB s
A s S P2 2
2
= +
=−
.( )
( )
Ex:
F sS S
S
a
S
a
S
a
S( )
.
( ) ( ) ( ) ( )=
+ ++
=+
++
++
2
313
312
2112 3
1 1 1 1
( )a SS S
SS
133
2
3
1
132
1312 3
11 2 1 3 2=
+ ++
∴ = − − + ∴ =
=−
+ a a( )
( ) .
f t td
dtt e et t( ) ( ) ( )= + + −− −2 2 2δ δ t ≥
0
diferenciação
impulso unitário
impulso unitário
CTE

Apostila de Sistemas de Controle II-15
( ) ( )ad
dSS
S S
SS
S
S123
2
3
1
12 1 12
1
11
2 3
12 2 0= +
+ ++
∴ = + ⇒ =
=−=−! ( )
a a
( ) ( )ad
dSS
S S
SS
S11
2
23
2
3
1
11 1
1
21
2 3
1
1
22 1= +
+ ++
∴ = ⇒ =
=−=−! ( )
a a
F sS S S
( ) =2
1
0
1
1
13 2( ) ( ) ( )++
++
+
L L LF sS S
− − −=+
+
+
1 13
12
1
1
1( )
( ) ( )
f t t e t( ) ( )= + −1 2
f(t) = t 2e et t− −+ t ≥ 0
c) Pólos Complexos Conjugados
Seja a seguinte função:
F sK
S a jb
K
S a j b( )
.=
+ −+
+ +1 2
A definição dos termos K1 e K2, é dada por:
K S a jb F s M MeS a jb
j1 = + − = ==− +
( ). ( ) θ θ
K S a jb F s M MeS a jb
j2 = + + = − ==− −
−( ). ( ) θ θ
Desta forma:
F sMe
S a jb
Me
S a jb
j j
( )( ) ( )
=+ −
++ +
−θ θ
/ − − − − − += +1 F s M e e M e ej a jb t j a jb t( ) . . . .( ) ( )θ θ
/ − − + − += +1 2
2F s M e e eat j bt j bt( ) . . .( ) ( )θ θ
/ − −+ − +
= +
1 22
F s M ee eat
j bt j bt
( ) . .( ) ( )θ θ
0

Apostila de Sistemas de Controle II-16
/ − −= +1 2F s M e btat( ) . cos( )θ
2.7- SOLUÇÃO DE EQUAÇÕES DIFERENCIAIS, LINEARES E INVARIANTESNO TEMPO ATRAVÉS DE T.L.
Nos métodos clássicos para obtenção de solução de equações diferenciais há a necessidadeda determinação das constantes de integração através do uso das condições iniciais. O uso da T.L.na solução das equações diferenciais elimina esta dificuldade, uma vez que as condições iniciais sãoautomaticamente incluídas.
Para a obtenção da T.L. de um equação diferencial cujas condições iniciais são nulas, sim-
plesmente substitui-se “ddt
” por “S”, “ ddt
2
2” por “S2 ” e assim sucessivamente.
Dada uma equação diferencial linear e invariante no tempo, acha-se inicialmente a T.L. decada termo que a compõe, transformando-se uma equação diferencial em uma equação algébrica.Após, deve-se manipular a expressão algébrica resultante isolando-se a variável dependente. Umavez solucionada esta expressão, através da aplicação da T.I.L obtém-se a solução da equação dife-rencial dada.Ex:
1) Ache a solução para x(t) da equação diferencial, mostrada abaixo:
χ χ χ(t) + 3 (t) + 2 (t) 0= Onde: χ( )0 = a ( )χ 0 = b
X saS b a
S Ss
aS b a
S S( ) ( )
( )( )=
+ ++ +
∴ =+ +
+ +3
3 2
3
1 22 X
X sA
S
B
S( ) =
++
+1 2
AaS b a
S
a b a
S
=+ +
+
∴ =
− + +
∴
=−
3
2
3
11
A A b a= + 2
BaS b a
S
a b a
S
=+ +
+
∴ =
− + +−
∴
=−
3
1
2 3
12
B B = −b −a
X sa b
S
a b
S( )
( )
( )=
++
−++
2
1 2 χ( ) ( ). ( ).t a b e a b et t= + − +− −2 2
2) Ache a solução para x(t) da equação diferencial:
χ χ χ+ + =2 5 3 χ( )0 0= , ( )χ 0 0=
Solução: x(t) = 3
5
3
102
3
52− −− −. . . .cose sen t e tt t .

Apostila de Sistemas de Controle III-1
&$3Ì78/2 ,,,
“CONCEITOS FUNDAMENTAIS”
3.1- INTRODUÇÃO
Inicialmente neste capítulo, estuda-se o conceito de função de transferência, o qual é a baseda teoria de controle clássico. Após, estuda-se a representação de sistemas através de diagrama deblocos, bem como a álgebra de blocos e suas simplificações. É também apresentado o gráfico defluxo de sinais e a obtenção da função de transferência de um sistema utilizando a fórmula do ganhode Mason. Finalizando este capítulo, é apresentada uma introdução a abordagem de modelo devariáveis de estado para representação de sistemas.
3.2- FUNÇÃO DE TRANSFERÊNCIA
A função de transferência de um sistema linear invariante no tempo é definida como sendo arelação entre a transformada de laplace da saída (função resposta) e a transformada de laplace daentrada (função excitação), considerando-se nulas todas as condições iniciais.
Seja a seguinte expressão:
ad y t
dta
d y t
dt
dy t
dta y t b
d t
dtb
d t
dtb
d t
dtb t
n
n
n
n n n
m
m
m
m m m0 1
1
1 1 0 1
1
1 1
( ) ( )...
( ). ( )
( ) ( )...
( ). ( )+ + + = + + +
−
− −
−
− − aχ χ χ
χ
Onde: n m≥χ( )t ⇒ entrada e y t( ) ⇒ saída
Aplicando-se a transformação de laplace na expressão acima, temos:
( ) ( )a a S a a Y s b b b b X sn nn n
m mm m0 1
11 0 1
11.S .... .S ( ) .S .S .... .S ( )+ + + + = + + + +−
−−
−
Utilizando o conceito de função de transferência, resulta:
G sY s
X s
b b b b
a a a a
m mm m
n nn n
( )( )
( )
.S .S .... .S
.S .S .... .S= = + + + +
+ + + +
−−
−−
0 11
1
0 11
1
⇒
COMENTÁRIOS SOBRE FUNÇÃO DE TRANSFERÊNCIA
• A função de transferência de um sistema é uma propriedade do sistema, independendo danatureza e da magnitude da entrada;
• Utilizando-se o conceito de função de transferência, é possível representar um sistemadinâmico em termos de expressões algébricas da variável complexa “S”;
• Embora a função de transferência de um sistema inclua as informações necessárias pararelacionar a entrada com a saída, ela não fornece informações a respeito da estrutura física dosistema. Isto significa que a função de transferência de sistemas fisicamente diferentes podemser idênticas;
FUNÇÃO DE TRANSFERÊNCIA
(de um sistema de ordem n)

Apostila de Sistemas de Controle III-2
• Se a função de transferência de um sistema é conhecida, a resposta do mesmo pode seranalisada para diferentes formas de excitação (entrada), com a finalidade de compreender anatureza e o comportamento do sistema;
• Se a função de transferência de um sistema não é conhecida, ela pode se obtidaexperimentalmente pela introdução de sinais de entrada conhecidos e estudando-se asrespostas obtidas. Uma vez obtida, a função de transferência fornece uma descrição completadas características dinâmicas do sistema.
3.3- DIAGRAMA DE BLOCOS
O diagrama de blocos de um sistema, é a representação gráfica das funções desempenhadaspelos componentes que compõe o sistema, juntamente com o fluxo de sinais dentro do sistema. Odiagrama de blocos, ao contrário da representação matemática do sistema, fornece uma visão gráficaglobal do sistema indicando realisticamente a finalidade dos componentes dentro do sistema, e comoocorre o fluxo de sinais entre os blocos. A seguir são apresentados os componentes que compõe umdiagrama de blocos e uma descrição sobre os mesmos.
- Blocos e Fluxo de Sinais
É uma representação simbólica para a operação matemática, na qual o sinal de saída do blocoé produzido pelo sinal de entrada deste mesmo bloco, multiplicado pelo ganho do bloco (função detransferência do bloco).
Os fluxos de sinais são flechas que indicam o sentido em que os sinais de entrada e saída dosblocos são interligados.
A representação de um sistema através de diagramas de blocos, permite que se saiba qual acontribuição de cada bloco (componente) no desempenho global do sistema.
- Ponto de Soma
Os pontos de soma em um diagrama de blocos indicam como os sinais devem ser somados ousubtraídos. Deve-se observar que os sinais a serem somados ou subtraídos, devem ter as mesmasdimensões e unidades.
- Pontos de Ramificações
São pontos nos quais, um mesmo sinal flui em direções diferentes.
Y s X s G s( ) ( ) . ( )=

Apostila de Sistemas de Controle III-3
3.4- DIAGRAMA DE BLOCOS DE UM SISTEMA EM MALHA FECHADA
Quando em um diagrama de blocos de um sistema em malha fechada, a saída é realimentadapara um ponto de soma para comparação com o sinal de entrada, é necessário converter o sinal desaída para a unidade do sinal de entrada (ex: tensão, força, posição, etc.). Esta conversão é feita porum elemento de realimentação, cuja função de transferência é H(s). Na maioria das vezes, esteelemento de realimentação , é um sensor que mede a grandeza de saída Y(s), fornecendo como saídaum sinal proporcional B(s), porém de mesma natureza que o sinal de entrada X(s). O sinal E(s) é osinal de erro atuante do sistema.
Para o diagrama de bloco mostrado acima, as funções de transferências associados são:
Função de transferência de malha-aberta: F.T.M.A ⇒ B s
E sG s H s
( )
( )( ). ( )=
Função de transferência direta: F.T.D ⇒ Y s
E sG s
( )
( )( )=
Função de transferência de malha-fechada: F.T.M.F ⇒ Y s
X s
G s
G s H s
( )
( )
( )
( ). ( )=
+1
A função de transferência de malha-fechada pode ser obtida como segue:
Y s G s E s
E s X s B s
B s H s Y s
( ) ( ). ( )
( ) ( ) ( )
( ) ( ). ( )
=
= −=
( )Y s G s X s H s Y s G( ) ( ). ( ) ( ). ( )= − ∴ = Y(s) 1 + G(s).H(s) (s).X(s)
Y s
X s
G s
G s H s
( )
( )
( )
+ ( ). ( )=
1 ⇒ =
+Y s
X s
F T D
F T M A
( )
( )
. .
. . .1
Ex:Seja o circuito abaixo representado; onde ei(t) é o sinal de entrada e e0(t) é o sinal de saída.
Obtenha o diagrama de blocos correspondente. Após obtenha a função de transferência de malhafechada do circuito, utilizando o conceito visto.
Obs:
Para a obtenção do diagrama de blocos de um determinado sistema, deve-se inicialmenteobter as equações que descrevem cada componente. Aplica-se T.L., admitindo-se condições iniciaisnulas. Represente cada equação pelos blocos correspondentes. Então junte os blocos e tenha odiagrama de blocos completo.

Apostila de Sistemas de Controle III-4
I sE s E s
R( )
( ) ( )= −1 0 I s CS E s s
I s
CS( ) . ( ) ( )
( )= ∴ =0 0 E
G sRCS
( ) = 1 e H s( ) = 1
Sabendo-se que: E s
E s
G s
G s H s
0
1 1
( )
( )
( )
( ) ( )=
+, resulta:
E s
E s RCS
0
1
1
1
( )
( )=
+ ⇒
E s
E sRC
S RC
0
1
1
1( )
( )=
+
3.5- SISTEMA EM MALHA-FECHADA SUJEITO A PERTURBAÇÕES
No sistema acima representado, temos dois sinais de entrada, isto é, a própria entrada dosistema X(s) e uma perturbação N(s).
Quando temos um sistema sujeito a entradas diferentes podemos obter independentemente asrespostas para cada uma das entradas, utilizando-se o teorema da superposição, e após adicioná-lasresultando na resposta completa.
Para o sistema mostrado, considere que:
Y(s) = YN(s) + YX(s)Onde:
i te t e t
R
i t Cd e t
dt
i( )( ) ( )
( ) .. ( )
=−
=
0
0
⇒

Apostila de Sistemas de Controle III-5
Y(s) = resposta completa do sistema;
YN(s) = resposta do sistema devido a entrada N(s) (perturbação);
YX(s) = resposta do sistema devido a entrada X(s) (ent. principal);
Y s
N s
G s
G s G s H s
N( )
( )
( )
( ) ( ). ( ).=
+2
2 11
Y s
X s
G s G s
G s G s H s
X( )
( )
( ). ( )
( ) ( ). ( ).=
+1 2
1 21
Y sG s N s
G s G s H s
G s G s X s
G s G s H s( )
( ). ( )
( ) ( ). ( )
( ) ( ). ( )
( ) ( ). ( ).
.
.=
++
+2
1 2
1 2
1 21 1
Y sG s
G s G s H sN s G s X s( )
( )
( ) ( ). ( )( ) ( ). ( )
.=
++ +
2
1 21
1
Se G s G s H s1 2 1( ) ( ) ( ). . >>> e G s H s1 1( ). ( ) >>> então:
Y sX s
H s( ) =
( )
( )
Com isto, concluí-se que:
• Se o ganho G1(s).H(s) é elevado, os efeitos que as perturbações poderiam causar naresposta do sistema, são desprezados.
• Se o ganho G1(s).H(s) é elevado, a função de transferência do sistema independe dasvariações em G1(s) e G2(s) e é inversamente proporcional ao ganho H(s). Se o ganhoda realimentação é unitário, então o sistema em malha fechada, tende a igualar a saídacom a entrada.
3.6- REGRAS DA ÁLGEBRA DO DIAGRAMA DE BLOCOS
Geralmente, diagramas de blocos complicados envolvendo diversos laços de realimentação,vários blocos em série, pode ser simplificado através da manipulação de blocos no diagrama,utilizando-se as regras da álgebra de blocos mostrados a seguir:
Y sN( ) ≈ 0
Y sH s
X sX( )( )
. ( )≈1

Apostila de Sistemas de Controle III-6
Observações:
- Em toda simplificação a ser feita, o produto das funções de transferência diretas devepermanecer inalterado. Isto também vale para funções de transferência em um laço.
- Para a correta simplificação de um diagrama de blocos deve-se inicialmente deslocar-sepontos de soma e junção, permutar pontos de soma e, então, reduzir-se os laços de realimentaçãointernos.
3.7- GRÁFICOS DE FLUXO DE SINAL
Da mesma forma que o diagrama de blocos, o gráfico de fluxo de sinais é usado para arepresentação gráfica de uma função de transferência.
No gráfico de fluxo de sinais, os blocos são substituídos por setas e os pontos de soma pornós. Porém, os nós também representam as variáveis do sistema. Cada seta indica a direção do fluxode sinal e também o fator de multiplicação que deve ser aplicado a variável de partida da seta (ganhodo bloco).
Ex:
≈C s G s E s( ) ( ). ( )=

Apostila de Sistemas de Controle III-7
DEFINIÇÕES DOS TERMOS USADOS EM GRÁFICO DE FLUXO DE SINAIS
Nó: Representa uma variável.Ganho de Ramo: É o ganho entre dois nós.Ramo: É uma reta interligando dois nós.Nó de Entrada: São os nós que possuem apenas ramos que saem do nó. Corresponde a umavariável de controle independente.Nó de Saída: São os nós que possuem apenas ramos que chegam ao nó. Corresponde a umavariável dependente.Nó Misto: São os nós que apresentam ramos saindo e chegando ao nó.Caminho: É uma trajetória de ramos ligados no sentido das flechas.Caminho Aberto: É aquele em que nenhum nó é cruzado mais de uma vez.Caminho Fechado: É aquele em que termina no mesmo nó em que começou.Caminho Direto: É o caminho desde um nó de entrada até um nó de saída, cruzando cadanó uma única vez.Laço: É um caminho fechado.Ganho do Laço: É o produto dos ganhos dos ramos que fazem parte do laço.Laços que não se tocam: São laços que não apresentam nós comuns.
ÁLGEBRA DO GRÁFICO DE FLUXO DE SINAIS
≈

