ATUALIZAÇÃO DO MODELO DE CARGAS MÓVEIS PARA PONTES …
304
ATUALIZAÇÃO DO MODELO DE CARGAS MÓVEIS PARA PONTES RODOVIÁRIAS DE PEQUENOS VÃOS NO BRASIL Carlos Eduardo Rossigali Tese de Doutorado apresentada ao Programa de Pós-graduação em Engenharia Civil, COPPE, da Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Doutor em Engenharia Civil. Orientadores: Michèle Schubert Pfeil Luis Volnei Sudati Sagrilo Rio de Janeiro Abril de 2013
Transcript of ATUALIZAÇÃO DO MODELO DE CARGAS MÓVEIS PARA PONTES …
ATUALIZAÇÃO DO MODELO DE CARGAS MÓVEIS PARA PONTES
RODOVIÁRIAS DE PEQUENOS VÃOS NO BRASIL
Carlos Eduardo Rossigali
Tese de Doutorado apresentada ao Programa de
Pós-graduação em Engenharia Civil, COPPE, da
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Doutor em Engenharia Civil.
Orientadores: Michèle Schubert Pfeil
Luis Volnei Sudati Sagrilo
Rio de Janeiro
Abril de 2013
ATUALIZAÇÃO DO MODELO DE CARGAS MÓVEIS PARA PONTES
RODOVIÁRIAS DE PEQUENOS VÃOS NO BRASIL
Carlos Eduardo Rossigali
TESE SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO LUIZ
COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE) DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE DOUTOR EM
CIÊNCIAS EM ENGENHARIA CIVIL.
Examinada por:
________________________________________________
Profa. Michèle Schubert Pfeil, D.Sc.
________________________________________________ Prof. Luis Volnei Sudati Sagrilo, D.Sc.
________________________________________________ Prof. Ronaldo Carvalho Battista, Ph.D.
________________________________________________ Prof. Benjamin Ernani Diaz, Dr.Ing.
________________________________________________ Prof. Luiz Eloy Vaz, Dr.Ing.
________________________________________________ Prof. Túlio Nogueira Bittencourt, Ph.D.
RIO DE JANEIRO, RJ - BRASIL
ABRIL DE 2013

iii
Rossigali, Carlos Eduardo
Atualização do modelo de cargas móveis para pontes
rodoviárias de pequenos vãos no Brasil / Carlos Eduardo
Rossigali. – Rio de Janeiro: UFRJ/COPPE, 2013.
XV, 289 p.: il.; 29,7 cm.
Orientadores: Michèle Schubert Pfeil
Luis Volnei Sudati Sagrilo
Tese (doutorado) – UFRJ/ COPPE/ Programa de
Engenharia Civil, 2013.
Referências Bibliográficas: p. 227-238.
1. Pontes rodoviárias. 2. Simulação de tráfego. 3.
Dinâmica Estrutural. I. Pfeil, Michèle Schubert et al.. II.
Universidade Federal do Rio de Janeiro, COPPE,
Programa de Engenharia Civil. III. Título.
iv
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Doutor em Ciências (D.Sc.)
ATUALIZAÇÃO DO MODELO DE CARGAS MÓVEIS PARA PONTES
RODOVIÁRIAS DE PEQUENOS VÃOS NO BRASIL
Carlos Eduardo Rossigali
Abril/2013
Orientadores: Michèle Schubert Pfeil
Luis Volnei Sudati Sagrilo
Programa: Engenharia Civil
Para aumentar a durabilidade e melhorar o comportamento de pavimentos e
obras de arte rodoviárias, os projetos devem ser elaborados com base em modelos de
cargas que produzam efeitos similares aos dos veículos reais. Assim, há a necessidade
de modernizar a norma brasileira de cargas móveis em pontes rodoviárias, a qual não foi
concebida desta forma. É neste contexto que o presente trabalho se insere.
A partir da análise de cinco fontes de dados rodoviários, elaborou-se uma base
de dados que foi utilizada para simular o tráfego em pontes típicas da malha viária
brasileira, considerando vãos de até 40 m, em situação de fluxo livre, objetivando a
elaboração das distribuições de extremos dos esforços estáticos.
Em pontes de pequenos vãos, a situação crítica em termos de esforços
solicitantes é o fluxo livre dos veículos, com a consequente amplificação dinâmica; para
avaliar esta ação, realizaram-se análises dinâmicas das pontes, considerando a interação
veículo-pavimento-estrutura, mediante a passagem de um caminhão articulado de 5
eixos. Finalmente, por meio de um processo de busca, propuseram-se duas novas
configurações, que reproduzem de forma mais adequada os efeitos devidos ao tráfego
real em pontes de pequenos vãos.

v
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Doctor of Science (D.Sc.)
UPDATE IN LIVE LOAD MODEL FOR SMALL-SPAN HIGHWAY BRIDGES IN
BRAZIL
Carlos Eduardo Rossigali
April/2013
Advisors: Michèle Schubert Pfeil
Luis Volnei Sudati Sagrilo
Department: Civil Engineering
In order to increase durability and improve performance of pavements and
highway bridges, design should be based on live load models which produce effects
similar to those of actual vehicles. Thus, there is a need to update the live loads for
highway bridges in the brazilian design code, which were not defined with this
prerequisite. This work deals with this problem.
From the analyses of five data sources, a comprehensive database was prepared.
It was used to simulate traffic on typical bridges of the brazilian highways network,
considering spans up to 40 m in free flow situation, aiming the distributions of extremes
from static effects.
In small-span bridges the governing situation in terms of effects is the free flow,
with dynamic amplification. To evaluate this event, dynamic analyses for these bridges
were performed, considering the vehicle-pavement-structure interaction. For this
purpose, the motion of a 5-axle articulated truck was determined. Finally, by means of a
seek process, two new configurations were proposed, which reproduce more adequately
the effects due to actual traffic on small-span bridges.

vi
Dedicatória
Este trabalho é dedicado a Nestor Oscar Guevara Junior, falecido em 15/04/2013.
Dele fica o exemplo a ser lembrado e seguido de um homem que foi um brilhante
profissional e um excelente amigo, pai, marido e filho.
vii
Agradecimentos
A Deus, o criador de todos nós e de todas as coisas, por ter me dado forças para
cumprir mais esta etapa.
Aos meus orientadores, Michèle Schubert Pfeil e Luís Volnei Sudati Sagrilo,
pela orientação, pela amizade, pela paciência, pelos conselhos e pela atenção dispensada
durante todo o período do doutorado.
Aos meus pais, cujo caráter, perseverança e humildade ainda me trazem
constantes lições de vida e são minha base e inspiração.
Aos meus irmãos e minha sobrinha, por todo o carinho, a atenção, o
companheirismo e o auxílio.
À minha namorada Helena, por todo o seu amor e a sua dedicação, sobretudo
nas horas mais difíceis. Faltam palavras para descrever o tamanho da bondade que há
dentro do seu coração.
Ao Cel. Paulo Roberto Dias Morales, chefe da Assessoria A7 do DEC/EB, por
gentilmente fornecer as planilhas contendo as informações coletadas em cada um dos
postos pelo CENTRAN.
Aos funcionários da CCR AutoBAn, especialmente James, Adhemar, Adriana e
Graci, pela concessão dos dados rodoviários e, ainda, pelo excelente tratamento
recebido nas visitas ao PGF 58, em Jundiaí.
Aos funcionários da Ecovia Caminhos do Mar, especialmente Lizandra e
Palermo, pela atenção recebida e pelo fornecimento de vasta quantidade de dados
rodoviários da BR 277.
Ao Eng. Nilton Velihovetchi, da CCR Ponte, por disponibilizar novamente o
canal de contato com a CCR AutoBAn ao final de 2010.
Aos Professores Ronaldo Carvalho Battista e Eliane Maria Lopes Carvalho, pela
grande amizade e por todos os ensinamentos transmitidos.
Aos Professores Eduardo Batista, Santiago, Fernandão e Romildo, pela ótima
convivência.
Aos velhos amigos que reencontrei: Adcleides, Alexandre Landesmann, Ana
Maria, Carlos Cortês, Ederli, Emerson, Flávio Silva, Guilherme Cordeiro, Guilherme
Quinderé, Janine, João, Luiz Fernando, Reila, Silvoso, Vivian, Walber e Wendell.
viii
Aos novos amigos que fiz: Adriana, Alex, Ana Paula, Anderson, Andréa,
Andrielli, Camila, Carolina, Edgar, Edson, Eldo, Eliane, Emilien, Gerrit, Gregório,
Héctor, Javier, Juarez, Júlio, Kátia, Marco, Margareth, Maria Rita, Mariana, Mazza,
Nelson, Paula, Paulo Rocha, Otávio, Rodolfo Lima, Samanta, Santiago, Sérgio
Montoya, Shirley, Thiago, Tina, William, Wilson e Yemcy.
Injustiça seria cometida se neste momento fossem esquecidos os queridos
amigos que me deram a satisfação de me acompanhar mais de perto nesta jornada:
Carlos Seruti, Dimas, Eduardo Peldoza, Fabrício, Iolanda, Luciane, Marcela, Natasha,
Rodolfo Santos, Saulo e Tati. Obrigado por tudo, vocês foram demais.
Aos técnicos e funcionários do LabEst: Adailton, Alessandro, Cássia, Clodoaldo,
Eduardo, todos os Flávios, Jô, Júlio, Luzidelle, Márcio, Paulinho, Renan, Rocha,
Rodrigo, Rogério, Rosângela e Sandra.
Aos funcionários do LabPEC, Amanda e Célio, e em especial ao Orlando, pela
amizade e pelo auxílio prestado em diversas oportunidades. Este agradecimento se
estende aos funcionários da Secretaria Acadêmica do PEC e à Cristina, secretária do
Laceo.
Ao AC/DC e aos Ramones, por terem proporcionado as melhores trilhas sonoras
do doutorado.
Ao CNPq, pelo auxílio financeiro.
ix
Índice
1 Introdução
1.1 Motivação e cenário do tema de pesquisa 1
1.2 Objetivos 5
1.3 Revisão bibliográfica 7
1.4 Normas para projeto de pontes rodoviárias 8
1.4.1 Eurocódigo 9
1.4.2 AASHTO LRFD e OHBDC 11
1.4.3 Normas britânicas 15
1.4.4 Normas alemãs 16
1.4.5 A norma brasileira de pontes 18
1.5 Apresentação do trabalho 21
2 Descrição e análise dos dados de tráfego
2.1 Base de dados do DNIT (DN-02) 22
2.2 Base de dados do CENTRAN (CE-05) 28
2.3 Bases de dados da AutoBAn 31
2.3.1 Descrição geral 31
2.3.2 Sistemática operacional do posto de pesagem; balanças utilizadas 31
2.3.3 Base de dados de 2008 (AB-08) 37
2.3.4 Base de dados de 2011 (AB-11) 43
2.4 Base de dados da Ecovia (EC-08) 45
2.5 Análise dos dados 48
2.5.1 Comparação dos registros da balança seletiva com os da balança lenta 48
2.5.2 Cargas dos eixos agrupados 50
2.5.3 Veículos mais frequentes das bases de dados 51
2.5.4 Peso total dos veículos 52
2.6 Base de dados híbrida desenvolvida e utilizada (H-2013) 53
2.6.1 Montagem da matriz de composição do tráfego 53
2.6.2 Velocidades dos veículos 56
2.6.3 Ajuste de distribuições de probabilidades aos pesos totais dos veículos 57
2.6.4 Ajuste de curvas às cargas dos grupos de eixos 59
2.6.5 Estimativa dos pesos máximos e mínimos dos veículos 65
x
2.6.6 Ajuste de distribuições de probabilidades a algumas distâncias entre eixos 75
2.6.7 Valores fixos e limites adotados para as distâncias longitudinais 77
2.6.8 Dimensões transversais 80
2.6.9 Resumo das informações utilizadas em cada base de dados 81
2.6.10 Correlações que não foram consideradas 81
3 Efeitos estáticos da passagem dos veículos sobre as pontes
3.1 Estruturas consideradas 84
3.2 Descrição da ferramenta para simulação de tráfego e análise estrutural
temporal - STPG 88
3.2.1 Algoritmo da simulação de tráfego 88
3.2.2 Correlações não consideradas pelo programa STPG 91
3.2.3 Verificação de compatibilidade entre velocidades e intervalos 91
3.2.4 Modelos estruturais considerados 97
3.2.5 Transformação das cargas das rodas em cargas nodais equivalentes 100
3.2.6 Cálculo dos esforços solicitantes considerados 100
3.2.7 Cálculo do incremento de tempo 103
3.2.8 Valores armazenados para os esforços solicitantes 104
3.2.9 Fluxograma da análise estrutural 105
3.3 Testes para validação da ferramenta computacional STPG 106
3.3.1 Determinação de esforços solicitantes devidos a veículos isolados
de 1 kN de peso 108
3.3.2 Simulação de tráfego para veículos isolados em uma faixa 110
3.3.3 Simulação de um dia para verificação do histograma de peso total
e das distâncias entre eixos 112
3.4 Cenários de tráfego considerados 113
3.4.1 Posição transversal dos veículos na pista 114
3.4.2 Períodos de retorno considerados para as extrapolações dos esforços
solicitantes 119
3.4.3 Volume de tráfego adotado (VMD) 121
3.4.4 Divisão do fluxo total entre as faixas de rolamento; distribuição
do tempo entre veículos 123
3.5 Consideração da base de dados H-2013 pelo programa STPG 126
xi
3.6 Execuções do programa STPG para definir as velocidades
e a sua correlação com o peso total 127
3.7 Extrapolação dos esforços devidos ao tráfego real 130
3.7.1 Sistemática de extrapolação 130
3.7.2 Extrapolação pelo nível de probabilidade 131
3.7.3 Extrapolação pela Estatística de Extremos 132
3.7.4 Consideração dos máximos por uma distribuição de Rice 133
3.7.5 Comparação entre os métodos; definição do método utilizado neste trabalho 134
3.7.6 Definição do tempo de simulação e do modelo para a distribuição inicial 135
3.7.7 Extrapolação simulando a distribuição dos extremos mensais
de cada esforço solicitante 139
3.8 Valores-alvo dos esforços solicitantes estáticos obtidos com o programa STPG 142
3.9 Comparação dos esforços estáticos extrapolados com os da norma brasileira 148
4 Análise dinâmica das estruturas e valores-alvo dos esforços solicitantes devidos
ao tráfego real
4.1 Descrição do programa IVPE-v3 151
4.2 Considerações para a análise dinâmica 152
4.2.1 Considerações para as respostas dinâmicas das estruturas 153
4.2.2 Equações do movimento do veículo 2S3 acoplado a uma estrutura 157
4.2.3 Rugosidade superficial 168
4.2.4 Ressalto e distância de aproximação 171
4.2.5 Validação do modelo para análise dinâmica 172
4.3 Considerações sobre o fator de amplificação dinâmica 173
4.4 Procedimento para incluir a análise dinâmica na determinação
dos valores-alvo dos esforços solicitantes 175
4.5 Veículo considerado para as análises dinâmicas 179
4.6 Valores obtidos para as amplificações dinâmicas 181
4.7 Valores-alvo dos esforços solicitantes nas estruturas devidos ao tráfego real 183
4.8 Comparações dos valores-alvo obtidos com outros valores de referência 184
5 Obtenção de modelos de cargas móveis representativos do tráfego real
5.1 Descrição da ferramenta para busca de modelos de cargas móveis – BMCMov 190
5.1.1 Sistemática de busca 191
xii
5.1.2 Cálculo de esforços devidos às cargas concentradas e distribuídas 195
5.1.3 Fluxograma da busca do modelo de cargas 198
5.2 Testes para validação do programa BMCMov 199
5.2.1 Reprodução dos esforços gerados pelo modelo de cargas
da NBR 7188 199
5.2.2 Busca com resultado esperado 201
5.3 Busca de modelos de cargas móveis que representem o tráfego real 203
5.3.1 Modelos preliminares considerados em trabalhos anteriores 203
5.3.2 Considerações sobre os modelos de cargas 204
5.3.3 Busca de modelos de cargas por meio de execuções do programa BMCMov 207
5.3.4 Modelos de cargas móveis adotados para representar o tráfego real 211
5.4 Comparação dos valores dos esforços obtidos pelos modelos de cargas
propostos com os valores-alvo obtidos 214
5.5 Comparação dos valores dos esforços obtidos pelos modelos de cargas
propostos com os da NBR 7188 216
6 Conclusões e sugestões para pesquisas futuras
6.1 Comentários gerais e conclusões 219
6.2 Sugestões para pesquisas futuras 224
Referências bibliográficas
Anexo A Lei da Balança e nomenclatura dos veículos
A.1 A Lei da Balança 239
A.2 Nomenclatura 245
Anexo B Equações e métodos numéricos utilizados
B.1 Distribuições de probabilidades consideradas para o ajuste aos dados amostrais 248
B.1.1 Informações sobre as distribuições 248
B.1.2 Estimativa dos parâmetros das distribuições 251
B.1.3 Distribuições cumulativas inversas 253
B.1.4 Notas 254
B.2 Geração de números aleatórios pela técnica Monte Carlo 257
B.2.1 Números aleatórios não correlacionados 257
xiii
B.2.2 Números aleatórios correlacionados 260
B.3 Solução do problema de autovalor generalizado para obtenção
de formas modais e frequências naturais 263
B.4 Integração numérica das equações de movimento 264
Anexo C Equações de movimento dos veículos articulados
C.1 Equações de movimento do bitrem de 9 eixos e 15 graus de liberdade 267
C.1.1 Considerações iniciais; diagramas de corpo livre e de força resultante 267
C.1.2 Equação de compatibilidade de deslocamentos 271
C.1.3 Equações de movimento finais e matrizes consideradas 274
C.2 Determinação da magnitude e da localização do peso de cada massa suspensa 280
C.2.1 Determinação do CM da parte suspensa dos cavalos mecânicos
de 2 e 3 eixos 280
C.2.2 Magnitude e localização dos pesos das partes suspensas das carretas
dos semirreboques compostos por 2 partes 284
C.2.3 Magnitude e localização dos pesos das partes suspensas das carretas
dos semirreboques compostos por 3 partes 285
C.3 Caso particular definido: veículo 2S3 287
Anexo D Fluxogramas de geração de variáveis e análise estrutural no tempo
xiv
Lista de siglas
AASHTO American Association of the State Highway and Transportation Officials
ABNT Associação Brasileira de Normas Técnicas
AB-08 Base de dados da AutoBAn de 2008
AB-11 Base de dados da AutoBAn de 2011
AET Autorização Especial de Trânsito
ANFAVEA Associação Nacional dos Fabricantes de Veículos Automotores
ANFIR Associação Nacional dos Fabricantes de Implementos Rodoviários
ASTM American Society for Testing and Materials
A7 Assessoria de Projetos de Engenharia e Projetos de Alto Nível
BMCMov Buscador de Modelos de Cargas Móveis
CENTRAN Centro de Excelência em Engenharia de Transportes
CMT Capacidade Máxima de Tração
CNT Código Nacional de Trânsito
CONTRAN Conselho Nacional de Trânsito
CTB Código de Trânsito Brasileiro
CVC Combinação de Veículos de Carga
DE Duplo especial
DEC Departamento de Engenharia e Construção do Exército Brasileiro
DENATRAN Departamento Nacional de Trânsito
DIN Deutsche Institut für Normung
DNER Departamento Nacional de Estradas de Rodagem
DNIT Departamento Nacional de Infraestrutura de Transportes
EC-08 Base de dados da Ecovia de 2008
FAD Fator de amplificação dinâmica
IPR Instituto de Pesquisas Rodoviárias
ISO International Organization for Standardization
IVPE Interação veículo-pavimento-estrutura
LRFD Load and Resistance Factor Design
NG Número de grupos de eixos
NP Número de pontos
OHBDC Ontario Highway Bridge Design Code
PBT Peso Bruto Total
xv
PBTC Peso Bruto Total Combinado
PDNEP Plano Diretor Nacional Estratégico de Pesagem
PDP Plano Diretor de Pesagem
PNCT Plano Nacional de Contagem de Tráfego
QFV Quadro de Fabricantes de Veículos
RCNT Regulamento do Código Nacional de Trânsito
SNT Sistema Nacional de Trânsito
SRD Simples de rodas duplas
SRS Simples de rodas simples
STPG Simulador de Tráfego para Pontes em Grelha
TD Tandem duplo
TT Tandem triplo
VMD Volume Médio Diário
WIM Weigh-in-motion
1
1 Introdução
1.1 Motivação e cenário do tema de pesquisa
Assim como o que ocorre em diversos outros países, o desenvolvimento do
tráfego rodoviário no Brasil tem se caracterizado pela multiplicidade de configurações
dos veículos, bem como o acréscimo de peso, velocidade e volume de tráfego.
A cada vez que o volume ou a tipologia do tráfego de veículos é alterado com
maior significância, a questão de maior vulto que se coloca é saber se as pontes e os
pavimentos das rodovias são capazes de suportar o tráfego atual de veículos comerciais,
já que não foram projetados para estas situações. Caso haja a desconfiança ou a
confirmação de que o projeto de novas estruturas, ou a utilização das estruturas
existentes, não apresente margem de segurança suficiente, geralmente são propostas
atualizações nas normas de projeto; no caso das pontes rodoviárias, as normas passam a
contar com trens-tipo mais pesados.
Como a versão em vigor da norma brasileira para projeto de pontes rodoviárias,
a NBR 7188, data de 1984, esta questão é altamente relevante atualmente no Brasil, pois
desde o final da década de 1990, com o avanço da tecnologia de fabricação de veículos
comerciais, o crescente desenvolvimento do setor de transportes e a permissão de
trânsito dos veículos compostos denominados Combinações de Veículos de Carga
(CVC), especialmente a partir de 1998, com a publicação da Resolução no 68 do
CONTRAN, o tráfego comercial brasileiro sofreu alterações abruptas, já que estes
veículos, mais modernos e com maior capacidade de carga, conferem maior ganho de
produtividade e reduzem os custos operacionais aos motoristas e às empresas
transportadoras, em comparação aos veículos monolíticos e aos semirreboques
convencionais.
Com a constatação de que as pontes brasileiras não foram projetadas para o
trânsito dos veículos atuais, apesar de eles estarem sujeitos aos mesmos limites de carga
por eixo dos veículos mais antigos, esta situação pode tornar-se crítica tendo em vista o
fato de que boa parte das pontes foi projetada de acordo com a versão de 1960 da norma
brasileira para cargas móveis em pontes rodoviárias, com o emprego de materiais e
técnicas construtivas bastante defasados, e que ainda permanecem em uso. Portanto, a
verificação da segurança estrutural das obras de arte especiais mediante a passagem do
2
tráfego brasileiro atual é crucial. Alguns trabalhos recentes, citados na revisão
bibliográfica (Seção 1.2), tratam deste tema.
Duas outras importantes questões surgem neste cenário. A primeira é a
necessidade de verificar a segurança dos novos veículos compostos que circulam pelas
rodovias, relativamente a itens como dirigibilidade, frenagem, resistência ao
tombamento, ultrapassagens, impacto nos pavimentos, amplificação dinâmica etc. Este
tema não será abordado neste trabalho.
A segunda decorre do fato de que, como a principal preocupação das normas
para cargas móveis em pontes rodoviárias ao longo dos anos foi evidentemente garantir
a segurança das obras de arte especiais quando do seu projeto, ainda que isto implicasse
em uma solução antieconômica, as cargas móveis de cálculo das normas brasileiras
nunca tiveram o intuito de reproduzir com exatidão as cargas reais dos veículos que
circulam nas nossas rodovias, pois estas cargas são oriundas do tráfego de veículos com
dimensões e pesos fixados nas regulamentações da Lei da Balança e independem de
qualquer relação com as pontes.
A representação fidedigna do tráfego real por um modelo de cargas calibrado
para este fim favorece tanto a segurança das pontes, já que dificilmente haverá casos em
que um modelo de cargas representativo gere esforços muito diferentes daqueles que o
tráfego real produz nas pontes, quanto a posterior calibração de coeficientes de
segurança, já que, desta forma, estes podem ser propostos segundo a sua verdadeira
serventia perante o método semi-probabilístico, que é a de garantir uma margem de
segurança conhecida. Esta tarefa é plenamente facilitada com a adoção dos valores
característicos das ações e das resistências (SANTOS, 1983).
Dessa forma, este trabalho está inserido em uma linha de pesquisa que pretende
contribuir para a modernização das normas de cargas de veículos no Brasil, com a
obtenção de modelos de cargas móveis que representem o tráfego real e a calibração de
novos coeficientes de segurança para as ações e as resistências. As normas de projeto
mais modernas (Eurocódigo 1, 2003 e AASHTO LRFD, 2007) apresentam modelos de
cargas móveis desenvolvidos e calibrados de maneira a bem reproduzir os efeitos do
tráfego rodoviário. Para tal, esta linha de pesquisa compreende as etapas resumidas a
seguir:
1) Seleção de pontes representativas das obras de arte existentes na malha
rodoviária brasileira e das tendências das obras a serem projetadas no futuro,
3
considerando diferentes materiais, comprimentos, sistemas estruturais, números de
faixas de tráfego e classes de rodovia.
2) Aquisição de dados de monitoração do tráfego real e estudo estatístico com
vistas à obtenção de informações gerais por faixa de rolamento, como a composição do
tráfego e a distribuição do espaçamento ou tempo entre veículos, e específicas de cada
classe de veículo, como o número de eixos e as distribuições das distâncias entre eixos,
da velocidade, do peso total e da carga por eixo.
3) Seleção dos esforços solicitantes monitorados em seções transversais críticas
dos elementos estruturais.
4) Simulação de tráfego em situações como fluxo livre, fluxo misto e
engarrafamentos, que reproduzam as condições reais de trânsito nas pontes,
possibilitando a presença simultânea de veículos tanto no mesmo sentido quanto em
sentidos opostos.
5) Cálculo dos esforços dinâmicos do tráfego real nas pontes.
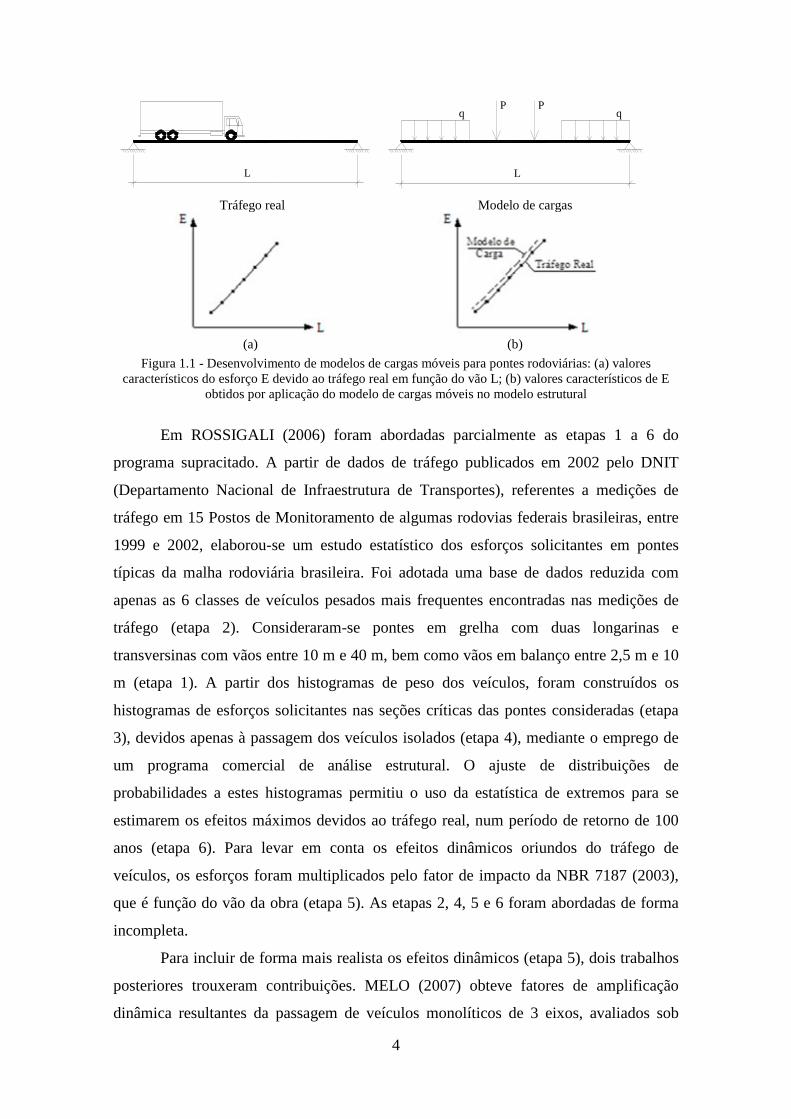
6) Extrapolação dos efeitos do tráfego real dos veículos nas pontes, calculados
para um determinado período de retorno, obtendo-se os gráficos de esforços
característicos em função do vão da obra, como aquele ilustrado na Figura 1.1a. Estes
esforços característicos são os valores-alvo a serem reproduzidos pelos modelos de
cargas quando aplicados no mesmo sistema estrutural.
7) Busca, por processos de otimização, de novos modelos de carga, compostos
de forças concentradas e distribuídas, que possam de fato reproduzir os efeitos do
tráfego real, conforme ilustrado na Figura 1.1b.
8) Calibração de coeficientes de segurança, para ações e resistências, via análise
de confiabilidade estrutural das pontes consideradas, de forma a garantir uma margem
de segurança consistente e uniforme para todas as estruturas.
9) Recalibração ou verificação dos modelos de cargas móveis e dos coeficientes
parciais de segurança em função de novas medições que registrem a evolução no padrão
do tráfego (configurações dos veículos, volume de tráfego etc.).
Os modelos de carga assim desenvolvidos substituiriam o carregamento de
projeto constante atualmente na NBR 7188.
4
Tráfego real Modelo de cargas
(a) (b)
Figura 1.1 - Desenvolvimento de modelos de cargas móveis para pontes rodoviárias: (a) valores característicos do esforço E devido ao tráfego real em função do vão L; (b) valores característicos de E
obtidos por aplicação do modelo de cargas móveis no modelo estrutural
Em ROSSIGALI (2006) foram abordadas parcialmente as etapas 1 a 6 do
programa supracitado. A partir de dados de tráfego publicados em 2002 pelo DNIT
(Departamento Nacional de Infraestrutura de Transportes), referentes a medições de
tráfego em 15 Postos de Monitoramento de algumas rodovias federais brasileiras, entre
1999 e 2002, elaborou-se um estudo estatístico dos esforços solicitantes em pontes
típicas da malha rodoviária brasileira. Foi adotada uma base de dados reduzida com
apenas as 6 classes de veículos pesados mais frequentes encontradas nas medições de
tráfego (etapa 2). Consideraram-se pontes em grelha com duas longarinas e
transversinas com vãos entre 10 m e 40 m, bem como vãos em balanço entre 2,5 m e 10
m (etapa 1). A partir dos histogramas de peso dos veículos, foram construídos os
histogramas de esforços solicitantes nas seções críticas das pontes consideradas (etapa
3), devidos apenas à passagem dos veículos isolados (etapa 4), mediante o emprego de
um programa comercial de análise estrutural. O ajuste de distribuições de
probabilidades a estes histogramas permitiu o uso da estatística de extremos para se
estimarem os efeitos máximos devidos ao tráfego real, num período de retorno de 100
anos (etapa 6). Para levar em conta os efeitos dinâmicos oriundos do tráfego de
veículos, os esforços foram multiplicados pelo fator de impacto da NBR 7187 (2003),
que é função do vão da obra (etapa 5). As etapas 2, 4, 5 e 6 foram abordadas de forma
incompleta.
Para incluir de forma mais realista os efeitos dinâmicos (etapa 5), dois trabalhos
posteriores trouxeram contribuições. MELO (2007) obteve fatores de amplificação
dinâmica resultantes da passagem de veículos monolíticos de 3 eixos, avaliados sob
L L
q qPP
5
diversas condições de pavimento, velocidade, peso e possibilidade de obstáculos na
pista; para tal, foi desenvolvido um modelo analítico-numérico plano que considera a
interação entre o veículo, o pavimento e a estrutura, denominado IVPE, no qual cada
ponte é representada por um modelo unifilar de barras, dispostas ao longo do eixo
central da estrutura (FERREIRA, 1999). Foi utilizado o método da superposição modal
para a obtenção dos deslocamentos. Esta ferramenta foi validada a partir da comparação
dos seus resultados, em termos de deslocamentos, com valores experimentais.
MENDONÇA (2009) deu continuidade a este estudo, obtendo a ferramenta
computacional IVPE-v2, por meio da qual se elaboraram histogramas de esforços
solicitantes dinâmicos.
SANTOS (2007) considerou a interação dinâmica veículo-pavimento-estrutura
para avaliar o desempenho de sistemas de controle de vibrações em pontes rodoviárias,
incluindo aquelas com tabuleiros de propriedades ortotrópicas, dando ênfase a modelos
tridimensionais para representar os caminhões. MOROZ (2009) introduziu um novo
grau de liberdade para rotação em torno do eixo longitudinal (roll ) do modelo
tridimensional do caminhão monolítico de 3 eixos.
1.2 Objetivos
Em relação às etapas listadas na Seção 1.1, este trabalho tem por objetivos
apresentar contribuições às etapas 2, 4, 5, 6 e 7 a seguir especificadas:
- desenvolver uma base de dados atualizada representativa do tráfego de veículos
pesados em rodovias brasileiras;
- desenvolver uma ferramenta computacional para simulação de tráfego acoplada
a um esquema de análise estrutural;
- implementar o modelo mecânico de um veículo articulado (semirreboque) na
ferramenta computacional IVPE;
- desenvolver uma metodologia para a obtenção dos valores-alvo dos esforços
solicitantes nas pontes;
- obter novos modelos de cargas móveis que representam o tráfego real.
Quanto à etapa 2, verificou-se que a base de dados do DNIT (ROSSIGALI,
2006) já se apresentava obsoleta e não contemplava todas as informações necessárias
para simular o tráfego. Para contornar este problema, foram adquiridas novas
informações de 4 outras fontes de dados rodoviários, advindas tanto de postos de
pesagem de veículos em rodovias concessionadas quanto de outra pesquisa abrangente,
6
de caráter nacional, oriunda de outra agência pública, o CENTRAN (Centro de
Excelência em Engenharia de Transportes), vinculado ao DNIT e ao Exército Brasileiro.
Manipulando as informações de cada uma destas fontes, obteve-se uma base de dados
híbrida, H-2013, representativa do tráfego nas regiões Sul e Sudeste do Brasil, a qual
congrega informações diversas de cada uma delas e foi utilizada para simular o tráfego
nas pontes.
Para avançar na etapa 4, inicialmente foram buscadas informações acerca dos
simuladores de tráfego desenvolvidos na área da Engenharia de Transportes. Apesar de
alguns deles levarem em conta informações correlatas ao tema desta linha de pesquisa,
verificou-se que estes simuladores não atendem aos propósitos deste trabalho, já que
todos eles são orientados especificamente à análise e ao projeto de sistemas de
transportes, além de terem a operação bastante complexa e dependerem de uma vasta
quantidade de informações que fogem do escopo deste trabalho. Assim, para cumprir
este objetivo, optou-se por desenvolver uma ferramenta computacional própria para
simulação de tráfego, destinada a atender às necessidades específicas da área da
Engenharia Estrutural, a saber: simular o tráfego de veículos pesados em pontes a partir
de características físicas dos veículos que compõem o fluxo e informações sobre as
estruturas que suportam o tráfego, e calcular os esforços solicitantes ao longo do tempo,
com a discriminação de informações para a extrapolação, para a análise dinâmica e para
a análise de confiabilidade estrutural.
Quanto às análises dinâmicas (etapa 5), foi desenvolvida uma terceira versão da
ferramenta computacional IVPE, cuja principal colaboração foi a implementação das
equações de movimento do semirreboque 2S3, uma combinação de um cavalo mecânico
de 2 eixos com uma carreta de 3 eixos, ligados entre si por pino rei e quinta-roda. Este
veículo foi considerado como referência, de forma provisória, para a obtenção dos
fatores de amplificação dinâmica (FAD) gerados pelo tráfego real.
Com relação à etapa 6, foi proposta uma nova metodologia para a obtenção dos
valores-alvo dos esforços, descartando-se a utilização dos histogramas de esforços
dinâmicos, que era prevista em trabalhos anteriores (ROSSIGALI, 2006, MELO, 2007,
MENDONÇA, 2009).
No tocante à etapa 7, foi implementada uma ferramenta computacional que
busca a melhor configuração de um modelo de cargas a partir da definição da geometria
e dos limites mínimos e máximos das cargas concentradas e distribuídas em cada faixa
de projeto. Dois modelos de cargas móveis, ainda provisórios, foram obtidos. Como o
7
segundo modelo de cargas proposto é constituído por 3 faixas de projeto, torna-se
desnecessário considerar fatores de redução de cargas nos carregamentos em múltiplas
faixas.
O elenco de pontes representativas permanece o mesmo dos trabalhos anteriores
desta linha de pesquisa: as pontes rodoviárias de pequenos vãos em concreto armado.
1.3 Revisão bibliográfica
Em termos de estudos sobre a verificação da segurança nas pontes no Brasil
mediante a passagem de veículos pesados, destaca-se o trabalho de EL DEBS et al.
(2002), que avalia as solicitações devidas à passagem das CVC em pontes típicas da
malha rodoviária do Estado de São Paulo e as compara aos esforços devidos às ações
dos trens-tipo da NB-6 (1960) e da NBR 7188 (1984), a partir de um vasto
levantamento das obras de arte especiais realizado pelo DER-SP. Os seguintes veículos
foram considerados candidatos a gerarem eventos críticos em termos de carregamento:
- rodotrem com 740 kN de peso total e comprimento igual a 25,00 m;
- rodotrem com 740 kN de peso total e comprimento igual a 19,80 m;
- semirreboque 3S3 com 485 kN de peso total e comprimento igual a 14,00 m;
- bitrem de 9 eixos com 740 kN de peso total e comprimento igual a 24,90 m.
O estudo conclui que uma variável muito importante para verificar a segurança
estrutural das pontes é a carga por comprimento dos caminhões e que, justamente por
este motivo, a segunda e a terceira combinações das cargas dadas acima são as mais
críticas, já que podem gerar solicitações maiores que as de projeto, mesmo nas pontes
Classe 45; por isso, algumas resoluções do Conselho Nacional de Trânsito
(CONTRAN) posteriores à divulgação deste relatório proibiram o tráfego destas
configurações.
Posteriormente, SANTOS (2003) identificou a incompatibilidade do trânsito
destas CVC com as pontes da malha viária brasileira, especialmente com o rodotrem de
19,80 m, muito embora elas satisfaçam as prescrições da Lei da Balança, e, a partir do
cálculo da capacidade portante das pontes, abordou alternativas possíveis para lidar com
este problema. O autor concluiu, ainda, que a esconsidade e a curvatura não
influenciaram os valores dos esforços solicitantes nas vigas principais das pontes.
A partir das informações do levantamento realizado pelo DER-SP sobre as obras
de arte, FERREIRA (2006) realizou análise de confiabilidade estrutural para verificar o
desempenho de obras de arte sob jurisdição do DER-SP, em concreto armado e
8
protendido, projetadas para os veículos TB-36 e TB-45, em termos do índice de
confiabilidade β , com vistas à obtenção de limites de peso de caminhões e CVC, na
forma de ECPLs (equações comprimento peso-limite). O autor demonstrou que o peso
bruto total combinado (PBTC), embora seja um parâmetro necessário, não é suficiente
para quantificar a segurança de uma ponte.
A partir da simulação do tráfego em pontes de concreto em grelha e em seção
celular, com vãos variando de 30 m a 200 m, em situação de engarrafamento, portanto
sem a consideração da amplificação dinâmica, LUCHI (2006) conclui que, nesta faixa
de vãos e de sistemas estruturais e com esta modalidade de fluxo, a maioria das pontes
Classe 45 está dimensionada com boa margem de segurança. Exceção é feita às pontes
de pista simples e mão dupla, onde a segurança pode estar comprometida quando a
distância entre os para-choques dos veículos é igual ou inferior a 5 m. Para distâncias
maiores ou iguais a 10 m, embora os esforços extrapolados gerados pelas simulações de
tráfego não tenham atingido os valores de projeto para as pontes Classe 45,
possivelmente a inclusão da amplificação dinâmica poderia ampliar esta faixa de
espaçamentos onde a segurança estrutural não é verificada.
Com o objetivo de implementar um sistema de gestão de pontes rodoviárias,
MENDES (2009) apresentou informações detalhadas sobre a evolução das obras de arte
existentes nas rodovias federais brasileiras, tanto de suas características geométricas e
estruturais quanto às normas utilizadas para projeto e ao estado em que se encontram
atualmente, baseando-se em dados levantados junto ao DNIT e várias empresas
responsáveis pela gestão de rodovias federais em regime de concessão.
1.4 Normas para projeto de pontes rodoviárias
Quanto às normas para projeto de pontes rodoviárias, uma extensa revisão
bibliográfica descrevendo os principais aspectos dos códigos mais importantes
existentes pode ser encontrada nos trabalhos de SANTOS (2003) e MENDES (2009),
dentre outros. Nesta Seção é feito um breve resumo das principais características e de
certos aspectos relacionados à elaboração de algumas das principais normas de projeto
de pontes rodoviárias no mundo, tais como o Eurocódigo 1, a norma canadense
OHBDC e a norma estadunidense AASHTO LRFD. Para a elaboração destes códigos,
foram consideradas para as simulações de tráfego as características regionais dos
veículos que circulam nas rodovias daqueles países. Mostram-se, também, as extintas
normas alemã - DIN 1072 - e britânica - BS 5400: Parte 2. Por último, resume-se a
9
evolução das normas brasileiras para cargas móveis em pontes rodoviárias desde a
primeira versão da NB-6, de 1943.
1.4.1 Eurocódigo
Os Eurocódigos 0 e 1 foram originalmente formulados como projeto de uma
única norma, ENV Eurocode I: Basis of design and actions on structures; em 1997 esta
proposição foi dividida em dois documentos separados: o EN 1990: Eurocode basis of
structural design e o EN 1991: Eurocode 1: Actions on structures. Este último é
composto por 10 partes, sendo que a segunda delas, denominada Eurocode 1: Part 2:
Traffic loads on bridges, foi aprovada como projeto de norma no Comité Européen de
Normalisation (CEN) em 1994 e publicada em 1995 como ENV 1991-3, vigorando
como norma EN 1991-2 a partir de 2003. Ela define os modelos de cargas a serem
usados no projeto de pontes ferroviárias, rodoviárias e passarelas (GULVANESSIAN e
MENZIES, 2000).
A calibração original dos modelos de carga definidos no Eurocódigo 1 foi
baseada em dados de tráfego registrados entre 1986 e 1987 na rodovia A6, próxima a
Auxerre, na França, onde o tráfego é composto por veículos de diversos países; por isso
foi considerada representativa do tráfego em vários países europeus (CALGARO,
1998). Os dados foram obtidos de acordo com o sistema de pesagem em movimento
(weigh-in-motion, WIM).
Os modelos de cargas móveis foram calibrados de forma que seus efeitos
reproduzam com precisão os efeitos do tráfego. Eles já incorporam a amplificação
dinâmica, a qual foi modelada por meio da interação veículo-estrutura, para diversas
superfícies de influência em sistemas estruturais com vãos entre 5 m e 200 m e pistas de
até 42 m de largura. Para as extrapolações consideraram-se as distribuições dos esforços
solicitantes; foi adotado um período de retorno de 1000 anos para limitar a chance de
haver excedências consecutivas de estados limites de serviço durante um período de
referência de 50 anos (CALGARO, 1998).
Para pontes rodoviárias, o Eurocódigo 1 define quatro modelos de carga: LM1-4.
O LM1 (load model 1) e o LM2 (load model 2) são os carregamentos principais, sendo
que o último se destina a algumas verificações locais (ele cobre os efeitos dinâmicos do
tráfego normal em pontes de pequeno vão), normalmente aplicado a tabuleiros
ortotrópicos. O LM3 e o LM4 só são usados se forem requisitados; o LM3 representa
veículos de cargas excepcionais, sendo constituído por 8 tipos diferentes de veículos
10
com peso total variando de 600 kN a 3600 kN, e o LM4 representa o acúmulo de
veículos no tabuleiro por meio de uma carga uniformemente distribuída de 5,0 kN/m2.
A recalibração dos modelos, a partir de novos dados obtidos entre os anos de
1997 e 2001, nas rodovias A1, A2, A31 (Bulgnéville), RN10 (Trappes) e na própria
rodovia A6 (desta vez em Chalon), todas na França, acabou por confirmar os valores
dos esforços obtidos na calibração original (PRAT, 2001).
Nas simulações de tráfego foram considerados vários cenários de tráfego (fluxo
livre, engarrafamentos etc.). Para a obtenção das cargas por eixo e do peso total dos
veículos a partir dos registros medidos por pesagem em movimento, considerou-se que
estes registros incluíam algum efeito dinâmico e resolveu-se dividi-los por 1,10. Foram
consideradas várias linhas e superfícies de influência para flexão, torção e cisalhamento
nas longarinas e nos tabuleiros. Os passos para este procedimento são os seguintes
(PRAT, 2001):
• seleção de um nível de probabilidade para os valores característicos;
• determinação dos valores-alvo de cada esforço;
• pesquisa do modelo apropriado, que deve ser capaz de reproduzir os valores-
alvo dos esforços, por técnicas de pesquisa operacional.
A configuração mais satisfatória é conseguida com o teste de sucessivos
modelos de carga: os melhores são aqueles que minimizam o módulo da máxima
diferença entre a razão dos valores-alvo e os alcançados pelos modelos, e a unidade.
Vários modelos foram testados; os modelos mais apropriados foram os que
incorporaram tanto as cargas concentradas quanto as distribuídas (CALGARO, 1998).
Foram necessários dois eixos para a reprodução precisa dos valores-alvo. A magnitude
mínima das cargas distribuídas foi fixada em 2,5 kN/m2 no processo de busca, o valor
mínimo encontrado nas normas europeias até então.
O sistema final considera a pista de tráfego dividida em faixas de projeto
fictícias (notional lanes) com 3,00 m de largura. O LM1 é composto por uma carga
uniformemente distribuída no tabuleiro de 2,5 kN/m2, exceto na faixa no 1, carregada
com 9,0 kN/m2, além de eixos tandem duplo colocados em 3 faixas de projeto
(sobrepostos às cargas distribuídas), que podem ou não ser adjacentes. A carga de cada
eixo tandem duplo é igual a 300 kN na faixa 1, 200 kN na faixa 2 e 100 kN na faixa 3.
A posição e a numeração das faixas devem ser feitas de forma decrescente em termos
dos efeitos mais desfavoráveis possíveis. A faixa remanescente não é carregada com
11
cargas concentradas. O sistema é colocado na posição mais desfavorável ao esforço
analisado.
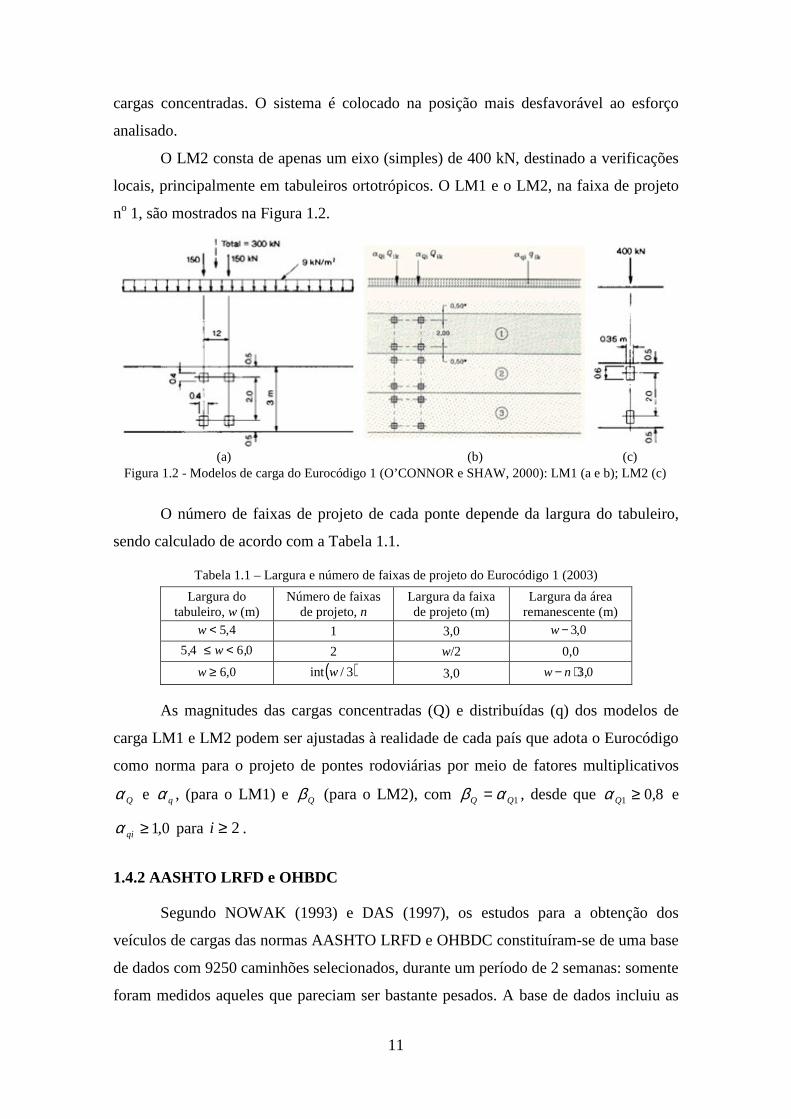
O LM2 consta de apenas um eixo (simples) de 400 kN, destinado a verificações
locais, principalmente em tabuleiros ortotrópicos. O LM1 e o LM2, na faixa de projeto
no 1, são mostrados na Figura 1.2.
(a) (b) (c) Figura 1.2 - Modelos de carga do Eurocódigo 1 (O’CONNOR e SHAW, 2000): LM1 (a e b); LM2 (c)
O número de faixas de projeto de cada ponte depende da largura do tabuleiro,
sendo calculado de acordo com a Tabela 1.1.
Tabela 1.1 – Largura e número de faixas de projeto do Eurocódigo 1 (2003)
Largura do tabuleiro, w (m)
Número de faixas de projeto, n
Largura da faixa de projeto (m)
Largura da área remanescente (m)
4,5<w 1 3,0 0,3−w
0645 ,w , <≤ 2 w/2 0,0
0,6≥w ( )3/int w 3,0 ,nw 03⋅−
As magnitudes das cargas concentradas (Q) e distribuídas (q) dos modelos de
carga LM1 e LM2 podem ser ajustadas à realidade de cada país que adota o Eurocódigo
como norma para o projeto de pontes rodoviárias por meio de fatores multiplicativos
Qα e qα , (para o LM1) e Qβ (para o LM2), com 1QQ αβ = , desde que 8,01 ≥Qα e
0,1≥qiα para 2≥i .
1.4.2 AASHTO LRFD e OHBDC
Segundo NOWAK (1993) e DAS (1997), os estudos para a obtenção dos
veículos de cargas das normas AASHTO LRFD e OHBDC constituíram-se de uma base
de dados com 9250 caminhões selecionados, durante um período de 2 semanas: somente
foram medidos aqueles que pareciam ser bastante pesados. A base de dados incluiu as
12
dimensões e as cargas (total e por eixo) dos caminhões. Para cada caminhão medido,
foram calculados o momento fletor e o esforço cortante em vários vãos. Foram
consideradas como representativas cerca de 200 pontes de várias regiões dos Estados
Unidos, variando o sistema estrutural, o número de vãos e os materiais empregados,
bem como o carregamento específico de cada região (NOWAK, 1995). Foi dada ênfase
em tendências futuras, ao invés de pontes muito antigas. Os dados foram obtidos com o
sistema weigh-in-motion; consideraram-se também dados estatísticos para as
resistências como testes e medições de campo. Os dados foram coletados pelo Ontario
Ministry of Transportation (NOWAK, 1993).
Com as características do tráfego definidas, o próximo passo foi carregar as
estruturas e obter as distribuições dos esforços solicitantes. Foram consideradas linhas
de influência de estruturas biapoiadas (para momento fletor no meio do vão e esforço
cortante no apoio) e contínuas de dois vãos iguais (para obtenção do momento fletor no
apoio central) para vãos entre 9 m e 60 m (DAS, 1997). Para prever comportamentos
futuros, as distribuições dos esforços devidos ao tráfego são extrapoladas para um
período de retorno de 75 anos, com extrapolação pelo inverso do período de retorno, na
própria distribuição inicial, que foi modelada por uma distribuição normal (NOWAK e
SZERSZEN, 1998). Os esforços são calculados dinamicamente com a geração de perfis
de irregularidades a partir da transformada de Fourier de suas densidades espectrais de
potência (NOWAK, 1995).
Foi considerado que o esforço máximo em uma faixa é causado por um
caminhão simples ou por dois ou mais caminhões em sequência. Para ocorrência
múltipla, os parâmetros considerados são as distâncias entre caminhões e o grau de
correlação entre os seus pesos. Os efeitos máximos, para o caso de duas ou mais faixas,
foram determinados por meio de simulações. Foram estudados também os fatores de
distribuição transversal de cargas entre as longarinas.
Carregando as mesmas estruturas com os veículos de projeto (os que estavam
em vigor nos Estados Unidos – o semirreboque HS20 - e no Canadá antes da
atualização das normas da AASHTO e da OHBDC, respectivamente), obtiveram-se
valores nominais de projeto para os esforços considerados. Compararam-se, então, os
fatores de tendência, bias factors (razão entre os valores extrapolados dos esforços e os
nominais), para cada vão e cada estrutura. Evidentemente, os bias factors não são iguais
em todas as estruturas e em todos os comprimentos de vãos. Os novos modelos de
cargas móveis são buscados de forma a uniformizar os bias factors. Após a
13
determinação da configuração desejada, todos os fatores de tendência são
aproximadamente iguais a 1,2.
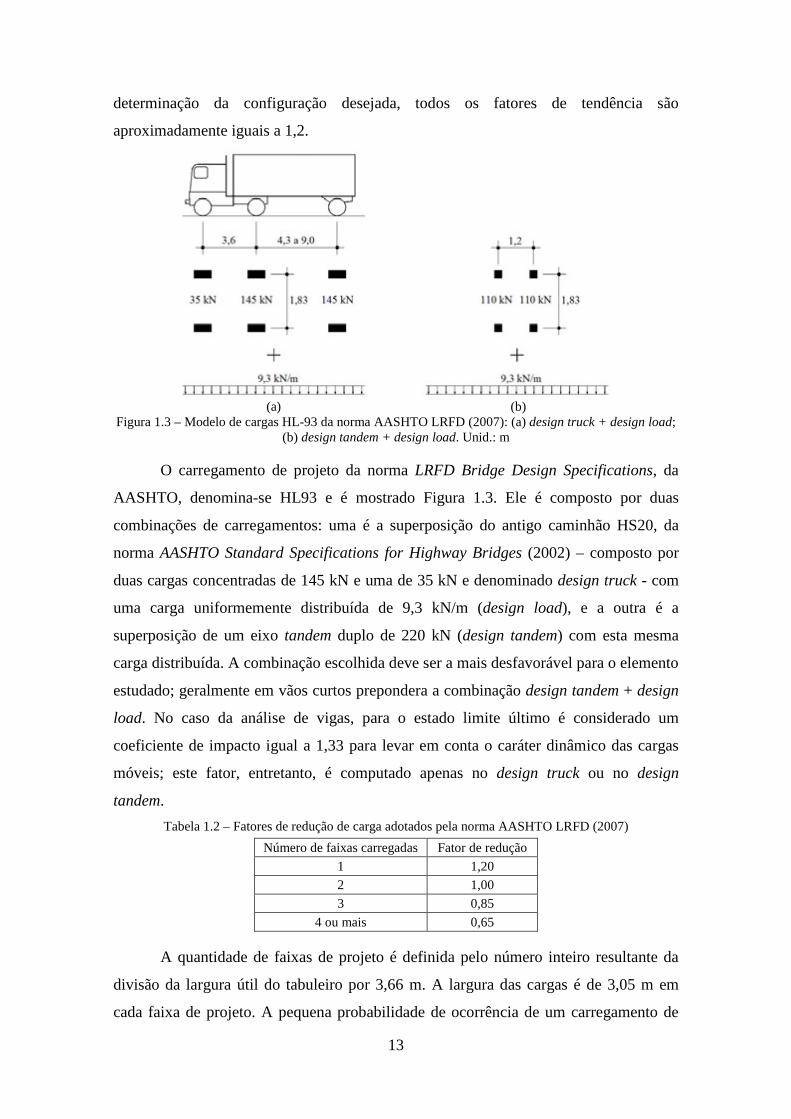
(a) (b) Figura 1.3 – Modelo de cargas HL-93 da norma AASHTO LRFD (2007): (a) design truck + design load;
(b) design tandem + design load. Unid.: m
O carregamento de projeto da norma LRFD Bridge Design Specifications, da
AASHTO, denomina-se HL93 e é mostrado Figura 1.3. Ele é composto por duas
combinações de carregamentos: uma é a superposição do antigo caminhão HS20, da
norma AASHTO Standard Specifications for Highway Bridges (2002) – composto por
duas cargas concentradas de 145 kN e uma de 35 kN e denominado design truck - com
uma carga uniformemente distribuída de 9,3 kN/m (design load), e a outra é a
superposição de um eixo tandem duplo de 220 kN (design tandem) com esta mesma
carga distribuída. A combinação escolhida deve ser a mais desfavorável para o elemento
estudado; geralmente em vãos curtos prepondera a combinação design tandem + design
load. No caso da análise de vigas, para o estado limite último é considerado um
coeficiente de impacto igual a 1,33 para levar em conta o caráter dinâmico das cargas
móveis; este fator, entretanto, é computado apenas no design truck ou no design
tandem.
Tabela 1.2 – Fatores de redução de carga adotados pela norma AASHTO LRFD (2007)
Número de faixas carregadas Fator de redução
1 1,20
2 1,00
3 0,85
4 ou mais 0,65
A quantidade de faixas de projeto é definida pelo número inteiro resultante da
divisão da largura útil do tabuleiro por 3,66 m. A largura das cargas é de 3,05 m em
cada faixa de projeto. A pequena probabilidade de ocorrência de um carregamento de
14
grande magnitude, atuando simultaneamente em todas as faixas carregadas, é levada em
consideração pela norma AASHTO LRFD por meio de fatores de redução de carga, em
função do número de faixas de projeto que estão sendo carregadas. Estes valores são
apresentados na Tabela 1.2, sendo opcional a aplicação deste fator em apenas uma faixa
de projeto.
A primeira edição da norma canadense Ontario Highway Bridge Design Code
(OHBDC), de 1979, foi o primeiro código para projeto de pontes a considerar a filosofia
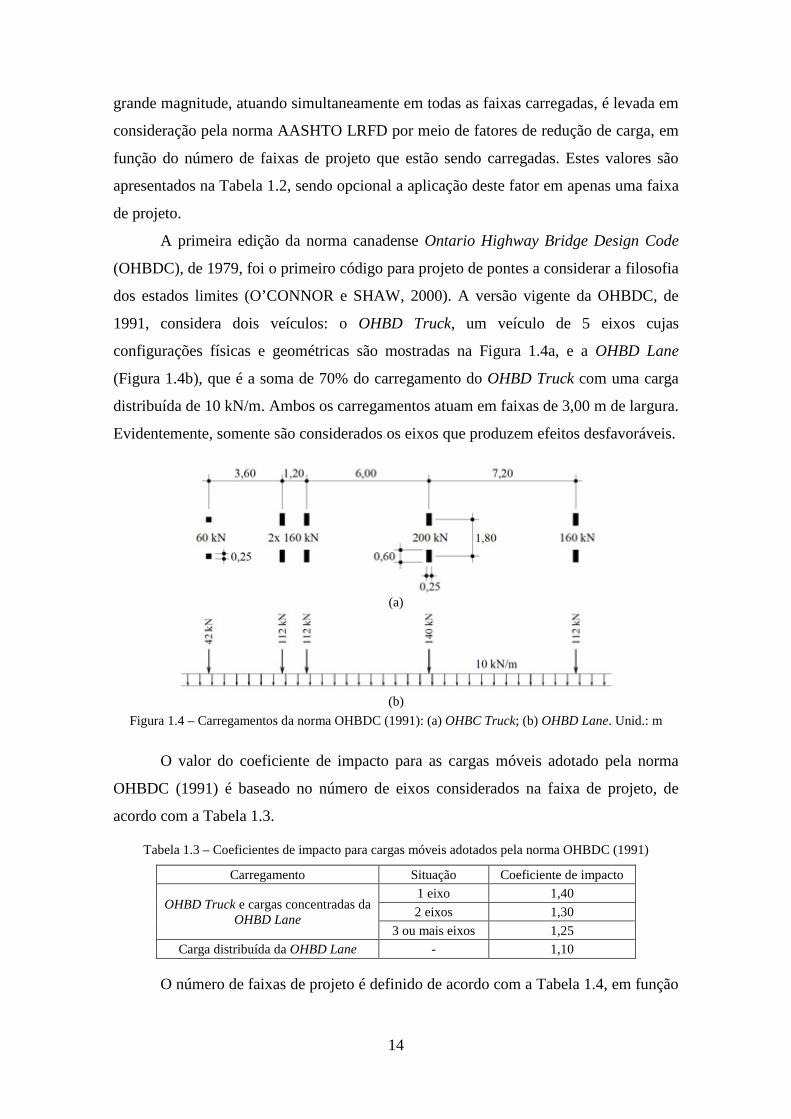
dos estados limites (O’CONNOR e SHAW, 2000). A versão vigente da OHBDC, de
1991, considera dois veículos: o OHBD Truck, um veículo de 5 eixos cujas
configurações físicas e geométricas são mostradas na Figura 1.4a, e a OHBD Lane
(Figura 1.4b), que é a soma de 70% do carregamento do OHBD Truck com uma carga
distribuída de 10 kN/m. Ambos os carregamentos atuam em faixas de 3,00 m de largura.
Evidentemente, somente são considerados os eixos que produzem efeitos desfavoráveis.
(a)
(b)
Figura 1.4 – Carregamentos da norma OHBDC (1991): (a) OHBC Truck; (b) OHBD Lane. Unid.: m
O valor do coeficiente de impacto para as cargas móveis adotado pela norma
OHBDC (1991) é baseado no número de eixos considerados na faixa de projeto, de
acordo com a Tabela 1.3.
Tabela 1.3 – Coeficientes de impacto para cargas móveis adotados pela norma OHBDC (1991)
Carregamento Situação Coeficiente de impacto
OHBD Truck e cargas concentradas da OHBD Lane
1 eixo 1,40
2 eixos 1,30
3 ou mais eixos 1,25
Carga distribuída da OHBD Lane - 1,10
O número de faixas de projeto é definido de acordo com a Tabela 1.4, em função
15
da largura do tabuleiro, CW . Os fatores de redução de carga, mostrados na Tabela 1.5,
são dados em função do número de faixas carregadas.
Tabela 1.4 – Número de faixas de projeto segundo a norma OHBDC (1991)
Largura do tabuleiro, CW (m) Número de faixas de projeto
0,6≤CW 1
0,100,6 ≤< CW 2
5,130,10 ≤< CW 3
0,175,13 ≤< CW 4
5,200,17 ≤< CW 5
0,245,20 ≤< CW 6
5,270,24 ≤< CW 7
5,27>CW 8
Tabela 1.5 – Fatores de redução de carga adotados pela norma OHBDC (1991)
Número de faixas de projeto Fator de redução
1 1,00
2 0,90
3 0,80
4 0,70
5 0,60
6 ou mais 0,55
1.4.3 Normas britânicas
As primeiras regulamentações britânicas para as cargas móveis em pontes
rodoviárias datam do fim do século XIX, quando era adotada uma carga distribuída de
5,4 kN/m2 adicionada a um eixo de 200 kN para simular a passagem dos veículos da
época nas pontes. Após algumas atualizações regulamentares, a norma de maior vulto
foi a Parte 2 da BS 5400, que entrou em vigor em 1978, sendo a primeira norma
britânica que considerou a filosofia dos estados limites (O’CONNOR e SHAW, 2000).
Baseada nos modelos de cargas da Parte 3A da BS 153 (1972), este código
considerava dois modelos de cargas, um destinado a representar o tráfego comum (HA)
e outro para considerar veículos excepcionais (HB), com peso unitário. Ambos já
continham as amplificações dinâmicas embutidas nos valores das suas cargas. O modelo
de cargas HA era composto por uma carga P de 120 kN e uma carga distribuída W (em
kN/m2) dada como uma função decrescente do comprimento carregado L, em metros:
-0,475L151⋅=W , para m 30>L , desde que 0,9≥W kN/m2. Para m 30<L ,
considerava-se uma carga de 30 kN/m.

16
O modelo de cargas HB era um veículo com peso unitário (1 tf) e configuração
mostrada na Figura 1.5. O número de unidades que definia o peso total do veículo HB
era definido em função da classe da rodovia à qual pertencia a ponte projetada. A
distância entre o segundo e o terceiro eixos deste veículo podia ser de 6 m, 11 m, 16 m,
21 m ou 26 m. O valor escolhido era aquele que gerava o efeito mais desfavorável.
Figura 1.5 – Modelo de cargas HB com peso 1 tf (10 kN) da norma BS 5400: Parte 2 (1978). Unid.: m
Na última atualização da Parte 2 da BS 5400, em 2006, a carga distribuída W do
modelo HA passou a ser dada por
>⋅
≤⋅=
m 50 se L63
m 50 se L3630,10-
-0,67
L
LW (1.1)
O modelo de cargas unitário HB podia ser multiplicado por até 45 unidades. A
largura padrão das faixas de projeto era de 3,65 m, embora fossem permitidas larguras
menores em certos casos. O modelo HA era aplicado com seu valor integral em duas
faixas de projeto e 1/3 do seu carregamento nas demais faixas.
A BS 5400: Parte 2 (2006) foi substituída pelo Eurocódigo 1, a exemplo de
várias outras normas de projeto relevantes de outros países da Europa.
1.4.4 Normas alemãs
A norma alemã DIN 1072 influenciou a elaboração de diversas outras normas de
projeto. A sua primeira versão data de 1925, tendo sofrido várias atualizações. Em
algumas das versões mais antigas era considerada para o projeto de pontes rodoviárias
uma combinação de tanques e compressores. Já na versão de 1952 era considerado
apenas um veículo-tipo sobre o tabuleiro. As pontes projetadas para suportar o tráfego
mais pesado pertenciam às Classes 24 e 45, as quais foram abolidas e atualizadas para
as Classes 30 e 45, respectivamente, na versão de 1967. Em todas estas Classes, a DIN
1072 considerava o veículo-tipo em uma faixa principal de projeto com 3,00 m de
largura, que também era solicitada por uma carga distribuída de 5,0 kN/m2 à frente e
atrás da área ocupada pelo veículo. Na análise de vigas principais de extremidade, era
17
permitida a locação do veículo-tipo na pior posição transversal possível: com as suas
rodas tangenciando a barreira lateral. No restante do tabuleiro, fora da delimitação
transversal da faixa principal, era considerada uma carga de 3,0 kN/m2. O coeficiente de
impacto adotado (Eq. 1.2) era aplicado somente nos carregamentos da faixa principal.
L⋅−= 008,04,1ϕ (1.2)
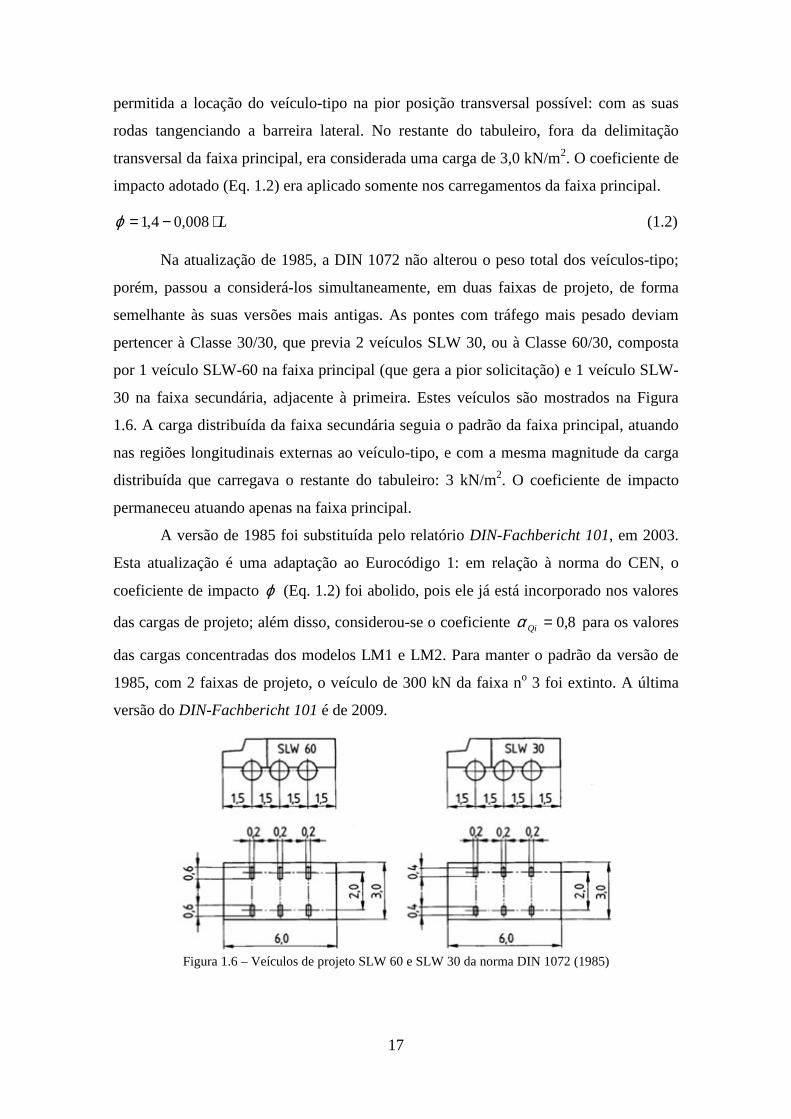
Na atualização de 1985, a DIN 1072 não alterou o peso total dos veículos-tipo;
porém, passou a considerá-los simultaneamente, em duas faixas de projeto, de forma
semelhante às suas versões mais antigas. As pontes com tráfego mais pesado deviam
pertencer à Classe 30/30, que previa 2 veículos SLW 30, ou à Classe 60/30, composta
por 1 veículo SLW-60 na faixa principal (que gera a pior solicitação) e 1 veículo SLW-
30 na faixa secundária, adjacente à primeira. Estes veículos são mostrados na Figura
1.6. A carga distribuída da faixa secundária seguia o padrão da faixa principal, atuando
nas regiões longitudinais externas ao veículo-tipo, e com a mesma magnitude da carga
distribuída que carregava o restante do tabuleiro: 3 kN/m2. O coeficiente de impacto
permaneceu atuando apenas na faixa principal.
A versão de 1985 foi substituída pelo relatório DIN-Fachbericht 101, em 2003.
Esta atualização é uma adaptação ao Eurocódigo 1: em relação à norma do CEN, o
coeficiente de impacto ϕ (Eq. 1.2) foi abolido, pois ele já está incorporado nos valores
das cargas de projeto; além disso, considerou-se o coeficiente 8,0=Qiα para os valores
das cargas concentradas dos modelos LM1 e LM2. Para manter o padrão da versão de
1985, com 2 faixas de projeto, o veículo de 300 kN da faixa no 3 foi extinto. A última
versão do DIN-Fachbericht 101 é de 2009.
Figura 1.6 – Veículos de projeto SLW 60 e SLW 30 da norma DIN 1072 (1985)
18
1.4.5 A norma brasileira de pontes
Em 1940 foi publicada a primeira versão da NB-1 (atualmente a NBR 6118).
Com a iminente necessidade de prever situações específicas, como o projeto de pontes,
foram publicadas em 1941 a primeira versão da NB-2 (atualmente a NBR 7187) e em
1943 a primeira versão da NB-6 (atualmente a NBR 7188).
De acordo com a versão de 1943 da NB-6, as rodovias eram divididas segundo o
grau de importância nas classes I, II e III, sendo que as principais eram consideradas
rodovias de Classe I. O trem-tipo das pontes Classe I era montado com um compressor
de 160 kN e tantos caminhões de 90 kN quantas fossem as faixas de tráfego, menos
uma, dispostos na posição mais desfavorável para o cálculo do elemento considerado;
havia a restrição de apenas um veículo por faixa de tráfego e espaçamento mínimo de
2,5 m entre os eixos longitudinais dos veículos. A carga de multidão tinha magnitude de
4,50 kN/m2. A ponte devia ainda ser verificada para um único compressor de 240 kN,
disposto na direção do tráfego, na posição mais desfavorável para o elemento em estudo
(LUCHI, 2006). Para levar em consideração os efeitos dinâmicos, a NB-2 (1941)
adotava um fator de impacto igual a 1,3. A sistemática da versão de 1943 da NB-6 foi
baseada nas versões antigas da norma alemã DIN 1072, que considerava tanques e
compressores para simular as cargas móveis nas pontes.
Em 1960 foi publicada uma nova versão da NB-6. O crescimento do Brasil nas
décadas de 1960 e 1970 levou à ampliação da malha rodoviária brasileira,
proporcionando a construção de um grande número de obras de arte especiais projetadas
segundo esta norma.
Os veículos da versão de 1960 da NB-6 tinham 3,00 m de largura e 6,00 m de
comprimento. Um único veículo era considerado, sendo colocado na posição mais
desfavorável para o esforço estudado. Esta norma considerava para os veículos de
projeto a Classe 36, a Classe 24 e a Classe 12, para as Classes I, II e III das pontes,
respectivamente, com pesos totais de 360 kN, 240 kN e 120 kN. Para carregar o
tabuleiro, considerava-se uma faixa principal com 3,00 m de largura, na qual se
encontravam o veículo-tipo e uma carga de multidão principal, p, à frente e atrás deste.
A faixa principal era disposta na mesma posição transversal do veículo de projeto e no
restante do tabuleiro era aplicada a carga distribuída p’. A consideração dos efeitos
dinâmicos era feita com o coeficiente de impacto da NB-2 (1960), em função do
tamanho do vão teórico L :
19
L⋅−= 007,04,1ϕ (1.3)
Pode-se perceber que esta versão da NB-6 também foi amplamente baseada na
norma alemã DIN 1072, que considerava, na versão então vigente, de 1952, a mesma
sistemática de uma faixa de projeto, a mesma geometria do veículo-tipo e a carga
distribuída interrompida na região do veículo, além de uma expressão muito similar
para o coeficiente de impacto.
Com a entrada em vigor do Código Nacional de Trânsito (CNT), em 1966, o
peso bruto total (PBT) dos veículos passou a ser de 400 kN, ultrapassando, portanto, o
peso total de 360 kN do carregamento TB-36 da NB-6. Em 1978, o CNT autorizou a
circulação de caminhões com PBTC de até 450 kN.
Assim, para levar em conta o crescimento do PBTC dos veículos, a NB-6 foi
reeditada em 1982 e publicada em 1984, passando a vigorar como NBR 7188. Os
veículos de projeto das Classes 24 e 30 foram substituídos pelos de 300 kN (Classe 30)
e 450 kN (Classe 45). A Classe 12 permaneceu inalterada, bem como a configuração
geométrica dos veículos-tipo das classes mais pesadas. Esta norma não mais estabelece
os critérios para a consideração de cada classe. Geralmente, nas rodovias principais as
pontes são projetadas para a Classe 45. O escopo das cargas de multidão p e 'p foi
alterado em todas as classes: além da revisão nos seus valores, a carga p da NBR 7188
carrega toda a pista (onde for desfavorável) e a carga 'p atua apenas nos passeios.
Algumas dimensões das rodas dos veículos também sofreram alterações. Para a
consideração dos efeitos dinâmicos, foi mantido nas atualizações da NB-2 o coeficiente
de impacto em função do comprimento do vão teórico carregado, da Eq. 1.3, que
permanece até hoje, na versão de 2003 da NBR 7187.
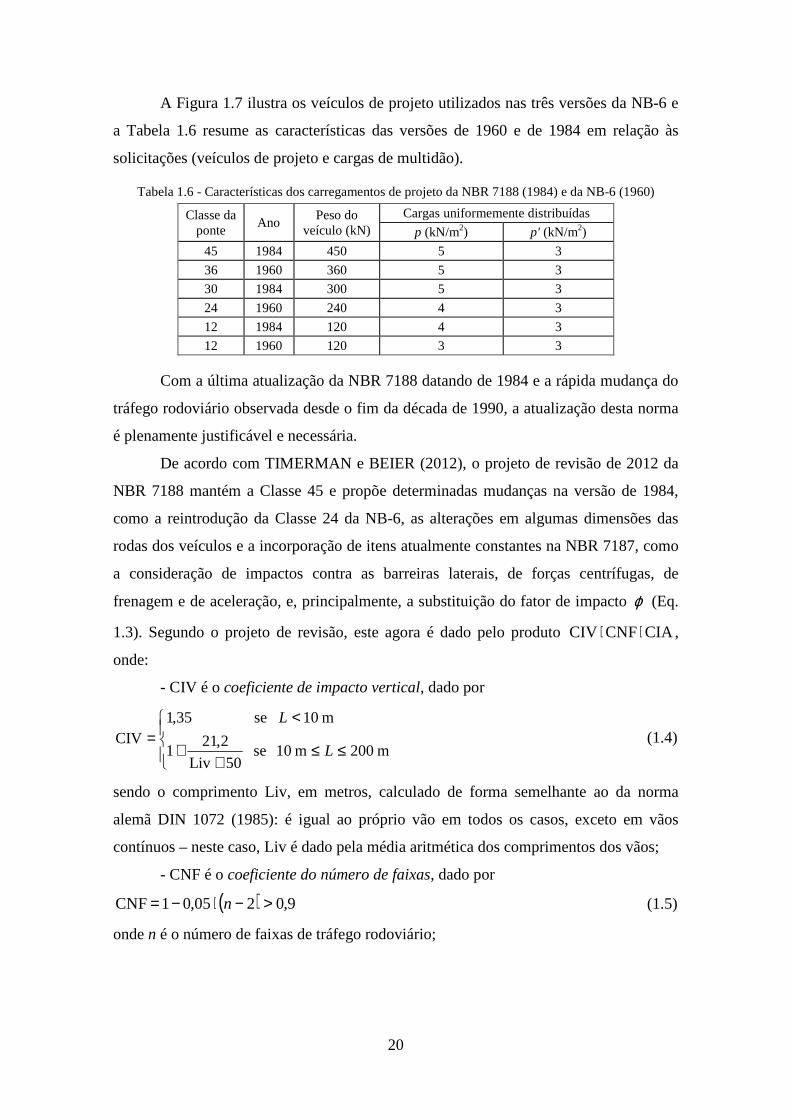
(a) (b)
(c)
Figura 1.7 – Veículos de projeto (a) da NBR 7188 (1984) e (b) da NB-6 (1960); (c) caminhão e compressor de projeto da NB-6 (1943)
20
A Figura 1.7 ilustra os veículos de projeto utilizados nas três versões da NB-6 e
a Tabela 1.6 resume as características das versões de 1960 e de 1984 em relação às
solicitações (veículos de projeto e cargas de multidão).
Tabela 1.6 - Características dos carregamentos de projeto da NBR 7188 (1984) e da NB-6 (1960)
Classe da ponte
Ano Peso do
veículo (kN) Cargas uniformemente distribuídas
p (kN/m2) p' (kN/m2)
45 1984 450 5 3
36 1960 360 5 3
30 1984 300 5 3
24 1960 240 4 3
12 1984 120 4 3
12 1960 120 3 3
Com a última atualização da NBR 7188 datando de 1984 e a rápida mudança do
tráfego rodoviário observada desde o fim da década de 1990, a atualização desta norma
é plenamente justificável e necessária.
De acordo com TIMERMAN e BEIER (2012), o projeto de revisão de 2012 da
NBR 7188 mantém a Classe 45 e propõe determinadas mudanças na versão de 1984,
como a reintrodução da Classe 24 da NB-6, as alterações em algumas dimensões das
rodas dos veículos e a incorporação de itens atualmente constantes na NBR 7187, como
a consideração de impactos contra as barreiras laterais, de forças centrífugas, de
frenagem e de aceleração, e, principalmente, a substituição do fator de impacto ϕ (Eq.
1.3). Segundo o projeto de revisão, este agora é dado pelo produto CIACNFCIV ⋅⋅ ,
onde:
- CIV é o coeficiente de impacto vertical, dado por
≤≤+
+
<=
m 200m 10 se 50Liv
2,211
m 10 se ,351CIV
L
L (1.4)
sendo o comprimento Liv, em metros, calculado de forma semelhante ao da norma
alemã DIN 1072 (1985): é igual ao próprio vão em todos os casos, exceto em vãos
contínuos – neste caso, Liv é dado pela média aritmética dos comprimentos dos vãos;
- CNF é o coeficiente do número de faixas, dado por
( ) 9,0205,01CNF >−⋅−= n (1.5)
onde n é o número de faixas de tráfego rodoviário;
21
- CIA é o coeficiente de impacto adicional, aplicável a juntas estruturais e nas
extremidades das estruturas, sendo igual a 1,25 em pontes em concreto ou mistas, e 1,15
em pontes metálicas.
As atualizações do projeto de 2012 conferem um grande avanço na forma de
projetar as pontes rodoviárias brasileiras, mas ainda não permitem a representação
fidedigna dos efeitos do tráfego real pelo modelo de cargas. Como o projeto de revisão
de 2012 ainda está em fase de consulta pública e implantação, a NBR 7188 ainda não
havia sido oficialmente atualizada até a data de publicação deste trabalho (abril/2013).
Todas as comparações e citações subsequentes à norma brasileira de cargas móveis em
pontes rodoviárias referem-se exclusivamente às versões de 1943, 1960 e 1984.
1.5 Apresentação do trabalho
O texto do presente trabalho é apresentado em capítulos de acordo com a
formatação especificada a seguir. No Capítulo 2 detalham-se os dados rodoviários
adquiridos junto a concessionárias de rodovias e órgãos públicos, o estudo estatístico
realizado e a obtenção da base de dados híbrida utilizada neste trabalho. O Capítulo 3
descreve a análise estática das estruturas por meio do simulador de tráfego
desenvolvido. No Capítulo 4 é realizada a análise dinâmica das estruturas e são obtidos
os valores-alvo dos esforços. Já no Capítulo 5 são explanadas as etapas para obtenção
de modelos de cargas que representem o tráfego real; como resultado, mostram-se duas
configurações provisórias para o novo modelo de cargas móveis. Finalmente, o Capítulo
6 apresenta as conclusões deste trabalho e sugestões para pesquisas futuras desta linha
de pesquisa.
Informações complementares são apresentadas em quatro Anexos. O Anexo A
traz um breve histórico da Lei da Balança e da evolução dos padrões de nomenclatura
dos veículos comerciais. No Anexo B são apresentadas informações sobre alguns
métodos numéricos e equações utilizados no decorrer deste trabalho. O Anexo C mostra
a dedução das equações de movimento dos veículos articulados, compostos
exclusivamente por ligações do tipo semirreboque, considerando a interação dinâmica
veículo-pavimento-estrutura. Por fim, o Anexo D mostra as versões completas dos
fluxogramas que ilustram a geração de valores aleatórios para a criação das filas de
veículos e a análise estrutural realizada em cada instante de tempo pelo simulador de
tráfego descrito no Capítulo 3.
22
2 Descrição e análise dos dados de tráfego
2.1 Base de dados do DNIT (DN-02)
O DNIT (Departamento Nacional de Infraestrutura de Transportes) avalia o
tráfego pelos Postos de Pesagem, de Contagem e de Monitoramento.
Postos de Pesagem
Estes Postos efetuam a pesagem dos veículos primeiramente em velocidades de
até 60 km/h, quando se estimam o seu peso total e as cargas por eixo. Em seguida os
veículos selecionados têm seu peso aferido em baixas velocidades, com o intuito de
eliminar os efeitos dinâmicos (ver a Seção 2.3.2). Em 1975 o DNER (Departamento
Nacional de Estradas de Rodagem) iniciou o desenvolvimento do Plano Diretor de
Pesagem (PDP), partindo da determinação de pontos estrategicamente localizados, de
maneira a interceptar os principais fluxos de carga nas rodovias brasileiras. A primeira
etapa do Plano compreendia a instalação de 132 postos. Esse Plano viria a sofrer
reformulações posteriores devido a restrições orçamentárias. A segunda etapa
compreenderia a implantação de Postos de Pesagem Móveis, mas o antigo Plano se
tornou praticamente inoperante e inadequado às necessidades atuais em razão das
constantes modificações dos fluxos de cargas bem como da evolução tecnológica na
fabricação de veículos de carga e de equipamentos de pesagem. Apenas 34 deles foram
efetivamente colocados em operação. Em 2006 apenas 13 funcionavam normalmente.
As informações desses postos não foram consideradas neste trabalho.
Postos de Contagem
Os Postos de Contagem realizam as contagens volumétrica e classificatória.
Segundo o volume de apresentação do Plano Diretor Nacional Estratégico de Pesagem
(PDNEP), de 2006, o DNIT, através do Plano Nacional de Contagem de Tráfego
(PNCT), possui uma significativa série histórica de volume de trânsito de muitas
rodovias apesar da desativação de alguns postos e da criação de outros. A formação do
PNCT, em 1975 (juntamente com o PDP), ocorreu de forma lenta e gradativa até chegar
a sua constituição atual. Em 1977 o PNCT teve início efetivo com 120 postos
permanentes.
Esse Plano Diretor se tornou inadequado ao longo dos anos. Os dados dos Postos
de Pesagem disponibilizados pelo DNIT em seu sítio na internet (www.dnit.gov.br)
foram colhidos de forma não contínua em 92 postos entre os anos de 1994 e 2001 (nem
23
em todos os meses nem em todos os anos). Somente em 22 deles há dados de ambas as
contagens (volumétrica e classificatória). Estes dados também não foram usados neste
trabalho.
Postos de Monitoramento
Existe um total de 100 Postos de Monitoramento na Rede Rodoviária Federal
sob jurisdição do DNIT entre os planejados e os em operação. Entre 1999 e 2002 15
desses Postos coletaram, em vários pontos diferentes do país, dados relativos ao volume
de tráfego, às velocidades dos veículos e às cargas por eixo de caminhões e ônibus.
Segundo o órgão, tais dados permitem o detalhamento dos aspectos operacionais do
tráfego e fornecem subsídios para os estudos que definem as políticas de construção,
manutenção e administração das estradas. Essas informações foram analisadas e
utilizadas em ROSSIGALI (2006) e também serão consideradas neste trabalho. Os
dados levantados pelos Postos compreendem originalmente 315 arquivos do Microsoft
Excel® (em formato XLS) com informações mensais dos resultados das medições de
tráfego. Não foi possível conhecer os detalhes dos sensores utilizados nem dos
procedimentos de medição e coleta de dados disponibilizados pelo DNIT. As medições
foram realizadas com o tráfego corrente pelo sistema weigh in motion por meio de
células de carga instaladas sob o pavimento da rodovia. A força de cada eixo sobre o
pavimento é a carga estática do eixo afetada pelos efeitos dinâmicos oriundos da
vibração vertical do veículo em movimento sobre o pavimento rugoso. Portanto, para se
obter a carga estática por eixo a partir de medições com o veículo em movimento são
necessários procedimentos de calibração dos quais não se obtiveram informações.
Como o volume de dados é grande e heterogêneo elegeu-se um posto que
representasse, de forma satisfatória, todo o tráfego medido no país. Escolheu-se como
representativo o posto P51, localizado em Pedro Canário, ES, pois ele apresentou as
informações mais coerentes (tráfego consideravelmente pesado, medições praticamente
contínuas, um VMD – volume médio diário - relativamente alto e poucos meses com
dados heterogêneos) e grande semelhança com o padrão geral de todos os postos e ainda
por pertencer a uma rodovia de grande importância no Brasil: a BR 101. Essa base de
dados foi utilizada de forma simplificada em ROSSIGALI (2006) para obter os valores-
alvo de esforços solicitantes em longarinas de pontes típicas da malha viária brasileira,
desconsiderando a possibilidade de haver cruzamentos entre veículos.
24
Não há registros de informações do posto P51 em 12/1999, 01/2000 e 08/2000.
Originalmente esse posto contém 32 planilhas mensais de dados. Os meses de setembro
e outubro de 2002 foram desconsiderados por conterem dados fora do padrão geral.
Resultam, então, 30 meses de dados medidos (2,5 anos) com um total de 1,28 x 106
registros de veículos comerciais (ônibus e caminhões). O VMD do referido posto nos 30
meses é de 3.905 veículos/dia, sendo desses 1.586 veículos comerciais. Cada arquivo de
dados é composto por 16 planilhas que apresentam, entre outras, as seguintes
informações:
- VMD por classe;
- peso total e carga por grupo de eixos dos veículos;
- sobrecarga total e por eixo;
- velocidade dos veículos;
- distribuição dos veículos por faixa de rolamento;
- distribuição dos veículos no decorrer do tempo.
Não há informações sobre distâncias entre eixos dos veículos nem sobre
distâncias entre veículos. Algumas planilhas classificam os veículos detalhadamente em
classes, enquanto outras os classificam segundo “classes simples”: leves, utilitários,
caminhões (incluindo reboques) e semirreboques.
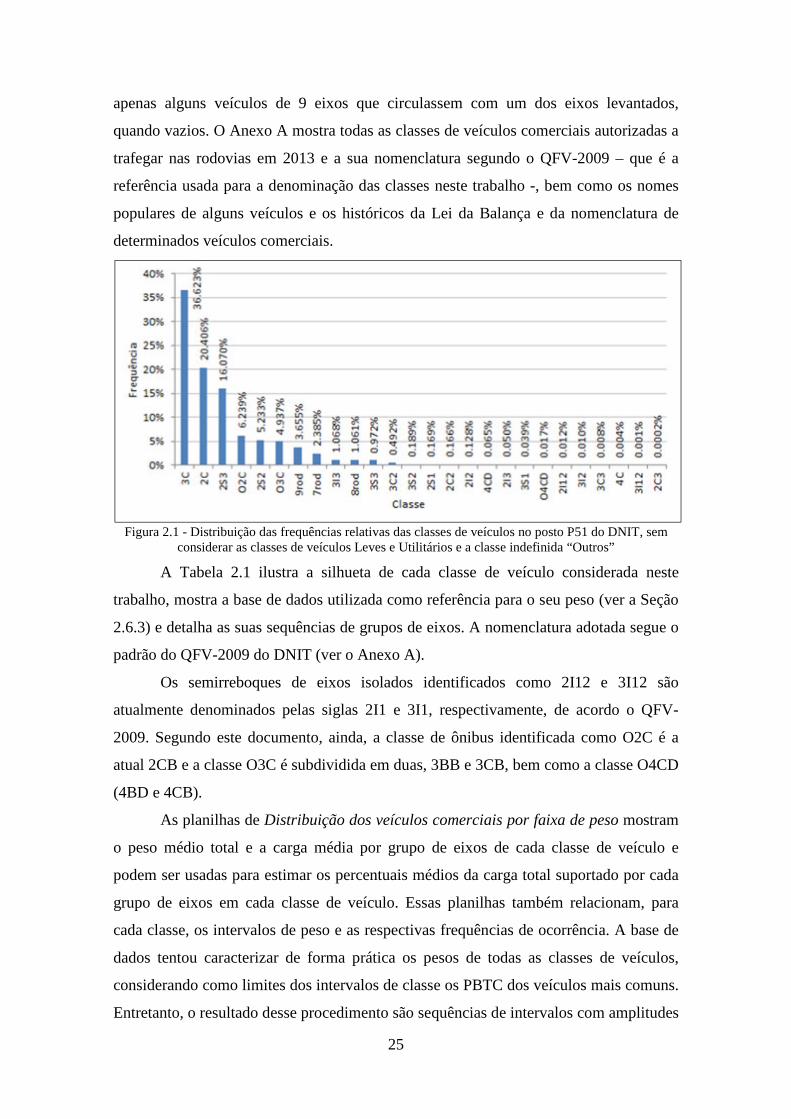
As planilhas com o Tráfego Médio Diário por Classe apresentam os totais
mensais de veículos contados. Com a soma de todos os meses disponíveis no posto P51
obtém-se a distribuição mostrada na Figura 2.1, que mostra a frequência relativa de cada
classe de veículo (já excluídas as classes de veículos leves, utilitários e a categoria
indefinida “Outros”). Verifica-se que as classes 3C, 2C, 2S3, O2C, 2S2 e O3C são as
mais frequentes entre os veículos comerciais com um total de 1,15 x 106 veículos.
O padrão utilizado pelo DNIT para a nomenclatura das classes de veículos nessa
base de dados não corresponde àquele existente na versão que vigorava do Quadro de
Fabricantes de Veículos (QFV) de 2001, editado pelo extinto DNER, tampouco ao
padrão da versão seguinte, o QFV-2005, já editada pelo DNIT. Os veículos com 7, 8 e 9
eixos são, respectivamente, identificados pelas siglas 7rod, 8rod e 9rod. À época da
coleta dos dados vigorava ainda o Anexo I da Resolução 68 do CONTRAN, que
autorizava apenas o trânsito das classes identificadas como 3C3, 3D4, 3T4, 3Q4, 3T6 e
3R6 pelo QFV-2009. Assim, provavelmente, a sigla 7rod inclui as classes 3D4, 3T4 e
3Q4 e a sigla 9rod engloba as classes 3T6, 3R6 e alguns bitrens de 9 eixos (3M6) que
tinham autorização para circular entre 2001 e 2002. A classe 8rod, desta forma, incluiria
25
apenas alguns veículos de 9 eixos que circulassem com um dos eixos levantados,
quando vazios. O Anexo A mostra todas as classes de veículos comerciais autorizadas a
trafegar nas rodovias em 2013 e a sua nomenclatura segundo o QFV-2009 – que é a
referência usada para a denominação das classes neste trabalho -, bem como os nomes
populares de alguns veículos e os históricos da Lei da Balança e da nomenclatura de
determinados veículos comerciais.
Figura 2.1 - Distribuição das frequências relativas das classes de veículos no posto P51 do DNIT, sem
considerar as classes de veículos Leves e Utilitários e a classe indefinida “Outros”
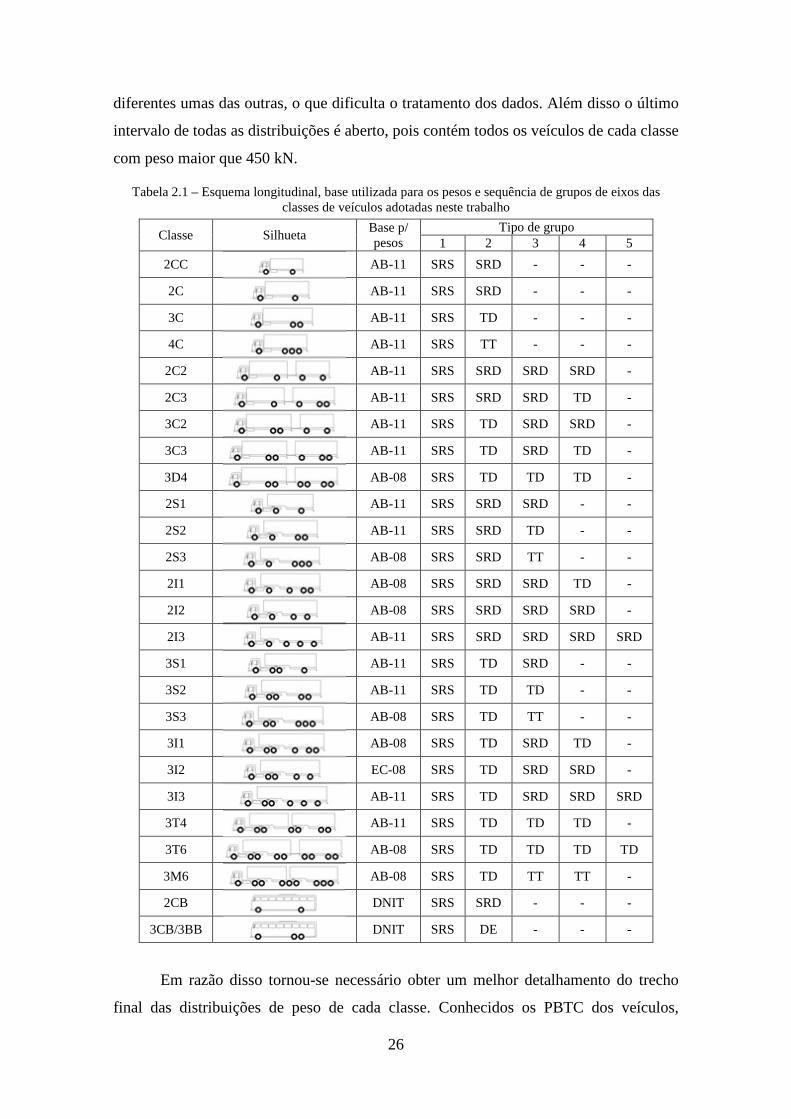
A Tabela 2.1 ilustra a silhueta de cada classe de veículo considerada neste
trabalho, mostra a base de dados utilizada como referência para o seu peso (ver a Seção
2.6.3) e detalha as suas sequências de grupos de eixos. A nomenclatura adotada segue o
padrão do QFV-2009 do DNIT (ver o Anexo A).
Os semirreboques de eixos isolados identificados como 2I12 e 3I12 são
atualmente denominados pelas siglas 2I1 e 3I1, respectivamente, de acordo o QFV-
2009. Segundo este documento, ainda, a classe de ônibus identificada como O2C é a
atual 2CB e a classe O3C é subdividida em duas, 3BB e 3CB, bem como a classe O4CD
(4BD e 4CB).
As planilhas de Distribuição dos veículos comerciais por faixa de peso mostram
o peso médio total e a carga média por grupo de eixos de cada classe de veículo e
podem ser usadas para estimar os percentuais médios da carga total suportado por cada
grupo de eixos em cada classe de veículo. Essas planilhas também relacionam, para
cada classe, os intervalos de peso e as respectivas frequências de ocorrência. A base de
dados tentou caracterizar de forma prática os pesos de todas as classes de veículos,
considerando como limites dos intervalos de classe os PBTC dos veículos mais comuns.
Entretanto, o resultado desse procedimento são sequências de intervalos com amplitudes
26
diferentes umas das outras, o que dificulta o tratamento dos dados. Além disso o último
intervalo de todas as distribuições é aberto, pois contém todos os veículos de cada classe
com peso maior que 450 kN.
Tabela 2.1 – Esquema longitudinal, base utilizada para os pesos e sequência de grupos de eixos das classes de veículos adotadas neste trabalho
Classe Silhueta Base p/ pesos
Tipo de grupo 1 2 3 4 5
2CC
AB-11 SRS SRD - - -
2C
AB-11 SRS SRD - - -
3C
AB-11 SRS TD - - -
4C
AB-11 SRS TT - - -
2C2
AB-11 SRS SRD SRD SRD -
2C3
AB-11 SRS SRD SRD TD -
3C2
AB-11 SRS TD SRD SRD -
3C3
AB-11 SRS TD SRD TD -
3D4
AB-08 SRS TD TD TD -
2S1
AB-11 SRS SRD SRD - -
2S2
AB-11 SRS SRD TD - -
2S3
AB-08 SRS SRD TT - -
2I1
AB-08 SRS SRD SRD TD -
2I2
AB-08 SRS SRD SRD SRD -
2I3
AB-11 SRS SRD SRD SRD SRD
3S1
AB-11 SRS TD SRD - -
3S2
AB-11 SRS TD TD - -
3S3
AB-08 SRS TD TT - -
3I1
AB-08 SRS TD SRD TD -
3I2
EC-08 SRS TD SRD SRD -
3I3
AB-11 SRS TD SRD SRD SRD
3T4
AB-11 SRS TD TD TD -
3T6
AB-08 SRS TD TD TD TD
3M6
AB-08 SRS TD TT TT -
2CB
DNIT SRS SRD - - -
3CB/3BB
DNIT SRS DE - - -
Em razão disso tornou-se necessário obter um melhor detalhamento do trecho
final das distribuições de peso de cada classe. Conhecidos os PBTC dos veículos,

