AUTOMAÇÃO INDUSTRIAL LABORATÓRIOS - Autenticação · exemplo Fupla, que lhe permitiria...
22
José Luís Sequeira 20010/11 AUTOMAÇÃO INDUSTRIAL LABORATÓRIOS BOAS PRÁTICAS E UTILIZAÇÃO DOS EQUIPAMENTOS POR BANCADA
Transcript of AUTOMAÇÃO INDUSTRIAL LABORATÓRIOS - Autenticação · exemplo Fupla, que lhe permitiria...

José Luís Sequeira 20010/11
AUTOMAÇÃO INDUSTRIAL
LABORATÓRIOS
BOAS PRÁTICAS E UTILIZAÇÃO DOS EQUIPAMENTOS POR
BANCADA

José Luís Sequeira 20010/11
O laboratório de Automação Industrial localiza-se na cave do pavilhão de Mecânica III.
O laboratório está actualmente dividido em oito bancadas de trabalho operacionais. A sua distribuição espacial é a ilustrada na figura 1.
Esta distribuição indica ainda qual o autómato que está associado a cada bancada.
José Luís Sequeira 20010/11
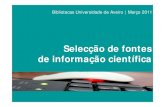
A bancada 1 tem um autómato PCD1, com duas cartas de entrada e duas de saída, ou seja com todas as suas potencialidades de input/output esgotadas;
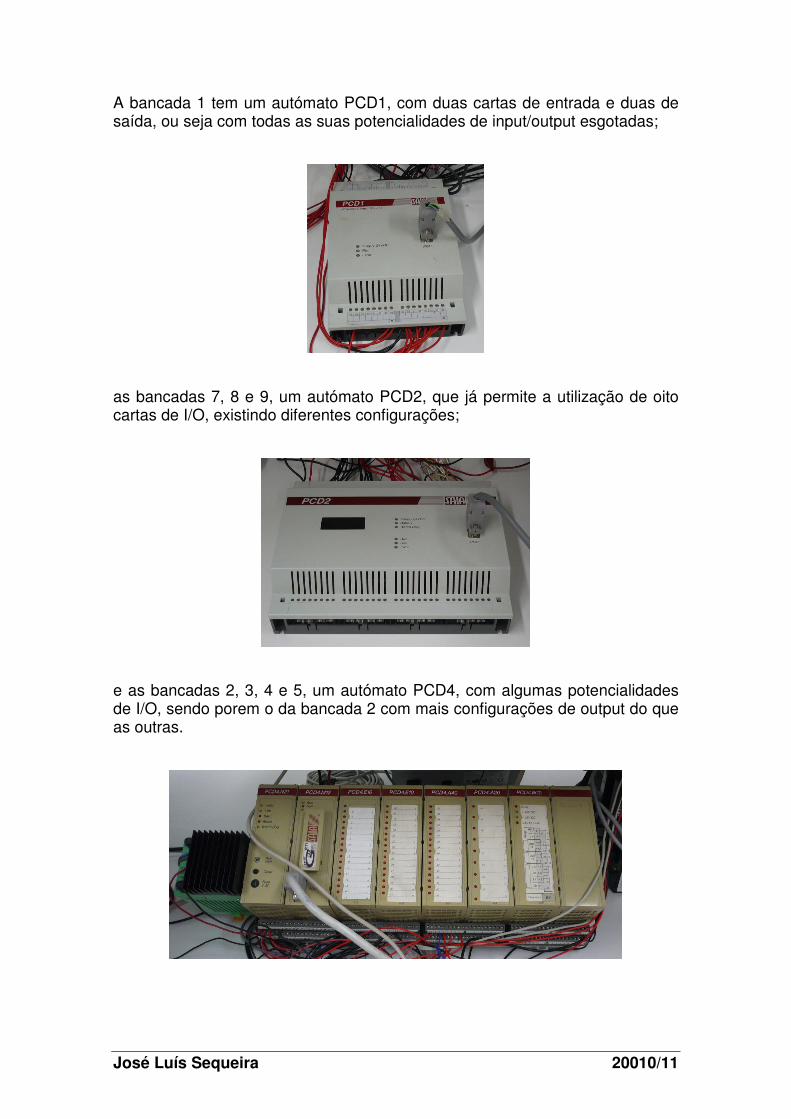
as bancadas 7, 8 e 9, um autómato PCD2, que já permite a utilização de oito cartas de I/O, existindo diferentes configurações;
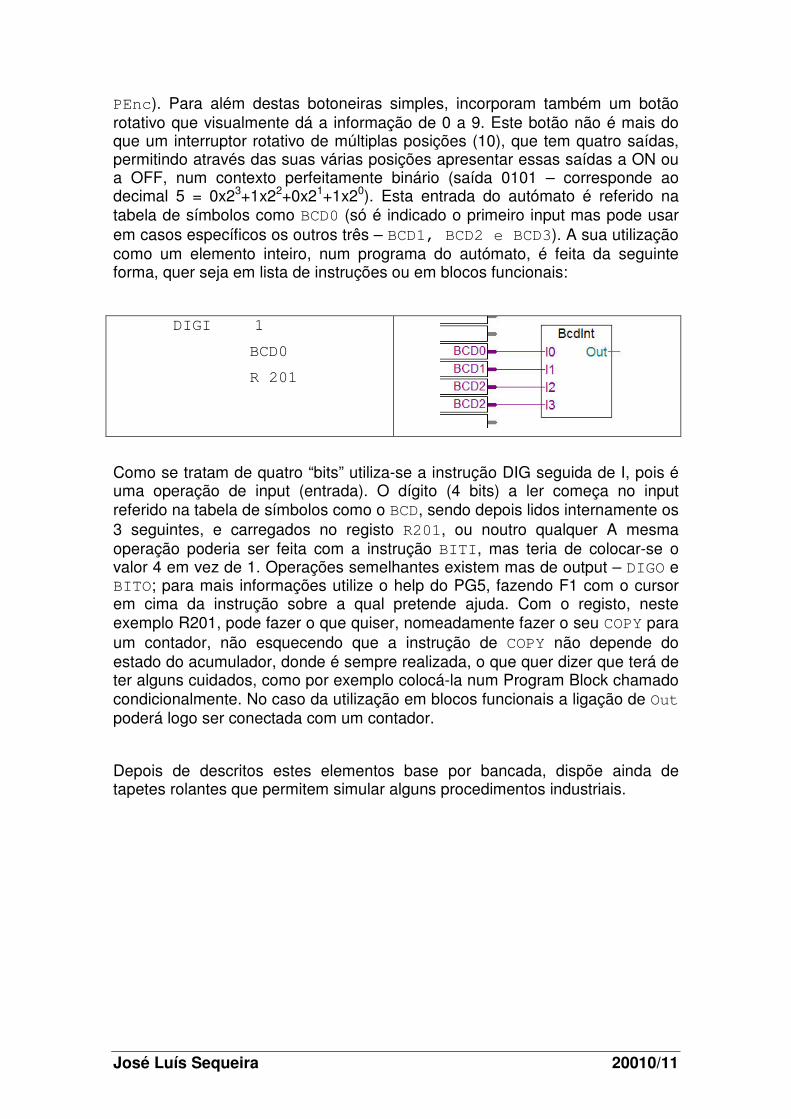
e as bancadas 2, 3, 4 e 5, um autómato PCD4, com algumas potencialidades de I/O, sendo porem o da bancada 2 com mais configurações de output do que as outras.

