
Atuadores elétricos - SIPOS Aktorik · Programa de parametrização para PC COM-SIPOS Y070.024...
80
Instruções de uso Atuadores elétricos SIPOS 5 PROFITRON HiMod Edição 08.14 Y070.020/BR Sujeito a alterações sem aviso prévio!
Transcript of Atuadores elétricos - SIPOS Aktorik · Programa de parametrização para PC COM-SIPOS Y070.024...

Instruções de uso
Atuadores elétricos
SIPOS 5PROFITRON
HiMod
Edição 08.14 Y070.020/BRSujeito a alterações sem aviso prévio!

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 2 Y070.020/BR
Conteúdo
Conteúdo
1 Fundamentos ....................................... 3
1.1 Informações de segurança .................... 3
1.2 Transporte e armazenamento ............... 4
1.3 Eliminação residual e reciclagem .......... 4
1.4 Indicações relativas às instruções de uso .................................................... 4
1.5 Instruções complementares .................. 5
2 Geral ..................................................... 6
2.1 Princípio de funcionamento ................... 6
2.2 Módulos ................................................. 7
2.3 Esquema funcional (conexões elétricas) ................................................ 8
3 Montagem e conexão .......................... 9
3.1 Montagem na guarnição/engrenagem .. 9
3.2 Conexão elétrica ................................. 10
3.3 Montagem separada ........................... 14
4 Indicações para o comando e a operação ......................................... 15
4.1 Manivela, Manete ................................ 15
4.2 Controle local, display ......................... 16
4.3 Menu principal, Comando do menu .... 18
4.4 Controle remoto ................................... 20
4.5 COM-SIPOS ........................................ 21
5 Comissionamento ............................. 22
5.1 Fundamentos ...................................... 22
5.2 Selecionar idioma ................................ 23
5.3 Entrada no menu „Comissionamento“; autorização de acesso ........................ 24
5.4 Parametrizar direção de fechamento, números de rotações, tipos e torques de desligamento .................................. 25
5.5 Outros parâmetros específi cos de válvulas ......................................... 29
5.6 Ajustar as posições fi nais nos modelos com transdutor de posicionamento ..... 31
5.7 Ajustar as posições fi nais para HiMod e PROFITRON no modelo „não instrusivo“ .................................. 39
6 Parâmetros e possíveis valores de parâmetros ......................................... 44
6.1 Parâmetros específi cos de guarnições ........................................... 44
6.2 Parâmetros para a técnica de instrumentação e controle ................... 46
6.3 Funções de software opcionais .......... 54
7 Avisos de condição e de erros, diagnóstico ........................................ 55
7.1 Observar (Avisos de condição do aparelho e de erros) ............................ 55
7.2 Avisos de situação e de erros ............ 58
7.3 Diagnóstico (Dados operacionais e limites de manutenção) .................... 61
7.4 Registrar curvas de torque .................. 62
8 Manutenção, inspeção, assistência ......................................... 64
8.1 Geral .................................................... 64
8.2 Prazos para lubrifi cação e lubrifi cantes ......................................... 65
9 Peças de reposição ........................... 66
9.1 Geral .................................................... 66
9.2 Lista de peças de reposição ................ 66
9.3 Vistas explodidas ................................. 67
Explicação de montagem original para quase máquinas (Diretriz CE 2006/42/CE) e declaração de conformidade CE conforme Diretriz da Baixa Tensão e CEM ...................... 79
Y070.020/BR Página 3
Instruções de usoSIPOS 5 PROFITRON, HiMod
1
Fund
amen
tos
1 Fundamentos
1 Fundamentos
1.1 Informações de segurança
Geral
Os aparelhos de que se tratam estas instruções é parte componente de instalações para apli-cações industriais. Eles foram fabricados de acordo com normas técnicas reconhecidas.
Todos os serviços relativos ao transporte, montagem, instalação, colocação em funcionamento, manutenção e reparos devem ser executados por pessoal qualifi cado.
Pessoal qualifi cado no âmbito das indicações técnicas de segurança desta documentação são pessoas autorizadas a realizar cada uma das atividades necessárias de acordo com os padrões técnicos de segurança, capazes de reconhecer possíveis perigos e ser de evitá-los. Devem estar muito bem familiarizados com as advertências no aparelho e as indicações de segurança destas instruções de uso.
A execução dos serviços em instalações de corrente elétrica está regulamentada entre outras na DIN EN 50110-1 (antiga DIN VDE 0105) ou IEC 60364-4-47 (VDE 0100 parte 470) que proíbem que sejam efetuados por pessoas não qualifi cadas.
A operação perfeita e segura pressupõe o transporte correto, o armazenamento conforme, a mon-tagem e a colocação em funcionamento cuidadoso.
Este é um produto de disponibilidade restrita de acordo com IEC 61800-3.Este produto pode provocar interferências em ambientes domésticos; neste caso pode ser neces-sário que o operador tome medidas corretivas correspondentes.
Deve ser dada atenção especial para: ■ Os dados e indicações técnicas sobre a utilização permissível (condições para montagem, conexão, ambientais e para operação), que constam no catálogo, nos documentos do pedido, nas instruções de uso, nas indicações nas placas e na documentação restante do produto;
■ As regulamentações gerais de montagem e de segurança; ■ As determinações e exigências locais e relativas à fábrica; ■ O emprego correto de ferramentas, dispositivos de elevação e de transporte; ■ A utilização de equipamento individual de proteção, em especial em ambientes com temperatu-ras altas e altas temperaturas de superfícies junto ao atuador (causadas por períodos frequentes e longos de operação).
Advertências localizadas no aparelho
Perigo de esmagamento. Ao pressionar a manivela ou o manete, tomar cuidado para não esmagar a mão ou os dedos, veja fi g.
Vale para aparelhos da série 2SA5.5/6/7/8 e 2SB555/6: Indica qual o lubrifi cante utilizado, veja também capítulo 8.2 „Prazos para lubrifi cação e lubri-fi cantes“.
Fig.: Perigo de esmagamento

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 4 Y070.020/BR
1 Fundamentos
1
Fundamentos
1.3 Eliminação residual e reciclagem
Embalagem
As embalagens dos nossos produtos são compostas de materiais sustentáveis e facilmente se-paráveis e podem ser reutilizadas. Os nossos materiais de embalagem são: Painéis de madeira industrializada (MSB/OSB), papelão, papel e película de polietileno. Para eliminar o material da embalagem recomendamos empresas especializadas em reciclagem.
Atuador
Os nossos atuadores são montados em módulos e por isso podem ser bem separados e ordena-dos conforme o material: peças eletrônicas, metais diversos, materiais sintéticos, lubrifi cantes e graxas.
De modo geral vale o seguinte: ■ Juntar lubrifi cantes e graxas durante a desmontagem. Via de regra, esses são material prejudici-ais para a água, que não devem chegar ao meio-ambiente.
■ Encaminhar o material desmontado a um serviço regular de eliminação residual ou a um serviço de reciclagem de materiais.
■ Observar regulamentos nacionais/locais relativos à eliminação residual.
1.4 Indicações relativas às instruções de uso
1.4.1 Indicações de segurança: Símbolos utilizados e seu signifi cadoNas instruções de uso são usados os seguintes símbolos que possuem signifi cados diversos. No caso de não obediência podem ocorrer ferimentos ou danos graves.
Advertência indica atividades, que quando não executadas corretamente podem causar risco de segurança a pessoas ou bens materiais.
Indicação indica atividades que têm infl uência signifi cativa sobre o funcionamento correto. Em caso de não obediência podem ocorrer danos refl exos.
Componentes sensíveis à eletrostática encontram-se sobre placas de circuitos, eles podem ser danifi cados ou destruídos por descargas elétricas. Caso seja necessário, durante os serviços de confi guração, medições ou substituição de placas de circuito tocar em componentes, deve-se tocar antes uma superfície metálica aterrada (p.ex. a carcaça) para a descarga eletrostática.
Etapas do trabalho já executadas pelo fornecedor das guarnições:Quando atuadores são fornecidos montados em guarnições, essa etapa é realizada pelo fornece-dor. Durante a colocação em funcionamento deve-se verifi car a confi guração.
1.2 Transporte e armazenamento ■ O envio deve ser realizado em embalagem fi rme. ■ Para transportar, lançar corda em torno do motor e da carca-ça do manete, veja fi gura. Os olhais (1) na unidade eletrôni-cos só devem ser usados para elevar o peso do atuador.
■ Jamais fi xar o dispositivo de elevação na manivela ou no manete.
■ Armazenamento em local arejado e seco. ■ Proteção contra a umidade do solo através de armazena-mento em estante ou palete de madeira.
■ Manter a tampa de conexões e os passa-cabos, e a tampa da unidade eletrônica fechadas.
Fig.: Transporte

Y070.020/BR Página 5
Instruções de usoSIPOS 5 PROFITRON, HiMod
1
Fund
amen
tos
1 Fundamentos
1.4.2 Âmbito de aplicaçãoAs instruções, a fi m de manter maior clareza, podem não conter todas as informações detalhadas sobre todos os modelos do produto e também não pode considerar todas as possibilidades de montagem, funcionamento ou manutenção. Correspondentemente, as instruções de uso essenci-almente apenas contêm instruções para pessoal qualifi cado (veja parágrafo 1), que é necessário para o uso correto dos aparelhos em campos de aplicação industrial.
Caso os aparelhos não sejam utilizados em ambientes industriais e por isso sejam necessários outros requisitos de segurança, devem ser providenciadas medidas de segurança e protetoras durante a montagem por parte do cliente.
Perguntas, em especial no caso de informações detalhadas específi cas de produtos, podem ser dirigidas ao revendedor responsável SIPOS Aktorik. É importante indicar sempre a identifi cação de tipo e número de série do atuador em questão (veja a placa de características).
É recomendável utilizar-se do apoio e serviços da assistência SIPOS Aktorik responsável para as tarefas de planejamento, montagem, colocação em funcionamento e assistência técnica.
Chamamos a atenção para o fato de que o conteúdo das instruções de uso e documentações do produto não é parte de um acordo, confi rmação ou relação jurídica antiga ou existente ou que pre-tende alterar uma destas condições. Todas as obrigações da SIPOS Aktorik constam do contrato de compra em questão, que também contém a regulamentação completa e única válida relativa à garantia por vícios de fabricação. Estas regulamentações contratuais também não são ampliadas ou limitadas pelas explicações das instruções e documentações.
1.5 Instruções complementares
2SB5 Atuador linear Y070.0272SC5 Atuador giratório Y070.0282SG5 Atuador giratório pequeno Y070.029Programa de parametrização para PC COM-SIPOS Y070.024 Instrução de uso PROFIBUS Y070.023 Instrução de uso MODBUS Y070.022Instruções de uso HART Y070.221Tipo de proteção IP68 „K51“ Y070.047Resistência aumentada à vibração „K57“, „K58“ Y070.048Resistência aumentada à vibração classe sísmica S2A „K59“ Y070.049Proteção intensa contra corrosão,categoria de corrosividade C5 “L38” Y070.162Atuador SIPOS 5 com ASI Y070.053Entradas binárias e analógicas através de Bus livremente disponível Y070.050 Funções de software opcionais Veja capítulo 6.3Instruções breves PROFITRON Y070.021e outros
Caso o fabricante tenha fornecido também instruções de montagem e uso especiais de elementos de terceiros montados ou embutidos adicionalmente, estas se encontram anexadas às instruções de uso e devem ser observadas.
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 6 Y070.020/BR
2 Geral
2
Geral
2 Geral
2.1 Princípio de funcionamento
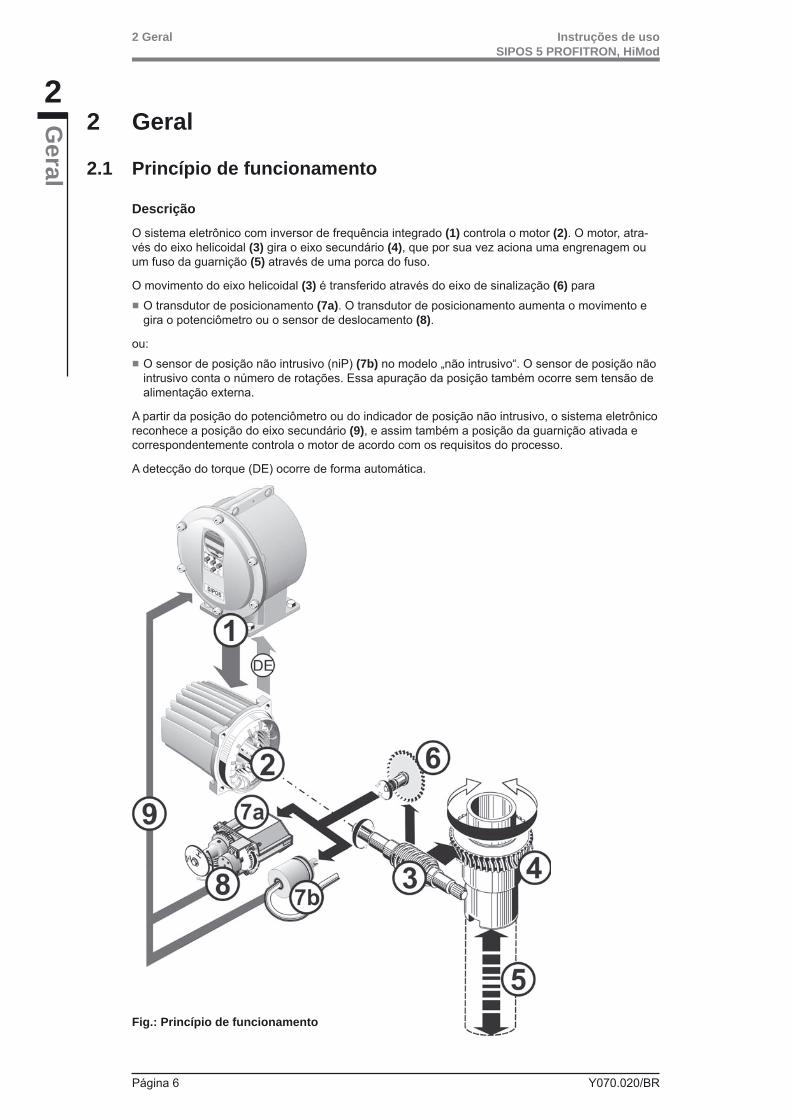
Descrição
O sistema eletrônico com inversor de frequência integrado (1) controla o motor (2). O motor, atra-vés do eixo helicoidal (3) gira o eixo secundário (4), que por sua vez aciona uma engrenagem ou um fuso da guarnição (5) através de uma porca do fuso.
O movimento do eixo helicoidal (3) é transferido através do eixo de sinalização (6) para ■ O transdutor de posicionamento (7a). O transdutor de posicionamento aumenta o movimento e gira o potenciômetro ou o sensor de deslocamento (8).
ou: ■ O sensor de posição não intrusivo (niP) (7b) no modelo „não intrusivo“. O sensor de posição não intrusivo conta o número de rotações. Essa apuração da posição também ocorre sem tensão de alimentação externa.
A partir da posição do potenciômetro ou do indicador de posição não intrusivo, o sistema eletrônico reconhece a posição do eixo secundário (9), e assim também a posição da guarnição ativada e correspondentemente controla o motor de acordo com os requisitos do processo.
A detecção do torque (DE) ocorre de forma automática.
Fig.: Princípio de funcionamento
Y070.020/BR Página 7
Instruções de usoSIPOS 5 PROFITRON, HiMod
2
Ger
al
2 Geral
2.2 Módulos
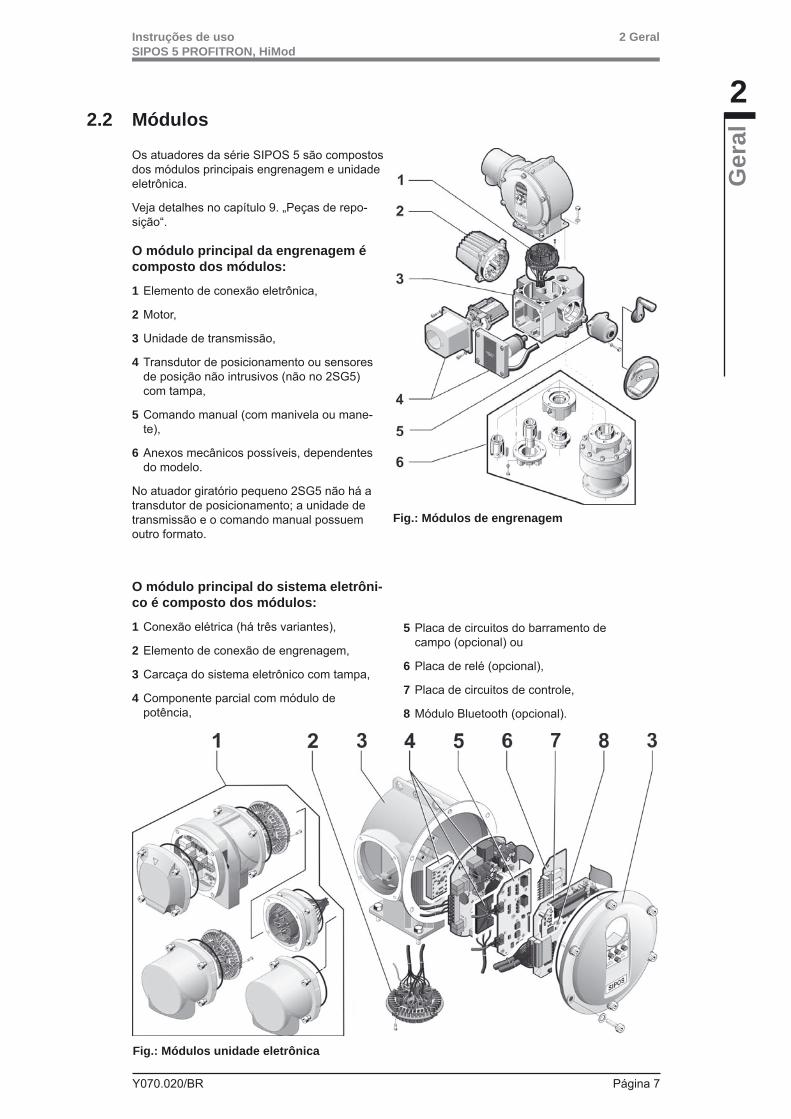
Os atuadores da série SIPOS 5 são compostos dos módulos principais engrenagem e unidade eletrônica.
Veja detalhes no capítulo 9. „Peças de repo-sição“.
O módulo principal da engrenagem é composto dos módulos:
1 Elemento de conexão eletrônica,
2 Motor,
3 Unidade de transmissão,
4 Transdutor de posicionamento ou sensores de posição não intrusivos (não no 2SG5) com tampa,
5 Comando manual (com manivela ou mane-te),
6 Anexos mecânicos possíveis, dependentes do modelo.
No atuador giratório pequeno 2SG5 não há a transdutor de posicionamento; a unidade de transmissão e o comando manual possuem outro formato.
O módulo principal do sistema eletrôni-co é composto dos módulos:
1 Conexão elétrica (há três variantes),
2 Elemento de conexão de engrenagem,
3 Carcaça do sistema eletrônico com tampa,
4 Componente parcial com módulo de potência,
Fig.: Módulos de engrenagem
Fig.: Módulos unidade eletrônica
5 Placa de circuitos do barramento de campo (opcional) ou
6 Placa de relé (opcional),
7 Placa de circuitos de controle,
8 Módulo Bluetooth (opcional).

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 8 Y070.020/BR
2 Geral
2
Geral
2.3 Esquema funcional (conexões elétricas)
O esquema funcional mostra os módulos eletrônicos e as entradas e saídas para conexões especí-fi cas do cliente.
Fig.: Esquema funcional
Y070.020/BR Página 9
Instruções de usoSIPOS 5 PROFITRON, HiMod
3
Mon
tage
m e
con
exão
3 Montagem e conexão
3 Montagem e conexão
3.1 Montagem na guarnição/engrenagem
Quando o atuador for fornecido sobre uma guarnição, esta etapa dos trabalhos é feita no forne-cedor das guarnições. No entanto, durante a colocação em funcionamento deve-se verifi car a confi guração.
■ Observar as informações de segurança (veja o capítulo 1.1)! ■ Antes do início da montagem deve-se assegurar que não seja possível colocar pessoas ou a instalação em perigo através das medidas pretendidas (eventual ativação da guarnição, etc.).
É recomendável utilizar-se do apoio e serviços da assistência SIPOS Aktorik responsável para as tarefas de planejamento, montagem, colocação em funcionamento e assistência técnica.
3.1.1 Indicações gerais de montagem para todos os modelos de eixo fi nal ■ Montagem e operação podem ser realizadas em qualquer posição desejada. ■ Evitar pancadas ou uso de força. ■ Verifi car, se a fl ange de conexão e o modelo do eixo fi nal combinarem com a guarnição/engre-nagem.
■ Limpar cuidadosamente as superfícies de apoio no atuador e na guarnição/engrenagem. ■ Lubrifi car ligeiramente os locais de união. ■ Colocar o atuador sobre a guarnição/engrenagem, atentar para a centralização. ■ Utilizar parafusos com qualidade mínima 8.8 (proteger com arruelas elásticas). No caso de se utilizar parafusos não oxidáveis de qualidade idêntica, estes devem ser ligeiramente lubrifi cados com vaselina.Selecionar profundidade de rosqueamento do parafuso mínima de 1,25 x a rosca.
■ Colocar o atuador sobre a guarnição/engrenagem e apertar bem os parafusos, homogeneamen-te e em cruz.
■ A carcaça dos atuadores SIPOS 5 é composta de uma liga de alumínio, que em condições normais é resistente à corrosão. Caso tenham ocorrido danos na pintura através da montagem, estes poderão ser corrigidos com a tinta original, disponível em embalagens pequenas na SIPOS Aktorik.
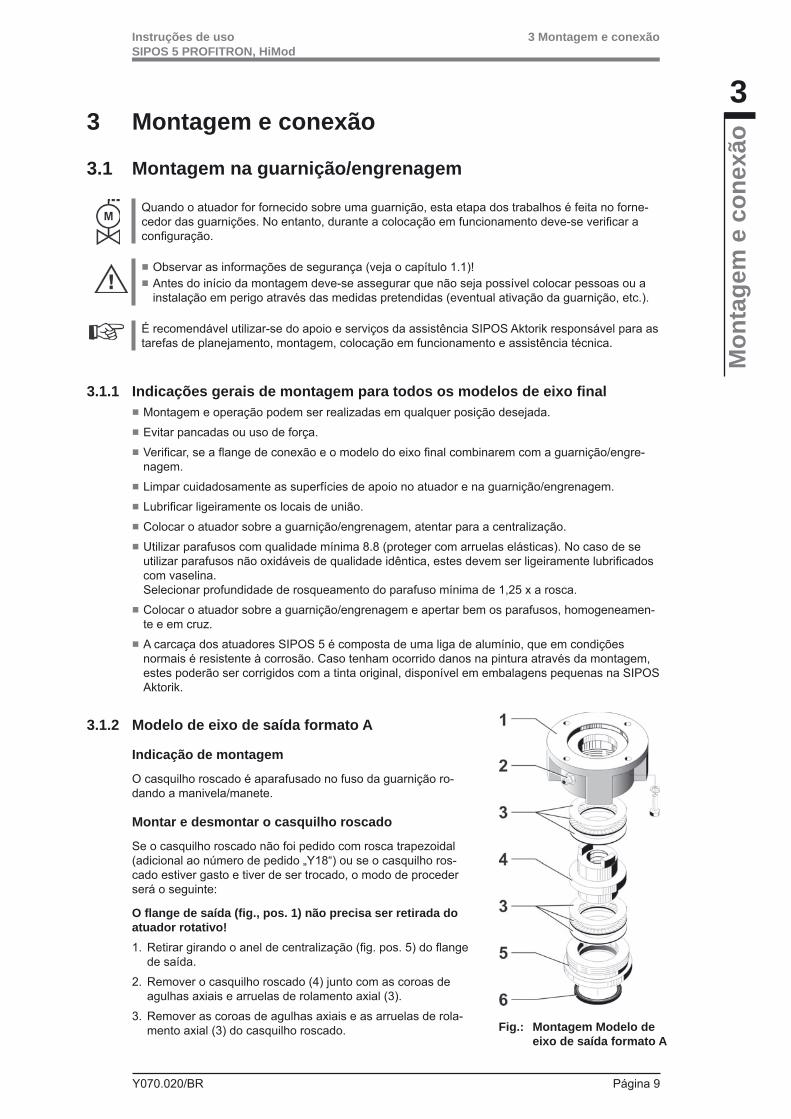
3.1.2 Modelo de eixo de saída formato A
Indicação de montagem
O casquilho roscado é aparafusado no fuso da guarnição ro-dando a manivela/manete.
Montar e desmontar o casquilho roscado
Se o casquilho roscado não foi pedido com rosca trapezoidal (adicional ao número de pedido „Y18“) ou se o casquilho ros-cado estiver gasto e tiver de ser trocado, o modo de proceder será o seguinte:
O fl ange de saída (fi g., pos. 1) não precisa ser retirada do atuador rotativo!1. Retirar girando o anel de centralização (fi g. pos. 5) do fl ange
de saída.
2. Remover o casquilho roscado (4) junto com as coroas de agulhas axiais e arruelas de rolamento axial (3).
3. Remover as coroas de agulhas axiais e as arruelas de rola-mento axial (3) do casquilho roscado. Fig.: Montagem Modelo de
eixo de saída formato A

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 10 Y070.020/BR
3 Montagem e conexão
3
Montagem
e conexão
4. Apenas quando o casquilho roscado foi fornecido sem rosca: Cortar rosca no casquilho roscado (4) (ao fi xar atentar para marcha concêntrica e lateral) e limpar.
5. Lubrifi car as coroas de agulhas axiais e arruelas de rolamento axial (3) com graxa de rolamento de esferas e colocar sobre o casquilho roscado novo ou recondicionado (4).
6. Encaixar o casquilho roscado (4) com mancal axial no fl ange de saída (as garras devem fi xar corretamente na ranhura do eixo secundário do atuador).
7. Aparafusar o anel de centralização (5) e apertar até o encosto. Atentar para a introdução bem feita do anel de vedação do eixo (6).
8. Aplicar graxa de rolamento de esferas com a bomba de graxa no niple de lubrifi cação (2), até que a graxa vaze entre o anel de centralização (5) e o casquilho roscado (4).
3.1.3 Montar o tubo protetor do fuso1. Remover a tampa (fi g., pos. 1).
2. Verifi car se os fusos estendidos não ultrapassam o comprimento do tubo protetor de fusos.
3. Aplicar massa obturadora na rosca e superfícies de vedação (p. ex. 732 RTV da empresa Dow Corning, Munique).
4. Aparafusar o tubo de proteção do fuso (2).
Fig.: Modelo do eixo de saída formato A montada
Fig.: Montar o tubo protetor do fuso
3.2 Conexão elétrica
Os componentes foram calculados de tal forma que não seja possível tocar diretamente peças que tenham tensão elétrica aplicada, ou seja, a proteção contra toque foi respeitada conforme IPX2 ou IPXXB.
Mesmo com o motor parado há tensões perigosas no atuador. Antes de abrir a tampa de conexões, desligar o atuador para que fi que sem tensão. Observar o tempo de descarga dos capacitores de no mín. 5 minutos e não tocar nos contatos neste período.
■ A tensão de rede deve obrigatoriamente estar dentro da faixa de tensão indicada na placa de identifi cação.
■ Cabo de alimentação: Para ligar na rede usar prensa cabos de metal. ■ Cabos de sinal: Para conectar o cabo de sinal, utilizar o prensa-cabos de metal com blin-dagem, do contrário podem ocorrer falhas. O cabo de sinal deve ser blindado e a blindagem deve ser aplicada de ambos os lados ou aterrado. Atentar para uma blindagem cuidadosa do prensa-cabos!
■ Os prensa-cabos e os pontos de vedação (anéis tóricos) devem ser montados com cuidado para respeitar o tipo de proteção! Para cortes transversais de cabos permissíveis veja o esque-ma de conexões.
■ Os prensa-cabos e os cabos não são fornecidos.
Y070.020/BR Página 11
Instruções de usoSIPOS 5 PROFITRON, HiMod
3
Mon
tage
m e
con
exão
3 Montagem e conexão
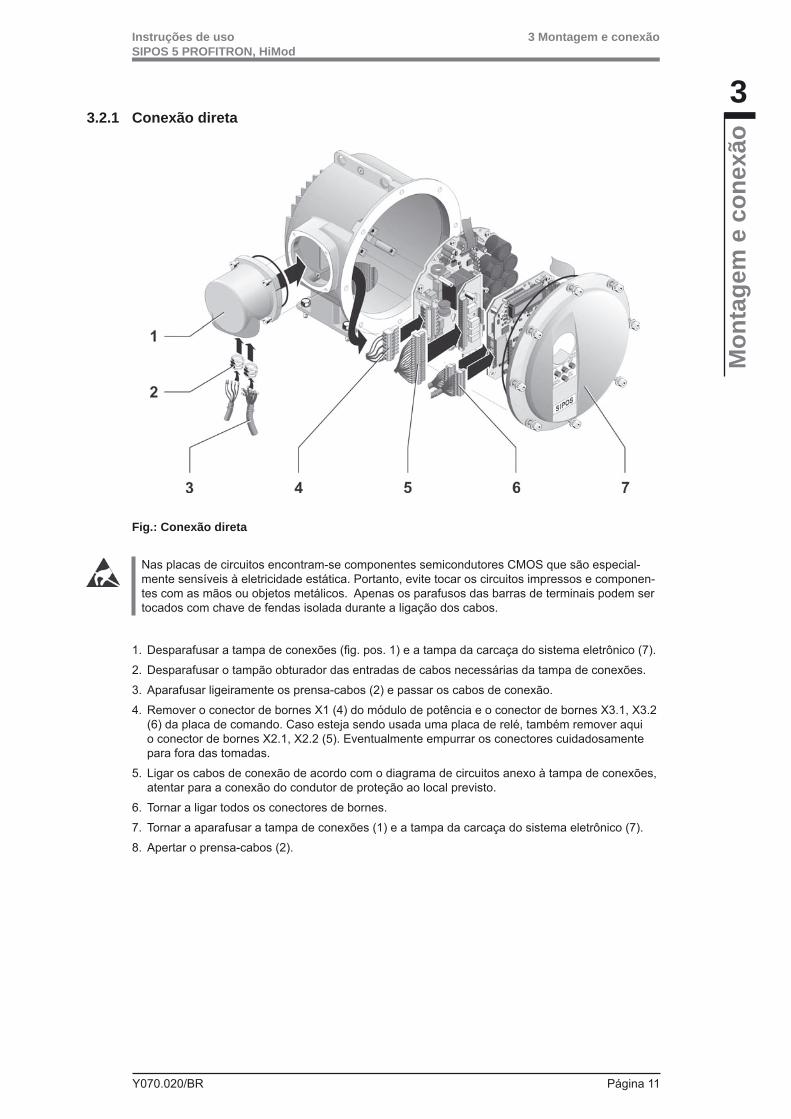
3.2.1 Conexão direta
Fig.: Conexão direta
Nas placas de circuitos encontram-se componentes semicondutores CMOS que são especial-mente sensíveis à eletricidade estática. Portanto, evite tocar os circuitos impressos e componen-tes com as mãos ou objetos metálicos. Apenas os parafusos das barras de terminais podem ser tocados com chave de fendas isolada durante a ligação dos cabos.
1. Desparafusar a tampa de conexões (fi g. pos. 1) e a tampa da carcaça do sistema eletrônico (7).
2. Desparafusar o tampão obturador das entradas de cabos necessárias da tampa de conexões.
3. Aparafusar ligeiramente os prensa-cabos (2) e passar os cabos de conexão.
4. Remover o conector de bornes X1 (4) do módulo de potência e o conector de bornes X3.1, X3.2 (6) da placa de comando. Caso esteja sendo usada uma placa de relé, também remover aqui o conector de bornes X2.1, X2.2 (5). Eventualmente empurrar os conectores cuidadosamente para fora das tomadas.
5. Ligar os cabos de conexão de acordo com o diagrama de circuitos anexo à tampa de conexões, atentar para a conexão do condutor de proteção ao local previsto.
6. Tornar a ligar todos os conectores de bornes.
7. Tornar a aparafusar a tampa de conexões (1) e a tampa da carcaça do sistema eletrônico (7).
8. Apertar o prensa-cabos (2).
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 12 Y070.020/BR
3 Montagem e conexão
3
Montagem
e conexão
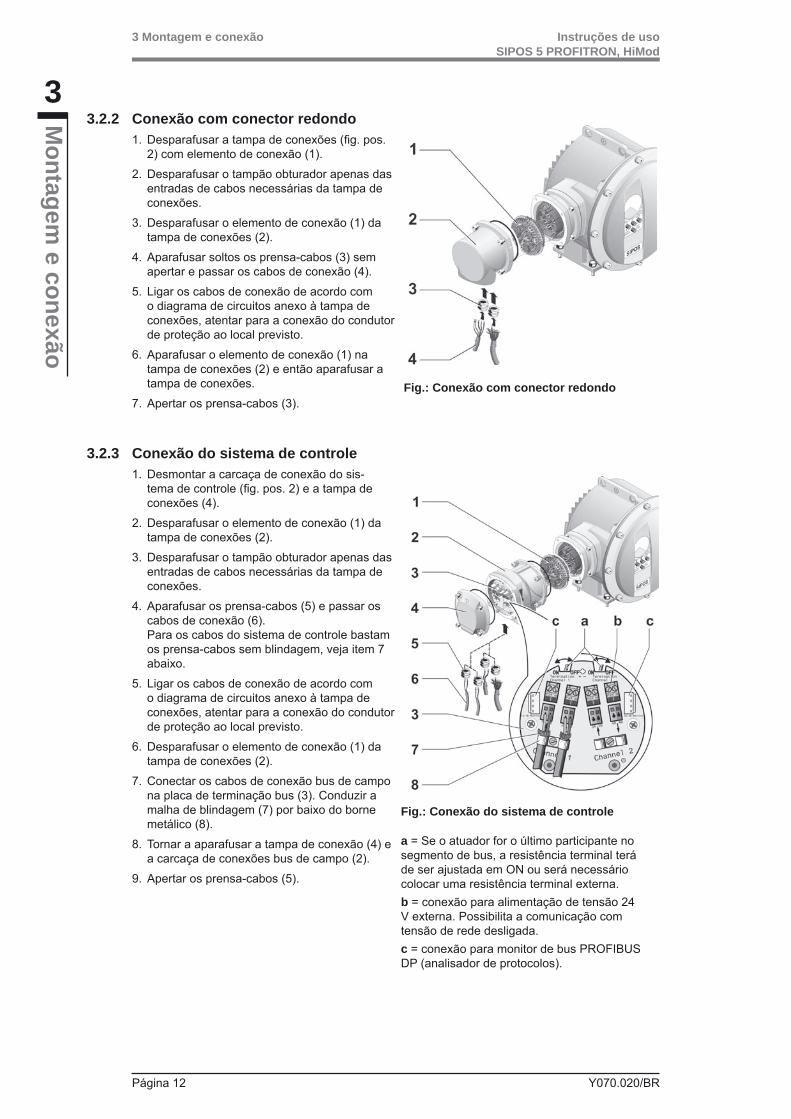
3.2.2 Conexão com conector redondo1. Desparafusar a tampa de conexões (fi g. pos.
2) com elemento de conexão (1).
2. Desparafusar o tampão obturador apenas das entradas de cabos necessárias da tampa de conexões.
3. Desparafusar o elemento de conexão (1) da tampa de conexões (2).
4. Aparafusar soltos os prensa-cabos (3) sem apertar e passar os cabos de conexão (4).
5. Ligar os cabos de conexão de acordo com o diagrama de circuitos anexo à tampa de conexões, atentar para a conexão do condutor de proteção ao local previsto.
6. Aparafusar o elemento de conexão (1) na tampa de conexões (2) e então aparafusar a tampa de conexões.
7. Apertar os prensa-cabos (3).
3.2.3 Conexão do sistema de controle1. Desmontar a carcaça de conexão do sis-
tema de controle (fi g. pos. 2) e a tampa de conexões (4).
2. Desparafusar o elemento de conexão (1) da tampa de conexões (2).
3. Desparafusar o tampão obturador apenas das entradas de cabos necessárias da tampa de conexões.
4. Aparafusar os prensa-cabos (5) e passar os cabos de conexão (6).Para os cabos do sistema de controle bastam os prensa-cabos sem blindagem, veja item 7 abaixo.
5. Ligar os cabos de conexão de acordo com o diagrama de circuitos anexo à tampa de conexões, atentar para a conexão do condutor de proteção ao local previsto.
6. Desparafusar o elemento de conexão (1) da tampa de conexões (2).
7. Conectar os cabos de conexão bus de campo na placa de terminação bus (3). Conduzir a malha de blindagem (7) por baixo do borne metálico (8).
8. Tornar a aparafusar a tampa de conexão (4) e a carcaça de conexões bus de campo (2).
9. Apertar os prensa-cabos (5).
a = Se o atuador for o último participante no segmento de bus, a resistência terminal terá de ser ajustada em ON ou será necessário colocar uma resistência terminal externa.b = conexão para alimentação de tensão 24 V externa. Possibilita a comunicação com tensão de rede desligada.c = conexão para monitor de bus PROFIBUS DP (analisador de protocolos).
Fig.: Conexão com conector redondo
Fig.: Conexão do sistema de controle

