Calculo 02
264
Cálculo II São Cristóvão/SE 2009 Samuel da Cruz Canevari
-
Upload
alysonaemd -
Category
Documents
-
view
698 -
download
5
Transcript of Calculo 02

Cálculo II
São Cristóvão/SE2009
Samuel da Cruz Canevari

Projeto Gráfico e CapaHermeson Alves de Menezes
Elaboração de ConteúdoSamuel da Cruz Canevari
Canevari, Samuel da Cruz.C221c Cálculo II / Samuel da Cruz Canevari -- São
Cristóvão: Universidade Federal de Sergipe, CESAD,2009.
1. Cálculo. 2. Matemática. I. Título.
CDU 517.2/.3
Copyright © 2009, Universidade Federal de Sergipe / CESAD.Nenhuma parte deste material poderá ser reproduzida, transmitida e grava-da por qualquer meio eletrônico, mecânico, por fotocópia e outros, sem aprévia autorização por escrito da UFS.
FICHA CATALOGRÁFICA PRODUZIDA PELA BIBLIOTECA CENTRALUNIVERSIDADE FEDERAL DE SERGIPE
Cálculo II

UNIVERSIDADE FEDERAL DE SERGIPECidade Universitária Prof. “José Aloísio de Campos”
Av. Marechal Rondon, s/n - Jardim Rosa ElzeCEP 49100-000 - São Cristóvão - SE
Fone(79) 2105 - 6600 - Fax(79) 2105- 6474
Chefe de GabineteEdnalva FreireCaetano
Coordenador Geral da UAB/UFSDiretor do CESAD
Itamar Freitas
Vice-coordenador da UAB/UFSVice-diretor do CESADFábio Alves dos Santos
Coordenador do Curso de Licenciaturaem Matemática
Hassan Sherafat
Presidente da RepúblicaLuiz Inácio Lula da Silva
Ministro da EducaçãoFernando Haddad
Secretário de Educação a DistânciaCarlos Eduardo Bielschowsky
ReitorJosué Modesto dos Passos Subrinho
Vice-ReitorAngelo Roberto Antoniolli
NÚCLEO DE MATERIAL DIDÁTICOHermeson Menezes (Coordenador)Jean Fábio B. Cerqueira (Coordenador)Baruch Blumberg Carvalho de MatosChristianne de Menezes GallyEdvar Freire CaetanoFabíola Oliveira Criscuolo MeloGerri Sherlock AraújoIsabela Pinheiro Ewerton
Jéssica Gonçalves de AndradeLara Angélica Vieira de AguiarLucílio do Nascimento FreitasNeverton Correia da SilvaNycolas Menezes MeloPéricles Morais de Andrade J´niorTaís Cristina Samora de FigueiredoTatiane Heinemann Böhmer
Diretoria PedagógicaClotildes Farias (Diretora)Hérica dos Santos Matos
Diretoria Administrativa e FinanceiraEdélzio Alves Costa Júnior (Diretor)
Núcleo de TutoriaRosemeire Marcedo Costa (Coordenadora)Carla Darlem Silva dos ReisAmanda Maíra SteinbachLuís Carlos Silva LimaRafael de Jesus Santana
Núcleo de Tecnologia daInformaçãoFábio Alves (Coordenador)André Santos SabâniaDaniel SIlva CurvelloGustavo Almeida MeloJoão Eduardo Batista de Deus AnselmoHeribaldo Machado JuniorLuana Farias OliveiraRafael Silva Curvello
Núcleo de Formação ContinuadaAndrezza Maynard (Coordenadora)
Assessoria de ComunicaçãoGuilherme Borba Gouy
Núcleo de Serviços Gráficos eAudiovisuaisGiselda Barros


Sumário
Aula 1: Integrais Impróprias 7
1.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 8
1.2 Extremos de Integração Infinitos . . . . . . . . . . 8
1.3 Integrais Impróprias com descontinuidades . . . . . 11
1.4 Convergência de Integrais Impróprias . . . . . . . . 14
1.5 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 16
1.6 Atividades . . . . . . . . . . . . . . . . . . . . . . . 16
1.7 Comentário das Atividades . . . . . . . . . . . . . 17
1.8 Referências . . . . . . . . . . . . . . . . . . . . . . 18
Aula 2: Seqüências de Números Reais 19
2.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 20
2.2 Seqüências e Subseqüências . . . . . . . . . . . . . 20
2.3 Seqüências Convergentes . . . . . . . . . . . . . . . 22
2.4 Seqüências Monótonas e Seqüência Limitadas . . . 29
2.5 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 34
2.6 Atividades . . . . . . . . . . . . . . . . . . . . . . . 34
2.7 Comentário das Atividades . . . . . . . . . . . . . 35
2.8 Referências . . . . . . . . . . . . . . . . . . . . . . 36

Aula 3: Séries de Números Reais 37
3.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 38
3.2 Séries Numéricas . . . . . . . . . . . . . . . . . . . 38
3.3 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 54
3.4 Atividades . . . . . . . . . . . . . . . . . . . . . . . 55
3.5 Comentário das Atividades . . . . . . . . . . . . . 56
3.6 Referências . . . . . . . . . . . . . . . . . . . . . . 57
Aula 4: Séries de Potências 59
4.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 60
4.2 Série de Potências . . . . . . . . . . . . . . . . . . 60
4.3 Representação de Funções . . . . . . . . . . . . . . 67
4.4 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 69
4.5 Atividades . . . . . . . . . . . . . . . . . . . . . . . 70
4.6 Comentário das Atividades . . . . . . . . . . . . . 70
4.7 Referências . . . . . . . . . . . . . . . . . . . . . . 70
Aula 5: Métodos de Representação de Funções em
Séries de Potências 73
5.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 74
5.2 Diferenciação e Integração . . . . . . . . . . . . . . 74
5.3 Séries de Taylor e de Maclaurin . . . . . . . . . . . 76
5.4 Séries Binomiais . . . . . . . . . . . . . . . . . . . 83
5.5 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 87
5.6 Atividades . . . . . . . . . . . . . . . . . . . . . . . 88
5.7 Comentário das Atividades . . . . . . . . . . . . . 89
5.8 Referências . . . . . . . . . . . . . . . . . . . . . . 90

Aula 6: Equações Paramétricas 91
6.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 92
6.2 Equações Paramétricas . . . . . . . . . . . . . . . . 92
6.3 Cálculo com Curvas Paramétricas . . . . . . . . . . 95
6.3.1 Tangentes . . . . . . . . . . . . . . . . . . . 96
6.3.2 Áreas . . . . . . . . . . . . . . . . . . . . . 100
6.3.3 Comprimento de Arco . . . . . . . . . . . . 101
6.3.4 Área de Superfície . . . . . . . . . . . . . . 102
6.4 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 103
6.5 Atividades . . . . . . . . . . . . . . . . . . . . . . . 103
6.6 Comentário das Atividades . . . . . . . . . . . . . 105
6.7 Referências . . . . . . . . . . . . . . . . . . . . . . 106
Aula 7: Curvas Polares 107
7.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 108
7.2 Coordenadas Polares . . . . . . . . . . . . . . . . . 108
7.3 Curvas Polares . . . . . . . . . . . . . . . . . . . . 112
7.4 Tangentes as Curvas Polares . . . . . . . . . . . . . 114
7.5 Áreas e Comprimentos em Coordenadas Polares . . 116
7.6 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 120
7.7 Atividades . . . . . . . . . . . . . . . . . . . . . . . 120
7.8 Comentário das Atividades . . . . . . . . . . . . . 122
7.9 Referências . . . . . . . . . . . . . . . . . . . . . . 122
Aula 8: Funções com Valores Vetoriais 123
8.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 124
8.2 Definições e Propriedades . . . . . . . . . . . . . . 124
8.3 Limite e Continuidade . . . . . . . . . . . . . . . . 126
8.4 Derivada . . . . . . . . . . . . . . . . . . . . . . . . 127

8.5 Integral . . . . . . . . . . . . . . . . . . . . . . . . 128
8.6 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 129
8.7 Atividades . . . . . . . . . . . . . . . . . . . . . . . 130
8.8 Comentário das Atividades . . . . . . . . . . . . . 131
8.9 Referências . . . . . . . . . . . . . . . . . . . . . . 132
Aula 9: Curvas Espaciais 133
9.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 134
9.2 Movimentos no espaço . . . . . . . . . . . . . . . . 134
9.3 Movimento no espaço: Velocidade e Aceleração . . 142
9.4 Comprimento de Arco . . . . . . . . . . . . . . . . 145
9.5 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 146
9.6 Atividades . . . . . . . . . . . . . . . . . . . . . . . 147
9.7 Comentário das Atividades . . . . . . . . . . . . . 149
9.8 Referências . . . . . . . . . . . . . . . . . . . . . . 149
Aula 10: Funções de Varias Variáveis Reais a Valores
Reais 151
10.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 152
10.2 Noções Topológicas no R2 . . . . . . . . . . . . . . 152
10.3 Funções . . . . . . . . . . . . . . . . . . . . . . . . 158
10.4 Gráficos . . . . . . . . . . . . . . . . . . . . . . . . 161
10.5 Curvas de Nível . . . . . . . . . . . . . . . . . . . . 164
10.6 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 168
10.7 Atividades . . . . . . . . . . . . . . . . . . . . . . . 169
10.8 Comentário das Atividades . . . . . . . . . . . . . 170
10.9 Referências . . . . . . . . . . . . . . . . . . . . . . 171

Aula 11: Limites, Continuidade e Derivadas Parciais 173
11.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 174
11.2 Limite . . . . . . . . . . . . . . . . . . . . . . . . . 174
11.3 Continuidade . . . . . . . . . . . . . . . . . . . . . 180
11.4 Derivadas Parciais . . . . . . . . . . . . . . . . . . 184
11.5 Derivadas parciais de ordem superior . . . . . . . . 187
11.6 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 190
11.7 Atividades . . . . . . . . . . . . . . . . . . . . . . . 191
11.8 Comentário das Atividades . . . . . . . . . . . . . 193
11.9 Referências . . . . . . . . . . . . . . . . . . . . . . 193
Aula 12: Funções Diferenciáveis 195
12.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 196
12.2 Diferenciabilidade . . . . . . . . . . . . . . . . . . . 196
12.3 Plano Tangente e Reta Normal . . . . . . . . . . . 204
12.4 A Diferencial . . . . . . . . . . . . . . . . . . . . . 207
12.5 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 209
12.6 Atividades . . . . . . . . . . . . . . . . . . . . . . . 210
12.7 Comentário das Atividades . . . . . . . . . . . . . 213
12.8 Referências . . . . . . . . . . . . . . . . . . . . . . 213
Aula 13: Regra da Cadeia e Derivação Implícita 215
13.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 216
13.2 Regra da Cadeia . . . . . . . . . . . . . . . . . . . 216
13.3 Derivação de funções definidas implicitamente . . . 218
13.4 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 221
13.5 Atividades . . . . . . . . . . . . . . . . . . . . . . . 223
13.6 Comentário das Atividades . . . . . . . . . . . . . 224
13.7 Referências . . . . . . . . . . . . . . . . . . . . . . 224

Aula 14: Vetor Gradiente e as Derivadas Direcionais 225
14.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 226
14.2 Vetor Gradiente . . . . . . . . . . . . . . . . . . . . 226
14.3 Derivada Direcional . . . . . . . . . . . . . . . . . . 229
14.4 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 234
14.5 Atividades . . . . . . . . . . . . . . . . . . . . . . . 235
14.6 Comentário das Atividades . . . . . . . . . . . . . 237
14.7 Referências . . . . . . . . . . . . . . . . . . . . . . 238
Aula 15: Máximos e Mínimos 239
15.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . 240
15.2 Pontos de Máximo e Pontos de Mínimo . . . . . . 240
15.3 Máximos e Mínimos sobre Conjuntos Compactos . 246
15.4 Máximos e Mínimos Condicionados . . . . . . . . . 250
15.5 Resumo . . . . . . . . . . . . . . . . . . . . . . . . 256
15.6 Atividades . . . . . . . . . . . . . . . . . . . . . . . 258
15.7 Comentário das Atividades . . . . . . . . . . . . . 260
15.8 Referências . . . . . . . . . . . . . . . . . . . . . . 260

1AULA
1LIVRO
Integrais Impróprias
META
Apresentar os conceitos e pro-
priedades de integrais com extremos
de integrações infinitos e integrais
de funções com descontinuidade.
OBJETIVOS
Calcular áreas de regiões não limi-
tadas.
PRÉ-REQUISITOS
Conceitos de funções reais, funções
contínuas e o Teorema Fundamental
do Cálculo.

Integrais Impróprias
1.1 Introdução
Caros alunos, estamos iniciando o curso de Cálculo II. Neste curso,
faremos uso de bastantes conceitos e resultados vistos no curso de
Cálculo I. Esta primeira aula tem por objetivo estender o Teorema
Fundamental do Cálculo (TFC) e definir as Integrais Impróprias.
No TFC, os limites de integração, a e b em∫ b
af(x)dx, são
números reais e f uma função contínua no intervalo [a, b]. Pode
acontecer que, ao aplicarmos estes conceitos, seja preciso ou con-
veniente considerar os casos em que a = −∞, b = +∞, ou f seja
descontínua em um ou mais pontos do intervalo. Nestas condições,
é preciso ampliar conceito de integral e as técnicas de integração,
de modo a incluir estes casos adicionais. Estas integrais, em que
a = −∞, b = +∞ ou f é descontínua em [a, b], são chamadas Inte-
grais Impróprias. Nem sempre uma integral deste tipo representa
um número real, isto é, nem sempre uma integral imprópria ex-
iste. Quando ela existe, seu valor é calculado levando-se em conta
a generalização do conceito de integral definida.
1.2 Integrais Impróprias com Extremos de
Integração Infinitos
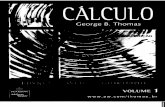
Exemplo 1.2.1. Consideremos o problema de encontrar área da
região limitada pela curva y = ex , pelo eixo−y e pela reta x =
b > 0 como mostra a Figura 1.1 abaixo.
Se A unidades de área for a área da região, então
A =∫ b
0e−xdx = −e−x
∣∣b0
= 1− e−b = 1− 1eb.
8

Livro de Cálculo II
1AULA
Figura 1.1: Área
Se deixarmos b crescer sem limitações, então
limb→∞
∫ b
0e−xdx = lim
b→∞(1− 1
eb) = 1. (1.1)
Segue da equação (1.1) que não importa quão grande seja o
valor de b, a área da região será sempre menor do que 1 unidades
de área.
A equação (1.1) estabelece que se b > 0 para todo ε > 0 existe
um N > 0 tal que
se b > N então |∫ b
0e−xdx− 1| < ε.
Em lugar de (1.1) escrevemos∫ ∞
0e−xdx = 1. Em geral temos
as seguintes definições:
Definição 1.1. (i) Se f for contínua para todo x ≥ a, então∫ ∞a
f(x)dx = limb→∞
∫ b
af(x)dx
se esse limite existir;
(ii) Se f for contínua para todo x ≤ b, então∫ b
−∞f(x)dx = lim
a→−∞
∫ b
af(x)dx
9

Integrais Impróprias
se esse limite existir;
(i) Se f for contínua para todos valores de x e c for um número
real qualquer, então∫ ∞−∞
f(x)dx = lima→−∞
∫ 0
af(x)dx+ lim
b→+∞
∫ b
0f(x)dx
se esse limite existir;
Na definição acima, se o limite existir, diremos que a integral
imprópria é convergente, caso caso contrário, diremos que é diver-
gente.
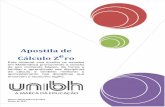
Exemplo 1.2.2. Calcule a integral, se ela convergir:∫ 2
−∞
dx
(4− x)2.
(Ver Figura 1.2)
Figura 1.2: Área com extremo inferior indefinido.
Resolução:∫ 2
−∞
dx
(4− x)2= lim
a→−∞
∫ 2
a
dx
(4− x)2
= lima→−∞
[1
4− x
]2
a
= lima→−∞
(12− 1
4− a) =
12.
Exemplo 1.2.3. Estude a convergência da integral:∫ +∞
0xe−xdx.
10

Livro de Cálculo II
1AULA
Resolução: ∫ +∞
0xe−xdx = lim
a→+∞
∫ a
0xe−xdx
Para calcular essa integral, usaremos integração por partes com
u = x, dv = e−x, du = dx e v = −e−x. Assim,∫ +∞
0xe−xdx = lim
a→+∞
[−xe−x − e−x
]a0
= lima→+∞
(−ae−a − e−a + 1)
= − lima→+∞
a
ea− 0 + 1.
Aplicando a regra de L’Hospital temos que
lima→+∞
a
ea= lim
a→+∞
1ea
= 0
e portanto ∫ +∞
0xe−xdx = 1.
1.3 Integrais Impróprias com descontinuidades
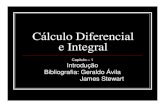
Exemplo 1.3.1. Suponha que queremos obter a área da região
do plano limitada pela curva cuja equação é y =1√x, pelo eixo-x,
pelo eixo-y e pela reta x = 4. Conforme ilustrado na Figura 1.3
abaixo:
Se for possível ter um número que represente a medida da área
dessa região, ele será obtido pela integral∫ 4
0
1√x.
Entretanto, o integrando é descontínuo no extremo inferior zero.
Além disso, limx→+∞
1√x
= +∞, assim dizemos que o integrando tem
11

Integrais Impróprias
Figura 1.3: Área com descontinuidade no extremo inferior de inte-
gração
uma descontinuidade infinita no extremo inferior. Essa integral é
imprópria e sua existência pode ser determinada da seguinte forma:∫ 4
0
1√x
= limt→0+
∫ 4
t
1√x
= limt→0+
(2√x∣∣4t) = lim
t→0+(4− 2
√t) = 4
logo 4 será a medida da área da região dada.
Mais geralmente temos a seguinte definição:
Definição 1.2. (i) Se f for contínua para todo x do intervalo
semi-aberto à esquerda (a, b], e se limx−→a+
f(x) = ±∞, então
∫ b
af(x)dx = lim
t→a+
∫ b
tf(x)dx
se esse limite existir;
(ii) Se f for contínua para todo x do intervalo semi-aberto à direita
[a, b), e se limx−→b−
f(x) = ±∞, então
∫ b
af(x)dx = lim
t→b−
∫ t
af(x)dx
se esse limite existir;
(iii) Se f for contínua para todos valores de x no intervalo [a, b]
12

Livro de Cálculo II
1AULA
exceto c, onde a < c < b e se limx−→c
|f(x)| = +∞, então
∫ b
af(x)dx = lim
t→c−
∫ t
af(x)dx+ lim
s→c+
∫ b
sf(x)dx
se esse limite existir;
Exemplo 1.3.2. Calcule a integral, se ela for convergente:∫ 2
0
dx
(x− 1)2.
Resolução:
O integrando tem uma descontinuidade infinita em 1, ou seja,
limx−→1
dx
(x− 1)2= +∞, portanto, pela definição que acabamos de
estabelecer, temos∫ 2
0
dx
(x− 1)2= lim
t→1−
∫ t
0
dx
(x− 1)2dx+ lim
s→1+
∫ 2
s
dx
(x− 1)2dx
= limt→1−
(− 1x− 1
)|t0 + lims→1+
(− 1x− 1
)|2s
= limt→1−
(− 1t− 1
− 1) + lims→1+
(1
s− 1− 1)
Como nenhum desses limites existe, a integral imprópria é diver-
gente.
Se no exemplo anterior não tivéssemos notado a descontinuidade
do integrando em 1, teríamos∫ 2
0
dx
(x− 1)2= (− 1
x− 1)|20 = −2.
Esse resultado é obviamente incorreto, uma vez que1
(x− 1)2nunca
é negativo.
Exemplo 1.3.3. Calcule a integral, se ela existir:∫ 1
0x ln xdx.
Resolução:
O integrando tem uma descontinuidade no extremo inferior. Por-
tanto, escrevemos∫ 1
0x ln xdx = lim
t−→0+
∫ 1
tx ln xdx
13

Integrais Impróprias
Para calcular essa integral, usaremos integração por partes com
u = ln x, dv = xdx, du = 1xdx e v = x2
2 . Assim,∫ 1
0x ln xdx = lim
t−→0+
∫ 1
tx ln xdx = lim
t−→0+(12x2 ln x− 1
4x)|1t
= limt−→0+
(12ln(1)− 1
4− 1
2t2ln(t) +
14t)
= −14− 1
2lim
t−→0+t2ln(t).
Note que limt−→0+
t2ln(t) é uma indeterminação to tipo 0.(−∞). Para
calcular esse limite, usaremos L’Hospital,
limt−→0+
t2ln(t) = limt−→0+
ln(t)1t2
= limt−→0+
1t
− 2t3
= limt−→0+
− t2
2= 0.
Logo, ∫ 1
0x ln xdx = −1
4.
1.4 Convergência e Divergência de Integrais
Impróprias: Critério de Comparação
Algumas vezes é impossível encontrar o valor exato de uma in-
tegral imprópria, mais ainda assim é importante saber se ela é
convergente ou divergente. Em tais casos o critério de comparação
é útil.
Observamos, inicialmente, que se f for integrável em [a, t], para
todo t > a, e se f(x) ≥ 0 em [0,+∞), então a função
F (x) =∫ x
af(t)dt, x ≥ a
será crescente em [0,+∞). De fato, se x1 e x2 são dois valores reais
quaisquer, com 0 ≤ x1 < x2 então
F (x2)− F (x1) =∫ x2
af(t)dt−
∫ x1
af(t)dt =
∫ x2
x1
f(t)dt ≥ 0.
14

Livro de Cálculo II
1AULA
Segue que, limx−→∞
∫ x
af(t)dt ou será finito ou +∞; será finito e
existir M ≥ a tal que∫ x
af(t)dt ≤M para todo x ≥ a.
Critério da Comparação: Sejam f e g duas funções integráveis
em [a, t], para todo t > a, e tais que, para todo x ≥ a, 0 ≤ f(x) ≤
g(x). Então
a)∫ +∞
ag(x)dx converge =⇒
∫ +∞
af(x)dx converge.
b)∫ +∞
af(x)dx diverge =⇒
∫ +∞
ag(x)dx diverge.
Demostração:
a) limt−→+∞
∫ +∞
ag(x)dx é finito, pois por hipótese,
∫ +∞
ag(x)dx é
convergente. De 0 ≤ f(x) ≤ g(x), para todo x ≥ a, resulta∫ t
af(x)dx ≤
∫ t
ag(x)dx ≤
∫ +∞
ag(x)dx.
Sendo F (t) =∫ ta f(x)dx crescente e limitada, resulta que lim
t−→+∞
∫ t
af(x)dx
será finito e, portanto,∫ +∞
af(x)dx será convergente.
b) análoga. tu
Exemplo 1.4.1. Verifique que∫ +∞
0e−xsen2xdx é convergente.
Resolução:
Note que,
0 ≤ e−xsen2x ≤ e−x, para todo x ≥ 0
e mais∫ +∞
0e−xdx = lim
t−→∞
∫ t
0e−xdx = lim
t−→∞(e−t + 1) = 1,
15

Integrais Impróprias
logo,∫ +∞
0e−xdx é convergente. Segue do critério de comparação
que∫ +∞
0e−xsen2xdx é convergente e, além disso,
∫ +∞
0e−xsen2xdx ≤
1.
Exemplo 1.4.2. Verifique que a integral imprópria∫ +∞
1
x3
x4 + 3dx
é divergente.
Resolução:
Note quemx3
x4 + 3=
1x· x2
1 + 3x4
.
Para todo x ≥ 1,x2
1 + 3x4
≥ 14, e, portanto,
x3
x4 + 3≥ 1
4x> 0.
De∫ +∞
0
14xdx = +∞, segue, pelo critério de comparação, que∫ +∞
1
x3
x4 + 3dx é divergente.
1.5 Resumo
Nesta aula, você aprendeu calcular a∫ b
af(x)dx onde a = −∞ e
b = +∞; ou f é descontínua em um ou mais pontos do intervalo
[a, b]. Esta ferramenta será bastante útil nas próximas aulas, onde
estudaremos convergências de séries numéricas.
1.6 Atividades
01. Estude a convergência das integrais a seguir:
(a)∫ +∞
−∞xe−xdx (c)
∫ +∞
−∞xe−x
2dx (e)
∫ +∞
1
ln x
xdx
16

Livro de Cálculo II
1AULA(b)
∫ +∞
1
1xdx (d)
∫ +∞
1
1x2
(f)∫ +∞
−∞xdx
02. Calcule as seguintes integrais, se existirem:
(a)∫ 1
0
1√xdx (c)
∫ 1
0ln x dx (e)
∫ 2
−1
14− x2
dx
(b)∫ 1
0
1xdx (d)
∫ 3
1
x2
√x3 − 1
(f)∫ π
4
0
cos x√sen x
dx
03. Suponha f integrável em [a, t), para todo t ≥ a. Prove que se∫ +∞
0|f(x)|dx é convergente, então
∫ +∞
0f(x)dx também é con-
vergente. (Sugestão: use que 0 ≤ |f(x)| + f(x) ≤ 2|f(x)| e que
f(x) = |f(x)|+ f(x)− |f(x)|)
04. Usando o exercício 03., prove que a integral∫ +∞
0e−xsen3xdx
é convergente.
05. A integral∫ +∞
1
sen x
xdx é convergente ou divergente? Justi-
fique sua resposta.
1.7 Comentário das Atividades
A atividade 01. é para você (aluno) praticar os conceitos vistos na
Seção 1.2. Se você conseguiu resolver todos os ítens desta ativi-
dade, então você aprendeu a calcular integrais impróprias com ex-
tremos de integração infinitos.
A atividade 02. é referente a Seção 1.3. Conseguiu resolver to-
dos os ítens desta atividade? Que bom!!! Você aprendeu a calcular
17

Integrais Impróprias
integrais impróprias com descontinuidades.
Nas atividades 03., 04. e 05. devem usar os resultados vistos na
Seção 1.4. Tais resultados são muito úteis no cálculo de integrais
impróprias.
1.8 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 2).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
18

2AULA
1LIVRO
Seqüências deNúmeros Reais
META
Estudar seqüências de números
reais.
OBJETIVOS
Estudar a convergência de seqüên-
cias numéricas infinita.
PRÉ-REQUISITOS
Funções Reais, Limites, Derivadas,
Integrais de funções reais e a Aula
01.

Seqüências de Números Reais
2.1 Introdução
Nesta aula estudaremos as seqüências numéricas infinitas. Tais
seqüências pode ser pensadas como uma lista de números escritos
em uma ordem definida:
x1, x2, x3, · · · , xn, · · ·
O principal objetivo desta aula, é estudar a convergência de tais
seqüências, em outras palavras, queremos calcular o limite dessas
seqüências quando n tende ao infinito.
2.2 Seqüências e Subseqüências
Definição 2.3. Uma seqüência de números reais é uma função
x : N −→ R para a qual denotamos o valor de x em n por xn em
vez de x(n).
Geralmente usamos a notação (xn)n∈N para representar a se-
qüência x : N −→ R. Às vezes a notaremos também por
(x1, x2, . . . , xn, . . .).
Dizemos que xn é o termo de ordem n ou que xn é o n-ésimo termo
da seqüência.
Quando quisermos explicitar que a imagem da seqüência (xn)n∈N
está contida em A ⊂ R escrevemos (xn)n∈N ⊂ A.
Exemplo 2.2.1. Seja a ∈ R e tomemos xn = a para todo n ∈ N.
A seqüência (xn)n∈N é constante.
Exemplo 2.2.2. Seja a seqüência (xn)n∈N = 2n. Temos
x0 = 20, x1 = 21, x2 = 22, . . .
20

Livro de Cálculo II
2AULAExemplo 2.2.3. Seja a seqüência (sn)n∈N =
(n∑k=1
k
)n∈N
Temos
s1 = 1, s2 = 1 + 2, s3 = 1 + 2 + 3, . . .
Exemplo 2.2.4. Seja a seqüência (sn)n∈N =
(n∑k=1
1k
)n∈N
. Temos
s1 = 1, s2 = 1 +12, s3 = 1 +
12
+13, . . .
Exemplo 2.2.5. Considere a seqüência
(sn)n∈N =
(n∑k=0
tk
)n∈N
, t 6= 0 e t 6= 1.
Vamos verificar que
sn =1− tn+1
1− t.
Solução:
Note que
sn = 1 + t+ t2 + . . .+ tn−1 + tn. (2.1)
Multiplicando ambos os membros de (2.1) por t, obtemos
tsn = t+ t2 + t3 + . . .+ tn + tn+1. (2.2)
Subtraindo membro a membro (2.1) e (2.2), teremos
sn(1− t) = 1− tn+1.
Logo
sn =1− tn+1
1− t.
Observe que sn é a soma dos termos da Progressão Geométrica
1, t, t2, t3, . . . , tn.
21

Seqüências de Números Reais
Definição 2.4. Dizemos que (yk)k∈N é uma subseqüência de (xn)n∈N
se existe uma seqüência (nk)k∈N ⊂ N com nk < nk+1, ∀k ∈ N, tal
que yk = xnk para todo k ∈ N.
Exemplo 2.2.6. Sejam a, r ∈ N. Considere a seqüência (xn)n∈N =
a + (n − 1)r, n ≥ 1. Note que a seqüência (xn)n∈N é uma Pro-
gressão Aritmética de primeiro termo a e razão r. A Progressão
Aritmética (yk)k∈N de termo inicial a e razão 2r é uma subseqüên-
cia de (xn)n∈N. De fato, tomando nk = 2k − 1 (k ∈ N) obtemos:
xnk = a+ (nk − 1)r = a+ (2k − 2)r = a+ (k − 1)(2r) = yk.
2.3 Seqüências Convergentes
Intuitivamente, uma seqüência (xn)n∈N é convergente para x se
seus termos se aproximam de x quando n cresce. Esta idéia não
está todo errada. Porém, ela pode induzir a uma idéia equivocada
de convergência. Somos tentados a dizer que (xn)n∈N converge
para x quando a distância entre xn e x diminui à medida que n
cresce. Não é bem assim. Veja a figura 2.4.
Ela Foge um pouco do assunto "seqüências de números reais"mais
ilustra bem o que queremos dizer por "se aproximar". Imagine que,
partindo do ponto A, percorremos no sentido anti-horário o cam-
inho desenhado como indicado pelas setas. Ninguém duvida, e
com razão, de que estaremos assim nos aproximando do ponto O.
Porém, a idéia de que a nossa distância ao ponto O decresce com
o tempo mostra-se errada. Convença-se disto percebendo que pas-
samos primeiro pelo ponto B antes de chegar a C e, entretanto, o
segmento BO é menor que o segmento CO. De fato, a distância a
O cresce quando percorremos o segmento BC. Podemos perceber
22

Livro de Cálculo II
2AULA
Figura 2.4: Espiral da Convergência
que existem muitos trechos do caminho sobre os quais a distância
a O é crescente com o tempo, de modo que não existe nenhum
ponto a partir do qual a distância a O passe a ser decrescente com
o tempo.
Continuemos analisando a Figura 2.4 em busca da boa definição
de convergência. Observamos que nossa distância a O fica tão
pequena quando quisermos, bastando para isto que continuemos
andando por um tempo suficientemente longo. Por exemplo, nossa
distância a O será menor que 1 depois que passamos pelo ponto
D. Ou seja, em certo instante entramos na bola de raio 1 entrada
em O e dela não saímos mais. Da mesma forma, a partir de outro
instante (futuro) entramos na bola de raio 1/2, centrada em O, e
aí ficamos.De modo geral, dado qualquer número positivo ε, existe
um instante a partir do qual nossa distância a O será menos que ε.
Aí está a definição. Para seqüências reais ela é expressa da seguinte
maneira:
Definição 2.5. Um seqüência (xn)n∈N é dita convergente se existe
23

Seqüências de Números Reais
x ∈ R de modo que
∀ε > 0, ∃N ∈ N tal que n ≥M =⇒ |xn − x| ≤ ε.
Neste caso, escrevemos xn −→ x e dizemos que x é limite da
seqüência (xn)n∈N ou que xn converge para (ou tende a) x quando
n tende a mais infinito (n −→ +∞). Se (xn)n∈N não converge,
então dizemos que ela é divergente.
Existem seqüências divergentes que possuem limite! Isto é ape-
nas um jogo de palavras. A definição seguinte diz que certas se-
qüências têm limites que não são números reais. Não diremos que
tais seqüências são convergentes.
Definição 2.6. Seja (xn)n∈N uma seqüência. Dizemos que xn
tende a mais infinito quando n tende a mais infinito ou que mais
infinito é limite da seqüência e escrevemos
xn −→ +∞ ou limn−→+∞
xn = +∞
se,
∀M ∈ R, ∃N ∈ N tal que n ≥M =⇒ xn ≥M.
Definição 2.7. Seja (xn)n∈N uma seqüência. Dizemos que xn
tende a menos infinito quando n tende a mais infinito ou que menos
infinito é limite da seqüência e escrevemos
xn −→ −∞ ou limn−→+∞
xn = −∞
se,
∀M ∈ R, ∃N ∈ N tal que n ≥M =⇒ xn ≤M.
Observamos que as definições acima são exatamente as mesmas
já vistas quando tratamos com limite de uma função f(x) quando
24

Livro de Cálculo II
2AULA
x −→ +∞; deste modo, tudo aquilo que dissemos sobre os limites
da forma limx−→+∞
f(x) aplica-se aqui.
Exemplo 2.3.1. Seja x ∈ R e considere a seqüência dada por
xn = x para todo n ∈ N. Temos que xn −→ x. De fato, |xn−x| = 0
para todo n ∈ N. Portanto, podemos escrever
∀ε > 0, ∃N ∈ N tal que n ≥ N =⇒ |xn − x| < ε.
Exemplo 2.3.2. Considere a seqüência dada por xn = 1n para
todo n ∈ N. Vamos mostrar que xn −→ 0. Dado ε > 0, tomemos
N ∈ N tal que N > 1ε . Temos então 0 < 1
N < ε. Mas se n ∈ N e
n ≥ N, então xn = 1n ≤
1N = xN . Logo podemos escrever
∀ε > 0, ∃N ∈ N tal que n ≥ N =⇒ |xn − 0| < ε.
O leitor talvez conheça a notação limx−→+∞
xn = x para xn −→
x. Vamos refletir sobre ela. Por enquanto, façamos de conta que
não conhecemos a definição de limite. Suponhamos que ao abrir
um livro de Cálculo, pela primeira vez, encontremos as seguintes
inscrições:
xn −→ 0 e xn −→ 1.
Não ficaríamos chocados. Porém, se estivesse escrito
limx−→+∞
xn = 0 e limx−→+∞
xn = 1.
Seríamos levados a concluir que 0 = 1. Ora, é o sinal ” = ” que
nos leva a esta confusão. Se não tivermos a unicidade do limite,
então a notação limx−→+∞
xn = x é fortemente enganosa.
Teorema 2.1. Sejam (xn)n∈N uma seqüência e x, y ∈ R tais que
xn −→ x e xn −→ y. Então x = y.
25

Seqüências de Números Reais
Demonstração: Suponhamos, por absurdo, que x 6= y. Seja ε =|x−y|
2 > 0. Como xn −→ x, existe N ∈ N tal que
n ≥ N =⇒ |xn − x| < ε.
Também temos xn −→ y. Logo existe N ′ ∈ N tal que
n ≥ N ′ =⇒ |xn − y| < ε.
Seja n o maior dos números N e N ′. Para tal n as duas conclusões
anteriores são válidas. Temos então
|x− y| ≥ |x− xn|+ |xn − y| < ε+ ε = 2ε = |x− y|.
Concluímos que |x− y| < |x− y|, o que é um absurdo.
Exemplo 2.3.3. (Teorema do Confronto) Suponha que exista um
natural n1 tal que, para todo n ≥ n1, an ≤ bn ≤ cn. Prove que se
limn−→+∞
an = L = limn−→+∞
cn
com L ∈ R, então
limn−→+∞
bn = L.
Demonstração: Como limn−→+∞
an = L = limn−→+∞
cn, dado ε > 0
existe N ∈ N que podemos supor maior que n1, tal que se n >
N =⇒
L− ε < an < L+ ε e L− ε < cn < L+ ε.
Tendo em vista a hipótese,
n > n0 =⇒ L− ε < an ≤ bn ≤ cn < L+ ε
e, portanto,
n > n0 =⇒ L− ε < bn < L+ ε,
26

Livro de Cálculo II
2AULA
ou seja,
limn−→+∞
bn = L.
Exemplo 2.3.4. Suponha 0 < t < 1. Mostre que
limn−→∞
n∑k=0
tk =1
1− t.
Demonstração: Temos pelo Exemplo 2.2.5 que
sn =n∑k=0
tk =1− tn+1
1− t
. Logo
limn−→∞
n∑k=0
tk = limn−→∞
1− tn+1
1− t=
11− t
.
A proxima proposição nos fornece um critério para testarmos
a convergência de uma seqüência dada.
Proposição 1. Uma seqüência (xn)n∈N tende a x se, e somente
se, toda subseqüência de (xn)n∈N tende a x.
Demonstração: Suponhamos que exista x ∈ R tal que xn −→
x. Seja (yk)k∈N uma subseqüência de (xn)n∈N, isto é, yk = xnk para
alguma seqüência (nk)k∈N estritamente crescente. Mostremos que
yk −→ x. Seja ε > 0. Como xn −→ x, existe N ∈ N tal que se
n ≥ N, então |xn−x| < ε. Como (nk)k∈N é estritamente crescente,
existe K ∈ N tal que se k ≥ K, então nk ≥ N. Segue que
k ≥ K =⇒ |yk − x| < ε.
Portanto (yk)k∈N converge para x. A recíproca é imediata (basta
observar que (xn)n∈N é uma subseqüência de si mesma).
27

Seqüências de Números Reais
Exemplo 2.3.5. A seqüência (1, 0, 1, 0, 1, 0, 1, 0, 1, 0, . . .) é diver-
gente. De fato, se ela fosse convergente, então pela proposição
anterior todas as suas subseqüências seriam convergente para o
mesmo limite. Porém, (1, 1, 1, 1, 1, . . .) e (0, 0, 0, 0, 0, . . .) são duas
de suas subseqüências sendo que a primeira converge para 1 e a
segunda para 0.
Como corolário da proposição anterior, obtemos que se xn
tende a x, então xn+2008 tende a x. Não há nada de especial
com o número 2008. Mais geralmente, fixado p ∈ N, temos que
se xn tende a x, então xn+p tende a x. É fácil perceber que a
recíproca também é válida, ou seja, se para algum p ∈ N temos
que xn+p tende a x, então xn tende a x. A importância deste fato
é o seguinte: Se conhecemos alguma propriedade que garanta a
convergência de uma seqüência e soubermos que tal propriedade
só é válida a partir do p−ésimo termo então, ainda sim, pode-
mos concluir que a seqüência é convergente. Vejamos um exemplo
esclarecedor.
Exemplo 2.3.6. Sabemos que seqüências constantes são conver-
gentes. Considere a seqüência (não constante) dada por xn =
b1000/nc, sendo bxc a função Parte Inteira de x, definida abaixo:
bxc = m se m ∈ Z e m ≤ x ≤ m+ 1.
É fácil ver que xn = 0 para todo n > 1000. Ou seja, (xn)n∈N é
constante a partir do seu milésimo-primeiro termo. Concluímos
que ela é convergente.
Teorema 2.2. Toda seqüência convergente é limitada.
Demonstração: Seja (xn)n∈N uma seqüência convergente para
x ∈ R. Tomemos ε = 1 na definição de seqüência convergente,
28

