C. Bombardelli - Apostila de fundamentos da eletrotécnica
75
FUNDAMENTOS B`SICOS DE ELETROTCNICA Elaborado por Clovis Bombardelli, [email protected] Versªo original: Junho / 2002 1“ ediªo: Dezembro / 2009 BIBLIOGRAFIA: Cotrim, A. A. M. B., Instalaıes ElØtricas, 3 a ed., Makron Books, Sªo Paulo, 1993; Creder, H., Instalaıes ElØtricas, 13 ed., LTC, Rio de Janeiro, 1997; Mamede Fo., Instalaıes ElØtricas Industriais, 5 a ed., LTC, Rio de Janeiro, 1997; Smith, J. Ralph, Circuitos, Dispositivos e Sistemas, Ed. Ao Livro TØcnico (Captulo 7 em diante) Watkins, A. J., CÆlculo de Instalaıes ElØtricas, Ed. Edgard Blücher, 2 vol. Vol 1: Parte 2 Vol 2: todo
-
Upload
clovis-bombardelli -
Category
Documents
-
view
2.927 -
download
38
description
Fornece subsídios técnicos ao aluno para entender a eletricidade, projetar instalações e efetuar manutenção de equipamentos elétricos, principalmente motores e iluminação em unidades industriais (projetar significa dimensionar corretamente todos os elementos de um circuito elétrico).
Transcript of C. Bombardelli - Apostila de fundamentos da eletrotécnica
FUNDAMENTOS BÁSICOS DE ELETROTÉCNICA
Elaborado por
Clovis Bombardelli, [email protected]
Versão original: Junho / 2002 1ª edição: Dezembro / 2009
BIBLIOGRAFIA: Cotrim, A. A. M. B., Instalações Elétricas, 3a ed., Makron Books, São Paulo, 1993; Creder, H., Instalações Elétricas, 13 ed., LTC, Rio de Janeiro, 1997; Mamede Fo., Instalações Elétricas Industriais, 5a ed., LTC, Rio de Janeiro, 1997; Smith, J. Ralph, Circuitos, Dispositivos e Sistemas, Ed. Ao Livro Técnico (Capítulo 7 em diante) Watkins, A. J., Cálculo de Instalações Elétricas, Ed. Edgard Blücher, 2 vol. Vol 1: Parte 2 Vol 2: todo
id10398437 pdfMachine by Broadgun Software - a great PDF writer! - a great PDF creator! - http://www.pdfmachine.com http://www.broadgun.com
2
LEMBRETE O engenheiro como profissional, dentro de sua área de aplicação, deve ter competência para: Aplicar conhecimentos matemáticos, científicos, tecnológicos e instrumentais à engenharia; Projetar e conduzir experimentos e interpretar resultados; Conceber, projetar e analisar sistemas, produtos e processos; Planejar, supervisionar, elaborar e coordenar projetos e serviços de engenharia; Identificar, formular e resolver problemas de engenharia; Desenvolver e/ou utilizar novas técnicas e ferramentas; Supervisionar a operação e a manutenção de sistemas; Avaliar criticamente a operação e a manutenção de sistemas; Comunicar-se adequadamente nas formas escrita, oral e gráfica; Atuar em equipes multidisciplinares; Compreender e aplicar a ética e a responsabilidade profissional; Avaliar o impacto das atividades da engenharia no contexto social e ambiental; Avaliar a viabilidade econômica de projetos de engenharia; Assumir a postura de permanente busca de atualização profissional; Objetivos da Eletrotécnica: Fornecer subsídios técnicos ao aluno para entender a eletricidade, projetar instalações e efetuar
manutenção de equipamentos elétricos, principalmente motores e iluminação em unidades
industriais (projetar significa saber dimensionar corretamente todos os elementos de um circuito
elétrico).
3
Programação do conteúdo da disciplina de eletrotécnica:
1o bimestre Definições fundamentais, unidades Circuitos elétricos de corrente alternada em série Circuitos elétricos de corrente alternada em paralelo Circuitos elétricos mistos Iluminação elétrica, células fotoelétricas. Normas de projeto. (NBR 5413)
2o bimestre
Circuitos polifásicos Transformação de energia elétrica em mecânica. Instalação de Motores Correção do fator de potência Proteção de circuitos e motores Dimensionamento de condutores. Normas de projeto. (NBR 5410)
3o bimestre Geradores. Associação de geradores. Transformadores
Conversores e retificadores Segurança em eletricidade Dispositivos semicondutores básicos
4o bimestre Eletroquímica aplicada Eletrólise Eletrodeposição de metais Trabalhos:
Memorial de cálculo do projeto de iluminação industrial Memorial de cálculo do projeto de instalação de motores e dimensionamento dos circuitos Memorial de cálculo da estação alimentadora. Dimensionamento de transformador Dimensionamento do setor de eletrólise. Projeto elétrico industrial, (desenhos)
4
1
a aula:
Objetivo: Introdução à eletricidade, definições fundamentais e variáveis envolvidas. Circuitos elétricos e seus elementos:
Circuito elétrico é o caminho que as cargas elétricas seguem em sua totalidade, sendo sempre
um caminho fechado, ou seja, as cargas sempre retornam ao ponto de partida, onde são novamente
�empurradas� para frente. A função de �empurrar� as cargas elétricas cabe ao gerador, que na verdade apenas aumenta o estado de energia dos elétrons, impondo a eles uma diferença de potencial, fazendo
com que eles circulem através do circuito. Em todo circuito, existirá sempre um ou mais pontos onde os
elétrons recebem energia e um ou mais pontos onde eles perdem a energia. Aos elementos ligados aos circuitos, que também são chamados de dispositivos, pode-se
encontrar:
Dispositivos geradores. Produzem a diferença de potencial, convertendo outra forma de energia em energia elétrica;
Disjuntores. Tem a finalidade de desconectar a eletricidade em caso de necessidade, para prevenir danos maiores aos dispositivos ligados ao circuito;
Interruptores. Tem a finalidade de permitir a qualquer pessoa, a desconexão segura dos dispositivos existentes num circuito da eletricidade;
Dispositivos consumidores. Tem a finalidade de converter a energia elétrica em qualquer outra
forma de energia. Tipos de eletricidade:
CC (corrente contínua, estuda-se na física); CA monofásica (corrente alternada com uma fase); CA trifásica (corrente alternada, porém com três fases distintas).
Natureza dos condutores e isolantes elétricos:
São condutores:
Metais (elétrons livres conduzem a eletricidade); Soluções eletrolíticas (íons conduzem a eletricidade); Gases ionizados (íons conduzem a eletricidade); Semicondutores (elétrons ativados ou em excesso na camada de valência do retículo cristalino
conduzem a eletricidade, somente quando estes encontram um buraco portador no átomo
vizinho); Todos os demais materiais são mais ou menos isolantes, com pequenas exceções, sendo a grafite
uma delas. Grandezas físicas envolvidas:
Quantidade de eletricidade (Q) coulomb, C Corrente elétrica (I) ampère, A Tensão (E) volt,V Resistência elétrica, (R) ohm, Reatância indutiva (XL) ohm, Reatância capacitiva (Xc) ohm, Impedância (Z) ohm, Condutância elétrica (G), siemens, S Trabalho elétrico, energia elétrica, (W) joule, J ou kilowatthora, kWh Potência, (P) watt, W Frequência (f) hertz, Hz Capacitância elétrica (C), farad, F

5
Particularidades físicas:
Fase, adimensional; Fator de potência, adimensional.
Definições básicas: explicação sucinta das grandezas físicas envolvidas (variáveis de projeto) Quantidade de eletricidade ou carga elétrica: Assim como a unidade de massa (kg), de tempo (s) e de espaço (m), a quantidade de eletricidade (C) é uma unidade física fundamental, ou seja, não depende de
outras grandezas. Por definição, a quantidade de eletricidade expressa a eletricidade que existem nos
elétrons e este valor corresponde ao número 1,59 x 10 �19 C.
Corrente elétrica: Quando um átomo adquire carga elétrica, sua tendência natural é voltar ao estado
normal, ou seja, voltar a ser eletricamente neutro. Evidentemente, um corpo eletrizado tende a perder sua carga, libertando-se dos elétrons em excesso ou procurando receber para satisfazer a falta dos mesmos. Assim, é fácil concluir que, basta juntar dois corpos em situações elétricas diferentes para ter-se um fluxo de elétrons entre os mesmos, fluxo este que recebe o nome de corrente elétrica. Para se ter uma idéia
exata da grandeza de uma corrente elétrica tornou-se necessário estabelecer um padrão, e, deste modo,
fala-se do maior ou menor número de elétrons que passam por segundo num determinado ponto de um
condutor, quando se quer dizer que a corrente é mais forte ou mais fraca. Define-se então como medida padrão de corrente elétrica o ampère, definido como a quantidade de eletricidade (coulomb) por segundo
que flui num condutor
Corrente elétrica é a quantidade de eletricidade que passa num condutor por unidade de tempo
t
QI (eq. 1.1)
Q = quantidade de corrente, em coulombs (C) t = tempo, em segundos (s) I = corrente elétrica, em ampère (A) Tensão: Sempre que um corpo é capaz de enviar elétrons para outro, ou dele receber estas partículas,
dizemos que tem um potencial elétrico. Se um corpo A manda elétrons para um corpo B, diz-se que A é
negativo em relação a B e, naturalmente, B é positivo em relação a A. Dois corpos entre os quais pode se
estabelecer um fluxo de elétrons apresentam uma DIFERENÇA DE POTENCIAL. Esta diferença de
potencial também é chamada de ddp, força eletromotriz, voltagem, pressão elétrica e tensão elétrica. De todos os termos, o último é mais empregado. A unidade é o Volt, simbolizada pela letra V.
A tensão ou a diferença de potencial entre dois pontos é a causa da corrente elétrica
Observação importante: Vê-se aqui que os elétrons sempre fluem do ponto mais negativo, onde existe
excesso de elétrons, para o ponto mais positivo, onde ocorre a falta de elétrons. No entanto, para facilitar
os cálculos, para evitar o uso de valores negativos, se convencionou tratar o ponto de maior potencial como sendo positivo, assim a corrente elétrica sempre flui do ponto de maior potencial (valor positivo) para o de menor potencial (valor negativo ou zero), que é de sentido contrário ao fluxo dos elétrons.
A corrente elétrica tem sempre o sentido oposto ao fluxo dos elétrons.
Resistência elétrica: A diferença fundamental entre os vários condutores e inclusive entre um condutor e
um isolante é a maior ou menor resistência que um material oferece à passagem da corrente elétrica.
Quanto menor for, mais condutor é o material, e no caso contrário, melhor isolante. A medida da
resistência é dada em ohms. Esta resistência depende da natureza do material e das dimensões básicas do
condutor ou isolante (área da seção transversal e comprimento)
a
lR
. (eq. 1.2)
6
R= resistência elétrica, em ohm resistividade específica do material, em ohm.mm
2/m l = comprimento do condutor, em m a = área da seção transversal, em mm2
A resistência de um condutor é diretamente proporcional à resistividade do material e ao
comprimento do mesmo e inversamente proporcional à área da seção transversal
Significa dizer que quanto maior o comprimento de um condutor maior será sua resistência, e, quanto
maior for a área da seção transversal menor será sua resistência. A Resistividade do material também
depende da temperatura em que o material se encontra, onde é a taxa de incremento em oC, de
acordo com a equação:
)].(1.[ oo ttRR (eq. 1.3)
Resistividade do cobre: 0,0178 mm2/m a 15 oC 0,00393 oC Resistividade do alumínio: 0,028 mm2/m a 15 oC 0,00390 oC Observações: A resistividade pode se apresentar também com a unidade ohm.m. Neste caso, a área do
condutor deve ser convertida para metros quadrados ao de ser aplicada na fórmula acima; Devido ao fato dos condutores reais terem área de seção transversal e material constante, sendo praticamente variável apenas o comprimento, para cada tipo de condutor é usual o fabricante apresentar,
além de outros dados relevantes, a resistência específica do condutor, a qual tem como unidade básica
ohm/m
Reatâncias capacitiva, reatância indutiva e impedância: As dificuldades que a eletricidade tem para fluir dentro de um condutor aumentam quando a corrente é do tipo alternada, aparecendo outros tipos de
impedimento devido à variação do campo elétrico e magnético formado ao longo de todo condutor. Estas oposições recebem o nome de reatância capacitiva e indutiva, respectivamente a variação do campo
elétrico e ao campo magnético, sendo que o total de todas as oposições recebe então o nome de
impedância. É importante notar que embora tais oposições tenham a mesma unidade, as mesmas não
podem ser somadas algebricamente, conforme veremos mais adiante. Condutância: É o inverso da resistência, ou seja, a facilidade com que a eletricidade flui através de um
condutor e é medida em siemens (S).
RG
1 (eq. 1.4)
G = condutância, em siemens (S) R = resistência elétrica, em ohm (
Susceptância: É o inverso da reatância, tanto capacitiva como indutiva, e, da mesma maneira, é também o
recíproco da reatância e é medida em siemens (S)
XB
1 (eq. 1.5)
B = susceptância, em siemens (S) X = reatância elétrica, XC para reatância capacitiva ou XL para reatância indutiva, em ohm ( Admitância: É o inverso da impedância, ou seja, matematicamente é igual ao recíproco da impedância e
também é medida em siemens (S)
ZY
1 (eq. 1.6)
Y = admitância, em siemens (S) Z = impedância elétrica, em ohm (

7
Trabalho e energia: Toda vez que um corpo se movimenta está sendo realizado um trabalho, o qual é
calculado pela equação T=F.d. (força realizada x distância percorrida). Quando unimos com um condutor
dois pontos entre os quais existe uma tensão elétrica, se estabelece uma corrente elétrica constituída por
elétrons em movimento, e evidentemente realizando um trabalho, que pela sua natureza recebe a
denominação de trabalho elétrico. Este trabalho produzido depende da quantidade de eletricidade conduzida, ou seja, quanto maior o número de �Coulombs� que percorrem o condutor, em conseqüência
de uma determinada tensão aplicada aos seus extremos, maior será o trabalho realizado. Também é fácil
concluir que quanto maior a tensão aplicada aos extremos do mesmo condutor, maior será a intensidade
da corrente elétrica, portanto, maior será o trabalho. Para calcular quantitativamente o trabalho
empregamos a fórmula fundamental
QEW . (eq. 1.7)
W = trabalho, em Joule (J) E = tensão elétrica, em V Q = Quantidade de eletricidade, em C
O trabalho para transportar 1 Coulomb de eletricidade de um ponto a outro, entre os quais existe uma diferença de tensão de 1 Volt é chamado de Joule
Vimos que:
tIQ . (eq. 1.8)
Por substituição, temos:
tIEW .. (eq. 1.9) Observação: Energia é a capacidade de produzir trabalho. Quando dizemos que uma pilha tem energia, isto significa
que ela é capaz de produzir um trabalho elétrico num condutor ligado aos seus terminais. Se a pilha, depois de algum tempo de uso, não pode produzir corrente no condutor dizemos que ela não tem mais
energia, ou seja, capacidade de realizar trabalho. Ora, se o corpo só tem energia enquanto realizar
trabalho é evidente que o máximo trabalho que ele poderá realizar corresponde ao máximo de energia que
possui. Face ao exposto, designamos a energia gasta com as mesmas unidades de trabalho e utilizamos as mesmas equações para calcular o trabalho realizado. Lembrar também que a energia não é algo se gasta, mas sim se transforma em outras formas de energia,
sendo que o trabalho realizado na verdade é o efeito útil da transformação de uma forma de energia em
outra forma. Na verdade, quando se fala em gastar a energia, se trata de converter a mesma. Potência elétrica: Potência é a rapidez com que se gasta a energia, ou a rapidez com que se produz
trabalho. Podemos dizer que é a energia gasta por unidade de tempo.
t
WP (eq. 1.10)
P = Potência elétrica, em Watt (W) = J/s W = energia (ou trabalho), em J t = tempo, em s Observação: Consideremos alguns casos para o uso da palavra potência. No caso de um gerador, a potência elétrica é a
energia que ele pode fornecer na unidade de tempo, ou o trabalho elétrico que ele pode realizar na
unidade de tempo. Já a potência de uma lâmpada, valor que estamos habituados a ler nos bulbos das
mesmas, significa a energia elétrica que é gasta pela lâmpada em cada unidade de tempo. Devido ao fato do joule e o watt serem muito pequenas para a maioria dos usos práticos, utilizam-se em seu lugar múltiplos mais convenientes. É o KWh, que representa a energia de 1000 joules/segundo
8
produzidos ou consumidos durante uma hora. Equipamentos que consomem ou produzem 1000 W a cada segundo, tem a potência de 1 KW. Outras unidades ainda usadas: Horsepower (HP) = 746 W Cavalo-vapor (CV) = 736 W Rendimento ou eficiência: Sempre que um dispositivo qualquer é usado na transferência de energia, com
ou sem transformação de um tipo para outro, como geradores de eletricidade, motores, transformadores, etc., uma parte da mesma energia é usada para fazer o próprio aparelho funcionar, constituindo o que
chamamos de perda de energia. Assim, a relação entre a energia que o aparelho entrega (energia útil) e a
energia que ele recebe (energia total) é o rendimento ou a eficácia do aparelho na transformação.
Lembrando que a energia sempre se conserva, ou seja, não se perde nem se cria apenas se
transforma e considerando que parte da energia é necessária ao funcionamento do aparelho, a qual
normalmente se degrada em calor, que é uma forma de energia nem sempre desejada, fica fácil perceber
que o rendimento de qualquer aparelho será sempre menor do que 1, (em termos percentuais, menor de 100%). Frequência: Quando a corrente é alternada, isto significa dizer que a mesma varia em intensidade, ora
subindo, ora descendo, e isto ocorre sucessivamente um número de vezes a cada tempo unitário. A
medida desta alternação é a frequência com que a mesma ocorre e é medida em Hertz (Hz), que em
termos físicos representa a quantidade de alternações por segundo Fase: Ao analisar duas oscilações alternadas distintas, de mesma frequência, as mesmas estão variando
suas intensidades ao longo do tempo e estas alternâncias podem não ser sincronizadas, ou seja, quando
uma sobe a outra sobe também. Chama-se fase ou também defasagem, ou também o ângulo de
defasagem, o grau trigonométrico que existe entre as duas alternâncias. Quando estão em fase ambas
passam pelo zero no mesmo instante. Anotações de aula: (anotar aqui todas as informações importantes comentadas em aula)
9
2a aula:
Objetivos: Corrente alternada, CA A maior parte da potência elétrica é gerada, transmitida e utilizada na forma de correntes alternadas em regime permanente. Também muito da comunicação da informação por fio ou rádio está na forma de
sinais CA que variam em frequências de alguns ciclos por segundo até bilhões de ciclos por segundo.
Certamente os mais comuns, mas não os mais difíceis, problemas encontrados na engenharia envolvem a análise de circuitos de CA e muitos livros foram escritos a respeito deste assunto. Estes são problemas
práticos que surgem no projeto e na aplicação de equipamento elétrico. Eles são de interesse do
engenheiro astronáutico no planejamento da instalação de um satélite transmissor, do engenheiro
químico, na seleção de processos de controle remoto, do engenheiro de construção, no planejamento de
uma linha de potência temporária, do engenheiro mecânico, na construção de um amplificador de
vibração e do engenheiro industrial, no aperfeiçoamento do rendimento de uma instalação. Em resumo,
no caso mais simples, o engenheiro deve pelo menos, saber projetar instalações de motores e iluminação e
todos os seus acessórios. Diferenças fundamentais entre CA e CC (corrente alternada e corrente contínua): Na corrente contínua estão envolvidas basicamente as variáveis corrente, tensão e resistência, enquanto
que em corrente alternada surgem novas variáveis decorrentes da sua própria natureza oscilante. São a
frequência, a amplitude, a fase, corrente média e o fator de potência. Surgem também como oposição
ao fluxo da corrente a reatância capacitiva e a reatância indutiva. Para o cálculo da queda de tensão
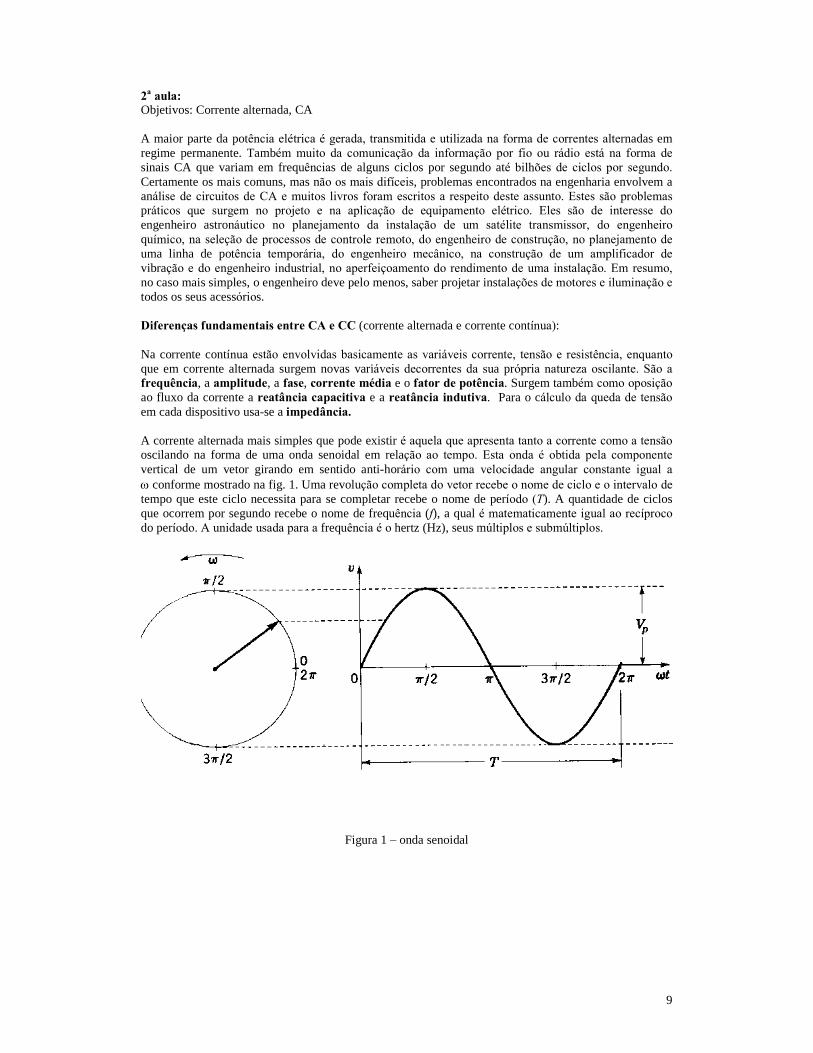
em cada dispositivo usa-se a impedância. A corrente alternada mais simples que pode existir é aquela que apresenta tanto a corrente como a tensão
oscilando na forma de uma onda senoidal em relação ao tempo. Esta onda é obtida pela componente
vertical de um vetor girando em sentido anti-horário com uma velocidade angular constante igual a
conforme mostrado na fig. 1. Uma revolução completa do vetor recebe o nome de ciclo e o intervalo de
tempo que este ciclo necessita para se completar recebe o nome de período (T). A quantidade de ciclos que ocorrem por segundo recebe o nome de frequência (f), a qual é matematicamente igual ao recíproco
do período. A unidade usada para a frequência é o hertz (Hz), seus múltiplos e submúltiplos.
Figura 1 � onda senoidal
10
Um ciclo completo percorre um ângulo total de radianos. A velocidade angular do vetor é igual a f. Se o comprimento total do vetor é Vp, o valor instantâneo em qualquer tempo t é denominado de amplitude, igual a:
).(. tsinVv p (eq. 2.1)
Onde: v = valor instantâneo da amplitude da onda senoidal Vp = comprimento do vetor giratório ou também denominado pico da amplitude = velocidade angular do vetor giratório t = tempo, em segundos Frequência:
2f (eq. 2.2)
onde: f= frequência, em Hertz (Hz) velocidade angular do vetor girante, em rad/s
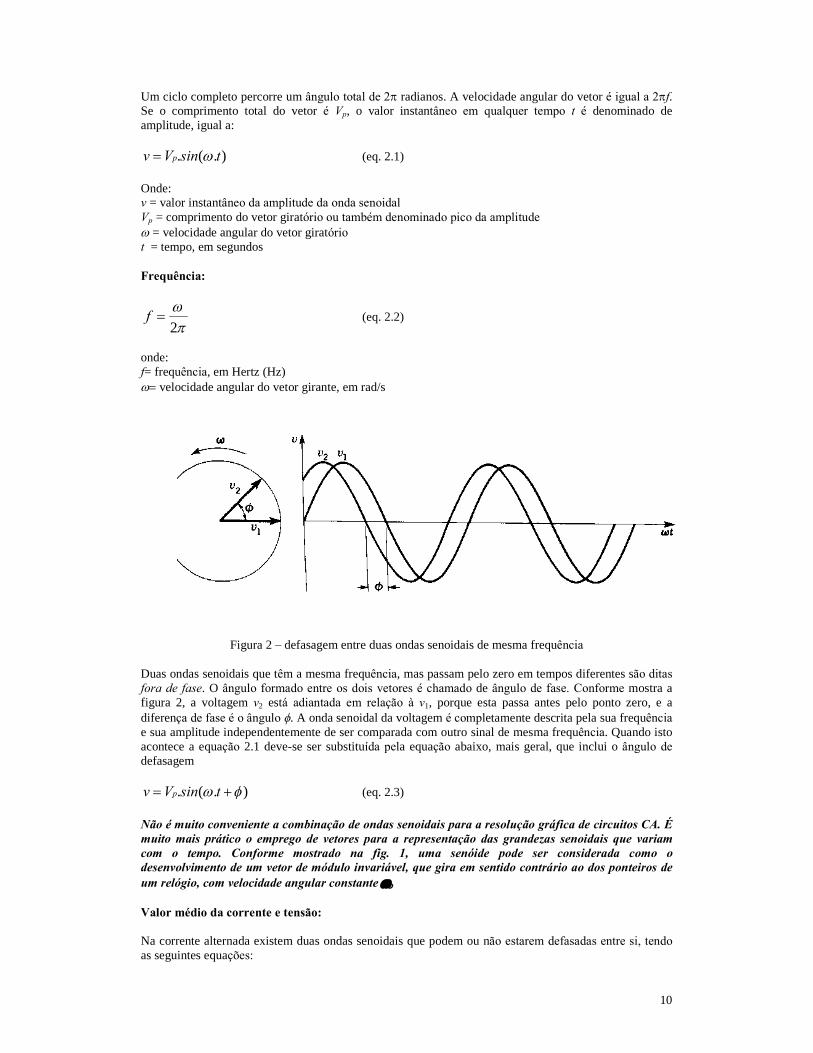
Figura 2 � defasagem entre duas ondas senoidais de mesma frequência
Duas ondas senoidais que têm a mesma frequência, mas passam pelo zero em tempos diferentes são ditas
fora de fase. O ângulo formado entre os dois vetores é chamado de ângulo de fase. Conforme mostra a figura 2, a voltagem v2 está adiantada em relação à v1, porque esta passa antes pelo ponto zero, e a diferença de fase é o ângulo. A onda senoidal da voltagem é completamente descrita pela sua frequência e sua amplitude independentemente de ser comparada com outro sinal de mesma frequência. Quando isto acontece a equação 2.1 deve-se ser substituída pela equação abaixo, mais geral, que inclui o ângulo de
defasagem
).(. tsinVv p (eq. 2.3)
Não é muito conveniente a combinação de ondas senoidais para a resolução gráfica de circuitos CA. É
muito mais prático o emprego de vetores para a representação das grandezas senoidais que variam
com o tempo. Conforme mostrado na fig. 1, uma senóide pode ser considerada como o
desenvolvimento de um vetor de módulo invariável, que gira em sentido contrário ao dos ponteiros de
um relógio, com velocidade angular constante Valor médio da corrente e tensão:
Na corrente alternada existem duas ondas senoidais que podem ou não estarem defasadas entre si, tendo
as seguintes equações:
11
).(.
).(.
tsinVv
tsinIi
p
p
(eq. 2.4)
Estas equações fornecem a corrente e tensão instantâneas para qualquer valor de t, no entanto, para efeitos práticos, em corrente alternada, inclusive para cálculo da potência dissipada, deve ser usada o valor da
corrente média que flui através de um condutor. Ou seja, o valor efetivo da corrente alternada é aquele
que produz o mesmo efeito térmico de um resistor, quando o mesmo atravessado por uma corrente
contínua deste valor. Para determinar este valor, o efeito térmico de uma corrente alternada é calculada
pela média de todos os infinitos valores de I ao longo de um ciclo completo. O valor da corrente média do
ciclo também conhecido como corrente RMS, é calculado pela relação:
2
pII (eq. 2.5)
2
pVV (eq. 2.6)
Onde: I = corrente média quadrática (rms) Ip = corrente de pico V = tensão média quadrática (rms) Vp = tensão de pico De acordo com a fórmula acima, o valor efetivo da corrente alternada senoidal é simplesmente igual o
valor de pico dividido pela raiz quadrada de 2 e este valor também é conhecido como valor RMS (root mean square ou média quadrática). Os aparelhos de medidas tanto de tensão, como de corrente são
calibrados para mostrar este valor, senão a leitura destas variáveis não seria obtida em aparelhos simples,
tais como voltímetros e amperímetros comuns.
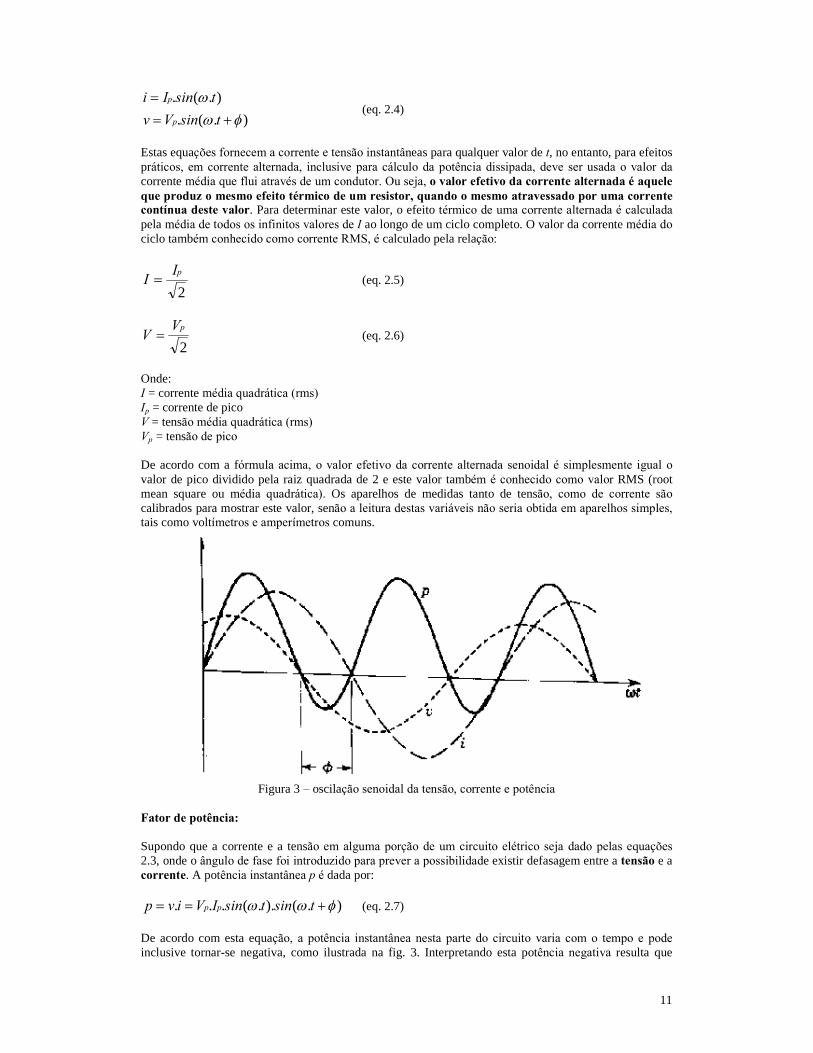
Figura 3 � oscilação senoidal da tensão, corrente e potência Fator de potência:
Supondo que a corrente e a tensão em alguma porção de um circuito elétrico seja dado pelas equações
2.3, onde o ângulo de fase foi introduzido para prever a possibilidade existir defasagem entre a tensão e a corrente. A potência instantânea p é dada por:
).()..(... tsintsinIVivp pp (eq. 2.7)
De acordo com esta equação, a potência instantânea nesta parte do circuito varia com o tempo e pode
inclusive tornar-se negativa, como ilustrada na fig. 3. Interpretando esta potência negativa resulta que
12
durante estas partes do ciclo, esta parte do circuito fornece energia ao restante do circuito, ou seja, durante estes intervalos de tempo o circuito passa de consumidor a fornecedor de energia. A equação acima,
depois de integrada ao longo de um ciclo completo, fornece a equação:
coscos2
.VI
IVP
pp (eq. 2.8)
Onde: P =potência total média de um ciclo completo V = valor médio (rms) para a tensão I = Valor médio (rms) para a corrente cos = fator de potência A existência do fator de potência na equação acima indica que a potência útil de um circuito CA não
depende somente da tensão e da corrente, mas também da fase que existe entre a tensão e a corrente.
Notar que quando o angulo de fase entre ambos for de 90 graus, o fator de potência é zero e devido a esse
fato, a potência útil também será zero. Quando ambas estiverem em fase, o fator de potência é unitário,
sendo então a potência idêntica àquela obtida com a corrente contínua. Reatância capacitiva:
A reatância capacitiva aparece quando existem capacitores ligados no circuito. Capacitor são elementos
elétricos formados por duas placas condutoras isoladas entre si ligadas cada uma a um dos pólos do
circuito. A capacidade de um capacitor é dada pela equação
CVQ (eq. 2.9)
Onde: Q = Quantidade de eletricidade armazenada nas placas, em coulomb C = capacitância, em farad V = Tensão aplicada nas placas, em volt Que em forma infinitesimal fica
dt
dVC
dt
dQi (eq. 2.10)
Todo capacitor tem uma propriedade elétrica chamada de capacitância (C), a qual depende da geometria que existe entre as placas do capacitor, e esta é importante num circuito CA, porque a tensão varia com a
carga do capacitor e consequentemente com a corrente. Integrando a equação diferencial acima para uma
alternância senoidal, e substituindo-se a tensão e corrente de pico pelos respectivos valores RMS, obtém-se:
IC
V
1 (eq. 2.11)
Onde: V = tensão nos terminais do capacitor Icorrente A equação acima mostra que a corrente alternada num capacitor incrementa a tensão alternada aplicada,
analogamente à equação de Ohm para resistores (V = R.I). O fator de proporcionalidade que aparece na equação (1/C) é chamado de reatância capacitiva. Funciona analogamente ao cálculo da resistência da
lei de Ohm, exceto pelo fato que a mesma diminui com o aumento da frequência. A unidade de medida para a reatância também é o Ohm, pois pela equação vemos que se trata da mesma grandeza usada pela lei de Ohm, ou seja, a queda de tensão por unidade de corrente que flui no condutor, a qual recebe o nome
específico de Ohm (). Sabe-se que a tensão aplicada entre as placas de um capacitor é zero quando a

