Braço mecânico para manipulação de PCI voltado à...
15
Braço mecânico para manipulação de PCI voltado à aplicações de baixo custo Bernardo Farias Asmus Graduando em Mecatrônica Industrial Curso Superior de Tecnologia em Mecatrônica Industrial – Instituto Federal de Santa Catarina [email protected] Gregory Chagas da Costa Gomes Graduando em Mecatrônica Industrial Curso Superior de Tecnologia em Mecatrônica Industrial – Instituto Federal de Santa Catarina [email protected] Marcelo Grigollo Bagnatti Graduando em Mecatrônica Industrial Curso Superior de Tecnologia em Mecatrônica Industrial – Instituto Federal de Santa Catarina [email protected] Milena Won Dias Victorette Graduando em Mecatrônica Industrial Curso Superior de Tecnologia em Mecatrônica Industrial – Instituto Federal de Santa Catarina [email protected] Vítor Farias de Borba Graduando em Mecatrônica Industrial Curso Superior de Tecnologia em Mecatrônica Industrial – Instituto Federal de Santa Catarina [email protected] Resumo: Visando a agilidade e segurança do processo de manipulação de placas de circuito impresso, viu-se a possibilidade de utilização de um braço mecânico de baixo custo para atender a esta demanda. Peso, área de trabalho e facilidade de operação foram prioridades no desenvolvimento deste projeto. Utilizando materiais e ferramentas de software já disponíveis em ampla escala no mercado, foi fabricado um protótipo com cinco graus de liberdade na configuração TRR:RT seguindo a metodologia proposta por bibliografia especializada. Embora não tenha sido concluído o protótipo, cálculos e simulações comprovam a viabilidade do projeto. Palavras-chave: braço mecânico, PCI, robótica Abstract: Aiming the security and agility of the printed circuit board manipulation process, saw the possibility of using a low cost mechanical arm to attend this demand. Weight, work area and easy operation were priorities in the project’s development. Using materials and software already available in large scale in the labor market, was manufactured a prototype with five liberty degrees in the TRR:RT configuration following the proposed methodology by specialized bibliography. Although the prototype wasn’t finished, the project’s feasibility was proven by calculus and simulations. Key-words: mechanical arm, printed circuit board, robotics
Transcript of Braço mecânico para manipulação de PCI voltado à...

Braço mecânico para manipulação de PCI voltado à aplicações de baixo custo
Bernardo Farias Asmus Graduando em Mecatrônica Industrial
Curso Superior de Tecnologia em Mecatrônica Industrial – Instituto Federal de Santa Catarina [email protected]
Gregory Chagas da Costa Gomes
Graduando em Mecatrônica Industrial Curso Superior de Tecnologia em Mecatrônica Industrial – Instituto Federal de Santa Catarina
Marcelo Grigollo Bagnatti Graduando em Mecatrônica Industrial
Curso Superior de Tecnologia em Mecatrônica Industrial – Instituto Federal de Santa Catarina [email protected]
Milena Won Dias Victorette
Graduando em Mecatrônica Industrial Curso Superior de Tecnologia em Mecatrônica Industrial – Instituto Federal de Santa Catarina
Vítor Farias de Borba
Graduando em Mecatrônica Industrial Curso Superior de Tecnologia em Mecatrônica Industrial – Instituto Federal de Santa Catarina
Resumo: Visando a agilidade e segurança do processo de manipulação de placas de circuito impresso, viu-se a possibilidade de utilização de um braço mecânico de baixo custo para atender a esta demanda. Peso, área de trabalho e facilidade de operação foram prioridades no desenvolvimento deste projeto. Utilizando materiais e ferramentas de software já disponíveis em ampla escala no mercado, foi fabricado um protótipo com cinco graus de liberdade na configuração TRR:RT seguindo a metodologia proposta por bibliografia especializada. Embora não tenha sido concluído o protótipo, cálculos e simulações comprovam a viabilidade do projeto.
Palavras-chave: braço mecânico, PCI, robótica
Abstract: Aiming the security and agility of the printed circuit board manipulation process, saw the possibility of using a low cost mechanical arm to attend this demand. Weight, work area and easy operation were priorities in the project’s development. Using materials and software already available in large scale in the labor market, was manufactured a prototype with five liberty degrees in the TRR:RT configuration following the proposed methodology by specialized bibliography. Although the prototype wasn’t finished, the project’s feasibility was proven by calculus and simulations. Key-words: mechanical arm, printed circuit board, robotics
Introdução
Com o constante crescimento populacional e redução da vida útil dos materiais,
hoje em dia faz-se necessário uma produção de bens de consumo extremamente ágil
e independente de adversidades temporais.
Para garantir que os produtos cheguem ao maior número possível de clientes
nos mais diversos locais, a produção elevada junto a um sistema ágil, eficiente e
confiável é indispensável. Para garantir que estas metas sejam atendidas, a utilização
de braços robóticos e demais produtos mecatrônicos é necessária. Atribuindo custo e
não valor ao produto, o braço robótico vem para suprir estas necessidades podendo
ser construído para tarefas específicas, ele traz todas as especificações que a
produção em massa exige, trazendo assim um lucro significativo a médio e longo
prazo.
