Cálculo Diferencial e Integral -...
248
Cálculo Diferencial e Integral Cálculo Diferencial e Integral Ed. v0.8.10 i
-
Upload
truongdieu -
Category
Documents
-
view
216 -
download
0
Transcript of Cálculo Diferencial e Integral -...

Cálculo Diferencial e Integral
Cálculo Diferencial e Integral
Ed. v0.8.10
i

Cálculo Diferencial e Integral
Sumário
1 Números Reais 11.1 Sistema dos Números Reais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 Adição e Multiplicação de Números Reais . . . . . . . . . . . . . . . . . . . 2
1.1.2 Subtração e Divisão de Números Reais . . . . . . . . . . . . . . . . . . . . 3
1.1.3 Relação de Ordem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Desigualdades e Intervalos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Inequações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.4 Valor absoluto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.5 Axioma do Supremo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.6 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.7 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2 Relações e Funções 182.1 Relações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.1.1 Domínio, imagem e gráfico de uma relação . . . . . . . . . . . . . . . . . . 20
2.2 Relação inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2.1 Relações entre o gráfico de uma relação e gráfico de sua inversa . . . . . . . 22
2.3 Funções . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3.1 Translações e reflexões de uma função . . . . . . . . . . . . . . . . . . . . . 26
2.3.2 Funções comuns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3.3 Função par e função ímpar . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.3.4 Função periódica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.3.5 Função crescente e função decrescente . . . . . . . . . . . . . . . . . . . . . 36
2.3.6 Função definida por partes . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.4 Função injetiva, sobrejetiva e bijetiva . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.4.1 Operações com funções . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.5 Composição de funções . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.6 Função inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.7 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.8 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
ii
Cálculo Diferencial e Integral
3 Limites 483.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.2 Vizinhança . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.3 Limites de uma função . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.4 Propriedades dos limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3.5 Leis do limite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.6 Limites laterais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.7 Limites no infinito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3.8 Limites infinitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
3.9 Limites infinitos no infinito . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.10 Assíntotas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
3.11 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
3.12 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4 Continuidade 794.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.2 Noção intuitiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.3 Definição formal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.4 Tipos de descontinuidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
4.5 Continuidade de funções em intervalos . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.6 Teorema de valor intermediário . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.7 Funções inversas e continuidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.8 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.9 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
5 A Derivada 965.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.2 A derivada e a reta tangente de uma função em um ponto. . . . . . . . . . . . . . . . 97
5.3 A derivada como função . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5.4 Derivadas laterais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
5.5 Reta normal a uma curva em um ponto . . . . . . . . . . . . . . . . . . . . . . . . . 103
5.6 Regras de derivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
5.7 A derivada da composição de funções . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.8 Teorema da função inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.9 Derivadas de funções elementares . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.10 Derivadas de ordem superior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.11 Derivação Implícita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
5.12 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.13 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
iii

Cálculo Diferencial e Integral
6 Aplicações da Derivada 123
6.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
6.2 Valores Extremos de uma Função . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
6.3 Determinando Valores Extremos de uma Função . . . . . . . . . . . . . . . . . . . . 126
6.4 Teorema do Valor Médio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
6.5 Concavidade e esboço de curvas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
6.6 Construindo o gráfico de y = f (x) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
6.7 Formas indeterminadas e a regra de L’Hôpital . . . . . . . . . . . . . . . . . . . . . 139
6.8 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
6.9 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
7 A Integral Indefinida 148
7.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
7.2 A Antiderivada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
7.3 Propriedades da Integral Indefinida . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
7.4 Integrais Imediatas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
7.5 Método de Integração por Partes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
7.6 Técnicas de Integração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
7.6.1 Integrais de Funções que Contêm um Trinômio Quadrado . . . . . . . . . . 164
7.6.2 Integrais de Funções Trigonométricas e Hiperbólicas . . . . . . . . . . . . . 166
7.6.3 Integração por Substituição Trigonométrica . . . . . . . . . . . . . . . . . . 173
7.6.4 Integração de Funções Racionais . . . . . . . . . . . . . . . . . . . . . . . . 177
7.6.5 O método de Hermite-Ostrogradski . . . . . . . . . . . . . . . . . . . . . . 183
7.6.6 Integrais de Funções Irracionais . . . . . . . . . . . . . . . . . . . . . . . . 186
7.7 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
7.8 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
8 A Integral Definida 199
8.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
8.2 Somatórios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
8.2.1 Propriedades do Somatório . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
8.3 Cálculo da Área de uma Região Plana por Somatórios . . . . . . . . . . . . . . . . . 201
8.3.1 Partição de um Intervalo Fechado . . . . . . . . . . . . . . . . . . . . . . . 201
8.3.2 Aproximação da Área de uma Região por Áreas de Retângulos . . . . . . . . 202
8.3.3 Soma Superior e Soma Inferior . . . . . . . . . . . . . . . . . . . . . . . . . 206
8.3.4 Propriedades dos Somatórios Superiores e Inferiores . . . . . . . . . . . . . 207
iv

Cálculo Diferencial e Integral
8.4 Integrais Inferiores e Superiores . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
8.5 A Integral de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
8.6 Propriedades da integral definida . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210
8.7 Teorema do Valor Intermediário para Integrais . . . . . . . . . . . . . . . . . . . . . 211
8.8 Teoremas Fundamentais do Cálculo Integral . . . . . . . . . . . . . . . . . . . . . . 212
8.9 Mudança de Variável em uma Integral Definida . . . . . . . . . . . . . . . . . . . . 215
8.10 Integração por Partes em uma Integral Definida . . . . . . . . . . . . . . . . . . . . 216
8.11 Integrais Impróprias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 217
8.11.1 Integrais Impróprias com Limites Infinitos . . . . . . . . . . . . . . . . . . . 217
8.11.2 Integrais Impróprias com Limites Finitos . . . . . . . . . . . . . . . . . . . 220
8.12 Aplicações da Integral Definida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
8.12.1 Áreas de Regiões Planas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222
8.12.2 Volume de um Sólido de Revolução . . . . . . . . . . . . . . . . . . . . . . 225
8.12.3 Comprimento de Arco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
8.12.4 Área de uma Superfície de Revolução . . . . . . . . . . . . . . . . . . . . . 234
8.13 Recapitulando . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 235
8.14 Atividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 236
9 Referências 239
9.1 Referências Bibliográficas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
v
Cálculo Diferencial e Integral
Prefácio
Este livro foi projetado e escrito com o objetivo de oferecer aos estudantes do Curso de Licenciaturaem Computação a Distância um material didático de fácil entendimento dos fundamentos de umcurso de Cálculo Diferencial e Integral. Temos nos esforçado em apresentar o cálculo de forma nãotão rigorosa. Isto é, neste livro focamos no uso da teoria e suas propriedades e não nos aprofundamosnas demonstrações destas. Priorizamos o uso do desenvolvimento teórico com exemplos e com umaquantidade razoável de atividades para uma fixação do conteúdo, de tal forma que resulte de máximoproveito aos estudantes.
A obra é composta por 8 capítulos contendo os principais tópicos abordados em uma disciplina básicade Cálculo Diferencial e Integral, e que seguem uma ordem progessiva de conteúdo, por isto reco-mendamos ao estudante que dedique tempo e esmero em cada capítulo e resolva a máxima quantidadede atividades.
No primeiro capítulo se faz uma apresentação axiomática dos números reais e suas principais propri-edades; no segundo capítulo tratamos das relações e das funções que serão o principal objeto mate-mático tratado neste livro; no terceiro capítulo estudamos os conceito de limite, fundamental para ateoria subsequente; no quarto capítulo estudamos a continuidade de uma função; no quinto capítulointroduzimos a derivada de uma função e suas principais propriedades; no sexto capítulo apresenta-mos algumas aplicações da derivada; no sétimo capítulo tratamos da integral indefinida e os métodosde integração; e no oitavo e último capítulo, introduzimos o conceito da integral definida e tratamosde algumas das aplicações desta.
Sabemos que existem vários outros materiais e livros que abordam o mesmo conteúdo apresentadoaqui, alguns até mais abrangentes. Somos porém, realistas que em uma primeira abordagem demosprioridade a possibilitar ao aluno familiarizar-se com conceitos básicos e interpretações, deixando aprova de todos esses resultados a posteriori.
Esperamos que este livro forneça apoio e incentivo para que o aluno, depois de aprender estes con-ceitos, se sinta confiante ao resolver problemas com aplicações práticas no mundo real.
João Pessoa, agosto de 2013.Kely D. V. VillacortaFelipe A. G. Moreno
Público alvo
O público alvo desse livro são os alunos de Licenciatura em Computação, na modalidade à distância.1
1Embora ele tenha sido feito para atender aos alunos da Universidade Federal da Paraíba, o seu uso não se restringea esta universidade, podendo ser adotado por outras universidades do sistema UAB.
vi

Cálculo Diferencial e Integral
Como você deve estudar cada capítulo
• Leia a visão geral do capítulo
• Estude os conteúdos das seções
• Realize as atividades no final do capítulo
• Verifique se você atingiu os objetivos do capítulo
NA SALA DE AULA DO CURSO
• Tire dúvidas e discuta sobre as atividades do livro com outros integrantes do curso
• Leia materiais complementares eventualmente disponibilizados
• Realize as atividades propostas pelo professor da disciplina
Caixas de diálogo
Nesta seção apresentamos as caixas de diálogo que poderão ser utilizadas durante o texto. Confira ossignificados delas.
NotaEsta caixa é utilizada para realizar alguma reflexão.
DicaEsta caixa é utilizada quando desejamos remeter a materiais complementares.
ImportanteEsta caixa é utilizada para chamar atenção sobre algo importante.
CuidadoEsta caixa é utilizada para alertar sobre algo que exige cautela.
AtençãoEsta caixa é utilizada para alertar sobre algo potencialmente perigoso.
Os significados das caixas são apenas uma referência, podendo ser adaptados conforme as intençõesdos autores.
vii
Cálculo Diferencial e Integral
Compreendendo as referências
As referências são apresentadas conforme o elemento que está sendo referenciado:
Referências a capítulosPrefácio [vi]
Referências a seções“Como você deve estudar cada capítulo” [vii], “Caixas de diálogo” [vii].
Referências a imagens e tabelasFigura 1 [ix] Tabela 1 [viii]
NotaNa versão impressa, o número que aparece entre chaves “[ ]” corresponde ao número dapágina onde está o conteúdo referenciado. Nas versões digitais do livro você poderá clicarno link da referência.
Contribuindo com o livro
Você pode contribuir com a atualização e correção deste livro. A tabela a seguir resume os métodosde contribuições disponíveis:
Tabela 1: Métodos para contribuição do livro
Método decontribui-ção
Habilidades necessárias Descrição
Issue track
• Inscrição no site dogithub
• Preenchimento de umformulário
Consiste em acessar o repositório do livro esubmeter um erro, uma sugestão ou uma crítica —através da criação de um Issue. Quandoprovidências forem tomadas você será notificadodisso.
Submissãode correção
• Realizar fork deprojetos
• Atualizar texto do livro
• Realizar PullRequest
Consiste em acessar os arquivos fontes do livro,realizar a correção desejada e submetê-la paraavaliação. Este processo é o mesmo utilizado naprodução de softwares livres.
viii

Cálculo Diferencial e Integral
ImportanteQuando for enviar sua contribuição lembre-se de informar qual a versão e página do livro queestá se referindo.
Contribuição através do Issue trackPara contribuir com um erro, sugestão ou crítica através de um envio de uma mensagem acesse:https://github.com/edusantana/calculo-diferencial-e-integral-livro/issues/new
Figura 1: Exemplo de contribuição através do Issue track
Baixando a edição mais nova deste livro
Nós estamos constantemente atualizando o nosso material didático. Todas as versões deste livroencontram-se disponíveis para download.
DicaAcesse https://github.com/edusantana/calculo-diferencial-e-integral-livro/releases para bai-xar a versão mais nova deste livro.
ix
Cálculo Diferencial e Integral
Capítulo 1
Números Reais
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Entender o conceito do sistema dos números reais e saber diferenciar os subconjuntosque o integram: naturais, inteiros, racionais e irracionais;
• Dados dois números reais, reconhecer a relação de ordem estabelecida entre eles;
• Dada uma desigualdade, establecer a que intervalo ela está relacionada;
• Determinar o conjunto solução de uma inequação dada;
• Dominar o conceito de valor absoluto;
• Familiarizar-se com o Axioma do supremo.
O sistema dos números reais que conhecemos atualmente foi obtido depois de muitas reflexões porparte do homem. Desde o início de nossa civilização já se conheciam os números inteiros positivos,ou seja, 1,2,3, . . . Os números inteiros tão grandes quanto 100000 já eram utilizados no Egito emépocas como 300 a. C.
Na aritmética de números inteiros positivos que desarrolhou os antigos Egípcios e Babilônios podiamefetuar-se as operações de adição e multiplicação, embora essa última não tenha sido desenvolvidapor completo. Além disso, naquela época já se conheciam certas frações, isto é, os números racionais.Por outro lado, os Babilônios tiveram maior êxito no desenvolvimento da aritmética e da álgebra, e anotação que eles usavam também era superior à dos egípcios, com a diferença que eles trabalhavamna base 60 e não na 10.
Nosso sistema decimal foi criado pelos Hindus e introduzido na Europa Ocidental no século XIImediante a tradução de textos árabes. Porém, essa notação demorou para ter uma aceitação geral, emuito depois disso veio a aceitação dos números negativos, a qual aconteceu apenas no final do séculoXVI, época em que eram descartadas as raízes negativas das equações.
Ainda que a necessidade dos números irracionais, tais como√
2 e π , tivesse se apresentado já aos ma-temáticos da antiga Grécia no seus estudos geométricos, não foram introduzidos métodos satisfatóriosde construção dos números reais a partir dos racionais até finais do século XIX, quando os matemá-ticos conseguiram propor um ponto de partida para a construção total dos números reais, abordagemesta que ainda é usada até hoje.
1 / 239

Cálculo Diferencial e Integral
O ponto de vista adotado aqui não é construtivo, pois assume-se que existam certos objetos, chamadosde números reais, que verificam os 11 axiomas a serem enunciados neste capítulo. Todas as proprie-dades dos números reais que serão apresentadas neste livro, ou estão entre estes axiomas, ou podemser deduzidos a partir destes.
Portanto, neste capítulo revisaremos o sistema dos números reais, desigualdades e intervalos, inequa-ções, valor absoluto, Axioma do Supremo, e resolveremos alguns problemas usando a teoria apresen-tada.
1.1 Sistema dos Números Reais
Um conjunto não vazio de suma importância é o conjunto dos números reais, que é representado porR. O sistema dos números reais é o conjunto R fornecido de duas operações: adição (+) e multi-plicação (·), de uma relação de ordem (<) (se lê menor que) e de um axioma chamado Axioma dosupremo. O sistema dos números reais é denotado por (R;+; ·;<), porém por simplicidade usamosa notação R. Cada elemento x ∈ R é chamado de número real.
1.1.1 Adição e Multiplicação de Números Reais
Adição e multiplicação de números reais são duas operações internas em R e se definem como segue:
Adiçãodados a e b ∈ R se associa um único c ∈ R, chamado de soma de a e b, e se escreve c = a+b.A adição de números reais satisfaz os seguintes axiomas:
Axioma 1a+b = b+a, ∀a,b ∈ R.
Axioma 2(a+b)+ c = a+(b+ c), ∀a,b,c ∈ R.
Axioma 3Existe o número real zero, denotado por 0, tal que a+0 = a, ∀a ∈ R.
Axioma 4Para cada número real a existe um real chamado de oposto de a e é representado por −a,tal que a+(−a) = 0.
MultiplicaçãoDados a e b∈R se associa um único d ∈R, chamado de produto de a e b, e se escreve d = a ·b.A multiplicação de números reais satisfaz os seguintes axiomas:
Axioma 5a ·b = b ·a, ∀a,b ∈ R.
Axioma 6(a ·b) · c = a · (b · c), ∀a,b,c ∈ R.
Axioma 7Existe o número real um, denotado por 1, tal que a ·1 = a, ∀a ∈ R.
Axioma 8Para cada número real a, diferente de zero, existe um real chamado de inverso de a e é
representado por a−1 ou1a
, tal que a ·a−1 = a · 1a= 1.
2 / 239

Cálculo Diferencial e Integral
O axioma distributivo relaciona a adição e multiplicação de números reais:
Axioma 9a(b+ c) = a ·b+a · c, ∀a,b,c ∈ R
Nota
a. Os Axiomas 1 e 5 são conhecidos como axiomas comutativos para a soma e multi-plicação, respectivamente.
b. Os Axiomas 2 e 6 são conhecidos como axiomas associativos para a soma e multi-plicação, respectivamente.
O seguinte teorema enuncia as propriedades dessas duas operações.
Teorema 1.1
i. Os números 0, 1, −a e a−1 são únicos;
ii. a =−(−a), ∀a ∈ R;
iii. Se a 6= 0, então a = (a−1)−1;
iv. a ·0 = 0, ∀a ∈ R;
v. −a = (−1) ·a, ∀a ∈ R;
vi. a · (−b) = (−a) ·b, ∀a, b ∈ R;
vii. (−a) · (−b) = a ·b, ∀a, b ∈ R;
viii. Se a+ c = b+ c, então a = b;
ix. Se a · c = b · c e c 6= 0, então a = b;
x. a ·b = 0 ⇔ a = 0 ou b = 0;
xi. a ·b 6= 0 ⇔ a 6= 0 e b 6= 0;
xii. a2 = b2 ⇔ a = b ou a =−b.
1.1.2 Subtração e Divisão de Números Reais
Subtraçãodados a e b ∈ R, a diferença de a e b é a−b = a+(−b).
Divisão ou quocientedados a e b ∈ R, com b 6= 0, o quociente de a e b é
ab= a · (b−1).
Teorema 1.2
i. a−b =−(b−a);
ii. a−b = c ⇔ a = b+ c;
iii. Se b 6= 0, então c =ab⇔ b · c = a;
iv. a · (b− c) = a ·b−a · c;
v. Se b 6= 0 e d 6= 0, entãoab± c
d=
a ·d±b · cb ·d
.
3 / 239

Cálculo Diferencial e Integral
1.1.3 Relação de Ordem
Axioma 10Em R existe um subconjunto chamado de reais positivos, denotado por R+, que satisfaz asseguintes propriedades:
i. Se a ∈ R, então a ∈ R+ ou −a ∈ R+ou a = 0;
ii. Se a ∈ R+ e b ∈ R+, então a+b ∈ R+ e a ·b ∈ R+.
Definição 1.1Sejam a, b ∈ R. Diz-se que:
i. a é menor que b e se denota por a < b, ⇔ b−a ∈ R+;
ii. a é menor ou igual que b e se escreve a≤ b, ⇔ a < b ou a = b.
Nota
a. Escrever a < b, é equivalente a escrever b > a e se lê “b é maior que a”;
b. Da mesma forma, se diz que b é maior ou igual que a e se escreve b≥ a.
O seguinte teorema enuncia as propriedades associadas à relação de ordem.
Teorema 1.3
i. Lei da tricotomia: Dados a, b ∈ R, então a = b ou a < b ou a > b;
ii. a2 ≥ 0. ∀a ∈ R. Se a 6= 0, então a2 > 0;
iii. Lei transitiva: Se a < b e b < c, então a < c;
iv. Lei da monotonia para a soma: Se a < b, então a+ c < b+ c, ∀c ∈ Rv. Se a < b e c < d, então a+ c < b+d;
vi. Se a < b e c > 0, então a · c < b · c;
vii. Se a < b e c < 0, então a · c > b · c;
viii. Se a < b e 0 < c < d, então a · c < b ·d;
ix. a e a−1 têm o mesmo sinal:
• Se a > 0, então a−1 > 0,• Se a < 0, então a−1 < 0;
x. Se 0 < a < b, então a−1 > b−1 > 0. Se 0 > b > a, então 0 > a−1 > b−1;
xi. a ·b > 0 ⇔ (a > 0 e b > 0) ou (a < 0 ou b < 0) ;
xii. a ·b≥ 0 ⇔ (a≥ 0 e b≥ 0) ou (a≤ 0 ou b≤ 0)
xiii. a ·b < 0 ⇔ (a < 0 e b > 0) ou (a > 0 ou b < 0) ;
xiv. a ·b≥ 0 ⇔ (a≤ 0 e b≥ 0) ou (a≥ 0 ou b≤ 0)
xv. Se a≥ 0 e b≥ 0, então a < b ⇔ a2 < b2;
xvi. a2 +b2 = 0 ⇔ a = 0 e b = 0.
4 / 239

Cálculo Diferencial e Integral
Nota
a. Se a e b são dois números tais que a2 = b, diz-se que a é a raiz quadrada de b e seescreve a=
√b. Por exemplo, 2 e−2 são raízes quadradas de 4, pois (−2)2 = 22 = 4.
No decorrer deste livro, a notação√
b denotará a raiz quadrada positiva e −√
b, araiz quadrada negativa.
b. Se b < 0, pelo Teorema 1.3.ii, não existe a ∈R tal que a2 = b. Em outras palavras, noconjunto dos números reais não existe raiz quadrada de números negativos.
c. Se a2 = 0, então se deduz que a = 0, Portanto,√
0 = 0.
No decorrer deste livro, entenderemos que resolver a equação E(x) = 0, onde E(x) é uma expressãoalgébrica, significa determinar todos os números reais que satisfazem a dita equação.
Exemplo 1.1 Resolvamos as seguintes equações
a. 5x+6 = 8.
Solução
5x+6 = 8 ⇔ x =25
, pois 5 · 25+6 = 8.
b. x2 +1 = 0.
SoluçãoEssa equação não tem solução, em R, pois x2 +1 > 0, ∀x ∈ R.
c. 5x+5 = 1−3x .
Solução
5x+5 = 1−3x ⇔ 8x =−4 ⇔ x =−12
.
d. 4x2− x−3 = 0.
Solução
4x2− x− 3 = 0 ⇔ (4x+ 3)(x− 1) = 0 ⇔ 4x+ 3 = 0 ou x− 1 = 0 ⇔ x = −34
oux = 1.
Outro método (Completando quadrados)
4x2− x−3 = 0 ⇔ (2x)2− x+(−1
4
)2
=4916⇔
(2x− 1
4
)2
=4916⇔ 2x− 1
4=
−74
ou 2x− 14=
74⇔ 2x =−3
2ou 2x = 2 ⇔ x =−3
4ou x = 1.
1.2 Desigualdades e Intervalos
Os números reais são identificados por pontos em uma reta. E essa identificação dá-se da seguintemaneira:
5 / 239

Cálculo Diferencial e Integral
Figura 1.1: Reta Real
Dada uma reta L (por conveniência horizontal) e uma unidade de medida arbitrária, fixamos o ponto0 da reta, logo, a cada número real x se identifica com o ponto que está situado a x unidades à direitado 0, se x > 0, e com o ponto situado a −x unidades à esquerda do 0, se x < 0.
Essa correspondência entre os números reais e os pontos da reta é biunívoca, isto é, a cada númeroreal há um único ponto correspondente na reta, e a cada ponto na reta há um único número realcorrespondente. No decorrer deste livro não faremos nenhuma diferença entre ambos elementos.
Se x, y e z ∈ R tais que x < y < z, então x está à esquerda de y, a uma distância de y− x unidades e zestá à direita de y, a uma distância de z− y unidades.
Figura 1.2: Distância entre x e y, e distância entre y e z
Uma expressão que contém relações como <, ≤, >, ≥ é chamada de desigualdade. Assim:
x < y < z significa que x < y e y < z;
x < y≤ z significa que x < y e y≤ z;
x≤ y < z significa que x≤ y e y < z;
x≤ y≤ z significa que x≤ y e y≤ z.
Definição 1.2Dados os números reais a e b com a < b, os intervalos são subconjuntos de R e podem serclasificados em:
Intervalos Limitados1. Intervalo Aberto: (a,b) = {x ∈ R : a < x < b}
2. Intervalo Fechado: [a,b] = {x ∈ R : a≤ x≤ b}
3. Intervalo Semiaberto pela Direita: [a,b) = {x ∈ R : a≤ x < b}
4. Intervalo Semiaberto pela Esquerda: (a,b] = {x ∈ R : a < x≤ b}
6 / 239
Cálculo Diferencial e Integral
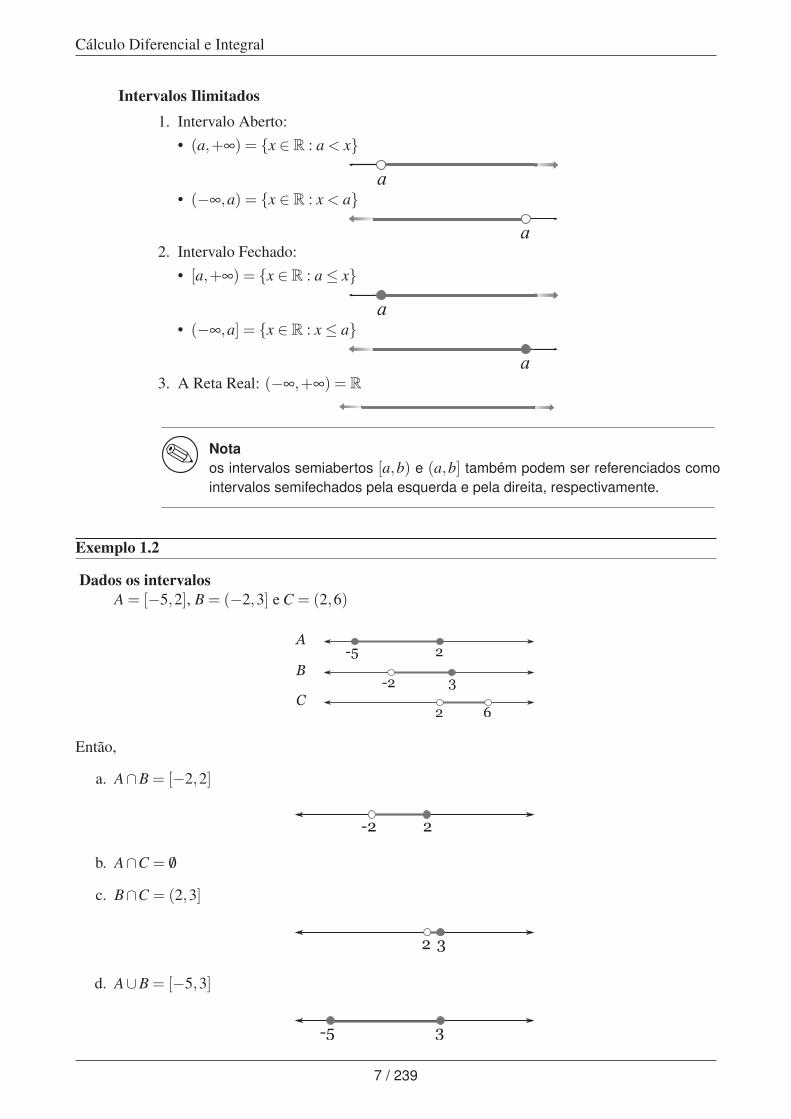
Intervalos Ilimitados1. Intervalo Aberto:
• (a,+∞) = {x ∈ R : a < x}
• (−∞,a) = {x ∈ R : x < a}
2. Intervalo Fechado:• [a,+∞) = {x ∈ R : a≤ x}
• (−∞,a] = {x ∈ R : x≤ a}
3. A Reta Real: (−∞,+∞) = R
Notaos intervalos semiabertos [a,b) e (a,b] também podem ser referenciados comointervalos semifechados pela esquerda e pela direita, respectivamente.
Exemplo 1.2
Dados os intervalosA = [−5,2], B = (−2,3] e C = (2,6)
Então,
a. A∩B = [−2,2]
b. A∩C = /0
c. B∩C = (2,3]
d. A∪B = [−5,3]
7 / 239

Cálculo Diferencial e Integral
e. A∪C = [−5,6)
f. B∪C = (−2,6)
Exemplo 1.3Se x ∈ (1,2], provemos que x2−2x ∈ (−1,0].
SoluçãoDesde que x2−2x é equivalente a (x−1)2−1, trabalharemos com esta última expressão.x ∈ (1,2] ⇔ 1 < x ≤ 2 ⇔ 0 < x−1 ≤ 1 ⇔ 0 < (x−1)2 ≤ 1 ⇔ −1 < (x−1)2−1 ≤ 0⇔ −1 < x2−2x≤ 0. Portanto, x2−2x ∈ (−1,0].
Exemplo 1.4
Se x ∈ (0,2), encontremos m e M ∈ R tais que m <x+2x+5
< M.
Solução
Desde quex+2x+5
é equivalente a 1− 3x+5
, trabalharemos com este último.
x ∈ (0,2) ⇔ 0 < x < 2 ⇔ 5 < x+5 < 7 ⇔ 17<
1x+5
<15⇔ −3
5<− 3
x+5<−3
7⇔
1− 35< 1− 3
x+5< 1− 3
7⇔ 2
5<
x+2x+5
<47
. Portanto, m =25
e M =47
.
1.3 Inequações
Definição 1.3Uma inequação é uma expressão algébrica que contém alguma das relações <, ≤, >, ≥.
Exemplo 1.5
• Inequação de Primeiro grau
3x−4 < 2− x
• Inequação de Segundo grau
3x2−4x−5 < 0
8 / 239

Cálculo Diferencial e Integral
• Inequação de Racional
x2−5x+4x2−4
≥ x+2
Definição 1.4Diz-se que um número real a satisfaz uma inequação, ou é solução da inequação, se aosubstituir a variável da equação por a, a desigualdade se faz verdadeira.
Exemplo 1.6
a. O número real 2 satisfaz a inequação de segundo grau acima, pois 3(2)2−4(2)−5≤ 0;
b. porém o número real 4 não a satisfaz, pois 3(4)2−4(4)−5 > 0.
Definição 1.5O conjunto de todos os números que satisfazem uma inequação é chamado de conjunto solu-ção, denotado por C. S.. Resolver uma inequação significa encontrar seu conjunto solução.
Exemplo 1.7 Encontremos o conjunto solução das seguintes inequações
a. 3x−4 < 2+ x.
Solução3x−4 < 2+ x ⇔ 2x < 6 ⇔ x < 3. Portanto, C. S.= (−∞,3).
b. x2−2 < 3x+2.
SoluçãoPrimeiro método (Decompondo)
x2−2< 3x+2 ⇔ x2−3x−4< 0 ⇔ (x−4)(x+1)< 0 ⇔ (x−4< 0 e x+1> 0)ou (x−4 > 0 e x+1 < 0) ⇔ (x < 4 e x >−1) ou (x > 4 e x <−1) ⇔ −1 < x < 4⇔ x ∈ (−1,4).
Segundo método (Completando Quadrados)
x2−2 < 3x+2 ⇔ x2−3x < 4 ⇔ x2−3x+94< 4+
94⇔
(x− 3
2
)2
<254⇔
−52< x− 3
2<
52⇔ −1 < x < 4 ⇔ x ∈ (−1,4).
Terceiro método (Encontrando o quadro de sinais)x2−2 < 3x+2 ⇔ x2−3x−4 < 0 ⇔ (x+1)(x−4)< 0. Os valores de x para osque (x+1)(x−4) = 0 são x =−1 e x = 4 (raízes de cada fator). Logo,
Figura 1.3: Quadro de sinais
9 / 239

Cálculo Diferencial e Integral
Na Figura 1.3 observamos que (x+1)(x−4)< 0, se x ∈ (−1,4).Portanto, C. S.= (−1,4).
Regra para determinar o sinal de um produto ou quociente
• Para determinar o sinal de x−a, temos que considerar:
i. O sinal de x−a é + ⇔ x−a > 0 ⇔ x > a ⇔ x está à direita de a.ii. O sinal de x−a é − ⇔ x−a < 0 ⇔ x < a ⇔ x está à esquerda de a.
• Para determinar o sinal de um produto, consideram-se as seguintes regras:
(+)(+) = +; (−)(−) = +; (+)(−) =−; (+)(−) =−.
• O sinal de quocientes é obtido de forma análoga.
Exemplo 1.8 Resolvamos a seguinte inequação
a.x−2x−4
>x+2
x
Soluçãox−2x−4
>x+2
x⇔ x+2
x− x−2
x−4< 0 ⇔ (x+2)(x−4)− x(x−2)
x(x−4)< 0 ⇔ −8
x(x−4)< 0
⇔ 1x(x−4)
> 0.
As raízes dos fatores são os valores de x que têm o zero como numerador e denominador,isto é, x = 0 e x = 4.
Logo, C. S.= (0,4).
NotaPara evitar o trabalho de determinar o sinal de cada fator, será suficiente considerar um pontoem cada intervalo e determinar o sinal de E(x) em determinado ponto. Esse sinal será, porsua vez, o sinal de E(x) em todo o intervalo.
1.4 Valor absoluto
10 / 239

Cálculo Diferencial e Integral
Definição 1.5O valor absoluto de um número real, denotado por |a|, se define como:
|a|={
a, se a≥ 0−a, se a < 0.
Desde que o ponto de vista geométrico |a| representa a distância entre o ponto da reta real a e o origem0.
Da mesma forma, |a−b|= |b−a| se interpreta como a distância entre os pontos a e b.
Exemplo 1.9
a. |7|= 7;
b. |0|= 0;
c. |−4|= 4;
d. |− |a||= |a|.
Teorema 1.4Se a e b ∈ R, então:
i. |a| ≥ 0, ∀a ∈ R e |a|= 0 ⇔ a = 0;
ii. |ab|= |a||b|;iii. |a+b| ≤ |a|+ |b|.
A seguir enunciamos outras propriedades adicionais que o valor absoluto verifica.
Teorema 1.5Se a, b e x ∈ R, então:
i. |a|2 = a2;
ii. Se b≥ 0, |a|= b ⇔ a = b ou a =−b;
iii. |a|= |b| ⇔ a = b ou a =−b;
iv. |−a|= |a|=√
a2;
v.∣∣∣ab
∣∣∣= |a||b| , b 6= 0;
11 / 239

Cálculo Diferencial e Integral
vi. Se a < x < b⇒ |x|< max{|a|, |b|};vii. Se b > 0, |x|< b ⇔ −b < x < b;
viii. Se b≥ 0, |x| ≤ b ⇔ −b≤ x≤ b;
ix. Se |x|> b ⇔ x > b ou x <−b;
x. Se |x| ≥ b ⇔ x≥ b ou x≤−b;
xi. ||a|− |b|| ≤ |a−b| ≤ |a|+ |b|.
Exemplo 1.10 Resolvamos as seguintes equações com valor absoluto:
a. |3x−5|= 4
Solução|3x−5|= 4 ⇔ 3x−5 = 4 ou 3x−5 =−4 ⇔ x = 3 ou x = 1
3 .
Portanto, C. S.= {13,3}.
b. ||7−4x|−3|= 9
Solução||7−4x|−3|= 9 ⇔ |7−4x|−3= 9 ou |7−4x|−3=−9 ⇔ |7−4x|= 12 ou |7−4x|=−6, porém |7−4x| ≥ 0 e −6 < 0. Então, só devemos analisar |7−4x|= 12.
Assim, |7−4x|= 12 ⇔ 7−4x = 12 ou 7−4x =−12 ⇔ x =−54
ou x =194
.
Portanto, C. S.= {54,194}.
c. |x−2|+3|x−4|= 5|x+1|
SoluçãoDenotemos por E(x) a equação |x−2|+3|x−4| = 5|x+1|. Nesse caso, consideramos adefinição de cada valor absoluto. Igualando cada valor absoluto a zero, obtemos os pontosx = 2, x = 4 e x =−1 e podemos analisar os 4 casos a seguir:
Caso 1Se x <−1, então• x+1 < 0 ⇒ |x+1|=−x−1• x−2 <−3 ⇒ |x−2|=−x+2• x−4 <−5 ⇒ |x−4|=−x+4
Logo, E(x) é equivalente a −x+2−3x+12 =−5x−5. Assim, x =−19 e −19 ∈(−∞,−1).
Caso 2Se −1≤ x < 2, então• 0≤ x+1 < 3 ⇒ |x+1|= x+1• −3≤ x−2 < 0 ⇒ |x−2|=−x+2• −5≤ x−4 <−2 ⇒ |x−4|=−x+4
Logo, E(x) é equivalente a −x+2−3x+12 = 5x+5. Assim, x = 1 e 1 ∈ [−1,2).Caso 3
Se 2≤ x < 4, então• 3≤ x+1 < 4 ⇒ |x+1|= x+1
12 / 239

Cálculo Diferencial e Integral
• 0≤ x−2 < 2 ⇒ |x−2|= x−2• −2≤ x−4 < 0 ⇒ |x−4|=−x+4
Logo, E(x) é equivalente a x−2−3x+12= 5x+5. Assim, x=57
, porém576∈ [2,4).
Caso 4Se 4≤ x, então• 5≤ x+1 ⇒ |x+1|= x+1• 2≤ x−2 ⇒ |x−2|= x−2• 0≤ x−4 ⇒ |x−4|= x−4
Logo, E(x) é equivalente a x− 2 + 3x− 12 = 5x + 5. Assim, x = −19, porém−19 6∈ [4,+∞).
Portanto, o C. S. é obtido dos casos 1 e 2, isto é, C. S.= {−19,1}.
1.5 Axioma do Supremo
Antes de começar a falar sobre os limitantes de um conjunto A ⊂ R, vejamos alguns conjuntosimportantes em R:
• O conjunto dos números naturais, denotado por N, é o conjunto
N= {1,2,3,4, . . . ,n,n+1, . . .}
Se n ∈ N, então n é dito de número natural.
• O conjunto dos números inteiros, denotado por Z, é o conjunto
Z= {. . . ,−4,−3,−2,−1,0,1,2,3,4, . . .}
Se z ∈ Z, então z é dito de número inteiro.
• O conjunto dos números racionais, denotado por Q, é o conjunto
Q={a
b: a ∈ Z e b ∈ Z, com b 6= 0
}Se q ∈Q, então q é dito de número racional.
• O conjunto dos números irracionais, denotado por I, é o conjunto
I= {x ∈ R : x 6∈Q}
Se x ∈ I, então x é dito de número irracional.
13 / 239

Cálculo Diferencial e Integral
Nota
a. Entre os números irracionais temos:
•√
2,√
3, 7√
4, −√
7, . . .
• π = 3,141592 . . .
• e = 2,71828182 . . .
b. Uma propriedade importante dos números racionais e irracionais é que:
• Entre dois números racionais existe um número infinito de números irracionais;
• Entre dois números irracionais existe um número finito de números racionais.
c. Verifica-se que:
N⊂ Z⊂Q⊂ R, R=Q∪ I e Q∩ I= /0.
Definição 1.6Seja A um subconjunto não vazio de R. Diz-se que:
i. A é limitado superiormente, se existe M ∈ R tal que
x≤M, ∀x ∈ A.
O número M é chamado de limitante superior de A.
ii. A é limitado inferiormente, se existe m ∈ R tal que
m≤ x, ∀x ∈ A.
O número m é chamado de limitante inferior de A.
iii. A é limitado, se existe k > 0 tal que
|x| ≤ k, ∀x ∈ A.
Um conjunto é limitado se é limitado superiormente e inferiormente.
Exemplo 1.11
a. Os conjuntos N e (−1,+∞) são limitados inferiormente pelo limitante−2, por exemplo, porémnão são limitados superiormente.
b. Os conjuntos (−∞,4] e −N são conjuntos limitados superiormente pelo limitante superior 7,por exemplo, porém não são limitados inferiormente.
c. Os conjuntos{
23z
: z ∈ Z\{0}}
e {x ∈ R : 2x− x2 ≥−7} são limitados por 4.
14 / 239

Cálculo Diferencial e Integral
Definição 1.7Seja A um subconjunto não vazio de R. Diz-se que:
i. s ∈ R é o supremo de A, denotado por Sup(A) se:
• s é limitante superior de A, isto é, x≤ s, ∀x ∈ A.• Se b ∈ R e b < s, então existe x ∈ A tal que b < x≤ s.
ii. r ∈ R é o ínfimo de A, denotado por Inf(A) se:
• r é limitante inferior de A, isto é, r ≤ x, ∀x ∈ A.• Se c ∈ R e r < c, então existe x ∈ A tal que r ≤ x < c.
Nota
a. O supremo de um conjunto é o menor limitante superior, e o ínfimo é o maiorlimitante inferior.
b. Se o supremo e o ínfimo de um conjunto A pertencem ao conjunto, esses ele-mentos são chamados máximo de A, denotado por max(A), e mínimo de A,denotado por min(A), respectivamente.
Exemplo 1.12Dados os conjuntos
A = (−1,94], B =
{1k
: k ∈ N}
e C = {x ∈Q :−20≤ x}
temos que:
a. Inf(A) =−1, Sup(A) =94= max(A). Portanto, A é limitado.
b. Inf(B) = 0, Sup(B) = 1 = max(B). Portanto, B é limitado.
c. Inf(C) = −20 = min(C). Porém, C não tem supremo, logo, não tem ínfimo. Portanto, não élimitado.
O axioma a seguir completa os axiomas que definem o sistema dos números reais.
Axioma 11 (Axioma do Supremo)Todo subconjunto não vazio, limitado superiormente, B⊂ R possui um supremo s = Sup(B) ∈R.
Teorema 1.6Seja A⊂ R com A 6= /0. Se A é limitado inferiormente, então este possui ínfimo.
Para finalizar, embora o princípio da boa ordem seja muito importante para essa teoria, ele seráapenas enunciado.
Teorema 1.7 (Princípio da boa ordem)Todo subconjunto não vazio de Z, limitado inferiormente, possui ínfimo.
Este princípio é usado para demonstrar o Princípio da Indução Finita e para provar várias propriedadesreferentes aos números inteiros.
15 / 239

Cálculo Diferencial e Integral
1.6 Recapitulando
Neste capítulo apresentamos as noções básicas sobre os Números Reais com o intuito de fazer comque o aluno tenha um melhor entendimento dos próximos capítulos.
Desta forma, apresentamos o sistema dos números reais, e nele os axiomas que regem a adição emultiplicação. Seguindo esse raciocínio, apresentamos dois teoremas que mostram as propriedadesda substração e divisão.
Desde que em matemática é importantíssimo entender qual é a relação de ordem entre dois ele-mentos quaisquer, visando lidar com desigualdades, intervalos, inequações, etc., esse conceito e suasprincipais propriedades foram revisadas.
Nas seções subsequentes trabalhamos os conceitos de desigualdades, intervalos, inequações e valorabsoluto, além de terem sido apresentados exemplos ilustrativos.
Por último, mas não menos importantes, o axioma do supremo e o princípio da boa ordem foramapresentados, estabelecendo-se os conceitos de conjuntos limitados inferiormente, superiormente,supremo, ínfimo, máximo e mínimo.
No proxímo capítulo, apresentaremos as noções básicas sobre relações e funções, já que esta teoria éfundamental para, por exemplo, determinar com precisão o domínio e a imagem das funções reais.
1.7 Atividades
1. Encontrar M tal que ∀x ∈ R se verifique:
i. 2x− x2 ≤M. ii. −(x2 +4x+13
)≤M. iii. 2− x
13 − x
23 ≤M.
2. Encontrar M tal que:
i.∣∣∣∣ x+62x+1
−3∣∣∣∣< M, ∀x ∈ (0,4). ii.
∣∣∣∣2x+7x2 − 1
2
∣∣∣∣< M, ∀x ∈ (2,5).
iii.∣∣∣∣3x+4
x−1−2∣∣∣∣< M, ∀x ∈ (3,7). iv.
∣∣∣∣ x−2x2 +4x−5
∣∣∣∣< M, se |x−2|< 12
.
v.∣∣∣∣ x2−5xx2 + x+10
∣∣∣∣< M, se |x+1|< 1.
3. Encontre as raízes reais das seguintes equações:
i. 12x−4 = 3x+9. ii. 2x2−11x−4 = 0.iii. x4−2x2−8 = 0. iv.
∣∣x2−4x∣∣= 3x+4.
v. |2x−1|= x−1.
4. Encontre o conjunto solução das seguintes inequações:
i. 3x−8 < 5x−2. ii. 3x2−5x−2 > 0.
iii. (x2 + x−6)(4x−4− x2)≤ 0. iv.x−2x+4
≤ x+5x+3
.
v.x2−2x+3x2−4x+3
>−2. vi.32
x2−4≥ x
x−2− 4
x+2.
16 / 239

Cálculo Diferencial e Integral
vii.√
x2−2x−15 > x+1. viii.√
x2−11x+30 > 6− x.
ix.
√x2 +3x−4
4−√
x2 +6x> x−2. x.
∣∣∣∣x2 +3x−2x2−1
∣∣∣∣< 1.
xi. 3(|x+1|− 1
6
)2
≥ 1−2∣∣∣∣|x+1|− 1
6
∣∣∣∣.
17 / 239

Cálculo Diferencial e Integral
Capítulo 2
Relações e Funções
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Determinar com precisão o domínio e a imagem de funções reais;
• Dado o gráfico de uma relação, estabelecer se esta relação é funcional;
• Dada uma função, saber estabelecer se ela é injetora, sobrejetora ou bijetora;
• Realizar operações com funções, isto é, soma, substração, produto, divisão e composi-ção de funções;
• Relacionar-se cada vez mais com a linguagem e simbolismo matemático relativo àsfunções definidas no conjunto dos números reais;
• Encontrar a inversa de uma função, se ela existir.
No nosso dia a dia, ao lermos um jornal, ao assistirmos televisão, nos deparamos com gráficos, tabelase ilustrações, pois estes são instrumentos muito utilizados nos meios de comunicação. Um texto comilustrações é muito mais interessante, chamativo, agradável e de fácil compreensão. Não é só nos jor-nais ou revistas que encontramos gráficos, eles também estão presentes nos exames laboratoriais, nosrótulos de produtos alimentícios, nas informações de composição química de cosméticos, nas bulasde remédios, enfim, em todos os lugares. Ao interpretarmos estes gráficos, verificamos a necessidadedos conceitos necessários para o bom entendimento dos mesmos.
Ao relacionarmos espaço em função do tempo, intensidade da fotossíntese realizada por uma plantaem função da intensidade de luz a que ela é exposta, ou pessoa em função da impressão digital,percebemos quão importantes são os conceitos de funções para compreendermos as relações entre osfenômenos físicos, biológicos e sociais.
Observamos então que as aplicações das relações e funções estão presentes no nosso cotidiano. Por-tanto, neste capítulo revisaremos um dos conceitos mais importante da Matemática: a função. Inicia-remos o capítulo dando as definições gerais de relação. Em seguida, definiremos as funções reais devariável real, pois são estas funções o objetivo de estudo deste capítulo e de todos os outros.
2.1 Relações
Na matemática, como em outras ciências, muitas vezes se deseja estabelecer uma relação ou corres-pondência entre dois conjuntos. Suponhamos que temos os conjuntos A = {18,20,21,33} e
18 / 239

Cálculo Diferencial e Integral
B = {Joao, Maria, Pedro, Brenda} e queremos estabelecer uma relação entre estes conjuntos, demodo que a cada número do conjunto A associamo-lhes o nome de uma pessoa do conjunto B. As-sim, podemos estabelecer o seguinte esquema conforme a figura abaixo:
18
20
21
33
João
Maria
Pedro
Brenda
A B
No entanto, este esquema pode ser representado mediante pares ordenados, isto é:
(18,João), (20,Maria), (21,Pedro), (33,Brenda).
Esta correspondência determina um subconjunto do conjunto A×B, e denotaremos este conjunto por:
R = {(18,João), (20,Maria), (21,Pedro), (33,Brenda)} .
É claro que a relação estabelecida não é única, pois é possível estabelecer outras relações entre estesdois conjuntos. Abaixo apresentamos a definição formal de uma relação.
Definição 2.1Sejam A e B dois conjuntos. Uma relação de A em B é um subconjunto de A× B, isto é,R⊂ A×B, e é denotada por R : A→ B.
Definição 2.2Seja a relação R : A→ B. Então:
i. Diz-se que o conjunto A é o conjunto de partida e o conjunto B é o conjunto de chegada;
ii. Se (x,y) ∈ R, diz-se que x esta em relação com y mediante R, e é denotado por xRy;
iii. Desde que /0⊂ A×B, /0 é uma relação de A em B, é chamada de relação nula;
iv. Se R⊂ A×A, diz-se que R é uma relação em A.
Exemplo 2.1Sejam A = {1,2,3,4,5} e B = {2,4,6,8,10}, determinemos por extenso as relações R e S definidaspor:
R = {(x,y) ∈ A×B : y = 2x} , S = {(x,y) ∈ A×B : y≥ 3x+1}
SoluçãoDas definições das relações R e S, temos que:
R= {(1,2),(2,4),(3,6),(4,8),(5,10)} , S= {(1,4),(1,6),(1,8),(1,10),(2,8),(2,10),(3,10)} .
Na figura a seguir são ilustradas estas relações.
19 / 239

Cálculo Diferencial e Integral
2
4
6
8
10
1
2
3
4
5
R
2
4
6
8
10
1
2
3
4
5
SA B A B
2.1.1 Domínio, imagem e gráfico de uma relação
Definição 2.3Seja a relação R : A→ B, com R 6= /0. Então:
i. O domínio da relação R é o conjunto {x ∈ A : (x,y) ∈ A×B}, e é denotado por Dom(R);isto é, o domínio de R é o subconjunto de A cujos elementos são os primeiros componentesde todos os pares ordenados que pertencem à relação R.
ii. A imagem da relação R é o conjunto {y ∈ B : (x,y) ∈ A×B}, e é denotado por Im(R); istoé, a imagem de R é o subconjunto de B cujos elementos são os segundos componentes detodos os pares ordenados que pertencem à relação R.
iii. Se A e B são subconjuntos de R, o gráfico da relação R é o conjunto{(x,y) ∈ R×R : (x,y) ∈ R}, e é denotado por Graf(R).
NotaNo momento de esboçar o gráfico de uma relação R, é usual posicionar o domínio noeixo x (horizontal) e a imagem no eixo y (vertical).
Exemplo 2.2Das relações R e S, definidas no Exemplo 2.1 [19], temos que:
Dom(R) = {1,2,3,4,5} , Im(R) = {2,4,6,8,10} ;
Dom(S) = {1,2,3} , Im(S) = {4,6,8,10} ;
Os gráficos de R e S são apresentados nas figuras a seguir:
1 2 3 4 5
10
8
6
4
2
9
7
5
3
1
6
-
-
-
-
- - - - - -
-
-
-
-
-
-
Graf( )S
1 2 3 4 5
10
8
6
4
2
9
7
5
3
1
6
-
-
-
-
- - - - - -
-
-
-
-
-
-
Graf( )R
20 / 239

Cálculo Diferencial e Integral
Exemplo 2.3Sejam as relações:
R ={(x,y) ∈ N×N : x2 + y2 ≤ 16
}, S =
{(x,y) ∈ R×R : x2 + y2 ≤ 16
}.
Encontremos os domínios e as imagens delas e esboçemos seus gráficos.
Solução
• Da definição de R temos que:
R = {(1,1),(1,2)(1,3),(2,1),(2,2),(2,3),(3,1),(3,2)} , Dom(R) = {1,2,3,4}= Im(R).
• Da definição de S temos que x2+y2 = 16 representa uma circunferência com centro na origeme raio 4, concluímos que o gráfico de S está formado por todos os pontos da circunferência etambém por todos os pontos interiores a esta. Além disso, Dom(S) = [−4,4] = Im(S).
• Os gráficos de R e S são apresentados nas figuras a seguir:
Graf( )S
1 2
3
1
4
2
3
- - --
-
-
-
Graf( )R
4
-
0
-2 1 1 2
3
1
1
3
4
2
2
4
3
-
-
-
- - - -
-
-
-
-
-
4
-
3
-
4
-
5
-
0
5
5
-
5-
-
- -- - -
-
-
-
-
-
2.2 Relação inversa
Definição 2.4Seja uma relação R : A→ B, R 6= /0. A relação inversa de R, denotada por R−1, é o conjunto
R−1 = {(y,x) ∈ B×A : (x,y) ∈ R} .
NotaA partir esta definição, é possível deduzir que R−1 é uma relação de B em A, isto é,R−1 : B→ A, e é obtida a partir da relação R, interligando os componentes dos paresordenados que pertencem a R.
21 / 239

Cálculo Diferencial e Integral
Exemplo 2.4Sejam as relações R e S estabelecidas no Exemplo 2.1 [19]. Então
R−1 = {(2,1),(4,2),(6,3),(8,4)} ;
S−1 = {(4,1),(6,1),(8,1),(10,1),(8,2),(10,2),(10,3)} .
Propriedades da relação inversaDa definição de R−1, temos que:
i. (y,x) ∈ R−1⇔ (x,y) ∈ R;
ii. Dom(R−1) = Im(R) e Im(R−1) = Dom(R);
iii. (R−1)−1 = R; isto é, a relação inversa de R−1 é a própria R.
2.2.1 Relações entre o gráfico de uma relação e gráfico de sua inversa
Se R : R→ R, então, da propriedade acima, temos que:
(a,b) ∈ R⇔ (b,a) ∈ R−1.
Logo, os pontos (a,b) e (b,a) são simétricos com respeito à reta L : y = x; veja o item (a) da figuraa seguir. Isto implica que, os gráficos de R e R−1 são simétricos com respeito à reta L : y = x; veja oitem (b) da figura a seguir.
b-
b
-
0
a-
a
-
L: x=y
x
y
(b,a)
(a,b)
Graf(R)
Graf(R-1)
0
L: x=y
x
y
(a) (b)
Exemplo 2.5Sejam as relações
R ={(x,y) ∈ R×R : x2 + y2 = 2x
}e S = {(x,y) ∈ R×R : 2x≤ y} .
Determinemos as relações inversas e esbocemos seus respectivos gráficos.
Solução
a. Da definição de relação inversa temos que:
R−1 ={(y,x) ∈ R×R : x2 + y2 = 2x
}Porém, é convenção escrever x como primeiro componente de um par ordenado, e y comoo segundo componente, fazendo esta troca obtemos
R−1 ={(x,y) ∈ R×R : x2 + y2 = 2y
}={(x,y) ∈ R×R : x2 +(y−1)2 = 1
}Os gráficos de R e R−1 são apresentados no item (a) da figura a seguir.
22 / 239

Cálculo Diferencial e Integral
(a) (b)
x
y
01
1
x
Graf(R)
Graf(R -1)
Graf(S -1)
b. De forma análoga, para a relação S, obtemos que:
S−1 = {(x,y) ∈ R×R : 2y≤ x}
Os gráficos de S e S−1 são apresentados no item (b) da figura acima.
2.3 Funções
Nesta seção definiremos e desenvolveremos o conceito de função, que é objeto matemático básicoutilizado para descrever o mundo real em termos matématicos.
Definição 2.5Sejam A e B dois conjuntos não vazios e f uma relação de A em B, com domínio Dom( f ).Diz-se que f é uma função de A em B, se para cada elemento x ∈ Dom( f ) existe um únicoelemento y ∈ B tal que (x,y) ∈ f . Ou equivalentemente,
f : A→ B é função, se (x,y) ∈ f e (x,z) ∈ f implica que y = z.
NotaDesta definição temos que, em uma função não existem dois pares ordenados comprimeiros componentes iguais e segundos componentes diferentes.
Exemplo 2.6Sejam os conjuntos A = {1,2,3,4} e B = {a,b,c,d,e}. Então:
a. A relação f1 : A→ B, definida por f1 = {(1,a),(2,b),(3,c),(4,d)}, é uma função de A em B.Veja o item (a) da figura abaixo;
b. A relação f2 : A→ B, definida por f2 = {(1,a),(2,b),(3,c),(4,d),(1,e)}, não é uma funçãode A em B, pois ao elemento 1 lhe corresponde a dois elementos do conjunto B (isto é, (1,a) e(1,e)). Veja o item (b) da figura abaixo;
c. A relação f3 : A→ B, definida por f3 = {(1,a),(2,a)}, é uma função de A em B. Veja o item(c) da figura abaixo;
d. A relação f4 : A→ B, definida por f4 = {(1,a),(2,a),(3,a),(4,e)}, é uma função de A em B.Veja o item (d) da figura abaixo.
23 / 239

Cálculo Diferencial e Integral
a
b
c
d
e
1
2
3
4
f1 f2
a
b
c
d
e
1
2
3
4
a
b
c
d
e
1
2
3
4
f3
a
b
c
d
e
1
2
3
4
(a) (c)(b) (d)
f4
NotaSeja uma função f : A→ B.
a. Se (x,y) ∈ f , se escreve y = f (x) (leia-se “y é igual a f de x”) e diz-se que y é ovalor de f em x, neste caso, x é denominada variável independente e y variáveldependente.
b. Desde que f é também uma relação, as definições de domínio, imagem e gráfico de fsão os mesmos estabelecidos na seção anterior.
c. Se Dom( f ) = A, diz-se que f é uma aplicação de A em B. Além disso, se Im( f ) = B,diz-se que f é uma aplicação de A sobre B.
d. Se A e B são subconjuntos de R, então f é chamada de função real de variável real.
e. Se f é uma função real de variável real, definida pela regra de correspondência y =f (x), então:
i. Quando Dom( f ) não é especificado, considera-se que este é o maior subcon-junto de R para os quais a regra de correspondência tenha sentido e resulte emvalores reais. Isso é denominado domínio natural da função.
ii. Os valores de x para os quais f (x) = 0 são as coordenadas x para os quais ográfico de f intersecta o eixo x. Estes valores são denominados zeros de f ,raízes de f (x) = 0 ou pontos de corte de y = f (x) com o eixo x.
f. Os gráficos podem fornecer uma informação visual importante sobre uma função. Porexemplo, como o gráfico de uma função f no plano xy é o grafico da equação y = f (x),os pontos do gráfico são da forma (x, f (x)), ou seja, a coordenada y de um ponto dográfico de f é o valor de f na coordenada x correspondente.
Exemplo 2.7Determinemos o domínio, a imagem e o gráfico de f , das funções a seguir:
a. Sejam A = {1,2,3,4}, B = {5,6,7,8,9} e f : A→ B definida por f (x) = x+2.
SoluçãoDesde que f (1) = 1+ 2 = 3, f (2) = 2+ 2 = 4, f (3) = 3+ 2 = 5, f (4) = 4+ 2 = 6,verificamos que os únicos valores de A que tem um correspondente no conjunto B são3, 4. Portanto, Dom( f ) = {3,4} e Im( f ) = {5,6} e o gráfico de f é apresentado no item(a) da figura abaixo
24 / 239

Cálculo Diferencial e Integral
b. Seja f : R→ R definida por f (x) =1x
.
SoluçãoA função f dada esta definida para todo x ∈ R, exceto x = 0; assim Dom( f ) = R\{0}.Para determinar Im( f ) é conveniente introduzir uma variável dependente y:
y =1x.
Embora para muitos o conjunto dos possíveis valores de y não seja evidente nessa equação,o gráfico de f . Veja o item (b) da figura abaixo, que sugere que Im( f ) = R \ {0}. Paraprovar isto resolvamos a equação acima para x em termos de y:
x 6= 0 ⇒ xy = 1 ⇔ x =1y.
Agora está evidente que essa expressão está definida para todo y ∈ R, exceto y = 0. Por-tanto, Im( f ) = R\{0}.
0
Graf( )f
1 2 3 4
8
6
9
7
5
- - - -
-
-
-
-
-
Graf( )f
x
y
x
y
1 2 3 4
8
6
9
7
5
- - - -
-
-
-
x
y
5
-
6
-
10-
-
-
4
3
-
-
2
1
-
-
0
Dom( )f
Im( )f
(a) (b) (c)
Graf( )f
c. Seja f : (0,5]→ [1,10) definida por f (x) = (x−3)2 +1.
SoluçãoDa definição de f temos que Dom( f ) = (0,5]. Por outro lado, à medida que x varia sobreo intervalo (0,5], o valor de (x− 3)2 varia sobre o intervalo [0,9); assim o valor de f (x)varia sobre o intervalo [1,10). Portanto, Im( f ) = [1,10).Nesse caso, f é uma aplicação de (0,5] sobre [1,10) e Im( f ) pode ser escrita comof ((0,5]) = [1,10). Veja o item (c) da figura acima.
A próxima nota nos diz que nem toda curva no plano pode ser gráfico de uma função.
25 / 239