Livro de Cálculo II
2AULA
concluímos que existe N ∈ N tal que se n ≥ N, então |xn−x| < 1,
isto é, xn ∈ (x− 1, x+ 1). Tomando
a = min{x1, . . . , xN , x− 1} e b = max{x1, . . . , xN , x+ 1}
temos imediatamente que xn ∈ [a, b] para todo n ∈ N. Portanto
(xn)n∈N é limitada.
2.4 Seqüências Monótonas e Seqüência Lim-
itadas
A recíproca do Teorema 2.2 é falsa como mostra o Exemplo 2.3.5.
Porém, existem algumas recíprocas parciais que veremos nesta
seção.
Seja (xn)n∈N uma seqüência. Dizemos que tal seqüência é cres-
cente se, quaisquer que sejam m,n ∈ N,
m < n =⇒ xm ≤ xn.
Se xm ≤ xn for trocado por xm ≥ xn, então diremos que a seqüên-
cia é decrescente.
Uma seqüência é dita monótona se for crescente ou decrescente.
Dizemos que a seqüência (xn)n∈N é limitada inferiormente se
existir um número real α tal que, para xn ≥ α, ∀n ∈ N.
Dizemos que a seqüência (xn)n∈N é limitada superiormente se
existir um número real β tal que, para xn ≤ β, ∀n ∈ N.
Uma seqüência é dita limitada se for limitada inferiormente e
superiormente.
O teorema que enunciaremos, e provaremos a seguir, será muito
importante para o que segue.
29

Seqüências de Números Reais
Teorema 2.3. Se (xn)n∈N é crescente e limitada superiormente,
então xn −→ sup{xn; n ∈ N}. Da mesma forma, se (xn)n∈N é
decrescente e limitada inferiormente, então xn −→ inf{xn; n ∈ N}.
Demonstração: Vamos provar apenas a primeira parte do teo-
rema já que a segunda se demonstra de modo análogo. Seja s =
sup{xn; n ∈ N}. Dado ε > 0, tome N ∈ N tal que x− ε < xN ≤ s.
Logo, para n ≥ N, temos x − ε < xN ≤ xn ≤ s. Concluímos daí
que |xn − s| < ε.
O teorema que acabamos de provar conta-nos que para uma
seqüência crescente só há duas possibilidades: convergente ou di-
vergente para +∞. Será convergente se for limitada superiormente
e divergirá para +∞ se não for limitada superiormente.
Exemplo 2.4.1. A seqüência de termo geral sn =n∑k=1
1k2
é con-
vergente ou divergente? Justifique.
Solução: Observamos, inicialmente, que a seqüência é crescente.
De fato, qualquer que sejam os naturais m e n, com 1 ≤ m < n,
tem-se
sm =m∑k=1
1k2
e
sn =m∑k=1
1k2
+n∑
k=m+1
1k2.
Comon∑
k=m+1
1k2
> 0, resulta que sn > sm.
Vamos provar a seguir que a seqüência é limitada superior-
mente.
Temos (Veja Figura 2.5)
sn = 1 +122
+132
+ . . .+1n2≤ 1 +
∫ n
1
1x2dx
30

Livro de Cálculo II
2AULA
Figura 2.5: Soma Inferior
Como a seqüência de termo geral∫ n
11x2 é crescente e
limn−→+∞
∫ n
1
1x2dx = lim
n−→+∞(−1n
+ 1) = 1
resulta
sn ≤ 2, ∀n ≥ 1.
Segue que a seqüência é convergente, pois é crescente e limitada
superiormente por 2.
Exemplo 2.4.2. A seqüência de termo geral sn =n∑k=1
1ké conver-
gente ou divergente? Justifique.
Solução:
Para todo n ≥ 1, (Veja Figura 2.6)
sn = 1 +12
+13
+ . . .+1n≥∫ n+1
1
1xdx
Como
limn−→+∞
∫ n+1
1
1xdx = lim
n−→+∞lnn+ 1 = +∞
resulta
limn−→+∞
sn = +∞.
31

Seqüências de Números Reais
Figura 2.6: Soma Superior
Exemplo 2.4.3. Investigue seqüência de termo geral xn definida
pela relação de recorrência:
x1 = 1, xn+1 =12
(xn + 6), ∀n > 1.
Solução: Observamos, inicialmente, que a seqüência é crescente.
De fato, usaremos indução finita:
1) se n = 1 então x1 = 2 < 4 = x2;
2) suponhamos que xk−1 < xk, ∀k ≥ 2;
3) provemos que xk < xk+1, ∀k ≥ 2 : Temos que xk−1 < xk.
Somando 6 dew ambos os lados da última desigualdade, obtemos
xk−1 +6 < xk+6. Agora, multiplicando, ambos os lados da última
desigualdade, por 12 , concluímos que 1
2(xk−1 + 6) < 12(xk + 6), ou
seja,
xk < xk+1, ∀k ≥ 2.
Vamos provar agora, usando indução finita, que a seqüência é
limitada superiormente:
1) se n = 1 então x1 = 2 < 6;
2) suponhamos que xk−1 < 6, ∀k ≥ 2;
3) Provemos que xk < 6, ∀k ≥ 2 : Temos que xk−1 < 6. Somando 6
32

Livro de Cálculo II
2AULA
de ambos os lados da última desigualdade, obtemos xk−1 +6 < 12.
Agora, multiplicando, ambos os lados da última desigualdade, por12 , concluímos que 1
2(xk−1 + 6) < 6, ou seja,
xk < 6, ∀k ≥ 2.
Portanto, a seqüência (xn)n∈N é crescente e limitada superior-
mente, logo é convergente, digamos que para L. Aplicando o limite,
quando n tende a infinito, de ambos os lados de xn+1 = 12(xn+ 6),
temos:
limn−→+∞
xn+1 = limn−→+∞
12
(xn + 6)
=⇒ limn−→+∞
xn+1 =12
(6 + limn−→+∞
xn)
=⇒ L =12
(6 + L) =⇒ L = 6.
Finalizamos esta Aula com o seguinte:
Teorema 2.4. (Bolzano-Weierstrass) Toda seqüência limitada pos-
sui uma subseqüência convergente.
Demonstração: Sejam (xn)n∈N uma seqüência limitada. Con-
sidere o seguinte conjunto:
N = {n ∈ N; xn > xm, ∀m > n}.
Existem duas possibilidades: N é infinito ou N é finito.
1) N é infinito: Escrevamos N = {n1, n2, n3, . . .} com n1 < n2 <
n3 < . . .. Assim, se i < j então ni < nj e, como ni ∈ N, obte-
mos que xni > xnj . Concluímos que a subseqüência (xnk)k∈N é
decrescente. Sendo ela limitada obtemos, finalmente, que ela é
convergente.
2) N é finito: Como N é finito, existe n1 ∈ N \ N cota superior
33

Seqüências de Números Reais
de N. Ora, n1 /∈ N logo, existe n2 > n1 (e, portanto, n2 /∈ N) tal
que xn1 ≤ xn2 . Mas n2 /∈ N segue que existe n3 > n2 (e, portanto,
n3 /∈ N) tal que xn2 ≤ xn3 . Por indução, definimos uma subse-
qüência (xnk)k∈N que é crescente e, portanto, convergente (pois
ela é limitada).
2.5 Resumo
Vimos que uma seqüência é uma função que associa a cada número
natural um e só um número real. Deste modo, estudar seqüência
de números reais é estudar um caso particular de função real cujo
domínio é o conjunto dos números naturais.
O limite de uma seqüência é o limite do termo geral da se-
qüência, para n tendendo ao infinito. Quando este limite existe e
é finito, dizemos que a seqüência é convergente e converge para o
seu limite. Vimos, também, nesta aula, alguns principais resulta-
dos que nos auxiliam a estudar a convergência de uma seqüência
qualquer.
Na próxima aula, estudaremos um seqüência especial denomi-
nada série numérica.
2.6 Atividades
01. Liste os dez primeiros termos da seqüência:
(a) xn = 1− (0, 2)n (c) x1 = 1, xn = 2xn−1 + 1
(b) xn =(−2)n
n!(d) xn =
(−1)n−1n
n2 + 1
02. Encontre o termo geral da seqüência:
34

Livro de Cálculo II
2AULA
(a){
12,
14,
16,
18, · · ·
}(c){
1, −23,
49, − 8
27, · · ·
}
(b){
12,
14,
18,
116, · · ·
}(d) {1, −1, 1, −1, · · · }
03. Determine se a seqüência converge ou diverge. Se ela conver-
gir, encontre seu limite:
(a) xn =n3 + 3n+ 1
4n3 + 2(e)∫ n
1
1xα, onde α ∈ R
(b) xn =√n+ 1−
√n (f) xn = nsen
1n
(c) xn =1nsen
1n
(g) xn =n∑k=0
(12
)
(d) xn =2n
3n+1(h) xn =
n∑k=1
(1k− 1k + 1
)
04. Suponha que, para todo n ≥ 1, |xn − x| ≤ 1n , onde x é um
número real fixo. Calcule limn−→+∞
xn e justifique.
05. Uma seqüência xn é dada por
x1 =√
2, xn+1 =√
2 + xn.
(a) Mostre que xn é crescente e limitada superiormente por 3.
Aplique o Teorema 2.3 para mostrar que a seqüência é convergente.
(b) Calcule limn−→+∞
xn.
2.7 Comentário das Atividades
Se você (aluno) conseguiu resolver as Atividades 01. e 02., então
entendeu a definição de seqüências de números reais. Viu que uma
35

Seqüências de Números Reais
seqüência nada mais é que uma função que associa a cada número
natural (denominado índice) um e só um número real.
Na Atividade 03. você utilizou (ou utilizará) as propriedades
de limites (vistas no Cálculo I) para testar a convergência das
seqüência dadas.
A Atividade 04. você utilizou (ou deve utilizar) a seguinte
propriedade de módulo de números reais:
|y−x| ≤ a⇔ −a ≤ y−x ≤ a⇔ x−a ≤ y ≤ x+a, ∀a, x, y ∈ R, a > 0.
Após utilizar essa propriedade, basta aplicar o limite para n ten-
dendo ao infinito, de ambos os lados da desigualdade resultante.
Conseguiu resolver a Atividade 05.? Ótimo!!! Você aprendeu
que toda seqüência monótona e limitada é convergente.
Lembrem-se sempre que há tutores a distância e presenciais
para ajudá-los na resolução dessas atividades. Estudar em grupo
com seus colegas, pode tornar a resolução dessas atividades mais
fácil e interessante.
2.8 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 4).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
36

3AULA
1LIVRO
Séries de NúmerosReais
META
Representar funções como somas de
séries infinitas.
OBJETIVOS
Calcular somas de infinitos números
reais.
PRÉ-REQUISITOS
Seqüências (Aula 02).

Séries de Números Reais
3.1 Introdução
Estudaremos nesta aula, uma exemplo especial de seqüência. Seja
(xn)n∈N uma seqüência, a seqüência cujo termo geral é a soma
dos n primeiros termos da seqüência xn, é denominada série de
números reais (numérica).
O principal objetivo dessa aula, é estudar propriedades e a con-
vergência dessas séries. Veremos que quando uma série convergir,
digamos para S então S é a soma de infinitos números reais.
3.2 Séries Numéricas
Definição 3.8. Considere uma seqüência (xn)n∈N. Para cada n ∈
N definimos
Sn =n∑i=1
xi = x1 + x2 + . . .+ xn.
A seqüência (Sn)n∈N denomina-se série numérica associada a se-
qüência (xn)n∈N.
Os números xn, n ≥ 1, são denominados termos da série; xn é
o termo geral da série. Referir-nos-emos a
Sn =n∑i=1
xi
como soma parcial de ordem n da série.
O limite da série, quando existe (finito ou infinito), denomina-
se soma da série e é indicada por+∞∑n=1
xn. Assim
+∞∑n=1
xn = limn−→+∞
n∑i=1
xi.
38

Livro de Cálculo II
3AULA
Se a soma for finita, diremos que a série é convergente. Se a soma
for infinita (+∞ ou −∞) ou se o limite não existir, diremos que
a série é divergente. Finalmente, dizemos que a série converge
absolutamente se a série+∞∑n=1
|xn| for convergente.
O símbolo+∞∑n=1
xn foi indicado para indicar a soma da série.
Por um abuso de notação, tal símbolo será utilizado ainda para
representar a própria série. Falaremos, então, da série+∞∑n=1
xn,
entendendo-se que se trata da série cuja soma parcial de ordem
n é Sn =n∑i=1
xi. Escreveremos com freqüência∑
xn para repre-
sentar a série+∞∑n=1
xn.
Exemplo 3.2.1. Considere a Série Geométrica+∞∑n=0
arn, onde r é
razão da série e a ∈ R∗ é uma constante denominada termo inicial
da série. Vamos estudar a convergência desta série em função dos
valores de r. Temos que
Sn = a+ ar + ar2 + ar3 + . . .+ arn−1 + arn.
Se r = 1, então é imediato que Sn = na. Segue que (Sn)n∈N
diverge e, portanto∑arn =
∑a diverge. Suponhamos que r 6= 1.
Multiplicando Sn por r, obtemos
rSn = ar + ar2 + ar3 + ar4 + . . .+ arn + arn+1.
Agora Sn − rSn = a− arn+1 e daí
Sn = a1− rn+1
1− r.
Assim,∑arn converge se, e somente se, |r| < 1 e, neste caso,
+∞∑n=0
arn =a
1− r.
39

Séries de Números Reais
Exemplo 3.2.2. Considere a série+∞∑k=1
xk e suponha que xk =
yk − yk+1, k ≥ 1. (Uma tal série denomina-se série telescópica).
a) Verifique que Sn =n∑k=1
xk = y1 − yn+1.
b) Conclua que se limn−→+∞
yn = y, com b real, então a soma da série
será finita e igual a y1 − y.
Solução:
a)n∑k=1
xk = (y1 − y2) + (y2 − y3) + . . .+ (yn − yn+1) = y1 − yn+1
b)+∞∑k=1
xk = limn−→+∞
n∑k=1
xk = limn−→+∞
(y1 − yn+1) = y1 − y.
Exemplo 3.2.3. Calcule a soma+∞∑k=1
1k(k + 1)
.
Solução: Note que1
k(k + 1)=
1k
+1
k + 1. Trata-se então de
uma série telescópica. Segue do exemplo anterior que
n∑k=1
1k(k + 1)
= 1− 1n+ 1
.
Logo,n∑k=1
1k(k + 1)
= 1, pois limn−→+∞
1n+ 1
= 0.
Proposição 2. Sejam∑xn e
∑yn suas séries convergentes e
c ∈ R. Temos que
(i)∑
(xn + yn) é convergente para∑xn +
∑yn;
(ii)∑
(c · xn) é convergente para c ·∑xn.
Demonstração: A demonstração é trivial: basta aplicar as pro-
priedades de limite da soma e da multiplicação por um escalar.
Observamos que, em geral,
+∞∑n=0
(xn · yn) 6=+∞∑n=0
xn ·+∞∑n=0
yn.
40

Livro de Cálculo II
3AULA
Passamos ao estudo da natureza de séries, isto é, estamos in-
teressados em critérios que determinam se uma série é convergente
ou divergente.
Teorema 3.5. (i)∑xn converge se, e somente se,
∀ε > 0, ∃N ∈ N tal que n ≥ m ≥ N =⇒
∣∣∣∣∣n∑
i=m
xi
∣∣∣∣∣ < ε.
(ii) Se∑xn converge, então xn −→ 0, quando n −→ +∞.
(iii) Toda série absolutamente convergente é convergente.
Demonstração: (i) Suponhamos que∑xn converge, isto é, a
seqüência de termo geral Sn =n∑i=1
xi é convergente, digamos que
para S. Logo, dado ε > 0, existe N ∈ N tal que se n ≥ N, então
|Sn − S| < ε2 . Portanto, se n ≥ m ≥ N, temos∣∣∣∣∣
n∑i=m
xi
∣∣∣∣∣ = |Sn − Sm| ≤ |Sn − S|+ |S − Sm| <ε
2+ε
2= ε.
Reciprocamente, um argumento análogo ao da demonstração do
Teorema 2.2 mostra que (Sn)n∈N é limitada (verifique). Pelo Teo-
rema de Bolzano-Weierstrass, (Sn)n∈N tem subseqüência (Snk)k∈N
convergente para o limite S. Mostremos que Sn −→ S. Seja ε > 0,
temos que existe N ∈ N tal que
n ≥ m ≥ N =⇒ |Sn − Sm| < ε. (3.1)
Como Snk −→ S, existe k ∈ N tal que nk ≥ N e |Snk − S| < ε2 .
Daí e de (3.1) segue que, se n ≥ N, então
|Sn − S| ≤ |Sn − Snk |+ |Snk − S| <ε
2+ε
2= ε.
(ii) Segue de (i), tomando n = m.
(iii)Observamos que para todo m,n ∈ N temos∣∣∣∣∣n∑
i=m
xi
∣∣∣∣∣ ≤n∑
i=m
|xi| =
∣∣∣∣∣n∑
i=m
|xi|
∣∣∣∣∣ .
41

Séries de Números Reais
Portanto, por (i), a convergência de∑|xn| implica a de
∑xn.
Devemos ressaltar que a recíproca do item (iii) do teorema ante-
rior, não é verdadeira, ou seja, existem séries que são convergentes
mas não são absolutamente convergentes, as séries deste tipo são
denominadas séries condicionalmente convergente. Veremos um
exemplo posteriormente.
Exemplo 3.2.4. Pelo item (ii), a condição xn −→ 0 é necessária
para a convergência da série∑xn porém ela não é suficiente. A
Série Harmonica∑ 1
né o contra exemplo mais famoso. De fato,
temos
S2 = 1 +12,
S4 = S2 +13
+14> S2 +
24
= 1 + 2 · 12,
S8 = S4 +15
+16
+17
+18> 1 + 2 · 1
2+
48
= 1 + 3 · 12,
...
Portanto, S2n > 1 + n/2. Daí, segue que limn−→+∞
S2n = +∞. Con-
cluímos que a série diverge.
Vamos tratar agora de alguns critérios de convergência para
séries de termos positivos. Claramente, todos os critérios aqui ex-
postos podem ser adaptados para séries de termos negativos. Com
efeito, se∑xn é uma série de termos negativos, então
∑(−xn) é
uma série de termos positivos e, além disso, a primeira converge
se, e somente se, a segunda converge.
Eventualmente, podemos usar também critérios sobre séries de
termos positivos para uma série∑xn que tenha termos de sinais
variáveis, tais séries são denominadas séries alternadas. Ora, se ao
aplicarmos algum destes critérios para a série∑|xn| concluirmos
42

Livro de Cálculo II
3AULA
que ela é convergente, então, como toda série absolutamente con-
vergente é convergente, concluiremos que∑xn converge. Por
outro lado, se o critério nada disser, ou mesmo se ele nos infor-
mar que∑|xn| é divergente, em geral, nada poderemos afirmar
sobre a convergência da série∑xn. Neste caso, temos o seguinte
critério de convergência para Séries Alternadas:
Teorema 3.6. (Critério de convergência para séries alternadas)
Seja a série+∞∑n=0
(−1)nxn, onde xn > 0, ∀n ∈ N (Séries Alternadas).
Se a seqüência (xn)n∈N for decrescente e se limn−→+∞
xn = 0, então
a série alternada+∞∑n=0
(−1)nxn será convergente.
Não faremos a demonstração deste Critério, pois é baseada em
propriedades dos Intervalos Encaixantes não vistos neste curso. O
leitor interessado pode encontra tal demonstração no Livro "Um
Curso de Cálculo, Vol. 4"de Hamilton Luiz Guidorizzi.
Antes de seguir para o estudo dos critérios de convergência para
séries de termos positivos, observamos também o seguinte fato, já
mencionado no caso de seqüência. Os primeiros termos de uma
série nada influem na sua natureza. De fato, a série∑xn con-
verge se, e somente se, a série∑xn+2008 converge. De maneira
geral, fixando p ∈ N a série∑xn é convergente se, e somente
se, a série∑xn+p é convergente. Desta forma, todos os critérios
que determinam a natureza de uma série através de algumas pro-
priedades verificada por todos os seus termos continuam válidos
se a tal propriedade é verificada à partir de algum termo (por ex-
emplo, 2008). Por outro lado, não podemos desprezar nenhum
termo de uma série convergente quando estamos interessados em
determinar o valor de sua soma infinita.
43

Séries de Números Reais
Proposição 3. Uma série de termos positivos é convergente se, e
somente se, a seqüência de suas somas parciais é limitada superi-
ormente.
Demonstração: Por definição∑xn é convergente se, e somente
se, a seqüências de suas somas parciais (Sn)n∈N é convergente.
Como xn ≥ 0, temos imediatamente que (Sn)n∈N é crescente.
Logo, (Sn)n∈N é convergente se, e somente se, ela é limitada supe-
riormente.
Teorema 3.7. (Critério da Integral) Consideremos a série∞∑k=0
xk
e suponhamos que exista p ∈ N e uma função f : [p,+∞[−→ R
contínua, decrescente e positiva tal que f(k) = xk para todo k ≥ p.
Nestas condições, tem-se:
(i)∫ +∞
pf(x)dx convergente =⇒
∞∑k=0
xk convergente;
(ii)∫ +∞
pf(x)dx divergente =⇒
∞∑k=0
xk divergente.
Demonstração: Para n > p,
n∑k=0
xk =p∑
k=0
xk +n∑
k=p+1
xk. Como
p está fixo, segue dessa relação que a série∞∑k=0
xk será convergente
(ou divergente) se, e somente se,+∞∑
k=p+1
xk for convergente (ou di-
vergente).
(i) Temos que (Veja Figura 3.7)n∑
k=p+1
xk ≤∫ n
pf(x)dx ≤
∫ +∞
pf(x)dx.
Segue que a seqüêncian∑
k=p+1
xk é crescente e limitada superi-
ormente por∫ +∞
pf(x)dx. Logo a série
+∞∑k=p+1
xk é convergente e,
44

Livro de Cálculo II
3AULA
Figura 3.7: Soma Inferior
portanto,+∞∑k=0
xk também é convergente.
(ii) A demonstração deste item é análoga a do item (i), por isso
deixamos para o leitor.
Exemplo 3.2.5. Seja α > 0, com α 6= 1, um real dado. Estude a
série+∞∑k=2
1k(ln k)α
com relação a convergência ou divergência.
Solução: Se α = 1 estudaremos a convergência da série+∞∑k=2
1k ln k
através do Critério da Integral, utilizando a função
f(x) =1
x lnx, x ≥ 2.
Tal função é positiva, contínua e decrescente em [2,+∞[ como se
verifica facilmente. Temos∫ t
2
1x lnx
dx = [ln(lnx)]t2 = ln(ln t)− ln(ln 2).
Como limt−→∞
ln(ln t)dt = +∞, resulta∫ +∞
2
1x lnx
dx = +∞. Pelo
critério da integral a série é divergente.
Suponhamos agora que α > 0 e α 6= 1. Vamos aplicar, novamente,
o critério da integral com a função f(x) =1
x(lnx)α. Está função
é claramente positiva, contínua e decrescente no intervalo [2,+∞[.
45

Séries de Números Reais
Temos∫ t
2
1x(lnx)α
dx =[
1(1− α)(lnx)α−1
]t2
= ln(ln t)− ln(ln 2)
e, portanto,∫ t
2
1x(lnx)α
dx =1
1− α
[1
(ln t)α−1− 1
(ln 2)α−1
].
Para
α > 1 =⇒ limt−→∞
1(ln t)α−1
= 0
e, para
0 < α < 1 =⇒ limt−→∞
1(ln t)α−1
= +∞
. Pelo critério da integral, a série é convergente para α > 1 e
divergente para 0 < α < 1.
Teorema 3.8. (Critério da Comparação) Sejam as séries∞∑k=0
xk
e∞∑k=0
yk. Suponhamos que exista p ∈ N tal que, para todo k ≥
p, 0 ≤ xk ≤ yk. Nestas condições, tem-se:
(i)∞∑n=0
yk convergente =⇒∞∑n=0
xk convergente;
(ii)∞∑n=0
xk divergente =⇒∞∑n=0
yk divergente.
Demonstração: (i) Basta provamos que∞∑k=p
xk é convergente.
Como, para todo k ≥ p, yk ≥ 0, a seqüência
tn =n∑n=0
yk, n ≥ p,
é crescente. Daí e pelo fato da série∞∑k=p
yk ser convergente resulta,
para todo n ≥ p,n∑k=p
yk ≤+∞∑k=p
yk.
46

Livro de Cálculo II
3AULA
Como, para todo k ≥ p, 0 ≤ xk ≤ yk, resulta que a seqüência
sn =n∑k=p
xk, n ≥ p, (3.2)
é crescente e, para todo n ≥ p,n∑k=p
xk ≤+∞∑k=p
yk.
Segue que a seqüência 3.2 é convergente, ou seja, a série+∞∑k=p
xk é
convergente.
(ii) Fica a cargo do leitor.
Exemplo 3.2.6. Vamos estudar a natureza da série∑ 1
npse-
gundo os valores de p. É claro que se p ≤ 0, então ela diverge pois
neste caso limn−→+∞
xn 6= 0. Suponhamos 0 ≤ p ≤ 1. Temos1n≤ 1np
para todo n ∈ N. Portanto, por comparação com a série harmonica,
concluímos que a série diverge. Finalmente, consideramos o caso
p > 1. Mostraremos que a série converge através do Critério da
Integral, utilizando a função f(x) =1xp, p > 1. Tal função é posi-
tiva, contínua e decrescente em [1,+∞[ como se verifica facilmente.
Temos∫ t
1
1xpdx =
[1
(1− p)xp−1
]t1
=1
(1− p)tp−1− 1
1− p.
Como limt−→∞
1(1− p)tp−1
dt = 0, resulta∫ +∞
1
1xpdx =
1p− 1
. Pelo
critério da integral a série é convergente.
Exemplo 3.2.7. A série+∞∑k=1
1ksen
1ké convergente ou divergente?
Justifique.
Solução: Para todo k ≥ 1,
0 ≤ 1ksen
1k≤ 1k· 1k.
47

Séries de Números Reais
Como+∞∑k=1
1k2
é convergente (basta usar o exemplo 3.2.6 com p = 2),
segue do Teorema da Comparação que+∞∑k=1
1ksen
1ké convergente.
Exemplo 3.2.8. A série+∞∑k=1
k
k2 + 2k + 1é convergente ou diver-
gente? Justifique.
Solução:k
k2 + 2k + 1=
1k· 1
1 + 2k + 1
k2
.
Para todo k ≥ 1,
1 +2k
+1k2≤ 4
e, portanto, para todo k ≥ 1,
11 + 2
k + 1k2
≥ 14.
Segue que, para todo k ≥ 1,
11 + 2k + 1
≥ 14k.
Como+∞∑k=1
14k
é divergente resulta que
+∞∑k=1
k
k2 + 2k + 1
diverge.
Teorema 3.9. (Critério do Limite) Sejam∑xn e
∑yn duas
séries de termos positivos. Suponhamos que
limn−→∞
xnyn
= L.
Então:
a) se L > 0, L real, ou ambas são convergentes ou ambas são di-
vergentes;
48

Livro de Cálculo II
3AULA
b) se L = +∞ e se∑yn for divergente,
∑xn também será diver-
gente;
c) se L = 0 e se∑yn for convergente,
∑xn também será conver-
gente.
Demonstração:
a) De limn−→∞
xkyk
= L, L > 0 e real, segue que tomando ε = L2 , existe
N ∈ N tal que
n > N =⇒ L− L
2<xnyn
< L+L
2
ou seja
n > N =⇒ L
2yn < xn <
3L2yn.
Segue do critério da comparação que ambas são convergentes ou
ambas são divergentes.
b) De limn−→∞
xkyk
= +∞, segue que tomando-se ε = 1, existe N ∈ N
tal que
n > N =⇒ xnyn
> 1
e, portanto,
n > N =⇒ xn > yn.
Segue do critério da comparação que se∑yn for divergente, então∑
xn também será.
c) De limn−→∞
xkyk
= 0, segue que tomando-se ε = 1, existe N ∈ N tal
que
n > N =⇒ xnyn
< 1
e, portanto,
n > N =⇒ xn < yn.
Segue do critério da comparação que se∑yn for convergente, então∑
xn também será.
49

Séries de Números Reais
Exemplo 3.2.9. A série+∞∑n=1
e−n é convergente ou divergente? Jus-
tifique.
Solução: A série+∞∑n=1
e−n2 é convergente, pois trata-se de uma
série geométrica de razão r = e−12 . Façamos
xn = ne−n e yn = e−n2.
Temos
limn−→∞
xnyn
= limn−→∞
n
en2
= 0.
Pelo critério do limite, a série dada é convergente.
Observação 3.1. O sucesso na utilização do critério do limite está
exatamente na escolha adequada da série∑yn de comparação.
Em muitos casos, as séries harmonicas ou as séries geométricas
desempenham muito bem este papel.
Exemplo 3.2.10. A série+∞∑n=1
1ln k
é convergente ou divergente?
Justifique.
Solução: Vamos tomar como série de comparação a série har-
monica+∞∑k=1
1ln k
. Temos
xk =1
ln ke yk =
1k.
Então,
limk−→+∞
xkyk
= limk−→+∞
k
ln k= +∞.
Pelo Critério do Limite a série dada é divergente.
Observe, no exemplo anterior, que se tivéssemos tomado como
séria de comparação a harmonica convergente+∞∑n=1
1k2
, teríamos,
50

Livro de Cálculo II
3AULA
também,
limk−→+∞
xkyk
= limk−→+∞
k2
ln k= +∞.
Entretanto, neste caso, o critério do limite não nos fornecerá infor-
mações alguma sobre a convergência ou divergência da série dada.
Os próximos dois critérios de convergências valem também para
séries com termos negativos.
Teorema 3.10. (Teste da Razão, ou de d’Alembert) Seja
(xn)n∈N uma seqüência não nula. Suponhamos que limn−→+∞
∣∣∣∣xn+1
xn
∣∣∣∣exista, finito ou infinito. Seja
limn−→+∞
∣∣∣∣xn+1
xn
∣∣∣∣ = L.
Nesta condições, tem-se:
(i) Se L < 1, a série∑xn será convergente;
(ii) Se L > 1 ou L = +∞, a série∑xn será divergente;
(iii) Se L = 1, o critério nada revela.
Demonstração: (i) A idéia é comparar a série dada com uma
série geométrica convergente. Como L < 1, existe r ∈ R tal que
limn−→+∞
∣∣∣∣xn+1
xn
∣∣∣∣ < r < 1. Segue da definição de limite, que existe
N ∈ N tal que∣∣∣∣xn+1
xn
∣∣∣∣ < r para todo n ≥ N. Temos então:
|xN+1| < r|xN |;
|xN+2| < r|xN+1| < r2|xN |;
|xN+3| < r|xN+2| < r3|xN |;...
De maneira geral, |xn| < rn−N |xN |, para todo n ≥ N. Tomando
yn = rn−N |xN | (para todo n ∈ N) temos que |xn| < yn para todo
51

Séries de Números Reais
n ∈ N. Como∑yn é uma Série Geométrica de razão r ∈ (0, 1),
ela é convergente. O critério da comparação nos garante que∑xn
converge absolutamente e, portanto, é convergente .
(ii) Como limn−→+∞
∣∣∣∣xn+1
xn
∣∣∣∣ > 1 ou limn−→+∞
∣∣∣∣xn+1
xn
∣∣∣∣ = +∞, existe N ∈
N tal que, se n ≥ N então ∣∣∣∣xn+1
xn
∣∣∣∣ > 1.
Isso significa que |xn+1| > |xn| quando n ≥ N, e assim
limn−→∞
xn 6= 0.
Portanto,∑xn diverge pelo teste da divergência.
A parte (iii) do Teste da Razão diz que, se limn−→+∞
∣∣∣∣xn+1
xn
∣∣∣∣ = 1,
o Teste da Razão não dá nenhuma informação. Por exemplo, para
a série convergente∑ 1
n2, temos
∣∣∣∣xn+1
xn
∣∣∣∣ =1
(n+1)2
1n2
=n2
(n+ 1)2=
1(1 + 1
n
)2 −→ 1 quando n −→∞
enquanto para a série divergente∑ 1
n, obtemos∣∣∣∣xn+1
xn
∣∣∣∣ =1
n+11n
=n
n+ 1=
11 + 1
n
−→ 1 quando n −→∞.
Portanto, se limn−→+∞
∣∣∣∣xn+1
xn
∣∣∣∣ = 1 a série∑xn pode convergir ou
divergir. Neste caso, o Teste da Razão falha e devemos usar algum
outro teste.
Exemplo 3.2.11. A série+∞∑n=1
1n!
é convergente, pois
limn−→+∞
∣∣∣∣xn+1
xn
∣∣∣∣ = limn−→+∞
1(n+1)!
1n!
= limn−→+∞
n!(n+ 1)!
= limn−→+∞
1n+ 1
= 0 < 1.
52

Livro de Cálculo II
3AULAExemplo 3.2.12. A série
+∞∑n=1
(−1)nn3
3né convergente. De fato,
limn−→+∞
∣∣∣∣xn+1
xn
∣∣∣∣ = limn−→+∞
∣∣∣∣∣(−1)n+1(n+1)3
3n+1
(−1)nn3
3n
∣∣∣∣∣= lim
n−→+∞
(n+ 1)3
3n+1· 3n
n3
= limn−→+∞
13
(n+ 1n
)3
= limn−→+∞
13
(1 +
1n
)3
=13< 1.
Exemplo 3.2.13. A série+∞∑n=1
nn
n!é divergente. Com efeito,
limn−→+∞
∣∣∣∣xn+1
xn
∣∣∣∣ = limn−→+∞
(n+ 1)n+1
(n+ 1)!· n!nn
= limn−→+∞
(n+ 1)(n+ 1)n
(n+ 1)n!· n!nn
= limn−→+∞
(n+ 1n
)n= lim
n−→+∞
(1 +
1n
)n= e > 1.
O teste a seguir é conveniente para ser aplicado quando as
potências de n ocorrem. Sua prova é similar à do Teste da Razão
e fica por conta do leitor.
Teorema 3.11. (Teste da Raiz)
(i) Se limn−→∞
n√|xn| = L < 1, então a série
+∞∑n=1
xn é absolutamente
convergente e, portanto, convergente;
(ii) Se limn−→∞
n√|xn| = L > 1, então a série
+∞∑n=1
xn é divergente;
(iii) Se limn−→∞
n√|xn| = 1, então o Teste da Raiz não é conclusivo.
O Teste da Raiz é mais eficiente que o da Razão. Mais pre-
cisamente, em todos os casos nos quais o Teste da Razão permite
53

Séries de Números Reais
concluir (seja por convergência ou por divergência) o Teste da Raiz
também será concludente. Entretanto, o Teste da Razão é, em
geral, mais fácil de ser aplicado.
Exemplo 3.2.14. Teste a convergência da série∞∑n=1
(2n+ 33n+ 2
)n.
Solução: Considere
xn =(
2n+ 33n+ 2
)ne
limn−→∞
n√|xn| = lim
n−→∞
2n+ 33n+ 2
= limn−→∞
2 + 3n
3 + 2n
=23< 1
Então, a série dada converge pelo Teste da Raiz.
3.3 Resumo
Considere uma seqüência (xn)n∈N. Para cada n ∈ N definimos
Sn =n∑i=1
xi = x1 + x2 + . . .+ xn.
A seqüência (Sn)n∈N denomina-se série numérica associada a
seqüência (xn)n∈N. O termo geral da (Sn)n∈N,
Sn =n∑i=1
xi
é denominado soma parcial de ordem n da série.
O limite da série, quando existe (finito ou infinito), denomina-
se soma da série e é indicada por+∞∑n=1
xn. Assim
+∞∑n=1
xn = limn−→+∞
n∑i=1
xi.
54

Livro de Cálculo II
3AULA
Se a soma for finita, diremos que a série é convergente. Se a soma
for infinita (+∞ ou −∞) ou se o limite não existir, diremos que a
série é divergente.
Nosso objetivo com essa aula era que você (aluno) aprendesse
a testar a convergência de séries. Para tanto, foi apresentado os
principais critérios de convergências de séries. (Ver os Critérios e
os Testes de convergências)
Os conceitos e os critérios de convergência de séries serão essen-
ciais no estudo de séries de potências que faremos na próxima aula.
3.4 Atividades
01. (a) Qual a diferença entre uma seqüência e uma série?
(b) O que é uma série convergente? O que é uma série divergente?
02. Seja xn =n
n+ 1.
(a) Determine se (xn)n∈N é convergente.
(b) Determine se∞∑n=1
xn é convergente.
03. Determine se a série é convergente ou divergente. Se for con-
vergente, calcule sua soma.
a)12
+14
+16
+18
+ · · · (b) 3 + 2 +43
+89
+ · · ·
(c)∞∑n=0
(12
)n(d)
∞∑n=1
(23
)n−1
(e)∞∑n=2
(2
n2 − 1
)(f)
∞∑n=1
(3n + 2n
6n
)
(g)∞∑n=1
2n
(h)1
(4n+ 1)(4n+ 5)
55

Séries de Números Reais
04. Mostre que a série dada é convergente.
a)∞∑n=1
(−1)n2−n (b)∞∑n=1
(−1)n+1 lnnn.
05. Estude a série dada com relação a convergência ou divergên-
cia.
(a)∞∑n=1
(−1)n−1
√n
(b) (−1)nn
lnn
(c)∞∑n=0
1n2 + 1
(d)∞∑n=2
1n lnn
(e)∞∑n=1
ne−n2
(f)∞∑n=3
1n lnn ln(lnn)
(g)∞∑n=1
52 + 3n
(h)∞∑n=1
4 + 3n
2n
(i)∞∑n=0
(−10)n
n!(j)
∞∑n=1
e−nn!
06. (a) Mostre que∞∑n=0
xn
n!converge para todo x.
(b) Deduza que limn−→∞
xn
n!= 0.
3.5 Comentário das Atividades
Se você (aluno) conseguiu resolver as Atividades 01. e 02., então
entendeu a grande diferença de seqüências e séries de números
reais. Entender essa diferença é muito importante.
Na Atividade 03. você utilizou (ou utilizará) as propriedades
de limites (vistas no Cálculo I) para testar a convergência das séries
dadas.
Na Atividade 04. é dada duas séries alternadas e é pedido que
56

Livro de Cálculo II
3AULA
você (aluno) teste a convergência das mesmas. Nesta atividade
podemos usar o critério de convergência para séries alternadas ou
lançarmos mão da convergência absoluta.
A Atividade 05. você utilizou (ou deve utilizar) os critérios de
convergência vistos nesta Aula, para estudar a convergência das
séries dadas.
O Teste da Razão deverá ser usado na resolução da Atividade
06.. Nesta atividade estamos interessados em encontrar o conjunto
dos x tais que a série numérica converge.
Conseguiu resolver todas as Atividade? Sabe usar os critérios
de convergência (Critério da Razão dentre outros) dados? Ótimo!!!
Você esta com todos os requisitos necessários para compreensão da
próxima aula.
Lembrem-se sempre que há tutores a distância e presenciais
para ajudá-los na resolução dessas atividades. Estudar em grupo
com seus colegas, pode tornar a resolução dessas atividades mais
fácil e interessante.
3.6 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 4).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
57


4AULA
1LIVRO
Séries de Potências
META
Apresentar os conceitos e as prin-
cipais propriedades de Séries de
Potências. Além disso, introduzire-
mos as primeiras maneiras de
escrever uma função dada como
uma série de potências.
OBJETIVOS
Representar funções em séries de
potências.
PRÉ-REQUISITOS
Séries Numéricas (Aula 3).

