
Calculo de Deslocamentos
27
FIEL FACULDADES INTEGRADAS EINSTEIN DE LIMEIRA CURSO DE ENGENHARIA CIVIL TEORIA DAS ESTRUTURAS DESLOCAMENTOS EM ESTRUTURAS LINEARES O PRINCÍPIO DOS TRABALHOS VIRTUAIS Prof. Dr. José Luiz F. de Arruda Serra
-
Upload
filipe-pereira-battisti -
Category
Documents
-
view
133 -
download
3
Transcript of Calculo de Deslocamentos
FIELFACULDADES INTEGRADAS EINSTEIN DE LIMEIRA
CURSO DE ENGENHARIA CIVIL
TEORIA DAS ESTRUTURAS
DESLOCAMENTOS EM ESTRUTURAS LINEARESO PRINCÍPIO DOS TRABALHOS VIRTUAIS
Prof. Dr. José Luiz F. de Arruda Serra
SUMÁRIO
01. O Princípio dos trabalhos virtuais aplicado aos corpos rígidos ...................... 01
1.1 – Introdução ................................................................................011.2 – Roteiro para aplicação do PTV (estruturas isostáticas) ....................011.3 – Exemplo número 1 ....................................................................021.4 – Exemplo número 2 .....................................................................03
02. O Princípio dos trabalhos virtuais aplicado aos corpos deformáveis ...............05
2.1 – Introdução ................................................................................052.2 – Enunciado do PTV para corpos deformáveis ...................................052.3 – O processo da carga unitária para cálculo de deslocamentos ........... 07
03. Aplicação do PTV às treliças ....................................................................07
3.1 – Exemplo número 3 .....................................................................083.2 – Exemplo número 4 .....................................................................10
04. O PTV aplicado às estruturas de nós rígidos .............................................. 11
4.1 – Avaliação da integral do produto de duas funções ..........................124.2 – Exemplo número 5 .....................................................................134.3 – Observação sobre o uso das tabelas .............................................144.4 – Exemplo número 6 .....................................................................154.5 – Exemplo número 7 .....................................................................16
05. Deformações por variação de temperatura ................................................18
5.1 – Exemplo número 8 .....................................................................18
06. Exercícios propostos ...............................................................................20
Anexo 01 – Tabela de integrais do produto de duas funções ..............................25
DESLOCAMENTOS EM ESTRUTURAS LINEARES
1. O Princípio dos trabalhos virtuais aplicado aos corpos rígidos
1.1. Introdução
Os conceitos relativos a deslocamentos virtuais e trabalho virtual são usualmente introduzidos durante o estudo da Mecânica Geral quando são usados para resolver problemas de equilíbrio estático.
A palavra virtual significa que as quantidades são puramente imaginárias e que não precisam existir no sentido real ou físico. Assim, um deslocamento virtual é um pequeno deslocamento imaginário, arbitrariamente imposto sobre um sistema estrutural. Não há necessidade de se tratar de um deslocamento real, como por exemplo os deslocamentos de flexão causada por cargas atuantes na estrutura. O trabalho realizado por forças reais durante um deslocamento virtual é chamado trabalho virtual.
O Princípio dos Trabalhos Virtuais (PTV) estabelece:
“A condição necessária e suficiente para o equilíbrio de um ponto ou sistema de pontos materiais qualquer é ser nula a soma dos trabalhos virtuais em qualquer deslocamento virtual compatível com as ligações do sistema”, ou seja:
Σ T virtual externo = zero.................................................(1.1)
Como é mostrado no estudo da Mecânica Geral, este princípio pode ser usado no lugar das três equações de equilíbrio ΣX=0, ΣY=0 e ΣM=0 com o propósito de resolver problemas de equilíbrio estático.
O deslocamento virtual deve ser suposto infinitesimal, de modo a não alterar a configuração estática e geométrica do sistema das forças que nele agem, não violando as condições de equilíbrio que tais forças obedecem. O deslocamento virtual é causado por uma ação externa qualquer, cuja origem não é objeto de discussão, sendo completamente independente das forças externas que mantém a estrutura em equilíbrio.
O PTV aplicado às estruturas isostáticas em equilíbrio resolve o problema estático através do geométrico. Como o PTV consiste de apenas uma equação, ele se torna seletivo, ou seja, sua aplicação determina apenas uma incógnita, havendo necessidade de se repetir o procedimento para cada incógnita procurada. Não obstante este fato – e inclusive por isto - é muito útil quando se deseja calcular apenas um esforço, como é o caso de determinação de linhas de influência.
A aplicação do PTV às estruturas isostáticas para a determinação de um determinado esforço requer que seja aplicado um deslocamento virtual, que só pode ser realizado se o sistema for móvel, o que é obtido retirando-se o vínculo correspondente à incógnita e substituindo-o pelo esforço correspondente. Como os deslocamentos virtuais são supostos infinitesimais, estes deslocamentos seguem as leis dos pequenos deslocamentos, mais simples que as dos deslocamentos finitos. No caso dos pequenos deslocamentos a tangente dos ângulos formados durante os deslocamentos se confunde com o próprio ângulo, ou seja:
tg θ = θ (em radianos)............................................... (1.2)
1.2. - Roteiro para aplicação do PTV (estruturas isostáticas)
01) retira-se o vínculo correspondente à incógnita, substituindo-o pela incógnita para manter o equilíbrio. A incógnita passa a ser considerada como carga externa;
02) aplica-se um deslocamento virtual compatível com as ligações remanescentes da estrutura;
03) calcula-se o trabalho virtual de todos os esforços externos igualando-o a zero.
1
Como estamos trabalhando com estruturas isostáticas, a retirada de um vínculo conforme item 01) do roteiro transformará a estrutura em uma cadeia cinemática (ou mecanismo ou sistema móvel) com um grau de liberdade, podendo então ser aplicado o deslocamento conforme item 02), sem que nesta fase ocorra deformações adicionais nas barras do sistema.
O fato da cadeia cinemática ter apenas um grau de liberdade significa que conhecido um deslocamento (linear ou angular), todos os outros deslocamentos podem ser determinados em função deste, o que em geral é bastante simples em se tratando de pequenos deslocamentos para os quais os ângulos e suas tangentes se confundem.
É conveniente no primeiro passo introduzir a incógnita com o sentido positivo das convenções usuais assim como o deslocamento virtual pode preferencialmente ser dado no sentido contrário ao sentido da incógnita e suposto unitário para facilitar os cálculos.
No cálculo dos trabalhos virtuais, pode-se usar as resultantes dos carregamentos distribuídos em cada chapa da estrutura. Não pode ser usada uma só resultante para cargas que atuam em mais de uma chapa.
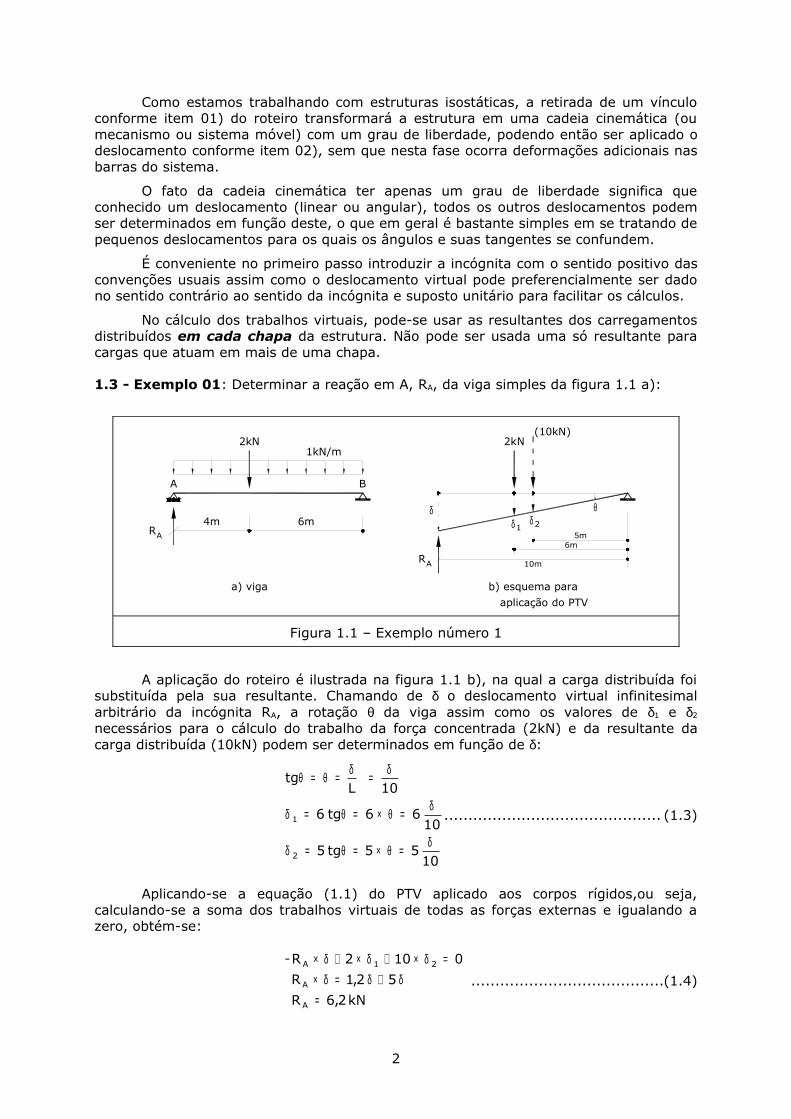
1.3 - Exemplo 01: Determinar a reação em A, RA, da viga simples da figura 1.1 a):
RA
a) viga
4m
A
2kN
6m
B
1kN/m
6m
aplicação do PTVb) esquema para
AR 10m
5m
2kN
δδ 1
δ 2
(10kN)
θ
Figura 1.1 – Exemplo número 1
A aplicação do roteiro é ilustrada na figura 1.1 b), na qual a carga distribuída foi substituída pela sua resultante. Chamando de δ o deslocamento virtual infinitesimal arbitrário da incógnita RA, a rotação θ da viga assim como os valores de δ1 e δ2
necessários para o cálculo do trabalho da força concentrada (2kN) e da resultante da carga distribuída (10kN) podem ser determinados em função de δ:
1055tg5
1066tg6
10Ltg
2
1
δ=θ×=θ=δ
δ=θ×=θ=δ
δ=δ=θ=θ
............................................. (1.3)
Aplicando-se a equação (1.1) do PTV aplicado aos corpos rígidos,ou seja, calculando-se a soma dos trabalhos virtuais de todas as forças externas e igualando a zero, obtém-se:
kN2,6R52,1R
0102R
A
A
21A
=δ+δ=δ×
=δ×+δ×+δ×−
........................................(1.4)
2
Nota-se que o parâmetro δ aparece em todos os termos da equação, podendo ser eliminado, ou seja, não influi no resultado justificando adotá-lo unitário. Aplicando-se o deslocamento virtual unitário contrário ao sentido positivo da incógnita, o trabalho desta será negativo e numericamente igual ao seu valor. Assim a incógnita aparecerá sozinha e com sinal positivo quando for isolada no outro membro da equação.
1.4 – Exemplo 02
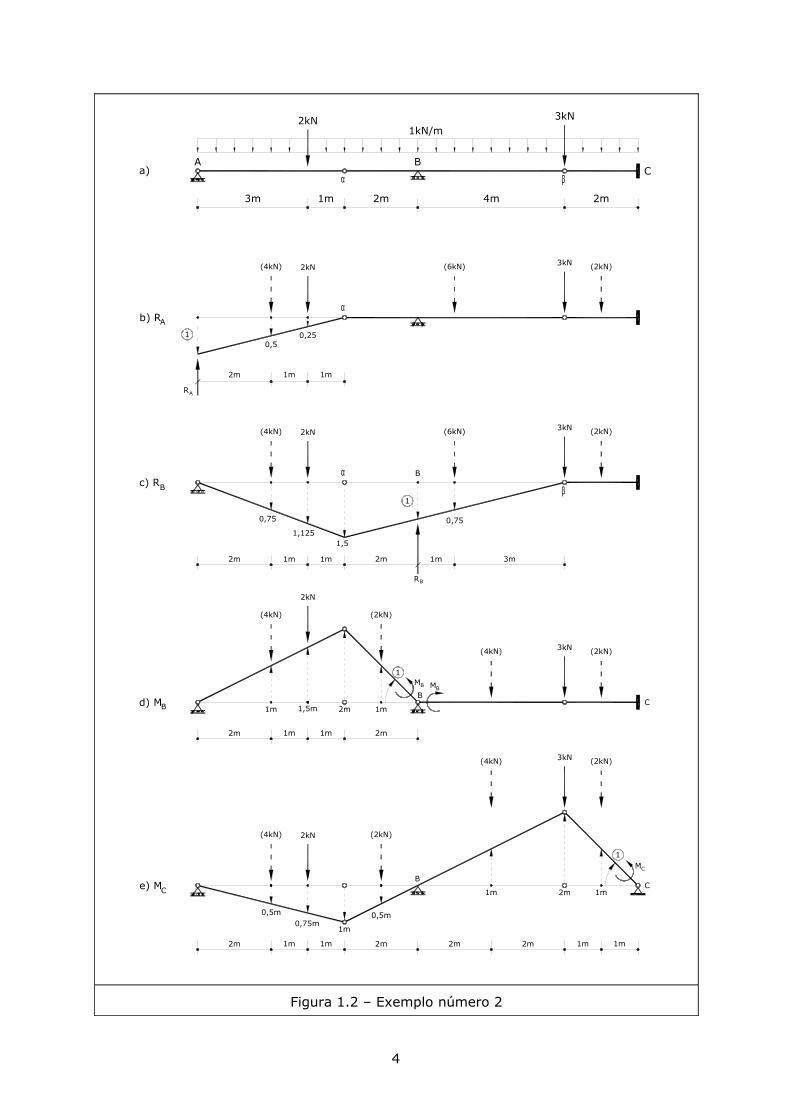
Para a Viga Gerber da figura 1.2 a), determinar os valores das reações RA, RB e dos momentos fletores MB e MC que ocorrem na seção sobre o apoio B e no engastamento C, respectivamente.