José Luís Sequeira 20010/11
Em termos operacionais, e face ao uso que os alunos fazem destes autómatos, podemos considerá-los todos “iguais”.
O ambiente de programação que suporta a edição de programas de qualquer um destes autómatos é realizado em PG5 (Saia-Burgess).
Este software é disponibilizado, sendo a sua instalação simples. Se tem o Windows Vista ou Seven deve atender às notas existentes relativamente à instalação.
A partir do momento que instalou a sua versão aluno (operacional durante 3 meses), começar a utilizar o software é muito simples. Ressalve-se entretanto a situação dos computadores com Windows Vista ou Seven que devem executar o programa com privilégios de Administrador. Depois de o lançar no “Start Programs” o procedimento é o seguinte:
Criar um novo projecto (que não é mais do criar uma directoria onde irão residir todos os programas que realizar).
Depois de criar um novo projecto, no exemplo Xpto, o passo seguinte é desenvolver um programa consoante o método de programação que pretende.

José Luís Sequeira 20010/11
Neste caso tratar-se-á do ficheiro Trab_AI no qual irá desenvolver uma programação com base em GRAFTEC. Poderia ter feito outra opção, como por exemplo Fupla, que lhe permitiria programar em diagrama de contactos e/ou em blocos funcionais, ou feito a selecção para Lista de Instruções.
Depois de desenvolvido o programa, em qualquer das das linguagens, e mesmo com programas com mistura de linguagens, a sequência seguinte será
sempre de “Build” “Download” “Go On” e por fim “Run” . É perfeitamente natural que um projecto não funcione à primeira vez, donde é
vivamente aconselhado utilizar o “Debug” .
A utilização do Debug é muito intuitiva e se olhar para o rodapé da janela de debug verificará que apenas precisará das iniciais dos comandos para operacionalizar a verificação de todo o seu projecto.

José Luís Sequeira 20010/11
Ou seja neste caso para visualizar, dinamicamente o evoluir das flags, foi feito D F 1 t 20 R.
Todo o trabalho de preparação deverá ser desenvolvido no laboratório remoto, donde tenha em atenção que ao migrar o seu trabalho, tem de se certificar que, para o caso da sua bancada, está a utilizar o autómato correcto (PCD1, PCD2 ou PCD4).
CPU – Hardware Settings
Note também que é natural ter uma ligação TCP/IP do tipo S-Bus. Para o caso do laboratório presencial terá de anular essa ligação TCP/IP e configurar para tipo PGU – estas operações são feitas em Hardware Settings.

José Luís Sequeira 20010/11
Não se esqueça, também, que no laboratório presencial os equipamentos são de diferentes tipos, e as respectivas ligações podem ser diferentes donde corresponderem a tabelas de símbolos diferentes do laboratório remoto. Estas tabelas de símbolos por bancada, estão na página Web da disciplina, assim como na “desktop” do computador de bancada. Para fazer o seu “import” para o autómato terá de fazer:
View – Global Symbols (aparece um novo icon – Symbols) – Advanced – Import Symbols
No contexto desta disciplina torna-se mais simples considerar todas as variáveis globais, visto não haver necessidade de atender a espaço de memória.

José Luís Sequeira 20010/11
Elementos existentes nas bancadas:
Cilindros, caixa de luzes, caixa de botoneiras com BCD, Sirene. Tapete rolante com câmara vídeo e programas de interface Caixa de luzes adicionais
Cilindros, caixa de luzes, caixa de botoneiras com BCD, Sirene. Tapete rolante com câmara vídeo e programas de interface Botões adicionais Caixa de semáforos
Cilindros, caixa de luzes, caixa de botoneiras com BCD, Sirene. Tapete rolante com câmara vídeo e programas de interface Caixa de semáforos
Cilindros, caixa de luzes, caixa de botoneiras com BCD, Sirene. Tapete rolante com câmara vídeo e programas de interface Botões adicionais Caixa de semáforos
Cilindros, caixa de luzes, caixa de botoneiras com BCD, Sirene. Tapete rolante com câmara vídeo e programas de interface Botões adicionais Elevador de 4 pisos
Cilindros, caixa de luzes, caixa de botoneiras com BCD, Sirene. Tapete rolante com câmara vídeo e programas de interface Botões adicionais Sistema FESTO
Cilindros, caixa de luzes, caixa de botoneiras com BCD, Sirene. Tapete rolante com câmara vídeo e programas de interface Botões adicionais Elevador de 4 pisos
Cilindros, caixa de luzes, caixa de botoneiras com BCD, Sirene. Tapete rolante com câmara vídeo e programas de interface Botões adicionais Luzes adicionais Elevador de 4 pisos

José Luís Sequeira 20010/11
Nos diversos trabalhos irá fundamentalmente operar com os painéis existentes, e outros equipamentos que mais à frente serão descritos.
Dispõe tipicamente de dois tipos de painéis, os de parede, bancadas 1, 2, 3, 4 e 5 (mesmo o da bancada 5 é em tudo semelhante aos outros) e os de bancada, bancadas 7, 8 e 9.
Em todos eles dispõe de 3 cilindros pneumáticos (excepto a bancada 5, com 4 cilindros) que são pilotados por electroválvulas monoestáveis 5/2, actuadas apenas através de um só solenóide para mudança de estado, e recuperando o estado inicial através de uma mola interna.