Cálculo Diferencial e Integral
Teste da Reta VerticalUma relação f : R→R com domínio localizado no eixo horizontal e a imagem localizada noeixo vertical, é uma função se, e somente se, toda reta vertical intersecta o seu gráfico nomáximo uma vez. O item (a) da figura a seguir corresponde a uma função, enquanto que oitem (b) não corresponde a uma função.
x
y
0
y = f (x)
Graf( f ) x
y
0
L
P
Q
R
S
TGraf( f )
(a) (b)
2.3.1 Translações e reflexões de uma função
Esta parte se dedicará a considerar o efeito geométrico de efetuar operações básicas com funções.Isso nos permitirá usar gráficos de funções conhecidas para visualizar ou esboçar gráficos de funçõesrelacionadas.
Teorema 2.1 (Testes de simetria)
i. Uma curva plana é simétrica em relação ao eixo y se, e somente se, subtituindo-se x por−x em sua equação obtém-se uma equação equivalente;
ii. Uma curva plana é simétrica em relação ao eixo x se, e somente se, subtituindo-se y por−y em sua equação obtém-se uma equação equivalente;
iii. Uma curva plana é simétrica em relação à origem se, e somente se, subtituindo-se x por−x e y por −y em sua equação obtém-se uma equação equivalente.
Esboçando gráficosPara esboçar o gráfico de uma função é importante considerar a relação entre ela e uma outrafunção já conhecida, y = f (x). Seja o gráfico de y = f (x) apresentado no item (a) da figuraabaixo. Então o gráfico de:
• y =− f (x) é a função simétrica ao gráfico original com respeito ao eixo x. Veja o item (b) dafigura abaixo;
• y = f (−x) é a curva simétrica ao gráfico original com respeito ao eixo y. Veja o item (c) dafigura abaixo;
• y = | f (x)| se obtém transladando a parte do gráfico original que se encontra abaixo do eixo x( f (x)< 0) de forma simétrica a este último e mantendo a parte do gráfico que está por cimado eixo x ( f (x)≥ 0). Veja o item (d) da figura abaixo;
26 / 239

Cálculo Diferencial e Integral
x
y
0
y = f (x)
x
f(x)
(a)
x
y
0
y = f (x)
y = - f (x)
(b) (d)
x
y
0
y = f (x) y = f (- x)
x
y
0
y = |f (x)|
y = f (x)
(c)
Sejam k > 0 e h > 0. Então o gráfico de:
• y = f (x)+ k se obtém transladando verticalmente o gráfico original k unidades para cima.Veja o item (a) da figura abaixo;
• y = f (x)− k se obtém transladando verticalmente o gráfico original k unidades para baixo.Veja o item (a) da figura abaixo;.
• y = f (x + h) se obtém transladando horizontalmente o gráfico original h unidades para aesquerda. Veja o item (b) da figura abaixo;
• y = f (x− h) se obtém transladando horizontalmente o gráfico original h unidades para adireita. Veja o item (b) da figura abaixo;
• y = f (x−h)+k se obtém efetuando uma dupla translação, h unidades para a direita horizon-talmente e k unidades para cima verticalmente. Veja o item (c) da figura abaixo.
x
y
0
y = f (x)
(c)
y = f (x - h) + k
k
h
x
y
0
y = f (x)
x
y
0
y = f (x)
(a) (b)
y = f (x) + k
y = f (x) - k
y = f (x+h) y = f (x-h)
k
k
h h
Exemplo 2.8Dadas as seguintes funções:
a. f (x) = x2;
b. g(x) =−x2;
c. h(x) = x2 +1;
d. i(x) = (x+1)2;
e. j(x) = (x−1)2−2;
f. k(x) = |x2−2|.
Nas figuras abaixo encontramos, na sua respectiva letra, o esboço do gráfico de cada uma delas.
27 / 239

Cálculo Diferencial e Integral
(b)
x
y
0
(a)
x
y
0
y = - x2
x
y
0
y = x2
y = x2 + 1
y = x2y = x21
(c)
(f)
x
y
0
(e)
x
y
0
y = x2
y = (x -1)2 - 2
1
y = |x 2 - 2|
y = x 2 - 2
x
y
0
y = (x +1)2
1
-2
(d)
y = x2
2.3.2 Funções comuns
Agora apresentaremos algumas funções reais de variável real que são de uso frequente em cálculo.
Função linearÉ a função definida por f (x) = mx+b, onde m e b são constantes. O domínio da função linearé Dom( f ) = R e sua imagem é Im( f ) = R. Seu gráfico é a reta dependente m que intersecta oeixo x em (0,b); veja o item (a) da figura abaixo.
Casos particularesa. Quando b= 0, a função f (x) =mx passa pela origem; veja o item (b) da figura abaixo.b. Quando m = 1 e b = 0, a função f (x) = x é chamada de função identidade, também
denotada por Id(x), e seu gráfico é a reta diagonal do primeiro e terceiro quadrantes;veja o item (c) da figura abaixo.
c. Quando m = 0, a função f (x) = b é chamada de função constante, e nesse casoIm( f ) = {b}; veja o item (d) da figura abaixo.
x
y
0
y = mx + b
Dom( ) = f
Im( ) = f R
R
x
y
0
y = b
Im( ) = {b}f
Dom( ) = f R
x
y
0
y = x
(a) (b) (c) (d)
y
y = x
y = - x
y = - 4x
3
2
5
2
y = 2x
y = x
b
28 / 239

Cálculo Diferencial e Integral
Função valor absolutoÉ a função definida por f (x) = |x|, x ∈ R. Da definição de valor absoluto temos:
|x|=√
x2 =
{x, se x≥ 0;−x, se x < 0.
O domínio da função valor absoluto é Dom( f ) = R e sua imagem é Im( f ) = [0,+∞); veja oitem (a) da figura abaixo.
Função raiz quadradaÉ a função definida por f (x) =
√x, x ≥ 0. O domínio da função raiz quadrada é Dom( f ) =
[0,+∞) e sua imagem é Im( f ) = [0,+∞); veja o item (b) da figura abaixo.
Função raiz cúbicaÉ a função definida por f (x) = 3
√x, x ∈ R. O domínio da função raiz cúbica é Dom( f ) = R e
sua imagem é Im( f ) = R; veja o item (c) da figura abaixo.
x
y
0
y = |x|
Im( ) = [0, + )f 8
Dom( ) = f R Dom( ) =
x0
f
Im( ) = f
y = 3 x
R
R
y
x
y
0
y = x
f
Im( ) = [0, + )f 88Dom( ) = [0, + )
(a) (b) (c)
Função polinomial de grau nÉ a função definida por f (x)= a0xn+a1xn−1+ · · ·+an, onde x∈R, a0,a1, . . . ,an são constantesreais, a0 6= 0 e n∈N∪{0}. O domínio da função polinomial é Dom( f )=R, porém, sua imagemdepende de n.
Casos particularesa. f (x) = xn, n ∈ N:
i. Se n é par, sua imagem é Im( f ) = [0,+∞), seu gráfico é simétrico em relação aoeixo y com formato geral de uma parábola, y = x2, embora não sejam realmenteconsideradas assim quando n > 2, e cada gráfico passa pelos pontos (−1,1) e(1,1); veja o item (a) da figura abaixo.
ii. Se n é impar, sua imagem é Im( f ) = R, seu gráfico é simétrico à origem comformato geral de uma cúbica y = x3, e cada gráfico passa pelos pontos (−1,−1)e (1,1), veja o item (b) da figura abaixo.
iii. Quando n cresce, no intervalo (−1,1) os gráficos ficam mais achatados e nosintervalos (−∞,−1) e (1,+∞) cada vez mais próximos ao eixo y;
b. Função quadrática ou função polinomial de 2◦ grau: f (x) = ax2 + bx+ c, a 6= 0. O
gráfico desta função é uma parábola de vértice(− b
2a,c− b2
4a
).
i. Se a > 0, a parábola se abre para cima e Im( f ) =[
c− b2
4a,+∞
); veja o item (c)
da figura abaixo.
29 / 239

Cálculo Diferencial e Integral
ii. se a < 0, a parábola se abre para abaixo e Im( f ) =(−∞,c− b2
4a
]; veja o item
(d) da figura abaixo.
iii. O valor máximo ou mínimo da função ocorre no vértice, isto é, f(− b
2a
)=
c− b2
4aé o valor máximo ou mínimo da função.
Dom( ) =
x
y
0
f
Im( ) = f
y = x5
R
R
y = x3
Dom( ) =
x
y
0
f
f
y = x4
Ry = x2
8
(a) (b)
x
y
0 b2a
b2
4ac
x
y
0 b2a
b2
4ac
Im( ) = [0, + )
(c) (d)
y = x6
y = x7
Função racionalÉ a função definida por
f (x) =a0xn +a1xn−1 + · · ·+an
b0xm +b1xm−1 + · · ·+bm, x ∈ R.
Esta função é o quociente dos polinômios P(x) = a0xn+a1xn−1+ · · ·+an e Q(x) = b0xm+b1xm−1+· · ·+bm, onde a0,a1, . . . ,an,b0,b1, . . . ,bm são constantes reais, a0,b0 6= 0 e n,m∈N∪{0}. O domínioda função racional é Dom( f ) = {x ∈ R : Q(x) 6= 0} ≡ R\{x ∈ R : Q(x) = 0}.
Casos particulares
a. f (x) =1xn , n ∈ N:
i. Se n é impar, o domínio da função é Dom( f ) = R \ {0}, sua imagem é Im( f ) =
R \ {0} e seu gráfico é semelhante ao gráfico de y =1x
e cada gráfico passa pelos
pontos (−1,−1) e (1,1); veja o item (a) da figura abaixo;ii. Se n é par, o domínio da função é Dom( f ) =R\{0}, sua imagem é Im( f ) = [0,+∞)
e seu gráfico é semelhante ao gráfico de y =1x2 , e cada gráfico passa pelos pontos
(−1,1) e (1,1); veja o item (b) da figura abaixo;iii. O fato de x /∈ Dom( f ) implica que o gráfico tem uma quebra na origem. Por esse
motivo, zero é denominado ponto de descontinuidade. Esse conceito será visto nopróximo capítulo;
iv. Quando n cresce, nos intervalos (−∞,−1) e (1,+∞) os gráficos ficam mais achatadose nos intervalos (−1,0) e (0,1) cada vez mais próximos ao eixo y.
b. f (x) =1
1+ xn , n ∈ N:
i. Se n é impar, o domínio da função é Dom( f ) = R \ {−1}, sua imagem é Im( f ) =R \ {0} e seu gráfico tem um comportamento semelhante à curva mostrada no item(c) da figura abaixo;
30 / 239

Cálculo Diferencial e Integral
ii. Se n é par, o domínio da função é Dom( f ) = R, sua imagem é Im( f ) = (0,1] e seugráfico tem um comportamento semelhante à curva mostrada no item (d) da figuraabaixo.
x
y
0
y =
Dom( ) = - {0} f
Im( ) = - {0} f R
R
1x
(a)
x
y
0
y =
Dom( ) = - {0} f
Im( ) = [0, + )f
R
8
1x2
(b) (c) (d)
x
y
0
Dom( ) = - { - 1} f
Im( ) = - {0} f R
R
-1
Dom( ) =f
Im( ) = (0, 1]f
R
x
y
0
1
Função algébricaÉ qualquer função construída a partir de polinômios por meio de operações algébricas (adição,subtração, multiplicação, divisão ou extração de raízes). Todas as funções racionais são algébri-cas, porém existem outras funções mais complexas inclusas nesse conjunto. Os gráficos dessetipo de função variam amplamente, e assim sendo, é difícil fazer afirmações sobre elas.
x
y
0
Dom( ) = f
Im( ) = [0, + )f
R
1 2 3
1
2
-3 -2 -1
-1
y = x2/3(x+2)2
(c)
3
4
8
x
y
0
Dom( ) = f
Im( ) = f
R
1 2 3
1
2
-3 -2 -1
-1
y = x(1 - x)2/5
R
x
y
0
Dom( ) = f
Im( ) = - 3 4, +f
R
1 2 3
5
10
-3 -2 -1
-5
y = 3x1/3(2+ x)
(b)
15
208
(a)
94[ )
Função trigonométicaExistem 6 funções básicas trigonométricas, sen(x), cos(x), tg(x), sec(x), cossec(x) e cotg(x).Os gráficos das funções seno e cosseno são mostrados na figura abaixo nos itens (a) e (b),respectivamente.
x
y
0 π
1
-1
y = sen(x)
(b)(a)
2π
π2
3
2π
π2
π2
3
π2
π x
y
0 π
1
-1
y = cos(x)
2
π
π2
3 2ππ2
π2
3π2
π
Dom( ) = f R Im( ) = [-1, 1]f
31 / 239
Cálculo Diferencial e Integral
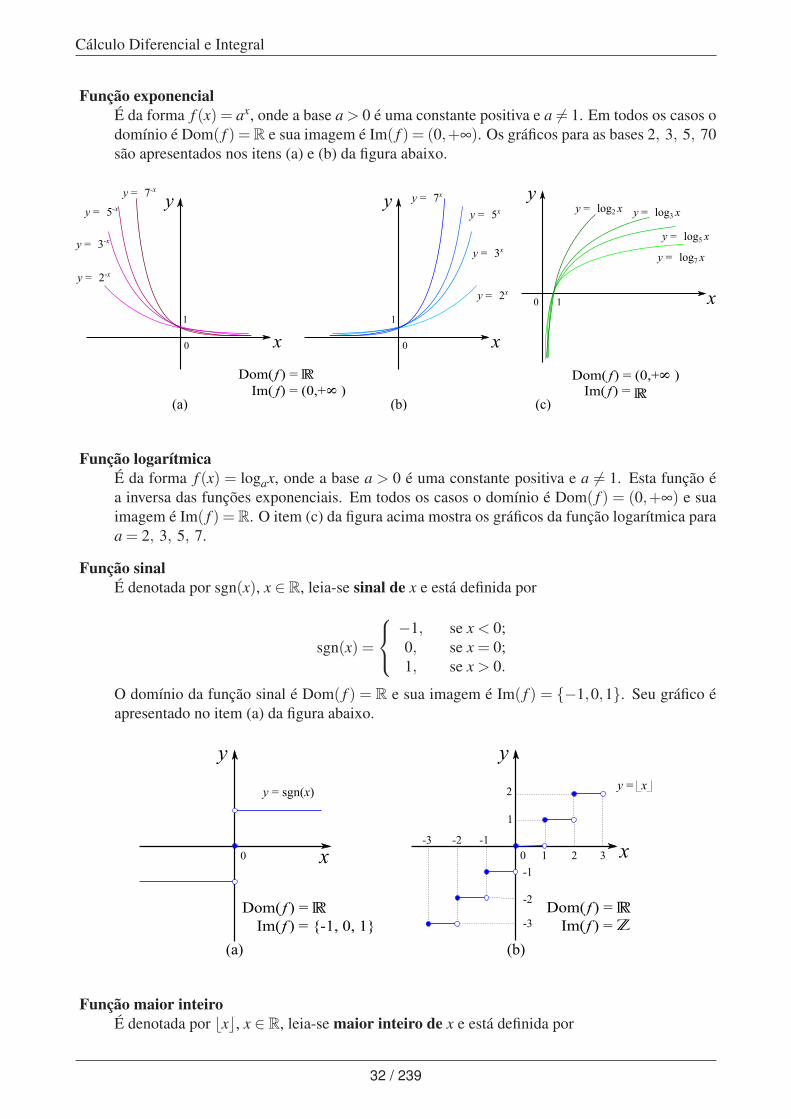
Função exponencialÉ da forma f (x) = ax, onde a base a > 0 é uma constante positiva e a 6= 1. Em todos os casos odomínio é Dom( f ) =R e sua imagem é Im( f ) = (0,+∞). Os gráficos para as bases 2, 3, 5, 70são apresentados nos itens (a) e (b) da figura abaixo.
Dom( ) = (0,+ )f 8
(a)
x
y
0
Dom( ) = f
Im( ) = (0,+ )f
R
1
y = 7-x
y = 5-x
y = 3-x
y = 2-x
8
x
y
0
Im( ) = f R
1
y = log2 x
x
y
0
1
(b)
y = 7x
y = 5x
y = 3x
y = 2x
(c)
y = log3 x
y = log5 x
y = log7 x
Função logarítmicaÉ da forma f (x) = logax, onde a base a > 0 é uma constante positiva e a 6= 1. Esta função éa inversa das funções exponenciais. Em todos os casos o domínio é Dom( f ) = (0,+∞) e suaimagem é Im( f ) =R. O item (c) da figura acima mostra os gráficos da função logarítmica paraa = 2, 3, 5, 7.
Função sinalÉ denotada por sgn(x), x ∈ R, leia-se sinal de x e está definida por
sgn(x) =
−1, se x < 0;0, se x = 0;1, se x > 0.
O domínio da função sinal é Dom( f ) = R e sua imagem é Im( f ) = {−1,0,1}. Seu gráfico éapresentado no item (a) da figura abaixo.
x
y
0
Dom( ) = f
Im( ) = f
R
1 2 3
1
2
-3 -2 -1
-1
-2
-3
y = x
x
y
0
Dom( ) = f
Im( ) = {-1, 0, 1} f
R
y = sgn(x)
(a) (b)
Função maior inteiroÉ denotada por bxc, x ∈ R, leia-se maior inteiro de x e está definida por
32 / 239

Cálculo Diferencial e Integral
bxc= n se, e somente se, n≤ x < n+1, n ∈ Z
Isto é, bxc representa o maior número inteiro que não supera a x. O domínio da função maiorinteiro é Dom( f ) = R e sua imagem é Im( f ) = Z. Seu gráfico é apresentado no item (b) dafigura acima.
Propriedades da função maior inteiroa. x−1 < bxc ≤ x, ∀x ∈ R;b. Se n ∈ Z ⇒ bx+nc= bxc+n, ∀x ∈ R;c. Se f (x) = baxc, com a 6= 0, a longitude do intervalo onde a função permanece cons-
tante é `=1|a|
, desde que
baxc= n⇔ n≤ ax < n+1
na≤ x <
na+
1a, se a > 0;
na≥ x >
na+
1a, se a < 0.
Em ambos casos, `=∣∣∣∣na +
1a− n
a
∣∣∣∣= 1|a|
.
Exemplo 2.9Dada a função maior inteiro bxc:
a. Se x = 3,1415⇒ bxc= 3;
b. Se x = 3⇒ bxc= 3;
c. Se x =−1,25⇒ bxc=−2;
d. Se x ∈ [−2,−1)⇒ bxc=−2;
e. Se x ∈ [−1,0)⇒ bxc=−1;
f. Se x ∈ [0,1)⇒ bxc= 0;
g. Se x ∈ [1,2)⇒ bxc= 1.
Exemplo 2.10Esbocemos os gráficos das seguintes funções:
a. f (x) = b3xc
Solução
Pela definição, b3xc = n⇔ n ≤ 3x < n+ 1⇔ n3≤ x <
n3+
13
. O gráfico desta função éapresentado no item (a) da figura abaixo. A amplitude do intervalo onde a função perma-
nece constante é `=13
.
33 / 239

Cálculo Diferencial e Integral
b. f (x) =⌊−x
3
⌋Solução
Pela definição,⌊−x
3
⌋= n⇔ n ≤ −x
3< n+ 1⇔ −3n− 3 < x ≤ −3n. O gráfico desta
função é apresentado no item (a) da figura abaixo. A amplitude do intervalo onde a função
é constante é `=1∣∣∣∣−13
∣∣∣∣ = 3.
x
y
-1 3 3
0 1 2 1
-1
-2
-3
3 3
2 1
y = 3x
x
y
0
1
2
-9
-1
-2
-3
3 6
y =
9
-6 -3
x3
(a) (b)
1
2
2.3.3 Função par e função ímpar
Definição 2.6
i. Uma função f : R→R é chamada par se para todo x ∈Dom( f ) se verifica−x ∈Dom( f )e f (−x) = f (x).
x
y
0
y = xn
x
y
0
y = |x|
Im( ) = [0, + )f 8
Dom( ) = f R
x
y
0
y =
Dom( ) = - {0} f
Im( ) = [0, + )f
R
8
1xn
Dom( ) =f
Im( ) = (0, 1]f
R
x
y
0
1
y = 1
xn+1
Figura 2.1: Gráficos de funções pares, em todos eles n é par.
ii. Uma função f : R→ R é chamada ímpar se para todo x ∈ Dom( f ) se verifica −x ∈Dom( f ) e f (−x) =− f (x).
34 / 239

Cálculo Diferencial e Integral
x
y
0
y = x
Dom( ) = f
Im( ) = f R
R
x
y
0
y = n x
Dom( ) =
x
y
0
f
Im( ) = f
y = xn
R
R
x
y
0
y =
Dom( ) = - {0} f
Im( ) = - {0} f R
R
1xn
Figura 2.2: Gráficos de funções ímpares, em todos eles n é ímpar.
Nota
a. O gráfico de toda função par é simétrico em relação ao eixo y, uma vez que f (−x) =f (x), um ponto (x,y) estará no gráfico se, e somente se, o ponto (−x,y) estiver nográfico. Uma reflexão através do eixo y não altera o gráfico.
b. O gráfico de toda função ímpar é simétrico em relação à origem, uma vez que f (−x) =− f (x), um ponto (x,y) estará no gráfico se, e somente se, o ponto (−x,−y) estiver nográfico.
c. Um gráfico é simétrico em relação à origem se uma rotação de 180◦ em relação àorigem não altera o gráfico.
2.3.4 Função periódica
Definição 2.7Uma função f : R→ R é dita periódica se existe um número real t 6= 0 tal que para todox ∈ Dom( f ) se verifica:
i. x+ t ∈ Dom( f )
ii. f (x+ t) = f (x).
iii. O menor valor de t é o período de f .
Exemplo 2.11As seguintes funções são periódicas:
a. f (x) = x−bxc , x∈R Notamos que f (x+1) = (x+1)−bx+1c= x+1−(bxc+1) = x−bxc=f (x) e desde que não existe outro número real t tal que 0 < t < 1 e que seja o período de f ,assim f é de período 1; veja o item (a) da figura abaixo.
x
y
1
-1
f(x) = |sen(2x)|
π π-π2
-π2
x
y
0
1
-3 1 2
f(x) = x x
3-2 -1-4 4
(a) (b)
-1
Dom( ) = f Im( ) = [0, 1] fR
35 / 239

Cálculo Diferencial e Integral
b. f (x) = |sen(x)|, x ∈R O período de f é t = π . De fato, f (x+π) = |sen(x+π)|= |− sen(x)|=|sen(x)|= f (x); veja o item (b) da figura acima.
2.3.5 Função crescente e função decrescente
Definição 2.8Seja f uma função definida em um intervalo I e x1 e x2 dois pontos em I.
i. Se f (x2)> f (x1) sempre que x1 < x2, então dizemos que f é crescente em I; veja o item(a) da figura abaixo.
x
y
a bx1 x2
f(x1)
f(x2)
0
Ix
y
a bx1 x2
f(x2)
f(x1)
0
I
ii. Se f (x2) < f (x1) sempre que x1 < x2, então dizemos que f é decrescente em I; veja oitem (b) da figura acima.
NotaUma função é crescente se seu gráfico é ascendente e é decrescente se seu gráfico é des-cendente, em ambos casos da esquerda para a direita.
Exemplo 2.12A função f (x)= |x2−4|, veja gráfico abaixo, é crecente nos intervalos [−2,0] e [2,+∞), e decrescentenos intervalos (−∞,−2] e [0,2].
x
y
f(x) = | x2- 4 |
-2 2
4
36 / 239

Cálculo Diferencial e Integral
2.3.6 Função definida por partes
Definição 2.9Uma função f : R→R é definida por partes se ela é descrita por funções diferentes em partesdiferentes de seu domínio.
f (x) =
f1(x), se x ∈ I1;f2(x), se x ∈ I2;
......
fn(x), se x ∈ In;
onde Ii ⊆ Dom( fi), ∀ i, Dom( f ) =⋃n
i=1 Ii e Ii∩ I j = /0, ∀ i, j ∈ {1,2, . . . ,n}, i 6= j.
Exemplo 2.13A função
f (x) =
(x+1)2 +1, se x ∈ (−∞,−1);|x|, se x ∈ [−1,1);1, se x ∈ [1,π);
−cos(x), se x ∈ [π,+∞);
é definida por partes, e na figura abaixo podemos ver seu gráfico.
x
y
1
-1
f(x)
π-1 1
2.4 Função injetiva, sobrejetiva e bijetiva
Nesta seção apresentamos três conceitos muito importantes para funções: injetividade, sobrejetivi-dade e bijetividade.
Definição 2.10Seja f : A→ B uma função. Diz-se que:
i. f é injetiva se f (x1) = f (x2) implica que x1 = x2 para todo x1,x2 ∈ Dom( f ). Ou equiva-lentemente, ∀x1,x2 ∈ Dom( f ), com x1 6= x2, temos que f (x1) 6= f (x2).
ii. f é sobrejetiva ou sobre se para todo y ∈ B existe x ∈ A tal que f (x) = y. Em outraspalavras, f : A→ B é sobrejetiva se Im( f ) = B.
iii. f é bijetiva se, e somente se, f é injetiva e sobrejetiva.
37 / 239

Cálculo Diferencial e Integral
Nota
a. A função injetiva também é conhecida como função univalente ou um a um, já queexiste uma correspondência um para um entre os elementos do domínio e a imagem.
b. Geometricamente, uma função definida por y = f (x) é injetiva se ao traçar retas para-lelas ao eixo x, essas intersectam o seu gráfico em não mais um ponto.
x
y
0
y
Exemplo 2.14
a. A função f : R→ R definida por f (x) = 3x+ 2, é injetiva. De fato, se f (x1) = f (x2) ⇒3x1 + 2 = 3x2 + 2 ⇒ 3x1 = 3x2 ⇒ x1 = x2. Além disso, f é sobrejetiva desde que se
y ∈R, existe x =y−2
3tal que f (x) = f
(y−2
3
)= 3
(y−2
3
)+2 = y, assim f é sobrejetiva e
concluimos que f é bijetiva.
b. A função f : R→ [0,+∞) definida por f (x) = x2, é sobrejetiva pois Im( f ) = [0,+∞). Porém,x1 =−2 e x2 = 2 geram a mesma imagem, isto é, f (−2) = 4 = f (2). Portanto, f não é bijetiva.
2.4.1 Operações com funções
Da mesma forma que fazemos operações aritméticas com números, podemos realizar este tipo deoperações entre funções, produzindo outras novas.
Definição 2.11Sejam f e g duas funções reais de variáveis reais com domínios Dom( f ) e Dom(g), respectiva-mente. Define-se:
A função soma
( f +g)(x) := f (x)+g(x), x ∈ Dom( f +g) = Dom( f )∩Dom(g).
A função diferença
( f −g)(x) := f (x)−g(x), x ∈ Dom( f −g) = Dom( f )∩Dom(g).
A função produto
( f ·g)(x) := f (x) ·g(x), x ∈ Dom( f ·g) = Dom( f )∩Dom(g).
38 / 239

Cálculo Diferencial e Integral
A função quociente(fg
)(x) :=
f (x)g(x)
, x ∈ Dom(
fg
)= Dom( f )∩ (Dom(g)\{x : g(x) = 0}) .
A função valor absoluto
| f |(x) := | f (x)|, x ∈ Dom(| f |) = Dom( f ).
A função produto de uma constante por uma função
(c f )(x) := c f (x), x ∈ Dom(c f ) = Dom( f ),
onde c ∈ R é uma constante real .
Exemplo 2.15As funções
a. f (x) = 4x3−6 e g(x) =−(6−4x3) são iguais desde que Dom( f ) =Dom(g) =R e f (x) = g(x).
b. f (x) =√
(x−2)(x−5) e g(x) =√
x−2√
x−5 são diferentes, sendo Dom( f ) = (−∞,2]∪[5,+∞) e Dom(g) = [5,+∞) ou seja Dom( f ) 6= Dom(g).
Exemplo 2.16
Sejam f (x) =√
9− x2 e g(x) =√
x2− 14 . Encontremos as regras de correspondência das funções:
f +g, f −g, f ·g, −8g,(
fg
), |g|.
SoluçãoCaculemos os domínios:
Dom( f ) ={
x ∈ R : 9− x2 ≥ 0}= [−3,3];
Dom(g) ={
x ∈ R : x2− 14≥ 0}=
(−∞,−1
2
]∪[
12,+∞
);
Dom( f )∩Dom(g) =[−3,−1
2
]∪[
12,3]
a. ( f +g)(x) = f (x)+g(x) =√
9− x2 +√
x2− 14 , x ∈ [−3,−1
2 ]∪ [12 ,3];
b. ( f −g)(x) = f (x)−g(x) =√
9− x2−√
x2− 14 , x ∈ [−3,−1
2 ]∪ [12 ,3];
c. ( f ·g)(x) = f (x) ·g(x) =√
9− x2 ·√
x2− 14 , x ∈ [−3,−1
2 ]∪ [12 ,3];
d. (−8g)(x) =−8g(x) =−8√
x2− 14 , x ∈ [−3,3];
e.(
fg
)(x) =
f (x)g(x)
=
√9− x2√x2− 1
4
, x ∈ [−3,−12)∪ (
12 ,3];
f. |g|(x) = |g(x)|=∣∣∣∣√x2− 1
4
∣∣∣∣=√x2− 14 , x ∈ [−1
2 ,12 ].
39 / 239

Cálculo Diferencial e Integral
2.5 Composição de funções
A composição é outra forma de combinar funções, esta operação não tem analógo direto na aritméticausual.
Definição 2.12Sejam f : A→ B e g : B→C duas funções reais tais que Im( f )∩Dom(g) 6= /0. A composiçãode g com f , denotada por g◦ f , é a função g◦ f : A→C definida por:
(g◦ f )(x) := g( f (x))
O domínio da função composta g◦ f é dado por
Dom(g◦ f ) = {x ∈ R : x ∈ Dom( f ) e f (x) ∈ Dom(g)}
Na seguinte figura ilustramos a função composta g◦ f
A B C
Dom( f )
g f °
Dom( g )
f (g(x))
f g
NotaFalando de forma informal, a operação de composição de duas funções é a operação desubstituir a variável dependente da sua definição pela função que a precede.
Exemplo 2.17Sejam as funções f (x) = 2x−6 e g(x) =
√x. Encontremos g◦ f e f ◦g
Solução
a. (g◦ f )(x) = g( f (x)) = g(2x−6) =√
2x−6,logo, o domínio da g◦ f é
Dom(g◦ f ) = {x ∈ R : x ∈ Dom( f ) e f (x) ∈ Dom(g)}= {x ∈ R : x ∈ R e 2x−6≥ 0}= [3,+∞)
b. ( f ◦g)(x) = f (g(x)) = f (√
x) = 2√
x−6,logo, o domínio da f ◦g é
Dom( f ◦g) = {x ∈ R : x ∈ Dom(g) e g(x) ∈ Dom( f )}= {x ∈ R : x≥ 0 e
√x ∈ R}
= [0,+∞)
A seguinte figura ilustra cada uma destas composições.
40 / 239

Cálculo Diferencial e Integral
x
y
0
-4
-6
-2
1 5 6 9
x
(g f )(x) = 2x-6
y
3 540
°
(f g )(x) = 2 x - 6°
2
2
NotaDeste exemplo, podemos concluir que a composição de funções não é comutativa, isto é,g◦ f e f ◦g em geral são diferentes.
Exemplo 2.18Sejam as funções
f (x) ={
x2 se x < 1;−x3 se x≥ 2;
g(x) ={−x se x < 2;2x se x≥ 4.
Encontremos f ◦g.
SoluçãoNeste caso cada uma das funções é definida por partes:
f (x) ={
f1(x) se x ∈ Dom( f1);f2(x) se x ∈ Dom( f2);
g(x) ={
g1(x) se x ∈ Dom(g1);g2(x) se x ∈ Dom(g2).
Logo, o domínio de f ◦g será obtido analisando todas as combinações possíveis de f1, f2, g1 eg2, isto é:
a. f1 ◦g1:
Dom( f1 ◦g1) = {x ∈ R : x ∈ Dom(g1) e g1(x) ∈ Dom( f1)}= {x ∈ R : x ∈ (−∞,2) e − x ∈ (−∞,1)}= {x ∈ R : x ∈ (−∞,2) e x ∈ (−1,+∞)}= (−1,2)
Então, ( f ◦g)(x) = f1(g1(x)) = f1(−x) = x2, ∀x ∈ (−1,2).
b. f1 ◦g2:
Dom( f1 ◦g2) = {x ∈ R : x ∈ Dom(g2) e g2(x) ∈ Dom( f1)}= {x ∈ R : x ∈ [4,+∞) e 2x ∈ (−∞,1)}
=
{x ∈ R : x ∈ [4,+∞) e x ∈ (−∞,
12)
}= /0
41 / 239

Cálculo Diferencial e Integral
c. f2 ◦g1:
Dom( f2 ◦g1) = {x ∈ R : x ∈ Dom(g1) e g1(x) ∈ Dom( f2)}= {x ∈ R : x ∈ (−∞,2) e − x ∈ [2,+∞)}= {x ∈ R : x ∈ (−∞,2) e x ∈ (−∞,−2]}= (−∞,−2)
Então, ( f ◦g)(x) = f2(g1(x)) = f2(−x) = x3, ∀x ∈ (−∞,−2).
d. f2 ◦g2:
Dom( f2 ◦g2) = {x ∈ R : x ∈ Dom(g2) e g2(x) ∈ Dom( f2)}= {x ∈ R : x ∈ [4,+∞) e 2x ∈ [2,+∞)}= {x ∈ R : x ∈ [4,+∞) e x ∈ [1,+∞)}= [4,+∞)
Então, ( f ◦g)(x) = f2(g2(x)) = f1(2x) =−8x3, ∀x ∈ [4,+∞). Portanto,
( f ◦g)(x) =
x2, se x ∈ (−∞,−2);x3, se x ∈ (−1,2);−8x3, se x ∈ [4,+∞).
Propriedades da composição de funçõesSejam f ,g e h funções reais com domínios Dom( f ), Dom(g) e Dom(h), respectivamente. Entãose verifica que:
a. ( f ◦g)◦h = f ◦ (g◦h)
b. f ◦ Id = f = Id◦ f
c. ( f +g)◦h = f ◦h+g◦h
d. ( f −g)◦h = f ◦h−g◦h
e. ( f ·g)◦h = ( f ◦h) · (g◦h)
f.(
fg
)◦h =
f ◦hg◦h
2.6 Função inversa
Dada uma função f : A→ B, sempre temos alguma das duas possibilidades: f é injetiva ou f não éinjetiva.
• Se f não é injetiva, existem pelo menos dois elementos x1,x2 ∈ A tais como:
(x1,y) ∈ f e (x2,y) ∈ f .
Portanto, a (relação) inversa de f , f−1, não é uma função de B em A.
• Se f : A→ B é injetiva, então a inversa f−1 : B→ A é uma função injetiva e é chamada de funçãoinversa de f
42 / 239
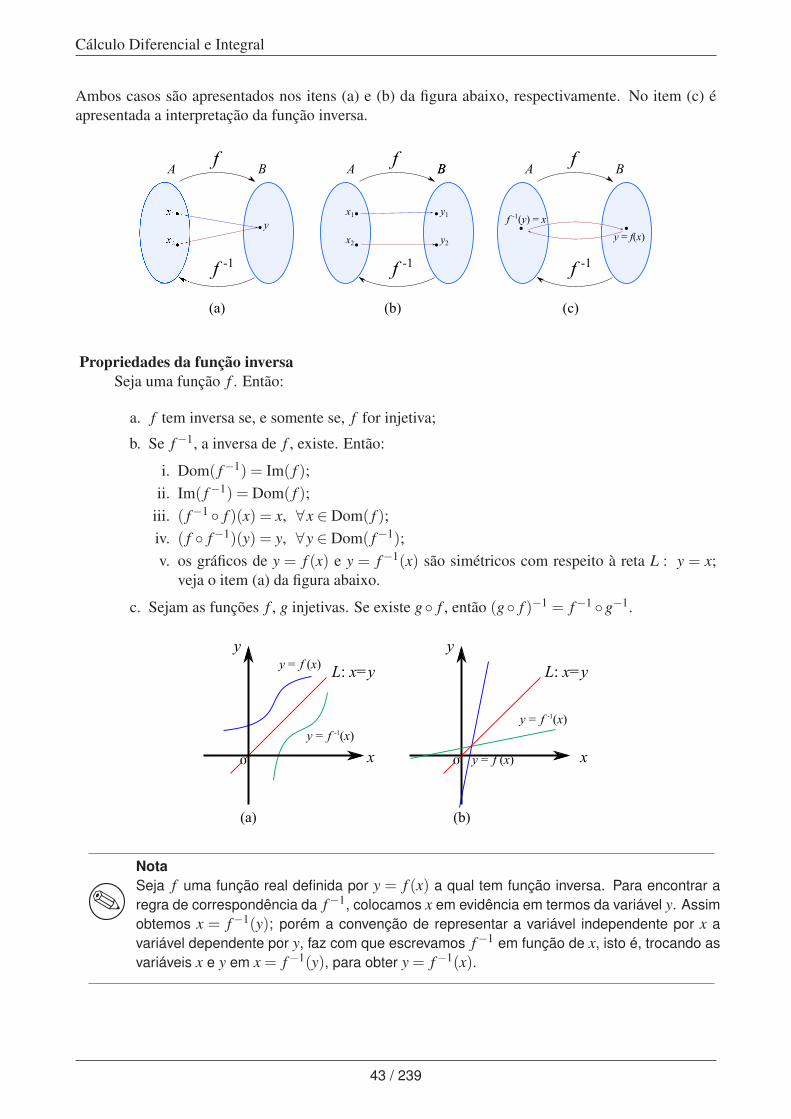
Cálculo Diferencial e Integral
Ambos casos são apresentados nos itens (a) e (b) da figura abaixo, respectivamente. No item (c) éapresentada a interpretação da função inversa.
f
(a) (b)
y
f -1
A Bf
x1
x2
f -1
A B
y1
y2
(c)
Bf
f -1(y) = x
f -1
A B
y = f(x)
Propriedades da função inversaSeja uma função f . Então:
a. f tem inversa se, e somente se, f for injetiva;
b. Se f−1, a inversa de f , existe. Então:
i. Dom( f−1) = Im( f );ii. Im( f−1) = Dom( f );
iii. ( f−1 ◦ f )(x) = x, ∀x ∈ Dom( f );iv. ( f ◦ f−1)(y) = y, ∀y ∈ Dom( f−1);v. os gráficos de y = f (x) e y = f−1(x) são simétricos com respeito à reta L : y = x;
veja o item (a) da figura abaixo.
c. Sejam as funções f , g injetivas. Se existe g◦ f , então (g◦ f )−1 = f−1 ◦g−1.
y = f -1(x)
y = f (x)0
L: x=y
x
y
y = f -1(x)
y = f (x)
0
L: x=y
x
y
(a) (b)
NotaSeja f uma função real definida por y = f (x) a qual tem função inversa. Para encontrar aregra de correspondência da f−1, colocamos x em evidência em termos da variável y. Assimobtemos x = f−1(y); porém a convenção de representar a variável independente por x avariável dependente por y, faz com que escrevamos f−1 em função de x, isto é, trocando asvariáveis x e y em x = f−1(y), para obter y = f−1(x).
43 / 239

Cálculo Diferencial e Integral
Exemplo 2.19Encontremos a função inversa da função f (x) = 5x−3, se x ∈ [0,6].
SoluçãoVerificamos que f (x1) = f (x2)⇒ 5x1− 3 = 5x2− 3⇒ x1 = x2, assim f é injetiva. por outrolado, desde que y = f (x), então y = 5x−3, x ∈ [0,6]. Pondo em evidência a variável x obtemos
que x =y+3
5, para x ∈ [0,6], logo determinamos a variação da variável y
x =y+3
5∈ [0,6]⇒ 0≤ y+3
5≤ 6⇒ 0≤ y+3≤ 30⇒−3≤ y≤ 27⇒ y ∈ [−3,27]
Assim x =y+3
5, para y ∈ [−3,27], permutamos x por y, isto é, y =
x+35
, para x ∈ [−3,27].
Portanto, f−1(x) =x+3
5, para x ∈ [−3,27].
No item (b) da figura acima podemos ver os gráficos de f e f−1.
2.7 Recapitulando
Neste capítulo, apresentamos o conceito de Relações entre conjuntos, além de importantes definiçõesrelativas a este. Também foi apresentado o conceito de Função com o intuito de fazer com que oaluno determine com precisão o domínio, a imagem e o gráfico de uma função real dada; foramapresentados diversos exemplos ilustrando esses tópicos.
Da mesma forma que é importante ter noção sobre domínios, imagens e gráficos de funções, de-vemos ter noção sobre os conceitos de injetividade, sobrejetividade e bijetividade. Portanto, estesconceitos também foram abordados.
Nas seções subsequentes, apresentamos alguns casos partirculares de funções, com as quais vamos alidar no decorrer deste livro, assim como as operações aritméticas e composições que as envolvem.Por último, e não menos importante, a teoria sobre a inversa de uma função foi apresentada.
No próximo capítulo, apresentaremos as noções básicas sobre limites e continuidade, uma das ideiasmais importantes e mais fascinates de toda a matemática, pois apesar da palavra contínua pareçaintuitivamente clara, não é fácil imaginar uma boa definição desta ideia.
2.8 Atividades
1. Sejam os conjuntos A = {1,3,5,7} e B = {3,5,8,9} e a relação R : A→ B:
i. R = {(x,y) ∈ A×B : x < y}.ii. R = {(x,y) ∈ A×B : x é divisor de y}.
iii. R = {(x,y) ∈ A×B : y = x+4}.
Em cada caso, determine R por extensão, Dom(R) e Im(R); esboce o gráfico e encontre arelação inversa.
44 / 239

Cálculo Diferencial e Integral
2. Seja a relação R : R→ R:
i. R = {(x,y) ∈ R×R : x = 3 e y > 0}.ii. R = {(x,y) ∈ R×R : y = 2x e x ∈ [−2,1)}.
iii. R = {(x,y) ∈ R×R : 4x2 +9y2−36≤ 0}.
Em cada caso, determine Dom(R) e Im(R); esboce o gráfico e encontre a relação inversa.
3. Esboce o gráfico e calcule a área das regiões definidas pelas seguintes relações:
i. R = {(x,y) ∈ R×R : 1≤ x2 + y2 ≤ 9} ii. R = {(x,y) ∈ R×R : 2|x|+ |y| ≤ 1}
4. Seja f a função definida por:
i. f (x) = x2−5x+3. ii. f (x) =√
2x2 +1.
iii. f (x) =x3−3x2 + x−2
4x2− x−5. iv. f (x) =
|x|x, se x 6= 0;
1, se x = 0.
Em cada caso, calcule f (0), f (−2), f(1
3
).
5. Sejam f e g funções definidas por:
f (x) ={
1, se 0≤ x≤ 1,2, se 1 < x≤ 2; e g(x) = f (2x)+ f (x−2).
Encontre Dom(g).
6. Sejam f e g funções definidas por:
f (x) ={
x2, se |x|< 1x, se |x| ≥ 1.
e g(x) ={
1− x, se |x| ≥ 2x, se |x|< 2.
Encontre ( f +g)(x),(
fg
)(x) e esboce seus respectivos gráficos.
7. Seja f : Dom( f )→ [0,1] definida por:
i. f (x) =|x|x
. ii. f (x) = 2+ x− x2. iii. f (x) =x−1x−3
.
Em cada caso, determine Dom( f ).
8. Seja f : Dom( f )→ (−2,6] definida por f (x) = x2−4x+1. Determine Dom( f ), e verifique sef é injetiva e sobrejetiva.
9. Determine Dom( f ) das seguintes funções:
i. f (x) =√
x− x3. ii. f (x) = 3√
x−bxc.
iii. f (x) = 4√
x2 +4x−12+3x2
4√
20+ x− x2.
45 / 239

Cálculo Diferencial e Integral
10. Seja a função f definida por:
i. f (x) =
x4
x−2, se x 6= 2;
3, se x = 2.ii. f (x) =
{|4− x2|, se |x|< 3;
5, se |x| ≥ 3.
iii. f (x) =
(x−1)3, se 0≤ x < 2;10− x2, se 2≤ x≤ 3;−2, caso contrário .
iv f (x) =x2 + sgn(2x−1)√
4−bxc2.
Em cada caso esboce o gráfico de f , determine Dom( f ) e Im( f ).
11. Determine o período das seguintes funções:
i. f (x) =√b7xc−7bxc. ii. f (x) = 8bxc−b8xc.
12. Verifique se as seguintes funções são pares ou ímpares:
i. f (x) =−x3 + x. ii. f (x) = |x|+4x2.iii. f (x) =− x
|x|. iv. f (x) =−x3−2x2.
13. Sejam f (x) = x3 +2 e g(x) = x+a, determine o valor de a tal que ( f ◦g)(3) = (g◦ f )(a−1).
14. Sejam f e g duas funções, determine f (x) se:
i. g(x) = 1− x2 e f (g(x)) =√
1− x2. ii. g(x) = 2x+3 e f (g(x)) = 4x2 +12x+9.
15. Se f (x) = 2x+ c e f (c) = 2 f−1(c2), determine o valor de:
i. f (0) · f−1(0). ii.f (1)
f−1(1).
16. Dada a função f (x) =9− x2
4− x2 , x≥ 0.
i. Prove que f é injetiva. ii. Determine a função f−1. iii. Determine Dom( f−1).
17. Determine a função inversa, caso ela exista, das seguintes funções:
i. f (x) =√
x2−4, x ∈ (−∞,−2). ii. f (x) =√
2− x− x2, x ∈ [−2,1].
18. Sejam as funções definidas por:
f (x) =x4−1
16− x4 , se x≥ 0 e x 6= 2; g(x) = 4√
16− x2, se x ∈ [0,4];
h(x) =√
x+1, se x ∈ [−1,+∞); i(x) =√
x2−1, se x ∈ [1,+∞).
i. Determine:
a. ( f ◦g)−1 e Dom(( f ◦g)−1). b. h · ( f ◦g)−1.
46 / 239

Cálculo Diferencial e Integral
c. h−1 · ( f ◦g)−1 eDom
(h−1 · ( f ◦g)−1). d. i · ( f ◦g)−1 e Dom
(i · ( f ◦g)−1).
e. i◦ ( f ◦g)−1 e Dom(i◦ ( f ◦g)−1).
ii. Verifique se h · ( f ◦g)−1 é injetiva.
iii. Esboce o gráfico de ( f ◦g)−1.
19. Sejam f (x) =√
2− x+ b2− xc e g(x) =
√4− x2
2+ x. Determine:
i. ( f −g)(x), Dom( f −g) e Im( f −g).
ii. ( f ◦g)−1(x), Dom(( f ◦g)−1) e Im
(( f ◦g)−1).
47 / 239

Cálculo Diferencial e Integral
Capítulo 3
Limites
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Interpretar geometricamente a definição de limite de uma função;
• Interpretar adequadamente a propriedade de unicidade do limite;
• Avaliar limites de funções elementares;
• Conhecer as indeterminações da forma00
,∞
∞, entre outras;
• Aplicar os teoremas sobre limites de funções na resolução dos exercícios.
3.1 Introdução
Neste Capítulo trataremos a teoria dos limites de uma função, uma das ideias mais importantes efascinantes da Matemática, a qual é indispensável conhecer por ser um dos pilares dos conceitos decontinuidade, derivada, integral, etc.
Quando começou a se desenvolver o cálculo, a maioria das funções eram contínuas (intuitivamente,isto é, se o gráfico da função podia ser feito sem levantar o lápis do papel), e por tanto não se sentia anecessidade de se aprofundar quanto ao significado exato de continuidade. Foi em meados do séculoXVIII que s e apresentaram algumas funções descontínuas em conexão com os problemas da física,fato obrigou os matemáticos no início do século XIX a examinar cuidadosamente o significado dosconceitos de função e continuidade. A pesar de que o significado de “contínuo” parece claro paratodo mundo, não era fácil imaginar uma boa definição. Uma definição satisfatória de continuidade foiapresentada em 1821 usando o conceito de limite. Esta abordagem será exposta a seguir, mas antes,apresentaremos alguns conceitos básicos necessários para entender a definição de limite.
3.2 Vizinhança
Embora a definição de vizinhança, no sentido topológico, seja muito abstrata, é necessário ter al-guma noção sobre este conceito. Neste livro, o espaço em que trabalhamos é R, portanto, a seguintedefinição é suficiente para cumprir nossos objetivos.
48 / 239

Cálculo Diferencial e Integral
Definição 3.1Dados a, δ , δ1, δ2 ∈ R, com δ , δ1, δ2 > 0:
i. Chama-se vizinhança aberta do ponto a ao intervalo (a−δ1,a+δ2);
ii. Chama-se bola aberta de centro a e raio δ ao intervalo (a−δ ,a+δ );
iii. A bola aberta de centro a e raio δ é denotada por B(a;δ ), isto é, B(a;δ ) = (a−δ ,a+δ ).
O item (a) da figura a seguir ilustra uma vizinhança, enquanto que o item (b) ilustra uma bola decentro a e raio δ .
aδ1 δ2 δ δa
(a) (b)
B(a;δ)
Exemplo 3.1
a. Os intervalos seguintes são vizinhanças abertas do ponto a = 5:
(5−3,5+2) = (2,7),(
5− 13,5+4
)=
(143,9).
b. Os intervalos seguintes são bolas abertas do ponto a = 5:
B(5;2) = (5−2,5+2) = (3,7), B(
5;13
)=
(5− 1
3,5+
13
)=
(143,163
).
Propriedades das vizinhançasDados a, δ , δ1, δ2 ∈ R, com δ , δ1, δ2 > 0, verifica-se que:
a. B(a;δ ) = {x ∈ R : |x−a|< δ};b. A interseção de duas vizinhanças de centro a é uma vizinhança de centro a, ou seja:
B(a;δ1)∩B(a;δ2) = B(a;δ )
onde δ = min{δ1,δ2}.
3.3 Limites de uma função
Antes de definir o conceito de limite apresentaremos a noção intuitiva do mesmo no exemplo abaixo.
49 / 239

Cálculo Diferencial e Integral
Exemplo 3.2Sejam as funções f e g definidas pelas regras de correspondências:
f (x) = x+1, x 6= 1 e g(x) ={
x2 +1 se x 6= 1;3 se x = 1.
Das, respectivas, definições observamos que para x = 1, f (x) não está definida, ou seja, f (1) nãoexiste, enquanto que g(1) = 3. Porém, o comportamento de ambas funções é exatamente o mesmoem uma vizinhança de 1, excluindo o ponto 1 dessa vizinhança, e pode ser descrito da seguinte forma:
• Para valores de x próximos a 1, com x 6= 1, os valores de f (x) e g(x) se aproximam do númeroL = 2.
• No caso da função f , dizemos que 2 é o limite de f (x) quando x tende (ou se aproxima) a 2;
• De forma semelhante, para a função g dizemos que 2 é o limite de g(x) quando x tende a 1.
Notamos que o limite de f quando x tende a 1 não depende de f (1), pois esse não existe, e sim osvalores que a função f toma quando x é próximo a 1.
Definição 3.2Sejam f : R → R uma função, L ∈ R e a um ponto que não, necessariamente, pertence aDom( f ), porém, toda vizinhança de a contém pontos de Dom( f ). Se para cada ε > 0 é possívelencontrar um δ > 0 que depende de a e ε , tal que
x ∈ Dom( f ), x 6= a e 0 < |x−a|< δ ⇒ | f (x)−L|< ε,
diz-se que f se aproxima do limite L quando x se aproxima de a, e escreve-se:
limx→a
f (x) = L,
leia-se L é o limite de f (x) quando x tende a a ou o limite de f quando x tende a a é L.
Nota
• A definição acima pode ser reescrita usando a notação de vizinhanças:
limx→a
f (x)=L ⇔ ∀ε > 0, ∃δ > 0 tal que ∀x∈Dom( f )∩B(a;δ ), x 6= a⇒ f (x)∈B(L;ε).
• O conceito de limite implica na ideia de que f (x) poder ser tão próximo a L quanto quizer-mos, sempre que x for escolhido suficientemente próximo de a.
Exemplo 3.3Seja f (x) = 4x−5. Se lim
x→2f (x) = 3. Quão próximo de 2 deve estar x para que | f (x)−3|< 0,001?
SoluçãoFazendo ε = 0,001, queremos que | f (x)−3|< ε . Para encontrar um δ adequado, notamos que| f (x)−3|= |4x−5−3|= 4|x−2|< 0,001, dessa última desigualdade, obtemos que |x−2|<0,00025. Portanto, se x está distante de 2 em menos de 0,00025, então f (x) está distante de 3em menos de 0,001.
50 / 239

Cálculo Diferencial e Integral
Nota
Passos para determinar um δ para dados f , L, a e ε > 0Os passos para determinar um δ tal que para todo x
0 < |x−a|< δ ⇒ | f (x)−L|< ε
podem ser organizados:
1. Decompondo o termo | f (x)−L| em uma expressão onde apareça o termo |x−a|,isto é,
| f (x)−L|= |x−a||g(x)|;
2. Encontrando um δ1 > 0, valor inicial para δ , com o intuito de limitar a expressão|g(x)|, isto é,
0 < |x−a|< δ1 ⇒ ∃ K > 0 : |g(x)|< K;
i. Se 0 < |x−a|< δ1, então
| f (x)−L|= |x−a||g(x)|< |x−a|K;
ii. Se |x−a|< ε
K, então
|x−a|K < ε ⇒ | f (x)−L|< ε;
3. Fazer δ = min{
δ1,ε
K
}.
4. Portanto, 0 < |x−a|< δ implica que | f (x)−L|= |x−a||g(x)|< ε , o que provaque
limx→a
f (x) = L.
Algumas recomendações
a. Ao considerar valores para δ1, tais que 0 < |x−a|< δ1:
i. podemos considerar δ1 = 1 ou números menores.
ii. devemos verificar a não existência de assíntotas verticais de g(x) no inter-valo (a−δ1,a+δ1).
b. Ao limitar g(x), dado δ1, devemos lembrar algumas propriedades de desigualda-des e valor absoluto:
i. Se 0 < |x−a|< δ1, então a−δ1 < x < a+δ1;
ii. Se a < y < b, então |y|< max{|a|, |b|};iii. Se a < y < b, então y2 < k2 onde k = max{|a|, |b|};
c. Dados 0 < δ < δ . Se δ verifica a definição de limite, então δ também verifica adefinição de limite.
51 / 239

Cálculo Diferencial e Integral
Exemplo 3.4
a. Se f (x) = 2x2−5x+2, provemos que limx→3
f (x) = 5.
SoluçãoDado ε > 0, devemos encontrar um δ tal que
0 < |x−3|< δ ⇒ | f (x)−5|< ε.
Dos passos da nota anterior, temos que:
| f (x)−5|= |2x2−5x+2−5|= |2x2−5x−3|= |x−3||2x+1|.
Para δ1 = 1 e busquemos K > 0 : 0 < |x−3|< 1⇒ |2x+1|< K. De fato:
|x−3|< 1⇒ 2 < x < 4⇒ 4 < 2x < 8⇒ 5 < 2x+1 < 9⇒ |2x+1|< 9,
multiplicando ambos lados dessa desigualdade pela expressão |x−3| obtemos:
|x−3||2x+1|< 9|x−3|.
Logo, deduzimos que 9|x− 3| < ε quando |x− 3| < ε
9. Em resumo, dado ε > 0, ∃δ =
min{
1,ε
9
}tal que
0 < |x−3|< δ ⇒ | f (x)−5|= |x−3||2x+1|< 9|x−3|< ε
Portanto, limx→3
f (x) = 5.
b. Se f (x) =x+3x−3
, provemos que limx→5
f (x) = 4.
SoluçãoDado ε > 0, devemos encontrar um δ tal que:
0 < |x−5|< δ ⇒ | f (x)−4|< ε.
De forma análoga ao exemplo do item anterior, temos que
| f (x)−4|=∣∣∣∣x+3x−3
−4∣∣∣∣= ∣∣∣∣−3(x−5)
x−3
∣∣∣∣= 3|x−5||x−3|
.
Por outro lado, se consideramos δ1 = 1 obtemos
0 < |x−5|< 1⇒ 4 < x < 6⇒ 1 < x−3 < 3⇒ 13<
1x−3
< 1⇒ 1|x−3|
< 1
Multiplicando ambos lados dessa desigualdade pela expressão 3|x−5| obtemos:
3|x−5||x−3|
< 3|x−5|< ε ⇒ |x−5|< ε
3
Em resumo, dado ε > 0, ∃δ = min{
δ1 = 1,ε
3
}tal que
0 < |x−5|< δ ⇒ | f (x)−4|= 3|x−5||x−3|
< 3|x−5|< 3ε
3= ε
Portanto, limx→5
f (x) = 4.
52 / 239

Cálculo Diferencial e Integral
3.4 Propriedades dos limites
A primeira propriedade que apresentamos é uma das mais utilizadas dos números reais.
Propriedade 3.1Seja x ∈ R. Se |x|< ε para todo ε > 0, então x = 0.
Na sequência, os resultados apresentados são importantes para o domínio da teoria de limites.
Teorema 3.1 (Unicidade do limite)Se o limite de uma função existe, então este limite é único. Em outras palavras, se existem L1e L2 ∈ R tal que:
limx→a
f (x) = L1 e limx→a
f (x) = L2,
então L1 = L2.
É natural esperar que sejam verificados os seguites resultados:
Teorema 3.2 (Teorema da comparação)Sejam f e g duas funções tais que:
i. f (x)≤ g(x), ∀x ∈ B(a;r) com x 6= a;
ii. limx→a
f (x) = L e limx→a
g(x) = M.
Então, L≤M, isto é limx→a
f (x)≤ limx→a
g(x).
O teorema seguinte, que também é chamado vulgarmente de Teorema do Sanduíche, é uma con-sequência do Teorema da Comparação.
Teorema 3.3 (Teorema do confronto)Sejam f , g e h três funções tais que:
i. f (x)≤ g(x)≤ h(x), ∀x ∈ B(a;r), com x 6= a;
ii. limx→a
f (x) = limx→a
h(x) = L.
Então, limx→a
g(x) = L.
Teorema 3.4Sejam f e g duas funções tais que:
i. limx→a
f (x) = 0;
ii. Existe M > 0 tal que |g(x)|< M, ∀x ∈ B(a;r), com x 6= a.
Então, limx→a
f (x)g(x) = 0.
53 / 239

Cálculo Diferencial e Integral
3.5 Leis do limite
Para calcular limites de funções que são combinações aritméticas de funções que pussuem limitesconhecidos, podemos utilizar as seguintes regras simples.
Teorema 3.5Sejam c ∈ R uma constante, f e g duas funções tais que lim
x→af (x) = L e lim
x→ag(x) = M. Então:
i. limx→a
c = c;
ii. Regra da soma:
limx→a
( f (x)+g(x)) = limx→a
f (x)± limx→a
g(x) = L+M;
iii. Regra da diferença:
limx→a
( f (x)−g(x)) = limx→a
f (x)± limx→a
g(x) = L−M;
iv. Regra da multiplicação por uma constante:
limx→a
(c f (x)) = c(
limx→a
f (x))= cL;
v. Regra do produto:
limx→a
( f (x) ·g(x)) = limx→a
f (x) · limx→a
g(x) = L ·M;
vi. Regra do quociente: Se M 6= 0, então
limx→a
1g(x)
=1
limx→a
g(x)=
1M
;
limx→a
f (x)g(x)
=limx→a
f (x)
limx→a
g(x)=
LM.
Os seguintes corolários são consequências diretas do resultado anterior.
Corolário 3.1Se lim
x→afi(x) = Li, para i = 1,2, . . . ,n, então:
i. limx→a
( f1(x)+ f2(x)+ . . .+ fn(x)) = L1 +L2 + . . .+Ln;
ii. limx→a
( f1(x) · f2(x) · . . . · fn(x)) = L1 ·L2 · . . . ·Ln.
Corolário 3.2Se lim
x→af (x) = L e n ∈ Z, então
limx→a
[ f (x)]n =[
limx→a
f (x)]n
= Ln.
Se n≤ 0, então para que limx→a
[ f (x)]n exista, L deve ser diferente de zero.
54 / 239