13
corrente de carga é máxima, e vice-versa. Num circuito CA com capacitância pura, VC e I estão sempre
defasados 90o, onde a corrente está sempre adiantada em relação a VC.
CXC
1 (eq. 2.12)
IXV C. (eq. 2.13)
Num capacitor, a ddp entre as placas é zero quando a corrente é máxima e vice-versa. Portanto, EC
e I estarão sempre defasados 90o elétricos.
Reatância indutiva:
Toda corrente elétrica é acompanhada de campo magnético que aparece ao redor do condutor. Alterações
no campo magnético provocam alterações na corrente e vice-versa. Ou seja, toda variação na corrente de
um condutor elétrico provoca a variação do campo magnético, que por sua vez, induz no condutor uma tensão induzida, a qual se opõe ao movimento dos elétrons, e esta tensão é dada pela expressão:
dt
diLv (eq. 2.14)
Onde: v = tensão induzida, em Volt L = indutância, em henrie di/dt = variação da corrente em função do tempo A indutância, assim como a capacitância, também depende de fatores geométricos e das propriedades
magnéticas dos materiais usados. A tensão induzida sempre atua de maneira a se opor a variação da
corrente e aumenta com a taxa de incremento da corrente. A indutância em circuitos simples é pequena o
suficiente para ser usualmente desprezada, exceto nos circuitos de alta frequência, onde ela adquire valores que não podem ser desprezados. Integrando a equação acima e substituindo-se os valores de pico pelos correspondentes valores RMS tem-se:
LIV (eq. 2.15) Esta equação mostra que a corrente alternada num indutor se incrementa com o aumento da tensão,
novamente, da mesma forma que a Lei de Ohm para os resistores. A quantidade L recebe o nome de reatância indutiva e também é medida em Ohm. Notar que ao contrário da reatância capacitiva, esta
aumenta com o aumento da frequência. Sabe-se que a indutância no circuito retarda o crescimento e a
queda da corrente e sabe-se que a tensão de auto-indução é máxima quando a corrente de carga é zero, e
vice-versa. Num circuito CA com indutância pura, VC e I estão sempre defasados 90o, onde a corrente está
sempre atrasada em relação a VC.
LXL (eq. 2.16)
IXV L . (eq. 2.17) A indutância num circuito retarda o crescimento e a queda de tensão e a força eletromotriz de auto-
indução é máxima quando I é igual a zero e vice-versa. Portanto, EL e I estarão sempre defasados
90o elétricos.
Impedância:
Em todo e qualquer dispositivo elétrico, inclusive um simples condutor terá a ele associado, uma
resistência elétrica, que depende da natureza do material usado na construção e uma reatância indutiva ou
capacitiva ou muitas vezes ambas, as quais dependem unicamente da forma e da geometria usada na construção do dispositivo. A simples soma algébrica entre elas não é possível, pois a reatância sempre
atua perpendicularmente em relação à resistência, formando sempre um triângulo retângulo. Fisicamente,
isto significa dizer que a reatância tende sempre a defasar a corrente em relação à tensão, num máximo de

14
90o. A reatância indutiva tende a atrasar a corrente em relação à tensão, enquanto que a reatância
capacitiva faz o contrário, avança a corrente em relação à tensão. O ângulo de defasagem é o angulo
formado entre a resistência elétrica e a reatância total do dispositivo, e a impedância é a soma vetorial de
ambos os fatores, calculada pela equação:
22XRZ (eq. 2.18)
Onde R
Xarctan (eq. 2.19)
ou também
Z
Xarccos (eq. 2.20)
Potência reativa:
Desde que a potência em uma resistência é proporcional ao quadrado da corrente ou tensão, a potência é
sempre positiva e a energia é dissipada através do ciclo inteiro. Em contraste, a indutância e a
capacitância armazenam, mas não dissipam energia. Quando a corrente através de uma indutância está
crescendo, a energia é transferida do circuito para o campo magnético, mas quando a corrente decresce,
esta energia retorna. Similarmente, quando a tensão através de uma capacitância está aumentando, a
energia é transferida para o campo elétrico e a potência é positiva. Quando a tensão diminui, esta energia
retorna e a potência é negativa. A potência reativa recebe a unidade VAR (volt-ampère reativo) Potência aparente:
A potência aparente é medida em VA ou kVA (volt-ampère ou quilovolt-ampère). Pode-se visualizar a potência aparente no triângulo de potência, correspondendo à hipotenusa do mesmo, matematicamente
pode ser entendida como uma quantidade complexa, com uma componente real igual à potência útil e
uma componente imaginária igual à potência reativa. A potência aparente é uma medida prática da
capacidade de um equipamento de CA. Em um transformador utilizado para abaixar a tensão a partir de
um potencial de 4000 V até um potencial de 120 V, a saída admissível é limitada pelo aquecimento do
transformador devido às perdas. Estas são determinadas pela tensão e pela corrente, e não são afetadas
pelo fator de potência. O tamanho do transformador, requerido para alimentar uma carga industrial é
determinado pela corrente aparente em Volt-ampère ao invés de pela potência em Watts. Potência útil:
É aquela que realmente é convertida em trabalho elétrico. Esta potência é medida em W (Watt). Podemos entender melhor a eletricidade se pensarmos que parte da corrente que circula num condutor, irá produzir
um trabalho útil e outra parte é armazenada no campo magnético e no campo magnético, sem gerar
trabalho, mas esse acréscimo na corrente irá sempre implicar numa maior perda por calor gerado no
condutor e também exigir mais do equipamento que �gera� a energia. Exemplo: Uma carga industrial consiste de um aquecedor elétrico de 30 kW e motores de indução de 150 kVA,
operando com um fator de potência em atraso igual a 0,6. A potência é fornecida à instalação a partir de
uma rede de 4000 V. Determinar a corrente total e o fator de potência da instalação. Considerando que um aquecedor opere com resistências elétricas e estas normalmente tem uma indutância e capacitância desprezíveis ou quase, portanto, considera-se que as mesmas tenham um fator de potência igual a 1. Os motores, ao trabalharem com fator de potência de 0,6, têm uma potência útil de
90 kW e uma potência reativa de 120 kVA. Somando as componentes, tem-se potência útil total igual a
90+30 = 120 kW, e potência reativa igual a 120+0 = 120 kVAr, cuja soma vetorial irá fornecer um valor
de 170 kVA e um fator de potência combinado de 0,71. A corrente nesta instalação é:

15
AkV
kVA
V
PA5,42
4
170
Para alimentar esta instalação a companhia de força local deve instalar um transformador capaz de
fornecer 170 kVA, (isto desprezando a margem de segurança para sobrecargas) e fios suficientemente
grossos para conduzir 42,5 A. Em adição aos 120 kW de potência fornecidos à instalação, a companhia de
força deve gerar energia para suprir as perdas I2R em todos os equipamentos de geração, transmissão e
distribuição. Para fornecer a mesma energia a uma instalação que operasse com fator de potência igual a 1, seria requerido apenas um transformador de potência de 120 kVA e fios nominais para apenas 30 A. As perdas
na geração, transmissão e distribuição também serão menores. É razoável esperar que o preço da energia
a esta segunda instalação seja menor refletindo o custo mais baixo para a companhia de força. Devido a
tal fato, deve-se sempre em nome da economia, procurar deixar as instalações sempre com fator próximos
da unidade. Algo em torno de 0,85 a 0,92. Anotações de aula:

16
3a aula:
Circuitos monofásicos em CA Os circuitos em CA, tanto em série, como em paralelo, apresentam as mesmas características gerais dos
circuitos em CC, ou seja, Circuito em série:
A intensidade de corrente é a mesma em qualquer parte do circuito; A tensão aplicada ao circuito é igual à soma das tensões parciais nos diversos elementos do mesmo.
Entretanto, em CA a soma em apreço é vetorial; A impedância total ou equivalente é a soma das impedâncias parciais. Na determinação da
impedância total, associamos primeiro as resistências, indutâncias e capacitâncias, e, então,
representamos a indutância na forma polar ou binômia. Às vezes, não são conhecidos os valores das
resistências, indutâncias e capacitâncias parciais, mas são oferecidos os valores das impedâncias dos diversos elementos do circuito, o que facilita ainda mais o cálculo da impedância total, resumindo-se numa simples soma vetorial de quantidades conhecidas.
nT ZZZZZ ...321 (eq. 3.1) Onde: ZT = impedância total do ramo ou circuito em série, e é igual a soma de todas as impedâncias parciais
existentes no ramo A queda de tensão no ramo em série é dada pela equação
IZV T. (eq. 3.2)
Onde: ZT = impedância do ramo em série
Dissipa ou converte maior energia, de todos os dispositivos presentes num circuito, aquele que
apresentar a maior impedância.
Observação: Num circuito em série, nas representações gráficas, se usa sempre a corrente como
referência. Circuito em paralelo:
A tensão aplicada em cada elemento do circuito é sempre a mesma; A corrente total aplicada ao circuito é igual a soma das correntes parciais de cada elemento,
novamente lembrando que em CA, a soma deve ser vetorial; A o recíproco da impedância total ou equivalente é igual à soma dos recíprocos das impedâncias
parciais, conforme a equação abaixo
nT
nT
YYYYY
ZZZZZ
...
1...
1111
321
321 (eq. 3.3)
A queda de tensão é dada pela equação 3.2
IZV T.
Onde: ZT = impedância total do circuito
Dissipa ou converte maior energia o dispositivo, aquele que apresentar a menor impedância.
17
E
ER
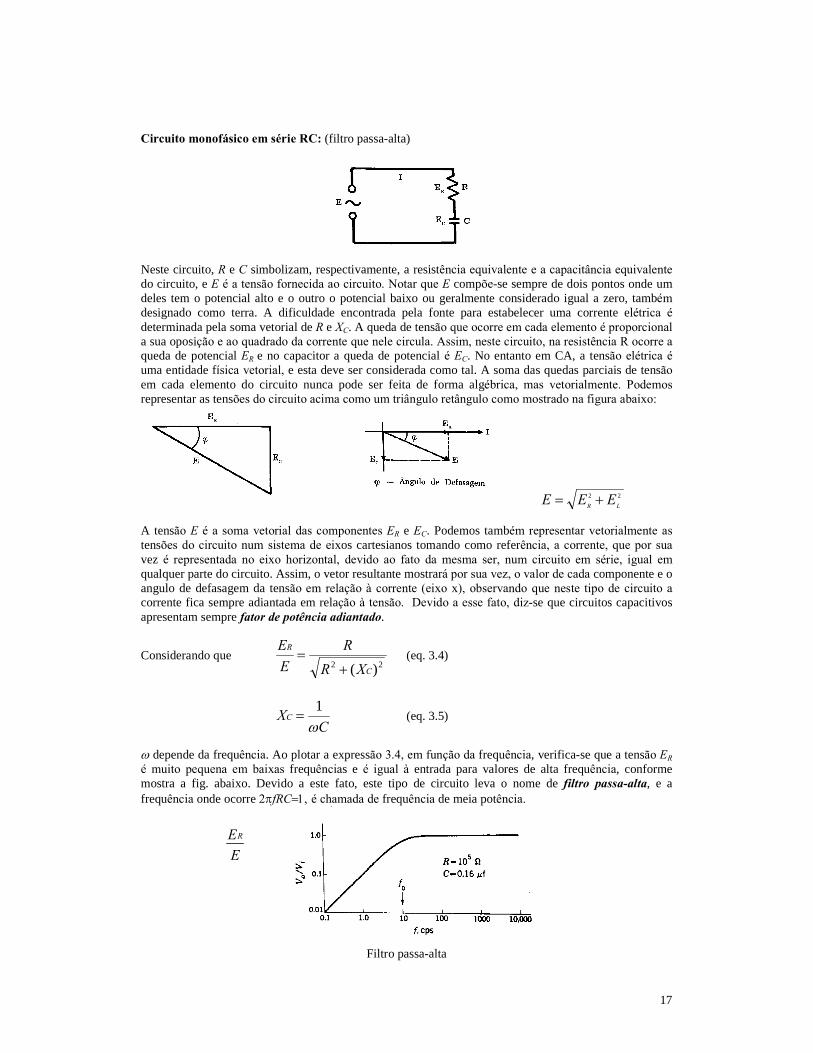
Circuito monofásico em série RC: (filtro passa-alta)
Neste circuito, R e C simbolizam, respectivamente, a resistência equivalente e a capacitância equivalente
do circuito, e E é a tensão fornecida ao circuito. Notar que E compõe-se sempre de dois pontos onde um deles tem o potencial alto e o outro o potencial baixo ou geralmente considerado igual a zero, também
designado como terra. A dificuldade encontrada pela fonte para estabelecer uma corrente elétrica é
determinada pela soma vetorial de R e XC. A queda de tensão que ocorre em cada elemento é proporcional
a sua oposição e ao quadrado da corrente que nele circula. Assim, neste circuito, na resistência R ocorre a
queda de potencial ER e no capacitor a queda de potencial é EC. No entanto em CA, a tensão elétrica é
uma entidade física vetorial, e esta deve ser considerada como tal. A soma das quedas parciais de tensão
em cada elemento do circuito nunca pode ser feita de forma algébrica, mas vetorialmente. Podemos
representar as tensões do circuito acima como um triângulo retângulo como mostrado na figura abaixo:
22
LREEE
A tensão E é a soma vetorial das componentes ER e EC. Podemos também representar vetorialmente as
tensões do circuito num sistema de eixos cartesianos tomando como referência, a corrente, que por sua
vez é representada no eixo horizontal, devido ao fato da mesma ser, num circuito em série, igual em
qualquer parte do circuito. Assim, o vetor resultante mostrará por sua vez, o valor de cada componente e o angulo de defasagem da tensão em relação à corrente (eixo x), observando que neste tipo de circuito a
corrente fica sempre adiantada em relação à tensão. Devido a esse fato, diz-se que circuitos capacitivos apresentam sempre fator de potência adiantado.
Considerando que 22 )( C
R
XR
R
E
E
(eq. 3.4)
CXC
1 (eq. 3.5)
depende da frequência. Ao plotar a expressão 3.4, em função da frequência, verifica-se que a tensão ER é muito pequena em baixas frequências e é igual à entrada para valores de alta frequência, conforme mostra a fig. abaixo. Devido a este fato, este tipo de circuito leva o nome de filtro passa-alta, e a frequência onde ocorre fRCé chamada de frequência de meia potência.
Filtro passa-alta
18
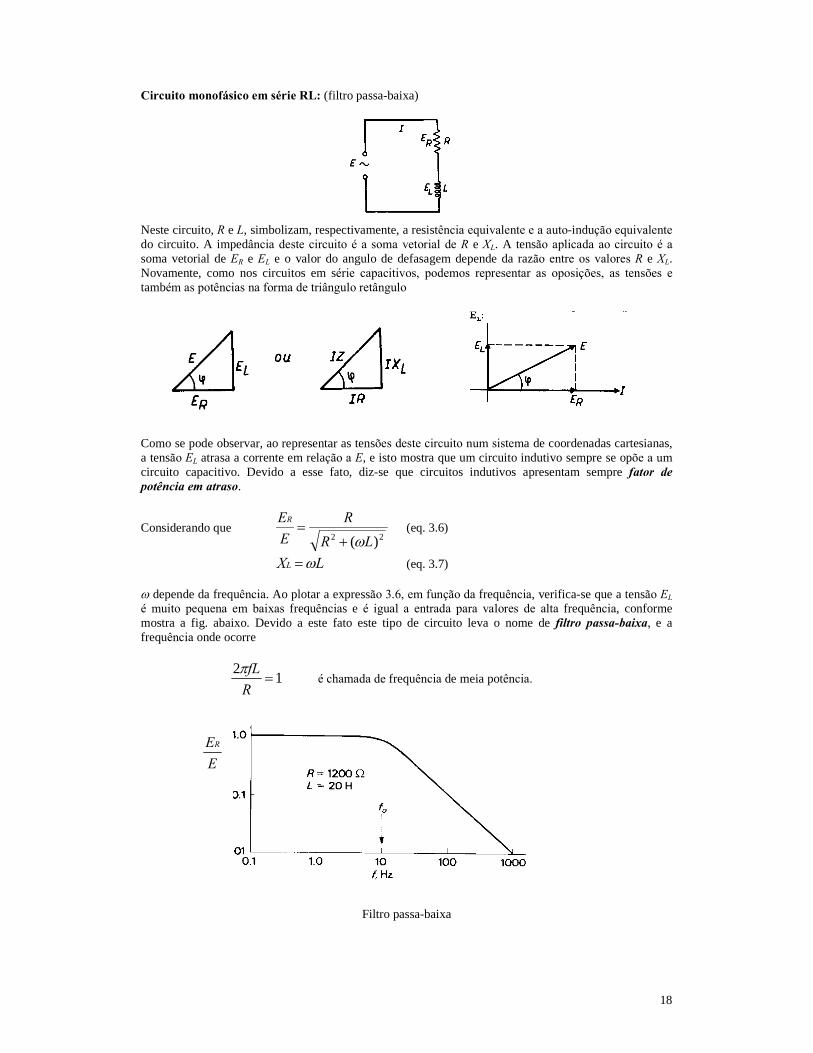
Circuito monofásico em série RL: (filtro passa-baixa)
Neste circuito, R e L, simbolizam, respectivamente, a resistência equivalente e a auto-indução equivalente
do circuito. A impedância deste circuito é a soma vetorial de R e XL. A tensão aplicada ao circuito é a
soma vetorial de ER e EL e o valor do angulo de defasagem depende da razão entre os valores R e XL. Novamente, como nos circuitos em série capacitivos, podemos representar as oposições, as tensões e
também as potências na forma de triângulo retângulo
Como se pode observar, ao representar as tensões deste circuito num sistema de coordenadas cartesianas, a tensão EL atrasa a corrente em relação a E, e isto mostra que um circuito indutivo sempre se opõe a um
circuito capacitivo. Devido a esse fato, diz-se que circuitos indutivos apresentam sempre fator de
potência em atraso.
Considerando que 22 )( LR
R
E
ER
(eq. 3.6)
LXL (eq. 3.7)
depende da frequência. Ao plotar a expressão 3.6, em função da frequência, verifica-se que a tensão EL é muito pequena em baixas frequências e é igual a entrada para valores de alta frequência, conforme mostra a fig. abaixo. Devido a este fato este tipo de circuito leva o nome de filtro passa-baixa, e a frequência onde ocorre
12
R
fL é chamada de frequência de meia potência.
Filtro passa-baixa
E
ER
19
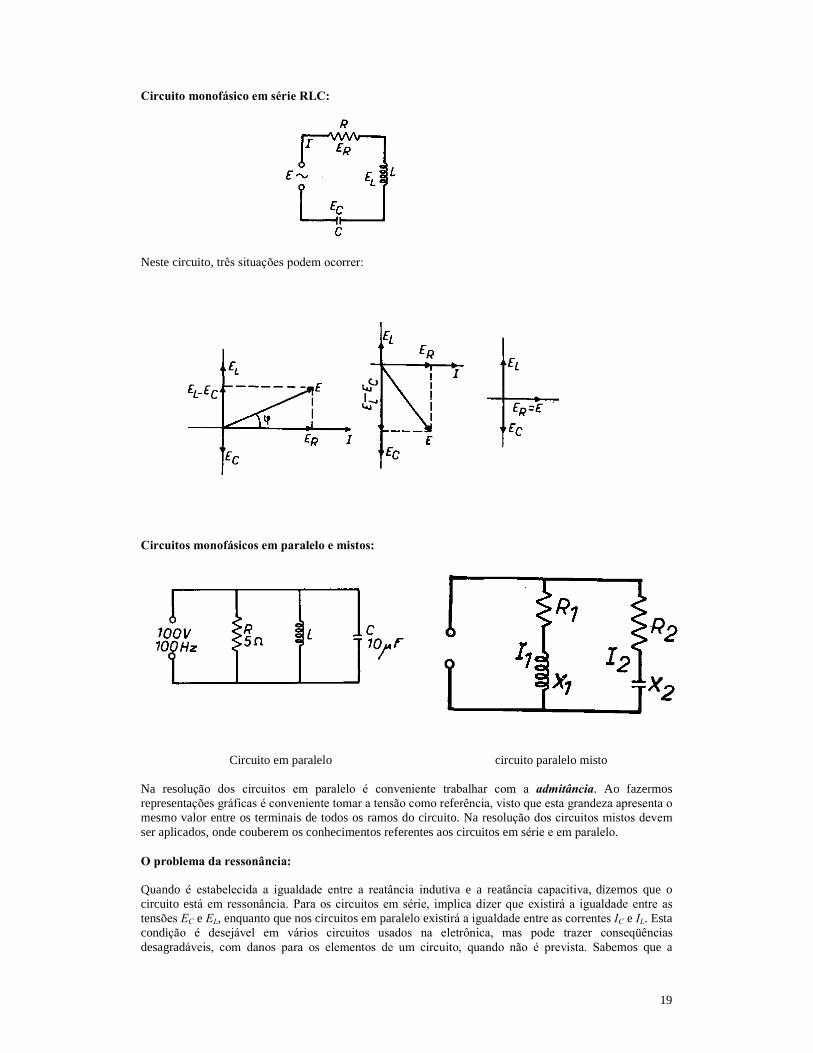
Circuito monofásico em série RLC:
Neste circuito, três situações podem ocorrer:
Circuitos monofásicos em paralelo e mistos:
Circuito em paralelo circuito paralelo misto Na resolução dos circuitos em paralelo é conveniente trabalhar com a admitância. Ao fazermos representações gráficas é conveniente tomar a tensão como referência, visto que esta grandeza apresenta o
mesmo valor entre os terminais de todos os ramos do circuito. Na resolução dos circuitos mistos devem
ser aplicados, onde couberem os conhecimentos referentes aos circuitos em série e em paralelo. O problema da ressonância: Quando é estabelecida a igualdade entre a reatância indutiva e a reatância capacitiva, dizemos que o circuito está em ressonância. Para os circuitos em série, implica dizer que existirá a igualdade entre as
tensões EC e EL, enquanto que nos circuitos em paralelo existirá a igualdade entre as correntes IC e IL. Esta condição é desejável em vários circuitos usados na eletrônica, mas pode trazer conseqüências
desagradáveis, com danos para os elementos de um circuito, quando não é prevista. Sabemos que a
20
reatância indutiva é diretamente proporcional à frequência e que a reatância capacitiva depende
inversamente da mesma. Assim, quando alimentamos um circuito com uma fonte CA e fazemos a frequência variar desde um valor praticamente nulo até um valor alto, podemos observar o crescimento da reatância indutiva e a queda da reatância capacitiva. Numa determinada frequência as duas grandezas tornam-se iguais e o circuito apresentará então características especiais que correspondem à condição
denominada ressonância. A equação para o cálculo da frequência de ressonância é dada pela expressão:
LCfr
2
1 (eq. 3.9)
Na condição de ressonância, tem-se: Para os circuitos em série: A impedância do circuito ou da malha torna-se mínima, ficando reduzida ao valor da resistência; A intensidade de corrente é máxima, como conseqüência do exposto no item anterior; O circuito torna-se resistivo; Toda energia aplicada ao circuito é gasta para vencer sua resistência; Para os circuitos em paralelo: A impedância do circuito ou da malha torna-se máxima, ficando novamente igual ao valor da
resistência; A intensidade de corrente é mínima; O circuito torna-se apenas resistivo; Toda energia aplicada ao circuito é gasta para vencer sua resistência; Correção do fator de potência:
O fator de potência de um circuito deve ser mantido aproximadamente igual a 1. Isto, porque um fator de potência muito baixo implica no encarecimento da instalação e em maiores perdas nos condutores, pois
são necessárias maior corrente e maior potência aparente para a obtenção de uma determinada potência
real, o que se pode concluir observando a expressão abaixo:
cosE
PI (eq. 3.10)
Onde: I = corrente, em ampère (A) P = potência , em Watt (W) cos = fator de potência, adimensional A tensão aplicada aos circuitos industriais, nas residências e nas fábricas é constante, e, portanto, a
corrente fornecida aos mesmos pode ser demasiado elevada, se o fator de potência for muito baixo. O
grande número de aparelhos indutivos (motores, lâmpadas fluorescentes, máquinas de soldar)
normalmente usados nas instalações industriais exige, pela legislação em vigor com relação ao
fornecimento de energia elétrica, que se corrija este fator para um valor entre 0,85 a 0,92, através do
acoplamento de capacitores ligados em paralelo com os elementos causadores do baixo fator. Anotações de aula:

