BLOOQQUUEE TTTEEMMAATIICCOO NN°°...
19
1 E. E. T. P. Nº 466 BLOQUE TEMATICO N° 6 : Cuerpos vinculados y Diagramas de Esfuerzos Internos Autor: Ing. Ricardo Pérez Sottile 6. 1- CONSIDERACIONES Elemento estructural: es un cuerpo que soporta y transmite solicitaciones, como por ejemplo las losas, columna, vigas, armadura, bielas, etc. Los elementos estructurales deben estar en equilibrio, por esto es necesario vincular el cuerpo libre, a tierra o a otro cuerpo rígido. Estos cuerpos se denominan vinculados. Chapa: es un cuerpo rígido, plano de forma indefinida, que representa al elemento estructural. La chapa queda determinada en su plano por la posición de dos de sus puntos. Ejemplo: una losa. Barra: es un cuerpo que posee dos dimensiones pequeñas en comparación a la tercera. Puede ser de sección transversal constante y de eje rectilíneo, la línea que une los centros de gravedad de las secciones transversales, se denomina eje de la barra. Ejemplo. Una viga o una columna. Bloques: es un cuerpo que posee tres dimensiones similares, como por ejemplo una base de Hormigón. Estructuras planas: son las que tienen un plano de simetría, en el cual se considera actúan las cargas ( Figura 6-1 a) Grados de libertad: son las posibilidades de movimiento que un elemento posee. Es decir, el número de coorde- nadas libres en un sistema dado. Una partícula que se desplaza sobre una línea, tiene un grado de libertad. Se ubica en cada momento por una coordenada libre. Una partícula que se mueve en un plano tiene dos grados de libertad, se ubica en cada instante por dos coorde- nadas libres como muestra la Figura 6–1 b. Una partícula que se mueve en el espacio posee tres grados de libertad. Se ubica en cada instante por tres coor- denadas libres. Figura 6-1 6.2- GRADOS DE LIBERTAD DE UNA CHAPA EN EL PLANO La chapa queda definida por las partículas A y B. Cada partícula independientemente tiene dos grados de libertad. Como ambas partículas se hallan impuestas de la condición de rigidez (distancia d invariable), solo hace falta fijar una coordenada de la partícula B pues la otra resulta determinada por la condición de rigidez (Figura 6-2 a) Se fija el punto B, fijando sus coordenadas x B e y B. La chapa puede girar alrededor de B (Figura 6- 2 b) Si se impone la condición de rigidez que la abcisa del punto A sea constante, la chapa queda fija. Para ubicar una chapa que se desplaza en el plano, es necesario fijar tres coordenadas (Figura 6-2 c) Una chapa en el plano posee tres grados de libertad. Tiene tres coordenados libres. Fuerzas activas Fuerzas reactivas A x y y x Fuerzas Vínculo a) b)
Transcript of BLOOQQUUEE TTTEEMMAATIICCOO NN°°...