As figuras 1.2 b), c), d) e e) mostram as cadeias cinemáticas formadas após a retirada do vínculo correspondente à incógnita respectiva e aplicação do deslocamento unitário.
Como o deslocamento unitário é o único valor conhecido “a priori”, ele foi assinalado na figura com um círculo. A partir deste valor unitário todos as outras ordenadas e os giros, se necessários, foram determinados através de simples proporções ou lembrando que tgθ = θ.
Nos casos e) e d) para o cálculo dos momentos fletores sobre os apoios B e C respectivamente, os apoios não podem ser retirados, pois correspondem às reações RB e RC. No caso do engastamento C, a retirada do vínculo correspondente ao momento o transforma em um apoio fixo. Como MB é um esforço interno, o vínculo correspondente retirado deve ser substituído pelo par de esforços que foi eliminado, ou seja, deve ser indicado tanto a ação que a parte à esquerda da seção exerce na parte da direita, como a ação que a direita exerce na parte da esquerda (ação e reação). No caso de momentos fletores em vigas horizontais, a convenção usual prescreve que eles são positivos quando tracionam as fibras inferiores.
É conveniente lembrar que as forças existem sempre aos pares (ação e reação). Assim, também poderia ser indicado as ações (inverso das reações nos apoios) que a viga exerce na terra. Isto não é necessário pois a terra é suposta um referencial absoluto que naturalmente não apresenta deslocamentos, gerando sempre trabalho nulo e não influindo nos resultados.
Indicadas as cargas externas aplicadas no sistema – as distribuídas através de suas resultantes em cada chapa – e calculados os deslocamentos ao longo das suas linhas de ação através de simples proporcionalidade, fica bastante simples o cálculo dos trabalhos realizados e a aplicação do PTV. A incógnita por ter substituído um vínculo da estrutura deve ser considerada esforço externo, junto com as ações aplicadas.
No caso dos momentos, o deslocamento virtual correspondente é um deslocamento angular, que adotamos unitário. Como se trata de pequenos deslocamentos, para o ângulo ser unitário, o triângulo obtido durante a varredura do deslocamento deve ter a base e a altura iguais.
Considerando o deslocamento correspondente a incógnita adimensional, as ordenadas da forma deslocada da cadeia cinemática no caso de incógnita força também resultam adimensionais, e no caso dos momentos, as ordenadas têm dimensão de comprimento, pois neste caso o valor do deslocamento angular é sempre a razão (cociente) entre dois comprimentos, e como um deles corresponde à distâncias na viga (em metros, por exemplo), o outro deve ter a mesma dimensão para se anularem na operação de divisão.
A aplicação da equação Text =0 fornece para a reação em A conforme fig. 1.2 b):
RA = 4 x 0,5 + 2 x 0,25 → RA = 2,5 kN
Para a reação em B – figura 1.2 c):
RB = 4 x 0,75 + 2 x 1,125 + 6 x 0,75 → RB = 9,75 kN
3
0,5m
e) MC
d) MB
0,75m
2m
0,5m
1m
1m
1m 2m
1,5m
2m
(4kN)
1m
1m
(4kN)
2kN
1m
(2kN)
2m
2m
2kN
1m
(2kN)
c) RB
b) R
RA
A
a)A
1,125
2m
0,75
1m
(4kN)
2m
0,5
1m
(4kN)
α
1,5
1m
2kN
2m
α
0,25
1m
2kN
3m
α
1m
2kN
2m
B
2m 2m
1m 2m
M
BB
BR
MB
(4kN) 3kN
(4kN) 3kN
1m
1m
1m
C
(2kN)
MC
(2kN)
C
1m
B
0,75
(6kN)
(6kN)
3m
β
3kN
3kN
1kN/m
B
4m
β
3kN
(2kN)
(2kN)
2m
C
1
1
1
1
Figura 1.2 – Exemplo número 2
4
Para o momento fletor em B - figura 1.2.d):
MB = − 4 x 1 − 2 x 1,5 − 2 x 1 → MB = − 9 kN×m
Para a reação momento em C – figura 1.2 e):
MC = 4 x 0,5 +2 x 0,75 + 2 x 0,5 − 4 x 1 − 3 x 2 − 2 x 1
MC = − 7,5 kN×m
Os sinais negativos dos valores de MB e MC indicam que estas incógnitas têm sentido oposto ao adotado nas figuras, ou seja tracionam as fibras superiores da viga. No cálculo de MC poderia ter sido usada a resultante total do trecho α−β: 6t deslocando 0,5m no sentido oposto, resultando o trabalho de − 3 kN×m.
Maiores detalhes sobre as cadeias cinemáticas serão vistos no estudo das Linhas de Influência, inclusive com um capítulo dedicado ao estudo das leis de deslocamento das cadeias cinemáticas.
2. O Princípio dos trabalhos virtuais aplicado aos corpos deformáveis
2.1 – Introdução
No estudo da análise estrutural deve-se estender o Princípio dos Trabalhos Virtuais para o caso de estruturas deformáveis. Neste caso deve-se levar em consideração não apenas o trabalho realizado pelas ações externas mas também o trabalho associado aos esforços internos na deformação dos elementos da estrutura.
Este princípio é extremamente valioso e tem muitas aplicações na análise estrutural. Durante o desenvolvimento do princípio nota-se que as propriedades do material não entram em discussão, e consequentemente o PTV aplica-se a todas as estruturas independente do material se comportar linearmente ou não.
2.2 – Enunciado do PTV para corpos deformáveis:
“Em uma estrutura deformável em equilíbrio, a soma dos trabalhos virtuais das ações externas, em um deslocamento compatível com as ligações, é igual ao trabalho virtual interno, realizado pelos esforços internos na deformação dos elementos da estrutura”, ou seja:
Texterno = Tinterno na deformação .......................................... (2.1)
Seja a viga da figura 2.1 a), em equilíbrio sob a ação de um carregamento genérico qualquer que denominaremos estado de carregamento – índice c. Nestas condições um elemento diferencial genérico (c) de comprimento dx, apresenta os esforços solicitantes MC, VC e NC na face esquerda e na face direita podem estar alterados de quantidades diferenciais, sendo apresentados como MC+dMc, VC+dVC e NC+dNC, conforme ilustra a figura 2.1 c).
Admita-se que nesta estrutura seja dada uma deformação virtual que produza uma pequena alteração em sua forma fletida. Esta deformação virtual é imposta sobre a estrutura de alguma maneira não especificada e é completamente independente do fato da estrutura já ter sido submetida a deflexões reais causadas pelas cargas do estado de carregamento. A deformação virtual representa uma deformação adicional imposta à estrutura. A única restrição é que ela deve ter uma forma que poderia ocorrer fisicamente, ou em outras palavras, a deformação virtual no estado de deslocamento – índice d, ilustrado na figura 2.1 b), deve ser compatível com as condições de apoio da estrutura e deve manter a continuidade entre os elementos da estrutura.
Durante a deformação virtual, o elemento genérico (c) se desloca para a posição (d) conforme mostra a figura 2.1 b) deformando até atingir a forma final ilustrada na figura 2.1 d). Nesta figura estão indicadas as deformações que o elemento diferencial sofre nas direções dos esforços solicitantes N, V e M, denominadas respectivamente dud,
5
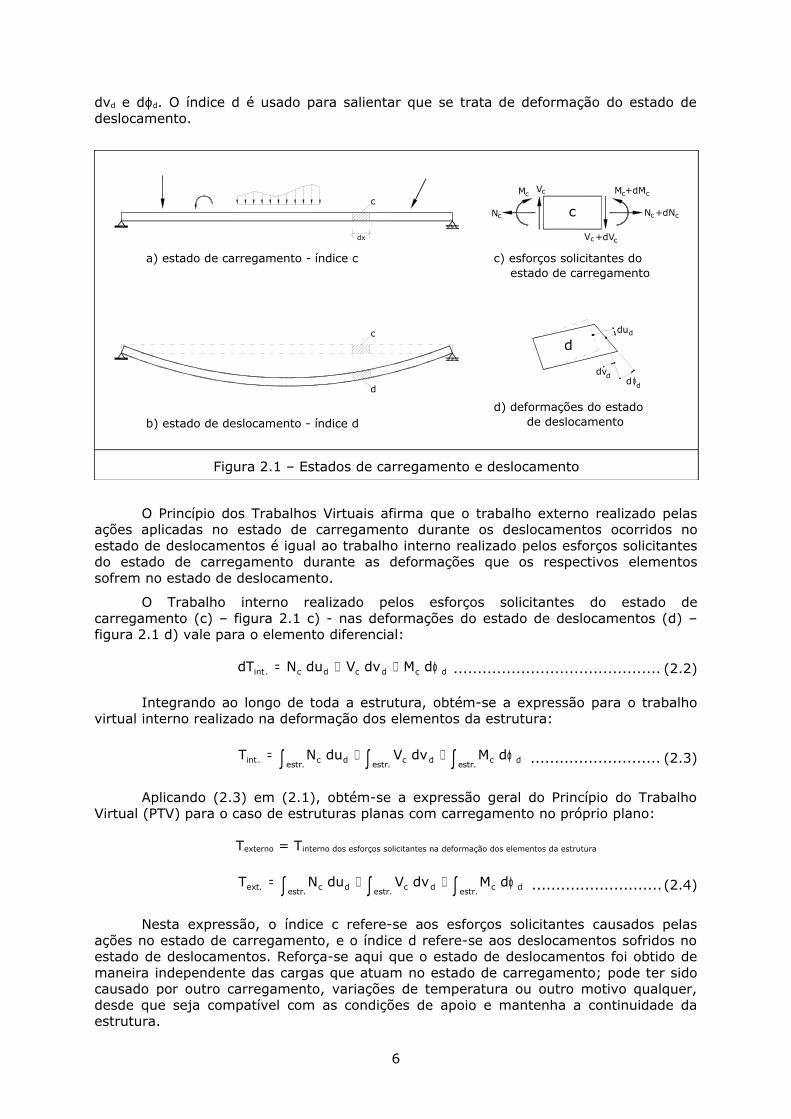
dvd e dϕd. O índice d é usado para salientar que se trata de deformação do estado de deslocamento.
b) estado de deslocamento - índice d
a) estado de carregamento - índice c
d
c
c
dx
de deslocamentod) deformações do estado
d
ddvϕd d
dud
estado de carregamentoc) esforços solicitantes do
+dV
Nc
Vc
c
cM Vc
N
c
+dNc c
cM +dMc
Figura 2.1 – Estados de carregamento e deslocamento
O Princípio dos Trabalhos Virtuais afirma que o trabalho externo realizado pelas ações aplicadas no estado de carregamento durante os deslocamentos ocorridos no estado de deslocamentos é igual ao trabalho interno realizado pelos esforços solicitantes do estado de carregamento durante as deformações que os respectivos elementos sofrem no estado de deslocamento.
O Trabalho interno realizado pelos esforços solicitantes do estado de carregamento (c) – figura 2.1 c) - nas deformações do estado de deslocamentos (d) – figura 2.1 d) vale para o elemento diferencial:
dcdcdc.int dMdvVduNdT ϕ++= ........................................... (2.2)
Integrando ao longo de toda a estrutura, obtém-se a expressão para o trabalho virtual interno realizado na deformação dos elementos da estrutura:
∫∫∫ ϕ++=.estr dc.estr dc.estr dc.int dMdvVduNT ........................... (2.3)
Aplicando (2.3) em (2.1), obtém-se a expressão geral do Princípio do Trabalho Virtual (PTV) para o caso de estruturas planas com carregamento no próprio plano:
Texterno = Tinterno dos esforços solicitantes na deformação dos elementos da estrutura
∫∫∫ ϕ++=.estr dc.estr dc.estr dc.ext dMdvVduNT ........................... (2.4)
Nesta expressão, o índice c refere-se aos esforços solicitantes causados pelas ações no estado de carregamento, e o índice d refere-se aos deslocamentos sofridos no estado de deslocamentos. Reforça-se aqui que o estado de deslocamentos foi obtido de maneira independente das cargas que atuam no estado de carregamento; pode ter sido causado por outro carregamento, variações de temperatura ou outro motivo qualquer, desde que seja compatível com as condições de apoio e mantenha a continuidade da estrutura.
6
2.3 – O processo da carga unitária para cálculo de deslocamentos
O procedimento prático da aplicação do PTV para o cálculo de deslocamentos é conhecido como processo da carga unitária ou processo da carga substituta. Também é encontrado com o nome de processo ou método de Maxwell-Mohr, por ter sido desenvolvido independentemente por James Clerk Maxwell (1831-1879) e Otto Christian Mohr (1835-1918) em torno do ano de 1870.
O procedimento prático da carga unitária é adequado para o cálculo de qualquer deslocamento linear ou angular, absoluto ou relativo. Pode ser usado tanto para estruturas isostáticas como para estruturas hiperestáticas, desde que se conheça os diagramas de estado em toda a estrutura.
Para a aplicação deste procedimento deve-se considerar dois sistemas: o primeiro consiste na estrutura com cargas reais, mudanças de temperatura ou outras causas responsáveis pela produção do deslocamento a ser calculado, configurando então um estado de deslocamento. O segundo sistema é um estado de carregamento que consiste na aplicação de uma carga (ou eventualmente um par de cargas opostas) unitária que age sozinha na estrutura. Esta carga unitária é uma carga fictícia ou substituta, introduzida apenas para se calcular o deslocamento produzido pelas ações reais.