José Luís Sequeira 20010/11
Donde a sua actuação será sempre do tipo SET, para o avanço do cilindro, e RES para o seu recuo. Todos os cilindros têm sensores indutivos de fim de curso, ou seja, por exemplo para o caso do cilindro A (na tabela de símbolos Cil_A) o sensor da retaguarda é o a0 e o sensor de avanço o a1.
Estes cilindros permitem-lhe pensar num procedimento meramente pneumático, mas também pode idealizar que o seu avanço corresponde a um fechar de uma porta, ou de uma cancela ou mesmo de um outro qualquer acto.
No caso dos painéis de parede eles dispõem ainda de uma caixa de luzes, tipo semáforo – luzes verde, amarela e encarnada, e de um sensor de presença (na tabela de símbolos – dP) que nuns casos é um sensor fotoeléctrico, noutros indutivo, noutros capacitivo ou ainda fotoeléctrico de barreira. Nos painéis de bancada (e também na bancada 5), a caixa de luzes, encontra-se na própria bancada, sendo a sua referência em termos de tabela de símbolos sempre a mesma – LVerde, LAmar e LEnc. Estes também dispõem de um sensor de presença dP, que na generalidade dos casos é indutivo.
Além dos painéis, dispõe por bancada de uma caixa de botoneiras, com algumas diferenças de bancada para bancada, mas todas elas com o mesmo tipo de elementos e referência em tabela de símbolos.
Estas caixas de Inputs, elementos de entrada no autómato, dispõem de um botão do tipo START/STOP, de posição fixa, e dois botões do tipo pulso, o verde e o encarnado (referidos na tabela de símbolos como Start, PVerde e
José Luís Sequeira 20010/11
PEnc). Para além destas botoneiras simples, incorporam também um botão rotativo que visualmente dá a informação de 0 a 9. Este botão não é mais do que um interruptor rotativo de múltiplas posições (10), que tem quatro saídas, permitindo através das suas várias posições apresentar essas saídas a ON ou a OFF, num contexto perfeitamente binário (saída 0101 – corresponde ao decimal 5 = 0x23+1x22+0x21+1x20). Esta entrada do autómato é referido na tabela de símbolos como BCD0 (só é indicado o primeiro input mas pode usar em casos específicos os outros três – BCD1, BCD2 e BCD3). A sua utilização como um elemento inteiro, num programa do autómato, é feita da seguinte forma, quer seja em lista de instruções ou em blocos funcionais:
DIGI 1
BCD0
R 201
Como se tratam de quatro “bits” utiliza-se a instrução DIG seguida de I, pois é uma operação de input (entrada). O dígito (4 bits) a ler começa no input referido na tabela de símbolos como o BCD, sendo depois lidos internamente os 3 seguintes, e carregados no registo R201, ou noutro qualquer A mesma operação poderia ser feita com a instrução BITI, mas teria de colocar-se o valor 4 em vez de 1. Operações semelhantes existem mas de output – DIGO e BITO; para mais informações utilize o help do PG5, fazendo F1 com o cursor em cima da instrução sobre a qual pretende ajuda. Com o registo, neste exemplo R201, pode fazer o que quiser, nomeadamente fazer o seu COPY para um contador, não esquecendo que a instrução de COPY não depende do estado do acumulador, donde é sempre realizada, o que quer dizer que terá de ter alguns cuidados, como por exemplo colocá-la num Program Block chamado condicionalmente. No caso da utilização em blocos funcionais a ligação de Out poderá logo ser conectada com um contador.
Depois de descritos estes elementos base por bancada, dispõe ainda de tapetes rolantes que permitem simular alguns procedimentos industriais.