27
obtém-se um refino da porção final dos histogramas cruzando as informações da
planilha de Distribuição de veículos comerciais por faixa de peso com a da planilha de
Percentual de sobrecarga dos veículos com excessos, tendo em vista que esta divide o
excesso de peso de cada classe de veículo em intervalos de sobrecarga: até 10%; de 10 a
20%; de 20 a 30%; e mais de 30% de excesso no peso total. A Figura 2.2 mostra os
histogramas de peso usados neste trabalho, já refinados, para os ônibus O2C e O3C e
para os caminhões 3C. Os diagramas são apresentados na unidade quilonewton (kN)
para manter o padrão representativo de uma grandeza constante no SI, muito embora
todas as informações coletadas das cargas, tanto na base de dados do DNIT quanto nas
outras fontes, tenham sido fornecidas em tonelada-força (tf).
(a) (b) (c)
Figura 2.2 - Histogramas refinados de peso no posto P51 do DNIT: (a) classe O2C (X = 121 kN; s =
28,9 kN); (b) classe O3C (X = 160 kN; s = 48,8 kN); (c) classe 3C (X = 151 kN; s = 59,3 kN)
As planilhas de Peso total na rodovia mostram os pesos médios mensais de cada
classe de veículo bem como as cargas médias dos eixos componentes de cada
configuração. Com a reunião de todas essas tabelas podem-se obter os percentuais
médios de carga por eixo de cada veículo. Já as planilhas de Distribuição dos veículos
por faixa de velocidade, organizadas por classes simples, possibilitam a confecção dos
histogramas mostrados na Figura 2.3.
(a) (b) (c) Figura 2.3 - Histogramas de velocidade no posto P51 do DNIT: (a) caminhões (X = 77,1 km/h; s = 13,5
km/h); (b) ônibus (X = 82,4 km/h; s = 16,4 km/h); (c) semirreboques (X = 78,3 km/h; s = 11,2 km/h)
28
2.2 Base de dados do CENTRAN (CE-05)
De acordo com o volume de apresentação do PDNEP, durante mais de uma
década, devido a restrições orçamentárias, o DNER se viu impedido de realizar a coleta
de dados de tráfego que integravam o Plano Nacional de Contagem de Tráfego, tal qual
o DNIT, seu sucessor. Em função da ausência e escassez e dados oficiais de tráfego a
solução encontrada foi implementar um novo Plano Diretor de Pesagem que
contemplasse todo o sistema viário federal. Assim, o Centro de Excelência em
Engenharia de Transportes (CENTRAN) realizou o Plano Diretor Nacional Estratégico
de Pesagem (PDNEP). O CENTRAN é um órgão com coordenação mista do DNIT
(Ministério dos Transportes) e do Exército Brasileiro (Ministério da Defesa).
Segundo o DNIT o PDNEP tem como objetivo a contratação de empresas ou
consórcios de empresas para a execução de serviços inerentes à preservação da
integridade da infraestrutura e da segurança do trânsito das rodovias federais
pavimentadas sob a jurisdição do órgão mediante uso de sistemas fixos e móveis de
pesagem dinâmica e sistemas complementares associados. A fim de coletar dados para
elaborar o PDNEP foi realizada uma abrangente pesquisa de tráfego nas rodovias
brasileiras no período de 26 de novembro a 02 de dezembro de 2005, denominada
“Semana Nacional de Contagem de Tráfego”, quando foram montados 109 postos de
pesquisa espalhados pela malha rodoviária federal – considerando as principais
rodovias, os corredores de exportação e suas movimentações. As pesquisas ocorreram
ininterruptamente durante os 7 dias de coleta de dados.
Tais pesquisas foram do tipo volumétricas/classificatórias e de origem/destino.
A primeira, de interesse neste trabalho, objetivou a identificação do tráfego ao longo
dos corredores; a segunda buscou, amostralmente, a identificação das principais rotas
que se utilizam dos corredores. Foram contados nos 109 postos cerca de 5,08 milhões
de veículos (sendo desses 2,16 milhões de veículos comerciais) e foram entrevistados
mais de 400.000 usuários das rodovias. O trabalho realizado significou a retomada das
pesquisas de tráfego dos postos de monitoramento interrompidas em 2002. Os postos de
pesquisa do CENTRAN foram alocados segundo critérios diferentes daqueles utilizados
até então pelo DNIT para definir os postos de contagem, pesagem e monitoramento.
Deveriam ser executadas pesquisas de origem/destino em 2007 e 2009, e a partir
daí a cada 5 anos. Essas informações seriam subsídios para o Planejamento Rodoviário,
nas áreas de influência dos Postos de Pesagem.
29
Os arquivos do Microsoft Excel® (formato XLS) contendo as informações
coletadas em cada um dos postos foram cedidos por MORALES (2008), via
correspondência particular. Cada um é composto por planilhas que contêm dados gerais
do posto, o número de veículos a serem entrevistados por dia, o número de veículos de
cada classe contados por hora, por dia, por sentido e os totais gerados por dia de
contagem, a composição da frota, a variação horária do VMD, a distribuição direcional
do tráfego e o VMD total e de cada classe e tipo de veículo, bem como o fator de
correção sazonal no VMD.
Quanto à nomenclatura dos veículos, o padrão de identificação do CENTRAN
foi dado em função de cada tipo de veículo (que engloba um número determinado de
classes), codificado com as suas iniciais e um número de ordem para cada classe
existente dentro de cada tipo de veículo. Também é apresentado nas planilhas, para
comparação e conversão, o código de cada classe segundo o QFV-2005 do DNIT,
vigente à época. O primeiro grupo, dos veículos de passeio e leves, foi dividido em 3
classes (P1 a P3), assim como o dos ônibus (O1 a O3). Os caminhões foram separados
em 4 grupos – leves (C1 a C3), semirreboques simples (S1 a S6), semirreboques
especiais (SE1 a SE3: bitrem de 7 eixos, rodotrem e tritrem) e reboques (R1 a R6) – que
totalizam 18 classes. O último grupo a ser contabilizado foi o das motocicletas (M). No
total há 25 classes diferentes.
Justamente por ser oriunda de pesquisas volumétricas e classificatórias, a base
de dados do CENTRAN tem as vantagens de não conter uma classe de identificação
“indefinida” e de poder reconhecer como diferentes os veículos 3T4 (bitrem de 7 eixos,
codificado como SE1) dos veículos 3D4 (reboque Romeu e Julieta de 7 eixos), bem
como os veículos 3T6 (rodotrem, codificado como SE2) dos veículos 3R6 (tritrem,
codificado como SE3). Estes pares são formados pelas mesmas sequências de grupos de
eixos (no primeiro par os veículos são dados por uma sequência de um eixo SRS com 3
eixos TD, enquanto no segundo eles são dados por uma sequência de um eixo SRS com
4 eixos TD). Quando a classificação do veículo é feita automaticamente, por um sistema
de aquisição de dados, como no caso dos Postos de Pesagem, esse sistema pode não ser
capaz de diferenciar entre estes pares com as mesmas sequências de eixos. Na Figura
2.4 são mostrados os grupos de eixos mais frequentes nos veículos comerciais, segundo
a Resolução 210 do CONTRAN.
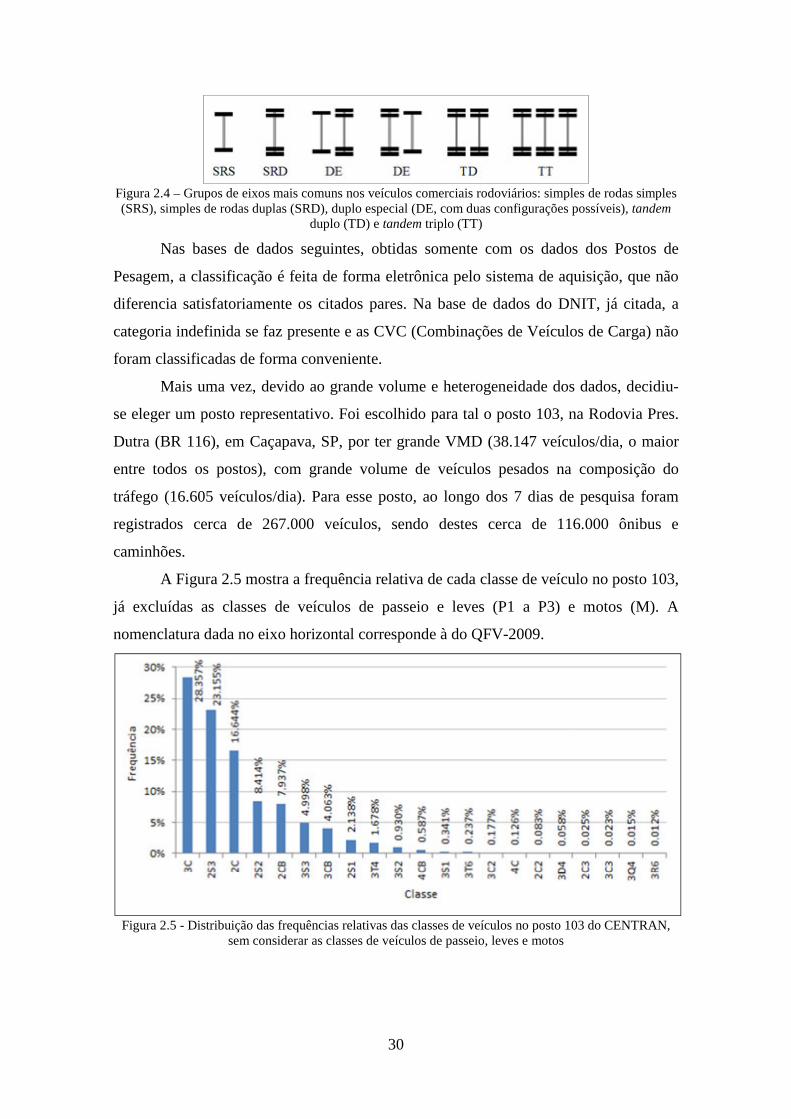
30
Figura 2.4 – Grupos de eixos mais comuns nos veículos comerciais rodoviários: simples de rodas simples (SRS), simples de rodas duplas (SRD), duplo especial (DE, com duas configurações possíveis), tandem
duplo (TD) e tandem triplo (TT)
Nas bases de dados seguintes, obtidas somente com os dados dos Postos de
Pesagem, a classificação é feita de forma eletrônica pelo sistema de aquisição, que não
diferencia satisfatoriamente os citados pares. Na base de dados do DNIT, já citada, a
categoria indefinida se faz presente e as CVC (Combinações de Veículos de Carga) não
foram classificadas de forma conveniente.
Mais uma vez, devido ao grande volume e heterogeneidade dos dados, decidiu-
se eleger um posto representativo. Foi escolhido para tal o posto 103, na Rodovia Pres.
Dutra (BR 116), em Caçapava, SP, por ter grande VMD (38.147 veículos/dia, o maior
entre todos os postos), com grande volume de veículos pesados na composição do
tráfego (16.605 veículos/dia). Para esse posto, ao longo dos 7 dias de pesquisa foram
registrados cerca de 267.000 veículos, sendo destes cerca de 116.000 ônibus e
caminhões.
A Figura 2.5 mostra a frequência relativa de cada classe de veículo no posto 103,
já excluídas as classes de veículos de passeio e leves (P1 a P3) e motos (M). A
nomenclatura dada no eixo horizontal corresponde à do QFV-2009.
Figura 2.5 - Distribuição das frequências relativas das classes de veículos no posto 103 do CENTRAN,
sem considerar as classes de veículos de passeio, leves e motos
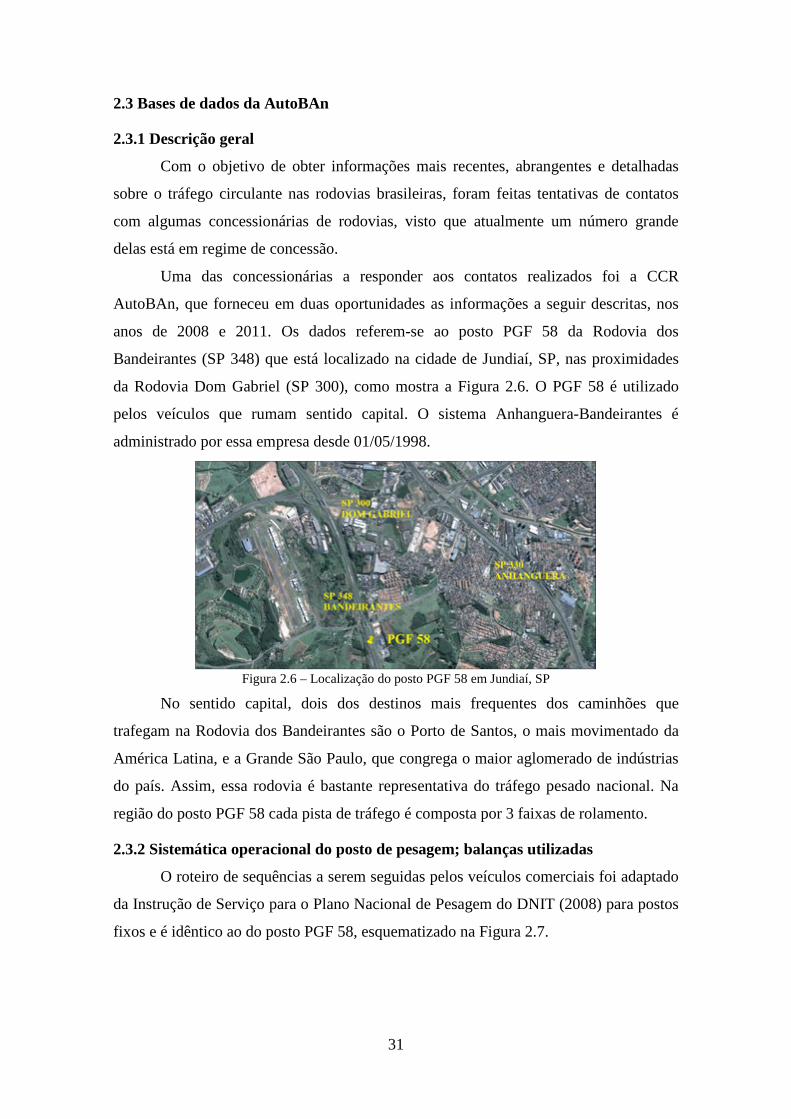
31
2.3 Bases de dados da AutoBAn
2.3.1 Descrição geral
Com o objetivo de obter informações mais recentes, abrangentes e detalhadas
sobre o tráfego circulante nas rodovias brasileiras, foram feitas tentativas de contatos
com algumas concessionárias de rodovias, visto que atualmente um número grande
delas está em regime de concessão.
Uma das concessionárias a responder aos contatos realizados foi a CCR
AutoBAn, que forneceu em duas oportunidades as informações a seguir descritas, nos
anos de 2008 e 2011. Os dados referem-se ao posto PGF 58 da Rodovia dos
Bandeirantes (SP 348) que está localizado na cidade de Jundiaí, SP, nas proximidades
da Rodovia Dom Gabriel (SP 300), como mostra a Figura 2.6. O PGF 58 é utilizado
pelos veículos que rumam sentido capital. O sistema Anhanguera-Bandeirantes é
administrado por essa empresa desde 01/05/1998.
Figura 2.6 – Localização do posto PGF 58 em Jundiaí, SP
No sentido capital, dois dos destinos mais frequentes dos caminhões que
trafegam na Rodovia dos Bandeirantes são o Porto de Santos, o mais movimentado da
América Latina, e a Grande São Paulo, que congrega o maior aglomerado de indústrias
do país. Assim, essa rodovia é bastante representativa do tráfego pesado nacional. Na
região do posto PGF 58 cada pista de tráfego é composta por 3 faixas de rolamento.
2.3.2 Sistemática operacional do posto de pesagem; balanças utilizadas
O roteiro de sequências a serem seguidas pelos veículos comerciais foi adaptado
da Instrução de Serviço para o Plano Nacional de Pesagem do DNIT (2008) para postos
fixos e é idêntico ao do posto PGF 58, esquematizado na Figura 2.7.
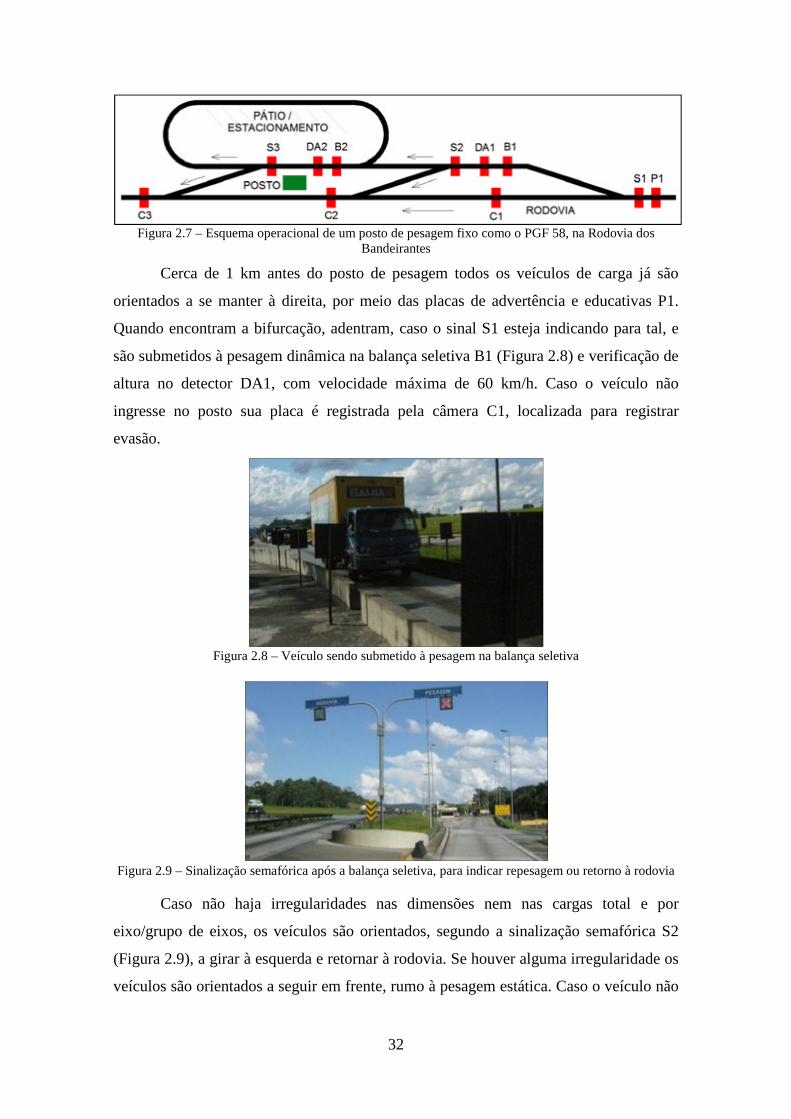
32
Figura 2.7 – Esquema operacional de um posto de pesagem fixo como o PGF 58, na Rodovia dos
Bandeirantes
Cerca de 1 km antes do posto de pesagem todos os veículos de carga já são
orientados a se manter à direita, por meio das placas de advertência e educativas P1.
Quando encontram a bifurcação, adentram, caso o sinal S1 esteja indicando para tal, e
são submetidos à pesagem dinâmica na balança seletiva B1 (Figura 2.8) e verificação de
altura no detector DA1, com velocidade máxima de 60 km/h. Caso o veículo não
ingresse no posto sua placa é registrada pela câmera C1, localizada para registrar
evasão.
Figura 2.8 – Veículo sendo submetido à pesagem na balança seletiva
Figura 2.9 – Sinalização semafórica após a balança seletiva, para indicar repesagem ou retorno à rodovia
Caso não haja irregularidades nas dimensões nem nas cargas total e por
eixo/grupo de eixos, os veículos são orientados, segundo a sinalização semafórica S2
(Figura 2.9), a girar à esquerda e retornar à rodovia. Se houver alguma irregularidade os
veículos são orientados a seguir em frente, rumo à pesagem estática. Caso o veículo não
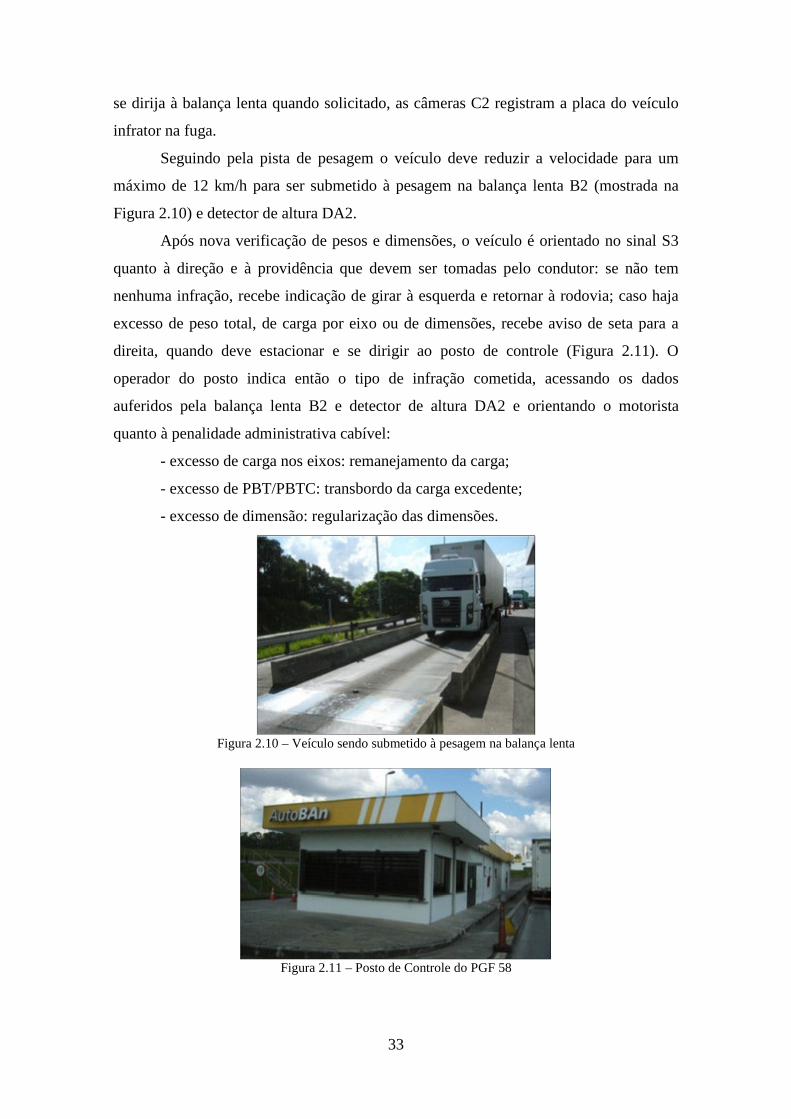
33
se dirija à balança lenta quando solicitado, as câmeras C2 registram a placa do veículo
infrator na fuga.
Seguindo pela pista de pesagem o veículo deve reduzir a velocidade para um
máximo de 12 km/h para ser submetido à pesagem na balança lenta B2 (mostrada na
Figura 2.10) e detector de altura DA2.
Após nova verificação de pesos e dimensões, o veículo é orientado no sinal S3
quanto à direção e à providência que devem ser tomadas pelo condutor: se não tem
nenhuma infração, recebe indicação de girar à esquerda e retornar à rodovia; caso haja
excesso de peso total, de carga por eixo ou de dimensões, recebe aviso de seta para a
direita, quando deve estacionar e se dirigir ao posto de controle (Figura 2.11). O
operador do posto indica então o tipo de infração cometida, acessando os dados
auferidos pela balança lenta B2 e detector de altura DA2 e orientando o motorista
quanto à penalidade administrativa cabível:
- excesso de carga nos eixos: remanejamento da carga;
- excesso de PBT/PBTC: transbordo da carga excedente;
- excesso de dimensão: regularização das dimensões.
Figura 2.10 – Veículo sendo submetido à pesagem na balança lenta
Figura 2.11 – Posto de Controle do PGF 58
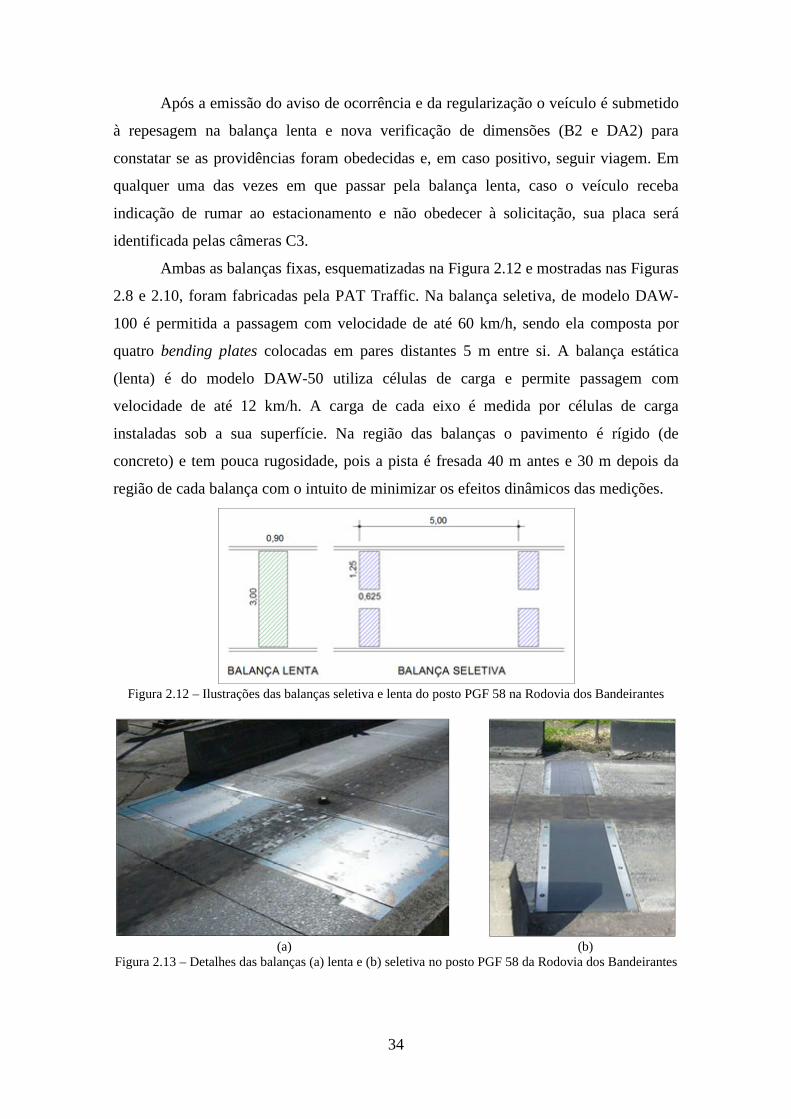
34
Após a emissão do aviso de ocorrência e da regularização o veículo é submetido
à repesagem na balança lenta e nova verificação de dimensões (B2 e DA2) para
constatar se as providências foram obedecidas e, em caso positivo, seguir viagem. Em
qualquer uma das vezes em que passar pela balança lenta, caso o veículo receba
indicação de rumar ao estacionamento e não obedecer à solicitação, sua placa será
identificada pelas câmeras C3.
Ambas as balanças fixas, esquematizadas na Figura 2.12 e mostradas nas Figuras
2.8 e 2.10, foram fabricadas pela PAT Traffic. Na balança seletiva, de modelo DAW-
100 é permitida a passagem com velocidade de até 60 km/h, sendo ela composta por
quatro bending plates colocadas em pares distantes 5 m entre si. A balança estática
(lenta) é do modelo DAW-50 utiliza células de carga e permite passagem com
velocidade de até 12 km/h. A carga de cada eixo é medida por células de carga
instaladas sob a sua superfície. Na região das balanças o pavimento é rígido (de
concreto) e tem pouca rugosidade, pois a pista é fresada 40 m antes e 30 m depois da
região de cada balança com o intuito de minimizar os efeitos dinâmicos das medições.
Figura 2.12 – Ilustrações das balanças seletiva e lenta do posto PGF 58 na Rodovia dos Bandeirantes
(a) (b) Figura 2.13 – Detalhes das balanças (a) lenta e (b) seletiva no posto PGF 58 da Rodovia dos Bandeirantes
35
O INMETRO realiza inspeção anual para aprovar as balanças. Antes da data da
última visita ao posto PGF 58 (11/04/2011) as balanças haviam sido homologadas em
31/05/2010. As Figuras 2.13 e 2.14 detalham as balanças seletiva e lenta, bem como as
condições da pista de rolamento nas suas imediações.
Os dados do posto PGF 58 da Rodovia dos Bandeirantes são adquiridos por
sistemas weigh-in-motion (WIM) que estimam o peso dos veículos quando eles
trafegam sobre balanças monitoradas. Dentre as várias tecnologias existentes para
operar estes sistemas, a bending plate e a célula de carga (load cell) são as utilizadas,
respectivamente, pelas balanças seletiva e lenta nesse posto; ambas têm uso consolidado
no Brasil desde a década de 1990, segundo o volume de apresentação do PDNEP
(2006). Seus requisitos de desempenho constam na norma ASTM E1318 (2002).
(a) (b)
Figura 2.14 – Condições das pistas na região das balanças (a) lenta e (b) seletiva no posto PGF 58 da Rodovia dos Bandeirantes em 11/04/2011
Bending plate
Os sistemas WIM com bending plate (Figura 2.15a) utilizam placas com
extensômetros do tipo strain gage conectados à sua parte inferior. Este tipo de sensor
mede deformações por meio de alterações na resistividade registradas pelo circuito
elétrico interno, geralmente do tipo ponte de Wheatstone. Essas alterações são
proporcionais às deformações. Quando um eixo passa sobre a placa o sistema registra a
deformação medida pelos strain gages e calcula o carregamento requerido para induzir
aquele grau de deformação. O carregamento dinâmico pode ser convertido em peso
estático por meio dos parâmetros de calibração do sistema que levam em conta fatores
como velocidade, condições do pavimento e características dinâmicas conhecidas das
suspensões dos veículos, de acordo com Volume VI do PDNEP (2006).
36
As balanças são instaladas em pares, niveladas com a superfície da pista e
perpendiculares à direção do fluxo, alinhadas e locadas nas posições transversais de
passagem das rodas direitas e esquerdas dos eixos para que os pneus de cada ponta de
eixo sejam pesados dupla e separadamente. A plataforma de pesagem tem dimensões
tais que possibilitam o isolamento de cada pneu quando ele é pesado. O sistema ainda é
composto por dois laços indutivos: o anterior detecta veículos e alerta o sistema para um
veículo que se aproxima, e o posterior é usado para determinar velocidade, distâncias
entre eixos etc. Os sistemas WIM com bending plate têm custo menor que os equipados
com célula de carga, porém são menos precisos que estes.
A acurácia do sistema bending plate pode ser expressa como uma função da
velocidade do veículo que trafega sobre as placas. Alteram a qualidade das medições as
cargas líquidas, que amplificam os efeitos dinâmicos, bem como velocidades altas ou
variáveis.
Célula de carga
A célula de carga (Figura 2.15b) contém dois sensores que operam de forma
independente, fornecendo as estimativas de carga para os pneus esquerdos e direitos de
cada eixo separadamente. O sistema WIM registra as cargas medidas por cada sensor e
as soma para obter a carga do eixo. O carregamento no sensor da superfície de pesagem
é transferido por barras de torção à célula de carga, a qual contém uma pequena
quantidade de óleo. Por um transdutor de pressão o aparelho estima a carga
relacionando a variação dessa grandeza com um valor equivalente de carga e envia esta
informação para o equipamento de análise.
A célula de carga é posicionada na faixa de tráfego de forma perpendicular ao
fluxo. Pelo menos um laço indutivo e um detector de eixos são usados: o laço indutivo é
posicionado a montante da célula de carga para detectar veículos e alertar o sistema
sobre a aproximação de um veículo; o sensor de eixos é colocado a jusante da célula de
carga para determinar distâncias entre eixos e a velocidade dos veículos.
As células de carga ficam contidas num invólucro de aço nivelado com a
superfície da balança, o que torna as suas respostas praticamente insensíveis à
temperatura e às condições dos pneus e do pavimento. A plataforma da balança também
permite isolar cada eixo quando ele é pesado. Por ser bastante preciso, o sistema WIM
com célula de carga pode pesar os veículos em velocidades altas ou baixas. Porém,
apresenta altos custos iniciais e de manutenção.
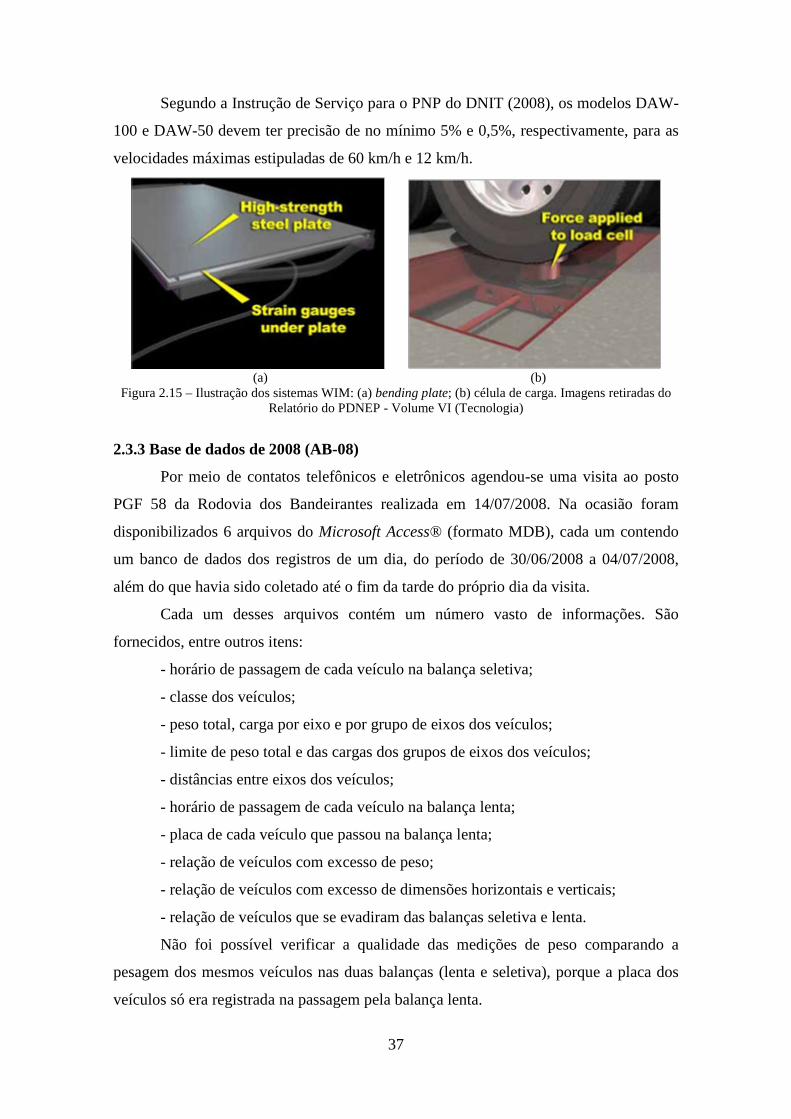
37
Segundo a Instrução de Serviço para o PNP do DNIT (2008), os modelos DAW-
100 e DAW-50 devem ter precisão de no mínimo 5% e 0,5%, respectivamente, para as
velocidades máximas estipuladas de 60 km/h e 12 km/h.
(a) (b)
Figura 2.15 – Ilustração dos sistemas WIM: (a) bending plate; (b) célula de carga. Imagens retiradas do Relatório do PDNEP - Volume VI (Tecnologia)
2.3.3 Base de dados de 2008 (AB-08)
Por meio de contatos telefônicos e eletrônicos agendou-se uma visita ao posto
PGF 58 da Rodovia dos Bandeirantes realizada em 14/07/2008. Na ocasião foram
disponibilizados 6 arquivos do Microsoft Access® (formato MDB), cada um contendo
um banco de dados dos registros de um dia, do período de 30/06/2008 a 04/07/2008,
além do que havia sido coletado até o fim da tarde do próprio dia da visita.
Cada um desses arquivos contém um número vasto de informações. São
fornecidos, entre outros itens:
- horário de passagem de cada veículo na balança seletiva;
- classe dos veículos;
- peso total, carga por eixo e por grupo de eixos dos veículos;
- limite de peso total e das cargas dos grupos de eixos dos veículos;
- distâncias entre eixos dos veículos;
- horário de passagem de cada veículo na balança lenta;
- placa de cada veículo que passou na balança lenta;
- relação de veículos com excesso de peso;
- relação de veículos com excesso de dimensões horizontais e verticais;
- relação de veículos que se evadiram das balanças seletiva e lenta.
Não foi possível verificar a qualidade das medições de peso comparando a
pesagem dos mesmos veículos nas duas balanças (lenta e seletiva), porque a placa dos
veículos só era registrada na passagem pela balança lenta.
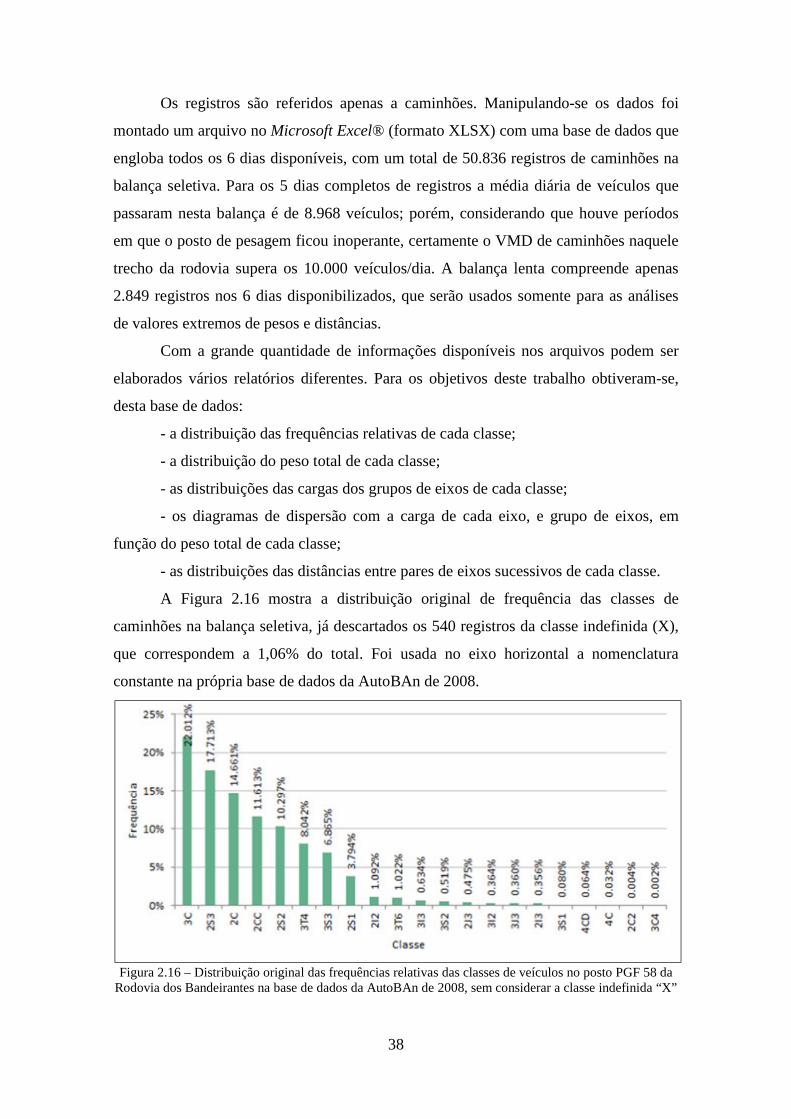
38
Os registros são referidos apenas a caminhões. Manipulando-se os dados foi
montado um arquivo no Microsoft Excel® (formato XLSX) com uma base de dados que
engloba todos os 6 dias disponíveis, com um total de 50.836 registros de caminhões na
balança seletiva. Para os 5 dias completos de registros a média diária de veículos que
passaram nesta balança é de 8.968 veículos; porém, considerando que houve períodos
em que o posto de pesagem ficou inoperante, certamente o VMD de caminhões naquele
trecho da rodovia supera os 10.000 veículos/dia. A balança lenta compreende apenas
2.849 registros nos 6 dias disponibilizados, que serão usados somente para as análises
de valores extremos de pesos e distâncias.
Com a grande quantidade de informações disponíveis nos arquivos podem ser
elaborados vários relatórios diferentes. Para os objetivos deste trabalho obtiveram-se,
desta base de dados:
- a distribuição das frequências relativas de cada classe;
- a distribuição do peso total de cada classe;
- as distribuições das cargas dos grupos de eixos de cada classe;
- os diagramas de dispersão com a carga de cada eixo, e grupo de eixos, em
função do peso total de cada classe;
- as distribuições das distâncias entre pares de eixos sucessivos de cada classe.
A Figura 2.16 mostra a distribuição original de frequência das classes de
caminhões na balança seletiva, já descartados os 540 registros da classe indefinida (X),
que correspondem a 1,06% do total. Foi usada no eixo horizontal a nomenclatura
constante na própria base de dados da AutoBAn de 2008.
Figura 2.16 – Distribuição original das frequências relativas das classes de veículos no posto PGF 58 da
Rodovia dos Bandeirantes na base de dados da AutoBAn de 2008, sem considerar a classe indefinida “X”
39
Pode-se notar que o sistema de aquisição de dados utilizado pela AutoBAn em
2008 classificava os veículos segundo o padrão de identificação do QFV-2005 do
DNIT, exceto pela classe identificada como 3C4, uma denominação antiga da classe
3D4; porém, à época da visita ao PGF 58 (julho/2008) vigorava o QFV-2007, que já
incluía codificação para várias classes de veículos não existentes no QFV-2005, como
os bitrens de 8 e 9 eixos. Assim, há duas dificuldades nesta tipificação:
a) algumas classes de caminhões com permissão de tráfego não puderam ser
corretamente catalogadas pelo sistema de aquisição de dados;
b) algumas classes são formadas por sequências iguais ou semelhantes de eixos
e, em alguns casos, não foram corretamente distinguidas.
Quanto à primeira dificuldade (a), foi possível identificar veículos 3C, 2S2, 2S3,
3S3, 2I3, 3I3 e 3T4 (classes existentes na própria base de dados), até então englobados
na classe “X” porque alguma das distâncias entre eixos agrupados havia sido estimada
com valor menor que o limite mínimo definido no sistema de aquisição: 1,00 m. Como,
em geral, as distâncias entre eixos agrupados, tanto nos veículos tratores quanto nas
carretas, varia aproximadamente entre 1,2 m e 1,4 m, possivelmente nesses registros
encontrados os veículos aceleraram durante a passagem entre os dois pares de bending
plates (ver a Seção 2.3.2) e os valores apresentados para as distâncias entre eixos foram
subestimados. Isto pode ser confirmado pelo fato de que, caso haja frenagem, as
distâncias entre eixos são superestimadas. De fato há valores registrados para as
distâncias entre eixos agrupados, em várias classes, maiores que o limite superior usual
de 1,4 m, como, por exemplo, o valor máximo de 1,63 m registrado para a distância
entre os dois últimos eixos (da carreta) de um caminhão 2S3. Esses valores
superestimados, entretanto, não levam a indefinições na classificação dos veículos.
Com o intuito de obter um melhor detalhamento da base de dados AB-08,
decidiu-se buscar, na classe considerada indefinida (X), registros de outras
configurações possíveis e não catalogadas pelo sistema de aquisição de dados, que
constassem nos documentos de tipificação mais recentes. Analisando os valores dos
campos de peso total, cargas por eixo e distâncias entre eixos, foram identificados
registros compatíveis com as seguintes classes:
- 3M6 (bitrem de 9 eixos), que passou a constar no QFV-2007;
- 2LD, 3LD, 2N3, 3N3 e 3N4, que passaram a constar no QFV-2007 com os
códigos 2D3L, 3D3L, 2N3I, 3N3I e 3N4I, respectivamente (ver o Anexo A);
- 3DS, que passou a constar apenas no QFV-2009;
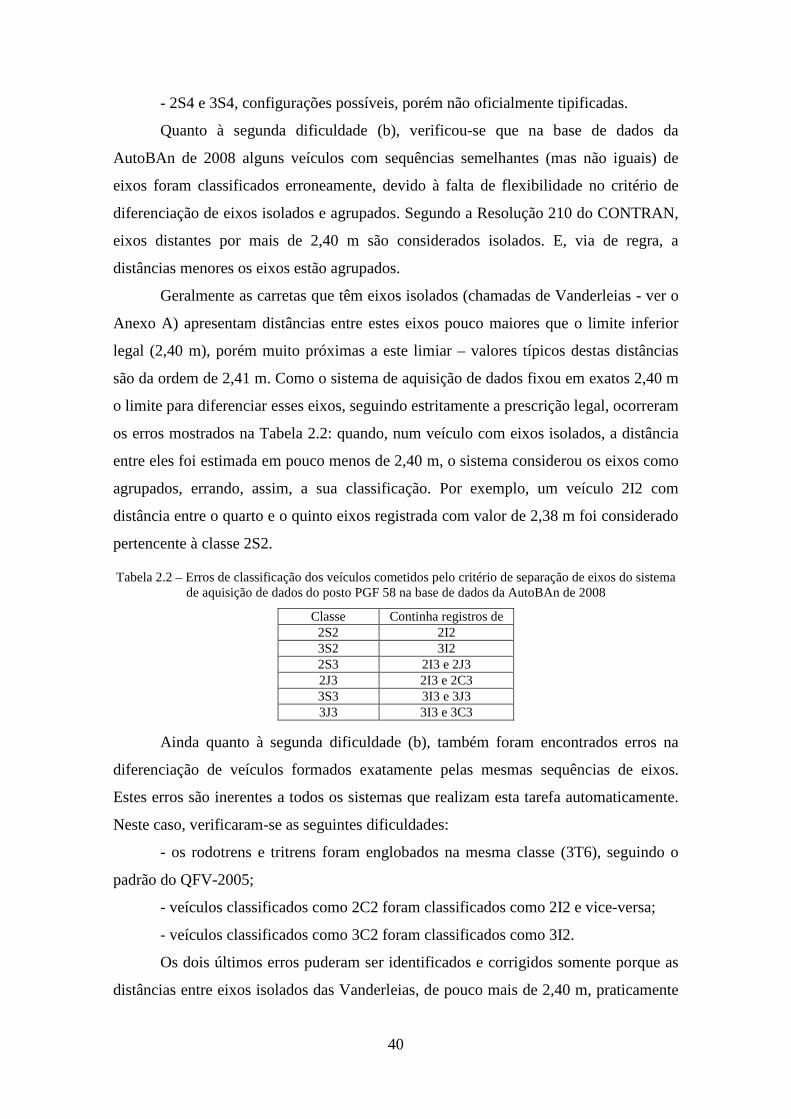
40
- 2S4 e 3S4, configurações possíveis, porém não oficialmente tipificadas.
Quanto à segunda dificuldade (b), verificou-se que na base de dados da
AutoBAn de 2008 alguns veículos com sequências semelhantes (mas não iguais) de
eixos foram classificados erroneamente, devido à falta de flexibilidade no critério de
diferenciação de eixos isolados e agrupados. Segundo a Resolução 210 do CONTRAN,
eixos distantes por mais de 2,40 m são considerados isolados. E, via de regra, a
distâncias menores os eixos estão agrupados.
Geralmente as carretas que têm eixos isolados (chamadas de Vanderleias - ver o
Anexo A) apresentam distâncias entre estes eixos pouco maiores que o limite inferior
legal (2,40 m), porém muito próximas a este limiar – valores típicos destas distâncias
são da ordem de 2,41 m. Como o sistema de aquisição de dados fixou em exatos 2,40 m
o limite para diferenciar esses eixos, seguindo estritamente a prescrição legal, ocorreram
os erros mostrados na Tabela 2.2: quando, num veículo com eixos isolados, a distância
entre eles foi estimada em pouco menos de 2,40 m, o sistema considerou os eixos como
agrupados, errando, assim, a sua classificação. Por exemplo, um veículo 2I2 com
distância entre o quarto e o quinto eixos registrada com valor de 2,38 m foi considerado
pertencente à classe 2S2.
Tabela 2.2 – Erros de classificação dos veículos cometidos pelo critério de separação de eixos do sistema de aquisição de dados do posto PGF 58 na base de dados da AutoBAn de 2008
Classe Continha registros de 2S2 2I2 3S2 3I2 2S3 2I3 e 2J3 2J3 2I3 e 2C3 3S3 3I3 e 3J3 3J3 3I3 e 3C3
Ainda quanto à segunda dificuldade (b), também foram encontrados erros na
diferenciação de veículos formados exatamente pelas mesmas sequências de eixos.
Estes erros são inerentes a todos os sistemas que realizam esta tarefa automaticamente.
Neste caso, verificaram-se as seguintes dificuldades:
- os rodotrens e tritrens foram englobados na mesma classe (3T6), seguindo o
padrão do QFV-2005;
- veículos classificados como 2C2 foram classificados como 2I2 e vice-versa;
- veículos classificados como 3C2 foram classificados como 3I2.
Os dois últimos erros puderam ser identificados e corrigidos somente porque as
distâncias entre eixos isolados das Vanderleias, de pouco mais de 2,40 m, praticamente
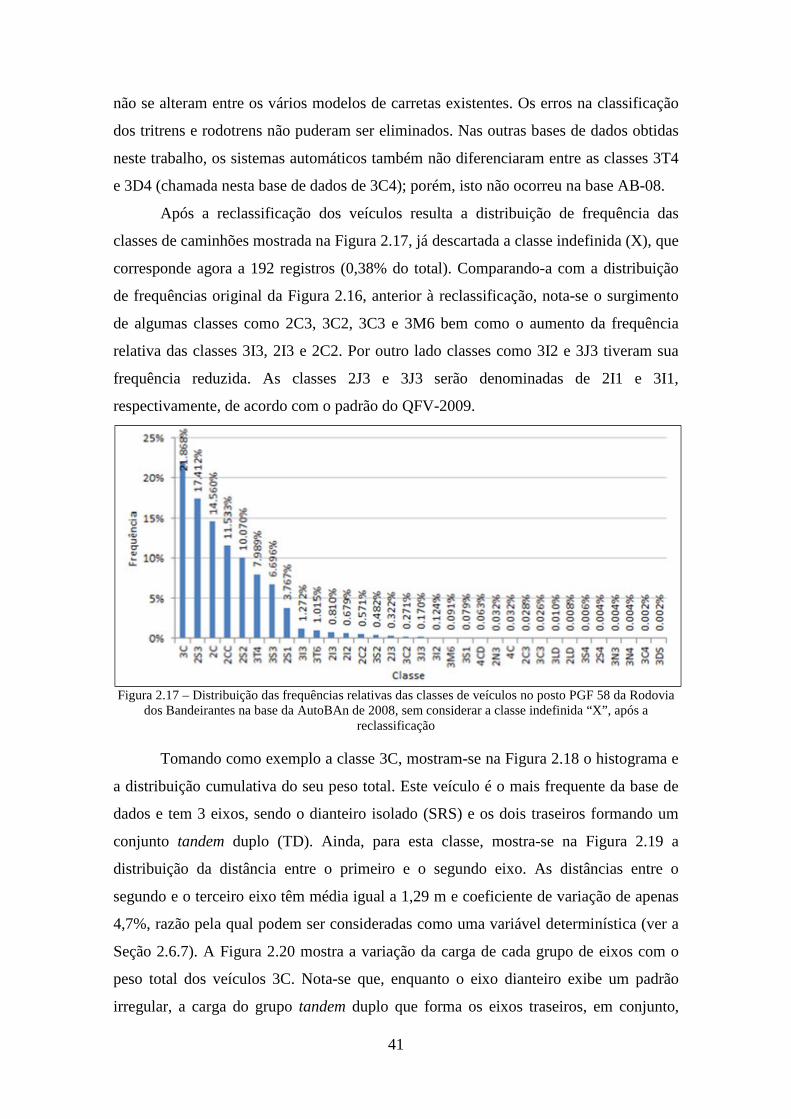
41
não se alteram entre os vários modelos de carretas existentes. Os erros na classificação
dos tritrens e rodotrens não puderam ser eliminados. Nas outras bases de dados obtidas
neste trabalho, os sistemas automáticos também não diferenciaram entre as classes 3T4
e 3D4 (chamada nesta base de dados de 3C4); porém, isto não ocorreu na base AB-08.
Após a reclassificação dos veículos resulta a distribuição de frequência das
classes de caminhões mostrada na Figura 2.17, já descartada a classe indefinida (X), que
corresponde agora a 192 registros (0,38% do total). Comparando-a com a distribuição
de frequências original da Figura 2.16, anterior à reclassificação, nota-se o surgimento
de algumas classes como 2C3, 3C2, 3C3 e 3M6 bem como o aumento da frequência
relativa das classes 3I3, 2I3 e 2C2. Por outro lado classes como 3I2 e 3J3 tiveram sua
frequência reduzida. As classes 2J3 e 3J3 serão denominadas de 2I1 e 3I1,
respectivamente, de acordo com o padrão do QFV-2009.
Figura 2.17 – Distribuição das frequências relativas das classes de veículos no posto PGF 58 da Rodovia
dos Bandeirantes na base da AutoBAn de 2008, sem considerar a classe indefinida “X”, após a reclassificação
Tomando como exemplo a classe 3C, mostram-se na Figura 2.18 o histograma e
a distribuição cumulativa do seu peso total. Este veículo é o mais frequente da base de
dados e tem 3 eixos, sendo o dianteiro isolado (SRS) e os dois traseiros formando um
conjunto tandem duplo (TD). Ainda, para esta classe, mostra-se na Figura 2.19 a
distribuição da distância entre o primeiro e o segundo eixo. As distâncias entre o
segundo e o terceiro eixo têm média igual a 1,29 m e coeficiente de variação de apenas
4,7%, razão pela qual podem ser consideradas como uma variável determinística (ver a
Seção 2.6.7). A Figura 2.20 mostra a variação da carga de cada grupo de eixos com o
peso total dos veículos 3C. Nota-se que, enquanto o eixo dianteiro exibe um padrão
irregular, a carga do grupo tandem duplo que forma os eixos traseiros, em conjunto,

42
apresenta correlação linear com o peso total do veículo. Neste trabalho os grupos de
eixos são numerados de forma crescente à medida que se caminha para a parte traseira
dos veículos: o primeiro grupo sempre corresponde ao eixo SRS dianteiro.
(a) (b)
Figura 2.18 – (a) Histograma de frequências relativas e (b) distribuição cumulativa do peso total dos
veículos da classe 3C na base de dados da AutoBAn de 2008 (X = 171 kN; s = 51,8 kN)
(a) (b)
Figura 2.19 – (a) Histograma de frequências relativas e (b) distribuição cumulativa da distância entre o
primeiro e o segundo eixos dos veículos da classe 3C na base de dados da AutoBAn de 2008 (X = 5,20 m; s = 0,65 m)
(a) (b)
Figura 2.20 – Diagramas de dispersão relacionando a carga dos grupos de eixos com o peso total dos
veículos da classe 3C na base de dados da AutoBAn de 2008: (a) grupo 1 (X = 44,3 kN; s = 10,4 kN);
(b) grupo 2 (X = 127 kN; s = 45,5 kN)
A Figura 2.21 mostra a distribuição de frequências da carga de cada grupo de
eixos da classe 3C, onde é possível notar a semelhança entre o histograma da carga do
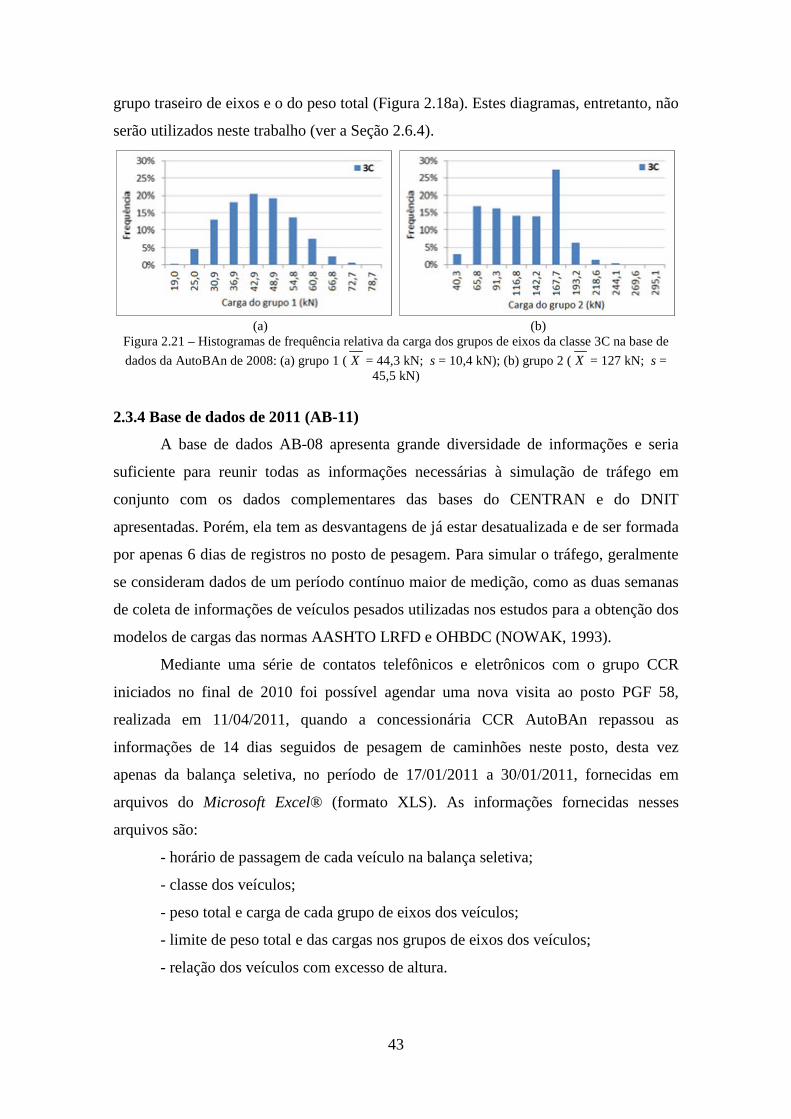
43
grupo traseiro de eixos e o do peso total (Figura 2.18a). Estes diagramas, entretanto, não
serão utilizados neste trabalho (ver a Seção 2.6.4).
(a) (b)
Figura 2.21 – Histogramas de frequência relativa da carga dos grupos de eixos da classe 3C na base de
dados da AutoBAn de 2008: (a) grupo 1 (X = 44,3 kN; s = 10,4 kN); (b) grupo 2 (X = 127 kN; s = 45,5 kN)
2.3.4 Base de dados de 2011 (AB-11)
A base de dados AB-08 apresenta grande diversidade de informações e seria
suficiente para reunir todas as informações necessárias à simulação de tráfego em
conjunto com os dados complementares das bases do CENTRAN e do DNIT
apresentadas. Porém, ela tem as desvantagens de já estar desatualizada e de ser formada
por apenas 6 dias de registros no posto de pesagem. Para simular o tráfego, geralmente
se consideram dados de um período contínuo maior de medição, como as duas semanas
de coleta de informações de veículos pesados utilizadas nos estudos para a obtenção dos
modelos de cargas das normas AASHTO LRFD e OHBDC (NOWAK, 1993).
Mediante uma série de contatos telefônicos e eletrônicos com o grupo CCR
iniciados no final de 2010 foi possível agendar uma nova visita ao posto PGF 58,
realizada em 11/04/2011, quando a concessionária CCR AutoBAn repassou as
informações de 14 dias seguidos de pesagem de caminhões neste posto, desta vez
apenas da balança seletiva, no período de 17/01/2011 a 30/01/2011, fornecidas em
arquivos do Microsoft Excel® (formato XLS). As informações fornecidas nesses
arquivos são:
- horário de passagem de cada veículo na balança seletiva;
- classe dos veículos;
- peso total e carga de cada grupo de eixos dos veículos;
- limite de peso total e das cargas nos grupos de eixos dos veículos;
- relação dos veículos com excesso de altura.
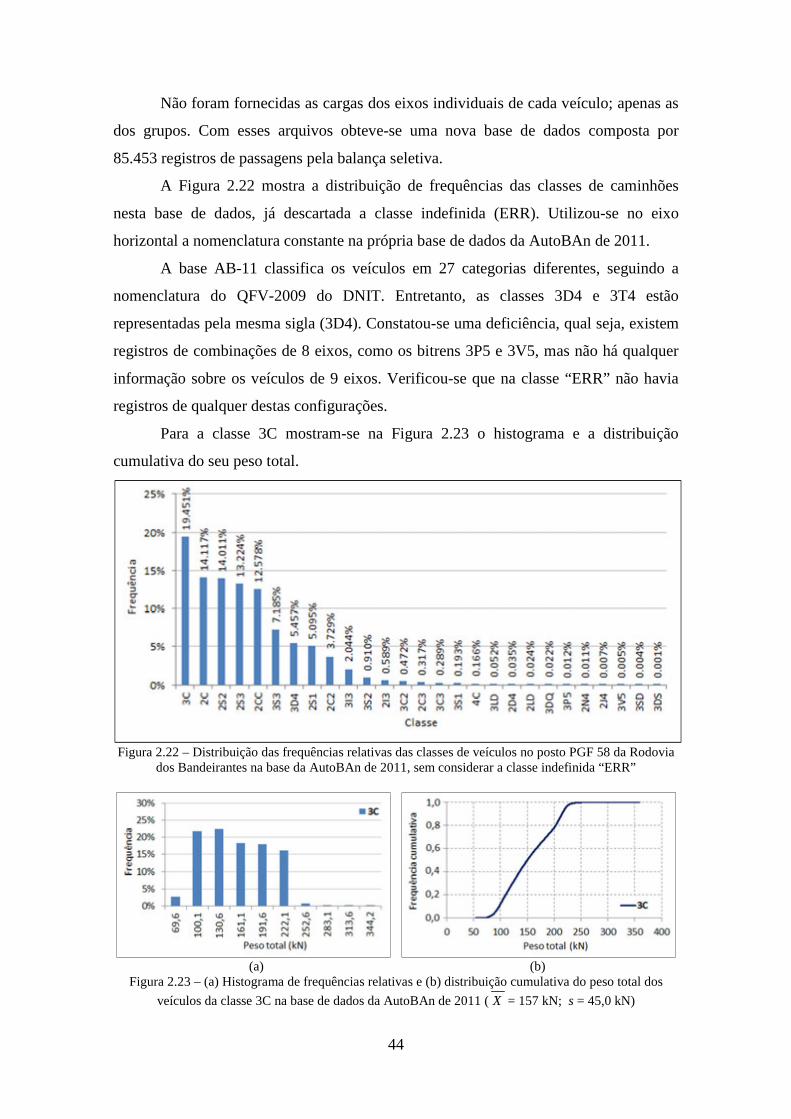
44
Não foram fornecidas as cargas dos eixos individuais de cada veículo; apenas as
dos grupos. Com esses arquivos obteve-se uma nova base de dados composta por
85.453 registros de passagens pela balança seletiva.
A Figura 2.22 mostra a distribuição de frequências das classes de caminhões
nesta base de dados, já descartada a classe indefinida (ERR). Utilizou-se no eixo
horizontal a nomenclatura constante na própria base de dados da AutoBAn de 2011.
A base AB-11 classifica os veículos em 27 categorias diferentes, seguindo a
nomenclatura do QFV-2009 do DNIT. Entretanto, as classes 3D4 e 3T4 estão
representadas pela mesma sigla (3D4). Constatou-se uma deficiência, qual seja, existem
registros de combinações de 8 eixos, como os bitrens 3P5 e 3V5, mas não há qualquer
informação sobre os veículos de 9 eixos. Verificou-se que na classe “ERR” não havia
registros de qualquer destas configurações.
Para a classe 3C mostram-se na Figura 2.23 o histograma e a distribuição
cumulativa do seu peso total.
Figura 2.22 – Distribuição das frequências relativas das classes de veículos no posto PGF 58 da Rodovia
dos Bandeirantes na base da AutoBAn de 2011, sem considerar a classe indefinida “ERR”
(a) (b)
Figura 2.23 – (a) Histograma de frequências relativas e (b) distribuição cumulativa do peso total dos
veículos da classe 3C na base de dados da AutoBAn de 2011 (X = 157 kN; s = 45,0 kN)
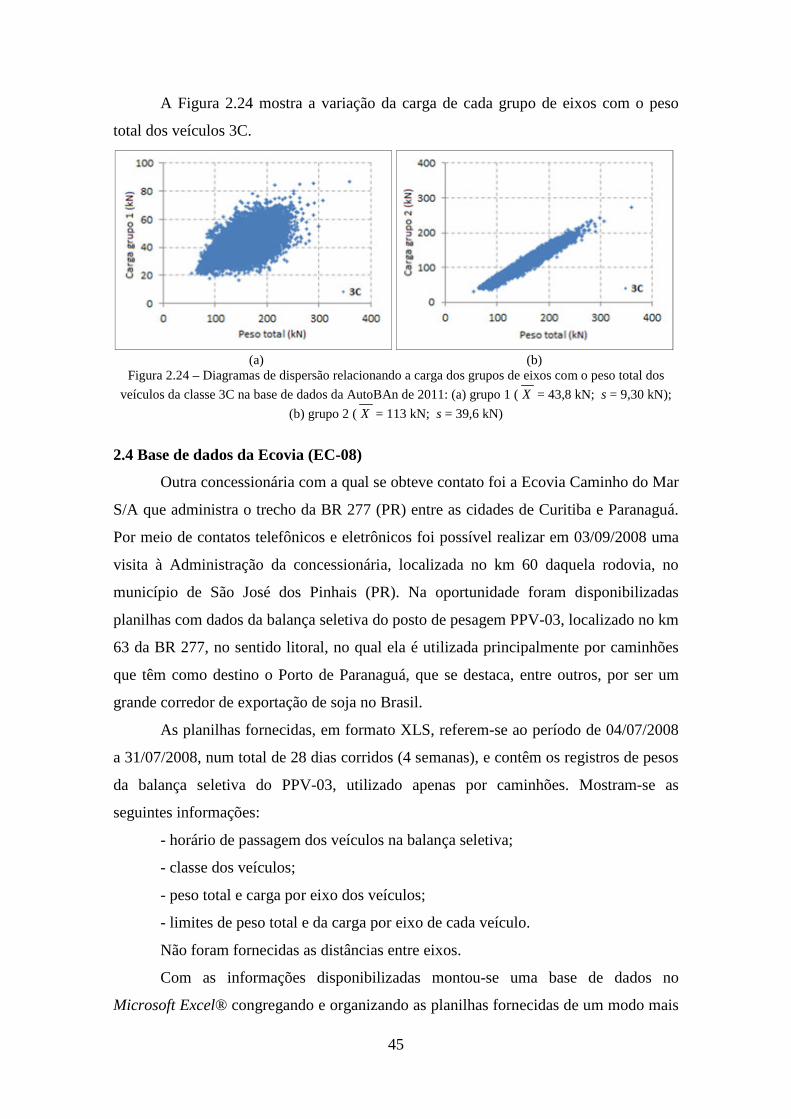
45
A Figura 2.24 mostra a variação da carga de cada grupo de eixos com o peso
total dos veículos 3C.
(a) (b)
Figura 2.24 – Diagramas de dispersão relacionando a carga dos grupos de eixos com o peso total dos
veículos da classe 3C na base de dados da AutoBAn de 2011: (a) grupo 1 (X = 43,8 kN; s = 9,30 kN);
(b) grupo 2 (X = 113 kN; s = 39,6 kN)
2.4 Base de dados da Ecovia (EC-08)
Outra concessionária com a qual se obteve contato foi a Ecovia Caminho do Mar
S/A que administra o trecho da BR 277 (PR) entre as cidades de Curitiba e Paranaguá.
Por meio de contatos telefônicos e eletrônicos foi possível realizar em 03/09/2008 uma
visita à Administração da concessionária, localizada no km 60 daquela rodovia, no
município de São José dos Pinhais (PR). Na oportunidade foram disponibilizadas
planilhas com dados da balança seletiva do posto de pesagem PPV-03, localizado no km
63 da BR 277, no sentido litoral, no qual ela é utilizada principalmente por caminhões
que têm como destino o Porto de Paranaguá, que se destaca, entre outros, por ser um
grande corredor de exportação de soja no Brasil.
As planilhas fornecidas, em formato XLS, referem-se ao período de 04/07/2008
a 31/07/2008, num total de 28 dias corridos (4 semanas), e contêm os registros de pesos
da balança seletiva do PPV-03, utilizado apenas por caminhões. Mostram-se as
seguintes informações:
- horário de passagem dos veículos na balança seletiva;
- classe dos veículos;
- peso total e carga por eixo dos veículos;
- limites de peso total e da carga por eixo de cada veículo.
Não foram fornecidas as distâncias entre eixos.
Com as informações disponibilizadas montou-se uma base de dados no
Microsoft Excel® congregando e organizando as planilhas fornecidas de um modo mais
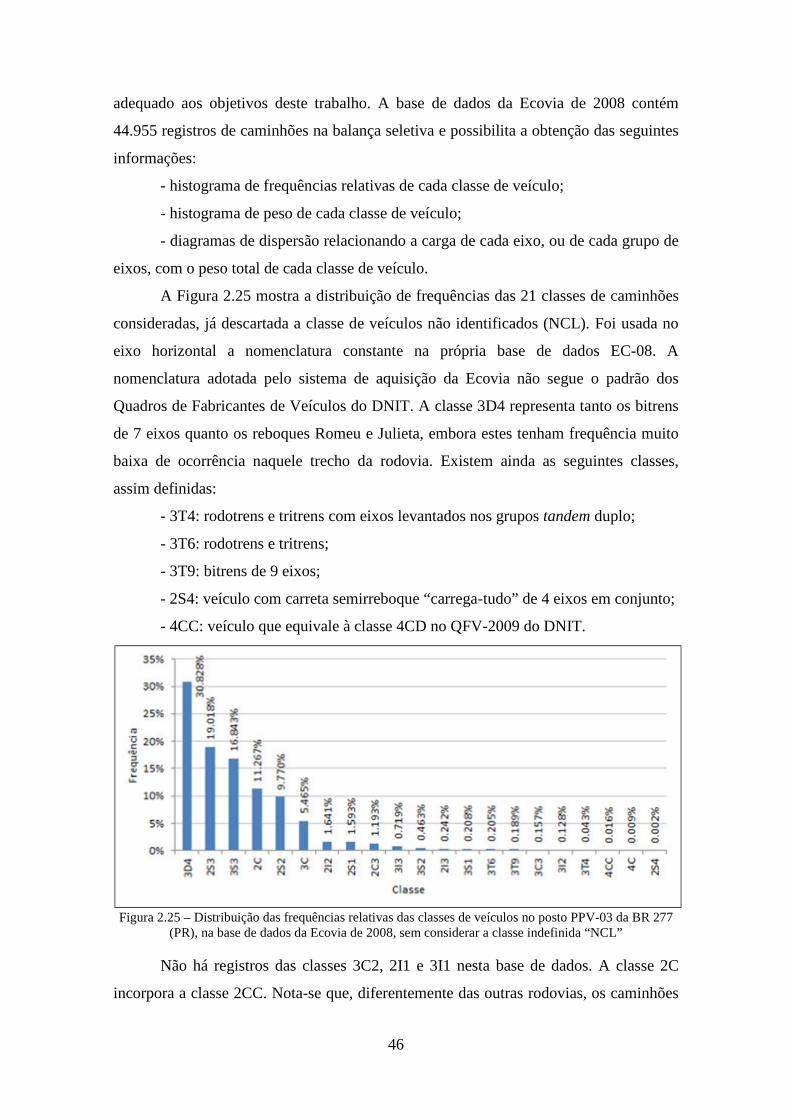
46
adequado aos objetivos deste trabalho. A base de dados da Ecovia de 2008 contém
44.955 registros de caminhões na balança seletiva e possibilita a obtenção das seguintes
informações:
- histograma de frequências relativas de cada classe de veículo;
- histograma de peso de cada classe de veículo;
- diagramas de dispersão relacionando a carga de cada eixo, ou de cada grupo de
eixos, com o peso total de cada classe de veículo.
A Figura 2.25 mostra a distribuição de frequências das 21 classes de caminhões
consideradas, já descartada a classe de veículos não identificados (NCL). Foi usada no
eixo horizontal a nomenclatura constante na própria base de dados EC-08. A
nomenclatura adotada pelo sistema de aquisição da Ecovia não segue o padrão dos
Quadros de Fabricantes de Veículos do DNIT. A classe 3D4 representa tanto os bitrens
de 7 eixos quanto os reboques Romeu e Julieta, embora estes tenham frequência muito
baixa de ocorrência naquele trecho da rodovia. Existem ainda as seguintes classes,
assim definidas:
- 3T4: rodotrens e tritrens com eixos levantados nos grupos tandem duplo;
- 3T6: rodotrens e tritrens;
- 3T9: bitrens de 9 eixos;
- 2S4: veículo com carreta semirreboque “carrega-tudo” de 4 eixos em conjunto;
- 4CC: veículo que equivale à classe 4CD no QFV-2009 do DNIT.
Figura 2.25 – Distribuição das frequências relativas das classes de veículos no posto PPV-03 da BR 277
(PR), na base de dados da Ecovia de 2008, sem considerar a classe indefinida “NCL”
Não há registros das classes 3C2, 2I1 e 3I1 nesta base de dados. A classe 2C
incorpora a classe 2CC. Nota-se que, diferentemente das outras rodovias, os caminhões
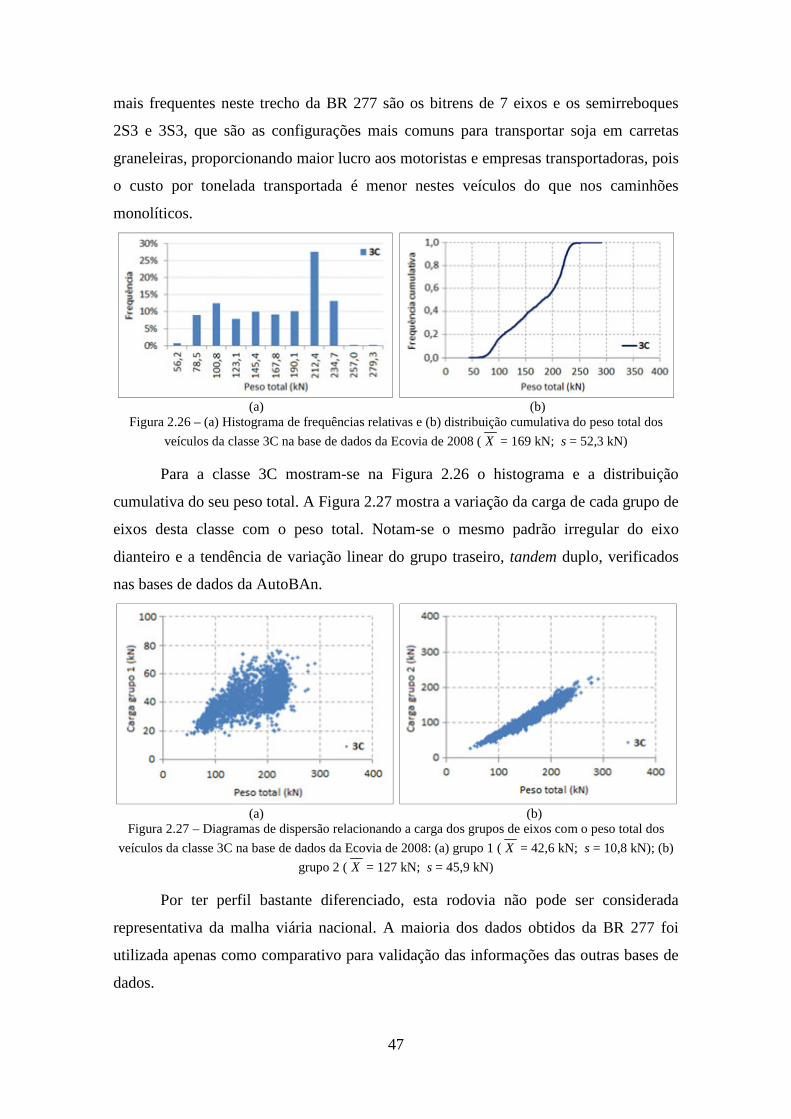
47
mais frequentes neste trecho da BR 277 são os bitrens de 7 eixos e os semirreboques
2S3 e 3S3, que são as configurações mais comuns para transportar soja em carretas
graneleiras, proporcionando maior lucro aos motoristas e empresas transportadoras, pois
o custo por tonelada transportada é menor nestes veículos do que nos caminhões
monolíticos.
(a) (b)
Figura 2.26 – (a) Histograma de frequências relativas e (b) distribuição cumulativa do peso total dos
veículos da classe 3C na base de dados da Ecovia de 2008 (X = 169 kN; s = 52,3 kN)
Para a classe 3C mostram-se na Figura 2.26 o histograma e a distribuição
cumulativa do seu peso total. A Figura 2.27 mostra a variação da carga de cada grupo de
eixos desta classe com o peso total. Notam-se o mesmo padrão irregular do eixo
dianteiro e a tendência de variação linear do grupo traseiro, tandem duplo, verificados
nas bases de dados da AutoBAn.
(a) (b)
Figura 2.27 – Diagramas de dispersão relacionando a carga dos grupos de eixos com o peso total dos
veículos da classe 3C na base de dados da Ecovia de 2008: (a) grupo 1 (X = 42,6 kN; s = 10,8 kN); (b)
grupo 2 (X = 127 kN; s = 45,9 kN)
Por ter perfil bastante diferenciado, esta rodovia não pode ser considerada
representativa da malha viária nacional. A maioria dos dados obtidos da BR 277 foi
utilizada apenas como comparativo para validação das informações das outras bases de
dados.

48
2.5 Análise dos dados
2.5.1 Comparação dos registros da balança seletiva com os da balança lenta
Durante a visita feita em 2011 ao posto PGF 58 da Rodovia dos Bandeirantes
colheram-se os valores das cargas dos eixos registrados, tanto pela balança seletiva
quanto pela lenta, em veículos que foram orientados a realizar pesagem nesta balança.
Com os registros referidos aos mesmos caminhões há a possibilidade de comparar os
valores registrados pelas duas balanças e, assim, avaliar o erro cometido pela balança
seletiva na estimativa do peso dos veículos. Como essas informações conjuntas tiveram
de ser coletadas manualmente, pois o sistema de aquisição de dados não gerava
relatórios com estas informações conjuntamente, o tamanho da amostra foi limitado às
condições disponíveis no momento da visita. Foram coletados os pesos de 22 veículos,
sendo que em 11 deles foi possível tomar nota das cargas de todos os grupos de eixos -
nos outros 11 foram anotadas apenas as cargas de alguns grupos de eixos.
Na Figura 2.28 mostram-se, em função da carga registrada na balança lenta, as
diferenças percentuais entre as cargas estimadas pelas duas balanças, em relação à lenta,
para o eixo SRS e para os 11 veículos completamente medidos; na Tabela 2.3 mostram-
se o número total de registros adquiridos de cada tipo de eixo, além dos veículos que
foram completamente pesados, e algumas estatísticas (média, desvio padrão e maior
valor absoluto) das diferenças percentuais nas cargas registradas pela balança seletiva,
em relação à balança lenta, em cada um deles.
(a) (b) Figura 2.28 – Diagramas de dispersão relacionando a diferença percentual da carga medida pela balança seletiva em relação à balança lenta, em função das cargas por esta registradas: (a) para os eixos SRS; (b)
para os 11 veículos completamente medidos
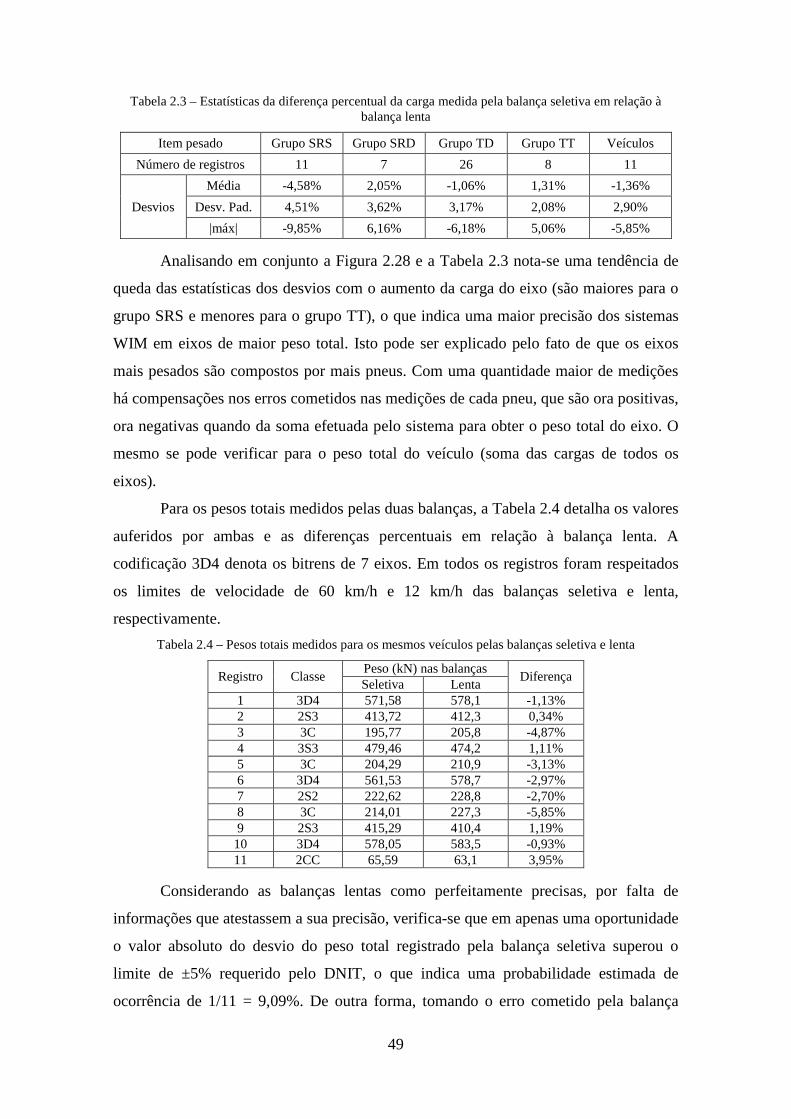
49
Tabela 2.3 – Estatísticas da diferença percentual da carga medida pela balança seletiva em relação à balança lenta
Item pesado Grupo SRS Grupo SRD Grupo TD Grupo TT Veículos
Número de registros 11 7 26 8 11
Desvios
Média -4,58% 2,05% -1,06% 1,31% -1,36%
Desv. Pad. 4,51% 3,62% 3,17% 2,08% 2,90%
|máx| -9,85% 6,16% -6,18% 5,06% -5,85%
Analisando em conjunto a Figura 2.28 e a Tabela 2.3 nota-se uma tendência de
queda das estatísticas dos desvios com o aumento da carga do eixo (são maiores para o
grupo SRS e menores para o grupo TT), o que indica uma maior precisão dos sistemas
WIM em eixos de maior peso total. Isto pode ser explicado pelo fato de que os eixos
mais pesados são compostos por mais pneus. Com uma quantidade maior de medições
há compensações nos erros cometidos nas medições de cada pneu, que são ora positivas,
ora negativas quando da soma efetuada pelo sistema para obter o peso total do eixo. O
mesmo se pode verificar para o peso total do veículo (soma das cargas de todos os
eixos).
Para os pesos totais medidos pelas duas balanças, a Tabela 2.4 detalha os valores
auferidos por ambas e as diferenças percentuais em relação à balança lenta. A
codificação 3D4 denota os bitrens de 7 eixos. Em todos os registros foram respeitados
os limites de velocidade de 60 km/h e 12 km/h das balanças seletiva e lenta,
respectivamente.
Tabela 2.4 – Pesos totais medidos para os mesmos veículos pelas balanças seletiva e lenta
Registro Classe Peso (kN) nas balanças
Diferença Seletiva Lenta
1 3D4 571,58 578,1 -1,13% 2 2S3 413,72 412,3 0,34% 3 3C 195,77 205,8 -4,87% 4 3S3 479,46 474,2 1,11% 5 3C 204,29 210,9 -3,13% 6 3D4 561,53 578,7 -2,97% 7 2S2 222,62 228,8 -2,70% 8 3C 214,01 227,3 -5,85% 9 2S3 415,29 410,4 1,19% 10 3D4 578,05 583,5 -0,93% 11 2CC 65,59 63,1 3,95%
Considerando as balanças lentas como perfeitamente precisas, por falta de
informações que atestassem a sua precisão, verifica-se que em apenas uma oportunidade
o valor absoluto do desvio do peso total registrado pela balança seletiva superou o
limite de ±5% requerido pelo DNIT, o que indica uma probabilidade estimada de
ocorrência de 1/11 = 9,09%. De outra forma, tomando o erro cometido pela balança
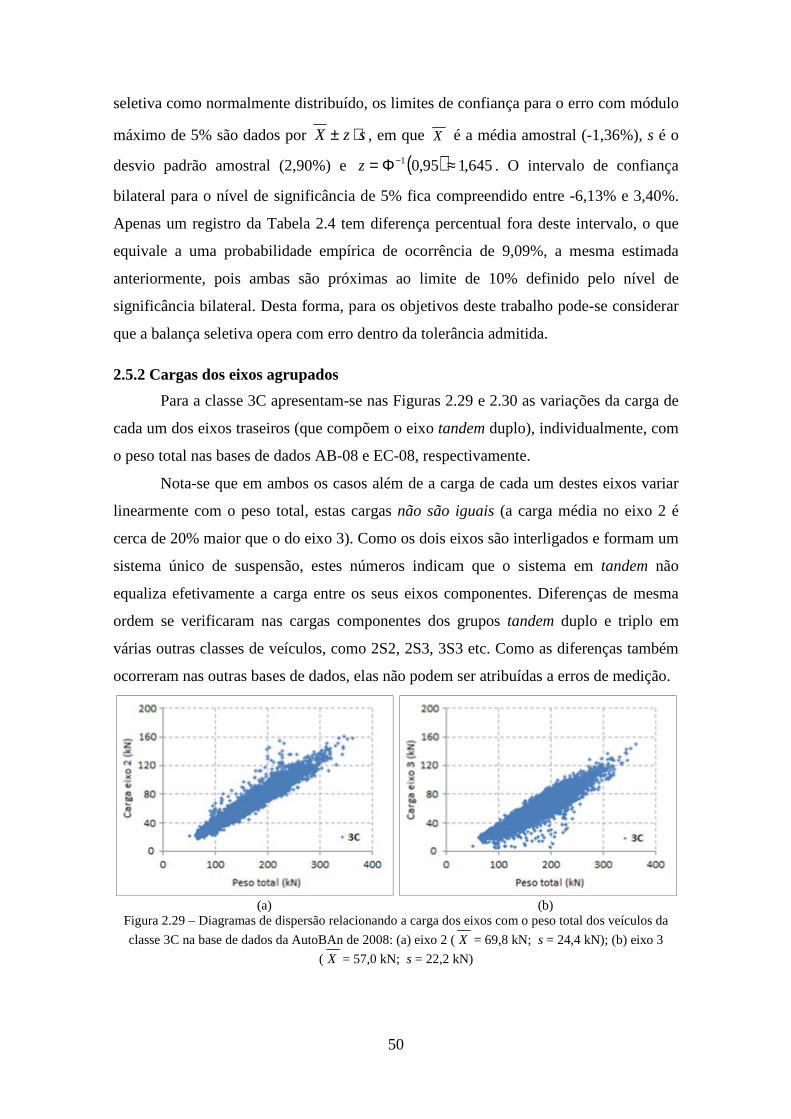
50
seletiva como normalmente distribuído, os limites de confiança para o erro com módulo
máximo de 5% são dados por szX ⋅± , em que X é a média amostral (-1,36%), s é o
desvio padrão amostral (2,90%) e ( ) 645,195,01 ≈Φ= −z . O intervalo de confiança
bilateral para o nível de significância de 5% fica compreendido entre -6,13% e 3,40%.
Apenas um registro da Tabela 2.4 tem diferença percentual fora deste intervalo, o que
equivale a uma probabilidade empírica de ocorrência de 9,09%, a mesma estimada
anteriormente, pois ambas são próximas ao limite de 10% definido pelo nível de
significância bilateral. Desta forma, para os objetivos deste trabalho pode-se considerar
que a balança seletiva opera com erro dentro da tolerância admitida.
2.5.2 Cargas dos eixos agrupados
Para a classe 3C apresentam-se nas Figuras 2.29 e 2.30 as variações da carga de
cada um dos eixos traseiros (que compõem o eixo tandem duplo), individualmente, com
o peso total nas bases de dados AB-08 e EC-08, respectivamente.
Nota-se que em ambos os casos além de a carga de cada um destes eixos variar
linearmente com o peso total, estas cargas não são iguais (a carga média no eixo 2 é
cerca de 20% maior que o do eixo 3). Como os dois eixos são interligados e formam um
sistema único de suspensão, estes números indicam que o sistema em tandem não
equaliza efetivamente a carga entre os seus eixos componentes. Diferenças de mesma
ordem se verificaram nas cargas componentes dos grupos tandem duplo e triplo em
várias outras classes de veículos, como 2S2, 2S3, 3S3 etc. Como as diferenças também
ocorreram nas outras bases de dados, elas não podem ser atribuídas a erros de medição.
(a) (b)
Figura 2.29 – Diagramas de dispersão relacionando a carga dos eixos com o peso total dos veículos da
classe 3C na base de dados da AutoBAn de 2008: (a) eixo 2 (X = 69,8 kN; s = 24,4 kN); (b) eixo 3
( X = 57,0 kN; s = 22,2 kN)
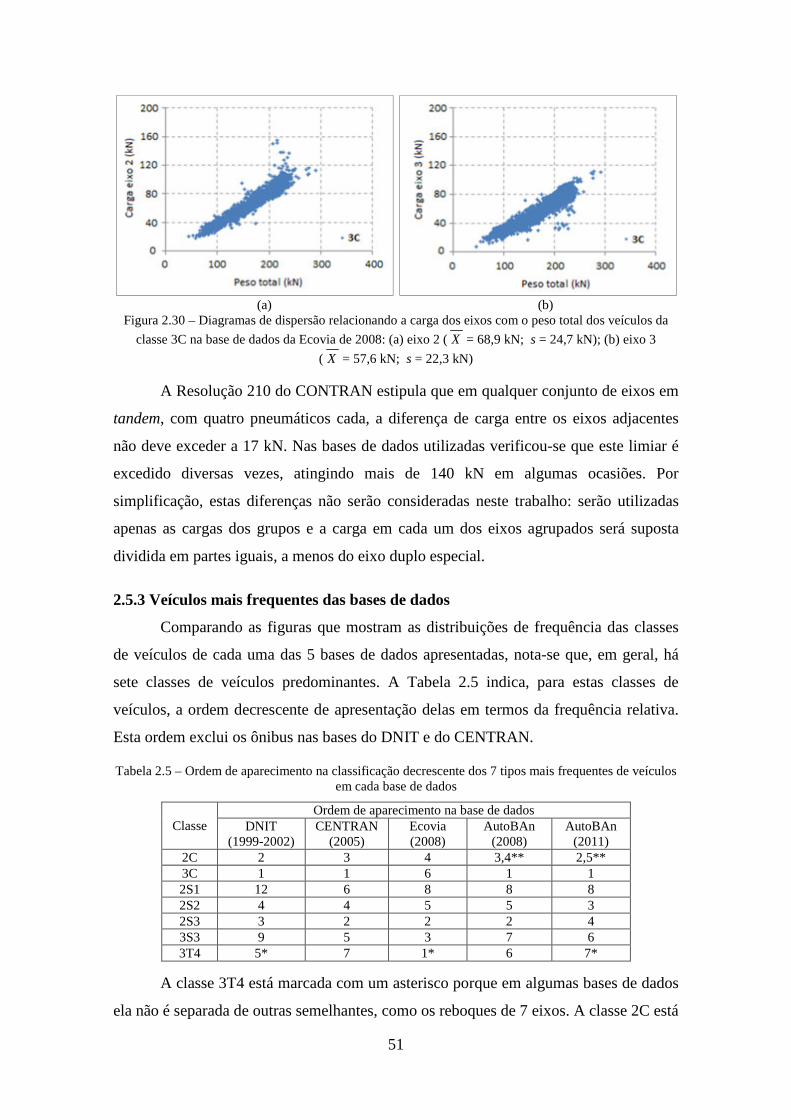
51
(a) (b)
Figura 2.30 – Diagramas de dispersão relacionando a carga dos eixos com o peso total dos veículos da
classe 3C na base de dados da Ecovia de 2008: (a) eixo 2 (X = 68,9 kN; s = 24,7 kN); (b) eixo 3
( X = 57,6 kN; s = 22,3 kN)
A Resolução 210 do CONTRAN estipula que em qualquer conjunto de eixos em
tandem, com quatro pneumáticos cada, a diferença de carga entre os eixos adjacentes
não deve exceder a 17 kN. Nas bases de dados utilizadas verificou-se que este limiar é
excedido diversas vezes, atingindo mais de 140 kN em algumas ocasiões. Por
simplificação, estas diferenças não serão consideradas neste trabalho: serão utilizadas
apenas as cargas dos grupos e a carga em cada um dos eixos agrupados será suposta
dividida em partes iguais, a menos do eixo duplo especial.
2.5.3 Veículos mais frequentes das bases de dados
Comparando as figuras que mostram as distribuições de frequência das classes
de veículos de cada uma das 5 bases de dados apresentadas, nota-se que, em geral, há
sete classes de veículos predominantes. A Tabela 2.5 indica, para estas classes de
veículos, a ordem decrescente de apresentação delas em termos da frequência relativa.
Esta ordem exclui os ônibus nas bases do DNIT e do CENTRAN.
Tabela 2.5 – Ordem de aparecimento na classificação decrescente dos 7 tipos mais frequentes de veículos em cada base de dados
Classe Ordem de aparecimento na base de dados
DNIT (1999-2002)
CENTRAN (2005)
Ecovia (2008)
AutoBAn (2008)
AutoBAn (2011)
2C 2 3 4 3,4** 2,5** 3C 1 1 6 1 1 2S1 12 6 8 8 8 2S2 4 4 5 5 3 2S3 3 2 2 2 4 3S3 9 5 3 7 6 3T4 5* 7 1* 6 7*
A classe 3T4 está marcada com um asterisco porque em algumas bases de dados
ela não é separada de outras semelhantes, como os reboques de 7 eixos. A classe 2C está
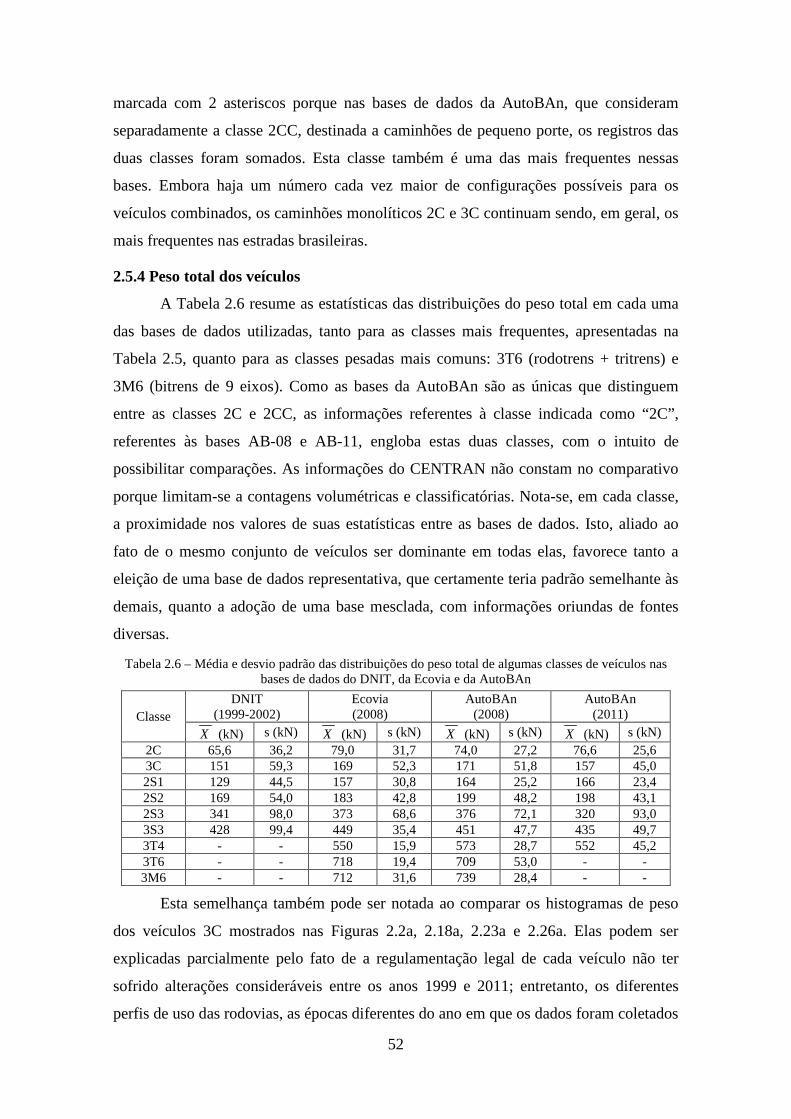
52
marcada com 2 asteriscos porque nas bases de dados da AutoBAn, que consideram
separadamente a classe 2CC, destinada a caminhões de pequeno porte, os registros das
duas classes foram somados. Esta classe também é uma das mais frequentes nessas
bases. Embora haja um número cada vez maior de configurações possíveis para os
veículos combinados, os caminhões monolíticos 2C e 3C continuam sendo, em geral, os
mais frequentes nas estradas brasileiras.
2.5.4 Peso total dos veículos
A Tabela 2.6 resume as estatísticas das distribuições do peso total em cada uma
das bases de dados utilizadas, tanto para as classes mais frequentes, apresentadas na
Tabela 2.5, quanto para as classes pesadas mais comuns: 3T6 (rodotrens + tritrens) e
3M6 (bitrens de 9 eixos). Como as bases da AutoBAn são as únicas que distinguem
entre as classes 2C e 2CC, as informações referentes à classe indicada como “2C”,
referentes às bases AB-08 e AB-11, engloba estas duas classes, com o intuito de
possibilitar comparações. As informações do CENTRAN não constam no comparativo
porque limitam-se a contagens volumétricas e classificatórias. Nota-se, em cada classe,
a proximidade nos valores de suas estatísticas entre as bases de dados. Isto, aliado ao
fato de o mesmo conjunto de veículos ser dominante em todas elas, favorece tanto a
eleição de uma base de dados representativa, que certamente teria padrão semelhante às
demais, quanto a adoção de uma base mesclada, com informações oriundas de fontes
diversas.
Tabela 2.6 – Média e desvio padrão das distribuições do peso total de algumas classes de veículos nas bases de dados do DNIT, da Ecovia e da AutoBAn
Classe DNIT
(1999-2002) Ecovia (2008)
AutoBAn (2008)
AutoBAn (2011)
X (kN) s (kN) X (kN) s (kN) X (kN) s (kN) X (kN) s (kN) 2C 65,6 36,2 79,0 31,7 74,0 27,2 76,6 25,6 3C 151 59,3 169 52,3 171 51,8 157 45,0 2S1 129 44,5 157 30,8 164 25,2 166 23,4 2S2 169 54,0 183 42,8 199 48,2 198 43,1 2S3 341 98,0 373 68,6 376 72,1 320 93,0 3S3 428 99,4 449 35,4 451 47,7 435 49,7 3T4 - - 550 15,9 573 28,7 552 45,2 3T6 - - 718 19,4 709 53,0 - - 3M6 - - 712 31,6 739 28,4 - -
Esta semelhança também pode ser notada ao comparar os histogramas de peso
dos veículos 3C mostrados nas Figuras 2.2a, 2.18a, 2.23a e 2.26a. Elas podem ser
explicadas parcialmente pelo fato de a regulamentação legal de cada veículo não ter
sofrido alterações consideráveis entre os anos 1999 e 2011; entretanto, os diferentes
perfis de uso das rodovias, as épocas diferentes do ano em que os dados foram coletados
53
(que os tornam sujeitos a variações sazonais) e os erros na estimativa do peso cometidos
pelas balanças contribuem para as diferenças nas estatísticas.
As distribuições do peso total e das cargas por eixo nas bases de dados
consideradas neste trabalho também se assemelham, em geral, àquelas utilizadas nos
trabalhos de CHAMON (1989), FERREIRA (2006), LINDQUIST (2006) e LUCHI
(2006), todos baseados em dados de tráfego coletados em rodovias das regiões Sul e
Sudeste.
2.6 Base de dados híbrida desenvolvida e utilizada (H-2013)
Já que nenhuma das 5 bases de dados obtidas contempla simultaneamente
informações acerca de todas as variáveis requeridas à simulação de tráfego (velocidades
e tempo entre veículos com o tráfego corrente, distâncias longitudinais, peso total e
carga por grupo de eixos e medições de ônibus), optou-se por montar uma base híbrida,
que utiliza informações de todas as fontes consideradas. Como as informações
estatísticas de cada uma delas têm certa semelhança, julgou-se que a adoção de uma
base híbrida não ocasionaria erros consideráveis.
2.6.1 Montagem da matriz de composição do tráfego
Por ser a fonte mais recente de dados, a base da AutoBAn de 2011 foi tomada
como referência para a composição do tráfego já que ela apresenta informações recentes
de uma rodovia representativa do tráfego pesado e moderno no país. Porém, esta base de
dados apresenta as seguintes desvantagens:
- não contém registros de ônibus;
- não contém registros dos semirreboques 2I1, 2I2, 3I1 e 3I2;
- não contém registros de qualquer combinação com mais de 8 eixos;
- considera a classe “3D4” duplicada (compreendendo simultaneamente os
bitrens de 7 eixos e os reboques Romeu e Julieta de 4 eixos);
- não disponibiliza as distâncias entre eixos, o que inviabiliza a análise detalhada
da base de dados e a reclassificação de veículos.
Para contornar as dificuldades citadas, algumas correções foram efetuadas na
base AB-11 para se obter uma composição final do tráfego apta a atender aos propósitos
da simulação de tráfego:
• a classe duplicada “3D4” foi dividida nas classes 3T4 (bitrens de 7 eixos) e
3D4 (reboque de 4 eixos), segundo a proporção encontrada na base de dados do
CENTRAN (3,32% de reboques);
54
• as classes 2S2, 2S3, 3S2 e 3S3 tiveram suas frequências relativas multiplicadas
pela razão entre as frequências final e inicial de ocorrência na base de dados da
AutoBAn de 2008 (iguais a 0,978; 0,983; 0,928 e 0,975, respectivamente), para simular
a perda de registros destas classes para as carretas com eixos isolados;
• a classe 2I3 foi dividida nas classes 2I3 e 2I1, segundo a proporção encontrada
na base de dados da AutoBAn de 2008 (71,55% de veículos 2I3);
• a classe 2C2 foi dividida nas classes 2C2 e 2I2, segundo a proporção
encontrada na base de dados da AutoBAn de 2008 (45,66% de veículos 2C2);
• a classe 3I3 foi dividida nas classes 3I3 e 3I1, segundo a proporção encontrada
na base de dados da AutoBAn de 2008 (88,22% de veículos 3I3);
• a classe 3C2 foi dividida nas classes 3C2 e 3I2, segundo a proporção
encontrada na base de dados da AutoBAn de 2008 (68,50% de veículos 3C2);
• inseriram-se artificialmente os rodotrens (3T6) e tritrens (3R6), em duas
etapas: primeiro foi considerada a frequência da classe duplicada “3T6” da base de
dados da AutoBAn de 2008 (1,01% do total de caminhões), e depois esta classe foi
dividida em 3T6 e 3R6, segundo a proporção encontrada na base de dados do
CENTRAN (4,83% de tritrens);
• inseriram-se artificialmente os bitrens de 9 eixos (3M6), com a frequência
encontrada na base de dados da Ecovia (0,19% do total de caminhões);
• inseriram-se artificialmente os ônibus das classes 2CB e 3CB, com as
frequências encontradas na base de dados do CENTRAN (7,94% e 4,06% do total de
veículos comerciais, respectivamente);
• a classe “3CB”, que engloba todos os ônibus de 3 eixos, foi dividida nas
classes 3CB e 3BB, em que o eixo simples se encontra à frente ou atrás do eixo duplo,
respectivamente, no grupo traseiro de eixos (duplo especial). Para a divisão, foi adotada
a proporção de 50% de veículos de cada tipo, estimada a partir do número de unidades
vendidas de cada modelo de ônibus, segundo a Associação Nacional dos Fabricantes de
Veículos Automotores (ANFAVEA), com a posterior identificação de cada tipo, entre
os modelos de maior venda, de acordo com as especificações técnicas de cada chassi,
encontradas nos sítios de seus fabricantes na internet: MAN Latin America, Mercedes-
Benz do Brasil, Scania Latin America e Volvo do Brasil;
• algumas classes apresentam mais de uma moda nas distribuições das suas
distâncias entre eixos e podem ser divididas segundo estas grandezas. A separação em
subclasses contorna a limitação de não se considerarem correlações entre as variáveis
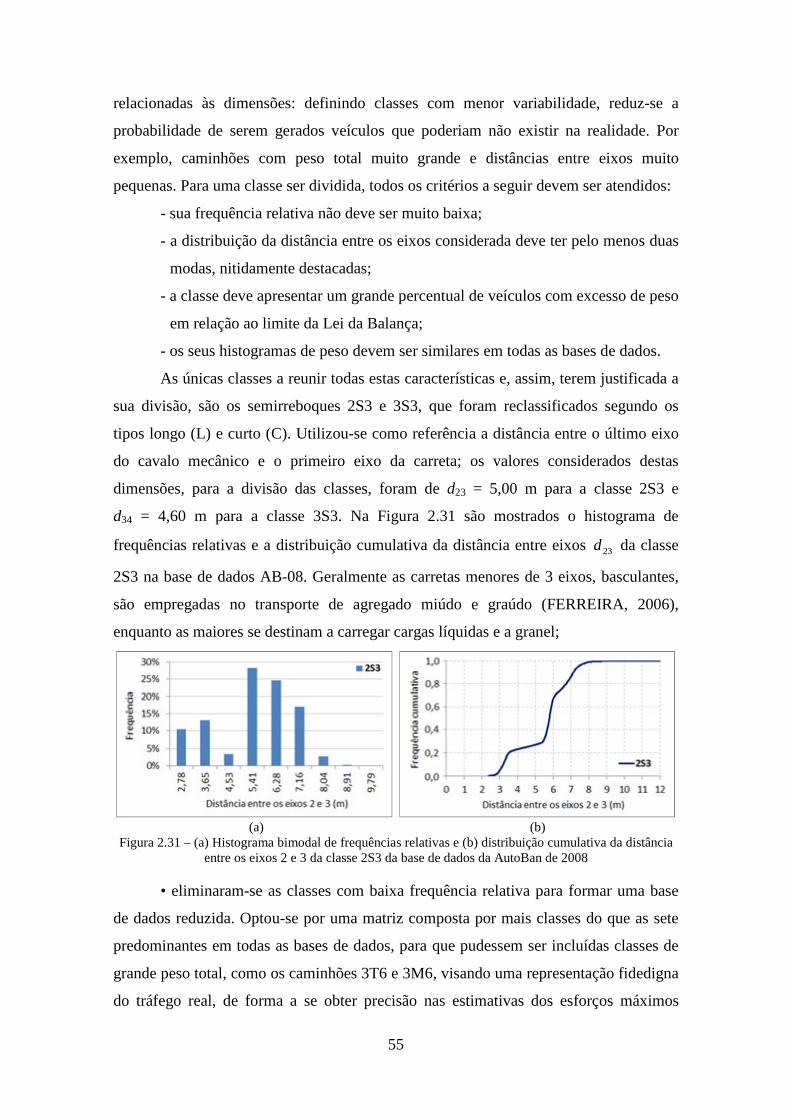
55
relacionadas às dimensões: definindo classes com menor variabilidade, reduz-se a
probabilidade de serem gerados veículos que poderiam não existir na realidade. Por
exemplo, caminhões com peso total muito grande e distâncias entre eixos muito
pequenas. Para uma classe ser dividida, todos os critérios a seguir devem ser atendidos:
- sua frequência relativa não deve ser muito baixa;
- a distribuição da distância entre os eixos considerada deve ter pelo menos duas
modas, nitidamente destacadas;
- a classe deve apresentar um grande percentual de veículos com excesso de peso
em relação ao limite da Lei da Balança;
- os seus histogramas de peso devem ser similares em todas as bases de dados.
As únicas classes a reunir todas estas características e, assim, terem justificada a
sua divisão, são os semirreboques 2S3 e 3S3, que foram reclassificados segundo os
tipos longo (L) e curto (C). Utilizou-se como referência a distância entre o último eixo
do cavalo mecânico e o primeiro eixo da carreta; os valores considerados destas
dimensões, para a divisão das classes, foram de d23 = 5,00 m para a classe 2S3 e
d34 = 4,60 m para a classe 3S3. Na Figura 2.31 são mostrados o histograma de
frequências relativas e a distribuição cumulativa da distância entre eixos 23d da classe
2S3 na base de dados AB-08. Geralmente as carretas menores de 3 eixos, basculantes,
são empregadas no transporte de agregado miúdo e graúdo (FERREIRA, 2006),
enquanto as maiores se destinam a carregar cargas líquidas e a granel;
(a) (b) Figura 2.31 – (a) Histograma bimodal de frequências relativas e (b) distribuição cumulativa da distância
entre os eixos 2 e 3 da classe 2S3 da base de dados da AutoBan de 2008
• eliminaram-se as classes com baixa frequência relativa para formar uma base
de dados reduzida. Optou-se por uma matriz composta por mais classes do que as sete
predominantes em todas as bases de dados, para que pudessem ser incluídas classes de
grande peso total, como os caminhões 3T6 e 3M6, visando uma representação fidedigna
do tráfego real, de forma a se obter precisão nas estimativas dos esforços máximos
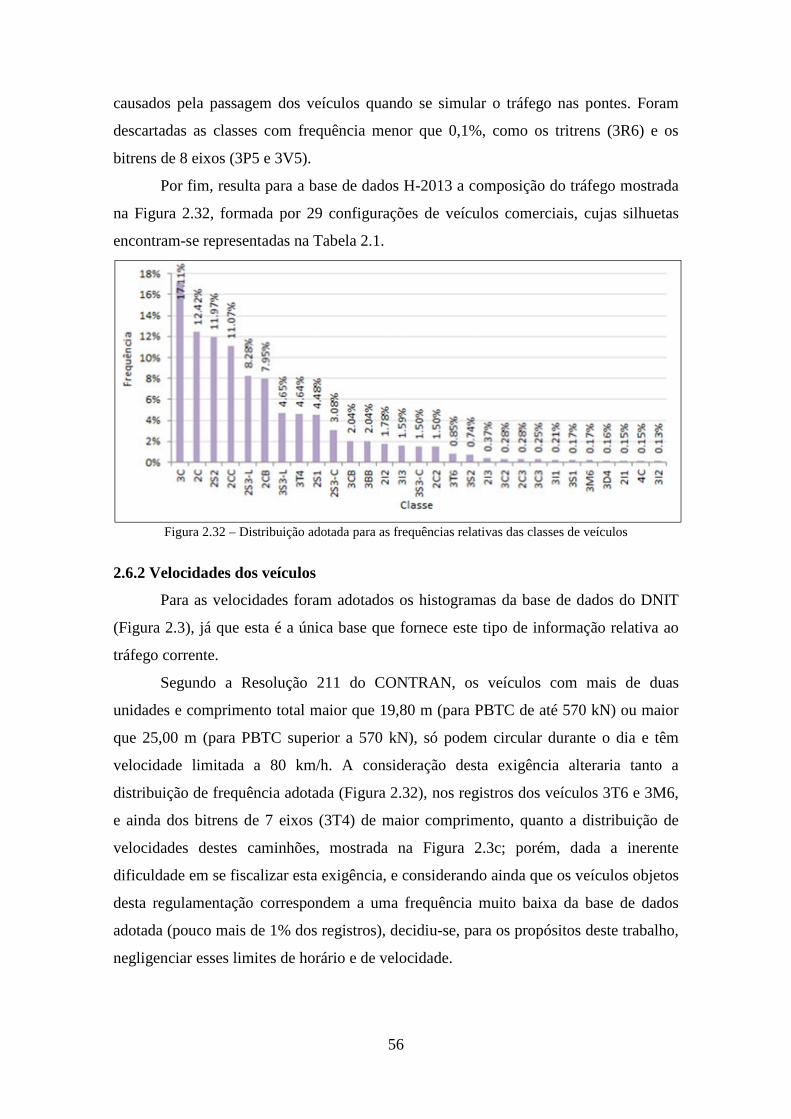
56
causados pela passagem dos veículos quando se simular o tráfego nas pontes. Foram
descartadas as classes com frequência menor que 0,1%, como os tritrens (3R6) e os
bitrens de 8 eixos (3P5 e 3V5).
Por fim, resulta para a base de dados H-2013 a composição do tráfego mostrada
na Figura 2.32, formada por 29 configurações de veículos comerciais, cujas silhuetas
encontram-se representadas na Tabela 2.1.
Figura 2.32 – Distribuição adotada para as frequências relativas das classes de veículos
2.6.2 Velocidades dos veículos
Para as velocidades foram adotados os histogramas da base de dados do DNIT
(Figura 2.3), já que esta é a única base que fornece este tipo de informação relativa ao
tráfego corrente.
Segundo a Resolução 211 do CONTRAN, os veículos com mais de duas
unidades e comprimento total maior que 19,80 m (para PBTC de até 570 kN) ou maior
que 25,00 m (para PBTC superior a 570 kN), só podem circular durante o dia e têm
velocidade limitada a 80 km/h. A consideração desta exigência alteraria tanto a
distribuição de frequência adotada (Figura 2.32), nos registros dos veículos 3T6 e 3M6,
e ainda dos bitrens de 7 eixos (3T4) de maior comprimento, quanto a distribuição de
velocidades destes caminhões, mostrada na Figura 2.3c; porém, dada a inerente
dificuldade em se fiscalizar esta exigência, e considerando ainda que os veículos objetos
desta regulamentação correspondem a uma frequência muito baixa da base de dados
adotada (pouco mais de 1% dos registros), decidiu-se, para os propósitos deste trabalho,
negligenciar esses limites de horário e de velocidade.

57
2.6.3 Ajuste de distribuições de probabilidades aos pesos totais dos veículos
O peso total de cada classe foi considerado como uma variável aleatória e
modelado por distribuições contínuas de probabilidades. Para obter o modelo mais
adequado a cada classe confeccionou-se o programa computacional Ajusta_v1,
desenvolvido em linguagem Fortran®, que elege automaticamente a curva mais
adequada aos dados a partir do histograma de frequências relativas e do próprio
conjunto de valores registrados, caso ele esteja disponível. Para um máximo de 3 modas
ajustam-se a cada subdivisão do histograma os 18 modelos de distribuição mostrados na
Tabela 2.7. Testando combinações entre estes modelos (ou cada modelo
individualmente, caso a distribuição seja unimodal) o programa determina pelos
critérios de semelhanças de ordenadas das distribuições de probabilidades (densidade e
cumulativa) e testes de aderência (chi-quadrado e Kolmogorov-Smirnov) o modelo
probabilístico que mais se assemelha aos dados amostrais de acordo com um fator de
importância previamente definido para cada critério. Para a estimativa dos parâmetros
das distribuições utiliza-se o método dos momentos, por ser o de mais fácil
implementação, embora não seja o mais preciso (ANG e TANG, 1975). As equações
destas curvas são mostradas no Anexo B.
Tabela 2.7 – Distribuições contínuas de probabilidades consideradas para o ajuste de modelos populacionais
Cód. Distribuição Sigla 1 Normal NOR 2 Lognormal LNO 3 Gamma GAM 4 Exponencial EXP 5 Erlang ERL 6 Chi-quadrado CHI 7 Exponencial dupla EDU 8 Beta BET 9 Student STU 10 Logística LGT 11 Rayleigh RAY 12 Tipo I de máximos (Gumbel) GUM 13 Tipo I de mínimos 1MN 14 Tipo II de máximos (Frèchet) FRE 15 Tipo II de mínimos 2MN 16 Tipo III de máximos 3MX 17 Tipo III de mínimos (Weibull) WEI 18 Uniforme UNI
O programa possibilita, ainda, a determinação da melhor distribuição
considerando o histograma como um todo, quando todos os intervalos têm a mesma
importância relativa, ou então priorizando as caudas de mínimos ou de máximos,
quando as variáveis associadas ao ajuste são calculadas segundo fatores de importância

58
diferentes para cada intervalo do histograma de entrada, dados em função da
extremidade a enfatizar. Para o peso total dos veículos, as curvas foram ajustadas
considerando os mesmos fatores de importância para todos os intervalos dos
histogramas.
Para a maioria das classes de veículos mostradas na Tabela 2.1 foram usados
como referência os histogramas de peso da base de dados AB-11; entretanto, as
distribuições dos pesos de algumas classes de caminhões foram considerados a partir da
base AB-08:
- das classes 2S3 e 3S3, porque a base AB-08 é a única que permite a divisão em
veículos longos e curtos de acordo com as distâncias entre eixos;
- das classes 2I2, 3T6 e 3M6, por fornecer os dados mais consistentes sobre os
pesos destes caminhões;
- das classes 2I1 e 3I1, por ser a única fonte de dados de seus pesos.
Tabela 2.8 – Grandezas estatísticas e distribuições de probabilidades ajustadas ao peso total dos veículos
Classe Peso total (kN) Distribuição 1 Distribuição 2 Distribuição 3 Média D.P. Tipo Média D.P. Tipo Média D.P. Tipo Média D.P.
2CC 58,1 16,1 GAM 58,1 16,1 - - - - - - 2C 93,1 20,7 GAM 93,1 20,7 - - - - - - 3C 157 45,0 WEI 115 18,6 UNI 194 25,2 EXP 262 14,0 4C 207 46,6 LNO 182 23,2 LNO 277 19,1 - - - 2C2 208 27,5 FRE 208 27,5 - - - - - - 2C3 376 75,2 ERL 252 44,7 2MN 413 28,9 - - - 3C2 288 84,1 CHI 229 41,8 GUM 382 41,4 - - - 3C3 449 53,2 1MN 449 53,2 - - - - - - 3D4 552 45,2 EDU 552 45,2 - - - - - - 2S1 166 23,4 LGT 166 23,4 - - - - - - 2S2 198 43,1 GUM 198 43,1 - - - - - -
2S3-C 403 51,4 EDU 403 51,4 - - - - - - 2S3-L 366 76,0 2MN 361 72,9 RAY 505 40,9 - - -
2I1 417 40,6 STU 417 40,6 - - - - - - 2I2 221 56,4 GUM 221 56,4 - - - - - - 2I3 405 57,3 2MN 405 57,3 - - - - - - 3S1 193 22,9 3MX 193 22,9 - - - - - - 3S2 267 69,5 BET 223 38,6 GUM 350 39,1 - - -
3S3-C 452 27,4 EDU 452 27,4 - - - - - - 3S3-L 450 52,6 2MN 436 46,2 FRE 515 34,8 - - -
3I1 470 34,1 WEI 470 34,1 - - - - - - 3I2 295 99,7 FRE 210 32,5 2MN 398 29,3 - - - 3I3 492 65,5 2MN 492 65,5 - - - - - - 3T4 552 45,2 EDU 552 45,2 - - - - - - 3T6 709 53,0 2MN 709 53,0 - - - - - - 3M6 739 28,4 STU 739 28,4 - - - - - - 2CB 121 28,9 LGT 121 28,9 - - - - - - 3CB/ 3BB
160 48,8 LNO 160 48,8 - - - - - -
59
Para o peso da classe 3I2 foi utilizada a base EC-08, por fornecer dados mais
consistentes que a base AB-08; e ainda, para o peso das classes de ônibus 2CB, 3CB e
3BB foi utilizada a base de dados do DNIT (Figuras 2.2a e 2.2b), a única a fornecer
informações sobre estes tipos de veículo. A Tabela 2.8 resume as informações das
distribuições ajustadas ao peso total de cada veículo. Por falta de informações, a classe
3D4 foi considerada com as mesmas características da classe 3T4 neste e em alguns
itens subsequentes.
Nos estudos para obtenção dos modelos de carga do Eurocódigo 1, para modelar
os histogramas de peso total dos veículos foram consideradas apenas distribuições
normais, com até 3 modas (CAPRANI et al., 2008).
2.6.4 Ajuste de curvas às cargas dos grupos de eixos
As cargas dos eixos, em cada classe, também devem ser consideradas como
variáveis aleatórias, pois suas magnitudes dispõem de grande amplitude de valores.
Uma maneira possível de representá-los seria por meio das distribuições de frequência
dos grupos de eixos (Figura 2.21). Esta forma de análise foi utilizada, entre outros, por
CHAMON (1989) para analisar o fenômeno da fadiga nas vigas principais de pontes
rodoviárias. Ao se utilizarem essas distribuições para a simulação de tráfego, entretanto,
far-se-ia necessário considerar a correlação entre as cargas de todos os pares de grupos
de eixos, em cada classe, pois todos eles se inter-relacionam ao representarem parcelas
da mesma variável aleatória global: o peso total.
Quando vazios, os caminhões têm maior carga no eixo dianteiro, devido à
presença do motor em sua porção anterior. À medida que eles vão sendo carregados, há
a tendência de o peso da carga transportada ser suportado quase totalmente pelos eixos
traseiros; a carga no eixo dianteiro pouco varia. Assim, por simplificação, utilizaram- se
neste trabalho as equações que relacionam, individualmente, a carga de cada grupo com
o peso total. Empregando esta forma alternativa, evita-se a necessidade de utilizar as
correlações entre as cargas dos grupos de eixos. Para a obtenção dessas curvas, foram
usadas como referência as mesmas bases de dados que definiram o peso total de cada
classe, mostradas na Tabela 2.1.
Os diagramas de dispersão que relacionam, em cada classe, a carga de cada
grupo de eixos com peso total, foram submetidos a ajustes por curvas de regressão de
mínimos quadrados, por meio de um programa em linguagem Fortran® confeccionado
para realizar automaticamente esta tarefa. As equações usadas para testar cada diagrama

60
são mostradas na Tabela 2.9. As constantes a, b, c, d, e, f e g (chamadas genericamente
de ia ) são determinadas de forma a minimizar a soma do quadrado das diferenças entre
as ordenadas fornecidas e as calculadas pelas equações j , em cada abscissa k (a
variação não explicada):
( )[ ]∑=
=−∂∂ NP
kkjk
i
xfya 1
2 0 (2.1)
Tabela 2.9 – Equações usadas para ajuste aos diagramas de dispersão
Núm. Equação 1 ( )axxf ln)( =
2 ( )xaxf ln)( ⋅=
3 ( )bxaxf ln)( ⋅=
4 ( )bxaxf += ln)(
5 axexf =)(
6 xeaxf ⋅=)(
7 bxeaxf ⋅=)(
8 xebaxf ⋅+=)(
9 axxf =)(
10 bxaxf ⋅=)(
11 axf =)(
12 axxf =)(
13 bxaxf +=)(
14 2)( cxbxaxf ++=
15 32)( dxcxbxaxf +++=
16 432)( exdxcxbxaxf ++++=
17 5432)( fxexdxcxbxaxf +++++=
18 65432)( gxfxexdxcxbxaxf ++++++=
A qualidade do ajuste de cada curva aos dados pode ser medida pelo coeficiente
de determinação (SPIEGEL, 1994), o quadrado do coeficiente de correlação, que é
estimado pela relação
2
2|2 1
Y
XY
j s
sj−=ρ , (2.2)
onde XYjs | é o erro padrão da estimativa de Y a partir da equação j e Ys é o desvio
padrão de Y:
( )[ ]2
1
2
| −
−=∑
=
NP
xfys
NP
kkk
XYj e
( )1
1
2
−
−=∑
=
NP
Yys
NP
kk
Y . (2.3)
O coeficiente de determinação também pode ser calculado pela razão
61
( )[ ]( )∑
∑
=
=
−
−=
NP
kk
NP
kkj
j
Yy
Yxf
1
2
1
2
2ρ , (2.4)
onde o numerador e o denominador da Eq. 2.4 são conhecidos, respectivamente, por
variação explicada e variação total de Y. Esse coeficiente é aplicado somente aos casos
em que variação total de Y for numericamente igual à soma da variação não explicada
com a variação explicada:
( ) ( )[ ] ( )[ ]∑∑∑===
−+−=−NP
kkj
NP
kkjk
NP
kk YxfxfyYy
1
2
1
2
1
2. (2.5)
Verifica-se que esta relação não é satisfeita por nenhuma equação com menos de
dois parâmetros; nestes casos, quando não há sentido real no valor numérico do
coeficiente de correlação, o programa utiliza como indicador da qualidade do ajuste a
própria variação não explicada, já que ela mede a diferença entre as ordenadas dadas e
as calculadas e é a grandeza de referência a ser minimizada. Como resultado, o
programa fornece duas curvas, geralmente distintas: a mais correlata e a mais
semelhante aos dados.
Em todos os diagramas de carga dos grupos de eixos em função do peso total de
cada classe, verificou-se que as variações lineares, quando não respondem diretamente
pelos melhores ajustes, sempre figuram entre aquelas com maior coeficiente de
determinação e menor variação não explicada; isto pode ser notado, por exemplo, nas
Figuras 2.20b, 2.24b e 2.27b, relativas aos eixos traseiros do veículo 3C. Devido à
simplicidade e à praticidade inerentes a esta equação, adotou-se para todas as variações
de carga dos grupos o modelo bxaxf +=)( . Este modelo ainda apresenta a vantagem
de ser confiável para a extrapolação, necessária para estimar o peso total máximo de
cada classe de veículo (Seção 2.6.5).
A Tabela 2.10 mostra os valores dos coeficientes de correlação encontrados nos
diagramas que relacionam a carga de cada grupo de eixos ao peso total de cada classe,
na base de dados adotada. Os pesos das classes 2CB, 3CB e 3BB não são mostrados
porque seus pesos advêm da base de dados do DNIT, que não possibilita o cálculo das
correlações por não fornecer os dados brutos.
Verifica-se que, em geral, as variações das cargas dos eixos dianteiros (SRS)
com o peso total não obedecem a nenhum padrão, pois não apresentam correlação com

62
qualquer curva que as represente; isso é exemplificado nas Figuras 2.20a, 2.24a e 2.27a,
que mostram estas variações nos veículos 3C.
Tabela 2.10 – Coeficientes de correlação lineares obtidos pelo modelo linear para representar a variação da carga de cada grupo de eixos com o peso total de cada classe de veículo
Classe 21Gρ 2
2Gρ 23Gρ 2
4Gρ 25Gρ
2CC 0,609 0,846 - - -
2C 0,438 0,876 - - -
3C 0,416 0,967 - - -
4C 0,209 0,988 - - -
2C2 0,086 0,497 0,666 0,748 -
2C3 0,411 0,514 0,517 0,868 -
3C2 0,298 0,878 0,840 0,853 -
3C3 0,011 0,586 0,114 0,665 -
2S1 0,149 0,431 0,588 - -
2S2 0,204 0,676 0,907 - -
2S3-C 0,133 0,691 0,943 - -
2S3-L 0,092 0,787 0,971 - -
2I1 0,058 0,594 0,268 0,618 -
2I2 0,236 0,591 0,902 0,879 -
2I3 0,184 0,608 0,409 0,822 0,797
3S1 0,014 0,388 0,015 - -
3S2 0,092 0,860 0,906 - -
3S3-C 0,017 0,430 0,598 - -
3S3-L 0,003 0,682 0,869 - -
3I1 0,008 0,371 0,137 0,463 -
3I2 0,147 0,921 0,629 0,785 -
3I3 0,094 0,721 0,461 0,835 0,842
3T4 0,025 0,821 0,848 0,870 -
3T6 0,018 0,624 0,737 0,734 0,804
3M6 0,094 0,018 0,618 0,727 -
Ainda é possível notar que a correlação tende a aumentar com a carga de cada
grupo de eixos, como mostrado na Tabela 2.11, que exprime as médias aritméticas dos
coeficientes de correlação de cada tipo de grupo e os limites legais de carga segundo a
Resolução 210 do CONTRAN.
Tabela 2.11 – Tipo de cada grupo e coeficientes de correlação obtidos pelo modelo linear para representar a variação da carga de cada grupo de eixos com o peso total de cada classe de veículo
Tipo de grupo Carga legal (kN) 2medρ
SRS 60 0,162 SRD 100 0,620 TD 170 0,695 TT 255 0,816
63
Para um valor dado do peso total, num caso geral, faz mais sentido estimar
apenas as cargas dos grupos SRD, TD e TT, e obter a carga no eixo dianteiro
diferenciando essa soma do peso total, já que as suas estimativas de peso são
insatisfatórias. Este é o padrão definido para a simulação de tráfego. Porém, como estão
sendo admitidas variações lineares em todos os grupos, esta ordem não tem
importância, pois a carga restante (do eixo SRS) equivale numericamente à mesma
equação linear ajustada, de baixa correlação: denominando o índice g para os grupos, se
TOTggG PbaPg
⋅+= , deve-se ter ∑=
=NG
gGTOT g
PP1
, o que equivale a
TOT
NG
ggTOT
NG
gg PbPa
11∑∑
==
=⋅+ (2.6)
Pela identidade polinomial, devem ser satisfeitas as equações
01
=∑=
NG
gga e 1
1∑
=
=NG
ggb (2.7)
Isolando os coeficientes incógnitos 1a e 1b dos somatórios, estes são dados por
∑=
−=NG
ggaa
21 e ∑
=
−=NG
ggbb
21 1 . (2.8)
A Tabela 2.12 resume, para cada grupo de cada classe, à exceção do primeiro, os
valores dos parâmetros a e b das variações de suas cargas com o peso total.
Em ROSSIGALI (2006) foi utilizada uma base de dados reduzida para a
obtenção dos esforços solicitantes nas longarinas das pontes, composta apenas pelas
classes 2CB, 3CB, 2C, 3C, 2S2 e 2S3, montada a partir da base de dados do DNIT,
descrita na Seção 2.1. Esta base de dados permite apenas a obtenção dos percentuais
médios da carga total dos veículos suportada por cada grupo de eixos, o que equivale a
considerar, em cada classe, a carga de cada grupo como proporcional ao peso total. Os
valores destes percentuais são ilustrados na Tabela 2.13. Como a base de dados do
DNIT é a única que fornece informações acerca dos pesos dos ônibus, as classes 2CB,
3CB e 3BB também tiveram, neste trabalho, as cargas dos grupos considerados desta
forma simplificada; por isso as suas equações têm 0=ga na Tabela 2.12. Este modelo,
além de insuficiente, é inadequado para os ônibus, porque o seu motor pode ser
dianteiro, central ou traseiro, dependendo do tipo de chassi; seriam necessárias ao
menos três equações para representar a variação das cargas dos eixos com o peso total -
entretanto, para os caminhões 3C e 2S3 esses percentuais médios representam com
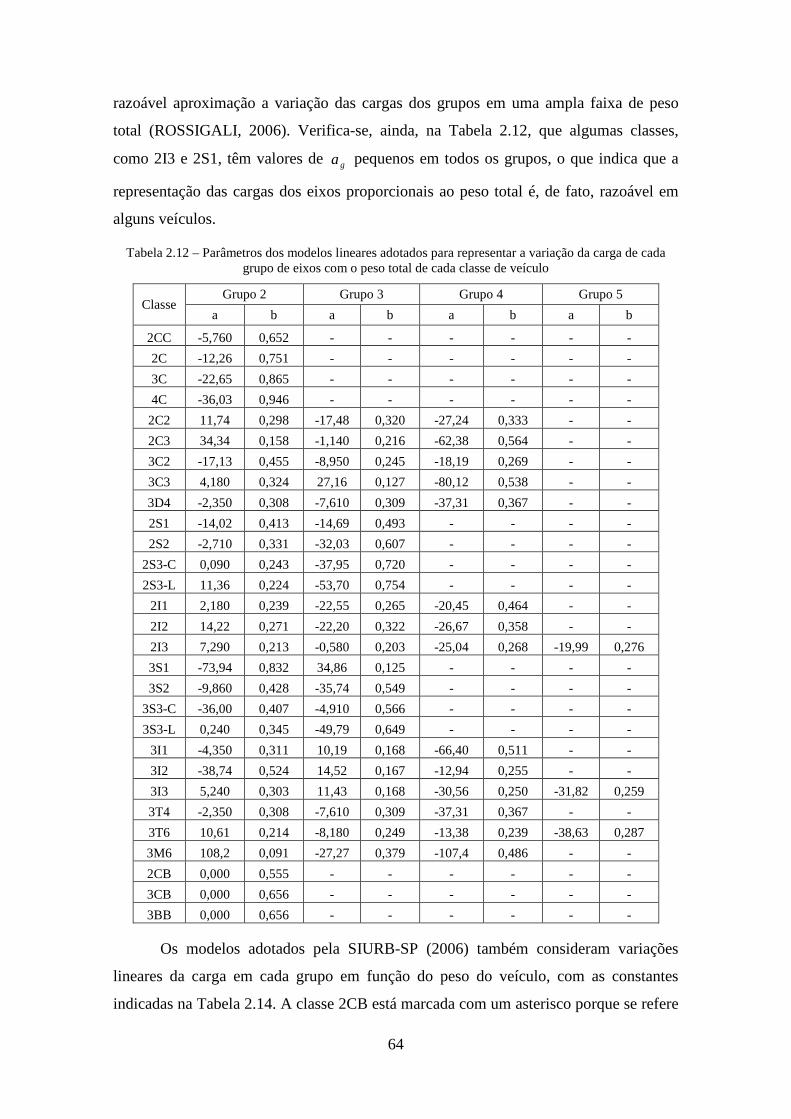
64
razoável aproximação a variação das cargas dos grupos em uma ampla faixa de peso
total (ROSSIGALI, 2006). Verifica-se, ainda, na Tabela 2.12, que algumas classes,
como 2I3 e 2S1, têm valores de ga pequenos em todos os grupos, o que indica que a
representação das cargas dos eixos proporcionais ao peso total é, de fato, razoável em
alguns veículos.
Tabela 2.12 – Parâmetros dos modelos lineares adotados para representar a variação da carga de cada grupo de eixos com o peso total de cada classe de veículo
Classe Grupo 2 Grupo 3 Grupo 4 Grupo 5
a b a b a b a b
2CC -5,760 0,652 - - - - - -
2C -12,26 0,751 - - - - - -
3C -22,65 0,865 - - - - - -
4C -36,03 0,946 - - - - - -
2C2 11,74 0,298 -17,48 0,320 -27,24 0,333 - -
2C3 34,34 0,158 -1,140 0,216 -62,38 0,564 - -
3C2 -17,13 0,455 -8,950 0,245 -18,19 0,269 - -
3C3 4,180 0,324 27,16 0,127 -80,12 0,538 - -
3D4 -2,350 0,308 -7,610 0,309 -37,31 0,367 - -
2S1 -14,02 0,413 -14,69 0,493 - - - -
2S2 -2,710 0,331 -32,03 0,607 - - - -
2S3-C 0,090 0,243 -37,95 0,720 - - - -
2S3-L 11,36 0,224 -53,70 0,754 - - - -
2I1 2,180 0,239 -22,55 0,265 -20,45 0,464 - -
2I2 14,22 0,271 -22,20 0,322 -26,67 0,358 - -
2I3 7,290 0,213 -0,580 0,203 -25,04 0,268 -19,99 0,276
3S1 -73,94 0,832 34,86 0,125 - - - -
3S2 -9,860 0,428 -35,74 0,549 - - - -
3S3-C -36,00 0,407 -4,910 0,566 - - - -
3S3-L 0,240 0,345 -49,79 0,649 - - - -
3I1 -4,350 0,311 10,19 0,168 -66,40 0,511 - -
3I2 -38,74 0,524 14,52 0,167 -12,94 0,255 - -
3I3 5,240 0,303 11,43 0,168 -30,56 0,250 -31,82 0,259
3T4 -2,350 0,308 -7,610 0,309 -37,31 0,367 - -
3T6 10,61 0,214 -8,180 0,249 -13,38 0,239 -38,63 0,287
3M6 108,2 0,091 -27,27 0,379 -107,4 0,486 - -
2CB 0,000 0,555 - - - - - -
3CB 0,000 0,656 - - - - - -
3BB 0,000 0,656 - - - - - -
Os modelos adotados pela SIURB-SP (2006) também consideram variações
lineares da carga em cada grupo em função do peso do veículo, com as constantes
indicadas na Tabela 2.14. A classe 2CB está marcada com um asterisco porque se refere
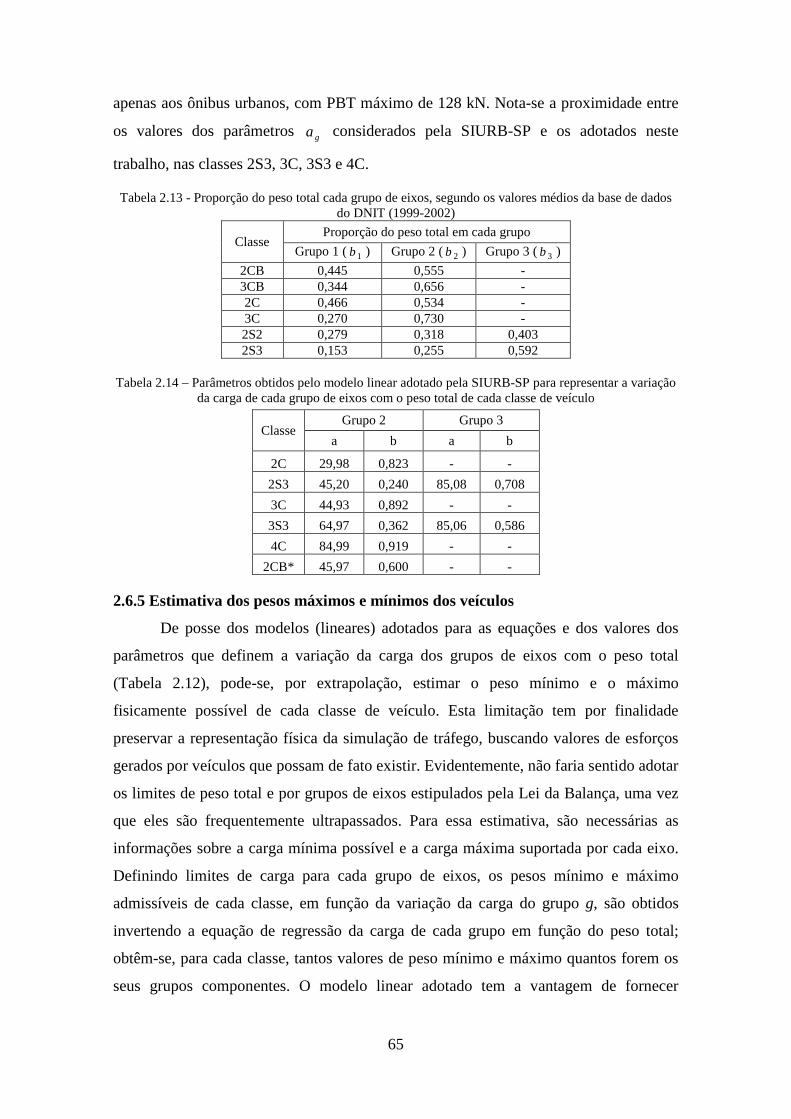
65
apenas aos ônibus urbanos, com PBT máximo de 128 kN. Nota-se a proximidade entre
os valores dos parâmetros ga considerados pela SIURB-SP e os adotados neste
trabalho, nas classes 2S3, 3C, 3S3 e 4C.
Tabela 2.13 - Proporção do peso total cada grupo de eixos, segundo os valores médios da base de dados do DNIT (1999-2002)
Classe Proporção do peso total em cada grupo
Grupo 1 ( 1b ) Grupo 2 ( 2b ) Grupo 3 ( 3b )
2CB 0,445 0,555 - 3CB 0,344 0,656 - 2C 0,466 0,534 - 3C 0,270 0,730 - 2S2 0,279 0,318 0,403 2S3 0,153 0,255 0,592
Tabela 2.14 – Parâmetros obtidos pelo modelo linear adotado pela SIURB-SP para representar a variação da carga de cada grupo de eixos com o peso total de cada classe de veículo
Classe Grupo 2 Grupo 3
a b a b
2C 29,98 0,823 - -
2S3 45,20 0,240 85,08 0,708
3C 44,93 0,892 - -
3S3 64,97 0,362 85,06 0,586
4C 84,99 0,919 - -
2CB* 45,97 0,600 - -
2.6.5 Estimativa dos pesos máximos e mínimos dos veículos
De posse dos modelos (lineares) adotados para as equações e dos valores dos
parâmetros que definem a variação da carga dos grupos de eixos com o peso total
(Tabela 2.12), pode-se, por extrapolação, estimar o peso mínimo e o máximo
fisicamente possível de cada classe de veículo. Esta limitação tem por finalidade
preservar a representação física da simulação de tráfego, buscando valores de esforços
gerados por veículos que possam de fato existir. Evidentemente, não faria sentido adotar
os limites de peso total e por grupos de eixos estipulados pela Lei da Balança, uma vez
que eles são frequentemente ultrapassados. Para essa estimativa, são necessárias as
informações sobre a carga mínima possível e a carga máxima suportada por cada eixo.
Definindo limites de carga para cada grupo de eixos, os pesos mínimo e máximo
admissíveis de cada classe, em função da variação da carga do grupo g, são obtidos
invertendo a equação de regressão da carga de cada grupo em função do peso total;
obtêm-se, para cada classe, tantos valores de peso mínimo e máximo quantos forem os
seus grupos componentes. O modelo linear adotado tem a vantagem de fornecer
66
extrapolações coerentes. O peso total máximo adotado para cada classe é o valor
mínimo encontrado entre os limites relativos a cada grupo:
−=
g
gLIM
gMAXMAXTOT b
aPP ,min (2.9)
Similarmente, o peso total mínimo adotado em cada classe é o valor máximo
encontrado entre os limites relativos a cada grupo:
−= 0 ; max ,
g
gLIM
gMINMINTOT b
aPP (2.10)
Se LIMgMINg Pa ,> , o numerador da Eq. 2.10 torna-se negativo, assim como a razão
em relação a gb , pois 0>gb (a carga de cada grupo não diminui com o peso total).
Caso isto ocorra, toma-se o valor do peso total mínimo da classe, em relação ao grupo g,
como nulo.
Em todas as classes de caminhões as variações da carga dos grupos com o peso
total foram efetivamente modeladas a partir de dados realistas; nestes veículos, o peso
total máximo admitido nunca se deve ao atingimento da capacidade técnica de carga no
eixo dianteiro, pois à medida que os veículos vão sendo carregados, o peso da carga
tende a ser suportado apenas pelos eixos traseiros. Os ônibus que constam na base de
dados têm o peso dos grupos considerados, de forma simplificada, como proporcionais
ao peso total ( )0=ga e são os únicos veículos da base adotada que têm o peso total
máximo definido pelo limite de carga do eixo dianteiro.
Os valores das cargas máximas por eixo adotados foram obtidos considerando
tanto os limites técnicos de carga por eixo dos fabricantes, quanto os valores máximos
encontrados nas bases de dados. Os limites técnicos de carga por eixo foram obtidos
junto aos mesmos fabricantes de veículos e implementos rodoviários com informações
disponíveis para as estimativas de distâncias de algumas classes de veículos, cuja
relação é citada na Seção 2.6.7. A busca destes valores foi levada a efeito tanto via
contatos telefônicos e eletrônicos, quanto em pesquisas em seus sítios na internet.
Verifica-se que os limites técnicos de carga em cada eixo variam com a finalidade de
uso de cada veículo:
- caminhões tratores: em geral, os veículos rígidos e cavalos mecânicos
utilizados nas rodovias pavimentadas têm capacidade técnica limitada a 90 kN no eixo
simples (com 2 pneus) e 130 kN no eixo duplo (com 4 pneus), como, por exemplo, o