Apostila de Sistemas de Controle III-8
3.8- FÓRMULA DO GANHO DE MASON
A fórmula do ganho de Mason permite que se determine o ganho de um sistema em malhafechada diretamente do diagrama de blocos ou do gráfico de fluxo de sinais, sem a necessidade deredução dos mesmos. Embora seja um procedimento simples, a aplicação desta técnica deve serusada com extremo cuidado para que os termos que compõe a fórmula do ganho não sejamtrocados.
Ex: Seja o seguinte sistema:
A definição dos caminhos diretos e dos ganhos dos laços envolvidos é mostrado abaixo.
CAMINHOS DIRETOS: G1 ,G2 ,G3 ,G4 ,G5
G6 ,G4 ,G5
LAÇOS: G2 H1
G4 H2
Seja “T”, o ganho do gráfico acima, isto é, a sua função de transferência. A fórmula do ganhode Mason é dada por:
( )T M M M MK KK
P
p p= = + + +=
∑1 1
11 2 2∆
∆∆
∆ ∆ ∆. . . ...... .
Onde:∆ ⇒ Determinante do gráfico
∆ ⇒ 1 − (Σ dos ganhos dos laços individuais) + (Σ dos produtos de ganhos de todasas possíveis combinações de dois laços que não se tocam) − (Σ dos produtos de ganhos de todas aspossíveis combinações de três laços que não se tocam) + (Σ dos produtos de ganhos de todas aspossíveis combinações de quatros laços que não se tocam) − (........
∆ ⇒ −1 L L L L L Laa bb c c d e fd e f
∑ ∑ ∑+ − +, , ,
. . . .....
MK = ganho do K-ésimo caminho direto;
∆K = É o determinante associado ao K-ésimo caminho direto. É obtido de ∆, remo- vendo-se os laços que tocam este K-ésimo caminho direto.
Para o exemplo mostrado, resulta:
M1 = G1, G2, G3, G4, G5
M2 = G6, G4, G5
L1 = - G2H1
Ganho dos caminhos Diretos;
Ganhos dos laços individuais;L2 = - G4H2

Apostila de Sistemas de Controle III-9
L1. L2 = G2H1.G4H2 Ganho de 2 laços que não se tocam;
∆ = 1 - (- G2H1 - G4H2) + (G2H1.G4H2)
∆1 = 1
∆2 = 1 + G2H1
TM M
=+1 1 2 2∆ ∆∆
( ) ( ) ( )T
G G G G G G G G G H
G H G H G H G H=
+ ++ + +
1 2 3 4 5 6 4 5 2 1
2 1 4 2 2 1 4 2
1 1
1
. .
.
3.9- INTRODUÇÃO A TEORIA DE MODELOS DE VARIÁVEIS DE ESTADO
A tendência dos sistemas modernos é de que cada vez mais aumente sua complexidade. Istose deve principalmente a necessidade de uma boa precisão, aliada a própria complexidade das tarefasa serem executadas pelo sistema. Nestes sistemas tem-se várias-entradas e várias-saídas quegeralmente podem ser variantes no tempo.
Esta complexidade fez com que os sistemas de controle fossem analisados segundo uma novaabordagem, que é o modelo de variáveis de estado.
Esta abordagem é uma ferramenta fundamental na teoria de sistemas de controle moderno,sendo aplicável a sistemas com múltiplas entradas e saídas, lineares ou não, variantes ou invariantesno tempo. Esta abordagem é feita no domínio de tempo.
Vale lembrar que a abordagem de controle clássico, baseada no conceito de função detransferência, é válida para sistemas lineares, invariantes no tempo e uma entrada-uma saída e feitano domínio freqüência.
A seguir são feitas algumas definições necessárias para a abordagem de ESPAÇO DE ESTADO.
- Estado:O estado de um sistema dinâmico é o menor conjunto de variáveis (de estado), tal que o
conhecimento destas variáveis em t = t0, juntamente com a entrada para t ≥ t0, determinacompletamente o comportamento do sistema para qualquer instante t ≥ t0.
- Variáveis de EstadoÉ o menor conjunto de variáveis que determina o estado de um sistema dinâmico. Se pelo
menos “n” variáveis ( )χ χ χ1 2( ), ( ),.... ( )t t tn são necessárias para descrever completamente o
comportamento de um sistema dinâmico, então estas “n” variáveis são um conjunto de variáveis deestado.
Embora não seja necessário, é interessante que as variáveis de estado sejam grandezasfacilmente mensuráveis devido a aplicação das de de controle que necessitam da realimentaçãodestas variáveis.
- Vetor de Estado
Se “n” variáveis de estado são necessárias para descrever o comportamento de um sistema,então estas “n” variáveis podem ser consideradas como “n” componentes de um vetor X t1( ) ,chamado VETOR DE ESTADO.

Apostila de Sistemas de Controle III-10
- Modelo de Variáveis de EstadoÉ um conjunto de equações diferenciais de 1a ordem, escritas na forma matricial que permite,
além de representar as relações entre as entradas e as saídas do sistema, permite representar tambémalgumas características internas do sistema.
Como característica desta abordagem, pode-se citar:
- Como o sistema pode ter mais de uma entrada, é possível enviar para dentro do modelomais informações a cerca da planta;
- Vários modelos de variáveis de estado podem ser obtidos para um mesmo sistema. Visto
que depende da escolha das variáveis de estado; - As teorias de controle moderno são desenvolvidas para esta abordagem; - Para simulação de sistemas, geralmente necessita-se do seu modelo de variáveis de estado.
Ex:Seja o sistema mostrado abaixo. Obtenha a equação diferencial de segunda ordem que
o define, a sua função de transferência e duas representações por modelo de variáveis de estado.
“1” , “2”, “4” → “3”
ϑ ϑ ϑϑ ϑ
i t
R
c t
R
t
RC
d
dtt
L
R
d
dtt
( ) ( ) ( ). ( ) . . ( )
1 1
0
2
0
2
0= + + +
“6”
ϑ ϑ ϑ ϑ ϑ ϑi t
R
t
R
L
R R
d t
dt
t
RC
d t
dt
LC
R
d t
dt
( ) ( ).
( ) ( ).
( ).
( )
1
0
1 1 2
0 0
2
0
2
20
2= + + + + “7”
LCRR
tL CR R
Rt
R RR
t i t1
2
01 2
2
01 2
2
0. ( ) . ( ) . ( ) ( )ϑ ϑ ϑ ϑ++
+
+
= “8”
A expressão acima representa o sistema mostrado, através da equação diferencial de 2a
ordem que o define.
- Função de Transferência
Para a obtenção da função de transferência deste sistema, deve-se obter a razão entre astransformações de laplace dos sinais de entrada e saída.
i ti t c t
R11
( )( ) ( )
=−ϑ ϑ
“1”
ϑ ϑc t t Ldi t
dt( ) ( ) .
( )− =0
2 “2”
i t i t Cd c t
dt1 2( ) ( ) .( )− = ϑ “3”
ϑ0 2 2( ) . ( )t R i t= “4”“2” → ϑ ϑc t t Ldi t
dt( ) ( ) .
( )= +0
2 “5”

Apostila de Sistemas de Controle III-11
Entrada: ϑi t Vi s( ) ( )− Saída: ϑ0 0( ) ( )t V s−
LCR
RS V s
L CR R
RSV s
R R
RV s Vi s1
2
20
1 2
2
01 2
2
0. ( ) . ( ) ( ) ( )++
+
+
= “9”
Seja:
ALCR
R= 1
2
; BL CR R
R=
+ 1 2
2
; CR R
R=
+1 2
2
;
V s
Vi s AS BS C
0
2
1( )
( )=
+ + “10”
- 1o Modelo de Variáveis de Estado
Para a obtenção do modelo de variáveis de estado, deve-se inicialmente definir quem são asvariáveis de estado; sinais de entrada e sinais de saída.
Entrada: ϑi t( ) Saída: ϑ0( )t
Variáveis de Estado: ϑ ϑ0 0( ), ( )t t
Desta forma, tem-se que:
χ ϑχ ϑ
1 0
2 0
( ) ( )
( ) ( )
t t
t t
=
=
Variáveis de estado y t t t( ) ( ) ( )= =ϑ χ0 1 → Sinal de saída
LCR
Rt
L CR R
Rt
R R
Rt i t1
21
1 2
21
1 2
21. ( ) . ( ) . ( ) ( )χ χ χ ϑ+
+
++
= “11”
mas, ( ) ( )χ χ1 2t t= . Desta forma, resulta que:
LCR
Rt
L CR R
Rt
R R
Rt i t1
22
1 2
22
1 2
21. ( ) . ( ) . ( ) ( )χ χ χ ϑ+
+
++
= “12”
Seja:
DR R
LCR=
+1 2
1
; EL CR R
L CR=
++
1 2
1
; FR
LCR= 2
1
;
( ) ( )
.( )
( ). ( )
χχ
χχ ϑ1
2
1
2
0 1 0t
t D E
t
t Fi t
=− −
+
“13”
[ ]y tt
t( ) .
( )
( )=
1 01
2
χχ “14”
- 2o Modelo de Variáveis de Estado

Apostila de Sistemas de Controle III-12
Sejam agora as variáveis de estado, a tensão do capacitor e a corrente do indutor.
Entrada: ϑi t( ) Saída: ϑ0( )t
Variáveis de Estado: χ ϑ1( ) ( )t c t= χ2 2( ) ( )t i t=
( ) . ( ) . ( ) . ( )χ ϑ χ χ1
1 11 2
1 1 1t
R Ci t
R Ct
Ct= − − “15”
( ) ( ) ( ) ( )χ χ χ ϑ11
1 21
1 1 1t
R Ct
Ct
R Ci t= − − + “16”
( ) ( ) . ( )χ χ χ2 1
22
1t
Lt
R
Lt= − “17”
y t R t( ) . ( )= 2 2χ
( ) ( )
.( )
( ). ( )
χχ
χχ ϑ1
2
1
2
1
21
1 1
1
1
0
t
tR C C
L
R
L
t
tR C i t
=− −
−
+
[ ]y t Rt
t( ) .
( )
( )=
0 2
1
2
χχ
3.10- FORMA PADRÃO DE REPRESENTAÇÃO DO MODELO DE VARIÁVEISDE ESTADO DE UM SISTEMA
A forma padrão para representação do modelo de variáveis de estado para um sistemaqualquer é mostrado abaixo.
( ) . ( ) . ( )
( ) . ( ) . ( )
X t A X t B U t
Y t C X t D U t
= + ⇒= + ⇒
Onde: X(t) → Vetor de Estado; A → Matrix de Estado; B → Matrix de Entrada; C → Matrix de Saída; D → Matrix de Transmissão direta;
Equação de EstadoEquação de Saída
Y(t) → Vetor de Saída.

Apostila de Sistemas de Controle III-13
U(t) → Vetor de Entrada;
Geralmente, a Matrix deTransmissão
Direta é nula, visto que quase sempre existe uma dinâmica em todas as ligações entrada e saída dossistemas.
A obtenção do modelo de variáveis de estado de um sistema, geralmente pode ocorreratravés de uma das formas apresentadas abaixo
- Equações Diferenciais do Sistema: Geralmente as variáveis de estado são variáveis físicas dosistema.
- Função de Transferência: Geralmente não são variáveis físicas do sistema.
3.11- OBTENÇÃO DO MODELO DE ESTADO DE UM SISTEMA A PARTIR DASEQUAÇÕES DIFERENCIAIS
Seja o seguinte sistema de equações, onde y1(t) e y2(t) são as saídas do sistema e µ1(t) e µ2(t)as entradas do sistema.
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
y t K y t K y t t K t
y t K y t K y t K t1 1 1 2 1 1 3 2
2 4 2 5 1 6 1
+ + = ++ + =
µ µµ
- Variáveis de Estado
Desta forma, substituindo as variáveis de estado no sistema de equações, resulta:
( ) ( )χ χ1 2t t=
( ) ( ) ( ) ( ) ( )χ χ χ µ µ2 1 2 2 1 1 3 2t K t K t t K t= − − + +
( ) ( ) ( ) ( )χ χ χ µ3 5 2 4 3 6 1t K t K t K t= − − +
( ) ( ) ( )
.
( )
( )
( )
.( )
( )
χχχ
χχχ
µµ
1
2
3
2 1
5 4
1
2
3
3
6
1
2
0 1 0
0
0
0 0
1
0
t
t
t
K K
K K
t
t
t
K
K
t
t
= − −− −
+
χχχ
1 1
2 1
3 2
( ) ( )
( ) ( )
( ) ( )
t y t
t y t
t y t
===

Apostila de Sistemas de Controle III-14
y t
y t
t
t
t
1
2
1
2
3
1 0 0
0 0 1
( )
( ).
( )
( )
( )
=
χχχ
3.12- OBTENÇÃO DO MODELO DE ESTADO DE UM SISTEMA A PARTIR DAFUNÇÃO DE TRANSFERÊNCIA
Seja a seguinte Função de Transferência:
Y s
U sG s
b S b S b
S a S a S as
s
( )
( )( ) . ( )
( )= =
+ ++ + +
22
1 03
22
1 0
1
1
χχ
Y s b S s b S s b s
U s S s a S s a S s a s
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
= + +
= + + +
2
21 1 1 0 1
31 2
21 1 1 0 1
χ χ χ
χ χ χ χ
Definindo-se:
S s sχ χ1 2( ) ( )= S s S s s2
1 2 3χ χ χ( ) ( ) ( )= =
Aplicando-se a transformação inversa de laplace no sistema de equações acima, resulta que :
Y t b t b t b t( ) ( ) ( ) ( )= + +2 3 1 2 0 1χ χ χ
e:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
χ χ χ χ µχ χ
χ χ
3 2 3 1 2 0 1
1 2
2 3
t a t a t a t t
t t
t t
= − − − +
==

Apostila de Sistemas de Controle III-15
( ) ( ) ( )
.
( )
( )
( )
. ( )
χχχ
χχχ
µ1
2
3 0 1 2
1
2
3
0 1 0
0 0 1
0
0
1
t
t
t a a a
t
t
t
t
=− − −
+
[ ]y t b b b
t
t
t
( ) .
( )
( )
( )
=
0 1 2
1
2
3
χχχ
3.13- OBTENÇÃO DA FUNÇÃO DE TRANSFERÊNCIA DE UM SISTEMA, APARTIR DAS EQUAÇÕES DE ESTADO
Seja a representação de estado, mostrada abaixo:
Aplicando a transformação de laplace nestas equações e considerando nulas as condiçõesiniciais, resulta:
SX s AX s BU s( ) ( ) ( )= +
Y s CX s DU s( ) ( ) ( )= +
( ). ( ) ( ) ( ) ( ) . ( )SI A X s BU s X s SI A BU s− = → = − −1
Substituindo a expressão de X(s) na equação de Y(s), resulta:
Y s C A B D U s( ) .(SI ) . . ( )= − +−1
Com isto, tem-se:
Y s
U sG s C SI A B D
( )
( )( ) .( ) .= = − +−1
X t A X t B t
Y t C X t D t
•= += +
( ) . ( ) . ( )
( ) . ( ) . ( )
µµ
matrix identidade