21
Vetores e quantidades complexas: (complemento da 3a aula) Quando se fala do comprimento de um corpo, de sua massa ou ainda do seu volume, nada mais é
necessário que o valor numérico de cada uma dessas grandezas, acompanhado da respectiva unidade, para
que se tenha uma idéia exata do que se deseja informar. Grandezas desse tipo são chamadas
ESCALARES. Outras grandezas, chamadas VETORIAIS, só são perfeitamente entendidas quando delas conhecemos além do valor numérico, o sentido, o ponto de aplicação e a direção segundo a qual a
grandeza atua. Como exemplo pode-se citar a aplicação de uma força a um corpo, onde só é possível
saber o que acontece a esse corpo, quando se conhece o valor da força, a direção e o sentido da aplicação
desta força. Da mesma forma, não podemos dizer que dois carros têm a mesma velocidade somente
porque as leituras dos seus velocímetros são iguais. Isto, porque seus movimentos podem ter direções e
sentidos diferentes. Grandezas vetoriais são representados graficamente com o auxílio de segmentos de retas orientadas, às
quais chamam-se VETORES. O Comprimento do segmento de reta representa em escala, o valor numérico (em módulo) da grandeza vetorial, enquanto a flecha fornece o sentido e ângulo formado com
uma reta de referência fornece a direção segundo a qual a grandeza atua. É importante fazer a distinção
entre direção e sentido, lembrando aqui que cada direção (horizontal ou vertical) admite sempre dois sentidos. A notação usual para designar um vetor, com letras maiúsculas acompanhadas de uma flecha ou
um ponto superior ou simplesmente uma letra maiúscula em negrito, à qual se lê, como exemplo para E
, �Vetor E�. Para combinar vários vetores num único equivalente, deve-se observar vários casos particulares: a)
Quando todos os vetores componentes tem a mesma direção, o vetor equivalente é obtido pela soma
algébrica dos componentes, onde vetores de mesmo sentido são somados e vetores de sentido oposto são
subtraídos; b) Quando os vetores componentes tem direções diferentes, o vetor resultante pode ser obtido
construindo-se um paralelogramo com as direções dos vetores componentes e traçando-se a diagonal a partir do ponto comum aos vetores componentes, conforme mostrado abaixo.
A soma de três ou mais vetores de direções diferentes é obtida compondo-se dois vetores componentes quaisquer, a cada vez, para em seguida somar o primeiro resultado com o próximo componente, e assim sucessivamente até o último, conforme mostrado abaixo:
Outra forma de se obter o vetor resultante, de uma maneira mais genérica, é decompor cada vetor
componente em suas coordenadas cartesianas, as quais cada qual em sua direção, podem ser somadas, para no final reconverter para o vetor resultante, cujas coordenadas é a soma das coordenadas dos
vetores componentes.
22
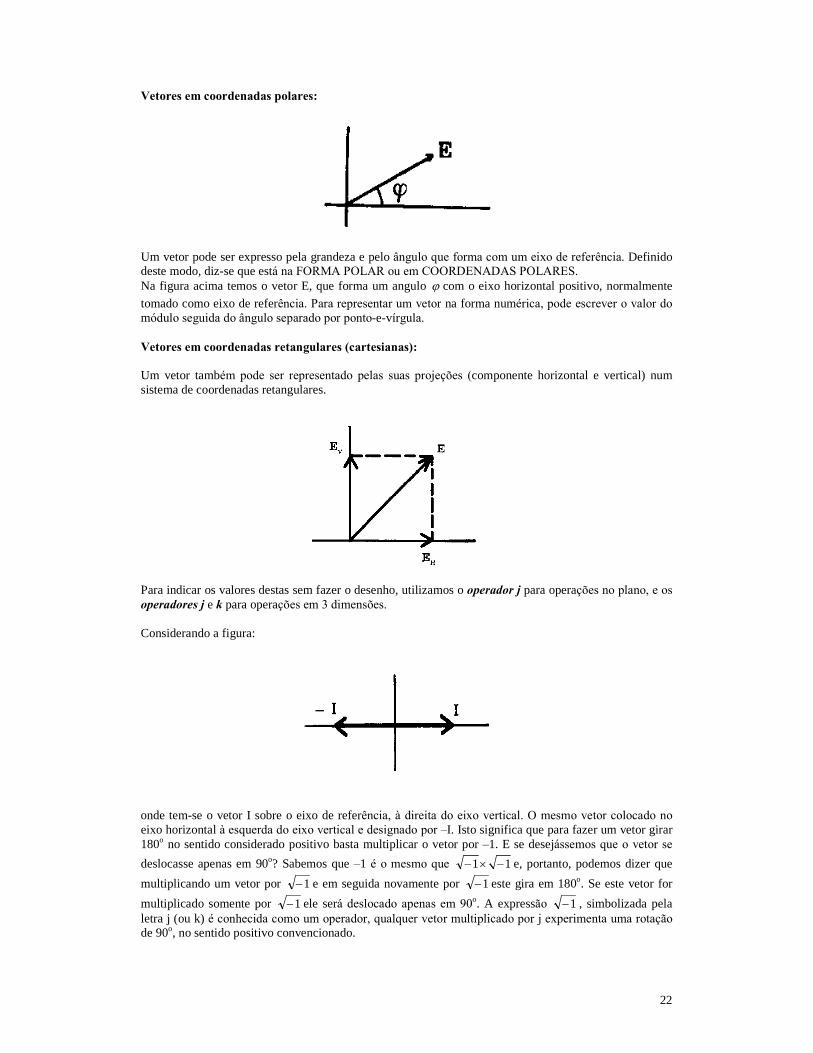
Vetores em coordenadas polares:
Um vetor pode ser expresso pela grandeza e pelo ângulo que forma com um eixo de referência. Definido deste modo, diz-se que está na FORMA POLAR ou em COORDENADAS POLARES. Na figura acima temos o vetor E, que forma um angulo com o eixo horizontal positivo, normalmente
tomado como eixo de referência. Para representar um vetor na forma numérica, pode escrever o valor do
módulo seguida do ângulo separado por ponto-e-vírgula. Vetores em coordenadas retangulares (cartesianas): Um vetor também pode ser representado pelas suas projeções (componente horizontal e vertical) num sistema de coordenadas retangulares.
Para indicar os valores destas sem fazer o desenho, utilizamos o operador j para operações no plano, e os
operadores j e k para operações em 3 dimensões. Considerando a figura:
onde tem-se o vetor I sobre o eixo de referência, à direita do eixo vertical. O mesmo vetor colocado no
eixo horizontal à esquerda do eixo vertical e designado por �I. Isto significa que para fazer um vetor girar 180o no sentido considerado positivo basta multiplicar o vetor por �1. E se desejássemos que o vetor se
deslocasse apenas em 90o? Sabemos que �1 é o mesmo que 11 e, portanto, podemos dizer que
multiplicando um vetor por 1 e em seguida novamente por 1 este gira em 180o. Se este vetor for
multiplicado somente por 1 ele será deslocado apenas em 90o. A expressão 1 , simbolizada pela
letra j (ou k) é conhecida como um operador, qualquer vetor multiplicado por j experimenta uma rotação
de 90o, no sentido positivo convencionado.

23
De acordo com as expressões abaixo, um vetor situado sobre eixos vertical e horizontal será designado
em conformidade com a figura abaixo:
Vê-se que o operador j, sob o ponto de vista não matemático, é um simbolo que, acompanhando um vetor, serve para indicar sua posição num sistema de eixos retangulares. Se a letra (ou o valor) correspondente ao vetor está acompanhada de +j, sabe-se que o vetor está no eixo vertical para cima. Se está precedida de
�j, sabe-se que está no eixovertical para baixo. Sem o j, está no eixo horizontal, à direita ou à esquerda
dependendo do sinal. A representação do vetor na forma retangular também chamada BINÔMIA ou
COMPLEXA, é feita conforme mostram os exemplos abaixo:
Sabe-se que:
EsinEV
EEH
cos
IsinI
II
V
H
cos
Logo, pode-se escrever que:
jIsinII
jEsinEE
cos
cos
Conversão da forma polar para a forma retangular e vice-versa:
As componentes cartesianas de um vetor, num sistema de eixos retangulares, formam com o próprio vetor
um triângulo retângulo, o que nos permite escrever as expressões abaixo, relativas aos MÓDULOS dos
vetores.
III
EEE
VH
VH
22
22

24
Os argumentos (ângulos) dos vetores em questão podem ser determinados a partir da tangente, o que se
faz do seguinte modo:
I
Iarctg
E
Earctg
H
V
H
V
Operações com vetores na forma polar:
Não é possível somar ou subtrair quantidades vetoriais na forma polar. Primeiramente devem ser
convertidas na forma retangular ou binômia e, em seguida, efetuadas as operações com suas componentes cartesianas. Entretanto, a multiplicação e a divisão de vetores na forma polar são possíveis e bastante
simples. Para multiplicar, basta multiplicar os módulos e somar os argumentos, como no exemplo abaixo:
5;24)5)20(10(;24423
5;4
20;2
10;3
CBA
C
B
A
Para dividir, basta efetuar a divisão indicada com os módulos. O argumento do quociente é igual ao
argumento do dividendo menos o do divisor.
90;5)12030(;20
100
120;20
30;100
B
A
B
A
Operações com vetores na forma retangular:
A soma, a subtração e a multiplicação de vetores nesta forma obedecem às regras da álgebra. Isto porque
as componentes ortogonais de todos os vetores ficam convertidas em vetores que atuam na mesma direção, podendo, portanto, serem somados algebricamente. Exemplos:
Soma: Somar os vetores 15+j20, -2+j4 e �3-j2 15 + j 20 - 2 + j 4 - 3 - j 2 10 + j 22
Subtração: Subtrair do vetor 5 � j 4 o vetor 3 � j 2
5 � j 4 - 3 + j 2 (deve-se inverter os sinais. �(3-j2)=-3+j2 )
2 � j 2
Multiplicação: Na multiplicação, usa-se a multiplicação binomial Multiplicar 2 + j 4 por 3 � j 5 (2 + j 4) (3 � j 5) = 6 � j 10 + j 12 � j2 20 = 26 + j 2 ( lembrar que j2 = -1)
25
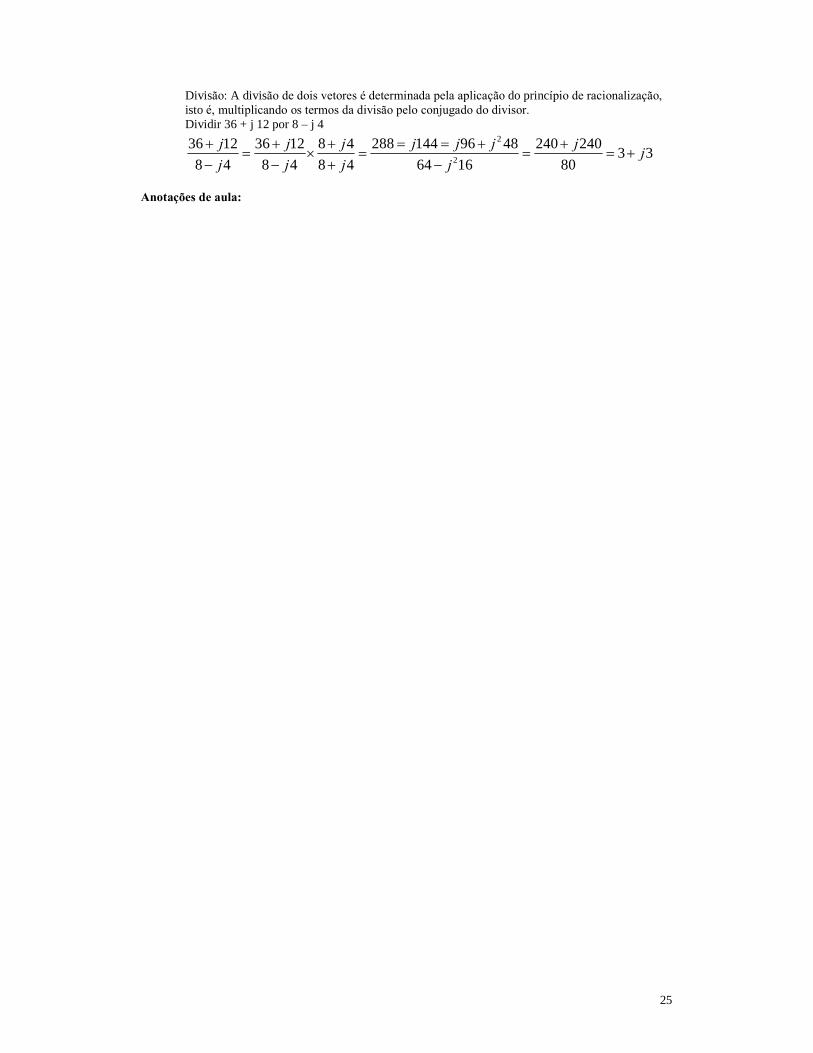
Divisão: A divisão de dois vetores é determinada pela aplicação do princípio de racionalização, isto é, multiplicando os termos da divisão pelo conjugado do divisor. Dividir 36 + j 12 por 8 � j 4
3380
240240
1664
4896144288
48
48
48
1236
48
12362
2
jj
j
jjj
j
j
j
j
j
j
Anotações de aula:
26
4a aula:
Circuitos monofásicos em CA � exercícios diversos Saber projetar instalações exige do projetista saber dimensionar corretamente todos os elementos
de uma instalação. Para tal é necessário muitas vezes se obter dados através de relações conhecidas
e mediante cálculos como aqueles aqui apresentados. Na condição de projetista, além de saber
especificar um componente elétrico corretamente para determinada aplicação, é necessário também
saber dimensionar os condutores elétricos, que deverão ser usados na ligação de tal equipamento.
Estes condutores dependem exclusivamente da corrente que devem transportar. Mais uma vez esse
tipo de dado é obtido mediante cálculos muito semelhantes aos problemas aqui apresentados.
Portanto, ao bom projetista é importante dominar todos os conceitos aqui apresentados.
Observações: É interessante fazer uma memória de cálculo, usando uma folha
inteira para cada problema, procurando esquematizar todos os passos seguidos.
Esta metodologia ajuda a criar o hábito de limpeza e organização durante a
elaboração matemática. 1. Um amperímetro, um voltímetro e um wattímetro são ligados no circuito de um motor de
indução monofásico e indicam respectivamente, 10 A, 220 V e 1900 W. Determinar a) O fator de potência b) A impedância do circuito c) A resistência efetiva
2. 75% da energia aplicada por segundo a um circuito CA são transformados em calor. O circuito
que é indutivo apresenta uma resistência de 10 Determinar: a) O fator de potência do circuito b) A impedância do circuito c) A reatância indutiva do circuito
3. Uma impedância de 4-j3 foi ligada a uma fonte de 100 V. Determinar os seguintes elementos
do circuito: a) A resistência efetiva b) A reatância c) A intensidade de corrente d) O fator de potência e) A potência aparente f) A potência real g) A potência reativa
4. Num circuito de CA em série tem-se ligadas 0,06 H de indutância e 2,4 µF de capacitância e 350
de resistência não indutiva. Qual a frequência de ressonância deste circuito? 5. Uma impedância de 3+j4 foi ligada a uma fonte de 100 V. Determinar:
a) A condutância b) A susceptância c) A admitância do circuito
6. Um circuito de CA em paralelo é ligado a uma fonte de 220 V, 60 Hz. Sabendo-se que um dos
ramos contém 30 de resistência e 40 de reatância indutiva e que o outro apresenta 50 de resistência e80 de reatância capacitiva, determinar: a) A impedância do circuito b) A corrente solicitada da fonte c) O fator de potência do circuito d) A impedância em cada ramo do circuito e) O fator de potência de cada ramo do circuito f) A admitância do circuito g) A susceptância do circuito
27
h) A condutância do circuito i) A potência real do circuito j) A potência aparente do circuito
7. 3 ramos em paralelo contém respectivamente, uma resistência de 5, uma indutância de valor
desconhecido e uma capacitância de 10 µF, ligados a uma fonte CA de 100 Hz. Pergunta-se: a) Se o circuito estivesse em ressonância, qual seria a corrente solicitada da fonte? b) Qual o valor de XL para que o circuito entre em ressonância? c) Se não existisse R, qual seria a corrente total, quando o circuito estivesse em ressonância? d) Qual seria a admitância do circuito, se ele estivesse em ressonância?
8. Uma bobina é ligada em série com um motor monofásico para reduzir a tensão aplicada aos
terminais do motor. A tensão aplicada ao conjunto é de 130 V, 45o e a tensão somente do motor é
de 90 V, 30o. Calcular a ddp entre os terminais da bobina. 9. Uma resistência efetiva de 30 é ligada em série com 50 de reatância indutiva a uma fonte
CA de 230 V. Determinar a impedância do circuito, a intensidade da corrente, a queda de tensão
na resistência e a queda de tensão na bobina. 10. Uma bobina com núcleo de ar, com uma resistência igual a 40 e uma indutância de 0,316 H, é
ligada em série com uma fonte de 240 V, 25 Hz. Que valor tem o resistor, se a corrente no circuito é de 3 A?
11. Um motor de indução solicita 6 A, com um fator de potência em atraso de 0,8, quando é ligado a
uma fonte de 220 V, 60 Hz. a) Que valor de capacitância deverá ser ligado em paralelo com o motor para tornar unitário o
fator de potência do circuito? b) Qual será, então, a intensidade de corrente fornecida pela fonte?
12. O fator de potência de uma carga ligada a uma fonte de 120 V, 60 Hz, é elevado de 0,707 em
atraso para 0,806 em atraso, ligando-se um capacitor de 53 µF em paralelo com a mesma. Qual é
a potência real nesta carga? 13. Uma bobina com 10 de resistência e 12 de reatância indutiva é ligada em série com um
circuito em paralelo de dois ramos. O primeiro ramo contém 20 de resistência e 40 de reatância capacitiva, e outro ramo contém 15 de resistência e 20 de reatância indutiva.
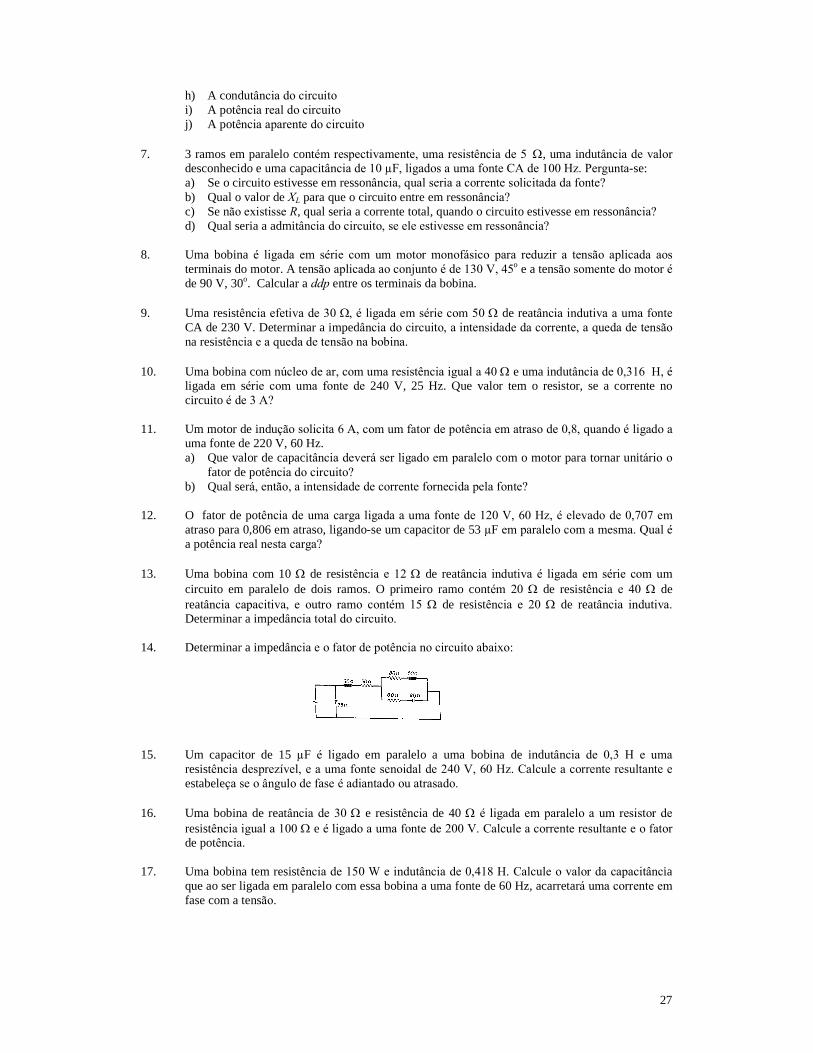
Determinar a impedância total do circuito. 14. Determinar a impedância e o fator de potência no circuito abaixo:
15. Um capacitor de 15 µF é ligado em paralelo a uma bobina de indutância de 0,3 H e uma
resistência desprezível, e a uma fonte senoidal de 240 V, 60 Hz. Calcule a corrente resultante e
estabeleça se o ângulo de fase é adiantado ou atrasado. 16. Uma bobina de reatância de 30 e resistência de 40 é ligada em paralelo a um resistor de
resistência igual a 100 e é ligado a uma fonte de 200 V. Calcule a corrente resultante e o fator
de potência. 17. Uma bobina tem resistência de 150 W e indutância de 0,418 H. Calcule o valor da capacitância
que ao ser ligada em paralelo com essa bobina a uma fonte de 60 Hz, acarretará uma corrente em
fase com a tensão.

28
EXERCÍCIOS PRONTOS
Circuitos mistos (ramos paralelos com elementos em série) 1. Um circuito paralelo consiste de dois ramos. O ramo A possui uma reatância indutiva de 100 e
uma resistência de 173,2 , em série. O ramo B tem uma reatância capacitiva de 173,2 e uma resistência de 100 também em série. A fonte de alimentação do circuito é de 200 V, 50 Hz.
Determine: a) A corrente na fonte e o fator de potência; b) As componentes do circuito em série equivalente.
Esquema:
Cálculos: Ramo A �
AI
Z
VI
Z
Z
XRZ
L
L
L
L
L
LLL
1200
200
200
)100()2,173(22
22
O ângulo de fase é determinado de:
30)5774,0(
5774.02,173
100
arctg
R
Xtg
L
L
L
(atrasado)
Ramo B-
AI
Z
VI
Z
Zc
XRZ
C
C
C
C
CLC
1200
200
200
)2,173()100(22
22
29
O ângulo de fase no ramo capacitivo é determinado de:
60)732,1(
732.1100
2,173
arctg
R
Xtg
C
CC
(adiantado)
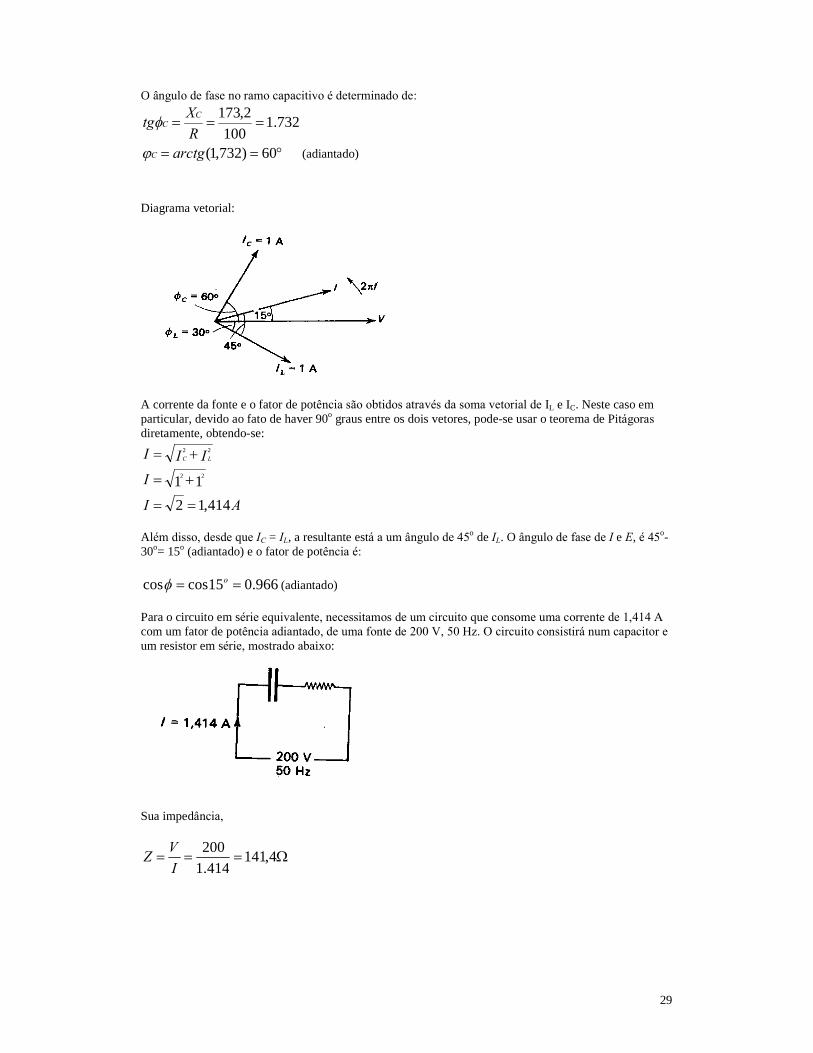
Diagrama vetorial:
A corrente da fonte e o fator de potência são obtidos através da soma vetorial de IL e IC. Neste caso em particular, devido ao fato de haver 90o graus entre os dois vetores, pode-se usar o teorema de Pitágoras
diretamente, obtendo-se:
AI
I
III LC
414,12
1122
22
Além disso, desde que IC = IL, a resultante está a um ângulo de 45
o de IL. O ângulo de fase de I e E, é 45o-
30o= 15o (adiantado) e o fator de potência é:
966.015coscos o (adiantado)
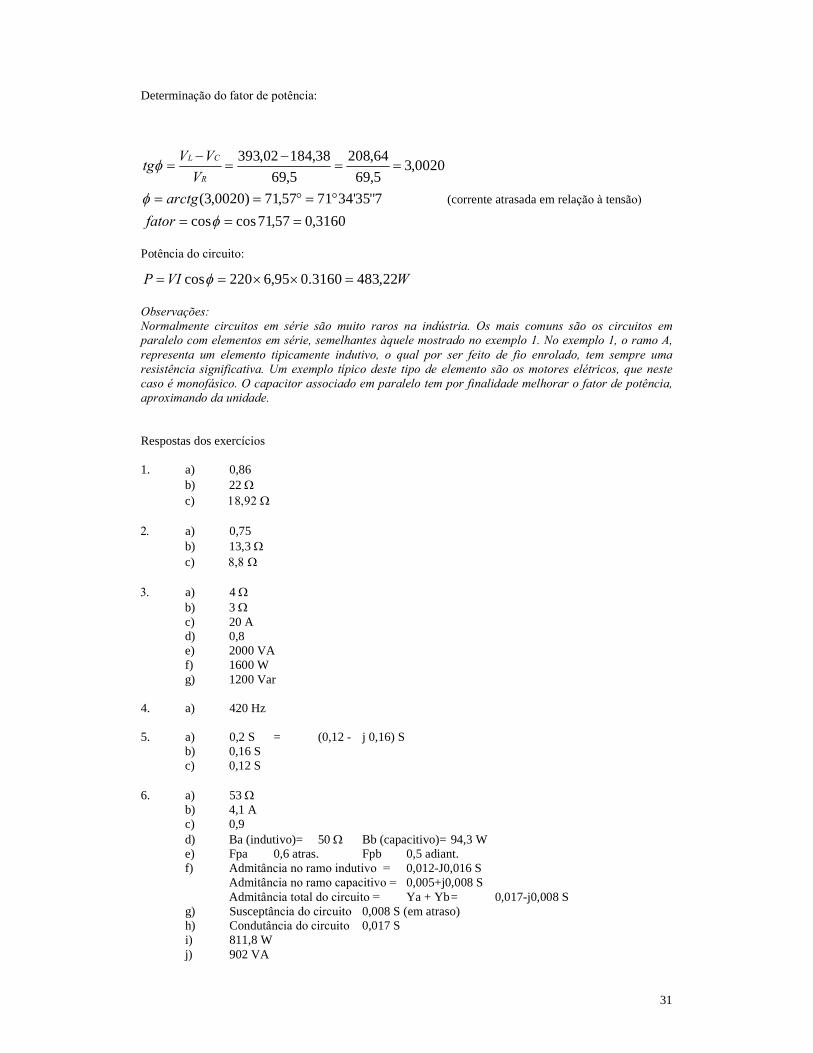
Para o circuito em série equivalente, necessitamos de um circuito que consome uma corrente de 1,414 A
com um fator de potência adiantado, de uma fonte de 200 V, 50 Hz. O circuito consistirá num capacitor e
um resistor em série, mostrado abaixo:
Sua impedância,
4,141414.1
200
I
VZ

