Cálculo3 UFG
154
C ÁLCULO 3 C URSO DE F ÍSICA 2009 J OÃO C ARLOS DA R OCHA M EDRADO M IGUEL A NTÔNIO DE C AMARGO Texto para utilização na disciplina Cálculo 3 do Curso de Física a distância. Goiânia 2009
description
Livro muito bom de cálculo 3.Elaborado pelos professores da UFG.
Transcript of Cálculo3 UFG

CÁLCULO 3
CURSO DE FÍSICA 2009
JOÃO CARLOS DA ROCHA MEDRADO
MIGUEL ANTÔNIO DE CAMARGO
Texto para utilização na disciplina Cálculo 3 do Curso de Física adistância.
Goiânia2009

Sumário
Ao leitor 6
Introdução 8
1 Movimentos no plano e no espaço 101.1 Vetores no Plano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.1.1 Operações com Vetores . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.2 Vetores Paralelos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.2.1 Equações Paramétricas da Reta . . . . . . . . . . . . . . . . . . . . . . . 181.3 Produto Escalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.3.1 Vetores Perpendiculares . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.3.2 Equação Cartesiana da Reta . . . . . . . . . . . . . . . . . . . . . . . . . 221.3.3 Ângulos entre vetores . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
1.4 Curvas Parametrizadas no Plano . . . . . . . . . . . . . . . . . . . . . . . . . . 251.4.1 Limite, Continuidade e Derivabilidade . . . . . . . . . . . . . . . . . . 261.4.2 Integrais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
1.5 Vetores no Espaço . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321.5.1 Retas e Planos no Espaço . . . . . . . . . . . . . . . . . . . . . . . . . . 37
1.6 Superfícies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 401.7 Curvas Espaciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
1.7.1 Integrais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 511.8 Comprimento de Arco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
1.8.1 Vetor Aceleração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2 Funções de Várias Variáveis 562.1 Limites e Continuidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
2.1.1 Propriedades de Limites . . . . . . . . . . . . . . . . . . . . . . . . . . . 662.2 Continuidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
3 Diferenciabilidade de Funções de Várias Variáveis 683.1 Derivadas Parciais de Funções de Duas Variáveis . . . . . . . . . . . . . . . . . 68
3.1.1 Derivadas de Ordem Superior . . . . . . . . . . . . . . . . . . . . . . . 713.2 Diferenciabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 743.3 Regra da Cadeia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
3.3.1 Regra da Cadeia: Versão 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 773.3.2 Regra da Cadeia: Versão 2 . . . . . . . . . . . . . . . . . . . . . . . . . . 81
3.4 Derivada direcional e Gradiente . . . . . . . . . . . . . . . . . . . . . . . . . . . 833.4.1 Observações e Interpretações . . . . . . . . . . . . . . . . . . . . . . . . 853.4.2 Aplicações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.5 Extremos de Funções de Duas Variáveis . . . . . . . . . . . . . . . . . . . . . . 903.5.1 Extremos Locais e Absolutos . . . . . . . . . . . . . . . . . . . . . . . . 903.5.2 Teste da Derivada Segunda . . . . . . . . . . . . . . . . . . . . . . . . . 95
4 Integração de Funções de Várias Variáveis 1014.1 Cálculo de Integrais Repetidas . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
4.1.1 Propriedades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1084.2 Mudança de Variáveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
4.2.1 Mudança de Variáveis na Integral Dupla . . . . . . . . . . . . . . . . . 110
2

4.2.2 Mudanças de Coordenadas Especiais . . . . . . . . . . . . . . . . . . . 1114.3 Integral Tripla . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
4.3.1 Cálculo de Integrais Triplas . . . . . . . . . . . . . . . . . . . . . . . . . 1164.3.2 Mudança de Variáveis na Integral Tripla . . . . . . . . . . . . . . . . . 118
4.4 Aplicações das Integrais Dupla e Tripla . . . . . . . . . . . . . . . . . . . . . . 1234.5 Integrais de Linha . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
4.5.1 Integral de Linha de Funções Escalares . . . . . . . . . . . . . . . . . . 1294.5.2 Integral de Linha das Formas Diferenciais . . . . . . . . . . . . . . . . . 1324.5.3 Propriedades da Integral de Linha . . . . . . . . . . . . . . . . . . . . . 135
4.6 Teorema de Green . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1394.6.1 Aplicações do Teorema de Green . . . . . . . . . . . . . . . . . . . . . . 141
4.7 Teoremas de Gauss e de Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Bibliografia 152
Índice Remissivo 153

Lista de Figuras
1.1 Vetor deslocamento do avião (Exemplo 1.1). . . . . . . . . . . . . . . . . . . . . 111.2 Representação gráfica de um vetor dado por dois pontos. . . . . . . . . . . . . 111.3 Vetores perpendiculares. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.4 Soma de vetores e produto de um vetor por um escalar. . . . . . . . . . . . . . 131.5 Soma e diferença de vetores e produto de um vetor por um escalar. . . . . . . 131.6 Avião: Velocidade Resultante. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.7 Representação gráfica do vetor u = (a, b) . . . . . . . . . . . . . . . . . . . . . 151.8 Representação gráfica dos vetores u = (a, b) e v = (c, d). . . . . . . . . . . . . 161.9 Representação gráfica de um vetor u como a soma dos versores e1 e e2. . . . . 181.10 Representação gráfica dos vetores formados pelos pontos A, B e P e da reta r. 181.11 Vetores perpendiculares. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.12 Equação Cartesiana da reta r. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221.13 Determinação do ângulo entre vetores. . . . . . . . . . . . . . . . . . . . . . . . 231.14 Determinação da Projeção de um vetor F sobre o vetor u. . . . . . . . . . . . . 241.15 Determinação das coordenadas de um vetor unitário em função do ângulo θ. 251.16 Representação dos vetores velocidade e aceleração em um movimento circular. 301.17 Determinando as coordenadas de um ponto P. . . . . . . . . . . . . . . . . . . 331.18 Sistemas de coordenadas no espaço. . . . . . . . . . . . . . . . . . . . . . . . . 331.19 Marcando o ponto P(a, b, c). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341.20 Área de um paralelogramo é ||u × v||. . . . . . . . . . . . . . . . . . . . . . . . 361.21 Cálculo do torque gerado pelo aperto de um parafuso com uma chave inglesa. 371.22 Equações paramétricas da reta. . . . . . . . . . . . . . . . . . . . . . . . . . . . 371.23 Equações paramétricas do plano. . . . . . . . . . . . . . . . . . . . . . . . . . . 381.24 Superfície z = (1.3)x.sen(y). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 411.25 Representação gráfica da superfície y = x2. . . . . . . . . . . . . . . . . . . . . 411.26 Representação gráfica da superfície z = seny. . . . . . . . . . . . . . . . . . . . 421.27 Determinação da equação de uma superfície de revolução. . . . . . . . . . . . 421.28 Determinação da equação do Elipsóide. . . . . . . . . . . . . . . . . . . . . . . 431.29 Determinação da equação do Hiperbolóide de uma folha. . . . . . . . . . . . . 441.30 Determinação da equação do Hiperbolóide de duas folhas. . . . . . . . . . . . 441.31 Determinação da equação do Parabolóide. . . . . . . . . . . . . . . . . . . . . . 451.32 Determinação da equação do Cone de Revolução para z ≥ 0. . . . . . . . . . . 451.33 Determinação da equação do Cilindro Circular Reto para z ≥ 0. . . . . . . . . 461.34 Representação gráfica da superfície z = sen(xy). . . . . . . . . . . . . . . . . . 471.35 Representação gráfica da curva espacial α(t) = (tsent, t, tcost), t ∈ R. . . . . 481.36 Representação gráfica da Hélice α(t) = (cost, sent, t), t ∈ R. . . . . . . . . . . 491.37 Representação gráfica dos vetores T(t), T′(t) e a(t) em uma curva α(t). . . . . 54
2.1 Representação do gráfico da função y = f (x) = x. . . . . . . . . . . . . . . . . 562.2 Representação do gráfico da função z = f (x, y) = x. . . . . . . . . . . . . . . . 572.3 Representação dos gráficos das funções dadas implicitamente por x2 + y2 =
1, no plano e no espaço, respectivamente. . . . . . . . . . . . . . . . . . . . . . 582.4 Representação gráfica do domínio D da função f . . . . . . . . . . . . . . . . . 592.5 Representação gráfica do domínio D (em vermelho), da imagem (em azul) e
do gráfico da função y =√
x. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 602.6 Representação gráfica do domínio D (em vermelho), da imagem (em azul) e
do gráfico da função z = x2 + y2. . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4

2.7 Representação gráfica das curvas de nível no gráfico da função f (x.y) =x2 + y2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.8 Representação gráfica das curvas de nível no gráfico da função f (x, y) =4 − x − y. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
2.9 Representação gráfica das direções de aproximação a um ponto. . . . . . . . . 63
3.1 Representação gráfica da derivada considerando y constante (y = y0). . . . . 693.2 Representação gráfica da derivada considerando x constante (x = x0). . . . . 693.3 O gradiente é perpendicular ao vetor tangente às curvas de nível. . . . . . . . 813.4 Representação gráfica da derivada direcional. . . . . . . . . . . . . . . . . . . . 833.5 Determinação de um plano tangente a uma superfície. . . . . . . . . . . . . . . 873.6 Representação gráfica da Calha. . . . . . . . . . . . . . . . . . . . . . . . . . . . 903.7 Representação gráfica de uma superfície com vários tipos de extremos. . . . . 913.8 Curvas de nível e a elipse. Em azul, ∇ f e em amarelo ∇g. . . . . . . . . . . . 963.9 Representação gráfica de 16x2 + 4y2 + 9z2 = 144. . . . . . . . . . . . . . . . . . 1003.10 Representação gráfica da Calha. . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
4.1 Aproximação da área sob a parábola por falta (a) ou por excesso (b). . . . . . 1014.2 Definição da integral dupla: dividindo o domínio D. . . . . . . . . . . . . . . . 1024.3 Regiões 1 e 2 para a integração dupla. . . . . . . . . . . . . . . . . . . . . . . . 1044.4 Cálculo do volume. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1064.5 Representação gráfica do Prisma - Exemplo 4.6. . . . . . . . . . . . . . . . . . . 1064.6 Representação gráfica do Triângulo D - Exemplo 4.8. . . . . . . . . . . . . . . . 1084.7 Representação gráfica do domínio D - Exemplo 4.10. . . . . . . . . . . . . . . . 1114.8 Representação gráfica do Triângulo D - Exemplo 4.8. . . . . . . . . . . . . . . . 1124.9 Semi-esfera - Exemplo 4.9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1134.10 Integral Tripla - calculando o volume. . . . . . . . . . . . . . . . . . . . . . . . 1154.11 Representação gráfica do Triângulo D - Exemplo 4.9. . . . . . . . . . . . . . . . 1174.12 Curva - partição do domínio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1294.13 Curva - a poligonal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1334.14 Curva α(t). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1394.15 Curvas fechadas simples: (1) suave e (2) parcialmente suave. . . . . . . . . . 1404.16 Regiões 1 e 2 para a integração dupla. . . . . . . . . . . . . . . . . . . . . . . . 1404.17 Exemplo 4.45: Cilindro parabólico e planos. . . . . . . . . . . . . . . . . . . . . 1474.18 Teorema de Stokes: Superfície S e a curva C. . . . . . . . . . . . . . . . . . . . 1484.19 Exemplo 4.46: Cilindro e o plano. . . . . . . . . . . . . . . . . . . . . . . . . . . 149

Caro leitor,
Este texto foi elaborado para servir de suporte à disciplina Cálculo 3, em nível universitário, maisespecificamente para o curso de Física a distância promovido pela Universidade Federal de Goiás ecom a participação das Universidades Estadual de Goiás e Católica de Goiás.
Neste texto, minimizamos ao máximo a formalidade para esse curso de Cálculo e o escrevemoscom uma linguagem que acreditamos, seja dialógica e de fácil compreensão. Esperamos motivaratravés de situações–problema, que em geral são originadas dos problemas físicos ou mesmo do nossodia–a–dia, os novos resultados aqui apresentados. Esperamos, ainda, que as suas respectivas de-monstrações ou justificativas, estejam à altura da experiência e maturidade do estudante.
Apresentamos antes de cada novo resultado, que formalmente são chamados de teoremas ou pro-posições, vários exemplos que motivam e ilustram com aplicações a utilização dos mesmos, com oobjetivo principal de ativar a intuição e provocar a compreensão de forma natural.
Apresentamos também, várias listas com exercícios variados, que complementam e ampliam oconhecimento descrito no texto. Assim, esperamos que você, estudante, leia com bastante atençãonão somente este texto, mas, principalmente, na elaboração de resoluções dos exercícios propostos e,se possível, propor novas situações a serem resolvidas com a utilização dos conceitos vistos.
É muito importante que o estudante se aplique tanto na pesquisa em outros materiais, comoem livros, artigos e publicações disponibilizadas via internet ou quaisquer outros meios que tiveremacesso, nunca se esquecendo de que, embora seja um curso a distância, você tem a possibilidade e,quem sabe, a necessidade de trocar informações a cerca de estudos com colegas e/ou orientadores. Istopode e deve ser feito sempre, pois o trabalho sendo realizado em equipe tem maiores possibilidades desucesso.
Apresentamos a seguir uma breve descrição de vida acadêmica e profissional dos autores, quetambém produziram os textos intitulados "Fundamentos de Matemática"e "Cálculo 1"para essemesmo curso de graduação a distância.
Miguel Antônio de Camargo defende sempre o ensino significativo como forma de motivaçãopara o aprendizado "de fato"!
Licenciado em matemática pela UCG - Goiânia, Mestre em matemática pela UFG.Professor do Instituto de Matemática e Estatística da Universidade Federal de Goiás(IME/UFG), desde 1980, tendo participado de uma extensa gama de eventos rela-cionados à matemática e ao ensino dela em diversas universidades e faculdades denosso Estado.
Dedica grande parte de seu trabalho ao Curso de Licenciatura em Matemática e outraboa parte atua em cursos de formação (continuada) de professores, inclusive cursosa distância, como, atualmente, o de Licenciatura em Física e recentemente o Multi-curso Matemática Ensino Médio, promovido pelo governo de Goiás em parceria coma Fundação Roberto Marinho (RJ) e anteriormente ao Pró-Ciências, realizado pelaUFG com o apoio da CAPES.

João Carlos da Rocha Medrado define-se como um apaixonado pelo ensino de matemática e umentusiasta pelo ensino a distância!
É Professor associado do IME/UFG, onde trabalha desde 1989, Doutor em Matemá-tica pela Unicamp (1997) e Livre Docente pela Unesp (2007). Pesquisa em SistemasDinâmicos.
Atua na formação e capacitação de docentes desde 1987 através de vários projetos,sendo os principais, o Pró–Ciências, apoiado pela CAPES e o Multicurso Matemáticaapoiado pela Secretaria da Educação de Goiás e Fundação Roberto Marinho.
Os autores.

Introdução
Neste texto apresentaremos os conteúdos da disciplina Cálculo 3 para o Curso de Físicaa distância. Basicamente, discorreremos sobre:
1. Movimentos no plano e no espaço.
2. Funções de várias variáveis: continuidade, derivabilidade e integrabilidade.
O Cálculo, uma das mais importantes descobertas científicas conquistadas pelo homemem todos os tempos, é a matemática dos movimentos. Onde há movimento ou variações degrandezas, onde forças variáveis atuam produzindo aceleração, o Cálculo é a ferramentamatemática a ser empregada para seu desenvolvimento e análise.
Aprender Cálculo é, de certa forma, diferente de aprender, por exemplo, Geometria,Álgebra ou Aritmética. Para essas disciplinas, de início, aprende-se a lidar com as figu-ras, sejam planas ou espaciais, a operar com variáveis e simplificar expressões, também seaprende a calcular com números.
Em Cálculo, aprende-se tudo isso, e novos conceitos, novas habilidades, em níveis maisavançados; tornam-se necessários os conceitos de derivada e de integral, bem como suasimportantíssimas e abrangentes aplicações, além dos métodos computacionais desses ob-jetos. Para aprendê-lo, você terá que fazê-lo, na maioria das vezes, sozinho ou com a parti-cipação de colegas.
Para o aprendizado é importante:
• ler os conceitos e suas conseqüências;
• analisar e aprimorar tanto a lógica formal como a intuitiva;
• analisar exemplos já desenvolvidos, os mais diversos possíveis, buscando sempreentender cada passo;
• esboçar figuras e gráficos que representem cada situação, sempre que possível.
Além disso, é extremamente importante analisar o significado de cada conceito, de cadaresultado dado, de cada exemplo desenvolvido, de cada exercício proposto e de cada apli-cação feita.
Sugerimos fortemente ao leitor que não se restrinja a apenas este texto e, neste sentido,disponibilizamos na bibliografia uma série de livros que poderão ser utilizados ao longodeste aprendizado.
Teremos a seguir o capítulo Introdução e outros 4 capítulos:
Capítulo 1: Movimentos no plano e no espaçoExploraremos os comportamentos das aplicações da reta no plano e também no es-paço, seus gráficos e aplicações, mas é importante lembrar que as parametrizaçõessão estudadas desde o início do estudo dos movimentos das partículas, já que a po-sição das mesmas dependem a cada instante do tempo. Assim, estudaremos ainda acontinuidade, a derivabilidade e a integrabilidade destas parametrizações.

Capítulo 2: Funções de Várias VariáveisNeste capítulo, abordamos aplicações e elementos importantíssimos para o desen-volvimento do Cálculo, relacionados às funções que dependem de várias variáveis.Mais especificamente, de duas e três variáveis. Para o entendimento do comporta-mento das funções, assim como foi feito para funções de uma variável, estudaremosa continuidade.
Capítulo 3: Diferenciabilidade de Funções de Várias Variáveis Na Física, não há dúvidasde que a velocidade é o principal ingrediente em todos os modelos. Neste capítulo,nos dedicamos a estudar a derivada (velocidade) de Funções de Várias Variáveis.
Capítulo 4: Integração de Funções de Várias VariáveisDesde o tempo dos gregos, o Cálculo de áreas tem papel importante no desenvol-vimento humano, e hoje, para todos os modelos físicos, a inversa da derivada oua integração dentre as suas diversas características é um elemento importante nesseaspecto.
É necessário termos várias formas de encarar os problemas, pois com uma visão amplaserá mais fácil o entendimento, bem como resolvê-los. Então, vamos deixar o olhar agu-çado, a criatividade solta e a vontade a mil, para que possamos chegar ao final deste, comum ótimo aproveitamento, não apenas na disciplina, mas principalmente para a vida.
Capítulo 1
Movimentos no plano e no espaço
O objetivo principal é trabalhar com vetores, que se constituem em uma das mais im-portantes ferramentas não somente em matemática mas, principalmente em Física.
No texto "Fundamentos de Matemática" definimos e estudamos os vetores. Aqui va-mos apresentar alguns resultados importantes relacionados a eles.
1.1 Vetores no Plano
Definimos a posição de um objeto sempre em relação a algum sistema referencial, sejaele um poste, um objeto fixo, ou não, uma estrela (o sol, por exemplo), ou seja estabelece-mos um ponto e damos a posição relativa do objeto o qual ao se deslocar, estará mudandoa sua posição em relação ao sistema referencial.
Em problemas físicos, temos diversas situações nas quais, para a sua compreensão, te-mos que analisar várias componentes, como por exemplo, o deslocamento, a velocidade, aaceleração, forças atuantes, ou seja, temos que avaliar diversas informações sobre o corpodurante o seu deslocamento. Observemos a situação:
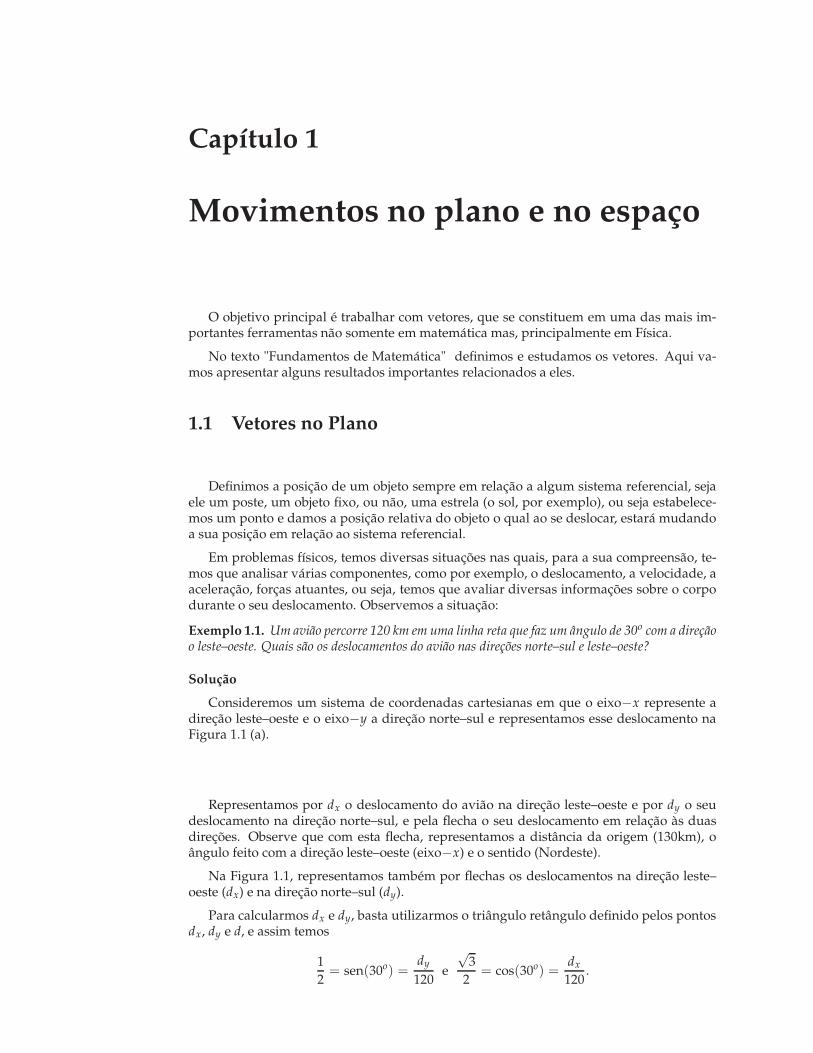
Exemplo 1.1. Um avião percorre 120 km em uma linha reta que faz um ângulo de 30o com a direçãoo leste–oeste. Quais são os deslocamentos do avião nas direções norte–sul e leste–oeste?
Solução
Consideremos um sistema de coordenadas cartesianas em que o eixo−x represente adireção leste–oeste e o eixo−y a direção norte–sul e representamos esse deslocamento naFigura 1.1 (a).
Representamos por dx o deslocamento do avião na direção leste–oeste e por dy o seudeslocamento na direção norte–sul, e pela flecha o seu deslocamento em relação às duasdireções. Observe que com esta flecha, representamos a distância da origem (130km), oângulo feito com a direção leste–oeste (eixo−x) e o sentido (Nordeste).
Na Figura 1.1, representamos também por flechas os deslocamentos na direção leste–oeste (dx) e na direção norte–sul (dy).
Para calcularmos dx e dy, basta utilizarmos o triângulo retângulo definido pelos pontosdx, dy e d, e assim temos
12
= sen(30o) =dy
120e
√3
2= cos(30o) =
dx
120.

120 kmd
Norte
Sul
Leste Oeste30o
dy
dx
||v||P(a,b)
α
b
a
(a) (b)
x
y
Figura 1.1: Vetor deslocamento do avião (Exemplo 1.1).
Assim, dx = 60√
3 km e dy = 60 km.
Podemos então representar dx pelo ponto (60√
3, 0) e dy pelo ponto (0, 60) e, finalmenteo deslocamento total d pelo ponto (60
√3, 60).
Vemos uma relação interessante nesse caso
(60√
3, 60) = (60√
3, 0) + (0, 60),
ou seja, o deslocamento d pode ser escrito como a soma dos pontos dados pelos deslo-camentos nas direções leste–oeste e norte–sul. Será que este procedimento repete-se emoutras situações? A resposta é afirmativa e nos deteremos agora neste novo elemento.
Em um sistema de coordenadas, a cada ponto do plano podemos associar uma flechaque representa a distância da origem, o ângulo feito com o eixo−x e o sentido (no Exem-plo 1.1, nordeste). A esta flecha, damos o nome de vetor.
Como dissemos anteriormente, muitas vezes, podemos mudar o referencial e assima posição do objeto. E aqui, vemos toda a importância dos vetores, pois independentede onde esteja a sua extremidade, sempre podemos representá-los com a extremidade naorigem do sistema de coordenadas.
Há casos em que representamos graficamente um vetor por uma seta que não partenecessariamente da origem. Por exemplo, a mudança de posição de uma partícula, ou sejao seu deslocamento. Se essa partícula se move do ponto A(x1, y1) para o ponto B(x2, y2),estes pontos determinam o vetor, chamado vetor deslocamento e é dado por
−→AB = (x2, y2)− (x1, y1) = (x2 − x1, y2 − y1).
Como mostra a Figura 1.2, a seta que representa o vetor−→AB, partindo da origem, e a seta
com origem em A e extremidade em B, têm o mesmo módulo, direção e sentido. Conformea conveniência, utilizamos uma ou outra para representar o vetor
−→AB.
x
y
x1 x2x2 − x1
y1
y2
y2 − y1
A
B
Figura 1.2: Representação gráfica de um vetor dado por dois pontos.
Veja o próximo exemplo.
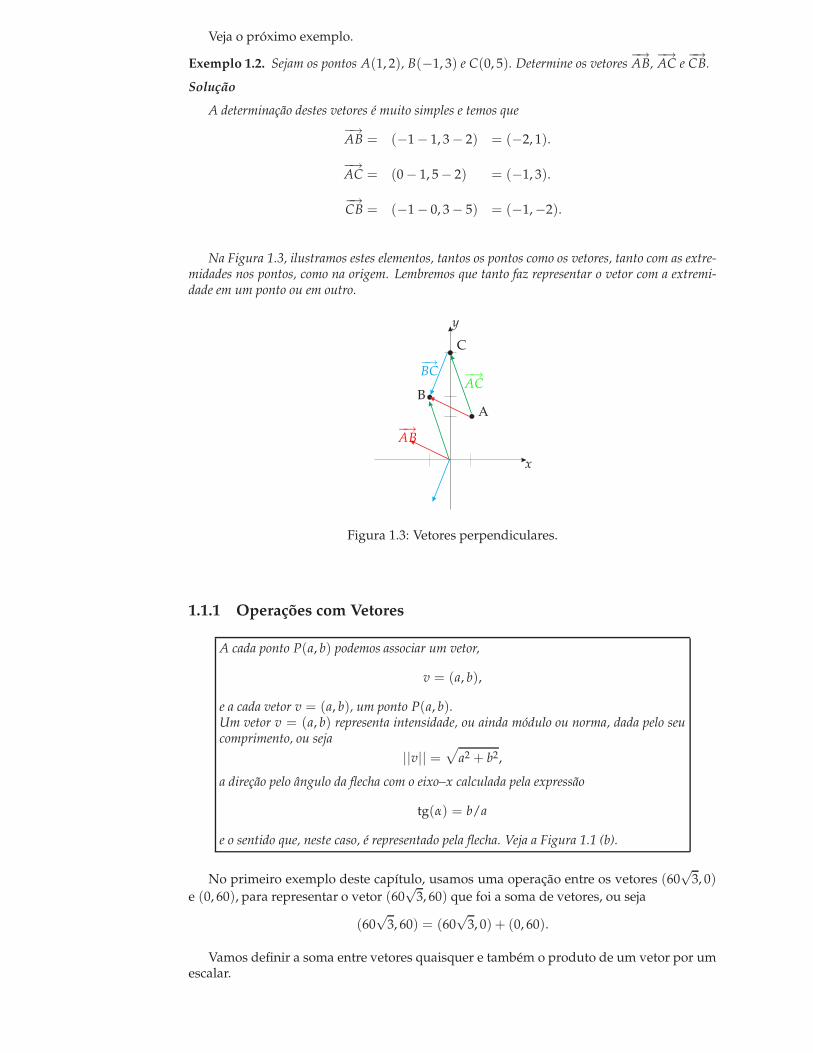
Exemplo 1.2. Sejam os pontos A(1, 2), B(−1, 3) e C(0, 5). Determine os vetores−→AB,
−→AC e
−→CB.
Solução
A determinação destes vetores é muito simples e temos que
−→AB = (−1 − 1, 3 − 2) = (−2, 1).
−→AC = (0 − 1, 5 − 2) = (−1, 3).
−→CB = (−1 − 0, 3 − 5) = (−1,−2).
Na Figura 1.3, ilustramos estes elementos, tantos os pontos como os vetores, tanto com as extre-midades nos pontos, como na origem. Lembremos que tanto faz representar o vetor com a extremi-dade em um ponto ou em outro.
−→AB
−→AC
−→BC
x
y
AB
C
Figura 1.3: Vetores perpendiculares.
1.1.1 Operações com Vetores
A cada ponto P(a, b) podemos associar um vetor,
v = (a, b),
e a cada vetor v = (a, b), um ponto P(a, b).Um vetor v = (a, b) representa intensidade, ou ainda módulo ou norma, dada pelo seucomprimento, ou seja
||v|| =√
a2 + b2,
a direção pelo ângulo da flecha com o eixo–x calculada pela expressão
tg(α) = b/a
e o sentido que, neste caso, é representado pela flecha. Veja a Figura 1.1 (b).
No primeiro exemplo deste capítulo, usamos uma operação entre os vetores (60√
3, 0)
e (0, 60), para representar o vetor (60√
3, 60) que foi a soma de vetores, ou seja
(60√
3, 60) = (60√
3, 0) + (0, 60).
Vamos definir a soma entre vetores quaisquer e também o produto de um vetor por umescalar.

Sejam os vetores u = (a, b) e v = (c, d) e um escalar λ ∈ R. Definimos
Soma de vetores w = u + v = (a + c, b + d);
Produto de um vetor por um escalar λv = (λa, λb).
aa
a
bb
b
c
d
uuu
v
a + c
b + du + v
λu
λu
λaλa
λb
λb
(a)(b) λ > 0 (c) λ < 0
xxx
yyy
Figura 1.4: Soma de vetores e produto de um vetor por um escalar.
Ilustramos estas operações no próximo exemplo:
Exemplo 1.3. Dados os vetores u = (1, 2) e v = (−3, 1), calcule u + v, u − v e 2u. Represente osgraficamente.
Solução
É uma aplicação direta da definição das operações soma e produto por um escalar. Ve-jamos:
1. u + v = (1, 2) + (−3, 1) = (1 + (−3), 2 + 1) = (−2, 3);
2. u − v = (1, 2) − 1.(−3, 1) = (1, 2) + ((−1).(−3), (−1).1) = (1, 2) + (3,−1) = (1 +3, 2 + (−1)) = (4, 1);
3. 2u = 2(1, 2) = (2.1, 2.2) = (2, 4).
Agora, os representamos na Figura 1.5. Observe que representamos o vetor u − v comsua origem no zero e também como uma das diagonais do paralelogramo definido pelosvetores u e v.
u
u uuvv vv
u − v u − vu + vu + v
2u
xx xx
yy yy
4−3 −3−31 2
(a) (b) (c) (d)
Figura 1.5: Soma e diferença de vetores e produto de um vetor por um escalar.