Séries de Potências
4.1 Introdução
Uma série de potências de x é uma série da forma+∞∑n=0
an(x− x0)n = a0 + a1(x− x0) + a2(x− x0)2 + · · ·
Observe que esta série pode ser vista como a generalização de
um polinômio. O principal objetivo de estudar essas séries é que
é possível (veremos a diante) representar uma função dada como
uma série de potências.
Você pode imaginar por que queremos expressar uma função
conhecida como uma soma infinita de termos. Veremos mais tarde
que essa estratégia é útil para integrar funções que não têm an-
tiderivadas elementares e para aproximar as funções por polinômios.
Cientistas fazem isso para simplificar expressões que eles utilizam e
para poder representar as funções em calculadoras e computadores.
Nesta aula, introduziremos os conceitos de séries de potências.
Além disso, iniciaremos o estudo de representação de funções em
séries de potências.
4.2 Série de Potências
Seja an, n ≥ 0, uma seqüência numérica dada e seja x0 um real
dado. A série+∞∑n=0
an(x− x0)n (4.1)
denomina-se série de potências, com coeficientes an, em volta de
x0 (ou centrada em x0). Se x0 = 0, temos a série de potências em
volta de zero:+∞∑n=0
anxn = a0 + a1x+ a2x
2 + · · ·. (4.2)
60

Livro de Cálculo II
4AULA
Para cada x fixo, a série de potências é uma série de constantes
que podemos testar sua convergência ou divergência. Uma série
de potências pode convergir para alguns valores de x e divergir
para outros. A soma da série é uma função de x, cujo domínio é o
conjunto de todos os x para os quais a série converge. Esta função
assemelha a um polinômio. A única diferença é que f tem infinitos
termos.
Exemplo 4.2.1.+∞∑n=0
xn
n!é uma série de potências em volta de zero
e com coeficientes an =1n!.
Nosso objetivo, de agora em diante, é encontrar os valores de
x para os quais uma série de potências é convergente.
Teorema 4.12. Se+∞∑n=0
anxn for convergente para x = x1, com
x1 6= 0, então a série convergirá absolutamente para todo x no
intervalo aberto (−|x1|, |x1|).
Demonstração: Sendo, por hipótese,+∞∑n=0
anxn1 convergente, segue
que
limn−→+∞
anxn1 = 0.
Tomando-se ε = 1, existe um N ∈ N tal que, para todo n ≥ N ,
|anxn1 | ≤ 1.
Como
|anxn| = |anxn1 |∣∣∣∣ xx1
∣∣∣∣n ,resulta que, para todo x e todo n ≥ N,
|anxn| ≤∣∣∣∣ xx1
∣∣∣∣n .
61

Séries de Potências
Para |x| < |x1|, a série geométrica+∞∑n=0
∣∣∣∣ xx1
∣∣∣∣n é convergente. Segue
do Teste da Comparação que+∞∑n=0
anxn converge absolutamente
para todo x, com |x| < |x1|.
Exemplo 4.2.2. A série+∞∑n=0
xn
nconverge para x = −1. Pelo
Teorema anterior, a série converge absolutamente para todo x ∈
(−1, 1). Para x = −1 a série não é absolutamente convergente.
Exemplo 4.2.3. Para quais valores de x a série+∞∑n=0
n!xn é con-
vergente?
Solução: Usamos o Teste da Razão. Se fizermos an, como ha-
bitualmente, denotar o n-ésimo termo da série, então an = n!xn.
Se x 6= 0, temos
limn−→+∞
∣∣∣∣an+1
an
∣∣∣∣ = limn−→+∞
∣∣∣∣(n+ 1)!xn+1
n!xn
∣∣∣∣ = limn−→+∞
(n+ 1)|x| =∞
Pelo Teste da Razão, a série diverge quando x 6= 0. Então, a série
converge apenas quando x = 0.
Exemplo 4.2.4. Para quais valores de x a série+∞∑n=0
(x− 3)n
né
convergente?
Solução: Seja an = (x−3)n
n . Então
limn−→+∞
∣∣∣∣an+1
an
∣∣∣∣ = limn−→+∞
∣∣∣∣(x− 3)n+1!n+ 1
· n
(x− 3)n
∣∣∣∣= lim
n−→+∞
11 + 1
n
|x− 3| = |x− 3|
Pelo Teste da Razão, a série dada é absolutamente convergente, e
portanto convergente, quando |x − 3| < 1 e é divergente quando
|x− 3| > 1. Agora
|x− 3| < 1⇔ −1 < x− 3 < 1⇔ 2 < x < 4
62

Livro de Cálculo II
4AULA
assim a série converge quando 2 < x < 4 e diverge quando x < 2 e
x > 4.O Teste da Razão não fornece informação quando |x−3| = 1;
assim, devemos considerar x = 2 e x = 4 separadamente. Se
colocarmos x = 4 na série, ela se tornará+∞∑n=0
1n, a série harmonica,
que é divergente. Se x = 2, a série é+∞∑n=0
(−1)n
nque é convergente
pelo Teste da Série Alternada. Então a série dada converge para
2 ≤ x < 4.
Exemplo 4.2.5. Encontre o domínio da função definida por
f(x) =+∞∑n=0
xn
n!
. Solução: Seja an =xn
n!. Então
limn−→+∞
∣∣∣∣an+1
an
∣∣∣∣ = limn−→+∞
∣∣∣∣ xn+1
(n+ 1)!· n!xn
∣∣∣∣ = limn−→+∞
1n+ 1
|x| = 0 < 1
para todo x ∈ R. Então pelo Teste da Razão, a série dada converge
para todos os valores de x. Em outras palavras, o domínio da
função dada é (−∞,+∞) = R.
Para as séries de potências que temos vistos até agora, o con-
junto de valores de x para os quais a série é convergente tem sempre
sido um intervalo (um intervalo finito nos exemplos 4.2.2 e 4.2.4,
o intervalo infinito (−∞,+∞) no exemplo 4.2.5 e um intervalo co-
lapsado [0, 0] = {0} no exemplo 4.2.3). O teorema a seguir, diz
que isso, em geral, é verdadeiro.
Teorema 4.13. Para uma dada série de potências+∞∑n=0
an(x− x0)n
existem apenas três possibilidades:
(i) a série converge apenas quando x = x0;
(ii) a série converge para todo x ∈ R;
63

Séries de Potências
(iii)existe um número R tal que a série converge se |x − x0| < R
e diverge de |x − x0| > R. Nos extremos x0 − R e x0 + R a série
poderá convergir ou não.
Demonstração: Fazendo u = x − x0 na série+∞∑n=0
an(x− x0)n
obtemos+∞∑n=0
anun, deste modo basta provarmos que
(i) a série converge apenas quando u = 0;
(ii) a série converge para todo u ∈ R;
(iii)existe um número R tal que a série converge se |u| < R e
diverge de |u| > R. Nos extremos R e R a série poderá convergir
ou não.
Provemos: Seja A o conjunto de todos u ≥ 0 para os quais a série
converge.
1.0 Caso: A = {0}
Se a série convergisse para algum valor u1 6= 0, pelo Teorema 4.12,
convergiria, também, para todo u ∈ (−|u1|, |u1|), que contradiz a
hipótese A = {0}. Logo, se A = {0} a série convergirá apenas para
u = 0.
2.0 Caso: A = (0,+∞) = R+
Para todo u ∈ R, existe u1 > 0 tal que
|u| < u1.
Como a série+∞∑n=0
anun1 é convergente, pelo teorema 4.12, a série
convergirá absolutamente para todo u, com |u| < u1. Portanto, a
série converge absolutamente para todo u.
3.0 Caso: A 6= R+ e A 6= {0}
64

Livro de Cálculo II
4AULA
Se, para todo r > 0, existisse u1 > r tal que+∞∑n=0
anun1
fosse convergente, pelo teorema 4.12, a série seria absolutamente
convergente para todo u, que contradiz a hipótese A 6= R+. Por-
tanto, se A 6= R+, então A será limitado superiormente; logo,
admitirá supremo R :
R = supA.
ComoA 6= {0}, teremos, evidentemente, R > 0. SendoR o supremo
de A, para todo x com |u| < R, existe u1 ∈ A, com |u| < u1.
Resulta novamente do teorema 4.12, que a série converge absolu-
tamente para todo u ∈ (−R,R). Fica a cargo do leitor verificar
que a série diverge para todo u, com |u| > R.
O número R que aparece no Teorema anterior é chamado Raio
de Convergência da série de Potência. Por convenção, o raio de
convergência é R = 0 no caso (i) e R =∞ no caso (ii).
Exemplo 4.2.6. Encontre o raio de convergência e o intervalo de
convergência da série∞∑n=1
(−1)n(x+ 2)n
n2n.
Solução: Seja an = (−1)n(x+ 2)n
n2n. Então
limn−→+∞
∣∣∣∣an+1
an
∣∣∣∣ = limn−→+∞
∣∣∣∣(−1)n+1(x+ 2)n+1
(n+ 1)2n+1· n2n
(−1)n(x+ 2)n
∣∣∣∣= lim
n−→+∞
12
n
n+ 1|x+ 2|
=12|x+ 2|.
Pelo Teste da Razão, a série dada converge se12|x+ 2| < 1 e di-
verge se12|x+ 2| > 1. Então, ela é convergente se |x+ 2| < 2 e
65

Séries de Potências
divergente se |x+ 2| > 2. Isso significa que o raio de convergência
é R =12.
A desigualdade |x+ 2| < 2 pode ser escrita como −4 < x < 0;
assim, testamos a série nos extremos −4 e 0. Quando x = −4, a
série é
∞∑n=1
(−1)n(−4 + 2)n
n2n=∞∑n=1
1n.
que é uma série harmonica e, portanto, diverge. Quando x = 0, a
série é
∞∑n=1
(−1)n(0 + 2)n
n2n=∞∑n=1
(−1)n1n.
que converge pelo Teste das Séries Alternadas. Então a série con-
verge apenas quando −4 < x ≤ 0, assim, o intervalo de convergên-
cia é (−4, 0].
Exemplo 4.2.7. Encontre o raio de convergência e o intervalo de
convergência da série
∞∑n=1
n!(2x− 1)n.
Solução: Seja an = n!(2x− 1)n. Então
limn−→+∞
∣∣∣∣an+1
an
∣∣∣∣ = limn−→+∞
∣∣∣∣(n+ 1)!(2x− 1)n+1
n!(2x− 1)n
∣∣∣∣= lim
n−→+∞(n+ 1)|2x− 1| = 0 < 1
se, e somente se, |2x− 1| = 0, ou seja, x =12. Então, o raio de
convergência é R = 0. E o intervalo de convergência é{
12
}.
66

Livro de Cálculo II
4AULA
4.3 Representação de Funções em Séries de
Potências
Nesta seção aprenderemos como representar certos tipos de funções
como soma de séries de potências pela manipulação de séries ge-
ométricas ou pela diferenciação ou integração de tais séries.
Começaremos com uma equação que vimos antes:
11− x
= 1 + x+ x2 + x3 + . . . =∞∑n=0
xn, |x| < 1 (4.1)
Encontramos essa equação no Exemplo 3.2.1, onde a obtivemos
observando que ela é uma série geométrica com a = 1 e r = x.
Mas aqui nosso ponto de vista é diferente. Agora nos referiremos
à Equação 4.1 como uma expressão da função f(x) =1
1− xcomo
uma soma de uma série de potências.
Uma ilustração geométrica da Equação 4.1 é mostrada na Figura
4.8. Como a soma de uma série é o limite da seqüência de somas
parciais, temos
11− x
= limn−→∞
Sn(x)
onde Sn =n∑k=0
xk é a n-ésima soma parcial. Note que, quando n
aumenta, Sn(x) se torna uma aproximação de f(x) para −1 < x <
1.
Exemplo 4.3.1. Expresse f(x) =1
1 + 9x2como a soma de uma
série de potências e encontre o intervalo de convergência.
Solução: Temos que
11 + 9x2
=1
1− [−(3x)2]
67

Séries de Potências
Figura 4.8: f(x) e algumas somas parciais
Trocando x por −(3x)2 na Equação 4.1, obtemos:
11 + 9x2
=∞∑n=0
[−(3x)2]n =∞∑n=0
(−1)n32nx2n
= 1− 32x2 + 34x4 − 36x6 + . . .
Como essa é uma série geométrica, ela converge quando |−(3x)2| <
1, isto é, 9x2 < 1, ou seja, |x| < 13. Portanto o intervalo de con-
vergência é(−1
3,13
).
Exemplo 4.3.2. Encontre a representação em série de potências
para f(x) =1
x+ 2.
Solução: Note que
12 + x
=1
2(1 + x
2
) =12· 1
1−(−x
2
)Trocando x por −x
2 na Equação 4.1, obtemos:
12 + x
=12
∞∑n=0
(−x
2
)n=∞∑n=0
(−1)n
2n+1xn
Como essa é uma série geométrica, ela converge quando |− x2 | < 1,
isto é, |x| < 2. Portanto o intervalo de convergência é (−2, 2).
68

Livro de Cálculo II
4AULA
4.4 Resumo
Uma série de potências de x em volta de x0 (ou centrada em x0)
é uma série do tipo Seja . A série
+∞∑n=0
an(x− x0)n (4.1)
onde an, n ≥ 0 (coeficientes) é uma seqüência numérica dada e x0
um real dado.
Para cada x fixo, a série de potências é uma série de constantes
que podemos testar sua convergência ou divergência. Uma série
de potências pode convergir para alguns valores de x e divergir
para outros. A soma da série é uma função de x, cujo domínio é o
conjunto de todos os x para os quais a série converge.
Dada uma série de potências de x, utilizamos principalmente o
Critério da Razão, visto na Aula 3, para encontrarmos o domínio
da série dada.
Vimos uma primeira maneira de representar funções em série
de potências, através da série geométrica que foi estudada com
detalhes na Aula 3.
Nosso objetivo com essa aula era que você (aluno) aprendesse
a representar funções em séries de potências, através da série ge-
ométrica.
Na próxima aula, estudaremos outras maneiras (mais eficientes)
de representar funções em séries de potências.
69

Séries de Potências
4.5 Atividades
01. Determine o domínio das seguintes séries de potências de x :
(a)∞∑n=0
nxn (b)∞∑n=2
xn
lnn
(c)∞∑n=1
xn
n3n(d)
∞∑n=1
(−1)nn4nxn
(e)∞∑n=1
(−1)n(x− 2)n
nn(f)
∞∑n=1
n!(2x− 1)n
02. Encontre uma representação em série de potências parax3
x+ 2.
Encontre seu domínio.
4.6 Comentário das Atividades
Essas atividades tem o objetivo de você (aluno) exercitar os con-
ceitos desenvolvidos nesta aula.
A Atividade 01. pede para encontrar o domínio de algumas
séries de potências dadas. Para tanto, você precisa encontra o raio
de convergência (usando o Critério da Razão) e testar a série nos
extremos do intervalo de convergência da série.
Na Atividade 02. você deve utilizar a série geométrica para
representar a função dada em série de potências.
4.7 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 4).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
70

Livro de Cálculo II
4AULA
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
71


5AULA
1LIVRO
Métodos de Repre-sentação de Funçõesem Séries de Potên-cias
META
Apresentar os principais métodos de
representação de funções em séries
de potências.
OBJETIVOS
Representar funções em séries de
potências.
PRÉ-REQUISITOS
Série de Potências (Aula 4).

Métodos de Representação de Funções em Séries dePotências
5.1 Introdução
Na aula anterior pudemos encontrar representações para uma certa
classe restrita de funções, utilizando as Séries Geométricas. Nesta
aula, investigaremos problemas mais gerais: quais funções têm rep-
resentações em série de potências? Como podemos achar tais rep-
resentações?
Iniciaremos esta aula, com a diferenciação e integração de séries
de potências que será uma ferramenta muito poderosa de represen-
tação de funções em série de potências. Posteriormente, estudare-
mos a Série de Taylor e a Série de MacLaurin. Mostraremos que, se
uma função puder ser representada como uma série de potências,
então essa função é igual à soma de sua série de Taylor.
5.2 Diferenciação e Integração de Séries de
Potências
A soma de uma série de potências é uma função+∞∑n=0
cn(x− x0)n
cujo domínio é o intervalo de convergência da série. Gostaríamos
de poder diferenciar e integrar tais funções, e o teorema a seguir
(que não provaremos) diz que podemos fazer isso por diferenciação
e integração de cada termo individual da série, como faríamos para
um polinômio. Isso é chamado diferenciação e integração termo a
termo.
Teorema 5.14. Se a série de potências+∞∑n=0
cn(x− x0)n tiver um
raio de convergência R > 0, então a função f definida por
f(x) = c0 + c1(x− x0) + c2(x− x0)2 + . . . =+∞∑n=0
cn(x− x0)n
74

Livro de Cálculo II
5AULA
é diferenciável (e portanto contínua) no intervalo (x0 −R, x0 +R)
e
(i) f ′(x) = c1 + 2c2(x− x0) + 3c3(x− x0)2 + . . . =+∞∑n=0
ncn(x− x0)n−1
(ii)∫f(x)dx = C + c0(x− x0) + c1
(x− x0)2
2+ c2
(x− x0)3
3+ . . .
= C ++∞∑n=0
cn(x− x0)n+1
n+ 1
Os raios de convergência da série de potência nas Equações (i) e
(ii) são ambos R.
Observação 5.2. Embora o Teorema 5.14 diga que o raio de con-
vergência permanece o mesmo quando uma série de potências é
diferenciada ou integrada, isso não significa que o intervalo de con-
vergência permanece o mesmo. Pode acontecer de a série original
convergir em um extremo enquanto a série diferenciada diverge
nesse ponto.
Exemplo 5.2.1. Expresse1
(1− x)2como uma série de potências
e encontre seu raio de convergência.
Solução: Diferenciando cada lado da equação
11− x
= 1 + x+ x2 + x3 + . . . =∞∑n=0
xn
obtemos
1(1− x)2
= 1 + 2x+ 3x2 + 4x3 + . . . =∞∑n=0
nxn−1.
De acordo com o Teorema 5.14, o raio de convergência da série
diferenciada é o mesmo que o raio de convergência da série original,
a saber, R = 1
75

Métodos de Representação de Funções em Séries dePotências
Exemplo 5.2.2. Encontre uma representação em série de potên-
cias para ln(1− x) e seu raio de convergência.
Solução: Temos que
ln(1− x) = −∫
11− x
dx.
Mas
11− x
=∞∑n=0
xn = 1 + x+ x2 + x3 + . . .
Daí
ln(1− x) = −∫ ( ∞∑
n=0
xn
)dx = −
∞∑n=0
∫xndx = −
∞∑n=0
xn+1
n+ 1+ C.
Para determinarmos o valor de C, colocamos x = 0 nessa equação
e obtemos ln(1− 0) = C. Então, C = 0 e
ln(1− x) = −∞∑n=0
xn+1
n+ 1
= −∞∑n=1
xn
n= −x− x2
2− x3
3− . . . , |x| < 1.
O raio de convergência é o mesmo que o da série original: R = 1.
5.3 Séries de Taylor e de Maclaurin
Veremos nessa seção que, se uma função f puder ser representada
como uma série de potências, então f é igual à soma de sua Série
de Taylor.
Supondo que f seja qualquer função que pode ser representada
por uma série de potências.
f(x) =∞∑n=0
cn(x− x0)n (5.1)
= c0 + c1(x− x0) + c2(x− x0)2 + . . . , |x− x0| < R
76

Livro de Cálculo II
5AULA
Queremos determinar os coeficientes cn em função de f . Para
começar, note que, se colocarmos x = x0 na equação (5.1), então
todos os termos depois do primeiro são nulos e obtemos:
f(x0) = c0.
Pelo Teorema 5.14, podemos diferenciar a série na equação (5.1)
termo a termo:
f ′(x) = c1 + 2c2(x− x0) + (5.2)
+3c3(x− x0)2 + 4c4(x− x0)3 + . . . , |x− x0| < R
e a substituição de x = x0 na equação (5.2) fornece:
f ′(x0) = c1.
Agora diferenciando ambos os lados da equação (5.2) temos:
f ′′(x) = 2c2 + 2 · 3c3(x− x0) + (5.3)
+3 · 4c4(x− x0)2 + . . . , |x− x0| < R.
Novamente colocando x = x0 na equação (5.3). O resultado é
f ′′(x0) = 2c2.
Vamos aplicar o procedimento mais uma vez. A diferenciação da
série na equação (5.3) fornece
f ′′′(x) = 2 · 3c3 + 2 · 3 · 4c4(x− x0) + (5.4)
+3 · 4 · 5c4(x− x0)2 + . . . |x− x0| < R.
e a substituição de x = x0 na equação (5.4) resulta em
f ′′′(x0) = 2 · 3c3 = 3!c3.
77

Métodos de Representação de Funções em Séries dePotências
Agora você pode ver o padrão. Se continuarmos a diferenciar e
substituir x = x0, obteremos
f (n)(x0) = 2 · 3 · 4 · · · · · ncn = n!cn.
Resolvendo essa equação para o n-ésimo coeficiente cn, obteremos:
cn =f (n)(x0)
n!
Esta fórmula permanecerá válida mesmo para n = 0 se adotarmos
as convenções de que 0! = 1 e f (0) = f. Então provamos o teorema
a seguir:A série de Taylorrecebeu esse nomeem homenagem aomatemático inglêsBrook Taylor (1685-1731), e a série deMaclaurin tem essenome em homenagemao matemático es-cocês Colin Maclaurin(1698-1746), apesardo fato de a série deMaclaurin ser apenasum caso especial dasérie de Taylor. Mas aidéia da representaçãode funções particu-lares em somas deséries de Potênciasremonta a Newton,e a série geral deTaylor era conhecidapelo matemáticoescocês James Gre-gory em 1668 e pelomatemático suíço JohnBernoulli na década de1690. Taylor aperente-mente não conhecia dotrabalho de Gregory eBernoulli quando pub-licou suas descobertassobre séries em 1715no livro Methodusincrementorum directaet inversa.
Teorema 5.15. Se f tiver uma representação (expansão) em série
de potências em x0, isto é, se
f(x) =∞∑n=0
cn(x− x0)n |x− x0| < R
então seus coeficientes são dados pela fórmula
cn =f (n)(x0)
n!.
Segue desse teorema que, se f tiver uma expansão em série de
potências em x0, então ela deve ser da forma a seguir:
f(x) =∞∑n=0
f (n)(x0)n!
(x− x0)n (5.5)
= f(x0) +f ′(x0)
1!(x− x0) +
f ′′(x0)2!
(x− x0)2 + . . .
A série na equação (5.5) é chamada Série de Taylor da
função f em x0 (ou ao redor de x0 ou centrada em x0). Para o
caso especial x0 = 0 a série de Taylor se torna
f(x) =∞∑n=0
f (n)(0)n!
xn
= f(0) +f ′(0)
1!x+
f ′′(0)2!
x2 +f ′′′(0)
3!x3 + . . . (5.6)
78

Livro de Cálculo II
5AULA
Esse caso surge com freqüência, e lhe foi dado o nome especial se
Série de Maclaurin.
Exemplo 5.3.1. Encontre a série de Maclaurin da função f(x) =
ex e seu raio de convergência.
Solução: Temos que f (n)(x) = ex, então f ((n))(0) = e0 = 1 para
todo n. Portanto a série de Maclaurin para f é
∞∑n=0
f (n)(0)n!
xn =∞∑n=0
xn
n!= 1 +
x
1!+x2
2!+x3
3!+ . . .
Para encontrarmos o raio de convergência fazemos an =xn
n!. Então
limn−→+∞
∣∣∣∣an+1
an
∣∣∣∣ = limn−→+∞
∣∣∣∣ xn+1
(n+ 1)!· n!xn
∣∣∣∣ = limn−→+∞
|x|n+ 1
= 0 < 1
assim pelo Teste da Razão, a série converge para todo x, e o raio
de convergência é R =∞.
Segue do Teorema 5.15 e do exemplo 5.3.1 que se ex tiver uma
expansão em série de potências em 0, então
ex =∞∑n=0
xn
n!
A questão agora é como determinar se ex tem uma representação
em série de potências.
Vamos investigar uma questão mais geral: sob quais circun-
stâncias uma função é igual à soma de uma série de Taylor? Em
outras palavras, se f tiver derivadas de todas as ordens, quando é
verdade que
f(x) =∞∑n=0
f (n)(x0)n!
(x− x0)n
Segue da definição de séries convergentes que, f(x) é o limite das
79

Métodos de Representação de Funções em Séries dePotências
somas parciais. No caso da série de Taylor, as somas parciais são
Tn(x) =n∑k=0
f (k)(x0)k!
(x− x0)k
=f(x0) +f ′(x0)
1!(x− x0) +
f ′′(x0)2!
(x− x0)2 + . . .+f (n)(x0)
n!(x− x0)n
Note que Tn(x) é um polinômio de grau n chamado polinômio de
Taylor de grau n de f em x0.
Em geral, f(x) é a soma de uma série de Taylor se
f(x) = limn−→∞
Tn(x).
Se fizermos Rn(x) = f(x)− Tn(x) de maneira que f(x) = Tn(x) +
Rn(x) então Rn(x) é denominado resto da série de Taylor. Se
pudermos de alguma maneira mostrar que
limn−→∞
Rn(x) = 0,
segue que
limn−→∞
Tn(x) = limn−→∞
[f(x)−Rn(x)] = f(x)− limn−→∞
Rn(x) = f(x).
Aqui, portanto, provamos o seguinte:
Teorema 5.16. Se f(x) = Tn(x)+Rn(x), onde Tn(x) é o polinômio
de Taylor de grau n de f em x0 e
limn−→∞
Rn(x) = 0,
para |x − x0| < R, então f é igual a soma de sua série de Taylor
no intervalo |x− x0| < R.
Ao tentar mostrar que
limn−→∞
Rn(x) = 0,
para uma função específica f , geralmente usamos o fato a seguir
(que não demonstraremos)
80

Livro de Cálculo II
5AULA
Teorema 5.17. (Desigualdade de Taylor) Se |f (n+1)(x)| ≤M
para |x − x0| ≤ d, então o resto Rn(x) da série de Taylor satisfaz
a desigualdade
|Rn(x)| ≤ M
(n+ 1)!|x− x0|n+1 para |x− x0| ≤ d.
Exemplo 5.3.2. Prove que ex é igual à soma de sua série de
Maclaurin.
Solução: Temos que f (n+1)(x) = ex para todo n. Se d for qual-
quer número positivo e |x| ≤ d, então |f (n+1)(x)|ex ≤ ed. Assim a
desigualdade de Taylor, com x0 = 0 e M = ed, diz que
|Rn(x)| ≤ ed
(n+ 1)!|x|n+1 para |x| ≤ d
e
limn−→∞
ed
(n+ 1)!|x|n+1 = ed lim
n−→∞
|x|n+1
(n+ 1)!= 0
Agora, segue do Teorema do Confronto que limn−→∞
Rn(x) = 0 para
todos os valores de x. Pelo Teorema 5.16, ex é igual à soma de sua
Série de Maclaurin,
ex =∞∑n=0
xn
n!para todo x. (5.7)
Exemplo 5.3.3. Encontre a série de Taylor para f(x) = ex em
x0 = 2.
Solução: Temos que f (n)(2) = e2; e assim, colocando x0 = 2 na
definição de uma série de Taylor, obtemos∞∑n=0
f (n)(2)n!
(x− 2)n =∞∑n=0
e2
n!(x− 2)n
Novamente pode ser verificado, como no Exemplo 5.3.1, que o raio
de convergência é R = ∞. Como no Exemplo 5.3.2, podemos
81

Métodos de Representação de Funções em Séries dePotências
verificar que limn−→∞
Rn(x) = 0, assim
ex =∞∑n=0
e2
n!(x− 2)n para todo x. (5.8)
Observe que temos duas expansão em série de potências da
função ex. A primeira, dada pela equação (5.7), é melhor se es-
tivermos interessados em valores de ex para x próximos de 0 e, a
segunda, dada pela equação (5.8), é melhor se x estiver próximo
de 2.
Exemplo 5.3.4. Encontre a série de Maclaurin da função f(x) =
sen x e prove que ela representa sen x para todo x.
Solução: Temos que
f ′(x) = cos x =⇒ f ′(0) = cos 0 = 1
f ′′(x) = −sen x =⇒ f ′′(0) = −sen 0 = 0
f ′′′(x) = −cos x =⇒ f ′′′(0) = −cos 0 = −1...
...
Portanto a série de Maclaurin para f é
∞∑n=0
f (n)(0)n!
xn =x
1!− x3
3!+x5
5!+ . . . =
∞∑n=0
(−1)nx2n+1
(2n+ 1)!
É fácil ver que, |f (n+1)(x)| ≤ 1, ∀x ∈ R. Assim a desigualdade de
Taylor, com x0 = 0 e M = 1, diz que
|Rn(x)| ≤ 1(n+ 1)!
|x|n+1 para todo x ∈ R
e
limn−→∞
1(n+ 1)!
|x|n+1 = 0
82

Livro de Cálculo II
5AULA
Agora, segue do Teorema do Confronto que limn−→∞
Rn(x) = 0 para
todos os valores de x. Pelo Teorema 5.16, sen x é igual à soma de
sua Série de Maclaurin, ou seja,
sen x =∞∑n=0
(−1)nx2n+1
(2n+ 1)!para todo x ∈ R.
Exemplo 5.3.5. Encontre a série de Maclaurin da função f(x) =
cos x.
Solução: Temos que
cos x =d
dxsen x
e, pelo Exemplo 5.3.5, sen x =∞∑n=0
(−1)nx2n+1
(2n+ 1)!, logo
cos x =d
dx
∞∑n=0
(−1)nx2n+1
(2n+ 1)!
=∞∑n=0
(−1)nd
dx
x2n+1
(2n+ 1)!=∞∑n=0
(−1)nx2n
(2n)!.
Logo
cos x =∞∑n=0
(−1)nx2n
(2n)!para todo x ∈ R.
5.4 Séries Binomiais
Concluiremos esse capítulo com um exemplo muito importante: a
série binomial, descoberta por Isac Newton. De fato, estamos aqui
revertendo a ordem histórica: originalmente, a série binomial foi
descoberta por Newton sem fazer uso da série de Taylor (então
desconhecida). De certa forma, foi o estudo da série binomial uma
das motivações de Newton no desenvolvimento do cálculo, daí sua
importância histórica.
83

Métodos de Representação de Funções em Séries dePotências
Com o nosso conhecimento de s´eries de Taylor, porém, obter-
emos um caminho mais rápido e simples que o de Newton para
expandir a função
(1 + x)k
em série de potências. Aqui, não estamos supondo que k é uma in-
teiro positivo! O argumento a seguir funciona para qualquer valor
real de k (podendo ser inclusive negativo). Observe que uma vez
obtida a expansão para (1+x)k, obteremos facilmente uma expan-
são para (x+ y)k, por meio da igualdade (x+ y)k = xk(1 +y
x)k.
Teorema 5.18. Seja k um número real. A Série de Taylor para
f(x) = (1 + x)k em torno de x = 0 (chamada Série Binomial) é
1 +∞∑n=1
k(k − 1)(k − 2) . . . (k − n+ 1)n!
xn;
seu raio de convergência é R = 1, e a série de Taylor converge para
f(x) no intervalo (−1, 1).
Observe que quando k é um inteiro positivo, podemos escrever
o n-ésimo coeficiente da série acima como(a
b
)=k(k − 1)(k − 2) . . . (k − n+ 1)
n!.
Neste caso os termos são todos nulos para n > k, e a igualdade
de (1 + x)k com sua série de Taylor nada mais é que a fórmula do
binômio de Newton.
Observe que se definimos, motivados pelo caso que acabamos
de discutir,(a
b
)=k(k − 1)(k − 2) . . . (k − n+ 1)
n!para n ≥ 1;
(k
0
)= 1
84

Livro de Cálculo II
5AULA
quaisquer que seja a constante real k, então a série Binomial to
teorema pode ser escrita sob a forma
(1 + x)k =∞∑n=0
(k
n
)xn
Para verificarmos o teorema, primeiro calculamos as derivadas
de f(x) = (1 + x)k :
f (n)(x) = k(k − 1)(k − 2) . . . (k − n+ 1)(1 + x)k−n.
Obtemos então para os coeficientes da série de Taylor:
an =f (n)(0)n!
=k(k − 1)(k − 2) . . . (k − n+ 1)
n!.
Assim, obtemos a fórmula para a série de Taylor dada no enunciado
do teorema. Para calcular o raio de convergência, utilizaremos o
Teste da Razão. Observe que o termo geral da série é anxn, logo
para aplicarmos o teste temos q estudar o limite de∣∣∣∣an+1xn+1
anxn
∣∣∣∣ =∣∣∣∣an+1
anx
∣∣∣∣ .Temos
|an+1||an|
|x| =|k(k − 1) . . . (k − n)|
(n+ 1)!· n!|k(k − 1) . . . (k − n+ 1)|
|x|
=|k − n|n+ 1
|x|;
Como k é uma constante, vemos que o limite dessa expressão
quando n −→ ∞ é L = |x|. O teste da razão nos diz que a série
converge de L < 1, e diverge de L > 1; ou seja: a série binomial
converge para |x| < 1 e diverge para |x| > 1. A convergência da
série nos casos em que o teste não dá informações, x = 1,−1,
depende do valor de k e não será de interesse para nós.
85

Métodos de Representação de Funções em Séries dePotências
Exemplo 5.4.1. Expanda (8 + x)1/3 em série de potências.
Solução: Usaremos a série binomial com k = 13 . O coeficiente
binomial é
k(k − 1)(k − 2) . . . (k − n+ 1)n!
=
(13
) (13 − 1
) (13 − 2
). . .(
13 − n+ 1
)n!
=
(13
) (−23
) (−53
). . .(
4−3n3
)n!
= (−1)n+1 (1) (2) (5) . . . (3n− 4)n!3n
e, assim, quando |x| < 1,
(8 + x)1/3 = 1 +∞∑n=1
(−1)n+1 (1) (2) (5) . . . (3n− 4)n!3n
xn
Como Newton calculava... Newton fez uso da série binomial;
a partir desta série ele calculou expansões para diversas funções.
Vamos exemplificar o método de Newton calculando a série de
Taylor de f(x) = arcsen x em torno de x = 0. Primeiro notamos
que
f ′(x) =1√
1− x2= (1− x2)−1/2
que é uma função da forma estudada anteriormente com k = −1/2,
mas calculada em −x2. Assim, f ′(x) pode ser expandida numa
série da forma∞∑n=0
an(−x2)n,
onde a0 = 1 e, para n ≥ 1,
an =k(k − 1)(k − 2) . . . (k − n+ 1)
n!
=
(−1
2
) (−1
2 − 1) (−1
2 − 2). . .(−1
2 − n+ 1)
n!
=
(−1
2
) (−3
2
) (−5
2
). . .(−2n+1
2
)(−1)n
n!
86

Livro de Cálculo II
5AULA
Esta expansão é válida para | − x2| < 1, isto é, |x| < 1. Como
(−x2)n = (−1)nx2n, obtemos
(1− x2)−1/2 = 1 +∞∑n=1
(1) (3) (5) . . . (2n− 1)n!2n
x2n para |x| < 1.
Agora, observando que
arcsen x =∫ x
0(1− t2)−1/2dt,
e integrando termo a termo a expressão acima, obtemos
arcsen x = x+∞∑n=1
(1) (3) (5) . . . (2n− 1)n!2n(2n+ 1)
x2n+1 para |x| < 1.
5.5 Resumo
Vimos, nesta aula, três métodos muito eficientes na representação
de funções em série de potências.
O primeiro método é dado pelo Teorema 5.14 que trata-se da
diferenciação e integração e séries de potências.
O segundo método é dado pela Série de Taylor: Se uma função
f admitir expansão em série de potências então sua expansão em
torno de x0 é dada por
f(x) =∞∑n=0
f (n)(x0)n!
(x− x0)n
= f(x0) +f ′(x0)
1!(x− x0) +
f ′′(x0)2!
(x− x0)2 + . . .
O Teorema 5.17, nos da uma condição suficiente para que uma
dada função admita expansão em série de potências.
A série de Taylor em torno da origem é dada por
f(x) =∞∑n=0
f (n)(x0)n!
xn
= f(0) +f ′(0)
1!x+
f ′′(0)2!
x2 + . . .
87

Métodos de Representação de Funções em Séries dePotências
Esta série é denominada Série de Maclaurin.
Terminamos essa aula, estudando da Série Binomial. Tal série
é útil para expandirmos funções do tipo (1+x)k em série de potên-
cias.
Com essa aula, terminamos a primeira parte do curso de Cál-
culo II.
Nossa primeira avaliação tem o objetivo de avaliar o vosso con-
hecimento relativo às aulas 1,2,3,4 e 5.
Nas próximas aula, passaremos a estudar novos tipos de funções.
5.6 Atividades
01. (a) Use diferenciação para achar a representação em série de
potências para
f(x) =1
(1 + x)2.
Qual é o raio de convergência.
(b) Use o item (a) para encontrar uma série de potências para
f(x) =1
(1 + x)3.
(c) Use o item (b) para achar a série de potências para
f(x) =x2
(1 + x)3.
02. Encontre uma representação em série de potências para a
função e determine o raio de convergência.
(a) f(x) = ln(1 + x) (b) f(x) = x ln(1 + x)
03. Avalie a integral indefinida∫x− tg−1x
x3como uma série de
potências. Qual é o raio de convergência?
88

Livro de Cálculo II
5AULA
04. Assuma que a função f(x) = xex admita expansão em série
de potências em torno da origem e encontre sua expansão.
05. Assuma que a função f(x) = x3 admita expansão em série de
potências em torno de x0 = −1 e encontre sua expansão.
06. Prove que a função f(x) = cos2x admite expansão em série de
potências em torno da origem e encontre tal expansão.
07. Use a série binomial para expandir a função f(x) =1
(1 + x)4
como uma série de potências. Encontre seu raio de convergência.
5.7 Comentário das Atividades
Essas atividades tem o objetivo de você (aluno) exercitar os con-
ceitos desenvolvidos nesta aula.
Na resolução das atividades 01. e 02. você (aluno) deve utilizar
o método de diferenciação e integração de série de potências e
também as propriedades de série de potências. Se você conseguiu
resolver essas atividades então entendeu os conceitos e o método
de diferenciação e integração de série de potências.
A atividade 03. mostra uma das vantagens de representarmos
funções em séries de potências. Para resolver a integral da ativi-
dade 03. você deve, inicialmente, expandir a função f(x) = tg−1x
em série de potências, em torno da origem. Feito isso, substitua
tal expansão no integrando e integra a expressão resultante. Note
que a expressão resultante é um polinômio de fácil integração.
Na resolução das atividades 04., 05, 06. e 07, basta utilizar as
89

Métodos de Representação de Funções em Séries dePotências
séries de Taylor, de Maclaurin e a Binomial.
Se sentir muita dificuldade na resolução dessas atividades, volte
ao inicio da aula e reveja com cuidado os conceitos apresentados.
E não esqueça dos tutores, eles existem para ajuda-lo em vosso
aprendizado.
5.8 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 4).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
90

6AULA
1LIVRO
Equações Paramétri-cas
META
Estudar funções que a cada ponto
do domínio associa um par orde-
nado de R2
OBJETIVOS
Estudar movimentos de partículas
no plano.
PRÉ-REQUISITOS
Ter compreendido os conceitos de
funções reais, vistas no Cálculo 1.