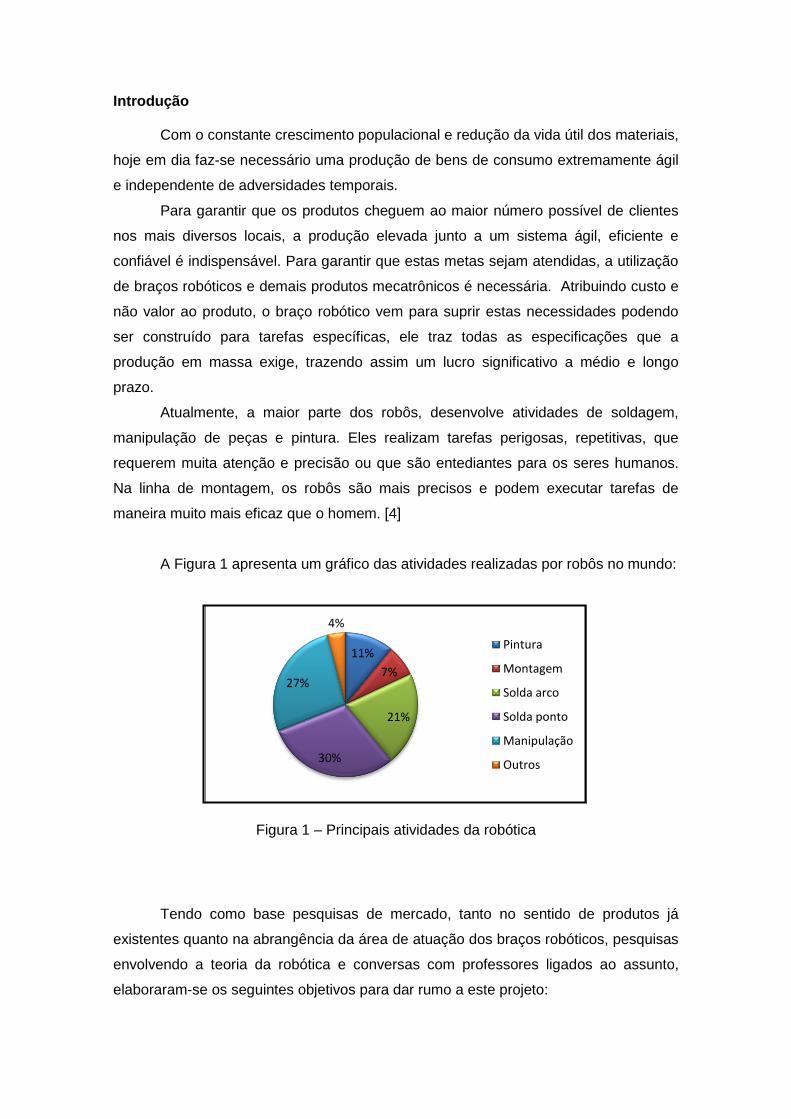
Atualmente, a maior parte dos robôs, desenvolve atividades de soldagem,
manipulação de peças e pintura. Eles realizam tarefas perigosas, repetitivas, que
requerem muita atenção e precisão ou que são entediantes para os seres humanos.
Na linha de montagem, os robôs são mais precisos e podem executar tarefas de
maneira muito mais eficaz que o homem. [4]
A Figura 1 apresenta um gráfico das atividades realizadas por robôs no mundo:
Figura 1 – Principais atividades da robótica
Tendo como base pesquisas de mercado, tanto no sentido de produtos já
existentes quanto na abrangência da área de atuação dos braços robóticos, pesquisas
envolvendo a teoria da robótica e conversas com professores ligados ao assunto,
elaboraram-se os seguintes objetivos para dar rumo a este projeto:
11%
7%
21%
30%
27%
4%
Pintura
Montagem
Solda arco
Solda ponto
Manipulação
Outros

1.1 Objetivo geral
Desenvolver o protótipo de um braço mecânico com a capacidade de
desenvolver com precisão, agilidade e segurança a tarefa de manipular placas de
circuito impresso.
1.2 Objetivos específicos
a) Desenvolver pesquisas sobre braços robóticos;
b) Adquirir conhecimentos na área de Sistemas Digitais;
c) Adquirir conhecimentos na área de Sistemas Mecânicos;
d) Adquirir conhecimentos na área de CAD;
e) Utilizar as ferramentas de Metodologia de Projeto para a realização deste;
f) Efetuar simulações mecânicas e digitais para um braço robótico;
g) Construção do protótipo;
h) Análise dos resultados obtidos.
2. Metodologia
Para o melhor desenvolvimento do projeto deste protótipo no sentido da
qualidade, agilidade e confiabilidade, foi utilizada como base a metodologia de projetos
exibida e detalhada no livro Projeto Integrado de Produtos [2], seguindo-se as etapas
de Projeto Informacional, Projeto Conceitual, Projeto Preliminar e Projeto Detalhado.
As duas principais concepções para o protótipo do braço que foram
desenvolvidas nas etapas de projeto Conceitual e Preliminar estão ilustradas abaixo
nas figuras 2(a) e 2(b).
Figura 2(a) – Concepção 1 Figura 2(b) – Concepção 2
3. O protótipo
A solução que melhor atende aos requisitos de cliente é a elaboração de um
robô articulado ou revoluto com 4 elos, 3 juntas rotativas, e 2 juntas torcionais sendo

de punho com dupla articulação (rolamento e arfagem), sendo assim a configuração
final do robô é TRR:RT, configuração que confere a ele 5 graus de liberdade.
Possui acionamento indireto e transmissão por polias e correias dentadas, exceto
nas juntas torcionais onde será utilizado acionamento direto [5], o controle será de
malha aberta utilizando passos controlados por um micro controlador de arquitetura
8051 e sensores fim de curso para determinação do arco de trabalho de cada elo.
3.1 Projeto mecânico
3.1.1 Dimensionamento dos motores
Para a movimentação do braço são utilizados motores de passo NEMA 23 e
NEMA 34 com flange, exceto para os movimentos da garra onde são utilizados
motores de passo de pequeno porte. Abaixo segue o esquema de torque que gerara
embasamento para definição dos motores:
Onde,
E1(distância eixo 1) = 0mm
m1 (peso motor 1) = 29,4N
B1 (distância da barra 1) = 200mm
E2 (distância eixo 2) = 400mm
m2 (peso motor 2) = 19,6N
B2 (distância barra 2) = 550mm
E3 (distância eixo 3) = 700mm
G (torque na garra) = 1176Nm
3.1.2 Dimensionamento dos eixos
Para o cálculo do diâmetro do primeiro eixo foi utilizado o método de sobreposição
de forças, além de um estudo de dinâmica aplicada sobre o mesmo nos momentos de
aceleração positiva e negativa do braço.