Geometricamente, temos que:
1. a soma de dois vetores é representada pela diagonal maior doparalelogramo definido pelos dois vetores (Figura 1.4(a));
2. a diferença entre dois vetores é um vetor paralelo à diago-nal menor do paralelogramo definido por estes vetores (Figu-ras 1.5(b) e 1.5(c));
3. o produto de um vetor por um escalar, apenas altera a intensi-dade ou o sentido (Figuras 1.4(b) e 1.4(c)).
Exemplo 1.4. Um Airbus A320 realiza um vôo para leste a 800 km/h sem vento e em determi-nado momento encontra um vento de popa de 106 km/h atuando no sentido 60o nordeste. O aviãomantém-se rumo ao leste, mas devido a esse vento, adquire nova velocidade em relação ao solo etambém direção e sentido. Determine-os.
Solução
Precisamos determinar os novos elementos, norma, direção e sentido, após a ação do vento. Ora,um vetor representa todos estes elementos, então o que devemos fazer é a partir da determinação dosvetores velocidade do avião sem a ação do vento de popa, v, e a velocidade de popa, vp, determinar ovetor resultante vR. Neste caso, temos ainda que,
||v|| = 800 e ||vp|| = 105.
Observando a Figura 1.6, fica clara a situação, e assim devemos calcular os elementos resultantesque é dado por
vR = v + vp.
Consideremos um sistema referencial no avião, ou matematicamente, um sistema de coordenadascartesiano, onde o eixo x representa a direção Oeste–Leste e o eixo y, a direção Norte–Sul. Ilustremosa situação na Figura 1.6.
vp
v
vR = v + vp
x
y
θ
600
Figura 1.6: Avião: Velocidade Resultante.
Assim, determinamos os vetores
v = (800, 0)vp = (106 cos(60o), 106 sen(60o)) = (53, 53
√3).
Determinemos então vR, ou
vR = v + vp = (853, 53√
3).
E a nova velocidade escalar é dada por
||vR|| =
√
8532 + (53√
3)2 ≃ 855, 84,

e a direção, por
tg(θ) =53√
3853
≃ 0, 10761 ⇒ θ ≃ 6, 14o.
Portanto, temos que após a ação do vento de popa, o avião segue com velocidade de 855,84 km/he direção e sentido dados por 6, 140 nordeste.
1.2 Vetores Paralelos
Um vetor u no plano R2 é representado por um par ordenado, ou seja,
u = (a, b).
e o representamos graficamente por
xx
yy
aa
b
b u
uθ
θ π − θ
Figura 1.7: Representação gráfica do vetor u = (a, b)
Observe ainda que sabendo o seu comprimento (intensidade ou norma) e o ângulo θpodemos também determinar suas coordenadas. Por exemplo, na Figura 1.7, o vetor temintensidade ||u|| e faz um ângulo θ radianos com o eixo x.
Do triângulo retângulo tiramos as igualdades
cos(θ) =a
||u|| ⇒ a = ||u||cos(θ), e
sen(θ) =b
||u|| ⇒ b = ||u||sen(θ).
Portanto, podemos expressar o vetor u pelas coordenadas
u = (||u||cos(θ), ||u||sen(θ))
Observe que podemos expressar o ângulo θ pela expressão
tg(θ) =ba
.

x xxx
yyyyyy
aaa
bbbb
ccc
dddd
uu vv
(a) (b) (c) (d)
θ θ
Figura 1.8: Representação gráfica dos vetores u = (a, b) e v = (c, d).
Ora, digamos que dois vetores u = (a, b) e v = (c, d) representados na Figura 1.8 sejamparalelos. Isto quer dizer que o ângulo formado entre eles e o eixo x é o mesmo, ou aindase a e c forem não nulos temos que
tg(θ) =ba
=dc⇒ d =
bca
.
E se a for nulo (a = 0), então o ângulo θ é igual a π/2.
Dessa igualdade concluímos que
se a 6= 0, então v = (c, d) = (c,bca
) =ca(a, b) = λ(a, b) = λu, ou
se a = 0, então θ =π
2⇒ c = 0 ⇒ v = (0, d) =
db(0, b) = λ(0, b) = λu.
Portanto, se os vetores u e v são paralelos,então eles são múltiplos um do outro, ou seja
v = λu e λ ∈ R.
Exemplo 1.5. Para os vetores u = (1, 3) e v = (4/5, 2/5), determine:
1. as normas dos vetores u e v;
2. um vetor w paralelo ao vetor u e que tenha norma igual a 1. Sempre que um vetor tem norma1, dizemos que ele é unitário ou ainda um versor.
3. Determine um ponto P(x0, y0) tal que o vetor−→PA, onde A é o ponto A(1, 2), seja paralelo ao
vetor v.
Solução
Iniciamos calculando as normas dos vetores u e v. A norma de um vetor é igual ao seu compri-mento e assim ficamos com
||u|| = ||(1, 3)|| =√
12 + 32 =√
10.
||v|| = ||(16/5, 4/5)|| =
√
(
165
)2
+
(
45
)2
=
√
1625
+425
=
√
2525
= 1.
Agora, vamos determinar um vetor w que seja paralelo ao vetor u e que tenha norma 1.
Para que os vetores w e u sejam paralelos, é necessário que eles sejam múltiplos, ou seja
w = λu, λ ∈ R.
Assim, ficamos com
w = λ(1, 3) = (λ, 3λ), para todo λ ∈ R.

Mas, queremos também que ele seja unitário, ou seja, sua norma é 1, e então temos que
||w|| = 1
√λ2 + 9λ2 = 1
|λ|√
10 = 1
|λ2|.10 = 1
λ2 = 1/10
λ = ±√
110
Portanto, temos dois vetores unitários w+ e w− que são paralelos ao vetor u dados por
w+ =
√
110
(1, 3) =
(
√
110
, 3
√
110
)
e
w− = −√
110
(1, 3) =
(
−√
110
,−3
√
110
)
.
Finalmente, o último item. Neste caso, queremos um vetor com a origem no ponto A(1, 2), ouseja um vetor na forma
w1 = (x0 − 1, y0 − 2).
Como w1 é paralelo ao vetor v, basta tomar w1 igual a um múltiplo do vetor v, ou ainda
w1 = (x0 − 1, y0 − 2) = λ(4/5, 2/5), λ ∈ R.
Desta igualdade, temos o seguinte sistema de equações lineares
x0 − 1 = 45 λ
y0b − 2 = 25 λ
E assim, temos que para qualquer λ, basta tomarmos P(x0, y0) na forma
P(1 +45
λ, 2 +25
λ)
Isto quer dizer que temos infinitos valores para x0 e y0. Pense sobre isto!!!! Está correto? É coerente?Represente graficamente esta situação.
Vetores de norma 1 são chamados unitários. Dentre eles temos alguns especiais,
e1 = (1, 0) e e2 = (0, 1),
que são chamados de vetores unitários padrão ou por serem unitários, versores.Vetor nulo é
0 = (0, 0).
Se o vetor v é não nulo, entãov
||v||é unitário, ou seja ||v|| = 1. Verifique isto!!!!
Observemos que utilizando os versores, ou vetores unitários padrão, é muito simplesescrever qualquer vetor como múltiplos deles, ou seja, para o vetor u = (a, b), temos que
u = a(1, 0) + b(0, 1) = ae1 + be2.
Neste caso, dizemos que o vetor u é dado pela combinação linear entre e1 e e2. Veja a Fi-gura 1.9.

x
y
a.e1
b.e2
e1
e2
u
Figura 1.9: Representação gráfica de um vetor u como a soma dos versores e1 e e2.
Exemplo 1.6. Sejam os pontos P(2, 1) e Q(−1, 3). Determine o vetor−→PQ como combinação linear
de e1 e e2.
Solução
O vetor−→PQ é dado por
−→PQ = (−1 − 2, 3 − 1) = (−3, 2) = −3(1, 0) + 2(0, 1) = −3e1 + 2e2.
Exercício 1.7.
1. Verifique se os vetores u = (1, 2) e v = (5, 10) são paralelos. E os vetores u = (1, 2) ev = (−5,−10)? E ainda, os vetores u = (−3, 2) e v = (2,−3)?
2. Determine um vetor paralelo ao vetor u = (−2, 5).
1.2.1 Equações Paramétricas da Reta
Uma aplicação interessante e muito útil desse fato é a obtenção das equações paramé-tricas da reta. Mãos à obra!!!!
Da Geometria Plana, sabemos que dois pontos quaisquer e distintos A(a, b) e B(c, d),definem uma única reta r. Estes mesmos dois pontos definem também um vetor
−→AB. Veja
a Figura 1.10(a).
Tomando qualquer outro ponto P(x, y) dessa reta r, temos que os vetores
−→AP = (x − a, y − b) ou−→BP = (x − c, y − d)
são paralelos ao vetor−→AB = (c − a, d − b).
xx
yy
aa a
bb b
c cc
ddd−→AB
(a) (b) (c) (d)
rr rrP
A
B
−→AP
−→BP
Figura 1.10: Representação gráfica dos vetores formados pelos pontos A, B e P e da reta r.

Podemos então escrever
−→AP = tλ
−→AB ou
(x − a, y − b) = t(c − a, d − b).
ou ainda,
x = a + t(c − a)y = b + t(d − b)
que são as equações paramétricas da reta r definida pelos pontos A e B.
Observe que para cada valor de λ temos um ponto da reta. Por exemplo, para t = 0temos o ponto
x = a + 0.(c − a) = ay = b + 0.(d − b) = b
ou seja o ponto A. Para qual valor de t obteríamos o ponto B?
E por que dizemos equações paramétricas?
Para cada valor de t obtemos um único ponto da reta, e paracada ponto da reta obtemos um único valor para t.Assim, os pontos da reta dependem do parâmetro t, daí onome paramétricas.
Exercício 1.8.
1. Escreva as equações paramétricas da reta que contém os pontos A(1, 2) e B(3, 5). Represente-agraficamente. Qual é a equação cartesiana dessa reta?
2. Determine as equações paramétricas da reta que contém o ponto A(1, 0) e que é paralela aovetor u = (1, 2). Represente graficamente tanto a reta como o vetor.
3. Observe que as equações paramétricas da reta formam um sistema de equações. Para as equa-ções paramétricas encontradas no item, isole o valor de λ na primeira equação e substitua nasegunda equação. Reconhece esta equação?
Ora, então tendo as equações paramétricas, temos cada ponto (x, y) dependendo dovalor de t. Mas, isto é equivalente a dizer que tanto x como y são funções de t, ou ainda
x = x(t) e y = y(t),
ou,P(t) = (x(t), y(t)) = (a + t(c − a), b + t(d − b)),
onde P(t) representa um ponto da reta.
Portanto, podemos representar os pontos da reta, por uma função P, dada por
P : R → R2
t (x(t), y(t))
1.3 Produto Escalar
Sejam as matrizes U = [a b], V = [c d] e W = Vt, então temos que:
Soma de matrizes U + V = [a + b c + d];
Produto de matrizes U.W = ac + bd.

Observemos que podemos identificar um vetor u = (a, b) com uma matriz U = [a b] eassim a soma de matrizes é a mesma operação que na soma de vetores.
Produto escalar entre vetoresO produto escalar entre dois vetores,
u = (a, b) e v = (c, d)
é dado por
u.v = ac + bd.
Dessa forma, o produto escalar entre dois vetores é um número real, por isto dizemos,produto escalar. Observemos ainda que tanto a soma de vetores como o produto de umescalar (número real) por um vetor, resulta num vetor. Veremos muitas utilidades para estadefinição.
Exemplo 1.9. Considere os vetores u = (1, 2) e v = (3,−1). Calcule: (a) u + v; (b) −3u; (c) u.v;(d) u.u; (e) v.v; (f) ||u||; e (g) ||v||.Solução
A soma u + v é dada por
u + v = (1, 2) + (3,−1) = (1 + 3, 2 + (−1)) = (4, 1).
O produto −3u por
−3u = −3(1, 2) = ((−3).1, (−3).2) = (−3,−6).
O produto escalar entre os vetores u e v, ou ainda, u escalar v, por
u.v = (1, 2).(3,−1) = 1.3 + 2.(−1) = 1.
E os produtosu.u = (1, 2).(1, 2) = 1.1 + 2.2 = 12 + 22 = 5, e
v.v = (3,−1)(3,−1) = 32 + (−1)2 = 10.
Lembremos que a norma de um vetor u = (a, b) é
||u|| =√
a2 + b2.
Assim, as normas dos vetores u e v são
||u|| =√
12 + 22 =√
5 e ||v|| =√
32 + (−1)2 =√
10.
Concluímos que,
se u = (a, b) então
u.u = (a, b)(a, b) = a2 + b2 = ||u||2.
Esta é uma importante relação entre o produto escalar de um vetor por elemesmo e a norma do mesmo.
Observemos ainda algumas propriedades para a operação produto escalar entre veto-res. Para mostrá-las, basta dar coordenadas aos vetores e usar a definição. Em geral, aspropriedades decorrem diretamente das propriedades respectivas para números reais.
Comutatividade O produto escalar entre vetores u e v é comutativo, ou seja
u.v = v.u.

Associatividade O produto escalar entre vetores u, v e w é associativo, ou seja
u.(v.w) = (u.v).w.
Distributividade O produto escalar entre vetores u, v e w é distributivo em relação a estaoperação, ou seja
u.(v + w) = u.v + u.w.
1.3.1 Vetores Perpendiculares
Para dois vetores perpendiculares u e v consideramos um triângulo retângulo com lados
||u||, ||v|| e ||u − v||.
Ora, sabemos também que podemos considerar estes vetores com as extremidades naorigem, ou seja, consideramos eles com coordenadas na forma
u = (a, b) e v = (c, d)
e assim, temos o vetor u − v dado por
u − v = (a − c, b − d).
Ilustramos na Figura 1.11(b).
u uv v
u − v u − v
x
y
(a) (b)
Figura 1.11: Vetores perpendiculares.
Do triângulo retângulo e aplicando o Teorema de Baskara, temos que
||u − v||2 = ||u||2 + ||v||2.
Considerando os vetores em coordenadas, ficamos com
||(a − c, b − d)||2 = ||(a, b)||2 + ||(c, d)||2
(a − c)2 + (b − d)2 = a2 + b2 + c2 + d2
a2 − 2ac + c2 + b2 − 2bd + d2 = a2 + b2 + c2 + d2
ac + bd = 0.
Ou seja, se os vetores u = (a, b) e v = (c, d) são perpendiculares ou ortogonais,então
u.v = ac + bd = 0.
Esta é outra importante relação entre o perpendicularismo entre vetores e oproduto escalar entre eles.

Poderíamos também ter a mesma conclusão sem utilizar coordenas para os vetores, poissabemos que ||u||2 = u.u e usando as propriedades, ficamos com
||u − v||2 = ||u||2 + ||v||2
(u − v).(u − v) = u.u + v.v
u.u − u.v − v.u + v.v = u.u + v.v
−2u.v = 0
u.v = 0
1.3.2 Equação Cartesiana da Reta
Assim como podemos definir uma reta que passe por um ponto e que seja paralela a umvetor, podemos também, equivalentemente definir uma reta que passa por um ponto dadoe que seja perpendicular a um vetor dado. Lembremos que o vetor, além da norma e osentido, nos dá a orientação e é este importante aspecto que utilizamos aqui.
Mais especificamente, seja um ponto P(x0, y0) e um vetor u = (a, b), e definamos por ra reta que contém o ponto P e que seja perpendicular ao vetor u. Veja a Figura 1.12(a).
x0x0
y0y0
x
y
PP
Q
rr
uu
u
(a) (b)
θ
Figura 1.12: Equação Cartesiana da reta r.
Da Figura 1.12(b), vemos que o vetor−→PQ, onde Q(x, y) é um ponto qualquer da reta, é
paralelo à reta r, ou seja é perpendicular ao vetor−→PQ, ou ainda
−→PQ.u = (x − x0, y − y0).(a, b) = 0.
Ou ainda,
a(x − x0) + b(y − y0) = 0
ouax + by = ax0 + by0,
que é a equação da reta r.
Observemos ainda que se b 6= 0, podemos escrever esta equação na forma
y = mx + k,
onde
m = − ba
e k =ax0 + by0
b.
Observe que esta equação y = mx + k é chamada equação reduzida da reta, onde m e k sãoa inclinação da reta e o ponto de intersecção da reta r com o eixo y, respectivamente.

Representações da reta
Podemos representar a reta por
Equação Cartesiana uma função real,
P : R −→ R
x y = P(x).
Equações Paramétricas uma função da reta no plano,
P : R −→ R2
t P(t) = (x(t), y(t)).
1.3.3 Ângulos entre vetores
Consideremos o seguinte problema:
Dados os vetores u e v, qual é o ângulo entre eles?
Esbocemos na Figura 1.13 os vetores u e v.
x
y
v
u u − v
θ
Figura 1.13: Determinação do ângulo entre vetores.
Ora, da lei dos cossenos temos que
||u − v||2 = ||u||2 + ||v||2 − 2||u||.||v||cos(θ)
(u − v).(u − v) = ||u||2 + ||v||2 − 2||u||.||v||cos(θ)
||u||2 + ||v||2 − 2u.v = ||u||2 + ||v||2 − 2||u||.||v||cos(θ)
u.v = ||u||||v||cos(θ)
Assim temoscos(θ) =
u.v||u||.||v|| .
Uma aplicação é utilizar o ângulo entre vetores para determinar ângulos de triângulos.Vamos a um exemplo!
Exemplo 1.10. Seja o triângulo ABC, com vértices A(0, 0), B(1, 2) e C(2, 1). Determine o ânguloA.
Solução
Para calcularmos o ângulo A, basta calcularmos o ângulo entre os vetores−→AB e
−→AC que são
dados por −→AB = (1, 2) e
−→AC = (2, 1).
Observe que a ordem na tomada destes vetores é muito importante, pois se tívessemos tomado,
por exemplo, os vetores−→AB e
−→CA, calcularíamos o ângulo externo A.
O ângulo entre os vetores−→AB e
−→AC é dado por
cos(θ) =
−→AB.
−→AC
||−→AB||.||−→AC||
=4√
5.√
5
=45
Portanto,
θ = arccos(
45
)
.
Em vários problemas na Física se faz necessário decompor forças ou velocidades, oualgum outro elemento vetorial, na direção de outros vetores. Vejamos um exemplo!!!
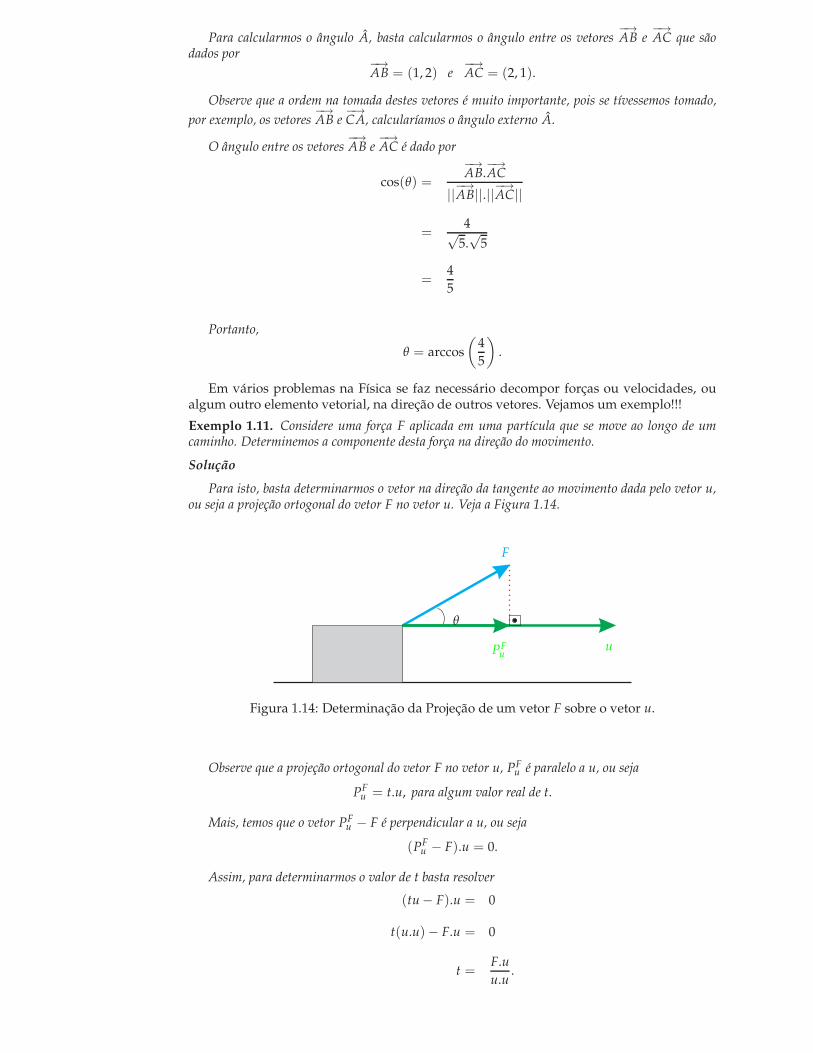
Exemplo 1.11. Considere uma força F aplicada em uma partícula que se move ao longo de umcaminho. Determinemos a componente desta força na direção do movimento.
Solução
Para isto, basta determinarmos o vetor na direção da tangente ao movimento dada pelo vetor u,ou seja a projeção ortogonal do vetor F no vetor u. Veja a Figura 1.14.
PFu
F
u
θ
Figura 1.14: Determinação da Projeção de um vetor F sobre o vetor u.
Observe que a projeção ortogonal do vetor F no vetor u, PFu é paralelo a u, ou seja
PFu = t.u, para algum valor real de t.
Mais, temos que o vetor PFu − F é perpendicular a u, ou seja
(PFu − F).u = 0.
Assim, para determinarmos o valor de t basta resolver
(tu − F).u = 0
t(u.u)− F.u = 0
t =F.uu.u
.

Portanto, temos que
PFu =
(
F.uu.u
)
u.
Observe que não podemos simplificar u, pois não temos definida a operação divisão para vetores.
Dados dois vetores u e v, temos que:
Ângulo entre vetores O ângulo entre eles é dado por
cos(θ) =u.v
||u||.||v|| .
Projeção ortogonal A projeção ortogonal de v sobre u é dado por,
Pvu =
( v.uu.u
)
u.
1.4 Curvas Parametrizadas no Plano
Na secção anterior, vimos as equações paramétricas de uma reta, ou seja definimos umareta por uma função da reta num plano que depende de um parâmetro. Ora, assim comoestudamos curvas definidas por equações cartesianas, como por exemplo, parábolas dadaspor y = x2, circunferências, por x2 + y2 = 1 e outras, não poderíamos também definirequações paramétricas para elas?
Observemos que equações paramétricas têm muita importância em Física, pois quandoestudamos o movimento de um corpo, o fazemos observando sua posição a cada instantede tempo, ou seja, dependendo de um parâmetro t.
Vejamos alguns exemplos:
Exemplo 1.12. Consideremos um vetor unitário, v, qualquer, ou seja vetores do tipo v = (a, b) talque
a2 + b2 = 1.
x
y
a
b
1
v
θ
Figura 1.15: Determinação das coordenadas de um vetor unitário em função do ângulo θ.
Solução
Na Figura 1.15 esboçamos um vetor qualquer unitário e pelo triângulo retângulo, observamos asrelações:
a = ||v||cos(t) = cos(t),
b = ||v||sen(t) = sen(t).

Portanto, cada ponto da circunferência C está em função do ângulo t. Para darmos a voltacompleta, basta variarmos t de 0 a 2π, ou seja, definimos a aplicação
C : [0, 2π] ⊂ R → R2
t C(t) = (cos(t), sen(t))
Exemplo 1.13. Consideremos agora a parábola dada pela equação y = x2 e busquemos tambémuma parametrização para esta curva. Neste caso, temos que o gráfico desta parábola é dada pelospontos
Gráfico = (x, y) ∈ R2 | y = x2.
Ora, então basta considerarmos x = t e temos a parametrização
x(t) = t e y(t) = t2,
ou ainda,C : R → R
2
t C(t) = (t, t2)
Quando um objeto se move em um plano, durante um intervalo de tempo I ⊂ R,podemos descrever o seu movimento α(t), em um sistema de coordenadas, por aplicaçõesque dependem do parâmetro t, ou seja a posição (x, y) e cada instante é dado por
α : I ⊂ R −→ R2
t α(t) = (x(t), y(t)).
Variando t em seu domínio temos a trajetória descrita pelo objeto no plano e podemosassim considerar para cada t o vetor posição, que no caso é α(t). Dizemos que α é umafunção vetorial.
Observe ainda que podemos expressar esta função vetorial tanto na forma
α(t) = (x(t), y(t))
como também decomposto nas direções dos vetores e1 = (1, 0) e e2 = (0, 1), ou seja
α(t) = x(t)e1 + y(t)e2.
Os vetores e1 e e2, na literatura, também são chamados de vetores i e j, respectivamente.
1.4.1 Limite, Continuidade e Derivabilidade
Assim, como foi feito para funções reais, temos também que estudar as aplicações da retano plano, as parametrizações, sob os conceitos de continuidade e derivabilidade. Para istoiniciaremos com o estudo dos limites.
Observemos inicialmente que as aplicações, α(t), da reta no plano podem ser escritascomo a soma
α(t) = x(t)e1 + y(t)e2.
Ora, então calcular o limite de α(t) para t se aproximando de t0, ou seja
limt→t0
α(t),
pode ser escrito na forma
limt→t0
α(t) = limt→t0
(x(t)e1 + y(t)e2)
= limt→t0
x(t)e1 + limt→t0
y(t)e2

Ora, existindo os limites das funções reais x(t) e y(t) e sendo Lx e Ly os seus limitesrespectivos, quando t → t0, temos que
limt→t0
α(t) = Lx e1 + Ly e2.
Observemos que caso algum dos limites de x(t) e y(t) não exista, não existirá tambémo limite de α(t). A continuidade da aplicação α segue da mesma forma como para funçõesreais, ou seja α é contínua se as funções x(t) e y(t) também o forem.
Consideremos a trajetória de um objeto dada por uma aplicação vetorial
α(t) = (x(t), y(t)).
Para t = t0, seja o ponto P(x(t0), y(t0)) e o ponto Q(x(t0 + ∆), y(t0 + ∆)).
Temos então o vetor−→PQ, que representamos por ∆α, dado por
∆α = α(t0 + ∆t) − α(t0)
= (x(t0 + ∆t), y(t0 + ∆t))− (x(t0), y(t0))
= (x(t0 + ∆t)− x(t0), y(t0 + ∆t) − y(t0))
= ∆xe1 + ∆ye2.
Agora, fazendo ∆ → 0 temos que
1. O ponto Q se aproxima do ponto P, Q → P.
2. A reta secante que contém os pontos P e Q, aproxima a uma posição–limite tangenteà curva α para t = t0.
3. O limite ∆α existe, se existir os limites de ∆x e ∆y, e neste caso temos que
lim∆t→0
∆α
∆t= lim
∆t→0
∆xe1 + ∆ye2
∆t
= lim∆t→0
∆x∆t
e1 + lim∆t→0
∆y∆t
e2
= x′(t)e1 + y′(t)e2.
= (x′(t), y′(t))

Seja a aplicação
α : I ⊂ R → R2
t α(t) = x(t)e1 + y(t)e2 = (x(t), y(t)),
então temos que
Limites O limite da aplicação α existe para t → t0 se e somente se existem oslimites das funções reais x(t) e y(t), para t → t0.
Continuidade A aplicação α é contínua se e somente se as funções reais x(t) ey(t), também são contínuas.
Derivabilidade A aplicação α é derivável se e somente se as funções reais x(t)e y(t), também são deriváveis e
dα
dt=
dxdt
e1 +dydt
e2 =
(
dxdt
,dydt
)
ou ainda,α′(t) = x′(t)e1 + y′(t)e2 = (x′(t), y′(t)).
Neste caso, o vetor α′(t) é um vetor tangente ao movimento no ponto α(t).Mais ainda, α′(t) é o vetor velocidade do objeto no ponto ponto α(t).
Vimos então que a derivabilidade de aplicações da reta no plano,ou seja, parametriza-ções, depende diretamente das funções reais que a constituem, e assim, temos as proprie-dades:
Considere a aplicação
α : I ⊂ R → R2
t α(t) = x(t)e1 + y(t)e2 = (x(t), y(t)),
Função constante Se as funções x(t) e y(t) são constantes, então α(t) também é constantee
α′(t) = 0.
Produto por um escalar Seja a função real f (t) e consideremos a aplicação β(t) = f (t)α(t),então
β′(t) = ( f (t)α(t))′ = f ′(t)α(t) + f (t)α′(t).
Observe que se f (t) = k = constante, então f ′(t) = 0 e
β′(t) = kα′(t).
Soma de aplicações Seja a aplicação β(t) = (x1(t), y1(t)), então
(α + β)′(t) = α′(t) + β(t)′(t).
Produto de aplicações Seja a aplicação β(t) = (x1(t), y1(t)), então
(αβ)′(t) = α′(t)β(t) + α(t)β′(t).
Regra da cadeia Seja a função real f (t) e consideremos a aplicação β(t) = α( f (t)), então
β′(t) = f ′(t)α′( f (t)).
Vamos verificar a última propriedade e deixaremos as outras como um exercício.
Consideremos então que f (t) é uma função real e a aplicação β(t) é dada por
β(t) = α( f (t)).

Desta igualdade temos que
β′(t) = (α f )′(t)
=(
(x f )′(t), (y f )′(t))
=(
f ′(t)x′( f (t)), f ′(t)y′( f (t)))
= f ′(t)(
x′( f (t)), y′( f (t)))
= f ′(t)α′( f (t)).
O vetor posição α(t) de uma partícula no plano, que se move ao longo de umacurva, em qualquer instante t é dado pela aplicação
α : I ⊂ R → R2
t α(t) = x(t)e1 + y(t)e2 = (x(t), y(t)),
então temos que
Vetor Velocidade O vetor velocidade dessa partícula é tangente à curva e dadopor
v(t) =dα
dt(t).
Velocidade Escalar A velocidade escalar dessa partícula, em cada instante t, édado por
||v(t)||.
Vetor Aceleração O vetor aceleração dessa partícula é dado por
v(t) =dvdt
(t) =d2α
dt2 (t).
Versor do movimento O do movimento é dado por um vetor paralelo ao vetorvelocidade e unitário, ou seja, por
v(t)||v(t)|| .
Vetor aceleração ortogonal à curva Se o vetor velocidade dessa partícula é uni-tário, ou seja um versor do movimento, então o vetor aceleração é ortogo-nal à curva. Verifiquemos isto!!!! Como o vetor velocidade é unitário,então||v(t)|| = 1. Assim,
d(||v||2)dt
(t) = 0
d(v.v)
dt(t) = 0
2v(t)v′(t) = 0
v(t).a(t) = 0.
Ou seja, o vetor velocidade que é tangente ao caminho é perpendicular aovetor aceleração, ou ainda o vetor aceleração é ortogonal ao caminho.
Exemplo 1.14. A trajetória planar de uma partícula é definida pela aplicação
α(t) = (3cos(t), 3sen(t)), t ∈ R.
Determine:

1. Os vetores velocidade, v e aceleração a.
2. a velocidade, a aceleração, a velocidade escalar e o versor do movimento para t = π/4.
3. o produto v.a. Interprete esse resultado geometricamente.
4. Esboce estes elementos em um gráfico.
Solução
Observemos inicialmente que esta trajetória é uma circunferência de centro no ponto (0, 0) ouorigem, e raio igual a 3, ou seja a partícula descreve um movimento circular.
1. O vetor velocidade é dado pela primeira derivada de α e a aceleração, pela segunda. Assim,
v(t) =dα
dt(t) = (−3sen(t), 3cos(t)),
e
a(t) =dvdt
(t) =d2α
dt2 (t) = (−3cos(t),−3sen(t)).
2. Para t = π/4, temos que
v(t) = (−3√
2/2, 3√
2/2), a(t) = (−3√
2/2,−3√
2/2), ||v(π/4)|| = 3,
e o versor do movimento , que é um vetor unitário paralelo ao vetor velocidade, é dado por
v(π/4)
||v(π/4)|| = (−√
2/2,√
2/2).
3. Calculando o produto escalar v.a, obtemos
v(t).a(t) = 0.
Portanto, os vetores v(t) e a(t) são ortogonais para todo valor de t.
4. Esboçamos estes elementos na Figura 1.16.
x
y
a
b
3
v
a
θ
Figura 1.16: Representação dos vetores velocidade e aceleração em um movimento circular.
1.4.2 Integrais
Uma função vetorial β(t) é uma primitiva de α(t), que estão definidas em um intervaloI ⊂ R se
dβ
dt(t) = α(t), ∀t ∈ I ⊂ R.
Ou seja, noção equivalente ao dado para funções reais. Assim, equivalentemente dize-mos que

O vetor posição α(t) de uma partícula no plano, que se move ao longo de umacurva, em qualquer instante t é dado pela aplicação
α : I ⊂ R → R2
t α(t) = x(t)e1 + y(t)e2 = (x(t), y(t)),
então temos que
∫
α(t)dt =
(
∫
x(t)dt,∫
y(t)dt)
=∫
x(t)dte1 +∫
y(t)dte2 = β(t) + c,
onde c = c(c1, c2) é um vetor constante.
Observemos ainda que geometricamente, a integral do vetor a(t) nos dá o vetor veloci-dade, e a integral deste, o vetor posição.
Assim como para funções reais, temos também para funções vetoriais ou aplicações dareta no plano, as integrais definidas, que de forma semelhante são definidas.
O vetor posição α(t) de uma partícula no plano, que se move ao longo de umacurva, em qualquer instante t é dado pela aplicação
α : I ⊂ R → R2
t α(t) = x(t)e1 + y(t)e2 = (x(t), y(t)),
então temos que
∫ b
aα(t)dt =
(
∫ b
ax(t)dt,
∫ b
ay(t)dt
)
=∫ b
ax(t)dte1 +
∫ b
ay(t)dte2.
Exemplo 1.15. Uma partícula se move em um plano com velocidade dada pela aplicação
v(t) = (−sen(t), cos(t)) , t ≥ 0.
1. Determine o vetor posição, α(t) desta partícula, sabendo que para t = π/2 ela está no ponto(0, 1).
2. Determine a distância percorrida pela partícula, l, no período de tempo de t = 0 a t = π.
Solução
Determinemos o que está sendo pedido.
1. Sabemos que a velocidade é obtida através da derivação do vetor posição, α(t). Assim, paraobter α(t) basta calcularmos a integral de v(t), ou seja
α(t) =∫
v(t)dt
= (∫
(−sen(t))dt,∫
cos(t)dt)
= (cos(t) + c1, sen(t) + c2))
Como para t = π/2 ela está no ponto (0, 1), ou seja α(π/2) = (0, 1), podemos calcular asconstantes c1 e c2, pois
α(1π/2) =(
cos(π
2
)
+ c1, sen(π
2
)
+ c2))
= (0, 1),
ou ainda, c1 = 0 e c2 = 0.
Portanto, a posição da partícula é dada pela aplicação
α(t) = (cos(t), sen(t))) .
Observemos ainda que o traço desta curva é a circunferência de centro na origem e raio iguala um.

