Calculo vetorial com formas´ diferenciais - Página...
172
C´ alculo vetorial com formas diferenciais S. C. Coutinho
Transcript of Calculo vetorial com formas´ diferenciais - Página...

Calculo vetorial com formasdiferenciais
S. C. Coutinho



Conteudo
Capıtulo 1. Preliminares 11. Subconjuntos do Rn 12. Parametrizacao de curvas e superfıcies 33. Integrais duplas e triplas 34. Mudanca de variaveis 35. Campos escalares e vetoriais 36. Exercıcios 9
Capıtulo 2. 1-formas 131. Trabalho 132. O caso geral 243. Integracao de 1-formas 334. Teorema do gradiente 425. Aplicacoes 436. Recapitulando 517. Exercıcios 538. Problemas 57
Capıtulo 3. 2-formas 591. Fluxo 592. O caso geral 723. Integracao de 2-formas 874. Teorema de Stokes 1045. Aplicacoes 1076. Recapitulando 1197. Exercıcios 1228. Problemas 125
Capıtulo 4. 3-formas 1271. 3-formas 1272. Integracao de 3-formas 1373. Teorema de Stokes 1414. Aplicacoes 1465. Exercıcios 1566. Problemas 158
Capıtulo 5. n-formas 161
iii

iv CONTEUDO
Apendice 1631. Determinantes 163
Bibliografia 165
Indice 167

Capıtulo 1
Preliminares
Neste capıtulo introduzimos algumas das nocoes basicas que serao utili-zadas ao longo de todo o livro, como campos escalares e vetoriais, e integraisduplas e triplas.
1. Subconjuntos do Rn
Nesta secao revisamos a nomenclatura basica utilizada na descricao dos con-juntos que servem como domınio e imagem das funcoes do calculo.
Para comecar, se v e um vetor do Rn, entao podemos escreve-lo na forma
v = (a1, . . . , an).(1.1)
Isto corresponde a decomposicao de v em termos de suas coordenadas na basecanonica ε de Rn. Os vetores de ε sao
ej = (0, . . . , 0, 1, 0, . . . , 0) para 1 ≤ j ≤ n,
onde o 1 aparece na j-esima posicao, e todas as demais entradas sao nulas.Com frequencia escreveremos
v = a1e1 + · · ·+ anen,
em vez de (1.1). A norma de v e
‖v‖ =√a21 + · · ·+ a2
n.
Se n = 1, entao v = a ∈ R e ‖v‖ = |a| e o modulo do numero real a.Seja, agora, p0 ∈ Rn e ε > 0 um numero real. A bola aberta de raio ε e
centro em p0 e o conjunto
Bε(p0) = q ∈ Rn : ‖q − p0‖ < ε.
Note que, no caso da bola aberta, usamos o sinal <. Ja a bola fechada demesmo centro e raio e definida da mesma maneira, exceto pela troca de < por≤. Assim, a bola fechada corresponde ao conjunto
Bε(p0) = q ∈ Rn : ‖q − p0‖ ≤ ε.
Os pontos que estao na bola fechada, mas nao na bola aberta, constituem afronteira de Bε(p0), que sera denotada por ∂Bε(p0). Temos, assim, que
∂Bε(p0) = q ∈ Rn : ‖q − p0‖ = ε.
1

2 1. PRELIMINARES
Outra tipo de subconjunto especial, e igualmente importante de Rn, saoos retangulos. Um n-retangulo e um subconjunto de Rn que pode ser escritocomo um produto cartesiano de n intervalos. Se todos os intervalos sao abertos,entao temos um retangulo aberto; se fechados, temos um retangulo fechado.Note que, por esta definicao, um intervalo e um 1-retangulo da reta, e um para-lelepıpedo um 3-retangulo do espaco. Um n-retangulo que e igual ao produtocartesiano de n intervalos iguais, digamos [a, b], sera denotado por [a, b]n.
A partir da nocao de bola aberta definimos o conceito de conjunto abertode Rn. Dizemos que U ⊆ Rn e aberto se, dado p ∈ U , existe um numero realε > 0 (que depende de p) tal que
Bε(p) ⊆ U.
Isto e, cada ponto de U pertence a uma pequena bola aberta, que esta intei-ramente contida em U . Sao exemplos de conjuntos abertos de Rn, as bolasabertas (veja exercıcio 1), o conjunto Rn inteiro, e o conjunto vazio. E facilentender porque Rn e aberto; mas e o conjunto vazio? O fato e que ∅ satisfaza condicao para aberto por vacuidade. Em outras palavras, a condicao paraaberto e satisfeita por todos os pontos de ∅ justamente porque este conjuntonao tem nenhum ponto para satisfazer a condicao.
Poderıamos ter definido conjuntos abertos partindo da nocao de retanguloaberto, em vez de bola aberta. Neste caso, um conjunto U ⊆ Rn seria definidocomo aberto se, dado um ponto qualquer de p de U , existe um n-retanguloaberto R tal que p ∈ R ⊆ U . Os conjuntos abertos assim definidos coincidemcom aqueles definidos em termos de bolas. Isto decorre do fato de que todon-retangulo aberto nao vazio contem uma bola aberta e, reciprocamente, todabola aberta nao vazia contem um retangulo aberto. Para mais detalhes veja oexercıcio 2.
Por outro lado, um conjunto e fechado se seu complementar e aberto. Umponto p de um conjunto fechado F pertence a fronteira ∂F de F se, qualquerque seja ε > 0, temos que
Bε(p) ∩ F 6= ∅ e Bε(p) ∩ (Rn \ F ) 6= ∅.
Os pontos de F que nao pertencem a sua fronteira sao chamados de pontosinteriores. Note, contudo, que um fechado pode nao ter nenhum ponto interior,como e o caso de um ponto isolado. Neste caso, o conjunto fechado inteiroe sua propria fronteira. Alem dos pontos isolados e das bolas fechadas, osconjuntos ∅ e Rn sao fechados. Mas ∅ e Rn nao eram abertos? Eram; mastambem sao fechados, ja que
Rn \ ∅ = Rn,
que e aberto, eRn \ Rn = ∅,
que tambem e aberto. A bem da verdade, os unicos subconjuntos de Rn que saosimultaneamente abertos e fechados sao exatamente estes dois; veja exercıcio3.

5. CAMPOS ESCALARES E VETORIAIS 3
Um subconjunto V de Rn e conexo, se dados dois pontos p, q ∈ V , existeuma curva contınua parametrizavel C que liga p a q. Uma tal curva e definidapor uma aplicacao
C : [0, 1] → V,
tal queC(0) = p e C(1) = q.
Na pratica, isto significa que V e formado por apenas “um pedaco”. Por exem-plo, se p, q ∈ Rn e
d = ‖p− q‖ > 0
e a distancia entre p e q, entao a uniao das bolas
Bd/3(p) ∪ Bd/3(q)
nao e conexa. De fato, como as bolas nao se tocam, nao e possıvel desenharuma curva contınua que liga o ponto de uma bola, a um ponto da outra.
Finalmente, um subconjunto U de Rn e convexo se, dados dois pontosquaisquer p e q de U , o segmento de reta que une p a q esta totalmente contidoem U . Mais precisamente, o conjunto
(1− t)p+ tq : 0 ≤ t ≤ 1 ⊂ U.
Bolas e retangulos, tanto abertos, quanto fechados sao conjuntos convexos.Como convexo e conexo sao palavras muito parecidas, e facil confundi-
las e, com isso, trocar um conceito pelo outro. Para complicar os conjuntosabertos e conexos aparecerao com frequencia neste livro. Levando isto emconta, e tambem para evitar que nossa linguagem se torne prolixa, usaremos apalavra regiao como abreviacao de aberto e conexo.
2. Parametrizacao de curvas e superfıcies
3. Integrais duplas e triplas
Revisao de integracao de funcoes de uma, duas e tres variaveis. Ainda nao tivetempo de escrever.
4. Mudanca de variaveis
Revisao de mudanca de variaveis em integrais duplas e triplas e jacobiano.Tambem nao tive tempo de escrever.
5. Campos escalares e vetoriais
O conceito mais importante deste livro e a nocao de campo, cujo estudo inici-amos nesta secao.

4 1. PRELIMINARES
5.1. Definicao e exemplos. Dada uma regiao U de Rn, considerare-mos dois tipos de campos neste livro. Um campo escalar e uma funcao deU em R; ja um campo vetorial e uma aplicacao de U em Rn. A importanciadestes conceitos esta relacionada as suas aplicacoes em matematica, fısica, en-genharia, meteorologia e ciencias afins. De agora em diante a palavra campo,usada sem nenhuma qualificacao adicional, significara sempre campo vetorial.
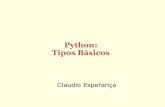
Considere, por exemplo, a regiao A da atmosfera, abaixo de uma certa al-titude, e sobre uma dada area da superfıcie terrestre. A funcao que relaciona acada ponto de A a temperatura da atmosfera naquele ponto e um exemplo decampo escalar. Outro exemplo, e a funcao que a cada ponto de A associa suapressao atmosferica. Podemos representar campos escalares geometricamenteusando curvas que passam por todos os pontos em que o campo tem um mesmovalor. No caso da temperatura, estas curvas sao chamadas de isotermas, e fo-ram introduzidas pelo naturalista alemao Alexander von Humboldt como partede sua observacao de que especies de plantas com caracterısticas semelhanteshabitam areas montanhosas de mesma temperatura; veja [7, p. 93-94].
FIGURA 1. Isotermas
A representacao geometrica de um campo vetorial
F : U → Rn,
e feita associando-se a cada ponto p ∈ U o vetor F (p), que imaginaremoscomo tendo sua origem em p. Considerando a mesma regiao A da atmosferamencionada acima, imagine que a cada um de seus pontos associamos o vetorque corresponde a velocidade com que uma partıcula se moveria se fosse soltanaquele ponto. Isto nos daria um campo de velocidades, que e um exemplo decampo vetorial.

5. CAMPOS ESCALARES E VETORIAIS 5
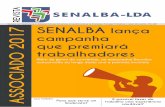
Esta definicao de campo vetorial nao exclui a possibilidade do campo seanular em um ponto. Se isto ocorre, dizemos que o ponto e uma singularidadedo campo. Contudo, o movimento de uma partıcula sob a acao de um campo
pode se tornar bastante complicado se o campo tiver singularidades.
FIGURA 2. Velocidade dos ventos
Outros exemplos de campos vetoriais incluem os campos de forca usaisda fısica, como o campo gravitacional, o campo eletrico e o campo magnetico.Por exemplo, a lei de Coulomb nos diz que o campo eletrico de uma cargapositiva isolada, situada na origem, e dado por
E(x, y, z) =k
(x2 + y2 + z2)3/2(x, y, z),
onde k e uma constante. Portanto, os vetores deste campo sao radiais e apontampara fora. Observe que a regiao de definicao de E e
R3 \ (0, 0, 0),ja que, na origem, estarıamos efetuando uma divisao por zero. Os campos(escalares e vetoriais) que estudaremos nao variam com o tempo. Isto e, ovalor do campo, em um dado ponto, e sempre o mesmo, embora possa assumirvalores distintos em pontos diferentes.
Ao longo de todo o livro consideraremos apenas campos escalares e veto-riais que sejam diferenciaveis. Como um campo escalar em U e uma funcaode U em R, nao ha dificuldade em definir diferenciabilidade neste caso. Nocaso de um campo vetorial, temos uma funcao de U em Rn. Assim, podemosescrever F , em termos de coordenadas, na forma
F (p) = (F1(p), . . . , Fn(p)),
onde p ∈ U eFj : U → R, para 1 ≤ j ≤ n,
sao as funcoes coordenadas de F . Diremos que F e diferenciavel, se cada umade suas funcoes coordenadas o for.

6 1. PRELIMINARES
O conjunto dos campos escalares (isto e, funcoes) diferenciaveis em Usera denotado por O(U). Podemos munir este conjunto de duas operacoes. Asoma de f, g ∈ O(U) e definida em cada ponto p ∈ U por
(f + g)(p) = f(p) + g(p);
ja a multiplicacao e definida por
(fg)(p) = f(p)g(p).
Um escalar k ∈ R pode ser identificado com a funcao constante de O(U), quea cada ponto de U associa o valor k. Usando a definicao de multiplicacao defuncoes podemos, entao, definir o produto de uma funcao f ∈ O(U) por umescalar k ∈ R como
(kf)(p) = kf(p) para todo p ∈ U.
Calculos de rotina mostram que o conjunto O(U) e um espaco vetorial real re-lativamente as operacoes de soma e multiplicacao por escalar definidas acima.
O conjunto dos campos vetoriais diferenciaveis em U sera denotado porX(U). Este conjunto pode ser provido de operacoes de soma e multiplicacaopor um campo escalar. A soma de F,G ∈ X(U) e definida em cada pontop ∈ U por
(F +G)(p) = F (p) +G(p).
SeF = (F1, . . . , Fn) e G = (G1, . . . , Gn),
sao as expressoes de F eG em termos de coordenadas, entao a definicao acimanos da
F +G = (F1 +G1, . . . , Fn +Gn).
Ja a multiplicacao de F por uma funcao g ∈ O(U) e definida por
(gF ) = (gF1, . . . , gFn).
Usando a definicao de multiplicacao de funcoes por campos podemos definir oproduto de um campo vetorial F ∈ X(U) por um escalar k ∈ R por
(kF ) = (kF1, . . . , kFn).
Calculos de rotina mostram que o conjunto X(U) e um espaco vetorial relati-vamente as operacoes de soma e multiplicacao por escalar definidas acima.
5.2. Campos gradientes. Uma classe especial de campos vetoriais,muito importante nas aplicacoes, sao os campos gradientes. Um campo Fdefinido em uma regiao U de Rn e gradiente se existe uma funcao f ∈ O(U)tal que F = ∇f . Dizemos, tambem, que f e uma funcao potencial para ocampo F .
O nome potencial foi empregado, neste sentido, pela primeira vez, naintroducao da monografia de 1828 de George Green. Em suas palavras

5. CAMPOS ESCALARES E VETORIAIS 7
No que segue, teremos ocasiao de falar frequentemente so-bre esta funcao e, portanto, para abreviar, vamos chama-lade funcao potencial do sistema S. 1
Veja [6, p. 1].Exemplos de campos gradientes incluem os campos gravitacionais e os
campos eletricos. Considere, por exemplo, o campo eletrico de uma cargapontual q. Como vimos no paragrafo anterior, este campo e definido em U =R3 \ (0, 0, 0) por
E(x1, x2, x3) =kq
(x21 + x2
2 + x23)3/2
(x1, x2, x3).
Como∂
∂xi
(1√
x21 + x2
2 + x23
)=
−xix2
1 + x22 + x2
3
vemos que a funcao
f =−kq√
x21 + x2
2 + x23
,
e uma funcao potencial para o campo E.O campo de uma esfera (solida) de raio 1, que foi uniformemente eletri-
zada tambem e gradiente. Para calcular o potencial explicitamente neste caso,basta imaginar cada “volume infinitesimal” da esfera como representando umacarga pontual, e integrar sobre a contribuicao de cada um destes pequenos vo-lumes. Para facilitar os calculos digamos que o sistema de eixos foi escolhidode modo que a esfera tem centro na origem, e o ponto no qual queremos cal-cular o potencial tem coordenadas (0, 0, a), onde a > 1. A contribuicao doponto (x1, x2, x3), de carga q, para o potencial em (0, 0, a) depende apenas dadistancia entre os dois pontos, e e igual a
−kq√x2
1 + x22 + (x3 − a)2
.
Integrando esta funcao sobre toda a esfera, obtemos
h =∫ 1
−1
∫ √1−x2
−√
1−x2
∫ √1−x2−y2
−√
1−x2−y2
−kq√x2
1 + x22 + (x3 − a)2
dzdydx.(5.1)
Para simplificar a integracao usaremos coordenadas esfericas. Neste caso,
x21 + x2
2 + (x3 − a)2 = x21 + x2
2 + x23 − 2ax3 + a2,
e igual ar2 + a2 − 2ar cos(φ);
ao passo que o jacobiano e r2 sen(φ). Portanto, a integral (5.1) e igual a
h =−kq2
∫ 2π
0
∫ 1
0
∫ π
0
r2 sen(φ)√r2 + a2 − 2ar cos(φ)
dφdrdθ.
1“In the sequel, we shall often have occasion to speak of this function, and will therefore, forabridgment, call it the potential function arising from the system S.”

8 1. PRELIMINARES
Calculando a primeira integral integral,
h =kq
a
∫ 2π
0
∫ 1
0
[r√r2 + a2 − 2ar cos(φ)
]π0drdθ =
kq
a
∫ 2π
0
∫ 1
0
[r√r2 + a2 + 2ar −
√r2 + a2 − 2ar
]drdθ.
Por sorte as expressoes dentro das raızes sao quadrados perfeitos. Ha, con-tudo, um detalhe importante ao qual precisamos estar alerta. A expressao√r2 + a2 − 2ar corresponde a raiz quadrada positiva de (r − a)2. Como
a > 1 ≥ r, devemos ter√r2 + a2 − 2ar = a − r > 0; e nao r − a, que
e um numero negativo. Assim,
h =kq
a
∫ 2π
0
∫ 1
0
[r(r + a)− r(a− r)]π0 drdθ =2kqa
∫ 2π
0
∫ 1
0
r2drdθ.
Continuando a integracao, obtemos
h =4πkq3a
.
Note que a e a distancia entre a origem da esfera e o ponto no qual estamoscalculando o potencial. Levando em conta a simetria da esfera e a distribuicaouniforme de carga, vemos que, o potencial no ponto, exterior a esfera, cujascoordenadas sao (x1, x2, x3), e
f(x1, x2, x3) =4πkq
3
(1√
x21 + x2
2 + x23
).
Derivando o potencial, obtemos o campo eletrico de uma esfera carregada noponto (x1, x2, x3), que e
−4πkq3
1x2
1 + x22 + x2
3
(x1, x2, x3).
Portanto, o campo eletrico de uma esfera carregada e o mesmo de uma partıculaposicionada no centro da esfera, e cuja carga e igual a carga total da esfera; istoe
(volume da esfera)× q =43π · q.
Um resultado analogo foi provado por Newton no PRINCIPIA, relativa-mente ao campo gravitacional; [10, Proposition LXX, Theorem XXXI, p. 193].Como os campos eletrico e gravitacional variam com o inverso do quadradoda distancia, o argumento e essencialmente o mesmo nos dois casos. Entre-tanto, Newton nao possuıa a nocao de potencial, nem ferramentas de calculotao avancadas quanto as nossas. Nao admira, portanto, que a demonstracaodeste fato tenha sido um dos grandes obstaculos que enfrentou ao escrever oPRINCIPIA. Uma discussao detalhada da contribuicao de Newton pode ser en-contrada em [3, p. 269-275] e [15, p. 427].

6. EXERCICIOS 9
6. Exercıcios
1. Mostre que uma bola aberta e um conjunto aberto de Rn.
2. Mostre que todo retangulo aberto de Rn contem uma bola fechada e quetoda bola aberta contem um retangulo fechado.
3. Mostre que os unicos subconjuntos de Rn que sao simultaneamente abertose fechados sao Rn e ∅.
4. Mostre que, se um conjunto fechado de Rn nao tem fronteira, entao e iguala Rn e ∅.
5. Mostre que uma regiao de R e convexa se, e somente se, e um intervalo.
6. Qual das seguintes afirmacoes e verdadeira, e qual e falsa:(a) Todo subconjunto convexo de Rn e conexo.(b) Todo subconjunto conexo de Rn e convexo.
Justifique cuidadosamente a sua resposta.
7. Seja U uma regiao de Rn e f : U → R uma funcao. O laplaciano de f edefinido por
∆(f) =n∑j=1
∂2f
∂xj.
Dizemos que f satisfaz a equacao de Laplace se seu laplaciano e nulo. Mos-tre que as seguintes funcoes satisfazem a equacao de Laplace:(a) f(x, y, z) = x2 + y2 − 2z2;(b) f(x, y, z) = cos(5z) exp(3x+ 4y)
8. Sejam f e g funcoes diferenciaveis, definidas em uma regiao abertaU ⊆ R2.Mostre que, se
∂f
∂x= −∂g
∂ye
∂f
∂y=∂g
∂x,
entao, ∆(f) = 0.
9. Mostre que a funcao f(x, y) = arctan(y/x) definida em x > 0, satisfaz∆f = 0.
10. Seja U uma regiao aberta de Rn e f : U → R uma funcao diferenciavel.Considere uma curva diferenciavel parametrizada
C : (0, 1) → U,
com parametro t. Use a regra da cadeia em mais de uma variavel para cal-cular a derivada de g(t) = f(C(t)), em funcao das derivadas parciais def .

10 1. PRELIMINARES
11. Seja U uma regiao de Rn e f ∈ O(U) uma funcao diferenciavel. O laplaci-ano de f e definido pela formula
∆(f) =n∑i=1
∂2f
∂x2i
.
Calcule o laplaciano das funcoes cos(x1x2), tan(x1 + x2) e exp(x21 + x2
2).
12. Seja U uma regiao de Rn. Uma funcao f ∈ O(U) satisfaz a equacao deLaplace se ∆(f) = 0 em U . Mostre que cada uma das funcoes abaixosatisfaz a equacao de Laplace:(a) f(x, y, z) = x2 + y2 − 2z2;(b) f(x, y, z) = cos(5z) exp(3x+ 4y)
13. Sejam f e g funcoes diferenciaveis, definidas em uma regiao abertaU ⊆ R2.Mostre que, se
∂f
∂x= −∂g
∂ye
∂f
∂y=∂g
∂x,
entao, ∆(f) = 0.
14. Mostre que a funcao f(x, y) = arctan(y/x) definida em x > 0, satisfaz∆f = 0.
15. Seja r = (x21 + · · ·+ x2
n)1/2.
(a) Calcule ∂r/∂xi.(b) Calcule ∇r.
16. Seja f uma funcao diferenciavel em apenas uma variavel e
r = (x21 + · · ·+ x2
n)1/2.
Definag(x1, . . . , xn) = f(r).
(a) Calcule o gradiente de g.(b) Calcule ∆g.
17. Seja f uma funcao diferenciavel definida em um aberto de Rn que contema origem. Use o exercıcio anterior para mostrar que:
o valor de f em p ∈ U depende apenas da distancia de p a origemse, e somente se, ∇f e nulo ou paralelo ao vetor
−→Op.
18. Seja U uma regiao de Rn. Prove que O(U) e X(U) sao espacos vetoriaissobre R.
19. Esboce cada um dos campos de velocidade descritos abaixo.(a) F (x, y, z) = (y, 0);(b) F (x, y, z) = (2/r2, 0);

6. EXERCICIOS 11
(c) F (x, y, z) = (4y, 0);(d) F (x, y, z) = (0, 3r3);
onde r =√x2 + y2.
20. Seja f um polinomio nas variaveis x e y e coeficientes reais. A curvaalgebrica Cf e o conjunto de pontos de R2 que sao zeros de f ; isto e,
Cf = p ∈ R2 : f(p) = 0.Esboce C(f) em cada um dos casos abaixo:(a) f(x, y) = y − x2.(b) f(x, y) = x2 + y2 − 1.(c) f(x, y) = y2 − x3.(d) f(x, y) = y2 − x2(x+ 1).
21. Seja f um polinomio nas variaveis x e y e coeficientes reais.(a) De uma formula para o vetor tangente a Cf em um ponto p ∈ Cf , em
funcao das derivadas parciais de f .(b) Um ponto onde o vetor tangente se anula e conhecido como ponto sin-
gular de Cf . Determine os pontos singulares de Cf para cada uma dasfuncoes f do exercıcio ??.
22. Seja g um polinomio em x. Mostre que se f(x, y) = ym−g(x), onde k > 0e um numero inteiro, entao o numero de pontos singulares de f e finito.
23. Sejam p e q pontos do Rn. Escreva uma equacao parametrica para o seg-mento de reta que vai de p a q.
24. Sejam p e q pontos da esfera de raio 1 e centro na origem do Rn. Escrevauma equacao parametrica para a curva que vai de p a q e esta totalmentecontida na esfera.
25. Seja F um campo vetorial definido em uma regiao U do R3 e defina o ope-rador
DF = F1∂
∂x1+ F2
∂
∂x2+ F3
∂
∂x3,
onde F1, F2 e F3 sao as funcoes coordenadas de F . Mostre que se g ∈O(U), entao
DF (g) = ∇g · F.
26. Sejam F e G campo vetoriais definidos em uma regiao U do R3. Defina ocomutador de F e G como sendo
[DF , DG] = DF ·DG −DG ·DF ,
onde o ponto indica a composta de operadores. Mostre que [DF , DG] = DH
para algum campoH definido em U e calcule as funcoes coordenadas deH .


Capıtulo 2
1-formas
Usando a nocao de trabalho como ponto de partida, introduzimos nestecapıtulo as 1-formas e aprendemos a integra-las.
1. Trabalho
Como explicamos na introducao, comecamos nosso tratamento de 1-formasutilizando como motivcao a nocao de trabalho.
1.1. Trabalho de um campo constante. Seja F : R2 → R2 umcampo de forcas constante definido em todo o plano. Como o campo e cons-tante, temos que F (u) = F0, para todo u ∈ R2. No ensino medio, aprendemosa calcular o trabalho realizado por uma forca em um deslocamento em linhareta. No nosso caso, a forca e dada pelo campo. Como estamos supondo que ocampo F e constante, podemos definir o trabalho realizado por F de maneiraanaloga ao do trabalho de uma forca constante. Mais precisamente, o trabalhorealizado por F no deslocamento em linha reta que vai de p a q em R2 e dadopelo produto interno
F0 · (q − p),
onde a diferenca q − p deve ser interpretada como o vetor que vai de p a q.Aumentando um pouco a generalidade de nosso problema, suponhamos
que o campo F e constante, mas que o deslocamento ja nao seja ao longo deuma reta. Comecaremos tratando o caso mais simples em que o deslocamentose da ao longo do grafico de uma funcao.
Digamos que x e y sao as coordenadas usuais do plano, determinadas pelabase canonica. A curva que queremos considerar corresponde ao grafico dafuncao contınua f : [0, 1] → R. Em outras palavras, os pontos desta curvasao da forma (t, f(t)), onde t ∈ [0, 1]. Note que assumimos f contınua, paraque a curva correspondente nao de pulos; do contrario, nosso modelo nao seriafisicamente defensavel. Desejamos definir o trabalho realizado pelo campoconstante F : R2 → R2 ao longo desta curva. Nosso ponto de partida, sera aunica definicao de trabalho que conhecemos; a que supoe que o deslocamentoseja ao longo de uma reta.
A ideia e obvia, basta aproximar a curva por uma sucessao de segmentosde reta. Somamos, entao, o trabalho realizado sobre cada segmento. Reduzindoo tamanho dos segmentos, podemos obter uma aproximacao tao boa quanto
13

14 2. 1-FORMAS
desejarmos. Para executar esta estrategia, dividimos o intervalo [0, 1] em npartes. Obtendo, assim, n subintervalos da forma [i/n, (i + 1)/n], onde 0 ≤i ≤ n− 1. Nas extremidades do intervalo [i/n, (i+ 1)/n] a funcao f assumeos valores f(i/n) e f((i+ 1)/n). Portanto, o segmento(
i+ 1n
)t+ (1− t)
i
ncom 0 ≤ t ≤ 1
nos da uma aproximacao de f entre i/n e (i + 1)/n. Naturalmente, a aproxi-macao sera tanto melhor, quanto menores forem os intervalos; isto e, quantomaior for n. A bem da verdade, esta afirmacao so e verdadeira se a curvacorrespondente ao grafico de f for diferenciavel, e nao apenas contınua. Porisso assumiremos, de agora em diante, que f e uma funcao diferenciavel.
Passando, agora, ao calculo do trabalho em [i/n, (i + 1)/n], temos que odeslocamento em linha reta vai de (i/n, f(i/n)) a ((i + 1)/n, f((i + 1)/n)).Desta forma, o vetor que descreve o deslocamento e
((i+ 1)/n, f((i+ 1)/n))− (i/n, f(i/n)) = (1/n, f((i+ 1)/n))− f(i/n)),
de modo que o trabalho correspondente sera
(1/n, f((i+ 1)/n))− f(i/n)) · F0
onde F0 e o vetor constante que define F . Para obter uma aproximacao dotrabalho sobre toda a curva, somamos o trabalho ao longo dos pequenos seg-mentos, obtendo
n−1∑i=0
F0 · (1/n, f((i+ 1)/n))− f(i/n)).
Pelas propriedades do produto interno, esta soma e igual a
(1.1) F0 ·
(n−1∑i=0
1/n,n−1∑i=0
f((i+ 1)/n)− f(i/n)
).
Expandindo o somatorion−1∑i=0
f
(i+ 1n
)− f
(i
n
),
temos(f
(1n
)− f(0)
)+(f
(2n
)− f
(1n
))+ · · ·
+(f
(n− 2n
)− f
(n− 1n
))+(f
(n− 1n
)− f
(nn
))que e uma soma telescopica. Em outras palavras, os termos intermediarios secancelam, de modo que sobram, apenas, o termo final e o inicial; com isso
n−1∑i=0
(f(i+ 1n
)− f(i
n))
= f(n)− f(0).

1. TRABALHO 15
Comon−1∑i=0
1/n = 1,
verificamos que (1.1) e igual a
F0 · (1, f(1)− f(0)).
Este resultado e extremamente surpreendente, porque o computo final dotrabalho acabou nao dependendo nem do grafico da funcao, nem de quantaspartes dividimos o segmento [0, 1]. Em particular, o resultado e exato, ja que onumero de divisoes do segmento nao influencia o valor obtido. Mais surpreen-dente ainda e o fato do resultado nao depender da forma do grafico da funcao:da no mesmo se o grafico e uma reta ou uma curva cheia de altos e baixos.
Antes que voce fique por demais entusiasmado com a simplicidade doresultado que obtivemos, convem lembrar que estamos fazendo duas hipotesessubstanciais. A primeira e que o campo e constante; a outra, que a curva aolongo da qual o trabalho esta sendo calculado e o grafico de uma funcao. Vamosremover estas suposicoes uma a uma, comecando pela segunda.
Seja, entao, C uma curva em R2. Queremos dividir a curva em pequenossegmentos para calcular uma aproximacao do trabalho. O caso anterior foifacil, porque bastou dividir o segmento [0, 1] e usar isto para dividir a curva.Como proceder no caso de uma curva mais geral? A saıda e nao consideraruma curva geral demais; mais precisamente, queremos que C seja uma curvacontınua parametrizavel. Isto significa que o conjunto C de pontos da curva eigual a imagem de uma funcao contınua
ψ : [0, 1] → R2.
Assim, para cada ponto p0 da curva C existe um t0 ∈ [0, 1] tal que p0 = ψ(t0).Em §3.3 veremos como considerar curvas um pouco mais gerais.
Assumiremos, portanto, de agora em diante, que todas as curvas com asquais estamos trabalhando sao, de fato, parametrizaveis. Por causa disto, e parafacilitar a notacao, usaremos a mesma letra para designar a curva e a funcao de[0, 1] em R2 que corresponde a sua parametrizacao.
Seja, entao, C : [0, 1] → R2 uma curva parametrizada, e seja F : R2 →R2 o campo de vetores constantes ja considerado acima. Como no caso dografico de uma funcao, subdividimos o intervalo em que C esta definida em npartes que, por sua vez, usamos para subdividir a curva C. Portanto, o trabalhorealizado pelo campo no deslocamento ao longo deC pode ser aproximado por
F0 ·(C
(i+ 1n
)− C
(i
n
)).
Somando sobre cada intervalo, e apelando para as propriedades do produtointerno, obtemos
F0 ·
(n−1∑i=0
C
(i+ 1n
)− C
(i
n
)).

16 2. 1-FORMAS
Mais uma vez, trata-se de uma soma telescopica. Efetuando o cancelamentodos termos intermediarios, descobrimos que o trabalho total e igual a
F0 · (C(1))− F0 · (C(0)).
Novamente o resultado depende apenas do inıcio e do fim da curva, e nao decomo a curva evolui entre estes dois pontos. Podemos, com isso, enunciarnosso primeiro teorema.
TEOREMA. O trabalho de um campo constante entre dois pontos inde-pende de como e feito o deslocamento entre estes pontos.
Resta-nos remover a hipotese do campo ser constante, faremos isto noproximo paragrafo.
1.2. Trabalho de um campo variavel. Chegou a hora de enfrentar ocaso geral, em que o campo nao e constante e o deslocamento se da ao longode uma curva qualquer. Lembre-se, porem, que em nossa nomenclatura a ex-pressao “curva qualquer” e uma abreviacao de “curva parametrizavel contınuaqualquer”. Outro ponto a ser notado e que, como o campo era constante, esti-vemos supondo que estava definido em todo o plano. Contudo, ja que vamospermitir um campo variavel, esta hipotese se torna inconveniente. Por exem-plo, o campo gravitacional definido por uma massa pontual nao esta definidono ponto onde a massa esta situada, ja que o valor do campo neste ponto seriainfinito. Por isso, assumiremos, a partir de agora, que nossos campos e curvasestao contidos em regioes do plano.
Antes de por maos a obra, convem fazer algumas ressalvas sobre o trata-mento que daremos ao problema de definir trabalho de um campo variavel nesteparagrafo. Nosso objetivo e justificar o porque da definicao utilizada em fısica,tomando por base apenas a definicao de trabalho de um campo constante. Noteo uso da palavra “justificar”. Nao podemos “provar” que a definicao utilizadaem fısica esta correta, simplesmente porque isto nao faz sentido. Afinal, posso,em princıpio, definir qualquer coisa que eu deseje. Se minha definicao e ounao util na descricao de algum fenomeno fısico, e outro problema. Portanto,o que queremos e um argumento mais ou menos convincente que nos permitaentender porque os fısicos julgam adequada a definicao geral de trabalho queutilizam.
Tendo em mente as consideracoes acima, utilizaremos um argumento queremonta aos PRINCIPIA de Newton. O argumento propoe uma maneira deaproximar um campo de forca variavel a partir de uma forca constante.
Seja U uma regiao do plano. Digamos que F : U → R2 e um campocontınuo (nao constante), e que C : [0, 1] → U e uma curva contınua parame-trizada. Como no §1.1 dividiremos o intervalo em n partes iguais, e usamosisto para dividir a curva C. O argumento a la Newton consiste em supor queo campo F pode ser aproximado por um campo descontınuo, que e igual aF (i/n) no intervalo [i/n, (i+1)/n). Assim, de 0 ate chegar a 1/n, suporemosque o campo vale F (0). Em 1/n, o campo aumenta instantaneamente paraF (1/n), e continua assim ate chegar em 2/n. Em 2/n ha mais um aumento

1. TRABALHO 17
instantaneo, desta vez para F (2/n), e o campo fica constante ate chegar a 3/n.E assim por diante.
Newton usou este tipo de argumento, por exemplo, na Proposicao I, Te-orema I, da secao II, Livro I, do PRINCIPIA, onde prova que a terceira lei deKepler segue do fato de que a gravitacao e uma forca centrıpeta. Neste casoNewton imagina que a forca centrıpeta, que deveria ser contınua, e aplicadainstantaneamente a intervalos regulares ao longo da trajetoria do objeto. Valea pena ler o argumento diretamente no PRINCIPIA; veja [10, p. 40].
Voltando ao nosso problema, vejamos como aplicar o que ja sabemos sobrecampos constantes a situacao atual. Tomando o intervalo [i/n, (i+1)/n) comobase, estamos supondo, em nossa aproximacao, que o campo vale F (C(i/n))ao longo de todo este intervalo. Nosso primeiro impulso seria utilizar o te-orema 1.1. Fazendo isto, concluirıamos que o trabalho executado, sob estascircunstancias, para ir de C(i/n) a C((i+ 1)/n) deveria ser
F (C(i/n)) · (C((i+ 1)/n)− C(i/n)).
Contudo, isto nao esta correto, ja que estamos assumindo que o campo au-menta, instantaneamente, para F (C((i + 1)/n)) em (i + 1)/n; ao passo queo teorema pressupoe o campo constante em todo o intervalo fechado. Resol-vemos esta dificuldade chegando muito perto de (i+ 1)/n, mas sem atingi-lo.Por exemplo, avancamos ao longo da curva C de i/n ate
(i+ 1)n
− 12n.
Se n for grande, este numero esta bem perto, mas aparece um pouco antes, de(i+ 1)/n, de modo que o campo ainda vale F (C(i/n)) em
C
((i+ 1)n
− 12n
).
Portanto, sob estas hipoteses, o trabalho realizado por F no intervalo [i/n, (i+1)/n) e aproximadamente igual a
F (C(i/n)) ·(C
((i+ 1)n
− 12n
)− C(i/n)
).
Para descomplicar um pouco a notacao, escreveremos
ti = i/n e ∆t =1n− 1
2n,
de modo que(i+ 1)n
− 12n
= ti + ∆t.
Com isto a aproximacao para o trabalho no intervalo [i/n, (i + 1)/n) se rees-creve como
F (C(ti)) · (C(ti + ∆t)− C(ti)).

18 2. 1-FORMAS
Somando todos estes valores para 0 ≤ i ≤ n− 1, obtemos
Tn =n−1∑i=0
F (C(ti)) · (C(ti + ∆t)− C(ti)),
como uma aproximacao do trabalho realizado por F ao longo de C. Porem, aocontrario do que ocorria no caso de um campo constante, esta nao e uma somatelescopica. Para que isto fosse verdade precisarıamos poder cancelar
F (C(ti)) · (C(ti + ∆t)) com F (C(ti+1)) · (C(ti+1));
o que nao e possıvel, ja que nao sao iguais. Contornamos esta dificuldadefazendo uma coisa bem mais sofisticada.
Pelas propriedades do produto interno, temos que
Tn =n−1∑i=0
F (C(ti)) ·(C(ti + ∆t)− C(ti)
∆t
)∆t.
Contudo, esta soma e uma soma de Riemann (ou quase isto...); de forma quefazendo n tender a infinito, esperamos encontrar uma integral. Antes, porem,devemos decidir o que acontece ao integrando quando passamos a este limite.Mas,
limn→∞
∆t = limn→∞
(1n− 1
2n
)= 0,
de forma que
limn→∞
(C(t+ ∆t)− C(t)
∆t
)= lim
∆t→0
(C(t+ ∆t)− C(t)
∆t
)= C ′(t),
que e derivada de C em relacao a t, sua unica variavel. E claro que, para queisto faca sentido, C tem que ser diferenciavel, e nao apenas contınua, comofuncao de t. Assumindo isto, obtemos
limn→∞
Tn =∫ 1
0
F (C(t)) · (C ′(t))dt.
Portanto, o trabalho TC(F ) do campo F ao longo da curva C deve ser definidocomo
(1.2) TC(F ) =∫ 1
0
F (C(t)) · (C ′(t))dt.
que e conhecida como a integral de linha de F ao longo de C, e denotada por∫C
F.

1. TRABALHO 19
1.3. Exemplos. Antes de sistematizar a definicao obtida no §1.2, deter-minaremos o trabalho de alguns campos nao constantes usando a formula (1.2)da integral de linha.
Considere a regiao U = R2. Calcularemos o trabalho realizado por doiscampos diferentes ao longo da circunferencia de raio 1 com centro na origem.Os pontos desta circunferencia estao completamente contidos em U , e pode-mos parametriza-la na forma
C(t) = (cos(2πt), sen(2πt)).
Como vamos precisar da derivada desta funcao, e melhor calcula-la logo,
C ′(t) = (−2π sen(2πt), 2π cos(2πt)).
Comecemos determinando o trabalho relativo ao campo
F1(x, y) = (x2, y).
Calculando o integrando de (1.2) para este campo, obtemos
(cos(2πt)2, sen(2πt)) · (−2π sen(2πt), 2π cos(2πt)),
que e igual a
2π(− cos(2πt)2 sen(2πt) + sen(2πt)) cos(2πt)).
Portanto, o trabalho realizado pelo campo ao longo da circunferencia e
2π∫ 1
0
(− cos(2πt)2 sen(2πt) + sen(2πt) cos(2πt))dt.
Esta funcao e facilmente integravel, e nos da
2π[cos(2πt)3
6π+
sen(2πt)2
4π
]10
= 0.
Note que este resultado e compatıvel com a expectativa gerada pelo teo-rema 1.1. Como estamos integrando ao longo de uma curva fechada, o valor docampo no inıcio e no fim da curva coincidem. Portanto, se o teorema continuavalendo, deverıamos mesmo obter 0.
Passando ao segundo exemplo, o campo desta vez e dado por
F2(x, y) = (−y, x).O integrando de (1.2) e igual a
(− sen(2πt), cos(2πt))·(−2π sen(2πt), 2π cos(2πt)) = 2πsen(2πt)2+2π cos(2πt)2 = 2π.
Portanto, o trabalho realizado por F2 ao longo da circunferencia e igual a∫ 1
0
dt = 2π,
e nao e zero, como seria o caso se o teorema 1.1 valesse em geral.Este ultimo exemplo nos permite concluir que o teorema 1.1 nao vale para
qualquer campo. Entretanto, ja sabemos que sempre vale para campos cons-tantes e parece valer tambem para F1. O “parece” fica por conta do fato deso termos feito os calculos para um caminho muito especial, a circunferencia

20 2. 1-FORMAS
de raio 1 em torno da origem. Para garantir que o teorema e valido para F1
terıamos que testa-lo para qualquer curva fechada contida em U . Vejamos oque acontece se fizermos isto.
Seja, entao, C : [0, 1] → U uma curva fechada diferenciavel. O fato de Cser fechada se traduz pela igualdade C(0) = C(1); e isto e basicamente tudoque sabemos sobre C. Calculando o integrando de (1.2), obtemos
c1(t)2c′1(t) + c2(t)c′2(t),
onde c1 e c2 sao as funcoes coordenadas da curva C. Portanto, o trabalhorealizado por F1 ao longo desta curva e igual a
TC(F1) =∫ 1
0
(c1(t)2c′1(t) + c2(t)c′2(t))dt =[c1(t)3
3+c2(t)2
2
]10
= 0,
uma vez que
c1(0) = c1(1) e c2(0) = c2(1).
Mostramos, assim, que o trabalho realizado por F1 em qualquer caminhofechado e sempre zero. Mas isto basta para concluirmos que o resultado doteorema 1.1 vale para F1. Para entender porque, suponha que C e D sao duascurvas que vao de P1 a P2, dois pontos de U . Definimos uma nova curva−D : [0, 1] → U por
−D(t) = D(1− t).
Isto quer dizer que os ponto de −D sao os mesmos de D, so que a curva epercorrida ao contrario. Percorrendo, agora, C de P1 a P2, seguido de −D,de P2 a P1, obtemos uma curva fechada. Vamos chama-la de C −D. Do queprovamos acima,
TC−D(F1) = 0.
Mas, como e facil ver,
TC−D(F1) = TC(F1) + T−D(F1) = TC(F1)− TD(F1),
ja que ao percorrermos a curva em sentido contrario, o sinal da integral seinverte. Mas isto implica que
TC(F1) = TD(F1),
provando assim que o trabalho realizado por F1 independe do deslocamento,desde que os pontos inicial e final coincidam.
Revendo este argumento com o devido cuidado, e facil constatar que ati-ramos toda cautela pela janela. Por exemplo, ja vimos que uma curva deve serdiferenciavel para que possamos calcular a integral de linha. Contudo C −Dpode nao ser diferenciavel mesmo se C e D o forem, como mostra a figuraabaixo.