Cálculo Diferencial e Integral
Corolário 3.3Se f (x) = a0xn +a1xn−1 + . . .+an, onde a0,a1, . . . ,an são constantes, então:
limx→b
(a0xn +a1xn−1 + . . .+an) = a0bn +a1bn−1 + . . .+bn = f (b).
Teorema 3.6Se lim
x→af (x) = L e uma das condições seguintes é verificada
i. L≥ 0 e n é qualquer inteiro positivo ou
ii. L < 0 e n é qualquer inteiro positivo ímpar;
então limx→a
n√
f (x) = n√
limx→a
f (x) = n√
L.
Exemplo 3.5Calculemos os seguintes limites:
a. limx→2
(5x2−3x+4
).
SoluçãoUsando o Teorema 3.5 temos que
limx→2
(5x2−3x+4
)= 5
(limx→2
x2)−3(
limx→2
x)+
(limx→2
4)= 5(4)−3(2)+4 = 18.
ou de forma alternativa, do Corolário 3.3, temos que f (x) = 5x2−3x+4, x→ 2 e f (2) =18. Logo
limx→2
f (x) = f (2) = 18.
b. limx→18
4√
x−2.
SoluçãoDesde que lim
x→18(x− 2) = lim
x→18x− lim
x→182 = 16 > 0 e n = 4 > 0, do Teorema 3.6, temos
que:
limx→18
4√
x−2 = 4√
limx→18
(x−2) = 4√
16 = 2.
c. limx→2
3
√2x5−4x−2
x3−6.
SoluçãoDesde que lim
x→2(2x5− 4x− 2) = 54, lim
x→2(x3− 6) = 2 e n = 3 > 0, da regra do quociente,
do Teorema 3.5, e Teorema 3.6 temos que:
limx→2
3
√2x5−4x−2
x3−6=
3
√limx→2
2x5−4x−2x3−6
= 3
√√√√√ limx→2
(2x5−4x−2)
limx→2
(x3−6)=
3
√542
=3√
27 = 3.
55 / 239

Cálculo Diferencial e Integral
Nota
a. Dado um limite da forma limx→a
f (x)g(x)
, com limx→a
f (x) = 0 e limx→a
g(x) = 0, isto é, não é pos-
sível aplicar a regra do quociente do Teorema 3.5, diz-se que o limite é indeterminado
e é da forma00
. Nesse caso, devemos, fatorar no numerador e no denominador, e se
possível o termo (x−a), e também, simplificar o fator comum para calcular o limite.
b. Em geral, as formas indeterminadas são:
00,
∞
∞, ∞−∞, 0 ·∞, 00, 1∞ e ∞
0
c. Em todos esses casos, devemos usar alguns artifícios que permitam eliminar a inde-terminação.
Exemplo 3.6Calculemos os seguintes limites:
a. limx→−4
x2−163x+12
SoluçãoAo analisar o numerador e o denominador desse quociente, observamos que temos uma
indeterminação da forma00
, pois limx→−4
(x2−16) = 0 e limx→−4
(3x+12) = 0.
Porém, observamos que o termo (x+4) pode ser fatorado de cada um deles, isto é,
x2−16 = (x+4)(x−4) e 3x+12 = 3(x+4).
Logo,
limx→−4
x2−163x+12
= limx→−4
����(x+4)(x−4)3����(x+4)
= limx→−4
x−43
=13
limx→−4
(x−4) =−83.
b. limx→0
√x+3−
√3
x
Solução
Da mesma forma que o item acima, esse limite tem uma indeterminação da forma00
,para resolver tal problema precisamos racionalizar o numerador, isto é, multiplicar tantoo numerador como o denominador por
√x+3+
√3:
limx→0
√x+3−
√3
x= lim
x→0
(√
x+3−√
3)(√
x+3+√
3)x(√
x+3+√
3)= lim
x→0
x+3−3x(√
x+3+√
3)=
limx→0
�x
�x(√
x+3+√
3)= lim
x→0
1√x+3+
√3=
1√3+√
3=
12√
3.
56 / 239

Cálculo Diferencial e Integral
NotaPara racionalizar precisamos lembrar que:
(an−bn) = (a−b)(an−1 +an−2b+an−3b2 + . . .+abn−2 +bn−1)︸ ︷︷ ︸fator racionalizante
(an +bn) = (a+b)︷ ︸︸ ︷(an−1−an−2b+an−3b2− . . .−abn−2 +bn−1)
Exemplo 3.7Calculemos os seguintes limites:
a. limx→4
3−√
5+ x1−√
5− x
Solução
Esse limite tem uma indeterminação da forma00
, nesse caso devemos fazer uma duplaracionalização:
limx→4
3−√
5+ x1−√
5− x= lim
x→4
(3−√
5+ x)(3+√
5+ x)(1+√
5− x)(1−√
5− x)(1+√
5− x)(3+√
5+ x)
= limx→4
−����(x−4)(1+√
5− x)(3+√
5+ x)����(x−4)=− lim
x→4
1+√
5− x3+√
5+ x
= −1+13+3
=−26=−1
3
b. limx→0
√1+ x2− 4
√1+ x4
x2
Solução
Aqui temos a indeterminação da forma00
, e observamos que
√1+ x2− 4
√1+ x4 = 4
√(1+ x2)2− 4
√1+ x4
=(1+ x2)− (1+ x4)√
(1+ x2)3 +(1+ x2)4√
1+ x4 +√
1+ x2√
1+ x4 + 4√(1+ x4)3
=2x2√
(1+ x2)3 +(1+ x2)4√
1+ x4 +√
1+ x2√
1+ x4 + 4√(1+ x4)3
.
Logo, calcular o limite acima é equivalente a calcular
limx→0
2��x2
��x2[√
(1+ x2)3 +(1+ x2)4√
1+ x4 +√
1+ x2√
1+ x4 + 4√(1+ x4)3
] =57 / 239

Cálculo Diferencial e Integral
limx→0
2[√(1+ x2)3 +(1+ x2)
4√
1+ x4 +√
1+ x2√
1+ x4 + 4√
(1+ x4)3] =
21+1+1+1
=12.
Portanto,
limx→0
√1+ x2− 4
√1+ x4
x2 =12.
c. limx→64
√x−8
3√
x−4
Solução
Assim como nos casos anteriores, a indeterminação é da forma00
e poderíamos fazer umadupla racionalização, porém os cálculos se tornariam muito complicados. Por outro lado,observando as quantidades sub-radicais, notamos que elas são iguais, o que será útil sefizermos uma mudança de variável com o intuito de simplificar a expressão:Escolhe-se uma variável que seja igual à quantidate sub-radical e o expoente desta variávelé o minimo múltiplo comum dos índices dos radicais. Em nosso caso:Como m.c.m(2,3) = 6 fazemos y6 = x, notemos que x→ 64 implica que y→ 2, e quandosubstituímos no limite acima obtemos:
limx→64
√x−8
3√
x−4= lim
y→2
y3−8y2−4
= limx→2
(y−2)(y2 +2y+4)(y−2)(y+2)
= limx→2
y2 +2y+4y+2
=4+4+4
2+2= 3.
d. limx→0
x 3√
x+1+ 4√
x+1−1x2 3√
x+1+ 4√
x+1−1
Solução
Novamente, a indeterminação é00
e precisamos fazer uma mudança de variável para eli-
minar os radicais. Como m.c.m.(3,4) = 12 e desde que x + 1 ≥ 0, fazemos x + 1 =ym.c.m.(3,4) = y12, logo x→ 0 implica que y→ 1:
limx→0
x 3√
x+1+ 4√
x+1−1x2 3√
x+1+ 4√
x+1−1= lim
y→1
(y12−1)y4 + y3−1(y12−1)y4 + y3−1
= limy→1
(y−1)(y11 + y10 + . . .+1)y4 +(y−1)(y2 + y+1)(y−1)2(y11 + y10 + . . .+1)2y4 +(y−1)(y2 + y+1)
= limy→1
(y11 + y10 + . . .+1)y4 + y2 + y+1(y−1)(y11 + y10 + . . .+1)2y4 + y2 + y+1
=11+3
3=
143.
58 / 239

Cálculo Diferencial e Integral
3.6 Limites laterais
Quando calculamos limx→a
f (x) = L, o problema real, é encontrar um número L para o qual os valores
de f (x) se aproximam, quando x tende a a. Em outras palavras, para encontrar um número L para oqual os valores de f (x) se aproximam, são necessários analisar dois casos:
i. para valores menores que a, x tende a a pela esquerda; e
ii. para valores maiores que a, x tende a a pela direita.
Veja o item (a) da figura abaixo.
x
y
a
f(x)
f(x)
0 x
y
a
L1
0
y = f(x)
L
L2
a+ xax
(a) (b)
y = f(x)
Quando precisamos calcular os limites laterais o problema é mais simples, já que este depende docomportamento da função f (x) quando x se aproxima de a somente pela esquerda ou somente peladireita de x; veja o item (b) da figura acima.
Definição 3.3Seja f uma função definida no intervalo (c,a), com c < a. Diz-se que o número L1 é o limitelateral de f (x) quando x tende a a pela esquerda, denotado por lim
x→a−f (x) = L1, se
∀ε > 0, ∃δ > 0 : 0 < a− x < δ ⇒ | f (x)−L1|< ε.
Definição 3.4Seja f uma função definida no intervalo (a,d), a< d. Diz-se que o número L2 é o limite lateralde f (x) quando x tende a a pela direita, denotado por lim
x→a+f (x) = L2, se
∀ε > 0, ∃δ > 0 : 0 < x−a < δ ⇒ | f (x)−L2|< ε.
Teorema 3.7Se f é uma função definida em uma vizinhança do ponto a, e L ∈ R, então
limx→a
f (x) = L ⇔ limx→a−
f (x) = L e limx→a+
f (x) = L.
Em outras palavras, o limite de uma função existe se, e somente se, os limites laterais existeme são iguais.
59 / 239

Cálculo Diferencial e Integral
Nota
a. O limx→a
f (x) não existe nos seguintes casos:
i. algum dos limites laterais não existe;
ii. os limites laterais existem, porém são diferentes.
b. Se a função f é definida por partes para x < a e para x > a, para encontrar o limx→a
f (x)é necessário calcular os seus respectivos limites laterais.
Exemplo 3.8
a. Seja a função f definida por:
f (x) =
x2, se x < 2;4, se x = 2;
8−2x, se x > 2.
Calculemos limx→2
f (x), caso exista.
SoluçãoComo f tem diferentes regras de correspondência para x < 2 e x > 2, precisamos calcularos limites laterais:
• Limite lateral quando x tende a 2 pela direita, isto é, 2 < x:
limx→2+
f (x) = limx→2+
8−2x = 8−4 = 4;
• Limite lateral quando x tende a 2 pela esquerda, isto é, x < 2:
limx→2−
f (x) = limx→2−
x2 = 22 = 4.
Comparando estes limites laterais, além deles existirem, ambos são iguais. Portanto, olimx→2
f (x) existe e
limx→2
f (x) = 4.
b. Seja a função f , definida por:
f (x) = x
√1
4x2 −16
Calculemos limx→0
f (x), caso exista.
SoluçãoAnalisando f temos que
f (x) = x
√1
4x2 −16 = x
√1−64x2
4x2 =x√
1−64x2
2|x|,
60 / 239

Cálculo Diferencial e Integral
Logo, f pode ser reescrita por partes em 0 :
f (x) =
−√
1−64x2
2, se x < 0;
√1−64x2
2, se x≥ 0.
Então, para calcular limx→0
f (x), precisamos calcular os limites laterais:
• Limite lateral quando x tende a 0 pela esquerda, isto é, x < 0:
limx→0−
−√
1−64x2
2=−1
2;
• Limite lateral quando x tende a 0 pela direita, isto é, x > 0:
limx→0+
√1−64x2
2=
12.
Comparando estes limites laterais, observamos que embora eles existam, não são iguais.Portanto, o lim
x→2f (x) não existe.
c. Seja a função f , definida por:
f (x) =√|x|+ b3xc
Calculemos limx→ 7
3
f (x), caso exista.
SoluçãoDesde que o máximo inteiro forma parte desta função, precisamos analisar os limiteslaterais numa vizinhança do 7
3 , porém 2 < 73 < 3, então analisemos:
• Limite lateral quando x tende a 73 pela esquerda, e 2≤ x, ou seja, 2≤ x < 7
3 :Logo, 6≤ 3x < 7⇒ b3xc= 6 e
limx→ 7
3−
√|x|+ b3xc= lim
x→ 73−
√x+6 =
5√
33
• Limite lateral quando x tende a 73 pela direita, e x < 3, ou seja, com 7
3 ≤ x < 3:Logo, 7≤ 3x < 8⇒ b3xc= 7 e
limx→ 7
3+
√|x|+ b3xc= lim
x→ 73+
√x+7 =
√283.
Comparando esses limites laterais, observamos que embora eles existam, não são iguais.Portanto, o lim
x→ 73
f (x) não existe.
61 / 239

Cálculo Diferencial e Integral
3.7 Limites no infinito
Antes de apresentar a definição exata desse conceito, consideremos a função f (x) = 1+1
x−2e seu
respectivo gráfico:
x
y
20
y = f(x)
1 3
1
2
Analisando essa função, notamos que quando x cresce ilimitadamente, denotado por x→+∞, o valorde f (x) se aproxima de 1, ou seja,
limx→+∞
f (x) = 1,
e quando x decresce ilimitadamente, denotado por x→+∞, o valor de f (x) se aproxima, também, de1, ou seja,
limx→−∞
f (x) = 1.
Esses limites são conhecidos como limites no infinito.
Definição 3.5Sejam a, L ∈ R.
i. Se f : (a,+∞)→ R. Diz-se que L é o limite de f (x) quando x tende a +∞, denotado porlim
x→+∞f (x) = L, se
∀ε > 0, ∃N > 0 : x > N ⇒ | f (x)−L|< ε;
ii. Se f : (−∞,a)→ R. Diz-se que L é o limite de f (x) quando x tende a −∞, denotado porlim
x→−∞f (x) = L, se
∀ε > 0, ∃M > 0 : x <−M ⇒ | f (x)−L|< ε.
A seguir apresentaremos propriedades aritméticas que nos ajudam com os cálculos de limites noinfinito.
Teorema 3.8Seja n ∈ N. Então:
limx→+∞
1xn = 0 e lim
x→−∞
1xn = 0.
62 / 239

Cálculo Diferencial e Integral
Teorema 3.9Sejam c ∈ R uma constante, f e g duas funções definidas nos intervalos (a,+∞) e (b,+∞),respectivamente, com a, b ∈ R. Se
limx→+∞
f (x) = L e limx→+∞
g(x) = M,
então:
i. limx→+∞
c = c;
ii. limx→+∞
[c f (x)] = c[
limx→+∞
f (x)]= cL;
iii. limx→+∞
f (x)+g(x) = limx→+∞
f (x)+ limx→+∞
g(x) = L+M;
iv. limx→+∞
f (x)−g(x) = limx→+∞
f (x)− limx→+∞
g(x) = L−M;
v. limx→+∞
f (x) ·g(x) = limx→+∞
f (x) · limx→+∞
g(x) = L ·M;
vi. Se M 6= 0, então:
limx→+∞
1g(x)
=1
limx→+∞
g(x)=
1M
;
limx→+∞
f (x)g(x)
=lim
x→+∞f (x)
limx→+∞
g(x)=
LM.
Nota
a. As propriedades quando x→−∞ são estabelecidas de forma análoga às apresenta-das no resultado anterior.
b. Quando temos que calcular os limites no infinito de uma função racional, na práticapodemos dividir tanto o numerador como o denominador pela maior potência de x, dodenominador que aparecer na expressão dada. Logo, é aplicado o critério do Teorema3.8.
Exemplo 3.9Calculemos os seguintes limites no infinito:
a. limx→+∞
7x2−8x+25x2 +3x−3
SoluçãoPela observação anterior, dividimos o numerador e o denominador por x2 (maior potênciado denominador) e obtemos:
limx→+∞
7x2−8x+25x2 +3x−3
= limx→+∞
7− 8x+
2x2
5+3x− 3
x2
=
limx→+∞
(7− 8
x+
2x2
)lim
x→+∞
(5+
3x− 3
x2
) =7−0+05+0−0
=75.
63 / 239

Cálculo Diferencial e Integral
b. limx→−∞
12−3x+6x4
1+ x6
SoluçãoNesse caso, dividimos o numerador e o denominador por x6 e obtemos:
limx→−∞
12−3x+6x4
1+ x6 = limx→−∞
12x6 −
3x5 +
6x2
1x6 +1
=
limx→−∞
(12x6 −
3x5 +
6x2
)lim
x→−∞
(1x6 +1
) =0−0+0
0+1= 0.
c. limx→+∞
12x+63−4x
SoluçãoDividimos o numerador e o denominador por x e obtemos:
limx→+∞
12x+63−4x
= limx→+∞
12+6x
3x−4
=
limx→+∞
(12+
6x
)lim
x→+∞
(3x−4) =
12+00−4
=−3.
d. limx→−∞
√x2−2x+4+ x
SoluçãoPara que possamos aplicar a metodologia dos exemplos anteriores, precisamos expressara função como um quociente e para isso devemos racionalizar, isto é:
limx→−∞
√x2−2x+4+ x = lim
x→−∞
(√x2−2x+4+ x
)(√x2−2x+4− x
)√
x2−2x+4− x
= limx→−∞
x2−2x+4− x2√
x2−2x+4− x= lim
x→−∞
−2x+4√x2−2x+4− x
Desde que, x considera valores negativos que tendem para −∞, podemos dividir por x =−√
x2, e obteremos:
limx→−∞
−2x+4√x2−2x+4− x
= limx→−∞
−2+4x
−√
1− 2x+
4x2 −1
=−2+0
−√
1−0+0−1= 1
Portanto, limx→−∞
√x2−2x+4+ x = 1.
e. limx→+∞
√x+√
x+√
x+3√
x+3
SoluçãoObservamos que x considera valores positivos, assim dividimos o numerador e o denomi-nador por
√x e obtemos:
64 / 239

Cálculo Diferencial e Integral
limx→+∞
√x+√
x+√
x+3√
x+3= lim
x→+∞
√√√√1+
√1x+
√1x3 +
3x4√
1+3x
=
√1+√
0+√
0+0√
1+0= 1.
3.8 Limites infinitos
Antes de apresentar a definição exata desse conceito, consideremos, novamente, função f (x) = 1+1
x−2e seu respectivo com gráfico:
x
y
20
y = f(x)
1 3
1
2
Analisando essa função, notamos que quando x tende a 2, pela direita, f (x) cresce ilimitadamente, ouseja,
limx→2+
f (x) = +∞,
e quando x tende a 2, pela esquerda, f (x) decresce ilimitadamente, ou seja,
limx→2−
f (x) =−∞.
Esses tipos de limites são conhecidos como limites infinitos.
Definição 3.6Sejam a ∈ R e uma função f :
i. Diz-se que, o limite de f (x) é +∞, quando x tende ao ponto a, denotado por limx→a
f (x) =+∞, se
∀K >> 0, ∃δ > 0 : 0 < |x−a|< δ ⇒ f (x)> K.
ii. Diz-se que, o limite de f (x) é −∞, quando x tende ao ponto a, denotado por limx→a
f (x) =−∞, se
∀M >> 0, ∃δ > 0 : 0 < |x−a|< δ ⇒ f (x)<−M.
65 / 239

Cálculo Diferencial e Integral
Neste caso, também são definidos os seguintes limites laterais:
limx→a+
f (x) = +∞, limx→a−
f (x) = +∞, limx→a−
f (x) =−∞, limx→a+
f (x) =−∞.
Nota
a. Desde que os símbolos +∞ e −∞ não são números reais, nenhum dos limites infini-tos existem.
b. O termo o limite existe será usado somente quando o limite é um número real.
Teorema 3.10Seja n ∈ N. Então:
limx→0+
1xn =+∞ e lim
x→0−
1xn =
{−∞, se n é impar;+∞, se n é par.
Exemplo 3.10Alguns casos particulares do Teorema 3.10 são:
limx→0+
1x5 =+∞, lim
x→0+
1x4 =+∞, lim
x→0−
1x3 =−∞, lim
x→0+
1x6 =+∞.
O seguinte resultado apresenta algumas propriedades que nos permitem calcular limites infinitos.
Propriedades dos limites infinitosSejam a, M ∈ R, com M 6= 0, tal que:
limx→a
f (x) = 0 e limx→a
g(x) = M.
a. Se M > 0 e f (x)→ 0, através de valores positivos, então
limx→a
g(x)f (x)
= +∞;
b. Se M > 0 e f (x)→ 0, através de valores negativos, então
limx→a
g(x)f (x)
=−∞;
c. Se M < 0 e f (x)→ 0, através de valores positivos, então
limx→a
g(x)f (x)
=−∞;
d. Se M < 0 e f (x)→ 0, através de valores negativos, então
limx→a
g(x)f (x)
= +∞.
66 / 239

Cálculo Diferencial e Integral
Exemplo 3.11Seja a função f definida por:
f (x) =4x3−1
2− x− x2 .
Calculemos limx→1−
f (x) e limx→1+
f (x).
Solução
Quando avaliamos f (x) para x = 1, observamos que f (1) =30
, das propriedades vistas acima,podemos concluir que os dois limites desejados são infinitos. Porém, precisamos estabelecer osinal de cada um deles. Para determinar isto, fatoramos o denominador e analisamos se f (x) seaproxima a 0 por valores positivos ou negativos. Assim:
• limx→1
(4x3−1) = 3 > 0.
• limx→1
(2− x− x2) = limx→1
(1− x)(x+2), porém:
i. Se x→ 1+ (muito próximo a 1): 1−x > 0 e x+2 > 0 então limx→1+
(1−x)(x+2) = 0+, ou
seja, (1− x)(x+2)→ 0 por valores positivos.ii. Se x→ 1− (muito próximo a 1): 1−x < 0 e x+2 > 0 então lim
x→1−(1−x)(x+2) = 0−, ou
seja, (1− x)(x+2)→ 0 por valores negativos. Portanto,
limx→1+
4x3−12− x− x2 =
30+
=+∞ e limx→1−
4x3−12− x− x2 =
30−
=−∞.
Exemplo 3.12Calculemos os seguintes limites:
a. limx→2+
x+2x2−4
Solução
limx→2+
x+2x2−4
= limx→2+
���x+2(x−2)����(x+2)
= limx→2+
1x−2
=+∞
b. limx→4−
√16− x2
x−4
Solução
limx→4−
√16− x2
x−4= lim
x→4−
16− x2
(x−4)√
16− x2= lim
x→4−
(4− x)(4+ x)
(x−4)√
16− x2
= − limx→4−
4+ x√16− x2
=− 80+
=−∞
c. limx→4−
bxc−4x−4
67 / 239

Cálculo Diferencial e Integral
SoluçãoDesde que x→ 4− temos x ∈ [3,4)⇒ bxc= 3 logo,
limx→4−
bxc−4x−4
= limx→4−
3−4x−4
= limx→4−
−1x−4
=− 10−
=+∞.
3.9 Limites infinitos no infinito
Da mesma forma que limites em números reais, os limites no infinito podem deixar de existir, porexemplo, quando valores de f (x) crescerem ou descrescerem ilimitadamente quando x→+∞ oux→−∞. Para formalizar esse conceito, temos a seguinte definição.
Definição 3.7Seja f uma função. Se Dom( f ) contém algum intervalo da forma (a,+∞), então:
i. limx→+∞
f (x) = +∞ ⇔ ∀K� 0, ∃M > 0 : x > M ⇒ f (x)> K;
ii. limx→+∞
f (x) =−∞ ⇔ ∀K� 0, ∃M > 0 : x > M ⇒ f (x)<−K;
iii. limx→−∞
f (x) = +∞ ⇔ ∀K� 0, ∃M > 0 : x <−M ⇒ f (x)> K;
iv. limx→−∞
f (x) =−∞ ⇔ ∀K� 0, ∃M > 0 : x <−M ⇒ f (x)<−K.
O item i, dessa definição, significa que para valores de x grandes suficiente (positivos), os valorescorrespondentes a f (x) também serão grandes (positivos). Os itens ii, iii e iv são interpretados deforma análoga.
Agora, apresentamos as seguintes propriedades de limites infinitos no infinito.
Teorema 3.11Sejam f e g duas funções, onde f verfica:
limx→±∞
f (x) =±∞
i. Se limx→±∞
g(x) =±∞, então
limx→±∞
( f (x)+g(x)) =±∞ e limx→±∞
( f (x) ·g(x)) =±∞;
ii. Se limx→±∞
g(x) = L, então
limx→±∞
( f (x)+g(x)) =±∞;
iii. Se limx→±∞
g(x) = L, L > 0, então
limx→±∞
( f (x) ·g(x)) =±∞ e limx→±∞
f (x)g(x)
=±∞;
68 / 239

Cálculo Diferencial e Integral
iv. Se limx→±∞
g(x) = L, L < 0, então
limx→±∞
( f (x) ·g(x)) =∓∞ e limx→±∞
f (x)g(x)
=∓∞;
v. Se limx→±∞
g(x) =∓∞, então
limx→±∞
( f (x) ·g(x)) =∓∞;
NotaO Teorema 3.11 pode ser resumido da seguinte forma, dada uma constante k temos que:
a. k+(+∞) = +∞ b. k+(−∞) =−∞
c. (+∞)+(+∞) = +∞ d. (−∞)+(−∞) =−∞
e. (+∞)(+∞) = +∞ f. (−∞)(−∞) = +∞
g. (+∞)(−∞) =−∞ h.k±∞
= 0
i. (+∞)n =+∞, n ∈ Z+ j. (−∞)n=
{+∞, se n é par positivo;−∞, se n é impar positivo;
k. k(+∞) =
{+∞, se k > 0;−∞, se k < 0; l. k(−∞) =
{−∞, se k > 0;+∞, se k < 0.
NotaSejam P(x) = a0xn + a1xn−1 + · · ·+ an e Q(x) = b0xm + b1xm−1 + · · ·+ bm dois polinômiosde grau n e m, respectivamente, então:
a. limx→±∞
P(x) = limx→±∞
(a0xn +a1xn−1 + · · ·+an) = limx→±∞
a0xn;
b. limx→±∞
P(x)Q(x)
= limx→±∞
a0xn +a1xn−1 + · · ·+an
b0xm +b1xm−1 + · · ·+bm=
∞ se n > m;
a0
b0se n = m;
0 se n < m.
Exemplo 3.13Calculemos os seguintes limites:
a. limx→+∞
(−8x12 +5x7−5x3 +2x−67).
Soluçãolim
x→+∞(−8x12 +5x7−5x3 +2x−67) = lim
x→+∞(−8x12) =−∞.
b. limx→−∞
7x9−456x5−67001000x3−1
.
Solução
limx→−∞
7x9−456x5−67001000x3−1
= limx→−∞
7x9
1000x3 = limx→−∞
7x6
1000=+∞.
69 / 239

Cálculo Diferencial e Integral
c. limx→+∞
√x2 +9x+4
SoluçãoO limite é da forma ∞/∞. Dividimos o numerador e o denominador por x =
√x2, x > 0 ,
obtemos limx→+∞
√x2 +9x+4
= limx→+∞
√x2 +9√
x2
x+4x
= limx→+∞
√1+
9x2
1+4x
= 1.
d. limx→−∞
√x2 +9x+4
SoluçãoEsse limite é da forma ∞/∞. Logo, precisamos dividir o numerador e o denominador porx =−
√x2, x < 0, obtendo
limx→−∞
√x2 +9x+4
= limx→−∞
√x2 +9
−√
x2
x+4x
= limx→−∞
−√
1+9x2
1+4x
=−1.
e. limx→−∞
(√
4x2−3x−2x)
SoluçãoDevido ao fato que lim
x→−∞
√4x2−3x = lim
x→−∞4√
x2 =+∞ e limx→−∞
2x =−∞, temos que
limx→−∞
(√
4x2−3x−2x) = (+∞)− (−∞) = +∞.
f. limx→+∞
(√
4x2−3x−2x)
SoluçãoEsse limite é da forma ∞−∞, logo, precisamos racionalizá-lo
limx→+∞
(√
4x2−3x−2x) = limx→+∞
−3x√4x2−3x+2x
= limx→+∞
−3√4− 3
x+2
=−34.
3.10 Assíntotas
Definição 3.8Diz-se que a reta L é uma assíntota do gráfico y = f (x) se a distância entre a reta L e o pontoA, que se movimenta ao longo do gráfico y = f (x), tende a zero quando A tende ao infinito. Emoutras palavras,
limA→∞
Dist(L,A) = 0.
70 / 239
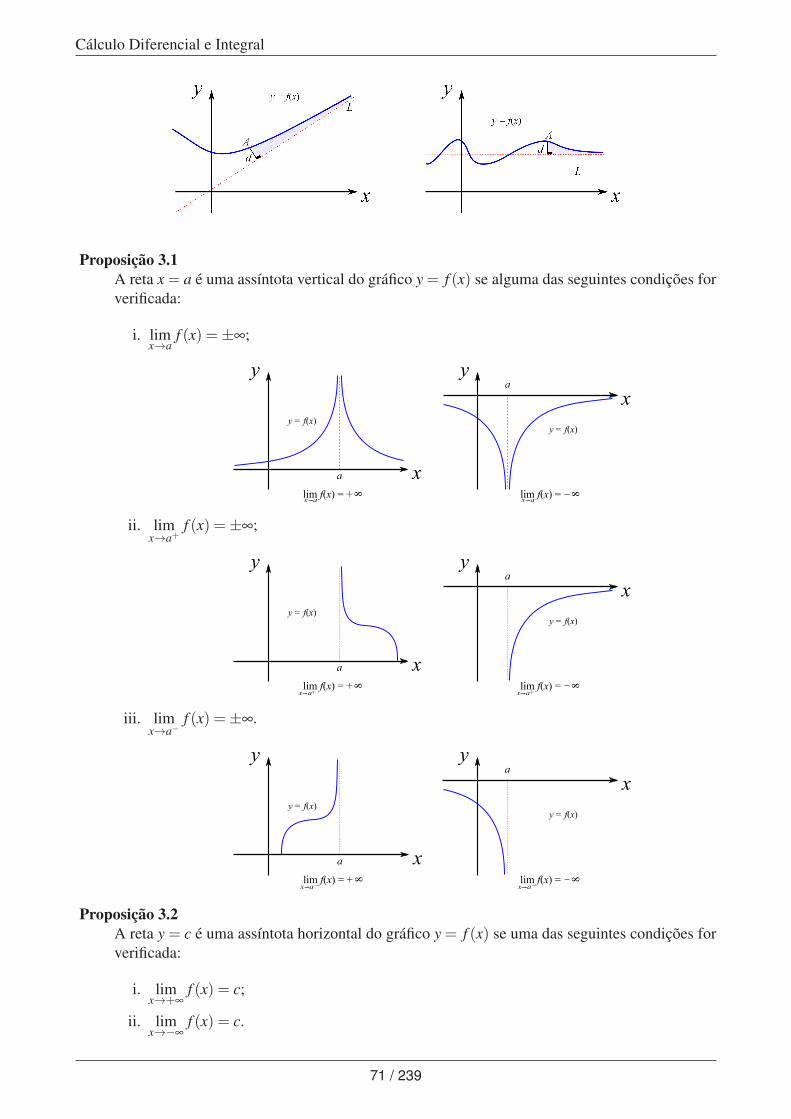
Cálculo Diferencial e Integral
Proposição 3.1A reta x = a é uma assíntota vertical do gráfico y = f (x) se alguma das seguintes condições forverificada:
i. limx→a
f (x) =±∞;
x
y
y = f(x)
a
x
y
lim f(x) = + 8
x a
y = f(x)
a
lim f(x) = 8
x a
ii. limx→a+
f (x) =±∞;
x
y
y = f(x)
a
x
y
lim f(x) = + 8
x a
y = f(x)
a
lim f(x) = 8
+ x a+
iii. limx→a−
f (x) =±∞.
x
y
y = f(x)
a
x
y
lim f(x) = + 8
x a
y = f(x)
a
lim f(x) = 8
x a
Proposição 3.2A reta y = c é uma assíntota horizontal do gráfico y = f (x) se uma das seguintes condições forverificada:
i. limx→+∞
f (x) = c;
ii. limx→−∞
f (x) = c.
71 / 239

Cálculo Diferencial e Integral
x
yy = f(x)
x
y
y = f(x)
cc
(a) (b)
Proposição 3.3A reta y = mx+b, m 6= 0 é uma assíntota oblíqua do gráfico y = f (x) se, e somente se, uma dasseguintes condições for verificada:
i. limx→+∞
f (x)x
= m e limx→+∞
( f (x)−mx) = b;
ii. limx→−∞
f (x)x
= m e limx→−∞
( f (x)−mx) = b.
x
y
y = f(x)
x
y
y = f(x)
Nota
a. Se ao calcular os valores de m e b (quando x→ +∞), um dos limites não existe, acurva não apresenta assíntotas obliquas à direita. De forma analoga, se m ou b nãoexiste, quando x→−∞, então a curva não apresenta assíntotas oblíquas à esquerda.
b. Se m = 0 e b é finito, a assíntota é horizontal.
c. Se uma função f (x) é fracionária, as possíveis assíntotas verticais são obtidas nosvalores de x que anulam ao denominador de f (x). Se esses valores existem, devemoscomprovar se o seu limite é infinito.
Exemplo 3.14Encontremos as assíntotas, da função f definida por:
a. f (x) =x2 +9x−3
Soluçãoi. Assíntotas verticais: observamos que x = 3 é um zero do denominador, e
limx→3
x2 +9x−3
=±∞,
Logo, x = 3 é uma assíntota vertical.
72 / 239

Cálculo Diferencial e Integral
ii. Assíntotas horizontais: encontremos c ∈ R tal que c = limx→∞
f (x).
limx→∞
x2 +9x−3
=+∞.
Porém, +∞ não é um número real, então não existem assíntotas horizontais.iii. Assíntotas oblíquas: dada a reta y = mx+b encontremos m e b definidos na proposi-
ção acima, ou seja,
m = limx→±∞
f (x)x
= limx→∞
x2 +9x2−3x
= 1
b = limx→±∞
( f (x)−mx) = limx→∞
x2 +9x−3
− x = limx→∞
3x+9x−3
= 3
Logo, a assíntota oblíqua é a reta y = x+3.
b. f (x) =x2 +1x−1
+ 3√
x
Soluçãoi. Assíntotas verticais: observamos que x = 1 é um zero do denominador, e
limx→1
x2 +1x−1
+ 3√
x = ∞.
Então, x = 1 é uma assíntota vertical.ii. Assíntota horizontal: y = c, onde
c = limx→±∞
x2 +1x−1
+ 3√
x =±∞.
Portanto, f não têm assíntotas horizontais.iii. Assíntotas oblíquas:
m = limx→±∞
f (x)x
= limx→±∞
x2 +1x2− x
+3√
xx
= 1
b = limx→±∞
( f (x)−mx) = limx→±∞
x2 +1x−1
+ 3√
x− x =±∞
Logo, não existe assíntota oblíqua.
Exemplo 3.15Encontremos as assíntotas e o gráfico, da função f definida por:
a. f (x) =2x2−5x−3
x−1
Soluçãoi. Interseção com os eixos:
1. Eixo y : x = 0 então f (0) = 3, assim (0,3) é um ponto de interseção.2. Eixo x : f (x) = 0 então x1 = −1
2 , x2 = 3, assim (−12 ,0), (3,0) são os pontos de
interseção.
73 / 239

Cálculo Diferencial e Integral
ii. Assíntotas verticais: x = 1 é um zero do denominador e
limx→1
2x2−5x−3x−1
= ∞.
Portanto, a reta x = 1 é assíntota vertical e Dom( f ) = R\{1}.Para obter o gráfico, precisamos determinar o sinal de ∞ quando x→ 1− e x→ 1+.Assim, obtemos que:
limx→1−
2x2−5x−3x−1
=+∞ e limx→1+
2x2−5x−3x−1
=−∞.
iii. Assíntotas horizontais: não existem, devido a
c = limx→±∞
2x2−5x−3x−1
=±∞.
iv. Assíntotas oblíquas:
m = limx→±∞
f (x)x
= limx→∞
2x2−5x−3x(x−1)
= 2
Por outro lado,
f (x)−mx =2x2−5x−3
x−1−2x =
2x2−5x−3−2x2−3x−1
=−3x−3
x−1.
Assim,
b = limx→±∞
( f (x)−mx) = limx→±∞
−3x−3x−1
=−3.
Portanto, a reta y = 2x−3 é uma assíntota oblíqua do gráfico de y = f (x). O gráficoé apresentado no item (a) da figura abaixo.
y = x-1
y =
2x-
3
x = 1y y
x x
(a) (b)
b. f (x) = 3√
x3−3x2−9x+27.
SoluçãoFatorando os termo dentro da raiz, temos que f (x) = 3
√(x−3)2(x+3). Logo, Dom( f ) =
R.
i. Interseções com os eixos:1. Eixo y : x = 0 então f (0) = 3, assim (0,3) é um ponto de interseção.2. Eixo x : f (x) = 0 então x1 = −3, x2 = 3, assim (−3,0), (3,0) são os pontos de
interseção.
74 / 239

Cálculo Diferencial e Integral
ii. Assíntotas verticais: desde que f não possui denominador, então não existem assín-totas verticais.
iii. Assíntotas horizontais:
c = limx→±∞
3√
x3−3x2−9x+27 =±∞.
Portanto, não existem assíntotas horizontais.iv. Assíntotas oblíquas:
m = limx→±∞
f (x)x
= limx→∞
3√
x3−3x2−9x+27x
= 1
b= limx→±∞
( f (x)−mx)= limx→±∞
3√
x3−3x2−9x+27−x= limx→±∞
3√−3x2−9x+27=−1.
Portanto, a reta y = x− 1 é uma assíntota oblíqua do gráfico y = f (x). O gráfico éapresentado no item (b) da figura acima.
3.11 Recapitulando
Nesse capítulo, apresentamos o conceito de limite com o intuito de fazer com que o aluno entendao por que esse assunto é importante, e assim, dar continuidade ao nosso estudo. Porém, para definirlimites é necessário antes conhecer a definição de vizinhanças e bolas abertas, por isso esse capítulofoi iniciado com esses conceitos.
Nas seções subsequentes, as principais propriedades e leis sobre limites foram apresentadas. Desdeque a obtenção de um limite, não é sempre direta, isto é, avaliando a função no ponto em questão, adefinição de limites laterais foi introduzida.
Dando continuidade ao nosso estudo, também foram considerados os casos onde o ponto em questãocresce ou decresce ilimitadamente, assunto esse que é conhecido como limites ao infinito. O conceitode limites infinitos foi apresentado, para definir o fato em que o limite solicitado tende a +∞, ou−∞,quanto mais próximo se esteja do ponto em questão.
Desde que essa teoria analisa os pontos onde a função estudada tem um comportamento crítico, é ne-cessário completá-la com a introdução e definição de assíntotas verticais, horiozontais e/ou oblíquas,já que esse conceito estabelece, caso elas existam, o comportamento da função próxima delas.
Diversos exemplos foram apresentados ilustrando todos esses conceitos.
No próximo capítulo, apresentaremos as noções básicas de continuidade, um teoria totalmente de-pendente do domínio de limites. Continuidade é uma das ideias mais importantes e mais fascinatesde toda a matemática, pois apesar da palavra contínua parecer intuitivamente clara, não é fácil ima-ginar uma boa definição para tal ideia.
3.12 Atividades
1. Aplicando a definição de limite, demonstre os seguintes limites:
i. limx→2
(3x2− x−2) = 8. ii. limx→3
4x−2
= 4. iii. limx→7
x+19x−60
=83
.
75 / 239

Cálculo Diferencial e Integral
iv. limx→1
x+1√x
= 2. v. limx→−7
3xx+8
=−21. vi. limx→1
|2− x|3x−1
=12
.
vii. limx→64
√x−1
3√
x+3= 1. viii. lim
x→ 12
bxcx+1
= 0. ix. limx→0
√4x2 +1 = 1.
x. limx→−1
4x2 +13x+2
=−5. xi. limx→−3
√−4x−3x+2
=−3. xii. limx→5
4xx+3
= 10.
2. Calcule os seguintes limites:
i. limx→4
3x2−17x+204x2−25x+36
. ii. limx→1
x5−1x6−1
.
iii. limx→1
2x2n +1−3x−2n
3x2n−5+2x−2n . iv. limx→2
3x−61−√
4x−7.
v. limx→4
3−√
5+ x1−√
5− x. vi. lim
x→64
√x−8
3√
x−4.
vii. limx→8
√2+ 3√
x−2x−8
. viii. limx→5
2−√
x−1
1− 3√
3−√
x−1.
ix. limx→20
2 4√
x−4−45√
x+12−2. x. lim
x→2
x2 + 3√
x−2−43√
4− x√
3x−2.
xi. limx→1
|x3−1||x−1|+ |x−1|2
. xii. limx→3
2x3−5x2−2x−34x3−13x2 +4x−3
.
xiii. limx→2
23x−6
− 22x2−5x+2
. xiv. limx→−3
x3 +6x2 +9xx3 +5x2 +3x−9
.
xv. limx→3
√x2−2x+6−
√x2 +2x−6
x2−4x+3. xvi. lim
x→−3
√−x+6−3
x2−√−x−2− 3
√x2−1+2x
.
xvii. limx→1
3√
3x2+x+4+√
x2+5x+10−6x2
3√√
x+3+6+√
x+8−5x2. xviii. lim
x→1
3√
(x2 +1)2−2 3√
2x2 +2+ 3√
4(x−1)2 .
xix. limx→1
√x3 +3
√x−3x−1
x+3 3√
x−3 3√x2−1.
3. Se f (x) =x2−mx+3x−3m
x−m, encontre os valores de m, de modo que lim
x→mf (x) = m2−17.
4. Se limx→1
f (x)1− x3 = 4 e lim
x→1
g(x)1− x2 =−6, calcule lim
x→1
f (x)g(x)
.
5. Se limx→−2
f (x+2)√−2x−2
= 8 e limx→−2
g(x+2)x2−4
= 3, calcule limx→0
f (x)g(x)
.
6. Se limx→1
k√
x−1x−1
= L 6= 0, encontrar limx→0
√x+1−1
k√
x+1−1.
7. Calcule os limites indicados, se existirem:
i. limx→2
f (x), onde
f (x) =
x2−4x−2
, se x 6= 2;
5, se x = 2;
76 / 239

Cálculo Diferencial e Integral
ii. limx→0
f (x) e limx→1
f (x), onde f (x) =x+ |1− x|
x2 +1.
iii. limx→2
f (x), onde
f (x) ={
x2, se x≤ 2;8−2x, se x > 2.
iv. limx→2
f (x), onde
f (x) =
6x− x2, se x < 2;
6, se x = 2;2x2− x−3, se x > 2.
v. limx→1+
( 36√
x−1− 9√
x−13x2−3+ 36
√x−1
)(x3/2−1+
√x−1√
x2−1
).
vi. limx→−1−
5 5√
x+2−4 4√−1−2x+3
√2+ x−2
√−1−2x+5x+3
x2 + x.
vii. limx→ 5
3
√|x|+ b3xc+4.
viii. limx→ 5
3
√b9+ x2c.
ix. limx→1
x3− x2 +3x−3|x−1|
.
x. limx→√
x−
2bx2 +1c+ |x+2|−2b3x+2c
.
xi. limx→√
x+
[2bx2− sgn(|x2−1|−1)
].
xii. limx→6
x2−⌊x
3
⌋b2xc+10
.
xiii. limx→−1+
√−9x+ 3
√x−2
x+1.
8. Calcule os seguintes limites no infinito:
i. limx→+∞
4x3 +2x2−5x+2−8x3 . ii. lim
x→+∞
2x+3x+ 3√
x.
iii. limx→+∞
√4+ x+ x2− x
x2 . iv. limx→−∞
(√x2−2x+4+ x
).
v. limx→+∞
(√x2−5x+6− x
). vi. lim
x→+∞
(√16x2+8x+6−
√16x2−8x−6
).
vii. limn→+∞
1+2+3+ . . .+nn2 . viii. lim
x→+∞
5
√(5−√
x)(√
x+3)243x−11
.
ix. limx→−∞
(√x2 + x−
√x2 +5
). x. lim
x→+∞
(√4x+
√4x+
√4x−2
√x)
.
xi. limx→−∞
(3√
x3− x2 +1+ 3√
x4− x3 +1)
. xii. limx→+∞
3√
x3 +6x2−16− x√x2 +2x+1−
√x2− x
.
77 / 239

Cálculo Diferencial e Integral
9. Calcule os seguintes limites infinitos:
i. limx→2+
x+2x2−4
. ii. limx→4−
√16− x2
x−4.
iii. limx→−2−
3x2−7x+6x2 + x−6
. iv. limx→2
(1
x−2− 3
x2−4
).
10. Calcule o limite indicado:
i. limx→1
[1
1− x− 1
x2−2x−1
]. ii. lim
x→−∞
(x√
x2 +1− x2)
.
iii. limx→2−
√4− x2
x2 +1. iv. lim
x→+∞
[x3 +1x2 +1
+√
x2 +2−2x]
.
v. limh→0
√h2 +2h+4+ 3
√h3 +3h2 +3h−8+6h
h√
h+1−h
11. Encontre as assíntotas do gráfico da função f , e trace o gráfico mostrando as assíntotas.
i. f (x) =√
1+ x2 +2x. ii. f (x) =1− x2
x2−4.
iii. f (x) =x−5
x2−7x+10. iv. f (x) =
√x2 + x− x.
v. f (x) =
√9x2−6x−8
16x2 +4x−6. vi. f (x) = 4
√x4− x3−9x2 +9x.
vii. f (x) =3x3 +3x+1x2 + x−6
+√
x2 +4. viii. f (x) =
x
√2+ x2− x
, se |x|< 2;
2x2
x2 + x, se |x| ≥ 2.
ix. f (x) =
x2
√1− x2
, se |x|< 1;
3x2x+1
+3x, se |x| ≥ 1.x. f (x) =
√
x2 + x− x, se |x| ≥ 9;x2−81x2−9x
, se |x|< 9 e x 6= 0.
12. Calcule as constantes a e b, de modo que se verifique a condição:
i. limx→+∞
(x2−3 3
√x2 +1+3
x−3−ax−b
)= 0 ;
ii. limx→−∞
(x2 +3 3
√x2 +1+5
x+3−ax−b
)= 0 ;
iii. limx→+∞
(5x3− 4
√x8 +1− 3
√x6 +1+1
x2−4−ax−b
)= 0.
78 / 239
Cálculo Diferencial e Integral
Capítulo 4
Continuidade
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Interpretar geometricamente a definição de continuidade de uma função;
• Compreender o conceito de continuidade de uma função em um ponto;
• Determinar a partir do gráfico de uma função se esta é contínua ou não.
4.1 Introdução
O conceito de continuidade em matemática é o que utilizamos no nosso cotidiano, isto é, continuidadeimplica em uma ligeira variação da função, sem saltos bruscos que desiquilibrem o gráfico. Geome-tricamente, uma função f é contínua no seu domínio quando seu gráfico não tem quebras ou espaços,em nenhum ponto que pertença ao domínio. Isto é, seu gráfico pode ser traçado sem tirar o lápis dopapel.
4.2 Noção intuitiva
Consideremos uma função f . Intuitivamente, quando falamos de função contínua podemos entenderque o gráfico da função f pode ser descrito como uma curva contínua que não apresenta quebrasou espaços. Para tornar essa ideia mais precisa, necessitamos compreender em que casos poderiamacontecer essas quebras ou espaços. Na figura a seguir esses casos são apresentados:
• A função f não está definida em c, veja o item (a);
• O limite de f (x) não existe quando x tende a c, veja os itens (b) e (c);
• O valor da função e o valor do limite em c são diferentes, veja o item (d).
79 / 239

Cálculo Diferencial e Integral
c c c c
y y y y
x x x x
(a) (b) (c) (d)
y = f(x)y = f(x) y = f(x) y = f(x)
Agora, apresentamos a definição formal desse conceito.
4.3 Definição formal
Definição 4.1Seja f uma função definida no conjunto A ⊂ R e a ∈ A. Diz-se que f é contínua em x = a seas seguintes condições são verificas:
i. f (a) existe, ou seja, a ∈ Dom( f );
ii. limx→a
f (x) existe;
iii. limx→a
f (x) = f (a).
Diz-se que f é descontínua em a, se alguma dessas condições não é verificada em x = a.
Nota
a. Diz-se que f é contínua no ponto a ∈ Dom( f ) quando é possível tornar f (x) arbitrari-amente próxima de f (a) desde que se tome x suficientemente próximo de a.
b. Ao contrário da definição de limite, veja o capítulo anterior, só faz sentido indagar se fé contínua no ponto a quando a ∈ Dom( f ).
c. Ao investigar a continuidade de uma função f em um ponto ou em um conjunto, éfundamental ter sempre em conta o domínio de f .
Exemplo 4.1
a. Seja a função
f (x) ={
3x−4, se x 6= 3;5, se x = 3.
Determinemos se f é contínua em x = 3.
Soluçãoi. Da definição de f temos que f (3) = 5. Logo, f (3) existe;
80 / 239

Cálculo Diferencial e Integral
ii. Lembremos que limx→3
f (x) existe, se, e somente se, limx→3−
f (x) = limx→3+
f (x). Então
analisemos esses limites laterais:
limx→3−
f (x) = limx→3−
(3x−4) = 5 e limx→3+
f (x) = limx→3+
(3x−4) = 5.
Assim, limx→3
f (x) existe e é igual a 5.
iii. Logo, limx→3
f (x) = 5 = f (3).
Portanto, pela Definição 4.1, f é contínua em x = 3; veja item (a) da seguinte figura.
y y y
x x x
(a) (b) (c)
y = f(x)y = f(x) y = f(x)
43 3
5
8
3
4
2
-2
b. Seja a função
f (x) =
2x2−32
x2−2x−8, se −1 < x < 10 e x 6= 4;
83, se x = 4.
Determinemos se f é contínua em x = 4.
Solução
i. Da definição de f temos que f (4) =83
. Então, f (4) existe;
ii. limx→4
f (x) = limx→4
2x2−32x2−2x−8
= limx→4
2(
x+4x+2
)=
83
iii. Assim, limx→4
f (x) =83= f (4).
Portanto, pela Definição 4.1, f é contínua em x = 4; veja item (b) da figura acima.
c. Dada a função
f (x) =
x2−2, se −2 < x≤ 1;
x+1, se 1 < x≤ 3;
2√
x−3+4, se 3 < x.
Determinemos se f é contínua em x = 1 e x = 3.
Solução• Analisemos para x = 1:
i. Da definição de f vemos que f (1) =−1. Assim, f (1) existe;
81 / 239

Cálculo Diferencial e Integral
ii. Para afirmar que limx→1
f (x) existe, analisemos os limites laterais neste ponto:
limx→1−
f (x) = limx→1−
(x2−2) =−1 e limx→1+
f (x) = limx→1+
(x+1) = 2.
Embora esses limites laterais existam, eles não são iguais, logo, concluímos quelimx→1
f (x) não existe.
Portanto, f não é contínua em x = 1, ou em outras palavras, f é descontínua em x = 1.• Analisemos para x = 3:
i. Da definição de f vemos que f (3) = 4. Assim, f (3) existe;ii. Para afirmar que lim
x→3f (x) existe, analisemos os limites laterais:
limx→3−
f (x) = limx→3−
(x+1) = 4 e limx→3+
f (x) = limx→3+
(2√
x−3+4) = 4.
Desde que ambos limites laterais existem e são iguais, concluímos que limx→3
f (x) e é
igual a 4.iii. Dos resultados prévios, concluímos que lim
x→3f (x) = 4 = f (3)
Portanto, pela Definição 4.1, a função f é contínua em x = 3; veja o item (c) da figuraacima.
4.4 Tipos de descontinuidade
Descontinuidade evitável ou removívelDiz-se que a função f : R→ R tem descontinuidade evitável ou removível no ponto x = a se:
i. o número limx→a
f (x) existe;
ii. a 6∈ Dom( f ), veja o item (a) da figura a seguir, ou;
iii. a ∈ Dom( f ), porém limx→a
f (x) 6= f (a), veja o item (b) da figura a seguir.
(a) (b)
x x
y y
a a
y = f(x) y = f(x)
Logo, podemos evitar ou remover a descontinuidade de f definindo a nova função:
F(x) =
{f (x), se x 6= a;
limx→a
f (x), se x = a.
Notemos que essa função está definida em x = a e limx→a
F(x) = F(a). Portanto, ela é uma função
contínua. F é chamada de extensão contínua de f em x = a.
82 / 239

Cálculo Diferencial e Integral
Descontinuidade não evitável ou irremovível
Descontinuidade de primeira espécieDiz-se que a função f : R→ R tem descontinuidade de primeira espécie no ponto a se oslimites laterais
limx→a−
f (x) e limx→a+
f (x)
existem, ou seja, são finitos, porém são diferentes.
Descontinuidade de segunda espécieDiz-se que a função f : R→ R tem descontinuidade de segunda espécie no ponto a, selimx→a
f (x) não existe, ou seja, se algum dos limites laterais é ±∞.
Exemplo 4.2Determinemos os valores de x para os quais a função f é descontínua, e verifiquemos se nesses pontosa descontinuidade é removível ou não.
a. f (x) =x4−81x2−9
SoluçãoDa definição de f , observamos que ela pode ser reescrita como x2 +9, isto é,
f (x) =x4−81x2−9
=(x2 +9)(x+3)(x−3)
(x+3)(x−3)= x2 +9, com x 6=±3,
limx→−3
x2 +9 = 18 e limx→3
x2 +9 = 18.
Logo, os pontos x = −3 e x = 3 são pontos de descontinuidade evitáveis da função f .Portanto, podemos definir uma função contínua em todo ponto a partir da função f :
F(x) ={
x2 +9, se x 6=±3;18, se x =±3.
b. f (x) =x3−2x2−11x+12
x2−5x+4
SoluçãoNovamente, da definição de f notamos que ela pode ser reescrita como x+3, ou seja,
f (x) =x3−2x2−11x+12
x2−5x+4=
(x−4)(x−1)(x+3)(x−4)(x−1)
= x+3 com x 6= 1, x 6= 4,
limx→1
f (x) = limx→1
x+3 = 4 e limx→4
f (x) = limx→4
x+3 = 7
Então, os pontos x = 1 e x = 4 são pontos de descontinuidade evitável de f . Logo, pode-mos definir uma função contínua em todo ponto a partir da função f :
F(x) =
x+3, se x 6= 1,4;
4, se x = 1;7, se x = 4.
83 / 239

Cálculo Diferencial e Integral
c. f (x) =
2x+3, se x≤ 1;8−3x, se 1 < x < 3;x+3, se x≥ 3.
SoluçãoDesde que, f seja uma função definida por partes, e todas essas partes sejam funções linea-res, os únicos possíveis pontos de descontinuidade são os pontos x= 1 e x= 3. Analisemosse realmente f é descontínua em algum destes pontos, e o tipo de descontinuidade:
• Para x = 1:i. f (1) = 5;
ii. limx→1
f (x) = 5. De fato:
limx→1−
f (x) = limx→1−
2x+3 = 5 e limx→1+
f (x) = limx→1+
8−3x = 5.
• Para x = 3:i. f (3) = 6;
ii. limx→3
f (x) não existe. De fato, analisando os limites laterais:
limx→3−
f (x) = limx→3−
8−3x =−1 e limx→3+
f (x) = limx→3+
x+3 = 6.
notamos que, embora eles existam, são diferentes.
Portanto, a função f é contínua em x = 1 e tem descontinuidade de primeira espécie noponto x = 3.
d. f (x) =
x3−27sgn(x−1)
x3 +3x2 +3x−9⌊x
9
⌋ , se −5 < x < 0 e x 6=−3;
x2−9x2−2x−3
, se 0≤ x < 5 e x 6= 3;
94, se x =−3;
32, se x = 3.
SoluçãoExaminando a função f (x) para −5 < x < 0 temos que:
⌊x9
⌋=−1 e sgn(x−1) =
1, se x > 1;0, se x = 1;−1, se x < 1;
84 / 239

Cálculo Diferencial e Integral
podemos então reescrevê-la como:
f (x) =
x3 +27x3 +3x2 +3x+9
, se −5 < x < 0 e x 6=−3;
x2−9x2−2x−3
, se 0≤ x < 5 e x 6= 3;
94, se x =−3;
32, se x = 3.
Agora, analisemos a continuidade de f em x =−3, x = 0 e x = 3.
• Para x =−3:
i. f (−3) =94
;
ii. limx→−3
f (x) existe. De fato,
limx→−3
f (x) =x3 +27
x3 +3x2 +3x+9=
94.
• Para x = 0:i. f (0) = 3;
ii. limx→0
f (x) existe. De fato,
limx→0+
f (x) = limx→0+
x2−9x2−2x−3
= 3 e limx→0−
f (x) = limx→0−
x3 +27x3 +3x2 +3x+9
= 3
• Para x = 3:
i. f (3) =32
;
ii. limx→3
f (x) existe. De fato,
limx→3
f (x) =x2−9
x2−2x−3=
32
Portanto, f é contínua em cada x ∈ (−5,5).
Embora a Definição 4.1 seja de fácil entendimento, devemos ressaltar que para as demostrações deresultados teóricos, precisamos usar a definição de continuidade em relação de ε e δ , isto é:
Definição 4.2Uma função f : D→ R, definida no conjunto D⊂ R, é contínua no ponto a ∈ D se:
∀ε > 0, ∃δ > 0 : x ∈ D, e |x−a|< δ ⇒ | f (x)− f (a)|< ε.
Além disso, a função f é contínua em um conjunto A ⊂ D quando f é contínua em a paratodo a ∈ A.
85 / 239

Cálculo Diferencial e Integral
Exemplo 4.3
a. Dada a função f : R→ R definida por f (x) = k, onde k é uma constante. Provemos que f écontínua em R.
SoluçãoConsideremos a ∈ R arbitrário e ε > 0. Para qualquer δ > 0 e x ∈ R se tem:
|x−a|< δ ⇒ | f (x)− f (a)|= |k− k|= 0 < ε
Logo, f é contínua no ponto a, ver Definição 4.2. Como a foi escolhido arbitrariamente,f é contínua em R.
b. Dada a função f : R→ R definida por f (x) = x2. Provemos que f é contínua em R.
SoluçãoConsideremos a ∈ R arbitrário e ε > 0. Precisamos resolver a desigualdade
| f (x)− f (a)|= |x2−a2|= |x−a||x+a| ≤ |x−a|(|x|+ |a|)< ε.
Considerando δ1 = 1, obtemos que |x−a|< δ1 = 1 implica que |x|< |a|+1, substituindona desigualdade acima obtemos
| f (x)− f (a)| ≤ |x−a|(|x|+ |a|)≤ |x−a|(2|a|+1)< ε
assim obtemos que |x−a|< ε
2|a|+1= δ2. Logo
dadoε > 0, existe δ = min{
1,ε
2|a|+1
}> 0 tal que |x−a|< δ ⇒ | f (x)− f (a)|= ε
Logo, f é contínua em R, ver Definição 4.2.
O cálculo da continuidade pode ser simplificado com frequência usando o teorema seguinte, queproporciona regras básicas de operações aritméticas de funções contínuas.
Teorema 4.1Sejam f e g duas funções reais contínuas no ponto a. Então
i. k · f é contínua no ponto a, onde k é uma constante;
ii. f ±g é contínua no ponto a;
iii. f ·g é contínua no ponto a;
iv.fg
é contínua no ponto a, sempre que g(a) 6= 0;
v.1g
é contínua no ponto a, sempre que g(a) 6= 0;
vi. | f | é contínua no ponto a.
86 / 239