y
x
Figura 3 – Eixo2
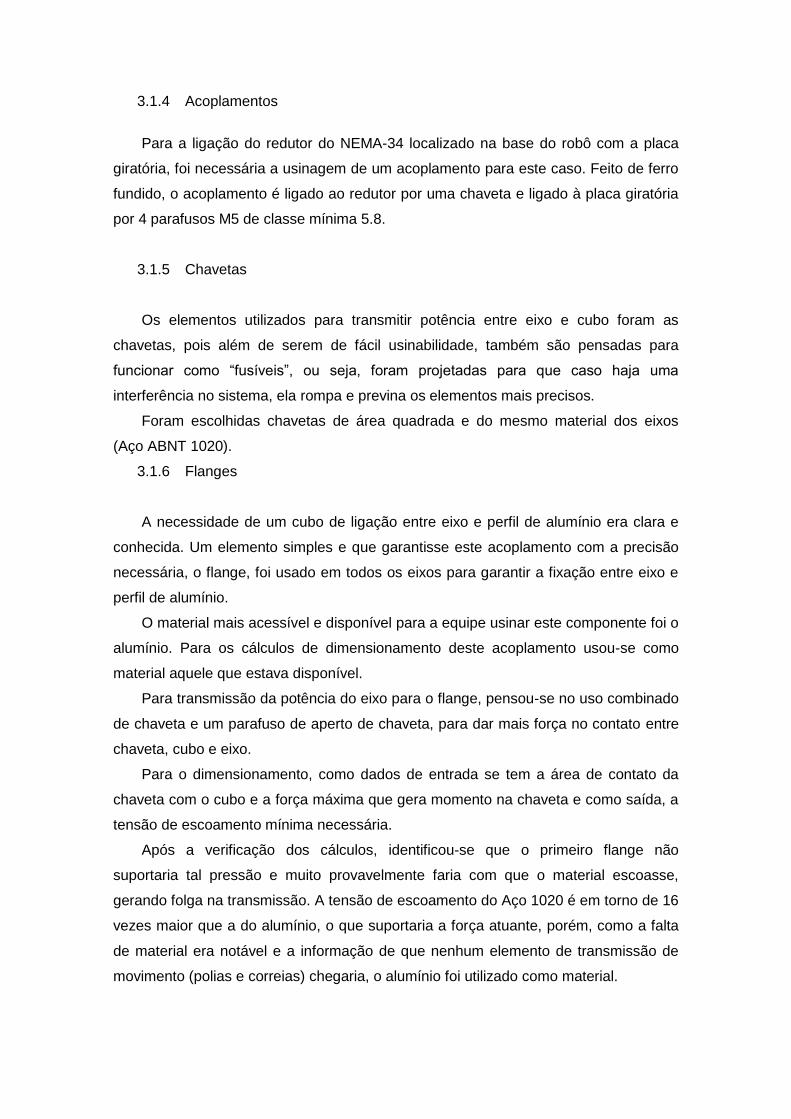
3.1.3 Sistema de Transmissão por polias e correias
Para dimensionar as polias e correias utilizou-se um software disponível no site
www.brecoflex.com, onde com as informações obtidas sobre torque em cada motor e
distância entre elos pode-se calcular, via este software, a largura necessária para as
correias e também ver os comprimentos catalogados de cada modelo de correia.
No projeto, serão usadas correias sincronizadoras modelo HTD5MM, que
possuem comprimentos maiores e são próprias para equipamentos com médio porte
onde o torque é considerado alto. Os diâmetros e larguras das correias vão depender
da transmissão em que serão submetidas, mas todas terão passo de 5mm. Na Figura
4, a seguir, podemos ver o software.
Figura 4 – BrecoFLEX software
3.1.4 Acoplamentos
Para a ligação do redutor do NEMA-34 localizado na base do robô com a placa
giratória, foi necessária a usinagem de um acoplamento para este caso. Feito de ferro
fundido, o acoplamento é ligado ao redutor por uma chaveta e ligado à placa giratória
por 4 parafusos M5 de classe mínima 5.8.
3.1.5 Chavetas
Os elementos utilizados para transmitir potência entre eixo e cubo foram as
chavetas, pois além de serem de fácil usinabilidade, também são pensadas para
funcionar como “fusíveis”, ou seja, foram projetadas para que caso haja uma
interferência no sistema, ela rompa e previna os elementos mais precisos.
Foram escolhidas chavetas de área quadrada e do mesmo material dos eixos
(Aço ABNT 1020).
3.1.6 Flanges
A necessidade de um cubo de ligação entre eixo e perfil de alumínio era clara e
conhecida. Um elemento simples e que garantisse este acoplamento com a precisão
necessária, o flange, foi usado em todos os eixos para garantir a fixação entre eixo e
perfil de alumínio.
O material mais acessível e disponível para a equipe usinar este componente foi o
alumínio. Para os cálculos de dimensionamento deste acoplamento usou-se como
material aquele que estava disponível.
Para transmissão da potência do eixo para o flange, pensou-se no uso combinado
de chaveta e um parafuso de aperto de chaveta, para dar mais força no contato entre
chaveta, cubo e eixo.
Para o dimensionamento, como dados de entrada se tem a área de contato da
chaveta com o cubo e a força máxima que gera momento na chaveta e como saída, a
tensão de escoamento mínima necessária.
Após a verificação dos cálculos, identificou-se que o primeiro flange não
suportaria tal pressão e muito provavelmente faria com que o material escoasse,
gerando folga na transmissão. A tensão de escoamento do Aço 1020 é em torno de 16
vezes maior que a do alumínio, o que suportaria a força atuante, porém, como a falta
de material era notável e a informação de que nenhum elemento de transmissão de
movimento (polias e correias) chegaria, o alumínio foi utilizado como material.