1. TRABALHO 21
·
C
·
D
Nesta figura, as curvas C e D foram desenhadas de forma a terem tangentesem todo lugar. Apesar disto, formaram-se ‘bicos’ nos pontos onde as curvasse encontram, indicando que a curva fechada C − D nao e diferenciavel emnestes pontos. Voltaremos a esta questao em detalhe no §3.1.
Com isto, podemos refinar nossas observacoes anteriores sobre o teorema1.1. Mostramos que
• o teorema nao vale para qualquer campo;• o teorema vale para qualquer campo constante;• o teorema nao vale apenas para campos constantes.
Estas observacoes sugerem imediatamente o seguinte problema.
PROBLEMA. Caracterizar os campos para os quais trabalho entre doispontos fixos independe da curva ao longo da qual e calculado.
Campos para os quais esta propriedade vale sao chamados de conserva-tivos, e incluem muitos exemplos fısicos, como o campo gravitacional e ocampo eletrico. A caracterizacao dos campos conservativos sera feita no §5.6do capıtulo 3.
1.4. Mudando de perspectiva. Seja U uma regiao do plano e F umcampo definido em U . No §1.2 vimos que o trabalho de F ao longo de umacurva parametrizada C, contida em U , e a integral da funcao
γ(t) = F (C(t)) · C ′(t),entre 0 e 1. Neste paragrafo investigamos as propriedades desta funcao.
A primeira coisa a notar e que γ pode ser facilmente escrita como a com-posta de duas aplicacoes, que chamaremos de G e α. A aplicacao G e definidapor
G(t) = (C(t), C ′(t))e tem domınio [0, 1] e contradomınio U × R2. Ja
α : U × R2 → Re definida por
α(p, v) = F (p) · v,onde p ∈ U e v ∈ R2. Temos, assim, que
[0, 1] G−→ U × R2 α−→ R

22 2. 1-FORMAS
donde γ = α · G. Note que, ao efetuar esta decomposicao, os papeis desem-penhados pela curva e pelo campo foram atribuıdos a duas funcoes diferentes.De fato G codifica a informacao referente a curva, ao passo que o campo e co-dificado em α. E nas propriedades de α que queremos nos concentrar a seguir.
Em primeiro lugar, se p ∈ U for fixado, obtemos a partir de α a aplicacao
α|p0 : Rn → R,
definida porα|p0(v) = α(p0, v) = F (p0) · v.
Apelando mais uma vez para as propriedades do produto interno, vemos queα|p0 e uma aplicacao linear. Em outras palavras,
Propriedade 1: α e linear em sua segunda entrada, desde que a pri-meira entrada assuma um valor fixo.
Por outro lado, se F = (a1, a2) e v0 = (x0, y0) for um vetor fixo de U ,obtemos uma funcao
p 7→ α(p, v0) = a1(p)x0 + a2(p)y0.
Mas as funcoes coordenadas de F sao diferenciaveis por hipotese. Como qual-quer combinacao linear de funcoes diferenciaveis e uma funcao diferenciavel,o mesmo vale para a funcao acima definida. Portanto,
Propriedade 2: α e diferenciavel em sua primeira entrada, desde que asegunda entrada assuma um valor fixo.
Qualquer aplicacaoU × Rn → R,
que satisfaca as propriedades 1 e 2, destacadas acima, e chamada de 1-formadiferencial. Agora que sabemos o que e uma 1-forma, podemos introduzir anotacao tradicionalmente usada para denota-las. Seja β uma 1-forma em U e
ε = e1, e2
a base canonica do R2. Escolha p ∈ U e v = x1e1 + x2e2 um vetor doplano. Apelando para a linearidade de β relativamente a sua segunda entrada,podemos escrever
β(p, v) = β(p, x1e1 + x2e2) = x1β(p, e1) + x2β(p, e2).(1.3)
Como a segunda entrada esta fixa em β(p, e1) e β(p, e2), temos que estasduas funcoes de p sao diferenciaveis. A partir de (1.3) seria facil descre-ver a representacao matricial de β, mas nao e este o caminho adotado nanotacao tradicional. Ao inves disto, definimos aplicacoes lineares auxiliaresdxi : R2 → R pela formula
dxi(v) = dxi(x1e1 + x2e2) = xi,
para 1 ≤ i ≤ 2. Em palavras,dxi captura a i-esima coordenada de v.

1. TRABALHO 23
Usando esta notacao, e levando em conta (1.3), β pode ser escrita como
β = β(p, e1)dx1 + β(p, e2)dx2.
Podemos resumir o que fizemos ate aqui dizendo que uma 1-forma e uma ex-pressao da forma
b1dx1 + b2dx2,
onde b1, b2 : U → R sao funcoes diferenciaveis.A aplicacao composta α · G e conhecida como a imagem inversa de α
pela curva parametrizada C, e denotada por C∗(α). Ha um detalhe importantedesta ultima construcao que nao podemos deixar de observar. Conservando anotacao introduzida acima para F , e denotando as funcoes coordenadas de Cpor c1 e c2, temos que
C∗(α) = a1(C)c′1 + a2(C)c′2.
Apesar de estarmos acostumados a pensar na derivada C ′(t) como sendo umvetor, o correto seria considera-la como a transformacao linear DC : R → R2
definida em s ∈ R por
DC(t)(s) = C ′(t)s = (c′1(t)s, c′2(t)s).
Naturalmente estamos supondo que t esta fixo na definicao acima. Assumindoque a derivada e uma transformacao linear, vemos que C∗(α) corresponde aaplicacao de [0, 1]× R em R, dada por
C∗(α)(t, s) = γ(t)s,(1.4)
ondeγ(t) == (a1(C(t))c′1(t) + a2(C(t))c′2(t)),
e uma funcao de [0, 1] em R. Como C∗(α)(t, s) e linear em s e diferenciavelem t, temos uma 1-forma diferencial, so que, desta vez, definida no intervalo(0, 1).
Retroagindo a definicao dada anteriormente, uma 1-forma diferencial em(0, 1) deve ser uma aplicacao
η : (0, 1)× R → R,que e diferenciavel em relacao a sua primeira coordenada e linear em relacaoa segunda. Procedendo como no caso de 1-formas de R2, podemos escrever ηcomo
η = η(t, 1)dt,onde dt : R → R e a transformacao linear definida por dt(s) = s. Talvezisto pareca muita notacao para pouca matematica, mas e apenas consequenciado fato, bem conhecido, de que um operador linear qualquer de R e dadopela multiplicacao por uma constante. E e exatamente isto que obterıamosse fixassemos t na expressao de η. Usando esta notacao, podemos reescrever(1.4) na forma
C∗(α) = γ(t)dt.Estes comentarios nos ajudam a interpretar a nocao de integral de linha na
linguagem das formas diferenciais. Lembre-se que a integral de F ao longo

24 2. 1-FORMAS
de C foi definida como sendo a integral da funcao γ entre 0 e 1. Mas γ eo coeficiente da 1-forma C∗(α). Reescrevendo tudo isto numa ordem maisdireta: a integral da 1-forma α ao longo de C, e a integral da 1-forma C∗(α)em [0, 1] que, por sua vez, e a integral de γ neste mesmo intervalo. Isto e,∫
C
α =∫
[0,1]
C∗(α) =∫ 1
0
γdt.
Como de costume, o termo mais a direita nesta ultima equacao representa aintegral da funcao γ entre 0 e 1. O dt esta presente, apenas, para indicar qual ea variavel de integracao. Contudo, a integral da 1-forma γdt em [0, 1] e∫
[0,1]
γdt,
que e perigosamente parecida com a notacao para a integral de γ entre 0 e 1.Removeremos o perigo de ambıguidade simplesmente definindo∫
[0,1]
γdt, como sendo igual a∫ 1
0
γdt.
Para encerrar, generalizamos a definicao acima para a integral de qualquer1-forma do plano ao longo de uma curva. Se β e uma 1-forma em U e C :[0, 1] → U uma curva, definimos∫
C
β =∫
[0,1]
C∗(β).
ComoC∗(β) = gdt,
para alguma funcao diferenciavel g,∫[0,1]
C∗(β) =∫ 1
0
gdt,
que e a integral usual de g entre 0 e 1.Na proxima secao generalizaremos e sistematizaremos tudo isto. Entre
outras coisas, precisamos esclarecer como se deve lidar com o conflito entre in-tervalos abertos e fechados, que se manisfestou subrepiticiamente na discussaoacima. De fato, a integral foi calculada no intervalo fechado [0, 1]. Contudo, oseu integrando e uma 1-forma definida no intervalo aberto (0, 1).
2. O caso geral
Nesta secao vamos generalizar e (com perdao pelo trocadilho) formalizar anocao de 1-forma diferenciavel. Apesar de nao utilizarmos formas em espacosde dimensao superior a 3 em nossas aplicacoes, introduziremos 1-formas sobreRn. Faremos isto porque a teoria geral e tao elementar que restringi-la nao asimplificaria em nada. Sinta-se livre para imaginar que 1 ≤ n ≤ 3, se preferir.

2. O CASO GERAL 25
2.1. 1-formas diferenciais. Seja U uma regiao de Rn. Uma 1-formadiferencial em U e uma aplicacao
α : U × Rn → R,que satisfaz as seguintes condicoes:
(1) fixando p0 ∈ U , e considerando α(p0, u) como funcao apenas de u,temos uma aplicacao linear de Rn em R;
(2) fixando u0 ∈ Rn, e considerando α(p, u0) como funcao apenas de p,temos uma funcao diferenciavel de U em R.
Como no §1.4, uma vez que p ∈ U tenha sido fixado, definimos αp como sendoa transformacao linear
αp : Rn → R,dada por
α|p(v) = α(p, v) para todo v ∈ Rn.Podemos expressar qualquer 1-forma de maneira bastante concreta, se
adotamos um sistema de coordenadas em Rn. Feito isto, seja
ε = e1, . . . , en,a base canonica relativamente a esta escolha de coordenadas. Dado um vetorv, qualquer, de Rn, podemos escreve-lo como
v = b1e1 + · · ·+ bnen,
onde b1, . . . , bn sao numeros reais. Fixando, agora, um ponto p em U , e ape-lando para a propriedade (1) da definicao acima,
α(p, v) = b1α(p, e1) + · · ·+ bnα(p, en).(2.1)
Denotando, entao, por dxi a transformacao linear de Rn em R que extrai ai-esima coordenada de um vetor, temos que
dxi(u) = bi.
Portanto, o ultimo termo de (2.1) pode ser reescrito na forma
α(p, u) = α(p, e1)dx1(u) + · · ·+ α(p, en)dxn(u).
Entretanto, ei e um vetor fixo de Rn, de modo que, pela propriedade (2),α(p, ei) e uma funcao diferenciavel de p para cada 1 ≤ i ≤ n. Por isso,escrevendo,
ai(x1, . . . , xn) = α((x1, . . . , xn), ei),temos uma funcao diferenciavel
ai : U → R.Assim,
α(p, u) = a1(p)dx1(u) + · · ·+ an(p)dxn(u),para todo p ∈ U e u ∈ Rn. Mas isto equivale a dizer que
α = a1dx1 + · · ·+ andxn,(2.2)
em U × Rn.

26 2. 1-FORMAS
Nao foi a toa que preferimos definir o conceito de 1-forma diferenci-alutilizando as propriedades (1) e (2), ao inves de usar diretamente a expressao(2.2). A formula (2.2) pressupoe que um sistema de coordenadas tenha sidopreviamente escolhido, que nao e o caso da definicao do inıcio deste paragrafo.No jargao matematico a definicao que escolhemos e livre de coordenadas.
2.2. O espaco vetorial das 1-formas diferenciais. O conjunto for-mado pelas 1-formas diferenciais definidas em uma regiao U do Rn sera deno-tado por Ω1(U). Ha varias operacoes que podemos definir em Ω1(U), a maissimples das quais e a soma. Sejam α e β 1-formas diferenciais em U , a somaα+ β e definida em um ponto (p, v) ∈ U × Rn por
(α+ β)(p, v) = α(p, v) + β(p, v).
Para que esta definicao seja util, e preciso que α+β tambem seja uma 1-formadiferencial em U , e nao apenas uma aplicacao qualquer. Mas isto e facil deverificar usando as propriedades (1) e (2).
Em primeiro lugar, fixando p ∈ U e tomando v1, v2 ∈ Rn e um escalar k,temos que
(α+ β)(p, v1 + kv2) = α(p, v1 + kv2) + β(p, v1 + kv2).(2.3)
Como α e β satisfazem (1),
α(p, v1 + kv2) = α(p, v1) + kα(p, v2) e
β(p, v1 + kv2) = β(p, v1) + kβ(p, v2).
Substituindo em (2.3), obtemos
(α+ β)(p, v1 + kv2) = α(p, v1) + kα(p, v2) + β(p, v1) + kβ(p, v2),
que pode ser reescrito na forma
(α+ β)(p, v1 + kv2) = (α+ β)(p, v1) + k(α+ β)(p, v2).
Isto mostra que α+ β e linear na segunda coordenada, quando a primeira estafixa. Poderıamos ter abreviado toda esta conta apelando apenas para o fato deque a soma de duas aplicacoes lineares (neste caso, α|p e β|p) tambem e umaaplicacao linear.
Fixando, agora, um vetor v0 ∈ Rn temos, pela propriedade (2), queα(p, v0) e β(p, v0) sao funcoes diferenciaveis de p. Como a soma de funcoesdiferenciaveis em U e uma funcao diferenciavel em U , concluımos que (α +β)(p, v0) e diferenciavel como funcao de p. Mostramos, assim, que α + βsatisfaz (1) e (2); portanto, e uma 1-forma diferenciavel em U . Um calculosimples mostra que se
α = a1dx1 + · · ·+ andxn e β = b1dx1 + · · ·+ bndxn,
entaoα+ β = (a1 + b1)dx1 + · · ·+ (an + bn)dxn,
como, alias, seria de esperar.

2. O CASO GERAL 27
Procedendo de maneira semelhante, podemos mostrar que se α e uma 1-forma diferencial em U e f : U → R, entao a aplicacao de U × Rn em Rdefinida por
(fα)(p, v) = f(p)α(p, v),
onde p ∈ U e v ∈ Rn. Mais uma vez, isto e facilmente expresso em termos decoordenadas pela formula
fα = f(a1dx1 + · · ·+ andxn) = (fa1)dx1 + · · ·+ (fan)dxn.
Um caso particular da multiplicacao de uma 1-forma por uma funcao ocorrequando a funcao e constante. Neste caso o que temos e o produto de um escalarpor uma 1-forma. Assim, podemos somar 1-formas diferenciaveis e multiplica-las por escalares. Com um pouco de paciencia e possıvel verificar que estasoperacoes satisfazem todas as propriedades requeridas para fazer de Ω1(U)um espaco vetorial sobre R. Este e um fato que usaremos com frequencia aolongo destas notas; tao frequentemente que raramente chamaremos a atencaopara o que estamos fazendo.
No §1.4 vimos como associar uma 1-forma diferencial a um campo doplano. Esta construcao se generaliza imediatamente para dimensoes maiores.Seja U uma regiao de Rn e F : U → Rn um campo de vetores diferenciavelem U . Denotando por x1, . . . , xn as coordenadas de Rn relativamente a basecanonica, e por F1, . . . , Fn as funcoes coordenadas de F , definimos a 1-formadiferencial associada a F por
τF = F1dx1 + · · ·+ Fndxn.
Isto nos da uma correspondencia bijetiva entre campos definidos emU e formasem Ω1(U). Com isso, tanto podemos estudar o calculo vetorial em termos deformas, quanto de campos. A vantagem de usar a linguagem de formas e quepermite um tratamento unificado do que ocorre em todas as dimensoes; aocontrario do que ocorre com os campos de vetores, como ja comentamos naintroducao.
2.3. Diferencial. Como vimos no §5.2 do capıtulo 1, uma classe im-portante de campos vetoriais sao os campos gradientes. Seja F um campogradiente, definido em uma regiao U de Rn, e f ∈ O(U) sua funcao potencial.A 1-forma
τ∇f =∂f
∂x1dx1 + · · ·+ ∂f
∂xndxn
e denotada por df , e conhecida como a diferencial, ou diferencial total, dafuncao f . Uma 1-forma em U que pode ser escrita como df para algum f ∈O(U), e chamada de exata.
Podemos nos perguntar de que forma a diferencial se comporta com rela-cao as operacoes definidas em O(U); veja §5 do capıtulo 1. Em primeiro lugar,como a derivacao parcial e linear,
d(f + kg) = d(f) + kd(g), para todo f, g ∈ O(U) e k ∈ R.

28 2. 1-FORMAS
Como O(U) e Ω1(U) sao ambos espacos vetoriais sobre R, podemos reformu-lar esta propriedade dizendo simplesmente que a diferencial
d : O(U) → Ω1(U)
e uma transformacao linear.No caso da multiplicao de funcoes, a situacao e mais complicada. Con-
siderando, novamente, o que ocorre com as derivadas parciais, temos que sef, g ∈ O(U), entao
∂
∂xj(fg) =
∂f
∂xjg + f
∂g
∂xj,
para cada 1 ≤ j ≤ n. Assim,
d(fg) =n∑j=1
(∂f
∂xjg + f
∂g
∂xj
)dxj .
Distribuindo os dxj sobre a soma, obtemos
d(fg) =n∑j=1
(∂f
∂xjgdxj + f
∂g
∂xj
)dxj .
Separando as parcelas em duas somas,
d(fg) =n∑j=1
(g∂f
∂xjdxj
)+
n∑j=1
(f∂g
∂xj
)dxj .
Pondo, agora, f e g em evidencia,
d(fg) = g
n∑j=1
(∂f
∂xjdxj
)+ f
n∑j=1
(∂g
∂xj
)dxj ,
que pode ser reescrito como
d(fg) = gdf + fdg.
Esta equacao e conhecida como formula de Leibniz.
2.4. Imagem inversa. E chegada a hora de introduzir o conceito deimagem inversa de uma 1-forma por uma aplicacao diferenciavel. Faremosisto de uma maneira suficientemente geral para cobrir os dois casos de imageminversa introduzidos no §1.4.
Seja V uma regiao de Rm, e seja φ : V → Rn uma aplicacao dife-renciavel. Escrevendo φ em termos de suas funcoes coordenadas, temos que
φ(p) = (φ1(p), . . . , φn(p)),
para todo p ∈ V . Dizer que φ e diferenciavel, equivale a dizer que cada umadas funcoes coordenadas
φj : V → R para 1 ≤ j ≤ n,
e diferenciavel. A derivada de φ em um ponto p ∈ V e dada pela matrizjacobiana Jp(φ), que por sua vez define uma transformacao linear de Rm emRn, que tambem denotaremos por (Jp(φ)).

2. O CASO GERAL 29
Ate aqui nao fizemos nada que nao tenha sido visto em um curso de calculodiferencial. Seguindo, agora, o roteiro ja utilizado em 1.4, definimos umafuncao
Gφ : V × Rm → Rn × Rn,por
Gφ(p, v) = (φ(p), Jp(φ)v),
onde p ∈ V e v ∈ Rm. Note que Gφ e diferenciavel como funcao de suas mprimeiras coordenadas e linear como funcao das m ultimas coordenadas.
Suponha, agora, que a imagem de φ esta contida em uma regiao U de Rn,na qual esta definida uma 1-forma diferencial α. Neste caso a imagem de Gφesta contida em U × Rn, de modo que faz sentido calcular a composta de αcom Gφ. A imagem inversa de α por φ, denotada por φ∗(α), e definida por
φ∗(α) = α ·Gφ.
Pela definicao de composta, φ∗(α) e uma aplicacao de V × Rm em R. Resta-nos mostrar que e uma 1-forma diferencial em V . Para isto, basta verificar ascondicoes (1) e (2) da definicao enunciada no §2.1.
Digamos que um ponto p0 ∈ V foi fixado. Entao, para qualquer v ∈ Rmtemos
φ∗(α)(p0, v) = α(φ(p0), Jp0(φ)v),
que e equivalente a dizer que
φ∗(α)(p0, v) = α|φ(p0) · Jp0(φ)(v).
Mas, com p0 fixado, tanto α|φ(p0), quanto Jp0(φ) sao lineares nas coordena-das restantes. Como a composta de aplicacoes lineares e linear, temos que aaplicacao φ∗(α)(p0, v) e linear em v, de modo que φ∗(α) satisfaz (1).
Suponhamos, agora, que o vetor v0 ∈ Rm esta fixo. Considere a funcaog0 : V → U × Rn definida pela regra
g0(p) = (φ(p), Jp(φ)(v0)).
Como Jp(φ)(v0) e diferenciavel como funcao de p, o mesmo vale para g0.Contudo,
φ∗(α)(p, v0) = α · g0(p)qualquer que seja p ∈ V . Como composta de duas aplicacoes diferenciaveis,φ∗(α)(p, v0) e, ela propria, diferenciavel, o que prova (2).
E claro que, se φ corresponder a uma curva parametrizavel, entao a ima-gem inversa definida aqui coincide com a que foi definida no §1.4. Por outrolado, se φ : Rm → Rn for uma transformacao linear, entao
Gφ(p, v) = (φ(p), φ(v)),
ja que, neste caso, a transformacao linear induzida pela jacobiana e a propriaφ. Se α for uma 1-forma diferenciavel em Rm, temos
α ·Gφ(p, v) = α(φ(p), φ(v)).

30 2. 1-FORMAS
Supondo, agora, que α e constante, seus coeficientes sao independentes daescolha de suas m primeiras coordenadas, de modo que
α ·Gφ(p, v) = α(φ(v)).
Com isso,φ∗(α) = α · φ,
se α for uma forma constante.Um caso um pouco mais geral corresponde a imagem inversa de dxi por
uma aplicacao diferenciavel qualquer, onde xi e a i-esima coordenada de Rnem relacao a base canonica ε. Mais uma vez, seja V um aberto de Rm eφ : V → Rn uma aplicacao diferenciavel. Por definicao,
Gφ(p, v) = (φ(p), Jp(φ)v),
onde p ∈ V e v ∈ Rm. Mas isto implica que
φ∗(dxi)(p, v) = dxi(Jp(φ)v).
Contudo, a i-esima coordenada de Jp(φ)v e igual a
∂φi∂y1
(p)b1 + · · ·+ ∂φi∂ym
(p)bm,(2.4)
onde y1, . . . , ym sao as coordenadas de Rm relativamente a sua base canonica,e v = (b1, . . . , bm). Com isto,
dyj(v) = bj , para 1 ≤ j ≤ m.
de modo que (2.4) pode ser reescrita como(∂φi∂y1
(p)dy1 + · · ·+ ∂φi∂ym
(p)dym
)(v).
Mas isto significa que
φ∗(dxi) =∂φi∂y1
dy1 + · · ·+ ∂φi∂ym
dym.
que e exatamente a diferencial da funcao φi, conforme definida no final do§2.1. Com isso, podemos escrever
φ∗(dxi) = dφi.(2.5)
2.5. Propriedades da imagem inversa. Seja φ : V → U uma apli-cacao diferenciavel, onde V e U sao regioes de Rm e Rn, respectivamente.Usando a notacao introduzida no §2.1 para o espaco das 1-formas diferenciaissobre uma regiao, podemos dizer que a imagem inversa nos da uma aplicacao
φ∗ : Ω1(U) → Ω1(V ).
Observe que φ tem V como domınio e U como contradomınio, ao passo que,na imagem inversa, estas duas regioes aparecem com suas posicoes trocadas:o domınio de φ sao as formas definidas sobre U , ja seu contradomınio corres-ponde as formas definidas sobre V .

2. O CASO GERAL 31
Como Ω1(U) e Ω1(V ) sao espacos vetoriais, e razoavel perguntar se φ∗ euma transformacao linear. A resposta e sim, como e facil de verificar. Se α1 eα2 sao 1-formas diferenciais em U e k e um escalar, entao
φ∗(α1 + kα2) = (α1 + kα2) ·Gφ.Mas, da definicao de soma de formas, isto e igual a
α1 ·Gφ + k(α2 ·Gφ);que pode ser reescrito como
φ∗(α1) + kφ∗(α2),
provando, assim, a linearidade de φ∗.O produto de uma 1-forma por um escalar e apenas um caso especial do
produto por uma funcao. Como vimos no §2.1, se g : U → R e uma funcaodiferenciavel e α uma 1-forma na regiao U , entao a formula
(gα)(p, v) = g(p)α(p, v), para todo p ∈ U e v ∈ Rn,(2.6)
define uma nova 1-forma diferencial em U . Vejamos o que acontece se calcu-lamos a imagem inversa de gα pela aplicacao diferenciavel φ : V → U dadaacima. Por definicao, temos que
φ∗(gα)(p, v) = (gα)(φ(p), Jp(φ)v).
Mas, pela formula (2.6),
(gα)(φ(p), Jp(φ)v) = g(φ(p))α(φ(p), Jp(φ)v) = (g · φ)(p)φ∗(α).
Escrevendo φ∗(g) = g · φ, temos a sugestiva formula
φ∗(gα) = φ∗(g)φ∗(α),
na qual a justaposicao indica o produto da funcao φ∗(g) pela 1-forma φ∗(α),ambas definidas sobre V . Por uma questao de coerencia diremos que φ∗(g) ea imagem inversa da funcao g pela aplicacao φ.
As propriedades descritas acima nos permitem dar uma formula bastantecompacta, alem de muito util, para a imagem inversa de uma forma expressaem termos de coordenadas. Digamos que x1, . . . , xn sao as coordenadas deRn, e que φ1, . . . , φn sao as funcoes coordenadas de φ. Neste caso, se a 1-forma diferencial α se escreve como
α = a1dx1 + · · ·+ andxn,
temos queφ∗(α) = φ∗(a1dx1) + · · ·+ φ∗(andxn),
pela linearidade da imagem inversa. Usando, agora, a propriedade relativa aoproduto por uma funcao diferenciavel, obtemos
φ∗(α) = φ∗(a1)φ∗(dx1) + · · ·+ φ∗(an)φ∗(dxn).
Finalmente, por (2.5),
φ∗(α) = φ∗(a1)dφ1 + · · ·+ φ∗(an)dφn.(2.7)

32 2. 1-FORMAS
Outra propriedade muito importante da imagem inversa diz respeito a di-ferencial de uma funcao. Se f : U → R e uma funcao diferenciavel, entao,pela formula (2.5), a imagem inversa de sua diferencial por φ e
φ∗(df) =m∑j=1
∂f
∂yj(φ(z))dφj =
n∑i=1
m∑j=1
∂f
∂yj(φ(z))
∂φj∂xi
dxi.
Entretanto, pela regra da cadeia, isto e igual a
d(φ∗(f)) = d(f · φ).
Como veremos na secao 5, esta formula e uma das chaves do estudo de camposconservativos.
A ultima propriedade que desejamos considerar diz respeito a imagem in-versa por uma aplicacao composta. Sejam
ψ : W → V e φ : V → U
aplicacoes diferenciaveis, onde W , V e U sao regioes de Rk, Rm e Rn, res-pectivamente. Queremos calcular (φ · ψ)∗(α), onde α e uma 1-forma definidaem U . Mas,
(φ · ψ)∗(α)(p, v) = α((φ · ψ)(p), Jp(φ · ψ)(v).
Contudo, pela regra da cadeia para funcoes de mais de uma variavel
Jp(φ · ψ) = Jψ(p)(φ)Jp(ψ).
Assim,(φ · ψ)∗(α)(p, v) = α((φ · ψ)(p), Jψ(p)(φ)Jp(ψ)(v),
que e igual aφ∗(α)(ψ(p), Jp(ψ)(v);
que, por sua vez, eψ∗(φ∗(α))(p, v).
Portanto,(φ · ψ)∗(α) = ψ∗(φ∗(α)).
Note a inversao das posicoes de φ e ψ quando passamos de um lado para ooutro da equacao.
Vamos encerrar enunciando, de maneira sistematica, todas as propriedadesda imagem inversa de formas. Seja φ : V → U uma aplicacao diferenciavelentre regioes V ⊆ Rm e U ⊆ Rn.
Propriedade 1: A imagem inversa φ∗ : Ω1(U) → Ω1(V ) e uma trans-formacao linear entre espacos vetoriais.
Propriedade 2: Se α ∈ Ω1(U) e f ∈ O(U), entao
φ∗(fα) = φ∗(f)φ∗(α).
Propriedade 3: Se f ∈ O(U), entao
φ∗(df) = dφ∗(f).

3. INTEGRACAO DE 1-FORMAS 33
Propriedade 4: Se ψ : W → V e uma aplicacao diferenciavel em umaregiao W ⊆ Rk e α ∈ Ω1(U), entao
(φ · ψ)∗(α) = ψ∗(φ∗(α)).
3. Integracao de 1-formas
Ja estamos de posse de toda a maquinaria necessaria para definir a integral deuma 1-forma diferencial qualquer sobre uma curva.
3.1. Integral de 1-forma em 1-celula. Ate aqui assumimos que umacurva parametrizada C e, simplesmente, uma funcao diferenciavel do intervalo[0, 1] em R. Lembre-se que a diferenciabilidade e necessaria para que o calculoda imagem inversa de uma forma possa ser feita. Entretanto, esta definicaoenvolve um certo conflito de interesses. O problema se da porque queremosque C esteja definida em um intervalo fechado; ja que a integral vai de umextremo ao outro da curva. Por outro lado, a diferenciabilidade de C requerque esteja definida em um aberto, porque o limite do quociente de Newton deveser tomado a esquerda e a direita de cada ponto do intervalo. Daı o conflito:para ter a diferenciabilidade, perdemos os extremos do intervalo.
Ha varias saıdas possıveis, algumas mais sofisticadas, outras menos. Porexemplo, poderıamos definir diferenciabilidade apenas a direita ou apenas a es-querda, para dar conta das extremidades do intervalo. Entretanto, em nome dasimplicidade, a solucao que adotaremos sera muito menos sofisticada. Imagi-naremos queC esta definida em um intervalo aberto um pouco maior que [0, 1],e que e diferenciavel em todo este intervalo. Para quase todas as aplicacoespraticas da teoria, esta e uma hipotese perfeitamente aceitavel.
Sejam a < b dois numeros reais. Sistematizando os comentarios acima,diremos que σ e uma 1-celula definida no intervalo [a, b], se existe um numeroreal ε > 0 tal que
σ : (a− ε, b+ ε) → R,e uma funcao diferenciavel em todo ponto de (a − ε, b + ε). Ha duas razoesprincipais para chamar o objeto que acabamos de definir de 1-celula, em vez decurva parametrizada. A primeira, e que terıamos mais um sentido ligeiramentediferente para o termo curva parametrzizada, o que o tornaria ainda mais so-brecarregado. A segunda, e que queremos chamar sua atencao para o paraleloentre as varias celulas definidas ao longo do curso; 2-celulas no capıtulo 3 e3-celulas no capıtulo 4.
Talvez voce ja tenha observado que definimos 1-celulas sobre um intervalofechado geral [a, b], e nao sobre [0, 1], como vınhamos fazendo com todas ascurvas parametrizadas ate aqui. Na verdade, esta nao e uma generalizacaorelevante. De fato, se σ e uma 1-celula em [a, b], entao a funcao
σ : [0, 1] → R,definida por
σ(t) = σ(a(1− t) + bt)

34 2. 1-FORMAS
e diferenciavel e tem a mesma imagem que σ. Em outras palavras, qualquer1-celula pode ser reparametrizada em termos do intervalo [0, 1]. A unica razaopara admitir intervalos de definicao mais gerais para as 1-celulas e que istosimplifica as demonstracoes de algumas propriedades da integral de uma 1-forma, conforme veremos a seguir.
Nossa definicao tera como partida o caso unidimensional. Em primeirolugar, qualquer 1-forma definida em um intervalo (a′, b′) de R pode ser escritana forma gdt, onde t e a coordenada de R e g : (a′, b′) → R e uma funcaodiferenciavel. Se a′ < a < b < b′, entao a integral da forma gdt no intervalo[a, b] e definida como sendo a integral da funcao g neste intervalo. Isto e,∫
[a,b]
gdt =∫ b
a
gdt.
Suponha, agora, que U ⊆ Rn e uma regiao, α e uma 1-forma diferencialem U e σ : [a, b] → Rn e uma 1-celula cuja imagem esta contida em U . Aintegral de α ao longo de σ e definida por∫
σ
α =∫
[a,b]
σ∗(α).
Esta formula esta bem definida porque, a direita, temos a integral de uma 1-forma em dimensao um, que ja foi definida anteriormente. Se F for um campode vetores em U , a integral de linha de F ao longo de σ e∫
σ
F =∫σ
τF .
Como τ estabelece uma correspondencia bijetiva entre campos e 1-formas, asnocoes de integral de linha e integral de 1-forma sao essencialmente equiva-lentes. Por isso, passaremos de uma a outra nocao, sem maiores cerimonias,sempre que necessario.
Vejamos um exemplo em dimensao tres. Seja
α = xdx+ yzdy + (x+ y)dz,
uma 1-forma definida em todo o R3 e σ : [1, 2] → R a 1-celula definida porσ(t) = (t2, t3, t4). Calculando a imagem inversa da forma por σ, obtemos
σ∗(α) = σ∗(x)σ∗(dx) + σ∗(yz)σ∗(dy) + σ∗(x+ y)σ∗(dz).
Contudo,
σ∗(x) = t2, σ∗(yz) = t7 e σ∗(x+ y) = t2 + t3,
ao passo que,
σ∗(dx) = d(t2) = 2tdt,
σ∗(dy) = d(t3) = 3t2dt e
σ∗(dz) = d(t4) = 4t3dt.
Assim,σ∗(α) = (2t3 + 3t9 + 4t5 + 4t6)dt.

3. INTEGRACAO DE 1-FORMAS 35
Portanto,∫σ
α =∫ 2
1
(2t3+3t9+4t5+4t6)dt =[t4
2+
3t10
10+
2t6
3+
4t7
7
]21
=15014
35.
3.2. Propriedades da integral de uma 1-forma. Ha algumas pro-priedades elementares das integrais de 1-formas que precisamos considerar.Suponha, como ja se tornou usual, que U seja uma regiao de Rn. Dadas duas1-formas diferenciais α e β em U , e um escalar k ∈ R, queremos calcular∫
σ
(α+ kβ),
onde σ e uma 1-celula definida em [a, b] cuja imagem esta contida em U . Pordefinicao ∫
σ
(α+ kβ) =∫
[a,b]
σ∗(α+ kβ).
Assim, das propriedades da imagem inversa, segue que∫σ
(α+ kβ) =∫
[a,b]
σ∗(α) + kσ∗(β).
Mas, do lado direito desta equacao, temos a integral de funcoes de uma varia-vel, que sabemos satisfazer∫
[a,b]
σ∗(α) + kσ∗(β) =∫
[a,b]
σ∗(α) + k
∫ b
a
σ∗(β).
Reescrevendo tudo isto em termos ao longo de C temos∫σ
(α+ kβ) =∫σ
α+ k
∫σ
β,
como, alias, seria de esperar.As outras propriedades que desejamos estudar estao relacionadas a mu-
dancas nas curvas. Em primeiro lugar, que efeito tem uma reparametrizacaoda curva sobre a integral? Antes de formular esta pergunta com exatidao, econveniente introduzir a seguinte definicao. Para manter a coerencia com anocao de 1-celula descrita acima, usaremos a expressao
a funcao diferenciavel γ : [a, b] → [c, d]
para designar uma funcao diferenciavel
γ : (c− ε, d+ ε) → (a− ε, b+ ε)
onde ε e um numero real positivo. Se σ e γ sao como acima, entao, σ · γ defineuma parametrizacao diferente da 1-celula σ. Isto e, σ · γ e uma 1-celula cujaimagem e a mesma de σ. A pergunta pode, entao, ser reformulada como: quala relacao entre a integral de uma 1-forma α ∈ Ω1(U) ao longo da 1-celula σ ·γe a integral da mesma forma ao longo de σ?

36 2. 1-FORMAS
Para responder a esta pergunta, calculamos a integral desejada usando asvarias propriedades que ja conhecemos. Como,∫
σ·γα =
∫[c,d]
(σ · γ)∗α,
devemos calcular primeiro a imagem inversa (σ · γ)∗α. Usando a propriedade4 do final do §2.5, temos que
(σ · γ)∗α = γ∗(σ∗(α)).
Como σ∗(α) e uma funcao de apenas uma variavel, podemos escreve-la comogdu, onde g e uma funcao do parametro u de σ. Nesta notacao,
γ∗(σ∗(α)) = γ∗(gdu) = (g · γ)dγ.
Explicitando o valor da diferencial dγ em funcao da variavel t de γ, obtemos
γ∗(σ∗(α)) = (g · γ)γ′dt.
Portanto, ∫[c,d]
γ∗(σ∗(α)) =∫
[c,d]
(g · γ)γ′dt.
Mas esta e a integral de uma funcao de uma variavel, de modo que, pela regrade integracao por substituicao,∫
[c,d]
(g · γ)γ′dt =∫ γ(d)
γ(c)
g(u)du,
onde u = γ(t). Como σ∗(α) = gdu, obtemos a formula∫σ·γ
α =∫ γ(d)
γ(c)
σ∗(α).(3.1)
Se γ satisfizerγ(c) = a e γ(d) = b,
a formula (3.1) nos da ∫σ·γ
α =∫σ
α.
Em outras palavras, a reparametrizacao de uma 1-celula por uma funcao dife-renciavel nao altera o valor da integral de uma forma ao longo daquela 1-celula.Este resultado e tao importante que e melhor enuncia-lo a parte.
FORMULA DE MUDANCA DE VARIAVEIS. Sejam σ : [a, b] → R uma1-celula e γ : [c, d] → [a, b] uma funcao diferenciavel. Se a imagem de σ estacontida em uma regiao U de Rn na qual esta definida uma 1-forma α, temos∫
σ·γα =
∫ γ(d)
γ(c)
σ∗(α).

3. INTEGRACAO DE 1-FORMAS 37
Seja σ uma 1-celula definida em [a, b] e cuja imagem esta contida em umaregiao U de Rn. Se
γ : [0, 1] → [a, b],
e dada por γ(t) = (b − a)t + a, entao σ · γ e uma 1-celula cuja imagem e amesma de σ. Alem disso, se α ∈ Ω1(U), temos que∫
σ·γα =
∫σ
α.
Isto significa que podemos supor que as 1-celulas que aparecem na demons-tracao de qualquer de nossos teoremas estao parametrizadas a partir de [0, 1],sem que com isto haja qualquer perda de generalidade. E exatamente isto quefaremos, daqui ate o final deste paragrafo.
As proximas propriedades da integral sao consequencias imediatas da for-mula de mudanca de variaveis. Seja σ uma 1-celula parametrizada por [0, 1] ecuja imagem esta contida em U . Defina −σ : [0, 1] → U pela regra
−σ(t) = σ(1− t).
Se 0 ≤ t ≤ 1, entao (1− t) ∈ [0, 1], contudo −σ(0) = σ(1) e −σ(1) = σ(0).Portanto, −σ tem a mesma imagem que σ, mas percorre os pontos da imagemno sentido oposto ao de σ. Aplicando a formula de mudanca de variaveis comγ(t) = 1− t, obtemos ∫
−σα =
∫ γ(1)
γ(0)
σ∗(α).
Contudo, como −σ(0) = σ(1) e −σ(1) = σ(0),∫−σ
α = −∫
[0,1]
σ∗(α).
Portanto, ∫−σ
α = −∫σ
α.(3.2)
Em outras palavras, percorrer a 1-celula ao contrario inverte o sinal da integral.A proxima propriedade da integral esta relacionada ao fato de que uma
partıcula em movimento pode percorrer uma mesma curva varias vezes. Istoocorre, por exemplo, com uma partıcula carregada presa em um campo mag-netico. Qual o trabalho realizado pelo campo, em um caso como este? Na-turalmente, precisamos supor que a curva e fechada para que a pergunta facasentido. Seja, entao,
σ : [0, 1] → U,
uma curva fechada e α uma 1-forma definida em U . Se percorrermos σ duasvezes, obtemos uma nova curva
2σ : [0, 2] → U

38 2. 1-FORMAS
definida por
2σ(t) =
σ(t) se t ∈ [0, 1]σ(t− 1) se t ∈ [1, 2],
Note que, se σ for diferenciavel, entao 2σ tambem sera diferenciavel e
(2σ)′(t) =
σ′(t) se t ∈ [0, 1]σ′(t− 1) se t ∈ [1, 2].
Portanto, ∫2σ
α =∫ 2
0
(2σ)∗α
e igual a ∫ 1
0
α(σ(t)σ′(t))dt+∫ 2
1
α(σ(t− 1))σ′((t− 1))dt.
Contudo, tomando s = t− 1,∫ 2
1
α(σ(t− 1))σ′((t− 1))dt =∫ 1
0
α(σ(s))σ′(s)ds,
de modo que ∫2σ
α = 2∫ 1
0
α(σ(t)σ′(t)dt
Assim, ∫2σ
α = 2∫σ
α,
que, evidentemente, e uma formula muito satisfatoria. Um argumento seme-lhante mostra que se k e um inteiro positivo, entao∫
kσ
α = k
∫σ
α.
Por outro lado, supondo ainda que k > 0, temos por (3.2) que∫−kσ
α = −∫kσ
α = −k∫σ
α.
Resumindo, se k for um inteiro qualquer, positivo ou negativo, entao∫kσ
α = k
∫σ
α.(3.3)
Esta formula desempenhara um papel central no proximo paragrafo.

3. INTEGRACAO DE 1-FORMAS 39
3.3. Integrais em encadeamentos de 1-celulas. Para a ultima pro-priedade da integral consideremos tres numeros reais a < b < c e uma 1-celulaσ, definida em [a, c]. Podemos subdividir σ em duas curvas que chamaremos deσ1 e σ2. A primeira destas celulas corresponde ao arco descrito por σ quandot varia entre a e b, ao passo que a segunda corresponde ao arco com t variandoentre b e c. Mais precisamente,
σ1(t) = σ(t) para a ≤ t ≤ c, e
σ2(t) = σ(t) para c ≤ t ≤ b.
Se a imagem de σ esta contida em uma regiao U de Rn e α ∈ Ω1(U), entao∫σ
α =∫
[a,c]
σ∗(α).
Mas, pelas propriedades da integral de funcoes de uma variavel,∫[a,c]
σ∗(α) =∫
[a,b]
σ∗(α) +∫
[b,c]
σ∗(α).
Como σ = σ1 no intervalo [a, b],∫[a,b]
σ∗(α) =∫
[a,b]
σ∗1(α) =∫σ1
α,
e uma equacao semelhante vale para σ2. Portanto,∫σ
α =∫σ1
α+∫σ2
α.(3.4)
A proxima formula deveria corresponder a colagem de duas 1-celulas, umaseguida da outra, para formar uma unica curva parametrizada. Digamos queσ1 : [a, b] → Rn e σ2 : [a′, b′] → Rn sejam duas 1-celulas cujas imagens estaocontidas em uma regiao U ⊆ Rn. Se σ1(b) = σ2(a′), podemos definir umacurva contınua
σ1 + σ2 : [0, 1] → Rn
por
(σ1 + σ2)(t) =
σ1(a(1− 2t) + 2bt) se 0 ≤ t ≤ 1/2σ2(a′(1− 2t) + 2b′t) se 1/2 ≤ t ≤ 1.
Apesar de ser contınua, σ1 + σ2 nem sempre sera diferenciavel no pontoσ1(b) = σ2(a′), onde foi feita a emenda. Por exemplo, o segmento de retaσ1 parametrizado por (t,−t) no intervalo [−1, 0] tem o ponto (0, 0) em co-mum com o segmento σ2 parametrizado por (t, t) no intervalo [0, 1]. Contudo,a curva C resultante da colagem de σ1 com σ2 nao e diferenciavel em (0, 0).

40 2. 1-FORMAS
·
·
σ2
σ1
22222222222222
Felizmente, isto nao nos impede de definir a integral de uma forma aolongo de σ1 + σ2. A saıda deste impasse esta no famoso ditado: se nao podeprova-lo, defina-o. Continuando com a notacao acima, se α ∈ Ω1(U), defini-mos ∫
σ1+σ2
α,
como sendo a soma ∫σ1
α+∫σ2
α.
Desta forma, a formula (3.4) continua valendo neste caso mais geral, se toma-mos E = σ1 + σ2. Isto parece um blefe; e e! Mas, que importa? Basta que oblefe funcione.
Note que esta definicao e coerente com a formula (3.3), bastando para issoque convecionemos escrever
kσ = σ + · · ·+ σ︸ ︷︷ ︸k vezes
, se k ≥ 0 e kσ = −|k|σ, se k < 0,
para qualquer 1-celula σ e qualquer inteiro k. Isto explica porque escolhemosusar o sımbolo para a soma, em vez do sımbolo da uniao, para denotar esteprocedimento de colagem de curvas. Afinal, seA e um conjunto, entaoA∪A =A, que nao corresponde ao comportamente esperado para a colagem de curvas.
Considere, agora, o seguinte diagrama
·L1P · R · L2
Imagine que uma partıcula se movimenta ao longo desta curva da seguinte ma-neira: comecando em P a partıcula segueR para a direita, da a volta no lacoL2
e retorna por R para a esquerda, dando a volta em L1 e parando novamente noponto de partida P . Usando a notacao introduzida acima, podemos descreveresta curva como
R+ L2 −R+ L1.(3.5)
Se α for uma 1-forma definida em uma regiao que contem a curva, entao∫R+L2−R+L1
α =∫R
+∫L2
α−∫R
α+∫L1
α =∫L2
α+∫L1
α.
A tentacao em escrever esta ultima soma de integrais como uma unica integral∫L1+L2
α

3. INTEGRACAO DE 1-FORMAS 41
e grande, mas nao faria sentido, pelo menos em vista do processo de colagemdefinido originalmente. Afinal de contas, os lacos L1 e L2 juntos nao formamuma curva contınua. Entretanto, se admitirmos, por um momento, que a somaL1 + L2 faca sentido, nos vemos tentados a ir ainda mais longe e nos pergun-tamos se nao seria possıvel cancelar R com −R na expressao (3.5). Neste casoobterıamos diretamente
R+ L2 −R+ L1 = L1 + L2,
e nao haveria necessidade, sequer, de escrever as integrais e proceder ao seucancelamento. Isto e mais razoavel do que pode parecer a primeira vista, por-que a unica justificativa para introduzirmos esta “soma” de celulas e o fato deque precisamos de curvas mais gerais para usar nas nossas integrais. Se ocancelamento vai ser mesmo feito nas integrais, por que nao cancelar logo ascurvas e ganhar tempo com isto?
Este tipo de argumento e um tanto perigoso em matematica, porque pa-rece estar clamando que os fins justificam os meios. Felizmente ha uma saıdaaceitavel, que consiste em criar um calculo com celulas, com regras proprias,formalizadas com o devido cuidado. Evidentemente, as regras para este calculocom celulas serao derivadas do comportamento das integrais.
Passando a formalizacao, definimos um encadeamento de 1-celulas, ou1-encadeamento, como uma expressao da forma
c1σ1 + · · ·+ cmσm,
onde os σs sao 1-celulas contidas em uma regiao U do Rn e os cs sao numerosinteiros. Esta adicao de celulas satisfaz as seguintes propriedades. Se σ1, σ2 eσ3 sao celulas em U e k ∈ Z, entao:
• (σ1 + σ2) + σ3 ≡ σ1 + (σ2 + σ3);• σ1 + σ2 ≡ σ2 + σ1;• kσ1 + σ1 ≡ (k + 1)σ1;• 0σ1 ≡ 0;• se a imagem de σ1 e apenas um ponto, entao σ1 ≡ 0.
Usamos ≡ em lugar de um simples sinal de igualdade para deixar claro quecada uma destas propriedades e derivada do comportamento de uma integralcalculada sobre um encadeamento. Diremos que um encadeamento esta emforma reduzida se eliminamos todas as parcelas que correspondem a pontos, ecancelamos todos os pares de celulas com sinais opostos. Assim, no exemploacima, L1 + L2 e a forma reduzida de R+ L2 −R+ L1.
Para lhe dar o verdadeiro nome, o que fizemos foi sistematizar o compor-tamento da adicao de celulas enumerando suas propriedades basicas. Isto naocorresponde ao que um matematico chamaria de “formalizacao” desta adicao.O problema e que, para chegar a um nıvel de precisao considerado satisfatoriopor um matematico precisarıamos apelar para a teoria de grupos. Se o seu co-nhecimento de grupos abrange a nocao de grupo quociente entao voce poderesolver o problema 3, onde a formalizacao dos conceitos acima e levada acabo em detalhes.