Y070.020/BR Página 13
Instruções de usoSIPOS 5 PROFITRON, HiMod
3
Mon
tage
m e
con
exão
3 Montagem e conexão
Fig.: Conexão com separação galvânica
Fig.: Aparafusar o condutor de potencial
3.2.4 Conexão com separação galvânicaAs entradas e saídas binárias são separadas galvanicamente através de opto acoplador. Sinais analógicos também podem, opcionalmente, ser separados galvanicamente. Isso será necessário quando se desejar evitar interferências de corrente e de tensão por meio de potenciais de compen-sação.
■ Valor real da posição (saída analógica) separada galvanicamente: Suplemento de pedido C10. ■ Valor real (saída analógica) e teórico da posição (entrada analógica) separada galvanicamente: Suplemento de pedido C11
1. Desparafusar a tampa de conexões (fi g. pos. 2) e tampa de conexões (4).
2. Desparafusar o elemento de conexão (1) da tampa de conexões (2).
3. Desparafusar o tampão obturador apenas das entradas de cabos necessárias da tampa de conexões.
4. Aparafusar os prensa-cabos (5) sem apertar e passar os cabos de conexão (6).
5. Ligar os cabos de conexão de acordo com o diagrama de circuitos anexo à tampa de conexões, atentar para a conexão do condutor de proteção ao local previsto.O cabo para os sinais analógicos „valor real da posição“ e eventualmente „valor teórico da posição“ deve ser conectado na placa de circuitos (3). Conduzir a malha de blindagem por baixo do borne metálico.
6. Aparafusar o elemento de conexão (1) na carcaça de conexões (2).
7. Tornar a aparafusar a carcaça de conexões (2) e a tampa de conexões (4).
8. Apertar os prensa-cabos (5)
3.2.5 Ligação do cabo de conexão equipotencial externoO cabo de conexão equipotencial externo pode ser utilizado para aterramento funcional, não como terra de proteção.
1. Retirar a tampa plástica (1) da carcaça do sistema eletrônico.
2. Com o parafuso M5 (2) aparafusar o condutor de potencial (3) e a arruela serrilhada (4).

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 14 Y070.020/BR
3 Montagem e conexão
3
Montagem
e conexão
3.3 Montagem separada
Quando as condições ambientais exigirem, como p.ex. vibrações extremas, temperatura elevada e/ou condições desfavoráveis do local, a unida-de eletrônica deverá ser instalada separada do redutor.
O kit para a montagem em separado do redutor e da unidade eletrônica pode ser pedida diretamen-te com o atuador, ou em separado como acessório (2SX5300-...). O kit de montagem é pré-fabricado. Se o kit de montagem for pedido diretamente junto com o atuador, ele é fornecido junto com o atuador, porém não instalado. O kit de montagem também pode ser fornecido com um sistema se-parador de cabos com acoplamentos de conexão rápida. Desta forma, na montagem em salas dife-rentes, será necessária uma montagem através da parede de apenas Ø 45 mm.
Antes de iniciar os trabalhos desligue o atua-dor!
Como proceder1. Montar o suporte angular (fi g. pos. 3) no local
da montagem da carcaça do sistema eletrôni-co.
2. Desmontar a carcaça do sistema eletrônico (1) da engrenagem (6) e montar com anel tórico (2) no suporte angular (3).
3. Montagem padrão, veja AAparafusar o kit de montagem „Montagem em separado“: tampa do conector com os pinos de contato (4) abaixo do suporte angular (3) e tampa de conexões com casquilhos de contato (5) na unidade da engrenagem (6).
4. Montagem com tubo de proteção do fuso, veja BPara que as ligações não sejam obstruídos pelo tubo de proteção do fuso, girar a tampa de conexões em 90° ou 180°:Desparafusar os parafusos (7) do conector redondo (8), girar conector redondo em 90° ou 180° e voltar a aparafusar.Continuar como descrito sob item 3.
■ Durante a montagem deve-se atentar para a colocação correta dos anéis tóricos, a fi m de aten-der à conformidade do tipo de proteção.
■ Atentar para que as ligações não obstruam as peças móveis, por exemplo o braço giratório. ■ Excepcionalmente o motor pode esquentar muito, portanto não deixar as ligações junto ao motor.
Especifi cação do cabo de ligação entre a unidade eletrônica e a unidade da engre-nagem
Ligação na rede: blindado e resistente a UV, p. ex. cabo Topfl ex-611-C-Pur-4G1,5/11,3 (TOPFLEX® é uma marca da empresa HELUKABEL.) Conexão do controle: blindada e resistente a UV, p. ex. L IY11Y-7x2x0,5/11,4-SOs contatos de pressão são banhados em prata.Os cabos de conexão encontram-se disponíveis em diversos modelos:
■ Comprimentos padrão : 3 m; 5 m; 10 m, ■ com dispositivo adicional (Filtro) até 50 m(em caso de montagem separada superior a 10 m com fi ltro, deve colocar o parâmetro “Monta-gem separada“ no valor “>10m com fi ltro”).
Fig.: Montagem separada
A = Padrão, B = com tubo de proteção do fuso

Y070.020/BR Página 15
Instruções de usoSIPOS 5 PROFITRON, HiMod
4
Indi
caçõ
es p
ara
o co
man
do e
a o
pera
ção
4 Indicações para o comando e a operação
4 Indicações para o comando e a operação
4.1 Manivela, Manete
■ O acionamento mecânico da manivela/manete não é permitido. ■ Após a colocação em funcionamento não deslocar o atuador com a manivela/manete para além de suas posições fi nais.
■ Ao pressionar a manivela/manete, atentar para que a mão não se encontre entre a manivela/manete e a carcaça: Perigo de esmagamento! Veja passo de comando 3 a seguir.
Durante o funcionamento do motor a manivela/manete fi ca parada.
Comando
Comando em todos os atuadores com exceção do 2SG5:1. O atuador deve estar desligado (1).
2. Remover o grampo (opcional) (2). O grampo tem a função de proteger contra o engate não intencional da manivela/manete, quando o atuador estiver sen-do exposto a vibrações ou pressão de água intensa (modelo de proteção IP 68).
3. Pressionar a manivela/manete na direção da car-caça da engrenagem contra a pressão da mola (3) e girar (4). (Atenção: perigo de esmagamento ao pressionar!)
Acionamento manual tem preferência sobre o acionamento motorizado. Somente após soltar a manivela/manete o atuador poderá voltar a ser deslocado eletricamente.
Se durante a condição „Remoto“ o atuador for deslocado manualmente e existir um comando de deslocamento, o atuador de deslocará logo após soltar a manivela.
Apenas no 2SG5:
Girar o manete sem apertar. O acionamento manual se sobrepõe ao acionamento motorizado: se a manivela for acionada durante o funcionamento do motor, ocorre, dependendo da direção da rotação, um aumento ou diminuição do tempo de atuação.
Sentido da rotação
A rotação para a direita na manivela/manete causa no ■ atuador rotativo S2A5: rotação para a direita no eixo de transmissão (exceção em 2SA5.7. e 2SA5.8.).
■ Atuador linear 2SB5: Estender a biela. ■ Atuador giratório 2SC5: Com o olhar na tampa com indicador da engrenagem helicoidal rotação para a direita no acoplamento ou na alavanca giratória nos modelos de engrenagem RR ou LR.
■ Atuador giratório 2SG5: Com olhar no indicador de posição mecânico rotação para a direita no acoplamento ou na alavanca.
Fig.: Comandar manivela
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 16 Y070.020/BR
4 Indicações para o comando e a operação
4
Indicações para o comando e a operação
4.2 Controle local, display
Com o Controle Local (CL) o comando pode ser feito diretamente no atuador através de 4 teclas (veja fi g. painel de controle).
Com a tecla Local/Remote pode-se, através de acionamento repetido, selecionar entre as três condições „ Remota.“, „ Local“ e „ Par.loc.“.
Dependendo da condição no qual o atuador se encontra, as teclas tem função diversa.
Quando se comuta da condição „Local“ ou „Par.loc.“ para a condição „ Remota“, o atuador se desloca se houver uma ordem de deslocamento do sistema de automatização.
O programa de parametrização COM SIPOS para PC oferece um controle e parametrização confortável do atuador, veja cap. 4.5. O controle do atuador pode ser feito a partir do PC (laptop) através de um cabo ou por Bluetooth. A comunicação através de Bluetooth é exibida por LEDs que piscam no atuador.
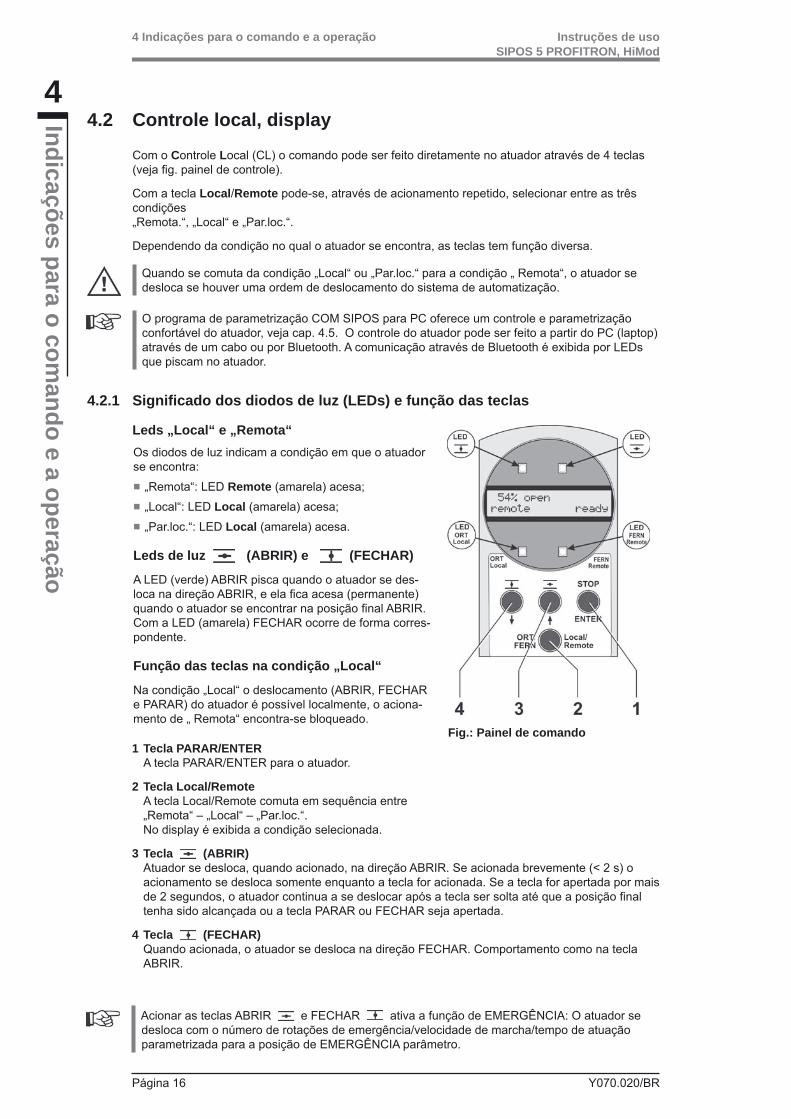
4.2.1 Signifi cado dos diodos de luz (LEDs) e função das teclas
Leds „Local“ e „Remota “Os diodos de luz indicam a condição em que o atuador se encontra:
■ „Remota“: LED Remote (amarela) acesa; ■ „Local“: LED Local (amarela) acesa; ■ „Par.loc.“: LED Local (amarela) acesa.
Leds de luz (ABRIR) e (FECHAR)
A LED (verde) ABRIR pisca quando o atuador se des-loca na direção ABRIR, e ela fi ca acesa (permanente) quando o atuador se encontrar na posição fi nal ABRIR. Com a LED (amarela) FECHAR ocorre de forma corres-pondente.
Função das teclas na condição „Local“
Na condição „Local“ o deslocamento (ABRIR, FECHAR e PARAR) do atuador é possível localmente, o aciona-mento de „ Remota“ encontra-se bloqueado.
1 Tecla PARAR/ENTER A tecla PARAR/ENTER para o atuador.
2 Tecla Local/RemoteA tecla Local/Remote comuta em sequência entre „Remota“ – „Local“ – „Par.loc.“.No display é exibida a condição selecionada.
3 Tecla ( ABRIR)Atuador se desloca, quando acionado, na direção ABRIR. Se acionada brevemente (< 2 s) o acionamento se desloca somente enquanto a tecla for acionada. Se a tecla for apertada por mais de 2 segundos, o atuador continua a se deslocar após a tecla ser solta até que a posição fi nal tenha sido alcançada ou a tecla PARAR ou FECHAR seja apertada.
4 Tecla ( FECHAR)Quando acionada, o atuador se desloca na direção FECHAR. Comportamento como na tecla ABRIR.
Acionar as teclas ABRIR e FECHAR ativa a função de EMERGÊNCIA: O atuador se desloca com o número de rotações de emergência/velocidade de marcha/tempo de atuação parametrizada para a posição de EMERGÊNCIA parâmetro.
Fig.: Painel de comando

Y070.020/BR Página 17
Instruções de usoSIPOS 5 PROFITRON, HiMod
4
Indi
caçõ
es p
ara
o co
man
do e
a o
pera
ção
4 Indicações para o comando e a operação
Função das teclas na condição „Remota“
Na condição „Remota“ ocorre o acionamento através do sistema de automatização. Se na con-dição „Remota“ a tecla STOP/ENTER for apertada, poderão ser selecionados os seguintes menus com a tecla ou sem interromper o funcionamento (veja também capítulo 4.3.1 „Menu principal“):
■ Idioma: Seleção de outro idioma. ■ Dados de comissionamento; Exibição dos parâmetros. ■ Observar: Indicação da condição do aparelho e de eventuais avisos de erros. ■ Diagnóstico: Exibição dos dados operacionais atuais e limites de manutenção.
Uma alteração dos parâmetros, com exceção de Idioma, só é possível na condição “Par.loc.”.
Função das teclas na condição „Par.loc.“
Na condição „ Par.loc.“ os parâmetros poderão ser alterados, o acionamento de „Remota“ está blo-queado. Se na condição „Par.loc.“ a tecla PARAR/ENTER for apertada, poderão então ser selecio-nados os seguintes menus com a tecla ou (veja também capítulo 4.3.1 „Menu principal“):
■ Idioma: Seleção de outro idioma. ■ Comissionamento: Alteração dos parâmetros (veja abaixo). ■ Observar: Indicação da condição do aparelho e de eventuais avisos de erros. ■ Diagnóstico: Exibição dos dados operacionais atuais e limites de manutenção.
4.2.2 Exibição dos avisos no displayO display exibe a condição „Remota“, „Local“ ou „Par.loc.“ na qual o atuador se encontra atual-mente, e o display auxilia a navegação nos menus. O display é iluminado automaticamente: A iluminação de fundo é ligada quando a primeira tecla for acionada e se desliga automaticamente quando não ocorrer algum comando.
1 Display, duas linhas com 16 caracteres cada e ilumi-nação de fundo automática.
2 Na primeira linha é exibida a posição da guarnição e se o atuador se desloca, além da direção na qual foi confi gu-rada.Nos menus „Comissionamento“, „observar“ e „Diagnósti-co“, na primeira linha é exibida a função selecionada com a tecla ou .
3 Na segunda linha é exibida a condição „Remoto“, „Local“ ou „Par.loc.“ e se o atuador está pronto ou não. Nos menus „Comissionamento“, „observar“ são exibidos parâ-metros possíveis, no menu „Diagnóstico“ são exibidos dados operacionais e limites de manutenção. Fig.: Display
Nas descrições a seguir, os textos no display que são relevantes para a função descrita são exibidos com xxx.
4 Parâmetros e valores de parâmetros que piscam no display podem ser alterados com a tecla ou ou salvos com a tecla ENTER. No capítulo 5 „Colocação em funcionamento“ são exibidos nas sequências de operações de comando em branco sob fundo preto.
5 Símbolo para a tecla ENTER.
6 Símbolo para a tecla .
7 Símbolo para a tecla .
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 18 Y070.020/BR
4 Indicações para o comando e a operação
4
Indicações para o comando e a operação
4.3 Menu principal, Comando do menu
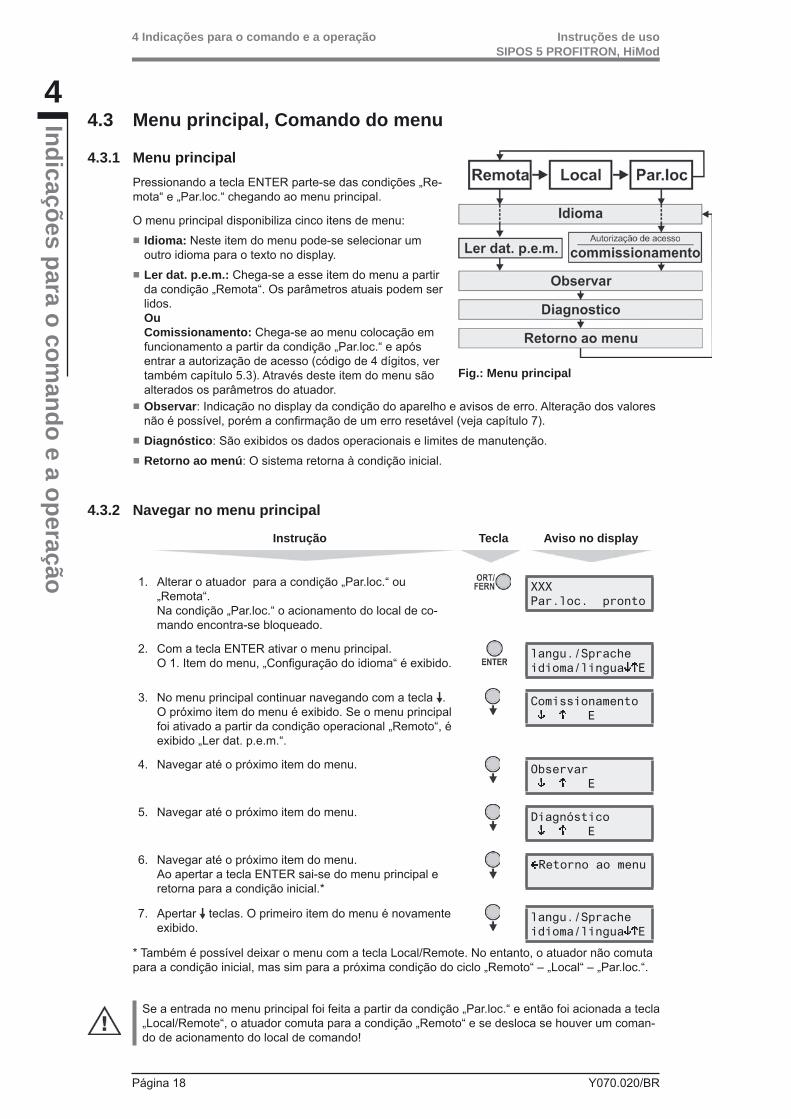
4.3.1 Menu principalPressionando a tecla ENTER parte-se das condições „Re-mota“ e „Par.loc.“ chegando ao menu principal.
O menu principal disponibiliza cinco itens de menu: ■ Idioma: Neste item do menu pode-se selecionar um outro idioma para o texto no display.
■ Ler dat. p.e.m.: Chega-se a esse item do menu a partir da condição „Remota“. Os parâmetros atuais podem ser lidos.OuComissionamento: Chega-se ao menu colocação em funcionamento a partir da condição „Par.loc.“ e após entrar a autorização de acesso (código de 4 dígitos, ver também capítulo 5.3). Através deste item do menu são alterados os parâmetros do atuador.
Fig.: Menu principal
■ Observar: Indicação no display da condição do aparelho e avisos de erro. Alteração dos valores não é possível, porém a confi rmação de um erro resetável (veja capítulo 7).
■ Diagnóstico: São exibidos os dados operacionais e limites de manutenção. ■ Retorno ao menú: O sistema retorna à condição inicial.
4.3.2 Navegar no menu principal
Instrução Tecla Aviso no display
1. Alterar o atuador para a condição „Par.loc.“ ou „Remota“. Na condição „Par.loc.“ o acionamento do local de co-mando encontra-se bloqueado.
XXX Par.loc. pronto
2. Com a tecla ENTER ativar o menu principal. O 1. Item do menu, „Confi guração do idioma“ é exibido.
langu./Spracheidioma/lingua E
3. No menu principal continuar navegando com a tecla .O próximo item do menu é exibido. Se o menu principal foi ativado a partir da condição operacional „Remoto“, é exibido „Ler dat. p.e.m.“.
Comissionamento E
4. Navegar até o próximo item do menu. Observar E
5. Navegar até o próximo item do menu. Diagnóstico E
6. Navegar até o próximo item do menu. Ao apertar a tecla ENTER sai-se do menu principal e retorna para a condição inicial.*
Retorno ao menu
7. Apertar teclas. O primeiro item do menu é novamente exibido.
langu./Sprache idioma/lingua E
* Também é possível deixar o menu com a tecla Local/Remote. No entanto, o atuador não comuta para a condição inicial, mas sim para a próxima condição do ciclo „Remoto“ – „Local“ – „Par.loc.“.
Se a entrada no menu principal foi feita a partir da condição „Par.loc.“ e então foi acionada a tecla „Local/Remote“, o atuador comuta para a condição „Remoto“ e se desloca se houver um coman-do de acionamento do local de comando!
Y070.020/BR Página 19
Instruções de usoSIPOS 5 PROFITRON, HiMod
4
Indi
caçõ
es p
ara
o co
man
do e
a o
pera
ção
4 Indicações para o comando e a operação
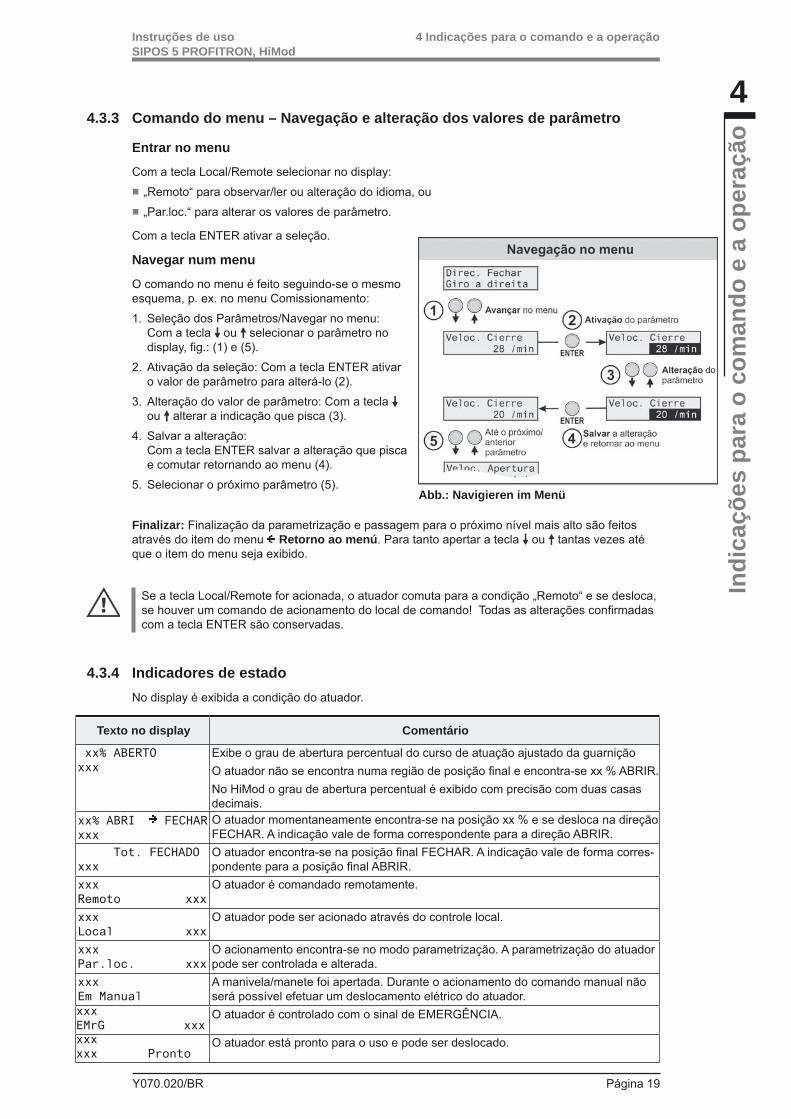
4.3.3 Comando do menu – Navegação e alteração dos valores de parâmetro
Entrar no menu
Com a tecla Local/Remote selecionar no display: ■ „Remoto“ para observar/ler ou alteração do idioma, ou ■ „Par.loc.“ para alterar os valores de parâmetro.
Com a tecla ENTER ativar a seleção.
Navegar num menu
O comando no menu é feito seguindo-se o mesmo esquema, p. ex. no menu Comissionamento:
1. Seleção dos Parâmetros/Navegar no menu: Com a tecla ou selecionar o parâmetro no display, fi g.: (1) e (5).
2. Ativação da seleção: Com a tecla ENTER ativar o valor de parâmetro para alterá-lo (2).
3. Alteração do valor de parâmetro: Com a tecla ou alterar a indicação que pisca (3).
4. Salvar a alteração: Com a tecla ENTER salvar a alteração que pisca e comutar retornando ao menu (4).
5. Selecionar o próximo parâmetro (5).
Finalizar: Finalização da parametrização e passagem para o próximo nível mais alto são feitos através do item do menu Retorno ao menú. Para tanto apertar a tecla ou tantas vezes até que o item do menu seja exibido.
Se a tecla Local/Remote for acionada, o atuador comuta para a condição „Remoto“ e se desloca, se houver um comando de acionamento do local de comando! Todas as alterações confi rmadas com a tecla ENTER são conservadas.
4.3.4 Indicadores de estadoNo display é exibida a condição do atuador.
Texto no display Comentário
xx% ABERTOxxx
Exibe o grau de abertura percentual do curso de atuação ajustado da guarnição O atuador não se encontra numa região de posição fi nal e encontra-se xx % ABRIR. No HiMod o grau de abertura percentual é exibido com precisão com duas casas decimais.
xx% ABRI FECHARxxx
O atuador momentaneamente encontra-se na posição xx % e se desloca na direção FECHAR. A indicação vale de forma correspondente para a direção ABRIR.
Tot. FECHADOxxx
O atuador encontra-se na posição fi nal FECHAR. A indicação vale de forma corres-pondente para a posição fi nal ABRIR.
xxxRemoto xxx
O atuador é comandado remotamente.
xxxLocal xxx
O atuador pode ser acionado através do controle local.
xxxPar.loc. xxx
O acionamento encontra-se no modo parametrização. A parametrização do atuador pode ser controlada e alterada.
xxxEm Manual
A manivela/manete foi apertada. Durante o acionamento do comando manual não será possível efetuar um deslocamento elétrico do atuador.
xxxEMrG xxx
O atuador é controlado com o sinal de EMERGÊNCIA.
xxxxxx Pronto
O atuador está pronto para o uso e pode ser deslocado.
Abb.: Navigieren im Menü
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 20 Y070.020/BR
4 Indicações para o comando e a operação
4
Indicações para o comando e a operação
Texto no display Comentárioxxxxxx Falha
Caso essa indicação surja na condição „Remoto“ ou „Local“, existe um erro: veja capítulo 7 „Avisos de condição e de erros“. O atuador não poderá ser deslocado. Indicação:Essa indicação aparece em todos os atuadores fornecidos, nos quais ainda não foi realizado o ajuste da região da posição fi nal. Apenas na condição „Par.loc.“ o atuador poderá ser deslocado através do controle local e poderão ser realizadas as parametrizações necessárias.
xxxmantem valor rem
A mensagem só aparece quando a opção do software “Controlador de processo” está ativa. Ruptura de cabo da fonte de comando (técnica de controle). Valor real de processo é parado.
xxxmov rem a valor
A mensagem só aparece quando a opção do software “Controlador de processo” está ativa.Ruptura de cabo da fonte de comando (técnica de controle). Valor fi xo teórico é deslocado e parado.
4.4 Controle remoto
4.4.1 Acionamento O acionamento dos atuadores ocorre de acordo com o sistema de automatização e em dependên-cia da parametrização para „Controle remoto“ e „Com. Remota“ (veja capítulo 6) através de
■ conexão convencional (24 V binário ou 0/4 – 20 mA análogo) ou ■ Bus de campo (p.ex. PROFIBUS DP ou MODBUS RTU).Cada atuador (participante) no bus de campo é acionado através de seu endereço bus. O ende-reço bus, quando do fornecimento, está pré-ajustado em todos os aparelhos: 126 no PROFIBUS e 247 no MODBUS, contanto que não tenha solicitado alterações através de formulário, comple-mento do pedido „Y11“.A operação através de uma interface bus de campo encontra-se descrita em instruções de uso, veja também capítulo 1.5 „Instruções complementares“.A comutação de „Remoto“ para „Local“ ou „Par.loc.“ pode ser bloqueada através do bus de campo.
Um comando de EMERGÊNCIA enviado pelo local de comando é executado, independentemen-te do tipo de acionamento e fonte de sinal selecionado, pelo atuador, mesmo quando o atuador é acionado de forma convencional e o comando de EMERGÊNCIA é feito pelo bus de campo e vice-e-versa.
4.4.2 Parametrizar e observarA parametrização e observação à distância apenas são possível através do acionamento bus de campo.
■ PROFIBUS DPA parametrização de aparelhos pode ser lida e escrita através de serviços cíclicos e acíclicos. Para uma integração simples existe uma série de ferramentas disponíveis no software.Ferramentas de confi guração e de parametrização:
– SIMATIC PDM (Process Device Manager). Neste protocolo de confi guração e parametrização está armazenada a descrição do aparelho Flash SIPOS 5 EED (Electronic Device Description).
– FDT/DTM (Field Device Tool/Device Type Manager). Para a integração na ferramenta de confi -guração FDT está disponível a descrição do aparelho Flash SIPOS 5 DTM.
■ MODBUS RTUParâmetros de instrumentos podem ser lidos e escritos através de assim chamados „Holding Registers“ e „Coils“. É possível observar e diagnosticar através de „Input-Register“ e „Discretes Input“.