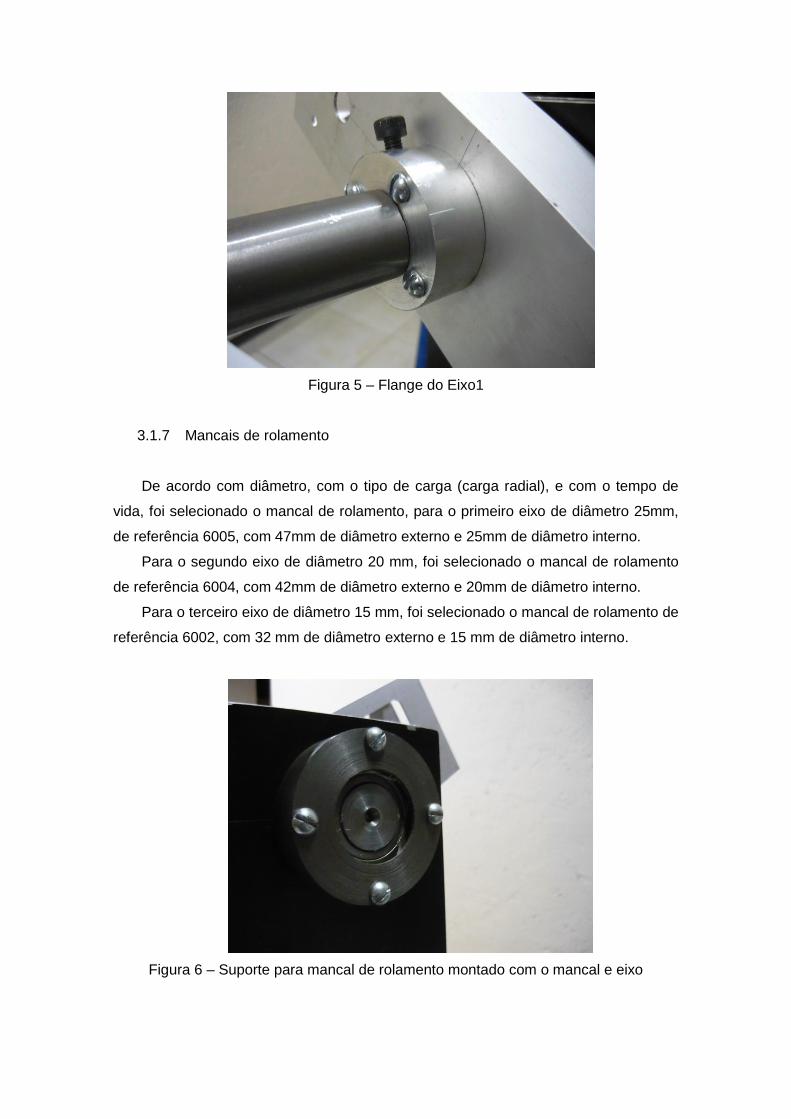
Figura 5 – Flange do Eixo1
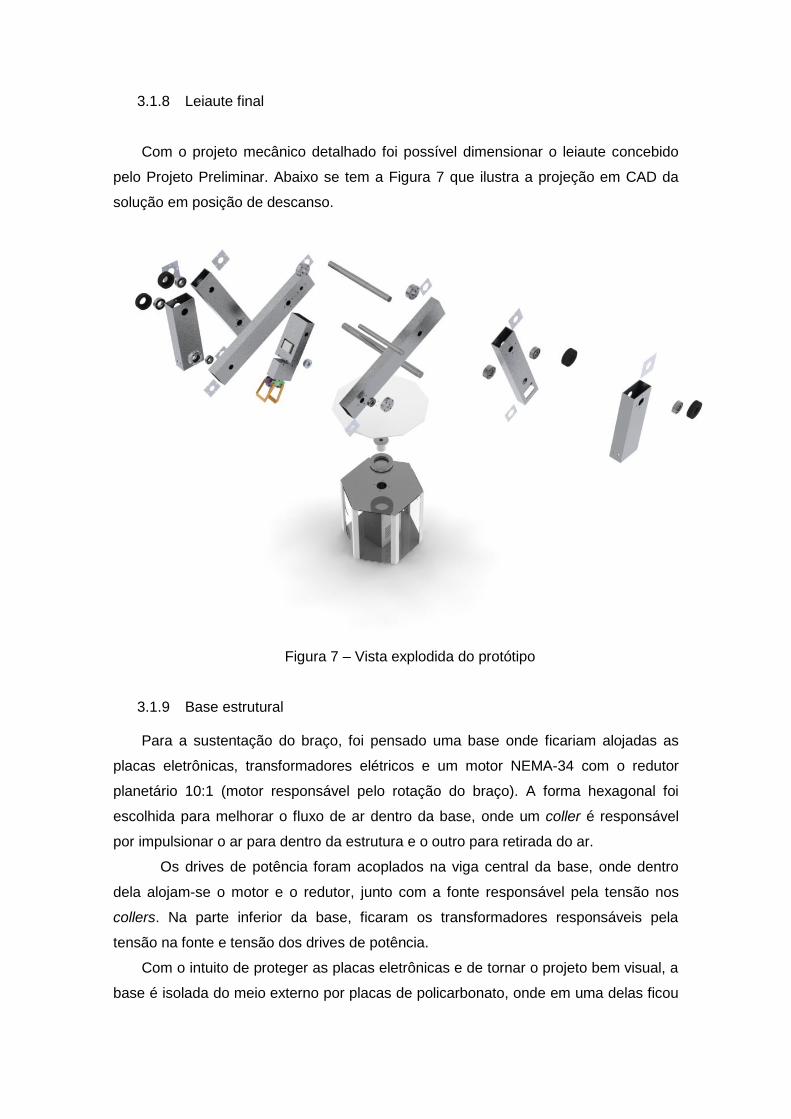
3.1.7 Mancais de rolamento
De acordo com diâmetro, com o tipo de carga (carga radial), e com o tempo de
vida, foi selecionado o mancal de rolamento, para o primeiro eixo de diâmetro 25mm,
de referência 6005, com 47mm de diâmetro externo e 25mm de diâmetro interno.
Para o segundo eixo de diâmetro 20 mm, foi selecionado o mancal de rolamento
de referência 6004, com 42mm de diâmetro externo e 20mm de diâmetro interno.
Para o terceiro eixo de diâmetro 15 mm, foi selecionado o mancal de rolamento de
referência 6002, com 32 mm de diâmetro externo e 15 mm de diâmetro interno.