42 2. 1-FORMAS
4. Teorema do gradiente
Esta secao contem um unico resultado: uma generalizacao do teorema funda-mental do calculo para 1-formas. Nem mesmo se trata de um teorema cujademonstracao seja longa ou complicada. Entao, porque dedicar uma secao in-teira a este teorema? A principal razao e que este e o primeiro de uma serie deresultados que serao todos reunidos no capıtulo 4 sob o nome de teorema deStokes. Os resultados correspondentes, nos proximos capıtulos, sao bem maissofisticados e demandam uma secao propria. Para chamar sua atencao para oparalelo entre os resultados deste capıtulo e dos proximos, pareceu convenientemanter a mesma estrutura de secoes entre os diversos capıtulos. E foi assim queeste teorema veio parar em uma secao propria: por influencia de seus irmaosmais importantes.
TEOREMA DO GRADIENTE. Seja U uma regiao do Rn e σ uma 1-celulacontida em U , que comeca em p e acaba em q. Se f ∈ O(U), entao∫
σ
df = f(q)− f(p).
DEMONSTRACAO. A demonstracao e meramente uma questao de calcu-lar a integral pela definicao. Digamos que σ e parametrizada a partir do inter-valo [a, b]. Como ∫
σ
df =∫
[a,b]
σ∗(df),
e σ∗(df) = d(σ∗(f)), temos que∫σ
df =∫
[a,b]
d(σ∗(f)).
Contudo,g(t) = σ∗(f) = f(σ(t)),
e uma funcao de um unica variavel t, de modo que∫σ
df =∫
[a,b]
d(σ∗(f)) =∫
[a,b]
g′dt.(4.1)
Aplicando, agora, o teorema fundamental do calculo para uma variavel,∫[a,b]
g′dt = g(b)− g(a).(4.2)
Mas,
g(b) = f(σ(b)) = f(q) e g(a) = f(σ(a)) = f(p),(4.3)
ja que a curva comeca em p e acaba em q. Reunindo as equacoes (4.1), (4.2) e(4.3), obtemos∫
σ
df =∫ b
a
g′dt = g(b)− g(a) = f(q)− f(p),
provando assim o teorema.

5. APLICACOES 43
Se aplicarmos este teorema a uma forma definida em um intervalo da reta,obtemos o teorema fundamental do calculo para funcoes de uma variavel, queaprendemos em calculo I. Entretanto, este ultimo teorema foi o unico resultadoimportante utilizado na demonstracao acima. Esta situacao curiosa significaque estes dois teoremas – o teorema do gradiente e o teorema fundamental docalculo – sao exatamente equivalentes um ao outro.
Como a integral de uma 1-forma sobre um 1-encadeamento e mera somadas integrais sobre as parcelas, temos de imediato a seguinte generalizacao doteorema acima.
COROLARIO. Seja U uma regiao do Rn eE um 1-encadeamento contidoem U , que comeca em p e acaba em q. Se f ∈ O(U), entao∫
E
df = f(q)− f(p).
5. Aplicacoes
Nesta secao investigamos algumas aplicacoes da integral de uma 1-forma.
5.1. Circulacao. Imagine um fluido que escorre em uma regiao do R3.Sabemos que o campo de velocidades do fluido nos permite descrever o cami-nho percorrido por uma partıcula nele abandonada. A pergunta que desejamosfazer aqui, entretanto, e um pouco diferente:
De que forma o fluido contribui, ou se opoe, ao movimentode uma partıcula que percorre uma curva fechada?
Para tornar a pergunta mais concreta, considere a seguinte situacao. Ima-gine uma circunferencia feita de arame, na qual circula uma pequena esferaperfurada, como uma conta num colar. Mergulhamos o aro com a esfera emum fluido, e movemos a esfera ao longo do aro. A esfera descrevera uma cir-cunferencia mas, dependendo do campo de velocidades, o fluxo pode empurrara esfera em alguns momentos, e oferecer resistencia a seu movimento em ou-tros. Queremos definir uma magnitude, chamada de circulacao, que mede acontribuicao total de um campo ao movimento ao longo de uma curva fechadacontida na regiao onde o campo esta definido.
Vejamos, em primeiro lugar, o que ocorre se o campo e constante. Diga-mos que o campo esta definido em todo o R3, e que flui ao longo do sentidopositivo do eixo x. Em outras palavras, o campo F : R3 → R3 e definido por
F (p) = e1 = (1, 0, 0), para todo p ∈ R3.
Seja C a circunferencia de centro na origem e raio 1, contida no plano z = 0.Queremos saber de que forma o campo empurra ou se opoe ao movimento deuma partıcula que tentamos fazer girar ao longo de C.
Note que a contribuicao do campo ao movimento da partıcula e igual acomponente de F tangente a C em cada ponto. Parametrizando C como usual,

44 2. 1-FORMAS
temosC(t) = (cos(t), sen(t), 0), onde 0 ≤ t ≤ 2π.
O vetor tangente a C no ponto C(t) e
C ′(t) = (−sen(t), cos(t), 0),
de modo que a projecao do campo sobre a tangente a curva no ponto C(t) da
C ′(t) · e1 = −sen(t).
Isto significa que, enquanto empurramos a esfera entre t = 0 e t = π, o campose opoe ao movimento. Por outro lado, entre t = π e t = 2π, o campo e o vetortangente a curva apontam na mesma direcao. Com isto, o campo nos ajuda aempurrar a esfera. Como
−sen(t+ π) = −sen(t),
o campo se opoe ao movimento da esfera no primeiro semi-cırculo exatamentecom a mesma intensidade com que nos ajuda a empurra-la no segundo semi-cırculo. Portanto, e de esperar que a contribuicao total do campo ao movimentoda esfera seja zero. Mas, para obter a contribuicao total, precisamos “somar”C ′(t) ·e1 sobre todos os valores de t entre 0 e 2π. Mais precisamente, devemoscalcular a integral∫ 2π
0
(C ′(t) · e1)dt =∫ 2π
0
(−sen(t))dt = 0.
Em geral, se F e um campo de velocidades definido em uma regiao U doespaco, a contribuicao total de F ao nosso esforco de deslocar uma partıculaao longo de uma curva fechada C, parametrizada por [a, b], e igual a integralda projecao de F (C(t)) sobre C ′(t) ao longo da curva C. Chamamos estenumero de circulacao de F em C, e o denotamos por ΓF (C). Assim,
ΓF (C) =∫C
F.
Equivalentemente, se α e uma 1-forma em U definimos sua circulacao em Cpor
Γα(C) =∫C
α.
Vejamos outro exemplo. Imagine um fio (infinito) ao longo do eixo z noqual flui uma corrente eletrica. Com isto temos um campo magnetico
B : U → R3
na regiaoU = (x, y, z) ∈ R3 : z 6= 0,
que corresponde ao R3 sem o eixo z. O campo B e dado por
B(x, y, z) =k
x2 + y2(−y, x, 0),

5. APLICACOES 45
onde k e uma constante. Vamos calcular a circulacao de B ao longo de umacircunferencia de raio r, contida no plano z = z0. Parametrizando a circun-ferencia, obtemos
C(t) = (r cos(t), r sen(t), z0), onde 0 ≤ t ≤ 2π.
O vetor tangente a C no ponto C(t) e
C ′(t) = (−r sen(t), r cos(t), 0),
ao passo que o valor de B em C(t) e,
B(C(t)) =k
r(−r sen(t), r cos(t), 0).
Assim,
C ′(t) ·B(C(t)) =k
r(r2 sen2(t) + r2 cos2(t)) = kr.
Portanto,
ΓB(C) =∫ 2π
0
krdt = 2πkr.
Isto nao e surpreendente porque, neste caso, as linhas de forca do campo saocircunferencias paralelas ao plano z = 0, e com centro no eixo z.
Se interpretarmos o campo B como sendo o campo de velocidades de umfluido, vemos que o fluido estaria girando em torno do eixo z. Mas isto significaque o campo estaria sempre empurrando ou se opondo a qualquer partıcula quefosse girada em torno de z. E exatamente isto que faz com que a circulacaodeste campo nao seja nula. Em geral, o campo de velocidades de um fluido teracirculacao nao nula se nele houver vortices ou redemoinhos, como ocorre como campo B. A figura abaixo ilustra exemplos de vortices avistados pelo sateliteLandsat 7 na atmosfera terrestre sobre a ilha Selkirk. A proposito, esta ilhado Pacıfico tem este nome em homenagem ao marinheiro Alexander Selkirk,que la foi abandonado, a seu pedido, em 1704. Selkirk foi resgatado em 1709e voltou a Inglaterra. Esta historia inspirou Daniel Defoe a escrever RobinsonCrusoe, que foi publicado apenas dois anos depois do retorno de Selkirk.
Apesar de so termos calculado exemplos de circulacao de campos sobrecurvas fechadas parametrizadas, podemos faze-lo sobre qualquer 1-encade-amento cuja extremidade inicial coincide com a final. De agora em diantevamos nos referir a estes encadeamentos como fechados.
5.2. Formas exatas. Seja U uma regiao de Rn. Lembre-se que uma1-forma diferencial α em U e exata se existir f ∈ O(U) tal que α = df . Nesteparagrafo caracterizamos as formas exatas em termos de sua circulacao. Usare-mos isto, ja no proximo paragrafo, para mostrar que todo campo conservativotem potencial. Outras aplicacoes surgirao no capıtulo 3.
Antes de enunciar o teorema precisamos de introduzir a seguinte termino-logia. Diremos que um encadeamento
E = σ1 + · · ·+ σm

46 2. 1-FORMAS
FIGURA 1. Vortices na atmosfera
e contınuo se o ponto final de σi coincide com o ponto inicial de σi+1, paratodo 1 ≤ i ≤ m− 1. Se, alem disso, o ponto final de σn coincide com o pontoinicial de σ1, diremos que E e fechado.
TEOREMA. Uma 1-forma definida em uma regiao U de Rn e exata se, esomente se, sua circulacao e nula para qualquer encadeamento fechado con-tido em U .
DEMONSTRACAO. Para comecar, suponha, que a 1-forma e exata. Por-tanto, podemos escreve-la como df , para alguma funcao f ∈ O(U). Seja,agora,
E = σ1 + · · ·+ σm ⊂ U
um encadeamento contınuo e digamos que cada uma destas 1-celulas e parame-trizada por [0, 1], o que podemos fazer sem perda de generalidade pela formulade mudanca de variaveis do §3.2. Entao∫
σi
df =∫ 1
0
σ∗i (df).
Como σ∗i (df) = d(σ∗i (f)), obtemos∫σi
τ∇f =∫ 1
0
d(σ∗i (f)).
Mas, σ∗i (f) = g e uma funcao diferenciavel, de uma variavel t, definida em[0, 1]. Portanto, σ∗i (df) = g′dt, donde∫
σi
df =∫ 1
0
g′dt.
Contudo, pelo teorema fundamental do calculo∫ 1
0
g′dt = g(1)− g(0),

5. APLICACOES 47
de forma que ∫σi
df = g(1)− g(0).
Porem, como
g(a) = σ∗i (f)(0) = f(σi(0)),
e uma formula semelhante vale para g(1), concluımos que∫σi
df = f(σi(1))− f(σi(0)).
Como ∫E
df =m∑i=1
∫σi
df,
obtemos, apos o cancelamento dos termos intermediarios da soma telescopica,que ∫
E
df =m∑i=1
(f(σi(1))− f(σi(0))) = f(σn(1))− f(σ1(0)).
Portanto,
a integral de uma forma exata df em um encadeamentocontınuo depende apenas dos valores de f nos pontos ini-cial e final do encadeamento.
Em particular, se o encadeamento for fechado, σn(1) = σ1(0), de modo que∫E
df = 0.
Mostramos, assim, que toda forma exata tem circulacao nula.Passando, agora, a recıproca, seja α ∈ Ω1(U) uma 1-forma cuja circulacao
e zero. Queremos usar isto para construir uma funcao f : U → R de modo queF = df . O problema e como proceder para construir f . Se n = 1, isto e facilde fazer. Neste caso, a forma α = gdx, onde g e uma funcao de um intervaloaberto em R. Portanto, se f for uma primitiva de g, teremos
d′f = f ′dx = gdx.
Logo, para achar f basta integrar g. Isto sugere que podemos tentar obter afuncao potencial integrando α ao longo de um encadeamento.
Fixe um ponto p0 ∈ U que servira de base para a construcao. A funcaof vai assumir valor zero em p0, e seu valor em outros pontos sera calculadorelativamente a este ponto base.
Seja p ∈ U e C uma curva qualquer que vai de p0 a p. Definimos
f(p) =∫E
α.

48 2. 1-FORMAS
Como α e exata, o valor da integral independente do encadeamento contınuoescolhido para ir de p0 a p. Para concluir a demonstracao, precisamos apenasmostrar que df = α. Para isto basta provar que
∂f
∂xi= ai para cada 1 ≤ i ≤ n,
onde ai e o coeficiente de dxi em α.Calcularemos as derivadas parciais de f a partir da definicao; isto e, usando
quocientes de Newton. Como U e um conjunto aberto, existe um numero realpositivo ε, para o qual a bola aberta Bp(ε), de raio ε e centro em p, esta total-mente contida em U . Seja h um numero real que satisfaz |h| < ε. Denotandopor ei o i-esimo vetor da base canonica, temos que p+ hei ∈ Bp(ε).
O encadeamento de E com o segmento de reta σ que vai de p a p + heinos da um encadeamento E + σ entre p0 e p+ hei. Portanto,
f(p+ hei)− f(p) =∫E+σ
α−∫E
α;
donde
f(p+ hei)− f(p) =∫σ
α.
Mas σ(t) = p+ tei, para 0 ≤ t ≤ h, de modo que
f(p+ hei)− f(p) =∫ h
0
σ∗α.
Contudo, como p+ tei e constante em todas as direcoes exceto ei, temos que
σ∗(dxj) =
dt se j = i
0 se j 6= i.
Mas isto implica queσ∗(α) = ai(p+ tei)dt.
Assim,
f(p+ hei)− f(p) =∫ h
0
ai(p+ tei)dt
que e a integral de uma funcao de apenas uma variavel. Pelo teorema funda-mental do calculo
limh→0
f(p+ hei)− f(p)h
= limh→0
1h
∫ h
0
ai(p+ tei)dt
e igual a ai(p), completando assim a demonstracao do teorema.
A demonstracao do teorema propoe um metodo que podemos utilizar paracalcular f , quando soubermos que a forma α e exata. Considere, por exemplo,a forma
α = yzdx+ xzdy + xydz,
definida sobre todo o R3. Tomando o ponto base p0 como sendo a origem,queremos calcular o valor da funcao f em p = (x, y, z). Para isso precisamos

5. APLICACOES 49
calcular a integral de α de um caminho qualquer que vai da origem a p. Comoo campo esta definido em todo o R3, podemos escolher o segmento de reta quevai da origem a (x, y, z). Isto e, podemos tomar
σ(t) = (xt, yt, zt) para 0 ≤ t ≤ 1.
Neste caso,
f(p) =∫σ
α =∫ 1
0
σ∗(α).
Como,σ∗(α) = σ∗(yzdx+ xzdy + xydz) = 3xyzt2dt,
obtemos
f(x, y, z) = f(p) =∫ 1
0
3xyzt2dt = 3xyz.
5.3. Circulacao de campos conservativos. No paragrafo 1.3 de-finimos campos conservativos do plano, mas esta nocao pode ser facilmentegeneralizada para Rn. Dizemos que um campo F , definido em uma regiao Ude Rn, e conservativo se o trabalho realizado por F e o mesmo ao longo dequaisquer duas curvas em U que tenham os mesmos pontos inicial e final.
Os campos conservativos tambem podem ser definidos em termos de suacirculacao. Como esta outra definicao e muito conveniente quando se trata deverificar se um campo e ou nao conservativo, provaremos que e equivalente adefinicao original.
PROPOSICAO. Um campo e conservativo se, e somente se, sua circula-cao sobre qualquer encadeamento fechado e nula.
Um encadeamento fechado e aquele que corresponde a uma curva contınuacujos extremos coincidem.
DEMONSTRACAO. Seja U uma regiao de Rn e F : U → Rn um campode vetores.
Como F e conservativo, a integral de τF assume o mesmo valor ao longode qualquer caminho que comece e termine em um ponto P ∈ U . Mas o maissimples destes caminhos e dado pela 1-celula constante D(t) = P , para todot ∈ [0, 1]. Contudo, D∗(τF ) = 0, de modo que
ΓF (E) =∫E
τF =∫D
τF = 0,
qualquer que digamos que o 1-encadeamento fechado E ⊂ U , que comece etermine no ponto P .
Reciprocamente, suponha que F tem circulacao nula, e sejam E1 e E2
dois encadeamentos com mesmos pontos iniciais e mesmos pontos finais. Istosignifica que o encadeamento E1 − E2 e fechado. Portanto,∫
E1−E2
τF = 0.

50 2. 1-FORMAS
Contudo, pelas formulas do final do §3.2, temos∫E1
τF −∫E2
τF =∫E1−E2
τF = 0;
de modo que ∫E1
τF =∫E2
τF ,
completando, assim, nossa demonstracao.
Para refinar ainda mais este resultado, usaremos o teorema sobre formasexatas provados no §5.2.
TEOREMA. Um campo vetorial definido em uma regiao de Rn e conser-vativo se, e somente se, tem funcao potencial.
DEMONSTRACAO. Seja U uma regiao de Rn e F um campo em U . Pelaproposicao anterior F e conservativo se, e somente se, sua circulacao e nulasobre qualquer encadeamento fechado contido em U . Traduzindo isto em ter-mos de formas, podemos dizer que F e conservativo se, e somente se, τF temcirculacao igual a zero sobre qualquer encadeamento fechado contido em U .Entretanto, pelo teorema do §5.2, isto ocorre se, e somente se, existe f ∈ O(U)tal que τF = df . Portanto, F e conservativo, se, e somente se,
τF = df = τ∂f ,
para algum f ∈ O(U); que e equivalente ao resultado enunciado no teorema.
5.4. Campos centrais. Um tipo especial de campo conservativo, mui-to importante em fısica, sao os campos centrais. Se p ∈ Rn, dizemos que umcampo F definido em U = Rn \ p e central se
• os vetores de F tem como suporte retas que passam por p;• a intensidade de F em qualquer ponto q ∈ U depende apenas da
distancia entre p e q.O ponto p e chamado de centro do campo. Escolhendo o sistema de coorde-nadas de maneira que o centro p seja a origem, podemos escrever F em U naforma
F (x1, . . . , xn) = g(r)(x1, . . . , xn),(5.1)
onde r =√x2
1 + · · ·+ xn e g : R → R e uma funcao diferenciavel. Paracampos centrais vale uma versao mais refinada do teorema do §5.3.
TEOREMA. Todo campo central e conservativo, e seu potencial em umponto e funcao apenas da distancia deste ponto ao centro do campo.
DEMONSTRACAO. Ja vimos que uma escolha adequada de coordenadasnos permite escrever um campo central F na forma (5.1). Como todo campogradiente e conservativo, basta achar uma funcao potencial para F . Neste caso

6. RECAPITULANDO 51
isto e muito facil, porque se h for qualquer funcao de uma variavel entao, pelaregra da cadeia,
∂h(r)∂xj
= h′(r)∂r
∂xj,
onde h′ denota a derivada de h em relacao a sua unica variavel, neste caso r.Contudo,
∂r
∂xj=xjr,
donde∂h(r)∂xj
= h′(r)xjr.
Assim,
∇h(r) =h′(r)r
(x1, . . . , xn).
Comparando esta ultima equacao a 5.1, verificamos que h seria um potencialpara F se
h′(r) = rg(r);
isto e, se h for uma primitiva de rg(r). Como g e diferenciavel, uma tal primi-tiva sempre existe, provando assim o teorema.
6. Recapitulando
Nesta secao recapitulamos boa parte do que foi feito no primeiro capıtulo. Haduas razoes para fazermos isto. A primeira, e mais obvia, e prove-lo com umresumo sistematico do conteudo das secoes anteriores. A segunda razao e queesta recapitulacao nos ajudara a tornar mais explıcito o padrao que sera seguidono desenvolvimento da teoria de 2-formas no proximo capıtulo. Com isto, asecao 5 ficou de fora da recapitulacao, ja que trata apenas de aplicacoes dateoria.
Na secao 1 introduzimos de 1-forma, curva parametrizavel, imagem in-versa e integral de uma 1-forma ao longo de uma curva a partir do conceito detrabalho de uma forca. Estas nocoes foram sistematizadas nas secoes 2, 3 e 4,obedecendo as seguintes etapas.
6.1. Definicao. Fixada uma regiao U do Rn, comecamos introduzindoo conceito geral de 1-forma diferencial como sendo uma aplicacao
α : U × Rn → R,
que satisfaz as duas condicoes seguintes:
(1) fixando p0 ∈ U , e considerando α(p0, u) como funcao apenas de u,temos uma aplicacao linear de Rn em R;
(2) fixando u0 ∈ Rn, e considerando α(p, u0) como funcao apenas de p,temos uma funcao diferenciavel de U em R.

52 2. 1-FORMAS
O conjunto das 1-formas em U , que e denotado por Ω1(U), e um espaco ve-torial relativamente a soma de formas, e a sua multiplicacao por escalares,conforme definidas no §2.1.
6.2. Campos e formas. A um campo vetorial F : U → Rn cujasfuncoes coordenadas sao F1, . . . , Fn, fazemos corresponder a 1-forma
τF = F1dx1 + · · ·+ Fndxn.
Esta correspondencia e bijetiva, e nos permite tratar a analise vetorial seja nalinguagem de formas, seja na linguagem de campos. A vantagem da linguagemde formas e que estabelece um padrao generalizavel para objetos de dimensaomaior; ao contrario do que acontece com os campos.
6.3. Diferencial. O conjunto das funcoes diferenciaveis em U sera de-notado por O(U). Tambem este e um espaco vetorial, ja que podemos so-mar estas funcoes e multiplica-las por escalar. A diferencial determina umatransformacao linear de O(U) em Ω1(U), que e definida em f ∈ O(U) pelaformula
df =∂f
∂x1dx1 + · · ·+ ∂f
∂xndxn.
Vimos, tambem, que se f, g ∈ O(U), entao
d(fg) = fd(g) + gd(f),
que e conhecida como a formula de Leibniz. Uma 1-forma que e do tipo df ,para alguma funcao f ∈ O(U), e chamada de exata.
6.4. 1-celulas e encadeamentos. Uma 1-celula em U e uma apli-cacao diferenciavel σ : [a, b] → U , onde a < b sao numeros reais. Umencadeamento de 1-celulas
σj : [aj , bj ] → U, para 1 ≤ j ≤ k
e uma expressao da forma
c1σ1 + · · ·+ ckσk,(6.1)
onde os cs sao numeros inteiros. Estas expressoes podem ser manipuladasobedecendo-se as seguintes regras: se σ1, σ2 e σ3 sao celulas em U e k ∈ Z,entao,
• (σ1 + σ2) + σ3 ≡ σ1 + (σ2 + σ3);• σ1 + σ2 ≡ σ2 + σ1;• kσ1 + σ1 ≡ (k + 1)σ1;• 0σ1 ≡ 0;• se a imagem de σ1 e apenas um ponto, entao σ1 ≡ 0.

7. EXERCICIOS 53
6.5. Imagem inversa. Dada uma aplicacao diferenciavel φ : V → U ,onde V e uma regiao de Rm, definimos a imagem inversa de uma 1-forma
α = a1dx1 + · · ·+ andxn ∈ Ω1(U),
como sendo
φ∗(α) = (a1 · φ)dφ1 + · · ·+ (an · φ)dφn ∈ Ω1(V ),
onde φ1, . . . , φn sao as funcoes coordenadas de φ. A imagem inversa deter-mina uma transformacao linear de Ω1(U) em Ω1(V ) que satisfaz
φ∗(df) = dφ∗(f).
6.6. Integral. Se σ for uma 1-celula em U , a imagem inversa de α ∈Ω1(U) por σ pode ser escrita na forma
σ∗(α) = gdt,
onde g = g(t) e uma funcao diferenciavel definida no intervalo [a, b], queparametriza σ. A integral de α ao longo de σ e dada por∫
σ
α =∫
[a,b]
σ∗(α) =∫ b
a
gdt,
que e a integral usual da funcao g no intervalo [a, b]. A integral de α ao longodo um encadeamento (6.1) de U e definida pela formula∫
c1σ1+···+ckσk
α = c1
∫σ1
α+ · · ·+ ck
∫σk
α.
Se F : U → Rn e um campo de vetores e E e um encadeamento em U , aintegral ∫
E
F =∫E
τF ,
e conhecida como a integral de linha de F ao longo de E.
7. Exercıcios
1. Considere as curvas parametrizadas no intervalo (−1, 1) dadas abaixo. De-termine os pontos em que sua tangente nao esta bem definida e esboce acurva em cada caso.(a) C(t) = (t2, t3);(b) C(t) = (t2 − t, t3);(c) C(t) = (2 sen(3πt+ 1)), 3 sen(2πt+ 4)).
2. Parametrize as seguintes curvas algebricas usando coordenadas polares. Emcada caso, a e b sao constantes positivas.(a) x2/a2 + y2/b2 = 1;(b) ((x− a)2 + y2)((x+ a)2 + y2) = b4;(c) (y − a)2(x2 + y2) = b2y2.

54 2. 1-FORMAS
3. Esboce cada uma das curvas cuja equacao polar e dada abaixo e escreva aequacao parametrica correspondente.(a) r = a cos(θ);(b) r = a(1 + cos(θ));(c) r = 4a cos3(θ/3.
4. Calcule o trabalho dos campos abaixo nos caminhos indicados.(a) (x2 − 2xy, y2 − 2xy) ao longo da parabola y = x2, entre (−2, 4) e
(1, 1);(b) (x, y, xz − y) no segmento de reta que vai da origem a (1, 2, 4);(c) (x, y)/
√x2 + y2 na circunferencia de raio 2 e centro na origem, ori-
entada no sentido anti-horario;(d) (xy, x) na parabola x = 2y2, do ponto (2,−1), ao ponto (8, 2);(e) (x2y2, xy2) no caminho fechado formado por partes das retas x = 1 e
y = 0, e da parabola y =√x, percorrido em sentido anti-horario.
5. Seja F (x, y) = (cxy, x6y2), um campo polinomial definido em todo oplano, onde c e uma constante positiva. Sejam a e b numeros reais posi-tivos. Ache um valor de a, em termos de c, para o qual a integral de F aolongo de y = axb, da origem a reta x = 1 e independente de b.
6. Calcule α(p, u) para(a) α = cos(x1)dx1 + sen(x2
2)dx3, p = (1, 0, 0), u = (1, 1, 1);(b) α = ex2dx1+log(x3)dx2−cos(x1x2)dx3, p = (1, 1, 1), u = (1, 1, 3);(c) α = x2dx1 + x3dx2 − x1x2dx3, p = (1, 8, 7), u = (1, 4, 3);(d) α = cos(x1x3)dx1 + sen(x1x3)dx2, p = (π, 8, 7), u = (1, 5, 1);
7. Seja U uma regiao de Rn e α uma 1-forma diferencial em U . Mostre que sef : U → R e uma funcao diferenciavel, entao a aplicacao de U × Rn em Rdefinida por
(fα)(p, v) = f(p)α(p, v),onde p ∈ U e v ∈ Rn, e uma 1-forma em U .
8. Seja U uma regiao de Rn. Mostre que Ω1(U) e um espaco vetorial sobre R.
9. Calcule a diferencial total de cada uma das seguintes funcoes de R3:(a) x2y4 + 5z7 + xz3;(b) cos(z) tan(x+ y);(c) cos(x+ y + z);(d) log(xyz);(e) exp(x cos(y)).
10. Seja T o operador linear de R3 cuja matriz na base canonica e2 3 41 2 −37 −5 2
.

7. EXERCICIOS 55
Calcule as imagens inversas das 1-formas
dx1, 3dx1 + 2dx2 − 2dx3 e dx1 + dx2 + dx3,
por T .
11. Calcule as imagens inversas das 1-formas
cos(x1)dx1 + sen(x22)dx3 e ex2dx1 + log(x3)dx2 − cos(x1x2)dx3,
pelas seguintes aplicacoes:(a) φ(t) = (t2, t3, t4);(b) φ(s, t) = (t cos(s), t2et, t3);(c) φ(u, v, w) = (uvw, uv, u2);(d) φ(u, v, w) = (u, v, uw);(e) φ(u, v, w) = (cos(uvw), v, exp(u2)).
12. Escreva na forma de um 1-encadeamento um caminho contınuo cujas celu-las sao todas as arestas do cubo
[0, 1]× [0, 1]× [0, 1].
E possıvel fazer isto de modo que cada 1-celula tenha multiplicidade um?
13. Explique porque a curva parametrizada C(t) descrita abaixo nao e uma 1-celula e escreva-a na forma de um 1-encadeamento.
C(t) =
(2− t
2π , 0) se 0 ≤ t ≤ 2π(cos(5t), sen(5t)) se 2π ≤ t ≤ 4π(2 cos(t), 2 sen(t)) se 4π ≤ t ≤ 5π(−2 + (t− 5π), 3(t− 5π)) se 5π ≤ t ≤ 8π
14. Calcule a integral do campo (x, y2, 4z3) ao longo do caminho obtido comoo encadeamento do segmento de reta que vai de (0, 0, 0) a (1, 1, 0), seguidodo segmento que vai deste ultimo ponto a (1, 1, 2).
15. Calcule as integrais das 1-formas de R2 dadas abaixo, nos encadeamentosindicados:(a) xydx+ xdy na espiral r = θ, com 0 ≤ θ ≤ 3π;(b) x2y2dx+ xy2dy no encadeamento r = | cos(θ)|, com 0 ≤ θ ≤ 3π.(c) (x2y2+x+1)dx+xy2dy no encadeamento fechado formado por partes
das retas x = 1 e y = 0, e da parabola y =√x, orientado no sentido
anti-horario;(d) (x2 + y)dx + (x − y2)dy no encadeamento formado pelos lados do
retangulo [0, 3]× [0, 2], percorrido no sentido anti-horario;(e) (x2 − y2)dx + xdy no encadeamento fechado, formado pelos eixos
coordenados e pelo arco de x2+y2 = 9 contido no primeiro quadrante,orientado no sentido anti-horario.

56 2. 1-FORMAS
16. Calcule as integrais das 1-formas de R3 dadas abaixo, nos encadeamentosindicados:(a) (x − 2x3y)dx + (y3 − 2xy)dy + dz na intersecao de z = x2 + y2 e
y = 0 entre os pontos (−2, 0, 4) e (1, 0, 1);(b) xyzdx+ y2dy + (xz − y)dz no segmento de reta que vai da origem a
ao ponto (1, 2, 4);(c) (x2−y2)dx+xdy+(xy+z)dz na circunferencia de equacoes x2+y2 =
4 e z = 0, orientada no sentido horario (para quem olha de cima);(d) xydx+ xdy na curva r = z = θ, com 0 ≤ θ ≤ 3π.
17. Considere o campo definido em R2 por F (x, y) = (x2y, xy2).(a) Este campo admite funcao potencial?(b) Calcule a integral de F entre a origem O e o ponto P = (1/
√2, 1/
√2)
ao longo do segmento de reta que vai de O a P .(c) Calcule a integral de F entre O e P ao longo do encadeamento do seg-
mento de reta que vai de O a (1, 0), seguido do arco de circunferenciaque vai de (1, 0) a P .
(d) Compare os valores das integrais ao longo destes dois caminhos.
18. Calcule o potencial de cada um dos campos centrais dados abaixo. Parasimplificar a notacao escreveremos r =
√x2 + y2 + z2.
(a) (x, y, z)/r3;(b) (r2 + r + 1)(x, y, z);(c) (cos(r) + 7 cos(r) sen(r))(x, y, z).
19. Seja α = a1dx1 + · · · + andxn uma 1-forma diferencial definida em umaregiao U de Rn. Mostre que se aj e funcao apenas de xj , entao α e umaforma diferencial exata.
20. Traduza o exercıcio anterior em termos de campos conservativos.
21. Seja α uma 1-forma fdx definida em [0, 1], com f(0) = f(1). Mostre queexiste um unico numero k, de modo que
α− kdx = dg,
para alguma funcao g : [0, 1] → R, que satisfaz g(0) = g(1).SUGESTAO: integre α− kdx = dg em [0, 1] para achar k.

8. PROBLEMAS 57
8. Problemas
1. Seja σ uma 1-celula em R3. Defina uma 1-forma diferencial ds por
ds(p, v) = T (p) · v,onde T (p) e o vetor tangente a p ∈ σ. Note que esta forma so esta definidapara pontos de σ.(a) Discuta a forma ds a luz da definicao de 1-forma dada no §2.1.(b) Mostre que a integral de ds sobre σ e igual ao comprimento de σ.(c) Seja f uma funcao definida em uma regiao contendo σ. Expresse a
integral da 1-forma fds em σ em termos da integral de uma funcao deuma variavel (o parametro de σ).
2. Seja U uma regiao de Rn. Dado um campo de vetores F em U , defina umaaplicacao
ιF : Ω1(U) → O(U),por ιF (α)(p) = α(p, F ), para uma forma α e um ponto p ∈ U .(a) Calcule ιF (α)(p) quando p = (x1, . . . , xn) eα = a1dx1+· · ·+andxn.(b) Mostre que ιF e uma transformacao linear.(c) Calcule ι∇f (α) e ιF (df) onde f ∈ O(U).(d) Calcule ιF (τF ).(e) Seja R = (x1, x2, x3) o campo radial de R3. Mostre que se f e um
polinomio homogeneo de grau k nas variaveis x1, x2 e x3, entao
ιE(df) = kf.
Lembre-se que um polinomio f nas variaveis x1, x2 e x3 e homogeneose todas os seus monomios tem grau total igual a k. Isto e, a soma dograus de cada uma das variaveis da k para cada um dos monomios def .
3. Seja S(U) o conjunto das 1-celulas definidas em uma regiao U ⊆ Rn eseja F(U) o grupo abeliano livre cuja base e o conjunto S(U). Considere osubgrupo P(U) de F(U) gerado pelos σ ∈ S(U) cuja imagem e um ponto.(a) Mostre que se α ∈ Ω1(U), entao a aplicacao
Iα : F(U) → R,definida por
Iα(σ) =∫σ
α
e um homomorfismo de grupos.(b) Mostre que P(U) esta contido no nucleo de Iα, qualquer que seja α ∈
Ω1(U).(c) Defina o conjunto E1(U) dos 1-encadeamentos contidos em U como
sendo o grupo quociente F(U)/P(U) e mostre que Iα induz um homo-morfismo de E1(U) em R.


Capıtulo 3
2-formas
Neste segundo capıtulo discutimos a nocao de 2-forma diferencial. Segui-remos um roteiro semelhante ao do capıtulo 2. Assim, na primeira secao in-troduzimos 2-formas a partir da nocao de fluxo. Ja a integral de uma 2-formassera definida na secao 3. A secao 4 e dedicada a uma versao do teorema de Sto-kes e suas interpretacoes em analise vetorial (teorema de Green). Finalmente,aplicamos estes resultados a problemas de fısica na secao 5, e revisamos todoo conteudo do capıtulo na secao 6.
1. Fluxo
Vamos imaginar um fluido incompressıvel que escorre ao longo de uma ca-lha. Incompressıvel, naturalmente, significa que o fluido nao pode ser compri-mido. Podemos formalizar isto dizendo que a densidade do fluido e constanteao longo de toda a calha e nao varia no tempo. Imagine, agora, que voce temuma moldura de arame plana, com qualquer forma desejada, mas que esta va-zada. Digamos que a largura maxima da moldura e menor que a profundidadee largura da calha, de modo que podemos imergi-la completamente no fluido.O fluxo do fluido atraves da moldura e a quantidade de lıquido que atravessa aarea limitada pela moldura. Interpretaremos a quantidade de fluido em termosde volume. Entretanto, como estamos supondo que o fluido e incompressıvel,poderıamos falar igualmente em massa; para isto, bastaria multiplicar o vo-lume pela densidade do fluido em todas as nossas equacoes. Nosso objetivonesta secao e criar um modelo matematico para a nocao de fluxo.
Ha, entretanto, um detalhe importante que precisa ser levado em conta.Caso a superfıcie seja fechada–uma caixa oca, por exemplo–o fluxo atraves dacaixa e igual a diferenca entre a quantidade de lıquido que entra e que sai dacaixa. Para que isto faca sentido, precisamos ser capazes de associar um sinalao fluxo, para que possamos identificar onde o lıquido entra na caixa, e onde saida caixa. Portanto, para que o fluxo atraves de uma superfıcie fechada nao denulo e preciso que haja ou uma fonte, ou um sorvedouro, dentro da superfıcie.
Como a maneira mais natural de definir fluxo e mesmo em termos de umfluido incompressıvel, voce e convidado a imaginar que os campos de vetoresdescritos nesta secao sao todos campos de velocidades.
59

60 3. 2-FORMAS
1.1. Fluxo de um campo constante. Seja
F : R3 → R3
um campo de vetores constante–que estaremos imaginando ser um campo develocidades. Suponhamos que o vetor constante F (p) e paralelo ao eixo z.Queremos definir o fluxo de F atraves de um retangulo
R = [0, `]× [0, h].
Comecamos com o caso em que R esta contido em um plano paralelo a z = 0.Digamos que R tem largura ` (medida ao longo de x) e comprimento h
(medido ao longo de y). Neste caso, todo o lıquido contido no paralelepıpedode base R e altura |F (p)|t (medida ao longo de z) atravessa R no tempo t. Emoutras palavras, o fluxo deste campo atraves de R sera
ΦF (R) = |F (p)|h`,que e a quantidade de lıquido que atravessa o retangulo por unidade de tempo.
Mantendo o campo constante, vamos inclina-lo de um angulo θ em relacaoao eixo z. Ao fazer isto, a quantidade de fluido que atravessa R no tempo tpassa a ser igual ao volume de um prisma. Tomando a base do prisma comosendo o retangulo de lados ` e h, sua altura sera igual a
|F (p)|t sen(θ).
Portanto, neste caso, o fluxo de F atraves de R e
ΦF (R) = |F (p)|h` sen(θ).
Existe uma outra maneira de calcular o volume do prisma que e mais con-veniente para os nossos propositos. Em primeiro lugar, o retangulo R ficacompletamente determinado pelos vetores
v1 = `e2, v2 = he2;
ao passo que a altura do prisma e dada pela projecao do vetor v3 = F (0) aolongo da vertical, que e igual a
F (0) · e3.Portanto, o volume do prisma e
h`(F (0) · e3) = F (0) · (h`e3).Contudo, como v1 e v2 sao ortogonais,
v1 × v2 = (h`e3).
Assim, o fluxo atraves do retangulo R e dado por
ΦF (R) = F (0) · (v1 × v2),(1.1)
que e o produto misto destes tres vetores.Uma vantagem de expressar o fluxo desta maneira e que a formula 1.1 vale,
nao importa qual seja a posicao relativa dos vetores v1, v2 e F . Tomaremos esteproduto misto como sendo a definicao do fluxo do campo constante F , atravesdo paralelograma definido pelos vetores ortogonais v1 e v2.