Cálculo Diferencial e Integral
NotaDo Teorema 4.1 obtemos:
a. Toda função polinomial f (x) = a0xn +a1xn−1 + · · ·+an, a0 6= 0 é contínua em R.
b. Toda função racional g(x) =a0xn +a1xn−1 + · · ·+an
b0xm +b1xm−1 + · · ·+bmé contínua em Dom(g).
c. As afirmações recíprocas do Teorema 4.1 não necessariamente são verdadeiras. Porexemplo, pode acontecer de f +g ser contínua no ponto a, sem que as funções f e go sejam. De fato, se considerarmos as funções f ,g,h : R→ R definidas por:
f (x) ={
0, se x≤ 0;1, se x > 0; g(x) =
{1, se x≤ 0;0, se x > 0; h(x) =
{−1, se x≤ 0;1, se x > 0;
não é difícil provar que são descontínuas no ponto x = 0. Porém as funções
f (x)+g(x) = 1, f (x) ·g(x) = 0 |h(x)|= 1, ∀x ∈ R
são funções contínuas em R.
Os próximos teoremas dizem respeito à composição de funções contínuas.
Teorema 4.2Sejam as funções reais f : A→ B ⊆ R e g : B→ R. Se f é contínua no ponto a ∈ A e g écontínua no ponto b = f (a) ∈ B, então g◦ f é contínua em a.
Teorema 4.3Sejam as funções reais f : A→ B⊆ R e g : B→ R, com
i. Im( f )⊂ B;
ii. limx→a
f (x) = b;
iii. g é contínua no ponto b.
Então limx→a
g( f (x)) = g(
limx→a
f (x))= g(b).
Exemplo 4.4
a. Calculemos limx→3
√5x2 +4
SoluçãoConsiderando g(x) =
√x e f (x) = 5x2 + 4, temos que g( f (x)) =
√5x2 +4. Como
limx→3
f (x) = 49 e g é contínua no ponto x = 49, pelo Teorema 4.3:
limx→3
√5x2 +4 = lim
x→3g( f (x)) = g
(limx→3
f (x))= g(49) =
√49 = 7.
b. Demostremos que, para todo n ∈ N, limx→±∞
1xn = 0.
87 / 239

Cálculo Diferencial e Integral
Solução
Considerando f (x) =1x
e g(x) = xn, verificamos que limx→±∞
f (x) = 0. Além disso, g é uma
função contínua para todo n ∈ N e (g◦ f )(x) = g( f (x)) =1xn , então, pelo Teorema 4.3
limx→±∞
1xn = lim
x→±∞g( f (x)) = g
(lim
x→±∞f (x)
)= g(0) = 0.
4.5 Continuidade de funções em intervalos
Definição 4.3Seja a função f : (a,b)→ R. Diz-se que f é contínua em (a,b), se f é contínua em todox ∈ (a,b).
Para estabelecer as próximas definições, precisamos dos conceitos de continuidade nos pontos dafronteira.
Definição 4.4
i. A função f é contínua pela direita em x = a, se limx→a+
f (x) = f (a);
ii. A função f é contínua pela esquerda em x = a, se limx→a−
f (x) = f (a).
Definição 4.5Seja a função f : (a,b]→ R. Diz-se que f é contínua em (a,b], se
i. f é contínua em x ∈ (a,b);
ii. f é contínua pela esquerda em b.
Definição 4.6Seja a função f : [a,b]→ R. Diz-se que f é contínua em [a,b), se
i. f é contínua em x ∈ (a,b);
ii. f é contínua pela direita em a.
Definição 4.7Seja a função f : [a,b]→ R. Diz-se que f é contínua em [a,b], se
i. f é contínua em x ∈ (a,b);
ii. f é contínua pela direita em a;
iii. f é contínua pela esquerda em b.
88 / 239

Cálculo Diferencial e Integral
Exemplo 4.5
a. Seja f (x) = bxc, x ∈ R. Demonstremos que f é contínua pela direita em todo n ∈ Z e que nãoexiste lim
x→nf (x).
SoluçãoDa definição de f (x) = bxc, temos que, para todo x ∈ [n,n+1),
para x ∈ [n,n+1) : bxc= n e limx→n+
f (x) = limx→n+bxc= lim
x→n+n = n.
Além disso, f (n) = n, o que implica que f (x) = bxc é contínua pela direita em n. Poroutro lado, para x ∈ [n−1,n) temos que
bxc= n−1 e limx→n−
f (x) = limx→n−bxc= lim
x→n−(n−1) = n−1.
Notamos que, embora esses limites laterais existam no ponto n, eles são diferentes. Por-tanto, lim
x→nf (x) não existe.
b. Dada a função f (x) =
√9− x2
x2−4, determinemos os intervalos onde f é contínua.
SoluçãoDa definição de f temos que Dom( f ) = [−3,−2) ∪ (2,3], logo, f é contínua em(−3,−2)∪ (2,3). Agora, analisemos a continuidade nos pontos x =−3 e x = 3. Como
limx→−3+
f (x) = 0 = f (−3) e limx→3−
f (x) = 0 = f (3),
podemos concluir que f é contínua em Dom( f ).
c. Dada a função
f (x) =
√9− x2
x2−4, se 2 < |x| ≤ 3;
sgn(x2−16)√|x|−
⌊x2
⌋ , se |x| ≤ 2 e x 6= 0;
4
√x2−9|2− x|
, se |x|> 3;
determinemos os intervalos onde f é contínua.
SoluçãoDa definição de f temos que Dom( f ) = R \ {0} e como f é definida por partes, devemosanalisar a continuidade nos pontos x = −3, x = −2, x = 2 e x = 3. Nos outros pontos dodomínio, ou seja, nos intervalos (−∞,−3),(−3,−2),(−2,0),(0,2),(2,3) e (5,+∞), a funçãof é contínua.
89 / 239

Cálculo Diferencial e Integral
i. Para x =−3, temos f (−3) = 0 e limx→−3
f (x) = 0, os limites laterais são iguais. Assim, f é
contínua em x =−3. Portanto, f é contínua em (−∞,−2).
ii. Para x =−2, temos f (−2) =− 1√3
, limx→−2−
f (x) = +∞ e limx→−2+
f (x) =− 1√3
, concluímos
que f não é contínua no ponto x =−2 pela esquerda, porém é contínua no ponto x =−2pela direita, portanto é contínua em [−2,0).
iii. Para x = 2, temos f (2) =−1, limx→2−
f (x) =−1 e limx→2+
f (x) =+∞, concluímos que f não é
contínua no ponto x =−2 pela direita, porém é contínua no ponto x =−2 pela esquerda,portanto, é contínua em [2,3).
iv. Para x = 3, temos f (3) = 0, limx→3−
f (x) = 0 e limx→3+
f (x) = 0, concluímos que f é contínua
no ponto x = 3. Portanto, f é contínua em (2,+∞).
Concluímos que f é contínua nos intervalos: (−∞,−2), [−2,0), (0,2] e (2,+∞).
4.6 Teorema de valor intermediário
As funções contínuas em intervalos possuem propriedades que as tornam particularmente úteis namatemática e em suas aplicações. A principal propriedade é conhecida como Teoremade Bolzanoou do Valor Intermediário.
Teorema 4.4 (Teorema de Bolzano ou do Valor Intermediário)Se f : R→ R é uma função contínua em um intervalo fechado [a,b], com a < b, e se w équalquer valor estritamente compreendido entre f (a) e f (b), então existe, no mínimo, um c ∈(a,b) tal qual f (c) = w.
Geometricamente, veja o item (a) da figura a seguir. O Teorema 4.4 diz que qualquer reta horizontaly = w, que atravessa o eixo y entre os valores f (a) e f (b) atravessará a curva y = f (x) ao menos umavez no intervalo [a,b], ou em outras palavras, uma função contínua em um intervalo não passa de umvalor a outro sem assumir todos os valores intermédios.
y
xbca
f(b)
w
f(a)
y = f(x)
xa
b
0
f(b) < 0
f(a) > 0
y = f(x)
y
(a)
0
f(a) < 0
f(b) > 0
x
a
b
y = f(x)
y
(b) (c)
c
c
Corolário 4.1Se f : R→ R é uma função contínua em um intervalo fechado [a,b], e não se anula em algumponto de [a,b], então f (x) tem o mesmo sinal em todo x ∈ [a,b].
90 / 239

Cálculo Diferencial e Integral
O item (a) da figura acima também ilustra o Corolário 4.1. Nessa figura podemos observar quef (x) > 0 em todo x ∈ [a,b]. Porém, no item (b) podemos ver que f (x) > 0 em todo x ∈ [a,c) ef (x) < 0 em todo x ∈ (c,b], e no item (c) temos que f (x) < 0 em todo x ∈ [a,c) e f (x) > 0 em todox ∈ (c,b], isto é, devido a f (c) = 0, ou seja, existe um ponto em [a,b] no qual f se anula.
Corolário 4.2Se f : R→ R é uma função contínua em um intervalo fechado [a,b], e se f (a) e f (b) sãodiferentes de zero com sinais opostos, então existe, no mínimo, uma solução para f (x) = 0 nointervalo (a,b).
Os itens (b) e (c) da figura acima, mostram a interpretação geométrica do Teorema 4.4 nos casos emque f (a)> 0 e f (b)< 0, e f (a)< 0 e f (b)> 0, respectivamente.
Teorema 4.5 (Teorema de Weierstrass)Qualquer função contínua em um intervalo [a,b], fechado e limitado, tem máximo e mínimonesse intervalo.
NotaEm qualquer um destes resultados, as condições são apenas condições suficientes; não sãocondições necessárias.
4.7 Funções inversas e continuidade
Desde que o gráfico de qualquer função inversa, f−1, é a reflexão do gráfico de f ao longo da retay = x, e o gráfico de f , quando contínua, não pode possuir interrupções, então f−1 deve ser contínua.O seguinte teorema estabelece formalmente esse resultado.
Teorema 4.6 (Teorema da continuidade da função inversa)Se f : R→R é uma função contínua e injetora em cada ponto de Dom( f ), então f−1 é contínuaem cada ponto de Dom( f−1); em outras palavras então f−1 é contínua em cada ponto de Im( f ).
Na figura seguinte podemos ver uma ilustração do Teorema 4.6.
y
x
y = f(x)
y = f -1(x)
91 / 239

Cálculo Diferencial e Integral
Corolário 4.3Se f : R→ R é uma função contínua e estritamente crescente ou decrescente em um intervalo[a,b] então:
i. f é invertível em [a,b];
ii. f−1 é estritamente crescente, ou descrescente;
iii. f−1 é contínua.
Notaf estritamente crescente ou decrescente implica que f é injetora em [a,b].
4.8 Recapitulando
Nesse capítulo, apresentamos o conceito de continuidade em etapas, partindo de uma noção informale intuitiva para uma definição matemática precisa. Percebemos que o conceito de limite é fundamentalpara o bom entendimento e desenvolvimento desta teoria. O conceito de descontinuidade e os tiposde descontinuidade de uma função foram apresentados, pois é necessário saber reconocer, dadauma função, se esta é contínua ou descontínua. Também aprendemos como evitar, ou remover, umadescontinuidade, caso seja possível.
A definição de continuidade em intervalos foi apresentanda, isto é, envolvendo intervalos da forma:(a,b), [a,b], [a,b) e (a,b]. Diversos teoremas foram vistos para nos ajudar a mostrar se uma funçãoé ou não contínua. E concluímos o capítulo mostrando como a continuidade de uma função estárelacionada com a sua inversa. Exemplos foram desenvolvidos tentando ilustrar todos esses itens.
Desde que já estudamos limites e continuidade, podemos no proxímo capítulo avançar para as noçõesbásicas sobre derivada, conceito muito utilizado para resolver uma ampla gama de problemas queenvolvem tangentes e taxas de variação, entre outras aplicações.
4.9 Atividades
1. Demostre, usando ε e δ , que as seguintes funções são contínuas em a:
i. f (x) =−8x+7, a = 1. ii. f (x) = x3, a =−1.
2. Determine se a função é contínua ou descontínua em a. Caso seja descontínua indique o tipode descontinuidade:
i. f (x) ={
5x−3, se x 6= 1;1, se x = 1; ii. f (x) =
{x2, se x≥−1;
1−|x|, se x <−1;a = 1. a =−1.
iii. f (x) =
x+2, se −2≤ x≤−1;
1, se −1 < x < 1;2− x, se 1≤ x≤ 2;
iv. f (x) =
−1, se −3 < x≤ 0;
x−1, se 0 < x < 2;5− x2, se 2≤ x≤ 2
√3;
92 / 239

Cálculo Diferencial e Integral
a =−1, a = 1. a = 0, a = 2.
3. Encontre, se possível, um número L∈R para que a função f seja contínua no ponto a. Justitiquesua resposta.
i. f (x) =
x2−3x−4x−4
, se x 6= 4;
L, se x = 4;ii. f (x) =
1− x2, se |x|< 1;|x|−1, se |x|> 1;
L, se |x|= 1;a = 4. a =±1.
iii. f (x) =
|x|−2, se |x|< 2;4− x2, se |x|> 2;
L, se |x|= 1;iv. f (x) =
|x2−2x−3|
x−3, se x 6= 3;
L, se x = 3;a =±2. a = 3.
v. f (x) ={
4− x2, se |x|< 2;L, se x≥ 4;
a =±2.
4. Sejam as funções f e g. Determine se as funções f , g, f +g, f −g, f ·g efg
são contínuas no
ponto x = 0:
i. f (x) =
1x
(1√
x+1−1), se x 6= 0;
−12, se x = 0;
g(x) =
√
2+ x−√
22x
, se x 6= 0;
14√
2, se x = 0.
ii. f (x) =
4√
x4 +1−√
x2 +1x
, se x 6= 0;
−12, se x = 0;
g(x) =
x√
1−4x−2, se x 6= 0;
2, se x = 0.
5. Determine os pontos de descontinuidade das seguintes funções:
i. f (x) =
x3−1x−1
, se x 6= 1;
8, se x = 1.
ii. f (x) =
−|x|+ x
2, se x < 0;
2, se x = 0.
iii. f (x) =2x−|x|3x+ |x|
. iv. f (x) =
3x2−7x+2
x−2, se x 6= 0;
3, se x = 0.
v. f (x) =
x2−9, se x≤ 3;
x, se x > 2.vi. f (x) =
8− x3√
x−2, se x < 8;
3−2x, se x≥ 8.
93 / 239

Cálculo Diferencial e Integral
vii. f (x) =
√
4− x4+ x
, se |x|< 4;
2x2−16
, se |x|> 4.
viii. f (x) =
x√
1+4x−2, se x < 0;
2x−1, se x≥ 0.
ix. f (x) =
|x||x−1|
, se x >−1, x 6= 1;
sgn(|x2−1|−1), se x <−1.
x. f (x) =
sgn(x2−3x−10), se x≤−3;
|x2−9|, se −3 < x≤ 2;
−x2 +4x+3, se 2 < x < 5;
− 2(x−4)2 , se x > 5.
6. Determine a continuidade nos intervalos que se indicam:
i. f (x) =
|16− x4|4− x2 , se x 6=±2;
−8, se x =−2;
8, se x = 2;em (−∞,−2), (−∞,−2], (−2,2], [−2,2], [−2,2), [2,+∞) e (2,+∞).
ii. f (x) =
|x3 + x2− x−1|x2−3x+2
, se x 6= 1, 2;
−4, se x = 1;
4, se x = 2;em (−∞,1), (−∞,1], (1,2), [1,2], [2,+∞) e (2,+∞).
iii. f (x) = (x−1)bxc em [0,2].
7. Indique se a função é ou não é contínua no intervalo onde tem sido definida.
i. f (x) =x+2
x2−3x−10, 2 < x < 4.
ii. f (x) =
x+4x2−16
, se −5 < x < 5, x 6=±4;
−18, se x =−4;
2, se x = 4;
.
94 / 239

Cálculo Diferencial e Integral
iii. f (x) =
(x−1)|x+2||x2−1|
, se 0 < x < 4, x 6= 1;
12, se x = 1.
.
8. Determine os valores de a e b de forma que a função dada seja contínua no seu domínio.
i. f (x) =
x+2a, se x <−2;
3ax+b, se −2≤ x≤ 1;
6x−2b, se x > 1.
ii. f (x) =
3− 3√
3x+3a( 3√
x−2), se x < 8;
ab, se x = 8;
2|2x−7|b
, se x > 8.
9. Determine os intervalos onde a função f é contínua.
i. f (x) =
√x2−16x−6
. ii. f (x) = 3√
4−√
x−2.
iii. f (x) = 1− x+ bxc−b1− xc. iv. f (x) =|4x−3|−1b3−4xc
.
v. f (x) =
x3 +3x+3, se x≤−1;
|x−2|, se −1 < x≤ 4;
8x− x2−15, se x > 4.
10. Analise a continuidade da função h
i. h = f ·g−1 onde
f (x) =
√
16x2−17x+1, se x≥ 2;
√x2−3x+2, se x≤ 1;
g(x) =x2−1
x2−16, x≥ 0, x 6= 4.
ii. h = f ◦g e g◦ f onde
f (x) = sgn(x); g(x) = x− x3.
iii. h = f ◦g onde
f (x) =x+ |x|
2; g(x) =
x, se x < 0;
x2, se x≥ 0.
iv. h = g−1 ◦ f−1 onde
f (x) =
2x+1, se x≥ 1;
x2−2, se x≤ 0;g(x) =
3x+1, se x≤ 8;
2x3, se x > 10.
95 / 239
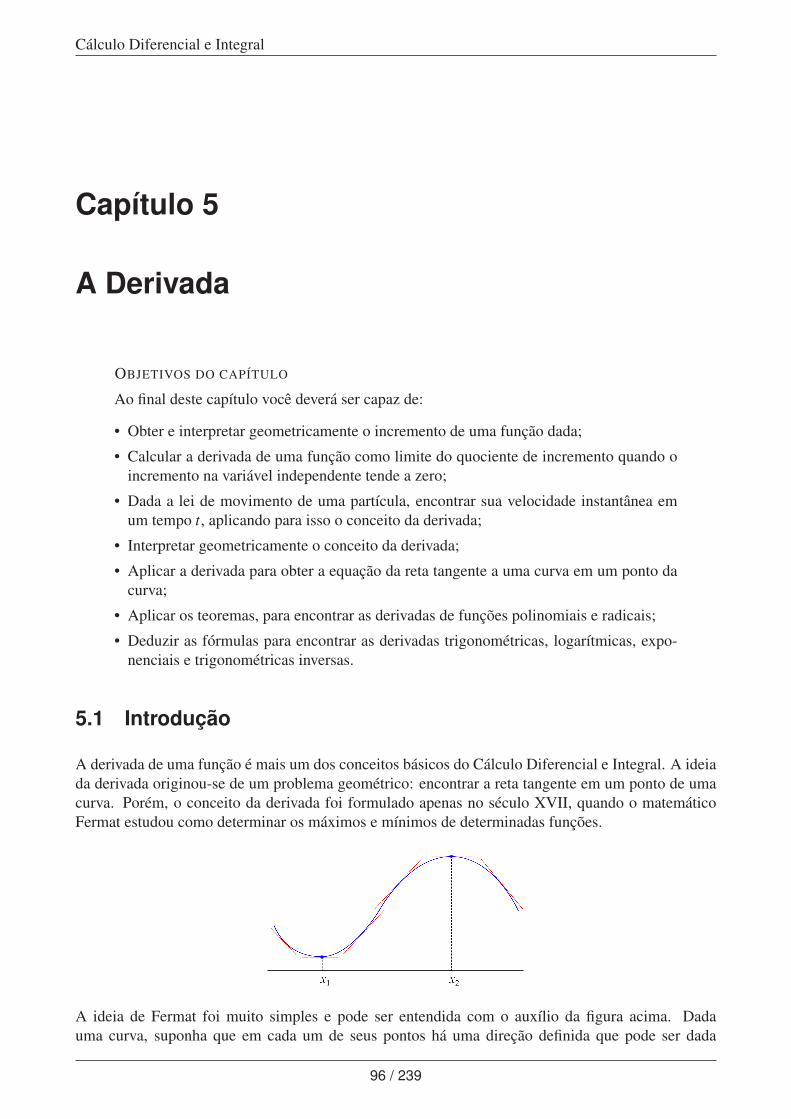
Cálculo Diferencial e Integral
Capítulo 5
A Derivada
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Obter e interpretar geometricamente o incremento de uma função dada;
• Calcular a derivada de uma função como limite do quociente de incremento quando oincremento na variável independente tende a zero;
• Dada a lei de movimento de uma partícula, encontrar sua velocidade instantânea emum tempo t, aplicando para isso o conceito da derivada;
• Interpretar geometricamente o conceito da derivada;
• Aplicar a derivada para obter a equação da reta tangente a uma curva em um ponto dacurva;
• Aplicar os teoremas, para encontrar as derivadas de funções polinomiais e radicais;
• Deduzir as fórmulas para encontrar as derivadas trigonométricas, logarítmicas, expo-nenciais e trigonométricas inversas.
5.1 Introdução
A derivada de uma função é mais um dos conceitos básicos do Cálculo Diferencial e Integral. A ideiada derivada originou-se de um problema geométrico: encontrar a reta tangente em um ponto de umacurva. Porém, o conceito da derivada foi formulado apenas no século XVII, quando o matemáticoFermat estudou como determinar os máximos e mínimos de determinadas funções.
x1 x2
A ideia de Fermat foi muito simples e pode ser entendida com o auxílio da figura acima. Dadauma curva, suponha que em cada um de seus pontos há uma direção definida que pode ser dada
96 / 239

Cálculo Diferencial e Integral
pela tangente. Cada uma dessas tangentes são indicadas na figura por um segmento de reta tracejada.Fermat observou que nos pontos onde a curva alcança um ponto máximo ou mínimo, x1 e x2 na figura,a reta tangente é será horizontal. Portanto, o problema para encontrar esses valores extremos se reduza localizar tangentes horizontais.
Isso nos conduz à questão mais geral da determinação da direção da reta tangente em um pontoarbitrário da curva. A tentativa de resolver este problema foi o que levou Fermat a descobrir algumasdas ideias primárias referentes à derivada.
À primeira vista parece que não existe conexão entre o problema de encontrar a área de uma regiãolimitada por uma curva e o problema de encontrar a tangente em um ponto de uma curva. O primeiroa unir essas ideias foi Newton. No entanto, Newton e Leibniz, de forma independente, foram os pri-meiros que compreenderam a verdadeira importância dessa relação e a exploraram para desenvolveras ideias básicas do Cálculo Diferencial e Integral até conseguir que problemas, até então sem solu-ção, fossem resolvidos facilmente utilizando os novos métodos, e assim, inauguraram uma etapa semprecedente no desenvolvimento da matemática.
5.2 A derivada e a reta tangente de uma função em um ponto.
Definição 5.1Sejam f : R→ R uma função e um ponto a ∈ Dom( f ). Diz-se que:
i. f é derivável ou diferenciável em a, se o limite
f ′(a) := limx→a
f (x)− f (a)x−a
existe;
ii. f ′(a) é a derivada de f em a.
iii. f é derivável (ou diferenciável) em A, se A ⊆ Dom( f ) e f é derivável em a para todoa ∈ A.
Nota
a. Ao fazer a mudança de variável h = x− a na Definição 5.1, obtemos a forma equiva-lente de f ′(a):
f ′(a) = limh→0
f (a+h)− f (a)h
.
b. A notação f ′(a) deve-se ao matemático Lagrange, mas também são usadas as se-
guintes notações: Dx f (a),d f (x)
dx
∣∣∣∣x=a
, f (a) e estas se devem ao matemáticos Cauchy,
Leibniz e Newton, respectivamente.
97 / 239

Cálculo Diferencial e Integral
Exemplo 5.1Encontremos a derivada das seguintes funções no ponto x = 9:
a. f (x) = x2;
SoluçãoDa definição da derivada, veja a nota acima, e de f temos que
f ′(9) = limh→0
f (9+h)− f (9)h
= limh→0
(9+h)2−92
h= lim
h→0(18+h) = 18.
b. f (x) =√
x
SoluçãoDa definição da derivada, veja a nota acima, e de f temos que
f ′(9)= limh→0
f (9+h)− f (9)h
= limh→0
√9+h−3
h= lim
h→0
√9+h2−32
h(√
9+h+3)= lim
h→0
1√9+h+3
=16.
c. f (x) =1x
SoluçãoDa definição da derivada e de f temos que
f ′(9) = limh→0
f (9+h)− f (9)h
= limh→0
19+h
− 19
h= lim
h→0
−h9h(9+h)
=− limh→0
19(9+h)
=− 181
.
Definição 5.2Sejam f : R→ R uma função derivável em A⊆ Dom( f ) e um ponto a ∈ A. A reta tangente àcurva y = f (x) no ponto (a, f (a)) é a reta de equação:
LT : y− f (a) = f ′(a)(x−a).
De forma mais simples, diz-se que LT é a reta tangente a y = f (x) em a.
NotaA ideia básica para obter a reta tangente é aproximar as retas secantes. Veja isso na figuraabaixo. É possível provar rigorosamente que quando os pontos d0, d1, . . . ,dn vão se aproxi-
mando do ponto d, as fraçõesf (xi)− f (a)
xi−avariam cada vez menos, tendendo ao valor limite
constante f ′(a).
a
98 / 239

Cálculo Diferencial e Integral
Exemplo 5.2Encontremos a equação da reta tangente LT à curva:
a. y = x2 no ponto (9,81)
SoluçãoDo exemplo anterior temos que a inclinação de LT em x = 9 é f ′(9) = 18. Assim, aequação de LT em (9,81) é
y−81 = 18(x−9) ou de forma equivalente y = 18x−81.
b. y =√
x no ponto (9,3)
Solução
Do exemplo anterior temos que a inclinação de LT em x= 9 é f ′(9)=16
. Assim, a equação
de LT em (9,3) é
y−3 =16(x−9) ou de forma equivalente y =
16
x− 32.
c. y =1x
no ponto(
9,19
)Solução
Do exemplo anterior temos que a inclinação de LT em x = 9 é f ′(9) = − 181
. Assim, a
equação de LT em(
9,19
)é
y− 19=− 1
81(x−9) ou de forma equivalente y =− 1
81x+
29.
5.3 A derivada como função
Na seção anterior vimos a derivada de y = f (x) no ponto x = a. Agora, definiremos a derivada comouma função deduzida de f .
Definição 5.3Seja f : R→ R uma função. A função f ′ definida por
limh→0
f (x+h)− f (x)h
,
se o limite existir, ela será denominada de função derivada de f . O domínio dessa função édenotado por Dom( f ′) e definido por {x ∈ Dom( f ) : f ′(x) existe}. Além disso, as notaçõesmais comuns para a derivada de y = f (x) são:
f ′(x),d f (x)
dx,
dydx
, y′, Dx f (x), f (x).
O símbolod f (x)
dxlê-se derivada de f (x) com respeito a x.
99 / 239

Cálculo Diferencial e Integral
Exemplo 5.3
a. Provemos que a função constante f (x) = c, onde c ∈ R é derivável e f ′(x) = 0, ∀x ∈ R.
SoluçãoDa definição da derivada e de f temos que:
f ′(x) = limh→0
f (x+h)− f (x)h
= limh→0
c− ch
= limh→0
0 = 0,
Portanto, f é derivável e f ′(x) = 0, ∀x ∈ R.
b. Seja a, b ∈ R, a 6= 0. Provemos que a derivada da função f (x) = ax+b é f ′(x) = a, ∀x ∈ R.
SoluçãoDa definição da derivada e de f temos que:
f ′(x) = limh→0
f (x+h)− f (x)h
= limh→0
a(x+h)+b− (ax+b)h
= limh→0
ahh
= a,
Portanto, f ′(x) = a, ∀x ∈ R.
c. Seja n ∈ N. Provemos que a derivada da função f (x) = xn é f ′(x) = nxn−1, ∀x ∈ R.
SoluçãoPara n = 1, a prova é trivial. Assumamos que n≥ 2:
f ′(x) = limh→0
f (x+h)− f (x)h
= limh→0
(x+h)n− xn
h
= limh→0
[(x+h)− x][
n−vezes︷ ︸︸ ︷(x+h)n−1 +(x+h)n−2x+ · · ·+ xn−1]
h
= limh→0
[
n−vezes︷ ︸︸ ︷(x+h)n−1 +(x+h)n−2x+ · · ·+(x+h)xn−2 + xn−1] = nxn−1
Portanto, a derivada da função é f ′(x) = nxn−1, ∀x ∈ R.
d. Provemos que a função f (x) = |x| não é derivável no ponto x = 0.
SoluçãoDa definição de f , e analisando o limite:
limx→0
f (x)− f (0)x−0
= limx→0
|x|x,
notamos que, este limite não existe, pois limx→0+
|x|x
= 1 e limx→0−
|x|x
=−1. Portanto, f não é
derivável no ponto x = 0.
100 / 239

Cálculo Diferencial e Integral
5.4 Derivadas laterais
Definição 5.4Seja f : R→ R uma função e a ∈ Dom( f ).
i. A derivada pela esquerda de f no ponto a é definida por
limx→a−
f (x)− f (a)x−a
se o limite existir, e denotada por f ′−(a).ii. A derivada pela direita de f no ponto a é definida por
limx→a+
f (x)− f (a)x−a
se o limite existe, e denotada por f ′+(a).
NotaDe forma alternativa, as derivadas laterais são definidas por:
f ′−(a) = limh→0−
f (a+h)− f (a)h
e f ′+(a) = limh→0+
f (a+h)− f (a)h
.
Proposição 5.1A função f : R→ R é derivável no ponto a ∈ Dom( f ) se, e somente se, as derivadas lateraisf ′−(a) e f ′+(a) existem e são iguais.
Proposição 5.2Se a função f : R→ R é derivável no ponto a ∈ Dom( f ), então f é contínua no ponto a.
Nota
a. A recíproca da Proposição 5.2 não é necessariamente verdadeira. Consideremos quea função f (x) = |x| seja contínua em x = 0, porém não seja derivável em x = 0. Vejao item (iv) do exemplo anterior.
b. Para encontrar as derivadas laterais das funções definidas por partes, nos pontos ondea função muda de regra de correspondência, é útil ter em mente as seguintes proprie-dades:
i. Se f é derivável para todo x < a, limx→a−
f (x) = f (a) e limx→a−
f ′(x) = L existe, então
f ′−(a) = L.
ii. Se f é derivável para todo x > a, limx→a+
f (x) = f (a) e limx→a+
f ′(x) = L existe, então
f ′+(a) = L.
101 / 239

Cálculo Diferencial e Integral
Exemplo 5.4
a. Seja a função f definida por:
f (x) ={
x2, se x < 1;ax+b, se x≥ 1.
Determinemos os valores de a e b para que f ′(1) exista.
SoluçãoConsiderando que f ′(1) existe, então f é contínua no ponto x = 1. Logo, obtemoslim
x→1−f (x) = lim
x→1+f (x), e assim obtemos que 1 = a+b.
Por outro lado,
f ′(x) ={
2x, se x < 1;a, se x > 1.
Pela nota anterior, temos que
f ′(1−) = limx→1−
f (x) = 2 e f ′(1+) = limx→1+
f (x) = a,
e como f ′(1) existe, então a = 2. Finalmente, da condição a+b = 1 obtemos que b =−1.
b. Determinemos se a função f definida por:
f (x) ={
x, se x≤ 0;x2, se x > 0;
é derivável no ponto x = 0.
SoluçãoDa definição de f temos que
f ′(0−) = limx→0−
f (x)− f (0)x−0
= limx→0−
xx= 1
f ′(0+) = limx→0+
f (x)− f (0)x−0
= limx→0+
x2
x= lim
x→0+x = 0.
Portanto, a função não é derivável no ponto x = 0, porém é contínua no ponto x = 0.
c. Seja a função f definida por:
f (x) ={
x2, se xé racional;0, se xé irracional.
Provemos que f é derivável no ponto x = 0.
SoluçãoDa definição da derivada no ponto x = 0, obtemos que
f ′(0) = limh→0
f (h)− f (0)h
= limh→0
f (h)−02
h= lim
h→0
f (h)h
102 / 239

Cálculo Diferencial e Integral
Agora, analisemos f (h) ef (h)
h. Como
f (h) ={
h2, se hé racional;0, se hé irracional,
então,f (h)
h=
{h, se hé racional;0, se hé irracional,
Assim, em qualquer um dos dois casos, limh→0
f (h)h
= 0. Portanto, f ′(0) = 0.
5.5 Reta normal a uma curva em um ponto
Ao considerar a interpretação geométrica da derivada em um ponto, entendemos como a equação dareta tangente, denotada por LT é obtida. Agora vamos a analisar a reta perpendicular a esta.
Definição 5.5Seja f : R→R uma função derivável no ponto x = a. A reta que passa pelo ponto (a, f (a)) e éperpendicular à reta tangente da curva y = f (x) no ponto (a, f (a)) é chamada de reta normalda curva y = f (x) no ponto (a, f (a)), denotada por LN , e se:
i. f ′(a) 6= 0, então a equação da reta normal é
LN : y− f (a) =− 1f ′(a)
(x−a);
ii. f ′(a) = 0, então a equação da reta normal é
LN : x−a = 0.
Exemplo 5.5
a. Seja f (x) = x2−2x+3, encontremos as equações da reta tangente, LT , e da reta normal, LN , àcurva y = f (x) no ponto (2,3).
SoluçãoDesde que as equações de LT e LN , no ponto (2,3) dependem de f ′(2), calculemos estevalor
f ′(2) = limh→0
f (2+h)− f (2)h
= limh→0
(h+2) = 2.
Assim, as equações das retas tangente e normal à curva y = f (x), no ponto (2,3), são:
LT : y−3 = 2(x−2) ⇔ LT : 2x− y−1 = 0
LN : y−3 =−12(x−2) ⇔ LN : x+2y−8 = 0
103 / 239

Cálculo Diferencial e Integral
b. Determinemos (w, f (w)), e as equações das retas tangente e normal à curva y = f (x) = 2−x−x2, sendo que a reta tangente é paralela à reta x− y−4 = 0.
SoluçãoO nosso problema aqui é encontrar o ponto (w, f (w)) no qual a reta esta definida. Porém,a reta paralela x− y−4 = 0 nos dará essa informação.Calculando a derivada
f ′(w) = limh→0
f (w+h)− f (w)h
= limh→0
(−1−2w−h) =−1−2w.
Como as inclinações de x− y−4 = 0 e LT são iguais, então f ′(w) = 1, logo, destas duasequações obtemos que w =−1. Portanto, o ponto de tangência é (−1, f (−1)) = (−1,2),e as equações das retas tangente e normal são:
LT : y = x+3 e LN : y =−x+1,
respectivamente.
c. Dada a reta LN , normal à curva y = f (x) = x2−4 no ponto (w, f (w)). Se LN passa pelo ponto(33,0), determinemos o valor de w e as equações de LT e LN .
SoluçãoComo f ′(x) = 2x, a inclinação de LT no ponto (w, f (w)) é f ′(w) = 2w. Por outro lado, ainclinação da reta LN que passa pelos pontos (33,0) e (w, f (w)) é
− 1f ′(w)
=f (w)−0w−33
=w2−4w−33
Logo,2w3−7w−33 = 0 ⇒ (w−3)(2w2 +6w+11) = 0
Em consequência, w = 3, pois é a única raiz real da equação acima, e as equações dasretas tangente e normal são:
LT : y = 6x−13 e LN : y =−16
x+112,
respectivamente.
5.6 Regras de derivação
Teorema 5.1Sejam f e g duas funções deriváveis em x e seja k uma constante. Então, as funções
k f , f ±g, f ·g, 1g
efg
são deriváveis em x. Além disso,
i. (k f )′(x) = k[ f ′(x)]
104 / 239

Cálculo Diferencial e Integral
ii. ( f ±g)′(x) = f ′(x)±g′(x)
iii. ( f ·g)′(x) = f ′(x) ·g(x)+ f (x) ·g′(x)iv. Se g(x) 6= 0, então
a.(
1g
)′(x) =− g′(x)
[g(x)]2;
b.(
fg
)′(x) =− f ′(x) ·g(x)− f (x) ·g′(x)
[g(x)]2.
Teorema 5.2Se f1, f2, . . . , fn são funções deriváveis em x então:
i. f1 + f2 + . . .+ fn é derivável em x e
( f1 + f2 + . . .+ fn)′(x) = f ′1(x)+ f ′2(x)+ . . .+ f ′n(x)
ii. f1 · f2 · . . . · fn é derivável em x e
( f1 · f2 · . . . · fn)′(x) = f ′1(x) f2(x) . . . fn(x)+ f1(x) f ′2(x) f3(x) . . . fn(x)+ . . .
. . .+ f1(x) f2(x) . . . f ′n−1(x) fn(x)+ f1(x) f2(x) . . . fn−1(x) f ′n(x).
Exemplo 5.6Calculemos f ′(x) da função f definida por:
a. f (x) = 6x5 + x4−3x3 +2
SoluçãoDo Teorema 5.2, aplicando a propriedade da soma de derivadas temos que:
f ′(x) = (6x5 + x4−3x3 +2)′
= (6x5)′+(x4)′− (3x3)′+(2)′
= 6(x5)′+4x3−3(x3)′+0= 30x4 +4x3−9x2.
b. f (x) = (x2 + x+1)x3
SoluçãoDo Teorema 5.2, aplicando a propriedade do produto de derivadas temos que:
f ′(x) = (x2 + x+1)′x3 +(x2 + x+1)(x3)′
= (2x+1)x3 +(x2 + x+1)3x2
= x2(5x2 +4x+3)
c. f (x) = x−n, com x 6= 0 e n ∈ N
Solução
Da definição de f notamos que ela pode ser reescrita como f (x) =1xn . Logo, do Teorema
5.1 temos que
f ′(x) =(
1xn
)′=−nxn−1
x2n =−nx−n−1, ∀x ∈ R\{0}
105 / 239
Cálculo Diferencial e Integral
d. f (x) =x+32− x
, x 6= 2
SoluçãoAplicando a regra da derivada para a divisão, Teorema 5.1, obtemos que
f ′(x) =(x+3)′(2− x)− (x+3)(2− x)′
(2− x)2 =(1)(2− x)− (x+3)(−1)
(2− x)2 =5
(2− x)2 .
e. f (x) =ax5 +bx4 + c√
a2 +b2 + c2
SoluçãoDa definição de f observamos que ela pode ser reescrita como f (x) =
1√a2 +b2 + c2
(ax5 + bx4 + c), onde1√
a2 +b2 + c2é uma constante. Logo, pelo
Teorema 5.1
f ′(x) =1√
a2 +b2 + c2(ax5 +bx4 + c)′ =
1√a2 +b2 + c2
(5ax4 +4bx3).
Nota
a. Se f (x) = xn, n ∈ Z obtemos que f ′(x) = nxn−1.
b. Se c é uma constante em R, e f (x) = xc, então f ′(x) = cxc−1. Por exemplo, se
f (x) = x2/3 então f ′(x) =23
x−1/3.
5.7 A derivada da composição de funções
Teorema 5.3 (Regra da cadeia)Sejam f : A→ R e g : B→ R duas funções tais que Im( f ) ⊂ B. Se f é derivável no pontoa ∈ Dom( f ) e g é derivável no ponto b = f (a) ∈ B, então g◦ f é derivável em a e a derivada é:
(g◦ f )′(a) = g′ ( f (a)) · f ′(a).
Corolário 5.1Seja f uma função derivável em a e h(x) = [ f (x)]n, onde n é uma constante, então a função h éderivável em a e
h′(a) = n[ f (a)]n−1 f ′(a).
106 / 239

Cálculo Diferencial e Integral
NotaEm particular, dos resultados anteriores obtemos que:
a. Se y = y(t) e t = t(x) são duas funções deriváveis, então
dydx
=dydt· dt
dx, onde
dydt
= y′(t) edtdx
= t ′(x).
b. Se y = f (x) é uma função derivável, comdydx6= 0, e possui inversa, x = f−1(y), então
dxdy
=1
dy/dx;
c. Se y = y(t) e x = x(t) são duas funções deriváveis, comdxdt6= 0, então
dydx
=dy/dtdx/dt
;
d. Se f (x) = [u(x)]n e u(x) é derivável, então
f ′(x) = n[u(x)]n−1 ·u′(x);
e. Se f (x) =√
u(x) e u(x) é derivável, com u(x)> 0, então
f ′(x) =u′(x)
2√
u(x);
f. Se f (x) = |u(x)| e u(x) é derivável, com u(x) 6= 0, então
f ′(x) =u(x)|u(x)|
·u′(x).
Exemplo 5.7
a. Encontremos f ′, usando o item (d) da nota acima, onde f é definida por:
i. f (x) = (x4 +1)3
Soluçãof ′(x) = 3(x4 +1)2(x4 +1)′ = 3(x4 +1)2(4x3) = 12x3(x4 +1)2
ii. f (x) = (x3 +12x−4)300
Soluçãog′(x) = 300(x3 +12x−4)299(x3 +12x−4)′ = 900(x2 +4)(x3 +12x−4)299
iii. f (x) =[
x+2x−2
]18
Solução
h′(x) = 18[
x+2x−2
]17(x+2x−2
)′= 18
[x+2x−2
]17[(x−2)− (x+2)(x−2)2
]=−72(x+2)15
(x−2)17 .
107 / 239

Cálculo Diferencial e Integral
b. Sejam y = t4− t2 + t e t = (x2 +1)4, calculemosdydx
.
SoluçãoDo item (a) da nota anterior temos que:
dydx
=dydt· dt
dx= [4t3−2t +1][4(x2 +1)3][2x]
Substituindo t por (x2 +1)4, obtemos que
dydx
= [4(x2 +1)3−2(x2 +1)+1][8x(x2 +1)3] = 8x[(x2 +1)6−2(x2 +1)4 +(x2 +1)3].
c. Se f (x) = 7√
(5x2−3x+2)3, determinemos f ′(x).
SoluçãoObservamos que f (x) = (5x2−3x+2)3/7. Assim
f ′(x) =37(5x2−3x+2)−4/7(5x2−3x+2)′ =
3(10x−3)
7 7√(5x2−3x+2)4
.
d. Seja f (x) =√
5+ |3x2−8|, determinemos f ′(x).
SoluçãoDo item (f) da nota acima temos que:
f ′(x) =(5+ |3x2−8|)′√
5+ |3x2−8|=
1√5+ |3x2−8|
(3x2−8|3x2−8|
· (3x2−8)′)
=1√
5+ |3x2−8|
(3x2−8|3x2−8|
· (6x))=
3x(3x2−8)
|3x2−8|√
5+ |3x2−8|
e. Sejam f (x+1) = 2x2 +8 e g(x+1) = f (x−2), determinemos g′(4).
SoluçãoFazendo z = x+1, temos que x = z−1, f (z) = 2(z−1)2 +8 e g(z) = f (z−3). Logo,
f ′(z) = 4(z−1).
Aplicando a regra da cadeia, temos que
g′(z) = f ′(z−3)(z−3)′ = 4((z−3)−1) = 4(z−4)
Portanto, para z = 4( ou x = 3), obtemos que g′(4) = 4(4−4) = 0.
f. Sejam f ′(x) =x
x−1e y = f
(x−1x+1
), determinemos
dydx
.
Solução
Fazendo z =x−1x+1
, temos que y = f (z). Aplicando a regra da cadeia, obtemos que
dydx
=dydz· dz
dx= f ′(z) · 2
(x+1)2 =z
z−1· 2(x+1)2
Substituindo z porx−1x+1
, temos quedydx
=1− x
(x+1)2 .
108 / 239

Cálculo Diferencial e Integral
5.8 Teorema da função inversa
No Capítulo 2 estudamos a função inversa e como ela modifica o efeito da função da qual é inversa.Esse resultado é um dos teoremas fundamentais da matemática, pois garante, dada uma função deri-vável, a existência da inversa e a derivabilidade desta. No teorema seguinte analisaremos a relação dereciprocidade entre as derivadas de f e f−1.
Teorema 5.4Seja f definida e derivável em um intervalo aberto I. Se f ′(x) 6= 0 para todo x ∈ I, então fpussui inversa, f−1, derivável e
( f−1)′(x) =1
f ′( f−1(x)).
5.9 Derivadas de funções elementares
Função ExponencialSejam f ,g : R→ R, u(x) uma função derivável, e a ∈ R, com 0 < a 6= 1. Se f (x) = ax eg(x) = au(x), então
f ′(x) = ln(a)ax e g′(x) = ln(a)au(x)u′(x).
Função LogarítmicaSejam f ,g : R→ R, u(x) uma função derivável, e a ∈ R, com 0 < a 6= 1. Se f (x) = loga(x) eg(x) = loga(u(x)), então
f ′(x) =loga(e)
xe g′(x) =
loga(e)u′(x)
u(x).
Funções TrigonométricasSejam f ,g : R→ R, e u(x) uma função derivável.
Função SenoSe f (x) = sen(x) e g(x) = sen(u(x)), então
f ′(x) = cos(x) e g′(x) = cos(u(x))u′(x);
Função CosenoSe f (x) = cos(x) e g(x) = cos(u(x)), então
f ′(x) =−sen(x) e g′(x) =−sen(u(x))u′(x);
Função TangenteSe f (x) = tg(x) e g(x) = tg(u(x)), então
f ′(x) =−sec2(x) e g′(x) =−sec2(u(x))u′(x);
109 / 239

Cálculo Diferencial e Integral
Função CotangenteSe f (x) = cotg(x) e f (x) = cotg(u(x)), então
f ′(x) =−cossec2(x) e g′(x) =−cossec2(u(x))u′(x);
Função SecanteSe f (x) = sec(x) e g(x) = sec(u(x)), então
f ′(x) = tg(x)sec(x) e g′(x) = tg(u(x))sec(u(x))u′(x);
Função CossecanteSe f (x) = cossec(x) e g(x) = cossec(u(x)), então
f ′(x) =−cotg(x)cossec2(x) e g′(x) =−cotg(u(x))cossec2(u(x))u′(x);
Funções Trigonométricas InversasSejam f ,g : R→ R, e u(x) uma função derivável.
Função Arco SenoSe f (x) = arcsen(x) e g(x) = arcsen(u(x)), então
f ′(x) =1√
1− x2, com |x|< 1, e g′(x) =
u′(x)√1−u2(x)
, com |u(x)|< 1;
Função Arco CosenoSe f (x) = arccos(x) e g(x) = arccos(u(x)), então
f ′(x) =− 1√1− x2
, com |x|< 1, e g′(x) =− u′(x)√1−u2(x)
, com |u(x)|< 1;
Função Arco TangenteSe f (x) = arctg(x) e g(x) = arctg(u(x)), então
f ′(x) =1
1+ x2 , com x 6= 1, e g′(x) =u′(x)
1+u2(x), com u(x) 6= 1;
Função Arco CotangenteSe f (x) = arccotg(x) e g(x) = arccotg(u(x)), então
f ′(x) =− 11+ x2 , com x 6= 1, e g′(x) =− u′(x)
1+u2(x), com u(x) 6= 1;
Função Arco SecanteSe f (x) = arcsec(x) e g(x) = arcsec(u(x)), então
f ′(x) =1
|x|√
x2−1, com |x|> 1, e g′(x) =
u′(x)
|u(x)|√
u2(x)−1, com |u(x)|> 1;
Função Arco CossecanteSe f (x) = arccossec(x) e g(x) = arccossec(u(x)), então
f ′(x) =− 1|x|√
x2−1, com |x|> 1, e g′(x) =− u′(x)
|u(x)|√
u2(x)−1, com |u(x)|> 1.
110 / 239

Cálculo Diferencial e Integral
5.10 Derivadas de ordem superior
Definição 5.6Seja f : R→ R uma função derivável.
i. Se f ′ é uma função derivável, então sua derivada é chamada de derivada segunda de f eé denotada por
( f ′)′ = f ′′(x), D2x f (x),
d2 f (x)dx2 , f (x);
ii. Se f ′′ é uma função derivável, então sua derivada é chamada de derivada terceira de f eé denotada por
( f ′′)′ = f ′′′(x), D3x f (x),
d3 f (x)dx3 ,
...f (x);
iii. Desta forma, derivando sucessivamente a função f , se a derivada de ordem (n− 1) def é uma função derivável, então sua derivada é chamada de derivada n−ésima de f e édenotada por
( f (n−1))′ = f (n), Dnx f (x),
dn f (x)dxn .
Proposição 5.3 (Formula de Leibniz)Suponhamos que as funções u(x) e v(x) têm derivada de ordem n no mesmo conjunto A ⊆ R.Então, y = u · v é derivável até a ordem n em A e
y(n) = (u · v)(n) =(
n0
)u(n) · v+
(n1
)u(n−1) · v′+ · · ·+
(nk
)u(n−k) · v(k)+ · · ·+
(nn
)u · v(n)
onde u(0) = u, v(0) = v, u(1) = u′, v(1) = v′, u(2) = u′′, v(2) = v′′, etc.
Exemplo 5.8Sejam as funções f ,g : R→ R e h : [4,+∞)→ R definidas por:
f (x) =√
x4 +1, g(x) =|x|
1+2x4 e h(x) = (3x5 + x2 +7)√
3x−12
Encontremos f ′′(x), g′′(x) e h′′(x).
Solução
a. f (x) =√
x4 +1 implica que f ′(x) =2x3√
x4 +1. Logo, f ′′(x) = ( f ′(x))′, isto é,
f ′′(x) =2x2(x4 +3)
(x4 +1)32.
111 / 239

Cálculo Diferencial e Integral
b. g(x) =3|x|
1+2x4 implica que g′(x) =3x−18x5
|x|(1+2x4)2 , com x 6= 0. Logo g′′(x) = (g′(x))′, isto
é,
g′′(x) =6x3(−30x5 +54x4−11x−9)
|x|(1+ x4)3 , com x 6= 0.
c. h(x) = (3x5+x2+7)√
3x−12 implica que h′(x) =(93x5−360x4 +13x2−48x+7)
2√
3x−12, com
x > 4. Logo h′′(x) = (h′(x))′, isto é,
h′′(x) =2511x5−18720x 4+34560x3 +117x2−912x+1152
4(3x−12)32
, com x 6= 4.
Exemplo 5.9Sejam as funções f ,g : R→ R definidas por:
f (x) = |x|3 e g(x) ={
x4, se x≥ 0;−x4, se x < 0.
Encontremos
a. f ′(x), f ′′(x) e f ′′′(x);
b. g′(x), g′′(x) e g′′′(x);
se existem, para todo x ∈ R.
Solução
a. Da definição de f (x), podemos reescrevê-la como:
f (x) ={
x3, se x≥ 0;−x3, se x < 0.
Logo,
f ′(x) ={
3x2, se x > 0;−3x2, se x < 0;
f ′′(x) ={
6x, se x > 0;−6x, se x < 0;
f ′′′(x) ={
6, se x > 0;−6, se x < 0;
Analisando as derivadas laterais, para x = 0, temos que:
f ′(0) = f ′′(0) = 0, f ′′′(0−) =−6 e f ′′′(0+) = 6.
Portanto, f ′′′(x) não existe para todo x ∈ R.
112 / 239

Cálculo Diferencial e Integral
b. Usando o mesmo raciocínio do item acima, temos que:
g′(x) ={
4x3, se x≥ 0;−4x3, se x < 0;
g′′(x) ={
12x2, se x > 0;−12x2, se x < 0;
g′′′(x) ={
24x, se x > 0;−24x, se x < 0;
Analisando as derivadas laterais, para x = 0, temos que:
g′(0) = g′′(0) = g′′′(0) = 0
Portanto, g′′′(x) existe para todo x ∈ R.
Exemplo 5.10Calculemos a n−ésima derivada de f , definida por:
a. f (x) = anxn +an−1xn−1 + · · ·+a1x+a0, com an 6= 0;
SoluçãoNotemos que f (x) é um polinômio de grau n. Logo
f ′(x) = annxn−1 +an−1(n−1)xn−2 + · · ·+2a2x+a1;f ′′(x) = ann(n−1)xn−2 +an−1(n−1)(n−2)xn−3 + · · ·+2a2;
...f (n)(x) = an n!.
Além disso,f (k)(x) = 0, ∀x ∈ R e k ≥ n+1.
b. f (x) =1
1+ x, com x 6=−1.
SoluçãoDa definição de f , podemos reescrevê-la como (1+x)−1. Logo, derivando sucessivamentef temos que:
f ′(x) = −1(1+ x)−2 = − 1(1+ x)2 ;
f ′′(x) = (−1)(−2)(1+ x)−3 =(−1)22!(1+ x)3 ;
...
f (n)(x) =(−1)nn!(1+ x)n+1 .
c. f (x) =x
1+2x, com x 6=−1
2.
113 / 239

Cálculo Diferencial e Integral
Solução
Da definição de f , podemos reescrevê-la como x(2x+1)−1, com x 6=−12
. Logo, derivandosucessivamente f temos que:
f ′(x) = (2x+1)−2;
f ′′(x) = −2 ·2(2x+1)−3;
f ′′′(x) = 22 ·2 ·3(2x+1)−3;
...
f (n)(x) = (−1)n+1 2n−1n!(2x+1)n+1 .
d. f (x) =6x+5
x2 + x−6, com x 6= 2 e x 6=−3.
SoluçãoDa definição de f , podemos reescrevê-la como a soma de frações:
175(x−2)−1 +
135(x+3)−1,
com x 6= 2 e x 6=−3. Logo, derivando sucessivamente f temos que:
f ′(x) =175(−(x−2)−2)+ 13
5(−(x+3)−2) ;
f ′′(x) =175(2(x−2)−3)+ 13
5(2(x+3)−3) ;
...
f (n)(x) =(−1)n
5
(17
(x−2)n+1 +13
(x+3)n+1
).
e. f (x) =√
1+ x, com x≥−1.
SoluçãoDa definição de f , podemos reescrevê-la como (1+ x)
12 , para x > −1. Logo, derivando
sucessivamente f temos que:
114 / 239

Cálculo Diferencial e Integral
f ′(x) =12(1+ x)−
12 =
12√
1+ x;
f ′′(x) = −12· 1
2(1+ x)
−32 =− 1
22√
(1+ x)3;
f ′′′(x) =323 (1+ x)
−52 =
3
23√
(1+ x)5;
f (4)(x) =3 ·524 (1+ x)
−72 =
3 ·524√
(1+ x)7;
...
f (n)(x) = (−1)n+1 3 ·5 . . .(2n−5) · (2n−3)
2n√
(1+ x)2n−1.
5.11 Derivação Implícita
Funções definidas explícita e implicitamenteAté o momento, trabalhamos apenas com funções descritas pela equação y = f (x). Esse tipo defunção é chamada de explícita, pois y é expressa explicitamente em termos de x. Porém, existemoutras situações nas quais será necessário lidar com equações como
y2− x+1 = 0, y2 + x4−9 = 0 ou y7−3y5 +7y2− xcosx = 0,
que são denotadas por E(x,y) = 0, e definem uma relação implícita entre as variáveis x e y. Em algunscasos, seremos capazes de expressar a variável y explicitamente em termos de x. Por exemplo, dada aequação
E(x,y) : y2− x+1 = 0
temos que E(x,y) = 0 define de forma implícita as funções f1 e f2 onde
f1(x) =√
x−1 e f2(x) =−√
x−1,
ou seja,y = f1(x) e y = f2(x).
Se nosso objetivo é derivá-la, então aplicamos as regras de derivação conhecidas. No entanto, dadauma equação E(x,y) = 0 muitas vezes não é simples encontrar as funções explicitamente definidaspor ela, por exemplo:
E(x,y) : y7−3y5 +7y2− xcosx = 0.
Contudo, ainda define y como uma função de x. Assim, Diz-se que E(x,y) = 0 define y implicita-mente como uma função de x, e para obter a derivada de forma usual, devemos determinar dy/dxpor intermédio de Diferenciação Implícita, que será descrita nesta seção. Porém, existem casos queE(x,y) = 0 não define nenhuma função, por exemplo:
y6 + x4 +5 = 0
115 / 239

Cálculo Diferencial e Integral
De modo mais formal, temos a seguinte definição.
Definição 5.7Diz-se que E(x,y) = 0 define a função f implicitamente se o gráfico de y = f (x) coincide comalguma porção do gráfico da equação E(x,y) = 0.
Exemplo 5.11Seja E(x,y) : x = y4, ressaltemos que esta equação não define nenhuma função em y, pois uma retavertical corta em dois pontos o seu gráfico, veja item (a) da figura abaixo. No entanto, se resolvemosE(x,y) = 0 para y em termos de x, obtemos as equações
y = 4√
x e y =− 4√
x,
x
y
x
yE(x,y) = 0L Ly = f1(x)
y = f2(x)
(a) (b)
cujos gráficos são porções do gráfico de E(x,y) = 0. Veja também o item (b) da figura acima. Assim,E(x,y) = 0 define implicitamente as funções
f1(x) = 4√
x e f2(x) =− 4√
x.
Diferenciação Implícita
Felizmente, dada a equação E(x,y) = 0 não é necessário resolvê-la, colocando y em termos de x afimde obter as derivadas das funções definidas implicitamente por ela.
Para ilustrar esse fato, calcularemos as derivadas de f1 e f2, do exemplo anterior, de duas formas.
Exemplo 5.12
Primeira formaDo exemplo anterior temos que
f1(x) = 4√
x e f2(x) =− 4√
x.
Então,
f ′1(x) =1
4 4√x3e f ′2(x) =−
1
4 4√x3.
Segunda formausando derivação implícita para obter a derivada podemos diferenciar ambos lados da equaçãoE(x,y) : x = y4, ou seja,
ddx
[x] =ddx
[y4]
1 = 4y3y′1
4y3 = y′
116 / 239

Cálculo Diferencial e Integral
Logo, se nesta última expressão substituimos y =± 4√
x, obtemos
y′ =1
4 4√x3e y′ =− 1
4 4√x3.
o que está de acordo com as derivadas obtidas para f1 e f2.
Exemplo 5.13Usando diferenciação implícita encontremos y′ se:
a. y2− x+1 = 0
Solução
ddx
[y2− x+1
]=
ddx
[0]
2yy′−1+0 = 02yy′ = 1.
Logo,
y′ =12y
.
b. y2 + x4−9 = 0.
Solução
ddx
[y2 + x4−9
]=
ddx
[0]
2yy′+4x3−0 = 02yy′ = −4x3.
Logo,
y′ =−2x3
y.
c. y7−3y5 +7y2− xcos(x) = 0.
Solução
ddx
[y7−3y5 +7y2− xcos(x)
]=
ddx
[0]
7y6y′−15y4y′+14yy′− cos(x)+ xsen(x) = 0(7y6−15y4 +14y)y′ = cos(x)− xsen(x).
Logo,
y′ =cos(x)− xsen(x)7y6−15y4 +14y
.
117 / 239