1
E. E. T. P. Nº 466
BBLLOOQQUUEE TTEEMMAATTIICCOO NN°° 66:: CCuueerrppooss vviinnccuullaaddooss
yy DDiiaaggrraammaass ddee EEssffuueerrzzooss IInntteerrnnooss Autor: Ing. Ricardo Pérez Sottile
6. 1- CONSIDERACIONES
Elemento estructural: es un cuerpo que soporta y transmite solicitaciones, como por ejemplo las losas, columna, vigas, armadura, bielas, etc.
Los elementos estructurales deben estar en equilibrio, por esto es necesario vincular el cuerpo libre, a tierra o a otro cuerpo rígido. Estos cuerpos se denominan vinculados.
Chapa: es un cuerpo rígido, plano de forma indefinida, que representa al elemento estructural. La chapa queda determinada en su plano por la posición de dos de sus puntos. Ejemplo: una losa.
Barra: es un cuerpo que posee dos dimensiones pequeñas en comparación a la tercera. Puede ser de sección transversal constante y de eje rectilíneo, la línea que une los centros de gravedad de las secciones transversales, se denomina eje de la barra. Ejemplo. Una viga o una columna.
Bloques: es un cuerpo que posee tres dimensiones similares, como por ejemplo una base de Hormigón.
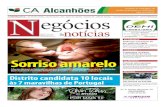
Estructuras planas: son las que tienen un plano de simetría, en el cual se considera actúan las cargas (Figura 6-1 a)
Grados de libertad: son las posibilidades de movimiento que un elemento posee. Es decir, el número de coorde-nadas libres en un sistema dado. Una partícula que se desplaza sobre una línea, tiene un grado de libertad. Se ubica en cada momento por una coordenada libre. Una partícula que se mueve en un plano tiene dos grados de libertad, se ubica en cada instante por dos coorde-nadas libres como muestra la Figura 6–1 b. Una partícula que se mueve en el espacio posee tres grados de libertad. Se ubica en cada instante por tres coor-denadas libres.
Figura 6-1
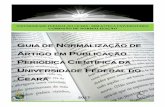
6.2- GRADOS DE LIBERTAD DE UNA CHAPA EN EL PLANO La chapa queda definida por las partículas A y B. Cada partícula independientemente tiene dos grados de libertad. Como ambas partículas se hallan impuestas de la condición de rigidez (distancia d invariable), solo hace falta fijar una coordenada de la partícula B pues la otra resulta determinada por la condición de rigidez (Figura 6-2 a) Se fija el punto B, fijando sus coordenadas xB e yB. La chapa puede girar alrededor de B (Figura 6- 2 b) Si se impone la condición de rigidez que la abcisa del punto A sea constante, la chapa queda fija. Para ubicar una chapa que se desplaza en el plano, es necesario fijar tres coordenadas (Figura 6-2 c) Una chapa en el plano posee tres grados de libertad. Tiene tres coordenados libres.
Fuerzas activas
Fuerzas reactivas
A x
y
y
x
B)
Fuerzas
Vínculo
a) b)

2
E. E. T. P. Nº 466
a) b) c)
Figura 6-2
y
yA
y y
x x x
yB
xB xA
d
A
B
A
B
d
xB= cte.
yB = cte.
xB= cte.
xA= cte.
yB = cte.
d
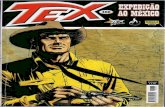
6. 3- VINCULOS Es todo lo que elimina la posibilidades de movimiento, lo hace introduciendo sobre el cuerpo fuerzas que se llaman reacciones si el vinculo es a parte fija (por ejemplo a tierra) o interacciones si se relaciona a otro elemento estructural. El vínculo elemental es el apoyo simple o contacto entre dos cuerpos (Figura 6- 3 a) Convenimos estudiar vínculos ideales, es decir, sin rozamientos, por lo tanto las interacciones (las interacciones son las fuerzas de igual intensidad y sentido contrario) son perpendiculares a la superficie de contacto, como muestra la Figura 6- 3 b.
Los vínculos se materializan por los denominados apoyos Los movimientos en las estructuras son pequeños, infinitésimos, magnitudes que no pueden trazarse en las escalas de dibujo en las que se representan las estructuras.
6.4- TIPOS DE VINCULOS 6.4-1- VINCULOS EXTERNOS
a) Apoyo móvil, simple o de primera especie
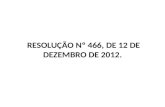
Restringe un grado de libertad de la chapa. La chapa puede desplazarse en la dirección del plano de deslizamiento y rotar alre-dedor del punto A (Figura 6-4) En la Figura 6-5 se pueden observar las formas de materializar los apoyos simples.
A
Figura 6-4
a) soporte de bolas b) de rodillo c) de rodillos d) cable – cadena e) biela y zapata
Figura 6-5
a) b)
Figura 6-3

3
E. E. T. P. Nº 466
Figura 6-7 A
En la Figura 6-6 se observa como se puede simbolizar el apoyo móvil.
b) Apoyo fijo o de segunda especie Restringe dos grados de libertad de la chapa. La chapa puede girar alrededor de A (Figura 6-7). Estos
vínculos son también llamados articulaciones
En la Figura 6-8 se pueden observar las formas de materializar los apoyos fijos. En la Figura 6-9 se observa como se puede simbolizar el apoyo fijo.
c) Empotramiento o vínculo de tercera especie
Restringe tres grados de libertad de la chapa en el plano (Figura 6-10). Equivale a vincular la chapa con tres apoyos simples En la Figura 6-11 se puede observar la justificación de la inmovilidad
En la Figura 6-12 se observa como se puede simbolizar el empotramiento.
Figura 6-9
Figura 6-10
Figura 6-11 Figura 6-12
Figura 6-6
Soportes constituidos por dos bielas Soporte de zapata
Figura 6-8