Figura 6 – Suporte para mancal de rolamento montado com o mancal e eixo
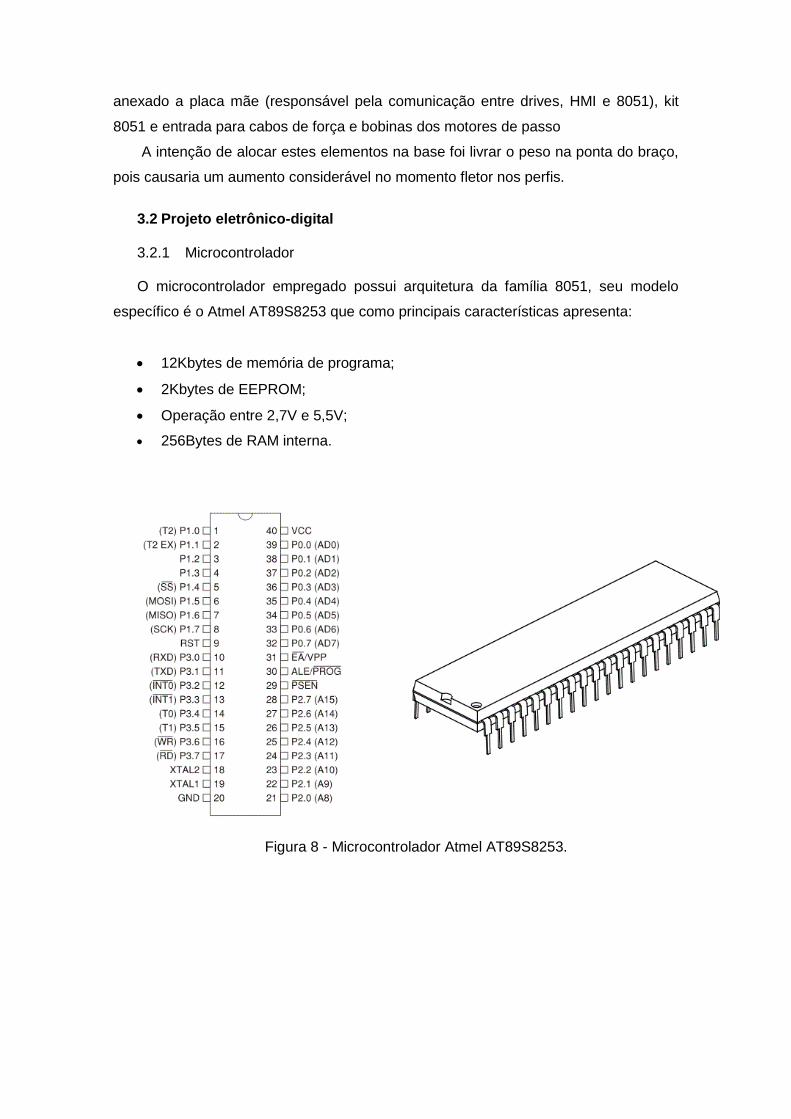
3.1.8 Leiaute final
Com o projeto mecânico detalhado foi possível dimensionar o leiaute concebido
pelo Projeto Preliminar. Abaixo se tem a Figura 7 que ilustra a projeção em CAD da
solução em posição de descanso.
Figura 7 – Vista explodida do protótipo
3.1.9 Base estrutural Para a sustentação do braço, foi pensado uma base onde ficariam alojadas as
placas eletrônicas, transformadores elétricos e um motor NEMA-34 com o redutor
planetário 10:1 (motor responsável pelo rotação do braço). A forma hexagonal foi
escolhida para melhorar o fluxo de ar dentro da base, onde um coller é responsável
por impulsionar o ar para dentro da estrutura e o outro para retirada do ar.
Os drives de potência foram acoplados na viga central da base, onde dentro
dela alojam-se o motor e o redutor, junto com a fonte responsável pela tensão nos
collers. Na parte inferior da base, ficaram os transformadores responsáveis pela
tensão na fonte e tensão dos drives de potência.
Com o intuito de proteger as placas eletrônicas e de tornar o projeto bem visual, a
base é isolada do meio externo por placas de policarbonato, onde em uma delas ficou
anexado a placa mãe (responsável pela comunicação entre drives, HMI e 8051), kit
8051 e entrada para cabos de força e bobinas dos motores de passo
A intenção de alocar estes elementos na base foi livrar o peso na ponta do braço,
pois causaria um aumento considerável no momento fletor nos perfis.
3.2 Projeto eletrônico-digital
3.2.1 Microcontrolador O microcontrolador empregado possui arquitetura da família 8051, seu modelo
específico é o Atmel AT89S8253 que como principais características apresenta:
12Kbytes de memória de programa;
2Kbytes de EEPROM;
Operação entre 2,7V e 5,5V;
256Bytes de RAM interna.
Figura 8 - Microcontrolador Atmel AT89S8253.
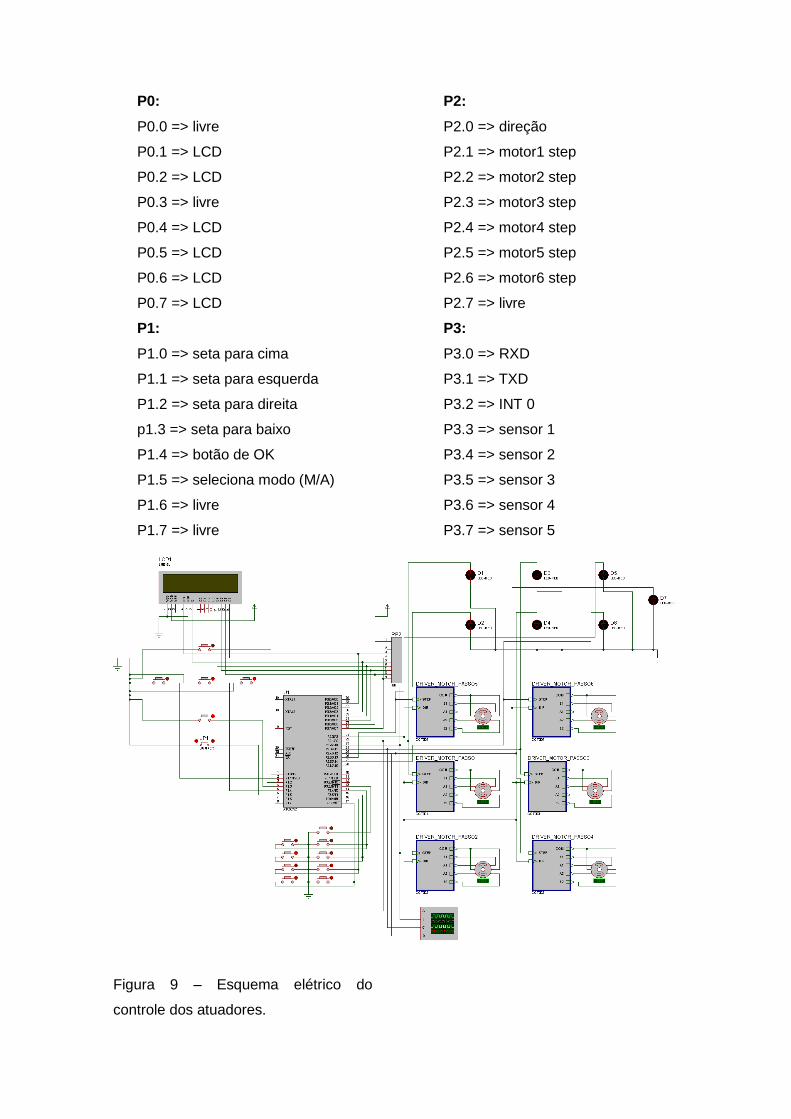
P0:
P0.0 => livre
P0.1 => LCD
P0.2 => LCD
P0.3 => livre
P0.4 => LCD
P0.5 => LCD
P0.6 => LCD
P0.7 => LCD
P1:
P1.0 => seta para cima
P1.1 => seta para esquerda
P1.2 => seta para direita
p1.3 => seta para baixo
P1.4 => botão de OK
P1.5 => seleciona modo (M/A)
P1.6 => livre
P1.7 => livre
Figura 9 – Esquema elétrico do
controle dos atuadores.