Equações Paramétricas
6.1 Introdução
Até agora descrevemos as curvas planas, dando y como uma função
de x [y = f(x)] ou x em função de y [x = g(y)] ou fornecendo a
relação entre x e y que define y implicitamente como uma função
de x [f(x, y) = 0]. Nesta aula discutiremos um novo método para
descrever as curvas no plano. Esse método consiste em escrever
as variáveis x e y em termos de uma terceira variável t, chamada
parâmetro [x = f(t), y = g(t)]. Tais equações serão denominadas
equações paramétricas.
6.2 Equações Paramétricas
Imagine que a trajetória de uma partícula que se move no plano
é descrita pela curva dada na Figura 6.9. Note que é impossível
descrever C por uma equação do tipo y = f(x). Mas as coor-
denadas x e y da partícula são funções de uma terceira variável
t (denominada parâmetro) e, assim, podemos escrever x = f(t)
e y = g(t). Esse par de equações é, muitas vezes, uma maneira
conveniente para descrever uma curva. Tais equações são denomi-
nadas Equações Paramétricas. Para cada valor de t determina
um ponto (x, y), que podemos plotar em um plano coordenado.
Quando t varia, o ponto (x, y) = (f(t), g(t)) varia e traça a curva
C, que chamamos de Curva Paramétrica. Em muitas aplicações
das curvas paramétricas, t denota o tempo e, portanto, podemos
interpretar (x, y) = (f(t), g(t)) como a posição de uma partícula
no tempo t.
Exemplo 6.2.1. Seja a curva paramétrica α(t) = (sen t, cos2t), 0 ≤
t ≤ π2 . Isto equivale as equações paramétricas x = sen t, y =
92

Livro de Cálculo II
6AULA
Figura 6.9: Curva no plano.
cos2t, com 0 ≤ t ≤ π2 . Pela relação fundamental, estas equações
nos conduzem à equação cartesiana y = 1 − x2, que é a equação
de uma parábola. Na verdade, é apenas um ramo da parábola tal
que 0 ≤ x ≤ 1. (Veja a figura 6.10)
Figura 6.10: Ramos da parábola y = 1− x2.
Em geral, a curva com equações paramétricas
x = f(t) y = g(t) a ≤ t ≤ b
tem ponto inicial (f(a), g(a)) e ponto final (f(b), g(b)).
Exemplo 6.2.2. A curva representada pelas equações paramétri-
93

Equações Paramétricas
cas x = cos t, y = sen t, 0 ≤ t ≤ 2π é um círculo. De fato,
eliminando o parâmetro t,
x2 + y2 = cos2t+ sen2t = 1.
Note que, nesse exemplo, o parâmetro t pode ser interpretado como
o ângulo (em radianos) mostrado na figura 6.11. Quando t au-
menta de 0 a 2π, o ponto (x, y) = (cos t, sen t) se move uma vez
ao redor do círculo no sentido anti-horário partindo do ponto (1, 0).
Figura 6.11: Círculo percorrido no sentido anti-horário.
Observe que a curva representada pelas equações paramétricas
x = sen 2t, y = cos 2t, 0 ≤ t ≤ 2π também é um circulo, pois
eliminando o parâmetro t, temos que,
x2 + y2 = sen22t+ cos22t = 1.
Mas quando t aumenta de 0 a 2π, o ponto (x, y) = (sen 2t, cos 2t)
começa em (0, 1) e se move duas vezes ao redor do círculo no sentido
horário, como indicado na figura 6.12.
94

Livro de Cálculo II
6AULA
Figura 6.12: Círculo percorrido no sentido horário.
O exemplo acima mostra que diferentes conjuntos de equações
paramétricas podem representar a mesma curva. Então distin-
guimos uma curva, que é um conjunto de pontos, e uma curva
paramétrica, na qual os pontos são traçados em uma ordem par-
ticular.
Exemplo 6.2.3. Vamos descrever a curva de equações paramétri-
cas x = t3, y = t2, com t real. É fácil ver que a equação cartesiana
da curva é x2 = y3, ou seja y = 3√x2. (Veja a figura 6.13)
6.3 Cálculo com Curvas Paramétricas
Nesta seção vamos introduzir os métodos de cálculo com curvas
paramétricas. Em particular, vamos resolver os problemas envol-
vendo tangentes, áreas, arco e superfície de área.
95

Equações Paramétricas
Figura 6.13: Curva Paramétrica.
6.3.1 Tangentes
Na seção anterior, vimos que algumas curvas definidas por equações
paramétricas x = f(t) e y = g(t) podem também ser expressas pela
eliminação do parâmetro na forma y = F (x). Em geral temos o
seguinte:
Teorema 6.19. Se f ′ for contínua e f ′(t) 6= 0 para a ≤ t ≤ b,
a curva paramétrica x = f(t), y = g(t), a ≤ t ≤ b, pode ser
colocada na forma y = F (x).
Se substituirmos x = f(t) e y = g(t) na equação y = F (x),
obteremos:
g(t) = F (f(t))
assim, se g, F e f forem diferenciáveis, a Regra da Cadeia fornece
g′(t) = F ′(f(t))f ′(t) = F ′(x)f ′(t).
Se f ′(t) 6= 0, podemos resolver para F ′(x) :
F ′(x) =g′(t)f ′(t)
(6.1)
96

Livro de Cálculo II
6AULA
Como a inclinação da tangente à curva y = F (x) em (x, F (x)) é
F ′(x), a Equação (6.1) nos permite encontrar tangentes a curvas
paramétricas sem ter que eliminar o parâmetro. Usando a notação
de Leibniz podemos reescrever a Equação (6.1) de uma maneira
fácil de lembrar:
dy
dx=
dydtdxdt
sedx
dt6= 0 (6.2)
Podemos ver da Equação (6.2) que a curva tem uma tangente
horizontal quando dydt = 0 (desde que dx
dt 6= 0) e tem uma tangente
vertical quando dxdt = 0 (desde que dy
dt 6= 0). Essa informação é útil
para esboçar as curvas paramétricas.
Para o estudo da concavidade da curva, é útil considerar d2ydx2 .
Isso pode ser encontrado mudando y por dydx na Equação (6.2):
d2y
dx2=
d
dx
(dy
dx
)=
ddt
(dydx
)dxdt
sedx
dt6= 0
Exemplo 6.3.1. Uma curva C é definida pelas equações paramétri-
cas x = t2 e y = t3 − 3t.
(a) Mostre que C tem duas tangentes no ponto (3, 0) e encontre
suas equações.
(b) Encontre os pontos em C onde a tangente é horizontal ou ver-
tical.
(c) Determine onde a curva sobre e desce e onde sua concavidade
se encontra para cima ou para baixo.
Solução:
(a) Note que y = t3−3t = t(t2−3) = 0 quando t = 0 ou t = ±√
3.
Portanto, o ponto (3, 0) em C surge de dois valores do parâmetro,
t =√
3 e t = −√
3. Isso indica que C intercepta ele mesmo em
97

Equações Paramétricas
(3, 0). Como
dy
dx=
dydtdxdt
=3t2 − 3
2t=
32
(t− 1
t
)a inclinação da tangente quando t = ±
√3 é
dy
dx= ± 6
2√
3= ±√
3;
assim, as equações das tangentes em (3, 0) são
y =√
3(x− 3) e y = −√
3(x− 3).
(b) C tem uma tangente horizontal quando dydx = 0 isto é, dydt = 0
e dxdt 6= 0. Uma vez que dy
dt = 3t2 − 3, isso é apropriado quando
t2 = 1, isto é t = ±1. Os pontos correspondentes em C são (1,−2)
e (1, 2). C tem uma tangente vertical quando dxdt = 2t = 0, isto é,
t = 0. O ponto correspondente em C é (0, 0).
(c)Para determinar a concavidade, calculamos a derivada segunda:
d2y
dx2=
ddt
(dydx
)dxdt
=32
(1 + 1
t2
)2t
=3(t2 + 1)
4t3.
Então a concavidade da curva é para cima quando t > 0 e para
baixo quando t < 0.
(d) Usando as informações das partes (b) e (c), esboçamos C na
Figura 6.14.
Exemplo 6.3.2. (a) Encontre a tangente para a ciclóide x = r(θ−
senθ), y = r(1− cosθ), no ponto θ = π3 .
(b) Em que ponto a tangente é horizontal? Quando é vertical?
Solução:
(a) A inclinação da reta tangente é
dy
dx=
dydθdxdθ
=r senθ
r(1− cosθ)=
senθ
1− cosθ
98

Livro de Cálculo II
6AULA
Figura 6.14: Curva referente ao Exemplo 6.3.1.
Quando θ = π3 , temos
x = r(π
3− senπ
3) = r(
π
3−√
32
) y = r(1− cosπ3
) =r
2
e
dy
dx=
senπ31− cosπ3
=
√3
2
1− 12
=√
3.
Portanto a inclinação da tangente é√
3 e sua equação é
y =r
2=√
3(x− rπ3
+ r
√3
2) ou
√3x− y = r(
π√3− 2).
A tangente está esboçada na Figura 6.15.
Figura 6.15: Ciclóide
(b) A tangente é horizontal quando dydx = 0, o que ocorre quando
senθ = 0 e 1 − cosθ 6= 0, isto é, θ = (2n − 1)π, n ∈ Z. O ponto
correspondente da ciclóide é ((2n− 1)πr, 2r).
99

Equações Paramétricas
Quando θ = 2nr, tanto dxdθ e dy
dθ são 0. a partir do gráfico parece
que as tangentes são verticais naqueles pontos. Podemos verificar
isso usando a Regra de L’Hôspital, como a seguir:
limθ−→2nπ+
dy
dx= lim
θ−→2nπ+
senθ
1− cosθ= lim
θ−→2nπ+
cosθ
senθ=∞
Um cálculo similar mostra que limθ−→2nπ−
dy
dx= −∞; assim, real-
mente existem tangentes verticais quando θ = 2nπ, isto é, quando
x = 2nπr.
6.3.2 Áreas
O Teorema Fundamental do Cálculo no diz que a áreas sob uma
curva y = F (x) de a até b é A =∫ ba F (x)dx, onde F (x) ≥ 0. Se a
curva for dada por equações paramétricas x = f(t), y = g(t) e for
percorrida quando t aumenta de α para β, então podemos adaptar
a fórmula anterior usando a Regra da Substituição para Integrais
Definidas como a seguir:
A =∫ b
aydx =
∫ β
αg(t)f ′(t)dt
ou
A =∫ α
βg(t)f ′(t)dt
se (f(β), g(β)) for o extremo esquerdo.
Exemplo 6.3.3. Encontre a área sob um arco da ciclóide x =
r(θ − senθ), y = r(1− cosθ).
Solução:
Um arco da ciclóide é dado por 0 ≤ θ ≤ 2π. Usando a Regra de
100

Livro de Cálculo II
6AULA
Substituição com y = r(1− cosθ) e dx = r(1− cosθ)dθ, temos
A =∫ 2πr
0ydx =
∫ 2π
0r(1− cosθ)r(1− cosθ)dθ
= r2
∫ 2π
0(1− cosθ)2dθ = r2
∫ 2π
0(1− 2cosθ + cos2θ)dθ
= r2
∫ 2π
0[1− 2cosθ +
12
(1 + cos2θ)]dθ
= r2[32θ − 2senθ +
14sen2θ]2π0
= r2(32· 2π) = 3πr2.
Figura 6.16: Arco da ciclóide.
6.3.3 Comprimento de Arco
Sabemos que, se uma curva C é dada na forma y = F (x), a ≤ x ≤
b e F ′ for contínua, então o comprimento L da curva C é dado por
L =∫ b
a
√1 +
(dy
dx
)2
dx
Se a curva C for dada por equações paramétricas x = f(t), y =
g(t), α ≤ t ≤ β, onde f ′ e g′ são contínuas em [α, β] e for percor-
rida exatamente uma vez quando t aumenta de α para β, então
adaptando a fórmula anterior, obtemos
L =∫ β
α
√(dx
dt
)2
+(dy
dt
)2
dt.
101

Equações Paramétricas
Exemplo 6.3.4. Encontre o comprimento de arco da curva x =
sen t− tcos t, y = cos t+ tcos t, −1 ≤ t ≤ 1.
Solução:
Temos que√(dx
dt
)2
+(dy
dt
)2
=√
(tsen t)2 + (tcos t)2 =√t2 = |t|
Logo,
L =∫ 1
−1
√(dx
dt
)2
+(dy
dt
)2
dt =∫ 1
−1|t|dt =
∫ 0
−1(−t)dt+
∫ 1
0tdt = 1.
Figura 6.17: Curva referente ao Exemplo 6.3.4.
Neste caso, dizemos que a curva C é parametrizada pelo com-
primento de arco.
6.3.4 Área de Superfície
Dada uma curva C com equações paramétrica x = f(t), y =
g(t), α ≤ t ≤ β onde f ′, g′ são contínuas e g(t) ≥ 0, queremos
calcular a área da superfície gerada à partir da rotação da curva
C em torno do eixo-x. A área resultante é dada por
S =∫ β
α2πy
√(dx
dt
)2
+(dy
dt
)2
dt.
102

Livro de Cálculo II
6AULA
Exemplo 6.3.5. Mostre que a área da superfície de uma esfera
de raio r é 4πr2.
Solução:
A esfera é obtida pela rotação do semicírculo
x = rcos t y = sen t 0 ≤ t ≤ π
ao redor do eixo-x. Portanto,
S =∫ π
02πsen t
√(−rsen t)2 + (rcos t)2dt
= 2π∫ π
0rsen t
√r2(sen2t+ cos2t)dt
= 2πr2
∫ π
0sen tdt = 2πr2(−cos t)
]π0
= 4πr2.
6.4 Resumo
Nesta aula, conhecemos um novo tipo de função, as funções que a
cada valor de t associa um par ordenado (x, y) no plano. Vimos que
tais funções são úteis na descrição da trajetória de uma partícula
no plano.
Além disso, aprendemos a fazer cálculos com curvas paramétri-
cas. Em particular, resolvemos problemas envolvendo tangentes,
áreas, arco e superfície de área.
Na próxima aula, estudaremos as curvas paramétricas em co-
ordenadas polares.
6.5 Atividades
01. Elimine o parâmetro para encontrar uma equação cartesiana
da curva, esboce a curva e indique com uma seta a direção na qual
103

Equações Paramétricas
a curva é traçada quando o parâmetro aumenta.
(a) x = 3t− 5, y = 2t+ 1
(b) x = t2 − 2, y = 5− 2t, −3 ≤ t ≤ 4
(c) x = 4 cos θ, y = 5 sen θ, −π2≤ θ ≤ π
2(d) x = et, y = e−t
02. Descreva o movimento de uma partícula com posição (x, y)
dada por
x = cos2t, y = cos t
quando 0 ≤ t ≤ 4π.
03. (a) Mostre que as equações paramétricas
x = x1 + (x2 − x1)t, y = y1 + (y2 − y1)t
onde 0 ≤ t ≤ 1 descrevem o segmento de reta que une os pontos
(x1, x2) e (y1, y2).
(b) Encontre as equações paramétricas para representar o segmento
de reta de (−2, 7) até (3,−1).
04. Encontre os pontos da curva dada por
x = t4 + 1, y = t3 + t
em que a tangente é horizontal. Em que pontos a tangente é verti-
cal? Calcule a equação da reta tangente e da reta normal a curva
dada no ponto em que t = −1.
05. Encontre os pontos da curva dada por
x = 2 cos θ, y = sen 2θ
104

Livro de Cálculo II
6AULA
em que a tangente é horizontal. Em que pontos a tangente é ver-
tical? Calcule a equação da reta tangente a curva dada no ponto
em que θ = π2 .
06. Calcule o comprimento da curva dada por
x = et + e−t, y = 5− 2t
para 0 ≤ t ≤ 3.
07. Calcule a área da superfície obtida pela rotação da curva dada
por
x = 3t− t3, y = 3t2, 0 ≤ t ≤ 1
ao redor do eixo x.
6.6 Comentário das Atividades
Essas atividades tem o objetivo de você (aluno) exercitar os con-
ceitos desenvolvidos nesta aula.
As atividades 01, 02 e 03 são referentes ao estudo das curvas
paramétricas no plano. Se conseguiu resolve-las, então você apren-
deu a descrever o movimento de uma partícula no plano.
As atividades 04, 05, 06 e 07 são referentes ao cálculo com
curvas paramétricas. Cálculo de retas tangentes, retas normais,
comprimento de arco e área de superfícies de rotação. Se conseguiu
resolver todas essas atividades. Parabéns. Você sabe fazer cálculo
com curvas paramétricas.
105

Equações Paramétricas
6.7 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 2).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
106

7AULA
1LIVRO
Curvas Polares
META
Estudar as curvas planas em coor-
denadas polares (Curvas Polares).
OBJETIVOS
Estudar movimentos de partículas
no plano. Cálculos com curvas
planas em coordenadas polares.
PRÉ-REQUISITOS
Curvas Paramétricas (Aula 06).

Curvas Polares
7.1 Introdução
Até agora temos usado as coordenadas cartesianas para representar
um ponto no plano, por um par ordenado de números, chamados
coordenadas, que são distâncias dirigidas a partir de dois eixos
perpendiculares. Nesta aula descreveremos um sistema de coor-
denadas introduzido por Newton, denominado sistema de coorde-
nadas polares. Tal sistema de coordenadas é muito útil no estudo
de curvas no plano.
Escreveremos as curvas no plano em coordenadas polares. Além
disso, faremos os cálculos relativos as tangentes, ao comprimento
de arco e as áreas delimitadas por curvas no plano, utilizando co-
ordenadas polares.
7.2 Coordenadas Polares
Escolhemos um ponto no plano conhecido como pólo (ou origem) e
o denominamosO. Então, desenhamos um raio (semi-reta) começando
de O, chamado eixo polar. Esse eixo é geralmente desenhado hor-
izontalmente para a direita e corresponde ao eixo x positivo nas
coordenadas cartesianas.
Se P for qualquer ponto no plano, seja r a distância de O a P
e seja θ o ângulo entre o eixo polar e a reta OP como na Figura
7.18. Daí o ponto P é representado pelo par ordenado (r, θ) e r, θ
são denominados coordenadas polares de P.
Usamos a convenção de que um ângulo é positivo se for medido
no sentido anti-horário a partir do eixo polar e negativo se for
medido no sentido horário. Se P = O, então r = 0, e concordamos
que (0, θ) representa o pólo para quaisquer valor de θ.
108

Livro de Cálculo II
7AULA
Figura 7.18: Sistema de Coordenadas Polares.
Exemplo 7.2.1. Plote os pontos cujas coordenadas polares são
(a) (1, 5π4 ) (b) (2, 3π) (c) (2, −2π
3 ) (d) (−3, 3π4 )
Solução: Os pontos são plotados na Figura 7.19.
Figura 7.19: Figura referente ao Exemplo 7.2.1
No sistema de coordenadas cartesianas cada ponto tem ape-
nas uma representação, mais no sistema de coordenadas polares
cada ponto tem muitas representações. De fato, como uma ro-
tação completa no sentido anti-horário é dada por um ângulo 2π,
o ponto representado pelas coordenadas polares (r, θ) é também
representado por
(r, θ + 2nπ) e (−r, θ + (2n+ 1)π)
onde n é qualquer inteiro.
A relação entre as coordenadas polares e cartesianas pode ser
vista a partir da Figura 7.20, na qual o pólo corresponde à origem
e o eixo polar coincide com o eixo x positivo. Se o ponto P tiver
coordenadas cartesianas (x, y) e coordenadas polares (r, θ), então,
109

Curvas Polares
Figura 7.20: Coordenadas Cartesianas ↔ Coordenadas Polares.
a partir da figura, temos:
cosθ =x
rsenθ =
y
r
e assim,
x = rcosθ y = rsenθ. (7.1)
As Equações (7.1) nos permitem encontrar as coordenadas carte-
sianas de um ponto quando as coordenadas polares são dadas. Para
encontrar r e θ onde x e y são conhecidos, usaremos as equações
r2 = x2 + y2 tgθ =y
x. (7.2)
que podem ser deduzidas a partir das Equações (7.1).
Exemplo 7.2.2. Converta o ponto (3, π2 ) de coordenadas polares
para cartesianas.
Solução: Como r = 3 e θ = π2 , as Equações (7.1) fornecem
x = rcosθ = 3cosπ
2= 3 · 0 = 0
y = rsenθ = 3senπ
2= 3 · 1 = 3
Portanto, o ponto é (0, 3) nas coordenadas cartesianas.
110

Livro de Cálculo II
7AULA
Exemplo 7.2.3. Represente o ponto com coordenadas cartesianas
(1,−1) em termos de coordenadas polares.
Solução: Se escolhermos r positivo, então a Equação (7.2) fornece
r =√x2 + y2 =
√12 + (−1)2 =
√2
tgθ =y
x= −1
Como o ponto (1,−1) estão no quarto quadrante, podemos escol-
her θ = −π4 ou θ = 7π
4 . Então uma resposta possível é (√
2,−π4 );
e outra é (√
2, 7π4 ).
Exercícios:
01. Plote o ponto cujas coordenadas polares são dadas. Então en-
contre dois outros pares de coordenadas polares desse ponto, um
com r > 0 e outro com r < 0. Encontre as coordenadas cartesianas
do ponto.
(a)(
1,π
2
)(b)
(−2,
π
4
)(c)(
2,−π4
)(d)
(−2,−π
2
)(e)(
3,π
2
)(f)(−2,−5π
6
)02. As coordenadas cartesianas de um ponto são dadas. Encontre
as coordenadas polares do ponto. Plote-os.
(a) (1, 1) (b)(
2√
3, −2)
(c)(−1,−
√3)
(d) (−2,−3)
03. Esboce a região do plano que consiste em pontos cujas coor-
denadas polares satisfazem as condições dadas.
(a) 1 ≤ r ≤ 2
111

Curvas Polares
(b) r ≥ 0,π
3≤ θ ≤ 2π
3(c) −1 ≤ r ≥ 1,
π
4≤ θ ≤ 3π
4
04. (a) Encontre uma fórmula para a distância entre os pontos
com coordenadas polares (r1, θ1) e (r2, θ2).
(b) Encontre a distância entre os pontos com coordenadas polares(3,π
2
)e(−2,−5π
6
).
Observação 7.3. Conseguiu fazer todos esses exercícios??? SIM!!!
Ótimo, você já pode continuar seus estudos relativos à essa aula.
Se você sentiu dificuldades em resolver esses exercícios, volte a
estudar as coordenadas polares, antes de prosseguir nesta aula.
7.3 Curvas Polares
Uma curva polar é representada por uma equação r = f(θ), ou
mais geralmente, F (r, θ) = 0 e seu gráfico consiste em todos os
pontos P que têm pelo menos uma representação (r, θ) cujas coor-
denadas satisfazem a equação.
Exemplo 7.3.1. A circunferência de raio 3 e centro na origem é
representada pela equação polar r = 3. De fato, temos que x2 +
y2 = r2, logo x2 + y2 = 9.
Exemplo 7.3.2. A curva com equação polar r = 2cosθ é uma
circunferência com centro em (1, 0) e raio 1. De fato, na Figura
7.22 encontramos os valores de r para alguns valores convenientes
de θ e plotamos os pontos correspondentes (r, θ). Então juntamos
esses pontos para esboçar a curva.
112

Livro de Cálculo II
7AULA
Figura 7.21: Circunferência de equação r = 3.
Vamos agora converter a equação dada em uma equação carte-
siana, usando as Equações (7.1) e (7.2). A partir de x = rcosθ,
temos cosθ = xr ; assim, a equação r = 2cosθ torna-se r
2 = xr , que
fornece
2x = r2 = x2 + y2 ou x2 + y2 − 2x = 0
Completando o quadrado, obtemos
(x− 1)2 + y2 = 1
que é uma equação do círculo com centro em (1, 0) e raio 1.
Figura 7.22: Circunferência de equação r = 2cos θ.
Exemplo 7.3.3. A curva polar r = 1+senθ é denominada cardióide
porque tem o formato parecido com o de um coração. Plotando a
cardióide através do Software Winplot, obtemos a Figura 7.23:
113

Curvas Polares
Figura 7.23: Cardióide
Exemplo 7.3.4. A curva polar r = cos2θ é denominada rosa
de quatro pétalas (ou 4−rosácea). Plotando a curva através do
Software Winplot, obtemos a Figura 7.24:
Figura 7.24: 4−rosácea.
7.4 Tangentes as Curvas Polares
Para encontrar a reta tangente a uma curva polar r = f(θ), va-
mos considerar θ como um parâmetro e escrever suas equações
paramétricas como
x = rcosθ = f(θ)cosθ y = rsenθ = f(θ)senθ
114

Livro de Cálculo II
7AULA
Então, usando o método para encontrar inclinações de curvas paramétri-
cas(Equação (6.2)), e a Regra do Produto temos:
dy
dx=
dydθdxdθ
=drdθsenθ + rcosθdrdθ cosθ − rsenθ
(7.1)
Localizamos as tangentes horizontais achando os pontos onde dydθ =
0 e dxdθ 6= 0. Do mesmo modo, localizamos as tangentes verticais
nos pontos onde dydθ 6= 0 e dx
dθ = 0.
Exemplo 7.4.1. (a) Para a cardióide r = 1 + cosθ, calcule a in-
clinação da reta tangente quando θ = π6 .
(b) Encontre os pontos na cardióide onde a reta tangente é hori-
zontal ou vertical.
Solução: Usando a Equação (7.1) com r = 1 + cosθ, obtemos
dy
dx=
drdθsenθ + rcosθdrdθ cosθ − rsenθ
=−senθ senθ + (1 + cosθ)cosθ−senθ cosθ − (1 + cosθ)senθ
=−sen2θ + cosθ + cos2θ
−2senθ cosθ − senθ=
2cos2θ + cosθ − 1−senθ(2cosθ + 1)
(a) A inclinação da tangente no ponto onde θ = π6 é
dy
dx=
2cos2 π6 + cosπ6 − 1
−senπ6 (2cosπ6 + 1)=
2(√
32
)2+√
32 − 1
−12
(2√
32 + 1
)=
12 +
√3
2
−12
(√3 + 1
) = −1
(b) Observe que
dy
dθ= 2cos2θ + cosθ − 1 = 0 quando θ =
π
3, π,
5π3
dx
dθ= −senθ(2cosθ + 1) = 0 quando θ = 0,
2π3, π,
4π3
Portanto existem tangentes horizontais nos pontos (32 ,
π3 ), (3
2 ,5π3 )
e tangentes verticais em (2, 0), (12 ,
2π3 ), (1
2 ,4π3 ). Quando θ = π, dxdθ
115

Curvas Polares
e dydθ são 0 e, dessa forma, devemos ser cuidadosos. Usando a Regra
de L’Hôspital, temos
limθ−→π−
dy
dx= lim
θ−→π−2cos2θ + cosθ − 1−senθ(2cosθ + 1)
= limθ−→π−
−2cosθsenθ − senθ−cosθ(2cosθ + 1)− senθ(−2senθ)
= 0
Da mesma forma, prova-se que
limθ−→π+
dy
dx= 0.
Então existe uma reta horizontal no pólo (Veja Figura 7.25).
Figura 7.25: Cardióide
7.5 Áreas e Comprimentos em Coordenadas
Polares
Seja R a região ilustrada na Figura 7.26, limitada pela curva polar
r = f(θ) e pelos raios θ = a e θ = b, onde f é uma função contínua
e positiva onde 0 < b− a ≤ 2π.
Dividimos o intervalo [a, b] em n subintervalos iguais, cada qual
com comprimento ∆θ = b−an . Sejam a = θ0 < θ1 < · · · < θn = b
116

Livro de Cálculo II
7AULA
Figura 7.26: Área entre curvas polares.
os pontos dessa divisão. Os raios θ = θi, i = 1, · · · , n, dividem a
figura em n setores, o i−ésimo deles estando compreendido entre
os raios θ = θi−1 e θ = θi possui área aproximadamente igual a
área do setor de um círculo com ângulo central ∆θ e raio f(θ∗i )
para algum θ∗i em [θi−1, θi], ou seja, a área do i−ésimo setor é
dada por f(θ∗i ) ·f(θ∗i )∆θ
2 = f(θ∗i )2
2 ∆θ. (Veja Figura 7.27)
Figura 7.27: Partição da região em setores de um círculo.
Portanto, a área procurada é a soma de todas essas áreas (soma
de Riemann), isto é,
A =n∑i=1
f(θ∗i )2
2∆θ.
117

Curvas Polares
Tomando seu limite quando n −→∞, obtemos a integral
A =∫ b
a
12
[f(θ)]2dθ (7.1)
A fórmula (7.1) é freqüentemente escrita como
A =∫ b
a
12r2dθ (7.2)
entendendo que r = f(θ).
Exemplo 7.5.1. Calcule a área da cardióide r = 1 + cosθ.
Solução: A curva cardióide esta plotada na Figura 7.25. Para
calcular a área, usaremos a fórmula 7.2:
A =∫ 2π
0
12
(1 + cosθ)2dθ =12
∫ 2π
0(1 + 2cosθ + cos2θ)dθ =
3π2.
Exemplo 7.5.2. Calcule a área limitada por uma pétala da 4-
rosácea r = cos2θ.
Solução: Note a partir da Figura 7.28 que a região limitada por
uma pétala da 4-rosácea é varrida pelo raio que gira de θ = π4 até
θ = −π4 . Desta forma, a fórmula (7.2) fornece
L =12
∫ π4
−π4
cos22θdθ =∫ π
4
0cos22θdθ
=∫ π
4
0
12
(1 + cos4θ)dθ =12
[θ +14sen4θ]
π40 =
π
8.
Quando uma curva é dada em coordenadas polares, por exem-
plo, r = f(θ), obtemos facilmente suas equações paramétricas em
termos do ângulo como parâmetro, ou seja:
x = rcosθ = f(θ)cosθ
y = rsenθ = f(θ)senθ
118

Livro de Cálculo II
7AULA
Figura 7.28: 4−rosácea
Segue que(dx
dθ
)2
+(dy
dθ
)2
= [f ′(θ)cosθ − f(θ)senθ]2 + [f ′(θ)senθ + f(θ)cosθ]2
= f ′(θ)2 + f(θ)2.
Logo, o comprimento de arco da curva com equação polar r =
f(θ), a ≤ θ ≤ b é
L =∫ b
a
√f(θ)2 + f ′(θ)2dθ
ou
L =∫ b
a
√r2 +
(dr
dθ
)2
dθ. (7.3)
Exemplo 7.5.3. Calcule o comprimento da curva polar r = θ2, 0 ≤
θ ≤ 2π.
Solução: A curva é mostrada na Figura 7.29. Seu comprimento
total é dado pelo intervalo de parâmetro 0 ≤ θ ≤ 2π, assim a
fórmula 7.3 fornece
119

Curvas Polares
L =∫ 2π
0
√θ2 + (2θ)2dθ =
∫ 2π
0
√5θ2dθ =
√5∫ 2π
0θdθ = 2
√5π2.
Figura 7.29: Figura referente ao Exemplo 7.5.3
7.6 Resumo
Nesta aula, introduzimos as coordenadas polares. Além disso, tra-
balhamos com as curvas planas em coordenadas polares. Aprende-
mos a fazer cálculos com curvas polares. Em particular, resolvemos
problemas envolvendo tangentes, áreas, arco e superfície de área.
7.7 Atividades
01. Encontre a equação cartesiana para a curva descrita pela
equação polar dada:
(a) r = 2 (b) r = 3 sen θ
(c) r cos θ = 1 (d) r = 2 senθ + 2 cosθ
02. Encontre a equação polar para a curva descrita pela equação
cartesiana dada:(a) x = 3 (b) x2 + y2 = 9
(c) x = −y2 (d) x+ y = 9
120

Livro de Cálculo II
7AULA
03. Esboce a curva com equação dada:
(a) θ = −π6
(b) r2 − 3r + 2 = 0
04. Esboce a curva com equação dada, calcule a área limitada por
ela e encontre os pontos na curva onde a reta tangente é horizontal
ou vertical:(a) r = 3 cosθ (b) r = cos θ + sen θ
(c) r = sen θ (d) r = −3 cos θ
(e) r = 2 cos 4θ (f) r = sen 5θ
(g) r = 1 + sen θ (h) r = cos 2θ
05. Encontre a área da região que é limitada pelas curvas dadas
que está no setor especificado.
(a) r =√θ, 0 ≤ θ ≤ π
4;
(b) r = sen θ,π
3≤ θ ≤ 2π
3.
06. Encontre a área da região dentro de um laço da curva.
(a) r = sen 2θ;
(b) r = 1 + 2sen θ.
07. Encontre a área da região que está dentro da curva r =
2 + sen θ e fora da curva r = 3sen θ.
08. Encontre a área da região que está dentro das curvas r = sen θ
e r = cos θ.
09. Calcule o comprimento da curva polar:
(a) r = 3sen θ, 0 ≤ θ ≤ π
3;
(b) r = θ, 0 ≤ θ ≤ 2π.
121

Curvas Polares
7.8 Comentário das Atividades
Essas atividades, são referentes aos assuntos discutidos no decorrer
desta aula e têm o objetivo de você (aluno) exercitar os conceitos
aprendidos.
Lembre-se, sempre, que existem tutores para ajuda-los na res-
olução dessas atividades.
7.9 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 2).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
122

8AULA
1LIVRO
Funções com ValoresVetoriais
META
Estudar funções de uma variável
real a valores em R3
OBJETIVOS
Estudar movimentos de partículas
no espaço.
PRÉ-REQUISITOS
Ter compreendido os conceitos de
funções reais e de curvas no plano.