Apostila de Sistemas de Controle III-16
3.14- TRANSFORMAÇÃO DE EQUAÇÕES DE ESTADO E VARIÁVEIS DEESTADO
Seja a seguinte representação de estado:
Definindo-se um outro Vetor de Estado V(t) = Q.X(t), onde “Q” é uma matrix qualquer,
resulta.
X t Q V t( ) . ( )= −1
Onde:Q P− =1 ; P → Matrix de Transformação;
X t P V t( ) . ( )= ( ) . ( )X t P V t=
Substituindo-se as expressões de X(t) e ( )X t na representação mostrada, tem-se:
P V t A P V t B U t
Y t C P V t D U t
. ( ) . . ( ) . ( )
( ) . . ( ) . ( )
= += +
( ) . . . ( ) . . ( )
( ) . . ( ) . ( )
V t P A P V t P B U t
Y t C P V t D U t
= += +
− −1 1
( ) . ( ) . ( )
( ) . ( ) . ( )
V t Av V t Bv U t
Y t Cv V t D U t
= += +
⇒ NOVA REPRESENTAÇÃO DE ESPAÇO DE ESTADO
Ex:
Dado G sS S
( ) =+ +
1
3 22 obtenha:
- Uma representação por Espaço de Estado;
- Uma representação por Espaço de Estado para a seguinte transformação:
ϑ χ χϑ χ χ
1 1 2
2 1 22( ) ( ) ( )( ) ( ) . ( )t t tt t t
= += +
Utilizando-se o procedimento mostrado no ítem 3.12, o modelo de estado para este sistema éobtido como mostrado abaixo:
( ) ( )
.( )
( ). ( )
X t
X t
X t
X tt1
2
1
2
0 1
2 3
0
1
= − −
+
µ
( ) . ( ) . ( )
( ) . ( ) . ( )
X t A X t B U t
Y t C X t D U t
= += +

Apostila de Sistemas de Controle III-17
[ ]Y tX
X( ) .=
1 01
2
O novo conjunto de variáveis de estado V(t), em função das variáveis de estado X(t), é dadopor:
V tX t
X t( ) .
( )
( )=
1 1
1 21
2
Onde: Q Q=
= +
1 1
1 21 e e Adj Q. =
−−
2 1
1 1
Sendo P-1=Q, resulta que:
P Q− = =
1 1 1
1 2 P Q
Adj Q
Q= =−1 .
P=−
−
2 1
1 1
Com isto, temos que:
P A P− =
− −
−−
=− −− −
−−
=−− −
11 1
1 2
0 1
2 3
2 1
1 1
2 2
4 5
2 1
1 1
2 0
3 1. . . . .
e:
P B− =
=
11 1
1 2
0
1
1
2. . [ ] [ ]C.P=
−−
= −1 02 1
1 12 1.
Finalizando, o novo modelo de variáveis de estado é dado por:
( ) ( )
.( )
( ). ( )
V t
V t
V t
V tt1
2
1
2
2 0
3 1
1
2
=
−− −
+
µ
[ ]Y tV t
V t( ) .
( )
( )= −
2 11
2

Apostila de Sistemas de Controle IV-1
&$3Ì78/2 ,9
“MODELAGEM MATEMÁTICA DE SISTEMAS DINÂMICOS ”
4.1- INTRODUÇÃO
Inicialmente é necessário que se defina o que é sistema, sistema dinâmico e sistema estático.Um SISTEMA é uma combinação de componentes que atuam em conjunto para satisfazer um objetivoespecificado. O sistema é dito ESTÁTICO, quando a saída atual do sistema depende somente da entra-da atual. A saída do sistema só varia se a sua entrada variar.
O sistema é dito DINÂMICO, se a sua saída depende da entrada e dos valores passados daentrada. Num sistema dinâmico a saída varia se ela não estiver num ponto de equilíbrio, mesmo quenenhuma entrada esteja sendo aplicada.
O modelo matemático de um sistema dinâmico é definido como sendo o conjunto de equa-ções que representam a dinâmica do sistema com uma certa precisão. O modelo matemático de umdado sistema não é único, isto é, um sistema pode ser representado por diferentes modelos depen-dendo da análise que se deseja fazer.
Na obtenção do modelo matemático para um dado sistema deve-se ter um compromisso en-tre a simplicidade do modelo e a sua precisão. Nenhum modelo matemático, por mais preciso queseja, consegue representar completamente um sistema.
Em geral deve-se obter um modelo matemático, que seja adequado para solucionar o pro-blema específico que esta em análise. Porém, é importante ressaltar que os resultados obtidos destaanálise serão válidos somente para os casos em que o modelo é válido.
Quando vamos obter um modelo simplificado de um sistema, geralmente ignoramos algumaspropriedades físicas deste sistema. Se os efeitos que estas propriedades causam na resposta do siste-ma são pequenos, então uma boa semelhança entre os resultados da análise matemática e os resulta-dos práticos do sistema é obtido.
Em geral os sistemas dinâmicos são não lineares. Porém, os procedimentos matemáticos paraa obtenção de solução de modelos lineares são muito complicados. Por isto, geralmente substituí-seo modelo não linear por um modelo linear, com validade somente em uma região limitada de opera-ção, ou para um ponto de operação.
A obtenção dos modelos que representam um dado sistema, são baseados nas leis que regemaquele sistema. Por exemplo, na modelagem de um sistema mecânico, deve-se ter em mente as leisde Newton; na modelagem de sistemas elétricos deve-se ter em mente as leis das correntes e dastensões de Kirchoff; na modelagem de sistemas térmicos deve-se ter mente as leis que regem os fe-nômenos térmicos, isto é, condução, radiação e convenção, etc...
Neste capítulo, nos preocupamos com a modelagem de sistemas mecânicos de translação erotação e sistemas eletromecânicos. A modelagem de outros sistemas físicos, tais como, sistemastérmicos e sistemas hidráulicos não serão objeto de análise.
4.2- MODELAGEM MATEMÁTICA DE SISTEMAS MECÂNICOSOs sistemas mecânicos são divididos em dois grupos, isto é, sistemas mecânicos de transla-
ção, e sistemas mecânicos de rotação. A seguir, alguns conceitos importantes relativos a sistemasmecânicos, serão revisados.
- Massa
A massa de um corpo, é a quantidade de matéria deste corpo, a qual é constante. Fisicamen-te, a massa de um corpo é responsável pela inércia do mesmo, isto é, a resistência à mudança de mo-vimento de um corpo. O peso de um corpo, é a força com a qual a terra exerce atração deste corpo.

Apostila de Sistemas de Controle IV-2
mg
=ω
Onde:
m é massa (Kg) ω é o peso (Kgf) g é a aceleração da gravidade (≈ 9,81 m/s2)
Embora o peso de um corpo possa variar de um ponto para outro, a massa do mesmo nãovaria.
- Força
A força é definida como a causa que tende a produzir uma mudança na posição de um corpo,no qual a força está atuando. As forças, podem ser classificadas de duas formas, FORÇAS DE
CONTATO e FORÇAS DE CAMPO. As forças de contato são aquelas que tem um contato direto com ocorpo, enquanto as forças de campo não apresentam contato direto com o corpo, como por exem-plo, força magnética e força gravitacional.
- Torque
O torque, é definido como qualquer causa que tende a produzir uma mudança na posiçãoangular (rotacional) de um corpo, no qual o torque esteja atuando.
- Deslocamento, Velocidade e Aceleração
O deslocamento χ( )t é a troca de posição de um ponto, tomado como referência, para outro.A velocidade é a derivada temporal do deslocamento χ( )t .
ϑχ
χ( )( )
( )td t
dtt= =
A aceleração é a derivada temporal da velocidade:
a td t
dt
d t
dtt t t( )
( ) ( )( ) ( ) ( )= = ∴ = =
ϑ χϑ χ
2
2 a
- Deslocamento Angular, Velocidade Angular e Aceleração Angular
O deslocamento angular “θ(t)”, é definido como a troca de posição angular, sobre um eixo,de um ângulo tomado como referência e outro. É medido em radianos. A direção anti-horário é to-mada como positiva.
A velocidade angular “ω(t)”, é a derivada temporal do deslocamento angular “θ(t)”.
ωθ
θ( )( )
( )td t
dtt= =
A aceleração angular “α(t)”, é a derivada temporal da velocidade angular “ω”.
αω θ
α ω θ( )( ) ( )
( ) ( ) ( )td t
dt
d t
dtt t t= = ∴ = =
2
2

Apostila de Sistemas de Controle IV-3
Obs:Se a velocidade ou a velocidade angular é medida em relação a uma referência fixa, então
chamamos de velocidade absoluta ou velocidade angular absoluta. Caso contrário serão grandezasrelativas. O mesmo é válido para a aceleração.
LEIS DE NEWTON
Das três leis que foram formuladas por Newton, a segunda lei é a mais importante, para aobtenção de modelos matemáticos de sistemas mecânicos.
- Segunda lei de Newton (Translação)
“A aceleração adquirida por de qualquer corpo rígido é diretamente proporcional as forçasque atuam neste corpo, e inversamente proporcional a massa deste corpo”.
- Segunda lei de Newton (Rotação)
“A aceleração angular de qualquer corpo rígido é diretamente proporcional aos torques queatuam neste corpo, e inversamente proporcional ao momento de inércia deste corpo”.
Onde: J → Momento de inércia;
4.2.1- SISTEMAS MECÂNICOS DE TRANSLAÇÃO
Nos sistemas mecânicos de translação, há três elementos mecânicos envolvidos que são: ele-mento de inércia, elemento de amortecimento, elemento de elasticidade.
- Elemento de Inércia (Massa)
M → massa;
f (t) → força aplicada;
χ(t) → deslocamento.
É assumido que a massa é rígida. Desta forma a conexão superior, não deve se mover emrelação a conexão inferior, isto é, ambas conexões se deslocam segundo χ(t).
f t M a t md t
dtM
d t
dt( ) . ( )
( ) ( )= = =
ϑ χ2
2
Onde:
a(t) → aceleração; ϑ(t) → velocidade; χ(t)→ deslocamento.
Σ forças = m.a
ΣT = Jα

Apostila de Sistemas de Controle IV-4
- Elemento de Amortecimento (Amortecedor)
No caso deste elemento existe um deslocamento relativo entre oponto de conexão superior e o ponto de conexão inferior. Portanto,existe a necessidade de duas variáveis deslocamento para descrever esteelemento. A realização física deste elemento é a fricção viscosa associa-da ao óleo ou ar.
Força de Amortecimento f t Bd t
dtd t
dt( )
( ) ( )= −
χ χ1 2 f(t) = B(ϑ1(t)- ϑ2(t))
B → Coeficiente de amortecimento;
ϑ1(t) → Velocidade relativa ao deslocamento χ1( )t
ϑ2(t) → Velocidade relativa ao deslocamento χ2 ( )t .
- Elemento de Elasticidade (Mola)
Este elemento, pode ser deformado por uma força externa, talque a deformação é diretamente proporcional a esta força.
( )f t K t t( ) ( ) ( )= −χ χ1 2 Força de elasticidade
Uma vez que os elementos mecânicos dos movimentos de translação estão definidos, asequações de sistemas mecânicos de translação podem ser escritas seguindo as leis de Newton.
Ex1:
Neste sistema, três forças exercem influências sobre a massa M: força aplicada f(t), a força deamortecimento e a força de elasticidade.
A função de transferência , pode ser obtida, considerando-se a força aplicada como entrada eo deslocamento χ( )t como saída.
F(s) = MS2X(s) + BSX(s) + KX(s)
Md t
dtf t B
d t
dtK t
2
2
χ χχ( )
( )( )
( )= − −
X s
F sG s
MS BS K
M
SB
MS
K
M
( )
( )( )= =
+ +=
+ +
1 12
2

Apostila de Sistemas de Controle IV-5
Ex2:
Este sistema mecânico, é o modelo simplificado de umsistema de suspensão de uma das rodas de um automó-vel, onde:
M1 → Massa do automóvel;M2 → Massa do roda;K1 → Cte de elasticidade (mola);K2 → Cte de elasticidade (pneu);B → Cte de amortecimento (amortecedores).
Se observarmos a figura, existem 2 deslocamentos independentes χ1( )t e χ2 ( )t . Isto significaque, conhecer o deslocamento χ1( )t não implica em conhecer o deslocamento χ
2 ( )t . Portanto deve-se escrever 2 equações.
( )Md t
dtK t t B
d t
dtd t
dt1
21
2 1 1 21 2χ
χ χχ χ( )
( ) ( ). ( ) . ( )
= − − − −
“1”
( )Md t
dtf t K t t B
d t
dtd t
dtK t2
22
2 1 2 12 1
2 2
χχ χ
χ χχ( )
( ) ( ) ( )( ) ( )
( )= − − − −
− “2”
Supondo que deseja-se obter a função de transferência entre a força aplicada f(t) e o deslo-camento do carro χ1( )t .
M1S2X1(s) = - K1(X1(s) - X2(s)) - B(SX1(s) - SX2(s)) “3”
M2S2X2(s) = F(s) - K1(X2(s) - X1(s)) - B(SX2(s) - SX1(s)) - K2X2(s) “4”
Pela equação “3” ; resulta X1(s)(M1S2 + K1 + BS) = X2(s)(K1 + BS)
X sBS K
M S BS KX s1
1
12
12( ) . ( )=
++ + “5”
Pela equação “4” , resulta X2(s)(M2S2 + K1 + K2 + BS) = F(s) + (K1 + BS)X1(s)
X sM S BS K K
F sBS K
M S BS K K22
21 2
1
22
1 2
1( ) . ( )=
+ + ++
++ + +
X (s)1 “6”
X s G s X s1 1 2( ) ( ). ( )= “5”
X s G s X s G s F s2 2 1 3( ) ( ). ( ) ( ). ( )= + “6”
As equações “5” e “6” fornecem as seguintes representações:

Apostila de Sistemas de Controle IV-6
Caminho direto: M1 = G1. G3
Laços individuais: La = G1. G2
Determinante do sistema: ∆ = −1 1 2G G
Função de transferência: X
F1 =
−G G
G G1 3
1 21
Onde:
( ) ( )G GBS K
M S BS K
BS K
M S BS K K1 2
1
12
1
1
22
1 2
=+
+ ++
+ + +.
( ) ( )G GBS K
M S BS K M S BS K K1 3
1
12
1 22
1 2
1=
++ + + + +
.
Com isto, a função de transferência deste sistema é dada por:
( ) ( )( )( ) ( )
( )( )
X s
F s
BS K
M S BS K M S BS K K
M S BS K M S BS K K BS K
M S BS K M S BS K K
1
1
12
1 22
1 2
12
1 22
1 2 1
2
12
1 22
1 2
( )
( )
.=
++ + + + +
+ + + + + − +
+ + + + +
( ) ( )X s
F s
BS K
M M S M M BS M K M K M K S BK S K K1 1
1 24
1 23
1 1 1 2 2 12
2 1 2
( )
( )=
++ + + + + + + +
Esta função de transferência, descreve completamente, a dinâmica do sistema apresentado.Uma vez conhecido, a massa do carro “M1”, massa da roda “M2” e a elasticidade do pneu “K2”, asuavidade ou conforto do carro é determinado pela definição dos valores de K1 e B.(B → amortece-dor; K1 → mola).
Como o coeficiente de amortecimento B varia com o desgaste do amortecedor, a função detransferência também varia com o tempo mudando o conforto do carro.
4.2.2- SISTEMAS MECÂNICOS DE ROTAÇÃO
⇒ Diagrama de blocos
⇒ Gráficos de fluxo de sinais
Os elementos mecânicos envolvidos nos sistemas mecânicos de rotação, são os mesmos jádefinidos para os sistemas mecânicos de translação. A diferença é que agora os deslocamentos sãoangulares.