1. FLUXO 61
Note que definimos o valor do fluxo como sendo o produto misto, e naoo seu modulo. Este e um ponto importante. Considere, por exemplo, o queacontece se calculamos o fluxo de um campo constante atraves do cubo [0, 1]×[0, 1]. Se o campo e definido por F = e3, entao o fluxo pelas faces do cuboperpendiculares ao plano z = 0 vai dar zero. Ja o fluxo pela face contida emz = 0 da 1, e o fluxo pela face contida em z = 1 da −1. Assim o fluxototal atraves do cubo da zero. Isto e exatamente o que esperavamos. Afinal,conforme observamos no inıcio desta secao, o fluxo atraves de uma superfıciefechada sera zero sempre que nao houver uma fonte ou sorvedouro de fluidodentro da superfıcie.
Expressar o fluxo como o produto misto tambem tem a vantagem de quepassa a ser facil calcula-lo a partir das coordenadas dos vetores. Se
vj = (aj , bj , cj), para 1 ≤ j ≤ 2,
e F = (F1, F2, f3), entao,
(v1 × v2) · v3 = det
F1 F2 F3
a1 b1 c1a2 b2 c2
,como aprendemos no curso basico de geometria analıtica. Mais detalhes po-dem ser encontrados em [12, pp. 21–24]. Para simplificar a notacao denotare-mos o determinante acima por
det[F, v1, v2].
1.2. Propriedades do fluxo. Suponhamos, agora, queF seja um campovetorial qualquer definido em uma regiao U de R3. Se p ∈ U e v1 e v2 saovetores de R3, entao podemos escrever
det[F (p), v1, v2].
Contudo “poder escrever” nao basta. O que queremos mesmo saber e se estenumero serve para alguma coisa ou, melhor ainda, se tem uma interpretacaofısica. Mas, se os vetores v1 e v2 tiverem comprimento muito pequeno, onumero det[F (p), v1, v2] nos da uma aproximacao para o fluxo atraves doretangulo determinado por v1 e v2 em p, mesmo quando o campo nao for cons-tante. Em outras palavras, det[F (p), v1, v2] representa uma aproximacao dofluxo nas proximidades de p. Com isto em mente, estudaremos as proprieda-des de det[F (p), v1, v2] como funcao de p e dos vetores v1 e v2.
Para facilitar a discussao escreveremos
ΦF (p, v1, v2) = det[F (p), v1, v2],
o que nos da uma aplicacao
ΦF : U × R3 × R3 → R.
Se p ∈ U for fixado, obtemos a partir de ΦF a aplicacao
(ΦF )p0 : Rn × Rn → R,

62 3. 2-FORMAS
definida por
(ΦF )p0(v, w) = ΦF (p0, v, w) = det[F (p0), v, w].
Apelando para as propriedades do determinante, vemos que (ΦF )p0 satisfaz• (ΦF )p0(v, w + w′) = (ΦF )p0(v, w) + (ΦF )p0(v, w
′), e• (ΦF )p0(v, kw) = k(ΦF )p0(v, w).
Uma aplicacao com estas propriedades e chamada de bilinear, porque e linearem cada uma de suas entradas (pressupondo que a outra entrada esteja fixa!).
Uma aplicacao bilinear bem conhecida nossa e o produto interno entredois vetores. Entretanto, ao contrario do que ocorre com o produto interno,(ΦF )p0 nao e simetrica; isto e, seu valor nao e independente da ordem em queos vetores aparecem no argumento. Isto ocorre porque o determinante troca desinal quando permutamos duas de suas linhas. Portanto,
(ΦF )p0(w, v) = det[F (p0), w, v] = −det[F (p0), v, w],
que por sua vez e igual a (ΦF )p0(v, w). Logo,
(ΦF )p0(w, v) = −(ΦF )p0(v, w).
Por isso, dizemos que (ΦF )p0 e alternada. Assim,Propriedade 1: ΦF e bilinear e alternada em suas duas ultimas entra-
das, desde que a primeira entrada assuma um valor fixo.Apelando para uma outra propriedade dos determinantes, a expansao em
co-fatores, podemos decompor ΦF (p, v, w) de uma maneira mais ou menoscanonica. Expandindo o determinante pela primeira linha
(1.2) ΦF (p, v, w) = F1 det[a2 a3
b2 b3
]−F2 det
[a1 a3
b1 b3
]+F3 det
[a1 a2
b1 b2
]Supondo que os vetores v e w estejam fixos, ΦF (p, v, w) e uma combinacaolinear dos coeficientes de F . Como estes coeficientes sao diferenciaveis, omesmo vale para ΦF (p, v, w) como funcao de p. Portanto,
Propriedade 2: ΦF e diferenciavel em sua primeira entrada, desde queas duas ultimas entradas assumam valores fixos.
Qualquer aplicacaoU × R3 × R3 → R,
que satisfaca as propriedades 1 e 2, destacadas acima, e chamada de 2-formadiferencial. Agora que sabemos o que e uma 2-forma, podemos introduzir anotacao tradicionalmente usada para denota-las. Para 1 ≤ i 6= j ≤ 3 definimosdxi ∧ dxj como sendo a 2-forma de R3 dada pelo determinante
det[(−1)kek, v, w], onde i 6= k 6= j.
Por sua vez, este determinante e o menor 2×2 obtido da matriz [(−1)kek, v, w]pela eliminacao da primeira linha e da k-esima coluna. Por exemplo,
dx2 ∧ dx3(v, w) =
1 0 0a1 a2 a3
b1 b2 b3
=[a2 a3
b2 b3
]

1. FLUXO 63
Em geral, temos
dxi ∧ dxj(ek, e`) =
1 se i = k e j = `
−1 se i = ` e j = k
0 em qualquer outro caso.(1.3)
Usando esta notacao podemos escrever (1.11) como
(1.4) ΦF = F1dx2 ∧ dx3 − F2dx1 ∧ dx3 + F3dx1 ∧ dx2.
Diremos que esta e a 2-forma associada ao fluxo do campo F .Como ja atribuımos um significado a dx1, dx2 e dx3 (como 1-formas),
e difıcil resistir a tentacao de pensar em dx1 ∧ dx2, dx1 ∧ dx3 e dx2 ∧ dx3
como “produtos” destas 1-formas. E difıcil, e nao e necessario, porque, comoveremos, e possıvel definir uma multiplicacao de 1-formas. Mas isto fica paraa secao ????.
Vejamos o que acontece se aplicamos a definicao de 2-forma ao R2. SejaV uma regiao de R2, e η uma aplicacao
V × R2 × R2 → R,
que e diferenciavel com respeito a primeira, e bilinear alternada com respeitoas duas ultimas entradas. Tome p ∈ V e dois vetores
v = a1e1 + a2e2 e w = b1e1 + b2e2.
Vamos calcular
η(q, v, w) = η(q, a1e1 + a2e2, b1e1 + b2e2).
Como η e bilinear,
η(q, v, w) = a1b1η(q, e1, e1)+a1b2η(q, e1, e2)+a2b1η(q, e2, e1)+a2b2η(q, e2, e2).
Mas η tambem e alternada, o que implica que
η(q, e2, e1) = −η(q, e1, e2),
e tambem queη(q, e1, e1) = η(q, e2, e2) = 0.
Temos, portanto, que
η(q, v, w) = (a1b2 − a2b1)η(q, e1, e2),(1.5)
onde g(p) = η(q, e1, e2) e uma funcao diferenciavel definida em V .Denotando por s e t as coordenadas de R2, podemos definir ds∧ dt como
sendo a 2-forma de R2 que satisfaz
ds ∧ dt(v, w) = det[v, w] = a1b2 − a2b1.
Usando esta notacao, (1.14) nos da a igualdade
η = gds ∧ dt.(1.6)

64 3. 2-FORMAS
1.3. Superfıcies parametrizadas. Ate agora tratamos apenas de co-mo calcular o fluxo de um campo constante atraves de um retangulo. Mas nossameta e definir fluxo para um campo qualquer atraves de uma superfıcie naonecessariamente plana. Para isso, precisamos delimitar o que deve ser enten-dido quando usarmos a palavra superfıcie. Antes, porem, precisamos descobrircomo estas superfıcies serao utilizadas. Por isso, comecaremos descrevendo aestrategia a ser adotada para definir fluxo no caso geral.
Usando a definicao de trabalho sobre uma curva como inspiracao, inicia-remos aproximando a superfıcie por retangulos. Alem disso, assumiremos queos retangulos escolhidos sao pequenos o suficiente para que o campo possaser considerado como constante sobre cada um deles. Sob estas hipoteses po-demos calcular o fluxo atraves de cada retangulo, cuja soma nos dara umaaproximacao para o fluxo atraves de toda a superfıcie. Passando ao limite, ob-teremos uma formula integral para o fluxo. Nossa experiencia com o caso dotrabalho de um campo sugere que, para facilitar a aproximacao por retangulos,seria preferıvel introduzir superfıcies de maneira parametrizada, e e exatamenteisto que faremos aqui.
Tomando a definicao de curva como ponto de partida, definimos uma su-perfıcie parametrizada de R3 como sendo uma aplicacao diferenciavel
S : [a, a′]× [b, b′] → R3,
onde a < a′ e b < b′ sao numeros reais. Como sempre nao estamos fazendouma distincao clara entre a aplicacao S e sua imagem, muito embora a su-perfıcie propriamente dita corresponda ao conjunto de pontos de R3 que formaa imagem de S.
Como no caso de curvas, trabalhar com uma superfıcie parametrizadaS tem a vantagem de permitir que a aproximacao de S por uma malha deretangulos seja facil de fazer. Para isto, subdividimos [a, a′] em m partesiguais, e [b, b′] em n partes iguais, onde m e n sao inteiros positivos. Assim,[a, a′]× [b, b′] fica subdividido em mn retangulos de largura
` =(a′ − a)m
e altura
h =(b′ − b)n
,
que correspondem aos produtos cartesianos de cada uma das partes em quedividimos os dois intervalos. Escrevendo
ai = a+ i` e bi = b+ jh
onde 0 ≤ i ≤ m e 0 ≤ j ≤ n, temos que o retangulo resultante do produto dosubintervalo
[ai, ai+1]
de [a, a′], com o subintervalo
[bj , bj+1],

1. FLUXO 65
de [b, b′] pode ser parametrizado como
(1− t1 − t2)(ai, bj) + t1(ai+1, bj) + t2(ai, bj+1),
onde 0 ≤ t1, t2 ≤ 1. Aplicando os vertices deste retangulo do plano sobre asuperfıcie S, obtemos os retangulos Ri,j(S) definidos por
(1− t1 − t2)S(ai, bj) + t1S(ai+1, bj) + t2S(ai, bj+1),
onde 0 ≤ t1, t2 ≤ 1. Na verdade, Ri,j(S) fica completamente determinadopelos vetores
S(ai+1, bj)− S(ai, bj) e S(ai, bj+1)− S(ai, bj),
que definem dois de seus lados adjacentes. Em particular, Ri,j(S) nao e aimagem de um retangulo do plano por S.
Para simplificar a terminologia, diremos que Rij(S) e um S-retangulo, eque o conjunto
Rm,n = Rij(S) : 0 ≤ i ≤ m e 0 ≤ j ≤ n,
de todos os S-retangulos correspondentes a uma certa escolha de inteiros po-sitivos m e n, determina uma subdivisao da superfıcie. Entretanto, deve ficarclaro que os S-retangulos que estamos considerando sao planos, e sabemosapenas que seus vertices estao sobre a superfıcie. Em outras palavras, naoe estritamente verdade que S fica subdividida pelos Rij(S), ja que os pontosdestes retangulos nao estao totalmente contidos na imagem de S. Por exemplo,ao subdividir uma calota esferica em S-retangulos temos um efeito semelhanteao que obterıamos colando pastilhas de revestimento de parede na superfıcieinterna da calota.
Alias, o exemplo da calota e muito bom, porque pode ser facilmente expli-citado usando coordenadas esfericas. Considerando a calota como tendo raioum e centro na origem, sua parametrizacao
S : [0, 2π]× [0, π] → R3,
sera dada por
S(θ, φ) = ( sen(φ) cos(θ), sen sen(θ), cos(φ)).
O quadrado [0, π/4]× [0, π/2] e levado por esta parametrizacao em
R0,0(S) = (1− u− v)(0, 0, 1)+
u( sen(0) cos(π/2), sen(0) sen(π/2), cos(0))+
v( sen(π/4) cos(0), sen(π/4) sen(0), cos(π/4))
que e igual a
R0,0(S) = (0, 0, 1)(1− u− v) + u(0, 1, 0) + u(√
22, 0,
√2
2).
Outro exemplo e dado pela superfıcie do cilindro parabolico, definida por
Sc(s, t) = (s, s2, t), onde 0 ≤ s, t ≤ 1.

66 3. 2-FORMAS
Tomando n = 4, como acima, temos
R0,0(Sc) = (0, 0, 0)(1− u− v) + u(14,
116, 0) + v(0, 0,
14),
ao passo que
R1/2,0(Sc) = (1− u− v)(12,14, 0) + u(
34,
916, 0) + v(
12,14,14).
1.4. Fluxo atraves de uma superfıcie. Seja U uma regiao de R3 e
F : U → R3
um campo de vetores. Queremos calcular o fluxo de F atraves de uma su-perfıcie parametrizada
S : [a, a′]× [b, b′] → R3,
onde a < a′ e b < b′ sao numeros reais.Recapitulando a estrategia, ja descrita no §1.3, devemos, primeiramente,
subdividir a superfıcie em S-retangulos. Supondo os retangulos suficiente-mente pequenos, assumiremos que o campo pode ser considerado constantesobre todo o retangulo. Com isto, podemos calcular o fluxo atraves de umretangulo a partir do valor do campo em um de seus vertices. Somando todosestes valores temos uma aproximacao do valor do fluxo sobre toda a superfıcie.Mas esta aproximacao e tanto melhor quanto maiores sao m e n. Portanto, to-mando o limite quando m e n tendem a infinito obteremos o valor exato, quesera representado por uma integral dupla.
Para executar esta estrategia em detalhes, comecamos escolhendo os in-teiros positivos m e n, e costruindo a subdivisao Rm,n da superfıcie em S-retangulos. Utilizando a notacao introduzida no numero 1.3, o fluxo atraves doretangulo Rij(S) sera
det[F (ai, bj),∆1(i, j),∆2(i, j)].
onde
∆1(i, j) = S(ai+1, bj)− S(ai, bj) = S(ai + `, bj)− S(ai, bj)
ao passo que
∆2(i, j) = S(ai, bj+1)− S(ai, bj) = S(ai, bj + h)− S(ai, bj),
para 1 ≤ i ≤ m e 1 ≤ j ≤ n. Somando sobre toda a superfıcie, obtemos umasoma dupla
n−1∑j=0
m−1∑i=0
det[F (ai, bj),∆1(i, j),∆2(i, j)].(1.7)
que corresponde a uma aproximacao do fluxo ΦF (S) do campo F calculadosobre toda a superfıcie S.

1. FLUXO 67
Como o determinante e linear relativamente a cada uma de suas linhas,podemos reescrever (1.7) como
n−1∑j=0
m−1∑i=0
det[F (ai, bj),∆1(i, j)
`,∆2(i, j)
h]`h,(1.8)
onde ` e largura e h a altura de cada um dos retangulos da malha em que[a, a′]× [b, b′] foi subdividido. Com isto, a aproximacao para o fluxo dada por(1.7) pode ser considerada como uma soma de Riemann.
O proximo passo consiste em passar ao limite, fazendo m e n tenderem ainfinito. Entretanto, a medida que o numero de quadrados cresce, seu tamanhodiminui. Mais precisamente, ` e h tendem a zero quando m e n tendem ainfinito. Contudo,
lim`→0
S(s0 + `, t0)− S(s0, t0)`
=∂S
∂s(s0, t0),
onde s e t denotam os parametros de S. Esta notacao precisa ser interpretadacom um certo cuidado. Geralmente falamos de derivadas parcias de funcoes deuma regiao aberta em R. Porem, S e uma aplicacao cujo contradomınio e R3.Em outras palavras,
S(s, t) = (S1(s, t), S2(s, t), S3(s, t)),
onde S1 S2 e S3 sao as funcoes coordenadas de S. Entao, a derivada parcial deS com relacao a s deve ser interpretada como sendo o vetor(
∂S1
∂s,∂S2
∂s,∂S2
∂s
),
ja que o limite quando ` vai a zero esta sendo tomado com relacao a cadacoordenada. Sob esta mesma interpretacao, e facil mostrar que
limh→0
S(s0, t0 + h)− S(s0, t0)h
=∂S
∂t(s0, t0),
Portanto, ao tomar o limite quandom e n tendem a infinito, a aproximacaodada pela dupla soma de Riemann (1.8) tende para a integral dupla∫ a′
a
∫ b′
b
det[F (S(s, t)),
∂S
∂s(s, t),
∂S
∂s(s, t)
]dsdt.
Sempre que nao houver o risco de confusao, omitiremos os nomes dos para-metros da notacao. Fazendo isto na expressao acima, ela se simplifica para∫ a′
a
∫ b′
b
det[F (S),
∂S
∂s,∂S
∂s
]dsdt.(1.9)
SejaF = (x, y, z2)
um campo em R3 eσp : [0, 1]× [0, 2π] → R3,

68 3. 2-FORMAS
parte da superfıcie de um paraboloide parametrizado por
σp(r, θ) = (r cos(θ), r sen(θ), r2).(1.10)
Vamos determinar o fluxo de F atraves de σp utilizando (1.9). Para comecarprecisamos calcular a funcao
g(r, θ) = det[σp,
∂σp∂r
,∂σp∂θ
],
que devemos integrar. Mas, para isto, precisamos conhecer as derivadas parciasde σp,
∂σp∂r
= (cos(θ), sen(θ), 2r) e∂σp∂θ
= (−r sen(θ), r cos(θ), 0).
Entao,
g(r, θ) = det
r cos(θ) r sen(θ) z2
cos(θ) sen(θ) 2r−r sen(θ) r cos(θ) 0
que, feitos os os cancelamentos necessarios, nos da
g(r, θ) = (r5 − 2r3).
Portanto, o fluxo de F atraves de σp e igual a integral∫ r
0
∫ 2π
0
(r5 − 2r3)drdθ.
Efetuando a integracao, obtemos[r6
6− r4
2
]10
· θ∣∣∣2π0
= −2π3.
1.5. Mudando a perspectiva. Procederemos exatamente como fize-mos no §1.4. Assim, nosso primeiro objetivo e separar, no integrando do fluxo,o que cabe ao campo e o que cabe a superfıcie. Sejam F : U → Rn um campoe S : [a, a′]× [b, b′] → U , uma superfıcie em uma regiao U de Rn. Denotandopor Fi e Si as funcoes coordenadas de F e S, respectivamente, o integrandosera
γ(s, t) = det
F1(S) F2(S) F3(S)∂S1/∂s ∂S2/∂s ∂S3/∂s∂S1/∂t ∂S2/∂t ∂S2/∂t
onde s e t sao os parametros de S. Para isolar a contribuicao do campo F , daque corresponde a superfıcie S criaremos duas funcoes. A primeira,
GS : [a, a′]× [b, b′] → U × R3 × R3
e definida porGS(q, u, z) = (S(q), Jq(S)u, Jq(S)z),
onde Jq(S) e a jacobiana de S em q; e a segunda
ω : U × R3 × R3 → R

1. FLUXO 69
por
ω(p, v, w) = det
F1 F2 F3
a1 a2 a3
b1 b2 b3
onde v = (a1, a2, a3) e w = (b1, b2, b3). Com isto,
γ(q) = (ω ·GF )(q, e1, e2).
E nas propriedades de ω que queremos nos concentrar, em primeiro lugar.Se p ∈ U for fixado, obtemos a partir de ω a aplicacao
ωp0 : Rn × Rn → R,
definida por
ωp0(v, w) = ω(p0, v, w) = det[F (p0), v, w].
Apelando para as propriedades do determinante, vemos que ωp0 satisfaz
• ωp0(v, w + w′) = ωp0(v, w) + ωp0(v, w′), e
• ωp0(v, kw) = kωp0(v, w).Uma aplicacao com estas propriedades e chamada de bilinear, porque e linearem cada uma de suas entradas (pressupondo que a outra entrada esteja fixa!).
Uma aplicacao bilinear bem conhecida nossa e o produto interno entredois vetores. Entretanto, ao contrario do que ocorre com o produto interno,ωp0 nao e simetrica; isto e, seu valor nao e independente da ordem em que osvetores aparecem no argumento. Isto ocorre porque o determinante troca desinal quando permutamos duas de suas linhas. Portanto,
ωp0(w, v) = det[F,w, v] = −det[F, v, w],
que por sua vez e igual a ωp0(v, w). Logo,
ωp0(w, v) = −ωp0(v, w).
Por isso, dizemos que ωp0 e alternada. Assim,
Propriedade 1: ω e bilinear e alternada em suas duas ultimas entradas,desde que a primeira entrada assuma um valor fixo.
Apelando para uma outra propriedade dos determinantes, a expansao emco-fatores, podemos decompor ω(p, v, w) de uma maneira mais ou menoscanonica. Expandindo o determinante pela primeira linha
(1.11) ω(p, v, w) = F1 det[a2 a3
b2 b3
]−F2 det
[a1 a3
b1 b3
]+F3 det
[a1 a2
b1 b2
]Supondo que os vetores v e w estejam fixos, ω(p, v, w) e uma combinacaolinear dos coeficientes de F . Como estes coeficientes sao diferenciaveis, omesmo vale para ω(p, v, w) como funcao de p. Portanto,
Propriedade 2: ω e diferenciavel em sua primeira entrada, desde queas duas ultimas entradas assumam valores fixos.

70 3. 2-FORMAS
Qualquer aplicacaoU × R3 × R3 → R,
que satisfaca as propriedades 1 e 2, destacadas acima, e chamada de 2-formadiferencial. Agora que sabemos o que e uma 2-forma, podemos introduzir anotacao tradicionalmente usada para denota-las. Para 1 ≤ i 6= j ≤ 3 definimosdxi ∧ dxj como sendo a 2-forma de R3 dada pelo determinante
det[ek, v, w], onde i 6= k 6= j.
Por sua vez, este determinante e o menor 2× 2 obtido da matriz [ek, v, w] pelaeliminacao da primeira linha e da k-esima coluna. Assim, por exemplo,
dx2 ∧ dx3(v, w) =
1 0 0a1 a2 a3
b1 b2 b3
=[a2 a3
b2 b3
]Em geral, temos
dxi ∧ dxj(ek, e`) =
1 se i = k e j = `
−1 se i = ` e j = k
0 em qualquer outro caso.(1.12)
Usando esta notacao podemos escrever (1.11) como
(1.13) ΦF = F1dx2 ∧ dx3 − F2dx1 ∧ dx3 + F3dx1 ∧ dx2.
Diremos que esta e a 2-forma associada ao fluxo do campo F .Como ja atribuımos um significado a dx1, dx2 e dx3 (como 1-formas),
e difıcil resistir a tentacao de pensar em dx1 ∧ dx2, dx1 ∧ dx3 e dx2 ∧ dx3
como “produtos” destas 1-formas. E difıcil, e nao e necessario, porque, comoveremos, e possıvel definir uma multiplicacao de 1-formas. Mas isto fica paraa proxima secao.
Vejamos o que acontece se aplicamos a definicao de 2-forma ao R2. SejaV uma regiao de R2, e η uma aplicacao
V × R2 × R2 → R,que e diferenciavel com respeito a primeira, e bilinear alternada com respeitoas duas ultimas entradas. Tome p ∈ V e dois vetores
v = a1e1 + a2e2 e w = b1e1 + b2e2.
Vamos calcular
η(q, v, w) = η(q, a1e1 + a2e2, b1e1 + b2e2).
Como η e bilinear,
η(q, v, w) = a1b1η(q, e1, e1)+a1b2η(q, e1, e2)+a2b1η(q, e2, e1)+a2b2η(q, e2, e2).
Mas η tambem e alternada, o que implica que
η(q, e2, e1) = −η(q, e1, e2),e tambem que
η(q, e1, e1) = η(q, e2, e2) = 0.

1. FLUXO 71
Temos, portanto, que
η(q, v, w) = (a1b2 − a2b1)η(q, e1, e2),(1.14)
onde g(p) = η(q, e1, e2) e uma funcao diferenciavel definida em V .Denotando por s e t as coordenadas de R2, podemos definir ds∧ dt como
sendo a 2-forma de R2 que satisfaz
ds ∧ dt(v, w) = det[v, w] = a1b2 − a2b1.
Usando esta notacao, (1.14) nos da a igualdade
η = gds ∧ dt.(1.15)
E chegada a hora de voltar nossa atencao para a aplicacao composta ω ·GS ,que e conhecida como a imagem inversa de ω pela superfıcie parametrizada S,e denotada por S∗(ω). Se q e um ponto do retangulo onde S esta definida,temos por (1.15) que
S∗(ω) = ω(S, Jq(S)e1, Jq(S)e2)ds ∧ dt = γ(q)ds ∧ dt.Estes comentarios nos ajudam a interpretar a nocao de integral de su-
perfıcie na linguagem das formas diferenciais. Lembre-se que a integral deF atraves de S foi definida como sendo a integral da funcao γ no retangulo
R = [a, a′]× [b, b′].
Mas γ e o coeficiente da 1-forma S∗(ω). Reescrevendo tudo isto numa or-dem mais direta: a integral da 2-forma ω ao longo de S, e a integral da 2-forma S∗(ω) no retangulo R que, por sua vez, e a integral de γ neste mesmoretangulo. Isto e, ∫
S
ω =∫R
S∗(ω) =∫ a′
a
∫ b′
b
γdsdt.
Como no caso de 1-formas, removemos o perigo de ambiguidade entre a inte-gral da 2-forma γds ∧ dt e a integral dupla de γ declarando que uma e outra.Ou seja, definimos∫
R
γds ∧ dt, como sendo igual a∫ a′
a
∫ b′
b
γdsdt.
Com isto podemos generalizar a definicao acima para a integral de qual-quer 2-forma sobre uma superfıcie. Se θ e uma 2-forma em U e S : [a, a′] ×[b, b′] → U e uma superfıcie, definimos∫
S
θ =∫
[a,a′]×[b,b′]
S∗(θ).
ComoS∗(θ) = gds ∧ dt,
para alguma funcao diferenciavel g,∫[a,a′]×[b,b′]
S∗(θ) =∫ a′
a
∫ b′
b
gdt,

72 3. 2-FORMAS
que e a integral usual de g no retangulo [a, a′]× [b, b′].Note o paralelo entre as integrais de 1-formas e 2-formas, que relaciona-
mos na tabela abaixo.
Onde havia: Temos agora:trabalho fluxo1-forma 2-forma
integral simples integral duplacurva parametrizada C superfıcie parametrizada S
C(t) S(s, t)dC/dt ∂S/∂s e ∂S/∂t.
2. O caso geral
Nesta secao comecamos a sistematizar os conceitos introduzidos na secao an-terior. Iniciamos revisando alguns conceitos basicos de algebra linear.
2.1. Formas bilineares alternadas. Uma forma bilinear de Rn euma aplicacao
ω : Rn × Rn → R,que satisfaz a seguinte condicao:
dado um vetor v0 ∈ Rn, a aplicacao
ωj : Rn → R, para j = 1, 2
obtida fixando-se a j-esima coordenada de ω como sendoigual a v0, e linear.
Uma descricao mais explıcita (porem mais prolixa) consiste em dizer que, da-dos v0, v1, v2 ∈ Rn e k ∈ R, temos que
• ω(v0, v1 + kv2) = ω(v0, v1) + kω(v0, v2), e• ω(v1 + kv2, v0) = ω(v1, v0) + kω(v2, v0).
As formas bilineares ocorrem em abundancia em matematica, a comecarpelo produto interno de Rn. Outro exemplo, que ja fez sua aparicao na secaoanterior, e o determinante
det[F, v1, v2] = det
F1 F2 F3
x1 y1 z1x2 y2 z2
,onde F = (F1, F2, F3) e um vetor constante, ao passo que
v1 = (x1, y1, z1) e v2 = (x2, y2, z2),
sao vetores quaisquer de R3.Uma forma bilinear ω de Rn pode ser expressa, de maneira bastante con-
creta, se fixamos uma base
β = u1, . . . , un

2. O CASO GERAL 73
de Rn. Escrevendo v, w ∈ Rn como funcao de β, obtemos
v = a1u1 + · · ·+ anun e w = b1u1 + · · ·+ bnun,(2.1)
onde os as e os bs sao numeros reais. Apelando, agora, para a linearidade de ωrelativamente a segunda entrada, temos que
ω(v, w) = ω(v, b1u1 + · · ·+ bnun)
nos da
(2.2) ω(v, w) = b1ω(v, u1) + · · ·+ bnω(v, un).
Mas ω tambem e linear com relacao a sua primeira entrada, de forma que
ω(v, ui) = ω(a1u1 + · · ·+ anun, ui) = a1ω(u1, ui) + · · ·+ anω(un, ui),
para cada 1 ≤ i ≤ n. Substituindo em (2.2),
ω(v, w) =∑
1≤i,j≤n
aibjω(ui, uj).(2.3)
Esta equacao pode ser reescrita em forma matricial como
ω(v, w) = vtΩβw,
onde Ωβ e a matriz n× n cuja entrada ij e ω(ui, uj).Ha duas classes muito importantes de formas bilineares: as formas sime-
tricas e as formas alternadas. Uma forma bilinear ω de Rn e simetrica se
ω(v, w) = ω(w, v) para todo v, w ∈ Rn.
Escolhendo, em particular, v = ui e w = uj , elementos de β, obtemos
ω(ui, uj) = ω(uj , ui),
quaisquer que sejam 1 ≤ i, j ≤ n. Isto implica que as entradas das posicoes ije ji de Ωβ sao iguais. Em outras palavras, Ωβ e uma matriz simetrica: o que,alias, soa muito justo. O produto escalar e o exemplo mais conhecido de formasimetrica.
Por outro lado, uma forma bilinear ω de Rn e alternada se
ω(v, w) = −ω(w, v) para todo v, w ∈ Rn.
As formas bilineares alternadas tambem sao conhecidas como 2-formas cons-tantes.
A matriz Ωβ , da forma bilinear alternada ω relativamente a uma base β doRn, e anti-simetrica, isto e, satisfaz
Ωtβ = −Ωβ .
Em particular, usando a notacao de (2.1), temos que
ω(v, w) =∑
1≤i<j≤n
ω(ui, uj)(aibj − ajbi).

74 3. 2-FORMAS
Note que aibj − ajbi e igual ao determinante da matriz 2 × 2 correspondenteas colunas i e j da matriz [
a1 a2 · · · anb1 b2 · · · bn
].
A aplicacao que associa ao par de vetores (v, w) o numero aibj−ajbi tambeme uma 2-forma constante. Quando β e a base canonica de Rn, esta forma edenotada por dxi ∧ dxj . Neste caso, podemos escrever ω como
ω =∑
1≤i<j≤n
ω(ui, uj)dxi ∧ dxj .(2.4)
Como as 2-formas constantes sao aplicacoes que tomam valores em R,podemos soma-las da maneira usual. Isto, e, dadas duas formas constantes ω eθ, definimos
(ω + θ)(v, w) = ω(v, w) + θ(v, w),(2.5)
quaisquer que sejam v, w ∈ Rn. Nao ha duvida de que esta formula defineuma aplicacao de Rn × Rn em R; a questao e se essa aplicacao e bilinear ealternada. Contudo, fixando v0 em (2.5), temos
(ω + θ)(v0, w) = ω(v0, w) + θ(v0, w).
Mas, por definicao, ω(v0, w) e θ(v0, w) sao aplicacoes lineares, quando con-sideradas como funcoes de suas segundas entradas. Assim, (ω + θ)(v0, w) elinear como funcao de w. Um argumento semelhante mostra que ω+θ e linearcomo funcao da primeira entrada, quando a segunda esta fixa. Finalmente,
(ω + θ)(w, v) = ω(w, v) + θ(w, v) = −ω(w, v)− θ(w, v);
como isto e igual a −(ω+θ)(w, v), concluımos que ω+θ tambem e alternada.Resumindo:
a soma de duas 2-formas constantes e uma 2-forma cons-tante.
Encerramos este paragrafo definindo a imagem inversa de uma 2-formaconstante por uma aplicacao linear. Dada uma transformacao linear T : Rm →Rn, comecamos por definir uma aplicacao
∆T : Rm × Rm → Rn × Rn,
pela formula∆T (v, w) = (T (v), T (w)).
Como T e linear,• ∆T (v1 + kv2, w0) = ∆T (v1, w0) + k∆T (v2, w0);• ∆T (w0, v1 + kv2) = ∆T (w0, v1) + k∆T (w0, v2),
onde k e um escalar e v1, v2, w0 ∈ Rm.
PROPOSICAO. Se ω e uma 2-forma constante em Rn, entao a compostaω ·∆T e uma 2-forma constante em Rm.

2. O CASO GERAL 75
DEMONSTRACAO. Sejam k um escalar e v1, v2, w0 ∈ Rm, entao
(ω ·∆T )(v1 + kv2, w0) = ω ·∆T (v1, w0) + kω ·∆T (v2, w0);
ao passo que (ω ·∆T )(v1, w0) e igual a
ω(T (v1), T (w0)) = −ω(T (w0), T (v1)) = −(ω ·∆T )(w0, v1),
donde(ω ·∆T )(v1, w0) = −(ω ·∆T )(w0, v1).
Portanto, ω ·∆T e uma 2-forma constante em Rm, como desejavamos mostrar.
Nos proximos paragrafos generalizaremos tudo isto para 2-formas naoconstantes, definidas sobre uma regiao aberta de Rn.
2.2. 2-formas diferenciais. Seja U uma regiao de Rn. Uma 2-formadiferencial em U e uma aplicacao
α : U × Rn × Rn → R,que satisfaz as seguintes condicoes:
(1) fixando p0 ∈ U , e considerando ω(p0, v, w) como funcao apenas dev e w, temos uma aplicacao bilinear alternada de Rn × Rn em R;
(2) fixando v0, w0 ∈ Rn, e considerando ω(p, v0, w0) como funcao ape-nas de p, temos uma funcao diferenciavel de U em R.
Como no caso de 1-formas, optamos por uma definicao livre de coorde-nadas para as 2-formas diferenciais. Por isso devemos comecar descobrindocomo escrever uma 2-forma em termos de coordenadas; como, alias, ja fize-mos para o caso de dimensao tres no §1.5. Seja p ∈ U . De acordo com apropriedade (1), a aplicacao
ωp : Rn × Rn → R,definida por
ωp(v, w) = ω(p, v, w),e uma 2-forma constante. Assumindo que os vetores v e w foram expressos emtermos de suas coordenadas na base canonica, segue da equacao (2.4) que
ωp =∑
1≤i<j≤n
aij(p)dxi ∧ dxj .
Porem, como dxi ∧ dxj(ei, ej) = 1, temos
ω(p, ei, ej) = aij(p).
Portanto, pela propriedade (2) da definicao de 2-forma diferencial,
aij : U → R,sao funcoes diferenciaveis definidas em U . Concluımos, portanto, que toda2-forma diferencial definida em uma regiao U do Rn pode ser escrita na forma
ω =∑
1≤i<j≤n
aijdxi ∧ dxj .

76 3. 2-FORMAS
onde aij = aij(x1, . . . , xn) sao funcoes diferenciaveis em U . Por outro lado,como e facil verificar, qualquer aplicacao da forma acima satisfaz (1) e (2).
O conjunto das 2-formas diferenciais definidas em uma regiao aberta Ude Rn sera denotado por Ω2(U). Ha varias operacoes que podemos definir emΩ2(U), a mais simples das quais e a soma. Sejam ω e θ 2-formas diferenciaisem U , a soma ω + θ e definida em um ponto (p, v, w) ∈ U × Rn × Rn por
(ω + θ)(p, v, w) = ω(p, v, w) + θ(p, v, w).(2.6)
Para que esta definicao seja util, e preciso que ω+ θ tambem seja uma 2-formadiferencial em U , e nao apenas uma aplicacao qualquer. Mas isto e facil deverificar usando as propriedades (1) e (2), como veremos a seguir.
Fixando p ∈ U , podemos reescrever (2.6) na forma
(ω + θ)(p, v, w) = (ωp + θp)(v, w).
Porem, como vimos no §2.1, a soma de 2-formas constantes e uma 2-formaconstante. Portanto, ω + θ e bilinear alternada, o que prova (1). Passando,agora, a segunda propriedade, fixamos dois vetores v0 e w0 do Rn, e conside-ramos
(ω + θ)(p, v0, w0) = ω(p, v0, w0) + θ(p, v0, w0),como funcao de p. Mas ω(p, v0, w0) e θ(p, v0, w0) sao ambas diferenciaveiscomo funcoes de p, e a soma de funcoes diferenciaveis e diferenciavel. Assim,(ω+θ)(p, v0, w0) e uma funcao diferenciavel de p, o que prova (2). Um calculosimples mostra que se
ω =∑
1≤i<j≤n
aijdxi ∧ dxj e θ =∑
1≤i<j≤n
bijdxi ∧ dxj ,
entaoω + θ =
∑1≤i<j≤n
(aij + bij)dxi ∧ dxj
como, alias, seria de esperar.Procedendo de maneira semelhante, podemos mostrar que, se ω e uma 2-
forma diferencial em U e f ∈ O(U), entao a aplicacao de U ×Rn ×Rn em Rdefinida por
(fω)(p, v, w) = f(p)ω(p, v, w),onde p ∈ U e v, w ∈ Rn tambem e uma 2-forma diferencial. Mais uma vez,isto e facilmente expresso em termos de coordenadas pela formula
fω =∑
1≤i<j≤n
(faij)dxi ∧ dxj .
Um caso particular da multiplicacao de uma 2-forma por uma funcao ocorrequando a funcao e constante. Neste caso o que temos e o produto de um escalarpor uma 2-forma. Assim, podemos somar 2-formas diferenciaveis e multiplica-las por escalares. Com um pouco de paciencia e possıvel verificar que estasoperacoes satisfazem todas as propriedades requeridas para fazer de Ω2(U)um espaco vetorial sobre R. Este e um fato que usaremos com frequencia ao

2. O CASO GERAL 77
longo deste livro; tao frequentemente que raramente chamaremos a atencaopara o que estamos fazendo.
2.3. Produto exterior. Como ja observamos no paragrafo 1.5, a no-tacao dxi ∧ dxj sugere uma interpretacao desta 2-forma como um produto.Neste paragrafo, introduzimos uma nocao de multiplicacao de formas que nospermitira formalizar esta interpretacao. Mais precisamente, dada uma regiaoU ⊆ Rn, desejamos inventar uma operacao que, a cada par de 1-formas em U ,associa uma 2-forma, tambem definida em U .
Sejam α e β 1-formas diferenciais definidas em U , definimos o produtoexterior α ∧ β em um ponto
(p, v, w) ∈ U × Rn × Rn
pela formula
(α ∧ β)(p, v, w) = det[α(p, v) α(p, v)β(p, w) β(p, w)
].
E importante voce notar que ha uma correlacao entre a ordem em queas 1-formas e os vetores aparecem em (α ∧ β)(p, v, w) e sua posicao no de-terminante. Afinal, qualquer variacao na ordem das linhas ou colunas fara odeterminante mudar de sinal. Por exemplo,
(α ∧ β)(p, w, v) = det[α(p, w) α(p, w)β(p, v) β(p, v)
]= −det
[α(p, v) α(p, w)β(p, v) β(p, w)
]que, por sua vez, e igual a −(α ∧ β)(p, v, w). Portanto,
(α ∧ β)(p, w, v) = −(α ∧ β)(p, v, w).
Em particular, α ∧ β e alternada.Para mostrar que α∧ β e bilinear, suponhamos que v′ e um outro vetor do
Rn e que k e um escalar, entao
(α ∧ β)(p, v + kv′, w) = det[α(p, v + kv′) α(p, w)β(p, v + kv′) β(p, w)
].
Pela linearidade de α e de β,
(α ∧ β)(p, v + kv′, w) = det[α(p, v) + kα(p, v′) α(p, w)β(p, v) + kα(p, v′) β(p, w)
].
Mas, este ultimo determinante e igual a soma
det[α(p, v) α(p, w)β(p, v) β(p, w)
]+ k det
[α(p, v′) α(p, w)α(p, v′) β(p, w)
].
Transcrevendo esta equacao em termos de ∧, obtemos
(α ∧ β)(p, v + kv′, w) = (α ∧ β)(p, v, w) + k(α ∧ β)(p, v′, w).
Um argumento analogo, mostra que
(α ∧ β)(p, v, w + kw′) = (α ∧ β)(p, v, w) + k(α ∧ β)(p, v′, w′).
Portanto, α ∧ β satisfaz a propriedade (1).

78 3. 2-FORMAS
Por outro lado, se fixarmos v e w, as entradas do determinante passama ser funcoes diferenciaveis em U . Como somas e produtos de funcoes di-ferenciaveis tambem sao diferenciaveis, o determinante e diferenciavel comofuncao de p. Isto prova a propriedade (2). Como ja havıamos provado (1),podemos concluir que a aplicacao α ∧ β acima definida e uma 2-forma dife-renciavel em U . Portanto, o produto exterior define uma aplicacao
Ω1(U)× Ω1(U) → Ω2(U),
e, como tal, pode ser considerada como uma operacao, que a cada par de 1-formas associa uma 2-forma.
Tendo chegado a este ponto, podemos nos perguntar se a 2-forma dxi ∧dxj , definida como o produto exterior de dxi por dxj coincide com a 2-formade mesmo nome definida no §1.5. Para isto, basta mostrar que o produto dedxi por dxj satisfaz (1.12), ja que isto define completamente o valor de uma2-forma em qualquer par de vetores. Mas, por definicao, o produto exterior dedxi por dxj no par (ek, e`) vale
det[dxi(ek) dxi(e`)dxj(ek) dxj(e`)
].
Escrevendo
δik =
1 se i = k
0 se i 6= k
temos que
det[δik δi`δjk δj`
],
ja que dxi captura a i-esima coordenada de um vetor, e dxj sua j-esima coor-denada. Mas,
δikδj` − δi`δjk =
1 se i = k e j = `
−1 se i = ` e j = k
0 em qualquer outro caso
como desejavamos mostrar.
2.4. Propriedades do produto exterior. Agora que sabemos que ∧e uma operacao que entrelaca duas 1-formas para produzir uma 2-forma; deve-mos nos perguntar quais sao as propriedades de uma tal operacao.
Comecamos com a comutatividade. Sejam α1 e α2 1-formas diferenciaisdefinidas em uma regiao U do Rn. Vamos calcular α2 ∧ α1 e compara-lo aα1 ∧ α2. Se p ∈ U e v, w ∈ Rn, entao
(α2 ∧ α1)(p, v, w) = det[α2(p, v) α2(p, w)α1(p, v) α1(p, w)
].
Como o determinante troca de sinal quando permutamos duas de suas linhas,
(α2 ∧ α1)(p, v, w) = −det[α1(p, v) α1(p, w)α2(p, v) α2(p, w)
],

2. O CASO GERAL 79
que e igual a −(α1 ∧ α2)(p, v, w). Mas esta igualdade vale para qualquerescolha de p ∈ U e v, w ∈ R3, de modo que podemos concluir que
α2 ∧ α1 = −(α1 ∧ α2).(2.7)
Em particular a operacao ∧ nao e comutativa. Como nada pior que uma trocade sinal acontece, quando os termos sao transpostos, dizemos que ∧ e anti-co-mutativa.
A anti-comutatividade de ∧ tem um efeito colateral inesperado. Por exem-plo, tomando α1 = α2 em (2.7), verificamos que
α1 ∧ α1 = −(α1 ∧ α1).
Mas isto so pode ocorrer se α1 ∧ α1 = 0. Portanto,
α ∧ α = 0(2.8)
para toda 1-forma diferencial α.A segunda propriedade que abordaremos e a distributividade. Conser-
vando a notacao anterior, seja α3 uma terceira 1-forma em U e k ∈ R, entao
((α1 + kα2) ∧ α3)(p, v, w) = det[(α1 + kα2)(p, v) (α1 + kα2)(p, w)
α3(p, v) α3(p, w)
]Como
(α1 + kα2)(p, v) = α1(p, v) + kα2(p, v) para todo p ∈ U e v ∈ Rn,
temos que
((α1+kα2)∧α3)(p, v, w) = det[α1(p, v) + kα2(p, v) α1(p, w) + kα2(p, w)
α3(p, v) α3(p, w)
].
Mas este determinante e igual a
det[α1(p, v) α1(p, w)α3(p, v) α3(p, w)
]+ k det
[α2(p, v) α2(p, w)α3(p, v) α3(p, w)
],
donde,
((α1 + kα2) ∧ α3)(p, v, w) = (α1 ∧ α3)(p, v, w) + k(α2 ∧ α3)(p, v, w).
Como esta igualdade vale para qualquer escolha de p ∈ U e v, w ∈ Rn, pode-mos concluir que
(α1 + kα2) ∧ α3 = α1 ∧ α3 + k(α2 ∧ α3).
Logo, ∧ e distributiva.Ha uma propriedade da operacao usual de multiplicacao que ainda nao
abordamos com relacao ao produto exterior. Trata-se da associatividade, queequivale a perguntar se
(α1 ∧ α2) ∧ α3 = α1 ∧ (α2 ∧ α3).
Contudo, α1∧α2 e uma 2-forma que, do lado esquerdo da equacao, esta sendomultiplicada pela 1-forma α3. Entretanto, um tal produto nunca foi definido:tudo o que sabemos e multiplicar duas 1-formas. Portanto, pelo menos por

80 3. 2-FORMAS
enquanto, esta propriedade esta fora do nosso alcance pela falta dos conceitosapropriados.
2.5. Diferencial de 1-formas. Podemos aproveitar o que fizemos nasecao anterior para definir a diferencial de uma 1-forma. Lembre-se que no§2.3 do capıtulo 2 definimos a diferencial de uma funcao como sendo umacerta 1-forma. Neste paragrafo pretendemos estender este conceito, da maneiramais natural possıvel, para as 1-formas: o resultado, naturalmente, sera uma 2-forma. Mais precisamente, queremos construir uma aplicacao
d : Ω1(U) → Ω2(U),
onde U e uma regiao de Rn.Usando o produto exterior, podemos escrever uma 1-forma α definida em
U como
α =n∑j=1
aidxi,(2.9)
onde ai ∈ O(U) para 1 ≤ i ≤ n. Como a diferencial de uma funcao e umatransformacao linear, e razoavel supor que a diferencial de uma 1-forma pelomenos se distribui sobre uma soma. Mas, isto implica que
d(α) =n∑j=1
d(aidxi),
de forma que basta definir d(aidxi) para cada 1 ≤ i ≤ n. Tomando comoinspiracao os calculos do paragrafo anterior, definiremos
d(aidxi) = d(ai) ∧ d(dxi).
Portanto,
d(α) =n∑j=1
d(ai) ∧ d(dxi),
e uma 2-forma em U como desejavamos.Agora que temos uma definicao, resta-nos verificar se e satisfatoria. Por
exemplo, o que ocorre se calculamos a diferencial de fα, onde f ∈ O(U)?Vejamos: escrevendo α como na equacao (2.9), temos
fα =n∑j=1
(fai)dxi,
donde
d(fα) =n∑j=1
d(fai)dxi.
Contudo,d(fai) = fdai + aidf para cada 1 ≤ i ≤ n.

