Busca
32
Resolução de problemas por meio de busca Prof. Pedro Luiz Santos Serra
-
Upload
thiago-reis -
Category
Documents
-
view
24 -
download
3
Transcript of Busca
Resolução de problemas por meio de busca
Prof. Pedro Luiz Santos Serra
Prof. Pedro Luiz Santos Serra 2
Agentes de resolução de problemas
• Agente: É um elemento qualquer capaz de perceber seu ambiente por meio de sensores e de agir sobre este ambiente por intermédio de atuadores.
• Agentes de resolução de problemas: Tratam-se de agentes com poder de decisão, ou seja, decidem o que fazer quando encontra seqüência de ações que levam a estados desejáveis.– Devem maximizar sua medida de desempenho.
• Formulação de objetivos: é o primeiro passo para a resolução de problemas. Baseada na situação atual e na medida de desempenho do agente.
Prof. Pedro Luiz Santos Serra 3
Agentes de resolução de problemas
• Exemplo: Suponha um agente em férias na cidade de Arad na Romênia. Suas medidas de desempenho são:– Melhorar o bronzeado– Melhorar seu conhecimento no idioma Romeno– Vera as paisagens, apreciar a vida noturna (ver como
ela é),– Evitar ressacas, etc.
• Suponha ainda que o agente tenha uma passagem aérea não-reembolsável para partir de Bucareste no dia seguinte.
• Faz sentido adotar o objetivo de chegar a Bucareste. Os demais cursos podem ser rejeitados sem nenhuma consideração adicional.

Prof. Pedro Luiz Santos Serra 4
Agentes de resolução de problemas
Prof. Pedro Luiz Santos Serra 5
Agentes de resolução de problemas
• Objetivo: É um conjunto de estados do mundo.• Formulação de problemas: É o processo de decidir
que ações e estados devem ser considerados, em função de um objetivo. Considera-se a possibilidade de se atingir um mesmo objetivo através de caminhos (ações e estados) diferentes.
• Busca: É o processo de procura pela melhor seqüência em função das diversas opções existentes de ações possíveis que levam a estados de valor conhecido.
Prof. Pedro Luiz Santos Serra 6