2. O comprimento de uma curva, l, α(t) de t = a a t = b é dada por
l =∫ b
a||v(t)||dt.
Assim, para determinarmos l, basta calcularmos então
l =∫ π
0
√
(−sen(t))2 + (cos(t))2dt
=∫ π
0 dt = t|π0 = π.
Assim, o comprimento da curva l é igual a π. Isto era esperado, pois é meia volta na circunfe-rência que tem comprimento total 2π.
Exercício 1.16. Faça como no Exemplo 1.15, mas considerando
v(t) = (−asen(at), acos(at)) , t ≥ 0.
Qual é a interpretação física neste caso?
1.5 Vetores no Espaço
Antes de iniciarmos o estudo sobre vetores, primeiro observamos que este estudo étotalmente análogo ao dos vetores no plano. Claro que existem diferenças e é justamentesobre elas que iremos focar e distinguir. Assim, como no plano, temos que
A cada ponto do espaço associamos um vetor e a cada vetor, um ponto.
Na verdade, esta associação entre ponto e vetor vale em qualquer dimensão, ou seja, noplano R
2, R3 ou R
n, n qualquer natural.
Bom, para iniciarmos então temos que marcar pontos no espaço. O espaço, ou R3, tem
três dimensões, e assim podemos sempre imaginar o canto de uma parede de uma sala,que tem as três retas, duas no solo e uma que segue a parede para o alto. Estando a salabem esquadrejada, estas três retas são perpendiculares entre si, duas a duas. Isto é análogoao plano, R
2, cujo sistema cartesiano é formado por duas retas perpendiculares.
Muito bem, mas e como marcar os pontos?
Sigamos o mesmo procedimento feito para marcar pontos no plano, ou seja, primeiroum sistema de coordenadas com duas retas graduadas, orientadas (positivo e negativo) eperpendiculares, os eixos x e y, e depois pelo ponto traçamos duas retas paralelas r e s aoseixos do sistema x e y, respectivamente. Da intersecção das retas obtemos as coordenadasdos pontos.
E o procedimento inverso, ou seja, tendo as coordenadas do ponto, traçamos perpen-diculares aos eixos que contenham estas coordenadas e a intersecção destas duas retas, é amarcação do ponto no plano. Veja a Figura 1.17.
Para marcarmos pontos no espaço, dado o ponto ou suas coordenadas, faremos deforma análoga, ou seja primeiro consideramos um sistema de coordenadas formado portrês retas graduadas, orientadas (positivo e negativo) e perpendiculares, duas a duas, queserão os eixos coordenados x, y e z. Consideraremos os eixos x e y, representando o planono solo e o eixo z a altura (lembremos do canto inferior da parede de uma sala). Veja aFigura 1.18.
Uma questão interessante aqui é que temos que representar o espaço em uma folhade papel que é plana, e portanto, teremos que na verdade trabalhar com projeções. Paraconseguir este efeito, após traçar os eixos, teremos sempre que respeitar a projeção querepresenta a ortogonalidade no plano.

x x
y y
a a
b
s
rPP
Figura 1.17: Determinando as coordenadas de um ponto P.
Z
x
y
P
Figura 1.18: Sistemas de coordenadas no espaço.
No plano, os pontos, (a, 0) e (0, b), são marcados nos eixos x e y, respectivamente. Damesma forma, os pontos (a, 0, 0), (0, b, 0) e (0, 0, c), são marcados nos eixos x, y e z, res-pectivamente. Obviamente, a origem é a intersecção dos três eixos. Os pontos, que têm aaltura zero (z = 0 ou ainda (a, b, 0)), estão no plano coordenado xy e assim também temosos pontos (0, b, c) e (a, 0, c) que estão nos planos coordenados yz e xz, respectivamente.
Muito bem, agora vamos marcar o ponto, tendo as coordenadas. Lembremos ainda queo trabalho aqui é um pouco maior, por trabalharmos com projeções.
O procedimento será realizado por passos. Vamos a eles!
• Através das coordenadas do ponto, digamos (a, b, c), traçamos retas perpendicularesaos eixos x e y, ou seja por a e por b traçamos perpendiculares aos eixos, para isto, omelhor é por (a, 0, 0) traçamos uma paralela ao eixo y e por (0, b, 0) uma paralela aoeixo x. Essas duas retas se interceptam no ponto Q(a, b, 0).
• Trace um segmento A unindo o ponto Q(a, b, 0) à origem (0, 0, 0) e uma reta r quepassa pelo ponto (a, b, 0) e que seja paralela ao eixo z.
• Muito bem, agora do ponto (0, 0, c), trace uma paralela ao segmento A que passa por(0, 0, c). Esta paralela intercepta a reta r no ponto (a, b, c). Veja a Figura 1.19.
Agora, associado ao ponto P(a, b, c), associamos o vetor u = (a, b, c), da mesma formaque fizemos no plano. De forma similar, temos que
Operações com vetores Sejam u = (u1, u2, u3), v = (v1, v2, v3), w = (w1, w2, w3) e λ umescalar real. Então, temos que:
Soma de vetores u + v = (u1 + v1, u2 + v2, u3 + v3). A soma de vetores tem as se-guintes propriedades:
Simétrico de um vetor (−1)u = −u = −(−u1,−u2,−u3).

xx x
yy y
zz z
aaa bbb
cccPP
QQQ
Passo 1 Passo 2 Passo 3
Figura 1.19: Marcando o ponto P(a, b, c).
Produto por um escalar λu = (λu1, λu2, λu3).
Produto de vetores u.v = u1.v1 + u2.v2 + u3.v3.
Estas operações gozam das seguintes propriedades:
Comutatividade u + v = v + u e u.v = v.u.Associatividade (u + v) + w = u + (v + w) = u + v + w e (λu)v = λ(u.v) =
u.(λv).Distributividade 1 λ(u + v) = λu + λv.Distributividade 2 (λ1 + λ2)u = λ1u + λ2u;Distributividade 3 u.(v + w) = u.v + u.w.
Norma de um vetor ||u|| =√
u21 + u2
2 + u23. Temos ainda que
||u||2 = u.u = u21 + u2
2 + u23.
Vetor unitário ||u|| = 1 =√
u21 + u2
2 + u23.
Vetor nulo u = (0, 0, 0).
Vetores perpendiculares u.v = 0.
Ângulo entre vetores cosθ =u.v
||u||.||v|| . Observe ainda que
u.v = ||u||.||v||cosθ.
A prova destas propriedades é similar ao caso para vetores definidos no plano. Faça-as!!!!
Bem, mas temos algumas novidades e uma delas é a existência agora de um vetor queperpendicular simultaneamente a outros dois vetores que não são paralelos. Para obtê-lo,precisamos definir mais uma operação, que é chamada de Produto Vetorial entre vetores.
Dados os vetores não nulos u = (u1, u2, u3), v = (v1, v2, v3), queremos um terceiro,w = (w1, w2, w3) que seja perpendicular a estes, ou seja
u.w = 0 e v.w = 0.
Destas equações, temos o sistema linear
u1w1 + u2w2 + u3w3 = 0
v1w1 + v2w2 + v3w3 = 0.
Este sistema admite uma infinidade de soluções e uma delas é dado por
w1 = u2v3 − v2u3
w2 = v1u3 − u1v3
w3 = u1v2 − v1u2

Assim, o vetorw = (u2v3 − v2u3, v1u3 − u1v3, u1v2 − v1u2)
é simultaneamente perpendicular aos vetores u e v.
Definição 1.17. Sejam os vetores não nulos u = (u1, u2, u3), v = (v1, v2, v3), então definimoso produto vetorial entre u e v, como sendo um vetor que simultaneamente perpendicular aos dois edenotamos por
u × v = (u2v3 − v2u3, v1u3 − u1v3, u1v2 − v1u2).
Sempre podemos usar este procedimento para calcular o vetor w, mas vamos apresentaruma forma mais simples de se lembrar.
Considerando os vetores i = (1, 0, 0), j = (0, 1, 0) e k = (0, 0, 1), como de costume,observamos que podemos escrever o vetor w na forma
u × v = (u2v3 − v2u3)i + (v1u3 − u1v3)j + (u1v2 − v1u2)k.
Podemos ainda escrever que
u2v3 − v2u3 =
∣
∣
∣
∣
u2 v2u3 v3
∣
∣
∣
∣
;
v1u3 − u1v3 = −∣
∣
∣
∣
u1 v1u3 v3
∣
∣
∣
∣
;
u1v2 − v1u2 =
∣
∣
∣
∣
u1 u2v1 v2
∣
∣
∣
∣
;
ou ainda que
u × w =
∣
∣
∣
∣
u2 v2u3 v3
∣
∣
∣
∣
i −∣
∣
∣
∣
u1 v1u3 v3
∣
∣
∣
∣
j +∣
∣
∣
∣
u1 u2v1 v2
∣
∣
∣
∣
=
∣
∣
∣
∣
∣
∣
i j ku1 u2 u3v1 v2 v3
∣
∣
∣
∣
∣
∣
Obviamente, aqui não temos uma matriz com entradas reais, pois i, j e k são vetores. Mas,é um bom formato para se lembrar do produto vetorial.
É importante ressaltar que o produto escalar entre vetores é um número e o produtovetorial entre vetores, resulta em um vetor.
Temos as seguintes propriedades para o produto vetorial entre vetores, que seguemdiretamente das propriedades dos determinantes.
• (u + v)× w = u × w + v × w;
• w × (u + v) = w × u + w × v;
• u × v = −v × u.
• u × v = 0 ⇔ u e v são paralelos.
Exercício 1.18.
1. Verifique as propriedades listadas aqui relativas a vetores.
2. Verifique a seguinte igualdade:
Se u e v são vetores, então
||u × v||2 = ||u||2.||v||2 − (u.v)2.
Obs. Utilize as coordenadas dos vetores e verifique que os dois lados da igualdade são realmenteiguais.

O ângulo entre vetores está relacionado com a igualdade
u.v = ||u|.||v||cosθ.
Assim, do Exercício 2 da Lista 1.18, segue que
||u × v||2 = ||u||2.||v||2 − (u.v)2
= ||u||2.||v||2 − (||u|.||v||cosθ)2
= ||u||2.||v||2(1 − cos2θ
= ||u||2.||v||2sen2θ.
Assim, temos que||u × v|| = ||u||.||v||senθ,
onde θ é o ângulo entre os vetores u e v.
Exemplo 1.19. Observe ainda que a área de um paralelogramo definido por vetores u e v é igual au × v. Veja a Figura 1.20.
u
v
h
θ
Figura 1.20: Área de um paralelogramo é ||u × v||.
Solução
Isto é verdade, pois a área do paralelogramo é dado por
A = base × altura,
e neste caso, a base é ||u|| e a altura é dado por
h = ||v||senθ.
Exemplo 1.20. Utilizando uma chave inglesa, ao apertarmos uma porca, exercemos um torque aolongo do eixo do parafuso. A norma do torque depende da distância entre o eixo do parafuso e o pontosobre a chave inglesa no qual a força é aplicada e de quanto da força é perpendicular à chave no pontode aplicação. Veja a Figura 1.21.
Solução
Para calcular a norma do Torque, basta calcularmos a norma do vetor ||F × r||. Observe que ovetor F × r é perpendicular simultaneamente aos vetores F e r e portanto paralelo ao vetor que dá otorque.
Assim,
||torque|| = ||F||||r||senθ,
onde θ é o ângulo entre os vetores r e F.

FF⊥θ
Torque
r
Figura 1.21: Cálculo do torque gerado pelo aperto de um parafuso com uma chave inglesa.
Exercício 1.21 (Produto misto). Vefique que o volume do paralepípedo dado pelos vetores u, v e wé igual a
|(u × v).w| = ||u × v||||w||cosθ.
Lembre-se que o volume é dado pela área da base vezes a altura. Neste caso a base é o paralelogramodefinido por dois destes vetores.
1.5.1 Retas e Planos no Espaço
As retas no espaço, assim como no plano, necessitam de apenas um ponto e um vetorparalelo para serem definidas. Assim, seja a reta r que passa pelo ponto A(x0, y0, z0) e queé paralela ao vetor u = (a, b, c). Veja a Figura 1.22.
u
r
AP
x
y
z
Figura 1.22: Equações paramétricas da reta.
Seja P um ponto qualquer da reta, então, o vetor−→AP(x − x0, y − y0, z − z0) é paralelo ao
vetor u = (a, b, c), ou seja −→AP = t.u,
que nos dá(x − x0, y − y0, z − z0) = t(a, b, c) = (at, bt, ct),
ou ainda, temos o seguinte sistema de equações
r :
x = x0 + at
y = y0 + bt
z = z0 + ct.
que são as equações paramétricas da reta r.
Observamos que neste caso não podemos explicitar t, como fizemos no plano para ob-termos a equação cartesiana da reta, ou seja, retas no espaço não têm equação cartesiana.Verifique isto!!!!

E como determinarmos os planos? Sabemos que três pontos quaisquer e não colinearesdeterminam um único plano. Digamos então que queremos determinar a equação de umplano α definido pelos pontos A(a1, a2, a3), B(b1, b2, b3) e C(c1, c2, c3). Com este pontosformemos dois vetores, digamos
−→AB e
−→AC. Como os pontos são não colineares temos que
estes vetores não são paralelos entre si.
Ora, para um ponto qualquer P(x, y, z) pertencer ao plano, temos que ter o vetor−→AP
paralelo ao plano, ou seja pela regra do paralelogramo, podemos escrevê-lo como umasoma de vetores paralelos aos vetores
−→AB e
−→AC. Veja a Figura 1.23.
AB
C
λ2−→AC
λ1−→AB
P
Figura 1.23: Equações paramétricas do plano.
Escrevemos então −→AP = λ1
−→AB + λ2
−→AC.
Em coordenadas ficamos com as seguintes equações
α :
x = a1 + (b1 − a1)λ1 + (c1 − a1)λ2
y = a2 + (b2 − a2)λ1 + (c2 − a2)λ2
z = a3 + (b3 − a3)λ1 + (c3 − a3)λ2,
que são as equações paramétricas do plano α definido pelos pontos A(a1, a2, a3), B(b1, b2, b3) eC(c1, c2, c3), ou ainda por um destes pontos e dois vetores paralelos ao plano. Lembremosque para obtermos a equação cartesiana da reta no plano, foi suficiente um ponto e umvetor perpendicular à reta. Ora, e para obtermos a equação cartesiana do plano?
Observamos inicialmente que um ponto A(x0, y0, z0) e um vetor u = (a, b, c) perpendi-cular ao plano, definem um único plano. Para obtermos a equação do plano, consideramoso ponto qualquer P(x, y, z) pertencente ao plano, isto que dizer que
−→AP.u = 0,
pois o vetor−→AP é paralelo ao plano α e o vetor w é perpendicular a este plano.
Assim, ficamos com(x − x0, y − y0, z,z0).(a, b, c) = 0,
ouα : ax + by + cz = ax0 + by0 + cz0.
que é a equação cartesiana do plano.
Exercício 1.22.
1. Obtenha a equação cartesiana do plano α resolvendo o sistema de equações dado pelas equaçõesparamétricas do plano, ou seja, resolva-o considerando as variáveis λ1 e λ2.
2. Determine um ponto do plano x = 1.

3. Determine um vetor paralelo ao plano x − y = 1.
4. Determine um vetor perpendicular ao plano x − y = 1.
5. Determine equações paramétricas para o plano α : x + y − z = 0.
6. Obtenha uma equação do plano
(a) paralelo ao eixo z e que contenha os pontos (2, 0, 0) e (0, 3, 2).
(b) paralelo ao eixo y e que contenha os pontos (2, 1, 0) e (0, 2, 1).
(c) paralelo ao plano yz e que contenha o ponto (3, 4,−1).
(d) perpendicular ao eixo z e que contenha o ponto (1, 1, 1).
(e) que contenha o eixo z e o ponto (4, 4, 1).
(f) que contenha o ponto (2, 1, 0) e que seja perpendicular ao plano 2x − y + z = 0.
7. Determine a intersecção dos planos
α : 2x + 3y + z = 1 e β : x − 2y + 3z = 0.
8. Determine a intersecção entre o plano
α : x − 4y + z = −2
e a reta
r :
x = 3 − 2t
y = 1 + t
z = 2 + 3t
9. Determine a intersecção entre as retas
r :
x = 3 + t
y = 2 − t
z = 1 + 4t
e s :
x = 2 + s
y = −3 + 2s
z = 1 + 2s
10. Determine a intersecção entre as retas
r :
x = 1 + 2t
y = −1 + t
z = 5 − 3t
e s :
x = 4s
y = 2 + 2s
z = 8 − 6s
11. Determine a intersecção entre as retas
r :
x = 3 + t
y = 2 − t
z = 1 + 4t
e s :
x = 2 + s
y = −3 + 2s
z = 2 + 2s
12. Seja o plano α : x − y + z = 1 e o ponto A(1, 1, 3). Calculemos a distância entre o ponto A eo plano α.
(a) Escreva a equação da reta r que contenha o ponto A e que seja perpendicular ao plano α;
(b) Determine o ponto I que é a intersecção dessa reta r com o plano α;
(c) Calcule a distância entre os pontos A e I. Este número é a distância entre o ponto A e oplano α.

(d) Generalize este resultado, ou seja, considere o plano α : ax + by + cz + d = 0 e o ponto(x0, y0, z0). Verifique que a distância entre o ponto P e o plano α é dado por
d(P, α) = d(P, I) =|ax0 + by0 + cz0 + d|√
a2 + b2 + c2.
13. Seja o ponto P(1, 2,−1) e a reta
r :
x = 1 + 2t
y = 5 − t
z = −2 + 3t.
Determine a distância entre a reta r e o ponto P. Para isto faça:
(a) Determine um plano α que contenha P e que seja perpendicular a reta r;
(b) Determine o ponto I que é a intersecção dessa reta r com o plano α;
(c) Calcule a distância entre os pontos P e I. Este número é a distância entre o ponto P e areta r.
14. Considere as retas
r :
x = 3 + t
y = 2 − t
z = 1 + 4t
e s :
x = 2 + s
y = −3 + 2s
z = 2 + 2s
Vimos no exercício anterior que a intersecção entre elas é vazio e as mesmas não são paralelas,ou seja, estas retas são reversas. Vamos calcular a distância entre elas. Para isto façamos oseguinte:
(a) Determine um ponto A da reta s;
(b) Determine uma reta s1 que contenha o ponto A e que seja paralelo a reta r;
(c) Determine um plano α que contenha as retas s e s1. Observe que o plano α é paralelo àreta r;
(d) Como o plano α é paralelo a reta r, então qualquer ponto de r está a mesma distância deα. Calcule então a distância de qualquer ponto de r ao plano α. Este número é a distânciaentre as retas reversas r e s.
1.6 Superfícies
Uma das superfícies mais simples e conhecida no espaço é justamente a esfera, que secaracteriza como sendo o lugar geométrico do espaço dos pontos que equidistam de umponto dado, ou ainda, consideremos um ponto dado P(x0, y0, z0), então a esfera tendo ocentro em P e raio r é dado por
S2 = (x, y, z) ∈ R3 : x2 + y2 + z2 = r2.
Algumas superfícies não são tão conhecidas, mas são belas, como por exemplo, a esbo-çada na Figura 1.24.
Vamos nesta secção dar vários exemplos de superfícies que são úteis em várias situa-ções.

Figura 1.24: Superfície z = (1.3)x.sen(y).
Cilindro Desde o ensino médio, conhecemos muito bem o cilindro circular reto, que é repre-sentado pelo conjunto
Ccr = (x, y, z) ∈ R3 : x2 + y2 = 1.
Este é um cilindro circular reto particular, pois interceptando ele pelo plano z = 0,temos a circunferência de raio 1 e centro (0, 0, 0). Mas, os cilindros na verdade sãomais gerais, como por exemplo este:
C1 = (x, y, z) ∈ R3 : y = x2,
que é chamado de cilindro parabólico e que no dia-a-dia, chamamos de calha. Veja aFigura 1.25.
Figura 1.25: Representação gráfica da superfície y = x2.
Outro exemplo, é o conjunto dado por
C2 = (x, y, z) ∈ R3 : z = seny.
Você já viu este cilindro por aí?
Na verdade a resposta é sim, pois a telha eternit ondulada parece-se muito com ele. Vejaa Figura 1.26.
Assim, dado uma curva qualquer e em um ponto dela, uma reta. Agora, para obter-mos um cilindro, basta fazer esta reta percorrer a curva deslocando-a paralelamente areta dada. Portanto, o cilindro parabólico é obtido considerando-se a parábola y = x2
no plano z = 0 e uma reta perpendicular a este plano e que intercepta a parábola.
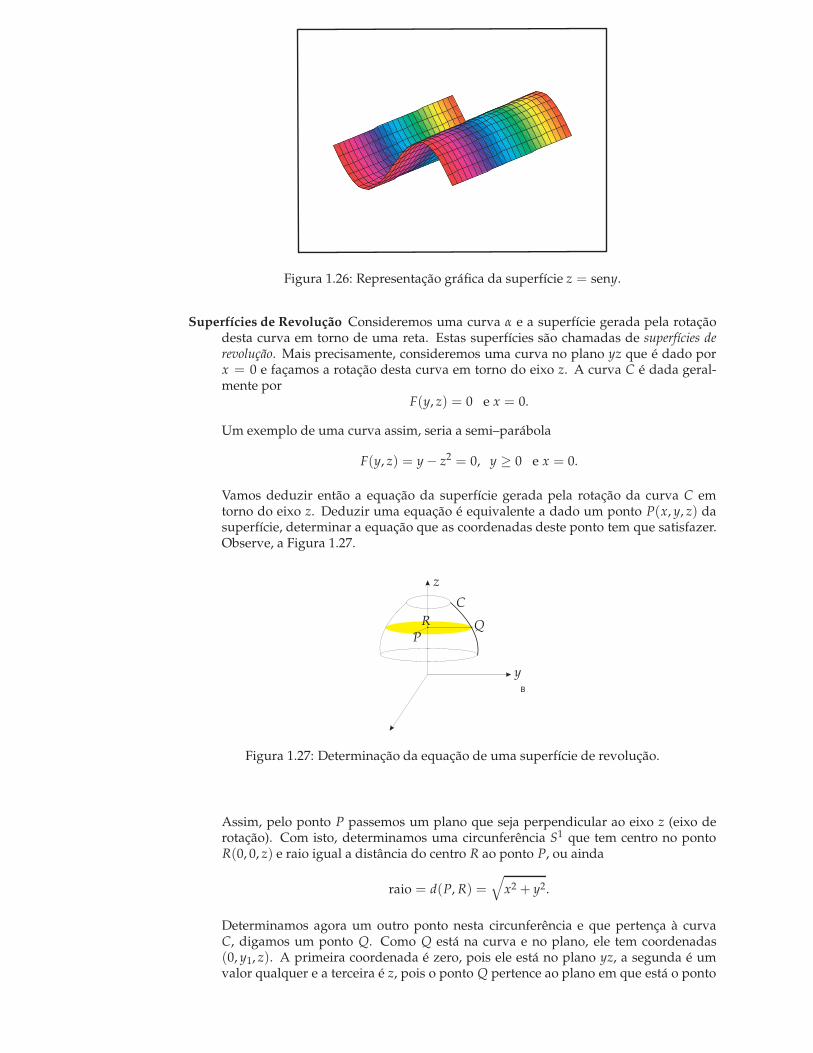
Figura 1.26: Representação gráfica da superfície z = seny.
Superfícies de Revolução Consideremos uma curva α e a superfície gerada pela rotaçãodesta curva em torno de uma reta. Estas superfícies são chamadas de superfícies derevolução. Mais precisamente, consideremos uma curva no plano yz que é dado porx = 0 e façamos a rotação desta curva em torno do eixo z. A curva C é dada geral-mente por
F(y, z) = 0 e x = 0.
Um exemplo de uma curva assim, seria a semi–parábola
F(y, z) = y − z2 = 0, y ≥ 0 e x = 0.
Vamos deduzir então a equação da superfície gerada pela rotação da curva C emtorno do eixo z. Deduzir uma equação é equivalente a dado um ponto P(x, y, z) dasuperfície, determinar a equação que as coordenadas deste ponto tem que satisfazer.Observe, a Figura 1.27.
B
QRC
P
y
z
Figura 1.27: Determinação da equação de uma superfície de revolução.
Assim, pelo ponto P passemos um plano que seja perpendicular ao eixo z (eixo derotação). Com isto, determinamos uma circunferência S1 que tem centro no pontoR(0, 0, z) e raio igual a distância do centro R ao ponto P, ou ainda
raio = d(P, R) =√
x2 + y2.
Determinamos agora um outro ponto nesta circunferência e que pertença à curvaC, digamos um ponto Q. Como Q está na curva e no plano, ele tem coordenadas(0, y1, z). A primeira coordenada é zero, pois ele está no plano yz, a segunda é umvalor qualquer e a terceira é z, pois o ponto Q pertence ao plano em que está o ponto
P também. Observe ainda que a distância do ponto Q ao ponto R é também igual aoraio da circunferência S1, ou melhor
raio = d(Q, R) =√
y21.
Destas duas últimas igualdades, elevando-as ao quadrado, obtemos que
y21 = x2 + y2.
Como o ponto Q pertence curva, então sabemos que
F(y1, z) = 0.
Assim, a superfície de revolução gerada pela rotação da curva C em torno do eixo zfica dada por
F(y1, z) = 0 e y21 = x2 + y2.
Vamos usar este procedimento para obtermos algumas superfícies muito especiaischamadas quádricas.
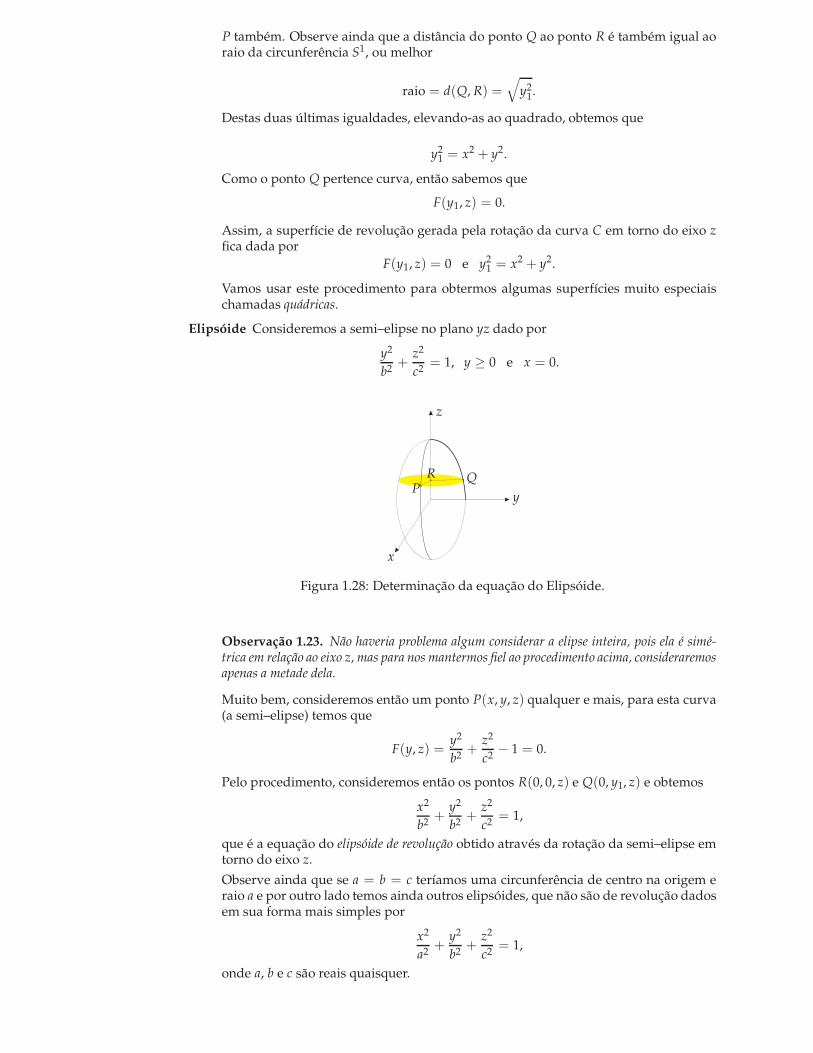
Elipsóide Consideremos a semi–elipse no plano yz dado por
y2
b2 +z2
c2 = 1, y ≥ 0 e x = 0.
R QP
y
z
x
Figura 1.28: Determinação da equação do Elipsóide.
Observação 1.23. Não haveria problema algum considerar a elipse inteira, pois ela é simé-trica em relação ao eixo z, mas para nos mantermos fiel ao procedimento acima, consideraremosapenas a metade dela.
Muito bem, consideremos então um ponto P(x, y, z) qualquer e mais, para esta curva(a semi–elipse) temos que
F(y, z) =y2
b2 +z2
c2 − 1 = 0.
Pelo procedimento, consideremos então os pontos R(0, 0, z) e Q(0, y1, z) e obtemos
x2
b2 +y2
b2 +z2
c2 = 1,
que é a equação do elipsóide de revolução obtido através da rotação da semi–elipse emtorno do eixo z.
Observe ainda que se a = b = c teríamos uma circunferência de centro na origem eraio a e por outro lado temos ainda outros elipsóides, que não são de revolução dadosem sua forma mais simples por
x2
a2 +y2
b2 +z2
c2 = 1,
onde a, b e c são reais quaisquer.

Hiperbolóides Consideremos agora a hipérbole (como é simétrica, a consideraremos com-pleta),
y2
b2 − z2
c2 = 1, e x = 0.
C
R QP
y
x
Figura 1.29: Determinação da equação do Hiperbolóide de uma folha.
Muito bem, consideremos então um ponto P(x, y, z) qualquer e mais, para esta hipér-bole temos que
F(y, z) =y2
b2 − z2
c2 − 1 = 0.
Pelo procedimento, consideremos então os pontos R(0, 0, z) e Q(0, y1, z) e obtemos
x2
b2 +y2
b2 − z2
c2 = 1,
que é a equação do hiperbolóide de revolução de uma folha ou simplesmente hiperbolóidede uma folha obtido através da rotação da hipérbole em torno do eixo z.
C
R QP
y
x
Figura 1.30: Determinação da equação do Hiperbolóide de duas folhas.
Observe ainda que poderíamos tê-la girado em torno do eixo y e obteríamos agora
− x2
b2 +y2
b2 − z2
c2 = 1,
que é a equação do hiperbolóide de revolução de duas folhas ou simplesmente hiperbolóidede duas folhas obtido através da rotação da hipérbole em torno do eixo y.
Parabolóides Consideremos agora a parábola no plano yz (como é simétrica, a considera-remos completa),
y = z2, e x = 0.
Muito bem, consideremos então um ponto P(x, y, z) qualquer e mais, para esta pará-bola temos que
F(y, z) = y − z2 = 0.