30
Do triângulo de impedância, tem-se:
FC
C
fCX
X
X
Z
Xsin
R
R
Z
R
C
C
C
Co
8759,36502
10502
1059,36
2
10
59,364,1412588,0
4,1412588,0
15
6,1364,141966,0
4,141966,0
cos
6
6
6
Circuitos em série
Um resistor de 10 , um capacitor de 100 µF e um indutor de 0,15 H são ligados em série a uma fonte de
220 V, 60 Hz. Calcule a impedância, a corrente, a diferença de potencial através de cada componente, o
fator de potência total e a potência total do circuito. Desenhe o diagrama vetorial do mesmo.
VXIV
VXIV
VRIV
AZ
VI
Z
Z
XXRZ
fCX
fLX
CC
LL
R
CL
C
L
38,18453,2695,6
02,39355,5695,6
50,6900,1095,6
95,664,31
220
64,31
)53,2655,56(10
)(
53,26100602
10
2
10
55,5615,06022
22
222
66
31
Determinação do fator de potência:
3160,057,71coscos
7"35'347157,71)0020,3(
0020,35,69
64,208
5,69
38,18402,393
fator
arctg
V
VVtg
R
CL
(corrente atrasada em relação à tensão)
Potência do circuito:
Observações:
Normalmente circuitos em série são muito raros na indústria. Os mais comuns são os circuitos em
paralelo com elementos em série, semelhantes àquele mostrado no exemplo 1. No exemplo 1, o ramo A,
representa um elemento tipicamente indutivo, o qual por ser feito de fio enrolado, tem sempre uma
resistência significativa. Um exemplo típico deste tipo de elemento são os motores elétricos, que neste
caso é monofásico. O capacitor associado em paralelo tem por finalidade melhorar o fator de potência,
aproximando da unidade.
Respostas dos exercícios 1. a) 0,86
b) 22
c)
a) 0,75 b) 13,3 c)
a) 4 b) 3 c) 20 A d) 0,8 e) 2000 VA f) 1600 W g) 1200 Var
4. a) 420 Hz 5. a) 0,2 S = (0,12 - j 0,16) S
b) 0,16 S c) 0,12 S
6. a) 53 b) 4,1 A c) 0,9 d) Ba (indutivo)= 50 Bb (capacitivo)= 94,3 W e) Fpa 0,6 atras. Fpb 0,5 adiant. f) Admitância no ramo indutivo = 0,012-J0,016 S
Admitância no ramo capacitivo = 0,005+j0,008 S Admitância total do circuito = Ya + Yb = 0,017-j0,008 S
g) Susceptância do circuito 0,008 S (em atraso) h) Condutância do circuito 0,017 S
i) 811,8 W j) 902 VA
WVIP 22,4833160.095,6220cos
32
7) a) 20 A
b) XL = XC = 100 , condição fundamental para haver ressonância c) I= 0 A d) Y= 0 S
8) a) 48,9 V (73o 29�) 9) a) 58,3
b) 2,03 � j 3,38 A c) 118,5 V d) 197,5 V
10) a) 22,4
a µF b) 4,8 A
a) 682 W 13) a) 41,9 (30o31�) a) 70 (56o58�)
b) 0,5 15) a) 16) a) 17) a)
Anotações de aula:
33
5a aula:
Iluminação industrial. Iluminação elétrica. Normas de projeto.
Chama-se ponto de luz um ponto gerador de radiações capazes de impressionar os nossos olhos. As fontes
luminosas são de duas naturezas: a luz natural, proveniente do sol, e a artificial, produzida por lâmpadas
elétricas, a gás, a querosene, velas, etc. Todas as fontes luminosas, além de luz, irradiam calor, sendo as
de melhor rendimento as que conseguem irradiar maior quantidade de luz produzindo o menor calor possível. Para efeito de comparação entre diferentes condições de iluminação é necessário estabelecer padrões de
medidas, os quais são obtidos da física da luz e fotometria. Assim, tem-se:
Iluminamento: O iluminamento representa o fluxo luminoso que cada unidade de uma superfície
iluminada intercepta. A unidade de iluminamento é o lux e corresponde ao iluminamento que sofre uma superfície de 1 m2, quando sobre ela incide o fluxo luminoso de uma lâmpada-padrão colocada a um
metro de distância da superfície. (1lux= 1lumem/m2).
Fluxo luminoso: Chama-se fluxo luminoso, com relação a uma superfície, o produto do iluminamento,
expresso em lux, existente nesta superfície, pela área da mesma, sendo o resultado expresso em lumens.
A iluminação natural, obtida do sol, é a que mais se adapta à natureza humana. Infelizmente, nem sempre
é possível desfrutar desse privilégio da natureza, por duas razões essenciais: em primeiro lugar, porque o
sol ilumina a terra, eficientemente, somente algumas horas por dia e, em segundo lugar, porque a maioria dos trabalhos delicados, que requerem suficiente iluminação, é feita no interior de edifícios, onde nem
sempre a quantidade de luz, provinda do exterior, é suficiente. Assim sendo, todas as vezes em que há
deficiência ou falta absoluta de iluminação natural, torna-se imperativo o uso da iluminação artificial,
como complementar ou substituta da luz solar. A iluminação residencial, atualmente com a preponderância dos apartamentos e residências de pequeno
porte, não constitui problema de difícil solução, pois as salas e quartos são , em geral, de tamanho
reduzido e providos de amplas janelas que lhes asseguram uma suficiente iluminação durante o dia e à
noite, uma lâmpada ou um grupo conveniente de lâmpadas de potência adequada asseguram ao local uma iluminação suficiente às tarefas domésticas ordinárias. Em casos especiais, de leitura, bordado ou costura,
uma lâmpada auxiliar proporciona a complementação necessária que essas tarefas requerem. A
iluminação industrial, pelo contrário, constitui um problema mais complexo, cuja solução exige um
estudo minucioso. A indústria requer uma iluminação adequada, tanto natural como artificial, que não
prejudique a visão e que concorra para a eficiência do trabalho, como elemento primordial do custo de produção. O ponto mais importante da iluminação industrial é determinar em que proporções esta deve
completar a natural durante o dia, e como a primeira deve substituir a segunda nas horas de trabalho noturno. Os meios para iluminação natural das modernas construções de fábricas são os janelões, as clarabóias, as
janelas dente de serra, etc. Estas proporcionam uma iluminação razoável dentro da fábrica, sendo, porém
deficiente nos dias de chuva. Torna-se indispensável então a iluminação artificial para compensar essa deficiência. Vantagens de uma boa iluminação industrial:
Aumento de produção; Diminuição de refugos; Melhoria da qualidade dos produtos; Redução dos acidentes pessoais; Melhoria das condições de trabalho dos operários; Diminuição da fadiga; Facilidade de supervisão; Possibilidade de trabalho independente da luz do dia; Condições que uma iluminação artificial deve ter:
Deve ter ausência absoluta de ofuscamento, direto ou indireto ou refletido. Entende-se por ofuscamento a cegueira momentânea causada por fontes de luz excessivamente brilhantes, situadas
no campo visual; Deve ter luz uniforme e suficientemente intensa sobre todos os planos de trabalho;
34
Os tetos e paredes devem ser, em geral, de cor clara, para aumentar o nível de iluminamento; A luz deve ser suficientemente difusa e bem dirigida para evitar sombras acentuadas e contrastes
nocivos; A luz deve ser produzida por aparelhagem simples, segura e de fácil manutenção, e apresentar
sempre com elevado rendimento. Iluminação industrial:
A iluminação industrial deve ser feita tendo em vista os processos individuais de trabalho, a
complexidade das máquinas em serviço, a localização e a construção das máquinas que hão de ser
privativas do gênero de trabalho, e por fim, os constantes perigos de acidentes. A iluminação industrial é dividida em três grupos: Iluminação geral; Iluminação geral e localizada; Iluminação combinada; A iluminação geral emprega luminárias colocadas a espaços regulares e suspensas a uma conveniente e
uniforme distância do chão; A iluminação geral e localizada emprega luminárias suspensas a uma altura determinada, colocadas de
acordo com as condições de trabalho; A iluminação combinada é empregada nos casos em que a iluminação geral não é suficiente para
determinado posto de trabalho. Uma fonte de luz local compensa a deficiência. Recomendações para um projeto de iluminação:
Fazer um projeto de iluminação consiste em determinar o tipo de luminárias, seu número, espaçamento,
altura de montagem e potência, para produzir um determinado iluminamento no plano horizontal de
trabalho. Para isto é necessário tomar-se em consideração as dimensões e forma do local, a cor das
paredes e do teto, coeficiente de utilização, espaçamento máximo e a distribuição da luz. A execução de um projeto de iluminação requer informações a respeito de luminárias. É imprescindível a
consulta às informações técnicas obtidas junto aos fabricantes de lâmpadas e luminárias. Devem-se conhecer os detalhes técnicos de cada tipo a ser usado (rendimento luminoso, fator de depreciação, a
eficiência das luminárias, fluxo luminoso, potência etc.). Estes dados são facilmente obtidos junto ao fabricante.
Níveis de iluminamento:
Os níveis de iluminamento, tecnicamente convenientes, em cada local de trabalho dependem do tipo de atividades que nele se exercem, sendo os mesmos indicados pela Norma P-NB-57 de 1969 da ABNT. Atualmente a mesma sofreu correções e recebeu o número NB-5413. Observar as seguintes condições gerais relativas ao nível de iluminamento, a saber: Nível de iluminamento deverá ser mantido no campo de trabalho. Quando o campo de trabalho não
for definido, deverá se adotar o plano horizontal a 0,75 m do piso; Caso seja necessário um elevado nível de iluminamento em um limitado campo de trabalho, este
poderá ser conseguido com iluminação suplementar; No restante do ambiente, o iluminamento não deverá ser inferior a 1/10 do valor adotado para o
campo de trabalho, mesmo que o iluminamento recomendado para o restante do ambiente seja menor;
Procurar manter o iluminamento em qualquer ponto do campo de trabalho nunca inferior a 70% do iluminamento médio, o qual pode ser determinado pelo método MB-207.
Altura e espaçamento de luminárias:
O plano de trabalho é situado a uma altura que varia entre 0,75 e 1,00 m, entretanto, por comodidade, a altura de montagem das mesmas é medida a partir do piso. Para refletores pequenos é recomendável uma
altura de montagem de 3,00m enquanto que para os grandes recomenda-se a altura entre 3,00 a 8,00 metros. O espaçamento entre as luminárias deve ser proporcional à altura de montagem das mesmas. O
espaçamento é o fator que determina a uniformidade da distribuição do fluxo luminoso. Para se obter um
iluminamento razoavelmente uniforme, os espaçamentos máximos nunca devem exceder as recomendações dos fabricantes. Em geral, o espaçamento máximo entre as luminárias deve ser

35
aproximadamente igual a sua altura de montagem. Nas luminárias embutidas, o espaçamento deve
corresponder à metade da altura de montagem. A distância entre as luminárias extremas e as paredes deve
ser aproximadamente a metade do espaçamento normal entre as luminárias. Trabalho proposto: Simulação de projeto:
Simular o ambiente industrial constituído por um local de produção, depósito, escritório, refeitório e
sanitários. Atribuir dimensões e distribuição espacial fictícias. Elaborar a memória de cálculo, contendo
todas as informações necessárias ao projeto de iluminação destes ambientes. Admitir que a energia seja
tomada do quadro geral de distribuição locado junto ao ambiente de produção. Dimensionar todos os
circuitos, procurando equilibrar a distribuição das cargas nas três fases. Todo o trabalho deverá
respeitar as normas de projeto vigentes.
Projeto elétrico da instalação industrial:
O cuidado a ser dispensado na elaboração dos projetos de instalações industriais, bem como a posterior
execução destas instalações é, sem dúvida, um fator de importância ponderável tanto na sua economia
como na sua segurança. É bom lembrar que uma instalação econômica não é aquela que custa
simplesmente barato, e por outro lado, nem toda instalação que custa muito caro é melhor. Assim sendo,
deve-se procurar executar um projeto visando uma real economia na instalação. É realmente a confusão
feita com os termos BARATO e ECONÔMICO que tem causado grandes prejuízos não só a industriais
como também a pessoas físicas, uma vez que nem sempre o que é mais barato é o mais econômico.
Adotando-se essa linha de raciocínio, o projetista deve primar pela economia real, evitando também os excessos que somente ajudam a elevar o preço da instalação sem aumentar a sua eficiência. O correto
dimensionamento dos equipamentos, máquinas e seus motores e principalmente os circuitos elétricos que
os alimentarão é de fundamental importância para a economia e segurança de uma instalação elétrica. Regras básicas para um bom projeto:
O projeto deve ser racionalmente dimensionado, sobretudo visando a segurança e a eficiência da
instalação; Projeto deve ser econômico tanto da parte de instalação como da manutenção; Após a execução da obra, o projeto deve ser guardado em lugar de fácil acesso, de modo a permitir
que o pessoal de operação e manutenção possa consultá-lo sempre quando necessário; As modificações feitas nas instalações deverão ser registradas de imediato no projeto das instalações,
garantindo assim, a sua atualização; Um projeto atualizado é uma ferramenta de trabalho que possibilita nos casos de modificações das
instalações, tanto nas substituições como nas ampliações e na própria manutenção, uma economia de
tempo ponderável, além de dar segurança aos responsáveis pelas modificações e/ou manutenção. Anotações de aula:
36
6ª aula
Circuitos polifásicos Nas aulas anteriores foram vistos os circuitos monofásicos, constituídos sempre de dois condutores sendo um deles uma fase, aonde chega a corrente elétrica e outro, o neutro, o qual tem potencial normalmente
igual a zero, e neste caso é considerado com o mesmo potencial da terra, e portanto, é aterrado junto ao
quadro de distribuição principal. Os aparelhos elétricos considerados monofásicos sempre têm dois fios, os quais são respectivamente ligados um à fase e outro ao neutro. Nos circuitos polifásicos, existem mais
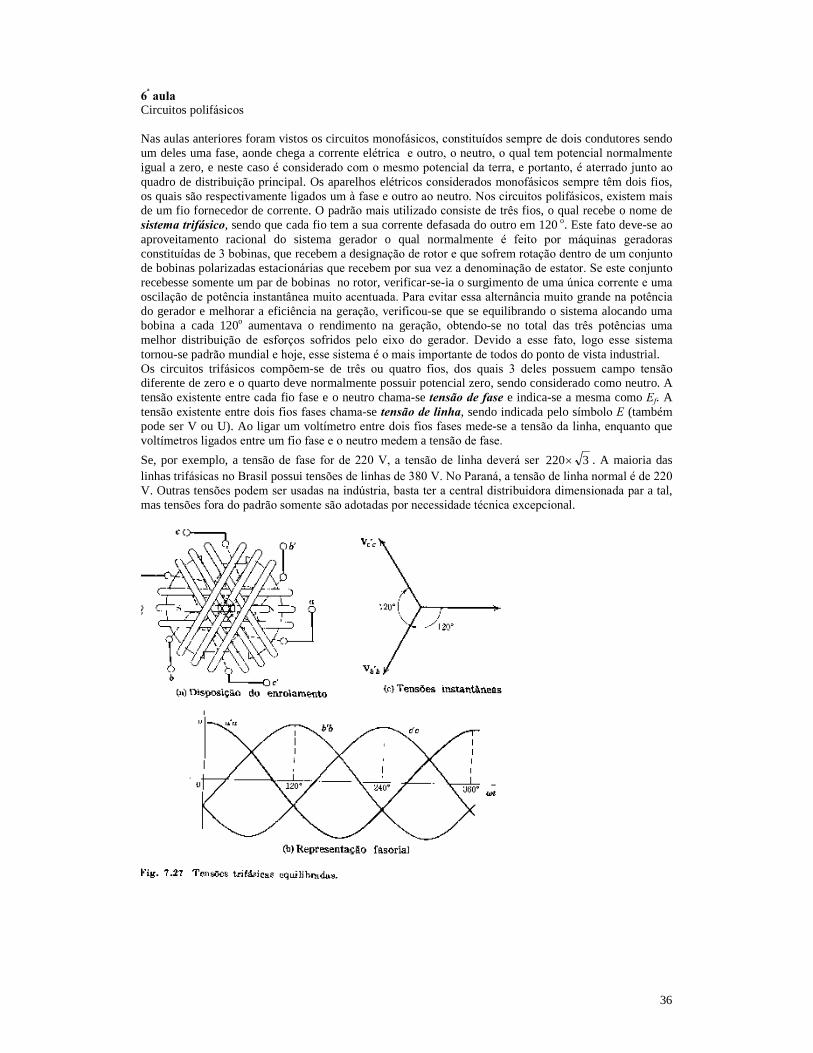
de um fio fornecedor de corrente. O padrão mais utilizado consiste de três fios, o qual recebe o nome de sistema trifásico, sendo que cada fio tem a sua corrente defasada do outro em 120 o. Este fato deve-se ao aproveitamento racional do sistema gerador o qual normalmente é feito por máquinas geradoras
constituídas de 3 bobinas, que recebem a designação de rotor e que sofrem rotação dentro de um conjunto
de bobinas polarizadas estacionárias que recebem por sua vez a denominação de estator. Se este conjunto
recebesse somente um par de bobinas no rotor, verificar-se-ia o surgimento de uma única corrente e uma
oscilação de potência instantânea muito acentuada. Para evitar essa alternância muito grande na potência
do gerador e melhorar a eficiência na geração, verificou-se que se equilibrando o sistema alocando uma bobina a cada 120o aumentava o rendimento na geração, obtendo-se no total das três potências uma
melhor distribuição de esforços sofridos pelo eixo do gerador. Devido a esse fato, logo esse sistema
tornou-se padrão mundial e hoje, esse sistema é o mais importante de todos do ponto de vista industrial. Os circuitos trifásicos compõem-se de três ou quatro fios, dos quais 3 deles possuem campo tensão
diferente de zero e o quarto deve normalmente possuir potencial zero, sendo considerado como neutro. A tensão existente entre cada fio fase e o neutro chama-se tensão de fase e indica-se a mesma como Ef. A tensão existente entre dois fios fases chama-se tensão de linha, sendo indicada pelo símbolo E (também
pode ser V ou U). Ao ligar um voltímetro entre dois fios fases mede-se a tensão da linha, enquanto que
voltímetros ligados entre um fio fase e o neutro medem a tensão de fase.
Se, por exemplo, a tensão de fase for de 220 V, a tensão de linha deverá ser 3220 . A maioria das linhas trifásicas no Brasil possui tensões de linhas de 380 V. No Paraná, a tensão de linha normal é de 220
V. Outras tensões podem ser usadas na indústria, basta ter a central distribuidora dimensionada par a tal, mas tensões fora do padrão somente são adotadas por necessidade técnica excepcional.
37
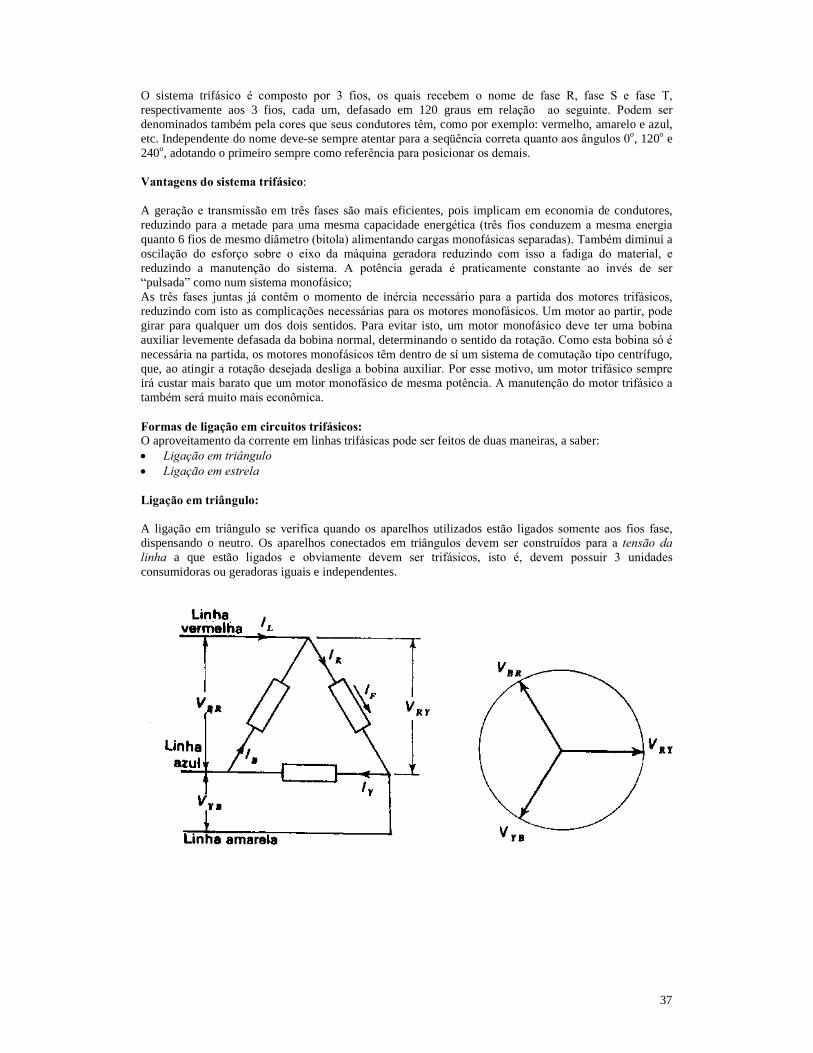
O sistema trifásico é composto por 3 fios, os quais recebem o nome de fase R, fase S e fase T,
respectivamente aos 3 fios, cada um, defasado em 120 graus em relação ao seguinte. Podem ser
denominados também pela cores que seus condutores têm, como por exemplo: vermelho, amarelo e azul, etc. Independente do nome deve-se sempre atentar para a seqüência correta quanto aos ângulos 0
o, 120o e 240o, adotando o primeiro sempre como referência para posicionar os demais. Vantagens do sistema trifásico: A geração e transmissão em três fases são mais eficientes, pois implicam em economia de condutores, reduzindo para a metade para uma mesma capacidade energética (três fios conduzem a mesma energia
quanto 6 fios de mesmo diâmetro (bitola) alimentando cargas monofásicas separadas). Também diminui a oscilação do esforço sobre o eixo da máquina geradora reduzindo com isso a fadiga do material, e
reduzindo a manutenção do sistema. A potência gerada é praticamente constante ao invés de ser
�pulsada� como num sistema monofásico; As três fases juntas já contêm o momento de inércia necessário para a partida dos motores trifásicos,
reduzindo com isto as complicações necessárias para os motores monofásicos. Um motor ao partir, pode
girar para qualquer um dos dois sentidos. Para evitar isto, um motor monofásico deve ter uma bobina
auxiliar levemente defasada da bobina normal, determinando o sentido da rotação. Como esta bobina só é
necessária na partida, os motores monofásicos têm dentro de si um sistema de comutação tipo centrífugo, que, ao atingir a rotação desejada desliga a bobina auxiliar. Por esse motivo, um motor trifásico sempre
irá custar mais barato que um motor monofásico de mesma potência. A manutenção do motor trifásico a
também será muito mais econômica.
Formas de ligação em circuitos trifásicos:
O aproveitamento da corrente em linhas trifásicas pode ser feitos de duas maneiras, a saber: Ligação em triângulo
Ligação em estrela
Ligação em triângulo:
A ligação em triângulo se verifica quando os aparelhos utilizados estão ligados somente aos fios fase,
dispensando o neutro. Os aparelhos conectados em triângulos devem ser construídos para a tensão da
linha a que estão ligados e obviamente devem ser trifásicos, isto é, devem possuir 3 unidades
consumidoras ou geradoras iguais e independentes.

38
A figura acima mostra três cargas ligadas na configuração em triângulo, também chamada de ligação delta. A tensão aplicada a qualquer uma das três cargas é a tensão da linha, EL, e a corrente de linha é a
diferença vetorial (fasorial) entre as correntes nas duas cargas ligadas à linha considerada. Em particular,
se as correntes de carga são todas iguais e fazem iguais ângulos de fase com suas respectivas tensões, o
sistema é considerado balanceado. Neste caso tem-se:
FL II 3 Onde IL= corrente de linha, em ampères IF= corrente de fase, em ampères
cos.3 LLIEP Onde P= potência útil, em Watts EL= tensão de linha, em Volt IL= corrente de linha, em ampère = angulo de defasagem entre a tensão e a corrente Exemplo: Três bobinas, cada uma com uma resistência de 40 ohms, e uma reatância indutiva de 30 ohm, são ligadas
em triângulo a um sistema trifásico de 400 V. Calcule a corrente em cada bobina, a corrente de linha, a potência de cada bobina e a potência total do circuito. Impedância em cada bobina:
503040 2222L
XRZ
Corrente em cada bobina:
AZ
E
Z
EI
LFF 8
50
400
Corrente de linha:
AIL 86,1683
Fator de potência de cada bobina:
8,050
40cos
Z
R
Potência em cada bobina: Aparente: = EF . IF = 400 . 8 = 3200 VA Reativa: = EF . IF. sen = 400 . 8 . 0,6 = 1920 Var Útil = EF . IF. cos = 400 . 8 . 0,8 = 2560 W Potência total do circuito:
WIEPPPPP LLuuuUt 76808,0.86,13.400.3cos...3321
WPt 768025603
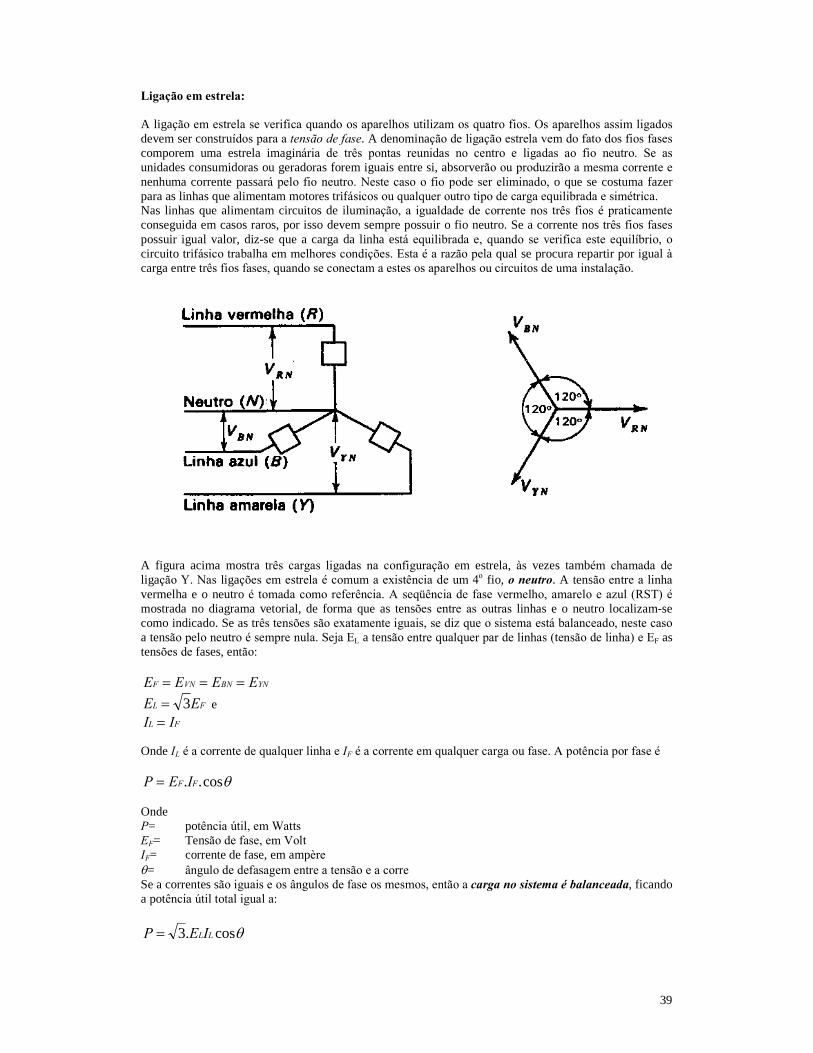
39
Ligação em estrela:
A ligação em estrela se verifica quando os aparelhos utilizam os quatro fios. Os aparelhos assim ligados
devem ser construídos para a tensão de fase. A denominação de ligação estrela vem do fato dos fios fases
comporem uma estrela imaginária de três pontas reunidas no centro e ligadas ao fio neutro. Se as
unidades consumidoras ou geradoras forem iguais entre si, absorverão ou produzirão a mesma corrente e
nenhuma corrente passará pelo fio neutro. Neste caso o fio pode ser eliminado, o que se costuma fazer para as linhas que alimentam motores trifásicos ou qualquer outro tipo de carga equilibrada e simétrica. Nas linhas que alimentam circuitos de iluminação, a igualdade de corrente nos três fios é praticamente
conseguida em casos raros, por isso devem sempre possuir o fio neutro. Se a corrente nos três fios fases
possuir igual valor, diz-se que a carga da linha está equilibrada e, quando se verifica este equilíbrio, o
circuito trifásico trabalha em melhores condições. Esta é a razão pela qual se procura repartir por igual à carga entre três fios fases, quando se conectam a estes os aparelhos ou circuitos de uma instalação.
A figura acima mostra três cargas ligadas na configuração em estrela, às vezes também chamada de
ligação Y. Nas ligações em estrela é comum a existência de um 4o fio, o neutro. A tensão entre a linha
vermelha e o neutro é tomada como referência. A seqüência de fase vermelho, amarelo e azul (RST) é
mostrada no diagrama vetorial, de forma que as tensões entre as outras linhas e o neutro localizam-se como indicado. Se as três tensões são exatamente iguais, se diz que o sistema está balanceado, neste caso
a tensão pelo neutro é sempre nula. Seja EL a tensão entre qualquer par de linhas (tensão de linha) e EF as tensões de fases, então:
YNBNVNF EEEE
FL EE 3 e
FL II Onde IL é a corrente de qualquer linha e IF é a corrente em qualquer carga ou fase. A potência por fase é
cos.. FF IEP Onde P= potência útil, em Watts EF= Tensão de fase, em Volt IF= corrente de fase, em ampère = ângulo de defasagem entre a tensão e a corre Se a correntes são iguais e os ângulos de fase os mesmos, então a carga no sistema é balanceada, ficando a potência útil total igual a:
cos.3 LLIEP