Agentes de resolução de problemas
Um algoritmo de busca recebe um problema como entrada e retorna uma solução sob a forma de uma seqüência de ações.As ações recomendadas podem ser executadas (fase de execução).Forma-se então o ciclo:
Formular – Buscar – Executar
Prof. Pedro Luiz Santos Serra 7
Agentes de resolução de problemas
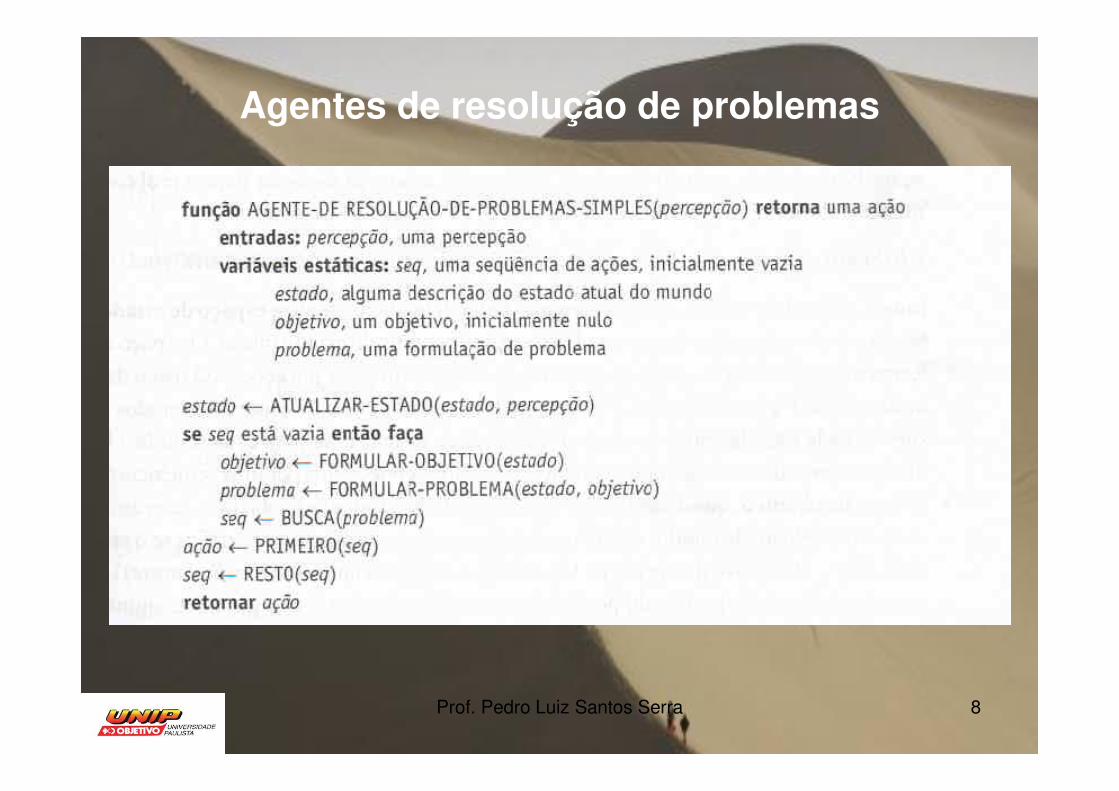
função AGENTE DE RESOLUÇÃO DE PROBLEMAS – SIMPLES(percepção) retorna uma ação
entradas: percepção, uma percepção
variáveis estáticas: seq, uma seqüência de ações, inicialmente vazia
estado, alguma descrição do estado atual do mundo
objetivo, um objetivo, inicialmente nulo
problema, uma formulação do problema
Prof. Pedro Luiz Santos Serra 8
Agentes de resolução de problemas

Prof. Pedro Luiz Santos Serra 9
Agentes de resolução de problemas
• Agentes de Resolução de problemas ← Agentes de ambiente– Ambiente é estático: não ocorrem mudanças no ambiente
durante o processo de formulação e resolução do problema;
– Ambiente é observável: o estado inicial é conhecido– Ambiente é discreto: os cursos alternativos de ação
podem ser enumerados;– Ambiente determinístico: As soluções para os problemas
são seqüências de ações únicas. Isto impossibilita a ocorrência de ações inesperadas. Na teoria de controle, denomina-se sistemas similares como laço de repetição aberto ou sistema de malha aberta.

Prof. Pedro Luiz Santos Serra 10
Problemas e soluções bem definidos
Quatro elementos podem definir um problema:• Estado inicial: Trata-se do estado em que o agente começa.
Por ex.: Em(Arad)
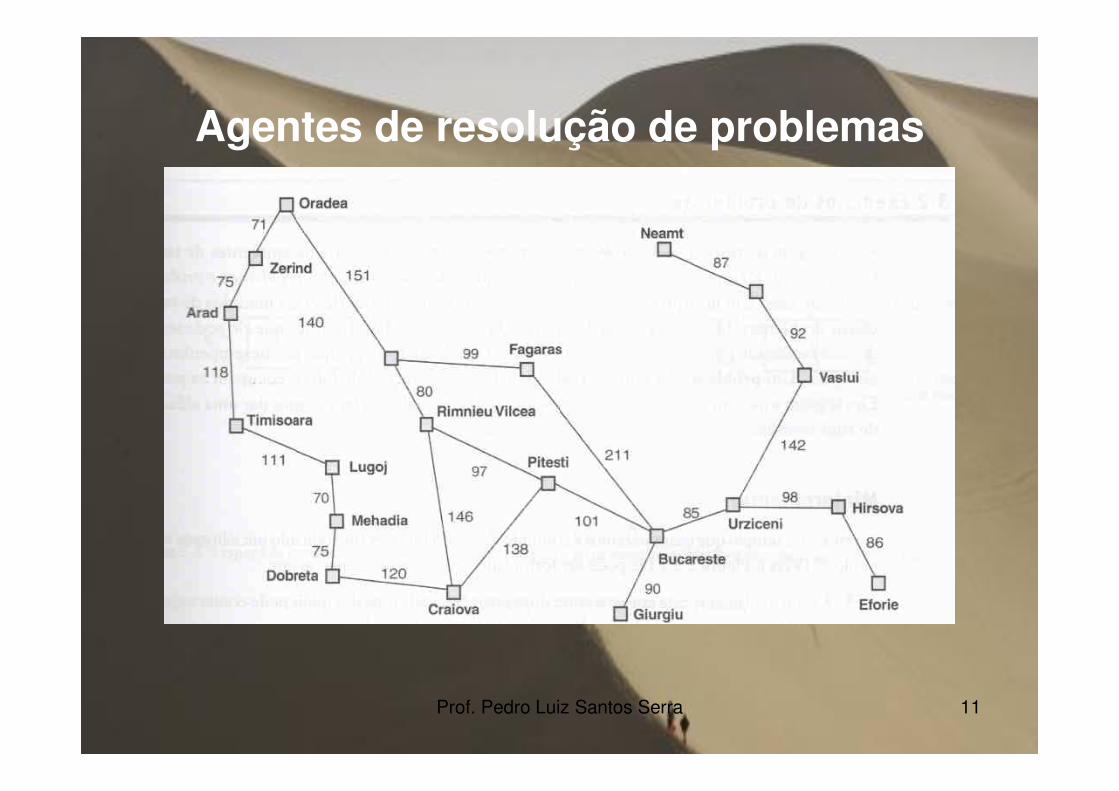
• Uma descrição das ações possíveis que estão disponíveis para o agente. A formulação mais comum utiliza uma função sucessor.Dado um estado particular x, SUCESSOR(x) retorna um conjunto de pares ordenados <ação, sucessor>, em que cada ação é uma ação válida no estado x e cada sucessor é um estado que pode ser alcançado a partir de x aplicando-se a ação.