José Luís Sequeira 20010/11
Este sistema é composto por uma cinta transportadora e por dois sensores fotoeléctricos em cada uma das extremidades. A sua utilização é muito simples, precisando apenas da especificação da direcção do movimento e da activação do movimento. Assim segundo a tabela de símbolos dispõem da saída TapeteDirec para definir a direcção e de TapeteOnOff para o colocar em movimento. Relativamente aos sensores instalados, o da esquerda é referido como sendo TapeteCesq e o da direita TapeteCdir. Quando não estiver a ser usado o tapete poderá usar estes sensores como normais sensores de presença. De notar que não devem ocorrer mudanças bruscas de direcção no tapete para não danificar os motores, devendo caso necessite de o fazer, de introduzir um temporizador, com um pequeno tempo, para o efeito.
Associado ao tapete rolante existe uma webcam que permite fazer alguns exercícios no domínio da visão computacional. Concretamente tem actualmente ao seu dispor dois softwares: Interface SAIA–Contagem e Interface SAIA–Cor, que lhe permitem contar pontos e identificar a cor numa imagem.
Interface SAIA–Contagem
Ao executar esse software encontrará uma janela com o seguinte aspecto:

José Luís Sequeira 20010/11
Numa operação típica de utilização deste software deverá primeiro lançar o seu projecto PG5. Para depois estabelecer a ligação entre esta aplicação e o autómato basta ir ao menu PCD e fazer “Ligar PCD”.
onde depois lhe aparece a seguinte janela, onde deverá fazer OK.
José Luís Sequeira 20010/11
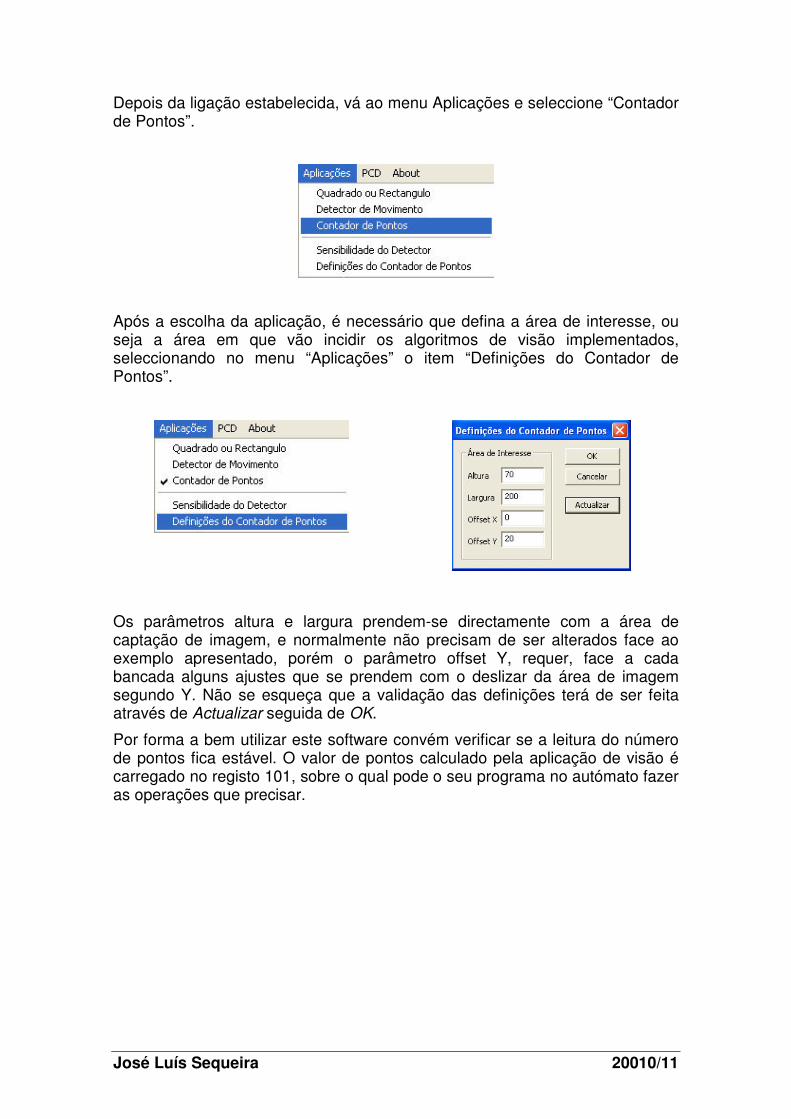
Depois da ligação estabelecida, vá ao menu Aplicações e seleccione “Contador de Pontos”.
Após a escolha da aplicação, é necessário que defina a área de interesse, ou seja a área em que vão incidir os algoritmos de visão implementados, seleccionando no menu “Aplicações” o item “Definições do Contador de Pontos”.
Os parâmetros altura e largura prendem-se directamente com a área de captação de imagem, e normalmente não precisam de ser alterados face ao exemplo apresentado, porém o parâmetro offset Y, requer, face a cada bancada alguns ajustes que se prendem com o deslizar da área de imagem segundo Y. Não se esqueça que a validação das definições terá de ser feita através de Actualizar seguida de OK.
Por forma a bem utilizar este software convém verificar se a leitura do número de pontos fica estável. O valor de pontos calculado pela aplicação de visão é carregado no registo 101, sobre o qual pode o seu programa no autómato fazer as operações que precisar.