4
E. E. T. P. Nº 466
6.4-2- VINCULACION DE UNA CHAPA EN SU PLANO
Para fijar una chapa en el plano, será necesario vincularla de una de las formas que se indica en la Figura 6-13, de acuerdo al grado de libertad que cada tipo de apoyo restringe.
Los vínculos deben disponerse de manera que no den lugar a una configuración crítica, es decir, con vínculos aparentes. Esto ocurre cuando los vínculos son suficientes en número pero permiten movimiento. La Figura 6-14 muestra ejemplos de configuraciones críticas. Cuando las chapas están relacionadas a la parte fija con sus vínculos necesarios, dispuestos sin configurar formas críticas, vale decir sin posibilidad de movimientos, se dice que el sistema es Isostático o estáticamente determinado. Si la chapa posee más vínculos que los necesarios, el sistema es Hiperestático. Si la chapa posee menos vínculos que los necesarios, el sistema es Hipostático o inestable. 8 4-3- VINCULOS INTERNOS
Una articulación que vincula por ejemplo dos chapas, constituye un vínculo interno. Esta unión limita la posibilidad de movimiento y se puede realizar por medio de un perno o un cordón de soldadura.
8.5- REACCIONES Las fuerzas de los vínculos externos sobre las chapas se denominan reacciones. Las reacciones equilibran el efecto del sistema de fuerzas que actúan en la chapa. Los apoyos condicionan las reacciones. En los apoyos simples, la dirección de la recta de acción de la fuerza reactiva es normal al plano del desplazamiento (Figura 6-15 a) En los apoyos fijos, la recta de acción de la reacción puede tener cualquier dirección, pero siempre pasa por el punto de articulación y este es un punto inmóvil (Figura 6–15 b) En los empotramientos, la recta de acción puede tomar cualquier dirección (pasa por el centro de gravedad de la sección empotrada) y aparece además el par de empotramiento MA en la Figura 6-15 c.
un apoyo de primera especie y uno de segunda especie
tres apoyos de primera especie
Figura 6-13
un apoyo de tercera especie:
un empotramiento segunda especie
a) La chapa puede trasladarse horizontalmente
Figura 6-14
b) Esta chapa gira alrededor de A.
c) La chapa puede girar alrededor de O.
A B C A B A B C
O

5
E. E. T. P. Nº 466
6.5-1- DIAGRAMA DE CUERPO LIBRE
Es un esquema de un cuerpo o elemento estructural o parte de éste, en donde se indican las solicitaciones que actúan sobre él. Las solicitaciones pueden ser fuerzas externas (activas, reactivas, interacciones) o fuerzas internas (cuando se tome una parte del elemento). Si el cuerpo está en equilibrio, las solicitaciones deben constituir un sistema en equilibrio. Tanto las fuerzas externas del conjunto (chapas I y II ) como las de cada chapa considerado aisladamente, deben constituir un sistema en equilibrio. En la Figura 6-16 es un ejemplo de dos chapas articuladas y se trazan los diagramas de cuerpo libre de cada chapa.
a) b) c)
Figura 6-15
F1 F2 F1 F2 F1 F2
RA RA
RA
A A
A
MA
Biela (Vínculo externo)
Articulación (Vínculo interno)
Biela (Vínculo externo)
Articulación (Vínculo externo)
B
A
D
C F1
F2
F3
II
I
D.C. L. I: D. C. L. II:
RA?
RB?
F1
F2
A II-I
F3
A I-II
RC?
Figura 6-16