• Ex.: Em(Arad) a função sucessor retornaria:{<Ir(Sibiu), Em(Sibiu)>,<Ir(Timisoara),Em(Timisoara)>,<Ir(Zerind),Em(Zerind)>}
Prof. Pedro Luiz Santos Serra 11
Agentes de resolução de problemas
Prof. Pedro Luiz Santos Serra 12
Problemas e soluções bem definidos
• Espaço de Estados: É a conjunção do estado inicial e a função sucessor do problema. Trata-se do conjunto de todos os estados acessíveis a partir do estado inicial. Forma um grafo em que os nós são estados e os arcos entre os nós são ações.
• Caminho: Trata-se de uma seqüência de estados conectados por uma seqüência de ações.
• Teste de Objetivo: é um teste que determina se um dado estado é um estado objetivo.É possível a existência de um conjunto de estados objetivos possíveis e o teste simplesmente verifica se o estado dado é um deles.

Prof. Pedro Luiz Santos Serra 13
Problemas e soluções bem definidos
• Custo de caminho: é uma função que atribui um custo (valor) numérico a cada caminho. O agente de resolução de problemas escolhe uma função de custo que reflete sua própria medida de desempenho. No exemplo do agente de Arad, o tempo é essencial e, portanto, considera-se o caminho mais rápido aquele com a menor distância percorrida.
• Custo de passo: é o custo por se adotar a ação a para ir do estado x ao estado y, ou seja, denota-se c(x,a,y).Para o caso do agente que se desloca de Arad àBucareste, trata-se das distância das rotas entre os diversos municípios interligados entre as duas cidades.
Prof. Pedro Luiz Santos Serra 14
Problemas e soluções bem definidos
Solução Ótima
Uma solução para um dado problema é um caminho desde o estado inicial até o estado objetivo.
A qualidade da solução é medida pela função de custo de caminho.
Uma solução é considerada ótima quando apresenta o menor custo de caminho entre todas soluções.
Prof. Pedro Luiz Santos Serra 15
Exemplos de Problemas - Miniproblemas• Miniproblemas: destina-se a ilustrar ou exercitar
diversos métodos de resolução de problemas.• Aspirador de Pó:
– Estados: O agente está em uma entre duas posições (Esquerda ou Direita), cada uma das quais pode conter sujeira ou não.
– Estado Inicial: Qualquer estado pode ser designado como o estado inicial.
– Função Sucessor: Gera os estados válidos que resultam da tentativa de executar as três ações (Esquerda, Direita e Aspirar).
– Teste de Objetivo: Verifica se todos os quadrados estão limpos.
– Custo de Caminho: Cada passo custa 1, e assim o cursto do caminho é o número de passos do caminho.