Apostila de Sistemas de Controle IV-7
- Elementos de inércia (Momento de Inércia)
Onde: J → Momento de inércia;
T(t) → Torque aplicado;
θ(t) → Deslocamento angular.
α(t) → Aceleração angular;
ω(t) → Velocidade angular.
- Elemento de Amortecimento (Amortecedor)
- Elemento de Elasticidade (Mola)
Exemplos:
1) Considere o sistema mecânico rotacional, mostrado a seguir:
Aplicando T.L, resulta: T(s) = JS.Ω(s) +B.Ω(s)
Ω( )
) .
s
T(s J S B=
+1
2) Considere o sistema mecânico rotacional, mostrado a seguir:
Este sistema é um exemplo de relógios de pêndulo. O momentode Inércia do pêndulo, é representado por J; a fricção entre opêndulo e o ar é representado por B, e a elasticidade do pên-dulo é representada por K.
J t T tα( ) ( )= ∑
T t J t Jd t
dtJ
d t
dt( ) ( )
( ) ( )= = = ∴α
ω θ2
2 T(t) = J( )θ t
( )T(t B t t) ( ) ( )= −θ θ1 2
( ) ( )θ θ1 2t t− = Velocidade Relativa;
T = Torque aplicado;
B = Coef. de amortecimento Rotacional.
( )T(t K t t) ( ) ( )= −θ θ1 2T (t) = Torque aplicado;
θ1(t) - θ2(t) = Desloc. angular relativo.
J t T t
J t T(t B t
T(t J t B t
αω ω
ω ω
( ) ( )
( ) ) ( )
) ( ) ( )
== −
= +
∑
Jd t
dtT(t B
d t
dtK t
2
2
θ θ θ( ))
( )( )= − −

Apostila de Sistemas de Controle IV-8
Aplicando T.L, resulta:
J S s T s BS s K s. ( ) ( ) . ( ) . ( )2θ θ θ= − −
A função de transferência, será então:
θ( )
.
s
B S KT(s)=
1
J.S2 + +
4.3- MODELAGEM MATEMÁTICA DE SISTEMAS ELÉTRICOS
A modelagem de sistemas elétricos é baseada nas leis das tensões e das correntes de Kirchoff.Devido a nossa familiaridade com circuitos elétricos, a modelagem dos mesmos torna-se facilitada.
Os elementos envolvidos nos circuitos elétricos são: Resistores, Indutores, Capacitores, am-plificadores, etc...
4.3.1- CIRCUITO RLC
Aplicando a T.L nas expressões acima, resulta:
L.S.I(s) + R.I(s) + Vc(s) = Ei(s)
I(s) = C.S.Vc(s)
Substituindo-se a expressão de I(s) na primeira equação, tem-se:
L.S.C.S.Vc(s) + R.C.S.Vc(s) + Vc(s) = Ei(s)Como:
Vc(s) = E0(s)
LCS2. E0(s) + R.CSE0(s) + E0(s) =Ei(s)
E s
Ei s L C S R C S0
2
1
1
( )
( ) . . . .=
+ +
Obs:Em invés trabalharmos com o elemento elétrico podemos trabalhar com o circuito de impe-
dância complexa, facilitando a obtenção da Função de Transferência.
Ldi t
dtRi t c t i t
i t Cd c t
dt
e( )
( ) ( ) ( )
( )( )
+ + =
=
ϑ
ϑ
ELEMENTO IMPEDÂNCIA CARACTERÍSTICAR RL LSC 1/CS

Apostila de Sistemas de Controle IV-9
2)
( )Ei s R I sC S
I s I s( ) ( ) ( ) ( )+ + − =1 11
1 2
10
I s I s
C SEi s R I s1 2
11 1
( ) ( )( ) ( )
−= −
( )10
11 2 2 2 0C S
I s I s R I s E s( ) ( ) ( ) ( )− + + =I s I s
C SE s R I s1 2
10 2 2
( ) ( )( ) ( )
−= +
I sC SEi s C SE s
R C S11 2 0
1 11( )
( ) ( )=
++
I s C SE s2 2 0( ) ( )=
Ei s RC SEi s C SE s
R C SE s R C SE s( ) .
( ) ( )( ) ( )−
++
= +11 2 0
1 10 2 2 01
( ) ( )( )Ei s R C S R C S R C SE s R C S R C S E s( ) ( ) ( )1 1 11 1 1 1 1 2 0 1 1 2 2 0+ − + = + +
( )( )E
Ei R C S R C S R C S0
1 1 2 2 1 2
1
1 1=
+ + +
4.4- SISTEMAS ANÁLOGOS
Sistemas análogos, são sistemas que embora apresentem características físicas diferentes, sãodescritos pelos mesmos modelos matemáticos. A existência deste conceito é muito utilizada na práti-ca. Uma vez que um determinado sistema físico esteja estudado e analisado, um outro sistema análo-go a este também estará. Em virtude da construção de um protótipo de um sistema mecânico, hi-dráulico, etc, ser mais complicado, estes sistemas podem se estudados e analisados através do cir-cuito elétrico análogo.
4.4.1- ANALOGIA ENTRE SISTEMAS ELÉTRICOS E MECÂNICOS
Entre os sistemas elétricos e mecânicos, existem dois tipos de analogias:
• Analogia Força-Tensão;• Analogia Força-Corrente.
a) Analogia Força-Tensão
Abaixo é mostrado as grandezas análogas entre os sistemas Elétricos e Mecânicos para estecaso.
E sC S
I s02
2
1( ) . ( )=

Apostila de Sistemas de Controle IV-10
SISTEMA ELÉTRICO SISTEMA MECÂNICO DETRANSLAÇÃO
SISTEMA MECÂNICO DEROTAÇÃO
Tensão ϑ(t) Força F(t) Torque T(t) Indutância L Massa M Momento de Inércia (J) Resistência R Coef. de Atrito B Coef. de Atrito B Inverso da Capacitância 1/C Coef. de Elasticidade K Coef. de Elasticidade K Carga Elétrica q(t) Deslocamento χ( )t Desloc. Angular θ(t) Corrente i(t) Velocidade ( )χ t Veloc. Angular ( ) ( )θ ωt t=
Sejam os sistemas elétricos e mecânicos, abaixo representados.
Para o sistema mecânico, tem-se que:
Md t
dtB
d t
dtK t f
2χ χχ( ) ( )( )+ + = “1”
Para o sistema elétrico, tem-se que:
Ldi t
dtRi t i t dt t
C
( )( ) ( ) ( )+ + =∫1
ϑ
mas, i tdq t
dt( )
( )= → Ldq t
dtR
dq t
dtq t t
C
2
2
1( ) ( )( ) ( )+ + = ϑ “2”
onde: q(t) → Cargas elétricas.
As equações diferenciais “1” e “2” são idênticas e portanto os dois sistemas apresentadossão análogos.
b) Analogia Força-Corrente
Sejam os sistemas elétricos e mecânicos, abaixo representados.

Apostila de Sistemas de Controle IV-11
A equação que define o sistema mecânico já foi obtida acima, em “1” .Para o sistema elétrico, tem-se que:
iL(t) + iR(t) + iC(t) = is(t) “3”
1
Lt dt
t
RC
d t
dtis tϑ
ϑ ϑ( )
( ) ( )( )+ + =∫
mas: ϑφ
( )( )
td t
dt= ; onde: φ → fluxo magnético.
Cd t
dt
d t
dtt is t
R L
φ φφ
2
2
1 1( ) ( )( ) ( )+ + = “4”
As equações “1” e “4” , são idênticas e portanto os dois sistemas apresentados são análogos.Abaixo é mostrado as grandezas análogas entre os sistemas elétricos e mecânicos para o caso
da analogia Força-Corrente.
SISTEMA ELÉTRICO SISTEMA MECÂNICO DETRANSLAÇÃO
SISTEMA MECÂNICO DEROTAÇÃO
Corrente i(t) Força F(t) Torque T(t) Capacitância C Massa M Momento de Inércia (J) Inverso da Resistência 1/R Coef. de Atrito B Coef. de Atrito B Inverso da Indutância 1/L Coef. de Elasticidade K Coef. de Elasticidade K Fluxo Magnético φ(t) Deslocamento χ( )t Desloc. Angular θ(t)
4.5 - SISTEMAS ELETROMECÂNICOS
Os sistemas eletromecânicos a serem analisados são o servomotor de corrente contínua e ogerador de corrente contínua.
4.5.1- SERVOMOTORES DE CORRENTE CONTÍNUA
Um servomotor de corrente contínua é um motor de corrente contínua, com característicasdinâmicas especiais, para serem usados em sistemas realimentados.
As características desejáveis de um servomotor de CC são:
• Inércia reduzida;
• Máxima aceleração possível;
• Alta relação torque-inércia;
• Constante de tempo extremamente pequena.
Os servomotores CC de baixas potências são usados em equipamentos computacionais comoacionadores de disco, impressoras, acionadores de fita e também em instrumentação. Já os servo-motores CC de médias e altas potências são usados em sistemas robotizados, controles de posição,etc...
O modelo básico de um servomotor CC, é mostrado a seguir:

Apostila de Sistemas de Controle IV-12
ϑa(t) → Tensão aplicada na armadura;
Ra → Resistência de armadura;
La → Indutância de armadura;
Ea(t) → Força eletromotriz
ia(t)→ Corrente da armadura;
Lf → Indutância de campo;
Rf → Resistência de campo;
ϑf(t) → Tensão aplicada no campo;
if(t) → Corrente de campo;
T(t) → Torque desenvolvido pelo motor;
Lf, Rf → Enrolamento de campo;
Ra, La → Enrolamento de armadura.
Este servomotor pode ser acionado de 2 formas, que são:• Controle da Armadura;
• Controle de Campo;
No CONTROLE DE ARMADURA, o enrolamento de campo é excitado separadamente. A cor-rente de campo é mantida constante e o controle do motor é exercido pela corrente de armadura.
No CONTROLE DE CAMPO, a corrente de armadura é mantida constante e a velocidade é con-trolada pela tensão de campo. O controle pelo campo dos servomotores, apresenta como desvanta-gens, o fato de trabalhar com constantes de tempo maiores e também a maior dificuldade de obten-ção de uma fonte de corrente contínua.
4.5.1.1- CONTROLE PELA ARMADURA DE SERVOMOTORES CC
Considere o diagrama esquemático do controle de servomotores CC pela armadura. A cor-rente de campo é mantida constante.
As equações que definem o motor CC em Regime Permanente estão abaixo definidas.O torque eletromagnético desenvolvido pelo motor CC é dado pela seguinte expressão:
T(t) = Ka.φ(t).ia(t) “1” Onde:
φ → Fluxo no entreferro;
Ka → CTE;
ia(t) → Corrente de armadura.

Apostila de Sistemas de Controle IV-13
Pela curva de magnetização mostrada, o fluxo no entreferro na região linear, é proporcional acorrente de campo.
φ(t) = Kf . if (t) “2”
Como neste caso a corrente de campo é constante, resulta que o fluxo também será:
Substituindo “3” em “1” , tem-se:
“4”
Pela expressão “4” , o torque eletromagnético produzido pelo motor CC é diretamente pro-porcional a corrente de armadura.
A força eletromotriz “Ea(t)” induzida na armadura é dada por:
Ea(t) = Ka.φ (t).ωm(t) “5” Onde:
ωm(t) → Velocidade angular do motor;
Como o fluxo é constante, resulta:
E t K ta m( ) . ( )= 3 ω
ou “6”
E Kd
dta (t)(t)
= 3.θ
A equação diferencial associada a armadura do motor CC, isto é, a equação do motor CC édefinida em “7” .
ϑa aa
a a aLd i
dtR i E t(t)
(t)(t)= + +
.. ( ) “7”
A equação diferencial mecânica associada ao sistema representado na figura, é definido em“8” .
T(t Jd t
dtB
d t
dt)
( ) ( )= +
θ θ2
“8”
Assumindo condições iniciais nulas, a transformada de Laplace das expressões “6”, “7”, “8”e “4” , será:
Ea(s) = K3.S.θ(s) “9”
Va(s) = La.S.Ia(s) +Ra.Ia(s) +Ea(s) “10”
T(s) = J.S2.θ(s) + B.S.θ(s) “11”
T(s) = K2.Ia(s) “12”
Considerando que a tensão aplicada na armadura da máquina “Va(s)” é a entrada do sistema,o deslocamento angular do eixo do rotor “θ(s)” é a saída, pode-se então obter a Função de Transfe-rência deste sistema.
φ(t) = K1 “3”
T(t) = K2 . ia(t)

Apostila de Sistemas de Controle IV-14
Inicialmente, mostra-se o diagrama de blocos para o sistema apresentado.
O diagrama de fluxo de sinais, é mostrado a seguir:
( )( )
( )( )( ) ( )
θ θ( )
( )
. . .
. .
. . .
( )
( ) . . . . . .
s
V s
K
L S R J S B S
K K S
L S R J S B S
s
V s
K
L S R S J S B K K Sa
a a
a a
a a a
=+ +
++ +
∴ =+ + +
2
2
2 3
2
2
2 31
( )( ) θ( )
( ) . . .
s
V s
K
S K K L S R J S Ba a a
=+ + +
2
2 3
“13”
( )( )θ( )
( ) . . . . . .
s
V s
K
S L J S L B R J S R B K Ka a a a a
=+ + + +
2
22 3
“14”
Considerando-se que La é pequena e pode ser desprezada, temos:
( )θ( )
( ) . . . .
s
V s
K
S R J S R B K Ka a a
=+ +
2
2 3
“15”
Ou:
θ( )
( )
.
. .
.
s
V s
K
R B K K
SR J
R B K KS
a
a
a
a
=+
++
⇒
2
2 3
2 3
1
( )K
S T S
s
V sm
m a. .
( )
( )+=
1
θ “16”
TR J
R B K Kma
a
=+
.
. .2 3
KK
R B K Kma
=+
2
2 3. .
Km = ganho constante da máquina;
Tm = constante de tempo da máquina.
Pelas expressões acima observa-se que quanto menor for “Ra” e “J”, menor será a constantede tempo da máquina.