6
E. E. T. P. Nº 466
a) b) c)
Figura 6-18
a b
F
l
B A
D. C. L. I : (léase, diagrama de cuerpo libre de la chapa I) y AI-II y AII-I son interacciones
8.5-2- CUERPOS VINCULADOS ISOSTATICAMENTE BAJO LA ACCION DE CARGAS ACTIVAS Y REACTIVAS
Una chapa en el plano posee tres grados de libertad. Se inmoviliza aplicando tres vínculos. Las incógnitas son las acciones ejercidas por estos vínculos sobre la chapa. El sistema de fuerzas aplicadas (activas) y las fuerzas reactivas que se desarrollan a través de los vínculos, debe constituir un sistema en equilibrio. 8.5-3- CALCULO DE LAS REACCIONES Para un sistema de fuerzas cualesquiera (caso más general) se pueden plantear tres ecuaciones de equilibrio de acuerdo a lo visto en el Bloque Temático Nº 4:
Fx = 0 Fx = 0 MFA
= 0
Fy = 0 MFA
= 0 MFB
= 0
MFA
= 0 MFB
= 0 MFC
= 0
Se tienen tres ecuaciones y tres incógnitas.
El sistema de fuerzas activas (F1, F2, F3 y F4) y las fuerzas reactivas RA, RB y RC que se desarrollan a través de los
vínculos, debe constituir un sistema en equilibrio. Para calcular las reacciones elegiremos las ecuaciones b), pues resulta más facil su resolución. Además se deberá verificar el resultado obtenido, en este caso con la siguiente ecuación:
Fy = 0 8.5-4- EJEMPLO DE CALCULO DE REACCIONES
Calcular las reacciones de la viga de la Figura 6-18
A
F1
B
F2
F3
C
F4
RB
RA
F1
RC
F2 F3
F4
Figura 6-17
RA, RB, RC:
(Reacciones) 3 Incógnitas
F1, F2, F3, F4:
Sistemas de Fuerzas Cualesquiera

7
E. E. T. P. Nº 466
Calculamos las proyecciones de la fuerza P sobre los ejes “X” e “Y”
Donde Px = P. cos
Py = P. sen
Luego representamos como muestra la Figura 6-19, las fuerzas proyectadas y las incógnitas:
En el Apoyo Fijo A: RAY y RAX
En el Apoyo Móvil B: RB
Resolveremos el problema aplicando las ecuaciones b)
MFA
= 0 MF
B = 0
Fx = 0
6.6- CARGA DISTRIBUIDA Hasta ahora hemos considerado que las fuerzas actuaban concentrando su intensidad en un solo punto. En realidad todas las cargas se transmiten a través de superficies de contacto, si esta superficie es pequeña se la considera como concentrada ya que esta aproximación no provoca errores importantes en el cálculo. Cuando la superficie de contacto sea mayor las vamos a considerar distribuidas y tendremos lo que llamamos carga repartida. Estas cargas repartidas se representan con diagramas, pudiendo ser de un valor constante (Figura 6-20 a), repartidas en forma triangular (Figura 6.20 b) y repartidas en forma trapecial (Figura 9-20 c). En el primer caso se dice que es uniformemente repartida. En vigas serán cargas repartidas por unidad de longitud.
Figura 8- 19
RAX
RAY RB
FY
FX
A
B
RB =
FY . a
l RAY =
FY . b
l
MFB
= 0
RAY . l - FY . b = 0
MFA
= 0
FY . a – RB . l = 0
Fx = 0
RAX - FX = 0
RAX = FX
Verificación:
FY = 0
RAY - FY + RB = 0
a) b) c)
Figura 6 - 20

8
E. E. T. P. Nº 466
Plano normal o transversal al eje de
la estructura
Sección normal a la estructura
eje longitudinal
Figura 6-23
6.6-1- EJEMPLO DE CALCULO DE REACCIONES
Calcular las reacciones de la viga de la Figura 6-21:
Representamos como muestra la Figura 6-22, la fuerza resultante (P) que reemplaza a la carga distribuida y las incógnitas:
En el Apoyo Fijo A: RA
En el Apoyo Móvil B: RB
Resolveremos el problema aplicando las ecuaciones:
MFA
= 0 MF
B = 0
Fx = 0
6. 7- ESTRUCTURAS LINEALES PLANAS
q
l
A B
Figura 6 - 21
Figura 6 - 22
P = q . l
l/2 l/2
l RA RB
Verificación:
FY = 0
RA - P + RB = 0
RA + RB = q. l
MFB = 0
RAY . l - P . l/2= 0
MFA = 0
P .l/2 - RB . l = 0
RB =
P . l/2
l
RB =
q . l
2
RAY =
P . l/2
l
RAY =
q . l
2