Prof. Pedro Luiz Santos Serra 16
Exemplos de Problemas
O mini-problema do Aspirador de Pó: Espaço de Estados

Prof. Pedro Luiz Santos Serra 17
Exemplos de Problemas
• Quebra-cabeças de 8 peças (blocos deslizantes):
Estado inicial Estado objetivo

Prof. Pedro Luiz Santos Serra 18
Exemplos de Problemas
• Quebra-cabeças de 8 peças (blocos deslizantes):– Estados: Especifica a posição de cada uma das oito
peças e do espaço vazio em um dos nove quadrados.– Estado inicial: Qualquer estado pode ser designado
como o estado inicial.– Função sucessor: Gera os estados válidos que
resultam da tentativa de executar as quatro ações (o espaço vazio se desloca para a Esquerda, Direita, Acima ou Abaixo).
– Teste de objetivo: Verifica se o estado corresponde àconfiguração de objetivo.
– Custo de caminho: Cada passo custa 1, e assim o custo de caminho é o número de passos do caminho.
Prof. Pedro Luiz Santos Serra 19
Exemplos de Problemas
• O quebra-cabeças de 8 peças (blocos deslizantes):– É um problema da classe NP-completos: Trata-se de uma
classificação de problemas, em Inteligência Artificial. Problemas denominados NP-completos, são o extremo de uma classe de problemas NP considerados de difícil solução. Tratam-se de problemas cujo tempo de solução de problemas não pode ser atribuido à uma função polinomial (tempo polinomial);
– O quebra cabeças de 8 peças tem 9!/2 = 181.440 estados acessíveis e é resolvido com facilidade;
– O quebra cabeças de 15 peças (em um tabuleiro de 4 x 4) tem, aproximadamente 1,3 trilhão de estados;
– O quebra cabeças de 24 peças tem cerca de 1025 estados e são bastante difíceis de resolver de forma ótima com as máquinas e algorítmos atuais.

Prof. Pedro Luiz Santos Serra 20
Exemplos de Problemas
• Problema de 8 rainhas: Posicionar 8 rainhas em um tabuleiro de xadrez de tal forma que nenhuma rainha ataque outra.
Prof. Pedro Luiz Santos Serra 21
Exemplos de Problemas
• Problema de 8 rainhas:– Estados: qualquer disposição de 0 a 8 rainhas no
tabuleiro é um estado.– Estado inicial: Nenhuma rainha no tabuleiro.– Função sucessor: Colocar uma rainha em
qualquer quadrado vazio.– Teste de objetivo: 8 rainhas estão no tabuleiro e
nenhuma é atacada.• NESSA FORMULAÇÃO TEMOS 3 x 1014
SEQÜÊNCIAS POSSÍVEIS PARA INVESTIGAR.

Prof. Pedro Luiz Santos Serra 22
EXEMPLOS DE PROBLEMAS
• Problema de 8 rainhas:• UMA FORMULAÇÃO MELHOR SERIA A RESTRIÇÃO
DA COLOCAÇÃO DE UMA RAINHA EM QUALQUER QUADRADO QUE JÁ ESTIVESSE SOB ATAQUE:– Estados: Os estados são disposições de n
rainhas (0 ≤≤≤≤ n ≤≤≤≤ 8), uma por coluna nas n colunas mais à esquerda, sem que nenhuma rainha ataque outra.
– Função sucessor: Adicione uma rainha a qualquer quadrado na coluna vazia mais àesquerda de tal modo que ela não seja atacada por qualquer outra rainha.
• ESSA FORMULAÇÃO REDUZ O ESPAÇO DE ESTADOS PARA 2057, E AS SOLUÇÕES SÃO FÁCEIS DE ENCONTRAR.
Prof. Pedro Luiz Santos Serra 23
Exemplos de Problemas
• Problemas do mundo real ���� Problemas de Roteamento.
• Problema de passagem aérea:
– Estados: Cada um é apresentado por uma posição (por exemplo: um aeroporto – GRU) e pela hora atual.
– Estado inicial: É especificado pelo problema.– Função sucessor: Retorna os estados resultantes de tomar
qualquer vôo programado (talvez especificado com mais detalhes pela classe e posição da poltrona) que parte depois da hora atual somada ao tempo de trânsito no aeroporto, desde o aeroporto atual até outro.
– Teste de objetivo: Verifica o destino após algum tempo previamente especificado.
– Custo de caminho: Depende do custo monetário, do tempo de espera, do tempo de vôo, dos procedimentos alfandegários e de imigração, da qualidade da poltrona, da hora do dia, do tipo de aeronave, dos prêmios por milhagem em vôos freqüentes e assim por diante.