Y070.020/BR Página 21
Instruções de usoSIPOS 5 PROFITRON, HiMod
4
Indi
caçõ
es p
ara
o co
man
do e
a o
pera
ção
4 Indicações para o comando e a operação
4.5 COM-SIPOS
O software de confi guração COM SIPOS é uma ferramenta para ■ O comando: Deslocamento do atuador na operação Local; ■ Observar: Leitura dos parâmetros do atuador, da condição do aparelho „Local“ e „Remoto“; ■ Diagnóstico: busca por erro; ■ Parametrizar: leitura e alteração dos parâmetros do atuador; ■ Carregar novo fi rmware: atualização do software para o mais recente; ■ Arquivar: salvar os parâmetros e curvas de referência do torque do atuador.
A ligação entre PC e atuador ocorre através de cabo null modem padrão ou, opcionalmente, atra-vés de Bluetooth.
O COM-SIPOS pode ser fornecido incl. cabo null modem, adaptador USB serial e manual do usuário (em CD); nº para pedidos: 2SX5100-3PC02. Opcionalmente poderá ser fornecida uma interface Bluetooth.
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 22 Y070.020/BR
5 Comissionamento
5
Com
issionamento
5 Comissionamento
5.1 Fundamentos
■ Antes de iniciar os trabalhos no atuador montado e conectado eletricamente, assegurar junto ao pessoal responsável pela instalação, que a colocação em funcionamento não possa causar um erro na instalação ou colocar pessoas em perigo.
■ Quando foi selecionado um tipo de desligamento ou confi guração de torque inadequado para a guarnição, a instalação poderá sofrer danos!
■ Se, ao colocar em operação, o procedimento atual for interrompido com a tecla Local/Remote, haverá comutação para a condição „Remoto“ e o atuador se desloca se houver um comando de acionamento da técnica de instrumentação e controle!
■ Há tensões perigosas no atuador.
É recomendável utilizar-se do apoio e serviços da assistência SIPOS Aktorik responsável para as tarefas de planejamento, montagem, colocação em funcionamento e assistência técnica.
Assegurar requisitos para a colocação em funcionamento
Os seguintes itens devem ser verifi cados e assegurados após a montagem e durante a revisão: ■ O atuador foi montado corretamente. ■ Todos os parafusos de fi xação e elementos de união encontram-se bem apertados. ■ As conexões de aterramento e equipotenciais encontram-se estabelecidas corretamente. ■ A conexão elétrica foi realizada corretamente. ■ Todas as medidas de proteção de contatos para peças móveis ou que conduzam corrente foram executadas.
■ O atuador e a guarnição não se encontram danifi cados. ■ A faixa de temperatura permissível para o atuador foi observada e também foi considerada e transmissão de calor do elemento de regulação.
Outras verifi cações poderão ser necessárias, eventualmente, conforme as condições específi cas da instalação.
As Etapas de comissionamento devem ser executadas na sequência seguinte
Não é necessário efetuar cada um dos ajustes. Dependendo se no momento do pedido do atu-ador já foram feitos especifi cações de ajustes ou o atuador até foi montado sobre a guarnição, apenas será necessária uma verifi cação dos ajustes.
1. Selecionar idioma. Apenas será necessário se o texto no display não for exibido no idioma desejado.
2. Entrada no menu „Comissionamento “; autorização de acesso.
3. Direção de fechamento, parametrizar o número de rotações ou velocidade de marcha/tempo de atuação, parametrizar/verifi car tipo de desligamento e torques/forças de desligamento. Se já estiver familiarizado com o comando, também poderá trabalhar com o capítulo 6.1 „Parâmetros específi cos de guarnições”. Ali os parâmetros e os valores possíveis de parâ-metros encontram-se listados em tabela.
4. Verifi car os outros parâmetros específi cos de guarnições (superar bloqueio, tempo de ace-leração, força de frenagem, advertência do motor, proteção do motor, aquecimento do motor).

Y070.020/BR Página 23
Instruções de usoSIPOS 5 PROFITRON, HiMod
5
Com
issi
onam
ento
5 Comissionamento
5. Verifi car/ajustar posições fi nais. No modelo com transdutor de posicionamento, antes de ajustar as posições fi nais, deve-se ajustar o coefi ciente da transmissão do transdutor de posicionamen-to. Isso apenas será necessário, quando no momento do pedido do atuador não foi mencionada especifi cação e o ajuste padrão não corresponder aos requisitos.
6. Verifi car/ajustar indicador mecânico de posição, caso existente.
7. Adaptar atuador aos requisitos do sistema de automatização.
Parâmetros para a técnica de instrumentação e controle veja capítulo 6.2.
5.2 Selecionar idioma
A seleção de um idioma apenas será necessária se o texto no display não for exibido no idioma desejado. Os seguintes idiomas podem ser ajustados atualmente:
Idioma Texto no display Idioma Texto no display
alemão* Sprache DE polonês Jezyk PL
inglês language UK/US tcheco jazyk CZ
francês langue FR sueco språk SE
espanhol Idioma ES neerlandês taal NL
italiano lingua ITALIANO português Idoma PT
fi nlandês Kieli FI
*ajustado por padrão, se não foi solicitado de forma diferente pelo cliente.
Sequência de comando
1. Selecionar condição „Par.loc.“ ou „Remoto“. xxxPar.loc. xxx
2. Ativar menu principal. O item do menu seleção de idioma é exibido.
Langu./Sprache/idioma/Lingua E
3. Confi rmar a seleção. O idioma selecionado é exibido.
Idioma UK/US
4. Para alterar, apertar a tecla ENTER. As letras para o idioma selecionado piscam.
IdiomaUK/USUK/US
5. Com as teclas ou selecionar idioma. Para os idio-mas possíveis, veja a tabela acima.
LanguageUK/USUK/US
6. Salvar a alteração do idioma com ENTER. O item do menu seleção de idioma é exibido.
Langu./Sprache/idioma/Lingua E
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 24 Y070.020/BR
5 Comissionamento
5
Com
issionamento
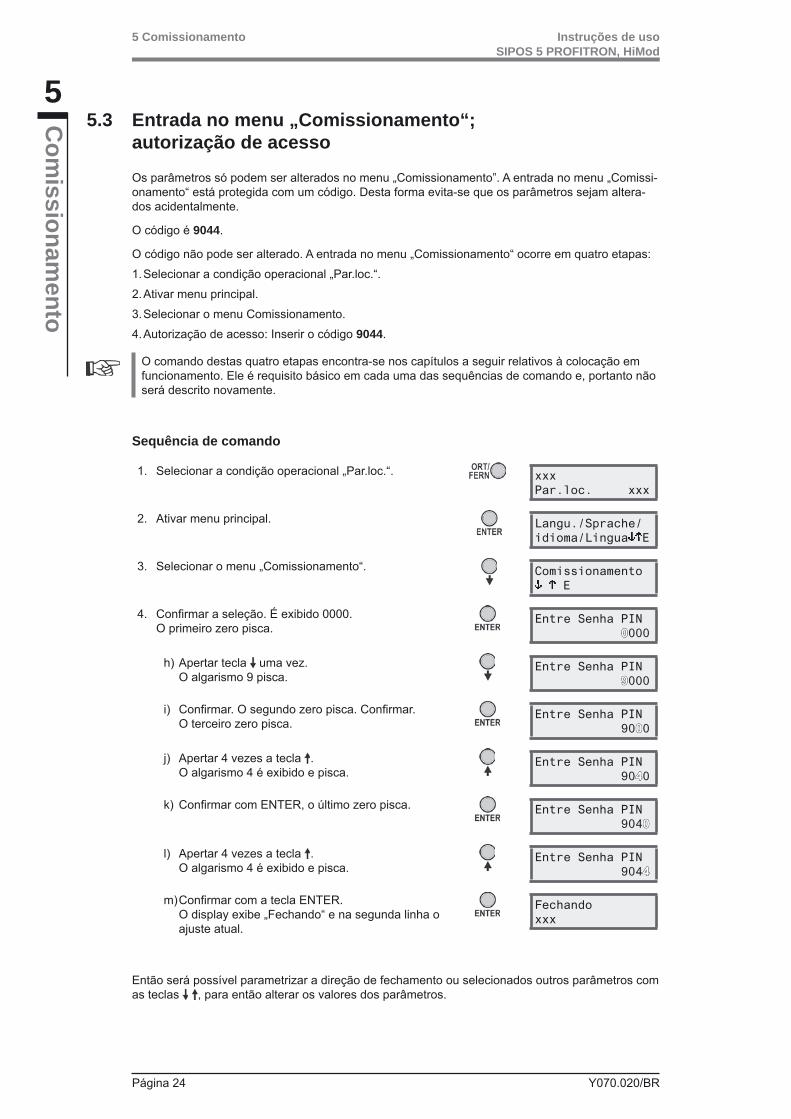
5.3 Entrada no menu „Comissionamento“; autorização de acesso
Os parâmetros só podem ser alterados no menu „Comissionamento”. A entrada no menu „Comissi-onamento“ está protegida com um código. Desta forma evita-se que os parâmetros sejam altera-dos acidentalmente.
O código é 9044.
O código não pode ser alterado. A entrada no menu „Comissionamento“ ocorre em quatro etapas:
1. Selecionar a condição operacional „Par.loc.“.
2. Ativar menu principal.
3. Selecionar o menu Comissionamento.
4. Autorização de acesso: Inserir o código 9044.
O comando destas quatro etapas encontra-se nos capítulos a seguir relativos à colocação em funcionamento. Ele é requisito básico em cada uma das sequências de comando e, portanto não será descrito novamente.
Sequência de comando
1. Selecionar a condição operacional „Par.loc.“. xxxPar.loc. xxx
2. Ativar menu principal.
Langu./Sprache/idioma/Lingua E
3. Selecionar o menu „Comissionamento“.
Comissionamento E
4. Confi rmar a seleção. É exibido 0000. O primeiro zero pisca.
Entre Senha PIN 00000
h) Apertar tecla uma vez. O algarismo 9 pisca.
Entre Senha PIN 99000
i) Confi rmar. O segundo zero pisca. Confi rmar. O terceiro zero pisca.
Entre Senha PIN 90000
j) Apertar 4 vezes a tecla . O algarismo 4 é exibido e pisca.
Entre Senha PIN 90440
k) Confi rmar com ENTER, o último zero pisca. Entre Senha PIN 90400
l) Apertar 4 vezes a tecla . O algarismo 4 é exibido e pisca.
Entre Senha PIN 90444
m) Confi rmar com a tecla ENTER. O display exibe „Fechando“ e na segunda linha o ajuste atual.
Fechandoxxx
Então será possível parametrizar a direção de fechamento ou selecionados outros parâmetros com as teclas , para então alterar os valores dos parâmetros.
Y070.020/BR Página 25
Instruções de usoSIPOS 5 PROFITRON, HiMod
5
Com
issi
onam
ento
5 Comissionamento
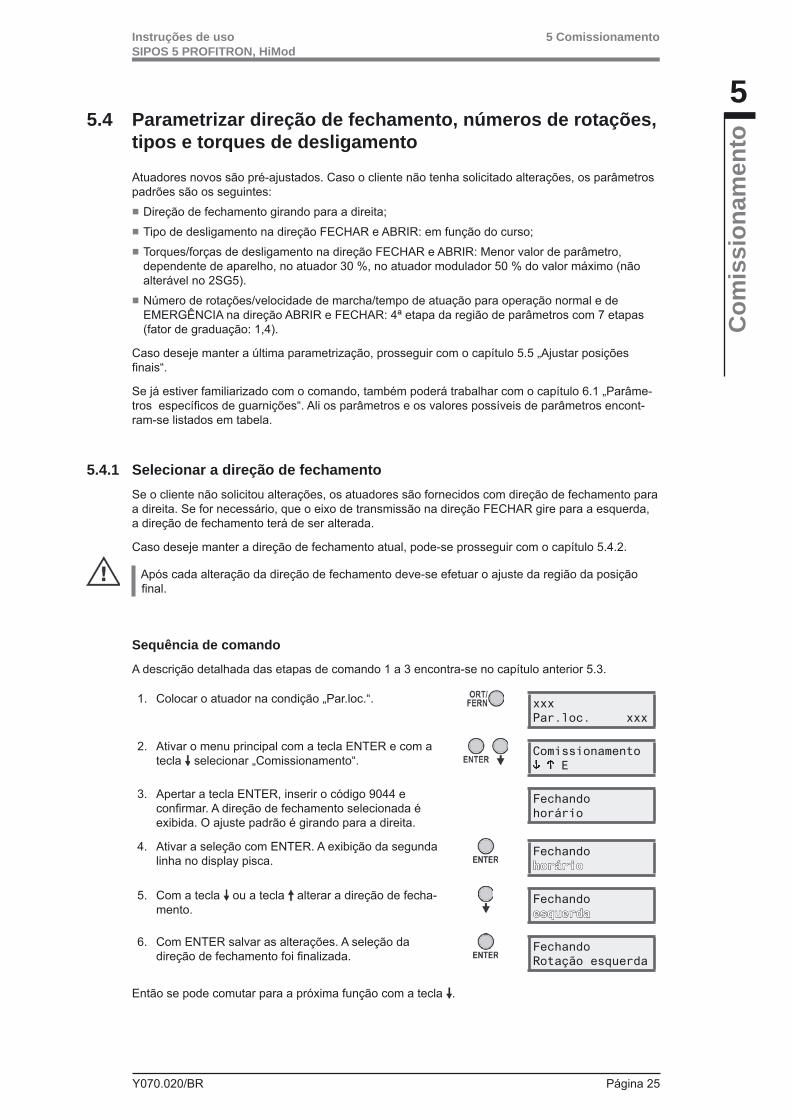
5.4 Parametrizar direção de fechamento, números de rotações, tipos e torques de desligamento
Atuadores novos são pré-ajustados. Caso o cliente não tenha solicitado alterações, os parâmetros padrões são os seguintes:
■ Direção de fechamento girando para a direita; ■ Tipo de desligamento na direção FECHAR e ABRIR: em função do curso; ■ Torques/forças de desligamento na direção FECHAR e ABRIR: Menor valor de parâmetro, dependente de aparelho, no atuador 30 %, no atuador modulador 50 % do valor máximo (não alterável no 2SG5).
■ Número de rotações/velocidade de marcha/tempo de atuação para operação normal e de EMERGÊNCIA na direção ABRIR e FECHAR: 4ª etapa da região de parâmetros com 7 etapas (fator de graduação: 1,4).
Caso deseje manter a última parametrização, prosseguir com o capítulo 5.5 „Ajustar posições fi nais“.
Se já estiver familiarizado com o comando, também poderá trabalhar com o capítulo 6.1 „Parâme-tros específi cos de guarnições“. Ali os parâmetros e os valores possíveis de parâmetros encont-ram-se listados em tabela.
5.4.1 Selecionar a direção de fechamentoSe o cliente não solicitou alterações, os atuadores são fornecidos com direção de fechamento para a direita. Se for necessário, que o eixo de transmissão na direção FECHAR gire para a esquerda, a direção de fechamento terá de ser alterada.
Caso deseje manter a direção de fechamento atual, pode-se prosseguir com o capítulo 5.4.2.
Após cada alteração da direção de fechamento deve-se efetuar o ajuste da região da posição fi nal.
Sequência de comando
A descrição detalhada das etapas de comando 1 a 3 encontra-se no capítulo anterior 5.3.
1. Colocar o atuador na condição „Par.loc.“. xxxPar.loc. xxx
2. Ativar o menu principal com a tecla ENTER e com a tecla selecionar „Comissionamento“.
Comissionamento E
3. Apertar a tecla ENTER, inserir o código 9044 e confi rmar. A direção de fechamento selecionada é exibida. O ajuste padrão é girando para a direita.
Fechandohorário
4. Ativar a seleção com ENTER. A exibição da segunda linha no display pisca.
Fechandohoráriohorário
5. Com a tecla ou a tecla alterar a direção de fecha-mento.
Fechandoesquerdaesquerda
6. Com ENTER salvar as alterações. A seleção da direção de fechamento foi fi nalizada.
FechandoRotação esquerda
Então se pode comutar para a próxima função com a tecla .
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 26 Y070.020/BR
5 Comissionamento
5
Com
issionamento
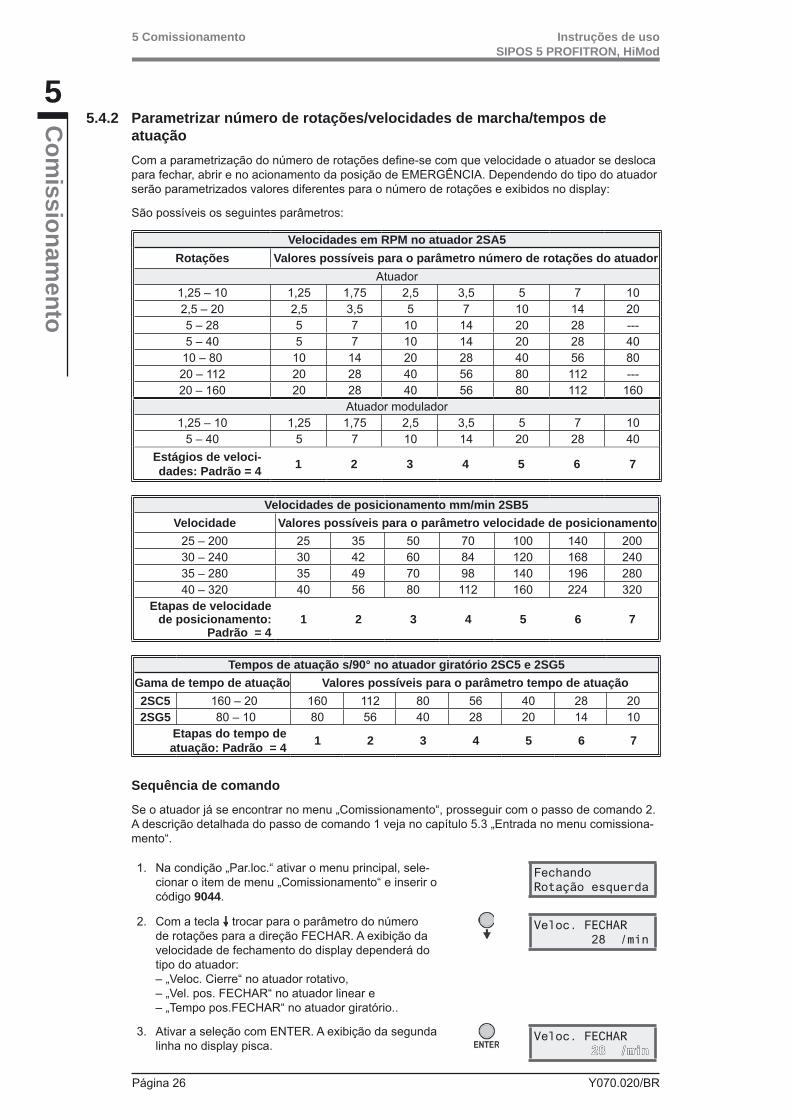
5.4.2 Parametrizar número de rotações/ velocidades de marcha/ tempos de atuação Com a parametrização do número de rotações defi ne-se com que velocidade o atuador se desloca para fechar, abrir e no acionamento da posição de EMERGÊNCIA. Dependendo do tipo do atuador serão parametrizados valores diferentes para o número de rotações e exibidos no display:
São possíveis os seguintes parâmetros:
Velocidades em RPM no atuador 2SA5Rotações Valores possíveis para o parâmetro número de rotações do atuador
Atuador1,25 – 10 1,25 1,75 2,5 3,5 5 7 102,5 – 20 2,5 3,5 5 7 10 14 205 – 28 5 7 10 14 20 28 ---5 – 40 5 7 10 14 20 28 4010 – 80 10 14 20 28 40 56 8020 – 112 20 28 40 56 80 112 ---20 – 160 20 28 40 56 80 112 160
Atuador modulador1,25 – 10 1,25 1,75 2,5 3,5 5 7 10
5 – 40 5 7 10 14 20 28 40Estágios de veloci-dades: Padrão = 4 1 2 3 4 5 6 7
Velocidades de posicionamento mm/min 2SB5Velocidade Valores possíveis para o parâmetro velocidade de posicionamento
25 – 200 25 35 50 70 100 140 20030 – 240 30 42 60 84 120 168 24035 – 280 35 49 70 98 140 196 28040 – 320 40 56 80 112 160 224 320
Etapas de velocidade de posicionamento:
Padrão = 41 2 3 4 5 6 7
Tempos de atuação s/90° no atuador giratório 2SC5 e 2SG5Gama de tempo de atuação Valores possíveis para o parâmetro tempo de atuação2SC5 160 – 20 160 112 80 56 40 28 202SG5 80 – 10 80 56 40 28 20 14 10
Etapas do tempo de atuação: Padrão = 4 1 2 3 4 5 6 7
Sequência de comando
Se o atuador já se encontrar no menu „Comissionamento“, prosseguir com o passo de comando 2. A descrição detalhada do passo de comando 1 veja no capítulo 5.3 „Entrada no menu comissiona-mento“.
1. Na condição „Par.loc.“ ativar o menu principal, sele-cionar o item de menu „Comissionamento“ e inserir o código 9044.
FechandoRotação esquerda
2. Com a tecla trocar para o parâmetro do número de rotações para a direção FECHAR. A exibição da velocidade de fechamento do display dependerá do tipo do atuador: – „Veloc. Cierre“ no atuador rotativo,– „Vel. pos. FECHAR“ no atuador linear e – „Tempo pos.FECHAR“ no atuador giratório..
Veloc. FECHAR 28 /min
3. Ativar a seleção com ENTER. A exibição da segunda linha no display pisca.
Veloc. FECHAR 28 /min28 /min

Y070.020/BR Página 27
Instruções de usoSIPOS 5 PROFITRON, HiMod
5
Com
issi
onam
ento
5 Comissionamento
4. Com a tecla ou a tecla selecionar outro valor e salvar o valor com a tecla ENTER.
Veloc. FECHAR 20 /min
5. Com a tecla trocar para o ajuste do número de rotações para a direção ABRIR. A exibição depende do tipo de atuador, veja passo de comando 2.
Veloc. Apertura 20 /min
6. Ativar a seleção com ENTER e alterar o valor que pisca com as teclas .
Veloc. Apertura 28 /min28 /min
7. Salvar o valor selecionado com ENTER. Veloc. Apertura 28 /min
8. Repetir os passos de comando 2 a 4 para o ajuste do número de rotações de EMERGÊNCIA na direção ABRIR e FECHAR.
Vel.emer.FECHAR 40 /min
Então se pode comutar para o próximo parâmetro com a tecla .
5.4.3 Parametrizar tipos de desligamento e torques/forças de desligamento
Tipo de desligamento
Se o atuador se deslocar, poderá ser desligado nas posições fi nais dependendo do curso ou do torque.
Desligamento em função do curso signifi ca que o atuador desliga quando a guarnição tiver alcan-çado determinada posição.
Desligamento em função do torque signifi ca que o atuador apenas desliga quando durante o deslo-camento na região da posição fi nal for alcançado um torque previamente defi nido.
O valor padrão para o tipo de desligamento de ambas as posições fi nais, ABRIR e FECHAR de-pende do curso. Caso se deseje manter os valores atuais, pode-se prosseguir com o capítulo 5.5.
Após cada alteração do tipo de desligamento deve-se efetuar o ajuste da região da posição fi nal.
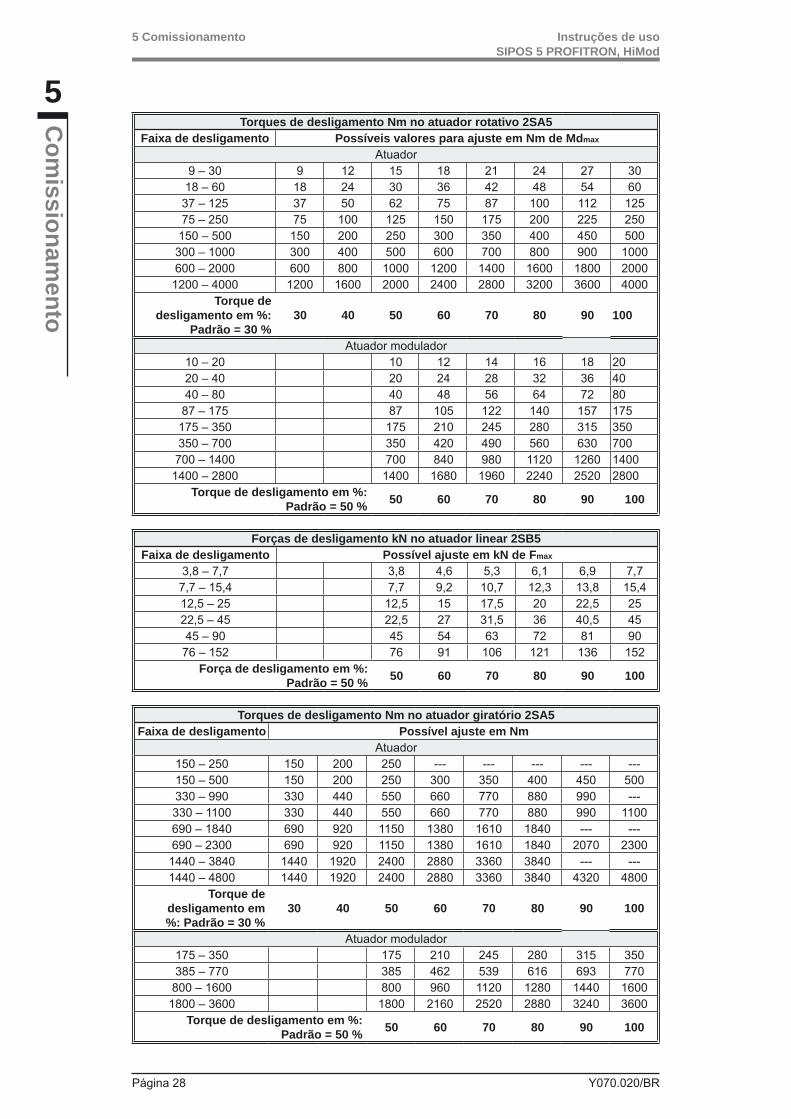
Força/torque de desligamento
O ajuste (do torque de desligamento no atuador rotativo e no atuador giratório, da força de desliga-mento no atuador linear) defi ne qual o torque ou qual a força deve ser alcançada dependendo da carga, na qual o motor desliga. Isso valerá tanto no desligamento em função do torque/da força na posição fi nal, quanto num bloqueio. Portanto, no desligamento em função de curso deve-se ajustar o torque de desligamento ou a força de desligamento.
A região de ajuste no atuador é de 30 – 100 % e no atuador modulador de 50 – 100 %, sempre em passos de 10 % do torque máximo (em alguns atuadores giratórios valem outros valores limite). O ajuste padrão é sempre o menor valor possível (tipicamente 30 % do valor máximo no atuador, no atuador modulador 50 % do valor máximo).
As tabelas a seguir mostram os valores de parâmetros possíveis.
No atuador giratório 2SG5 não é possível alterar o torque de desligamento.
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 28 Y070.020/BR
5 Comissionamento
5
Com
issionamento
Torques de desligamento Nm no atuador rotativo 2SA5Faixa de desligamento Possíveis valores para ajuste em Nm de Mdmax
Atuador9 – 30 9 12 15 18 21 24 27 3018 – 60 18 24 30 36 42 48 54 60
37 – 125 37 50 62 75 87 100 112 12575 – 250 75 100 125 150 175 200 225 250
150 – 500 150 200 250 300 350 400 450 500300 – 1000 300 400 500 600 700 800 900 1000600 – 2000 600 800 1000 1200 1400 1600 1800 20001200 – 4000 1200 1600 2000 2400 2800 3200 3600 4000
Torque de desligamento em %:
Padrão = 30 %30 40 50 60 70 80 90 100
Atuador modulador10 – 20 10 12 14 16 18 2020 – 40 20 24 28 32 36 4040 – 80 40 48 56 64 72 80
87 – 175 87 105 122 140 157 175175 – 350 175 210 245 280 315 350350 – 700 350 420 490 560 630 700
700 – 1400 700 840 980 1120 1260 14001400 – 2800 1400 1680 1960 2240 2520 2800
Torque de desligamento em %: Padrão = 50 % 50 60 70 80 90 100
Forças de desligamento kN no atuador linear 2SB5Faixa de desligamento Possível ajuste em kN de Fmax
3,8 – 7,7 3,8 4,6 5,3 6,1 6,9 7,77,7 – 15,4 7,7 9,2 10,7 12,3 13,8 15,412,5 – 25 12,5 15 17,5 20 22,5 2522,5 – 45 22,5 27 31,5 36 40,5 4545 – 90 45 54 63 72 81 9076 – 152 76 91 106 121 136 152
Força de desligamento em %:Padrão = 50 % 50 60 70 80 90 100
Torques de desligamento Nm no atuador giratório 2SA5Faixa de desligamento Possível ajuste em Nm
Atuador150 – 250 150 200 250 --- --- --- --- ---150 – 500 150 200 250 300 350 400 450 500330 – 990 330 440 550 660 770 880 990 ---330 – 1100 330 440 550 660 770 880 990 1100690 – 1840 690 920 1150 1380 1610 1840 --- ---690 – 2300 690 920 1150 1380 1610 1840 2070 23001440 – 3840 1440 1920 2400 2880 3360 3840 --- ---1440 – 4800 1440 1920 2400 2880 3360 3840 4320 4800
Torque de desligamento em %: Padrão = 30 %
30 40 50 60 70 80 90 100
Atuador modulador175 – 350 175 210 245 280 315 350385 – 770 385 462 539 616 693 770800 – 1600 800 960 1120 1280 1440 1600
1800 – 3600 1800 2160 2520 2880 3240 3600Torque de desligamento em %:
Padrão = 50 % 50 60 70 80 90 100
Y070.020/BR Página 29
Instruções de usoSIPOS 5 PROFITRON, HiMod
5
Com
issi
onam
ento
5 Comissionamento
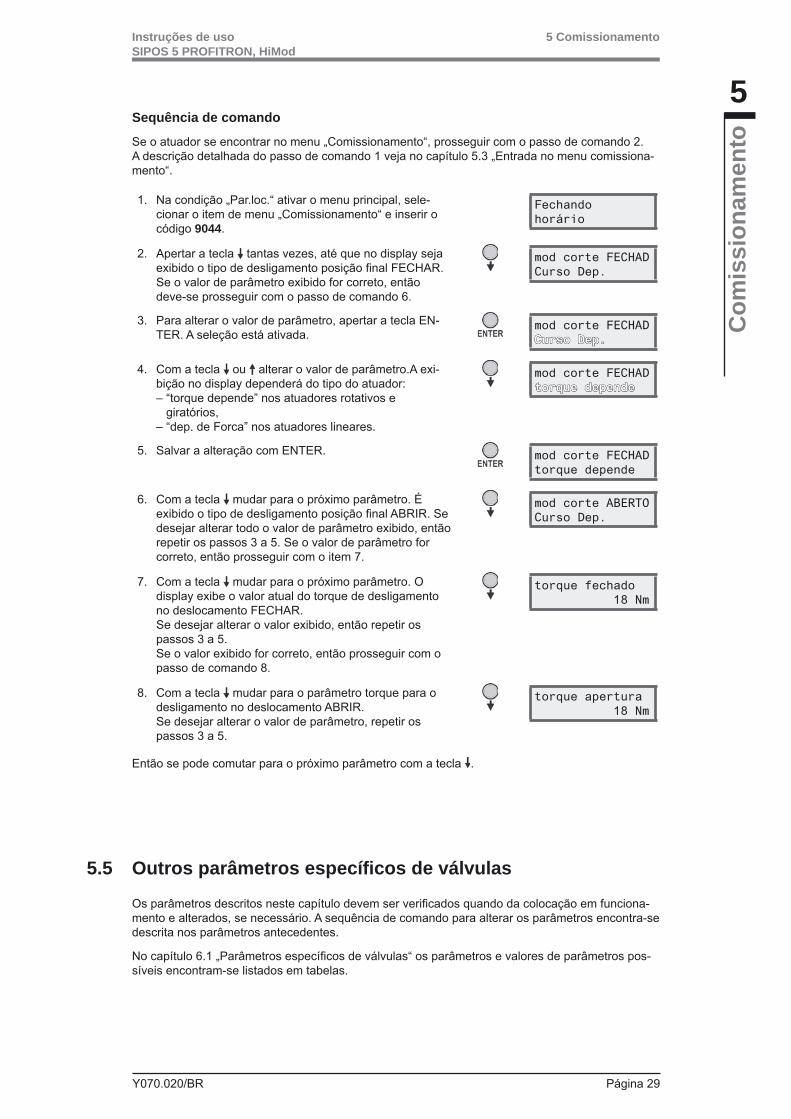
Sequência de comando
Se o atuador se encontrar no menu „Comissionamento“, prosseguir com o passo de comando 2. A descrição detalhada do passo de comando 1 veja no capítulo 5.3 „Entrada no menu comissiona-mento“.
1. Na condição „Par.loc.“ ativar o menu principal, sele-cionar o item de menu „Comissionamento“ e inserir o código 9044.
Fechandohorário
2. Apertar a tecla tantas vezes, até que no display seja exibido o tipo de desligamento posição fi nal FECHAR. Se o valor de parâmetro exibido for correto, então deve-se prosseguir com o passo de comando 6.
mod corte FECHADCurso Dep.
3. Para alterar o valor de parâmetro, apertar a tecla EN-TER. A seleção está ativada.
mod corte FECHADCurso Dep.Curso Dep.
4. Com a tecla ou alterar o valor de parâmetro.A exi-bição no display dependerá do tipo do atuador: – “torque depende” nos atuadores rotativos e giratórios,– “dep. de Forca” nos atuadores lineares.
mod corte FECHADtorque dependetorque depende
5. Salvar a alteração com ENTER. mod corte FECHADtorque depende
6. Com a tecla mudar para o próximo parâmetro. É exibido o tipo de desligamento posição fi nal ABRIR. Se desejar alterar todo o valor de parâmetro exibido, então repetir os passos 3 a 5. Se o valor de parâmetro for correto, então prosseguir com o item 7.
mod corte ABERTOCurso Dep.
7. Com a tecla mudar para o próximo parâmetro. O display exibe o valor atual do torque de desligamento no deslocamento FECHAR. Se desejar alterar o valor exibido, então repetir os passos 3 a 5.Se o valor exibido for correto, então prosseguir com o passo de comando 8.
torque fechado 18 Nm
8. Com a tecla mudar para o parâmetro torque para o desligamento no deslocamento ABRIR. Se desejar alterar o valor de parâmetro, repetir os passos 3 a 5.
torque apertura 18 Nm
Então se pode comutar para o próximo parâmetro com a tecla .
5.5 Outros parâmetros específi cos de válvulas
Os parâmetros descritos neste capítulo devem ser verifi cados quando da colocação em funciona-mento e alterados, se necessário. A sequência de comando para alterar os parâmetros encontra-se descrita nos parâmetros antecedentes.
No capítulo 6.1 „Parâmetros específi cos de válvulas“ os parâmetros e valores de parâmetros pos-síveis encontram-se listados em tabelas.
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 30 Y070.020/BR
5 Comissionamento
5
Com
issionamento
Superar bloqueio
Se o atuador reconhecer um bloqueio fora das regiões das posições fi nais, então será desligado e será dado aviso de erro „curso bloq.“. O atuador, porém, continuará sinalizando „Pronto“, já que ainda é possível deslocar na direção oposta.
Se o valor de parâmetro „superar bloqueio“ for diferente de zero, o atuador desloca automatica-mente na direção oposta após reconhecer um bloqueio (para um curso que corresponde ao taman-ho da região de posição fi nal, no entanto não maior que 2 seg.) e então, novamente, na direção do bloqueio. Isso acontece tantas vezes até que o bloqueio tenha sido superado ou o número de tentativas parametrizadas tenha sido alcançado.Ajuste padrão é 0.
Tempo de aceleração
O parâmetro „Tempo de aceleração (Rise time.)“ acessa o inversor de frequência integrado. Quanto mais curto o tempo de aceleração, mais rápido o atuador alcança o número de rotações indicado. O ajuste do tempo de aceleração infl uencia o tipo de regulação. Um tempo de aceleração mais longo provoca uma precisão de regulamentação maior, mas também reduz a dinâmica de regulação.A faixa de ajuste é de passos de 0,1 seg, em atuadores de 0,1 seg a 1 seg e em atuadores modu-ladores de 0,1 seg a 2 seg. Ajuste padrão é de 0,5 seg.
Força de frenagem
Um valor diferente de „0%“ desencadeia, através do inversor de frequência integrado, o meca-nismo de frenagem por corrente contínua. Quanto maior o valor, maior será o ajuste da corrente continua do freio.
Num valor de „0%“, por sua vez, o número de rotações do motor é reduzido o mais rápido possível, através do inversor de frequência, até a parada total. Em quase todos os itens operacionais esse é o tempo mais curto até a parada total, por isso recomenda-se a manutenção do ajuste padrão.
Advertência do motor
Ocorre a advertência, quando a temperatura do motor alcançar um valor ajustado previamente. Pode-se ajustar um valor entre 0 e 155°C. O sinal de advertência pode ser disponibilizado à técnica de instrumentação e controle através de sinal binário e protocolo de bus de campo.O valor padrão é 135°C.No atuador giratório 2SG5 esse parâmetro não está disponível.
Proteção do motor
O motor possui uma proteção eletrônica total do motor contra danos térmicos. A proteção do motor está ligada por parte do cliente e pode ser desligada. Para que o desligamento não ocorra ocasio-nalmente, deve se entrar o código 9044.
Se a proteção do motor for desligada, o mesmo perde a garantia!
Aquecimento do motor
Para evitar condensação o motor é aquecido com corrente contínua , o aquecimento dependende da diferença da temperatura do motor e da temperatura ambiente. Por padrão, o aquecimento fi ca desligado.
Em condições climáticas com alterações intensas, o atuador deverá ser operado com o aqueci-mento do motor ligado.
Y070.020/BR Página 31
Instruções de usoSIPOS 5 PROFITRON, HiMod
5
Com
issi
onam
ento
5 Comissionamento
5.6 Ajustar as posições fi nais nos modelos com transdutor de posicionamento
Os atuadores PROFITRON existem ou com transdutores de posicionamento ou na variante „não intrusiva“ com o sensor de posição não instrusivo. O ajuste das posições fi nais em HiMod e PRO-FITRON com um sensor de posição não instrusivo está descrito no capítulo 5.7.
5.6.1 Geral
Quando atuadores são fornecidos montados sobre guarnições, essa etapa do trabalho, normal-mente, é realizada no fornecedor de guarnições. Durante a colocação em funcionamento deve-se verifi car a confi guração.
A confi guração do coefi ciente da transmissão do transdutor de posicionamento não é necessária no atuador 2SG5... Este atuador não possui um transdutor de posicionamento ajustável. Conti-nue no capítulo 5.6.3.
Princípio de funcionamento detecção do curso
Com a confi guração do coefi ciente da transmissão do transdutor de posicionamento e as posições fi nais assegura-se que o comprimento, o início e o fi m (posição fi nal ABRIR e FECHAR) do curso de ajuste da guarnição sejam notifi cados ao sistema eletrônico.
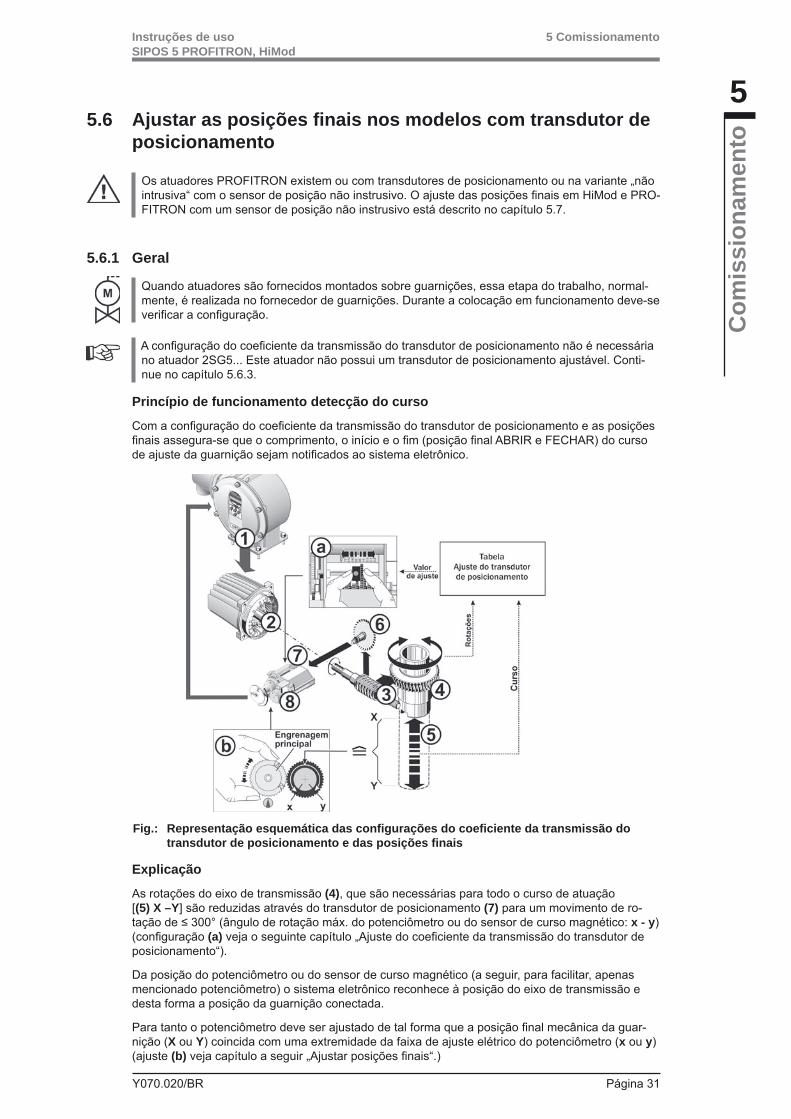
Fig.: Representação esquemática das confi gurações do coefi ciente da transmissão do transdutor de posicionamento e das posições fi nais
Explicação
As rotações do eixo de transmissão (4), que são necessárias para todo o curso de atuação [(5) X –Y] são reduzidas através do transdutor de posicionamento (7) para um movimento de ro-tação de ≤ 300° (ângulo de rotação máx. do potenciômetro ou do sensor de curso magnético: x - y) (confi guração (a) veja o seguinte capítulo „Ajuste do coefi ciente da transmissão do transdutor de posicionamento“).
Da posição do potenciômetro ou do sensor de curso magnético (a seguir, para facilitar, apenas mencionado potenciômetro) o sistema eletrônico reconhece à posição do eixo de transmissão e desta forma a posição da guarnição conectada.
Para tanto o potenciômetro deve ser ajustado de tal forma que a posição fi nal mecânica da guar-nição (X ou Y) coincida com uma extremidade da faixa de ajuste elétrico do potenciômetro (x ou y) (ajuste (b) veja capítulo a seguir „Ajustar posições fi nais“.)