Cálculo Diferencial e Integral
NotaNo último exemplo as respostas apresentadas envolvem tanto x quanto y. A fim de obteruma solução que envolva somente x, teríamos de resolver a equação original, ou seja, obtery de forma explícita, e então substituir em cada uma das soluções dadas. Fazendo isto paraos itens (i) e (ii) temos que:
(i) y2− x+1 = 0 ⇒ y =±√
x−1 ⇒ y′ =± 12√
x−1.
(ii) y2 + x4−9 = 0 ⇒ y =±√
9− x4 ⇒ y′ =∓ 2x3√
9− x4
Porém, para o item (iii) isto é impossível ser feito, assim, somos forçados a deixar a fórmulade y′ em termos de x.
5.12 Recapitulando
Neste capítulo, apresentamos o conceito da derivada. Novamente, percebemos que esse conceito,assim como o de continuidade, depende da teoria de limites, e este limite é tão importante quepossui a notação especifica y′. As definições da derivada e da reta tangente foram estabelecidaspara um ponto dado. De certa forma a derivada pode ser interpretada como a inclinação da retatangente à curva y = f (x) em um ponto dado. Além disso, diferente do conceito de continuidade,podemos pensar na derivada como uma função.
Desde que a definição da derivada depende da obtenção de um limite, quando a variável se aproximaao ponto analisado, os conceitos de derivadas laterais são estabelecidos. Além disso, a definição dareta normal à curva dada é apresentada. Depois disso, apresentamos as regras de derivação para asoperações aritméticas, a derivada da composição de funções e o teorema da função inversa.
Tendo a teoria necessária para a obtenção da derivada, as derivadas de funções elementares foramapresentadas. Como a derivada de uma função é uma outra função, podemos recorrer repetidamenteà obtenção da derivada destas novas funções, e a isto dá-se o nome derivadas de ordem superior.
Por fim, apresentamos a derivação implícita, teoria que lida com a obtenção da derivada de equações,na qual a função a ser derivada não necessariamente tem uma representação explícita. Exemplosforam desenvolvidos tentando ilustrar todos esses assuntos.
No proxímo capítulo, apresentaremos algumas aplicações da derivada . Por exemplo, com ajuda daderivada de primeira e segunda ordem aprenderemos métodos para analisar o comportamento de umafunção em um conjunto dado, e obteremos com mais precisão o seu gráfico.
5.13 Atividades
1. Usando a definição, calcule a derivada no ponto indicado:
i. f (x) =√
1+9x, x = 7. ii. f (x) =1√
2x+3, x = 3.
iii. f (x) =1x+ x+ x2, x = 3. iv. f (x) =
1√1−3x
, x =−8.
118 / 239

Cálculo Diferencial e Integral
v. f (x) = |x−3|3, x = 3. vi. f (x) =2√x−1, x = 4.
vii. f (x) = 3−√
5+ x, x = 4. vii. f (x) =√
x2−9, x = 5.
ix. f (x) =x+3
2x−5, x = 2.
2. Encontre f ′(x) e indique seu domínio da função definida por:
i. f (x) =2x+33x−2
. ii. f (x) =1√
x+2.
iii. f (x) = x√
x+1. iv. f (x) = 3√
2x+3.
v. f (x) =√
3−2x. vi. f (x) =x2−1x2 +1
.
vii. f (x) =ax+bcx+d
. viii. f (x) =√
ax+a√ax
.
ix. f (x) =
√a2 + x2
x. x. f (x) =
x√a2− x2
.
xi. f (x) =√
x+√
x+√
x. xii. f (x) = 3√
1+ 3√
1+ 3√
x.
3. Determine a derivada de f definida por:
i. f (x) =arccos(x)
x2 +12
ln
(1−√
1− x2
1+√
1− x2
). ii. f (x)= ln(x+1−
√x2−1)− x
1−√
x2−1.
iii. f (x) =120
sen(5x2)− 1
4sen(x2). iv. f (x) =
√arctg(x)− (arcsen(x))3.
v. f (x) =sen(x)− cos(x)sen(x)+ cos(x)
. vi. f (x) = (1+ ln(sen(x)))n.
vii. f (x) =(
sen(x
2
)− cos
(x2
)). viii. f (x) =
√x+1−
√x−1√
x+1+√
x−1.
ix. f (x) = x6 (1− cos(2x))2. x. f (x) = ln
(√1− sen(x)1+ sen(x)
).
xi. f (x) = ln
(√x2 +a2 + x√x2 +a2− x
). xii. f (x) = arctg
(sen(x)+ cos(x)sen(x)− cos(x)
).
xiii. f (x) = tg(
eln(arctg(x1/3)))
. xiv. f (x) =1√x
ex2arctg(x)+ 12 ln(x)+1.
119 / 239

Cálculo Diferencial e Integral
xv. f (x) =14
ln(
1+ x1− x
)− 1
2arctg(x). xvi. f (x) = ln
(x+√
x2 +1)
.
xvii. f (x) = sen(cos2(x)
)cos(sen2(x)
). xviii. f (x) = sen3 (sen2(sen(x))
).
xvii. f (x) = ln
(√4tg(x)+1−2
√tg(x)√
4tg(x)+1+2√
tg(x)
). xviii. f (x) = ln
(2ln2(sen(x))+32ln2(sen(x))−3
).
xxi. f (x) = ln
(1−√
sen(x)
1+√
sen(x)
)+2arctg
√sen(x).
xxii. f (x) =x2
√x2 +a2 +
a2
2ln(
x+√
x2 +a2)
.
xxii. f (x) = ln(√
2sen(x)+1+√
2sen(x)−1)
.
4. Determine se f , definida a seguir, é derivável no ponto dado:
i. f (x) = |x−3|3(x−3)+x3⌊x−3
2
⌋, x0 = 3. ii. f (x) = |x2−4|, x0 = 2, −2.
iii. f (x) =√|x|, x0 = 0. iv. f (x) =
√|x|−bxc, x0 = 1,
32,
52
.
v. f (x) ={ √
1− x, x < 1;(1− x)2, x≥ 1;
x0 = 1. vi. f (x) ={ √
|x|, x < 1;x2, x≥ 1;
x0 = 1.
vii. f (x)={
x2, x <−1;−1−2x, x≥−1;
x0 =−1. viii. f (x) ={
x2−4, x < 2;√x−2, x≥ 2;
x0 = 2.
ix. f (x) =
|x+2|, x < 0;2−2x2, 0≤ x < 2;x2−4x+2, x≥ 2;
x0 = 0, 2.
5. Encontre os valores de a e b da função f para que a derivada exista no ponto dado.
i. f (x) ={−3x2, x≤ 2;ax+b, x > 2;
x0 = 2. ii. f (x) ={
x2, x < 1;ax+b, x≥ 1;
x0 =−1.
iii. f (x) ={
ax+b, x < 2;2x2−1, x≥ 2;
x0 = 2. iv. f (x) ={
x2 +ax+3, x≤ 1;−4ax+b, x > 1;
x0 = 1.
6. Encontre os valores de a e b tal que a função f , definida a seguir, seja diferenciável em todoseu domínio.
i. f (x) ={
x2, x < 1;ax+b, x≥ 1.
ii. f (x) =
ax2 +b, x≤ 1;1|x|
, x > 1.
120 / 239

Cálculo Diferencial e Integral
7. Obtenha a equação ou equações das retas tangentes à curva
i. y = x3 +3x2−5 e perpendicular à reta 2x−6y+1 = 0.
ii. y = (7x−6)−1/3 e perpendicular à reta 12x−7x+2 = 0
iii. 3√
xy = 14x+ y no ponto (2,−32).
iv. x2(x+ y) = a2(x− y) na origem de coordenadas.
v. y = x4−6x e perpendicular à reta x−2y+6 = 0.
vi. y = x− 1x
nos pontos onde esta curva se intersecta com o eixo x.
vii. y =x+9x+5
que passam pela origem de coordenadas.
viii.x2
2− y2
7= 1 e perpendiculares à reta 2x+4y−3 = 0.
ix. x2 +4y2−4x−8y+3 = 0 que passam pelo ponto (−1,3).
x. y2 +4x = 0 que passa pelo ponto (1,2).
8. Encontre a e b tal que:
i. a reta y = 2x seja tangente à curva y = x2 +ax+b, no ponto (2,4).
ii. a reta y = ax+b seja tangente à curva y = x− x3, com x ∈ [−2,2], no ponto (−1,0).
iii. as curvas y = x2 +ax+b e y = x2 +ax, tenham a mesma reta tangente no ponto (2,2).
iv. as curvas y = x2+ax+b e y = x3+a se intersectan e têm a mesma reta tangente no ponto(1,2).
9. Encontre a equação ou equações das retas normais à curva:
i. y = x ln(x) e paralela à reta 2x−2y+3 = 0.
ii. y = x√
16+ x2 na origem.
iii. 4x2− y2 = 36 paralelas à reta 2x+5y = 4.
iv. x− y =√
x+ y no ponto (3,1).
10. Obtenha o gráfico de f e determine f ′−(x0), f ′+(x0) e f ′(x0), se existem, onde f e x0 são defini-dos a seguir:
i. f (x) = (x−1)bxc, x ∈ [0,2], x0 = 1. ii. f (x) = (5− x)bxc, x ∈ [4,6], x0 = 5.
11. Determinedydx
, usando derivação implícita:
i. ey = x+ y. ii. ln(y)+xy= k.
iii. arctg(y
x
)=
12
ln(x2 + y2). iv. y3 =
x− yx+ y
.
v. xy = arctg(y
x
). vi. xsen(y)− cos(y)+ cos(2y) = 0.
121 / 239

Cálculo Diferencial e Integral
vii. ysen(x)− cos(x− y) = 0. viii. sen(xy)+ cos(xy) = tg(x+ y).
ix. x3 +ax2y+bxy2 + y3 = 0. x. x4 + y4 = x2y2.
xi. x− y = arcsen(x)− arcsen(y). xii. x2−a√
xy+ y2 = a.
xiii. 2x4y2−4x2y4 + x2y2 = 6. xiv. y5−2x2y3 +3x4y− x5 = 5.
xv.√
y+ 3√
y+ 4√
y3 = x. xvi.√
xy+2x =√
y.
xvii. x− y = arcsen(x)− arcsen(y). xviii. y = x+ arctg(y).
xix. x3 +2x2y− xy2 +2y3 = 2. xx. x3−3axy+ y3 = a3.
xxi.x3
y2 +x2
y3 =78
. xxii. (x+ y)3 +(x− y)3 = x4 + y4.
xxii. (x+ y)2 +(x− y)2 = x3 + y3. xxiv. (x+ y)y3 = x− y.
xxv. yx = xy.
12. Em cada um dos exercícios do item (11) acima, determinedxdy
usando derivação implícita em
relação de y, ou seja, x = g(y).
13. Encontre a derivada de y = ( f (x))g(x) onde:
i. f (x) = x2 +1, g(x) = sen(x). ii. f (x) = 1+ x2, g(x) = arctg(x).
iii. f (x) = ex, g(x) = xxx. iv. f (x) = 2x, g(x) =
√x.
v. f (x) = x, g(x) = sen(x). vi. f (x) = x, g(x) = ln(x).
vii. f (x) = ln(x), g(x) = x. viii. f (x) = sen(x), g(x) = cos(x).
ix. f (x) = cos(x), g(x) = x. x. f (x) = x, g(x) = x2.
xi. f (x) = ex + ln(x)−8, g(x) =
√x+√
yx−√y
.
122 / 239

Cálculo Diferencial e Integral
Capítulo 6
Aplicações da Derivada
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Estabelecer a relação entre o crescimento ou decrescimento de uma função em umintervalo;
• Aplicar o critério da primeira e segunda derivada de uma função para encontrar osmáximos e mínimos relativos e/ou absolutos de uma função;
• Encontrar os pontos de inflexão, se existirem, e os intervalos onde a função é côncavapara cima e côncava para baixo;
• Desenhar o gráfico de uma função depois de analisar seu domínio e imagem, os inter-valos onde ela é crescente ou decrescente, os pontos máximos e mínimos, os pontos deinflexão e a concavidade;
• Aprender a regra de L’Hôpital, para determinar os valores de limites indeterminados daforma 0/0, ∞/∞, ∞ ·0, ∞−∞, 1∞, 00 e ∞0.
6.1 Introdução
Neste capítulo estudaremos várias aplicações da derivada. De fato, utilizaremos métodos do cálculopara analisar o comportamento das funções e poder construir seu gráfico. O fundamento teórico paraessas aplicações é o Teorema de Valor Médio.
Uma das aplicações mais importantes e úteis da derivada está no estudo de valores máximos e míni-mos de uma função. Existem muitos problemas práticos nos quais trata-se de encontrar uma “melhor”maneira de formular-se problemas relacionados na determinação dos valores máximos e mínimos deuma função.
Além disso, usaremos a teoria das derivadas para calcular alguns limites indeterminados, técnica queé conhecida como a Regra de L’Hôpital.
6.2 Valores Extremos de uma Função
Já sabiamos que as funções contínuas sobre um intervalo fechado alcançam seu valor máximo e seuvalor mínimo em pontos deste intervalo. Porém, até o momento não dispúnhamos de um método paraencontrá-los. Nesta seção resolveremos esse problema.
123 / 239

Cálculo Diferencial e Integral
Definição 6.1Seja a função f : Dom( f )⊂ R→ R. Diz-se que:
i. f tem um máximo relativo, ou máximo local, em um ponto x◦ ∈ Dom( f ), se existe umδ1 > 0, tal que
f (x◦)≥ f (x), ∀x ∈ (x◦−δ1,x◦+δ1)∩Dom( f ).
ii. f tem um mínimo relativo, ou mínimo local, em um ponto x∗ ∈ Dom( f ), se existe umδ2 > 0, tal que
f (x◦)≤ f (x), ∀x ∈ (x◦−δ2,x◦+δ2)∩Dom( f ).
iii. f tem um máximo absoluto, ou máximo global, em um ponto x∗ ∈ Dom( f ), se
f (x∗)≥ f (x), ∀x ∈ Dom( f ).
iv. f tem um mínimo absoluto, ou mínimo global, em um ponto x∗ ∈ Dom( f ), se
f (x∗)≤ f (x), ∀x ∈ Dom( f ).
Na figura abaixo podemos ver esses conceitos ilustrados:
f
x( )
x
( )x°
°
x
x**
Nota
• Todo máximo absoluto é um máximo relativo, de forma análoga, todo mínimo absoluto éum mínimo relativo;
• Os valores máximos e mínimos são chamados de valores extremos da função f ;
• Uma função pode ter infinitos valores extremos;
• Uma função pode não ter um máximo ou um mínimo se o domínio for ilimitado ou nãocontiver um ponto extremo.
124 / 239

Cálculo Diferencial e Integral
Exemplo 6.1Dada a função f (x) = x3 determinemos seus valores extremos, caso existam, para os diferentes do-mínios:
a. Dom( f ) = R
SoluçãoNão existem máximos nem mínimos, pois f é ilimitada neste domínio. Veja o item (a) dafigura abaixo.
b. Dom( f ) = [−2,2]
SoluçãoO mínimo absoluto de −2 é −8 e o máximo absoluto de 2 é 8. Veja o item (b) da figuraabaixo.
y = f(x)
x
y
(a)
y = f(x)
x
y
(b)
y = f(x)
x
y
(d)
y = f(x)
x
y
(c)
c. Dom( f ) = (−2,2]
SoluçãoAusência de mínimo absoluto, pois −2 /∈ Dom( f ), e o máximo absoluto de 2 é 8. Veja oitem (c) da figura acima.
d. Dom( f ) = (−2,2).
SoluçãoAusência de mínimo e máximo absoluto, pois −2,2 /∈ Dom( f ). Veja o item (d) da figuraacima.
NotaAlgumas funções tem máximos e/ou mínimos absolutos sobre um intervalo e outras não. Oexemplo acima ilustra esse fato.
Teorema 6.1 (Teorema do Valor Extremo)Se f é uma função contínua em um intervalo fechado [a,b], então f atinge tanto um valor má-ximo absoluto M quanto um valor mínimo absoluto m neste intervalo. Isto é, existem númerosx1, x2 ∈ [a,b] tais quais
f (x1) = m, f (x2) = M e m≤ f (x)≤M para qualquer x ∈ [a,b].
A seguinte figura ilustra algumas possíveis localizações dos extremos absolutos de uma função con-tínua em um intervalo fechado [a,b]
125 / 239

Cálculo Diferencial e Integral
y = f(x)
x
(a)
y = f(x)
x
(b)
y = f(x)
x
(d)
y = f(x)
x
(c)
• No item (a) os pontos de máximo e mínimo estão no interior;
• No item (b) os pontos de máximo e mínimo estão nas extremidades;
• No item (c) o ponto de máximo é interior e de mínimo está na extremidade;
• No item (d) o ponto de mínimo é interior e de máximo está na extremidade.
NotaOs requisitos do Teorema 6.1 eram que o intervalo fosse fechado e limitado, e a função fossecontínua. Esses são componentes fundamentais, sem eles, as conclusões do Teorema 6.1não são válidas. Se o intervalo não é fechado, o resultado do Teorema 6.1 não necessari-amente é verificado. Por exemplo, a função f (x) = ln(x) é contínua em (0,1), porém, nãotem nem mínimo nem máximo.
6.3 Determinando Valores Extremos de uma Função
Teorema 6.2Seja f : R→ R contínua em [a,b] e derivável em (a,b).
i. Se f ′(x)> 0, para todo x ∈ (a,b), então f é crescente em [a,b];
ii. Se f ′(x)< 0, para todo x ∈ (a,b), então f é decrescente em [a,b].
Proposição 6.1 (Condição suficiente para a derivada primeira)Seja f uma função que está definida em uma vizinhança B(c;δ ) = (c− δ ,c+ δ ) do ponto c eé:
a. contínua em B(c;δ );
b. derivável em B(c;δ ), exceto talvez em c.
Logo,
i. Se f ′(x) > 0, para todo x ∈ (c− δ ,c), e f ′(x) < 0, para todo x ∈ (c,c+ δ ), então f (c) éum valor máximo local de f ;
ii. Se f ′(x) < 0, para todo x ∈ (c− δ ,c), e f ′(x) > 0, para todo x ∈ (c,c+ δ ), então f (c) éum valor mínimo local de f .
Teorema 6.3 (Condição necessária da derivada primeira para valores extremos locais)Se f possui um valor máximo ou um mínimo local em um ponto c interior de seu domínio e sef ′ é definida em c, então
126 / 239

Cálculo Diferencial e Integral
f ′(c) = 0.
Nota
a. O Teorema 6.3 nos diz que a primeira derivada de uma função é sempre zero em umponto interior em que a função tenha um valor extremo local e a derivada seja definida.Assim, os únicos locais em que uma função f pode ter valores extremos (locais ouglobais) são
1. pontos interiores em que f ′ = 0;
2. pontos interiores em que f ′ não existe;
3. extremidades do domínio de f .
b. f ′(c) = 0 implica que a reta tangente à curva, no ponto P = (c, f (x)), é uma reta hori-zontal. A figura a seguir ilustra esse fato nos pontos P1 = (x◦, f (x◦)), P2 = (x∗, f (x∗)),P3 = (x∗, f (x∗)) e P4 = (x◦, f (x◦)).
f
xxx°°
x
x**
Proposição 6.2 (Condição suficiente para a derivada segunda)Seja f uma função tal que:
a. tenha derivadas até a segunda ordem, contínuas em uma vizinhança B(c,δ ) do ponto c;
b. f ′(c) = 0;
c. f ′′(c) 6= 0.
Logo,
i. Se f ′′(c)< 0, então f (c) é um valor máximo local de f ;
ii. Se f ′′(c)> 0, então f (c) é um valor mínimo local de f .
A definição apresentada a seguir resume essas informações.
Definição 6.2um ponto interior do domínio de uma função f em que f ′ é zero ou indefinida é um pontocrítico de f .
127 / 239

Cálculo Diferencial e Integral
Nota
Critério da derivada primeira para encontrar valores extremosA Proposição 6.1 nos permite estabelecer o seguinte critério para determinar os valo-res máximos e/ou mínimos relativos de uma função contínua:
1. Determinar os pontos críticos da função f ;
2. Se c é um ponto crítico, devemos determinar o sinal de f ′(x), primeiro para x < c,suficientemente próximos, e depois para c < x, suficientemente próximos:
i. Se o sinal muda de − para +, então f (c) é um valor mínimo relativo;
ii. Se o sinal muda de + para −, então f (c) é um valor máximo relativo;
iii. Se não existe variação do sinal, não existem nem máximos nem mínimosrelativos a c.
Critério da derivada segunda para encontrar valores extremosA Proposição 6.2 nos permite estabelecer o seguinte critério para determinar os valo-res máximos e/ou mínimos relativos de uma função contínua:
1. Determinar os pontos críticos da função f ;
2. Se c é um ponto crítico, calcular f ′′(c):
i. Se f ′′(c)> 0, então f (c) é um valor mínimo relativo;
ii. Se f ′′(c)< 0, então f (c) é um valor máximo relativo;
iii. Se f ′′(c) = 0 ou f ′′(c) não existe, então este critério não pode ser aplicado.
Exemplo 6.2Determinemos os intervalos de crescimento e decrescimento, e os valores extremos de f :
a. f (x) = 2x3 +6x2−48x+9
Solução1. Dom( f ) = R;2. Para determinar os intervalos de crescimento e decrescimento, da Proposição 6.1, é
suficiente determinar os intervalos onde f ′ é positiva ou negativa;3. f ′(x) = 6x2 +12x−48 = 6(x+4)(x−2), logo os pontos críticos são:
x =−4 e x = 2.
Intervalos Sinal de f ′ Cresc. ouDecresc.
(−∞,−4) + cresce(−4,2) − decresce(2,+∞) + cresce
Agora, analisando os valores extremos temos que:• f (−4) = 169 é um máximo relativo;• f (2) =−47 é um mínimo relativo.
128 / 239

Cálculo Diferencial e Integral
b. f (x) =4
x−1+
x+22
Solução1. Dom( f ) = R\{1};2. Para determinar os intervalos de crescimento e decrescimento da Proposição 6.1 é
suficiente determinar os intervalos onde f ′ é positiva ou negativa;
3. f ′(x) =− 4(x−1)2 +
13=
(x+1)(x−3)3(x−1)2 , logo os pontos críticos são:
x =−1, x = 1 e x = 3.
Intervalos Sinal de f ′ Cresc. ouDecresc.
(−∞,−1) + cresce(−1,1) − decresce(1,3) − decresce(3,+∞) + cresce
Agora, analisando os valores extremos temos que:
• f (−1) =−53
é um mínimo relativo;
• f (1) não existe, logo x = 1 é uma assintota;
• f (3) =113
é um máximo relativo.
c. f (x) = 3x1/3(x+4)2/3
Solução1. Dom( f ) = R;2. Para determinar os intervalos de crescimento e decrescimento da Proposição 6.1 é
suficiente determinar os intervalos onde f ′ é positiva ou negativa;
3. f ′(x) =(x+4)2/3
x2/3 +2x1/3
(x+4)1/3 =3x+4
x2/3(x+4)1/3 , logo os pontos críticos são:
x =−4, x =−43
e x = 0.
Intervalos Sinal de f ′ Cresc. ouDecresc.
(−∞,−4) + cresce(−4,−4
3
)− decresce(
−43,0)
+ cresce
(0,+∞) + cresce
Agora, analisando os valores extremos temos que:• f (−4) = 0 é um máximo relativo;
129 / 239
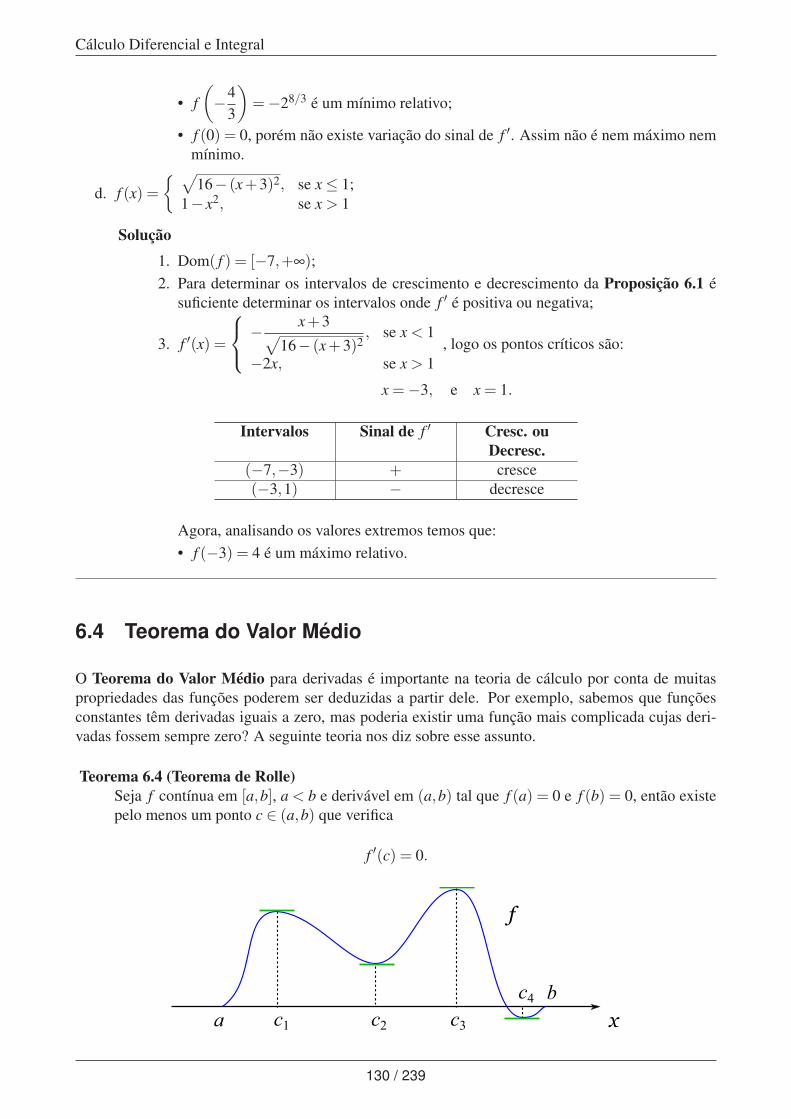
Cálculo Diferencial e Integral
• f(−4
3
)=−28/3 é um mínimo relativo;
• f (0) = 0, porém não existe variação do sinal de f ′. Assim não é nem máximo nemmínimo.
d. f (x) ={ √
16− (x+3)2, se x≤ 1;1− x2, se x > 1
Solução1. Dom( f ) = [−7,+∞);2. Para determinar os intervalos de crescimento e decrescimento da Proposição 6.1 é
suficiente determinar os intervalos onde f ′ é positiva ou negativa;
3. f ′(x) =
−x+3√
16− (x+3)2, se x < 1
−2x, se x > 1, logo os pontos críticos são:
x =−3, e x = 1.
Intervalos Sinal de f ′ Cresc. ouDecresc.
(−7,−3) + cresce(−3,1) − decresce
Agora, analisando os valores extremos temos que:• f (−3) = 4 é um máximo relativo.
6.4 Teorema do Valor Médio
O Teorema do Valor Médio para derivadas é importante na teoria de cálculo por conta de muitaspropriedades das funções poderem ser deduzidas a partir dele. Por exemplo, sabemos que funçõesconstantes têm derivadas iguais a zero, mas poderia existir uma função mais complicada cujas deri-vadas fossem sempre zero? A seguinte teoria nos diz sobre esse assunto.
Teorema 6.4 (Teorema de Rolle)Seja f contínua em [a,b], a < b e derivável em (a,b) tal que f (a) = 0 e f (b) = 0, então existepelo menos um ponto c ∈ (a,b) que verifica
f ′(c) = 0.
f
xa
b
c1 c2 c3
c4
130 / 239

Cálculo Diferencial e Integral
Nota
1. No Teorema 6.4, a condição de continuidade de f em [a,b] é obviamente muito impor-tante, pois garante que o gráfico de f não tenha saltos bruscos dentro de [a,b].
2. O resultado do Teorema 6.4 segue sendo válido se a hipótese (c) for substituída porf (a) = f (b). A figura a seguir ilustra isso:
c1a
f
xa b
f
c
c2
c3 xb
3. O teorema de Rolle afirma que a curva deve ter pelo menos uma reta tangente hori-zontal em algum ponto do intervalo (a,b).
Teorema 6.5 (Teorema do Valor Médio ou de Lagrange)Seja f : [a,b]→ R uma função tal que
i. f é contínua em [a,b];
ii. f é diferenciável em (a,b).
Então, existe pelo menos um c ∈ (a,b) tal que
f ′(c) =f (b)− f (a)
b−a,
ou equivalentemente,f ′(c)(b−a) = f (b)− f (a).
a bc
y = f(x)
A
B
P
y
x
f(b)
f(a)
Frequentemente a seguinte extensão do teorema do valor médio é útil. Ela é conhecida na literaturacomo o Teorema Generalizado do Valor Médio de Cauchy:
Teorema 6.6Sejam f e g : [a,b]→ R funções tais que
131 / 239

Cálculo Diferencial e Integral
i. f e g são contínuas em [a,b];
ii. f e g são diferenciáveis em (a,b);
iii. g(a) 6= g(b) e g′(x) 6= 0, ∀x ∈ (a,b).
Então, existe pelo menos um c ∈ (a,b) tal que
f ′(c)g′(c)
=f (b)− f (a)g(b)−g(a)
.
NotaDevemos observar que tanto o Teorema 6.6 quanto o teorema do valor médio não especi-ficam a posição exata do “valor médio” ou “valores médios”, já que em muitos casos essaé uma tarefa difícil. Contudo, a utilidade real desses teoremas está no fato de que elesgarantem a existência de um ponto, ou pontos, e as concluções que podemos tirar dessefato.
Teorema 6.7 (Teorema da função constante)Se f ′(x) = 0, para todo x ∈ (a,b), então f é uma função constante em (a,b).
Teorema 6.8 (Teorema da diferença constante)Sejam f e g funções contínuas em [a,b]. Então, f ′(x) = g′(x) para todo x ∈ (a,b) se, e somentese, f (x) = g(x)+ k, onde k é uma constante.
6.5 Concavidade e esboço de curvas
O conceito de concavidade é muito útil no esboço do gráfico de uma curva. Na figura abaixo, noitem (a) observamos que dado um ponto qualquer c entre a e b, em pontos próximos de c o gráficode f estará acima da tangente à curva no ponto P = (c, f (c)). Dizemos que a curva tem concavidadevoltada para cima no intervalo (a,b).
Como f ′(x) é a inclinação da reta tangente à curva, no item (b) observa-se que no intervalo (a,b) aderivada f ′(x) é crescente.
a bc
y = f(x)
P
y
x a b
y
x
y = f(x)
(a) (b)
Geometricamente falando, isso significa que a reta tangente gira no sentido anti-horário à medida queavançamos sobre a curva da esquerda para a direita.
Analogamente, o inverso vale para uma função que tem concavidade voltada para baixo no intervalo(a,b), isto é, o gráfico de f estará abaixo da tangente à curva no ponto P = (c, f (c)) .
132 / 239
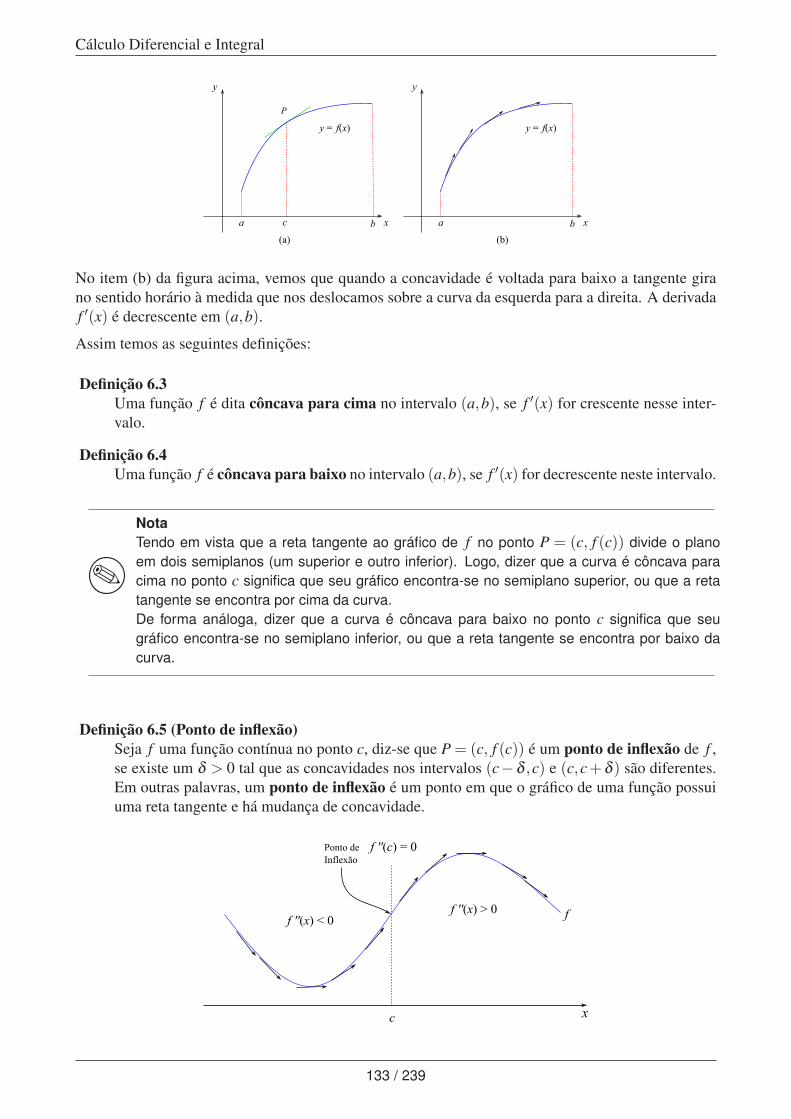
Cálculo Diferencial e Integral
a bc
y = f(x)
P
y
x a b
y
x
y = f(x)
(a) (b)
No item (b) da figura acima, vemos que quando a concavidade é voltada para baixo a tangente girano sentido horário à medida que nos deslocamos sobre a curva da esquerda para a direita. A derivadaf ′(x) é decrescente em (a,b).
Assim temos as seguintes definições:
Definição 6.3Uma função f é dita côncava para cima no intervalo (a,b), se f ′(x) for crescente nesse inter-valo.
Definição 6.4Uma função f é côncava para baixo no intervalo (a,b), se f ′(x) for decrescente neste intervalo.
NotaTendo em vista que a reta tangente ao gráfico de f no ponto P = (c, f (c)) divide o planoem dois semiplanos (um superior e outro inferior). Logo, dizer que a curva é côncava paracima no ponto c significa que seu gráfico encontra-se no semiplano superior, ou que a retatangente se encontra por cima da curva.De forma análoga, dizer que a curva é côncava para baixo no ponto c significa que seugráfico encontra-se no semiplano inferior, ou que a reta tangente se encontra por baixo dacurva.
Definição 6.5 (Ponto de inflexão)Seja f uma função contínua no ponto c, diz-se que P = (c, f (c)) é um ponto de inflexão de f ,se existe um δ > 0 tal que as concavidades nos intervalos (c−δ ,c) e (c,c+δ ) são diferentes.Em outras palavras, um ponto de inflexão é um ponto em que o gráfico de uma função possuiuma reta tangente e há mudança de concavidade.
x
f ''(c) = 0
f ''(x) > 0f ''(x) < 0
Ponto de
Inflexão
f
c
133 / 239

Cálculo Diferencial e Integral
Proposição 6.3 (Teste da segunda derivada para concavidade)Seja f : R→ R derivável em uma vizinhança B(c;δ )⊂ Dom( f ) e f ′′(c) 6= 0.
i. Se f ′′(c)> 0, então f é côncava para cima no ponto c;
ii. Se f ′′(c)< 0, então f é côncava para baixo no ponto c.
Corolário 6.1Se f é derivável duas vezes em B(c;δ )⊂Dom( f ) e P = (c, f (c)) é um ponto de inflexão de f ,então f ′′(c) = 0.
Proposição 6.4 (Condição suficiente para pontos de inflexão)Seja f duas vezes derivável em B(c,δ )⊂ Dom( f ), exceto talvez em x = c, porém contínua emx = c e
i. f ′′(c) = 0 ou não existe f ′′(c);
ii. f ′′ tem sinais opostos em (c−δ ,c) e em (c,c+δ ).
Então, P = (c, f (c)) é um ponto de inflexão.
Nota
Critério para determinar os pontos de inflexão de uma funçãoDas Proposições 6.3 e 6.4 podemos estabelecer o seguinte critério para encontrar ospontos de inflexão de uma função contínua f :
1. Encontrar os valores de x para os quais f ′′(x) = 0 ou f ′′(x) não existem. Cha-maremos tais valores de pontos críticos de inflexão (pci);
2. Determinar o sinal de f ′′(x) para valores menores e maiores suficientementepróximos a cada ponto crítico de inflexão:
a. Se f ′′(x) muda de sinal, então o pci avaliado é um ponto de inflexão;
b. Se f ′′(x) permanece com o mesmo sinal, então o pci avaliado não é umponto de inflexão.
Exemplo 6.3Analisemos a concavidade e encontremos os pontos de inflexão de f definida por:
a. f (x) = x6− x5
Solução1. f é contínua em R;2. f ′(x) = 6x5−5x4;3. f ′′(x) = 30x4−20x3 = 10x3(3x−2);
Logo, os pontos críticos de inflexão são:
x = 0 e x = 2/3.
A análise dos sinais de f ′′(x) é mostrada na tabela a seguir:
134 / 239

Cálculo Diferencial e Integral
Intervalos Sinal de f ′′ Concavidade(−∞,0) + para cima(0,2/3) − para baixo(2/3,+∞) + para cima
Portanto, P1 = (0,0) e P2 =
(23,− 32
729
)são pontos de inflexão. O item (a) da figura
abaixo mostra o gráfico dessa função.
b. f (x) ={
(x−3)2 se x≥ 3;− 3√
x−3 se x < 3
Solução1. f é contínua em R;
2. f ′(x) =
2(x−3) se x > 3;
− 13√
3(x−3)2se x < 3
3. f ′′(x) =
2 se x > 3;
23√
9(x−3)5se x < 3
Logo, o ponto crítico de inflexão é x = 3, pois f ′′(3) não existe.A análise dos sinais de f ′′(x) é mostrada na tabela a seguir:
Intervalos Sinal de f ′′ Concavidade(−∞,3) − para baixo(3,+∞) + para cima
Portanto, P = (3,0) é ponto de inflexão. O item (b) da figura abaixo mostra o gráficodessa função.
x
y
f
30
1
fx
y
10
f
(a)
x
y
30
f
(b) (c)
c. f (x) =x+1x−5
Solução1. f é contínua em R\{5};
2. f ′(x) =− 6(x−5)2 ;
3. f ′′(x) =12
(x−5)3 ;
Embora para que x = 5 seja necessário que f ′′(5) não exista, ele não é um pontocrítico de inflexão porque 5 /∈ Dom( f ). Portanto, f não tem pontos de inflexão.A análise dos sinais de f ′′(x) é mostrada na tabela a seguir:
135 / 239

Cálculo Diferencial e Integral
Intervalos Sinal de f ′′ Concavidade(−∞,5) − para baixo(5,+∞) + para cima
O item (c) da figura acima mostra o gráfico dessa função.
Proposição 6.5 (Condição suficiente de concavidade e pontos de inflexão com a n−ésima derivada)
Se f : R→ R satisfaz as seguintes condições:
a. Derivadas contínuas até a ordem n em uma vizinhança B(c,δ )⊂ Dom( f );
b. f ′′(c) = f ′′′(c) = · · ·= f (n−1)(c) = 0;
c. f (n)(c) 6= 0.
Então,
i. Se n é par e f (n)(c)> 0, então f é côncava para cima em x = c;
ii. Se n é par e f (n)(c)< 0, então f é côncava para baixo em x = c;
iii. Se n é ímpar, então c é um ponto de inflexão.
Proposição 6.6 (Condição suficiente de valor extremo e pontos de inflexão com a n−ésima derivada)
Se f : R→ R satisfaz as seguintes condições:
a. Derivadas contínuas até a ordem n em uma vizinhança B(c,δ )⊂ Dom( f );
b. f ′′(c) = f ′′′(c) = · · ·= f (n−1)(c) = 0;
c. f (n)(c) 6= 0.
Então,
i. Se n é par e f (n)(c)> 0, então c é um ponto de mínimo de f ;
ii. Se n é par e f (n)(c)< 0, então c é um ponto de máximo de f ;
iii. Se n é ímpar, então c é um ponto de inflexão.
Exemplo 6.4Determinemos os valores extremos de f definida por:
a. f (x) = (x−2)6
SoluçãoDa definição de f temos que
f ′(x) = 6(x−2)5, f ′′(x) = 30(x−2)4, f ′′′(x) = 120(x−2)3
f (4)(x) = 360(x−2)2, f (5)(x) = 720(x−2) e f (6)(x) = 720.
Logo, a equação f ′(x) = 0 admite uma única solução em x = 2.Como f ′(2) = f ′′(2) = f ′′′(2) = f (4)(2) = f (5)(2) = 0, f (6)(2) > 0 e n = 6 é par, entãoexiste um mínimo em x = 2, com valor mínimo f (2) = 0.
136 / 239

Cálculo Diferencial e Integral
b. f (x) = (x−2)5 +5
SoluçãoDa definição de f temos que
f ′(x) = 5(x−2)4, f ′′(x) = 20(x−2)3, f ′′′(x) = 60(x−2)2
f (4)(x) = 120(x−2) e f (5)(x) = 120.
Logo, a equação f ′(x) = 0 admite uma única solução em x = 2.Como f ′(2) = f ′′(2) = f ′′′(2) = f (4)(2) = 0, f (5)(2)> 0 e n = 5 é ímpar, então existe umponto de inflexão em x = 2.
6.6 Construindo o gráfico de y = f (x)
Construir do gráfico de uma função é muito importante, pois com ele podemos determinar o compor-tamento de uma função. Para construir o gráfico de uma função, precisaremos da teoria de limites ede derivadas. O procedimento é o seguinte:
a. Determinar o domínio de f , Dom( f );
b. Determinar as interseções com os eixos;
c. Verificar a simetria da função, a existência de assíntotas, e calcular limites nos extremos deDom( f ) e nos pontos de descontinuidade a fim de determinar o comportamento da funçãonesses pontos;
d. Determinar os intervalos de crescimento e os valores extremos da função;
e. Determinar os intervalos de concavidade e os pontos de inflexão;
f. Construir o gráfico da função com a informação obtida.
Exemplo 6.5Construa o gráfico de f definida por:
a. f (x) =x2− x−2
x−5
Solução1. Dom( f ) = R\{5};2. Interseções com os eixos:
• Com o eixo y: para x = 0, temos que f (0) = 2/5• Com o eixo x: para f (x) = 0, temos que x =−1 ou x = 2Logo, os ponto de interseção com os eixos são: (0,2/5), (−1,0) e (2,0).
3.• O gráfico não é simétrico com respeito ao eixo y pois f (−x) 6= f (x)
137 / 239

Cálculo Diferencial e Integral
• Assíntota vertical: x = 5 porque
limx→5−
f (x) =−∞ e limx→5+
f (x) = +∞;
• Assíntotas horizontais: não existem porque
limx→−∞
f (x) =−∞ e limx→+∞
f (x) = +∞;
• Assíntotas oblíquas: y = x+4 é a única oblíqua porque
limx→∓∞
f (x)x
= 1 e limx→±∞
( f (x)− x) = 4.
4. Como f ′(x) =x2−10x+7(x−5)2 , logo, os pontos críticos são x = 5−3
√2 e x = 5+3
√2.
A análise dos sinais de f ′(x) é mostrada na tabela a seguir:
Intervalos Sinal de f ′ Cresc. ouDecresc.
(−∞,5−3√
2) + crescente(5−3
√2,5) − decrescente
(5,5+3√
2) − decrescente(5+3
√2,+∞) + crescente
Então, f (5−3√
2) é um valor máximo e f (5+3√
2) é um valor mínimo.
5. Como f ′′(x) =36
(x−5)3 , logo, não existem pontos críticos de inflexão, pois 5 /∈
Dom( f ). A análise dos sinais de f ′′(x) é mostrada na tabela a seguir:
Intervalos Sinal de f ′′ Concavidade(−∞,5) − para baixo(5,+∞) + para cima
6. Portanto, o gráfico de f é o item (a) da figura a seguir:
x
y
0
f
f
-4
4
5
x
y
0
f
f
-2 2
(a) (b)
b. f (x) =x
x2−4
Solução1. Dom( f ) = R\{−2,2};
138 / 239

Cálculo Diferencial e Integral
2. Interseções com os eixos: (0,0);3.
• O gráfico de f não é simétrico em relação ao eixo y porque f (−x) 6= f (x).• Assíntotas verticais: x =−2 e x = 2, porque
limx→−2−
f (x) =−∞ e limx→−2+
f (x) = +∞;
limx→2−
f (x) =−∞ e limx→2+
f (x) = +∞;
• Assíntota horizontal: y = 0;• Assíntotas oblíquas: não existem.
4. Como f ′(x) = − x2 +4(x2−4)2 não existem pontos críticos e f ′(x) < 0 para todo x ∈
Dom( f ). Logo, f é decrescente em (−∞,−2), (−2,2) e (2,+∞).
5. Como f ′′(x) =2(x2 +12)(x2−4)3 , logo x = 0 é um ponto crítico de inflexão, pois −2, 2 /∈
Dom( f ). A análise dos sinais de f ′′(x) é mostrada na tabela a seguir:
Intervalos Sinal de f ′′ Concavidade(−∞,−2) − para baixo(−2,0) + para cima(0,2) − para baixo(2,+∞) + para cima
Logo, o ponto P = (0,0) é um ponto de inflexão;6. Portanto, o gráfico de f é o item (b) da figura acima.
6.7 Formas indeterminadas e a regra de L’Hôpital
Em muitos exemplos das seções anteriores temos calculado o limite de um quociente f (x)/g(x) ondeo numerador f (x) e o denominador g(x) tendem a 0 ou ∞. Nos exemplos desse tipo diz-se que oquociente f (x)/g(x) adota uma forma indeterminada.
Uma maneira de resolver esses problemas é obtendo polinômios de aproximação para f (x) e parag(x). Algumas vezes o trabalho pode ser abreviado com o uso de uma técnica de derivação denomi-nada a regra de L’Hôpital
Teorema 6.9 (Forma indeterminada 0/0)Suponha que f (a) = g(a) = 0, que f e g sejam deriváveis em um intervalo aberto I, com a ∈ Ie que g′(x) 6= 0 em I. Então,
limx→a
f (x)g(x)
= limx→a
f ′(x)g′(x)
,
supondo que o limite do lado direito dessa equação exista.
139 / 239

Cálculo Diferencial e Integral
Nota
1. Em alguns casos pode ser necessário aplicar a regra de L’Hôpital repetidas vezes
2. Se a = ∞, podemos fazer x =1z
, e o problema se reduz a:
limx→∞
f (x)g(x)
= limz→0
− f ′(
1z
)1z2
−g′(
1z
)1z2
= limz→0
f ′(
1z
)g′(
1z
) = limx→∞
f ′(x)g′(x)
.
Exemplo 6.6Calculando os seguintes limites:
a. limx→0
1− e2x
x
SoluçãoFazendo f (x) = 1− e2x e g(x) = x, temos que
limx→0
f (x) = 0 e limx→0
g(x) = 0.
Logo, podemos usar a regra de L’Hôpital. Das definições de f (x) e g(x), temos quef ′(x) =−2e2x e g′(x) = 1. Assim,
limx→0
1− e2x
x= lim
x→0
−2e2x
1=−2.
b. limx→0
sen(x)x
SoluçãoFazendo f (x) = sen(x) e g(x) = x, temos que
limx→0
f (x) = 0 e limx→0
g(x) = 0.
Logo, podemos usar a regra de L’Hôpital. Das definições de f (x) e g(x), temos quef ′(x) = cos(x) e g′(x) = 1. Assim
limx→0
1− e2x
x= lim
x→0
cos(x)1
= 1.
c. limx→0
x− tan(x)x− sen(x)
SoluçãoFazendo f (x) = x− tan(x) e g(x) = x− sen(x), temos que
limx→0
f (x) = 0 e limx→0
g(x) = 0
140 / 239

Cálculo Diferencial e Integral
Logo, podemos usar a regra de L’Hôpital. Das definições de f (x) e g(x), temos quef ′(x) = 1− sec2(x) e g′(x) = 1− cos(x). Porém,
limx→0
f ′(x) = 0 e limx→0
g′(x) = 0
Desde que o quociente das derivadasf ′(x)g′(x)
tende à forma indeterminada 0/0, da Nota
anterior, podemos aplicar a regra de L’Hôpital repetidas vezes até eliminar essa indeter-minação. Neste caso, aplicaremos duas vezes mais a regra de L’Hôpital, ou seja, até aderivada de ordem 3. Assim
limx→0
x− tan(x)x− sen(x)
= limx→0
1− sec2(x)1− cos(x)
= limx→0
−2tan(x)sec2(x)sen(x)
= limx→0
−2(1+3tan2(x))cos2(x)
=−2.
Formas Indeterminadas ∞/∞, ∞ ·0, ∞−∞
Às vezes quando tentamos avaliar um limite quando x→ a, pela substituição de x = a, obtemosuma forma indeterminada como ∞/∞, ∞ ·0 ou ∞−∞, em vez de 0/0.
Forma Indeterminada ∞/∞: em tratamentos mais avançados de cálculo é provado que a regra deL’Hôpital aplica-se à forma indeterminada ∞/∞, da mesma forma que 0/0, ou seja, se f (x)→±∞ eg(x)→±∞, quando x→ a, então
limx→a
f (x)g(x)
= limx→a
1g(x)
1f (x)
= limx→a
f ′(x)g′(x)
desde que o limite da direita exista.Na notação x→ a, a pode ser finito ou infinito. Além disso, x→ a pode ser substituído pelos limiteslaterais x→ a− ou x→ a+
Exemplo 6.7Determinemos os limites da forma ∞/∞:
a. limx→∞
ex
x2
SoluçãoDesde que lim
x→∞ex = ∞ e lim
x→∞x2 = ∞, obtemos
limx→∞
ex
x2 = limx→∞
ex
2x= lim
x→∞
ex
2= ∞.
1. limx→π/2+
tan(x)−5sec(x)+4
SoluçãoDesde que lim
x→π/2+tan(x) = ∞ e lim
x→π/2+sec(x) =−∞, temos que
limx→π/2+
tan(x)−5sec(x)+4
= limx→π/2+
sec2(x)sec(x)tan(x)
= limx→π/2+
1sen(x)
= 1.
b. limx→∞
ln(x)4√
x
141 / 239

Cálculo Diferencial e Integral
SoluçãoDesde que lim
x→∞ln(x) = ∞ e lim
x→∞
√x = ∞, temos que
limx→∞
ln(x)√x
= limx→∞
1x2√x
= limx→0
2√x= 0.
Forma Indeterminada ∞ · 0: Para determinar limx→a
f (x)g(x), quando limx→a
f (x) = ∞ e limx→a
g(x) = 0, a
função f (x)g(x) deve ser expressa de forma que adote uma das formas indeterminadas: 0/0 ou ∞/∞,em outras palavras:
limx→a
f (x)g(x) = limx→a
f (x)1
g(x)
ou limx→a
f (x)g(x) = limx→a
g(x)1
f (x)
,
e assim, podemos aplicar as regras estabelecidas anteriormente.
Exemplo 6.8Determinemos os limites da forma ∞ ·0:
a. limx→∞
x1/4sen(
1√x
)Solução
Desde que limx→∞
x1/4 = ∞ e limx→∞
sen(
1√x
)= 0, fazendo z =
1√x
temos que x→ ∞ se, e
somente se, z→ 0+, logo
limx→∞
x1/4sen(
1√x
)= lim
z→0+
sen(z)√z
= limz→0+
cos(z)1
2√
z
= limz→0+
2√
zcos(z) = 0.
b. limx→0+
√x ln(x)
SoluçãoDesde que lim
x→0+
√x = 0 e lim
x→0+ln(x) =−∞, temos que
limx→0+
√x ln(x) = lim
x→0+
ln(x)1/√
x= lim
x→→0+
1/x
−1/2√
x3= lim
x→→0+(−2√
x) = 0.
Forma Indeterminada ∞−∞: para determinar limx→a
( f (x)−g(x)), quando limx→a
f (x) = ∞ e limx→a
g(x) =
∞, a função f (x)−g(x) deve ser expressa da seguinte forma:
limx→a
( f (x)−g(x)) = ln(
elimx→a
( f (x)−g(x)))= ln
(e− lim
x→ag(x)
e− lim
x→af (x)
)
e desta forma quando x→ a, esse quociente toma a forma indeterminada 0/0 e podemos aplicar ateoria já estudada.
142 / 239

Cálculo Diferencial e Integral
Exemplo 6.9Determinemos o limite
limx→π/2−
(tan(x)− sec(x))
que é da forma ∞−∞:
SoluçãoDesde que lim
x→π/2−tan(x) = +∞ e lim
x→π/2−sec(x) = +∞, temos que
limx→π/2−
(tan(x)− sec(x)) = ln(
limx→π/2−
sec2(x)sec(x)tan(x)
)= ln
(lim
x→π/2−
1sen(x)
)= ln(1) = 0.
Potências indeterminadasOs limites da forma 1∞, 00 e ∞0 podem, as vezes, ser tratados em função de um logarítmo.Que por sua vez pode ser resolvido usando a regra de L’Hôpital. Este procedimento pode serjustificado pela continuidade da função exponencial e o teorema que fala sobre a continuidadeda composição de funções. Em outras palavras:
Proposição 6.7Se lim
x→aln( f (x)) = L, então
limx→a
f (x) = limx→a
eln( f (x)) = eL,
onde a pode ser finito ou infinito.
Exemplo 6.10Determinemos os seguintes limites:
a. limx→0+
(1+ x2)1/x2
SoluçãoNotemos que essa indeterminação é da forma 1∞. Fazendo f (x) = (1+ x2)1/x2
, determi-nemos lim
x→0+ln( f (x)). Como
ln((1+ x2)1/x2)
=1x2 ln(1+ x2) =
ln(1+ x2)
x2
pela regra de L’Hôpital temos que
limx→0+
ln(1+ x2)
x2 = limx→0+
2x2x(1+ x2)
= 1
Portanto, limx→0+
(1+ x2)1/x2= e1 = e.
b. limx→∞
x1/x2
143 / 239
Cálculo Diferencial e Integral
SoluçãoNotemos que essa indeterminação é da forma ∞0. Fazendo f (x) = x1/x2
, determinemoslimx→∞
ln( f (x)). Como
ln(x1/x2) =
1x2 ln(x) =
ln(x)x2
pela regra de L’Hôpital temos que
limx→∞
ln(x)x2 = lim
x→∞
1/x2x
= limx→∞
12x2 = 0
Portanto, limx→∞
x1/x2= e0 = 1.
6.8 Recapitulando
Nesse capítulo, apresentamos algumas aplicações da derivada. Entendemos como ela nos ajuda aestabelecer se uma função está crescendo ou decrescendo em um intevalo dado. Aprendemos osconceitos de máximo e mínimo, absolutos ou relativos.
Também foram apresentados teoremas de suma importância para a compreensão dos conceitos demáximo e mínimo, entre eles, o Teorema do Valor Médio.
Desde que a derivada por si própia é uma função, ela pode ser derivável caso satisfaça certas con-dições. Assim, as derivadas de ordem superior também nos auxiliam a entender mais ainda o com-portamento de uma função, caso elas existam. Para ser mais específico, com a ajuda da segundaderivada podemos encontrar os pontos de inflexão de uma função e saber se ela é côncava para cimaou para baixo. Novamente, o domínio desse conceito é fundamental, pois nos auxilia na elaboraçãode gráficos de funções.
Por último, mas não menos importante, as derivadas nos auxiliam também no cálculo de limites
indeterminados, como por exemplo00
ou∞
∞, entre outros. Para encontrar os valores desses limites
recorremos à Regra de L’Hôpital.
No proxímo capítulo, apresentaremos a integral, que pode ser vista como a operação inversa daderivada, propriedade que é chamada de Teorema Fundamental do Cálculo.
6.9 Atividades
1. Determine os ponto críticos e intervalos onde a função é crescente e decrescente, assim comoos máximos e mínimos relativos:
i. f (x) = x4−14x2−24x+1; ii. f (x) =x+1
x2 + x+1;
iii. f (x) = 2−3x+ x3; iv. f (x) = 1− (x−2)4/5;
v. f (x) = x√
1− x2; vi. f (x) = x2(1− x√
x);
144 / 239

Cálculo Diferencial e Integral
vii. f (x) =x2 +2x−23
x−4; viii. f (x) =
x1+ x2 ;
ix. f (x) =1
ln(x4 +4x3 +30); x. f (x) =−x2
√x2 +2;
xi. f (x) = x− ln(1− x); xii. f (x) = x− ln(1+ x2);
xiii. f (x) = 3√(x2−a2)2; xiv. f (x) = (x2−2x) ln(x)− 3
2x2 +4x;
xv. f (x) =x
x2−6x−16; xvi. f (x) = x ln(x);
xvii. f (x) = 2ex2−4x; xviii. f (x) =x
3√
x2−4;
xix. f (x) = x(x−1)2(x−3)3; xx. f (x) = x ln2(x);
xxi. f (x) =2arctan(x)
3+
13
arctan(
x1− x2
).
2. Determine se o Teorema do Valor Médio é aplicável no intervalos indicado. Caso afirmativo,encontre os valores que o verificam; caso contrário dê uma razão que justifique sua resposta.
i. f (x) = x2 +2x; em [−2,0]. ii. f (x) =√
x2 +9; em [0,4].
iii. f (x) = 2x3− x2−3x+5; em [−2,2]. iv. f (x) =x+1x−1
; em [2,4].
v. f (x) = |4− x2|; em [−2,2]. vi. f (x) = |9−4x2|; em[−3
2,32
].
vii. f (x) ={
2x+3, se x < 3;15−2x, se x≥ 3; viii. f (x) =
3− x2
2, se x≤ 1;
1x, se x > 1;
em [−1,5]. em [0,2].
ix. f (x) =
x2 +4, se −2≤ x < 0;4− x3, se 0≤ x < 1;
6x2 +1
se 1≤ x≤ 2;x. f (x) =
{ 4x2 , se x≤−1;
8−4x2, se x >−1;
em [−2,2]. em [−2,0].
xi. f (x) =|x|3
1+ x6 ; em [−2,2]. xii. f (x) =x3
x2−4; em [−9,−4].
xiii. f (x) =x2
4+ |x|; em [−1,2].
145 / 239

Cálculo Diferencial e Integral
xiv. f (x) =
|x2 +9|, se x < 2;5+2
√x−2, se 2≤ x≤ 11;
1+(x−11)3 se x > 11;em [−4,12].
3. Construa os gráficos das funções indicando os pontos de descontinuidade, os pontos críticos,os intervalos onde é crescente e decrescente, os máximos e mínimos relativos, os pontos deinflexão e os intervalos de concavidade:
i. f (x) = 3x4 +4x3 +6x2−4; ii. f (x) = x2(x+4)3;
iii. f (x) = x4−3x3 +3x2 +1; iv. f (x) =x2
x−1;
v. f (x) = 3x2/3−2x; vi. f (x) = (x+2)√−x;
vii. f (x) = x− ln(x+1); viii. f (x) =x3
3− x2 ;
ix. f (x) = x− arctan(x); x. f (x) =2arctan(x)
3+
13
arctan(
x1− x2
);
xi. f (x) =(x−1)2
(x+1)3 ; xii. f (x) =2arcsen(x)√
1− x2;
xiii. f (x) = cos(x)cos(2x); xiv. f (x) = sen(x)+ cos(x);
xv. f (x) = sen3(x)+ cos3(x); xvi. f (x) =ln(√
x2 +1)−1
x;
xvii. f (x) = (x+1) ln2(x+1); xviii. f (x) =x2
2ln(
1x
);
xix. f (x) = (x2 +2)e−x2; xx. f (x) =
x3√
x2−1;
xxi. f (x) = 2x+2−3 3√
(x+2)2; xxii. f (x) =√
8+ x−√
8− x;
xxiii. f (x) =4x−12(x−2)2 ; xxiv. f (x) =
x+42
3√
x−4;
xxv. f (x) =x2−3x−4
x−2; xxvi. f (x) = 4x5−5x4;
xxvii. f (x) = 2(18x+6x2−2x3−54)1/3; xxviii. f (x) = arctan(ln(x));
xxix. f (x) = ln(3x− x2); xxx. f (x) = e−x cos(x).
4. Determine os seguintes limites aplicando a regra de L’Hôpital:
146 / 239