R QP
y
z
x
Figura 1.31: Determinação da equação do Parabolóide.
Pelo procedimento, consideremos então os pontos R(0, 0, z) e Q(0, y1, z) e obtemos
x2 + y2 − z2 = 0,
ou melhorx2 + y2 = z2,
que é a equação do parabolóide obtido através da rotação da parábola em torno do eixoz.
Observe ainda que poderíamos tê-la girado em torno do eixo y e obteríamos agora
− x2
b2 +y2
b2 − z2
c2 = 1,
que é a equação do hiperbolóide de revolução de duas folhas ou simplesmente hiperbolóidede duas folhas obtido através da rotação da hipérbole em torno do eixo y.
Cone de revolução Ao girarmos uma reta que passa pela origem e que não é paralela aoeixo z, em torno do eixo z obtemos um cone de revolução. Vamos obter sua equação!!!Consideremos a reta contida no plano yz que passa pela origem
y = mz, e x = 0.
R QP
y
z
x
Figura 1.32: Determinação da equação do Cone de Revolução para z ≥ 0.
Muito bem, consideremos então um ponto P(x, y, z) qualquer, e mais, para esta pará-bola temos que
F(y, z) = y − mz = 0.
Pelo procedimento, consideremos então os pontos R(0, 0, z) e Q(0, y1, z) e obtemos
x2 + y2 − mz = 0,

ou melhorx2 + y2 = m.z,
que é a equação do cone de revolução obtido através da rotação da reta em torno doeixo z.
Cilindro de revolução Ao girarmos uma reta paralela r ao eixo z e distinta deste, em tornodo eixo z, obtemos um cilindro de revolução. Vamos obter sua equação!!! Observe queno nosso procedimento sempre consideramos uma curva dada por um gráfico ou sejado tipo
F(y, z) = 0, e x = 0.
Mas, neste caso, não temos esta situação pois para esta reta teríamos as seguintescondições
y = y0, e x = 0.
Lembremos que ao contrário para retas no plano, que podemos expressá-las por meiode uma equação cartesiana, no espaço isto não é possível!
Muito bem, consideremos então um ponto P(x, y, z) qualquer, e da mesma forma ospontos R(0, 0, z) e Q(0, y0, z). Então, P pertence a essa superfície se
d2(P, Q) = d2(R, Q),
ou aindax2 + y2 = y2
0.
R QP
y
z
x
Figura 1.33: Determinação da equação do Cilindro Circular Reto para z ≥ 0.
Mas, y0 é a distância da reta r ao eixo z, ou seja,
d(r, z) = y0 = R.
Portanto, temos quex2 + y2 = R2,
e a equação do cilindro de revolução ou cilindro circular reto obtido através da rotaçãode uma reta paralela ao eixo z em torno do eixo z.
Exemplo 1.24. Podemos ter algumas superfícies que ainda não foram batizadas, mas que são extre-mamemente bonitas e ricas. Por exemplo, veja a superfície dada por z = sen(xy) representada naFigura 1.34.

Figura 1.34: Representação gráfica da superfície z = sen(xy).
Exercício 1.25.
1. Mostre que o gráfico de cada uma das seguintes equações reduz-se a um único ponto:
(a) x2 + y2 + z2 − 2x − 4y + 2z + 6 = 0;
(b) x2 + 2y2 + 2z2 − 2xy − 2yz = 0;Sugestão: Basta completar os quadrados.
2. Mostre que o gráfico de
2x2 + 2y2 + 5z2 + 2xy + 2xz + 2yz + 8 = 0.
3. Esboce os cilindros dados por
(a) x2 + (y − 1)2 = 1;
(b) z = y2 + 2;
(c) xy = 1.
4. Encontre uma superfície tal que sua intersecção com planos da forma x = k dá a elipse
y2
9+
z2
4= k2,
com planos da forma y = k, dá a hipérbole
9x2 − 94
z2 = k2,
e, com planos da forma z = k, dá a hipérbole
4x2 − 49
y2 = k2.
5. Determine o centro da circunferência dada pela intersecção das superfícies
z = x2 + y2 e x2 + y2 + z2 = 1.
6. Determine m para que o cone gerado pela rotação da reta y = mz, x = 0, em torno da retay = z, x = 0, intercepte o plano x = 1 segundo a cônica 2yz = 1.
1.7 Curvas Espaciais
Assim, como no caso de curvas planas, o movimento de uma partícula no espaço é descritopor curvas que agora chamamos de espaciais. Assim, as posições vão sendo descritas pelovetor posição α(t), onde para cada valor de t temos a posição no espaçõ da partícula, ouainda, temos a seguinte aplicação
α : I ⊂ R → R3
t α(t) = (x(t), y(t), z(t))
onde I é um intervalo real, e x(t), y(t) e z(t) são funções reais.

Exemplo 1.26. Na Figura 1.35, apresentamos a curva dada pela aplicação de R em R3,
α(t) = (tsent, t, tcost), t ∈ R.
Figura 1.35: Representação gráfica da curva espacial α(t) = (tsent, t, tcost), t ∈ R.
Na verdade, para todos os conceitos apresentados para curvas planares, temos o análogoaqui. Vamos a eles:
Seja a aplicação
α : I ⊂ R → R3
t α(t) = x(t)e1 + y(t)e2 + z(t)e3 = (x(t), y(t), z(t)),
então temos que
Limites O limite da aplicação α existe para t → t0 se e somente se existem oslimites das funções reais x(t), y(t) e z(t), para t → t0.
Continuidade A aplicação α é contínua se e somente se as funções reais x(t),y(t) e z(t), também são contínuas.
Derivabilidade A aplicação α é derivável se e somente se as funções reaisx(t),y(t) e z(t), também são deriváveis e
dα
dt=
dxdt
e1 +dydt
e2 +dzdt
e3 =
(
dxdt
,dydt
,dyzdt
)
onde e1 = (1, 0, 0), e2 = (0, 1, 0) e e3 = (0, 0, 1), ou ainda,
α′(t) = x′(t)e1 + y′(t)e2 + z′(t)e3 = (x′(t), y′(t), z′(t)).
Neste caso, o vetor α′(t) é um vetor tangente ao movimento no ponto α(t).Mais ainda, α′(t) é o vetor velocidade do objeto no ponto α(t).
Vamos a alguns exemplos:
Exemplo 1.27. Uma das curvas espaciais mais famosas é a hélice
α(t) = (x(t), y(t), z(t)) = (cost, sent, t), t ∈ R.
Para analisarmos o seu movimento, ou seja, a sua representação gráfica, observamos inicialmenteque esta hélice mora no cilindro
x2 + y2 = 1.
Para ver isto, basta substituir α(t) nessa equação. Faça isto!

Figura 1.36: Representação gráfica da Hélice α(t) = (cost, sent, t), t ∈ R.
Solução
Na verdade, a hélice se enrola ao redor deste cilindro, e ela sobe a medida que z(t) = t aumenta.Observe ainda que a cada vez que t aumenta em 2π, a hélice dá uma volta completa ao redor docilindro. Veja a Figura 1.36.
Obviamente, α(t) é contínua e derivável, pois as suas coordenadas o são e o seu vetor velocidade,é
v(t) = α′(t) = (−sent, cost, 1).
Assim, como para curvas planares, temos as seguintes propriedades para curvas espa-ciais, ou ainda aplicações de R em R
3:
Considere a aplicação
α : I ⊂ R → R3
t α(t) = x(t)e1 + y(t)e2 + z(t)e3 = (x(t), y(t), z(t)),
Função constante Se as funções x(t), y(t) e z(t) são constantes, então α(t) também é cons-tante e
α′(t) = 0.
Produto por um escalar Seja a função real f (t) e consideremos a aplicação β(t) = f (t)α(t),então
β′(t) = ( f (t)α(t))′ = f ′(t)α(t) + f (t)α′(t).
Observe que se f (t) = k = constante, então f ′(t) = 0 e
β′(t) = kα′(t).
Soma de aplicações Seja a aplicação β(t) = (x1(t), y1(t)), então
(α + β)′(t) = α′(t) + β(t)′(t).
Produto de aplicações Seja a aplicação β(t) = (x1(t), y1(t)), então
(αβ)′(t) = α′(t)β(t) + α(t)β′(t).
Regra da cadeia Seja a função real f (t) e consideremos a aplicação β(t) = α( f (t)), então
β′(t) = f ′(t)α′( f (t)).
Vetor aceleração Considerando o movimento de uma partícula no espaço temos que a ve-locidade e aceleração, a(t) = α′′(t) são ortogonais, se o vetor velocidade é unitário,ou seja
||v(t)|| = ||α′(t)|| = 1.
A prova deste fato é feita da mesma forma que fizemos para curvas planares

Exemplo 1.28. Uma pessoa em uma asa delta está espiralando para cima devido a uma corrente dear ascendente em uma trajetória descrita pela aplicação
α(t) = (3cost, 3sent, t2).
Esta trajetória se assemelha ao movimento de uma hélice, embora não seja o mesmo, devido aterceira coordenada z(t) ser t2. Para este movimento determine:
1. os vetores velocidade e aceleração;
2. a velocidade escalar da asa delta, ou seja, a norma do vetor velocidade;
3. os instantes, caso existam, em que a aceleração da asa delta é ortogonal ao vetor velocidade.
Solução
1. O vetor velocidade é a derivada do vetor posição, ou seja
v(t) = α′(t) = (−3sent, 3cost, 2t),
e o vetor aceleração é a segunda derivada do vetor posição ou ainda a primeira derivada dovetor velocidade, ou seja
a(t) = v′(t) = α′′(t) = (−3cost,−3sent, 2).
2. A velocidade escalar da asa delta é dada pela norma do vetor velocidade, ou seja
||v(t)|| =√
(−3sent)2 + (3cost)2 + (2t)2
=√
9sen2t + 9cos2t + 4t2
=√
9 + 4t2.
Observe que a velocidade aumenta a medida em que a asa delta sobe em relação a terra. Omovimento descrito desta forma, obviamente não pode ser executado para todo valor de t real.Por quê?
3. Para que os vetores velocidade e aceleração da asa delta sejam ortogonais, basta que o produtoescalar entre eles seja nulo, ou seja
v.a = 9sentcost − 9costsent + 4t = 4t = 0.
Ou seja, eles serão perpendiculares apenas para t = 0.
As regras de derivação são as mesmas válidas para curvas planares ou ainda para apli-cações da reta no plano, considerando apenas mais uma coordenada. Citaremos aqui ape-nas as que envolvem o produto vetorial, visto que esta operação não está definida para asaplicações planares.
Sejam α e β aplicações da reta no espaço, ou ainda funções vetoriais de R em R3,
então vale que
Regra do Produto Vetorial A derivada do produto vetorial u(t) × v(t) é dadopor
ddt
[u(t) × v(t)] = u′(t)× v(t) + u(t)× v′(t).
Este resultado segue diretamente da derivada da função determinante e adeixamos como um exercício.
Exercício 1.29.

1. Escreva as equações paramétricas da curva dada pela intersecção das superfícies
(a) z = x2 + y2 e x2 + y2 + z2 = 1.
(b) x2 + (y − 1)2 = 1 e y = x2 + 2.
2. Mostre que a curva dada pela intersecção das superfícies
x2 + (y − 1)2 = 1 e x2 + y2 + z2 = 4,
não é plana.
3. Verifique que a curva cuja equações paramétricas são
x = costy = sentz = t,
intercepta o plano x − y = 0 numa infinidade de pontos.
4. Mostre que a tangente à curvax = 6ty = 3t2
z = t3
faz um ângulo constante com o vetor (1, 0, 1).
5. Escreva a equação cartesiana do plano osculador da curva
x = ty = et
z = cost,
no ponto (0, 1, 1).
1.7.1 Integrais
Uma função vetorial β(t) é uma primitiva de α(t), que estão definidas em um intervaloI ⊂ R se
dβ
dt(t) = α(t), ∀t ∈ I ⊂ R.
Ou seja, noção equivalente à dada para funções reais. Assim, equivalentemente dize-mos que
O vetor posição α(t) de uma partícula no plano, que se move ao longo de umacurva, em qualquer instante t é dado pela aplicação
α : I ⊂ R → R2
t α(t) = x(t)e1 + y(t)e2 + z(t)e3 = (x(t), y(t), z(t)),
então temos que∫
α(t)dt = (∫
x(t)dt,∫
y(t)dt,∫
z(t)dt)
= (∫
x(t)dt) e1 + (∫
y(t)dt) e2 + (∫
z(t)dt) e3
= β(t) + c,
onde β é uma função vetorial no espaço e c = c(c1, c2, c3) é um vetor constante.

Observemos ainda que geometricamente, a integral do vetor a(t) nos dá o vetor veloci-dade, e a integral deste, o vetor posição.
Assim como para funções reais, temos também para funções vetoriais ou aplicações dareta no plano, as integrais definidas, que de forma semelhante são definidas.
O vetor posição α(t) de uma partícula no plano, que se move ao longo de umacurva, em qualquer instante t é dado pela aplicação
α : I ⊂ R → R2
t α(t) = x(t)e1 + y(t)e2 + z(t)e3 = (x(t), y(t), z(t)),
então temos que
∫ ba α(t)dt =
(
∫ ba x(t)dt,
∫ ba y(t)dt,
∫ ba z(t)dt
)
=(
∫ ba x(t)dt
)
e1 +(
∫ ba y(t)dt
)
e2 +(
∫ ba z(t)dt
)
e3.
Exemplo 1.30. Suponha que no Exemplo 1.28 soubessémos apenas que o vetor aceleração da asadelta era dado por
a(t) = (−3cost,−3sent, 2),
e quiséssemos saber o vetor posição da asa delta. Para isto, bastaria integrarmos seguidamente porduas vezes o vetor aceleração ou seja, integramos uma primeira vez e obtemos o vetor velocidade queé dado por
v(t) =∫
a(t)dt
= (∫
−3costdt,∫
−3sentdt,∫
2dt)
= (−3sent, 3cost, 2t) + (c1, c2, c3).
Solução
Observe que para determinarmos o vetor constante (c1, c2, c3) basta termos informação em re-lação ao vetor velocidade em algum momento, ou seja, sabermos o vetor velocidade para um tempot0. A isto chamamos condição inicial e você vai retornar a isto quando estiver no curso de métodosmatemáticos e estiver estudando equações diferenciais, a verdadeira base dos modelos físicos. Porenquanto, assumamos que v(0) = (0, 3, 0) e neste caso temos que
v(0) = (0, 3, 0) = (−3sen0, 3cos0, 2(0)) + (c1, c2, c3)
ou ainda que(c1, c2, c3) = (0, 3, 0)− (0, 3, 0) = (0, 0, 0).
Portanto, temos quev(t) = (−3sent, 3cost, 2t) .
Determinando agora o vetor posição α(t), temos que
α(t) =∫
v(t)dt
= (∫
−3sentdt,∫
3costdt,∫
2tdt)
=(
3cost, 3sent, t2)+ (c1, c2, c3).
E o mesmo se passa novamente para determinarmos o vetor constante e, assim, assumindo queα(0) = (0, 0, 0) ficamos com
(c1, c2, c3) = (−3, 0, 0).
Ou ainda que,
α(t) =(
3cost, 3sent, t2)
+ (−3, 0, 0) =(
3cost − 3, 3sent, t2)
.

Observe que sob as condições acima assumidas, determinamos outra curva que é diferente dacurva dada no Exemplo 1.28. Qual deveria ser a condição inicial sob α(0) para que obtivéssemos amesma curva do exemplo aqui citado?
1.8 Comprimento de Arco
Para movimentos retílineos, a determinação da distância percorrida era feita de formamuito simples, bastando medir o trecho do segmento de reta percorrido e para curvas pla-nares, vimos que basta integrarmos a norma do vetor velocidade.
Para curvas espaciais não temos surpresas, pois para calcularmos o espaço percorridoS ao longo de uma curva espacial
α(t) = (x(t), y(t), z(t)), para a ≤ t ≤ b,
basta calcularmos
S =∫ b
a
√
(
dxdt
)
+
(
dydt
)
+
(
dzdt
)
.
Ou ainda,
S =∫ b
a||v(t)||dt.
Exemplo 1.31. Um pássaro está voando conforme a hélice dada por
α(t) = (cost, sent, t).
Qual a distância percorrida, em metros, ao longo dessa trajetória no período, em segundos, de t = 0a t = 2π?
Solução
Calculando, obtemos que
S =∫ 2π
0||v(t)||dt
=∫ 2π
0
√
(−sen(t))2 + (cost)2 + (1)2dt
=∫ 2π
0
√2dt = 2π
√2.
Assim, o pássaro percorreu a distância de 2π√
2 metros. Em relação a altura, quanto ele subiu?
1.8.1 Vetor Aceleração
Vimos que para uma trajetória dada por
α(t) = (x(t), y(t), z(t), t inI ⊂ R,
que o vetor velocidade, v(t), é dado por
v(t) = α′(t),
e que este vetor é tangente ao movimento e, ainda, sabemos que o vetor aceleração é aderivada do vetor velocidade.

Agora, dado o vetor velocidade podemos obter um vetor unitário, ou um versor, bas-tando para isto dividirmos o vetor velocidade pela sua norma. A este vetor, chamaremosde vetor tangencial à curva e o denotamos por
T(t) =1
||v(t)||v(t),
ou ainda quev(t) = ||v(t)||.T(t).
Derivando esta expressão ficamos com
a(t) = v′(t) =ddt||v(t)||.T(t) + ||v(t)||.T′(t).
Ora, mas o vetor T(t) é unitário e assim T((t) e T′(t) são ortogonais. Mostre isto!!!
Portanto, podemos escrever o vetor aceleração como a soma dos vetores
ddt||v(t)||.T(t) e ||v(t)||.T′(t),
sendo que o primeiro é tangente à curva e o segundo perpendicular à trajetória e estes doisvetores têm os nomes de componente tangencial da aceleração e componente normal da aceleração.Veja a Figura 1.37.
a T
T′
α
Figura 1.37: Representação gráfica dos vetores T(t), T′(t) e a(t) em uma curva α(t).
O plano que contém o ponto α(t) e é paralelo aos vetores T(t) e T′(t) é chamado planoosculador. Observe ainda que se a velocidade tem norma constante, ou seja, se
||v(t)|| = k constante,
então sua derivada é nula e o vetor aceleração é ortogonal ao vetor velocidade, ou ainda,tangente a T.
Exemplo 1.32. Determine o plano osculador à hélice
α(t) = (cost, sent, t), t ∈ R,
no ponto α(0) = (1, 0, 0).
Solução
Determinemos os vetores T(t) e T′(t). Para isto, calculemos o vetor velocidade da curva e queneste caso é dado por
v(t) = (−sent, cost, 1).
O vetor unitário T(t) é dado por
T(t) =v(t)
||v(t)|| =1√2(−cost, sent, 1).

Assim,
T′(t) =1√2(−cost,−sent, 0).
No ponto t = 0, temos que
T(0) =1√2(0, 1, 1) e T′(0) =
1√2(−1, 0, 0).
Como o plano osculador, Π, é paralelo aos vetores T(0) e T′(0), obtemos as equações paramétri-cas
Π : (x, y, z) = (1, 0, 0) + T(0)s1 + T′(0)s2, s1, s2 ∈ R
ou ainda que
x = 1 − s2y = s1z = s1
Quais são as componentes do vetor aceleração neste caso?

Capítulo 2
Funções de Várias Variáveis
Em muitas situações práticas ou mesmo teóricas, o valor de uma grandeza pode depen-der do valor de duas ou mais outras grandezas. Em particular, tanto nos modelos geomé-tricos quanto nos sistemas físicos reais isto geralmente ocorre. A área ou o perímetro deuma região retangular, por exemplo, depende das medidas de seus lados. O volume deum reservatório depende de suas dimensões. A produção de uma lavoura, dentre outrasvariáveis, depende da área utilizada, da fertilidade do solo, de sua manutenção.
Por motivos didáticos, para o estudo dessas funções, iremos trabalhar preferencial-mente com aquelas que dependem de duas variáveis e cujos valores poderão ser indicadospor valores numéricos .
Trabalhamos com funções de uma variável, ou seja, funções do tipo
y = f (x),
onde f é uma função que depende de uma variável, que no caso é x. Para analiSarmosestas funções estudamos sobre limites, continuidade, diferenciabilidade e também integra-bilidade. Estes conceitos também são importantes para o estudo de funções de várias va-riáveis, ou seja funções que dependem de mais de uma variável, ou ainda, como exemplode uma função que depende de duas variáveis apresentamos
z = f (x, y) = x2 + y2.
Um aspecto importante e que envolve todos os conceitos inerentes às funções é o seugráfico. Para funções de uma variável, como por exemplo, y = f (x) = x, sabemos que ográfico é o subconjunto do plano, dado por
Gráfico( f ) = (x, y) ∈ R2 : y = x
e representamos graficamente esta reta na Figura 2.1.
x
yy = x
Figura 2.1: Representação do gráfico da função y = f (x) = x.
56

Neste gráfico podemos observar a continuidade e a diferenciabilidade, pois o traço nãotem saltos e em todos os pontos do gráfico podemos apoiar uma reta tangente. É claro queapenas desta observação não podemos assegurar estes fatos!!!
Bem, agora teremos algumas surpresas agradáveis, pois quando trabalhamos com fun-ções de várias variáveis, embora queiramos estudar os mesmos aspectos sobre uma função,teremos diferenças interessantes, pois para o estudo e análise sempre precisamos investi-gar o que acontecia numa vizinhança do ponto em questão, o que para funções de umavariável, bastava observar e analiSar o que acontecia em um intervalo aberto (em geral!!!)que continha o ponto.
Para funções de mais de uma variável, não é tão simples assim, pois agora quandoconsideramos um conjunto que contém pontos próximos de um ponto dado, temos naverdade que estudar o que ocorre em uma região que contenha este ponto.
Vejamos um exemplo.
Exemplo 2.1. Seja a função de f : R2 → R definida por f (x, y) = x. Ora, o gráfico desta função
é o subconjunto do espaço R3 dado por
Gráfico( f ) = (x, y, z) ∈ R3 : z = x,
ou ainda, é um plano. Veja a Figura 2.2.
x
y
z
z = x
Figura 2.2: Representação do gráfico da função z = f (x, y) = x.
Muitas vezes temos funções dadas implicitamente, ou seja, definimos os pontos de de-terminada região satisfazendo uma equação, como por exemplo:
x2 + y2 = 1.
Neste caso, é importante sabermos onde estamos trabalhando, pois neste exemplo, seestivermos considerando os pontos do plano R
2 que satisfazem esta equação, temos que oobjeto é uma circunferência C de centro (0, 0) e raio 1, mas se consideraRmos os pontos doespaço R
3, teremos então um cilindro circular reto que contém a circunferência C . Veja aFigura 2.3.
Exemplo 2.2. Podemos representar os exemplos mencionados na introdução deste capítulo, pormeio de equações de funções como
(a) O perímetro e a área de um retângulo, cujas medidas dos lados são x e y, são dadOs respectiva-mente, pelas funções
p(x, y) = 2x + 2y e a(x, y) = xy.
(b) Se o reservatório tiver o formato de um paralelepípedo retângulo de arestas x, y e z, o volume é
V(x, y, z) = xyz.

x
x
y
y
z
11
Figura 2.3: Representação dos gráficos das funções dadas implicitamente por x2 + y2 = 1,no plano e no espaço, respectivamente.
Observamos que no item (a) a representação é feita utilizando funções que dependemde duas variáveis, enquanto que no item (b) utilizamos funções que dependem de trêsvariáveis.
Em ambos os casos, as variáveis envolvidas são grandezas que podem ser representa-das por números reais, no primeiro exemplo, as grandezas a que estamos referindo sãoas medidas dos lados do retângulo. Estas grandezas são chamadas de independentes, en-quanto que as grandezas área e perímetro que dependem dos valores dados às medidasdos lados são as dependentes.
Da mesma forma que para funções reais de uma variável, para funções de duas variá-veis temos a seguinte definição:
Definição 2.3. Seja D um subconjunto de R2. Uma função f de D em R é uma regra que associa
a cada (x, y) ∈ D, um único valor real representado por
z = f (x, y) .
Da mesma forma que para funções de uma variável, o conjunto D é chamado de domí-nio de f e z = f (x, y) o valor de f no ponto (x, y) e o conjunto de todos os valores
z = f (x, y)
é o conjunto imagem, ou simplesmente, imagem da função f que indicamos por
ℑ( f ) = z ∈ R| z = f (x, y), para (x, y) ∈ D.
No Exemplo 2.2 as variáveis independentes x, y e z assumem apenas valores reais posi-tivos, pois representam comprimentos de lados, portanto, o domínio das funções p(x, y) ea(x, y) é o conjunto
D = (x, y) ∈ R+ = R+ × R+ = R2+,
enquanto que o domínio da função V(x, y, z) é R+ × R+ × R+ = R3+.
Assim, como no Cálculo 1, temos ainda a seguinte representação:
f : D ⊂ R2 → R
(x, y) f (x, y).
Em relação ao domínio de uma função devemos observar dois detalhes importantes:
(a) O conjunto de valores que as variáveis independentes fazem sentido;
(b) As operações envolvidas na expressão que define a função, elas também tem que fazersentido.
Nos exemplos acima tomamos todos reais não negativos, pois representam medidas eas operações envolvidas foram apenas somas e produtos.

Exemplo 2.4. Para uma situação em que não foi especificado o significado das variáveis e que afunção representante seja, por exemplo,
f (x, y) =√
y − x2
convenciona-se que o domínio é o conjunto de todos os pares (x, y) para os quais a operação raizquadrada esteja definida no conjunto dos números reais.
Neste exemplo, o conjunto D é
(x, y) ∈ R2|y − x2 ≥ 0.
Graficamente, na Figura 2.4, representamos o conjunto D.
x
y
D
Figura 2.4: Representação gráfica do domínio D da função f .
Exercício 2.5.
Para cada uma das seguintes funções, determine o domínio e a imagem. Represente graficamenteesses conjuntos:
1. f (x, y) =1
x2 + y2 ;
2. f (x, y) =1
x2 − y2 ;
3. f (x, y) =√
y − x;
4. f (x, y) =√
9 − y2 − x2;
5. f (x, y) = ln(
x2 − y − 1)
;
6. f (x, y) =
√
2x − y + 4x − 2
.
Existem diversas maneiras de representar funções com mais de uma variável indepen-dente sob a forma de gráficos. Para o nosso entendimento inicial veremos os gráficos carte-sianos, que trazem uma representação bastante apropriada para a maioria dos estudos queprecisamos fazer.
Lembremos que para as funções reais de uma variável real que estudamos no curso deCálculo 1, o gráfico era sempre representado no plano R
2. Vejamos um exemplo.
Exemplo 2.6. Seja a funçãof : D ⊂ R → R
x√
x,
ondeD = x ∈ R| x ≥ 0.

Ora, podemos representar esta função por
y =√
x
e o gráfico desta função são os pontos do plano tais que
(x, y) = (x,√
x) para x ≥ 0.
Graficamente temos
x
y
y =√
x
Figura 2.5: Representação gráfica do domínio D (em vermelho), da imagem (em azul) e dográfico da função y =
√x.
E como é o gráfico para funções de mais de uma variável?
Para responder esta pergunta, vamos trabalhar com funções de duas variáveis f : D ⊂R
2 → R ou aindaz = f (x, y) para (x, y) ∈ D ⊂ R
2.
Ora, então o gráfico de f é o conjunto
(x, y, z) ∈ R2 × R = R
3|z = f (x, y)
ou ainda, o gráfico de f está contido em R3. Vejamos um exemplo simples:
Exemplo 2.7. Consideremos a função f : D ⊂ R2 → R dada por
f (x, y) = x2 + y2,
onde D é o subconjunto do plano
(x, y) ∈ R2|x2 + y2 ≤ 1, x ≥ 0 e y ≥ 0
Neste caso, considerando z = f (x, y) e (x, y) ∈ D, o gráfico é dado por
(x, y, z) ∈ R3|z = x2 + y2
Exercício 2.8. Determine o domínio, a imagem e esboce o gráfico das funções abaixo:
1. f (x, y) = 4 − 2x − 3y;
2. f (x, y) =√
9 − x2 − y2;
3. f (x, y) = x2 + y2 − 2.

x
y
z
Figura 2.6: Representação gráfica do domínio D (em vermelho), da imagem (em azul) e dográfico da função z = x2 + y2.
Há outra forma interessante de visualizar uma função de duas variáveis e que seráuma ferramenta interessante que nos ajudará a esboçar o gráfico da função. Esse métodoconsiste em determinar o conjunto de pontos do domínio da função que tenham a mesmaimagem, ou seja, para um valor escolhido na imagem de f , digamos k, determinar os pontos(x, y) do domínio da função tal que
f (x, y) = k, k ∈ Im( f ).
Observarmos que para cada valor k escolhido na imagem da função determinamos umsubconjunto no domínio de f . Cada um destes conjuntos é chamado de curva de nível k dafunção e é representado por
Ck =
(x, y) ∈ D f : f (x, y) = k, k ∈ Im ( f )
Vamos apresentar alguns exemplos para curvas de nível.
Exemplo 2.9. As curvas de nível 1, 4 e 9 da função
f (x, y) = x2 + y2
são, respectivamente, as circunferências
C1 : x2 + y2 = 1,
C4 : x2 + y2 = 4, e
C9 : x2 + y2 = 9.
Essas curvas de nível indicam que a imagem de todos os pontos da circunferência de raio 1, deraio 2 e de raio 3, são iguais, respectivamente, a 1, 4 e 9. Veja a Figura 2.7.
x
y
z
f (C1)
f (C4)
f (C9)
3
Figura 2.7: Representação gráfica das curvas de nível no gráfico da função f (x.y) = x2 + y2.

Exemplo 2.10. As curvas de nível k da função
f (x, y) = 4 − x − y
são as retas de equações4 − x − y = k ⇔ x + y = 4 − k.
x
y
C1
C2
C3
C4
Figura 2.8: Representação gráfica das curvas de nível no gráfico da função f (x, y) = 4 −x − y.
Observe ainda que ao calcularmos a curva de nível 0, na verdade estamos encontrando a inter-secção do gráfico da função f com o plano z = 0.
Exercício 2.11. 1. Esboce algumas curvas de nível e das seguintes funções, bem como os seusrespectivos gráficos:
(a) f (x, y) = 9x2 + 4y2;
(b) g (x, y) = y − x2 + 5;
(c) h (x, y) =1
x2 + y2 ;
(d) i (x, y) = y2 − x2.
2. Explique porque duas curvas de nível não se interceptam.
3. Dada a funçãof (x, y) = ln (x + y − 3) .
(a) Calcule f (1, 3) e f (3, e);
(b) Determine e esboce o domínio de f;
(c) Determine a imagem de f;
(d) Determine e esboce algumas curvas de nível de f;
(e) A partir das informações acima, você tem alguma ideia de como é o gráfico de f ?
Da mesma forma que definimos curvas de nível para funções de duas variáveis, defini-mos superfícies de nível para funções de três ou mais variáveis. Cada conjunto solução daequação
f (x, y, z) = k, k ∈ Im( f )
é uma superfície de nível de f .
Exercício 2.12. Determine e esboce algumas das superfícies de nível das funções abaixo:
1. f (x, y, z) = x2 + y2 + z2 e
2. g (x, y, z) = z − x2 − y2.

2.1 Limites e Continuidade
Os conceitos de limite e de continuidade para funções de duas ou mais variáveis, bemcomo suas interpretações, são similares aos dados para funções de uma variável, entre-tanto, há uma diferença relevante, a qual explicaremos na sequência. De modo intuitivo,se os valores de uma função
z = f (x, y)
estão próximos de um número real L para todos os pontos (x, y) suficientemente próximos deum ponto fixado (a, b), dizemos então que f tem limite L quando (x, y) tende ao ponto(a, b).
Neste caso, escrevemoslim
(x,y)→(a,b)[ f (x, y)] = L.
Devemos observar que se (a, b) for um ponto que se encontra no interior do domínio,D, da função f, então o ponto (x, y) pode se aproximar de (a, b) por qualquer direção.
Lembremos que no caso de funções de uma variável, as únicas direções possíveis paraa aproximação de um ponto x a um ponto fixo a, são à esquerda e à direita, enquanto queagora, para funções de mais de uma variável, temos muitas outras direções a considerar.Veja a Figura 2.9.
x x
y
DD
a a
b
Figura 2.9: Representação gráfica das direções de aproximação a um ponto.
Vamos estudar o Limite de funções reais de várias variáveis a partir de alguns exemplos:
Exemplo 2.13. Consideremos as funções:
1. f (x, y) = x + 2y;
2. g (x, y) =sen
(
x2 + y2)
x2 + y2 e
3. f (x, y) =x2 − y2
x2 + y2 .
e estudemos os seus comportamentos quando (x, y) aproxima-se do ponto (0, 0) por quaisquer dire-ções.
Solução
Analisando f : No caso da função f , é fácil ver que seu valor se aproximará de zero se (x, y) apro-xima de (0, 0), pois esta função é polinomial. Neste caso, o domínio é todo o plano R
2.