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 32 Y070.020/BR
5 Comissionamento
5
Com
issionamento
5.6.2 Ajustar transmissão do transdutor de posicionamentoO número de rotações necessárias para perpassar todo o curso de atuação deve ser conhecido. O fabricante das guarnições fornece essas informações. Caso não se possua essa informação, ver as orientações abaixo. O ajuste necessário resultante do transdutor de posicionamento pode ser conferido na tabela a seguir „Ajuste do transdutor de posicionamento“.
Valores intermediários de Rpcurso ou curso de atuação (mm) ou graus são arredondados para o próximo valor gradual mais alto (p.ex. 30 R/curso deve ser ajustado o valor 36).
Ajuste do transdutor de posicionamentoTipo Unidade Curso de atuação da guarnição
Atuador rotativo
2SA5.1/2/3/4/5/6 Rotações/Curso
0,8 2,1 5,5 14 36* 93 240 610 1575 40202SA5.7/8 0,2 0,52 1,37 3,5 9* 23,2 60 152 393 1005
Atuador linear
2SB551/2 mm/ Curso de atuação
4 10,5 27,5 70* 180 4652SB553 4,8 12,6 33 84* 216 558
2SB554/5 5,6 14,7 38,5 98* 252 6512SB556 6,4 16,8 44 112* 288 744
Atuador giratório
2SC5.1/2/3/4/5/6 Graus 90° * 120/240° 360°
10 ajustes possíveis no transdutor de
posicionamento (escala) ▬►
▼ ▼ ▼ ▼ ▼ ▼ ▼ ▼ ▼ ▼0,8 2,1 5,5 14 36 93 240 610 1575 4020
* ajustado por padrão, se não foi solicitado de forma diferente pelo cliente
Fig.: Ajustar transmissão do transdutor de posicionamento
Caso o número das rotações/curso não seja conhecido, como p. ex. o atuador deve ser operado num guarnição já existente, então deslocar o atuador por todo o curso de atuação e observar, quantas rotações o eixo de transmissão faz.
Se a observação do eixo de transmissão não for possível, pular este capítulo. No capítulo 5.6.3 „Ajustar posições fi nais“ sob „Requisitos para o ajuste das posições fi nais“ atentar para a nota relativa ao transdutor de posicionamento.
Modo de proceder1. Soltar 4 parafusos (pos.1) da tampa do trans-
dutor de posicionamento e remover a tampa.
2. Arredondar R/Curso ou mm/curso de atuação ou graus para o próximo valor mais alto de graduação (valores de graduação ver na tabe-la acima).
3. Ajustar a roda deslizante (2) de tal forma, que sua coroa dentada esteja em frente ao valor de graduação desejado:empurrar a roda deslizante com ligeira pres-são na direção desejada. O ajuste da roda deslizante é facilitado pela movimentação da coroa dentada (3).
Ainda não montar a tampa do transdutor de posicionamento. Será necessário ajustar posições fi nais e em dependência delas o indicador mecânico de posição, caso exista.
Y070.020/BR Página 33
Instruções de usoSIPOS 5 PROFITRON, HiMod
5
Com
issi
onam
ento
5 Comissionamento
___________________________* Se o ajuste das posições fi nais já foi realizado (p.ex. pelo fornecedor de guarnições), no display aparecerá a pergunta, se deve ser realizado um ajuste novo completo: „nova calibração?“. Em caso negativo selecionar a posição fi nal que deverá ser reajustada, ver também capítulo a seguir 5.6.4 „Reajuste das posições fi nais“.
5.6.3 Ajustar posições fi naisO ajuste das posições fi nais é realizado diretamente no atuador.
Requisito para o ajuste das posições fi nais ■ A guarnição não deve estar fi xada sobtensão. Eventualmente soltar com a manivela/manete. Comando da manivela/manete veja capítulo 4.1.
■ O transdutor de posicionamento deve estar ajustado, ver capítulo precedente „Ajuste do coefi ci-ente da transmissão do transdutor de posicionamento“.Se o coefi ciente da transmissão do transdutor de posicionamento não tiver sido ajustado, porque não se conhece o número de rotações/curso, proceder mesmo assim conforme descrito, atentar para o aviso no display no passo de comando 10 e proceder correspondentemente.
Primeiro ajuste
A sequência na qual a posição fi nal é ajustada pela primeira vez não é obrigatória. No exemplo a seguir encontram-se os avisos do display para a posição fi nal ABRIR. Os avisos no ajuste da posição fi nal FECHAR são correspondentes.
Interrupção do procedimento de ajuste apertando simultaneamente as teclas .
Sequência de comando
Se o atuador se encontrar no menu „Comissionamento“, prosseguir com o passo de comando 4. A descrição detalhada do passo de comando 3 veja no capítulo 5.3 „Entrada no menu colocação em funcionamento“.
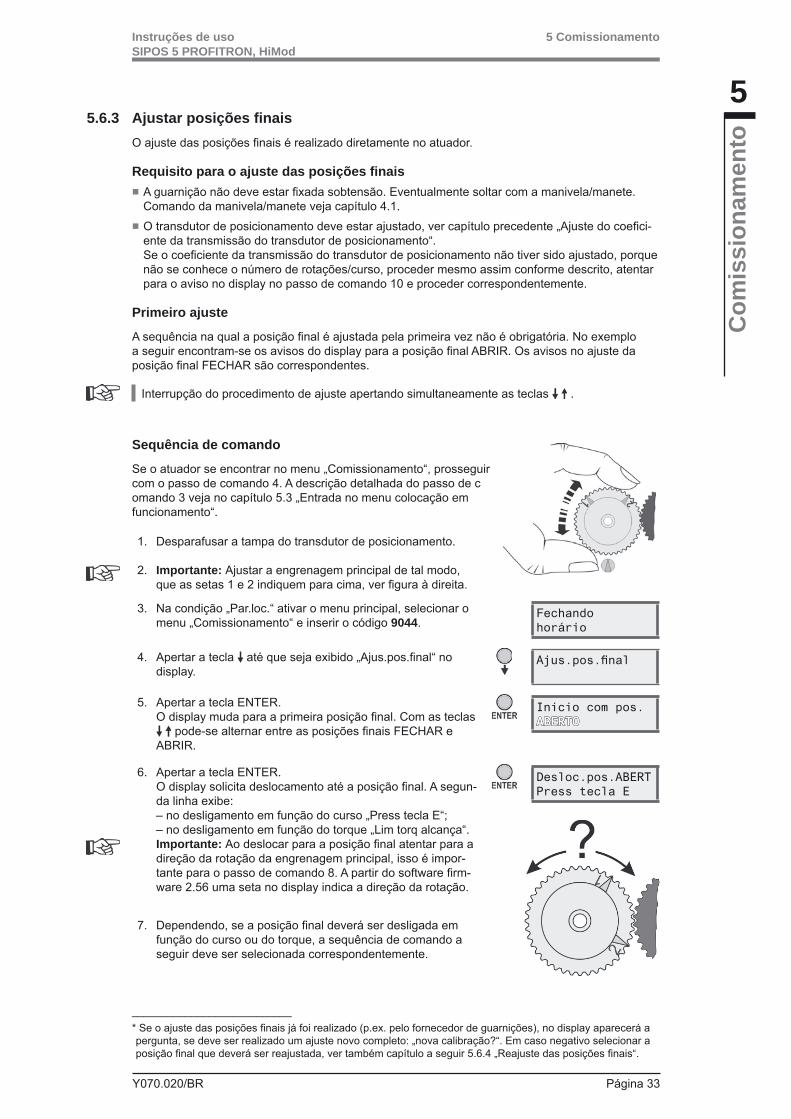
1. Desparafusar a tampa do transdutor de posicionamento.
2. Importante: Ajustar a engrenagem principal de tal modo, que as setas 1 e 2 indiquem para cima, ver fi gura à direita.
3. Na condição „Par.loc.“ ativar o menu principal, selecionar o menu „Comissionamento“ e inserir o código 9044.
Fechandohorário
4. Apertar a tecla até que seja exibido „Ajus.pos.fi nal“ no display.
Ajus.pos.fi nal
5. Apertar a tecla ENTER. O display muda para a primeira posição fi nal. Com as teclas pode-se alternar entre as posições fi nais FECHAR e
ABRIR.
Inicio com pos.ABERTOABERTO
6. Apertar a tecla ENTER. O display solicita deslocamento até a posição fi nal. A segun-da linha exibe:– no desligamento em função do curso „Press tecla E“;– no desligamento em função do torque „Lim torq alcança“. Importante: Ao deslocar para a posição fi nal atentar para a direção da rotação da engrenagem principal, isso é impor-tante para o passo de comando 8. A partir do software fi rm-ware 2.56 uma seta no display indica a direção da rotação.
7. Dependendo, se a posição fi nal deverá ser desligada em função do curso ou do torque, a sequência de comando a seguir deve ser selecionada correspondentemente.
Desloc.pos.ABERT Press tecla E
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 34 Y070.020/BR
5 Comissionamento
5
Com
issionamento
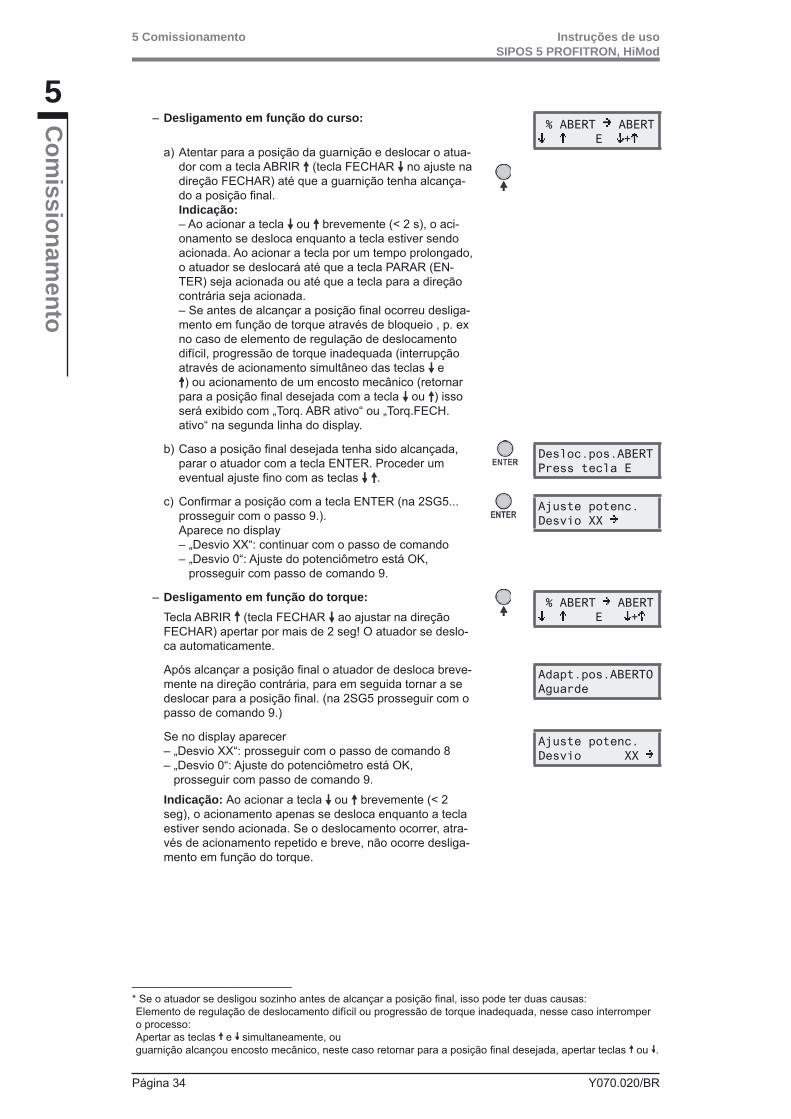
– Desligamento em função do curso:
a) Atentar para a posição da guarnição e deslocar o atua-dor com a tecla ABRIR (tecla FECHAR no ajuste na direção FECHAR) até que a guarnição tenha alcança-do a posição fi nal. Indicação: – Ao acionar a tecla ou brevemente (< 2 s), o aci-onamento se desloca enquanto a tecla estiver sendo acionada. Ao acionar a tecla por um tempo prolongado, o atuador se deslocará até que a tecla PARAR (EN-TER) seja acionada ou até que a tecla para a direção contrária seja acionada.– Se antes de alcançar a posição fi nal ocorreu desliga-mento em função de torque através de bloqueio , p. ex no caso de elemento de regulação de deslocamento difícil, progressão de torque inadequada (interrupção através de acionamento simultâneo das teclas e) ou acionamento de um encosto mecânico (retornar
para a posição fi nal desejada com a tecla ou ) isso será exibido com „Torq. ABR ativo“ ou „Torq.FECH.ativo“ na segunda linha do display.
% ABERT ABERT E +
b) Caso a posição fi nal desejada tenha sido alcançada, parar o atuador com a tecla ENTER. Proceder um eventual ajuste fi no com as teclas .
Desloc.pos.ABERTPress tecla E
c) Confi rmar a posição com a tecla ENTER (na 2SG5...prosseguir com o passo 9.).Aparece no display– „Desvio XX“: continuar com o passo de comando – „Desvio 0“: Ajuste do potenciômetro está OK, prosseguir com passo de comando 9.
Ajuste potenc.Desvio XX
– Desligamento em função do torque:Tecla ABRIR (tecla FECHAR ao ajustar na direção FECHAR) apertar por mais de 2 seg! O atuador se deslo-ca automaticamente.
% ABERT ABERT E +
Após alcançar a posição fi nal o atuador de desloca breve-mente na direção contrária, para em seguida tornar a se deslocar para a posição fi nal. (na 2SG5 prosseguir com o passo de comando 9.)
Adapt.pos.ABERTOAguarde
Se no display aparecer– „Desvio XX“: prosseguir com o passo de comando 8– „Desvio 0“: Ajuste do potenciômetro está OK, prosseguir com passo de comando 9.
Indicação: Ao acionar a tecla ou brevemente (< 2 seg), o acionamento apenas se desloca enquanto a tecla estiver sendo acionada. Se o deslocamento ocorrer, atra-vés de acionamento repetido e breve, não ocorre desliga-mento em função do torque.
Ajuste potenc.Desvio XX
___________________________* Se o atuador se desligou sozinho antes de alcançar a posição fi nal, isso pode ter duas causas: Elemento de regulação de deslocamento difícil ou progressão de torque inadequada, nesse caso interromper o processo: Apertar as teclas e simultaneamente, ou guarnição alcançou encosto mecânico, neste caso retornar para a posição fi nal desejada, apertar teclas ou .