Funções com Valores Vetoriais
8.1 Introdução
Nesta aula, vamos estudar funções que a cada número real de um
intervalo da reta (domínio) associa um único vetor no espaço. Tais
funções serão úteis no estudo de curvas espaciais, que faremos na
próxima aula.
8.2 Definições e Propriedades
Uma função de uma variável real a valores em R3 ou função vetorial
é uma função ~F : I −→ R3 onde I é um subconjunto de R. Uma
tal função associa a cada t ∈ I, um único vetor ~F (t) ∈ R3. O
conjunto I é o domínio de ~F e será indicado por D~F . A imagem
ou trajetória de ~F é o lugar geométrico, em R3, descrito por ~F (t),
quando t varia em I.
Como uma função vetorial associa a cada t ∈ I, um único vetor
~F (t) ∈ R3, então existem, e são únicas, 3 (três) funções a valores
reais Fi : I −→ R, i = 1, 2, 3, tais que, qualquer que seja t ∈ I,
~F (t) = (F1(t), F2(t), F3(t)) ou ~F (t) = F1(t)~i+F2(t)~j+F3(t)~k.
Tais funções são denominadas funções componentes de F .
Exemplo 8.2.1. ~F (t) = (t2, sen t, 2) é uma função vetorial e suas
funções componentes são:
F1(t) = t2, F2(t) = sen t e F3(t) = 2.
Exemplo 8.2.2. Seja ~F (t) = t~i +√t~j + sen 3t~k. As funções
componentes de ~F são as funções:
F1(t) = t, F2(t) =√t e F3(t) = sen 3t.
124

Livro de Cálculo II
8AULA
Sejam ~F , ~G : I −→ R3 duas funções de uma variável real a
valores em R3, f : I −→ R uma função a valores reais e k uma
constante. Definimos:
(a) a função ~F + ~G : I −→ R3 dada por
(~F + ~G)(t) = F (t) + ~G(t)
denomina-se soma de ~F e ~G.
(b) a função k ~F : I −→ R3 dada por
(k ~F )(t) = k ~F (t) + ~G(t)
é o produto de ~F pela constante k.
(c) a função f · ~F : I −→ R3 dada por
(f · ~F )(t) = f(t)~F (t)
é o produto de ~F pela função escalar f .
(d) a função ~F · ~G : I −→ R dada por
(F ·G)(t) = F (t) ·G(t)
onde ~F (t) · ~G(t) = F1(t) ·G1(t) + F2(t) ·G2(t) + F3(t) ·G3(t), é o
produto escalar de F e G.
(e) a função ~F × ~G : I −→ R3 dada por
(~F × ~G)(t) = ~F (t)× ~G(t) =
∣∣∣∣∣∣∣∣∣~i ~j ~k
F1(t) F2(t) F3(t)
G1(t) G2(t) G3(t)
∣∣∣∣∣∣∣∣∣= [F2(t)G3(t)− F3(t)G2(t)]~i+ [F3(t)G1(t)− F1(t)G3(t)]~j
+[F1(t)G2(t)− F2(t)G1(t)]~k
denomina-se produto vetorial de ~F e ~G.
125

Funções com Valores Vetoriais
Exemplo 8.2.3. Sejam ~F (t) = (t, sen t, 2), ~G(t) = (3, t, t2) e
f(t) = et. Temos:
(a) o produto escalar de ~F e ~G é a função ~H dada por
~H(t) = ~F (t) · ~G(t) = 3t+ t sen t+ 2et.
(b) o produto de ~F pela função escalar f é a função com valores
em R3 dada por
f(t)~F (t) = et(t, sen t, 2) = (tet, etsen t, 2et).
(c) o produto vetorial de ~F e ~G é a função a valores em R3 dada
por
(~F × ~G)(t) = ~F (t)× ~G(t) =
∣∣∣∣∣∣∣∣∣~i ~j ~k
t sen t 2
3 t t2
∣∣∣∣∣∣∣∣∣= [t2sen t− 2t]~i+ [6− t3]~j + [t2 − 3sen t]~k
8.3 Limite e Continuidade
O limite de uma função vetorial ~F é definido tomando-se os limites
de suas funções componentes como se segue:
Se limt−→a
~F (t) = L, essadefinição equivale adizer que o compri-mento, a direção eo sentido do vetor~F (t) se aproximamdo comprimento, dadireção e do sentido dovetor L.
Definição 8.9. Se ~F (t) = (F1(t), F2(t), F3(t)), então
limt−→a
~F (t) = ( limt−→a
F1(t), limt−→a
F2(t), limt−→a
F3(t))
desde que os limites das funções componentes existam.
Exemplo 8.3.1. Determine limt−→0
~F (t) onde ~F (t) = (t2,√t+ 1,
√5− t).
Solução:
limt−→0
~F (t) = ( limt−→0
t2, limt−→0
√t+ 1, lim
t−→0
√5− t = (0, 1,
√5).
126

Livro de Cálculo II
8AULA
Uma função vetorial ~F é contínua em t0 se
limt−→t0
~F (t) = ~F (t0).
Segue da Definição 8.9 que ~F é contínua em t0 se e somente se suas
funções componentes F1, F2 e F3 são contínuas em t0.
Dizemos que ~F é contínua em J ⊂ I de ~F for contínua em todo
t ∈ J ; dizemos, simplesmente, que ~F é contínua se for contínua em
cada t do seu domínio.
8.4 Derivada
A derivadad~F
dtde uma função vetorial ~F é definida do mesmo
modo como foi feito para as funções reais:
Definição 8.10. Uma função vetorial ~F tem derivadad~F
dtse
d~F
dt= lim
h−→0
~F (t+ h)− ~F (t)h
.
Notação 1.d~F
dt(t) = ~F ′(t)
Observação 8.4. Observe que
limh−→0
~F (t+ h)− ~F (t)h
=(
limh−→0
F1(t+ h)− F1(t)h
, limh−→0
F2(t+ h)− F2(t)h
, limh−→0
F3(t+ h)− F3(t)h
)= (F ′1(t), F ′2(t), F ′3(t)).
O próximo teorema mostra que as fórmulas de diferenciação
para funções reais têm suas equivalentes para as funções vetoriais.
Teorema 8.20. Sejam ~F , ~G : I −→ R3, f : I −→ R deriváveis
em A. Então, f · ~F e ~F · ~G serão, também, diferenciáveis em I e
1.d
dt[f · ~F ] =
df
dt· ~F + f · d
~F
dt;
127

Funções com Valores Vetoriais
2.d
dt[~F · ~G] =
d~F
dt· ~G+ ~F · d
~G
dt;
3.d
dt[~F × ~G] =
d~F
dt× ~G+ ~F × d~G
dt;
4.d
dt[~F (f(t))] =
df
dt· d~F
dt(f(t)).
A demonstração desse teorema segue diretamente da Obser-
vação 8.4 e das fórmulas de diferenciação correspondentes para a
função real. Deste modo, tal demonstração ficará para exercício.Geometricamente, esseresultado indica que, sea curva está em umaesfera com o centro naorigem, então o ve-tor tangente é sempreperpendicular ao vetorposição ~F (t).
Exemplo 8.4.1. Mostre que, se ‖~F (t)‖ = c (uma constante),
então ~F ′(t) é ortogonal a ~F (t) para todo t.
Demonstração: Como
~F (t) · ~F (t) = ‖~F (t)‖2 = c2
e c2 é uma constante, segue da Fórmula 4 do Teorema 8.20 que
0 =d
dt[~F (t) · ~F (t)] = ~F ′(t) · ~F (t) + ~F (t) · ~F ′(t) = 2~F ′(t) · ~F (t).
Então, ~F ′(t) · ~F (t) = 0, o que implica que ~F ′(t) é ortogonal a ~F (t).
8.5 Integral
Seja ~F = (F1, F2, F3) definida em [a, b]. Dizemos que ~F é inte-
grável em [a, b] se cada componente de ~F o for. Além disso, se ~F
for integrável em [a, b], então∫ b
a
~F (t)dt =(∫ b
aF1(t)dt,
∫ b
aF2(t)dt,
∫ b
aF3(t)dt
)=
∫ b
aF1(t)dt ·~i+
∫ b
aF2(t)dt ·~j +
∫ b
aF3(t)dt · ~k.
Se ~F for integrável em [a, b] e ~G for uma primitiva de ~F em
[a, b] teremos ∫ b
a
~F (t)dt = ~G(t)]ba
= ~G(b)− ~G(a).
128

Livro de Cálculo II
8AULA
De fato,
d~G
dt= ~F ⇔ dGi
dt= Fi, i = 1, 2, 3.
então∫ b
a
~F (t)dt =(∫ b
aF1(t)dt,
∫ b
aF2(t)dt,
∫ b
aF3(t)dt
)= (G1(b)−G1(a), G2(b)−G2(a), G3(b)−G3(a))
= ~G(b)− ~G(a).
Exemplo 8.5.1. Se ~F (t) = et~i+ 2~j + t~k, então∫~F (t)dt =
(∫etdt
)~i+
(∫2dt)~j +
(∫tdt
)~k
= et~i+ 2t~j +t2
2~k + C
onde C é um vetor constante de integração, e∫ 1
0
~F (t)dt =[et~i+ 2t~j +
t2
2~k
]1
0
= e1~i+ 2~j +12~k − e0~i
= (e− 1)~i+ 2~j +12~k.
8.6 Resumo
Uma função de uma variável real a valores em R3 é uma função do
tipo ~F : I ⊂ R −→ R3 dada por
~F (t) = (F1(t), F2(t), F3(t)) ou ~F (t) = F1(t)~i+F2(t)~j+F3(t)~k.
Se ~F (t) = (F1(t), F2(t), F3(t)), então
limt−→a
~F (t) = ( limt−→a
F1(t), limt−→a
F2(t), limt−→a
F3(t))
desde que os limites das funções componentes existam.
129

Funções com Valores Vetoriais
Uma função vetorial ~F é contínua em t0 se
limt−→t0
~F (t) = ~F (t0).
Uma função vetorial ~F = (F1(t), F2(t), F3(t)) tem derivadad~F
dtse
d~F
dt= lim
h−→0
~F (t+ h)− ~F (t)h
.
Vimos, também, que
~F ′(t) = (F ′1(t), F ′2(t), F ′3(t)).
Seja ~F = (F1, F2, F3) definida em [a, b]. Dizemos que ~F é
integrável em [a, b] se cada componente de ~F o for. Além disso, se
~F for integrável em [a, b], então∫ b
a
~F (t)dt =(∫ b
aF1(t)dt,
∫ b
aF2(t)dt,
∫ b
aF3(t)dt
)=
∫ b
aF1(t)dt ·~i+
∫ b
aF2(t)dt ·~j +
∫ b
aF3(t)dt · ~k.
Na próxima aula, usaremos essas funções vetoriais para estudar
os movimentos de partículas no espaço.
8.7 Atividades
01. Sejam ~F (t) = (t, 2, t2) e ~G(t) = (t, −1, 1). Calcule:
(a) ~F (t) · ~G(t) (b) e−t ~F (t)
(c) ~F (t)− 2~G(t) (d) ~F (t)× ~G(t)
02. Calcule:
(a) limt−→1
~F (t), onde ~F (t) =(√
t− 1t− 1
, t2,t− 1t
)(b) lim
t−→0~F (t), onde ~F (t) = (t, cos t, sen t)
130

Livro de Cálculo II
8AULA
03. Determine o conjunto dos pontos de continuidade. Justifique
sua resposta.
(a) ~F (t) = t~i+√t~j + 3~k.
(b) ~F (t) =√t− 1~i+
√t+ 1~j + et~k.
04. Sejam ~F , ~G : I −→ R3 e f : I −→ R contínuas em t0 ∈ I.
Prove que ~F + ~G, f ~F , ~F · ~G e ~F × ~G são contínuas em t0.
05. Determine ~r = ~r(t) sabendo que
d~r
dt= sen t~i+ cos 2t~j +
11 + t
~k, t ≥ 0, e ~r(0) =~i−~j + 2~k.
06. Calcule
(a)∫ 1
0(t~i+ et~j)dt;
(b)∫ 1
−1
(sen 3t,
11 + t2
, 1)dt.
07. Sejam ~F (t) = t~i+~j + et~k e ~G(t) =~i+~j + ~k. Calcule
(a)∫ 1
0(~F (t)× ~G(t))dt;
(b)∫ 1
0
(~F (t) · ~G(t)
)dt.
8.8 Comentário das Atividades
Essas atividades, são referentes aos assuntos discutidos no decorrer
desta aula e têm o objetivo de você (aluno) exercitar os conceitos
aprendidos.
Lembre-se, sempre, que existem tutores para ajuda-los na res-
olução dessas atividades.
131

Funções com Valores Vetoriais
8.9 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 2).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
132

9AULA
1LIVRO
Curvas Espaciais
META
Estudar as curvas no espaço (R3).
OBJETIVOS
Descrever o movimento de objetos
no espaço.
PRÉ-REQUISITOS
Funções vetoriais (Aula 08).

Curvas Espaciais
9.1 Introdução
Na aula anterior, estudamos as funções vetoriais. Nesta aula, estu-
daremos o movimento de objetos no espaço utilizando tais funções.
9.2 Movimentos no espaço
Para descrever o movimento de uma partícula no espaço precisamos
explicar onde a partícula está a cada instante de tempo t de um
certo intervalo. Assim, a cada instante t no intervalo considerado
I, corresponde um ponto ~r(t) e o movimento é descrito por uma
função vetorial ~r : I −→ R3.
Suponha que f, g e h sejam funções reais contínuas em um
intervalo I da reta. Então o conjunto C de todos os pontos (x, y, z)
no espaço para os quais x = f(t)
y = g(t)
z = h(t)
(9.1)
e t varia no intervalo I é chamado curva espacial ou curva em R3.
As equações em (9.1) são denominadas equações paramétricas de
C e t é denominado o parâmetro.
Se considerarmos a função vetorial ~r(t) = (f(t), g(t), h(t)), en-
tão ~r(t) é um vetor posição do ponto P (f(t), g(t), h(t)) sobre C.
Assim, qualquer função vetorial define uma curva espacial C que
é traçada pela ponta do vetor em movimento.
Definição 9.11. Seja ~r : I −→ R3 uma curva. O traço de ~r é a
imagem do intervalo I por ~r.
134

Livro de Cálculo II
9AULA
Figura 9.30: Traço de ~r.
Exemplo 9.2.1. Descreva o traço da curva espacial dada por
~r(t) = (2− 3t, −t, −2 + t).
Solução: As equações paramétricas correspondentes são
x = 2− 3t, y = −t, z = −2 + t
que são as equações paramétricas de uma reta passando pelo ponto
(2, 0,−2) e paralela ao vetor (−3,−1, 1). Outro modo de ver é
observar que a função pose ser escrita como ~r = ~r0 + tv, onde
~r0 = (2, 0,−2) e v = (−3,−1, 1). (Ver Figura 9.31)
Exemplo 9.2.2. Esboce o traço da curva cuja equação vetorial é
dada por
~r(t) = cos t~i+ sen t~j + t~k t ∈[0,
5π2
].
135

Curvas Espaciais
Figura 9.31: Traço da curva dada no Exemplo 9.2.1.
Solução: As equações paramétricas para essa curva sãox = cos t
y = sen t
z = t
Como x2 + y2 = cos2t + sen2t = 1, a curva precisa pertencer ao
cilindro circular x2 + y2 = 1. O ponto (x, y, z) está diretamente
acima do ponto (x, y, 0), que se move no sentido anti-horário em
torno da circunferência x2 + y2 = 1 no plano xy. Como z = t, a
curva faz uma espiral para cima ao redor de um cilindro quando t
aumenta. A curva, mostrada na Figura 9.32, é chamada hélice.
Nos exemplos 9.2.1 e 9.2.2 demos as equações vetoriais das
curvas e pedimos uma descrição geométrica ou esboço delas. No
proximo exemplo daremos uma descrição geométrica da curva e
pediremos para determinar suas equações paramétricas.
Exemplo 9.2.3. Determine a equação vetorial para o segmento
de reta ligando o ponto P (1, 3,−2) ao ponto Q(2,−1, 3).
Solução: Uma equação para o segmento de reta de P a Q (Ver
136

Livro de Cálculo II
9AULA
Figura 9.32: Hélice
Figura 9.33):
~r(t) = (1− t)(1, 3,−2) + t(2,−1, 3), 0 ≤ t ≤ 1
ou
~r(t) = (1 + t, 3− 4t,−2 + 5t), 0 ≤ t ≤ 1.
Como vimos, a função vetorial ~r tem derivada ~r′(t) em t ∈ I se
~r′(t) = limh−→0
~r(t+ h)−~r(t)h
Lembre que, se~r(t) = (f(t), g(t), h(t)), então~r′(t) = (f ′(t), g′(t), h′(t)).
A Figura 9.34 mostra que o vetor~r(t+ h)−~r(t)
htem a di-
reção que, conforme h tende a zero, aproxima-se da direção que
costumamos chamar a direção tangente à curva ~r em ~r(t).
A derivada ~r′(t) se existe e é diferente do vetor nulo é chamado
de vetor tangente a ~r em ~r(t). Deste modo, a equação da reta
tangente à curva ~r em ~r(t0) é dada por
(x, y, z) = ~r(t0) + t~r′(t0), t ∈ R.
137

Curvas Espaciais
Figura 9.33: Segmento de reta ligando o ponto P (1, 3,−2) ao ponto
Q(2,−1, 3).
Figura 9.34: Vetor Secante (Figura à esquerda) e Vetor Tangente
(Figura à direita).
Teremos ocasião de considerar o versor tangente, dado por
T (t) =~r′(t)‖~r′(t)‖
.
Temos que ‖T (t)‖ = 1, para todo t ∈ I, logo, segue do Exemplo
8.4.1, que T (t) · T ′(t) = 0, ou seja, os vetores T (t) e T ′(t) são
138

Livro de Cálculo II
9AULA
ortogonais. O vetor
N(t) =T ′(t)‖T ′(t)‖
é denominado vetor normal principal unitário a ~r em ~r(t).
O vetor B(t) = T (t) × N(t) é denominado vetor binormal, é
perpendicular a T e N e também é unitário. (Veja Figura 9.35)
Figura 9.35: Vetores tangente, normal e binormal.
O número
k =‖~r′(t)×~r′′(t)‖‖~r′(t)‖3
é denominado curvatura de uma curva espacial ~r em ~r(t) e mede
quão rapidamente a curva muda de direção no ponto.
Exemplo 9.2.4. Considere a hélice com equações paramétricasx = 2cos t
y = sen t
z = t
Determine as equações paramétricas para a reta tangente à hélice
no ponto (0, 1, π/2).
Solução: A equação vetorial da hélice é ~r(t) = (2cos t, sen t, t),
de modo que
~r′(t) = (−2sen t, cos t, 1).
139

Curvas Espaciais
Note que o valor do parâmetro correspondente ao ponto (0, 1, π/2)
é t = π/2, e o vetor tangente é~r′(π/2) = (−2, 0, 1). A reta tangente
que passa por (0, 1, π/2) e é paralela ao vetor (−2, 0, 1) é dada por
(x, y, z) = (−2, 0, 1) + t(0, 1, π/2), t ∈ R
ou
x = −2t
y = 1
z = π2 + t
t ∈ R.
Figura 9.36: Traço da hélice e da reta tangente.
Exemplo 9.2.5. Determine os vetores normais e binormais da
hélice circular
~r(t) = cos t~i+ sen t~j + t~k.
140

Livro de Cálculo II
9AULA
Solução: Temos que
~r′(t) = −sen t~i+ cos t~j + 1~k
‖~r′(t)‖ =√
(−sen t)2 + (cos t)2 + 1 =√
2
T (t) =~r′(t)|~r′(t)|
=1√2
(−sen t~i+ cos t~j + 1~k)
T ′(t) =1√2
(−cos t~i− sen t~j) ‖T ′(t)‖ =1√2
N(t) =T ′(t)‖T ′(t)‖
= −cos t~i− sen t~j = (−cos t, sen t, 0)
A Figura 9.37 ilus-tra o Exemplo 9.2.5mostrando os vetoresT, N e B em doispontos da hélice cir-cular. Em geral, osvetores T, N e Bcomeçando nos váriosponto, formam um con-junto de vetores or-togonais, denominadostriedro TNB, que semove ao longo da curvaquando t varia.
Figura 9.37: Triedro TNB
Isso mostra que o vetor normal em um ponto da hélice circular
é horizontal e aponta em direção ao eixo-z. O vetor binormal é
B(t) = T (t)×N(t) =1√2
~i ~j ~k
−sen t cos t 1
−cos t −sen t 0
=
1√2
(sen t, −cos t, 1).
141

Curvas Espaciais
Exemplo 9.2.6. Determine a curvatura da curva dada pela equação
vetorial ~r(t) = (t, t2, t3) em um ponto genérico e em (0, 0, 0).
Solução: Temos que
~r′(t) = (1, 2t, 3t2) ~r′′(t) = (0, 2, 6t)
‖~r′(t)‖ =√
1 + 4t2 + 9t4
~r′(t)×~r′′(t) =
∣∣∣∣∣∣∣∣∣~i ~j ~k
1 2t 3t2
0 2 6t
∣∣∣∣∣∣∣∣∣ = 6t2~i− 6t~j + 2~k
‖~r′(t)×~r′′(t)‖ =√
36t4 + 36t2 + 4 = 2√
9t4 + 9t2 + 1
Então a curvatura da curva ~r em ~r(t) é dada por
k(t) =‖~r′(t)×~r′′(t)‖‖~r′(t)‖3
=2√
9t4 + 9t2 + 1(1 + 4t2 + 9t4)3/2
Na origem, a curvatura é k(0) = 2.
9.3 Movimento no espaço: Velocidade e Acel-
eração
Nesta seção mostraremos como as idéias dos vetores tangente e nor-
mal, podem ser usadas na física para estudar o movimento de obje-
tos, sua velocidade e sua aceleração, quando eles estão se movendo
ao longo de uma curva espacial.
Suponha que uma partícula se mova no espaço de forma que
seu vetor posição no instante t seja ~r(t). Observe que o número
‖~r(t+ h)−~r(t)‖|h|
,
para h pequeno, é a velocidade média de ~r no intervalo de t a t+h.
Se ~r′(t) existe, então
‖~r′(t)‖ = limh−→0
‖~r(t+ h)−~r(t)‖|h|
.
142

Livro de Cálculo II
9AULA
De fato, notemos que(∗) Usamosa propriedade|‖−→u ‖ − ‖−→v ‖| ≤‖−→u −−→v ‖0 ≤
∣∣∣∣‖~r(t+ h)−~r(t)‖|h|
− ‖~r′(t)‖∣∣∣∣ ≤(∗)
≤∥∥∥∥~r(t+ h)−~r(t)
|h|−~r′(t)
∥∥∥∥ −→ 0, com h −→ 0.
Logo‖~r(t+ h)−~r(t)‖
|h|−→ ‖~r′(t)‖
com h −→ 0.
Assim ‖~r′(t)‖ é um limite de velocidades médias sobre um inter-
valo arbitrariamente pequeno. Por essa razão, ‖~r′(t)‖ é chamado
a velocidade (ou rapidez) da partícula que se move no espaço sob
a curva ~r no ponto ~r(t) e v(t) = ~r′(t) é dito vetor velocidade de ~r
em ~r(t).
Da mesma forma, ‖~r′′(t)‖ é a aceleração da partícula que se
move no espaço sob a curva ~r no ponto ~r(t) e a(t) = v′(t) = ~r′′(t)
é dito vetor aceleração de ~r em ~r(t).
Exemplo 9.3.1. O vetor de um objeto se movendo no espaço é
dado por ~r(t) = (t2 + 1, t3, t2 − 1). Determine a velocidade, a
rapidez e a aceleração do objeto no instante t = 1.
Solução: A velocidade e a aceleração no instante t são
v(t) = ~r′(t) = (2t, 3t2, 2t)
a(t) = ~r′′(t) = (2, 6t, 2)
e a rapidez é
‖v(t)‖ =√
(2t)2 + (3t2)2 + (2t)2 =√
8t2 + 9t4.
Quando t = 1, temos
v(1) = (2, 3, 2), a(t) = (2, 6, 2), ‖v(1)‖ =√
17.
143

Curvas Espaciais
Figura 9.38: Vetor Velocidade e Vetor Aceleração.
Exemplo 9.3.2. Uma partícula de move de uma posição inicial
~r(0) = (0, 0, 0) com velocidade inicial v(0) =~i−~j. Sua aceleração
é dada por a(t) = 4t~i+6t~j+~k. Determine sua velocidade e posição
no instante t.
Solução: Como a(t) = v′(t), temos
v(t) =∫a(t)dt =
∫(4t~i+ 6t~j + ~k)dt = 2t2~i+ 3t2~j + t~k + C
Para determinar o valor de C, usaremos o fato de que v(0) =~i−~j.
A equação anterior nos dá v(0) = C, assim C =~i−~j e
v(t) = 2t2~i+ 3t2~j + t~k +~i−~j = (2t2 + 1)~i+ (3t2 − 1)~j + t~k.
Como v(t) = ~r′(t), temos
~r(t) =∫v(t)dt =
∫((2t2 + 1)~i+ (3t2 − 1)~j + t~k)dt
=(
23t3 + t
)~i+ (t3 − t)~j +
t2
2~k +D
Para determinar o valor de D, usaremos o fato de que ~r(0) = 0. A
equação anterior nos dá ~r(0) = D, assim D = 0 e
~r(t) =(
23t3 + t
)~i+ (t3 − t)~j +
t2
2~k.
144

Livro de Cálculo II
9AULA
9.4 Comprimento de Arco
O comprimento de uma curva é a distância total percorrida pela
partícula móvel. Prova-se que dada uma curva ~r : [a, b] −→ R3,
seu comprimento é dado por
c(~r) =∫ b
a‖~r′(t)‖dt.
Vejamos uma interpretação:
Figura 9.39: Comprimento de arco.
‖~r′(ti)‖ ·∆i w comprimento de arco destacado, melhorando a
aproximação quando Deltai −→ 0.
Assim:
c(~r) = lim∆i−→0
n∑i=1
‖~r′i(ti)‖ ·∆i =∫ b
a‖~r′(t)‖dt
Observação 9.5. O Leitor interessado na dedução dessa fórmula
pode consultar, por exemplo, o livro Advanced Calculus - Buck -
pag. 321.
Exemplo 9.4.1. Considere a curva ~r : [0, 2π] −→ R2 dada por
~r(t) = (cos t, 0). É fácil ver que (Veja a Figura 9.40) que o com-
primento da curva é 4.
145

Curvas Espaciais
Figura 9.40: Traço da curva ~r(t) = (cos t, 0).
Vamos calcular agora pela definição:
c(~r) =∫ 2π
0‖~r′(t)‖dt =
∫ 2π
0‖(−sen t, 0)‖dt =
∫ 2π
0
√(−sen t)2dt
= 2∫ π
0sen tdt = 2[−cos t]π0 = 2(−cos π + cos 0) = 2(2) = 4.
Exemplo 9.4.2. Considere a hélice circular~r(t) = (cos t, sen t, t), t ∈
[0, 2π]. Seu comprimento é dado por
c(~r) =∫ 2π
0‖~r′(t)‖dt =
∫ 2π
0‖(−sen t, cos t, 1)‖dt
=∫ 2π
0
√(−sen t)2 + (cos t)2 + 1dt =
∫ 2π
0
√2dt = 2
√2π.
9.5 Resumo
Vimos nesta aula, que uma curva espacial é dada por uma função
vetorial ~r : I −→ R3.
A derivada ~r′(t) se existe e é diferente do vetor nulo é chamado
de vetor tangente a ~r em ~r(t). O versor tangente é dado por
T (t) =~r′(t)‖~r′(t)‖
.
O vetor
N(t) =T ′(t)‖T ′(t)‖
146

Livro de Cálculo II
9AULA
é denominado vetor normal principal unitário a ~r em ~r(t).
O vetor B(t) = T (t) × N(t) é denominado vetor binormal, é
perpendicular a T e N e também é unitário.
Se uma partícula se move no espaço de forma que seu vetor
posição no instante t seja ~r(t). Então sua velocidade e sua aceler-
ação no instante t são dadas por ‖~r′(t)‖ e ‖~r′′(t)‖, respectivamente.
O comprimento de uma curva é a distância total percorrida pela
partícula móvel. Prova-se que dada uma curva ~r : [a, b] −→ R3,
seu comprimento é dado por
c(~r) =∫ b
a‖~r′(t)‖dt.
9.6 Atividades
01. Esboce o gráfico da curva cuja equação vetorial é dada por:
(a) ~r(t) = t2~i+ t4~j + t6~k;
(b) ~r(t) = (sen t, 3, cos t);
(c) ~r(t) = (1 + t, 3t, −t);
(d) ~r(t) = t~i+ t~j + cos t~k.
02. Encontre uma equação vetorial e equações paramétricas para
o segmento de reta que liga P (−2, 4, 0) e Q(6, −1, 2).
03. Duas partículas viajam ao longo das curvas espaciais
~r1(t) = (t, t2, t3) ~r2(t) = (1 + 2t, 1 + 6t, 1 + 14t).
As partículas colidem? Suas trajetórias se interceptam?
04. Determine os vetores tangente, normal, binormal e o versor
tangente no ponto com valor de parâmetro t dado.
147

Curvas Espaciais
(a) ~r(t) = (6t5, 4t3, 2t), t = 1;
(b) ~r(t) = 4√t~i+ t2~j + t~k, t = 1;
(c) ~r(t) = e2t~i+ e−2t~j + te2t~k, t = 0.
05. Determine as equações paramétricas para a reta tangente à
curva dada pelas equações paramétricas, no ponto especificado.
(a) x = t5, y = t4, z = t3; (1, 1, 1)
(b) x = e−tcos t, y = e−tsen t, z = e−t; (1, 0, 1)
06. Determine o comprimento da curva dada:
(a) ~r(t) = (2sen t, 5t, 2cos t), −10 ≤ t ≤ 10;
(b) ~r(t) = t2~i+ 2t~j + ln t~k, 1 ≤ t ≤ e;
07. Determine a curvatura da curva dada por ~r(t) = etcos t~i +
etsen t~j + t~k no ponto (1, 0, 0).
08. Determine os vetores velocidade e aceleração e a rapidez da
partícula cuja função posição é dada:
(a) ~r(t) = (√
2t, et, e−t);
(b) ~r(t) = et(cos t~i+ sen t~j + t~k).
09. Determine os vetores velocidade e de posição de uma partícula
dadas a sua aceleração, velocidade e posição iniciais.
a(t) = −5~k, v(0) =~i+~j − 2~k, ~r(0) = 2~i+ 3~j.
10. Mostre que, se uma partícula se move com rapidez constante,
então os vetores velocidade e de aceleração são ortogonais.
148

Livro de Cálculo II
9AULA
9.7 Comentário das Atividades
Essas atividades, são referentes aos assuntos discutidos no decorrer
desta aula e têm o objetivo de você (aluno) exercitar os conceitos
aprendidos.
Lembre-se, sempre, que existem tutores para ajuda-los na res-
olução dessas atividades.
9.8 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 2).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
149


10AULA
1LIVRO
Funções de VariasVariáveis Reais a Val-ores Reais
META
Estudar o domínio, o gráfico e as
curvas de níveis de funções de duas
variáveis a valores reais.
OBJETIVOS
Estender os conceitos de domínio
e de gráfico de funções de uma
variável a valores reais.
PRÉ-REQUISITOS
Funções de uma variável a valores
reais.

Funções de Varias Variáveis Reais a Valores Reais
10.1 Introdução
No mundo real, quantidades físicas freqüentemente dependem de
duas ou mais variáveis, de modo que, nesta aula, focalizaremos
nossa atenção a funções de duas variáveis e estenderemos nossas
idéias básicas do cálculo diferencial para funções de uma variável
real a valores reais.
Antes de iniciarmos nosso estudo sobre funções de duas var-
iáveis a valores reais, precisamos introduzir alguns conceitos da
topologia do R2.
10.2 Noções Topológicas no R2
Nosso objetivo, nesta seção, é introduzir no R2 os conceitos de
norma e de conjunto aberto, que generalizam os conceitos de mó-
dulo e de intervalo aberto, e que serão fundamentais em tudo o
que veremos a seguir.
Considere P = (x1, x2) ∈ R2.
Associamos ao ponto P um número real chamado sua norma,
definido por:
‖P‖ =√x2
1 + x22
.
Dizemos que a distância entre os pontos P e Q é dada por
d(P,Q) = ‖P −Q‖. Se P = (x1, x2) e Q = (y1, y2), então
d(P,Q) = ‖P −Q‖ =√
(x1 − y1)2 + (x2 − y2)2.
Observação 10.6. Esta é a distância euclidiana. Tal distância
pode ser estendida para n variáveis de maneira natural.
152

Livro de Cálculo II
10AULA
Figura 10.41: Distância entre os pontos P e Q.
Definição 10.12. Chama-se bola aberta (ou vizinhança) de centro
em P0 ∈ R2 e raio δ > 0, ao seguinte conjunto:
B(P0, δ) = {P ∈ R2; d(P, P0) < δ}
Figura 10.42: Bola aberta centrada em P0 e raio δ.
Observação 10.7. Uma bola aberta de centro em P0 e raio δ > 0
também será chamada de vizinhança de raio δ do ponto P0 que
será denotada por Vδ(P0).
153

Funções de Varias Variáveis Reais a Valores Reais
Dado um conjunto S ⊂ R2, qualquer, todo ponto de R2 tem
uma das propriedades:
(a) dizemos que P é ponto interior a S, se existir δ > 0 tal que
B(P, δ) ⊂ S.
(b) dizemos que P é ponto exterior a S, se existe δ > 0 tal que
B(P, δ) não contém qualquer elemento de S, isto é, B(P, δ)∩S = ∅.
(c) dizemos que P é ponto de fronteira de S, quando P não é
interior nem exterior a S, isto é, para todo δ > 0, B(P, δ) contém
pontos de S e pontos que não são de S.
Exemplo 10.2.1. Observando a Figura 10.43 é fácil ver que P é
ponto exterior a S, Q é ponto interior a S e R é ponto de fronteira
de S.
Figura 10.43: Pontos interiores, exteriores e de fronteira.
154

Livro de Cálculo II
10AULA
Exemplo 10.2.2. Considere o conjunto S ={(
1n,
1n
), n ∈ N
}⊂ R2.
O esboço do conjunto S em R2 é dado na Figura 10.44. Note que
os pontos P e Q são pontos de fronteira de S e o ponto R é ponto
exterior a S.
Figura 10.44: Pontos exteriores e de fronteira.
Definição 10.13. Seja A ⊂ R2. Dizemos que A é aberto, se todo
ponto de A for interior a A, isto é, para todo P ∈ A existe δ > 0
tal que B(P, δ) ⊂ A.
Exemplo 10.2.3. R2 é aberto em R2.
Exemplo 10.2.4. A = {P = (x, y) ∈ R2; ‖(x, y)‖ < 1} é aberto
em R2. De fato: seja P0 = (x0, y0) ∈ A. Logo ‖P0‖ = r <
1. Consideremos a bola aberta B
(P0,
1− r2
). Mostremos que
B
(P0,
1− r2
)⊂ A : Seja P ∈ B
(P0,
1−r2
)então
‖P‖ = ‖P − P0 + P0‖ ≤ ‖P − P0‖+ ‖P0‖
= ‖P − P0‖+ r <1− r
2+ r < 1.
155

Funções de Varias Variáveis Reais a Valores Reais
Exemplo 10.2.5. Qualquer B(P0, δ) é um conjunto aberto no R2.
Observação 10.8. Dado um conjunto A ⊂ R2, o conjunto dos
pontos interiores a A é chamado interior de A e é denotado por
intA.
Definição 10.14. Dado A ⊂ R2. dizemos que P é um ponto de
acumulação de A, se qualquer vizinhança de P contém pontos de
A, diferentes de P.
Exemplo 10.2.6. Todo ponto P ∈ R2 é ponto de acumulação do
R2.
Exemplo 10.2.7. Nenhum ponto P ∈ R2 é ponto de acumulação
do conjunto ∅.
Exemplo 10.2.8. O conjunto de pontos de acumulação de A =
{(x, y) ∈ R2; x2 + y2 < 1} ⊂ R2 é {(x, y) ∈ R2; x2 + y2 ≤ 1}.
Exemplo 10.2.9. Considere o conjunto A = {(x, y) ∈ R2; y >
x} ∪ {(1, 0)}. (Veja Figura 10.45) Observe que o ponto (1, 0) ∈ A
Figura 10.45: Esboço do conjunto A
mais não é ponto de acumulação de A e o ponto (1, 1) /∈ A mais é
156

Livro de Cálculo II
10AULA
ponto de acumulação de A.
Definição 10.15. Um conjunto A é fechado se todo ponto de
acumulação de A pertence a A.
Exemplo 10.2.10. R2 é fechado.
Exemplo 10.2.11. ∅ é fechado.
Exemplo 10.2.12. A = {(x, y) ∈ R2; x2 +y2 < 1} não é fechado.
Definição 10.16. Um conjunto A ⊂ R2 é dito limitado se existe
δ > 0 tal que A ⊂ B(0, δ).
Figura 10.46: Conjunto limitado
Exemplo 10.2.13. Qualquer B(P, δ) é um conjunto limitado.
Exemplo 10.2.14. {(1,m) ∈ R2; m ∈ N} não é limitado. Desenhe-
o.
Definição 10.17. Um conjunto A ⊂ R2 se diz compacto quando
é fechado e limitado.
Exemplo 10.2.15. Todo conjunto finito é compacto.
157

Funções de Varias Variáveis Reais a Valores Reais
10.3 Funções
Nesta aula e nas seguintes daremos ênfase ao estudo das funções
reais de duas variáveis reais, e você alunos que chegou até aqui,
não terá dificuldade em generalizar os resultados para funções de
mais de duas variáveis, já que não há diferenças importantes.
Definição 10.18. Seja D ⊂ R2. Uma função f definida em D com
valores em R é uma correspondência que associa a cada ponto de
D um e um só número real.
Notação 2. f : D ⊂ R2 −→ R
O conjunto D é chamado domínio de f e representado por
D(f) ou Df . O conjunto B = {f(P ); P ∈ D} é chamado imagem
de f e denotado por Im(f).
Figura 10.47: Função de duas variáveis reais a valores reais.
Exemplo 10.3.1. Seja f a função de duas variáveis reais a valores
reais dada por
f(x, y) =y√x− y2
.
O domínio de f é o conjunto de todos os pares (x, y) de números
reais, com x − y2 > 0, ou seja, x > y2, isto é: D(f) = {(x, y) ∈
R2; x > y2}. Esta função transforma o par ordenado (x, y) no
número real y√x−y2
. Uma representação gráfica do domínio de f é
dada na Figura 10.48.
158

Livro de Cálculo II
10AULA
Figura 10.48: Representação gráfica do D(f).
Exemplo 10.3.2. Represente graficamente o domínio da função
f : D(f) ⊂ R2 −→ R dada por
f(x, y) =√y − x2 +
√2x− y.
Solução: O domínio de f é o conjunto de todos os pares (x, y),
com y − x2 ≥ 0 e 2x− y ≥ 0: D(f) = {(x, y) ∈ R2; y ≥ x2 e y ≤
2x}. A representação gráfica do domínio de f é dada na Figura
10.49.
Figura 10.49: Representação gráfica do D(f).
Exemplo 10.3.3. Represente graficamente o domínio da função
159

Funções de Varias Variáveis Reais a Valores Reais
z = f(x, y) dada por
z2 + 4 = x2 + y2, z ≥ 0.
Solução: z2 + 4 = x2 + y2, z ≥ 0 =⇒ z =√x2 + y2 − 4. Assim,
f é a função dada por f(x, y) =√x2 + y2 − 4. Seu domínio é o
conjunto de todos (x, y), com x2 + y2 − 4 ≥ 0. E
x2 + y2 − 4 ≥ 0⇔ x2 + y2 ≥ 4.
Portanto, o domínio de f é a parte exterior ao círculo de raio 2 e
centro na origem. A representação gráfica do domínio de f é dada
na Figura 10.50.
Figura 10.50: Representação gráfica do D(f).
Exemplo 10.3.4. (Função Polinomial) Uma função polinomial de
duas variáveis reais a valores reais é uma função f : R2 −→ R dada
por
f(x, y) =∑
m+n≤pamnx
myn
160

Livro de Cálculo II
10AULA
onde p é um natural fixo e os amn são números reais dados; a soma
é estendida a todas as soluções (m,n), m e n naturais, da equação
m+ n ≤ p.
(a) f(x, y) = 3x2y2 − 13xy +
√2 é uma função polinomial.
(b) f(x, y) = ax+by+c, onde a, b, c são reais dados, é uma função
polinomial; tal função é denominada função afim.
Exemplo 10.3.5. (Função linear) Toda função f : R2 −→ R dada
por
f(x, y) = ax+ by
onde a, b são reais dados, denomina-se função linear.
Exemplo 10.3.6. (Função racional) Toda função f : R2 −→ R
dada por
f(x, y) =p(x, y)q(x, y)
onde p e q são funções polinomiais, denomina-se função racional.
O domínio de f é o conjunto D(f) = {(x, y) ∈ R2; q(x, y) 6= 0}.
Observação 10.9. Analogamente como feito para funções h :
R −→ R podemos definir, ponto a ponto, a soma, o produto e a
divisão de duas funções f, g : A ⊂ R2 −→ R. Por exemplo: a soma
f + g é definida por: (f + g)(x, y) = f(x, y) + g(x, y), ∀(x, y) ∈ A.
10.4 Gráficos
Uma forma, bastante eficiente, de visualizar o comportamento de
uma função de duas variáveis é através de seu gráfico.
Definição 10.19. Se f é uma função de duas variáveis com domínio
D, então o gráfico de f é o conjunto de todos os pontos (x, y, z) ∈
R3 tal que z = f(x, y) e (x, y) pertençam a D.
161

Funções de Varias Variáveis Reais a Valores Reais
Notação 3. G(f) = {(x, y, z) ∈ R3; z = f(x, y), (x, y) ∈ D} =
{(x, y, f(x, y)); (x, y) ∈ D}
Assim como o gráfico de uma função f de uma variável é uma
curva C com equação y = f(x), o gráfico de uma função de duas
variáveis é uma superfície S com equação z = f(x, y). Podemos
enxergar a superfície S de f como estando diretamente em cima
ou abaixo de seu domínio D que está no plano xy. (Veja a Figura
10.51).
Figura 10.51: Gráfico de uma função de duas variáveis a valores
reais.
Exemplo 10.4.1. O gráfico da função constante f(x, y) = k é um
plano paralelo ao plano xy.
Exemplo 10.4.2. O gráfico da função linear f : R2 −→ R dada
por z = f(x, y) = y é um plano passando pela origem e normal ao
162

Livro de Cálculo II
10AULA
Figura 10.52: Gráfico da função constante.
vetor (0, 1,−1) :
z = y ⇔ y − z = 0⇔ (0, 1,−1) · [(x, y, z)− (0, 0, 0)] = 0
Figura 10.53: Gráfico da função f(x, y) = y.
Exemplo 10.4.3. O gráfico da função f : D ⊂ R2 −→ R dada
163

Funções de Varias Variáveis Reais a Valores Reais
por f(x, y) = x2 + y2 é dado por
G(f) = {(x, y, x2 + y2), (x, y) ∈ A}
e é denominado o parabolóide.
Figura 10.54: Esboço do parabolóide, feito no Software Maple
através do comando ”plot3d(x2 + y2, x = −5..5, y = −5..5); ” .
Exemplo 10.4.4. Considere a função f : R2 −→ R dada pela dis-
tância do ponto (x, y) ao ponto (0, 0), ou seja f(x, y) =√x2 + y2.
O gráfico de f é dado por
G(f) = {(x, y,√x2 + y2), (x, y) ∈ R2}.
10.5 Curvas de Nível
Acabamos de estudar o gráfico de funções e vimos que este é um
importante método para visualizar funções. Vamos agora estudar
um novo método, empregado por cartógrafos, de visualização de
funções de duas variáveis a valores reais. Trata-se de um mapa de
164