P2:
P2.0 => direção
P2.1 => motor1 step
P2.2 => motor2 step
P2.3 => motor3 step
P2.4 => motor4 step
P2.5 => motor5 step
P2.6 => motor6 step
P2.7 => livre
P3:
P3.0 => RXD
P3.1 => TXD
P3.2 => INT 0
P3.3 => sensor 1
P3.4 => sensor 2
P3.5 => sensor 3
P3.6 => sensor 4
P3.7 => sensor 5
Para facilitar a utilização foi empregado o uso do KIT de desenvolvimento para
microcontroladores da família 8051, projetado e produzido pelo Professor Édson Melo.
A Figura 9 apresenta o diagrama esquemático feito no software Proteus do sistema de
controle do microcontrolador.
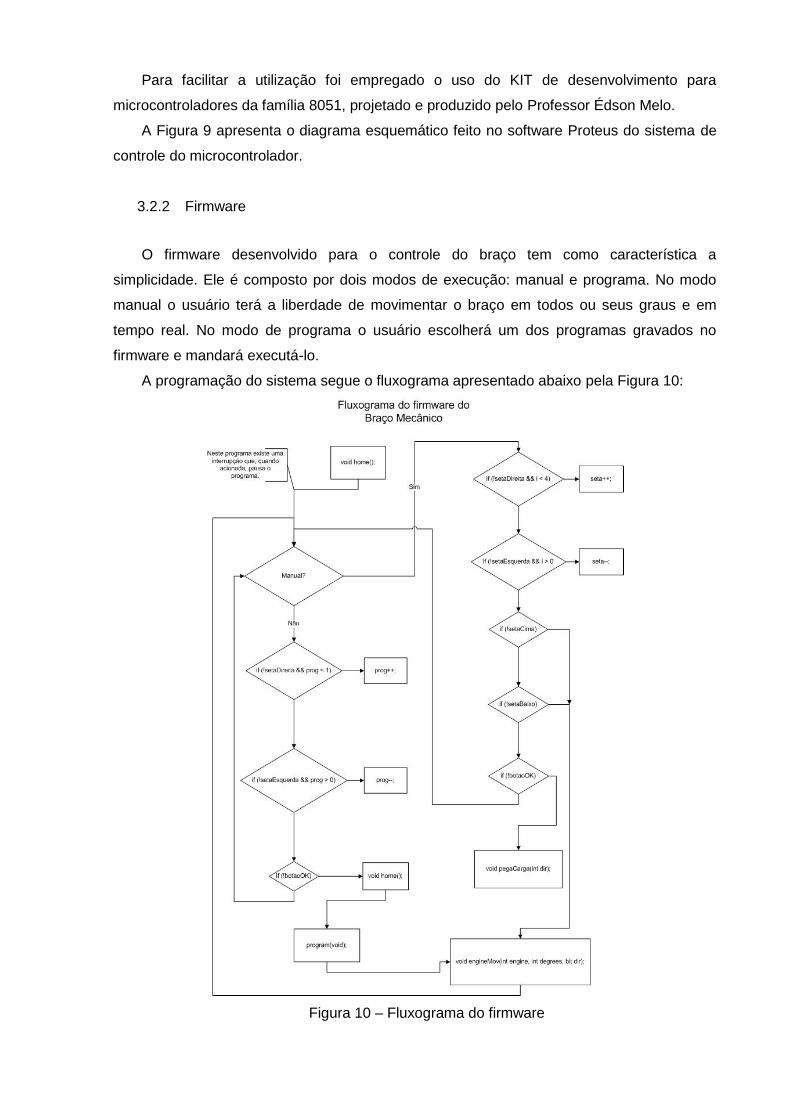
3.2.2 Firmware
O firmware desenvolvido para o controle do braço tem como característica a
simplicidade. Ele é composto por dois modos de execução: manual e programa. No modo
manual o usuário terá a liberdade de movimentar o braço em todos ou seus graus e em
tempo real. No modo de programa o usuário escolherá um dos programas gravados no
firmware e mandará executá-lo.