9
E. E. T. P. Nº 466
F2
F1 F3
F4
A B
s
s
eje
I II
Figura 6-25
Son aquellas que tienen dos dimensiones relativamente pequeñas (la de la sección normal o transversal) en relación con la tercera (longitudinal). Puede considerarse generada por la sección que se desplaza con su centro de gravedad a lo largo de una línea denominada eje, manteniéndose normal a dicho eje en toda la longitud (Figura 6-23). Las secciones se toman normales al eje del elemento estructural
6.8- ESFUERZOS INTERNOS 6.8-1 FUERZAS INTERNAS
Las fuerzas internas son acciones mutuas entre partículas. Constituyen una interacción, es decir una acción y una reacción: dos fuerzas internas (Figura 6-24)
6.8-2 ESFUERZO INTERNO TOTAL EN UNA SECCIÓN
Es la resultante de las fuerzas internas que se desarrollan a través de todas las partículas cuyas caras componen la sección.
6.8-3- ESFUERZOS INTERNOS EN LAS ESTRUCTURAS LINEALES PLANAS
Suponemos una estructura lineal plana en equilibrio, sometida a la acción de un sistema de fuerzas exteriores, que le practicamos una sección normal (s-s) al eje longitudinal (Figura 6-25)
Si cortamos y separmos en dos partes (Figura 6-26), cada una de estas partes no se mantendrá en equilibrio, a
menos que apliquemos en la sección s-s la acción ó acciones que la otra parte suprimida le transmita (Figura 6-27).
AII-I: (acción de la parte II sobre la parte I) es la resultante de las fuerzas interiores que actúan en la parte I
Figura 6-24
1
2
f 1-2
f 2-1
F1 F2 F3
F4 F1 F2 F3
F4
I II I II
AII-I
AI-II s s
s s s s
s s
RA1 RA2
RB
Figura 6-26 Figura 6-27

10
E. E. T. P. Nº 466
AI-II: (acción de la parte I sobre la parte II) es la resultante de las fuerzas interiores que actúan en la parte II.
Como el sistema estaba en equilibrio AII-I es igual a AI-II ya que debe permanecer en equilibrio, si planteamos
los D. C. L. (Diagramas de Cuerpos Libres) de acuerdo a la Figura 6-28:
Reemplazando las fuerzas activas y reactivas por las resultantes RI y RII (Figura 6-29)
Significa que la resultante de las fuerzas externas que actúan a un lado de la sección (por ejemplo R I del lado izquierdo) equivale a la acción de las fuerzas internas dela parte I sobre la parte II. Si trasladamos la acción de AII-I al centro de gravedad de la sección (G) como muestra la Figura 6-30.
AII-I = AI-II
AII-I = RI
RI = AI-II
AI-II = AII-I
AI-II = RII
RII = AI-II
I II
s
AII-I
G G
s s
s
AI-II RI
RII
Figura 6-29
F1
F2 F3
F4
RA RB
AII-I
AI-II
s
s s
s
G G
I II
Figura 6-28

11
E. E. T. P. Nº 466
Obtenemos en la Figura 6-31
AII-I actuando en el baricentro de la sección G y la cupla MII-I = AII-I . dII-I AI-II actuando en el baricentro de la sección G y la cupla MI-II = AI-II . dI-II
Si proyectamos las acciones AII-I y AI-II en el baricentro de la sección (G) sobre el eje de la estructura y sobre el plano de la sección tendremos en la Figura 6.32:
s
s s
s
AII-I
I
G
Figura 6-30
dII-I
II
G
AII-I
AII-I
RI
AI-II
AI-II
AI-II
RII
dI-II
I II
Figura 6-31
I II I II
AII-I
MII-I
MI-II
AI-II
RI
RII
G G
s
s s
s
Figura 6-32
RI
RII
QII-I
NI-II NII-I
QI-II
MII-I
MI-II I II
G G
s
s s
s