Livro de Cálculo II
10AULA
Figura 10.55: Esboço do gráfico de f(x, y) =√x2 + y2, feito no
Software Maple através do comando ”plot3d(sqrt(x2 + y2), x =
−5..5, y = −5..5); ” .
contornos, em que os pontos com elevações constantes são ligados
para formar curvas de contorno ou curvas de nível.
Definição 10.20. Sejam z = f(x, y) uma função e k ∈ Im(f).
O conjunto de todos os pontos (x, y) ∈ D(f) tais que f(x, y) = k
denomina-se curva de nível de f correspondente ao nível z = k. Em
outras palavras, denomina-se curva de nível de f correspondente
ao nível z = k ao seguinte conjunto:
{(x, y) ∈ D(f); f(x, y) = k}.
Observação 10.10. Uma curva de nível de f correspondente ao
nível z = k é o conjunto de todos os pontos do domínio de f nos
quais o valor de f é k.
Você pode ver na Figura 10.56 a relação entre as curvas de nível
e os traços horizontais. As curvas de nível de f correspondente ao
nível z = k são apenas traços do gráfico de f no plano horizontal
z = k projetado sobre o plano xy. Assim, se você traçar as curvas
165

Funções de Varias Variáveis Reais a Valores Reais
de nível da função e visualiza-las elevadas para a superfície na
altura indicada, poderá imaginar o gráfico da função colocando as
duas informações juntas.
Figura 10.56: Curvas de nível de f correspondente ao nível z = k.
Exemplo 10.5.1. Esboce algumas curvas de nível da função f(x, y) =
x2 + y2.
Solução: A curva de nível de f correspondente ao nível k é dada
por
x2 + y2 = k
que, para k ≥ 0, descreve uma circunferência de raio√k centrada
no ponto (0, 0). A Figura 10.57 mostra as curvas de nível de f
correspondentes a alguns k ≥ 0. Observe que, ao aumentarmos o
valor de k estaremos aumentando o raio das circunferências. Deste
modo, se elevarmos essas curvas aos seus nível correspondente e
uni-las obtemos o gráfico do parabolóide.
166

Livro de Cálculo II
10AULA
Figura 10.57: Curvas de nível de f(x, y) = x2 + y2 correspondente
ao nível z = k.
Exemplo 10.5.2. Esboce algumas curvas de nível da função f(x, y) =1
x2+y2.
Solução: A curva de nível de f correspondente ao nível k é dada
por
1x2 + y2
= k ⇔ x2 + y2 =1k
que, para k ≥ 0, descreve uma circunferência de raio 1√kcentrada
no ponto (0, 0). A Figura 10.58 mostra as curvas de nível de f
correspondentes a alguns k ≥ 0.
Observe que, ao aumentarmos o valor de k estaremos dimin-
uindo o raio das circunferências. Agora, se elevarmos essas curvas
aos seus nível correspondente e uni-las obtemos o seguinte gráfico
(Ver Figura 10.59).
Exemplo 10.5.3. As Figuras 10.60 e 10.61 mostram, respecti-
vamente, algumas curvas de níveis de f(x, y) =−3y
x2 + y2 + 1e o
gráfico correspondente.
167

Funções de Varias Variáveis Reais a Valores Reais
Figura 10.58: Curvas de
nível de f(x, y) = x2 +
y2 correspondente ao nível
z = k.
Figura 10.59: Esboço do
gráfico da função f(x, y) =1
x2+y2.
Figura 10.60: Cur-
vas de Nível de
f(x, y) = −3yx2+y2+1
.
Figura 10.61: Esboço do
gráfico da função f(x, y) =−3y
x2+y2+1.
10.6 Resumo
Uma função f de duas variáveis reais a valores reais é uma cor-
respondência que associa a cada ponto de D ⊂ R2 um e um só
número real.
Notação 4. f : D ⊂ R2 −→ R
O conjunto D é chamado domínio de f e representado por
D(f) ou Df . O conjunto B = {f(P ); P ∈ A} é chamado imagem
168

Livro de Cálculo II
10AULA
de f e denotado por Im(f).
O gráfico uma função f : D ⊂ R2 −→ R é o conjunto de todos
os pontos (x, y, z) ∈ R3 tal que z = f(x, y) e (x, y) ∈ D(f).
O conjunto de todos os pontos (x, y) ∈ D(f) tais que f(x, y) =
k denomina-se curva de nível de f correspondente ao nível z = k.
A extensão desses conceitos para funções de três ou mais var-
iáveis é feita de modo natural. Se você (aluno) entendeu os con-
ceitos estudados até hoje nesse curso, terá condições suficientes
para estender os conceitos estudados nesta aula para mais de duas
variáveis.
10.7 Atividades
01. Seja f(x, y) = ln(x+ y − 1).
(a) Estime f(1, 1).
(b) Estime f(e, 1).
(c) Determine o domínio de f.
(d) Estabeleça a imagem de f .
02. Seja f(x, y, z) = ln(25− x2 − y2 − z2).
(a) Estime f(1, 1, 1).
(b) Determine o domínio de f.
(c) Estabeleça a imagem de f .
03. Determine e faça um esboço do domínio da função:
(a) f(x, y) =√x+ y
(b) f(x, y) = ln(9− x2 − y2).
(c) f(x, y) =3x+ 5y
x2 + y2 − 4.
169

Funções de Varias Variáveis Reais a Valores Reais
(d) f(x, y) =
√y − x2
1− x2.
(e) f(x, y) =√x2 + y2 − 1 + ln(4− x2 − y2).
04. Esboce o gráfico da função:
(a) f(x, y) = 1− x− y
(b) f(x, y) = 1− x2.
(c) f(x, y) = y.
(d) f(x, y) = 3− x2 − y2.
(e) f(x, y) = cos x.
05. Traçar curvas de níveis para as funções:
a) f(x, y) = xy;
b) f(x, y) = cos(x).
06. Ache as curvas de nível de f : R2 −→ R definida por f(x, y) =
sen(x− y). Esboce o gráfico de f.
10.8 Comentário das Atividades
Essas atividades, são referentes aos assuntos discutidos no decorrer
desta aula e têm o objetivo de você (aluno) exercitar os conceitos
aprendidos.
Lembre-se, sempre, que existem tutores para ajuda-los na res-
olução dessas atividades.
170

Livro de Cálculo II
10AULA
10.9 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 2).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
171


11AULA
1LIVRO
Limites, Con-tinuidade eDerivadas Parciais
META
Estudar limite, continuidade e as
derivadas parciais de funções de
duas variáveis a valores reais.
OBJETIVOS
Estender os conceitos de limite e
continuidade, e estudar as derivadas
parciais de funções de uma variável
a valores reais.
PRÉ-REQUISITOS
Limite, Continuidade e Derivadas de
funções de uma variável a valores
reais.

Limites, Continuidade e Derivadas Parciais
11.1 Introdução
Nesta aula, vamos apresentar os conceitos de limite, continuidade
e derivadas parciais. Você que entendeu e lembra dos conceitos
de limite, continuidade e derivadas de funções de uma variável
real, visto no curso de Cálculo 1, não terá dificuldade alguma em
compreender o assunto dessa aula.
11.2 Limite
Definição 11.21. Sejam f : A ⊂ R2 −→ R uma função, (x0, y0)
um ponto de acumulação de A e L um número real. Dizemos que
o limite da função f no ponto (x0, y0) é igual a L e escrevemos
lim(x,y)−→(x0,y0)
f(x, y) = L
quando:
Para todo ε > 0, existe δ > 0 tal que, para todo (x, y) ∈ D(f),
0 < ‖(x, y)− (x0, y0)‖ < δ =⇒ |f(x, y)− L| < ε.
Notação 5. lim(x,y)−→(x0,y0) f(x, y) = L e f(x, y) −→ L quando
(x, y) −→ (x0, y0).
Note que |f(x, y)−L| corresponde à distância entre os números
f(x, y) e L, e ‖(x, y)− (x0, y0)‖ =√
(x− x0)2 + (y − y0)2 é a dis-
tância entre os pontos (x, y) e o ponto (x0, y0). Assim a Definição
11.21 diz que a distância entre f(x, y) e L pode ser arbitraria-
mente pequena se tomarmos a distância de (x, y) a (x0, y0) sufi-
cientemente pequena (mais não nula). A Figura 11.62 ilustra a
Definição 11.21 por meio de um diagrama de setas. Se nos é dado
um pequeno intervalo (L−ε, L+ε) em torno de L, então podemos
determinar uma bola aberta B((x0, y0), δ) com centro em (x0, y0)
174

Livro de Cálculo II
11AULA
e raio δ > 0 tal que f leve todos os pontos de B((x0, y0), δ) [exceto
possivelmente (x0, y0)] no intervalo (L− ε, L+ ε).
Figura 11.62: Representação geométrica do limite.
Observação 11.11. De agora em diante, sempre que falarmos que
f tem limite em (x0, y0), fica subentendido que (x0, y0) é ponto de
acumulação de D(f).
Exemplo 11.2.1. Se f(x, y) = k é uma função constante, então,
para todo (x0, y0) ∈ R2,
lim(x,y)−→(x0,y0)
k = k.
Solução: Temos que |f(x, y) − k| = |k − k| = 0. Assim, dado
ε > 0 e tomando-se um δ > 0 qualquer,
0 < ‖(x, y)− (x0, y0)‖ < δ =⇒ |f(x, y)− k| < ε.
Logo
lim(x,y)−→(x0,y0)
f(x, y) = lim(x,y)−→(x0,y0)
k = k.
Exemplo 11.2.2. Se f(x, y) = x, para todo (x0, y0) ∈ R2,
lim(x,y)−→(x0,y0)
f(x, y) = lim(x,y)−→(x0,y0)
x = x0.
175

Limites, Continuidade e Derivadas Parciais
Solução: Temos que
|f(x, y)− x0| = |x− x0| =√
(x− x0)2
≤√
(x− x0)2 + (y − y0)2 = ‖(x, y)− (x0, y0)‖
Deste modo, dado ε > 0 e tomando δ = ε vem:
0 < ‖(x, y)− (x0, y0)‖ < δ =⇒ |f(x, y)− k| < ε.
Logo,
lim(x,y)−→(x0,y0)
x = x0.
Exemplo 11.2.3. Se f(x, y) = x+y2 então lim(x,y)−→(2,1)
f(x, y) = 3.
Solução: Temos que
|f(x, y)− 3| = |x+ y2 − 3| = |x− 2 + y−1| ≤ |x− 2|+ |y + 1||y − 1|.
Então, dado ε > 0 tomando δ = min{1, ε3} obtemos que |y+1| < 3
e
‖(x, y)− (2, 1)‖ =√
(x− 2)2 + (y − 1)2 < δ =⇒
=⇒ |f(x, y)− 3| ≤ |x− 2|+ |y + 1||y − 1| ≤ δ + 3δ = 4δ ≤ 4ε
4= ε.
Para as funções de uma única variável, quando fazemos x se
aproxima de x0, só existe duas direções possíveis de aproximação:
pela direita e pela esquerda. Lembremos la do Cálculo 1 que, se
os limites laterais são diferentes então o limite não existe.
Já para as funções de duas variáveis essa situação não é tão
simples porque existem infinitas maneiras de (x, y) se aproximar
de (x0, y0) por uma quantidade infinita de direções e de qualquer
maneira que se queira (veja a Figura 11.63), bastando que (x, y)
se mantenha no domínio de f .
176

Livro de Cálculo II
11AULA
Figura 11.63: Infinitas maneiras de (x, y) se aproximar de (x0, y0).
O proximo teorema nos diz que se o limite de uma função f
existe em (x0, y0) e é igual a L então não importa a maneira que
(x, y) se aproxima de (x0, y0) que o limite sempre vai ser L.
Teorema 11.21. Sejam f : A ⊂ R2 −→ R uma função e (x0, y0)
um ponto de acumulação. Suponha que lim(x,y)−→(x0,y0)
f(x, y) = L e
seja γ uma curva em R2, contínua em t0, com γ(t0) = (x0, y0) e,
para todo t 6= t0, γ(t) 6= (x0, y0) com γ(t) ∈ D(f). Então
limt−→t0
f(γ(t)) = L.
Demonstração: De lim(x,y)−→(x0,y0)
f(x, y) = L segue que dado ε >
0, existe δ1 > 0 tal que
0 < ‖(x, y)− (x0, y0)‖ < δ1 =⇒ |f(x, y)− L| < ε. (11.1)
Sendo γ contínua em t0, para todo γ1 > 0 acima, existe γ > 0 tal
que
0 < ‖t− t0‖ < δ =⇒ |γ(t)− γ(t0)| < δ1. (11.2)
De (11.1) e (11.2) segue
0 < ‖t− t0‖ < δ =⇒ |f(γ(t))− L| < ε,
177

Limites, Continuidade e Derivadas Parciais
ou seja,
limt−→t0
f(γ(t)) = L.
Sejam γ1 e γ2 duas curvas nas condições do Teorema 11.21.
Segue do Teorema 11.21 que se ocorrer
limt−→t0
f(γ1(t)) = L1 e limt−→t0
f(γ2(t)) = L2 (11.3)
com L1 6= L2, então lim(x,y)−→(x0,y0)
f(x, y) não existirá. Da mesma
forma, tal limite não existirá de um dos limites em (11.1) não
existir.
Exemplo 11.2.4. Considere a função f : R2 −→ R dada por
f(x, y) =
1, para x 6= 0
0, para x = 0
Não existe o lim(x,y)−→(0,0)
f(x, y). De fato, considerando as curvas
γ1(t) = (t, 0) e γ2(t) = (0, t), temos que
limt−→0
f(γ1(t)) = limt−→0
1 = 1 e limt−→0
f(γ2(t)) = limt−→0
0 = 0.
Logo, lim(x,y)−→(0,0)
f(x, y) não existe.
Exemplo 11.2.5. Considere a função f : R2 − {(0, 0)} −→ R
dada por f(x, y) =xy
x2 + y2. Observe que f(x, y) ≡ 0 quando (x, y)
está em um dos eixos coordenados, de modo que f(x, y) converge
para 0 quando (x, y) aproxima-se de (0, 0) pelos eixos. Por outro
lado, considerando a curva γ : I ⊂ R −→ R2 − {(0, 0)} dada por
γ(t) = (t, t) temos que
limt−→0
f(γ(t)) = limt−→0
t2
2t2=
12.
Portanto, lim(x,y)−→(0,0)
xy
x2 + y2não existe.
178

Livro de Cálculo II
11AULA
Observamos que continuam válidas para funções de duas var-
iáveis reais a valores reais as seguintes propriedades dos limites
cujas demonstrações são exatamente iguais às que voce fez para
funções de uma variável real, na disciplina de Cálculo 1.
1. (Teorema do Confronto) Se f(x, y) ≤ g(x, y) ≤ h(x, y) para
0 < ‖(x, y)− (x0, y0)‖ < r e se
lim(x,y)−→(x0,y0)
f(x, y) = L = lim(x,y)−→(x0,y0)
h(x, y)
então
lim(x,y)−→(x0,y0)
g(x, y) = L.
2. Se lim(x,y)−→(x0,y0) f(x, y) = 0 e se |g(x, y)| ≤ M para 0 <
‖(x, y)− (x0, y0)‖ < r onde r > 0 e M > 0 são reais fixos, então
lim(x,y)−→(x0,y0)
f(x, y)g(x, y) = 0.
3. lim(x,y)−→(x0,y0)
f(x, y) = 0⇔ lim(x,y)−→(x0,y0)
|f(x, y)| = 0.
4. lim(x,y)−→(x0,y0)
f(x, y) = L⇔ lim(x,y)−→(x0,y0)
[f(x, y)− L] = 0.
5. lim(x,y)−→(x0,y0)
f(x, y) = L⇔ lim(h,k)−→(0,0)
f(x0 + h, y0 + k) = L.
6. Se lim(x,y)−→(x0,y0)
f(x, y) = L1 e lim(x,y)−→(x0,y0)
g(x, y) = L2, en-
tão,
(a) lim(x,y)−→(x0,y0)
[f(x, y) + g(x, y)] = L1 + L2;
(b) lim(x,y)−→(x0,y0)
kf(x, y) = kL1; (k constante)
179

Limites, Continuidade e Derivadas Parciais
(c) lim(x,y)−→(x0,y0)
f(x, y)g(x, y) = L1L2;
(d) lim(x,y)−→(x0,y0)
f(x, y)g(x, y)
=L1
L2desde que L2 6= 0.
7. (Conservação do sinal) Se lim(x,y)−→(x0,y0)
f(x, y) = L, L > 0,
então existirá δ > 0, tal que, para todo (x, y) ∈ D(f),
0 < ‖(x, y)− (x0, y0)‖ < δ =⇒ f(x, y) > 0.
Exemplo 11.2.6. Calcula, caso exista, lim(x,y)−→(0,0)
x3
x2 + y2.
Solução: Note que
x3
x2 + y2= x · x2
x2 + y2.
lim(x,y)−→(x0,y0)
x = 0 e∣∣∣∣ x2
x2 + y2
∣∣∣∣ ≤ 1, para todo (x, y) 6= (0, 0). Logo,
segue da Propriedade 2 acima que
lim(x,y)−→(0,0)
x3
x2 + y2= lim
(x,y)−→(0,0)x · x2
x2 + y2= 0.
11.3 Continuidade
Definição 11.22. Sejam f : A ⊂ R2 −→ R uma função e (x0, y0)
um ponto de acumulação de A com (x0, y0) ∈ A. Dizemos que f é
contínua em (x0, y0) se
lim(x,y)−→(x0,y0)
f(x, y) = f(x0, y0),
ou seja:
Para todo ε > 0, existe δ > 0 tal que, para todo (x, y) ∈ D(f),
0 < ‖(x, y)− (x0, y0)‖ < δ =⇒ |f(x, y)− f(x0, y0)| < ε.
180

Livro de Cálculo II
11AULA
Definição 11.23. Uma função é dita contínua em um conjunto
B quando for contínua em todos os pontos de B. Diremos, sim-
plesmente, que f é contínua se o for em todos os pontos de seu
domínio.
Exemplo 11.3.1. A função constante f(x, y) = k é contínua, pois,
lim(x,y)−→(x0,y0)
f(x, y) = k = f(x0, y0)
para todo (x0, y0) ∈ R2. (Veja Exemplo 11.2.1).
Exemplo 11.3.2. A função f(x, y) = x é contínua, pois,
lim(x,y)−→(x0,y0)
f(x, y) = lim(x,y)−→(x0,y0)
x = x0 = f(x0, y0)
para todo (x0, y0) ∈ R2. (Veja Exemplo 11.2.2).
Exemplo 11.3.3. A função f(x, y) =
x2−y2x2+y2
se (x, y) 6= (0, 0)
0 se (x, y) = (0, 0)não é contínua em (0, 0). De fato, tomando-se as curvas γ1(t) =
(t, 0) e γ2(t) = (0, t) vem,
limt−→0
f(γ1(t)) = limt−→0
t2
t2= 1
e
limt−→0
f(γ2(t)) = limt−→0
−t2
t2= −1.
Segue das propriedades de limite, as seguintes propriedades de
funções contínuas:
1. A soma de m funções contínuas em um ponto é uma função
contínua no ponto.
2. O produto de m funções contínuas em um ponto é uma
função contínua no ponto.
181

Limites, Continuidade e Derivadas Parciais
Conseqüência imediata dessas propriedades: A função polino-
mial p(x, y) em x e y dada pela soma de parcelas do tipo
axl1xl2
onde a é constante e l1, l2 ∈ N é uma função contínua como produto
e soma de funções contínuas.
Definição 11.24. Sejam f : A ⊂ R2 −→ B ⊂ R e g : B −→ R. A
função composta de g com f, indicada por g ◦ f é definido por
g ◦ f : A ⊂ R2 −→ R
(g ◦ f)(x, y) = g(f(x, y))
Figura 11.64: Função composta
O próximo teorema nos diz que se g(u) e f(x, y) forem con-
tínuas e se Im(f) ⊂ D(g), então a função composta h(x, y) =
g(f(x, y)) também o será.
Teorema 11.22. Sejam f : A ⊂ R2 −→ B ⊂ R e g : B −→ R tais
que f seja contínua em (x0, y0) e g é contínua em f(x0, y0). Então
g ◦ f é contínua em (x0, y0).
182

Livro de Cálculo II
11AULA
Demonstração: Dado ε > 0, queremos encontrar δ > 0 tal que,
se (x, y) ∈ A,
‖(x, y)− (x0, y0)‖ < δ =⇒ |(g ◦ f)(x, y)− (g ◦ f)(x0, y0)| < ε.
Figura 11.65: Esboço da demonstração
Sabemos que existe δ1 = δ1(ε, f(x0, y0)) tal que
z ∈ B, |z − f(x0, y0)| < δ1 =⇒ |g(z)− g(f(x0, y0))| < ε
Como f é contínua em (x0, y0) sabemos que dado δ1 > 0, existe
δ2 > 0 tal que
(x, y) ∈ A, ‖(x, y)− (x0, y0)‖ < δ2 =⇒ |f(x, y)− f(x0, y0)| < δ1.
Logo para
(x, y) ∈ A, ‖(x, y)− (x0, y0)‖ < δ2 =⇒ |f(x, y)− f(x0, y0)| < δ1
=⇒ |g(f(x, y))− g(f(x0, y0))| < ε.
Portanto, g ◦ f é contínua em (x0, y0).
Como conseqüência deste teorema, segue que se g(x) for con-
tínua, então a função h(x, y) = g(x) também será contínua. De
fato, sendo f(x, y) = x, teremos h(x, y) = g(f(x, y)), com g e f
contínuas.
183

Limites, Continuidade e Derivadas Parciais
Exemplo 11.3.4. h(x, y) = x2 +√x é contínua em seu domínio.
Exemplo 11.3.5. Sendo f(x, y) contínua, as compostas sen f(x, y),
cos f(x, y), [f(x, y)]2, etc.
Exemplo 11.3.6. f(x, y) =
x3
x2+y2se (x, y) 6= (0, 0)
0 se (x, y) = (0, 0)é con-
tínua em R2. De fato, temos que (Veja Exemplo 11.2.6)
lim(x,y)−→(0,0)
x3
x2 + y2= 0 = f(0, 0).
11.4 Derivadas Parciais
Seja z = f(x, y) uma função de duas variáveis a valores reais
definida em um conjunto aberto A e seja (x0, y0) ∈ A. Então para
x suficientemente próximo de x0 todos os pontos (x, y0) estão em
A, logo podemos considerar a função g de uma variável real dada
por
g(x) = f(x, y0).
A derivada desta função no ponto x = x0 (caso exista) denomina-se
derivada parcial de f , em relação a x, no ponto (x0, y0).
Notação 6. fx(x0, y0); ∂f∂x (x0, y0); f1(x0, y0); zx(x0, y0); ∂z∂x(x0, y0).
Assim:
fx(x0, y0) =[dg(x)dx
]x0
= lim∆x−→0
g(x0 + ∆x)− g(x0)∆x
= lim∆x−→0
f(x0 + ∆x, y0)− f(x0, y0)∆x
.
ou, ainda,
fx(x0, y0) = limx−→x0
f(x, y0)− f(x0, y0)x− x0
.
184

Livro de Cálculo II
11AULA
Seja B o subconjunto aberto de A formado por todos os pontos
(x, y) tais que fx(x, y) existe, fica assim definida uma nova função,
indicada por fx(x, y) e definida em B, para cada (x, y) ∈ B associa
o número fx(x, y), onde
fx(x, y) = lim∆x−→0
f(x+ ∆x, y)− f(x, y)∆x
.
Tal função denomina-se função derivada parcial de 1.a ordem de f ,
em relação a x, ou simplesmente, derivada parcial de f em relação
a x.
Considerando z = f(x, y) como uma função de y, para x fixo,
obtemos de maneira semelhante a derivada parcial de f , em relação
a y, no ponto (x0, y0).
Notação 7. fy(x0, y0); ∂f∂y (x0, y0); f2(x0, y0); zy(x0, y0); ∂z∂y (x0, y0).
Temos
fy(x0, y0) = lim∆y−→0
f(x0, y0 + ∆x)− f(x0, y0)∆y
.
ou
fy(x0, y0) = limy−→y0
f(x0, y)− f(x0, y0)y − y0
.
Interpretação Geométrica da Derivada Parcial
Podemos interpretar geometricamente a derivada parcial como
uma inclinação: Consideremos a secção da superfície z = f(x, y)
pelo plano vertical y = y0. Neste plano a curva z = f(x, y0) tem
uma tangente com inclinação fx(x0, y0) em x0.
185

Limites, Continuidade e Derivadas Parciais
Figura 11.66: Interpretação geométrica das derivadas parciais
As secções da superfície z = f(x, y) com os planos y = y0 e
x = x0 são dadas, respectivamente, nas Figuras 11.67 e 11.68.
Figura 11.67: Secções da
superfície z = f(x, y) com
o plano y = y0.
Figura 11.68: Secções da
superfície z = f(x, y) com
o plano x = x0.
186

Livro de Cálculo II
11AULA
Para se calcular fx(x0, y0) fixa-se y = y0 em z = f(x, y) e
calcula-se a derivada de g(x) = f(x, y0) em x = x0 : fx(x0, y0) =
g′(x0). Da mesma forma, fx(x, y) é a derivada, em relação a x,
de f(x, y), mantendo-se y constante. Por outro lado, fy(x, y) é a
derivada em relação a y, de f(x, y), mantendo-se x constante.
Exemplo 11.4.1. Se f(x, y) = x2y + ycos x, determine fx(x, y),
fy(x, y), fx(1, 0) e fy(1, 0).
Solução: Para encontrarmos fx(x, y) devemos olhar y como con-
stante em f(x, y) = x2 + ycos x e derivar em relação a x:
fx(x, y) = 2xy − ysen x.
Para encontramos fy(x, y) devemos olhar x como constante em
f(x, y) = x2 + ycos x e derivar em relação a y:
fy(x, y) = x2 + cos x.
Agora fx(1, 0) = 2 · 1 · 0 − 0 · sen 1 = 0 e fy(1, 0) = 12 + cos 1 =
1 + cos 1.
11.5 Derivadas parciais de ordem superior
Se z = f(x, y) é uma função de duas variáveis reais a valores
reais, então fx e fy são também funções de duas variáveis reais a
valores reais. Se estas duas funções fx e fy estiverem definidas em
um aberto A poderemos considerar suas derivadas parciais (fx)x,
(fx)y, (fy)x e (fy)y chamadas derivadas parciais de 2.a (segunda)
187

Limites, Continuidade e Derivadas Parciais
ordem de f , denotadas como segue:
(fx)x = fxx = f11 =∂
∂x
(∂f
∂x
)=∂2f
∂x2
(fx)y = fxx = f12 =∂
∂y
(∂f
∂x
)=
∂2f
∂y∂x
(fy)x = fxx = f21 =∂
∂x
(∂f
∂y
)=
∂2f
∂x∂y
(fy)y = fyy = f22 =∂
∂y
(∂f
∂y
)=∂2f
∂y2
Se estas derivadas parciais existirem em todos os pontos de um
aberto A, poderemos falar nas derivadas parciais de 3.a (Terceira)
ordem, e assim sucessivamente.
Definição 11.25. Seja f : A ⊂ R2 −→ R, A aberto. Dizemos que
f é de classe Ck (k ≥ 1) em B ⊂ A se f e as derivadas parciais
até a ordem k forem contínuas em todos os pontos de B. f é dita
de classe C∞ se f é de classe Ck, ∀k ≥ 1.
Notação 8. f ∈ Ck e f ∈ C∞.
Exemplo 11.5.1. Seja f(x, y) = xy. Temos que: fx(x, y) = y,
fy(x, y) = x, fxx(x, y) = 0, fxy(x, y) = 1, f(yx)(x, y) = 1 e
fyy(x, y) = 0. Observe que as derivadas de ordem k, k ≥ 3 ex-
istem e são todas nulas. Portanto f ∈ C∞.
Exemplo 11.5.2. A função z = f(x, y) = xsen y + y2cos x é
de classe C∞. De fato, temos que fx(x, y) = sen y − y2sen x,
fy(x, y) = xcos y + 2ycos x, fxx(x, y) = −y2cos x, fxy(x, y) =
cos y−2ysen x, fyx(x, y) = cos y−2ysen x e fyy(x, y) = −xsen y+
2cos x. Observe que existem e são contínuas todas derivadas par-
ciais.
Neste dois exemplos notamos que fxy(x, y) = fyx(x, y), isto é,
a ordem de derivação não influi no resultado, mais isto nem sempre
188

Livro de Cálculo II
11AULA
é válido. De fato: Consideremos z = f(x, y) = x+ |y|. Temos que
fx(x, y) ≡ 1 e fxy(0, 0) = 0. No entanto,
fy(0, 0) = lim∆y−→0
f(0,∆y)− f(0, 0)∆y
= lim∆y−→0
|∆y|∆y
que não existe. e assim fyx(0, 0) não existe.
O próximo teorema fornece condições sob as quais podemos
afirmar que fxy = fyx.
Teorema 11.23. (Teorema de Schwartz) Seja f : A ⊂ R2 −→
R, A aberto. Se f for de classe C2 em A, então
fxy(x, y) = fyx(x, y)
para todo (x, y) ∈ A.
Vejamos outro exemplo, onde não temos a igualdade fxy = fyx.
Exemplo 11.5.3. Consideremos f(x, y) =
xy3
x2+y2se (x, y) 6= (0, 0)
0 se (x, y) = (0, 0)Neste caso, temos que fxy(0, 0) 6= fyx(0, 0). De fato,
fx(x, y) =xy4 + 3x3y2
(x2 + y2)2, se (x, y) 6= (0, 0)
fy(x, y) =y5 − x2y3
(x2 + y2)2, se (x, y) 6= (0, 0)
fx(0, 0) = lim∆x−→0
f(∆x, 0)− f(0, 0)∆x
= 0
fy(0, 0) = lim∆y−→0
f(0,∆y)− f(0, 0)∆y
= 0
fxy(0, 0) = lim∆y−→0
fx(0,∆y)− fx(0, 0)∆y
= 1
fyx(0, 0) = lim∆x−→0
fy(∆x, 0)− fy(0, 0)∆x
= 0
Observação 11.12. No exemplo anterior podemos observar que
f, fx e fy são contínuas em todo R2. Assim, pelo Teorema anterior
fxy não pode ser contínua em (0, 0), pois caso fosse fxy(0, 0) =
fyx(0, 0), o que não é o caso.
189

Limites, Continuidade e Derivadas Parciais
11.6 Resumo
Faremos, agora, um resumo das principais definições e resultados
vistos nesta aula.
Definição 11.26. Sejam f : A ⊂ R2 −→ R uma função, (x0, y0)
um ponto de acumulação de A e L um número real. Dizemos que
o limite da função f no ponto (x0, y0) é igual a L e escrevemos
lim(x,y)−→(x0,y0)
f(x, y) = L
quando:
Para todo ε > 0, existe δ > 0 tal que, para todo (x, y) ∈ D(f),
0 < ‖(x, y)− (x0, y0)‖ < δ =⇒ |f(x, y)− L| < ε.
Teorema 11.24. Sejam f : A ⊂ R2 −→ R uma função e (x0, y0)
um ponto de acumulação. Suponha que lim(x,y)−→(x0,y0)
f(x, y) = L e
seja γ uma curva em R2, contínua em t0, com γ(t0) = (x0, y0) e,
para todo t 6= t0, γ(t) 6= (x0, y0) com γ(t) ∈ D(f). Então
limt−→t0
f(γ(t)) = L.
Sejam γ1 e γ2 duas curvas nas condições do Teorema 11.21.
Segue do Teorema 11.21 que se ocorrer
limt−→t0
f(γ1(t)) = L1 e limt−→t0
f(γ2(t)) = L2 (11.1)
com L1 6= L2, então lim(x,y)−→(x0,y0)
f(x, y) não existirá. Da mesma
forma, tal limite não existirá de um dos limites em (11.1) não
existir.
Definição 11.27. Sejam f : A ⊂ R2 −→ R uma função e (x0, y0)
um ponto de acumulação de A com (x0, y0) ∈ A. Dizemos que f é
contínua em (x0, y0) se
lim(x,y)−→(x0,y0)
f(x, y) = f(x0, y0),
190

Livro de Cálculo II
11AULA
ou seja:
Para todo ε > 0, existe δ > 0 tal que, para todo (x, y) ∈ D(f),
0 < ‖(x, y)− (x0, y0)‖ < δ =⇒ |f(x, y)− f(x0, y0)| < ε.
Definição 11.28. Uma função é dita contínua em um conjunto
B quando for contínua em todos os pontos de B. Diremos, sim-
plesmente, que f é contínua se o for em todos os pontos de seu
domínio.
11.7 Atividades
01. Mostre, pela definição, que:
a) lim(x,y)→(2,0)
(x2 + y2 − 4) = 0;
b) lim(x,y)→(1,2)
(x2 + 2xy + y2) = 9.
02. Seja a função f(x) =
1, x ≥ 0
−1, x < 0.Prove que a função tem
limite igual a 1 nos pontos (x0, y0) com x0 > 0 e que tem limite
igual a −1 nos pontos (x0, y0) com x0 < 0. Prove ainda que não
tem limite non pontos (0, y0).
03. Determine o valor dos limites, quando existirem:
a) lim(x,y)→(0,0)
x2 − y2
1 + x2 + y2; b) lim
(x,y)→(0,0)
x
x2 + y2;
c) lim(x,y)→(0,0)
x2 + y2sen1xy
; d) lim(x,y)→(4,π)
x2seny
x;
e) lim(x,y)→(0,0)
1 + y2sen x
x; f) lim
(x,y)→(0,0)
1 + x− yx2 + y2
;
g) lim(x,y,z)→(0,0,0)
4x− y − 3z2x− 5y + 2z
.
04. Usando a definição, prove que f(x, y) = xy + 6x é contínua
em:
191

Limites, Continuidade e Derivadas Parciais
a) (1, 2); b) (x0, y0).
05. Investigue a continuidade de cada uma das funções abaixo, no
ponto (0, 0) :
a) f(x, y) =
x3x+5y , 3x+ 5y 6= 0
0, 3x+ 5y = 0;
b) f(x, y) =
x2 + y2 sen(
1x2+y2
), se (x, y) 6= 0
0, se (x, y) = 0;
c) f(x, y) =
xy x−yx2+y2
, se (x, y) 6= 0
0, se (x, y) = 0;
06. Se f(x, y) = (x − y)sen (3x + 2y) calcule: a) fx(0, π3 ); b)
fy(0, π3 ).
07. Calcule ux e uy quando:
a) u(x, y) = exysen(x+y); b) u(x, y) = ln(x4+y4)arcsen√
1− x2 − y2.
08. Se f(x, y) =
x2y2+xyx+y , se x 6= −y
0, se x = −y.
a) Calcule fx(x, 0) e fy(0, y);
b) Observe que f não é constante em nenhuma vizinhança de (0, 0).
09. Ache ∂3f∂x2∂y
(x, y) se f(x, y) = ln(x+ y).
10. Mostre que ∂2f∂x2 + ∂2f
∂y2= 0 esta satisfeita por:
a) ln(x2 + y2); b) x3 − 3xy2.
192

Livro de Cálculo II
11AULA
11. Calcule fy(1, 2) onde
f(x, y) = xxxy
+ sen(πx)[x2 + sen(x+ y) + excos2y].
11.8 Comentário das Atividades
Essas atividades, são referentes aos assuntos discutidos no decorrer
desta aula e têm o objetivo de você (aluno) exercitar os conceitos
aprendidos.
Lembre-se, sempre, que existem tutores para ajuda-los na res-
olução dessas atividades.
11.9 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 2).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
193


12AULA
1LIVRO
Funções Diferen-ciáveis
META
Estudar derivadas de funções de
duas variáveis a valores reais.
OBJETIVOS
Estender os conceitos de diferencia-
bilidade de funções de uma variável
a valores reais.
PRÉ-REQUISITOS
Limite, continuidade e derivadas
parciais de funções de duas variáveis
a valores reais.