Prof. Pedro Luiz Santos Serra 24
Busca por soluções
• Árvore de Busca: – Gerada pelo estado inicial e pela função sucessor
(definem o espaço de estado)• Grafo de busca:
– Também pode ser utilizado ao invés da árvore de busca. Empregado quando o mesmo estado pode ser alcançado a partir de vários caminhos.
Prof. Pedro Luiz Santos Serra 25
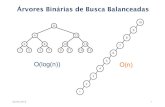
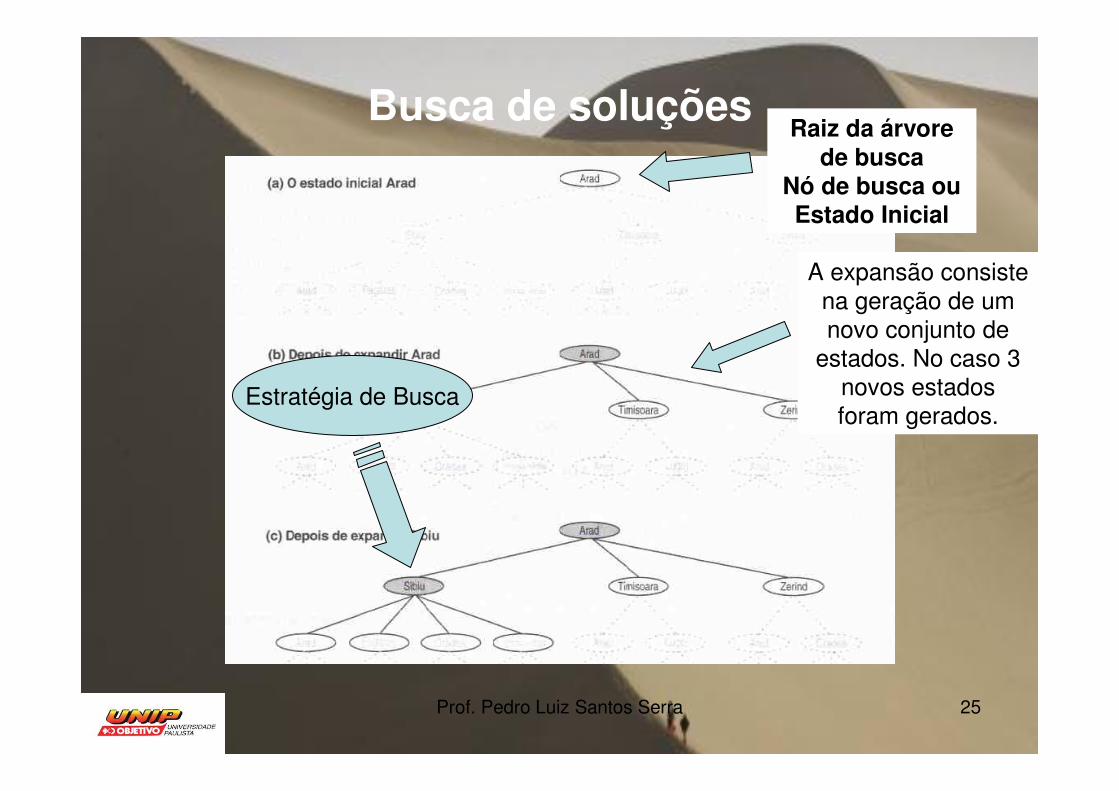
Busca de soluçõesRaiz da árvore
de buscaNó de busca ou Estado Inicial
A expansão consiste na geração de um novo conjunto de
estados. No caso 3 novos estados foram gerados.