A programação do sistema segue o fluxograma apresentado abaixo pela Figura 10:
Figura 10 – Fluxograma do firmware
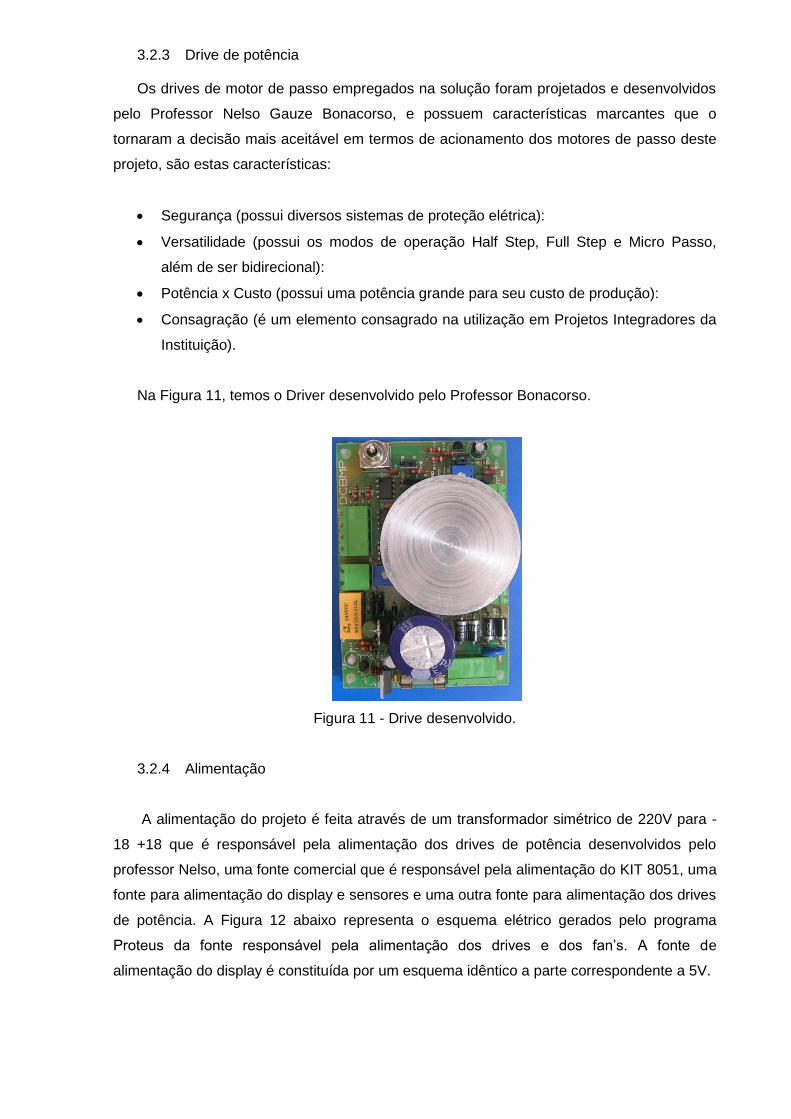
3.2.3 Drive de potência Os drives de motor de passo empregados na solução foram projetados e desenvolvidos
pelo Professor Nelso Gauze Bonacorso, e possuem características marcantes que o
tornaram a decisão mais aceitável em termos de acionamento dos motores de passo deste
projeto, são estas características:
Segurança (possui diversos sistemas de proteção elétrica):
Versatilidade (possui os modos de operação Half Step, Full Step e Micro Passo,
além de ser bidirecional):
Potência x Custo (possui uma potência grande para seu custo de produção):
Consagração (é um elemento consagrado na utilização em Projetos Integradores da
Instituição).
Na Figura 11, temos o Driver desenvolvido pelo Professor Bonacorso.
Figura 11 - Drive desenvolvido.
3.2.4 Alimentação
A alimentação do projeto é feita através de um transformador simétrico de 220V para -
18 +18 que é responsável pela alimentação dos drives de potência desenvolvidos pelo
professor Nelso, uma fonte comercial que é responsável pela alimentação do KIT 8051, uma
fonte para alimentação do display e sensores e uma outra fonte para alimentação dos drives
de potência. A Figura 12 abaixo representa o esquema elétrico gerados pelo programa
Proteus da fonte responsável pela alimentação dos drives e dos fan’s. A fonte de
alimentação do display é constituída por um esquema idêntico a parte correspondente a 5V.
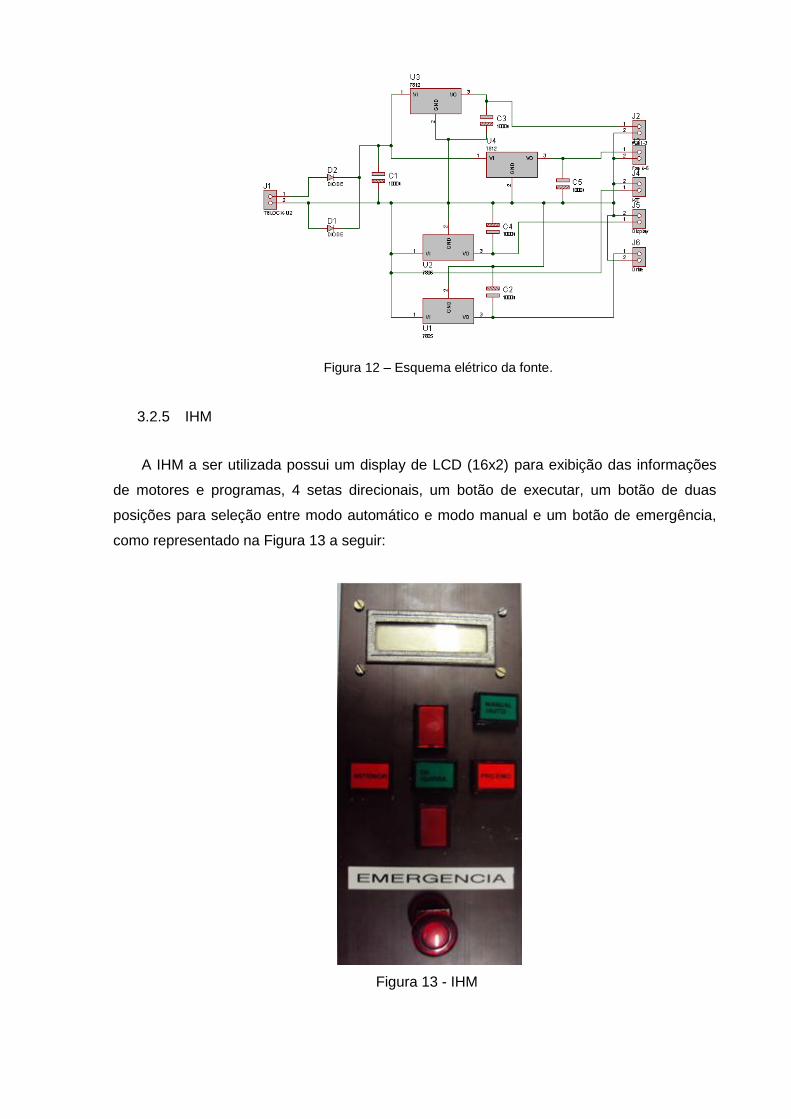
Figura 12 – Esquema elétrico da fonte.