67
caminhão Scania® R580 CB 6x4. A grande maioria dos caminhões têm limites técnicos
de carga por eixo menores, como o Volvo® VM 6x4 R (limites de 67 kN e 100 kN nos
eixos simples e duplo, respectivamente). Porém, há veículos fora-de-estrada utilizados
em fins específicos que trafegam com eixos e pneus mais resistentes, como os
caminhões Iveco® Trakker 720T 42T e Mercedes-Benz® Axor 4140, cujo limite
técnico de carga do eixo duplo é 160 kN. Geralmente estes veículos transportam cargas
especiais como minério de ferro e rochas (quando rígidos), ou ainda cana e toras de
madeira (quando tracionam tritrens ou rodotrens), em estradas vicinais;
- carretas: as comuns têm limite técnico de carga de até 130 kN em cada eixo,
como a carreta bitrem carga seca fabricada pela Indústria Metalúrgica Pastre; entretanto,
existem carretas cujos eixos dispõem de maior capacidade de carga, como os
semirreboques basculantes de três eixos fabricados pela Rodolinea (Grupo Hübner),
cuja capacidade técnica é de 160 kN. Ainda, segundo informações obtidas do setor
técnico da Goydo Implementos Rodoviários, via contatos eletrônicos e telefônicos, em
algumas carretas destinadas a aplicações específicas, como rodotrens para transporte de
madeira, o limite de carga de cada eixo pode chegar a 170 kN;
- ônibus: os valores máximos encontrados para as cargas admissíveis nos eixos
dianteiro e traseiro foram, respectivamente, de 75 kN e 120 kN, como, por exemplo, no
chassi para ônibus Scania® F270 4x2, com motor dianteiro.
Tabela 2.15 – Cargas máximas nos eixos registradas nas bases de dados
Tipo Eixo
Silh
uet
a
Local
Ord
em
Carga (kN)
Bal
ança
Classe Eixo no
Grupo de referência
Excesso no Tipo
Lim. legal (kN)
Sim
ple
s
Trator leve
1 65,1 L 2CC 1 1 SRS 60
8,5% 2 62,1 S 3,5% 3 54,9 S -
Trator pesado
1 107,7 S 2S2 1 1 SRS 60
79,5% 2 102,7 S 3I2 71,2% 3 101,5 S 2C 69,2%
Du
plo
Trator leve
1 119,9 L 2CC 2 2 SRD 100
19,9% 2 110,7 S 10,7% 3 109,9 S 9,9%
Trator pesado
1 191,5 S 3T4 2 2
TD 85 125,3% 2 180,3 S 3S3 TD 85 112,1% 3 179,8 S 2S3 SRD 100 79,8%
Carreta 1 177,3 S 2S3 4 3 TT 85 108,6% 2 175,8 S 3I3 6 5 SRD 100 75,8% 3 162,3 S 2S3 5 3 TT 85 90,9%
Os valores máximos de carga em cada tipo de eixo observados entre as bases de
dados EC-08, AB-11 (para as balanças seletivas) e AB-08 (para a balança seletiva e a
68
lenta), relacionando apenas os caminhões, são mostrados na Tabela 2.15, bem como a
balança que registrou o valor máximo: seletiva (S) ou lenta (L). Os eixos simples e
duplos são divididos em três categorias: veículos tratores leves (para as classes 2CB e
2CC), carretas e veículos tratores pesados. Não foram levadas em conta as informações
da base de dados do DNIT.
As classes 3CB e 3BB, formadas em maioria por ônibus rodoviários, foram
consideradas como veículos pesados, pois geralmente os ônibus urbanos montados em
chassis de pequenas dimensões, com baixa capacidade de carga, têm apenas dois eixos.
Os caminhões 2S3 e 3S3 foram considerados sem a divisão pelo comprimento, para que
pudessem ser consideradas as informações de todas as bases de dados para estas classes.
Verifica-se que os registros de carga máxima dos eixos na balança lenta da base
de dados AB-08 superam os limites das balanças seletivas apenas na classe 2CC, a mais
leve entre os veículos comerciais; em todas as outras, mais pesadas, as balanças
seletivas apresentam valores extremos consideravelmente maiores. Considerando que a
balança lenta é utilizada principalmente por veículos com suspeita de excesso de peso
total ou de carga nos eixos, a falta de representatividade dessa balança nos valores
extremos pode ser atribuída aos seguintes fatores:
- à evasão dos veículos na segunda pesagem;
- à menor precisão das balanças seletivas, devido à possibilidade de inclusão da
amplificação dinâmica;
- à reduzida frequência de registros da balança lenta comparativamente ao
volume de tráfego registrado em cada balança seletiva, pois os valores extremos
dependem substancialmente do tamanho das amostras;
- ao uso irregular do equipamento conhecido como “bexigão”, fato constatado
nas visitas ao PGF 58 da Rodovia dos Bandeirantes. O aparelho se situa geralmente
próximo à quinta roda dos semirreboques e é utilizado ilegalmente com a finalidade de
transferir a carga entre os eixos do veículo: para os eixos traseiros, quando ele é inflado
(o veículo fica mais alto na parte central); novamente para os eixos dianteiros, quando
ele é esvaziado. Dessa forma, cargas excessivas nos eixos próximos à quinta roda
podem ser subestimadas pela balança lenta.
Nota-se também que, na maioria das vezes, as cargas máximas de cada eixo
registradas pelas balanças seletivas superam tanto os limites de carga por eixo da Lei da
Balança quanto os limites técnicos de carga fornecidos pelos fabricantes de veículos e
implementos. Isto pode ser justificado pela possibilidade de amplificação dinâmica dos
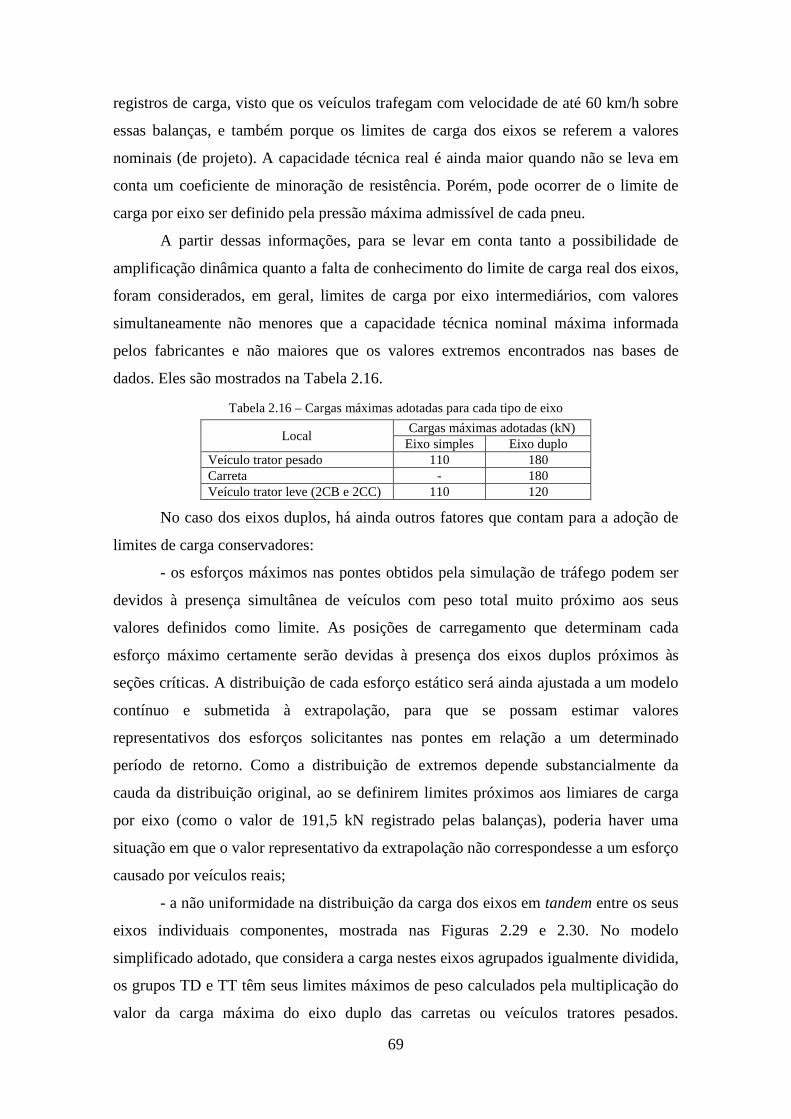
69
registros de carga, visto que os veículos trafegam com velocidade de até 60 km/h sobre
essas balanças, e também porque os limites de carga dos eixos se referem a valores
nominais (de projeto). A capacidade técnica real é ainda maior quando não se leva em
conta um coeficiente de minoração de resistência. Porém, pode ocorrer de o limite de
carga por eixo ser definido pela pressão máxima admissível de cada pneu.
A partir dessas informações, para se levar em conta tanto a possibilidade de
amplificação dinâmica quanto a falta de conhecimento do limite de carga real dos eixos,
foram considerados, em geral, limites de carga por eixo intermediários, com valores
simultaneamente não menores que a capacidade técnica nominal máxima informada
pelos fabricantes e não maiores que os valores extremos encontrados nas bases de
dados. Eles são mostrados na Tabela 2.16.
Tabela 2.16 – Cargas máximas adotadas para cada tipo de eixo
Local Cargas máximas adotadas (kN)
Eixo simples Eixo duplo Veículo trator pesado 110 180 Carreta - 180 Veículo trator leve (2CB e 2CC) 110 120
No caso dos eixos duplos, há ainda outros fatores que contam para a adoção de
limites de carga conservadores:
- os esforços máximos nas pontes obtidos pela simulação de tráfego podem ser
devidos à presença simultânea de veículos com peso total muito próximo aos seus
valores definidos como limite. As posições de carregamento que determinam cada
esforço máximo certamente serão devidas à presença dos eixos duplos próximos às
seções críticas. A distribuição de cada esforço estático será ainda ajustada a um modelo
contínuo e submetida à extrapolação, para que se possam estimar valores
representativos dos esforços solicitantes nas pontes em relação a um determinado
período de retorno. Como a distribuição de extremos depende substancialmente da
cauda da distribuição original, ao se definirem limites próximos aos limiares de carga
por eixo (como o valor de 191,5 kN registrado pelas balanças), poderia haver uma
situação em que o valor representativo da extrapolação não correspondesse a um esforço
causado por veículos reais;
- a não uniformidade na distribuição da carga dos eixos em tandem entre os seus
eixos individuais componentes, mostrada nas Figuras 2.29 e 2.30. No modelo
simplificado adotado, que considera a carga nestes eixos agrupados igualmente dividida,
os grupos TD e TT têm seus limites máximos de peso calculados pela multiplicação do
valor da carga máxima do eixo duplo das carretas ou veículos tratores pesados.
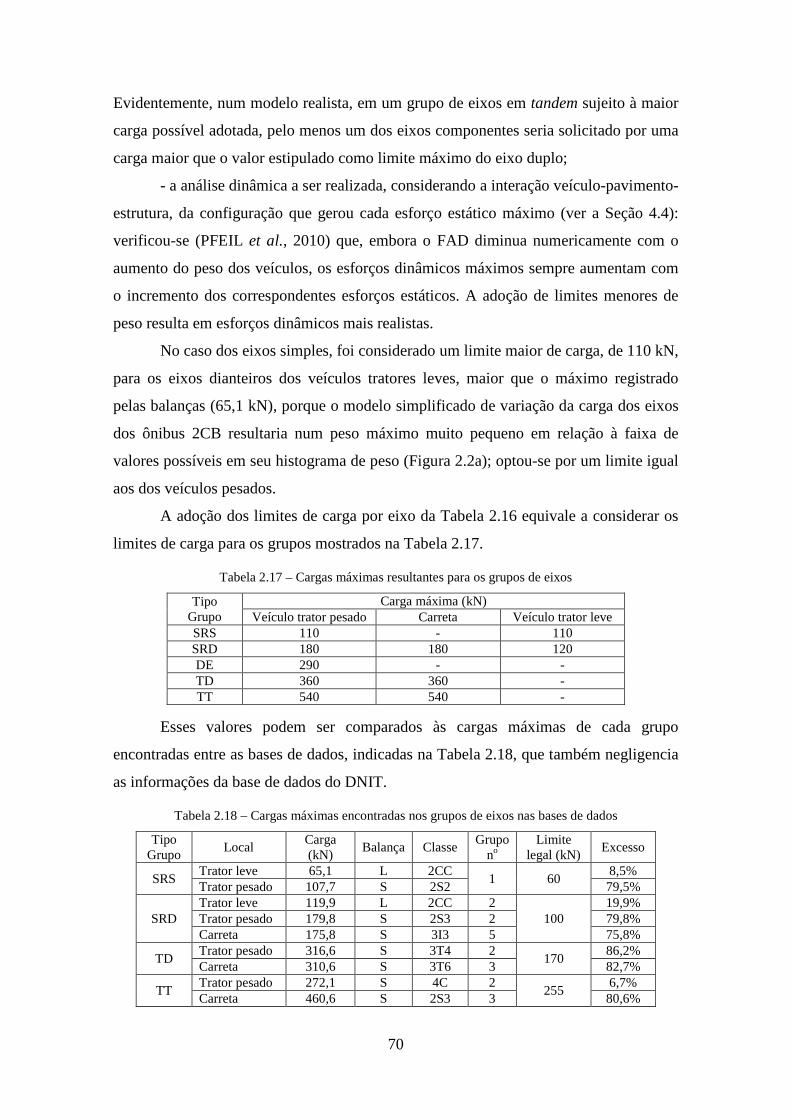
70
Evidentemente, num modelo realista, em um grupo de eixos em tandem sujeito à maior
carga possível adotada, pelo menos um dos eixos componentes seria solicitado por uma
carga maior que o valor estipulado como limite máximo do eixo duplo;
- a análise dinâmica a ser realizada, considerando a interação veículo-pavimento-
estrutura, da configuração que gerou cada esforço estático máximo (ver a Seção 4.4):
verificou-se (PFEIL et al., 2010) que, embora o FAD diminua numericamente com o
aumento do peso dos veículos, os esforços dinâmicos máximos sempre aumentam com
o incremento dos correspondentes esforços estáticos. A adoção de limites menores de
peso resulta em esforços dinâmicos mais realistas.
No caso dos eixos simples, foi considerado um limite maior de carga, de 110 kN,
para os eixos dianteiros dos veículos tratores leves, maior que o máximo registrado
pelas balanças (65,1 kN), porque o modelo simplificado de variação da carga dos eixos
dos ônibus 2CB resultaria num peso máximo muito pequeno em relação à faixa de
valores possíveis em seu histograma de peso (Figura 2.2a); optou-se por um limite igual
aos dos veículos pesados.
A adoção dos limites de carga por eixo da Tabela 2.16 equivale a considerar os
limites de carga para os grupos mostrados na Tabela 2.17.
Tabela 2.17 – Cargas máximas resultantes para os grupos de eixos
Tipo Grupo
Carga máxima (kN) Veículo trator pesado Carreta Veículo trator leve
SRS 110 - 110 SRD 180 180 120 DE 290 - - TD 360 360 - TT 540 540 -
Esses valores podem ser comparados às cargas máximas de cada grupo
encontradas entre as bases de dados, indicadas na Tabela 2.18, que também negligencia
as informações da base de dados do DNIT.
Tabela 2.18 – Cargas máximas encontradas nos grupos de eixos nas bases de dados
Tipo Grupo
Local Carga (kN)
Balança Classe Grupo
no Limite
legal (kN) Excesso
SRS Trator leve 65,1 L 2CC
1 60 8,5%
Trator pesado 107,7 S 2S2 79,5%
SRD Trator leve 119,9 L 2CC 2
100 19,9%
Trator pesado 179,8 S 2S3 2 79,8% Carreta 175,8 S 3I3 5 75,8%
TD Trator pesado 316,6 S 3T4 2
170 86,2%
Carreta 310,6 S 3T6 3 82,7%
TT Trator pesado 272,1 S 4C 2
255 6,7%
Carreta 460,6 S 2S3 3 80,6%

71
Mesmo com a adoção de limites de carga mais conservadores para os eixos
duplos, verifica-se pelas Tabelas 2.17 e 2.18 que as cargas máximas registradas dos
grupos de eixos em tandem pelas balanças não superam os limites de carga adotados
neste trabalho. Nestes grupos, a carga máxima não corresponde à multiplicação da carga
máxima de algum eixo duplo individual; era de se esperar, devido à não uniformidade
da distribuição da carga do grupo entre os eixos. Verifica-se, também, pelas Tabelas
2.15 e 2.18, que os maiores excessos de carga em relação aos limites legais são sempre
referentes aos eixos em tandem.
Tabela 2.19 – Pesos totais máximos das classes de veículos
Classe
Peso total máximo (kN) Excesso do máx. reg. / Lei Balança
Percentual reg. c/ excesso de peso nos histogramas
Fisicamente possível (adotado)
Registrado nas bases de dados
Lei da Balança (s/ tol.)
Sem tolerância
Com tolerância
de 5% Valor Balança
2CC 193 176,4 L 160 10,3% - - 2C 256 210,0 S 160 31,2% 0,20% 0,10% 3C 442 366,4 S 230 59,3% 2,77% 0,83% 4C 609 354,4 S 315 12,5% 1,43% 0,00% 2C2 565 418,8 S 360 16,3% 0,25% 0,16% 2C3 749 481,0 S 430 11,9% 27,24% 0,75% 3C2 737 573,3 S 430 33,3% 4,01% 2,26% 3C3 818 621,7 S 500* 24,3% 9,84% 2,46% 3D4 1082 176,8 S 570* - - - 2S1 395 301,2 L 260 15,8% 0,30% 0,05% 2S2 551 448,2 S 330 35,8% 0,68% 0,28%
2S3-C 739 608,0 S 415 46,5% 36,01% 8,78% 2S3-L 753 666,0 S 415 60,5% 17,65% 4,89%
2I1 744 556,5 S 430 29,4% 47,24% 6,75% 2I2 578 441,1 S 360 22,5% 2,33% 2,04% 2I3 726 524,2 S 460* 14,0% 6,23% 0,20% 3S1 521 393,4 L 330 19,2% 0,00% 0,00% 3S2 721 562,2 S 400 40,5% 4,03% 2,60%
3S3-C 963 651,6 S 450** 44,8% 53,15% 11,99% 3S3-L 908 738,1 S 485* 52,2% 13,38% 3,00%
3I1 835 591,6 S 500* 18,3% 17,44% 2,33% 3I2 756 533,3 S 430 24,0% 5,36% 0,00% 3I3 819 582,8 S 530* 10,0% 32,52% 3,76% 3T4 1082 979,4 S 570* 71,8% 18,14% 1,84% 3T6 1388 1256,4 S 740 69,8% 18,79% 1,37% 3M6 1333 814,7 S 740 10,1% 63,04% 4,35% 2CB 216 - - 160 - 6,92% -
3CB/3BB 320 - - 195 - 17,39% -
Aplicando na Eq. 2.9 os limites de carga por eixo da Tabela 2.16 e os parâmetros
das equações de regressão da Tabela 2.12, resultam os limites de peso de cada classe de
veículo indicados na Tabela 2.19. Nela são incluídos, também, os pesos máximos de
cada classe encontrados entre as bases de dados EC-08, AB-08 e AB-11, bem como o
tipo de balança que registrou o valor máximo, os limites de peso total estipulados pela
72
Lei da Balança e os excessos de peso dos veículos mais pesados registrados. Mostram-
se, ainda, o percentual de veículos de cada classe com excesso de peso em relação ao
limite legal, segundo os histogramas adotados para o peso total de cada classe, tanto
sem tolerância quanto com a tolerância de 5% permitida pela Resolução 102 do
CONTRAN.
As classes marcadas com um asterisco têm PBTC limitado a 450 kN caso seu
comprimento total seja menor que 16,00 m (2I3, 3I1, 3I3 e 3S3-L) ou 17,50 m (3C3,
3D4 e 3T4), de acordo com a Portaria 63/08 do DENATRAN. Quanto à classe 3S3-C,
destacada com dois asteriscos, verifica-se, pela Tabela 2.26, mostrada na Seção 2.6.7,
que, para os limites e valores fixos adotados para as suas distâncias longitudinais, o seu
comprimento total poderia atingir, eventualmente, o valor de 16,96 m, o que implica em
considerar, na prática, para esses veículos, o PBTC reduzido: poucos registros
superariam os 16,00 m de comprimento que incrementam o limite de peso.
Os maiores pesos totais possíveis, das classes 3T6 e 3M6, são inferiores à
capacidade máxima de tração (CMT) de 1500 kN de alguns caminhões tratores de 3
eixos, como o Scania® G440 CA 6x4; ainda, os veículos tracionados por caminhões de
2 eixos têm peso máximo possível inferior à CMT de 800 kN de alguns caminhões
como o Scania® R460 4x2. Isto assegura que todos os veículos considerados
correspondem a configurações possíveis fisicamente.
Pelas mesmas razões expostas na análise da carga máxima dos eixos, era de se
esperar que a balança lenta da base AB-08 pouco influísse nos pesos máximos
encontrados para os veículos; de fato, apenas as classes 2CC, 2S1 e 3S1 tiveram seus
pesos máximos registrados por esse equipamento.
Comparando os pesos máximos encontrados com os admitidos, verifica-se na
Tabela 2.19 que o maior peso possível estimado sempre supera o valor máximo obtido
nas bases de dados. Isto faz com que os limites máximos de carga adotados sejam
suficientes para obter de forma confiável os esforços máximos devidos ao tráfego real
nas pontes.
Com relação aos limites de peso, verifica-se que os veículos mais pesados das
classes 3C, 2S3-L, 3S3-L, 3T4 e 3T6 superam o PBTC da Lei da Balança em mais de
50%; merece destaque, ainda, o fato de que os veículos de praticamente todas as classes
circulam com excesso de carga. Mais de 30% dos veículos das classes 2I1, 2S3-C, 3I3,
3S3-C e 3M6 trafegam com peso superior ao permitido; quando se leva em conta a
tolerância admissível de 5% no peso total, mais de 8% dos caminhões 2S3-C e 3S3-C
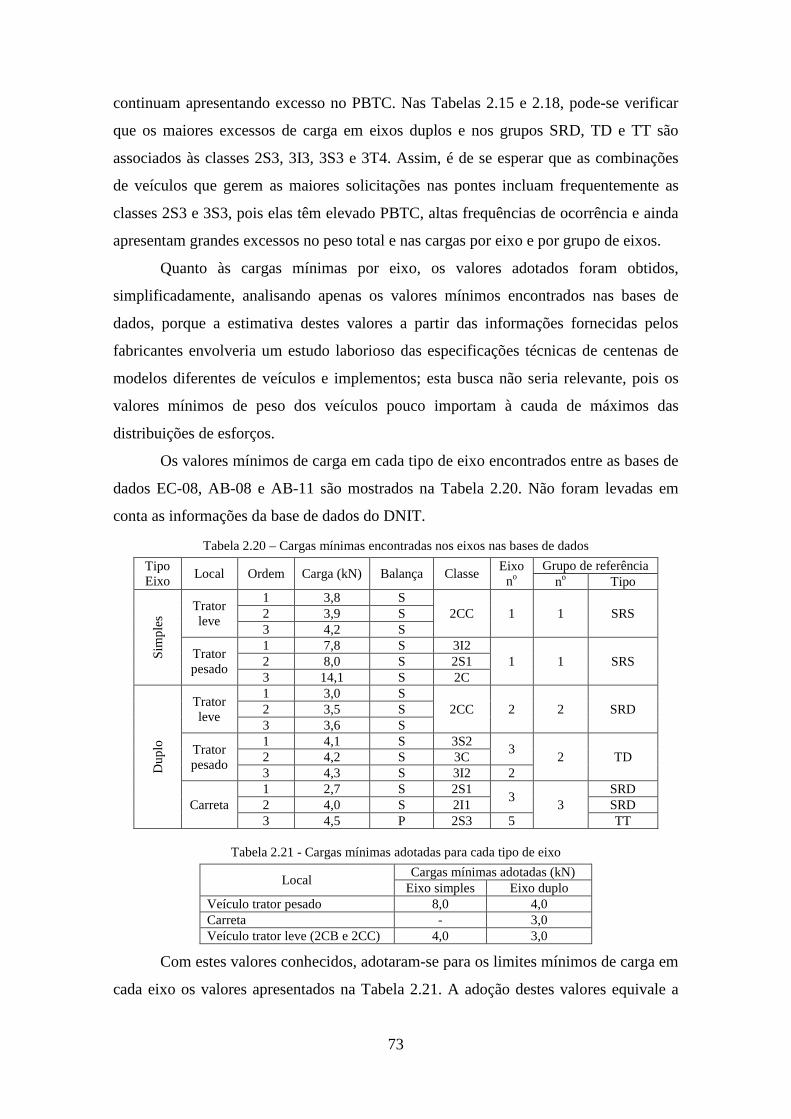
73
continuam apresentando excesso no PBTC. Nas Tabelas 2.15 e 2.18, pode-se verificar
que os maiores excessos de carga em eixos duplos e nos grupos SRD, TD e TT são
associados às classes 2S3, 3I3, 3S3 e 3T4. Assim, é de se esperar que as combinações
de veículos que gerem as maiores solicitações nas pontes incluam frequentemente as
classes 2S3 e 3S3, pois elas têm elevado PBTC, altas frequências de ocorrência e ainda
apresentam grandes excessos no peso total e nas cargas por eixo e por grupo de eixos.
Quanto às cargas mínimas por eixo, os valores adotados foram obtidos,
simplificadamente, analisando apenas os valores mínimos encontrados nas bases de
dados, porque a estimativa destes valores a partir das informações fornecidas pelos
fabricantes envolveria um estudo laborioso das especificações técnicas de centenas de
modelos diferentes de veículos e implementos; esta busca não seria relevante, pois os
valores mínimos de peso dos veículos pouco importam à cauda de máximos das
distribuições de esforços.
Os valores mínimos de carga em cada tipo de eixo encontrados entre as bases de
dados EC-08, AB-08 e AB-11 são mostrados na Tabela 2.20. Não foram levadas em
conta as informações da base de dados do DNIT.
Tabela 2.20 – Cargas mínimas encontradas nos eixos nas bases de dados
Tipo Eixo
Local Ordem Carga (kN) Balança Classe Eixo no
Grupo de referência no Tipo
Sim
ple
s
Trator leve
1 3,8 S 2CC 1 1 SRS 2 3,9 S
3 4,2 S
Trator pesado
1 7,8 S 3I2 1 1 SRS 2 8,0 S 2S1
3 14,1 S 2C
Du
plo
Trator leve
1 3,0 S 2CC 2 2 SRD 2 3,5 S
3 3,6 S
Trator pesado
1 4,1 S 3S2 3
2 TD 2 4,2 S 3C 3 4,3 S 3I2 2
Carreta 1 2,7 S 2S1
3 3
SRD 2 4,0 S 2I1 SRD 3 4,5 P 2S3 5 TT
Tabela 2.21 - Cargas mínimas adotadas para cada tipo de eixo
Local Cargas mínimas adotadas (kN)
Eixo simples Eixo duplo Veículo trator pesado 8,0 4,0 Carreta - 3,0 Veículo trator leve (2CB e 2CC) 4,0 3,0
Com estes valores conhecidos, adotaram-se para os limites mínimos de carga em
cada eixo os valores apresentados na Tabela 2.21. A adoção destes valores equivale a
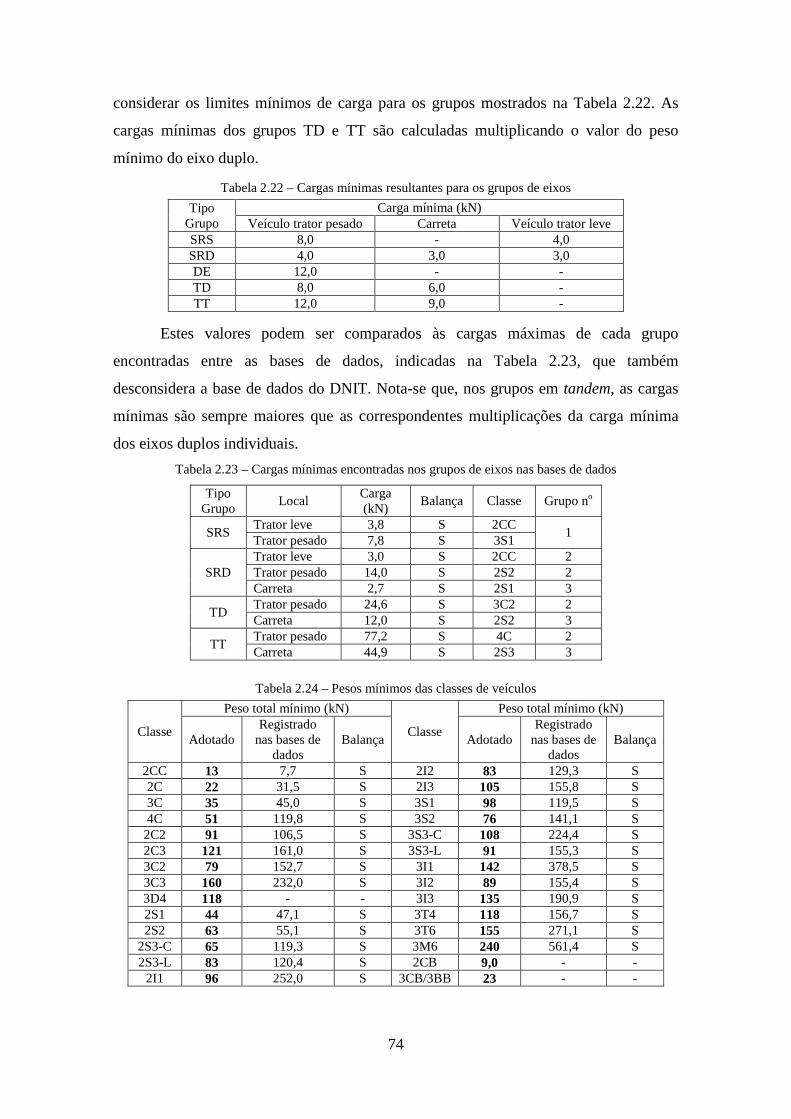
74
considerar os limites mínimos de carga para os grupos mostrados na Tabela 2.22. As
cargas mínimas dos grupos TD e TT são calculadas multiplicando o valor do peso
mínimo do eixo duplo.
Tabela 2.22 – Cargas mínimas resultantes para os grupos de eixos
Tipo Grupo
Carga mínima (kN) Veículo trator pesado Carreta Veículo trator leve
SRS 8,0 - 4,0 SRD 4,0 3,0 3,0 DE 12,0 - - TD 8,0 6,0 - TT 12,0 9,0 -
Estes valores podem ser comparados às cargas máximas de cada grupo
encontradas entre as bases de dados, indicadas na Tabela 2.23, que também
desconsidera a base de dados do DNIT. Nota-se que, nos grupos em tandem, as cargas
mínimas são sempre maiores que as correspondentes multiplicações da carga mínima
dos eixos duplos individuais.
Tabela 2.23 – Cargas mínimas encontradas nos grupos de eixos nas bases de dados
Tipo Grupo
Local Carga (kN)
Balança Classe Grupo no
SRS Trator leve 3,8 S 2CC
1 Trator pesado 7,8 S 3S1
SRD Trator leve 3,0 S 2CC 2 Trator pesado 14,0 S 2S2 2 Carreta 2,7 S 2S1 3
TD Trator pesado 24,6 S 3C2 2 Carreta 12,0 S 2S2 3
TT Trator pesado 77,2 S 4C 2 Carreta 44,9 S 2S3 3
Tabela 2.24 – Pesos mínimos das classes de veículos
Classe
Peso total mínimo (kN)
Classe
Peso total mínimo (kN)
Adotado Registrado
nas bases de dados
Balança Adotado Registrado
nas bases de dados
Balança
2CC 13 7,7 S 2I2 83 129,3 S 2C 22 31,5 S 2I3 105 155,8 S 3C 35 45,0 S 3S1 98 119,5 S 4C 51 119,8 S 3S2 76 141,1 S 2C2 91 106,5 S 3S3-C 108 224,4 S 2C3 121 161,0 S 3S3-L 91 155,3 S 3C2 79 152,7 S 3I1 142 378,5 S 3C3 160 232,0 S 3I2 89 155,4 S 3D4 118 - - 3I3 135 190,9 S 2S1 44 47,1 S 3T4 118 156,7 S 2S2 63 55,1 S 3T6 155 271,1 S
2S3-C 65 119,3 S 3M6 240 561,4 S 2S3-L 83 120,4 S 2CB 9,0 - -
2I1 96 252,0 S 3CB/3BB 23 - -
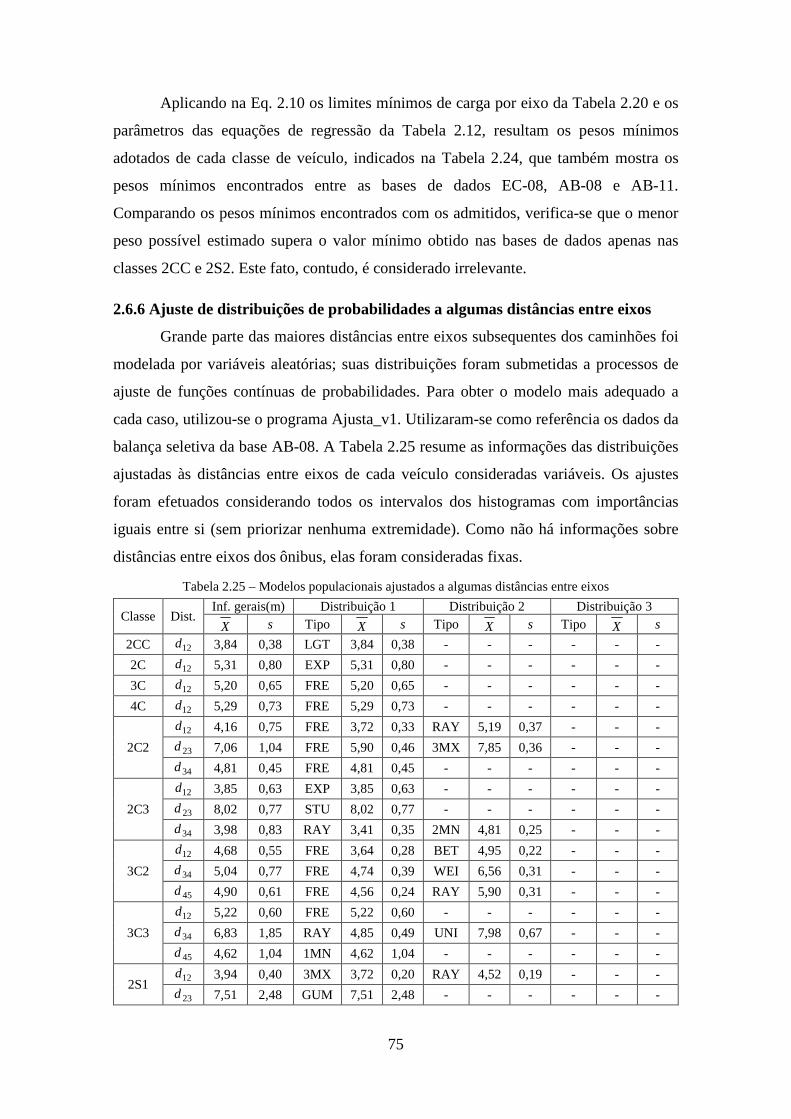
75
Aplicando na Eq. 2.10 os limites mínimos de carga por eixo da Tabela 2.20 e os
parâmetros das equações de regressão da Tabela 2.12, resultam os pesos mínimos
adotados de cada classe de veículo, indicados na Tabela 2.24, que também mostra os
pesos mínimos encontrados entre as bases de dados EC-08, AB-08 e AB-11.
Comparando os pesos mínimos encontrados com os admitidos, verifica-se que o menor
peso possível estimado supera o valor mínimo obtido nas bases de dados apenas nas
classes 2CC e 2S2. Este fato, contudo, é considerado irrelevante.
2.6.6 Ajuste de distribuições de probabilidades a algumas distâncias entre eixos
Grande parte das maiores distâncias entre eixos subsequentes dos caminhões foi
modelada por variáveis aleatórias; suas distribuições foram submetidas a processos de
ajuste de funções contínuas de probabilidades. Para obter o modelo mais adequado a
cada caso, utilizou-se o programa Ajusta_v1. Utilizaram-se como referência os dados da
balança seletiva da base AB-08. A Tabela 2.25 resume as informações das distribuições
ajustadas às distâncias entre eixos de cada veículo consideradas variáveis. Os ajustes
foram efetuados considerando todos os intervalos dos histogramas com importâncias
iguais entre si (sem priorizar nenhuma extremidade). Como não há informações sobre
distâncias entre eixos dos ônibus, elas foram consideradas fixas.
Tabela 2.25 – Modelos populacionais ajustados a algumas distâncias entre eixos
Classe Dist. Inf. gerais(m) Distribuição 1 Distribuição 2 Distribuição 3
X s Tipo X s Tipo X s Tipo X s
2CC 12d 3,84 0,38 LGT 3,84 0,38 - - - - - -
2C 12d 5,31 0,80 EXP 5,31 0,80 - - - - - -
3C 12d 5,20 0,65 FRE 5,20 0,65 - - - - - -
4C 12d 5,29 0,73 FRE 5,29 0,73 - - - - - -
2C2 12d 4,16 0,75 FRE 3,72 0,33 RAY 5,19 0,37 - - -
23d 7,06 1,04 FRE 5,90 0,46 3MX 7,85 0,36 - - -
34d 4,81 0,45 FRE 4,81 0,45 - - - - - -
2C3 12d 3,85 0,63 EXP 3,85 0,63 - - - - - -
23d 8,02 0,77 STU 8,02 0,77 - - - - - -
34d 3,98 0,83 RAY 3,41 0,35 2MN 4,81 0,25 - - -
3C2 12d 4,68 0,55 FRE 3,64 0,28 BET 4,95 0,22 - - -
34d 5,04 0,77 FRE 4,74 0,39 WEI 6,56 0,31 - - -
45d 4,90 0,61 FRE 4,56 0,24 RAY 5,90 0,31 - - -
3C3 12d 5,22 0,60 FRE 5,22 0,60 - - - - - -
34d 6,83 1,85 RAY 4,85 0,49 UNI 7,98 0,67 - - -
45d 4,62 1,04 1MN 4,62 1,04 - - - - - -
2S1 12d 3,94 0,40 3MX 3,72 0,20 RAY 4,52 0,19 - - -
23d 7,51 2,48 GUM 7,51 2,48 - - - - - -
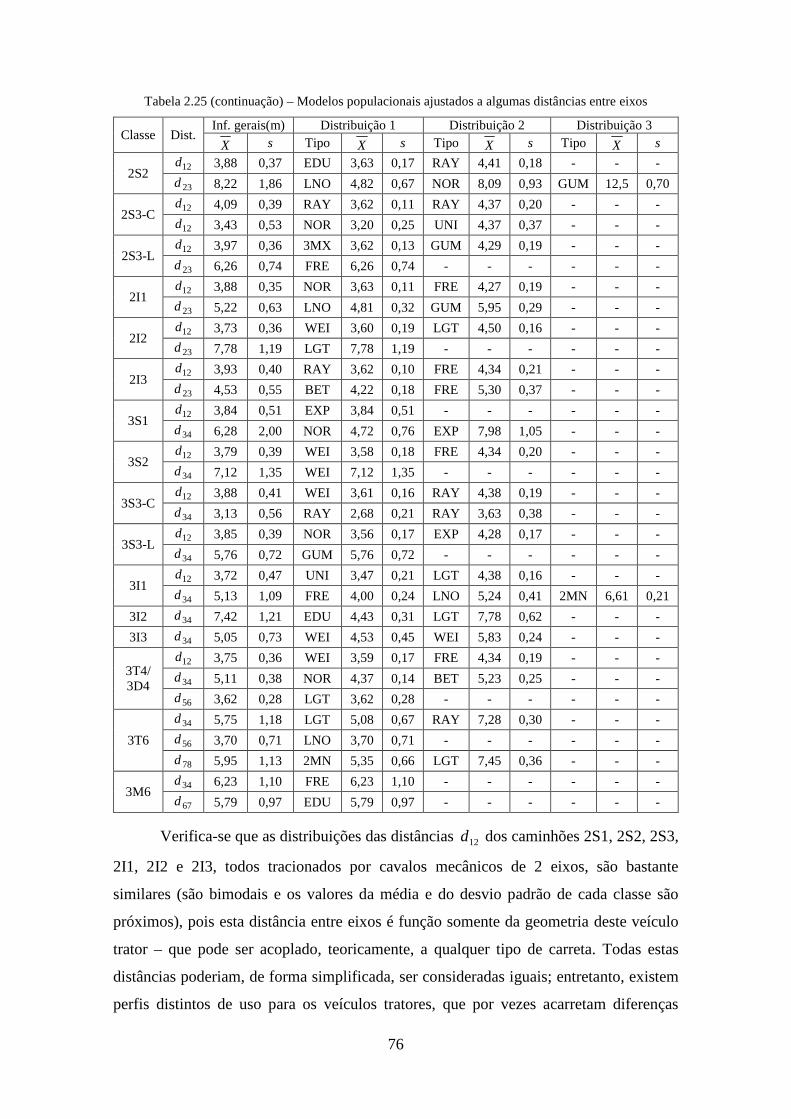
76
Tabela 2.25 (continuação) – Modelos populacionais ajustados a algumas distâncias entre eixos
Classe Dist. Inf. gerais(m) Distribuição 1 Distribuição 2 Distribuição 3
X s Tipo X s Tipo X s Tipo X s
2S2 12d 3,88 0,37 EDU 3,63 0,17 RAY 4,41 0,18 - - -
23d 8,22 1,86 LNO 4,82 0,67 NOR 8,09 0,93 GUM 12,5 0,70
2S3-C 12d 4,09 0,39 RAY 3,62 0,11 RAY 4,37 0,20 - - -
12d 3,43 0,53 NOR 3,20 0,25 UNI 4,37 0,37 - - -
2S3-L 12d 3,97 0,36 3MX 3,62 0,13 GUM 4,29 0,19 - - -
23d 6,26 0,74 FRE 6,26 0,74 - - - - - -
2I1 12d 3,88 0,35 NOR 3,63 0,11 FRE 4,27 0,19 - - -
23d 5,22 0,63 LNO 4,81 0,32 GUM 5,95 0,29 - - -
2I2 12d 3,73 0,36 WEI 3,60 0,19 LGT 4,50 0,16 - - -
23d 7,78 1,19 LGT 7,78 1,19 - - - - - -
2I3 12d 3,93 0,40 RAY 3,62 0,10 FRE 4,34 0,21 - - -
23d 4,53 0,55 BET 4,22 0,18 FRE 5,30 0,37 - - -
3S1 12d 3,84 0,51 EXP 3,84 0,51 - - - - - -
34d 6,28 2,00 NOR 4,72 0,76 EXP 7,98 1,05 - - -
3S2 12d 3,79 0,39 WEI 3,58 0,18 FRE 4,34 0,20 - - -
34d 7,12 1,35 WEI 7,12 1,35 - - - - - -
3S3-C 12d 3,88 0,41 WEI 3,61 0,16 RAY 4,38 0,19 - - -
34d 3,13 0,56 RAY 2,68 0,21 RAY 3,63 0,38 - - -
3S3-L 12d 3,85 0,39 NOR 3,56 0,17 EXP 4,28 0,17 - - -
34d 5,76 0,72 GUM 5,76 0,72 - - - - - -
3I1 12d 3,72 0,47 UNI 3,47 0,21 LGT 4,38 0,16 - - -
34d 5,13 1,09 FRE 4,00 0,24 LNO 5,24 0,41 2MN 6,61 0,21
3I2 34d 7,42 1,21 EDU 4,43 0,31 LGT 7,78 0,62 - - -
3I3 34d 5,05 0,73 WEI 4,53 0,45 WEI 5,83 0,24 - - -
3T4/ 3D4
12d 3,75 0,36 WEI 3,59 0,17 FRE 4,34 0,19 - - -
34d 5,11 0,38 NOR 4,37 0,14 BET 5,23 0,25 - - -
56d 3,62 0,28 LGT 3,62 0,28 - - - - - -
3T6 34d 5,75 1,18 LGT 5,08 0,67 RAY 7,28 0,30 - - -
56d 3,70 0,71 LNO 3,70 0,71 - - - - - -
78d 5,95 1,13 2MN 5,35 0,66 LGT 7,45 0,36 - - -
3M6 34d 6,23 1,10 FRE 6,23 1,10 - - - - - -
67d 5,79 0,97 EDU 5,79 0,97 - - - - - -
Verifica-se que as distribuições das distâncias 12d dos caminhões 2S1, 2S2, 2S3,
2I1, 2I2 e 2I3, todos tracionados por cavalos mecânicos de 2 eixos, são bastante
similares (são bimodais e os valores da média e do desvio padrão de cada classe são
próximos), pois esta distância entre eixos é função somente da geometria deste veículo
trator – que pode ser acoplado, teoricamente, a qualquer tipo de carreta. Todas estas
distâncias poderiam, de forma simplificada, ser consideradas iguais; entretanto, existem
perfis distintos de uso para os veículos tratores, que por vezes acarretam diferenças
77
geométricas entre os diversos modelos, geralmente em função do tipo de carga
transportada e da sua capacidade máxima de tração (CMT). Isto pode ser verificado, por
exemplo, na classe 2S3, onde os modelos curtos e longos, destinados a aplicações
diferentes, apresentam modelos populacionais distintos e estatísticas ligeiramente
diferentes para a distância 12d . Situação semelhante ocorre nos semirreboques
tracionados por cavalos mecânicos de 3 eixos; neste caso, porém, as diferenças devidas
ao perfil de uso são mais nítidas. Os valores médios da distância 12d dos veículos 3M6
e 3T6, tracionados somente por veículos 6x4 e dotados de grande CMT, são
sensivelmente menores que os das classes que podem ser tracionadas por veículos 6x2.
Estas duas distâncias foram consideradas determinísticas; ver a Tabela 2.26.
Assim, para melhor representar cada semirreboque, consideraram-se modelos
distintos para os cavalos mecânicos de cada classe.
2.6.7 Valores fixos e limites adotados para as distâncias longitudinais
Valores fixos
Por apresentarem coeficiente de variação muito reduzido, as seguintes
dimensões longitudinais foram consideradas com valores determinísticos:
- as distâncias entre os eixos agrupados de todas as classes que os possuem, além
das distâncias entre os eixos isolados dos semirreboques 2I1, 2I2, 2I3, 3I1, 3I2 e 3I3;
- as distâncias 12d dos caminhões 3I2, 3I3, 3T6 e 3M6, pois apresentam desvio
padrão menor que 0,30 m e nenhuma destas classes têm frequência relativa alta;
- o balanço dianteiro (distância entre a extremidade dianteira e o primeiro eixo) e
o balanço traseiro (distância entre o último eixo e a extremidade traseira) de todas as
classes de veículos;
- as distâncias entre eixos das classes 2CB, 3CB e 3BB, pois na base AB-08, a
única que fornece informações de distâncias entre eixos, não há registros de ônibus.
Para as distâncias entre eixos isolados das Vanderleias e entre eixos agrupados,
utilizaram-se como referência as informações da balança seletiva da base AB-08. Já os
balanços longitudinais e as distâncias entre eixos dos ônibus foram estimados com base
em levantamentos das informações técnicas fornecidas pelos fabricantes de veículos e
implementos rodoviários. As dimensões referentes aos ônibus e caminhões tratores
foram adquiridas nos sítios na internet de alguns dos fabricantes de veículos filiados à
ANFAVEA: Agrale S.A., Ford Caminhões Brasil, Iveco-Fiat Industrial S. P. A., Man
Latin America, Mercedes-Benz do Brasil, Scania Latin America e Volvo do Brasil. Os
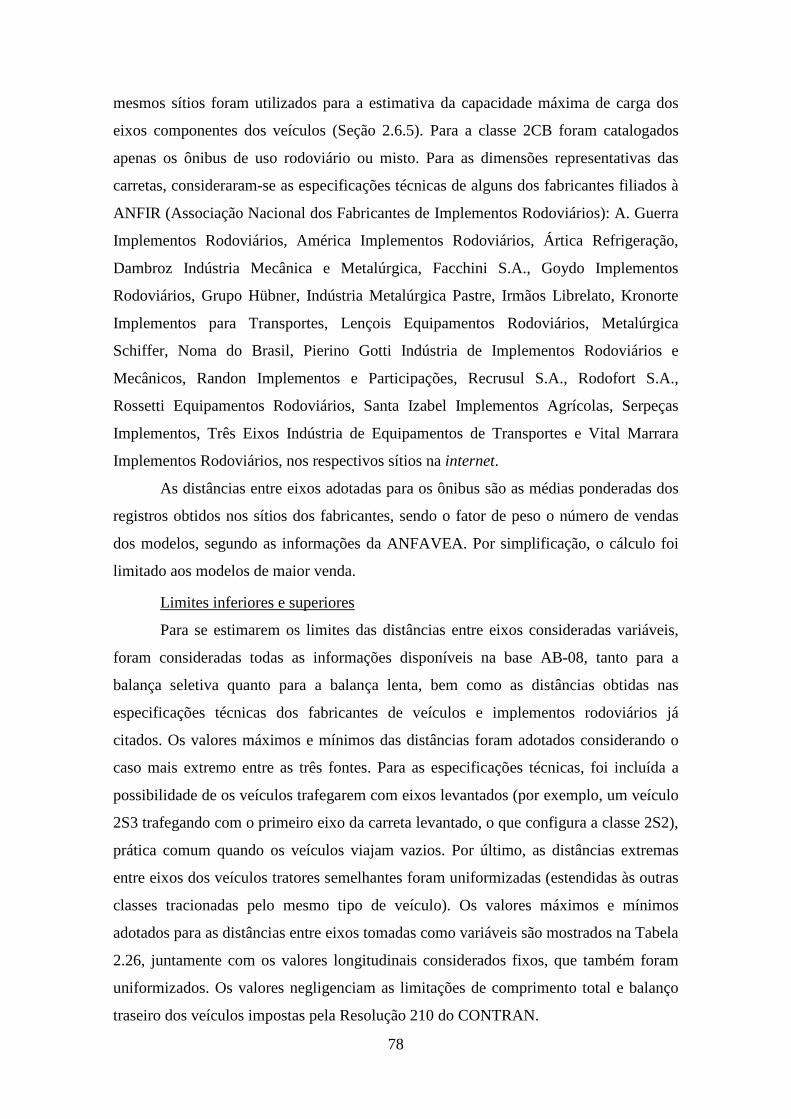
78
mesmos sítios foram utilizados para a estimativa da capacidade máxima de carga dos
eixos componentes dos veículos (Seção 2.6.5). Para a classe 2CB foram catalogados
apenas os ônibus de uso rodoviário ou misto. Para as dimensões representativas das
carretas, consideraram-se as especificações técnicas de alguns dos fabricantes filiados à
ANFIR (Associação Nacional dos Fabricantes de Implementos Rodoviários): A. Guerra
Implementos Rodoviários, América Implementos Rodoviários, Ártica Refrigeração,
Dambroz Indústria Mecânica e Metalúrgica, Facchini S.A., Goydo Implementos
Rodoviários, Grupo Hübner, Indústria Metalúrgica Pastre, Irmãos Librelato, Kronorte
Implementos para Transportes, Lençois Equipamentos Rodoviários, Metalúrgica
Schiffer, Noma do Brasil, Pierino Gotti Indústria de Implementos Rodoviários e
Mecânicos, Randon Implementos e Participações, Recrusul S.A., Rodofort S.A.,
Rossetti Equipamentos Rodoviários, Santa Izabel Implementos Agrícolas, Serpeças
Implementos, Três Eixos Indústria de Equipamentos de Transportes e Vital Marrara
Implementos Rodoviários, nos respectivos sítios na internet.
As distâncias entre eixos adotadas para os ônibus são as médias ponderadas dos
registros obtidos nos sítios dos fabricantes, sendo o fator de peso o número de vendas
dos modelos, segundo as informações da ANFAVEA. Por simplificação, o cálculo foi
limitado aos modelos de maior venda.
Limites inferiores e superiores
Para se estimarem os limites das distâncias entre eixos consideradas variáveis,
foram consideradas todas as informações disponíveis na base AB-08, tanto para a
balança seletiva quanto para a balança lenta, bem como as distâncias obtidas nas
especificações técnicas dos fabricantes de veículos e implementos rodoviários já
citados. Os valores máximos e mínimos das distâncias foram adotados considerando o
caso mais extremo entre as três fontes. Para as especificações técnicas, foi incluída a
possibilidade de os veículos trafegarem com eixos levantados (por exemplo, um veículo
2S3 trafegando com o primeiro eixo da carreta levantado, o que configura a classe 2S2),
prática comum quando os veículos viajam vazios. Por último, as distâncias extremas
entre eixos dos veículos tratores semelhantes foram uniformizadas (estendidas às outras
classes tracionadas pelo mesmo tipo de veículo). Os valores máximos e mínimos
adotados para as distâncias entre eixos tomadas como variáveis são mostrados na Tabela
2.26, juntamente com os valores longitudinais considerados fixos, que também foram
uniformizados. Os valores negligenciam as limitações de comprimento total e balanço
traseiro dos veículos impostas pela Resolução 210 do CONTRAN.
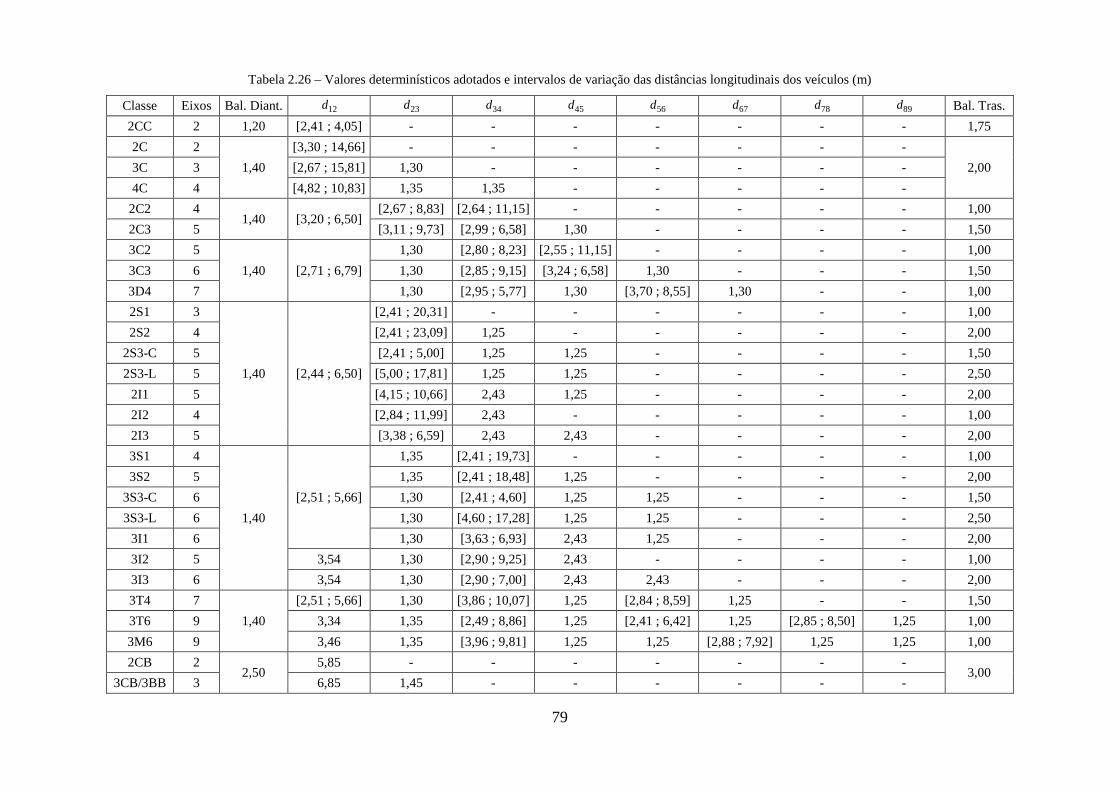
79
Tabela 2.26 – Valores determinísticos adotados e intervalos de variação das distâncias longitudinais dos veículos (m)
Classe Eixos Bal. Diant. 12d 23d 34d 45d 56d 67d 78d 89d Bal. Tras.
2CC 2 1,20 [2,41 ; 4,05] - - - - - - - 1,75
2C 2
1,40
[3,30 ; 14,66] - - - - - - -
2,00 3C 3 [2,67 ; 15,81] 1,30 - - - - - -
4C 4 [4,82 ; 10,83] 1,35 1,35 - - - - -
2C2 4 1,40 [3,20 ; 6,50]
[2,67 ; 8,83] [2,64 ; 11,15] - - - - - 1,00
2C3 5 [3,11 ; 9,73] [2,99 ; 6,58] 1,30 - - - - 1,50
3C2 5
1,40 [2,71 ; 6,79]
1,30 [2,80 ; 8,23] [2,55 ; 11,15] - - - - 1,00
3C3 6 1,30 [2,85 ; 9,15] [3,24 ; 6,58] 1,30 - - - 1,50
3D4 7 1,30 [2,95 ; 5,77] 1,30 [3,70 ; 8,55] 1,30 - - 1,00
2S1 3
1,40 [2,44 ; 6,50]
[2,41 ; 20,31] - - - - - - 1,00
2S2 4 [2,41 ; 23,09] 1,25 - - - - - 2,00
2S3-C 5 [2,41 ; 5,00] 1,25 1,25 - - - - 1,50
2S3-L 5 [5,00 ; 17,81] 1,25 1,25 - - - - 2,50
2I1 5 [4,15 ; 10,66] 2,43 1,25 - - - - 2,00
2I2 4 [2,84 ; 11,99] 2,43 - - - - - 1,00
2I3 5 [3,38 ; 6,59] 2,43 2,43 - - - - 2,00
3S1 4
1,40
[2,51 ; 5,66]
1,35 [2,41 ; 19,73] - - - - - 1,00
3S2 5 1,35 [2,41 ; 18,48] 1,25 - - - - 2,00
3S3-C 6 1,30 [2,41 ; 4,60] 1,25 1,25 - - - 1,50
3S3-L 6 1,30 [4,60 ; 17,28] 1,25 1,25 - - - 2,50
3I1 6 1,30 [3,63 ; 6,93] 2,43 1,25 - - - 2,00
3I2 5 3,54 1,30 [2,90 ; 9,25] 2,43 - - - - 1,00
3I3 6 3,54 1,30 [2,90 ; 7,00] 2,43 2,43 - - - 2,00
3T4 7
1,40
[2,51 ; 5,66] 1,30 [3,86 ; 10,07] 1,25 [2,84 ; 8,59] 1,25 - - 1,50
3T6 9 3,34 1,35 [2,49 ; 8,86] 1,25 [2,41 ; 6,42] 1,25 [2,85 ; 8,50] 1,25 1,00
3M6 9 3,46 1,35 [3,96 ; 9,81] 1,25 1,25 [2,88 ; 7,92] 1,25 1,25 1,00
2CB 2 2,50
5,85 - - - - - - - 3,00
3CB/3BB 3 6,85 1,45 - - - - - -
80
2.6.8 Dimensões transversais
Os valores adotados para as bitolas dianteiras e traseiras dos eixos dos veículos
são mostrados na Tabela 2.27. A bitola de um eixo é a distância entre os centros dos
dois pneus ligados às suas extremidades, no caso de um eixo simples, ou entre os pontos
médios dos pares de pneus adjacentes de cada extremidade, no caso de um eixo duplo,
conforme mostrado na Figura 2.33.
Figura 2.33 – Bitola dos eixos simples e duplos
Tabela 2.27 – Valores adotados para as bitolas dos eixos (m)
Classe Eixo 1 Eixo 2 Eixo 3 Eixo 4 Eixo 5 Eixo 6 Eixo 7 Eixo 8 Eixo 9 2CC 1,75 1,65 - - - - - - -
2C
2,00
1,85 - - - - - - -
3C 1,90
- - - - - -
4C - - - - -
2C2
2,00
1,85 1,90 - - - - -
2C3
- - - -
3C2
1,90
- - - -
3C3
1,90
- - -
3D4 - -
2S1
2,05 1,85
- - - - - -
2S2
- - - - -
2S3-C
1,90
- - - -
2S3-L - - - -
2I1 - - - -
2I2 - - - - -
2I3 - - - -
3S1
2,05 1,85
- - - - -
3S2 - - - -
3S3-C - - -
3S3-L 1,90 - - -
3I1 - - -
3I2 - - - -
3I3 - - -
3T4
2,05 1,85
- -
3T6 1,90
3M6
2CB
2,05
1,85 - - - - - - -
3CB 2,10 1,85 - - - - - -
3BB 1,85 2,10 - - - - - -
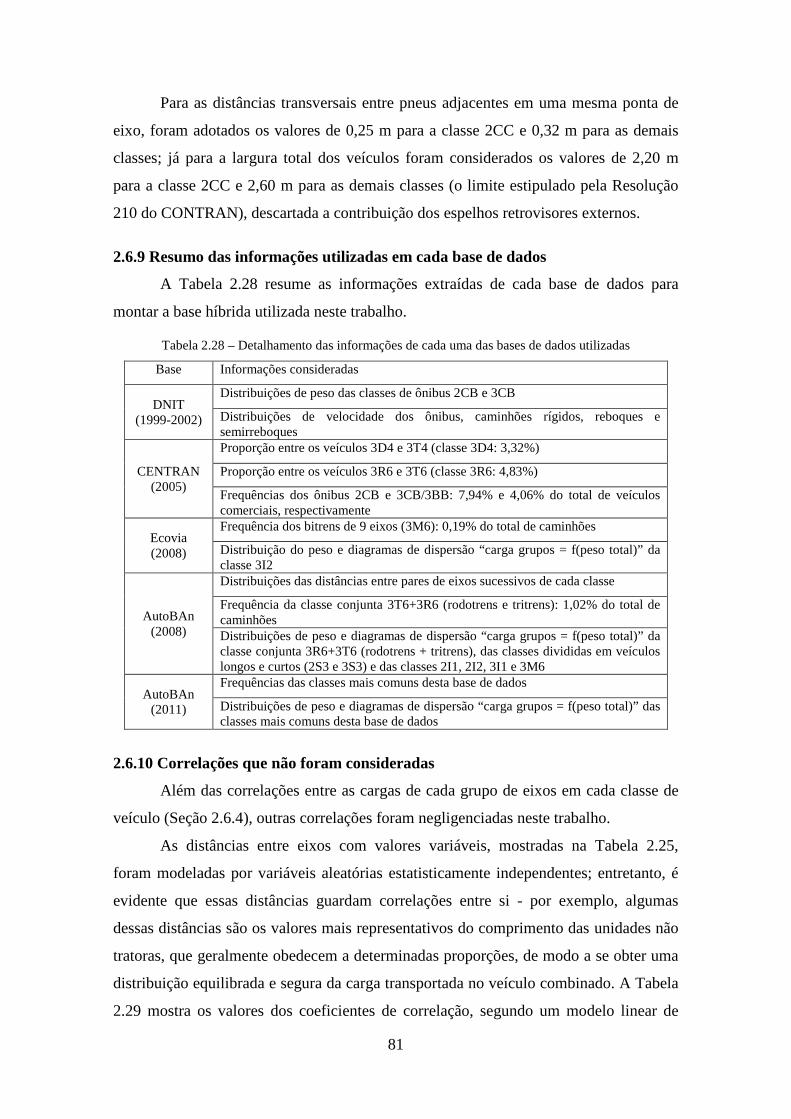
81
Para as distâncias transversais entre pneus adjacentes em uma mesma ponta de
eixo, foram adotados os valores de 0,25 m para a classe 2CC e 0,32 m para as demais
classes; já para a largura total dos veículos foram considerados os valores de 2,20 m
para a classe 2CC e 2,60 m para as demais classes (o limite estipulado pela Resolução
210 do CONTRAN), descartada a contribuição dos espelhos retrovisores externos.
2.6.9 Resumo das informações utilizadas em cada base de dados
A Tabela 2.28 resume as informações extraídas de cada base de dados para
montar a base híbrida utilizada neste trabalho.
Tabela 2.28 – Detalhamento das informações de cada uma das bases de dados utilizadas
Base Informações consideradas
DNIT (1999-2002)
Distribuições de peso das classes de ônibus 2CB e 3CB
Distribuições de velocidade dos ônibus, caminhões rígidos, reboques e semirreboques
CENTRAN (2005)
Proporção entre os veículos 3D4 e 3T4 (classe 3D4: 3,32%)
Proporção entre os veículos 3R6 e 3T6 (classe 3R6: 4,83%)
Frequências dos ônibus 2CB e 3CB/3BB: 7,94% e 4,06% do total de veículos comerciais, respectivamente
Ecovia (2008)
Frequência dos bitrens de 9 eixos (3M6): 0,19% do total de caminhões
Distribuição do peso e diagramas de dispersão “carga grupos = f(peso total)” da classe 3I2
AutoBAn (2008)
Distribuições das distâncias entre pares de eixos sucessivos de cada classe
Frequência da classe conjunta 3T6+3R6 (rodotrens e tritrens): 1,02% do total de caminhões Distribuições de peso e diagramas de dispersão “carga grupos = f(peso total)” da classe conjunta 3R6+3T6 (rodotrens + tritrens), das classes divididas em veículos longos e curtos (2S3 e 3S3) e das classes 2I1, 2I2, 3I1 e 3M6
AutoBAn (2011)
Frequências das classes mais comuns desta base de dados
Distribuições de peso e diagramas de dispersão “carga grupos = f(peso total)” das classes mais comuns desta base de dados
2.6.10 Correlações que não foram consideradas
Além das correlações entre as cargas de cada grupo de eixos em cada classe de
veículo (Seção 2.6.4), outras correlações foram negligenciadas neste trabalho.
As distâncias entre eixos com valores variáveis, mostradas na Tabela 2.25,
foram modeladas por variáveis aleatórias estatisticamente independentes; entretanto, é
evidente que essas distâncias guardam correlações entre si - por exemplo, algumas
dessas distâncias são os valores mais representativos do comprimento das unidades não
tratoras, que geralmente obedecem a determinadas proporções, de modo a se obter uma
distribuição equilibrada e segura da carga transportada no veículo combinado. A Tabela
2.29 mostra os valores dos coeficientes de correlação, segundo um modelo linear de

82
representação, encontrados em alguns pares de distâncias entre eixos consideradas
aleatórias, e negligenciados neste trabalho.
Tabela 2.29 – Correlações lineares entre as distâncias entre eixos de algumas classes da base de dados da AutoBAn de 2008
Classe X Y 2XYρ Classe X Y 2
XYρ
2C2 12d 23d 0,733 3S1 12d 34d 0,046
2C2 12d 34d 0,000 3S2 12d 34d 0,017
2C2 23d 34d 0,021 3S3-C 12d 34d 0,021
2C3 12d 23d 0,662 3S3-L 12d 34d 0,096
2C3 12d 34d 0,464 3I1 12d 34d 0,441
2C3 23d 34d 0,181 3I2 12d 34d 0,210
3C2 12d 34d 0,657 3I3 12d 34d 0,324
3C2 12d 45d 0,009 3T4 12d 34d 0,020
3C2 34d 45d 0,057 3T4 12d 56d 0,018
3C3 12d 34d 0,326 3T4 34d 56d 0,019
3C3 12d 45d 0,211 3T6 12d 34d 0,130
3C3 34d 45d 0,563 3T6 12d 56d 0,054
2S1 12d 23d 0,048 3T6 12d 78d 0,161
2S2 12d 23d 0,027 3T6 34d 56d 0,238
2S3-C 12d 23d 0,002 3T6 34d 78d 0,251
2S3-L 12d 23d 0,077 3T6 56d 78d 0,077
2I1 12d 23d 0,024 3M6 12d 34d 0,022
2I2 12d 23d 0,094 3M6 12d 67d 0,018
2I3 12d 23d 0,077 3M6 34d 67d 0,048
De acordo com as especificações técnicas obtidas dos fabricantes de veículos
comerciais filiados à ANFAVEA, existem, também, correlações entre a maior distância
entre eixos e o comprimento do balanço traseiro dos veículos monolíticos, como
indicado na Tabela 2.30, segundo uma equação linear. Ao se modelarem os balanços
traseiros por valores determinísticos (Tabela 2.26), elimina-se a possibilidade de
considerar essas correlações.
Tabela 2.30 - Correlações lineares entre a maior distância entre eixos dos veículos monolíticos e o seu balanço traseiro, segundo as especificações técnicas dos fabricantes
Classe X Y 2XYρ
2CC
12d Bal. Tras.
0,340 2C 0,462 3C 0,080
2CB 0,016 3BB 0,058
Por último, mostram-se na Tabela 2.31 os coeficientes de correlação lineares
obtidos, e descartados, nas relações entre a maior distância entre eixos e a parcela do
peso total suportada pelos eixos traseiros dos semirreboques. Com o aumento desta
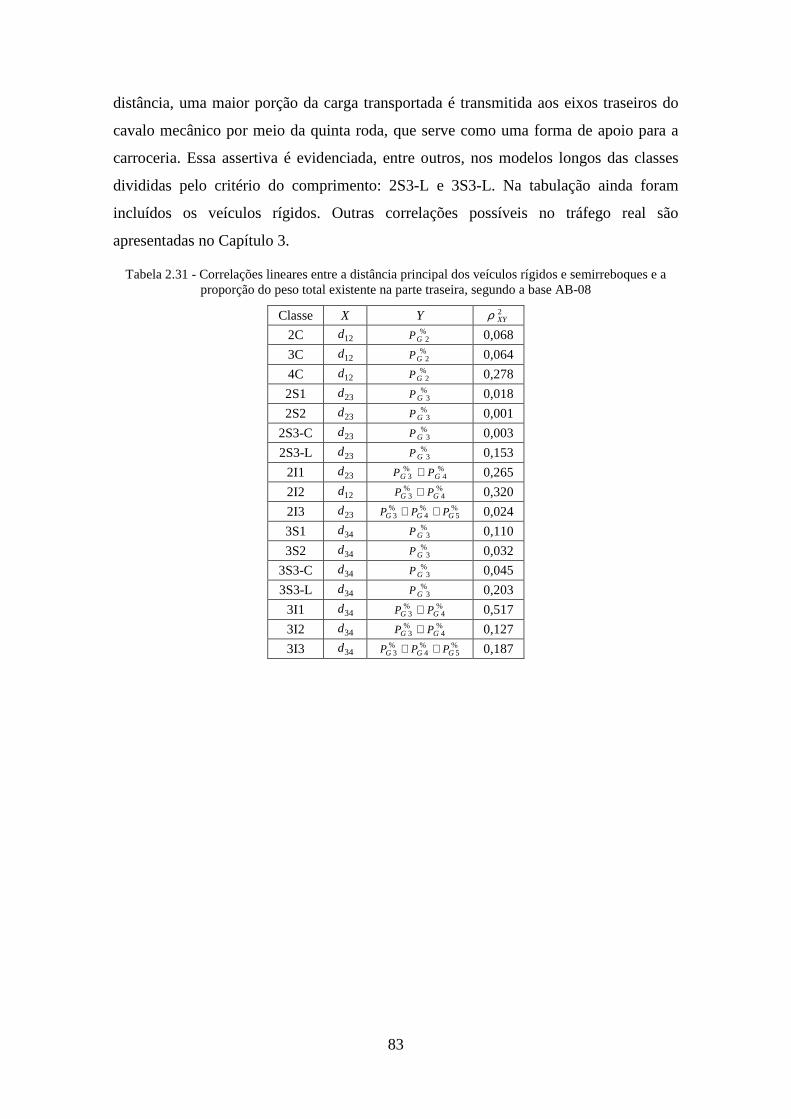
83
distância, uma maior porção da carga transportada é transmitida aos eixos traseiros do
cavalo mecânico por meio da quinta roda, que serve como uma forma de apoio para a
carroceria. Essa assertiva é evidenciada, entre outros, nos modelos longos das classes
divididas pelo critério do comprimento: 2S3-L e 3S3-L. Na tabulação ainda foram
incluídos os veículos rígidos. Outras correlações possíveis no tráfego real são
apresentadas no Capítulo 3.
Tabela 2.31 - Correlações lineares entre a distância principal dos veículos rígidos e semirreboques e a proporção do peso total existente na parte traseira, segundo a base AB-08
Classe X Y 2XYρ
2C 12d %
2GP 0,068
3C 12d %
2GP 0,064
4C 12d %
2GP 0,278
2S1 23d %3GP 0,018
2S2 23d %3GP 0,001
2S3-C 23d %3GP 0,003
2S3-L 23d %3GP 0,153
2I1 23d %4
%3 GG PP + 0,265
2I2 12d %
4%
3 GG PP + 0,320
2I3 23d %5
%4
%3 GGG PPP ++ 0,024
3S1 34d %3GP 0,110
3S2 34d %3GP 0,032
3S3-C 34d %3GP 0,045
3S3-L 34d %3GP 0,203
3I1 34d %4
%3 GG PP + 0,517
3I2 34d %4
%3 GG PP + 0,127
3I3 34d %5
%4
%3 GGG PPP ++ 0,187

84
3 Efeitos estáticos da passagem dos veículos sobre as pontes
3.1 Estruturas consideradas
As rodovias federais de Classe I foram, em sua maioria, projetadas e construídas
com pista simples de duas faixas de tráfego, em rodovias de mão dupla, tendo sido
padronizadas com largura entre 7,00 m e 7,20 m, com acostamentos de 2,50 m. As
pontes das rodovias federais construídas entre 1946 e 1950 consideravam apenas a
largura da pista simples e o acréscimo do guarda-rodas, perfazendo uma largura total de
8,30 m (MENDES, 2009). A partir de 1950, os tabuleiros das pontes foram construídos
com pista de 8,20 m de largura e guarda-rodas de 0,90 m, com largura total de 10,00 m
(modelo antigo do DNER), sem acostamentos (ver a Figura 3.1a). Para compensar a
obstrução psicológica provocada pelos 0,30 m de altura dos guarda-rodas, alargava-se a
pista 0,50 m ou 0,60 m para cada lado.
A partir de 1975 o DNER passou a adotar para as pontes rurais a largura total da
estrada, com a pista e os acostamentos, de modo a reduzir a obstrução psicológica. Para
impedir a saída dos veículos da pista, alguns guarda-rodas dos tabuleiros estreitos
antigos foram substituídos por barreiras laterais (PFEIL, 1985). A largura total das
pontes passou a ser de 10,80 m. A partir de 1985, passou-se a considerar a largura
trafegável entre 12,00 m e 12,20 m (o modelo atual), com largura total entre 12,80 m e
13,00 m (ver a Figura 3.1b).
Como os tabuleiros do modelo atual começaram a ser utilizados pelo DNER
anteriormente à mudança da NB-6 para a NBR 7188, existem obras com a geometria do
modelo atual projetadas para os veículos TB-36 e TB-45.
(a) (b)
Figura 3.1 – (a) Tabuleiro de modelo antigo do DNER, estreito; (b) tabuleiro de modelo atual, largo (PFEIL, 1985); dimensões em centímetros
De acordo com MENDES (2009), nos cerca de 73.000 km de rodovias federais
brasileiras existem 5.619 pontes, construídas principalmente a partir da década de 1940
(Figura 3.2). Nos cadastros destas obras de arte, muitas vezes não constam todas as suas
informações técnicas, como dados geométricos, sistema estrutural etc. Daquelas que
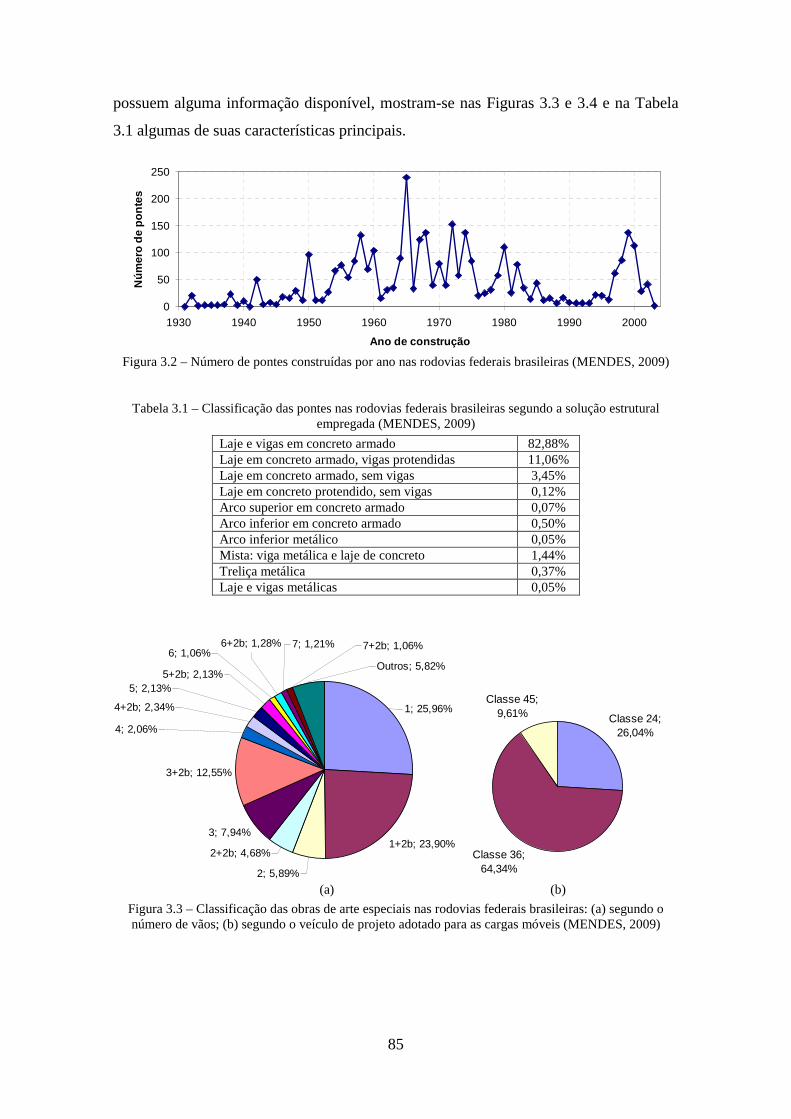
85
possuem alguma informação disponível, mostram-se nas Figuras 3.3 e 3.4 e na Tabela
3.1 algumas de suas características principais.
Figura 3.2 – Número de pontes construídas por ano nas rodovias federais brasileiras (MENDES, 2009)
Tabela 3.1 – Classificação das pontes nas rodovias federais brasileiras segundo a solução estrutural
empregada (MENDES, 2009)
Laje e vigas em concreto armado 82,88% Laje em concreto armado, vigas protendidas 11,06% Laje em concreto armado, sem vigas 3,45% Laje em concreto protendido, sem vigas 0,12% Arco superior em concreto armado 0,07% Arco inferior em concreto armado 0,50% Arco inferior metálico 0,05% Mista: viga metálica e laje de concreto 1,44% Treliça metálica 0,37% Laje e vigas metálicas 0,05%
(a) (b)
Figura 3.3 – Classificação das obras de arte especiais nas rodovias federais brasileiras: (a) segundo o número de vãos; (b) segundo o veículo de projeto adotado para as cargas móveis (MENDES, 2009)
0
50
100
150
200
250
1930 1940 1950 1960 1970 1980 1990 2000
Ano de construção
Núm
ero
de p
onte
s
1+2b; 23,90%
2; 5,89%
2+2b; 4,68%
3; 7,94%
3+2b; 12,55%
5+2b; 2,13%
6; 1,06%6+2b; 1,28%
1; 25,96%
5; 2,13%
7; 1,21% 7+2b; 1,06%
Outros; 5,82%
4+2b; 2,34%
4; 2,06%Classe 24;
26,04%
Classe 36; 64,34%
Classe 45; 9,61%
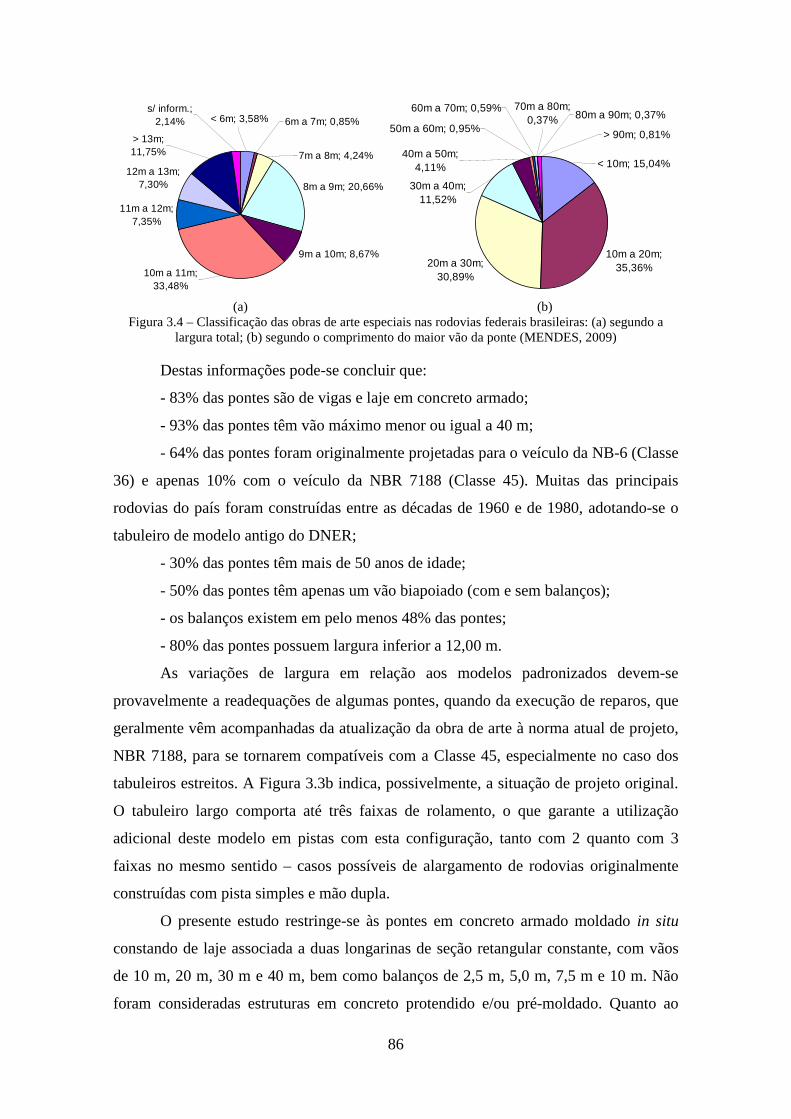
86
(a) (b)
Figura 3.4 – Classificação das obras de arte especiais nas rodovias federais brasileiras: (a) segundo a largura total; (b) segundo o comprimento do maior vão da ponte (MENDES, 2009)
Destas informações pode-se concluir que:
- 83% das pontes são de vigas e laje em concreto armado;
- 93% das pontes têm vão máximo menor ou igual a 40 m;
- 64% das pontes foram originalmente projetadas para o veículo da NB-6 (Classe
36) e apenas 10% com o veículo da NBR 7188 (Classe 45). Muitas das principais
rodovias do país foram construídas entre as décadas de 1960 e de 1980, adotando-se o
tabuleiro de modelo antigo do DNER;
- 30% das pontes têm mais de 50 anos de idade;
- 50% das pontes têm apenas um vão biapoiado (com e sem balanços);
- os balanços existem em pelo menos 48% das pontes;
- 80% das pontes possuem largura inferior a 12,00 m.
As variações de largura em relação aos modelos padronizados devem-se
provavelmente a readequações de algumas pontes, quando da execução de reparos, que
geralmente vêm acompanhadas da atualização da obra de arte à norma atual de projeto,
NBR 7188, para se tornarem compatíveis com a Classe 45, especialmente no caso dos
tabuleiros estreitos. A Figura 3.3b indica, possivelmente, a situação de projeto original.
O tabuleiro largo comporta até três faixas de rolamento, o que garante a utilização
adicional deste modelo em pistas com esta configuração, tanto com 2 quanto com 3
faixas no mesmo sentido – casos possíveis de alargamento de rodovias originalmente
construídas com pista simples e mão dupla.
O presente estudo restringe-se às pontes em concreto armado moldado in situ
constando de laje associada a duas longarinas de seção retangular constante, com vãos
de 10 m, 20 m, 30 m e 40 m, bem como balanços de 2,5 m, 5,0 m, 7,5 m e 10 m. Não
foram consideradas estruturas em concreto protendido e/ou pré-moldado. Quanto ao
8m a 9m; 20,66%
9m a 10m; 8,67%
11m a 12m;7,35%
12m a 13m;7,30%
10m a 11m; 33,48%
< 6m; 3,58%s/ inform.;
2,14%
> 13m;11,75%
6m a 7m; 0,85%
7m a 8m; 4,24%
10m a 20m; 35,36%20m a 30m;
30,89%
60m a 70m; 0,59% 70m a 80m;0,37% 80m a 90m; 0,37%
50m a 60m; 0,95%
40m a 50m;4,11%
> 90m; 0,81%
< 10m; 15,04%
30m a 40m; 11,52%
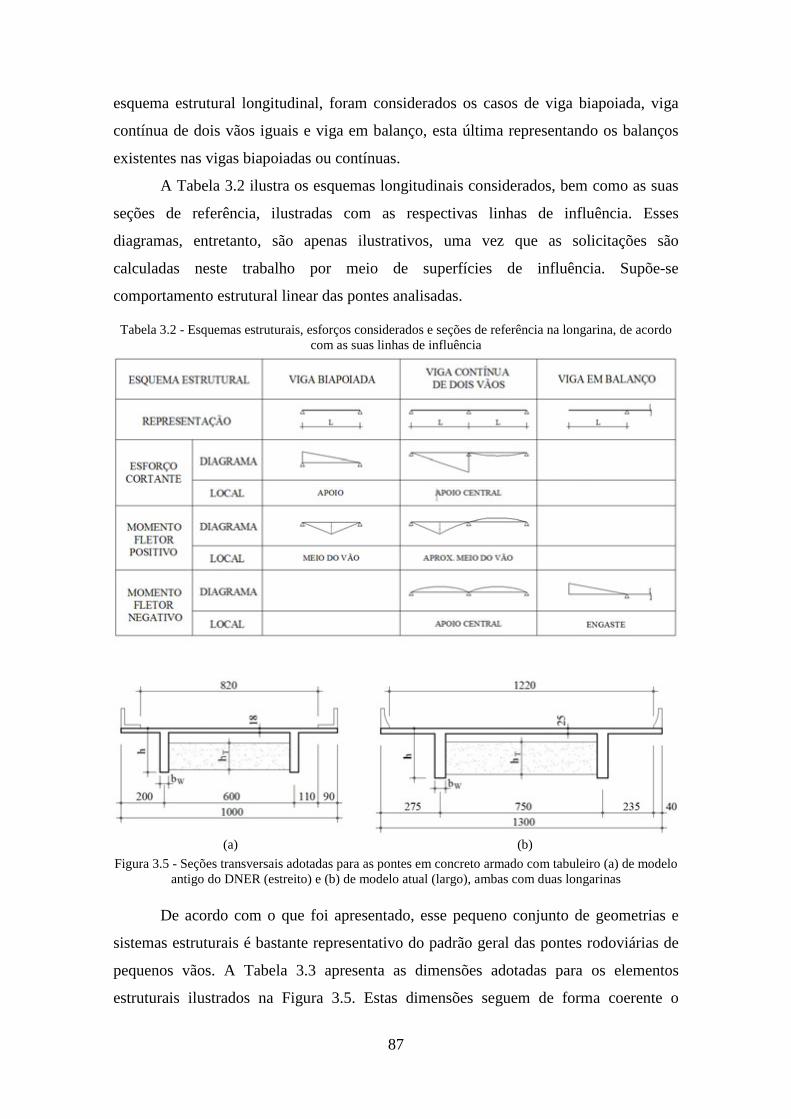
87
esquema estrutural longitudinal, foram considerados os casos de viga biapoiada, viga
contínua de dois vãos iguais e viga em balanço, esta última representando os balanços
existentes nas vigas biapoiadas ou contínuas.
A Tabela 3.2 ilustra os esquemas longitudinais considerados, bem como as suas
seções de referência, ilustradas com as respectivas linhas de influência. Esses
diagramas, entretanto, são apenas ilustrativos, uma vez que as solicitações são
calculadas neste trabalho por meio de superfícies de influência. Supõe-se
comportamento estrutural linear das pontes analisadas.
Tabela 3.2 - Esquemas estruturais, esforços considerados e seções de referência na longarina, de acordo com as suas linhas de influência
(a) (b)
Figura 3.5 - Seções transversais adotadas para as pontes em concreto armado com tabuleiro (a) de modelo antigo do DNER (estreito) e (b) de modelo atual (largo), ambas com duas longarinas
De acordo com o que foi apresentado, esse pequeno conjunto de geometrias e
sistemas estruturais é bastante representativo do padrão geral das pontes rodoviárias de
pequenos vãos. A Tabela 3.3 apresenta as dimensões adotadas para os elementos
estruturais ilustrados na Figura 3.5. Estas dimensões seguem de forma coerente o
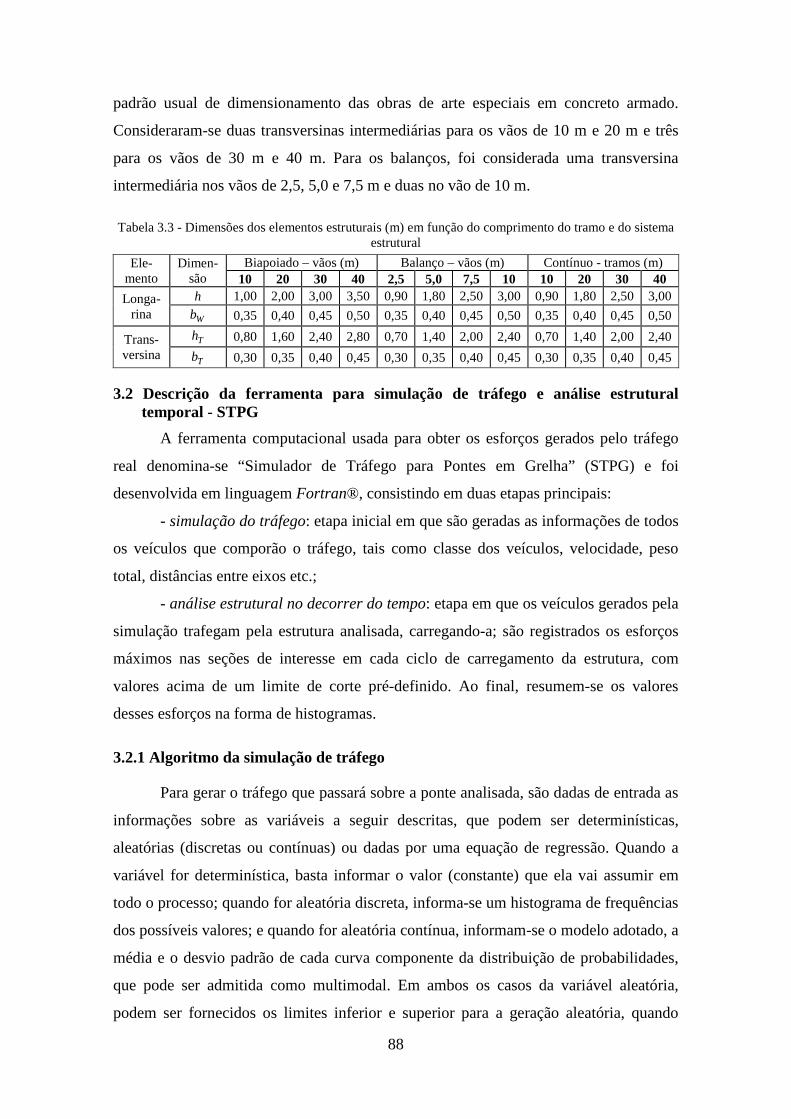
88
padrão usual de dimensionamento das obras de arte especiais em concreto armado.
Consideraram-se duas transversinas intermediárias para os vãos de 10 m e 20 m e três
para os vãos de 30 m e 40 m. Para os balanços, foi considerada uma transversina
intermediária nos vãos de 2,5, 5,0 e 7,5 m e duas no vão de 10 m.
Tabela 3.3 - Dimensões dos elementos estruturais (m) em função do comprimento do tramo e do sistema estrutural
Ele-mento
Dimen-são
Biapoiado – vãos (m) Balanço – vãos (m) Contínuo - tramos (m) 10 20 30 40 2,5 5,0 7,5 10 10 20 30 40
Longa-rina
h 1,00 2,00 3,00 3,50 0,90 1,80 2,50 3,00 0,90 1,80 2,50 3,00
Wb 0,35 0,40 0,45 0,50 0,35 0,40 0,45 0,50 0,35 0,40 0,45 0,50
Trans-versina
Th 0,80 1,60 2,40 2,80 0,70 1,40 2,00 2,40 0,70 1,40 2,00 2,40
Tb 0,30 0,35 0,40 0,45 0,30 0,35 0,40 0,45 0,30 0,35 0,40 0,45
3.2 Descrição da ferramenta para simulação de tráfego e análise estrutural temporal - STPG
A ferramenta computacional usada para obter os esforços gerados pelo tráfego
real denomina-se “Simulador de Tráfego para Pontes em Grelha” (STPG) e foi
desenvolvida em linguagem Fortran®, consistindo em duas etapas principais:
- simulação do tráfego: etapa inicial em que são geradas as informações de todos
os veículos que comporão o tráfego, tais como classe dos veículos, velocidade, peso
total, distâncias entre eixos etc.;
- análise estrutural no decorrer do tempo: etapa em que os veículos gerados pela
simulação trafegam pela estrutura analisada, carregando-a; são registrados os esforços
máximos nas seções de interesse em cada ciclo de carregamento da estrutura, com
valores acima de um limite de corte pré-definido. Ao final, resumem-se os valores
desses esforços na forma de histogramas.
3.2.1 Algoritmo da simulação de tráfego
Para gerar o tráfego que passará sobre a ponte analisada, são dadas de entrada as
informações sobre as variáveis a seguir descritas, que podem ser determinísticas,
aleatórias (discretas ou contínuas) ou dadas por uma equação de regressão. Quando a
variável for determinística, basta informar o valor (constante) que ela vai assumir em
todo o processo; quando for aleatória discreta, informa-se um histograma de frequências
dos possíveis valores; e quando for aleatória contínua, informam-se o modelo adotado, a
média e o desvio padrão de cada curva componente da distribuição de probabilidades,
que pode ser admitida como multimodal. Em ambos os casos da variável aleatória,
podem ser fornecidos os limites inferior e superior para a geração aleatória, quando
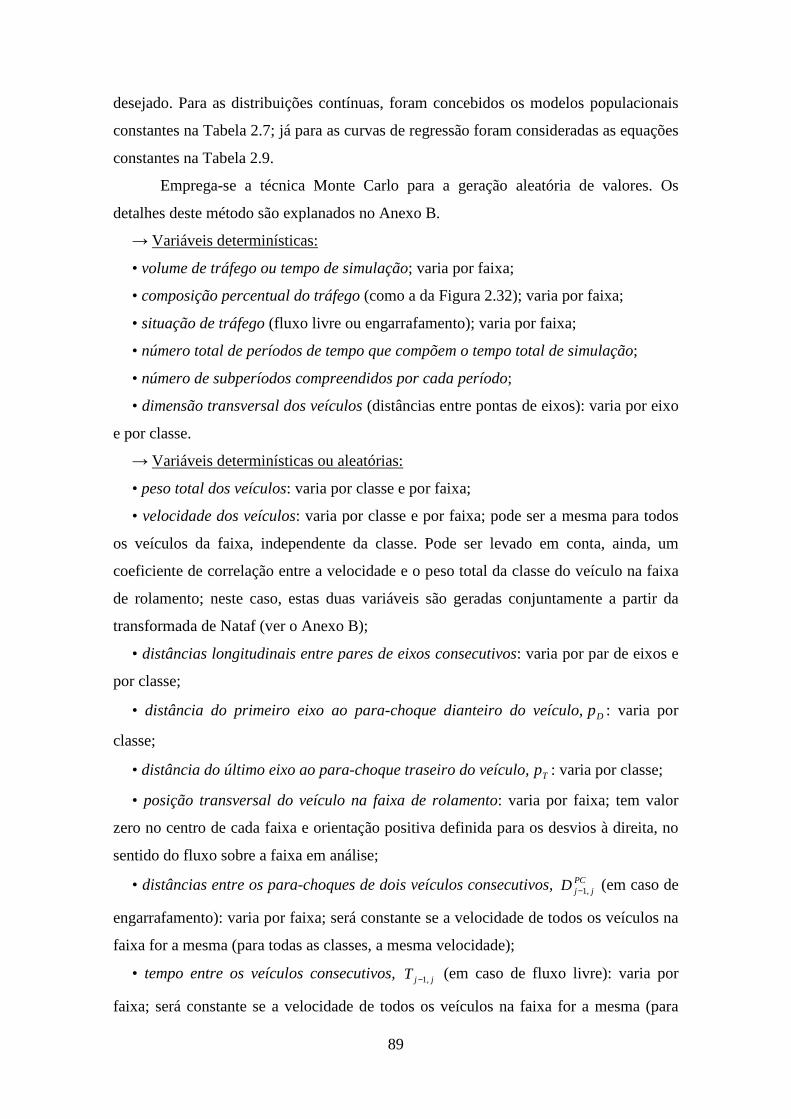
89
desejado. Para as distribuições contínuas, foram concebidos os modelos populacionais
constantes na Tabela 2.7; já para as curvas de regressão foram consideradas as equações
constantes na Tabela 2.9.
Emprega-se a técnica Monte Carlo para a geração aleatória de valores. Os
detalhes deste método são explanados no Anexo B.
→ Variáveis determinísticas:
• volume de tráfego ou tempo de simulação; varia por faixa;
• composição percentual do tráfego (como a da Figura 2.32); varia por faixa;
• situação de tráfego (fluxo livre ou engarrafamento); varia por faixa;
• número total de períodos de tempo que compõem o tempo total de simulação;
• número de subperíodos compreendidos por cada período;
• dimensão transversal dos veículos (distâncias entre pontas de eixos): varia por eixo
e por classe.
→ Variáveis determinísticas ou aleatórias:
• peso total dos veículos: varia por classe e por faixa;
• velocidade dos veículos: varia por classe e por faixa; pode ser a mesma para todos
os veículos da faixa, independente da classe. Pode ser levado em conta, ainda, um
coeficiente de correlação entre a velocidade e o peso total da classe do veículo na faixa
de rolamento; neste caso, estas duas variáveis são geradas conjuntamente a partir da
transformada de Nataf (ver o Anexo B);
• distâncias longitudinais entre pares de eixos consecutivos: varia por par de eixos e
por classe;
• distância do primeiro eixo ao para-choque dianteiro do veículo,Dp : varia por
classe;
• distância do último eixo ao para-choque traseiro do veículo,Tp : varia por classe;
• posição transversal do veículo na faixa de rolamento: varia por faixa; tem valor
zero no centro de cada faixa e orientação positiva definida para os desvios à direita, no
sentido do fluxo sobre a faixa em análise;
• distâncias entre os para-choques de dois veículos consecutivos, PCjjD ,1− (em caso de
engarrafamento): varia por faixa; será constante se a velocidade de todos os veículos na
faixa for a mesma (para todas as classes, a mesma velocidade);
• tempo entre os veículos consecutivos, jjT ,1− (em caso de fluxo livre): varia por
faixa; será constante se a velocidade de todos os veículos na faixa for a mesma (para
90
todas as classes, a mesma velocidade); ver a Figura 3.6.
Figura 3.6 – Conversão da distância entre para-choques para a distância entre o primeiro eixo dos
veículos
→ Variável definida por curva de regressão:
• carga de cada eixo do veículo: calculada por curvas de mínimos quadrados, em
função do peso total da classe; varia por eixo e por classe (ver a Seção 2.6.4).
Com as informações iniciais definidas pelas variáveis citadas, gera-se uma fila
de veículos em cada faixa, bem como todas as características (aleatórias ou
determinísticas) dos veículos que trafegarão sobre a ponte considerada. O tráfego é
gerado em cada faixa de forma separada e independente.
A classe é a primeira variável a ser gerada para o veículo pelo programa STPG,
também por meio da técnica Monte Carlo, em função da probabilidade de ocorrência de
cada classe. Definida a sua classe, geram-se todas as outras informações pertinentes a
este veículo. A geração de valores para as variáveis é repetida até que se preencha todo
o tempo estipulado, ou então até completar o número total de veículos determinado na
faixa. Pode ser fornecida separadamente uma fila determinística de veículos; neste caso,
dispensa-se a geração de uma classe para cada veículo e passa-se diretamente à geração
das outras variáveis da simulação.
Existem várias formas diferentes de gerar as informações do tráfego. Por
exemplo, em LUCHI (2006), o número de veículos de cada classe em cada dia de
simulação é gerado aleatoriamente a partir da distribuição da quantidade de veículos
por dia, que é possível de ser obtida quando se têm dados registrados em vários dias
consecutivos.
Em cada faixa, o fluxo pode ser livre ou engarrafado. Definindo cada período
completo por subperíodos, é possível modelar qualquer situação sazonal de tráfego,
como, por exemplo, engarrafamentos em determinados horários e fluxo livre no restante
do dia. Como não estão sendo levadas em conta as acelerações e frenagens dos veículos,
a velocidade gerada para cada um deles permanece constante ao longo de todo o seu
trajeto. Além disso, não são previstos deslocamentos laterais dos veículos (apenas
91
longitudinais, no sentido do tráfego).
3.2.2 Correlações não consideradas pelo programa STPG
Não são levadas em conta, na atual versão do programa STPG, as correlações
descritas na Seção 2.6.10 - entre as diferentes distâncias entre pares de eixos
consecutivos de cada classe, entre as distâncias entre eixos e o balanço traseiro e entre a
carga dos eixos e as distâncias entre eixos –, tampouco as correlações entre as cargas
dos grupos de eixos de cada classe e as correlações descritas por O’BRIEN e ENRIGHT
(2011):
• entre os pesos de veículos sucessivos em uma mesma faixa, devida, por
exemplo, à passagem de comboios. Esta grandeza depende dos pesos do par de
veículos;
• entre os pesos de veículos de faixas diferentes no mesmo sentido;
• entre as velocidades de veículos sucessivos em uma mesma faixa, quando o
intervalo entre a passagem destes veículos for pequeno;
• entre o peso total dos veículos e o intervalo entre a passagem de veículos
sucessivos em uma mesma faixa.
Os autores concluem que as correlações devidas à interdependência entre pesos,
velocidades e intervalo entre veículos aumentam os valores dos esforços solicitantes
característicos das extrapolações.
NOWAK (1993), na calibração das normas AASHTO LRFD e OHBDC,
considerou de forma aproximada nas simulações de tráfego que, em rodovias com 2
faixas de tráfego no mesmo sentido, 1 em cada 10 caminhões trafega lado a lado com
outro veículo de peso parcialmente correlato a ele, na faixa de rolamento adjacente, e
que há correlação total entre os pesos de caminhões a cada 30 passagens.
3.2.3 Verificação de compatibilidade entre velocidades e intervalos
a) Verificação dos tempos até a saída da área de afastamento
Como, num caso geral, as distâncias entre veículos e as velocidades são
aleatórias, pode ocorrer, em cada faixa, de o veículo anterior (1−j ) não ter tempo
suficiente para sair completamente da ponte antes de ser alcançado pelo veículo
posterior (j ). Como estão sendo consideradas apenas velocidades constantes para os
veículos, e não são previstos deslocamentos laterais, deve-se evitar a ocorrência desta
situação, que na simulação de tráfego seria considerada como uma sobreposição, mas
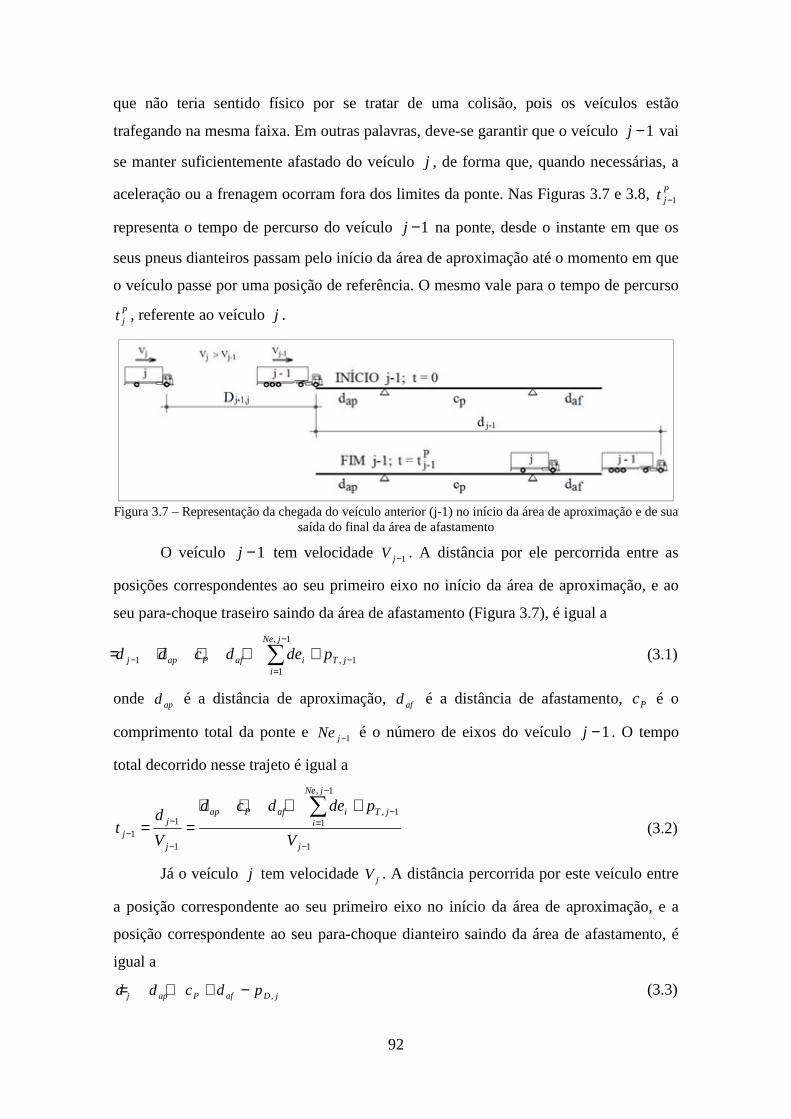
92
que não teria sentido físico por se tratar de uma colisão, pois os veículos estão
trafegando na mesma faixa. Em outras palavras, deve-se garantir que o veículo 1−j vai
se manter suficientemente afastado do veículo j , de forma que, quando necessárias, a
aceleração ou a frenagem ocorram fora dos limites da ponte. Nas Figuras 3.7 e 3.8, Pjt 1−
representa o tempo de percurso do veículo 1−j na ponte, desde o instante em que os
seus pneus dianteiros passam pelo início da área de aproximação até o momento em que
o veículo passe por uma posição de referência. O mesmo vale para o tempo de percurso
Pjt , referente ao veículo j .
Figura 3.7 – Representação da chegada do veículo anterior (j-1) no início da área de aproximação e de sua
saída do final da área de afastamento
O veículo 1−j tem velocidade 1−jV . A distância por ele percorrida entre as
posições correspondentes ao seu primeiro eixo no início da área de aproximação, e ao
seu para-choque traseiro saindo da área de afastamento (Figura 3.7), é igual a
1,
1,
11 −
−
=− ++++= ∑ jT
jNe
iiafPapj pdedcdd (3.1)
onde apd é a distância de aproximação, afd é a distância de afastamento, Pc é o
comprimento total da ponte e 1−jNe é o número de eixos do veículo 1−j . O tempo
total decorrido nesse trajeto é igual a
1
1,
1,
1
1
11
−
−
−
=
−
−−
++++==
∑
j
jT
jNe
iiafPap
j
jj V
pdedcd
V
dt (3.2)
Já o veículo j tem velocidade jV . A distância percorrida por este veículo entre
a posição correspondente ao seu primeiro eixo no início da área de aproximação, e a
posição correspondente ao seu para-choque dianteiro saindo da área de afastamento, é
igual a
jDafPapj pdcdd ,−++= (3.3)
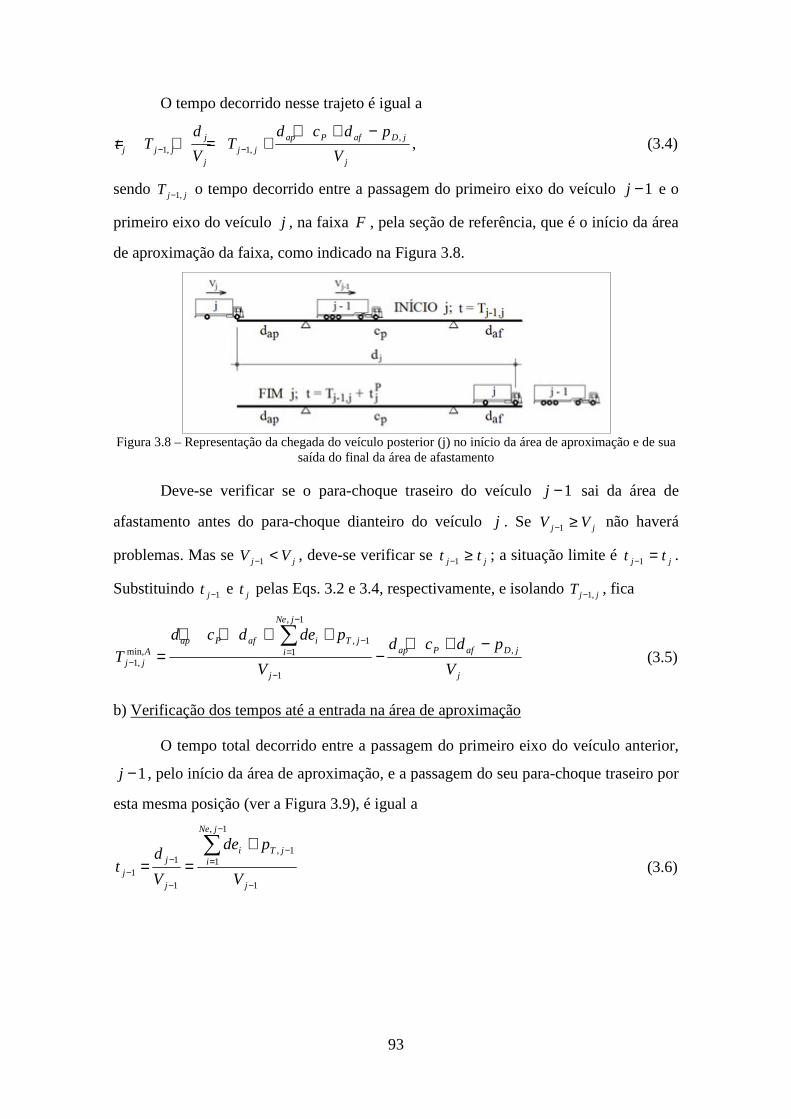
93
O tempo decorrido nesse trajeto é igual a
j
jDafPapjj
j
jjjj V
pdcdT
V
dTt ,
,1,1
−+++=+= −− , (3.4)
sendo jjT ,1− o tempo decorrido entre a passagem do primeiro eixo do veículo 1−j e o
primeiro eixo do veículo j , na faixa F , pela seção de referência, que é o início da área
de aproximação da faixa, como indicado na Figura 3.8.
Figura 3.8 – Representação da chegada do veículo posterior (j) no início da área de aproximação e de sua
saída do final da área de afastamento
Deve-se verificar se o para-choque traseiro do veículo 1−j sai da área de
afastamento antes do para-choque dianteiro do veículo j . Se jj VV ≥−1 não haverá
problemas. Mas se jj VV <−1 , deve-se verificar se jj tt ≥−1 ; a situação limite é jj tt =−1 .
Substituindo 1−jt e jt
pelas Eqs. 3.2 e 3.4, respectivamente, e isolando jjT ,1− , fica
j
jDafPap
j
jT
jNe
iiafPap
Ajj V
pdcd
V
pdedcdT ,
1
1,
1,
1min,,1
−++−
++++=
−
−
−
=−
∑ (3.5)
b) Verificação dos tempos até a entrada na área de aproximação
O tempo total decorrido entre a passagem do primeiro eixo do veículo anterior,
1−j , pelo início da área de aproximação, e a passagem do seu para-choque traseiro por
esta mesma posição (ver a Figura 3.9), é igual a
1
1,
1,
1
1
11
−
−
−
=
−
−−
+==∑
j
jT
jNe
ii
j
jj V
pde
V
dt (3.6)
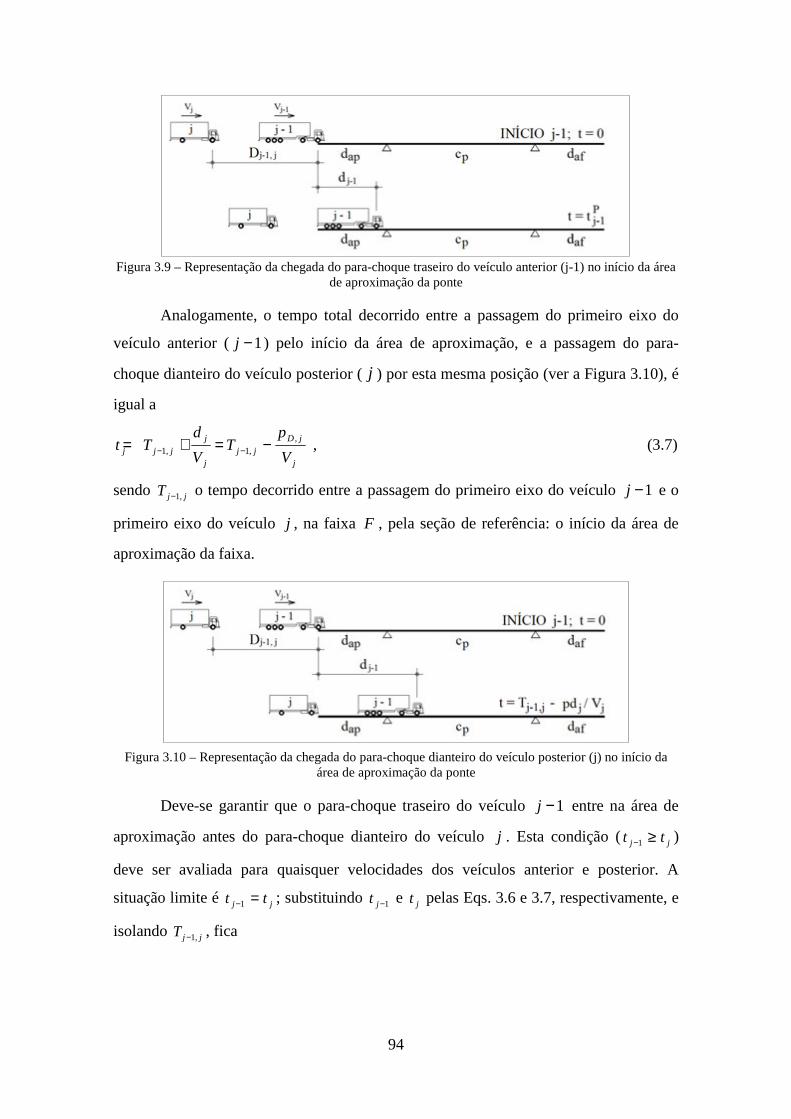
94
Figura 3.9 – Representação da chegada do para-choque traseiro do veículo anterior (j-1) no início da área
de aproximação da ponte
Analogamente, o tempo total decorrido entre a passagem do primeiro eixo do
veículo anterior ( 1−j ) pelo início da área de aproximação, e a passagem do para-
choque dianteiro do veículo posterior (j ) por esta mesma posição (ver a Figura 3.10), é
igual a
j
jDjj
j
jjjj V
pT
V
dTt ,
,1,1 −=+= −− , (3.7)
sendo jjT ,1− o tempo decorrido entre a passagem do primeiro eixo do veículo 1−j e o
primeiro eixo do veículo j , na faixa F , pela seção de referência: o início da área de
aproximação da faixa.
Figura 3.10 – Representação da chegada do para-choque dianteiro do veículo posterior (j) no início da
área de aproximação da ponte
Deve-se garantir que o para-choque traseiro do veículo 1−j entre na área de
aproximação antes do para-choque dianteiro do veículo j . Esta condição ( jj tt ≥−1 )
deve ser avaliada para quaisquer velocidades dos veículos anterior e posterior. A
situação limite é jj tt =−1 ; substituindo 1−jt e jt
pelas Eqs. 3.6 e 3.7, respectivamente, e
isolando jjT ,1− , fica
95
j
jD
j
jT
jNe
ii
Bjj V
p
V
pdeT ,
1
1,
1,
1min,,1 +
+=
−
−
−
=−
∑ (3.8)
Por fim, quando jj VV <−1 , o tempo mínimo necessário entre a passagem dos
primeiros eixos dos veículos j e 1−j deve ser igual ao maior valor encontrado nas
duas verificações:
( )Bjj
Ajjjj TTT min,
,1min,
,1min
,1 ;max −−− = (3.9)
Assim, a verificação de compatibilidade entre velocidades e intervalos equivale
a verificar o valor de jjT ,1− . Qualquer min,1,1 jjjj TT −− >
satisfaz as Eqs. 3.5 e 3.8; caso
min,1,1 jjjj TT −− ≤ , ao menos uma das equações não será satisfeita e será necessário gerar um
novo valor aleatório para jjT ,1− . Isto pode ser feito, por exemplo, a partir da equação
( ) min,1,1 1 jjjj TT −− ⋅+= α , com α aleatório e uniformemente distribuído entre 0 e 1.
A distância de aproximação (apd ) não tem importância na simulação de tráfego;
foi considerada no modelo devido à necessidade de sua presença na análise dinâmica,
descrita no Capítulo 4. Ela é essencial para que cada veículo atinja a ponte com
condições iniciais numericamente compatíveis com a estrutura. A distância de
afastamento (afd ) não importa para a análise dinâmica, porém é essencial na simulação
do tráfego, para a verificação de compatibilidade, e pode ser considerada constante ou
variável para cada intervalo entre veículos. Caso ela seja constante, é necessário garantir
que seu valor seja maior que o comprimento do veículo mais extenso da faixa (sem
contar a distância Tp ):
( )FjTFjaf pLd ,,,max −≥ (3.10)
sendo FjL , o comprimento do veículo j da faixa F :
∑=
++=FjNE
iFjTFjDFjiFj ppdeL
,
2,,,,,,, (3.11)
Para considerar esta distância constante, haveria a inconveniente necessidade de
se ter gerado previamente todo o tráfego da faixa F . Assim, para que a distância de
afastamento seja a mínima possível, é mais coerente representá-la variável, com um
valor para cada veículo: Fjafaf dd ,,= . Um modelo possível, que foi utilizado para as
simulações neste trabalho, consiste em adotar a distância de aproximação nula e a