Apostila de Sistemas de Controle IV-15
As expressões “15” e “16” representam a Função de Transferência para o sistema eletrome-cânico mostrado. Para obtermos a representação por espaço de estado, basta que se tenha as equa-ções diferenciais relacionadas as expressões “15” e “16” .
Da expressão “15” , resulta:
( )R J t R B K K t K ta a a. .( ) . ( ) . ( ).θ θ ϑ+ + =2 3 2 “17”
Sejam χ1( )t e χ2( )t as variáveis de estado.
A saída θ(t) será: y(t) = θ(t) = χ1(t) e a entrada: ϑa(t) = µ(t)
( ) ( ) ( )
( ). .
..
.( )
χ χ
χ χ ϑ
1 2
22 3
22
t t
tR B K K
R J
K
R Jt
a
a aa
=
= −+
+
A representação por Espaço de Estado para a equação “17” resulta:
( ) ( )
. .
..
( )
( ) .. ( )
χχ
χχ µ
1
22 3
1
22
0 1
0
0t
tR B K K
R J
t
tK
R Jta
a a
= −+
+
“18”
[ ]y tt
t( ) .
( )
( )=
1 01
2
χχ
Em função dos termos “Km” e “Tm”, já definidos, a representação por espaço de estado,resulta:
( ) ( )
.( )
( ). ( )
χχ
χχ µ
1
2
1
2
0 1
0 10t
t T
t
tKT
tm
m
m
= −
+
[ ]y tt
t( ) .
( )
( )=
1 01
2
χχ
O uso do controle eletrônico de servomotores CC, também conhecido como servo aciona-mento, melhora significamente a operação dos servomotores. A seguir é mostrado um diagrama deblocos de um servoacionamento para controle de velocidade de um servomotor CC.
χ θ1( ) ( )t t=χ θ2 ( ) ( )t t=

Apostila de Sistemas de Controle IV-16
Ei → referência de velocidade (volts);
E0 → velocidade de saída (volts);
TN → sensor de velocidade.
O diagrama acima, representa o controle de velocidade de um servomotor CC. O servoacio-namento, transforma o erro entre a Velocidade de Referência e a Velocidade medida, num aumentoou diminuição da tensão que alimenta a armadura do servomotor.
A seguir é mostrado, um diagrama simplificado, para o controle de posição de um servomo-
tor. O bloco K
Sa , representa o ganho do servoacionamento Ka e o integrador
1
S.
Atualmente, através do uso de servoacionamentos incorpora-se ao sistema (servoaciona-mento + servomotor) duas malhas de controle de velocidade e posição, conforme mostrado abaixo.
4.5.1.2- GERADOR CC
O modelo básico do gerador CC, é mostrado a seguir:
As equações que regem este sistema são:
Equação de campo: ϑ f f f f ft R i t Ld
dti t( ) ( ) ( )= + “19”
Equação de Armadura: E t R i t Ld
dti t ta a a a a a( ) ( ) ( ) ( )= + + ϑ “20”

Apostila de Sistemas de Controle IV-17
Equação de carga: ϑa at Z i t( ) . ( )= “21”
Pela equação “5” temos que: E t Kd t
dta a( ) . .( )= φ θ
Considerando-se que a velocidade do gerador é constante, e que pela equação “2” o fluxo no
entreferro é diretamente proporcional a corrente de campo if(t), resulta:
E t K i ta f( ) . ( )= 4 “22”
Desta forma, as transformadas de Laplace das equações “19” , “20” , “21” e “22” , são dadaspor:
V s R L S I sf f f f( ) ( . ). ( )= + “23”
E s K i sa f( ) . ( )= 4 “24”
I sR Z L S
E saa a
a( ).
( )=+ +
1 “25”
V s Z I sa a( ) . ( )= “26”
O diagrama de bloco para o sistema é mostrado abaixo:
A função de transferência entre Va(s) e Vf(s) é dada por:
V s
V s
K Z
L S R L S R Z)a
f f f a a
( )
( )
.
( . )( .=
+ + +4 “27”
Pela expressão acima, verifica-se que a carga “Z” afeta tanto a dinâmica do gerador como
também a própria saída ϑa(t).
4.6- TRANSFORMADORES E ENGRENAGENS
Em um circuito elétrico, um transformador é um dispositivo de acoplamento magnético, cujafinalidade é transformar os níveis de tensão e corrente de um lado do acoplamento para o outro. Emnosso estudo todos os transformadores serão considerados ideais, sendo desta forma, a potência deentrada do mesmo igual a sua potência de saída. A seguir é mostrado o modelo de um transformadorideal.
P t t i te1 1 1( ) ( ). ( )=
P t t i te2 2 2( ) ( ). ( )=
P t P t1 2( ) ( )=
ee
t
t
i t
i t1
2
2
1
( )
( )
( )
( )=

Apostila de Sistemas de Controle IV-18
Pela Lei de Faraday sabe-se que a tensão induzida em um bobina é diretamente proporcionala taxa de variação do fluxo magnético e ao número de espiras da bobina. Com isto, tem-se que:
e t Nd t
dt1 1( )( )= φ
e e t Nd t
dt2 2( )( )= φ
Portanto:e et
N
t
N1
1
2
2
( ) ( )= e
N
N
t
t
i t
i t
ee
1
2
1
2
2
1
= =( )
( )
( )
( )
A função da engrenagem em um sistema mecânico é a mesma, do transformador em um sis-tema elétrico, isto é, propiciar o acoplamento mecânico. Seja o acoplamento mecânico mostrado aseguir:
Em uma outra perspectiva, o sistema de engrenagens pode ser representado como mostradoabaixo. O produto entre o número de dente de uma engrenagem (N1) e o deslocamento angular destaengrenagem (θ1), deve ser igual ao mesmo produto relativo a outra engrenagem. Portanto:
N t N t1 1 2 2. ( ) . ( )θ θ= ou
N
N
t
t1
2
2
1
=θθ
( )
( )
Já os torques T1(t) e T2(t) são diretamente proporcionais aos números de dentes das engre-nagens. Portanto:
N
N
T t
T t1
2
1
2
=( )
( )
Por outro lado, o número de dentes de uma engrenagem é diretamente proporcional ao raio
(ou diâmetro) da engrenagem, isto é, N
N
R
Rna
1
2
1
2
= = .
4.7- LINEARIZAÇÃO DE MODELOS MATEMÁTICOS NÃO-LINEARES
Conforme já foi comentado anteriormente, os modelos mais precisos de sistemas físicos sãonão-lineares. Entretanto, a transformação de Laplace não pode ser utilizada na solução de equaçõesdiferenciais não-lineares. Por isto, é necessário que seja introduzida uma técnica de linearização desistemas não-lineares.
Onde:T1(t), T2(t) → Torques;
θ1(t), θ2(t) → Deslocamentos angulares;
N1, N2 → Número de dentes das engrenagens.

Apostila de Sistemas de Controle IV-19
Seja o sistema de um pêndulo mostrado abaixo:
L → comprimento do pêndulo;
M → massa do pêndulo;
f → força que atua no pêndulo;
g → gravidade.
A equação diferencial que descreve o movimento do pêndulo, é:
L
g
d t
dtt.
( )sen ( )
2
2
θθ= −
Esta equação é não linear, devido a presença do termo sen θ(t). A característica não-linearpara a função f(θ) = sen θ é mostrada abaixo.
O procedimento usual de linearização é substituir a característica da função por uma linhareta, o que fornece uma precisão razoável para uma pequena região de operação. Por exemplo, su-ponha que deseja-se linearizar a função f(θ) = sen θ em torno do ponto f(θ0). Através de expansãoem Série de Taylor, representa-se a função f(θ) em torno do ponto “θ0”, por:
f fdf
d
d f
d( ) ( ) .( ) .
( )
!......
( ) ( )θ θ
θθ θ
θθ θ
θ θ θ θ= + − +
−+
= =00
0
2
20
02
2 “2”
Se a variação “θ - θ0” é pequena, os termos de maior grau podem ser desprezados na série de
Taylor. Isto resulta em:
f fdf
d( ) ( ) . ( )
( )θ θ
θθ θ
θ θ≅ + −
=00
0 “3”
Seja portanto: f(θ) = sen θ. Com isto temos:
( )sen sen cos .θ θ θ θ θ= + −0 0 0 “4”
Como, o pêndulo mostrado, opera na região em que θ = 00, pode-se linearizar a fun-
ção em torno do ponto θ000= .
( )sen .θ θ≅ + − ∴0 1 00 senθ θ≅ “5”

Apostila de Sistemas de Controle IV-20
Substituindo “5” em “1” , resulta:
L
g
d t
dtt.
( )( )
2
2
θθ= − “6”
ou
( ) ( )θ θtg
Lt+ = 0 “7”
Portanto, para linearizar uma função f ( )χ em torno do ponto “χ0”, deve-se⇒ expandir estafunção através de Série de Taylor, considerando-se desprezível os termos (θ − θ0)n, ⇒para n > 1.
f fdf
d( ) ( )
( )( )χ χ
χχ χ χ
χ χ= + −=00
0
A precisão, desta linearização depende da magnitude dos termos ignorados.

Apostila de Sistemas de Controle V-1
&$3Ì78/2 9
“AÇÕES BÁSICAS DE CONTROLE E CONTROLADORESAUTOMÁTICOS INDUSTRIAIS”
Conforme havíamos mencionado no Capítulo I, a busca da qualidade, eficiência e precisãonos processos industriais, exige sistemas de controle em malha fechada sem a presença do operadorhumano, os quais são chamados de Controladores Automáticos.
5.1- AÇÕES BÁSICAS DE CONTROLE
A comparação do valor atual da variável de saída de um planta com um valor de referênciadesejado, gera um sinal de erro. Este sinal de erro, produz um sinal de controle que deverá agir nosentido de tornar este erro nulo ou próximo de zero. Isto é chamado de Ação de Controle.
Os controladores industriais analógicos, são classificados de acordo com a ação de controleque executam. Esta classificação é mostrada a seguir.
• Controladores ON-OFF;
• Controladores Proporcionais;
• Controladores Integrais;
• Controladores Proporcionais-Integrais;
• Controladores Proporcionais-Derivativos;
• Controladores Proporcionais-Integrais-Derivativos.
Estes controladores podem ser implementados de três formas: Controladores Eletrônicos,Controladores Pneumáticos ou Controladores Hidráulicos. Como fonte de energia utilizam a eletrici-dade, pressão ar e pressão de óleo respectivamente.
Seja o sistema de controle mostrado abaixo:
O controlador automático é formado pelo detector de erro e um amplificador, cuja função étransformar o sinal de erro, que é de baixa potência em um sinal de potência um pouco mais elevada.O atuador transforma o sinal de erro amplificado no valor de entrada da planta, com o objetivo deque a saída da planta se aproxime do valor de referência.
5.1.1- AÇÃO DE CONTROLE ON-OFF OU DE DUAS POSIÇÕES
Nos controladores On-Off, o atuador tem somente duas posições fixas, isto é, Liga-do/Desligado. Por esta razão apresenta um custo relativamente baixo, aliado a simplicidade.

Apostila de Sistemas de Controle V-2
Seja o sinal de saída do controlador “µ(t)” e a en-trada o sinal de erro atuante. Neste tipo de controlador,a saída “µ(t)” permanece num valor máximo ou numvalor mínimo, dependendo do sinal do erro atuante, istoé, positivo ou negativo.
µ(t) = U1 para e(t) > 0µ(t) = U2 para e(t) < 0
O valor mínimo U2, ou é zero ou é -U1. Na prática, deve-se implementar este controlador,considerando-se uma pequena diferença entre os valores positivos e negativos de erro. Isto significaque na transição do sinal de erro atuante, de um valor positivo para um valor negativo, o controladornão será acionado exatamente no ponto e(t) = 0, mas sim quando e(t) = e(t)-. Da mesma forma, ocontrolador será acionado na transição do sinal de erro atuante de um valor negativo para positivo,quando e(t) = e(t)+. Isto cria um intervalo diferencial, conhecido como histerese, cuja finalidade édiminuir a freqüência de abertura e fechamento do controlador e portanto aumentar a sua vida útil.
5.1.2- AÇÃO DE CONTROLE PROPORCIONAL
Em um controlador, cuja ação de controle é proporcional, a relação entre a saída do contro-lador “µ(t)” e o sinal de erro atuante “e(t)”, que é a entrada do controlador, é dada por:
µ( ) . ( )t Kp e t= “1” ou KpU s
E s=
( )
( ) “2”
Onde: Kp = Ganho Proporcional
Independente do mecanismo utilizado e da forma de operação, o controlador proporcional éessencialmente um amplificador com um ganho ajustável.
5.1.3- AÇÃO DE CONTROLE INTEGRAL
Em um controlador, cuja ação de controle é integral a saída do controlador “µ(t)”, varia comum taxa proporcional ao sinal de erro atuante, isto é:
d t
dtKi e t
µ( ). ( )= “3” ou

Apostila de Sistemas de Controle V-3
SU s Ki E s( ) . ( )= →
Onde: Ki → Ganho Integral.
Obs:Se o sinal de erro atuante é nulo, significa que a taxa de variação do sinal de saída do con-
trolador é nula, portanto “µ(t)” é Constante. Por outro lado, como a saída não pode variar instanta-neamente, a ação integral afeta a dinâmica do sistema.
5.1.4- AÇÃO DE CONTROLE PROPORCIONAL-INTEGRAL
A ação de controle proporcional-integral é definida por:
µ( ) . ( ) ( )t Kp e tKp
Tit dt
t= + ∫ e
0 “5”
Ou: U s Kp E sKp
Ti
E s
S( ) . ( ) .
( )= + ∴
U s
E sKp
Kp
Ti S
( )
( ) .= +
U s
E sKp
Ti S
( )
( ) .= +
1
1
Onde:Kp = Ganho proporcional;
Ti = Tempo integral.
U s
E s
Ki
S
( )
( )= “4”
( )U s
E s
Kp
Ti
TiS
S
( )
( )=
+
1“6”

Apostila de Sistemas de Controle V-4
5.1.5- AÇÃO DE CONTROLE PROPORCIONAL-DERIVATIVO
A ação de controle proporcional-derivativa é definida por:
µ( ) . ( ) . . ( )t Kp e t Kp Tdd
dte t= + “7”
Ou:
U s Kp E s Kp Td S E s( ) . ( ) . . . ( )= + ∴ ( )U s
E sKp Td S
( )
( ).= +1
U s
E sKp Td S
Td
( )
( ).= +
1 “8”
Onde: Kp = Ganho Proporcional;
Td = Tempo Derivativo.
Obs:Conforme pode ser visto acima, a ação de controle derivativo, tem um caracter antecipativo.
A ação de controle derivativa, só apresenta influência nos transitórios.
5.1.6- AÇÃO DE CONTROLE PROPORCIONAL-INTEGRAL-DERIVATIVO
Este tipo de ação, combina as vantagens das três ação de controle envolvidas. A ação decontrole Proporcional-Integral-Derivativa é definida por:
µ( ) . ( ) ( ).( )
t Kp e tKp
Tie t dt KpTd
de t
dt
t= + +∫
0 “9”
Ou:
U s
E sKp
Ti STd S
( )
( ) ..= + +
11
“10”

Apostila de Sistemas de Controle V-5
Comentários:
Um controlador proporcional, nada mais é, do que um ganho. Este, é utilizado em situaçõesquando uma resposta transitória e uma resposta em regime são satisfatórias simplesmente adicionan-do-se um ganho ao sistema, sem a necessidade de compensação dinâmica.
Um controlador PI, é utilizado para melhorar a resposta de Regime Permanente. Este tipo decontrolador, apresenta um pólo na origem.
Um controlador PD, é utilizado para melhorar a resposta transitória de um sistema. Este tipode controlador, adiciona ao sistema um zero.
Um controlador PID, é utilizado para melhorar tanto a resposta transitória, como a respostade Regime Permanente. Este tipo de controlador adiciona ao sistema 2 zeros e 1 pólo.
5.2- CONTROLE PROPORCIONAL APLICADO A UM SISTEMA DE 1 a ORDEM
Seja a planta de um sistema de 1a ordem, dada pela seguinte função de transferência
Y s
X s RCS
( )
( )=
+1
1 “11”
O sistema em malha-fechada é mostrado abaixo:
A função de transferência do sistema, pode ser representada pela expressão “14” , sendo R(s)a entrada de referência.
Y s
R s
Kp
RCS Kp
( )
( )=
+ +1 “14”
Deseja-se agora analisar a resposta do sistema para uma entrada degrau-unitário.
Se r(t) é um degrau-unitário, a sua função de transferência será:
/ r t R sS
( ) ( )= = 1 “15”
Substituindo “15” em “14” , resulta:
( )Y sKp
RC S K ST( )
..=
+ +∴
1
1 Y s
KpRC
S SKp
RC
( ) =+ +
1 “17”