Cálculo Diferencial e Integral
i. limx→0
x− sen(x)x− tan(x)
; ii. limx→∞
π−2arctan(x)
ln(
1+1x
) ;
iii. limx→a
xm−am
xn−an ; iv. limx→0
ex2−1cos(x)−1
;
v. limx→0
ex− e−x
sen(x)cos(x); vi. lim
x→0
ex− e−x−2xx− sen(x)
;
vii. limx→0
ex− x3
6− x2
2− x−1
cos(x)+x2
2−1
; viii. limx→0
ln(1+ x)4−4x+2x2− 43
x3 + x4
6sen(x)−6x+ x3 ;
ix. limx→1
(x
x−1− 1
ln(x)
); x. lim
x→1
(1
ln(x)− x
ln(x)
);
xi. limx→0
(1x
)sen(x)
; xii. limx→0
xx;
xiii. limx→1
x
11− x ; xiv. lim
x→π/2(sen(x))tan(x).
147 / 239

Cálculo Diferencial e Integral
Capítulo 7
A Integral Indefinida
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Interpretar o sentido geométrico da integral definida;
• Familiarizar-se com as fórmulas básicas de integração;
• Aplicar corretamente os métodos de integração;
• Classificar as integrais de funções transcendentes para identificar o método de integra-ção;
• Determinar as integrais de funções racionais e irracionais.
7.1 Introdução
No estudo da derivada, o problema básico da derivação é: dado o recorrido de um ponto móvel,calcular sua velocidade, ou dada uma curva, calcular sua pendente, isto é, obter, a partir de umafunção, outra função chamada de derivada.
Neste capítulo, o problema básico da integração é o caso inverso da derivação: dada a velocidadede um ponto móvel em cada instante, encontrar sua trajetória, ou dada a pendente de uma curva emcada um de seus pontos, calcular a curva, ou seja, encontraremos ou determinaremos uma funçãooriginal que chamaremos de antiderivada. Por tal motivo, aprenderemos algumas das técnicas paraencontrar as antiderivadas aplicando as regras de derivação e as derivadas de várias funções estudadasno Capítulo 5.
7.2 A Antiderivada
Estudar o cálculo diferencial trata-se, principalmente, de: dada uma função, encontrar sua derivada.
No entanto, muitas aplicações importantes do cálculo têm uma relação com o problema inverso, istoé: “dada uma função f definida em um intervalo I, encontrar uma função F cuja derivada seja afunção f , ou seja, F ′(x) = f (x) para cada x pertencente ao intervalo I”.
Mais formalmente, temos a seguinte definição.
148 / 239

Cálculo Diferencial e Integral
Definição 7.1Diz-se que a função F é uma antiderivada da função f no intervalo I, se
F ′(x) = f (x), ∀x ∈ I.
Exemplo 7.1Sejam as funções f (x) = 4x3 e g(x) = ex, com x ∈ R. Da definição acima, as funções F(x) = x4 eG(x) = ex, com x ∈ R, são antiderivadas de f e g em R, respectivamente, em outras palavras:
F ′(x) =(x4)′ = 4x3, ∀x ∈ R e G′(x) = (ex)′ = ex, ∀x ∈ R.
No entanto,
F1(x) = x4 +5, F2(x) = x4 +√
lnπ, e F3(x) = x4 +100π
4√
e
também são antiderivadas da função f , pois se derivarmos cada uma delas obteremos 4x3.De forma análoga,
G1(x) = ex−6, G2(x) = ex +π√
e, e G3(x) = ex− ln2
1099
também são antiderivadas da função g.
NotaSe F(x) é uma antiderivada de f (x) em um intervalo I, então F(x) + c é tambem umaantiderivada de f (x) em I, onde c é uma constante real. Em outras palavras, a antiderivadade uma função nunca é única, salvos os casos em que são especificadas algumas condiçõesadicionais.
Proposição 7.1Sejam I um intervalo aberto, f : I → R e F : I → R uma antiderivada de f . Se F1 : I → R étambem uma antiderivada de f , então existe uma constante c ∈ R tal que
F1(x) = F(x)+ c.
Definição 7.2Seja F(x) uma antiderivada de f (x) definida no intervalo I. A Integral Indefinida de f (x) é oconjunto de todas as antiderivadas de f (x) definidas em dito intervalo e é denotada por:
∫f (x)dx = F(x)+ c,
onde c é uma constante real e é denominada de constante de integração.
149 / 239

Cálculo Diferencial e Integral
Nota
1. Dada a integral indefinida
∫f (x)dx = F(x)+ c.
Diz-se que:
a. f (x) é o integrando;
b. f (x)dx é o elemento de integração;
c. x é a variável da integral;
d. o símbolo∫
é deminado símbolo da integral.
e. A equação acima deve ser lida como: a integral de f (x) em relação a x é igual aF(x) mais uma constante.
2. Da Definição 7.2, deduzem-se as seguintes propriedades:
a. A derivada da integral indefinida é igual ao integrando, isto é:
ddx
(∫f (x)dx
)=
(∫f (x)dx
)′= (F(x)+ c)′ = f (x);
b. d(∫
f (x)dx)=
(∫f (x)dx
)′dx = f (x)dx;
c. Se f é uma função derivável em I, então uma antiderivada de f é f ′. Logo,∫f ′(x)dx = f (x)+ c;
d. Desde qued ( f (x))
f ′(x)= dx, se deduz que∫
d ( f (x)) = f (x)+ c.
3. A partir dessas observações, pode-se concluir que a integral indefinida é interpretadacomo uma operação inversa da diferenciação. Isto é, ao aplicar a integral indefinida aodiferencial da função f (x), esta resulta na função f (x) mais a constante de integração.
Exemplo 7.2Do exemplo anterior, obtêm-se:∫
4x3dx = x4 + c e∫
exdx = ex + c
O significado geométrico da antiderivada F(x) da função f (x), é que qualquer outra antiderivadade f (x) é uma curva paralela ao gráfico de y = F(x). No item (a) da figura abaixo podemos ver umainterpretação geométrica geral e no item (b) vemos a ilustração das antiderivadas da função f (x) = ex,isto é, F(x) = ex + c.
150 / 239

Cálculo Diferencial e Integral
y y
x
xy = F(x) - c
y = F(x) + c
y = F(x)
y = ex
0
0
Exemplo 7.3
Desde que d(x ln(x)− x) = ln(x)dx e d(
12arc tg
(x2
)+ c)=
12
(12
1+ x24
)dx =
14+ x2 dx, obtemos que
∫ln(x)dx = x ln(x)− x+ c e
∫ 14+ x2 dx =
12
arc tg(x
2
)+ c.
7.3 Propriedades da Integral Indefinida
Os seguintes resultados são análogos aos obtidos para as derivadas da soma e do produto com umescalar.
Proposição 7.2Se f e g são duas funções que admitem antiderivadas no intervalo I e k ∈ R é uma constante,então, as funções f ±g e k · f admitem antiderivadas em I e tem-se:
i.∫[ f (x)±g(x)]dx =
∫f (x)dx±
∫g(x)dx;
ii.∫[k f (x)]dx = k
∫f (x)dx.
Exemplo 7.4
Determinemos a seguinte integral indefinida∫(ex−4x3 + ln(x))dx
SoluçãoPela proposição acima e os exemplos anteriores, temos que:
∫(ex−4x3 + ln(x))dx =
∫exdx−
∫4x3dx+
∫ln(x)dx
= (ex + c1)− (x4 + c2)+(x ln(x)− x+ c3) = ex− x4 + x ln(x)− x+ c
onde c = c1 + c2 + c3. No decorrer deste capítulo, usaremos somente uma única constante deintegração para a soma de duas ou mais funções.
151 / 239

Cálculo Diferencial e Integral
7.4 Integrais Imediatas
Seja uma função f derivável. Se f ′ é conhecida, então deduz-se que:∫f ′(x)dx = f (x)+ c ou equivalentemente
∫d ( f (x)) = f (x)+ c.
Quando isso acontece, diz-se que tal integral é uma integral imediata. Na sequência, listamos algumasintegrais imediatas de funções elementares e de outras funções que serão de muita utilidade. Porconveniência, usamos a variável u em lugar de x, porque, como veremos nas próximas seções, u podeser uma função do tipo u = u(x).
Fórmulas elementares de integração
1.∫
du = u+ c 2.∫ du
u= ln |u|+ c
3.∫
undu =un+1
n+1+ c, para n 6= 1 4.
∫eudu = eu + c
5.∫
audu =au
ln(a)+ c 6.
∫sen(u)du =−cos(u)+ c
7.∫
cos(u)du = sen(u)+ c 8.∫
tg(u)du = ln |sec(u)|+ c
9.∫
cotg(u)du = ln |sen(u)|+ c 10.∫
sec(u)du = ln |sec(u)+ tg(u)|+ c
11.∫
cossec(u)du = ln |cossec(u)+ cotg(u)|+ c
12.∫
cossec(u)cotg(u)du =−cossec(u)+ c
13.∫
sec2(u)du = tg(u)+ c 14.∫
cossec2(u)du =−cotg(u)+ c
15.∫
sec(u) tg(u)du = sec(u)+ c 16.∫
senh(u)du = cosh(u)+ c
17.∫
cosh(u)du = senh(u)+ c 18.∫
tgh(u)du = ln |cosh(u)|+ c
19.∫
sech2(u)du = tgh(u)+ c 20.∫
cossech2(u)du =−cotgh(u)+ c
21.∫
sech(u) tgh(u)du =−sech(u)+ c
22.∫
cossech(u)cotgh(u)du =−cosh(u)+ c
23.∫ du
a2 +u2 =1a
arc tg(u
a
)+ c, a > 0 24.
∫ duu2−a2 =
12a
ln∣∣∣∣u−au+a
∣∣∣∣+ c, a > 0
25.∫ du
a2−u2 =1
2aln∣∣∣∣u+au−a
∣∣∣∣+ c, a > 0 26.∫ du√
a2−u2= arcsen
(ua
)+ c, a > 0
152 / 239

Cálculo Diferencial e Integral
28.∫ du
u√
u2−a2=
1a
arcsec(|u|a
)+ c, a > 0
29.∫ √
a2−u2du =12
[u√
a2−u2 +a2arcsen(u
a
)]+ c, a > 0
30.∫ √
u2 +a2du =12
[u√
u2 +a2 +a2 ln(
u+√
u2 +a2)]
+ c
31.∫ √
u2−a2du =12
[u√
u2−a2−a2 ln∣∣∣u+√u2−a2
∣∣∣]+ c
NotaPara verificar cada uma dessas fórmulas podemos derivar o lado direito da equação comrespeito à variável u.
Exemplo 7.5Mostremos que ∫
duu2−a2 =
12a
ln∣∣∣∣u−au+a
∣∣∣∣+ c, para a > 0.
SoluçãoDe fato,
ddu
(1
2aln∣∣∣∣u−au+a
∣∣∣∣)=1
2a
[ddu
(ln |u−a|− ln |u+a|)]=
12a
[1
u−a− 1
u+a
]=
1u2−a2
Portanto,∫ du
u2−a2 =1
2aln∣∣∣∣u−au+a
∣∣∣∣+ c.
Exemplo 7.6Determinemos as seguintes integrais indefinidas:
a.∫
x(a−bx2)dx, para a, b ∈ R.
Solução ∫x(a−bx2)dx =
∫(ax−bx3)dx = a
∫xdx−b
∫x3dx =
ax2
2− bx4
4+ c.
b.∫(x3 +1)43x2dx.
SoluçãoFazendo u = x3 +1, temos que du = 3x2dx. Logo,∫
(x3 +1)43x2dx =
∫t4dt =
t5
5+ c =
(x3 +1)5
5+ c.
c.∫(xm− xn)2√
xdx, onde m, n 6= 3
4e m+n 6= 3
2.
153 / 239

Cálculo Diferencial e Integral
SoluçãoAntes de determinar essa integral, precisamos reescrever f :
(xm− xn)2√
x=
x2m−2xm+n + x2n√
x= x2m− 1
2 −2xm+n− 12 x2n− 1
2 = x4m−1
2 −2x2m+2n−1
2 + x4n−1
2
Logo, ∫(xm− xn)2√
xdx =
∫ (x
4m−12 −2x
2m+2n−12 + x
4n−12
)dx
=∫
x4m−1
2 dx−2∫
x2m+2n−1
2 dx+∫
x4n−1
2 dx
=x
4m+12
4m+12
− 2x2m+2n+1
2
2m+2n+12
+x
4n+12
4n+12
+ c
=2√
x4m+1
4m+1− 4√
x2m+2n+1
2m+2n+1+
2√
x4n+1
4n+1+ c
NotaEm alguns casos, é necessário fazer uma mudança de variável no integrando, com o intuitode torná-lo mais simples de ser resolvido.
Exemplo 7.7Determinemos as seguintes integrais indefinidas, fazendo uma mudança de variável:
a.∫ x4
7√
x5 +1dx.
SoluçãoFazendo u = x5 +1, obtemos que du = 5x4dx, então,
∫x4
7√
x5 +1dx =
15
∫5x4dx
7√
x5 +1=
15
∫u−1/7du =
15· 7
6u6/7 + c =
730
7√
(x5 +1)6 + c.
b.∫ 5ex√
1− e2xdx.
SoluçãoFazendo u = ex, obtemos que du = exdx, então,∫
5ex√
1− e2xdx = 5
∫du√
1−u2= 5arcsen(u)+ c = 5arcsen(ex)+ c.
c.∫ senh(x) cosh(x)
(1+ senh2(x))5dx.
154 / 239

Cálculo Diferencial e Integral
SoluçãoFazendo u = 1+ senh2(x), obtemos que du = 2senh(x)cosh(x)dx, então,
∫senh(x) cosh(x)(1+ senh2(x))5
=
∫ 12duu5 =
12
∫u−5du =
12
u−4
(−4)+ c =
−18(1+ senh2(x))4
+ c.
d.∫ arcsen
√x√
x− x2dx.
Solução
Fazendo u = arcsen√
x, obtemos que du =1√
1− xdx
2√
x=
dx√x− x2
. Portanto,∫arcsen
√x√
x− x2dx =
∫2udu = u2 + c =
(arcsen
√x)2
+ c = arcsen2√x+ c.
e.∫ x+2(x−2)4 dx.
SoluçãoFazendo u = x−2, obtemos que du = dx. Logo,∫
u+4u4 du =
∫(u−3 +4u−4)du =−1
2u−2− 4
3u−3 + c =− 3x+2
6(x−2)3 + c
f.∫
x√
x+4dx.
SoluçãoFazendo u =
√x+4, obtemos que u2 = x+4 e dx = 2udu. Logo,∫x√
x+4dx =∫(u2−4)u.2udu =
∫(2u4−8u2)du
=25
u5− 83
u3 + c =(x+4)3/2
15(6x−16)+ c.
NotaAs vezes é necessário manipular a forma da função a ser integrada e obter uma expressãoequivalente, novamente, com o intuito de facilitar a determinação da integral.
Exemplo 7.8Determinemos as seguintes integrais indefinidas:
a.∫ √
2+√
2+√
2+2cos(5√
x+4) · x−1/2dx.
155 / 239

Cálculo Diferencial e Integral
SoluçãoAntes de recorrer a alguma fórmula elementar, é necessário usar a identidade trigono-
métrica cos2(
θ
2
)=
1+ cos(θ)2
ou, equivalentemente, 1 + cos(θ) = 2cos2(
θ
2
)em√
2+√
2+√
2+2cos(5√
x+4), para expressá-la de uma forma fácil de trabalhar. Ou
seja,
√2+√
2+√
2 [1+ cos(5√
x+4)] =
√√√√2+
√2+2cos
(5√
x+42
)
=
√2+2cos
(5√
x+44
)= 2cos
(5√
x+48
).
Assim,∫ √2+
√2+√
2+2cos(5√
x+4) · x−1/2dx =
∫2cos
(5√
x+48
)· x−1/2dx.
Agora, fazendo u =5√
x+48
, temos que du =5
16x−1/2dx ou equivalentemente
165
du =
x−1/2dx. Logo,∫2cos
(5√
x+48
)· x−1/2dx =
325
∫cos(u)du =
325
sen(u)+ c.
Portanto,∫ √2+
√2+√
2+2cos(5√
x+4) · x−1/2dx =325
sen(
5√
x+48
)+ c.
b.∫ x
e3x(1− x)4 dx.
SoluçãoNotamos que no integrando, o denominador pode ser reescrito como uma potência. Defato, multiplicando tanto o numerador como o denominador por ex temos que:
xe3x(1− x)4 =
xex
(e3x(1− x)4)ex =xex
e4x(1− x)4 =xex dx
(ex− xex)4 ,
assim, fazendo u = ex−xex obtemos du =−xexdx ou, equivalentemente, −du = xexdx, oque resulta em:∫
xe3x(1− x)4 dx =−
∫duu4 =
13u3 + c =
13e3x(1− x)3 + c.
c.∫
(x2−1)dx
(x2 +1)√
x4 +1.
156 / 239

Cálculo Diferencial e Integral
SoluçãoNovamente, dividindo o numerador e o denominador do integrando por x2, obteremos:
(x2−1)dx
(x2 +1)√
x4 +1=
x2−1x2 dx(
x2 +1x
)√x4 +1
x
=
(1− 1
x2
)dx(
x+1x
)√x2 +
1x2
.
Fazendo u = x+1x
, temos que du =
(1− 1
x2
)dx e u2−2 = x2 +
1x2 . Logo,∫
du
u√
u2−2=
1√2
arcsen|u|√
2+ c
Portanto, ∫(x2−1)dx
(x2 +1)√
x4 +1=
1√2
arcsen(
x2 +1√2|x|
)+ c
d.∫ xdx√
1+ x2 +√
(1+ x2)3.
SoluçãoManipulando o integrando, temos que ele pode ser reescrito como
x√
1+ x2√
1+√
1+ x2.
Logo, fazendo u = 1+√
1+ x2, obteremos du =xdx√1+ x2
. Assim,∫x
√1+ x2
√1+√
1+ x2dx =
∫du√
u=
∫u−1/2du = 2
√u+ c.
Portanto, ∫xdx√
1+ x2 +√(1+ x2)3
= 2√
1+√
1+ x2 + c.
7.5 Método de Integração por Partes
A ideia básica da integração por partes consiste em determinar a integral original mediante o cálculode outra integral, a qual se pressupõe que seja menos complicada de ser resolvida.
Sejam as funções u e v deriváveis no intervalo I, pela regra do diferencial do produto, temos a equação:
d(uv) = udv+ vdu,
que pode ser reescrita como udv = d(uv)− vdu. Integrando ambos lados desta igualdade obtém-se afórmula ∫
udv = uv−∫
vdu,
que é conhecida como fórmula de integração por partes. Ou seja, vamos decompor o elementode integração em dois fatores u e dv. Normalmente, escolhe-se como u a parte do integrando que sesimplifica com a derivação, logo, dv será o fator restante do elemento de integração.
157 / 239

Cálculo Diferencial e Integral
NotaQuando determinamos v a partir da integração do seu diferencial, ou seja,
∫dv, não será
necessário considerar a constante de integração, como é demonstrado a seguir. Observeque se considerarmos dita constante, teremos v+ c em vez de v, c constante, então,∫
udv = u(v+ c)−∫
(v+ c)du = uv+ cu−∫
vdu− cu = uv−∫
vdu.
Em outras palavras, considerando ou não essa constante, ela não figurará no resultado fi-nal.
Exemplo 7.9Determinemos as seguintes integrais, usando o método de integração por partes:
a.∫
ln(x)dx.
Solução
Se considerarmos u = ln(x) e dv = dx, então, du =1x
dx e v =∫
dx = x, como já foi
mencionado, não é necessário considerar a constante da integração. Aplicando a fórmulade integração por partes, obtém-se:∫
ln(x)dx = x ln(x)−∫
xdxx
= x ln(x)−∫
dx = x ln(x)− x+ c.
b.∫
x2 ln(x)dx.
Solução
Considerando u = ln(x) e dv = x2 dx temos que du =dxx
e v =∫
x2dx =x3
3. Logo,∫
x2 ln(x)dx =x3
3ln(x)−
∫x3
3dxx
=x3
3ln(x)− 1
3
∫x2dx =
x3 ln(x)3− x3
9+ c.
c.∫
ln(
x+√
1+ x2)
dx.
Solução
Considerando u = ln(
x+√
1+ x2)
e dv = dx temos que du =dx√
1+ x2e v = x. Então,∫
ln(
x+√
1+ x2)
dx = x ln(
x+√
1+ x2)−∫ xdx√
1+ x2
= x ln(
x+√
1+ x2)−√
1+ x2 + c.
d.∫(x2 +2x+3)cos(2x)dx.
SoluçãoConsiderando u = x2 + 2x + 3 e dv = cos(2x)dx temos que du = 2(x + 1)dx e v =∫
cos(2x)dx =sen(2x)
2. Logo,
158 / 239

Cálculo Diferencial e Integral
∫(x2 +2x+3)cos(2x)dx =
x2 +2x+32
sen(2x)−∫
(x+1)sen(2x)dx.
Aplicando, novamente, a integração por partes à última integral temos:
u = x+1 ⇒ du = dx
dv = sen(2x)dx ⇒ v =∫
sen(2x)dx = −cos(2x)2
.
Logo,∫(x+1)sen(2x)dx=−x+1
2cos(2x)−
∫− cos(2x)
2dx=−x+1
2cos(2x)+
sen(2x)4
+c.
Portanto,∫(x2 +2x+3)cos(2x)dx =
x2 +2x+32
sen(2x)−∫(x+1)sen(2x)dx
=x2 +2x+3
2sen(2x)+
x+12
cos(2x)− sen(2x)4
+ c
=2x2 +4x+6
4sen(2x)+
x+12
cos(2x)+ c.
e.∫
xe2xdx.
Solução
Ao considerar u = x e dv = e2xdx, temos que du = dx e v =∫
e2xdx =e2x
2. Assim,
obteremos: ∫xe2xdx =
xe2x
2−∫
e2x
2dx =
xe2x
2− e2x
4+ c =
e2x
4(2x−1)+ c.
f.∫(x2 +3x−1)e2xdx.
SoluçãoAo considerar u = x2 +3x−1 e dv = e2xdx, temos que du = (2x+3)dx e v =
∫e2xdx =
e2x
2. Assim obtemos∫
(x2 +3x−1)e2xdx =12(x2 +3x−1)e2x−
∫ (x+
32
)e2xdx;
aplicando novamente a integração por partes:
u = x+32⇒ du = dx
dv = e2xdx ⇒ v =∫
e2xdx =e2x
2.
Portanto,∫(x2+3x−1)e2xdx=
12(x2+3x−1)e2x−
[(x+
32
)e2x
2−∫ 1
2e2xdx
]=(x2+2x−2)
e2x
2+c.
159 / 239

Cálculo Diferencial e Integral
g. Calculando∫
xsen(3x)dx
Solução
Ao considerar u= x e dv= sen(3x)dx, temos que du= dx e v=∫
sen(3x)dx=−cos(3x)3
.
Assim, obteremos:
∫xsen(3x)dx =−x cos(3x)
3−∫ (−cos(3x)
3
)dx =−x cos(3x)
3+
sen(3x)9
+ c.
h.∫
eax cos(bx)dx.
SoluçãoAo considerar u = eax e dv = cos(bx)dx, temos que du = aeaxdx e v =
∫cos(bx)dx =
sen(bx)b
. Assim obtemos
∫eax cos(bx)dx =
1b
eaxsen(bx)−∫ a
beaxsen(bx)dx =
eax
bsen(bx)− a
b
∫eaxsen(bx)dx
e integrando, novamente, por partes a última integral
u = eax ⇒ du = aeaxdx
dv = sen(bx)dx ⇒ v =∫
sen(bx)dx =−cos(bx)b
.
Dessa forma, obteremos∫eax cos(bx)dx =
eax
bsen(bx)− a
b
[−1
beax cos(bx)dx+
ab
∫eax cos(bx)dx
].
Desde que∫
eax cos(bx)dx aparece em ambos lados da igualdade, o pomos em evidência
e somamos a constante de integração:∫eax cos(bx)dx =
eax
a2 +b2 (bsen(bx)+acos(bx))+ c.
i.∫
sec5(x)dx.
SoluçãoEm primeiro lugar, vamos reescrever essa integral:∫
sec5(x)dx =
∫sec3(x) sec2(x)dx
Agora, apliquemos a integração por partes, escolhendo:
u = sec3(x) ⇒ du = 3sec3(x)tg(x)dx
dv = sec2(x)dx ⇒ v =∫
sec2(x)dx = tg(x).
160 / 239

Cálculo Diferencial e Integral
Dessa forma, obteremos:∫sec5(x)dx = tg(x)sec3(x)−
∫3sec3(x) tg2(x)dx
= tg(x)sec3(x)−∫
3sec3(x)(sec2(x)−1)dx
= tg(x)sec3(x)−3∫
sec5(x)dx+3∫
sec3(x)dx
que resultará em:
4∫
sec5(x)dx = tg(x)sec3(x)+32(sec(x)tg(x)+ ln |sec(x)+ tg(x)|) .
Portanto,∫sec5(x)dx =
14
tg(x)sec3(x)+38(sec(x)tg(x)+ ln |sec(x)+ tg(x)|)+ c.
j.∫
xarc tg(x)dx.
Solução
Escolhendo u = arc tg(x) e dv = xdx obteremos que du =dx
1+ x2 dx e v =∫
xdx =x2
2.
Assim,
∫xarc tg(x)dx =
x2
2arc tg(x)− 1
2
∫ x2
1+ x2 dx =x2
2arc tg(x)− 1
2
∫ (1− 1
1+ x2
)dx
=x2
2arc tg(x)− 1
2(x− arc tg(x))+ c =
(x2 +1)2
arc tg(x)− x2+ c.
k.∫ cos(x)+ xsen(x)−1
(sen(x)− x)2 dx.
SoluçãoUsando a identidade sen2(x)+ cos2(x) = 1, reescrevemos essa integral como:
∫ cos(x)+ xsen(x)−1(sen(x)− x)2 dx =
∫ cos(x)+ xsen(x)− sen2(x)− cos2(x)(sen(x)− x)2 dx
=∫ −cos(x)(cos(x)−1)− sen(x)(sen(x)− x)
(sen(x)− x)2 dx
=∫ −cos(x)(cos(x)−1)
(sen(x)− x)2 dx−∫ sen(x)(sen(x)− x)
dx.
Agora, determinemos a integral∫ −cos(x)(cos(x)−1)
(sen(x)− x)2 dx. Aplicando integração por par-
tes, escolhemos:
u = −cos(x) ⇒ du = sen(x)dx
dv =(cos(x)−1)(sen(x)− x)2 dx ⇒ v =
∫(cos(x)−1)(sen(x)− x)2 dx =− 1
(sen(x)− x)
161 / 239
Cálculo Diferencial e Integral
Assim,∫ cos(x)+ xsen(x)−1(sen(x)− x)2 dx =
cos(x)sen(x)− x
+∫ sen(x)(sen(x)− x)
dx−∫ sen(x)(sen(x)− x)
dx
=cos(x)
sen(x)− x+ c.
l.∫ ex(1+ x ln(x))
xdx.
SoluçãoSeparando essa integral como a soma de duas integrais temos:∫
ex(1+ x ln(x))x
dx =
∫ex
xdx+
∫ex ln(x)dx
Aplicando a integração por partes na segunda integral teremos:
u = ln(x) ⇒ du =1x
dx
dv = exdx ⇒ v =∫
exdx = ex
Assim, ∫ex(1+ x ln(x))
xdx =
∫ex
xdx+
[ex ln(x)−
∫ex
xdx]= ex ln(x)+ c.
m.∫ xearc tg(x)
(1+ x2)3/2 dx.
SoluçãoObservamos que: ∫
xearc tg(x)
(1+ x2)3/2 dx =
∫x√
1+ x2
earc tg(x)
(1+ x2)dx
Assim, aplicamos a integração por partes da seguinte forma:
u =x√
1+ x2⇒ du = − x
(1+ x2)3/2 dx
dv =earc tg(x)
(1+ x2)dx ⇒ v =
∫ earc tg(x)
(1+ x2)dx = earc tg(x)
Assim, ∫xearc tg(x)
(1+ x2)3/2 dx =xearc tg(x)√
1+ x2−∫
earc tg(x)
(1+ x2)3/2 dx
Novamente, aplicando integração por partes na segunda integral:
u =1√
1+ x2⇒ du = − x
(1+ x2)3/2 dx
dv =earc tg(x)
(1+ x2)dx ⇒ v = earc tg(x)
162 / 239

Cálculo Diferencial e Integral
e obteremos: ∫ xearc tg(x)
(1+ x2)3/2 =xearc tg(x)√
1+ x2−
[earc tg(x)√
1+ x2+∫ xearc tg(x)
(1+ x2)3/2 dx
]
=xearc tg(x)√
1+ x2− earc tg(x)√
1+ x2−∫ xearc tg(x)
(1+ x2)3/2
Portanto, ∫xearc tg(x)
(1+ x2)3/2 =(x−1)earc tg(x)
2√
1+ x2+ c.
n.∫ senh2(x)(xcosh(x)− senh(x))2 dx.
SoluçãoAo multiplicar e dividir a integral por x obteremos:
∫senh2(x)dx
(xcosh(x)− senh(x))2 =
∫senh2(x)dx
(xcosh(x)− senh(x))2 =
∫senh(x)
xxsenh(x)dx
(xcosh(x)− senh(x))2
e escolhemos:
u =senh(x)
x⇒ du =
xcosh(x)− senh(x)x2 dx
dv =xsenh(x)dx
(xcosh(x)− senh(x))2 ⇒ v =∫ xsenh(x)dx(xcosh(x)− senh(x))2
= − 1xcosh(x)− senh(x)
então, ∫ senh2(x)dx(xcosh(x)− senh(x))2 =
senh(x)x(senh(x)− xcosh(x))
+∫ dx
x2
=senh(x)
x(senh(x)− xcosh(x))− 1
x+ c.
o.∫ esen(x) (xcos3(x)− sen(x)
)cos2(x)
dx.
SoluçãoObservamos que:∫
esen(x) (xcos3(x)− sen(x))
cos2(x)dx =
∫xesen(x) cos(x)dx−
∫esen(x) sen(x)
cos2(x)dx
Aplicando a integração por partes a cada uma destas integrais. Para a primeira escolhe-mos:
u = x ⇒ du = dx
dv = esen(x) cos(x)dx ⇒ v =∫
esen(x) cos(x)dx = esen(x)
163 / 239

Cálculo Diferencial e Integral
então, ∫xesen(x) cos(x)dx = xesen(x)−
∫esen(x)dx
Para a segunda escolhemos:
u = esen(x) ⇒ du = esen(x) cos(x)dx
dv =sen(x)cos2(x)
dx ⇒ v =∫ sen(x)
cos2(x)dx =
1cos(x)
que resultará em:
−∫
esen(x) sen(x)cos2(x)
dx =esen(x)
cos(x)−∫
esen(x)dx = esen(x)sec(x)−∫
esen(x)dx
Portanto,∫ esen(x) (xcos3 x− sen(x))
cos2(x)dx = xesen(x)−
∫esen(x)dx−
[esen(x)sec(x)−
∫esen(x)dx
]= xesen(x)− esen(x)sec(x)+ c.
7.6 Técnicas de Integração
7.6.1 Integrais de Funções que Contêm um Trinômio Quadrado
Caso I Caso II∫dx
px2 +qx+ r
∫dx√
px2 +qx+ r
Nesses casos é suficiente completar os quadrados no trinômio e aplicar as fórmulas(23), (24), (25) ou (26), de acordo com o caso correspondente.
Exemplo 7.10Determinemos as seguintes integrais:
a.∫ 3dx
4x2 +4x−3.
SoluçãoCompletando o quadrado em cada trinômio e aplicando as fórmulas de integração, obte-remos: ∫
3dx4x2 +4x−3
=32
∫2dx
(2x+1)2−4=
38
ln∣∣∣∣2x−12x+3
∣∣∣∣+ c.
b.∫ dx
x2−2x+10.
164 / 239

Cálculo Diferencial e Integral
Solução ∫dx
x2−2x+10=
∫dx
(x−1)2 +9=
13
arc tg(
x−13
)+ c.
c.∫ 2dx√
x2 +6x+18.
Solução ∫2dx√
x2 +6x+18= 2∫
dx√(x+3)2 +9
= 2ln[x+3+
√x2 +6x+18
]+ c.
d.∫ 5dx√−x2−8x−12
.
Solução ∫5dx√
−x2−8x−12= 5∫
dx√4− (x+4)2
= 5arcsen(
x+42
)+ c.
Caso III Caso IV∫(ax+b)dxpx2 +qx+ r
∫(ax+b)dx√px2 +qx+ r
Nesses casos usaremos o seguinte artifício:
ax+b =a
2p(2px+q)− aq
2p+b.
O termo (2px+q) é a derivada do trinômio quadrado. Assim,∫(ax+b)dxpx2 +qx+ r
=a
2p
∫(2px+q)dxpx2 +qx+ r
+
(b− aq
2p
)∫dx
px2 +qx+ r︸ ︷︷ ︸IA
=a
2pln |px2 +qx+ r|+
(b− aq
2p
)· IA.
Por outro lado,∫(ax+b)dx√px2 +qx+ r
=a
2p
∫(2px+q)dx√
px2 +qx+ r+
(b− aq
2p
)∫dx√
px2 +qx+ r︸ ︷︷ ︸IB
=a
2p
√px2 +qx+ r+
(b− aq
2p
)· IB.
Observe que as integrais IA e IB são determinadas pelos Casos I e II, respectivamente.
165 / 239

Cálculo Diferencial e Integral
Exemplo 7.11Determinemos as seguintes integrais:
a.∫
(3x−5)dxx2 +6x+18
.
Solução
Aplicamos o artifício, e assim, 3x−5 =32(2x+6)−9−5 =
32(2x+6)−14. Então:∫
(3x−5)dxx2 +6x+18
=32
∫(2x+6)dx
x2 +6x+18−14
∫ dx(x+3)2 +9
=32
ln(x2 +6x+18)− 143
arc tg(
x+33
)+ c.
b.∫
(1−4x)dx√9x2 +6x−3
.
Solução
Aplicamos o artifício, e assim, 1−4x=− 418
(18x+6)+1+43=−2
9(18x+6)+
73
. Então:
∫(1−4x)dx√9x2 +6x−3
= −29
∫(18x+6)dx√9x2 +6x−3
+73· 1
3
∫ 3dx√(3x+1)2−4
= −49
√9x2 +6x−3+
79
ln∣∣∣3x+1+
√9x2 +6x−3
∣∣∣+ c.
c.∫
(2− x)dx√x2 +10x+21
.
Solução
Aplicamos o artifício, e assim, 2− x =−12(2x+10)+2+5 =−1
2(2x+10)+7. Então:
∫(2− x)dx√
x2 +10x+21= −1
2
∫(2x+10)dx√x2 +10x+21
+7∫ dx√
(x+5)2−4= −
√x2 +10x+21+7ln
∣∣∣x+5+√
x2 +10x+21∣∣∣+ c.
d.∫(4+5x)dx
x(x+3).
Solução∫(4+5x)dx
x(x+3)=
52
∫2x+3x2 +3x
dx− 72
∫dx(
x+32
)2
− 94
=52
ln |x2 +3x|− 76
ln∣∣∣∣ xx+3
∣∣∣∣+ c.
7.6.2 Integrais de Funções Trigonométricas e Hiperbólicas
Nesta subseção, usaremos alguns artifícios para resolver certas integrais, e para tanto, será necessáriolembrar das seguintes identidades:
166 / 239

Cálculo Diferencial e Integral
1. sen2(u)+ cos2(u) = 1 2. sec2(u)− tg2(u) = 1
3. cossec2(u)− cotg2(u) = 1 4. sen2(u) =1− cos(2u)
25. cos2(u) =
1+ cos(2u)2
6. cosh2(u)− senh2(u) = 1
7. sech2(u)− tgh2(u) = 1 8. cotgh2(u)− cossech2(u) = 1
9. senh2(u) =cosh(2u)−1
210. cosh2(u) =
cosh(2u)+12
Caso I ∫senm(x)cosn(x)dx e
∫senhm(x)coshn(x)dx
Consideram-se dois subcasos:
Subcaso aUm dos expoentes m ou n é um inteiro positivo ímpar
• Se m é um número ímpar e n é qualquer número, então, expressamos a integral daseguinte forma:∫
senm(x)cosn(x)dx =∫
senm−1(x)cosn(x)sen(x)dx∫senhm(x)coshn(x)dx =
∫senhm−1(x)coshn(x)senh(x)dx
• Se n é um número ímpar e m é qualquer número, então, expressamos a integral daseguinte forma:∫
senm(x)cosn(x)dx =∫
senm(x)cosn−1(x) cos(x)dx∫senhm(x)coshn(x)dx =
∫senhm(x)coshn−1(x) cosh(x)dx
Em qualquer um desses subcasos podemos usar as identidades trigonométrias 1 e 6.
Exemplo 7.12Determinemos as seguintes integrais:
a.∫
sen3(x)cos4(x)dx.
Solução ∫sen3(x)cos4(x)dx =
∫sen3(x)cos4(x)dx =
∫sen2(x)cos4(x)(sen(x)dx)
=∫(1− cos2(x))cos4(x)(sen(x)dx)
Na última integral, fazemos u = cos(x), então, du =−sen(x)dx. Portanto,∫sen3(x)cos4(x)dx =
∫(1−u2)u4(−du) =−
∫(u4−u6)du =−u5
5+
u7
7+ c
=cos5(x)
35(5cos2(x)−7)+ c.
167 / 239

Cálculo Diferencial e Integral
b.∫
senh5(x)√
cosh(x)dx
Solução∫senh5(x)
√cosh(x)dx =
∫senh4(x)cosh1/2(x)(senh(x)dx)
=∫(cosh2(x)−1)2 cosh1/2(x)(senh(x)dx)
=∫(cosh9/2(x)−2cosh5/2(x)+ cosh1/2(x))(senh(x)dx)
=2
11cosh11/2(x)− 4
7cosh7/2(x)+
23
cosh3/2(x)+ c.
Subcaso bSe m e n são inteiros positivos pares, serão usadas as identidades 4, 5, 9 ou 10. E ao efetuar asoperações, serão obtidos termos que contêm potências pares e impares de cos(2u) ou cosh(2u).Os termos que têm potências impares integram-se assim como o Subcaso a. Os termos que têmpotências pares reduzem-se usando, novamente, as identidades indicadas, sucessivamente.
Exemplo 7.13Determinemos as seguintes integrais:
a.∫
sen2(x)cos4(x)dx.
Solução
∫sen2(x)cos4(x)dx =
∫ (1− cos(2x)2
)(1+ cos(2x)
2
)2
dx
=18
∫(1+ cos(2x)− cos2(2x)− cos3(2x)dx)
=18
∫ (1+ cos(2x)− 1+ cos(4x)
2
)dx− 1
8
∫(1− sen2(2x))cos(2x)dx
=18
∫ (12+ cos(2x)− 1
2cos(4x)
)dx− 1
16
∫(1− sen2(2x))(2cos(2x)dx)
=18
(x2+
12
sen(2x)− 18
sen(4x))− 1
16
(sen(2x)− 1
3sen3(2x)
)+ c
=1
16
(x− sen(4x)
4+
sen3(2x)3
)+ c.
b.∫
senh43xdx.
Solução
∫senh4(3x)dx =
∫ (cosh(6x)−12
)2
dx =∫(cosh2(6x)−2xcosh(6x)+1)dx
=∫ (cosh(12x)+1
2−2cosh(6x)+1
)dx
=∫(cosh(12x)−4cosh(6x)+3)dx
=1
96senh(12x)− 1
12senh(6x)+
38
x+ c
168 / 239

Cálculo Diferencial e Integral
Caso II
1.∫
tgm(x)secn(x)dx 2.∫
cotgm(x)cossecn(x)dx
3.∫
tghm(x)sechn(x)dx 4.∫
cotghm(x)cossechn(x)dx
Consideram-se dois subcasos:
Subcaso aSe m é um inteiro positivo ímpar, então, expressamos a integral da seguinte forma:
∫tgm(x)secn(x)dx =
∫tgm−1(x) secn−1 xtg(x)sec(x)dx∫
cotgm(x)cossecn(x)dx =∫
cotgm−1(x)cossecn−1(x)cotg(x)cossec(x)dx∫tghm(x)sechn(x)dx =
∫tghm−1(x)sechn−1(x) tgh(x)sech(x)dx∫
cotghm(x)cossechn(x)dx =∫
cotghm−1(x)cossechn−1(x)cotgh(x)cossech(x)dx
Logo, se usam as identidades 2 e 3 ou 7 e 8, respectivamente.
Exemplo 7.14Determinemos as seguintes integrais:
a.∫ tg3(x)
sec4(x)dx.
Solução ∫ tg3(x)sec4(x)
dx =∫ tg2(x)
sec5(x)(tg(x)sec(x)dx) =
∫ sec2(x)−1sec5(x)
(tg(x)sec(x)dx)
=∫(sec−3(x)− sec−5(x))(tg(x)sec(x)dx)
Fazendo u = sec(x), temos que du = tg(x)sec(x)dx. Logo,∫tg3(x)sec4(x)
dx =−12
sec−2(x)+14
sec−4(x)+ c =−14
cos2(x)(cos2(x)−2)+ c.
b.∫
cotg5(x)dx
Solução∫cotg5(x)dx =
∫ cotg4(x)cossec(x)
(cotg(x)cossec(x)dx)
=∫(cossec2(x)−1)2
cossec(x)(cotg(x)cossec(x)dx)
= −∫ (
cossec3(x)−2cossec(x)+1
cossec(x)
)(−cotg(x)cossec(x))dx
=cossec4(x)
4− cossec2(x)+ ln |cossec(x)|+ c.
169 / 239

Cálculo Diferencial e Integral
c.∫
tgh3(x)√
sech(x)dx.
Solução ∫tgh3(x)
√sech(x)dx =
∫ tgh2(x)√sech(x)
(tgh(x)sech(x)dx)
=∫ 1− sech2(x)√
sech(x)(tgh(x)sech(x)dx)
= −∫(sech−1/2(x)− sech3/2(x))(−tgh(x)sech(x)dx)
= −(
2√
sech(x)− 25
sech5/2(x))+ c
=
√sech(x)
5(2sech2(x)−10
)+ c
d.∫
cotgh5(x)cossech2(x)dx
Solução∫cotgh5(x)cossech2(x)dx =
∫cotgh4(x)cossech2(x)cotgh(x)cossech(x)dx
=∫(1+ cossech2(x))2 cossech2(x)(cotgh(x)cossech(x)dx)
= −∫
cossech(x)(−cotgh(x)cossech(x)dx)
−∫(2cossech3(x)+ cossech5(x))(−cotgh(x)cossech(x)dx)
= −12
(cossech2(x)+ cossech4(x)+
13
cossech6(x))+ c.
Subcaso bSe n é um inteiro positivo par, então, expressamos a integral da seguinte forma:
∫tgm(x)secn(x)dx =
∫tgm(x) secn−2(x)sec2(x)dx∫
cotgm(x)cossecn(x)dx =∫
cotgm(x)cossecn−2(x)cotg(x)cossec2(x)dx∫tghm(x)sechn(x)dx =
∫tghm(x)sechn−2(x)sech2(x)dx∫
cotghm(x)cossechn(x)dx =∫
cotghm(x)cossechn−2(x)cossech2(x)dx
Logo, usaremos as identidades 2 e 3 ou 7 e 8, respectivamente.
Exemplo 7.15Determinemos as seguintes integrais:
a.∫
tg3/2(x)sec4(x)dx.
170 / 239

Cálculo Diferencial e Integral
Solução ∫tg3/2(x)sec4(x)dx =
∫tg3/2(x)sec2(x)(sec2(x)dx)
=∫
tg3/2(x)(1+ tg2(x))(sec2(x)dx)
=∫(tg3/2(x)+ tg7/2(x))(sec2(x)dx)
Fazendo u = tg(x), temos que du = sec2(x)dx. Logo,∫tg3/2(x)sec4(x)dx =
25
tg5/2(x)+29
tg9/2(x)+ c.
b.∫
cossec4(x)dx.
Solução∫cossec4(x)dx =
∫cossec2(x)(cossec2(x)dx) =−
∫(1+ cotg2x)(−cossec2(x)dx)
Fazendo u = cotg(x), temos que du =−cossec2(x)dx. Assim,∫cossec4(x)dx =−
(cotg(x)+
13
cotg3(x))+ c.
c.∫
tgh2(x)sech4(x)dx
Solução ∫tgh2(x)sech4(x)dx =
∫tgh2(x)(1− tgh2(x))(sech2(x)dx)
=∫ (
tgh2(x)− tgh4(x))(sech2(x)dx)
=13
tgh3(x)− 15
tgh5(x)+ c
d.∫
cossech6(x)dx.
Solução ∫cossech6(x)dx =
∫ (cotgh2(x)−1
)2(cossech2(x)dx)
= −∫(cotgh4(x)−2cotgh2(x)+1)(−cossech2(x)dx)
=15
cotgh5(x)− 23
cotgh3(x)+ cotgh(x)+ c.
Caso III
1.∫
sen(mx) cos(nx)dx; 2.∫
sen(mx)sen(nx)dx;
3.∫
cos(mx) cos(nx)dx; 4.∫
senh(mx) cosh(nx)dx;
171 / 239

Cálculo Diferencial e Integral
5.∫
senh(mx)senh(nx)dx; 6.∫
cosh(mx) cosh(nx)dx.
Para determinar as integrais deste caso precisamos das seguintes identidades trigonométricas:
1. sen(mx) cos(nx) =12[sen((m−n)x)+ sen((m+n)x)];
2. sen(mx)sen(nx) =12[cos((m−n)x)− cos((m+n)x)];
3. cos(mx) cos(nx) =12[cos((m−n)x)+ cos((m+n)x)];
4. senh(mx) cosh(nx) =12[senh((m+n)x)+ senh((m−n)x)];
5. senh(mx)senh(nx) =12[cosh((m+n)x)− cosh((m−n)x)];
6. cosh(mx) cosh(nx) =12[cosh((m+n)x)+ cosh((m−n)x)].
Além disso, são usadas também: sen(−u)=−sen(u), cos(−u)= cos(u), senh(−u)=−senh(u)e cosh(−u) = cosh(u).
Exemplo 7.16Determinemos as seguintes integrais:
a.∫
sen(2x) cos(3x)dx.
Solução∫sen(2x) cos(3x)dx =
12
∫[sen((2−3)x)+ sen((2+3)x)]dx
=12
∫[sen(5x)− sen(x)]dx =
12
(−cos(5x)
5+ cos(x)
)+ c.
b.∫
cos(3x) cos(4x)dx.
Solução∫cos(3x) cos(4x)dx =
12
∫[cos(−x)+ cos(7x)]dx =
12
(sen(x)+
17
sen(7x))+ c.
c.∫
senh(3x)senh(4x)dx.
Solução∫senh(3x)senh(4x)dx =
12
∫[cosh(7x)− cosh(x)]dx =
12
(17
senh(7x)− senh(x))+ c.
172 / 239

Cálculo Diferencial e Integral
d.∫
senh(x) cosh(4x)dx.
Solução∫senh(x) cosh(4x)dx=
12
∫[senh(5x)−senh(3x)]dx=
12
(15
cosh(5x)− 13
cosh(3x))+c.
7.6.3 Integração por Substituição Trigonométrica
Seja u = f (x) uma função de x. Em muitos casos é possível calcular uma integral efetuando umasubstituição trigonométrica adequada às funções da forma:∫
R(u,√
u2 +a2)du,∫
R(u,√
a2−u2)duou
∫R(u,√
u2−a2)du
onde R é uma função racional. Apresentamos os casos para calcular essas integrais:
Caso I ∫R(u,
√u2 +a2)du, a > 0.
Construímos um triângulo retângulo, de acordo com a figura a seguir, e consideramos a função:
As demais funções são consideradas de acordo ao integrando que se tem.
Caso II ∫R(u,
√a2−u2)du, a > 0.
Construímos um triângulo retângulo, de acordo com a figura a seguir, e consideramos a função:
sen(θ) =
u2
a2
173 / 239

Cálculo Diferencial e Integral
As demais funções são consideradas de acordo ao integrando que se tem.
Caso III ∫R(u,
√u2−a2)du, a > 0.
Construímos um triângulo retângulo, de acordo com a figura a seguir, e consideramos a função:
sec(θ) =
As demais funções são consideradas de acordo ao integrando que se tem.
Exemplo 7.17Determinemos as seguintes integrais:
a.∫ x2dx√
9+ x2.
SoluçãoAplicando a substituição do Caso I, consideramos:
tg(θ) =x2
⇒x = 3tg(θ) ⇒
θ = arc tg(x
3
)du = 3sec2(θ)dθ .
Além disso, sec(θ) =
√x2 +9
3⇒√
x2 +9 = 3sec(θ). Fazendo as substituições:
∫ x2dx√9+ x2
=∫ 9tg2(θ)3sec2(θ)dθ
3sec(θ)=∫
9tg2(θ)sec(θ)dx
=∫(sec2(θ)−1)sec(θ)dθ = 9
∫(sec3(θ)− sec(θ))dθ
= 9[
12(tg(θ)sec(θ)+ ln |tg(θ)+ sec(θ)|)− ln |tg(θ)+ sec(θ)|
]+ c
=92(tg(θ)sen(θ)− ln |tg(θ)+ sec(θ)|)+ c
=92
[x3
x√x2 +9
− ln
∣∣∣∣∣x3 +
√x2 +9
3
∣∣∣∣∣]+ c
=92
[x2
3√
x2 +9− ln
∣∣∣∣∣x+√
x2 +93
∣∣∣∣∣]+ c.
b.∫ dx
x2√
16+9x2.
174 / 239

Cálculo Diferencial e Integral
Solução
A integral pode ser reescrita como∫ dx
x2√
16+9x2=∫ dx
x2√
42 +(3x)2. Aplicando a subs-
tituição do Caso I, consideramos:
tg(θ) =3x4
⇒
x =43
tg(θ) ⇒
θ = arc tg(
3x4
)dx =
43
sec2(θ)dθ .
Além disso, sec(θ) =
√16+9x2
4⇒√
16+9x2 = 4sec(θ). Fazendo as substituições:
∫ dx
x2√
16+9x2=
∫ 43
sec2(θ)dθ
169
tg2(θ) sec(θ)=
316
∫ sec(θ)dθ
tg2(θ)=
316
∫ cos(θ)dθ
sen2(θ)
=316
∫cotg(θ)cossec(θ)dθ =− 3
16cossec(θ)+ c
= − 316
√16+9x2
3x+ c =−
√16+9x2
16x+ c.
c.∫
(2x−5)√4x− x2
dx.
Solução
A integral pode ser reescrita como∫
(2x−5)√4x− x2
dx =∫
(2x−5)√4− (x−2)2
dx. Aplicando a
substituição do Caso II, consideramos:
sen(θ) =x−2
2⇒
x = 2+2sen(θ) ⇒θ = arcsen
(x−2
2
)du = 2cos(θ)dθ .
Além disso, cos(θ) =
√4x− x2
2⇒√
4x− x2 = 2cos(θ). Fazendo as substituições:
∫(2x−5)√
4x− x2dx =
∫ 4sen(θ)−12cos(θ)
2cos(θ)dθ =∫(4sen(θ)−1)dθ
= −4cos(θ)−θ + c =−2√
4x− x2− arcsen(
x−22
)+ c.
d.∫ x2 dx√
1− x2.
SoluçãoAplicando a substituição do Caso II, consideramos:
sen(θ) = x ⇒x = sen(θ) ⇒
θ = arcsen(x)dx = cos(θ)dθ .
175 / 239

Cálculo Diferencial e Integral
Além disso, cos(θ) =√
1− x2. Fazendo as substituições:∫ x2 dx√1− x2
=∫ sen2(θ) cos(θ)dθ
cos(θ)=∫
sen2(θ)dθ =12
∫(1− cos(2θ))dθ
=12
(θ − sen(2θ)
2
)+ c =
12(θ − sen(θ) cos(θ))+ c
=12
(arcsen(x)− x
√1− x2
)+ c.
e.∫
(2x−3)(x2 +2x−3)3/2 dx.
Solução
A integral pode ser reescrita como∫
(2x−3)(x2 +2x−3)3/2 dx =∫
(2x−3)dx
((x+1)2−4)√(x+1)2−4
. Aplicando a substituição do Caso III, considera-
mos:
sec(θ) =x+1
2⇒
x = −1+2sec(θ) ⇒θ = arcsec
(x+1
2
)du = 2sec(θ) tg(θ)dθ .
Além disso, tg(θ) =
√x2 +2x−3
2⇒√
x2 +2x−3 = 2tg(θ). Fazendo as substituições:
∫(2x−3)
(x2 +2x−3)3/2 dx =∫(4sec(θ)−5)2sec(θ) tg(θ)dθ
4tg2(θ)2tg(θ)=∫ 4sec2(θ)−5sec(θ)dθ
4tg2(θ)
=54
∫ (cossec2(θ)− 5
4cotg(θ)cossec(θ)
)dθ
=54
cossec(θ)− cotg(θ)+ c
=5(x+1)
4√
x2 +2x−3− 2√
x2 +2x−3+ c.
f.∫ x3√
x2−9dx.
SoluçãoAplicando a substituição do Caso III, consideramos:
sec(θ) =x3
⇒x = 3sec(θ) ⇒
θ = arcsec(x
3
)du = 3sec(θ) tg(θ)dθ
Fazendo as substituições:∫ x3√
x2−9dx =
∫ 27sec3(θ)3sec(θ) tg(θ)dθ√9sec2(θ)−9
= 27∫(1+ tg2(θ))sec2(θ)dθ
= 27(
tg(θ)+13
tg3(θ)
)+ c = 9
√x2−9+
13(x2−9)3/2 + c.
176 / 239

Cálculo Diferencial e Integral
7.6.4 Integração de Funções Racionais
Consideremos dois polinômios:
P(x) = bmxm +bm−1xm−1 + . . .+b1x+b0 e Q(x) = anxn +an−1xn−1 + . . .+a1x+a0,
uma função racional é o quociente desses dois polinômios, isto é:
R(x) =P(x)Q(x)
.
Diz-se que a função racional R(x) é própria se o grau de P(x) for menor que o grau de Q(x); casocontrário, diz-se que é imprópria.
Se R(x) é uma função racional imprópia, ao dividir o numerador pelo denominador, R(x) pode serreescrita como a soma de um polinômio e uma função racional própria, isto é:
R(x) =P(x)Q(x)
=C(x)+S(x)Q(x)
onde o grau de S(x) é menor que o grau de Q(x).
Nesta seção, trataremos apenas de funções racionais próprias, já que nosso interesse é apreender comointegrar as funções do tipo: ∫
P(x)Q(x)
dx
Consideremos os seguintes casos:
Caso I ∫Ax+B
ax2 +bx+ cdx,
onde a,b,c são constantes.
1. Completam-se os quadrados no denominador: ax2 +bx+ c = a(
x+b
2a
)2
+
(c− b
4a
);
2. Faz-se a substituição z = x+ba
, e assim, a integral transforma-se em:∫Ax+B
ax2 +bx+ cdx =
∫mz+n
a(z2 +n)dz =
ma
∫zdz
z2 +n+
na
∫dz
z2 +n.
Para realizar o cálculo dessas integrais, usam-se as fórmulas básicas de integração.
Caso IIQuando Q(x) se descompõe em um produto de diferentes fatores lineares, teremos:
Q(x) = an(x−α1)(x−α2) . . .(x−αn),
com α1 6= α2 6= . . . 6= αn, a função racionalP(x)Q(x)
se expressa como uma soma de frações sim-
ples: ∫P(x)Q(x)
dx =
∫ (A1
x−α1+
A2
x−α2+ · · ·+ An
x−αn+
)dx
onde A1,A2, . . . ,An são constantes a serem determinadas.
177 / 239

Cálculo Diferencial e Integral
Caso IIIQuando Q(x) se descompõe em fatores lineares repetidos, isto é, supondo que o fator linear(x−a) se repete p vezes:
Q(x) = an (x−a)(x−a) · · ·(x−a)︸ ︷︷ ︸p vezes
(x−αp+1)(x−αp+2) . . .(x−αn)
a função racionalP(x)Q(x)
se expressa como uma soma de frações simples:∫P(x)Q(x)
dx =
∫ (A1
x−a+
A2
(x−a)2 + · · ·+Ap
(x−a)p +Ap+1
x−αp+1+ · · ·+ An
x−αn+
)dx
onde A1,A2, . . . ,An são constantes a serem determinadas.
Caso IVQuando Q(x) se descompõe em fatores lineares e quadráticos irredutíveis diferentes teremos:
Q(x) = an(x2 +b1x+ c1)(x2 +b2x+ c2)(x2 +b3x+ c3)(x−α4) . . .(x−αn)
a função racionalP(x)Q(x)
se expressa como uma soma de frações simples:∫P(x)Q(x)
dx =
∫ (A1x+B1
x2 +b1x+ c1+
A2x+B2
x2 +b2x+ c2+
A3x+B3
x2 +b3x+ c3+
A4
x−α4+ · · ·+ An
x−αn
)dx
onde A1,A2, . . . ,An,B1,B2,B3 são constantes a serem determinadas.
Caso VQuando Q(x) se descompõe em fatores lineares e quadráticos irredutíveis, assim como os fato-res quadráticos podem ser repetidos, teremos:
Q(x) = an(x2 +bx+ c)2(x−α3) . . .(x−αn)
a função racionalP(x)Q(x)
se expressa como uma soma de frações simples:∫P(x)Q(x)
dx =
∫ (A1x+B1
x2 +bx+ c+
A2x+B2
(x2 +bx+ c)2 +A3
x−α3+ · · ·+ An
x−αn
)dx
onde A1,A2, . . . ,An,B1,B2 são constantes a ser determinadas.
Exemplo 7.18Determinar as seguintes integrais:
a.∫ 4x2 +9x−1
x3 +2x2− x−2dx.
SoluçãoFatorando o denominador Q(x) = x3 +2x2− x−2 = (x+1)(x−1)(x+2), então,∫
4x2 +9x−1x3 +2x2− x−2
dx =
∫ (A
x+1+
Bx−1
+C
x+2
)dx
178 / 239

Cálculo Diferencial e Integral
Calculando as constantes A,B,C:
4x2 +9x−1x3 +2x2− x−2
=A
x+1+
Bx−1
+C
x+2
=A(x−1)(x+2)+B(x+1)(x+2)+C(x+1)(x−1)
(x+1)(x−1)(x+2)
Igualando os numeradores: 4x2 + 9x− 1 = A(x2 + x− 2)+B(x2 + 3x+ 2)+C(x2− 1) eordenando
4x2 +9x−1 = (A+B+C)x2 +(A+3B)x−2A+2B−C.
Por igualdade de polinômios temos:A+B+C = 4
A+3B = 9−2A+2B−C = −1
⇒
A = 3B = 2C = −1
substituindo na integral obtemos:∫ 4x2 +9x−1x3 +2x2− x−2
dx =∫ ( 3
x+1+
2x−1
+1
x+2
)dx
= 3ln |x+1|+2ln |x−1|− ln |x+2|+ c
= ln∣∣∣∣(x+1)3(x−1)2
x+2
∣∣∣∣+ c.
b.∫ 5x−7(x−3)(x2− x−2)
dx.
SoluçãoFatorando o denominador Q(x) = (x−3)(x2− x−2) = (x−3)(x−2)(x+1), então:∫
5x−7(x−3)(x2− x−2)
dx =
∫ (A
x−3+
Bx−2
+C
x+1
)dx
Calculando as constantes A,B,C:
5x−7(x−3)(x2− x−2)
=A
x−3+
Bx−2
+C
x+1
=A(x−2)(x+1)+B(x−3)(x+1)+C(x−3)(x−2)
(x−3)(x−2)(x+1)
Igualando os numeradores: 5x− 7 = A(x2− x− 2)+B(x2− 2x− 3)+C(x2− 5x+ 6) eordenando
5x−7 = (A+B+C)x2 +(−A−2B−5C)x−2A−3B+6C.
Por igualdade de polinômios temos:A+B+C = 0
−A−2B−5C = 5−2A−3B+6C = −7
⇒
A = 2B = −1C = −1
179 / 239