96
distância de afastamento igual ao comprimento do veículo j da faixa F (descontada a
sua distância Tp ), acrescida de uma folga, que pode ser constante para todos os
veículos:
0=apd e ( ) folga ,,,,, +−= FjTFjFjaf pLd (3.12)
Desta forma, o comprimento da área de afastamento é calculado para cada
veículo, sem a necessidade de gerar todo o tráfego previamente. Além disso, com uma
distância de afastamento adaptada minimamente ao comprimento de cada veículo,
reduzem-se os casos em que é necessário gerar uma nova distância entre veículos, o que
ajuda a preservar o aspecto original da distribuição do intervalo entre veículos. Adotou-
se o valor de 5 m para a folga, no caso do fluxo livre.
No caso de engarrafamentos, a variável aleatória considerada é a distância entre
os para-choques de dois veículos subsequentes (ver a Figura 3.6). Deve-se, em primeiro
lugar, converter esta grandeza na distância entre o primeiro eixo do veículo 1−j e o
primeiro eixo do veículo j , por meio da equação
( )FjDFjFjDPC
jjjj pLpDD ,1,,1,,,1,1 −−−− −++= (3.13)
Como a simulação é realizada apenas com os intervalos de tempo entre veículos,
jjT ,1− , para transformar a distância em tempo utiliza-se a equação
j
jjjj V
DT ,1
,1−
− = (3.14)
em que jjT ,1− e jjD ,1− são referentes ao instante de tempo em que o primeiro eixo do
veículo 1−j atinge o início da área de aproximação.
O fluxograma da Figura 3.11 mostra de forma resumida todas as etapas de
geração das variáveis relacionadas ao tráfego. Ele é reproduzido de forma mais
detalhada no Anexo D.
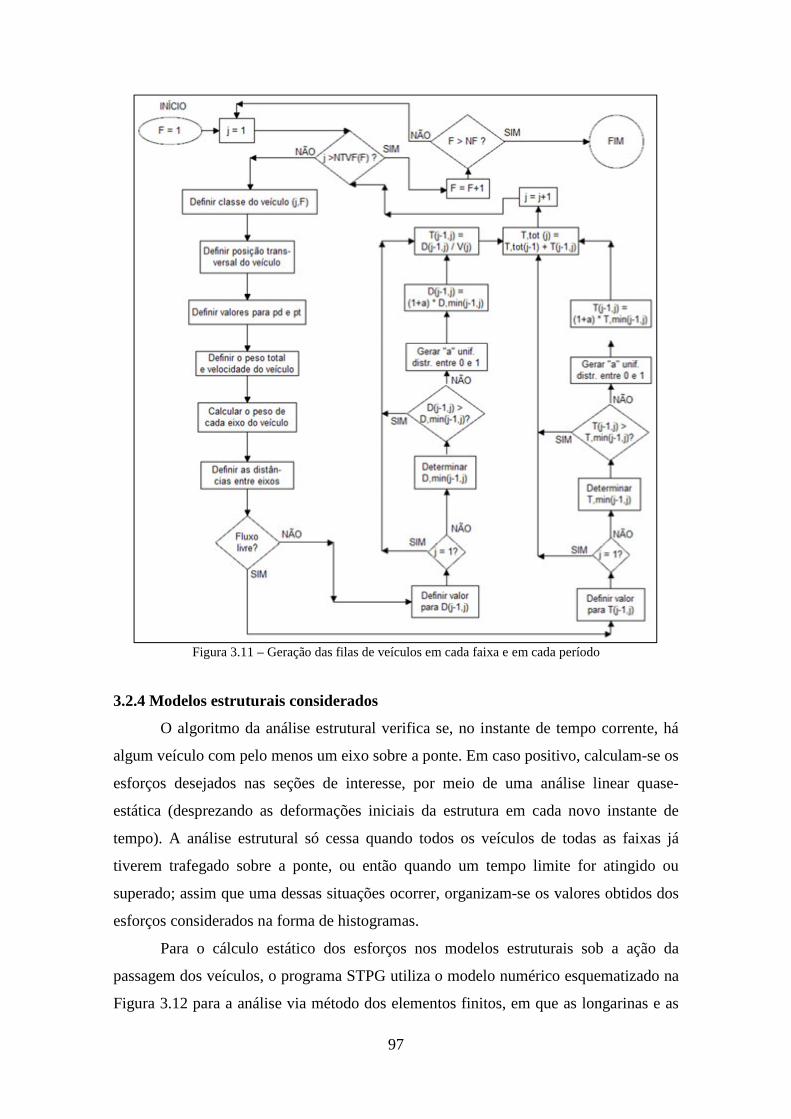
97
Figura 3.11 – Geração das filas de veículos em cada faixa e em cada período
3.2.4 Modelos estruturais considerados
O algoritmo da análise estrutural verifica se, no instante de tempo corrente, há
algum veículo com pelo menos um eixo sobre a ponte. Em caso positivo, calculam-se os
esforços desejados nas seções de interesse, por meio de uma análise linear quase-
estática (desprezando as deformações iniciais da estrutura em cada novo instante de
tempo). A análise estrutural só cessa quando todos os veículos de todas as faixas já
tiverem trafegado sobre a ponte, ou então quando um tempo limite for atingido ou
superado; assim que uma dessas situações ocorrer, organizam-se os valores obtidos dos
esforços considerados na forma de histogramas.
Para o cálculo estático dos esforços nos modelos estruturais sob a ação da
passagem dos veículos, o programa STPG utiliza o modelo numérico esquematizado na
Figura 3.12 para a análise via método dos elementos finitos, em que as longarinas e as
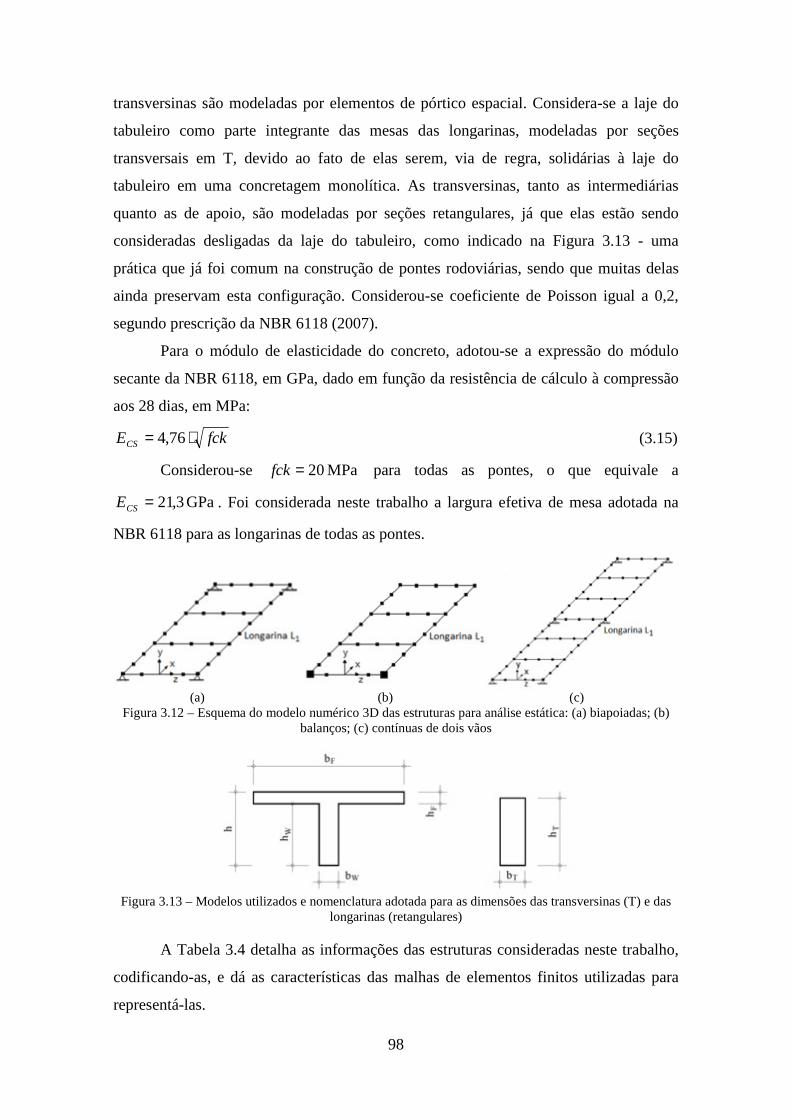
98
transversinas são modeladas por elementos de pórtico espacial. Considera-se a laje do
tabuleiro como parte integrante das mesas das longarinas, modeladas por seções
transversais em T, devido ao fato de elas serem, via de regra, solidárias à laje do
tabuleiro em uma concretagem monolítica. As transversinas, tanto as intermediárias
quanto as de apoio, são modeladas por seções retangulares, já que elas estão sendo
consideradas desligadas da laje do tabuleiro, como indicado na Figura 3.13 - uma
prática que já foi comum na construção de pontes rodoviárias, sendo que muitas delas
ainda preservam esta configuração. Considerou-se coeficiente de Poisson igual a 0,2,
segundo prescrição da NBR 6118 (2007).
Para o módulo de elasticidade do concreto, adotou-se a expressão do módulo
secante da NBR 6118, em GPa, dado em função da resistência de cálculo à compressão
aos 28 dias, em MPa:
fckECS ⋅= 76,4 (3.15)
Considerou-se MPa 20=fck para todas as pontes, o que equivale a
GPa 3,21=CSE . Foi considerada neste trabalho a largura efetiva de mesa adotada na
NBR 6118 para as longarinas de todas as pontes.
(a) (b) (c)
Figura 3.12 – Esquema do modelo numérico 3D das estruturas para análise estática: (a) biapoiadas; (b) balanços; (c) contínuas de dois vãos
Figura 3.13 – Modelos utilizados e nomenclatura adotada para as dimensões das transversinas (T) e das
longarinas (retangulares)
A Tabela 3.4 detalha as informações das estruturas consideradas neste trabalho,
codificando-as, e dá as características das malhas de elementos finitos utilizadas para
representá-las.
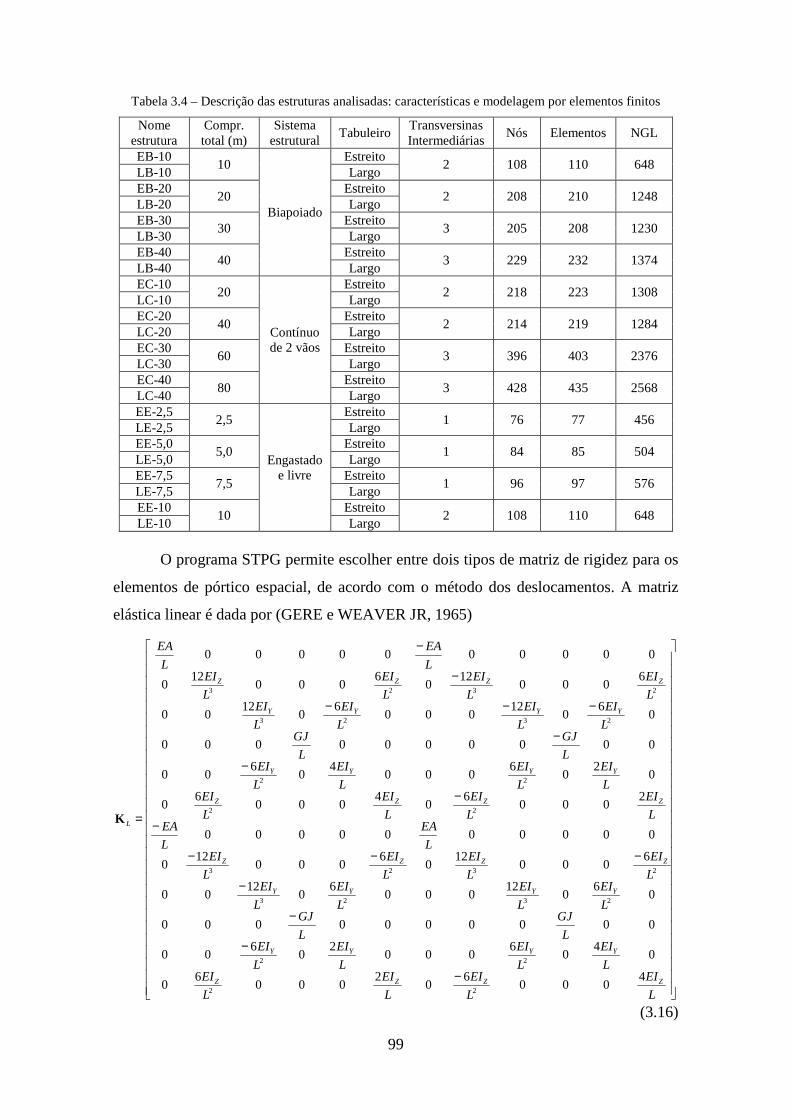
99
Tabela 3.4 – Descrição das estruturas analisadas: características e modelagem por elementos finitos
Nome estrutura
Compr. total (m)
Sistema estrutural
Tabuleiro Transversinas Intermediárias
Nós Elementos NGL
EB-10 10
Biapoiado
Estreito 2 108 110 648
LB-10 Largo EB-20
20 Estreito
2 208 210 1248 LB-20 Largo EB-30
30 Estreito
3 205 208 1230 LB-30 Largo EB-40
40 Estreito
3 229 232 1374 LB-40 Largo EC-10
20
Contínuo de 2 vãos
Estreito 2 218 223 1308
LC-10 Largo EC-20
40 Estreito
2 214 219 1284 LC-20 Largo EC-30
60 Estreito
3 396 403 2376 LC-30 Largo EC-40
80 Estreito
3 428 435 2568 LC-40 Largo EE-2,5
2,5
Engastado e livre
Estreito 1 76 77 456
LE-2,5 Largo EE-5,0
5,0 Estreito
1 84 85 504 LE-5,0 Largo EE-7,5
7,5 Estreito
1 96 97 576 LE-7,5 Largo EE-10
10 Estreito
2 108 110 648 LE-10 Largo
O programa STPG permite escolher entre dois tipos de matriz de rigidez para os
elementos de pórtico espacial, de acordo com o método dos deslocamentos. A matriz
elástica linear é dada por (GERE e WEAVER JR, 1965)
−
−
−
−
−−−
−
−
−
−
−−−
−
−
=
L
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
GJ
L
GJL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EAL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
GJ
L
GJL
EI
L
EI
L
EI
L
EIL
EI
L
EI
L
EI
L
EIL
EA
L
EA
ZZZZ
YYYY
YYYY
ZZZZ
ZZZZ
YYYY
YYYY
ZZZZ
L
4000
60
2000
60
04
06
0002
06
00
0000000000
06
012
0006
012
00
6000
120
6000
120
0000000000
2000
60
4000
60
02
06
0004
06
00
0000000000
06
012
0006
012
00
6000
120
6000
120
0000000000
22
22
2323
2323
22
22
2323
2323
K
(3.16)
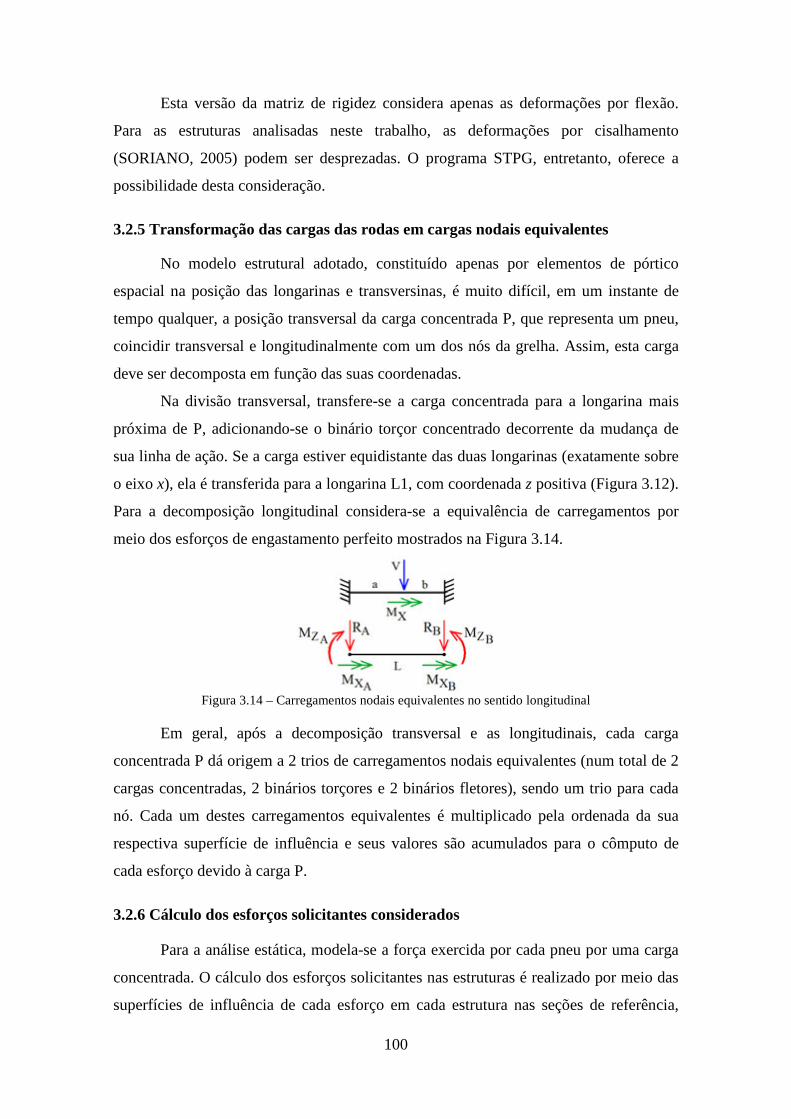
100
Esta versão da matriz de rigidez considera apenas as deformações por flexão.
Para as estruturas analisadas neste trabalho, as deformações por cisalhamento
(SORIANO, 2005) podem ser desprezadas. O programa STPG, entretanto, oferece a
possibilidade desta consideração.
3.2.5 Transformação das cargas das rodas em cargas nodais equivalentes
No modelo estrutural adotado, constituído apenas por elementos de pórtico
espacial na posição das longarinas e transversinas, é muito difícil, em um instante de
tempo qualquer, a posição transversal da carga concentrada P, que representa um pneu,
coincidir transversal e longitudinalmente com um dos nós da grelha. Assim, esta carga
deve ser decomposta em função das suas coordenadas.
Na divisão transversal, transfere-se a carga concentrada para a longarina mais
próxima de P, adicionando-se o binário torçor concentrado decorrente da mudança de
sua linha de ação. Se a carga estiver equidistante das duas longarinas (exatamente sobre
o eixo x), ela é transferida para a longarina L1, com coordenada z positiva (Figura 3.12).
Para a decomposição longitudinal considera-se a equivalência de carregamentos por
meio dos esforços de engastamento perfeito mostrados na Figura 3.14.
Figura 3.14 – Carregamentos nodais equivalentes no sentido longitudinal
Em geral, após a decomposição transversal e as longitudinais, cada carga
concentrada P dá origem a 2 trios de carregamentos nodais equivalentes (num total de 2
cargas concentradas, 2 binários torçores e 2 binários fletores), sendo um trio para cada
nó. Cada um destes carregamentos equivalentes é multiplicado pela ordenada da sua
respectiva superfície de influência e seus valores são acumulados para o cômputo de
cada esforço devido à carga P.
3.2.6 Cálculo dos esforços solicitantes considerados
Para a análise estática, modela-se a força exercida por cada pneu por uma carga
concentrada. O cálculo dos esforços solicitantes nas estruturas é realizado por meio das
superfícies de influência de cada esforço em cada estrutura nas seções de referência,
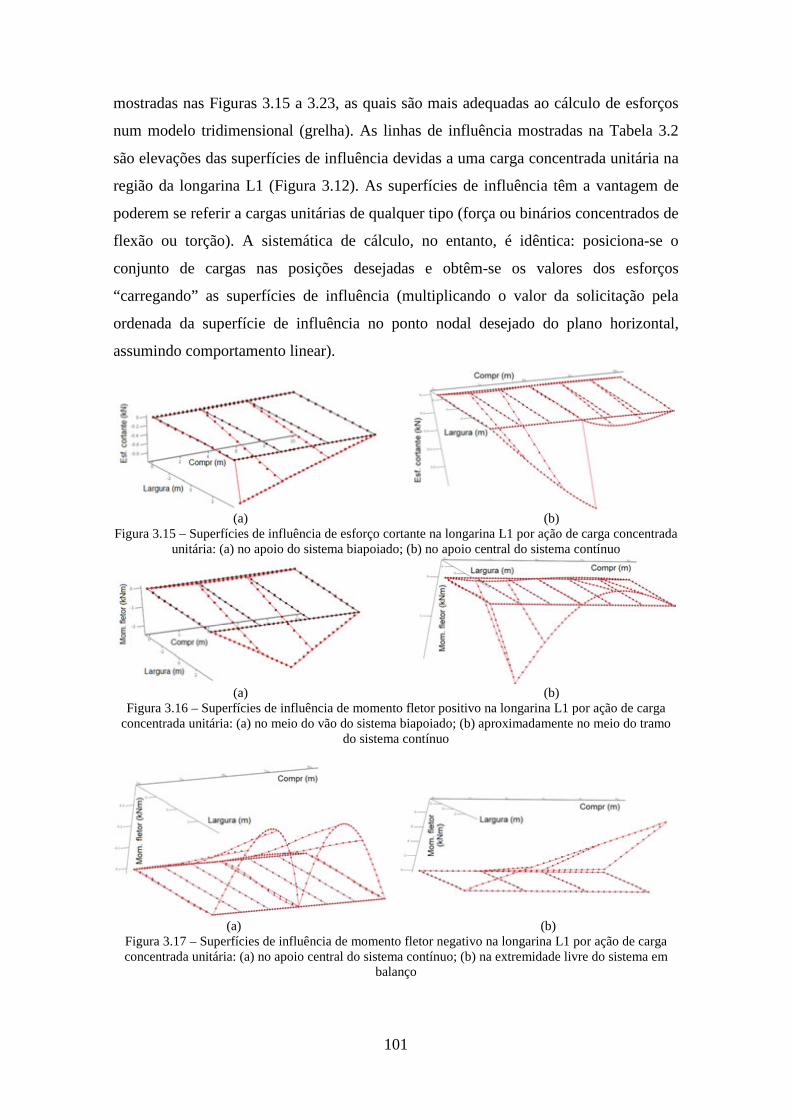
101
mostradas nas Figuras 3.15 a 3.23, as quais são mais adequadas ao cálculo de esforços
num modelo tridimensional (grelha). As linhas de influência mostradas na Tabela 3.2
são elevações das superfícies de influência devidas a uma carga concentrada unitária na
região da longarina L1 (Figura 3.12). As superfícies de influência têm a vantagem de
poderem se referir a cargas unitárias de qualquer tipo (força ou binários concentrados de
flexão ou torção). A sistemática de cálculo, no entanto, é idêntica: posiciona-se o
conjunto de cargas nas posições desejadas e obtêm-se os valores dos esforços
“carregando” as superfícies de influência (multiplicando o valor da solicitação pela
ordenada da superfície de influência no ponto nodal desejado do plano horizontal,
assumindo comportamento linear).
(a) (b) Figura 3.15 – Superfícies de influência de esforço cortante na longarina L1 por ação de carga concentrada
unitária: (a) no apoio do sistema biapoiado; (b) no apoio central do sistema contínuo
(a) (b)
Figura 3.16 – Superfícies de influência de momento fletor positivo na longarina L1 por ação de carga concentrada unitária: (a) no meio do vão do sistema biapoiado; (b) aproximadamente no meio do tramo
do sistema contínuo
(a) (b)
Figura 3.17 – Superfícies de influência de momento fletor negativo na longarina L1 por ação de carga concentrada unitária: (a) no apoio central do sistema contínuo; (b) na extremidade livre do sistema em
balanço
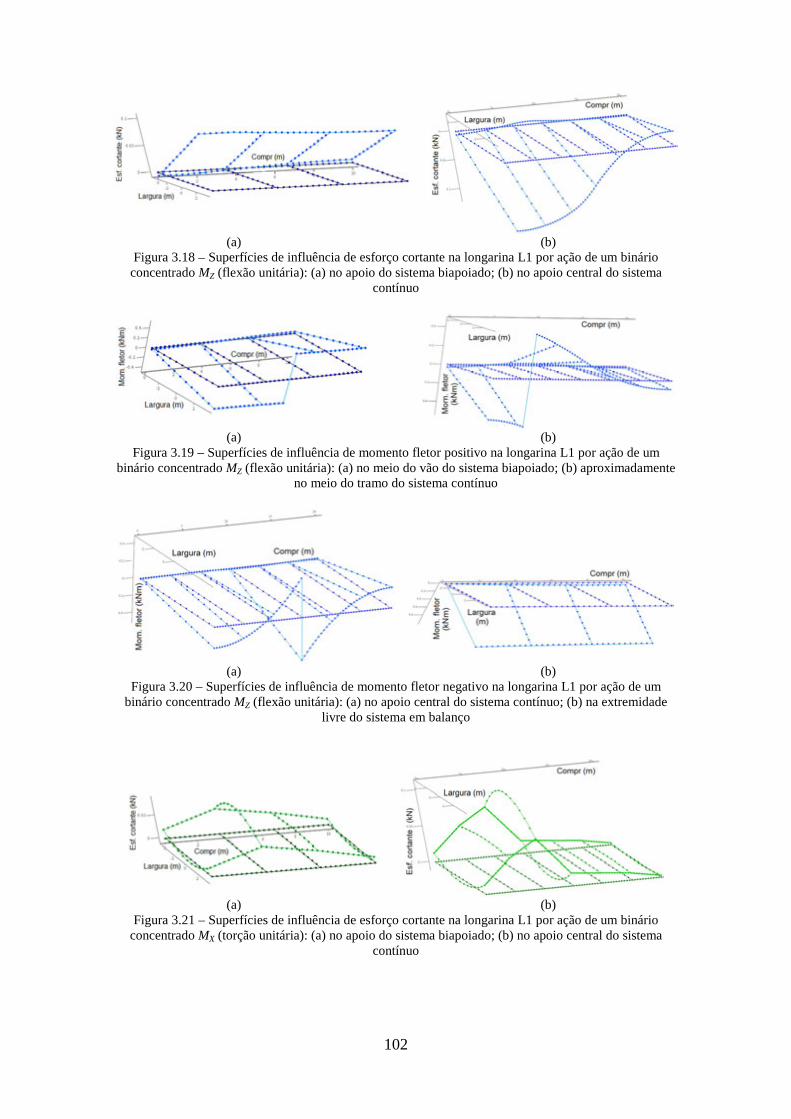
102
(a) (b)
Figura 3.18 – Superfícies de influência de esforço cortante na longarina L1 por ação de um binário concentrado MZ (flexão unitária): (a) no apoio do sistema biapoiado; (b) no apoio central do sistema
contínuo
(a) (b)
Figura 3.19 – Superfícies de influência de momento fletor positivo na longarina L1 por ação de um binário concentrado MZ (flexão unitária): (a) no meio do vão do sistema biapoiado; (b) aproximadamente
no meio do tramo do sistema contínuo
(a) (b)
Figura 3.20 – Superfícies de influência de momento fletor negativo na longarina L1 por ação de um binário concentrado MZ (flexão unitária): (a) no apoio central do sistema contínuo; (b) na extremidade
livre do sistema em balanço
(a) (b)
Figura 3.21 – Superfícies de influência de esforço cortante na longarina L1 por ação de um binário concentrado MX (torção unitária): (a) no apoio do sistema biapoiado; (b) no apoio central do sistema
contínuo
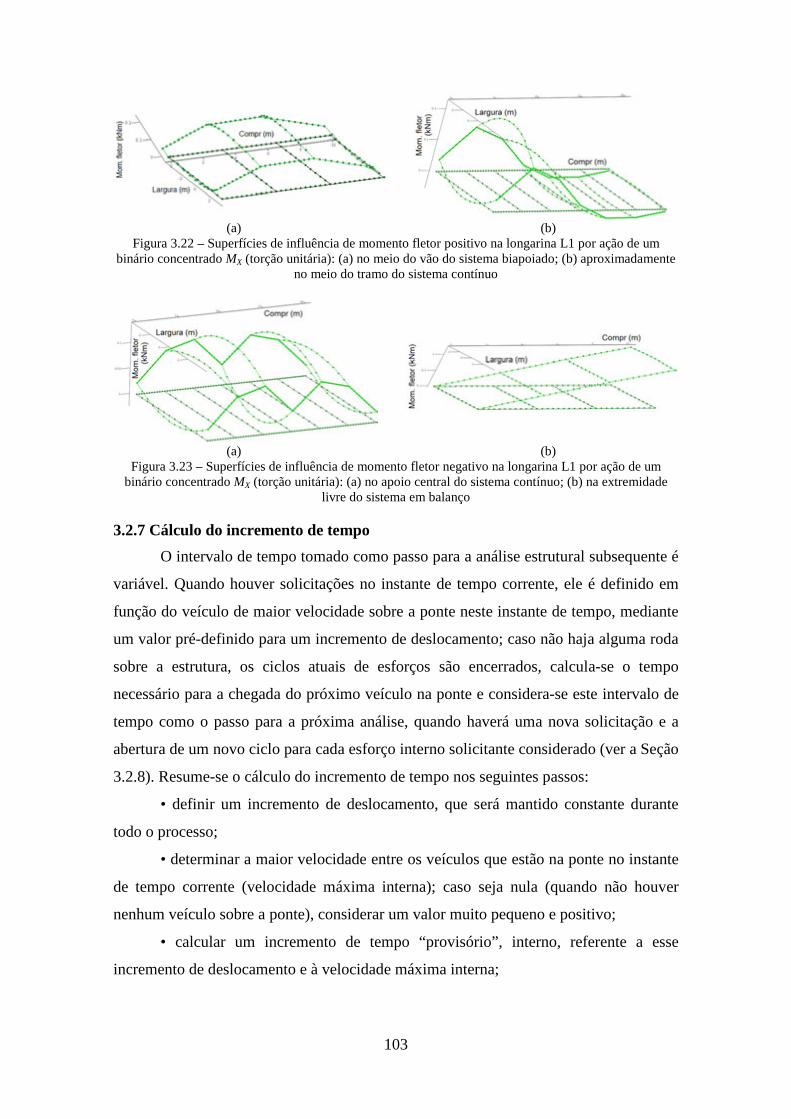
103
(a) (b)
Figura 3.22 – Superfícies de influência de momento fletor positivo na longarina L1 por ação de um binário concentrado MX (torção unitária): (a) no meio do vão do sistema biapoiado; (b) aproximadamente
no meio do tramo do sistema contínuo
(a) (b)
Figura 3.23 – Superfícies de influência de momento fletor negativo na longarina L1 por ação de um binário concentrado MX (torção unitária): (a) no apoio central do sistema contínuo; (b) na extremidade
livre do sistema em balanço
3.2.7 Cálculo do incremento de tempo
O intervalo de tempo tomado como passo para a análise estrutural subsequente é
variável. Quando houver solicitações no instante de tempo corrente, ele é definido em
função do veículo de maior velocidade sobre a ponte neste instante de tempo, mediante
um valor pré-definido para um incremento de deslocamento; caso não haja alguma roda
sobre a estrutura, os ciclos atuais de esforços são encerrados, calcula-se o tempo
necessário para a chegada do próximo veículo na ponte e considera-se este intervalo de
tempo como o passo para a próxima análise, quando haverá uma nova solicitação e a
abertura de um novo ciclo para cada esforço interno solicitante considerado (ver a Seção
3.2.8). Resume-se o cálculo do incremento de tempo nos seguintes passos:
• definir um incremento de deslocamento, que será mantido constante durante
todo o processo;
• determinar a maior velocidade entre os veículos que estão na ponte no instante
de tempo corrente (velocidade máxima interna); caso seja nula (quando não houver
nenhum veículo sobre a ponte), considerar um valor muito pequeno e positivo;
• calcular um incremento de tempo “provisório”, interno, referente a esse
incremento de deslocamento e à velocidade máxima interna;
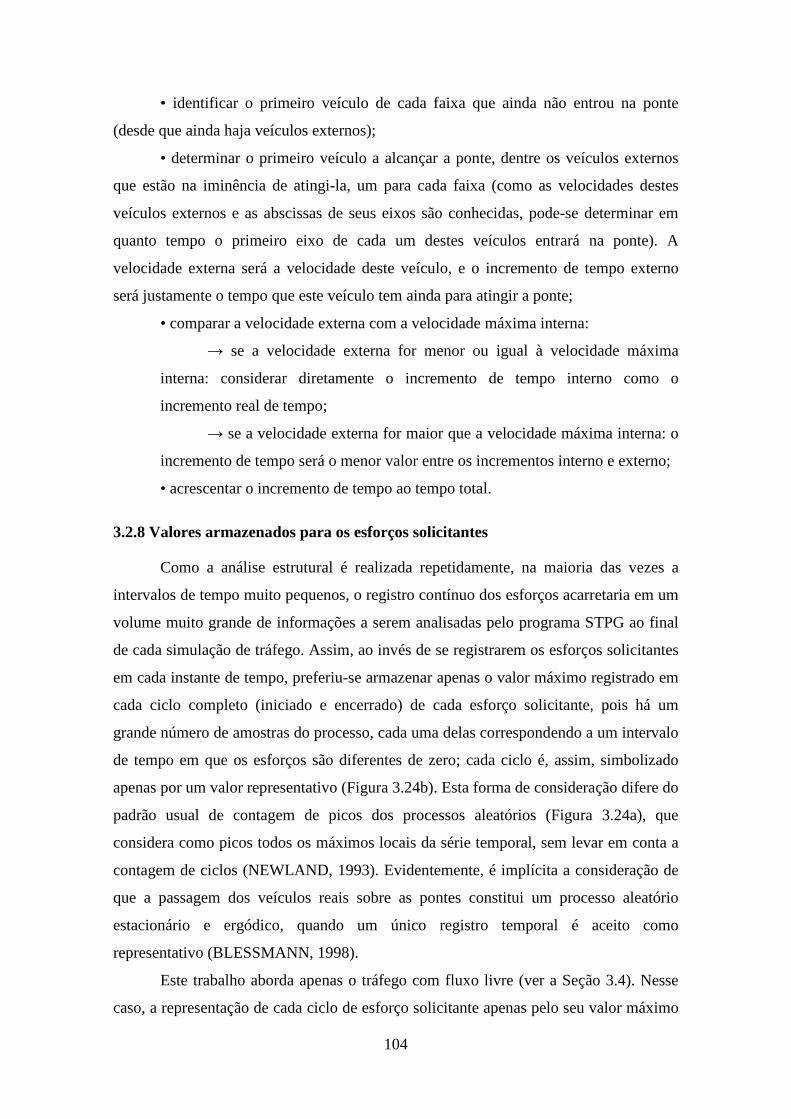
104
• identificar o primeiro veículo de cada faixa que ainda não entrou na ponte
(desde que ainda haja veículos externos);
• determinar o primeiro veículo a alcançar a ponte, dentre os veículos externos
que estão na iminência de atingi-la, um para cada faixa (como as velocidades destes
veículos externos e as abscissas de seus eixos são conhecidas, pode-se determinar em
quanto tempo o primeiro eixo de cada um destes veículos entrará na ponte). A
velocidade externa será a velocidade deste veículo, e o incremento de tempo externo
será justamente o tempo que este veículo tem ainda para atingir a ponte;
• comparar a velocidade externa com a velocidade máxima interna:
→ se a velocidade externa for menor ou igual à velocidade máxima
interna: considerar diretamente o incremento de tempo interno como o
incremento real de tempo;
→ se a velocidade externa for maior que a velocidade máxima interna: o
incremento de tempo será o menor valor entre os incrementos interno e externo;
• acrescentar o incremento de tempo ao tempo total.
3.2.8 Valores armazenados para os esforços solicitantes
Como a análise estrutural é realizada repetidamente, na maioria das vezes a
intervalos de tempo muito pequenos, o registro contínuo dos esforços acarretaria em um
volume muito grande de informações a serem analisadas pelo programa STPG ao final
de cada simulação de tráfego. Assim, ao invés de se registrarem os esforços solicitantes
em cada instante de tempo, preferiu-se armazenar apenas o valor máximo registrado em
cada ciclo completo (iniciado e encerrado) de cada esforço solicitante, pois há um
grande número de amostras do processo, cada uma delas correspondendo a um intervalo
de tempo em que os esforços são diferentes de zero; cada ciclo é, assim, simbolizado
apenas por um valor representativo (Figura 3.24b). Esta forma de consideração difere do
padrão usual de contagem de picos dos processos aleatórios (Figura 3.24a), que
considera como picos todos os máximos locais da série temporal, sem levar em conta a
contagem de ciclos (NEWLAND, 1993). Evidentemente, é implícita a consideração de
que a passagem dos veículos reais sobre as pontes constitui um processo aleatório
estacionário e ergódico, quando um único registro temporal é aceito como
representativo (BLESSMANN, 1998).
Este trabalho aborda apenas o tráfego com fluxo livre (ver a Seção 3.4). Nesse
caso, a representação de cada ciclo de esforço solicitante apenas pelo seu valor máximo
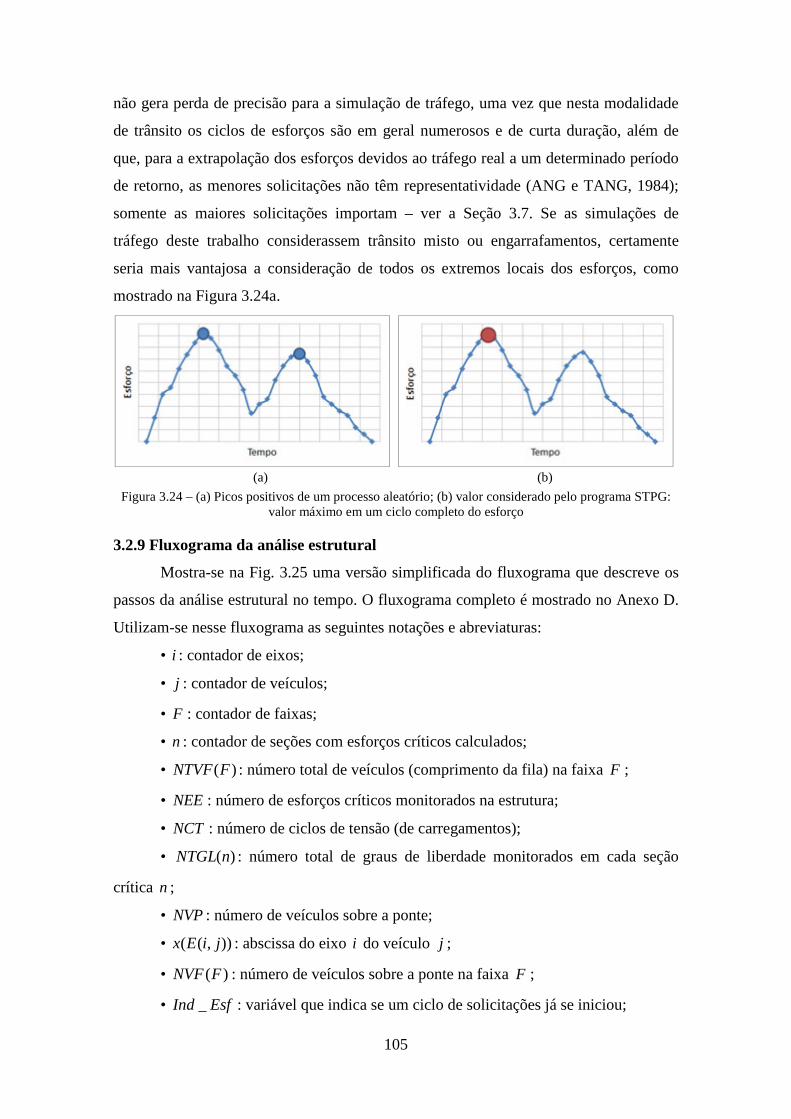
105
não gera perda de precisão para a simulação de tráfego, uma vez que nesta modalidade
de trânsito os ciclos de esforços são em geral numerosos e de curta duração, além de
que, para a extrapolação dos esforços devidos ao tráfego real a um determinado período
de retorno, as menores solicitações não têm representatividade (ANG e TANG, 1984);
somente as maiores solicitações importam – ver a Seção 3.7. Se as simulações de
tráfego deste trabalho considerassem trânsito misto ou engarrafamentos, certamente
seria mais vantajosa a consideração de todos os extremos locais dos esforços, como
mostrado na Figura 3.24a.
(a) (b)
Figura 3.24 – (a) Picos positivos de um processo aleatório; (b) valor considerado pelo programa STPG: valor máximo em um ciclo completo do esforço
3.2.9 Fluxograma da análise estrutural
Mostra-se na Fig. 3.25 uma versão simplificada do fluxograma que descreve os
passos da análise estrutural no tempo. O fluxograma completo é mostrado no Anexo D.
Utilizam-se nesse fluxograma as seguintes notações e abreviaturas:
• i : contador de eixos;
• j : contador de veículos;
• F : contador de faixas;
• n : contador de seções com esforços críticos calculados;
• )(FNTVF : número total de veículos (comprimento da fila) na faixa F ;
• NEE : número de esforços críticos monitorados na estrutura;
• NCT : número de ciclos de tensão (de carregamentos);
• )(nNTGL : número total de graus de liberdade monitorados em cada seção
crítica n ;
• NVP: número de veículos sobre a ponte;
• )),(( jiEx : abscissa do eixo i do veículo j ;
• )(FNVF : número de veículos sobre a ponte na faixa F ;
• EsfInd_ : variável que indica se um ciclo de solicitações já se iniciou;

106
• chave: variável que indica se o último veículo de cada faixa já passou pela
ponte;
• TEsf _ : variável que indica se já houve cálculo de esforços no instante de
tempo atual.
Figura 3.25 – Esquema ilustrativo da análise estrutural realizada em cada instante de tempo
3.3 Testes para validação da ferramenta computacional STPG
Para validar a ferramenta computacional STPG, realizaram-se três verificações
que avaliam a resposta estática e a geração de variáveis aleatórias.

107
Em trabalhos anteriores (ROSSIGALI, 2006, PFEIL et al., 2010), a análise dos
modelos estruturais sob a ação da passagem dos veículos, para a obtenção dos esforços
solicitantes, foi realizada por meio do software SAP 2000®, com as seguintes
considerações:
• uma base de dados reduzida, composta apenas pelas 6 classes de veículos da
Figura 3.26, cujas frequências de ocorrência são mostradas na Tabela 3.5. Esta base foi
obtida a partir dados de tráfego do DNIT, detalhados na Seção 2.1. As distribuições do
peso total destes veículos, modeladas por histogramas, também advieram desta base de
dados e são mostradas na Figura 2.2 para as classes O2C, O3C e 3C;
Figura 3.26 – Base de dados reduzida adotada em trabalhos anteriores: veículos considerados, distâncias
entre eixos adotadas e proporção do peso total suportada por cada grupo de eixos
• proporções constantes do peso total suportado pelos grupos de eixos de cada
classe de veículo (carga dos eixos proporcional ao peso total);
• distâncias entre eixos constantes, estimadas por um levantamento das
especificações técnicas fornecidas pelos fabricantes de veículos comerciais e
implementos rodoviários;
• tráfego apenas em uma faixa de rolamento, com os veículos passando
isoladamente na ponte, sem a presença simultânea de veículos carregando a estrutura, na
posição transversal mais desfavorável para os esforços na longarina L1: rentes ao
guarda-rodas ou à barreira lateral (Figura 3.27);
• os esforços devidos ao tráfego desses veículos são obtidos multiplicando-se o
valor dos esforços devidos a veículos de peso unitário (1 kN), com as configurações
geométricas e de carga por eixo já descritas, pelo valor do peso referente ao ponto
8,6m 1,3m3,9m31,8% 40,3%
2S2
O2C
27,9%
3C
73,0%27,0%
O3C
34,4% 65,6%
25,5%15,3% 59,2%
2S3
4,8m 1,3m
1,3m6,0m
5,9m 1,3m3,9m
46,6 %
2C
53,4 %4,0m
44,5% 55,5%
5,9m
caminhões rígidos
ônibus
semi-reboques
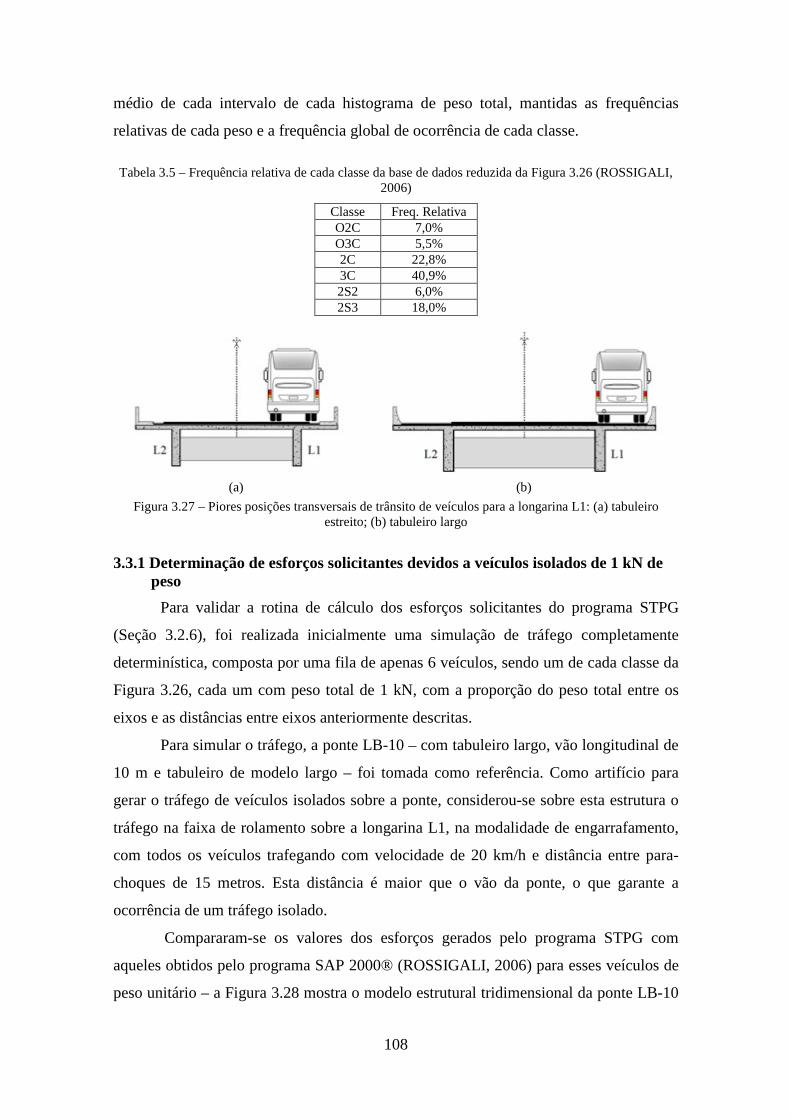
108
médio de cada intervalo de cada histograma de peso total, mantidas as frequências
relativas de cada peso e a frequência global de ocorrência de cada classe.
Tabela 3.5 – Frequência relativa de cada classe da base de dados reduzida da Figura 3.26 (ROSSIGALI, 2006)
Classe Freq. Relativa O2C 7,0% O3C 5,5% 2C 22,8% 3C 40,9% 2S2 6,0% 2S3 18,0%
(a) (b)
Figura 3.27 – Piores posições transversais de trânsito de veículos para a longarina L1: (a) tabuleiro estreito; (b) tabuleiro largo
3.3.1 Determinação de esforços solicitantes devidos a veículos isolados de 1 kN de peso
Para validar a rotina de cálculo dos esforços solicitantes do programa STPG
(Seção 3.2.6), foi realizada inicialmente uma simulação de tráfego completamente
determinística, composta por uma fila de apenas 6 veículos, sendo um de cada classe da
Figura 3.26, cada um com peso total de 1 kN, com a proporção do peso total entre os
eixos e as distâncias entre eixos anteriormente descritas.
Para simular o tráfego, a ponte LB-10 – com tabuleiro largo, vão longitudinal de
10 m e tabuleiro de modelo largo – foi tomada como referência. Como artifício para
gerar o tráfego de veículos isolados sobre a ponte, considerou-se sobre esta estrutura o
tráfego na faixa de rolamento sobre a longarina L1, na modalidade de engarrafamento,
com todos os veículos trafegando com velocidade de 20 km/h e distância entre para-
choques de 15 metros. Esta distância é maior que o vão da ponte, o que garante a
ocorrência de um tráfego isolado.
Compararam-se os valores dos esforços gerados pelo programa STPG com
aqueles obtidos pelo programa SAP 2000® (ROSSIGALI, 2006) para esses veículos de
peso unitário – a Figura 3.28 mostra o modelo estrutural tridimensional da ponte LB-10
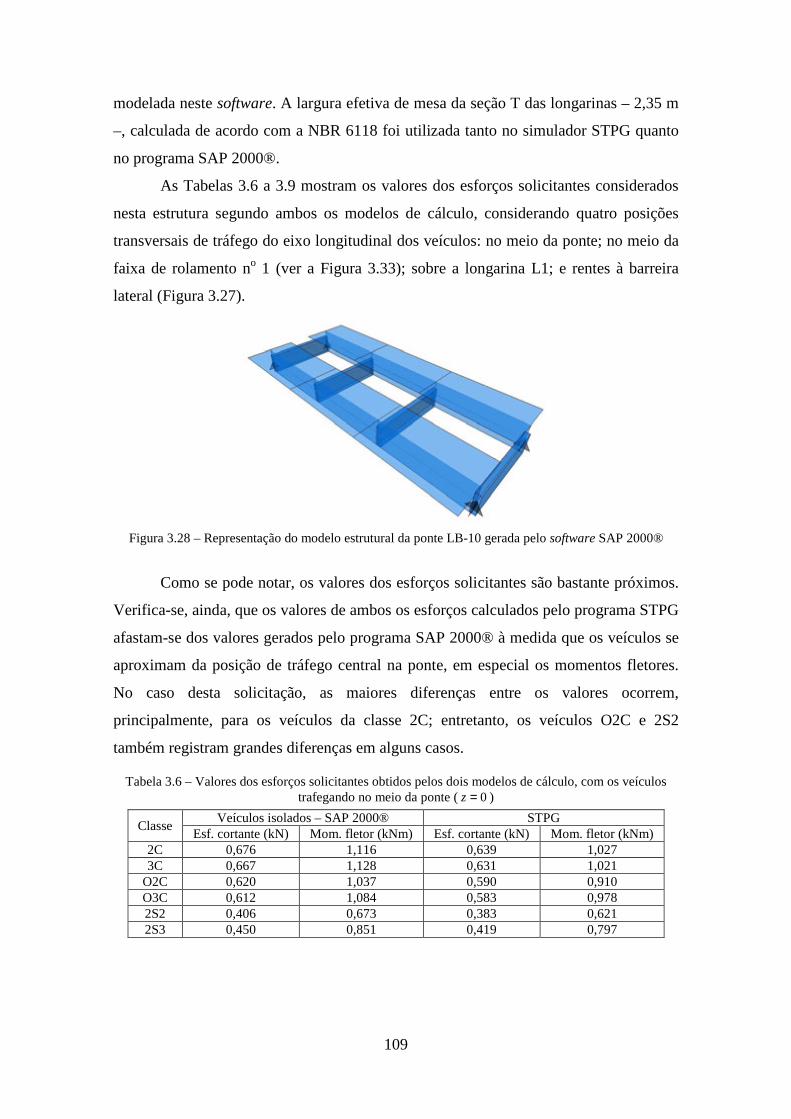
109
modelada neste software. A largura efetiva de mesa da seção T das longarinas – 2,35 m
–, calculada de acordo com a NBR 6118 foi utilizada tanto no simulador STPG quanto
no programa SAP 2000®.
As Tabelas 3.6 a 3.9 mostram os valores dos esforços solicitantes considerados
nesta estrutura segundo ambos os modelos de cálculo, considerando quatro posições
transversais de tráfego do eixo longitudinal dos veículos: no meio da ponte; no meio da
faixa de rolamento no 1 (ver a Figura 3.33); sobre a longarina L1; e rentes à barreira
lateral (Figura 3.27).
Figura 3.28 – Representação do modelo estrutural da ponte LB-10 gerada pelo software SAP 2000®
Como se pode notar, os valores dos esforços solicitantes são bastante próximos.
Verifica-se, ainda, que os valores de ambos os esforços calculados pelo programa STPG
afastam-se dos valores gerados pelo programa SAP 2000® à medida que os veículos se
aproximam da posição de tráfego central na ponte, em especial os momentos fletores.
No caso desta solicitação, as maiores diferenças entre os valores ocorrem,
principalmente, para os veículos da classe 2C; entretanto, os veículos O2C e 2S2
também registram grandes diferenças em alguns casos.
Tabela 3.6 – Valores dos esforços solicitantes obtidos pelos dois modelos de cálculo, com os veículos trafegando no meio da ponte ( 0=z )
Classe Veículos isolados – SAP 2000® STPG
Esf. cortante (kN) Mom. fletor (kNm) Esf. cortante (kN) Mom. fletor (kNm) 2C 0,676 1,116 0,639 1,027 3C 0,667 1,128 0,631 1,021
O2C 0,620 1,037 0,590 0,910 O3C 0,612 1,084 0,583 0,978 2S2 0,406 0,673 0,383 0,621 2S3 0,450 0,851 0,419 0,797
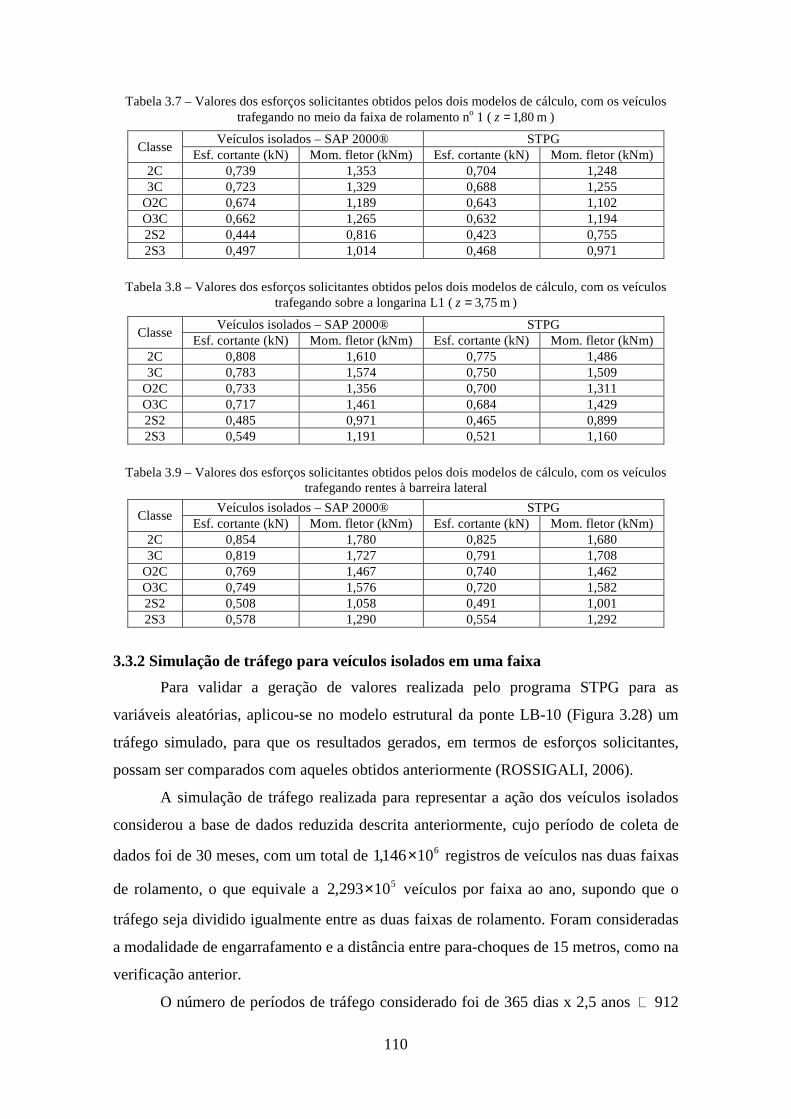
110
Tabela 3.7 – Valores dos esforços solicitantes obtidos pelos dois modelos de cálculo, com os veículos trafegando no meio da faixa de rolamento no 1 ( m 80,1=z )
Classe Veículos isolados – SAP 2000® STPG
Esf. cortante (kN) Mom. fletor (kNm) Esf. cortante (kN) Mom. fletor (kNm) 2C 0,739 1,353 0,704 1,248 3C 0,723 1,329 0,688 1,255
O2C 0,674 1,189 0,643 1,102 O3C 0,662 1,265 0,632 1,194 2S2 0,444 0,816 0,423 0,755 2S3 0,497 1,014 0,468 0,971
Tabela 3.8 – Valores dos esforços solicitantes obtidos pelos dois modelos de cálculo, com os veículos trafegando sobre a longarina L1 ( m 75,3=z )
Classe Veículos isolados – SAP 2000® STPG
Esf. cortante (kN) Mom. fletor (kNm) Esf. cortante (kN) Mom. fletor (kNm) 2C 0,808 1,610 0,775 1,486 3C 0,783 1,574 0,750 1,509
O2C 0,733 1,356 0,700 1,311 O3C 0,717 1,461 0,684 1,429 2S2 0,485 0,971 0,465 0,899 2S3 0,549 1,191 0,521 1,160
Tabela 3.9 – Valores dos esforços solicitantes obtidos pelos dois modelos de cálculo, com os veículos trafegando rentes à barreira lateral
Classe Veículos isolados – SAP 2000® STPG
Esf. cortante (kN) Mom. fletor (kNm) Esf. cortante (kN) Mom. fletor (kNm) 2C 0,854 1,780 0,825 1,680 3C 0,819 1,727 0,791 1,708
O2C 0,769 1,467 0,740 1,462 O3C 0,749 1,576 0,720 1,582 2S2 0,508 1,058 0,491 1,001 2S3 0,578 1,290 0,554 1,292
3.3.2 Simulação de tráfego para veículos isolados em uma faixa
Para validar a geração de valores realizada pelo programa STPG para as
variáveis aleatórias, aplicou-se no modelo estrutural da ponte LB-10 (Figura 3.28) um
tráfego simulado, para que os resultados gerados, em termos de esforços solicitantes,
possam ser comparados com aqueles obtidos anteriormente (ROSSIGALI, 2006).
A simulação de tráfego realizada para representar a ação dos veículos isolados
considerou a base de dados reduzida descrita anteriormente, cujo período de coleta de
dados foi de 30 meses, com um total de 610146,1 × registros de veículos nas duas faixas
de rolamento, o que equivale a 510293,2 × veículos por faixa ao ano, supondo que o
tráfego seja dividido igualmente entre as duas faixas de rolamento. Foram consideradas
a modalidade de engarrafamento e a distância entre para-choques de 15 metros, como na
verificação anterior.
O número de períodos de tráfego considerado foi de 365 dias x 2,5 anos ≅ 912
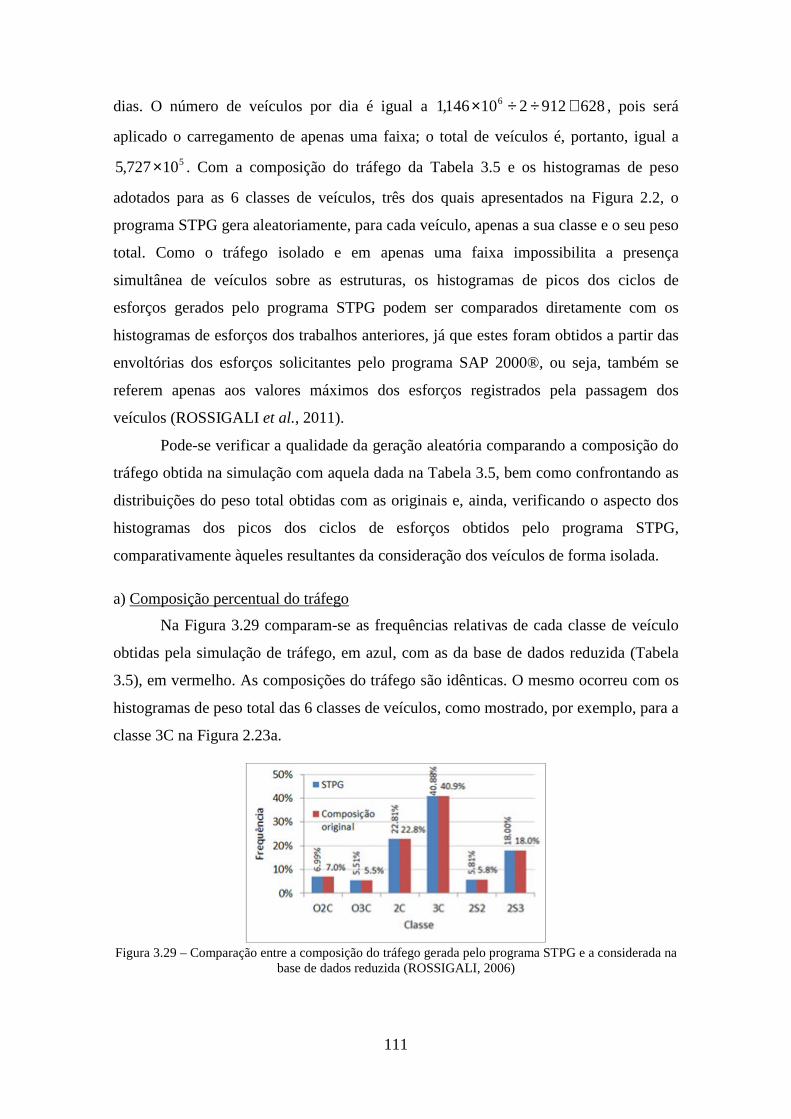
111
dias. O número de veículos por dia é igual a 628 912 2 10146,1 6 ≅÷÷× , pois será
aplicado o carregamento de apenas uma faixa; o total de veículos é, portanto, igual a
510727,5 × . Com a composição do tráfego da Tabela 3.5 e os histogramas de peso
adotados para as 6 classes de veículos, três dos quais apresentados na Figura 2.2, o
programa STPG gera aleatoriamente, para cada veículo, apenas a sua classe e o seu peso
total. Como o tráfego isolado e em apenas uma faixa impossibilita a presença
simultânea de veículos sobre as estruturas, os histogramas de picos dos ciclos de
esforços gerados pelo programa STPG podem ser comparados diretamente com os
histogramas de esforços dos trabalhos anteriores, já que estes foram obtidos a partir das
envoltórias dos esforços solicitantes pelo programa SAP 2000®, ou seja, também se
referem apenas aos valores máximos dos esforços registrados pela passagem dos
veículos (ROSSIGALI et al., 2011).
Pode-se verificar a qualidade da geração aleatória comparando a composição do
tráfego obtida na simulação com aquela dada na Tabela 3.5, bem como confrontando as
distribuições do peso total obtidas com as originais e, ainda, verificando o aspecto dos
histogramas dos picos dos ciclos de esforços obtidos pelo programa STPG,
comparativamente àqueles resultantes da consideração dos veículos de forma isolada.
a) Composição percentual do tráfego
Na Figura 3.29 comparam-se as frequências relativas de cada classe de veículo
obtidas pela simulação de tráfego, em azul, com as da base de dados reduzida (Tabela
3.5), em vermelho. As composições do tráfego são idênticas. O mesmo ocorreu com os
histogramas de peso total das 6 classes de veículos, como mostrado, por exemplo, para a
classe 3C na Figura 2.23a.
Figura 3.29 – Comparação entre a composição do tráfego gerada pelo programa STPG e a considerada na
base de dados reduzida (ROSSIGALI, 2006)
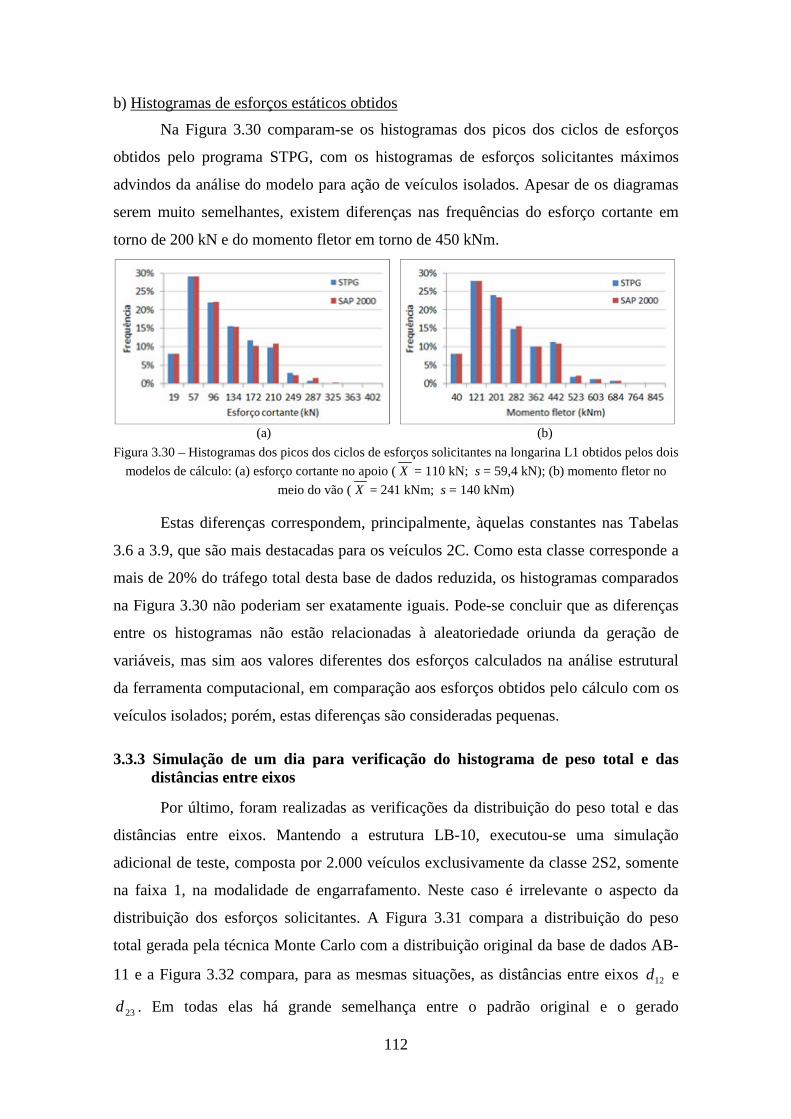
112
b) Histogramas de esforços estáticos obtidos
Na Figura 3.30 comparam-se os histogramas dos picos dos ciclos de esforços
obtidos pelo programa STPG, com os histogramas de esforços solicitantes máximos
advindos da análise do modelo para ação de veículos isolados. Apesar de os diagramas
serem muito semelhantes, existem diferenças nas frequências do esforço cortante em
torno de 200 kN e do momento fletor em torno de 450 kNm.
(a) (b)
Figura 3.30 – Histogramas dos picos dos ciclos de esforços solicitantes na longarina L1 obtidos pelos dois
modelos de cálculo: (a) esforço cortante no apoio (X = 110 kN; s = 59,4 kN); (b) momento fletor no
meio do vão (X = 241 kNm; s = 140 kNm)
Estas diferenças correspondem, principalmente, àquelas constantes nas Tabelas
3.6 a 3.9, que são mais destacadas para os veículos 2C. Como esta classe corresponde a
mais de 20% do tráfego total desta base de dados reduzida, os histogramas comparados
na Figura 3.30 não poderiam ser exatamente iguais. Pode-se concluir que as diferenças
entre os histogramas não estão relacionadas à aleatoriedade oriunda da geração de
variáveis, mas sim aos valores diferentes dos esforços calculados na análise estrutural
da ferramenta computacional, em comparação aos esforços obtidos pelo cálculo com os
veículos isolados; porém, estas diferenças são consideradas pequenas.
3.3.3 Simulação de um dia para verificação do histograma de peso total e das distâncias entre eixos
Por último, foram realizadas as verificações da distribuição do peso total e das
distâncias entre eixos. Mantendo a estrutura LB-10, executou-se uma simulação
adicional de teste, composta por 2.000 veículos exclusivamente da classe 2S2, somente
na faixa 1, na modalidade de engarrafamento. Neste caso é irrelevante o aspecto da
distribuição dos esforços solicitantes. A Figura 3.31 compara a distribuição do peso
total gerada pela técnica Monte Carlo com a distribuição original da base de dados AB-
11 e a Figura 3.32 compara, para as mesmas situações, as distâncias entre eixos 12d e
23d . Em todas elas há grande semelhança entre o padrão original e o gerado
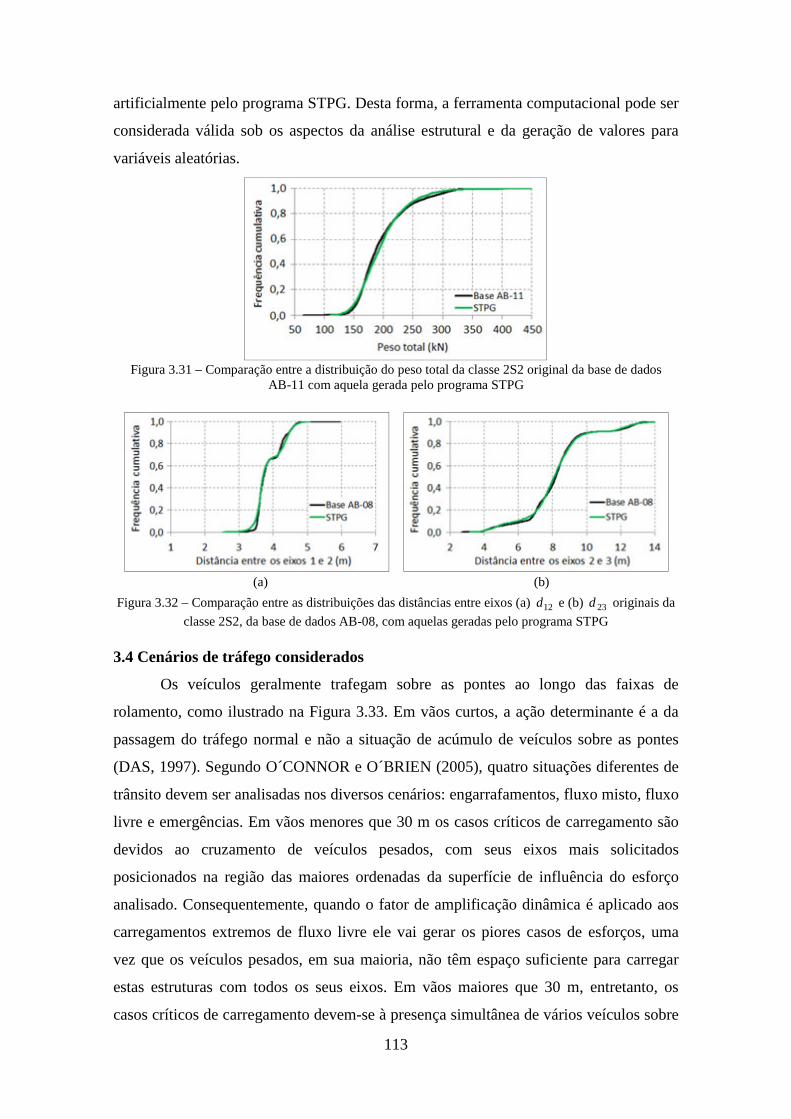
113
artificialmente pelo programa STPG. Desta forma, a ferramenta computacional pode ser
considerada válida sob os aspectos da análise estrutural e da geração de valores para
variáveis aleatórias.
Figura 3.31 – Comparação entre a distribuição do peso total da classe 2S2 original da base de dados
AB-11 com aquela gerada pelo programa STPG
(a) (b)
Figura 3.32 – Comparação entre as distribuições das distâncias entre eixos (a) 12d e (b) 23d originais da
classe 2S2, da base de dados AB-08, com aquelas geradas pelo programa STPG 3.4 Cenários de tráfego considerados
Os veículos geralmente trafegam sobre as pontes ao longo das faixas de
rolamento, como ilustrado na Figura 3.33. Em vãos curtos, a ação determinante é a da
passagem do tráfego normal e não a situação de acúmulo de veículos sobre as pontes
(DAS, 1997). Segundo O´CONNOR e O´BRIEN (2005), quatro situações diferentes de
trânsito devem ser analisadas nos diversos cenários: engarrafamentos, fluxo misto, fluxo
livre e emergências. Em vãos menores que 30 m os casos críticos de carregamento são
devidos ao cruzamento de veículos pesados, com seus eixos mais solicitados
posicionados na região das maiores ordenadas da superfície de influência do esforço
analisado. Consequentemente, quando o fator de amplificação dinâmica é aplicado aos
carregamentos extremos de fluxo livre ele vai gerar os piores casos de esforços, uma
vez que os veículos pesados, em sua maioria, não têm espaço suficiente para carregar
estas estruturas com todos os seus eixos. Em vãos maiores que 30 m, entretanto, os
casos críticos de carregamento devem-se à presença simultânea de vários veículos sobre
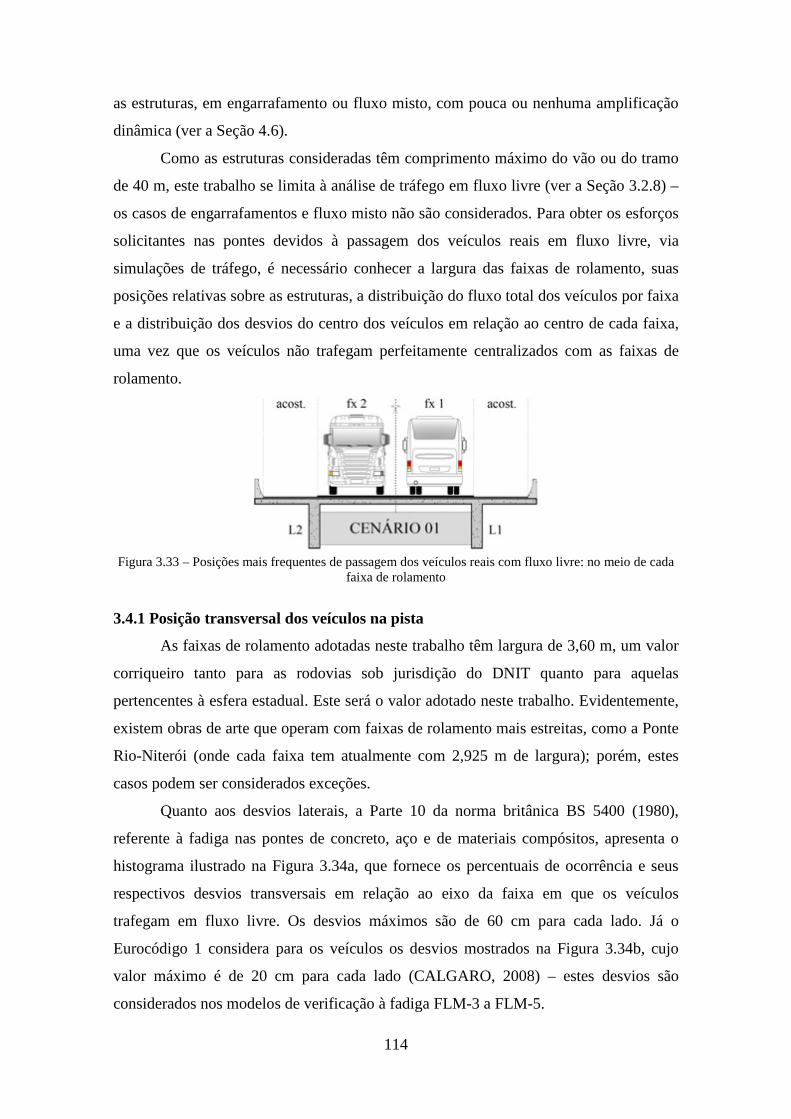
114
as estruturas, em engarrafamento ou fluxo misto, com pouca ou nenhuma amplificação
dinâmica (ver a Seção 4.6).
Como as estruturas consideradas têm comprimento máximo do vão ou do tramo
de 40 m, este trabalho se limita à análise de tráfego em fluxo livre (ver a Seção 3.2.8) –
os casos de engarrafamentos e fluxo misto não são considerados. Para obter os esforços
solicitantes nas pontes devidos à passagem dos veículos reais em fluxo livre, via
simulações de tráfego, é necessário conhecer a largura das faixas de rolamento, suas
posições relativas sobre as estruturas, a distribuição do fluxo total dos veículos por faixa
e a distribuição dos desvios do centro dos veículos em relação ao centro de cada faixa,
uma vez que os veículos não trafegam perfeitamente centralizados com as faixas de
rolamento.
Figura 3.33 – Posições mais frequentes de passagem dos veículos reais com fluxo livre: no meio de cada
faixa de rolamento
3.4.1 Posição transversal dos veículos na pista
As faixas de rolamento adotadas neste trabalho têm largura de 3,60 m, um valor
corriqueiro tanto para as rodovias sob jurisdição do DNIT quanto para aquelas
pertencentes à esfera estadual. Este será o valor adotado neste trabalho. Evidentemente,
existem obras de arte que operam com faixas de rolamento mais estreitas, como a Ponte
Rio-Niterói (onde cada faixa tem atualmente com 2,925 m de largura); porém, estes
casos podem ser considerados exceções.
Quanto aos desvios laterais, a Parte 10 da norma britânica BS 5400 (1980),
referente à fadiga nas pontes de concreto, aço e de materiais compósitos, apresenta o
histograma ilustrado na Figura 3.34a, que fornece os percentuais de ocorrência e seus
respectivos desvios transversais em relação ao eixo da faixa em que os veículos
trafegam em fluxo livre. Os desvios máximos são de 60 cm para cada lado. Já o
Eurocódigo 1 considera para os veículos os desvios mostrados na Figura 3.34b, cujo
valor máximo é de 20 cm para cada lado (CALGARO, 2008) – estes desvios são
considerados nos modelos de verificação à fadiga FLM-3 a FLM-5.
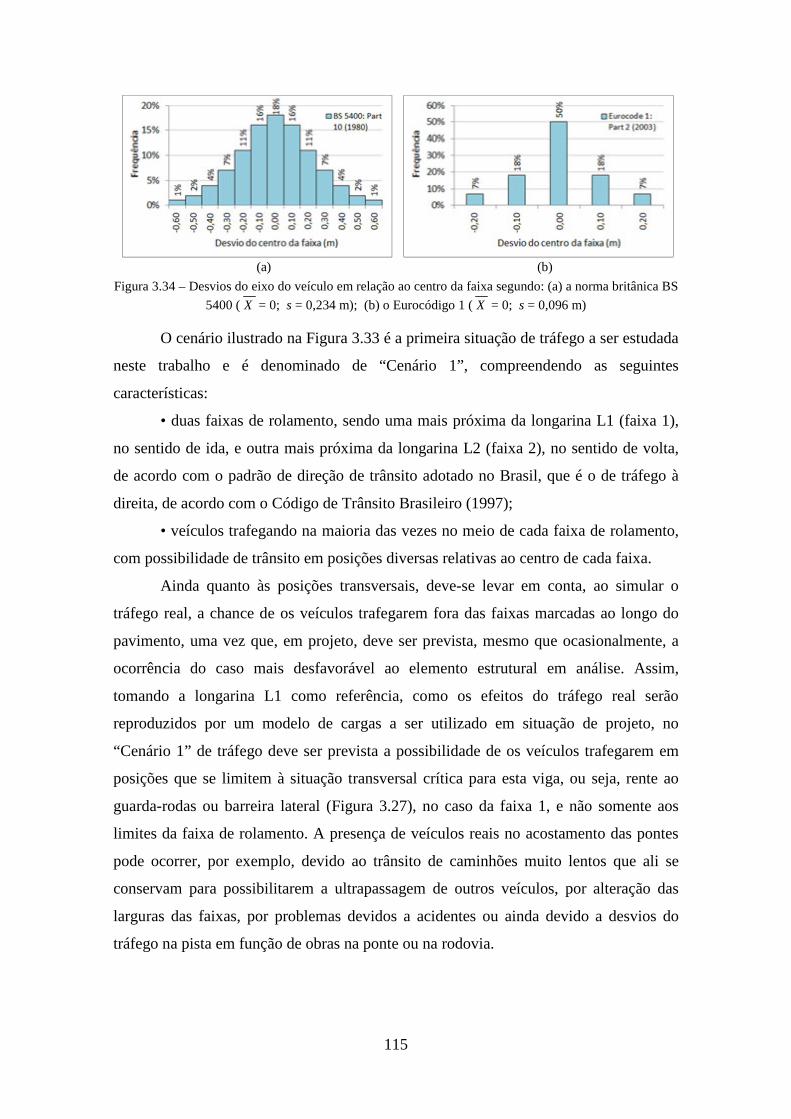
115
(a) (b)
Figura 3.34 – Desvios do eixo do veículo em relação ao centro da faixa segundo: (a) a norma britânica BS
5400 (X = 0; s = 0,234 m); (b) o Eurocódigo 1 (X = 0; s = 0,096 m)
O cenário ilustrado na Figura 3.33 é a primeira situação de tráfego a ser estudada
neste trabalho e é denominado de “Cenário 1”, compreendendo as seguintes
características:
• duas faixas de rolamento, sendo uma mais próxima da longarina L1 (faixa 1),
no sentido de ida, e outra mais próxima da longarina L2 (faixa 2), no sentido de volta,
de acordo com o padrão de direção de trânsito adotado no Brasil, que é o de tráfego à
direita, de acordo com o Código de Trânsito Brasileiro (1997);
• veículos trafegando na maioria das vezes no meio de cada faixa de rolamento,
com possibilidade de trânsito em posições diversas relativas ao centro de cada faixa.
Ainda quanto às posições transversais, deve-se levar em conta, ao simular o
tráfego real, a chance de os veículos trafegarem fora das faixas marcadas ao longo do
pavimento, uma vez que, em projeto, deve ser prevista, mesmo que ocasionalmente, a
ocorrência do caso mais desfavorável ao elemento estrutural em análise. Assim,
tomando a longarina L1 como referência, como os efeitos do tráfego real serão
reproduzidos por um modelo de cargas a ser utilizado em situação de projeto, no
“Cenário 1” de tráfego deve ser prevista a possibilidade de os veículos trafegarem em
posições que se limitem à situação transversal crítica para esta viga, ou seja, rente ao
guarda-rodas ou barreira lateral (Figura 3.27), no caso da faixa 1, e não somente aos
limites da faixa de rolamento. A presença de veículos reais no acostamento das pontes
pode ocorrer, por exemplo, devido ao trânsito de caminhões muito lentos que ali se
conservam para possibilitarem a ultrapassagem de outros veículos, por alteração das
larguras das faixas, por problemas devidos a acidentes ou ainda devido a desvios do
tráfego na pista em função de obras na ponte ou na rodovia.
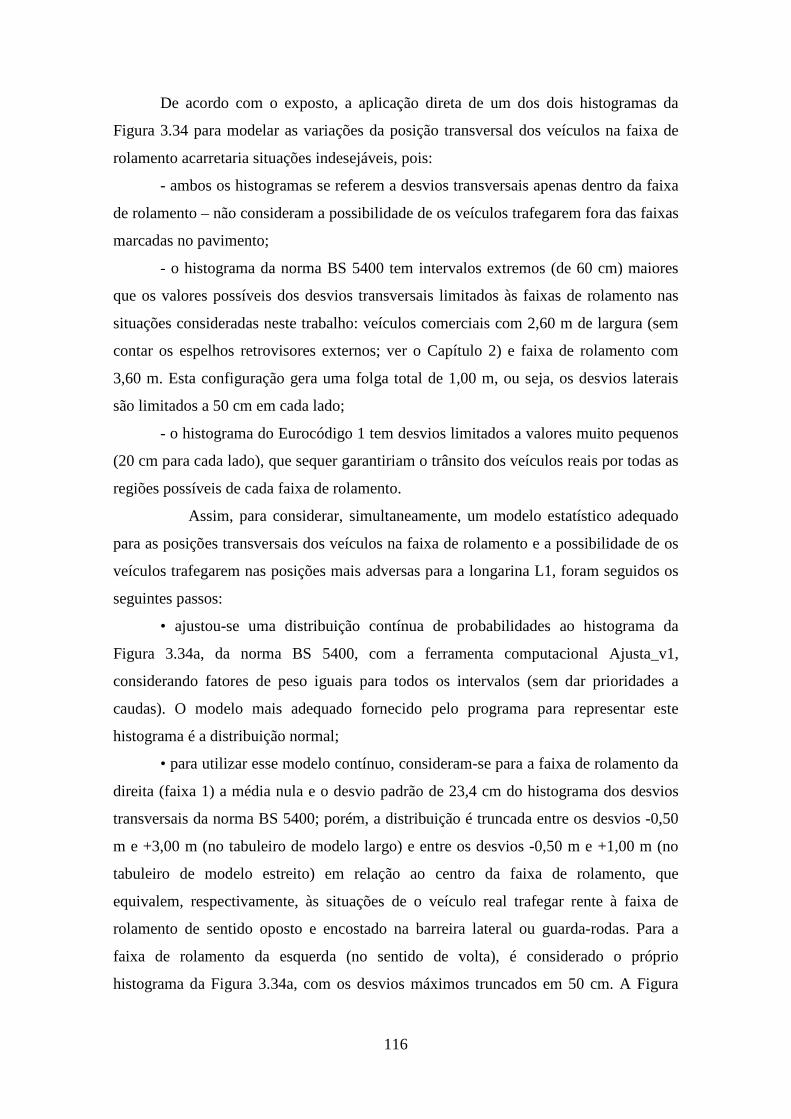
116
De acordo com o exposto, a aplicação direta de um dos dois histogramas da
Figura 3.34 para modelar as variações da posição transversal dos veículos na faixa de
rolamento acarretaria situações indesejáveis, pois:
- ambos os histogramas se referem a desvios transversais apenas dentro da faixa
de rolamento – não consideram a possibilidade de os veículos trafegarem fora das faixas
marcadas no pavimento;
- o histograma da norma BS 5400 tem intervalos extremos (de 60 cm) maiores
que os valores possíveis dos desvios transversais limitados às faixas de rolamento nas
situações consideradas neste trabalho: veículos comerciais com 2,60 m de largura (sem
contar os espelhos retrovisores externos; ver o Capítulo 2) e faixa de rolamento com
3,60 m. Esta configuração gera uma folga total de 1,00 m, ou seja, os desvios laterais
são limitados a 50 cm em cada lado;
- o histograma do Eurocódigo 1 tem desvios limitados a valores muito pequenos
(20 cm para cada lado), que sequer garantiriam o trânsito dos veículos reais por todas as
regiões possíveis de cada faixa de rolamento.
Assim, para considerar, simultaneamente, um modelo estatístico adequado
para as posições transversais dos veículos na faixa de rolamento e a possibilidade de os
veículos trafegarem nas posições mais adversas para a longarina L1, foram seguidos os
seguintes passos:
• ajustou-se uma distribuição contínua de probabilidades ao histograma da
Figura 3.34a, da norma BS 5400, com a ferramenta computacional Ajusta_v1,
considerando fatores de peso iguais para todos os intervalos (sem dar prioridades a
caudas). O modelo mais adequado fornecido pelo programa para representar este
histograma é a distribuição normal;
• para utilizar esse modelo contínuo, consideram-se para a faixa de rolamento da
direita (faixa 1) a média nula e o desvio padrão de 23,4 cm do histograma dos desvios
transversais da norma BS 5400; porém, a distribuição é truncada entre os desvios -0,50
m e +3,00 m (no tabuleiro de modelo largo) e entre os desvios -0,50 m e +1,00 m (no
tabuleiro de modelo estreito) em relação ao centro da faixa de rolamento, que
equivalem, respectivamente, às situações de o veículo real trafegar rente à faixa de
rolamento de sentido oposto e encostado na barreira lateral ou guarda-rodas. Para a
faixa de rolamento da esquerda (no sentido de volta), é considerado o próprio
histograma da Figura 3.34a, com os desvios máximos truncados em 50 cm. A Figura
117
3.35 ilustra a distribuição transversal na faixa 1 para os tabuleiros largo e estreito no
Cenário 1.
(a) (b)
Figura 3.35 – Distribuições do desvio do eixo dos veículos em relação ao centro da faixa de rolamento da direita (faixa 1, sentido de ida), para o Cenário 1, adotadas para os tabuleiros: (a) largo; (b) estreito
O Cenário 1 de tráfego, embora permita a passagem dos veículos na faixa 1 fora
dos limites demarcados pela faixa contínua lateral, acaba por não considerar um
percentual representativo de veículos trafegando no acostamento, de forma que,
segundo a distribuição transversal gaussiana adotada nesta representação é muito rara a
passagem de um veículo rente ao guarda-rodas ou barreira lateral. Assim, faz mais
sentido aplicar esta representação do tráfego em questões relativas ao Estado Limite de
Serviço (ELS), como, por exemplo, a busca de modelos de carga relativos à fadiga;
estas situações, no entanto, fogem do escopo deste trabalho (ver a Seção 1.3).
Para efeito de busca de modelo de cargas móveis para projeto no Estado Limite
Último (ELU), as simulações de tráfego devem prever o trânsito de veículos na posição
transversal mais desfavorável no elemento estrutural em questão, para que nele resultem
os maiores esforços solicitantes possíveis. A NBR 7188 instrui o projetista a considerar,
de fato, o veículo-tipo na posição mais desfavorável para a determinação da solicitação
na peça estudada.
Desta forma, abrem-se diversas possibilidades para o tráfego nas pontes; todas
devem, em tese, ser previstas e analisadas para que se obtenham os efeitos mais
desfavoráveis na longarina L1. Para os tabuleiros considerados neste trabalho, as
situações de tráfego adicionais analisadas são identificadas na Figura 3.36 como
Cenários 2, 4, 6 e 8.
118
Nesses cenários de número par (2 a 8), não há mudança na posição transversal
de cada faixa de rolamento, em relação à previsão comum de uso da rodovia – somente
a faixa 1 é considerada de forma a se alcançarem as piores posições transversais, com os
veículos trafegando no acostamento, rentes ao guarda-rodas ou barreira lateral; porém,
de acordo com o procedimento adotado para a obtenção dos modelos de carga do
Eurocódigo 1 (PRAT, 2001), em uma situação de projeto a divisão da pista em faixas de
rolamento é determinada pela forma da superfície de influência do esforço analisado.
Esta divisão, evidentemente, difere da repartição real existente na ponte. Desta forma,
para levar em conta esta forma de divisão da pista, foram incluídos nas buscas pelos
maiores esforços solicitantes na longarina L1 os Cenários 3, 5, 7 e 9 – estas
representações consideram o remanejamento das faixas de rolamento: todas estão
realocadas, situadas à direita, mais próximas da longarina L1, enquanto os
acostamentos, ou recuos (folgas), se aglomeram à esquerda da ponte. Evidentemente,
esta repartição deve ser referenciada a um período de retorno menor que aquele
utilizado nos cenários que utilizam a divisão convencional das faixas de rolamento.
Esses cenários representam, em parte, as situações de emergência, cuja representação se
faz necessária.
Nos Cenários 1, 2, 3, 4 e 5, aplicáveis tanto ao tabuleiro estreito quanto ao
tabuleiro largo, os veículos trafegam em duas faixas de rolamento, enquanto nos
Cenários 6, 7, 8 e 9 a rodovia tem três faixas de tráfego – esta situação só é possível no
tabuleiro de modelo largo, uma vez que não cabem três faixas de 3,60 m no tabuleiro
estreito, com apenas 8,20 m de largura trafegável: os tabuleiros largos comportam 2 ou
3 faixas de 3,60 m, enquanto os tabuleiros estreitos só permitem a alocação de duas
faixas de rolamento. Em todos os cenários, à exceção do primeiro, os veículos que
trafegam em cada faixa estão localizados na posição transversal mais desfavorável para
a longarina L1, segundo as superfícies de influência mostradas nas Figuras 3.14 a 3.22.
Os cenários considerados tentam abranger todas as situações comuns de tráfego
livre possíveis nas pontes com a geometria transversal considerada neste trabalho,
durante a sua vida útil, bem como algumas de caráter especial e emergencial. Caso
fossem consideradas as hipóteses de fluxo misto ou engarrafamento, seria necessário
considerar a faixa de rolamento com largura menor – por exemplo, com 3,00 m – para
cobrir as situações especiais; para estes casos, entretanto, a matriz de composição do
tráfego (Figura 2.32) deveria incluir a presença de veículos leves.
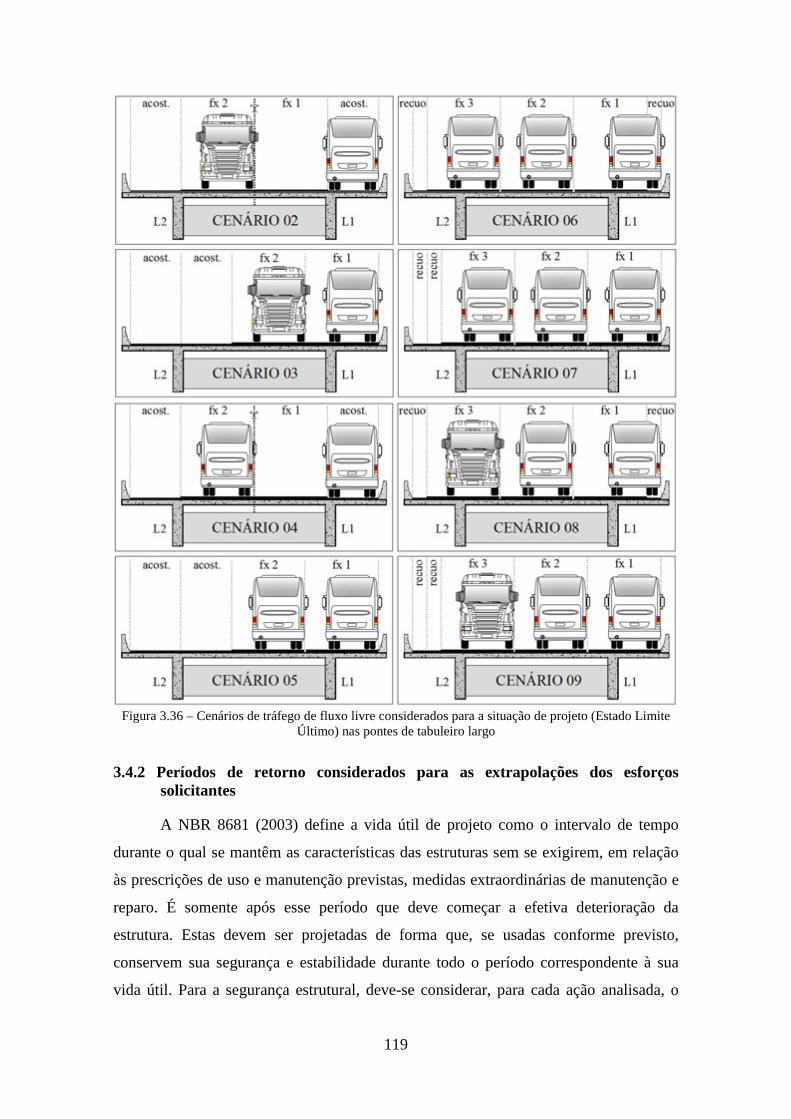
119
Figura 3.36 – Cenários de tráfego de fluxo livre considerados para a situação de projeto (Estado Limite
Último) nas pontes de tabuleiro largo
3.4.2 Períodos de retorno considerados para as extrapolações dos esforços solicitantes
A NBR 8681 (2003) define a vida útil de projeto como o intervalo de tempo
durante o qual se mantêm as características das estruturas sem se exigirem, em relação
às prescrições de uso e manutenção previstas, medidas extraordinárias de manutenção e
reparo. É somente após esse período que deve começar a efetiva deterioração da
estrutura. Estas devem ser projetadas de forma que, se usadas conforme previsto,
conservem sua segurança e estabilidade durante todo o período correspondente à sua
vida útil. Para a segurança estrutural, deve-se considerar, para cada ação analisada, o
120
período de retorno maior que a vida útil de projeto. Pressupõe-se para as estruturas uma
vida útil de pelo menos 50 anos.
No Brasil admite-se um período convencional de referência, ajustando-se o valor
característico das ações em função do seu período de retorno médio. Os valores
característicos das ações, Fk, são estabelecidos em função da variabilidade de suas
intensidades. No caso das ações permanentes, estes valores correspondem à
variabilidade existente num conjunto de estruturas análogas, correspondendo à mediana
da distribuição, seja quando os efeitos forem favoráveis, seja quando forem
desfavoráveis. Nas ações variáveis, os valores característicos correspondem à
probabilidade de eles serem igualados ou superados (somente no sentido desfavorável)
compreendida entre 25% e 35%, em relação à distribuição correspondente a um período
convencional de referência de 50 anos, o que corresponde a um período de retorno entre
140 e 200 anos.
Para a calibração dos modelos de cargas LM-1 a LM-4 do Eurocódigo 1, os
valores-alvo foram tomados com período de retorno de 1000 anos, para garantir uma
pequena probabilidade anual de excedência: 0,1% (CALGARO, 1998). Essa escolha foi
feita de forma a limitar a probabilidade de ocorrerem várias excedências do Estado
Limite de Serviço durante o período-base de 50 anos. Já o modelo de cargas da norma
AASHTO LRFD foi calibrado com período de retorno de 75 anos (NOWAK, 1993).
Para definir o período de retorno da extrapolação dos esforços solicitantes, deve-
se levar em conta que a representação dos carregamentos aleatórios em termos do
período de retorno é apenas uma forma conveniente de se denotar os níveis de
solicitações extremas. O nível de carregamento do tráfego num período de retorno
muito grande não é representativo (DAS, 1997), pois ele provavelmente não vai
permanecer por muito tempo com a configuração em que foi medido: a tecnologia que
muda rapidamente provoca a descaracterização do padrão de solicitação em longo
prazo, violando a suposição de que esses processos aleatórios são estacionários, o que,
em certa medida, invalida os grandes períodos de retorno, ao contrário dos fenômenos
modelados essencialmente pela natureza, como os ventos e as cheias dos rios. A
introdução das grandes CVC no mercado brasileiro é um exemplo da rápida mudança de
perfil das cargas móveis.
Por outro lado, a extrapolação está sendo realizada para grandezas aleatórias não
medidas (ver a Seção 4.4), mas sim modeladas de forma indireta - os esforços
solicitantes -, o que pode gerar erros; nestes casos, por segurança, podem ser
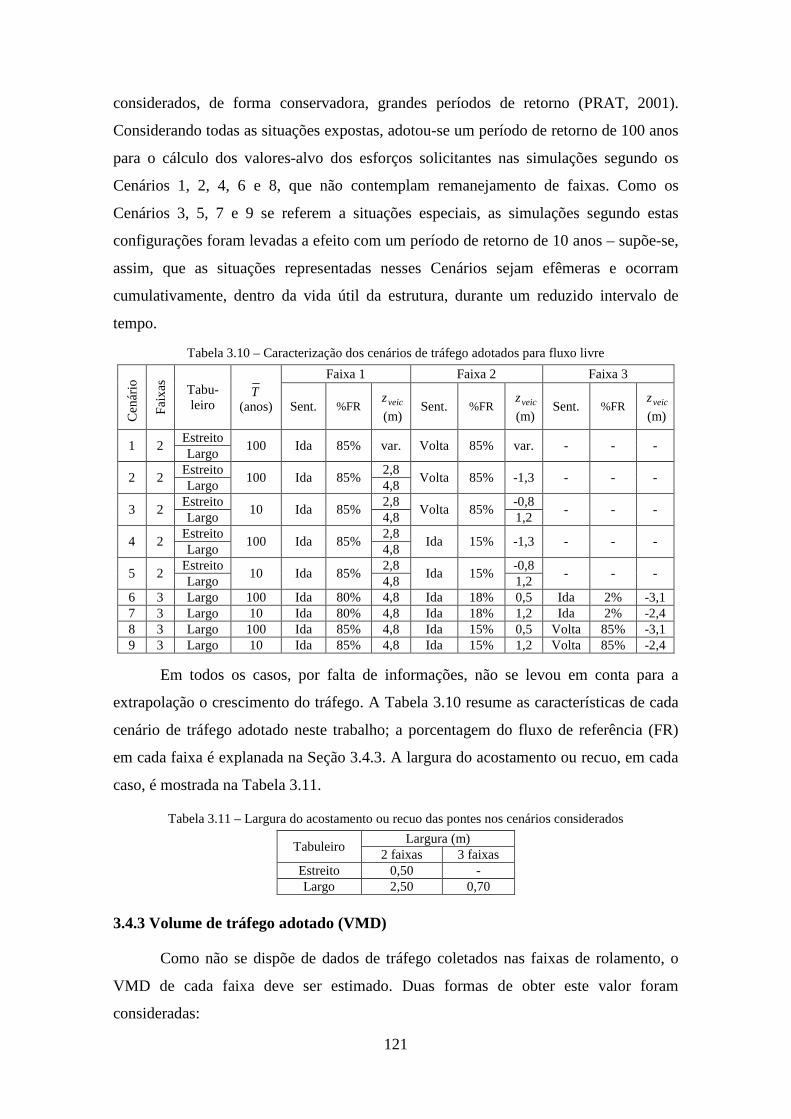
121
considerados, de forma conservadora, grandes períodos de retorno (PRAT, 2001).
Considerando todas as situações expostas, adotou-se um período de retorno de 100 anos
para o cálculo dos valores-alvo dos esforços solicitantes nas simulações segundo os
Cenários 1, 2, 4, 6 e 8, que não contemplam remanejamento de faixas. Como os
Cenários 3, 5, 7 e 9 se referem a situações especiais, as simulações segundo estas
configurações foram levadas a efeito com um período de retorno de 10 anos – supõe-se,
assim, que as situações representadas nesses Cenários sejam efêmeras e ocorram
cumulativamente, dentro da vida útil da estrutura, durante um reduzido intervalo de
tempo.
Tabela 3.10 – Caracterização dos cenários de tráfego adotados para fluxo livre
Cen
ário
Fai
xas
Tabu-leiro
T (anos)
Faixa 1 Faixa 2 Faixa 3
Sent. %FR veicz
(m) Sent. %FR veicz
(m) Sent. %FR veicz
(m)
1 2 Estreito
100 Ida 85% var. Volta 85% var. - - - Largo
2 2 Estreito
100 Ida 85% 2,8
Volta 85% -1,3 - - - Largo 4,8
3 2 Estreito
10 Ida 85% 2,8
Volta 85% -0,8
- - - Largo 4,8 1,2
4 2 Estreito
100 Ida 85% 2,8
Ida 15% -1,3 - - - Largo 4,8
5 2 Estreito
10 Ida 85% 2,8
Ida 15% -0,8
- - - Largo 4,8 1,2
6 3 Largo 100 Ida 80% 4,8 Ida 18% 0,5 Ida 2% -3,1 7 3 Largo 10 Ida 80% 4,8 Ida 18% 1,2 Ida 2% -2,4 8 3 Largo 100 Ida 85% 4,8 Ida 15% 0,5 Volta 85% -3,1 9 3 Largo 10 Ida 85% 4,8 Ida 15% 1,2 Volta 85% -2,4
Em todos os casos, por falta de informações, não se levou em conta para a
extrapolação o crescimento do tráfego. A Tabela 3.10 resume as características de cada
cenário de tráfego adotado neste trabalho; a porcentagem do fluxo de referência (FR)
em cada faixa é explanada na Seção 3.4.3. A largura do acostamento ou recuo, em cada
caso, é mostrada na Tabela 3.11.
Tabela 3.11 – Largura do acostamento ou recuo das pontes nos cenários considerados
Tabuleiro Largura (m)
2 faixas 3 faixas Estreito 0,50 - Largo 2,50 0,70
3.4.3 Volume de tráfego adotado (VMD)
Como não se dispõe de dados de tráfego coletados nas faixas de rolamento, o
VMD de cada faixa deve ser estimado. Duas formas de obter este valor foram
consideradas:
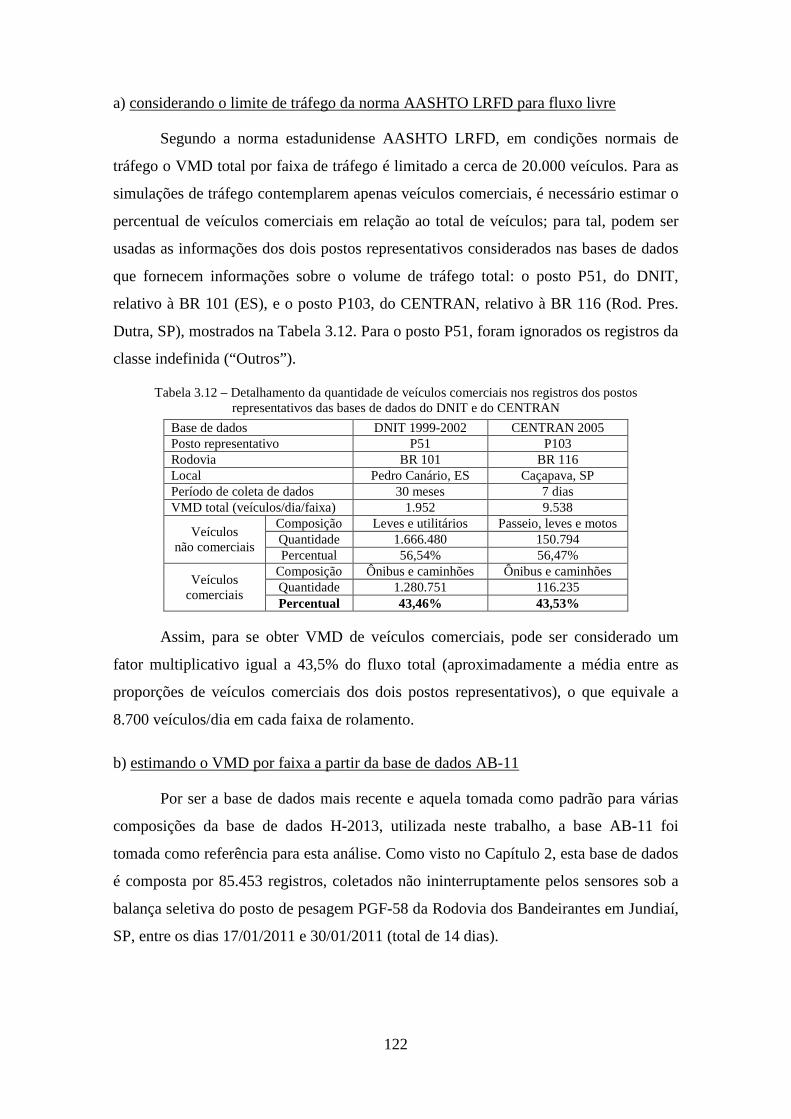
122
a) considerando o limite de tráfego da norma AASHTO LRFD para fluxo livre
Segundo a norma estadunidense AASHTO LRFD, em condições normais de
tráfego o VMD total por faixa de tráfego é limitado a cerca de 20.000 veículos. Para as
simulações de tráfego contemplarem apenas veículos comerciais, é necessário estimar o
percentual de veículos comerciais em relação ao total de veículos; para tal, podem ser
usadas as informações dos dois postos representativos considerados nas bases de dados
que fornecem informações sobre o volume de tráfego total: o posto P51, do DNIT,
relativo à BR 101 (ES), e o posto P103, do CENTRAN, relativo à BR 116 (Rod. Pres.
Dutra, SP), mostrados na Tabela 3.12. Para o posto P51, foram ignorados os registros da
classe indefinida (“Outros”).
Tabela 3.12 – Detalhamento da quantidade de veículos comerciais nos registros dos postos representativos das bases de dados do DNIT e do CENTRAN
Base de dados DNIT 1999-2002 CENTRAN 2005 Posto representativo P51 P103 Rodovia BR 101 BR 116 Local Pedro Canário, ES Caçapava, SP Período de coleta de dados 30 meses 7 dias VMD total (veículos/dia/faixa) 1.952 9.538
Veículos não comerciais
Composição Leves e utilitários Passeio, leves e motos Quantidade 1.666.480 150.794 Percentual 56,54% 56,47%
Veículos comerciais
Composição Ônibus e caminhões Ônibus e caminhões Quantidade 1.280.751 116.235 Percentual 43,46% 43,53%
Assim, para se obter VMD de veículos comerciais, pode ser considerado um
fator multiplicativo igual a 43,5% do fluxo total (aproximadamente a média entre as
proporções de veículos comerciais dos dois postos representativos), o que equivale a
8.700 veículos/dia em cada faixa de rolamento.
b) estimando o VMD por faixa a partir da base de dados AB-11
Por ser a base de dados mais recente e aquela tomada como padrão para várias
composições da base de dados H-2013, utilizada neste trabalho, a base AB-11 foi
tomada como referência para esta análise. Como visto no Capítulo 2, esta base de dados
é composta por 85.453 registros, coletados não ininterruptamente pelos sensores sob a
balança seletiva do posto de pesagem PGF-58 da Rodovia dos Bandeirantes em Jundiaí,
SP, entre os dias 17/01/2011 e 30/01/2011 (total de 14 dias).
123
O número médio de registros por dia é igual a 79,610314/85453 = veículos;
entretanto, deve ser levado em conta que este número de registros não perfaz o total de
veículos comerciais que trafegaram pela rodovia neste período, pois:
- alguns veículos se evadem da pesagem da balança seletiva;
- em horários de pico, geralmente por volta das 18 h em dias de semana, a fila
formada pelos caminhões para entrar no posto de pesagem pode se estender até a
Rodovia SP 300 (ver a Figura 2.6), cuja alça de acesso à Rodovia dos Bandeirantes dista
cerca de 1,5 km da entrada para a plataforma da balança seletiva do posto PGF 58.
Quando isto ocorre, a administração da CCR AutoBAn recomenda que os veículos não
adentrem no posto; o seu fechamento é feito por meio da sinalização vertical situada a
cerca de 1 km da entrada para a balança seletiva, como mostrado na Figura 2.7. A
interrupção dura até que a fila de caminhões se reduza a poucas centenas de metros e é
reativada a cada vez que a fila atinja as proximidades da Rodovia SP 300. Este
fechamento periódico é chamado de “sangria”.
Não foram relatados problemas de qualquer outra ordem no posto PGF 58
durante o período de coleta de dados, como avarias em equipamentos etc. De acordo
com as informações repassadas por funcionários da CCR AutoBAn, estima-se que,
devido à evasão e à sangria, o número real de veículos comerciais a passar pela pista
sentido interior-capital da Rodovia dos Bandeirantes, nas proximidades do posto PGF
58, seja 15% maior que o volume medido na plataforma da balança seletiva, incluída a
presença dos ônibus, que não são submetidos à pesagem nesta estrada. Assim,
considerando este “fator de ajuste” para o número real de veículos, o VMD real de
veículos comerciais nesta base de dados é estimado em 701979,610315,1 ≈×
caminhões e ônibus. Este valor é chamado de fluxo de referência (FR) e inclui o tráfego
pesado nas três faixas de rolamento.
Decidiu-se por considerar neste trabalho o VMD estimado, pois, embora seu
valor seja apenas uma aproximação e de valor bem menor que o limite físico de fluxo
livre da norma AASHTO LRFD, ele advém da própria base de dados considerada como
referência.
3.4.4 Divisão do fluxo total entre as faixas de rolamento; distribuição do tempo entre veículos
De acordo com as informações das bases de dados do DNIT (P51, BR 101, com
pista simples e mão dupla) e do CENTRAN (P103, BR 116, pista dupla com 2 faixas
124
cada), quando há um número igual de faixas de rolamento para cada sentido de trânsito,
pode-se considerar, de forma aproximada, que o volume de tráfego total em uma
rodovia é dividido igualmente para cada sentido, mesmo com a existência das variações
sazonais (época do ano) e horárias (migrações pendulares). Nos outros postos de coleta
de dados de ambas as bases o volume total também é dividido em aproximadamente
50% para cada sentido.
Quanto à divisão do fluxo de cada sentido para as faixas de tráfego, verifica-se
que, quando há a opção do tráfego por mais de uma faixa de rolamento, o fluxo total de
veículos pesados não se divide uniformemente segundo a orientação transversal. A faixa
da direita tende naturalmente a receber a maioria do tráfego de veículos comerciais,
visto que os veículos dotados de menor velocidade são orientados a trafegar nesta faixa;
porém, a proporção de veículos comerciais trafegando em cada faixa depende de vários
fatores específicos do trecho de rodovia como a existência de sinalização indicativa, a
qualidade relativa do pavimento entre as faixas, o horário, as condições climáticas e a
topografia local. Desta forma, as proporções ideais a serem usadas neste trabalho para a
divisão do fluxo total deveriam ser decorrentes de uma medição de tráfego realizada nas
imediações do posto PGF 58 da Rodovia dos Bandeirantes; porém, como este tipo de
informação não é catalogado nesta rodovia, a proporção do tráfego total suportada por
cada faixa tem de ser estimada. A Tabela 3.13 mostra as divisões do fluxo total
apresentadas por alguns autores para pistas com 2 e 3 faixas no mesmo sentido. Os
valores não são semelhantes. Em GETACHEW (2003) e PRAT (2001) as proporções
encontradas para o fluxo foram estimadas a partir de estudos de tráfego detalhados
realizados, respectivamente, em rodovias da França e da Suécia; em O´BRIEN e
ENRIGHT (2011) elas se referem a dados coletados em rodovias na Holanda (A) e
República Checa (B). Os valores considerados por LUCHI (2006) são sugestões para a
divisão do fluxo. A numeração das faixas de tráfego é contada, no sentido do fluxo, da
direita para a esquerda – a faixa 1 é a mais lenta.
O fluxo de referência refere-se à condição existente em cada uma das 2 pistas de
tráfego na Rodovia dos Bandeirantes, composta por 3 faixas de rolamento no mesmo
sentido na região próxima ao PGF 58. Considera-se, para os propósitos deste trabalho,
que é possível esse volume de tráfego fluir inteiramente (sem congestionamento) tanto
em 3 faixas de tráfego, que correspondem aos Cenários de tráfego 6 e 7, quanto em
apenas 2 faixas, situação representada nos Cenários 4 e 5, e ainda no sentido de ida dos
Cenários 8 e 9.
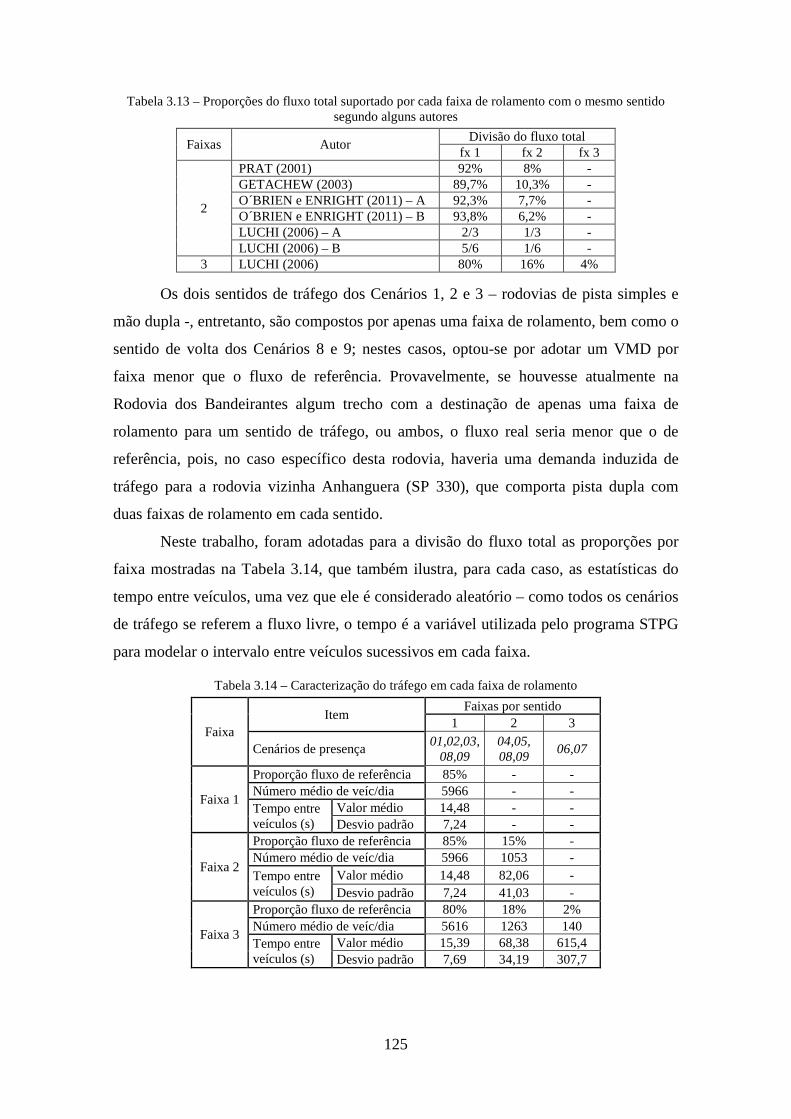
125
Tabela 3.13 – Proporções do fluxo total suportado por cada faixa de rolamento com o mesmo sentido segundo alguns autores
Faixas Autor Divisão do fluxo total
fx 1 fx 2 fx 3
2
PRAT (2001) 92% 8% - GETACHEW (2003) 89,7% 10,3% - O´BRIEN e ENRIGHT (2011) – A 92,3% 7,7% - O´BRIEN e ENRIGHT (2011) – B 93,8% 6,2% - LUCHI (2006) – A 2/3 1/3 - LUCHI (2006) – B 5/6 1/6 -
3 LUCHI (2006) 80% 16% 4%
Os dois sentidos de tráfego dos Cenários 1, 2 e 3 – rodovias de pista simples e
mão dupla -, entretanto, são compostos por apenas uma faixa de rolamento, bem como o
sentido de volta dos Cenários 8 e 9; nestes casos, optou-se por adotar um VMD por
faixa menor que o fluxo de referência. Provavelmente, se houvesse atualmente na
Rodovia dos Bandeirantes algum trecho com a destinação de apenas uma faixa de
rolamento para um sentido de tráfego, ou ambos, o fluxo real seria menor que o de
referência, pois, no caso específico desta rodovia, haveria uma demanda induzida de
tráfego para a rodovia vizinha Anhanguera (SP 330), que comporta pista dupla com
duas faixas de rolamento em cada sentido.
Neste trabalho, foram adotadas para a divisão do fluxo total as proporções por
faixa mostradas na Tabela 3.14, que também ilustra, para cada caso, as estatísticas do
tempo entre veículos, uma vez que ele é considerado aleatório – como todos os cenários
de tráfego se referem a fluxo livre, o tempo é a variável utilizada pelo programa STPG
para modelar o intervalo entre veículos sucessivos em cada faixa.
Tabela 3.14 – Caracterização do tráfego em cada faixa de rolamento
Faixa Item
Faixas por sentido 1 2 3
Cenários de presença 01,02,03,
08,09 04,05, 08,09
06,07
Faixa 1
Proporção fluxo de referência 85% - - Número médio de veíc/dia 5966 - - Tempo entre veículos (s)
Valor médio 14,48 - - Desvio padrão 7,24 - -
Faixa 2
Proporção fluxo de referência 85% 15% - Número médio de veíc/dia 5966 1053 - Tempo entre veículos (s)
Valor médio 14,48 82,06 - Desvio padrão 7,24 41,03 -
Faixa 3
Proporção fluxo de referência 80% 18% 2% Número médio de veíc/dia 5616 1263 140 Tempo entre veículos (s)
Valor médio 15,39 68,38 615,4 Desvio padrão 7,69 34,19 307,7
126
Como exemplo, nos casos da faixa única de tráfego e da faixa lenta da situação
de 2 faixas, o VMD por faixa é fixado em 85% do fluxo de referência, que equivale a
5966701985,0 ≈× veículos comerciais. O tempo médio entre veículos, neste caso, é
igual a
s/veic 48,14 veic/dia5966
s/dia 86400,1 ==− jjT (3.17)
3.5 Consideração da base de dados H-2013 pelo programa STPG
Uma vez calibrado, o programa STPG pode ser utilizado para se obterem os
esforços devidos ao tráfego real nas estruturas. Para representar a base de dados híbrida
obtida no Capítulo 2, foram adotadas as seguintes considerações:
• a composição do tráfego definida pelo espectro de veículos da Tabela 2.1 e
pela distribuição de frequências das classes da Figura 2.32;
• os histogramas de velocidade da Figura 2.3, descartando valores menores que
30 km/h ou maiores que 140 km/h;
• as distribuições do peso total dos veículos da Tabela 2.8, sendo limitados aos
valores constantes nas Tabelas 2.19 e 2.24;
• as variações lineares da carga de cada grupo de eixos com o peso total de cada
classe, mostradas na Tabela 2.12;
• as distâncias entre eixos dos veículos descritas pelas Tabelas 2.25 e 2.26, sendo
algumas aleatórias e outras determinísticas;
• os balanços dianteiros e traseiros mostrados na Tabela 2.26;
• as dimensões transversais mostradas na Tabela 2.27.
Como a geração dos tempos entre veículos sucessivos é independente em cada
faixa, os cruzamentos de veículos são automaticamente considerados nas simulações de
tráfego, bem como a possibilidade de presença simultânea de veículos em uma mesma
faixa de rolamento. Não foram considerados subperíodos para modelar as sazonalidades
e variações do fluxo de tráfego dentro de um mesmo dia: a unidade temporal de
referência para as simulações é o período de 1 dia completo (86.400 s).
O tempo entre veículos, cujas estatísticas para cada faixa e cenário são descritas
na Tabela 3.14, foi modelado por uma distribuição gama (PORTUGAL, 2005). A
adoção desta distribuição é sugerida no caso de o processo de chegada de veículos ser
idealizado por uma cadeia de Markov conhecida como processo de Poisson. Outros
modelos contínuos utilizados neste caso são as distribuições exponencial e de Erlang
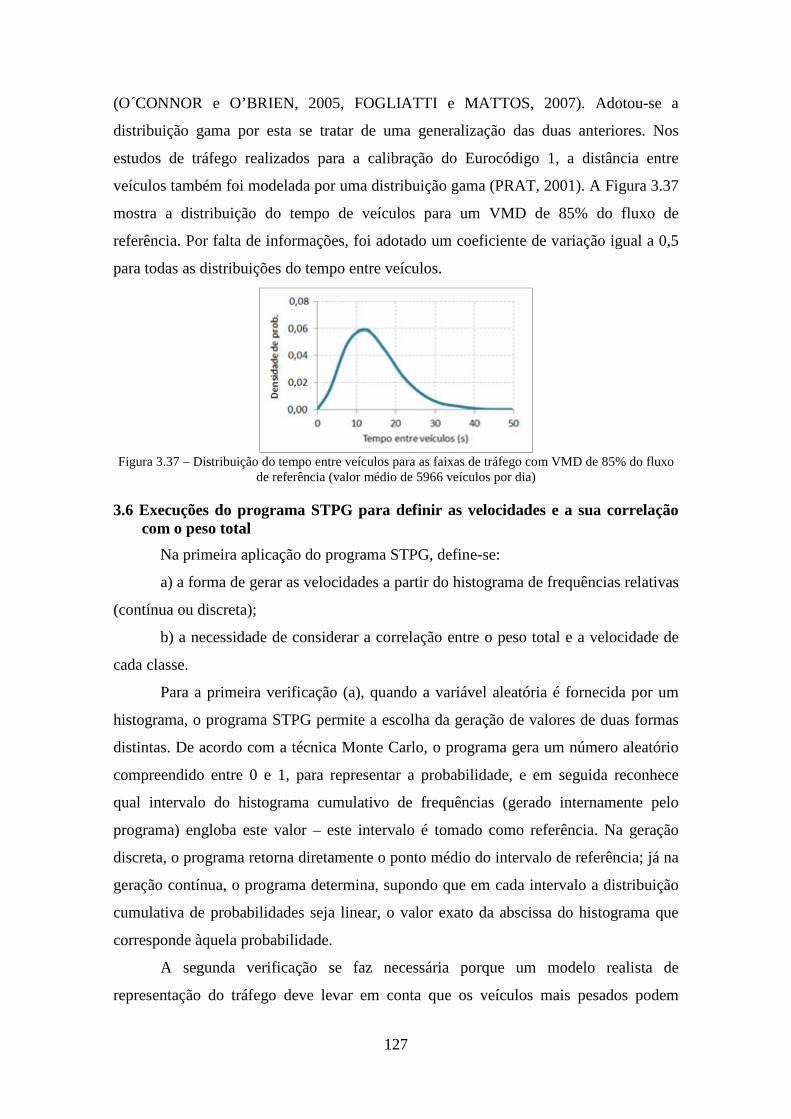
127
(O´CONNOR e O’BRIEN, 2005, FOGLIATTI e MATTOS, 2007). Adotou-se a
distribuição gama por esta se tratar de uma generalização das duas anteriores. Nos
estudos de tráfego realizados para a calibração do Eurocódigo 1, a distância entre
veículos também foi modelada por uma distribuição gama (PRAT, 2001). A Figura 3.37
mostra a distribuição do tempo de veículos para um VMD de 85% do fluxo de
referência. Por falta de informações, foi adotado um coeficiente de variação igual a 0,5
para todas as distribuições do tempo entre veículos.
Figura 3.37 – Distribuição do tempo entre veículos para as faixas de tráfego com VMD de 85% do fluxo
de referência (valor médio de 5966 veículos por dia)
3.6 Execuções do programa STPG para definir as velocidades e a sua correlação com o peso total
Na primeira aplicação do programa STPG, define-se:
a) a forma de gerar as velocidades a partir do histograma de frequências relativas
(contínua ou discreta);
b) a necessidade de considerar a correlação entre o peso total e a velocidade de
cada classe.
Para a primeira verificação (a), quando a variável aleatória é fornecida por um
histograma, o programa STPG permite a escolha da geração de valores de duas formas
distintas. De acordo com a técnica Monte Carlo, o programa gera um número aleatório
compreendido entre 0 e 1, para representar a probabilidade, e em seguida reconhece
qual intervalo do histograma cumulativo de frequências (gerado internamente pelo
programa) engloba este valor – este intervalo é tomado como referência. Na geração
discreta, o programa retorna diretamente o ponto médio do intervalo de referência; já na
geração contínua, o programa determina, supondo que em cada intervalo a distribuição
cumulativa de probabilidades seja linear, o valor exato da abscissa do histograma que
corresponde àquela probabilidade.
A segunda verificação se faz necessária porque um modelo realista de
representação do tráfego deve levar em conta que os veículos mais pesados podem