A carga unitária deve corresponder ao deslocamento procurado, ou seja, para se calcular um deslocamento linear absoluto, aplica-se uma força unitária na direção e sentido do deslocamento linear procurado. Caso o deslocamento procurado seja uma rotação, a carga unitária correspondente deve ser um momento. Se o deslocamento procurado for a translação relativa entre dois pontos ao longo da linha que os une, o carregamento unitário deve ser constituído de duas forças unitárias, colineares e opostas agindo nos dois pontos considerados. Caso o deslocamento seja a rotação relativa entre duas tangentes, o carregamento constituirá de dois momentos unitários e opostos.
O cálculo prático para a determinação de um deslocamento qualquer é aplicar na estrutura uma carga (força ou momento) unitária na direção e sentido do deslocamento real procurado e determinar os diagramas de esforços solicitantes N, V e M produzidos por este carregamento unitário, ou seja o estado de carregamento (c) é o sistema com a carga unitária. Tomando-se os deslocamentos e deformações causados pelas ações que agem na estrutura como estado de deslocamento, o único trabalho externo – caso não se tenha recalques de apoio - é o realizado pela carga unitária e é igual ao produto da carga unitária pelo deslocamento procurado. O trabalho interno, como foi visto, será igual a integral estendida a toda estrutura do produto dos esforços solicitantes causados pela carga unitária pelos respectivas deformações causadas pelas ações que agem na estrutura, ou seja:
∫∫∫ ϕ++=δ×.estr
dc.estr
dc.estr
dcprocurado dMdvVduN1 .................. (2.5)
o índice c refere-se ao carregamento unitário;o índice d refere-se à estrutura com as ações aplicadas.
Pode parecer estranho que neste procedimento o estado de deslocamentos que na concepção do PTV é um estado virtual, seja o dos deslocamentos reais. Isto é possível, e até conveniente pois os deslocamentos reais são certamente compatíveis com as condições de apoio da estrutura, bastando serem pequenos o suficiente para não alterarem as condições de equilíbrio das forças reais envolvidas para poderem ser considerados como deslocamentos virtuais.
3. Aplicação do PTV às treliças
No caso das treliças com as hipóteses usuais de cálculo, articulações perfeitas e cargas apenas nos nós, o único esforço que resulta nas barras da treliça é o esforço normal e tem valor constante para cada barra.
Assim, como M = V = zero, apenas a integral que calcula o trabalho interno relacionada com o esforço normal da equação 2.5 é diferente de zero. Temos então:
7
∫=δ×treliça dcprocurado duN1 .................................................... (3.1)
Como as normais são constantes para cada barra e a integral pode ser calculada como uma somatória das integrais em cada barra, temos tirando os valores constantes de N fora das integrais:
∫∑=δibarra d
ibarrasciprocurado duN ..................................................(3.2)
Como diibarranadbarrai
d LLdu ∆=∆=∫ , obtém-se:
diibarras
ciprocurado LN ∆=δ ∑ .........................................................(3.3)
Os deslocamentos ∆L podem ser causados por cargas aplicadas que produzem normais Ndi nas barras i ou variação de temperatura e para cada um destes casos vale:
Caso força normal (conforme Lei de Hooke): ii
ididi AE
LNL =∆ ...........................(3.4)
Caso variação de temperatura: tLL idi ∆α=∆ .............................................(3.5)
nas quais E é o módulo de elasticidade, A é a área da seção transversal e α é o coeficiente de dilatação térmica.
3.1 – Exemplo número 3
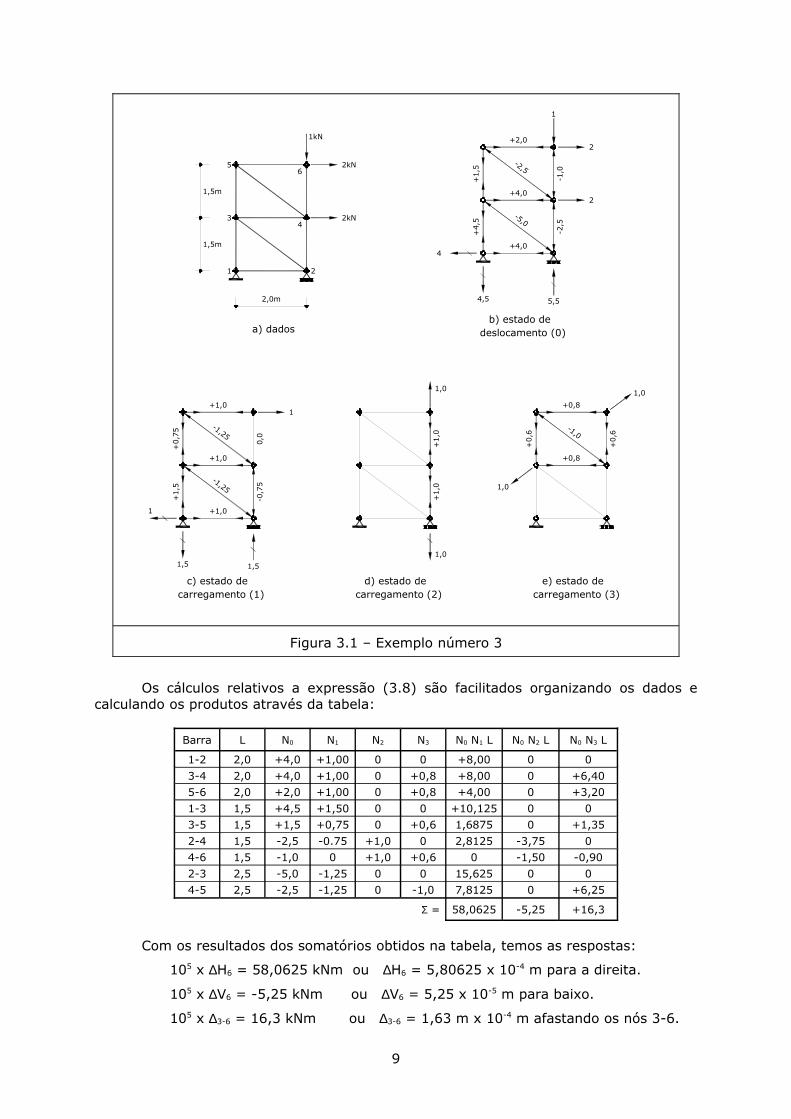
Para a treliça da figura 3.1 a) de EA=105 kN, submetida ao carregamento mostrado, determinar:
a) as componentes horizontal e vertical do deslocamento do nó 6;b) o deslocamento relativo entre os nos 3 e 6.
Como os deslocamentos procurados são causados por um carregamento, as deformações nas barras da treliça são calculadas segundo a Lei de Hooke, conforme a equação (3.4). Aplicando na expressão (3.3), obtém-se:
dibarrasi ii
diciprocurado L
AENN
∆=δ ∑ ....................................................(3.6)
A figura 3.1 b) mostra os resultados das normais nas barras da treliça devido o carregamento dado (índice 0), ou seja, as normais do estado de deslocamento. As figuras 3.1 c) e d) mostram, respectivamente, as normais determinadas dos estados de carregamento unitário para o cálculo das componentes horizontal e vertical do deslocamento do nó 6. A figura 3.1 e) apresenta as normais do estado de carregamento unitário para o cálculo do deslocamento relativo entre os nós 3 e 6. As forças - cargas e normais nas barras – estão em kN no estado de deslocamento e são adimensionais nos estados de carregamentos unitários.
Como EA é constante e usando a notação (0) para os esforços do estado de deslocamento (treliça dada) e (1), (2) e (3) para os estados de carregamento unitário respectivos aos deslocamentos procurados conforme mostra a figura 3.1, a expressão (3.6) fica:
LNNEA1
barrasi0procurado ∑=δ ..................................................... (3.7)
ou, LNNEAbarras
i0procurado ∑=δ ......................................................(3.8)
8
carregamento (1)c) estado de
1,5
1
+1,
5+
0,75
1,5
-1,25
+1,0
-0,7
5
-1,25
+1,0
+1,0
0,0
1
1,5m
1,5m
4
a) dados
2,0m
1
3 2kN
2
65 2kN
1kN
1,0
+1,
0
1,0
+1,
0
1,0
+0,
6
+0,8
-1,0
+0,8
+0,
6
1,0
deslocamento (0)b) estado de
4,5
4
+4,
5
5,5
+4,0
+4,0
-5,0
-2,5
+1,
5
+2,0
-2,5
-1,0
1
2
2
carregamento (2)d) estado de
carregamento (3)e) estado de
Figura 3.1 – Exemplo número 3
Os cálculos relativos a expressão (3.8) são facilitados organizando os dados e calculando os produtos através da tabela:
Barra L N0 N1 N2 N3 N0 N1 L N0 N2 L N0 N3 L
1-2 2,0 +4,0 +1,00 0 0 +8,00 0 03-4 2,0 +4,0 +1,00 0 +0,8 +8,00 0 +6,405-6 2,0 +2,0 +1,00 0 +0,8 +4,00 0 +3,201-3 1,5 +4,5 +1,50 0 0 +10,125 0 03-5 1,5 +1,5 +0,75 0 +0,6 1,6875 0 +1,352-4 1,5 -2,5 -0.75 +1,0 0 2,8125 -3,75 04-6 1,5 -1,0 0 +1,0 +0,6 0 -1,50 -0,902-3 2,5 -5,0 -1,25 0 0 15,625 0 04-5 2,5 -2,5 -1,25 0 -1,0 7,8125 0 +6,25
Σ = 58,0625 -5,25 +16,3
Com os resultados dos somatórios obtidos na tabela, temos as respostas:
105 x ∆H6 = 58,0625 kNm ou ∆H6 = 5,80625 x 10-4 m para a direita.
105 x ∆V6 = -5,25 kNm ou ∆V6 = 5,25 x 10-5 m para baixo.
105 x ∆3-6 = 16,3 kNm ou ∆3-6 = 1,63 m x 10-4 m afastando os nós 3-6.
9
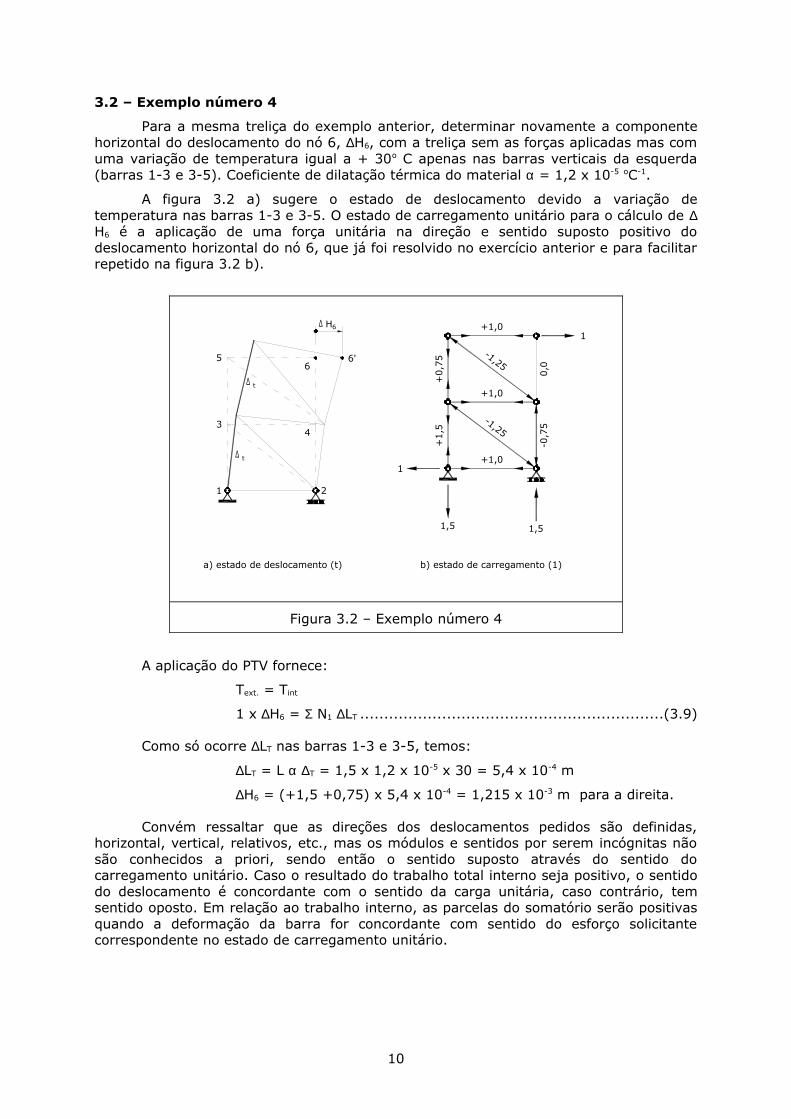
3.2 – Exemplo número 4
Para a mesma treliça do exemplo anterior, determinar novamente a componente horizontal do deslocamento do nó 6, ∆H6, com a treliça sem as forças aplicadas mas com uma variação de temperatura igual a + 30o C apenas nas barras verticais da esquerda (barras 1-3 e 3-5). Coeficiente de dilatação térmica do material α = 1,2 x 10-5 oC-1.