Apostila de Sistemas de Controle V-6
Aplicando a transformação inversa de Laplace em “17”, resulta:
( )y tKp
Kpe t( ) =
+
− ≥−
11 α t 0 “18”
Onde: α = +1 Kp
RC “19”
O erro de regime permanente é igual a 11+ Kp
. Portanto, quanto maior for o ganho “Kp”
menor será o erro de regime permanente. A presença de um erro de R.P é característico do Contro-lador Proporcional. Para eliminá-lo é necessariamente introduzir no controlador uma ação integral.
5.2.1- IMPLEMENTAÇÃO DO CONTROLADOR PROPORCIONAL
Os controladores eletrônicos, são implementados através de circuitos amplificadores, maisespecificamente os amplificadores operacionais. A seguir, são mostrados dois exemplos de controla-dores proporcionais.
5.2.2- IMPLEMENTAÇÃO DO CONTROLADOR PROPORCIONAL-DERIVATIVO
Neste caso, deseja-se implementar a seguinte ação de controle: “Kp(1 + TdS)”.Em função da variável “S”, deve-se acrescentar ao circuito uma dinâmica. Isto consegue-se,
através de um capacitor. Primeiro, implementa-se “1 + TdS” e após, multiplica-se por um ganho.
e t
e t
R
Ri
F0
1
( )
( )= “20”
e t
e t
R
Ri
F0
1
1( )
( )= +
“21”

Apostila de Sistemas de Controle V-7
e s
e s
R
CSx
i
( )
( )= + ∴1
1
e s
e sRCSx
i
( )
( )= +1 “22”
e s
e s
RF
Rx
0 11
( )
( )= +
“23”
Substituindo “22” em “23” , resulta:
( )e s
e s
RF
RRCS
i
0 11
1( )
( ).= +
+ ∴ ( )e s
e sKp TdS
i
0 1( )
( )= + “24”
Onde:
KpRF
RRC= + =1
1 e Td
5.2.3- IMPLEMENTAÇÃO DO CONTROLADOR PROPORCIONAL-INTEGRAL
Neste caso deseja-se implementar a seguinte ação de controle: “KpTiS
11
+
”.
e s
e sCSR
x
i
( )
( )= + ∴1
1
e s
e s RCSx
i
( )
( )= +1
1 “26”
e s
e s
RF
Rx
0
1
1( )
( )= + “27”

Apostila de Sistemas de Controle V-8
Substituindo “26” em “27” , resulta:
e s
e s
RF
R RCSi
0
1
1 11( )
( )= +
+
∴
e s
e sKp
TiSi
0 11( )
( )= +
“28”
Onde:
KpRF
R= +1
1
e Ti RC=
5.3- EFEITOS DAS AÇÕES DE CONTROLE INTEGRAL E DERIVATIVA NO DE-SEMPENHO DO SISTEMA
5.3.1- AÇÃO DE CONTROLE INTEGRAL
Conforme foi visto no item 5.2, a adição de um controlador do tipo proporcional, a uma
planta cuja função de transferência não apresenta um integrador ( )1 S , haverá um erro de regimepermanente, na resposta ao degrau. Este erro, pode ser eliminado, adicionando-se uma ação integralao controlador (pólo na origem).
Y s
R s
K
S RCSK
S RCS
( )
( )( )
( )
=+
++
∴1
11
Y s
R s
K
RCS S K
( )
( )=
+ +2 “29”
O sinal de erro é dado por: E(s) = R(s) - Y(s) (÷ R(s)).
E s
R s
R s Y s
R s
( )
( )
( ) ( )
( )=
− “30”
Substituindo-se “29” em “30” , resulta:
E(s)
R(s)=
++ +
RCS S
RCS S K
2
2 “31”
Portanto, o erro produzido para uma entrada degrau unitário, resulta:
E sRCS S
RCS S K S( ) .=
++ +
2
2
1 “32”
Para obtermos o erro em regime permanente, utiliza-se o teorema do valor final. Este teore-ma, é o seguinte:

Apostila de Sistemas de Controle V-9
e e t S E st S
( ) ( ) . ( )∞ = =→∞ →OLP OLP
0 “33”
Aplicando o teorema acima em "32", resulta:
e SRCS S
RCS S K SS( ) . .∞ =
++ +
→
OLP0
2
2
1 e( )∞ = 0
5.3.2- RESPOSTA DE UM SISTEMA COM CONTROLE PROPORCIONAL APERTURBAÇÃO
Como, desejamos saber a resposta do sistema a perturbação “N(s)”, considera-se a entradaR(s) = 0.
C s
N s JS BS Kp
N( )
( )=
+ +1
2 “1”
A expressão do erro, é dada por: E(s) = R(s) - CN(s)
E s
N s
C s
N s
N( )
( )
( )
( )= − “2”
E s
N s JS BS Kp
( )
( )=
−+ +
12 “3”
Seja a perturbação um degrau de amplitude igual a TN. Portanto:
e e t S E st S
( ) ( ) . . ( )∞ = =→∞ →OLP OLP
0 “4”
e SJS BS Kp
T
SS
N( ) . .∞ = −
+ +
→
OLP0 2
1
eT
Kp
N( )∞ =
− “5”
Como E(s) = −CN(s), o erro da saída devido a perturbação é o mesmo mostrado em “5” ,porém com sinal trocado. Isto significa que para reduzir este erro, deve-se trabalhar com ganhosproporcionais (Kp) bastante elevados, o que não é prático. A solução, é a substituição do controla-dor Proporcional, por um controlador Proporcional-Integral.
0

Apostila de Sistemas de Controle V-10
5.3.3- RESPOSTA DE UM SISTEMA COM CONTROLE “P-I” A PERTUBAÇÕES
C s
N s
S
JS BS KpSKp
Ti
N( )
( )=
+ + +3 2
“1”
Da mesma forma, que no caso anterior:
E s
N s
C s
N s
N( )
( )
( )
( )=
− “2”
Portanto:
E s
N s
S
JS BS KpSKp
Ti
( )
( )=
−
+ + +3 2
“3”
Seja a perturbação, um degrau de valor TN, portanto:
e e t S E st S
( ) . ( ) . . ( )∞ = =→∞ →OLP OLP
0 “4”
e S S
JS BS KpS KpTi
T
SS
N( ) . .∞ = −
+ + +
→OLP
0 3 2 “5”
e( )∞ = 0 “6”
A expressão “6” mostra que o erro de regime permanente devido a uma perturbação podeser eliminado, pela adição de uma ação de controle integral ao controlador proporcional.
Obs:A adição da ação integral, tornou o sistema de 3a ordem. Nestes casos, se valores grandes de
Kp forem usados, as raízes da equação característica (pólos) poderão ter partes reais positivos, tor-nando o sistema instável. Já para os sistema de 2a ordem, estes serão sempre estáveis se os coefici-entes são todos positivos.

Apostila de Sistemas de Controle VI-1
CAPÍTULO VI
“ANÁLISE DA RESPOSTA TRANSITÓRIA, DO ERRO DE REGIME PERMANENTE E DA ESTABILIDADE DE SISTEMAS”
6.1- INTRODUÇÃO Neste capítulo inicialmente serão estudados o comportamento transitório de sistemas de 1a. e 2a. ordem. Após é mostrado que os sistemas de ordem superior a 2a., podem ser decompostos em sistemas de 1a. e 2a. ordem. As especificações relativas a resposta transitória para sistemas de 2a. ordem são apresentadas. Após, são analisados os erros de regime permanente para um sistema genérico considerando como sinal de entrada, um degrau unitário, uma rampa e uma parábola. Em um sistema de controle real, quase sempre o sinal de entrada não é conhecido, e com isto a saída do sistema não pode ser obtida analiticamente. Entretanto, para o projeto de um determinado sistema de controle deve-se ter um procedimento padrão para comparar o seu desempenho. Isto é conseguido, estipulando-se como sinais de entrada, sinais conhecidos e comparando as respostas de vários sistemas a estes sinais. A decisão sobre qual sinal deve-se adotar para análise depende da forma da entrada a que o sistema está sujeito mais freqüentemente. Para finalizar este capítulo, é apresentado o critério de estabilidade de Routh-Hurwitz. Este critério é uma ferramenta bastante importante para o estudo da estabilidade de sistemas. 6.2- SISTEMAS DE PRIMEIRA ORDEM Seja o sistema de primeira ordem, representado a seguir.
A função de transferência deste sistema é dada por: Um sistema é considerado estável, se a sua resposta natural tende a se anular com o decorrer do tempo. O denominador da função de transferência T(s), mostrada acima, é conhecido como equação característica ou polinômio característico. Para que o sistema seja estável, as raízes deste polinômio devem estar localizadas no semiplano esquerdo do plano complexo “S”. Isto significa que para o sistema mostrado ser estável, é necessário que a > 0, isto é, S = -a. a) Resposta ao degrau Seja o sinal de entrada x(t), um degrau unitário. O sinal de saída é dado por:
Y s aS S a
AS
BS a( ) ( )= + = + + A
B== −
11
Substituindo os valores de A e B na expressão acima, e aplicando a transformação inversa de laplace, resulta:
y t e a t( ) .= − −1 “2”
Y sX s T s a
S a( )( ) ( )= = + “1”

Apostila de Sistemas de Controle VI-2
A expressão acima é composta de um termo constante e um termo exponencial decrescente, responsável pela resposta transitória da sistema. Isto permite concluir que :
- Quanto maior for o valor de “a”, menor será o período transitório; - Caso “a” seja menor que zero, isto é, s = a, o termo exponencial será crescente e levará o sistema a instabilidade. O mesmo raciocínio é valido caso a realimentação do sistema seja positiva. b) Resposta a Rampa Unitária Seja o sinal de entrada x(t), uma rampa unitária. O sinal de saída é dado por:
( )Y sX s
aS S a
aS
aS
BS a
( )( ) = + = + + +2
112
12 aa aB a
11
12
11
1
== −
=
Substituindo os valores de a11, a12 e B na expressão acima, e aplicando a transformação inversa de Laplace, resulta:
y t t a a e a t( ) .= − + −1 1 “2” A seguir é mostrado os sinais de saída e de entrada em função do tempo.
O erro em regime Permanente é dado por:
E sX s
SS a
( )( ) = + → ( )E s S S a( ) = +
1 → e e t S E s at S( ) ( ) . ( )∞ = = =
→∞ →lim lim
01
Isto significa que quanto maior for o valor de a, menor será o erro de regime permanente para uma entrada do tipo rampa. 6.3 - SISTEMAS DE 2
a ORDEM
E sX s
X s Y sX s
( )( )
( ) ( )( )= −
E sX s
Y sX s
aS a
( )( )
( )( )= − = − +1 1

Apostila de Sistemas de Controle
VI-3
Para a análise de sistemas de 2a. ordem, será considerada o sistema mostrado a seguir .
A função de transferência deste sistema é dada por:
ou ( )( )C sR s
KS S S S
( )( ) = + +1 2
“7”
Onde: S BJ
BJ
KJ1 2
2
2 2, = − ±
−
Os pólos da função de transferência mostrada acima, podem ser: a) Reais → B
JKJ2 0
2
− > (2 raízes reais).
b) Complexos: → BJ
KJ2 0
2
− < (2 raízes complexas conjugadas).
Para a análise da Resposta transitória de um sistema de 2a ordem, deve-se representar a função de transferência na sua forma padrão, a qual está representada a seguir. Note que esta função depende de dois parâmetros, que são: A freqüência natural de oscilação “ωn” e o Coeficiente de amortecimento “ζ”. Isto significa que o desempenho de sistemas de segunda ordem depende somente deste dois parâmetros.
C sR s S S
nn n
( )( ) = + +
ωζω ω
2
2 22 “8” Os pólos desta função padrão são determinados por:
O termo ωd é conhecido como Freqüência Natural Amortecida: ω ω ζd n= −1 2
Para o sistema mostrado os valores de ωn e ζ são: ωnKJ= ; ζ = B
JK2
Os sistemas de segunda ordem, são classificados de acordo com o valor do coeficiente de amortecimento, como mostrado a seguir. 1o Caso: SISTEMA SUBAMORTECIDO: →→ 0 < ζζ < 1 Neste caso , o sistema apresenta dois pólos complexos e conjugados com parte real negativa (semiplano esquerdo), e portanto o sistema será estável. Então, a função de Transferência para este caso, será:
C sR s
KJS BS K
( )( ) = + +2
S j j dn n n1 22
1 21, ,= − ± − ∴ = − ±ζω ω ζ ζω ω S “9”

Apostila de Sistemas de Controle
VI-4
( ) ( )C sR s S j d S j d
nn n
( )( ) = + + + −
ωζω ω ζω ω
2 “10”
Se a entrada R(s) for um degrau unitário, então C(s) é obtida aplicando-se T.I.L na expressão abaixo.
( )( )C s S S j d S j dn
n n( ) = + + + −
ωζω ω ζω ω
2 “11”
c t e dtnt( ) . . sen cos= − − +− −1 1
1 21
ζ ω ζζω t ≥ 0 “12”
O erro entre o sinal de entrada e o sinal de saída, é dado por: e(t) = r(t) - c(t) e t e d t
nt( ) sen . cos= + − +
−−
ζω
ζ ω ζ1 2
1 “13”
O erro em regime Permanente é obtido para t = ∞, e portanto: e( )∞ = 0 2o Caso: SISTEMA CRITICAMENTE AMORTECIDO: →→ ζζ = 1 Neste caso, o sistema apresenta 2 pólos reais e iguais. ( )
C sR s S
n
n
( )( ) = +
ωω
2
2 “14” Se R(s) é um degrau unitário, então: ( )C s S S
n
n( ) .= +
ωω
2
2 “15” Aplicando-se T.I.L na expressão acima, resulta: ( )C t e tnt n( ) = − +−1 1ω ω t ≥ 0 “16” O erro é dado por: e(t) = r(t) - c(t)
( )e t e tnt n( ) = +−ω ω1 para t = ∞
e( )∞ = 0

Apostila de Sistemas de Controle VI-5
3o Caso: SISTEMA SUPERAMORTECIDO: →→ ζζ > 1 Neste caso, o sistema apresenta dois pólos reais e diferentes. Portanto as raízes da equação característica são: S n n1
2 1= − + −ζω ω ζ e S n n22 1= − −−ζω ω ζ
A função de transferência para este caso é mostrada a seguir.
( )( )C s
R s S Sn
n n n n
( )( ) = + + − + − −
ωζω ω ζ ζω ω ζ
2
2 21 1 “17”
Se R(s) é um degrau unitário, então C(s) é obtida aplicando-se T.I.L. na expressão acima:
C t e s ts
e s ts
n( ) = + −−
−−
12 12
1
1
2
2
ωζ t ≥ 0 “18”
Da mesma forma que nos casos anteriores, o erro em regime permanente será nulo.
Conforme verifica-se na expressão “18”, a resposta do sistema, sofre a influência de 2 exponenciais que são função das raízes S1 e S2, isto é: − ± −ζω ω ζn n
2 1. Se ζ >> 1, a exponencial que é função de − −−ζω ω ζn n
2 1 deve exercer pouca influência no sistema, podendo ser desprezível. Com isto, a resposta do sistema aproxima-se à de um sistema de primeira ordem.
O gráfico mostrado abaixo, apresenta uma família de curvas com vários valor de ζ. Nota-se que as curvas que chegam mais rapidamente ao valor final, correspondem a sistemas subamortecidos com 0,5 < ζ < 0,8.