Y070.020/BR Página 35
Instruções de usoSIPOS 5 PROFITRON, HiMod
5
Com
issi
onam
ento
5 Comissionamento
8. Girar a engrenagem principal devagar na mesma di-reção1) na qual ela se girou ao se deslocar na direção da posição fi nal (veja nota no passo de comando 6), até que no display seja exibida a variação „0“. Se a engre-nagem principal já estiver no encosto, então girar na outra direção.1) A partir do software fi rmware 2.56 uma seta ao lado do valor da desviação indica a direção da rotação: = girar a engrenagem principal no sentido horário. = girar a engrenagem principal no sentido anti-horário.
Assim o potenciômetro ou o sensor de curso magnético estará ajustado. (Se a tecla ENTER for apertada antes do ajuste em 0, aparece a indicação „Ajuste potenc. – Necessário“. Apertando ENTER novamente, volta-se ao início do ajuste da região da posição fi nal, será exibido „Ajus.pos.fi nal“.)
Ajuste potenc.Desvio 0
9. Confi rmar com ENTER. A primeira posição fi nal estará ajustada, o sistema muda para o ajuste da outra posição fi nal. A segunda linha exibe:– no desligamento em função do curso „Press tecla E“;– no desligamento em função do torque „Lim torq alcança“.
10. Se houver um indicador de posição mecânico no atua-dor, será indicado ligá-lo agora. Desta forma evita-se um deslocamento separado até a posição fi nal. Ajuste veja capítulo a seguir 5.6.5.
ir p.POS:FECHADALim torq alcança
11. Deslocar o atuador para a outra posição fi nal: – Desligamento em função do curso a) Com a tecla FECHAR (tecla ABRIR no ajuste na
direção ABRIR) deslocar o atuador até que a guar-nição tenha alcançado a posição fi nal. Durante o deslocamento atentar para a guarnição. Indicação: Se antes de alcançar a posição fi nal ocor-reu desligamento em função de torque através de bloqueio, p. ex no caso de elemento de regulação de deslocamento difícil, progressão de torque inadequa-da (interrupção através de acionamento simultâneo das teclas e ) ou acionamento de um encosto mecânico (retornar para a posição fi nal desejada com a tecla ou ) isso será exibido na segunda linha do display com „Torq. ABR ativo“ ou „Torq.FECH.ativo“.
% ABRIR FECHAR E +
b) Se a posição fi nal tiver sido alcançada, confi rmar com a tecla ENTER após aprox. 2 seg. O display confi rma o ajuste correto. Prosseguir com o passo de comando 12.Se for exibido „Aumentar“ ou „reduzir“, apertar a tecla ENTER e reajustar a roda deslizante correspondente-mente no transdutor de posicionamento (veja capítulo 5.6.2) e repetir o ajuste das posições fi nais.
Relação Engrenagajuste OK
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 36 Y070.020/BR
5 Comissionamento
5
Com
issionamento
– No desligamento em função do torqueTecla FECHAR (tecla ABRIR ao ajustar na direção ABRIR) apertar por mais de 2 seg! O atuador se desloca automaticamente até alcançar a posição fi nal, e então se desloca brevemente na direção contrária, para em seguida tornar a se deslocar para a posição fi nal.
Adapt.pos.FECHADAguarde
O display confi rma o ajuste correto.Se for exibido „Aumentar“ ou „reduzir“ apertar a tecla ENTER e reajustar a roda deslizante correspondente-mente no transdutor de posicionamento (veja capítulo 5.6.2) e repetir o ajuste das posições fi nais.
Relação Engrenagajuste OK
12. Apertar a tecla ENTER. O atuador comuta para o menu no parâmetro „Ajustar as posições fi nais“.Então ajustar a segunda posição fi nal do indicador de posição mecânico, ver capítulo 5.6.5.
Ajus.pos.fi nal
Então se pode comutar para o próximo parâmetro com a tecla . Se for apertada a tecla Local/Re-mote, o atuador comuta para a condição „Remoto“. Todas as alterações confi rmadas com ENTER são salvas.
■ Se a entrada no menu principal foi feita a partir da condição „Par.loc.“ e então foi acionada a tecla „LOCAL/REMOTE“, o atuador comuta para a condição „Remoto“ e se desloca se houver um comando de acionamento do local de comando!
■ Após ajustar as posições fi nais, a engrenagem principal não deverá mais ser reajustada! Do contrário será necessário ajustar todas as posições fi nais novamente.
5.6.4 Reajuste das posições fi nais
Requisitos ■ Deve existir um ajuste da região da posição fi nal válido! Caso não exista, veja capítulo preceden-te „Primeiro ajuste“.
■ A guarnição no início do ajuste da região da posição fi nal não pode se encontrar em condição tensionada, eventualmente soltar com auxílio da manivela/manete (veja capítulo 4.1).
■ A posição da engrenagem principal não pode ter sido alterada desde o primeiro ajuste e também não será alterada com o reajuste!
Pode-se interromper durante o reajuste apertando simultaneamente as teclas e O atuador então estará pronto para o uso novamente com os ajustes anteriores. Se durante a interrupção aparecer o aviso „Teste.pos.fi n.“, apertar a tecla ENTER.
Sequência de comando
1. Na condição „Par.loc.“ ativar o menu principal, selecionar o item de menu „Comissionamento“ e inserir o código 9044.
Fechandohorário
2. Apertar a tecla tantas vezes até que seja exibido „Ajus.pos.fi nal“ no display.
Ajus.pos.fi nal
3. Apertar a tecla ENTER. No display aparece a pergunta, se deve ser efetuado um novo ajuste completo.
nova calibração?SimSim
___________________________* O ajuste completo da região da posição fi nal está descrita no capítulo anterior.
Y070.020/BR Página 37
Instruções de usoSIPOS 5 PROFITRON, HiMod
5
Com
issi
onam
ento
5 Comissionamento
4. Apertar com a tecla . O display muda para „Nao“.
nova calibração?NaoNao
5. O display muda para a primeira posição fi nal. Com as teclas pode-se alternar entre as posições fi nais FECHAR e ABRIR.
Novo ajuste doABERTOABERTO
6. Apertar a tecla ENTER. Na primeira linha aparece a solicitação de deslocamento até a primeira posição fi nal selecionada. Na segunda linha aparece alternadamente a alteração do curso de posicionamento em % e – no desligamento em função do curso „Press tecla E“;– no desligamento em função do torque „Lim torq alcança“.
Desloc.pos.ABERTAlteração-XXX,X%
Desloc.pos.ABERTPress tecla E
7. Deslocar o atuador para a posição fi nal: – Desligamento em função do curso a) Com a tecla ABRIR ou FECHAR deslocar o
atuador até que a guarnição tenha alcançado a posição fi nal. Durante o deslocamento atentar para a guarnição. No display é exibida a alteração do curso de posicionamento. Indicação: Se houve desligamento em função de torque através de bloqueio, isso será exibido na segunda linha no display com „Torq. ABR ativo“ ou „Torq.FECH.ativo“.
% ABERT ABERTAlteração X,X%
b) Se a posição fi nal tiver sido alcançada, confi rmar com a tecla ENTER após aprox. 2 seg. O display confi rma o ajuste correto. Prosseguir com passo de comando 8.Indicação: Se aparecer o aviso „potenciometro. Fora de range“ ou „Relação Engrenag reduzir“ então deslocar conforme as instruções no texto „Avisos“ a seguir.
Relação Engrenagajuste OK
No desligamento em função do torqueTecla ABRIR (no ajuste da posição fi nal FECHAR ) apertar por mais de 2 seg. O atuador se desloca
automaticamente até alcançar a posição fi nal, e então se desloca brevemente na direção contrária, para em seguida tornar a se deslocar para a posição fi nal.
Adapt.pos.FECHADAguarde
O display confi rma o ajuste correto.Indicação: Se aparecer o aviso „ potenciometro. Fora de range“ ou „Relação Engrenag reduzir „, então deslo-car conforme as instruções no texto „Avisos“ a seguir.
Relação Engrenagajuste OK
8. Apertar a tecla ENTER. O atuador comuta para o menu no parâmetro „Ajustar as posições fi nais“.Se necessário, ajustar indicador de posição mecânico, ver capítulo 5.6.5 a seguir.
Ajus.pos.fi nal
Então pode-se comutar para o próximo parâmetro com a tecla Se for apertada a tecla Local/Re-mote, o atuador comuta para a condição „Remoto“. Todas as alterações confi rmadas com ENTER são salvas.
Se a entrada no menu principal foi feita a partir da condição „Par.loc.“ e então foi acionada a tecla „LOCAL/REMOTE“, o atuador comuta para a condição „Remoto“ e se desloca se houver um comando de acionamento do local de comando!
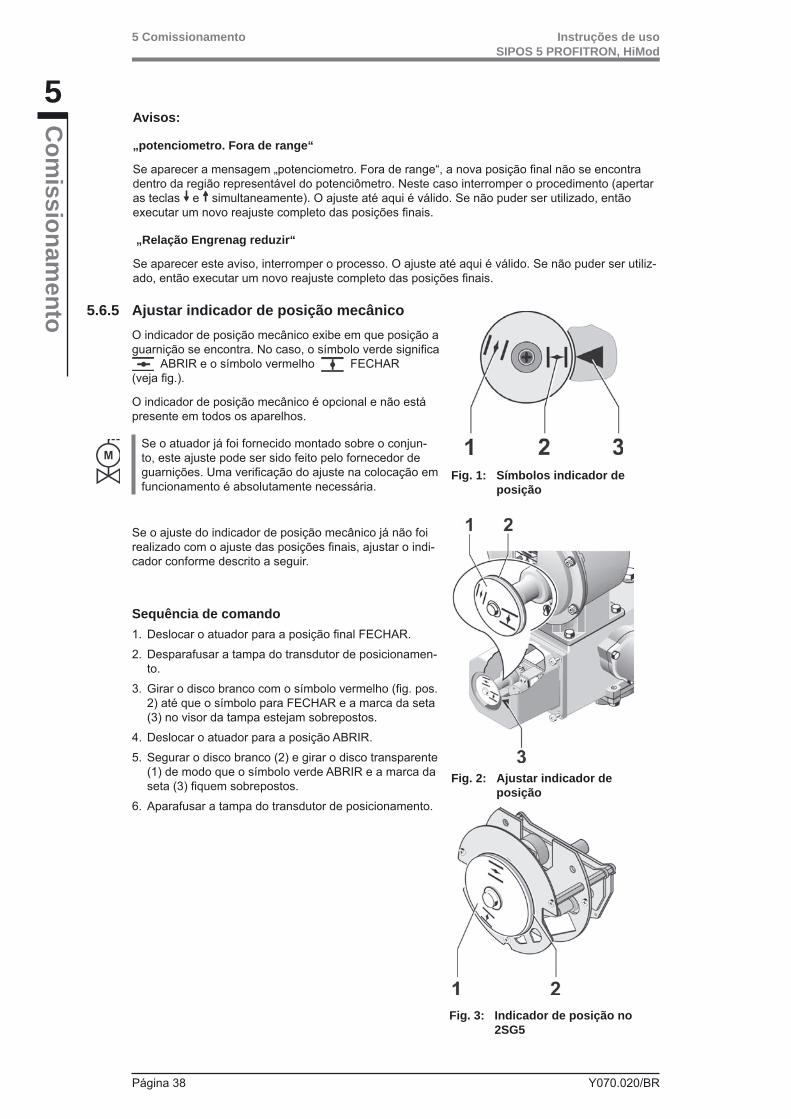
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 38 Y070.020/BR
5 Comissionamento
5
Com
issionamento
Avisos:
„potenciometro. Fora de range“
Se aparecer a mensagem „potenciometro. Fora de range“, a nova posição fi nal não se encontra dentro da região representável do potenciômetro. Neste caso interromper o procedimento (apertar as teclas e simultaneamente). O ajuste até aqui é válido. Se não puder ser utilizado, então executar um novo reajuste completo das posições fi nais.
„Relação Engrenag reduzir“
Se aparecer este aviso, interromper o processo. O ajuste até aqui é válido. Se não puder ser utiliz-ado, então executar um novo reajuste completo das posições fi nais.
5.6.5 Ajustar indicador de posição mecânicoO indicador de posição mecânico exibe em que posição a guarnição se encontra. No caso, o símbolo verde signifi ca
ABRIR e o símbolo vermelho FECHAR (veja fi g.).
O indicador de posição mecânico é opcional e não está presente em todos os aparelhos.
Se o atuador já foi fornecido montado sobre o conjun-to, este ajuste pode ser sido feito pelo fornecedor de guarnições. Uma verifi cação do ajuste na colocação em funcionamento é absolutamente necessária.
Se o ajuste do indicador de posição mecânico já não foi realizado com o ajuste das posições fi nais, ajustar o indi-cador conforme descrito a seguir.
Sequência de comando1. Deslocar o atuador para a posição fi nal FECHAR.
2. Desparafusar a tampa do transdutor de posicionamen-to.
3. Girar o disco branco com o símbolo vermelho (fi g. pos. 2) até que o símbolo para FECHAR e a marca da seta (3) no visor da tampa estejam sobrepostos.
4. Deslocar o atuador para a posição ABRIR.
5. Segurar o disco branco (2) e girar o disco transparente (1) de modo que o símbolo verde ABRIR e a marca da seta (3) fi quem sobrepostos.
6. Aparafusar a tampa do transdutor de posicionamento.
Fig. 1: Símbolos indicador de posição
Fig. 2: Ajustar indicador de posição
Fig. 3: Indicador de posição no 2SG5
Y070.020/BR Página 39
Instruções de usoSIPOS 5 PROFITRON, HiMod
5
Com
issi
onam
ento
5 Comissionamento
5.7 Ajustar as posições fi nais para HiMod e PROFITRON no modelo „não instrusivo“
Os atuadores PROFITRON são fornecidos com transdutores de posicionamento ou na variante „não intrusiva“ com o sensor de posição não instrusivo (niP). O ajuste das posições fi nais com transdutor de posicionamento está descrito no capítulo 5.6.
Quando atuadores são fornecidos montados sobre guarnições, essa etapa do trabalho, normal-mente, é realizada no fornecedor de guarnições. Durante o start up deve-se verifi car a confi gu-ração.
5.7.1 GeralO ajuste das posições fi nais é realizado diretamente no atuador.
Requisito para o ajuste das posições fi nais
A guarnição não deve estar fi xada sob tensão. Eventualmente soltar com a manivela/manete. Co-mando da manivela/manete veja capítulo 4.1.
5.7.2 Primeiro ajusteA sequência na qual a posição fi nal é ajustada pela primeira vez não é obrigatória. No exemplo a seguir encontram-se os avisos do display para a posição fi nal ABRIR. Os avisos no ajuste da posição fi nal FECHAR são correspondentes.
Interrupção do procedimento de ajuste apertando simultaneamente as teclas .
Sequência de comando
Se o atuador se encontrar no menu „Comissionamento“, prosseguir com o passo de comando 2. A descrição detalhada do passo de comando 1 veja no capítulo 5.3 „Entrada no menu comissiona-mento“.
1. Na condição „Par.loc.“ ativar o menu principal, selecio-nar o menu „Comissionamento“ e inserir o código 9044.
Fechandohorário
2. Apertar a tecla até que seja exibido „Ajus.pos.fi nal“ no display.
Ajus.pos.fi nal
3. Apertar a tecla ENTER. O display muda para a primeira posição fi nal. Com as teclas pode-se alternar entre as posições fi nais FECHAR e ABRIR.
Inicio com pos.ABERTOABERTO
4. Apertar a tecla ENTER. O display solicita deslocamento até a posição fi nal. A segunda linha exibe:– no desligamento em função do curso „Press tecla E“;– no desligamento em função do torque „Lim torq alcança“.
5. Dependendo, se a posição fi nal deverá ser desligada em função do curso ou do torque, a sequência de comando a seguir deve ser selecionada correspondentemente.
Desloc.pos.ABERTPress tecla E
___________________________* Se o ajuste das posições fi nais já foi realizado (p.ex. pelo fornecedor de guarnições), no display aparecerá a pergunta, se deve ser realizado um ajuste novo completo: „nova calibração?“. Em caso negativo selecionar a posição fi nal que deverá ser reajustada, ver também capítulo a seguir 5.7.3 „Reajuste das posições fi nais“.
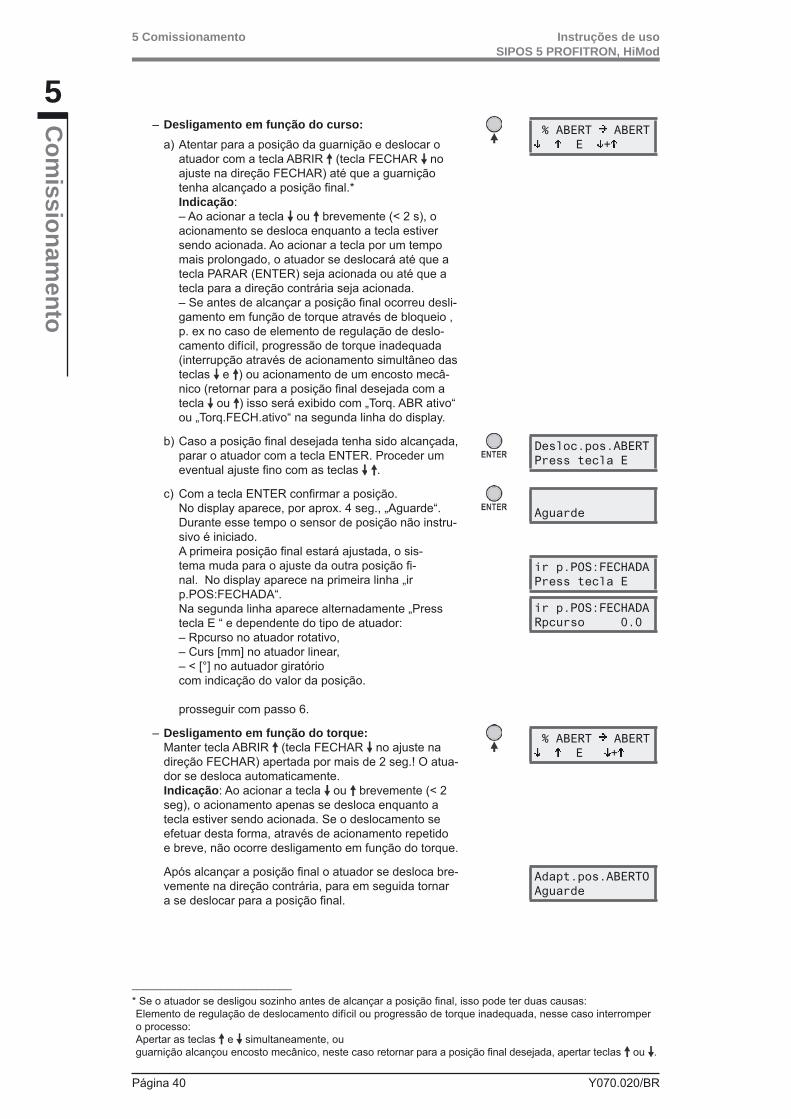
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 40 Y070.020/BR
5 Comissionamento
5
Com
issionamento
– Desligamento em função do curso:a) Atentar para a posição da guarnição e deslocar o
atuador com a tecla ABRIR (tecla FECHAR no ajuste na direção FECHAR) até que a guarnição tenha alcançado a posição fi nal.* Indicação: – Ao acionar a tecla ou brevemente (< 2 s), o acionamento se desloca enquanto a tecla estiver sendo acionada. Ao acionar a tecla por um tempo mais prolongado, o atuador se deslocará até que a tecla PARAR (ENTER) seja acionada ou até que a tecla para a direção contrária seja acionada.– Se antes de alcançar a posição fi nal ocorreu desli-gamento em função de torque através de bloqueio , p. ex no caso de elemento de regulação de deslo-camento difícil, progressão de torque inadequada (interrupção através de acionamento simultâneo das teclas e ) ou acionamento de um encosto mecâ-nico (retornar para a posição fi nal desejada com a tecla ou ) isso será exibido com „Torq. ABR ativo“ ou „Torq.FECH.ativo“ na segunda linha do display.
% ABERT ABERT E +
b) Caso a posição fi nal desejada tenha sido alcançada, parar o atuador com a tecla ENTER. Proceder um eventual ajuste fi no com as teclas .
Desloc.pos.ABERTPress tecla E
c) Com a tecla ENTER confi rmar a posição.No display aparece, por aprox. 4 seg., „Aguarde“.Durante esse tempo o sensor de posição não instru-sivo é iniciado. A primeira posição fi nal estará ajustada, o sis-tema muda para o ajuste da outra posição fi -nal. No display aparece na primeira linha „ir p.POS:FECHADA“. Na segunda linha aparece alternadamente „Press tecla E “ e dependente do tipo de atuador:– Rpcurso no atuador rotativo,– Curs [mm] no atuador linear,– < [°] no autuador giratóriocom indicação do valor da posição.
prosseguir com passo 6.
Aguarde
ir p.POS:FECHADAPress tecla E
ir p.POS:FECHADARpcurso 0.0
– Desligamento em função do torque:Manter tecla ABRIR (tecla FECHAR no ajuste na direção FECHAR) apertada por mais de 2 seg.! O atua-dor se desloca automaticamente. Indicação: Ao acionar a tecla ou brevemente (< 2 seg), o acionamento apenas se desloca enquanto a tecla estiver sendo acionada. Se o deslocamento se efetuar desta forma, através de acionamento repetido e breve, não ocorre desligamento em função do torque.
% ABERT ABERT E +
Após alcançar a posição fi nal o atuador se desloca bre-vemente na direção contrária, para em seguida tornar a se deslocar para a posição fi nal.
Adapt.pos.ABERTOAguarde
___________________________* Se o atuador se desligou sozinho antes de alcançar a posição fi nal, isso pode ter duas causas: Elemento de regulação de deslocamento difícil ou progressão de torque inadequada, nesse caso interromper o processo: Apertar as teclas e simultaneamente, ouguarnição alcançou encosto mecânico, neste caso retornar para a posição fi nal desejada, apertar teclas ou .
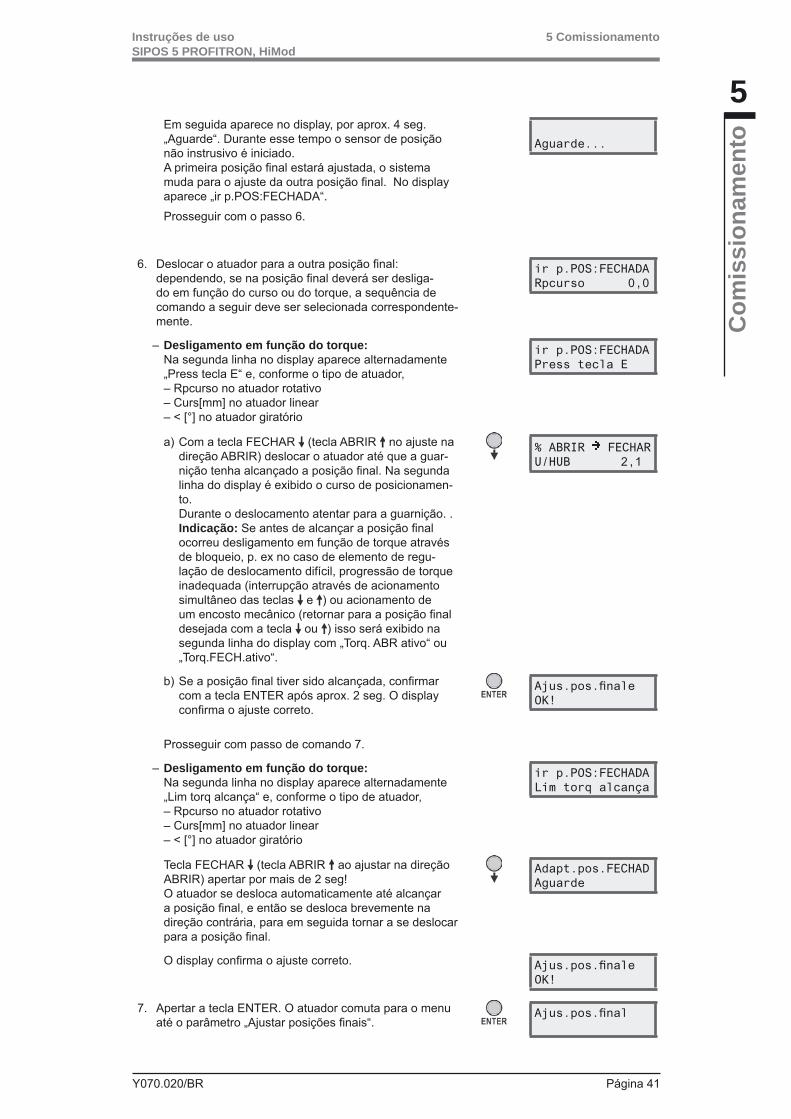
Y070.020/BR Página 41
Instruções de usoSIPOS 5 PROFITRON, HiMod
5
Com
issi
onam
ento
5 Comissionamento
Em seguida aparece no display, por aprox. 4 seg. „Aguarde“. Durante esse tempo o sensor de posição não instrusivo é iniciado. A primeira posição fi nal estará ajustada, o sistema muda para o ajuste da outra posição fi nal. No display aparece „ir p.POS:FECHADA“.
Prosseguir com o passo 6.
Aguarde...
6. Deslocar o atuador para a outra posição fi nal:dependendo, se na posição fi nal deverá ser desliga-do em função do curso ou do torque, a sequência de comando a seguir deve ser selecionada correspondente-mente.
ir p.POS:FECHADARpcurso 0,0
– Desligamento em função do torque:Na segunda linha no display aparece alternadamente „Press tecla E“ e, conforme o tipo de atuador,– Rpcurso no atuador rotativo– Curs[mm] no atuador linear– < [°] no atuador giratório
ir p.POS:FECHADAPress tecla E
a) Com a tecla FECHAR (tecla ABRIR no ajuste na direção ABRIR) deslocar o atuador até que a guar-nição tenha alcançado a posição fi nal. Na segunda linha do display é exibido o curso de posicionamen-to.Durante o deslocamento atentar para a guarnição. .Indicação: Se antes de alcançar a posição fi nal ocorreu desligamento em função de torque através de bloqueio, p. ex no caso de elemento de regu-lação de deslocamento difícil, progressão de torque inadequada (interrupção através de acionamento simultâneo das teclas e ) ou acionamento de um encosto mecânico (retornar para a posição fi nal desejada com a tecla ou ) isso será exibido na segunda linha do display com „Torq. ABR ativo“ ou „Torq.FECH.ativo“.
% ABRIR FECHARU/HUB 2,1
b) Se a posição fi nal tiver sido alcançada, confi rmar com a tecla ENTER após aprox. 2 seg. O display confi rma o ajuste correto.
Prosseguir com passo de comando 7.
Ajus.pos.fi naleOK!
– Desligamento em função do torque:Na segunda linha no display aparece alternadamente „Lim torq alcança“ e, conforme o tipo de atuador,– Rpcurso no atuador rotativo– Curs[mm] no atuador linear– < [°] no atuador giratório
ir p.POS:FECHADALim torq alcança
Tecla FECHAR (tecla ABRIR ao ajustar na direção ABRIR) apertar por mais de 2 seg! O atuador se desloca automaticamente até alcançar a posição fi nal, e então se desloca brevemente na direção contrária, para em seguida tornar a se deslocar para a posição fi nal.
Adapt.pos.FECHADAguarde
O display confi rma o ajuste correto. Ajus.pos.fi naleOK!
7. Apertar a tecla ENTER. O atuador comuta para o menu até o parâmetro „Ajustar posições fi nais“.
Ajus.pos.fi nal
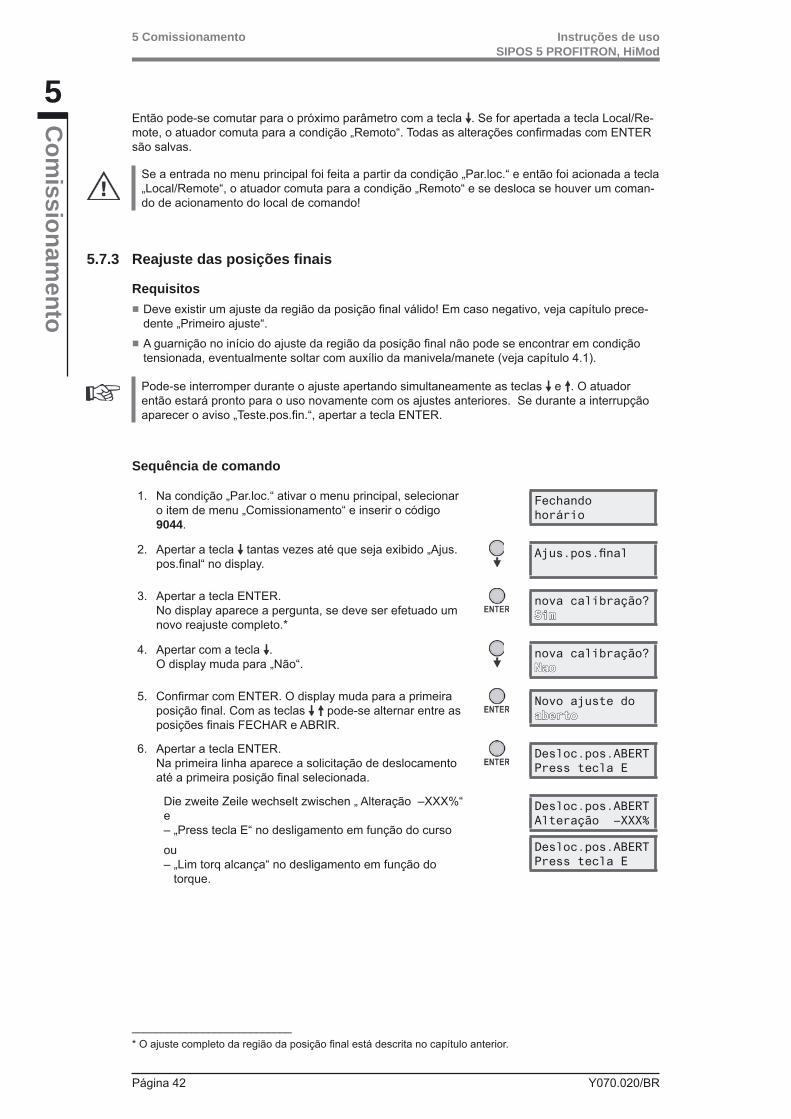
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 42 Y070.020/BR
5 Comissionamento
5
Com
issionamento
Então pode-se comutar para o próximo parâmetro com a tecla . Se for apertada a tecla Local/Re-mote, o atuador comuta para a condição „Remoto“. Todas as alterações confi rmadas com ENTER são salvas.
Se a entrada no menu principal foi feita a partir da condição „Par.loc.“ e então foi acionada a tecla „Local/Remote“, o atuador comuta para a condição „Remoto“ e se desloca se houver um coman-do de acionamento do local de comando!
5.7.3 Reajuste das posições fi nais
Requisitos ■ Deve existir um ajuste da região da posição fi nal válido! Em caso negativo, veja capítulo prece-dente „Primeiro ajuste“.
■ A guarnição no início do ajuste da região da posição fi nal não pode se encontrar em condição tensionada, eventualmente soltar com auxílio da manivela/manete (veja capítulo 4.1).
Pode-se interromper durante o ajuste apertando simultaneamente as teclas e . O atuador então estará pronto para o uso novamente com os ajustes anteriores. Se durante a interrupção aparecer o aviso „Teste.pos.fi n.“, apertar a tecla ENTER.
Sequência de comando
1. Na condição „Par.loc.“ ativar o menu principal, selecionar o item de menu „Comissionamento“ e inserir o código 9044.
Fechandohorário
2. Apertar a tecla tantas vezes até que seja exibido „Ajus.pos.fi nal“ no display.
Ajus.pos.fi nal
3. Apertar a tecla ENTER. No display aparece a pergunta, se deve ser efetuado um novo reajuste completo.*
nova calibração?SimSim
4. Apertar com a tecla . O display muda para „Não“.
nova calibração?NaoNao
5. Confi rmar com ENTER. O display muda para a primeira posição fi nal. Com as teclas pode-se alternar entre as posições fi nais FECHAR e ABRIR.
Novo ajuste doabertoaberto
6. Apertar a tecla ENTER. Na primeira linha aparece a solicitação de deslocamento até a primeira posição fi nal selecionada.
Desloc.pos.ABERTPress tecla E
Die zweite Zeile wechselt zwischen „ Alteração –XXX%“ e – „Press tecla E“ no desligamento em função do curso
ou– „Lim torq alcança“ no desligamento em função do torque.
Desloc.pos.ABERTAlteração –XXX%
Desloc.pos.ABERTPress tecla E
___________________________* O ajuste completo da região da posição fi nal está descrita no capítulo anterior.

Y070.020/BR Página 43
Instruções de usoSIPOS 5 PROFITRON, HiMod
5
Com
issi
onam
ento
5 Comissionamento
7. Deslocar o atuador para a posição fi nal: – Desligamento em função do curso a) Com a tecla ABRIR ou FECHAR deslocar o atu-
ador até que a guarnição tenha alcançado a posição fi nal. Durante o deslocamento atentar para a guar-nição. No display é exibida a alteração do curso de posicionamento. Indicação: Se houve desligamento em função de torque através de bloqueio, isso será exibido na segunda linha no display com „Torq. ABR ativo“ ou „Torq.FECH.ativo“.
% ABERT ABERTAlteração XX,X%
b) Se a posição fi nal tiver sido alcançada, confi rmar com a tecla ENTER após aprox. 2 seg. O display confi rma o ajuste correto.
Prosseguir com passo de comando 8.
Ajus.pos.fi naleOK!
– No desligamento em função do torque
Tecla ABRIR (no ajuste da posição fi nal FECHAR ) apertar por mais de 2 seg.
Adapt.pos.ABERTOAguarde
O atuador se desloca automaticamente até alcançar a posição fi nal, e então se desloca brevemente na direção contrária, para em seguida tornar a se deslocar para a posição fi nal.
% ABERT ABERTRpcurso 48
O display confi rma o ajuste correto. Ajus.pos.fi naleOK!
8. Apertar a tecla ENTER. O atuador comuta para o menu até o parâmetro „Ajustar posições fi nais“ (Ajus.pos.fi nal).
Ajus.pos.fi nal
Então pode-se comutar para o próximo parâmetro com a tecla . Se for apertada a tecla Local/Re-mote, o atuador comuta para a condição „Remoto“. Todas as alterações confi rmadas com ENTER são salvas.
Se a entrada no menu principal foi feita a partir da condição „Par.loc.“ e então foi acionada a tecla „LOCAL/REMOTE“, o atuador comuta para a condição „Remoto“ e se desloca se houver um comando de acionamento do local de comando!
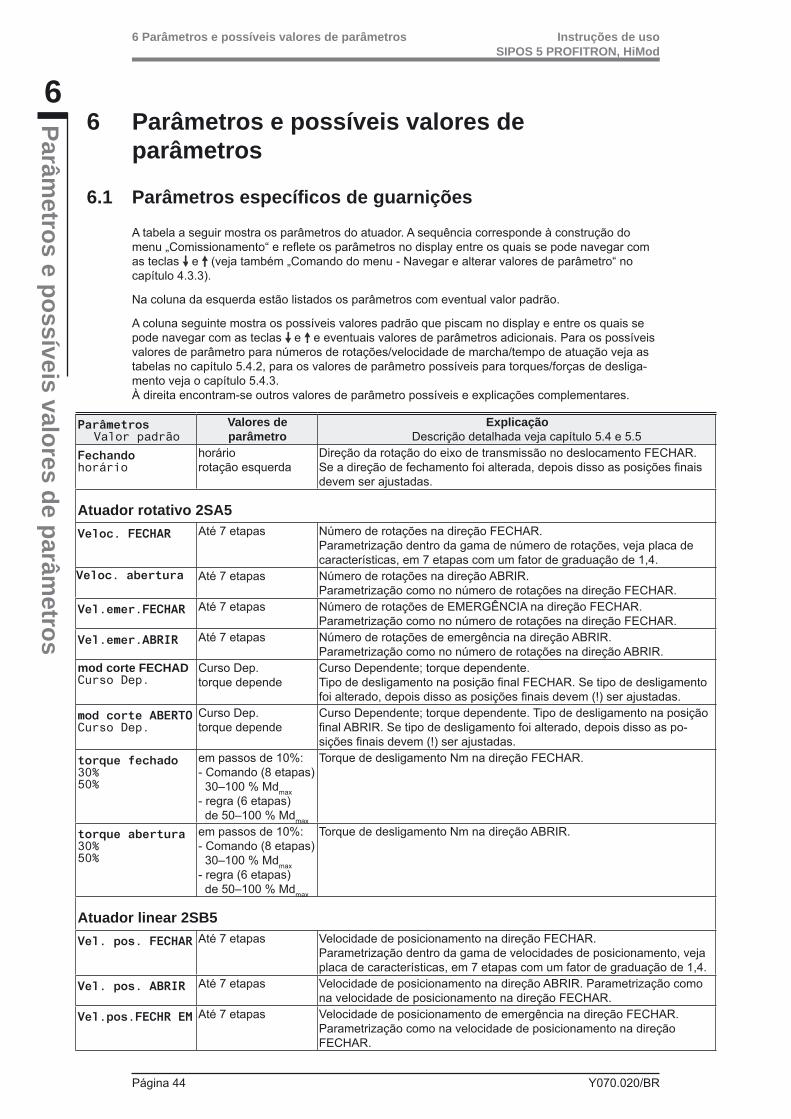
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 44 Y070.020/BR
6 Parâmetros e possíveis valores de parâmetros
6
Parâmetros e possíveis valores de parâm
etros
6 Parâmetros e possíveis valores de parâmetros
6.1 Parâmetros específi cos de guarnições
A tabela a seguir mostra os parâmetros do atuador. A sequência corresponde à construção do menu „Comissionamento“ e refl ete os parâmetros no display entre os quais se pode navegar com as teclas e (veja também „Comando do menu - Navegar e alterar valores de parâmetro“ no capítulo 4.3.3).
Na coluna da esquerda estão listados os parâmetros com eventual valor padrão.
A coluna seguinte mostra os possíveis valores padrão que piscam no display e entre os quais se pode navegar com as teclas e e eventuais valores de parâmetros adicionais. Para os possíveis valores de parâmetro para números de rotações/velocidade de marcha/tempo de atuação veja as tabelas no capítulo 5.4.2, para os valores de parâmetro possíveis para torques/forças de desliga-mento veja o capítulo 5.4.3.À direita encontram-se outros valores de parâmetro possíveis e explicações complementares.
ParâmetrosValor padrão
Valores de parâmetro
ExplicaçãoDescrição detalhada veja capítulo 5.4 e 5.5
Fechandohorário
horáriorotação esquerda
Direção da rotação do eixo de transmissão no deslocamento FECHAR. Se a direção de fechamento foi alterada, depois disso as posições fi nais devem ser ajustadas.
Atuador rotativo 2SA5Veloc. FECHAR Até 7 etapas Número de rotações na direção FECHAR.
Parametrização dentro da gama de número de rotações, veja placa de características, em 7 etapas com um fator de graduação de 1,4.
Veloc. abertura Até 7 etapas Número de rotações na direção ABRIR.Parametrização como no número de rotações na direção FECHAR.
Vel.emer.FECHAR Até 7 etapas Número de rotações de EMERGÊNCIA na direção FECHAR.Parametrização como no número de rotações na direção FECHAR.
Vel.emer.ABRIR Até 7 etapas Número de rotações de emergência na direção ABRIR.Parametrização como no número de rotações na direção ABRIR.
mod corte FECHAD Curso Dep.
Curso Dep.torque depende
Curso Dependente; torque dependente. Tipo de desligamento na posição fi nal FECHAR. Se tipo de desligamento foi alterado, depois disso as posições fi nais devem (!) ser ajustadas.
mod corte ABERTO Curso Dep.
Curso Dep.torque depende
Curso Dependente; torque dependente. Tipo de desligamento na posição fi nal ABRIR. Se tipo de desligamento foi alterado, depois disso as po-sições fi nais devem (!) ser ajustadas.
torque fechado30%50%
em passos de 10%:- Comando (8 etapas) 30–100 % Mdmax - regra (6 etapas) de 50–100 % Mdmax
Torque de desligamento Nm na direção FECHAR.
torque abertura30%50%
em passos de 10%:- Comando (8 etapas) 30–100 % Mdmax - regra (6 etapas) de 50–100 % Mdmax
Torque de desligamento Nm na direção ABRIR.
Atuador linear 2SB5Vel. pos. FECHAR Até 7 etapas Velocidade de posicionamento na direção FECHAR.
Parametrização dentro da gama de velocidades de posicionamento, veja placa de características, em 7 etapas com um fator de graduação de 1,4.
Vel. pos. ABRIR Até 7 etapas Velocidade de posicionamento na direção ABRIR. Parametrização como na velocidade de posicionamento na direção FECHAR.
Vel.pos.FECHR EM Até 7 etapas Velocidade de posicionamento de emergência na direção FECHAR.Parametrização como na velocidade de posicionamento na direção FECHAR.
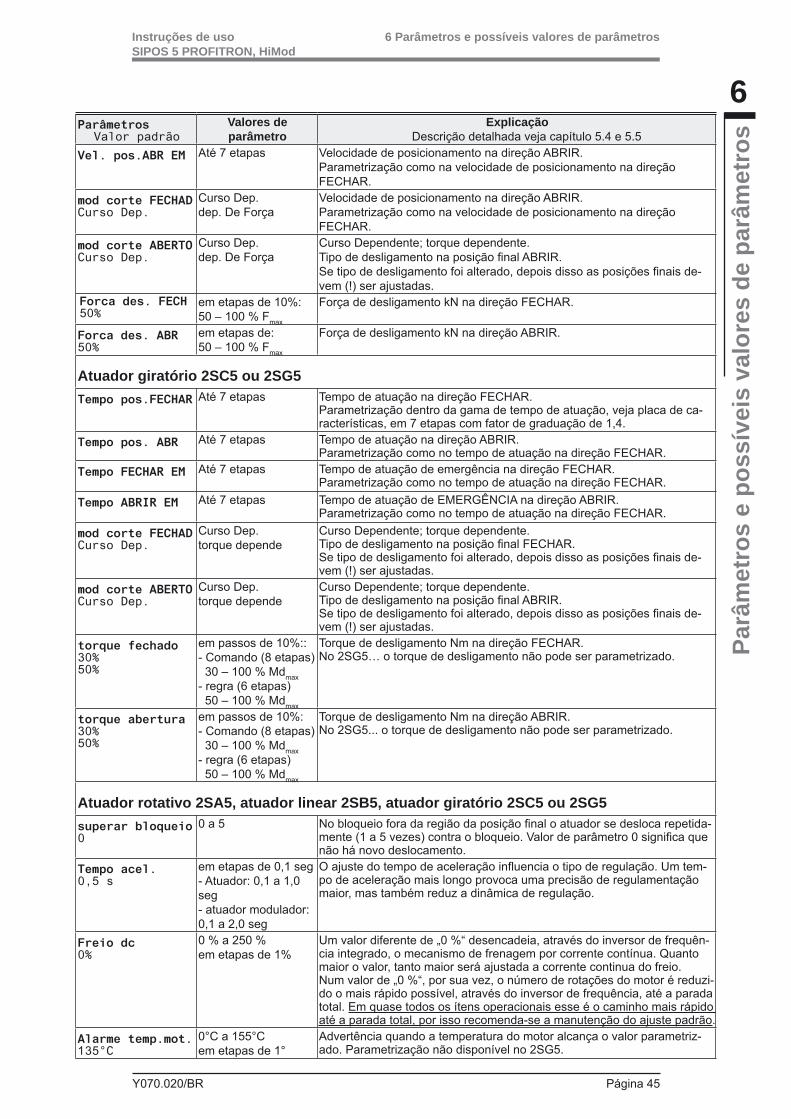
Y070.020/BR Página 45
Instruções de usoSIPOS 5 PROFITRON, HiMod
6
Parâ
met
ros
e po
ssív
eis
valo
res
de p
arâm
etro
s
6 Parâmetros e possíveis valores de parâmetros
ParâmetrosValor padrão
Valores de parâmetro
ExplicaçãoDescrição detalhada veja capítulo 5.4 e 5.5
Vel. pos.ABR EM Até 7 etapas Velocidade de posicionamento na direção ABRIR.Parametrização como na velocidade de posicionamento na direção FECHAR.
mod corte FECHAD Curso Dep.
Curso Dep.dep. De Força
Velocidade de posicionamento na direção ABRIR.Parametrização como na velocidade de posicionamento na direção FECHAR.
mod corte ABERTOCurso Dep.
Curso Dep.dep. De Força
Curso Dependente; torque dependente. Tipo de desligamento na posição fi nal ABRIR.Se tipo de desligamento foi alterado, depois disso as posições fi nais de-vem (!) ser ajustadas.
Forca des. FECH50%
em etapas de 10%:50 – 100 % Fmax
Força de desligamento kN na direção FECHAR.
Forca des. ABR50%
em etapas de:50 – 100 % Fmax
Força de desligamento kN na direção ABRIR.
Atuador giratório 2SC5 ou 2SG5Tempo pos.FECHAR Até 7 etapas Tempo de atuação na direção FECHAR.
Parametrização dentro da gama de tempo de atuação, veja placa de ca-racterísticas, em 7 etapas com fator de graduação de 1,4.
Tempo pos. ABR Até 7 etapas Tempo de atuação na direção ABRIR.Parametrização como no tempo de atuação na direção FECHAR.
Tempo FECHAR EM Até 7 etapas Tempo de atuação de emergência na direção FECHAR.Parametrização como no tempo de atuação na direção FECHAR.
Tempo ABRIR EM Até 7 etapas Tempo de atuação de EMERGÊNCIA na direção ABRIR.Parametrização como no tempo de atuação na direção FECHAR.
mod corte FECHADCurso Dep.
Curso Dep.torque depende
Curso Dependente; torque dependente. Tipo de desligamento na posição fi nal FECHAR.Se tipo de desligamento foi alterado, depois disso as posições fi nais de-vem (!) ser ajustadas.
mod corte ABERTOCurso Dep.
Curso Dep.torque depende
Curso Dependente; torque dependente. Tipo de desligamento na posição fi nal ABRIR.Se tipo de desligamento foi alterado, depois disso as posições fi nais de-vem (!) ser ajustadas.
torque fechado30%50%
em passos de 10%::- Comando (8 etapas) 30 – 100 % Mdmax - regra (6 etapas) 50 – 100 % Mdmax
Torque de desligamento Nm na direção FECHAR. No 2SG5… o torque de desligamento não pode ser parametrizado.
torque abertura30%50%
em passos de 10%:- Comando (8 etapas) 30 – 100 % Mdmax - regra (6 etapas) 50 – 100 % Mdmax
Torque de desligamento Nm na direção ABRIR.No 2SG5... o torque de desligamento não pode ser parametrizado.
Atuador rotativo 2SA5, atuador linear 2SB5, atuador giratório 2SC5 ou 2SG5superar bloqueio0
0 a 5 No bloqueio fora da região da posição fi nal o atuador se desloca repetida-mente (1 a 5 vezes) contra o bloqueio. Valor de parâmetro 0 signifi ca que não há novo deslocamento.
Tempo acel.0,5 s
em etapas de 0,1 seg- Atuador: 0,1 a 1,0 seg- atuador modulador: 0,1 a 2,0 seg
O ajuste do tempo de aceleração infl uencia o tipo de regulação. Um tem-po de aceleração mais longo provoca uma precisão de regulamentação maior, mas também reduz a dinâmica de regulação.
Freio dc0%
0 % a 250 % em etapas de 1%
Um valor diferente de „0 %“ desencadeia, através do inversor de frequên-cia integrado, o mecanismo de frenagem por corrente contínua. Quanto maior o valor, tanto maior será ajustada a corrente continua do freio. Num valor de „0 %“, por sua vez, o número de rotações do motor é reduzi-do o mais rápido possível, através do inversor de frequência, até a parada total. Em quase todos os ítens operacionais esse é o caminho mais rápido até a parada total, por isso recomenda-se a manutenção do ajuste padrão.
Alarme temp.mot. 135°C
0°C a 155°C em etapas de 1°
Advertência quando a temperatura do motor alcança o valor parametriz-ado. Parametrização não disponível no 2SG5.