A figura 3.2 a) sugere o estado de deslocamento devido a variação de temperatura nas barras 1-3 e 3-5. O estado de carregamento unitário para o cálculo de ∆H6 é a aplicação de uma força unitária na direção e sentido suposto positivo do deslocamento horizontal do nó 6, que já foi resolvido no exercício anterior e para facilitar repetido na figura 3.2 b).
a) estado de deslocamento (t)
1 2
∆ t
3
5
4
∆ t
6
1
6'
∆ H6
b) estado de carregamento (1)
1,5 1,5
+1,0
+1,0
+1,
5+
0,75
-1,25
-0,7
5
-1,25
0,0
+1,01
Figura 3.2 – Exemplo número 4
A aplicação do PTV fornece:
Text. = Tint
1 x ∆H6 = Σ N1 ∆LT ...............................................................(3.9)
Como só ocorre ∆LT nas barras 1-3 e 3-5, temos:
∆LT = L α ∆T = 1,5 x 1,2 x 10-5 x 30 = 5,4 x 10-4 m
∆H6 = (+1,5 +0,75) x 5,4 x 10-4 = 1,215 x 10-3 m para a direita.
Convém ressaltar que as direções dos deslocamentos pedidos são definidas, horizontal, vertical, relativos, etc., mas os módulos e sentidos por serem incógnitas não são conhecidos a priori, sendo então o sentido suposto através do sentido do carregamento unitário. Caso o resultado do trabalho total interno seja positivo, o sentido do deslocamento é concordante com o sentido da carga unitária, caso contrário, tem sentido oposto. Em relação ao trabalho interno, as parcelas do somatório serão positivas quando a deformação da barra for concordante com sentido do esforço solicitante correspondente no estado de carregamento unitário.
10
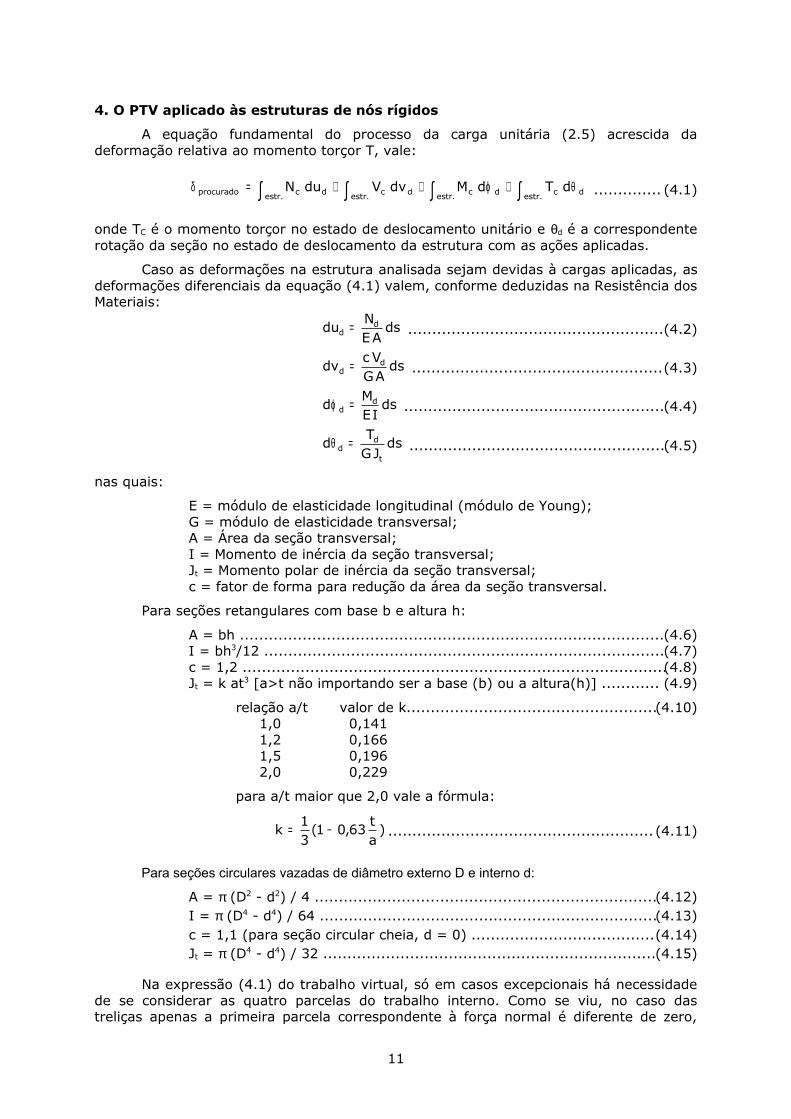
4. O PTV aplicado às estruturas de nós rígidos
A equação fundamental do processo da carga unitária (2.5) acrescida da deformação relativa ao momento torçor T, vale:
∫∫∫∫ θ+ϕ++=δ.estr dc.estr dc.estr dc.estr dcprocurado dTdMdvVduN .............. (4.1)
onde TC é o momento torçor no estado de deslocamento unitário e θd é a correspondente rotação da seção no estado de deslocamento da estrutura com as ações aplicadas.
Caso as deformações na estrutura analisada sejam devidas à cargas aplicadas, as deformações diferenciais da equação (4.1) valem, conforme deduzidas na Resistência dos Materiais:
dsAE
Ndu dd = .....................................................(4.2)
dsAGVcdv d
d = ....................................................(4.3)
dsIE
Md dd =ϕ ......................................................(4.4)
dsJG
Tdt
dd =θ .....................................................(4.5)
nas quais:
E = módulo de elasticidade longitudinal (módulo de Young);G = módulo de elasticidade transversal;A = Área da seção transversal;I = Momento de inércia da seção transversal;Jt = Momento polar de inércia da seção transversal;c = fator de forma para redução da área da seção transversal.
Para seções retangulares com base b e altura h:
A = bh ........................................................................................(4.6)I = bh3/12 ...................................................................................(4.7)c = 1,2 ........................................................................................(4.8)Jt = k at3 [a>t não importando ser a base (b) ou a altura(h)] ............ (4.9)
relação a/t valor de k....................................................(4.10) 1,0 0,141 1,2 0,166 1,5 0,196 2,0 0,229
para a/t maior que 2,0 vale a fórmula:
)at63,01(
31k −= ....................................................... (4.11)
Para seções circulares vazadas de diâmetro externo D e interno d:
A = π (D2 - d2) / 4 .......................................................................(4.12)I = π (D4 - d4) / 64 ......................................................................(4.13)c = 1,1 (para seção circular cheia, d = 0) ......................................(4.14)Jt = π (D4 - d4) / 32 .....................................................................(4.15)
Na expressão (4.1) do trabalho virtual, só em casos excepcionais há necessidade de se considerar as quatro parcelas do trabalho interno. Como se viu, no caso das treliças apenas a primeira parcela correspondente à força normal é diferente de zero,
11
sendo portanto a única a ser considerada. A quarta parcela só será diferente de zero se houver momento torçor, isto é, só se ocorrer carregamento fora do plano da estrutura.
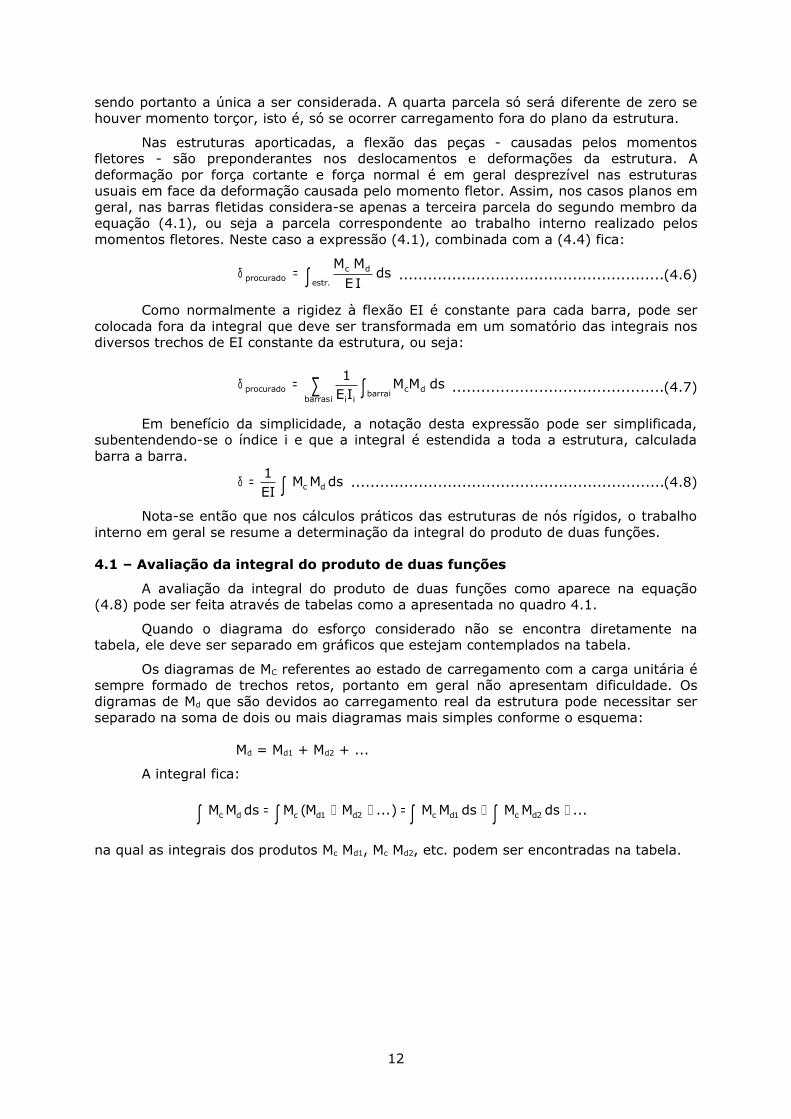
Nas estruturas aporticadas, a flexão das peças - causadas pelos momentos fletores - são preponderantes nos deslocamentos e deformações da estrutura. A deformação por força cortante e força normal é em geral desprezível nas estruturas usuais em face da deformação causada pelo momento fletor. Assim, nos casos planos em geral, nas barras fletidas considera-se apenas a terceira parcela do segundo membro da equação (4.1), ou seja a parcela correspondente ao trabalho interno realizado pelos momentos fletores. Neste caso a expressão (4.1), combinada com a (4.4) fica:
∫=δ.estr
dcprocurado ds
IEMM
.......................................................(4.6)
Como normalmente a rigidez à flexão EI é constante para cada barra, pode ser colocada fora da integral que deve ser transformada em um somatório das integrais nos diversos trechos de EI constante da estrutura, ou seja:
∑ ∫=δibarras
ibarra dcii
procurado dsMMIE1
............................................(4.7)
Em benefício da simplicidade, a notação desta expressão pode ser simplificada, subentendendo-se o índice i e que a integral é estendida a toda a estrutura, calculada barra a barra.
∫=δ dsMMEI1
dc .................................................................(4.8)
Nota-se então que nos cálculos práticos das estruturas de nós rígidos, o trabalho interno em geral se resume a determinação da integral do produto de duas funções.
4.1 – Avaliação da integral do produto de duas funções
A avaliação da integral do produto de duas funções como aparece na equação (4.8) pode ser feita através de tabelas como a apresentada no quadro 4.1.
Quando o diagrama do esforço considerado não se encontra diretamente na tabela, ele deve ser separado em gráficos que estejam contemplados na tabela.
Os diagramas de MC referentes ao estado de carregamento com a carga unitária é sempre formado de trechos retos, portanto em geral não apresentam dificuldade. Os digramas de Md que são devidos ao carregamento real da estrutura pode necessitar ser separado na soma de dois ou mais diagramas mais simples conforme o esquema:
Md = Md1 + Md2 + ...
A integral fica:
...dsMMdsMM)...MM(MdsMM 2dc1dc2d1dcdc ++=++= ∫∫∫∫
na qual as integrais dos produtos Mc Md1, Mc Md2, etc. podem ser encontradas na tabela.