Apostila de Sistemas de ControleVI-6
6.3.1- ESPECIFICAÇÕES DO TEMPO DE RESPOSTA O desempenho de um sistema de segunda ordem é muito freqüentemente caracterizado através da definição de algumas especificações que descrevem as características que o sistema deve apresentar quando a entrada do sistema é um degrau unitário. Estas especificações são: tempo de subida, tempo de pico, tempo de acomodação e overshoot máximo. A seguir é mostrada uma resposta típica de um sistema de 2a ordem para uma entrada do tipo degrau unitário.
No sinal mostrado, as seguintes especificações são definidas:
- Tempo de Subida “tr” : tempo necessário para o sinal passar de 10% para 90% do seu valor final;
- Tempo de Pico “tp” : tempo necessário para o sinal alcançar o primeiro “overshoot”; - Tempo de Acomodação “ts” : tempo necessário para o sinal permanecer dentro de uma
faixa em torno do valor final. Normalmente esta faixa é especificada como 5% ou 2% do valor final;
- Overshoot Máximo “Mp” : é o máximo valor de pico do sinal.
Mp C tp CC= − ∞
∞( ) ( )
( ) x 100% “19” Observação: Entre estas especificações, algumas são conflitantes como por exemplo, “Overshoot Mínimo” e “Tempo de Subida Reduzido”; A minimização de um, implica na maximização do outro. Portanto, cabe ao projetista estabelecer estas especificações no sentido de otimizar estas especificações. Seja a expressão “12”, que caracteriza a resposta de um sistema subamortecido:
c t e dtnt( ) . . sen cos= − − +− −1 11 2
1
ζ ω ζζω “20”

Apostila de Sistemas de Controle VI-7
Para obtermos a definição do tempo de subida “tr”, basta que se substitua na expressão “20”, t = tr e C(tr) = 1. Desta forma, a expressão “20” pode ser representada como mostrada a seguir.
( )e dtrntr−
−− + =ζω
ζ ω ζ1
021sen cos “21”
Como “ζ ” e “ωn ” são diferentes de zero, para que a expressão acima seja válida, é necessário que: ( )sen cosω ζdtr + =−1 0 “22”
ω ζdtr + =−cos 1 0 “23”
ω ζdtr = − −cos 1 “24”
Seja a representação no plano complexo “S” das raízes da equação característica, mostrada a seguir.
Observa-se que : cos cos cosθ ζω
ω θ ζ π θ ζ = n
n∴ = ∴ − = −− −1 1 “25”
Substituindo “25” em “24”, resulta:
tr d= −π θω
Para a obtenção do tempo de pico “tp”, basta que se derive a expressão “20”, e se imponha que dc t
dt( ) = 0 e t = tp.
dc tdt
e dtnt
n( ) .sen= −
−ζω
ζ ω ω1 2 “25”
e d tp
ntpn
−
− =ζω
ζ ω ω1
02 .sen . “26”
Como ζωn ≠ 0 , para que a expressão acima seja válida resulta que:
sen .ωd tp = 0
Desta forma: ω π π πd tp. , , , ,.......= 0 2 3

Apostila de Sistemas de Controle
VI-8
Como o overshoot ocorre antes de “2π“ e depois de “0o”, resulta: tp d= πω “27”
Para a obtenção do overshoot máximo, tem-se que:
( )− − + = −−
−e dtp C tntpζω
ζ ω ζ1
121sen cos ( ) “28”
Substituindo “27” em “28”, resulta:
( ) ( )Mp e n d= − − + ∴ + = − = − −
−ζω πω
ζ π θ π θ θ ζ.
sen sen sen1
122
( )Mp e= − −ζπ ζ1 2
“29” A definição do tempo de acomodação é novamente baseado na expressão “12”. Esta expressão é função do coeficiente de amortecimento “ζ “ e da freqüência natural de oscilação “ωn”. Por outro lado, o Tempo de Acomodação “ts” é função da tolerância admitida, a qual em geral é 2% ou 5%. Com isto, para uma dada freqüência “ωn”, e uma dada tolerância admitida, o tempo de acomodação é função somente de “ζ “. Na prática adota-se os seguintes valores de “ts”, considerando 0 < ζ < 0,9:
Tolerância 2% →→ ts = 4 Constantes de Tempo →→ ts = 4 ζωn Tolerância 5% →→ ts = 3 Constantes de Tempo →→ ts = 3 ζωn
Constante de Tempo = 1ζωn
Observação: Na a expressão “29”, a qual define o overshoot máximo, vê-se que este é definido única e exclusivamente pelo coeficiente de amortecimento (ζ ). Por outro lado, o tempo de acomodação é função de “ζ ” e “ωn”. Com isto, definido um overshoot admissível para um dado “ζ ” o tempo de acomodação é função de “ωn” exclusivamente. 6.4- SISTEMAS DE ORDEM SUPERIOR / RESPOSTA TRANSITÓRIA Seja um sistema genérico como o mostrado abaixo.
A função de transferência deste sistema pode ser escrita como o quociente entre dois polinômios, como mostra a expressão “30”, onde o grau do polinômio do numerador deve ser menor que o grau do polinômio do denominador.
C sR s
b S b S b S ba S a S a S a
m mm m
n nm m
( )( )
..........= + + + +
+ + + +−
−−
−
0 11
1
0 11
1 m n≤ “30”

Apostila de Sistemas de Controle
VI-9
A função de transferência mostrada pode ser expandida em frações parciais, como uma série de termos de 1a. ordem e de 2a. ordem (pólos) associados aos seus respectivos resíduos. Por simplicidade, neste estudo será considerado apenas pólos reais simples. Aplicando-se técnicas de fatoração de polinômios na expressão acima, resulta:
C sR s
K Z Z ZP P P
m
n
( )( )
(S )(S ).....(S )(S )(S ).....(S )= + + +
+ + +1 2
1 2 “31”
Considere que o sinal de entrada R(s) é um degrau unitário. A aplicação de expansão em frações parciais na expressão “31”, resulta: C s a
Sai
S Pii
n( ) = + +=
∑1
Onde: ai → Resíduo associado ao pólo Pi. Desta forma, uma função de transferência de ordem “n” é uma somatória de termos 1a. ordem e de 2a. ordem (pólos) onde cada um apresenta uma certa influência na resposta global do sistema, que depende da constante de tempo e do resíduo associado ao pólo. Os termos que apresentam resíduos muitos pequenos, praticamente não exercem influência na resposta transitória e podem ser desprezados. Isto permite analisar a resposta de um sistema de ordem superior a partir de um sistema simplificado. Os pólos que estão mais próximos do eixo jω no plano complexo “S”, chamados de Pólos Dominantes, correspondem aos termos de resposta transitória que decaem mais lentamente (maior constante de tempo). De acordo com os comentários feitos, pode-se concluir que a estabilidade relativa e a resposta transitória de um sistema estão diretamente ligados com a localização de pólos e zeros no plano “S”. Muitas vezes, é necessário ajustar um ou mais parâmetros do sistema para que o mesmo tenha um desempenho satisfatório. 6.5 - ERRO DE REGIME PERMANENTE PARA UM SISTEMA DE 2a. ORDEM ASSOCIADA A UM COMPENSADOR PROPORCIONAL Seja o diagrama de bloco mostrado abaixo, que representa uma planta de segunda ordem.
A função de transferência deste sistema é mostrada na expressão “32”. O erro apresentado pelo sinal de saída em relação ao sinal de entrada, é mostrado na expressão “33”. E s
R sC sR s s JS BS
JS BS K R s( )( )
( )( ) ( ) . ( )= − ⇒ = +
+ +
1
2
2 E “33”
C sR s
KJS BS K
( )( ) = + +2 “32”

Apostila de Sistemas de Controle
VI-10
Pelo teorema do valor final, sabe-se que: e e t S E st S
( ) ( ) . ( )∞ = =→∞ →lim lim0
Se R(s) é um degrau unitário, então o erro apresentado pelo sinal de saída, é dado por:
e S S JS BJS BS K SS
( ) . .( ) .∞ = ++ +
→lim
0 21
⇒ e( )∞ = 0 “34” Se R(s) é uma rampa unitária, então o erro apresentado pelo sinal de saída, é dado por:
e S S JS BJS BS K SS
( ) . .( ) .∞ = ++ +
→lim
0 2 21
⇒ e BK( )∞ = “35”
Para o sistema mostrado, os valores de ωn e ζ são:
ωnKJ= e ζ = B
J K2 . Então, o erro em função de “ζ ” e “ωn” será: e
n( )∞ = 2ζ
ω “36” Pela expressão do erro em regime permanente para um sistema de 2a ordem, com um entrada do tipo rampa, concluí-se que “ζ ” deve ser pequeno para que o erro seja pequeno. Porém, isto acarreta um aumento no overshoot durante os transitórios. Para que se obtenha um compromisso melhor entre erro de regime permanente e overshoot, deve-se considerar outros tipos de controladores. 6.6- CONTROLADOR “P-D” APLICADO A UM SISTEMA DE 2a ORDEM A utilização de um controlador do tipo “PD” aplicado a um sistema de 2a ordem, melhora o desempenho do mesmo tanto em regime transitório como em regime permanente. Isto porque a ação derivativa atua no sentido de minimizar o período transitório, e a ação proporcional atua para minimizar o erro em regime permanente. Seja o diagrama de blocos e a sua função de transferência mostrados abaixo.
O erro apresentado pelo sinal de saída em relação ao sinal de entrada, é mostrado na expressão “38”.
( )E sR(s
JS BSJS B Kd S KP
( )) = +
+ + +2
2 ⇒ e e t S E st S
( ) ( ) . ( )∞ = =→∞ →lim lim0 “38”
Para uma entrada do tipo rampa unitária, o erro será:
( )C sR s
Kp KdSJS B Kd S KP
( )( ) = +
+ + +2 “37”

Apostila de Sistemas de Controle VI-11
e BKp( )∞ = “39”
A equação caraterística da função de transferência “37” é dada por: ( )S B Kp
J S KpJ
2 0+ + + = “40” Igualando a expressão acima, com a equação característica padrão S n n2 22 0+ + =ζω ω , resulta que:
ζ = +B KdJ Kp2 . ωn
KpJ=
Neste caso, pode-se definir valores para B, Kp e Kd que simultaneamente minimizem tanto o erro de regime, como o overshoot nos transitórios. 6.7- CRITÉRIO DE ESTABILIDADE DE ROUTH-HURWITZ Para os sistemas que apresentam equações características de 1a. ou de 2a. ordem, a estabilidade pode ser determinada diretamente por inspeção. Um polinômio de 1a. ou de 2a. ordem apresentará todas as suas raízes no semiplano esquerdo do plano “S”(estabilidade), se e somente se todos os coeficientes do polinômio apresentarem o mesmo sinal algébrico. Entretanto para polinômios de ordem superior a 2a., estas informações não são conclusivas. Nestes casos deve-se aplicar algum procedimento matemático que auxilie na determinação do número de raízes que o polinômio apresenta no semiplano direito (instabilidade).
O critério de estabilidade de Routh-Hurwitz, permite investigar a estabilidade absoluta dos sistemas, através dos coeficientes das equações características. A utilização deste método evita a necessidade de fatoração da equação característica para obtenção dos pólos (raízes) e aí verificar se existe algum destes no semiplano direto do plano complexo, ou sobre o eixo imaginário. Caso exista, o sistema é instável. O procedimento utilizado nesta técnica é:
1) Escrever a equação característica de “S” na seguinte forma:
a S a S a S an nn n0 1
11 0+ + + + =−
−.....
2) Se um dos coeficientes é zero ou negativo na presença de pelo menos um coeficiente positivo, então há pelo menos uma raiz com parte real positiva e portanto o sistema NÃO É ESTÁVEL.
3) Se todos os coeficientes são positivos, arranje os coeficientes da equação caraterística em linhas e colunas da seguinte forma:
b a a a aa
b a a a aa
b a a a aa
b a a a aa
11 2 0 3
1
21 4 0 5
1
31 6 0 7
1
41 8 0 9
1
= −
= −
= −
= −
c b a a bb
c b a a bb
c b a a bb
c b a a bb
11 3 1 2
1
21 5 1 3
1
31 7 1 4
1
41 9 1 5
1
= −
= −
= −
= −
S a a a aS a a a aS b b b bS c c c c
S d dS eS f
n
n
n
n
0 2 4 61
1 3 5 72
1 2 3 43
1 2 3 4
21 2
11
01
−
−
−

Apostila de Sistemas de Controle
VI-12
O critério de estabilidade de Routh-Hurwitz diz que o número de raízes da equação característica com parte real positiva, é igual ao número de mudanças de sinal nos coeficientes da primeira coluna da tabela (a0, a1, b1, c1, d1, e1, f1). Se todos estes coeficientes são positivos, então todos os pólos da equação característica apresentam parte real negativa e portanto o sistema é estável . Observações: - Se um termo da primeira coluna (b1, c1, d1, etc) é nulo, e os restantes não são, então zero deve ser substituído por um número positivo muito pequeno “εε ”, e então o resto da tabela é calculado. - Caso os termos de uma linha sejam todos nulos, devemos substituir estes valores, pelos coeficientes da derivada do polinômio anterior (linha anterior) em relação a “S”. Este polinômio é chamado de polinômio auxiliar. 6.8- ERROS EM REGIME PERMANENTE Seja o sistema abaixo:
O sinal de saída deste sistema é dado por: C s Gc s Gp s
Gc s Gp s R s( ) ( ). ( )( ). ( ) ( )= +1 “1”
Onde:
Gc s Gp s K F sS Q sN( ). ( ) . ( )
. ( )= “2”
F(s), Q(s) → São Polinômios da variável “S” são escritos na seguinte forma: “(Ra.S+1).(Rb.S+1).(Rc.S+1)......”, e não apresentam raízes do tipo S = 0;
K → ganho de malha-aberta; N → número de integradores na função de transferência, isto é, números de pólos
(raízes) na origem. O número de integradores presentes na função de Transferência, serve de parâmetro para classificar o sistema, isto é, se N = 0 o sistema é dito do TIPO “0”; Se N == 1, o sistema é dito do TIPO “1”; Se N = 2 o sistema é dito do TIPO “2”, e assim sucessivamente. Para o sistema mostrado, o erro em regime permanente é dado por:
E s R sGc s Gp s( ) ( )
( ). ( )= +1 “3” ou
e S R sG s G st c p
( ) . ( )( ). ( )∞ = +
→∞lim 1 “4”

Apostila de Sistemas de Controle VI-13
6.8.1- ERRO PARA UMA ENTRADA DO TIPO DEGRAU UNITÁRIO : R s S( ) = 1
e G s G s G s G s Kt c pt c p p
( ) ( ). ( ) ( ). ( )∞ = +
= + = +→∞
→∞
lim lim1
11
11
1 “4” K G s G sp t c p= →∞lim ( ). ( ) ou Kp Gc Gp= ( ). ( )0 0 “5”
Onde: Kp →→ CONSTANTE DE ERRO DE POSIÇÃO; Substituindo “2” em “5”, resulta:
Kp K F sS Q sS N=
→lim0. . ( )
( ) = Kp K RaS RbSS R S R SS N= + +
+ +
→lim0 1 2
1 11 1. .( )( ).....
( )( )..... “6”
Desta forma, o erro de posição do sistema, pode ser obtido para os diferentes tipos de sistema. SISTEMA TIPO “0“ → N = 0 ⇒ Kp K e K= → ∞ = +( ) 1
1 SISTEMA TIPO “1” → N = 1 ⇒ Kp e= ∞ → ∞ =( ) 0 SISTEMA TIPO “2” → N = 2 ⇒ Kp e= ∞ → ∞ =( ) 0
N > 1 Kp =→ ∞
Portanto, se desejamos que o sistema apresente erro nulo para uma entrada do tipo degrau, o sistema deve ser do tipo “1” ou maior. 6.8.2- ERRO PARA UMA ENTRADA DO TIPO RAMPA UNITÁRIA: “ R s S( ) = 1
2 ”
e S S Gc s Gp s S Gc s Gp s KvSS
( ) . . ( ). ( ) ( ) . . ( ). ( )∞ = +
∴ ∞ = =→→
lim lim00
1 1 1 e “8”
Kv S Gc s Gp s
S= →lim
0. ( ). ( ) “9”
Onde: Kv →→ CONSTANTE DE ERRO DE VELOCIDADE; Substituindo “2” em “9”, resulta:

Apostila de Sistemas de Controle VI-14
Kv K F sS Q sS N=
→ −lim0 1. . ( )
( ) “10” Desta forma, o erro de velocidade do sistema pode ser obtido para os diferentes tipos de sistemas:
SISTEMA TIPO “0“ → N = 0 ⇒ Kv sse= → = ∞0 SISTEMA TIPO “1” → N = 1 ⇒ Kv K ss Ke= → = 1 SISTEMA TIPO “2” → N = 2 ⇒ Kv sse= ∞ → = 0
N > 2 Kv =→ ∞ Pelo exposto, concluí-se que para um sistema do tipo “0“, a saída não consegue acompanhar uma entrada do tipo rampa e o erro tende a aumentar indefinidamente. Para um sistema do tipo “1”, o erro em regime é inversamente proporcional ao ganho de malha aberta. E para sistema do tipo “2” ou maior, o erro torna-se nulo.
6.8.3- ERRO PARA UMA ENTRADA DO TIPO PARÁBOLA : “R s S( ) = 13 ”
e S S Gc s Gp s S Gc s Gp s KaSS
( ) . . ( ). ( ) ( ) . . ( ). ( )∞ = +
∴ ∞ = =→→
lim lim0 2 20
21 1 1 e “11”
Ka S Gc s Gp sS
= →lim0
2 . ( ). ( ) “12” Onde: KA →→ CONSTANTE DE ERRO DE ACELERAÇÃO; Substituindo “2” em “11”, resulta:
Ka K F sS Q sS N=
→ −lim0 2. . ( )
( ) Desta forma, o erro de aceleração do sistema, para os diferentes tipos de sistema será:
SISTEMA Tipo “0“ → N = ∅ ⇒ Ka e= → ∞ = ∞0 ( ) SISTEMA Tipo “1” → N = 1 ⇒ Ka e= → ∞ = ∞0 ( ) SISTEMA Tipo “2” → N = 2 ⇒ Ka K e K= → ∞ =( ) 1 SISTEMA Tipo “3” → N = 3 ⇒ Ka e= ∞ → ∞ =( ) 0
N > 3 Ka =→ ∞ Conforme mostrado acima, se a entrada do sistema é do tipo Parábola e o sistema for do tipo “0” ou “1” a saída não conseguirá acompanhar a entrada e o erro tende a aumentar indefinidamente. Já para um sistema do tipo “2” o erro será inversamente proporcional ao ganho de malha aberta. Para o sistema do tipo “3” ou maior, o erro a uma entrada do tipo parábola será nulo.