Cálculo Diferencial e Integral
substituindo na integral obtemos:∫ 5x−7(x−3)(x2− x−2)
dx =∫ ( 2
x−3− 1
x−2− 1
x+1
)dx
= 2ln |x−3|− ln |x−2|− ln |x+1|+ c
= ln∣∣∣∣ (x−3)3
(x−2)(x+1)
∣∣∣∣+ c.
c.∫ 2x2 +1(x+1)2(x−3)
dx.
SoluçãoA integral pode ser expressa como∫
2x2 +1(x+1)2(x−3)
dx =
∫ (A
x+1+
B(x+1)2 +
Cx−3
)dx
Calculando as constantes A,B,C:
2x2 +1(x+1)2(x−3)
=A
x+1+
B(x+1)2 +
Cx−3
=A(x+1)(x−3)+B(x−3)+C(x+1)2
(x+1)2(x−3)
Igualando os numeradores: 2x2 +1 = A(x2−2x−3)+B(x−3)+C(x2 +2x+1) e orde-nando
2x2+= (A+C)x2 +(−2A+B+2C)x−3A−3B+C.
Por igualdade de polinômios temos:
A+C = 2
−2A+B+2C = 03A−3B+C = 1
⇒
A =
1316
B = −34
C =1916
substituindo na integral obtemos:∫ 2x2 +1(x+1)2(x−3)
dx =1316
∫ dxx+1
− 34
∫ dx(x+1)2 +
1916
∫ dxx−3
=1316
ln |x+1|+ 34(x+1)
+1916
ln |x−3|+ c.
d.∫ 4x2 +6
x3 +3xdx.
SoluçãoFatorando o denominador Q(x) = x3 +3x = x(x2 +3), assim,∫
4x2 +6x3 +3x
dx =
∫ (Ax+
Bx+Cx2 +3
)dx.
Calculando as constantes A,B,C:
4x2 +6x3 +3x
=Ax+
Bx+Cx2 +3
=A(x2 +3)+Bx2 +Cx
x(x2 +3)
180 / 239

Cálculo Diferencial e Integral
Igualando os numeradores: 4x2 +6 = (A+B)x2 +Cx+3A. Por igualdade de polinômiostemos
A+B = 4C = 0
3A = 6⇒
A = 2B = 2C = 0
substituindo na integral obtemos:∫4x2 +6x3 +3x
dx =
∫2x
dx+
∫2x
x2 +3dx = 2ln |x|+ ln |x2 +3|+ c = ln(x)2(x2 +3)+ c.
e.∫ x3 +3x2−2x+1
x4 +5x2 +4dx.
SoluçãoFatorando o denominador Q(x) = x4 +5x2 +4 = (x2 +4)(x2 +1), obtemos:∫
x3 +3x2−2x+1x4 +5x2 +4
dx =
∫ (Ax+Bx2 +1
+Cx+Dx2 +4
)dx.
Calculando as constantes A,B,C,D:
x3 +3x2−2x+1x4 +5x2 +4
=Ax+Bx2 +1
+Cx+Dx2 +4
=(Ax+B)(x2 +4)+(Cx+D)(x2 +1)
(x2 +1)(x2 +4)
Igualando os numeradores: x3 + 3x2 − 2x + 1 = A(x3 + 4x) + B(x2 + 4) +C(x3 + x) +D(x2 +1) e ordenando
x3 +3x2−2x+1 = (A+C)x3 +(B+D)x2 +(4A+C)x+4B+D.
Por igualdade de polinômios temos:A+C = 1B+D = 3
4A+C = −24B+D = 1
⇒
A = −1, B = −2
3
C = 2, D =113,
e substituindo na integral obtemos:∫ x3 +3x2−2x+1x4 +5x2 +4
dx = −∫ xdx
x2 +1− 2
3
∫ dxx2 +1
+∫ 2xdx
x2 +4+
113
∫ dxx2 +4
= −12
ln |x2 +1|− 23
arc tg(x)+ ln |x2 +4|+ 116
arc tg(x
2
)+ c.
f.∫ x3−2x2 +3x−4(x−1)2(x2 +2x+2)
dx.
SoluçãoA integral pode ser expressa como:∫
x3−2x2 +3x−4(x−1)2(x2 +2x+2)
dx =
∫ (A
x−1+
B(x−1)2 +
Cx+Dx2 +2x+2
)dx
181 / 239

Cálculo Diferencial e Integral
Calculando as constantes A,B,C,D:
x3−2x2 +3x−4(x−1)2(x2 +2x+2)
=A
x−1+
B(x−1)2 +
Cx+Dx2 +2x+2
=A(x−1)(x2 +2x+2)+B(x2 +2x+2)+(Cx+D)(x−1)2
(x−1)2(x2 +2x+2)
Igualando os numeradores:
x3−2x2 +3x−4 = A(x3 + x2−2)+B(x2 +2x+2)+C(x3−2x2 + x)+D(x2−2x+1)
= (A+C)x3 +(A+B−2C+D)x2 +(2B+C−2D)x−2A+2B+D
Por igualdade de polinômios temos:A+C = 1
A+B−2C+D = −22B+C−2D = 3−2A+2B+D = −4
⇒
A =
1825
, B = −25,
C =7
25, D = −44
25,
e substituindo na integral obtemos:∫ x3−2x2 +3x−4(x−1)2(x2 +2x+2)
dx =1825
∫ xdxx−1
− 25
∫ dx(x−1)2 +
125
∫(7x−44)dxx2 +2x+2
=1825
ln |x−1|+ 25(x−1)
+7
50
∫(2x+2)dxx2 +2x+2
−5425
∫ dxx2 +2x+2
+ c
=1825
ln |x−1|+ 25(x−1)
+7
50ln |x2 +2x+2|
−5425
arc tg(x+1)+ c.
g.∫ dx
x(x2 +1)2 .
SoluçãoA integral pode ser expressa como:∫
dxx(x2 +1)2 =
∫ (Ax+
Bx+Cx2 +1
+Dx+E(x2 +1)2
)dx.
Calculando as constantes A,B,C,D,E:
1x(x2 +1)2 =
Ax+
Bx+Cx2 +1
+Dx+E(x2 +1)2 =
A(x2 +1)2 +(Bx+C)x(x2 +1)+(Dx+E)xx(x2 +1)2
Igualando os numeradores:
1 = A(x4 +2x2 +1)+B(x4 + x2)+C(x3 + x)+Dx2 +Ex
= (A+B)x4 +Cx3 +(2A+B+D)x2 +(C+E)x+A
182 / 239

Cálculo Diferencial e Integral
Por igualdade de polinômios temos:A+B = 0
C = 02A+B+D = 0
C+E = 0A = 1
⇒
A = 1B = −1C = 0D = −1E = 0
e substituindo na integral obtemos:∫ dxx(x2 +1)2 =
∫ (1x− x
x2 +1− x
(x2 +1)2
)dx
= ln |x|− 12
ln |x2 +1|+ 12(x2 +1)
+ c =12
ln∣∣∣∣ x2
x2 +1
∣∣∣∣+ 12(x2 +1)
+ c.
7.6.5 O método de Hermite-Ostrogradski
Para encontrar integrais da forma∫Ax+B
(x2 +bx+ c)n dx, n = 1,2,3, . . .
onde x2 + bx + c é uma expressão quadrática irredutível, a integral deve ser reescrita da seguinteforma: ∫
Ax+B(x2 +bx+ c)n dx =
P(x)(x2 +bx+ c)n−1 +
∫Cx+D
x2 +bx+ cdx,
onde P(x) é um polinômio de grau < 2(n−1) = grau de (x2 +bx+ c)n−1 e os coeficientes de P(x),assim como os valores de C e D, calculam-se derivando ambos membros e aplicando o método daseção anterior.
Método de Hermite-Ostrogradski
Se na função racionalP(x)Q(x)
, Q(x) se descompõe em fatores de multiplicidade, teremos:
Q(x) = (x−a1)α1(x−a2)
α2 . . .(x−ar)αr(x2 +b1x+ c1)
β1 . . .(x2 +bsx+ cs)βs
E então, a integral pode ser expressada da seguinte forma:∫P(x)Q(x)
dx =f (x)
Q1(x)+
∫g(x)
Q2(x)dx
onde Q1(x) := m.d.c(Q(x),Q′(x)) é o máximo divisor comum dos polinômios Q(x) e da sua
derivada Q′(x) e Q2(x) =Q(x)Q1(x)
. Além disso, f (x) e g(x) são polinômios com coeficientes
indeterminados, cujos graus são menores em uma unidade que os polinômios Q1(x) e Q2(x),respectivamente. Os coeficientes de f (x) e g(x) são determinados derivando a última equiva-lência da integral.
183 / 239

Cálculo Diferencial e Integral
Exemplo 7.19Determinemos as seguintes integrais:
a.∫ dx(x+1)2(x2 +1)2 dx.
SoluçãoDesde que Q(x) = (x+ 1)2(x2 + 1)2 temos que Q′(x) = 2(x+ 1)(x2 + 1)(3x2 + 2x+ 1).Além disso,
Q1(x) = m.c.d(Q(x),Q′(x)) = (x+1)(x2 +1)
Q2(x) =Q(x)Q1(x)
=(x+1)2(x2 +1)2
(x+1)(x2 +1)= (x+1)(x2 +1)
Como ∫dx
(x+1)2(x2 +1)2 =f (x)
Q1(x)+
∫g(x)
Q2(x)dx
então, ∫dx
(x+1)2(x2 +1)2 =Ax2 +Bx+C(x+1)(x2 +1)
+
∫Dx2 +Ex+F(x+1)(x2 +1)
dx.
Derivando a equação anterior, obtemos:
1(x+1)2(x2 +1)2 =
Dx5 +(−A+D+E)x4 +(−2B+D+E +F)x3
(x+1)2(x2 +1)2
+(A−B−3C+D+E +F)x2 +(2A−2C+E +F)x+B−C+F
(x+1)2(x2 +1)2
Por igualdade de polinômios temos:
D = 0−A+D+E = 0
−2B+D+E +F = 0A−B−3C+D+E +F = 0
2A−2C+E +F = 0B−C+F = 1
⇒
A = −14, B =
14,
C = 0, D = 0,
E = −14, F = −3
4,
substituindo na integral obtemos:
∫ dx(x+1)2(x2 +1)2 =
−x2
4+
x4+0
(x+1)(x2 +1)+∫ 0− x
4+
34
(x+1)(x2 +1)dx
= − x2− x4(x+1)(x2 +1)
− 14
∫ x−3(x+1)(x2 +1)
dx
= − x2− x4(x+1)(x2 +1)
− 14
[∫ −2dxx+1
+∫ 2xdx
x2 +1−∫ dx
x2 +1dx]
= − x2− x4(x+1)(x2 +1)
− 14[−2ln |x+1|+ ln |x2 +1|− arc tg(x)
]+ c
= − x2− x4(x+1)(x2 +1)
+12
ln |x+1|− 14
ln |x2 +1|+ 14
arc tg(x)+ c.
b.∫ dx(x3−1)2 dx.
184 / 239

Cálculo Diferencial e Integral
SoluçãoDesde que Q(x) = (x3−1)2 resulta que Q′(x) = 6x2(x3−1). Além disso,
Q1(x) = m.c.d(Q(x),Q′(x)
)= x3−1 e Q2(x) =
Q(x)Q1(x)
=(x3−1)2
x3−1= x3−1
Como ∫dx
(x3−1)2 =f (x)
Q1(x)+
∫g(x)
Q2(x)dx
então, ∫dx
(x3−1)2 =Ax2 +Bx+C
x3−1+
∫Dx2 +Ex+F
x3−1dx.
Derivando a equação anterior, obtemos:
1(x3−1)2 =
(x3−1)(2Ax+B)− (Ax2 +Bx+C)3x2
(x3−1)2 +Dx2 +Ex+F
x3−1
Ao igualar os numeradores:
1 = (x3−1)(2Ax+B)−3x2(Ax2 +Bx+C)+(Dx2 +Ex+F)(x3−1)
= Dx5 +(−A+E)x4 +(−2B+F)x3 +(−3C−D)x2 +(2A−E)x−B−F.
Por igualdade de polinômios temos:
D = 0−A+E = 0−2B+F = 0−3C−D = 0
2A−E = 0B−F = 1
⇒
A = 0, B = −1
3, C = 0,
D = 0, E = 0, F = −23,
substituindo na integral obtemos:∫ dx(x3−1)2 =
−x3(x3−1)
− 23
∫ dxx3−1
=−x
3(x3−1)− 2
3
[13
∫ dxx−1
− 13
∫ x+2x2 + x+1
dx]
=−x
3(x3−1)− 2
3
[13
ln |x−1|− 16
ln |x2 + x+1|− 1√3
arc tg(
2x+1√3
)]+ c
=−x
3(x3−1)+
19
ln(|x2 + x+1||x−1|
)+
23√
3arc tg
(2x+1√
3
)+ c.
185 / 239

Cálculo Diferencial e Integral
7.6.6 Integrais de Funções Irracionais
Como vimos nas subseções anteriores, as funções racionais possuem integrais que podem ser ex-pressas como combinações lineares finitas de funções elementares. Porém, isto não acontece com asfunções irracionais, salvo em alguns casos particulares. Examinaremos agora alguns critérios pararesolver integrais desse tipo.
Caso I ∫(Ax+B)√
ax2 +bx+ cdx
Para calcular esse tipo de integrais, precisaremos completar o quadrado no trinômio ax2 +bx+c:
ax2 +bx+ c = a(
x2 +ba
x+ca
)= a
(x2 +
ba
x+b2
4a2
)+ c− b2
4a= a
(x+
b2a
)2
+4ac−b2
4a
assim, ∫(Ax+B)√
ax2 +bx+ cdx =
∫(Ax+B)√
a(
x+b
2a
)2
+4ac−b2
4a
dx
Logo, faz-se a substituição z = x+b
2ae aplicam-se as fórmulas básicas de integração.
Exemplo 7.20
Determinemos a integral∫
(x+2)√4−2x− x2
dx.
SoluçãoAo completar o quadrado obtemos: 4−2x− x2 = 5(x2 +2x+1) = 5− (x+1)2. Assim,
∫(x+2)dx√4−2x− x2
=∫
(x+2)dx√5− (x+1)2
Fazendo z = x+1 temos que x = z−1 e dx = dz. Logo,∫(x+2)dx√4−2x− x2
=∫(z−1+2)√
5− z2dz =
∫(z+1)√
5− z2dz
=∫ zdz√
5− z2+∫ dz√
5− z2
= −√
5− z2 + arcsen(
z√5
)+ c
= −√
4−2x− x2 + arcsen(
x+1√5
)+ c.
186 / 239

Cálculo Diferencial e Integral
Caso II ∫R
(x, n
√ax+bcx+d
)dx
onde a,b,c,d são constantes n ∈ N e ad−bc 6= 0. Para calcular essas integrais, faz-se a substi-
tuição: z = n
√ax+bcx+d
, e pondo em evidência x, obtemos:
x =b−dzn
czn−a⇒ dx =
nzn−1(ad−bc)(czn−a)2
Logo, calculamos a integral composta de uma função racional na variável z.
Exemplo 7.21
Solução
Pelo critério estabelecido, z3 =1− x1+ x
, e assim,
x =1− z3
1+ z3 ⇒ dx =− 6z2dz(1+ z3)2
Substituindo na integral teremos:∫3
√1− x1+ x
dxx
=∫
z1+ z3
1− z3
[−6z2dz(1+ z3)2
]=−6
∫ z3dz(1− z3)(1+ z3)
= 6∫ z3dz(z3−1)(z3 +1)
= 6∫ [ A
z−1+
Bz+1
+Cz+D
z2 + z+1+
Ez+Fz2− z+1
]dz
=66
∫ [ 1z−1
+1
z+1− z+2
z2 + z+1− z−2
z2− z+1
]dz
= ln |z−1|+ ln |z+1|− 12
ln |z2 + z+1|− 12
ln |z2− z+1|
−√
3arc tg(
2z−1√3
)+√
3arc tg(
2z+1√3
)+ c
= ln |z2−1|− 12
ln |(z2 + z+1)(z2− z+1)|−√
3arc tg
( √3
2z2 +1
)+ c.
Caso III ∫R
(x,(
ax+bcx+d
)p1/q1
,
(ax+bcx+d
)p2/q2
, . . . ,
(ax+bcx+d
)pk/qk)
dx
onde a,b,c,d são constantes tais quais ad− bc 6= 0, p1, p2, . . . , pk,q1,q2, . . . ,qk ∈ Z, sendo Ruma função racional. Para calcular essas integrais, devemos transformá-las em uma integral de
uma função racional na variável z, mediante a substituição de zn =ax+bcx+d
, onde n é o mínimo
múltiplo comum dos números q1,q2, . . . ,qk.
187 / 239

Cálculo Diferencial e Integral
Exemplo 7.22
Determinemos a integral∫ x2 +
√1+ x
3√
1+ xdx.
Solução
Pelo critério estabelecido, z6 = 1+ x, assim,{
z2 = 3√
1+ xz3 =
√1+ x
, além disso, x = z6−1 ⇒ dx =
6z5dz. Substituindo na integral, teremos:
∫ x2 +√
1+ x3√
1+ xdx =
∫(z6−1)+ z3
z2 6z5dz = 6∫
z3(z12−2z6 +1+ z3)dz
= 6∫(z15−2z9 + z6 + z3)dz = 6
[z16
16− z10
5+
z7
7+
z4
4
]+ c
= 6z4[
z12
16− z6
5+
z3
7+
14
]+ c
= 6 3√
(x+1)2[(x+1)2
16− 1+ x
5+
√1+ x7
+14
]+ c.
Caso IV ∫Pn(x)√
ax2 +bx+ cdx
onde Pn(x) é um polinômio de grau n. Para calcular esse tipo de integral, temos expressá-lascomo: ∫
Pn(x)√ax2 +bx+ c
dx = Qn−1(x)√
ax2 +bx+ c+λ
∫dx√
ax2 +bx+ conde Qn−1(x) é um polinômio de grau (n− 1), com coeficientes indeterminados e λ ∈ R, osquais são calculados ao derivar a última expressão.
Exemplo 7.23
Determinemos a integral∫ x2√
x2− x+1dx.
SoluçãoPelo critério estabelecido, expressamos a integral como:∫
x2√
x2− x+1dx = (Ax+B)
√x2− x+1+λ
∫dx√
x2− x+1.
Derivando essa expressão, obtemos:
x2√
x2− x+1= A
√x2− x+1+
(Ax+B)(2x−1)2√
x2− x+1+
λ√x2− x+1
.
188 / 239

Cálculo Diferencial e Integral
Multiplicando em ambos extremos por√
x2− x+1, resultará em:
2x2 = 2A(x2− x+1)+(Ax+B)(2x−1)+2λ = 4Ax2 +(2B−3A)x+2A+2λ −B.
Por igualdade de polinômios temos:4A = 2
2B−3A = 02A+2λ −B = 0
⇒{
A =12, B =
34, λ =−1
8,
e substituindo na integral obtemos:∫ x2√
x2− x+1dx =
(x2+
34
)√x2− x+1− 1
8
∫ dx√x2− x+1
=2x+3
4
√x2− x+1− 1
8
∫ dx√(x−1/2)2 +3/4
=2x+3
4
√x2− x+1− 1
8ln∣∣∣2x−1+2
√x2− x+1
∣∣∣+ c
Caso V ∫dx
(x−α)n√
ax2 +bx+ c
Para calcular esse tipo de integral, devemos transformá-las em integrais do Caso IV usando a
substituição t =1
x−αque implica que x−α =
1t
.
Exemplo 7.24
Determinemos a integral∫ dx
(x3 +3x2 +3x+1)√
x2 +2x−3.
SoluçãoPodemos reescrever a integral como:
∫ dx
(x3 +3x2 +3x+1)√
x2 +2x−3=
∫ dx
(x+1)3√
(x+1)2−4
Fazendo t =1
x+1temos que x+1 =
1t
e dx =−dtt2 . Assim,
∫ dx
(x3 +3x2 +3x+1)√
x2 +2x−3=
∫ −dtt2
1t3
√1t2 −4
=−∫ t2dt√
1−4t2
Assim, resolvemos a última integral usando o critério do Caso IV:∫t2dt√1−4t2
= (At +B)√
1−4t2 +λ
∫dt√
1−4t2,
189 / 239

Cálculo Diferencial e Integral
derivando essa expressão, obtemos:
t2√
1−4t2= A
√1−4t2− 4t(At +B)√
1−4t2+
λ√1−4t2
.
E multiplicando em ambos extremos por√
1−4t2, resultará em:
t2 = A(1− t2)−4t(At +B)+λ =−8At2−4Bt +A+λ .
Por igualdade de polinômios temos:−8A = 1−4B = 0
A+λ = 0⇒{
A =18, B = 0, λ =
18
Substituindo na integral obtemos:∫t2dt√1−4t2
=− t8
√1−4t2 +
18
∫dt√
1−4t2=− t
8
√1−4t2 +
116
arcsen(2t)
Portanto, substituindo na integral original:∫ dx
(x3 +3x2 +3x+1)√
x2 +2x−3= −
∫ t2dt√1−4t2
=t8
√1−4t2− 1
16arcsen(2t)+ c
=
√x2 +2x−38(x+1)2 − 1
16arcsen
(2
x+1
)+ c.
Caso VI ∫xm(a+bxn)pdx
onde, m,n, p são números racionais. Para calcular esse tipo de integral, devemos aplicar ascondições de CHEBICHEV, e assim, a integral pode ser expressa como uma combinaçãofinita de funções elementares somente nos três casos seguintes:
a. Quando p é um número inteiro;
b. Quandom+1
né um número inteiro fazemos a substituição zs = a+bxn, onde s é o divisor
da fração p;
c. Quandom+1
n+ p é um número inteiro fazemos a substituição zs = ax−n +b, onde s é o
divisor da fracção p.
190 / 239

Cálculo Diferencial e Integral
Exemplo 7.25Determinemos as seguintes integrais
a.∫
x3(1+2x2)−3/2dx.
Solução
Aplicamos o critério de CHEVICHEV:m+1
n=
3+12
= 2 é um número inteiro, então,
z2 = 1+2x2 ⇒ x2 =z2−1
2, xdx =
zdz2∫
x3(1+2x2)−3/2dx =∫
x2(1+2x2)−3/2xdx =∫ z2−1
2(z2)−3/2 zdz
2
=14
∫(z2−1)z−3zdz =
14
∫(1− z−2)dz =
14
(z+
1z
)+ c
=14
(z2 +1
z
)+ c =
1+ x2
2√
1+2x2+ c.
b.∫ dx√
x3 3√
1+ 4√x3.
SoluçãoEscrevemos a integral como:∫
dx√
x3 3√
1+ 4√x3=
∫x−3/2(1+ x3/4)−1/3dx.
Aplicamos o critério de CHEVICHEV:
•m+1
n=−3
2+1
34
=−23
não é um número inteiro,
•m+1
n+ p =−2
3− 1
3é um número inteiro, então,
z3 = x−3/4 +1 ⇒ x3/4 =1
z3−1⇒ x =
1(z3−1)4/3 , dx =−4z2(z3−1)−7/3dz
subtituindo∫ dx√
x3 3√
1+ 4√x3=
∫ [(z3−1)−4/3
]−3/2(
1+1
z3−1
)(−4z2)(z3−1)−7/3dz
= −4∫
zdz =−2z2 + c =−2 3√(
x−3/4 +1)2
+ c.
Caso VII ∫R(x,
√ax2 +bx+ c)dx
onde a,b,c ∈R. Calcula-se uma integral dessa forma usando a substituição de Euler, que per-mite transformar o integrando em uma função racional na variável t. Dessa maneira, podemosapresentar 3 subcasos:
191 / 239

Cálculo Diferencial e Integral
Subcaso aSe c ≥ 0, a mudança de variável é
√ax2 +bx+ c = tx +
√c. Ao elevar ao quadrado,
resultará em:
ax2+bx+c= t2x2+2√
ctx+c⇔ (a−t2)x2+(b−2√
ct)x= 0⇔ x[(a− t2)x+b−2
√ct]= 0
Ao eliminar a solução x = 0, obtemos x = ϕ(t), que é uma função racional em t, e dx =ϕ ′(t)dt que também é uma função racional em t. Portanto,∫
R(x,√
ax2 +bx+ c)dx =
∫R(ϕ(t), tϕ(t)+
√c)
ϕ′(t)dt
onde o integrando do segundo membro é uma função racional em t.
Exemplo 7.26
Determinemos∫ dx
x√
2x2 + x+1.
SoluçãoFazendo
√2x2 + x+1 = tx+1 e ao elevar ao quadrado obtemos 2x2 + x = t2 +2tx. Eliminando
a solução x = 0, teremos:
x =2t−12− t2 , dx =
2(t2− t +2)(2− t2)2 dt
substituindo na integral:
∫ dx
x√
2x2 + x+1=
∫ 2(t2− t +2)(2− t2)2 dt
2t−12− t2
(t(
2t−12− t2
)+1) =
∫ 2(t2− t +2)(2− t2)2 dt
(2t−1)(2t2− t +2− t2)
(2− t2)2
=∫ 2dt
2t−1= ln |2t−1|+ c = ln
∣∣∣∣∣2√
2x2 + x+1−2− xx
∣∣∣∣∣+ c
Subcaso bSe a ≥ 0, a mudança de variável é
√ax2 +bx+ c =
√ax+ t. Ao elevar ao quadrado,
resultará em:
ax2 +bx+ c = ax2 +2√
axt + t2 ⇔ bx+ c = 2√
axt + t2 ⇔ x =t2− c
(b−2√
at)
Obtemos x = ϕ(t), que é uma função racional em t, e dx = ϕ ′(t)dt que também é umafunção racional em t.
Exemplo 7.27
Determinemos∫ dx
x√
x2 + x+1.
SoluçãoFazendo
√x2 + x+1 = x+ t, ao elevar ao quadrado obtemos x2 + x+1 = x2 +2tx+ t2. Assim,
x =t2−11−2t
, dx = 2[−t2 + t−1(1+2t)2
]dt
192 / 239

Cálculo Diferencial e Integral
substituindo na integral:
∫ dx
x√
x2 + x+1=
∫ 2[−t2 + t−1(1+2t)2
]dt
t2−11−2t
(t2−11−2t
+ t) =
∫ 2dtt2−1
= ln∣∣∣∣t−1t +1
∣∣∣∣+ c = ln
∣∣∣∣∣√
x2 + x+1− x−1√x2 + x+1− x+1
∣∣∣∣∣+ c.
Subcaso cSe o trinômio ax2 +bx+ c tem duas raízes reais r,s, nesse caso, a mudança de variável é√
ax2 +bx+ c = t(x− r). E ao elevar ao quadrado, resultará em:
ax2 +bx+ c = a(x− r)(x− s) = t2(x− r)2 ⇒ a(x− s) = t2(x− r)
Da última igualdade, obtemos x = ϕ(t), a qual é uma função racional em t, e dx = ϕ ′(t)dta qual também é uma função racional em t.
Exemplo 7.28
Determinemos∫ dx
x√
x2−3x+2.
SoluçãoDesde que x2−3x+2 = (x−2)(x−1) ⇒
√x2−3x+2 =
√(x−2)(x−1) = t(x−1), elevando
ao quadrado e simplificando o fator (x−1) obtemos (x−2) = t2(x−1). Assim,
x =2− t2
1− t2 , dx =2t
(1− t2)2 dt,
substituindo na integral:
∫ dx
x√
x2−3x+2=
∫ 2t(1− t2)2 dt(
2− t2
1− t2
)t(
2− t2
1− t2 −1) =−2
∫ dtt2−2
=−√
22
ln
∣∣∣∣∣t−√
2t +√
2
∣∣∣∣∣+ c
=
√2
2ln
∣∣∣∣∣√
x−2+√
2(x−1)√
x−2−√
2(x−1)
∣∣∣∣∣+ c.
7.7 Recapitulando
Neste capítulo, apresentamos o conceito da integral indefinida como o problema inverso da deri-vação. Por isso, foram estudados diversos métodos de integração, como por exemplo, as fórmulasprovenientes das propriedades de derivação direta (integrais imediatas e método de integração porpartes), as técnicas para integrar funções que contêm um trinômio quadrado, como estudamos tam-bém formas de lidar com expressões que contêm funções trigonométricas.
Apresentamos, ainda, a técnica da substituição trigonométrica, bem como algumas metodologiaspara o tratamento de funções racionais, como o método de Hermite-Ostrogradski, e por últimoforam apresentados alguns critérios para resolver funções irracionais.
193 / 239

Cálculo Diferencial e Integral
Essas técnicas serão retomadas no próximo capítulo, no qual apresentaremos a integral definida esuas principais aplicações, que são de suma importância para o cálculo das mesmas.
7.8 Atividades
1. Determine as seguintes integrais indefinidas:
i.∫
(√
x+3)dx. ii.∫ 4√
6− x2dx.
iii.∫ dx
x(x2−8). iv.
∫ 7x2 +16x4 +4x2 dx.
v.∫ 3
x2 +4x−5dx. vi.
∫ √−4x2−12x−5dx.
vii.∫ 2x3x+1
5x+2 dx. viii.∫ dx
cos2(1−4x)dx.
ix.∫
cos(7x+4)dx. x.∫
e2x−5dx.
xi.∫ dx
x ln2(x)dx. xii.
∫4xexdx.
xiii.∫ e√
x3e√
x
√x
dx. xiv.∫ cos3(x)
1− sen(x)dx.
xv.∫(x5−2x+1)1/5
1− xdx. xvi.
∫ √2+ x2−√
2− x2√
4− x4dx.
xvii.∫ dx
1+ sen(x). xviii.
∫ ln(ln(x))x ln(x)
dx.
xix.∫ dx√
ex−1. xx.
∫ dx4+5cos5(x)
.
xxi.∫ dx
ex +4. xxii.
∫ √√√√ ln(
x+√
x2 +1)
1+ x2 dx.
xxiii.∫ dx√√
x+1. xxiv.
∫ √1+ cos(x)dx.
xxv.∫
(x−2)x√
x−1√
x2− x+1dx. xxvi.
∫ sen(8x)9+ sen4(4x)
dx.
xxvii.∫ √sec(x)− tg(x)
sec(x)+ tg(x)dx. xxviii.
∫sec3(x)dx.
xxix.∫ x(x−1)5e4x dx. xxx.
∫ ln(x)x3(ln(x)−1)3 dx.
xxxi.∫(4−3ln(x))4dx. xxxii.
∫ ex√ex +2ex +6
dx.
2. Integrando por partes, encontre as seguintes integrais indefinidas:
i.∫
x2 ln(x)dx. ii.∫ (
7+ x−3x2)e−xdx.
iii.∫
xsec2(x)dx. iv.∫ ln(x)
x3 dx.
v.∫
cos(ln(x))dx. vi.∫
xarc tg2(x)dx.
194 / 239

Cálculo Diferencial e Integral
vii.∫ ln(ln(x))
xdx. viii.
∫ x2 dxxcos(x)− sen(x))2 .
ix.∫ xex
(1+ x)2 dx. x.∫ arctan(x)
x2 dx.
xi.∫
e2x cos(ex)dx. xii.∫
eax sen(bx)dx.
3. Determine as seguintes integrais indefinidas que contêm um trinômio quadrado:
i.∫ dx
x2 +2x+3. ii.
∫ dxx2−7x+10
.
iii.∫ dx√
4x−3− x2. iv.
∫ dx√x2 +6x+13
.
v.∫
(x−2)dxx2−7x+12
. vi.∫ √
x2 +2x−8dx.
vii.∫ 9dx√
9x2−12x+13. viii.
∫ 3dx4x2−16x+17
.
ix.∫ 4−7x√
x2 +2x−8dx. x.
∫ 3+5x9x2−12x+13
dx.
4. Determine as seguintes integrais trigonométricas:
i.∫
sen2(x)dx. ii.∫
cos5(x)dx.
iii.∫
cos7(x)sen3(x)dx. iv.∫
senh3(x)dx.
v.∫
sen2(3x)cos4(3x)dx. vi.∫
cotg5(x)dx.
vii.∫
sec4(x)√
cotg3(x)dx. viii.∫
tgh6(x)sech4(x)dx.
ix.∫
sen(3x)sen(5x)dx. x.∫
sen5(2x)cos8(2x)dx.
xi.∫
sen3(x)cos3(x)dx. xii.∫
sen4(x
2
)cos2
(x2
)dx.
xiii.∫ dx
sen2(x)cos4(x). xiv.
∫ dxsen5(x)cos5 x)
.
xv.∫ sec2(πx)
cos6(πx)dx. xvi.
∫sen(x)sen(2x)sen(3x)dx.
xvii.∫
sen(4x)cos(5x)dx. xviii.∫
cosh(3x)cosh(x)dx.
xix.∫
sen3(x)cos(3x)dx. xx.∫
senh2(x)cosh(5x)dx.
5. Encontre as seguintes integrais usando substituição trigonométrica:
i.∫ x2
(16− x2)3/2 dx. ii.∫ √4+ x2
x6 dx.
iii.∫ √25− x2
xdx. iv.
∫x2√
16− x2 dx.
v.∫ x2√
2x2 +7dx. vi.
∫ x2√
21+4x− x2dx.
vii.∫
x2√
9− x2 dx. viii.∫ √x2 +1
xdx.
195 / 239
Cálculo Diferencial e Integral
ix.∫ dx(x2 +5)3/2 . x.
∫ √x2 +16x
dx.
xi.∫ √x2−8
x4 dx. xii.∫ x2
(a2− x2)3/2 dx.
xiii.∫ dx
(x+1)3√
x2 +2x. xiv.
∫ dx
(x2 +1)√
1− x2.
xv.∫ ex√
(e2x−2ex +5)3dx. xvi.
∫ x2√(9− x2)7
dx.
xvii.∫ √1− x2
x4 dx. xviii.∫(9− x2)1/2
x2 dx.
xix.∫
(x2 +3x)(x−1)(x2−2x+10)1/2 dx. xx.
∫ x2−3x(x4−4)1/2 dx.
xxi.∫ dx
(2x2 +1)√
x2 +1. xxii.
∫ dx
x3√
x2−1.
xxiii.∫(x2 +2x)1/2
x+1dx. xxiv.
∫ dx(4x− x2)3/2 .
xxv.∫ x2
(4− x2)5/2 dx. xxvi.∫ x2dx(2x− x2)1/2 .
xxvii.∫ exdx(e2x +8ex +7)3/2 . xxviii.
∫ 3xarcsen(x)(1− x2)5/2 dx.
xxix.∫ dx
x2√
x2−4. xxx.
∫ x2dx√1− x2
.
6. Determine as integrais das seguintes funções racionais:
i.∫ 2x2 +41x−91(x−1)(x+3)(x−4)
dx. ii.∫ 2x+1
x3−7x+6dx.
iii.∫ dx
x(a2− x2), a > 0. iv.
∫ 2x2−1x3− x
dx.
v.∫ 5x3 +2
x3−5x2 +4xdx. vi.
∫ x+1x3− x2−6x
dx.
vii.∫ x3−1
4x3− xdx. viii.
∫ 3x−2(x+2)(x+1)(x−1)
dx.
ix.∫ 2x2 +3x−1(x+3)(x+2)(x−1)
dx. x.∫ 5x2−11x+5
x3−4x2 +5x−2dx.
xi.∫ 2x4−2x+1
2x5− x4 dx. xii.∫ 3x+2
x(x+1)3 dx.
xiii.∫ x+1
x3 +4xdx. xiv.
∫ x2−3x−7(2x+3)(x+1)2 dx.
xv.∫ dx
x2(x+1)2 . xvi.∫ dx
x4− x2 .
xvii.∫ x3−6x2 +9x+7
(x−2)3(x−5)dx. xviii.
∫ x4− x3− x−1x3− x2 dx.
xix.∫ 2x+3(x+2)(x−1)
dx. xx.∫ x2 + x−1
x3− x2 dx.
xxi.∫ x+1
x3−2x2 +3xdx. xxii.
∫ x2 + x−2x4 +5x2 +4
dx.
xxiii.∫ dx(x2 +2x+5)3 . xxiv.
∫ 6x3
(x2 +1)2 dx.
196 / 239

Cálculo Diferencial e Integral
xxv.∫ x3 + x2 + x+2
x4 +3x2 +2dx. xxvi.
∫ x5
x3−1dx.
xxvii.∫ 2x2−1
x3− xdx. xxviii.
∫ x2 +3x+3(x+1)(x2 +1)
dx.
xxix.∫ x2−2x+3(x+1)2(x2 +4)
dx. xxx.∫ x2
1− x4 dx.
xxxi.∫ dx
x(4+ x2)(1+ x2). xxxii.
∫ dxx4 +1
.
xxxiii.∫ x3 + x−1
(x2 +2)2 dx. xxxiv.∫ dx
x3 + x2 .
xxxv.∫ dx
x(x4−1). xxxvi.
∫ dxx8 + x6 .
xxxvii.∫ 5x−8
x3 +4x2 +4xdx. xxxviii.
∫ xx4− x2−1
dx.
xxxix.∫ 2x3−4(x2 +1)(x+1)2 dx. xl.
∫ x(x−1)(x+1)2 dx.
7. Determine as seguintes integrais pelo método de Hermite-Ostrogradski:
i.∫ x7 +2(x2 + x+1)2 dx. ii.
∫ dx(x2 +1)4 dx.
iii.∫ dx(x4−1)2 . iv.
∫ dxx4(x3 +1)2 .
v.∫ x6 + x4−4x2
x3(x2 +1)2 dx. vi.∫ dx
x4(x3 +1)2 .
vii.∫ x5− x4−26x2−24x−25
(x2 +4x+5)2(x2 +4)2 dx. viii.∫ 3x4 +4
x2(x2 +1)3 dx.
ix.∫ x3 + x−1
(x2 +2)2 dx. x.∫ x3−2x2 +4
(x2−1)3 dx.
xi.∫ x2
(x+2)2(x+4)2 dx. xii.∫ dx(x4−1)3 .
8. Determine as seguintes integrais irracionais:
i.∫ dx(2+ x)
√1+ x
. ii.∫ 3
√x
x(√
x+ 3√
x)dx.
iii.∫ x+1
x√
x−2dx. iv.
∫ dx3√
x( 3√
x−1).
v.∫ dx√
x+ 4√
x. vi.
∫ dx√3x−2− 4
√3x−2
.
vii.∫ e2x
4√
ex +1dx. viii.
∫ dx√x+1+ 4
√x+1
.
ix.∫ √
2+√
xdx. x.∫ x5√
1− x2dx.
xi.∫ x2√
8+2x− x2dx. xii.
∫ 2x2−3x√x2−2x+5
dx.
xiii.∫ 3x2−5x√
3−2x− x2dx. xiv.
∫ dx
x√
3x2 +2x−1.
xv.∫ dx
x 3√
x2 +4. xvi.
∫ dx
x4√
x2−1.
197 / 239

Cálculo Diferencial e Integral
xvii.∫ dx√
x3 3√
1+ x3/4. xviii.
∫ √1− x4
x5 dx.
xix.∫
3√
x(1− x2)dx. xx.∫ √x2 +9
x3 dx.
xxi.∫ dx
x4√
1+ x2. xxii.
∫ dx
x 4√
(1+ x4)3
.
xxiii.∫ dx
3√
(x+1)2 (x−1)4. xxiv.
∫ 6√
x1+ 3√
xdx.
xxv.∫ √
x
(1+ 3√
x)2 dx. xxvi.∫ dx
x−√
x2− x+1.
xxvii.∫ dx
(x+2)√
x2 +2x. xxviii.
∫ dx
(x2 +1)√
x2−1.
xxix.∫ √x2 +2
1+ x2 dx. xxx.∫ 3
√x
( 3√
x+1)2 dx.
xxxi.∫
(x−2)2/3
(x−2)2/3 +3dx. xxxii.
∫ dx
x√
x2 +2x−1.
xxxiii.∫ dx
x√
2+ x− x2. xxxiv.
∫ 5x+3√5+4x− x2
dx.
xxxv.∫ dx(2x+5)
√2x−3+8x−12
. xxxvi.∫ dx
x−√
x2−1.
xxxvii.∫ 1−
√1+ x+ x2
x√
1+ x+ x2dx. xxxviii.
∫ √x+1− 3√
x+1√x+1+ 3
√x+1
dx.
198 / 239

Cálculo Diferencial e Integral
Capítulo 8
A Integral Definida
OBJETIVOS DO CAPÍTULO
Ao final deste capítulo você deverá ser capaz de:
• Conhecer o significado geométrico da definição da integral definida;
• Dominar as propriedades de somatórios;
• Identificar a existência das funções integráveis;
• Aplicar as propriedades de integral definida nos seus cálculos;
• Interpretar os teoremas fundamentais do cálculo integral;
• Interpretar corretamente a integral definida na aplicação do cálculo de áreas de regiõesplanas, volume, longitude de arco, etc.
8.1 Introdução
A integral definida é um dos pilares do cálculo; é também uma ferramenta essencial para definirquantidades importantes para a matemática, tais como áreas, volumes, comprimentos de curvas, entreoutros. A ideia por trás da integral definida é independente à da integral indefinida, ou seja, não écomo a operação inversa da derivada, logo, agora poderemos calcular efetivamente as quantidadesrequeridas, dividindo-as em pequenas partes e em seguida somando-as para obter uma aproximaçãodo valor desejado, que no limite torna-se exatamente o valor desejado.
Historicamente, as noções da integral definida remontam à antiguidade, mas o conceito foi estabe-lecido apenas na era moderna como consequência da contribuição de muitos matemáticos tais comoNewton e Leibniz, porém, foi o matemático Riemann, no século XIX, quem formulou o conceitoutilizado atualmente.
Neste capítulo, trataremos da integral definida e estudaremos suas principais propriedades, entre asquais ressaltamos os teoremas fundamentais do cálculo, que se relacionam com os conceitos da an-tiderivada de integral indefinida e da integral definida; estudaremos ainda as integrais imprópriasúteis no tratamento de intervalos ilimitados; e por fim, apresentaremos algumas aplicações da integraldefinida no cálculo de áreas, volumes e comprimento de uma curva.
199 / 239

Cálculo Diferencial e Integral
8.2 Somatórios
Sejam i, m, n ∈ Z, com m ≤ i ≤ n, e f uma função definida para cada [a,b], a notação ∑ni=m f (i)
representa a soma dos termos f (m), f (m+1), . . . , f (n), isto é,
n
∑i=m
f (i) = f (m)+ f (m+1)+ f (m+2)+ · · ·+ f (n)
onde a letra grega ∑ (sigma) denota o símbolo do somatório, [a,b] é o índice ou variável, m é o limiteinferior e n é o limite superior. Por exemplo, se f (i) = i3, então,
7
∑i=3
f (i) =7
∑i=3
i3 = 33 +43 +53 +63 +73 = 775.
8.2.1 Propriedades do Somatório
Sejam k uma constante e f uma função definida para cada i ∈ Z. Então:
n
∑i=m
k = (n−m+1)k.n
∑i=m
k f (i) = kn
∑i=m
f (i).
Em particular, se m = 1, entãon
∑i=1
k = nk.
Propriedade Distributiva
n
∑i=m
( f (i)±g(i)) =n
∑i=m
f (i) ±n
∑i=m
g(i).
Propriedades Telescópicas
n
∑i=m
( f (i)− f (i−1)) = f (n)− f (m−1).
n
∑i=m
( f (i+1)− f (i−1)) = f (n+1)+ f (n)− f (m)− f (m−1).
Em particular, se m = 1, então:
n
∑i=m
( f (i)− f (i−1)) = f (n)− f (0).
n
∑i=m
( f (i+1)− f (i−1)) = f (n+1)+ f (n)− f (1)− f (0).
Exemplo 8.1Calculemos o valor dos seguintes somatórios:
200 / 239

Cálculo Diferencial e Integral
a.100
∑i=5
(√i−√
i−1+2).
SoluçãoPela propriedade distributiva temos que:
100
∑i=5
(√i−√
i−1+2)=
100
∑i=5
(√i−√
i−1)+
100
∑i=5
2.
No primeiro somatório, aplicamos a Propriedade Telescópica para f (i) =√
i, m = 5 en = 100, e obtemos:
100
∑i=5
(√i−√
i−1)= f (100)− f (5−1) =
√100−
√4 = 10−2 = 8.
No segundo somatório, aplicando a primeira propriedade, resultará em:
100
∑i=5
2 = (100−5+1)2 = 192.
Portanto,
100
∑i=5
(√i−√
i−1+2)=
100
∑i=5
(√i−√
i−1)+
100
∑i=5
2 = 8+192 = 200.
b.n
∑i=1
[(i+1)2− (i−1)2]
SoluçãoConsiderando f (i) = i2, temos que f (i + 1) = (i + 1)2 e f (i− 1) = (i− 1)2, logo, daPropriedade Telescópica teremos:
n
∑i=1
[(i+1)2− (i−1)2]= (n+1)2 +n2−12−02 = 2n2 +2n = 2n(n+1).
NotaUma observação importante do último exemplo é que (i+1)2− (i−1)2 = 4i e ao substituirno somatório, resultará em:
n
∑i=1
4i = 2n(n+1) ⇔n
∑i=1
i =n(n+1)
2.
Ou seja, obtemos a fórmula da soma dos n primeiros números naturais.
8.3 Cálculo da Área de uma Região Plana por Somatórios
8.3.1 Partição de um Intervalo Fechado
201 / 239

Cálculo Diferencial e Integral
Definição 8.1[a,b] é um intervalo fechado. Uma partição do intervalo [a,b] é o conjunto de pontosx0, x1, x2, . . . , xn tais quais a = x0 < x1 < x2 < .. . < xn = b, e é denotada por P, isto é,P = {x0,x1,x2, . . . ,xn}.
xa=x0 x1 x2 xi-1 xi xn-1 xn=b......
i-ésimo subintervalo
Nota
a. Toda partição P divide [a,b] em n subintervalos fechados;
b. A largura de cada subintervalo [xi−1,xi], para i = 1,2, . . . ,n, é denotada por ∆xi =
xi− xi−1 e verifica-se quen
∑i=1
∆xi = b−a;
xa=x0 x1 x2 xi-1 xi xn-1 xn=b......
x1 x2 xi xn
c. Denomina-se norma ou diâmetro da partição P o número
‖P‖= max{∆xi : i = 1,2, . . . ,n} ;
d. Quando o intervalo [a,b] divide-se em n partes iguais, a largura da cada subintervalo
é ∆x =b−a
n. Nesse caso, os extremos de cada subintervalo são:
x0 = a, x1 = a+∆x, x2 = a+2∆x, . . . xi = a+ i∆x, . . . xn = b.
8.3.2 Aproximação da Área de uma Região por Áreas de Retângulos
Seja f : [a,b]→ R uma função contínua e não negativa ( f (x) ≥ 0) em [a,b]. Seja R a região planalimitada pelos gráficos de y = f (x), pelas retas x = a e x = b, e pelo eixo x, logo, R é chamada deregião abaixo do gráfico de f , do ponto a até b (veja a figura a seguir):
x
y
0 a b
R
202 / 239

Cálculo Diferencial e Integral
Seja P = {x0, x1, x2, . . . , xn} uma partição de [a,b], podemos eleger um conjunto de pontosu1, u2, . . . , un para que f (ui), seja o valor mínimo de f nos subintevalos [xi−1,xi], para i = 1,2, . . . ,n.
Dessa forma, construímos n retângulos cujas bases são as larguras de cada subintervalo de P e alturasf (u1), f (u2), . . . , f (un), respectivamente. Logo, as áreas desses retângulos são:
f (u1)∆x1, f (u2)∆x2, . . . f (un)∆xn,
respectivamente.
Esses n retângulos formam o chamado polígono retangular inscrito em R, assim como o item (a) dafigura a seguir, e a área desse polígono é denotada por I(P) e é da forma
I(P) =n
∑i=1
f (ui)∆xi.
x
y
0 a=x0
De forma análoga, escolhemos v1,v2, . . . ,vn nos n subintervalos de P, sendo f (vi) o valor máximo def no subintervalos [xi−1,xi], para i = 1, 2, . . . , n, logo, construímos os n retângulos cujas bases são aslarguras dos subintervalos de P e cujas alturas são f (v1), f (v2), . . . , f (vn), respectivamente. Assim, asáreas destes retângulos são
f (v1)∆x1, f (v2)∆x2, . . . f (vn)∆xn,
O polígono retangular formado por esses n retângulos é circunscrito à região R, e é chamado depolígono retangular circunscrito em R, assim como o item (b) da figura acima. Logo, a área dessepolígono é denotada por C(P) e é da forma
C(P) =n
∑i=1
f (vi)∆xi.
Denotando por AR à área da região R, temos que:
I(P)≤ AR ≤C(P).
Sendo assim, cada partição P, I(P) e C(P) podem ser vistas como aproximações da área exata sob acurva R. Além disso, fica evidente que, quando ‖P‖→ 0, essas aproximações irão se tornar cada vezmelhores e tender a AR como um limite.
Se o intervalo [a,b] for dividido em n partes iguais, cada subintervalo tem largura ∆x, podemos rees-crever cada soma acima como:
I(P) =n
∑i=1
f (ui)∆x =n
∑i=1
f (ui)
(b−a
n
)e C(P) =
n
∑i=1
f (vi)∆x =n
∑i=1
f (vi)
(b−a
n
).
Além disso, ‖P‖→ 0 implica que n→+∞.
203 / 239

Cálculo Diferencial e Integral
Definição 8.2Seja f : [a,b]→ R uma função contínua e não negativa em [a,b], AR a área da região planalimitada pelos gráficos de y = f (x), as retas x = a, x = b e o eixo x, então, AR é definida por
AR := limn→+∞
( n
∑i=1
f (ci)∆x
)unidades2,
onde ci é arbitrariamente escolhido no subintervalo [xi−1,xi].
Exemplo 8.2Calculemos a área da região R usando retângulos inscritos e retângulos circunscritos.
a. R é limitada pelos gráficos de y = x+1, x = 0, x = 3 e o eixo x.
SoluçãoO gráfico da região R é apresentado no item (a) da figura abaixo. Nesse caso, f (x) = x+1,a = 0 e b = 3. Então, vamos dividir o intervalo [0,3] em n partes iguais, ou seja, ∆x =3−0
n=
3n
.
y
x0
(a)
R
y = x
+1
3
Usando retângulos inscritosNos itens (b) e (c) da figura acima, vemos duas partições de [0,3], para n = 6 e n = 12,respectivamente. Já que f é crescente no intervalo [0,3], ela alcança um mínimo relativono extremo esquerdo de cada subintervalo, logo,
ui = a+(i−1)∆x = (i−1)3n=
3n
i− 3n
e f (ui) = ui +1 =3n
i− 3n+1, i = 1, . . . ,n
Portanto, usando a fórmula dada, temos que:
AR = limn→+∞
(3n
n∑
i=1
[3n
i+1− 3n
])= lim
n→+∞
(9n2
n∑
i=1i+
3n
(1− 3
n
)n∑
i=11)
= limn→+∞
(9n2
n(n+1)2
+3n
(1− 3
n
)n)= lim
n→+∞
(92
(1+
1n
)+3(
1− 3n
))=
152
unidades2.
Usando retângulos circunscritosNos itens (d) e (e) da figura acima, vemos duas partições de [0,3], para n = 6 e n = 12,respectivamente. Já que f é crescente no intervalo [0,3], ela alcança um máximo relativono extremo direito de cada subintervalo, logo,
vi = a+ i∆x = i3n=
3n
i e f (vi) = vi +1 =3n
i+1, i = 1, . . . ,n
204 / 239

Cálculo Diferencial e Integral
Portanto, usando a fórmula dada, temos que:
AR = limn→+∞
(3n
n∑
i=1
[3n
i+1])
= limn→+∞
(9n2
n∑
i=1i+
3n
n∑
i=11)
= limn→+∞
(9n2
n(n+1)2
+3n
n)= lim
n→+∞
(92
(1+
1n
)+3)
=152
unidades2.
b. R é limitada pelos gráficos de y = x2, x = 3 e o eixo x.
SoluçãoO gráfico da região R é apresentado no item (a) da figura abaixo. Nesse caso, f (x) = x2,a = 0 e b = 3. Então, vamos dividir o intervalo [0,3] em n partes iguais, ou seja, ∆x =3−0
n=
3n
.
y
x0
(a)
3
y= x2
R
y
x0
Usando retângulos inscritosNos itens (b) e (c) da figura acima vemos duas partições de [0,3], para n = 6 e n = 12,respectivamente. Já que f é crescente no intervalo [0,3], ela alcança um mínimo relativono extremo esquerdo de cada subintervalo, logo,
ui = a+(i−1)∆x=(i−1)3n=
3n
i− 3n
e f (ui)= unidades2i =
9n2 (i
2−2i+1), i= 1, . . . ,n
Portanto, usando a fórmula dada, temos que:
AR = limn→+∞
(3n
n∑
i=1
9n2 (i
2−2i+1))= lim
n→+∞
(27n3
(n∑
i=1i2−2
n∑
i=1i+
n∑
i=11))
= limn→+∞
(27n3
(n(n+1)(2n+1)
6−n(n+1)+n
))
= limn→+∞
(92
(2+
3n+
1n2
)− 27
n
)= 9 unidades2.
Usando retângulos circunscritosNos itens (d) e (e) da figura acima vemos duas partições de [0,3], para n = 6 e n = 12,respectivamente. Já que f é crescente no intervalo [0,3], ela alcança um máximo relativono extremo direito de cada subintervalo, logo,
vi = a+ i∆x =3n
i e f (vi) =9n2 i2
205 / 239

Cálculo Diferencial e Integral
Portanto, usando a fórmula dada, temos que:
AR = limn→+∞
(3n
n∑
i=1
9n2 (i
2)
)
= limn→+∞
(27n3
(n∑
i=1i2))
= limn→+∞
(27n3
(n(n+1)(2n+1)
6
))
= limn→+∞
92
(2+
3n+
1n2
)= 9 unidades2.
NotaNos exemplos acima, podemos ver que quando ‖P‖→ 0 ou n→+∞, tanto as aproximaçõesdo polígono retangular inscrito como o circunscrito proporcionam o mesmo valor.
8.3.3 Soma Superior e Soma Inferior
Nesta seção e nas seguintes, as funções consideradas estão definidas no intervalo [a,b] com a < b.
Definição 8.3Se P1 e P2 são duas partições de [a,b], diz-se que P2 é um refinamento de P1 quando P1 ⊂ P2.
NotaP2 é, comprovadamente, um refinamento de P1, então, ‖P2‖ ≤ ‖P1‖.
Definição 8.4Seja f : [a,b]→ R uma função limitada em [a,b] e P = {x0,x1, . . . ,xn} uma partição de [a,b]denotada por Ii ao i-ésimo subintervalo de [a,b], isto é , Ii = [xi−1,xi], i = 1, . . . ,n.
Desde que f é limitada em [a,b], existem mi e Mi tais que:
+mi = inf{ f (x) : x ∈ Ii} Mi = sup{ f (x) : x ∈ Ii}
+ Verificando mi ≤ f (x)≤Mi, ∀x ∈ Ii, i = 1, . . . ,n, definimos:
i. A soma inferior de f para P, denotada por S( f ,P),
S( f ,P) :=n
∑i=1
mi(xi− xi−1) =n
∑i=1
mi∆xi
ii. A soma superior de f para P, denotada por S( f ,P),
S( f ,P) :=n
∑i=1
Mi(xi− xi−1) =n
∑i=1
Mi∆xi.
206 / 239

Cálculo Diferencial e Integral
Exemplo 8.3
a. Seja f (x) = k a função constante definida em [a,b], assim como o item (a) da figura abaixo,temos que k = inf{ f (x) : x ∈ Ii} e k = sup{ f (x) : x ∈ Ii}, ∀ i = 1, . . . ,n. Portanto,
S( f ,P) =n
∑i=1
k∆xi = kn
∑i=1
∆xi = k(b−a),
S( f ,P) =n
∑i=1
k∆xi = kn
∑i=1
∆xi = k(b−a).
x
y
0
(a)
a b x0
(b)
a
b
y
f(x) =
x
b. Seja f (x) = x definida em [a,b], assim como o item (b) da figura acima, temos que x j−1 =inf{ f (x) : x ∈ Ii} e xi = sup{ f (x) : x ∈ Ii} ∀ i = 1, . . . ,n. Portanto,
S( f ,P) =n
∑i=1
xi−1∆xi e S( f ,P) =n
∑i=1
xi∆xi.
8.3.4 Propriedades dos Somatórios Superiores e Inferiores
Já que a função f é limitada em [a,b], existem m e M tais que:
m = inf{ f (x) : x ∈ [a,b]} e M = sup{ f (x) : x ∈ [a,b]}.
Proposição 8.1Seja f uma função limitada em [a,b] e P = {x0,x1, . . . ,xn} uma partição de [a,b], então,
m(b−a)≤ S( f ,P)≤ S( f ,P)≤M(b−a).
Proposição 8.2Se f é uma função limitada em [a,b], P1 e P2 são duas partições de [a,b], assim como P2 é umrefinamento de P1, P1 ⊂ P2, então,
i. S( f ,P1)≤ S( f ,P2) e S( f ,P1)≥ S( f ,P2)
ii. Se P2 \P1 tem r pontos, então,
S( f ,P2)−S( f ,P1) ≤ (M−m)‖P1‖;
S( f ,P1)−S( f ,P2) ≤ (M−m)‖P1‖.
207 / 239

Cálculo Diferencial e Integral
Proposição 8.3Se f é uma função limitada em [a,b], e P1 e P2 são duas partições arbitrárias de [a,b], então,
S( f ,P1)≤ S( f ,P2).
8.4 Integrais Inferiores e Superiores
Sendo D o conjunto de todas as partições possíveis de [a,b], e f limitada em [a,b], pela propriedadede limitação garante-se que para qualquer partição P o conjunto {S( f ,P) : P ∈ D} seja limitadosuperiormente e {S( f ,P) : P ∈ D} limitado inferiormente.
Definição 8.5Se f é uma função limitada em [a,b]
i. o número sup{S( f ,P) : P∈D} é chamado de integral inferior de f em [a,b] e é denotadopor ∫ b
af (x)dx = sup{S( f ,P) : P ∈ D};
ii. o número inf{S( f ,P) : P∈D} é chamado de integral superior de f em [a,b] e é denotadopor ∫ b
af (x)dx = inf{S( f ,P) : P ∈ D}.
A proposição a seguir apresenta algumas propriedades das integrais superiores e inferiores.
Proposição 8.4Se f é uma função limitada em [a,b], m = inf{ f (x) : x ∈ [a,b]} e M = sup{ f (x) : x ∈ [a,b]},então,
i. m(b−a)≤∫ b
af (x)dx≤
∫ b
af (x)dx≤M(b−a).
ii. existem c1,c2 ∈ [a,b] tais que∫ b
af (x)dx = f (c1)(b−a) e
∫ b
af (x)dx = f (c2)(b−a)
verificando m≤ f (c1)≤ f (c2)≤M.
iii. se c ∈ (a,b), então,
∫ b
af (x)dx =
∫ c
af (x)dx +
∫ b
cf (x)dx e
∫ b
af (x)dx =
∫ c
af (x)dx +
∫ b
cf (x)dx.
208 / 239