12
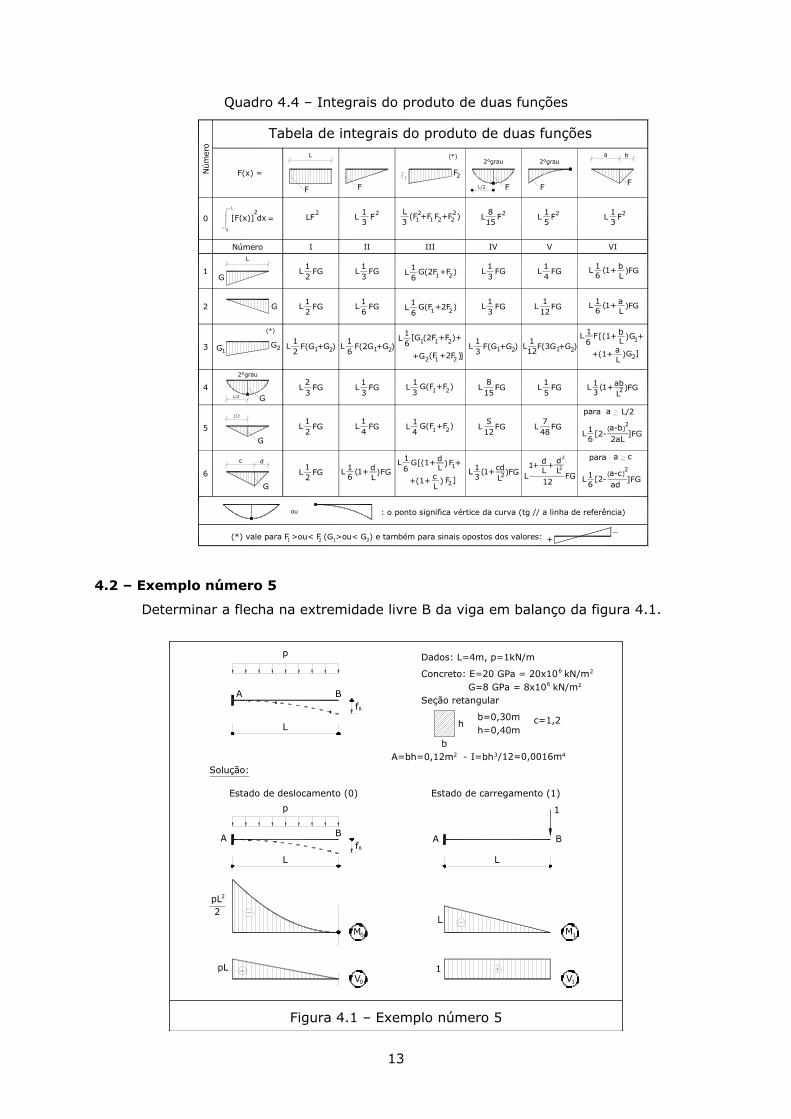
Quadro 4.4 – Integrais do produto de duas funções
(*) vale para F >ou< F (G >ou< G ) e também para sinais opostos dos valores: +_
para a c
para a L/2
ou : o ponto significa vértice da curva (tg // a linha de referência)
G(2F +F )
Tabela de integrais do produto de duas funções
Núm
ero
Número I II III IV V VI
0
1
2
3
4
5
6
F(x) =
[F(x)] dx 0
L2 2 2FL
31
F
L
F
a
F
(*)
L/2
2°grau
F F
2°grau
(F +F +F )1 1 2L3
L51 2FL
158 2F
(*)
L
2°grau
L/2 G
G
1 12 2
c
L/2
G
G
G
L21
FG
F22 2
=
b
d
L 1+( )FG6 L1 d
+(1+Lc ) 2F ]
[(1+ 16
L dL )G +
FG2-L [ ]2aL6a-b1 ( )
2
F2
1 2
21
F1
LF FL31 2
G1G2
1L F(G +G )
2
FGL21
FGL31
16
L FG
6L 1
6L 1
21G(F +2F )
F(2G +G )1 2L16
6L
12G (2F +F )+1 1
(F +2F )1 22
[
]
23
FGL FGL31
14
L FG12
L FG
1G(F +F )23L
1
1G(F +F )214
L
+G
2FGL
1
1L
3FG L
14
FG L 1+(16 )b
LFG
La
61L 1+( FG)
12L FG
1L 1
3FG
L13
F(G +G )1 2 L F(3G +G )2112 1
L
[(1+
+(1+
FL61
a ]2G)
+L )b G1
L FG125
L15
FG8
1+(13 )cd
LFG2L
7L
48FG
1L
5FG (L 1
3 L)1+ab
2 FG
FGL12
Ld+1 d
L+ 2
2
a-cad
2-L [16
(FG]
2)
4.2 – Exemplo número 5
Determinar a flecha na extremidade livre B da viga em balanço da figura 4.1.
p
pL
pL2
2
A
0V
L
0M
BfB
Estado de deslocamento (0)
Solução:
Af
L
B
p
B
1
1
L
A
L
1V
1M
B
Estado de carregamento (1)
G=8 GPa = 8x10 kN/mConcreto: E=20 GPa = 20x10 kN/m
Seção retangular
/12=0,0016mA=bh=0,12m -
h c=1,2
I=bhb
3
h=0,40mb=0,30m
Dados: L=4m, p=1kN/m
42
2
26
6
Figura 4.1 – Exemplo número 5
13
Com o propósito de mostrar que nas estruturas usuais o efeito da força cortante nos deslocamentos é desprezível em face do efeito do momento fletor, consideraremos neste primeiro exemplo estes dois efeitos.
Aplicando a técnica da carga unitária, temos:
GA2pLc
EI8pLf
1pL21L
GAcL
2p
41L
EI1f
dsVVGAcdsMM
EI1f
24
B
2
B
1010B
+=
⋅+=
+= ∫ ∫
............................................(4.9)
A primeira parcela corresponde ao efeito do momento fletor (flexão) na deformação da viga e a segunda corresponde ao efeito da força cortante na deformação. Substituindo-se os valores numéricos, obtém-se:
fB = (0,001 + 0,00001) m
Comparando-se o efeito do momento fletor com o efeito da força cortante:
01,0001,0
00001,0MdeEfeitoVdeEfeito ==
Ou seja, o efeito da força cortante é 1% do efeito do momento fletor, justificando não considerar, na grande maioria dos casos o efeito da força cortante nas deformações.
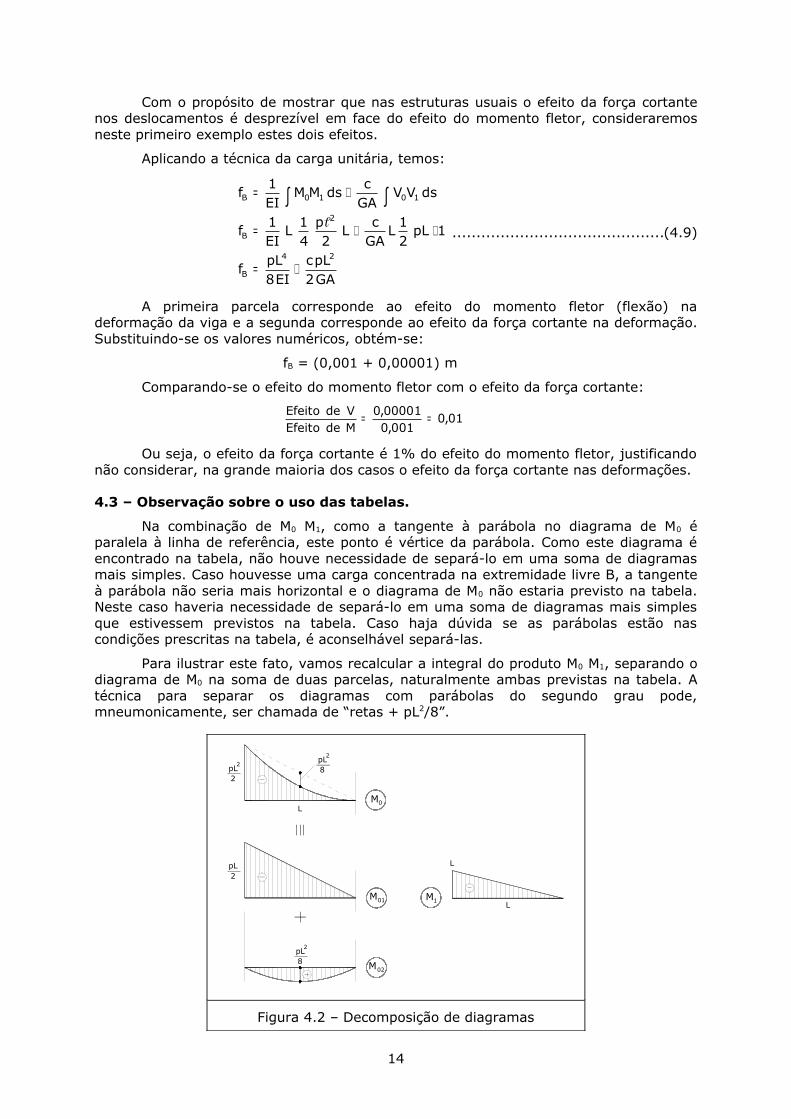
4.3 – Observação sobre o uso das tabelas.
Na combinação de M0 M1, como a tangente à parábola no diagrama de M0 é paralela à linha de referência, este ponto é vértice da parábola. Como este diagrama é encontrado na tabela, não houve necessidade de separá-lo em uma soma de diagramas mais simples. Caso houvesse uma carga concentrada na extremidade livre B, a tangente à parábola não seria mais horizontal e o diagrama de M0 não estaria previsto na tabela. Neste caso haveria necessidade de separá-lo em uma soma de diagramas mais simples que estivessem previstos na tabela. Caso haja dúvida se as parábolas estão nas condições prescritas na tabela, é aconselhável separá-las.
Para ilustrar este fato, vamos recalcular a integral do produto M0 M1, separando o diagrama de M0 na soma de duas parcelas, naturalmente ambas previstas na tabela. A técnica para separar os diagramas com parábolas do segundo grau pode, mneumonicamente, ser chamada de “retas + pL2/8”.
8pL2
02M
01M
L0M
M
L
1L
8pL2
2pL2
2pL
Figura 4.2 – Decomposição de diagramas
14
∫∫∫∫ ==+= dsMMdsMMds)MM(MdsMM 0210110201101
ou, 8
pL)14(24pLLpL
8pL
31LpL
2pL
31LdsMM
4422
01 =−=−=∫Ou seja, o resultado coincide com a parcela obtida em (4.9) correspondente a
deformação por momento fletor. Nesta última integral calculada, o sinal negativo que aparece no cálculo da integral de M1 M02 é porque neste caso os diagramas de M1 e M02
têm sinais opostos.
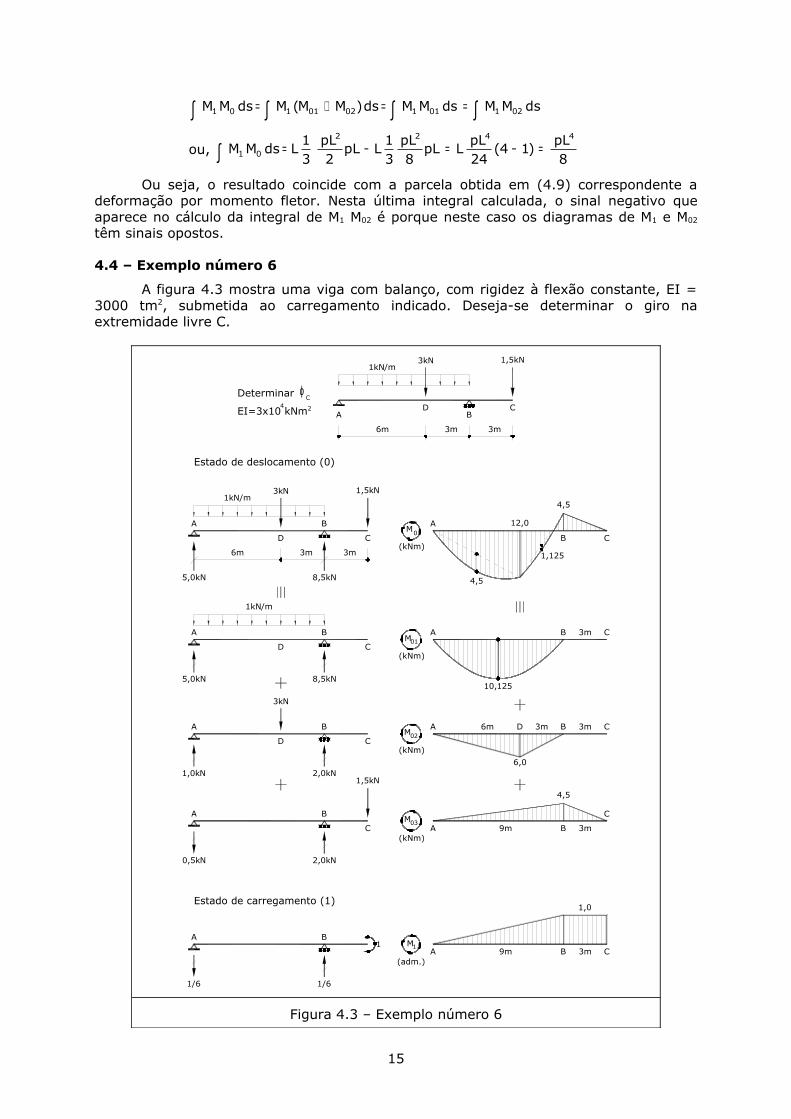
4.4 – Exemplo número 6
A figura 4.3 mostra uma viga com balanço, com rigidez à flexão constante, EI = 3000 tm2, submetida ao carregamento indicado. Deseja-se determinar o giro na extremidade livre C.
Estado de carregamento (1)
1/6
A
0,5kN
A
1,0kN
A
1/6
B1
2,0kN
2,0kN
3kN
D
B
C
B
1,5kN
C
EI=3x10 kNm
6m
1kN/m
Estado de deslocamento (0)
Determinar
A
5,0kN
5,0kN
A
8,5kN
8,5kN
D
1kN/m
D
3kN
3m
B
C
B
3m
C
1,5kN
4C
ϕ2
A
6m
1kN/m
M1A 9m
03MA
02MA
9m
6m
6,0
D 3m
3mB C
3m
1,0
B
C
3m
4,5
B C
1,125
4,5
A01M
0MA
10,125
12,0
D
3kN
3m
B
1,5kN
C
3m
3mB C
B
4,5
C
(adm.)
(kNm)
(kNm)
(kNm)
(kNm)
Figura 4.3 – Exemplo número 6
15
O estado de deslocamento, que chamaremos de estado (zero), é a viga com o carregamento real que consiste de três cargas: uma distribuída e duas concentradas. O digrama de momentos fletores correspondente M0, está indicado na figura e nota-se que na sua forma final não se encontra diretamente na tabela. A alternativa mais conveniente neste caso é usar o Princípio da Superposição de Efeitos, separando o carregamento múltiplo em uma soma dos carregamentos obtidos pela aplicação de cada carga atuando isoladamente como ilustra a figura 4.3. Desta forma obtém-se os diagramas mais simples, M01, M02 e M03, casos encontrados diretamente na tabela.
O estado de carregamento unitário para o cálculo do giro na extremidade C, ϕc, chamado de estado de carregamento (1), consiste em um momento unitário aplicado na posição do deslocamento procurado, conforme mostra a figura 4.3.