40
Onde P= potência útil, em Watts EL= tensão de linha, em Volt IL= corrente de linha, em ampère = angulo de defasagem entre a tensão e a corrente Exemplo: As seguintes cargas são ligadas a um sistema trifásico com quatro fios na tensão de 415 V: Entre a linha vermelha e o neutro, um resistor não indutivo de 24 ohm; Entre a linha amarela e o neutro, 886 W com fator de potência em atraso de 0,555; Entre a linha azul e o neutro, um capacitor com 30 ohms de reatância em série com um resistor de 40ohm; A seqüência de fase é vermelho, amarelo e azul. Calcule a corrente em cada linha, a potência total do
circuito e a corrente no neutro. Nos circuitos em estrela, a corrente de linha é igual a corrente de fase, assim:
V2403
415V
Z
VI
F
FF
Corrente na linha vermelha. Chamando de IR a corrente de fase nesta linha, vem:
AI RF 1024
240
Corrente na linha amarela:
A65,6555,0240
886I
555,0.I.240886
cos.I.EP
YF
YF
YFF
Corrente na linha azul:
AXRZ
EI
C
F
BF 8,4
3040
2402402222
Ângulo de fase nesta fase (linha azul):
´5236
75,040
30tan
B
CB
R
X
Potência útil total: A potência total do circuito é a soma das potências úteis em cada uma das cargas.
BYR PPPP A linha vermelha tem fator de potência igual a 1, pois só tem resistência.
WPR 240010240 A linha amarela tem potência fornecida com fator de potência igual a 0,555.
WPY 886

41
A linha azul tem fator de potência igual a 0,8
WP 42086,9218862400
Para determinar a corrente no neutro é necessário fazer-se a soma vetorial das três correntes, sendo que a
corrente do neutro é igual à soma vetorial das três correntes. (Fazer manualmente este calculo a título de
exercício, a resposta é 1,798A. Desenhar em escala os fasores ajuda a resolução do problema). IN=IR + IY + IB (Não esquecer que esta soma deve ser vetorial)
WPB 6,9218,08,4240´)5236cos(8,4240
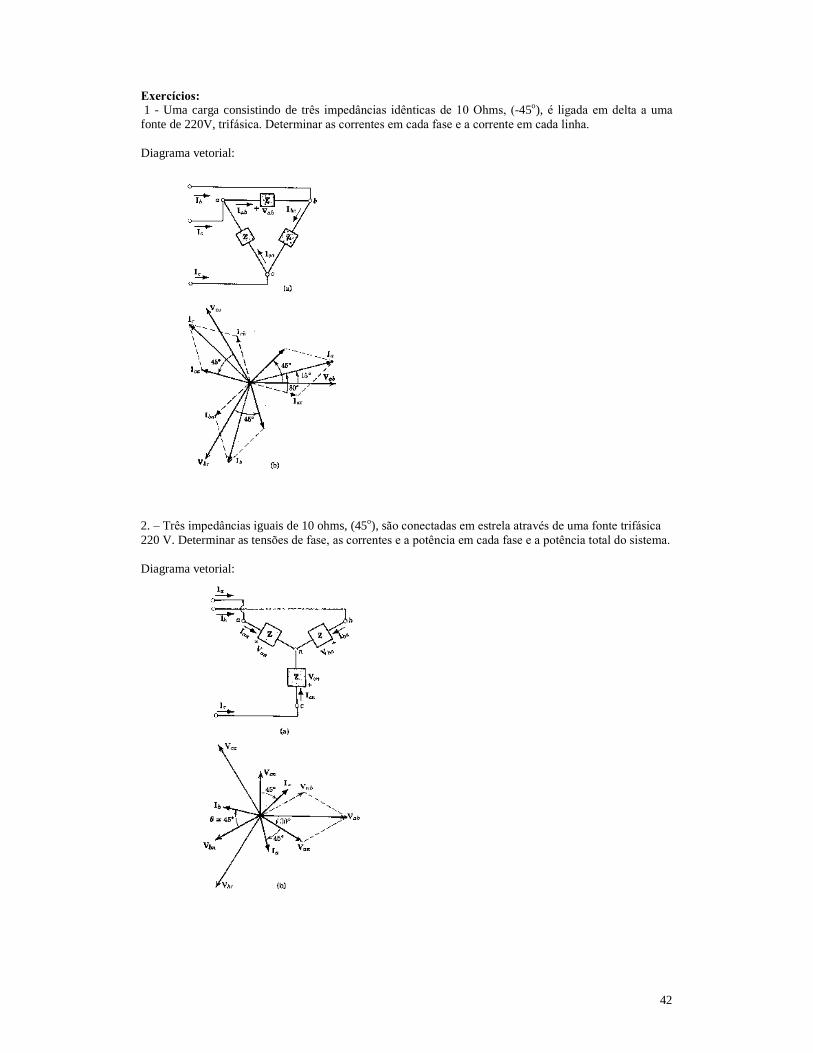
42
Exercícios:
1 - Uma carga consistindo de três impedâncias idênticas de 10 Ohms, (-45o), é ligada em delta a uma
fonte de 220V, trifásica. Determinar as correntes em cada fase e a corrente em cada linha. Diagrama vetorial:
2. � Três impedâncias iguais de 10 ohms, (45o), são conectadas em estrela através de uma fonte trifásica 220 V. Determinar as tensões de fase, as correntes e a potência em cada fase e a potência total do sistema. Diagrama vetorial:

43
Conselhos úteis:
O valor médio de uma corrente periódica é
T
0
)med( idtT
1I (para uma senóide, este valor é );
O valor eficaz ou valor rms de uma corrente periódica é
T
0
2dtiT
1I (para uma senóide, este valor é );
Os diagramas de fasores são geralmente traçados, usando-se os valores eficazes lidos em amperímetros e voltímetros CA;
A potência média, a qual é sempre indicada por um wattímetro é
T
0
dt.i.vT
1P (onde v = tensão instantânea)
Para senóide, este valor é, respectivamente:
Potência útil:
R
ER.Icos.I.EP
2R2
R (ER= componente �x� da tensão)
Potência reativa:
X
EX.Isen.I.EP
2X2
XX (EX= componente �y� da tensão)
Potência aparente:
Z
EZ.II.EP
22
A
Potência complexa:
XA jPPP
fator de potência:
Z
R
E
E
I.E
P
P
Pcosfp R
A
Na determinação da potência total aparente, as componentes da potência e as componentes da
potência reativa são somadas separadamente e combinadas vetorialmente. Traçar os triângulos de
potência é sempre útil; Um circuito contendo indutância e capacitância estará em série se a tensão e a corrente nos terminais
estiverem em fase; Na frequência de ressonância, o fator de potência é sempre igual a 1, e a impedância e a admitância
são puramente reais (número real); Uma fonte trifásica equilibrada consiste de três fontes monofásicas iguais e simétricas conectadas em
triângulo ou em estrela. Nos sistemas equilibrados em triângulo a tensão de linha é sempre igual à tensão da fase. Nos sistemas equilibrados em estrela, a corrente de linha é sempre igual à corrente de fase;
Ao analisar circuitos trifásicos equilibrados, traçar um diagrama de fiação cuidadosamente orientado
e identificado. Esboçar o diagrama de fasores como um guia e uma verificação. Não é necessário
calcular os parâmetros nas três fases separadamente. Basta analisar uma fase e usar a simetria.
cos.I.E.3cos.I.E3P linhalinhafasefasetotal
)()( 636,02
medmed II
)()(
707,02
med
med
II
I
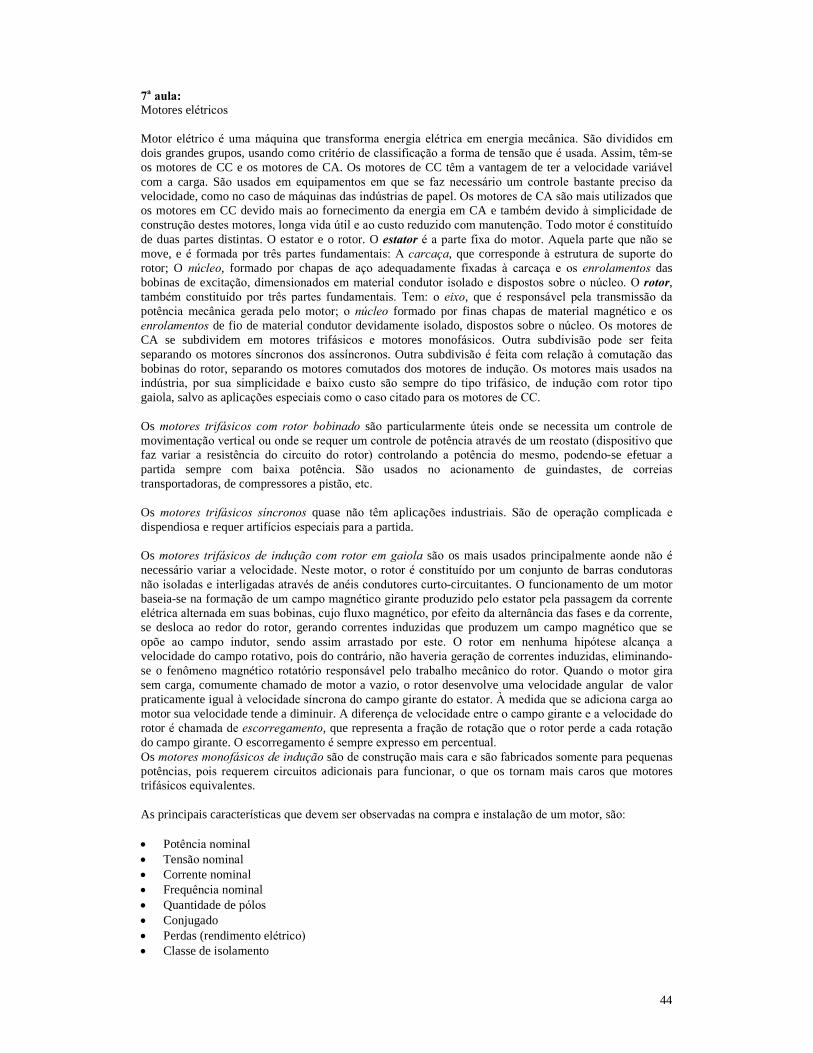
44
7a aula:
Motores elétricos Motor elétrico é uma máquina que transforma energia elétrica em energia mecânica. São divididos em
dois grandes grupos, usando como critério de classificação a forma de tensão que é usada. Assim, têm-se os motores de CC e os motores de CA. Os motores de CC têm a vantagem de ter a velocidade variável
com a carga. São usados em equipamentos em que se faz necessário um controle bastante preciso da
velocidade, como no caso de máquinas das indústrias de papel. Os motores de CA são mais utilizados que os motores em CC devido mais ao fornecimento da energia em CA e também devido à simplicidade de
construção destes motores, longa vida útil e ao custo reduzido com manutenção. Todo motor é constituído
de duas partes distintas. O estator e o rotor. O estator é a parte fixa do motor. Aquela parte que não se
move, e é formada por três partes fundamentais: A carcaça, que corresponde à estrutura de suporte do
rotor; O núcleo, formado por chapas de aço adequadamente fixadas à carcaça e os enrolamentos das bobinas de excitação, dimensionados em material condutor isolado e dispostos sobre o núcleo. O rotor, também constituído por três partes fundamentais. Tem: o eixo, que é responsável pela transmissão da
potência mecânica gerada pelo motor; o núcleo formado por finas chapas de material magnético e os
enrolamentos de fio de material condutor devidamente isolado, dispostos sobre o núcleo. Os motores de
CA se subdividem em motores trifásicos e motores monofásicos. Outra subdivisão pode ser feita
separando os motores síncronos dos assíncronos. Outra subdivisão é feita com relação à comutação das
bobinas do rotor, separando os motores comutados dos motores de indução. Os motores mais usados na
indústria, por sua simplicidade e baixo custo são sempre do tipo trifásico, de indução com rotor tipo
gaiola, salvo as aplicações especiais como o caso citado para os motores de CC. Os motores trifásicos com rotor bobinado são particularmente úteis onde se necessita um controle de movimentação vertical ou onde se requer um controle de potência através de um reostato (dispositivo que
faz variar a resistência do circuito do rotor) controlando a potência do mesmo, podendo-se efetuar a partida sempre com baixa potência. São usados no acionamento de guindastes, de correias
transportadoras, de compressores a pistão, etc. Os motores trifásicos síncronos quase não têm aplicações industriais. São de operação complicada e
dispendiosa e requer artifícios especiais para a partida. Os motores trifásicos de indução com rotor em gaiola são os mais usados principalmente aonde não é
necessário variar a velocidade. Neste motor, o rotor é constituído por um conjunto de barras condutoras
não isoladas e interligadas através de anéis condutores curto-circuitantes. O funcionamento de um motor baseia-se na formação de um campo magnético girante produzido pelo estator pela passagem da corrente
elétrica alternada em suas bobinas, cujo fluxo magnético, por efeito da alternância das fases e da corrente, se desloca ao redor do rotor, gerando correntes induzidas que produzem um campo magnético que se
opõe ao campo indutor, sendo assim arrastado por este. O rotor em nenhuma hipótese alcança a
velocidade do campo rotativo, pois do contrário, não haveria geração de correntes induzidas, eliminando-se o fenômeno magnético rotatório responsável pelo trabalho mecânico do rotor. Quando o motor gira
sem carga, comumente chamado de motor a vazio, o rotor desenvolve uma velocidade angular de valor praticamente igual à velocidade síncrona do campo girante do estator. À medida que se adiciona carga ao
motor sua velocidade tende a diminuir. A diferença de velocidade entre o campo girante e a velocidade do
rotor é chamada de escorregamento, que representa a fração de rotação que o rotor perde a cada rotação
do campo girante. O escorregamento é sempre expresso em percentual. Os motores monofásicos de indução são de construção mais cara e são fabricados somente para pequenas
potências, pois requerem circuitos adicionais para funcionar, o que os tornam mais caros que motores trifásicos equivalentes. As principais características que devem ser observadas na compra e instalação de um motor, são: Potência nominal Tensão nominal Corrente nominal Frequência nominal Quantidade de pólos Conjugado Perdas (rendimento elétrico) Classe de isolamento

45
Fator de serviço Tipo de carcaça Regime de funcionamento Tipos de ligação
Potência nominal:
A potência nominal de um motor é aquela que o motor pode fornecer no eixo, em regime contínuo, sem
que os limites de temperatura dos enrolamentos sejam excedidos aos valores máximos permitidos por
norma, dentro de sua classe de isolamento. Sempre que se aplicam cargas de valor muito superior ao da
potência para a qual foram projetados, os seus enrolamentos sofrem um aquecimento anormal,
diminuindo a vida útil do motor, podendo danificar o isolamento ou até abrir um curto-circuito interno, o
que caracteriza a sua queima.
Tensão nominal:
As tensões de maior utilização nas instalações industriais são de 220, 380 e 440 V. A ligação do motor
num determinado circuito depende das tensões nominais múltiplas para as quais o motor foi projetado.
Normalmente as tensões nominais de projeto vem afixadas na plaqueta do motor na forma e1/e2 (exemplo: 220/380V) onde a primeira tensão corresponde à tensão em que o motor é normalmente ligado
em triângulo enquanto a outra corresponde à ligação em estrela. Os motores que possuem mais de duas tensões têm mais opções de ligação, são, porém de construção mais cara, nem sempre necessária.
Corrente nominal:
É aquela que o motor solicita da rede quando está trabalhando na potência nominal, usando a tensão e
frequência nominal de projeto.
Frequência nominal:
É aquela fornecida pelo circuito de alimentação e para a qual o motor foi dimensionado. Lembrar que a
velocidade que o motor desenvolve é dependente desta frequência. O motor deve trabalhar satisfatoriamente dentro de um intervalo de variação de frequência de 5%, desde que seja mantida a tensão nominal constante.
Quantidade de pólos:
A velocidade num motor de indução depende da quantidade de pólos e da frequência a qual o motor ficar submetido. A única forma de variar a velocidade de um motor deste tipo, operacionalmente se obtém
variando-se a frequência uma vez que o numero de pólos é um detalhe construtivo que não pode ser
mudado. A expressão matemática que fornece a velocidade síncrona do motor para um dado número de
pólos é:
p
FWs
2
Onde: Ws = velocidade angular síncrona do motor, em Hertz; F = frequência, em Hertz; P = número de pólos.
Desta forma um motor com dois pólos ligado a uma fonte de 60Hz terá uma velocidade angular de
3600rpm. Um motor de 4 pólos terá uma velocidade de 1800 rpm e um motor de 8 pólos terá uma
velocidade de 900 rpm.
46
Conjugado (torque):
Os motores quando ligados apresentam um esforço que lhes permite girar o seu eixo. A este esforço dá-se o nome de conjugado motor. Já a carga acoplada ao motor reage a este esforço negativamente, ao que se
dá o nome de conjugado resistente ou também conjugado de carga. Todo motor dimensionado para acionar uma determinada carga acoplada ao seu eixo necessita a qualquer instante durante a partida, que o conjugado motor seja sempre superior ao conjugado resistente, até que o motor adquira a velocidade de
regime. Este intervalo de tempo, que é especificado pelo fabricante e deve ser observado para prevenir o
sobreaquecimento dos enrolamentos. Por esse motivo, cuidados especiais devem ser tomados na utilização de dispositivos de partida com redução de tensão. Nestas condições o conjugado motor é
sempre reduzido, enquanto que o conjugado resistente não é alterado, e como conseqüência disto o tempo
de aceleração é aumentado e sendo superior ao tempo de rotor bloqueado pode vir a danificar o motor.
Perdas:
A energia que o motor absorve da rede não é totalmente transformada em energia mecânica. Dentre as
perdas pode-se citar: A perda por aquecimento nos condutores de cobre, tanto no estator como no rotor; As perdas no núcleo devido às correntes induzidas nestes, tanto no estator como no rotor. Estas
correntes espúrias têm suas energias transformadas totalmente em calor; Perdas de energia mecânica por atrito nos mancais, as quais são reduzidas ao máximo possível com o
emprego de rolamentos de boa qualidade; Perdas por ventilação. Uma pequena parte da energia mecânica produzida deve ainda ser gasta para
forçar uma ventilação sobre o motor com o objetivo de melhorar o resfriamento do mesmo e
aumentar a vida útil do motor; O resultado líquido da energia mecânica produzida traduz o rendimento elétrico do motor, ou seja,
quanto de energia mecânica útil é possível obter-se de 100% da energia elétrica absorvida pelo motor.
Normalmente este rendimento situa-se entre 0,9 (90%)
Classe de isolamento:
Existe uma norma que agrupa os materiais isolantes e os sistemas de isolamento. Esta norma denomina classe de isolamento a faixa de temperatura que cada material pode suportar em regime contínuo de
operação sem que seja afetada a vida útil deste isolamento em máquinas elétricas são empregadas as
seguintes classes: Classe A: limite de temperatura de 105o C. Este isolamento pode ser obtido com seda, algodão, papel
e similares impregnados em líquidos isolantes, como o é o esmalte para fios; Classe E: limite de temperatura de 120o C. Obtido com fibras orgânicas sintéticas; Classe B: limite de temperatura de 130o C. Obtido com asbesto, mica e materiais a base de poliéster; Classe F: limite de temperatura de 155o C. Obtido com fibra de vidro, amianto associado a materiais
sintéticos; Classe H: limite de temperatura de 180o C. Obtido com fibra de vidro, mica, asbestos, associado a
silicones de alta estabilidade térmica. Lembrar que a temperatura do enrolamento é fundamental para a vida do motor.
Fator de serviço:
É um número que pode ser multiplicada a potência nominal do motor, a fim de se obter a carga
permissível que o mesmo pode acionar, em regime contínuo, dentro de condições estabelecidas por
norma. O fator de serviço não representa a capacidade de sobrecarga normal dos motores que é
normalmente entre 140 a 160% da potência nominal, a ser suportada por períodos de tempo muito curtos.
O fator de serviço representa apenas uma potência adicional contínua. Uma espécie de
sobredimensionamento.
Tipo de carcaça:
Motor aberto: É aquele que o ar ambiente circula livremente pelo interior do motor, retirando calor
das partes aquecidas; Motor totalmente fechado: É aquele que não tem troca de calor entre o meio refrigerante interno ao
motor e o externo. A troca de calor nestes motores é feita através da condução do calor através da
47
carcaça. Para melhorar o resfriamento interno neste tipo de motor, o mesmo pode ser construído com
uma carcaça aletada e dispor de ventilação externa para aumentar a eficiência das aletas. Outros tipos de resfriamento como dispor de ventilador interno também podem ser aplicados, caracterizando um
resfriamento ar-ar com troca térmica através da carcaça. Motor a prova de explosão: em certas indústrias que trabalham com materiais inflamáveis ou
explosivos, tais como petroquímicas, indústrias têxteis e semelhantes, tem a necessidade de
empregarem motores que suportem os esforços mecânicos internos quando, por danos de isolação
dos enrolamentos, em contato com o meio refrigerante contendo material combustível possam
provocar acidentes. Este tipo de motor tem uma carcaça e estrutura robustas. Compatíveis com a
solicitação dos esforços.
Lembrar que a água é o pior inimigo das instalações elétricas e em motores a água é extremamente
danosa.
Regime de funcionamento:
O regime de funcionamento indica a forma de funcionamento de uma carga. Os motores, em geral, são
projetados para trabalhar regularmente com carga constante, por tempo indeterminado, desenvolvendo a sua potência nominal, o que é denominado de regime contínuo. Outras formas de funcionamento são
possíveis, como aquele em que o motor trabalha continuamente por um tempo significativamente maior
do que a sua constante térmica de tempo e quando desligado só retorna ao funcionamento quando tiver sua temperatura equilibrada com a temperatura exterior. Outra forma é aquela em que o motor é acionado
por curtos intervalos de tempo, de sorte que a sua temperatura retorna à temperatura ambiente antes que
seja realizada uma nova operação. Em todo caso, deve-se cuidar para que partidas excessivas não
impliquem em sobreaquecimento do enrolamento, o que diminuiria a vida útil deste motor;
Tipos de ligação:
Dependendo da maneira como são conectados os terminais das bobinas dos enrolamentos do estator, o motor pode ser ligado a redes de alimentação de diferentes tensões. A maioria dos motores é fabricada
para operar em circuitos trifásicos supridos por tensões de 220/380 V ou 220/440V ou também 380/440V. Os tipos de ligação possível sempre estão presentes nas plaquetas dos motores. Estes tipos são: Ligação em série-paralelo: Para esta ligação ser possível, o motor de dois pólos deve apresentar 9
terminais acessíveis externamente. As configurações possíveis são: a ligação estrela-série e a ligação
dupla estrela-paralelo. Se o motor tiver 12 terminais acessíveis, então serão possíveis também as
ligações em triângulo-série, a ligação triângulo-paralelo e a ligação estrela-paralelo, permitindo a ligação deste motor em até 4 fontes de tensões distintas;
Ligação estrela-triângulo: Os motores que podem ser ligados a estas formas devem ter 6 terminais acessíveis. Quando a ligação é feita em estrela, cada bobina fica submetida a uma tensão (tensão de
fase) 3 vezes menor que a tensão de alimentação (tensão da linha), sendo a corrente circulante igual
em valor à corrente da linha. Quando a ligação é feita em triângulo, cada bobina fica sujeita à tensão
da linha enquanto que a corrente circulante é 3 vezes menores que a corrente da linha;
Dimensionamento de motores em função de sua utilização:
O dimensionamento de motores envolve sempre a capacidade do trabalho que o mesmo deve realizar por unidade de tempo, ou seja, a potência, que por definição é a relação entre a energia gasta para realizar um determinado trabalho e o tempo necessário para o mesmo ser executado. Isto pode ser facilmente
entendido ao considerar a potência necessária para levantar um objeto cuja massa é de 50 Kg, até uma
altura de 40 m, durante um período de tempo de 27 s. Neste caso, a energia gasta para tal tarefa é de 50 x
9,81 x 40 = 19620 J. Como o tempo para realizar esta tarefa foi de 27 s, a potência requerida por esta
tarefa foi de 726 W (J/s). Se a mesma tivesse que ser realizada em 17 s, então a potência deveria ser de
1154,12 W. A potência nominal em motores normalmente é expressa em CV, cuja equivalência é de 736W/CV. Nos
dois casos acima, o primeiro exigiria um motor de 1 CV enquanto o segundo exigiria um motor de 1,5 CV. Para dimensionar corretamente um motor deve-se sempre considerar, além do trabalho teórico
necessário para a tarefa em si, o rendimento mecânico do equipamento sendo movimentado pelo motor e para efeito de dimensionamento da instalação do motor, deve-se também considerar o rendimento
elétrico do mesmo.

48
Exemplo: dimensionar um motor para ser acoplado a uma bomba hidráulica centrífuga, cuja vazão deve
ser de 0,5m3/s e esta deve ter uma altura de recalque de 15m, destinada a bombear água potável. A potência em bombas centrífugas é dada pela fórmula:
HQP
b
...81,9 (rendimento da bomba = 0,7)
Assim:
CVkWPb 15011,1057,0
15.1.5,0.81,9
Instalação e operação de motores:
Os motores elétricos, durante a partida, solicitam da rede de alimentação uma corrente de valor elevado,
na ordem de 6 a 10 vezes a sua corrente nominal. Nestas condições, o circuito, que inicialmente fora
projetado para transportar a potência requerida pelo motor, é solicitado agora pela corrente de
acionamento, durante um período de tempo e em conseqüência disso o sistema fica submetido a uma queda de tensão muito superior à normal e aos limites estabelecidos para o funcionamento em regime
normal, podendo provocar sérios distúrbios operacionais nos equipamentos de comando e proteção, além
de afetar o desempenho da iluminação, notadamente a incandescente que estiver conectada na mesma
rede de alimentação. Motores síncronos se estiverem operando, podem parar por perda de sincronismo ou
por insuficiência de conjugado motor (força magnética para fazer girar o rotor). Segundo a norma NBR5410, a queda de tensão durante a partida de um motor não deve ultrapassar 10% da sua tensão
nominal no ponto de instalação do dispositivo de partida correspondente. Pode-se adotar uma queda de tensão superior a 10% em alguns casos específicos, quando são acionadas cargas de alto conjugado
resistente, desde que a tensão mínima das bobinas da chave de partida seja inferior à tensão resultante
durante a partida do motor. Em virtude destes fatos, durante a elaboração de um projeto de instalação
elétrica industrial devem ser analisados, dentre os motores de potência elevada, aqueles que podem
degradar a operação em regime normal do sistema, a fim de aplicar a solução adequada do método de
partida, ou dimensionar circuitos exclusivos a eles que pode ser um quadro geral de força ou diretamente
de um transformador exclusivo a este fim. Deve-se também durante a elaboração de um projeto industrial,
prever a possibilidade de dois motores de potência elevada partir juntos, e tomar o cuidado para que isto não aconteça. Existe também a possibilidade de certas máquinas retornarem a funcionar quando há
momentaneamente falta de energia e retornando em seguida. Se estes motores estiverem ligados a dispositivos de partida que permitam um baixo conjugado e a carga solicitar um alto conjugado então
haverá grandes possibilidades de danos a estes motores. Se a queda de tensão do circuito alimentador for
muito grande haverá a possibilidade de muitos motores, principalmente os síncronos, de pararem de
funcionar.
Exemplo de instalação de motor 220/380 V.
O termo 220/380 V irá sempre constar na plaqueta de um motor e indica as tensões para as quais o motor
foi fabricado, sendo neste caso os valores de 220 e 380. A tensão que as bobinas do motor é sempre a
primeira mostrada. A segunda tensão refere-se à tensão que o mesmo deve ser ligado se for conectado à
linha em estrela. Este motor pode ser instalado nas seguintes tensões de linha abaixo: Ligado em 220 V. Nesta tensão este motor pode ser ligado tanto em estrela como em triângulo.
Em triângulo fornecerá a potência nominal de projeto. Em estrela irá fornecer 1/3 da potência
nominal. Ligado em 380 V. Só poderá ser ligado em estrela, quando fornecerá a potência nominal de
projeto. Ligar nesta tensão em triângulo irá �queimar� o motor. Ligado em 127 V. Ao ligar este motor em triângulo a potência que ele poderá fornecer ficará
igual a 1/3 da potência nominal. Este modo é equivalente à ligação em estrela em linha de
220 V. Ao ligar em estrela nesta tensão, a potência ficará um 1/9 da potência nominal. Neste
último caso o motor também queimará, pois não terá potência suficiente para começar a girar.
Alteração no sentido de rotação de um motor trifásico. Para alterar o sentido de um motor trifásico basta permutar duas fases entre si, independente de ordem. Tal procedimento inverte o momento do campo girante fazendo com que o motor gire no sentido oposto ao anterior.
49
Sistemas de partida:
A adoção de um sistema de partida eficiente pode ser considerada uma das regras básicas para se obter do motor uma vida útil prolongada, custos reduzidos, além de dar à equipe de manutenção da indústria a
tranqüilidade no desempenho de suas tarefas. Entre os principais métodos de partidas pode-se citar: Partida direta: é o método mais simples, em que não são empregados dispositivos especiais de
acionamento do motor. Apenas uma chave de ligação que pode ser por contactor ou uma simples
chave interruptora e um dispositivo de proteção que pode ser fusíveis ou um disjuntor. As vezes
pode-se combinar tudo apenas num único disjuntor com a função de atuar também como chave,
porém esta prática não é recomendada, pois o uso contínuo do disjuntor como chave pode afetar a sua
função como disjuntor e o mesmo pode não funcionar como disjuntor quando for necessário; Para que este método possa ser usado, algumas condições devem ser satisfeitas:
A corrente nominal da rede é tão elevada que a corrente de partida do motor torna-se irrelevante; A corrente de partida do motor é baixa porque sua potência é pequena; A partida do motor é sempre feita sem carga, o que diminui muito a corrente de partida
Partida por chave estrela-triângulo: Em instalações industriais, principalmente aquelas
sobrecarregadas, podem ser usadas chaves de acionamento com uma configuração estrela-triângulo
para suavizar os efeitos de partida dos motores elétricos. O procedimento para o acionamento do
motor é feito, inicialmente, ligando-o na configuração estrela até que este alcance a velocidade
próxima à velocidade de regime quando então a ligação é comutada para uma configuração triângulo.
Durante a partida em estrela, o conjugado e a corrente de partida ficam reduzidos a 1/3 de seus valores nominais. Neste caso, um motor só pode partir através de chave triângulo-estrela quando o conjugado na ligação estrela for superior ao conjugado da carga. Este método de partida é
interessante quando os motores partem em vazio. Exemplo: Um motor 220/380V quando ligado a uma rede de força cuja tensão de linha é 220V, pode
ser ligado em triângulo, quando então poderá desenvolver sua potência nominal. Se ligado em
estrela nesta mesma linha, poderá apenas desenvolver 1/3 da potência nominal. Se a linha for de
tensão igual a 380 V, então este motor somente poderá ser ligado em estrela, quando poderá
desenvolver sua potência nominal. Se for ligado em triângulo, este motor será queimado assim que
for ligado, pois desenvolverá 3 vezes sua potência nominal. Ou seja, suas bobinas ficarão sujeitas a
uma tensão para a qual não foram projetadas. Por este exemplo pode-se ver que a primeira tensão
corresponde à tensão de fase à qual cada bobina do motor deve ser ligada. E normalmente esta
deverá ser também a tensão de linha
Partida através de chave compensadora. A chave compensadora é composta basicamente por um
autotransformador com várias derivações, destinadas a regular o processo de partida. Tem um custo
superior ao conjunto estrela-triângulo. Para maiores detalhes deve-se consultar uma bibliografia especializada no assunto.
Existem outros métodos de partida que não foram mencionados. Para maiores detalhes deve-se consultar a bibliografia especializada no assunto.
Influência da partida de um motor sobre o consumo e a demanda de energia elétrica:
A influência da partida sobre o consumo e a demanda de energia elétrica é muito pequena, sendo assim, aconselhável sempre desligarem-se os motores ligados desnecessariamente (aqueles que estejam funcionando a vazio).
Influência de partidas freqüentes sobre a temperatura de operação do motor:
Durante a partida, a elevada corrente resultante provoca perdas excessivas nos enrolamentos tanto do estator como no rotor. Se o motor já estiver em operação se encontra já aquecido na sua temperatura de regime, e se for desligado e logo em seguida religado, sem que haja tempo para a temperatura de suas partes internas declinarem significativamente, a temperatura pode chegar então a níveis superiores
àqueles indicados como limites para a classe de isolamento e com isto provocar danos irreparáveis ao
motor. Existem muitas aplicações em que o motor funciona em ciclos de operação que leva a freqüentes
acionamentos. Neste caso, é necessário especificar o motor para aquela atividade em particular. Para
verificar a capacidade de um motor suportar este regime de funcionamento deve-se: Determinar o tempo de aceleração deste motor; (depende da inércia de cada rotor ou do conjunto rotor mais carga. Nunca deve ultrapassar 15 segundos.
Estes dados devem ser fornecidos pelo fabricante, para partida a vazio e para partida a plena carga).
Determinar a perda de energia nos enrolamentos, a qual é transformada em calor, em ambos os enrolamentos, estator e rotor. Para tal pode-se usar as fórmulas:

50
Para os enrolamentos do estator:
1000
..3 2pe
e
IRP
Onde:
Pe = potência perdida em calor, em watt; Re = resistência do enrolamento, em ohm; Ip = corrente de partida, em ampère.
Para os enrolamentos do rotor:
ac
smcr
TF
WJP
.
..01974,02
2
Onde: Pr = potência perdida em calor, em watt; Jmc = momento de inércia do motor e da carga em kg.m2; Ws = velocidade angular síncrona do motor, em rpm; F = frequência da rede, em hertz; Tac = tempo de aceleração do motor, em segundos.
Determinar a perda de energia em regime normal. Esta é determinada com a fórmula:
)1.(736,0. nm
rn
PP
Onde: Prn = potência perdida em regime normal, em watt;
Pnm = potência nominal do motor, em watt; = rendimento do motor; Determinar a perda eficaz do ciclo de carga. Esta representa a fração de tempo em que o motor gasta
em partidas em relação ao tempo de funcionamento normal. É obtida pela média quadrática
ponderada entre os tempos envolvidos e a potência relacionada.
c
rrnacp
efT
TPTPP
)..( 22
Onde: Pef = potência eficaz do ciclo de carga, em watt; Tac = tempo de aceleração do motor, em segundos; Tr = tempo de funcionamento em regime normal, em segundo; Tc = Tempo total de um ciclo completo de operação, em segundo. Calcular a temperatura do motor devido ao ciclo de operação;
rn
efn
opP
PTT
.
Onde: Top = elevação da temperatura acima da temperatura ambiente, em
o C; Tn = elevação de temperatura nominal do motor, em
o C. Lembrar que a sobrelevação da temperatura normal dos motores depende da classe a qual o motor
pertence, devendo sempre obedecer ao limite a este imposto (ver classe de isolamento).
51
Queda de tensão na partida de motores de indução:
A partida de um motor elétrico pode solicitar o sistema de maneira severa, causando perturbações muitas
vezes inadmissíveis. Em alguns casos, podem ocorrer o acionamento simultâneo de dois ou mais motores,
o que agrava ainda mais as condições do sistema de suprimento. Este tipo de situação deve sempre ser
evitada. Motores elétricos e outros dispositivos como aparelhos de solda de alta potência ou fornos a arco,
provocam oscilações prejudiciais à operação de certos equipamentos, principalmente os eletrônicos e a
iluminação incandescente. A queda de tensão máxima permitida é da ordem de 7%. A concessionária
limita este valor entre 2 a 3%, no ponto de entrega da energia. A queda de tensão é a perda de tensão
devida à perda de energia nos condutores devido a sua própria resistência. Para efeito de cálculo deve-se conhecer a corrente de partida do motor, o comprimento dos fios de alimentação, o diâmetro nominal
destes e a resistividade específica do material com que os mesmos são construídos. Um cálculo preciso
deve considerar toda a rede desde o ponto de entrega da energia até o motor. Tempo de motor bloqueado:
É o tempo durante o qual o motor pode permanecer com o rotor travado, absorvendo, neste período, a
corrente nominal de partida sem afetar a sua vida útil. Este é um dado normalmente fornecido pelo
fabricante do motor e tem fundamental importância na montagem do esquema de proteção dos motores. Normalmente este tempo não ultrapassa 15 segundos. Os circuitos de proteção do motor devem ser especificados para desarmar a chave de acionamento do motor dentro deste tempo. Uso de conversores de frequência:
Os conversores de frequência são dispositivos eletrônicos capazes de alterar a frequência da fonte alimentadora, ou explicando melhor, usam a energia fornecida em frequência fixa (60 Hz) e entregam essa energia ao dispositivo consumidor com a frequência alterada, para mais ou para menos (geralmente de 1Hz a 100 Hz). Estes mesmos dispositivos além de permitirem a variação de frequência, permitem a variação da tensão, de modo a manter constante o fluxo magnético no dispositivo consumidor e no caso
de motor, manter constante o torque do mesmo. A principal função dos conversores de frequência é
permitir a um motor de indução de variar sua velocidade. Como a potência de um motor é diretamente
proporcional ao torque do mesmo e da velocidade angular, ou seja, Pm=TxW (torque x velocidade angular) e a velocidade angular depende da frequência (W=2f), tem-se que reduzindo a frequência, reduz-se a velocidade angular e com isto reduz-se a potência do motor, uma vez que o torque se mantém
constante. Com a redução da tensão nos terminais do motor, a corrente de partida, que lhe é proporcional,
também fica reduzida correspondentemente. A aplicação dos conversores de frequência está ficando
muito comum e apresenta inúmeras vantagens quando comparada aos motores de corrente contínua para
processos onde se requer velocidade variável. Apresenta também grande economia de energia nos
processos onde os motores não desenvolvem a plena potência ou tem funcionamento quase sempre em
carga mínima.
Correção do fator de potência:
O fator de potência relaciona a fração de energia que se converte em campo de força elétrico ou
magnético, portanto não realiza trabalho, mas fica momentaneamente armazenada na forma deste campo e que consome parte da corrente no sistema, sendo, entretanto, devolvida ao sistema de forma defasada, implicando sempre numa corrente sempre superior à necessária com relação ao trabalho útil sendo realizado, e no sobredimensionamento da fiação e do suprimento de energia. Matematicamente, é a razão
entre a potência útil e a potência total aparente do circuito. Fisicamente, o fator de potência representa o
cosseno do ângulo de defasagem das ondas senoidais da tensão e da corrente. Quando a corrente está
atrasada em relação à tensão, então o fator de potência é dito indutivo, e quando a corrente está adiantada
em relação à tensão então o fator de potência é dito capacitivo. Muitos equipamentos, tais como fornos elétricos a arco, motores, transformadores e outros que
necessitem de campo magnético irão forçosamente apresentar essa característica gerada pelo próprio
campo magnético necessário ao funcionamento destes dispositivos. Ao analisar o funcionamento de um motor, pode-se observar que a potência reativa absorvida pelo motor
aumenta muito pouco desde a sua operação a vazio até atingir sua plena carga, ou seja, a potência reativa
quase não varia com a potência real sendo desenvolvida pelo motor, a qual pode variar desde zero (ou quase zero) até sua capacidade de potência nominal. Já a potência ativa, ou a potência útil, aumenta
significativamente com a carga de maneira proporcional. Como resultado deste fato, percebe-se que um motor terá sempre um fator de potência máximo quando estiver operando a plena carga. Portanto, um
baixo fator de potência em motores pode ser atribuído ao seu funcionamento a vazio ou a um
superdimensionamento do mesmo em relação à tarefa para a qual foi determinado. Por esse motivo, um

52
bom dimensionamento do motor é fator importante de economia na indústria. Para determinar com precisão a economia deve-se levar em conta também a legislação em vigor pertinente ao fornecimento de
energia elétrica. (a ser consultada junto à concessionária). O fator de potência depende de uma série de fatores e o seu melhoramento não deve ser implantado no ato de projeto ou de instalação, mas somente após um período de avaliação quando então será possível
quantificar com precisão o modo de operação e a taxa de carregamento dos motores. Com esses dados
pode-se então determinar-se o fator de potência médio estimado da instalação e com isto prever os meios necessários para a sua correção. Vários métodos existem para a determinação de um fator de correção médio. Para aplicar um ou outro, o melhor meio é consultar uma bibliografia mais especializada. Entre alguns métodos existentes para se obter o fator de potência de instalações em operação, pode-se citar: Método dos consumos médios mensais; Método analítico; Método das potências medidas (ver exercício n. 1 da 4
a aula); Método das potências médias; O método analítico se baseia na resolução do triângulo das potências. Cada carga é considerada
individualmente calculando-se a sua demanda ativa e reativa, com base no fator de potência nominal. Ao
se obterem finalmente os valores de demanda ativa e reativa, calcula-se o valor do ângulo e com ele o
fator de potência. Este método é usado quando se deseja obter um fator de potência específico para um
determinado dispositivo elétrico. Na maioria das vezes, os motores nem sempre apresentam um regime
contínuo de funcionamento, então, a melhor forma de ajustar o fator de potência, é ajustar pela média
das potências do circuito em questão, e as vezes, o melhor a fazer é ajustar o fator pela média geral da
instalação toda.
Vida útil de motores:
A vida útil dos motores é intimamente ligada ao aquecimento das bobinas dos enrolamentos, fora dos
limites previstos na fabricação do motor. É também afetada pelas condições desfavoráveis do ambiente
onde os mesmos estão instalados, tais como umidade, presença de vapores corrosivos, vibrações, etc. O aquecimento, principal fator da redução da vida útil de um motor, provoca o envelhecimento gradual e
generalizado do isolamento elétrico dos condutores dos enrolamentos, até o limite de tensão ao qual o
mesmo está submetido, quando então este ficará sujeito a um curto-circuito interno, de conseqüências
fatais para o motor, implicando em sua queima.
Complementação dada em aula:
(diagramas de chave estrela-triângulo, diagramas de ligação de motores, etc.
53
8a aula:
Dimensionamento de condutores O dimensionamento de um condutor deve ser precedido de uma análise detalhada das condições de sua
instalação e da carga que o mesmo deve suprir. Um condutor mal dimensionado implica em operação
inadequada da carga, elevado risco de incêndio, principalmente quando existe um deficiente projeto de
proteção. O dimensionamento de condutores elétricos envolve: Tensão nominal; Frequência nominal; Potência a ser suprida; Fator de potência da carga; Tipo de sistema. Monofásico ou trifásico; Condições do ambiente a que ficam submetidos os condutores; Distância da carga ao suprimento de energia. (comprimento do condutor) Corrente de curto-circuito; Para que um condutor seja adequadamente dimensionado é necessário ter em mãos todos estes dados e
que se projetem os elementos de proteção a ele associados de maneira que sobrecargas presumidas do
sistema não afetem a sua isolação. Fios e cabos condutores:
A maioria absoluta das instalações usa condutores de cobre para suas instalações elétricas. Por norma, o uso de condutores de alumínio é restringido a seções transversal superiores a 10mm2. Os condutores de alumínio necessitam de cuidados especiais na manipulação e instalação, devidos as suas características
mecânicas. O maior problema encontrado com os condutores de alumínio é a dificuldade de se obter boas
conexões com os terminais dos aparelhos consumidores, já que a maioria destes é própria para a conexão de condutores de cobre.
Classificação dos condutores dentro de uma instalação:
Condutores primários. É designado como condutor primário aquele que transporta a energia em alta
tensão proveniente da rede da concessionária (normalmente subterrâneo) até o quadro geral de distribuição. Nas indústrias de grande porte, porém, podem existir vários destes condutores interligando
subestações diferentes existentes dentro da indústria.
Condutores secundários. São considerados condutores secundários aqueles que se enquadram nas seguintes condições: São dotados de isolação de PVC para 750V, sem cobertura; São dotados de isolação de PVC de 600V até 1000V, com capa de proteção em PVC; São dotados de isolação de XLPE ou EPR para tensões entre 600V a 1000V, com capa de proteção
de PVC; Em resumo, são todos os fios e cabos mais simples encontrados no comércio e que são usados nas instalações mais comuns.
Barramentos. Os barramentos são usados para o transporte de altas correntes em percursos de distâncias
razoavelmente grandes dentro de um ambiente industrial. Geralmente este tipo de condutor é usado nas
indústrias eletroquímicas onde se usa tensões muito baixas (da ordem de alguns Volts até uns 30 V) e
altas correntes (maiores que 4000 A). Também é muito comum se usar barramentos nos quadros de distribuição. Critérios para a divisão de circuitos:
Para que uma instalação elétrica tenha um desempenho satisfatório, deve ser projetada levando-se em conta as boas técnicas de divisão e seccionamento dos circuitos, respeitando as normas vigentes, (NBR 5410). Dividindo uma instalação em circuitos independentes e assim limitam-se as conseqüências de uma
pane a apenas um setor de toda instalação, facilita as verificações e ensaios e evita os inconvenientes que
54
possam resultar de um único circuito, como é o caso de ter luz fraca ao ligar um chuveiro. Dentro dos
pontos que devem ser observados pode-se citar: Cada circuito deve ser dividido de forma a poder ser seccionado sem risco de sofrer realimentação de
outro circuito; Os circuitos terminais devem ser individualizados pela função dos equipamentos de utilização que
alimentam; A alimentação de motores deve ser feita sempre por circuito individual; Devem ser previstos circuitos individuais para iluminação e para tomadas. Em residências e
acomodações domésticas podem usar circuito comum para iluminação e tomadas. No caso,
considerar cada tomada como sendo de 300W, excetuando-se as dependências de cozinha e áreas de
serviços, as quais deverão ter circuitos separados; Em unidades residenciais e acomodações (hotéis, escritórios e similares), equipamentos com potência
igual ou superior a 1500VA devem ter sempre um circuito individual; Nos locais supridos por rede trifásica, deve-se procurar distribuir as cargas entre as fases o mais
equilibrado possível; É sempre conveniente reservar uma capacidade excedente para uso futuro. Tanto no
dimensionamento de alimentação como nos quadros de distribuição. Isto deve ser feito dentro de uma expectativa de crescimento de carga, evitando-se deste modo a uma precoce saturação da capacidade
de suprimento do sistema ou a um desnecessário superdimensionamento da instalação, acarretando
sempre em custos nem sempre justificável; Dimensionamento de circuitos:
Os condutores a serem usados num circuito devem satisfazer a alguns quesitos básicos: Conduzir a
corrente necessária ao dispositivo consumidor sem acarretar significativas perdas em si próprio, ou seja,
deve respeitar os limites de queda de tensão e deve ter capacidade de suportar a corrente de curto-circuito por um tempo limitado bastante pequeno. Como todo condutor elétrico deve ser isolado, este isolamento
deve suportar a tensão nominal de regime com uma folga significativa. Para que este isolamento não se
deteriore facilmente, este mesmo condutor deve respeitar a temperatura limite que o mesmo pode ficar submetido sem comprometer seu isolamento. Por norma, o dimensionamento de fios e cabos condutores deve ser feito em função do seu tipo construtivo, denominada pela norma de escolha da linha elétrica e a forma como esta linha será instalada, denominada pela norma de instalação da linha elétrica. A forma usada na instalação influencia o resfriamento dos condutores e estes devem respeitar a temperatura
máxima determinada para seus tipos, de forma a não afetar o isolamento dos mesmos. Para circuitos
secundários a norma previu uma tabela de fácil consulta, para a obtenção das seções mínimas dos
condutores, elaborada considerando uma queda de tensão de 2% e um fator de potência igual a 0,9
(condição padrão de funcionamento de uma linha elétrica) e condutores de cobre embutidos em
eletrodutos de PVC. Esta tabela é usada nos casos simples e padronizados. Nos demais casos é necessário
proceder aos devidos cálculos para assumir uma escolha definitiva. O dimensionamento de um circuito em instalação de baixa tensão, circuitos de distribuição e circuitos
terminais, consiste na determinação da seção transversal dos condutores e na escolha das proteções contra
sobrecorrentes e eventualmente no dimensionamento dos dutos que os conterá. No caso mais geral,
devem ser cumpridas as seguintes etapas: Escolha do tipo de linha elétrica, o que inclui a escolha da maneira de instalar propriamente dita, do
tipo de conduto e do tipo de condutor; Determinação da corrente de projeto do circuito; Aplicação do critério da capacidade de condução de corrente; Aplicação do critério de queda de tensão; Escolha do dispositivo de proteção contra correntes de sobrecarga e de curto-circuito e determinação
da seção dos condutores que atenda aos dois critérios acima, mais o critério de correntes de curto-circuito;
Verificação das condições de proteção contra contatos indiretos, quando pertinentes; A escolha técnica incidirá sobre a seção transversal que atender aos três critérios, quando aplicáveis, portanto a maior seção determinada por estes critérios. A seção transversal poderá ainda ser aumentada visando atender ao critério econômico, quando se procura minimizar as perdas de energia elétrica.

55
Critério para a capacidade de condução de corrente:
Dimensionamento de condutores de circuitos de iluminação e tomadas. Uma vez conhecida a corrente do circuito, pode-se escolher em tabela, entre as várias seções definidas em norma, aquela que tenha
apresentar a capacidade suficiente para tal, mais próxima possível do valor desejado, sempre para mais do
que para menos. Não esquecer de verificar a maneira como os condutores serão dispostos nos eletrodutos.
Atentar também ao fato da seção mínima exigida por norma, que no caso de condutores de cobre para iluminação é de 1,5 mm
2. Atentar também ao fato de que as tabelas foram projetadas para um único
circuito em cada eletroduto. Caso se coloque mais de um circuito no mesmo eletroduto, um fator de correção deve ser aplicado às correntes máximas que cada condutor pode conduzir, diminuindo estas, de forma a reduzir o aquecimento localizado no interior do eletroduto. Atentar também que se a temperatura
ambiente for diferente da temperatura de 30o C para instalações aéreas e 20o C para as instalações
subterrâneas, outro fator de correção deve ser usado com o mesmo objetivo anterior, ou seja, o de
prevenir o excesso de temperatura sobre o material isolante. Dimensionamento de condutores para ligação de motores. Conhecida a corrente, calcula-se a corrente que o condutor deve suportar multiplicando esta pelo fator de serviço se este existir. Se o circuito servir a
mais de um motor simultaneamente, então o condutor deve ser capaz de suportar a soma das correntes de
todos os motores considerando-se também o fator de serviço de cada motor. Quando o fator de serviço
não é mencionado, considerar como sendo igual a 1. Quando os fatores de potência forem muito
diferentes o valor da corrente de cada motor não pode ser obtido por soma algébrica comum, mas por
soma vetorial dos componentes ativo e reativo de cada motor. Se os fatores de potência forem muito
próximos pode-se eventualmente somar as correntes por soma algébrica, implicando num pequeno erro
que muitas vezes pode ser desprezado. (exemplo: desprezar o erro se o mesmo ficar menor que 5%). Para a instalação de motores, o condutor mínimo de cobre que pode ser usado é de 2,5 mm
2. Observações: As tabelas necessárias para consultas devem ser obtidas da norma técnica pertinente.
(NBR 5410). A literatura especializada pode trazer algumas tabelas para efeito didático. Folheto de
dados técnicos de fabricantes também podem incluir tabelas específicas que respeitam as normas
vigentes e que podem ser usadas. Pode-se também usar a via analítica para se chegar aos mesmos
resultados, empregando-se obviamente as equações adequadas e corretas, entretanto, o grande problema
neste caso é estimar o aquecimento dos condutores, o qual depende muito da maneira como os mesmos
estão instalados e os recursos que existem para que o resfriamento dos mesmo seja efetivo.
Critério para a queda de tensão:
Após o dimensionamento da seção transversal do condutor pela capacidade de corrente de carga, é
necessário saber se esta seção está apropriada para provocar uma queda de tensão no ponto terminal dentro dos valores mínimos estabelecidos pela norma. Normalmente a concessionária impõe uma queda
de tensão limite para o ramal de entrada de 2%, enquanto que é tolerada uma queda de tensão máxima nos
condutores, medida no ponto terminal, de 7%, restando, portanto, um valor em torno de 4% para a queda de tensão entre o quadro distribuidor e o ponto terminal. Para as instalações que possuem geração própria
ou subestação transformadoras, estas podem adotar o valor de 7%. Fórmula que fornece a seção transversal em função da queda de tensão, para circuitos monofásicos:
l
cc
cVV
ILS
%.
).(..200
(eq. 8.01)
Fórmula que fornece a queda de tensão, para circuitos trifásicos:
l
cc
cVV
ILS
%.
).(..2,173
(eq. 8.02)
Onde (para ambas equações): Sc = seção transversal do condutor, em mm2;
= resistividade do material condutor, (para o cobre: 0,01786 mm2/m; Lc = comprimento do condutor, em metros; Ic = corrente total do circuito, em Ampère (corrente de fase); V% = queda de tensão máxima admitida em projeto, em %;
56
Vl = tensão de linha, em Volt. Critério para a capacidade de corrente de curto-circuito:
Estabelecer um curto circuito corresponde na prática encostar um fio no outro sem o devido isolamento.
Sem a devida carga para limitar a corrente por este condutor. A corrente de curto-circuito passa a ser limitada unicamente pela resistência do próprio condutor, a qual geralmente é muitíssimas vezes menores que a resistência da carga, implicando em correntes muito grandes. Em qualquer situação de curto-circuito é a limitação imposta é o tempo que o condutor pode ficar conduzindo tal corrente sem danificar
ou afetar as condições do isolamento do condutor. Para estabelecer um dimensionamento seguro com
relação a um curto-circuito, pode-se optar por dois critérios distintos: Limitação da seção transversal do condutor para uma determinada corrente de curto-circuito; Limitação do comprimento do circuito em função da corrente de curto-circuito fase-terra ou fase-
fase; Este tempo, baseado na corrente de curto-circuito mínimo presumível, cuja equação é mostrada em anexo,
após as devidas substituições, considerando que a energia convertida em calor, leva em conta a corrente
elevada ao quadrado multiplicado pelo tempo que esta corrente atua, fica:
lr
SEIcc .2..
..8,0min
(eq. 8.03) 222
min .SKtIcc (eq. 8.04) 2
2222
max.64,0
....4
E
lKrt
(eq. 8.05)
Onde:
E = tensão nominal entre a fase e o neutro, se possuir o mesmo, ou entre duas fases
para o caso de instalações trifásicas, em volt; S = Superfície da seção transversal do condutor, em mm2;
r = fator adimensional relacionado com a área dos condutores. 1 para condutores com área 120 mm2
1,15 para condutores com área 150 mm2; 1,20 para condutores com área 180 mm2; 1,25 para condutores com área 240 mm2; = resistividade do material majorada, para cobre usar 0,027mm2/m,
Para alumínio usar 0,043mm2/m; l = comprimento do circuito, em metros;
K = constante que depende do tipo de isolamento. Se os condutores forem de cobre, usa-se 115 para isolamento de PVC, e usa-se 135 para isolamento de EPR/XLPE. Para condutores de alumínio os valores são respectivamente, 74 e
87; O tempo obtido pela equação acima é o tempo máximo que o circuito de proteção tem para desarmar o
circuito de forma a não prejudicar o mesmo por aquecimento excessivo, o qual comprometeria a vida útil
do mesmo, que deve ser de aproximadamente de 20 anos. Em todo dimensionamento, se faz as três verificações anteriores e então se escolhe a opção que atende
os demais critérios. Pode-se também optar em se fazer a opção entre os dois primeiros critérios e o
terceiro ser devidamente atendido pelo correto dimensionamento dos dispositivos de proteção.
Exemplo: Instalação de um único motor trifásico, fator de potência igual a 0,6, de 15 CV, ligado em configuração
triângulo à linha de 220V, 60 Hz, locado a uma distância medida no condutor, de 45 m. Dimensionar o
condutor mais adequado para esta instalação. Atribuição n. 1: Usar condutor de cobre, = 0,017mm2/m; Atribuição n. 2: Usar eletrodutos enterrados no chão, com três condutores de força; Determinação da corrente circulante no circuito.
Para determinar a corrente circulante é necessário envolver a impedância do próprio condutor no
processo, de onde se obtém a impedância total do circuito, o qual se resume num circuito em série
constituído por uma impedância componente do fio condutor e uma impedância componente do
motor. Como a indutância e a capacitância do condutor são pequenas, as mesmas podem ser