2. O CASO GERAL 81
Assim,n∑j=1
d(fai) ∧ dxi =n∑j=1
(fdai ∧ dxi + aidf ∧ dxi);
e pondo f e df em evidencia,n∑j=1
d(fai) ∧ dxi = f
n∑j=1
dai ∧ dxi + df ∧ (n∑j=1
aidxi).
Portanto,
d(fα) = fdα+ df ∧ α,(2.10)
de forma que esta diferencial satisfaz uma relacao analoga a formula de Leib-niz. Esta e uma boa notıcia porque, alem da linearidade, a formula de Leibnizfoi a unica propriedade da diferencial de funcoes que provamos no capıtulo 2.
Por falar em linearidade, ainda nao sabemos se a diferencial e linear. Everdade que distribui sobre uma soma, ja que esta propriedade foi usada im-plicitamente em sua definicao. Mas sera que respeita o produto por escalar?Para verificar isto, seja k ∈ R. Considerando k como uma funcao constante,podemos usar (2.10), de modo que
d(kα) = kd(α) + d(k) ∧ α.
Levando em conta que d(k) = 0, temos
d(kα) = kd(α);
o que completa a prova da linearidade da diferencial.Estendendo a terminologia usada para 1-formas, dizemos que uma 2-forma
em U e exata se pode ser escrita como dα, para algum α ∈ Ω1(U). Como jaocorreu no caso de 1-formas, nao e verdade que toda 2-forma e exata. De fato,isto esta muito longe de ser verdade. Entretanto, para poder provar que umadada forma nao e exata, precisamos de um teorema de que ainda nao dispomos.Por isso vamos esperar o §5.7 para poder dar um exemplo de uma 2-forma quenao e exata.
Por falar em formas exatas, o que ocorre se calcularmos a diferencial deuma 1-forma exata? Para isto, considere f ∈ O(U). Calculando sua diferen-cial, temos
df =n∑i=1
∂f
∂xidxi;
que, por sua vez, tem diferencial
d(df) =n∑i=1
d(∂f
∂xi) ∧ dxi,(2.11)
Contudo,
d(∂f
∂xi) =
n∑j=1
∂2f
∂xi∂xjdxj .

82 3. 2-FORMAS
Substituindo em (2.11), e levando em conta a anti-comutatividade do produtoexterior,
d(df) =∑
1≤i<j≤n
(∂2f
∂xi∂xj− ∂2f
∂xj∂xi
)dxi ∧ dxj .
Porem, como f e diferenciavel em todas as ordens, temos que
∂2f
∂xi∂xj=
∂2f
∂xj∂xi
para todo 1 ≤ i < j ≤ n; donde
d(df) = 0.
Na linguagem da algebra linear, mostramos que toda 1-forma exata per-tence ao nucleo da transformacao linear
d : Ω1(U) → Ω2(U).
Entretanto, nem sempre e verdade que o nucleo desta transformacao e sempreigual ao conjunto das 1-formas exatas. Por isso, precisamos de uma palavradiferente para designar as 1-formas que pertencem ao nucleo de d; diremos quesao formas fechadas. Nesta terminologia, mostramos que toda forma exata efechada. Por outro lado, embora seja facil dar exemplos de formas fechadas quenao sao exatas, esbarramos novamente com a falta de uma ferramenta adequadapara provar que uma dada forma nao e exata. Por isso, este exemplo tambemvai ter que esperar ate o §5.7. Ja no §5.6 provaremos que toda forma fechadadefinida em uma regiao convexa e exata.
Resumindo, estendemos neste paragrafo a nocao de diferencial para o casode 1-formas. Mais precisamente, definimos uma transformacao linear
d : Ω1(U) → Ω2(U).
que satisfaz d(fα) = df ∧α. De fato, esta propriedade, juntamente com a line-aridade deerminam completamente a aplicacao d. Vimos tambem que o nucleode d contem o conjunto formado por todas as 1-formas exatas, e afirmamos(sem contudo dar exemplos) que estes dois conjuntos nem sempre sao iguais.
2.6. Imagem inversa. E chegada a hora de introduzir o conceito deimagem inversa de uma 2-forma por uma aplicacao diferencial. Antes, porem,precisamos de um resultado de algebra linear elementar.
Seja V uma regiao de Rm, e seja φ : V → Rn uma aplicacao dife-renciavel. Escrevendo φ em termos de suas funcoes coordenadas, temos que
φ(p) = (φ1(p), . . . , φn(p)),
para todo p ∈ V . Sabemos que φ e diferenciavel se, e somente se, cada umadas funcoes coordenadas
φj : V → R para 1 ≤ j ≤ n,
e diferenciavel. A derivada de φ em um ponto p ∈ V corresponde a matrizjacobiana Jp(φ).

2. O CASO GERAL 83
Generalizando o roteiro ja utilizado no §1.5, definimos uma funcao
Gφ : V × Rm × Rm → Rn × Rn × Rn,
porGφ(p, v, w) = (φ(p), Jp(φ)v, Jp(φ)w),
onde p ∈ V e v, w ∈ Rm. Note que Gφ e diferenciavel como funcao de suasm primeiras coordenadas e linear como funcao das 2m ultimas coordenadas.
Suponha, agora, que a imagem de φ esta contida em uma regiao U de Rn,na qual esta definida uma 2-forma diferencial ω. Neste caso a imagem de Gφesta contida em U ×Rn×Rn, de modo que faz sentido calcular a composta deω com Gφ. A imagem inversa de ω por φ, denotada por φ∗(ω), e definida por
φ∗(ω) = ω ·Gφ.
Portanto, se p ∈ U e v, w ∈ Rm,
φ∗(ω)(p, v, w) = ω(φ(p), Jp(φ)v, Jp(φ)w).
Pela definicao de composta, φ∗(ω) e uma aplicacao de V × Rm × Rm emR. Mas ainda precisamos mostrar que e uma 2-forma diferencial em V . Paraisto, basta verificar as condicoes (1) e (2) da definicao de 2-forma enunciadano §2.2.
Digamos que o ponto p0 ∈ V foi fixado. Entao, quaisquer que sejamv, w ∈ Rm temos
φ∗(ω)(p0, v, w) = (ωp0) ·∆Jp0 (φ)(v, w).
Mas, fixado p0, ω|φ(p0) e uma 2-forma constante, de forma que (1) e con-sequencia da proposicao da secao 2. Por outro lado, fixando os vetores v0, w0 ∈Rm, temos que
φ∗(ω)(p, v0, w0) = ω(p, Jp(φ)v0, Jp(φ)w0),
qualquer que seja p ∈ V . Podemos considerar esta expressao como sendo acomposta de ω com hφ, a aplicacao de V em U×Rm×Rm definida pela regra
hφ(p) = Gφ(p, v0, w0) = (φ(p), Jp(φ)v0, Jp(φ)w0).
Como a jacobiana e diferenciavel como funcao de p, o mesmo vale para hφ.Contudo, ω e diferenciavel em funcao de p, e linear nas outras entradas, demodo que e diferenciavel como aplicacao em U×Rm×Rm. Como a compostade aplicacoes diferenciaveis e diferenciavel, podemos concluir que a proprie-dade (2) vale para φ∗(ω). Em particular, φ∗(ω) e uma 2-forma diferencial emV .
E claro que, se φ definir uma superfıcie parametrizavel, entao esta defini-cao coincide com a do §1.5. Outro exemplo importante e o da imagem inversade dxi ∧ dxj por uma aplicacao diferenciavel qualquer, onde x1, . . . , xn saoas coordenadas de Rn. Mais uma vez, seja V um aberto de Rm e φ : V → Rnuma aplicacao diferenciavel. Por definicao,
Gφ(p, er, es) = (φ(p), Jp(φ)er, Jp(φ)es),

84 3. 2-FORMAS
onde p ∈ V e er e es sao vetores da base canonica de Rm. Mas isto implicaque
φ∗(dxi ∧ dxj)(p, er, es) = (dxi ∧ dxj)(Jp(φ)er, Jp(φ)es).(2.12)
Contudo, denotando por y1, . . . , ym as coordenadas de Rm relativamente asua base canonica, temos que ∂φi/∂yr e a i-esima coordenada de Jp(φ)ere ∂φj/∂ys a j-esima coordenada de Jp(φ)es. Substituindo isto em (2.12),obtemos
φ∗(dxi ∧ dxj)(p, er, es) =(∂φi∂yr
(p)∂φj∂ys
(p)− ∂φi∂ys
(p)∂φj∂yr
(p))dyr ∧ dys.
Supondo que p e constante, podemos usar (2.4) para escrever
φ∗(dxi ∧ dxj)|p =∑
1≤r<s≤m
(∂φi∂yr
(p)∂φj∂ys
(p)− ∂φi∂ys
(p)∂φj∂yr
(p))dyr ∧ dys,
donde
φ∗(dxi ∧ dxj) =∑
1≤r<s≤m
(∂φi∂yr
∂φj∂ys
− ∂φi∂ys
∂φj∂yr
)dyr ∧ dys.(2.13)
Utilizando o produto exterior, podemos reescrever esta formula de maneiramuito mais compacta. De fato como
dφi =n∑i=1
∂φi∂yr
dyr e dφj =n∑i=1
∂φi∂ys
dys,
temos que dφi ∧ dφj e igual ao lado direito de (2.13), donde
φ∗(dxi ∧ dxj) = dφi ∧ dφj .(2.14)
2.7. Propriedades da imagem inversa. Seja φ : V → U uma apli-cacao diferenciavel, onde V e U sao regioes de Rm e Rn, respectivamente.Usando a notacao introduzida no §2.2 para o espaco das 2-formas diferenciaissobre uma regiao, podemos dizer que a imagem inversa nos da uma aplicacao
φ∗ : Ω2(U) → Ω2(V ).
Observe que φ tem V como domınio eU como contradomınio, ao passo que emφ∗ estas duas regioes aparecem com suas posicoes trocadas, como ja aconteciano caso de 1-formas.
Como Ω2(U) e Ω2(V ) sao espacos vetoriais, e razoavel perguntar se φ∗ euma transformacao linear. A resposta e sim, como e facil de verificar. Se ω1 eω2 sao 2-formas diferenciais em U e k e um escalar, entao
φ∗(ω1 + kω2) = (ω1 + kω2) ·Gφ.Mas, da definicao de soma de formas, isto e igual a
ω1 ·Gφ + k(ω2 ·Gφ);que pode ser reescrito como
φ∗(ω1) + kφ∗(ω2),

2. O CASO GERAL 85
provando, assim, a linearidade de φ∗.O produto de uma 2-forma por um escalar e apenas um caso especial do
produto por uma funcao. Como vimos em 2.1, se g : U → R e uma funcaodiferenciavel e ω uma 2-forma na regiao U , entao a formula
(gω)(p, v, w) = g(p)ω(p, v, w), para todo p ∈ U e v ∈ Rn,(2.15)
define uma nova 2-forma diferencial em U . Vejamos o que acontece se calcu-lamos a imagem inversa de gω pela aplicacao diferenciavel φ : V → U dadaacima. Por definicao, temos que
φ∗(gω)(p, v, w) = (gω)(φ(p), Jp(φ)v, Jp(φ)w).
Mas, pela formula (2.15),
(gω)(φ(p), Jp(φ)v, Jp(φ)w) = g(φ(p))ω(φ(p), Jp(φ)v, Jp(φ)w);
isto e,
(gω)(φ(p), Jp(φ)v, Jp(φ)w) = (g · φ)(p)φ∗(ω)(p, v, w).
Como φ∗(g) = g · φ,φ∗(gω) = φ∗(g)φ∗(ω),
onde a justaposicao indica o produto da funcao φ∗(g) pela 2-forma φ∗(ω),ambas definidas sobre V .
As propriedades descritas ate aqui nos permitem dar uma formula bastantecompacta, alem de muito util, para a imagem inversa de uma 2-forma em ter-mos de coordenadas. Digamos que x1, . . . , xn sao as coordenadas de Rn, eque φ1, . . . , φn sao as funcoes coordenadas de φ. Neste caso, se a 2-formadiferencial ω se escreve como
ω =∑
1≤i<j≤n
aijdxi ∧ dxj ,
entao, temos que
φ∗(ω) =∑
1≤i<j≤n
φ∗(aij)φ∗(dxi ∧ dxj)
pela linearidade da imagem inversa. Mas, por (2.14),
φ∗(dxi ∧ dxj) = φ∗(dxi) ∧ φ∗(dxj).Combinando isto com a equacao (2.5) da pagina 84, obtemos
φ∗(dxi ∧ dxj) = dφi ∧ dφj .Finalmente,
φ∗(ω) =∑
1≤i<j≤n
φ∗(aij)dφi ∧ dφj ,(2.16)
que e a formula desejada.Ja identificamos como a imagem inversa de 2-formas se comporta com
relacao a soma e ao produto por uma funcao. Precisamos, agora, descobrircomo se relaciona com o produto exterior.

86 3. 2-FORMAS
PROPOSICAO. Sejam U ⊆ Rn e V ⊆ Rm regioes abertas. Se α e β sao1-formas definidas em U e φ : V → U e uma aplicacao diferenciavel, entao
φ∗(α ∧ β) = φ∗(α) ∧ φ∗(β).
DEMONSTRACAO. Como vimos no §2.1, as 1-formas α e β podem serescritas como
α =n∑i=1
aidxi e β =n∑i=1
bidxi,
onde ai, bi ∈ O(U) para 1 ≤ i ≤ n. Multiplicando estas formas
α ∧ β =∑
1≤i<j≤n
(aibj − ajbi)dxi ∧ dxj .
Por (2.16), a imagem inversa desta 2-forma por φ e
φ∗(α ∧ β) =∑
1≤i<j≤n
(φ∗(ai)φ∗(bj)− φ∗(aj)φ∗(bi))dφi ∧ dφj ,
que, por sua vez e igual a
(n∑i=1
φ∗(ai)dφi) ∧ (n∑j=1
φ∗(bj)dφj).
Mas esta expressao e igual a
φ∗(α) ∧ φ∗(β),
completando, assim, a demonstracao da proposicao.
A ultima propriedade diz respeito a imagem inversa por uma aplicacaocomposta. Sejam
ψ : W → V e φ : V → U
aplicacoes diferenciaveis, onde W , V e U sao regioes de Rk, Rm e Rn, res-pectivamente. Queremos calcular (φ · ψ)∗(ω), onde ω e uma 2-forma definidaem U . Mas,
(φ · ψ)∗(ω)(p, v, w) = ω((φ · ψ)(p), Jp(φ · ψ)(v), Jp(φ · ψ)(w)).
Contudo, pela regra da cadeia para funcoes de mais de uma variavel
Jp(φ · ψ) = Jψ(p)(φ)Jp(ψ).
Assim,
(φ · ψ)∗(ω)(p, v, w) = ω((φ · ψ)(p), Jψ(p)(φ)Jp(ψ)(v), Jψ(p)(φ)Jp(ψ)(w))
que e igual aφ∗(ω)(ψ(p), Jp(ψ)(v), Jp(ψ)(w));
que, por sua vez, eψ∗(φ∗(ω))(p, v, w).
Portanto,(φ · ψ)∗(ω) = ψ∗(φ∗(ω)).

3. INTEGRACAO DE 2-FORMAS 87
Note a inversao das posicoes de φ e ψ quando passamos de um lado para ooutro da equacao como, alias, ja acontecia para 1-formas.
Vamos encerrar enunciando, de maneira sistematica, todas as propriedadesda imagem inversa de formas. Seja φ : U → V uma aplicacao diferenciavelentre regioes U ⊆ Rm e V ⊆ Rn.
Propriedade 1: A imagem inversa φ∗ : Ω2(U) → Ω2(V ) e uma trans-formacao linear entre espacos vetoriais.
Propriedade 2: Se ω ∈ Ω1(U) e f : U → R e uma funcao dife-renciavel, entao
φ∗(fω) = φ∗(f)φ∗(ω).
Propriedade 3: Se ω, η ∈ Ω1(U), entao
φ∗(ω ∧ η) = φ∗(ω) ∧ φ∗(η).
Propriedade 4: Se ψ : W → U e uma aplicacao diferenciavel em umaregiao aberta W ⊆ Rk e ω ∈ Ω2(V ), entao
(φ · ψ)∗(ω) = ψ∗(φ∗(ω)).
3. Integracao de 2-formas
Ja estamos de posse de toda a maquinaria necessaria para definir a integral deuma 2-forma diferencial qualquer sobre uma superfıcie.
3.1. 2-celulas e fronteiras. E hora de formalizar a nocao de superfıcieparametrizada. Sejam a < a′, b < b′ e ε > 0 numeros reais e
R = [a, a′]× [b, b′],
um retangulo fechado. Uma 2-celula de Rn e uma aplicacao diferenciavel
σ : (a− ε, a′ − ε)× (b− ε, b′ − ε) → Rn,
onde ε > 0 e um numero real. Como de habito, nao distinguiremos claramenteentre a aplicacao σ e a imagem de R por σ. Para os propositos deste livrouma superfıcie e simplesmente uma 2-celula, e os dois termos serao usados demaneira intercambiavel de agora em diante.
Todos temos uma nocao intuitiva do que significa a fronteira (tambem co-nhecida como margem ou borda) de uma superfıcie. Sabemos tambem quenem toda superfıcie tem fronteira: um plano, porque se estende infinitamenteem todas as direcoes; uma esfera, porque e fechada. Nossa meta e formalizareste conceito para o caso de 2-celulas.
Vamos comecar com o proprio retangulo de parametros
R = [a, a′]× [b, b′].

88 3. 2-FORMAS
Um ponto esta na fronteira deR se pertence a um dos quatro lados do retangulo,a saber
L1 = [a, a′]× bL2 = a′ × [b, b′]
L3 = [a, a′]× b′L4 = a × [b, b′].(3.1)
Cada um destes lados corresponde a um intervalo da reta real que foi transla-dado de sua posicao sobre o eixo, e podemos parametriza-los facilmente, comomostra a tabela abaixo Com isto, fizemos com que cada lado de R se tornasse
Segmento Parametrizacao Valores dos parametrosL1 (t, b) a ≤ t ≤ a′
L2 (a′, t) b ≤ t ≤ b′
L3 (t, b′) a ≤ t ≤ a′
L4 (a, t) b ≤ t ≤ b′
uma 1-celula. Encadeando estas 1-celulas, obteremos uma parametrizacao detoda a fronteira. Contudo, para que o encadeamento seja contınuo, o pontoinicial de uma 1-celula deve ser igual ao final da celula seguinte. Infeliz-mente isto nao e verdade no caso das parametrizacoes acima. Por exemplo,L2 acaba no ponto (a′, b′), ao passo que L3 comeca em (a, b′). O problema eque a parametrizacao de L3 induzida pela ordenacao natural dos numeros re-ais no segmento [a, a′], percorre o segmento no sentido contrario ao desejada.De fato, L3 termina em (a′, b′), que deveria ser seu ponto inicial. Mas esteproblema e facil de resolver: basta percorrer L3 no sentido inverso ao que edado pela parametrizacao induzida da ordenacao natural em R. Observe que omesmo problema se da com L4. Denotando por ∂R a fronteira de R conside-rada como 1-encadeamento, podemos concluir que
∂R = L1 + L2 − L3 − L4.
O sentido em que cada um dos lados de R deve ser percorrido para que afronteira seja este 1-encadeamento e ilustrado na figura abaixo.
·
−L4
·−L3oo
·L1
//·
L2
OO
Observe, entretanto, que esta nao e a unica maneira possıvel de se obterum encadeamento contınuo a partir dos lados de R. A outra possibilidade estailustrada na figura abaixo.

3. INTEGRACAO DE 2-FORMAS 89
· L3 //·
−L2
·
L4
OO
·−L1
oo
Em nossa escolha original do sentido em que a fronteira deR e percorrida,avancamos ao longo do eixo x, e so depois subimos ao longo de y. Destaforma, a ordenacao das coordenadas e respeitada (primeiro vem x, depois vemy). Por isso, podemos arguir que esta maneira de encadear os lados e ‘maisnatural’ que aquela em que os lados sao percorridos no sentido inverso. Porisso, assumiremos, de agora em diante, que
considerando R como conjunto de parametros, e assumin-do que todos os seus lados sao percorridos no sentido na-tural de crescimento dos numeros reais, sua fronteira sera
∂R = L1 + L2 − L3 − L4.
Naturalmente, R tambem pode ser encarado como uma 2-celula. Porem, antesde tratar deste caso, precisamos definir o que e a fronteira de uma 2-celulaqualquer.
Seja σ : R → Rn uma 2-celula. A fronteira de σ e a forma reduzida do1-encadeamento
σ(L1) + σ(L2)− σ(L3)− σ(L4),e vamos denota-la por ∂σ. Note que, na definicao da fronteira do retangulo deparametros nao aparecia a expressao ‘forma reduzida’. A razao e simples: naoexiste a possibilidade de cancelamento entre as varias 1-celulas na fronteirade R. Entretanto, como veremos adiante, isto frequentemente ocorre no casogeral.
Vejamos alguns exemplos. Se a 2-celula for o paraboloide z = x2 + y2,com a parametrizacao σp descrita em (1.10), entao os lados do retangulo saodados por
L1 = [0, 1]× 0(3.2)
L2 = 1 × [0, 2π]
L3 = [0, 1]× 2πL4 = 0 × [0, 2π].
Contudo, σp(L4) = (0, 0, 0), de modo que a fronteira de σp seria
σp(L1) + σp(L2)− σp(L3).
Isto nos da uma curva em 3 partes, quando estavamos esperando apenas uma:a circunferencia de raio 1 e centro em (0, 0, 1), contida no plano z = 1. Efacil ver que esta circunferencia corresponde a σp(L2), uma vez que em L2

90 3. 2-FORMAS
o parametro r assume, apenas, o valor constante 1. Ja L1 e L3 apresentamo fenomeno oposto: o angulo esta fixo e o raio varia. Portanto, as imagensdestes dois lados nos dao um arco de parabola no plano y = 0, contido entreos planos z = 0 e z = 1. Entretanto, σp(L1) percorre o arco de baixo paracima, ao passo que −σp(L3) percorre o mesmo arco de cima para baixo. Por-tanto, estas celulas se cancelam, deixando apenas σp(L2) como fronteira parao paraboloide.
Uma situacao um pouco diferente ocorre com o cilindro x2 + y2 = 1, quepode ser parametrizado pela aplicacao
σc : [0, 2π]× [0, 1] → R3,
definida porσc(θ, z) = (cos(θ), sen(θ), z).
Neste caso os lados do retangulo de parametros sao
L1 = [0, 2π]× 0L2 = 2π × [0, 1]
L3 = [0, 2π]× 1L4 = 0 × [0, 1].
Portanto, a fronteira deveria ser
σc(L1) + σc(L2)− σc(L3)− σc(L4).
Desta vez nenhum dos tres lados se reduz a um ponto. Pelo contrario, σc(L1)e σc(L3) representam circunferencias; a primeira no plano z = 0, a segundaem z = 1. Olhando de um ponto acima do plano z = 0 verıamos ambasestas circunferencias sendo percorridas em sentido anti-horario. Por outro lado,σc(L2) e σc(L4) representam o segmento de reta que vai de (1, 0, 0) a (1, 0, 1),e que esta contido na superfıcie do cilindro. Como estes segmentos estao sendopercorridos em sentidos opostos, podemos cancela-los, obtendo
σc(L1)− σc(L3)
como fronteira para o cilindro. Portanto, a fronteira do cilindro e formada porduas circunferencias; a de baixo percorrida no sentido anti-horario, a de cimano sentido horario.
3.2. Orientando uma 2-celula. Antes de poder definir encadeamen-tos de 2-celulas, precisamos decidir o que significa orientar uma tal celula. Soassim podemos falar de “menos” uma 2-celula. A saıda mais simples e recor-rer a orientacao da fronteira da celula, que e induzida a partir da orientacao dafronteira do seu retangulo de parametros. Esta ultima, contudo, e sempre feitade uma maneira padronizada, como convencionamos no paragrafo anterior.
Antes de formalizar isto, vejamos o que ocorre quando a 1-celula e oproprio retangulo de parametros. Porem, quando consideramos o retangulo

3. INTEGRACAO DE 2-FORMAS 91
como como 1-celula, devemos parametriza-lo. A maneira natural de fazer istoe dada pela formula
s(1, 0) + t(0, 1), onde (s, t) ∈ R = [a, a′]× [b, b′].
Sob esta parametrizacao, L1 e L2 sao percorridos no sentido positivo do eixo,de modo que a fronteira desta 1-celula e a mesma de R. Para obter umaparametrizacao cuja fronteira e percorrida no sentido oposto basta forcar umdos lados do retangulo a ser percorrido no sentido oposto ao usual; por exem-plo,
(a+ a′ − s)(1, 0) + t(0, 1), onde (s, t) ∈ R = [a, a′]× [b, b′].
Desta vez, so obtemos uma fronteira contınua a partir do ponto (a, b), secomecarmos subindo pelo eixo y antes de avancar pela horizontal. Assim, afronteira desta 1-celula e percorrida no sentido oposto ao do retangulo R. Emoutras palavras, considerando o retangulo como 1-celula, sua fronteira sob estanova parametrizacao e
L3 + L4 − L2 − L1 = −∂R.
Por isso, convencionaremos chamar de −R o retangulo [a, a′] × [b, b′] consi-derado como 1-celula sob esta parametrizacao. Ja R designara o retangulo soba parametrizacao usual. Com isto, R esta representando duas coisas diferen-tes: o retangulo de parametros [a, a′]× [b, b′], e o mesmo retangulo visto como1-celula sob a parametrizacao natural. Como a fronteira e a mesmo nos doiscasos, nao corremos nenhum risco, apesar da ambiguidade da notacao.
Passando ao caso geral, seja
σ : R→ Rn
uma 2-celula e
∂σ = σ(L1) + σ(L2)− σ(L3)− σ(L4),
sua fronteira. Tomando o caso do retangulo como inspiracao, definimos
−σ : R→ Rn
como sendo a 2-celula em R = [a, a′]× [b, b′] para a qual
σ(s, t) = σ(a+ a′ − s, t).
Obedecendo a convencao que determina como R deve ser percorrido, verifica-mos que
∂(−σ) = σ(L3) + σ(L4)− σ(L1)− σ(L2),
como seria de esperar. Por isso, diremos que −σ tem a orientacao inversa deσ.
A orientacao de uma 2-celula esta relacionada ao seu vetor normal, como efacil de ver no caso de um retagulo parametrizado S. Denotaremos por vj(S)o vetor unitario paralelo ao lado Lj de S, cujo sentido coincide com aquele

92 3. 2-FORMAS
segundo o qual o lado e percorrido na orientacao definida pela parametrizacaode S. Com isto,
v1(R) = −v3(R) = e1 e v2(R) = −v4(R) = e2,
ao passo que
v1(−R) = −v3(−R) = −e1 e v2(−R) = v4(−R) = e2.
Esbocando estes vetores com centro na origem, obtemos
·v2
OO
v4
v1 //v3
oo ·v4
v2
OO
v1oo v3 //
A regra da mao direita nos da,
vj(R)× vj+1(R) = e3, ao passo que, vj(−R)× vj+1(−R) = −e3,
qualquer que seja 1 ≤ j ≤ 4. Isto pode ser formulado de uma maneira maisfacil de lembrar observando simplesmente que, se os dedos da mao direitapercorrem a fronteira de S, entao o polegar vai apontar sempre no sentidovj(S)× vj+1(S), quaisquer que sejam S e 1 ≤ j ≤ 4.
Podemos facilmente estender estas observacoes a uma 2-celula geral
σ : R→ Rn.
Lembre-se que os vetores
∂σ
∂s(p) e
∂σ
∂t(p),
sao tangentes a σ em um ponto p ∈ R, desde que nao se anulem neste ponto.Portanto, sob a hipotese de que os vetores nao se anulam em p, temos que oproduto vetorial
Np(σ) =∂σ
∂s(p)× ∂σ
∂t(p),
e perpendicular ao plano tangente a σ em p. Diremos que se trata de um vetornormal a σ em p. Como
∂(−σ)∂u
(p) = −∂σ∂s
(p) e∂(−σ)∂v
(p) =∂σ
∂t(p),
temos queNp(−σ) = −Np(σ).
Geometricamente isto significa que o vetor normal agora aponta para o ladooposto da superfıcie.
Para poder relacionar o vetor normal a fronteira, como fizemos no casodo retangulo, redefinimos vj como sendo o vetor tangente a 1-celula σ(Lj).

3. INTEGRACAO DE 2-FORMAS 93
Parametrizando os lados de R como
L1 = (0, 0) + t1(1, 0)
L2 = (0, 0) + t2(0, 1)
L3 = (0, b′) + (a′ + a− t1)(1, 0)
L4 = (a′, 0) + (b′ + b− t2)(0, 1)
onde t1 ∈ [a, a′] e t2 ∈ [b, b′] e assumindo que p ∈ Lj , sejam
vj(σ, p) =∂σ(Lj)∂t1
(p) e vj+1(σ, p) =∂σ(Lj+1)
∂t2(p)
para j = 1, 3. Observe que estes vetores apontam no sentido em que a fronteirade σ e percorrida. Como −σ(t1, t2) = σ(a+ a′ − t1, t2) temos
vj(−σ, p) = −∂σ(Lj)∂t1
(p) e vj+1(−σ, p) =∂σ(Lj+1)
∂t2(p)
para j = 1, 3. Portanto,
vj(−σ, p) = vj(σ, p) e vj+1(−σ, p) = vj+1(σ, p).
Supondo, agora, que p ∈ Lj ∩ Lj+1, para j = 1, 3, concluımos que se
Nj(σ, p) = vj(σ, p)×vj+1(σ, p) = −(vj(−σ, p)×vj+1(−σ, p)) = Nj(−σ, p).Um argumento semelhante se aplica aos outros dois pontos de intersecao
de lados da fronteira de R. Resumindo:se, na vizinhanca de um ponto dado, o movimento da maodireita acompanha a direcao em que a fronteira de σ e per-corrida, entao o polegar aponta na direcao do vetor normala σ naquele ponto.
3.3. Integracao de 2-formas. Neste paragrafo veremos como integraruma 2-forma em 2-celulas. Comecaremos com o caso mais simples possıvel:uma 2-forma definida em um retagulo de R2.
Seja U uma regiao do plano, e digamos que
R = [a, a′]× [b, b′] ⊆ U.
Dada η ∈ Ω2(U), queremos definir a integral de η no retangulo R. Se s e t saoas coordenadas em R2, podemos escrever
η = f(s, t)ds ∧ dt.Definimos, entao, a integral de η emR como sendo a integral da funcao f nestemesmo retangulo; isto e ∫
R
η =∫ a′
a
∫ b′
b
fdsdt.
Esta e a base de nossa definicao: o caso geral e reduzido a este caso particularatraves do calculo de uma imagem inversa. Em outras palavras, se
σ : R→ Rn,

94 3. 2-FORMAS
e uma 2-celula cuja imagem esta contida em uma regiao U de Rn, definimos aintegral de ω em σ por ∫
σ
ω =∫R
σ∗(ω).(3.3)
Precisamos descobrir de que maneira a orientacao da 2-celula afeta o cal-culo da integral. Para isto, consideramos uma 2-celula σ, definida sobre oretangulo
R = [a, a′]× [b, b′]
cuja imagem esta contida em uma regiao U de Rn. Digamos que s1 es2 saoos parametros de σ. Se ω ∈ Ω2(U), entao −σ tem domınio R e e definida por−σ(t1, t2) = σ(a+ a′ − t1, t2). Desta forma
(−σ)∗(ω)(q) = ω(σ(q),−Jq(σ)e1, Jq(σ)e2)dt1 ∧ dt2,
onde q = (t1, t2). Portanto,
(−σ)∗(ω)(q) = −ω(σ(q), Jq(σ)e1, Jq(σ)e2)dt1 ∧ dt2 = −(σ)∗(ω)(q),
ja que a troca de entradas em ω leva a uma troca de sinal da imagem inversa.Assim, ∫
Rt
(−σ)∗(ω) = −∫R
(σ)∗(ω),
que e equivalente a dizer que ∫−σ
ω = −∫σ
ω.
3.4. 2-encadeamento. Com o que vimos estamos aptos a definir um2-encadeamento como sendo uma expressao da forma
E = c1σ1 + · · ·+ cmσm,(3.4)
onde os cs sao numeros inteiros e os σs sao 2-celulas contidas em uma regiaoU de Rn. O sinal do coeficiente nos diz se a celula esta sendo percorrida nosentido dado por sua parametrizacao, ou no sentido oposto. Se ω ∈ Ω1(U),definimos ∫
E
= c1
∫σ1
ω + · · ·+ cm
∫σm
ω.
Como no caso de 1-encadeamentos, a definicao de integral sobre um encadea-mento justifica a utilizacao das seguintes propriedades da adicao de 2-celulas.Se σ1, σ2 e σ3 sao 2-celulas em U e k ∈ Z, entao:
• (σ1 + σ2) + σ3 ≡ σ1 + (σ2 + σ3);• σ1 + σ2 ≡ σ2 + σ1;• kσ1 + σ1 ≡ (k + 1)σ1;• 0σ1 ≡ 0;• se a imagem de σ1 e uma curva, entao σ1 ≡ 0.

3. INTEGRACAO DE 2-FORMAS 95
Usamos ≡ em lugar de um simples sinal de igualdade para deixar claro quecada uma destas propriedades e derivada do comportamento de uma integralcalculada sobre um encadeamento. Na ultima das propriedades acima, o queera ponto no caso de 1-celula virou curva, agora que nossas celulas tem di-mensao dois. Diremos que um encadeamento esta em forma reduzida se eli-minamos todas as parcelas que correspondem a pontos, e cancelamos todos ospares de celulas iguais com sinais opostos.
Em princıpio estamos admitindo 2-celulas quaisquer entre os σs. Na pra-tica, porem, o unico caso que nos interessa e aquele em que as celulas saodisjuntas ou se intersectam apenas em pontos da fronteira. Neste ultimo caso,podemos considerar (3.4) como uma colecao de 2-celulas as quais estamosassociando multiplicidades que nos dizem em que sentido, e quantas vezes,aquela 2-celula esta sendo percorrida. A fronteira do 2-encadeamento E des-crito em (3.4) e definida pela formula
∂E ≡ c1∂(S1) + · · ·+ cm∂(Sm),
onde, como sempre, estaremos considerando a forma reduzida da expressao adireita.
Considere, por exemplo, a superfıcie correspondente a colagem da tresfaces de um cubo de lado um que estao contidas nos planos coordenados, comomostra a figura.
Queremos representar esta colagem como um 2-encadeamento. Digamosque 1 ≤ i < j ≤ 3. A face σij , contida no plano xixj , pode ser parametrizadacomo
σij(s, t) = sei + tej ,
onde ei, ej ∈ ε, a base canonica de R3. Por causa de nossa convencao de quei < j, o vetor normal Nij a σij , satisfaz
Nij = ei × ej =
ek se (i, j) = (1, 2), (2, 3)−ek se (i, j) = (1, 3)
onde k 6= i, j. O problema e que, se encadearmos as 2-celulas assim parame-trizadas, a fronteira nao sera a esperada. Por exemplo, σ13 e σ23 tem um ladocomum ` sobre o eixo x3. Como este lado e interno a colagem das faces, naodeve fazer parte da fronteira do encadeamento. Entretando, ` esta orientado nomesmo sentido, tanto em σ13, quanto em σ23, de forma que nao sera canceladona fronteira de σ12 + σ13 + σ23.
Para evitar isto, precisamos reorientar algumas destas 2-celulas, o que nosobriga a listar os lados de cada face; isto e, as arestas do cubo. Escreveremosaii para a aresta que esta ao longo do eixo xi. A aresta oposta a aii na faceσij sera denotado por aji . Em ambos os casos vamos assumir que a 1-celulacorrespondente aponta no sentido do eixo xi. Usando esta notacao, os lados de

96 3. 2-FORMAS
σ12 podem ser enumerados como na figura.
·
−a22
·−a2
1oo
σ12
·a11
//·
a12
OO
Assim,∂σ12 = a1
1 + a12 − a2
1 − a22.
Procedendo de maneira semelhante para as outras faces, constatamos que
∂σ23 = a22 + a2
3 − a32 − a3
3 e que ∂σ13 = a11 + a1
3 − a31 − a3
3.
As arestas que devem se cancelar no encadeamento destas tres faces do cubosao a1
1, a22 e a3
3. Mas, para que isto ocorra quando somamos as fronteiras acima,basta inverter o sinal de σ13. Portanto, o encadeamento desejado e
E = σ12 + σ23 − σ13,
que tem como fronteira
a12 − a2
1 + a23 − a3
2 − a13 + a3
1.
Voltando aos vetores normais, constatamos que apenas N13 nao apontapara dentro do cubo – caso o cubo estivesse fechado, e claro. Isto nos da umamaneira facil de lembrar como orientar as faces para obter o 2-encadeamentocorreto: basta que todas as faces tenham o vetor orientado para dentro do cubo,ou para fora do cubo. No primeiro caso, temos o 2-encadeamento E acima; nosegundo caso, obtemos −E.
O cubo que vimos considerando tem outras tres faces. Escrevendo σoij paraa face oposta a σij , verificamos que tanto
E′ = −σo12 − σo23 + σo13,
quanto −E′ produzem um 2-encadeamento com a fronteira correta. Contudo,os vetores normais em E′ apontam todos para dentro do cubo, e ∂E′ = −∂E.Portanto,
∂(E + E′) = 0,
de modo que nao ha fronteira neste caso. Isto nao e surpreendente, afinal umcubo nao tem mesmo fronteira.
3.5. Encadeamentos fechados. Diremos que um 2-encadeamentocuja fronteira e zero e fechado. Ja vimos que isto ocorre no caso do cubo,outro exemplo, e o 2-encadeamento do paraboloide σp, definido no §3.1, como disco σd definido, sobre o mesmo retangulo de parametros R de σp, por
σd(r, θ) = (r cos(θ), r sen(θ), 1).

3. INTEGRACAO DE 2-FORMAS 97
Neste caso, os pontos de intersecao de σp com σd coincidem com os pontos dafronteira de ambas as celulas, e formam a circunferencia de raio 1 e centro em(0, 0, 1). Como σp(L4) = (0, 0, 0),
∂σp ≡ σp(L1) + σp(L2)− σp(L3) ≡ σp(L2).
Ja no caso do disco, σd(L4) degenera em um ponto (a origem), ao passo queσd(L1) e σd(L3) correspondem ao segmento de reta que vai da origem aoponto (1, 0, 1), percorrido em sentidos opostos. Com isso,
∂σd ≡ σp(L2).
Portanto, σp+σd nao e fechada, ao passo que−σp+σd e σp−σd sao fechadas.Naturalmente o conceito de encadeamento fechado tambem se aplica a
uma unica 2-celula; como e o caso da esfera. Contudo, neste caso nos depara-mos com a necessidade de orientar a fronteira de uma superfıcie sem fronteira.Nem podemos descartar este caso sumariamente, assumindo, por exemplo, quese nao ha fronteira, nao ha necessidade de nos preocuparmos com a orientacaoda superfıcie. Afinal, a orientacao da celula afeta o sinal da integral. Ha duasmaneiras de contornar este problema.
A primeira, consiste em recorrer a relacao entre orientacao da fronteirae vetor normal a celula. Como vimos no §(3.2), ao decidir qual o sentidono qual a fronteira do retangulo de parametros esta sendo percorrida, fizemosuma escolha entre um dos dois vetores normais a 2-celula. Como isto dependeapenas da parametrizacao da celula e da orientacao da fronteira do retangulo,podemos utilizar esta definicao mesmo se a fronteira da 2-celula for zero. Nestecaso, adotaremos a convencao:
a escolha da orientacao de uma superfıcie fechada deve serfeita de modo que o vetor normal sempre aponte para forada superfıcie.
Considere, por exemplo, o que acontece com a esfera σe de raio 1 e centrona origem. Utilizaremos a parametrizacao de σe em coordenadas esfericas
σe(φ, θ) = (cos(θ) sen(φ), sen(θ) sen(φ), cos(φ)).
definida no retanguloR = [0, π]× [0, 2π].
Neste caso, o vetor normal sera dado por
Np(σe) =∂σe∂φ
(p)× ∂σe∂θ
(p).
Um calculo simples mostra que
Np(σe) = sen(φ)σe(θ, φ).
Como o seno e positivo para 0 ≤ φ ≤ π, temos que Np(σe) aponta sempre nomesmo sentido que σe(θ, φ); isto e, para fora da superfıcie.
Podemos chegar ao mesmo resultado representando uma superfıcie fe-chada como encadeamento de duas ou mais celulas, cada uma das quais tem

98 3. 2-FORMAS
uma fronteira nao nula. Naturalmente a orientacao de cada uma destas duascelulas precisa ser feita de maneira que:
• as fronteiras de celulas adjacentes tenham orientacoes opostas, e• o vetor normal aponte para fora em cada uma das celulas em que a
superfıcie foi subdividida.Por exemplo, a esfera σe pode ser subdividida em duas celulas com fronteira,cada uma delas correspondendo a um hemisferio. Neste caso, o hemisferiosuperior Hs e obtido restringindo-se a parametrizacao σe da esfera definida noretangulo
[0, π/2]× [0, 2π].Hs tem fronteira
∂(Hs) ≡ Hs(L1) +Hs(L2)−Hs(L3)−Hs(L4),
onde os Ls correspondem aos lados do retangulo [0, π/2]× [0, 2π] enumeradosda maneira usual. Contudo,
Hs(L1) ≡ −Hs(L3) e Hs(L4) ≡ 0,
de modo que∂(Hs) ≡ Hs(L2).
Mas esta curva corresponde a circunferencia da base do hemisferio, percorridano sentido anti-horario. Portanto, neste caso, o vetor normal aponta semprepara fora do hemisferio Hs. Restringindo, agora, σe ao retangulo
[π, π/2]× [0, 2π],
obtemos o hemisferio inferior Hi, parametrizado de modo que o vetor normalaponte para fora (ou para baixo, se voce preferir), e com fronteira
∂(Hi) ≡ −Hs(L2).
Encadeando os dois hemisferios assim orientados, obtemos a orientacao dese-jada para a esfera.
Mesmo no caso em que a superfıcie nao e fechada, usaremos as expressoeslado de fora e lado de dentro da superfıcie. Neste caso, o lado de fora designaapenas aquele para o qual aponta o vetor normal. Por exemplo, parametri-zando o cilindro σc como no §3.1, temos um vetor normal que aponta parao que normalmente chamamos de parte de dentro do cilindro. Portanto, umaparametrizacao mais natural seria dada por −σc.
Encerramos este paragrafo com a surpreendente revelacao de que certosobjetos que chamamos de superfıcies nao admitem um lado de dentro, nemum lado de fora. O exemplo mais simples e a chamada faixa de Mobius. Paraconstruı-la, tome uma faixa de papel de uns 5 cm de largura e uns 20 cm decomprimento. Escolha um dos lados deste retangulo de papel, que chamaremosde lado de cima, e desenhe sobre ele a orientacao anti-horaria da fronteira. Paraobter uma superfıcie com um lado de cima e um lado de baixo, precisarıamoscolar as extremidades da fita de maneira que estivessem orientadas em sentidosopostos. Se fizessemos isto neste caso, obterıamos um cilindro. Ao inves disto,

3. INTEGRACAO DE 2-FORMAS 99
faremos a colagem de modo que as orientacoes nas extremidades coincidam.Para que isto seja possıvel voce precisara torcer a fita de papel. O resultado euma faixa como a da figura 1, que e usada como logotipo pelo IMPA.
FIGURA 1. Logotipo do IMPA
A razao pela qual esta fita nao tem um lado de dentro, e um lado de fora,e que nao ha dois lados, mas apenas um. Imagine uma formiga que comecassea caminhar pelo lado que convencionamos chamar “de cima” no retangulo ori-ginal. No momento em que a formiga inicia sua caminhada transformarmos oretangulo na faixa. Como as extremidades da faixa foram emendadas, a for-miga podera continuar sua caminhada. Entretanto, ao fazer isto sobre a faixade Mobius ela tera passado para o que era o “lado de baixo” no retangulo ori-ginal. Voce pode facilmente simular o comportamento da formiga tracando umcaminho sobre o papel da fita.
Nao podemos integrar formas sobre superfıcies deste tipo porque, comoveremos no proximo paragrafo, precisamos saber para que lado a normal asuperfıcie aponta. Como fenomenos como o da fita de Mobius nao podemocorrer sobre 2-celulas, nao precisamos nos preocupar mais com este tipo deproblema.
Vamos calcular alguns exemplos como ilustracao. Considere, em primeirolugar, o encadeamento σd − σp, do paraboloide com o disco definido no §3.4.Dada
ω = x2dy ∧ dz,calcularemos ∫
σd−σp
ω.
Como esta integral e igual a ∫σd
ω −∫σp
ω,
basta determinar cada uma destas, separadamente, e subtraı-las. Usando asparametrizacoes definidas no §3.1, temos que
σp(r, θ) = (r cos(θ), r sen(θ), r2),
ao passo queσd(r, θ) = (r cos(θ), r sen(θ), 1),
ambas definidas em R = [0, 1]× [0, 2π].