Analisando g: No caso da função g, já não tão simples, mas podemos observar que seu valor apro-ximará de 1 se (x, y) aproxima de (0, 0).
Para isto podemos fazerx2 + y2 = r2
e a função fica dependente apenas da variável r, ou seja podemos considerar a função
g(r) =sen(r2)
r2
e como já estudamos no Cálculo 1, este limite é o fundamental trigonométrico e vale 1 sempreque r se aproxima de zero (r → 0).
Observe ainda que quando r tende a zero, temos que x e y também tendem a zero!
Analisando h: Vamos analisar agora o limite da função h, quando x e y tendem a zero. Para istoescolhamos direções e calculemos os limites resultantes.
Veja quando (x, y) aproxima-se de (0, 0) na direção, por exemplo, do eixo x , isto é, na direção(x, 0).
Neste caso, podemos escrever
lim(x,y)→(0,0)
f (x, y) = lim(x,y)→(x,0)
x2 − 02
x2 + 02 = limx→0
x2
x2 = 1.
E para (x, y) aproximando-se de (0, 0) na direção do eixo y, isto é, na direção (0, y), temosque
lim(x,y)→(0,0)
f (x, y) = lim(x,y)→(0,y)
02 − y2
02 + y2 = limy→0
(−y2
y2
)
= −1.
Melhor ainda, quando (x, y) aproxima-se de (0, 0) na direção da reta
y = mx
isto é, na direção (x, mx). Observe que variando o valor de m obtemos todas as retas quepassam pela origem, com exceção da reta x = 0. Escrevemos
lim(x,y)→(0,0)
f (x, y) = lim(x,mx)→(0,0)
x2 − (mx)2
x2 + (mx)2 = limx→0
(
1 − m2
1 + m2
)
=1 − m2
1 + m2 .
Ora, da última igualdade, variando m obtemos valores diferentes, ou seja, não existe o limiteda função g, quando o ponto se aproxima da origem.
É importante ainda perceber que se para todas as retas obtivéssemos o mesmo valor,isto ainda não implicaria que o limite da função seria este valor. Veja o próximo exemplo!
Exemplo 2.14. Verifique a existência de
lim(x,y)→(0,0)
x3 + y3
y − x2 .
Solução
Ora, para funções de uma variável real, calculando o limite do quociente de dois polinômios semtermos constantes, sendo o do numerador com grau maior do que o denominador, o limite sempre ézero. Neste caso temos uma situação análoga. Façamos a análise deste limite.

Verifiquemos o valor deste limite ao longo de retas que passam pela origem, ou seja, retas deequação y = mx, m ∈ R.
lim(x,y)→(0,0)
x3 + y3
y − x2 = lim(x,y)→(0,0)
x3 + (mx)3
(mx)− x2
= lim(x,y)→(0,0)
x3(1 + m3)
x(m − x)
= lim(x,y)→(0,0)
x2(1 + m3)
m − x
= 0.
Calculando ao longo de qualquer caminho do tipo y = xn, com n ≥ 2.
lim(x,y)→(0,0)
x3 + y3
y − x2 = lim(x,y)→(0,0)
x3 + (xn)3
(xn)− x2
= lim(x,y)→(0,0)
x3(1 + x3n−3)
x2(xn−2 − 1)
= lim(x,y)→(0,0)
x(1 + x3n−3)
xn−2 − 1
= 0.
Esse procedimento nos parece indicar que o limite é nulo. Mas, observe ao calcularmos o limiteao longo da curva y = x2 + x3, ficamos com
lim(x,y)→(0,0)
x3 + y3
y − x2 = lim(x,y)→(0,0)
x3 + (x2 + x3)3
(x3 + x2)− x2
= lim(x,y)→(0,0)
x3(1 + x3(x + a)3)
x3
= lim(x,y)→(0,0)
1 + x3(x + a)3
= 1.
Portanto, como obtivemos valores para o limite diferentes, o lim(x,y)→(0,0)x3+y3
y−x2 não existe.
Dos exemplos, concluímos que a existência do limite para funções de várias variáveis,embora análoga ao já estudado para o caso de funções de uma variável, tem que ser maiscuidadosa pois envolve toda uma região e não mais um intervalo como antes.
Definição 2.15. Seja f : D ⊂ R2 → R uma função de duas variáveis cujo domínio D contém
pontos arbitrariamente próximos de (a, b).
Dizemos que o limite dez = f (x, y)
quando (x, y) tende ao ponto (a, b) é L e escrevemos
lim(x,y)→(a,b)
[ f (x, y)] = L,
se para todo número ε > 0, existe, em correspondência, um número δ > 0 tal que, para todo (x, y)no domínio de f ,
| f (x, y) − L| < ε sempre que |(x, y)− (a, b)| < δ.

Observe que a definição de limite diz que a distância entre f (x, y) e L se torna arbitrari-amente pequena se tomarmos a distância entre (x, y) e (a, b) suficientemente pequena, masnão nula.
Portanto, a definição se refere apenas a distância entre (x, y) e (a, b), mas nada sobre adireção em que o ponto (x, y) se aproxima de (a, b).
Este fato nos permite concluir que se encontrarmos dois caminhos distintos, pelos quaishá a aproximação, e se por esses caminhos f (x, y) obtivermos limites diferentes, então
lim(x,y)→(a,b)
[ f (x, y)]
não existe.
Ou ainda, se para (x, y) → (a, b), obtivemos que f (x, y) → L1 ao longo de um caminhoC1 e f (x, y) → L2 ao longo de um caminho C2, com
L1 6= L2,
entãolim
(x,y)→(a,b)[ f (x, y)]
não existe.
Vejamos alguns exemplos.
Exemplo 2.16. 1. lim(x,y)→(1,2)
(x + 2y) = 5. Neste caso, a função está definida em todos os
pontos.
2. Do exemplo anterior, temos que
lim(x,y)→(0,0)
x2 − y2
x2 + y2
não existe, pois ao longo de dois caminhos distintos, obtemos valores distintos, ou ainda
lim(x,y)→(0,0)
x2 − y2
x2 + y2 = lim(x,y)→(x,0)
x2 − 02
x2 + 02 = limx→0
x2
x2 = 1, e
lim(x,y)→(0,0)
x2 − y2
x2 + y2 = lim(x,y)→(0,y)
02 − y2
02 + y2 = limy→0
(−y2
y2
)
= −1.
3. Se f (x, y) =
x + 2y, (x, y) 6= (1, 2)3, (x, y) = (1, 2)
Para esta função temos diretamente que
lim(x,y)→(1,2)
f (x, y) = 5.
Esta função é contínua?
2.1.1 Propriedades de Limites
As propriedades operatórias de limites para funções de várias variáveis são análogas àsque possuem as funções de uma variável, e assim as enunciamos:

Se L, M e k são números reais e se
lim(x,y)→(a,b)
f (x, y) = L e lim(x,y)→(a,b)
g (x, y) = M,
então:
1. lim(x,y)→(a,b)
[k f (x, y)] = kL.
2. lim(x,y)→(a,b)
[ f (x, y) ± g (x, y)] = L ± M.
3. lim(x,y)→(a,b)
[ f (x, y) .g (x, y)] = L.M;
4. lim(x,y)→(a,b)
[
f (x, y)
g (x, y)
]
=LM
, M 6= 0.
2.2 Continuidade
Assim também como para funções de uma variável, a continuidade para funções de váriasvariáveis é dada por,
Uma funçãoz = f (x, y)
é contínua em um ponto (a, b) se são satisfeitas as condições:
1. f está definida em (a, b);
2. Existe lim(x,y)→(a,b)
f (x, y);
3. lim(x,y)→(a,b)
f (x, y) = f (a, b).
Dizemos também que uma função é contínua quando ela é contínua em todosos pontos de seu domínio.
Exercício 2.17. Decida sobre a continuidade das funções dadas nos exemplos da secção anterior.

Capítulo 3
Diferenciabilidade de Funções deVárias Variáveis
Existem muitos problemas que envolvem funções de várias variáveis, cujas resoluções pas-sam pela determinação da taxa de variação da função em relação a uma das variáveis,enquanto que as outras permanecem constantes. Casos como este requer a determinaçãode derivadas da função dada em relação à variável em questão.
O Cálculo de funções de várias variáveis, em muitos casos, é o Cálculo de funções deuma variável aplicado a várias variáveis, uma a cada vez. Vejam no caso de fixarmos todasvariáveis de uma função, exceto uma delas, a função se transforma em função apenas davariável livre. Vamos dar um exemplo:
Exemplo 3.1. Considere a função de duas variáveis
V (r, h) =13
πr2h
que representa o volume do cone de raio r e altura h.
Fixando r = 3 e variando h, temos a função
V1(h) = V (3, h) =13
π(3)2h = 3πh,
que é função apenas da variável h.
Agora se fixamos o valor de h, por exemplo, h = 2 e variamos r, temos a função
V2(r) = V (r, 2) =23
πr2,
que é função apenas da variável r.
Notemos que a função V1(h) é linear e representa, para cada valor de h, a altura do cilindrocircular reto de raio 3, enquanto que a função V2(r) é quadrática e representa 2/3 da área do círculode raio r.
Ambas as funções V1 e V2, são funções de uma só variável. Este mesmo raciocínio estende demodo natural a funções de mais variáveis.
3.1 Derivadas Parciais de Funções de Duas Variáveis
Sejam uma função z = f (x, y) e (x0, y0), um ponto do domínio de f .
O plano y = y0 intercepta a superfície
S : z = f (x, y)

na curva z = f (x, y0), a qual é o gráfico da função de uma variável
z = f (x, y0) = F (x) .
x
y
z
S
z = f (x, y0)
x0
y0
Figura 3.1: Representação gráfica da derivada considerando y constante (y = y0).
Já o plano x = x0 intercepta a mesma superfície segundo a curva
z = f (x0, y) ,
a qual é o gráfico da funçãoz = f (x0, y) = G (y) .
x
y
z
S
z = f (x0, y)
x0
y0
Figura 3.2: Representação gráfica da derivada considerando x constante (x = x0).
A derivada da funçãoz = f (x, y0) = F (x)
é chamada de derivada parcial da função z = f (x, y) em relação à variável x, no ponto(x0, y0). Esta derivada é denotada por
F′ (x0) =∂z∂x
(x0, y0) =∂ f∂x
(x0, y0)
ou aindaF′ (x0) = fx (x0, y0)
e seu significado geométrico é, como em funções de uma variável, ou seja, é a medida dainclinação da reta tangente ao gráfico da função
z = f (x, y0) = F (x)
no ponto (x0, y0, z0) = (x0, y0, f (x0, y0)).

De modo análogo, tem-se a derivada parcial da função z = f (x, y) em relação à variávely, no ponto (x0, y0), a qual é denotada por
G′ (x0) =∂z∂y
(x0, y0) =∂ f∂y
(x0, y0)
ouG′ (x0) = fy (x0, y0)
e o significado geométrico é a medida da inclinação da reta tangente ao gráfico da função
z = f (x0, y) = G (y)
no ponto (x0, y0, z0) = (x0, y0, f (x0, y0)).
Portanto, para a determinação das derivadas parciais, devemos proceder como se afunção
z = f (x, y)
fosse de uma só variável, ou seja, consideramos uma das duas variáveis constante.
Exemplo 3.2. Se f (x, y) = 3 − 2x2 − y2, então
fx (x, y) = −4x e fy (x, y) = −2y.
Observemos ainda que tanto fx(x, y) e fy(x, y) são também funções de duas variáveis e mais,representam a inclinação da reta tangente considerando uma das duas variáveis constante.
Mais especificamente, se queremos determinar a inclinação dessas retas no ponto (1, 3), basta
fx (1, 3) = −4 e fy (1, 3) = −6.
Exemplo 3.3. Se f (x, y) = sen(
xy2)
, então
fx (x, y) = y2cos(
xy2)
e fy (x, y) = 2xycos(
xy2)
.
Verifique!
A derivada parcial, calculada em um ponto (x0, y0), é dada pelo limite do quociente deNewton, isto é,
F′ (x0) = fx (x0, y0) = limh→0
f (x0 + h, x0) − f (x0, x0)
h.
Muitas vezes, não poderemos derivar diretamente no ponto e sim , determinarmos aderivada utilizando esta definição, ou seja, usando esse limite.
Por exemplo, para a determinação das derivadas parciais no ponto (0, 0) em que
f (x, y) =
xyx2 + y2 , (x, y) 6= (0, 0)
0, (x, y) 6= (0, 0)
.
Para este caso temos que
F′ (0) = fx (0, 0) = limh→0
f (0 + h, 0) − f (0, 0)
h= lim
h→0
0 − 0h
= 0;
G′ (0) = fy (0, 0) = limk→0
f (0, 0 + k) − f (0, 0)k
= limk→0
0 − 0k
= 0.
Já as derivadas parciais da função f nos pontos
(x, y) 6= (0, 0)

podem ser calculadas pelas regras de derivação conhecidas para funções de uma variável.
Assim,
F′ (x) = fx (x, y) =
(
x2 + y2) y − xy.(2x)
(x2 + y2)2 =
y3 − x2y
(x2 + y2)2 .
Exercício 3.4.
1. Dada a função f (x, y) = sen(
x1 + y
)
. Mostre que:
(a)∂ f∂x
(x, y) =1
1 + ycos
(
x1 + y
)
(b)∂ f∂y
(x, y) = − x
(1 + y)2 cos(
x1 + y
)
2. Calcule as derivadas parciais, em relação a x e também a y, de f (x, y) = x2 + 3xy + y − 1 noponto (4,−5)
3. Seja a função z = f (x, y) definida implicitamente pela equação x3 + y3 + z3 + 6xyz = 1.Mostre que:
(a)∂z∂x
= − x2 + 2yzz2 + 2xy
.
(b)∂z∂y
= −y2 + 2xzz2 + 2xy
4. A intersecção do plano x = 1 com o parabolóide de revolução z = x2 + y2 é a parábolaz = 1 + y2.
(a) Esboce o parabolóide z = x2 + y2 e nele, destaque a parábola z = 1 + y2
(b) Determine a inclinação da reta tangente à parábola, no ponto (1, 2, 5)
(c) Qual é a equação cartesiana da reta tangente à parábola no ponto (1, 2, 5)? Determinetambém as equações paramétricas dessa reta.
5. Enuncie e resolva o exercício semelhante ao anterior, apenas trocando o plano x = 1 pelo planoy = 2.
6. Dada a função f (x, y) =
xy(
x2 − y2)
x2 + y2 , (x, y) 6= (0, 0)
0, (x, y) 6= (0, 0)
(a) Mostre que fx (0, 0) = fy (0, 0) = 0;
(b) Calcule as derivadas parciais, fx (x, y) e fy (x, y), para (x, y) 6= (0, 0), e verifique quefx (y, x) = − fy (x, y);
(c) Escreva a funções fx (x, y) e fy (x, y) e explique por que ela é definida em todo plano R2.
3.1.1 Derivadas de Ordem Superior
Como vimos anteriormente, as derivadas parciais, fx e fy, de uma função f são funçõestambém de duas variáveis, e quando calculadas no ponto (x0, y0) significam, respectiva-mente, as inclinações das curvas
f (x, y0) e f (x0, y)
no ponto (x0, y0), ainda mais, representam as taxas de variações, respectivamente, de x e yno ponto (x0, y0).

Assim sendo, é natural considerarmos as suas derivadas parciais,
( fx)x = fxx , ( fx)y = fxy e(
fy)
y = fyy ,(
fy)
x = fyx.
Essas são as derivadas parciais de segunda ordem da função f , as quais são tambémfunções de (x, y).
Notação
fxx =∂2 f∂x2 =
∂
∂x
(
∂ f∂x
)
, e
fxy =∂2 f
∂y∂x=
∂
∂y
(
∂ f∂x
)
.
Exemplo 3.5. Calcular as derivadas de 2ª ordem da função f (x, y) = x2 + 3xy + y − 1.
Solução
Sabemos que fx (x, y) = 2x + 3y e fy (x, y) = 3x + 1.
Assim,fxx (x, y) = 2, fxy (x, y) = 3, fyx (x, y) = 3 e fyy (x, y) = 0.
Exemplo 3.6. Se f (x, y) = cos (xy) + x3y3, então
fx (x, y) = −ysen (xy) + 3x2y3 e fy (x, y) = −xsen (xy) + 3x3y2.
Assim,fxx (x, y) = −y2cos (xy) + 6xy3;fyy (x, y) = −x2cos (xy) + 6x3y efxy (x, y) = −sen (xy) − xycos (xy) + 9x2y2 = fyx (x, y) .
Observe que em ambos os exemplos, tivemos a fxy (x, y) = fyx (x, y), mas isso não é coinci-dência, ocorrem na maioria das funções, principalmente naquelas que encontramos na prática.
Vamos analisar um exemplo em que esse fato, o de fxy (x, y) = fyx (x, y), não ocorre.Para isto, consideramos a função
f (x, y) =
xy(
x2 − y2)
x2 + y2 , (x, y) 6= (0, 0)
0, (x, y) 6= (0, 0)
Observe ainda que apenas no ponto (0, 0), é que temos que
fxy (0, 0) = −1 e fyx (0, 0) = 1.
Verifique!
Mas, e como saber se isto ocorre ou não? Para isto temos um resultado devido aSchwartz que assegura o seguinte:
Se uma funçãoz = f (x, y)
e suas derivadas parciais fx, fy e fxy estão definidas em um conjunto abertocontendo o ponto (x0, y0) e tal que todas são contínuas, então
fxy (x0, y0) = fyx (x0, y0) .
Este é o teorema das derivadas parciais mistas, ele é devido a Clairaut.

Exercício 3.7.
1. Dada a função f (x, y) = 12 − x2 − 2y2. Calcule
∂ f∂x
(1, 2) e∂ f∂y
(1, 2) .
Interprete esses números como inclinações de retas tangentes. Faça o esboço de uma figuramostrando o gráfico dessa função e as retas tangentes.
2. As derivadas parciais ocorrem em equações diferenciais parciais que descrevem determinadosfenômenos físicos. Um exemplo é a Equação de Laplace,
zxx + zyy = 0.
As soluções dessa equação são chamadas funções harmônicas e são importantes no estudo decondução de calor, escoamento de fluídos e potencial elétrico. Verifique se as funções abaixosatisfazem a Equação de Laplace.
(a) z = x3 − 3xy2.
(b) z = ln(
√
x2 + y2)
.
(c) z = arctg( y
x
)
.
3. Outro exemplo é a equação diferencial que descreve o movimento de uma onda, que pode serde um som do mar ou de uma corda vibrante. A Equação da Onda é
utt = c2uxx.
Verifique se as funções a seguir são soluções da Equação da Onda.
(a) u (t, x) = sen (x + ct).
(b) u (t, x) = ln (2x + 2ct).
(c) u (t, x) = 6 ln (2x + 2ct) + e(x+ct) + tg (2x − 2ct).
4. Mostre que a função
z =1√
te−x2/4kt
satisfaz a equação de difusão ou do calor zt = kzxx, onde k é uma constante.
5. A temperatura em um ponto (x, y) de uma placa plana de metal é dada pela função
T (x, y) =60
1 + x2 + y2 ,
onde T é medido em 0C e x e y, em metros.
Calcule a taxa de variação da temperatura no ponto (1, 2), com relação a distância na direçãodo eixo x e também na do eixo y.
6. A resistência total R produzida por três condutores com resistências R1 R2 e R3, conectadosem paralelo em um circuito elétrico é dada por
1R
=1
R1+
1R2
+1
R3.
Calcule ∂R∂R e interprete o resultado.
7. A energia cinética de um corpo com massa m e velocidade v é E = 12 mv2. Mostre que
∂E∂m
∂2E∂v2 = E.

3.2 Diferenciabilidade
Ao estudarmos funções de uma variável, vimos que se elas forem deriváveis em um ponto,então ela é contínua nesse ponto. No caso de funções de mais variáveis isto não é maisverdade. Veja o próximo exemplo.
Exemplo 3.8. A função
f (x, y) =
xyx2+y2 , (x, y) 6= (0, 0)
0, (x, y) 6= (0, 0)
não é contínua em (0, 0), pois não existe
lim(x,y)→(0,0)
f (x, y) .
Verifique!
Entretanto, ela possui derivadas parciais neste ponto:
fx (0, 0) = limh→0
f (0 + h, 0)− f (0, 0)
h
= limh→0
0 − 0h
= 0;
fy (0, 0) = limk→0
f (0, 0 + k) − f (0, 0)
k
= limk→0
0 − 0k
= 0.
A existência das derivadas parciais de uma função em um ponto garante a continuidadedela apenas nas direções dos eixos coordenados, ou seja, apenas a continuidade das curvas
z = f (x, y0) e z = f (x0, y) ,
para as quais as derivadas existem.
Portanto, isto não contradiz nada estudado em funções de uma variável.
Lembremos que para funções de uma variável, y = f (x), vimos que se ela é derivávelem um ponto x0, então existe a reta tangente ao gráfico de f no ponto (x0, f (x0)), cujaequação é
y = f (x0) + f ′ (x0) (x − x0) ,
ou seja, a derivabilidade equivale à diferenciabilidade.
O conceito de diferenciabilidade, que traremos a seguir, implicará na continuidade dafunção, assim como tínhamos para funções deriváveis de uma variável. As definições são,respectivamente:
Definição 3.9. Uma função f de uma variável é derivável em um ponto x0, se existir o limite
lim∆x→0
f (x0 + ∆x)− f (x0)
∆x= f ′ (x0) ,
e é diferenciável em x0, se existir uma reta pelo ponto (x0, f (x0)) de equação
y = f (x0) + m(x − x0)
tal que para x tendendo a x0, a diferença f (x)− y tenda a zero mais rápido que r = x − x0, ou seja
limx→x0
[
f (x)− yx − x0
]
= limr→0
[
f (x) − f (x0)− mrr
]
= 0.

É fácil notar que, no caso de funções de uma variável, ser derivável ou diferenciávelsignificam coisas equivalentes, é o que mostraremos a seguir:
Teorema 3.10. Uma função f de uma variável é derivável em um ponto x0, se e somente se, fordiferenciável neste ponto.
Se f é diferenciável em um ponto x0, então existe uma reta pelo ponto (x0, f (x0)) deequação
Y = f (x0) + m (x − x0)
tal que
limx→x0
[
f (x) −Yx − x0
]
= limr→0
[
f (x)− f (x0) − mrr
]
= 0.
Mas, isto equivale a
limr→0
[
f (x) − f (x0)− mrr
]
= limx→x0
[
f (x)− f (x0)
x − x0
]
= m.
Portanto, f sendo diferenciável em x0, é derivável neste ponto e, além disso,
m = f ′ (x0) .
Assim, a reta tangente no ponto está bem definida e é dada pela equação
Y = f (x0) + f ′ (x0) (x − x0)
Observação 3.11. Essa reta é exatamente a tangente ao gráfico de f no ponto (x0, f (x0)), comoestudado no primeiro curso de Cálculo.
Assim, funções diferenciáveis ou deriváveis em um determinado ponto são aquelas que possibili-tam apoiar reta tangente a seu gráfico no ponto especificado.
Uma conseqüência importante desse fato sobre funções de uma variável é que diferenciabilidadeou derivabilidade implicam em continuidade.
Outro fato muito importante da equivalência descrita acima é a possibilidade de generalizaçãopara funções de mais variáveis.
Antes de definirmos a diferenciabilidade para funções de duas variáveis, observemosque se definimos
r = ‖(x, y)− (x0, y0)‖ =
√
(x − x0)2 + (y − y0)
2
então para r → 0 temos que x → x0 e y → y0, pois r é a distância entre os pontos (x, y) e(x0, y0).
Definição 3.12. Uma função z = f (x, y) é diferenciável em (x0, y0), se existir um plano peloponto (x0, y0, f (x0, y0)), de equação
Z = f (x0, y0) + A (x − x0) + B (y − y0) ,
tal que a diferença f (x, y) − Z tende a zero mais rápido que
r = ‖(x, y)− (x0, y0)‖ =
√
(x − x0)2 + (y − y0)
2
tende a zero quando (x, y) tende a (x0, y0), no sentido que
limr→0
[
f (x, y)− Zr
]
= limr→0
[
f (x, y) − f (x0, y0) − A (x − x0) − B (y − y0)
r
]
= 0.

Podemos notar que a diferenciabilidade dessa função z = f (x, y) no ponto (x0, y0) temimplicações importantes. Para isto denotando o quociente
a =f (x, y) − f (x0, y0) − A (x − x0) − B (y − y0)
r, (3.1)
temos:
1. Da igualdade 3.1 podemos escrever
f (x, y) = f (x0, y0) + A (x − x0) + B (y − y0) + ar.
E agora, considerando esta última igualdade e a equação 3.1, temos que se a → 0 parar → 0, temos que
f (x, y) → f (x0, y0) .
Portanto, a diferenciabilidade de f em (x0, y0) implica em sua continuidade nesteponto.
2. Calculandolimr→0
a
na direção do eixo x, isto é, tomando y = y0, temos
lim(x,y0)→(x0,y0)
[
f (x, y0) − f (x0, y0) − A (x − x0)
r
]
= limx→x0
[
f (x,y0)− f (x0,y0)x−x0
− A]
= 0.
Ou ainda,
fx(x, y) =∂ f∂x
(x0, y0) = A.
De modo análogo, calculando o limite de a na direção do eixo y, ou seja para x = x0,obtemos
fy(x, y) =∂ f∂y
(x0, y0) = B.
Sendo assim, a diferenciabilidade de f em (x0, y0) implica na existência de suas deri-vadas parciais neste ponto.
3. Além da continuidade e da existência das derivadas parciais da função f em (x0, y0)o plano de equação
Z = f (x0, y0) + fx (x0, y0) (x − x0) + fy (x0, y0) (y − y0) ,
aproxima o gráfico de z = f (x, y) na forma descrita acima, isto é, de modo que adiferença f (x, y)− Z tende a zero muito mais rápido que o ponto (x, y) tende ao ponto(x0, y0).
Da mesma forma que a reta
y = f (x0) + f ′(x0)(x − x0)
é tangente ao gráfico da função y = f (x) no ponto x = x0, este plano é o planotangente ao gráfico de z = f (x, y) no ponto (x0, y0).
4. Entretanto, observemos que a continuidade e a existência das derivadas parciais deuma função em um ponto não são condições suficientes para que ela seja diferenciávelnesse ponto.
Por exemplo, analisemos a função
f (x, y) =√
|xy|.

A função f é contínua em todos os pontos do plano e suas derivadas parciais sãoiguais a zero no ponto (0, 0). Verifique!
Entretanto, ela não é diferenciável em (0, 0). Para isto notemos que para esta função,a expressão
a =f (x, y)− f (0, 0) − fx (0, 0) x − fy (0, 0) y
r=
√
|xy|√
x2 + y2
não tem limite, portanto, não tende a zero. Para verificar isto, por exemplo, calculeeste limite para y = x.
5. Uma condição suficiente para a diferenciabilidade de uma função em um ponto é quesuas derivadas parciais de primeira ordem sejam contínuas em um conjunto abertoD, ou seja, não basta a existência delas em um ponto.
Definição 3.13. Quando a função z = f (x, y) for diferenciável no ponto(x0, y0), a expressão
d f = fx (x0, y0) dx + fy (x0, y0) dy,
onde dx = x − x0 e dy = y − y0, é a diferencial de z = f (x, y) no ponto(x0, y0) .
Exercício 3.14. 1. A pressão, o volume e a temperatura de um mol de um gás ideal estão rela-cionados pela equação
PV = 8, 31T,
onde P é medida em quilopascals, V em litros e T em Kelvins. Utilize diferenciais para de-terminar a variação aproximada da pressão se o volume aumenta de 12 L para 12,3 L e atemperatura diminui de 310 K para 305 K.
2. Se R é a resistência total produzida por três condutores com resistências R1, R2 e R3 conecta-das em paralelo em um circuito elétrico, então
1R
=1
R1+
1R2
+1
R3.
Se as resistências medem R1 = 25Ω, R2 = 40Ω e R3 = 50Ω, com precisão de 0, 5% em cadauma, o "erro"que se comete na determinação de R pode ser estimado por meio de diferenciais.Calcule então este erro.
RESPOSTA 117 ≃ 0, 059Ω.
3.3 Regra da Cadeia
Se y for uma função derivável de x, y = f (x), e se x por sua vez for função derivável de t,x = g (t), então, a Regra da Cadeia para funções de uma variável nos diz que
dydt
=dydx
· dxdt
.
Para as funções de mais variáveis, a Regra da Cadeia tem várias versões, cada umadelas nos dá um método de como calcular a derivada de uma função composta.
Admitiremos, a seguir, que as funções envolvidas sejam todas diferenciáveis.
3.3.1 Regra da Cadeia: Versão 1
Consideremos o caso em que z = f (x, y) e que as variáveis x e y sejam funções da variávelt. Assim, temos
z = f (x, y) , x = x (t) e y = y (t) ,

ou ainda,
z(t) = f (x(t), y(t)),
ou seja, z é função da variável t, daí, tem sentido falar emdzdt
. Mas o que seria esta derivada?
Antes de darmos a resposta, apresentaremos um exemplo.
Exemplo 3.15. Consideremos a funçãoz = x2y,
com x = t2 e y = t3.
Assim,z = x2y
=(
t2)2t3
= t7.
Portanto, temos quedzdt
= 7t6.
Observemos agora que:
∂z∂x
= 2xy,∂z∂y
= x2,dxdt
= 2t
edydt
= 3t2.
Fazendo
∂z∂x
· dxdt
+∂z∂y
· dydt
= 2xy · 2t + x2 · 3t2
e, substituindo x e y, respectivamente, por t2 e t3, temos
∂z∂x
· dxdt
+∂z∂y
· dydt
= 2xy · 2t + x2 · 3t2 = 2t2t3 · 2t +(
t2)2
· 3t2 = 7t6,
que é exatamente o valor dedzdt
calculado anteriormente.
Este exemplo sugere o seguinte procedimento:
Se z = f (x, y), x = x (t) e y = y (t), então
dzdt
=∂z∂x
· dxdt
+∂z∂y
· dydt
.
O que de fato é verdade. Confira!!!
A função z = f (x, y) é agora uma função diferenciável de uma única variável t, pois
z = f (x (t) , y (t)) ,
onde as funções x = x (t) e y = y (t) são deriváveis, então,
dzdt
= lim∆t→0
∆z∆t
.
Além disso, uma variação ∆t, em t, implicará variações ∆x, ∆y e ∆z, em x (t), y (t) ez = f (x, y), respectivamente.

Mas,
∆z = f (x + ∆x, y + ∆y) − f (x, y)
= fx (x0, y0) ∆x + fy (x0, y0) ∆y + ar,
com a → 0, quando
r = ‖(∆x, ∆y)‖ =
√
(∆x)2 + (∆y)2 → 0,
pois z = f (x, y) é diferenciável.
Portanto,
∆z∆t
=∂ f∂x
· ∆x∆t
+∂ f∂y
· ∆y∆t
+ar∆t
=∂ f∂x
· ∆x∆t
+∂ f∂y
· ∆y∆t
± a
√
(
∆x∆t
)2
+
(
∆y∆t
)2
,
onde o sinal desta última parcela é positivo ou negativo dependendo do sinal de ∆t.
Queremos calculardzdt
= lim∆t→0
∆z∆t
,
mas∆t → 0 ⇒ a → 0.
Daí,
dzdt
= lim∆t→0
∆z∆t
=∂ f∂x
· dxdt
+∂ f∂y
· dydt
.
Esta é a Regra da Cadeia para este caso e que pode ser escrita como o produto escalarentre os vetores
(
∂ f∂x
,∂ f∂y
)
e(
x′, y′)
,
ou seja,
dzdt
=
(
∂ f∂x
,∂ f∂y
)
·(
x′, y′)
.
O vetor(
∂ f∂x
,∂ f∂y
)
é chamado de Gradiente da função z = f (x, y) calculado no ponto (x, y) e é denotado por
∇ f =
(
∂ f∂x
,∂ f∂y
)
e o vetor (x′, y′) é o vetor tangente à curva
α (t) = (x (t) , y (t))
no ponto t.

Exercício 3.16.
1. Dada a funçãoz =
√
xy + y, x = cosθ, y = senθ :
(a) Calculedzdθ
, usando a regra da cadeia;
(b) Calculedzdθ
, substituindo x e y na função z;
(c) Mostre quedzdθ
(π/2) = −12
.
2. Considere o caso em z = f (x, y) e y = y (x). Mostre que
dzdx
=∂ f∂x
+∂ f∂y
· dydt
.
3. Considere que a equação F (x, y) = 0 define implicitamente y como função derivável de x e
que∂F∂y
6= 0. Mostre que
dydx
=∂F/
∂x
∂F/
∂y.
Utilize este resultado para mostrar que
dydx
= −3x2 + y2
2xy,
em que F (x, y) = x3 + xy2 − 3 = 0.
4. Considere que a função
z = T (x, y) = x2y + 3xy4, x = sen(2t), y = cost
represente a temperatura no ponto (x, y).
Então a função compostaz = T (sen(2t), cost)
representa a temperatura dos pontos da curva
C (t) = (sen(2t), cost)
e sua derivada dTdt corresponde a taxa de variação da temperatura ao longo de C.
Mostre que à taxa de variação da temperatura no instante t = 0 é 6.
5. A pressão, o volume e a temperatura de um mol de um gás ideal estão relacionados pela equação
PV = 8, 31T,
onde P é medida em quilopascals, V em litros e T em Kelvins.
Mostre que a taxa de variação da pressão quando a temperatura é de 300 K e está aumentandoà taxa de 0, 1K/s e o volume é de 100 L e está aumentando à taxa de 0, 2L/s é
dPdt
= −0, 04155.
Uma aplicação muito importante desta versão da Regra da Cadeia é para mostrar queo vetor gradiente,
∇ f = ( fx, fy),
de uma função z = f (x, y), quando não nulo, é perpendicular à curva de nível da funçãof .