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 46 Y070.020/BR
6 Parâmetros e possíveis valores de parâmetros
6
Parâmetros e possíveis valores de parâm
etros
ParâmetrosValor padrão
Valores de parâmetro
ExplicaçãoDescrição detalhada veja capítulo 5.4 e 5.5
Aqueciment MotorLigado
Ligadodesligado
Se a proteção do motor for desligada, esgota-se a garantia para o motor.
Calefac. Motordesligado
desligadoLigado
Em dependência da temperatura do motor, o mesmo é aquecido, quando parado, com corrente contínua.
Ajus.pos.final Inicio com pos.abertoInicio com pos.fechado
As posições mecânicas da guarnição conectada são calibradas com a faixa de posicionamento do atuador, procedimento de ajuste ver capítulo 5.6.3 ou 5.7.3 „Ajustar posições fi nais“.
Reg, ref torque Reg, ref torquecurva No. 1, 2 ou 3
Podem ser registradas até três curvas de referência do torque em diferen-tes momentos. Um diagnóstico é possível através de comparação. Veja capítulo 7.4 „Registrar curvas de torque“.
6.2 Parâmetros para a técnica de instrumentação e controle
A seguir encontram-se listados numa tabela os parâmetros e possíveis parametrizações para a técnica de instrumentação e controle. O exemplo a seguir mostra quais informações se encontram em que coluna.
ParâmetroValor de parâmetro
Nessa coluna encont-ram-se os parâmetros a negrito.O texto cursivo mos-tra a parametrização padrão.
ExplicaçãoAqui encontram-se as explicações relativas ao parâmetro mencionado à esquerda.Valor de parâmetro
Aqui encontram-se listados os valores de parâmetro possíveis.
Aqui encontram-se as explicações relativas ao valor de parâmetro mencionado à esquerda.
Outros parâm.Aqui se encontram outras eventuais parametrizações.
Aqui encontram-se explicações relativas à parametrização ao lado.
A exibição e a sequência dos parâmetros corresponde à construção do menu „Comissionamento“ e refl ete os parâmetros no display entre os quais se pode navegar com as teclas e (veja também „Comando do menu - Navegar e alterar valores de parâmetro“ no capítulo 4.3.3).
ParâmetroValor de parâmetro
ExplicaçãoValor de parâmetro Outros parâm.
Rang.pos.fin.FE.0% a 2%
De [0 % a 2 %] a [0 % a 20 %] em passos de 1 %
Fig.: Regiões de posições fi naisDentro da região de posição fi nal desloca-se com número de rotações baixo (velocidade de posicionamento ou tempo de atuação). Se o atuador desliga fora desta região em função do torque, é reconhecida um erro („curso bloq.“, veja capítulo 7.2).
Rang.pos.fin.AB.98% a 100%
De [98 % a 100 %] a [80 % a 100 %] em passos de 1 %

Y070.020/BR Página 47
Instruções de usoSIPOS 5 PROFITRON, HiMod
6
Parâ
met
ros
e po
ssív
eis
valo
res
de p
arâm
etro
s
6 Parâmetros e possíveis valores de parâmetros
ParâmetroValor de parâmetro
ExplicaçãoValor de parâmetro Outros parâm.
Entra set Point Crecente, 4-20mA
Indicação do valor teórico para modo de comando „Posicionador“ (contido, se no número do pedido houver B, C, E, G, H ou K na 15a posição).
Indicação do valor teórico na entrada analógica 1
Fig.: Conversão 0/4 - 20 mA em valor teórico de posição 0 - 100 % em curva característica diversa para posicionador
Curva d SetpointCrecente
crescente: 20 mA corresponde a 100 % ABRIR.
Curva d Setpoint Decrecente
decrescente: 20 mA corresponde a 0 % ABRIR.
Rang d set point4 mA – 20 mA
Detecção de ruptura de cabo (live zero).
Rang d set point0 mA – 20 mA
Detecção de ruptura de cabo não é possível (dead zero).
Entradas digit Normal aberto
Comando das entradas ABRIR, FECHAR e STOP.Normal aberto Ativo em sinal 24 V DC.NC Ativo em sinal 0 V DC.
Entr. EMERGENCIA Normal aberto
Steuerung des Eingangs NOT.Normal aberto Ativo em sinal 24 V DC.NC Ativo em sinal 0 V DC.
Controle remoto Cont perm.conv
Conforme o modelo o atuador pode ser comandado pela técnica de instrumentação e controle através de diferentes tipos de comando (binário, análogo ou através de bus de campo). Reg.pos.conven. Posicionador com valor teórico através de entrada de valor teórico.
(O atuador desloca a guarnição de modo proporcional ao sinal analógico 0/4 – 20 mA.)Apenas em posicionador liberado.
Reg.pos.bus Posicionador com valor teórico através de interface bus de campo. (O atuador desloca a guarnição de modo proporcional ao sinal digital.)Apenas com interface bus de campo existente e posicionador liberado.
Limitador Comando através de entrada analógica de posicionador de valor teórico:0 – 30 % = FECHAR, 30 – 70 % = PARAR, 70 – 100 % = ABRIR(O atuador se desloca quando existir um sinal analógico dentro da região do sinal ABRIR ou FECHAR e durante tanto tempo, até que a posição fi nal tenha sido alcançada ou o sinal mudar para a região PARAR. Uma mudança direta de direção de deslocamento não é possível.)
Cont perm.conv Contato permanente através de entradas binárias com comandos ABRIR/FECHAR. (O atuador se desloca enquanto houver um sinal ABRIR ou FECHAR. O atuador para, quando o sinal parar, a posição fi nal tiver sido alcançada ou os comandos ABRIR e FECHAR existirem simultaneamente.)
Contato perm.bus Contato permanente através de comandos bus de campo ABRIR/FECHAR. (O atuador se desloca enquanto for enviado um sinal ABRIR ou FECHAR. O atuador para, se num aviso sequencial os comandos forem removidos ou a posição fi nal for alcançada.)Apenas quando existir interface bus de campo.
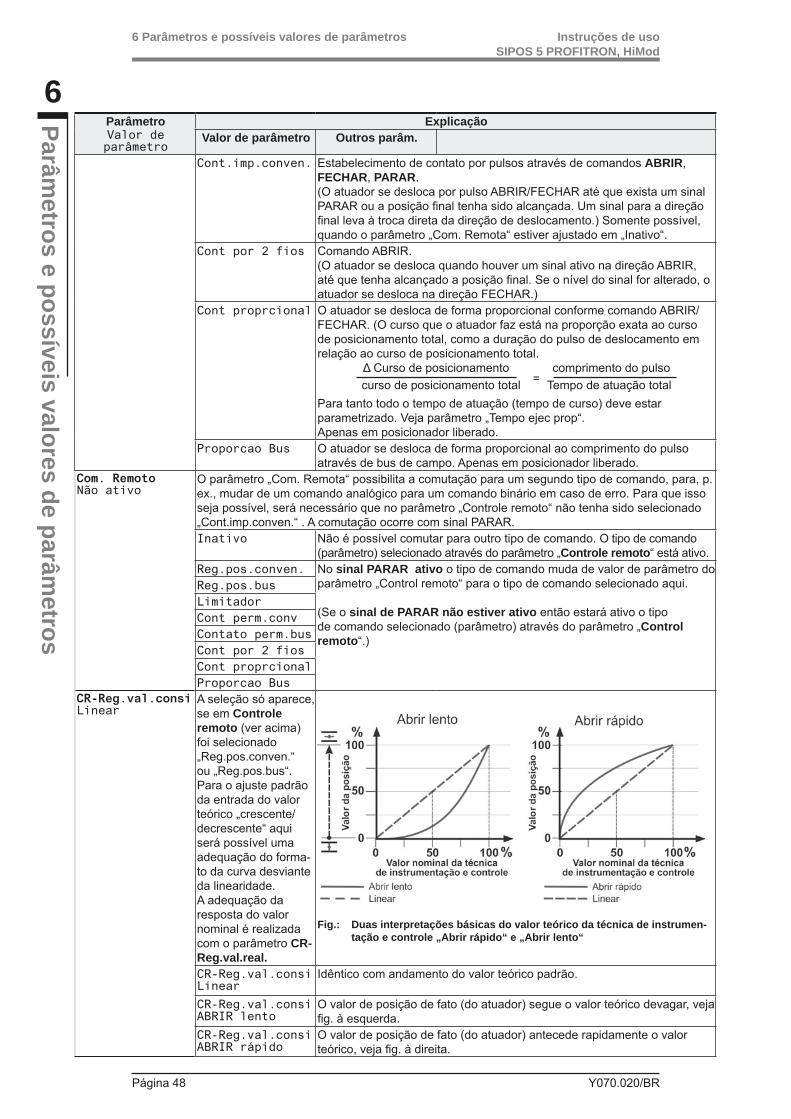
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 48 Y070.020/BR
6 Parâmetros e possíveis valores de parâmetros
6
Parâmetros e possíveis valores de parâm
etros
ParâmetroValor de parâmetro
ExplicaçãoValor de parâmetro Outros parâm.
Cont.imp.conven.
Estabelecimento de contato por pulsos através de comandos ABRIR, FECHAR, PARAR. (O atuador se desloca por pulso ABRIR/FECHAR até que exista um sinal PARAR ou a posição fi nal tenha sido alcançada. Um sinal para a direção fi nal leva à troca direta da direção de deslocamento.) Somente possível, quando o parâmetro „Com. Remota“ estiver ajustado em „Inativo“.
Cont por 2 fios Comando ABRIR.(O atuador se desloca quando houver um sinal ativo na direção ABRIR, até que tenha alcançado a posição fi nal. Se o nível do sinal for alterado, o atuador se desloca na direção FECHAR.)
Cont proprcional O atuador se desloca de forma proporcional conforme comando ABRIR/FECHAR. (O curso que o atuador faz está na proporção exata ao curso de posicionamento total, como a duração do pulso de deslocamento em relação ao curso de posicionamento total.
Δ Curso de posicionamento comprimento do pulso = curso de posicionamento total Tempo de atuação totalPara tanto todo o tempo de atuação (tempo de curso) deve estar parametrizado. Veja parâmetro „Tempo ejec prop“.Apenas em posicionador liberado.
Proporcao Bus O atuador se desloca de forma proporcional ao comprimento do pulso através de bus de campo. Apenas em posicionador liberado.
Com. Remoto Não ativo
O parâmetro „Com. Remota“ possibilita a comutação para um segundo tipo de comando, para, p. ex., mudar de um comando analógico para um comando binário em caso de erro. Para que isso seja possível, será necessário que no parâmetro „Controle remoto“ não tenha sido selecionado „Cont.imp.conven.“ . A comutação ocorre com sinal PARAR.Inativo Não é possível comutar para outro tipo de comando. O tipo de comando
(parâmetro) selecionado através do parâmetro „ Controle remoto“ está ativo.Reg.pos.conven. No sinal PARAR ativo o tipo de comando muda de valor de parâmetro do
parâmetro „Control remoto“ para o tipo de comando selecionado aqui. (Se o sinal de PARAR não estiver ativo então estará ativo o tipo de comando selecionado (parâmetro) através do parâmetro „Control remoto“.)
Reg.pos.busLimitadorCont perm.convContato perm.busCont por 2 fiosCont proprcionalProporcao Bus
CR-Reg.val.consiLinear
A seleção só aparece, se em Controle remoto (ver acima) foi selecionado „Reg.pos.conven.“ ou „Reg.pos.bus“.Para o ajuste padrão da entrada do valor teórico „crescente/ decrescente“ aqui será possível uma adequação do forma-to da curva desviante da linearidade. A adequação da resposta do valor nominal é realizada com o parâmetro CR-Reg.val.real.
Fig.: Duas interpretações básicas do valor teórico da técnica de instrumen-tação e controle „Abrir rápido“ e „Abrir lento“
CR-Reg.val.consiLinear
Idêntico com andamento do valor teórico padrão.
CR-Reg.val.consiABRIR lento
O valor de posição de fato (do atuador) segue o valor teórico devagar, veja fi g. à esquerda.
CR-Reg.val.consiABRIR rápido
O valor de posição de fato (do atuador) antecede rapidamente o valor teórico, veja fi g. à direita.

Y070.020/BR Página 49
Instruções de usoSIPOS 5 PROFITRON, HiMod
6
Parâ
met
ros
e po
ssív
eis
valo
res
de p
arâm
etro
s
6 Parâmetros e possíveis valores de parâmetros
ParâmetroValor de parâmetro
ExplicaçãoValor de parâmetro Outros parâm.
CR-Reg.val.real Pos=val.real
Se no parâmetro CR-Reg.val.consi a adequação do valor teórico foi parametrizado como Abrir devagar ou rápido, aqui então o valor real poderá ser adequado correspondentemente.CR-Reg.val.realPos=val.real
O valor REAL retornado à técnica de instrumentação e controle corresponde à posição do atuador.
CR-Reg.val.realPos=valor conv
O valor REAL retornado à técnica de instrumentação e controle corresponde ao valor teórico indicado.
Tempo ejec propCálculo autom.
Apenas em Controle remoto com valor de parâmetro „Cont proprcional“ ou „Proporcao Bus“. O requisito para o deslocamento proporcional é que o tempo de atuação (tempo de curso), ou seja, o tempo que o atuador precisa para percorrer todo o curso de posicionamento, seja conhecido. Ele pode ser apurado pelo próprio atuador ou medido pelo usuário e indicado previamente. Cálculo autom. Apuração automática do tempo de atuação. O tempo de atuação é
apurado novamente após cada ajuste da região da posição fi nal ou alteração do tempo de aceleração. Para tanto o atuador tem de percorrer pelo menos 3% do curso de posicionamento.
Personalizado Podem ser indicados previamente diferentes tempos de atuação para ABRIR e FECHAR.Ej. calc.FECHADO Possível ajuste para o tempo de atuação 5 a 3276
segundos. Ajuste padrão é de 60 seg.Ej. calc. ABERTOerr.contr.remotoManter pos.
Uma interrupção do cabo de acionamento é reconhecido no caso de ativação através– entradas binárias com parametrização “NC” (apenas no acionamento através de contato
permanente ou por pulso),– entradas analógicas com gama de sinal 4 – 20 mA,– acionamento por bus de campoIr a pos.EMrG. Ao detectar ruptura de cabo, ocorre deslocamento automático até a
posição parametrizada no parâmetro „Pos. EMERGENCIA“.No display aparece: EMErG inativa
Manter pos. Ao detectar ruptura de cabo a posição atual é mantida.No display aparece: Falha remoto.
mantem valor O processo do valor real é parado.A mensagem só aparece quando a opção do software “Controlador de processo” está ativa. Ver Instruções de uso adicional “Controlador de processo” Y070.035.
move p setpoint O processo do valor nominal fi xo é iniciado e parado.A mensagem só aparece quando a opção do software “Controlador de processo” está ativa. Ver Instruções de uso adicional “Controlador de processo” Y070.035.
FECHAR hermeticoSim
Sim
Fig.: Princípio do funcionamento „Fechamento hermético“
No funcionamento ativo „Fechamento hermético“ não é possível uma regulação dentro das regiões das posições fi nais.Se dentro da região das posições fi nais o comando de deslocamento na direção dessa posição fi nal for cancelado ou for emitido um sinal de PARAR, o atuador continua se deslocando até que ocorra o desligamento em função do torque ou um comando de deslocamento na direção contrária.Também no „desligamento em função do curso“, no acionamento através de posicionador ou controlador de processo e de modo similar ao do desligamento em função do torque, o comando de desloca¬mento interno é prolongado até alcançar a posição fi nal (0 % ou 100 %).
Nao Este ajuste será necessário quando for necessário regular dentro das regiões das posições fi nais.

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 50 Y070.020/BR
6 Parâmetros e possíveis valores de parâmetros
6
Parâmetros e possíveis valores de parâm
etros
ParâmetroValor de parâmetro
ExplicaçãoValor de parâmetro Outros parâm.
Pos. EMERGENCIA0 %
0 % a 100 % em etapas de
Caso haja um comando de emergência ou a detecção de ruptura de cabo e ajuste da função „Circ. Aberto“ para „Ir a pos.EMrG.“ há deslocamento automático até a posição indicada aqui.
Cont.Int.FECHtorque depende:0% a 2%Curso Dep.0% bis 0%
De [0 % a 0 %] a [0 % a 100 %] em passos de
Com o parâmetro contato intermediário de curso FECHAR é passado um sinal para a técnica de instrumentação e controle quando o atuador se encontrar dentro da região do curso de posicionamento.O sinal está ativo na região de 0 % até o valor parametrizado.
Cont.Int.ABRtorque depende:98% a 100%Curso Dep.100% a 100%
De [0 % a 100 %]a [100 % a 100 %] em passos de 1 %
Com a função contato intermediário de curso ABRIR é passado um sinal para a técnica de instrumentação e controle quando o atuador se encontrar dentro da região do curso de posicionamento.O sinal está ativo do valor parametrizado até 100 %.
Saida act val.Pos.,increc.,4mA
Saída valor real avisa analogicamente a posição do atuador. Curva v.realCrecente
20 mA corresponde a 100 % ABRIR,0/4 mA corresponde a 0 % ABRIR
Curva v.realDecrecente
20 mA corresponde a 0 % ABRIR,0/4 mA corresponde a 100 % ABRIRVal range act.4 mA – 20 mA
Detecção de ruptura de cabo (live zero).
Val range act.0 mA – 20 mA
Detecção de ruptura de cabo não é possível (dead zero).
Saida digital 1Tot. ABERTO ,NA
Para a resposta digital do atuador até a técnica de instrumentação e controle há 8 saídas de sinalização no total à disposição. Cada uma dessas saídas pode ser desligada ou ocupada com uma das 18 notifi cações de estado à disposição.Desconectado A saída de sinalização 1 não está ocupada com uma das notifi cações de
estado possíveis „Saida digital 1“ está desligada.Pode ser notifi cada uma das seguintes condições:
Tot. FECHADO O atuador desligou na posição fi nal FECHAR.Tot. ABERTO O atuador desligou na posição fi nal ABRIR.Torq.FECHAR O atuador desligou na direção FECHAR em função do torque. Torque ABR O atuador desligou na direção ABRIR em função do torque. Torq.ABR o FE O atuador desligou na direção FECHAR ou ABRIR em função do torque.ERRO Ocorreu um erro (ver tipo de erro no capítulo 7).Piscando O atuador se desloca.Pronto O atuador pode ser deslocado de „Local, Remota“.Pronto+rem O atuador pode ser deslocado de „Remoto“. Local O atuador encontra-se na posição „Local“ ou „Par.loc.“. Cont.Int.FECH A posição do atuador encontra-se na região de 0% até a posição
parametrizada, na função „Cont.Int.FECH“.Cont.Int.ABR A posição do atuador encontra-se na região da posição parametrizada até
100%, na função „Cont.Int.ABR“.ERRO temp.m. A temperatura máxima do motor (155 °C) foi ultrapassada.Alarme tempM A temperatura de advertência do motor foi ultrapassada (não no 2SG5...)ERRO ext.Volt Sobre ou subtensão alcançada ou falha na alimentação de corrente.Manutencao Foi excedido um limite de manutenção.Fechando O atuador se desloca na direção FECHARABRIndo O atuador se desloca na direção ABRIR
Est. saida.dig 1Normal aberto
NA (corrente de trabalho), ou seja nível 24 V quando aviso ativo.
Est. saida.dig 1NC
NC (corrente de repouso), ou seja nível 0 V quando aviso ativo.

Y070.020/BR Página 51
Instruções de usoSIPOS 5 PROFITRON, HiMod
6
Parâ
met
ros
e po
ssív
eis
valo
res
de p
arâm
etro
s
6 Parâmetros e possíveis valores de parâmetros
ParâmetroValor de parâmetro
ExplicaçãoValor de parâmetro Outros parâm.
Saida digital 2Tot. FECHADO ,NA
Parametrização correspondente a „Saida digital 1“, „Est. saida.dig 1“
Saida digital 3Torque ABR ,NC
Saida digital 4Torq.FECHAR ,NC
Saida digital 5ERRO ,NC
Saida digital 6Local ,NA
Saida digital 7Piscando ,NA
Saida digital 8Alarme tempM ,NCno 2SG5… : ERRO temp.m. NC
Parâmetros para a comunicação com bus de campoEnd.PROFIBUSCanal 1 126
Apenas no caso de interface PROFIBUS existente.Detalhes veja instrução de uso PROFIBUS (ver capítulo 1.5 „Instruções complementares“).Canal 1: 0 aCanal 1: 126
Endereço de bus de campo do atuador no canal 1.
End.PROFIBUSCanal 2 126
Apenas no caso de interface PROFIBUS redundante existente.Detalhes veja instrução de uso PROFIBUS (ver capítulo 1.5 „Instruções complementares“).Canal 2: 0 aCanal 2: 126
Endereço de bus de campo do atuador no canal 2.
PZD 3 Nr d Parametr .. Na representação de processo „PPO2“ podem ser preenchidos quatro valores de dados de processo (VDP) com dados provenientes do atuador. Os números de parâmetros entrados de 3 a 6 em VDP valem igualmente para canal 1 e 2.
PZD 4 Nr d Parametr ..PZD 5 Nr d Parametr ..PZD 6 Nr d Parametr ..End. MODBUS Canal 1 247
Apenas em interface MODBUS existente. Detalhes ver instrução de uso MODBUS (ver capítulo 1.5 „Instruções complementares“).Canal 1: 1 aCanal 1: 247
Endereço de bus de campo do atuador no canal 1.
Os parâmetros de comunicação a seguir taxa de transmissão, paridade e tempo de monitoramento da conexão deve coincidir com a técnica de instrumentação e controle (mestre).MODBUS baudrate119200 Baud
Parâmetro de comunicação no canal 1:
300, 600, 1200, 2400, 4800, 9600, 19200, 38400
Taxa de transmissão em bits por segundo.
MODBUS par/stop1 1 stopbit par
sem 2 stopbits Sem paridade e 2 bits de parada.1 stopbit par Paridade par e 1 bit de parada.1 stopbit impar Paridade ímpar e 1 bit de parada.
T monit MODBUSCanal 1: 3 seg
0,1 a 25,5 seg tempo de monitoramento da conexão.
End. MODBUSCanal 2 247
Apenas em interface MODBUS redundante existente.Canal 2: 1 aCanal 2: 247
Endereço de bus de campo do atuador no canal 2.Ajustes como no endereço MODBUS canal 1.
Os parâmetros de comunicação taxa de transmissão, paridade e tempo de monitoramento da conexão deve coincidir com a técnica de instrumentação e controle (mestre).MODBUS baudrate219200 Baud
Parâmetro de comunicação no canal 2:
300, 600, 1200, 2400, 4800, 9600, 19200, 38400
Taxa de transmissão em bits por segundo.

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 52 Y070.020/BR
6 Parâmetros e possíveis valores de parâmetros
6
Parâmetros e possíveis valores de parâm
etros
ParâmetroValor de parâmetro
ExplicaçãoValor de parâmetro Outros parâm.
MODBUS par/stop21 stopbit par
sem 2 stopbits Sem paridade e 2 bits de parada.1 stopbit par Paridade par e 1 bit de parada.1 stopbit impar Paridade ímpar e 1 bit de parada.
T monit MODBUSCanal 2: 3 seg
0,1 bis 25,5 seg tempo de monitoramento da conexão.
Parâmetro para manutenção, identifi cação da instalação e funções do software
Com os parâmetros para manutenção é permitido um planejamento efi caz dos intervalos de manutenção da guarnição em função de, por exemplo, as comutações ou horas de funcionamento realizadas.Para indicações relativas à manutenção do atuador ver o capítulo 8 “Manutenção, Inspeção, Assistência”.
Exibição aparece apenas na condição „Par.loc.“.Confi rmação com ENTER leva à atualização dos limites de manutenção e será exibida brevemente com „Manutencao – Confi rmado“.
Manutencao
ConfirmarDeve ocorrer uma confi rmação após cada manutenção, e também quando os valores do intervalo de manutenção foram alterados, p.ex. na primeira colocação em funcionamento.Um sinal pendente „Manutencao“, será exibido.
Confirmado Aviso só aparece brevemente na condição „Par.loc.“ após confi rmação de manutenção ocorrida com ENTER.
não necessário Aviso só aparece na condição „Remoto“, no menu „Ler dat. p.e.m.“ quando nenhum dos limites de manutenção possíveis ainda não foi alcançado.
Necessário Aviso só aparece na condição „Remoto“, no menu „Ler dat. p.e.m.“ quando um dos limites de manutenção possíveis foi alcançado. Adicionalmente é exibido o aviso „Manutencao“.
Per.manutencao E
Após apertar da tecla ENTER pode-se alterar em sequência os parâmetros „n manobras“, „Cortes por torq.“ e „T operação motor“. As alterações do intervalo de manutenção apenas se tornam efetivos após uma confi rmação do parâmetro „Manutencao – Confi rmar“.Comutaçõescomando: 30.000 Regra: 10.000.000
Regra: 30000 a 30000000 sempre em 30000Comando: 10000 bis 10000000sempre em 100
Após alcançar o número parametrizado das horas de operação do motor, é gerado o sinal „Manutencao“.
drehmo.abh.AbschSteuer: 3.000 Regel: 10.000
Regra: 200 a 20000 gradativamente em passos de 200Comando: 100 a 10000 gradativamente em passos de 100
Após alcançar o número parametrizado das horas de operação do motor, é gerado o sinal „Manutencao“.
Horas oper.Motor 2500
5 h a 2500 h gradativamente em passos de 5
Após alcançar o número parametrizado das horas de operação do motor, é gerado o sinal „Manutencao“.
Retorno ao menu
Retornar ao parâmetro „Per.manutencao.“
Ref.atuad. 1-10 Número de identifi cação da instalação, para a documentação da instalação.Entrada: Com as teclas e selecionar sinais alfanuméricos e confi rmar com ENTER. O próximo dígito pisca e pode ser parametrizado.Sair do menu de ajustes: Após inserir o 10° dígito, apertar ENTER. Mudar para a próxima função: Apertar teclas ou .
Ref.atuad. 11-20 Veja Stell. AKZ 1-10
Funções de software opcionais
As funções de software listadas a seguir já se encontram no atuador, quando tiverem sido parte do pedido. As funções de software também podem ser liberadas posteriormente. Para tal será necessário um código de liberação para cada um deles, disponíveis como acessório (ver capítulo a seguir „Funções de software opcionais“).
A sequência de comando para ativar as funções de software é sempre a mesma e por isso só é usada como exemplo na função de software seguinte.