Cálculo Diferencial e Integral
8.5 A Integral de Riemann
Definição 8.6Seja f : [a,b]→ R uma função limitada em [a,b]. Diz-se que f é integrável de Riemann em[a,b] se
∫ b
af (x)dx =
∫ b
af (x)dx =
∫ b
af (x)dx
De forma mais simples, podemos chamá-la de integral de f sobre [a,b], ou de integral defi-nida de f sobre [a,b], ou ainda de integral de f , de a até b.
NotaAssim como foi estabelecido no caso da integral indefinida, temos na integral∫ b
af (x)dx
• o símbolo∫
é um S alongado que é chamado do símbolo de integração, e foi criado pelo
matemático Leibniz para representar a palavra em latim summa;
• f (x) é o integrando;
• f (x)dx é o elemento de integração;
• a é o limite inferior e b é o limite superior;
• a variável x não tem significado especial, pois∫ b
af (x)dx =
∫ b
af (z)dz =
∫ b
af (t)dt =
∫ b
af (y)dy =
∫ b
af (u)du, etc.
Exemplo 8.4Seja f (x) = k uma função constante. No exemplo anterior, para [a,b] tem-se S( f ,P) = S( f ,P) =
k(b−a). Então,∫ b
af (x)dx =
∫ b
af (x)dx = k(b−a). Assim, f é integrável em [a,b] e
∫ b
af (x)dx = k(b−a).
209 / 239

Cálculo Diferencial e Integral
NotaSe AR representa numericamente a área da região R, uma região plana limitada pelos gráfi-cos de f , as retas x = a, x = b e o eixo x, então:
a. Se f (x)≥ 0, ∀x ∈ [a,b], AR =∫ b
af (x)dx;
b. Se f (x)≤ 0, ∀x ∈ [a,b], −AR =∫ b
af (x)dx.
O número∫ b
af (x)dx é chamado de área algébrica numa função arbitrária f contínua em
[a,b]. Essa integral definida de f em [a,b] representa a soma das áreas algébricas dasregiões delimitadas pelos gráficos de f e o eixo x, desde x = a até x = b.
Teorema 8.1 (Critério de integrabilidade de Riemann)Se f é uma função limitada em [a,b], uma condição necessária e suficiente para que f sejaintegrável em [a,b] é: dado ε > 0 arbitrário, deve existir uma partição P do intervalo [a,b] talque
S( f ,P)−S( f ,P)< ε.
Uma consequência desse critério é:
Teorema 8.2Sejam o intervalo [a,b] e a função f : [a,b]→ R. Se [a,b] é limitado e f é contínua, então f éintegrável.
8.6 Propriedades da integral definida
Consideremos suas funções f e g integráveis em [a,b] e k uma constante arbitrária em R, então:
1. f e g são integráveis em qualquer subintervalo de [a,b];
2.∫ b
ak f (x)dx = k
∫ b
af (x)dx;
3.∫ b
a[ f (x)±g(x)]dx =
∫ b
af (x)dx ±
∫ b
ag(x)dx;
4.∫ b
af (x)dx =
∫ c
af (x)dx +
∫ b
cf (x)dx, onde a≤ c≤ b;
5.∫ b
af (x)dx =−
∫ a
bf (x)dx;
6.∫ a
af (x)dx = 0;
210 / 239

Cálculo Diferencial e Integral
7.∫ b
af (x)dx =
∫ b+k
a+kf (x− k)dx;
8. Se f (x)≥ 0, ∀x ∈ [a,b], então,∫ b
af (x)dx ≥ 0;
9. Se f (x)≥ g(x), ∀x ∈ [a,b], então,∫ b
af (x)dx ≥
∫ b
ag(x)dx;
10. Se m e M são os valores mínimos e máximos de f em [a,b] respectivamente, então,
m(b−a)≤∫ b
af (x)dx ≤M(b−a);
11. Se f é uma função contínua em:
i. [a,b], então,∣∣∣∣∫ b
af (x)dx
∣∣∣∣≤ ∫ b
a| f (x)|dx;
ii. [0, t]⊆ [a,b], então,∫ t
0f (x)dx =
∫ t
0f (t− x)dx;
iii. [−t, t]⊆ [a,b], então,∫ 0
−tf (x)dx =
∫ t
0f (−x)dx;
iv. [−t, t]⊆ [a,b] é par, então,∫ t
−tf (x)dx = 2
∫ t
0f (x)dx e h(x) :=
∫ x
0f (z)dz, para cada
x ∈ [−t, t], é uma função ímpar;
v. [−t, t]⊆ [a,b] é ímpar, então,∫ t
−tf (x)dx = 0 e h(x) :=
∫ x
0f (z)dz, para cada x ∈ [−t, t], é
uma função par.
12. Para qualquer k 6= 0 temos:∫ b
af (x)dx =
1k
∫ kb
kaf(x
k
)dx e
∫ b
af (x)dx = k
∫ b/k
a/kf (kx)dx.
Nota
a. A propriedade 5 é conhecida como a propriedade de reflexão;
b. A propriedade 7 é conhecida como a propriedade de invariância em uma translação;
c. A propriedade 12 é conhecida como a propriedade de dilatação e contração do in-tervalo de integração, respectivamente. Quando k =−1 recuperamos a propriedade5.
8.7 Teorema do Valor Intermediário para Integrais
Teorema 8.3Se f é uma função contínua no intervalo [a,b], então, existe um número c ∈ [a,b] tal que
211 / 239

Cálculo Diferencial e Integral
∫ b
af (x)dx = f (c)(b−a).
Como já foi dito, podemos interpretar a integral∫ b
af (x)dx como a área da região limitada pelo gráfico
de f , pelas retas verticais x = a e x = b e pelo eixo x, e mesmo assim, o Teorema 8.3 nos garante queexiste um retângulo de largura (b−a) e altura f (c) com a mesma área.
8.8 Teoremas Fundamentais do Cálculo Integral
Teorema 8.4 (Primeiro Teorema Fundamental do Cálculo Integral)Seja f uma função contínua em [a,b], então, F(x) :=
∫ x
af (z)dz é contínua em [a,b] e derivável
em (a,b), e sua derivada é:
F ′(x) =ddx
(∫ x
af (z)dz
)= f (x), ∀x ∈ [a,b].
O Teorema 8.4 estabelece um enlace entre os conceitos de integral definida e indefinida, provando
que uma função f contínua em [a,b] admite uma antiderivada dada por F(x) =∫ x
af (t)dt, já que
F ′(x) = f (x), ∀x ∈ [a,b].
Além disso, o Teorema 8.4 estabelece um resultado de existência, pois se f é uma função contínua
em [a,b], existe F(x) =∫ x
af (t)dt tal que F ′(x) = f (x), ∀x ∈ [a,b], e por definição F(a) = 0. Logo,
F é a antiderivada de f em [a,b] com o gráfico passando pelo ponto (a,0).
Teorema 8.5 (Segundo Teorema Fundamental do Cálculo Integral)Se f é uma função contínua em [a,b] e F é uma antiderivada de f em [a,b], isto é, F ′(x) = f (x),∀x ∈ [a,b], então, ∫ b
af (x)dx = F(b)−F(a) = F(x)
∣∣∣ba.
NotaObservemos que a diferença F(b)−F(a) é independente da eleição da antiderivada F , poistodas as antiderivadas se diferenciam em uma constante, que é eliminada ao ser efetuadaa diferença. Por tal motivo, ao calcular uma integral definida não é necessário considerar aconstante na antiderivada.
212 / 239

Cálculo Diferencial e Integral
Exemplo 8.5
Seja a função F(x) =∫ x
0
11+ z2 dz, para x≥ 0, determinemos F ′(x), F ′′(x), F ′(1) e F(x).
Solução
Da definição de F(x) temos que f (z) =1
1+ z2 , e f é uma função contínua e integrável ∀z ∈ R,
logo, pelo Primeiro Teorema Fundamental temos que:
F ′(x) =1
1+ x2 ∀x≥ 0 ⇒ F ′′(x) =− 2x(1+ x2)2 ∀x≥ 0.
Logo, F(1) =12
.
Por outro lado, pelo Segundo Teorema Fundamental, desde que F ′(x) =1
1+ x2 , então, F(x) =
arctg(x)+ c para alguma constante c ∈ R. Além disso, F(0) = 0, assim, 0 = arctg(0)+ c implicaque c = 0. Portanto, F(x) = arctg(x).
Exemplo 8.6Calculemos o valor numérico das seguintes integrais:
a.∫ −1
1
11+ x2 dx.
Solução
Uma antiderivada de f (x) =1
1+ x2 em [−1,1] é F(x) = arctg(x), pela última nota, não é
considerada a constante de integração. Assim,∫ −1
1
11+ x2 dx = arctg(x)
∣∣∣1−1
= arctg(1)− arctg(−1) =π
4−(−π
4
)=
π
2.
b.∫
π/2
0senxdx.
Solução ∫π/2
0sen(x),dx =−cos(x)
∣∣∣π/2
0=−
(cos(
π
2)− cos(0)
)= 1.
c.∫ 1
0ex dx.
Solução ∫ 1
0ex dx = ex
∣∣∣10= e1− e0 = e−1.
d.∫ 1
0senh(x)dx.
213 / 239

Cálculo Diferencial e Integral
Solução ∫ 1
0senh(x)dx = cosh(x)
∣∣∣10= cosh(1)−1.
e.∫ 1
−1
|x|1+ x2 dx
Solução
Da definição de f (x) =|x|
1+ x2 , temos que:
f (x) =
x
1+ x2 , se x≥ 0
− x1+ x2 , se x < 0.
Assim, ∫ 1
−1f (x)dx =
∫ 0
−1f (x)dx+
∫ 1
0f (x)dx
= −∫ 0
−1
x1+ x2 dx+
∫ 1
0
x1+ x2 dx
= −[
12
ln(1+ x2)
]∣∣∣0−1
+
[12
ln(1+ x2)
]∣∣∣10
= −12(− ln2)+
12
ln2 = ln2.
f.∫ 4
−4|x2 + x−6|dx.
SoluçãoDa definição de f (x) = |x2 + x− 6|, notamos que x2 + x− 6 = (x+ 3)(x− 2), e assim,temos:
f (x) ={
x2 + x−6, se x ∈ (−∞,−3]∪ [2,+∞);−(x2 + x−6), se x ∈ (−3,2).
Dessa forma, obtemos:∫ 4
−4|x2 + x−6|dx =
∫ −3
−4(x2 + x−6)dx −
∫ 2
−3(x2 + x−6)dx +
∫ 4
2(x2 + x−6)dx
=
[x3
3+
x2
2−6x
]∣∣∣−3
−4−[
x3
3+
x2
2−6x
]∣∣∣2−3
+
[x3
3+
x2
2−6x
]∣∣∣42
=176−(
1256
)+
383
=1093
.
214 / 239

Cálculo Diferencial e Integral
8.9 Mudança de Variável em uma Integral Definida
Teorema 8.6Seja f : [a,b]→R uma função contínua em [a,b] e g : [α,β ]→ [a,b] uma função com derivadacontínua em [α,β ] com g(α) = a e g(β ) = b. Se substituímos a variável x da integral por g(t),isto é, x = g(t), então, verifica-se que:∫ b
af (x)dx =
∫β
α
f (g(t)) ·g′(t)dt.
NotaSe a função g : [α,β ]→ [a,b] é tal que g(β ) = a e g(α) = b, nesse caso, pelo Teorema 8.6,obtemos: ∫ b
af (x)dx =
∫α
β
f (g(t)) ·g′(t)dt.
Exemplo 8.7Calculemos o valor numérico das seguintes integrais:
a.∫ 3
2
x2
(1+ x3)3 dx.
Solução
Considerando t = 1+ x3, obtemos x = g(t) = 3√
t−1, g′(t) =1
3 3√(t−1)2
, g(9) = 2 e
g(28) = 3. Dado que g e g′ são contínuas em [9,28], então,
∫ 3
2
x2
(1+ x3)3 dx =
∫ 28
9
3√
(t−1)2
t3 · 1
3 3√(t−1)2
dx =13
∫ 28
9t−3dt =−1
61t2
∣∣∣28
9=
703381024
.
b.∫ 1
1/2
(x2−1)(x2 +1)
√x4 +1
dx.
SoluçãoAntes de fazer a mudança de variável, dividimos o numerador e o denominador por x2
(x2 > 0, pois x ∈ [1/2,1]), logo, substituímos t = x+1x
e para que x = 12 e x = 1, temos
t = 52 e t = 2, respectivamente. Então,
∫ 1
1/2
(x2−1)(x2 +1)
√x4 +1
dx =∫ 1
1/2
(1− 1
x2
)(
x+1x
)√x2 +
1x2
dx =∫ 2
5/2
dt
t√
t2−2
=1√2
arcsen(|t|√
2
)∣∣∣25/2
=1√2
(arcsen(
√2)− arcsen(5/2)
)=
1√2
(π
4− arcsen(5/2)
)215 / 239

Cálculo Diferencial e Integral
c.∫ 1
0
ln(x+1)1+ x2 dx.
SoluçãoAo considerar x = tg(θ) temos:∫ 1
0
ln(x+1)1+ x2 =
∫π/4
0
ln(1+ tg(θ))sec2(θ)
· sec2(θ)dθ =
∫π/4
0ln(1+ tg(θ))dθ
Aplicando o Teorema 8.6 na última integral obtemos:∫π/4
0ln(1+ tg(θ))dθ =
∫π/4
0ln[1+ tg
(π
4−θ
)]dθ
=∫
π/4
0ln(
1+1− tg(θ)1+ tg(θ)
)dθ
=∫
π/4
0ln(
21+ tg(θ)
)dθ
=∫
π/4
0ln(2)dθ −
∫π/4
0ln(1+ tg(θ))dθ
=π
4ln(2)−
∫π/4
0ln(1+ tg(θ))dθ
Assim,
2∫
π/4
0ln(1+ tg(θ))dθ =
π
4ln(2) ⇒
∫π/4
0ln(1+ tg(θ))dθ =
π
8ln(2).
8.10 Integração por Partes em uma Integral Definida
Teorema 8.7Se u = u(x) e v = v(x) são duas funções com derivadas contínuas em [a,b], então,∫ b
audv = (uv)
∣∣∣ba−∫ b
avdu.
Exemplo 8.8Calculemos as seguintes integrais definidas:
a.∫ 3
1x2 ln(x)dx.
SoluçãoAo considerar
u = ln(x) ⇒ du =dxx
dv = x2 dx ⇒ v =∫
x2dx =x3
3obtemos:∫
x2 ln(x)dx =x3
3ln(x)−
∫x3
3dxx
=x3
3ln(x)− 1
3
∫x2dx =
x3 ln(x)3− x3
9+ c.
216 / 239

Cálculo Diferencial e Integral
8.11 Integrais Impróprias
Na definição da integral definida∫ b
af (x)dx, foram estabelecidas duas restrições:
i. O intervalo [a,b] é limitado;
ii. A função f é limitada em [a,b].
Agora, estendemos a definição de integral definida por retirar alguma dessas restrições. f apresentauma descontinuidade infinita em [a,b].
As integrais que possuem essas características são chamadas de integrais impróprias e são do tipo:
Tipo 1Integrais impróprias com limites infinitos.
Tipo 2Integrais impróprias com limites finitos (com descontinuidades infinitas).
8.11.1 Integrais Impróprias com Limites Infinitos
Definição 8.7Seja f uma função contínua no intervalo:
i. [a,+∞). A integral imprópria de f , de a até +∞, é denotada e definida como:∫ +∞
af (x)dx := lim
t→+∞
∫ t
af (x)dx;
ii. (−∞,b]. A integral imprópria de f , de −∞ até b, é denotada e definida como:∫ b
−∞
f (x)dx := limt→−∞
∫ b
tf (x)dx.
Diz-se que∫ +∞
af (x)dx ou
∫ b
−∞
f (x)dx converge quando esse limite existe. Caso contrário,
diz-se que diverge.
217 / 239

Cálculo Diferencial e Integral
Nota
Nas seções anteriores, se f (x)≥ 0, a integral definida∫ t
af (x)dx representa a área da região
plana limitada pelo gráfico de f , o eixo x e as retas verticais x = a e x = t. No caso da integralimprópria ser convergente, podemos interpretar que o valor da integral:
a.∫ +∞
af (x)dx representa a área da região plana infinita que se encontra à direita da reta
x = a e está compreendida entre o gráfico de f e o eixo x. A figura à esquerda ilustraessa integral.
x
y
0 a t x
y
0bt
b.∫ b
−∞
f (x)dx representa a área da região infinita que se encontra à esquerda da reta
x = b e está compreendida entre o gráfico de f e o eixo x. A figura à direita ilustraessa integral.
Definição 8.8Seja f uma função contínua e integrável no intervalo (−∞,+∞), então, a integral imprópria def , de −∞ até +∞, é denotada e definida como:∫ +∞
−∞
f (x)dx :=∫ c
−∞
f (x)dx +
∫ +∞
cf (x)dx,
onde c é um número real arbitrário.
Diz-se que a integral imprópria∫ +∞
−∞
f (x)dx converge quando∫ c
−∞
f (x)dx e∫ +∞
cf (x)dx são conver-
gentes, e diverge se alguma dessas integrais impróprias forem divergentes.
NotaNa figura a seguir observamos 3 regiões: R1, R2 e R3:
xc
R1
f
xc
R3
f
xc
R2
f
Logo, da Definição 8.8 podemos concluir que R1 gerará uma integral imprópria convergente,enquanto R2 e R3 gerarão integrais imprópias divergentes.
218 / 239

Cálculo Diferencial e Integral
Exemplo 8.9Determinemos se as seguintes integrais são convergentes ou divergentes:
a.∫ 2
−∞
(x−2)ex dx.
SoluçãoAplicamos a integração por partes para u = x− 2 e dv = exdx. Da definição da integralimprópria, obtemos que:∫ 2
−∞
(x−2)ex dx = limt→−∞
∫ 2
t(x−2)ex dx = lim
t→−∞((x−2)ex− ex)
∣∣∣2t
= limt→−∞
(−e2− (t−2)et + et) = −e2− lim
t→−∞(t−2)et
O último limite é da forma “∞ ·0”. Aplicando a regra de L’Hôpital, obteremos:
limt→−∞
(t−2)et = limt→−∞
t−2e−t = lim
t→−∞
1−e−t = 0
Portanto, ∫ 2
−∞
(x−2)ex dx =−e2,
e concluímos, que essa integral imprópria é convergente e converge em −e2.
b.∫ +∞
1
x2 +2xx3 +3x2 +5
dx.
Solução∫ +∞
1
x2 +2xx3 +3x2 +5
dx = limt→+∞
13
∫ t
1
x2 +2xx3 +3x2 +5
dx =13
limt→+∞
(ln |t3 +3t2 +5|
∣∣∣t1
)
=13
limt→+∞
(ln |t3 +3t2 +5|− ln(9)
)=
13(+∞) = +∞.
Portanto, a integral imprópria diverge.
c.∫ +∞
−∞
dx1+ x2 .
SoluçãoEscolhendo c = 0, obtemos:
∫ +∞
−∞
dx1+ x2 =
∫ 0
−∞
dx1+ x2 +
∫ +∞
0
dx1+ x2 = lim
c→−∞
∫ 0
c
dx1+ x2 + lim
c→+∞
∫ c
0
dx1+ x2
= limc→−∞
(arctg(x)
∣∣∣0c
)+ lim
c→+∞
(arctg(x)
∣∣∣c0
)= lim
c→−∞arctg(c)+ lim
c→+∞arctg(c) = −
(−π
2
)+
π
2= π.
Portanto, a integral imprópria∫ +∞
−∞
dx1+ x2 é convergente e converge em π .
219 / 239

Cálculo Diferencial e Integral
8.11.2 Integrais Impróprias com Limites Finitos
Definição 8.9Seja f uma função contínua no intervalo:
i. [a,b) com limx→b−
f (x) = ∞. A integral imprópria de f , de a até b, é definida por:∫ b
af (x)dx = lim
t→b−
∫ t
af (x)dx.
ii. (a,b] com limx→a+
f (x) = ∞. A integral imprópria de f , de a até b, é definida por:∫ b
af (x)dx = lim
t→a+
∫ b
tf (x)dx.
iii. [a,b], exceto em algum ponto c ∈ (a,b) onde limx→c−
f (x) = ∞ ou limx→c+
f (x) = ∞. A integral
imprópria de f , de a até b, é definida por:∫ b
af (x)dx =
∫ c
af (x)dx +
∫ b
cf (x)dx.
Diz-se∫ b
af (x)dx converge se os limites existem e,
∫ c
af (x)dx e
∫ b
cf (x)dx são convergentes,
respectivamente, caso contrário diz-se que é divergente.
Nota
a. A Definição 8.9 pode ser estendida para n pontos de descontinuidade. Em outraspalavras, se a função f definida em (a,b), a pode ser −∞ e b pode ser +∞, e dentrodo intervalo (a,b) existe um número finito de pontos c1, c2, . . . , cn com descontinuidadeinfinita, isto é, lim
x→c−if (x) = ∞ ou lim
x→c+if (x) = ∞ para i = 1, . . . , n, então, a integral da
função f em (a,b) é definida por:∫ b
af (x)dx :=
∫ c1
af (x)dx +
∫ c2
c1
f (x)dx + · · ·+∫ b
cn
f (x)dx.
Diz-se que é convergente se todas as integrais impróprias da direita são convergentes.Caso contrário, diz-se que é divergente.
b. Os itens (i) e (ii) da definição anterior são, respectivamente, equivalentes a:∫ b
af (x)dx = lim
ε→0+
∫ b−ε
af (x)dx, e
∫ b
af (x)dx = lim
ε→0+
∫ b
a+ε
f (x)dx;
c. Se f (x)≥ 0 e a integral imprópria∫ b
af (x)dx é convergente, o valor da integral repre-
senta a área da região infinita limitada pelo gráfico de f , pelo eixo x e pelas retas x = ae x = b.
220 / 239

Cálculo Diferencial e Integral
Exemplo 8.10Determinemos se as seguintes integrais existem:
a.∫ 2
1
dx√x−1
.
Solução
A função f (x) =1√
x−1é contínua em (1,2] e lim
x→1+f (x) = +∞. Assim,
∫ 2
1
dx√x−1
= limt→1+
∫ 2
t
dx√x−1
= limt→1+
(2√
x−1∣∣∣2t
)= lim
t→1+
(2−2
√t−1
)= 2.
Portanto, a integral imprópria é convergente e converge ao valor 2.
b.∫
π/4
−π/4cotg(θ)dθ .
Solução
Ao definir a função f (θ) = cotg(θ) =cos(θ)sen(θ)
, observamos que existe uma descontinui-
dade infinita em θ = 0, isto é, limθ→0+
f (θ) =+∞ e limθ→0−
f (θ) =−∞. Assim, reescrevemos
a integral como:∫π/4
−π/4cotg(θ)dθ =
∫ 0
−π/4cotg(θ)dθ +
∫π/4
0cotg(θ)dθ
Por outro lado, a integral∫ 0
−π/4cotg(θ)dθ = lim
ε→0+
∫ −ε
−π/4cotg(θ)dθ = lim
ε→0+
(ln |sen(θ)|
∣∣∣−ε
−π/4
)
= limε→0+
(ln |− sen(ε)|− ln
(√2
2
))=−∞.
Portanto, a integral imprópia é divergente.
c.∫ +∞
−∞
dxx(x−2)
.
Solução
A função f (x) =1
x(x−2)tem duas descontinuidades infinitas em x = 0 e x = 2. Esco-
lhendo os pontos x =−1, x = 1 e x = 3, a integral é expressa como:∫ +∞
−∞
dxx(x−2)
=
∫ 0
−∞
dxx(x−2)
+
∫ 2
0
dxx(x−2)
+
∫ +∞
2
dxx(x−2)
.
Já que essas integrais são impróprias em cada um dos extremos, precisamos trabalhar deforma análoga à da integral imprópria em (−∞,+∞), ou seja, é necessário escolher 3
221 / 239

Cálculo Diferencial e Integral
pontos em cada um desses intervalos. Escolhendo os pontos x = −1 ∈ (−∞,0), x = 1 ∈(0,2) e x = 3 ∈ (2,+∞), a integral será expressada como:∫ +∞
−∞
dxx(x−2)
=∫ −1
−∞
dxx(x−2)
+∫ 0
−1
dxx(x−2)
+∫ 1
0
dxx(x−2)
+∫ 2
1
dxx(x−2)
+∫ 3
2
dxx(x−2)
+∫ +∞
3
dxx(x−2)
Agora, se analisarmos a integral imprópia, teremos:∫ 0
−1
dxx(x−2)
= limt→0−
∫ t
−1
dx(x−1)2−1
= limt→0−
(12
ln∣∣∣∣x−2
x
∣∣∣∣ ∣∣∣t−1
)
= limt→0−
(12
ln∣∣∣∣t−2
t
∣∣∣∣− 12
ln(3))=+∞,
é divergente, portanto, a integral dada é divergente.
8.12 Aplicações da Integral Definida
Nesta seção apresentaremos algumas aplicações da integral definida.
8.12.1 Áreas de Regiões Planas
Caso ISeja f : [a,b]→ R uma função contínua do tipo f (x) ≥ 0, ∀x ∈ [a,b], então, da interpretaçãogeométrica da integral definida que se segue, a área da região R limitada pelo gráfico de f , peloeixo x, pelas retas x = a e x = b, e assim como a figura a seguir, é denotada por:
AR =
(∫ b
af (x)dx
)unidades2.
x
y
0a b
R
y = f(x)
222 / 239

Cálculo Diferencial e Integral
Nota
a. Se f (x)≤ 0, então, a região R encontra-se abaixo do eixo x, assim como o item (a) dafigura a seguir. Nesse caso,
AR =
∣∣∣∣∣∫ b
af (x)dx
∣∣∣∣∣ unidades2.
x
y
0
R
x
y
0a b
R
c
d
y = f(x) x = h(y)
(a) (b)
b. Se a região R limitada pela curva x = h(y), pelo eixo y e pelas retas y = c e y = d,assim como o item (b) da figura acima, ela será denotada por:
AR =
(∫ d
ch(y)dy
)unidades2.
Caso IISejam f ,g : [a,b]→ R duas funções contínuas tais que g(x) ≥ f (x), ∀x ∈ [a,b], então, a áreada região R é limitada pelos gráficos de f e g e pelas retas x = a e x = b, assim como o item (a)da figura a seguir, e é denotada por:
AR =
(∫ b
a[g(x)− f (x)] dx
)unidades2.
x
y
0a bR
y = g(x)
y = f(x)
x
y
0
x = l(y)
x = h(y)
R
c
d
(a) (b)
223 / 239

Cálculo Diferencial e Integral
NotaSejam h, l : [c,d]→ R duas funções contínuas tais que h(y) ≥ l(y), ∀y ∈ [c,d], então, aregião R é limitada pelos gráficos de x = l(y) e x = h(y) e pelas retas y = c e y = d, assimcomo o item (b) da figura acima, e é dada por:
AR =
(∫ c
d[h(y)− l(y)] dy
)unidades2.
Exemplo 8.11Calculemos a área da região R limitada por:
a. A parábola y = 4x− x2 e o eixo x.
SoluçãoComo y = 4x− x2, logo, y− 4 = −(x− 2)2 é uma parábola de vértice no ponto (2,4),assim como o item (a) da figura a seguir, e sendo assim,
AR =
∫ 4
0ydx =
∫ 4
0(4x− x2)dx =
(2x2− x3
3
)∣∣∣40=
324
unidades2.
x
y
0
R
y = 4x - x2
4
2
4
x
y
R1
1
e
y = exy = e-x
(a) (b)
b. Os gráficos das curvas cujas equações são y = ex, y = e−x e a reta x = 1.
SoluçãoA região compreendida entre essas curvas é apresentada no item (b) da figura acima, eassim, teremos:
AR =∫ 1
0(ex− e−x)dx = (ex− e−x)
∣∣∣10= e+ e−1−2
= 2(
e+ e−1
2−1)= 2(cosh(1)−1) unidades2.
c. A parábola y =−x2 +4x−3 e as retas tangentes a ela nos pontos (0,−3) e (3,0).
SoluçãoObservamos que y = −x2 +4x−3 = 1− (x−2)2, e assim, a parábola y−1 = −(x−2)2
tem vértice no ponto (1,2). Além disso,
i.dydx
∣∣∣x=3
=(−2x+4)∣∣∣x=3
=−2, obtemos L1 : y−0=−2(x−3) de onde L1 : 2x+y= 6.
ii.dydx
∣∣∣x=0
= (−2x+4)∣∣∣x=0
= 4, obtemos L2 : y+3 = 4(x−0) de onde L2 : 4x− y = 3.
224 / 239

Cálculo Diferencial e Integral
A região R compreendida entre essas curvas é apresentada no item (a) da figura abaixo, eassim, teremos:
AR =∫ 3/2
0
[(4x−3)− (−x2 +4x−3)
]dx+
∫ 3
3/2
[(6−2x)− (−x2 +4x−3)
]dx
=∫ 3/2
0x2dx+
∫ 3
3/2(x2−6x+9)dx
=
(x3
3
)∣∣∣3/2
0+
(x3
3−3x2 +9x
)∣∣∣33/2
= 9+274− 27
2=
94
unidades2.
x
0
R
y = -x2 + 4x - 3
3
y
2
y = x + 6
x
y
1
y =
y = ln2(x)
e
e
(a) (b)
d. Os gráficos das funções y = ln(x) e y = ln2(x).
SoluçãoCalculemos os pontos de interseção de ambas curvas:
{y = ln(x)y = ln2(x)
⇒ (ln(x))(ln(x)−1) = 0⇒ ln(x) = 0 ou ln(x)−1= 0⇒{
x = e0;x = e1.
A região R compreendida entre essas curvas é apresentada no item (b) da figura acima, eassim, teremos:
AR =
∫ e
1
(ln(x)− ln2(x)
)dx =
(3x ln(x)− x ln2(x)−3x
)∣∣∣e1= (3− e) unidades2.
8.12.2 Volume de um Sólido de Revolução
Definição 8.10Um sólido de revolução é o sólido obtido com a rotação (ou revolução) de uma região planaem torno de um eixo em seu plano. Esse eixo é denominado de eixo de revolução.
Método do Disco Circular
Caso ISeja f : [a,b]→R uma função contínua, e S o sólido de revolução obtido pela rotação emtorno ao eixo x da região plana R limitada pelo gráfico da curva y = f (x), pelo eixo x epelas retas x = a e x = b, assim como a figura a seguir. Dessa maneira, o volume de S édado por:
V =
(π
∫ b
a[ f (x)]2 dx
)unidades3
225 / 239

Cálculo Diferencial e Integral
NotaSeja S o sólido de revolução obtido pela rotação em torno do eixo y da região plana R limitadapela curva x = g(y), onde g é uma função contínua em [c,d], pelo eixo y e pelas retas y = ce y = d. Sendo assim, o volume do sólido é:
V =
(π
∫ d
c[g(y)]2 dy
)unidades3.
Caso IISejam f ,g : [a,b]→ R duas funções contínuas cujos gráficos encontram-se ao mesmo lado doeixo x. Além disso, |g(x)| ≤ | f (x)|, ∀x ∈ [a,b]. Seja S o sólido de revolução que se obtém pelarotação em torno do eixo x da região R limitada pelas curvas y = f (x) e y = g(x), e pelas retasverticais x = a, x = b, assim como a figura a seguir. Logo, o volume do sólido de revolução S é:
V =
(π
∫ b
a
([ f (x)]2− [g(x)]2
)dx
)unidades3.
x
f(x)
a b
g(x)
226 / 239

Cálculo Diferencial e Integral
Nota
a. Sejam f ,g : [a,b]→R duas funções contínuas cujos gráficos encontram-se do mesmolado da reta y = c. Além disso, |g(x)− c| ≤ | f (x)− c|, ∀x ∈ [a,b]. Seja S o sólido derevolução obtido pela rotação em torno da reta y = c da região R limitada pelas curvasy = f (x) e y = g(x) e pelas retas verticais x = a e x = b. Então, o volume do sólido derevolução S é:
V =
(π
∫ b
a
([ f (x)− c]2− [g(x)− c]2
)dx
)unidades3.
b. Se a região R é limitada pelos gráficos x = f (y) e x = g(y) e pelas retas horizontaisy = c e y = d, girando em torno da reta vertical x = k, onde os gráficos de f e g estãodo mesmo lado do eixo de rotação e |g(y)−k| ≤ | f (y)−k|, ∀y∈ [c,d]. Logo, o volumedo sólido de revolução S é:
V =
(π
∫ d
c
([ f (y)− k]2− [g(y)− k]2
)dy
)unidades3.
Exemplo 8.12Calculemos o volume do sólido gerado pela rotação de R em torno:
a. do eixo x, onde R é a região limitada pelos gráficos de y = ex, x = 0 e y = 0.
SoluçãoA região R é apresentada no item (a) da figura a seguir. Aplicando o método, obtemos:
V = π
∫ 1
0(ex)2 dx = π
∫ 1
0e2xdx =
π
2(e2−1)unidades3.
x
y
R1
y = ex
(a)
b. do eixo y, onde R é a região limitada pelos gráficos de y = arcsen(x), y = 0 e x =−1.
SoluçãoDesde que o eixo de rotação é o eixo y, consideramos y como a variável independente. Aregião R é apresentada no item (b) da figura acima, então,
V = π
∫ 0
−π/2
[1− (−sen2(y))
]dy = π
[y2+
14
sen(2y)]∣∣∣0−π/2
=π
4unidades3.
227 / 239

Cálculo Diferencial e Integral
c. do eixo x, onde R é a região limitada pelos gráficos de y = x2, y =√
x e x = 2.
SoluçãoAs curvas y = x2 e y =
√x se intersectam nos pontos (0,0) e (1,1). A região R é apre-
sentada no item (a) da figura abaixo, e podemos observar que x2 ≤√
x para x ∈ [0,1] érepresentado na figura por R1, e
√x ≤ x2 para x ∈ [1,2], na figura é representada por R2.
Aplicando o método, obtemos:
V = π
∫ 1
0
[(√
x)2− (x2)2]dx+π
∫ 2
1
[(x2)2− (
√x)2]dx
= π
∫ 1
0(x− x4)dx+π
∫ 2
1(x4− x)dx =
3π
10+
47π
10= 5π unidades3.
x
y
R1
2
y = x
(a)
d. da reta x = 1 da região limitada pela circunferência (x+2)2 +(y−2)2 = 1.
SoluçãoA região R é apresentada no item (b) da figura acima, e podemos observar que f (y) =−2−
√1− (y−2)2 e g(y) = −2+
√1− (y−2)2 verificando que 1− g(y) ≤ 1− f (y).
Assim, aplicando o método, obtemos:
V = π
∫ 3
1
[(1− f (y))2− (1−g(y))2]dy
= π
∫ 3
1
[(3+√
1− (y−2)2)2−(
3−√
1− (y−2)2)2]
dy
= π
∫ 3
112√
1− (y−2)2 dy
= 6π
[(y−2)
√1− (y−2)2 + arcsen(y−2)
]∣∣∣31= 10π2 unidades3.
Método das Cascas Cilíndricas
Caso ISejam a≥ 0, f : [a,b]→R uma função contínua e não negativa, e S o sólido de revoluçãoobtido pela rotação em torno do eixo y da região plana R limitada pelo gráfico da curvay = f (x), pelo eixo x e pelas retas x = a e x = b, assim como a figura a seguir, logo, ovolume de S é dado por:
V =
(2π
∫ b
ax f (x)dx
)unidades3
228 / 239

Cálculo Diferencial e Integral
x
f(x)
a b
Caso IISejam f ,g : [a,b]→ R duas funções contínuas em [a,b] tais que g(x)≤ f (x), ∀x ∈ [a,b]. SejaR a região limitada pelas curvas y = f (x) e y = g(x), e pelas retas x = a e x = b, logo:
i. se c ≤ a, então, o volume do sólido de revolução S obtido pela rotação em torno da retax = c (veja o item (a) da figura a seguir) é dado por:
V =
(2π
∫ b
a(x− c) [ f (x)−g(x)] dx
)unidades3;
x
f(x)
a b
g(x)
R
ii. se b ≤ c, então, o volume do sólido de revolução S obtido pela rotação em torno da retax = c (veja o item (b) da figura acima) é dado por:
V =
(2π
∫ b
a(c− x) [ f (x)−g(x)] dx
)unidades3.
NotaSejam f e g duas funções contínuas em [a,b] tais que g(y) ≤ f (y), ∀y ∈ [a,b]. Seja R aregião limitada pelas curvas x = f (y) e x = g(y), e pelas retas y = a e y = b, dessa maneira:
i. se c≤ a, então, o volume do sólido de revolução S obtido ao rotar R em torno da retay = c é dado por:
V =
(2π
∫ b
a(y− c) [ f (y)−g(y)] dy
)unidades3;
ii. se b≤ c, então, o volume do sólido de revolução S obtido ao rotar R em torno da retay = c é dado por:
V =
(2π
∫ b
a(c− y) [ f (y)−g(y)] dy
)unidades3.
229 / 239

Cálculo Diferencial e Integral
Exemplo 8.13
a. Calculemos o volume do sólido obtido ao rotar R em torno do eixo y, onde R é a região limitadapela curva y = (x−2)3, pelo eixo x e pela reta x = 3.
SoluçãoR é apresentada no item (a) da figura abaixo, e nesse caso, o volume é dado por:
V = 2π
∫ 3
2x f (x)dx = 2π
∫ 3
2x(x−2)3dx
= 2π
∫ 3
2(x4−6x3 +12x2−8x)dx =
14π
10unidades3.
x
y = (x-2)2
3
R
b. Calculemos o volume do sólido obtido na rotação da região limitada pelos gráficos de x+ y2 +3y−6 = 0, x+ y−3 = 0 em torno da reta y = 3.
SoluçãoR é apresentada no item (b) da figura acima, e desde que o eixo de revolução é horizontal,o volume é:
V = 2π
∫ 1
−3(3− y)
[(6−3y− y2)− (3− y)
]dy
= 2π
∫ 1
−3(y3− y2−9y+9)dy =
256π
3unidades3.
c. Calculemos o volume do sólido de revolução obtido no giro da região limitada pelos gráficosde y = |x2−2x−3|, y+1 = 0, x−1 = 0 e x−4 = 0 em torno da reta x = 1.
SoluçãoNotamos que:
|x2−2x−3|= |(x−3)(x+1)|={−(x2−2x−3), 1≤ x < 3;
x2−2x−3, 3≤ x≤ 4.R é a região apresentada no item (c) da figura acima, e nesse caso, o volume é dado por:
V = 2π
∫ 4
1(x−1)
[|x2−2x−3|+1
]dx
= 2π
(∫ 3
1(x−1)
[(3+2x− x2)+1
]dx+
∫ 4
3(x−1)
[(x2−2x−3)+1
]dx)
= 2π
(∫ 3
1
(−4+2x+3x2− x3) dx+
∫ 4
3
(x3−3x2 +2
)dx)
= 2π
(6+
354
)=
592
π unidades3.
230 / 239

Cálculo Diferencial e Integral
8.12.3 Comprimento de Arco
Comprimento de uma curva y = f (x)Consideremos uma função f : [a,b]→ R com derivada contínua no intervalo [a,b] e com parti-ção P = {x0,x1, . . . ,xn} do intervalo [a,b], que define uma poligonal formada pelos segmentosretilíneos a partir do ponto Pi−1(xi−1, f (xi−1)) até o ponto Pi = (xi, f (xi)) para i = 1,2, . . . ,n.
x
y
a=x0 x1 x2 x3 xi-1 xn-1 xn=bxi0
P0P1
P2P3 Pi-1
Pn-1
Pn
Pi
O comprimento do [a,b]-ésimo segmento definido pela partição P é:∣∣Pi−1Pi∣∣=√(xi− xi−1)2 +( f (xi)− f (xi−1))2.
Portanto, o comprimento da poligonal definida pela partição P é:
LP =n
∑i=1
∣∣Pi−1Pi∣∣= n
∑i=1
√(xi− xi−1)2 +( f (xi)− f (xi−1))2.
Definição 8.11Seja f : [a,b]→R uma função com derivada contínua em [a,b], se existir um número L tal qual
L = lim‖P‖→0
n
∑i=1
∣∣Pi−1Pi∣∣
então, diz-se que o arco P0Pn da curva y = f (x) é retificável e que o número L é denominadode comprimento de arco da curva y = f (x) a partir do ponto P0 = (a, f (a)) até o ponto Pn =(b, f (b)).
Teorema 8.8Seja f : [a,b]→ R uma função com derivada contínua em [a,b], então, o comprimento de arcoda curva y = f (x) a partir do ponto (a, f (a)) até (b, f (b)) é expressado por:
L =
∫ b
a
√1+( f ′(x))2dx =
∫ b
a
√1+(
dydx
)2
dx.
231 / 239

Cálculo Diferencial e Integral
NotaSe g : [c,d]→ R é uma função contínua em [c,d], então, o comprimento de arco da curvax = g(y) a partir do ponto (g(c),c) até (g(d),d) é expressado por:
L =
∫ d
c
√1+(g′(y))2dy =
∫ d
c
√1+(
dxdy
)2
dy.
x
y
0
c
d
A
B
x=g(y)
Exemplo 8.14Encontremos o comprimento de arco:
a. da parábola 6y = x2, desde a origem de coordenadas até o ponto (4,83).
Solução
Como 6y = x2 (veja o item (a) da figura a seguir), então,dydx
=x3
, e portanto:
L =∫ 4
0
√1+(
dydx
)2
dx =∫ 4
0
√1+
x2
9dx =
13
∫ 4
0
√9+ x2 dx
=13
[x2
√9− x2 +
92
ln∣∣∣x+√x2 +9
∣∣∣]∣∣∣40=
13
[(10+
92
ln9)−(
0+92
ln3)]
=13
[10+
92
ln(3)]
unidades.
x
y
0
6y = x2
4
83
b. da circunferência x2 + y2 = a2.
SoluçãoDa equação x2+y2 = a2, obtemos y =±
√a2− x2 (veja o item (b) da figura acima). Além
232 / 239

Cálculo Diferencial e Integral
disso, observamos que o gráfico é simétrico com respeito ao eixo x, e considerando y =√
a2− x2 implicaria quedydx
=−x√
a2− x2. Portanto, o comprimento de arco é:
L = 2∫ a
−a
√1+(
dydx
)2
dx = 2∫ a
−a
√1+
x2
a2− x2 dx = 2a∫ a
−a
dx√a2− x2
dx
= 2aarcsen(x
a
)∣∣∣a−a
= 2a(arcsen(1)− arcsen(−1)) = 2a(
π
2+
π
2
)= 2πa unidades.
c. total da curva x2/3 + y2/3 = a2/3.
Solução
Da equação x2/3 + y2/3 = a2/3, obtemos que y =(
a2/3− x2/3)3/2
edydx
=
−x−1/3√
a2/3− x2/3, e que o gráfico da curva é simétrico com respeito à origem (vejao item (a) da figura abaixo), logo, temos que:
L = 4∫ a
0
√1+(
dydx
)2
dx = 4∫ a
0
√1+ x−2/3
(a2/3− x2/3
)dx
= 4∫ a
0
√x−2/3a2/3dx = 4
∫ a
0x−1/3a1/3dx = 6x2/3a1/3
∣∣∣a0= 6a unidades.
d. da parábola semicúbica 2y3 = x2 no interior da circunferência x2 + y2 = 20.
SoluçãoOs pontos de interseção de ambas curvas são (−4,2) e (4,2). Ao derivar a equação 2y3 =x2 implicitamente com respeito a variável y, temos que:
dxdy
=3y2
x⇒ 1+
(dxdy
)2
= 1+9y4
x2 = 1+9y(
y3
x2
)= 1+
9y2.
Além disso, como o gráfico é simétrico em relação ao eixo y (veja o item (b) da figuraacima), então, o comprimento de arco é:
L = 2∫ 2
0
√1+(
dxdy
)2
dx = 2∫ 2
0
√1+
9y2
dy =827
(√1000−1
)unidades.
233 / 239

Cálculo Diferencial e Integral
8.12.4 Área de uma Superfície de Revolução
Seja f : [a,b]→ R uma função não negativa e com derivada contínua no intervalo [a,b]. Ao girar ográfico de f de x = a até x = b em torno do eixo x é obtida uma superfície de revolução (veja a figuraabaixo). A área dessa superfície de revolução é dada por:
A(S) =
(2π
∫ b
af (x)
√1+( f ′(x))2dx
)unidades2.
x
y
Nota
a. Seja f : [a,b]→ R uma função com derivada contínua no intervalo [a,b], é possívelencontrar seu gráfico do mesmo lado da reta y = c. Ao girar o gráfico de f a partir dex = a até x = b em torno da reta y = c, obteremos uma superfície de revolução cujaárea é:
A(S) =
(2π
∫ b
a| f (x)− c|
√1+( f ′(x))2dx
)unidades2.
b. Se x = g(y) é uma função com derivada contínua no intervalo [a,b], encontraremosseu gráfico do mesmo lado da reta x = c. Ao girar o gráfico de g, a partir de y = a atéy = b, em torno da reta x = c, obteremos uma superfície de revolução cuja área é:
A(S) =
(2π
∫ b
a|g(y)− c|
√1+(g′(y))2dy
)unidades2.
Exemplo 8.15Calculemos a área da superfície gerada ao girar em torno:
a. do eixo x e do gráfico de f (x) =√
24−4x, x ∈ [3,6].
Solução
Ao derivar temos f ′(x) =−2√
24−4x, e a área da superfície é:
A(S) = 2π
∫ 6
3f (x)
√1+( f ′(x))2dx = 2π
∫ 6
3
√24−4x
√1+
424−4x
dx
= 2π
∫ 6
3
√28−4xdx =
56π
3unidades2.
234 / 239
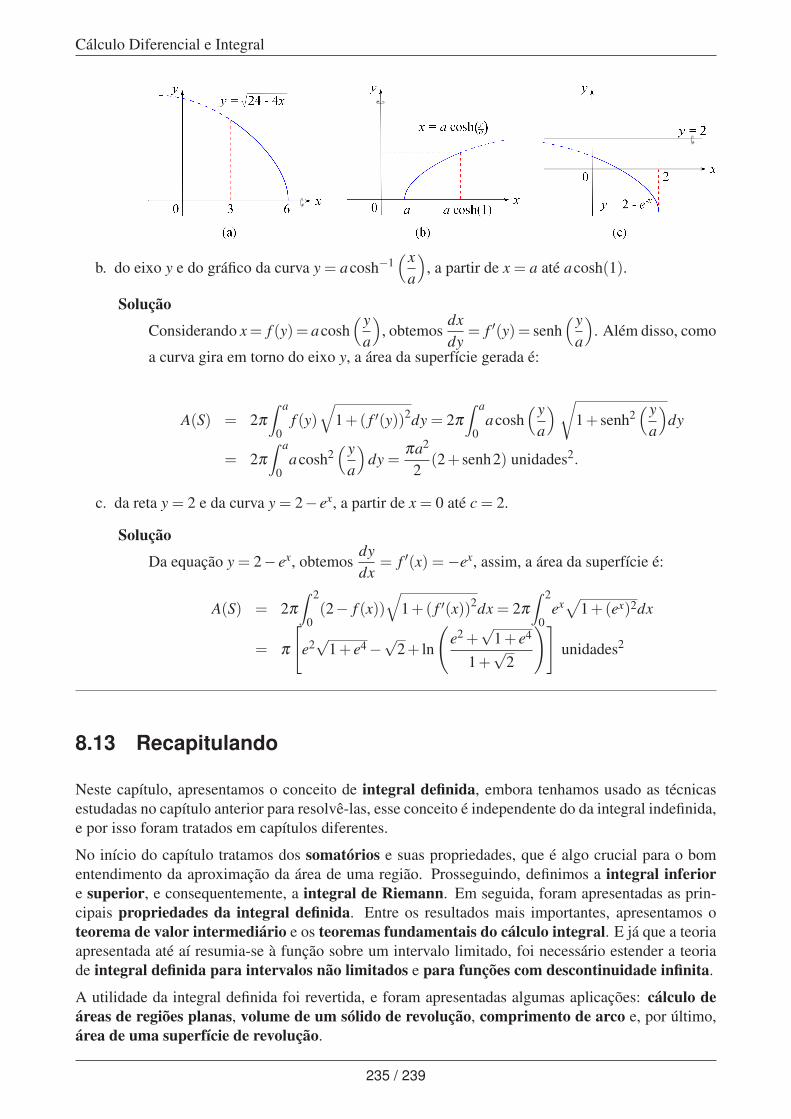
Cálculo Diferencial e Integral
x
y
b. do eixo y e do gráfico da curva y = acosh−1(x
a
), a partir de x = a até acosh(1).
Solução
Considerando x= f (y)= acosh(y
a
), obtemos
dxdy
= f ′(y)= senh(y
a
). Além disso, como
a curva gira em torno do eixo y, a área da superfície gerada é:
A(S) = 2π
∫ a
0f (y)
√1+( f ′(y))2dy = 2π
∫ a
0acosh
(ya
)√1+ senh2
(ya
)dy
= 2π
∫ a
0acosh2
(ya
)dy =
πa2
2(2+ senh2) unidades2.
c. da reta y = 2 e da curva y = 2− ex, a partir de x = 0 até c = 2.
Solução
Da equação y = 2− ex, obtemosdydx
= f ′(x) =−ex, assim, a área da superfície é:
A(S) = 2π
∫ 2
0(2− f (x))
√1+( f ′(x))2dx = 2π
∫ 2
0ex√
1+(ex)2dx
= π
[e2√
1+ e4−√
2+ ln
(e2 +√
1+ e4
1+√
2
)]unidades2
8.13 Recapitulando
Neste capítulo, apresentamos o conceito de integral definida, embora tenhamos usado as técnicasestudadas no capítulo anterior para resolvê-las, esse conceito é independente do da integral indefinida,e por isso foram tratados em capítulos diferentes.
No início do capítulo tratamos dos somatórios e suas propriedades, que é algo crucial para o bomentendimento da aproximação da área de uma região. Prosseguindo, definimos a integral inferiore superior, e consequentemente, a integral de Riemann. Em seguida, foram apresentadas as prin-cipais propriedades da integral definida. Entre os resultados mais importantes, apresentamos oteorema de valor intermediário e os teoremas fundamentais do cálculo integral. E já que a teoriaapresentada até aí resumia-se à função sobre um intervalo limitado, foi necessário estender a teoriade integral definida para intervalos não limitados e para funções com descontinuidade infinita.
A utilidade da integral definida foi revertida, e foram apresentadas algumas aplicações: cálculo deáreas de regiões planas, volume de um sólido de revolução, comprimento de arco e, por último,área de uma superfície de revolução.
235 / 239

Cálculo Diferencial e Integral
8.14 Atividades
1. Calcule a área da região limitada pelas curvas dadas:
i. y = (x−1)3, x = 3, x = 8 e o eixo x. ii. y = 4− x2 e o eixo y.iii. y = 2
√x, x = 0, x = 4 e o eixo x. iv. y = 12− x2, x =−3, x =−2 e o eixo x.
v. y = x2, y = 4−3x2.
2. Calcule as derivadas das seguintes funções:
i. F(x) =∫ 2x
1cosh(2t2 +1)dt. ii. F(x) =
∫ x
2
(∫ y
8
11+ t2 + sen2(t)
dt)
dy.
iii. F(x) = sen[∫ x
0sen(∫ y
0sen3(t)dt
)dy]
. iv. F(x) =∫ x2
x3
t5
1+ t4 dt.
v. F(x) =∫ ex
x2x(t2 +1)dt.
3. Se∫ 1
3x+1
0f (t)dt =
2ax
+ax, calcule os valores de a, de modo que f(
14
)=
163
.
4. Calcule f (2) supondo que a função f é contínua e verifica a equação dada ∀x≥ 0
i.∫ x
0f (t)dt = x2(1+ x). ii.
∫ x2
0f (t)dt = x2(1+ x).
iii.∫ f (x)
0t2dt = x2(1+ x). iv.
∫ x2(1+x)
0f (t)dt = x.
5. Calcule as seguintes integrais definidas:
i.∫ 2
−2x3dx. ii.
∫ 2
−1(x+1)3dx. iii.
∫ 1/2
0
1√1− x2
dx.
iv.∫ 2
1
x1+ x2 dx. v.
∫ 2
1
x2
x−1dx. vi.
∫ e
1ln(x)dx.
6. Calcule o valor das seguintes integrais definidas:
i.∫ 0
−1
dx4x2 +8x+8
. ii.∫ √2
0
dx√2− x2
.
iii.∫ 1
0x8 e−x3
dx. iv.∫
π/3
−π/3tg7(x)dx.
v.∫ 2
0
x5
(1+ x3)3/2 dx. vi.∫ 0
1x8 (1− x3)5/4dx.
vii.∫ 1
0
√x√
2− xdx. viii.∫ 1
0
xex
(1+ x)2 dx.
ix.∫ 1
0ln(√
2− x)dx. x.∫
π/3
π/4cotg(x)(ln(sen(x)))dx.
xi.∫ 2π
0|sen(x)− cos(x)|dx. xii.
∫ 4
−2
|x+1||x+6|
dx.
236 / 239

Cálculo Diferencial e Integral
7. Determine se as seguintes integrais são convergentes ou divergentes:
i.∫ +∞
0senxdx. ii.
∫ +∞
0e−xdx. iii.
∫ +∞
−∞
|x|ex2dx.
iv.∫ +∞
0
dx√ex
. v.∫ 1
−2
dxx3 . vi.
∫ +∞
−∞
dx4x2 +1
.
vii.∫ 0
−2
dx3√
x+1. viii.
∫ 1
0
e1/x
x3 . ix.∫ +∞
−∞
dxx2 +2x+2
.
x.∫ +∞
1
dx
x√
x2−1. xi.
∫ 1
0
dxx3−5x2 . xii.
∫ +∞
−∞
dxex + e−x .
xiii.∫ +∞
1
dx
x√
1+ x3. xiv.
∫ +∞
−∞
e(x−ex)dx. xv.∫ 4
0
xdx√16− x2
.
xvi.∫ 1
0
dx√x− x2
. xvii.∫ 4
1
dxx2−4
.
8. Calcule a área da região limitada pelas curvas dadas:
i. y = x2 +2x−3, x =−2, x = 0 e o eixo x. ii. y = 9− x2 e y = x2 +1.iii. y = 3x− x2 e y = x2− x. iv. y = x3 + x, x = 0, y = 2 e y = 0.v. y = x3−3x2 +2x+2 e y = 2x2−4x+2. vi. y = x3 + x−4, y = x e y = 8− x.
vii. y = |x−2|, y+ x2 = 0, x = 1 e x = 3. viii. y =x2−4
x2−16, x =−3, x = 3 e y = 0.
ix. y = x3 +3x2 +2 e y = x3 +6x2−25. x. y = x2, 2y = x2 e y = 2x.
xi. y = x4 e y = 8x. xii. y =1
1+ x2 e 2y = x2.
xiii. y = |20x+ x2− x3| e y = 0. xiv. y =8
x4 +4, y = 0, x = 0 e x = 4.
xv. y = |x−1|, y = x2−2x, x = 0 e x = 2. xvi. y = |x−2|− |x−6| e x− y = 4.xvii. y = x2, 2y = x2 e y = 2x. xviii. y = 60(x5−x4+x3), y=−2x e x2=1.xix. x+ y− y3 = 0 e x− y+ y2 = 0.
9. Calcule o volume do sólido gerado pela rotação da região R em torno da reta L onde:
i. L : y = 0; R é limitada por y = x2 e y = 4x.
ii. L : y = 0; R é limitada por y = x3−5x2 +8x−4 e y = 0.
iii. L : y = 0; R é limitada por x2 +(y−3)2 = 1.
iv. L : y = 4; R é limitada por y2 = 4(2− x) e x = 0.
v. L : y = 4; R é limitada por x2 + y2 = 1.
vi. L : y =−2; R é limitada por y2 = x e y = x2.
vii. L : x = 0; R é limitada por y =√
x2 +10, x = 3 e x = 4.
viii. L : y = 0; R é limitada por x =√
y2 +4, y = 0, y = 2 e x = 0.
ix. L : y =−1; R é limitada por y =√
x2−3, y = x−1 e y = 0.
x. L : x = 1; R é limitada por y = |x2−2x−3|, y+1 = 0, x = 2 e x = 4.
xi. L : x =−1; R é limitada por y =√
x, x = 0 e y = 2.
xii. L : x = 0; R é limitada por y = x5, x =−1, x =−2 e y =−1.
xiii. L : x = 4; R é limitada por y = (x−1)2 e y = x+1.
237 / 239

Cálculo Diferencial e Integral
xiv. L : x = 0; R é limitada por y = 3x2, y = 4−6x2.
xv. L : x = 0; R é limitada por x = y2 e x = 8− y2.
xvi. L : y = 2; R é limitada por y = ln(x), y = 0, x = 0 e y = 2.
xvii. L : y = 2; R é limitada por y =√
x, y = 0 e x = 4.
10. Calcule o comprimento de arco da curva y2 = 4x− x2, compreendido entre os dois pontos deinterseção com o eixo x.
11. Calcule o comprimento de arco da curva y = ln(x), a partir de x =√
3 e x =√
8.
12. Calcule o comprimento de arco da curva 5y3 = x2, compreendido dentro da circunferênciax2 + y2 = 6.
13. Calcule o comprimento de arco da curva y = ex, compreendido entre os pontos (0,1) e (1,e).
14. Calcule o comprimento de arco da curva y = ln(1− x2), a partir de x =14
e x =34
.
15. Calcule o comprimento de arco da curva 9y2 = 4x3, a partir da origem até o ponto (3,2√
3).
16. Calcule o comprimento de arco total do arco da curva y = 2√
x, a partir de x = 0 até até x = 1.
17. Calcule o comprimento de arco da curva x =y2
2− 1
2lny, a partir de y = 1 até y = e.
18. Calcule o comprimento de arco da curva y = ln(
ex +1ex−1
), a partir de x = 1 até x = 2.
19. Calcule o comprimento de arco da curva 9ay2 = x(x−3a)2, a partir de x = 0 até x = 3a.
20. Calcule o comprimento de arco da curva y = ln(1− x2), a partir de x = 0 até x = 1/2.
21. Calcule a área da superfície de revolução obtida ao girar as curvas dadas em torno do eixoindicado:
i. A curva f (x) =19
x3; a partir de x = 0 até x = 2; em torno do eixo x.
ii. A curva 6a2xy = x4 +3a4; a partir de x = a até x = 2a; em torno do eixo x.
iii. A curva y2 +4x = 2ln(y); a partir de y = 1 até y = 2; em torno do eixo x.
iv. A curva y = e−x; a partir de x≥ 0; em torno do eixo x.
v. A curva y2 = 4ax; a partir de x = 0 até x = 3a; em torno do eixo x.
vi. A curva x = y3; a partir de y = 0 até y = 3; em torno do eixo y.
vii. A curva x2 +4y2 = 16; em torno do eixo y.
viii. A curva y = x2; a partir de x = 1 até x = 2; em torno do eixo y.
ix. A curva y = x3/2; a partir de x = 1 até x = 8; em torno de y = 1.
x. A curva y = x3; a partir de x = 1 até x = 2; em torno de y =−1.
xi. A curva y = 4+ ex; a partir de x = 0 até x = 1; em torno de y = 4.
238 / 239

Cálculo Diferencial e Integral
Capítulo 9
Referências
9.1 Referências Bibliográficas
[1] APOSTOL, T. M. Cálculo, Vol. 1. Editora Reverté ltda. 2a Edição, 2004.
[2] ÁVILA, G. Cálculo I: Funções de uma variável. Editora LTC, 6a Edição, 1994.
[3] ANTON, H., BIVENS, I., DAVIS, S. CÁLCULO, Vol. 1. Editora Bookman, 8aEdição, 2012.
[4] THOMAS, G. B. Cálculo, Vol. 1. Editora Pearson Education do Brasil, 12a Edição,2012.
[5] ESPINOZA, E. Análisis matemático, Vol. 1 e 2. Editora Edukperu, 6a Edição, 2012.
[6] MITACC, M., TORO, L. Tópicos de cálculo, Vol. 1 e 2. Editora THALES, 3a Edi-ção, 2012.
[7] DEMIDOVITCH, B. Problemas e exercícios de análise matemática. EditoraEscolar-MIR, 1977.
239 / 239