SejaCk = (x, y) : f (x, y) = k
uma curva de nível da função z = f (x, y).
Considere que a curva Ck seja dada na forma paramétrica por
α (t) = (x (t) , y (t)) .
Assim, para cada t, α (t) = (x (t) , y (t)) é um ponto de Ck, portanto,
f (x (t) , y (t)) = k.
Calculando a derivada em relação à variável t em ambos os membros da igualdadeanterior, obtemos,
ddt
[ f (x (t) , y (t))] =ddt
(k)
∂ f∂x (x, y) · x′ (t) + ∂ f
∂y (x, y) y′ (t) = 0
∇ f (x, y) ·(
x′ (t) , y′ (t))
= 0
O que mostra que se os vetores forem não nulos, então são perpendiculares, ou seja queo vetor gradiente é perpendicular à curva de nível. Veja a Figura 3.3.
C1
C2
C3 : α(t)α′∇ f (x, y)
Figura 3.3: O gradiente é perpendicular ao vetor tangente às curvas de nível.
3.3.2 Regra da Cadeia: Versão 2
Consideremos o caso em que z = f (x, y) e que as variáveis x e y sejam funções das variá-veis t e s.
Assim, temos
z = f (x, y) , x = x (t, s) e y = y (t, s) .
Isto nos diz que z é função das variáveis t e s, a qual pode ser representada por
z = f (x (t, s) , y (t, s)) = F (t, s) .
Neste caso, tem sentido calcular em
∂ f∂t
e∂ f∂s
.
Mas, o que seriam estas derivadas?

Neste caso, para calcular, por exemplo,∂ f∂t
, basta considerar fixa a variável s, e assim,
as funções x e y passam a ser de uma só variável, recaindo portanto à Versão 1.
Portanto, se z = f (x (t, s) , y (t, s)) = F (t, s), então
∂z∂t
=∂ f∂x
· ∂x∂t
+∂ f∂y
· ∂y∂t
e∂z∂s
=∂ f∂x
· ∂x∂s
+∂ f∂y
· ∂y∂s
.
Uma observação importante é que os resultados que temos para funções de duas variá-veis se estende de modo natural para funções de três ou mais variáveis.
Exemplo 3.17. Se
w = f (x, y, z) = x + 2y + z2, x =ts
, y = t2 + ln s, z = 2t,
então
∂w∂t
=∂ f∂x
· ∂x∂t
+∂ f∂y
· ∂y∂t
+∂ f∂z
· ∂z∂t
= 1 · 1s
+ 2 · 2t + 2z · 2
=1s
+ 12t, e
∂w∂s
=2s− t
s2 .
Verifique!!!!
Exercício 3.18.
1. A voltagem V em um circuito que satisfaz a lei vai caindo lentamente à medida que a bateriadescarrega. Ao mesmo tempo, a resistência R vai aumentando conforme o resistor esquenta.
(a) Sabendo que V = IR e que todos os elementos do circuito dependem do tempo t, mostreque a taxa de variação da voltagem V em função do tempo pode ser dada pela equação
dVdt
=∂V∂I
dIdt
+∂V∂R
dRdt
;
(b) Calcule a variação da corrente desse circuito no instante em que
R = 600 ohm, I = 0, 04 amp,dRdt
= 0, 5 ohm edVdt
= −1volt/
s.
2. Os comprimentos a, b e c das arestas de uma caixa retangular variam com o tempo. Em umdeterminado momento tem-se
a = 1 m, b = 2 m, c = 3 m,dadt
=dbdt
= 1m/s edcdt
= −3m/s.
Calcule as taxas de variações da área A e do volume V da caixa no instante considerado.Decida se as diagonais do interior da caixa estão aumentando ou diminuindo naquele instante.
3. Determine a taxa que está variando a área de um triângulo se sua base é de 30 cm e estácrescendo à taxa de 6 cm/s, enquanto que sua altura é de 20 cm e está crescendo à taxa de 4cm/s.

3.4 Derivada direcional e Gradiente
As derivadas parciais, fx (x, y) e fy (x, y), significam as taxas de variações da função
z = f (x, y)
nas direções dos eixos coordenados, x e y, no sentido positivo, calculadas em cada ponto(x0, y0) do plano.
A partir de agora estamos interessados em determinar a taxa de variação da funçãoz = f (x, y), no ponto (x0, y0) e em direção e sentido quaisquer. Para isto, tomemos umvetor unitário u = (a, b) em sentido e direção arbitrários. A derivada direcional da função fno ponto (x0, y0), na direção u = (a, b) é dada pelo limite
∂ f∂~u
(x0, y0) = limt→0
f (x0 + at, y0 + bt) − f (x0, y0)
t,
quando este existe.
Podemos observar que o numerador da fração dada acima é a variação, ∆ f , da funçãof , na direção do vetor u, portanto, o quociente
f (x0 + at, y0 + bt) − f (x0, y0)
t
é a taxa de variação média de f , no ponto (x0, y0) e direção u. Assim, a derivada direcionalé a taxa de variação instantânea.
Uma interpretação geométrica importante está representada na Figura 3.4.
x
y
z
P
Q
P′
Q′
S
C
T
ha
hb
u
Figura 3.4: Representação gráfica da derivada direcional.
Um resultado importante é que se uma função f for diferenciável em um ponto (x0, y0),então essa função possui derivada direcional em todas as direções neste ponto. Sendo fdiferenciável, então
∆ f = f (x0 + h, y0 + k)− f (x0, y0) = fx (x0, y0) h + fy (x0, y0) k + ar,
e a → 0 quando r =√
h2 + k2 → 0.

Fazendo h = at e k = bt, temos
∆ ft
= fx (x0, y0) a + fy (x0, y0) b ± a,
e a → 0 quando r = |t| → 0.
Portanto, se f é diferenciável,
∂ f∂~u
(x0, y0) = limt→0
f (x0 + at, y0 + bt) − f (x0, y0)
t
= limt→0
∆ ft
= fx (x0, y0) a + fy (x0, y0) b
.
Temos então que a derivada direcional é o produto escalar do gradiente de f pelo vetordirecional, daí
∂ f∂~u (x0, y0) = fx (x0, y0) a + fy (x0, y0) b
=(
fx (x0, y0) , fy (x0, y0))
· (a, b)
= ∇ f ·~u.
Exemplo 3.19. 1. Para calcular a derivada direcional da função
f (x, y) = 3x2√y
na direção do vetor v = (3, 4) no ponto P = (2, 4).
Solução
Procedemos da seguinte forma:
(a) Determinamos o vetor gradiente da função f no ponto P = (2, 4):
∆ f (x, y) =(
fx (x, y) , fy (x, y))
=
(
6x√
y,3x2
2√
y
)
E assim, temos que∆ f (2, 4) = (24, 3) .
(b) Determinamos o vetor unitário na direção e sentido do vetor v = (3, 4), o qual é dadopor
u =v
‖v‖ =
(
35
,45
)
.
(c) Por fim, calculamos a derivada pedida, que é dada pelo produto escalar entre os vetores
∆ f (2, 4) e u =(
35 , 4
5
)
.
Assim,∂ f∂~v
(2, 4) = (24, 3) ·(
35
,45
)
= 24 · 35
+ 3 · 45
=8425
.
2. Para calcular a derivada de z = exy no ponto (−2, 0) na direção do vetor que faz um ângulode π
3 com o eixo x no sentido positivo, procede-se da seguinte forma:
(a) Determine o vetor unitário ~u. Este vetor é dado por
~u =(
cosπ
3, sen
π
3
)
=
(
12
,
√3
2
)
;

(b) Determine o gradiente de f no ponto (−2, 0). O qual é
∆ f (x, y) = (yexy, xexy) ⇒ ∆ f (−2, 0) = (0,−2) ;
(c) Por fim,∂ f∂~u
(−2, 0) = (0,−2) ·(
12
,
√3
2
)
= −√
3.
3.4.1 Observações e Interpretações
A seguir, apresentamos algumas importantes observações e interpretações sobre derivadadirecional.
1. Sendo a derivada direcional na direção u = (a, b) no ponto P0 = (x0, y0) de umafunção diferenciável
z = f (x, y)
dada por∂ f∂~u
(P0) = ∆ f (P0) ·~ue
∆ f (x, y) =(
fx (x, y) , fy (x, y))
,
então se u = (1, 0) temos a igualdade
∂ f∂~u
(P0) =(
fx (P0) , fy (P0))
· (1, 0) = fx (P0) .
Agora, se∂ f∂~u
(P0) =(
fx (P0) , fy (P0))
· (0, 1) = fy (P0) .
Temos que em ambos os casos as derivadas direcionais coincidem com as derivadasparciais.
2. Se na igualdade∂ f∂~u
(P0) = ∆ f (P0) ·~u
substituirmos o vetor direcional ~u = (a, b) pelo seu oposto, −~u = (−a,−b) o sinal daderivada fica também invertido, isto é,
∂ f∂~u
(P0) = − ∂ f∂ (−~u)
(P0)
Verifique!
3. De forma semelhante, se θ for o ângulo entre os vetores ∆ f (P0) e ~u então
cosθ =∆ f (P0) ·~u
‖∆ f (P0)‖ ‖~u‖.
Daí, temos que
∂ f∂~u
(P0) = ‖∆ f (P0)‖ ‖~u‖ cosθ = ‖∆ f (P0)‖ cosθ
Assim, o valor máximo da derivada direcional em um ponto P0 é na direção do gra-diente, isto é, quando θ for o vetor nulo, pois, neste caso cos θ = 1, que é seu valormáximo.

4. O gráfico da função z = f (x, y) é uma superfície S no espaço, se para um pontoP0 = (x0, y0) do domínio de f tem-se z0 = f (x0, y0), então o ponto P = (x0, y0, z0)pertence a S.
O plano paralelo ao eixo z e ao vetor u = (a, b) e que contém os pontos P0 e P inter-cepta S segundo uma curva C.
A derivada direcional∂ f∂~u
(P0)
é a inclinação da reta tangente à curva C no ponto P = (x0, y0, z0).
Assim, a equação dessa reta é
(x − x0) a = (y − y0) b.
Além disso, se θ for o ângulo dessa reta com o plano xy, então
∂ f∂~u
(P0) = tgθ.
Deste fato, podemos observar que a derivada é positiva se a função f cresce à medidaque o ponto Q = (x, y) se desloca a partir de P0 na direção u = (a, b) e negativa casof decresce.
5. SejaCk = (x, y) : f (x, y) = k
uma curva de nível da função z = f (x, y) em que a curva Ck seja parametrizada por
α (t) = (x (t) , y (t)) .
Assim, para cada t,α (t) = (x (t) , y (t))
é um ponto em Ck, portanto,f (x (t) , y (t)) = k,
para todo t.
Calculando a derivada em relação à variável t em ambos os membros da igualdadeacima, temos,
ddt
[ f (x (t) , y (t))] =ddt
(k)
∂ f∂x
(x, y) · x′ (t) +∂ f∂y
(x, y) y′ (t) = 0
∇ f (x, y) · α′ (t) = 0
.
Seα′ (t) 6= (0, 0) ,
isto mostra que os vetores ∇ f (x, y) e α′ (t) são perpendiculares.
Mas,α′ (t)
é tangente à curva de nível Ck da função f , assim, o gradiente é perpendicular à curvade nível em cada ponto dela.
Além disso, tomando
~u =α′ (t)
‖α′ (t)‖ ,
podemos observar que
∂ f∂~u
(P0) = ∇ f (x, y) · α′ (t)‖α′ (t)‖ = 0.
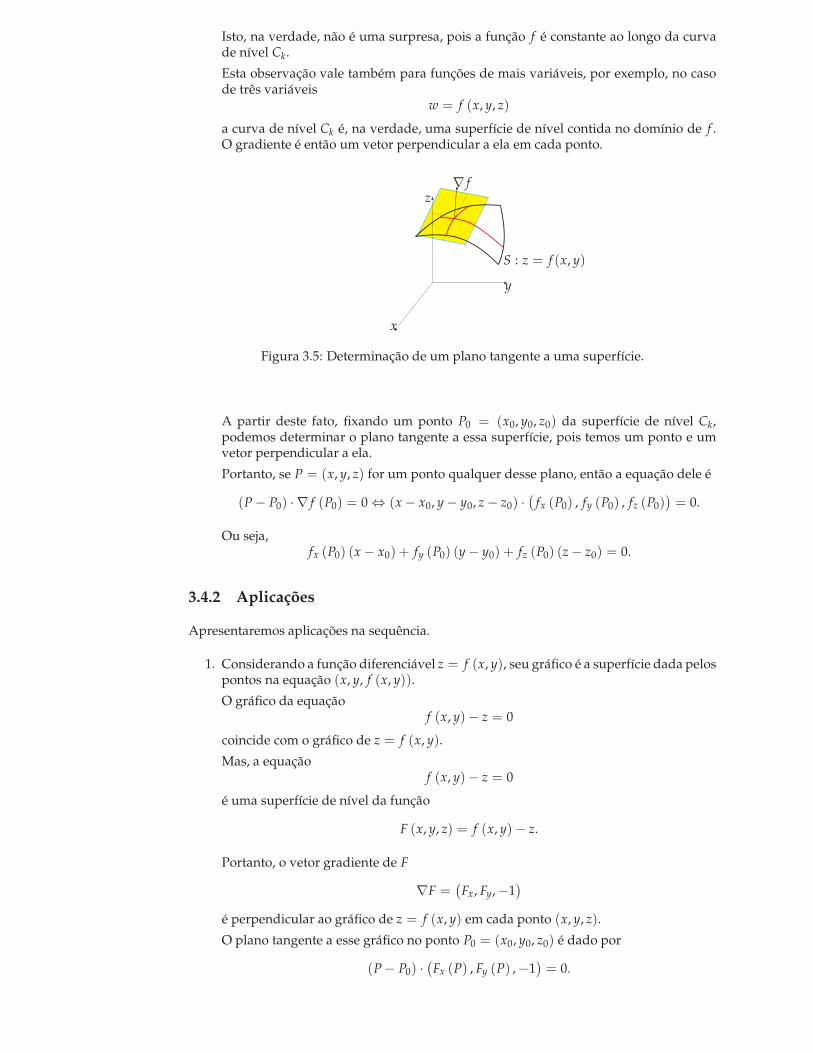
Isto, na verdade, não é uma surpresa, pois a função f é constante ao longo da curvade nível Ck.
Esta observação vale também para funções de mais variáveis, por exemplo, no casode três variáveis
w = f (x, y, z)
a curva de nível Ck é, na verdade, uma superfície de nível contida no domínio de f .O gradiente é então um vetor perpendicular a ela em cada ponto.
x
y
z∇ f
S : z = f (x, y)
Figura 3.5: Determinação de um plano tangente a uma superfície.
A partir deste fato, fixando um ponto P0 = (x0, y0, z0) da superfície de nível Ck,podemos determinar o plano tangente a essa superfície, pois temos um ponto e umvetor perpendicular a ela.
Portanto, se P = (x, y, z) for um ponto qualquer desse plano, então a equação dele é
(P − P0) · ∇ f (P0) = 0 ⇔ (x − x0, y − y0, z − z0) ·(
fx (P0) , fy (P0) , fz (P0))
= 0.
Ou seja,fx (P0) (x − x0) + fy (P0) (y − y0) + fz (P0) (z − z0) = 0.
3.4.2 Aplicações
Apresentaremos aplicações na sequência.
1. Considerando a função diferenciável z = f (x, y), seu gráfico é a superfície dada pelospontos na equação (x, y, f (x, y)).
O gráfico da equaçãof (x, y) − z = 0
coincide com o gráfico de z = f (x, y).
Mas, a equaçãof (x, y) − z = 0
é uma superfície de nível da função
F (x, y, z) = f (x, y) − z.
Portanto, o vetor gradiente de F
∇F =(
Fx, Fy,−1)
é perpendicular ao gráfico de z = f (x, y) em cada ponto (x, y, z).
O plano tangente a esse gráfico no ponto P0 = (x0, y0, z0) é dado por
(P − P0) ·(
Fx (P) , Fy (P) ,−1)
= 0.

2. A reta normal à superfície gráfico de z = f (x, y) ponto P0 = (x0, y0, z0) é dada pelasequações paramétricas
P − P0 = t(Fx(P), Fy(P),−1), t ∈ R.
De modo mais geral, se w = f (x, y, z), então o vetor
∇w =(
fx, fy, fz)
é normal à superfície de nível
f (x, y, z) = k, k ∈ Im ( f ) ,
em todo ponto P0 = (x0, y0, z0) ∈ D ( f ), e, consequentemente, o plano tangente àsuperfície de nível em P0 é dado pela equação
P − P0 = t · ∇ f (P0) , t ∈ R.
3. Dada a função
f (x, y) =x2
2+
y2
2,
responderemos três questões interessantes sobre a variação desta função.
(a) Em que direção ela possui maior crescimento a partir do ponto (1, 1).
(b) Em que direção ela decresce mais rapidamente a partir do ponto (1, 1).
(c) Em quais direções ela possui variação zero a partir do ponto (1, 1).
Vamos às respostas!!!
(a) A função f cresce mais rapidamente na direção e sentido de seu gradiente noponto considerado, portanto, é na direção de
∇ f (1, 1) = (x, y)(1,1) = (1, 1) ,
a qual pode ser dada pelo vetor
~u =
(
1√2
,1√2
)
.
(b) A função f decresce mais rapidamente na direção de seu gradiente, porém nosentido oposto, isto é, na direção −∇ f (1, 1), portanto, na direção de
−∆ f (1, 1) = (−1,−1) ,
a qual pode ser dada pelo vetor
−~u =
(
− 1√2
,− 1√2
)
.
(c) As direções de variações nulas em (1, 1) são as direções ortogonais ao gradienteno ponto. Portanto, são as direções ~v = (a, b) tais que
~v · ~u = (a, b) ·(
1√2
,1√2
)
= 0 ⇒ (a, b) =
(
− 1√2
,1√2
)
,
ou
(a, b) =
(
1√2
,− 1√2
)
.

4. Determinaremos uma reta tangente à elipse
x2
4+ y2 = 1
no ponto (−2, 1) .
Para isto, observemos inicialmente que a elipse
x2
4+ y2 = 1
é uma curva de nível da função
f (x, y) =x2
4+ y2.
Portanto, o gradiente de f no ponto (−2, 1) é perpendicular à elipse neste ponto
∇ f (−2, 1) = (−1, 2) .
Assim, um vetor normal ao gradiente é tangente à elipse em (−2, 1).
Logo, usando o vetor~t = (2, 1) tangente à elipse como direcional da reta, ela podeser escrita parametricamente por
(x + 2, y − 1) = r (2, 1)
ou na forma−1 (x + 2) + 2 (y − 1) = 0.
Exercício 3.20.
1. Defina o vetor gradiente, ∇ f , de uma função f de duas ou de três variáveis e:
(a) Explique o significado geométrico do vetor ∇ f ;
(b) Escreva a derivada direcional, ∂ f∂u em termos de ∇ f .
2. Considere a funçãof (x, y, z) = x3 − xy2 − z.
(a) Verifique que a derivada direcional da função f no ponto P0 = (1, 1, 0) e na direção~v = (2,−3, 6) é igual a 4
7 .
(b) Determine as direções em que a função f varia mais rapidamente em P0 e mostre que astaxas de variações nessas direções são iguais a 3 ou −3.
3. Mostre que as equações paramétricas da reta normal ao elipsóide
3x2 + 12y2 + 4z2 = 48
no ponto(
2, 1,√
6)
são x = 2 + 3t, y = 1 + 6t e z =√
6 + 2√
6 t. Escreva a equação do
plano tangente a esse elipsóide no ponto indicado e esboce o elipsóide, a reta normal e o planotangente.
4. Dada a função f (x, y, z) = x2 + y2 + z:
(a) Determine e esboce a superfície de nível de f que contém o ponto (1, 2, 4);
(b) Determine e esboce o vetor ∇ f (1, 2, 4);
(c) Determine e esboce a reta normal à superfície de nível determinada no item (a), no ponto(1, 2, 4);
(d) Determine e esboce o plano tangente à superfície de nível determinada no item (a), noponto (1, 2, 4).
5. Dada a função f (x, y) = x2 + 2y2:

(a) Desenhe a curva de nível de f que contém o ponto (3, 1) e esboce ∇ f (3, 1);
(b) Explique o significado do item (a) em relação ao gráfico da função f .
6. Determine as equações paramétricas da reta tangente à curva dada pela interseção do parabo-lóide
z = x2 + y2
com o elipsóide3x2 + 2y2 + z2 = 9
no ponto (1, 1, 2). (lembre que o vetor direcional da reta tangente será simultaneamente nor-mal aos vetores normais a cada uma das superfícies no ponto (1, 1, 2))
7. Determine os planos tangentes à esfera
x2 + y2 + z2 = 1
que sejam paralelos ao plano 2x + y − 3z = 1.
3.5 Extremos de Funções de Duas Variáveis
Ao estudarmos funções de uma variável (Cálculo I), estudamos máximos e mínimoslocais e absolutos, aplicamos estes conceitos na resolução de diversos problemas de otimi-zações, como determinar as dimensões de embalagens de modo a ter maior capacidade,gastando a menor quantidade de material possível. Agora, pretendemos entender essesconceitos e suas aplicações envolvendo funções de duas variáveis.
Um exemplo simples e motivador, poderia ser:
"Uma folha retangular de zinco com 1 m de largura deve ser dobrada ao longo dos dois ladospara formar uma calha de seção transversal trapezoidal, como na Figura 3.6. Determinar x e θ demodo que a calha tenha maior capacidade de escoamento".
x x
27 − 2x
θ
Figura 3.6: Representação gráfica da Calha.
3.5.1 Extremos Locais e Absolutos
As definições de máximo e de mínimo para funções de várias variáveis são as mesmas queno caso de funções de uma variável. Uma função f de duas variáveis tem um máximo localem (a, b) se existir um círculo aberto C contendo (a, b) de modo que
f (x, y) ≤ f (a, b)
para todo (x, y) em C e tem um mínimo local em (a, b) se existir um círculo aberto C contendo(c, d) de modo que
f (x, y) ≥ f (c, d)

para todo (x, y) em C.
Os máximos locais podem ser observados como sendo os pontos altos das superfíciesgráficos das funções, e os mínimos locais aqueles pontos baixos do gráfico, conforme indi-cados na Figura 3.7.
Os pontos de máximo e os de mínimo locais de uma função são denominados de pontosextremos ou extremantes da função e suas imagens são valores extremos da função. Umponto (x0, y0) é de máximo absoluto de uma função f se
f (x0, y0) ≥ f (x, y) ,
para todo (x, y) pertencente ao domínio de f e de mínimo absoluto se
f (x0, y0) ≤ f (x, y) ,
para todo (x, y) pertencente ao domínio de f .
Máximo absolutoMáximo local
Mínimo absoluto
Mínimo local
Figura 3.7: Representação gráfica de uma superfície com vários tipos de extremos.
Exemplo 3.21.
1. A função
f (x, y) =
√
4 − x2 − y2
x2 + y2
tem domínioD =
(x, y) : x2 + y2 ≤ 4
,
não tem máximo, pois quando (x, y) → (0, 0), f (x, y) → +∞.
Solução
Ela tem mínimo absoluto igual a zero, que ocorre em qualquer ponto da circunferência
x2 + y2 = 4.
2. A função
f (x, y) =yx2
tem domínioD = (x, y) : x 6= 0 .
Ela não tem máximo nem mínimo absolutos. Justifique!
Um resultado importante sobre extremos que se aplica às funções contínuas definidasem domínios fechados que foi visto para funções de uma variável e que é válido tambémpara funções de várias variáveis é o seguinte: Se f é uma função contínua em um domíniofechado e limitado D, então f possui um máximo absoluto f (a, b) e um mínimo absolutof (c, d) para algum (a, b) e algum (c, d) em D, isto é,
f (c, d) ≤ f (x, y) ≤ f (a, b)
para todo (x, y) em D.

Observação 3.22.
1. O extremo absoluto de uma função f ocorrerá sempre em pontos extremos locais ou na fron-teira da região em que ela é definida.
2. Para determinar o máximo ou mínimo absolutos de uma função contínua f em um conjuntofechado e limitado, D, procede-se da seguinte maneira:
(a) Determine os valores de f em seus pontos críticos, os quais encontram-se no interior deD;
(b) Determine os valores extremos de f na fronteira de D;
(c) O maior dos valores determinados nos itens anteriores é o valor máximo absoluto de fem D e o menor é o mínimo absoluto.
Exemplo 3.23. Determinar os extremos absolutos de
f (x, y) = x2 − 2xy + 2y
emD = (‘x, y) : 0 ≤ x ≤ 3, 0 ≤ y ≤ 2 .
Para isto temos que como f é contínua no conjunto D que é fechado e limitado, podemos aplicaro resultado exposto acima.
Solução
Inicialmente calculemos o único ponto crítico de f , que é a solução do sistema linear
fx = 2x − 2y = 0fy = −2x + 2 = 0 ⇒ x = y = 1 ⇒ (1, 1) .
No qual se tem f (1, 1) = 1.
Em seguida, estudamos os extremos de f na fronteira de D, a qual é constituída pelos quatrosegmentos de reta indicados a seguir:
Segmento 1: f (x, 0) = x2, 0 ≤ x ≤ 3;Segmento 2: f (3, y) = 9 − 4y, 0 ≤ y ≤ 2;Segmento 3: f (x, 2) = x2 − 4x + 4, 0 ≤ x ≤ 3;Segmento 4: f (0, y) = 2y, 0 ≤ y ≤ 2.
Podemos observar que para o Segmento 1, temos uma função crescente no intervalo 0 ≤ x ≤ 3,portanto, possui valor mínimo absoluto f (0, 0) = 0 e máximo absoluto f (3, 0) = 9;
Para o Segmento 2, temos uma função decrescente no intervalo 0 ≤ y ≤ 2, portanto, seumínimo f (3, 2) = 1 e seu máximo f (3, 0) = 9;
No Segmento 3, a função
f (x, 2) = x2 − 4x + 4, 0 ≤ x ≤ 3,
cujo mínimo ocorre em x = 2 e é f (2, 2) = 0 e seu máximo é f (0, 2) = 4
Finalmente, para o Segmento 4, temos a função
f (0, y) = 2y, 0 ≤ y ≤ 2,
cujo mínimo ocorre é f (0, 0) = 0 e máximo é f (0, 2) = 4.
Portanto, comparando os diversos valores, concluímos que o mínimo absoluto de f em D éf (0, 0) = f (2, 2) = 0 e o máximo absoluto é f (3, 0) = 9.
Outro fato interessante relacionado com extremantes locais é o seguinte:

Se f tem derivadas parciais de primeira ordem contínuas em (x0, y0) e se (x0, y0) for umponto extremo local, então o plano tangente ao gráfico de
z = f (x, y)
em (x0, y0, z0) é paralelo ao plano xy, assim, sua equação é z = z0.
Mas, a equação do plano tangente é dada por
z = z0 + fx (x0, y0) (x − x0) + fy (x0, y0) (y − y0) ,
o que implica quefx (x0, y0) = fy (x0, y0) = 0.
Portanto, as derivadas parciais calculadas nos pontos de máximo ou de mínimo locaissão nulas.
Podemos então concluir que os pontos do domínio de uma função f para os quais asderivadas parciais de primeira ordem forem nulas são os candidatos a extremantes locais dafunção f . Esses pontos são denominados pontos críticos de f .
Na verdade, nem sempre estes candidatos serão pontos de máximo ou de mínimos, ea seguir, daremos alguns exemplos em que em uns os candidatos serão eleitos e em outrosnão.
Exemplo 3.24. O único ponto crítico da função
f (x, y) = x2 + y2
é o ponto (0, 0) , pois
fx (x, y) = 2x = 0, fy (x, y) = 2y = 0 ⇒ (x, y) = (0, 0) .
E neste ponto o valor da função é zero, f (0, 0) = 0, e em qualquer outro ponto o valor de
f (x, y) = x2 + y2
é positivo. Portanto o candidato foi eleito, ou seja, (0, 0) é ponto de mínimo local de f e f (0, 0) = 0é o valor mínimo local.
Exemplo 3.25. O único ponto crítico da função
f (x, y) = y2 − x2
é o ponto (0, 0), pois
fx (x, y) = −2x = 0, fy (x, y) = 2y = 0 ⇒ (x, y) = (0, 0) .
E neste ponto o valor da função é zero, f (0, 0) = 0, entretanto, em qualquer círculo abertocentrado em (0, 0), por menor que seja o raio, existem pontos (x, y) para os quais f (x, y) > 0 epontos em que f (x, y) < 0. Verifique!!!
Assim, (0, 0) não é extremante de f . Nestes casos, dizemos que (0, 0) é um ponto de sela.
Exemplo 3.26. A funçãof (x, y) = 3 − (x − 1)2 + (y − 2)2
possui um único ponto crítico e ele é ponto de máximo. O valor máximo é 3?
Verifique isto!!!
Exercício 3.27.
1. Dê o significado de cada uma das sentenças abaixo:
(a) A função f tem um máximo local em (x0, y0);

(b) A função f tem um máximo absoluto em (x0, y0);
(c) A função f tem um ponto de sela em (x0, y0).
2. Dada a funçãof (x, y) = xy (3 − x − y) ,
definida emD = (x, y) : x ≥ 0, y ≥ 0, x + y ≤ 3 .
(a) Esboce o domínio da função;
(b) Justifique por que é que f tem máximo e mínimo absolutos em D;
(c) Mostre que f se anula em todos os pontos da fronteira de seu domínio;
(d) Calcule o único ponto crítico de f ;
(e) Qual o valor máximo e qual o valor mínimo de f e onde eles ocorrem?
3. Determine os valores máximos e mínimos da função
f (x, y) = 3xy − 6x − 3y + 7
na região triangular D com vértices (0, 0) , (3, 0) e (4, 0).
4. Determine a distância mínima da origem ao plano
2x + 3y + z = 4.
5. Determine os valores máximos e mínimos absolutos de
f (x, y) = 4xy2 − x2y2 − xy3
no conjunto D, onde D é a região triangular com vértices (0, 0) , (6, 0) e (0, 6).
6. Determine os valores máximos e mínimos absolutos de
f (x, y) = e−x2−y2(
x2 + 2y2)
no conjunto D, onde D é o círculox2 + y2 ≤ 4.
7. Determine os pontos da superfíciez2 = xy + 1
que estão mais próximos da origem.
8. Se função f é diferenciável e tem um máximo local em (x0, y0), o que se pode dizer de suasderivadas parciais neste ponto? E de suas derivadas direcionais?
Os Exemplos 3.24, 3.25 e 3.26 mostram que o fato de
fx = fy = 0
em um ponto (x0, y0) interior ao domínio de f não é suficiente para que esse ponto sejaextremante da função.
Lembremos que para funções de uma variável
y = f (x) ,
usamos o teste da derivada segunda para caracterizar um ponto crítico, se é ou não extre-mante. Para as funções de duas variáveis também tem o teste da derivada segunda que, namaioria dos casos, permite caracterizar um ponto crítico, se é ou não extremante.