128
apresentar maior dificuldade em desenvolver a sua velocidade desejada de viagem. As
correlações entre a velocidade e o peso total de cada classe são as únicas consideradas
na primeira versão do programa STPG. Como visto no Capítulo 2 e na Seção 3.2.2, um
modelo rebuscado de representação do tráfego deve levar em conta as correlações entre
vários outros pares de variáveis. Considerou-se, para fins de comparação, uma execução
do programa STPG com as correlações entre peso total e velocidade iguais a -0,10 para
os caminhões rígidos e reboques e -0,15 para os semirreboques.
Para estas verificações, o programa STPG foi executado 4 vezes, cada uma com
características distintas, todas descritas na Tabela 3.15. Consideraram-se as seguintes
situações para as simulações:
• a estrutura LB-10 (tabuleiro de modelo largo, biapoiado, com vão de 10 m);
• a largura efetiva de mesa calculada pela NBR 6118, de 2,35 m;
• tráfego em fluxo livre, com duração de apenas 1 dia;
• as posições transversais e o VMD por faixa definidos no Cenário 2 de tráfego
(Tabelas 3.10 e 3.14).
Tabela 3.15 – Características de domínio e correlação de cada execução do programa STPG
Execução no Domínio p/ geração
das velocidades Correlação entre
peso total e velocidade 1 Discreto Não 2 Contínuo Não 3 Discreto Sim 4 Contínuo Sim
Tabela 3.16 – Total de veículos gerados em cada faixa e características estatísticas das distribuições do esforço cortante e do momento fletor – valor médio, desvio padrão e número de ciclos, com valores de
corte de, respectivamente, 250 kN e 550 kNm
Exec. no
Total de veículos Distr. esf. cortante (kN) Distr. mom. fletor (kN)
Faixa1 Faixa 2 Valor médio
Desvio padrão
n Valor médio
Desvio padrão
n
1 5996 5951 271,50 21,294 341 600,23 49,485 399 2 5993 5958 270,96 21,068 341 599,51 48,983 400 3 5998 5907 273,80 22,247 341 600,97 50,398 427 4 5998 5907 273,88 22,337 341 600,81 50,270 418
Tabela 3.17 - Descrição das maiores solicitações – esforço cortante no apoio da longarina L1
Exe
c. no
Valor máx (kN)
Tempo (s)
Veículo da faixa 1 Veículo da faixa 2
Classe TOTP
(kN) Veloc (km/h)
Absc. eixo 1 (m)
Classe TOTP
(kN) Veloc (km/h)
Absc. eixo 1 (m)
1 370,561 24796,643 2S3-C 561,47 80,000 10,400 - - - - 2 370,561 24796,605 2S3-C 561,47 87,149 10,400 - - - - 3 411,236 28848,183 2S3-C 616,22 80,000 10,100 - - - - 4 411,236 28848,218 2S3-C 616,22 74,302 10,100 - - - -
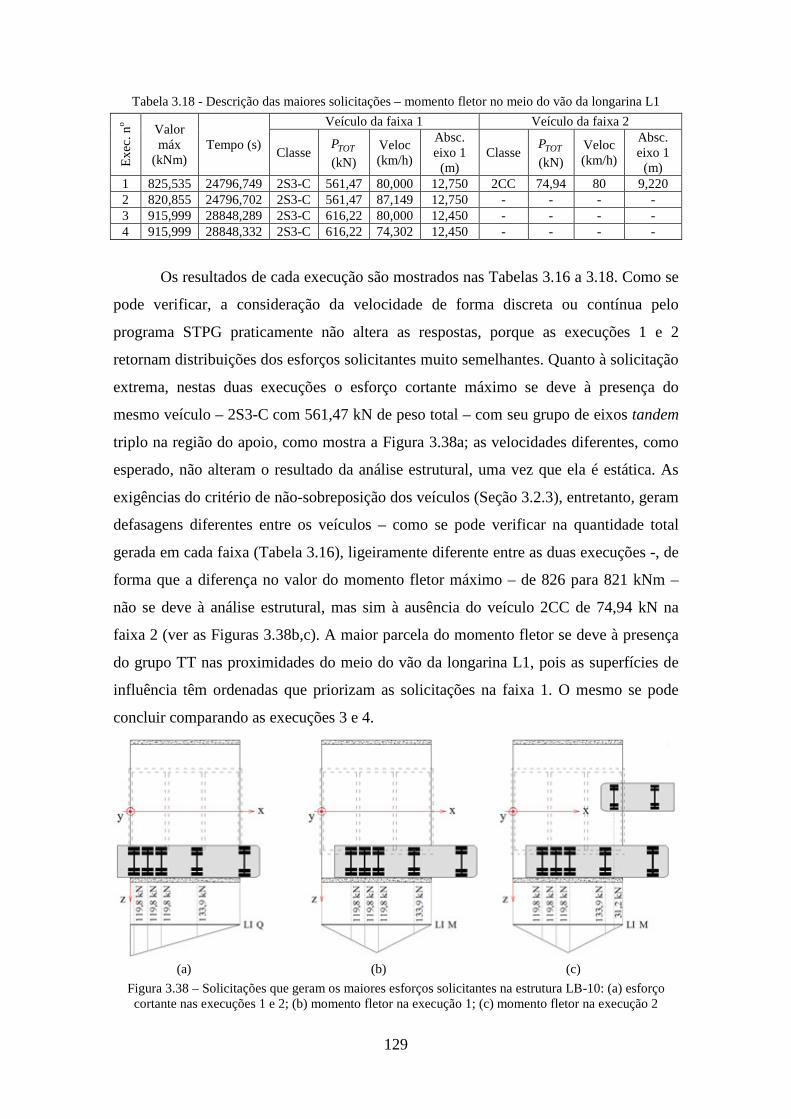
129
Tabela 3.18 - Descrição das maiores solicitações – momento fletor no meio do vão da longarina L1
Exe
c. no
Valor máx
(kNm) Tempo (s)
Veículo da faixa 1 Veículo da faixa 2
Classe TOTP
(kN) Veloc (km/h)
Absc. eixo 1 (m)
Classe TOTP
(kN) Veloc (km/h)
Absc. eixo 1 (m)
1 825,535 24796,749 2S3-C 561,47 80,000 12,750 2CC 74,94 80 9,220 2 820,855 24796,702 2S3-C 561,47 87,149 12,750 - - - - 3 915,999 28848,289 2S3-C 616,22 80,000 12,450 - - - - 4 915,999 28848,332 2S3-C 616,22 74,302 12,450 - - - -
Os resultados de cada execução são mostrados nas Tabelas 3.16 a 3.18. Como se
pode verificar, a consideração da velocidade de forma discreta ou contínua pelo
programa STPG praticamente não altera as respostas, porque as execuções 1 e 2
retornam distribuições dos esforços solicitantes muito semelhantes. Quanto à solicitação
extrema, nestas duas execuções o esforço cortante máximo se deve à presença do
mesmo veículo – 2S3-C com 561,47 kN de peso total – com seu grupo de eixos tandem
triplo na região do apoio, como mostra a Figura 3.38a; as velocidades diferentes, como
esperado, não alteram o resultado da análise estrutural, uma vez que ela é estática. As
exigências do critério de não-sobreposição dos veículos (Seção 3.2.3), entretanto, geram
defasagens diferentes entre os veículos – como se pode verificar na quantidade total
gerada em cada faixa (Tabela 3.16), ligeiramente diferente entre as duas execuções -, de
forma que a diferença no valor do momento fletor máximo – de 826 para 821 kNm –
não se deve à análise estrutural, mas sim à ausência do veículo 2CC de 74,94 kN na
faixa 2 (ver as Figuras 3.38b,c). A maior parcela do momento fletor se deve à presença
do grupo TT nas proximidades do meio do vão da longarina L1, pois as superfícies de
influência têm ordenadas que priorizam as solicitações na faixa 1. O mesmo se pode
concluir comparando as execuções 3 e 4.
(a) (b) (c)
Figura 3.38 – Solicitações que geram os maiores esforços solicitantes na estrutura LB-10: (a) esforço cortante nas execuções 1 e 2; (b) momento fletor na execução 1; (c) momento fletor na execução 2
130
Assim, foi adotada, neste trabalho, a geração de velocidades de forma discreta,
com os valores definidos pelo ponto médio de cada intervalo dos histogramas de
frequência relativa.
Ao se compararem as execuções 1 e 3, nota-se que os esforços gerados pela
simulação que considera a correlação entre pesos e velocidades são maiores que os
aqueles gerados sem correlação, em especial no tocante às solicitações máximas - a
passagem de veículos muito pesados na ponte a velocidades menores aumenta a
probabilidade de haver cruzamentos de veículos; contudo, as distribuições dos esforços
solicitantes não sofreram acréscimos significativos. Desta forma, por simplificação, a
correlação entre o peso total e a velocidade dos veículos foi negligenciada neste
trabalho, porque o custo computacional para a geração conjunta de valores pela
transformada de Nataf é consideravelmente maior do que quando as variáveis são
estatisticamente independentes.
3.7 Extrapolação dos esforços devidos ao tráfego real
Por razões que serão discutidas no Capítulo 4, as extrapolações dos esforços
realizadas neste trabalho concernem apenas aos valores estáticos, que advêm do
simulador STPG. As flutuações dinâmicas em torno das respostas estáticas são tratadas
separadamente por meio do fator de amplificação dinâmica.
3.7.1 Sistemática de extrapolação
Como as informações referentes aos valores extremos são de grande importância
para estimar comportamentos em longo prazo, o ideal seria ajustar uma distribuição de
probabilidades a amostras de valores máximos observados; entretanto, na maioria das
vezes esses valores extremos não estão disponíveis, pois a aquisição de dados de valores
extremos demanda períodos de tempo consideráveis – geralmente, quando esses valores
existem, suas amostras disponíveis são pequenas. Assim, o procedimento geralmente
empregado é determinar a distribuição de probabilidades mais adequada aos dados
disponíveis em curto prazo, a partir de um modelo populacional definido ou ajustado, e
depois recorrer a extrapolações (SAGRILO e LIMA, 2004).
Para estarem referidas a um período de tempo unitário, equivalente a uma única
tentativa, as extrapolações são feitas com base na ampliação do número de tentativas
(equivalente ao tamanho da amostra): inicialmente considera-se para este valor a
quantidade total de valores observados (o tamanho da amostra, n), no período de

131
observação, denotado por t∆ . Os valores observados são extrapolados por uma
proporção: se houve n tentativas num intervalo de tempo t∆ , então deve haver T
n
tentativas equivalentes a um período de retorno T . O número de tentativas referentes à
extrapolação é, portanto, igual a
t
Tnn
T ∆⋅= (3.18)
3.7.2 Extrapolação pelo nível de probabilidade
A forma mais simples de extrapolação é obtida com a própria distribuição inicial
ajustada. A probabilidade de ocorrência de um evento é, em média, recíproca ao período
de retorno (ANG e TANG, 1975). Tomando este intervalo como o próprio tamanho
equivalente da amostra, para que ele seja unitário, a chance de o evento ocorrer é igual a
Tn
p1= (3.19)
Por outro lado, a probabilidade de ocorrência de um evento modelado por uma
distribuição de probabilidades ( )xfX é igual a
)(1)(1TX
z
X zFdxxfpT
−=−= ∫∞−
(3.20)
Igualando as Eqs. (3.19) e (3.20), tem-se
TTX n
zF1
1)( −= ⇔
−= −
TT n
Fz1
11 (3.21)
O valor T
z da Eq. 3.21, definido como valor máximo característico da
extrapolação, é o valor de X tal que, numa amostra de tamanho T
n (referida ao período
de retorno T ), o número esperado de valores amostrais maiores que T
z seja igual a 1
(ANG e TANG, 1984). A quantidade à direita da Eq. 3.20 é chamada de nível de
probabilidade, representando a chance de a variável X igualar ou superar o valor T
z no
período de retorno T (a probabilidade de excedência).
De acordo com NOWAK (1993), esse método de calcular o valor representativo
foi usado para se estimarem os esforços devidos ao tráfego real nos estudos realizados
para a calibração das normas AASHTO LRFD e OHBDC.
132
3.7.3 Extrapolação pela Estatística de Extremos
Sendo X a variável aleatória inicial, com distribuição cumulativa de
probabilidades )(xFX , considerem-se amostras de tamanho n tomadas da população de
X; cada amostra é um conjunto de n observações, },,,{ 21 nxxx L , representando,
respectivamente, o primeiro, o segundo,..., e o n-ésimo valor observado. Se a sequência
de n observações for repetida, outros valores máximos e mínimos serão obtidos;
portanto, o maior e o menor valor possíveis compõem populações próprias. Como cada
valor observado é imprevisível antes da sua real observação, pode-se considerar que
cada observação é o valor de uma variável aleatória e que o conjunto de observações
},,,{ 21 nxxx L é a realização de variáveis aleatórias amostrais },,,{ 21 nXXX L . Os
maiores valores das amostras de tamanho n são também variáveis aleatórias e, portanto,
têm suas próprias distribuições de probabilidades. É de se esperar que estas
distribuições de valores máximos estejam relacionadas de alguma forma com a
distribuição inicial de probabilidades da variável X (ANG e TANG, 1984).
Em uma amostra de tamanho n, busca-se o valor máximo de },,,{ 21 nXXX L ,
isto é, a variável aleatória },,,{max 21 nn XXXY L= . Por definição, a probabilidade de
se encontrarem valores menores ou iguais a y na distribuição XF é igual a )(yFX . Se
nY , o maior valor entre },,,{ 21 nXXX L , for menor que algum valor y, então todas as
outras variáveis aleatórias amostrais terão necessariamente de ser menores que y; desta
forma, a distribuição acumulada de probabilidades de nY é igual a
∏=
=≤≤≤=≤=n
iXnnY yFyXyXyXPyYPyF
in1
21 )(),,,()()( K (3.22)
Por simplificação, considera-se que nXXX ,,, 21 L , além de estatisticamente
independentes, têm a mesma distribuição da variável aleatória inicial, X:
)()(...)()(21
xFxFxFxF XXXX n==== ⇒ iyFyF XX i
∀= ),()( (3.23)
Com todas as distribuições de probabilidades idênticas, tem-se
[ ]nX
n
iXY yFyFyF
n)( )()(
1∏
=
== (3.24)

133
Portanto, a distribuição de probabilidades dos valores máximos depende do
tamanho da amostra e da distribuição inicial adotada. A extrapolação se dá pela
substituição, na Eq. 3.24, do número de tentativas n pelo valor extrapolado T
n :
[ ] [ ] t
Tn
Xn
XY yFyFyF T
Tn∆
⋅== )()()( (3.25)
A função densidade de probabilidade da distribuição exata de máximos é dada
por
)()]([)(
)(1
yfyFt
Tn
dy
ydFyf X
t
Tn
X
Y
YTn
Tn⋅⋅
∆⋅==
−
∆⋅
(3.26)
De acordo com SPIEGEL (1994), para caracterizar a distribuição de máximos
por meio de um único número que a represente, deve-se destacar nela um valor
representativo, que deve ser uma medida de tendência central. O valor médio da
distribuição de máximos é dado por
[ ]∫∞
∞−
−
∆⋅ ⋅⋅⋅
∆⋅= dyyfyFy
t
Tn Xt
Tn
XYTn
)()( 1µ (3.27)
A mediana é a abscissa medy de )(yFTnY tal que 5,0)( =medY yF
Tn. A moda de
)(yfTn
Y , mody , é o valor mais provável da distribuição:
0)( mod
=dy
ydfTnY
(3.28)
Não há uma determinação que indique a adoção de um destes valores centrais,
por ser o valor representativo considerado “correto”. Como a forma da distribuição de
valores máximos depende basicamente do comportamento da extremidade final da
distribuição inicial (as porções iniciais têm pouquíssima influência em seu aspecto),
deve-se ajustar a distribuição à extremidade de máximos.
3.7.4 Consideração dos máximos por uma distribuição de Rice
De acordo com CALGARO (1998), três métodos diferentes foram utilizados
para extrapolar os esforços devidos às cargas móveis por ocasião da calibração dos
modelos de carga do Eurocódigo 1. Todos conduzem a resultados equivalentes (PRAT,
2001). O primeiro considera a cauda da distribuição dos extremos locais modelada por
uma distribuição normal. Se a superfície de influência do esforço considerado variar
134
suavemente ao longo do caminho percorrido pelos veículos, não houver
descontinuidade ou ordenadas nulas em uma região grande em relação ao comprimento
dos veículos e a razão entre o comprimento da ponte e a distância média entre veículos
consecutivos for suficientemente grande, pode-se assumir que o processo aleatório é
gaussiano (CREMONA, 2001) e que os efeitos do tráfego real podem ser modelados
por um ruído branco (DITLEVSEN, 1994). No segundo método, a distribuição dos
dados registrados foi substituída por uma composição de distribuições de Gumbel.
O terceiro método consiste em ajustar uma distribuição de Rice a partir da cauda
dos histogramas de transposições positivas de nível dos esforços solicitantes advindas
de registros de carga pelos sistemas weigh-in-motion (WIM). Este modelo é adequado
para representar a cauda da distribuição dos picos positivos ou das transposições
positivas de um processo estacionário, ergódico e gaussiano – que tende a uma
distribuição de Rayleigh quando o processo aleatório é de banda estreita, e a uma
distribuição normal quando o processo é de banda larga (SAGRILO, 2008).
3.7.5 Comparação entre os métodos; definição do método utilizado neste trabalho
Para definir o método de extrapolação utilizado neste trabalho, deve-se levar em
conta que a Estatística de Extremos permite grande aplicabilidade porque obtém uma
curva de extrapolação, na qual se podem definir precisamente quaisquer estatísticas e
probabilidades associadas ao modelo populacional, além de seus valores
representativos. A extrapolação pelo nível de probabilidade, em contrapartida, não
possibilita a obtenção de uma nova curva, pois fornece apenas um valor representativo;
entretanto, é um processo menos laborioso, pois calcula este valor representativo da
extrapolação baseando-se apenas na distribuição inicial cumulativa inversa.
Quanto aos valores representativos obtidos em cada método, é de se esperar que
o valor máximo característico extrapolado, T
z , da Eq. 3.21, seja próximo aos valores
representativos da curva extrapolada por meio da Estatística de Extremos, dados pelas
Eqs. 3.27 e 3.28. A moda, por ser a abscissa mais provável da distribuição de valores
máximos, é o valor central que mais se assemelha ao valor T
z da distribuição inicial –
estes valores praticamente se confundem (O’CONNOR e SHAW, 2000).
A distribuição de Rice não foi considerada neste trabalho pelas seguintes razões:
• os esforços solicitantes foram obtidos indiretamente, de forma numérica, a
partir de registros de cargas axiais não medidas diretamente na rodovia;
135
• algumas superfícies de influência, como as das Figuras 3.19 e 3.20, têm
descontinuidades, e outras apresentam ordenadas nulas na região de maior interesse (a
longarina L1);
• as pontes analisadas neste trabalho são de pequenos e médios vãos, o que
impossibilita a ocorrência de valores altos para a relação entre o comprimento da ponte
e a distância entre veículos;
• não há coleta de dados da série temporal nem dos picos positivos, pois o
programa STPG registra apenas o valor máximo do esforço solicitante em cada ciclo;
• a suposição de que os processos aleatórios oriundos da passagem dos veículos
sejam considerados estacionários em grandes períodos de retorno é violada, pois o fluxo
de veículos altera o padrão de solicitação ao longo do tempo, tanto devido ao
crescimento do tráfego quanto pela mudança de configuração dos veículos – como
houve, recentemente, com a introdução das CVC no mercado rodoviário brasileiro.
Estes fatores estão sendo negligenciados neste trabalho.
Para a obtenção dos valores-alvo dos esforços solicitantes, adotou-se, neste
trabalho, a extrapolação pelo nível de probabilidade, a partir da própria distribuição
inicial. Contudo, para as análises de confiabilidade estrutural teria de ser considerada
toda a distribuição de extremos, já que neste caso é necessário gerar valores aleatórios
para as solicitações extremas.
3.7.6 Definição do tempo de simulação e do modelo para a distribuição inicial
Definida a sistemática de extrapolação, o próximo passo é estimar o período de
tempo mínimo de simulação do tráfego que forneça valores coerentes para os valores
extrapolados dos esforços solicitantes nos períodos de retorno indicados na Tabela 3.10,
uma vez que esse intervalo de tempo é desconhecido e depende tanto das características
das estruturas analisadas quanto do tráfego que as solicita. Também é necessário definir
o modelo probabilístico a ser usado para as solicitações devidas ao tráfego real.
Para estabelecer o tempo de simulação, foi tomada como referência a estrutura
LB-10. A fim de garantir convergência ao caso de maior dificuldade, utilizou-se para a
calibração o Cenário 2 de tráfego, com período de retorno de 100 anos.
O intervalo de tempo referencial para a simulação de tráfego deve garantir que
as extrapolações das distribuições iniciais dos esforços convirjam para valores
semelhantes aos que seriam obtidos com a execução de outra simulação de maior
duração. Variando crescentemente entre 1 dia e 360 dias o intervalo de tempo de
136
simulação e registrando, de cada um, as informações de cada distribuição inicial dos
esforços, o intervalo de tempo considerado ideal é aquele sucedido por um tempo de
análise em que se encontrem solicitações com valores extrapolados semelhantes aos do
tempo considerado, quando as solicitações terão estatísticas e valores extremos com
valores muito próximos. É de se esperar, também, que o modelo populacional mais
adequado para representar cada distribuição não sofra grandes variações. Quanto maior
o período de simulação, menor a variância da estimativa.
Nas Tabelas 3.19 e 3.20 resumem-se, respectivamente, as informações obtidas
de cada simulação de tráfego na estrutura LB-10, com relação ao esforço cortante e ao
momento fletor (positivo), com períodos de tempo variando de 1 a 360 dias. Em cada
caso, o melhor modelo populacional é buscado pelo programa Ajusta_v1, dando ênfase
à cauda de máximos. Na Figura 3.39 constam as mesmas informações das Tabelas 3.19
e 3.20 referentes ao valor máximo obtido de cada esforço e os valores extrapolados em
100 anos.
Verifica-se, nas Tabelas 3.19 e 3.20, que, como esperado, os valores médios das
distribuições oriundas da Estatística de Extremos são ligeiramente superiores aos
obtidos pelo processo do nível de probabilidade, uma vez que estas distribuições iniciais
têm, todas, assimetria positiva e esta propriedade se preserva na extrapolação.
Para o caso do esforço cortante, nota-se que a distribuição exponencial seria o
modelo mais adequado para representar esta solicitação. A partir de 75 dias de
simulação, não há mais variação do melhor modelo que represente o tráfego, tampouco
dos valores representativos obtidos. Para o momento fletor, porém, há uma dificuldade:
não é possível definir na estrutura LB-10 um número de dias mínimo de simulação
porque não há uma definição nítida. Cada modelo populacional converge rapidamente
para o seu valor representativo da extrapolação, mas a melhor distribuição que
representa esses esforços oscila entre as distribuições de Gumbel, exponencial, gama e
chi-quadrado.
Nota-se, também, para o caso das distribuições gama e chi-quadrado, a
indesejável semelhança entre o valor máximo obtido de cada esforço no período de
simulação e o seu valor máximo extrapolado.
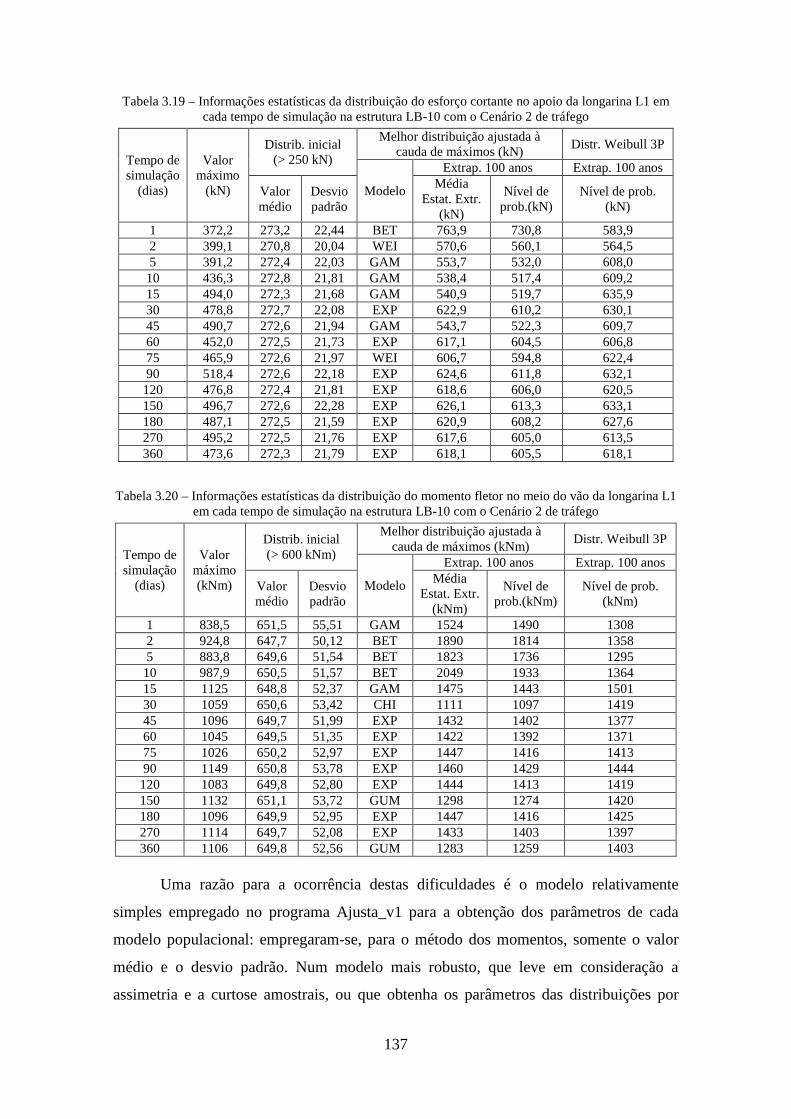
137
Tabela 3.19 – Informações estatísticas da distribuição do esforço cortante no apoio da longarina L1 em cada tempo de simulação na estrutura LB-10 com o Cenário 2 de tráfego
Tempo de simulação
(dias)
Valor máximo
(kN)
Distrib. inicial (> 250 kN)
Melhor distribuição ajustada à cauda de máximos (kN)
Distr. Weibull 3P
Modelo
Extrap. 100 anos Extrap. 100 anos
Valor médio
Desvio padrão
Média Estat. Extr.
(kN)
Nível de prob.(kN)
Nível de prob. (kN)
1 372,2 273,2 22,44 BET 763,9 730,8 583,9 2 399,1 270,8 20,04 WEI 570,6 560,1 564,5 5 391,2 272,4 22,03 GAM 553,7 532,0 608,0 10 436,3 272,8 21,81 GAM 538,4 517,4 609,2 15 494,0 272,3 21,68 GAM 540,9 519,7 635,9 30 478,8 272,7 22,08 EXP 622,9 610,2 630,1 45 490,7 272,6 21,94 GAM 543,7 522,3 609,7 60 452,0 272,5 21,73 EXP 617,1 604,5 606,8 75 465,9 272,6 21,97 WEI 606,7 594,8 622,4 90 518,4 272,6 22,18 EXP 624,6 611,8 632,1 120 476,8 272,4 21,81 EXP 618,6 606,0 620,5 150 496,7 272,6 22,28 EXP 626,1 613,3 633,1 180 487,1 272,5 21,59 EXP 620,9 608,2 627,6 270 495,2 272,5 21,76 EXP 617,6 605,0 613,5 360 473,6 272,3 21,79 EXP 618,1 605,5 618,1
Tabela 3.20 – Informações estatísticas da distribuição do momento fletor no meio do vão da longarina L1 em cada tempo de simulação na estrutura LB-10 com o Cenário 2 de tráfego
Tempo de simulação
(dias)
Valor máximo (kNm)
Distrib. inicial (> 600 kNm)
Melhor distribuição ajustada à cauda de máximos (kNm)
Distr. Weibull 3P
Modelo
Extrap. 100 anos Extrap. 100 anos
Valor médio
Desvio padrão
Média Estat. Extr.
(kNm)
Nível de prob.(kNm)
Nível de prob. (kNm)
1 838,5 651,5 55,51 GAM 1524 1490 1308 2 924,8 647,7 50,12 BET 1890 1814 1358 5 883,8 649,6 51,54 BET 1823 1736 1295 10 987,9 650,5 51,57 BET 2049 1933 1364 15 1125 648,8 52,37 GAM 1475 1443 1501 30 1059 650,6 53,42 CHI 1111 1097 1419 45 1096 649,7 51,99 EXP 1432 1402 1377 60 1045 649,5 51,35 EXP 1422 1392 1371 75 1026 650,2 52,97 EXP 1447 1416 1413 90 1149 650,8 53,78 EXP 1460 1429 1444 120 1083 649,8 52,80 EXP 1444 1413 1419 150 1132 651,1 53,72 GUM 1298 1274 1420 180 1096 649,9 52,95 EXP 1447 1416 1425 270 1114 649,7 52,08 EXP 1433 1403 1397 360 1106 649,8 52,56 GUM 1283 1259 1403
Uma razão para a ocorrência destas dificuldades é o modelo relativamente
simples empregado no programa Ajusta_v1 para a obtenção dos parâmetros de cada
modelo populacional: empregaram-se, para o método dos momentos, somente o valor
médio e o desvio padrão. Num modelo mais robusto, que leve em consideração a
assimetria e a curtose amostrais, ou que obtenha os parâmetros das distribuições por
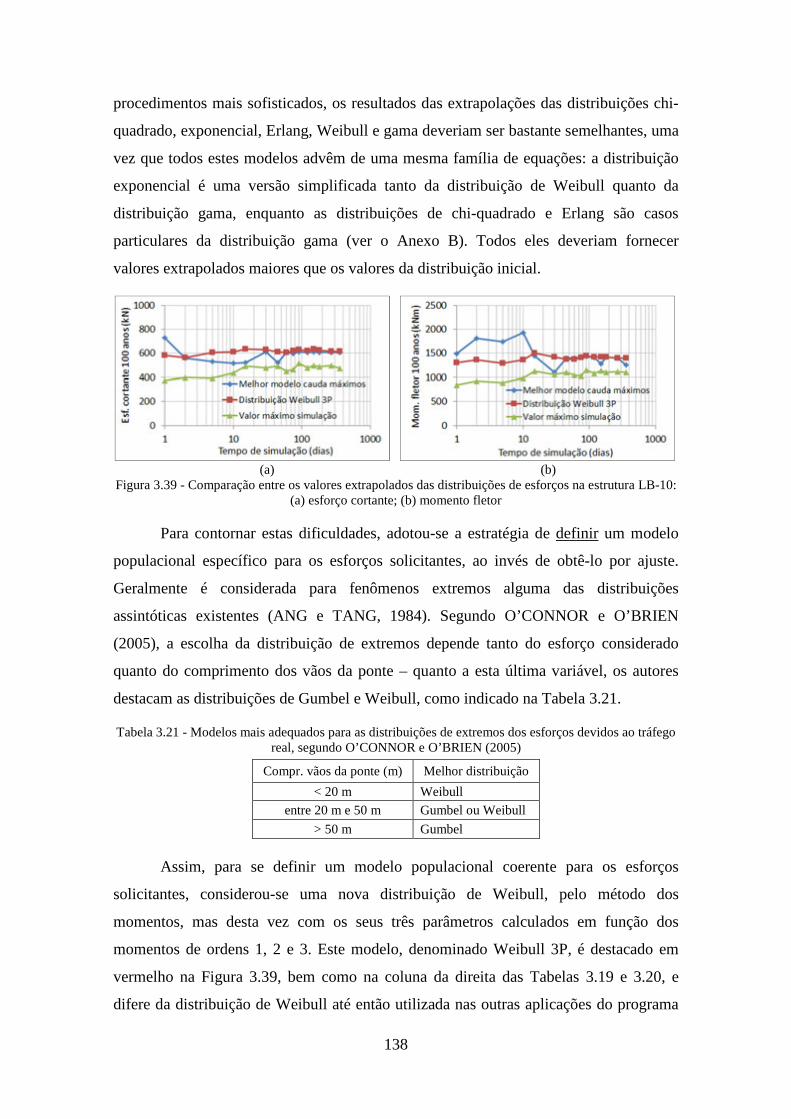
138
procedimentos mais sofisticados, os resultados das extrapolações das distribuições chi-
quadrado, exponencial, Erlang, Weibull e gama deveriam ser bastante semelhantes, uma
vez que todos estes modelos advêm de uma mesma família de equações: a distribuição
exponencial é uma versão simplificada tanto da distribuição de Weibull quanto da
distribuição gama, enquanto as distribuições de chi-quadrado e Erlang são casos
particulares da distribuição gama (ver o Anexo B). Todos eles deveriam fornecer
valores extrapolados maiores que os valores da distribuição inicial.
(a) (b) Figura 3.39 - Comparação entre os valores extrapolados das distribuições de esforços na estrutura LB-10:
(a) esforço cortante; (b) momento fletor
Para contornar estas dificuldades, adotou-se a estratégia de definir um modelo
populacional específico para os esforços solicitantes, ao invés de obtê-lo por ajuste.
Geralmente é considerada para fenômenos extremos alguma das distribuições
assintóticas existentes (ANG e TANG, 1984). Segundo O’CONNOR e O’BRIEN
(2005), a escolha da distribuição de extremos depende tanto do esforço considerado
quanto do comprimento dos vãos da ponte – quanto a esta última variável, os autores
destacam as distribuições de Gumbel e Weibull, como indicado na Tabela 3.21.
Tabela 3.21 - Modelos mais adequados para as distribuições de extremos dos esforços devidos ao tráfego real, segundo O’CONNOR e O’BRIEN (2005)
Compr. vãos da ponte (m) Melhor distribuição
< 20 m Weibull
entre 20 m e 50 m Gumbel ou Weibull
> 50 m Gumbel
Assim, para se definir um modelo populacional coerente para os esforços
solicitantes, considerou-se uma nova distribuição de Weibull, pelo método dos
momentos, mas desta vez com os seus três parâmetros calculados em função dos
momentos de ordens 1, 2 e 3. Este modelo, denominado Weibull 3P, é destacado em
vermelho na Figura 3.39, bem como na coluna da direita das Tabelas 3.19 e 3.20, e
difere da distribuição de Weibull até então utilizada nas outras aplicações do programa
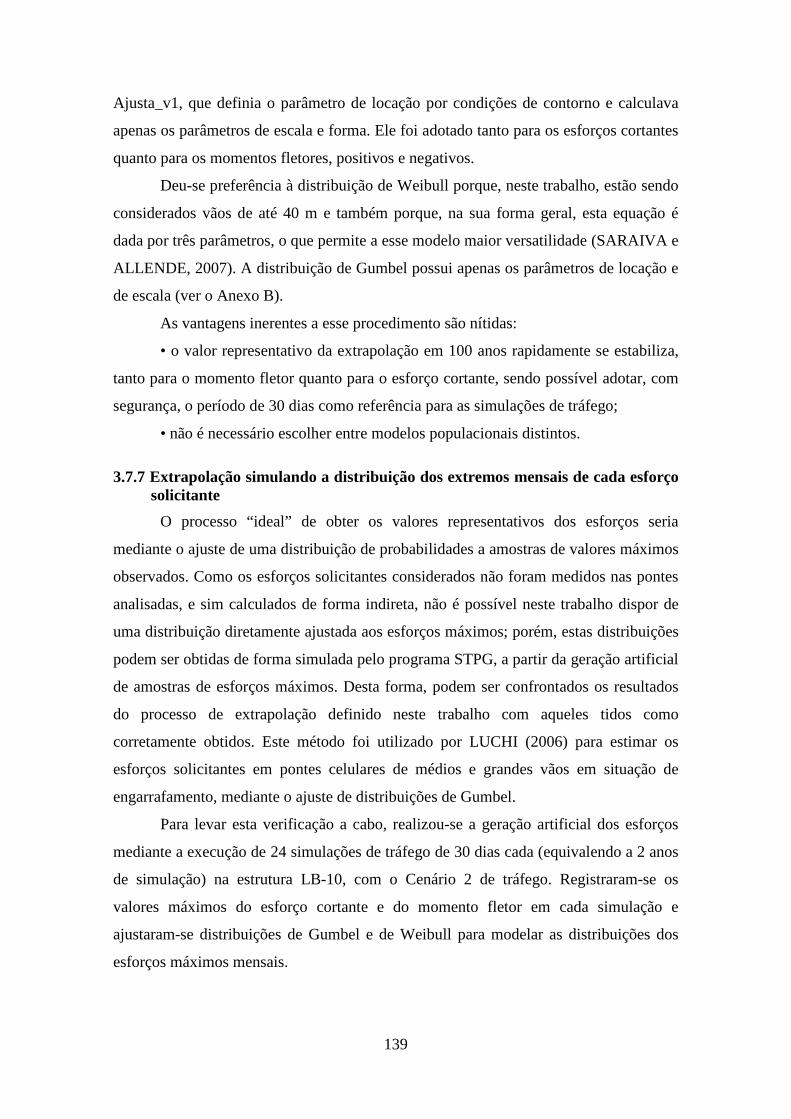
139
Ajusta_v1, que definia o parâmetro de locação por condições de contorno e calculava
apenas os parâmetros de escala e forma. Ele foi adotado tanto para os esforços cortantes
quanto para os momentos fletores, positivos e negativos.
Deu-se preferência à distribuição de Weibull porque, neste trabalho, estão sendo
considerados vãos de até 40 m e também porque, na sua forma geral, esta equação é
dada por três parâmetros, o que permite a esse modelo maior versatilidade (SARAIVA e
ALLENDE, 2007). A distribuição de Gumbel possui apenas os parâmetros de locação e
de escala (ver o Anexo B).
As vantagens inerentes a esse procedimento são nítidas:
• o valor representativo da extrapolação em 100 anos rapidamente se estabiliza,
tanto para o momento fletor quanto para o esforço cortante, sendo possível adotar, com
segurança, o período de 30 dias como referência para as simulações de tráfego;
• não é necessário escolher entre modelos populacionais distintos.
3.7.7 Extrapolação simulando a distribuição dos extremos mensais de cada esforço solicitante
O processo “ideal” de obter os valores representativos dos esforços seria
mediante o ajuste de uma distribuição de probabilidades a amostras de valores máximos
observados. Como os esforços solicitantes considerados não foram medidos nas pontes
analisadas, e sim calculados de forma indireta, não é possível neste trabalho dispor de
uma distribuição diretamente ajustada aos esforços máximos; porém, estas distribuições
podem ser obtidas de forma simulada pelo programa STPG, a partir da geração artificial
de amostras de esforços máximos. Desta forma, podem ser confrontados os resultados
do processo de extrapolação definido neste trabalho com aqueles tidos como
corretamente obtidos. Este método foi utilizado por LUCHI (2006) para estimar os
esforços solicitantes em pontes celulares de médios e grandes vãos em situação de
engarrafamento, mediante o ajuste de distribuições de Gumbel.
Para levar esta verificação a cabo, realizou-se a geração artificial dos esforços
mediante a execução de 24 simulações de tráfego de 30 dias cada (equivalendo a 2 anos
de simulação) na estrutura LB-10, com o Cenário 2 de tráfego. Registraram-se os
valores máximos do esforço cortante e do momento fletor em cada simulação e
ajustaram-se distribuições de Gumbel e de Weibull para modelar as distribuições dos
esforços máximos mensais.
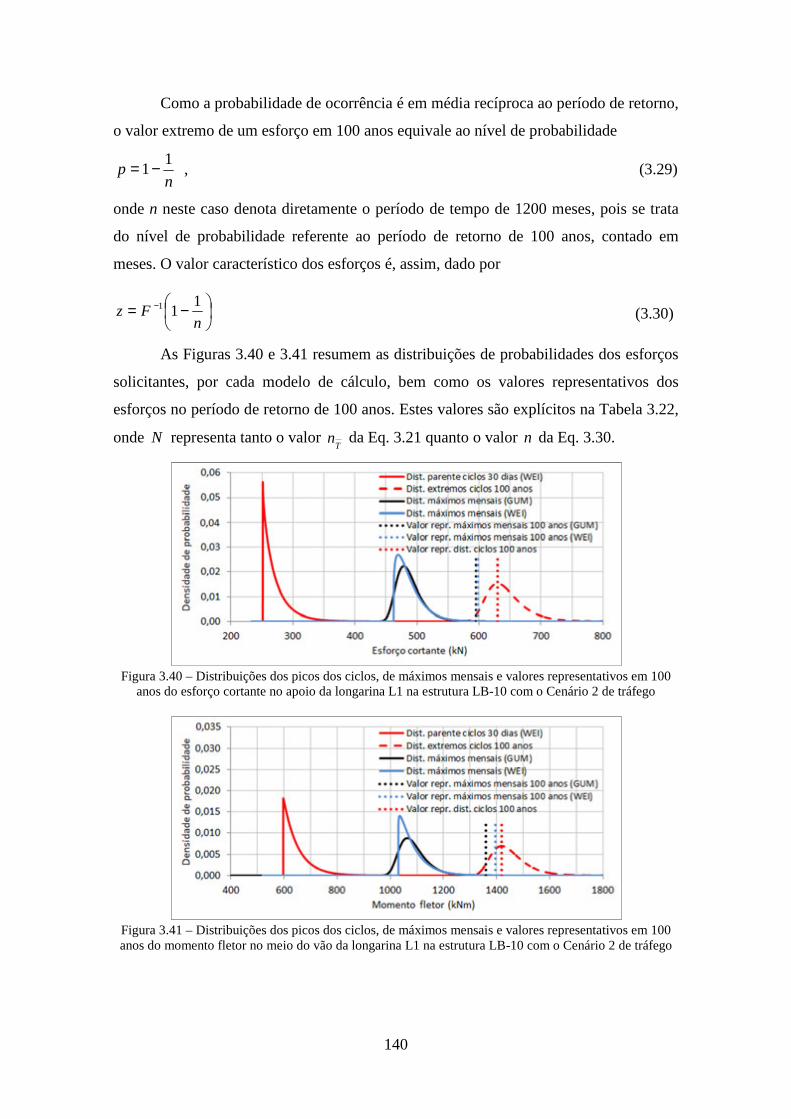
140
Como a probabilidade de ocorrência é em média recíproca ao período de retorno,
o valor extremo de um esforço em 100 anos equivale ao nível de probabilidade
np
11−= , (3.29)
onde n neste caso denota diretamente o período de tempo de 1200 meses, pois se trata
do nível de probabilidade referente ao período de retorno de 100 anos, contado em
meses. O valor característico dos esforços é, assim, dado por
−= −
nFz
111 (3.30)
As Figuras 3.40 e 3.41 resumem as distribuições de probabilidades dos esforços
solicitantes, por cada modelo de cálculo, bem como os valores representativos dos
esforços no período de retorno de 100 anos. Estes valores são explícitos na Tabela 3.22,
onde N representa tanto o valor T
n da Eq. 3.21 quanto o valor n da Eq. 3.30.
Figura 3.40 – Distribuições dos picos dos ciclos, de máximos mensais e valores representativos em 100
anos do esforço cortante no apoio da longarina L1 na estrutura LB-10 com o Cenário 2 de tráfego
Figura 3.41 – Distribuições dos picos dos ciclos, de máximos mensais e valores representativos em 100 anos do momento fletor no meio do vão da longarina L1 na estrutura LB-10 com o Cenário 2 de tráfego

141
Tabela 3.22 – Valores representativos no período de retorno de 100 anos das distribuições dos picos dos ciclos e dos máximos mensais dos esforços
Grandeza Distribuição Modelo adotado
N
−−
NF
111
Esforço cortante
Picos ciclos (> 250 kN) Weibull 710185,1 × 630,1 kN
Máximos mensais Weibull
1200 598,0 kN
Gumbel 595,4 kN
Momento fletor
Picos ciclos (> 600 kNm) Weibull 610227,5 × 1419 kNm
Máximos mensais Weibull
1200 1395 kNm
Gumbel 1359 kNm
As diferenças relativas entre o valor da extrapolação do método de cálculo
adotado neste trabalho em relação ao método de simular as amostras máximas mensais
são mostradas na Tabela 3.23.
Tabela 3.23 – Diferença percentual do valor extrapolado em 100 anos da distribuição dos picos dos ciclos dos esforços em relação aos valores extrapolados segundo as distribuições de máximos mensais
Grandeza Diferenças em relação ao modelo
de distr. máximos mensais Weibull Gumbel
Esforço cortante 5,4% 5,8% Momento fletor 1,7% 4,4%
Devido aos pequenos valores das diferenças percentuais dos esforços
extrapolados em 100 anos em relação a ambos os modelos considerados para as
distribuições dos máximos mensais, pode-se considerar que o método de extrapolação
utilizado neste trabalho é válido – a vantagem inerente à sua adoção reside no fato de
que não é necessário gerar artificialmente uma série de valores extremos, o que
demanda grande esforço computacional. A desvantagem é a geração de um erro no
cálculo do valor característico.
Uma questão importante a respeito das extrapolações concerne à limitação nos
valores dos esforços. Como em ambas as situações estudadas (tanto o método
considerado para verificação, que é a simulação da distribuição dos extremos mensais,
quanto o método efetivamente utilizado, que é a extrapolação “direta”) as extrapolações
foram efetuadas diretamente para os esforços solicitantes, deveria ser verificado se é
possível existir, de fato, alguma combinação de veículos pesados que possa
efetivamente gerar os esforços solicitantes extrapolados, já que, como estes têm os
pesos totais limitados fisicamente à capacidade de carga dos eixos e dos pneus, cada
veículo apresenta um limiar intrínseco no valor dos esforços solicitantes que pode gerar
nas estruturas. Isto se torna relevante porque tanto a distribuição de Weibull quanto a de
Gumbel, utilizadas para as extrapolações, são ilimitadas superiormente.
142
Com a vasta gama de classes possíveis de veículos, e ainda com as inúmeras
possibilidades de pesos totais e de distâncias entre eixos, seria extremamente
dispendioso realizar uma varredura nas situações potencialmente críticas em cada
esforço solicitante monitorado de cada estrutura para realizar este tipo de verificação,
especialmente nas estruturas de maiores vãos, onde é possível a presença simultânea de
veículos numa mesma faixa de tráfego.
Esta situação foi parcialmente contornada neste trabalho com a adoção dos
limites no peso total dos veículos, constantes na Tabela 2.19, por ocasião das
simulações de tráfego. Estes limites foram tomados com valores numericamente
inferiores às cargas axiais extremas encontradas nos registros das bases de dados (Seção
2.6.5). A estabilização dos valores característicos dos esforços solicitantes num período
de retorno de 100 anos, verificada com as simulações de tráfego levadas a efeito em
períodos maiores ou iguais a 30 dias, tal como mostrado nas Tabelas 3.19 e 3.20, ajuda
a tornar confiáveis os valores obtidos nas extrapolações, já que até o período máximo
considerado nas simulações, de 360 dias, não foi observado o decréscimo dos valores
extrapolados dos esforços, mostrados em vermelho nas Figuras 3.40 e 3.41, com o
aumento do período de referência da simulação de tráfego.
3.8 Valores extrapolados dos esforços solicitantes estáticos obtidos com o programa STPG
Com a validação da ferramenta computacional STPG no tocante à geração de
valores aleatórios e à análise estrutural, com valores definidos para todas as variáveis e
com o método de extrapolação definido e testado, pode-se, enfim, executar este
simulador para obter os histogramas dos esforços solicitantes nas diversas estruturas e
nos vários cenários de tráfego considerados. A estes histogramas são ajustadas
distribuições de Weibull 3P, que são extrapoladas aos períodos de retorno considerados
em cada cenário, de forma a se obterem os seus valores representativos, necessários ao
estabelecimento dos valores-alvo para a determinação dos modelos de cargas móveis. O
Cenário 1 de tráfego foi considerado apenas para as simulações nas estruturas EB-10 e
LB-10. O Cenário 2, a ele equivalente nos aspectos de volume e sentido de tráfego, e
referenciado ao mesmo período de retorno (100 anos), leva a extrapolações com valores
representativos consideravelmente maiores, uma vez que ele considera os veículos em
sua totalidade nas posições transversais mais desfavoráveis à longarina L1.

143
Tabela 3.24 – Valores extrapolados do esforço cortante no apoio da longarina L1 para as estruturas EB (biapoiadas com tabuleiro estreito)
Vão (m) Esforço cortante (kN)
CEN1 CEN2 CEN3 CEN4 CEN5 10 481,0 552,3 511,6 580,9 522,7 20 - 637,7 663,4 665,7 596,6 30 - 746,0 728,9 731,6 695,3 40 - 796,1 771,3 750,2 728,3
Tabela 3.25 – Valores extrapolados do momento fletor positivo no meio do vão da longarina L1 para as estruturas EB (biapoiadas com tabuleiro estreito)
Vão (m) Momento fletor positivo (kN)
CEN1 CEN2 CEN3 CEN4 CEN5 10 1060 1125 1122 1169 1077 20 - 2947 3147 2985 2687 30 - 5324 5212 4909 4881 40 - 7462 7449 6557 6770
Tabela 3.26 – Valores extrapolados do momento fletor positivo no tramo da longarina L1 para as estruturas EC (contínuas de dois vãos com tabuleiro estreito)
Tramo (m) Momento fletor positivo (kNm)
CEN2 CEN3 CEN4 CEN5 10 956,4 873,0 922,7 864,0 20 2371 2262 2220 2147 30 3999 4212 3747 3543 40 6010 6075 5450 5321
Tabela 3.27 – Valores extrapolados do esforço cortante no apoio central da longarina L1 para as
estruturas EC (contínuas de dois vãos com tabuleiro estreito)
Tramo (m) Esforço cortante (kN)
CEN2 CEN3 CEN4 CEN5 10 562,6 515,1 567,0 517,7 20 695,2 643,7 630,1 630,0 30 737,8 734,8 698,3 671,5 40 832,9 834,4 801,9 768,9
Tabela 3.28 – Valores extrapolados do momento fletor negativo no apoio central da longarina L1 para as estruturas EC (contínuas de dois vãos com tabuleiro estreito)
Tramo (m) Momento fletor negativo (kNm)
CEN2 CEN3 CEN4 CEN5 10 711,7 708,8 706,7 661,0 20 1971 1870 1909 1811 30 2797 2781 2943 2741 40 5011 4468 5181 5036
Tabela 3.29 – Valores extrapolados do momento fletor negativo na extremidade livre da longarina L1 para as estruturas EE (engastadas e livres com tabuleiro estreito)
Vão (m) Momento fletor negativo (kNm)
CEN2 CEN3 CEN4 CEN5 2,5 775,9 708,9 762,4 708,5 5,0 2120 2042 2154 1924 7,5 3564 3212 3489 3184 10 5065 4841 4898 4531
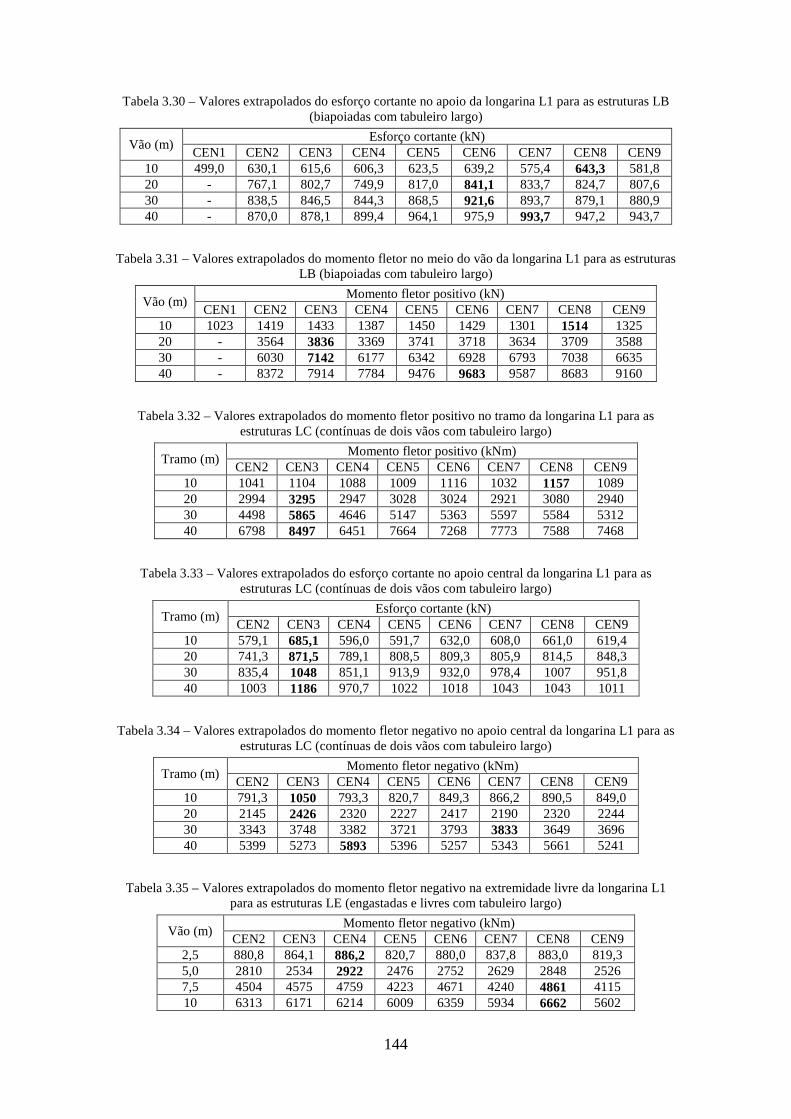
144
Tabela 3.30 – Valores extrapolados do esforço cortante no apoio da longarina L1 para as estruturas LB (biapoiadas com tabuleiro largo)
Vão (m) Esforço cortante (kN)
CEN1 CEN2 CEN3 CEN4 CEN5 CEN6 CEN7 CEN8 CEN9 10 499,0 630,1 615,6 606,3 623,5 639,2 575,4 643,3 581,8 20 - 767,1 802,7 749,9 817,0 841,1 833,7 824,7 807,6 30 - 838,5 846,5 844,3 868,5 921,6 893,7 879,1 880,9 40 - 870,0 878,1 899,4 964,1 975,9 993,7 947,2 943,7
Tabela 3.31 – Valores extrapolados do momento fletor no meio do vão da longarina L1 para as estruturas LB (biapoiadas com tabuleiro largo)
Vão (m) Momento fletor positivo (kN)
CEN1 CEN2 CEN3 CEN4 CEN5 CEN6 CEN7 CEN8 CEN9 10 1023 1419 1433 1387 1450 1429 1301 1514 1325 20 - 3564 3836 3369 3741 3718 3634 3709 3588 30 - 6030 7142 6177 6342 6928 6793 7038 6635 40 - 8372 7914 7784 9476 9683 9587 8683 9160
Tabela 3.32 – Valores extrapolados do momento fletor positivo no tramo da longarina L1 para as estruturas LC (contínuas de dois vãos com tabuleiro largo)
Tramo (m) Momento fletor positivo (kNm)
CEN2 CEN3 CEN4 CEN5 CEN6 CEN7 CEN8 CEN9 10 1041 1104 1088 1009 1116 1032 1157 1089 20 2994 3295 2947 3028 3024 2921 3080 2940 30 4498 5865 4646 5147 5363 5597 5584 5312 40 6798 8497 6451 7664 7268 7773 7588 7468
Tabela 3.33 – Valores extrapolados do esforço cortante no apoio central da longarina L1 para as estruturas LC (contínuas de dois vãos com tabuleiro largo)
Tramo (m) Esforço cortante (kN)
CEN2 CEN3 CEN4 CEN5 CEN6 CEN7 CEN8 CEN9 10 579,1 685,1 596,0 591,7 632,0 608,0 661,0 619,4 20 741,3 871,5 789,1 808,5 809,3 805,9 814,5 848,3 30 835,4 1048 851,1 913,9 932,0 978,4 1007 951,8 40 1003 1186 970,7 1022 1018 1043 1043 1011
Tabela 3.34 – Valores extrapolados do momento fletor negativo no apoio central da longarina L1 para as estruturas LC (contínuas de dois vãos com tabuleiro largo)
Tramo (m) Momento fletor negativo (kNm)
CEN2 CEN3 CEN4 CEN5 CEN6 CEN7 CEN8 CEN9 10 791,3 1050 793,3 820,7 849,3 866,2 890,5 849,0 20 2145 2426 2320 2227 2417 2190 2320 2244 30 3343 3748 3382 3721 3793 3833 3649 3696 40 5399 5273 5893 5396 5257 5343 5661 5241
Tabela 3.35 – Valores extrapolados do momento fletor negativo na extremidade livre da longarina L1 para as estruturas LE (engastadas e livres com tabuleiro largo)
Vão (m) Momento fletor negativo (kNm)
CEN2 CEN3 CEN4 CEN5 CEN6 CEN7 CEN8 CEN9 2,5 880,8 864,1 886,2 820,7 880,0 837,8 883,0 819,3 5,0 2810 2534 2922 2476 2752 2629 2848 2526 7,5 4504 4575 4759 4223 4671 4240 4861 4115 10 6313 6171 6214 6009 6359 5934 6662 5602
145
As Tabelas 3.24 a 3.35 mostram os valores extrapolados dos esforços
solicitantes em cada cenário, referentes ao período de retorno indicado na Tabela 3.10.
Os valores destacados são referentes à maior solicitação extrapolada em cada estrutura.
Pode-se notar que a consideração de períodos de retorno menores para as situações de
tráfego provisórias (Cenários 3, 5, 7 e 9) acaba por não definir uma única situação de
tráfego predominantemente desfavorável. Existem solicitações máximas pertencentes a
quase todas as representações – apenas os Cenários 5 e 9 não geram as maiores
extrapolações. Para o tabuleiro estreito, os Cenários 2 e 4 são os mais frequentes,
enquanto para o tabuleiro largo o Cenário 3 fornece os maiores valores dos esforços
estáticos característicos em 11 vezes num total de 24.
Os valores mostrados nas Tabelas 3.24 a 3.35 se referem à extrapolação pelo
nível de probabilidade segundo distribuições de Weibull ajustadas pelo método dos
momentos considerando momentos de até a terceira ordem (a assimetria). Os valores
estáticos característicos obtidos são consideravelmente maiores que aqueles encontrados
pela formulação anterior (ROSSIGALI, 2006). A análise destes valores é realizada no
Capítulo 4, após a obtenção da contribuição dinâmica para a definição dos valores-alvo
definitivos para os esforços solicitantes.
As Tabelas 3.36 e 3.37 detalham, para os cenários de tráfego que geraram os
maiores valores extrapolados de esforços, as configurações que obtiveram os maiores
esforços solicitantes estáticos. Estas configurações devem ser reavaliadas
dinamicamente para a obtenção do fator de amplificação dinâmica (FAD) de cada
esforço em cada estrutura, como comentado na Seção 4.4. De forma geral, observa-se
que em vãos curtos, de até 10 metros, predominam as ações dos grupos de eixos tandem
triplo dos veículos 2S3-C e 3S3-L. À medida que o vão de cada sistema estrutural
aumenta, incrementa-se a probabilidade de os veículos maiores e mais pesados, como os
das classes 3T4, 3T6 e 3M6, trafegarem nas pontes com todos os eixos
simultaneamente, solicitando a longarina L1 em vários locais diferentes.
De todas as situações de tráfego mostradas nas Tabelas 3.36 e 3.37, em 5 casos
houve presença simultânea de veículos em uma mesma faixa de tráfego. Resume-se o
total de veículos de cada classe que aparecem nas solicitações mais pronunciadas na
Tabela 3.38.
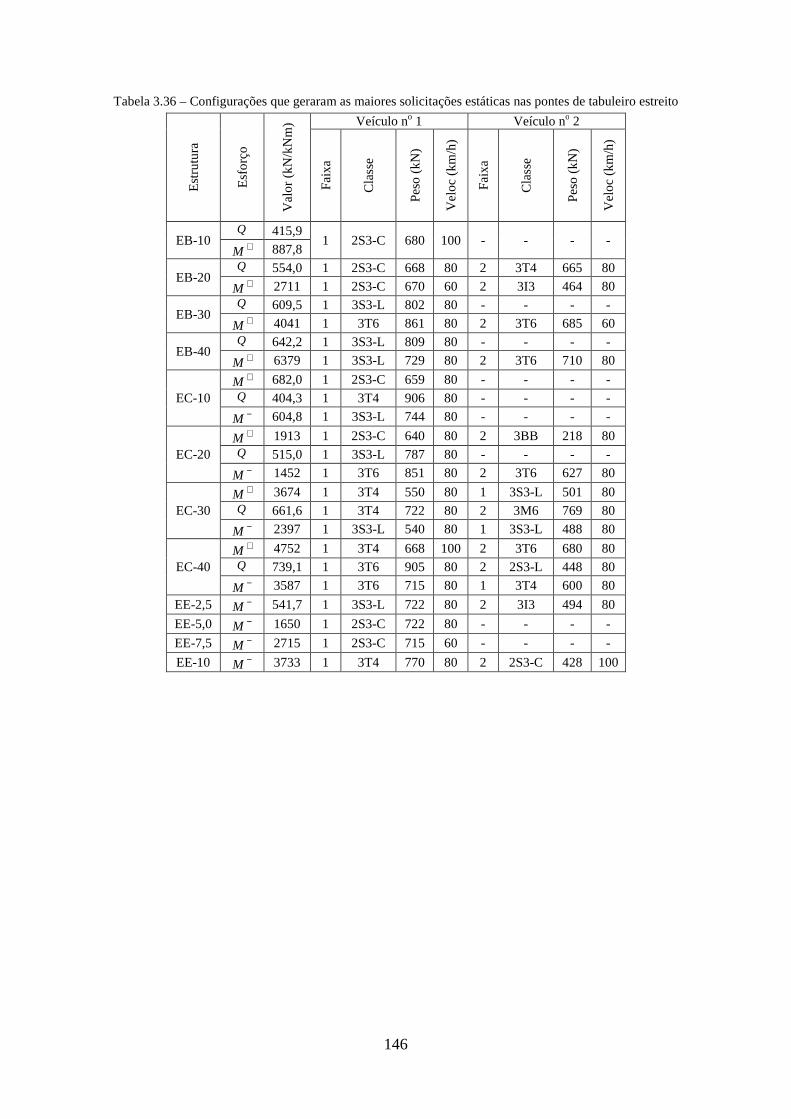
146
Tabela 3.36 – Configurações que geraram as maiores solicitações estáticas nas pontes de tabuleiro estreito
Est
rutu
ra
Esf
orç
o
Val
or
(kN
/kN
m) Veículo no 1 Veículo no 2
Fai
xa
Cla
sse
Pes
o (
kN)
Vel
oc
(km
/h)
Fai
xa
Cla
sse
Pes
o (
kN)
Vel
oc
(km
/h)
EB-10 Q 415,9
1 2S3-C 680 100 - - - - +M 887,8
EB-20 Q 554,0 1 2S3-C 668 80 2 3T4 665 80
+M 2711 1 2S3-C 670 60 2 3I3 464 80
EB-30 Q 609,5 1 3S3-L 802 80 - - - -
+M 4041 1 3T6 861 80 2 3T6 685 60
EB-40 Q 642,2 1 3S3-L 809 80 - - - -
+M 6379 1 3S3-L 729 80 2 3T6 710 80
EC-10
+M 682,0 1 2S3-C 659 80 - - - - Q 404,3 1 3T4 906 80 - - - -
−M 604,8 1 3S3-L 744 80 - - - -
EC-20
+M 1913 1 2S3-C 640 80 2 3BB 218 80 Q 515,0 1 3S3-L 787 80 - - - -
−M 1452 1 3T6 851 80 2 3T6 627 80
EC-30
+M 3674 1 3T4 550 80 1 3S3-L 501 80 Q 661,6 1 3T4 722 80 2 3M6 769 80
−M 2397 1 3S3-L 540 80 1 3S3-L 488 80
EC-40
+M 4752 1 3T4 668 100 2 3T6 680 80 Q 739,1 1 3T6 905 80 2 2S3-L 448 80
−M 3587 1 3T6 715 80 1 3T4 600 80
EE-2,5 −M 541,7 1 3S3-L 722 80 2 3I3 494 80
EE-5,0 −M 1650 1 2S3-C 722 80 - - - -
EE-7,5 −M 2715 1 2S3-C 715 60 - - - -
EE-10 −M 3733 1 3T4 770 80 2 2S3-C 428 100
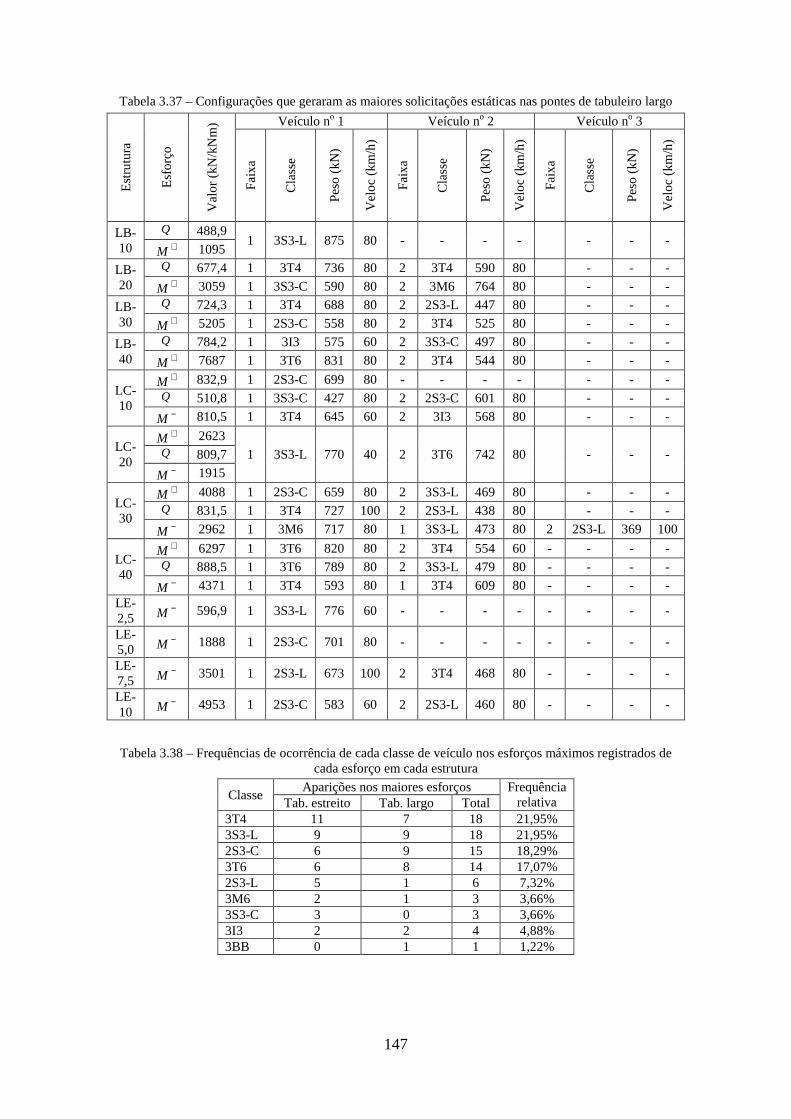
147
Tabela 3.37 – Configurações que geraram as maiores solicitações estáticas nas pontes de tabuleiro largo
Est
rutu
ra
Esf
orç
o
Val
or
(kN
/kN
m) Veículo no 1 Veículo no 2 Veículo no 3
Fai
xa
Cla
sse
Pes
o (
kN)
Vel
oc
(km
/h)
Fai
xa
Cla
sse
Pes
o (
kN)
Vel
oc
(km
/h)
Fai
xa
Cla
sse
Pes
o (
kN)
Vel
oc
(km
/h)
LB-10
Q 488,9 1 3S3-L 875 80 - - - - - - - +M 1095
LB-20
Q 677,4 1 3T4 736 80 2 3T4 590 80 - - - +M 3059 1 3S3-C 590 80 2 3M6 764 80 - - -
LB-30
Q 724,3 1 3T4 688 80 2 2S3-L 447 80 - - - +M 5205 1 2S3-C 558 80 2 3T4 525 80 - - -
LB-40
Q 784,2 1 3I3 575 60 2 3S3-C 497 80 - - - +M 7687 1 3T6 831 80 2 3T4 544 80 - - -
LC-10
+M 832,9 1 2S3-C 699 80 - - - - - - - Q 510,8 1 3S3-C 427 80 2 2S3-C 601 80 - - -
−M 810,5 1 3T4 645 60 2 3I3 568 80 - - -
LC-20
+M 2623
1 3S3-L 770 40 2 3T6 742 80 - - - Q 809,7 −M 1915
LC-30
+M 4088 1 2S3-C 659 80 2 3S3-L 469 80 - - - Q 831,5 1 3T4 727 100 2 2S3-L 438 80 - - -
−M 2962 1 3M6 717 80 1 3S3-L 473 80 2 2S3-L 369 100
LC-40
+M 6297 1 3T6 820 80 2 3T4 554 60 - - - - Q 888,5 1 3T6 789 80 2 3S3-L 479 80 - - - -
−M 4371 1 3T4 593 80 1 3T4 609 80 - - - - LE-2,5
−M 596,9 1 3S3-L 776 60 - - - - - - - -
LE-5,0
−M 1888 1 2S3-C 701 80 - - - - - - - -
LE-7,5
−M 3501 1 2S3-L 673 100 2 3T4 468 80 - - - -
LE-10
−M 4953 1 2S3-C 583 60 2 2S3-L 460 80 - - - -
Tabela 3.38 – Frequências de ocorrência de cada classe de veículo nos esforços máximos registrados de cada esforço em cada estrutura
Classe Aparições nos maiores esforços Frequência
relativa Tab. estreito Tab. largo Total 3T4 11 7 18 21,95% 3S3-L 9 9 18 21,95% 2S3-C 6 9 15 18,29% 3T6 6 8 14 17,07% 2S3-L 5 1 6 7,32% 3M6 2 1 3 3,66% 3S3-C 3 0 3 3,66% 3I3 2 2 4 4,88% 3BB 0 1 1 1,22%
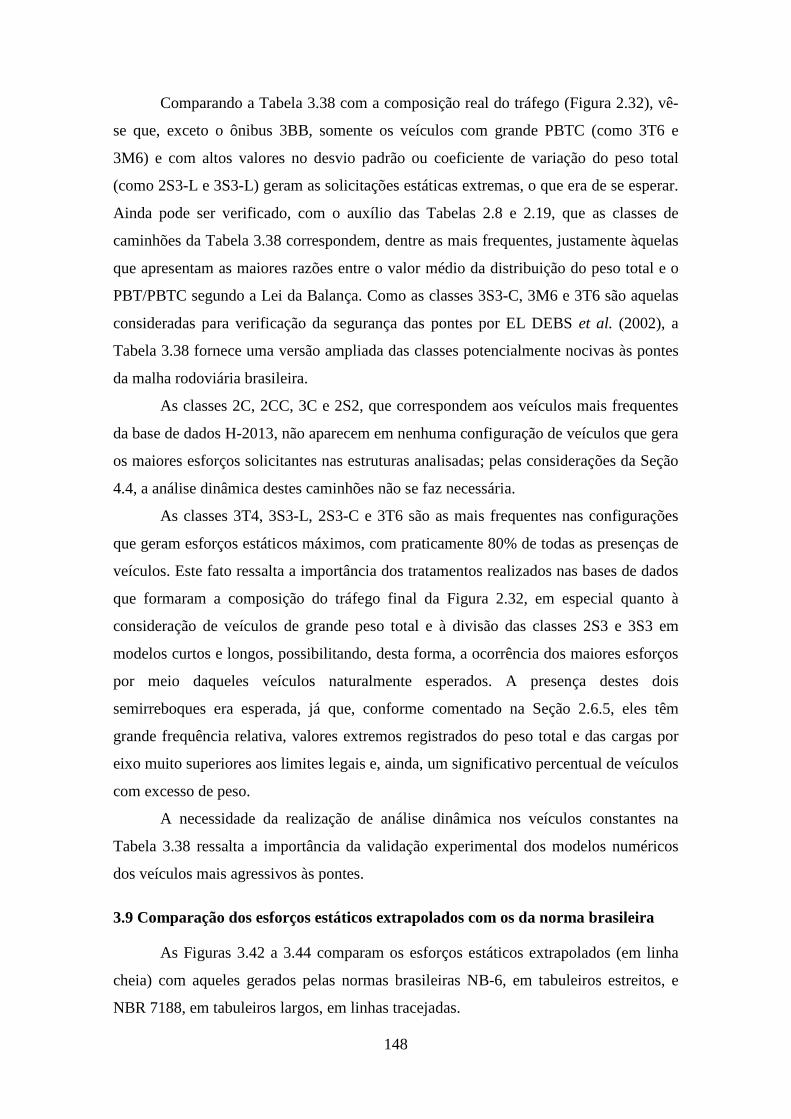
148
Comparando a Tabela 3.38 com a composição real do tráfego (Figura 2.32), vê-
se que, exceto o ônibus 3BB, somente os veículos com grande PBTC (como 3T6 e
3M6) e com altos valores no desvio padrão ou coeficiente de variação do peso total
(como 2S3-L e 3S3-L) geram as solicitações estáticas extremas, o que era de se esperar.
Ainda pode ser verificado, com o auxílio das Tabelas 2.8 e 2.19, que as classes de
caminhões da Tabela 3.38 correspondem, dentre as mais frequentes, justamente àquelas
que apresentam as maiores razões entre o valor médio da distribuição do peso total e o
PBT/PBTC segundo a Lei da Balança. Como as classes 3S3-C, 3M6 e 3T6 são aquelas
consideradas para verificação da segurança das pontes por EL DEBS et al. (2002), a
Tabela 3.38 fornece uma versão ampliada das classes potencialmente nocivas às pontes
da malha rodoviária brasileira.
As classes 2C, 2CC, 3C e 2S2, que correspondem aos veículos mais frequentes
da base de dados H-2013, não aparecem em nenhuma configuração de veículos que gera
os maiores esforços solicitantes nas estruturas analisadas; pelas considerações da Seção
4.4, a análise dinâmica destes caminhões não se faz necessária.
As classes 3T4, 3S3-L, 2S3-C e 3T6 são as mais frequentes nas configurações
que geram esforços estáticos máximos, com praticamente 80% de todas as presenças de
veículos. Este fato ressalta a importância dos tratamentos realizados nas bases de dados
que formaram a composição do tráfego final da Figura 2.32, em especial quanto à
consideração de veículos de grande peso total e à divisão das classes 2S3 e 3S3 em
modelos curtos e longos, possibilitando, desta forma, a ocorrência dos maiores esforços
por meio daqueles veículos naturalmente esperados. A presença destes dois
semirreboques era esperada, já que, conforme comentado na Seção 2.6.5, eles têm
grande frequência relativa, valores extremos registrados do peso total e das cargas por
eixo muito superiores aos limites legais e, ainda, um significativo percentual de veículos
com excesso de peso.
A necessidade da realização de análise dinâmica nos veículos constantes na
Tabela 3.38 ressalta a importância da validação experimental dos modelos numéricos
dos veículos mais agressivos às pontes.
3.9 Comparação dos esforços estáticos extrapolados com os da norma brasileira
As Figuras 3.42 a 3.44 comparam os esforços estáticos extrapolados (em linha
cheia) com aqueles gerados pelas normas brasileiras NB-6, em tabuleiros estreitos, e
NBR 7188, em tabuleiros largos, em linhas tracejadas.
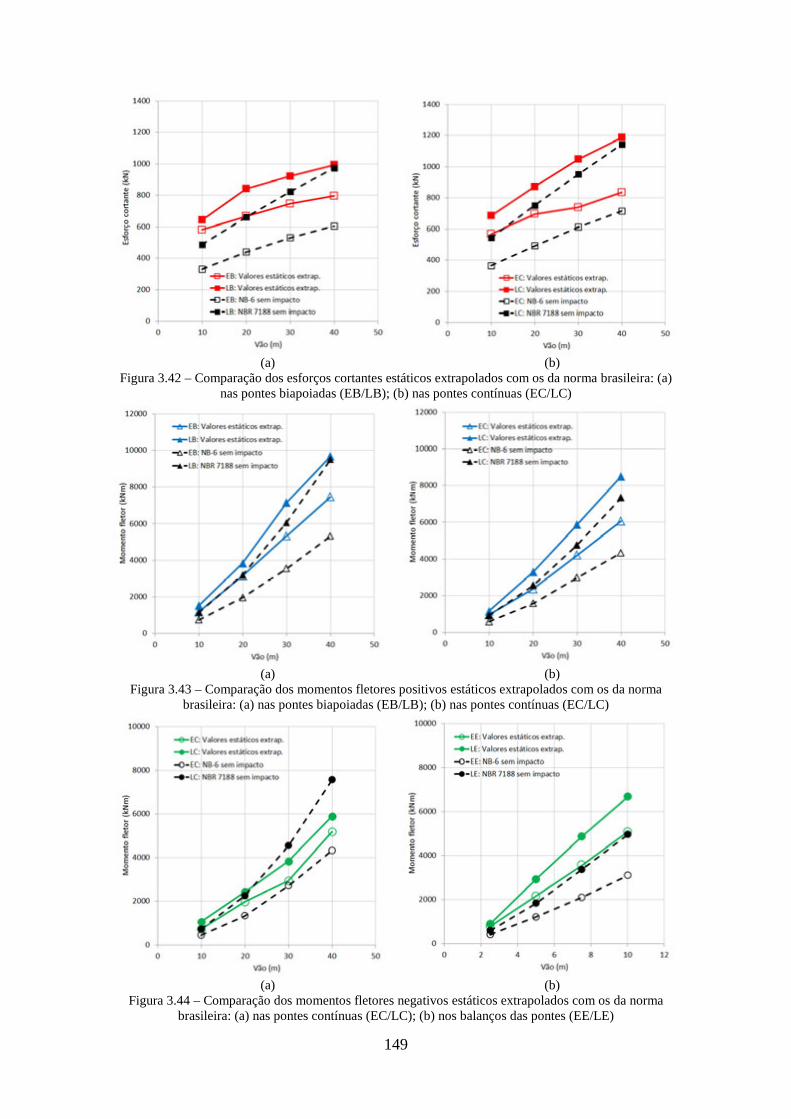
149
(a) (b) Figura 3.42 – Comparação dos esforços cortantes estáticos extrapolados com os da norma brasileira: (a)
nas pontes biapoiadas (EB/LB); (b) nas pontes contínuas (EC/LC)
(a) (b)
Figura 3.43 – Comparação dos momentos fletores positivos estáticos extrapolados com os da norma brasileira: (a) nas pontes biapoiadas (EB/LB); (b) nas pontes contínuas (EC/LC)
(a) (b)
Figura 3.44 – Comparação dos momentos fletores negativos estáticos extrapolados com os da norma brasileira: (a) nas pontes contínuas (EC/LC); (b) nos balanços das pontes (EE/LE)
150
Para comparar apenas as parcelas estáticas, não se considerou o coeficiente de
impacto da NBR 7187, mostrado na Eq. 1.3.
Analisando estas figuras, pode-se notar que as extrapolações dos esforços
solicitantes estáticos conduziram a valores característicos maiores que os carregamentos
estáticos dos modelos de cargas das normas brasileiras, especialmente nos esforços
cortantes e nos momentos fletores negativos dos balanços; exceção é feita para os
momentos fletores negativos das estruturas contínuas de tabuleiro largo (LC), onde, nos
vãos de 30 m e 40 m, o carregamento de projeto da Classe 45 superou as extrapolações.
As diferenças entre os esforços gerados pelas normas brasileiras e os valores-
alvo confirmam a hipótese de que os modelos de cargas de fato não representam
adequadamente as solicitações devidas ao tráfego real. A comparação dos valores-alvo
dos esforços solicitantes, incluídas as amplificações dinâmicas, com os carregamentos
da norma brasileira acrescidos do coeficiente de impacto ϕ da NB-2 e NBR 7187 é
efetuada no Capítulo 4.
151
4 Análise dinâmica das estruturas e valores-alvo dos esforços solicitantes devidos ao tráfego real
Para a análise dinâmica de uma ponte, é necessário descrever as equações de
interação entre os veículos, o pavimento e a sua estrutura flexível, devido à excitação
provocada pela passagem dos veículos. Para tal, levam-se em consideração as alterações
dos pontos de aplicação das cargas dos veículos ao longo do tempo, tal como nas
simulações de tráfego. Consideram-se, inicialmente, as mesmas estruturas em grelha,
tridimensionais, das análises estáticas, cujas características das discretizações em
elementos finitos são mostradas na Tabela 3.4.
Definido o modelo matemático, usam-se os princípios da Dinâmica e obtêm-se
as equações que governam a vibração do sistema. Elas podem ser obtidas a partir dos
diagramas de corpo livre (DCL) das massas: cada uma é isolada e nela são indicadas
todas as forças a ela aplicadas, contando as forças externas, as reativas e as de inércia.
4.1 Descrição do programa IVPE-v3
Para a consideração de forma automática da análise dinâmica da interação
veículo-pavimento-estrutura, foi utilizada neste trabalho ferramenta computacional
IVPE-v3, desenvolvida em linguagem Fortran®. A primeira versão deste programa,
denominada IVPE-U, foi utilizada por MELO (2007). Posteriormente, MENDONÇA
(2009) desenvolveu a segunda versão, IVPE-v2, realizando vários ajustes na versão
inicial. A versão v3 funciona de forma similar às duas anteriores, dividindo-se em duas
partes principais:
• a determinação das frequências naturais e das formas modais relacionadas
aos modelos tridimensionais que representam as pontes, por meio do método de Jacobi,
com a sugestão de modos de torção e de flexão relevantes para a análise dinâmica;
• a obtenção das respostas dinâmicas no tempo, quando um veículo trafega
sobre o pavimento rugoso de uma ponte flexível, solicitando-a e sofrendo,
simultaneamente, os efeitos da deformação da ponte.
Para a terceira versão deste programa, procedeu-se a uma revisão na versão v2,
quando se efetuaram correções nos seguintes itens:
- alguns termos das matrizes de massa, amortecimento e rigidez, bem como do
vetor de forças independentes do sistema mecânico que representa o veículo 3C;
- cálculo dos esforços solicitantes, dados a partir dos deslocamentos.
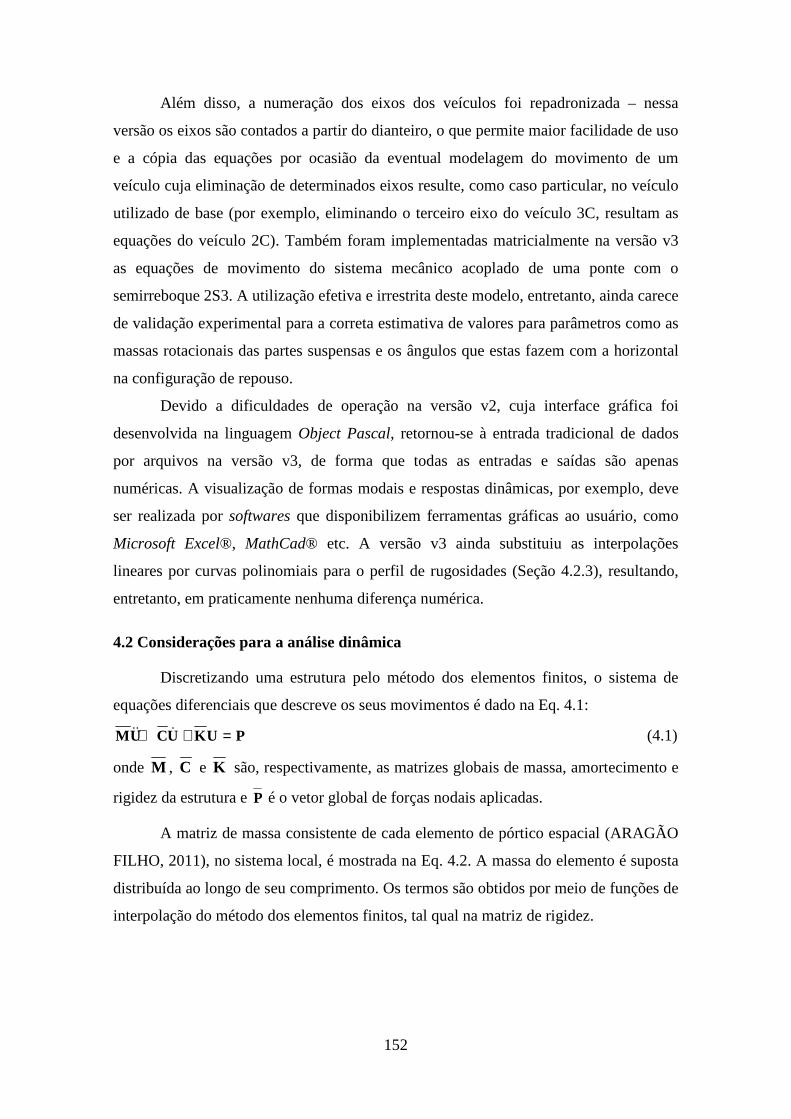
152
Além disso, a numeração dos eixos dos veículos foi repadronizada – nessa
versão os eixos são contados a partir do dianteiro, o que permite maior facilidade de uso
e a cópia das equações por ocasião da eventual modelagem do movimento de um
veículo cuja eliminação de determinados eixos resulte, como caso particular, no veículo
utilizado de base (por exemplo, eliminando o terceiro eixo do veículo 3C, resultam as
equações do veículo 2C). Também foram implementadas matricialmente na versão v3
as equações de movimento do sistema mecânico acoplado de uma ponte com o
semirreboque 2S3. A utilização efetiva e irrestrita deste modelo, entretanto, ainda carece
de validação experimental para a correta estimativa de valores para parâmetros como as
massas rotacionais das partes suspensas e os ângulos que estas fazem com a horizontal
na configuração de repouso.
Devido a dificuldades de operação na versão v2, cuja interface gráfica foi
desenvolvida na linguagem Object Pascal, retornou-se à entrada tradicional de dados
por arquivos na versão v3, de forma que todas as entradas e saídas são apenas
numéricas. A visualização de formas modais e respostas dinâmicas, por exemplo, deve
ser realizada por softwares que disponibilizem ferramentas gráficas ao usuário, como
Microsoft Excel®, MathCad® etc. A versão v3 ainda substituiu as interpolações
lineares por curvas polinomiais para o perfil de rugosidades (Seção 4.2.3), resultando,
entretanto, em praticamente nenhuma diferença numérica.
4.2 Considerações para a análise dinâmica
Discretizando uma estrutura pelo método dos elementos finitos, o sistema de
equações diferenciais que descreve os seus movimentos é dado na Eq. 4.1:
PUKUCUM =++ &&& (4.1)
onde M , C e K são, respectivamente, as matrizes globais de massa, amortecimento e
rigidez da estrutura e P é o vetor global de forças nodais aplicadas.
A matriz de massa consistente de cada elemento de pórtico espacial (ARAGÃO
FILHO, 2011), no sistema local, é mostrada na Eq. 4.2. A massa do elemento é suposta
distribuída ao longo de seu comprimento. Os termos são obtidos por meio de funções de
interpolação do método dos elementos finitos, tal qual na matriz de rigidez.
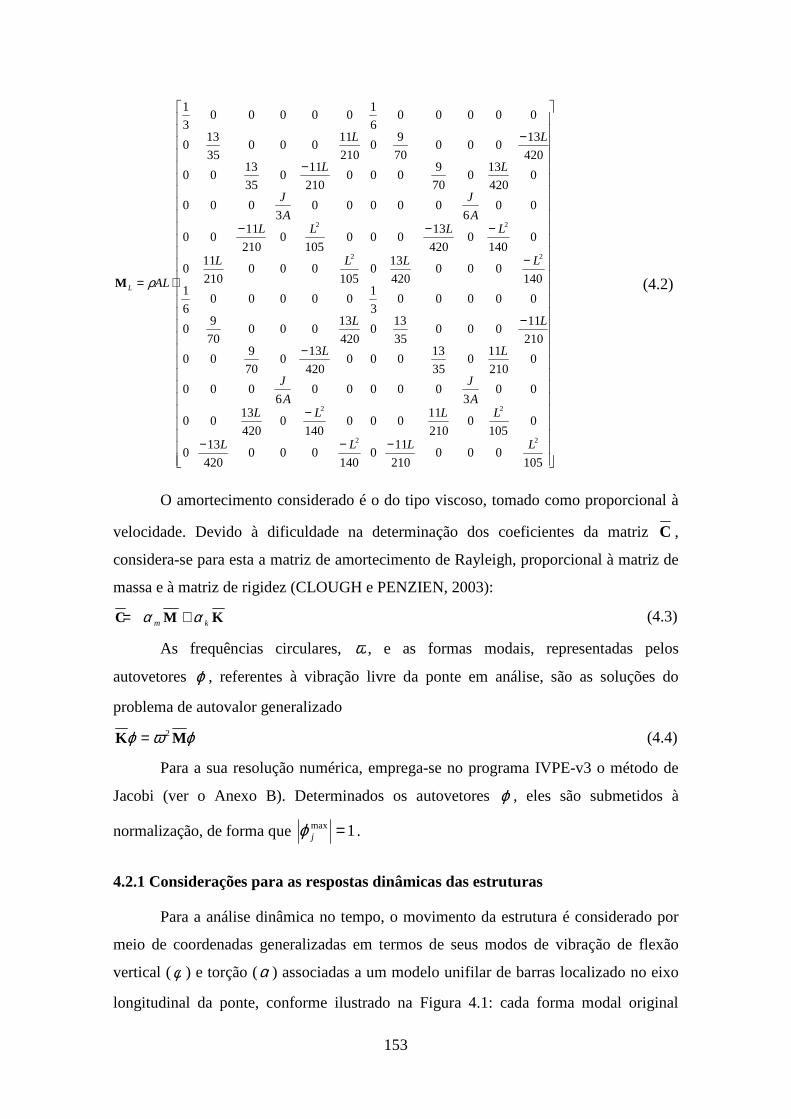
153
−−−
−
−
−
−
−−−
−
−
⋅=
105000
210
110
140000
420
130
0105
0210
11000
1400
420
1300
003
000006
000
0210
110
35
13000
420
130
70
900
210
11000
35
130
420
13000
70
90
000003
100000
6
1140
000420
130
105000
210
110
0140
0420
13000
1050
210
1100
006
000003
000
0420
130
70
9000
210
110
35
1300
420
13000
70
90
210
11000
35
130
000006
100000
3
1
22
22
22
22
LLLL
LLLLA
J
A
J
LL
LL
LLLL
LLLLA
J
A
J
LL
LL
ALL ρM
(4.2)
O amortecimento considerado é o do tipo viscoso, tomado como proporcional à
velocidade. Devido à dificuldade na determinação dos coeficientes da matriz C ,
considera-se para esta a matriz de amortecimento de Rayleigh, proporcional à matriz de
massa e à matriz de rigidez (CLOUGH e PENZIEN, 2003):
KMC km αα += (4.3)
As frequências circulares, ω , e as formas modais, representadas pelos
autovetores ϕ , referentes à vibração livre da ponte em análise, são as soluções do
problema de autovalor generalizado
ϕωϕ MK 2= (4.4)
Para a sua resolução numérica, emprega-se no programa IVPE-v3 o método de
Jacobi (ver o Anexo B). Determinados os autovetores ϕ , eles são submetidos à
normalização, de forma que 1max =jϕ .
4.2.1 Considerações para as respostas dinâmicas das estruturas
Para a análise dinâmica no tempo, o movimento da estrutura é considerado por
meio de coordenadas generalizadas em termos de seus modos de vibração de flexão
vertical (φ ) e torção (α ) associadas a um modelo unifilar de barras localizado no eixo
longitudinal da ponte, conforme ilustrado na Figura 4.1: cada forma modal original
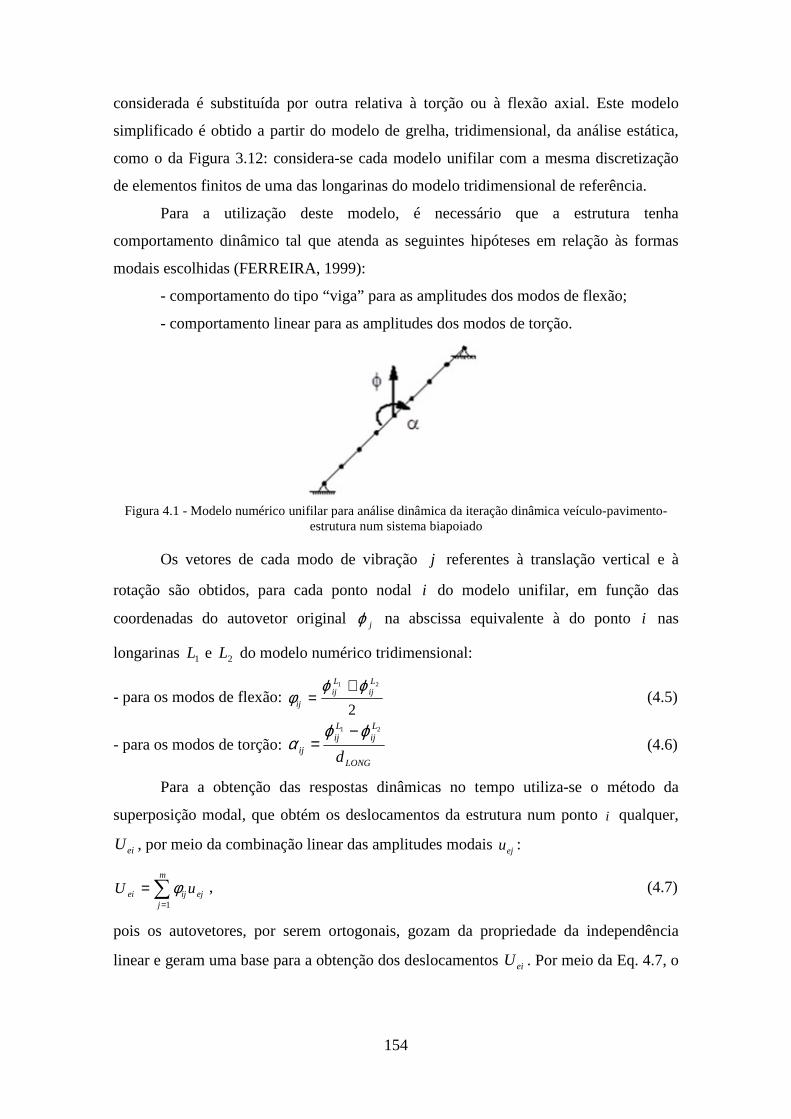
154
considerada é substituída por outra relativa à torção ou à flexão axial. Este modelo
simplificado é obtido a partir do modelo de grelha, tridimensional, da análise estática,
como o da Figura 3.12: considera-se cada modelo unifilar com a mesma discretização
de elementos finitos de uma das longarinas do modelo tridimensional de referência.
Para a utilização deste modelo, é necessário que a estrutura tenha
comportamento dinâmico tal que atenda as seguintes hipóteses em relação às formas
modais escolhidas (FERREIRA, 1999):
- comportamento do tipo “viga” para as amplitudes dos modos de flexão;
- comportamento linear para as amplitudes dos modos de torção.
Figura 4.1 - Modelo numérico unifilar para análise dinâmica da iteração dinâmica veículo-pavimento-
estrutura num sistema biapoiado
Os vetores de cada modo de vibração j referentes à translação vertical e à
rotação são obtidos, para cada ponto nodal i do modelo unifilar, em função das
coordenadas do autovetor original jϕ na abscissa equivalente à do ponto i nas
longarinas 1L e 2L do modelo numérico tridimensional:
- para os modos de flexão: 2
21 Lij
Lij
ij
ϕϕφ
+= (4.5)
- para os modos de torção: LONG
Lij
Lij
ij d
21 ϕϕα
−= (4.6)
Para a obtenção das respostas dinâmicas no tempo utiliza-se o método da
superposição modal, que obtém os deslocamentos da estrutura num ponto i qualquer,
eiU , por meio da combinação linear das amplitudes modais eju :
∑=
=m
jejijei uU
1
φ , (4.7)
pois os autovetores, por serem ortogonais, gozam da propriedade da independência
linear e geram uma base para a obtenção dos deslocamentos eiU . Por meio da Eq. 4.7, o
155
conjunto de NGL equações de movimento do sistema da Eq. 4.1 é transformado num
conjunto de m ( NGLm<< ) equações modais
PKuuCuM =++ &&& , (4.8)
onde M , C e K são, respectivamente, as matrizes modais (diagonais) de massa,
amortecimento e rigidez. A redução de base implica em grande ganho computacional
em sistemas inerciais, com frequências naturais preponderantes de baixos valores
(JACOB, 2004). Como o método da superposição modal limita-se a estruturas de
comportamento linear, a sua aplicação neste trabalho não é restrita, uma vez que todas
as pontes consideradas apresentam esta característica.
(a) (b)
Figura 4.2 – Modos de vibração relevantes das estruturas biapoiadas: (a) de flexão; (b) de torção
(a) (b)
Figura 4.3 – Modos de vibração relevantes das estruturas contínuas: (a) de flexão; (b) de torção
(a) (b)
Figura 4.4 – Modos de vibração relevantes de estruturas em balanço: (a) de flexão; (b) de torção
Para a obtenção das respostas dinâmicas, foram consideradas apenas as
contribuições do primeiro modo de flexão e do primeiro modo de torção de cada
estrutura. As Figuras 4.2 a 4.4 ilustram estes modos de vibração para as estruturas
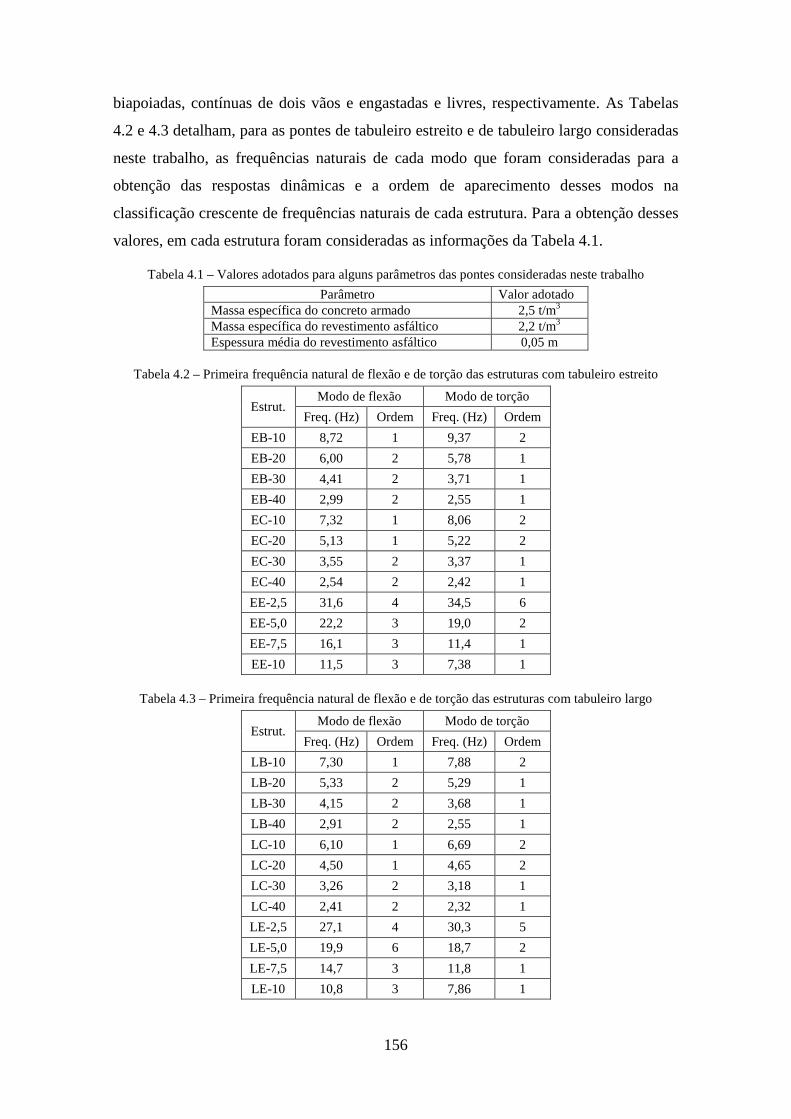
156
biapoiadas, contínuas de dois vãos e engastadas e livres, respectivamente. As Tabelas
4.2 e 4.3 detalham, para as pontes de tabuleiro estreito e de tabuleiro largo consideradas
neste trabalho, as frequências naturais de cada modo que foram consideradas para a
obtenção das respostas dinâmicas e a ordem de aparecimento desses modos na
classificação crescente de frequências naturais de cada estrutura. Para a obtenção desses
valores, em cada estrutura foram consideradas as informações da Tabela 4.1.
Tabela 4.1 – Valores adotados para alguns parâmetros das pontes consideradas neste trabalho
Parâmetro Valor adotado Massa específica do concreto armado 2,5 t/m3
Massa específica do revestimento asfáltico 2,2 t/m3 Espessura média do revestimento asfáltico 0,05 m
Tabela 4.2 – Primeira frequência natural de flexão e de torção das estruturas com tabuleiro estreito
Estrut. Modo de flexão Modo de torção
Freq. (Hz) Ordem Freq. (Hz) Ordem
EB-10 8,72 1 9,37 2
EB-20 6,00 2 5,78 1
EB-30 4,41 2 3,71 1
EB-40 2,99 2 2,55 1
EC-10 7,32 1 8,06 2
EC-20 5,13 1 5,22 2
EC-30 3,55 2 3,37 1
EC-40 2,54 2 2,42 1
EE-2,5 31,6 4 34,5 6
EE-5,0 22,2 3 19,0 2
EE-7,5 16,1 3 11,4 1
EE-10 11,5 3 7,38 1
Tabela 4.3 – Primeira frequência natural de flexão e de torção das estruturas com tabuleiro largo
Estrut. Modo de flexão Modo de torção
Freq. (Hz) Ordem Freq. (Hz) Ordem
LB-10 7,30 1 7,88 2
LB-20 5,33 2 5,29 1
LB-30 4,15 2 3,68 1
LB-40 2,91 2 2,55 1
LC-10 6,10 1 6,69 2
LC-20 4,50 1 4,65 2
LC-30 3,26 2 3,18 1
LC-40 2,41 2 2,32 1
LE-2,5 27,1 4 30,3 5
LE-5,0 19,9 6 18,7 2
LE-7,5 14,7 3 11,8 1
LE-10 10,8 3 7,86 1
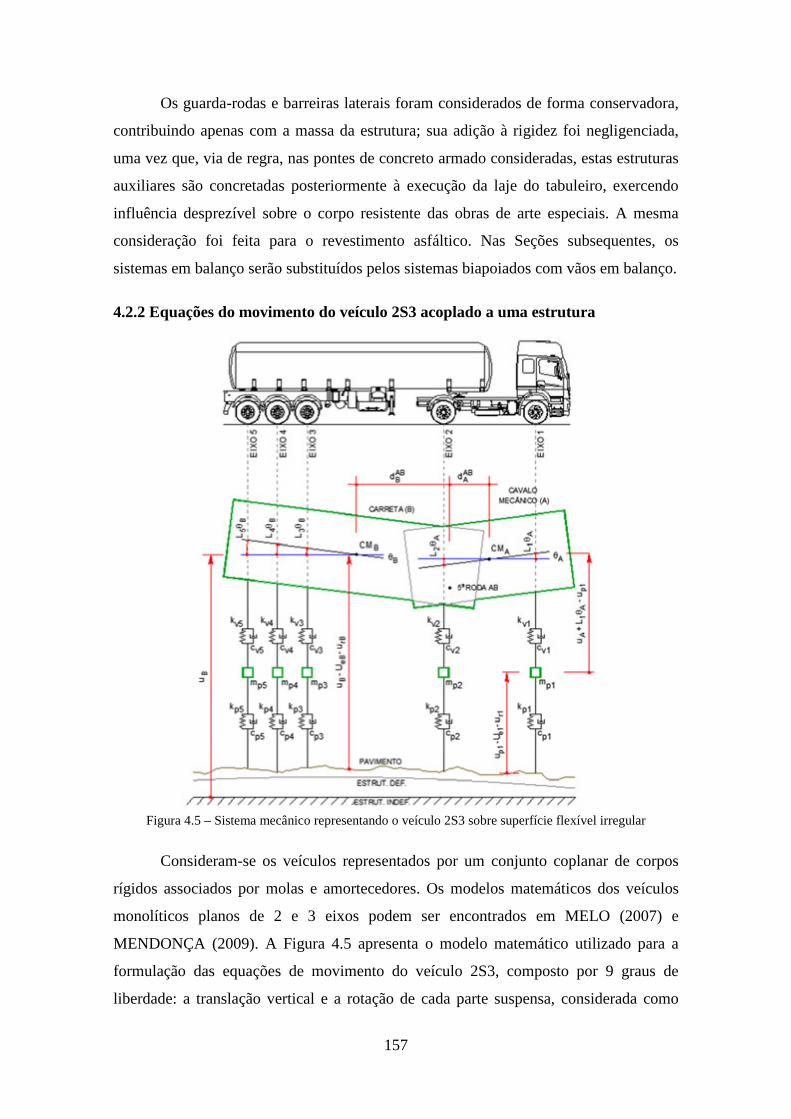
157
Os guarda-rodas e barreiras laterais foram considerados de forma conservadora,
contribuindo apenas com a massa da estrutura; sua adição à rigidez foi negligenciada,
uma vez que, via de regra, nas pontes de concreto armado consideradas, estas estruturas
auxiliares são concretadas posteriormente à execução da laje do tabuleiro, exercendo
influência desprezível sobre o corpo resistente das obras de arte especiais. A mesma
consideração foi feita para o revestimento asfáltico. Nas Seções subsequentes, os
sistemas em balanço serão substituídos pelos sistemas biapoiados com vãos em balanço.
4.2.2 Equações do movimento do veículo 2S3 acoplado a uma estrutura
Figura 4.5 – Sistema mecânico representando o veículo 2S3 sobre superfície flexível irregular
Consideram-se os veículos representados por um conjunto coplanar de corpos
rígidos associados por molas e amortecedores. Os modelos matemáticos dos veículos
monolíticos planos de 2 e 3 eixos podem ser encontrados em MELO (2007) e
MENDONÇA (2009). A Figura 4.5 apresenta o modelo matemático utilizado para a
formulação das equações de movimento do veículo 2S3, composto por 9 graus de
liberdade: a translação vertical e a rotação de cada parte suspensa, considerada como

158
corpo rígido, e as 5 translações verticais das massas dos conjuntos eixos-rodas-pneus.
Os índices A e B representam, respectivamente, as massas suspensas do cavalo
mecânico e da carreta.
As distâncias horizontais iL , omitidas na Figura 4.5, medem o afastamento do
eixo i em relação ao centro de massa; são medidas a partir do CM e contadas para a
esquerda, exceto no eixo 1. No ponto de contato do i-ésimo eixo do veículo com a
estrutura são geradas forças de interação de componentes elástica (epif ) e de
amortecimento ( apif ), funções do movimento (deslocamento piu ) da massa pim do
eixo i em relação aos movimentos da estrutura (deslocamento eiU ) e do pavimento
(deslocamento riu ):
( )rieipipiepi uUukf −−=
( )rieipipiapi uUucf &&& −−= (4.9)
Como as equações de movimento do veículo 2S3 envolvem mais termos que as
dos veículos monolíticos, adotaram-se, para padronizar e simplificar a apresentação das
equações, as distâncias auxiliares ABid , entre o eixo i e a quinta roda AB, dadas por
ABAii
ABi dsLd += , (4.10)
bem como as variáveis auxiliares is , que têm módulo igual à unidade e são fatores de
ajuste no sinal das distâncias auxiliares e das rotações; is é positiva se a massa suspensa
em questão estiver, na abscissa do eixo i, acima da sua posição estática de equilíbrio.
Para o j-ésimo modo de vibração da estrutura, a equação diferencial do
movimento pode ser escrita como na Eq. 4.11:
ejejejejejejej fukucum =++ &&&& (4.11)
Para levar em consideração a parte do sistema mecânico acoplado referente ao
veículo que trafega sobre a ponte, adicionam-se no sistema modal da Eq. 4.8 os seus
graus de liberdade translacionais e rotacionais.
As inércias rotacionais e os ângulos iniciais de cada parte suspensa S com a
horizontal (quando em posição de repouso) são designados, respectivamente, por SI e
Sβ . No Anexo C encontram-se detalhes para cálculos dos centros de massa e outras
variáveis importantes à análise dinâmica dos veículos articulados.
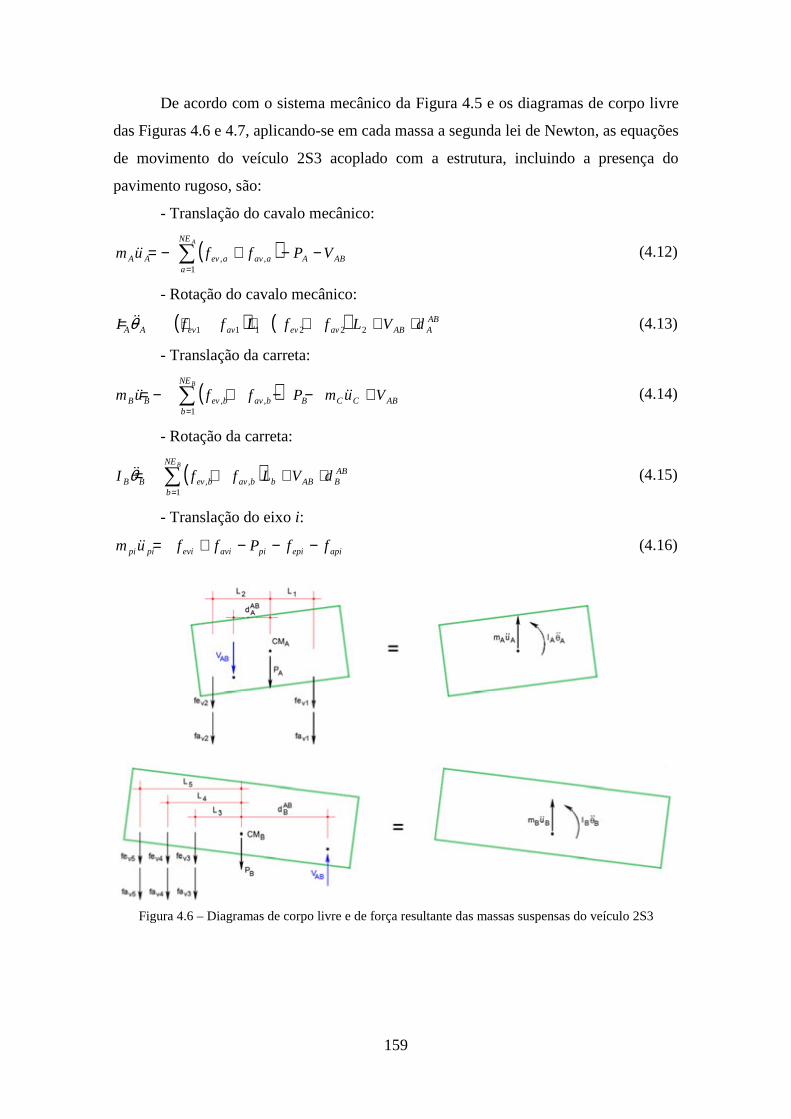
159
De acordo com o sistema mecânico da Figura 4.5 e os diagramas de corpo livre
das Figuras 4.6 e 4.7, aplicando-se em cada massa a segunda lei de Newton, as equações
de movimento do veículo 2S3 acoplado com a estrutura, incluindo a presença do
pavimento rugoso, são:
- Translação do cavalo mecânico:
( ) ABA
NE
aaavaevAA VPffum
A
−−+−= ∑=1
,,&& (4.12)
- Rotação do cavalo mecânico:
( ) ( ) ABAABavevavevAA dVLffLffI ⋅++++−= 222111θ&& (4.13)
- Translação da carreta:
( ) ABCCB
NE
bbavbevBB VumPffum
B
+−−+−= ∑=
&&&&
1,, (4.14)
- Rotação da carreta:
( ) ABBAB
NE
bbbavbevBB dVLffI
B
⋅++= ∑=1
,,θ&& (4.15)
- Translação do eixo i:
apiepipiavievipipi ffPffum −−−+=&&
(4.16)
Figura 4.6 – Diagramas de corpo livre e de força resultante das massas suspensas do veículo 2S3

160
Com a incógnita da força de contato ABV , a equação de translação do cavalo
mecânico (A) é utilizada para isolar esta variável e substituir sua expressão nas equações
de translação da carreta e rotações das duas partes suspensas. Assim,
( )∑=
+−−−=ANE
aaavaevAAAAB ffPumV
1,,&& (4.17)
Figura 4.7 – Diagramas de corpo livre e de força resultante das massas dos conjuntos eixos-rodas-pneus
A Eq. 4.17 é substituída por uma equação de compatibilidade entre os
deslocamentos das partes suspensas (ver o Anexo C).
Fazendo as substituições da superposição modal, o sistema de equações que
representa o movimento do veículo 2S3 associado a uma estrutura é mostrado na Eq.
4.18.
( )
( )
( )
( ) ( )
( )
( ) ( )
−−−+=
−−−+=
−−−+=
−−−+=
−−−+=
++++−=+
−−+−=+
+−−−⋅+⋅⋅+−=
=−−−
+=++
+=++
+=++
∑∑
∑
∑∑
∑
∑
∑
==
=
==
=
=+++++++
=
5555555
4444444
3333333
2222222
1111111
1,,
1,,
1
1,,
1,,
1,,,,,,,
11,1,1,1,1,1,1,
1,,,,,,,
0
papepavevpp
papepavevpp
papepavevpp
papepavevpp
papepavevpp
AABBb
NE
bbavbev
NE
aaavaev
ABBBBABA
BA
NE
iavieviBBAA
NE
aaavaevAAA
ABA
NE
aaaaavaevAA
BABBBA
ABAA
NE
iapiepininenenenenene
NE
iapiepijijejejejejeje
NE
iapiepijijejejejejeje
Pffffum
Pffffum
Pffffum
Pffffum
Pffffum
PdLffffdIudm
PPffumum
ffPumdLsffI
dudu
ffukucum
ffukucum
ffukucum
BA
AA
&&
&&
&&
&&
&&
&&&&
&&&&
&&&&
&&&&&&&&
&&&
M
&&&
&&&
θ
θ
θθ
φ
φ
φ
(4.18)

161
Substituindo as expressões de cada força elástica e de amortecimento e
convertendo-as à notação matricial (Eq. 4.8), resultam os vetores e matrizes mostrados
nas Eqs. 4.20 a 4.46, representando o sistema de equações que modela o movimento do
veículo 2S3 associado a uma estrutura, de acordo com a numeração de eixos da Figura
4.5. As matrizes M , C e K são particionadas, bem como o vetor modal de forças P , de
forma a separar as influências da estrutura (e) e do veículo (v):
=
vvve
evee
MM
MMM
=
vvve
evee
CC
CCC
=
vvve
evee
KK
KKK
=v
e
P
PP (4.19)
Diferentemente dos veículos monolíticos, as matrizes vvM , vvC e vvK da classe
2S3 são novamente particionadas em até quatro outras submatrizes, que consideram a
contribuição das massas suspensas (S) e dos conjuntos eixos-rodas-pneus (P), como
mostrado nas Eqs. 4.26, 4.33 e 4.42.
- Vetores de deslocamento, velocidade e aceleração:
=
+
+
5
4
3
2
1
,
1,
,
9)(m
p
p
p
p
p
B
B
A
A
ne
je
je
u
u
u
u
u
u
u
u
u
u
θ
θ
M
u
=
+
+
5
4
3
2
1
,
1,
,
)9(m
p
p
p
p
p
B
B
A
A
ne
je
je
u
u
u
u
u
u
u
u
u
u
&
&
&
&
&
&
&
&
&
&
M
&
&
&
θ
θu
=
+
+
5
4
3
2
1
,
1,
,
)9(m
p
p
p
p
p
B
B
A
A
ne
je
je
u
u
u
u
u
u
u
u
u
u
&&
&&
&&
&&
&&
&&
&&
&&
&&
&&
M
&&&
&&
&&
θ
θu
(4.20)
- Vetor de forças:
=+v
e
P
PP )9(m (4.21)
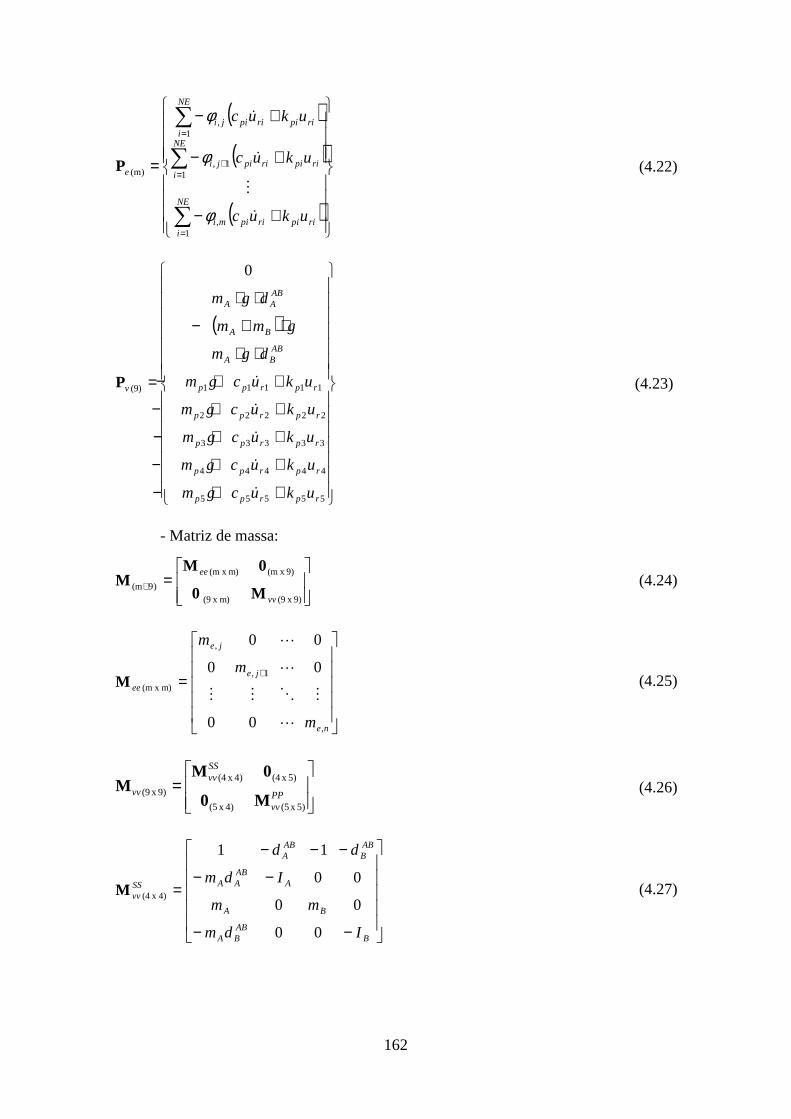
162
( )
( )
( )
+−
+−
+−
=
∑
∑
∑
=
=+
=
NE
iripiripimi
NE
iripiripiji
NE
iripiripiji
e
ukuc
ukuc
ukuc
1,
11,
1,
(m)
&
M
&
&
φ
φ
φ
P (4.22)
( )
++−
++−
++−
++−
++−
⋅⋅
⋅+−
⋅⋅
=
55555
44444
33333
22222
11111(9)
0
rprpp
rprpp
rprpp
rprpp
rprpp
ABBA
BA
ABAA
v
ukucgm
ukucgm
ukucgm
ukucgm
ukucgm
dgm
gmm
dgm
&
&
&
&
&P (4.23)
- Matriz de massa:
=+
9) x (9 m) x (9
9) x (mm) x (m
)9(m
vv
ee
M0
0MM (4.24)
=+
ne
je
je
ee
m
m
m
,
1,
,
m) x (m
00
00
00
L
MOMM
L
L
M (4.25)
=
PPvv
SSvv
vv
5) x (5 4) x (5
5) x (44) x (4
9) x (9 M0
0MM (4.26)
−−
−−
−−−
=
BABBA
BA
AABAA
ABB
ABA
SSvv
Idm
mm
Idm
dd
00
00
00
11
4) x (4 M (4.27)

163
=
9
2
1
5) x (5
00
00
00
p
p
p
PPvv
m
m
m
L
MOMM
L
L
M (4.28)
- Matriz de amortecimento:
=+
9) x (9 m) x (9
9) x (mm) x (m
)9(m
vvve
evee
CC
CCC (4.29)
+
+
+
=
∑∑∑
∑∑∑
∑∑∑
==+
=
=+
=++
=+
==+
=
NE
ipinime
NE
ipijini
NE
ipijini
NE
ipiniji
NE
ipijije
NE
ipijiji
NE
ipiniji
NE
ipijiji
NE
ipijije
ee
cccc
cccc
cccc
1
2,,
11,,
1,,
1,1,
1
21,1,
1,1,
1,,
11,,
1
2,,
m) x (m
φφφφφ
φφφφφ
φφφφφ
L
MOMM
L
L
C (4.30)
−−−−−
−−−−−
−−−−−
=+++++
4,44,43,32,21,1
51,541,431,321,211,1
5,54,43,32,21,1
9) x (m
0000
0000
0000
pnpnpnpnpn
pjpjpjpjpj
pjpjpjpjpj
ev
ccccc
ccccc
ccccc
φφφφφ
φφφφφ
φφφφφ
MMMMMMMMMC
(4.31)
−−−
−−−
−−−
−−−
−−−
=
+
+
+
+
+
npjpjp
npjpjp
npjpjp
npjpjp
npjpjp
ve
ccc
ccc
ccc
ccc
ccc
,551,55,55
,441,44,44
,331,33,33
,221,22,22
,111,11,11
m) x (9 000
000
000
000
000
000
φφφ
φφφ
φφφ
φφφ
φφφ
L
L
L
L
L
L
L
L
L
L
L
C (4.32)
=
PPvv
PSvv
SPvv
SSvv
vv
5) x (5 4) x (5
5) x (44) x (4
9) x (9 CC
CCC (4.33)
164
−−
−−
=
∑∑∑∑
∑∑∑∑
∑∑
====
====
==
BBAA
BBAA
AA
NE
bbvbb
NE
bbvbb
NE
aavaa
ABB
NE
ava
ABB
NE
bbvbb
NE
bvb
NE
aavaa
NE
ava
NE
a
ABaava
NE
a
ABavaa
SSvv
LcsLcsLcsdcd
LcscLcsc
dLcdcs
1
2
111
1111
11
4) x (4
00
0000
C (4.34)
−−−
−−−−−
−=
55443321
54321
2211
5) x (4
000
00000
LcLcLcdcdc
ccccc
dcdc
vvvABBv
ABBv
vvvvv
ABv
ABvSP
vvC (4.35)
−−
−−
−−
−
−−
=
555
444
333
222
111
4) x (5
00
00
00
00
00
Lcc
Lcc
Lcc
Lcc
Lcc
vv
vv
vv
vv
vv
PSvvC (4.36)
+
+
+
=
55
22
11
5) x (5
00
00
00
vp
vp
vp
PPvv
cc
cc
cc
L
MOMM
L
L
C (4.37)
- Matriz de rigidez:
=+
9) x (9 m) x (9
9) x (mm) x (m
)9(m
vvve
evee
KK
KKK (4.38)
+
+
+
=
∑∑∑
∑∑∑
∑∑∑
==+
=
=+
=++
=+
==+
=
NE
ipinime
NE
ipijini
NE
ipijini
NE
ipiniji
NE
ipijije
NE
ipijiji
NE
ipiniji
NE
ipijiji
NE
ipijije
ee
kkkk
kkkk
kkkk
1
2,,
11,,
1,,
1,1,
1
21,1,
1,1,
1,,
11,,
1
2,,
m) x (m
φφφφφ
φφφφφ
φφφφφ
L
MOMM
L
L
K (4.39)
165
−−−−−
−−−−−
−−−−−
=+++++
4,44,43,32,21,1
51,541,431,321,211,1
5,54,43,32,21,1
9) x (m
0000
0000
0000
pnpnpnpnpn
pjpjpjpjpj
pjpjpjpjpj
ev
kkkkk
kkkkk
kkkkk
φφφφφ
φφφφφ
φφφφφ
MMMMMMMMMK
(4.40)
−−−
−−−
−−−
−−−
−−−
=
+
+
+
+
+
npjpjp
npjpjp
npjpjp
npjpjp
npjpjp
ve
kkk
kkk
kkk
kkk
kkk
,551,55,55
,441,44,44
,331,33,33
,221,22,22
,111,11,11
m) x (9 000
000
000
000
000
000
φφφ
φφφ
φφφ
φφφ
φφφ
L
L
L
L
L
L
L
L
L
L
L
K (4.41)
=
PPvv
PSvv
SPvv
SSvv
vv
5) x (5 4) x (5
5) x (44) x (4
9) x (9 KK
KKK (4.42)
−−
−−
=
∑∑∑∑
∑∑∑∑
∑∑
====
====
==
BBAA
BBAA
AA
NE
bbvbb
NE
bbvbb
NE
aavaa
ABB
NE
ava
ABB
NE
bbvbb
NE
bvb
NE
aavaa
NE
ava
NE
a
ABaava
NE
a
ABavaa
SSvv
LksLksLksdkd
LkskLksk
dLkdks
1
2
111
1111
11
4) x (4
00
0000
K (4.43)
−−−
−−−−−
−=
55443321
54321
2211
5) x (4
000
00000
LkLkLkdkdk
kkkkk
dkdk
vvvABBv
ABBv
vvvvv
ABv
ABvSP
vvK (4.44)