A aplicação do PTV - técnica da carga unitária, equação (4.8) – resulta:
∫ ∫ ∫ ∫++==ϕ dsMMdsMMdsMMdsMMEI 10310210110c
15,421315,4
31916)
961(
6191125,10
319EI c ×××+×××+××+××−×××−=ϕ
2c tm125,25EI −=ϕ
ou, .radianos10375,830000
125,25 4c
−×−=−=ϕ
O sinal (-) significa que a rotação ocorre no sentido contrário ao suposto no estado de carregamento unitário, ou seja, ocorre no sentido anti-horário. Para não haver dúvidas em relação ao sentido, os deslocamentos podem ser expressos em módulo explicitando-se o sentido. No caso dos giros, é também conveniente expressá-los em graus (1 rad = 180/π graus). Assim,
.horárioantitidosenno048,0rad10375,8 o4c −=×=ϕ −
No cálculo da integral de M03×M1, usou-se a propriedade:
∫ ∫ ∫+=C
A
B
A
C
B 103103103 dsMMdsMMdsMM
4.5. Exemplo número 7
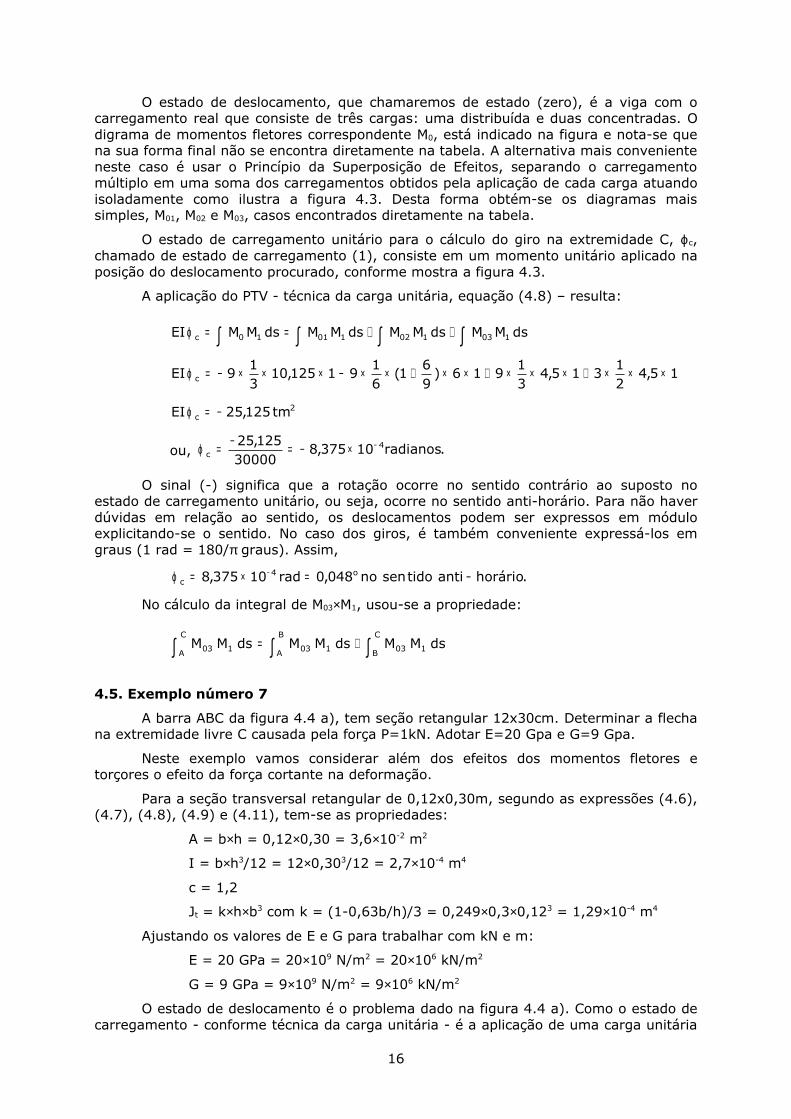
A barra ABC da figura 4.4 a), tem seção retangular 12x30cm. Determinar a flecha na extremidade livre C causada pela força P=1kN. Adotar E=20 Gpa e G=9 Gpa.
Neste exemplo vamos considerar além dos efeitos dos momentos fletores e torçores o efeito da força cortante na deformação.
Para a seção transversal retangular de 0,12x0,30m, segundo as expressões (4.6), (4.7), (4.8), (4.9) e (4.11), tem-se as propriedades:
A = b×h = 0,12×0,30 = 3,6×10-2 m2
I = b×h3/12 = 12×0,303/12 = 2,7×10-4 m4
c = 1,2
Jt = k×h×b3 com k = (1-0,63b/h)/3 = 0,249×0,3×0,123 = 1,29×10-4 m4
Ajustando os valores de E e G para trabalhar com kN e m:
E = 20 GPa = 20×109 N/m2 = 20×106 kN/m2
G = 9 GPa = 9×109 N/m2 = 9×106 kN/m2
O estado de deslocamento é o problema dado na figura 4.4 a). Como o estado de carregamento - conforme técnica da carga unitária - é a aplicação de uma carga unitária
16
na direção do deslocamento procurado, ele coincide com o estado de deslocamento. Assim, a aplicação do PTV neste caso fica, segundo (4.1) com (4.3), (4.4) e (4.5), omitindo-se os índices relativos aos problemas por serem desnecessários neste caso:
∫ ∫ ∫++= dsGJTds
GAVcds
EIM
ft
222f
B
P=1kN
P=1kN
P=1kN
A
B
C
AB
C
A B
B
C
Mf=6tm
T=6tmT=6tm
P=1kN
P=1kNT=6tm
Mf=3tm
MfT
(kN m) (kN m)(kN)
V
1,0
1,0
1,0
1kN
1kN
1kN
Convenção:
Momento (fletor ou torçor)ForçaForça "entrando" no plano da figuraForça "saindo" do plano da figura
Mf=3tm
P=1kN
a)
c)b)
d) diagramas dos esforços solicitantes
6,0
6,0
6,03,0
3m
6m
Figura 4.4 – Exemplo número 7
A figura 4.4 b) apresenta a estrutura em planta com a carga aplicada e as reações de apoio. A figura 4.4 c) mostra os esforços em equilíbrio que submetem as duas barras separadas. Como as barras AB e BC são perpendiculares entre si, na extremidade comum B, o que é momento fletor (Mf) em uma, será momento torçor (T) na outra. A figura também relembra a convenção usual para os vetores forças e momentos (seta dupla) e forças perpendiculares ao plano do desenho, quando não se usa perspectiva.
Com os diagramas fornecidos em 4.4 d), usando a tabela de integral do produto de duas funções, obtém-se:
46
2
26
22
46
22
B 1029,110963
106,310913162,1
107,21020
3336
36
f −−− ××××+
××××+××+
×××
×+×=
fB = 0,015 + 0,00003 + 0,093
fB ≈ 0,108 metros = 10,8 cm para baixo.
A segunda parcela da soma que resulta fB é o efeito da força cortante na deformação. Como se vê, desprezível.
17
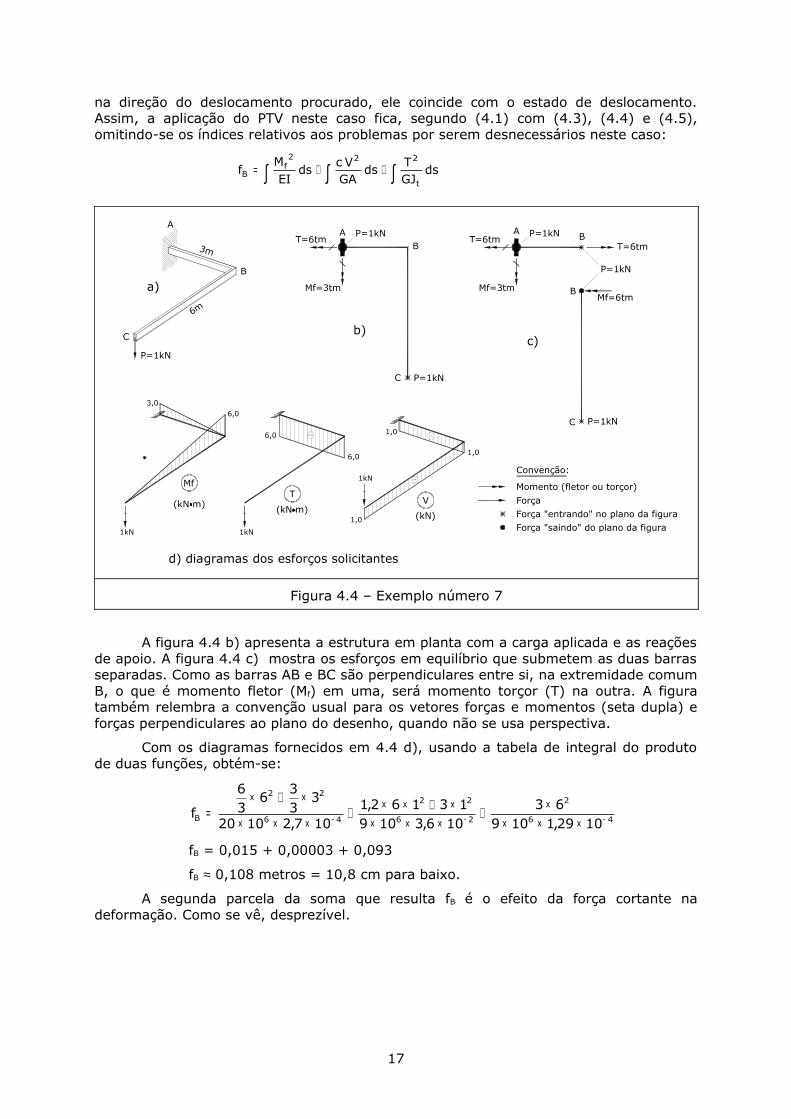
5. Deformações por variação de temperatura.
Caso o estado de deslocamento (d) seja causado por uma variação não uniforme de temperatura, a expressão geral do PTV (4.1), usando a técnica da carga unitária fica:
∫∫ ϕ+=δ.estr
dc.estr
dcprocurado dMduN ................................................. (5.1)
na qual as deformações dud e dϕd valem os valores mostrados na figura 5.1. Notar que neste caso a deformação dud é relativo ao eixo médio e dvd é nulo.
Substituindo os valores de dud e dφd, obtém-se:
∫∫∆−∆
α+∆α=δ.estr
cinfsup
.estrcmédioprocurado dxM
htt
dxNt .......................(5.2)
Neste caso, cuidado especial deve ser tomado em relação ao sinal do trabalho interno na deformação, ou seja, com o sinal dos resultados das integrais. Caso as deformações por temperatura sejam concordantes com o sentido dos esforços do estado de deslocamento, o sinal será positivo, caso contrário, negativo. Assim, A primeira integral será positiva para esforços normais de tração e a segunda será positiva quando o momento fletor Mc tracionar a fibra que se encontra mais distendida do trecho, ou aquela com a temperatura mais elevada.
gradiente
t∆ inferior
dudx
inferior
hd
superior∆ t
ddu
dϕ
superiordu
inf.
inf.
d dϕ
dud
∆ t ∆ tsup.α=h
_
sup.α=∆ t + ∆ t
dx
dx
∆
_
h
inferior
superior
médiadt
gradiente
inferior
superior
du
du
=
=
∆α t
∆α t
=∆ tsup
2∆
= sup.t +
dx
dx
∆ tinf
inf.t
Figura 5.1 – Variação de temperatura
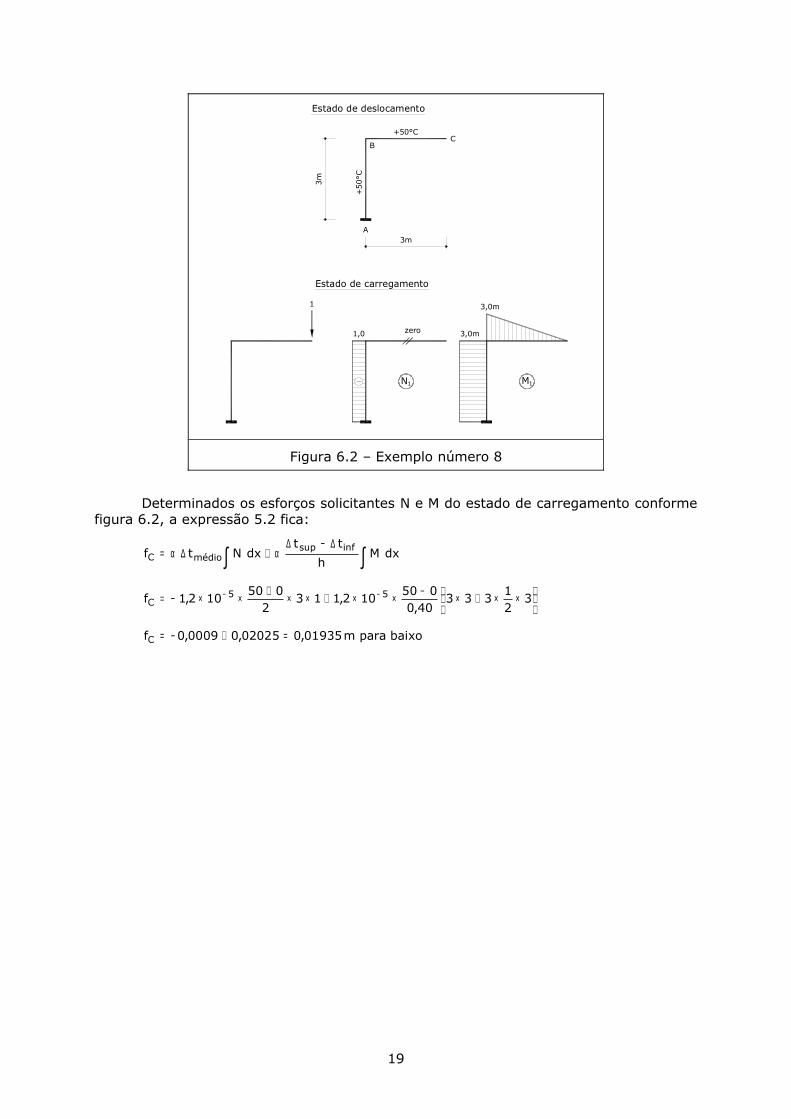
5.1 – Exemplo número 8
A estrutura da figura 5.2 apresenta uma variação de temperatura nas fibras “externas” de ambas as barras de +50o centígrados. Deseja-se determinar a flecha (componente vertical do deslocamento) na extremidade livre C. O coeficiente de dilatação térmica do material vale: α = 1,2 x 10-5 oC-1 e a seção transversal das barras tem altura h = 0,40m.