Y070.020/BR Página 53
Instruções de usoSIPOS 5 PROFITRON, HiMod
6
Parâ
met
ros
e po
ssív
eis
valo
res
de p
arâm
etro
s
6 Parâmetros e possíveis valores de parâmetros
ParâmetroValor de parâmetro
ExplicaçãoValor de parâmetro Outros parâm.
libera Contr.Pos „Cont. Processo“habilitado Função está liberada.
Desabilitado Função não está liberada. Para ativar apertar ENTER.Liberação Proc.R 0000
Inserir código de liberação, de modo análogo ao código de autorização de acesso, capítulo 5.3.
libera pos Regulador de posiçõe.
Variavel cliente 0
Programação de software específi co do cliente difere do fi rmware padrão. Ajuste não autorizado de variantes específi cas do cliente pode causar danos ao atuador/guarnição/instalação! A programação de software específi ca do cliente encontra-se descrita em instruções de uso adicional e é parte componente do fornecimento.Exibição algarismos Um algarismo diferente de 0 indica uma variante de software específi ca de
cliente.Habilita veloci „ Parâmetro de rotação analógico externo“
libera. curva. N „ Ajuste de rotação em função do curso“
Habil.prop/split „Função proporcional/Split Range“
HabCurvaTempo „ Tempos de atuação em função do curso livremente ajustáveis“
montagem remota Parâmetro no caso de montagem em separado.O parâmetro é importante para o funcionamento perfeito do atuador!Em caso de ajuste errado pode não ser possível detetar um bloqueio ou o atuador desligar com um baixo torque.nunca <=10m Ajuste se for utilizada uma montagem em separado ou uma montagem em
separado inferior a 10 m.>10m com fi ltro Ajuste em caso de montagem em separado superior a 10 m com fi ltro LC.
Retorno ao menu Com ENTER chega-se novamente ao menu „Comissionamento“.
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 54 Y070.020/BR
6 Parâmetros e possíveis valores de parâmetros
6
Parâmetros e possíveis valores de parâm
etros
6.3 Funções de software opcionais ■ Posicionador (descrição veja nestas instruções de uso), n° para pedido: 2SX5200-3FC00**Tipo: 2S . 5 . . . - . . . . . -4 . B .No HiMod a função de software „Posicionador“ está contida no pacote fornecido.
■ Controlador de processo (controlador PI), n° para pedidos: 2SX5200-3FG00**Tipo: 2S . 55 . . - . . . . . -4 . C/L .Instrução operacional adicional Y070.035A partir de versão de fi rmware 2.20
■ Ajuste de rotação em função do curso (curva característica rotações)*, n° para pedidos: 2SX5200-3FD00**Tipo: 2S . 5 . . . - . . . . . -4 . D/E .Instrução operacional adicional Y070.034A partir de fi rmware versão 2.14
■ Parâmetro de rotação analógico externo*, n° para pedido: 2SX5200-3FE00**Tipo: 2S . 5 . . . - . . . . . -4 . F/G .Instrução operacional adicional Y070.033A partir de fi rmware versão 2.34
■ Posicionador com função proporcional/split-range, n° para pedido: 2SX5200-3FH00**Tipo: 2S . 55 . . - . . . . . -4 . C .Instrução operacional adicional Y070.035A partir de versão de fi rmware 2.20
■ Em função do curso e tempos de atuação livremente ajustáveis, n° para pedidos: 2SX5200-3FJ00**Tipo: 2S . 5 . . . - . . . . . -4 . J/K.Instrução operacional adicional Y070.032A partir de fi rmware versão 2.37
* - rotações em atuador rotativo 2SA5 . . .; - Velocidade de posicionamento em atuador linear 2SB5 . . . ; - Tempo de atuação em atuador giratório 2SC5 . . . /2SG5 . . .
** Número para pedidos para liberação posterior da função do software.
Ao pedir posteriormente uma função de software opcional sempre indicar o número de série do atuador.
O número de série encontra-se na placa de característi-cas da unidade eletrônica (ver fi g.) e também pode ser visualizado através do menu ► observar número de série.
Se a placa de comando foi substituída, o número de série da nova placa de comando não será idêntica com o nú-mero na placa de características. Para pedir a função de software será necessário indicar o número que é exibido no menu observar.
Para a liberação de uma função de software opcional ver capítulo precedente. Caso se necessite de um fi rmware mais atual para a função de software, pode-se fazer o download dele na página da SIPOS na internet www.sipos.de. A atualização do atuador com o fi rmware novo é realizado com o programa de parametrização para PC COM-SIPOS.
Na atualização do fi rmware os parâmetros do atuador (ajustes do cliente e parâmetros de fábrica) incluindo o ajuste da região das posições fi nais e dados operacionais não são alterados.
Fig.: Placa de características
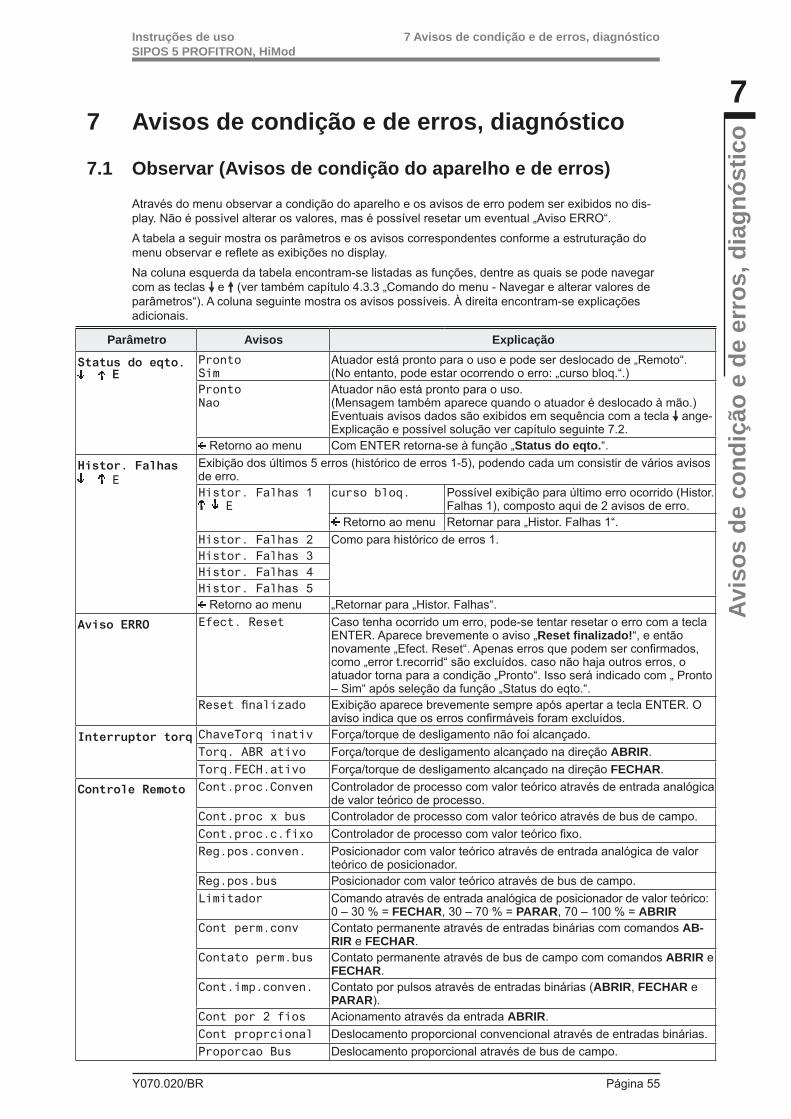
Y070.020/BR Página 55
Instruções de usoSIPOS 5 PROFITRON, HiMod
7
Avis
os d
e co
ndiç
ão e
de
erro
s, d
iagn
óstic
o
7 Avisos de condição e de erros, diagnóstico
Parâmetro Avisos Explicação
Status do eqto. E
ProntoSim
Atuador está pronto para o uso e pode ser deslocado de „Remoto“.(No entanto, pode estar ocorrendo o erro: „curso bloq.“.)
ProntoNao
Atuador não está pronto para o uso.(Mensagem também aparece quando o atuador é deslocado à mão.)Eventuais avisos dados são exibidos em sequência com a tecla ange-Explicação e possível solução ver capítulo seguinte 7.2.
Retorno ao menu Com ENTER retorna-se à função „Status do eqto.“.Histor. Falhas E
Exibição dos últimos 5 erros (histórico de erros 1-5), podendo cada um consistir de vários avisos de erro.Histor. Falhas 1 E
curso bloq. Possível exibição para último erro ocorrido (Histor. Falhas 1), composto aqui de 2 avisos de erro.
Retorno ao menu Retornar para „Histor. Falhas 1“.Histor. Falhas 2 Como para histórico de erros 1.Histor. Falhas 3Histor. Falhas 4Histor. Falhas 5
Retorno ao menu „Retornar para „Histor. Falhas“.
Aviso ERRO Efect. Reset Caso tenha ocorrido um erro, pode-se tentar resetar o erro com a tecla ENTER. Aparece brevemente o aviso „Reset fi nalizado!“, e então novamente „Efect. Reset“. Apenas erros que podem ser confi rmados, como „error t.recorrid“ são excluídos. caso não haja outros erros, o atuador torna para a condição „Pronto“. Isso será indicado com „ Pronto – Sim“ após seleção da função „Status do eqto.“.
Reset fi nalizado Exibição aparece brevemente sempre após apertar a tecla ENTER. O aviso indica que os erros confi rmáveis foram excluídos.
Interruptor torq ChaveTorq inativ Força/torque de desligamento não foi alcançado.Torq. ABR ativo Força/torque de desligamento alcançado na direção ABRIR.Torq.FECH.ativo Força/torque de desligamento alcançado na direção FECHAR.
Controle Remoto Cont.proc.Conven Controlador de processo com valor teórico através de entrada analógica de valor teórico de processo.
Cont.proc x bus Controlador de processo com valor teórico através de bus de campo.Cont.proc.c.fixo Controlador de processo com valor teórico fi xo.Reg.pos.conven. Posicionador com valor teórico através de entrada analógica de valor
teórico de posicionador.Reg.pos.bus Posicionador com valor teórico através de bus de campo.Limitador Comando através de entrada analógica de posicionador de valor teórico:
0 – 30 % = FECHAR, 30 – 70 % = PARAR, 70 – 100 % = ABRIRCont perm.conv Contato permanente através de entradas binárias com comandos AB-
RIR e FECHAR.Contato perm.bus Contato permanente através de bus de campo com comandos ABRIR e
FECHAR.Cont.imp.conven. Contato por pulsos através de entradas binárias (ABRIR, FECHAR e
PARAR).Cont por 2 fios Acionamento através da entrada ABRIR.Cont proprcional Deslocamento proporcional convencional através de entradas binárias.Proporcao Bus Deslocamento proporcional através de bus de campo.
7 Avisos de condição e de erros, diagnóstico
7.1 Observar ( Avisos de condição do aparelho e de erros)
Através do menu observar a condição do aparelho e os avisos de erro podem ser exibidos no dis-play. Não é possível alterar os valores, mas é possível resetar um eventual „Aviso ERRO“.
A tabela a seguir mostra os parâmetros e os avisos correspondentes conforme a estruturação do menu observar e refl ete as exibições no display.
Na coluna esquerda da tabela encontram-se listadas as funções, dentre as quais se pode navegar com as teclas e (ver também capítulo 4.3.3 „Comando do menu - Navegar e alterar valores de parâmetros“). A coluna seguinte mostra os avisos possíveis. À direita encontram-se explicações adicionais.

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 56 Y070.020/BR
7 Avisos de condição e de erros, diagnóstico
7
Avisos de condição e de erros, diagnóstico
Parâmetro Avisos Explicação
Cont.Int.FECH ...%, ativo Atuador encontra-se na região de 0 % a ... % do curso de posiciona-mento.
...%, inativo Atuador não se encontra na região de 0 % a ... % do curso de posicio-namento.
Cont.Int.ABR ...%, ativo Atuador encontra-se na região de ... % a 100% do curso de posiciona-mento.
...%, inativo Atuador não se encontra na região de ... % a 100% do curso de posici-onamento.
Set point ... % O valor teórico atual do controlador de processo ou do posicionador é de ... % da região do sinal analógico, ou da norma do acionamento do bus de campo.
Valor processo ... % O valor real atual do processo é de ... % da região do sinal analógico do sensor. (exibição só aparece com controlador de processo liberado.)
Entrada analóg.1 ... % O valor atual é de ... % da região do sinal analógico ajustado. (va-lor teórico de posição, valor teórico de processo ou sensor externo conectado.)
Entrada analóg.2 ... % O valor atual é de ... % da região do sinal analógico ajustado. (parâmet-ro de rotação, valor real de processo ou sensor externo conectado.)
Entradas digit FEC ABR PARO EMEG Sinal FECHAR, ABRIR, PARAR E EMERGÊNCIA ativo.(São exibidos apenas sinais ativos.)
Sem Sinal Sinal FECHAR, ABRIR, PARAR E EMERGÊNCIA não ativo.
Temp. Motor ...°C max 155°C A temperatura atual do motor = ... ° C.(não no 2SG5…).
Temp eletrónica ...°C Temperatura na carcaça do sistema eletrônico
Velocidad atual 0 /min Número de rotações atual do atuador Exibição aparece apenas no atuador rotativo.
Vel. pos. atual 0 mm/min Velocidade de posicionamento atual. Exibição aparece apenas no atua-dor linear.
Temp.pos.atual 0 sseg
Tempo de atuação atual. Exibição aparece apenas no atuador giratório.
Regulador pos. habilitado Posicionador disponível (opcional).Desabilitado Posicionador não está liberado.
Cont.. Processo habilitado Controlador de processo disponível (opcional).Desabilitado Controlador de processo não está liberado.
Ref an de veloc habilitado Parâmetro de rotação analógico externo está disponível (opcional).Desabilitado Parâmetro de rotação analógico externo* não está liberado.
curva de veloc. habilitado Parâmetro de rotação em função do curso está disponível (opcional).Desabilitado Parâmetro de rotação em função do curso* não está liberado.
Prop./Split habilitado Função proporcional/Split Range está disponível (opcional).Desabilitado Função proporcional/Split Range não está disponível (opcional).
Curva temp. pos. habilitado Tempos de atuação em função de curso livremente ajustáveis estão disponíveis (opcional).
Desabilitado Tempos de atuação em função do curso livremente ajustáveis não estão liberados.
Bluetooth Valido Módulo Bluetooth reconhecido. Exibição apenas aparece quando houver Bluetooth.
nao-intrusivo Valido Exibição aparece só em atuador com posicionador não intrusivo. Não é necessário abrir as carcaças.
Garantia motor Valido A proteção do motor não foi desligada.
erloschen A proteção do motor foi desligada, o motor pode ser operado além de sua temperatura limite.A garantia do motor caducou.
Carrera Rpcurso X,X Exibição aparece só em atuador não intrusivo. Curso de posicionamento em rotações por curso no atuador rotativo, curso em mm no atuador linear, região de giro em graus no atuador giratório.
Curs [mm]
< [°]
___________________________* Número de rotações é sinônimo para velocidade de posicionamento (atuador linear 2SB5...) e tempo de atu-ação (atuador giratório 2SC5…/2SG5…).

Y070.020/BR Página 57
Instruções de usoSIPOS 5 PROFITRON, HiMod
7
Avis
os d
e co
ndiç
ão e
de
erro
s, d
iagn
óstic
o
7 Avisos de condição e de erros, diagnóstico
Parâmetro Avisos Explicação
Nro do Atuador 2S.5………… Número de pedido do atuador (16 dígitos).
nro. fabricacao .............Número de 13 dígitos da unidade eletrônica para a documentação da fábrica do atuador, p. ex. 6011206001011.
nro.fabric.orig. .............Número de 13 dígitos da unidade eletrônica originalmente fornecida (relevante apenas em caso de troca). No fornecimento do atuador o número de série e o número de série original de fábrica são idênticos.
Versão Firmware 2 . . dd.mm.aa Número da versão do fi rmware, p.ex. 238 28.06.07:► Versão 2.38 de 28.06.2007.
Link de tensão . . . V Tensão de circuito intermediário atual do inversor em V.
Corrente motor . Corrente do motor em A.
No acionamento PROFIBUSCanal PB Field bus inativ Atuador não é acionado através da interface PROFIBUS.
Canal 1 ativo Atuador é acionado através do canal 1 da interface PROFIBUS.
Canal 2 ativo Atuador é acionado através do canal 2 da interface PROFIBUS.
Canal PB: 1 ouCanal PB: 2
sem transmissao Não há transmissão.
1,5 Mbaud Transmissão com 1,5 Mbaud.
Estado profibus1 ouEstado profibus2
Wait prm Aguardar telegrama de parametrização.
Wait cfg Aguardar telegrama de confi guração.
data exchange Troca de dados cíclica com master PROFIBUS.
No acionamento MODBUSVem do MODBUS Field bus inativ Atuador não é acionado através da interface MODBUS.
Canal 1 ativo Atuador é acionado através do canal 1 da interface MODBUS.
Canal 2 ativo Atuador é acionado através do canal 2 da interface MODBUS.
Modbus estado 1 ouModbus estado 2
Sem comunicação Não há comunicação.
Taxa baud OK Os parâmetros de comunicação estão OK.
data exchange Troca de dados cíclica com master MODBUS.
Retorno ao menu Com ENTER retorna-se ao menu „observar“.

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 58 Y070.020/BR
7 Avisos de condição e de erros, diagnóstico
7
Avisos de condição e de erros, diagnóstico
7.2 Avisos de situação e de erros
N° Aviso Explicação Solução possível
3 Acion. Manual. 1 ■ Manivela/manete está ativada ou ■ cabo até a manivela está defeituoso
Puxar manivela e/ou verifi car cabos/conta-tos no conector redondo.Não no 2SG5...
30 BaixaTensao 1 Tensão de rede fora da tolerância de -10 %. Verifi car tensão de rede (oscilações da tensão?)!
6 Cir. temp.motor 1 Conexão com sensor de temperatura (ter-mistor) interrompida.
Verifi car cabos/contatos no conector redon-do
8 circ.niP aberto2, 4Não são recebidos dados do sensor de posição não intrusivo (niP).
■ Verifi car alimentações e pontos de contato do sistema eletrônico/engrenagem,
■ verifi car alimentação na montagem em separado.
4 Com via bus 1 A colocação em funcionamento através de bus de campo está ativa. Neste caso não é possível ajuste através de controle local.
Aguardar fi nalização da colocação em funci-onamento através de bus.
31 curso bloq. 4, 3 Foi detectado bloqueio no curso do atuador. O torque realmente necessário é maior do que o torque de desligamento ajustadoouparâmetro ‚Montagem separada‘ está colocado„>10m com fi ltro , ”, apesar de não existir nenhum fi ltro LC.
■ Verifi car ajuste das guarnições do torque, eventualm. aumentar o torque de des-ligamento ou utilizar a função „superar bloqueio“!
■ Verifi car se elemento de regulação se desloca com difi culdade
■ Verifi car parâmetro „montagem remota“.Indicação: O atuador sempre poderá ser deslocado na direção contrária por meio elétrico.
1 entr dig aberta 1 Erro na verifi cação das entradas binárias (ABRIR, FECHAR, PARAR, EMERGÊN-CIA): As entradas binárias foram parametrizadas como „corrente de repouso“ e em todas as entradas binárias encontra-se nível Low (0V).
Verifi car a parametrizagem das entradas binárias e a tensão nas entradas binárias!
17 ERRO bus com 1 A comunicação bus de campo foi interrom-pida (timeout). Esse erro somente será co-municado como erro, se o Controle remoto ocorrer através de bus de campo.Indicação: O endereço BUS deve ser dife-rente do ajuste padrão (126 no PROFIBUS e 247 no Modbus)!
Verifi car comunicação BUS e conexão!
25 ERRO EEPROM 2 Erro EEPROM. Trocar sistema eletrônico.
22 ERRO entr.cons. 1 Esse aviso só é possível no ajuste live-zero (4 – 20 mA). Valor limite I: > 21 mA ou < 3,6 mA
■ Aumentar ou diminuir corrente. ■ Verifi car corrente de entrada!
19 ERRO ext.Volt. 1 Tensão de rede fora do especifi cado / baixa demais.
Verifi car alimentação elétrica.
20 ERRO int. tens.1, 2Erro alimentação elétrica / sistema eletrô-nico.
Trocar sistema eletrônico.
24 ERRO inversor 4,3,2 Erro ou sem comunicação com o inversor. Verifi car tensão de rede, contatar assistên-cia SIPOS ([email protected])!
18 ERRO p.dual RAM 2 Erro DualPortRAM. Substituir sistema eletrônico.(módulo PROFIBUS com defeito.)
26 ERRO RAM 2 Erro RAM. Trocar sistema eletrônico.
21 ERRO sal.v.atual 2 Erro na saída 0/4 – 20 m. Trocar sistema eletrônico.
27 ERRO watchdog 2 Erro Watchdog. Trocar sistema eletrônico.

Y070.020/BR Página 59
Instruções de usoSIPOS 5 PROFITRON, HiMod
7
Avis
os d
e co
ndiç
ão e
de
erro
s, d
iagn
óstic
o
7 Avisos de condição e de erros, diagnóstico
N° Aviso Explicação Solução possível
5 error t.recorrid 3 Após 3 % do tempo de atuação o atuador percorreu menos de 0,5 % do curso. O tem-po de atuação é medido e salvo de acordo com o ajuste da região da posição fi nal.Possíveis causas:
■ Os contatos do potenciômetro no contato redondo foram empurrados para fora.
■ Montagem incorreta e/ou ajuste do poten-ciômetro após uma troca
■ Cabo do motor interrompido (motor não funciona)
■ Erro na detecção do posicionamento (a folga da engrenagem entre o potenciô-metro e a engrenagem principal é grande ou pequena demais: não é detectada alteração de posição, apesar do motor estar funcionando)
■ coefi ciente da transmissão do transdutor de posicionamento foi alterado
- transdutor de posicionamento gira na direção contrária ou- ajuste selecionado grande demais da roda deslizante (Rpcurso) no transdutor de posicionamento)
■ Atuador está bloqueado (atuador não pode ser deslocado da posição/posição fi nal).
■ Potenciômetro com falha (camada condu-tora de precisão interrompida)
■ Parâmetro na montagem separda„>10m com fi ltro“ não colocado.
■ Verifi car guarnição, transdutor de posicio-namento, motor e potenciômetro!
■ Verifi car parâmetro „montagem remota“.
23 Faha Sobrecorr.3 Inversor de frequência detectou sobrecor-rente.
■ Verifi car alimentação do motor com re-lação a curto-circuito.
■ Verifi car condições operacionais, p. ex. temperatura do ambiente, eventualm. trocar sistema eletrônico.
16 Falha Bluetooth Foi detectado um erro de comunicação no módulo Bluetooth. O atuador continua po-dendo ser operado e pode ser parame-trizado através do controle local ou com COM-SIPOS através do cabo de modem nulo.
Tensão DESLIGAR-LIGAR. Caso o aviso ainda seja exibido, substituir o sistema eletrônico.(placa Bluetooth defeituosa.)
15 Falha entr.ana.21 Esse aviso só é possível no ajuste live-zero (4 – 20 mA). Valor limite I: > 21 mA ou < 3,6 mA.
Verifi car corrente de entrada!
13 Falha I2C 2, 2Não é possível comunicação I2C. Tensão DESLIGAR-LIGAR. Caso o aviso ainda seja exibido, substituir o sistema ele-trônico. (placa de comando defeituosa.)
14 Falha I2C niP 2, 2Sem comunicação I2C para o sensor de posição não intrusivo (niP).
Tensão DESLIGAR-LIGAR. Caso o aviso ainda seja exibido, substituir o sistema ele-trônico. (placa de comando defeituosa.)
33 Falha parametr..2 Falta o ajuste de fábrica do atuador ou EEPROM defeituoso.
Trocar sistema eletrônico.Contactar assistência SIPOS ([email protected])!
12 falha Tmp Electr 2, 2
A temperatura do sistema eletrônico não pode ser transmitida, valor da temperatura do sistema eletrônico será ajustado em 0 °C.
Com o aviso „falha Tmp Electr“ o aciona-mento continuará podendo ser deslocado. Caso o operador necessite da informação de temperatura, então tensão DESLIGAR-LIGAR. Caso o aviso ainda seja exibido, substituir o sistema eletrônico.

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 60 Y070.020/BR
7 Avisos de condição e de erros, diagnóstico
7
Avisos de condição e de erros, diagnóstico
N° Aviso Explicação Solução possível
11 Fora de ajuste.4 Ajuste da engrenagem principal encontra-se próximo demais do encosto fi nal mecâni-co do transdutor de posicionamento.
■ As posições fi nais foram ultrapassadas através de acionamento manual ou
■ o acoplamento de deslizamento do trans-dutor de posicionamento foi torcido, ou o coefi ciente da transmissão do trans¬dutor de posicionamento foi alterado.
Novo ajuste das posições fi nais necessário → ver capítulo 5.6 „Ajustar coefi ciente trans-missão do transdutor de posicionamento e das posições fi nais“.
9 Local bloqueado 4 Apenas aviso de status!A comutação local pode ser bloqueada através do bus de campo. Em um erro de comunicação bus a comutação local é auto-maticamente liberada novamente.
Através do bus de campo desfazer bloqueio de comutação.
32 sens.pos.aberto4, 2Cabo até potenciômetro ou sensor de curso magnético interrompido.
■ Verifi car alimentações e pontos de contato do sistema eletrônico/ engrenagem,
■ verifi car alimentação na montagem em separado.
29 Temp. Inversor 1 Temperatura no inversor de frequência é alta demais.
■ Verifi car se elemento de regulação se desloca com difi culdade,
■ número de comutações alto demais, ■ temperatura do ambiente alta demais.
Se aviso se repetir, atualização do fi rmware.7 Temp.motor alta 1 O motor ultrapassou a temperatura máxima
de 155° C. Possíveis causas p.ex.: ■ Temperatura ambiente elevada, ■ tempo de atuação longo demais (p.ex. exceder S2/15 min.),
■ comutações demais (p.ex. ultrapassar 1200 comutações/hr),
■ torque alto demais, ■ – Bobina em curto no motor ou
- conexão com o sensor de temperatura no motor interrompida (apenas no 2SG5)
■ Pârametro na montagem separada „>10m com fi ltro“ não colocado.
Indicação: O monitoramento da temperatu-ra do motor pode ser desativada através de parametrização no atuador (apenas PROFI-TRON) (proteção da instalação à frente da proteção do motor). No entanto, desta forma imediatamente caduca a garantia para o atuador.Verifi car parâmetro „montagem remota“.
28 Tensao alta 1 Tensão de rede fora da tolerância de +15 %.
■ Verifi car a tensão de alimentação, ■ verifi car a tensão de rede quanto a osci-lações.
10 teste.parametros 4 ■ Colocação em funcionamento não está totalmente fi nalizada ou
■ erro durante o arquivamento dos dados de colocação em funcionamento através de falha na alimentação de corrente.
Verifi car ajustes e eventualmente alterá-los.
2 Teste.pos.fin. 4 ■ O ajuste da região da posição fi nal ainda não foi realizado.
■ Posição fi nal foi ultrapassada por aciona-mento da manivela,
■ O acoplamento de deslizamento do trans-dutor de posicionamento foi torcido, ou coefi ciente da transmissão do transdutor de posicionamento foi alterado ou
■ tipo de desligamento foi alterado (p.ex. de em função de torque para em função de curso)
Novamente efetuar ajuste das posições fi nais.
___________________________1 Erro auto-resetável2 Assistência necessária, veja capítulo 8.13 Erro confi rmável, veja capítulo 7.14 São necessárias outras ações no atuador pelo operador
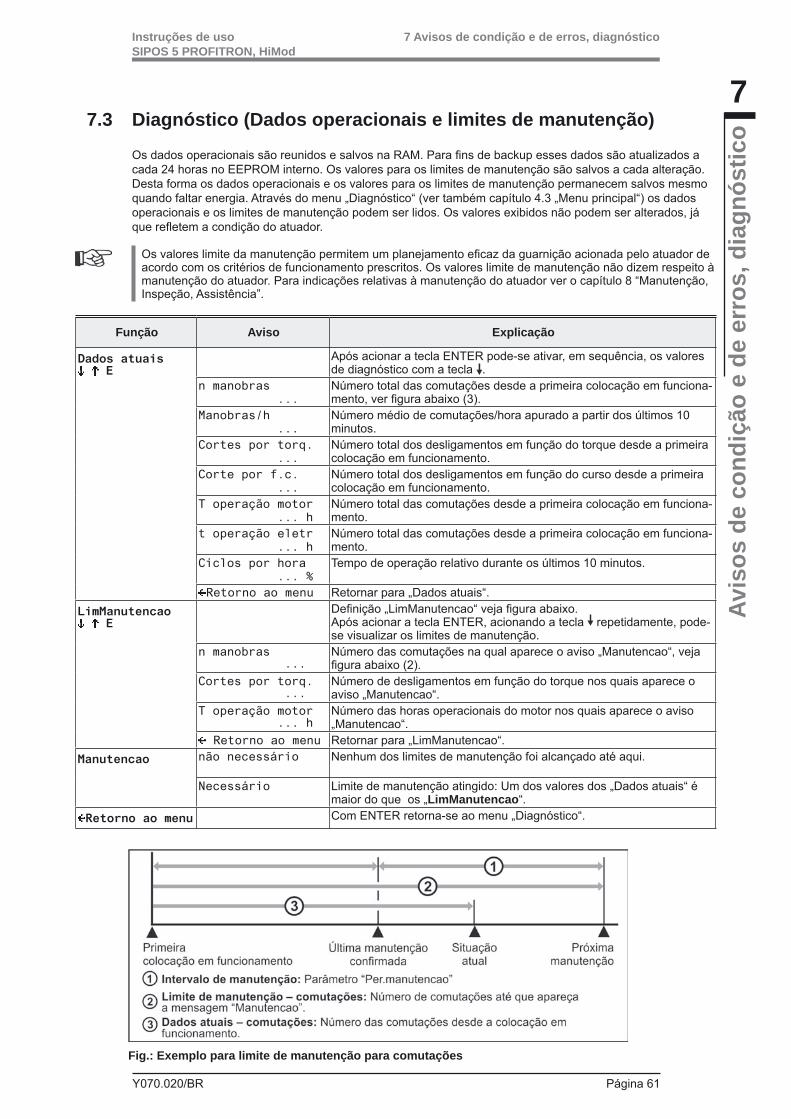
Y070.020/BR Página 61
Instruções de usoSIPOS 5 PROFITRON, HiMod
7
Avis
os d
e co
ndiç
ão e
de
erro
s, d
iagn
óstic
o
7 Avisos de condição e de erros, diagnóstico
7.3 Diagnóstico (Dados operacionais e limites de manutenção)
Os dados operacionais são reunidos e salvos na RAM. Para fi ns de backup esses dados são atualizados a cada 24 horas no EEPROM interno. Os valores para os limites de manutenção são salvos a cada alteração. Desta forma os dados operacionais e os valores para os limites de manutenção permanecem salvos mesmo quando faltar energia. Através do menu „Diagnóstico“ (ver também capítulo 4.3 „Menu principal“) os dados operacionais e os limites de manutenção podem ser lidos. Os valores exibidos não podem ser alterados, já que refl etem a condição do atuador.
Os valores limite da manutenção permitem um planejamento efi caz da guarnição acionada pelo atuador de acordo com os critérios de funcionamento prescritos. Os valores limite de manutenção não dizem respeito à manutenção do atuador. Para indicações relativas à manutenção do atuador ver o capítulo 8 “Manutenção, Inspeção, Assistência”.
Função Aviso Explicação
Dados atuais E
Após acionar a tecla ENTER pode-se ativar, em sequência, os valores de diagnóstico com a tecla .
n manobras ...
Número total das comutações desde a primeira colocação em funciona-mento, ver fi gura abaixo (3).
Manobras/h ...
Número médio de comutações/hora apurado a partir dos últimos 10 minutos.
Cortes por torq. ...
Número total dos desligamentos em função do torque desde a primeira colocação em funcionamento.
Corte por f.c. ...
Número total dos desligamentos em função do curso desde a primeira colocação em funcionamento.
T operação motor ... h
Número total das comutações desde a primeira colocação em funciona-mento.
t operação eletr ... h
Número total das comutações desde a primeira colocação em funciona-mento.
Ciclos por hora ... %
Tempo de operação relativo durante os últimos 10 minutos.
Retorno ao menu Retornar para „Dados atuais“.LimManutencao E
Defi nição „LimManutencao“ veja fi gura abaixo.Após acionar a tecla ENTER, acionando a tecla repetidamente, pode-se visualizar os limites de manutenção.
n manobras ...
Número das comutações na qual aparece o aviso „Manutencao“, veja fi gura abaixo (2).
Cortes por torq. ...
Número de desligamentos em função do torque nos quais aparece o aviso „Manutencao“.
T operação motor ... h
Número das horas operacionais do motor nos quais aparece o aviso „Manutencao“.
Retorno ao menu Retornar para „LimManutencao“.Manutencao não necessário Nenhum dos limites de manutenção foi alcançado até aqui.
Necessário Limite de manutenção atingido: Um dos valores dos „Dados atuais“ é maior do que os „LimManutencao“.
Retorno ao menu Com ENTER retorna-se ao menu „Diagnóstico“.
Fig.: Exemplo para limite de manutenção para comutações

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 62 Y070.020/BR
7 Avisos de condição e de erros, diagnóstico
7
Avisos de condição e de erros, diagnóstico
7.4 Registrar curvas de torque
Este capítulo não se aplica para 2SG5... .
Um monitoramento preventivo da guarnição é possível através da comparação de até três curvas de referência do torque, registradas em momentos diferentes, do atuador que se encontra em funcionamento.
■ Requisito para o registro das curvas do torque é o ajuste da região da posição fi nal válido. ■ Os valores exibidos podem desviar do torque real, em especial nas posições fi nais e quando houver alterações do número de rotações durante o funcionamento.
■ Uma comparação das curvas de referência do torque registradas apenas será possível, quan-do os ajustes do atuador e as condições da guarnição forem iguais.
O registro das curvas do torque pode ser realizado: ■ diretamente no atuador através – das teclas. Este método encontra-se descrito a seguir,– o programa de parametrização para PC COM-SIPOS (atuador deve estar ajustado em „Local pronto“);
■ de „Remoto“ através de PROFIBUS DP-V1 (atuador deve estar ajustado em „Modo rem. Pron-to“).
A medição do curso de posicionamento é realizado em passos de 1 %. Cada curva pode ser sob-rescrita, se desejado.
Nos atuadores lineares e giratórios a curva de torque representada é proporcional à progressão de força real do atuador linear ou à progressão do torque do atuador giratório.
Durante o registro das curvas de referência de torque o atuador desloca a guarnição no mínimo 2 vezes por todo o curso de posicionamento.
Indicações de comando ■ A indicação que pisca pode ser alterada com ou . ■ A indicação selecionada é aplicada com a tecla ENTER, aparece a primeira indicação. ■ Interrupção com a tecla Local/Remote, durante o registro de curva com a tecla PARAR. ■ Erros durante o registro (bloqueio do curso de posicionamento, interrupção pelo operador, queda de corrente, etc.) são exibidos com „erro de registro“. Confi rmar este aviso com ENTER. Atu-ador muda para condição inicial „Reg, ref torque“ O registro interrompido ou curva será salvo apenas para um diagnóstico de erro na memória (RAM) ate a próxima falha de alimentação elétrica (tensão de rede e auxiliar). Desta forma será possível ler a curva com COM-SIPOS até a interrupção.
Sequência de comando
1. Na condição „Par.loc.“ ativar o menu principal, sele-cionar o item de menu „Comissionamento“ e inserir o código 9044.
Fechandohorário
2. Selecionar o parâmetro registrar „Curvas de momento“.
Reg, ref torque
3. Confi rmar a seleção. É oferecido um número para curva.
Reg, ref torquecurva No. 1curva No. 1
4. Selecionar a curva de torque com as teclas (pode-se selecionar dentre três números de curvas) e con-fi rmar com ENTER.
iniciar registr?curva No. 1

Y070.020/BR Página 63
Instruções de usoSIPOS 5 PROFITRON, HiMod
7
Avis
os d
e co
ndiç
ão e
de
erro
s, d
iagn
óstic
o
7 Avisos de condição e de erros, diagnóstico
5. Apertar a tecla ENTER. O registro da curva de torque é iniciado.
Se o atuador não estiver na posição fi nal FECHAR, ele se desloca até a posição inicial. A posição do curso atual é exibida em passos %.
45% ABRIR FECHARcurva No. 1
Após alcançar a posição fi nal FECHAR o atuador au-tomaticamente se desloca para a posição fi nal ABRIR e ocorre o primeiro registro parcial. A posição do curso atual é exibida em valor %.
12% ABERT ABERTcurva No. 1
Após alcançar a posição fi nal ABRIR o atuador automaticamente se desloca para a posição fi nal FECHAR. Segue-se o 2. registro parcial.
36% ABRIR FECHARcurva No. 1
A curva do torque é arquivada de forma permanente, a curva anterior é sobrescrita.
fi m Memorizaçãocurva No. 1
6. Confi rmar o registro da curva de torque com ENTER. O display muda para o ponto inicial.
Reg, ref torque
Visualização das curvas de torque
As curvas de torque registradas podem ser exibidas através do programa de parametrização PC COM-SIPOS ou PROFIBUS (p.ex. SIMATIC PDM, DTM).
Fig.: Exemplo progressão de torque de uma guarnição
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 64 Y070.020/BR
8 Manutenção, inspeção, assistência
8
Manutenção, inspeção, assistência
8 Manutenção, inspeção, assistênciaAntes de cada intervenção no atuador, assegurar que
■ não possa ocorrer um erro na instalação ou colocação de perigo de pessoas através de medi-das não intencionais (eventual acionamento das guarnições);
■ que o atuador ou o componente da instalação esteja liberado conforme o regulamento. Além de atentar ao circuito principal, atentar também para circuitos adicionais ou auxiliares existentes!
Além disso, devem ser observadas ainda as regras gerais de segurança: Desativar todos os polos inclusive os de 24 V DC),
■ Proteger contra religamento, ■ Detectar ausência de tensão, ■ Aterrar o circuito, ■ Isolar ou cobrir peças vizinhas ativas.
8.1 GeralOs atuadores não necessitam de muita manutenção (prazos para lubrifi cação ver capítulo 8.2).
Recomenda-se submeter o atuador à uma inspeção geral após a colocação em funcionamento e após aprox. 50 horas operacionais a fi m de verifi car se
■ seu funcionamento continua perfeito, ■ não surgem ruídos/vibrações incomuns, ■ os elementos de fi xação não se soltaram, ■ não surgiram vazamentos.
A carcaça dos atuadores SIPOS 5 é composta de uma liga de alumínio, que em condições normais é resistente à corrosão. Caso tenham ocorrido danos na pintura através da montagem, estes po-derão ser corrigidos com a tinta original, disponível em embalagens pequenas na SIPOS Aktorik.
Esta listagem pode não ser completa. Outras verifi cações eventualmente podem ser necessárias conforme as condições específi cas da instalação especiais. Desvios ou alterações detectadas durante a inspeção devem ser imediatamente eliminadas.
A assistência ou revisão dos aparelhos é recomendada a cada 8 anos em condições normais de uso. Nessa ocasião deve ser trocado o lubrifi cante na carcaça da engrenagem, as vedações devem ser substituídas e as peças expostas ao fl uxo de forças devem ser verifi cadas com relação ao desgaste. dependendo das condições operacionais pode ser necessário manter intervalos de manutenção mais curtos.
Isso diz respeito especialmente a atuadores em execuções de alta temperatura – complemento do pedido T09. O serviço SIPOS deve verifi car a cada dois anos se eles estão funcionando adequa-damente e as peças desgastadas devem ser trocadas!
É recomendável fazer uso dos serviços de assistência do centro de assistência SIPOS Aktorik responsável.
Em caso de dúvidas dirija-se à SIPOS Aktorik GmbH. Endereço e telefone do contato responsável encontram-se em www.sipos.de. Também poderá encaminhar as suas questões diretamente por e-mail a [email protected].