166
−−
−−
−−
−
−−
=
555
444
333
222
111
4) x (5
00
00
00
00
00
Lkk
Lkk
Lkk
Lkk
Lkk
vv
vv
vv
vv
vv
PSvvK (4.45)
+
+
+
=
55
22
11
5) x (5
00
00
00
vp
vp
vp
PPvv
kk
kk
kk
L
MOMM
L
L
K (4.46)
Nas equações modais de movimento da estrutura (Eq. 4.11), as constantes ejm ,
ejc , ejk e ejf são dadas a partir das partições exclusivas da estrutura no vetor P e nas
matrizes M , C e K , que detêm algumas propriedades da análise modal. O vetor eP e
as matrizes eeM e eeK têm seus termos obtidos por
PΦP Te =
ΦMΦM Tee = (4.47)
ΦKΦK Tee =
Devido à ortogonalidade dos autovetores tanto em relação à matriz de massa
quanto em relação à matriz de rigidez (CLOUGH e PENZIEN, 2003), a matriz de massa
modal eeM é diagonal (ver o Anexo B), com o valor de termo dado por
( ) j ϕϕ MM Tjjjeeejm == (4.48)
Para estruturas de inércia constante ao longo do vão, as massas modais ejm são
calculadas pelas seguintes expressões:
- para modos de flexão: ∑=
=NGL
iijej ALm
1
2φρ (4.49)
- para modos de torção: ∑=
=NGL
iijPej LIm
1
2 αρ (4.50)
onde ρ é a massa equivalente por comprimento e PI é o momento polar de inércia de
massa da seção transversal, ambos referidos ao modelo unifilar equivalente. Se os
autovetores forem normalizados em relação à matriz de massa, a matriz M torna-se a
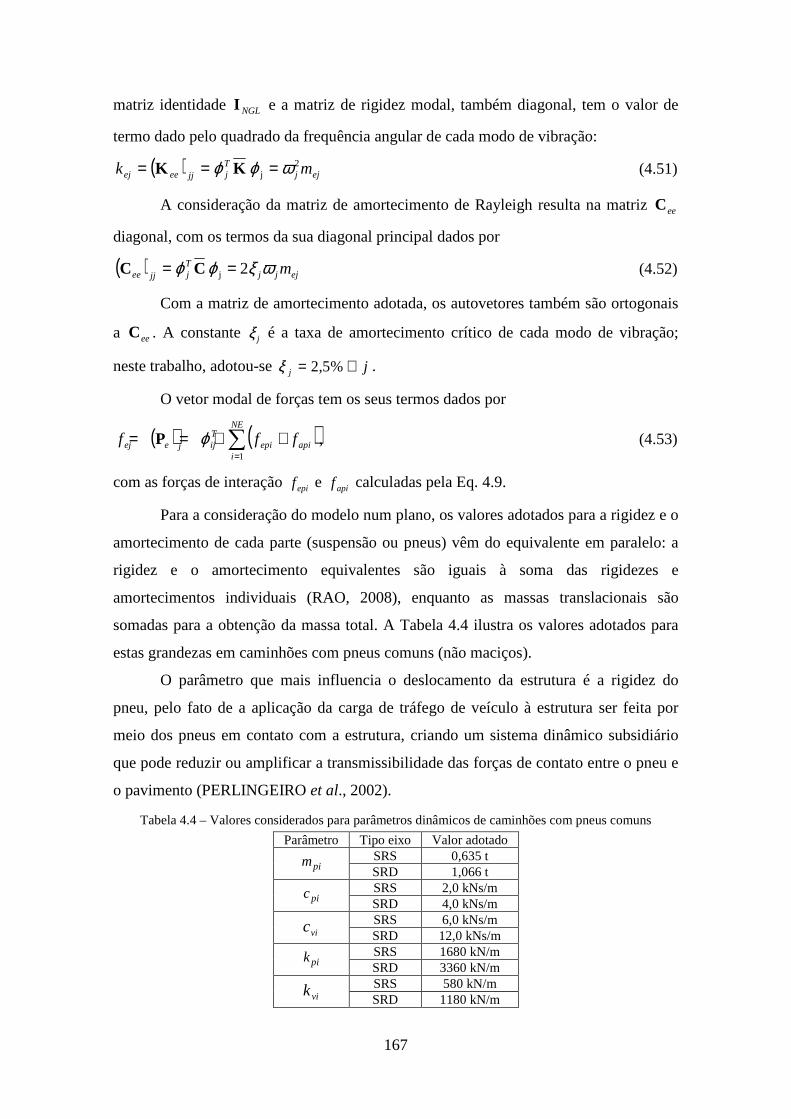
167
matriz identidade NGLI e a matriz de rigidez modal, também diagonal, tem o valor de
termo dado pelo quadrado da frequência angular de cada modo de vibração:
( ) ejjTjjjeeej mk 2
j ωϕϕ === KK (4.51)
A consideração da matriz de amortecimento de Rayleigh resulta na matriz eeC
diagonal, com os termos da sua diagonal principal dados por
( ) ejjjTjjjee mωξϕϕ 2 j == CC (4.52)
Com a matriz de amortecimento adotada, os autovetores também são ortogonais
a eeC . A constante jξ é a taxa de amortecimento crítico de cada modo de vibração;
neste trabalho, adotou-se jj %5,2 ∀=ξ .
O vetor modal de forças tem os seus termos dados por
( ) ( )∑=
+⋅==NE
iapiepi
Tijjeej fff
1
ϕP , (4.53)
com as forças de interação epif e apif calculadas pela Eq. 4.9.
Para a consideração do modelo num plano, os valores adotados para a rigidez e o
amortecimento de cada parte (suspensão ou pneus) vêm do equivalente em paralelo: a
rigidez e o amortecimento equivalentes são iguais à soma das rigidezes e
amortecimentos individuais (RAO, 2008), enquanto as massas translacionais são
somadas para a obtenção da massa total. A Tabela 4.4 ilustra os valores adotados para
estas grandezas em caminhões com pneus comuns (não maciços).
O parâmetro que mais influencia o deslocamento da estrutura é a rigidez do
pneu, pelo fato de a aplicação da carga de tráfego de veículo à estrutura ser feita por
meio dos pneus em contato com a estrutura, criando um sistema dinâmico subsidiário
que pode reduzir ou amplificar a transmissibilidade das forças de contato entre o pneu e
o pavimento (PERLINGEIRO et al., 2002).
Tabela 4.4 – Valores considerados para parâmetros dinâmicos de caminhões com pneus comuns
Parâmetro Tipo eixo Valor adotado
pim SRS 0,635 t SRD 1,066 t
pic SRS 2,0 kNs/m SRD 4,0 kNs/m
vic SRS 6,0 kNs/m SRD 12,0 kNs/m
pik SRS 1680 kN/m SRD 3360 kN/m
vik SRS 580 kN/m SRD 1180 kN/m
168
A aproximação adotada, de adicionar no sistema modal os graus de liberdade do
veículo, gera um erro, que é o de considerar as respostas do sistema mecânico em
função apenas das formas modais da estrutura. Numa análise mais realista, os modos de
vibração também dependem da massa do veículo sobre a estrutura; como essas massas
se posicionam em um local diferente a cada instante de tempo, as frequências naturais e
as formas modais do sistema mecânico são variáveis. Este erro, entretanto, será
negligenciado neste trabalho.
Para obter os deslocamentos generalizados u do sistema da Eq. 4.8 em cada
instante de tempo, é utilizado o método de integração numérica de Runge-Kutta de
quarta ordem (ver o Anexo B).
4.2.3 Rugosidade superficial
Os efeitos dinâmicos da passagem dos veículos sobre as pontes se originam da
interação entre os sistemas mecânicos dos veículos e das estruturas, tendo as
irregularidades do pavimento como meio gerador e de transferência das forças de
interação, que excitam a massa do veículo, amplificando o carregamento dinâmico
aplicado à estrutura.
O perfil longitudinal de irregularidades de uma rodovia pode ser tomado como
um processo aleatório estacionário e ergódico com média nula (MELO, 2007). Diversas
escalas padronizadas podem ser adotadas na medida da irregularidade do pavimento.
Uma referência bastante utilizada em nível mundial para denotar a qualidade do
pavimento em função do grau de rugosidade é o International Roughness Index (IRI).
No Brasil, a classificação dos pavimentos, em função do valor do IRI, é mostrada na
Tabela 4.5, de acordo com o DNIT.
Tabela 4.5 – Faixas de classificação de irregularidade no Brasil, de acordo com o valor do IRI
Classificação Valores do IRI (m/km) Excelente 5,2<
Bom entre 2,5 e 3,0 Regular entre 3,0 e 4,0
Mau entre 4,0 e 5,0 Péssimo 0,5>
Para a descrição matemática de um perfil de irregularidades, utilizam-se funções
de densidade espectral de potência obtidas experimentalmente. O espectro de
rugosidade do pavimento adotado neste trabalho foi ajustado por HONDA et al. (1982),
sendo dado por

169
( ) βωαω −⋅= kkS , (4.54)
onde α depende do estado de conservação do pavimento, o qual pode ser classificado
em 5 categorias de acordo com a International Organization for Standardization (ISO),
mostradas na Tabela 4.6, e β é o expoente que depende do material que constitui o
pavimento: é igual a 2,03 para pavimentos asfálticos e igual a 1,85 para pavimentos de
concreto.
Tabela 4.6 – Classificação do perfil longitudinal de acordo com o padrão da ISO (HONDA et al., 1982)
Condição do pavimento α ( 610−× m2/(m/ciclo)) Muito boa 24,0≤α
Boa 00,124,0 ≤< α
Regular 00,400,1 ≤< α
Ruim 0,1600,4 ≤< α
Muito ruim 0,16>α
Para compatibilizar os padrões da ISO (o fator α ) com a escala de classificação
de irregularidade adotada pelo DNIT em função do IRI, MELO (2007) apresenta os dois
parâmetros mostrados na Tabela 4.7.
Tabela 4.7 – Correlação observada entre as classificações das condições do pavimento adotadas no Brasil (IRI) e pela ISO (HONDA et al., 1982)
Condição do pavimento α ( 610−× m2/(m/ciclo)) IRI (m/km)
Excelente 24,0≤α 90,1IRI≤
De excelente a regular 00,124,0 ≤< α 80,3IRI90,1 ≤<
De regular a péssimo 00,1>α 80,3IRI >
Verifica-se que, dentro de cada intervalo de variação da classificação da ISO, na
Tabela 4.7, é possível observar mais de uma classificação das condições do pavimento
de acordo com o IRI no Brasil.
Para a geração de um perfil aleatório de irregularidades a partir da sua
densidade espectral de potência, geram-se, preliminarmente, ângulos de fase aleatórios
kϕ , uniformemente distribuídos entre 0 e π2 . As amplitudes verticais são, então,
geradas pela expressão (YANG e LIN, 1995)
( ) ( ) ( )∑=
−⋅⋅∆⋅=N
kkkkr xSxu
1
cos2 θωωω , (4.55)
com kθ uniformemente distribuído entre 0 e π2 , supondo um processo aleatório
estacionário e gaussiano.
Para que a área de contato entre os pneus e o pavimento seja considerada da
forma mais realista possível, o perfil de irregularidades do pavimento foi submetido a
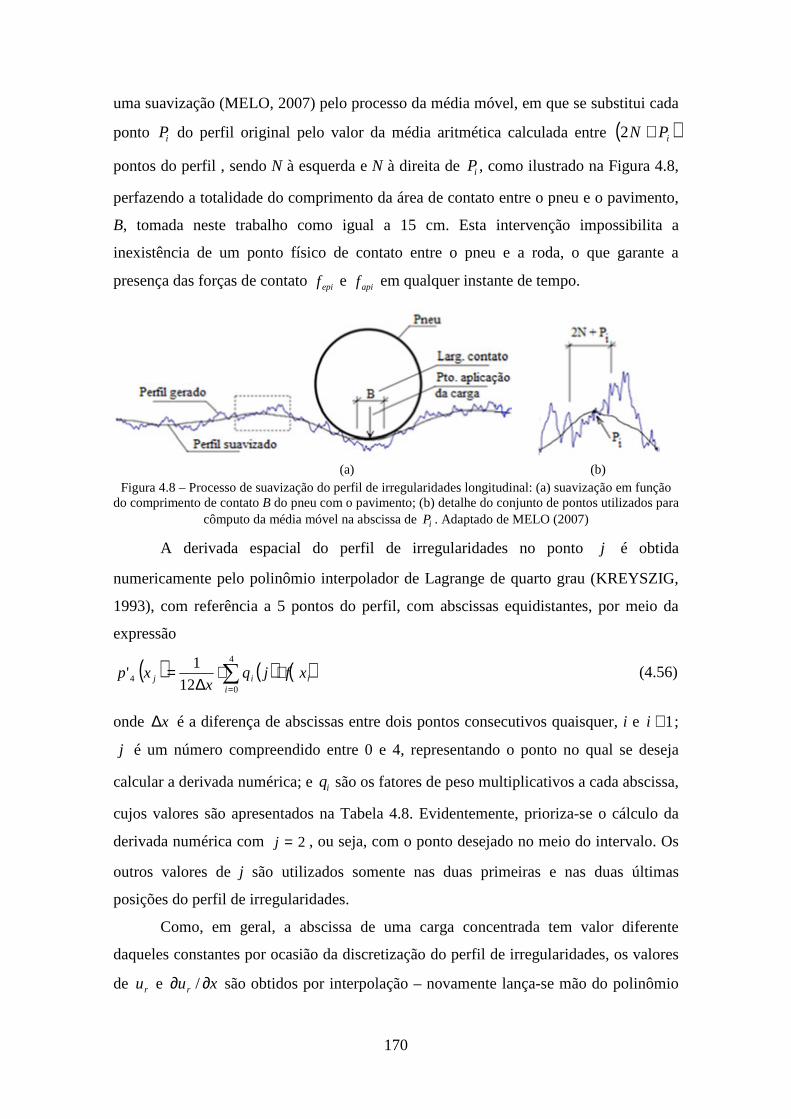
170
uma suavização (MELO, 2007) pelo processo da média móvel, em que se substitui cada
ponto iP do perfil original pelo valor da média aritmética calculada entre ( )iPN +2
pontos do perfil , sendo N à esquerda e N à direita de iP, como ilustrado na Figura 4.8,
perfazendo a totalidade do comprimento da área de contato entre o pneu e o pavimento,
B, tomada neste trabalho como igual a 15 cm. Esta intervenção impossibilita a
inexistência de um ponto físico de contato entre o pneu e a roda, o que garante a
presença das forças de contato epif e apif em qualquer instante de tempo.
(a) (b)
Figura 4.8 – Processo de suavização do perfil de irregularidades longitudinal: (a) suavização em função do comprimento de contato B do pneu com o pavimento; (b) detalhe do conjunto de pontos utilizados para
cômputo da média móvel na abscissa de iP . Adaptado de MELO (2007)
A derivada espacial do perfil de irregularidades no ponto j é obtida
numericamente pelo polinômio interpolador de Lagrange de quarto grau (KREYSZIG,
1993), com referência a 5 pontos do perfil, com abscissas equidistantes, por meio da
expressão
( ) ( ) ( )∑=
⋅⋅∆
=4
04 12
1'
iiij xfjq
xxp (4.56)
onde x∆ é a diferença de abscissas entre dois pontos consecutivos quaisquer, i e 1+i ;
j é um número compreendido entre 0 e 4, representando o ponto no qual se deseja
calcular a derivada numérica; e iq são os fatores de peso multiplicativos a cada abscissa,
cujos valores são apresentados na Tabela 4.8. Evidentemente, prioriza-se o cálculo da
derivada numérica com 2=j , ou seja, com o ponto desejado no meio do intervalo. Os
outros valores de j são utilizados somente nas duas primeiras e nas duas últimas
posições do perfil de irregularidades.
Como, em geral, a abscissa de uma carga concentrada tem valor diferente
daqueles constantes por ocasião da discretização do perfil de irregularidades, os valores
de ru e xur ∂∂ / são obtidos por interpolação – novamente lança-se mão do polinômio
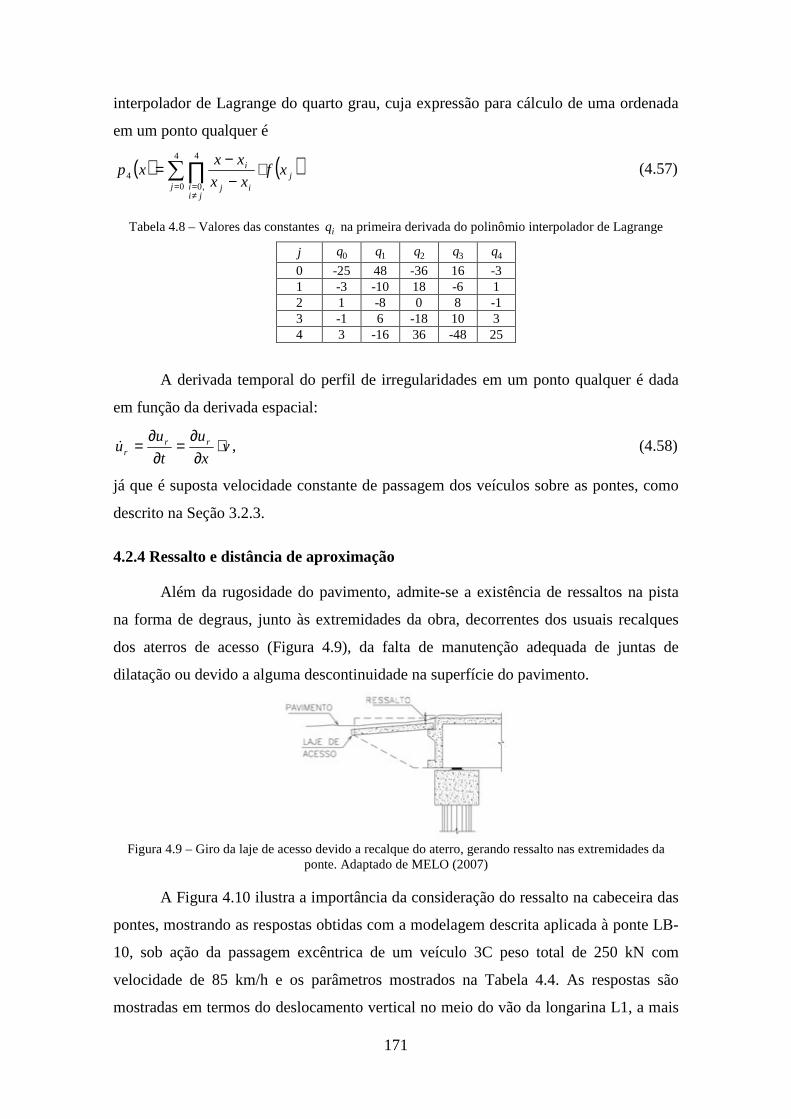
171
interpolador de Lagrange do quarto grau, cuja expressão para cálculo de uma ordenada
em um ponto qualquer é
( ) ( )jj
jii ij
i xfxx
xxxp ⋅
−−
=∑∏=
≠=
4
0
4
,04 (4.57)
Tabela 4.8 – Valores das constantes iq na primeira derivada do polinômio interpolador de Lagrange
j 0q 1q 2q 3q 4q
0 -25 48 -36 16 -3 1 -3 -10 18 -6 1 2 1 -8 0 8 -1 3 -1 6 -18 10 3 4 3 -16 36 -48 25
A derivada temporal do perfil de irregularidades em um ponto qualquer é dada
em função da derivada espacial:
vx
u
t
uu rr
r ⋅∂
∂=
∂∂
=& , (4.58)
já que é suposta velocidade constante de passagem dos veículos sobre as pontes, como
descrito na Seção 3.2.3.
4.2.4 Ressalto e distância de aproximação
Além da rugosidade do pavimento, admite-se a existência de ressaltos na pista
na forma de degraus, junto às extremidades da obra, decorrentes dos usuais recalques
dos aterros de acesso (Figura 4.9), da falta de manutenção adequada de juntas de
dilatação ou devido a alguma descontinuidade na superfície do pavimento.
Figura 4.9 – Giro da laje de acesso devido a recalque do aterro, gerando ressalto nas extremidades da
ponte. Adaptado de MELO (2007)
A Figura 4.10 ilustra a importância da consideração do ressalto na cabeceira das
pontes, mostrando as respostas obtidas com a modelagem descrita aplicada à ponte LB-
10, sob ação da passagem excêntrica de um veículo 3C peso total de 250 kN com
velocidade de 85 km/h e os parâmetros mostrados na Tabela 4.4. As respostas são
mostradas em termos do deslocamento vertical no meio do vão da longarina L1, a mais
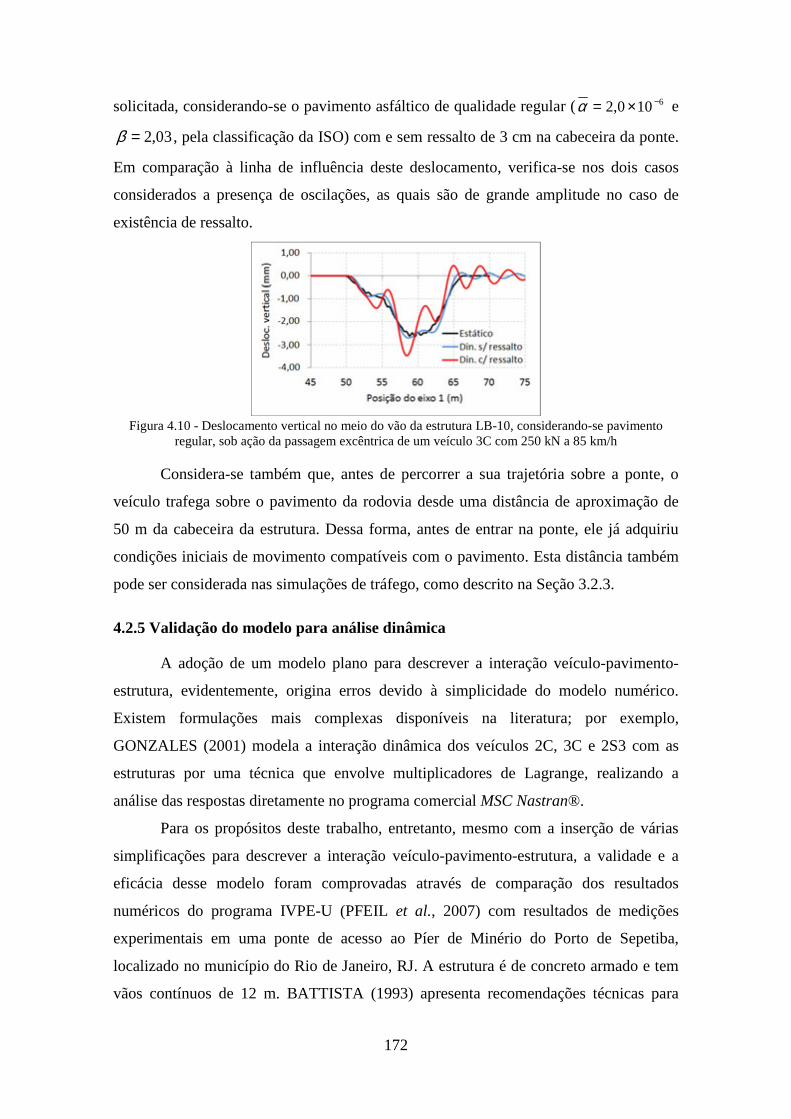
172
solicitada, considerando-se o pavimento asfáltico de qualidade regular ( 6100,2 −×=α e
03,2=β , pela classificação da ISO) com e sem ressalto de 3 cm na cabeceira da ponte.
Em comparação à linha de influência deste deslocamento, verifica-se nos dois casos
considerados a presença de oscilações, as quais são de grande amplitude no caso de
existência de ressalto.
Figura 4.10 - Deslocamento vertical no meio do vão da estrutura LB-10, considerando-se pavimento
regular, sob ação da passagem excêntrica de um veículo 3C com 250 kN a 85 km/h
Considera-se também que, antes de percorrer a sua trajetória sobre a ponte, o
veículo trafega sobre o pavimento da rodovia desde uma distância de aproximação de
50 m da cabeceira da estrutura. Dessa forma, antes de entrar na ponte, ele já adquiriu
condições iniciais de movimento compatíveis com o pavimento. Esta distância também
pode ser considerada nas simulações de tráfego, como descrito na Seção 3.2.3.
4.2.5 Validação do modelo para análise dinâmica
A adoção de um modelo plano para descrever a interação veículo-pavimento-
estrutura, evidentemente, origina erros devido à simplicidade do modelo numérico.
Existem formulações mais complexas disponíveis na literatura; por exemplo,
GONZALES (2001) modela a interação dinâmica dos veículos 2C, 3C e 2S3 com as
estruturas por uma técnica que envolve multiplicadores de Lagrange, realizando a
análise das respostas diretamente no programa comercial MSC Nastran®.
Para os propósitos deste trabalho, entretanto, mesmo com a inserção de várias
simplificações para descrever a interação veículo-pavimento-estrutura, a validade e a
eficácia desse modelo foram comprovadas através de comparação dos resultados
numéricos do programa IVPE-U (PFEIL et al., 2007) com resultados de medições
experimentais em uma ponte de acesso ao Píer de Minério do Porto de Sepetiba,
localizado no município do Rio de Janeiro, RJ. A estrutura é de concreto armado e tem
vãos contínuos de 12 m. BATTISTA (1993) apresenta recomendações técnicas para
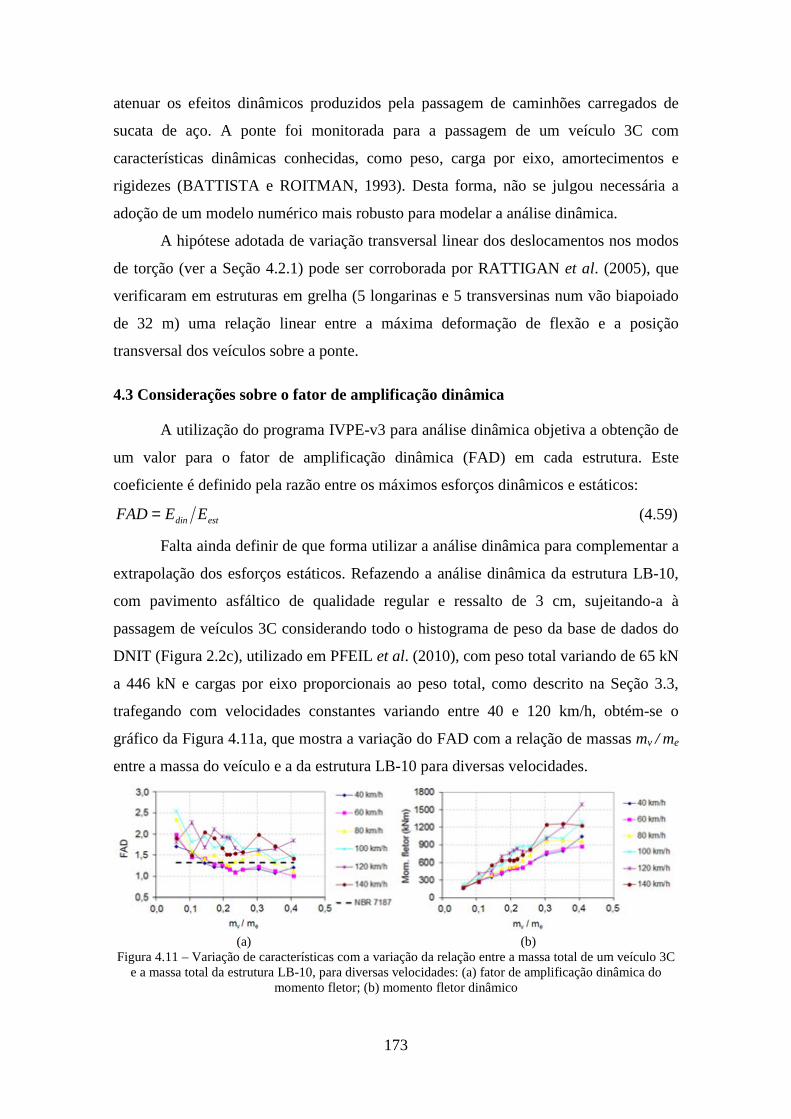
173
atenuar os efeitos dinâmicos produzidos pela passagem de caminhões carregados de
sucata de aço. A ponte foi monitorada para a passagem de um veículo 3C com
características dinâmicas conhecidas, como peso, carga por eixo, amortecimentos e
rigidezes (BATTISTA e ROITMAN, 1993). Desta forma, não se julgou necessária a
adoção de um modelo numérico mais robusto para modelar a análise dinâmica.
A hipótese adotada de variação transversal linear dos deslocamentos nos modos
de torção (ver a Seção 4.2.1) pode ser corroborada por RATTIGAN et al. (2005), que
verificaram em estruturas em grelha (5 longarinas e 5 transversinas num vão biapoiado
de 32 m) uma relação linear entre a máxima deformação de flexão e a posição
transversal dos veículos sobre a ponte.
4.3 Considerações sobre o fator de amplificação dinâmica
A utilização do programa IVPE-v3 para análise dinâmica objetiva a obtenção de
um valor para o fator de amplificação dinâmica (FAD) em cada estrutura. Este
coeficiente é definido pela razão entre os máximos esforços dinâmicos e estáticos:
estdin EEFAD= (4.59)
Falta ainda definir de que forma utilizar a análise dinâmica para complementar a
extrapolação dos esforços estáticos. Refazendo a análise dinâmica da estrutura LB-10,
com pavimento asfáltico de qualidade regular e ressalto de 3 cm, sujeitando-a à
passagem de veículos 3C considerando todo o histograma de peso da base de dados do
DNIT (Figura 2.2c), utilizado em PFEIL et al. (2010), com peso total variando de 65 kN
a 446 kN e cargas por eixo proporcionais ao peso total, como descrito na Seção 3.3,
trafegando com velocidades constantes variando entre 40 e 120 km/h, obtém-se o
gráfico da Figura 4.11a, que mostra a variação do FAD com a relação de massas mv / me
entre a massa do veículo e a da estrutura LB-10 para diversas velocidades.
(a) (b) Figura 4.11 – Variação de características com a variação da relação entre a massa total de um veículo 3C
e a massa total da estrutura LB-10, para diversas velocidades: (a) fator de amplificação dinâmica do momento fletor; (b) momento fletor dinâmico
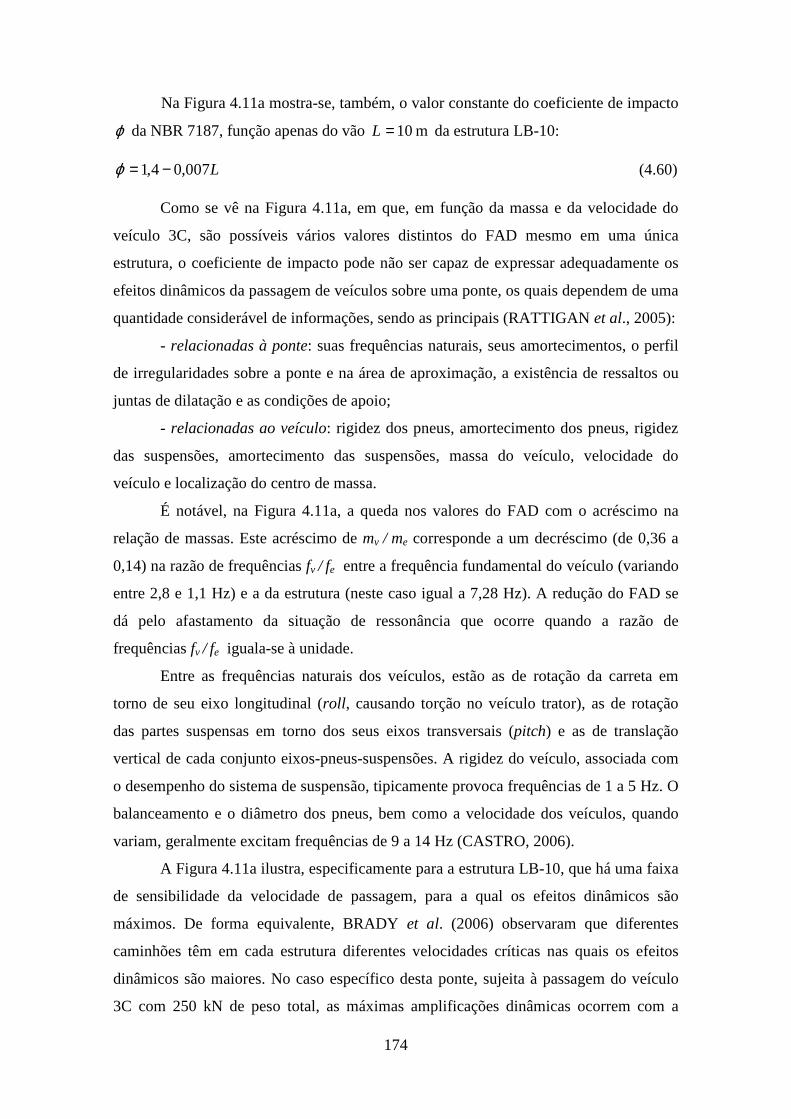
174
Na Figura 4.11a mostra-se, também, o valor constante do coeficiente de impacto
ϕ da NBR 7187, função apenas do vão m 10=L da estrutura LB-10:
L007,04,1 −=ϕ (4.60)
Como se vê na Figura 4.11a, em que, em função da massa e da velocidade do
veículo 3C, são possíveis vários valores distintos do FAD mesmo em uma única
estrutura, o coeficiente de impacto pode não ser capaz de expressar adequadamente os
efeitos dinâmicos da passagem de veículos sobre uma ponte, os quais dependem de uma
quantidade considerável de informações, sendo as principais (RATTIGAN et al., 2005):
- relacionadas à ponte: suas frequências naturais, seus amortecimentos, o perfil
de irregularidades sobre a ponte e na área de aproximação, a existência de ressaltos ou
juntas de dilatação e as condições de apoio;
- relacionadas ao veículo: rigidez dos pneus, amortecimento dos pneus, rigidez
das suspensões, amortecimento das suspensões, massa do veículo, velocidade do
veículo e localização do centro de massa.
É notável, na Figura 4.11a, a queda nos valores do FAD com o acréscimo na
relação de massas. Este acréscimo de mv / me corresponde a um decréscimo (de 0,36 a
0,14) na razão de frequências fv / fe entre a frequência fundamental do veículo (variando
entre 2,8 e 1,1 Hz) e a da estrutura (neste caso igual a 7,28 Hz). A redução do FAD se
dá pelo afastamento da situação de ressonância que ocorre quando a razão de
frequências fv / fe iguala-se à unidade.
Entre as frequências naturais dos veículos, estão as de rotação da carreta em
torno de seu eixo longitudinal (roll , causando torção no veículo trator), as de rotação
das partes suspensas em torno dos seus eixos transversais (pitch) e as de translação
vertical de cada conjunto eixos-pneus-suspensões. A rigidez do veículo, associada com
o desempenho do sistema de suspensão, tipicamente provoca frequências de 1 a 5 Hz. O
balanceamento e o diâmetro dos pneus, bem como a velocidade dos veículos, quando
variam, geralmente excitam frequências de 9 a 14 Hz (CASTRO, 2006).
A Figura 4.11a ilustra, especificamente para a estrutura LB-10, que há uma faixa
de sensibilidade da velocidade de passagem, para a qual os efeitos dinâmicos são
máximos. De forma equivalente, BRADY et al. (2006) observaram que diferentes
caminhões têm em cada estrutura diferentes velocidades críticas nas quais os efeitos
dinâmicos são maiores. No caso específico desta ponte, sujeita à passagem do veículo
3C com 250 kN de peso total, as máximas amplificações dinâmicas ocorrem com a
175
velocidade em torno de 120 km/h. Para outras estruturas, esta faixa é alterada, havendo
outros intervalos de maior sensibilidade, em função das frequências naturais de cada
estrutura, de cada veículo, das irregularidades do pavimento, dos valores adotados para
as rigidezes das suspensões e dos pneus etc.
Pode-se concluir também, pela Figura 4.11b, que, apesar de os veículos leves
promoverem as maiores amplificações dinâmicas na ponte LB-10, os esforços
dinâmicos aumentam com o peso dos veículos.
4.4 Procedimento para incluir a análise dinâmica na determinação dos valores-alvo dos esforços solicitantes
Em trabalhos anteriores desta linha de pesquisa, a metodologia de determinação
dos valores-alvo dos esforços solicitantes consistia das seguintes etapas:
• elaboração dos histogramas de esforços solicitantes dinâmicos, por meio da
multiplicação dos respectivos valores estáticos pelo fator de impacto ϕ da NBR 7187;
• ajuste de uma distribuição de probabilidades diretamente a cada histograma de
esforços dinâmicos e determinação da distribuição dos valores extremos a ela associada
para o período de retorno desejado;
• adoção dos valores médios das distribuições dos valores extremos dos esforços
dinâmicos como valores representativos das extrapolações e, portanto, como valores-
alvo a serem reproduzidos pelos novos modelos de cargas móveis.
A primeira revisão neste procedimento consistiria na substituição do fator de
impacto ϕ da NBR 7187, no primeiro item, por um valor de FAD representativo de
cada estrutura, considerando a interação veículo-pavimento-estrutura; os trabalhos de
MELO (2007) e MENDONÇA (2009) contribuíram nesse aspecto.
Quanto às ações e solicitações em estruturas, é importante mencionar que, em
geral, o tratamento estatístico é aplicado a alguma variável representativa das ações
como, por exemplo, a velocidade do vento. Uma vez obtido o valor extremo desta
variável em um determinado período de retorno, passa-se ao cálculo das forças extremas
e em seguida ao das solicitações estáticas ou dinâmicas na estrutura. A mesma
metodologia aplicada à ação de veículos em pontes teria como variável aleatória o peso
total dos veículos comerciais e conduziria à necessidade de se aplicar a extrapolação a
cada classe de veículo da Figura 2.32. Como os esforços dinâmicos aumentam com o
peso dos veículos, a adoção dos pesos extrapolados garantiria, de forma conservadora, a
previsão de esforços dinâmicos representativos no período de retorno adotado. Com a
176
arbitragem de um período de retorno e de posse das distribuições de probabilidades dos
pesos totais da Tabela 2.8, obter-se-iam os valores extrapolados de peso total – haveria,
adicionalmente, duas dificuldades: a limitação superior dos pesos dos veículos,
mostrada na Tabela 2.19, e a falta de conhecimento de uma situação específica de
tráfego para o cálculo dos esforços solicitantes, no tocante à presença simultânea de
veículos em uma mesma faixa de rolamento, cruzamentos etc. De qualquer forma, os
esforços devidos à passagem desses veículos muito pesados seriam obtidos por análise
dinâmica dos modelos estruturais e o maior valor de esforço obtido seria o valor
característico desejado.
Para evitar estas dificuldades e reduzir o número de cálculos, adotou-se a
estratégia de modelar diretamente a distribuição de cada esforço solicitante resultante,
ao invés de se considerar a extrapolação da distribuição de peso de cada tipo de veículo
constituinte da base de dados separadamente. No caso da análise estática, não há
grandes dificuldades na consideração do fator de impacto aplicado ao carregamento (ou
aos esforços solicitantes, admitindo-se linearidade). Em contrapartida, quando se dispõe
de um histograma de esforços dinâmicos, o ajuste de uma distribuição de probabilidades
diretamente aos esforços solicitantes leva a alguns pontos de dificuldade. Segundo a
sequência apresentada, a extrapolação aplicada aos esforços dinâmicos (Eq. 4.59),
implica que não só esforço solicitante, mas também o fator de impacto, ou qualquer
outra medida dos efeitos dinâmicos, seja uma variável aleatória, o que é discutível
(PFEIL et al., 2010).
Ao se desmembrar o esforço total em parcelas estática e dinâmica, vê-se que esta
é caracterizada pela flutuação em torno do valor estático e pode ser descrita em termos
do fator de amplificação dinâmica. Quando se faz a extrapolação diretamente para o
esforço solicitante dinâmico (histograma dinâmico), este procedimento não corresponde
à realidade: a parcela dinâmica não deve ser levada em conta na extrapolação porque ela
não depende do tempo, ou equivalentemente, não depende do número de veículos que
trafegam sobre a ponte. No caso da consideração do fator de impacto ϕ da NBR 7187,
não haveria problemas em considerar a extrapolação do histograma dinâmico, pois ele
seria obtido mediante a simples multiplicação do histograma estático por uma constante,
uma vez que ϕ depende exclusivamente do comprimento do vão da ponte; entretanto,
ao se refinar a análise dinâmica e considerar o FAD, deve-se ter em mente que este
coeficiente depende das características dinâmicas da estrutura, do carregamento imposto
177
e das condições do pavimento. Caso sejam definidas todas estas condições, o FAD não
se configura como uma variável aleatória sob o ponto de vista da análise dinâmica, não
sendo, portanto, passível de tratamento estatístico: deve ser considerado determinístico
na análise dinâmica individual de cada estrutura.
A consideração de diferentes condições do pavimento, por exemplo, deveria ser
avaliada se se objetivasse obter um FAD representativo, global, de cada estrutura; neste
caso, um tratamento estatístico posterior deveria ser efetuado, modelando como
variáveis aleatórias todos os parâmetros do revestimento da pista de rolamento que
influem na amplificação dinâmica.
Assim, para levar em conta o efeito extrapolado, deve-se considerar apenas a
parcela estática do esforço, tal como mostrado na Seção 3.8, a partir das distribuições de
probabilidades ajustadas aos histogramas estáticos, pois essa contribuição provém da
extrapolação do peso total dos veículos – tratado, ainda que de forma indireta, como
variável aleatória. Neste caso, evita-se o erro de considerar o fator de amplificação
dinâmica dependente do número de veículos; em compensação, surge uma dificuldade:
qual valor representativo adotar para o FAD? Uma possibilidade seria adotar uma
análise de regressão, obtendo-se uma equação do FAD em função de cada esforço
solicitante em cada estrutura. Evidentemente, esta abordagem seria bastante laboriosa.
Outra solução consistiria em obter a distribuição de frequências do FAD, para os
veículos constituintes da base de dados, e ajustar uma distribuição de probabilidades a
ele. Esta metodologia foi usada para a avaliação dinâmica de pontes de vãos curtos
existentes (DAS, 1997), mas ela é bastante conservadora, pois considera que os maiores
valores de FAD ocorrem para a passagem de veículos pesados, o que não se verifica de
fato, como se vê na Figura 4.11b.
Propõe-se, então, que se considere, para a determinação do FAD, a combinação
de veículos que solicitou a ponte no instante em que foi registrado o maior esforço
estático, e que, para toda esta configuração, quantos forem os veículos que a formam,
efetue-se a análise dinâmica das interações dinâmicas veículos-pavimento-estrutura,
determinando-se o valor do FAD de cada esforço solicitante considerado de cada
estrutura. Por fim, multiplicando-se o maior valor de FAD pelo valor representativo do
esforço estático extremo, obtém-se, ainda que de maneira conservadora, o valor-alvo
desejado.
Assim, a metodologia anterior foi revista de forma a incorporar de forma mais
consistente os efeitos dinâmicos na determinação dos valores-alvo dos esforços

178
considerando a interação dinâmica veículo-pavimento-estrutura e a extrapolação do
histograma de esforços estáticos para a inclusão do efeito dinâmico e a posterior análise
de confiabilidade. A nova sequência adotada para a obtenção dos valores-alvo dos
esforços devidos ao tráfego real consiste das seguintes etapas:
• elaboração dos histogramas de esforços solicitantes estáticos, mediante as
execuções do programa STPG, para vários cenários de tráfego possíveis em cada tipo de
tabuleiro (ver a Seção 3.8);
• ajuste de uma distribuição de Weibull 3P a cada histograma de esforços
estáticos, por meio do programa Ajusta_v1, e determinação da sua distribuição de
máximos referente ao período de retorno considerado em cada cenário de tráfego
(Tabela 3.10);
• adoção dos valores característicos das distribuições iniciais (nível de
probabilidade) dos esforços como valores representativos das distribuições dos esforços
solicitantes e adoção do cenário com a moda de mais alto valor como referência para o
esforço da estrutura;
• análise dinâmica de todo o carregamento que causou o maior esforço
solicitante considerado no Cenário de tráfego adotado para a estrutura analisada
(Tabelas 3.36 e 3.37), por meio do programa IVPE-v3, para a obtenção do fator de
amplificação dinâmica referente a esta configuração. Este FAD é tomado, de forma
conservadora, como representativo do esforço na estrutura;
• multiplicação do valor característico do esforço estático em cada estrutura pelo
correspondente FAD, para a determinação dos valores-alvo a serem reproduzidos pelos
novos modelos de cargas móveis.
Para aplicar esta nova metodologia neste trabalho, em cada esforço considerado
de cada ponte deveriam ser considerados todos os veículos que geraram, conjuntamente,
a maior solicitação estática, uma vez que todas as características destes veículos, como
pesos totais, cargas por eixo, distâncias entre eixos, posições transversais, defasagens
temporais etc., estão disponíveis nos relatórios de saída do simulador de tráfego STPG.
Considerando linearidade, cada FAD poderia ser obtido após a análise da interação
veículo-pavimento-estrutura resultante da passagem individual de cada veículo,
somando-se seus efeitos nos instantes de tempo adequados.
Mais uma vez por simplicidade, foi adotada para a obtenção de todos os FAD a
passagem de apenas um tipo de veículo, na posição transversal mais desfavorável para a
longarina L1, como mostrado na Figura 3.27, visto que a análise dinâmica de todas as
179
configurações solicitantes para cada esforço e para cada estrutura, resumidas nas
Tabelas 3.36 e 3.37, e compostas por até 3 veículos simultaneamente na ponte,
demandaria um grande número de modelagens.
Como o veículo 3C não se faz presente em qualquer das situações extremas para
os valores estáticos dos esforços, requeridas para a análise dinâmica, resumidas na
Tabela 3.38, decidiu-se, ainda que com a carência da validação experimental, pela
implementação das equações de movimento do veículo articulado 2S3 no programa
IVPE-v3, mostradas na Seção 4.2.2.
A consideração do modelo matemático dos caminhões 2S3 explica-se pela sua
importância, já que estes veículos têm grande frequência relativa na base de dados H-
2013 (Figura 2.32), são sujeitos a cargas por eixo bastante elevadas (ver a Seção 2.6.5;
especialmente a classe 2S3-C, uma das mais frequentes entre os veículos que geram as
solicitações estáticas extremas, como mostrado na Tabela 3.38) e, ainda, sujeita as
estruturas a grandes amplificações dinâmicas – por exemplo, RATTIGAN et al. (2005)
consideram que um evento crítico em termos de momento fletor no meio do vão de uma
estrutura biapoiada é o cruzamento de dois veículos 2S3 de grande peso total nas
proximidades do meio do vão.
4.5 Veículo considerado para as análises dinâmicas
Considerando que o FAD decresce com o peso total do veículo (Figura 4.11a) e
que a análise dinâmica considerada é simplificada (sem corresponder às situações de
tráfego mostradas nas Tabelas 3.36 e 3.37, compostas em sua maioria por mais de um
veículo solicitando cada estrutura), adotou-se, de forma conservadora, o veículo 2S3
mais pesado da base de dados do DNIT, que já havia sido utilizado em PFEIL et al.
(2010). Trata-se de um caminhão articulado com 560 kN de peso total, com as
distâncias entre os eixos e as proporções entre as cargas de cada grupo de eixos
mostradas na Figura 4.12, trafegando rente à barreira lateral (nas pontes de tabuleiro
largo) ou ao guarda-rodas (nas estruturas de tabuleiro estreito). Esta consideração
resulta em uma razoável redução do número de casos de análise dinâmica. Para as
massas, amortecimentos e rigidezes dos pneus e das suspensões foram utilizados os
valores da Tabela 4.4.
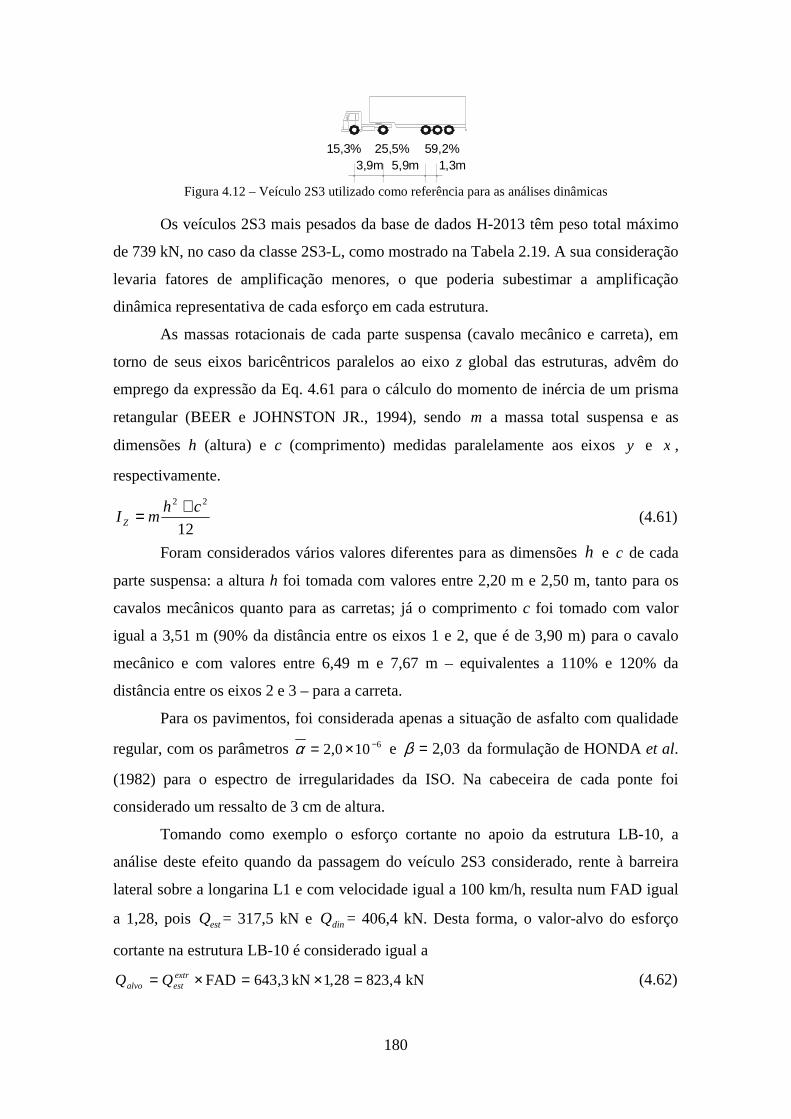
180
Figura 4.12 – Veículo 2S3 utilizado como referência para as análises dinâmicas
Os veículos 2S3 mais pesados da base de dados H-2013 têm peso total máximo
de 739 kN, no caso da classe 2S3-L, como mostrado na Tabela 2.19. A sua consideração
levaria fatores de amplificação menores, o que poderia subestimar a amplificação
dinâmica representativa de cada esforço em cada estrutura.
As massas rotacionais de cada parte suspensa (cavalo mecânico e carreta), em
torno de seus eixos baricêntricos paralelos ao eixo z global das estruturas, advêm do
emprego da expressão da Eq. 4.61 para o cálculo do momento de inércia de um prisma
retangular (BEER e JOHNSTON JR., 1994), sendo m a massa total suspensa e as
dimensões h (altura) e c (comprimento) medidas paralelamente aos eixos y e x ,
respectivamente.
12
22 chmIZ
+= (4.61)
Foram considerados vários valores diferentes para as dimensões h e c de cada
parte suspensa: a altura h foi tomada com valores entre 2,20 m e 2,50 m, tanto para os
cavalos mecânicos quanto para as carretas; já o comprimento c foi tomado com valor
igual a 3,51 m (90% da distância entre os eixos 1 e 2, que é de 3,90 m) para o cavalo
mecânico e com valores entre 6,49 m e 7,67 m – equivalentes a 110% e 120% da
distância entre os eixos 2 e 3 – para a carreta.
Para os pavimentos, foi considerada apenas a situação de asfalto com qualidade
regular, com os parâmetros 6100,2 −×=α e 03,2=β da formulação de HONDA et al.
(1982) para o espectro de irregularidades da ISO. Na cabeceira de cada ponte foi
considerado um ressalto de 3 cm de altura.
Tomando como exemplo o esforço cortante no apoio da estrutura LB-10, a
análise deste efeito quando da passagem do veículo 2S3 considerado, rente à barreira
lateral sobre a longarina L1 e com velocidade igual a 100 km/h, resulta num FAD igual
a 1,28, pois estQ = 317,5 kN e dinQ = 406,4 kN. Desta forma, o valor-alvo do esforço
cortante na estrutura LB-10 é considerado igual a
kN4,82328,1 kN 3,643FAD =×=×= extrestalvo QQ (4.62)
25,5%15,3% 59,2%5,9m 1,3m3,9m

181
Este valor é bastante superior ao valor de 648,0 kN produzido pela multiplicação
do esforço cortante de 487,2 kN advindo do carregamento de projeto de 450 kN da
NBR 7188, pelo fator de impacto 33,1=ϕ da NBR 7187, mediante o emprego da Eq.
4.60.
4.6 Valores obtidos para as amplificações dinâmicas
Aplicando, então, a metodologia descrita na Seção 4.4 por meio da simplificação
oriunda da consideração do veículo 2S3 adotado para a análise dinâmica de todas as
pontes consideradas, com velocidade de 80 km/h (a mais frequente nas Tabelas 3.36 e
3.37), obtêm-se os fatores de amplificação dinâmica mostrados na Tabela 4.9.
Tabela 4.9 – Valores obtidos para o FAD nas estruturas
Estrut. Esforço FAD Estrut. Esforço FAD
EB-10 Esforço cortante 1,26
LB-10 Esforço cortante 1,28
Mom. fletor posit. 1,52 Mom. fletor posit. 1,49
EB-20 Esforço cortante 1,10
LB-20 Esforço cortante 1,12
Mom. fletor posit. 1,41 Mom. fletor posit. 1,37
EB-30 Esforço cortante 1,04
LB-30 Esforço cortante 1,03
Mom. fletor posit. 1,32 Mom. fletor posit. 1,27
EB-40 Esforço cortante 1,00
LB-40 Esforço cortante 1,00
Mom. fletor posit. 1,12 Mom. fletor posit. 1,09
EC-10
Mom. fletor posit. 1,44
LC-10
Mom. fletor posit. 1,43
Esforço cortante 1,13 Esforço cortante 1,14
Mom. fletor negat. 1,44 Mom. fletor negat. 1,43
EC-20
Mom. fletor posit. 1,28
LC-20
Mom. fletor posit. 1,30
Esforço cortante 1,07 Esforço cortante 1,06
Mom. fletor negat. 1,28 Mom. fletor negat. 1,30
EC-30
Mom. fletor posit. 1,14
LC-30
Mom. fletor posit. 1,11
Esforço cortante 1,01 Esforço cortante 1,00
Mom. fletor negat. 1,14 Mom. fletor negat. 1,11
EC-40
Mom. fletor posit. 1,03
LC-40
Mom. fletor posit. 1,02
Esforço cortante 1,00 Esforço cortante 1,00
Mom. fletor negat. 1,03 Mom. fletor negat. 1,02
EE-2,5 Mom. fletor negat. 2,08 LE-2,5 Mom. fletor negat. 1,93
EE-5,0 Mom. fletor negat. 1,83 LE-5,0 Mom. fletor negat. 1,83
EE-7,5 Mom. fletor negat. 1,73 LE-7,5 Mom. fletor negat. 1,56
EE-10 Mom. fletor negat. 1,54 LE-10 Mom. fletor negat. 1,49
Os valores de FAD mostrados na Tabela 4.9, tal como o fator de impacto da
NBR 7187 e os de outras normas de projeto, indicam que as respostas dinâmicas das
estruturas com maiores comprimentos tendem a se igualar às estáticas, apresentando
182
uma atenuação rápida dos efeitos dinâmicos após a passagem do veículo, o que não
acontece com as pontes de menores vãos.
É importante ressaltar que, com os valores apresentados, não se objetivou obter
valores representativos do FAD para essas estruturas, uma vez que:
• foi adotado em todos os casos o pavimento asfáltico de qualidade regular, com
valores únicos para os parâmetros α e β do espectro de irregularidades da Eq. 4.54,
como se esse conjunto de valores representasse unicamente todas as condições de
irregularidades das pontes existentes no Brasil – o que, evidentemente, não corresponde
à realidade. Em um estudo que busque, especificamente, a proposição de valores para o
FAD, a informação do percentual de rodovias com cada condição de pavimento deve ser
levada em conta, para obter amplificações dinâmicas correspondentes a cada conjunto
de parâmetros de qualidade do pavimento;
• todas as estruturas foram submetidas ao mesmo carregamento dinâmico. Para
fins de obtenção de um FAD representativo, cada estrutura deveria ser testada com
vários carregamentos diferentes, variando informações como a classe do veículo, o peso
total, a posição transversal etc.;
• vários casos de presença simultânea de veículos deveriam ser considerados
para esse fim específico em cada estrutura, tanto no mesmo sentido quanto em sentidos
opostos;
• há a necessidade de verificação experimental de vários veículos. Neste
trabalho, para as saídas do programa STPG, seria necessário, no mínimo, validar
experimentalmente as respostas dinâmicas das classes 2S3, 3S3, 3T4, 3T6, 3M6, 3I3 e
3BB, constantes na Tabela 3.38;
• vários valores possíveis podem ser considerados para as rigidezes e
amortecimentos das suspensões e dos pneus, em função, por exemplo, do tipo de
suspensão. Os números constantes na Tabela 4.4 referem-se apenas a valores
selecionados a partir da suspensão mecânica; entretanto, no caso dos veículos que
possuem carretas com eixos isolados, como os caminhões da classe 3I3, as suspensões
das partes rebocadas devem ser obrigatoriamente pneumáticas, de acordo com a
Resolução 210 do CONTRAN (13/11/2006). Além disso, geralmente as carretas das
CVC como os bitrens (3T4 e 3M6) e rodotrens (3T6) são dotadas de suspensão
pneumática, bem como a maioria dos cavalos mecânicos de tração 6x4.
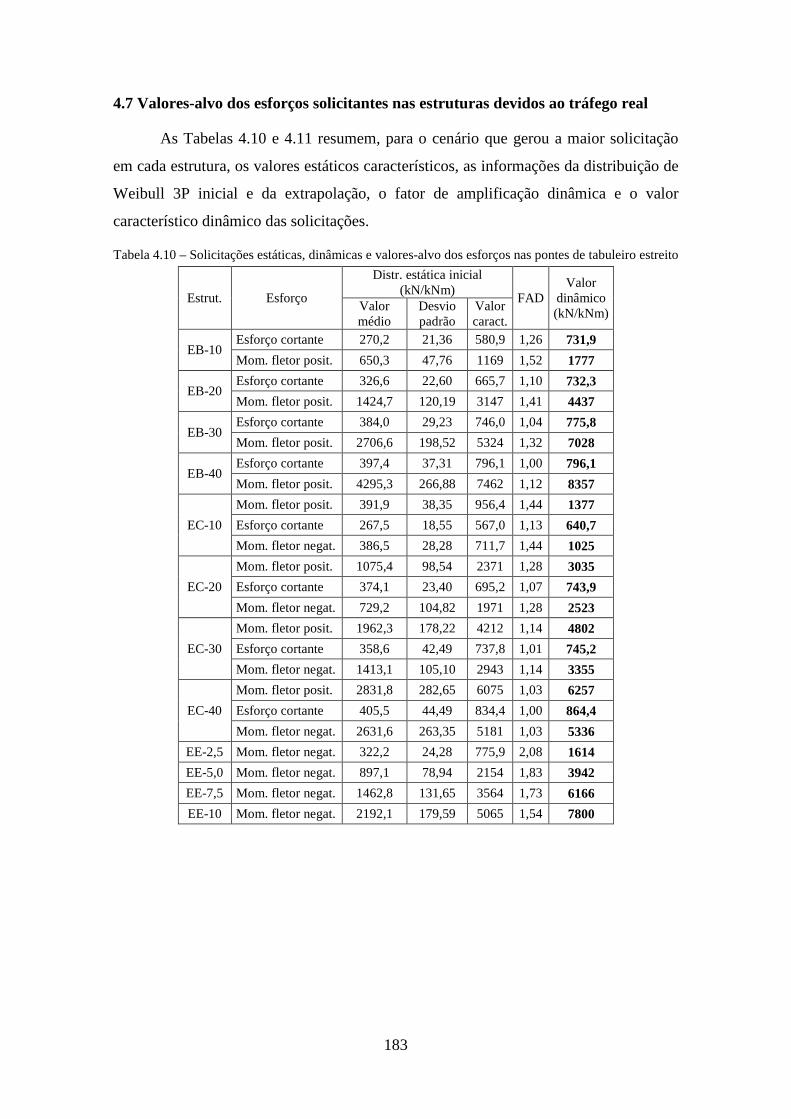
183
4.7 Valores-alvo dos esforços solicitantes nas estruturas devidos ao tráfego real
As Tabelas 4.10 e 4.11 resumem, para o cenário que gerou a maior solicitação
em cada estrutura, os valores estáticos característicos, as informações da distribuição de
Weibull 3P inicial e da extrapolação, o fator de amplificação dinâmica e o valor
característico dinâmico das solicitações.
Tabela 4.10 – Solicitações estáticas, dinâmicas e valores-alvo dos esforços nas pontes de tabuleiro estreito
Estrut. Esforço
Distr. estática inicial (kN/kNm)
FAD Valor
dinâmico (kN/kNm) Valor
médio Desvio padrão
Valor caract.
EB-10 Esforço cortante 270,2 21,36 580,9 1,26 731,9
Mom. fletor posit. 650,3 47,76 1169 1,52 1777
EB-20 Esforço cortante 326,6 22,60 665,7 1,10 732,3
Mom. fletor posit. 1424,7 120,19 3147 1,41 4437
EB-30 Esforço cortante 384,0 29,23 746,0 1,04 775,8
Mom. fletor posit. 2706,6 198,52 5324 1,32 7028
EB-40 Esforço cortante 397,4 37,31 796,1 1,00 796,1
Mom. fletor posit. 4295,3 266,88 7462 1,12 8357
EC-10
Mom. fletor posit. 391,9 38,35 956,4 1,44 1377
Esforço cortante 267,5 18,55 567,0 1,13 640,7
Mom. fletor negat. 386,5 28,28 711,7 1,44 1025
EC-20
Mom. fletor posit. 1075,4 98,54 2371 1,28 3035
Esforço cortante 374,1 23,40 695,2 1,07 743,9
Mom. fletor negat. 729,2 104,82 1971 1,28 2523
EC-30
Mom. fletor posit. 1962,3 178,22 4212 1,14 4802
Esforço cortante 358,6 42,49 737,8 1,01 745,2
Mom. fletor negat. 1413,1 105,10 2943 1,14 3355
EC-40
Mom. fletor posit. 2831,8 282,65 6075 1,03 6257
Esforço cortante 405,5 44,49 834,4 1,00 864,4
Mom. fletor negat. 2631,6 263,35 5181 1,03 5336
EE-2,5 Mom. fletor negat. 322,2 24,28 775,9 2,08 1614
EE-5,0 Mom. fletor negat. 897,1 78,94 2154 1,83 3942
EE-7,5 Mom. fletor negat. 1462,8 131,65 3564 1,73 6166
EE-10 Mom. fletor negat. 2192,1 179,59 5065 1,54 7800
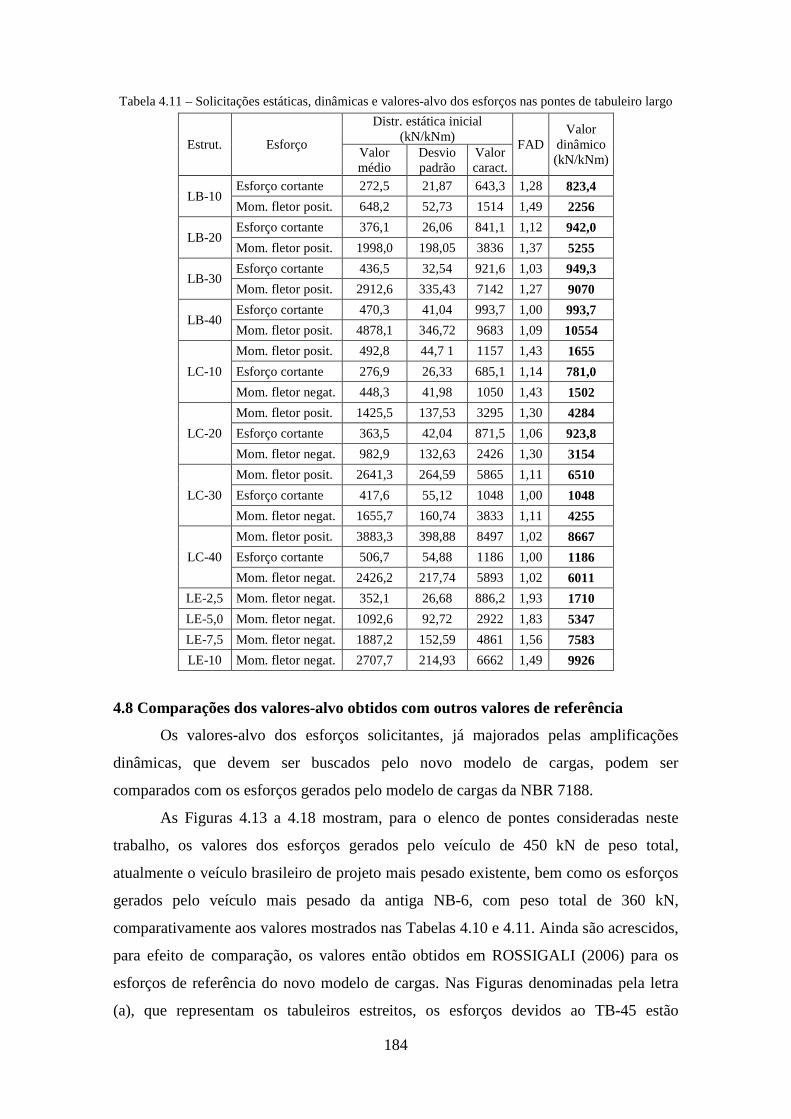
184
Tabela 4.11 – Solicitações estáticas, dinâmicas e valores-alvo dos esforços nas pontes de tabuleiro largo
Estrut. Esforço
Distr. estática inicial (kN/kNm)
FAD Valor
dinâmico (kN/kNm) Valor
médio Desvio padrão
Valor caract.
LB-10 Esforço cortante 272,5 21,87 643,3 1,28 823,4
Mom. fletor posit. 648,2 52,73 1514 1,49 2256
LB-20 Esforço cortante 376,1 26,06 841,1 1,12 942,0
Mom. fletor posit. 1998,0 198,05 3836 1,37 5255
LB-30 Esforço cortante 436,5 32,54 921,6 1,03 949,3
Mom. fletor posit. 2912,6 335,43 7142 1,27 9070
LB-40 Esforço cortante 470,3 41,04 993,7 1,00 993,7
Mom. fletor posit. 4878,1 346,72 9683 1,09 10554
LC-10
Mom. fletor posit. 492,8 44,7 1 1157 1,43 1655
Esforço cortante 276,9 26,33 685,1 1,14 781,0
Mom. fletor negat. 448,3 41,98 1050 1,43 1502
LC-20
Mom. fletor posit. 1425,5 137,53 3295 1,30 4284
Esforço cortante 363,5 42,04 871,5 1,06 923,8
Mom. fletor negat. 982,9 132,63 2426 1,30 3154
LC-30
Mom. fletor posit. 2641,3 264,59 5865 1,11 6510
Esforço cortante 417,6 55,12 1048 1,00 1048
Mom. fletor negat. 1655,7 160,74 3833 1,11 4255
LC-40
Mom. fletor posit. 3883,3 398,88 8497 1,02 8667
Esforço cortante 506,7 54,88 1186 1,00 1186
Mom. fletor negat. 2426,2 217,74 5893 1,02 6011
LE-2,5 Mom. fletor negat. 352,1 26,68 886,2 1,93 1710
LE-5,0 Mom. fletor negat. 1092,6 92,72 2922 1,83 5347
LE-7,5 Mom. fletor negat. 1887,2 152,59 4861 1,56 7583
LE-10 Mom. fletor negat. 2707,7 214,93 6662 1,49 9926
4.8 Comparações dos valores-alvo obtidos com outros valores de referência
Os valores-alvo dos esforços solicitantes, já majorados pelas amplificações
dinâmicas, que devem ser buscados pelo novo modelo de cargas, podem ser
comparados com os esforços gerados pelo modelo de cargas da NBR 7188.
As Figuras 4.13 a 4.18 mostram, para o elenco de pontes consideradas neste
trabalho, os valores dos esforços gerados pelo veículo de 450 kN de peso total,
atualmente o veículo brasileiro de projeto mais pesado existente, bem como os esforços
gerados pelo veículo mais pesado da antiga NB-6, com peso total de 360 kN,
comparativamente aos valores mostrados nas Tabelas 4.10 e 4.11. Ainda são acrescidos,
para efeito de comparação, os valores então obtidos em ROSSIGALI (2006) para os
esforços de referência do novo modelo de cargas. Nas Figuras denominadas pela letra
(a), que representam os tabuleiros estreitos, os esforços devidos ao TB-45 estão
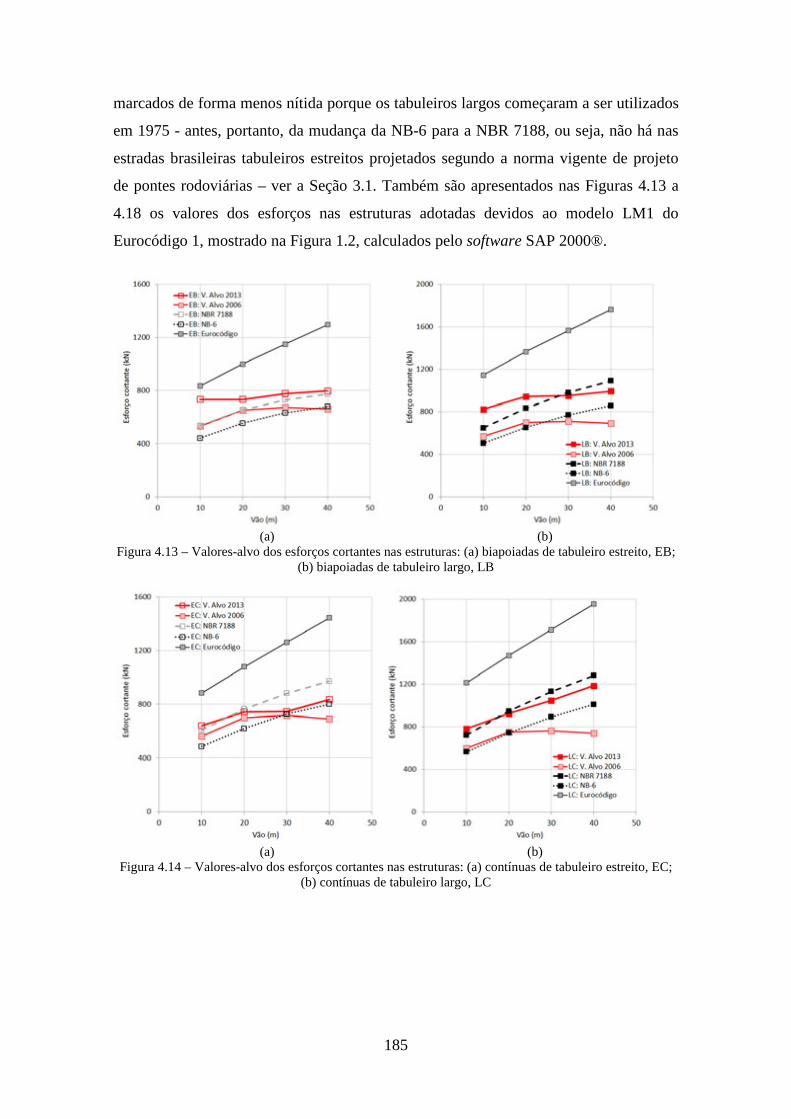
185
marcados de forma menos nítida porque os tabuleiros largos começaram a ser utilizados
em 1975 - antes, portanto, da mudança da NB-6 para a NBR 7188, ou seja, não há nas
estradas brasileiras tabuleiros estreitos projetados segundo a norma vigente de projeto
de pontes rodoviárias – ver a Seção 3.1. Também são apresentados nas Figuras 4.13 a
4.18 os valores dos esforços nas estruturas adotadas devidos ao modelo LM1 do
Eurocódigo 1, mostrado na Figura 1.2, calculados pelo software SAP 2000®.
(a) (b) Figura 4.13 – Valores-alvo dos esforços cortantes nas estruturas: (a) biapoiadas de tabuleiro estreito, EB;
(b) biapoiadas de tabuleiro largo, LB
(a) (b) Figura 4.14 – Valores-alvo dos esforços cortantes nas estruturas: (a) contínuas de tabuleiro estreito, EC;
(b) contínuas de tabuleiro largo, LC
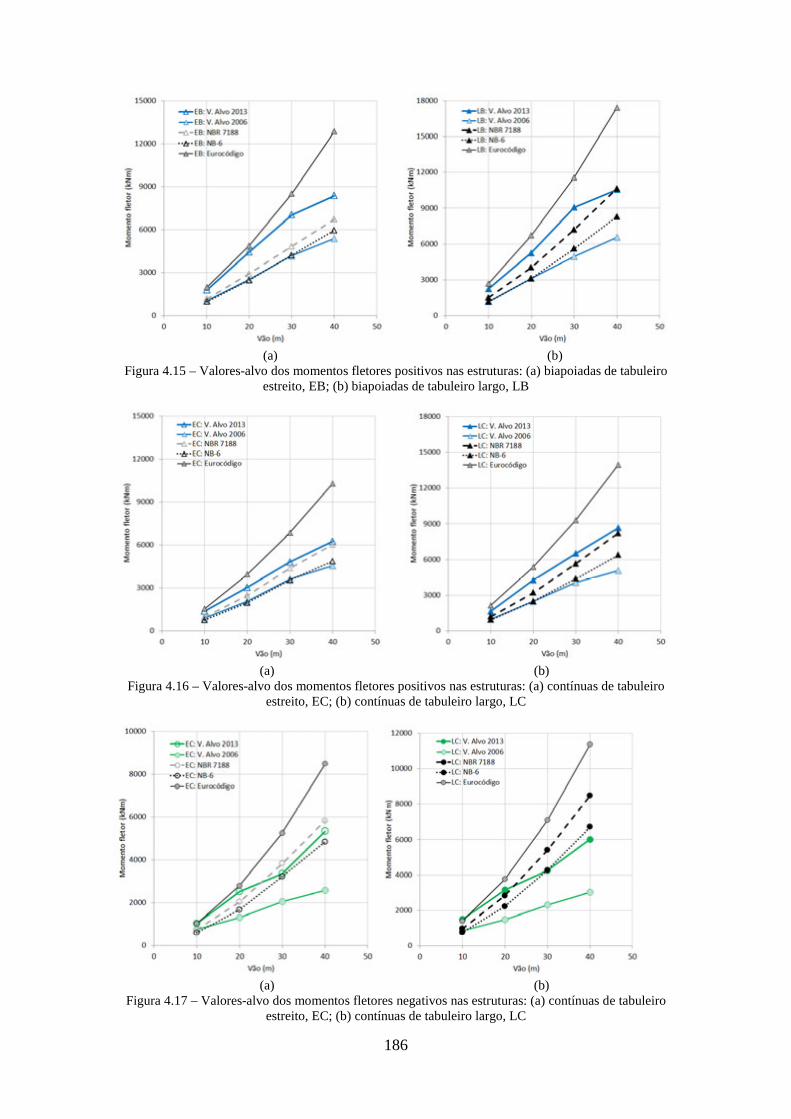
186
(a) (b)
Figura 4.15 – Valores-alvo dos momentos fletores positivos nas estruturas: (a) biapoiadas de tabuleiro estreito, EB; (b) biapoiadas de tabuleiro largo, LB
(a) (b)
Figura 4.16 – Valores-alvo dos momentos fletores positivos nas estruturas: (a) contínuas de tabuleiro estreito, EC; (b) contínuas de tabuleiro largo, LC
(a) (b)
Figura 4.17 – Valores-alvo dos momentos fletores negativos nas estruturas: (a) contínuas de tabuleiro estreito, EC; (b) contínuas de tabuleiro largo, LC

187
(a) (b) Figura 4.18 – Valores-alvo dos momentos fletores negativos nas estruturas: (a) biapoiadas com balanço,
de tabuleiro estreito, EE; (b) biapoiadas com balanço, de tabuleiro largo, LE
Pode-se verificar que, em relação aos números de 2006, os valores-alvo
atualizados dos esforços solicitantes sofreram acréscimos consideráveis. Isto pode ser
explicado por três motivos:
(1) o acréscimo de classes com grande PBTC, como os bitrens de 9 eixos (3M6)
e os rodotrens (3T6), na matriz de composição do tráfego. A matriz anterior
contemplava apenas as classes 2CB, 3CB, 2C, 3C, 2S2 e 2S3;
(2) a probabilidade, embora remota, de os veículos trafegarem com carga de até
180 kN em cada eixo SRD. As simulações de tráfego geram, com relativa frequência,
valores próximos a este limiar para as classes 2S3-C e 3S3-L, bastante frequentes e com
grandes valores de desvio padrão nas distribuições do peso total mostradas na Tabela
2.8. Estes caminhões dominam os efeitos extremos estáticos especialmente nas
estruturas de pequenos vãos (ver a Seção 3.8), onde apenas alguns eixos dos veículos
podem solicitar as pontes. Segundo O’CONNOR e O’BRIEN (2005), o valor
característico de um esforço numa ponte depende muito mais dos pesos máximos
possíveis dos veículos do que da proporção de veículos constante na matriz de
composição do tráfego. Conclusão semelhante é apresentada por ARAÚJO (2007). Na
matriz anterior, de 2006, a carga máxima de cada eixo SRD era de aproximadamente
162 kN, porém possível apenas no peso total mais alto da classe 3C - 446 kN -, com
baixíssima probabilidade de ocorrência: 0,001% (ROSSIGALI, 2006);
(3) a probabilidade não nula de cruzamento de veículos, a um VMD por faixa
consideravelmente maior que o adotado no trabalho de 2006, em alguns cenários de
tráfego.
188
É possível notar, também, que tanto os esforços devidos ao carregamento de
projeto da NBR 7188 quanto a grande maioria dos valores-alvo dos esforços
solicitantes, obtidos neste trabalho, são inferiores àqueles valores de esforços gerados
pelo modelo de cargas LM1 do Eurocódigo 1. Como este código é considerado a norma
mais elaborada em vigor para o projeto de pontes rodoviárias (CALGARO, 1998), e os
caminhões que circulam nas rodovias europeias são muitas vezes sujeitos a limites de
carga total e por eixo menores que os brasileiros (SOUZA, 2009), pode-se concluir que,
no elenco de pontes estudadas, a norma europeia de projeto é bastante conservadora.
Duas justificativas para este fato são os grandes volumes de tráfego registrados nas
rodovias estudadas - com VMD de até 8000 veículos/dia em algumas rodovias, segundo
CALGARO (1998) - e o período de retorno de 1000 anos adotado para as extrapolações
dos esforços solicitantes (PRAT, 2001). Em alguns casos, como nas estruturas em
balanço, os valores-alvo deste trabalho chegam a superar até mesmo os valores dos
esforços produzidos pelo modelo de cargas da norma europeia; porém, estas
ultrapassagens são limitadas a pequenos valores relativos.
Tal qual a norma europeia, o modelo de cargas da norma AASHTO LRFD
também é uma referência internacional para o projeto de pontes; este código normativo
já foi alvo de numerosos estudos e comparações. Mesmo assim, julgou-se desnecessário
aos propósitos deste trabalho incluir em comparações os esforços devidos a esse modelo
de cargas, pois a aplicação desta norma sabidamente resulta em efeitos menos
conservadores em relação ao Eurocódigo 1 (SANTOS, 2003, LUCHI, 2006).
Nota-se, ainda, que o veículo atual de projeto da NBR 7188 gera solicitações
bastante inferiores àquelas devidas ao tráfego real simulado (valores-alvo) em alguns
casos, como os momentos fletores negativos das estruturas em balanço (Figura 4.18).
Em outros casos, como os momentos fletores negativos das estruturas contínuas de
tabuleiro largo (LC, Figura 4.17b), nos comprimentos de tramos de 30 m e 40 m, o
carregamento de projeto da norma brasileira supera com folga os valores-alvo. No caso
dos momentos fletores positivos, não há grandes diferenças entre os valores-alvo
(maiores) e os esforços produzidos pelas normas brasileiras (menores), tal como na
comparação estática realizada na Seção 3.9. Já a comparação dos esforços cortantes
mostra que a conclusão da situação estática não se manteve: enquanto na análise
anterior, estática, os esforços cisalhantes gerados pelo tráfego real superaram com folga
os valores normativos, a inclusão do FAD e do coeficiente de impacto ϕ acabou
189
resultando em esforços dinâmicos aproximadamente equivalentes nos dois casos, já que
as amplificações dinâmicas da Tabela 4.9 têm valores menores que o coeficiente ϕ .
Em geral, verifica-se que os esforços devidos ao tráfego real superam com maior
magnitude aqueles gerados pelos veículos de projeto TB-36 e TB-45 nos tabuleiros
antigos (estreitos). Isto pode ser explicado pelas pequenas solicitações das cargas de
multidão da NB-6 e da NBR 7188 nestas estruturas, que são tanto mais intensas quanto
maior for a área da superfície do tabuleiro.
Pode-se concluir que, do ponto de vista das estruturas estudadas neste trabalho, a
NBR 7188 está desatualizada em relação às solicitações devidas ao tráfego real e
precisa revisar, em geral para cima, os valores dos esforços solicitantes gerados pelo
modelo de cargas principal. As diferenças entre os valores-alvo dos esforços obtidos e
os valores normativos mostram a necessidade de se obter um modelo de cargas que
gere, de fato, solicitações que se aproximem dos valores das Tabelas 4.10 e 4.11.
190
5 Obtenção de modelos de cargas móveis representativos do tráfego real
Buscam-se neste Capítulo as configurações físicas e geométricas de modelos de
cargas móveis para o projeto de pontes rodoviárias no Brasil, compostos por cargas
concentradas e distribuídas, de tal forma que, sendo aplicado o carregamento destes
modelos fictícios nas estruturas consideradas, mostradas na Tabela 3.2, resultem, nas
seções transversais críticas de cada uma delas, aproximadamente os mesmos esforços
representativos do tráfego real, mostrados nas Tabelas 4.10 e 4.11. Estes esforços foram
obtidos por extrapolação da parcela estática a determinados períodos de retorno, com a
posterior inclusão dos efeitos dinâmicos por meio dos fatores de amplificação dinâmica,
obtidos por meio da modelagem numérica da interação dinâmica veículo-pavimento-
estrutura, como descrito nos Capítulos 3 e 4; desta forma, os modelos de cargas
buscados já incluem a parcela dinâmica do carregamento.
5.1 Descrição da ferramenta para busca de modelos de cargas móveis - BMCMov
A ferramenta computacional desenvolvida para a busca de modelos de cargas
móveis que representem os esforços gerados pelo tráfego real denomina-se “Buscador
de Modelos de Cargas Móveis” (BMCMov) e foi desenvolvida em linguagem
Fortran®. Definindo características geométricas como o total de eixos e as distâncias
entre eles, a quantidade e a largura das faixas de projeto e fixando limites mínimos e
máximos para os valores das cargas concentradas (peso total do veículo) e distribuídas
(por unidade de área), o programa BMCMov busca via exaustão, ou seja, através uma
varredura em todas as combinações possíveis no domínio de cada um dos
carregamentos componentes, qual é o modelo que gera os esforços que mais se
assemelham, de forma geral, aos valores-alvo previamente fornecidos. Outros relatórios
de menor importância também são gerados, como, por exemplo, as configurações de
outros modelos de cargas móveis representativos dos valores-alvo, que não o mais apto.
Para o programa ser executado, é necessário fornecer as informações
geométricas das superestruturas das pontes – os tabuleiros estreito e largo mostrados na
Seção 3.1 –, bem como as superfícies de influência de cada esforço solicitante em cada
seção de referência de cada estrutura, segundo cada tipo de ação unitária (carga
concentrada, binário torçor e binário fletor), descritas na Seção 3.2.6.
Neste trabalho foram feitas as seguintes considerações:
191
- distâncias entre eixos com o mesmo valor, no caso de o modelo de cargas ser
definido com mais de 2 eixos;
- o peso total do veículo que representa o modelo de cargas móveis é suposto
dividido uniformemente entre todos os seus eixos componentes, de forma semelhante à
distribuição adotada para os eixos em tandem (Seção 2.5.2);
- a carga que cada eixo recebe é dividida igualmente entre as suas duas
extremidades; cada qual é representada por uma carga concentrada.
5.1.1 Sistemática de busca
Definidas as informações geométricas do modelo de cargas, buscam-se os
valores de peso total e de cargas distribuídas por faixa que minimizem o erro total
ponderado (descrito a seguir). A quantidade desejada de faixas de projeto e a largura de
cada uma delas (mantida constante para todas, exceto na faixa remanescente), são
informadas previamente.
Caso seja definida mais de uma faixa de projeto, verifica-se se é possível haver,
em cada tipo de tabuleiro, o número desejado de faixas, fN , com a largura desejada,
fL , na sua largura útil - região onde as superfícies de influência geram apenas efeitos
desfavoráveis. O número máximo possível de faixas em cada tabuleiro é calculado pela
expressão
=
f
tabU
f L
LN intmax , (5.1)
onde tabUL é a largura útil do tabuleiro considerado.
Se não houver problemas ( maxff NN ≤ ), o tabuleiro é dividido de forma
semelhante à divisão adotada no Eurocódigo 1: a primeira faixa é locada na posição
transversal que provocar os piores efeitos no elemento estrutural considerado e a
numeração das faixas cresce à medida que se loca cada nova posição transversal mais
desfavorável (desconsiderando aquelas já alocadas por faixas anteriores). Findada a
locação da última faixa de projeto, considera-se para a faixa remanescente a largura útil
que sobrou do tabuleiro. Caso a divisão desejada não seja possível (se maxff NN > ), o
programa BMCMov reduz o número de faixas de projeto para maxfN , mantendo a
largura desejada: para tal, altera-se a largura da faixa remanescente, que, no caso dos
tabuleiros de 2 longarinas considerados neste trabalho, é calculada pela expressão
192
( )fftabUr LNLL ⋅−= (5.2)
Mantida constante a largura das faixas de projeto, em cada uma delas sempre
haverá um veículo; sua posição é considerada centralizada transversalmente (seu eixo
coincidindo com o eixo da faixa). Como a largura da faixa remanescente pode ser muito
pequena, dependendo da configuração geométrica do tabuleiro, nesta faixa não são
previstos veículos – nela atua apenas a carga distribuída. A forma utilizada pelo
programa BMCMov para distribuir as faixas de projeto possibilita que um mesmo
modelo de cargas carregue diferentes estruturas com diferentes números de faixas de
projeto.
Havendo necessidade de rearranjar as faixas de projeto, o procedimento adotado
pelo programa BMCMov para este fim difere daquele preconizado pela norma europeia;
nesta, em função do elemento estrutural analisado, permite-se locar faixas com larguras
diferentes (algumas faixas mais estreitas) e a faixa remanescente é obtida com base em
toda a largura trafegável do tabuleiro – não apenas a partir da largura útil. Porém, para
os dois modelos de tabuleiro considerados neste trabalho, com apenas duas longarinas, e
com estes elementos estruturais sendo tomados como referência para o cálculo de
esforços, ambos os procedimentos resultam na mesma divisão em faixas de projeto.
Se se desejar uma busca com apenas uma faixa de projeto, em tabuleiros de
larguras diferentes, deve-se executar o programa BMCMov lançando mão da faixa
remanescente, uma vez que esta ferramenta considera apenas um valor de largura para
todas as faixas. Para tal, informa-se uma largura de faixa menor que a largura útil do
tabuleiro mais estreito considerado, e restringe-se a busca impondo a condição de que o
carregamento distribuído da faixa remanescente deve ser igual ao carregamento
distribuído da faixa de projeto no 1.
Como há uma grande diversidade de estruturas e esforços solicitantes tomados
como referência para os valores-alvo, o programa BMCMov permite atribuir um peso
para cada valor-alvo, sendo este composto pelo produto de três outros pesos: o do
sistema estrutural, ESTjP , o do tipo de tabuleiro, TAB
jP , e o do tipo de esforço solicitante
monitorado, ESFijP (Eq. 5.1). Neste Capítulo, os subíndices i, j e k referem-se,
respectivamente, aos contadores dos esforços solicitantes, das estruturas e dos modelos
de cargas.
ESFij
TABj
ESTjij PPPP ⋅⋅= (5.3)
193
Com a leitura das informações geométricas dos modelos de cargas, o que varia
efetivamente, em cada execução, são os carregamentos: os domínios de existência de
cada carga concentrada e cada carga distribuída são definidos pela leitura dos limites
inferiores e superiores destas variáveis, numa das etapas preliminares do programa
BMCMov. Assim, especialmente no caso de mais de uma faixa de projeto, a busca de
um modelo de cargas ótimo se traduz em um problema de otimização com
multiobjetivos.
Dentre as várias técnicas matemáticas existentes para lidar com este problema, a
mais comumente empregada nas otimizações de engenharia é a estratégia de Pareto
(NEVES, 1997), em que se objetiva encontrar uma solução factível localizada no
interior da fronteira de Pareto, o subconjunto de todas as soluções não dominadas do
espaço multidimensional de busca. A eficácia do processo de otimização, entretanto, é
garantida à custa de considerável complexidade na implementação (LIMA, 2008).
No caso específico do problema analisado neste Capítulo, haveria dificuldade
em se programar a procura de uma combinação ótima de geometria pré-configurada
num domínio multidimensional, possivelmente com um número colossal de extremos
locais e que pode variar radicalmente de características em cada execução, mediante,
por exemplo, a simples alteração no valor extremo de algum carregamento em alguma
das faixas de projeto.
Desta forma, para evitar uma modelagem matemática sofisticada, adotou-se no
programa BMCMov a estratégia de realizar a varredura nos valores possíveis dos
carregamentos discretizando os domínios contínuos de validade por meio da adoção de
incrementos de carga para os carregamentos concentrados (Pδ ) e distribuídos ( qδ ).
Conhecendo, de cada carregamento em cada faixa, os seus valores extremos
possíveis e o seu passo de variação, as magnitudes das cargas são tomadas a partir de
uma malha linear de valores possíveis. Tomando como exemplo o caso das cargas
concentradas, o valor da n-ésima carga total na faixa f , nfC , é dado por
( ) Pfn
f pPC δ⋅−+= 1min (5.4)
e o número de pesos totais possíveis para o veículo da faixa f , fNC , é igual a
−+=
P
fff
PPNC
δ
minmax
int1 (5.5)
194
O cálculo de cada carregamento distribuído, nas faixas de projeto e
remanescente, segue esta mesma sequência. Há uma desvantagem advinda da escolha
pela discretização dos domínios: ao se evitar o estudo matemático inerente à busca por
um modelo de cargas, a procura por exaustão necessita de um grande esforço
computacional, especialmente no caso de não haver restrições de domínio.
Denotando o número de cargas distribuídas possíveis nas faixas de projeto e na
faixa remanescente, respectivamente, por fND e rND , o número total de modelos de
carga possíveis a serem investigados pelo programa BMCMov é igual a
( )∏=
⋅⋅=fN
fffrMCD NDNCNDN
1
(5.6)
Para cada modelo de cargas distinto, o programa BMCMov calcula todos os
esforços solicitantes em todas as estruturas. Ao final da varredura nos MCDN modelos de
cargas distintos, considerando todas as combinações possíveis de cargas distribuídas e
concentradas, em quantas faixas de projeto houver, o programa armazena aquela com o
menor erro total ponderado. A sequência a seguir ilustra este procedimento:
• determinar o peso de cada valor-alvo de cada estrutura (ijP ) pela Eq. 5.3;
• calcular cada esforço i gerado na estrutura j pelo modelo de cargas k ( ijkE );
• calcular cada diferença relativa (ijkε ) entre o valor do esforço i gerado na
estrutura j pelo modelo de cargas k ( ijkE ) e o valor-alvo correspondente (ijV ):
ij
ijijkijk V
VE −=ε (5.7)
• calcular o erro total ponderado do modelo de cargas k, utilizando, como fator
de ponderação das diferenças relativas ijkε , os pesos dos esforços i nas estruturas j ( ijP ):
( )∑∑
∑∑=
j iij
j iijkij
k P
P εε (5.8)
Substituindo as Eqs. 5.3 e 5.7 na Eq. 5.8, o erro total ponderado pode ser
reescrito como
( )( )∑∑
∑∑
⋅⋅
−⋅⋅⋅
=
j i
ESFij
TABj
ESTj
j i ij
ijijkESFij
TABj
ESTj
kPPP
V
VEPPP
ε (5.9)
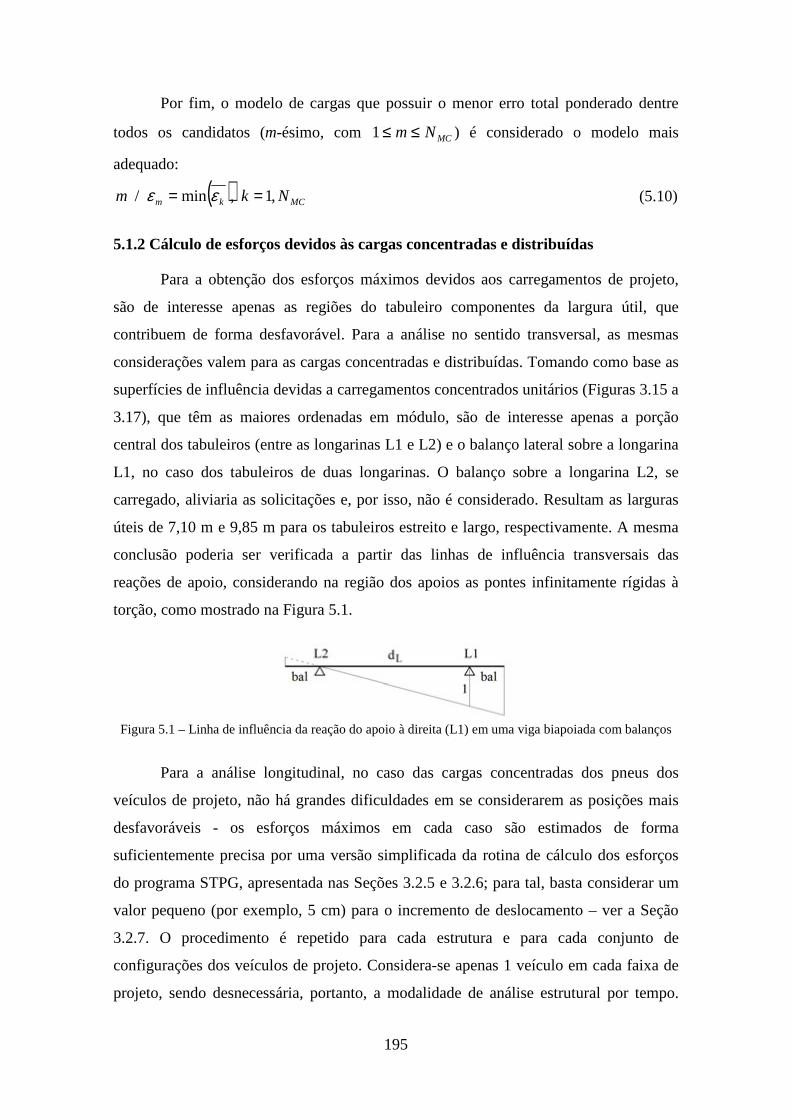
195
Por fim, o modelo de cargas que possuir o menor erro total ponderado dentre
todos os candidatos (m-ésimo, com MCNm≤≤1 ) é considerado o modelo mais
adequado:
( ) MCkm Nkm ,1 ,min / == εε
(5.10)
5.1.2 Cálculo de esforços devidos às cargas concentradas e distribuídas
Para a obtenção dos esforços máximos devidos aos carregamentos de projeto,
são de interesse apenas as regiões do tabuleiro componentes da largura útil, que
contribuem de forma desfavorável. Para a análise no sentido transversal, as mesmas
considerações valem para as cargas concentradas e distribuídas. Tomando como base as
superfícies de influência devidas a carregamentos concentrados unitários (Figuras 3.15 a
3.17), que têm as maiores ordenadas em módulo, são de interesse apenas a porção
central dos tabuleiros (entre as longarinas L1 e L2) e o balanço lateral sobre a longarina
L1, no caso dos tabuleiros de duas longarinas. O balanço sobre a longarina L2, se
carregado, aliviaria as solicitações e, por isso, não é considerado. Resultam as larguras
úteis de 7,10 m e 9,85 m para os tabuleiros estreito e largo, respectivamente. A mesma
conclusão poderia ser verificada a partir das linhas de influência transversais das
reações de apoio, considerando na região dos apoios as pontes infinitamente rígidas à
torção, como mostrado na Figura 5.1.
Figura 5.1 – Linha de influência da reação do apoio à direita (L1) em uma viga biapoiada com balanços
Para a análise longitudinal, no caso das cargas concentradas dos pneus dos
veículos de projeto, não há grandes dificuldades em se considerarem as posições mais
desfavoráveis - os esforços máximos em cada caso são estimados de forma
suficientemente precisa por uma versão simplificada da rotina de cálculo dos esforços
do programa STPG, apresentada nas Seções 3.2.5 e 3.2.6; para tal, basta considerar um
valor pequeno (por exemplo, 5 cm) para o incremento de deslocamento – ver a Seção
3.2.7. O procedimento é repetido para cada estrutura e para cada conjunto de
configurações dos veículos de projeto. Considera-se apenas 1 veículo em cada faixa de
projeto, sendo desnecessária, portanto, a modalidade de análise estrutural por tempo.
196
Todos os veículos (em todas as faixas) têm a mesma configuração geométrica.
Definem-se apenas o número desejado de eixos, a distância transversal entre pneus e as
distâncias longitudinais entre eixos. Estes veículos trafegam todos no mesmo sentido,
lado a lado, preservando exatamente as mesmas posições longitudinais relativas, com a
mesma velocidade de tráfego em cada faixa de projeto. As distâncias de afastamento e
de aproximação também devem ser iguais em todas as faixas. Com as configurações
geométricas dos veículos de projeto de cada faixa sendo todas idênticas, a única
característica variável entre eles é o peso total. Para facilitar as análises e reduzir tempo
computacional, geram-se inicialmente os esforços desejados devidos à passagem de um
veículo de peso unitário (1 kN) em cada faixa de projeto de cada estrutura; considerando
linearidade, aplica-se o princípio da superposição dos efeitos para se determinarem, em
cada modelo de cargas testado, os esforços devidos ao seu conjunto de valores de pesos
totais dos veículos.
A contribuição das cargas distribuídas para os esforços solicitantes é considerada
mediante outra sub-rotina. O esforço desejado devido a uma carga distribuída q (kN/m2)
deveria ser calculado multiplicando-se a magnitude de q pelo volume encerrado por
cada superfície de influência por ação de carga concentrada unitária, como indicado na
Figura 5.2a para o caso do momento fletor positivo no meio do vão da longarina nas
estruturas biapoiadas; entretanto, para esta tarefa ser cumprida, surgem algumas
dificuldades como a necessidade de obter equações analíticas dos planos para o cálculo
destas grandezas, a necessidade de calcular um volume externo ao encerrado pela
superfície de influência (no caso de uma faixa de projeto no balanço lateral sobre a
longarina L1) etc. Assim, para esse objetivo, optou-se por um procedimento numérico
simplificado: discretizou-se cada superfície de carregamento com magnitude q em
elementos retangulares, de lados x∆ e z∆ previamente definidos (Figura 5.2b). De cada
retângulo, cuja carga concentrada resultante tem magnitude zxqP ∆⋅∆⋅=∆ , obtêm-se
as coordenadas do seu centroide para a decomposição da carga P∆ na transversal e na
longitudinal, como exposto na Seção 3.2.5, dando origem, em geral, a 6 carregamentos
nodais, sendo 3 em cada longarina, num total de 2 cargas concentradas, 2 binários
torçores e 2 binários fletores, que são acumulados no vetor global de forças.
Para cada faixa de projeto, ou remanescente, de cada estrutura, acumulam-se as
contribuições nodais de cada elemento retangular de área em todos os nós de longarina
necessários e, ao final, calculam-se os esforços desejados devidos ao carregamento
distribuído q por meio das superfícies de influência fornecidas pelo programa STPG
197
(Figuras 3.15 a 3.23). Devido à discretização da superfície de carregamento distribuído,
surge a necessidade de calcular esforços computando as contribuições de torção e de
flexão. Caso fosse realizado o cálculo dos esforços devidos às cargas distribuídas em
cada faixa pelo cálculo real dos volumes das superfícies de influência, seria necessária
apenas a consideração das superfícies de influência devidas a carregamentos unitários.
Para a análise longitudinal, com a discretização de cada superfície de
carregamento (faixa de tráfego de projeto), o procedimento ideal para obter os esforços
devidos às cargas distribuídas consistiria em uma análise do incremento do efeito
devido à carga de cada elemento retangular: a contribuição do elemento de área em
questão deveria ser considerada somente se ele contribuísse desfavoravelmente para o
efeito em análise, ou seja, se o esforço acumulado, considerando o cômputo deste
elemento, incrementasse o módulo do esforço acumulado anterior à sua contribuição -
caso isto não ocorresse, descartar-se-ia a contribuição deste elemento de área. Este
procedimento implica na necessidade de cálculo de esforços repetidas vezes, o que pode
demandar grande esforço computacional dependendo do número de elementos de área
que compõem cada superfície de carregamento. Assim, por simplificação, esta análise
não foi realizada. A escolha dos elementos de área que contribuem desfavoravelmente
para cada esforço solicitante foi considerada de forma “manual”, tomando como base
apenas a forma das superfícies de influência devidas às cargas unitárias (Figuras 3.15 a
3.17), pois elas têm ordenadas mais pronunciadas que as correspondentes superfícies de
flexão e de torção, e também porque o procedimento mais refinado para a obtenção de
esforços, acima descrito, envolveria somente o cálculo dos volumes das superfícies de
influência devidas a estas solicitações.
Para a análise qualitativa das superfícies de influência, podem ser tomadas como
base apenas as linhas de influência (longitudinais) de cada esforço, devidas a uma carga
unitária (Tabela 3.2), correspondentes às elevações das superfícies de influência das
Figuras 3.15 a 3.17 na posição transversal correspondente à longarina L1. Desses
diagramas, nota-se que todas as ordenadas das linhas de influência têm o mesmo sinal
nas diferentes posições longitudinais, exceto na L.I. do momento fletor positivo,
aproximadamente no meio de um dos tramos, das estruturas contínuas de 2 vãos: neste
caso, como há ordenadas positivas e negativas, devem ser carregadas somente as
porções longitudinais das superfícies de influência que gerem efeitos desfavoráveis – no
caso, deve ser considerado apenas o primeiro tramo, que apresenta ordenadas positivas
(marcadas para baixo).
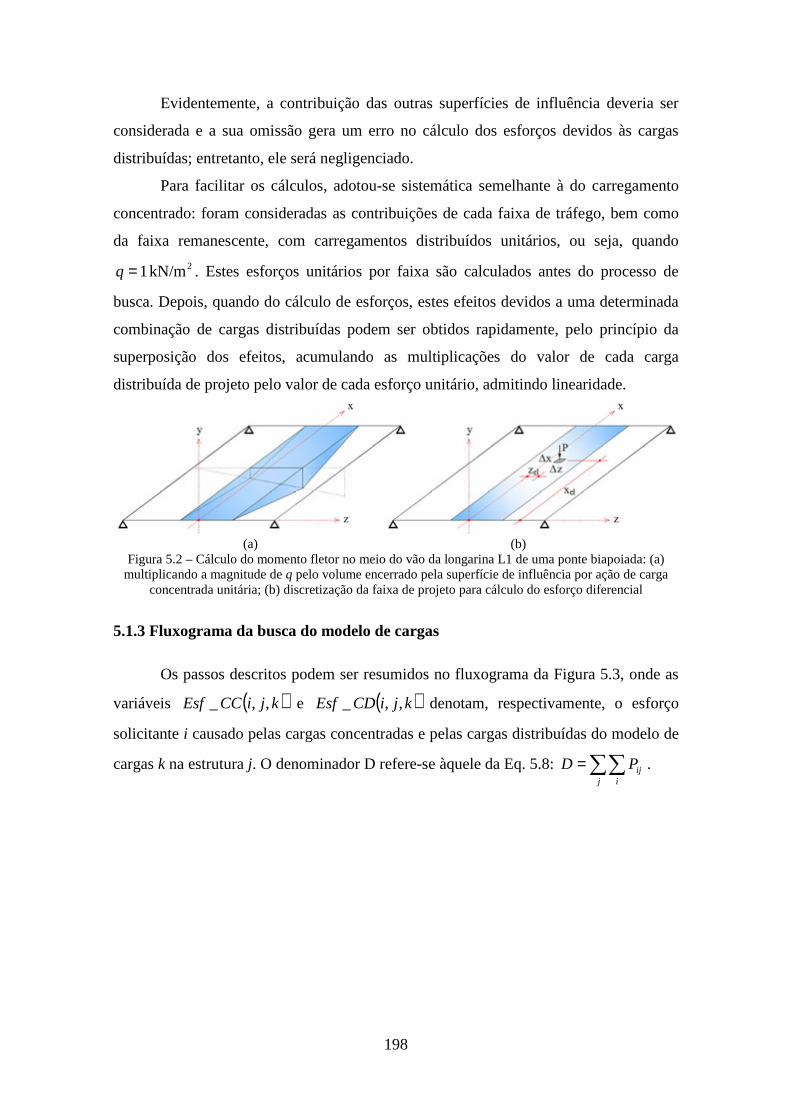
198
Evidentemente, a contribuição das outras superfícies de influência deveria ser
considerada e a sua omissão gera um erro no cálculo dos esforços devidos às cargas
distribuídas; entretanto, ele será negligenciado.
Para facilitar os cálculos, adotou-se sistemática semelhante à do carregamento
concentrado: foram consideradas as contribuições de cada faixa de tráfego, bem como
da faixa remanescente, com carregamentos distribuídos unitários, ou seja, quando
2kN/m 1=q . Estes esforços unitários por faixa são calculados antes do processo de
busca. Depois, quando do cálculo de esforços, estes efeitos devidos a uma determinada
combinação de cargas distribuídas podem ser obtidos rapidamente, pelo princípio da
superposição dos efeitos, acumulando as multiplicações do valor de cada carga
distribuída de projeto pelo valor de cada esforço unitário, admitindo linearidade.
(a) (b)
Figura 5.2 – Cálculo do momento fletor no meio do vão da longarina L1 de uma ponte biapoiada: (a) multiplicando a magnitude de q pelo volume encerrado pela superfície de influência por ação de carga
concentrada unitária; (b) discretização da faixa de projeto para cálculo do esforço diferencial
5.1.3 Fluxograma da busca do modelo de cargas
Os passos descritos podem ser resumidos no fluxograma da Figura 5.3, onde as
variáveis ( )kjiCCEsf ,,_ e ( )kjiCDEsf ,,_ denotam, respectivamente, o esforço
solicitante i causado pelas cargas concentradas e pelas cargas distribuídas do modelo de
cargas k na estrutura j. O denominador D refere-se àquele da Eq. 5.8: ∑∑=j i
ijPD .
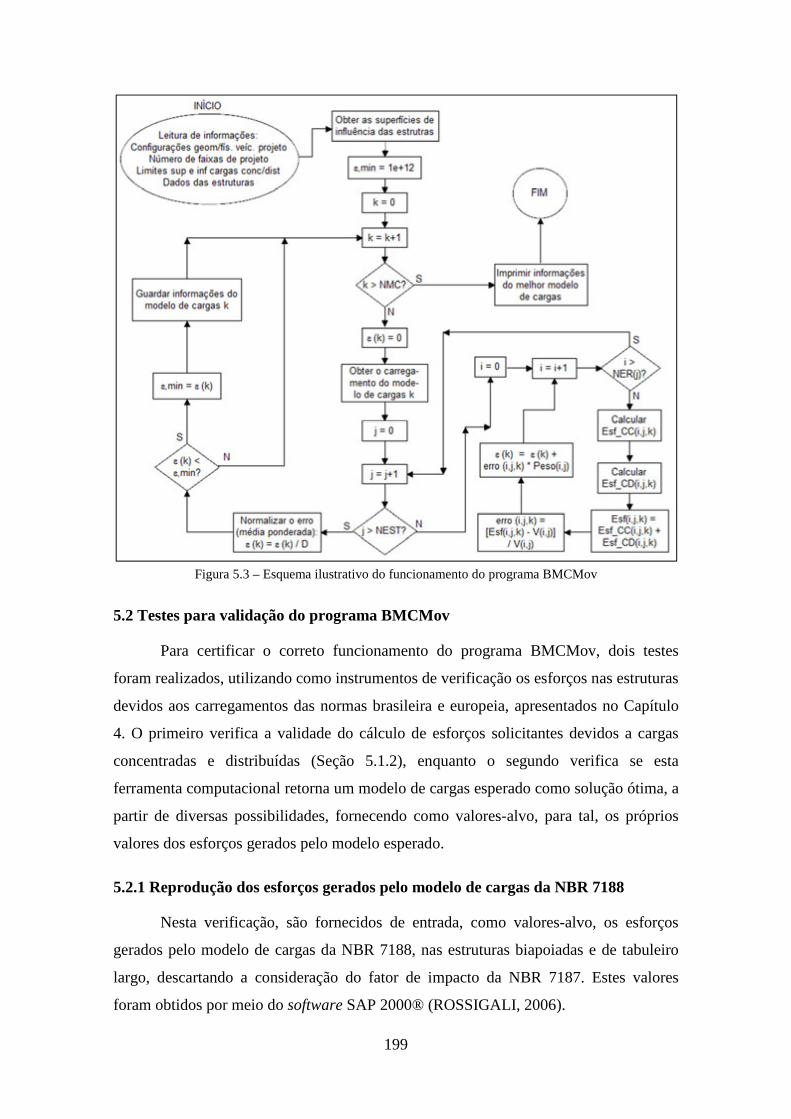
199
Figura 5.3 – Esquema ilustrativo do funcionamento do programa BMCMov
5.2 Testes para validação do programa BMCMov
Para certificar o correto funcionamento do programa BMCMov, dois testes
foram realizados, utilizando como instrumentos de verificação os esforços nas estruturas
devidos aos carregamentos das normas brasileira e europeia, apresentados no Capítulo
4. O primeiro verifica a validade do cálculo de esforços solicitantes devidos a cargas
concentradas e distribuídas (Seção 5.1.2), enquanto o segundo verifica se esta
ferramenta computacional retorna um modelo de cargas esperado como solução ótima, a
partir de diversas possibilidades, fornecendo como valores-alvo, para tal, os próprios
valores dos esforços gerados pelo modelo esperado.
5.2.1 Reprodução dos esforços gerados pelo modelo de cargas da NBR 7188
Nesta verificação, são fornecidos de entrada, como valores-alvo, os esforços
gerados pelo modelo de cargas da NBR 7188, nas estruturas biapoiadas e de tabuleiro
largo, descartando a consideração do fator de impacto da NBR 7187. Estes valores
foram obtidos por meio do software SAP 2000® (ROSSIGALI, 2006).
200
Como a sub-rotina do programa BMCMov referente ao cálculo de esforços
solicitantes devidos a cargas concentradas foi programada com base na sub-rotina
equivalente do programa STPG, mostrada nas Seções 3.2.5 e 3.2.6, e esta foi
considerada válida (Seção 3.3.2), é necessário validar apenas o cálculo de esforços
devidos às cargas distribuídas.
O programa BMCMov considera a carga distribuída por unidade de área atuando
integralmente no tabuleiro, sobrepondo-se, inclusive, ao veículo de cargas concentradas;
assim, para modelar o carregamento da NBR 7188, é necessário descontar do peso total
do veículo de projeto um carregamento equivalente à resultante da carga distribuída
atuando em toda a sua superfície. Como este veículo tem 3,00 m de largura por 6,00 m
de comprimento, e a carga de multidão da NBR 7188, para as pontes de rodovias Classe
I, é igual a 5,0 kN/m2, deve-se descontar o valor kN 90 kN/m 5,0 m 18 22 =× do peso
total do veículo (450 kN para pontes de rodovias Classe I): seu carregamento total passa
a ser 360 kN (6 x 60 kN).
Para esta execução, considera-se apenas uma faixa de tráfego, com largura de
2,00 m (valor igual à bitola dos eixos), para que os veículos atinjam a posição
transversal mais desfavorável para o cálculo dos esforços solicitantes, como
preconizado pela norma brasileira. Para carregar o restante da largura útil do tabuleiro,
considera-se a faixa remanescente. Busca-se um veículo com 3 eixos distantes entre si
por 1,50 m.
Definindo valores iguais para os limites inferiores e superiores dos intervalos de
busca dos carregamentos, resulta um universo de apenas uma possibilidade de
carregamento, equivalente àquele da NBR 7188. Os valores considerados são:
2min1
max1 kN/m 0,5== qq ; 2minmax kN/m 0,5== rr qq ; e kN 360min
1max
1 == PP . Todos os
fatores de peso foram considerados unitários (para os tabuleiros, sistemas estruturais e
esforços solicitantes), uma vez que, nesta execução de teste, não há importância alguma
nos pesos de tabuleiros, vinculações e tipos de esforço. Executando-se o programa
BMCMov com esta configuração, resultam os valores mostrados na Tabela 5.1, que são
comparados com os valores-alvo fornecidos.
Como se pode verificar, os valores dos esforços são relativamente próximos.
Pode-se considerar que, sob o ponto de vista do cálculo de esforços, o programa
BMCMov apresenta resultados coerentes.
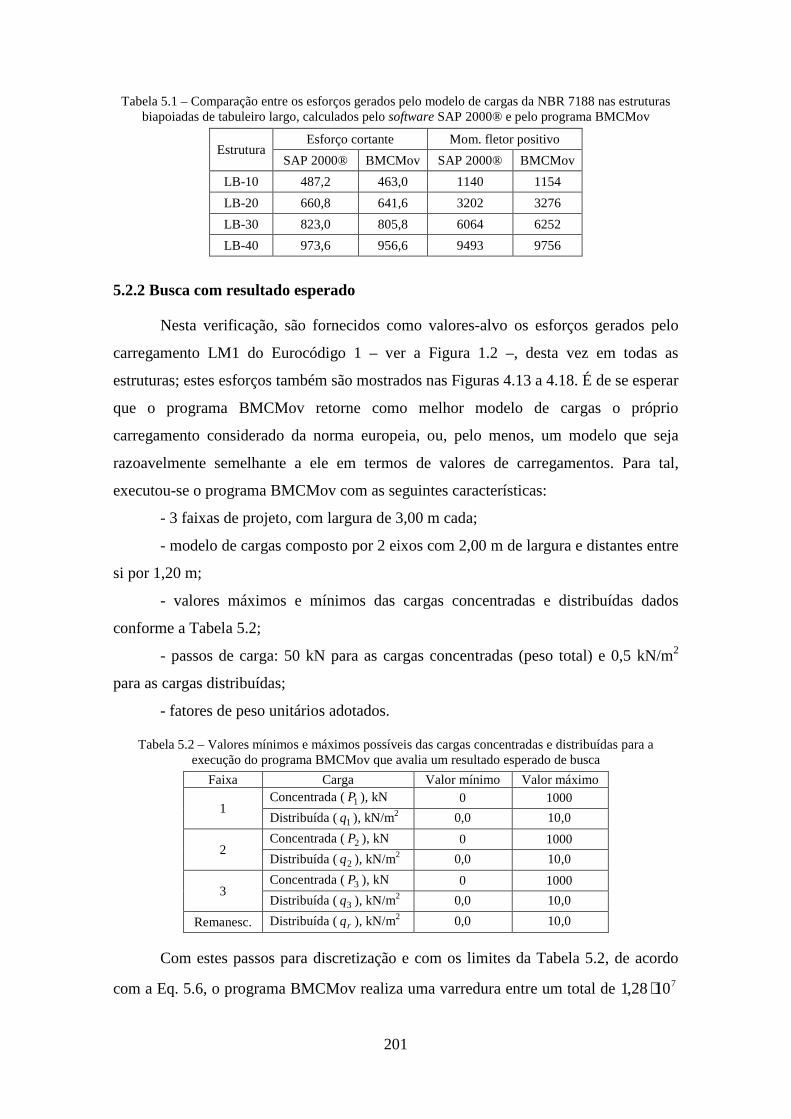
201
Tabela 5.1 – Comparação entre os esforços gerados pelo modelo de cargas da NBR 7188 nas estruturas biapoiadas de tabuleiro largo, calculados pelo software SAP 2000® e pelo programa BMCMov
Estrutura Esforço cortante Mom. fletor positivo
SAP 2000® BMCMov SAP 2000® BMCMov
LB-10 487,2 463,0 1140 1154
LB-20 660,8 641,6 3202 3276
LB-30 823,0 805,8 6064 6252
LB-40 973,6 956,6 9493 9756
5.2.2 Busca com resultado esperado
Nesta verificação, são fornecidos como valores-alvo os esforços gerados pelo
carregamento LM1 do Eurocódigo 1 – ver a Figura 1.2 –, desta vez em todas as
estruturas; estes esforços também são mostrados nas Figuras 4.13 a 4.18. É de se esperar
que o programa BMCMov retorne como melhor modelo de cargas o próprio
carregamento considerado da norma europeia, ou, pelo menos, um modelo que seja
razoavelmente semelhante a ele em termos de valores de carregamentos. Para tal,
executou-se o programa BMCMov com as seguintes características:
- 3 faixas de projeto, com largura de 3,00 m cada;
- modelo de cargas composto por 2 eixos com 2,00 m de largura e distantes entre
si por 1,20 m;
- valores máximos e mínimos das cargas concentradas e distribuídas dados
conforme a Tabela 5.2;
- passos de carga: 50 kN para as cargas concentradas (peso total) e 0,5 kN/m2
para as cargas distribuídas;
- fatores de peso unitários adotados.
Tabela 5.2 – Valores mínimos e máximos possíveis das cargas concentradas e distribuídas para a execução do programa BMCMov que avalia um resultado esperado de busca
Faixa Carga Valor mínimo Valor máximo
1 Concentrada (1P ), kN 0 1000
Distribuída ( 1q ), kN/m2 0,0 0,10
2 Concentrada (2P ), kN 0 1000
Distribuída ( 2q ), kN/m2 0,0 0,10
3 Concentrada (3P ), kN 0 1000
Distribuída ( 3q ), kN/m2 0,0 0,10
Remanesc. Distribuída ( rq ), kN/m2 0,0 0,10
Com estes passos para discretização e com os limites da Tabela 5.2, de acordo
com a Eq. 5.6, o programa BMCMov realiza uma varredura entre um total de 71028,1 ⋅
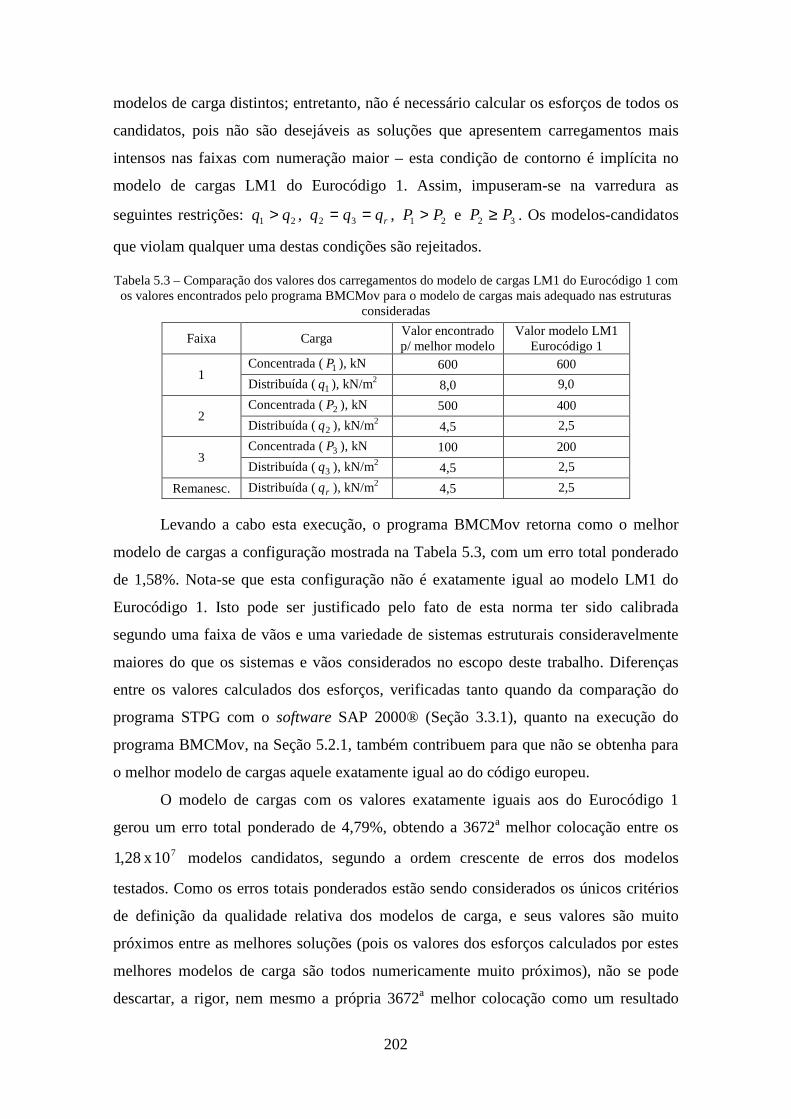
202
modelos de carga distintos; entretanto, não é necessário calcular os esforços de todos os
candidatos, pois não são desejáveis as soluções que apresentem carregamentos mais
intensos nas faixas com numeração maior – esta condição de contorno é implícita no
modelo de cargas LM1 do Eurocódigo 1. Assim, impuseram-se na varredura as
seguintes restrições: 21 qq > , rqqq == 32 , 21 PP > e 32 PP ≥ . Os modelos-candidatos
que violam qualquer uma destas condições são rejeitados.
Tabela 5.3 – Comparação dos valores dos carregamentos do modelo de cargas LM1 do Eurocódigo 1 com os valores encontrados pelo programa BMCMov para o modelo de cargas mais adequado nas estruturas
consideradas
Faixa Carga Valor encontrado p/ melhor modelo
Valor modelo LM1 Eurocódigo 1
1 Concentrada (1P ), kN 600 006
Distribuída ( 1q ), kN/m2 8,0 0,9
2 Concentrada (2P ), kN 500 004
Distribuída ( 2q ), kN/m2 4,5 5,2
3 Concentrada (3P ), kN 100 002
Distribuída ( 3q ), kN/m2 4,5 ,52
Remanesc. Distribuída ( rq ), kN/m2 4,5 5,2
Levando a cabo esta execução, o programa BMCMov retorna como o melhor
modelo de cargas a configuração mostrada na Tabela 5.3, com um erro total ponderado
de 1,58%. Nota-se que esta configuração não é exatamente igual ao modelo LM1 do
Eurocódigo 1. Isto pode ser justificado pelo fato de esta norma ter sido calibrada
segundo uma faixa de vãos e uma variedade de sistemas estruturais consideravelmente
maiores do que os sistemas e vãos considerados no escopo deste trabalho. Diferenças
entre os valores calculados dos esforços, verificadas tanto quando da comparação do
programa STPG com o software SAP 2000® (Seção 3.3.1), quanto na execução do
programa BMCMov, na Seção 5.2.1, também contribuem para que não se obtenha para
o melhor modelo de cargas aquele exatamente igual ao do código europeu.
O modelo de cargas com os valores exatamente iguais aos do Eurocódigo 1
gerou um erro total ponderado de 4,79%, obtendo a 3672a melhor colocação entre os
710 x 28,1 modelos candidatos, segundo a ordem crescente de erros dos modelos
testados. Como os erros totais ponderados estão sendo considerados os únicos critérios
de definição da qualidade relativa dos modelos de carga, e seus valores são muito
próximos entre as melhores soluções (pois os valores dos esforços calculados por estes
melhores modelos de carga são todos numericamente muito próximos), não se pode
descartar, a rigor, nem mesmo a própria 3672a melhor colocação como um resultado