12
E. E. T. P. Nº 466
Las componentes de las fuerzas internas desarrollan en la sección los esfuerzos internos que son: Una componente formada por las dos cuplas MI-II y MII-I llamada Momento Flector. Una componente formada por dos fuerzas internas QI-II y QII-I llamada Esfuerzo de Corte.
Una componente formada por dos fuerzas internas NI-II y NII-I llamada Esfuerzo Normal.
Definiciones ampliadas:
MOMENTO FLECTOR: en una sección, es la cupla que se introduce al trasladar la resultante de las fuerzas internas al baricentro de la misma.
ESFUERZO DE CORTE: en una sección, es la proyección de la resultante de las fuerzas internas contenida en el plano de la sección y aplicada en su baricentro.
ESFUERZO NORMAL: en una sección, es la proyección de la resultante de las fuerzas internas sobre el eje del elemento estructural (perpendicular a la sección) y aplicada en su baricentro.
6.9- CALCULO DE LOS ESFUERZOS INTERNOS EN FUNCION DE LA FUERZAS EXTERNAS
Mediante las componentes MI-II, QI-II y NI-II o sus equivalentes MII-I, QII-I y NII-I aplicando el teorema de las proyecciones, teniendo en cuenta que:
AI-II = RI AII-I = RII Podemos obtener los esfuerzos internos en la sección solo con las fuerzas externas a la izquierda o con las fuerzas externas a la derecha de la sección. Si calculamos con las fuerzas de la izquierda podemos verificar con las de la derecha.
MOMENTO FLECTOR (M):
M s-s (IZQ) = MII-I = AII-I . dAII-I = RI . dRI = RA . dRA + F1 . dF1 + F2 . dF2
M s-s (DER) = MI-II = AI-II . dAII-I = RII . dRII = RB . dRB + F3 . dF3 + F4 . dF4
ESFUERZO DE CORTE (Q):
Q s-s (IZQ) = QII-I = Proy. RI/s = Proy. RA/s + Proy. F1/s + Proy. F2 /s
Q s-s (DER) = QI-II = Proy. RII/s = Proy. RB/s + Proy. F3/s + Proy. F4 /s
ESFUERZO NORMAL (N): N s-s (IZQ) = NII-I = Proy. RI/eje = Proy. RA/eje + Proy. F1/eje + Proy. F2 /eje N s-s (DER) = NI-II = Proy. RII/eje = Proy. RB/eje + Proy. F3/eje + Proy. F4 /eje
6.10- SIGNOS DE LOS ESFUERZOS INTERNOS
Se establecen en función del efecto físico que producen.
6.10-1 MOMENTO FLECTOR
La cupla flectora introduce el efecto de un giro de la sección alrededor del eje de la estructura. Existen fibras (fibra: elemento longitudinal paralelo al eje y de sección infinitesimal) extendidas y comprimidas. Por ejemplo para un elemento estructural de eje horizontal (Figura 6-33):
Momento Flector a la izquierda de s-s
Momento Flector a la derecha de s-s
Esfuerzo de Corte a la izquierda de s-s
Esfuerzo de Corte a la derecha de s-s
Esfuerzo Normal a la izquierda de s-s
Esfuerzo Normal a la derecha de s-s

13
E. E. T. P. Nº 466
6.10-2 ESFUERZO DE CORTE
El efecto es la de una separación transversal al eje de las partes de la estructura en la sección considerada (Figura 6-34)
Figura 6-34
6.10-3 ESFUERZO NORMAL
El efecto físico (Figura 6-35) es el de “acortar” (compresión) o “alargar” (tracción)
6.11- DIAGRAMAS DE ESFUERZOS INTERNOS
Los esfuerzos internos suelen indicarse por gráficas que representan los valores del M, Q y N indistinta-mente para todas las secciones. Se representan tomando ejes de referencia paralelos al eje de la estructura.
Las ordenadas medidas perpendicularmente al eje de referencia representan, de acuerdo a escalas con-venientemente adoptadas, los esfuerzos internos en cada sección de la estructura.
Para el Momento Flector, se dibuja el diagrama del lado de las fibras traccionadas. Se deben calcular los esfuerzos en todos los puntos críticos (apoyos, punto de aplicación de cargas y
cambio de sección o de curvatura)
6.11-1- DIAGRAMAS DE ESFUERZOS INTERNOS PARA CARGAS CONCENTRADAS
Para los Momentos Flectores la variación es lineal entre puntos críticos. Los esfuerzos de Corte y Normal se mantienen constantes entre los puntos críticos.
Tracción abajo Tracción arriba Figura 6-33
MII-I
MI-II
MI-II
MII-I
I I II II
QII-I
SIGNO SIGNO
I I II II
QII-I
QI-II
QI-II
NII-I NII-I
NI-II NI-II I I II II
COMPRESIÓN SIGNO (-)
TRACCION SIGNO (+)
Figura 6-35