100 3. 2-FORMAS
Comecando pelo paraboloide,
σ∗p(ω) = r2 cos2(θ)d(r sen(θ) ∧ d(r2)).
Como
d(r sen(θ) ∧ d(r2)) = (r cos(θ)dθ + sen(θ)dr) ∧ 2rdr,
e dr ∧ dr = 0, concluımos que
σ∗p(ω) = (2r4 cos2(θ) cos(θ))dθ ∧ dr.
Assim, ∫σp
ω =∫ 2π
0
∫ 1
0
2r4 cos3(θ)dθdr.
Calculando a integral,∫σp
ω =25
∫ 2π
0
cos3(θ) =25
[(cos2(θ) + 2) sen(θ)
3
]2π0
= 0.
Passando, agora, ao discoσ∗p(ω) = 0,
ja σ∗p(dz) = 0. Com isto,∫σd−σp
ω =∫σd
ω −∫σp
ω = 0.
Como um segundo exemplo, calcularemos a integral∫S
1z2dx ∧ dy,
onde S e a superfıcie esferica de raio unitario e centro na origem. O primeiroimpulso e pensar em usar coordenadas esfericas. Neste caso terıamos, simples-mente, a integral de uma 2-forma em uma 2-celula. Contudo, neste exemplo emparticular, os calculos ficam mais faceis se usarmos coordenadas cilıdricas. Ounico problema e que, para fazer isto, precisamos parametrizar cada hemisferioseparadamente. Assim, acabamos tendo que tratar a esfera como um encadea-mento de seus dois hemisferios. Comecamos por parametrizar os hemisferiossobre o retangulo R = [0, 1]× [0, 2π], o que nos da
Hs(r, θ) = (r cos(θ), r sen(θ),√
1− r2),
para o hemisferio superior, e
Hi(r, θ) = (r cos(θ), r sen(θ),−√
1− r2),
para o inferior. Os lados deR sao os mesmos de (3.2), e e facil ver queHs(L1)e Hs(L3) correspondem ao arco que vai de (0, 0, 1) a (1, 0, 0), percorridos emsentidos opostos. Ja Hs(L2) e a circunferencia que representa a intersecao daesfera com o plano z = 0. Finalmente, Hs(L4) e apenas o ponto (0, 0, 1). Istosignifica que
∂Hs ≡ Hs(L2).

3. INTEGRACAO DE 2-FORMAS 101
Um argumento semelhante mostra que
∂Hi ≡ H(L2).
Como a circunferencia gira para no mesmo sentido em ambas as parametriza-coes, concluımos que
S = Hs −Hi,
para que a normal sempre aponte para fora da esfera, como convecionamosfazer no §3.4. Temos, assim, que∫
S
1z2dx ∧ dy =
∫Hs
1z2dx ∧ dy −
∫Hi
1z2dx ∧ dy.
Contudo,
H∗s (
1z2dx ∧ dy) =
√1− r2d(r cos(θ)) ∧ d(r sen(θ)).
Mas,
d(r cos(θ))∧ d(r sen(θ)) = (−r sen(θ)dθ+cos(θ)dr)∧(r cos(θ)dθ+sen(θ)dr),
e igual a −rdθ ∧ dr uma vez que
sen(θ)2 + cos(θ)2 = 1.
Portanto,
H∗s (
1zdx ∧ dy) = − r√
1− r2dθ ∧ dr
Como a unica diferenca entre as parametrizacoes Hs e Hi esta no sinal daultima coordenada, teremos que
H∗i (zdx ∧ dy) =
r√1− r2
dθdr
Calculando a integral∫Hs
zdx ∧ dy =∫R
H∗s (zdx ∧ dy)
obtemos ∫ 1
0
∫ 2π
0
r√1− r2
dθdr = −2π√
1− r2∣∣∣10
= 2π;
donde
−∫Hi
zdx ∧ dy =∫Hs
zdx ∧ dy = 2π.
Mas isto significa que∫S
zdx ∧ dy =∫Hs
zdx ∧ dy −∫Hi
zdx ∧ dy = 4π.

102 3. 2-FORMAS
3.6. Propriedades da integral de uma 2-forma. Ha algumas pro-priedades elementares das integrais de 2-formas que precisamos considerar.Suponha que U seja uma regiao de Rn. Dadas 2-formas diferenciais ω e η emU , e um escalar k ∈ R, queremos calcular∫
σ
(ω + kη),
onde S e uma 2-celula sobre um retangulo R do plano, cuja imagem esta con-tida em U . Por definicao∫
σ
(ω + kη) =∫R
σ∗(ω + kη).
Assim, das propriedades da imagem inversa, segue que∫σ
(ω + kη) =∫R
σ∗(ω) + kσ∗(η).
Mas, do lado direito desta equacao, temos a integral dupla de funcoes de duasvariaveis. Logo,∫
R
σ∗(ω) + kσ∗(η) =∫R
σ∗(ω) + k
∫R
σ∗(η).
Reescrevendo tudo isto em termos de integrais ao longo de σ temos∫σ
(ω + kη) =∫σ
ω + k
∫σ
η,
como, alias, seria de esperar. Como a integral sobre um encadeamento e igual asoma das integrais sobre suas parcelas (respeitado sentido da fronteira), seguedos calculos acima que∫
E
(ω + kη) =∫E
ω + k
∫E
η,
para qualquer encadeamento E cuja imagem esta contida em U .As outras propriedades que desejamos estudar estao relacionadas a mu-
dancas nas 2-celulas. Em primeiro lugar, que efeito tem uma reparametrizacaoda 2-celulas sobre a integral? Antes de formular esta pergunta com exatidao,e conveniente introduzir a seguinte definicao. Para manter a coerencia com anocao de superfıcie descrita no §3.1, usaremos a expressao
a aplicacao diferenciavel γ : [a, a′]× [b, b′] → [c, c′]× [k, k′]
para designar uma funcao diferenciavel
γ : (a− ε, a′ + ε)× (b− ε, b′ + ε) → (c− ε, c′ + ε)× (k − ε, k′ + ε)
onde ε e um numero real positivo. Suponhamos, alem disso, que:
• γ e bijetiva e• leva o interior de [a, a′]× [b, b′] no interior de [c, c′]× [k, k′].

3. INTEGRACAO DE 2-FORMAS 103
Se σ e γ sao como acima, entao, σ · γ define uma parametrizacao diferenteda 2-celula σ. Isto e, σ · γ e uma superfıcie cuja imagem e a mesma de σ. Apergunta pode, entao, ser reformulada como: qual a relacao entre a integral deuma 2-forma ω ∈ Ω2(U) na 2-celula σ · γ com a integral da mesma forma aolongo de σ?
Para responder a esta pergunta, calculamos a integral desejada usando asvarias propriedades que ja conhecemos. Como,∫
σ·γω =
∫ a′
a
∫ b′
b
(σ · γ)∗ω,
devemos calcular primeiro a imagem inversa (σ · γ)∗ω. Usando a propriedade4 do final do §2.7, temos que
(σ · γ)∗ω = γ∗(σ∗(ω)).
Como σ∗(ω) e uma 2-forma no plano, podemos escreve-la como gds1 ∧ ds2,onde g e uma funcao dos parametros s1 e s2 de σ. Nesta notacao,
γ∗(σ∗(ω)) = γ∗(gds1 ∧ ds2) = (g · γ)dγ1 ∧ dγ2,
onde γ1 e γ2 sao as funcoes coordenadas de γ. Um calculo simples mostra que
dγ1 ∧ dγ2 =(∂γ1
∂s1
∂γ2
∂s2− ∂γ2
∂s1
∂γ1
∂s2
)ds1 ∧ ds2.(3.5)
Contudo, o jacobiano de γ e
J(γ) =[∂γ1/∂s1 ∂γ1/∂s2∂γ2/∂s1 ∂γ2/∂s2
];
de forma que (3.5) pode ser reescrita como
dγ1 ∧ dγ2 = det(J(γ))ds1 ∧ ds2.Portanto, ∫
σ·γω =
∫ a′
a
∫ b′
b
(g · γ) det(J(γ))ds1ds2.
Mas, sedet(J(γ))(p) > 0 para todo p ∈ [a, a′]× [b, b′],
entao, pela formula de mudanca de variaveis em integrais duplas,∫ a′
a
∫ b′
b
(g · γ) det(J(γ))ds1ds2 =∫ c′
c
∫ k′
k
gdt1dt2.
Contudo esta ultima integral e, por definicao, a integral de ω sobre σ. Prova-mos, portanto, a seguinte formula de mudanca de variaveis para integrais de2-formas.
FORMULA DE MUDANCA DE VARIAVEIS. Sejam R e R′ retangulos doplano e γ : R→ R′ uma aplicacao diferenciavel bijetora para a qual:
• o determinante do jacobiano e sempre positivo em todo ponto de R,e
• o interior de R e levado por γ no interior de R′.

104 3. 2-FORMAS
Seσ : R→ U,
e uma 2-celula contida em uma regiao U de Rn, entao∫σ·γ
ω =∫σ
ω.
Em outras palavras, a reparametrizacao de uma superfıcie por uma aplica-cao diferenciavel cujo determinante jacobiano e positivo nao altera o valor daintegral de uma 2-forma ao longo daquela superfıcie.
Como consequencia desta formula mostraremos que, ao provar um resul-tado sobre integracao de 2-formas, sempre podemos supor que a superfıcie temo retangulo [0, 1]2 como espaco de parametros.
PROPOSICAO. Seja R = [a, a′] × [b, b′] um retangulo e ω uma 2-formadefinida em uma regiao aberta do plano que contem R. Entao existe umaaplicacao diferenciavel γ : [0, 1]2 → R, tal que∫
R
ω =∫
[0,1]2γ∗(ω).
DEMONSTRACAO. Defina γ : [0, 1]2 → R por γ(s, t) = (a, b) + s(a′ −a, 0) + t(0, b′ − b). Temos que
J(γ) =[a′ − a 0
0 b′ − b
];
donde det(J(γ)) = (a′ − a)(b′ − b) > 0, pois a′ > a e b′ > b. A proposicaosegue imediatamente da formula de mudanca de variaveis.
4. Teorema de Stokes
Nesta secao provamos nossa primeira versao do teorema de Stokes.
TEOREMA DE STOKES. Seja α uma 1-forma diferencial definida emuma regiao U de Rn. Se E e um encadeamento de superfıcies contido em U ,entao ∫
∂E
α =∫E
dα.
Dividiremos a demonstracao em duas partes. Na primeira parte provamoso teorema para 2-formas do plano, integradas sobre um retangulo; na segundareduzimos o caso geral a este caso especial.
4.1. Demonstracao do teorema de Stokes no plano. Comecamostratando o caso mais simples em que a 1-forma gds e integrada no retangulo[0, 1]2.
PRIMEIRA PARTE: demonstracao do teorema para a 1-forma gds em [0, 1]2,onde g ∈ O(U).

4. TEOREMA DE STOKES 105
Como
d(α) = (∂g
∂s− ∂g
∂t)ds ∧ dt
temos que ∫R
dα =∫ 1
0
∫ 1
0
(∂g
∂s− ∂g
∂t)dsdt.
Isto e ∫R
dα =∫ 1
0
∫ 1
0
∂g
∂sdsdt−
∫ 1
0
∫ 1
0
∂g
∂tdsdt;
Contudo, pelo teorema fundamental do calculo,∫ 1
0
∫ 1
0
∂g
∂sdsdt =
∫ 1
0
(g(1, t)− g(0, t))dt,
Analogamente, ∫ 1
0
∫ 1
0
∂g
∂t)dsdt =
∫ 1
0
(g(s, 1)− g(s, 0))ds.
Assim, ∫R
dα =∫ 1
0
(g(1, t)− g(0, t))dt−∫ 1
0
(g(s, 1)− g(s, 0))ds,
que pode ser reescrito como∫R
dα =∫ 1
0
g(s, 0)ds+∫ 1
0
g(1, t)dt−∫ 1
0
g(s, 1)ds− g(0, t)dt.(4.1)
Entretanto, R tem lados
L1 = [0, 1]× 0L2 = 1 × [0, 1]
L3 = [0, 1]× 1L4 = 0 × [0, 1].
Parametrizando L1 na forma (0, 0) + s(1, 0), vemos que∫L1
gds =∫ 1
0
g((0, 0) + s(1, 0))ds =∫ 1
0
g(s, 0)ds,
que e igual a primeira parcela na soma (4.1). Calculos semelhantes mostramque ∫
Lj
α =∫Lj
gds
corresponde a j-esima parcela daquela soma. Portanto,∫R
dα =∫L1
α+∫L2
α−∫L3
α−∫L4
α.
Porem, a fronteira de R e
∂R = L1 + L2 − L3 − L4,

106 3. 2-FORMAS
de sorte que ∫∂R
α =∫L1
α+∫L2
α−∫L3
α−∫L4
α.
Mas isto nos permite concluir que∫R
dα =∫∂R
α,
provando assim que o teorema de Stokes neste caso bastante particular.
SEGUNDA PARTE: demonstracao do teorema para a 1-forma g1ds + g2dt em[0, 1]2, onde g1, g2 ∈ O(U).
Por um lado, ∫∂R
α =∫∂R
g1ds+∫∂R
g2dt,
ao passo que ∫R
dα =∫R
d(g1ds) +∫R
d(g2dt),
ja que d e uma transformacao linear. Entretanto, pela primeira parte,∫R
d(g1ds) =∫∂R
g1ds e que∫R
d(g2dt) =∫∂R
g2dt.
Combinando estas igualdades obtemos o resultado desejado.
TERCEIRA PARTE: demonstracao do teorema para a 1-forma g1ds + g2dt emum retangulo qualquer R, onde g1, g2 ∈ O(U).
Pela proposicao do §3.6∫R
ω =∫
[0,1]2ω.(4.2)
Digamos que os lados de [0, 1]2 sejam enumerados consecutivamente por L1,L2, L3 e L4. Assim, o lado de R correspondente a Li e γ(Li). Pela formulade mudanca de variaveis para integrais de 1-formas∫
∂R
α =∫∂[0,1]2
α.(4.3)
Mas, pela segunda parte, ∫[0,1]2
ω =∫∂[0,1]2
α.
Combinando esta igualdade com (4.2) e (4.3), concluımos que∫R
ω =∫γ(L1)
α+∫γ(L2)
α−∫γ(L3)
α−∫γ(L4)
α,
que e o teorema de Stokes sobre R.

5. APLICACOES 107
4.2. Demonstracao do teorema de Stokes em Rn. Levando emconta que
• a fronteira de um encadeamento e igual ao encadeamento das fron-teiras de suas parcelas;
• a integral sobre um encadeamento e igual a soma das integrais sobrecada parcela do encadeamento;
vemos que basta provar o resultado no caso em que E e uma 2-celula.Sejam, entao, R = [a, a′]× [b, b′],
σ : R→ Rn
uma 2-celula, e
L1 = [a, a′]× bL2 = a′ × [b, b′]
L3 = [a, a′]× b′L4 = a × [b, b′].
os lados do retangulo R. Entao a fronteira de σ e dada por
∂σ = σ(L1) + σ(L2)− σ(L3)− σ(L4).
Se α ∈ Ω1(U) entao,
σ∗(α) ∈ Ω1(V ),
onde V ⊂ R2 e um retangulo aberto que contem R. Mas,∫∂σ
α =∫∂R
σ∗(α).
Contudo, ja sabemos do §4.1 que o teorema de Stokes se aplica a esta ultimaintegral, donde ∫
∂R
σ∗(α) =∫R
d(σ∗(α)).
Entretanto, pela definicao de integral de uma 2-forma∫σ
dα =∫R
σ∗(dα).
Como σ∗(dα) = dσ∗(α), podemos concluir que∫σ
dα =∫∂σ
α,
provando, assim, o teorema de Stokes no comeco da secao.
5. Aplicacoes
Nesta secao consideraremos varias aplicacoes do teorema de Stokes e das 2-formas a problemas de fısica.

108 3. 2-FORMAS
5.1. Circulacao e rotacional. Seja F : U → Rn um campo vetorialdefinido em uma regiao U do plano. Comecamos relembrando as definicoesdas formas associada a este campo. A 1-forma associada a F e
τF = F1dx1 + F2dx2 + F3dx3,
e a 2-forma, utilizada para calcular o fluxo e
ΦF = F1dx2 ∧ dx3 − F2dx1 ∧ dx3 + F3dx1 ∧ dx2.
Calculando a diferencial de τF , obtemos
dτF =∑
1≤i<j≤3
(∂Fi∂xj
− ∂Fj∂xi
)dxi ∧ dxj ,
que, por sua vez, corresponde a 2-forma do fluxo do campo(∂F2
∂x3− ∂F3
∂x2,∂F3
∂x1− ∂F1
∂x3,∂F1
∂x2− ∂F2
∂x1
).
Este ultimo campo e conhecido como o rotacional de F , e e denotado porrot(F ). Portanto,
dτF = Φrot(F ).(5.1)
Esta igualdade nos permite enunciar o teorema de Stokes na versao que serautilizada na maioria das aplicacoes.
TEOREMA DE STOKES. Seja σ uma 2-celula e F um campo vetorialdefinido em uma regiao aberta do plano que contem σ, entao∫
∂σ
τF =∫σ
Φrot(F ).
Para entender o significado fısico do rotacional, lembre-se que a circulacaode F em uma curva fechada C, totalmente contida em U , foi definida no §5.1como
ΓF (C) =∫C
F.
Supondo que C e igual a fronteira de uma 2-celula σ totalmente contida em U ,o teorema de Stokes nos da
ΓF (C) =∫∂σ
τF =∫σ
dτF ;
Isto e
ΓF (C) =∫σ
Φrot(F ).
Portanto, se F tem rotacional zero, entao sua circulacao e zero ao longo dequalquer curva fechada que seja fronteira de uma 2-celula inteiramente contidaem U . A parte da frase em italico e extremamente importante, e voltaremos aela ao final do paragrafo. Como o rotacional ser zero implica que a circulacaoe zero – ao menos sob certas hipoteses – deve haver alguma ligacao entre orotacional e o fato do campo nao ter redemoinhos; veja §5.1.

5. APLICACOES 109
Para entender isto melhor, vamos tentar relacionar o rotacional diretamentea existencia de movimento angular em um campo, sem recorrer a circulacao.Digamos que V representa o campo de velocidades de um fluxo bidimensional.Voce pode imaginar isto como uma aproximacao do que ocorre quando umalamina muito fina de agua que escorre sobre uma superfıcie plana. Entao,
V(x1, x2, x3) = (v1(x1, x2, x3), v2(x1, x2, x3), 0),
uma vez que o campo e bidimensional. Calculando o rotacional, obtemos rot =(0, 0, ω), onde
ω =∂v2∂x
− ∂v1∂y
.
Para descobrir o que ω representa consideremos fiapo de nylon, na formade um angulo reto, totalmente imerso no fluido.
q2
p
δy
OO
δy// q1
Denotaremos por p o vertice do angulo, e por q1 e q2 as extremidades decada um dos segmentos que formam o fiapo. Para facilitar os calculos, digamosque estamos considerando o fiapo no exato momento em que pq1 e paralelo aoeixo x e pq2 e paralelo ao eixo y. Como o fiapo e muito pequeno, os segmentossao muito curtos: pq1 tem comprimento δx e pq2 tem comprimento δy. Adiferenca entre a componente da velocidade ao longo do eixo y em q1 e em p eigual a
v2(p+ δx)− v2(p).
Como δx e muito pequeno, esta diferenca esta muito proxima de
∂v2∂x
· δx.
Isto significa que, em um tempo muito curto δt, o ponto q1 percorre a distancia
∂v2∂x
· δxδt
na direcao y. Como a distancia de p a q1 e igual a δx, o ponto q1 percorre umangulo
arctan(∂v2∂x
δt
)com centro em p. Entretanto, se θ e muito pequeno, arctan(θ) e aproximada-mente igual a θ. Assumindo que este e o caso acima –ja que δt e um tempomuito curto – vemos que o angulo percorrido por q1, relativamente a p, e apro-ximadamente igual a
∂v2∂x
δt.

110 3. 2-FORMAS
Portanto, a velocidade angular instantanea de pq1 em torno do eixo z e aproxi-madamente igual a
∂v2∂x
.
Um calculo similar mostra que a velocidade angular instantanea de pq2 emtorno do eixo z e aproximadamente igual a
−∂v1∂y
.
Portanto, a velocidade angular media do fiapo em forma de angulo reto e iguala
12ω =
12
rot(V).
Se V e o campo de velocidades de um fluido, a quantidade
ω = rot(V),
e conhecida como a vorticidade de V, e mede a tendencia que um pequenofiapo tem de rodar no fluido. Um campo de velocidades cuja vorticidade enula e chamado de irrotacional ou solenoidal. Note que o fato de um fluidoter vorticidade nao nula nao implica que tenha um movimento rotatorio global;isto e, que haja redemoinhos no fluido. Por exemplo,
V = (y, 0, 0)
nao exibe redemoinhos. Porem, a componente da velocidade ao longo do eixox aumenta com a distancia entre o ponto e o eixo x. Isto faz com que um fiapode nylon paralelo a y tenda a rodar enquanto e arrastado pelo fluido. De fato,um calculo simples, que sera deixado exercıcio, mostra que este fluido temvorticidade −1.
Contudo, a relacao entre rotacional e circulacao e mais sutil do que nossoscomentarios acima podem sugerir. Por exemplo, se ha uma haste perpendi-cular ao fluxo, podemos ter rotacional zero em todo lugar acompanhado decirculacao nao nula sobre curvas fechadas que dao a volta ao cilindro. E porisso que precisamos acrescentar a hipotese de que a curva fosse fronteira deuma 2-celula inteiramente contida emU , nas consideracoes que fizemos acima.Se ha um obstaculo no fluido, ela esta fora da 2-celula. Veremos um exemplode um campo com estas propriedades no §5.7.
5.2. A integral de superfıcie. Ao contrario do que fizemos ate aqui,vamos considerar neste paragrafo uma superfıcie S de R3 descrita como oconjunto de zeros de uma funcao diferenciavel. Mais precisamente, seja Uuma regiao de R3 e f ∈ O(U). Definimos
Sf = p ∈ R3 : f(p) = 0;
cf. exercıcio 20 da pagina 20. Muitas superfıcies bem conhecidas, e ja uti-lizadas neste livro, podem ser descritas desta maneira, entre elas a esfera, o

5. APLICACOES 111
cone, o paraboloide e o cilindro. Todos os exemplos de superfıcies mencio-nados acima tambem podem ser descritos a partir de uma parametrizacao, e eesta exatamente a situacao que queremos estudar neste paragrafo:
uma superfıcie Sf , para algum f ∈ O(U), que admite umaparametrizacao σ : R→ U , onde R e um retangulo de R2.
Supondo que o gradiente de f nao se anula em U , podemos definir ocampo
nf =∇f‖∇f‖
na regiao U . No caso particular em que ` e uma funcao linear, a superfıcie S` eum plano, e tem gradiente constante. Se u e v forem dois paralelos a este planoe p ∈ S`, entao ΦG`
(p, u, v) e o volume do solido determinado por u, v e pelovetor
G`(p) =(∇`)(p)‖(∇`)(p)‖
.
Como este ultimo vetor e normal a Sf e tem norma 1, o volume do solidocoincide com a area do paralelogramo definido por u e v. Por isso, a formadiferencial ΦGf
e conhecida como elemento de area e denotada por dA. Note,contudo, que trata-se apenas de uma notacao: dA nao corresponde, em geral, adiferencial total de nenhuma funcao.
Em geral, os vetores do campo G sao unitarios e normais a Sf em cadaponto desta superfıcie. Portanto, o fluxo deste campo por Sf deve ser igual aarea de Sf . Em outras palavras,
area de Sf =∫σ
dA,
ondedA = Φ∇f/‖∇f‖
e σ e uma parametrizaca de Sf . Considere, por exemplo, a esfera x2+y2+z2 =a2. Neste caso, f = x2 + y2 + z2 − a2, de modo que
nf =1r(x, y, z),
e um campo central, onde r =√x2 + y2 + z2, como usual. Parametrizando
Sf em coordenadas esfericas
σe(x, y, z) = (a cos(θ) sen(φ), a sen(θ) sen(φ), a cos(φ)),
onde a e o raio (constante!) da esfera. Daı,
σ∗e(dx ∧ dy) = a2 sen(φ) cos(φ)dθ ∧ dφσ∗e(dx ∧ dz) = −a2 sen(θ) sen2(φ)dθ ∧ dφσ∗e(dy ∧ dz) = a2 cos(θ) sen2(φ)dθ ∧ dφ.
Portanto, apos os devidos cancelamentos,
σ∗e(dA) = a2 sen(φ)dθ ∧ dφ.

112 3. 2-FORMAS
Logo, a area da esfera e igual a∫σe
dA =∫ 2π
0
∫ 2π
0
a2 sen(φ)dθ ∧ dφ = 4πa2,
como seria de esperar.Suponha, agora, que ha outra funcao ψ, definida na mesma regiao U . Mul-
tiplicando ψ por dA obtemos uma nova 2-forma em U , cuja integral∫σ
ψdA
e conhecida como a integral de superfıcie de ψ em em Sf . Como ψ e umafuncao que toma valores reais,
ψdA = Φψ∇f/‖∇f‖.
Vejamos o que acontece quando F ∈ X(U), f ∈ O(U) e ψ e igual ao produtoescalar dos campos F e nf . Neste caso,
(F · nf )∇f‖∇f‖
= Projnf(F ),
que e a projecao do campo F na direcao da normal a Sf . Contudo, se u e v saotangentes a Sf em p, entao u × v aponta na direcao da normal a Sf , de modoque
F (p) · (u× v) = Projnf(F )(p) · (u× v).
Portanto,
((F · nf )dA)(p, u, v) = ΦF (p, u, v),
desde que u e v sejam tangentes a Sf em p. Como esta hipotese e satisfeitaquando
u =∂σ
∂se v =
∂σ
∂t,
temos que
σ∗((F · nf )dA) = σ∗(ΦF ).
Logo, a integral de superfıcie∫σ
(F · nf )dA =∫R
σ∗((F · nf )dA)
e igual a ∫R
σ∗(ΦF ) =∫σ
ΦF .
Esta igualdade desempenhara um papel importante na interpretacao vetorialque daremos ao teorema de Stokes no proximo paragrafo.

5. APLICACOES 113
5.3. A variante vetorial. Antes de passar as aplicacoes do teorema deStokes ao eletromagnetismo, precisamos considerar sua traducao em termos daanalise vetorial tradicional. Isto e, sem usar formas diferenciais.
Comecaremos com a versao bidimensional do teorema de Stokes, que foioriginalmente enunciada por George Green em sua monografia [6, p. ].
TEOREMA DE GREEN. Seja A uma regiao do plano parametrizada porum retangulo. Se F = (F1, F2) e um campo definido em uma regiao do planoque contem A, entao∫
∂A
F =∫A
(∂F1
∂x2− ∂F2
∂x1
)dxdy.
Seja σ uma 1-celula contida em uma regiao U de R3. Para poder enunciara versao vetorial do teorema de Stokes em dimensao 3, precisamos explicitar∫
σ
dτF
em termos de uma integral dupla em cujo integrando o rotacional aparece. Mas,∫σ
dτF =∫σ
Φrot(F ),
onde σ e uma 2-celula sobre o retangulo planoR. Contudo, usando a igualdadeentre integral do fluxo e integral de superfıcie enunciada ao final do §5.2 temosque ∫
σ
Φrot(F ) =∫σ
ψ(rot(F ) ·GF )dA.
Isto nos permite enunciar a versao vetorial do teorema de Stokes.
TEOREMA DE STOKES (versao vetorial). Seja σ uma 2-celula. Se F =(F1, F2, F3) e um campo definido em uma regiao aberta do plano que contemσ, entao ∫
∂σ
F =∫σ
(rot(F ) ·N)dσ.
5.4. Campo eletrico de uma carga pontual. Comecamos nossasaplicacoes ao eletromagnetismo calculando o fluxo do campo eletrico corres-pondente a uma carga pontual q > 0 atraves de uma esfera. Pela lei de Cou-lomb, este campo e dado por
E(x, y, z) =kq
(x2 + y2 + z2)3/2(x, y, z),
onde k e uma constante, que nao precisamos explicitar.Para calcular o fluxo, usamos a 2-forma correspondente, que neste caso e
ΦE =kq
(x2 + y2 + z2)3/2(xdy ∧ dz − ydx ∧ dz + zdx ∧ dy).
Como o campo e central, e a integracao sera sobre a superfıcie de uma esfera,e melhor usar coordenadas esfericas:
S(x, y, z) = (r cos(θ) sen(φ), r sen(θ) sen(φ), r cos(φ)),

114 3. 2-FORMAS
onde r e o raio (constante!) da esfera. Daı,
S∗(dx ∧ dy) = r2 sen(φ) cos(φ)dθ ∧ dφS∗(dx ∧ dz) = r2 sen(θ) sen2(φ)dθ ∧ dφS∗(dy ∧ dz) = −r2 cos(θ) sen2(φ)dθ ∧ dφ.
Portanto, apos os devidos cancelamentos,
S∗(ΦE) = −kq cos2(φ) sen(φ)dθ ∧ dφ.
Portanto, o fluxo total atraves da esfera e∫S
ΦE =∫R
S∗(ΦE) =∫ 2π
0
∫ π
0
−kq cos2(φ) sen(φ)dθdφ,
que e facilmente integravel e da∫S
ΦE = 2πkq cos2(φ)∣∣∣π0
= 4πkq.(5.2)
Note que nao e facil calcular, desta maneira, o valor do fluxo atraves desuperfıcies mais gerais. Afinal, se a parametrizacao for muito complicada, oscalculos podem ficar intrataveis. No entanto, com a ajuda da versao do teoremade Stokes que apresentaremos no proximo capıtulo, sera facil determinar ofluxo de uma carga pontual atraves de qualquer superfıcie. E mais, o resultadogeral sera uma consequencia dos calculos deste paragrafo. E como se isto naobastasse, poderemos tratar tambem do caso de uma quantidade finita qualquerde cargas pontuais.
5.5. As equacoes de Maxwell. O estudo dos campos eletromagneti-cos esta completamente contido nas equacoes introduzidas por J. C. Maxwellem 1873. Das quatro equacoes, duas dependem de conceitos que ainda naointroduzimos, as outras duas podem ser formuladas da seguinte maneira
rot(E) = −∂B∂t
rot(B) =1c2
(∂E∂t
+1ε0J
),
onde E e B representam, respectivamente, os campos eletrico e magnetico, Je a densidade de corrente (que tambem e um vetor), c e ε0 sao constantes cujosignificado fısico nao precisamos considerar.
Segundo a primeira equacao, o rotacional do campo eletrico e dado poruma variacao do campo magnetico com o tempo. Ja a segunda equacao nosdiz que o rotacional do campo magnetico depende, nao apenas da variacao docampo eletrico, mas tambem da densidade de corrente.
Para simplificar, consideraremos apenas o caso estatico, em que nenhumadas quantidades acima varia com o tempo. Temos, assim, que o vetor J e

5. APLICACOES 115
constante, e que as derivadas de E e B com respeito a t sao nulas. Portanto, asequacoes se simplificam para
rot(E) = 0
rot(B) =J
c2ε0.
Seja C uma curva fechada no espaco. Se C for a fronteira de um 2-encadeamento S, entao, pelo teorema de Stokes∫
C
E =∫∂S
τE =∫S
dτE.
Contudo, pela equacao (5.1),
dτE = Φrot(E) = 0,
donde ∫C
E = 0.
Portanto, o campo eletrostatico tem circulacao nula.A situacao e completamente diferente no caso do campo magnetico. Re-
petindo o argumento acima para B, vemos que∫C
B =∫S
Φrot(B).
Mas, pela equacao de Maxwell,
Φrot(B) = ΦJ/c2ε0 =1c2ε0
ΦJ
donde, ∫C
B =1c2ε0
∫S
ΦJ .(5.3)
Resta-nos entender o que esta ultima integral representa. Para isto precisamoscompreender melhor o significado de J .
Imagine a corrente como um fluxo de eletrons ao longo de um fio e con-sidere uma secao transversal T do fio. Se a corrente nao varia com o tempo,entao os eletrons que passam por um ponto p ∈ T tem sempre a mesma ve-locidade v(p). Se a densidade de carga no fio e constante e igual a ρ entaoJ(p) = ρv(p). Portanto, ∫
T
ΦJ
representa a quantidade total de carga que flui atraves da secao T ; isto e, aintegral representa a corrente atraves de T . Assim, voltando a equacao (5.3),podemos reescreve-la na forma ∫
C
B =ICc2ε0
.
onde IC representa a corrente que passa atraves da curva fechada C. Estaequacao e conhecida como lei de Ampere.

116 3. 2-FORMAS
A lei de Ampere pode ser usada para calcular a intensidade do campomagnetico de um fio reto infinito de espessura desprezıvel, estendido ao longodo eixo z. Porem, para viabilizar este calculo precisamos de uma hipoteseadicional, que resulta da simetria do campo:
sobre qualquer cilindro cujo eixo e o proprio fio, o campoe constante, tangente ao cilindro e perpendicular ao fio.
Em particular, o campo e constante sobre uma circunferencia de raio r, dese-nhada sobre um plano perpendicular ao fio, cujo centro e o ponto de intersecaodo fio com o plano. Denotando por Cr esta circunferencia, temos que∫
Cr
B = 2πr‖B(p)‖, para qualquer p ∈ Cr.
Portanto, pela lei de Ampere,
2πr‖B(p)‖ =ICc2ε0
,
donde
‖B(p)‖ =1
2πc2ε0ICr.
Como r e a distancia de p = (x, y, z) ao fio, podemos reescrever esta formulacomo
‖B(x, y, z)‖ =1
2πc2ε0IC√x2 + y2
.
Finalmente, levando em conta que o campo e tangente a Cr,
B(x, y, z) =1
2πc2ε0IC
(x2 + y2)(−y, x, 0).
Podemos obter esta mesma formula, sem recorrer a nenhuma hipotese extra,calculando o potencial do campo; veja [11, p. 41].
5.6. Lema de Poincare. Comecamos relembrando as definicoes de for-mas exatas e fechadas. Seja α uma 1-forma diferencial definida em uma regiaoU de Rn. Dizemos que α e fechada se dα = 0, e que e exata se existef ∈ O(U) tal que α = df . Mas, como vimos no §2.5, d(df) = 0; isto e, todaforma exata e fechada. Nosso objetivo e discutir a recıproca desta afirmacao;isto e:
toda 1-forma fechada e exata?Como a resposta e “nem sempre”, precisamos entender de que a resposta de-pende.
Comecamos estudando uma regiao sobre a qual todas as formas fechadassao exatas. Lembre-se que uma regiaoU do Rn e convexa se, dados dois pontosquaisquer p e q em U , o segmento de reta que vai de p a q esta totalmentecontido em U .
LEMA DE POINCARE (para 1-formas). Toda 1-forma fechada definidaem uma regiao convexa de Rn e exata.

5. APLICACOES 117
DEMONSTRACAO. Seja U uma regiao de Rn e α uma forma fechada de-finida em U . Tendo em vista o teorema do §5.2, basta mostrar que a circulacaode α e zero sobre qualquer 1-encadeamento fechado E. Isto e facil de provardesde que E seja a fronteira de um 2-encadeamento E . Se for este o caso,entao, pelo teorema de Stokes,∫
E
α =∫∂Eα =
∫Edα = 0,
ja que α e fechada. Portanto, para completar a demonstracao basta construir Ea partir de E.
Para isto suponha que
E = σ1 + · · ·+ σm,
onde os σs sao 1-celulas parametrizadas por [0, 1] e digamos que σi(0) = pi.Como o encadeamento e fechado, temos que
σi(1) = pi+1 e σm(1) = p1.
Seja, agora, q um ponto que nao pertence aE, e considere as 2-celulas definidaspor
Si(s, t) = (1− s)p0 + tσi(t),para (s, t) ∈ [0, 1]2. Denotando por ri a reta que vai de q a pi, podemosconsiderar esta 2-celula como um triangulo (curvilıneo), com vertice em q,cujos lados sao as retas ri e ri+1. Mais precisamente,
∂(Si) = σi − ri+1 + ri,
Portanto, se
E =m∑i=1
Si,
entao
E =m∑i=1
∂(Si) =m∑i=1
(σi − ri+1 + ri);
cuja forma reduzida e
E =m∑i=1
σi = E.
Note que a construcao de E assume, implicitamente, que a regiao U e convexa,do contrario nao poderıamos garantir que as retas ri pertencessem a U .
Combinando o lema de Poincare com o teorema do §5.2, obtemos umacaracterizacao bastante simples dos campos conservativos em regioes conve-xas.
COROLARIO. Um campo F , definido em uma regiao convexa de Rn, econservativo se, e somente se, τF e uma forma fechada.
Quando n = 3 este resultado pode ser reformulado em termos do rotacio-nal do campo.

118 3. 2-FORMAS
COROLARIO. Um campo F , definido em uma regiao convexa de R3, econservativo se, e somente se, rot(F ) = 0 e uma forma fechada.
5.7. Formas fechadas, nao exatas. Tendo mostrado que toda formafechada sobre um regiao aberta convexa e exata, passamos agora ao caso emque a regiao nao e convexa. Para isto consideramos o campo magnetico deum fio infinito, estendido ao longo do eixo z. Como o campo e constante aolongo de qualquer cilindro cujo eixo e o fio, basta considerar o que acontece emum plano perpendicular a z, digamos xy. Restringindo o campo a este planoobtemos
B(x, y) =1
(x2 + y2)(−y, x, 0),
onde escolhemos a intensidade da corrente de modo que o quociente dos termosconstantes seja 1. Esta ultima hipotese nao e necessaria, e so foi feita parafacilitar a notacao. Este campo esta definido na regiao U = R2 \ (0, 0) e
τ = τB =−y
x2 + y2dx+
x
x2 + y2dy.
Um calculo direto, que sera deixado por sua conta, mostra que dτ = 0.Logo a forma τ e fechada. Considere, agora, a curva C : [0, 2π] → U quecorresponde a circunferencia de raio 1 parametrizada por
C(t) = (cos t, sent).
Como sen2(t) + cos2(t) = 1,
C∗(τ) = −sen(t)d(cos(t)) + cos td(sen(t)) = (sen2(t) + cos2 t)dt = dt.
Mas isto significa que, ∫C
τ =∫ 2π
0
dt = 2π.
Contudo, pelo corolario 5.3, se τ fosse uma forma exata, a integral deveriater dado zero, porque o caminho e fechado. Portanto, τ nao pode ser exata, eobtivemos o exemplo desejado.
Vamos imaginar, agora, que B define, nao um campo magnetico, mas simum campo de velocidades em R2 \ (0, 0). Podemos visualizar isto comomodelando um fluxo laminar definido em uma superfıcie na qual esta inseridaum prego (situado na origem do sistema de eixos). A presenca deste prego fazcom que o campo nao esteja definido em (0, 0). Utilizando a terminologia in-troduzida no §5.1 temos, assim um campo de vorticidade zero, cuja circulacaosobre uma curva fechada que envolve a origem e nao nula.
Voltando as formas, voce pode ter ficado com a impressao de que, seusando apenas funcoes racionais bem simples, conseguimos uma 1-forma naoexata em R2 \ (0, 0), que dizer entao se usarmos uma combinacao de senos,co-senos, logaritmos e exponenciais! A verdade, e que nada essencialmentepior que
τ = τB =−y
x2 + y2dx+
x
x2 + y2dy
ocorre, como mostra o proximo teorema.

6. RECAPITULANDO 119
TEOREMA. Seja U = R2 \ (0, 0). Se α ∈ Ω1(U) e fechada, entao
α = kτ + df,
para algum f ∈ O(U) e algum k ∈ R.
DEMONSTRACAO. Seja σ a 1-celula que corresponde a uma circunferen-cia com centro na origem e raio 1; isto e,
σ(θ) = (cos(θ), sen(θ)) onde 0 ≤ θ ≤ 2π.
Considere
k =12π
∫σ
α,
que, claramente, e um numero real. Seja, agora, E um encadeamento fechadoqualquer em U . Como α e fechada, temos pelo teorema de Stokes que∫
E−Cα = 0.
Portanto, ∫E
α =∫C
α = 2πk.
Se k = 0, entao pelo teorema do §5.2, α e exata. Logo, existe f ∈ O(U)tal que df = α, e o teorema esta provado neste caso. Suponha, agora, quek 6= 0 e considere a forma
β = α− kτ.
Como ∫C
β =∫C
α− k
∫C
τ = 2πk − k2π = 0,
podemos concluir, da parte anterior do argumento, que β = df para algumafuncao f ∈ O(U). Portanto, que
α− kτ = β = df ;
donde α = kτ + df , como querıamos mostrar.
6. Recapitulando
Nesta secao recapitulamos tudo o que foi feito neste segundo capıtulo. Noteque seguimos os mesmos passos utilizados na definicao de 1-formas e suasintegrais no capıtulo anterior.
Ao longo de toda esta secao U sera uma regiao de Rn e V uma regiao deRm.

120 3. 2-FORMAS
6.1. Definicao. Uma 2-forma diferencial e uma aplicacao
α : U × Rn × Rn → R,
que satisfaz as seguintes condicoes:(1) fixando p0 ∈ U , e considerando ω(p0, v, w) como funcao apenas de
v e w, temos uma aplicacao bilinear alternada de Rn × Rn em R;(2) fixando v0, w0 ∈ Rn, e considerando ω(p, v0, w0) como funcao ape-
nas de p, temos uma funcao diferenciavel de U em R.O conjunto das 2-formas em U , que e denotado por Ω2(U), e um espaco ve-torial relativamente a soma de formas, e a sua multiplicacao por escalares,conforme definidas no §2.2.
6.2. Produto exterior. Sejam α e β 1-formas diferenciais definidas emU , definimos o produto exterior α ∧ β em um ponto
(p, v, w) ∈ U × Rn × Rn
pela formula
(α ∧ β)(p, v, w) = det[α(p, v) β(p, v)α(p, w) β(p, w)
].
A operacao assim definida satisfaz as seguintes propriedadesAnti-comutatividade: α ∧ β = −β ∧ α;Distributividade: α+ kβ) ∧ η = α ∧ η + k(β ∧ η);
onde η ∈ Ω1(U) e outra 1-forma e k e um escalar. A anti-comutatividadeimplica que
α ∧ α = 0,para qualquer 1-forma α em U .
O produto exterior nos permite expressar qualquer 2-forma em U como
a1dx1 ∧ dx2 + a2dx1 ∧ dx3 + a3dx2 ∧ dx3,
onde a1, a2, a3 ∈ O(U). Podemos usa-lo tambem para definir a diferencialtotal da 1-forma
α =n∑i=1
bidxi,
como sendo
d(α) =n∑i=1
dbi ∧ dxi.
6.3. Campos e formas. A um campo vetorial F : U → R3 cujasfuncoes coordenadas sao F1, F2, F3, fazemos corresponder a 2-forma
ΦF = F1dx2 ∧ dx3 − F2dx1 ∧ dx3 + F3dx1 ∧ dx2,
onde x1, x2 e x3 sao as coordenadas de R3 Esta correspondencia e bijetiva,e nos permite tratar a analise vetorial seja na linguagem de formas, seja nalinguagem de campos.

6. RECAPITULANDO 121
6.4. Superfıcies. Uma 2-celula em U e uma aplicacao diferenciavelC : R→ U , onde
R = [a, a′]× [b, b′]e um retangulo em R com a′ > a e b′ > b. Denotando por L1, L2, L3 e L4
os lados consecutivos de R parametrizados de maneira que R e percorrido nosentido anti-horario, temos que a fronteira de σ e a forma reduzida do encade-amento de curvas
σ(L1) + σ(L2)− σ(L3)− σ(L4).
Um 2-encadeamento em U e uma expressao da forma
E = c1σ1 + · · ·+ ckσk,
onde σ1, . . . , σk sao 2-celula em U e os cs sao numeros inteiros. A fronteirade E e a forma reduzida do encadeamento de curvas
c1∂σ1 + · · ·+ ck∂σk.
6.5. Imagem inversa. Dada uma aplicacao diferenciavel φ : V → U ,onde V e uma regiao aberta de Rm, definimos a imagem inversa de uma 2-forma
ω =∑
1≤i<j≤n
aijdxi ∧ dxj ∈ Ω2(U),
como sendoφ∗(α) =
∑1≤i<j≤n
(aij · φ)dφi ∧ dφj .
onde φ1, . . . , φn sao as funcoes coordenadas de φ. A imagem inversa deter-mina uma transformacao linear de Ω2(U) em Ω2(V ) que satisfaz
σ∗(df) = dσ∗(f).
6.6. Integral. Seja σ uma superfıcie em U parametrizada pelo retanguloplano
R = [a, a′]× [b, a′].A imagem inversa de ω ∈ Ω2(U) por σ pode ser escrita na forma
σ∗(ω) = gdt1 ∧ dt2,onde g = g(t1, t2) e uma funcao diferenciavel em R. A integral de ω sobre σe dada por ∫
σ
ω =∫R
σ∗(ω) =∫ a′
a
∫ b′
b
gdt1 ∧ dt2,
que e a integral usual da funcao g no retangulo R. A integral de ω ao longo do2-encadeamento
E = c1σ1 + · · ·+ ckσk,
e definida como sendo∫E
ω = c1
∫σ1
ω + · · ·+ ck
∫σk
ω.