203
válido do processo de busca. Assim, o programa BMCMov pode ser considerado válido
sob o ponto de vista da eficácia na busca que realiza.
5.3 Busca de modelos de cargas móveis que representem o tráfego real
5.3.1 Modelos preliminares considerados em trabalhos anteriores
Em trabalhos anteriores, conceberam-se os veículos dos modelos de cargas
móveis (a parcela das cargas concentradas) com configuração geométrica semelhante ao
grupo de eixos tandem triplo, presente, por exemplo, nas carretas dos veículos
articulados 2S3 e 3S3, já que estes veículos são muito frequentes e responsáveis por um
grande percentual dos casos de ocorrência dos maiores esforços estáticos, como se pode
verificar na Tabela 3.38. O grupo tandem triplo, cujos eixos estão separados por uma
distância da ordem de 1,3 m, é o responsável pelas maiores solicitações das pontes com
vãos de até 10 metros – ver a Seção 3.8 –, além de ser geometricamente semelhante ao
veículo do modelo de cargas TB-45 da NBR 7188, com distância entre eixos de 1,50 m.
Em PFEIL et al. (2010) considerou-se apenas o momento fletor no meio do vão
da estrutura LB-10, com o valor-alvo provisório kNm 1550=alvoM , já inclusa a
componente dinâmica. Com apenas uma estrutura, é razoável, ainda, considerar apenas
uma faixa de tráfego para o modelo de cargas – a carga uniformemente distribuída,
neste caso, aplica-se a toda a largura útil do tabuleiro largo (9,85 m); não é necessário
considerar a faixa remanescente – buscam-se apenas valores para P e q . Com apenas
um parâmetro a otimizar e 2 variáveis de busca, pode-se fixar um valor desejado para
uma delas e pesquisar os valores da variável remanescente. Assim, adotando
kN 450=P (o mesmo valor do veículo TB-45 da norma brasileira), verifica-se que a
carga distribuída 2kN/m 3,6=q gera no meio da longarina L1 um momento fletor de
1550 kNm; ver a Figura 5.4. A bitola dos eixos adotada foi de 1,90 m e as distâncias
entre eixos foram consideradas com o mesmo valor de 1,30 m – estes valores
correspondem às dimensões do grupo TT consideradas tanto na base de dados H-2013
(Tabelas 2.26 e 2.27) quanto na base reduzida anterior (ROSSIGALI, 2006).
Já em PFEIL et al. (2011), adicionou-se na busca o momento fletor positivo na
estrutura LB-20, cujo valor-alvo provisório era 3698 kNm. Mantendo-se a opção de
apenas uma faixa de tráfego, o modelo de cargas ótimo encontrado é composto pelas
cargas kN 600=P e 2kN/m 0,2=q , mostrado na Figura 5.5, que gera os momentos

204
fletores de 1556 kNm e 3727 kNm nas estruturas LB-10 e LB-20, bastante próximos,
portanto, dos seus valores-alvo.
(a) (b) Figura 5.4 - (a) Elevação longitudinal, com destaque para as distâncias entre eixos, e (b) vista em planta
do modelo de cargas proposto em PFEIL et al. (2010), com a busca do momento fletor na estrutura LB-10
(a) (b) Figura 5.5 - (a) Elevação longitudinal, com destaque para as distâncias entre eixos, e (b) vista em planta do modelo de cargas proposto em PFEIL et al. (2011), com a busca dos momentos fletores nas estruturas
LB-10 e LB-20
5.3.2 Considerações sobre os modelos de cargas
De acordo com GULVANESSIAN e MENZIES (2000), a referência atual para
as ações em estruturas é o Eurocódigo 1, incluindo as cargas móveis em pontes
rodoviárias. Os modelos de carga LM1-2 deste código foram mostrados na Seção 1.4.1.
Verifica-se na Figura 1.2 que a parcela do modelo de cargas LM1 referente às cargas
concentradas é formada por grupos de eixos em tandem, distantes 1,20 m, com cargas
diferentes em cada faixa de projeto, porém de mesma configuração geométrica.
Evidentemente, nas várias normas de projeto de pontes rodoviárias existentes, há
inúmeras configurações diferentes tanto para as cargas concentradas quanto para as
distribuídas; algumas destas configurações foram apresentadas na Seção 1.4. Alguns
veículos apresentam valores variáveis para as distâncias entre eixos, como o caminhão
HL-93 da norma AASHTO LRFD; outros têm grande número de eixos, como o OHBD
Truck da norma OHBDC. As cargas distribuídas também se sujeitam a tipificações
diversas: por exemplo, a NBR 7188 e a NB-6 consideram as cargas distribuídas apenas
em áreas externas aos veículos de projeto; já a carga distribuída do carregamento de
1,3m1,3
10m
205
projeto da norma AASHTO LRFD é especificada por unidade de comprimento, ao invés
da área (embora se especifique uma largura de 3,05 m para a aplicação da carga
uniformemente distribuída linear). Algumas normas consideram a carga distribuída
calculada em função do comprimento do vão ou tramo, como o modelo de cargas HA da
norma BS 5400.
Neste trabalho, para a busca de um novo modelo de cargas móveis, as cargas
distribuídas são consideradas por área, com valores constantes por faixa de projeto
(uniformemente distribuídas) e com unidade física de pressão (pascal no SI); além
disso, no caso de 3 ou mais eixos, só serão consideradas distâncias entre eixos com
valores iguais, como comentado na Seção 5.1. Como não se levaram em conta
avaliações locais de esforços, este trabalho não objetiva sugerir modelos de carga
destinados a estas verificações (como em lajes); também não se levaram em conta as
dimensões dos pneus dos veículos de projeto – apenas são buscados os valores das
cargas.
Com poucos objetivos a cumprir, como mostrado na Seção 5.3.1, é natural
buscar um modelo de cargas relativamente simples, composto por apenas uma faixa de
projeto; entretanto, para o propósito deste trabalho, que é o cumprimento simultâneo de
48 objetivos (valores-alvo), mostrados nas Tabelas 4.10 e 4.11, em 24 estruturas
diferentes, para uma boa representação do tráfego real é razoável também levar em
conta a busca por um modelo de cargas que considere várias faixas de projeto, com um
maior número de parâmetros para otimização.
Para as execuções do programa BMCMov que buscam um modelo de cargas,
considerou-se a distância transversal entre pneus fixa, com o valor de 2,00 m. Este
valor, além de condizer com o padrão dos veículos comerciais, como se pode verificar
na Tabela 2.27, também coincide com as bitolas adotadas de eixos dos veículos de
projeto das normas brasileira e europeia.
Para buscar um modelo de cargas que represente os valores-alvo dos esforços
solicitantes deste trabalho, consideraram-se as seguintes possibilidades: 1 ou 3 faixas de
projeto; veículo de carga com 2 ou 3 eixos; distâncias entre eixos de 1,00 m, 1,30 m ou
1,50 m; com ou sem restrições.
Para as execuções com 1 faixa de projeto, manteve-se a sistemática da NBR
7188, posicionando o veículo na posição transversal mais desfavorável - para tal,
utilizam-se os artifícios mostrados na Seção 5.2.1. Para as execuções com 3 faixas de
projeto, considerou-se largura de 3,00 m em cada uma – resulta, para os tabuleiros
206
considerados neste trabalho, mostrados nas Figuras 3.1 e 3.5, que os tabuleiros estreitos
dividem-se em 2 faixas de projeto, com uma faixa remanescente de 1,10 m, ao passo
que os tabuleiros estreitos dividem-se em 3 faixas de projeto, com uma faixa
remanescente de 0,85 m. A configuração denominada “sem restrição” equivale aos
valores mínimos e máximos de cargas concentradas e distribuídas mostrados na Tabela
5.2. Os incrementos de carga utilizados foram os mesmos da segunda execução de
verificação (ver a Seção 5.2.2): 50 kN para o peso total e 0,5 kN/m2 para as cargas
distribuídas por área.
Os fatores de peso adotados para o sistema estrutural, ESTjP , o tipo de tabuleiro,
TABjP , e o tipo de esforço solicitante monitorado, ESF
ijP , são mostrados, respectivamente,
nas Tabelas 5.4, 5.5 e 5.6. Os tabuleiros estreitos foram considerados com relevância
muito menor que os largos porque, embora tenham sido construídos em número bem
maior que estes, sua edificação foi interrompida há muitos anos (desde 1975) e muitos
deles já foram alargados quando da realização de reparos nas pontes. Os valores
adotados tentam levar em consideração as informações mostradas na Seção 3.1.
Resultam, de acordo com a Eq. 5.1, os pesos finais de cada valor-alvo mostrados na
Tabela 5.7.
Tabela 5.4 – Fatores de peso adotados para os sistemas estruturais
Sistema estrutural Peso
Biapoiado 2,0
Contínuo 2,0
Engastado e livre 1,5
Tabela 5.5 – Fatores de peso adotados para os tipos de tabuleiro
Tipo de tabuleiro Peso
Largo (atual) 3,0
Estreito (antigo) 1,0
Tabela 5.6 – Fatores de peso adotados para os esforços solicitantes
Esforço solicitante Peso
Esforço cortante (Q) 2,0
Momento fletor positivo (M+) 2,5
Momento fletor negativo (M-) 2,5

207
Tabela 5.7 – Fatores de peso resultantes para cada esforço em cada estrutura
Estrutura Esforço Peso Estrutura Esforço Peso
EB-10 Q 4,00 LB-10 Q 12,00
EB-10 M+ 5,00 LB-10 M+ 15,00
EB-20 Q 4,00 LB-20 Q 12,00
EB-20 M+ 5,00 LB-20 M+ 15,00
EB-30 Q 4,00 LB-30 Q 12,00
EB-30 M+ 5,00 LB-30 M+ 15,00
EB-40 Q 4,00 LB-40 Q 12,00
EB-40 M+ 5,00 LB-40 M+ 15,00
EC-10 M+ 5,00 LC-10 M+ 15,00
EC-10 Q 4,00 LC-10 Q 12,00
EC-10 M- 5,00 LC-10 M- 15,00
EC-20 M+ 5,00 LC-20 M+ 15,00
EC-20 Q 4,00 LC-20 Q 12,00
EC-20 M- 5,00 LC-20 M- 15,00
EC-30 M+ 5,00 LC-30 M+ 15,00
EC-30 Q 4,00 LC-30 Q 12,00
EC-30 M- 5,00 LC-30 M- 15,00
EC-40 M+ 5,00 LC-40 M+ 15,00
EC-40 Q 4,00 LC-40 Q 12,00
EC-40 M- 5,00 LC-40 M- 15,00
EE-2,5 M- 3,75 LE-2,5 M- 11,25
EE-5,0 M- 3,75 LE-5,0 M- 11,25
EE-7,5 M- 3,75 LE-7,5 M- 11,25
EE-10 M- 3,75 LE-10 M- 11,25
5.3.3 Busca de modelos de cargas por meio de execuções do programa BMCMov
Para a busca de modelos de cargas que representem os esforços gerados pelo
tráfego real, o programa BMCMov foi executado num total de 38 vezes. A Tabela 5.8
resume as informações de cada configuração geométrica considerada e as restrições
impostas - na coluna que discrimina estas limitações físicas, as unidades adotadas para
fP e fq são, respectivamente, kN e kN/m2. Buscou-se variar o número de
configurações geométricas e o tipo de restrições impostas em cada caso, de forma a
garantir uma varredura em praticamente todas as possibilidades aceitáveis para um
modelo de cargas adequado aos propósitos deste trabalho, com as limitações discutidas
na Seção 5.3.2, de tal sorte que ele se assemelhe tanto a um grupo de eixos em tandem
quanto a modelos de carga difundidos na literatura, alguns dos quais mostrados na
Seção 1.4. A Tabela 5.9 discrimina os modelos ótimos obtidos em cada execução.
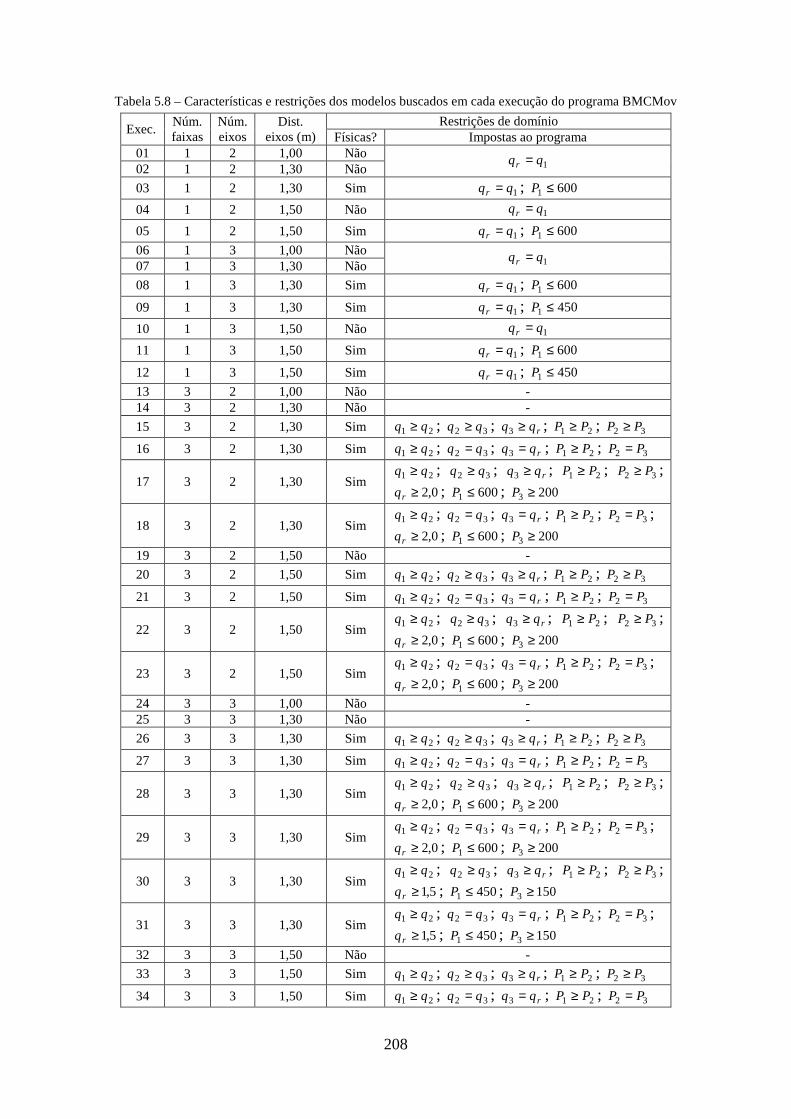
208
Tabela 5.8 – Características e restrições dos modelos buscados em cada execução do programa BMCMov
Exec. Núm. faixas
Núm. eixos
Dist. eixos (m)
Restrições de domínio Físicas? Impostas ao programa
01 1 2 1,00 Não 1qqr = 02 1 2 1,30 Não
03 1 2 1,30 Sim 1qqr = ; 6001 ≤P
04 1 2 1,50 Não 1qqr =
05 1 2 1,50 Sim 1qqr = ; 6001 ≤P
06 1 3 1,00 Não 1qqr = 07 1 3 1,30 Não
08 1 3 1,30 Sim 1qqr = ; 6001 ≤P
09 1 3 1,30 Sim 1qqr = ; 4501 ≤P
10 1 3 1,50 Não 1qqr =
11 1 3 1,50 Sim 1qqr = ; 6001 ≤P
12 1 3 1,50 Sim 1qqr = ; 4501 ≤P
13 3 2 1,00 Não - 14 3 2 1,30 Não -
15 3 2 1,30 Sim 21 qq ≥ ; 32 qq ≥ ; rqq ≥3 ; 21 PP ≥ ; 32 PP ≥
16 3 2 1,30 Sim 21 qq ≥ ; 32 qq = ; rqq =3 ; 21 PP ≥ ; 32 PP =
17 3 2 1,30 Sim 21 qq ≥ ; 32 qq ≥ ; rqq ≥3 ; 21 PP ≥ ; 32 PP ≥ ; 0,2≥rq ; 6001 ≤P ; 2003 ≥P
18 3 2 1,30 Sim 21 qq ≥ ; 32 qq = ; rqq =3 ; 21 PP ≥ ; 32 PP = ; 0,2≥rq ; 6001 ≤P ; 2003 ≥P
19 3 2 1,50 Não -
20 3 2 1,50 Sim 21 qq ≥ ; 32 qq ≥ ; rqq ≥3 ; 21 PP ≥ ; 32 PP ≥
21 3 2 1,50 Sim 21 qq ≥ ; 32 qq = ; rqq =3 ; 21 PP ≥ ; 32 PP =
22 3 2 1,50 Sim 21 qq ≥ ; 32 qq ≥ ; rqq ≥3 ; 21 PP ≥ ; 32 PP ≥ ; 0,2≥rq ; 6001 ≤P ; 2003 ≥P
23 3 2 1,50 Sim 21 qq ≥ ; 32 qq = ; rqq =3 ; 21 PP ≥ ; 32 PP = ; 0,2≥rq ; 6001 ≤P ; 2003 ≥P
24 3 3 1,00 Não - 25 3 3 1,30 Não -
26 3 3 1,30 Sim 21 qq ≥ ; 32 qq ≥ ; rqq ≥3 ; 21 PP ≥ ; 32 PP ≥
27 3 3 1,30 Sim 21 qq ≥ ; 32 qq = ; rqq =3 ; 21 PP ≥ ; 32 PP =
28 3 3 1,30 Sim 21 qq ≥ ; 32 qq ≥ ; rqq ≥3 ; 21 PP ≥ ; 32 PP ≥ ; 0,2≥rq ; 6001 ≤P ; 2003 ≥P
29 3 3 1,30 Sim 21 qq ≥ ; 32 qq = ; rqq =3 ; 21 PP ≥ ; 32 PP = ; 0,2≥rq ; 6001 ≤P ; 2003 ≥P
30 3 3 1,30 Sim 21 qq ≥ ; 32 qq ≥ ; rqq ≥3 ; 21 PP ≥ ; 32 PP ≥ ; 5,1≥rq ; 4501 ≤P ; 1503 ≥P
31 3 3 1,30 Sim 21 qq ≥ ; 32 qq = ; rqq =3 ; 21 PP ≥ ; 32 PP = ;5,1≥rq ; 4501 ≤P ; 1503 ≥P
32 3 3 1,50 Não -
33 3 3 1,50 Sim 21 qq ≥ ; 32 qq ≥ ; rqq ≥3 ; 21 PP ≥ ; 32 PP ≥
34 3 3 1,50 Sim 21 qq ≥ ; 32 qq = ; rqq =3 ; 21 PP ≥ ; 32 PP =
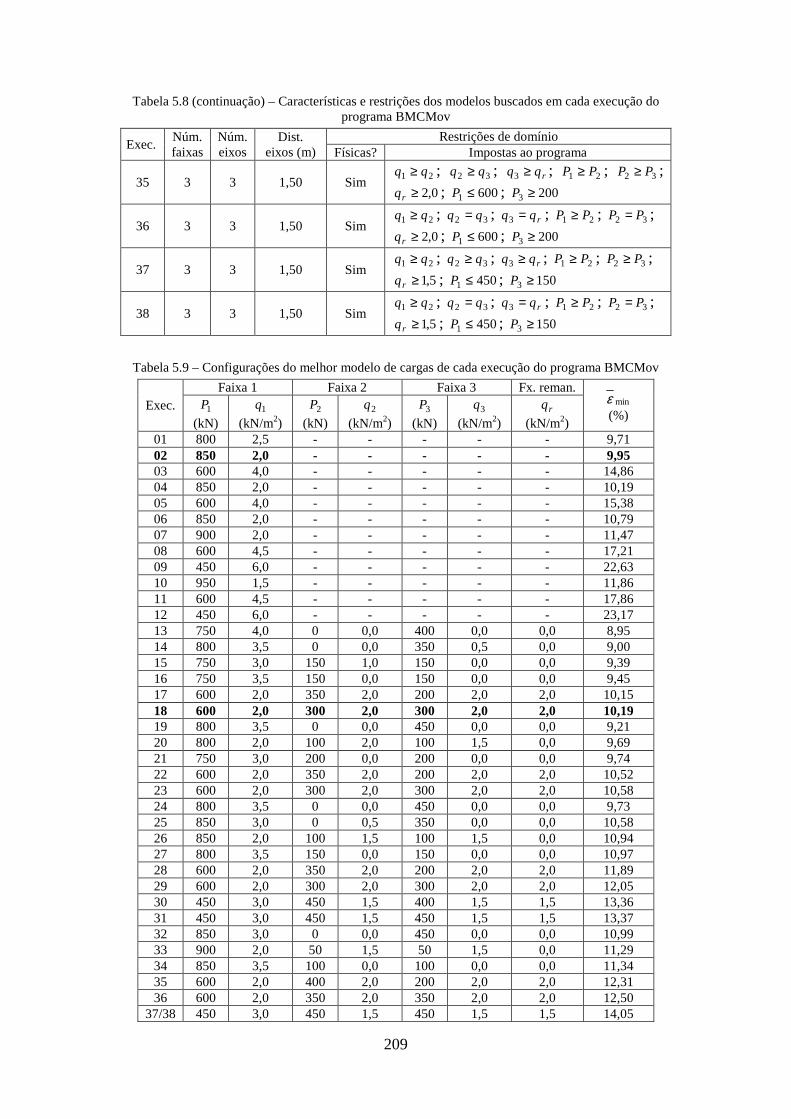
209
Tabela 5.8 (continuação) – Características e restrições dos modelos buscados em cada execução do programa BMCMov
Exec. Núm. faixas
Núm. eixos
Dist. eixos (m)
Restrições de domínio Físicas? Impostas ao programa
35 3 3 1,50 Sim 21 qq ≥ ; 32 qq ≥ ; rqq ≥3 ; 21 PP ≥ ; 32 PP ≥ ; 0,2≥rq ; 6001 ≤P ; 2003 ≥P
36 3 3 1,50 Sim 21 qq ≥ ; 32 qq = ; rqq =3 ; 21 PP ≥ ; 32 PP = ; 0,2≥rq ; 6001 ≤P ; 2003 ≥P
37 3 3 1,50 Sim 21 qq ≥ ; 32 qq ≥ ; rqq ≥3 ; 21 PP ≥ ; 32 PP ≥ ; 5,1≥rq ; 4501 ≤P ; 1503 ≥P
38 3 3 1,50 Sim 21 qq ≥ ; 32 qq = ; rqq =3 ; 21 PP ≥ ; 32 PP = ;5,1≥rq ; 4501 ≤P ; 1503 ≥P
Tabela 5.9 – Configurações do melhor modelo de cargas de cada execução do programa BMCMov
Exec. Faixa 1 Faixa 2 Faixa 3 Fx. reman.
minε (%)
1P
(kN) 1q
(kN/m2) 2P
(kN) 2q
(kN/m2) 3P
(kN) 3q
(kN/m2) rq
(kN/m2) 01 800 2,5 - - - - - 9,71 02 850 2,0 - - - - - 9,95 03 600 4,0 - - - - - 14,86 04 850 2,0 - - - - - 10,19 05 600 4,0 - - - - - 15,38 06 850 2,0 - - - - - 10,79 07 900 2,0 - - - - - 11,47 08 600 4,5 - - - - - 17,21 09 450 6,0 - - - - - 22,63 10 950 1,5 - - - - - 11,86 11 600 4,5 - - - - - 17,86 12 450 6,0 - - - - - 23,17 13 750 4,0 0 0,0 400 0,0 0,0 8,95 14 800 3,5 0 0,0 350 0,5 0,0 9,00 15 750 3,0 150 1,0 150 0,0 0,0 9,39 16 750 3,5 150 0,0 150 0,0 0,0 9,45 17 600 2,0 350 2,0 200 2,0 2,0 10,15 18 600 2,0 300 2,0 300 2,0 2,0 10,19 19 800 3,5 0 0,0 450 0,0 0,0 9,21 20 800 2,0 100 2,0 100 1,5 0,0 9,69 21 750 3,0 200 0,0 200 0,0 0,0 9,74 22 600 2,0 350 2,0 200 2,0 2,0 10,52 23 600 2,0 300 2,0 300 2,0 2,0 10,58 24 800 3,5 0 0,0 450 0,0 0,0 9,73 25 850 3,0 0 0,5 350 0,0 0,0 10,58 26 850 2,0 100 1,5 100 1,5 0,0 10,94 27 800 3,5 150 0,0 150 0,0 0,0 10,97 28 600 2,0 350 2,0 200 2,0 2,0 11,89 29 600 2,0 300 2,0 300 2,0 2,0 12,05 30 450 3,0 450 1,5 400 1,5 1,5 13,36 31 450 3,0 450 1,5 450 1,5 1,5 13,37 32 850 3,0 0 0,0 450 0,0 0,0 10,99 33 900 2,0 50 1,5 50 1,5 0,0 11,29 34 850 3,5 100 0,0 100 0,0 0,0 11,34 35 600 2,0 400 2,0 200 2,0 2,0 12,31 36 600 2,0 350 2,0 350 2,0 2,0 12,50
37/38 450 3,0 450 1,5 450 1,5 1,5 14,05
210
Das Tabelas 5.8 e 5.9, pode-se concluir que:
- analisando os modelos com os mesmos tipos (ou ausências) de restrição,
mesmo número de eixos e mesmas distâncias entre eixos, nota-se que há, como
esperado, uma redução do erro total ponderado de cada modelo ótimo de carga de 3
faixas comparativamente ao melhor modelo equivalente de 1 faixa de projeto, embora
esta redução não tenha valores numéricos significativos. Se se permitir um domínio
mais amplo nos modelos de 1 faixa, é possível se chegar praticamente aos mesmos
valores de esforços (e erro total ponderado) de um modelo equivalente de 3 faixas. Por
outro lado, como ficou demonstrado no segundo teste de validação do programa
BMCMov, na Seção 5.2.2, estas pequenas diferenças de erros ponderados equivalem,
no ranking de modelos candidatos de cada execução, a milhares de configurações
possíveis, ou seja, existe um número muito grande de veículos de 3 faixas de projeto
geometricamente semelhantes ao melhor veículo equivalente que considera apenas 1
faixa de projeto, todos eles com maior aptidão que este para representar o tráfego real;
- analisando os modelos de mesmos tipos (ou ausências) de restrição, mesmas
distâncias entre eixos e mesmo número de faixas de projeto, nota-se que os modelos de
cargas com 2 eixos sempre apresentam erro total ponderado menor que os equivalentes
de 3 eixos;
- analisando os modelos de mesmos tipos (ou ausências) de restrição, mesmo
número de eixos e mesmo número de faixas, verifica-se que sempre os menores erros
totais ponderados são atingidos pelos modelos de carga com as menores distâncias entre
eixos. As execuções 01, 06, 13 e 24, que foram levadas a cabo com distâncias entre
eixos de apenas 1,00 m, foram consideradas apenas para apontar esta característica,
embora não tenham serventia prática para as finalidades deste trabalho, já que este valor
para as distâncias entre eixos é demasiado pequeno para se assemelhar a uma
configuração axial existente;
- analisando os modelos de mesmo número de faixas, mesmas distâncias entre
eixos e mesmo número de eixos, nota-se que, em geral, o incremento de restrições,
como esperado, aumenta o erro total ponderado. Pode-se verificar, também, que os
modelos de cargas com 3 faixas de projeto são menos sensíveis a restrições de domínio
que os modelos de apenas 1 faixa. Isto pode ser explicado pelo maior número de
combinações possíveis de valores de carregamento, pois há mais parâmetros de
otimização.
Ainda se pode constatar que, especialmente no caso das buscas irrestritas com 3
211
faixas de projeto, o modelo de cargas ótimo de cada execução não se constitui em um
conjunto de valores de carregamento intuitivamente razoável ao uso de um projetista de
estruturas. Muitas destas execuções retornaram como melhor modelo de cargas um
carregamento composto por valores nulos de cargas concentradas e distribuídas na faixa
de projeto no 2; provavelmente isto ocorre porque se faz necessária apenas uma faixa
para representar adequadamente o tráfego nas estruturas de tabuleiro estreito, onde
atuam as cargas de apenas 2 faixas de projeto. Sendo necessárias mais faixas para uma
melhor representação do tráfego nos tabuleiros largos, o algoritmo de busca
“complementa” um valor de carregamento, geralmente pequeno, atuante apenas nas
estruturas que necessitam desse incremento. Assim, faz mais sentido considerar os
modelos equivalentes com restrições, já que neste caso a sua imposição pouco altera o
valor do erro total ponderado.
A execução no 12 das Tabelas 5.8 e 5.9 equivale à tentativa de manter as
configurações físicas e geométricas do veículo de cargas TB-45 da NBR 7188, variando
apenas o valor da carga de multidão, como feito na Seção 5.3.1; porém, este caso
corresponde justamente ao modelo ótimo com maior erro total ponderado na Tabela 5.9,
o que mostra que é praticamente impossível, para a faixa de vãos e sistemas estruturais
abordada neste trabalho, fazer com que, na configuração geométrica atual, o veículo da
norma brasileira represente adequadamente os esforços solicitantes devidos ao trânsito
de veículos comerciais circulante no país.
5.3.4 Modelos de cargas móveis adotados para representar o tráfego real
Para serem definidas as configurações dos modelos de cargas que representem
adequadamente o tráfego real, algumas observações devem ser feitas. Por um lado, há
uma clara vantagem em adotar um modelo que contemple 3 faixas de projeto, já que,
como apresentado na Seção 5.3.3, eles sempre geram erros ponderados menores que os
modelos equivalentes com apenas 1 faixa de projeto. Ainda, como se pode verificar na
Seção 1.4, com exceção da norma brasileira, em todas as normas de projeto citadas é
considerado mais de um trem-tipo transversalmente, em posições não limitadas
unicamente àquelas transversalmente mais desfavoráveis ao esforço analisado. Portanto,
esta é uma configuração interessante a ser adotada para um novo modelo de cargas. É
importante ressaltar que quanto maior for o valor do erro total ponderado, menos
semelhança há entre os esforços do modelo de cargas escolhido e os valores-alvo e,
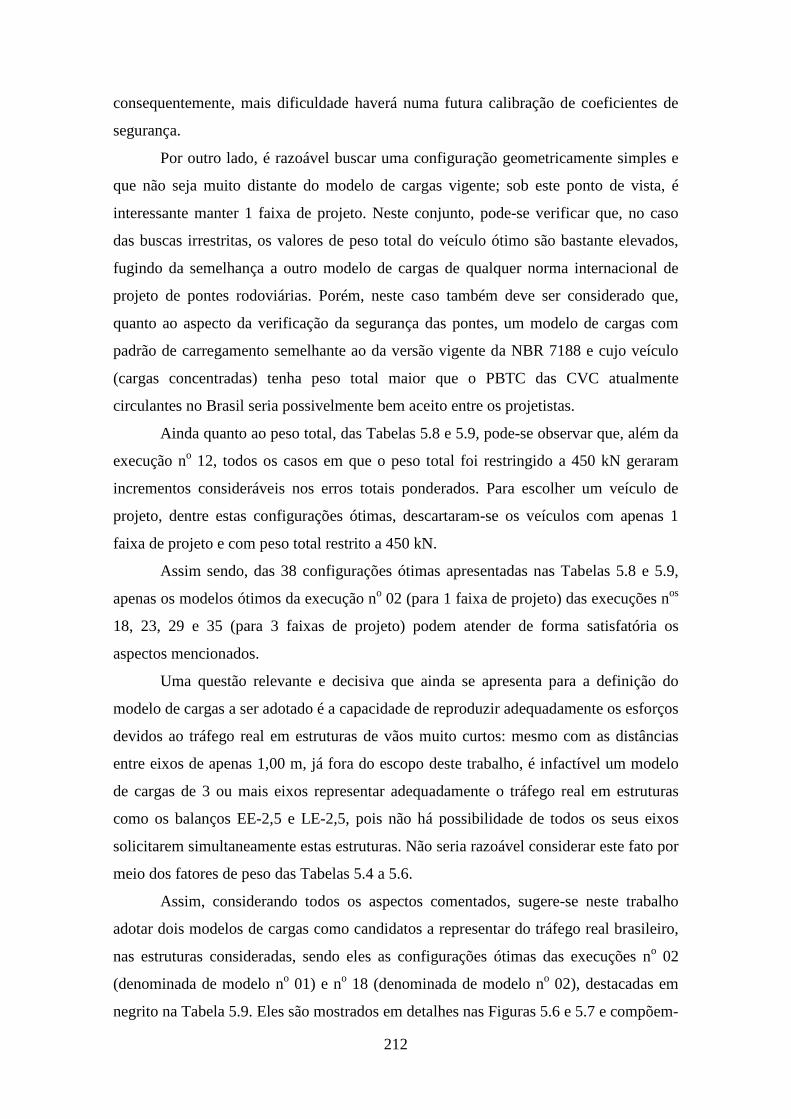
212
consequentemente, mais dificuldade haverá numa futura calibração de coeficientes de
segurança.
Por outro lado, é razoável buscar uma configuração geometricamente simples e
que não seja muito distante do modelo de cargas vigente; sob este ponto de vista, é
interessante manter 1 faixa de projeto. Neste conjunto, pode-se verificar que, no caso
das buscas irrestritas, os valores de peso total do veículo ótimo são bastante elevados,
fugindo da semelhança a outro modelo de cargas de qualquer norma internacional de
projeto de pontes rodoviárias. Porém, neste caso também deve ser considerado que,
quanto ao aspecto da verificação da segurança das pontes, um modelo de cargas com
padrão de carregamento semelhante ao da versão vigente da NBR 7188 e cujo veículo
(cargas concentradas) tenha peso total maior que o PBTC das CVC atualmente
circulantes no Brasil seria possivelmente bem aceito entre os projetistas.
Ainda quanto ao peso total, das Tabelas 5.8 e 5.9, pode-se observar que, além da
execução no 12, todos os casos em que o peso total foi restringido a 450 kN geraram
incrementos consideráveis nos erros totais ponderados. Para escolher um veículo de
projeto, dentre estas configurações ótimas, descartaram-se os veículos com apenas 1
faixa de projeto e com peso total restrito a 450 kN.
Assim sendo, das 38 configurações ótimas apresentadas nas Tabelas 5.8 e 5.9,
apenas os modelos ótimos da execução no 02 (para 1 faixa de projeto) das execuções nos
18, 23, 29 e 35 (para 3 faixas de projeto) podem atender de forma satisfatória os
aspectos mencionados.
Uma questão relevante e decisiva que ainda se apresenta para a definição do
modelo de cargas a ser adotado é a capacidade de reproduzir adequadamente os esforços
devidos ao tráfego real em estruturas de vãos muito curtos: mesmo com as distâncias
entre eixos de apenas 1,00 m, já fora do escopo deste trabalho, é infactível um modelo
de cargas de 3 ou mais eixos representar adequadamente o tráfego real em estruturas
como os balanços EE-2,5 e LE-2,5, pois não há possibilidade de todos os seus eixos
solicitarem simultaneamente estas estruturas. Não seria razoável considerar este fato por
meio dos fatores de peso das Tabelas 5.4 a 5.6.
Assim, considerando todos os aspectos comentados, sugere-se neste trabalho
adotar dois modelos de cargas como candidatos a representar do tráfego real brasileiro,
nas estruturas consideradas, sendo eles as configurações ótimas das execuções no 02
(denominada de modelo no 01) e no 18 (denominada de modelo no 02), destacadas em
negrito na Tabela 5.9. Eles são mostrados em detalhes nas Figuras 5.6 e 5.7 e compõem-
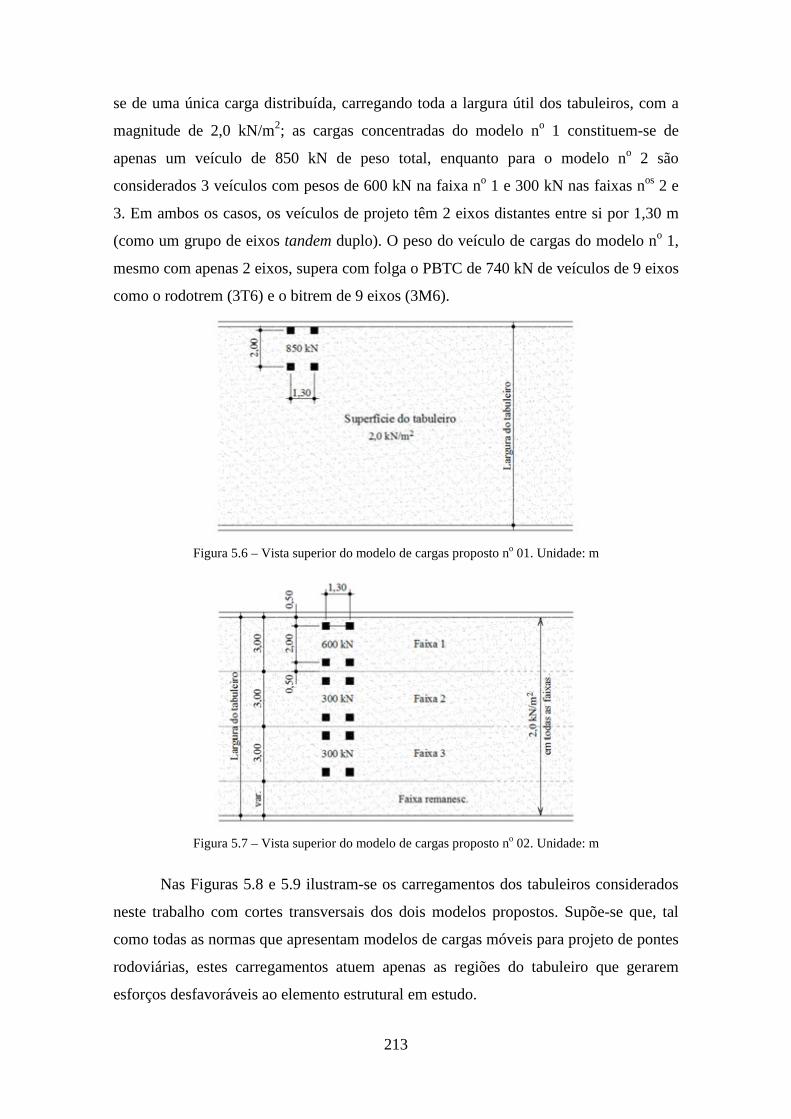
213
se de uma única carga distribuída, carregando toda a largura útil dos tabuleiros, com a
magnitude de 2,0 kN/m2; as cargas concentradas do modelo no 1 constituem-se de
apenas um veículo de 850 kN de peso total, enquanto para o modelo no 2 são
considerados 3 veículos com pesos de 600 kN na faixa no 1 e 300 kN nas faixas nos 2 e
3. Em ambos os casos, os veículos de projeto têm 2 eixos distantes entre si por 1,30 m
(como um grupo de eixos tandem duplo). O peso do veículo de cargas do modelo no 1,
mesmo com apenas 2 eixos, supera com folga o PBTC de 740 kN de veículos de 9 eixos
como o rodotrem (3T6) e o bitrem de 9 eixos (3M6).
Figura 5.6 – Vista superior do modelo de cargas proposto no 01. Unidade: m
Figura 5.7 – Vista superior do modelo de cargas proposto no 02. Unidade: m
Nas Figuras 5.8 e 5.9 ilustram-se os carregamentos dos tabuleiros considerados
neste trabalho com cortes transversais dos dois modelos propostos. Supõe-se que, tal
como todas as normas que apresentam modelos de cargas móveis para projeto de pontes
rodoviárias, estes carregamentos atuem apenas as regiões do tabuleiro que gerarem
esforços desfavoráveis ao elemento estrutural em estudo.

214
(a) (b) Figura 5.8 – Carregamento dos tabuleiros (a) estreito e (b) largo com o modelo de cargas proposto no 01
(a) (b) Figura 5.9 – Carregamento dos tabuleiros (a) estreito e (b) largo com o modelo de cargas proposto no 02
5.4 Comparação dos valores dos esforços obtidos pelos modelos de cargas propostos com os valores-alvo obtidos
Para avaliar a qualidade dos modelos de cargas propostos, as Figuras 5.10 a 5.12
comparam os valores-alvo originais, das Tabelas 4.10 e 4.11, com os esforços por eles
gerados nas estruturas. Nota-se que, como esperado, os modelos de cargas “suavizam”
as curvas de variação dos esforços com o comprimento do vão ou tramo, como no caso
dos esforços cortantes nas estruturas biapoiadas de tabuleiro estreito (EB; Figura 5.10a);
nota-se, também, que os momentos fletores negativos nos balanços (Figura 5.12b)
foram apenas razoavelmente reproduzidos e alguns esforços solicitantes, como os
esforços cortantes nos sistemas contínuos de tabuleiro largo (LC; Figura 5.10b) não
foram adequadamente reproduzidos.
Pode-se verificar, ainda, que os momentos fletores positivos foram os esforços
solicitantes mais bem representados por ambos os modelos de cargas (Figura 5.11) e
que o modelo de cargas no 2, com 3 faixas de projeto, consegue produzir uma diferença
entre os esforços gerados em tabuleiros largos e estreitos maior que aquelas observadas
no modelo no 1. Isto pode ser explicado pelo fato de que, havendo apenas 2 faixas de
3,00 m nos tabuleiros estreitos, os modelos largos acabam sendo sujeitos a um
carregamento de maior magnitude, o da faixa no 3.
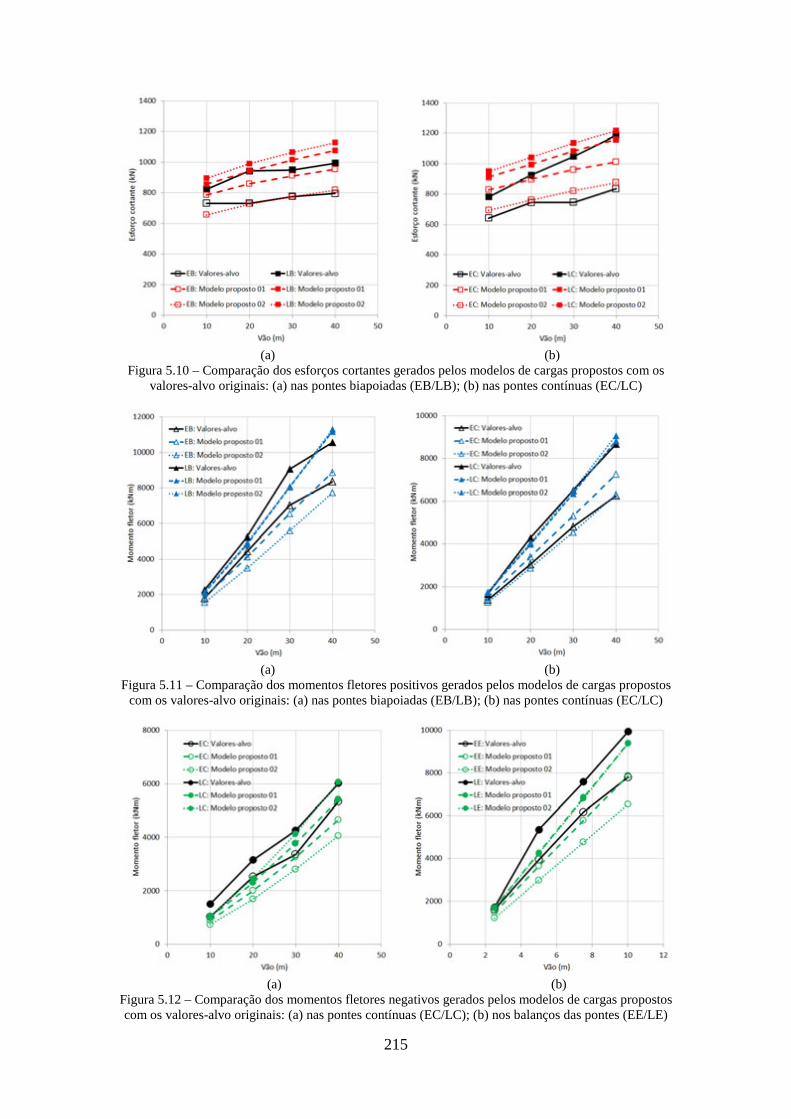
215
(a) (b)
Figura 5.10 – Comparação dos esforços cortantes gerados pelos modelos de cargas propostos com os valores-alvo originais: (a) nas pontes biapoiadas (EB/LB); (b) nas pontes contínuas (EC/LC)
(a) (b)
Figura 5.11 – Comparação dos momentos fletores positivos gerados pelos modelos de cargas propostos com os valores-alvo originais: (a) nas pontes biapoiadas (EB/LB); (b) nas pontes contínuas (EC/LC)
(a) (b) Figura 5.12 – Comparação dos momentos fletores negativos gerados pelos modelos de cargas propostos com os valores-alvo originais: (a) nas pontes contínuas (EC/LC); (b) nos balanços das pontes (EE/LE)
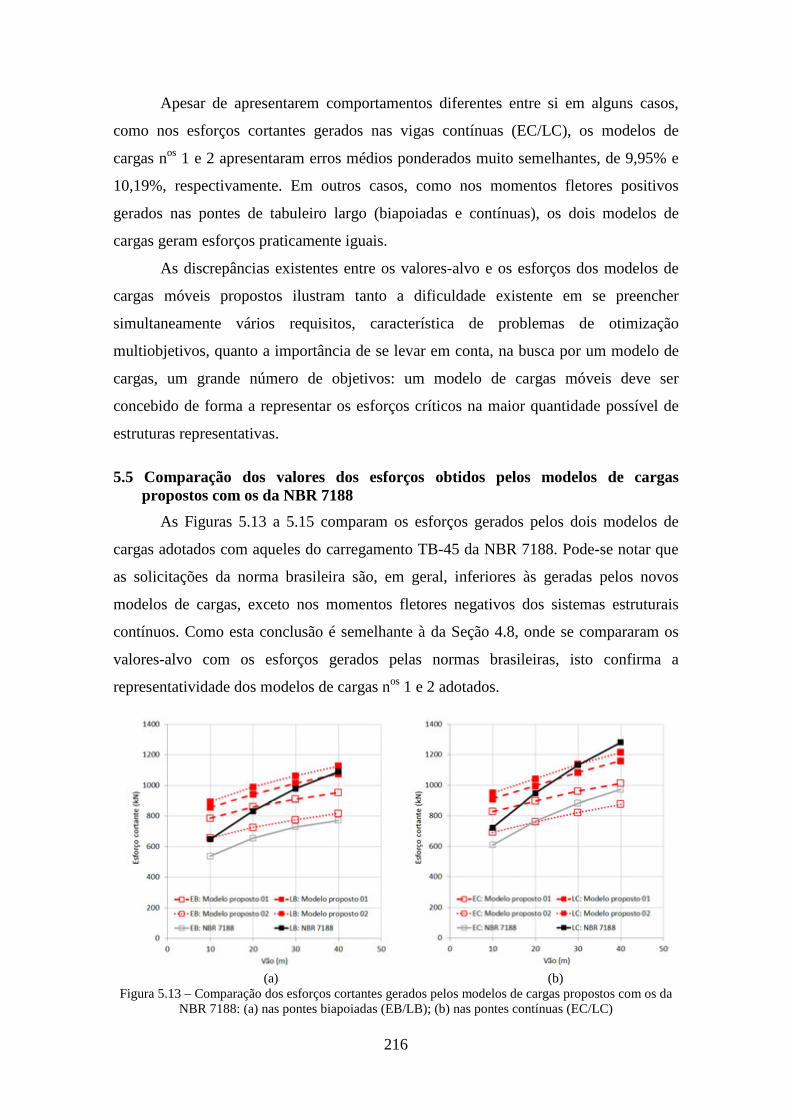
216
Apesar de apresentarem comportamentos diferentes entre si em alguns casos,
como nos esforços cortantes gerados nas vigas contínuas (EC/LC), os modelos de
cargas nos 1 e 2 apresentaram erros médios ponderados muito semelhantes, de 9,95% e
10,19%, respectivamente. Em outros casos, como nos momentos fletores positivos
gerados nas pontes de tabuleiro largo (biapoiadas e contínuas), os dois modelos de
cargas geram esforços praticamente iguais.
As discrepâncias existentes entre os valores-alvo e os esforços dos modelos de
cargas móveis propostos ilustram tanto a dificuldade existente em se preencher
simultaneamente vários requisitos, característica de problemas de otimização
multiobjetivos, quanto a importância de se levar em conta, na busca por um modelo de
cargas, um grande número de objetivos: um modelo de cargas móveis deve ser
concebido de forma a representar os esforços críticos na maior quantidade possível de
estruturas representativas.
5.5 Comparação dos valores dos esforços obtidos pelos modelos de cargas propostos com os da NBR 7188
As Figuras 5.13 a 5.15 comparam os esforços gerados pelos dois modelos de
cargas adotados com aqueles do carregamento TB-45 da NBR 7188. Pode-se notar que
as solicitações da norma brasileira são, em geral, inferiores às geradas pelos novos
modelos de cargas, exceto nos momentos fletores negativos dos sistemas estruturais
contínuos. Como esta conclusão é semelhante à da Seção 4.8, onde se compararam os
valores-alvo com os esforços gerados pelas normas brasileiras, isto confirma a
representatividade dos modelos de cargas nos 1 e 2 adotados.
(a) (b) Figura 5.13 – Comparação dos esforços cortantes gerados pelos modelos de cargas propostos com os da
NBR 7188: (a) nas pontes biapoiadas (EB/LB); (b) nas pontes contínuas (EC/LC)
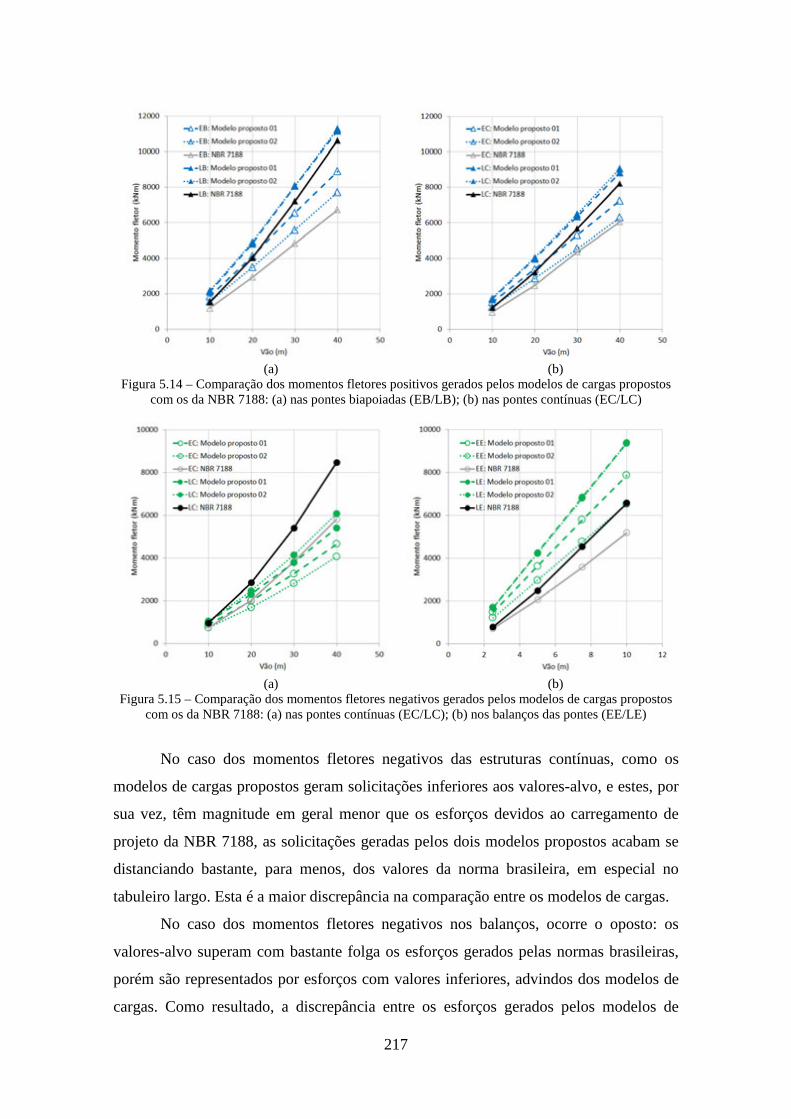
217
(a) (b)
Figura 5.14 – Comparação dos momentos fletores positivos gerados pelos modelos de cargas propostos com os da NBR 7188: (a) nas pontes biapoiadas (EB/LB); (b) nas pontes contínuas (EC/LC)
(a) (b) Figura 5.15 – Comparação dos momentos fletores negativos gerados pelos modelos de cargas propostos
com os da NBR 7188: (a) nas pontes contínuas (EC/LC); (b) nos balanços das pontes (EE/LE)
No caso dos momentos fletores negativos das estruturas contínuas, como os
modelos de cargas propostos geram solicitações inferiores aos valores-alvo, e estes, por
sua vez, têm magnitude em geral menor que os esforços devidos ao carregamento de
projeto da NBR 7188, as solicitações geradas pelos dois modelos propostos acabam se
distanciando bastante, para menos, dos valores da norma brasileira, em especial no
tabuleiro largo. Esta é a maior discrepância na comparação entre os modelos de cargas.
No caso dos momentos fletores negativos nos balanços, ocorre o oposto: os
valores-alvo superam com bastante folga os esforços gerados pelas normas brasileiras,
porém são representados por esforços com valores inferiores, advindos dos modelos de
cargas. Como resultado, a discrepância entre os esforços gerados pelos modelos de

218
cargas propostos superam com menos folga os valores produzidos pelo carregamento da
NBR 7188.
Finalmente, comparando as Figuras 5.13 a 5.15 com as Figuras 4.13 a 4.18,
verifica-se que os esforços gerados pelos modelos de cargas propostos são inferiores aos
correspondentes esforços gerados pelo carregamento LM1 do Eurocódigo 1.
219
6 Conclusões e sugestões para pesquisas futuras
6.1 Comentários gerais e conclusões
A partir de 5 fontes diferentes de dados rodoviários, estabeleceu-se uma base de
dados híbrida, denominada H-2013, que mescla características de cada uma delas e tem
o intuito de representar o tráfego real circulante de veículos comerciais nas rodovias
brasileiras e, por consequência, carregar as obras de arte especiais existentes nestes
corredores. Esta base de dados é composta por informações como a composição do
tráfego e as distribuições de probabilidades do peso total e das distâncias entre eixos.
Essas fontes de dados rodoviários se referem a informações adquiridas em postos de
pesagem, fornecidas por concessionárias de rodovias, nos anos de 2008 e 2011, bem
como a coletas extensivas de dados de tráfego realizadas de forma independente por
dois órgãos federais: o DNIT (Departamento Nacional de Infraestrutura de Transportes),
entre 1999 e 2002, e o CENTRAN (Centro de Excelência em Engenharia de
Transportes), em 2005.
Uma dessas fontes, denominada AB-11, foi considerada a principal referência
para informações rodoviárias, fornecendo dados coletados durante 14 dias do mês de
janeiro de 2011 no posto PGF 58 (localizado no município de Jundiaí, SP) da Rodovia
dos Bandeirantes, a qual é administrada pela concessionária CCR AutoBAn.
Essa base de dados refere-se a uma rodovia de fluxo intenso e pesado de
veículos comerciais, sendo assim representativa do tráfego moderno de caminhões
pesados no Brasil. Informações das outras 4 bases de dados foram utilizadas de maneira
complementar para a formação da base de dados H-2013, pois verificou-se que todas
essas bases de dados são semelhantes em relação a características como a composição
do tráfego e a distribuição do peso total dos veículos. Os histogramas de peso total e das
distâncias entre eixos foram transformados em modelos populacionais mediante o ajuste
de distribuições contínuas de probabilidades; para tal, confeccionou-se o programa
Ajusta_v1, que determina a melhor combinação de distribuições a partir de 18 modelos
unimodais conhecidos na literatura. A escolha é feita por comparação de probabilidades
e testes de aderência.
As distâncias entre eixos com baixo coeficiente de variação, como aquelas entre
eixos agrupados, foram consideradas determinísticas. As diversas correlações existentes
entre variáveis de cada classe de veículo foram desconsideradas. No caso das cargas por

220
eixo, modelou-se de forma alternativa a variação de cada uma delas com o peso total do
veículo.
A base de dados H-2013 representa o tráfego pesado moderno no Brasil e
objetiva primordialmente prover informações estatísticas necessárias à simulação do
tráfego. Para este fim, desenvolveu-se uma ferramenta computacional denominada
STPG, que gera filas de veículos, tantas quantas forem as faixas de rolamento da
estrutura analisada, e registra valores representativos dos esforços estáticos causados
pela passagem destes veículos. Esta ferramenta foi testada e validada, sendo então
executada por diversas vezes com vistas a obter as distribuições de extremos dos
esforços devidos ao tráfego real de veículos, bem como a registrar os valores máximos
de cada efeito e a configuração que gerou cada um destes máximos.
Consideraram-se neste trabalho pontes em concreto armado moldado in situ,
com duas longarinas de seção transversal constante, compreendendo dois modelos de
tabuleiro: o estreito, correspondente às pontes mais antigas, e o largo, correspondente às
pontes mais novas. Foram considerados vãos biapoiados e contínuos entre 10 m e 40 m
e balanços entre 2,5 m e 10 m. Para esta faixa de vãos, não é de fundamental
importância considerar simulações de tráfego com engarrafamentos, pois nestes casos as
maiores solicitações devem-se à passagem dos veículos em fluxo livre, com grande
amplificação dinâmica. A situação de acúmulo de veículos em pequenas velocidades é a
mais crítica apenas em vãos maiores.
Para executar as simulações de tráfego, consideraram-se vários cenários
possíveis de trânsito, incluindo alguns temporários, de forma a atender os requisitos de
projeto no Estado Limite Último. Para garantir que as simulações de tráfego
representem adequadamente o trânsito dos veículos reais, impuseram-se limites
inferiores e superiores no peso total e nas distâncias entre eixos de cada classe de
veículo.
Para extrapolar as distribuições estáticas dos esforços solicitantes, quatro formas
diferentes foram averiguadas:
a) a extrapolação pela estatística de extremos, utilizando uma distribuição de
Weibull ajustada à cauda de máximos dos esforços em 30 dias de simulação;
b) a extrapolação pelo nível de probabilidade, utilizando uma distribuição de
Weibull ajustada à cauda de máximos dos esforços em 30 dias de simulação;
221
c) a extrapolação pelo nível de probabilidade, gerando amostras mensais e
ajustando uma distribuição de Weibull aos valores máximos mensais;
d) a extrapolação pelo nível de probabilidade, gerando amostras mensais e
ajustando uma distribuição de Gumbel aos valores máximos mensais.
Todas essas técnicas forneceram valores similares para os esforços solicitantes
extrapolados. Decidiu-se pelo modelo (b) - pelo nível de probabilidade em uma
distribuição inicial de Weibull referente a 30 dias de simulação de tráfego -, pois, dentre
todos eles, é o de maior simplicidade.
Com a extrapolação estimaram-se os valores estáticos representativos de cada
esforço solicitante em cada estrutura. Para a consideração da parcela estática dos
valores-alvo, tomou-se como referência em cada caso o cenário de tráfego que gera o
maior valor representativo da extrapolação. Comparando estes valores extrapolados
estáticos com as cargas estáticas dos modelos de cargas das normas brasileiras (sem o
impacto), verifica-se que as extrapolações superam tanto os esforços gerados pelo
modelo de cargas da antiga NB-6 quanto os da NBR 7188, em todos os casos, exceto no
momento fletor negativo das duas maiores estruturas contínuas abordadas (vãos de 30 m
e 40 m) com tabuleiro largo.
Todos os casos estáticos mais críticos são referentes a tabuleiros largos: os
esforços cortantes nas estruturas biapoiadas de 10 m e 20 m (LB-10 e LB-20), cujas
extrapolações ultrapassaram os esforços estáticos gerados pelo TB-45 em média 30%, e
os momentos fletores negativos nos balanços cujas extrapolações superaram em média
45% o carregamento da NBR 7188.
De forma geral, observou-se das simulações de tráfego que em vãos curtos, de
até 10 metros, predominaram as ações dos eixos em tandem das classes 2S3-C e 3S3-L.
Em vãos maiores, predominaram as ações dos veículos mais pesados, com maior
número de eixos, como os das classes 3T4, 3T6 e 3M6, pois eles passam a solicitar as
pontes com todos os seus eixos. As classes mais frequentes das configurações que
geraram os maiores esforços estáticos são as combinações 3T4, 3S3-L, 2S3-C e 3T6,
presentes em quase 80% dos casos. Em várias situações, sobretudo nos vãos maiores, de
30 m e 40 m, das estruturas biapoiadas e contínuas, os maiores esforços estáticos foram
gerados pela presença simultânea de 2 ou mais veículos na ponte, tanto na mesma faixa
quanto em faixas diferentes – neste caso, tanto em faixas de mesmo sentido quanto em
faixas de sentidos opostos, quando há cruzamento de veículos.
222
A separação das parcelas estática e dinâmica é fundamental para a obtenção dos
valores-alvo dos esforços via extrapolações, uma vez que a amplificação dinâmica foi
abordada como uma função da estrutura, do pavimento e dos veículos, não sendo
passível de tratamento estatístico sob o ponto de vista da simulação do tráfego na
rodovia. A contribuição dinâmica foi considerada neste trabalho por meio da utilização
de um único valor de FAD para cada esforço de cada estrutura. Considerou-se para
todas as pontes pavimento de qualidade regular e a existência de um ressalto de 3 cm na
cabeceira da obra.
Para a obtenção dessas amplificações dinâmicas, utilizou-se a ferramenta
computacional IVPE, que realiza a análise dinâmica da interação veículo-pavimento-
estrutura das pontes, via método da superposição modal. Neste trabalho, as pontes
foram preliminarmente sujeitas apenas ao trânsito do semirreboque 2S3, uma das
configurações mais nocivas a elas em termos de vibrações, em posições transversais
críticas. A versão v3 deste programa teve implementadas as equações de movimento
deste veículo, além do cálculo dos esforços solicitantes dinâmicos em cada instante de
tempo.
Com a multiplicação dos valores estáticos extrapolados dos esforços solicitantes
pelos correspondentes fatores de amplificação dinâmica, são obtidos os valores-alvo dos
esforços. Verificou-se que há uma considerável discrepância entre estes valores e
aqueles produzidos pelos carregamentos de projeto das normas brasileiras. Na maioria
dos casos os valores-alvo superam os esforços gerados pelo modelo de cargas TB-45 da
NBR 7188, notadamente nos momentos fletores negativos dos balanços. Isto indica a
necessidade de atualizar a norma brasileira de cargas móveis em pontes rodoviárias.
Os valores-alvo obtidos estão sujeitos a incertezas, as quais advêm de causas
diversas, principalmente de considerações efetuadas para suprir a ausência de dados,
como, por exemplo:
- erros na estimativa das cargas das balanças seletivas, conforme mostrado na
Seção 2.5.1;
- a consideração de informações provenientes de diferentes fontes de dados para
formar a base H-2013, cada uma delas estando sujeita a erros diferentes das outras;
- a desconsideração de diversas correlações entre variáveis, conforme explanado
nas Seções 2.6.10 e 3.2.2;
- as manipulações realizadas para a obtenção da matriz de composição do
tráfego, envolvendo a eliminação de algumas classes de veículos para formar uma base
223
de dados reduzida, bem como a inserção de outras classes, como mostrado na Seção
2.6.1;
- a transformação das distribuições de peso total e distâncias entre eixos em
modelos populacionais, mediante o ajuste de distribuições de probabilidades;
- a idealização de cenários de tráfego e da distribuição dos veículos por faixa,
como mostrado na Seção 3.4;
- a análise dinâmica simplificada, realizada por meio de modelo unifilar para a
passagem de apenas um tipo de veículo sobre as pontes.
Estas fontes de incerteza geram um viés no valor de cada esforço solicitante
tomado como alvo. Ele foi negligenciado neste trabalho.
Definidos os valores-alvo, buscaram-se configurações físicas e geométricas de
modelos de cargas que possam reproduzir os efeitos do tráfego real, pois o veículo de
projeto da NBR 7188 não teve as suas configurações inspiradas no trânsito dos veículos
pesados brasileiros. Tal tarefa foi realizada pela ferramenta computacional BMCMov,
desenvolvida para realizar varreduras em todo o domínio de existência de cada
carregamento, a partir de condições geométricas fixas. Mediante várias execuções deste
programa, que consideraram diferentes situações possíveis de geometria, carregamentos
e restrições de domínio, obtiveram-se duas configurações provisórias para um novo
modelo de cargas.
A primeira delas (modelo no 1) considera apenas um veículo e uma faixa de
projeto, de forma semelhante ao modelo de cargas atualmente em vigor no Brasil; a
segunda (modelo no 2) considera 3 faixas de projeto, com 1 veículo em cada uma delas,
e ainda uma faixa remanescente, de forma semelhante ao modelo LM1 do Eurocódigo
1. Em ambas, os veículos de projeto são considerados sobrepostos às cargas
distribuídas.
Verificou-se que os modelos de cargas nos 1 e 2 representam de forma
satisfatória os valores-alvo dos esforços, com erros médios de 9,95% e 10,19%,
respectivamente. Ambos representaram com maior precisão os momentos fletores
positivos. As maiores discrepâncias ocorreram nos esforços cortantes.
Sucintamente, a contribuição global do presente trabalho é o estabelecimento de
uma metodologia que possibilita a atualização do modelo de cargas móveis em pontes
rodoviárias a partir da coleta de dados que representem o tráfego real de veículos
comerciais, para cumprir o programa de atividades mostrado na Seção 1.1. Os novos
modelos de cargas selecionados e os valores de esforços obtidos estão sujeitos a

224
revisões, de forma a se reduzirem as incertezas já mencionadas: por exemplo, com a
aquisição de dados de tráfego pesado mais adequados e uma análise dinâmica mais
refinada (ver a Seção 6.2). Dentro deste enfoque, os principais avanços para esta linha
de pesquisa foram os seguintes:
• a elaboração de uma base de dados de tráfego, denominada H-2013;
• o desenvolvimento de uma ferramenta computacional de simulação de tráfego
combinada à análise estrutural, denominada STPG;
• o estabelecimento de uma metodologia para a consideração dos efeitos
dinâmicos;
• a implementação das equações de movimento do semirreboque 2S3 na
ferramenta computacional IVPE;
• o desenvolvimento de uma ferramenta computacional que busca um modelo de
cargas que reproduza os esforços gerados pelo tráfego real, denominada BMCMov.
6.2 Sugestões para pesquisas futuras
Para o prosseguimento deste trabalho e a efetiva proposição de um conjunto de
carregamentos de projeto e fatores parciais de segurança que venham a substituir os
atualmente vigentes nas normas brasileiras, muitas etapas ainda estão em aberto.
Quanto à base de dados, devem ainda ser consideradas diversas correlações entre
variáveis de cada classe de veículo, bem como entre veículos em faixas diferentes no
caso de trânsito em faixas de mesmo sentido. A base de dados H-2013 é uma
compilação de informações de 5 bases de dados diferentes.
O período de 30 dias adotado para as simulações de tráfego, que levou à
estabilização das extrapolações, é intrínseco à base de dados H-2013. A atualização dos
dados ou a consideração de correlações entre variáveis, a qual foi feita de forma
bastante simplificada até o presente momento, pode alterar este valor, de forma que,
neste caso, ele necessitaria ser reavaliado.
Uma das dificuldades encontradas no decorrer deste trabalho foi a necessidade
de transformar os dados fornecidos, coletados de modo a atender às expectativas da
Engenharia de Transportes, em informações aplicáveis a outra área da Engenharia Civil.
Para obter todas as informações necessárias às simulações do tráfego, incluindo as
correlações entre variáveis, a situação ideal seria registrar informações de forma
específica aos interesses da Engenharia de Estruturas; por exemplo, com registro em
225
vídeo concomitante à aquisição de dados coletados diretamente sob o pavimento das
rodovias pelo sistema WIM.
Os modelos estruturais adotados devem incluir estruturas metálicas, mistas e em
concreto pré-moldado, bem como se estender a vãos maiores e com um maior número
de faixas de tráfego.
As simulações de tráfego devem ser alimentadas com todas as correlações
possíveis entre variáveis e ainda devem ser realizadas considerando cenários de fluxo
misto e engarrafamentos, que podem alterar os valores-alvo dos esforços nas estruturas
com vãos de 30 m e 40 m. Neste caso, é necessário alterar a forma de registrar os
valores representativos dos esforços no programa STPG: devem ser armazenados todos
os extremos locais.
Como neste trabalho não se verificou se há, de fato, configurações físicas
factíveis dos veículos que possam gerar os esforços estáticos extrapolados, esta tarefa
deve ser realizada futuramente, especialmente em estruturas menores, como os balanços
das estruturas, onde há um número bem menor de possibilidades críticas de carga, já
que apenas alguns eixos de cada veículo podem solicitar simultaneamente estas
estruturas.
Quanto às análises dinâmicas das pontes, para que elas possam ser realizadas de
forma completa, com as estruturas sendo solicitadas por toda a configuração que gerou
os maiores esforços estáticos, mostradas na Tabela 3.38, devem ser formuladas e
implementadas as equações de movimento de vários veículos, ainda faltantes. Também
é necessária a validação experimental das equações de movimento destes veículos, tal
como realizado para o caminhão monolítico de 3 eixos (3C).
Com a adição de pontes metálicas e mistas no elenco de estruturas
representativas, torna-se essencial o desenvolvimento de modelos de carga de fadiga, os
quais também devem ser considerados para estruturas de concreto convencional.
Os modelos de carga nos 1 e 2 consideraram apenas a equivalência de esforços
solicitantes nas longarinas. É necessário, ainda, desenvolver modelos específicos para
outras situações, como cargas especiais (anormais) e ainda verificações locais, tais
como esforços em lajes, em regiões próximas a apoios etc. Para estes casos, é
imprescindível que as lajes das pontes sejam representadas por modelos mais
elaborados, como as discretizações em elementos finitos bi ou tridimensionais. Para esta
classe de modelos de carga, devem ser especificadas as dimensões dos pneus; nos
modelos de utilização geral, obtidos até o presente momento, o tamanho dos pneus não
226
é relevante, uma vez que as cargas são consideradas concentradas. Uma melhor
discretização da laje das pontes também pode ser utilizada para validar a distribuição
transversal das cargas adotada neste trabalho.
O método de busca por exaustão, que realiza uma varredura em todos os valores
discretos possíveis, adotado no programa BMCMov, pode ser melhorado com a
utilização de técnicas de otimização que explorem de modo mais eficaz as regiões de
interesse do espaço de busca, tornando-o heterogêneo.
O ajuste de distribuições de probabilidades a histogramas foi considerado neste
trabalho pelo método dos momentos, que é uma forma bastante simples de transformar
uma amostra em um modelo populacional. Técnicas mais avançadas podem ser usadas
para esta tarefa, como o método da máxima probabilidade (maximum likelihood) e a
estimativa por intervalos.
De acordo com o programa de atividades citado na Seção 1.1, ainda resta
cumprir a etapa de calibração de coeficientes de segurança, a ser realizada via análise de
confiabilidade estrutural do elenco de pontes adotado, bem como uma futura
recalibração destes coeficientes e dos modelos de cargas móveis em função de dados
mais recentes, mais abrangentes ou ainda mais direcionados à Engenharia de Estruturas.
Por ocasião da análise de confiabilidade, pode ser realizado um tratamento estatístico
das incertezas que levam aos vieses nos valores-alvo dos esforços solicitantes.
227
Referências bibliográficas
Agrale S.A., 2012. Disponível em <www.agrale.com.br>. Acesso em 14/03/2012.
América Implementos Rodoviários, 2012. Disponível em <www.americair.com.br>.
Acesso em 14/03/2012.
American Association of State Highway and Transportation Officials, 2002, Standard
Specifications for Highway Bridges. Washington, DC, USA.
American Association of State Highway and Transportation Officials, 2007, AASHTO
LRFD Bridge Design Specifications. Washington, DC, USA.
American Society for Testing and Materials, 2002, ASTM E1318 - Standard
Specification for Highway Weigh-in-Motion (WIM) Systems with User
Requirements and Test Methods. West Conshohocken, USA.
ANG, A. H.-S., TANG, W. H., 1975, Probability Concepts in Engineering Planning
and Design. Volume I: Basic Principles. New York, USA, John Wiley & Sons.
ANG, A. H.-S., TANG, W. H., 1984, Probability Concepts in Engineering Planning
and Design. Volume II: Decision, Risk and Reliability. New York, USA, John
Wiley & Sons.
ARAGÃO FILHO, L. A. C. M., 2011. Notas de aula de Dinâmica das Estruturas. SE/2
– Seção de Ensino de Engenharia de Fortificação e Construção. Instituto Militar
de Engenharia, Rio de Janeiro, RJ.
ARAÚJO, J. J., 2007, Estudo do Impacto de Veículos Pesados sobre a Infra-Estrutura
Rodoviária através de Simulação Microscópica de Tráfego. Tese de D.Sc.,
EESC/USP, São Carlos, SP, Brasil.
Ártica Refrigeração, 2012. Disponível em <www.thermosul.com.br>. Acesso em
14/03/2012.
Associação Brasileira de Normas Técnicas, 1940, NB-1 – Cálculo e Execução de Obras
de Concreto Armado. Rio de Janeiro, RJ.
Associação Brasileira de Normas Técnicas, 1941, NB-2 – Cálculo e Execução de
Pontes em Concreto Armado. Rio de Janeiro, RJ.
Associação Brasileira de Normas Técnicas, 1943, NB-6 – Carga móvel em ponte
rodoviária. Rio de Janeiro, RJ.
Associação Brasileira de Normas Técnicas, 1960, NB-6 – Carga móvel em ponte
rodoviária. Rio de Janeiro, RJ.
228
Associação Brasileira de Normas Técnicas, 1984, NBR 7188 – Carga móvel em ponte
rodoviária e passarela de pedestre. Rio de Janeiro, RJ.
Associação Brasileira de Normas Técnicas, 1987, NBR 7187 – Projeto e Execução de
Pontes de Concreto Armado e Protendido - Procedimento. Rio de Janeiro, RJ.
Associação Brasileira de Normas Técnicas, 2001, NBR NM-ISO 337 - Veículos
rodoviários – Pino rei de 50 mm para semi-reboque – Dimensões básicas de
montagem e intercambialidade. Rio de Janeiro, RJ.
Associação Brasileira de Normas Técnicas, 2003, NBR 7187 – Projeto de Pontes de
Concreto Armado e de Concreto Protendido - Procedimento. Rio de Janeiro, RJ.
Associação Brasileira de Normas Técnicas, 2003, NBR NM-ISO 1726 - Veículos
rodoviários - Acoplamento mecânico entre caminhão trator e semi-reboque –
Intercambiabilidade. Rio de Janeiro, RJ.
Associação Brasileira de Normas Técnicas, 2003, NBR 8681 – Ações e segurança nas
estruturas – Procedimento. Rio de Janeiro, RJ.
Associação Brasileira de Normas Técnicas, 2007, NBR 6118 – Projeto de estruturas de
concreto - Procedimento. Rio de Janeiro, RJ.
Associação Brasileira de Normas Técnicas, 2010, NBR 11410 - Implementos
rodoviários – Engate automático para caminhões, reboques e semirreboques –
Requisitos. Rio de Janeiro, RJ.
Associação Nacional dos Fabricantes de Implementos Rodoviários, 2012. Disponível
em <www.anfir.org.br>. Acesso em 02/05/2012.
Associação Nacional dos Fabricantes de Veículos Automotores, 2012. Disponível em
<www.anfavea.com.br>. Acesso em 02/05/2012.
Associação Nacional das Empresas Importadoras de Veículos Automotores, 2006.
Disponível em <www.abeiva.com.br>. Acesso em 26/03/2006.
A. Guerra Implementos Rodoviários, 2012. Disponível em <www.guerra.com.br>.
Acesso em 14/03/2012.
BATHE, K.-J., 1996, Finite element procedures in engineering analysis. Englewood
Cliffs, USA, Prentice-Hall, Inc.
BATTISTA, R. C., 1993, Concepção, projeto e instalação de absorsores passivos de
vibração para atenuação dos esforços dinâmicos na ponte de acesso ao Porto de
Sepetiba. In: Relatório Técnico COPPETEC, Rio de Janeiro, RJ.
BATTISTA, R. C., 1995, Notas de aula de Dinâmica Estrutural. PEC/COPPE/UFRJ,
Rio de Janeiro, RJ.
229
BATTISTA, R. C., ROITMAN, N., 1993, Avaliação dinâmica da ponte de acesso do
porto de Sepetiba. In: Relatório Técnico COPPETEC, Rio de Janeiro, RJ.
BEER, F. P., JOHNSTON JR., E. R., 1994, Mecânica Vetorial para Engenheiros:
Estática. 5a edição revisada. São Paulo, SP, Makron Books do Brasil Editora Ltda.
BLESSMANN, J., 1998, Introdução ao Estudo das Ações Dinâmicas do Vento. Porto
Alegre, RS, Editora da Universidade, UFRGS.
BOX, G. E. P., MULLER, M. E., 1958, “A Note on the Generation of Random Normal
Deviates”, Mathematical Statistics, v. 29, pp. 610-611.
BRADY, S. P., O’BRIEN, E. J., ŽNIDARIČ, A., 2006, “The Effect of Vehicle Velocity
on the Dynamic Amplification of a Vehicle crossing a Simply Supported Bridge”,
ASCE Journal of Bridge Engineering, v. 11, no 2, pp. 241-249.
BRASIL, 1966, Código Nacional de Trânsito, de 21/09/1966.
BRASIL, 1967, Decreto-Lei no 237, de 23/02/1967.
BRASIL, 1968, Decreto no 62.167, de 16/01/1968.
BRASIL, 1978, Decreto no 82.925, de 21/12/1978.
BRASIL, 1983, Decreto no 88.686, de 06/09/1983.
BRASIL, 1985, Lei no 7408, de 25/11/1985.
BRASIL, 1990, Decreto no 98.933, de 07/02/1990.
BRASIL, 1996, Decreto no 2.069, de 12/11/1996.
BRASIL, 1997, Código de Trânsito Brasileiro, de 23/09/1997.
BRASIL, 1997, Lei no 9503, de 23/09/1997.
BRASIL, 2001, Lei no 10.633, de 05/06/2001.
BRASIL, 2003, Decreto no 4.711, de 29/05/2003.
British Standards Institution, 1972, BS 5400 - Specification for steel girder bridges.
Part 3A: Loads. London, UK.
British Standards Institution, 1978, BS 5400 - Steel, concrete and composite bridges.
Part 2: Specification for loads. London, UK.
British Standards Institution, 1980, BS 5400 - Steel, concrete and composite bridges.
Part 10: Code of practice for fatigue. London, UK.
British Standards Institution, 2006, BS 5400 - Steel, concrete and composite bridges.
Part 2: Specification for loads. London, UK.
CALGARO, J.-A., 1998, “Loads on Bridges”, Progress in Structural Engineering and
Materials, v. 1, no 4, pp. 452-461.
CALGARO, J.-A., 2008, Traffic loads on bridges and footbridges. “Eurocodes:
230
Background and application” Workshop. Brussels, Belgium, february 18-20.
CAPRANI, C. C., O’BRIEN, E. J., McLACHLAN, G. J., 2008, “Characteristic traffic
load from a mixture of loading events on short to medium span bridges”,
Structural Safety, v. 30, pp. 394-404.
CASTRO, R., 2006, Pesagem estática e dinâmica de veículos. Workshop: Tecnologias
de pesagem em movimento. Rio de Janeiro, RJ, junho.
CHAMON, R., 1989, Contribuição para Análise de Fadiga em Vigas de Pontes de
Concreto Armado. Dissertação de M.Sc., UFF, Niterói, RJ, Brasil.
CLOUGH, R. W., PENZIEN, J., 2003, Dynamics of Structures. 3rd edition. Computers
& Structures, Inc., Berkeley, CA, USA.
Comité Européen de Normalisation, 2003, Eurocode 1 – Basis of design and actions on
structures: Part 2 – Traffic loads on bridges. Bruxelles, Belgique.
Conselho Nacional de Trânsito, 1984, Resolução no 631, de 25/05/1984. Brasília, DF.
Conselho Nacional de Trânsito, 1994, Resolução no 787, de 11/10/1994. Brasília, DF.
Conselho Nacional de Trânsito, 1998, Resolução no 12, de 06/02/1998. Brasília, DF.
Conselho Nacional de Trânsito, 1998, Resolução no 62, de 21/05/1998. Brasília, DF.
Conselho Nacional de Trânsito, 1998, Resolução no 68, de 23/09/1998. Brasília, DF.
Conselho Nacional de Trânsito, 1998, Resolução no 76, de 19/11/1998. Brasília, DF.
Conselho Nacional de Trânsito, 1999, Resolução no 102, de 31/08/1999. Brasília, DF.
Conselho Nacional de Trânsito, 1999, Resolução no 104, de 21/12/1999. Brasília, DF.
Conselho Nacional de Trânsito, 2000, Resolução no 114, de 05/05/2000. Brasília, DF.
Conselho Nacional de Trânsito, 2004, Resolução no 164, de 10/09/2004. Brasília, DF.
Conselho Nacional de Trânsito, 2005, Resolução no 184, de 21/10/2005. Brasília, DF.
Conselho Nacional de Trânsito, 2006, Resolução no 189, de 25/01/2006. Brasília, DF.
Conselho Nacional de Trânsito, 2006, Resolução no 210, de 13/11/2006. Brasília, DF.
Conselho Nacional de Trânsito, 2006, Resolução no 211, de 13/11/2006. Brasília, DF.
Conselho Nacional de Trânsito, 2007, Resolução no 256, de 30/11/2007. Brasília, DF.
Conselho Nacional de Trânsito, 2007, Resolução no 258, de 30/11/2007. Brasília, DF.
Conselho Nacional de Trânsito, 2008, Resolução no 301, de 18/12/2008. Brasília, DF.
Conselho Nacional de Trânsito, 2009, Resolução no 326, de 17/07/2009. Brasília, DF.
Conselho Nacional de Trânsito, 2009, Resolução no 328, de 14/08/2009. Brasília, DF.
Conselho Nacional de Trânsito, 2009, Resolução no 337, de 17/12/2009. Brasília, DF.
Conselho Nacional de Trânsito, 2010, Resolução no 353, de 24/06/2010. Brasília, DF.
Conselho Nacional de Trânsito, 2010, Resolução no 365, de 24/11/2010. Brasília, DF.
231
Conselho Nacional de Trânsito, 2011, Resolução no 373, de 18/03/2011. Brasília, DF.
Conselho Nacional de Trânsito, 2011, Deliberação no 117, de 19/12/2011. Brasília, DF.
CREMONA, C., 2001, “Optimal extrapolation of traffic load effects”, Structural Safety,
v. 23, pp. 31-46.
Dambroz Indústria Mecânica e Metalúrgica, 2012. Disponível em <dambroz.com.br>.
Acesso em 14/03/2012.
DAS, P. C., 1997, Safety of Bridges. London, UK, Thomas Telford.
Departamento Nacional de Estradas de Rodagem, 2001, Quadro de Fabricantes de
Veículos e Instruções Operacionais para Postos de Pesagem Dinâmica de
Veículos. Diretoria de Operações Rodoviárias. Divisão de Controle Operacional.
Brasília, DF.
Departamento Nacional de Infraestrutura de Transportes, 2006. Disponível em
<www.dnit.gov.br>. Acesso em 02/08/2006.
Departamento Nacional de Infraestrutura de Transportes, 2005, Quadro de Fabricantes
de Veículos. Diretoria de Infraestrutura Rodoviária. Coordenação Geral de
Operações Rodoviárias. Brasília, DF.
Departamento Nacional de Infraestrutura de Transportes, 2007, Quadro de Fabricantes
de Veículos. Versão 4.1. Diretoria de Infraestrutura Rodoviária. Coordenação
Geral de Operações Rodoviárias. Brasília, DF.
Departamento Nacional de Infraestrutura de Transportes, 2008, Instrução de Serviço
para o Plano Nacional de Pesagem: 1a etapa. Coordenação Geral de Operações
Rodoviárias. Disponível em <www.dnit.gov.br>.
Departamento Nacional de Infraestrutura de Transportes, 2009, Quadro de Fabricantes
de Veículos. Diretoria de Infraestrutura Rodoviária. Coordenação Geral de
Operações Rodoviárias. Disponível em <www.dnit.gov.br>.
Departamento Nacional de Trânsito, 2001, Portaria 54/01, de 06/12/2001. Brasília, DF.
Departamento Nacional de Trânsito, 2002, Portaria 32/02, de 04/07/2002. Brasília, DF.
Departamento Nacional de Trânsito, 2002, Portaria 33/02, de 04/07/2002. Brasília, DF.
Departamento Nacional de Trânsito, 2002, Portaria 34/02, de 04/07/2002. Brasília, DF.
Departamento Nacional de Trânsito, 2002, Portaria 39/02, de 04/07/2002. Brasília, DF.
Departamento Nacional de Trânsito, 2002, Portaria 40/02, de 04/07/2002. Brasília, DF.
Departamento Nacional de Trânsito, 2006, Portaria 86/06, de 20/12/2006. Brasília, DF.
Departamento Nacional de Trânsito, 2008, Portaria 60/08, de 02/07/2008. Brasília, DF.
Departamento Nacional de Trânsito, 2008, Portaria 93/08, de 01/10/2008. Brasília, DF.
232
Departamento Nacional de Trânsito, 2009, Portaria 63/09, de 31/03/2009. Brasília, DF.
Deutsche Institut für Normung, 1952, DIN 1072 - Straßen- und Wegbrücken;
Lastannahmen. Berlin, Deutschland.
Deutsche Institut für Normung, 1967, DIN 1072 - Straßen- und Wegbrücken;
Lastannahmen. Berlin, Deutschland.
Deutsche Institut für Normung, 1985, DIN 1072 - Straßen- und Wegbrücken;
Lastannahmen. Berlin, Deutschland.
Deutsche Institut für Normung, 2003, DIN-Fachbericht 101 – Einwirkungen auf
Brücken. Berlin, Deutschland.
Deutsche Institut für Normung, 2009, DIN-Fachbericht 101 – Einwirkungen auf
Brücken. Berlin, Deutschland.
DITLEVSEN, O., 1994, “Traffic loads on large bridges modeled as white noise fields”,
ASCE Journal of Engineering Mechanics, v. 120, no 4, pp. 681-694.
DNIT, CENTRAN, DEC, 2006, Plano Diretor Nacional Estratégico de Pesagem –
PDNEP. Volume I: Apresentação do PDNEP. Disponível em <www.dnit.gov.br>.
DNIT, CENTRAN, DEC, 2006, Plano Diretor Nacional Estratégico de Pesagem –
PDNEP. Volume VI: Tecnologia. Disponível em <www.dnit.gov.br>.
EL DEBS, M. K., MALITE, M. et al., 2002, “Um Estudo das Conseqüências do
Tráfego de Combinações de Veículos de Carga sobre as Pontes da Rede Viária do
DER-SP”. XXX Jornadas Sul-americanas de Engenharia Estrutural, Brasília, DF,
maio.
Facchini S.A., 2012. Disponível em <www.facchini.com.br>. Acesso em 14/03/2012.
FERREIRA, L. M., 2006, Aplicação da Teoria da Confiabilidade na Obtenção de
Limites para o Peso de Veículos de Carga em Pontes de Concreto. Tese de D.Sc.,
EESC/USP, São Carlos, SP, Brasil.
FERREIRA, V. T., 1999, Modelo simplificado para a Análise Dinâmica de Estruturas
Mistas de Pontes. Dissertação de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
FOGLIATTI, M. C., MATTOS, N. M. C., 2007, Teoria de Filas. Rio de Janeiro, RJ,
Editora Interciência.
Ford Caminhões Brasil, 2012. Disponível em <www.ford.com.br>. Acesso em
14/03/2012.
GERE, J. M., WEAVER JR., W., 1965, Analysis of Framed Structures. New York,
USA, Van Nostrand Reinhold Ltd.
233
GETACHEW, A., 2003, Traffic loads on bridges: Statistical Analysis of Collected and
Monte Carlo Simulated Vehicle Data. Doctoral Thesis, Royal Institute of
Technology, Stockholm, Sweden.
GONZALES, A., 2001, Development of Accurate Methods of Weighing Trucks in
Motion. Ph.D. Thesis, Trinity College Dublin, Dublin, Ireland.
Goydo Implementos Rodoviários, 2012. Disponível em <www.goydo.com.br>. Acesso
em 14/03/2012.
GREENBERGER, M., 1961, “An A Priori Determination of Serial Correlation in
Computer Generated Random Numbers”, Mathematics of Computation, v. 15, pp.
383-389.
Grupo Hübner, 2012. Disponível em <www.rodolinea.com.br>. Acesso em 14/03/2012.
GULVANESSIAN, H., MENZIES, J. B., 2000, “The Eurocode for Structural loading:
Eurocode I”, Progress in Structural Engineering and Materials, v. 2, pp. 472-482.
HAUGH, M., 2004, The Monte Carlo Framework, Examples from Finance and
Generating Correlated Random Variables. Lecture Note #IEOR4703, Columbia
University, New York, USA.
HONDA, H., KAJIKAWA, Y., KOBORI, T., 1982, “Spectra of Road Surface
Roughness on Bridges”, Journal of the Structural Division, v. 108, ST 9, pp.
1956-66.
Indústria Metalúrgica Pastre, 2012. Disponível em <www.pastre.com.br>. Acesso em
14/03/2012.
Irmãos Librelato, 2012. Disponível em <librelato.com.br>. Acesso em 14/03/2012.
Iveco-Fiat Industrial S. P. A., 2012. Disponível em <www.iveco.com.br>. Acesso em
14/03/2012.
JACOB, B. P., 2004, Notas de aula de Dinâmica de Sistemas Discretos.
PEC/COPPE/UFRJ, Rio de Janeiro, RJ.
Jus Brasil, 2012. Disponível em <www.jusbrasil.com.br>. Acesso em 05/10/2012.
KOLMAN, B., 1996, Introdução à Álgebra Linear com Aplicações. Rio de Janeiro, RJ,
Prentice-Hall do Brasil Ltda.
KREISZIG, E. K., 1993, Advanced Engineering Mathematics. 7th edition. New York,
USA, John Wiley & Sons.
Kronorte Implementos para Transportes, 2012. Disponível em <www.kronorte.com.br>.
Acesso em 14/03/2012.
234
Lençois Equipamentos Rodoviários, 2012. Disponível em <www.lencois.ind.br>.
Acesso em 14/03/2012.
LIMA, B. S. L. P., 2008, Notas de aula de Algoritmos Genéticos. PEC/COPPE/UFRJ,
Rio de Janeiro, RJ.
LINDQUIST, M., 2006, Confiabilidade estrutural de pontes laminadas protendidas de
madeira. Tese de D.Sc., EESC/USP, São Carlos, SP, Brasil.
LUCHI, L. A. R., 2006, Reavaliação do trem-tipo à luz das cargas reais nas rodovias
brasileiras. Tese de D.Sc., EPUSP, São Paulo, SP, Brasil.
Man Latin America, 2012. Disponível em <www.man-la.com>. Acesso em 14/03/2012.
MELO, E. S., 2007, Interação dinâmica veículo- estrutura em pequenas pontes
rodoviárias. Dissertação de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
MELO, R. P., 2004, Avaliação da estabilidade lateral em conjuntos de veículos de
carga. Dissertação de M.Sc., PUC-PR, Curitiba, PR, Brasil.
MENDES, P.T.C., 2009, Contribuições para um modelo de gestão de pontes de
concreto aplicado à rede de rodovias brasileiras. Tese de D.Sc., EPUSP, São
Paulo, SP, Brasil.
MENDONÇA, R. F., 2009, Geração de dados para modelo dinâmico de cargas móveis
em pontes. Dissertação de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
Mercedes-Benz do Brasil, 2012. Disponível em <www.mercedes-benz.com.br>. Acesso
em 14/03/2012.
Metalúrgica Schiffer, 2012. Disponível em <www.schiffer.com.br>. Acesso em
14/03/2012.
MEYER, P. L., 1983, Probabilidade: Aplicações à Estatística. 2a edição. Rio de
Janeiro, RJ, Livros Técnicos e Científicos.
MORALES, P. R. D., 2008, Correspondência particular com o Coronel Paulo Roberto
Dias Morales, então chefe da A7 (Assessoria de Projetos de Engenharia e Estudos
de Alto Nível) do DEC (Departamento de Engenharia e Construção) do Exército
Brasileiro. Ministério da Defesa.
MOROZ, F. V., 2009, Uma metodologia para a análise da influência do tráfego de
veículos pesados na resposta dinâmica de pontes rodoviárias. Dissertação de
M.Sc., EPUSP, São Paulo, SP, Brasil.
NEVES, F. A., 1997, Programação com Multi-objetivos Aplicada à Otimização do
Projeto de Pontes Estaiadas. Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ,
Brasil.
235
NEWLAND, D. E., 1993, An Introduction to Random Vibrations, Spectral and Wavelet
Analysis. 3rd edition. Harlow, UK, Longman.
NIST/SEMATECH e-Handbook of Statistical Methods,
www.itl.nist.gov/div898/handbook, 09/05/2012.
Noma do Brasil, 2012. Disponível em <www.noma.com.br>. Acesso em 14/03/2012.
NOWAK, A. S., 1993, “Live load model for highway bridges”, Structural Safety, v. 13,
pp. 53-66.
NOWAK, A. S., 1995, “Calibration of LRFD Bridge Code”, Journal of Structural
Engineering, v. 121, no 8, pp. 1245-1251.
NOWAK, A. S., SZERSZEN, M. M., 1998, “Bridge load and resistance models”,
Engineering Structures, v. 20, no 11, pp. 985-990.
Ontario Ministry of Transportation, 1991, Ontario Highway Bridge Design Code.
Quality and Standards Division, Toronto, ON, Canada.
O’BRIEN, E. J., ENRIGHT, B., 2011, “Modeling same-direction two-lane traffic for
bridge loading”, Structural Safety, v. 33, pp. 296-304.
O’CONNOR, A., O’BRIEN, E. J., 2005, “Traffic load modeling and factors influencing
the accuracy of predicted extremes”, Canadian Journal of Civil Engineering, v.
32, pp. 270-278.
O’CONNOR, C., SHAW, P. A., 2000, Bridge Loads: An international perspective.
London, UK, Spon Press.
PEREIRA, D. R. A. M., 1992, Contribuição ao Estudo dos Fatores de Equivalência de
Carga. Dissertação de M.Sc. EPUSP, São Paulo, SP, Brasil.
PERLINGEIRO, M. S. P. L., FERREIRA, V. T., CARVALHO, E. M. L. et al., 2002,
“Influência da interação veículo-pavimento-estrutura na resposta dinâmica de
pontes”. XXX Jornadas Sul-Americanas de Engenharia Estrutural, Brasília, DF,
maio.
PFEIL, M. S., MELO, E. S., SANTOS, E. F. et al., 2007, “Modelo analítico-numérico
para análise da interação veículo-estrutura de ponte”. XXVIII Congresso Ibero-
latino-americano sobre métodos computacionais em engenharia, Porto, Portugal,
junho.
PFEIL, M. S., ROSSIGALI, C. E., BATTISTA, R. C., 2011, “Estatística de esforços
críticos devidos ao tráfego de veículos em pontes rodoviárias visando novos
modelos de cargas móveis”. 53o Congresso Brasileiro do Concreto, Florianópolis,
SC, novembro.
236
PFEIL, M. S., ROSSIGALI, C. E., BATTISTA, R. C. et al., 2010, “Proposição para
novos modelos de cargas móveis em pontes de pequenos vãos”. XXXIV Jornadas
Sudamericanas de Ingeniería Estructural, San Juan, Argentina, setembro.
PFEIL, W., 1985, Pontes em Concreto Armado. Volume 1. 3a edição. Rio de Janeiro,
RJ, Livros Técnicos e Científicos.
Pierino Gotti Indústria de Implementos Rodoviários e Mecânicos, 2006. Disponível em
<www.gotti.ind.br>. Acesso em 02/08/2006.
PORTUGAL, L. S., 2005, Simulação de tráfego: conceitos e técnicas de modelagem.
Rio de Janeiro, RJ, Editora Interciência.
PRAT, M., 2001, “Traffic load models for bridge design: recent developments and
research”, Progress in Structural Engineering and Materials, v. 3, pp. 326-334.
PRESS, W. H., TEUKOLSKY, S. A., VETTERLING, W. T. et al., 1997, Numerical
recipes in Fortran 77: the art of scientific computing. Volume 1. 2nd edition.
Cambridge, UK, Cambridge University Press.
Randon Implementos e Participações, 2012. Disponível em <www.randon.com.br>.
Acesso em 14/03/2012.
RAO, S. S., 2008, Vibrações Mecânicas. São Paulo, SP, Pearson Prentice Hall.
RATTIGAN, P. H., O’BRIEN, E. J., GONZALES, A., 2005, The Dynamic
Amplification on Highway Bridges due to Traffic Flow. Young Researchers
Seminar, European Conference of Transport Research Institutes, The Hague, The
Netherlands, may 11-13.
Recrusul S.A., 2012. Disponível em <www.recrusul.com.br>. Acesso em 14/03/2012.
Rodofort S.A., 2012. Disponível em <www.rodofort.com.br>. Acesso em 14/03/2012.
Rossetti Equipamentos Rodoviários, 2012. Disponível em <www.rossetti.com.br>.
Acesso em 14/03/2012.
ROSSIGALI, C. E., 2006, Estudos Probabilísticos para Modelos de Cargas Móveis em
Pontes Rodoviárias no Brasil. Dissertação de M.Sc., COPPE/UFRJ, Rio de
Janeiro, RJ, Brasil.
ROSSIGALI, C. E., PFEIL, M. S., SAGRILO, L. V. S., 2011, “Simulação de tráfego
visando novos modelos de cargas móveis para pontes rodoviárias”. XXXII
Congresso Ibero Latino Americano de Métodos Computacionais em Engenharia,
Ouro Preto, MG, novembro.
SAGRILO, L. V. S., 2008, Notas de aula de Métodos Probabilísticos Aplicados a
Estruturas Offshore. PEC/COPPE/UFRJ, Rio de Janeiro, RJ.
237
SAGRILO, L. V. S., LIMA, E. C. P., 2004, Notas de Aula de Confiabilidade Estrutural:
Variáveis Aleatórias, Distribuições de Probabilidade, Estatística de Extremos e
Inferência Estatística. PEC/COPPE/UFRJ, Rio de Janeiro, RJ.
Santa Izabel Implementos Agrícolas, 2012. Disponível em <www.santaizabel.ind.br>.
Acesso em 14/03/2012.
SANTOS, E. F., 2007, Análise e Redução de Vibrações em Pontes Rodoviárias. Tese de
D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
SANTOS, L. M., 1983, Cálculo de Concreto Armado segundo a nova NB-1 e o CEB.
Volume 1. 2a edição. São Paulo, SP, Editora LMS.
SANTOS, M. F., 2003, Contribuição ao Estudo do Efeito de Combinação de Veículos
de Carga sobre Pontes Rodoviárias de Concreto. Dissertação de M.Sc.,
EESC/USP, São Carlos, SP, Brasil.
SARAIVA, J. M. F., ALLENDE, K. A. A., 2007, “Utilização da Distribuição de
Weibull 3P para as Variáveis Envolvidas no Dimensionamento do Reforço de
Pilares Curtos por Encamisamento”, Revista Engenharia Estudo e Pesquisa/UFF,
v. 9, no 2, pp. 3-10.
Scania Latin America, 2012. Disponível em <www.scania.com.br>. Acesso em
14/03/2012.
Serpeças Implementos, 2012. Disponível em <www.serpecas.com.br>. Acesso em
14/03/2012.
SIURB-SP, 2006, Normas Técnicas de Pavimentação: Classificação das Vias.
Secretaria Municipal de Infraestrutura Urbana e Obras da Prefeitura da Cidade de
São Paulo, São Paulo, SP.
SORIANO, H. S., 2005, Análise de Estruturas: Formulação Matricial e Implementação
Computacional. Rio de Janeiro, RJ, Editora Ciência Moderna.
SOUZA, L. P., 2009, Um Modelo para Análise da Compatibilidade de Tráfego entre
um Caminhão ou uma Combinação de Veículos de Carga e um Trecho de
Rodovia. Dissertação de M.Sc., EESC/USP, São Carlos, SP, Brasil.
SPIEGEL, M. R., 1994, Estatística. 3a edição. São Paulo, SP, Makron Books do Brasil.
TIMERMAN, J., BEIER, M., 2012, Considerações sobre a revisão da ABNT NBR
7188. Encontro Mensal da Associação Brasileira de Engenharia e Consultoria
Estrutural (ABECE), São Paulo, SP, junho.
Três Eixos Indústria de Equipamentos de Transportes, 2012. Disponível em
<www.treseixos.com.br>. Acesso em 14/03/2012.
238
VIEIRA, C. E. C., RIBEIRO, C. C., CASTRO E SOUZA, R., 2004, “Geradores de
Números Aleatórios”, PUC-Rio Inf. MCC22.
Vital Marrara Implementos Rodoviários, 2012. Disponível em <vitalmarrara.com.br>.
Acesso em 14/03/2012.
Volvo do Brasil, 2012. Disponível em <www.volvo.com.br>. Acesso em 14/03/2012.
WALCK, C., 2001, Hand-book on Statistical Distributions for experimentalists.,
Universitet Stockholms, Stockholm, Sweden.
WIDMER, J. A., 2002, “Compatibilidade de Tráfego de Bitrens de 25 m com a Infra-
estrutura Viária Brasileira”. 2o Colloquium Internacional de Suspensões e do 1o
Colloquium de Implementos Rodoviários da SAE-Brasil, Caxias do Sul, RS, maio.
Wolfram Mathworld, www.mathworld.com, 01/07/2010.
YANG, Y. B., LIN, B. H., 1995, “Vehicle-Bridge Interaction Analysis by Dynamic
Condensation Method”, ASCE Journal of Structural Engineering, v. 121, no 11,
pp. 1636-1643.
239
Anexo A Lei da Balança e nomenclatura dos veículos
A.1 A Lei da Balança
O que se conhece como Lei da Balança é um conjunto de leis e normas que
regulamentam a circulação dos veículos comerciais nas rodovias brasileiras. A seguir é
descrito um histórico da evolução de algumas das suas características.
A implantação da indústria automobilística na década de 1950 obrigou o
Governo, na época, a investir maciçamente na ampliação da malha rodoviária. Para tal,
era necessário aperfeiçoar a tecnologia até então incipiente. Criou-se o IPR (Instituto de
Pesquisas Rodoviárias), do antigo DNER, que, entre outros, elaborou o Método de
Dimensionamento de Pavimentos Flexíveis, baseado na repetição de uma carga padrão
para os eixos dos veículos. Para que este método fosse válido, criou-se uma legislação
específica para disciplinar as cargas dos eixos dos veículos.
O Código Nacional de Trânsito (CNT) foi criado pela Lei 5.108, de 21/09/1966.
O Decreto 62.167, de 16/01/1968, criou o então Regulamento do Código Nacional de
Trânsito (RCNT) e regulamentou o Conselho Nacional de Trânsito (CONTRAN), que
havia sido criado em 23/02/1967 pelo Decreto-Lei 237, juntamente com o
Departamento Nacional de Trânsito (DENATRAN), entre outros, como órgãos
componentes do Sistema Nacional de Trânsito (SNT). Ambos pertenciam ao Ministério
da Justiça.
Algumas definições do RCNT são ainda válidas e atuais. Consideram-se eixos
em tandem aqueles que constituem um conjunto integral de suspensão, podendo
qualquer um deles ser ou não motriz. Nos eixos agrupados, a distância entre os dois
planos verticais que contêm os centros das duas rodas consecutivas se situa entre 1,20 m
e 2,40 m. Quando essa distância supera os 2,40 m, os eixos estão isolados, não sendo
tratados como um conjunto. À época do RCNT, o único conjunto de eixos agrupados
existente era o tandem duplo (TD), formado por dois eixos consecutivos de quatro
pneumáticos cada. Os eixos isolados de 2 pneumáticos são chamados de eixos simples
de rodas simples (SRS) e os isolados de 4 pneumáticos, eixos simples de rodas duplas
(SRD). Segundo os artigos 82 e 83 do RCNT, o Peso Bruto Total (PBT) de um veículo
ou combinação de veículos não poderia exceder a 400 kN e os limites de carga dos
eixos SRS, SRD e TD eram de 50 kN, 100 kN e 170 kN, respectivamente. Assim, em
240
1966 o limite de peso total dos veículos autorizado pelo RCNT, de 400 kN, superava o
peso total do veículo de projeto TB-36, da NB-6 (360 kN), vigente desde 1960.
Ainda, de acordo com os artigos 81 e 84 do RCNT, a largura e a altura máxima
permitidas de qualquer veículo, respectivamente, eram de 2,60 m e 4,00 m, e nenhuma
combinação de veículos poderia se constituir de mais de duas unidades, incluída a parte
tratora. Os comprimentos máximos aceitos eram de 12,00 m, 16,50 m e 18,00 m para os
veículos simples, articulados e com um reboque, respectivamente.
O CONTRAN já havia fixado os requisitos para a concessão de autorização
especial aos veículos com dimensões excedentes a esses limites.
O Decreto 82.925, de 21/12/1978, alterou a redação dos artigos 81 e 82 do
RCNT. A altura máxima permitida dos veículos passou de 4,00 m para 4,40 m. Os
comprimentos máximos permitidos aumentaram para 13,20 m, 18,15 m e 19,80 m, para
os veículos simples, articulados e com um reboque, respectivamente. O PBT máximo
permitido passou de 400 para 450 kN e os veículos com peso total maior que este limite
poderiam obter autorização especial para transitar, desde que não ultrapassassem os
limites de carga por eixo então vigentes.
Iniciou-se, na década de 1980, um esforço conjunto dos segmentos de
transportes de carga a granel para a liberação ao tráfego de veículos de maior porte. As
empresas transportadoras poderiam reduzir significativamente os custos de transporte,
que agregam uma importante parcela nos custos de produção e distribuição, devido ao
baixo valor dos produtos transportados por tonelada pelos veículos maiores. Veículos
articulados de grande capacidade já eram comuns em países como Estados Unidos,
Canadá e Austrália (WIDMER, 2002).
Como algumas rodovias brasileiras já apresentavam diversos problemas, devido
à falta de manutenção, uma forma de contornar essas adversidades foi a autorização do
tráfego de veículos mais compridos, com maior número de eixos e maior capacidade de
carga, porém sujeitos aos mesmos limites de cargas por eixo estabelecidos, garantindo
assim sobrevida aos pavimentos devido à redução da frota circulante e a consequente
diminuição do número de acidentes, da emissão de poluentes e dos danos aos
pavimentos, pois esses veículos são compostos por um maior número de eixos em
tandem. Em contrapartida, devido ao maior número de conexões, eles se sujeitam a
certos fenômenos que reduzem a sua dirigibilidade, como a amplificação traseira
(MELO, 2004).
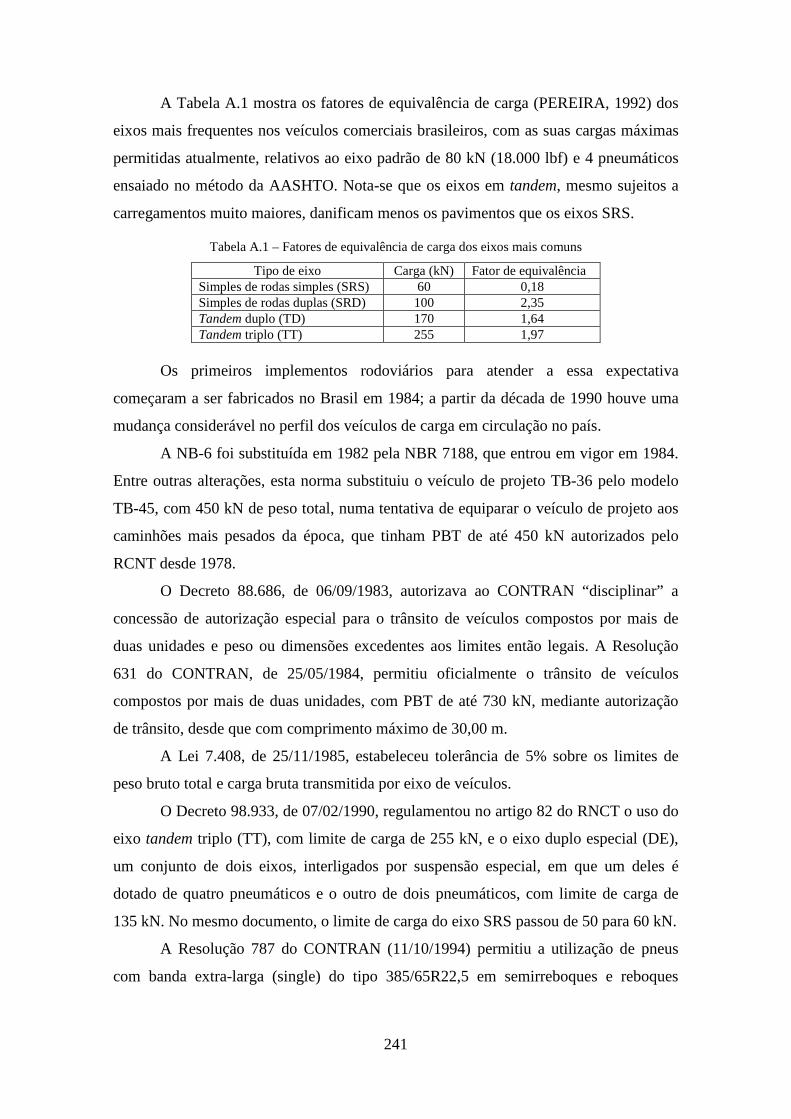
241
A Tabela A.1 mostra os fatores de equivalência de carga (PEREIRA, 1992) dos
eixos mais frequentes nos veículos comerciais brasileiros, com as suas cargas máximas
permitidas atualmente, relativos ao eixo padrão de 80 kN (18.000 lbf) e 4 pneumáticos
ensaiado no método da AASHTO. Nota-se que os eixos em tandem, mesmo sujeitos a
carregamentos muito maiores, danificam menos os pavimentos que os eixos SRS.
Tabela A.1 – Fatores de equivalência de carga dos eixos mais comuns
Tipo de eixo Carga (kN) Fator de equivalência Simples de rodas simples (SRS) 60 0,18 Simples de rodas duplas (SRD) 100 2,35 Tandem duplo (TD) 170 1,64 Tandem triplo (TT) 255 1,97
Os primeiros implementos rodoviários para atender a essa expectativa
começaram a ser fabricados no Brasil em 1984; a partir da década de 1990 houve uma
mudança considerável no perfil dos veículos de carga em circulação no país.
A NB-6 foi substituída em 1982 pela NBR 7188, que entrou em vigor em 1984.
Entre outras alterações, esta norma substituiu o veículo de projeto TB-36 pelo modelo
TB-45, com 450 kN de peso total, numa tentativa de equiparar o veículo de projeto aos
caminhões mais pesados da época, que tinham PBT de até 450 kN autorizados pelo
RCNT desde 1978.
O Decreto 88.686, de 06/09/1983, autorizava ao CONTRAN “disciplinar” a
concessão de autorização especial para o trânsito de veículos compostos por mais de
duas unidades e peso ou dimensões excedentes aos limites então legais. A Resolução
631 do CONTRAN, de 25/05/1984, permitiu oficialmente o trânsito de veículos
compostos por mais de duas unidades, com PBT de até 730 kN, mediante autorização
de trânsito, desde que com comprimento máximo de 30,00 m.
A Lei 7.408, de 25/11/1985, estabeleceu tolerância de 5% sobre os limites de
peso bruto total e carga bruta transmitida por eixo de veículos.
O Decreto 98.933, de 07/02/1990, regulamentou no artigo 82 do RNCT o uso do
eixo tandem triplo (TT), com limite de carga de 255 kN, e o eixo duplo especial (DE),
um conjunto de dois eixos, interligados por suspensão especial, em que um deles é
dotado de quatro pneumáticos e o outro de dois pneumáticos, com limite de carga de
135 kN. No mesmo documento, o limite de carga do eixo SRS passou de 50 para 60 kN.
A Resolução 787 do CONTRAN (11/10/1994) permitiu a utilização de pneus
com banda extra-larga (single) do tipo 385/65R22,5 em semirreboques e reboques
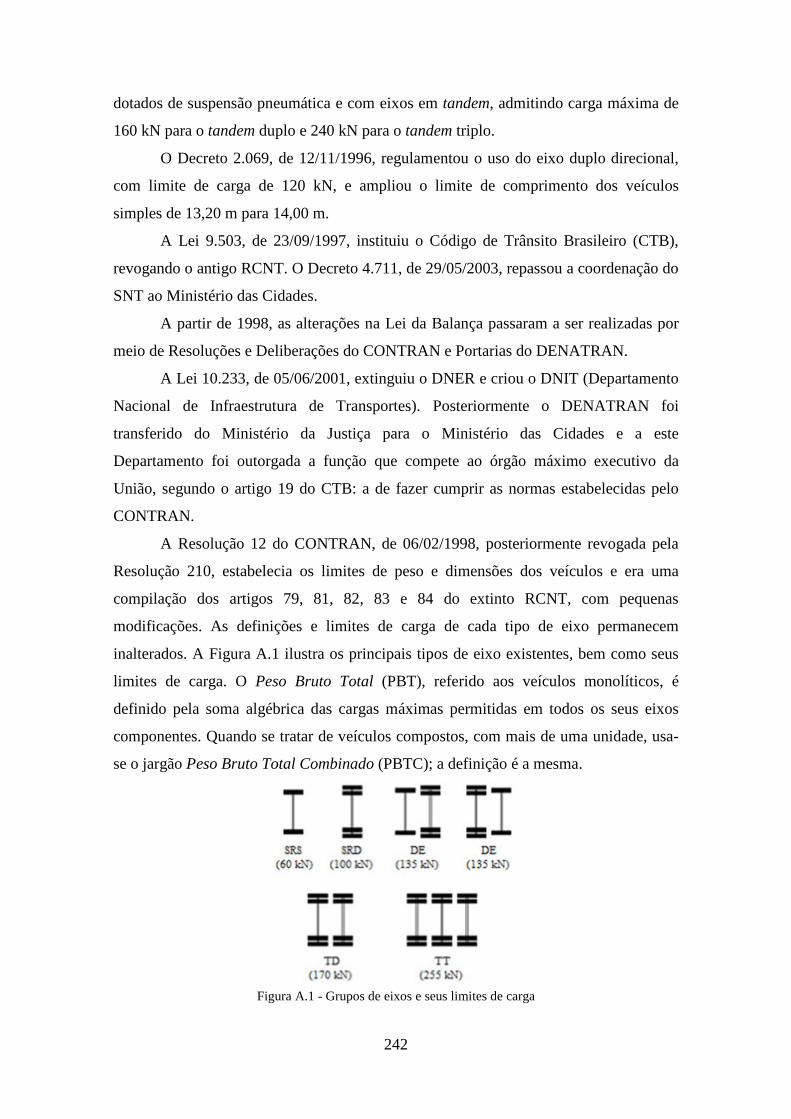
242
dotados de suspensão pneumática e com eixos em tandem, admitindo carga máxima de
160 kN para o tandem duplo e 240 kN para o tandem triplo.
O Decreto 2.069, de 12/11/1996, regulamentou o uso do eixo duplo direcional,
com limite de carga de 120 kN, e ampliou o limite de comprimento dos veículos
simples de 13,20 m para 14,00 m.
A Lei 9.503, de 23/09/1997, instituiu o Código de Trânsito Brasileiro (CTB),
revogando o antigo RCNT. O Decreto 4.711, de 29/05/2003, repassou a coordenação do
SNT ao Ministério das Cidades.
A partir de 1998, as alterações na Lei da Balança passaram a ser realizadas por
meio de Resoluções e Deliberações do CONTRAN e Portarias do DENATRAN.
A Lei 10.233, de 05/06/2001, extinguiu o DNER e criou o DNIT (Departamento
Nacional de Infraestrutura de Transportes). Posteriormente o DENATRAN foi
transferido do Ministério da Justiça para o Ministério das Cidades e a este
Departamento foi outorgada a função que compete ao órgão máximo executivo da
União, segundo o artigo 19 do CTB: a de fazer cumprir as normas estabelecidas pelo
CONTRAN.
A Resolução 12 do CONTRAN, de 06/02/1998, posteriormente revogada pela
Resolução 210, estabelecia os limites de peso e dimensões dos veículos e era uma
compilação dos artigos 79, 81, 82, 83 e 84 do extinto RCNT, com pequenas
modificações. As definições e limites de carga de cada tipo de eixo permanecem
inalterados. A Figura A.1 ilustra os principais tipos de eixo existentes, bem como seus
limites de carga. O Peso Bruto Total (PBT), referido aos veículos monolíticos, é
definido pela soma algébrica das cargas máximas permitidas em todos os seus eixos
componentes. Quando se tratar de veículos compostos, com mais de uma unidade, usa-
se o jargão Peso Bruto Total Combinado (PBTC); a definição é a mesma.
Figura A.1 - Grupos de eixos e seus limites de carga
243
A Resolução 62 do CONTRAN (21/05/1998) revogou a Resolução 787,
ampliando os limites da carga dos eixos em tandem compostos por pneus de banda
extra-larga para os mesmos limites dos eixos compostos por 4 pneumáticos comuns.
Posteriormente, a Resolução 68 do CONTRAN (23/09/1998) revogou a
Resolução 631 e permitiu que alguns veículos compostos, chamados à época de
Combinações de Veículos de Carga (CVC), circulassem com PBTC superior a 450 kN,
mediante uso da Autorização Especial de Trânsito (AET). Essas CVC tinham o PBTC
calculado pela soma das cargas máximas permitidas por eixo, como os outros veículos.
As CVC constantes no Anexo I da Resolução 68 eram:
- os reboques “Romeu e Julieta” 3C3 e 3C4, com comprimento máximo
permitido de 19,80 m estabelecido na Resolução 12 e PBTC autorizado de 500 kN e
570 kN, respectivamente;
- os veículos 3Q4 (treminhão), com comprimento máximo de 30,00 m e PBTC
autorizado de 630 kN;
- os veículos 3T4 (bitrem de 7 eixos), com comprimento máximo de 30,00 m e
PBTC autorizado de 570 kN;
- os veículos 3R6 (tritrem) e 3T6 (rodotrem), com comprimento máximo de
30,00 m e PBTC autorizado de 740 kN.
A Resolução 76 do CONTRAN (19/11/1998) autorizou, provisoriamente, o uso
de cavalo mecânico de 3 eixos e tração simples para tracionar bitrens de 7 eixos.
O bitrem de 9 eixos é uma das configurações por cuja autorização de tráfego os
fabricantes de implementos rodoviários mais se esforçaram ao longo dos anos. Por meio
das Portarias 54/01, 32/02, 33/02, 34/02, 39/02 e 40/02, o DENATRAN havia
concedido a 3 empresas fabricantes de implementos rodoviários, em caráter
experimental, autorização de trânsito a esta composição, com PBTC de 740 kN, cuja
parte tracionada é composta por dois grupos de eixos tandem triplo. As autorizações
valeram até 31/12/2002.
A exigência de AET dos bitrens de 7 eixos com comprimento total entre 17,50 m
e 19,80 m foi eliminada pela Resolução 164 do CONTRAN (10/09/2004).
A Resolução 184 do CONTRAN (21/10/2005) revogou a Resolução 76 e o
Anexo I da Resolução 68. A partir daquele momento, a denominação CVC se referia a
qualquer veículo de carga composto. Os veículos com PBTC de até 570 kN deveriam
ter comprimento entre 17,50 m e 19,80 m e um total de 7 eixos; já as composições com
PBT entre 570 kN e 740 kN deveriam ter comprimento entre 25,00 m e 30,00 m.
244
Veículos de comprimentos inferiores a estes mínimos estariam limitados a um PBTC de
450 kN. Esta Resolução ainda estipulava que novas composições só seriam permitidas
após homologação pelo DENATRAN mediante testes de desempenho. Como
consequência, as classes 2I3, 3S3, 3I1 e 3I3, já existentes, tiveram seus limites de peso
aumentados para 460 kN, 485 kN, 460 kN e 530 kN, respectivamente, desde que com
comprimento total maior que 17,50 m.
A Resolução 189 do CONTRAN (25/01/2006) autorizou a circulação de alguns
veículos com PBTC de até 740 kN e comprimento menor que 25,00 m.
A Resolução 210 do CONTRAN (13/11/2006) revogou a Resolução 12. Por
meio deste documento foi definido um comprimento máximo para os ônibus
articulados: 18,60 m. Também foi reduzido o comprimento mínimo abaixo do qual o
PBTC é limitado a 450 kN em algumas classes: nos semirreboques simples (de duas
unidades), incluindo os que têm carretas com eixos isolados, o valor mínimo passa a ser
de 16,00 m. Ainda, em todas as classes compostas por carretas de eixos isolados (2I1,
2I2, 2I3, 3I1, 3I2 e 3I3), passou-se a exigir o uso de suspensão pneumática. Na ocasião,
ainda se definiram os limites de comprimento do balanço traseiro dos veículos de
transporte de carga e de passageiros e foram encaminhados para a NBR NM-ISO 1726
(2003) os requisitos a serem cumpridos do balanço dianteiro das carretas com conexão
tipo semirreboque. Quanto ao acoplamento de unidades, as conexões do tipo reboque e
semirreboque devem satisfazer aos requisitos da NBR 11410 (2010) e da NBR NM-ISO
337 (2001), respectivamente.
A Resolução 211 do CONTRAN (13/11/2006) revogou as Resoluções 68, 164,
184 e 189 e estipulou que os veículos com mais de duas unidades e comprimento maior
que 19,80 m (para PBTC de até 570 kN) ou maior que 25,00 m (para PBTC superior a
570 kN), só podem circular portando AET e têm tráfego diurno e limitado à velocidade
de 80 km/h. No mesmo documento o CONTRAN resolveu que a autorização de novas
composições seria feito apenas mediante homologação pelo DENATRAN; deste
momento em diante, a liberação para tráfego de qualquer nova composição era feita por
meio de Portarias desse órgão.
A tão aguardada homologação das novas classes de veículos veio em
20/12/2006, com a publicação da Portaria 86/06 do DENATRAN, que considerou nesta
regulamentação apenas os veículos destinados ao transporte de cargas. Foram
homologadas 58 classes de caminhões, sendo que 22 destas composições necessitavam
245
de AET; dentre estas, destacavam-se o bitrem de 9 eixos e os de 8 eixos, com PBTC
máximos de 740 kN e 655 kN, respectivamente.
A Portaria 60/08 do DENATRAN (02/07/2008) revogou a Portaria 86/06 e
homologou 36 novas classes de composições para transporte de carga, num total de 94
diferentes tipos de caminhões, além de 25 composições para transporte de passageiros,
incluindo os ônibus articulados. Todas as classes passaram a ter um código que
representava seu nome. Esta regulamentação foi então revogada pela Portaria 93/08 do
DENATRAN (01/10/2008), que aumentou o número de composições de transporte de
passageiros homologadas para 44, e finalmente pela Portaria 63/09 do DENATRAN
(31/03/2009), vigente até hoje, que passou a homologar 109 classes diferentes de
caminhões.
A Resolução 256 do CONTRAN (30/11/2007) autorizava o uso de caminhão
trator de tração simples (4x2) em combinações com PBTC menor que 570 kN. A
Resolução 326 do CONTRAN (17/07/2009) definia que os veículos de 570 kN de
PBTC seriam tracionados apenas por veículos de tração 6x4; entretanto, aqueles
registrados com tração 6x2 até o fim de 2010 permaneceriam legais. Ela foi reescrita e
revogada pela Resolução 373 do CONTRAN (18/03/2011).
Quanto ao excesso de peso dos veículos, a Resolução 102 do CONTRAN
(31/08/1999) permitiu tolerância de 7,5% nas cargas por eixo. Foi complementada pelas
Resoluções 104 (21/12/1999) e 114 (05/05/2000) do CONTRAN, que impuseram um
maior número de condições para emissão de multas em veículos com excesso de peso.
A Resolução 258 do CONTRAN (30/11/2007) revogou as Resoluções 102, 104 e 114,
definindo metodologia para pesagem e mantendo a tolerância de PBTC em 5%. A
tolerância de carga dos eixos havia sido mantida, em caráter provisório, em 7,5%, ao
prazo de 31/12/2008; após esta data começaria a valer novamente a tolerância de 5% da
Lei 7408/85. Porém, por meio das Resoluções 301 (18/12/2008), 328 (14/08/2009), 337
(17/12/2009), 353 (24/06/2010) e 365 (24/11/2010) e da Deliberação 117 (19/12/2011)
do CONTRAN, esse prazo vem sendo sucessivamente estendido.
A.2 Nomenclatura
Algumas configurações comuns no Brasil recebem nomes especiais. A carreta
semirreboque com um ou mais eixos isolados é conhecida como Vanderleia. Um
veículo monolítico com uma ligação do tipo reboque é em geral conhecido como Romeu
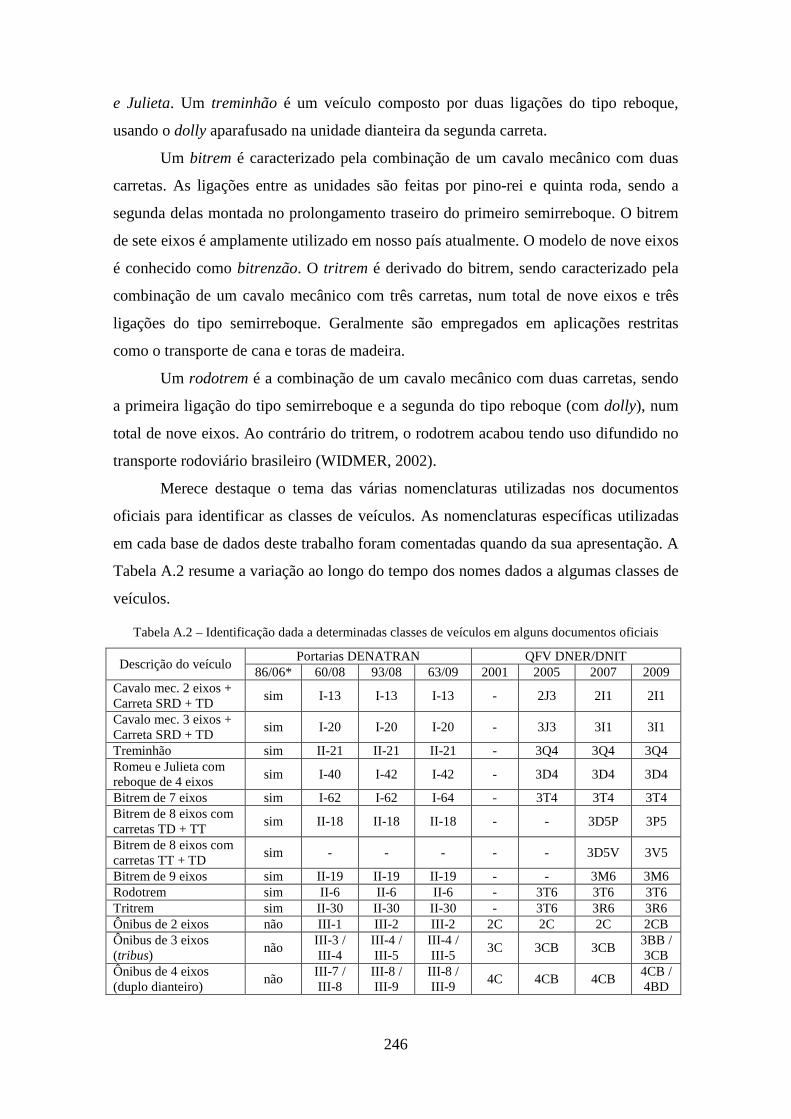
246
e Julieta. Um treminhão é um veículo composto por duas ligações do tipo reboque,
usando o dolly aparafusado na unidade dianteira da segunda carreta.
Um bitrem é caracterizado pela combinação de um cavalo mecânico com duas
carretas. As ligações entre as unidades são feitas por pino-rei e quinta roda, sendo a
segunda delas montada no prolongamento traseiro do primeiro semirreboque. O bitrem
de sete eixos é amplamente utilizado em nosso país atualmente. O modelo de nove eixos
é conhecido como bitrenzão. O tritrem é derivado do bitrem, sendo caracterizado pela
combinação de um cavalo mecânico com três carretas, num total de nove eixos e três
ligações do tipo semirreboque. Geralmente são empregados em aplicações restritas
como o transporte de cana e toras de madeira.
Um rodotrem é a combinação de um cavalo mecânico com duas carretas, sendo
a primeira ligação do tipo semirreboque e a segunda do tipo reboque (com dolly), num
total de nove eixos. Ao contrário do tritrem, o rodotrem acabou tendo uso difundido no
transporte rodoviário brasileiro (WIDMER, 2002).
Merece destaque o tema das várias nomenclaturas utilizadas nos documentos
oficiais para identificar as classes de veículos. As nomenclaturas específicas utilizadas
em cada base de dados deste trabalho foram comentadas quando da sua apresentação. A
Tabela A.2 resume a variação ao longo do tempo dos nomes dados a algumas classes de
veículos.
Tabela A.2 – Identificação dada a determinadas classes de veículos em alguns documentos oficiais
Descrição do veículo Portarias DENATRAN QFV DNER/DNIT
86/06* 60/08 93/08 63/09 2001 2005 2007 2009 Cavalo mec. 2 eixos + Carreta SRD + TD
sim I-13 I-13 I-13 - 2J3 2I1 2I1
Cavalo mec. 3 eixos + Carreta SRD + TD
sim I-20 I-20 I-20 - 3J3 3I1 3I1
Treminhão sim II-21 II-21 II-21 - 3Q4 3Q4 3Q4 Romeu e Julieta com reboque de 4 eixos
sim I-40 I-42 I-42 - 3D4 3D4 3D4
Bitrem de 7 eixos sim I-62 I-62 I-64 - 3T4 3T4 3T4 Bitrem de 8 eixos com carretas TD + TT
sim II-18 II-18 II-18 - - 3D5P 3P5
Bitrem de 8 eixos com carretas TT + TD
sim - - - - - 3D5V 3V5
Bitrem de 9 eixos sim II-19 II-19 II-19 - - 3M6 3M6 Rodotrem sim II-6 II-6 II-6 - 3T6 3T6 3T6 Tritrem sim II-30 II-30 II-30 - 3T6 3R6 3R6 Ônibus de 2 eixos não III-1 III-2 III-2 2C 2C 2C 2CB Ônibus de 3 eixos (tribus)
não III-3 / III-4
III-4 / III-5
III-4 / III-5
3C 3CB 3CB 3BB / 3CB
Ônibus de 4 eixos (duplo dianteiro)
não III-7 / III-8
III-8 / III-9
III-8 / III-9
4C 4CB 4CB 4CB / 4BD
247
As Portarias do DENATRAN citadas na Tabela A.2, todas posteriores à
Resolução 211 do CONTRAN, são os documentos que autorizam o trânsito de novas
composições de carga e passageiros. Na Portaria 86/06 não havia ainda códigos de
identificação das classes. Esta coluna foi preenchida na Tabela A.2 com a resposta à
indagação de nela existir, ou não, cada veículo mencionado. Como se vê, o nome dado a
cada classe de veículo nessas Portarias não tem grande serventia prática, por se tratar de
um código sem lógica de padronização; por isso, geralmente se faz uso das
nomenclaturas definidas pelo DNIT em seus Quadros de Fabricantes de Veículos
(QFV). Estes documentos são lançados periodicamente por esse órgão, no intuito de
acompanhar as Portarias do DENATRAN, criando códigos para cada classe
componente do espectro de veículos daqueles documentos. O Quadro de 2001, lançado
pelo extinto DNER, compreendia poucas classes de veículos. A versão de 2005, já
lançada pelo DNIT, foi baseada na Resolução 184 do CONTRAN, que havia revogado a
Resolução 68, mas ainda era anterior à Resolução 211 do CONTRAN: apenas as CVC
da Resolução 68 (3C3, 3D4, 3T4, 3Q4 e 3T6) haviam sido tipificadas. A classe 3T6
englobava tanto rodotrens quanto tritrens.
O QFV-2007 foi baseado na Portaria 86/06 do DENATRAN (posterior à
Resolução 211 do CONTRAN) e já incluía códigos para os bitrens de 8 e 9 eixos, além
de diferenciar os rodotrens (3T6) dos tritrens (3R6). Por fim, a edição vigente do QFV é
a de 2009, baseada na Portaria 63/09 do DENATRAN e que, dentre outras inovações,
passa a considerar duas classes diferentes para os ônibus de 3 e 4 eixos, caso, no eixo
duplo especial, o eixo de rodas simples esteja à frente ou atrás do eixo de rodas duplas,
respectivamente. A nomenclatura adotada neste trabalho para as classes de veículos é a
do QFV-2009 do DNIT.
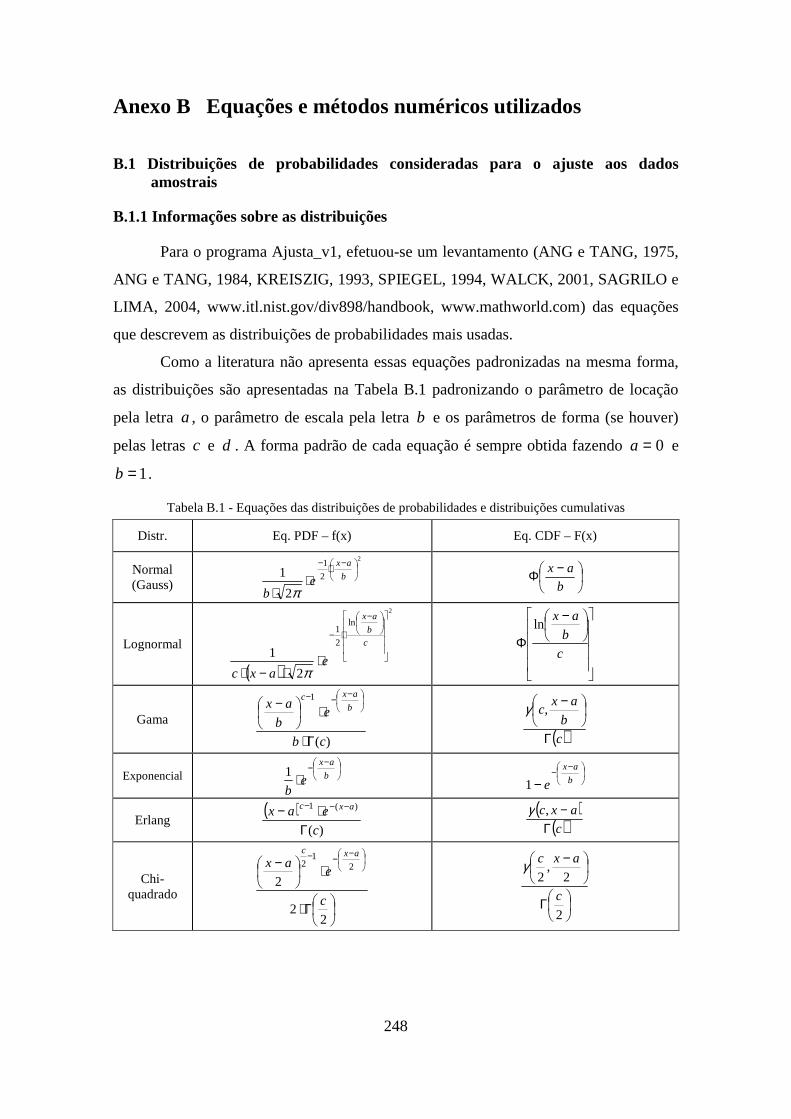
248
Anexo B Equações e métodos numéricos utilizados
B.1 Distribuições de probabilidades consideradas para o ajuste aos dados amostrais
B.1.1 Informações sobre as distribuições
Para o programa Ajusta_v1, efetuou-se um levantamento (ANG e TANG, 1975,
ANG e TANG, 1984, KREISZIG, 1993, SPIEGEL, 1994, WALCK, 2001, SAGRILO e
LIMA, 2004, www.itl.nist.gov/div898/handbook, www.mathworld.com) das equações
que descrevem as distribuições de probabilidades mais usadas.
Como a literatura não apresenta essas equações padronizadas na mesma forma,
as distribuições são apresentadas na Tabela B.1 padronizando o parâmetro de locação
pela letra a , o parâmetro de escala pela letra b e os parâmetros de forma (se houver)
pelas letras c e d . A forma padrão de cada equação é sempre obtida fazendo 0=a e
1=b .
Tabela B.1 - Equações das distribuições de probabilidades e distribuições cumulativas
Distr. Eq. PDF – f(x) Eq. CDF – F(x)
Normal (Gauss)
2
2
1
2
1
−⋅
−
⋅⋅
b
ax
eb π
−Φb
ax
Lognormal
( )
2
ln
2
1
2
1
−
⋅−
⋅⋅−⋅
c
b
ax
eaxc π
−
Φc
b
axln
Gama
)(
1
cb
eb
ax b
axc
Γ⋅
⋅
−
−−−
( )c
b
axc
Γ
−,γ
Exponencial
−−⋅ b
ax
eb
1
−−− b
ax
e1
Erlang ( )
)(
)(1
c
eax axc
Γ⋅− −−−
( )
( )c
axc
Γ−,γ
Chi-quadrado
Γ⋅
⋅
−
−−−
22
22
12
c
eax
axc
Γ
−
2
2,
2
c
axcγ

249
Tabela B.1 (continuação) - Equações das distribuições de probabilidades e distribuições cumulativas
Exp. dupla b
e b
ax
2
−−
≥⋅−
<⋅
−−
−
axe
axe
b
ax
b
ax
se 2
11
se 2
1
Beta
( )dcb
b
ax
b
axdc
,
111
Β⋅
−−⋅
− −−
( )dc
b
axdc
,
,,
Β
−β
Student
+−
−
+⋅
Β
2
12
1
2,
2
1
1
c
c
b
ax
cbc
+
−
−
Β+
cb
ax
b
ax
c
c 2
2
,2
,2
1
2,
2
12
1
2
1 β
Logística 2
1
+⋅
−−
−−
b
ax
b
ax
eb
e
1
1
−
−−
+ b
ax
e
Rayleigh
2
2
1
2
−⋅−
⋅
− b
ax
eb
ax
2
2
1
1
−⋅
−
− b
ax
e
Tipo I máx (Gumbel)
−−
−
−−⋅⋅
b
ax
eb
ax
eeb
1
−−
− b
ax
ee
Tipo I mín
−
−
−⋅⋅b
ax
b
ax
eeeb
1
−
−−b
ax
ee1
Tipo II máx (Frèchet)
c
b
axc
eb
ax
b
c−
−−−−
⋅
−⋅1
c
b
ax
e
−
−−
Tipo II mín
c
b
xac
eb
xa
b
c−
−−−−
⋅
−⋅1
c
b
xa
e
−
−−−1
Tipo III máx
c
b
xac
eb
xa
b
c
−−−
⋅
−⋅1
c
b
xa
e
−−
Tipo III mín (Weibull)
c
b
axc
eb
ax
b
c
−−−
⋅
−⋅1
c
b
ax
e
−−−1
Uniforme ab−
1
ab
ax
−−
A média, o desvio padrão e o domínio de cada distribuição são mostrados na
Tabela B.2.