18
Estado de carregamento
Estado de deslocamento
+50°C
1
1,0
3m
A
+50
°C
B
M
3,0m
N1
zero
3,0m
1
3m
C
Figura 6.2 – Exemplo número 8
Determinados os esforços solicitantes N e M do estado de carregamento conforme figura 6.2, a expressão 5.2 fica:
∫∫∆−∆
α+∆α= dxMh
ttdxNtf infsup
médioC
××+×−××+××+××−= −− 3
21333
40,0050102,113
2050102,1f 55
C
baixoparam01935,002025,00009,0fC =+−=
19
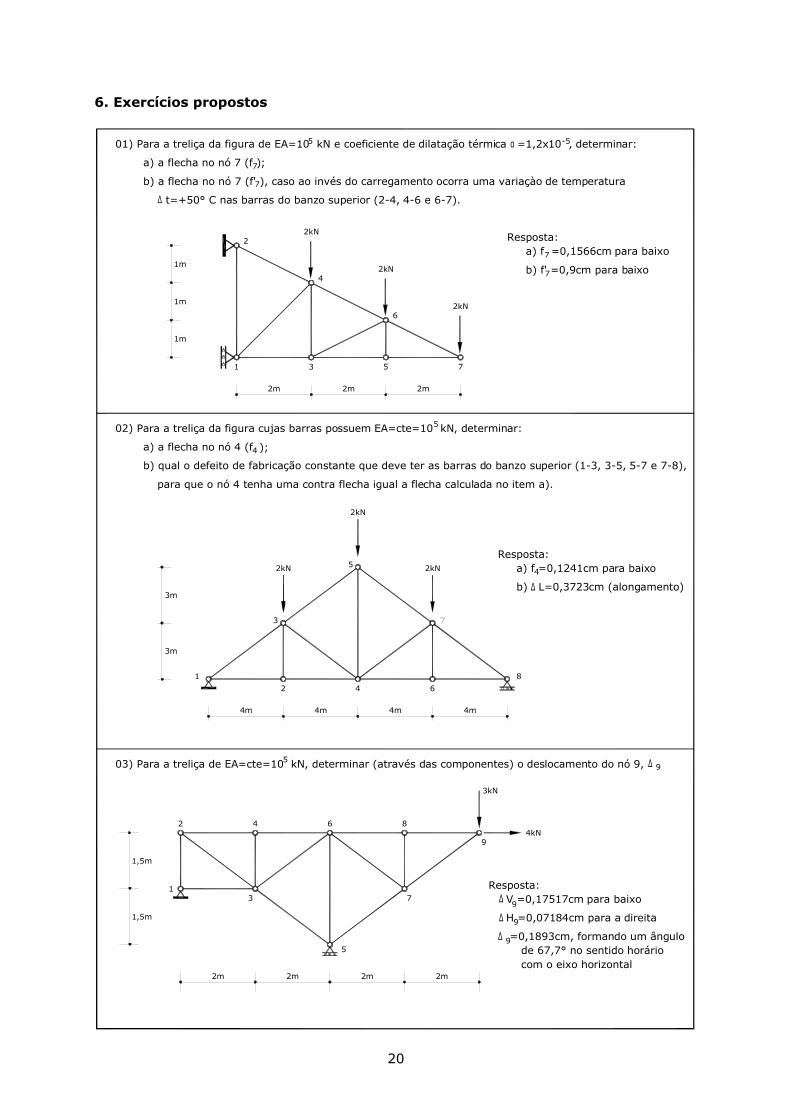
6. Exercícios propostos
01) Para a treliça da figura de EA=10 kN e coeficiente de dilatação térmica =1,2x10 , determinar:
a) a flecha no nó 7 (f );
b) a flecha no nó 7 (f' ), caso ao invés do carregamento ocorra uma variaçào de temperatura
t=+50° C nas barras do banzo superior (2-4, 4-6 e 6-7).
α
∆
-5
7
7
2
1
1m
1m
1m
2kN
7
2m2m
3 5
2m
4
2kN
6
2kN
Resposta:a) f =0,1566cm para baixo
b) f' =0,9cm para baixo7
7
b) qual o defeito de fabricação constante que deve ter as barras do banzo superior (1-3, 3-5, 5-7 e 7-8),
02) Para a treliça da figura cujas barras possuem EA=cte=10 kN, determinar:
a) a flecha no nó 4 (f4
para que o nó 4 tenha uma contra flecha igual a flecha calculada no item a).
1
4m 4m
2 4
4m 4m
6
3
2kN 5 2kN
8
3m
3m
2kN
∆4a) f =0,1241cm para baixo
b) L=0,3723cm (alongamento)
Resposta:
03) Para a treliça de EA=cte=10 kN, determinar (através das componentes) o deslocamento do nó 9, ∆ 9
3kN
1,5m
1,5m
2m
13
2 4
2m2m
5
2m
7
6 8
94kN
Resposta: V =0,17517cm para baixo
H =0,07184cm para a direita
=0,1893cm, formando um ângulode 67,7° no sentido horáriocom o eixo horizontal
9
9∆
∆
∆ 9
5
5
);
5
20
A
L/2
C
EI
L/2
B
P
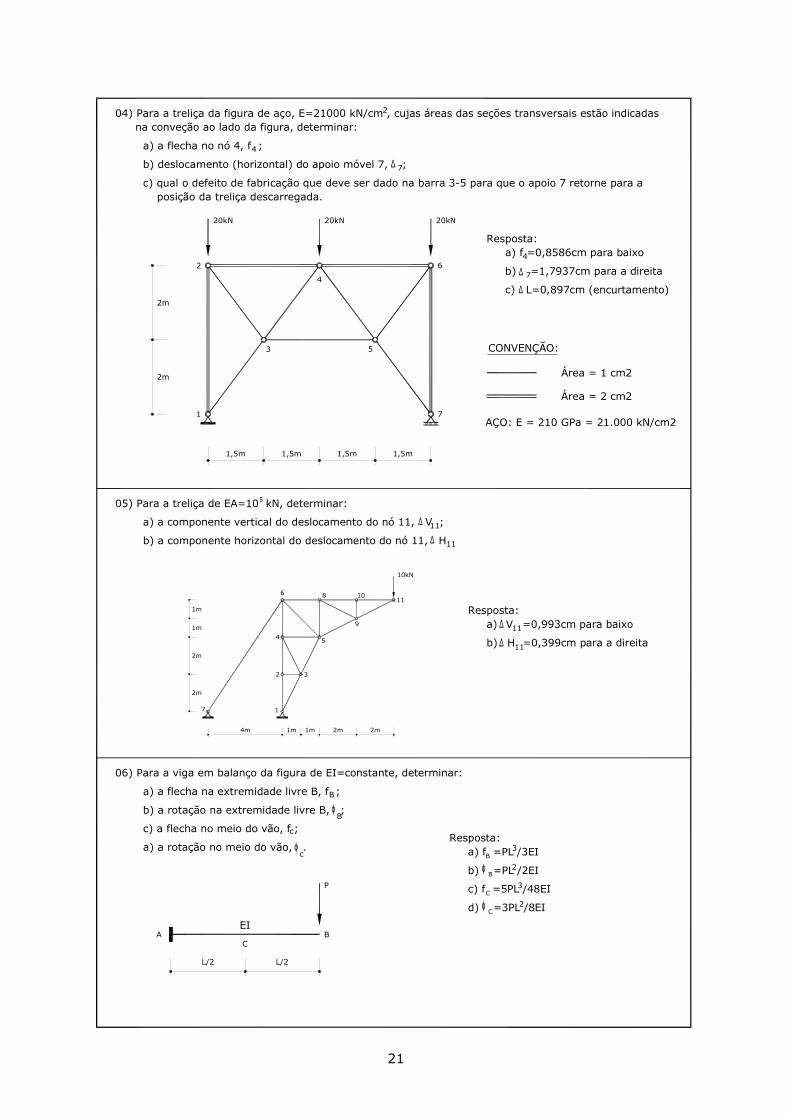
04) Para a treliça da figura de aço, E=21000 kN/cm , cujas áreas das seções transversais estão indicadas
a) a flecha no nó 4, f ;
b) deslocamento (horizontal) do apoio móvel 7, ;∆
2
4
7
Resposta:a) f =0,8586cm para baixo
b) =1,7937cm para a direita4
7
na conveção ao lado da figura, determinar:
c) qual o defeito de fabricação que deve ser dado na barra 3-5 para que o apoio 7 retorne para aposição da treliça descarregada.
1,5m 1,5m1,5m 1,5m
4
1
2m
2m
3 5
20kN
2
20kN
Área = 1 cm2
Área = 2 cm2
AÇO: E = 210 GPa = 21.000 kN/cm27
CONVENÇÃO:
6
20kN
c) L=0,897cm (encurtamento)∆
∆
05) Para a treliça de EA=10 kN, determinar:
a) a componente vertical do deslocamento do nó 11, V ;∆ 11
b) a componente horizontal do deslocamento do nó 11, H11∆
7
2
4m
1
1m 1m
3
4 5
6 8
2m2m
2m
11
9
10
2m
1m
1m
10kN
a) =0,993cm para baixo
b) =0,399cm para a direita
Resposta:
11∆
∆ 11
V
H
06) Para a viga em balanço da figura de EI=constante, determinar:
b) a rotação na extremidade livre B, ;
a) a flecha na extremidade livre B, f ;
ϕc
Bϕ
c) a flecha no meio do vão, f ;
a) a rotação no meio do vão, .
B
c
a) f =PL /3EIResposta:
B
b) =PL /2EIϕB
d) =3PL /8EI
c) f =5PL /48EIϕ
C
C
3
2
3
2
5
21
3m
A
C
3m
1kN/m4kN
B
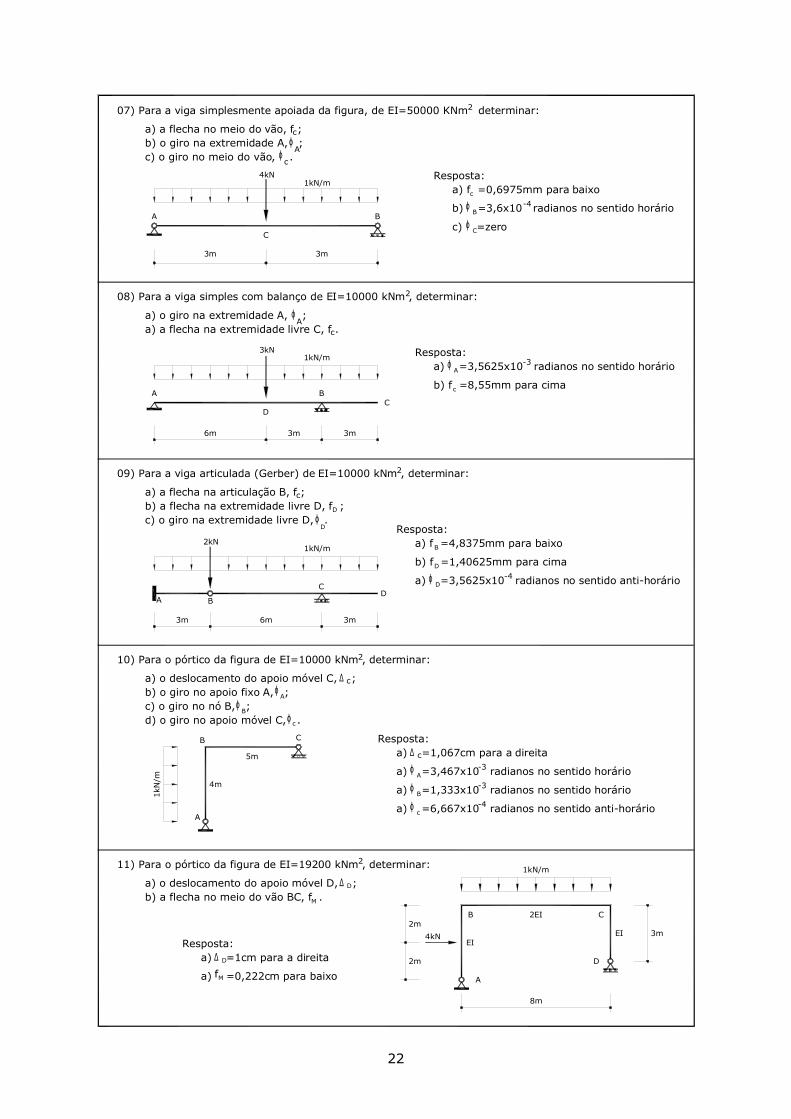
07) Para a viga simplesmente apoiada da figura, de EI=50000 KNm determinar:
c) o giro no meio do vão, .
a) a flecha no meio do vão, f ;b) o giro na extremidade A, ;
c
cϕ
ϕA
Bb) =3,6x10 radianos no sentido horário
c) =zeroCϕ
-4
a) f =0,6975mm para baixoResposta:
c
ϕ
2
a) a flecha na extremidade livre C, f .a) o giro na extremidade A, ;
08) Para a viga simples com balanço de EI=10000 kNm , determinar:
A
a) =3,5625x10 radianos no sentido horário1kN/m
6m
D
3kN
Aϕ
c
3m
-3
b) f =8,55mm para cima
ϕA
Resposta:
c
2
3m
CB
09) Para a viga articulada (Gerber) de EI=10000 kNm , determinar:
b) a flecha na extremidade livre D, f ;c) o giro na extremidade livre D, .