14
E. E. T. P. Nº 466
FY
FX RAX
RAY RB
A 1 2
B a b
l
6.11-1-1- EJEMPLO DE CALCULO: Diagramas de esfuerzos internos de la viga de la Figura 6-35
Adoptar Escala de dibujo y representar la
viga Calcular las proyecciones de la Fuerza
según el eje de la viga (FX) y perpendicular al eje (Fy)
Fx = F . cos
Fy = F . sen
Aplicar las ecuaciones de equilibrio para determinar las reacciones (Figura 6-36)
MFA
= 0 se determina RB
MFB
= 0 se determina RAY
Fx = 0 se determina RAX
Y se verifica con Fy = 0
Calculo de los esfuerzos
B
F
A
a b
l
Figura 6-35
B
C
Figura 6-35
POR IZQUIERDA Esfuerzo Normal
NA = RAX
Esfuerzo Corte
QA = RAY
Momento Flector
MA = 0
POR DERECHA Esfuerzo Normal
NA = - FX = - RAX
Esfuerzo Corte
QA = RB - FY = - RAY
Momento Flector
MA = FY . a – RB . l = 0
PUNTO A:

15
E. E. T. P. Nº 466
POR IZQUIERDA Esfuerzo Normal
NB = RAX - FX= 0
Esfuerzo Corte
QB = RAY - FY = - RB
Momento Flector
MB = - FY . b + RA . l = 0
POR DERECHA Esfuerzo Normal
NB = 0
Esfuerzo Corte
QB = RB
Momento Flector
MB = 0
POR IZQUIERDA Esfuerzo Normal
NC = RAX
Esfuerzo Corte
QC = RAY
Momento Flector
MC = RA . a
PUNTO B:
PUNTO 1:
RAX
RAY
A
a
1
POR IZQUIERDA Esfuerzo Normal
NC = RAX - FX = 0
Esfuerzo Corte
QC = RAY - FY
Momento Flector
MC = RA . a
PUNTO 2:
POR DERECHA Esfuerzo Normal
NC = -FX
Esfuerzo Corte
QC = RB - FY = - RAY
Momento Flector
MC = - RB .b
PUNTO 1:
FY
FX RAX
RAY
2
2
a AA
FY
FX
1
B b
RB

16
E. E. T. P. Nº 466
F
a b
l
FX
Fy
A C
B
RB
RAy
RAX
N
MF
Q
Figura 6-36
Representación gráfica de los dia-gramas de esfuerzos internos en esca-las de Momento Flector, esfuerzo de Corte y Normal (Figura 6-36)
Si observamos los diagramas de esfuerzo
de Corte y Momento Flector, muestran que en el punto de aplicación de la carga concentrada F hay una brusca variación del esfuerzo cortante co-rrespondiente con ello hay también una modifica-ción brusca en la pendiente de la gráfica del Mo-mento Flector, donde cambia el signo del esfuerzo cortante el momento flector es máximo.
6.11-2- DIAGRAMAS DE ESFUERZOS INTERNOS PARA CARGAS DISTRIBUIDAS
Para los Momentos Flectores la variación es parabólica entre puntos críticos.
Los esfuerzos de Corte y Normal la variación es lineal entre puntos críticos. 6.11-2-1- EJEMPLO DE CALCULO: Diagramas de esfuerzos internos de la viga de la Figura 6-37
Adoptar Escala de dibujo y representar la viga
Aplicando las ecuaciones de equilibrio, obtenemos:
RA = RB =
q . l
2
POR DERECHA Esfuerzo Normal
NC = 0
Esfuerzo Corte
QC = RB
Momento Flector
MC = - RB .b
PUNTO 2:
RB
2
B b
FY
FX