Funções Diferenciáveis
12.1 Introdução
Nesta aula, vamos apresentar os conceitos de funções diferenciáveis,
estendendo os conceitos de derivadas de funções de uma variável
real a valores reais, vistos no curso de cálculo 1.
12.2 Diferenciabilidade
Sabemos que, quando uma função de uma variável real é derivável
em um ponto, ela é contínua neste ponto. Observe agora o que
acontece com o exemplo a seguir.
Exemplo 12.2.1. Considere a função
f(x, y) =
xy
x2+y2se (x, y) 6= (0, 0)
0 se (x, y) = (0, 0)
Temos que f é derivável em relação a x e a y em (0, 0). De fato:
fixando-se y = 0, então z = f(x, 0) ≡ 0, e assim fx(0, 0) = 0.
Agora, fixando x = 0, então z = f(0, y) ≡ 0, e assim fy(0, 0) = 0.
Mas, por outro lado, f não é contínua em (0, 0). Com efeito, o
lim(x,y)−→(0,0)
f(x, y) não existe, pois considerando as curvas γ1(t) =
(t, 0) e γ2(t) = (t, t) temos que
limt−→0
f(γ1(t)) = limt−→0
0 = 0 e limt−→0
f(γ2(t)) = limt−→0
t2
2t2=
12.
Assim é possível que uma função tenha todas as derivadas par-
ciais em um ponto e que não seja contínua naquele ponto.
Vamos então introduzir o conceito de diferenciabilidade, que
entre outras propriedades, vai garantir a continuidade da função.
Na realidade ele implicará que o gráfico da função não tem quinas,
e em particular, que não tem saltos. será introduzido por analogia
196

Livro de Cálculo II
12AULA
com o conceito de diferenciabilidade de funções de uma variável.
Para uma variável:
y = f(x) é diferenciável (Ver Figura 12.69) em x0, se existe
uma reta passando por (x0, f(x0)) de equação
Y = f(x0) +m(x− x0),
tal que
limx−→x0
f(x)− Yx− x0
= 0
Figura 12.69: Reta tangente ao gráfico de uma função diferenciável.
y = f(x) é derivável em x0, se existe o seguinte limite
limx−→x0
f(x)− f(x0)x− x0
.
Observe que, para funções de uma variável real, ser derivável
é equivalente a ser diferenciável. De fato: suponhamos que f é
derivável em x0. Então existe
limx−→x0
f(x)− f(x0)x− x0
= m.
Considerando a reta de equação Y = f(x0)+m(x−x0), temos que
limx−→x0
f(x)− Yx− x0
= limx−→x0
f(x)− f(x0)−m(x− x0)x− x0
= limx−→x0
(f(x)− f(x0)
x− x0−m
)= 0
197

Funções Diferenciáveis
Portanto f é diferenciável em x0.
Por outro lado, suponhamos que f é diferenciável em x0.
0 = limx−→x0
f(x)− Yx− x0
= limx−→x0
f(x)− f(x0)−m(x− x0)x− x0
= limx−→x0
(f(x)− f(x0)
x− x0−m
)=⇒ lim
x−→x0
f(x)− f(x0)x− x0
= m.
Portanto, f é derivável em x0.
Passaremos agora a definir a diferenciabilidade de funções de
duas variáveis reais a valores reais e faremos isso estendendo o con-
ceito de diferenciabilidade de funções de uma variável real a valores
reais.
Para duas variáveis:
Diz-se que z = f(x, y) é diferenciável num ponto (x0, y0),
se existir uma plano passando pelo ponto (x0, y0, f(x0, y0)), de
equação
z = f(x0, y0) +A(x− x0) +B(y − y0),
tal que
limα−→0
f(x, y)− zα
= 0 (12.1)
onde α = ‖(x, y)−(x0, y0)‖ =√
(x− x0)2 + (y − y0)2. Em notação
alternativa, tomando x = x0 + h e y = y0 + k e chamando
E(h, k) = f(x, y)− z = f(x0 + h, y0 + k)− [f(x0, y0) +Ah+Bk]
(12.1) pode ser reescrita como
lim(h,k)−→(0,0)
E(h, k)‖(h, k)‖
= 0 (12.2)
Ainda, com a notação alternativa, temos:
f(x0 + h, y0 + k) = f(x0, y0) +Ah+Bk + E(h, k).
198

Livro de Cálculo II
12AULA
Passando o limite, com (h, k) −→ (0, 0), obtemos:
lim(h,k)−→(0,0)
f(x0 + h, y0 + k) = f(x0, y0).
Acabamos de provar o seguinte:
Teorema 12.25. Se f for diferenciável em (x0, y0), então f será
contínua em (x0, y0).
Voltemos em (12.2), fazendo k = 0, obtemos:
limh−→0
f(x0 + h, y0)− f(x0, y0)−Ah|h|
= 0
Isto equivale a:
limh−→0
[f(x0 + h, y0)− f(x0, y0)
h−A
]= 0
ou
limh−→0
[f(x0 + h, y0)− f(x0, y0)
h
]= A
Assim, fx(x0, y0) = A.
Analogamente, fy(x0, y0) = B.
Com isto, temos o seguinte:
Teorema 12.26. Se f for diferenciável em (x0, y0), então f admi-
tirá derivadas parciais neste ponto.
As principais conclusões sobre funções diferenciáveis são dadas
na Observação 12.13.
Observação 12.13. 1. Para mostrarmos que função f é difer-
enciável em (x0, y0) é suficiente provar que f admite derivadas
parciais em (x0, y0) e que
lim(h,k)−→(0,0)
f(x0 + h, y0 + k)− f(x0, y0)− fx(x0, y0)h− fy(x0, y0)k‖(h, k)‖
= 0.
199

Funções Diferenciáveis
2. Se uma das derivadas parciais não existirem em (x0, y0), então
f não será diferenciável neste ponto.
3. Se ambas as derivadas parciais existirem em (x0, y0), mais se o
limite acima não for zero, então f não será diferenciável em (x0, y0).
4. Se f não for contínua em (x0, y0), então f não será diferenciável
em (x0, y0).
Dizemos que f é diferenciável em B ⊂ D(f) se f for diferen-
ciável em todo (x, y) ∈ B. Diremos, simplesmente, que f é uma
função diferenciável se f for diferenciável em todo ponto de seu
domínio.
Exemplo 12.2.2. Prove que f(x, y) = x+ y é uma função difer-
enciável.
Solução: Precisamos provar que f é diferenciável em todo (x, y) ∈
R2. f admite derivadas parciais em todo (x, y) ∈ R2 e
fx(x, y) = 1 e fy(x, y) = 1.
Por outro lado, para todo (x, y) ∈ R2,
E(h, k) = f(x+ h, y + k)− f(x, y)− fx(x, y)h− fy(x, y)k
= x+ h+ y + k − x− y − h− k = 0
Daí
lim(h,k)−→(0,0)
E(h, k)‖(h, k)‖
= 0.
Portanto, f é diferenciável para todo (x, y) ∈ R2.
Exemplo 12.2.3. Prove que z = f(x, y) = xy é uma diferenciável.
Solução: Precisamos provar que f é diferenciável em todo (x, y) ∈
R2. f admite derivadas parciais em todo (x, y) ∈ R2 e
fx(x, y) = y e fy(x, y) = x.
200

Livro de Cálculo II
12AULA
Por outro lado, para todo (x, y) ∈ R2,
E(h, k) = f(x+ h, y + k)− f(x, y)− fx(x, y)h− fy(x, y)k
= (x+ h)(y + k)− xy − yh− xk
= xy + xk + yh+ hk − xy − yh− xk = hk
Daí
lim(h,k)−→(0,0)
E(h, k)‖(h, k)‖
= lim(h,k)−→(0,0)
hk√h2 + k2
= 0 (Já visto anteriormente).
Portanto, f é diferenciável para todo (x, y) ∈ R2.
Propriedades:
1. A soma (também o produto) de duas funções diferenciáveis em
um ponto é uma função diferenciável no ponto.
2. Toda função polinomial em duas variáveis P (x, y) =∑ij
aijxiyj
é diferenciável, como soma e produto de diferenciáveis.
Já vimos que toda função diferenciável é contínua, mas nem
toda função contínua é diferenciável. Por exemplo:
Exemplo 12.2.4. A função
f(x, y) =
x3
x2+y2se (x, y) 6= (0, 0)
0 se (x, y) = (0, 0)
é contínua em (0, 0) (Já visto anteriormente), mais não é diferen-
ciável em (0, 0). De fato, temos que
fx(0, 0) = limx−→0
f(x, 0)− f(0, 0)x− 0
= limx−→0
x
x= 1
fy(0, 0) = limy−→0
f(0, y)− f(0, 0)y − 0
= 0
e
E(h, k) = f(0 + h, 0 + k)− f(0, 0)− fx(0, 0)h− fy(0, 0)k
=h3
h2 + k2− h
201

Funções Diferenciáveis
Segue que
E(h, k)‖(h, k)‖
=h3
h2+k2 − h√h2 + k2
=−hk2
(h2 + k2)√h2 + k2
= G(h, k)
Como limt−→0
G(t, t) = limt−→0
−t2√
2|t|não existe, resulta que
lim(h,k)−→(0,0)
E(h, k)‖(h, k)‖
não existe. Logo, f não é diferenciável em (0, 0).
Vimos que se z = f(x, y) é diferenciável em (x0, y0), então ex-
istem fx(x0, y0) e fy(x0, y0). No entanto pode ocorrer que existam
fx(x0, y0) e fy(x0, y0) e f não ser diferenciável em (x0, y0).
Exemplo 12.2.5. Seja f(x, y) =
xy
x2+y2se (x, y) 6= (0, 0)
0 se (x, y) = (0, 0). Já
foi visto que fx(0, 0) = fy(0, 0) = 0. Ainda: f não é contínua e,
portanto, não é diferenciável em (0, 0).
Algumas vezes é difícil verificar diretamente a diferenciabili-
dade de uma função. O próximo teorema dá uma condição su-
ficiente para que uma função f seja diferenciável e é importante
dada a facilidade de verificação de suas hipóteses.
Teorema 12.27. (Critério de Diferenciabilidade) Se as derivadas
parciais fx e fy existem em um conjunto aberto A contendo (x0, y0)
e forem contínuas em (x0, y0), então f será diferenciável em (x0, y0).
Demonstração: Consideremos (x0, y0) ∈ A. Como A é aberto,
para h e k suficientemente pequenos o retângulo formado pelos 4
pontos: (x0, y0), (x0 + h, y0), (x0, y0 + k) e (x0 + h, y0 + k) está
contido em A. Temos então que
∆f = f(x0 + h, y0 + k)− f(x0, y0)
= [f(x0 + h, y0 + k)− f(x0 + h, y0)] + [f(x0 + h, y0)− f(x0, y0)]
202

Livro de Cálculo II
12AULA
Usando o Teorema do Valor Médio para funções de uma variável
sobre cada uma das diferenças acima, obtemos
∆f = fy(x0 + h, y1)k + fx(x1, y0)h.
Por hipótese, fx e fy são contínuas em (x0, y0) e assim
fx(x1, y0) = fx(x0, y0)+eta1 e fx(x0 +h, y1) = fy(x0, y0)+eta2
onde ambos η1 e η2 tendem a zero com ‖(h, k)‖ −→ 0. Assim:
∆f = fx(x0, y0)h+ fy(x0, y0)k + η1h+ η2k.
Pela definição de diferenciabilidade nós temos somente que mostrar:
n1h+ n2k√h2 + k2
−→ 0
mas ∣∣∣∣n1h+ n2k√h2 + k2
∣∣∣∣ ≤ (|n1|+ |n2|) −→ 0
conforme√h2 + k2 −→ 0.
Exemplo 12.2.6. A função z = f(x, y) = sen (xy) é diferenciável,
pois existem
fx(x, y) = ycos (xy) e fy(x, y) = xcos (xy)
e são contínuas em todo ponto (x, y) ∈ R2.
Bem, caros alunos, o teorema anterior parece resolver todos os
problemas no que se refere a mostrar que uma função é diferen-
ciável, há casos em que ele não se aplica, ou seja: existem funções
diferenciáveis em um ponto cujas derivadas parciais não são con-
tínuas neste ponto. Neste caso a verificação da diferenciabilidade
deve ser feita pela definição. Veja o exemplo a seguir:
203

Funções Diferenciáveis
Exemplo 12.2.7. Seja
f(x, y) =
(x2 + y2)sen(
1x2+y2
)se (x, y) 6= (0, 0)
0 se (x, y) = (0, 0)
(a) Determine fx e fy;
(b) Mostre que fx e fy não são contínuas em (0, 0);
(c) Prove que f é diferenciável em R2.
Solução:
(a) fx(x, y) =
2x sen(
1x2+y2
)− 2x
x2+y2cos(
1x2+y2
), se (x, y) 6= (0, 0)
0, se (x, y) = (0, 0)
fx(x, y) =
2y sen(
1x2+y2
)− 2y
x2+y2cos(
1x2+y2
), se (x, y) 6= (0, 0)
0, se (x, y) = (0, 0)
(b) limt−→0 fx(t, t) e limt−→0 fy(t, t) não existem e portanto fx e
fy não são contínuas em (0, 0)
(c) Para verificar que f é diferenciável em (0, 0) note que
E(h, k)‖(h, k)‖
=√h2 + k2 sen
(1
h2 + k2
)e que
lim(h,k)−→(0,0)
E(h, k)‖(h, k)‖
= 0
12.3 Plano Tangente e Reta Normal
Se f é diferenciável em (x0, y0), vimos na Seção 12.2 que o plano
de equação
z = f(x0, y0) + fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0) (12.1)
204

Livro de Cálculo II
12AULA
aproxima o gráfico de z = f(x, y) no seguinte sentido:
limα−→0
f(x, y)− zα
= 0
ou, na notação alternativa
lim(h,k)−→(0,0)
E(h, k)‖(h, k)‖
= 0.
Este é um modo de exprimir o fato de que o plano é tangente
à superfície no ponto (x0, y0, f(x0, y0)).
Observe que só definimos o plano tangente em (x0, y0, f(x0, y0))
se f for diferenciável em (x0, y0). Se f não for diferenciável em
(x0, y0), mais admitir derivadas parciais neste ponto, então o plano
12.1 existirá, mais não será plano tangente.
Em notação de produto escalar, o plano (12.1) se escreve:
(fx(x0, y0), fy(x0, y0), −1) · [(x, y, z)− (x0, y0, f(x0, y0))] = 0
Segue que o plano tangente em (x0, y0, f(x0, y0)) é perpendic-
ular à direção do vetor
(fx(x0, y0), fy(x0, y0), −1) (12.2)
A reta que passa pelo ponto (x0, y0, f(x0, y0)) e é paralela ao
vetor (12.1) denomina-se reta normal ao gráfico de f no ponto
(x0, y0, f(x0, y0)). A equação de tal reta é:
(x, y, z) = (x0, y0, f(x0, y0)) + λ (fx(x0, y0), fy(x0, y0), −1) , λ ∈ R.
Exemplo 12.3.1. Seja z = f(x, y) = 3x2y − x. Determine as
equações do plano tangente e da reta normal do ponto (1, 2, f(1, 2)).
Solução: Note que f é uma função polinomial de duas variáveis,
205

Funções Diferenciáveis
Figura 12.70: Plano Tangente e Reta Normal
logo é diferenciável. A equação do plano tangente à superfície
z = f(x, y) no ponto (1, 2, f(1, 2)) é dado por
z = f(1, 2) + fx(1, 2)(x− 1) + fy(1, 2)(y − 2).
Mas f(1, 2) = 5,
fx(x, y) = 6xy−1 =⇒ fx(1, 2) = 11 e fy(x, y) = 3x2 =⇒ fy(1, 2) = 3.
Logo a equação do plano tangente é
z − 5 = 11(x− 1) + 3(y − 2).
Por sua vez, a equação da reta normal à superfície z = f(x, y) no
ponto (1, 2, f(1, 2)) é dado por
(x, y, z) = (1, 2, f(1, 2)) + λ (fx(1, 2), fy(1, 2), −1) , λ ∈ R,
ou seja,
(x, y, z) = (1, 2, 5) + λ (11, 3, −1) , λ ∈ R.
206

Livro de Cálculo II
12AULA
12.4 A Diferencial
Seja f(x, y) diferenciável em (x0, y0) e consideremos a transfor-
mação linear L : R2 −→ R dada por
L(h, k) = fx(x0, y0)h+ fy(x0, y0)k.
Voltando à condição de diferenciabilidade notamos que
E(h, k) = f(x0 + h, y0 + k)− f(x0, y0)− [fx(x0, y0)h+ fy(x0, y0)k]
= ∆f − L(h, k),
onde ∆f = f(x0 + h, y0 + k)− f(x0, y0). Assim:
lim(h,k)−→(0,0)
∆f − L(h, k)‖(h, k)‖
= 0,
ou seja, L(h, k) ∼ ∆f, para ‖(h, k)‖ ∼ 0.
Chamamos a transformação linear L de diferencial de f em
(x0, y0). Dizemos que L(h, k) = fx(x0, y0)h+ fy(x0, y0)k é a difer-
encial de f em (x0, y0) relativa aos acréscimos h e k.
Em notação clássica a diferencial de f em (x, y) relativa aos
acréscimos dx e dy é indicada por dz (ou df)
dz = fx(x, y)dx+ fy(x, y)dy.
Assim, para acréscimos pequenos,
∆z ∼ dz.
Chamando η = ∆f−df‖(h,k)‖ , a condição de diferenciabilidade pode
ser reformulada com:
f é diferenciável em (x0, y0) se, e somente se, ∆f = df + η ·√h2 + k2, onde η −→ 0 com ‖(h, k)‖ −→ 0.
207

Funções Diferenciáveis
Figura 12.71: Representação da diferencial f em (x, y) relativa aos
acréscimos dx e dy.
Exemplo 12.4.1. Se z = f(x, y) = 3x2 − xy, calcule ∆z e dz se
(x, y) muda de (1, 2) para (1.01, 1.98).
Solução: Temos:
dz = (6x− y)dx+ (−x)dy.
Substituindo x = 1, y = 2, dx = ∆x = 0.01 e dy = ∆y = −0.02,
obtemos:
dz = (6− 2)(0.01) + (−1)(−0.02) = 0.06.
Calculando diretamente ∆z, teríamos:
∆z = 0.0605.
Assim, o erro envolvido é 0.0005.
Exemplo 12.4.2. O raio e a altura de uma caixa de forma cilín-
drica são medidos como 3m e 8m, respectivamente, com um pos-
sível erro de ±0.05m. Use diferenciais para calcular o erro máximo
208

Livro de Cálculo II
12AULA
no cálculo do volume.
Solução: Temos que o volume da caixa é dado por V = πr2h.
Calculando a diferencial de V temos:
dV =∂V
∂rdr +
∂V
∂hdh = 2πrhdr + πr2dh.
Substituindo r = 3, h = 8, dr = dh = ±0.05, temos:
dV = 48π(±0.05) + 9π(±0.05) = ±2.85π ' ±8.95m3.
12.5 Resumo
As principais conclusões sobre funções diferenciáveis serão dadas
abaixo:
1. Para mostrarmos que função f é diferenciável em (x0, y0) é
suficiente provar que f admite derivadas parciais em (x0, y0) e que
lim(h,k)−→(0,0)
f(x0 + h, y0 + k)− f(x0, y0)− fx(x0, y0)h− fy(x0, y0)k‖(h, k)‖
= 0.
2. Se f é diferenciável em (x0, y0) então f é contínua em (x0, y0).
3. Se f é diferenciável em (x0, y0) então f admite todas as
derivadas parciais em (x0, y0).
4. Se uma das derivadas parciais não existirem em (x0, y0), en-
tão f não será diferenciável neste ponto.
5. Se ambas as derivadas parciais existirem em (x0, y0), mais
se o limite acima não for zero, então f não será diferenciável em
(x0, y0).
209

Funções Diferenciáveis
6. Se f não for contínua em (x0, y0), então f não será diferen-
ciável em (x0, y0).
Se f é diferenciável em (x0, y0), então o plano de equação
z = f(x0, y0) + fx(x0, y0)(x− x0) + fy(x0, y0)(y − y0)
aproxima o gráfico de z = f(x, y) no seguinte sentido:
limα−→0
f(x, y)− zα
= 0
ou, na notação alternativa
lim(h,k)−→(0,0)
E(h, k)‖(h, k)‖
= 0.
Este é um modo de exprimir o fato de que o plano é tangente à
superfície no ponto (x0, y0, f(x0, y0)).
Segue que o plano tangente em (x0, y0, f(x0, y0)) é perpendic-
ular à direção do vetor
(fx(x0, y0), fy(x0, y0), −1) (12.1)
A reta que passa pelo ponto (x0, y0, f(x0, y0)) e é paralela ao
vetor (12.1) denomina-se reta normal ao gráfico de f no ponto
(x0, y0, f(x0, y0)). A equação de tal reta é:
(x, y, z) = (x0, y0, f(x0, y0)) + λ (fx(x0, y0), fy(x0, y0), −1) , λ ∈ R.
12.6 Atividades
01. Mostre que a função definida por
f(x) =
x2sen( 1x), se x 6= 0
0, se x = 0
210

Livro de Cálculo II
12AULA
é diferenciável para todo x, mais não é de classe C1 em x = 0.
02. Justifique porque a função
f(x, y) =
xy3
x2+y6, se (x, y) 6= (0, 0)
0, se (x, y) = (0, 0)
não é diferenciável na origem.
03. Calcular as derivadas das funções dadas abaixo:
a) z = exy2; b) z = x2√
1 + xy2.
04. Seja f(x) diferenciável com f(0) = 0 e f(x) 6= 0 para x 6=
0, x ∈ R. Seja
g(x, y) =
f(x)f(y)
f2(x)+f2(y), para (x, y 6= (0, 0)
0, para (x, y) = (0, 0)
a) Mostre que existe gx(0, 0) e gy(0, 0);
b) Mostre que g(x, y) não é diferenciável em (0, 0).
05. Seja f : R2 −→ R tal que |f(x, y)| ≤ x2 + y2. Mostre que f é
diferenciável em (0, 0).
06. Mostre que para uma função f(x, y) ter como curvas de níveis
circunferências com centro na origem é necessário e suficiente que
x∂f∂y = y ∂f∂x .
07. Achar as equações da reta tangente e da reta normal à curva
γ =
x = t− cos t
y = 3 + sen 2t
z = 1 + cos 3t
211

Funções Diferenciáveis
no ponto t = π2 .
08. Determinar a equação do plano tangente à superfície z =
x2 + y2 no ponto (1, 2, 5).
09. Determinar a equação do plano tangente à superfície z =√9− x2 − y2 no ponto (1, 2, 2).
10. Ache o vetor normal a o plano tangente ao gráfico de f(x, y) =
xy + yex no ponto (1, 1).
11. Ache os pontos do parabolóide z = x2 + y2 − 1 nos quais a
reta normal à superfície coincide com a reta q liga a origem a esses
pontos.
12. Ache a equação do plano tangente à superfície regular S :
x2 + 2y2 + 3z2 = 36 no ponto (1, 2, 3).
13. Ache a equação do plano tangente à superfície regular z =
x2 + 5xy − 2y2 no ponto (1, 2, 3).
14. Ache o plano tangente e a reta normal ao parabolóide de uma
folha x2 + y2 − z2 = 4 no ponto (2,−3, 3).
15. Dada a curva (x, y, z) = (et, e−1,√
2t). Qual a equação do
plano normal à curva no ponto P, correspondente a t = 0?
212

Livro de Cálculo II
12AULA
12.7 Comentário das Atividades
Essas atividades, são referentes aos assuntos discutidos no decorrer
desta aula e têm o objetivo de você (aluno) exercitar os conceitos
aprendidos.
Lembre-se, sempre, que existem tutores para ajuda-los na res-
olução dessas atividades.
12.8 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 2).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
213


13AULA
1LIVRO
Regra da Cadeia eDerivação Implícita
META
Derivar funções compostas e funções
definidas implicitamente.
OBJETIVOS
Estender os conceitos da regra da
cadeia e da derivação implícita de
funções de uma variável a valores
reais.
PRÉ-REQUISITOS
Ter compreendido os conceitos lim-
ite, continuidade e derivadas de
funções de uma variável a valores
reais.

Regra da Cadeia e Derivação Implícita
13.1 Introdução
13.2 Regra da Cadeia
Muitas vezes a função z = f(x, y) é dada sob a forma de função
composta, em que os argumentos x, y são eles próprios funções de
t
x = φ1(t) y = φ2(t).
Então, z = f(φ1(t), φ2(t)) e podemos, portanto, falar em diferen-
ciabilidade relativamente a t.
Figura 13.72: Função composta.
Para derivarmos z em função de t temos o seguinte:
Teorema 13.28. Sejam x = φ1(t) e y = φ2(t) diferenciáveis em t0
e z = f(x, y) diferenciável no ponto P0 = (φ1(t0), φ2(t0)). Então
z(t) = f(φ1(t), φ2(t)) é diferenciável em t0 e ainda(dz
dt
)t0
=(dz
dx
)P0
·(dφ1
dt
)t0
+(dz
dy
)P0
·(dφ2
dt
)t0
.
Demonstração: Como z é diferenciável em P0, temos em par-
ticular que:
∆z =(∂z
dx
)P0
·∆x+(∂z
dy
)P0
·∆y + αη
216

Livro de Cálculo II
13AULA
onde η −→ 0 com α −→ 0 e α =√
(∆x)2 + (∆y)2 sendo que
∆x = φ1(t0 + ∆t)− φ1(t0) e ∆y = φ2(t0 + ∆t)− φ2(t0).
Logo, para ∆t 6= 0
∆z∆t
=(∂z
dx
)P0
· ∆x∆t
+(∂z
dy
)P0
· ∆y∆t± η
√(∆x∆t
)2
+(
∆y∆t
)2
(13.1)
Observemos que
lim∆t−→0
∆x∆t
=(dφ1
∆t
)t0
e lim∆t−→0
∆y∆t
=(dφ2
∆t
)t0
ainda:
∆t −→ 0 =⇒ [∆x −→ 0 e ∆y −→ 0],
pois φ1 e φ2 sendo diferenciáveis em t0 são contínuas em t0. Pas-
sando ao limite a expressão (13.1) com ∆t −→ 0, temos(dz
dt
)t0
=(dz
dx
)P0
·(dφ1
dt
)t0
+(dz
dy
)P0
·(dφ2
dt
)t0
.
pois η −→ 0 com ∆t −→ 0 e
[(∆x∆t
)2
+(
∆y∆t
)2]−→ L ∈ R com
∆t −→ 0.
Exemplo 13.2.1. Seja z = f(x, y) = exy onde x = sen t e y =
cos t. Calculedz
dtem t = t0.
Solução: Temos que P0 = (φ1(t0), φ2(t0)) = (sen t0, cos t0).
Logo(dz
dt
)t0
=(dz
dx
)P0
·(dφ1
dt
)t0
+(dz
dy
)P0
·(dφ2
dt
)t0
,
ou seja,(dz
dt
)t0
= (y0ex0y0) · (cos t0) + (x0e
x0y0) · (−sen t0)
= esen t0 cos t0(cos2t0 − sen2t0).
217

Regra da Cadeia e Derivação Implícita
É freqüente encontrar-se z = f(x, y) com y = y(x). Neste caso,
z = f(x, y(x)) = z(x). Ainda
dz
dx=∂z
∂x· dxdx
+∂z
∂y· dydx.
Portanto,
dz
dx=∂z
∂x+∂z
∂y· dydx.
Exemplo 13.2.2. Seja z = f(x, y) = x2 + y2. Considere a curva
y = φ(x) = x3 e calcule:
(a)∂z
∂x(1, 1)
(b)dz
dx(1)
Solução:
(a) Temos que
∂z
∂x= 2x+ 2y
dy
dx= 2x+ 6yx2.
Logo∂z
∂x(1, 1) = 2 · 1 + 6 · 1 · 12 = 8.
(b)dz
dx(1) =
∂z
∂x(1, 1) +
∂z
∂y(1, 1) · dy
dx(1) = 8 + 1 · 3 = 11.
13.3 Derivação de funções definidas implici-
tamente
A Regra da Cadeia pode ser usada para uma descrição do processo
de diferenciação implícita. Suponhamos que a equação da forma
F (x, y) = 0 define y implicitamente como uma função diferenciável
de x, ou seja, y = f(x), onde F (x, f(x)) = 0, para todo x no
domínio de f . Se F é diferenciável, podemos usar a Regra da
218

Livro de Cálculo II
13AULA
Cadeira para diferenciar ambos os lados da equação F (x, y) = 0
com relação a x. Como x e y são ambas funções de x, obtemos:
∂F
∂x
dx
dx+∂F
∂y
dy
dx= 0.
No entanto, dxdx = 1; então, se ∂F
∂y 6= 0, resolvemos para dydx e
obtemos
dy
dx= −
∂F∂x∂F∂y
. (13.1)
Para derivar essa equação assumimos que F (x, y) = 0 define y
implicitamente em função de x. O próximo teorema nos fornece
condições segundo as quais essa hipótese é válida.
Teorema 13.29. (Teorema da Função Implícita) Seja F : A ⊂ R2
onde A é um aberto e F é de classe Ck, (k ≥ 1) em A. Se F
se anula em P0 = (x0, y0) ∈ A e ∂F∂y (P0) 6= 0, então existe um
intervalo aberto I contendo x0 e um aberto B ⊂ A, P0 ∈ B com
a seguinte propriedade:
Para cada x ∈ I existe um único ξ(x) ∈ R tal que (x, ξ(x)) ∈ B
e F (x, ξ(x)) = 0, ou seja, F (x, y) = 0 define y = ξ(x), implicita-
mente.
Exemplo 13.3.1. Mostre que existe um intervalo I contendo x0 =
2, no qual está definida da função y = ξ(x) satisfazendo x2 + xy+
y2 = 7 com ξ(2) = 1 e encontre dydx .
Solução: Definimos
F (x, y) = x2 + xy + y2 − 7.
Observemos que F é de classe C∞ em R2,
F (2, 1) = 0 e∂F
∂y(2, 1) = 4 6= 0.
219

Regra da Cadeia e Derivação Implícita
Pelo Teorema anterior, existe um intervalo I contendo x0 = 2 e
uma função y = ξ(x), tais que:
x2 + xξ(x) + (ξ(x))2 = 7, ∀x ∈ I.
Ainda: ξ(2) = 1, ξ é de classe C∞. Temos então que F (x, y) =
0 define y = ξ(x) implicitamente, logo, usando a fórmula 13.1,
obtemos
ξ′(x) =dy
dx= −
∂F∂x∂F∂y
= −2x+ y
x+ 2y.
Em particular, ξ′(2) = −54 .
Suponhamos agora que z seja dado implicitamente como uma
função z = f(x, y) por uma equação da forma F (x, y, z) = 0. Isto
é o mesmo que F (x, y, f(x, y)) = 0 para todo (x, y) no domínio de
f . Se F e f forem diferenciáveis, utilizamos a Regra da Cadeia
para diferenciar a equação F (x, y, z) = 0 como se segue:
∂F
∂x
∂x
∂x+∂F
∂y
∂y
∂x+∂F
∂z
∂z
∂x= 0.
Mas ∂x∂x = 1 e ∂y
∂x = 0 portanto, essa equação se escreve
∂F
∂x+∂F
∂z
∂z
∂x= 0.
Se ∂F∂z 6= 0, resolvendo para ∂z
∂x e obtemos:
∂z
∂x= −
∂F∂x∂F∂z
. (13.2)
Analogamente, obtemos
∂z
∂y= −
∂F∂y
∂F∂z
. (13.3)
Novamente, uma versão do Teorema da Função Implícita nos
dá as condições sob as quais nossa hipótese é válida. Se F ∈
220

Livro de Cálculo II
13AULA
Ck, (k ≥ 1) é definida em um aberto contendo P0 = (x0, y0, z0),
onde F (P0) = 0 e ∂F∂z (P0) 6= 0, então a equação F (x, y, z) = 0
define z como uma função de x e y perto do ponto P0, e as derivadas
parciais dessa função são dadas pelas fórmulas (13.2) e (13.3).
Exemplo 13.3.2. Determine ∂z∂x e ∂z
∂y se exyz = x2 + y2 + z2.
Solução: Seja F (x, y, z) = exyz−x2−y2−z2. Então, das equações
(13.2) e (13.3), temos
∂z
∂x= −
∂F∂x∂F∂z
= −yzexyz − 2x
xyexyz − 2z
∂z
∂y= −
∂F∂y
∂F∂z
= −xzexyz − 2y
xyexyz − 2z
Outra maneira:
Temos
∂
∂x(exyz) = exyz
∂
∂x(xyz) = exyz
(yz + xy
∂z
∂x
)e
∂
∂x(x2 + y2 + z2) = 2x+ 2z
∂z
∂x.
Assim
exyz(yz + xy
∂z
∂x
)= 2x+ 2z
∂z
∂x,
ou seja,∂z
∂x=
2x− yzexyz
xyexyz − 2z
em todo (x, y) ∈ D(f) com xyexyz − 2z 6= 0.
13.4 Resumo
A Regra da Cadeia é dada pelo seguinte:
221

Regra da Cadeia e Derivação Implícita
Teorema 13.30. Sejam x = φ1(t) e y = φ2(t) diferenciáveis em t0
e z = f(x, y) diferenciável no ponto P0 = (φ1(t0), φ2(t0)). Então
z(t) = f(φ1(t), φ2(t)) é diferenciável em t0 e ainda(dz
dt
)t0
=(dz
dx
)P0
·(dφ1
dt
)t0
+(dz
dy
)P0
·(dφ2
dt
)t0
.
A Regra da Cadeia pode ser usada para uma descrição do pro-
cesso de diferenciação implícita. Suponhamos que a equação da
forma F (x, y) = 0 define y implicitamente como uma função difer-
enciável de x, ou seja, y = f(x), onde F (x, f(x)) = 0, para todo x
no domínio de f . Se F é diferenciável, podemos usar a Regra da
Cadeira para diferenciar ambos os lados da equação F (x, y) = 0
com relação a x. Como x e y são ambas funções de x, obtemos:
∂F
∂x
dx
dx+∂F
∂y
dy
dx= 0.
No entanto, dxdx = 1; então, se ∂F
∂y 6= 0, resolvemos para dydx e
obtemos
dy
dx= −
∂F∂x∂F∂y
.
Para derivar essa equação assumimos que F (x, y) = 0 define y
implicitamente em função de x. O próximo teorema nos fornece
condições segundo as quais essa hipótese é válida.
Teorema 13.31. (Teorema da Função Implícita) Seja F : A ⊂ R2
onde A é um aberto e F é de classe Ck, (k ≥ 1) em A. Se F
se anula em P0 = (x0, y0) ∈ A e ∂F∂y (P0) 6= 0, então existe um
intervalo aberto I contendo x0 e um aberto B ⊂ A, P0 ∈ B com
a seguinte propriedade:
Para cada x ∈ I existe um único ξ(x) ∈ R tal que (x, ξ(x)) ∈ B
e F (x, ξ(x)) = 0, ou seja, F (x, y) = 0 define y = ξ(x), implicita-
mente.
222

Livro de Cálculo II
13AULA
13.5 Atividades
01. Calculedz
dt:
(a) z = sen xy, x = 3t, e y = t2.
(a) z = ln(1 + x2 + y2), x = sen 3t, e y = cos 3t.
02. Seja f(x, y) = x2 + y2. Considere a curva y = φ(x) = x3 e
calcule:
a) ∂z∂x(1, 1); b) dz
dx(1).
03. Seja g(t) = f(3t, 2t2 − 1).
(a) Expresse g′(t) em termos das derivadas parciais de f .
(b) Calcule g′(0) admitindo∂f
∂x(0, −1) =
13.
04. Suponha que, para todo t, f(t2, 2t) = t3 − 3t. Mostre que∂f
∂x(1, 2) = −∂f
∂y(1, 2).
05. Considerando a função F (x, y) = f
(x
y,y
x
).Mostre que x
∂F
∂x+ y
∂f
∂y= 0.
06. A equação y3 + xy + x3 = 4 define implicitamente alguma
função diferenciável y = y(x)? Em caso afirmativo, expressedy
dxem termos de x e y. (Sugestão: Observe que (0, 3
√4) satisfaz
a equação e utilize o teorema das funções implícitas para o caso
F (x, y) = 0)
07. Mostre que cada uma das equações seguintes define implici-
tamente pelo menos uma função diferenciável y = y(x). Expressedy
dxem termos de x e y.
223

Regra da Cadeia e Derivação Implícita
(a) x2y + sen y = x
(b) y4 + x2y2 + x4 = 3.
08. Suponha que y = y(x) seja diferenciável e dada implicitamente
pela equação x = F (x2 + y, y2), onde F (u, v) é suposta diferen-
ciável. Expressedy
dxem termos de x, y e das derivadas parciais de
F.
13.6 Comentário das Atividades
Essas atividades, são referentes aos assuntos discutidos no decorrer
desta aula e têm o objetivo de você (aluno) exercitar os conceitos
aprendidos.
Lembre-se, sempre, que existem tutores para ajuda-los na res-
olução dessas atividades.
13.7 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 2).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
224

14AULA
1LIVRO
Vetor Gradiente eas Derivadas Dire-cionais
META
Definir o vetor gradiente de uma
função de duas variáveis reais e
interpretá-lo geometricamente.
Além disso, estudaremos a derivada
direcional de uma função de duas
variáveis a valores reais.
OBJETIVOS
Estender o conceito de derivadas
parciais e estudar a taxa de variação
de uma função em qualquer direção.
PRÉ-REQUISITOS
Limite, continuidade e derivadas
parciais de funções de duas variáveis
reais a valores reais.