57
desprezadas tomando como impedância a própria resistência do condutor, a qual também é
desconhecida, pois depende da seção transversal, que ainda não ficou determinada, ficando então o
problema constituído numa equação a duas incógnitas, ou seja, para se encontrar a impedância total
do circuito é necessário a resistência do condutor, e para se determinar esta é necessário se
determinar a seção transversal do condutor que por sua vez depende da corrente demandada pelo
circuito. Este equacionamento pode se tornar bastante complicado se desejarmos fazer um cálculo
com exatidão, porém, como a quantidade de escolhas de condutores recai sobre um número limitado
de opções, pode-se fazer um cálculo aproximado desconsiderando-se a resistência do condutor
inicialmente, pois normalmente a resistência da carga é às vezes muitas vezes maior que a resistência
do condutor, mas nem sempre, como é o caso de um chuveiro elétrico, quando, pode acontecer que,
dado o comprimento do condutor ser muito grande, a resistência do condutor pode ficar maior que a
resistência do resistor do chuveiro e então o condutor irá se aquecer bem mais que o próprio
chuveiro. Voltando ao problema anterior, fazendo este cálculo aproximado, veremos que a potência
demandada pelo motor fica em 15CV x 736W/CV = 11040W. A potência aparente do motor fica em 11040/0,6=18400VA, sendo a potência igual ao produto V.I, (para motores trifásicos é 1,73.V.I) o
que implica dizer que IL=18400/(1,73x220)= 48,34A. Fica claro que se a resistência do condutor
fosse adicionada no cômputo da corrente, esta seria alguma coisa um pouco menor, uma vez que a
impedância total do circuito seria maior que o valor encontrado, por se tratar de uma associação em
série. Cálculo da queda de tensão no condutor. A resistência do condutor é obtida pela equação 1.2, a qual
multiplicada pela corrente em ambos os lados assume a forma:
4,222004,0
45017,034,48..
..
..
.
V
lIa
a
lIV
Ia
lIR
Onde a é a superfície da seção transversal do condutor necessária para atender a queda de tensão de 4%.
No caso igual a 4,2mm2. Ao se desejar obter um cálculo mais preciso, basta com este valor determinar a sua resistência e somá-la à impedância do motor, o que irá melhorar um pouco o fator de potência e irá
aumentar um pouco a impedância, resultando numa corrente um pouco menor. Após três ou quatro
iterações o processo terá convergido para o valor verdadeiro da superfície necessária à condução de
corrente. Porém, não é só esse o critério que deve ser levado em conta, pois se o condutor for subterrâneo
ou estiverem dentro de eletrodutos enterrados em argamassa muda todas as condições de troca térmica
entre o condutor e o meio circundante, implicando num maior aquecimento ao condutor e ao isolamento do mesmo, devendo também atender a esta especificação, observando que a temperatura do mesmo não
ultrapasse o valor definido para a sua classe (70o ou 90o C). Como os cálculos de troca térmica envolvem
um empirismo muito grande e diverso, o melhor que se pode fazer é usar as tabelas fornecidas pelos fabricantes ou obtidas da norma técnica pertinente, sabendo-se de antemão que o condutor mínimo nunca
deverá ser menor que 2,5 mm2, que é o diâmetro que se encontra definido na referida norma.
Verificação da capacidade de carga pela tabela. Consultando a tab.2.5 da pg 44 (Instalações Elétricas
Industriais de João Mamede Filho) observa-se que 2,5 mm2 são suficientes somente para conduzir 24
A. Como a demanda de corrente é um pouco maior deve-se optar pelo valor de 4 mm2.
Verificação da corrente de curto-circuito. Como o circuito que está sendo dimensionado é destinado à
alimentação de motor, considerar que deva ter um período máximo de aceleração de 15 segundos.
Durante este tempo os condutores deverão suportar uma corrente aproximadamente de 6 a 10 vezes
maior que a corrente normal de funcionamento. O disjuntor a ser empregado também deve ser capaz de suportar esta corrente sem desarmar, ou desarmar logo depois que este tempo for excedido. Se usarmos a eq. 8.04 como uma aproximação do tempo que o disjuntor deve suportar no máximo sem
impor danos térmicos aos condutores, para uma corrente de 6 vezes a corrente nominal, teremos: 42 . 1152 / (28. 6)2 = 7,6 segundos, sendo este o tempo máximo de aceleração que o motor deve ter. Se o
motor em questão tiver um tempo de aceleração maior que este, deve-se aumentar a seção do
condutor passando este para 6mm2 ou mais. O tempo de aceleração para estes condutores ficam
suficientes para até 16,8 segundos, dentro do mesmo cálculo executado anteriormente. Se a partida
do mesmo puder ser feita com o motor a vazio fazendo com isto diminuir o tempo de aceleração do
motor, pode-se então manter os condutores em 4mm2. Percebe-se que um correto dimensionamento
58
todos os fatores devem ser tomados em conta, inclusive a possibilidade de curto-circuito que ocorre quando o motor queima. Observar também que a equação usada no cálculo foi admitindo que a
corrente de partida ficasse o tempo integral no valor limite, o que não é verdade. Um cálculo mais
preciso deve considerar a integração da corrente, uma vez que a mesma cai a medida que o motor
acelera até o valor imposto pela carga de operação, a qual pode ser considerada como sendo a
corrente nominal do motor. Para um cálculo mais preciso considerar a equação 8.04 em sua forma
integral, como é apresentada nos anexos pela equação 8.10 Critério para dimensionar a seção transversal do condutor neutro, nas instalações trifásicas:
Nas instalações monofásicas a 2 ou 3 condutores o condutor neutro deverá sempre ter a mesma seção
transversal que o condutor fase. Nas instalações trifásicas a 4 fios, onde um deles é o neutro, este também
deverá ter a mesma seção transversal que os condutores fase se este tiver uma seção transversal menor ou
igual a 25mm2. Nos outros casos, a seção transversal do condutor neutro pode ser inferior aos condutores
fase, respeitando, entretanto, um limite imposto por norma, quando atender a dois quesitos básicos: Quando a soma das potências absorvidas pelos equipamentos alimentados entre cada fase e o neutro
não for superior a 10% da potência total absorvida pelo circuito; Quando a máxima corrente suscetível de percorrer o condutor neutro, em serviço normal, incluindo
harmônicos, for inferior à capacidade de condução correspondente à seção reduzida do neutro; Em nenhuma circunstância o neutro poderá ser comum a vários circuitos;
Proteção dos circuitos:
Os dispositivos de proteção pertencem também à classe de dispositivos de manobra, pois permitem a
qualquer momento que se libere o circuito em questão da fonte de fornecimento de energia. Os dispositivos de proteção têm este objetivo quando a carga sobre o circuito exceder a carga nominal de projeto por um tempo também predeterminado, o suficiente para que o isolamento da linha seja afetada.
Os dispositivos de proteção mais comuns são os fusíveis e os disjuntores termomagnéticos. Várias
classificações existem para agrupar estes dispositivos por função, capacidades e tipos. A classificação
mais geral divide os disjuntores em tipos aberto e tipos caixa moldada. Os abertos são geralmente
grandes, tripolares, com capacidade acima de 200 A, podendo ter acionamento manual ou motorizado e virem equipados com disparadores de sobrecorrente eletromagnéticos instantâneos ou com retardo, com
disparadores térmicos de sobrecarga e com disparadores de subtensão, que desligaria o circuito nos caso
de ocorrer uma tensão abaixo de certo limite. Os disjuntores de caixa moldada podem ser monopolares, bipolares ou tripolares. São menores e geralmente tem acionamento manual podendo vir equipados com
os mesmos recursos dos disjuntores abertos. São usados na proteção de circuitos terminais e de distribuição. Os fusíveis são dispositivos que abrem o circuito pela sua queima, quando a corrente excede
o valor de especificação por um tempo limite pré-determinado para cada tipo. Várias formas estão
disponíveis no mercado. As mais usadas na indústria são os tipos NH e Diazed. Os dispositivos de
manobra são as chaves e interruptores e servem para estabelecer, conduzir e interromper a corrente
elétrica sob as condições normais do circuito, que podem incluir sobrecargas de funcionamento
especificadas, como são àquelas originadas pela partida de um motor. Os dispositivos interruptores
podem ser de diversos tipos, desde os mais simples, como uma chave-faca (obsoleta), interruptores de pressão, com contatos a seco ou mergulhados em óleo ou também eletromagnéticos (contactores). Neste
último tipo, o fechamento dos contactos é obtido pela ação de um campo formado por um eletroimã, que
mantém estes fechados enquanto permanecer tensão atuando sobre sua bobina. Os contactores podem
receber relés, que tem a função de sentir as variações elétricas na rede e assim atuar sobre o disparador, se
o interruptor for tipo de contato por pressão, ou sobre a bobina do eletroimã, se for do tipo contactor.
Entre os vários relés disponíveis no mercado pode-se citar entre os mais comuns: Relés de tempo; Relés de medição; Relés térmicos; Relés monoestáveis; Relés biestáveis; Relés eletromecânicos; Relés estáticos; Numa instalação elétrica de baixa tensão podem-se distinguir quatro funções básicas que podem ser
exercidas por um ou mais dispositivos de manobra/proteção.
59
Proteção contra contatos indiretos. São dispositivos que se destinam a proteger as pessoas e animais domésticos contra os perigos de um contato com partes energizadas do circuito. Estes dispositivos
detectam a queda de tensão originada por um contato deste tipo, interrompendo o circuito da fonte; Proteção contra sobrecorrentes. Este tipo de proteção tem o objetivo de evitar o aquecimento
excessivo da linha quando ocorre um curto-circuito, como quando ocorre na �queima� de um motor
por um defeito qualquer; Comando funcional. Permite desligar e ligar o circuito a qualquer momento, ligando ou desligando
equipamentos de utilização. (motores, lâmpadas, resistências, etc.); Seccionamento não automático. Permite separar o circuito do restante da instalação, em carga ou em
vazio, para vistoria, teste ou manutenção; Todos os dispositivos de proteção e manobra são sempre especificados pela sua corrente máxima de
funcionamento. Assim, um disjuntor de 40 A deve ser capaz de funcionar com esta corrente sem desarmar. A corrente máxima permitida que acione o desarmamento é especificado por norma para cada
tipo de disjuntor. Critérios gerais da proteção contra sobrecorrentes:
Todos os condutores vivos de um circuito devem ser protegidos contra sobrecorrentes, exceto quando a fonte de alimentação tenha uma impedância tal que a máxima corrente que esta possa fornecer não
exceda a capacidade de condução dos condutores; A proteção deve ser capaz de desarmar o circuito dentro do prazo de uma hora sempre que haja
durante este tempo uma corrente de valor igual ou maior que 1,45 vezes a corrente nominal; Desarme o circuito em tempos decrescentes em função da sobrecorrente. Isto significa dizer que a
proteção tem que atuar em tempos decrescentes, desde o prazo de uma hora até poucos segundos para
sobrecarga de correntes entre 1,45 a 6 ou 7 vezes a corrente nominal de funcionamento; Desarme o circuito em tempo brevíssimo em caso de curto-circuito. Tempo da ordem de
milissegundos; Existem alguns casos que a norma permite omitir a proteção de sobrecorrente. Para tal deve-se
consultar a NB-3. Dimensionamento dos dispositivos de proteção:
Para o dimensionamento dos dispositivos de controle e proteção, seguir as recomendações pertinentes a cada tipo. Os dados e os critérios de seleção são sempre fornecidos pelos fabricantes.
Os métodos de seleção para os dispositivos aqui sucintamente descritos e relacionados devem ser mais
claramente entendidos através de consulta em literatura especializada, a ser feita pelo próprio aluno,
como um incentivo à pesquisa bibliográfica e à aquisição de métodos de trabalho;
Anexos: Determinação da corrente de curto-circuito mínima presumível.
A complexidade das instalações e dos equipamentos atuais bem como a falta de muitos parâmetros torna o cálculo da corrente de curto-circuito exato uma tarefa complicada e às vezes até impossível. Para as
instalações de baixa tensão, é desnecessária uma grande precisão e são então usados processos
aproximados que envolvem hipóteses simplificadoras. Para este cálculo, recorre-se a um circuito RL, com uma resistência e uma reatância indutiva, e com esta calcula-se a corrente de curto-circuito presumida. Mesmo assim este cálculo é altamente técnico, sendo preferível obter-se os valores via gráfica (ver
tabelas fig, 10.6 V e 10.6 VI, pag 624 e 625 de Ademaro Cotrim, INSTALAÇÕES ELÉTRICAS, 3a. ed.,
Ed. Makron Books) Para a especificação de dispositivos e condutores protegidos é suficiente obter-se a corrente de curto-circuito presumível mínima empregando-se a expressão:
lr
SEIcc .2..
..8,0min
(eq. 8.06)
Onde:
E = tensão nominal entre a fase e o neutro, se possuir o mesmo, ou entre duas fases para o
caso de instalações trifásicas, em volt;
60
S = Seção transversal dos condutores, em mm2; r = fator adimensional relacionado com a área dos condutores.
1 para condutores com área 120 mm2 1,15 para condutores com área 150 mm2; 1,20 para condutores com área 180 mm2; 1,25 para condutores com área 240 mm2; = resistividade do material majorada, para cobre usar 0,027mm2/m,
Para alumínio usar 0,043mm2/m; l = comprimento do circuito, em metros;
Observações: Se o condutor neutro for a metade dos condutores fases, o valor de Iccmin obtido pela
expressão acima deve ser multiplicado por 0,67.
Equação que fornece o aquecimento em uma linha elétrica.
).(.......0
2amvcobrecobre
t
TTclSTcmdtiR (eq. 8.07)
Onde: R = resistência do cobre, dependente da temperatura, em ohm; i = corrente que passa pelo fio, dependente do tempo, em ampère; dt = diferencial do tempo, em segundos; m = massa de cobre no condutor, em kg; cv = calor específico volumétrico do cobre, igual a 3,45x10
-3 J/o C.mm3; = massa específica do cobre, em kg/mm3; Tm = temperatura máxima admitida no condutor, em o C; Ta = temperatura ambiente, em o C; S = superfície da seção transversal do condutor, em mm
2; l = comprimento do condutor, em mm; A resistência é dependente da temperatura, que por sua vez é dependente do tempo, e portanto não deverá
ser posta fora da integral, porém, como o problema trata de dois pontos fixos, sendo o inicial a resistência
do condutor à temperatura ambiente e o final a resistência à temperatura limite, isto permite tratar a
resistência como um valor constante igual a média do intervalo. O calor obtido pela equação acima
corresponde à elevação da temperatura num processo adiabático, os seja, aquele onde não ocorre troca de
calor com o meio ambiente e corresponde à situação limite, quando o aquecimento é tão rápido que todo
calor gerado fica acumulado no condutor, tanto porque o isolante elétrico também tem características de
isolante térmico. Para condições de curto-circuito considerar temperaturas limites de 160o C para condutores de cobre com isolação de PVC e 250
o C para condutores de cobre com isolação de
EPR/XLPE. Para sobrecorrentes normais de operação considerar a temperatura limite de 70o C e 90o C
respectivamente. Considerando a resistência média como sendo:
S
lR medio .
Substituindo na equação 8.07 acima, simplificando e reagrupando, fica:
medio
amv
tTTc
Sdti
).(.... 2
0
2 (eq. 8.08)
Fazendo
medio
amv TTcK
).(. (eq. 8.09)
61
Resulta em:
22
0
2 ... KSdti
t
(eq. 8.10)
Esta integral fornece a capacidade máxima que um condutor tem de condução sem que o mesmo atinja uma temperatura limite e nela permaneça um tempo suficiente para danificar o seu isolamento elétrico. Os valores de K empregados na norma NB-3 não são obtidos desta última expressão, mas de outra
equação que dá resultados mais precisos, a qual poderá ser consultada na própria norma. Tabela que fornece a capacidade de condução em condutores.
(pesquisar)
62
Exercícios para o 2o bimestre
(circuitos polifásicos, cálculos de potência e dimensionamento de condutores).
1. Calcule a corrente consumida por um motor monofásico de 2 kW e 240 V trabalhando a plena carga
com um rendimento de 70% e um fator de potência de 0,6. (A potência de 2 kW é a potência
mecânica medida no eixo do motor). 2. Os seguintes resultados foram obtidos num teste com um motor de CA.
Potência mecânica: 1,2kW Tensão de alimentação: 240V Corrente de linha: 15A Potência elétrica: 1560W Calcule o rendimento e o fator de potência deste motor.
3. Uma carga de 120 kg é elevada através de uma distância vertical de 10 m em 45 s por um
transportador. O rendimento do mecanismo do transportador é de 30% e do seu motor monofásico é
de 80%. O fator de potência deste motor é de 0,8. A tensão de alimentação é de 240 V. Calcule a
corrente consumida por este motor. 4. Calcule a corrente de plena carga de um motor monofásico de 5 kW alimentado por uma linha de
220V, apresentando um rendimento de 70% e um fator de potência de 0,7. 5. Um motor monofásico fornece 15kW de potência. As condições de entrada são determinadas por
instrumentos de medidas que fornecem as seguintes leituras: 240V, 100A, 17590W. Calcule o rendimento e o fator de potência deste motor.
6. Um motor monofásico impulsiona uma bomba que bombeia 500kg de água por minuto ao topo de
um edifício de 12 m de altura. O rendimento combinado do motor mais a bomba é de 52% e a tensão
de fonte é de 240V. O fator de potência 0,45. Calcule a corrente elétrica deste motor. 7. Três bobinas idênticas com reatância indutiva de 30 ohm e resistência de 40 ohm são ligadas em
estrela a uma fonte trifásica com uma tensão de linha de 400 V. Calcule a corrente de linha e a
potência total desta instalação.
8. A carga ligada entre cada linha e o neutro de uma instalação trifásica de 415 V consiste de: R-N: Um resistência não indutiva de 25 ohm; S-N : Uma reatância indutiva de 12 ohm em série com uma resistência de 5 ohm; T-N: Uma reatância capacitiva de 17,3 ohm em série com uma resistência de 10 ohm. Calcular a corrente em cada linha e a potência total da instalação. Dizer que tipo de instalação é essa
(estrela ou triângulo)
9. Três bobinas com resistência de 45 ohm e uma indutância de 0,2 H são ligadas a uma fonte trifásica
de 415 V, 50Hz em triângulo. Calcule a corrente em cada bobina, a potência de cada bobina e a
potência total do circuito. 10. Usar o exemplo anterior e recalcular tudo para uma instalação em estrela. 11. Um alternador trifásico (gerador) de 415 V ligado em estrela supre um motor de indução ligado em
triângulo com rendimento em plena carga de 87% e um fator de potência de 0,8, apresentando uma
potência 14820 W. Calcule a corrente em cada enrolamento do motor, a corrente em cada enrolamento do gerador, a potência da máquina que irá movimentar o gerador, admitindo que este
tenha um rendimento de 82%. 12. Três bobinas indutivas com uma reatância de 30 ohm e uma resistência de 40 ohm são ligadas em
estrela a uma fonte trifásica com tensão de linha de 400 V. Calcule a corrente de linha e a potência
total. 13. Uma instalação trifásica em estrela de 415 V tem as seguintes cargas:
R-N: residência não indutiva de 100 ohm S-N: reatância indutiva de 100 ohm
63
T-N: reatância capacitiva de 100 ohm A seqüência de fase é RST. Calcule a corrente no neutro desta instalação.
14. O circuito composto por um capacitor de 50 microfarad ligado entre a linha S e o neutro, uma carga indutiva composta de uma resistência de 30 ohm e uma indutância de 0,0318H ligado entre a linha R
e o neutro e por ultimo uma resistência não indutiva de 40 ohm ligada entre a linha T e o neutro,
ficam submetidos à tensão de 415 V, 50 Hz, com uma seqüência de fase RST. Calcule a corrente que passa pelo neutro e determine a potência total deste circuito.
15. Uma carga balanceada de 35 A é alimentada a uma distância de 250m através de um cabo cujos
núcleos tem resistência de 1,351 ohm/km. A tensão de linha nas extremidades da fonte é de 415 V.
Calcule a tensão de linha nas extremidades da carga e determine a queda percentual na tensão da
linha. 16. Um motor trifásico de 10 kW opera em plena carga com rendimento de 80% e fator de potência de
075. É alimentado por um quadro geral através de um cabo com fios de resistência de 0,2 ohm.
Calcule a tensão necessária nas extremidades da fonte para que a tensão nos terminais de carga seja
415V. 17. A carga estimada em uma fábrica é 50kW, balanceada, com um fp = 0,8. O ponto de fornecimento da
energia está distante 120 m e sua tensão é 415 V. Calcule a área da seção transversal do cabo, de
forma que a queda total de tensão não exceda 2,5% da tensão da fonte. ( cobre = 1,78 x 10 �8 ohm.m. 18. Uma carga balanceada de 25 A deve ser alimentada por uma fonte de 415 V, distante 150 m. A queda
de tensão total não deve exceder 2,5 % da tensão da fonte. Escolha o cabo mais conveniente dentre os
seguintes. Dimensão do cabo em mm2 6 10 16 25 Corrente-limite em A 27 37 47 53 Queda de tensão por ampère Por metro em mV 6 3,6 2,2 1,5
19. Um motor trifásico de 40 kW, 415 V, a plena carga, tem rendimento de 86% e um fator de potência
de 0,75. O cabo de 3 fios que liga o motor ao quadro geral de entrada tem 110 m e seus condutores são de cobre e tem 25 mm2 de área. Calcule a queda de tensão total do cabo, desprezando sua
reatância. 20. A carga de uma instalação consiste em 2 kW de iluminação com fator de potência unitário, 6 kW de
aquecimento através de resistências não indutivas e 2 kW em motores com fator de potência 0,8 e rendimento de 80%. A fonte é de 240 V e está distante 100 m. Determine o cabo mais adequado a
esta instalação. 21. Uma carga monofásica de 25 A deve ser alimentada por uma fonte de 240 V que está distante 90 m
da instalação. A queda de tensão não deve ultrapassar 2,5% da tensão. Escolha o cabo mais
conveniente dentre os abaixo: Seção transversal em mm2 6 10 16 25 35 Corrente suportada em A 77 105 140 180 220 Queda de tensão por Ampère por metro 7,0 4,4 2,8 1,8 1,3
(Exercícios sobre correção do fator de potência)
1. A instalação de uma fábrica apresenta a seguinte carga: 50 kW de iluminação, 30 kW de
aquecimento e 44,76 kW de motores instalados. Assumindo que as cargas de iluminação e
aquecimento não são indutivas e os motores têm um rendimento total de 87% com um fator de potência de 0,7 em atraso, calcule: A carga total em kW e a demanda em kVA sob as condições de
carga total. 2. A corrente consumida por um motor de indução monofásico para 250V, 50 Hz, operando a plena
carga é de 39 A com um fator de potência 0,75 em atraso. Calcule a potência consumida da fonte em
kW e em kVA. Encontre o valor do capacitor que deve ser ligado entre os terminais do motor para causar uma potência consumida em kVA igual à potência consumida em kW.

64
3. Um conjunto de máquinas de solda consome 60 A de uma fonte CA de 240 V, 60 Hz, com um fp de 0,5 em atraso. Determine a potência reativa de um capacitor que aumente o fp para 0,9 em atraso. Calcule também qual corrente fluirá na nova situação.
4. A carga de uma oficina consiste de: 9 kW em iluminação, com fator de potência unitário, um motor
que consome 12 kVA, com fp de 0,75 em atraso, vários pequenos motores que consomem juntos 15
kW com fp 0,6 em atraso. As cargas são balanceadas nas três fases de um sistema fornecedor de 415
V. Determine: A potência total consumida em kW, a potência reativa total e a potência aparente total.
Aproveite e determine também o fator de potência e a corrente de linha da instalação. 5. Um sistema trifásico com 415 V, 50Hz, alimenta as seguintes cargas balanceadas: 8 kW em
iluminação, um motor cujo rendimento é de 80% e apresenta um potência de saída de 7460W e um fp de 0,75 em atraso. Vários pequenos motores, com uma potência somada de 8952 W, rendimento
conjunto de 70% e um fator de potência 0,7 em atraso. Determinar a carga total em kW, kVAr e kVA, o fator de potência e a corrente de linha de toda a instalação. Determine também a potência
reativa do capacitor que deve ser instalado para aumentar o fator de potência para 0,9 para ambas às
situações: (ligados em triangulo e ligados em estrela).

65
9a aula:
Transformadores Transformadoras são máquinas elétricas importantes, que podem ser usadas para transformar valores de
tensão em correntes variáveis, para casar impedâncias ou para isolar partes de um circuito elétrico. Um transformador é constituído de dois circuitos elétricos independentes, um primário e um secundário,
sendo ambos, associados entre si por um núcleo de alta permeabilidade magnética. Sendo os dois
circuitos formados por fio enrolado formando um solenóide ou simplesmente uma indutância. A corrente
atravessando um destes solenóides irá gerar um campo magnético que induzirá no outro solenóide e em si
próprio uma corrente induzida. Em eletrotécnica, os transformadores são projetados para operar com
tensões e correntes senoidais relativamente grandes. Em eletrônica, os transformadores lidam com formas
de ondas complexas de frequências diversas, geralmente em potências baixas. Os transformadores são
máquinas de grande eficiência, e os de grande potência, normalmente apresentam rendimento em torno de
99%. Seu funcionamento é baseado no fenômeno da indução mútua. Um transformador é constituído no
mínimo por duas bobinas, dispostas de tal modo que uma delas fica submetida a qualquer campo magnético produzido pela outra. Estas bobinas geralmente estão enroladas em um núcleo de ferro, que é o
núcleo do transformador. As duas bobinas constituem os enrolamentos primários e secundários do transformador. O enrolamento primário é aquele no qual é produzido o campo magnético variável, para
que apareça uma força eletromotriz induzida na outra bobina ou enrolamento secundário. O transformador ideal:
De acordo com o que já foi estudado, um transformador apresenta perdas resultantes da resistência
oferecida pelos condutores de cobre, também designadas por perdas por efeito joule, e as perdas em virtude das correntes de Foucault e da histerese, designadas como perdas no núcleo ou perdas no ferro. Além disto, deve ser considerado o fato de que nem todo fluxo magnético produzido no primário é
aproveitado pelo secundário. Entretanto, para facilitar a compreensão do funcionamento e do cálculo de
um transformador, consideraremos inicialmente como sendo um transformador ideal, ou seja, um transformador sem perdas e com coeficiente de acoplamento igual a 100%. A tensão instantânea de auto-indução no primário de um transformador é igual a...
dt
dNE p
(eq. 9.01)
Onde: E = tensão de auto-indução, em Volt, V Np= número de espiras
dt
d= variação do fluxo magnético em relação ao tempo.
Num transformador ideal, não haverá no primário outra dificuldade além de sua reatância indutiva, e,
portanto, esta mesma equação exprime numericamente, o valor da tensão aplicada ao primário (Ep). No transformador real deverá ser considerada a perda pelo efeito joule devido à resistência do enrolamento da
bobina e outros fatores mais, porém tudo se faz no projeto de um transformador para que esta perda seja a
mínima possível, de modo que a tensão aplicada ao primário seja praticamente igual à força eletromotriz
no mesmo. Um transformador pode funcionar ligado a uma fonte de CC, desde que a intensidade de corrente no primário seja variável. Como exemplo deste fato pode-se citar a bobina de ignição do sistema
elétrico dos automóveis. Geralmente, um transformador é calculado para trabalhar com CA, assim,
podemos dizer que para um quarto de ciclo da tensão senoidal aplicada ao primário, o valor médio da
tensão de auto-indução no primário é...
max
4
1
max...4
p
f
pppmedia NfNt
NEE
(eq. 9.02)
Onde: Ep = valor eficaz da tensão aplicada ao primário do transformador, em volt f = frequência da tensão aplicada, em hertz Np = número de espiras do primário do transformador

66
max = fluxo máximo produzido no primário do transformador, em webers (Wb)
O valor máximo da tensão é:
axp
p
fNfN
E
28,6636.0
4 max
max (eq. 9.03)
O valor eficaz da tensão é:
maxmaxmax 44,428,6707,0707,0 ppp fNfNEE (eq. 9.04)
A equação 9.04 é conhecida como a equação fundamental de um transformador. Desta equação conclui-se que
max44,4 f
EN
p
p
O valor da tensão Ep, é o valor da tensão da rede na qual o transformador é ligado. Quanto ao valor de
max, este depende da qualidade do material usado para constituir o núcleo magnético do transformador.
Os fabricantes de chapas para núcleos de transformadores prestam informações sobre o máximo de
densidade de fluxo magnético que pode ser obtido com o material que produzem. Conhecida a densidade
de fluxo, conhece-se o fluxo, bastando para tal conhecer as dimensões da seção transversal do núcleo e
este irá depender da potência do transformador, obedecendo a recomendações de ordem prática adquirida
pelos fabricantes de transformadores. Para a tensão no secundário, vale a mesma relação, alterando-se apenas o nome das variáveis Ep e Np, que passam agora a denominar-se Es e Ns. Seguindo o raciocínio da
conservação da energia, vemos que num transformador aumenta-se a tensão à custa da diminuição da
corrente e vice-versa. Portanto, o funcionamento de um transformador ideal tem rendimento igual a 1, ou seja aquele que não apresenta perdas na transformação. Dentro deste pensamento, pode-se tanto aumentar a tensão como diminuí-la bastando para isso, apenas mudar a relação entre as espiras entre o circuito primário e o secundário.
s
p
s
p
N
N
E
E (eq. 9.05)
Como o transformador é ideal, a potência do secundário é exatamente igual à do primário. Assim: (eq. 9.06)
sspp
sss
ppp
IEIE
IEP
IEP
(eq. 9.07)
aN
N
I
I
E
E
s
p
p
s
s
p (eq. 9.08)
As razões apresentadas na eq. 9.08 são chamadas RELAÇÕES DE TRANSFORMAÇÃO e são
normalmente representadas pela letra a
É importante observar também que qualquer variação na impedância ligada ao secundário de um
transformador implica na variação da corrente no seu enrolamento primário. Se a impedância do
secundário aumenta, diminui a corrente que ele fornece, e é menor a energia solicitada do secundário em
cada segundo. Como o secundário não cria energia, toda energia que ele fornece vem do primário. Como
a tensão no primário é praticamente constante, a corrente no primário cai na mesma razão que a do
secundário como se deduz da equação 9.06. Se a impedância no secundário fosse diminuída, a corrente
aumentaria, que implicaria em maior corrente no primário. Vê-se que qualquer alteração na impedância
sp PP

67
de um dos circuitos reflete na impedância do outro. Este fenômeno é tratado como impedância refletida Para estabelecer uma relação entre as impedâncias em apreço basta seguir o raciocínio:
p
pp
I
EZ , e que da equação 9.08 vem: mas,
Donde:
sp ZaZ2
(eq. 9.09) Corrente de Excitação:
Com o secundário aberto, a fem que aparece através dos terminais do secundário é exatamente igual ao à
tensão presente nos mesmos, porque não existe corrente elétrica. Portanto, não existem perdas no secundário. No primário pode-se dizer que é aproximadamente igual. A diferença é a pequena queda de
tensão devida à resistência do enrolamento, então a queda de tensão devido à reatância indutiva é
aproximadamente igual à tensão. A corrente que flui no primário quando o secundário está aberto é
denominada corrente de excitação, e é esta corrente que responsável pela pequena diferença entre a fem e a tensão, e é então, a mínima corrente que passa pelo transformador quando o mesmo não é usado. Isto
significa que mesmo sem uso, um transformador continua a consumir energia elétrica, embora mínima.
Perdas em um transformador:
Histerese; Correntes parasitas. Histerese. Na magnetização de um material ferromagnético por reorientação dos domínios, a maioria dos
efeitos é irreversível. Isto significa dizer que ao retirar o campo externo que provocou a magnetização do
material este retém em parte a magnetização imposta, ou seja, o material permanecerá magnetizado. Esta
característica é plenamente utilizada no armazenamento de dados e sinais usando como meio de armazenamento um material magnetizável como ferro, ou suas composições com níquel, cromo e cobalto.
Para retornar o meio ao estado original é necessária uma força magnética negativa, a qual acontece
quando a corrente muda de sentido. Exatamente como uma tira metálica se aquece quando é
repetidamente flexionada, o material magnético também se aquece quando é ciclicamente magnetizado. Em ambos os casos, a energia que aparece como um aumento na temperatura é devido à ação inelástica e,
portanto, existe uma pequena perda de energia devido a este fenômeno, o qual recebe o nome de
histerese. Definindo em melhores palavras histerese é a propriedade que os materiais têm de reter a orientação magnética quando a força magnetizante cessar.
Correntes parasitas. Nos geradores elétricos antigos aproximadamente ¾ da entrada apareciam como
calor no circuito magnético. Uma pequena parte desta energia era devida à histerese, mas a maior parte
era devida ao fato de que um fluxo magnético variável induz tensões no próprio material do núcleo. Em
um núcleo ferro condutor, as tensões induzidas provocam correntes parasitas localizadas e a potência
resultante i2R = V2/R aparece como calor. A perda de potência devido a este fato pode ser reduzida
diminuindo-se V e aumentando-se R e isto é conseguido ao usar um núcleo formado por finas lâminas de
ferro ao invés de um bloco único. Obviamente que as lâminas são eletricamente isoladas entre si pela
aplicação de um verniz isolante. Para um determinado núcleo, a perda de potência por correntes parasitas
é dada por
22.mee
BfKP (eq. 9.10) Relações auxiliares: EkBfm
.. (eq. 9.11) A
Bm
max (eq. 9.12)
Onde Ke = Constante que depende da resistividade do material do núcleo e da espessura das laminações; F = frequência de operação, em hertz; Bm = densidade de fluxo magnético, em tesla A = área da seção transversal do núcleo, em m
2; E = Tensão, em volts;
s
s
spp aE
N
ENE
a
Is
N
INI
p
ssp