122 3. 2-FORMAS
6.7. Teorema de Stokes. Seja σ uma superfıcie. O principal resultadodeste capıtulo e o seguinte teorema, que conecta a integral de uma 1-forma nafronteira de σ com a integral de sua diferencial sobre σ.
TEOREMA DE STOKES. Seja α uma 1-forma diferencial definida emuma regiao aberta U de Rn. Se E e um 2-encadeamento contido em U , entao∫
∂E
α =∫E
dα.
7. Exercıcios
1. Parametrize cada uma das superfıcies dadas abaixo:(a) o cilindro x2 + y2 = a2;(b) o cone a2z2 = x2 + y2;(c) o paraboloide a2z = x2 + y2;(d) o hiperboloide z2 = x2 − y2.
SUGESTAO: use funcoes hiperbolicas para parametrizar o hiperboloide.
2. Calcule o fluxo dos campos abaixo atraves das superfıcies indicadas:(a) F (x, y, z) = (x2,−y3, z) atraves do quadrado [0, 1]× [0, 1]× 2;(b) F (x, y, z) = (3xy2, 3x2y, 0) atraves da circunferencia de raio unitario
e centro na origem, contida no plano z = 0;(c) F (x, y, z) = (x3, y3, 0) atraves circunferencia de raio unitario e centro
na origem, contida no plano z = 0;(d) F (x, y, z) = (3xy2, 3x2y, z3) atraves da esfera de raio unitario e cen-
tro na origem;(e) F (x, y, z) = (x, y, z) atraves da esfera de raio unitario e centro na
origem;
3. Calcule as imagens inversas das seguintes formas sob as aplicacoes indica-das:(a) xdy ∧ dz sob σ(u, v) = (cos(uv), sen(uv), uv2);(b) xydz ∧ dx sob σ(u, v) = (u cos(v), u+ v, u sen(v));(c) z3dx ∧ dy sob σ(u, v) = (eu + v, eu − v, 2);(d) dx ∧ dy sob a transformacao de coordenadas polares para coordenadas
cartesianas;(e) xdy ∧ dz + ydz ∧ dx+ zdx ∧ dy sob a transformacao de coordenadas
esfericas para coordenadas cartesianas;
4. Calcule a integral da forma xdy ∧ dz + ydx ∧ dy nos encadeamentos indi-cados:(a) a 2-celula dada por
x = u+ v, y = u2 − v2 e z = uv
com 0 ≤ u ≤ 1 e 0 ≤ v ≤ 1;

7. EXERCICIOS 123
(b) a porcao do cilindro x2 + y2 = 1 com 0 ≤ z ≤ 1, orientada de modoque o vetor normal aponte para fora;
(c) a superfıcie do cubo [0, 1]× [0, 1]× [0, 1], sem a tampa superior, orien-tado de modo que o vetor normal aponte para fora.
5. Calcule a integral da 2-forma (x2 + y2)dx ∧ dy na regiao D dentro doquadrado |x|+ |y| = 4 e fora do cırculo x2 + y2 = 1.
6. Calcule a integral do fluxo do rotacional de cada um dos campos abaixo nassuperfıcies indicadas:(a) F (x, y, z) = (y, z, x) no triangulo cujos vertices sao (1, 0, 0), (0, 1, 0)
e (0, 0, 1);(b) F (x, y, z) = (x+y, y−z, x+y+z) no hemisferio x2 +y2 +z2 = a2
e z ≥ 0.
7. Considere o campo vetorial F (x, y, z) = (yez, xez, xyez). Seja E um 2-encadeamento fechado. Calcule a integral de F ao longo da fronteira deE.
8. Calcule o rotacional de um campo central.
9. Calcule a vorticidade de cada um dos campos de velocidades abaixo. Quaisdeles representam um campo irrotacional?(a) F (x, y, z) = (ay, 0, 0);(b) F (x, y, z) = (a/r2, 0, 0);(c) F (x, y, z) = (ay, 0, 0);(d) F (x, y, z) = (0, arn, 0);
onde a 6= 0 e uma constante e r =√x2 + y2 + z2.
10. Seja C o 1-encadeamento fechado que limita um 2-encadeamento conexoE. Mostre que a area de E e igual a
12
∫C
xdy − ydx.
11. Calcule a area das seguintes regioes:(a) a regiao limitada pela hipocicloide
x = a cos3(t) e y = a sen3(t),
onde 0 ≤ t ≤ 2 e a > 0;(b) a regiao limitada por um arco de cicloide
x = a(t− sen(t)) e y = a(1− cos(t)),
com a > 0 e 0 ≤ t ≤ 2;
12. Seja F (x, y, z) = (x, 0,−2z) um campo definido em todo o R3.(a) Determine ΦF .

124 3. 2-FORMAS
(b) Determine uma parametrizacao para a esfera x2 + y2 + z2 = 1, demodo que o vetor normal sempre aponte para fora.
(c) Calcule o fluxo deF atraves da esfera x2+y2+z2 = 1 com a orientacaodeterminada acima.
13. Mostramos no §2.4 que se λ1, λ2 e λ3 sao 1-formas constantes e k e umescalar, entao
(λ1 + kλ2) ∧ λ3 = λ1 ∧ λ3 + k(λ2 ∧ λ3).
Use esta propriedade e a anti-comutatividade de ∧ para provar que
λ1 ∧ (λ2 + kλ3) = λ1 ∧ λ2 + k(λ1 ∧ λ3).
14. Seja σ uma 2-celula definida em uma regiao U de R3. Suponha que F e umcampo de vetores definido em U e cujo rotacional e tangente a σ em todosos seus pontos. Calcule
∫∂στF .
15. O campo eletrico de um fio infinito cuja densidade de carga e uniforme edado por
E(x, y, z) =k
x2 + y2(x, y),
onde k e uma constante Calcule o fluxo deste campo atraves de um cilindrocujo eixo e o proprio fio.
16. Seja F um campo vetorial definido em uma regiao U de R3. Prove as se-guintes formulas:(a) rot(∇g) = 0;(b) rot(gF ) = [∇g, F ] + g rot(F );
onde g ∈ O(U). A definicao do comutador [, ] pode ser encontrada na pagina11.SUGESTAO: traduza as afirmacoes em termos de formas diferenciais.
17. Determine formulas para o rotacional de um campo de R3
(a) em coordenadas cilındricas;(b) em coordenadas esfericas.
18. Seja σ uma 2-celula contida em uma regiao U de R3 e f, g ∈ O(U). Proveas seguintes identidades:
(a)∫∂σ
τf∇g =∫σ
Φ∇f×∇g;
(b)∫∂σ
τf∇g+g∇f = 0;
19. Seja U a regiao de R2 definida por x > 0 e seja
α =−y
x2 + y2dx+
−xx2 + y2
dy.
(a) Mostre que U e convexa.

8. PROBLEMAS 125
(b) Mostre que α e uma 1-forma fechada em U .(c) Mostre que α e exata em U e determine f ∈ O(U) de modo que α =
df .(d) Explique porque isto nao contradiz a propriedade de α estabelecida no
§5.7.
20. Seja r =√x2 + y2 e considere um campo no plano definido por F (x, y) =
(−g(r)y, g(r)x), onde g e uma funcao diferenciavel de uma variavel.(a) Determine uma condicao necessaria e suficiente para que τF seja fe-
chada.(b) Resolva a equacao diferencial obtida em (a) e determine g como funcao
de r.(c) Em que regiao o campo assim obtido esta definido? Este campo e con-
servativo? Justifique detalhadamente sua resposta.SUGESTAO: a equacao diferencial obtida em (a) fica facil de resolver sevoce multiplica-la por r e usar a regra da derivacao do produto.
8. Problemas
1. Prove a distributividade do produto exterior de 1-formas nao constantes so-bre a adicao.
2. Sejam x1, x2, y1, y2 coordenadas de R4 e seja xdy a 1-forma de R4 definidapor
xdy = dx1 ∧ dy1 + dx2 ∧ dy2.(a) Calcule d(xdy). Esta e uma 2-forma de R4 que vamos denotar por
dx ∧ dy (por razoes obvias).(b) Calcule a integral de dx ∧ dy em uma superfıcie fechada e mostre que
da zero.
3. Seja f um polinomio nas variaveis x e y e Cf a curva algebrica por eledefinida em R2; veja pagina 11 para a definicao. Mostre que um campovetorial F de R2 e tangente a Cf em todos os seus pontos se, e somente se,
(∇f)(p) · F(p) = 0,
para todo p ∈ Cf .
4. Seja F um campo vetorial polinomial de R2. A curva algebrica definidapelo polinomio f , nas variaveis x e y, e uma solucao algebrica de F se opolinomio
(∇f · F)(x, y)e multiplo de f . Se F = (F1, F2), defina a forma αF = F2dx− F1dy.(a) Mostre que se f e uma solucao algebrica de F, entao F e tangente a Cf
em todo ponto p ∈ Cf em que nem F nem o gradiente de f se anulam.

126 3. 2-FORMAS
(b) Mostre que f e uma solucao algebrica de F se, e somente se,
αF ∧ df = fη,
onde η e uma 2-forma polinomial em R3.(c) Mostre que se αF for exata entao F tem infinitas solucoes algebricas
distintas.
5. Mostre que um campo linear F sempre tem pelo menos uma reta comosolucao algebrica.

Capıtulo 4
3-formas
Neste capıtulo introduzimos 3-formas e estudamos uma versao do teo-rema de Stokes que nos permite passar de integrais de 2-formas a integraisde 3-formas. Traduzindo este resultado na linguagem do calculo diferencial,obteremos o teorema de divergencia de Gauss.
Ao contrario dos outros capıtulos, introduzimos 3-formas e outros concei-tos correlatos diretamente, sem nenhuma motivacao fısica preliminar. Afinalde contas, tomando por base a teoria de 1-formas e 2-formas, nao e difıcil ad-vinhar o que deve ser uma 3-forma, nem o que devemos fazer para integra-las.
1. 3-formas
Comecamos generalizando o conceito de formula bilinear alternada.
1.1. Formas multilineares alternadas. Uma forma k-linear de Rne definida recursivamente como sendo uma aplicacao
ω : Rn × · · · × Rn︸ ︷︷ ︸k vezes
→ R,
que satisfaz a seguinte condicao:dado um vetor v0 ∈ Rn, a aplicacao
ωj : Rn × · · · × Rn︸ ︷︷ ︸k−1 vezes
→ R, para j = 1, . . . , k
obtida fixando-se a j-esima coordenada de ω como sendoigual a v0, e k − 1-linear.
Por exemplo,ω : Rn × Rn × Rn → R,
e 3-linear se, para todo v0 ∈ Rn, as formas
ω1(u,w) = ω(v0, u, w),
ω2(u,w) = ω(u, v0, w), e
ω3(u,w) = ω(u,w, v0),
sao bilineares.Uma forma k-linear ω de Rn e alternada se
ω(v1, . . . , vi, . . . , vj , . . . vk) = −ω(v1, . . . , vj , . . . , vi, . . . vk)
127

128 4. 3-FORMAS
quaisquer que sejam v1, . . . , vi, . . . , vj , . . . vk ∈ Rn. Em outras palavras,trocando de posicao duas entradas de ω, a forma troca de sinal. Como con-sequencia disto temos que
se vi = vj entao ω(v1, . . . , vi, . . . , vj , . . . vk) = 0.
Uma forma k-linear alternada tambem e conhecida como uma k-forma cons-tante.
Usando estas propriedades e facil determinar todas as 3-formas constantesde R3. Seja ω uma forma 3-linear alternada e u, v, w ∈ R3. Se e1, e2 e e3 saoos vetores da base canonica, entao
u = a1e1 + a2e2 + a3e3, onde a1, a2, a3 ∈ R.
Da linearidade de ω, obtemos
ω(u, v, w) = a1ω(e1, v, w) + a2ω(e2, v, w) + a3ω(e3, v, w).(1.1)
Mas os ω(ej , v, w) sao formas bilineares alternadas e, como tais, podemosescreve-las usando determinantes. Por exemplo, se
v = b1e1 + b2e2 + b3e3 e w = c1e1 + c2e2 + c3e3
entao,ω(e1, v, w) = ω(e1, b2e2 + b3e3, c2e2 + c3e3),
ja que a forma se anula quando duas entradas quaisquer se repetem. Assim,das propriedades de formas bilineares alternadas temos que
ω(e1, v, w) = ω(e1, e2, e3) det[b2 b3c2 c3
]Analogamente,
ω(e2, v, w) = −ω(e1, e2, e3) det[b1 b3c1 c3
]ao passo que,
ω(e3, v, w) = ω(e1, e2, e3) det[b1 b2c1 c2
]Substituindo em (1.1), vemos que ω(u, v, w) e igual a
ω(e1, e2, e3)(a1 det
[b2 b3c2 c3
]− a2 det
[b1 b3c1 c3
]+ a3 det
[b1 b2c1 c2
]).
Porem, a menos da constante ω(e1, e2, e3), esta e a expansao em co-fatores(pela primeira linha) do determinante
det[u, v, w] = det
a1 a2 a3
b1 b2 b3c1 c2 c3
Portanto,
ω(u, v, w) = ω(e1, e2, e3) det[u, v, w].(1.2)

1. 3-FORMAS 129
Como as 3-formas constantes sao aplicacoes que tomam valores em R, pode-mos soma-las da maneira usual. Isto, e, dadas duas 3-formas constantes ω e θ,definimos
(ω + θ)(u, v, w) = ω(u, v, w) + θ(u, v, w),(1.3)
quaisquer que sejam u, v, w ∈ Rn. Que esta formula define uma aplicacao deRn ×Rn ×Rn em R, nao ha duvida; a questao e se essa aplicacao e 3-linear ealternada. Fixando u0 em (1.3), temos
(ω + θ)(u0, v, w) = ω(u0, v, w) + θ(u0, v, w).
Contudo, por definicao, ω(u0, v, w) e θ(u0, v, w) sao aplicacoes bilinearesquando consideradas como funcoes de suas duas ultimas entradas. Assim,(ω + θ)(u0, v, w) e bilinear como funcao de v e w. Resultados semelhantesvalem para as outras duas escolhas de entradas fixas. Finalmente,
(ω + θ)(u, v, w) = ω(u, v, w) + θ(u, v, w) = −ω(u,w, v)− θ(u,w, v);
como isto e igual a −(ω + θ)(u,w, v), e resultado semelhantes valem para asoutras escolhas de entradas. Concluımos, assim, que ω+θ tambem e alternada.Resumindo:
a soma de duas 3-formas constantes e uma 3-forma cons-tante.
Encerramos este paragrafo definindo a imagem inversa de uma 3-formaconstante por uma aplicacao linear. Dada uma transformacao linear T : Rm →Rn, comecamos por definir uma aplicacao
∆T : Rm × Rm × Rm → Rn × Rn × Rn,
pela formula∆T (u, v, w) = (T (u), T (v), T (w)).
Como T e linear,
∆T (u1 + ku2, v0, w0) = ∆T (u1, v0, w0) + k∆T (u2, v0, w0),
onde k e um escalar e v1, v2, w0 ∈ Rm. Formulas semelhantes valem para asoutras duas escolhas de entradas.
PROPOSICAO. Se ω e uma 3-forma em Rn entao a composta ω · ∆T euma 3-forma em Rm.
DEMONSTRACAO. Sejam k e um escalar e u1, u2, v0, w0 ∈ Rm, entao
(ω ·∆T )(u1 + ku2, v0, w0) = ω ·∆T (u1, v0, w0) + kω ·∆T (u2, v0, w0);
ao passo que (ω ·∆T )(u1, v0, w0) e igual a
ω(T (u1), T (v0), T (w0)) = −ω(T (w0), T (v0), T (u1)) = −(ω·∆T )(w0, v0, u1),
donde(ω ·∆T )(u1, v0, w0) = −(ω ·∆T )(w0, v0, u1).

130 4. 3-FORMAS
Como formulas semelhantes valem para as outras trocas de posicoes dos ve-tores, podemos concluir que ω · ∆T e uma 2-forma constante em Rm, comodesejavamos mostrar.
Nos proximos paragrafos generalizemos tudo isto para 3-formas nao cons-tantes, definidas sobre uma regiao aberta de Rn.
1.2. 3-formas diferenciais. Seja U uma regiao aberta de Rn. Uma3-forma diferencial em U e uma aplicacao
ω : U × Rn × Rn × Rn → R,
que satisfaz as seguintes condicoes:
(1) fixando p0 ∈ U , e considerando ω(p0, u, v, w) como funcao apenasde u, v ew, temos uma aplicacao 3-linear alternada de Rn×Rn×Rnem R;
(2) fixando u0, v0, w0 ∈ Rn, e considerando ω(p, u0, v0, w0) como fun-cao apenas de p, temos uma funcao diferenciavel de U em R.
O conjunto das 3-formas diferenciais definidas em uma regiao aberta Ude Rn sera denotado por Ω3(U). Ha varias operacoes que podemos definir emΩ3(U), a mais simple das quais e a soma. Sejam ω e θ 3-formas diferenciaisem U , a soma ω+ θ e definida em um ponto (p, u, v, w) ∈ U ×Rn×Rn×Rnpor
(ω + θ)(p, u, v, w) = ω(p, u, v, w) + θ(p, u, v, w).(1.4)
Para que esta definicao seja util, e preciso que ω+ θ tambem seja uma 3-formadiferencial em U , e nao apenas uma aplicacao qualquer. Mas, como vimos no§1.1, a soma de 3-formas constantes e uma 3-forma constante, o que prova (1).Ja (2) segue porque a soma de funcoes diferenciaveis e diferenciavel.
Procedendo de maneira semelhante, podemos mostrar que se ω e uma 3-forma diferencial em U e f ∈ O(U), entao a aplicacao de U ×Rn ×Rn ×Rnem R definida por
(fω)(p, u, v, w) = f(p)ω(p, u, v, w),
onde p ∈ U e v, w ∈ Rn tambem e uma 3-forma diferencial. Um caso particu-lar da multiplicacao de uma 3-forma por uma funcao ocorre quando a funcao econstante. Neste caso o que temos e o produto de um escalar por uma 3-forma.Assim, podemos somar 3-formas diferenciais e multiplica-las por escalares.Com um pouco de paciencia e possıvel verificar que estas operacoes satisfa-zem todas as propriedades requeridas para fazer de Ω3(U) um espaco vetorialsobre R.
1.3. Produto exterior. Nesta secao queremos introduzir o produto ex-terior de tres 1-formas, assim como o produto de uma 2-forma por uma 1-forma. Como seria de esperar, em ambos os casos, teremos como resultadouma 3-forma.

1. 3-FORMAS 131
Comecamos com o produto de tres 1-formas, α, β e γ, definidas em umaregiao aberta U de Rn. Sejam p ∈ U e u, v, w ∈ Rn. Tomando a definicao doproduto exterior de duas 1-formas como ponto de partida, podemos definir
(α ∧ β ∧ γ)(p, u, v, w) = det
α(p, u) α(p, v) α(p, w)β(p, u) β(p, v) β(p, w)γ(p, u) γ(p, v) γ(p, w)
Segue, imediatamente, das propriedades do determinante que a expressao (α∧β ∧ γ)(p, u, v, w) e 3-linear alternada se p estiver fixo. Por outro lado, o deter-minante e uma expressao polinomial de suas entradas. Como somas e produtosde funcoes diferenciaveis sao diferenciaveis, temos que esta funcao e dife-renciavel quando u, v e w estao fixos. Logo, α ∧ β ∧ γ define, corretamente,uma 3-forma diferencial.
E importante voce notar que ha uma correlacao entre a ordem em que as1-formas e os vetores aparecem em (α ∧ β ∧ γ)(p, u, v, w) e sua posicao nodeterminante. Afinal, qualquer variacao na ordem das linhas ou colunas fara odeterminante mudar de sinal. Por exemplo,
(β ∧ α ∧ γ)(p, u, v, w) = det
β(p, u) β(p, v) β(p, w)α(p, u) α(p, v) α(p, w)γ(p, u) γ(p, v) γ(p, w)
e igual a
−det
α(p, u) α(p, v) α(p, w)β(p, u) β(p, v) β(p, w)γ(p, u) γ(p, v) γ(p, w)
que, por sua vez, e igual a −(α ∧ β ∧ γ)(p, u, v, w). Portanto,
β ∧ α ∧ γ = −(α ∧ βγ).Em particular, se duas entre as tres 1-formas sao trocadas de posicao, o sinaldo produto exterior muda. Por outro lado, se fizermos duas trocas de posicao, osinal muda duas vezes, de modo que continua igual ao inicial. Portanto, comono caso do produto exterior de duas 1-formas, o produto de tres delas tambeme anti-comutativo; isto e, o sinal troca a cada troca de posicao entre duas dastres 1-formas que estao sendo multiplicadas.
Como no caso de 2-formas, o produto exterior das 1-formas basicas de-sempenha um papel extremamente importante na teoria. Por isso, vamos cal-cular dxi ∧ dxj ∧ dxk em (u, v, w) ∈ Rn × Rn × Rn. Se
u = a1e1 + · · ·+ anen,
v = b1e1 + · · ·+ bnen ew = c1e1 + · · ·+ cnen
entao, por definicao,
(dxi ∧ dxj ∧ dxk)(u, v, w) = det
dxi(u) dxj(u) dxk(u)dxi(v) dxj(v) dxk(v)dxi(w) dxj(w) dxk(w)

132 4. 3-FORMAS
Levando em conta que estas 1-formas capturam certas coordenadas dos vetoresu, v e w, obtemos
(dxi ∧ dxj ∧ dxk)(u, v, w) = det
ai aj akbi bj bkci cj ck
(1.5)
Em particular,
(dxi ∧ dxj ∧ dxk)(ei′ , ej′ , ek′) =
1 se i = i′, j = j′ e k = k′
0 se i 6= i′ ou j 6= j′ ou k 6= k′.
Agora que temos a definicao do produto exterior de tres 1-formas, pode-mos expressar uma 3-forma qualquer em termos de coordenadas. Para sim-plificar a notacao, faremos isto apenas para 3-formas em R3; o caso geral ficacomo exercıcio. Seja p um ponto de uma regiao aberta U de R3 e ω ∈ Ω3(U).De acordo com a propriedade (1), a aplicacao
ωp : R3 × R3 × R3 → R,definida por
ωp(u, v, w) = ω(p, u, v, w),e uma 3-forma constante. Portanto, por (1.2) e (1.5),
ωp(u, v, w) = ωp(e1, e2, e3)(dx1 ∧ dx2 ∧ dx3)(u, v, w).
Como ωp(e1, e2, e3) e diferenciavel como funcao de p, podemos escrever
ω = gdx1 ∧ dx2 ∧ dx3,
onde g : U → R e dada por g(p) = ωp(e1, e2, e3).Assumindo que o produto exterior deve ser sempre distributivo sobre a
soma, e facil descobrir como o produto de uma 2-forma por uma 1-forma deveser feito para que seja compatıvel com o produto de tres 1-formas. Mais umavez, consideraremos apenas o caso em que a regiao aberta U esta contida emR3, ja que este e o unico caso necessario na maioria de nossas aplicacoes pos-teriores. Sejam α ∈ Ω1(U) e ω ∈ Ω1(U). Entao, existem aij ∈ O(U), taisque
ω =∑
1≤i<j≤3
aijdxi ∧ dxj .
Assumindo a distributividade do produto exterior sobre a soma,
α ∧ ω =∑
1≤j<k≤3
ajkα ∧ dxj ∧ dxk.(1.6)
Mas,α = b1dx1 + b2dx2 + b3dx3;
de modo que, usando novamente a distributividade, obtemos
α ∧ dxj ∧ dxk = bidxi ∧ dxj ∧ dxk.Como i, j, k = 1, 2, 3, podemos rearrumar a expressao dxi ∧ dxj ∧ dxkpara que fique na ordem dx1 ∧ dx2 ∧ dx3. Contudo, como o produto de tres

1. 3-FORMAS 133
1-formas muda de sinal, dependendo da ordem em que i, j e k aparecem.Denotando por trocas(ijk) o numero de trocas de posicao entre i, j e k quedevem ser efetuados para que estes tres ındices aparecam em ordem crescente,teremos
α ∧ dxj ∧ dxk = (−1)trocas(ijk)bidxi ∧ dxj ∧ dxk.
Por exemplo, para converter 321 em 123 precisamos:
• trocar o 1 com o 2, obtendo 312;• trocar o 1 com o 3, obtendo 132;• trocar o 3 com o 2, obtendo 123.
Fizemos, portanto, tres trocas de posicao, de modo que
dx3 ∧ dx2 ∧ dx1 = (−1)3dx1 ∧ dx2 ∧ dx3 = −dx1 ∧ dx2 ∧ dx3.
Voltando a equacao (1.6) podemos escreve-la, a partir do que foi feitoacima, como
α ∧ ω =∑
1≤j<k≤3
(−1)trocas(ijk)biajkdxi ∧ xj ∧ dxk.
Explicitando os tres casos possıveis para ijk, vemos que
α ∧ ω = (b1a23 − b2a13 + b3a12)dx1 ∧ dx2 ∧ dx3.
Vejamos quais sao as propriedades basicas do produto exterior nos casosem que o resultado e uma 3-forma. Como o produto de uma 2-forma poruma 1-forma foi definido a partir do produto de tres 2-formas, tudo segue daspropriedades deste ultimo caso. Porem, ja vimos que o produto exterior de tres1-formas e anti-comutativo e distributivo. Na verdade, segue das propriedadesdo determinante que se α1, α2, β, γ ∈ Ω1(U),onde U e uma regiao aberta deR3, e k ∈ R, entao
(α1 + kα2) ∧ β ∧ γ = α1 ∧ β ∧ γ + k(α2 ∧ β ∧ γ).
Portanto, se ω e uma 2-forma em U ,
(α1 + kα2) ∧ ω = α1 ∧ ω + k(α2 ∧ ω);
ao passo que, se θ ∈ Ω2(U),
α ∧ (ω + kθ) = α ∧ ω + kα ∧ θ.
Estas sao as propriedades do produto exterior de que precisamos. A bem daverdade, podemos resumir as propriedades do produto exterior em todos oscasos que consideramos neste texto dizendo apenas que este produto e anti-comutativo, associativo e distributivo. Praticamente tudo o mais segue disto.

134 4. 3-FORMAS
1.4. Diferencial de 2-formas. Podemos aproveitar o que fizemos nasecao anterior para definir a diferencial de uma 2-forma que, naturalmente,sera uma 3-forma. Mais precisamente, queremos construir uma aplicacao
d : Ω2(U) → Ω3(U),
onde U e uma regiao de Rn.Usando o produto exterior, podemos escrever uma 2-forma ω definida em
U comoω =
∑1≤i<j≤n
aijdxi ∧ dxj ,
onde aij ∈ O(U) para 1 ≤ i < j ≤ n. Definimos a diferencial de ω por
d(ω) =∑
1≤i<j≤n
d(aij) ∧ dxi ∧ dxj .
As propriedades desta aplicacao sao muito semelhantes as da diferencial deuma 1-forma, como alias seria de esperar. Sejam ω, η ∈ Ω2(U), f uma funcaodiferenciavel em U e k um escalar, entao
(1) d((ω + kη) = d((ω) + kd(η);(2) d(fω) = d(f) ∧ ω + fd(ω).
Por outro lado, se α, β ∈ Ω1(U),(3) d(α ∧ β) = dα ∧ β − α ∧ dβ;(4) d(dα) = 0.
Tendo em vista (1) e (2) e as propriedades da diferencial de uma 1-forma, bastaprovar (3) quando
α = adxi e β = bdxj ,
onde a, b ∈ O(U). Contudo,
d(adxi ∧ bdxj) = d(abdxi ∧ dxj),
que, por sua vez e igual a
d(ab)(dxi ∧ dxj) + abd(dxi ∧ dxj).
Pela definicao da diferencial de uma 2-forma, d(dxi ∧ dxj) = 0, donde
d(adxi ∧ bdxj) = d(ab)(dxi ∧ dxj).
Pela regra de Leibnizd(ab) = bd(a) + ad(b);
de forma que
d(adxi ∧ bdxj) = bd(a) ∧ dxi ∧ dxj) + ad(b) ∧ dxi ∧ dxj .
Mas, pela anti-comutativida do produto exterior,
d(b) ∧ dxi ∧ dxj = −dxi ∧ d(b) ∧ dxj ;
donde
d(adxi ∧ bdxj) = (d(a) ∧ dxi) ∧ (bdxj) +−(adxi) ∧ (d(b) ∧ dxj).

1. 3-FORMAS 135
Transcrevendo esta ultima equacao em termos de α e β obtemos a propriedades(3).
Para provar (4), escreva α na forma
α =n∑i=1
aidxi,
onde ai ∈ O(U) para 1 ≤ i ≤ n. Calculando sua diferencial, temos
dα =n∑i=1
d(ai) ∧ dxi;
que, por sua vez, tem diferencial
d(dα) =n∑i=1
d(d(ai)) ∧ dxi + d(ai) ∧ d(dx),(1.7)
Contudo,
d(∂f
∂xi) =
n∑j=1
∂2f
∂xi∂xjdxj .
Substituindo em (1.7), e levando em conta a anti-comutatividade do produtoexterior,
d(df) =∑
1≤i<j≤n
(∂2f
∂xi∂xj− ∂2f
∂xj∂xi
)dxi ∧ dxj .
Porem, como f e diferenciavel em todas as ordens, temos que
∂2f
∂xi∂xj=
∂2f
∂xj∂xi
para todo 1 ≤ i < j ≤ n; donde
d(df) = 0.
Estendendo a terminologia ja usada anteriormente, dizemos que uma 3-forma em U e exata se pode ser escrita como dω, para algum ω ∈ Ω2(U).Como ja ocorreu no caso de 1-formas e 2-formas, nao e verdade que toda 3-forma e exata. Como no capıtulo anterior, sera facil dar exemplos de 3-formasque nao sao exatas quando estivermos de posse do teorema de Stokes na versaoque interliga 2-formas e 3-formas. Ja uma 2-forma ω e fechada se dω = 0.Podemos reformular a propriedade (4) como dizendo que toda 2-forma exata efechada. Exploraremos melhor a relacao entre 2-formas exatas e fechadas no§4.4.

136 4. 3-FORMAS
1.5. Imagem inversa. Seja V uma regiao aberta de Rm, e seja φ : V →Rn uma aplicacao diferenciavel. Generalizando o roteiro ja utilizado para asimagens inversas de 1-formas e 2-formas, definimos
Gφ : V × Rm × Rm × Rm → Rn × Rn × Rn × Rn,
porGφ(p, u, v, w) = (φ(p), (Jpφ)u, (Jpφ)v, (Jpφ)w),
onde p ∈ V e u, v, w ∈ Rm. Note queGφ e diferenciavel como funcao de suasm primeiras coordenadas e linear como funcao das 3m ultimas coordenadas.
Suponha, agora, que a imagem de φ esta contida em uma regiao aberta Ude Rn, na qual esta definida uma 3-forma diferencial ω. Neste caso a imagemde Gφ esta contida em U × Rn × Rn × Rn, de modo que faz sentido calculara composta de ω com Gφ. A imagem inversa de ω por φ, denotada por φ∗(ω),e definida por
φ∗(ω) = ω ·Gφ.Portanto, se p ∈ U e u, v, w ∈ Rm,
φ∗(ω)(p, u, v, w) = ω(φ(p), Jp(φ)u, Jp(φ)v, Jp(φ)w).
Pela definicao de composta, φ∗(ω) e uma aplicacao de V ×Rm×Rm×Rm emR. Mas, ainda precisamos mostrar que e uma 3-forma diferencial em V . Paraisto, basta verificar as condicoes (1) e (2) da definicao de 3-forma enunciadano §1.2.
Digamos que o ponto p0 ∈ V foi fixado. Entao, quaisquer que sejamu, v, w ∈ Rm temos
φ∗(ω)(p0, u, v, w) = (ωp0) ·∆Jp0 (φ)(u, v, w),
para um valor fixo de p0. Mas, fixado p0, ω|φ(p0) e uma 3-forma constante, deforma que (1) e consequencia da proposicao da 1. Por outro lado, fixando osvetores u0, v0, w0 ∈ Rm, temos que
φ∗(ω)(p, u0, v0, w0) = ω ·Gφ(p, (Jp(φ))(u0), (Jp(φ))(v0), (Jp(φ))(w0)),
qualquer que seja p ∈ V . Podemos considerar esta expressao como sendo acomposta de ω com hφ, a aplicacao de V em U × Rm × Rm × Rm definidapela regra
hφ(p) = Gφ(p, v0, w0) = (φ(p), (Jp(φ))(u0), (Jp(φ))(v0), (Jp(φ))(w0)).
Como a jacobiana e diferenciavel como funcao de p, o mesmo vale para hφ.Contudo, ω e diferenciavel como funcao de p, e linear nas outras entradas, demodo que e diferenciavel como aplicacao em U × Rm × Rm × Rm. Como acomposta de aplicacoes diferenciaveis e diferenciavel, podemos concluir que apropriedade (2) vale para φ∗(ω). Em particular, φ∗(ω) e uma 3-forma diferen-cial em V .
Vamos calcular a imagem inversa de dx1 ∧ dx2 ∧ dx3 por uma aplicacaodiferenciavel φ de uma regiao aberta V de R3 em R3. Denotaremos por

2. INTEGRACAO DE 3-FORMAS 137
x1, x2, x3 as coordenadas no contradomınio, e por y1, y2, y3 as coordenadasno domınio. Por definicao,
Gφ(p, e1, e2, e3) = (φ(p), Jp(φ)e1, Jp(φ)e2, Jp(φ)e3),
onde p ∈ V e e1, e2 e e3 sao os vetores da base canonica de R3. Mas istoimplica que
(1.8) φ∗(dx1 ∧ dx2 ∧ dx3)(p, e1, e2, e3) =
(dx1 ∧ dx2 ∧ dx3)(Jp(φ)e1, Jp(φ)e2, Jp(φ)e3);
donde
φ∗(dx1 ∧ dx2 ∧ dx3)(p, e1, e2, e3) = det[∇φ1,∇φ2,∇φ3]dy1 ∧ dy2 ∧ dy3.Utilizando o produto exterior, podemos reescrever isto como
φ∗(dx1 ∧ dx2 ∧ dx3) = dφ1 ∧ dφ2 ∧ dφ3;(1.9)
que e a forma como vamos utiliza-la.
2. Integracao de 3-formas
E hora de descobrir como integrar uma 3-forma; antes, porem, precisamosdefinir 3-celulas e seus encadeamentos.
2.1. 3-celulas e fronteiras. Sejam a < a′, b < b′, c < c′ e ε > 0numeros reais e
R = [a, a′]× [b, b′]× [c, c′],(2.1)
um 3-retangulo (ou paralelepıpedo) fechado. Uma 3-celula de Rn e uma apli-cacao diferenciavel
σ : (a− ε, a′ − ε)× (b− ε, b′ − ε)× (c− ε, c′ − ε) → Rn,onde ε > 0 e um numero real. Como de habito, nao distinguiremos claramenteentre a aplicacao σ e a imagem de R por σ. Para os propositos deste livro umsolido e simplesmente uma 2-celula, e os dois termos serao usados de maneiraintercambiavel de agora em diante.
Como no caso de 2-celulas, comecamos definindo orientacao e fronteirapara o proprio 3-retangulo. Um ponto esta na fronteira de R se pertence a umade suas seis faces. Adaptando a notacao utilizada para o cubo [0, 1]3 no §3.4,podemos escrever
R12 = [a, a′]× [b, b′]× cRo12 = [a, a′]× [b, b′]× c′R23 = a × [b, b′]× [c, c′]
Ro23 = a′ × [b, b′]× [c, c′]
R13 = [a, a′]× b × [c, c′]
Ro13 = [a, a′]× b′ × [c, c′]

138 4. 3-FORMAS
Como no caso de 2-retangulos, assumiremos que cada uma destas faces estaorientada respeitando-se o sentido em que os reais crescem. Assim, se Nij e ovetor normal a face Rij e No
ij o vetor normal a face oposta, temos que
N12 = −No12 = e3
N23 = −No23 = e1
N13 = −No13 = −e2.
No §3.4 vimos que ha duas escolhas possıveis de sinais que fazem do encade-amento das faces de R uma 2-celula fechada. Em uma delas, o vetor normal acada face aponta para dentro, na outra, aponta para fora. Entre estas duas, es-colheremos aquela em que o vetor normal sempre aponta para fora. Portanto,orientando R da forma sua fronteira sera
∂R = −R12 +Ro12 −R23 +Ro23 +R13 −Ro13.
A fronteira de qualquer 3-celula sera orientada a partir desta orientacao padraode R.
Definimos, entao, a fronteira ∂σ de uma 3-celula
σ : R→ Rn
como a forma reduzida de
−σ(R12) + σ(Ro12)− σ(R23) + σ(Ro23) + σ(R13)− σ(Ro13).
Um bom exemplo, e a esfera de raio b da qual foi extraıda uma esfera menor,de raio a < b. Neste caso, a parametrizacao
Sa,b : [a, b]× [0, 2π]× [0, π] → R3,
em coordenadas esfericas, sera dada por
Sa,b(r, θ, φ) = (r sen(φ) cos(θ), r sen(φ) sen(θ), r cos(φ)).
Enumerando as faces de R na mesma ordem que fizemos acima, verificamosque ∂Sa,b(R12) e −∂Sa,b(Ro12) sao pontos, e que
∂Sa,b(R13) ≡ −∂Sa,b(Ro13)
correspondem a metade de um anel vertical, contido no semiplano definidopor y = 0 e x ≥ 0. Este anel tem de raio externo b e raio interno a, e asduas circunferencias correspondentes a estes raios estao orientadas em sentidosopostos. Portanto,
∂Sa,b = −Sa,b(R23) + Sa,b(R23),
e igual ao encadeamento das superfıcies interna e externa de Sa,b, ambas ori-entadas de modo que seus vetores normais apontem para fora da parte solidada 3-celula.
A esfera (solida) de raio a e um caso particular desta 3-celula, bastandopara isto tomar b = 0. Neste caso, Sa = Sa,0 tem fronteira
∂Sa = Sa,b(Ro23),

2. INTEGRACAO DE 3-FORMAS 139
ja queSa,b(R23) ≡ 0.
Antes de poder definir um 3-encadeamento, precisamos considerar comoinverter o sinal de uma 3-celula. Mas, para isto, basta trocar o sentido em queum de seus parametros avanca. Por exemplo, se o 3-retangulo de parametrosfor (2.1), podemos tomar
−σ(r, s, t) = σ(a+ a′ − r, s, t).
Com isto estamos prontos para definir um 3-encadeamento como sendouma expressao da forma
E = c1σ1 + · · ·+ cmσm,(2.2)
onde os cs sao inteiros e os σs sao 3-celulas. A fronteira deste 3-encadeamentoe definida pela formula
∂E = c1∂(σ1) + · · ·+ cm∂(σm),
como, alias, seria de esperar.
2.2. Integracao de 3-formas. Neste paragrafo veremos como integraruma 3-forma em 3-celulas. Comecaremos com o caso mais simples possıvel:uma 3-forma definida em um 3-retagulo de R3.
Seja U uma regiao do espaco, e digamos que
R = [a, a′]× [b, b′]× [c, c′] ⊆ U.
Dada η ∈ Ω3(U), queremos definir a integral de η no 3-retangulo R. Se r, s et sao as coordenadas em R3, podemos escrever
η = f(r, s, t)dr ∧ ds ∧ dt.
Definimos, entao, a integral de η emR como sendo a integral da funcao f nestemesmo retangulo; isto e∫
R
η =∫ a′
a
∫ b′
b
∫ c′
c
fdrdsdt.
Esta e a base de nossa definicao: o caso geral e reduzido a este caso particularatraves do calculo de uma imagem inversa. Em outras palavras, se
σ : R→ Rn,
e uma 3-celula cuja imagem esta contida em uma regiao U de Rn, definimos aintegral de ω em σ por ∫
σ
ω =∫R
σ∗(ω).(2.3)
Precisamos discutir de que maneira a orientacao da 3-celula afeta o cal-culo da integral. Para descobrir o que ocorre, consideramos uma 3-celula σ,definida sobre o retangulo
R = [a, a′]× [b, b′]× [c, c′]

140 4. 3-FORMAS
cuja imagem esta contida em uma regiao U de Rn. Digamos que r, s e t saoos parametros de σ. Se ω ∈ Ω3(U) entao −σ tem domınio R e e definida por−σ(r, s, t) = σ(a+ a′ − r, s, t). Desta forma
(−σ)∗(ω)(r, s, t) = ω(σ(q),−Jq(σ)e1, Jq(σ)e1, Jq(σ)e3)dr ∧ ds ∧ dt,
onde q = (a+ a′ − r, s, t). Portanto,
(−σ)∗(ω)(r, s, t) = −(σ)∗(ω)(q),
pela bilinearidade de ω. Assim,∫R
(−σ)∗(ω) = −∫R
(σ)∗(ω),
que e equivalente a dizer que ∫−σ
ω = −∫σ
ω.
2.3. Propriedades da integral de uma 3-forma. Ha algumas pro-priedades elementares das integrais de 3-formas que precisamos considerar.Suponha que U e uma regiao de Rn. Se ω, η ∈ Ω3(U) e k ∈ R, entao∫
E
(ω + kη) =∫E
ω + k
∫E
η,
ondeE e um 3-encadeamento contido emU . A demonstracao e essencialmentea mesma da propriedade correspondente para 2-formas e fica como exercıcio.
A segunda propriedade que desejamos estudar e a formula de mudanca devariaveis. No que segue, usaremos a expressao
a aplicacao diferenciavel γ : [a, a′] × [b, b′] × [c, c′] →[k, k′]× [`, `′]× [m,m′]
para designar uma funcao diferenciavel
γ : (a−ε, a′+ε)×(b−ε, b′+ε)×(c−ε, c′+ε) → (k−ε, k′+ε)×(`−ε, `′+ε)×(m−ε,m′+ε)
onde ε e um numero real positivo. Suponhamos, alem disso, que:• γ e bijetiva e• leva o interior de [a, a′]×[b, b′]×[c, c′] no interior de [k, k′]×[`, `′]×
[m,m′].O resultado que desejamos pode ser enunciado como segue.
FORMULA DE MUDANCA DE VARIAVEIS. Sejam R e R′ retangulos doplano e γ : R→ R′ uma aplicacao diferenciavel bijetora para a qual:
• o determinante do jacobiano e sempre positivo em todo ponto de R,e
• o interior de R e levado por γ no interior de R′.
Seσ : R→ U,

3. TEOREMA DE STOKES 141
e uma 3-celula contida em uma regiao U de Rn, entao∫σ·γ
σ∗ω =∫σ
ω.
Como no caso de 2-formas, a demonstracao consiste em reduzir o pro-blema a integracao de uma 3-forma em um 3-retangulo, usando a imagem in-versa por σ. Mas uma 3-forma em uma regiao U de R3 se escreve na formagdx1 ∧ dx2 ∧ dx3, onde g : U → R e uma funcao diferenciavel. Portanto,integrar esta forma em um retangulo e o mesmo que integrar g neste retangulo,o que nos permite usar o teorema de mudanca de base para integrais triplas. Osdetalhes ficam como exercıcio.
Como consequencia desta formula sempre podemos supor, ao provar umresultado sobre integracao de 3-formas, que a celula tem o retangulo [0, 1]3
como espaco de parametros.
PROPOSICAO. Seja R = [a, a′]× [b, b′]× [c, c′] um 3-retangulo e ω uma3-forma definida em uma regiao aberta do plano que contem R. Entao existeuma aplicacao diferenciavel γ : [0, 1]3 → R, tal que∫
R
ω =∫
[0,1]3γ∗(ω).
DEMONSTRACAO. Defina γ : [0, 1]3 → R por
γ(r, s, t) = (a, b, c) + r(a′ − a, 0) + s(0, b′ − b) + r(0, 0, c′ − c).
Temos que det(J(γ)) = (a′−a)(b′−b)(c′−c) > 0, pois a′ > a, b′ > b e c′ >c. A proposicao segue imediatamente da formula de mudanca de variaveis.
3. Teorema de Stokes
Nesta secao enunciamos e provamos nossa segunda versao do teorema de Sto-kes.
TEOREMA DE STOKES. Seja ω uma 2-forma diferencial definida emuma regiao U de Rn. Se E e um 3-encadeamento contido em U , entao∫
∂E
ω =∫E
dω.
A demonstracao e inteiramente analoga a da versao do mesmo teoremaenunciada na secao 4 do capıtulo 3. Na verdade as duas demonstracoes sao taosemelhantes que seria preferıvel se voce tratasse esta como um exercıcio, doqual estamos dando uma resposta completa.
Dividiremos a demonstracao em duas partes. A primeira consiste em mos-trar que o teorema vale para 3-formas do R3, integradas sobre um 3-retangulo.A segunda reduz o caso geral a este caso especial.