Vetor Gradiente e as Derivadas Direcionais
14.1 Introdução
Vamos iniciar nossa penúltima aula, definindo um vetor que indi-
cará a direção de maior crescimento de uma função, tal vetor será
denominado vetor gradiente.
Posteriormente, estudaremos a derivada direcional de uma função
de duas variáveis a valores reais. Já vimos na Aula 13 que as
derivadas parciais permite determinarmos a taxa de variação de
uma função nas direções tangentes às curvas coordenadas. A
derivada direcional, nos permitirá determinar a taxa de variação
de uma função de duas variáveis reais a valores reais, em qualquer
direção.
14.2 Vetor Gradiente
Definição 14.29. Seja z = f(x, y) uma função que admite derivadas
parciais em (x0, y0). O vetor
∇f(x0, y0) =(∂f
∂x(x0, y0),
∂f
∂y(x0, y0)
)=∂f
∂x(x0, y0) ·~i+
∂f
∂y(x0, y0) ·~j
denomina-se gradiente de f em (x0, y0).
Geometricamente, interpretaremos ∇f(x0, y0) como um vetor
aplicado no ponto (x0, y0).
Exemplo 14.2.1. Se f(x, y) = 16(x2 + y3), então
fx(x, y) =13x e fy(x, y) =
12y2.
Logo
∇f(x, y) =13x~i+
12y2~j.
226

Livro de Cálculo II
14AULA
Em particular,
∇f(0,−2) =13
0~i+12
(−2)2~j = 2~j.
Na Figura 14.73, esta representado∇f(0,−2) partindo do ponto
(0,−2) e mais alguns vetores gradientes aplicados em diferentes
pontos.
Figura 14.73: Vetores Gradientes de f(x, y) = 16(x2 + y3).
O proximo teorema mostra que, em certas condições, o vetor
∇f(x0, y0) é normal à curva de nível de f que passa por (x0, y0).
Teorema 14.32. Seja z = f(x, y) diferenciável em (x0, y0) com
∇f(x0, y0) 6= (0, 0). Então ∇f(x0, y0) é normal à curva de nível γ
de f que passa por (x0, y0).
Demonstração: Seja γ(t) = (x(t), y(t)) a curva de nível de
f(x, y) tal que γ(t0) = (x0, y0). Assim, temos que
z(t) = f(γ(t)) = f(x(t), y(t)) ≡ k. (14.1)
Como γ e f são diferenciáveis, podemos usar a regra da cadeia
227

Vetor Gradiente e as Derivadas Direcionais
para diferenciar ambos os membros de (14.1), obtendo:
∂f
∂x(x0, y0) ·
(dx
dt
)t0
+∂f
∂y(x0, y0) ·
(dy
dt
)t0
= 0
A equação anterior pode ser escrita como
∇f(x0, y0) · γ′(t0) = 0.
Portanto, ∇f(x0, y0) é perpendicular ao vetor γ′(t0) tangente à
curva de nível γ.
Figura 14.74: ∇f(x0, y0) é perpendicular ao vetor γ′(t0).
Exemplo 14.2.2. Achar o vetor normal à curva y = x+ sen x no
ponto x =π
2.
Solução: Definimos
F (x, y) = x+ sen x− y.
Temos que a curva considerada é uma curva de nível da função
diferenciável F. Assim, pelo Teorema 14.32, segue que, para calcu-
lar um vetor normal à curva dada, basta calcular ∇f(π
2,π
2+ 1) :
∇f(π
2,π
2+ 1) =~i−~j.
228

Livro de Cálculo II
14AULA
14.3 Derivada Direcional
Definição 14.30. Consideremos z = f(x, y) definida em um aberto
de R2 e seja ~v = (v1, v2) um vetor unitário (‖~v‖ = 1). A derivada
direcional de f no ponto P0 = (x0, y0) na direção de ~v é o valor do
limite
limt−→0
f(P0 + t~v)− f(P0)t
,
quando este limite existir.
Notação 9. D~vf(P0) ou(∂f∂~v
)(P0).
A derivada direcional D~vf(P0) denomina-se, também, taxa de
variação de f no ponto (x0, y0) e na direção do vetor ~v, com ‖~v‖ =
1.
Interpretação Geométrica da Derivada Parcial
Podemos interpretar geometricamente a derivada direcional de
f no ponto P0 na direção de ~v como uma inclinação: Consideremos
a curva γ(t) dada por
γ :
x = x0 + at
y = y0 + bt
z = g(t)
onde g(t) = f(x0 + at, y0 + bt).
Observe que a imagem de γ está contida no gráfico de f. Temos:
g′(0) = limt−→0
g(t)− g(0)t
= limt−→0
f(x0 + at, y0 + bt)− f(x0, y0)t
= D~vf(x0, y0)
onde ~v = (a, b).
229

Vetor Gradiente e as Derivadas Direcionais
Figura 14.75: Interpretação geométrica da derivada direcional.
Observe que, se ~v =~i = (1, 0) então
D~if(x0, y0) = limt−→0
f((x0, y0) + t(1, 0))− f(x0, y0)t
= limt−→0
f((x0 + t, y0))− f(x0, y0)t
= fx(x0, y0),
ou seja,D~if(x0, y0) = fx(x0, y0), ∀(x0, y0) ∈ D(f). Analogamente,
mostra-se que D~jf(x0, y0) = fy(x0, y0), ∀(x0, y0) ∈ D(f).
Exemplo 14.3.1. Dada a função f(x, y) = x2− xy+ 5y, calcular
a derivada direcional de f no ponto P0 = (−1, 2) na direção do
vetor (3,−4).
Solução: Note que ‖(3,−4)‖ =√
(3)2 + (−4)2 = 5. Seja então
~v =(
35 , −
45
). Temos que:
‖~v‖ = 1
f(P0 + t~v) = f
(−1 + t
35, 2− t4
5
)= 13− 36
5t+
2125t2
f(P0) = f(−1, 2) = 13
230

Livro de Cálculo II
14AULA
Logo
D~vf(P0) = limt−→0
f(P0 + t~v)− f(P0)t
= limt−→0
13− 365 t+ 21
25 t2 − 13
t
= limt−→0
(−36
5+
2125t
)= −36
5
Portanto, D~vf(P0) = −365.
O próximo teorema, relaciona a derivada direcional de f com
o vetor gradiente de f .
Teorema 14.33. Consideremos f : A ⊂ R2 −→ R com A aberto
e f diferenciável em P0 ∈ A. Para todo ~v ∈ R2 com ‖~v‖ = 1, existe
a D~vf(P0) e ainda:
D~vf(P0) = ∇f(P0) · ~v.
Demonstração: Sejam ~v = (v1, v2) e P0 = (x0, y0) fixos. Con-
sideremos a função F (t) = f(x0 + tv1, y0 + tv2) onde t é tal que
(x0 + tv1, y0 + tv2) ∈ A. Como F é diferenciável no ponto t = 0,
usando a Regra da Cadeira, obtemos:
F ′(0) = fx(x0, y0)v1 + fy(x0, y0)v2 = ∇f(P0) · ~v.
Por outro lado,
F ′(0) = limt−→0
F (t)− F (0)t
= limt−→0
f(x0 + tv1, y0 + tv2)− f(x0, y0)t
= D~vf(P0).
Assim, D~vf(P0) = ∇f(P0) · ~v.
Observação 14.14. Temos: Se f for diferenciável em P0, então
a derivada direcional D~vf(P0) é a projeção escalar do ∇f(P0) na
231

Vetor Gradiente e as Derivadas Direcionais
direção de ~v, ou seja,
D~vf(P0) = ∇f(P0) · ~v = ‖∇f(P0)‖‖~v‖cosθ = ‖∇f(P0)‖cosθ,
onde θ é o ângulo formado entre os vetores ∇f(P0) e ~v em P0.
Observação 14.15. O Teorema 14.33 afirma que se f é diferen-
ciável em um ponto P0, então f tem todas as derivadas direcionais
em P0. E a recíproca, é verdadeira? Vejamos um exemplo (a seguir)
em que f tem todas as derivadas direcionais em P0, mais f não é
diferenciável em P0.
Exemplo 14.3.2. Sejam
f(x, y) =
x|y|√x2+y2
, (x, y) 6= (0, 0)
0, (x, y) = (0, 0)
e ~v = (v1, v2) com ‖~v‖ = 1. Temos:
D~vf(0, 0) = limt−→0
tv1|tv2|t√t2(v2
1 + v22)
= limt−→0
v1|v2|√v2
1 + v22
=v1|v2|√v2
1 + v22
= v1|v2|.
Em particular:
fx(0, 0) = D~if(0, 0) = 0 e fy(0, 0) = D~jf(0, 0) = 0.
Ainda se
∆f = f(x, y)− f(0, 0) = df(0, 0)(x, y) + η√x2 + y2 = 0 + η
√x2 + y2
então
η =x|y|
x2 + y29 0, com (x, y) −→ (0, 0).
Portanto, f não é diferenciável em (0, 0).
232

Livro de Cálculo II
14AULA
Estamos terminando esta aula mais antes disso, vamos respon-
der uma pergunta interessante sobre derivadas direcionais.
Supondo f diferenciável, quando a derivada direcional de f é máx-
ima, quando é mínima e quando é nula?
Solução: Admitamos ∇f(P0) 6= (0, 0). Temos que
D~vf(P0) = ‖∇f(P0)‖cosθ.
Logo, é maxima quando cosθ = 1 e isso acontece se, e somente se,
θ = 0. Logo D~vf(P0) é máxima quando ~v tem o mesmo sentido
de ∇f(P0). É mínima quando cosθ = −1, isto é, quando θ = π.
Portanto, D~vf(P0) é mínima quando ~v tem sentido oposto ao de
∇f(P0). Finalmente, D~vf(P0) é nula se cos theta = 0 ⇔ θ = π2 .
Portanto, D~vf(P0) é nula se ~v é perpendicular ao vetor ∇f(P0).
Finalizamos esta aula, com uma aplicação de derivadas dire-
cionais.
Exemplo 14.3.3. A temperatura num ponto (x, y) do plano é
dada por
T (x, y) =100xyx2 + y2
.
(a) Calcule a derivada direcional no ponto (2, 1), no sentido que
faz um ângulo de 60o com o semi-eixo positivo dos x.
Figura 14.76: Figura referente ao item (a) do Exemplo 14.3.3
233

Vetor Gradiente e as Derivadas Direcionais
(b) Em que direção, a partir de (2, 1) é máxima a derivada dire-
cional?
(c) Qual o valor deste máximo?
Solução: (a) Observando a Figura 14.76 é fácil ver que
~u = cos 60o~i+ sen 60~j =12~i+√
32~j.
Note que ‖~u‖ = 1. Temos que T é diferenciável em (2, 1), uma vez
que as suas derivadas parciais são contínuas neste ponto. Além
disso, ∇T (2, 1) = (−12, 24). Logo
D~uT (2, 1) = ∇T (2, 1) · ~u = −6 + 12√
3.
(b) É máxima no sentido do gradiente, isto é, do vetor −12~i+
24~j.
(c) O máximo é o módulo do gradiente = 12√
5.
14.4 Resumo
Faremos, agora, um resumo das principais definições e resultados
vistos nesta aula.
Definição 14.31. Seja z = f(x, y) uma função que admite derivadas
parciais em (x0, y0). O vetor
∇f(x0, y0) =(∂f
∂x(x0, y0),
∂f
∂y(x0, y0)
)=∂f
∂x(x0, y0) ·~i+
∂f
∂y(x0, y0) ·~j
denomina-se gradiente de f em (x0, y0).
Teorema 14.34. Seja z = f(x, y) diferenciável em (x0, y0) com
∇f(x0, y0) 6= (0, 0). Então ∇f(x0, y0) é normal à curva de nível γ
de f que passa por (x0, y0).
234

Livro de Cálculo II
14AULA
Definição 14.32. Consideremos z = f(x, y) definida em um aberto
de R2 e seja ~v = (v1, v2) um vetor unitário (‖~v‖ = 1). A derivada
direcional de f no ponto P0 = (x0, y0) na direção de ~v é o valor do
limite
limt−→0
f(P0 + t~v)− f(P0)t
,
quando este limite existir.
A derivada direcional D~vf(P0) denomina-se, também, taxa de
variação de f no ponto (x0, y0) e na direção do vetor ~v, com ‖~v‖ =
1.
Teorema 14.35. Consideremos f : A ⊂ R2 −→ R com A aberto
e f diferenciável em P0 ∈ A. Para todo ~v ∈ R2 com ‖~v‖ = 1, existe
a D~vf(P0) e ainda:
D~vf(P0) = ∇f(P0) · ~v.
14.5 Atividades
01. Considere f(x, y) = xy + 1.
a) Desenhe as curvas de nível 0, 1 e 2;
b) Desenhe alguns vetores gradientes de f ;
c) O que acontece com ∇f(0, 0) e com a curva de nível que passa
por (0, 0)?
02. Em cada um dos casos abaixo, desenhe um número suficiente
de vetores para ilustrar para ilustrar o campo gradiente de f :
a) f(x, y) = 12(x2 + y2);
b) f(x, y, z) = x+ y + z;
235

Vetor Gradiente e as Derivadas Direcionais
c) f(x, y, z) = 20− z.
03. a) Encontre a equação do plano tangente à superfície f(x, y, z) =
x2 + y2 − z2 no ponto (1, 1,√
2).
b) Mostre que a superfície e o plano tem uma reta em comum.
c) Qual o ângulo entre essa reta e o vetor ∇f(1, 1,√
2)?
04. Prove que D~if(a, b) = fx(a, b) e D~jf(a, b) = fy(a, b). Se
D~vf(P0) = k então D~vf(P0) =?
05. Ache o valor absoluto da derivada direcional em (1, 0, 1) da
função f(x, y, z) = 4x2y + y2z na direção normal em (1, 1, 1) à
superfície x2 + 2y2 + z2 = 4.
06. Se a temperatura em um ponto (x, y, z) de uma bola sólida de
raio 3 centrada em (0, 0, 0) é dada por T (x, y, z) = yz + zx + xy
ache a direção, a partir de (1, 1, 2), na qual a temperatura cresce
mais rapidamente.
07. Sendo f diferenciável em R2, qual o significado geométrico
para o fato de ∇f(x, y) = 0.
a) em um ponto;
b) em todos os pontos.
08. Se f(x, y) = x2 − y2, calcule a derivada direcional de f na
direção ( 1√5, 2√
5) no ponto (1, 1).
09. Se f(x, y) = ex+y, calcule a derivada direcional de f no ponto
236

Livro de Cálculo II
14AULA
(1, 1) na direção da curva definida por g(t) = (t2, t3) em g(2) para
t crescendo.
10. A temperatura num ponto (x, y) do plano xy é dado por
T = yx2+y2
.
a) Calcule a derivada direcional no ponto (1, 2) no sentido que faz
um ângulo de 45◦ com o semi-eixo positivos dos x.
b) No sentido de P = (x, y) para Q = (0, 0), no ponto P.
11. Seja f(x, y) =
xy√x2+y2
, (x, y) 6= (0, 0)
0 , (x, y) = (0, 0)Mostre que fx(0, 0) = 0 = fy(0, 0) mais que o gráfico de f não tem
plano tangente em (0, 0).
12. Seja f(x, y) =
xy2
x2+y4, (x, y) 6= (0, 0)
0 , (x, y) = (0, 0)a) Mostre que f derivada direcional, em qualquer direção, em (0, 0)
b) Mostre que f não é diferenciável em (0, 0).
14.6 Comentário das Atividades
Essas atividades, são referentes aos assuntos discutidos no decorrer
desta aula e têm o objetivo de você (aluno) exercitar os conceitos
aprendidos.
Lembre-se, sempre, que existem tutores para ajuda-los na res-
olução dessas atividades.
237

Vetor Gradiente e as Derivadas Direcionais
14.7 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 2).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
238

15AULA
1LIVRO
Máximos e Mínimos
META
Encontrar os pontos de máximo
e mínimo de uma função de duas
variáveis a valores reais.
OBJETIVOS
Maximizar e/ou minimizar função
de duas variáveis a valores reais.
PRÉ-REQUISITOS
Limite, continuidade, derivadas par-
ciais e diferenciabilidade de funções
de duas variáveis reais a valores
reais.

Máximos e Mínimos
15.1 Introdução
Vimos no curso de Cálculo 1 que um dos principais usos da derivada
ordinária é na determinação dos valores máximo e mínimo. Nesta
aula, veremos como usar as derivadas parciais para localizar os
pontos de máximo e mínimo de uma função de duas variáveis.
Este estudo de máximo e mínimo de funções de duas variáveis
tem aplicações em diversas áreas da matemática. Por exemplo,
dado uma chapa com distribuição de temperatura dada por uma
função de duas variáveis reais a valores reais, encontraremos o
ponto de maior e o de menor temperatura desta chapa. (Ver Ex-
emplo 15.3.1).
Iniciemos esta aula com o estudo de máximos e mínimos gerais.
Posteriormente, estudaremos máximos e mínimos condicionados.
15.2 Pontos de Máximo e Pontos de Mínimo
Definição 15.33. Seja f(x, y) uma função a valores reais e seja
P0 = (x0, y0) ∈ A, com A ⊂ D(f) aberto, dizemos que:
(a) P0 é ponto de máximo local de f se existir uma vizinhança
V de P0 tal que f(P ) ≤ f(P0), para todo P ∈ V ∩A.
(b) P0 é ponto de mínimo local de f se existir uma vizinhança
V de P0 tal que f(P ) ≥ f(P0), para todo P ∈ V ∩A.
(c) P0 é ponto de máximo absoluto (ou global) de f se para
todo P ∈ A, f(P ) ≤ f(P0). Neste caso, o número f(P0) será de-
nominado valor máximo de f em A.
240

Livro de Cálculo II
15AULA(d) P0 é ponto de mínimo absoluto (ou global) de f se para
todo P ∈ A, f(P ) ≥ f(P0). Neste caso, o número f(P0) será de-
nominado valor mínimo de f em A.
(e) P0 é ponto crítico (ou estacionário) de f se fx(P0) = fy(P0) =
0.
Os pontos de máximo e mínimo de uma função f denominam-se
extremantes de f .
Exemplo 15.2.1. (0, 0) é ponto de mínimo absoluto de f(x, y) =
x2 +y2 e f(0, 0) = 0 é o valor mínimo de f, pois, f(x, y) ≥ f(0, 0),
para todo (x, y) ∈ R2.
O proximo teorema fornece-nos um critério para selecionar, en-
tre os pontos interiores de D(f), candidatos a pontos de máximo
(ou de mínimo) locais de f .
Teorema 15.36. Seja P0 = (x0, y0) um ponto interior de D(f) e
suponhamos que fx(P0) e fy(P0) existam. Nestas condições, uma
condição necessária para que P0 seja um extremante local de f é
que P0 seja um ponto critico de f , ou seja, fx(P0) = 0 e fy(P0) = 0.
Demonstração: Suponhamos que P0 seja um ponto de máximo
local de f . Como P0 é ponto interior de D(f), existe uma vizin-
hança B ⊂ D(f) de P0, tal que, para todo P ∈ B,
f(P ) ≤ f(P0).
Por outro lado, existe um intervalo aberto I, com x0 ∈ I, tal que
para todo x ∈ I, (x, y0) ∈ B. Consideremos a função g dada por
g(x) = f(x, y0), x ∈ I.
241

Máximos e Mínimos
Deste modo, temos que g é derivável em x0 (g′(x0) = fx(x0, y0)),
x0 é ponto interior de I e x0 é ponto de máximo local de g, daí
g′(x0) = 0
e, portanto,
fx(x0, y0) = 0.
De modo análogo, demonstra-se que fy(x0, y0) = 0.
Segue deste teorema que se (x0, y0) for interior a D(f), f difer-
enciável em (x0, y0) e (x0, y0) extremante local de f, então o plano
tangente ao gráfico de f em (x0, y0, f(x0, y0)) será paralelo ao plano
xy.
Além disso, o teorema anterior nos diz que se f admite derivadas
parciais em todo os pontos interiores a D(f), então os pontos críti-
cos de f são, entre os pontos interiores de D(f), os únicos can-
didatos a extremantes locais de f .
Já vimos que um ponto P0 ∈ A que não é ponto interior de
A, denomina-se ponto de fronteira de A. O teorema anterior não
se aplica a pontos de fronteira de D(f); um ponto de fronteira de
D(f) pode ser um extremante local sem que as derivadas parci-
ais se anulem nele. Os pontos de fronteira devem ser analisados
separadamente. (Faremos isso a diante.)
Exemplo 15.2.2. Seja f(x, y) = x2 + y2. Como D(f) = R2 é um
conjunto aberto, de
fx(x, y) = 2x e fy(x, y) = 2y
segue que (0, 0) é o único candidato a extremante local. Como
f(x, y) ≥ f(0, 0) = 0, para todo (x, y) ∈ R2, resulta que (0, 0) é
um ponto de mínimo global de f .
242

Livro de Cálculo II
15AULA
O próximo exemplo, nos mostrará que a condição das derivadas
parciais se anularem num ponto não é suficiente para concluirmos
que tal ponto é um extremante local.
Exemplo 15.2.3. Considere f : R2 −→ R dada por f(x, y) = xy.
Verifica-se sem dificuldade que (0, 0) é o único ponto crítico de
f mais não ponto de máximo ou de mínimo de f . (Para uma
visualização geométrica, observe a Figura 15.77)).
Figura 15.77: Ponto de Sela.
O ponto (0, 0) neste exemplo, denomina-se ponto de sela.
Quais seriam então as condições suficientes para garantir a na-
tureza de um ponto crítico de f?
Para respondermos essa pergunta, precisamos da seguinte definição.
Seja f(x, y) de classe C2. A função dada por
H(x, y) =
∣∣∣∣∣∣∂2f∂x2 (x, y) ∂2f
∂x∂y (x, y)∂2f∂x∂y (x, y) ∂2f
∂y2(x, y)
∣∣∣∣∣∣denomina-se hessiano de f . Observe que
H(x, y) =∂2f
∂x2(x, y) · ∂
2f
∂x2(x, y)−
[∂2f
∂x∂y(x, y)
]2
.
O próximo teorema fornece-nos uma condição suficiente para
um ponto crítico de f ser um extremante local de f .
243

Máximos e Mínimos
Teorema 15.37. Sejam f : A ⊂ R2 −→ R, f de classe C2 e
P0 = (x0, y0) um ponto interior de D(f). Se:
fx(P0) = fy(P0) = 0 (P0 é um ponto crítico de f) e H(P0) > 0.
Então P0 é extremante local de f e
(i) Se fxx(P0) < 0, então P0 é ponto de máximo local.
(ii) Se fxx(P0) > 0, então P0 é ponto de mínimo local.
Se H(P0) < 0, então P0 não será nem ponto de máximo e nem de
mínimo, ou seja, P0 é ponto de sela.
Se H(P0) = 0, nada se pode afirmar.
A demostração desse teorema pode ser encontrada facílmente
em livros mais avançados de Cálculo.
Exemplo 15.2.4. Classificar os pontos críticos da função f(x, y) =
3xy2 + x3 − 3x.
Solução: Note que f é de classe C2, pois é uma função polino-
mial de duas variáveis. Temos que
fx(x, y) = 3y2 + 3x2 − 3 = 0⇔ x2 + y2 = 1
fy(x, y) = 6xy = 0⇔ x = 0 ou y = 0.
Assim, os pontos críticos são: (0, 1), (0,−1), (1, 0) e (−1, 0).
Observemos que
H(x, y) =
∣∣∣∣∣∣∂2f∂x2 (x, y) ∂2f
∂x∂y (x, y)∂2f∂x∂y (x, y) ∂2f
∂y2(x, y)
∣∣∣∣∣∣ =
∣∣∣∣∣∣ 6x 6y
6y 6x
∣∣∣∣∣∣ = 36x2 − 36y2
(i) Análise para o ponto (0, 1) :
H(0, 1) = −36 < 0.
Logo (0, 1) é ponto de sela.
(ii) Análise para o ponto (0,−1) :
H(0,−1) = −36 < 0.
244

Livro de Cálculo II
15AULA
Logo (0,−1) é ponto de sela.
(iii) Análise para o ponto (1, 0) :
H(1, 0) = 36 > 0 e fxx(1, 0) = 6 > 0.
Logo (1, 0) é ponto de mínimo local de f .
(iv) Análise para o ponto (−1, 0) :
H(1, 0) = 36 > 0 e fxx(1, 0) = −6 < 0.
Logo (−1, 0) é ponto de máximo local de f .
Notemos ainda que: f(1, 0) = −2, f(−1, 0) = 2 e f(0, 1) =
f(0,−1) = 0. Utilizando o programa computacional Maple trace-
mos o gráfico de f. (Veja Figura 15.78)
Figura 15.78: Gráfico de f(x, y) = 3xy2 + x3 − 3x.
Exemplo 15.2.5. Seja z = f(x, y), com domínio A = {(x, y) ∈
R2; x ≥ 0 e y ≥ 0}, onde f(x, y) = x2y + 3x. O ponto (0, 0) é um
ponto de mínimo de f em A pois f(x, y) ≥ f(0, 0) em A. Como
fx(x, y) = 2xy + 3, segue que fx(0, 0) = 3 6= 0. Este fato não
245

Máximos e Mínimos
contradiz o Teorema 15.37, pois ele só se aplica a ponto interiores
a D(f) e (0, 0) não é um ponto interior a D(f) (D(f) = A).
15.3 Máximos e Mínimos sobre Conjuntos
Compactos
Na seção anterior determinamos condições necessárias e condições
suficientes para um ponto de D(f) seja um extremante local de
f . Entretanto, para muitos problemas que ocorrem na prática é
importante determinar os extremantes em um subconjunto A de
D(f). O Teorema de Weierstrass, que é o próximo teorema a ser
enunciado, fornece-nos condições suficientes para a existências de
tais extremantes.
Teorema 15.38. Se f(x, y) for contínua no subconjuntoA, fechado
e limitado, de D(f), então existiram pontos (x1, y1) e (x2, y2) em
A, tais que, para todo (x, y) ∈ A,
f(x1, y1) ≤ f(x, y) ≤ f(x2, y2).
Lembremos que um conjunto A ⊂ R2, fechado e limitado é
chamado de compacto.
Este teorema nos garante que se f for contínua em A e A
compacto, então existirão pontos (x1, y1) e (x2, y2) em A tais que
f(x1, y1) é o valor mínimo e f(x2, y2) é o valor máximo de f. As-
sim se estivermos interessados em descobrir os pontos máximos e
mínimos absolutos de f : A ⊂ R2 −→ R, f contínua e A compacto
devemos procurá-los entre:
(i) pontos de fronteira de A.
246

Livro de Cálculo II
15AULA
(ii) pontos interiores críticos de f .
Vejamos alguns exemplos:
Exemplo 15.3.1. Consideremos uma chapa com a forma D =
{(x, y) ∈ R2; x2 + y2 ≤ 1} e suponhamos que a temperatura em
D seja dada por T (x, y) = x2 + 2y2− x. Determinar o ponto mais
quente e mais frio de D.
Solução: Como T é contínua e D é compacto, pelo Teorema
15.38 sabemos que existem P1 = (x1, y1) e P2 = (x2, y2) em D,
tais que, para todo P = (x, y) ∈ D,
f(P1) ≤ f(P ) ≤ f(P2).
Assim P1 e P2 são, respectivamente, os pontos de mínimo e máximo
absolutos. Como sabemos, eles podem ocorrer somente em:
(i) pontos interiores críticos de f .
(ii) pontos de fronteira de D.
Vamos procurá-los:
(i) No interior de D = {(x, y) ∈ R2; x2 + y2 < 1}
Pontos críticos:
Tx(x, y) = 2x− 1 = 0⇔ x =12
Ty(x, y) = 4y = 0⇔ y = 0.
Assim, o único ponto crítico é o ponto(
12 , 0
)e T
(12 , 0
)= −1
4 .
(ii) Na fronteira de D : {(x, y) ∈ R2; x2 + y2 = 1}
Temos que x2 + y2 = 1 e assim y2 = 1 − x2. Substituindo y2
247

Máximos e Mínimos
em T, obtemos
T (x, y) = x2 + 2y2 − x = T (x, y) = x2 + 2(1− x2)− x
= −x2 − x+ 2 = F (x), −1 ≤ x ≤ 1.
Chegamos assim ao problema de determinar os pontos máximos e
mínimos absolutos de F (x) = −x2 − x+ 2 em [−1, 1].
Determinemos os pontos críticos em (−1, 1) :
F ′(x) = −2x− 1 = 0⇔ x = −12.
e F(−1
2
)= 9
4 . Ainda, nos pontos extremos, temos F (−1) = 2 e
F (1) = 0. Assim:
Ponto de máximo absoluto de F em [−1, 1] : x = −12 e F
(−1
2
)=
94 = 2, 25.
Ponto de mínimo absoluto de F em [−1, 1] : x = 1 e F (1) = 0.
Voltando ao nosso problema inicial em estudo, temos:
x = −12⇒ y = ±
√3
2x = 1⇒ y = 0.
Logo os candidatos a ponto de máximo e mínimos de T na fronteira
de D são:(
12 , ±
√3
2
)e (1, 0). Temos que
T
(12, ±√
32
)=
94
= 2, 25 e T (1, 0) = 0
Podemos sintetizar as informações na tabela a seguir:
Pontos Localização Imagem do ponto(12 , 0
)Interior de D −1
4
(1, 0) Fronteira de D 0(12 , ±
√3
2
)Fronteira de D 9
4
248

Livro de Cálculo II
15AULA
Conclusão: O ponto mais frio da chapa D é o ponto(
12 , 0
)e
sua temperatura é −14 = −0, 25. Os pontos mais quente da chapa
são(
12 , ±
√3
2
)e a temperatura correspondente é 9
4 = 2, 25. (Ver
Figura 15.79)
Figura 15.79: Chapa D.
Exemplo 15.3.2. Determine os extremantes de f(x, y) = xy em
A = {(x, y) ∈ R2; x2 + y2 ≤ 1}.
Solução: f é contínua e A é compacto; logo, f assume em A
valor máximo e valor mínimo. O único ponto crítico no interior de
A é (0, 0), e já vimos que este ponto crítico não é um extremante.
Segue que os valores máximo e mínimo de f, em A, são atingidos
na fronteira de A. A fronteira é parametrizada por x = cos θ
y = sen θ, 0 ≤ θ ≤ 2π.
Logo, os valores de f na fronteira de A são fornecidos pela função
F (θ) = f(cosθ, senθ) =12sen 2θ, 0 ≤ θ ≤ 2π.
Temos que
F ′(θ) = cos 2θ = 0⇔ 2θ = (2k + 1)π
2, k = 0, 1, 2, 3.
249

Máximos e Mínimos
Logo os pontos críticos de F são
θ =π
4⇒ F (
π
4) = 1
θ =3π4⇒ F (
3π4
) = −1
θ =5π4⇒ F (
5π4
) = 1
θ =7π4⇒ F (
7π4
) = −1.
F atinge o valor máximo em θ = π4 e θ = 5π
4 ; atinge o valor mínimo
em θ = 3π4 e θ = 7π
4 . Segue que(√
22 ,
√2
2
)e(−√
22 , −
√2
2
)são os
pontos de máximo de f em A;(−√
22 ,
√2
2
)e(√
22 , −
√2
2
)são os
pontos de mínimo de f em A. O valor máximo de f em A é 12 , e
o valor mínimo, −12 . (Veja Figura 15.80)
Figura 15.80: Esboço dos pontos de máximo e mínimo de f em A.
15.4 Máximos e Mínimos Condicionados
O objetivo desta seção é o estudo de máximos e mínimos de uma
função sobre conjuntos do tipo:
{(x, y) ∈ R2; ψ(x, y) = 0}.
250

Livro de Cálculo II
15AULA
Seja f(x, y) diferenciável no abertoD ⊂ R2 e sejaB = {(x, y) ∈
R2; ψ(x, y) = 0} onde ψ é suposta de classe C1 emD; suponhamos,
também, ∇ψ(x, y) 6= 0 em B. Estamos interessados em determinar
uma condição necessária para que P0 = (x0, y0) ∈ B seja um
extremante local de f em B. (Ver Figura 15.81)
Figura 15.81: Esboço do problema.
Suponhamos que P0 ∈ B seja ponto de máximo local de f em
B, isto é, f(P ) ≤ f(P0) para todo P ∈ B.
Analisemos a situação das curvas de nível ψ(x, y) = 0 e f(x, y) =
k, k ∈ R.
Se P percorre a curva de nível ψ(x, y) = 0 no sentido indicado
na Figura 15.82, então f(P ) cresce até o ponto P atingir P0 e
depois f(P ) começa a decrescer.
Já a situação da Figura 15.83 não é possível, pois depois que
P passa por P0 existem pontos tais que f(P ) ≥ f(P0).
Na Figura 15.82 temos
∇f(P0) = λ∇ψ(P0).
Notemos ainda na Figura 15.84, uma situação em que∇f(P0) =
251

Máximos e Mínimos
Figura 15.82: curvas de
nível ψ(x, y) = 0 e
f(x, y) = k, k ∈ R.
Figura 15.83: curvas de
nível ψ(x, y) = 0 e
f(x, y) = k, k ∈ R.
λ∇ψ(P0) e no entanto P0 não é ponto de máximo ou de mínimo
de f condicionado à curva ψ(x, y) = 0.
Figura 15.84: Esboço do problema.
Formalizemos a discussão anterior:
Teorema 15.39. Seja f(x, y) diferenciável no aberto D e seja
B = {(x, y) ∈ B; ψ(x, y) = 0}, onde ψ é suposta de classe C1
em D e ∇ψ(x, y) 6= (0, 0), para todo (x, y) ∈ B. Uma condição
necessária para que (x0, y0) ∈ B seja extremante local de f em B
252

Livro de Cálculo II
15AULA
é que exista um real λ tal que
∇f(x0, y0) = λ∇ψ(x0, y0).
(o número λ é chamado Multiplicador de Lagrange)
A demonstração desse teorema pode ser encontrada nos livros
de Cálculo mais avançados.
Então, sendo f(x, y) diferenciável no aberto D e B = {(x, y) ∈
B; ψ(x, y) = 0}, onde ψ é suposta de classe C1 em D e ∇ψ(x, y) 6=
(0, 0) em B, os candidatos a extremantes locais de f em B são os
(x, y) ∈ D que tornam compatível o sistema
∇f(x, y) = λ∇ψ(x, y)
ψ(x, y) = 0
Estabelecemos assim uma condição necessária para um ponto (x0, y0)
ser um extremante local de f em B.
Exemplo 15.4.1. Encontre o máximo de f(x, y) = xy sobre a
curva ψ(x, y) = (x+ 1)2 + y2 − 1 = 0.
Solução: Observemos que o conjuntoB = {(x, y) ∈ R2; ψ(x, y) =
0} = {(x, y) ∈ R2; (x+ 1)2 + y2 = 1} é compacto e f é contínua.
Logo f atinge seus extremos em B.
Temos ∇ψ(x, y) = (2(x + 1), 2y). Assim ∇ψ = (0, 0) se, e
somente se, (x, y) = (−1, 0). Portanto, ∇ψ 6= ~0,∀(x, y) ∈ B.
Temos também que ∇f(x, y) = (y, x). Logo, no ponto extremo
de f em B, devemos ter
∇f(x, y) = λ∇ψ(x, y),
253

Máximos e Mínimos
ou seja,
∇f(x, y) = λ∇ψ(x, y)
ψ(x, y) = 0=
y = λ2(x+ 1)
x = λ2y
(x+ 1)2 + y2 = 1
Se y = 0 =⇒ x = 0. Se y 6= 0, temos λ = x2y e, assim,
y =x
2y2(x+ 1) =⇒ y2 = x2 + x
. Substituindo y2 = x2 + x em (x+ 1)2 + y2 = 1, obtemos
(x+ 1)2 + x2 + x = 1⇔ 2x2 + 3 = 0⇔ x = 0 ou x = −32.
Para x = 0 =⇒ y = 0 =⇒ xy = 0.
Para x = −32 =⇒ y =
√3
2 =⇒ xy = −3√
34 .
Para x = −32 =⇒ y = −
√3
2 =⇒ xy = 3√
34 .
Portanto,(−3
2 ,3√
34
)é ponto de mínimo e
(−3
2 , −3√
34
)é
ponto de máximo. (Veja a Figura 15.85)
Figura 15.85: Localização dos pontos de máximo e de mínimo de
f(x, y) = xy em B.
254

Livro de Cálculo II
15AULA
Exemplo 15.4.2. Encontre a menor distância da origem a um
ponto da elipse ψ(x, y) = 8x2 − 12xy + 17y2 = 20.
Solução: Queremos minimizar f(x, y) = x2 + y2 (Podemos pen-
sar assim, pois a distância é positiva e portanto basta minimizar
seu quadrado).
Observemos que f é contínua e a elipse é um conjunto com-
pacto. Assim, f atinge seus extremos.
Temos:
∇ψ(x, y) = (16x− 12y, 34y − 12x) 6= ~0
nos pontos da elipse; e ∇f(x, y) = (2x, 2y).
Se ∇f(x, y) = λ∇ψ(x, y), então x = λ(8x− 6y)
y = λ(17y − 6x)
Podemos supor 8x− 6y 6= 0, uma vez que se 8x− 6y = 0 =⇒ x =
0 =⇒ y = 0, ponto que não está sobre a elipse.
Assim,
λ =x
8x− 6y=⇒ y =
x
8x− 6y(17y − 6x) =⇒ 6x2 − 9xy − 6y2 = 0,
a qual juntamente com 8x2−12xy+17y2 = 20 fornecerá y = ±2√
55 .
Calculando x obtemos os pontos(4√
55,
2√
55
),
(−√
55,
2√
55
),
(−4√
55, −2
√5
5
)e
(√5
5, −2
√5
5
).
Calculando a imagem desses pontos por f obtemos:
f
(4√
55,
2√
55
)= f
(−4√
55, −2
√5
5
)= 4
f
(−√
55,
2√
55
)= f
(√5
5, −2
√5
5
)= 1
255

Máximos e Mínimos
Assim, os pontos da elipse mais próximos da origem são:(−√
55 ,
2√
55
)e(√
55 , −
2√
55
). Os pontos da elipse mais distantes da origem são:(
4√
55 , 2
√5
5
)e(−4√
55 , −2
√5
5
). (Veja Figura 15.86)
Figura 15.86: Pontos da elipse que estão mais próximos e mais
distantes da origem.
15.5 Resumo
Faremos, agora, um resumo das principais definições e resultados
vistos nesta aula.
Definição 15.34. Seja f(x, y) uma função a valores reais e seja
P0 = (x0, y0) ∈ A, com A ⊂ D(f) aberto, dizemos que:
(a) P0 é ponto de máximo local de f se existir uma vizinhança
V de P0 tal que f(P ) ≤ f(P0), para todo P ∈ V ∩A.
(b) P0 é ponto de mínimo local de f se existir uma vizinhança
V de P0 tal que f(P ) ≥ f(P0), para todo P ∈ V ∩A.
256

Livro de Cálculo II
15AULA(c) P0 é ponto de máximo absoluto (ou global) de f se para
todo P ∈ A, f(P ) ≤ f(P0). Neste caso, o número f(P0) será de-
nominado valor máximo de f em A.
(d) P0 é ponto de mínimo absoluto (ou global) de f se para
todo P ∈ A, f(P ) ≥ f(P0). Neste caso, o número f(P0) será de-
nominado valor mínimo de f em A.
(e) P0 é ponto crítico (ou estacionário) de f se fx(P0) = fy(P0) =
0.
O próximo teorema nos da uma condição necessária para que
um ponto seja um extremante local de uma função.
Teorema 15.40. Sejam f : A ⊂ R2 −→ R, f de classe C2 e
P0 = (x0, y0) um ponto interior de D(f). Se:
fx(P0) = fy(P0) = 0 (P0 é um ponto crítico de f) e H(P0) > 0.
Então P0 é extremante local de f e
(i) Se fxx(P0) < 0, então P0 é ponto de máximo local.
(ii) Se fxx(P0) > 0, então P0 é ponto de mínimo local.
Se H(P0) < 0, então P0 não será nem ponto de máximo e nem de
mínimo, ou seja, P0 é ponto de sela.
Se H(P0) = 0, nada se pode afirmar.
Muitos problemas que ocorrem na prática é importante deter-
minar os extremantes em um subconjunto A de D(f). O Teorema
de Weierstrass, que é o próximo teorema a ser enunciado, fornece-
nos condições suficientes para a existências de tais extremantes.
Teorema 15.41. Se f(x, y) for contínua no subconjuntoA, fechado
257

Máximos e Mínimos
e limitado, de D(f), então existiram pontos (x1, y1) e (x2, y2) em
A, tais que, para todo (x, y) ∈ A,
f(x1, y1) ≤ f(x, y) ≤ f(x2, y2).
No estudo de máximos e mínimos de uma função sobre conjun-
tos do tipo:
{(x, y) ∈ R2; ψ(x, y) = 0},
usaremos o seguinte:
Teorema 15.42. Seja f(x, y) diferenciável no aberto D e seja
B = {(x, y) ∈ B; ψ(x, y) = 0}, onde ψ é suposta de classe C1
em D e ∇ψ(x, y) 6= (0, 0), para todo (x, y) ∈ B. Uma condição
necessária para que (x0, y0) ∈ B seja extremante local de f em B
é que exista um real λ tal que
∇f(x0, y0) = λ∇ψ(x0, y0).
(o número λ é chamado Multiplicador de Lagrange)
15.6 Atividades
01. Estude as funções abaixo quanto à pontos extremos:
(a) f(x, y) = (y − x2)2 + x5;
(b) f(x, y) = (x− y)4 + (y − 1)4;
02. Calcular os extremos de z = f(x, y) = xy +27x
+27y.
03. Calcular os pontos extremos da função z = f(x, y) = (x− y)6 + (y − 2)4.
(Nota: Observe que H = 0.)
258

Livro de Cálculo II
15AULA
04. Achar o ponto do plano 2x − y − 2z = 16 mais próximo da
origem. (Sugestão: Procure tirar y como função de x e z.)
05. Uma chapa retangular D é determinada pelas retas x = 3,
y = 5, x = 0 e y = 0. A temperatura da chapa é T (x, y) =
xy2 − x2y + 100. Determinar o ponto mais quente e o ponto mais
frio da chapa.
06. Qual é o ponto (x, y) do plano que tem a propriedade de ter
como mínima a soma de sua distância ao eixo x com duas vezes a
sua distância ao ponto (0, 1)?
07. Achar os máximos e mínimos locais de f(x, y) = x3 +y3−3x−
12y + 20.
08. Os leitos de dois rios são aproximadamente representados pela
parábola y = x2 e a reta x − y − 2 = 0. Deseja-se reunir os dois
cursos por um canal retilíneo de tal maneira que o comprimento
seja mínimo. Qual são os pontos pelos quais deve passar o canal.
(Observação: Distância de um ponto (x, y) à reta ax+ by + c = 0
é dada por∣∣∣∣ax0 + by0 + c√
a2 + b2
∣∣∣∣)09. Calcular o máximo e o mínimo de f(x, y) = x+ y sujeito à
condição x2 + y2 = 1. Observe que de fato eles existem. Desenhe
os vetores gradientes de f(x, y) e de ψ(x, y) = x2 + y2.
10. Calcule os pontos extremos de f(x, y) = 4xy − 2x2 − y4.
259

Máximos e Mínimos
11. Achar a maior e a menor distância de um ponto situado sobre
a elipsex2
4+ y2 = 1 à reta x+ y − 4 = 0.
15.7 Comentário das Atividades
Essas atividades, são referentes aos assuntos discutidos no decorrer
desta aula e têm o objetivo de você (aluno) exercitar os conceitos
aprendidos.
Lembre-se, sempre, que existem tutores para ajuda-los na res-
olução dessas atividades.
15.8 Referências
• GUIDORIZZI, H. L., Um Curso de Cálculo (Vol. 1 e 2).
Rio de Janeiro: LTC Editora, 2006.
• STEWART, J., Cálculo (vol. 1 e 2). São Paulo: Pioneira
Thomson Learning, 2006.
• THOMAS, G. B., Cálculo (vol. 1 e 2). São Paulo: Addison
Wesley, 2002.
260