Estratégia de Busca

Prof. Pedro Luiz Santos Serra 26
Busca de Soluções
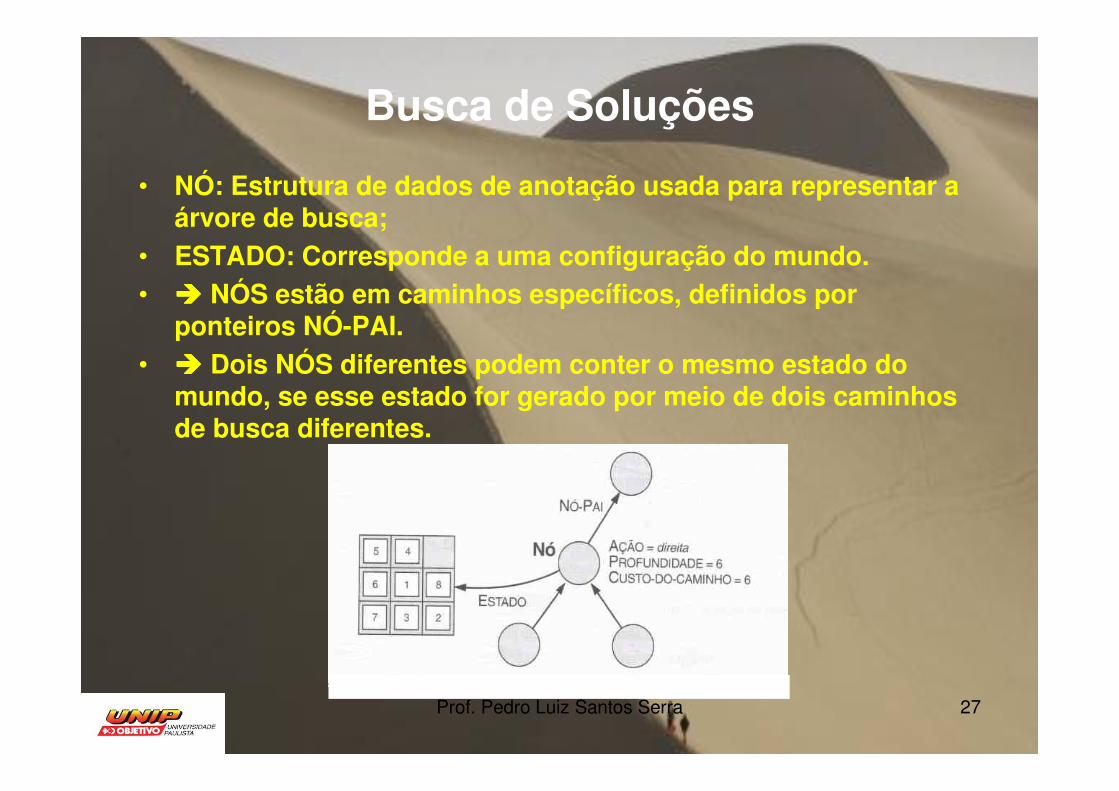
• Um nó é uma estrutura de dados com cinco componentes:– ESTADO: O estado no espaço de estados ao que o nó corresponde;– NÓ-PAI: O nó na árvore de busca que gerou este nó;– AÇÃO: A ação que foi aplicada ao PAI para gerar o nó;– CUSTO-DO-CAMINHO: O custo, tradicionalmente denotado por
g(n), do caminho desde o estado inicial até o nó indicado pelos ponteiros do pai.
– PROFUNDIDADE: O número de passos ao longo do caminho desde o estado inicial.
Prof. Pedro Luiz Santos Serra 27
Busca de Soluções
• NÓ: Estrutura de dados de anotação usada para representar a árvore de busca;
• ESTADO: Corresponde a uma configuração do mundo.• ���� NÓS estão em caminhos específicos, definidos por
ponteiros NÓ-PAI.• ���� Dois NÓS diferentes podem conter o mesmo estado do
mundo, se esse estado for gerado por meio de dois caminhos de busca diferentes.
Prof. Pedro Luiz Santos Serra 28
Busca de Soluções• BORDA: Coleção de nós gerados (ainda não expandidos);• NÓ-FOLHA: São elementos da BORDA. Cada elemento da BORDA é
um NÓ-FOLHA.• Supondo que a implementação de nós seja uma fila. As operações
sobre uma fila são:– CRIAR-FILA(elemento, ...) ���� cria uma fila com o(s) elemento(s)
dado(s);– VAZIA?(fila) ���� retorna verdadeiro caso não exista nenhum
elemento na fila;– PRIMEIRO(fila) ���� retorna o primeiro elemento da fila;– REMOVER-PRIMEIRO(fila) ���� retorna PRIMEIRO(fila) e o remove da
fila;– INSERIR(elemento,fila) ���� insere um elemento na fila e retorna a fila
resultante.– INSERIR-TODOS(elementos,fila) ����insere um conjunto de
elementos na fila e retorna a fila resultante.