68
Como se pode observar pela fórmula 9.1, a tensão induzida no núcleo é proporcional ao produto f.Bm e a perda varia com o quadrado da tensão, então a perda de potência varia com o quadrado do produto f.Bm
Princípio de funcionamento:
O transformador tem seu funcionamento baseado no principio de que toda corrente elétrica ao atravessar
um condutor produz um campo magnético e se este campo variar ao longo do tempo, esta variação
induzirá em condutores próximos uma corrente induzida surgindo assim uma tensão induzida em outro
condutor próximo, o qual não tem ligação elétrica alguma com o condutor eletrizado. O mesmo princípio
rege o funcionamento dos motores de indução, com a singular diferença que nos motores o secundário é
móvel e assim a energia elétrica induzida no secundário se converte em energia mecânica, enquanto que
nos transformadores, como o secundário é fixo, resulta simplesmente em energia elétrica transferida. Autotransformador:
Autotransformador é um transformador constituído por um único enrolamento tendo então o efeito da
reatância indutiva refletida sobre a tensão de entrada. O maior uso de um auto transformador é de regular
tensão ou servir de corretivo de fator de potência. Para aplicações de potência, ou uso industrial, as características externas que mais importam são a relação
de tensões, a potência de saída, o rendimento e a variação de tensão com a carga. Isto pode ser obtido do
fabricante ou extraídos da placa de informações do transformador, de medidas experimentais ou dos cálculos baseados em um modelo de circuito. Características de placa:
Um transformador é sempre especificado pelo fabricante por suas condições normais para o qual o
mesmo foi fabricado. Uma característica de placa típica poderia indicar Transformador marca ......, 4400/220V, 60 Hz, 10 kVA. Isto indica que este transformador foi feito para transformar 4400 V para 220 V ou vice-versa em uma frequência de 60 Hz. Neste caso a saída máxima que pode ser obtida é de 10
kVA e até este valor o transformador não sofre um aquecimento excessivo. Como o aquecimento depende
do quadrado da corrente, a saída é indicada em potência aparente ao invés da potência útil. Alimentando
uma carga de fator de potência unitário a potência útil que pode ser ligada neste transformador iguala-se a sua capacidade expressa em potência aparente. Rendimento:
Rendimento por definição é a razão entre a potência de saída e a potência de entrada. Pode ser expressa
sempre em forma percentual. Regulagem da tensão:
A regulagem de um transformador é a variação na tensão de saída produzida por uma variação na corrente
de carga de zero até o valor nominal, dividida pela tensão nominal. A regulagem pode ser positiva ou
negativa e também pode ser expressa em percentual. Observar que a regulagem é positiva se a tensão
decrescer com o aumento de carga. Regulagem é por definição o valor obtido pela expressão:
100
c
cs
E
EER
Onde R = Regulagem, em % Ec = tensão com carga máxima, em V; Es = tensão sem carga, em V;
Exemplos:
Os cálculos envolvidos no dimensionamento de um transformador são pertinentes às tensões de entrada e
saída e a potência que o mesmo pode fornecer, expressa sempre em potência aparente (kVA). Outros
69
dados secundários como fator de potência do próprio transformador, rendimento e regulação também são
desejáveis. Corrente de transformador a vazio e corrente de curto circuito são outras variáveis que influenciam a
qualidade do transformador e são parâmetros importantes. Calcule o valor máximo de fluxo no núcleo de um transformador com 2000 espiras no primário e
alimentado com 240 V, 50 Hz.
mWbWb 541,0000541,020005044,4
240max
Supondo que a densidade de fluxo máximo no núcleo do transformador não deva exceder 0,5 tesla, calcule a área da seção transversal do núcleo.
AB .maxmax
Onde Bmax é a densidade de fluxo máximo e A é a área da seção transversal do núcleo.
Exercícios:
Um transformador de 10 kVA, 60 Hz 1000/500V alimenta uma carga com fp = 0,5 em avanço Determinar
a regulagem de tensão e o rendimento deste quando opera com a carga máxima. Um transformador de 250/1000V, 60 Hz, é testado. Os dados em circuito aberto são: V1= 250 V, I1 =
0,51 A, W1 = 31,25 W, V2 = 1000 V. Os dados de curto-circuito são: V1 = 7,9 V, I1 = 20 A, W1 = 50 W. O secundário do transformador está conectado a uma resistência de 200 ohms. Determinar: A tensão real do primário requerida para desenvolver 1000 V através da resistência A corrente real do primário.
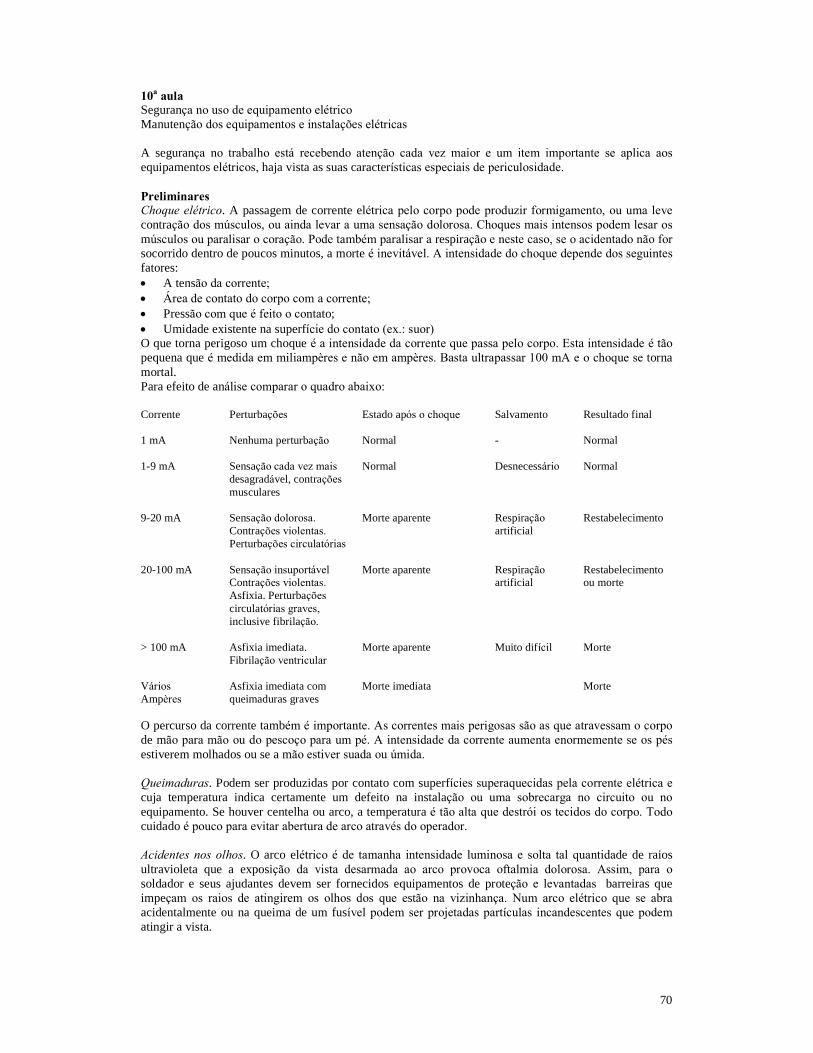
70
10a aula
Segurança no uso de equipamento elétrico Manutenção dos equipamentos e instalações elétricas A segurança no trabalho está recebendo atenção cada vez maior e um item importante se aplica aos
equipamentos elétricos, haja vista as suas características especiais de periculosidade. Preliminares
Choque elétrico. A passagem de corrente elétrica pelo corpo pode produzir formigamento, ou uma leve
contração dos músculos, ou ainda levar a uma sensação dolorosa. Choques mais intensos podem lesar os
músculos ou paralisar o coração. Pode também paralisar a respiração e neste caso, se o acidentado não for
socorrido dentro de poucos minutos, a morte é inevitável. A intensidade do choque depende dos seguintes
fatores: A tensão da corrente; Área de contato do corpo com a corrente; Pressão com que é feito o contato; Umidade existente na superfície do contato (ex.: suor) O que torna perigoso um choque é a intensidade da corrente que passa pelo corpo. Esta intensidade é tão
pequena que é medida em miliampères e não em ampères. Basta ultrapassar 100 mA e o choque se torna mortal. Para efeito de análise comparar o quadro abaixo: Corrente Perturbações Estado após o choque Salvamento Resultado final 1 mA Nenhuma perturbação Normal - Normal 1-9 mA Sensação cada vez mais Normal Desnecessário Normal
desagradável, contrações musculares
9-20 mA Sensação dolorosa. Morte aparente Respiração Restabelecimento Contrações violentas. artificial Perturbações circulatórias 20-100 mA Sensação insuportável Morte aparente Respiração Restabelecimento Contrações violentas. artificial ou morte Asfixia. Perturbações
circulatórias graves, inclusive fibrilação.
> 100 mA Asfixia imediata. Morte aparente Muito difícil Morte Fibrilação ventricular Vários Asfixia imediata com Morte imediata Morte Ampères queimaduras graves O percurso da corrente também é importante. As correntes mais perigosas são as que atravessam o corpo
de mão para mão ou do pescoço para um pé. A intensidade da corrente aumenta enormemente se os pés
estiverem molhados ou se a mão estiver suada ou úmida. Queimaduras. Podem ser produzidas por contato com superfícies superaquecidas pela corrente elétrica e
cuja temperatura indica certamente um defeito na instalação ou uma sobrecarga no circuito ou no
equipamento. Se houver centelha ou arco, a temperatura é tão alta que destrói os tecidos do corpo. Todo
cuidado é pouco para evitar abertura de arco através do operador.
Acidentes nos olhos. O arco elétrico é de tamanha intensidade luminosa e solta tal quantidade de raios ultravioleta que a exposição da vista desarmada ao arco provoca oftalmia dolorosa. Assim, para o
soldador e seus ajudantes devem ser fornecidos equipamentos de proteção e levantadas barreiras que impeçam os raios de atingirem os olhos dos que estão na vizinhança. Num arco elétrico que se abra
acidentalmente ou na queima de um fusível podem ser projetadas partículas incandescentes que podem
atingir a vista.
71
Acidentes mecânicos. Partidas súbitas de motores que acionam máquinas em conserto, lubrificação ou
ajustamento ou deslocamento inesperado de partes de chaves, interruptores ou outros aparelhos de controle, podem produzir ferimentos graves. Condições perigosas nos circuitos elétricos:
As condições que tornam um determinado circuito elétrico perigoso e que devem ser levados em conta são: Curto circuito; Contato acidental de um condutor com a terra; Sobrecarga; Contato defeituoso. Curto circuito. Ocorre quando a isolação se estraga. Pode ocorrer também na abertura lenta das chaves,
provocando um arco longo que pode saltar para outro polo. Pela interligação acidental dos terminais de
um motor, das facas de uma chave, ou dos suportes de fusíveis provocadas por manuseio descuidado de
ferramentas metálicas, ou pelo contato das pontas de duas pernas do condutor. Nestas condições, a
resistência natural do circuito deixa de existir ou praticamente se anula, e deste modo, a corrente passará
livremente e com tal intensidade que provoca aquecimentos elevados, abertura de arco, incêndio e
explosões e destruição de elementos por onde ela passa, a menos que os fusíveis e os equipamentos de
proteção entrem imediatamente em ação cortando a corrente do circuito. Contato acidental com a terra. Ocorre quando um condutor desencapado encosta numa árvore, num poste
molhado pela chuva, num cano de água e em qualquer peça metálica que esteja ligada com a terra, como
por exemplo, uma coluna ou uma ponte metálica. Entretanto costuma-se fazer ligações propositadas à
terra ligando carcaças e partes não energizadas com a terra, sempre com o objetivo de proteger o operador. Num caso de curto circuito interno num equipamento que está relativamente isolado da terra, o
equipamento inteiro poderá ficar energizado sem provocar o desarme da proteção e neste caso, quando o
operador tocar na máquina irá receber um choque. Sobrecarga. Cada condutor pode ser percorrido por uma corrente até certo valor em �ampères� sem se aquecer de maneira perceptível. Passado este limite, seu crescimento aumenta rapidamente e pode ser
tornar perigoso. Segue-se que a corrente de um circuito não pode ultrapassar este valor. Se for além, é
porque ou ele foi mal dimensionado para a carga em questão, ou ele está com sobrecarga. Este perigo
deixa de existir se os fusíveis forem bem dimensionados, pois assim os mesmos irão queimar antes de
haver prejuízo aos condutores. Mau contato. Ao ligar a ponta de um fio à ponta de outro ou a um aparelho, se não houver um contato
perfeito e firme no ponto de junção, dá-se um aquecimento que pode ser prejudicial. Também ao ligar uma chave. Se as lâminas da chave não ficarem bem pressionadas, ocorre um mau contato, levando a um
aparecimento de uma resistência localizada muito grande e neste ponto irá dissipar muita energia pela
conversão de energia elétrica em calor. Para evitar contato frouxo se pode usar de bornes dotados de parafusos para aperto entre os dois fios, ou em último caso, usar de solda para unir ambos. Prevenção dos acidentes elétricos:
As seguintes regras de segurança devem ser obedecidas rigorosamente: Só usar aparelhos e equipamentos em bom estado de conservação; atentar sempre para aparelhos e
equipamentos bem construídos; Instalá-los somente por pessoas competentes e obedecendo as normas técnicas NB-3 e NB-79 da
ABNT; Zelar pela boa manutenção; Não se fiar no fato da instalação usar tensão de 110 V. Esta tensão pode matar conforme a situação; Os fios e cabos do circuito devem ter capacidade para conduzir a corrente e estar dentro de conduítes.
Todas as partes por onde passa a corrente elétrica devem estar protegidas contra contato eventual de qualquer pessoa;
Ligar sempre as carcaças e barreiras protetoras ao fio terra; Se os condutores não puderem ser embutidos, devem ser postos tão altos ou tão afastados que
ninguém possa alcançá-los ou tocá-los acidentalmente com um vergalhão, um tubo ou uma peça
comprida. Acidentes mortais têm acontecido muito nestas condições;

72
Conforme o tipo de equipamento, fechá-lo em uma cabine, ou quadros; Tratar todos os fios, mesmos os isolados, como se fossem nus. O isolamento pode às vezes estar
estragado. Nunca apanhar um fio elétrico caído no chão; Nunca se aproximar de uma chave ou de uma linha de alta tensão; Se uma máquina estiver em conserto, a chave que comanda a corrente deve ser desligada. Os fusíveis
devem ser retirados, e deve ser colocado um aviso �Não ligue � Circuito em conserto� ou qualquer coisa semelhante;
Usar sempre a mesma cor para determinada fase, identificando bem as fases, evita-se possibilidades de curto circuito por ligações erradas. Para corrente de altas tensões a norma técnica NB-79 recomenda o uso das cores amarelo, verde e vermelho respectivamente para as fases RST de um circuito trifásico CA. Para correntes contínuas, usar a cor azul para o aís negativo, laranja para o positivo e preto para o fio terra. Terra de serviço, neutro ligado à terra de serviço e neutro ligado ao fio terra devem ser brancos;
Quando existem tomadas de diferentes tensões, é preciso sinalizar esta, e para maior segurança, usar
tomadas de pinagem diferente para cada tipo de tensão; Para alertar as pessoas do perigo, os avisos devem ser sempre excessivos ao invés de serem poucos. Equipamento de proteção individual:
O operador de eletricidade deve usar proteção individual se trabalhar com ou perto de partes vivas expostas. Qualquer objeto metálico como relógio, anéis, botões de roupas deve ser retirado antes de
iniciar o trabalho. Igualmente de seu vestiário ou equipamento não deve constar nada que seja inflamável
como viseiras de celulóide e óculos deste material. As roupas devem ser justas. Os equipamentos de proteção individual são: luvas, capacetes, aventais, botas, e braçadeiras da mais alta qualidade de
borracha. Outros equipamentos são plataformas isolantes, hastes de madeira seca e ferramentas isoladas. Outras regras essenciais de segurança:
Quando operar equipamento elétrico em que haja partes vivas, use somente uma das mãos para no caso de
choque, a corrente não ultrapassar o tórax. Conserve a outra mão no bolso. Os cabos de vassouras,
escovas e de aparelhos de limpeza devem ser de material bem isolante. Ferramentas, sempre que possível
devem ser feitas de material não metálico. Sendo impossível, devem Ter cabos bem isolantes. Em
trabalhos com tensão acima de 110 V feitos em lugares úmidos ou chuvosos e em todos os casos de trabalho à noite, deve haver sempre dois homens para o mesmo serviço. Ambos treinados em respiração
artificial.
Cuidados no uso do equipamento elétrico:
Transformadores. Devem estar instalados fora do prédio em espaço isolado com proibição de entrada de pessoas estranhas ao serviço. De maneira nenhuma se deve permitir fazer da cabine depósito de material.
Se envolvidos por cerca metálica, esta deve ser aterrada. Os fios de alta tensão na sua entrada devem estar
firmemente fixados e defendidos contra contato manual, mesmo que isolados. Se a cabine for de alvenaria ou no interior do prédio, as janelas devem ser protegidas por tela de arame forte e a soleira da porta
levantada de forma a evitar que algum vazamento de óleo do transformador se espalhe pelo interior do prédio. Só deverá entrar na cabine pessoa autorizada e sempre acompanhada por outra pessoa de igual
categoria. A instalação dos condutores deve obedecer às normas técnicas brasileiras.
Condutores. Todos os circuitos deverão ser calculados e executados de acordo com as normas técnicas
brasileiras. Obrigatoriamente, em locais onde existir a possibilidade de gases inflamáveis ou explosivos e
também excesso de umidade, os condutores deverão ficar contidos em eletrodutos que devem ser
estanques tanto aos gases quanto à umidade.
Fios flexíveis empregados nos equipamentos móveis. Devem ser defendidos contra avarias mecânicas,
contatos com óleo e produtos químicos e devem ser inspecionados constantemente. O cordão dos
equipamentos portáteis deve ser apropriado para o tipo de serviço desempenhado e ser bem isolado com
borracha de boa qualidade. Para aparelhos de aquecimento elétrico, o cordão deve ser revestido de
material incombustível e resistente ao calor, como fibra de vidro ou fibra de amianto.
Emendas. Proteger fios nus com fita isolante em vez de usar fio isolado não é recomendável e só deve ser
feito em casos de extrema necessidade. As ligações de pontas de fios devem ser muito bem feitas,

73
torcendo-as após ou usando uma ligação mecânica firme. A junta depois de feita deve ser enrolada com uma fita isolante de boa qualidade.
Dispositivos de proteção contra a sobrecorrente. Estes dispositivos se destinam a cortar a corrente no caso dela passar em intensidade maior que a prevista para a instalação. Isto pode acontecer quando há
�terra� na instalação ou um curto-circuito ou por excesso de carga num equipamento. Exemplos deste dispositivo são os fusíveis e as chaves de ligação automática. O fusível comum é uma resistência metálica
que funde quando a corrente passa maior do que a prevista. As chaves agem mais rapidamente que os fusíveis e podem ser repostas em operação por simples movimento de alavanca. Esta simplicidade,
porem, traz o problema do perigo de uma ligação inadvertida quando a chave tiver sido desligada para fins de reparo ou mudança de matrizes de alguma maquina. Por este motivo elas devem estar num lugar
isolado, livre da ação de curiosos, distraídos ou mal intencionados. É terminantemente proibido substituir
um fusível por uma moeda, pedaços de arame ou de qualquer outro material condutor improvisado. Um
fusível deve ser substituído por outro da mesma capacidade e não por um de maior corrente. Se o fusível
queimar é sinal de que existe algo errado com a instalação (terra, curto-circuito ou sobrecarga) que precisa ser corrigido. Aumentar a capacidade do fusível poderá provocar acidente ou incêndio.
Quadros de controle e distribuição. Muitas vezes é necessário haver um quadro de controle de
distribuição onde estão instalados os instrumentos de medida e as chaves de ligação de vários circuitos.
Estes quadros devem ser instalados em compartimentos especiais onde é proibida a entrada de pessoas
exceto aquelas autorizadas e encarregadas das manobras. Deve haver tapete de borracha isolante na frente do quadro para o operador pisar ou ficar isolado da terra. Em redor do quadro deve haver limpeza completa, não sendo permitido colocar qualquer material, nem por pouco tempo.
Motores. Os motores devem ter a carcaça sempre ligada ao fio terra. Evitar queda de objeto, ferramenta ou cavacos no seu interior. Afastar materiais inflamáveis de sua proximidade. Escolher tipos apropriados
para ambientes perigosos, inflamáveis e explosivos. Não ter motores debaixo do piso do compartimento
onde se manuseie gasolina ou outro material que produza vapores inflamáveis mais pesados do que o ar e
que podem atravessar o piso superior e espalhar-se em baixo. Nos casos onde haja perigo de fogo por faíscas elétricas, é preferível usar motor de indução. Técnicas de ressuscitação:
O Instituto Nacional de Segurança da França dá as seguintes probabilidades de volta à vida conforme o
número de minutos decorridos depois do choque aparentemente mortal. Tempo decorrido após o choque para probabilidade de reanimação Começar a respiração artificial da vítima 1 minuto 95 % 2 minutos 90 % 3 minutos 75 % 4 minutos 50 % 5 minutos 25 % 6 minutos 1 % 8 minutos 0,5 % Esta tabela mostra que esperar a chegada do médico ou da assistência para então começar a prestar
socorro ã vítima é condená-la à morte que poderia ter sido evitada por uma pronta respiração artificial. O
corpo humano pode passar dias sem comer ou beber, mas não pode passar muitos minutos sem respirar. A
providência a tomar é manter em todos os locais em que haja perigo de choque elétrico (e também de
afogamento ou de asfixia por gases) homens treinados em respiração artificial. São dois os métodos mais
usados.
Método de Holgen-Nielsen, de pressão no tórax e levantamento dos braços; Insuflação de ar pela boca, denominado boca a boca; Método Holger-Nielsen:
74
1. Para a aplicação deste método de pressão nas costas e levantamento dos braços, deve-se colocar a vítima de bruços, com a boca apoiada nas mãos. O operador deve permanecer em frente ã cabeça da
vítima, apoiado em um ou ambos os joelhos 2. Coloca-se as mãos nas costas e à altura das axilas da vítima, em posição tal que ambos os polegares
do socorrista se toquem; 3. Então, vagarosamente, o operador suspende o próprio corpo, conservando os cotovelos esticados e
exercendo sensível pressão sobre as costas da vítima; 4. Após essa pressão, deslizar as mãos em direção aos braços da vítima, até a altura dos cotovelos,
segurando-os. Puxam-se depois os braços da vítima até o ponto máximo em direção ao seu próprio
corpo. Depois se volta os braços da vítima à posição inicial, completando os movimentos. Repetir a operação na
média de 12 vezes por minuto. Método boca-a-boca:
No método boca a boca, o socorrista insufla o ar de seus pulmões colando a boca na boca de acidentado. Para garantir que o ar vá para o pulmão é preciso apertar as narinas da vítima e ter certeza de que a boca
está desobstruída e a língua desenrolada, puxando o queixo para frente a fim de que a língua, mesmo em
posição normal, não caia para trás, fechando a garganta. Somente quando o tórax da vítima começa a se
dilatar a cada soprada é que se tem a certeza de que o ar do socorrista está entrando nos pulmões do
socorrido, e daí para diante é perseverar até que a reanimação aconteça ou se constate o pior. Em resumo as operações são: 1. Deitar o socorrido de costas. Levantar a nuca e baixar a cabeça, colocando um objeto sob seus
ombros, para recolher a língua. Pode ser um sapato ou uma peça de roupa enrolada; 2. Desobstruir, com presteza, a boca e as vias respiratórias de possíveis obstáculos. (corpos sólidos,
água, sangue, vômitos, etc); 3. Iniciar o mais rápido possível, a insuflação de ar. Para isto, Inspirar profundamente e soprar todo o ar
na boca entreaberta do socorrido. Retirar a boca e aguardar alguns instantes para repetir a manobra; 4. Preferindo-se se pode soprar pelas narinas, e neste caso, é necessário fechar bem os lábios do
socorrido, calcando para cima com o polegar, o lábio inferior do paciente; 5. Ao mesmo tempo, outra pessoa pode promover a massagem cardíaca externa. Para a massagem
cardíaca, a pessoa deve se ajoelhar ao lado direito do paciente. Colocar a parte da mão direita na
metade inferior do osso externo e, com a mão esquerda e o peso do próprio corpo reforçar a mão
direita na compressão do tórax em direção da coluna vertebral. Rebaixar cerca de 3 a 5 cm; 6. Repetir com espaço de um segundo, cinco vezes a compressão, deixando no intervalo de exercer
qualquer pressão. A fim de uma ventilação boca a boca, fazer 5 compressões; Perseverar com este procedimento.
Em caso de choque elétrico, desligar a corrente ou cuidadosamente remover o paciente do contato
usando um isolador, por exemplo, um pedaço de madeira bem seca ou sacolas plásticas de polietileno
como luvas. Em seguida, proceder imediatamente à respiração artificial. Não se deixar influenciar pela
inflexibilidade ou rigidez prematura como sinal para cessação da respiração artificial. Independente do
método usado, a ressucitação deve ser continuada pelo menos por quatro horas, mesmo que não haja sinal
de revivação, procurando manter o corpo do paciente sempre aquecido, usando cobertores, garrafas de
água quente ou outro recurso semelhante.
75
Manutenção dos equipamentos e instalações elétricas:
Os diferentes tipos de manutenção elétrica cabem em três denominações básicas: preventiva, de rotina e
corretiva. Difícil é programar cada uma dessas etapas e decidir quando investir nas duas primeiras, de
modo a reduzir ao mínimo possível o ônus da terceira e alcançar os objetivos fundamentais da manutenção: Conservar o patrimônio da empresa em bom estado e obter baixos níveis de interrupções da
produção por defeitos nos sistemas elétricos. Inúmeros são os problemas, começando pela resistência por
parte dos dirigentes que acham desnecessário investir em setor que não fatura e que consideram a única
política admissível aquela de consertar quando quebrar. Outro ponto difícil de decidir é quanto a quem
delegar a tarefa de consertar. Montar equipe própria ou contratar serviços de terceiros? Como dimensionar o volume da manutenção a ser prestado, levando em conta que inevitavelmente, ele será
sempre menor que a necessidade máxima eventual e maior do que a mínima circunstancial. Reparar ou
trocar unidades avariadas por novas é outro ponto crucial. Muitas vezes a mão de obra para re-enrolar um motor pequeno demora o tempo suficiente para que o custo em mão-de-obra supere o preço de um motor
novo. É comum se dividir a manutenção nestas três fases: Rotineira, preventiva e corretiva. A primeira pode ser feita pelo próprio operador do equipamento ou por um funcionário sem maior qualificação profissional.
Compreende limpeza, lubrificação, retoque de pintura, lixamento de contatos elétricos, troca de peças
fáceis como fusíveis, parafusos, correias, contatos, etc. Tudo isso é feito sem prejudicar a produção,
aproveitando as paradas normais das máquinas. O ideal é que cada operador de máquina ou responsável
por um setor proceda diariamente à verificação geral dos sistemas elétricos antes de ligá-los para iniciar a jornada de trabalho. A manutenção preventiva implica interrupção da operação da máquina ou
equipamento para revisão geral, o que, por mais bem programado que seja, representará queda de
produção. Poucas empresas adotam a manutenção preventiva como hábito, assim mesmo influenciadas
por motivos poderosos, como por exemplo, para evitar infrações às cláusulas de concessão de serviços
públicos ou temor do não cumprimento de fornecimento a clientes muito especiais. O argumento-chave dos técnicos para convencer as empresas a investir em manutenção de rotina ou preventiva é devido ao
fato da manutenção corretiva ter sempre um custo muitas vezes maior. A eficiência da manutenção depende muito do acervo de conhecimentos sobre a máquina ou equipamento
parados. Tais conhecimentos precisam ser acumulados ao longo do tempo e registrados em fichas minuciosas contendo: a idade da máquina, detalhes de montagem e fabricação, desempenho real e
previsto da máquina, como se apresentaram os defeitos anteriores, se a máquina operava com sobrecarga, etc... Todo profissional de manutenção deve conseguir copiar e prestar todo e qualquer tipo de informação
sobre equipamento, máquina ou sistema objeto de manutenção e organizar tais informações num arquivo
de fácil consulta. Tanto na manutenção preventiva como na corretiva, o profissional recebe a unidade, ensaia, desmonta,
localiza o defeito, repara, remonta, ensaia outra vez e entrega. Essas operações consomem horas e, às
vezes, podem custar mais do que uma unidade nova. Para se ter eficiência na manutenção, observar os
seguintes pontos: Não consertar unidades totalmente queimadas; Reunir em série as várias unidades similares para consertá-las juntas e, com isto diminuir o custo; Consertar de preferência unidades grandes. As dificuldades de reparo não crescem com o aumento da
capacidade. Reparar antes defeitos visíveis. Substituir peças avariadas ao invés de consertá-las; Padronizar os elementos das unidades (buchas, painéis, comutadores, terminais, etc.); Agrupar as operações similares, dividindo a seção de manutenção em setores semi-especializados.