142 4. 3-FORMAS
3.1. Demonstracao do teorema de Stokes no R3. Comecamostratando o caso mais simples em que E e um 3-retangulo e ω uma 2-formadiferencial definida em uma regiao aberta V do plano, que contem E.
PRIMEIRA PARTE: reducao ao caso em que o retangulo e [0, 1]3.
Pela proposicao 2.3 ∫R
ω =∫
[0,1]3γ∗(dω).(3.1)
Enumerando os lados de C = [0, 1]3 e R segundo a convencao introduzida no§3.4, vemos que
γ(Cij) = Rij ,
e o mesmo vale para os lados opostos. Mas, pela formula de mudanca devariaveis para integrais de 2-formas∫
Rij)
ω =∫γ(Cij)
ω =∫Cij
γ∗(ω).
de modo que ∫∂R
ω =∫∂[0,1]3
γ∗(ω).(3.2)
Mas, se o teorema de Stokes vale para γ∗(ω) em [0, 1]3, temos∫[0,1]3
γ∗(dω) =∫∂[0,1]3
γ∗(ω);
donde segue por (3.1) e (3.2), que∫R
γ∗(ω) =
−∫γ(R12)
γ∗(ω) +∫γ(Ro
12)
γ∗(ω)
−∫γ(R23)
γ∗(ω) +∫γ(Ro
23)
γ∗(ω)
+∫γ(R13)
γ∗(ω)−∫γ(Ro
13)
γ∗(ω),
que e o teorema de Stokes sobre R. Por isso, podemos supor, de agora emdiante, que R = [0, 1]3.
SEGUNDA PARTE: reducao ao caso em que a 2-forma em [0, 1]3 e gdt1 ∧ dt2.
Sejaω = g1dt1 ∧ dt2 + g2dt2 ∧ dt3 + g3dt1 ∧ dt3,

3. TEOREMA DE STOKES 143
onde g1, g2, g3 ∈ O(V ). Mas,∫∂R
ω =∫∂R
g1dt1 ∧ dt2 +∫∂R
g2dt2 ∧ dt3 +∫∂R
g3dt1 ∧ dt3,
ao passo que∫R
dω =∫R
d(g1dt1 ∧ dt2) +∫R
d(g2dt2 ∧ dt3) +∫R
d(g3dt1 ∧ dt3),
ja que d e uma transformacao linear. Portanto, basta provar que∫R
d(g1dt1 ∧ dt2) =∫∂R
g1dt1 ∧ dt2∫R
d(g2dt2 ∧ dt3) =∫∂R
g2dt2 ∧ dt3 e que∫R
d(g3dt1 ∧ dt3) =∫∂R
g3dt1 ∧ dt3.
Como as demonstracoes destas tres formulas sao identicas (a menos de umamudanca de parametros), basta provar uma delas, as outras podem ficar comoexercıcios.
TERCEIRA PARTE: demonstracao do teorema para a 1-forma gdt1 ∧ dt2 em[0, 1]3.
Recapitulando, vimos nas duas partes anteriores que basta provar que aigualdade do teorema de Stokes e verdadeira quando
R = [0, 1]3 e ω = g(t1, t2, t3)dt1 ∧ dt2,
onde g ∈ O(U). Porem, como
d(ω) =∂g
∂t3dt1 ∧ dt2 ∧ dt3
temos que ∫R
dω =∫ 1
0
∫ 1
0
∫ 1
0
∂g
∂t3dt1dt2dt3.
Contudo, pelo teorema fundamental do calculo,∫ 1
0
∫ 1
0
∫ 1
0
∂g
∂t3dt1dt2dt3 =
∫ 1
0
∫ 1
0
(g(t1, t2, 1)− g(t1, t2, 0))dt1dt2,
que pode ser reescrito como∫R
dω =∫ 1
0
∫ 1
0
g(t1, t2, 1)dt1dt2 −∫ 1
0
∫ 1
0
g(t1, t2, 0)dt1dt2.(3.3)
Por outro lado, enumerando as faces de R na forma ja utilizada acima,verificamos que a imagem inversa de g(t1, t2, t3)dt1 ∧ dt2 por Ri3 e Roi3, para1 ≤ i ≤ 2, sao nulas pois, em ambos os casos, a primeira ou a segunda

144 4. 3-FORMAS
coordenada da face e constante. Parametrizando as duas faces restantes naforma
R12(s1, s2) = (0, 0, 0) + s1(1, 0, 0) + s2(0, 1, 0),
Ro12(s1, s2) = (0, 0, 1) + s1(1, 0, 0) + s2(0, 1, 0),
temos que ∫R12
gdt1 ∧ dt2 =∫ 1
0
∫ 1
0
g(s1, s2, 0)ds1ds2,
ao passo que ∫Ro
12
gdt1 ∧ dt2 =∫ 1
0
∫ 1
0
g(s1, s2, 1)ds1ds2,
Como∂R = −R12 +Ro12 −R23 +Ro23 +R13 −Ro13,
obtemos,∫∂R
ω = −∫ 1
0
∫ 1
0
g(s1, s2, 0)ds1ds2 +∫ 1
0
∫ 1
0
g(s1, s2, 1)ds1ds2
ja que as integrais sobre todas as outras faces sao nulas. Mas isto nos permiteconcluir que ∫
R
dω =∫∂R
ω,
provando assim que o teorema de Stokes vale sobre um retangulo do plano.
3.2. Demonstracao do teorema de Stokes em Rn. Levando emconta que
• a fronteira de um encadeamento e igual ao encadeamento das fron-teiras de suas parcelas;
• a integral sobre um encadeamento e igual a soma das integrais sobrecada parcela do encadeamento;
vemos que basta provar o resultado no caso em que E e uma 3-celula.Sejam, entao, R um 3-retangulo e
σ : R→ Rn
uma 3-celula. Se ω ∈ Ω2(U) entao,
σ∗(ω) ∈ Ω2(V ),
onde V ⊂ R3 e uma regiao que contem R. Mas,∫∂σ
ω =∫∂R
σ∗(ω).
Contudo, ja sabemos do §3.1 que o teorema de Stokes se aplica a esta ultimaintegral, donde ∫
∂R
σ∗(ω) =∫R
d(σ∗(ω)).

3. TEOREMA DE STOKES 145
Entretanto, pela definicao de integral de uma 3-forma∫σ
dω =∫R
σ∗(dω).
Como σ∗(dω) = dσ∗(ω), podemos concluir que∫σ
dω =∫∂σ
ω,
provando, assim, o teorema de Stokes enunciado no comeco da secao.
3.3. A variante vetorial. Antes de passar as aplicacoes do teorema deStokes, precisamos considerar sua traducao em termos da analise vetorial tra-dicional. Isto e, sem usar formas diferenciais.
Seja F : U → Rn um campo vetorial definido em uma regiao U do plano.A 2-forma associada a F e
ΦF = F1dx2 ∧ dx3 − F2dx1 ∧ dx3 + F3dx1 ∧ dx2,
e tem como diferencial
dΦF =(∂F1
∂x1+∂F2
∂x2+∂F3
∂x3
).
A funcao∂F1
∂x1+∂F2
∂x2+∂F3
∂x3
e conhecida como o divergente de F , e denotada por div(F ). Portanto,
dΦF = div(F )dx1 ∧ dx2 ∧ dx3.(3.4)
Veremos como interpretar o divergente na secao 4, por enquanto vamos noscontentar em traduzir o teorema de Stokes em termos do divergente.
Para poder enunciar a versao vetorial do teorema de Stokes em dimensao3, precisamos escrever ∫
σ
ΦF
sem usar formas. Mas, ja fizemos isto no caso especial de um campo rotacional.Estendendo a definicao ao presente caso, obtemos∫
σ
ΦF =∫σ
(F ·N)dσ,
onde N e o vetor normal unitario a σ. Com isto podemos enunciar a versaovetorial do teorema de Stokes.
TEOREMA DE DIVERGENCIA (caso vetorial). Seja σ uma 3-celula. SeF e um campo definido em uma regiao de R3 que contem σ, entao∫
∂σ
(F ·N)dσ =∫σ
div(F )dV.
Na pratica utilizaremos uma versao hıbrida do teorema, em que o diver-gente aparece como coeficiente de uma 3-forma. O enunciado completo e oseguinte.

146 4. 3-FORMAS
TEOREMA DE DIVERGENCIA. Seja σ uma 3-celula. Se F e um campodefinido em uma regiao de R3 que contem σ, entao∫
∂σ
ΦF =∫σ
div(F )dV,
onde dV = dx ∧ dy ∧ dz.
4. Aplicacoes
Nesta secao consideraremos varias aplicacoes do teorema de Stokes e das 3-formas a problemas de fısica. Comecamos buscando uma interpretacao para odivergente de um campo.
4.1. Divergente. Comecaremos calculando o divergente de alguns cam-pos simples de R3. Como e claro que um campo constante tem divergente zero,vamos comecar por um campo nao constante, mas cujos vetores sao todos pa-ralelos a uma dada direcao. Se v0 e um vetor unitario de R3 e ν uma funcao deR3 em R, podemos escrever um tal campo na forma
F (p) = ν(p)v0, para todo p ∈ R3.
Como v0 e constante, podemos escolher as coordenadas de modo que v0 =(1, 0, 0), donde
F (p) = (ν(p), 0, 0).
Calculando o divergente, obtemos
div(F ) =∂ν
∂x1.
Se interpretarmos F como um campo de velocidades, entao ν correspondeao modulo da velocidade em cada ponto. Portanto, o divergente sera zero ape-nas se o campo tiver aceleracao nula em todo lugar. Geometricamente istosignifica que partıculas que forem liberadas proximas uma da outra nao seraoseparadas pela acao do campo. Isto e, nao vao seguir trajetorias divergentes.Por outro lado, se a aceleracao for nao nula, as partıculas tendem a se afas-tar, ou a se aproximar, umas das outras. Um modelo fısico desta situacao edado por um gas que esta sendo expandido (aceleracao positiva) ou compri-mido (aceleracao negativa). E por isto que, em mecanica de fluidos, dizemosque um fluido e incompressıvel se seu divergente e zero.
E claro que ha outras maneiras de duas partıculas serem arrastadas paralonge ou para perto umas das outras, sem que para isto o modulo da velocidadeprecise variar. Basta considerar, por exemplo, o campo de velocidades
V(x1, x2, x3) =1√
x21 + x2
2 + x23
(x1, x2, x3),

4. APLICACOES 147
que tem modulo constante igual a 1. Neste caso as partıculas se afastam, porqueo campo e central. Calculando o divergente, obtemos
div(V) =−1
(x21 + x2
2 + x23)3/2
(x1 + x2 + x3),
que nao e constante, como seria de esperar.Para uma analise mais geral, e mais refinada, desta interpretacao do diver-
gente, considere uma regiao U ⊆ R3 onde esta definido um campo de vetoresF . Dado um ponto p ∈ U , seja σr uma bola fechada de raio r e centro em p,que esta inteiramente contida em U . Pelo teorema da divergencia,∫
∂σr
ΦF =∫σr
div(F )dV.(4.1)
Como div(F )(p) e constante e∫σr
dV =4πr3
3,
e o volume da celula σr, temos que se p ∈ U ,∫σr
div(F )(p)dV = div(F )(p)∫σr
dV =4πr3
3div(F )(p),
Somando e subtraindo este termo do lado direito de (4.1), obtemos∫∂σr
ΦF =∫σr
δdV +4πr3
3div(F )(p),(4.2)
ondeδ(x, y, z) = div(F )(x, y, z)− div(F )(p).
Como r e constante, podemos dividir (4.2) por 4πr3/3, o que nos da
34π
∫∂σr
1r3
ΦF =34π
∫σr
1r3δdV + div(F )(p),
Entretanto, div(F ) e uma funcao contınua em U , de forma que o limite deδ(x, y, z) tende a zero quando (x, y, z) tende a p. Assim, tomando o limitequando r tende a zero,
limr→0
∫σr
δdV = 0.(4.3)
Disto obtemos34π
limr→0
∫∂σr
1r3
ΦF = div(F )(p).
Portanto, lembrando que r esta fixo,
div(F )(p) =34π
limr→0
∫∂σr
1r3
ΦF(4.4)
Segundo a equacao (4.4), se r for muito pequeno, o divergente em p e maisou menos igual ao fluxo atraves de uma esfera de raio r e centro em p, divididopelo volume da esfera. Mas o fluxo atraves da esfera representa o balanco entre

148 4. 3-FORMAS
a quantidade de fluido que entra, e a quantidade que sai da esfera. Portanto,o divergente nos da o balanco entre a quantidade de fluido que entra e sai daesfera, por unidade de volume. Em particular, se o divergente for zero, entaotodo o fluido que entra na esfera, acaba saindo. Isto e, nao pode haver fluidose acumulando na esfera (seja por compressao, ou porque ha um sorvedourodentro da esfera), nem pode haver fluido vazando da esfera (seja por expansao,ou porque ha uma fonte dentro da esfera).
No §5.5 determinamos o campo magnetico de um fio infinito, que se pro-longa ao longo do eixo z, e por onde flui uma corrente constante. Vimos que asimetria do problema nos permite afirmar que
sobre qualquer cilindro cujo eixo e o proprio fio, o campoe constante, tangente ao cilindro e perpendicular ao fio.
Isto significa que duas partıculas, abandonarmos proximas uma da outra, e auma mesma distancia do fio, terao a mesma distancia relativa ao longo de todaa sua trajetoria. Por outro lado, se as duas partıculas estao a distancias diferen-tes do fio, entao so manterao sua posicao relativa se a intensidade do campo fora mesma em todo lugar. Contudo, as hipoteses decorrentes da simetria do pro-blema, combinadas com as equacoes de Maxwell, nos permitiram determinaro campo como sendo
B(x, y, z) =k
x2 + y2(−y, x, 0).
Em particular, o campo magnetico de um fio reto infinito tem intensidade umem todo lugar. Combinadas com a interpretacao fısica apresentada acima, estasconsideracoes nos permitem afirmar que o divergente deste campo deve sernulo. Um calculo direto a partir da formula para B mostra que div(B) e igual a
−2kx(x2 + y2)2
(−y) +−2ky
(x2 + y2)2(x)
2kxy(x2 + y2)2
+−2kxy
(x2 + y2)2= 0,
confirmando portanto, o palpite decorrente da geometria do campo. No §4.3veremos que o fato do divergente ser nulo e uma propriedade do campo mag-netico, qualquer que seja sua fonte.
4.2. Lei de Gauss: carga pontual. Seja
U = R3 \ (0, 0, 0),e E : U → R2 o campo eletrico de uma carga pontual q situada na origem.Pela lei de Coulomb E = ∇f , onde
f = − kq√x2
1 + x22 + x2
3
.
Temos, assim, que
ΦE =∂f
∂x1dx2 ∧ dx3 −
∂f
∂x2dx1 ∧ dx3 +
∂f
∂x3dx1 ∧ dx2.
Portanto,ΦE = gΦR

4. APLICACOES 149
onde
g =kq
(x21 + x2
2 + x23)3/2
e R e o campo radial. Mas,
d(ΦR) = 3dx1 ∧ dx2 ∧ dx3,
ao passo que
dg =−3kq
(x21 + x2
2 + x23)5/2
(x1dx1 + x2dx2 + x3dx3).
Contudo,
dg ∧ ΦR =−3kq
(x21 + x2
2 + x23)5/2
(x21 + x2
2 + x23)dx1 ∧ dx2 ∧ dx3;
donde
dg ∧ ΦR =−3kq
(x21 + x2
2 + x23)3/2
dx1 ∧ dx2 ∧ dx3.
Mas,
dΦE = dg ∧ (ΦR)− g ∧ d(ΦR),
de forma que obtemos
dΦE = 0.
Em particular, div(E) = 0.Com isto fica facil determinar o fluxo de E atraves da fronteira de um
3-celula σ que nao contem a origem. Afinal, pelo teorema de Stokes∫∂σ
ΦE =∫σ
dΦE = 0.
Por outro lado, se a origem esta no interior de σ, o teorema de Stokes naopode ser aplicado diretamente. O problema e que, por hipotese, precisamosque a 3-celula esteja totalmente contida na regiao onde a 2-forma esta definida.Mas isto nao ocorre neste caso, uma vez que ΦE nao esta definida na origem,que esta contida em σ. Por sorte este obstaculo e facil de contornar, desde quea 3-celula tenha pontos interiores; isto e, nao se reduza a uma superfıcie. Comoeste e mesmo o unico caso que nos interessa, podemos fazer esta hipotese sema preocupacao com possıveis sobressaltos posteriores.
Seja, entao, σ uma 3-celula σ que contem a origem e cujo interior e naovazio e contem a origem. Como a origem e um ponto interior de σ, existe umreal positivo ε > 0 de modo que a bola B de raio ε e centro na origem estatotalmente contida no interior de σ. Considere o 3-encadeamento E = σ −B,que corresponde ao solido σ do qual foi removido a bola B. A fronteira desteencadeamento e igual a
∂E = ∂σ − ∂B,

150 4. 3-FORMAS
que corresponde a superfıcie de σ, com o vetor normal orientado para fora, so-mada a superfıcie da bola B, com o vetor normal voltado para (0, 0, 0). Comoa origem nao pertence a E, podemos aplicar o teorema de Stokes, que nos da∫
∂E
ΦE =∫E
dΦE = 0.
Contudo, ∫∂E
ΦE =∫∂σ
ΦE −∫∂B
ΦE;
donde podemos concluir que ∫∂σ
ΦE =∫∂B
ΦE.
Portanto, para achar o fluxo de E atraves de ∂σ basta calcular seu fluxo atravesde ∂B, que e uma esfera de raio ε. Mas o valor deste fluxo ja foi obtido naequacao (5.2) da pagina 114, e e igual a 4πkq. Portanto,∫
∂σ
ΦE = 4πkq,
qualquer que seja a 3-celula σ. Observe que se trata de um resultado extrema-mente geral, que seria muito difıcil de provar sem este teorema. Resumindo,provamos o seguinte resultado da eletrostatica.
LEI DE GAUSS (para cargas pontuais). O fluxo do campo eletrico deuma carga pontual q atraves de uma superfıcie fechada S e igual a
• zero, se a carga nao esta contida no interior de S;• 4πkq, se a carga esta contida no interior de S.
Podemos nos perguntar se este resultado vale de maneira mais geral. Porexemplo, o que acontece se temos uma quantidade finita de cargas pontuaisq1, . . . , qm dentro da 3-celula σ? Neste caso, podemos repetir o argumentoanterior, desta vez tomando n bolas B1, . . . , Bm, cada uma das quais contemuma das cargas, e esta completamente contida em σ. Fazendo isto, vemos que,neste caso, o fluxo e igual a∫
∂σ
ΦE =m∑j=1
∫∂Bj
ΦE = 4πkqm.
4.3. As equacoes de Maxwell. No §5.5 do capıtulo 3 consideramosduas, das quatro equacoes de Maxwell. No caso estatico, as duas equacoesrestantes podem ser escritas como
div(E) =ρ
ε0div(B) = 0,
onde E e B representam, respectivamente, os campos eletrico e magnetico, ρe a densidade de carga e ε0 e uma constante cujo significado nao precisa nospreocupar.

4. APLICACOES 151
Pela quarta equacao de Maxwell, o divergente de um campo magneticoe sempre zero. Se o campo magnetico fosse o campo de velocidades de umfluido, isto significaria que este campo nao tem fontes, nem sorvedouros. Nocaso do campo eletrico, que pode ter divergente nao nulo, uma fonte do campoe uma carga positiva, e um sorvedouro uma carga negativa. Portanto, pode-mos interpretar a quarta equacao de Maxwell como dizendo que nao ha nadasemelhante a uma carga isolada, no caso do campo magnetico. Utilizando ojargao usual, nao pode haver um monopolo magnetico; isto e, um polo isolado.Portanto, a quarta lei de Maxwell esta relacionada ao fato, bem conhecido, deque quando quebramos um ima ao meio surgem dois novos polos magneticosde sinais opostas, um de cada lado da
Passando a terceira equacao de Maxwell, o que temos e uma versao dife-rencial da lei de Gauss. De fato, se U e uma regiao de R3 e E e um campoeletrico definido em U entao, pelo teorema de divergencia∫
∂σ
ΦF =∫σ
div(F )dV,
onde σ e uma 3-celula contida em U . Substituindo div(E) = ρε0
nesta equacao,obtemos ∫
∂σ
ΦF =∫σ
ρ
ε0dV.
Suponhamos que toda a carga esta concentrada em uma 3-celula ξ ⊆ σ. Nestecaso, a densidade de carga e nula em σ − ξ. Assim,∫
σ
ρ
ε0dV =
∫ξ
ρ
ε0dV,
uma vez que ∫σ−ξ
ρ
ε0dV = 0.
Portanto, ∫∂σ
ΦF =1ε0
∫ξ
ρdV.
Contudo, a integral a direita da formula acima e igual a carga total contida emξ. Resumindo, temos a seguinte versao generalizada da Lei de Gauss.
LEI DE GAUSS. Seja S uma superfıcie fechada. O fluxo do campoeletrico gerado por uma distribuicao de carga de densidade ρ contida em umsolido V e igual a
• zero, se V nao esta contida em S;• Q/ε0, se V esta contido em S.
Encerraremos o paragrafo calculando o campo eletrico E de um fio in-finito e carregado, cuja secao transversal suporemos desprezıvel, assim comofizemos para o campo magnetico. Note porem que, neste caso, nao ha uma cor-rente: a distribuicao de cargas no fio e uniforme e estatica. Como no caso docampo magnetico (veja §5.5) precisaremos apelar para a simetria do problema,a fim de entender a geometria do campo. Como se trata de um fio infinito, o

152 4. 3-FORMAS
campo deve ser igual em qualquer ponto de um cilindro σ coaxial com o fio.Alem disso, nossa experiencia com o caso de uma carga isolada sugere queeste campo deve ser normal ao cilindro. Portanto, denotando o campo restritoao cilindro σ por Eσ , obtemos
Eσ = ‖Eσ‖nσ,onde nσ e o vetor normal a σ. Observe que as consideracoes sobre a simetriado problema implicam que ‖Eσ‖ e constante. Logo,
σ∗(ΦE) = ‖Eσ‖Φnσ.
Portanto, ∫σ
ΦE = ‖Eσ‖∫σ
Φnσ,
ja que as consideracoes anteriores mostram que ‖Eσ‖ e constante sobre o ci-lindro. Contudo, ∫
∂σ
Φnσ= 4πr`,
que e a area do cilindro. Deste modo,∫σ
ΦE = ‖Eσ‖4πr`.
Apelando, agora, para a lei de Gauss, temos que ‖Eσ‖4πr` deve ser igual acarga total dentro de σ. Supondo que o fio tem densidade de carga constante,e igual a ρ, por unidade de comprimento, a carga total sera q`/ε0. Obtemos,assim, que
‖Eσ‖ =ρ
4πε0r.
4.4. Lema de Poincare. Seja U uma regiao de R3. Inspirados nasnocoes correspondentes para 1-formas, vimos que uma 2-forma ω ∈ Ω2(U) efechada se dω = 0. Uma 2-forma exata e aquela que pode ser escrita comodα para algum α ∈ Ω1(U). Como d(dα) = 0, temos que toda forma exata efechada. O que dizer sobre a recıproca?
Como no caso de 1-formas, se a regiao U for convexa entao a respostaa pergunta e que a recıproca e verdadeira. Tambem neste caso o resultado econhecido como lema de Poincare.
LEMA DE POINCARE (para 2-formas). Toda 2-forma fechada definidaem uma regiao e convexa de R3 e exata.
Para simplificar os detalhes tecnicos da construcao provaremos o lema dePoincare apenas no caso em que U e um 3-retangulo aberto que contem aorigem.
DEMONSTRACAO. Seja
ω = a1dx2 ∧ dx3 + a2dx1 ∧ dx3 + a3dx1 ∧ dx2.
uma 2-forma fechada definida em uma regiao convexa U de Rn. Vamos cons-truir, explicitamente, uma 1-forma α ∈ Ω1(U) tal que ω = dα, mostrando,

4. APLICACOES 153
assim, que ω e exata. Na verdade, podemos ate mesmo supor que o coeficientede dx3 em α e zero; de modo que
α = b1dx1 + b2dx2,
onde a1, a2 ∈ O(U).Calculando dα e igualando a ω, verificamos que
a1 = − ∂b2∂x3
a2 = − ∂b1∂x3
a3 =∂b2∂x1
− ∂b1∂x2
Integrando as duas primeiras equacoes com relacao a z, obtemos
b1 = −∫ x3
0
a2(x1, x2, t)dt+ P1
ao passo que
b2 = −∫ x3
0
a1(x1, x2, t)dt+ P2,
onde P1 e P2 sao funcoes apenas de x1 e x2, que por isso funcionam comoconstantes na integracao. Para determinar P1 e P2 recorremos a terceira dasequacoes acima. Substituindo os valores que obtivemos para b1 e b2 naquelaequacao, chegamos a
a3 = −∫ x3
0
(∂a1
∂x1− ∂a2
∂x2
)dt+
∂P1
∂x1− ∂P2
∂x2.(4.5)
Contudo, como ω e uma forma fechada, dω = 0, donde
∂a1
∂x1− ∂a2
∂x2= −∂a3
∂x3.
Substituindo em (4.5),
b3 =∫ x3
0
∂a3
∂x3(x1, x2, t)dt+
∂P1
∂x1− ∂P2
∂x2.
Portanto, pelo teorema fundamental do calculo,
a3(x1, x2, x3) = a3(x1, x2, x3)− a3(x1, x2, 0) +∂P1
∂x1− ∂P2
∂x2.
Efetuando os devidos cancelamentos,
a3(x1, x2, 0) =∂P1
∂x1− ∂P2
∂x2.
Mas, para que esta ultima equacao seja satisfeita, basta tomar P2 = 0 e
P1(x1, x2) =∫ x1
0
a3(t, x2, 0)dt.

154 4. 3-FORMAS
Resumindo, mostramos que α = b1dx1 + b2dx2, onde
b1 = −∫ x3
0
a2(x1, x2, t)dt+∫ x1
0
a3(t, x2, 0)dt e
b2 = −∫ x3
0
a1(x1, x2, t)dt
satisfaz ω = dα, provando assim o teorema de Poincare no caso especial emque U e um 3-retangulo aberto que contem a origem.
Como no caso de 1-formas esta demonstracao do lema de Poincare nos daum procedimento pelo qual podemos calcular a 1-forma α que satisfaz dα = ω,quando ω e uma dada 2-forma fechada definida em um paralelepıpedo de R3.Por exemplo, seja
ω =1
x2 + y2(−ydy ∧ dz − xdx ∧ dz).(4.6)
Como
dω =2xy
(x2 + y2)2dx ∧ dy ∧ dz − 2xy
(x2 + y2)2dy ∧ dx ∧ dz = 0,
entao, pelo lema de Poincare, existe uma 1-forma α, definida em um 3-retan-gulo R que nao contem o eixo z, para a qual
dα = ω.
Como a origem nao pertence ao retanguloR, vamos tomar o ponto p = (1, 0, 0)como base da construcao. Naturalmente, para que isto faca sentido, devemoster que p ∈ R. Supondo que α = b1dx1 + b2dx2, devemos ter
b1 = −∫ z
0
a2(x, y, t)dt+∫ x
1
a3(t, y, z)dt e b2 = −∫ z
0
a1(x, y, t)dt
ja que o ponto base e (1, 0, 0). Substituindo os valores de a1, a2 e a3 = 0 nasintegrais,
b1 = −∫ z
0
−xx2 + y22 dt =
xz
x2 + y22
b2 = −∫ z
0
−yx2 + y22 dt =
yz
x2 + y22 .
Portanto,
α =xz
x2 + y22 dx+yz
x2 + y22 dy.(4.7)
Observe que a forma α esta definida em toda a regiao
U = R3 \ x = y = 0,e satisfaz dα = ω em toda esta regiao e nao apenas no retangulo na qual foicalculada. Com isso, acabamos obtemos mais do que barganhamos, ja quemostramos que ω e exata em U e nao apenas em um retangulo R contendo(1, 0, 0).

4. APLICACOES 155
4.5. Potencial vetor. Vejamos o que o lema de Poincare nos diz quandoe aplicado a um campo F : U → R3. Apesar de nossa demonstracao se res-tringir ao caso em que U e um retangulo, vimos que o lema vale sobre qualquerregiao convexa. Por isso suporemos apenas que U e convexa. Digamos que Ftem divergente zero. Neste caso,
dΦF = div(F )dx1 ∧ dx2 ∧ dx3 = 0.
Logo, a 2-forma ΦF e fechada e, pelo lema de Poincare, existe
α = a1dx1 + a2dx2 + a3dx3,
tal que dα = ΦF . Escrevendo G para o campo cujas funcoes coordenadas sao(a1, a2, a3), vemos que
α = τG,
dondeΦF = dα = dτG = Φrot(G).
Concluımos que todo campo em U cujo divergente e zero e igual ao rotacio-nal de algum campo vetorial. Observe, tambem, que G nao esta definido demaneira unica. Afinal, se g ∈ O(U), entao H = G+∇g satisfaz
τH = τG + τ∇g = τG + dg,
dondeΦH = d(τG + dg) = d(τG) = F,
ja que d2 = 0. Em outras palavras, qualquer que seja g ∈ O(U) temos
rot(G+∇g) = rot(G) = F.
Todas estas consideracoes se aplicam quando F e um campo magnetico jaque, segundo as equacoes de Maxwell, este campo tem divergente nulo. Parafalar a verdade, tudo isto se parece muito com o que ocorria com o campoeletrico e seu potencial. So que la, o potencial era uma funcao com valores emreais, e o campo era obtido do potencial tomando-se o seu gradiente. Nestecaso, G funciona como o potencial de F , so que G tambem e um campo, eF e obtido de G tomando-se o seu rotacional. Estes paralelos fazem com queseja natural pensar em G como um potencial vetor de F . Outra semelhanca:no caso do campo eletrico o potencial esta definido a menos de uma constante;no campo magnetico, o potencial esta definido a menos do gradiente de umafuncao diferenciavel. A transformacao que leva o potencial vetor G de umcampo F emG+∇g, para algum g ∈ O(U) e conhecida como uma “mudancade gauge”, as vezes traduzida em portugues como mudanca de calibre.
Um exemplo simples e dado pelo campo magnetico de um fio infinito,alinhado ao longo do eixo z. Neste caso o campo e dado por
B(x, y, z) =k
x2 + y2(−y, x, 0);
de modo que, a menos da constante k, a forma do fluxo e a 2-forma ω definidaem (4.6). Como uma 1-forma α para a qual ω = dα e dada pela formula (4.7),

156 4. 3-FORMAS
o potencial vetor de B correspondera ao campo A que satisfaz τA = α. Mas,este campo e
A(x, y, z) =(
xz
x2 + y22 ,yz
x2 + y22
).
Podemos nos perguntar se o potencial vetor de um campo magnetico eum campo fidedigno ou apenas uma ficcao matematica. Para responder a estapergunta precisamos recorrer a fenomenos da fısica quantica. Em primeiro lu-gar, um campo pode ser nulo sem que seu potencial vetor seja nulo. Este e ocaso, por exemplo, dos campos conservativos. Uma situacao ainda mais radi-cal ocorre para o campo magnetico de um solenoide infinito no qual flui umacorrente estacionaria. Neste caso, o campo fora do solenoide e nulo, emboraseu potencial vetor nao seja nulo. A pergunta e: o fato do potencial vetor naoser nulo fora do solenoide pode ter algum efeito sobre um eletron que trafeganas proximidades solenoide? A resposta e sim, como mostra o chamado efeitode Aharonov-Bohm. O potencial vetor causa uma mudanca de fase no eletron,que pode ser observada em um experimento de difracao. Para mais detalhesveja [5, pp. 15-8 a 15-14] ou o verbete correspondente na Wikipedia. Umadiscussao detalhada do potencial vetor pode ser encontrada em [13].
5. Exercıcios
1. Calcule a diferencial das seguintes formas:(a) xdy ∧ dz;(b) xydz ∧ dx;(c) z3dx ∧ dy;(d) dx ∧ dy;(e) xdy ∧ dz + ydz ∧ dx+ zdx ∧ dy.
2. De exemplo de uma 2-forma de R3 que nao e fechada.
3. Use o produto exterior para calcular o jacobiano para as transformacoes decoordenadas cartesianas para(a) coordenadas cilındricas;(b) coordenadas esfericas.
4. Use o teorema de Stokes para calcular o fluxo dos seguintes campos atravesdas superfıcies dadas:(a) F = (y− x, z− y, y− x), atraves do cubo [−4, 4]× [−4, 4]× [−4, 4];(b) F = (y, xy,−z), na fronteira do solido interno ao cilindro x2+y2 ≤ 1,
limitado por z = 0 e por z = x2 + y2;(c) F = (2x, y2, z2) sobre a esfera unitaria com centro na origem;(d) F = (2x, 3y, z) sobre a superfıcie que limita a regiao definida por
x2 + y2 ≤ 4 e 1 ≤ z ≤ 3.

5. EXERCICIOS 157
5. Use o teorema de Stokes para calcular o fluxo do campo
(log(x2 + y2),2zx
arctan(yx, z√x2 + y2
),
atraves da fronteira do solido
V = (x, y, z) : 1 ≤ x2 + y2 ≤ 2 e − 1 ≤ z ≤ 2.
6. Deduza a lei de Coulomb a partir da lei de Gauss para uma carga pontual.
7. Mostre que a lei de Gauss e falsa para qualquer campo central cuja intensi-dade no ponto de coordenadas (x1, x2, x3) e dada por
k
(x21 + x2
2 + x23)n/2
,
onde k e uma constante e n 6= 2 e um inteiro positivo.
8. Seja F um campo vetorial definido em uma regiao U de R3. Prove as se-guintes formulas:(a) div( rot(F )) = 0;(b) div(gF ) = ∇g · F + g div(F );
onde g ∈ O(U).SUGESTAO: traduza a afirmacoes em termos de formas diferenciais.
9. Considere o campo central
F (x, y, z) = (kx, ky, kz),
onde k e uma constante. Esta formula descreve um campo eletrico ou umcampo magnetico? Justifique sua resposta usando as leis de Maxwell.
10. Calcule o divergente de cada um dos campos de velocidades abaixo. Quaisdeles representam um campo incompressıvel?(a) F (x, y, z) = (ay, 0, 0);(b) F (x, y, z) = (a/r2, 0, 0);(c) F (x, y, z) = (ay, 0, 0);(d) F (x, y, z) = (0, arn, 0);
onde a 6= 0 e uma constante e r =√x2 + y2 + z2.
11. Calcule o divergente de um campo central do R3.
12. Determine uma formula para o divergente:(a) em coordenadas cilıdricas;(b) em coordenadas esfericas.
13. Considere cada uma das 2-formas ω de R3 dadas abaixo. Verifique se ω efechada e, se for, determine uma 1-forma α tal que dα = ω.(a) ω = x2dx ∧ dy + (y3 + 1)dy ∧ dz + (z + 2)dx ∧ dz;(b) ω = xydx ∧ dy;(c) ω = (x2 + y2 + z2)dx ∧ dz;

158 4. 3-FORMAS
(d) ω = zdx ∧ dy + ydx ∧ dz.
14. Prove que a integral de uma 2-forma sobre fronteira de qualquer solido eigual a zero.
15. Sejam a1, a2 e a3 funcoes diferenciaveis de uma variavel definidas em todaa reta R, e considere a 2-forma
ω = a1(x)dx ∧ dy + a2(y)dy ∧ dz + a3(z)dx ∧ dz.
(a) Mostre que ω e uma forma fechada.(b) Determine uma 1-forma α tal que dα = ω.
16. Considere o campo F (x, y, z) = (0, 0,−k log(x2 + y2) definido em R3 \0, 0, 0), onde k ∈ R.(a) Mostre que F e um potencial vetor para o campo magnetico de um fio
infinito alinhado ao longo do eixo z.(b) Qual a “mudanca de gauge” que nos permite passar de F ao potencial
vetorial A determinado na pagina 4.5 para este mesmo campo?
17. Seja F um campo de vetores definido em uma regiao U de R3.(a) Calcule div(∇F ).(b) Mostre que div(∇F ) = ∆f , o laplaciano de f .(c) De exemplos de funcoes para as quais ∆f = 0.(d) Se uma funcao potencial f satisfaz ∆f = 0, o que podemos dizer
sobre o campo gradiente de f , quando e considerado como um campode velocidades?
A definicao de ∆(f) aparece na pagina 11.
18. Sejam U uma regiao de R3, f, g ∈ O(U) e V um solido limitado contidoem U . Prove as seguintes formulas, conhecidas como identidades de Green:
(a)∫∂V
Φ(f∇g) =∫V
(f∇2g +∇f · ∇g)dx ∧ dy ∧ dz
(b)∫∂V
Φ(f∇g−g∇f) =∫V
(f∇2g − g∇2f)dx ∧ dy ∧ dz.
Neste problema estamos usando a notacao ∇2f para denotar div(∇f).
6. Problemas
1. Seja U uma regiao de R3 e f ∈ O(U) uma funcao que satisfaz ∆f = 0.Denote por Dvf a derivada direcional de f ao longo de v. Considere umsolido V contido em U e seja n o vetor unitario normal a V .(a) Determine a 2-forma DnfdA.

6. PROBLEMAS 159
(b) Mostre que ∫∂V
DnfdA = 0.
(c) Mostre que∫∂V
fDnfdA =∫V
‖∇f‖2dx ∧ dy ∧ dz.
SUGESTAO: Em (b) tome F = ∇f e em (c) F = f∇f .
2. A pressao para baixo exercida por um fluido que preenche a regiao U defi-nida por x ≤ 0 e dada por F (x, y, z) = (0, 0, cx3), onde c e a densidadedo fluido. Seja V um solido (limitado) contido em U . O empuxo sobre V edefinido como
−∫∂V
ΦF .
Use o teorema de Stokes para provar o seguinte teorema de Arquimedes:O empuxo sobre V e igual ao peso do fluido deslocado por V .


Capıtulo 5
n-formas
Neste capıtulo fazemos uma revisao geral de tudo o que estudamos nolivro; por isso, ha aqui apenas definicoes e teoremas, sem nenhuma demons-tracao. Utilizaremos um enfoque em que 1-formas, 2-formas e 3-formas saotratadas simultaneamente, como instancias diferentes de um mesmo tipo de ob-jeto. Isto significa que, se voce desejar, pode considerar esta revisao como umaintroducao as n-formas. Neste caso, as demonstracoes de todos os resultadosenunciados ficam como exercıcios.
!!!!!!! So que ainda nao tive tempo de escrever este capıtulo!!!!!
161


Apendice
Estas secoes apenas revisam algumas propriedades elementares do calculodiferencial e dos determinantes que usamos com frequencia neste livro.
1. Determinantes
So usaremos determinantes de matrizes 2 × 2 e 3 × 3, e nao teremos ocasiaode calcular estes determinantes explicitamente em casos numericos. Por isso,nao usaremos tecnicas de calculo como o metodo de Gauss. De fato, alem daspropriedades elementares dos determinantes usaremos apenas a expansao emco-fatores para matrizes 3× 3.
Seja A uma matriz 2× 2, cujas entradas sao
A =[a1 a2
b1 b2
].
O determinante de A e definido por
det(A) = a1b2 − b2a1.
Para calcular o determinante de uma matriz 3 × 3, apelamos para a expansaoem co-fatores. Expandindo o determinante de
B =
a1 a2 a3
b1 b2 b3c1 c2 c3
pela primeira linha, obtemos
det(B) = a1
[b2 b3c2 c3
]− a2
[b1 b3c1 c3
]+ a3
[b1 b2c1 c2
]Note a alternancia dos sinais ao longo da linha. Para efetuar o calculo completodo determinante de det(B) precisarıamos, agora, de expandir cada um dosdeterminantes 2× 2. Nao faremos isto, porque a expressao final e complicadae nao sera utilizada em nenhum lugar no livro.
Para simplificar a notacao, pensaremos cada uma das linhas de uma matrizcomo um vetor. Assim,
u1 = (a1, a2, a3), u2 = (b1, b2, b3) e u3 = (c1, c2, c3).
163

164 APENDICE
Com isto, podemos escrever
B = [u1, u2, u3] e detB = det[u1, u2, u3].
Lembre-se que os us representam as linhas de B, e nao as suas colunas. Comesta notacao podemos formular facilmente as propriedades do determinante deque vamos precisar. Sejam u1, u2, u3, u4 ∈ Rn e k ∈ R, entao
Propriedade 1: se trocamos duas linhas quaisquer de um determinanteentre si, ele troca de sinal, por exemplo,
det[u2, u1, u3] = −det[u1, u2, u3];
Propriedade 2: se uma linha da matriz for multiplicada por uma cons-tante k, entao o determinante e multiplicado por k, por exemplo,
det[ku1, u2, u3] = k det[u1, u2, u3];
Propriedade 3: o determinante e aditivo com respeito a cada uma desuas linhas, por exemplo,
det[u1 + u4, u2, u3] = det[u1, u2, u3] + det[u4, u2, u3];
Embora tenhamos enunciado estas propriedades apenas no caso em que a ma-triz e 3× 3, elas tambem valem para matrizes 2× 2. Na verdade, todas valemquaisquer que sejam as matrizes quadradas cujos determinantes estamos cal-culando.

Bibliografia
[1] V. I Arnold, Mathematical methods of classical mechanics, Springer, New York (1989).
[2] D. Bachman, A geometric approach to differential forms, arXiv:math.GT/0306194 (2003).
[3] S. Chandrasekhar, Newton’s Principia for the Common Reader, Oxford University Press, Ox-ford (1995).
[4] R. Courant e F. John, Introduction to calculus and analysis, vol. 2, John Wiley and Sons(1974).
[5] R. P. Feynman, The Feynman lectures on physics, vol II, comemorative issue, Addison-Wesley,Reading (1989).
[6] G. Green, An essay on the application of mathematical analysis to the theories of electricityand magnetism, Nottingham, (1828).Disponıvel em http://
[7] G. Helferich, Humboldt’s Cosmos: Alexander von Humboldt and the Latin American Journeythat changed the way we see the World, Gotham Books, New York (2004).
[8] S . Lang, Calculus of several variables, Springer, New York (1987).
[9] I. Madsen e J. Tornehave, From calculus to cohomology: De Rham cohomology and charac-teristic classes, Cambridge University Press (1999)
[10] I. Newton, Mathematical Principles of Natural Philosophy and his system of the world, vol.I, traducao de A. Motte, revisao de F. Cajori Springer, University of California Press, Berkeley,(1962).
[11] E. M. Purcell, Eletricidade e magnetismo, curso de fısica de Berkeley, vol. 2, Edgard Blucher,Sao Paulo (1970).
[12] N. M. dos Santos, Vetores e matrizes, Instituto de Matematica Pura e Aplicada, Rio de Janeiro(1975).
[13] M. D. Semon e J. R. Taylor, Thoughts on the magnetic potential, Am. J. Phys. 64 (1996),1361–1369.
[14] M. Spivak, Calculus on manifolds, Benjamin/Cummings, New York (1965).
[15] R. S. Westfall, Never at rest: a biography of Isaac Newton, Cambridge University Press,Cambridge (1980).
165


Indice
Base canonica, 1Bola
aberta, 1fechada, 1
Celula1-celula, 522-celula, 873-celula, 137
Campoconstante, 43de velocidades, 44central, 50conservativo, 49eletrico
de fio infinito, 151magnetico
de fio infinito, 45, 116, 118, 148Carga
pontual, 148Circulacao, 43, 44, 108
e campos conservativos, 49Comutador, 11Conexo, 3Conjunto
aberto, 2convexo, 3fechado, 2vazio, 2
Curvaalgebrica, 11contınua
parametrizavel, 3
Divergente, 145formula integral, 147interpretacao fısica, 146
Encadeamento1-encademento, 52
Equacao de Laplace, 10Equacoes de Maxwell, 150
Fluidoincompressıvel, 146
Formadiferencial, 51
Fronteira, 2
Gausslei de, 151
Laplaciano, 10Lei
de Ampere, 115de Gauss, 148, 152
Magneticomonopolo, 151
Norma, 1
Redemoinho, 45Retangulo, 2Retangulo fechado, 2rotacional, 108
Singularidade, 5
Teoremada divergencia, 145, 146do gradiente, 42de Stokes, 42, 104, 141
Vortice, 45Velocidade
angular, 110campo de, 109
Vorticidade, 110, 118
167