3.5.2 Teste da Derivada Segunda
Seja f uma função de duas variáveis com derivadas parciais até segunda ordem contí-nuas em um círculo aberto centrado em (x0, y0) com
fx (x0, y0) = fy (x0, y0) = 0
e seja D o determinante da matriz Hessiana, dada por
D = fxx (x0, y0) · fyy (x0, y0) −(
fxy (x0, y0))2
=
∣
∣
∣
∣
fxx fxyfxy fyy
∣
∣
∣
∣
.
Então,
1. Se D > 0 e fxx (x0, y0) < 0, então f tem um máximo local em (x0, y0);
2. Se D > 0 e fxx (x0, y0) > 0, então f tem um mínimo local em (x0, y0);
3. Se D < 0, então f tem um ponto de sela em (x0, y0);
4. Se D = 0, então nenhuma conclusão pode ser retirada.
Exemplo 3.28. Determinemos e caracterizemos os pontos críticos da função
f (x, y) = 4xy − x4 − y4
definida em todo o plano Inicialmente, calculemos os pontos críticos de f , isto é, aqueles que anulama primeira derivada:
fx (x, y) = 4y − 4x3 = 0fy (x, y) = 4x − 4y3 = 0
.
Para isto, substituindo a primeira equação na segunda, obtemos
x9 − x = 0,
a qual nos dá x = 0, x = 1, x = −1.
Substituindo esses valores na primeira equação, obtemos os valores correspondentes
y = 0, y = 1, y = −1.
Portanto, os pontos críticos são
(0, 0) , (1, 1) e (−1,−1) .
Mas,fxx (x, y) = −12x2, fyy (x, y) = −12y2, fxy (x, y) = 4.
Daí, obtemos:
1. Para o ponto (0, 0),D = −16 < 0 ⇒ (0, 0)
e assim, é um ponto de sela;
2. Para os pontos (1, 1) e (−1,−1), temos que
D = 128 > 0 e fxx (1, 1) < 0.
Portanto, ambos são pontos de máximos absolutos de f em R2.

Exercício 3.29.
1. Determine e classifique os pontos críticos das funções abaixo:
(a) f (x, y) = xy − x2 − y2 − 2x − 2y + 10;
(b) f (x, y) = xy;
(c) f (x, y) = ysenx;
(d) f (x, y) = senx + seny + sen (x + y).
2. Determine o máximo e o mínimo absolutos da função em D:
(a) f (x, y) = x2 + y2 − xy − y, D = (x, y) : |x| ≤ 1, |y| ≤ 1;
(b) f (x, y) = 8x3 + y3 − 3xy, D = (x, y) : 0 ≤ x ≤ 1, 0 ≤ y ≤ 1;
3. Uma transportadora trabalha apenas com caixas retangulares (forma de paralelepípedos re-tângulos), cuja soma das medidas do comprimento e do perímetro da seção transversal é iguala 1,08 metros. Mostre que, nessas condições, a caixa de maior volume possível é aquela quetem comprimento 36 cm, altura e largura 18 cm. Quais as dimensões da caixa de retangularde maior volume cuja área superficial total é 64 cm2?
4. Encontre números a e b de modo que
f (a, b) =
b∫
a
(
6 − x − x2)
dx
tenha o valor máximo possível.
Outro método interessante para determinar extremos absolutos de funções contínuasdefinidas em conjuntos limitados e fechados é a utilização e interpretação de suas curvasde nível.
A seguir, daremos um exemplo para ilustrar esse processo.
Exemplo 3.30. Determine o máximo e o mínimo absolutos de
f (x, y) = xy
restrita à elipse g : 4x2 + y2 = 4.
Solução
Inicialmente, esboçaremos a elipse (domínio de f ) e algumas curvas de nível, xy = c, de f emum mesmo sistema de coordenadas.
Figura 3.8: Curvas de nível e a elipse. Em azul, ∇ f e em amarelo ∇g.

Por simples observação na Figura 3.8, podemos notar que o mínimo e o máximo de f serão,respectivamente, os valores de c para os quais a curva de nível xy = c intercepta a elipse em umúnico ponto, no terceiro e primeiro quadrantes. Para determiná-los, basta impor a condição para queo sistema de equações
4x2 + y2 = 4xy = c
tenha solução única.
Mas, substituindo a segunda equação na primeira, obtemos
4x2 +c2
x2 = 4 ⇔ 4x4 + c2 = 4x2 ⇔ 4x4 − 4x2 + c2 = 0,
a qual tem solução "única"se
∆ = 16 − 16c2 = 0 ⇒ c = ±1.
Substituindo estes valores na equação acima, obtemos
4x4 − 4x2 + 1 = 0 ⇒ x2 = ±12⇒ x = ± 1√
2⇒ y = ±
√2.
Portanto, os pontos de mínimo são(
± 1√2
,∓√
2)
e de máximo são(
± 1√2
,±√
2)
.
Os respectivos valores são
f(
± 1√2
,∓√
2)
= −1
e
f(
± 1√2
,±√
2)
= 1.
Exercício 3.31.
1. Faça como no Exemplo 3.30 para
f (x, y) = 2x − y
restrita ao círculo x2 + y2 = 1.
2. Faça como no exemplo acima para
f (x, y) = senx + cosy
restrita ao círculo x2 + y2 = 1.
Este método sugere o importante método denominado de Multiplicadores de Lagrange,o qual mostraremos a seguir.
Em primeiro lugar, voltemos à Figura 3.8 dada no exemplo anterior e agora sabemosque a função que determina os extremos é
f (x, y) = xy
restrita à condiçãog (x, y) = 4x2 + y2 − 4 = 0.

Observemos na Figura 3.8 que os vetores
∆ f (x, y) = (y, x)
e∆g (x, y) = (8x, 2y)
são perpendiculares às curvas f e g no ponto em que elas se tangenciam.
Isto é suficiente para percebermos que este raciocínio pode ser generalizado no sen-tido de que os pontos que minimizam ou que maximizam funções definidas em conjuntosfechados são aqueles cujos gradientes têm a mesma direção.
Sendo assim, podemos voltar ao exemplo acima e formulá-lo da seguinte forma:
Exemplo 3.32. Ache os extremos def (x, y) = xy
restrita à condiçãog (x, y) = 4x2 + y2 − 4 = 0.
Para a resolução, determinemos os pontos em que os vetores
∆ f (x, y) = (y, x)
e∆g (x, y) = (8x, 2y)
são paralelos, isto é,(y, x) = λ(8x, 2y), λ ∈ R.
Temos então o sistema
y − 8λx = 0x − 2λy = 0
4x2 + y2 − 4 = 0,
cuja solução pode ser encontrada de muitas formas diferentes.
Resolveremos substituindo a segunda equação na primeira, obtendo assim
y = 8λ (2λy) ⇔ y(
16λ2 − 1)
= 0 ⇒ y = 0, λ = ±14
.
Substituindo λ = ± 14 em x = 2λy, obtemos
x = 2(
±14
)
y ⇔ y = ±2x.
E que quando substituído na terceira equação, obtemos
4x2 + (±2x)2 − 4 = 0 ⇒ 8x2 = 4 ⇒ x = ± 1√2
.
Logo, y = ±√
2.
Desprezando os valores de λ, temos(
1√2
,∓√
2)
e(
− 1√2
,±√
2)
.
Por fim, fazendo x = 0 na equação 4x2 + y2 − 4 = 0, obtemos y = ±2.
Assim, os pontos (0,±2) podem determinar extremos da função f (x, y) = xy na elipse.

Este método pode ser descrito assim:
Sejam f e g funções de duas variáveis com derivadas primeiras contínuas, e suponha-mos que ∆g 6= 0 em uma região do plano xy.
Se f tem um extremo f (x0, y0) sujeito à condição g (x, y) = 0, então existe um númeroreal λ tal que
∆ f (x0, y0) = λ∆g (x0, y0) .
O número λ é denominado Multiplicador de Lagrange.
A partir deste resultado, podemos concluir que os pontos extremos da função f sujeitoà condição
g (x, y) = 0
fazem parte dos pontos (x, y), determinados pela solução do sistema
fx (x, y) = λgx (x, y)fy (x, y) = λgy (x, y)g (x, y) = 0
.
Exemplo 3.33.
1. Vamos usar esse método para mostrar que o retângulo de maior área com perímetro dado é oquadrado.
Sejam x e y as medidas dos lados do retângulo e p o perímetro. A função a ser maximizada é
f (x, y) = xy,
com a restriçãog (x, y) = 2x + 2y − p = 0.
Solução
Para isto devemos resolver o sistema
fx (x, y) = λgx (x, y)fy (x, y) = λgy (x, y)g (x, y) = 0
.
Ou ainda,
y = 2λx = 2λ
2x + 2y = p⇒ x = y =
p4
.
2. Este resultado pode ser estendido de modo natural ao caso de funções de mais variáveis. U
Vamos usá-lo para determinar o volume da maior caixa retangular de lados paralelos aos eixoscoordenados, que possa ser inscrita no elipsóide
16x2 + 4y2 + 9z2 = 144.
Resolução:
O que pretendemos é encontrar o máximo da função V = 8xyz restrita à condição
g (x, y, z) = 16x2 + 4y2 + 9z2 − 144 = 0.
Fazendo
∆ f (x, y, z) = λ∆g (x, y, z)e
16x2 + 4y2 + 9z2 − 144 = 0,

Figura 3.9: Representação gráfica de 16x2 + 4y2 + 9z2 = 144.
obtemos o sistema
(8yz, 8xz, 8xy) = λ (32x, 8y, 18z)e
16x2 + 4y2 + 9z2 − 1 = 0⇒ x =
√3, y = 2
√3 , z = 4
√3.
Segue que o volume da maior caixa possível é V = 64√
3.
Verifique isto!!!
Exercício 3.34. 1. Determine o ponto da reta 2x − 4y = 3 que está mais próximo da origem.
2. Determine o ponto do plano x + 2y + z = 2 que está mais próximo da origem.
3. Determine o ponto do círculo x2 + y2 = 45 que está mais próximo e um outro que esteja maisdistante do ponto (1, 2).
4. Seja a temperatura em um ponto (x, y) de uma placa de metal dada por
T (x, y) = 4x2 − 4xy + y2
Uma formiga, andando sobre a placa, percorre uma circunferência de raio 5 centrada na ori-gem. Qual é a maior e a menor temperatura encontrada pela formiga ao longo deste caminho?
x x
27 − 2x
θ
Figura 3.10: Representação gráfica da Calha.
5. Uma folha retangular de zinco com 1 m de largura deve ser dobrada ao longo dos dois ladospara formar uma calha de seção transversal trapezoidal, como na Figura 3.10. Determinar x eθ de modo que a calha tenha maior capacidade de escoamento.

Capítulo 4
Integração de Funções de VáriasVariáveis
Neste capítulo, estudaremos a integral de funções de duas variáveis, f (x, y), em uma re-gião do plano, a integral dupla e a integral tripla, que é a integral de funções de três variá-veis, f (x, y, z), em uma região do espaço.
Essas integrais são também chamadas de integrais múltiplas e são vistas como umaextensão natural das integrais definidas de uma variável em um intervalo da reta, elas sãodefinidas como limite de somas. Essas integrais são utilizadas para calcular volumes desólidos, áreas de superfícies, trabalho de uma força, massa contida em uma região, centrode gravidade, probabilidade de ocorrer um evento, dentre outros.
Lembramos que as integrais chamada simples, ou seja, as integrais de funções de umavariável y = f (x) são dadas por
limn→∞
n
∑i
f (xi)∆xi =∫ b
af (x)dx
e originaram-se e também foram motivadas devido a determinação de áreas sob curvas.Veja a Figura 4.1.
xx
yy
y = x2y = x2
(a) (b)
Figura 4.1: Aproximação da área sob a parábola por falta (a) ou por excesso (b).
Para as integrais duplas e triplas, o procedimento que usamos é análogo, ou mais espe-cificamente:
101

Seja f (x, y) definida num domínio D do plano, o qual suporemos limitado, isto é, estarcontido em um retângulo
R = (x, y) : a ≤ x ≤ b, c ≤ y ≤ d .
Ilustramos na Figura 4.2.
x
y
z
(xi, yi)
f (xi, yi)
a
b
c d
Figura 4.2: Definição da integral dupla: dividindo o domínio D.
Para definir a integral dupla de modo semelhante ao que foi feito para integrais simples,procedemos da seguinte forma:
• Traçando retas paralelas aos eixos coordenados, dividimos o retângulo R, que contémD, em n pequenos sub-retângulos e excluiremos aqueles que contiverem pelo menosum ponto fora da região D, permanecendo apenas sub-retângulos que são subcon-juntos de D. Denotaremos a área de cada um desses n sub-retângulos por ∆Ai.
• Escolheremos um ponto qualquer contido em cada sub-retângulo e denotemo-lo por(xi, yi), como representado na figura abaixo. O produto f (xi, yi) ∆Ai pode ser inter-pretado como o volume do paralelepípedo de altura f (xi, yi) e área da base ∆Ai, comsinal positivo se f (xi, yi) > 0 e com sinal negativo se f (xi, yi) < 0.
• O somatórion
∑i=1
f (xi, yi) ∆Ai
é uma aproximação do volume com sinal da região do espaço compreendida entre odomínio D e a superfície gráfico da função z = f (x, y). Esta aproximação deveráser melhor à medida que o número n de sub-retângulos for maior, devendo ter valorexato quando esse número tender a infinito.
• Assim, o volume com sinal do sólido compreendido entre o domínio D e o gráfico dafunção z = f (x, y) será
V = limn→∞
n
∑i=1
f (xi, yi) ∆Ai.
Definição 4.1. Seja f (x, y) definida num domínio limitado D do plano xy e seja
R = (x, y) : a ≤ x ≤ b, c ≤ x ≤ d
um retângulo que contém D. O limite
limn→∞
n
∑i=1
f (xi, yi) ∆Ai,
quando existe, é a integral dupla de f (x, y) em D e é denotado por
limn→∞
n
∑i=1
f (x1, y1)∆Ai =∫∫
f (x, ydA.

Observação 4.2.
1. Se a função f (x, y) for positiva em todo o domínio D, então
V =∫∫
Df (x, y)dA
é o volume do sólido compreendido entre a região D do plano xy e o gráfico de z = f (x, y);
2. Se f (x, y) for negativa em todo o domínio D, então
V =∫∫
Df (x, y)dA
também será o volume, porém com sinal negativo;
3. Se f (x, y) for negativa em parte de D e positiva em outra, então
V =∫∫
Df (x, y)dA
é um número igual a diferença entre os volumes com sinais;
4. Se f (x, y) = 1, então
V =∫∫
Df (x, y)dA =
∫∫
DdA
é a medida da área de D.
5. Sabemos que se f (x) ≥ 0, para todo x ∈ [a, b], então
∫ b
af (x)dx = A
é igual a área abaixo da curva y = f (x), acima do eixo x e entre as retas x = a e x = b.Portanto, podemos escrever
∫∫
DdA =
∫ b
a
[
∫ f (x)
0dy]
dx =∫ b
af (x)dx = A.
4.1 Cálculo de Integrais Repetidas
Ao estudarmos integrais simples, as de funções de uma variável, vimos que a determina-ção de integrais como limite de somas não é viável, pois apenas é possível para algumasfunções muito simples e ainda assim, para essas funções, o cálculo é bastante trabalhoso.Esta observação é também válida para integrais múltiplas.
O cálculo das integrais simples se reduziu à determinação de uma primitiva da funçãoa ser integrada e ao uso do Teorema Fundamental do Cálculo, como no exemplo a seguir:
∫ 2
12xdx = x2
∣
∣
∣
2
1= 22 − 12 = 3.
Na verdade, a determinação de integrais múltiplas se reduz à mesma situação, comoveremos, a seguir, em algumas situações especiais.
Situação 1: Seja f (x, y) uma função contínua e positiva no retângulo
R = (x, y) : a ≤ x ≤ b, c ≤ y ≤ d
a integral de f em R é
V =∫∫
Rf (x, y)dA =
∫ d
c
∫ b
af (x, y)dxdy =
∫ d
c
[
∫ b
af (x, y)dx)
]
dy.

A integral
A (y) =∫ b
af (x, y) dx
que aparece entre colchetes é calculada considerando a variável y constante.
A seguir, devemos calcular
V =∫ d
cA (y)dy.
É importante observar que para cada y no intervalo [c, d], a integral
A (y) =∫ b
af (x, y) dx
é a área da seção plana do sólido obtida pela interseção do plano paralelo xz contendoo ponto (0, y, 0) com o sólido acima do plano xy e abaixo do gráfico de z = f (x, y).Veja a Figura 4.3.
xx
yy
a b
c
d
y = g1(x)
y = g2(x)
x = f1(y) x = f2(y)
Região 1 Região 2
Figura 4.3: Regiões 1 e 2 para a integração dupla.
Pelo Princípio de Cavalieri, podemos expressar o volume V do sólido acima do re-tângulo R = (x, y) : a ≤ x ≤ b, c ≤ y ≤ d e abaixo do gráfico de z = f (x, y) pelaintegral
V =∫ d
cA (y)dy.
Portanto,
V =∫∫
Rf (x, y)dA =
∫ d
c
∫ b
af (x, y)dxdy =
∫ d
c
[
∫ b
af (x, y)dx
]
dy.
Exemplo 4.3. Vamos calcular a integral da função
f (x, y) = x2 + y2, −1 ≤ x ≤ 2, 0 ≤ x ≤ 2.
Neste caso, basta calcularmos a integral
V =∫∫
R(x2 + y2)dA.
Ou seja,

V =∫ 2
0
∫ 2
−1(x2 + y2)dxdy
=∫ 2
0
[
∫ 2
−1(x2 + y2)dx
]
dy
=∫ 2
0
[
x3
3+ xy2
]2
0dy
=∫ 2
0
[(
83
+ 2y2)
−(
−13− y2
)]
dy
=∫ 2
0
[
3 + y2]
dy
=
[
3y +y3
3
]2
0= 8.
Exercício 4.4. Esboce o sólido cujo volume é igual a 8 e que corresponde a integral calculadaacima, calcule a integral e compare o resultado e os procedimentos realizados no exemplo.
Situação 2: Seja f (x, y) uma função contínua em
D = (x, y) : a ≤ x ≤ b, α (x) ≤ y ≤ β (x) ,
onde α (x) e β (x) são funções contínuas em [a, b].
A integral de f em D é
∫∫
Df (x, y)dA =
∫ b
a
∫
α(x)β(x) f (x, y)dydx =
∫ b
a
[
∫ β(x)
α(s)f (x, y)dy
]
dx.
Como antes, para calcularmos a integral
A (x) =∫ β(x)
α(x)f (x, y) dy
consideramos a variável sendo x somente, ou ainda que a variável y seja constante.Agora, a seguir, calcula-se
I =∫ b
aA (x)dx.
Observação 4.5.
• Se f (x, y) for positiva em D, para cada x no intervalo [a, b], a integral
A (x) =∫ β(x)
α(x)f (x, y) dy
é a área da seção plana do sólido obtida pela interseção do plano paralelo yz contendo oponto (x, 0, 0) com o sólido, como está ilustrado na Figura 4.4.
Pela mesma razão dada na Situação 1, o volume V do sólido acima do retângulo
D = (x, y) : a ≤ x ≤ b, α (x) ≤ y ≤ β (x)
e abaixo do gráfico de z = f (x, y) é dado pela integral
V =∫ b
aA (x)dx.

x x
y y
z z
y = y0
y = y1
x = x1
x = x0
y = α(x)
y = β(x)
x = α(y)
x = β(y)
A(x) A(x)
S S
z = f (x, y) z = f (x, y)
Figura 4.4: Cálculo do volume.
• Se D = (x, y) : α (y) ≤ x ≤ β (y) , c ≤ y ≤ d, onde α (y) e β (y) são funções con-tínuas em [c, d], então integral de f em D é
∫∫
Df (x, y)dA =
∫ b
a
∫ β(x)
α(x)f (x, y)dxdy =
∫ b
a
[
∫ β(x)
α(x)f (x, y)dx
]
dy.
Exemplo 4.6. Vamos usar integral dupla para calcular o volume do prisma cuja base é otriângulo delimitado pelas retas y = 0, y = 2x e x = 1 e a face superior está no plano
z = f (x, y) = x + 2y + 3.
Solução
Vamos resolver por passos que estão a seguir.
• Em primeiro lugar é importante esboçar o domínio de integração, que neste caso será abase do prisma, que está ilustrado na Figura 4.5.
x
y
z
Figura 4.5: Representação gráfica do Prisma - Exemplo 4.6.
• Em seguida, escrevemos a integral que dá o volume procurado, a qual é
V =∫∫
D(x + 2y + 3)dA.
• Escolhemos a ordem de integração conveniente, integrando primeiro em relação à variá-vel x ou à variável y;

• Se a escolha for integrar primeiro em relação à variável y, então x e y estão nos intervalos
0 ≤ y ≤ 2x e 0 ≤ x ≤ 1.
Portanto,
V =∫∫
D(x + 2y + 3)dA
=∫ 1
0
∫ 2x
0(x + 2y + 3)dydx
=∫ 1
0
[
∫ 2x
0(x + 2y + 3)dy
]
dx
=∫ 1
0
[
xy + y2 + 3y]y=2x
y=0dx
=∫ 1
0
[
6x2 + 6x]
dx
=[
2x3 + 3x2]x=1
x=0= 5.
Integrando primeiro em relação à variável x, então x e y estão nos intervalos
y2≤ x ≤ 1 e 0 ≤ y ≤ 2.
Portanto,
V =∫∫
D(x + 2y + 3)dA
=∫ 2
0
∫ 1
y/2(x + 2y + 3)dxdy
=∫ 2
0
[
∫ 1
y/2(x + 2y + 3)dx
]
dy
=∫ 2
0
[
x2
2+ 2xy + 3x
]x=1
x=y2
dy
=∫ 2
0
[(
12
+ 2y + 3)
−(
y2
8+ y2 +
3y2
)]
dy
=∫ 2
0
[
−9y2
8+
y2
+72
]
dy
=
[
−9y3
24+
y2
4+
72
y]y=2
y=0= 5.
Exercício 4.7.
1. Esboce a região R do plano xy delimitada pela parábola y = x2 e pela reta y = 2x.Mostre que
I =∫∫
R(x3 + 4y)dA =
323
.
Calcule essa integral duas vezes, uma integrando primeiro em relação a x e outra inver-tendo a ordem de integração.

2. Esboce o domínio R de integração da integral
∫ 4
0
∫ 2
√y
(
ycos(x5))
dxdy
reescreva-a na ordem de integração invertida e mostre que ela é igual asen(32)
10.
Situação 3: Esta situação é quando o domínio, D, de integração puder ser decomposto empartes disjutas, D = D1 ∪ D2, de modo que cada uma delas seja adaptada a uma dassituações anteriores. Neste caso a integral
I =∫∫
Df (x, y)dA =
∫∫
D1
f (x, y)dA +∫∫
D2
f (x, y)dA.
A partir daí, procede-se como nas situações anteriores.
Exemplo 4.8. Para calcular a integral da função f (x, y) = 1− 2xy no domínio D delimitadopelas retas y = 0, x + y = 4 e pela parábola y2 = 2x.
Solução
Procedemos da seguinte forma:
• Em primeiro lugar, esbocemos o domínio de integração D. Veja a Figura 4.6.
x
y
x + y = 4
y2 = 2x
2
2
Figura 4.6: Representação gráfica do Triângulo D - Exemplo 4.8.
• Em seguida, vamos escrever a integral nas duas ordens possíveis. Assim, elas são:
I =∫∫
D2xydA =
∫ 2
0
∫ 4−x
y2/22xydxdy,
ou
I =∫∫
D2xydA =
∫ 2
0
∫
√2x
02xydydx +
∫ 4
2
∫ 4−x
02xydydx.
• Por último resolva uma das integrais. Esta parte fica como exercício.
4.1.1 Propriedades
Da mesma forma que a definição de integral dupla é análoga à definição de integral sim-ples, as propriedades também são. Temos então que
1.∫∫
Dk f (x, y)dA = k
∫∫
Df (x, y)dA para k ∈ R.
2.∫∫
D( f (x, y)± g(x, y)) dA =
∫∫
Df (x, y)dA ±
∫∫
Dg(x, y)dA.

3. Se D = D1 ∪ D2 e se D1 ∩ D2 = ∅, então,∫∫
Df (x, y)dA =
∫∫
D1
f (x, y)dA +∫∫
D2
f (x, y)dA.
4. Se f (x, y) ≥ 0, para todo x real, então∫∫
Df (x, y)dA ≥ 0.
Exercício 4.9.
1. Calcule a área da região delimitada pela reta y = −x e pela parábola y = 4x − x2 por doiscaminhos diferentes, um caminho usando uma integração simples e outro por meio de umaintegração dupla.
2. Calcule a área da região delimitada pelas retas y = x − 3 e x = −1 e pela função
y =4
1 + x2
por dois caminhos diferentes: usando uma integração simples e outro por meio de uma inte-gração dupla. Calcule a área da região delimitada pelas parábolas y = x2 e x = y2.
3. Mostre que o volume do sólido abaixo do gráfico da função
z = 4x2 + y2
e acima da região do plano xy, delimitada pelo polígono de vértices (0, 0) , (0, 1) , (2, 0) e(2, 1) é igual a 34
3 .
4. Calcule∫∫
D(x + y)dA,
onde D é o círculo x2 + y2 ≤ 1 e interprete o resultado geometricamente.
5. Calcule∫∫
DdA,
onde D é o círculo x2 + y2 ≤ 1 e interprete o resultado geometricamente.
6. Apresente um argumento geométrico que justifique a igualdade
∫ 1
0
∫
√1−y2
0
√
1 − x2 − y2dydx =π
6.
7. Esboce os gráficos das funções
y = 4x3 − x4 e y = 3 − 4x + 4x2
em um mesmo sistema de coordenadas, encontre os pontos de interseções entre eles e calcule aárea delimitada por esses gráficos.
8. O valor médio de uma função contínua z = f (x, y) em uma região R é definido por
1A(R)
∫∫
Df (x, y)dA,
onde A (R) é a área da região R. Dê uma interpretação geométrica para essa igualdade consi-derando que z = f (x, y) > 0 em toda a região R.
9. Calcule o valor médio de
f (x, y) =1
x2 + 1na região interna ao triângulo de vértices (0, 0) , (0, 1) e (1, 1). Faça o mesmo para a função
f (x, y) = x2 − xy
na região delimitada pela reta y = x e pela parábola f (x, y) = 3x − x2.

4.2 Mudança de Variáveis
O principal objetivo da mudança de variáveis na integral, seja ela simples ou múltipla,é a busca pela simplificação. Para funções de uma variável, vimos que a mudança devariáveis é exatamente a integração por substituição, cujo método é basicamente dado pelaigualdade:
∫ b
af (x)dx =
∫ d=g(b)
c=g(a)f (g (u))g′ (u) du,
sendo g invertível e com derivada contínua em [c, d].
4.2.1 Mudança de Variáveis na Integral Dupla
No caso de funções de duas variáveis, transformamos a integral dupla∫∫
Df (x, y)dxdy,
onde D é uma região do plano xy, em outra integral dupla,∫∫
Qf (u, v)dudv,
onde Q é uma região do plano uv.
Para isto, consideremos que o domínio D do plano xy seja transformado no domínio Qdo plano uv por uma aplicação biunívoca dada pelas equações
x = x (u, v) e y = y (u, v) .
Suponhamos também que essas funções sejam contínuas, com derivadas contínuas eque o determinante jacobiano da aplicação, que é dado por
J =∂ (x, y)
∂ (u, v)=
∣
∣
∣
∣
xu xvyu yv
∣
∣
∣
∣
seja diferente de zero em Q.
Nessas condições,∫∫
Df (x, y)dxdy =
∫∫
Q[(x(u, v), y(u, v)] |J|dudv.
Exemplo 4.10. Vamos resolver a integral∫∫
D(1 − (xy)2 + sen(xy))dxdy
onde D é a região delimitada pelas retas y = x e y = 4x e pelas hipérboles xy = 1 e xy = 2.
Solução
Usando a transformaçãox = u/v e y = v, v > 0
temos que
J =
∣
∣
∣
∣
1/v −u/
v2
0 1
∣
∣
∣
∣
=1v
.
Essa transformação leva D na região Q, delimitada pelas retas u = 1 e u = 2 e pelas parábolas
u = v2 e u = v2/
4.
Veja a Figura 4.7.

u
v
u = v2
u = v2/4
21
Figura 4.7: Representação gráfica do domínio D - Exemplo 4.10.
Assim,
I =∫ 1
0
∫ 2√
u
√u
(
1 − u2 + senu) 1
vdvdu
=∫ 1
0
(
1 − u2 + senu)
(
ln 2√
u − ln√
u)
du
= ln 2∫ 1
0
(
1 − u2 + senu)
du
= ln 2(
u − u3
3+ cosu
)1
0
= ln 2(
−13
+ cos1)
.
4.2.2 Mudanças de Coordenadas Especiais
Mudança Linear
Consideremos a transformação linear g definida pelas equações
(x, y) = g (u, v) ,
onde
x = au + bvy = cu + dv
e a, b, c e d são reais.
O determinante jacobiano desta transformação é dado por
J =∂ (x, y)
∂ (u, v)=
∣
∣
∣
∣
a bc d
∣
∣
∣
∣
.
Se J 6= 0, então g é injetora em R2 e
∫∫
Df (x, y)dxdy =
∫∫
Qf (au + bv, cu + dv)|ad − bc|dudv.
Exemplo 4.11. Vamos usar uma transformação linear conveniente para simplificar e calculara integral
∫∫
De(y−x)/(x+y)dxdy,
onde R é o triângulo delimitado pelos eixos coordenados e a reta x + y = 2.

Solução
Utilizemos a seguinte mudança de coordenadas dada por
u = y − xv = x + y
⇔
x =u + v
2
y =u − v
2
,
cujo determinante jacobiano é
J =∂ (x, y)
∂ (u, v)=
∣
∣
∣
∣
1/2 1/21/2 −1/2
∣
∣
∣
∣
= −12⇒ |J| =
12
.
Para encontrar a região de integração Q observemos que as retas x = 0 e y = 0 são levadas,respectivamente, nas retas u = v e u = −v, e a reta x + y = 2 é levada na reta u = 2. Veja aFigura 4.8.
u
v
u = v
u = −v
2
Figura 4.8: Representação gráfica do Triângulo D - Exemplo 4.8.
Assim, temos,∫∫
De(y−x)/(x+y)dxdy =
∫∫
Qeu/v.
12
.dudv
=12
∫ 2
0
∫ v
−veu/vdudv
=12
∫ 2
0v(e − e−1)dv
= (e − e−1).
Mudança Polar
Um ponto P (x, y) tem coordenadas polares (r, θ), onde r é a distância do ponto P àorigem e θ é o ângulo formado pelo eixo x, sentido positivo, e o segmento de reta queune P à origem.
As coordenadas retangulares e polares do ponto P estão relacionadas pelas equações:
x = rcosθ e y = rsenθ,
onde r ≥ 0 e θ0 ≤ θ < θ0 + 2π.
A transformação definida por essas equações é contínua juntamente com suas deri-vadas, seu jacobiano é
J =∂ (x, y)
∂ (r, θ)=
∣
∣
∣
∣
xr xθ
yr yθ
∣
∣
∣
∣
=
∣
∣
∣
∣
cosθ −rsenθsenθ rcosθ
∣
∣
∣
∣
= r.

E, escolhendo variações convenientes para r e θ de modo que ela seja biunívoca, po-demos aplicar a regra de mudança de variáveis.
Assim,
∫∫
Df (x, y)dxdy =
∫∫
Qf (rcosθ, rsenθ)rdrdθ
=∫ β
α
∫ r2(θ)
r1(θ)f (rcosθ, rsenθ)rdrdθ
Exemplo 4.12. Vamos usar uma transformação polar para resolver a integral que dá o volumeda esfera de raio R. O gráfico da função
z =√
R2 − x2 − y2
em D =
(x, y) : x2 + y2 ≤ R2 é a parte da esfera que está acima do plano xy. Veja aFigura 4.9.
Figura 4.9: Semi-esfera - Exemplo 4.9.
Portanto, o volume da esfera é dado pela integral
V =∫∫
D
√
R2 − x2 − y2dxdy
=∫ R
−R
∫ x=√
R2−y2
x=−√
R2−y2
√
R2 − x2 − y2dxdy
=∫ 2π
0
∫ R
0
√
R2 − r2(2r)drdθ
=∫ 2π
0
[
−23
(
R2 − r2)3/2
]r=R
r=0dθ
=∫ 2π
0
23
R3dθ
=
[
23
R3θ
]θ=2π
θ=0=
43
πR3.