Prof. Pedro Luiz Santos Serra 29
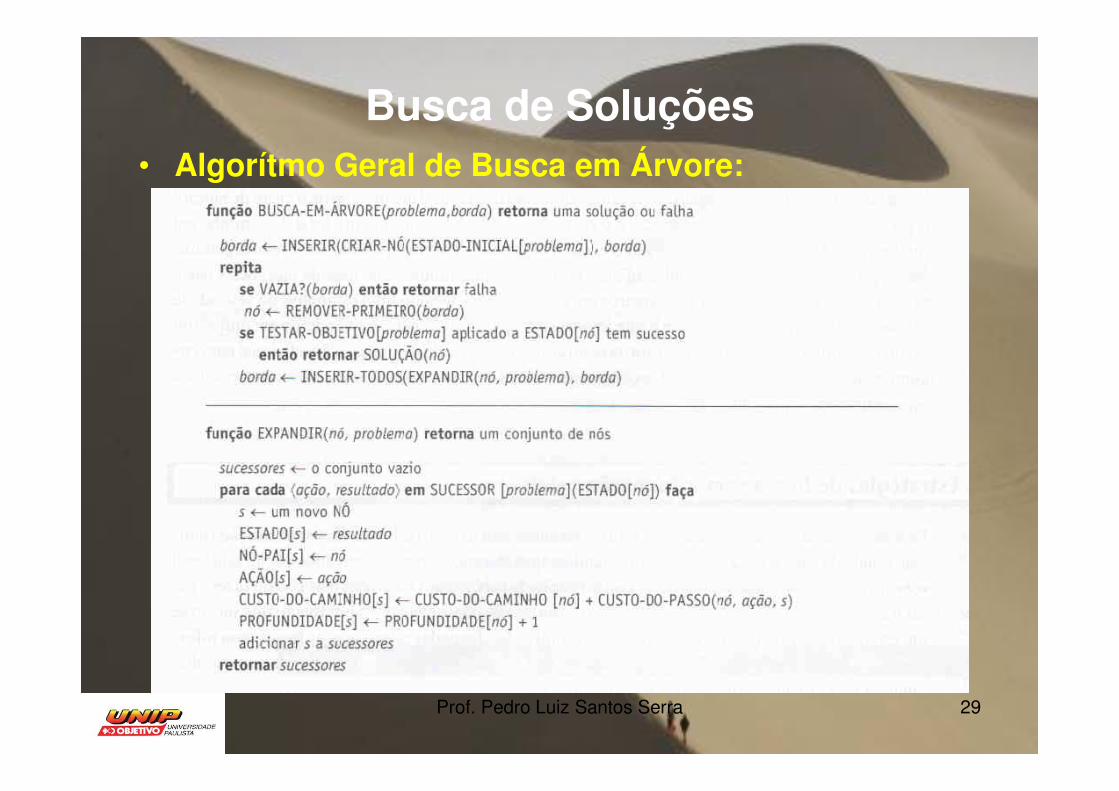
Busca de Soluções• Algorítmo Geral de Busca em Árvore:

Prof. Pedro Luiz Santos Serra 30
Busca de Soluções
• Medição de desempenho de resolução de problemas.• Quatro aspectos são empregados para avaliação do
desempenho de um algorítmo:– Completeza: O algorítmo oferece a garantia de
encontrar uma solução quando existir?– Otimização: A estratégia encontra a solução ótima?– Complexidade de tempo: Quanto tempo ele leva para
encontrar uma solução?– Complexidade de espaço: Quanta memória é
necessária para executar a busca?
Prof. Pedro Luiz Santos Serra 31
Busca de Soluções
• Em IA a complexidade é expressa em termos de três quantidades:– b ����Fator de ramificação: número máximo de
sucessores de qualque nó;– d ���� Profundidade do nó-objetivo menos profundo;– m ���� o comprimento máximo de qualquer caminho
no espaço de estados.
• Com freqüência o tempo é medido em termos do número de nós gerados durante a busca e o espaço émedido em termos de número de nós armazenados na memória.

Prof. Pedro Luiz Santos Serra 32
Busca de Soluções
• Custo de Busca ���� depende da complexidade de tempo mas também pode incluir um termo para uso da memória;
• Custo Total ���� Combina o custo de busca e o custo de caminho da solução encontrada.
• Ex.: Localizar uma rota desde Arad até Bucareste:– Custo de Busca ���� Período de tempo exigido pela
busca;– Custo de Solução ���� Comprimento total do
caminho em quilometros;– Custo Total ���� Soma do Custo de Busca com o
Custo de Solução.