Apostila de Sistemas de Controle
VI-15
QUADRO RESUMO
TIPO DE ENTRADA
r(t) = 1 r t t( ) = r t t( ) = 2 TIPO 0 1
1+ K ∞∞ ∞∞
DE 1 0 1K ∞∞
SISTEMA 2 0 0 1K

Apostila de Sistemas de Controle VII-1
&$3Ì78/2 9,,
“ANÁLISE DO LUGAR DAS RAÍZES”
7.1- INTRODUÇÃO
O método de localização e análise do lugar das raízes é uma forma de se representargraficamente os pólos da função de transferência de um sistema em malha-fechada e as suas váriaslocalizações, em função da variação de algum parâmetro presente na função de transferência.
Conforme foi visto no capítulo anterior, a resposta transitória de um sistema em malha-fechada, é função do valor dos pólos (raízes) da equação característica do sistema. Por exemplo:
• 2 Raízes Complexas: sistema é subamortecido;
• 2 Raízes Reais e iguais: sistema criticamente amortecido;
• 2 Raízes Reais e diferentes: sistema é Superamortecido.
A localização das raízes, isto é, os seus valores, definem ainda algumas especificações dosistema como por exemplo, overshoot, tempo de pico, tempo de acomodação, etc.
Com isto, o uso do método do lugar das raízes permite que se defina os valores dosparâmetros da função de transferência através da localização das raízes que satisfaçam asespecificações do sistema.
Com o uso deste método, pode-se prever os efeitos sobre a localização dos pólos de malha-fechada, quando houver variação do valor do ganho de malha-aberta ou for acrescidos pólos e/ouzeros na função de transferência de malha-aberta.
No capítulo seguinte, será usado o método da resposta em freqüência para analisar sistemas.O procedimento da resposta em freqüência fornece informações a respeito dos sistemas diferentesdas oferecidas pelo método do lugar das raízes. Será visto que estes dois métodos se complementame em muitos casos de projetos práticos ambos os métodos são aplicados.
7.2- MÉTODO DO LUGAR DAS RAÍZES
O método do lugar das raízes, possibilita determinar os pólos da função de transferência emmalha-fechada a partir dos pólos e zeros da função de transferência de malha-aberta, considerando oganho de malha-aberta como parâmetro.
No que diz respeito o projeto de sistemas de controle, o método do lugar das raízes indica amaneira pela a qual os pólos e zeros em malha-aberta devem ser modificados de modo que aresposta satisfaça as especificações de desempenho do sistema.
7.2.1- PRINCÍPIOS BÁSICOS DO MÉTODO DO LUGAR DAS RAÍZES
Seja o sistema em malha fechada, mostrada abaixo:

Apostila de Sistemas de Controle VII-2
θ02( )( ) ( )s JS BS T s+ = ∴ θ0 2
1( ) . ( )s
JS BST s=
+ “1”
T(s A E s) . ( )= “2”
O diagrama de blocos, então pode ser expresso da seguinte forma:
Onde:
G sK
S( )
(S )=
+ 2H(s) = 1
θ0(s) = C(s), θi(s) = R(s)
K = A/J
2 = B/J
C s
R s
K
S S K
( )
( )=
+ +2 2 “4”
Ec s S S K( ) ⇒ + + =2 2 0 “5” Ec(s) → equação característica.
Supondo que uma das especificações deste sistema, seja um overshoot máximo de 4,5%, istoé, ζ = 0,707.
A equação característica padrão para um sistema de 2a ordem é:
S Sn n2 22 0+ + =ζω ω “6”
Igualando “5” com “6” e sabendo que ζ = 0,707, resulta que ωn = 1,414 e K = 2.Desta forma, a definição do ganho de malha-aberta satisfez integralmente a única
especificação solicitada. Porém, se outras especificações são solicitadas, como por exemplo, tempode pico, tempo de subida, tempo de acomodação, a definição do único parâmetro de projeto, isto é,o ganho “K” não consegue satisfazer integralmente todas as especificações. Com isto, este ganhodeve ser escolhido de maneiras a satisfazer em parte todas as especificações de projeto, se possível.É nesta hora que o método do lugar das raízes é útil, para investigar o efeito produzido na respostado sistema pela escolha de diferentes valores para o ganho “K”.
Sejam portanto, S1 e S2 as raízes da equação característica mostrada em “5”.
S K1 2 1 1, = − ± − ∴ S j K1 2 1 1, = − ± − “7”
Para que este sistema seja estável é necessário que o ganho K seja maior do que zero.
Sejam Sa e Sb as raízes da equação característica mostrada em “6” .
“2” → “1” ( )θ0 ( )
( )( )
s
E s
AJ
S S BJ
G s=+
= “3”
C s
R s
G s
G s H s
( )
( )
( )
( ). ( )=
+1

Apostila de Sistemas de Controle VII-3
Para traçarmos no plano “S” as raízes S1, S2, mostradas em “7” , é necessário que se conheçao valor de “K”. Porém como este é o nosso parâmetro de projeto, podemos traçar as raízes S1 e S2
para todos os valores de “K” entre “0“ e “∞“ e após, definir qual o valor de “K” que melhor atendeas especificações.
Sejam os valores de “K”:
As linhas grossa definidas no plano “S”, mostrado acima, é o lugar das raízes para o sistemade 2a ordem, em questão. Para K > 1, as raízes são complexas e a constante de tempo do sistema
passa a ser constante Τ = 1ζωn. Por outro lado o aumento do valor de “K”, diminuí o valor de “ζ“ e
portanto aumenta o overshoot; causa também um aumento de “ωn” e “ωd ” diminuindo o tempo depico e o tempo de subida. Para o problema em questão, o valor de “K” que melhor atende asespecificações de projeto é K = 2. Neste caso, o valor de “K”, obtido experimentalmente é o mesmoque o obtido pela comparação das equações características do sistema (5) e a padrão (6). Entretanto,a medida que a ordem do sistema aumenta, isto é, aumenta o número de pólos e zeros do sistema, adificuldade da obtenção das especificações se forma extremamente complexa e o método do lugardas raízes torna-se bem mais atraente.
7.2.2- DEFINIÇÃO GERAL DO LUGAR DAS RAÍZES
Seja o sistema genérico mostrado abaixo:
A equação característica da função de transferência mostrada em “10” é:
1 + K.G(s).H(s) = 0 “11” ∴ K. ( ). ( )G s H s = −1
K G s H s=
−1
( ). ( ) “12”
S j
da b n n, = − ± −ζω ω ζ
ω1
2
“8”
Sa b n n, cos= ± = ± −ω θ ω ζ180 1800 0 1 “9”
K S1 S2
0 -0+ j0 -2 - j00,5 -0.3 + j0 -1,707-j01,0 -1,0 + j0 -1,0-j02,0 -1,0 + j1,0 -1,0 - j1,03,0 -1,0 + j1,414 -1,0 - j1,414
C s
R s
K G s
K G s H s
( )
( )
. ( )
. ( ). ( )=
+1 “10”

Apostila de Sistemas de Controle VII-4
Onde: G(s).H(s) → Razão de Polinômios em “S”.
Seja um ponto qualquer “S1” definido no plano complexo. O valor S = -S1 deverá pertencerao lugar da raízes, se e somente se a expressão “11” é satisfeita.
K G s H sK S S S
S S P S P S P
w
NM
. ( ). ( )( )( ) ......( )
( )( ).....( )=
+ + +
+ + +
] ] ]1 2
1 2
“13”
Como, geralmente a expressão “13” é uma quantidade complexa, a expressão “12” , pode serseparada em duas equações a fim de igualarem-se os ângulos e módulos de ambos os lados daequação.
KG(s).H(s) = -1
Os valores de “S” que satisfazem as condições de módulo e de ângulo são as raízes daequação característica ou os pólos da função de transferência do sistema em malha-fechada.
Como a condição de módulo pode ser satisfeita para uma dada combinação de valores de “S”e “K”, a mesma não pode ser considerada isoladamente para a definição dos valores possíveis para avariável “S” que estão no lugar das raízes.
Já a condição de ângulo pode ser considerada isoladamente pois não depende do parâmetroK.
Ex:Seja a seguinte função de transferência de malha aberta:
K G s H sK S Z
S P S P. ( ). ( )
( )
( )( )=
++ +
1
1 2
“16”
Deseja-se saber se o ponto S = S1 faz parte do lugar das raízes deste sistema.
Se a expressão “17” for satisfeita significa que o ponto S1 pertence ao lugar das raízes. Alocalização de todos os pontos que satisfazem “17” formam o lugar das raízes para este sistema.
- CONDIÇÃO DE MÓDULO: K G s H s. ( ). ( ) = 1 “14”
- CONDIÇÃO DE ÂNGULO: G s H s N( ). ( ) ( )= ± +180 2 1 “15”
β θ θ1 1 2 180 2 1− − = ± +o N( ) “17”

Apostila de Sistemas de Controle VII-5
Uma vez que para o ponto “S1” a equação “17” foi satisfeita deve-se então, substituir-se “S”por “S1” na expressão “14” para que se defina qual o valor do ganho de malha aberta (K) quefornece este ponto.
K G s H s. ( ). ( )1 1 1= “18”
Através do que foi mostrado, concluí-se então que a condição para que um ponto no plano“S” seja lugar das raízes é que:
Σ(todos ângulos desde os Zeros finitos) − Σ(todos ângulos desde os pólos finitos = ± 180o (2N+1)
“19”
7.3- REGRAS GERAIS PARA CONSTRUÇÃO DOS LUGARES
Seja o sistema mostrado abaixo:
1) Obtenha a equação característica: 1+ G(s).H(s) = 0, e coloque-a na seguinte forma:
1 01 2
1 2
++ + +
+ + +=
KB S Z S Z S Z
S P S P S Pm m
n
( ).( )......( )
( )( )......( ) “20”
ou
( )( )......( ) ( ).( )......( )S P S P S P KB S Z S Z S Zn m m+ + + + + + + =1 2 1 2 0 “21”
2) Localize no plano “S” os pólos e zeros da equação característica;
3) Se K S P S P S Pn= → + + + =0 01 2 ( )( )......( ) “22”
Se K S Z S Z S Zm= ∞ → + + + = ( )( ).....( )1 2 0 “23”
Como K aumenta de zero até ∞, significa que o lugar das raízes começa nos pólos e terminanos zeros, isto é, os pólos são pontos de partida e os zeros são pontos de chegada do lugar dasraízes.
Observação:
1- Isto inclui os zeros no infinito;
2- O número de pólos menos o número de zeros fornece o número de zeros no infinito.
4) Determine os lugares das raízes que estão sobre o eixo real.
Obs1:Os pólos e zeros complexos de G(s).H(s) não afetam a localização dos lugares dasraízes sobre o eixo real.

Apostila de Sistemas de Controle VII-6
Obs2:Se o número de pólos e zeros reais à direita do ponto de teste for ímpar, então esteponto de teste pertence ao lugar das raízes.
5) Determine o ângulo das assíntotas dos lugares das raízes.
Vimos que o número de pólos menos o número de zeros, fornece o número de zeros noinfinito. As assíntotas são a direção que o lugar das raízes assumem para chegar até os zeros queestão na infinito.
Se a equação característica não se encontra na forma fatorada (eq.(20)) então ela pode serexpressa na forma de uma razão de polinômios, como mostrado a seguir.
Onde: n ≥ m e n - m = α, α → no de zeros no infinito.
Com isto:
OLP OLP OLPS S
mm
nS
mG s H sKB S
S
KB
S→∞ →∞ →∞= >. ( ). ( ) ,= α α 0 “23”
Portanto:
OLP OLPS S
mG s H sKB
S→∞ →∞+ = ≈ +
=. ( ). ( )1 0 1 0 α “24”
S KBmα + = ⇒0 S KB KB Km m
α = − = ± +180 2 1( ) “25”
A expressão “25” , diz que a somatória dos ângulos dos zeros no infinito (α), tem que serigual a± +180 2 1( )K . Portanto o ângulo de cada zero no infinito, é dado por:
βα
=± +180 2 1( )K
“26”
6) Determine a interseção das assíntotas com o eixo real. Isto é dado por:
τα
ASoma dos pólos Soma dos zeros
=−
“27”
7) Determine os pontos de separação de partida e chegada em relação ao eixo real.
Seja a expressão “22” , expressa da seguinte forma:
1 1 11
11+ = +
+ ++
−−
−−G s H s
K B S B S
S a Sm
mm
m
nn
n( ). ( )( ......)
...... “22”
α Ângulos β0 -1 180o
2 ± 90o
3 ± 60o, 180o
4 ± 45o, ± 135o

Apostila de Sistemas de Controle VII-7
1 0+ = + =G s H s B s K A s( ). ( ) ( ) . ( ) “28”
Os pontos de separação de partida e chegada serão as raízes de:
dK
dS
dB s
dSA s
dA s
dSB s
A s= −
−=
( ). ( )
( ). ( )
( )2 0 “29”
8) Determine os ângulos de partida dos lugares das raízes de um pólo complexo.
O ângulo de partida para o pólo complexo S1 é:
9) Determine os ângulos de chegada dos lugares das raízes de um zero complexo.
10) Determine os pontos onde os lugares das raízes cruzam o eixo imaginário.
Isto pode ser feito de duas maneiras:
1- Substituindo-se na equação característica “S” por “jω” e calculando-se o valor de “ω”e “K”;
2- Através do critério de estabilidade de Routh-Hurwitz.
p = 180o - Σ entre os outros pólos e este pólo + Σ entre os zeros e este pólo
p = 180 - θ1 - θ2 - θ3 + β