A
C
6m3m
B
3m
Da) =3,5625x10 radianos no sentido anti-horário
Resposta:
1kN/m2kN
Dϕ
D
2
-4
b) f =1,40625mm para cimaϕ
D
D
a) a flecha na articulação B, f ;c
a) f =4,8375mm para baixoB
b) o giro no apoio fixo A, ;a) o deslocamento do apoio móvel C, ;
10) Para o pórtico da figura de EI=10000 kNm , determinar:
a) =1,333x10 radianos no sentido horário
a) =1,067cm para a direitaResposta:
cϕ
A
2
Bϕ -3
c) o giro no nó B, ;d) o giro no apoio móvel C, .
∆
ϕB
cϕ
1kN
/m 4m
A
B
5m
C
a) =3,467x10 radianos no sentido horárioAϕ -3
a) =6,667x10 radianos no sentido anti-horáriocϕ -4
∆ c
b) a flecha no meio do vão BC, f .a) o deslocamento do apoio móvel D, ;
11) Para o pórtico da figura de EI=19200 kNm , determinar:
M
∆ D
2
M
Da) =1cm para a direita
a) =0,222cm para baixo
Resposta:
f
∆
2EI
1kN/m
8m
EI
2m
A
4kN2m
B
D
C
EI 3m
22
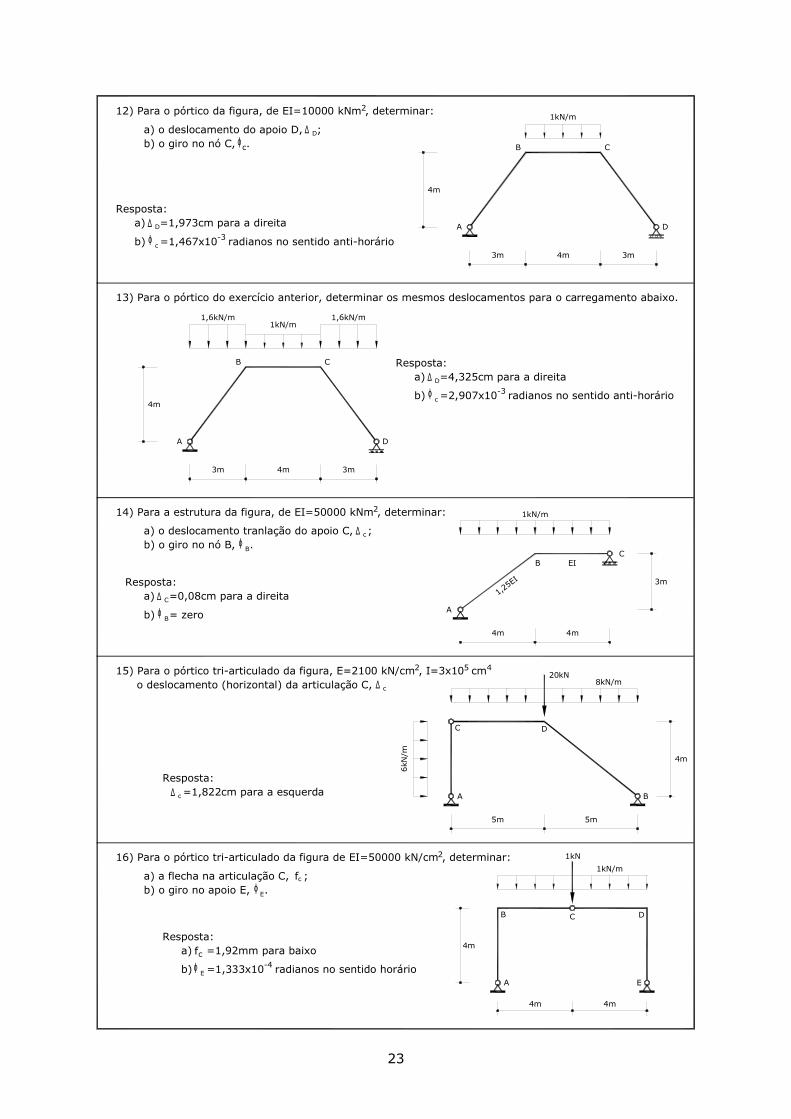
12) Para o pórtico da figura, de EI=10000 kNm , determinar:
a) o deslocamento do apoio D, ;b) o giro no nó C, .
Dϕc
cb) =1,467x10 radianos no sentido anti-horário-3
a) =1,973cm para a direitaResposta:
ϕ
2
∆
∆ D
1kN/m
4m
3m
A
B
4m 3m
D
C
A
4m
1,25E
I
1kN/m
B
4m
3m
EIC
6kN
/m
5m
A
C
4m
5m
B
D
8kN/m20kN
4m
A
4m
B
4m
E
1kN/m
C D
1kN
13) Para o pórtico do exercício anterior, determinar os mesmos deslocamentos para o carregamento abaixo.
A
4mb) =2,907x10 radianos no sentido anti-horário
Resposta:a) =4,325cm para a direita
D
3m 4m 3m
B
1kN/m
C
-3ϕc
∆ D
1,6kN/m 1,6kN/m
14) Para a estrutura da figura, de EI=50000 kNm , determinar:
a) o deslocamento tranlação do apoio C, ;b) o giro no nó B, .
b) = zero
Resposta:a) =0,08cm para a direita
∆B
ϕc
ϕB
∆ C
2
=1,822cm para a esquerda
15) Para o pórtico tri-articulado da figura, E=2100 kN/cm , I=3x10 cm o deslocamento (horizontal) da articulação C,
∆ c
Resposta:
∆ c
2 4
16) Para o pórtico tri-articulado da figura de EI=50000 kN/cm , determinar: 2
a) a flecha na articulação C, ;b) o giro no apoio E, .E
ϕfc
a) =1,92mm para baixo
b) =1,333x10 radianos no sentido horário
fcϕ
E
Resposta:
-4
5
23
6 4
2
4
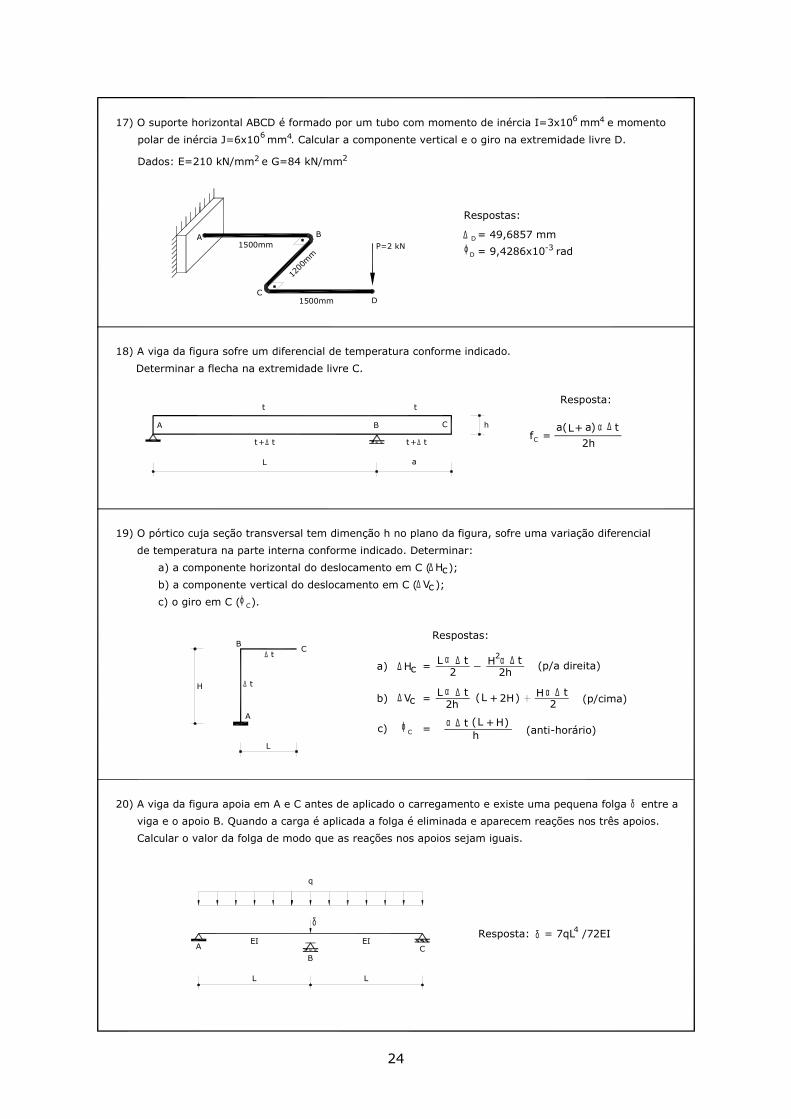
17) O suporte horizontal ABCD é formado por um tubo com momento de inércia I=3x10 mm e momento
polar de inércia J=6x10 mm . Calcular a componente vertical e o giro na extremidade livre D.
Dados: E=210 kN/mm e G=84 kN/mm2
P=2 kNB
1500mmA
C1500mm
1200
mm
D
= 9,4286x10 rad
= 49,6857 mm
Respostas:
ϕD
-3∆ D
6
B
A
H ∆
B
L
t
t∆C
A
L
∆+t
t
t
(p/cima)
Respostas:
+
H
c) =
∆
∆
b)
a)
cV =
Hc =
+L(t∆αh
2hαL ∆
αL ∆2
(t L
_t
(anti-horário)
(p/a direita)
2
)H
2H)
2hα2 t∆
H α ∆ t
H
a
V∆ c
∆
t+∆
t
t
C h )a+L ∆αa(
c
=Cf 2h
Resposta:
t
18) A viga da figura sofre um diferencial de temperatura conforme indicado.
Determinar a flecha na extremidade livre C.
19) O pórtico cuja seção transversal tem dimenção h no plano da figura, sofre uma variação diferencial
de temperatura na parte interna conforme indicado. Determinar:
a) a componente horizontal do deslocamento em C ( );
b) a componente vertical do deslocamento em C ( );
c) o giro em C ( ).ϕC
ϕC
20) A viga da figura apoia em A e C antes de aplicado o carregamento e existe uma pequena folga entre a
viga e o apoio B. Quando a carga é aplicada a folga é eliminada e aparecem reações nos três apoios.
Calcular o valor da folga de modo que as reações nos apoios sejam iguais.
A
L
EI
B
δ
L
EI
q
Resposta: = 7qL /72EIC
δ 4
δ
24

Anexo 01 – Tabela de integrais do produto de duas funções
F(x) G(x) dx =0
L
G(x) =
(*) vale para F >ou< F (G >ou< G ) e também para sinais opostos dos valores: +_
para a c
para a L/2
FG
L (7-3 2
)
(1+ )
L20
1+ +2
FG
3
L1-(1- )
4
FG
.
ou : o ponto significa vértice da curva (tg // a linha de referência)
G(2F +F )
245
Tabela de integrais do produto de duas funçõesN
úmer
o
Número I II III IV V VI
0
1
2
3
4
5
6
7
8
9
10
11
12
13
F(x) =
[F(x)] dx 0
L2 2 2FL
31
F
L
F
a
F
(*)
L/2
2°grau
F F
2°grau
(F +F +F )1 1 2L3
L51 2FL
158 2F
(*)
L
2°grau
L/2 G
G
2°grau
G
1 12 2
c
L/2
G
G
G
G
2°grau
2°grau
G
2°grau
G
qL3°grau
GqL16
2
9
2
/3LL/2
3°grau
G3°grau
G
L21
FG
3
3
F22 2
=
b
d
L 1+( )FG6 L1 d
+(1+Lc ) 2F ]
[(1+ 16
L dL )G +
FG2-L [ ]2aL6a-b1 ( )
2
aL
aL2
aL20
aL
aL
aL
+ aL2 3
12L
L+1 b
L+ b
2
2
FG
F2
1 2
21
F1
LF FL31 2
G1G2
1L F(G +G )2
FGL21
FGL31
16
L FG
6L 1
6L 1
21G(F +2F )
F(2G +G )1 2L 16
6L 1
2G (2F +F )+1 1
(F +2F )1 22
[
]
12L 21G(3F +F )11
3L FG
4FGL
1
3FGL
1
2L FG
3
121
L FG
12L
5FG
G(F +3F )1L12 1 2
1G(5F +3F )212L 1
12L 1 G(3F +5F )1 2
23
FGL
23
FGL
14
L FG
FGL31
14
L FG12
L FG
1G(F +F )23L 1
1G(F +F )214
L
+G
14FGL
45
2FGL
1
L FG32
1G(F +4F )
G(4F +F )120
20L 1
L1
2
2L FG4
L FG4
1
1L FG
51
20L FG
1
1L3
FG L 14
FG L 1+(16 )b
LFG
La
61L 1+( FG)
12L FG
1L 1
3FG
L 13
F(G +G )1 2 L F(3G +G )2112 1
L
[(1+
+(1+
FL61
a ]2G)
+L )b G1
5L
1FG L
51
FG
L51
FG
L157
FG
L15
FG7
L FG125
L15
FG8
1+(13 )cd
LFG2L
1G(7F +8F )L452
2 L8
FG15
L FG152
L FG152
FGL61
L601
FG
L FG845
7L
48FG
1L
5FG
L FG152
L10
FG3
30L FG
1
(L 13 L
)1+ab2 FG
aL
+L
1
12
aL
+FG
2
2
aL
-L
5
12
aL
-FG
2
2
aL
+L
3
12
aL
-FG
2
23
FGL12
Ld+1 d
L+ 2
2
a-cad
2-L [16
(FG]
2)
25


