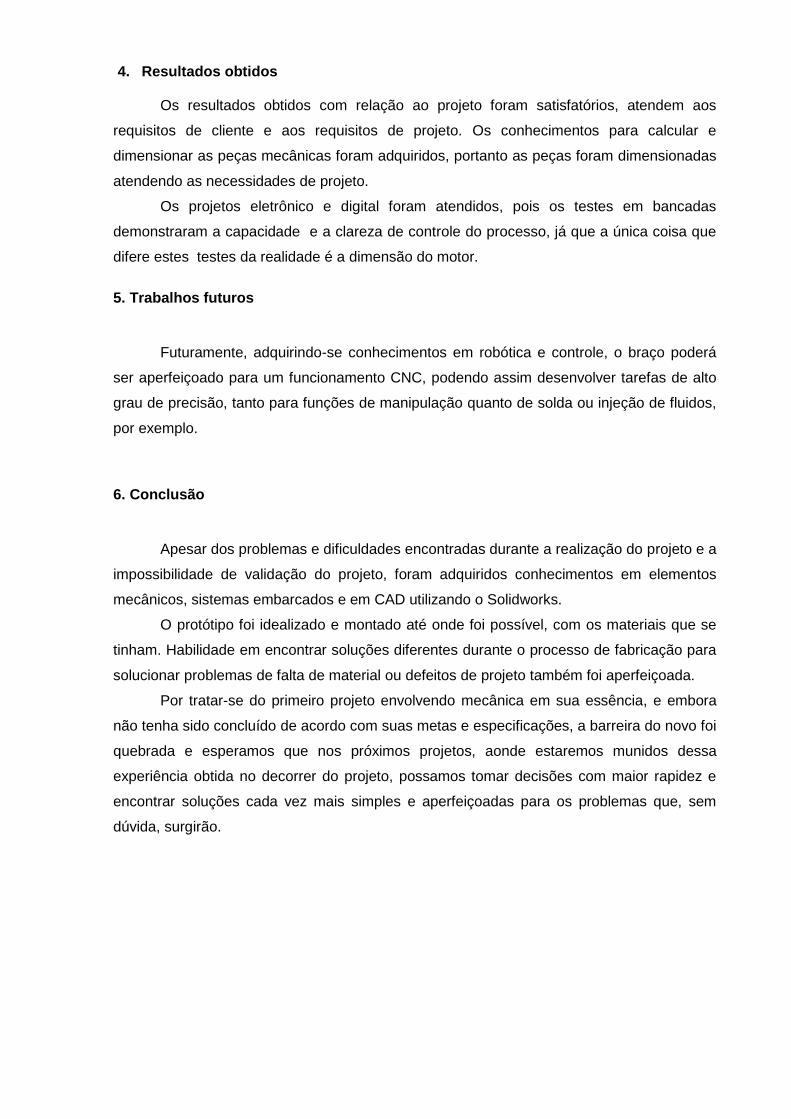
3.2.5 IHM
A IHM a ser utilizada possui um display de LCD (16x2) para exibição das informações
de motores e programas, 4 setas direcionais, um botão de executar, um botão de duas
posições para seleção entre modo automático e modo manual e um botão de emergência,
como representado na Figura 13 a seguir:
Figura 13 - IHM
4. Resultados obtidos
Os resultados obtidos com relação ao projeto foram satisfatórios, atendem aos
requisitos de cliente e aos requisitos de projeto. Os conhecimentos para calcular e
dimensionar as peças mecânicas foram adquiridos, portanto as peças foram dimensionadas
atendendo as necessidades de projeto.
Os projetos eletrônico e digital foram atendidos, pois os testes em bancadas
demonstraram a capacidade e a clareza de controle do processo, já que a única coisa que
difere estes testes da realidade é a dimensão do motor.
5. Trabalhos futuros
Futuramente, adquirindo-se conhecimentos em robótica e controle, o braço poderá
ser aperfeiçoado para um funcionamento CNC, podendo assim desenvolver tarefas de alto
grau de precisão, tanto para funções de manipulação quanto de solda ou injeção de fluidos,
por exemplo.
6. Conclusão
Apesar dos problemas e dificuldades encontradas durante a realização do projeto e a
impossibilidade de validação do projeto, foram adquiridos conhecimentos em elementos
mecânicos, sistemas embarcados e em CAD utilizando o Solidworks.
O protótipo foi idealizado e montado até onde foi possível, com os materiais que se
tinham. Habilidade em encontrar soluções diferentes durante o processo de fabricação para
solucionar problemas de falta de material ou defeitos de projeto também foi aperfeiçoada.
Por tratar-se do primeiro projeto envolvendo mecânica em sua essência, e embora
não tenha sido concluído de acordo com suas metas e especificações, a barreira do novo foi
quebrada e esperamos que nos próximos projetos, aonde estaremos munidos dessa
experiência obtida no decorrer do projeto, possamos tomar decisões com maior rapidez e
encontrar soluções cada vez mais simples e aperfeiçoadas para os problemas que, sem
dúvida, surgirão.
Referências [1] SIMÕES, A. S.; RICCHETTI, P. F.; Projeto e implementação de um braço robótico de baixo custo: uma plataforma multidisciplinar para motivação do trabalho em grupo. In: Congresso Brasileiro de Ensino de Engenharia, 31. 2003. Rio de Janeiro. [2] BACK, N.; OGLIARI, A.; DIAS, A.; SILVA, J. C. Projeto Integrado de Produtos. Barueri, SP, Editora Manole Ltda, 2008. [3] Elementos de Projeto. Disponível em: http://www.dee.feb.unesp.br/~marcelo/robotica/conteudo.html#P1. Acesso em: 08/03/2010 [4] BONACORSO, N. G.; NOLL V.; GEVAERD B. M. Desenvolvimento de um driver de corrente didático para acionamento de motores de passo aplicados ao ensino de eletrônica de potência e mecatrônica. Centro Federal de Educação Tecnológica de Santa Catarina - CEFET/SC. Santa Catarina. [5] CARRARA, V. Apostila de Robótica. Universidade Braz Cubas. São Paulo. [6] PATSKO, L. F. Tutorial controle de motor de passo. Maxwell Bohr – Instrumentação Eletrônica. 2006. [7] DINA. Disponível em: http://www.dina.com.br. Acesso em: 15/04/2010.
[8] 3D ContentCentral. Disponível em: http://www.3dcontentcentral.com. Acesso em: 18/04/2010.
[9] SKF. Disponível em: http://www.skf.com/portal/skf/home. Acesso em: 21/04/2010.
[10] ALCOA. Disponível em: http://www.alcoa.com/brazil/pt/custom_page/mercados.asp. Acesso em: 06/04/2010.