José Luís Sequeira 20010/11
Interface SAIA–Cor
Ao executar esse software encontrará uma janela com o seguinte aspecto:
José Luís Sequeira 20010/11
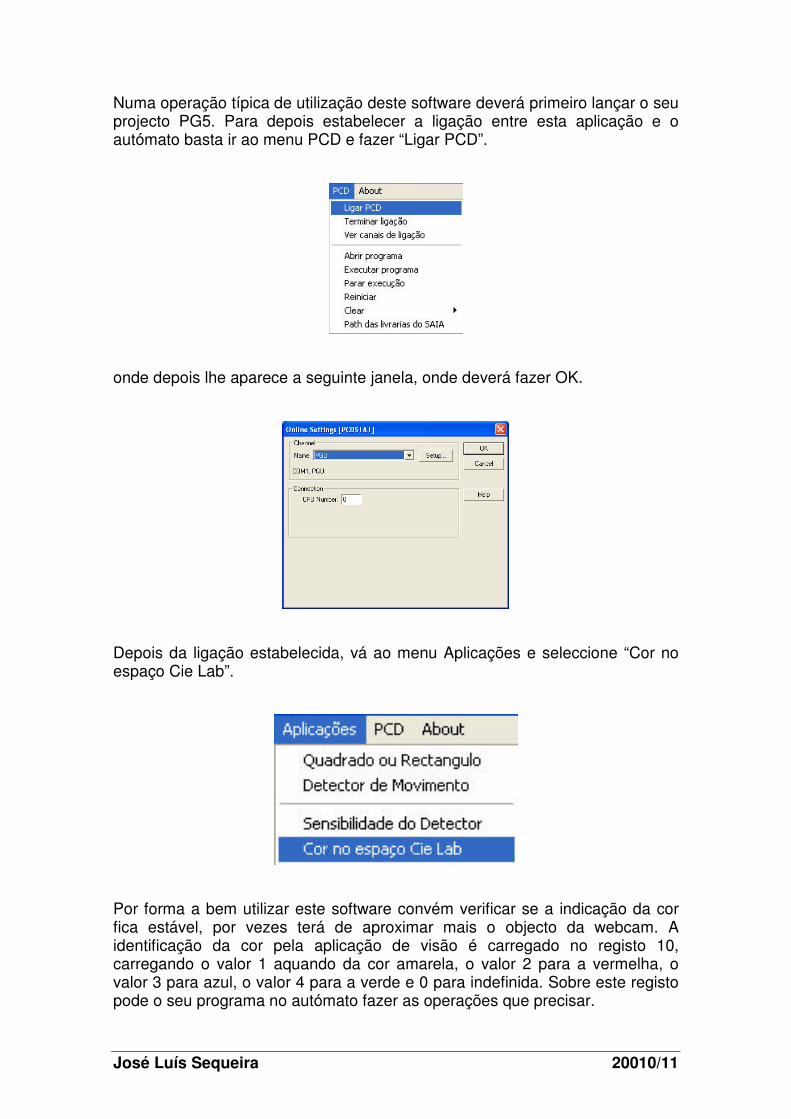
Numa operação típica de utilização deste software deverá primeiro lançar o seu projecto PG5. Para depois estabelecer a ligação entre esta aplicação e o autómato basta ir ao menu PCD e fazer “Ligar PCD”.
onde depois lhe aparece a seguinte janela, onde deverá fazer OK.
Depois da ligação estabelecida, vá ao menu Aplicações e seleccione “Cor no espaço Cie Lab”.
Por forma a bem utilizar este software convém verificar se a indicação da cor fica estável, por vezes terá de aproximar mais o objecto da webcam. A identificação da cor pela aplicação de visão é carregado no registo 10, carregando o valor 1 aquando da cor amarela, o valor 2 para a vermelha, o valor 3 para azul, o valor 4 para a verde e 0 para indefinida. Sobre este registo pode o seu programa no autómato fazer as operações que precisar.