17
E. E. T. P. Nº 466
Calculo de los esfuerzos Como no hay fuerzas que actúan sobre el
eje de la viga no tenemos diagrama de esfuerzo Normal.
POR IZQUIERDA Esfuerzo Corte
QC = RA - q . l = 0
2
Momento Flector
MC = RA . l - q . l . l. 2 2 4
= q . l2 - q . l
2 = q . l
2
4 8 8
POR DERECHA
Esfuerzo Corte
QC = RB - q . l = 0
2
Momento Flector
MC = - RB . l + q . l . l. 2 2 4 = - q . l
2 + q . l
2 = -q . l
2
4 8 8
PUNTO 1: (en el medio
de la luz de la viga)
POR IZQUIERDA Esfuerzo Corte
QA = RA
Momento Flector
MA = 0
POR DERECHA Esfuerzo Corte
QA = RB - q .l = - RA
Momento Flector
MA = q .l2 - RB . l = 0
2
POR IZQUIERDA Esfuerzo Corte
QB = RA - q . l = - RB
Momento Flector
MB = RA - q . l2
= 0 2
POR DERECHA Esfuerzo Corte
QB = RB
Momento Flector
MB = 0
PUNTO A:
PUNTO B:
l
q
A
Figura 6- 37
RA RB
B
PUNTO 1: (en el medio
de la luz de la viga)
l/2
q
A
RA
1
l /2
q
RB
1

18
E. E. T. P. Nº 466
Representación gráfica de los diagramas de esfuerzos internos en escalas de Momento Flector, esfuerzo de Corte (Figura 6-38)
6.11-2-2- TRAZADO DE LA PARÁBOLA
Como hemos visto el diagrama de Momento Flector resulta una parábola, a continuación desarrollare-mos los pasos para trazar esta parábola conociendo dos se sus tangentes y un punto de contacto (Figura 6-39)
Localizar el punto (M) que se encuentra en el medio del segmento AB.
Trazar una recta perpendicular al segmento AB por el punto M., marcar en ella los puntos P y Q de manera que los segmentos MP y PQ sean iguales a la longitud de la flecha de la parábola (f).
Unir los puntos A y B con el punto Q, quedan así determinadas dos tangentes.
Dividir los segmentos AQ y BQ en el mismo número de partes iguales y numerar a partir de Q en distinto sentido.
Dibujar los segmentos que unen puntos de igual numeración. Estos resultan tangentes a la parábola, formando su envolvente y quedando así representada la parábola.
q
l/2 l/2
l
RA RB
A
1
B
N
Q
MF
Figura 6-38
B
7
1
1
3
4
5
6
7
6
5
4
3
2
2 f =
M
Q
P
q . l2 8
7
Figura 6-39
A

19
E. E. T. P. Nº 466
6.11-3- DIAGRAMAS DE ESFUERZOS INTERNOS PARA CARGAS CONCENTRADAS Y DISTRIBUIDAS Trazado del diagrama de esfuerzo de Corte: En los tramos donde no se aplican cargas distribuidas el gráfico es un segmento paralelo al eje de referencia, por lo tanto es suficiente calcular el valor del esfuerzo de Corte en los puntos críticos. En los tramos donde se aplican cargas distribuidas, el esfuerzo de corte varía linealmente, es suficiente conocer los esfuerzos en las secciones inmediatas a la derecha y a la izquierda del comienzo y la finalización de dicha carga distribuida.
Trazado del diagrama de Momento Flector: Se deben calcular los esfuerzos solamente en los puntos de aplicación de cargas concentradas y en las secciones de comienzo y finalización de cargas distribuidas. Además se debe determinar la flecha para representar la parábola en cada tramo de carga distribuida. Uniendo los valores obtenidos mediante segmentos y arcos de parábolas se obtiene el diagrama definitivo. En la Figura 6-40 podemos observar un ejemplo:
P
q
A C D B
RA RB
N
Q
M F
Figura 6-40