250
Tabela B.2 – Domínio e equações para cálculo da média e do desvio padrão de cada distribuição
Distr. Média Desvio padrão Domínio
Normal
(Gauss) a b ( )∞∞− ;
Lognormal 2
2c
eba ⋅+ ( )122
−⋅⋅ cc eeb );[ ∞a
Gama cba ⋅+ cb⋅ );[ ∞a
Exponencial ba+ b );[ ∞a
Erlang ca+ c );[ ∞a
Chi-quadrado ca+ 2
2c⋅ );[ ∞a
Exp. dupla a 2⋅b ( )∞∞− ;
Beta ( )( )dc
abca
+−⋅+
+−⋅
++⋅
dc
ab
dc
dc
1 );[ baa +
Student a 2−
⋅c
cb ( )∞∞− ;
Logística a=µ 3
πσ ⋅= b ( )∞∞− ;
Rayleigh 2
π⋅+ ba 2
2π−⋅b );[ ∞a
Tipo I máx
(Gumbel) ba ⋅+ γ b⋅
6
π ( )∞∞− ;
Tipo I mín ba ⋅− γ b⋅6
π ( )∞∞− ;
Tipo II máx
(Frèchet)
−Γ⋅+c
ba1
1 2
11
21
−Γ−
−Γ⋅cc
b );[ ∞a
Tipo II mín
−Γ⋅−c
ba1
1 2
11
21
−Γ−
−Γ⋅cc
b ];( a∞
Tipo III máx
+Γ⋅−c
ba1
1 2
11
21
+Γ−
+Γ⋅cc
b ];( a∞
Tipo III mín
(Weibull)
+Γ⋅+c
ba1
1 2
11
21
+Γ−
+Γ⋅cc
b );[ ∞a
Uniforme 2
ba+
12
ab− ];[ ba
251
B.1.2 Estimativa dos parâmetros das distribuições
A estimativa dos parâmetros das distribuições é feita pelo método dos
momentos, usado por ser o de mais fácil aplicação. Nele, os j parâmetros populacionais
podem ser obtidos, pontualmente, a partir das estimativas dos j primeiros momentos
amostrais, admitidos iguais aos seus correspondentes momentos populacionais (Tabela
B.2). Como os momentos populacionais de cada distribuição são funções de seus
próprios parâmetros, podem-se obter os valores desses parâmetros resolvendo
simultaneamente as j equações, com j parâmetros incógnitos.
Como algumas distribuições têm até quatro parâmetros, seria necessário
calcular, em alguns casos, momentos até a quarta ordem; entretanto, quanto maior a
ordem do momento, mais complexa é a sua equação.
De forma simplificada, utilizaram-se somente as equações dos dois primeiros
momentos (valor médio e desvio padrão), por serem estes os principais descritores de
uma distribuição de probabilidades (ANG e TANG, 1975). Para não haver
indeterminações no sistema, os parâmetros que sobram, geralmente os de forma, são
determinados a partir de das condições de contorno. Restando apenas duas equações
teóricas, que definem o valor médio, o desvio padrão ou o domínio de cada distribuição,
e no máximo dois parâmetros incógnitos, não há indeterminações e é imediata a solução
dos sistemas de equações resultantes. Porém, para manter os valores da média e do
desvio padrão, é necessário considerar outro campo de existência das distribuições,
diferente dos originalmente concebidos. Em outras palavras, para que a média e o
desvio padrão populacionais sejam iguais aos amostrais e não se use nenhuma equação
adicional de momentos de ordem superior, não se pode escolher o limite inferior destas
distribuições; é necessário que eles sejam alterados.
Evidentemente, dadas nesta forma, essas distribuições não apresentam bom
ajuste a dados com ênfase na região dos mínimos. Este problema poderia ser evitado
considerando adicionalmente, no método dos momentos, as equações dos momentos de
ordens maiores nas distribuições em que fossem necessários, para serem igualados aos
equivalentes amostrais.
A Tabela B.3 mostra os valores de cada parâmetro das distribuições catalogadas
em função apenas das condições de contorno, do valor médio e do desvio padrão,
segundo o método dos momentos.

252
Tabela B.3 - Valores dos parâmetros de cada distribuição pelo método dos momentos
Distr. a b c d
Normal (Gauss)
µ σ ∞ -
Lognormal Cond. contorno 2
1
−+
−
a
a
µσ
µ
−+
2
1lnaµ
σ -
Gama Cond. contorno a−µ
σ 2
2
−σ
µ a -
Exponencial σµ − σ 1 -
Erlang 2σµ − 1 2σ -
Chi-quadrado 2
2σµ − 2 2
2σ
Exp. dupla µ 2
σ - -
Beta Cond. contorno Cond.
contorno ( )( )
−−−⋅−−
12σ
µµµ ba
ab
a
a
bc
−−⋅
µµ
Student µ 1
3
−−⋅
n
nσ 1−n -
Logística µ π
σ 3⋅ - -
Rayleigh π
πσµ−
⋅−4
22
πσ
−
2 -
Tipo I máx (Gumbel) π
σγµ 6⋅⋅− π
σ 6⋅ 0 -
Tipo I mín π
σγµ 6⋅⋅+ π
σ 6⋅ 0 -
Tipo II máx (Frèchet)
Cond. contorno
−Γ
−⋅
c
a
11
µσ
Solução de
a
c
cc
−=
−Γ
−Γ−
−Γ
µσ
11
11
21 2
-
Tipo II mín Cond. Contorno
−Γ
−⋅
c
a
11
µσ
Solução de
µσ−
=
−Γ
−Γ−
−Γ
a
c
cc
11
11
21 2
-

253
Tabela B.3 (continuação) - Valores dos parâmetros de cada distribuição pelo método dos momentos
Tipo III máx Cond. contorno
+Γ
−⋅
c
a
11
µσ
Solução de
µσ−
=
+Γ
+Γ−
+Γ
a
c
cc
11
11
21 2
-
Tipo III mín (Weibull)
Cond. contorno
+Γ
−⋅
c
a
11
µσ
Solução de
a
c
cc
−=
+Γ
+Γ−
+Γ
µσ
11
11
21 2
-
Uniforme Cond. contorno
Cond. contorno
- -
B.1.3 Distribuições cumulativas inversas
Segundo estas equações, as distribuições cumulativas inversas de probabilidades
são mostradas na Tabela B.4. Elas podem ser usadas para gerar números aleatórios pela
técnica Monte Carlo (Seção B.2.2).
Tabela B.4 - Equações das distribuições cumulativas inversas de probabilidades de cada tipo
Distribuição Equação
Normal
(Gauss) ( )pba 1−Φ⋅+
Lognormal ( )pceba1−Φ⋅⋅+
Gama Resolução iterativa
Exponencial ( )pba −⋅+ 1ln
Erlang Resolução iterativa
Chi-quadrado Resolução iterativa
Exp. dupla ( )
( )[ ]
≥−⋅−<⋅+
5,0 se 12ln
5,0 se 2ln
ppba
ppba
Beta Resolução iterativa
Student Resolução iterativa
Logística
−⋅+
p
pba
1ln
Rayleigh ( )pba −⋅−⋅+ 1ln2
Tipo I máx (Gumbel)
( )[ ]pba lnln −⋅−
Tipo I mín ( )[ ]pba lnln −⋅+

254
Tabela B.4 (continuação) - Equações das distribuições cumulativas inversas de probabilidades de cada tipo
Tipo II máx (Frèchet) ( )[ ] cpba
1ln
−−⋅+
Tipo II mín ( )[ ] cpba1
1ln−
−−⋅−
Tipo III máx ( )[ ]cpba1
ln−⋅−
Tipo III mín (Weibull) ( )[ ]cpba
11ln −−⋅+
Uniforme ( )apba −⋅+
No caso de uma distribuição exata de extremos, a distribuição cumulativa
inversa é facilmente determinada:
( )[ ] pxF nX = → ( ) n
X pxF = → ( )nX pFx 1−= (B.1)
B.1.4 Notas
Funções matemáticas
O símbolo ( )p1−Φ é a função cumulativa normal padrão inversa (0=a , 1=b ),
que é o valor x que satisfaz a equação
( ) px =Φ (B.2)
A função gama (ou gama completa) é a generalização do fatorial, definida por
∫∞
−− ⋅=Γ0
1)( dtetx tx (B.3)
A função gama incompleta inferior é definida por
∫−− ⋅=
stx dtetxs
0
1),(γ (B.4)
O número de Euler, 5772,0≅γ , é definido por
dx
d )1(Γ=γ
(B.5)
A função beta, também conhecida como integral de Euler do primeiro tipo, para
0, >yx , é definida por
( )∫−− −⋅=Β
1
0
11 1),( dtttyx yx , (B.6)
A função beta incompleta inferior é definida por

255
( )∫−− −⋅=
zyx dtttzyx
0
11 1),,(β (B.7)
A equação da distribuição cumulativa de Student é mais conhecida na forma
( )
−+⋅
Β⋅⋅−+=
c
tcF
cc
b
axxF
2
12 ;2
3;
2
1,
2
1
2,
2
11
2
1,
(B.8)
onde 12F é a série hipergeométrica, definida por
( ) ( ) ( )( )∑
∞
=
⋅⋅
=0
12 !;;,
n
n
n
nn
n
z
c
bazcbaF , (B.9)
em que os símbolos ( )nx são os “fatoriais ascendentes” de Pochhammer:
( ) ( ) ( )( )∏
−
= Γ+Γ=+=
1
0
n
kn x
nxkxx . (B.10)
A série hipergeométrica também é útil para definir a função cumulativa de
probabilidades da distribuição beta.
Relações entre distribuições de probabilidades
De acordo com certos valores dos parâmetros de locação, escala e forma,
algumas das distribuições citadas recebem nomes particulares, ou seja, pode-se obter
uma distribuição a partir de outra considerando certos valores dos parâmetros.
Distribuição de Erlang: é a distribuição gama com 1=b .
Distribuição de chi-quadrado com ν graus de liberdade: é a distribuição gama
com 2/ν=c e 2=b .
Distribuição exponencial: é a distribuição gama com 1=c ou a distribuição de
Weibull com 1=c .
Distribuição de Rayleigh: é a distribuição de Weibull com 2=c e 2' ⋅= bb .
Distribuição uniforme: é a distribuição beta com 1=c e 1=d .
Distribuição de Cauchy: é a distribuição de Student com 1=c :
−+⋅⋅
=2
1
1)(
b
axb
xfX
π
(B.11)

256
A distribuição de Cauchy não foi considerada por apresentar restrições de
convergência nas integrais que definem seus momentos.
A distribuição de Student com ∞→c tende à distribuição normal; na prática a
semelhança já se torna satisfatória para amostra de tamanho n maior que 30.
Formas de apresentação das distribuições de extremos
As três distribuições de máximos são mais conhecidas na literatura expressas em
uma forma generalizada (distribuição generalizada de valores extremos). A forma geral
da distribuição cumulativa é
( )
−⋅+−=
−c
b
axcxF
1
1exp (B.12)
e a forma geral da função de distribuição de probabilidades é
( )
−⋅+−⋅
−⋅+⋅=
−+−cc
c
b
axc
b
axc
bxf
1)1(
1exp11
(B.13)
O sinal do parâmetro c define o tipo da distribuição:
- se 0>c : distribuição Tipo II de máximos (Frèchet);
- se 0=c : distribuição Tipo I de máximos (Gumbel);
- se 0<c : distribuição Tipo III de máximos.
Para se obter a distribuição de Gumbel, deve-se extrair o limite
−−
−
=
−⋅+→
b
axc
eb
axc
c
1
10
lim, (B.14)
o que torna as expressões da distribuição cumulativa e de densidade de probabilidades,
respectivamente, iguais a
( )
−−−=b
axxF expexp e (B.15)
( )
−−−⋅
−−⋅=b
ax
b
ax
bxf expexpexp
1. (B.16)
Esta forma tem a desvantagem de não contemplar as três distribuições de
mínimos, como a distribuição de Weibull (Tipo III de mínimos).
Neste trabalho, as equações das distribuições de extremos foram apresentadas
numa espécie de “forma reduzida”, cuja equação geral pode ser expressa por
257
( )
⋅⋅−−⋅+=
⋅− ck
bkk
axkkxF
3
3221 exp , (B.17)
cujas constantes 1k , 2k e 3k assumem os valores mostrados nas Tabelas B.5 e B.6.
Tabela B.5 – Definição das constantes k1 e k2
Tipo de distribuição 1k 2k
Máximos 0 1
Mínimos 1 -1
Tabela B.6 – Definição da constante k3
Tipo de distribuição 3k
Tipo II 1
Tipo III -1
Igualmente, tomando o limite quando c tende a zero, obtêm-se as equações das
distribuições Tipo I:
( )
⋅−−−⋅+=
bk
axkkxF
221 expexp (B.18)
Adotando este padrão, as seis distribuições podem ser expressas por uma única
expressão.
B.2 Geração de números aleatórios pela técnica Monte Carlo
B.2.1 Números aleatórios não correlacionados
A técnica Monte Carlo prevê a geração de valores aleatórios em duas etapas. Na
primeira, geram-se números aleatórios uniformemente distribuídos entre 0 e 1; esta
parte é conhecida como a geração de números aleatórios de fato. Na segunda, os
valores obtidos são transformados em outros, equivalentes às distribuições de
probabilidades que se quer.
O propósito dos geradores de números aleatórios é produzir uma sequência de
números que aparentam ser gerados aleatoriamente de uma distribuição uniforme de
probabilidades. Os métodos para gerar estes números geralmente são baseados em
relações recursivas. Existem geradores de vários tipos, sendo que os mais comuns são
os geradores congruentes lineares, cuja fórmula de recorrência é
+⋅=+ m
cuau n
n int1 (B.19)

258
com valores inteiros para as constantes a , c e m e para as variáveis nu e 1+nu . O
processo começa pela semente inicial, 0x , que deve ser fornecida. O maior período
possível (o maior número possível de números diferentes gerados) é igual a m.
No exemplo seguinte, extraído de VIEIRA et al. (2004), com 5=a , 1=c ,
16=m e a semente 10 =x , a sequência de números inteiros gerados por esta
recorrência é 1, 6, 15, 12, 13, 2, 11, 8, 9, 14, 7, 4, 5, 10, 3, 0, 1, 6, 15, ... A partir do
término do período, os mesmos valores começam a ser gerados, exatamente na mesma
ordem. Por isso, numa simulação computacional que envolva números aleatórios, a
semente inicial deve ser tomada também um valor aleatório, para que não se reproduza
sempre a mesma sequência de números.
Neste exemplo, o período é igual a 16 (geram-se 16 números diferentes) e a
sequência possui o período mais longo possível, e ainda é uniforme, pois preenche
completamente o espaço de números inteiros entre 0 e 15. Para obter os números
decimais uniformemente distribuídos entre 0 e 1, divide-se cada número gerado por m,
neste caso igual a 16, e se obtêm os valores mostrados da Tabela B.7. Um
preenchimento eficiente dos valores da reta real entre 0 e 1 é garantido com períodos
grandes. Em ANG e TANG (1984) cita-se um gerador com parâmetros 127 +=a , 1=c
e 352=m .
Tabela B.7 – Números aleatórios decimais gerados (VIEIRA et al., 2004)
0,0625 0,3750 0,9375 0,7500
0,8125 0,1250 0,6875 0,5000
0,5625 0,8750 0,4375 0,2500
0,3125 0,6250 0,1875 0,0000
Além de preencher o maior número possível de inteiros entre 0 e m
(correspondendo a um período o mais próximo possível de m), um bom gerador deve
fornecer números estatisticamente independentes. O coeficiente de correlação entre os
números aleatórios nu e 1+nu é limitado pelos valores (GREENBERGER, 1961):
m
a
m
c
ma
c
a±
−⋅
⋅−= 1
61ρ (B.20)
Assim, grandes valores de a e de m (correspondentes a grandes períodos),
geram valores aleatórios praticamente independentes, que certamente terão distribuição
considerada satisfatoriamente como uniforme. Porém, a escolha dos valores de a , c e
m é bastante cuidadosa; a criação de um bom gerador não é trivial (VIEIRA et al.,

259
2004). Para economia de tempo, alguns compiladores geralmente utilizam geradores
“rápidos”, que utilizam valores menores para as constantes da relação recursiva (PRESS
et al., 1997), de forma a reduzir o tempo de obtenção de valores, no caso de não serem
necessários períodos tão grandes. Estes geradores podem ser implementados de forma
combinada, para produzirem geradores híbridos, que geralmente são melhores que os
dois geradores simples que o formam individualmente.
Rigorosamente falando, como os geradores de números aleatórios são algoritmos
sequenciais e determinísticos, os números obtidos não podem ser, por definição,
considerados exatamente como aleatórios; diz-se que são na verdade pseudo-aleatórios.
Na prática, os geradores já vêm embutidos nos vários programas computacionais de uso
comum na engenharia, como Microsoft Excel®, Fortran® etc.
Gerados os números aleatórios, ou pseudo-aleatórios, agora esses números
devem ser transformados em outros valores, de acordo a distribuição de probabilidades
desejada, ( )xFX , como esquematizado na Figura B.1. A variável uniforme entre 0 e 1 é
chamada de u .
Figura B.1 – Equivalência entre a função cumulativa de probabilidades da distribuição uniforme com a de
uma distribuição qualquer. Adaptado de ANG e TANG (1984)
Cada número aleatório gerado, com chance de estar entre 0 e 1 igualmente
distribuída entre estes valores, pode ser interpretado como um valor de probabilidade,
ou um valor da função cumulativa de probabilidades da distribuição uniforme, ao qual
deve corresponder a distribuição cumulativa ( )xFX .
O valor equivalente procurado, correspondente a u , é a abscissa x . Para
determinar seu valor, igualam-se as duas distribuições cumulativas:
[ ] [ ]uUPxXp ≤=≤ ⇒ ( ) ( )uFxF UX = (B.21)
Mas a equação da distribuição uniforme cumulativa é ( ) uuFU = ; assim,
( ) uxFX = ⇒ ( )uFx X1−= (B.22)

260
Portanto, para se obter o número equivalente, correspondente ao valor aleatório
com uma probabilidade de ocorrência distribuída segundo a função ( )xfX , basta tomar
a distribuição cumulativa inversa de Xf (Tabela B.4) para o valor obtido.
Para a distribuição normal, como o operador ( )pΦ não tem equação analítica,
para gerar números normalmente distribuídos, seria necessário empregar de forma
iterativa a Eq. B.29 para calcular a distribuição normal cumulativa inversa padrão.
Alternativamente, podem-se empregar neste caso as fórmulas de BOX e MULLER
(1958). Dado um par ( )21;UU de números aleatórios estatisticamente independentes e
uniformemente distribuídos, os números ( )211 2cosln2 UUS π⋅⋅−= e
( )212 2senln2 UUS π⋅⋅−= constituem um par de números aleatórios estatisticamente
independentes e com distribuição normal padrão. Para obter apenas um número
normalmente distribuído, escolhe-se uma destas fórmulas, com a geração de dois
números aleatórios uniformemente distribuídos. Pode-se tirar proveito delas, também,
para gerar números distribuídos segundo a curva lognormal.
B.2.2 Números aleatórios correlacionados
Para se gerar, pela técnica Monte Carlo, valores aleatórios para variáveis
correlacionadas, sem a necessidade de se conhecer a distribuição conjunta ou as
distribuições condicionais das variáveis, utilizou-se neste trabalho a transformada de
Nataf: São necessários apenas os coeficientes de correlação entre as variáveis e as suas
distribuições marginais de probabilidade (HAUGH, 2004).
No caso de n variáveis correlacionadas, utiliza-se a matriz de correlação:
=
1
1
1
1
321
33231
22321
11312
L
MOMMM
L
L
L
nnn
n
n
n
C
ρρρ
ρρρρρρρρρ
(B.23)
Como jiijji ,,, ∀= ρρ , a matriz C é simétrica. Demonstra-se que ela também é
positiva-definida. Matrizes que gozam destas propriedades podem ser transformadas
num produto matricial TLLC = ; esta transformação é conhecida como decomposição
de Cholesky. A matriz L é triangular inferior e é usada na transformada de Nataf.

261
=
nnnnn LLLL
LLL
LL
L
L
MOMMM
L
L
L
321
333231
2221
11
0
00
000
L (B.24)
A transformada de Nataf é a multiplicação de um vetor de variáveis normais
padrão e estatisticamente independentes pela matriz triangular inferior da decomposição
de Cholesky, gerando um vetor de variáveis normais padrão estatisticamente
dependentes.
O procedimento para gerar n números aleatórios estaticamente dependentes é o
seguinte:
• monta-se a matriz de correlação C (n x n), composta pelos coeficientes de
correlação entre as variáveis;
• calcula-se a matriz triangular inferior L da decomposição de Cholesky de C ;
• geram-se n números aleatórios s distribuídos segundo a distribuição normal
padrão e estatisticamente independentes, pelo algoritmo de Box-Muller;
• transformam-se os números s em valores distribuídos segundo a distribuição
normal padrão e estatisticamente dependentes, y ;
⋅
=⋅=
=
nnnnnnn s
s
s
s
LLLL
LLL
LL
L
y
y
y
y
M
L
MOMMM
L
L
L
M
3
2
1
321
333231
2221
11
3
2
1
0
00
000
sLy (B.25)
• calcula-se a função normal padrão cumulativa de cada valor de y : ( )ii yr Φ= ;
( )( )( )
( )
Φ
Φ
Φ
Φ
=
=
nn y
y
y
y
r
r
r
r
MM
3
2
1
3
2
1
r (B.26)
• calcula-se a função cumulativa inversa de cada valor de r : ( )iii rFx 1−= .

262
( )( )( )
( )
=
=
−
−
−
−
nnn rF
rF
rF
rF
x
x
x
x
1
31
3
21
2
11
1
3
2
1
MM
x (B.27)
Resumidamente, ( )( )sLx ⋅Φ= −1F , ou
⋅
Φ=
−
nnnnnnn s
s
s
s
LLLL
LLL
LL
L
F
x
x
x
x
M
L
MOMMM
L
L
L
M
3
2
1
321
333231
2221
11
13
2
1
0
00
000
(B.28)
onde F são as funções cumulativas marginais de probabilidades, s é o vetor com os
números aleatórios distribuídos segundo a distribuição normal padrão e estatisticamente
independentes, e x é o vetor com as variáveis distribuídas segundo as suas distribuições
marginais ajustadas e correlacionadas por meio dos coeficientes de correlação.
No caso particular de uma matriz M de ordem 2,
=
2221
2111
mm
mmM (B.29)
a matriz triangular inferior da decomposição de Cholesky é igual a
−=
11
221
22
11
21
11 0
m
mm
m
m
m
L (B.30)
Assim, para uma matriz de correlação C de ordem 2,
=
1
1
ρ
ρC (B.31)
a matriz triangular inferior da decomposição de Cholesky é igual a
−=
21
01
ρρL . (B.32)
A matriz de correlação de ordem 2 foi empregada, neste trabalho, na geração
simultânea de pesos e velocidades para os veículos na simulação de tráfego, pelo
263
programa STPG, já que, devido à limitação dos dados obtidos, não se conhece, a priori,
a distribuição conjunta de pesos e velocidades de cada classe de veículo.
B.3 Solução do problema de autovalor generalizado para obtenção de formas modais e frequências naturais
No programa IVPE-v3, para obter numericamente as frequências circulares, ω ,
e as formas modais, vetores ϕ , que são soluções do problema de autovalor generalizado
ϕωϕ MK 2= , (B.33)
emprega-se o método de Jacobi. Este pertence à categoria dos métodos de
transformação, que se valem de um teorema da álgebra linear que afirma que uma
matriz simétrica real e positivo-definida M tem somente autovalores reais e positivos
(KOLMAN, 1996) e que existe uma matriz real P , ortogonal a M , tal que PMP T é
diagonal. Os elementos da diagonal são os autovalores e as colunas da matriz P são os
autovetores de M . Denominando de Φ a matriz cujas colunas são os autovetores ϕ da
Eq. B.33, demonstra-se que
NGLT IΦ MΦ =
DΦKΦ = T (B.34)
onde NGLI é a matriz identidade de ordem NGL e D é uma matriz diagonal (elementos
apenas na diagonal principal). A ideia inerente a um método de transformação é
diagonalizar K e M por meio de sucessivas pré-multiplicações e pós-multiplicações
por matrizes TkP e kP , respectivamente, com NGLk ,,2,1 L= . Considerando KK =1
e MM =1 , em cada iteração realizam-se os produtos
kkTkk PKPK =+1
kkTkk PMPM =+1
(B.35)
O método de Jacobi foi originalmente desenvolvido para resolver o problema
padrão de autovalor, em que a matriz de massa se iguala à matriz identidade: NGLIM = .
Neste caso, resulta
ϕωϕ 2=K (B.36)
Na versão padrão do método de Jacobi, procura-se apenas diagonalizar a matriz
K de forma que DΦKΦ = T . Já na versão generalizada, cada matriz kP é tomada de
264
forma a resultar kK e kM o mais próximo possível da forma diagonal: adicionam-se na
matriz identidade NGLI os termos α=kijP e γ=k
jiP , cujos valores são escolhidos de
forma a anular simultaneamente os elementos ijM e ijK ; α e γ dependem, portanto,
dos valores de kijM ,
kiiM ,
kjjM ,
kijK ,
kiiK e
kjjK (BATHE, 1996). Assim, em cada
iteração k , o método de Jacobi reduz um par de elementos fora da diagonal a zero, com
a desvantagem de introduzir contribuições não nulas em posições anteriormente nulas -
porém, o produto da próxima matriz de rotação com a anterior tende a convergir para a
forma diagonal. Supondo que a convergência se dê na n-ésima iteração ( nk = ), a
matriz Φ é dada por
∏=
=n
kk
1
PΦ (B.37)
A matriz kP de cada iteração é ortogonal, pois satisfaz a propriedade
NGLkTk IPP = (B.38)
Caso fosse considerada na Eq. B.43 a matriz de amortecimento de Rayleigh
(Eq. 4.3), ela não poderia, em geral, ser diagonalizada simultaneamente com as matrizes
de massa e de rigidez; neste caso, os autovalores são ou reais e negativos, ou complexos
conjugados com partes reais negativas (RAO, 2008).
B.4 Integração numérica das equações de movimento
Para obter os deslocamentos generalizados u do sistema modal da Eq. 4.8 em
cada instante de tempo, é utilizado o método explícito de integração numérica de
Runge-Kutta de quarta ordem, em que a expressão usada para obter 1+iX partindo de iX
é dada pela série de Taylor de X em torno de tii ∆+=+ XX 1 até os termos de ordem
4t∆ . Desenvolvido para resolver uma equação de primeira ordem,
( )yxfy ,'= , (B.39)
o método pode ser adaptado para resolver equações de ordem superior mediante
algumas substituições: para o sistema de m equações diferenciais de segunda ordem da
Eq. 4.8, isola-se o vetor u&& ,
( )( ) ( )tt ,, 1 uufuKuCPMu &&&& =−−= − , (B.40)
e aplicam-se as transformações

265
ux =1 ux 2 &=
(B.41)
de forma que o sistema original pode ser reescrito como 2m equações de primeira ordem
21 xx =& ( )t,, 212 xxfx =&
(B.42)
que podem ser resolvidas simultaneamente. Definindo
( )( )
=t
t
2
1
x
xX e ( )
( )
=t
t,,
,21
2
xxf
xXF , (B.43)
os deslocamentos modais 1+iX são obtidos em termos de iX , iX& e iX&& . O método é
auto iniciado (RAO, 2008), pois são necessários apenas os valores da função no instante
de tempo inicial 0=tX e 0=tX& para obter os valores de X em qualquer instante
posterior. Consideram-se neste trabalho condições iniciais de repouso (nulas): 00 ==tX
e 00 ==tX& . Para o cálculo de 1+iX , no instante de tempo 1+it , é utilizada a expressão
( )43211 226
1KKKKXX ++++=+ ii , (B.44)
onde as constantes 1K , 2K , 3K e 4K são dadas por
( )it XFK 1 ⋅∆=
∆++⋅∆=2
; 2
12
ttt ii
KXFK
∆++⋅∆=2
; 2
23
ttt ii
KXFK
( )ttt ii ∆++⋅∆= ; 34 KXFK
(B.45)
As propriedades de consistência, precisão e estabilidade do algoritmo de
integração de Runge-Kutta são garantidas com a adoção de um passo de tempo
suficientemente pequeno; para tal, adotou-se um t∆ igual a um centésimo da maior (m-
ésima) frequência natural considerada (BATTISTA, 1995):
πω
200mt =∆ (B.46)
Em uma análise dinâmica simples de uma estrutura, sem a consideração da
interação com o(s) veículo(s), as matrizes modais de massa, amortecimento e rigidez
resumem-se a eeMM = , eeCC = e eeKK = ; o vetor modal de forças é dado por
266
ePP= e a aplicação do princípio da superposição modal leva a m equações
desacopladas para o sistema que descreve o movimento da estrutura, mostrado na Eq.
4.11, que podem ser resolvidas de forma independente.
Ao se considerar a interação entre o veículo e a estrutura, entretanto, as equações
de movimento mostradas nas Seções 4.2.3 e 4.2.4 se tornam acopladas, uma vez que as
matrizes C e K não são diagonais. O método de Runge-Kutta não apresenta
dificuldades de implementação nestes casos; porém, mantendo o mesmo passo de
tempo, este algoritmo de integração perde a vantagem do baixo custo computacional. A
necessidade de se efetuarem operações matriciais previamente à integração numérica
incrementa consideravelmente o número de cálculos realizados em cada instante de
tempo, em especial nos casos de veículos não monolíticos como o 2S3, quando se faz
necessária, a cada passo de tempo, a inversão da matriz de massa modal M (ver a Eq.
4.27), pois ela também apresenta elementos fora da diagonal principal, já que a
necessidade de substituir algumas equações de movimento torna a submatriz PPvvM - e,
por consequência, a submatriz vvM - não diagonal.

267
Anexo C Equações de movimento dos veículos articulados
As equações de movimento dos veículos monolíticos (rígidos), como os das
classes 2C e 3C, já foram deduzidas, testadas e implementadas em trabalhos anteriores
(MELO, 2007, SANTOS, 2007, MENDONÇA, 2009). A versão v2 do programa IVPE
já contemplava estes casos. Neste Anexo obtêm-se as equações de movimento dos
veículos compostos por até 3 partes, considerando ligações do tipo semirreboque (com
pino-rei e quinta roda). Os veículos compostos por ligações do tipo reboque, como as
classes 3D4 (Romeu e Julieta), 3T6 (rodotrem) e 3C3, não são contemplados neste
trabalho.
Todas as equações de movimento dos veículos compostos por ligações do tipo
semirreboque, como 2S3, 3S3 e 3T4, são casos particulares do caso mais geral, o bitrem
de 9 eixos.
C.1 Equações de movimento do bitrem de 9 eixos e 15 graus de liberdade
C.1.1 Considerações iniciais; diagramas de corpo livre e de força resultante
Apresenta-se esquematicamente, na Figura C.1, o modelo matemático utilizado
para a formulação das equações de movimento do bitrem de 9 eixos, composto por 15
graus de liberdade: a translação vertical e a rotação de cada uma das 3 partes suspensas,
consideradas como corpos rígidos, e as 9 translações verticais das massas dos conjuntos
eixos-rodas-pneus. As massas suspensas do cavalo mecânico (A) e das carretas
intermediária (B) e traseira (C) se apoiam sobre as suspensões formadas pelos conjuntos
mola-amortecedor. Estas, por sua vez, estão ligadas aos eixos, modelados por conjuntos
massa-mola-amortecedor. Essa configuração forma um sistema mecânico capaz de
incorporar os efeitos dinâmicos causados pela interação entre as massas suspensas e as
massas dos eixos.
As distâncias iL , mostradas na Figura C.2, medem o afastamento do eixo i em
relação ao centro de massa da parte suspensa à qual ele pertence; são contadas a partir
do CM e contadas para a esquerda, exceto no eixo 1. Dependendo da posição do centro
de massa, pode ocorrer de algumas distâncias, como 7L e 8L , serem negativas.
As distâncias auxiliares hid , entre o eixo i e a quinta roda h são dadas por:
- para a 1a parte suspensa (cavalo mecânico, A) e a quinta roda AB (eixos 1- 3):
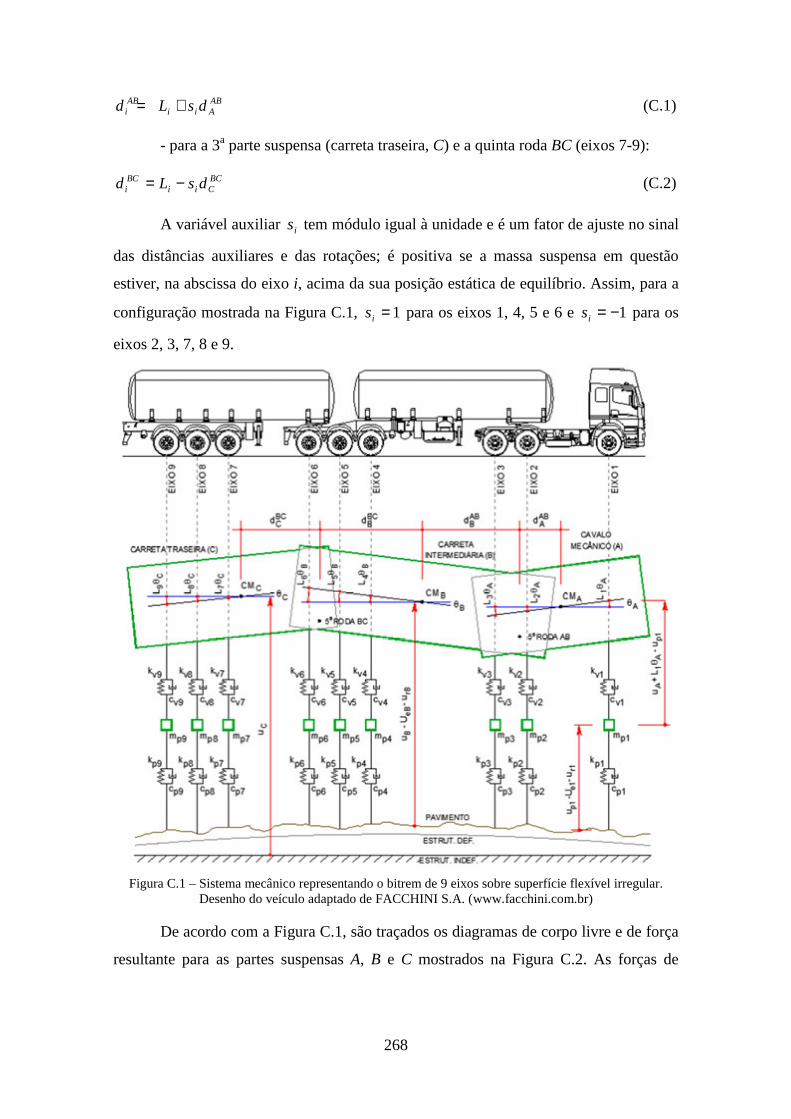
268
ABAii
ABi dsLd += (C.1)
- para a 3a parte suspensa (carreta traseira, C) e a quinta roda BC (eixos 7-9):
BCCii
BCi dsLd −= (C.2)
A variável auxiliar is tem módulo igual à unidade e é um fator de ajuste no sinal
das distâncias auxiliares e das rotações; é positiva se a massa suspensa em questão
estiver, na abscissa do eixo i, acima da sua posição estática de equilíbrio. Assim, para a
configuração mostrada na Figura C.1, 1=is para os eixos 1, 4, 5 e 6 e 1−=is para os
eixos 2, 3, 7, 8 e 9.
Figura C.1 – Sistema mecânico representando o bitrem de 9 eixos sobre superfície flexível irregular.
Desenho do veículo adaptado de FACCHINI S.A. (www.facchini.com.br)
De acordo com a Figura C.1, são traçados os diagramas de corpo livre e de força
resultante para as partes suspensas A, B e C mostrados na Figura C.2. As forças de
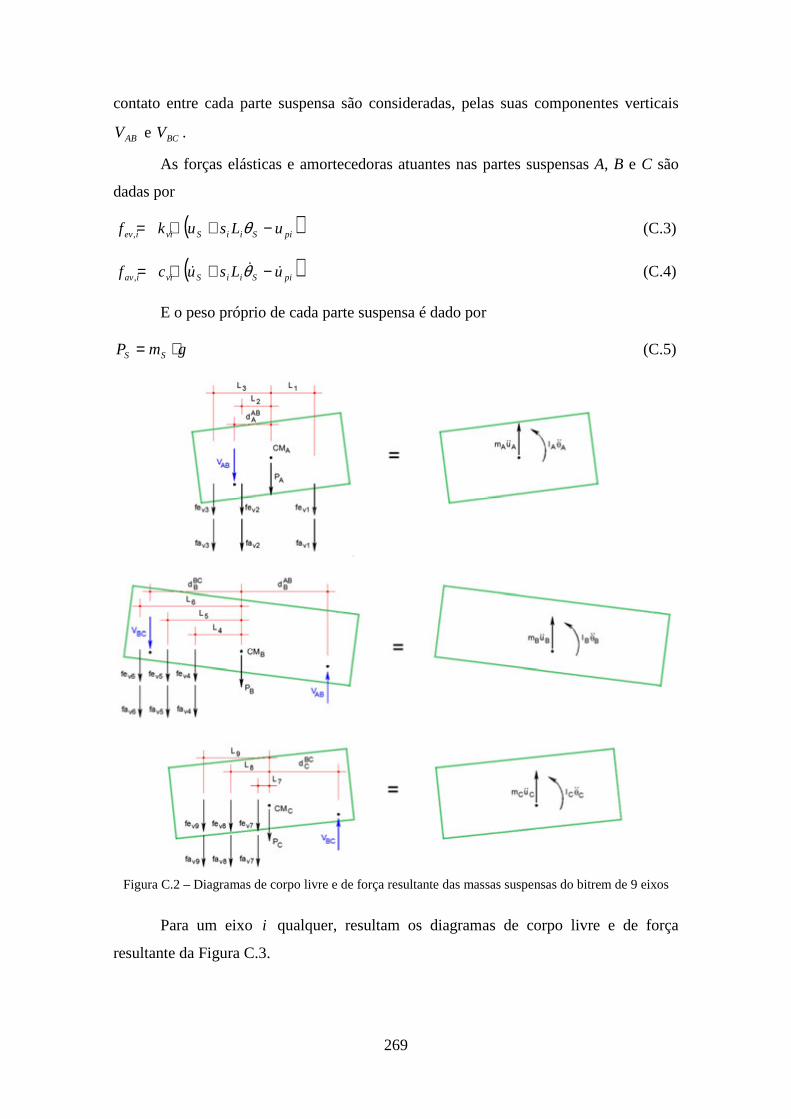
269
contato entre cada parte suspensa são consideradas, pelas suas componentes verticais
ABV e BCV .
As forças elásticas e amortecedoras atuantes nas partes suspensas A, B e C são
dadas por
( )piSiiSviiev uLsukf −+⋅= θ, (C.3)
( )piSiiSviiav uLsucf &&& −+⋅= θ, (C.4)
E o peso próprio de cada parte suspensa é dado por
gmP SS ⋅= (C.5)
Figura C.2 – Diagramas de corpo livre e de força resultante das massas suspensas do bitrem de 9 eixos
Para um eixo i qualquer, resultam os diagramas de corpo livre e de força
resultante da Figura C.3.

270
Figura C.3 – Diagramas de corpo livre e de força resultante das massas dos conjuntos eixos-rodas-pneus
As forças elásticas e amortecedoras atuantes nos eixos são dadas por
( )rieipipiiep uUukf −−⋅=, (C.6)
( )rieipipiiap uUucf &&& −−⋅=, (C.7)
E o peso próprio do i-ésimo conjunto eixo-pneus-suspensão é dado por
gmP pipi ⋅= (C.8)
De acordo com esses diagramas de corpo livre, as equações de movimento do
sistema acoplado são assim obtidas, mediante a aplicação das versões linear e angular
da segunda lei de Newton:
- Equação de movimento da estrutura no modo de vibração k:
( )∑=
+=++NE
iapiepijikekekekekeke ffukucum
1,,,,,,, φ&&& (C.9)
- Translação do cavalo mecânico:
( ) ABA
NE
aaavaevAA VPffum
A
−−+−= ∑=1
,,&& (C.10)
- Rotação do cavalo mecânico (A):
( ) ( ) ( ) ABAABavevavevavevAA dVLffLffLffI ⋅++++++−= 333222111θ&& (C.11)
- Translação da carreta intermediária (B):
( ) BCABB
NE
bbavbevBB VVPffum
B
−+−+−= ∑=1
,,&& (C.12)
- Rotação da carreta intermediária (B):
( ) BCBBC
ABBAB
NE
bbbavbevBB dVdVLffI
B
⋅+⋅++= ∑=1
,,θ&& (C.13)
- Translação da carreta traseira (C):
( ) BCC
NE
ccavcevCC VPffum
C
+−+−= ∑=1
,,&& (C.14)
- Rotação da carreta traseira (C):

271
( ) BCCBC
NE
cccavcevCC dVLffI
C
⋅++= ∑=1
,,θ&& (C.15)
- Translação do eixo i:
apiepipiavievipipi ffPffum −−−+=&& (C.16)
Como existem duas incógnitas adicionais, que são as forças de contato ABV e
BCV , as Eqs. C.10 e C.14, de translação do cavalo mecânico (A) e da carreta traseira (C),
serão utilizadas para isolar o valor de cada força de contato e substituir nas outras
equações (translação da carreta intermediária e rotação de cada parte suspensa) os
valores de ABV e BCV . Assim,
( )∑=
+−−−=ANE
aaavaevAAAAB ffPumV
1,,&& (C.17)
( )∑=
+++=CNE
ccavcevCCCBC ffPumV
1,,&& (C.18)
Estas equações são substituídas por outras que compatibilizam os deslocamentos
relativos das partes suspensas.
C.1.2 Equação de compatibilidade de deslocamentos
Figura C.4 – Ângulos iniciais de cada massa suspensa com a horizontal
Antes dos movimentos de rotação e de translação, a quinta roda AB encontra-se
na posição P da Figura C.5. Os ângulos Aβ , Bβ e Cβ , mostrados na Figura C.4,
representam as inclinações iniciais do cavalo mecânico e das carretas intermediária (B)
e traseira (C) antes do movimento e são medidos no sentido anti-horário a partir da
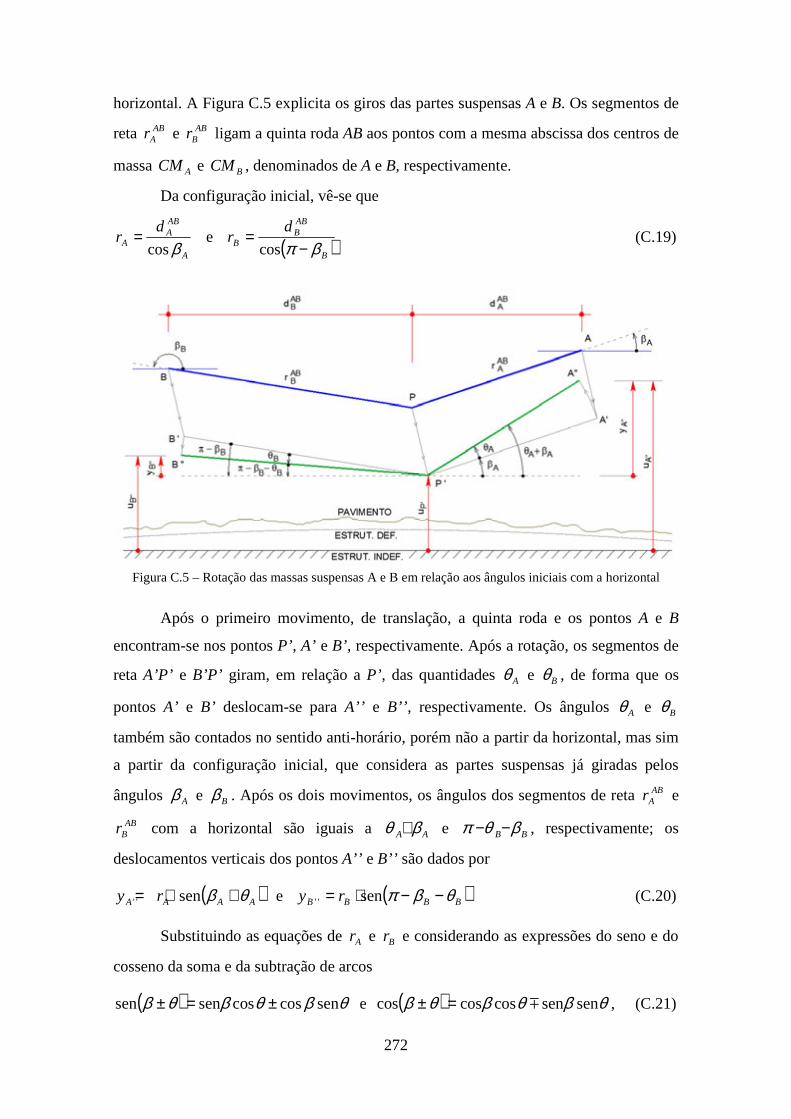
272
horizontal. A Figura C.5 explicita os giros das partes suspensas A e B. Os segmentos de
reta ABAr e AB
Br ligam a quinta roda AB aos pontos com a mesma abscissa dos centros de
massa ACM e BCM , denominados de A e B, respectivamente.
Da configuração inicial, vê-se que
A
ABA
A
dr
βcos= e ( )B
ABB
B
dr
βπ −=
cos (C.19)
Figura C.5 – Rotação das massas suspensas A e B em relação aos ângulos iniciais com a horizontal
Após o primeiro movimento, de translação, a quinta roda e os pontos A e B
encontram-se nos pontos P’, A’ e B’, respectivamente. Após a rotação, os segmentos de
reta A’P’ e B’P’ giram, em relação a P’, das quantidades Aθ e Bθ , de forma que os
pontos A’ e B’ deslocam-se para A’’ e B’’ , respectivamente. Os ângulos Aθ e Bθ
também são contados no sentido anti-horário, porém não a partir da horizontal, mas sim
a partir da configuração inicial, que considera as partes suspensas já giradas pelos
ângulos Aβ e Bβ . Após os dois movimentos, os ângulos dos segmentos de reta ABAr e
ABBr com a horizontal são iguais a AA βθ + e BB βθπ −− , respectivamente; os
deslocamentos verticais dos pontos A’’ e B’’ são dados por
( )AAAA ry θβ +⋅= sen' ' e ( )BBBB ry θβπ −−⋅= sen' ' (C.20)
Substituindo as equações de Ar e Br e considerando as expressões do seno e do
cosseno da soma e da subtração de arcos
( ) θβθβθβ sen coscossensen ±=± e ( ) θβθβθβ sen sencoscoscos m=± , (C.21)

273
têm-se
( )AAAABAA dy θθβ sencostg' ' += e ( )BBB
ABBB dy θθβ sencostg' ' +−= (C.22)
Se as rotações Aθ e Bθ forem pequenas, pode-se considerar AA θθ ≈sen e
BB θθ ≈sen , de forma que
11sen1cos 22 ≈−≈−= AAA θθθ e 1cos ≈Bθ (C.23)
As expressões dos deslocamentos verticais dos pontos A’’ e B’’ , para pequenas
rotações, podem ser aproximadas por
( )AAABAA dy θβ +≈ tg' ' e ( )BB
ABBB dy θβ +−≈ tg' ' (C.24)
O deslocamento vertical da quinta roda AB após os movimentos de translação e
rotação é dado pela equação
' ' ' ' ' BBAAP yuyuu −=−= (C.25)
Considerando os dois últimos membros desta dupla igualdade, tem-se uma
relação entre os deslocamentos Au e Bu . Substituindo as expressões dos deslocamentos
dos pontos A’’ e B’’ (Eqs. C.4), tem-se
BABBB
ABBA
ABAA
ABABA dddduu θβθβ ++++=− tgtg (C.26)
Esta equação tem a desvantagem de não envolver nenhum termo com
aceleração. Se considerada dessa forma, quando levada para a representação matricial, a
matriz de massa do sistema acoplado veículo-pavimento-estrutura teria uma linha nula,
o que inviabilizaria o cálculo numérico da integração no tempo; assim, faz-se necessária
a consideração de termos em aceleração. A derivada segunda da equação de
compatibilidade em relação ao tempo é igual a
0=−−− BABBBA
ABAA dudu θθ &&&&&&&& , (C.27)
visto que os ângulos iniciais Aβ e Bβ são constantes.
A Eq. C.27 substitui a da translação do cavalo mecânico (A). De forma
equivalente, para substituir a equação da translação da carreta traseira (C), considera-se
a equação da compatibilidade entre os deslocamentos das partes suspensas B e C:
0=−−− CBCCCB
BCBB dudu θθ &&&&&&&& (C.28)

274
C.1.3 Equações de movimento finais e matrizes consideradas
Substituindo as expressões das forças de contato ABV e BCV e considerando em
seus lugares as equações de compatibilidade, resulta o sistema linear da Eq. C.29.
( )
( )
( )
( ) ( )
( )
( ) ( ) ( )
( ) ( )
−−−+=
−−−+=
−−−+=
+++⋅++=
=−−−
−++++++−
=−+
−−−+−=++
+−−−⋅+⋅⋅+−=
=−−−
+=++
+=++
+=++
∑∑
∑∑∑
∑
∑∑
∑
∑
∑
==
===
=
==
=
=++++++
=
9999999
2222222
1111111
1,,
1,,
1,,
1,,
1,,
1
1,,
1,,
1,,,,,,,
1,1,1,1,1,1,1,
1,,,,,,,
0
0
papepavevpp
papepavevpp
papepavevpp
NE
ccavcevCCC
BCC
NE
cccavcevCC
CBCCCB
BCBB
CBCBA
ABB
NE
ccavcev
BCBb
NE
bbavbev
NE
aaavaev
ABB
CBCBCBBA
ABBA
CBA
NE
iavieviCCBBAA
NE
aaavaevAAA
ABA
NE
aaaaavaevAA
BABBBA
ABAA
NE
iapiepijinenenenenene
NE
iapiepijijejejejejeje
NE
iapiepijijejejejejeje
Pffffum
Pffffum
Pffffum
ffPumdLffI
dudu
PdPdffdLffffd
udmIudm
PPPffumumum
ffPumdLsffI
dudu
ffukucum
ffukucum
ffukucum
CC
CBA
AA
&&
M
&&
&&
&&&&
&&&&&&&&
&&&&&&
&&&&&&
&&&&
&&&&&&&&
&&&
M
&&&
&&&
θ
θθ
θ
θ
θθ
φ
φ
φ
(C.29)
Fazendo as substituições da superposição modal
∑=
=n
jkikekei uU φ e ∑
=
=n
jkikekei uU φ&& (C.30)
e considerando também as distâncias auxiliares hid , as equações do sistema da Eq. C.29
podem ser resumidas pelo sistema matricial
PKUUCUM =++ &&& (C.31)
onde as amplitudes U são as coordenadas generalizadas na dimensão modal, com a
adição dos graus de liberdade do veículo. Substituindo-se as expressões de cada força
elástica e de amortecimento, têm-se as matrizes M , C e K e o vetor de forças P
mostrados nas equações a seguir.

275
- Vetores de deslocamento, velocidade e aceleração:
=
+
+
9
2
1
,
1,
,
15)(m
p
p
p
C
C
B
B
A
A
ne
je
je
u
u
u
u
u
u
u
u
u
M
M
θ
θ
θ
U
=
+
+
9
2
1
,
1,
,
15)(m
p
p
p
C
C
B
B
A
A
ne
je
je
u
u
u
u
u
u
u
u
u
&
M
&
&
&
&
&
&
&
&
&
M
&
&
&
θ
θ
θ
U
=
+
+
9
2
1
,
1,
,
15)(m
p
p
p
C
C
B
B
A
A
ne
je
je
u
u
u
u
u
u
u
u
u
&&
M
&&
&&
&&
&&
&&
&&
&&
&&
&&
M
&&&
&&
&&
θ
θ
θ
U
(C.32)
- Vetor de forças:
( )
( )
( )
( )( )
++−
++−
++−
⋅⋅−
⋅−
⋅++−
⋅⋅
+−
+−
+−
=
∑
∑
∑
=
=+
=
+
99999
22222
11111
1,
11,
1,
15)(m
0
0
rprpp
rprpp
rprpp
BCCC
BCBC
ABBA
CBA
ABAA
NE
iripiripimi
NE
iripiripiji
NE
iripiripiji
ukucgm
ukucgm
ukucgm
dgm
gdmdm
gmmm
dgm
ukuc
ukuc
ukuc
&
M
&
&
&
M
&
&
φ
φ
φ
P
(C.33)
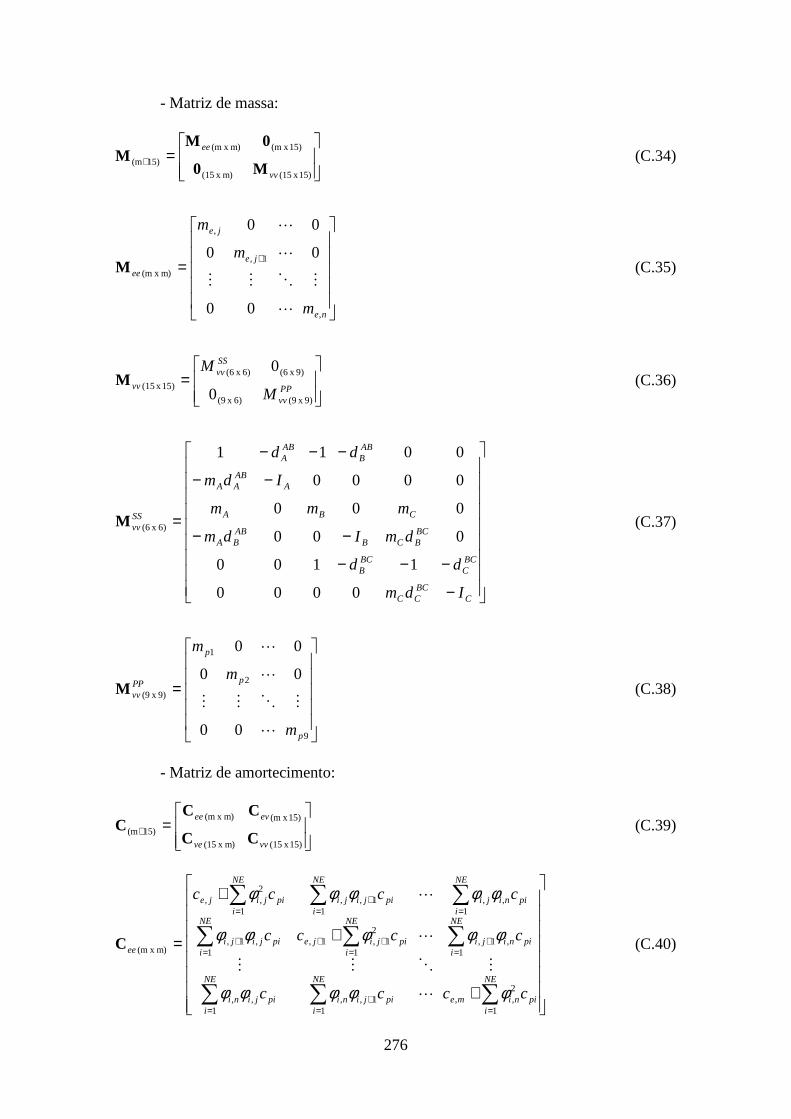
276
- Matriz de massa:
=+
15) x (15 m) x (15
15) x (mm) x (m
15)(m
vv
ee
M0
0MM (C.34)
=+
ne
je
je
ee
m
m
m
,
1,
,
m) x (m
00
00
00
L
MOMM
L
L
M (C.35)
=
PPvv
SSvv
vvM
M
9) x (9 6) x (9
9) x (66) x (6
15) x (15 0
0M (C.36)
−
−−−
−−
−−
−−−
=
CBCCC
BCC
BCB
BCBCB
ABBA
CBA
AABAA
ABB
ABA
SSvv
Idm
dd
dmIdm
mmm
Idm
dd
0000
1100
000
000
0000
0011
6) x (6 M (C.37)
=
9
2
1
9) x (9
00
00
00
p
p
p
PPvv
m
m
m
L
MOMM
L
L
M (C.38)
- Matriz de amortecimento:
=+
15) x (15 m) x (15
15) x (mm) x (m
15)(m
vvve
evee
CC
CCC (C.39)
+
+
+
=
∑∑∑
∑∑∑
∑∑∑
==+
=
=+
=++
=+
==+
=
NE
ipinime
NE
ipijini
NE
ipijini
NE
ipiniji
NE
ipijije
NE
ipijiji
NE
ipiniji
NE
ipijiji
NE
ipijije
ee
cccc
cccc
cccc
1
2,,
11,,
1,,
1,1,
1
21,1,
1,1,
1,,
11,,
1
2,,
m) x (m
φφφφφ
φφφφφ
φφφφφ
L
MOMM
L
L
C (C.40)
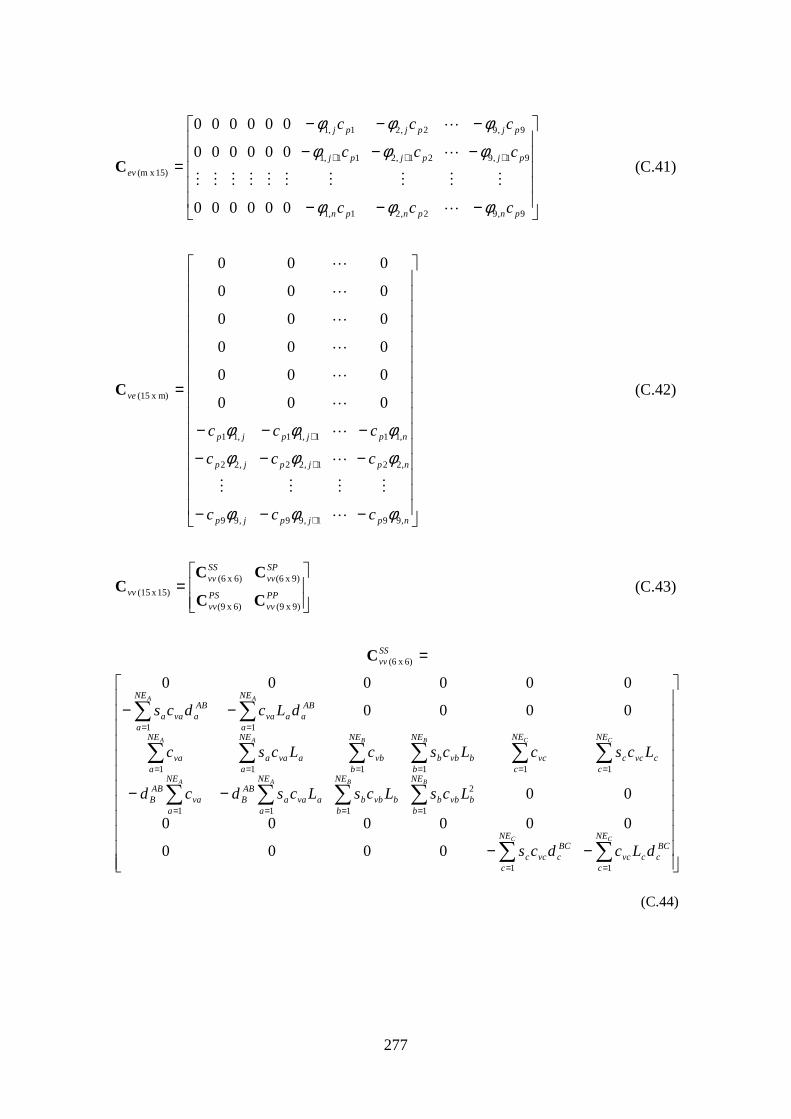
277
−−−
−−−
−−−
=+++
9,92,21,1
91,921,211,1
9,92,21,1
15) x (m
000000
000000
000000
pnpnpn
pjpjpj
pjpjpj
ev
ccc
ccc
ccc
φφφ
φφφ
φφφ
L
MMMMMMMMMM
L
L
C (C.41)
−−−
−−−
−−−
=
+
+
+
npjpjp
npjpjp
npjpjp
ve
ccc
ccc
ccc
,991,99,99
,221,22,22
,111,11,11
m) x (15 000
000
000
000
000
000
φφφ
φφφ
φφφ
L
MMMM
L
L
L
L
L
L
L
L
C (C.42)
=
PPvv
PSvv
SPvv
SSvv
vv
9) x (9 6) x (9
9) x (66) x (6
15) x (15 CC
CCC (C.43)
−−
−−
−−
=
∑∑
∑∑∑∑
∑∑∑∑∑∑
∑∑
==
====
======
==
CC
BBAA
CCBBAA
AA
NE
c
BCccvc
NE
c
BCcvcc
NE
bbvbb
NE
bbvbb
NE
aavaa
ABB
NE
ava
ABB
NE
ccvcc
NE
cvc
NE
bbvbb
NE
bvb
NE
aavaa
NE
ava
NE
a
ABaava
NE
a
ABavaa
SSvv
dLcdcs
LcsLcsLcsdcd
LcscLcscLcsc
dLcdcs
11
1
2
111
111111
11
6) x (6
0000
000000
00
0000
000000
C
(C.44)
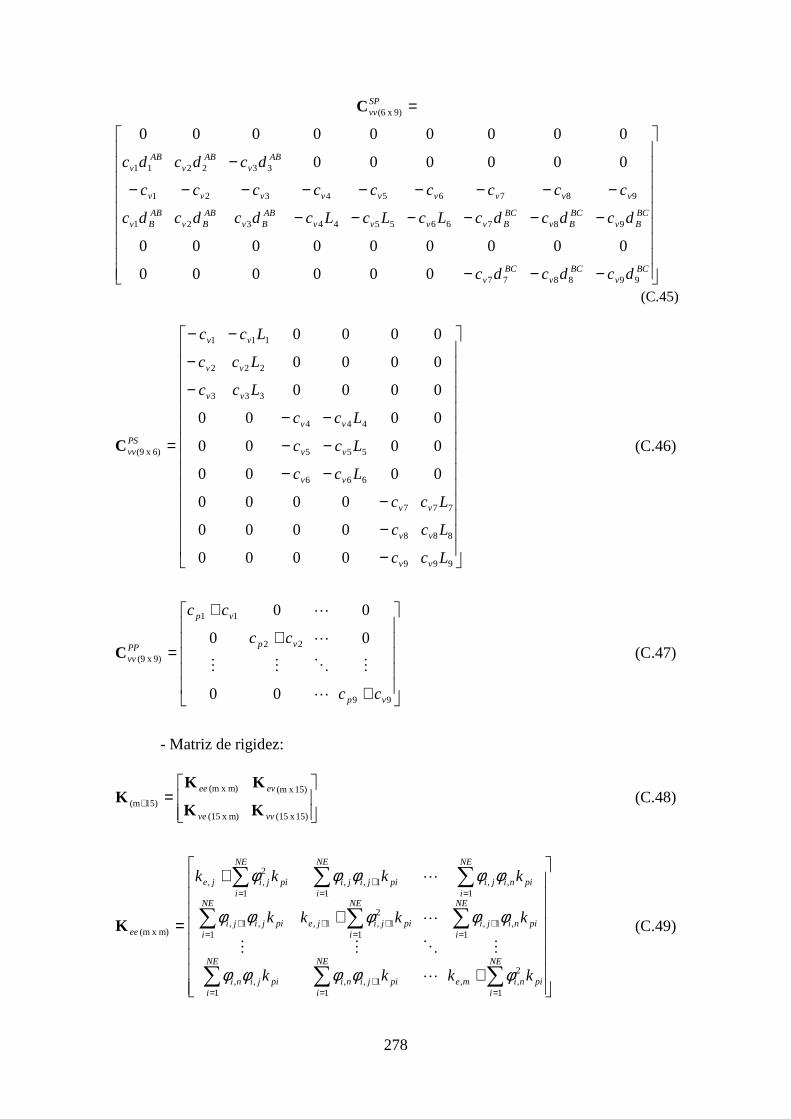
278
−−−
−−−−−−
−−−−−−−−−
−
=
BCv
BCv
BCv
BCBv
BCBv
BCBvvvv
ABBv
ABBv
ABBv
vvvvvvvvv
ABv
ABv
ABv
SPvv
dcdcdc
dcdcdcLcLcLcdcdcdc
ccccccccc
dcdcdc
998877
987665544321
987654321
332211
9) x (6
000000
000000000
000000
000000000
C
(C.45)
−
−
−
−−
−−
−−
−
−
−−
=
999
888
777
666
555
444
333
222
111
6) x (9
0000
0000
0000
0000
0000
0000
0000
0000
0000
Lcc
Lcc
Lcc
Lcc
Lcc
Lcc
Lcc
Lcc
Lcc
vv
vv
vv
vv
vv
vv
vv
vv
vv
PSvvC (C.46)
+
+
+
=
99
22
11
9) x (9
00
00
00
vp
vp
vp
PPvv
cc
cc
cc
L
MOMM
L
L
C (C.47)
- Matriz de rigidez:
=+
15) x (15 m) x (15
15) x (mm) x (m
15)(m
vvve
evee
KK
KKK (C.48)
+
+
+
=
∑∑∑
∑∑∑
∑∑∑
==+
=
=+
=++
=+
==+
=
NE
ipinime
NE
ipijini
NE
ipijini
NE
ipiniji
NE
ipijije
NE
ipijiji
NE
ipiniji
NE
ipijiji
NE
ipijije
ee
kkkk
kkkk
kkkk
1
2,,
11,,
1,,
1,1,
1
21,1,
1,1,
1,,
11,,
1
2,,
m) x (m
φφφφφ
φφφφφ
φφφφφ
L
MOMM
L
L
K (C.49)
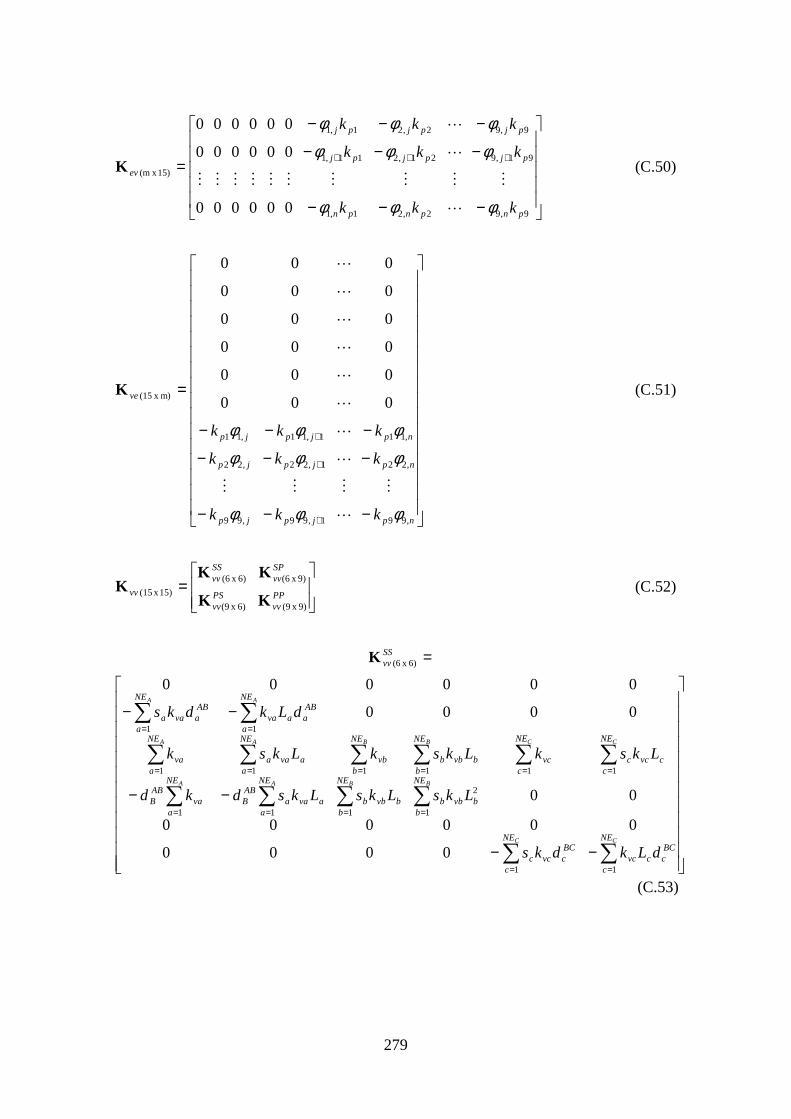
279
−−−
−−−
−−−
=+++
9,92,21,1
91,921,211,1
9,92,21,1
15) x (m
000000
000000
000000
pnpnpn
pjpjpj
pjpjpj
ev
kkk
kkk
kkk
φφφ
φφφ
φφφ
L
MMMMMMMMMM
L
L
K (C.50)
−−−
−−−
−−−
=
+
+
+
npjpjp
npjpjp
npjpjp
ve
kkk
kkk
kkk
,991,99,99
,221,22,22
,111,11,11
m) x (15 000
000
000
000
000
000
φφφ
φφφ
φφφ
L
MMMM
L
L
L
L
L
L
L
L
K (C.51)
=
PPvv
PSvv
SPvv
SSvv
vv
9) x (9 6) x (9
9) x (66) x (6
15) x (15 KK
KKK (C.52)
−−
−−
−−
=
∑∑
∑∑∑∑
∑∑∑∑∑∑
∑∑
==
====
======
==
CC
BBAA
CCBBAA
AA
NE
c
BCccvc
NE
c
BCcvcc
NE
bbvbb
NE
bbvbb
NE
aavaa
ABB
NE
ava
ABB
NE
ccvcc
NE
cvc
NE
bbvbb
NE
bvb
NE
aavaa
NE
ava
NE
a
ABaava
NE
a
ABavaa
SSvv
dLkdks
LksLksLksdkd
LkskLkskLksk
dLkdks
11
1
2
111
111111
11
6) x (6
0000
000000
00
0000
000000
K
(C.53)
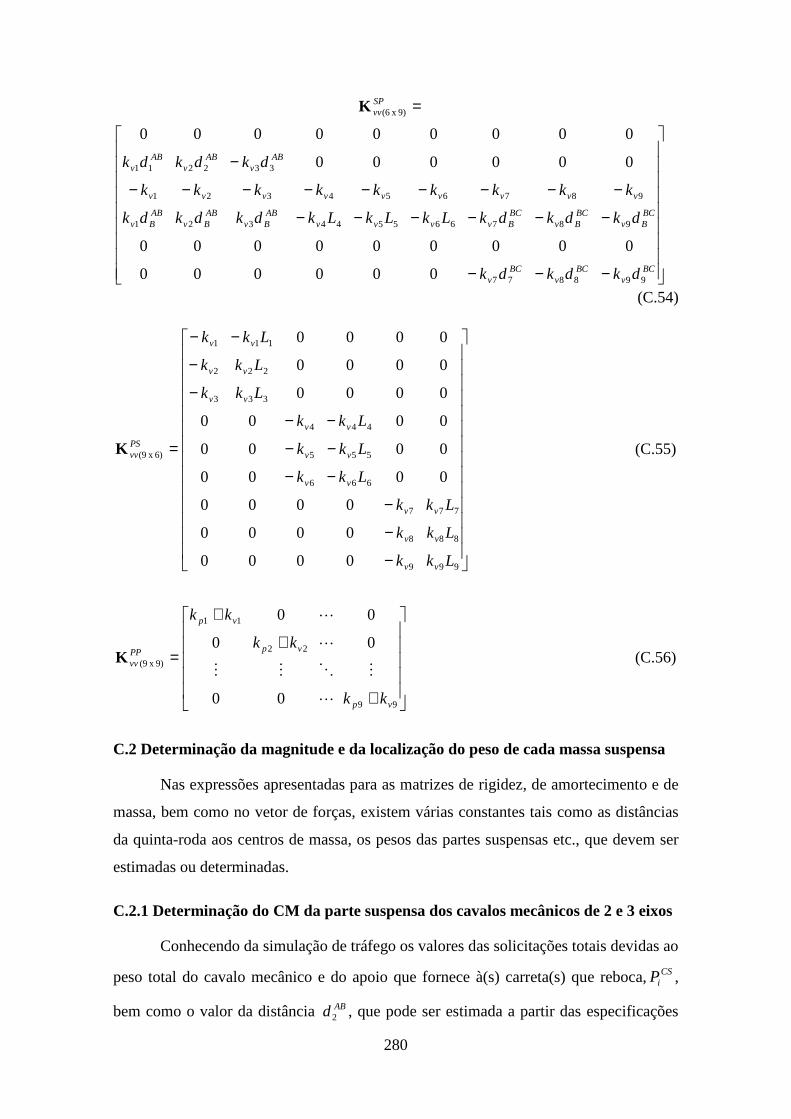
280
−−−
−−−−−−
−−−−−−−−−
−
=
BCv
BCv
BCv
BCBv
BCBv
BCBvvvv
ABBv
ABBv
ABBv
vvvvvvvvv
ABv
ABv
ABv
SPvv
dkdkdk
dkdkdkLkLkLkdkdkdk
kkkkkkkkk
dkdkdk
998877
987665544321
987654321
332211
9) x (6
000000
000000000
000000
000000000
K
(C.54)
−
−
−
−−
−−
−−
−
−
−−
=
999
888
777
666
555
444
333
222
111
6) x (9
0000
0000
0000
0000
0000
0000
0000
0000
0000
Lkk
Lkk
Lkk
Lkk
Lkk
Lkk
Lkk
Lkk
Lkk
vv
vv
vv
vv
vv
vv
vv
vv
vv
PSvvK (C.55)
+
+
+
=
99
22
11
9) x (9
00
00
00
vp
vp
vp
PPvv
kk
kk
kk
L
MOMM
L
L
K (C.56)
C.2 Determinação da magnitude e da localização do peso de cada massa suspensa
Nas expressões apresentadas para as matrizes de rigidez, de amortecimento e de
massa, bem como no vetor de forças, existem várias constantes tais como as distâncias
da quinta-roda aos centros de massa, os pesos das partes suspensas etc., que devem ser
estimadas ou determinadas.
C.2.1 Determinação do CM da parte suspensa dos cavalos mecânicos de 2 e 3 eixos
Conhecendo da simulação de tráfego os valores das solicitações totais devidas ao
peso total do cavalo mecânico e do apoio que fornece à(s) carreta(s) que reboca,CSiP ,
bem como o valor da distância ABd2 , que pode ser estimada a partir das especificações
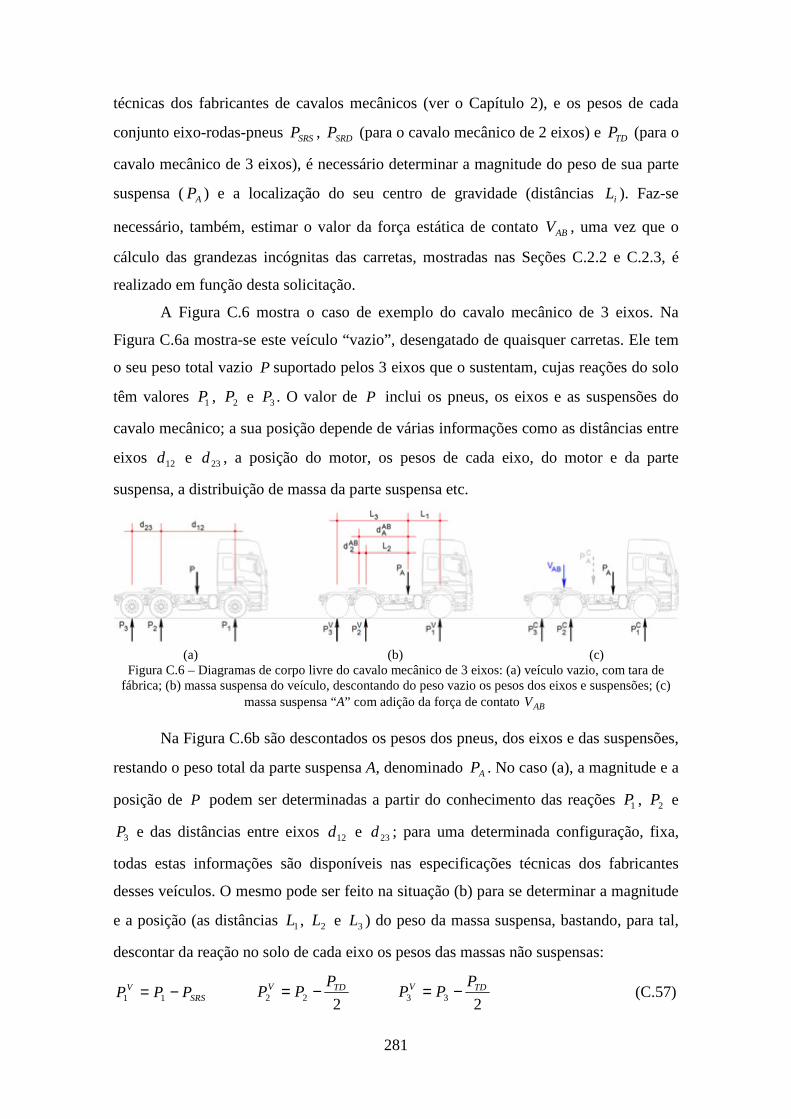
281
técnicas dos fabricantes de cavalos mecânicos (ver o Capítulo 2), e os pesos de cada
conjunto eixo-rodas-pneus SRSP , SRDP (para o cavalo mecânico de 2 eixos) e TDP (para o
cavalo mecânico de 3 eixos), é necessário determinar a magnitude do peso de sua parte
suspensa (AP ) e a localização do seu centro de gravidade (distâncias iL ). Faz-se
necessário, também, estimar o valor da força estática de contato ABV , uma vez que o
cálculo das grandezas incógnitas das carretas, mostradas nas Seções C.2.2 e C.2.3, é
realizado em função desta solicitação.
A Figura C.6 mostra o caso de exemplo do cavalo mecânico de 3 eixos. Na
Figura C.6a mostra-se este veículo “vazio”, desengatado de quaisquer carretas. Ele tem
o seu peso total vazio P suportado pelos 3 eixos que o sustentam, cujas reações do solo
têm valores 1P , 2P e 3P . O valor de P inclui os pneus, os eixos e as suspensões do
cavalo mecânico; a sua posição depende de várias informações como as distâncias entre
eixos 12d e 23d , a posição do motor, os pesos de cada eixo, do motor e da parte
suspensa, a distribuição de massa da parte suspensa etc.
(a) (b) (c)
Figura C.6 – Diagramas de corpo livre do cavalo mecânico de 3 eixos: (a) veículo vazio, com tara de fábrica; (b) massa suspensa do veículo, descontando do peso vazio os pesos dos eixos e suspensões; (c)
massa suspensa “A” com adição da força de contato ABV
Na Figura C.6b são descontados os pesos dos pneus, dos eixos e das suspensões,
restando o peso total da parte suspensa A, denominado AP . No caso (a), a magnitude e a
posição de P podem ser determinadas a partir do conhecimento das reações 1P , 2P e
3P e das distâncias entre eixos 12d e 23d ; para uma determinada configuração, fixa,
todas estas informações são disponíveis nas especificações técnicas dos fabricantes
desses veículos. O mesmo pode ser feito na situação (b) para se determinar a magnitude
e a posição (as distâncias 1L , 2L e 3L ) do peso da massa suspensa, bastando, para tal,
descontar da reação no solo de cada eixo os pesos das massas não suspensas:
SRSV PPP −= 11
222TDV P
PP −= 233TDV P
PP −= (C.57)
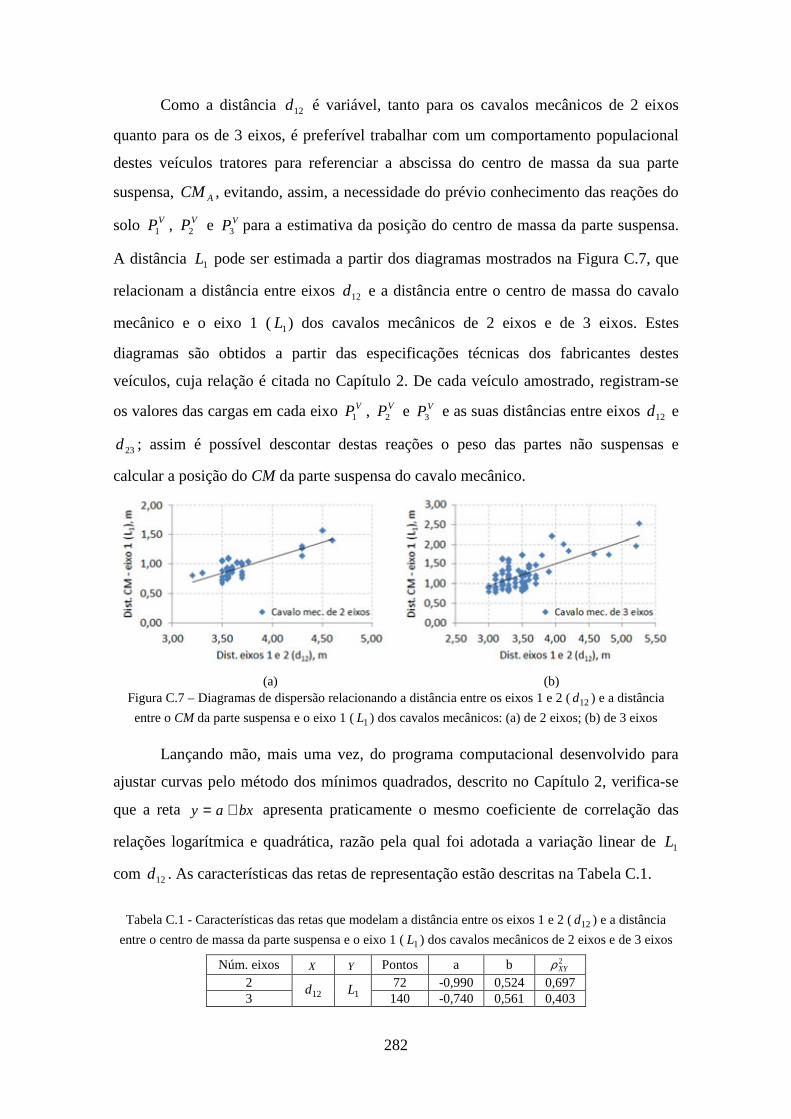
282
Como a distância 12d é variável, tanto para os cavalos mecânicos de 2 eixos
quanto para os de 3 eixos, é preferível trabalhar com um comportamento populacional
destes veículos tratores para referenciar a abscissa do centro de massa da sua parte
suspensa, ACM , evitando, assim, a necessidade do prévio conhecimento das reações do
solo VP1 , VP2 e VP3 para a estimativa da posição do centro de massa da parte suspensa.
A distância 1L pode ser estimada a partir dos diagramas mostrados na Figura C.7, que
relacionam a distância entre eixos 12d e a distância entre o centro de massa do cavalo
mecânico e o eixo 1 (1L ) dos cavalos mecânicos de 2 eixos e de 3 eixos. Estes
diagramas são obtidos a partir das especificações técnicas dos fabricantes destes
veículos, cuja relação é citada no Capítulo 2. De cada veículo amostrado, registram-se
os valores das cargas em cada eixo VP1 , VP2 e VP3 e as suas distâncias entre eixos 12d e
23d ; assim é possível descontar destas reações o peso das partes não suspensas e
calcular a posição do CM da parte suspensa do cavalo mecânico.
(a) (b)
Figura C.7 – Diagramas de dispersão relacionando a distância entre os eixos 1 e 2 (12d ) e a distância
entre o CM da parte suspensa e o eixo 1 (1L ) dos cavalos mecânicos: (a) de 2 eixos; (b) de 3 eixos
Lançando mão, mais uma vez, do programa computacional desenvolvido para
ajustar curvas pelo método dos mínimos quadrados, descrito no Capítulo 2, verifica-se
que a reta bxay += apresenta praticamente o mesmo coeficiente de correlação das
relações logarítmica e quadrática, razão pela qual foi adotada a variação linear de 1L
com 12d . As características das retas de representação estão descritas na Tabela C.1.
Tabela C.1 - Características das retas que modelam a distância entre os eixos 1 e 2 (12d ) e a distância
entre o centro de massa da parte suspensa e o eixo 1 (1L ) dos cavalos mecânicos de 2 eixos e de 3 eixos
Núm. eixos X Y Pontos a b 2XYρ
2 12d 1L 72 -0,990 0,524 0,697
3 140 -0,740 0,561 0,403
283
Com o valor de 1L definido, podem-se calcular 2L e 3L dos cavalos mecânicos
de 3 eixos pelas relações
1122 LdL −= , 2323 dLL += (C.58)
A distância ABAd pode ser calculada pela expressão
ABABA dLd 22 += (C.59)
Após o engate da(s) carreta(s), quando da montagem do conjunto articulado, é
acrescida ao cavalo mecânico a força estática de contato ABV que a(s) parte(s)
rebocada(s) exerce(m) na quinta roda do veículo trator, nele se apoiando, como indicado
na Figura C.6c. A força ABV é considerada externa ao cavalo mecânico, uma vez que ele
já se encontrava em equilíbrio estático antes do carregamento; se fosse interna esta força
transferiria o centro de massa ACM da posição onde se encontra AP (Figura C.6b) para
a posição CAP (Figura C.6c). Considerando apenas a parte suspensa A, as reações do
solo VP1 , VP2 e VP3 , referidas ao veículo vazio, passam a ser CP1 , CP2 e CP3 , referidas
ao veículo carregado, respectivamente, e podem ser calculadas pelo desconto dos pesos
das partes não suspensas dos valores totais das reações, CSP1 , CSP2 e CSP3 , informados
pela simulação de tráfego:
SRSCSC PPP −= 11
222TDCSC P
PP −= 233TDCSC P
PP −= (C.60)
Para a determinação de todas as variáveis inerentes à análise dinâmica, é
necessário determinar o valor da força estática de contato ABV e o peso da parte
suspensa AP . Considerando a posição do centro da massa da parte suspensa, ACM , já
conhecida (distâncias 1L , 2L e 3L ), em função da distância entre eixos 12d , as forças
AP e ABV podem ser determinadas a partir as reações do solo do veículo carregado, CP1 ,
CP2 e CP3 , sem a necessidade de usar as reações originais da parte suspensa vazia VP1 ,
VP2 e VP3 . Aplicando as equações de equilíbrio ao cavalo mecânico carregado da Figura
C.6c, vem
CCC
AABV PPPPVF 321 :0 ++=+=∑
(C.61) ( ) ( ) 2322312132233 :0 dPddPLPddVM CC
AAB
ABE ⋅++⋅=⋅+−⋅=∑
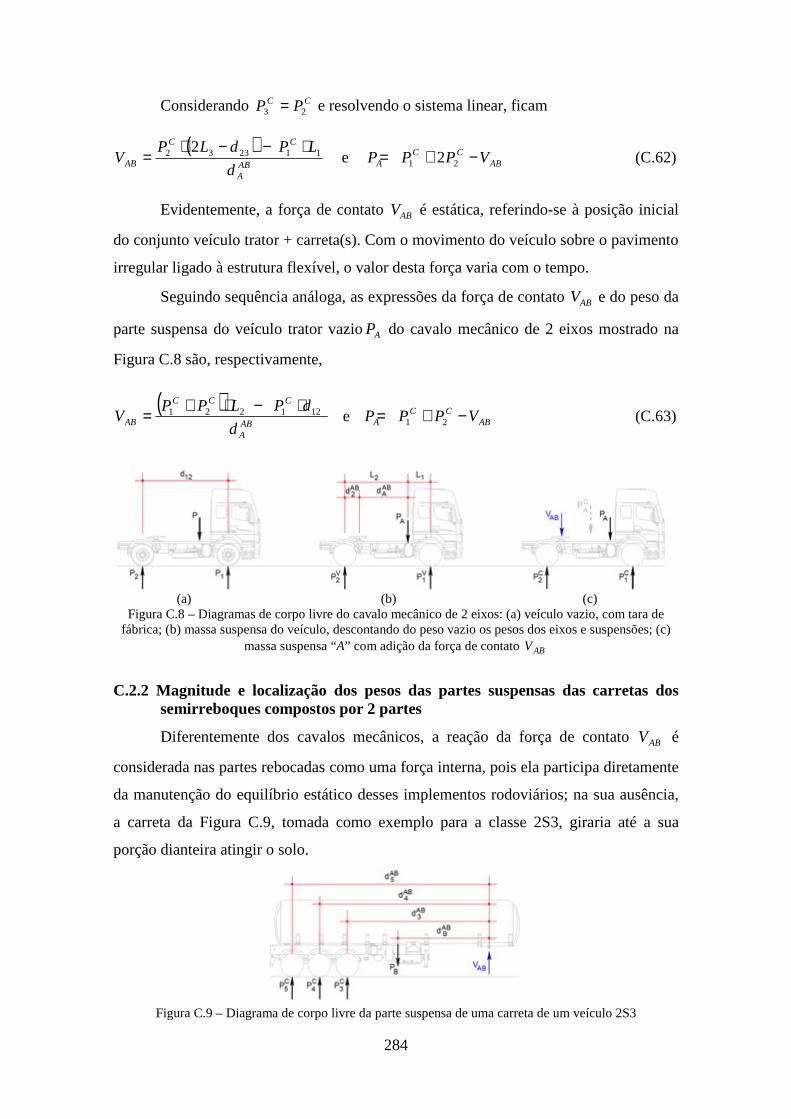
284
Considerando CC PP 23 = e resolvendo o sistema linear, ficam
( )ABA
CC
AB d
LPdLPV 112332 2 ⋅−−⋅
= e ABCC
A VPPP −+= 21 2 (C.62)
Evidentemente, a força de contato ABV é estática, referindo-se à posição inicial
do conjunto veículo trator + carreta(s). Com o movimento do veículo sobre o pavimento
irregular ligado à estrutura flexível, o valor desta força varia com o tempo.
Seguindo sequência análoga, as expressões da força de contato ABV e do peso da
parte suspensa do veículo trator vazioAP do cavalo mecânico de 2 eixos mostrado na
Figura C.8 são, respectivamente,
( )ABA
CCC
AB d
dPLPPV
121221 ⋅−⋅+= e AB
CCA VPPP −+= 21 (C.63)
(a) (b) (c)
Figura C.8 – Diagramas de corpo livre do cavalo mecânico de 2 eixos: (a) veículo vazio, com tara de fábrica; (b) massa suspensa do veículo, descontando do peso vazio os pesos dos eixos e suspensões; (c)
massa suspensa “A” com adição da força de contato ABV
C.2.2 Magnitude e localização dos pesos das partes suspensas das carretas dos semirreboques compostos por 2 partes
Diferentemente dos cavalos mecânicos, a reação da força de contato ABV é
considerada nas partes rebocadas como uma força interna, pois ela participa diretamente
da manutenção do equilíbrio estático desses implementos rodoviários; na sua ausência,
a carreta da Figura C.9, tomada como exemplo para a classe 2S3, giraria até a sua
porção dianteira atingir o solo.
Figura C.9 – Diagrama de corpo livre da parte suspensa de uma carreta de um veículo 2S3
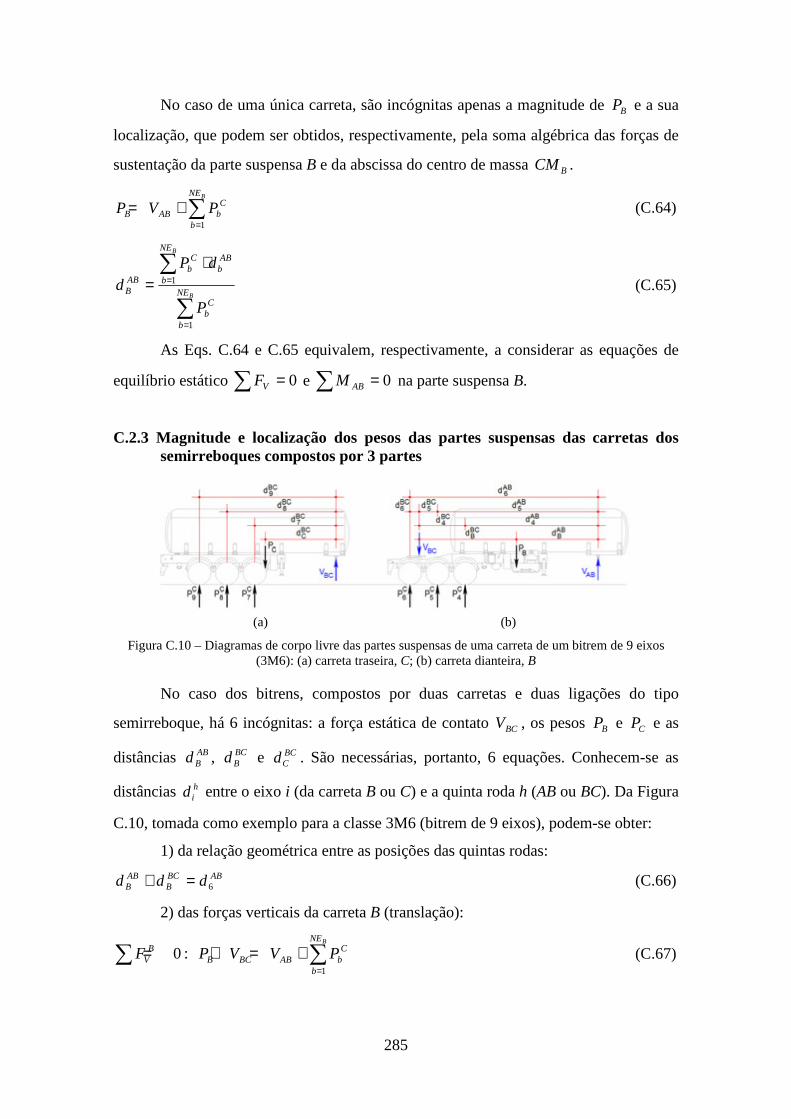
285
No caso de uma única carreta, são incógnitas apenas a magnitude de BP e a sua
localização, que podem ser obtidos, respectivamente, pela soma algébrica das forças de
sustentação da parte suspensa B e da abscissa do centro de massa BCM .
∑=
+=BNE
b
CbABB PVP
1
(C.64)
∑
∑
=
=
⋅=
B
B
NE
b
Cb
NE
b
ABb
Cb
ABB
P
dPd
1
1 (C.65)
As Eqs. C.64 e C.65 equivalem, respectivamente, a considerar as equações de
equilíbrio estático ∑ = 0VF e ∑ = 0ABM na parte suspensa B.
C.2.3 Magnitude e localização dos pesos das partes suspensas das carretas dos semirreboques compostos por 3 partes
(a) (b)
Figura C.10 – Diagramas de corpo livre das partes suspensas de uma carreta de um bitrem de 9 eixos (3M6): (a) carreta traseira, C; (b) carreta dianteira, B
No caso dos bitrens, compostos por duas carretas e duas ligações do tipo
semirreboque, há 6 incógnitas: a força estática de contato BCV , os pesos BP e CP e as
distâncias ABBd , BC
Bd e BCCd . São necessárias, portanto, 6 equações. Conhecem-se as
distâncias hid entre o eixo i (da carreta B ou C) e a quinta roda h (AB ou BC). Da Figura
C.10, tomada como exemplo para a classe 3M6 (bitrem de 9 eixos), podem-se obter:
1) da relação geométrica entre as posições das quintas rodas:
ABBCB
ABB ddd 6=+ (C.66)
2) das forças verticais da carreta B (translação):
∑∑=
+=+=BNE
b
CbABBCB
BV PVVPF
1
:0 (C.67)
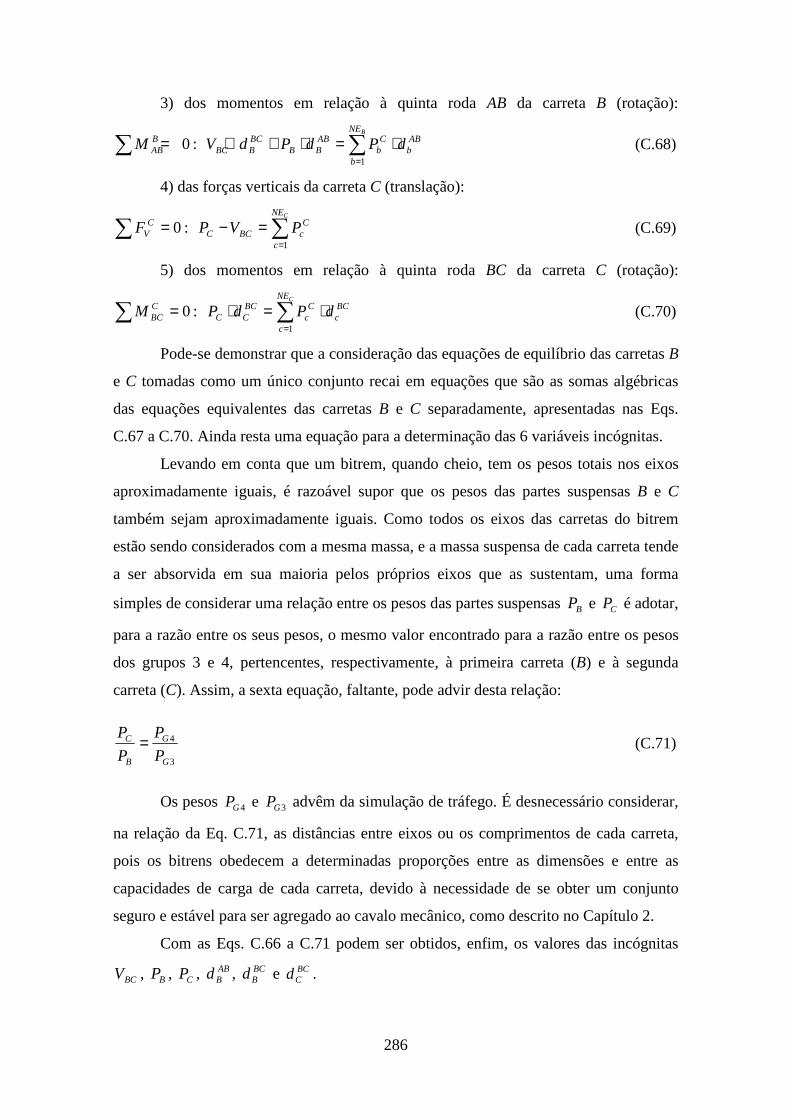
286
3) dos momentos em relação à quinta roda AB da carreta B (rotação):
∑∑=
⋅=⋅+⋅=BNE
b
ABb
Cb
ABBB
BCBBC
BAB dPdPdVM
1
:0 (C.68)
4) das forças verticais da carreta C (translação):
∑∑=
=−=CNE
c
CcBCC
CV PVPF
1
:0 (C.69)
5) dos momentos em relação à quinta roda BC da carreta C (rotação):
∑∑=
⋅=⋅=CNE
c
BCc
Cc
BCCC
CBC dPdPM
1
:0 (C.70)
Pode-se demonstrar que a consideração das equações de equilíbrio das carretas B
e C tomadas como um único conjunto recai em equações que são as somas algébricas
das equações equivalentes das carretas B e C separadamente, apresentadas nas Eqs.
C.67 a C.70. Ainda resta uma equação para a determinação das 6 variáveis incógnitas.
Levando em conta que um bitrem, quando cheio, tem os pesos totais nos eixos
aproximadamente iguais, é razoável supor que os pesos das partes suspensas B e C
também sejam aproximadamente iguais. Como todos os eixos das carretas do bitrem
estão sendo considerados com a mesma massa, e a massa suspensa de cada carreta tende
a ser absorvida em sua maioria pelos próprios eixos que as sustentam, uma forma
simples de considerar uma relação entre os pesos das partes suspensas BP e CP é adotar,
para a razão entre os seus pesos, o mesmo valor encontrado para a razão entre os pesos
dos grupos 3 e 4, pertencentes, respectivamente, à primeira carreta (B) e à segunda
carreta (C). Assim, a sexta equação, faltante, pode advir desta relação:
3
4
G
G
B
C
P
P
P
P= (C.71)
Os pesos 4GP e 3GP advêm da simulação de tráfego. É desnecessário considerar,
na relação da Eq. C.71, as distâncias entre eixos ou os comprimentos de cada carreta,
pois os bitrens obedecem a determinadas proporções entre as dimensões e entre as
capacidades de carga de cada carreta, devido à necessidade de se obter um conjunto
seguro e estável para ser agregado ao cavalo mecânico, como descrito no Capítulo 2.
Com as Eqs. C.66 a C.71 podem ser obtidos, enfim, os valores das incógnitas
BCV , BP , CP , ABBd , BC
Bd e BCCd .
287
Para o cálculo da força de contato ABV e BCV , não se levam conta os limites de
carga sobre a quinta roda, da ordem de 130 kN.
C. 3 Caso particular definido: veículo 2S3
Pode-se observar que, para obter as equações de movimento do veículo 2S3,
mostradas na Seção 4.2.2, basta retirar, das equações do bitrem de 15 graus de
liberdade, os eixos 2, 7, 8 e 9 e a carreta traseira, e anular nas matrizes C, M e K , bem
como no vetor de forças F, as linhas e colunas correspondentes a esses graus de
liberdade. Como só existe uma quinta roda, há apenas uma força de contato; é
necessário eliminar somente uma equação de translação e fazer uma substituição com a
equação de compatibilidade (Eq. C.27). Por fim, renumeram-se os eixos: para o cavalo
mecânico (A) ficam os eixos 1 e 2 e para a carreta os eixos 3, 4 e 5.
As equações de movimento do veículo 2S3 estão implementadas no programa
IVPE-v3; para o seu uso irrestrito ainda resta, entretanto, validar os resultados
produzidos pela passagem deste veículo nas pontes em termos de deslocamentos e
esforços, tal como realizado experimentalmente para o veículo 3C por BATTISTA
(1993).
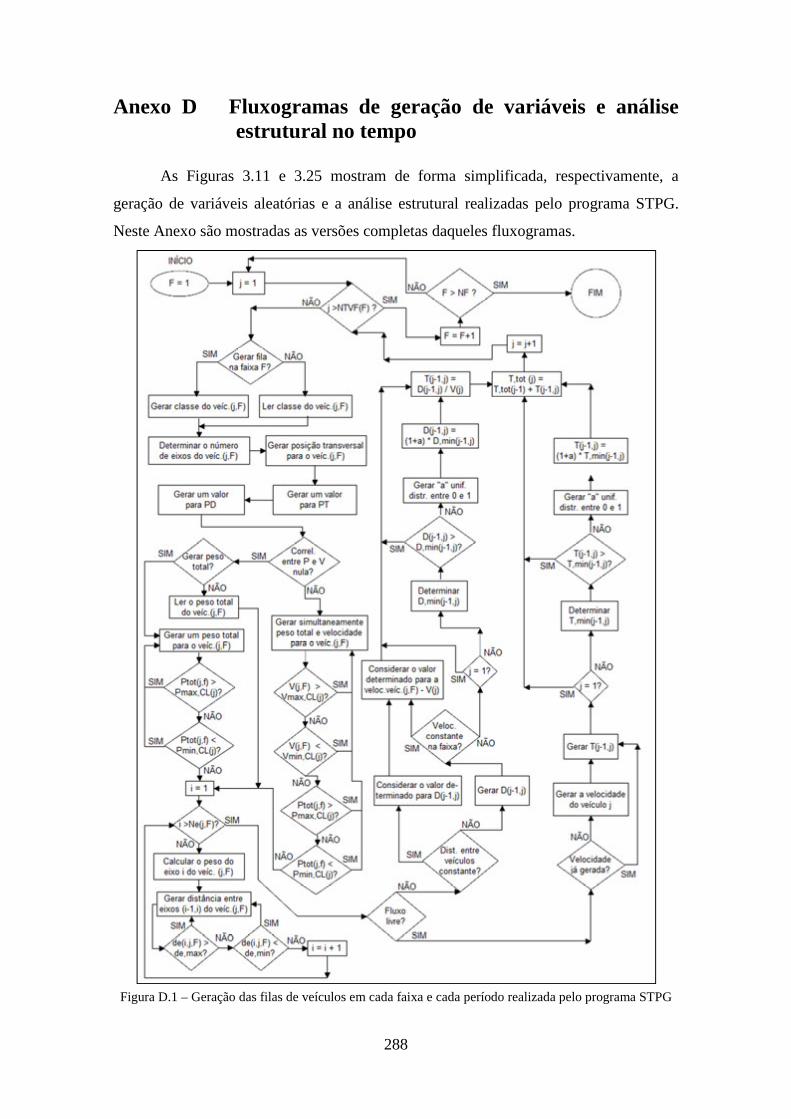
288
Anexo D Fluxogramas de geração de variáveis e análise estrutural no tempo
As Figuras 3.11 e 3.25 mostram de forma simplificada, respectivamente, a
geração de variáveis aleatórias e a análise estrutural realizadas pelo programa STPG.
Neste Anexo são mostradas as versões completas daqueles fluxogramas.
Figura D.1 – Geração das filas de veículos em cada faixa e cada período realizada pelo programa STPG
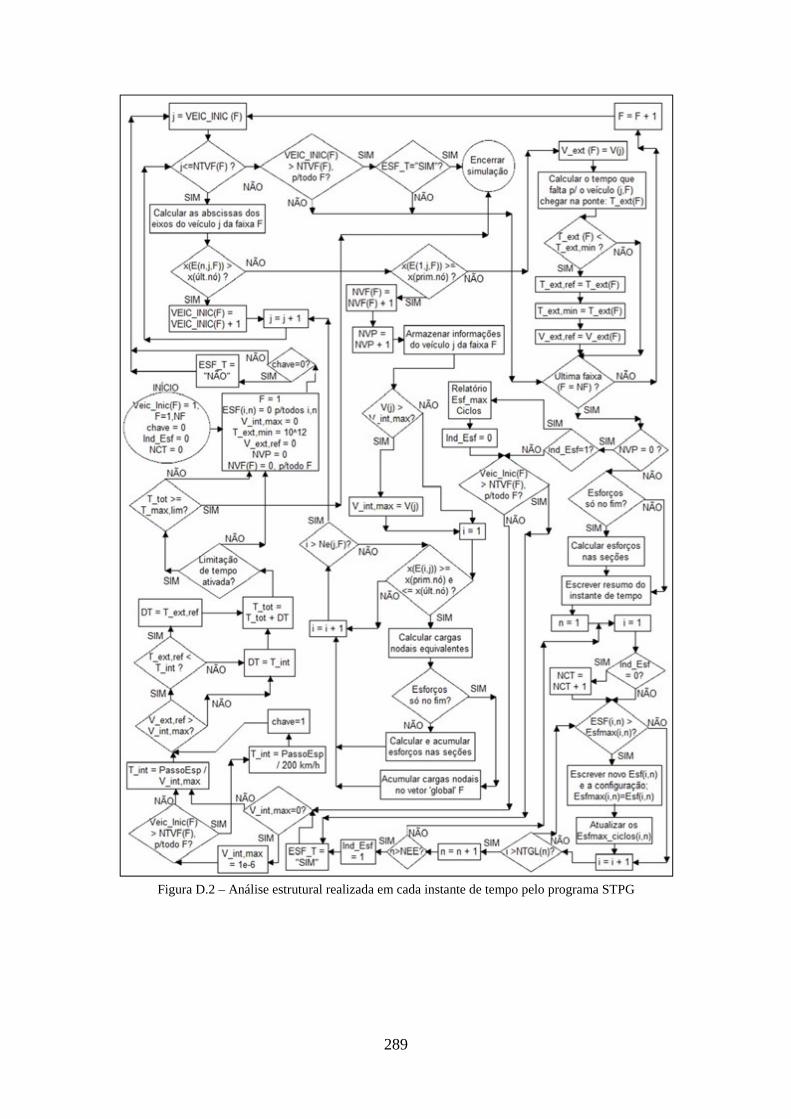
289
Figura D.2 – Análise estrutural realizada em cada instante de tempo pelo programa STPG