Y070.020/BR Página 65
Instruções de usoSIPOS 5 PROFITRON, HiMod
8
Man
uten
ção,
insp
eção
, ass
istê
ncia
8 Manutenção, inspeção, assistência
8.1.1 Prazos para lubrifi cação e lubrifi cantes Prazos para lubrifi caçãoApós aprox. 8 anos efetuar assistência ou revisão (ver capítulo 8.1).
Após cada 50 horas operacionais ou 1 ano, caso existente, lubrifi car o bloco de acoplamento formato A no niples de lubrifi cação.
Nos eixos fi nais formato A deve-se atentar para realizar a lubrifi cação do fuso da guarnição em separado!
Todos os prazos valem para uso normal. Em caso de uso mais intensivo, os prazos para lubrifi -cação diminuem correspondentemente.
O serviço SIPOS deve verifi car a cada dois anos se os atuadores em execuções de alta tempera-tura – complemento do pedido T09 – estão funcionando adequadamente e as peças desgastadas devem ser trocadas!
Após cada remoção das tampas e coberturas, verifi car as vedações com relação a danos. Even-tualmente substituir e lubrifi car.
8.1.2 Aplicação e quantidade de lubrifi cante:
Tipo de atuador2SA5.1/2 2SA5.3/4 2SA5.5/6/7/82SB551/2 2SB553/4 2SB555/62SC501/2/3/4,2SC551/2
2SC505/6, 2SC553/4
-
Óleo de transmissão Volume de lubrifi cante
760 cm3 1600 cm3 2400 cm3
Nível1 max. 46 mm max. 58 mm 23 – 27 mm
Lubrifi cante2 Klübersynth GH 6 – 220 N (da Klüber)3) ou Alphasyn PG 220 Polyglycol (da Castrol), Berusynth EP 220 (da Bechem), Panolin EP gear synth 220 (da Kleenoil).
Mobil SHC Gear 2203,4 (ver identifi cação no aparelho)
Locais de aterramento (internos)
Volume de lubrifi cante
1 cm3
Lubrifi cante2 Vaselina (DAB 10) V10Demais locais de lubrifi cação 5
Volume de lubrifi cante
50 cm3
Lubrifi cante2 Graxa AR1 (ZEPF)Eixo fi nal formato A 6
(2SA5)Volume de lubrifi cante
2 cm3
Lubrifi cante2 graxa para rolamento comum no mercadoEtapa linear para 2SG5... pouca manutenção
(as recomendações válidas para os atuadores também devem ser consideradas aqui.)
Unidade giratória para 2SC5...Atuador giratório para 2SG5...
■ Ao manusear os lubrifi cantes e sua eliminação devem ser observadas as indicações do fabri-cante e regulamentos relevantes. Informações técnicas acerca de lubrifi cantes sob solicitação.
■ Antes de utilizar um lubrifi cante alternativo (em comparação ao de fábrica), lavar e limpar as engrenagens e peças da engrenagem (evitar misturar os lubrifi cantes!).
___________________________1 medido da superfície do lubrifi cante até a lateral externa da carcaça na entrada do lubrifi cante.2 Faixa de temperatura ambiente -20 – +60°C.3 Lubrifi cante no enchimento na fábrica.4 Enchimento dos atuadores - até aprox. outubro de 2004 com Klüber Syntheso D 220 EP; - até aprox. outubro de 2011 com Mobilgear SHC XPM 220. 5 p.ex. aneis de vedação, uniões dos dentes, mancais, uniões por mola de ajuste, superfícies lisas, etc.6 caso existente.
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 66 Y070.020/BR
9 Peças de reposição
9
Peças de reposição
9 Peças de reposição
9.1 Geral
Com exceção das peças normatizadas e comuns no mercado, apenas devem ser usadas peças originais. No caso de peças de reposição, via de regra são fornecidos módulos completos (veja lista abaixo). Na representação a seguir as denominações estão listadas com 3 dígitos. A denomi-nação completa das peças de reposição é dada com o sufi xo „2SY5“.
Ao solicitar peças de reposição indique sempre os seguintes dados:
1. Número de pedido e número de série do atuador (veja placa de características),
2. Denominação da peça de reposição 2SY5 . . . (ver lista a seguir),
3. quantidade desejada.
■ Todas os componentes externos da carcaça são compostos de liga de alumínio resistente à corrosão, e por padrão são pintadas no tom RAL 7030 e preenchem os requisitos até categoria de corrosividade C5.
■ Outro tom de acabament ► Adicional de pedido Y35 ■ Proteção muito alta contra corrosão Categoria de corrosividade C5 com longa duração de proteção ► Adicional de pedido L38
9.2 Lista de peças de reposição
Nossos atuadores foram desenvolvidos de modo que funcionem sem reclamação dentro dos ciclos de manutenção. A experiência mostrou, no entanto, que infl uências externas, já durante a colocação em funcionamento, p.ex., podem causar danos no atuador. Para tais eventualidades encontram-se listadas peças de substituição recomendadas na tabela a seguir. Se forem neces-sitadas peças diferentes, dirigir-se à assistência.
N° Denominação2SY5001 Unidade eletrônica (012 – 042)2SY5041 Tampa para carcaça do sistema eletrônico 2SY5055 Conector de bornes (X1, X2.1, X2.2, X3.1, X3.2) 2SY5216 Utilização do eixo de saída, apenas para eixos com formato „A“: 2SY5218 Kit de vedações (sem ilustração)2SY5220 Transdutor de posicionamento completo (221, 222) 2SY5225 Tampa do transdutor de posicionamento2SY5250 Comando manual2SY5252 Manípulo abaulado / Manivela com manípulo abaulado
= Os últimos 3 algarismos se referem ao nº das peças nas vistas explodidas.

Y070.020/BR Página 67
Instruções de usoSIPOS 5 PROFITRON, HiMod
9
Peça
s de
repo
siçã
o
9 Peças de reposição
9.3 Vistas explodidas
9.3.1 Engrenagem 2SA5 1/2/3/4.-
Eixo de transmissão B1
Utilização do eixo de saída
Flange de redução
Eixo de transmissão A

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 68 Y070.020/BR
9 Peças de reposição
9
Peças de reposição
9.3.2 Engrenagem 2SA5. 5/6/7/8.-
Utilização do eixo de saída
Flange de redução
transmissão A
Eixo de transmissão B1
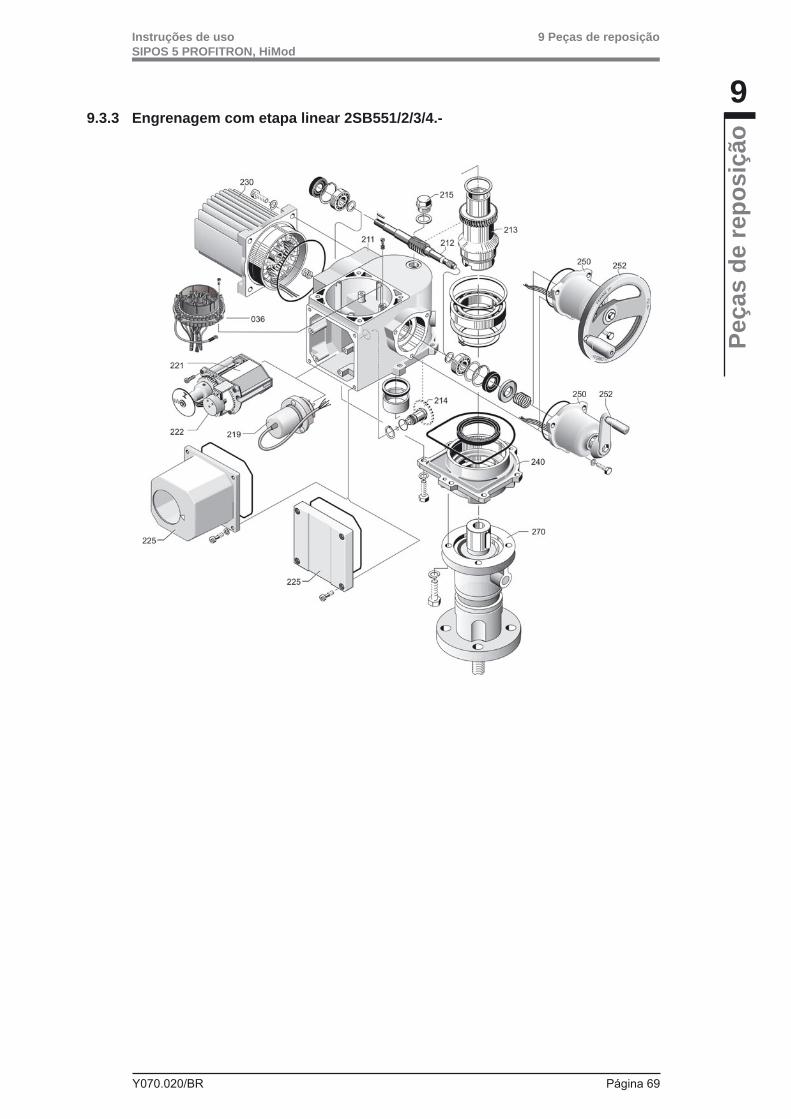
Y070.020/BR Página 69
Instruções de usoSIPOS 5 PROFITRON, HiMod
9
Peça
s de
repo
siçã
o
9 Peças de reposição
9.3.3 Engrenagem com etapa linear 2SB551/2/3/4.-
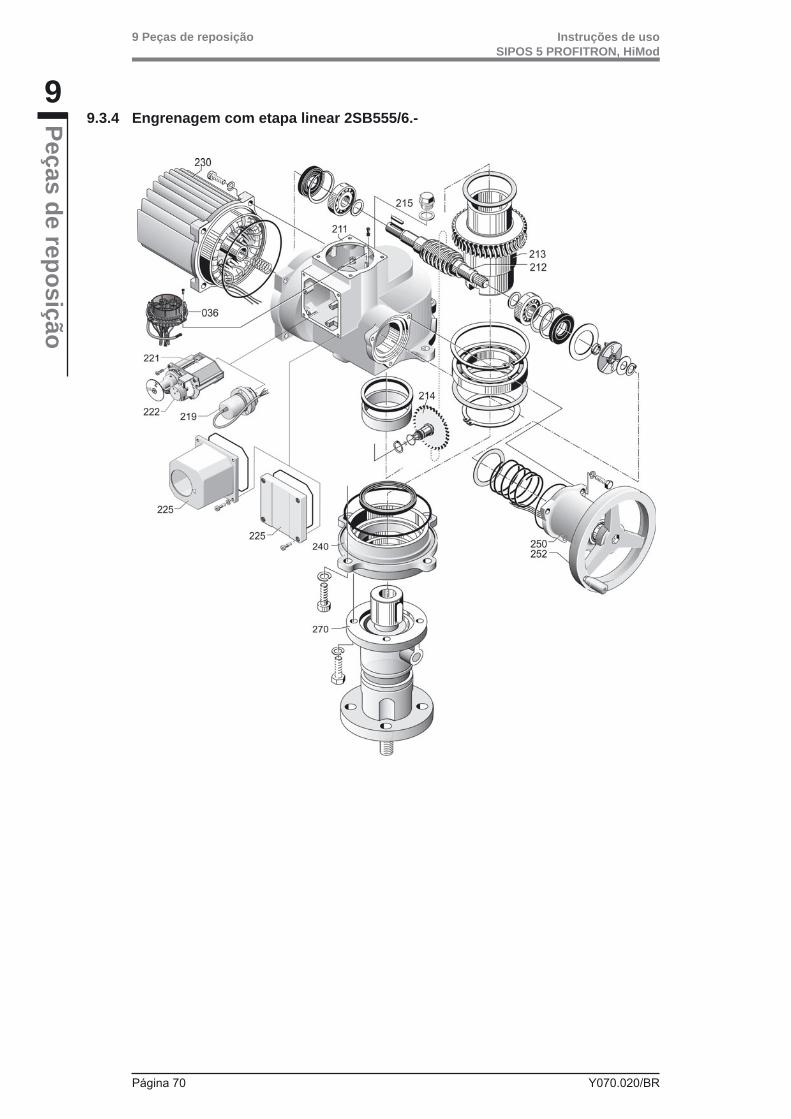
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 70 Y070.020/BR
9 Peças de reposição
9
Peças de reposição
9.3.4 Engrenagem com etapa linear 2SB555/6.-
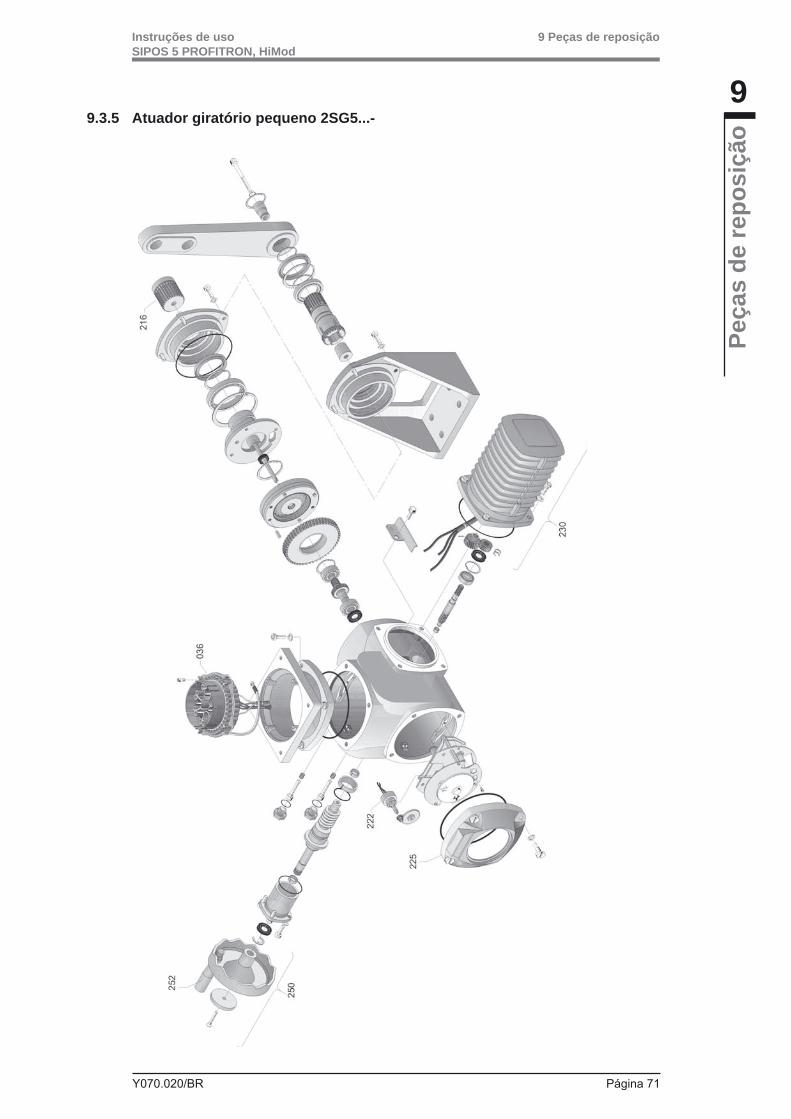
Y070.020/BR Página 71
Instruções de usoSIPOS 5 PROFITRON, HiMod
9
Peça
s de
repo
siçã
o
9 Peças de reposição
9.3.5 Atuador giratório pequeno 2SG5...-

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 72 Y070.020/BR
9 Peças de reposição
9
Peças de reposição
9.3.6 Engrenagem com unidade giratória 2SC5...-
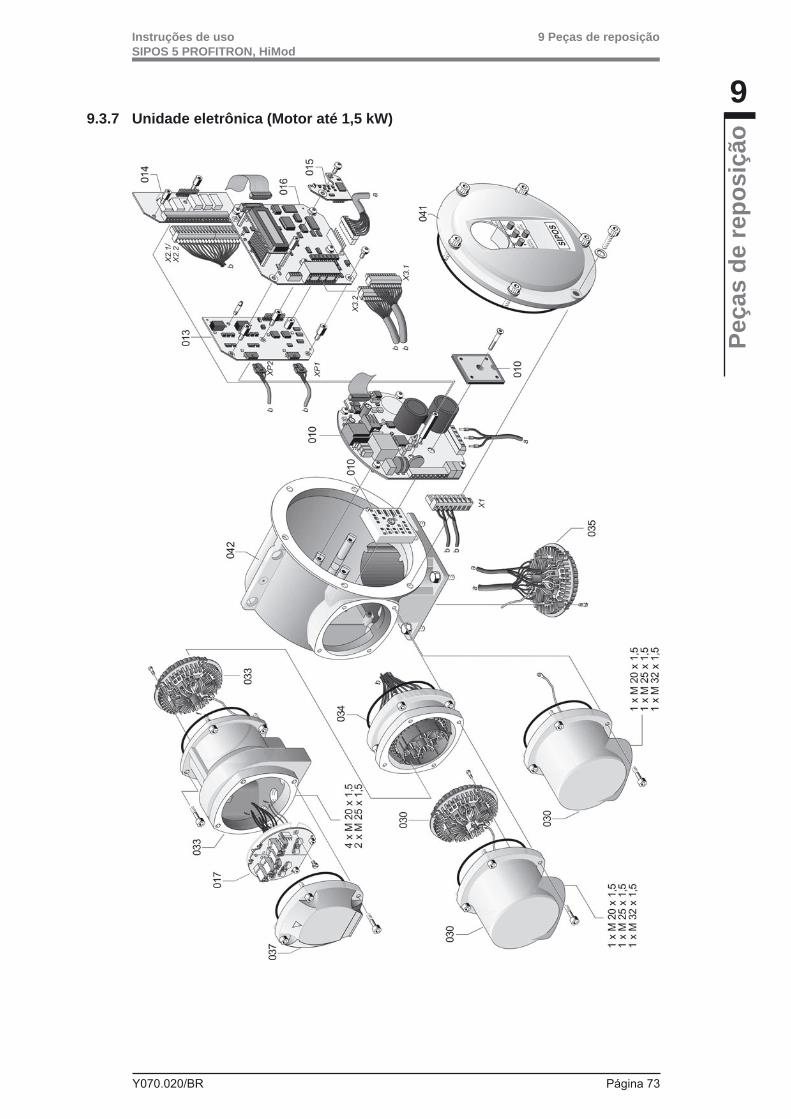
Y070.020/BR Página 73
Instruções de usoSIPOS 5 PROFITRON, HiMod
9
Peça
s de
repo
siçã
o
9 Peças de reposição
9.3.7 Unidade eletrônica (Motor até 1,5 kW)

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 74 Y070.020/BR
9 Peças de reposição
9
Peças de reposição
9.3.8 Unidade eletrônica (Motor a partir de 3 kW)
Y070.020/BR Página 75
Instruções de usoSIPOS 5 PROFITRON, HiMod
10
Índi
ce
10 Índice
AAdvertência do motor. . . . . . . . . . . . . . . . . . 30Ajustar. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Funções. . . . . . . . . . . . . . . . . . . . . . . . . . 44Número de rotações. . . . . . . . . . . . . . . . . 26tempos de atuação. . . . . . . . . . . . . . . . . . 26Tipo e torques de desligamento. . . . . . . . 27Velocidade de marcha. . . . . . . . . . . . . . . 26
Ajustar posições fi nais. . . . . . . . . . . . . . . . . 33Primeiro ajuste. . . . . . . . . . . . . . . . . . 33, 39Reajuste. . . . . . . . . . . . . . . . . . . . . . . 36, 42Requisito. . . . . . . . . . . . . . . . . . . . . . . . . 33
AjusteIdioma. . . . . . .Veja Confi guração do idiomaTransdutor de posicionamento. . . . . . . . . 22
Ajuste de rotação em função do curso. . . . 53 . . . . . . . . . . . . . . . . . . . . . . . . . . . Veja OpçõesAjuste padrão. . . . . . . . . . . . . . . . . . . . . . . 44Ajustes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44Alterar ajustes. . . . . . . . . . . . . . . . . . . . . . . 44Aquecimento. . . . .Veja aquecimento do motorAquecimento do motor. . . . . . . . . . . . . . . . . 30Armazenamento. . . . . . . . . . . . . . . . . . . . . . 4Assistência. . . . . . . . . . . . . . . . . . . . . . . . . 64Autorização de acesso. . . . . . . . . . . . . 18, 24Avançar no menu. . . . . . . . . . . . . . . . . . . . 19Avisos
Condição. . . . . . . . . . . . . . . . . . . . . . . . . 19Diagnóstico. . . . . . . . . . . . . . . . . . . . . . . 61Diodos de Luz. . . . . . . . . . . . . . . . . . . . . 16Erros. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Avisos de erro. . . . . . . . . . . . . . . . . . . . 55, 58
BBus de campo. . . . . . . . . . . . . . . . . . . . . . . 20
CCabos de sinal. . . . . . . . . . . . . . . . . . . . . . . 10Código. . . . . . . . . Veja Autorização de acessoColocação em funcionamento. . . . . . . . . . . 22
Autorização de acesso. . . . . . . . . . . . . . . 22Fundamentos. . . . . . . . . . . . . . . . . . . . . . 22Requisitos. . . . . . . . . . . . . . . . . . . . . . . . 22Sequência. . . . . . . . . . . . . . . . . . . . . . . . 22
Colocação em functionamento. . . . . . . . . . 24Autorização de acesso. . . . . . . . . . . . . . . 24
COM-SIPOS. . . . . . . . . . . . . . . . . . . . . . . . 21
Comutação REMOTA. . . . . . . . . . . . . . . . . 48Condição do aparelho. . . . . . . . . . . . . . . . . 55Condutor de potencial, do lado externo. . . . 13Conexão
Bus de campo. . . . . . . . . . . . . . . . . . . . . 12Condutor de potencial externo. . . . . . . . . 13Conector redondo. . . . . . . . . . . . . . . . . . 12Conexão direta. . . . . . . . . . . . . . . . . . . . . 11Separação galvânica. . . . . . . . . . . . . . . . 13
Conexão direta. . . . . . . . . . . . . . . . . . . . . . 11Conexão elétrica. . . . . . . . . . . . . . . . . . . . . 10
Conexão com conector redondo. . . . 12, 13Conexão de bus de campo. . . . . . . . . . . 12Conexão direta. . . . . . . . . . . . . . . . . . . . . 11
Conexão mecânica. . . . . . . . . . . . . . . . . . . . 9Confi guração do idioma. . . . . . . . . . . . . . . . 23Contato intermediário de curso. . . . . . . . . . 50Controlador de processo. . . . . . . Veja OpçõesControle local. . . . . . . . . . . . . . . . . . . . . . . . 16
Função das teclas. . . . . . . . . . . . . . . . . . 16Controle remoto. . . . . . . . . . . . . . . . . . . 20, 47
COM-SIPOS. . . . . . . . . . . . . . . . . . . . . . . 21Controle REMOTO. . . . . . . . . . . . . . . . . . . 48Curso de atuação da guarnição. . . . . . . . . 32Curvas de torque
Visualizar. . . . . . . . . . . . . . . . . . . . . . . . . 63
DDesenhos das peças de reposição. . . . . . . 67Desligamento dependente do percurso. 34, 40Desligamento dependente do torque de aperto. . . . . . . . . . . . . . . . . . . . . 34, 40, 41Diagnóstico. . . . . . . . . . . . . . . . . . . . . . 18, 61Diodos de luz (LED). . . . . . . . . . . . . . . . . . 16Direção de fechamento. . . . . . . . . . . . . 22, 25Display. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
EEixo fi nal. . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Indicações gerais de montagem. . . . . . . . 9Modelo formato A. . . . . . . . . . . . . . . . . . . . 9
Eliminação. . . . . . . . . . . . . . . . . . . . . . . . . . . 4Embalagem. . . . . . . . . . . . . . . . . . . . . . . . . . 4EMERGÊNCIA. . . . . . . . . . . . . . . . . . . . . . 26Em função do curso e tempos de atuação livremente ajustáveis. . . Veja OpçõesEngrenagem principal. . . . . . . . . . . . . . 31, 33
Índice
Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 76 Y070.020/BR
10 Índice
10
Índice Entrada do valor teórico. . . . . . . . . 47, 48, 49Entradas analógicas. . . . . . . . . . . . . . . . . . . 8
Entrada analógica 1. . . . . . . . . . . . . . . . . 47Esquema funcional. . . . . . . . . . . . . . . . . . . . 8Exibição
Ajuste da guarnição. . . . . . . . . . . . . . . . . 38
FFechamento hermético. . . . . . . . . . . . . . . . 49Flange de saída. . . . . . . . . . . . . . . . . . . . . . . 9Função proporcional/Split Range. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Veja OpçõesFunções do atuador. . . . . . . . . . . . . . . . . . . 44
GGeral
Indicador de posição não intrusivo. . . . . . . 6Graus. . . . . Ver Transdutor de posicionamento
IIdioma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18Indicações de segurança
Manutenção. . . . . . . . . . . . . . . . . . . . . . . 64Indicador de posição. . . . . . . . . . . . . . . . . . 38Indicador de posição mecânico. . . . . . . 35, 38Indicadores de estado. . . . . . . . . . . . . . . . . 19Informações de segurança. . . . . . . . . . . . . . 3Instrução de uso MODBUS. . . . . . . . . . . . . . 5Instrução de uso PROFIBUS. . . . . . . . . . . . . 5Instruções complementares. . . . . . . . . . . . . 5
KKit de montagem para montagem em separado. . . . . . . . . . . . . . . . . . . . . . . . 14
LLer dados CEF. . . . . . . . . . . . . . . . . . . . . . . 18Limites de manutenção. . . . . . . . . . . . . . . . 61Lista de peças de reposição. . . . . . . . . . . . 66Local. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Lubrifi cantes. . . . . . . . . . . . . . . . . . . . . . . . 65
MManete. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Manivela. . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Comando. . . . . . . . . . . . . . . . . . . . . . . . . 15Perigo de esmagamento. . . . . . . . . . . . . . . . . . . . . . . . . . . .Veja Indicações de segurança
Manutenção. . . . . . . . . . . . . . . . . . . . . . . . . 64Menu principal. . . . . . . . . . . . . . . . . . . . . . . 18
Navegar. . . . . . . . . . . . . . . . . . . . . . . . . . 18MODBUS. . . . . . . . . . . . . . . . . . . . . . . . . . . 20Módulo de potência. . . . . . . . . . . . . . . . . . . . 7Módulos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Engrenagem. . . . . . . . . . . . . . . . . . . . . . . . 7Sistema eletrônico. . . . . . . . . . . . . . . . . . . 7
Montagem separada. . . . . . . . . . . . . . . . . . 14Comprimentos dos cabos. . . . . . . . . . . . 14Conexões. . . . . . . . . . . . . . . . . . . . . . . . . 14Especifi cação. . . . . . . . . . . . . . . . . . . . . . 14
NNavegar no menu. . . . . . . . . . . . . . . . . . . . 19Número de identifi cação da instalação. . . . 52Número de rotações de EMERGÊNCIA. . . 44Número de série. . . . . . . . . . . . . . . . . . . . . 54
OObservar. . . . . . . . . . . . . . . . . . . . . . . . 18, 55Opções. . . . . . . . . . . . . . . . . . . . . . . . . . 5, 52
Controlador de processo. . . . . . . . . . . . . 54Opções de software. . . . . . . . . . . . . . . . . . . . 5
PParâmetro
Observar. . . . . . . . . . . . . . . . . . . . . . . . . . 55Parâmetro de rotação analógico externo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 . . . . . . . . . . . . . . . . . . . . . . . . . . . Veja OpçõesPar.loc.. . . . . . . . . . . . . . . . . . . . . . . . . . 16, 17Passa cabos. . . . . . . . . . . . . . . . . . . . . . . . 10Peças de reposição. . . . . . . . . . . . . . . . . . . 66Peças de reposição recomendadas. . . . . . 66Placa de circuitos bus de campo. . . . . . . . . . 7Placa de relé. . . . . . . . . . . . . . . . . . . . . . . . . 7Placa de terminação bus. . . . . . . . . . . . . . . 12Posição. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8Posição de montagem. . . . . . . . . . . . . . . . . . 9Posicionador com função proporcional/split-range. . . . . . . . Veja OpçõesPrazos para lubrifi cação. . . . . . . . . . . . . . . 65Princípio de funcionamento. . . . . . . . . . . . . . 6PROFIBUS. . . . . . . . . . . . . . . . . . . . . . . . . 20Proteção do motor. . . . . . . . . . . . . . . . . . . . 30

Y070.020/BR Página 77
Instruções de usoSIPOS 5 PROFITRON, HiMod
10
Índi
ce
10 Índice
RRegiões de posições fi nais. . . . . . . . . . . . . 46Relação de transmissão. . . . . . . . . . . . . . . 32Remoto. . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Resposta a técnica de instrumentação e controle. . . . . . . . . . . . . . . . . . . . . . . . . . . 50Rotações/curso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ver Transdutor de posicionamentoRuptura de cabo. . . . . . . . . . . . . . . . . . . . . 50
SSaída de valor real. . . . . . . . . . . . . . . . . . . 50Senha de acesso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Veja Autorização de acessoSensor de posição não instrusivo
Ajustar posições fi nais. . . . . . . . . . . . . . . 39Símbolos. . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Advertência. . . . . . . . . . . . . . . . . . . . . . . . 4Etapas de trabalho pelo fabricante de guarnições. . . . . . . . . . . . . . . . . . . . . . . 4Indicação. . . . . . . . . . . . . . . . . . . . . . . . . . 4
Símbolos no display. . . . . . . . . . . . Veja DisplaySuperar bloqueio. . . . . . . . . . . . . . . . . . . . . 30
TTecla
ABRIR. . . . . . . . . . . . . . . . . . . . . . . . . . . 16FECHAR. . . . . . . . . . . . . . . . . . . . . . . . . 16Local/Remote. . . . . . . . . . . . . . . . . . . . . . 16PARAR/ENTER. . . . . . . . . . . . . . . . . . . . 16
Teclas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16Comando do menu. . . . . . . . . . . . . . . . . . 17LOCAL. . . . . . . . . . . . . . . . . . . . . . . . . . . 16Par.loc.. . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Técnica de instrumentação e controleFunções para a. . . . . . . . . . . . . . . . . . . . 46
Tempo de aceleração. . . . . . . . . . . . . . . . . 30Tempos de atuação em função do curso livremente ajustáveis. . . . . . . . . . . . . 53 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Veja OpçõesTextos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Versão do idioma. . . . . . . . . . . . . . . . . . . 23 . . . . . . . . . . . . . . . . . . . . . . . . . .Veja Display
Tipo de desligamento. . . . . . . . . . . . . . . . . 25Transdutor de posição
Geral. . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Transdutor de posicionamento. . . . . . . . . . . 6Ajustar transmissão. . . . . . . . . . . . . . . . . 32Curso de atuação da guarnição. . . . . . . . 32Requisito para o ajuste. . . . . . . . . . . . . . 32Transmissão. . . . . . . . . . . . . . . . . . . . . . . 32
Transporte. . . . . . . . . . . . . . . . . . . . . . . . . . . 4Tubo protetor de fuso. . . . . . . . . . . . . . . . . 10
VVersão de país, idioma. . . . . . . . . . . . . . . . 23

Instruções de uso SIPOS 5 PROFITRON, HiMod
Página 78 Y070.020/BR

Y070.020/BR Página 79
Explicação de montagem original para quase máquinas (Diretriz CE 2006/42/CE) e declaração de conformidade CE conforme
Diretriz da Baixa Tensão e CEMNa qualidade de fabricante, a SIPOS Aktorik GmbH declara através desta que os atuadores elétricos listados a seguir cumprem os requisitos fundamentais da Diretriz das Máquinas CE 2006/42/CE: Anexo I, itens 1.1.2, 1.1.3, 1.1.5, 1.2.1, 1.2.6, 1.3.1, 1.3.7, 1.5.1, 1.6.3, 1.7.1, 1.7.3, 1.7.4.
Fabricante: SIPOS Aktorik GmbH, Im Erlet 2, 90518 Altdorf, AlemanhaDenominação do produto: Atuador elétricoResponsável peladocumentação: Dr. Matthias Rebhan, Im Erlet 2, 90518 Altdorf, AlemanhaModelo: 2SA5..., 2SB5..., 2SC5..., 2SG5…
As normas unifi cadas, no sentido da Diretriz de Máquinas, a seguir, foram aplicadas: EN 12100-1: 2003 EN 12100-2: 2003 EN 60204-1: 2006Além dessas, outras normas relevantes para a segurança consideradas: ISO 5210: 1996 ISO 5211: 2001 DIN 3358: 1982
A SIPOS se compromete a encaminhar eletronicamente a documentação relativa à máquina incompleta à autoridade nacional responsável, quando solicitada. A documentação técnica especial pertencente à máquina conforme anexo VII parte B foi criada.
Os atuadores SIPOS destinam-se à montagem com guarnições. A colocação em funcionamento estará proibida até que se tenha assegurado que a máquina toda, na qual foram montados os atuadores SIPOS, corresponde às determinações da Diretriz CE 2006/42/CE.
Os atuadores como máquinas incompletas correspondem ainda aos requisitos das normas unifi cadas mencionadas a seguir:
• Diretriz da Compatibilidade Eletromagnética (EMV) (2004/108/CE): EN 61800-3: 2005
• Diretriz da Baixa Tensão (2006/95/CE):EN 60204-1: 2006 EN 60034-1: 2004 EN 50178: 1997EN 61010-1: 2001
Ano da aplicação da identifi cação CE: 2010
Altdorf, 29.12.2009
Dr. Matthias Rebhan Diretor-Presidente
Esta explicação não engloba quaisquer garantias. As indicações de segurança da documentação do produto fornecida devem ser observadas. No caso de uma alteração não acordada dos aparelhos, esta declaração perde a sua validade.

Edição 08.14 Y070.020/BRSujeito a alterações sem aviso prévio!
© SIPOS Aktorik GmbHIm Erlet 2 • D-90518 Altdorf
www.sipos.de


