José Luís Sequeira 20010/11
Em projectos em que precise de mais entradas, dispõe na bancada 3, 4, 5, 7, 8 e 9 de botões extra Uma outra solução extraordinária será a de usar a interface anteriormente referida para simular entradas usando flags, como se habituou a fazer no laboratório remoto.

José Luís Sequeira 20010/11
As referências destes botões extra estão nas tabelas de símbolos, sendo Botao0 … Botao7 (ou Botao1 … Botao8).
Para além dos elementos já descritos ainda existem nas bancadas 2, 7 e 8 umas caixas de semáforos que simulam um cruzamento de duas vias (ou eventualmente algo que a sua imaginação engendrou).
Com este equipamento pode efectuar diferentes tipos de saídas, estando previamente como outputs definidos na tabela de símbolos os seguintes: Sem1_3V (semáforo da via 1 e 3 a verde), Sem1_3A, Sem1_3E, Sem2_4V, Sem2_4A, Sem2_4E.
Numa perspectiva de efectuar vários tipos de automatização de sistemas, foram desenvolvidos três protótipos de elevadores de 4 pisos, que estão disponíveis nas bancadas 3, 4 e 5.

José Luís Sequeira 20010/11
Tipicamente a sua utilização prende-se com a actuação de duas saídas, à semelhança dos tapetes rolantes, uma para definir a direcção ElevDirec, outra para efectuar o movimento ElevOnOff, e depois de quatro entradas que dão informação, através de sensores indicando o piso em que se encontra o elevador: ElevadorS0, ElevadorS1, ElevadorS2, ElevadorS3.
Refira-se que o elevador no andar 0 não deve ser mandado descer e no andar 3 subir, pois não há nenhuma o motor por protecção pára e terá de ser retirado do local manualmente.
Tem ainda à sua disposição no dispositivo Elevador um conjunto de quatro pulsadores que supostamente poderão simular a chamada, interior ou exterior, do elevador, assim dispõe de: ElevadorP0, ElevadorP1, ElevadorP2, ElevadorP3.

José Luís Sequeira 20010/11
Por fim, em termos dos equipamentos disponíveis no Laboratório de Automação Industrial, existe a bancada Festo associada ao autómato da bancada 9. Esta unidade permite uma grande variedade de realizações no domínio da automação.
Podemos dividi-la em duas partes, a mesa e o painel de controlo.
Botão Stop
Chave
LED Q1, Q2
Botão / Led Start Botão / Led Reset

José Luís Sequeira 20010/11
Relativamente à mesa dispõe fundamentalmente de cinco elementos: o disco rotativo, o elemento detector de peça presente, o módulo selector de peças, o sistema de acabamento superficial – a broca, e o removedor de peças.
A operação com este equipamento merece uma análise cuidada da tabela de símbolos e de informação acessória também disponibilizada. Entretanto para uma percepção mais imediata são mapeados as entradas e saídas (inputs e outputs) da mesa assim como as entradas e saídas do painel de controlo.

José Luís Sequeira 20010/11
Laboratório Remoto
Toda a documentação necessária encontra-se na página alternativa à página da disciplina no Fénix.
http://web.ist.utl.pt/ist11390/aind.htm
Nota: Esta sintetização de informação sobre boas práticas e utilização dos equipamentos por bancada, dos laboratórios de Automação Industrial, do Departamento de Engenharia Mecânica, contém alguma informação retirada do livro da disciplina, “Técnicas de Automação” , Pinto, J. R. Caldas.