Exercício 4.13.
1. Mostre que∫∫
D
cos(x − y)
sen(x + y)dxdy = 1,
onde D é o trapézio 1 ≤ x + y ≤ 2, x ≥ 0, y ≥ 0.
2. Mostre que se
D =
(x, y) : x2 + y2 ≤ 1
e usando coordenadas polares, então∫∫
Dsen(x2 + y2)dxdy =
∫ π
0
∫ 1
0rsen(r2)drdθ =
π
2(1 − cos(1)).
3. Calcule a área da região interna ao círculo r = 4senθ e externa ao círculo r = 2.
4. Use coordenadas polares para calcular o volume abaixo do parabolóide z = x2 + y2 e acimado círculo x2 + y2 ≤ 9.
5. Calcule o volume interna da esfera x2 + y2 + z2 = 16 e externo ao cilindro x2 + y2 = 4.
6. Calcule o volume do sólido acima do plano xy abaixo do gráfico de
f (x, y) = ln(
x2 + y2)
,
dentro do cilindro x2 + y2 = 4 e fora do cilindro x2 + y2 = 1.
7. Calcule o volume do sólido acima do plano xy limitado pelo parabolóide z = x2 + y2 e pelocilindro x2 + y2 = 2y. Esboce a figura.
8. Seja Ra a região delimitada pelo círculo x2 + y2 = a2. Definindo∫ ∞
−∞
∫ ∞
−∞e−(x2+y2)dA = lim
a→∞
∫∫
e−(x2+y2)dA,
mostre que essa integral imprópria é igual a π.
9. É possível provar que∫ +∞
−∞
∫ +∞
−∞e−(x2+y2)dxdy =
∫ +∞
−∞e−x2
dx∫ +∞
−∞e−y2
dy.
Use este fato para mostrar que∫ +∞
−∞e−x2
dx =√
π.
Interprete esse resultado geometricamente.
10. Utilizando o resultado do exercício anterior, mostre que
1√π
∫ +∞
−∞e−
x22 −dx = 1.
4.3 Integral Tripla
Definiremos a integral tripla de modo análogo ao que foi feito para integrais duplas, e ofaremos como uma extensão natural delas, ou seja estudando as funções não mais de duas,mas de três variáveis. Sendo assim, poderemos observar que todas as propriedades daintegral dupla são válidas também para integrais triplas.
Consideremos a função definida num domínio D do espaço R3, o qual suporemos limi-
tado, isto é, D está contido em um paralelepípedo retângulo
R = (x, y) : a ≤ x ≤ b, c ≤ y ≤ d, e ≤ z ≤ f ,
conforme Figura 4.10.

x
y
z
(xi, yi, zi)
Volume = ∆Vi
Figura 4.10: Integral Tripla - calculando o volume.
Para definir a integral tripla, procedemos da seguinte forma:
• Traçamos retas paralelas aos eixos coordenados, dividindo o paralelepípedo R, quecontém D, em n pequenos sub-paralelepípedos, excluindo aqueles que contiverempelo menos um ponto fora da região D.
Permanecem assim, apenas sub-paralelepípedos que são subconjuntos de D. Deno-taremos o volume de cada um desses n sub-retângulos por ∆Vi.
• Escolhemos um ponto qualquer contido em cada sub-paralelepípedo e denotemo-lopor (xi, yi, zi).
Definição 4.14. Seja f (x, y, z) definida num domínio limitado D ⊂ R3 em um paralelepípedoretângulo
R = (x, y) : a ≤ x ≤ b, c ≤ z ≤ d, e ≤ y ≤ f ,
conforme Figura 4.10.
Seja f (x, y, z) definida num domínio limitado D ⊂ R3. De acordo com o descrito acima, defini-mos a integral tripla de f em D como sendo o limite, quando este existir, dado por
limn→∞
n
∑i=1
f (xi, yi, zi) ∆Vi.
Denota-se por
limn→∞
n
∑i=1
f (xi, yi, zi) ∆Vi =∫∫∫
Df (x, y, z)dV.
Assim, como tivemos para integrais duplas no caso da definição de área de uma super-fície, e usando a Definição 4.14, observamos que se a função f (x, y, z) for constante e iguala 1 em todo o domínio D, então
∫∫∫
Df (x, y, z)dV
é o volume da superfície D e, se for negativa em todo o domínio D, será o volume, porémcom sinal negativo.

4.3.1 Cálculo de Integrais Triplas
A determinação de integrais triplas se reduz ao cálculo de integrais duplas, como veremosnos exemplos a seguir:
Exemplo 4.15.
1. Vamos calcular a integral da função
f (x, y) = x2 + y2 + z2,
no cubo D : 0 ≤ x ≤ 1, 0 ≤ y ≤ 1, 0 ≤ z ≤ 1,
Solução
Para isto, usaremos o mesmo procedimento adotado para a determinação de integrais duplas,ou seja,
I =∫∫∫
Df (x, y, z)dV
=∫ 1
0
∫ 1
0
∫ 1
0
(
x2 + y2 + z2)
dxdydz
=∫ 1
0
∫ 1
0
∫ 1
0
[
x3
3+ xy2 + xz2
]x=1
x=0dydz
=∫ 1
0
∫ 10
(
13 + y2 + z2
)
dydz
=∫ 1
0
[
y3
+y3
3+ yz2
]y=1
y=0dz
=∫ 1
0
(
13
+13
+ z2)
dz = 1.
2. Vamos usar integral tripla para calcular o volume do sólido D, delimitado pelos parabolóides
z = x2 + 3y2 e z = 8 − x2 − y2.
Sabemos que o volume é dado pela integral
V =∫∫∫
DdV,
onde f (x, y, z) = 1, para todo (x, y, z) ∈ D.
Para determinarmos os limites de integração é conveniente esboçar a superfície D, que é feitona Figura 4.11.
As superfícies se interceptam no cilindro elíptico x2 + 2y2 = 4, cuja projeção no plano xy é aelipse x2 + 2y2 = 4, z > 0.
O sólido D é limitado superiormente pelo elipsóide z = 8 − x2 − y2 e inferiormente peloelipsóide z = x2 + 3y2.
Portanto, os limites de integração que determinam a superfície D podem ser descritos por:
D :
x2 + 3y2 ≤ z ≤ 8 − x2 − y2,
−√
4 − x2/
2 ≤ y ≤√
4 − x2/
2, e
−2 ≤ z ≤ 2.

z = x2 + 3y2
z = 8 − x2 − y2
8
x2 + 2y2 = 4
Figura 4.11: Representação gráfica do Triângulo D - Exemplo 4.9.
Assim, temos que
V =∫∫∫
DdV
=∫ 2
−2
∫
√4−x22
−√
4−x22
∫ 8−x2−y2
x2+3y2dzdydx
=∫ 2
−2
∫
√4−x2
/
2
−√
4−x2/
2
(
8 − 2x2 − 4y2)
dydx
=∫ 2
−2
[
(
8 − 2x2)
y − 4y3
3
]y=√
4−x2/
2
y=−√
4−x2/
2dx ⇒
=4√
23
∫ 2
−2
(
4 − x2)3/2
dx =8π√
2.
Verifique isto!!!
Exercício 4.16.
1. As integrais
V1 =∫ 1
0
∫ 1−y
0
∫ 2
0dxdzdy e V2 =
∫ 1
0
∫ 1−z
0
∫ 2
0dxdydz,
representam o volume de um mesmo sólido.
(a) Esboce o sólido e utilize uma fórmula da geometria euclidiana para mostrar que o seuvolume sólido é igual a 1.
(b) Calcule cada uma das integrais e comprove esses resultados.
2. A integral∫ 1
−1
∫ 1
x2
∫ 1−y
0dzdydx
representa o volume de um sólido.
(a) Esboce o sólido;
(b) Calcule o volume do sólido;
(c) Reescreva a integral nas formas de integrais repetidas equivalentes à integral acima, emtodas as ordens possíveis.

3. Inverta a ordem de integração na integral
∫ 4
0
∫ 1
0
∫ 2
2y
2cos(
x2)
√z
dxdydz
e revolva-a para mostrar que é igual a 2sen4.
4. Determine o valor da constante k de modo que
∫ 1
0
∫ 4−k−x2
0
∫ 4−y−x2
kdzdydx =
415
.
Este número representa o volume de qual sólido?
4.3.2 Mudança de Variáveis na Integral Tripla
A questão da mudança de variáveis na Integral Tripla é totalmente análoga ao desen-volvido para a Integral Dupla. Para isto, vamos considerar a integração de uma funçãof (x, y, z) em um domínio D do espaço xyz. Seja Q, no espaço uvw, a imagem de umatransformação biunívoca, dada pelas equações
x = x (u, v, w) , y = y (u, v, w) e z = z (u, v, w) .
Suponhamos que em Q, essas funções são contínuas, tem derivadas contínuas e jacobi-ano diferente de zero, onde
J =
∣
∣
∣
∣
∣
∣
xu yu zuxv yv zvxw yw zw
∣
∣
∣
∣
∣
∣
.
E como antes, ficamos com
∫∫∫
Df (x, y, z)dxdydz =
∫∫∫
Qf (x(u, v, w), y(u, v, w), z(u, v, w))|J|dxdydz.
Coordenadas Cilíndricas: Um ponto P (x, y, z) tem coordenadas polares (r, θ, z), onde r eθ são as coordenadas polares da projeção de P no plano xy.
As coordenadas retangulares e cilíndricas do ponto P estão relacionadas pelas equa-ções:
x = rcosθ, y = rsenθ e z = z,
onde r ≥ 0, θ0 ≤ θ < θ0 + 2π e −∞ < z < +∞.
As equações definem uma transformação que restrita ao conjunto é biunívoca e con-tínua juntamente com suas derivadas e seu jacobiano é J = r 6= 0. Verifique!
Assim,
∫∫∫
Df (x, y, z)dxdydz =
∫∫∫
Qf (rcosθ, rsenθ, z)rdrdθdz.
Exemplo 4.17. Vamos usar as coordenadas cilíndricas para simplificar e calcular a integral∫∫∫
Dzdxdydz,
onde D é o sólido delimitado pela semi-esfera
z =√
8 − x2 − y2
e pelo parabolóide2z = x2 + y2.

Para isto, observemos que se (x, y, z) for um ponto em D, então,
2z =x2 + y2
2≤ z ≤
√
8 − x2 − y2,
e, se (x, y) ∈ R, onde R é a projeção de D no plano xy, então,
R = (x, y) ∈ R2 : x2 + y2 ≤ 4.
Usando as coordenadas cilíndricas
x = rcosθ, y = rsenθ e z = z,
temos que
D = (r, θ, z) ∈ R3 : 0 ≤ r ≤ 2, 0 ≤ θ ≤ 2π,
r2
2≤ z ≤
√
8 − r2.
Assim,
=∫ 2
0
∫ 2π
0
∫
√8−r2
r2/2rzdzdθdr
=∫ 2
0
∫ 2π
0
r2
(
8 − r2 − r4
4
)
dθdr
= π
[
4r2 − r4
4− r6
24
]r=2
r=0
=28π
3.
Coordenadas Esféricas: Um ponto P (x, y, z) tem coordenadas esféricas é dado por (r, θ, φ) ,onde r é a distância do ponto P à origem, θ é o ângulo formado pelo eixo x, sentidopositivo, e o segmento de reta que une a origem (0, 0, 0) ao ponto P (x, y, z) e φ é oângulo formado pelo eixo z, sentido positivo, e o segmento de reta que liga a origem(0, 0, 0) ao ponto P (x, y, z).
As coordenadas retangulares e esféricas do ponto P estão relacionadas pelas equa-ções:
x = rsenφcosθ, y = rsenφsenθ e z = rcosφ,
onde r ≥ 0, θ0 ≤ θ < θ0 + 2π e 0 ≤ φ ≤ π.
Observação 4.18.
• As superfícies no espaço xyz para r constante e igual a R são esferas de centro na origeme raio R.
• As superfícies para θ = θ0 constante são semi-planos que contém o eixo z.
• As superfícies para φ = φ0 constante são cones circulares com eixos coincidentes com oeixo z.
As equações acima definem uma transformação que restrita ao conjunto
(r, θ, φ) : r ≥ 0, θ0 ≤ θ < θ0 + 2π, 0 ≤ φ ≤ π
é biunívoca e contínua juntamente com suas derivadas e seu jacobiano tem determi-nante
|J| = r2senφ.
Verifique!
Assim,∫∫∫
Df (x, y, z) dxdydz =
∫∫∫
Qf (rsenφcosθ, rsenφsenθ, rcosφ) r2senφdrdθdφ.

Exemplo 4.19. Vamos usar as coordenadas cilíndricas para simplificar e calcular a integral,∫∫∫
Dzdxdydz
onde D é o sólido delimitado pela semi-esfera
z =√
8 − x2 − y2
e pelo parabolóide2z = x2 + y2.
Para isto, observemos que se (x, y, z) for um ponto em D, então,
x2 + y2
2≤ z ≤
√
8 − x2 − y2,
e, se (x, y) ∈ R, onde R é a projeção de D no plano xy, então,
R =
(x, y) ∈ R2 : x2 + y2 ≤ 4
.
Usando as coordenadas cilíndricas
x = rcosθ, y = rsenθ e z = z,
temos que
D =
(r, θ, z) ∈ R3 : 0 ≤ r ≤ 2, 0 ≤ θ ≤ 2π, r2/
2 ≤ z ≤√
8 − r2
.
Assim,
I =∫∫∫
Dzdxdydz
=∫∫∫
Qrzdrdθdz
=∫ 2
0
∫ 2π
0
∫
√8−r2
r2/2rzdzdθdr
=∫ 2
0
∫ 2π
0
r2
(
8 − r2 − r4
4
)
dθdr
= π
[
4r2 − r4
4− r6
24
]r=2
r=0=
28π
3.
Exercício 4.20.
1. Calcule, através de integral tripla, o volume do sólido limitado pelos gráficos de:
(a) z = 4 − x2, y + z = 4, z = 0 e y = 0
Resp.: v = 1285
(b) z = 4 − x2, z = 0, x = 0, y = 0 e y = 6Resp.: v = 40
(c) z = 1 + x2 + y2, z = 0, x = −1, x = 1, y = 1 e y = −1
Resp.: v = 203
(d) x = 3, y = 5, z = 4, x = 0, y = 0 e z = 0Resp.: v = 60x + 2z = 6, y = 0, y = 5, z = 0 e x = 0Resp.: v = 90

(e) x + 2y + 3z = 12, z = 0, x = 0, y = 0 e y = 4
Resp.: v = 3569
(f) x + y = 6, z = 0, z = 4, x = 0 e y = 0.Resp.: v = 72
(g) z = 9 − x2, z = 0, x = −1, x = 1, y = 0 e y = 5.Resp.: v = 260
3
2. Calcule a quantidade de massa m, sendo:
(a) S é o sólido limitado pelos planos
y + z = 8, z = 0, x = 0, x = 6 e y = 0,
sabendo que a densidade num ponto P(x, y, z) é dada pela função
F(x, y, z) = x.
Resp.: m = 576.
(b) S é o sólido limitado pelos planos
x + 2y = 6, z = 0, x = 0, e y = 0,
sabendo que a densidade num ponto P(x, y, z) é dada pela função
F(x, y, z) = x · y
Resp.: m = 108.
(c) S é o sólido limitado pela calha y = 4 − x2 e pelos planos
z = 0, , x = 0, z = 6 e y = 0,
sabendo que a densidade num ponto P(x, y, z) é dada pela função
F(x, y, z) = x2
Resp.: m = 25, 6 ou m = 128/5.
(d) S é o sólido limitado pelos planos
y = 4, z = 6, x = 2, x = 0, z = 0 e y = 0,
sabendo que a densidade num ponto P(x, y, z) é dada pela função
F(x, y, z) = x + y.
Resp.: m = 144
(e) S é o sólido limitado pelo cilindro y2 + x2 = 4 e pelos planos
z = 0, x = 0, z = 6 e y = 0,
sabendo que a densidade num ponto P(x, y, z) é dada pela função
F(x, y, z) = y.
Resp.: m = 16.
3. Calcule o volume do sólido, através de integral tripla, limitado pelos gráficos de:
(a) x2 + y2 = 9, z = 0 e z = 5.Resp.: v = 45π
(b) z =√
9 − x2 − y2 e z = 0.Resp.: v = 18π.

(c) z = 1 + x2 + y2 e z = 10.Resp.: v = 81
2 π
(d) z = x2 + y2 e z = 8 − x2 − y2
Resp.: v = 16π
(e) z =√
x2 + y2x2 + y2 + 9 e z = 0Resp.: v = 18π
(f) z =√
x2 + y2x2 + y2 + 9 e z = 10Resp.: v = 72π
(g) z = x2 + y2 x2 + y2 + 9 e z = 10Resp.: v = 99
2 π
(h) z = x2 + y2 x2 + y2 + 9 e z = 0Resp.: v = 81
2 π
(i) z =√
16 − x2 − y2 e z =√
x2+y2
3
Resp.: v = 64π3
(j) z =√
4 − x2 − y2 e z =√
x2 + y2
Resp.: v = −8√
2π+12π3
(k) z =√
9 − x2 − y2 e z = 0Resp.: v = 36π
4. Calcule as seguintes integrais onde:
(a) S é o sólido limitado pelos gráficos de x2 + y2 + z2 = 9, z = 0, x = 0, e y = 0 , sendoF = cosϕ . Resp.: 9π
4
(b) S é o sólido limitado pelos gráficos de z =√
x2 + y2 e z = 4 , sendo F = x2 + y2 .Resp.: 512
5 π
(c) S é o sólido limitado pelos gráficos de z = x2 + y2, z = 0, x2 + y2 = 4 , sendo F = y .Resp.: zero
(d) S é o sólido limitado pelos gráficos de z = x2 + y2, z = 10, x2 + y2 = 1 , sendo F = z .Resp.: 299
6 π
(e) S é o sólido limitado pelos gráficos de z =√
x2 + y2,z = 10 e x2 + y2 = 25 , sendoF = x . Resp.: zero
(f) S é o sólido limitado pelo gráfico de x2 + y2 + z2 = 9 , sendo F = x . Resp.: zero(g) S é o sólido limitado pelos gráficos de z = x2 + y2, z = 0, y = 0 e x2 + y2 = 1 , sendo
F = xz . Resp.: zero(h) S é o sólido limitado pelos gráficos de z = x2 + y2, z = 0, y = 0x = 0 e x2 + y2 = 25 ,
sendo F = xy . Resp.: 1562512
5. Calcule a quantidade de massa m, sendo:
(a) S o sólido limitado pelos gráficos do parabolóide z = x2 + y2 , cilindro x2 + y2 = 9 epelo plano z = 10 e sabendo que a densidade num P (x, y, z) é dada por F (x, y, z) =√
4x2 + 4y2 .Resp.: m = 828
5 π ou m = 165,6 π unidades de massa
(b) S o sólido limitado pelos gráficos do semi-cone z =√
x2 + y2, cilindro x2 + y2 = 1e pelo plano z = 12 e sabendo que a densidade em P (x, y, z) é dada por F (x, y, z) =3x2 + 3y2 .Resp.: m = 84
5 π ou m = 16,8 π unidades de massa.
(c) S o sólido limitado pelos gráficos dos parabolóides z = 8 − x2 − y2 e z = x2 + y2 esabendo que a densidade em P (x, y, z) é dada por F (x, y, z) =
√
9x2 + 9y2 .Resp.: m = 256
5 π ou m = 51,2 π unidades de massa.
(d) S o sólido limitado pelos gráficos do semi-cone z =√
x2 + y2 e da semi-esfera z =√
8 − x2 − y2 e sabendo que a densidade em P (x, y, z) é dada por F (x, y, z) = 6 .Resp.: m = 64
√2π − 64π unidades de massa.

4.4 Aplicações das Integrais Dupla e Tripla
Nesta secção, apresentamos algumas aplicações importantes.
Massa: Seja A ⊂ R3 um sólido limitado e fechado. Uma função densidade volumétrica de
massa associada ao sólido A é uma função contínua e positiva, ρ : A → R, de modoque, para todo subconjunto A1 ⊂ A, tem-se que,
massa de A1 =∫∫∫
A1
ρ (x, y, z)dV.
Assim, se ρ for uma função densidade volumétrica de massa relativamente à superfí-cie A, então
massa de A =∫∫∫
A
ρ (x, y, z)dV.
Observe que se ρ for constante e igual a k, então, a massa de A será igual ao produtodo volume de A pela constante k1. Neste caso, dizemos que o sólido é homogêneo.
No caso de uma massa estar distribuída sobre uma lâmina que ocupa uma região Ado plano xy e que possui densidade pontual ρ (x, y) então a massa total é dada por
m =∫∫
Aρ (x, y) dA.
Exercício 4.21.
1. Sabendo que o sólido delimitado pelos planos
x + z = 1, z − x = 1, y = 0
e pela superfície y =√
z tem densidade ρ (x, y, z) = 2y + 5. Mostre que ele tem massaigual a 3.
2. Calcule a massa contida no sólido delimitado pelos parabolóides
z = 16 − 2x2 − 2y2 e z = 2x2 + 2y2,
sabendo que ele tem densidade ρ (x, y, z) =√
2x2 + 2y2.
3. Verifique que a massa de uma lâmina triangular com vértices (0, 0) , (1, 0) e (0, 1) comdensidade ρ (x, y) = xy é igual a 1/24.
Momentos e Centro de Massa: O momento de uma partícula em torno de um eixo é de-finido como o produto de sua massa pela distância ao eixo. Como consequência,define-se o momento de uma lâmina A, com função densidade contínua ρ (x, y), emtorno do eixo x e em torno do eixo y, respectivamente por,
Mx =∫∫
Ayρ (x, y) dA e My =
∫∫
Axρ (x, y) dA.
As coordenadas do centro de massa da lâmina são dadas por,
x =My
me y =
Mx
m,
onde m =∫∫
A ρ (x, y) dA é a massa total.
Exemplo 4.22. Verifique que o centro de massa de uma lâmina triangular com vértices
(0, 0) , (1, 0) e (0, 2), com densidade ρ (x, y) = 1 + 3x + y é o ponto(
38 , 11
16
)
.

No caso de uma superfície D no espaço, o momento de massa em relação ao plano yz édado por
Myz =∫∫∫
D
xρ (x, y, z)dV,
e de modo análogo, define-se os momentos em relação aos planos xz e xy. O centrode massa é definido de modo análogo ao que foi feito no plano, isto é, se a funçãodensidade é ρ (x, y, z), as coordenadas do centro de massa de D são
x =1m
∫∫∫
D
xρ (x, y, z)dV,
y =1m
∫∫∫
D
yρ (x, y, z)dV e
z =1m
∫∫∫
D
zρ (x, y, z)dV,
ondem =
∫∫∫
D
ρ (x, y, z)dV
é a massa total contida em D.
Momento de Inércia: O Momento de Inércia de uma partícula de massa m que gira emtorno de um eixo é definido por mr2, onde r é a distância da partícula ao eixo derotação.
Esse conceito é estendido a uma lâmina com densidade ρ (x, y) e que ocupa umaregião D ⊂ R
2 de modo análogo ao desenvolvido para momentos simples. Para isto,imaginemos que a região D seja dividida em pequenos retângulos.
Aproximemos os momentos de inércia de cada um desses sub-retângulos em torno doeixo x, somamos esses valores e tomamos o limite com o número de sub-retângulostendendo a infinito. Assim, temos que o momento de inércia da lâmina em torno doeixo x é dado pela integral
Ix = limn→∞
n
∑i=1
y2i ρ (xi, yi) ∆A =
∫∫
Dy2ρ (x, y) dA,
da mesma forma, tem-se que o momento de inércia em torno do eixo y é
Iy = limn→∞
n
∑i=1
x2i ρ (xi, yi) ∆A =
∫∫
Dx2ρ (x, y) dA.
Já o momento de inércia em torno da origem que é dado por
I0 =∫∫
D
(
x2 + y2)
ρ (x, y) dA.
Verifique que I0 = Ix + Iy.
Em geral, o momento de inércia da lâmina em relação a um eixo E qualquer é dadopor
IE =∫∫
Dr2ρ (x, y) dA,
onde r é a distância do ponto (x, y) ao eixo E.
De modo inteiramente análogo, se um corpo D ⊂ R3 tem densidade ρ (x, y, z), o
momento de inércia em relação a um eixo fixo E, é dado por
IE =∫∫∫
D
r2ρ (x, y, z) dV,
onde r é a distância do ponto (x, y, z) ao eixo E.

Exemplo 4.23.
1. Um círculo de raio R e centro na origem se for homogêneo, então
Ix = Iy =πρR4
4.
Solução:
Para ver isto, basta fazer o seguinte: Como é homogêneo, a densidade é constante. Por-tanto, consideremos ρ (x, y) = k, então,
Ix =∫∫
Dy2ρ (x, y) dA
=∫∫
x2+y26R2ky2dA =
= k∫ 2π
0
∫ R0 r3sen2θdrdθ
= kR4
4
∫ 2π
0sen2θdθ
=kπR4
4.
Para mostrar que Iy =kπR4
4faz-se de modo similar. Faça isso!
2. O momento de inércia de uma esfera
S : x2 + y2 + z26 R2
com densidade constante ρ (x, y, z) = k, em relação a um diâmetro é dado por
I =∫∫∫
S
r2ρ (x, y, z) dV
=∫∫∫
x2+y2+z26R2
(
x2 + y2)
kdV.
Passando a coordenadas esféricas, temos que
I =∫∫∫
x2+y2+z26R2
(
x2 + y2)
kdV
= k∫ 2π
0
∫ R
0
∫ π
0
(
ρ2sen2φ)
ρ2senφdθdρdφ
=8
15kπR5.
Verifique!
Exercício 4.24.
1. Verifique que, o momento de inércia do sólido
D : x + y + z 6 4, x > 0, y > 0
e z > 0, homogêneo, densidade constante igual a k, em relação ao eixo z é dado por
I =∫∫∫
D
k(
x2 + y2)
dxdydz
e cujo valor é51215
k.

2. O cuboD : 0 6 x 6 1, 0 6 y 6 1, 0 6 z 6 1
tem, em cada ponto (x, y, z), densidade ρ (x, y, z) = x.
(a) Mostre que o momento de inércia em relação ao eixo z é
I =∫∫∫
D
x(
x2 + y2)
dV =5
12.
(b) Mostre também que o centro de massa do sólido é o ponto(
23 , 1
2 , 12
)
.
(c) Mostre que o centro de massa de um cone circular reto de raio R e altura h, cujadensidade é proporcional a distância da base do cone é o ponto
(
0, 0, 3h/
5)
.
Área de uma Superfície: Iremos utilizar a integral dupla para calcular a área de uma su-perfície em R
3. Para o objetivo de nosso estudo, vamos nos restringir ao cálculo deáreas das superfícies que são gráficos de uma função
z = f (x, y)
definida em uma região D do plano xy.
Para isso, consideremos a função
z = f (x, y)
em que seja contínua e possua derivadas parciais primeiras também contínuas. Semperda da generalidade, apenas para as explicações iniciais, consideremos f (x, y) > 0em todo o domínio D, o qual vamos supor ser um retângulo.
Dividindo D em n pequenos retângulos Di com áreas ∆A = ∆x∆y. Se (xi, yi) for umponto de Di, então
Pi = (xi, yi, f (xi, yi))
é um ponto da superfície S, gráfico de f , e que se localiza acima de Di.
Seja Ti o plano tangente a S no ponto Pi.
Assim, a área ∆Ti do paralelogramo, parte desse plano tangente que está exatamenteacima de Di, é uma aproximação da área ∆Si, da parte de S que também está exata-mente acima de Di. Então, uma aproximação da área total de S é
n
∑i=1
∆Ti
e daí, a área de S será
A (S) = limn→∞
n
∑i=1
∆Ti
Mas, ∆Ti pode ser escrito de uma forma bastante conveniente para que a área sejacalculada. Para isto, tomamos o ponto (xi, yi) como sendo um o vértice de Di maispróximo da origem do plano xy e tomamos também os vetores u e v como sendo oslados do paralelogramo de área ∆Ti.
Então,∆Ti = |u × v| .
Mas, fx (xi, yi) e fy (xi, yi) são as inclinações das retas tangentes a S em Pi, cujas dire-ções são os vetores u e v.
Portanto,
u = (∆x, 0, fx (xi, yi) ∆x)u =
(
0, ∆y, fy (xi, yi) ∆y) e u × v =
∣
∣
∣
∣
∣
∣
i j k∆x 0 fx (xi, yi) ∆x0 ∆y fy (xi, yi) ∆y
∣
∣
∣
∣
∣
∣

Temos ainda que
∆Ti = |u × v| =
√
1 + [ fx (xi, yi)]2 +
[
fy (xi, yi)]2
∆A.
Finalmente,
A (S) = limn→∞
n∑
i=1
√
1 + [ fx (xi, yi)]2 +
[
fy (xi, yi)]2
∆A
=∫∫
D
√
1 + [ fx (x, y)]2 +[
fy (x, y)]2 dA.
Por simplicidade de notação, denotamos esta integral por
∫∫
D
√
1 + [ fx (x, y)]2 +[
fy (x, y)]2 dA =
∫∫
DdS
Exemplo 4.25. A área da superfície parte do parabolóide
z = x2 + y2
que se localiza abaixo do plano z = 4 é dada pela integral
A =∫∫
DdS
=∫∫
x2+y264
√
1 + (2x)2 + (2y)2 dA
=∫ 2π
0
∫ 2
0
√
1 + 4r2drdθ
=π
6
(
17√
17 − 1)
.
Exercício 4.26. Mostre que a área da esfera de raio R é igual a A = 4πR2.
Integral de superfície: A integral de superfície é definida a partir da integral de área quedescrevemos anteriormente, isto se faz da seguinte forma:
Seja f (x, y, z) uma função definida em S, de modo que
f (x, y, z (x, y))
seja contínua para todo (x, y) ∈ D.
Então, a integral de f na superfície S é dada por
∫∫
Sf dS =
∫∫
Df (x, y, z (x, y))
√
1 + (zx)2 +
(
zy)2 dA.
É importante observar que:
• Se ρ (x, y, z) for a densidade superficial de massa de S (massa por unidade deárea), então a massa m de S é dada por
m =∫∫
Sρ (x, y, z) dS .
• O momento de inércia da superfície em relação a um eixo fixo E é definido por
IE =∫∫
Sr2ρ (x, y, z) dS ,
onde r é a distância do ponto (x, y, z) ao eixo E.
• As coordenadas do centro de massa são dadas por
x0 =1m
∫∫
Sxρ (x, y, z) dS,
y0 =1m
∫∫
Syρ (x, y, z) dS,
z0 =1m
∫∫
Szρ (x, y, z) dS.
Exemplo 4.27.
1. Se f (x, y, z) = 1, a integral∫∫
Sf (x, y, z) dS =
∫∫
DdA,
que é exatamente a área de D.2. O momento de inércia Ix de uma distribuição homogênea de massa sobre a semi-esfera
S : z =√
R2 − x2 − y2, x2 + y2 6 R2,
em relação ao eixo x, é dado pela integral de superfície
Ix =∫∫
Sρr2dS =
∫∫
Sk(
x2 + y2)
dS,
onde, dS =
√
1 + (zx)2 +
(
zy)2.
Portanto,
Ix =∫∫
Sρ(
x2 + y2)
dS
=∫∫
x2+y26R2
k(
R2 − x2) R√
R2 − x2 − y2dxdy
= kR∫ 2π
0
∫ R
0
R2 − r2cos2θ√R2 − r2
rdrdθ ⇒
=4πkR4
3.
Verifique os cálculos!
Exercício 4.28. 1. Mostre que∫∫
S
(
x2 + y2)
dS =20π
3,
onde S é a superfície x2 + y2 + z2 = 4, z > 1.
2. Verifique que o momento de inércia da superfície esférica de raio R, homogênea, de massa m,
em torno de um diâmetro é2mR2
3.
4.5 Integrais de Linha
A integral∫ b
af (x)dx
pode ser generalizada de diversas maneiras. Dentre elas é a própria integral múltipla,outra, a que trataremos aqui, são as integrais de linha, as quais têm diversas aplicaçõesimportantes, principalmente na Física.

4.5.1 Integral de Linha de Funções Escalares
Seja f : R3 → R e seja C uma curva em R
3, a qual é imagem da função
α : [a, b] → R3
t (x(t), y(t), z(t)).
Para definirmos a integral de linha da função f ao longo da curva C, temos como umadas principais motivações, por exemplo, o cálculo de massas, sabendo-se a densidade emcada ponto.
Consideremos, assim, que a curva α seja um arame e f (x, y, z) a densidade de massaem cada ponto (x, y, z) ∈ C, isto é, a massa por unidade de comprimento em cada pontode C. Queremos determinar a massa total, m, do arame.
Para isto, vamos dividir o intervalo em n subintervalos da forma
[ti−1, ti] , i = 1, 2, 3, ... , n,
onde t0 = a e tn = b.
Com isto, obtemos uma decomposição de C em curvas Ci definidas em [ti−1, ti]. Veja aFigura 4.12
x
y
z
α(t0)
α(ti) α(ti+1)
α(tn)
t0 = at1
ti
ti+1
tn−1tn = b
α
Figura 4.12: Curva - partição do domínio.
Supondo que α (t) seja contínua e possua derivada α′ (t) também contínua e denotandopor ∆si o comprimento de Ci, então temos que
∆si =∫ ti+1
ti
∥
∥α′ (t)∥
∥dt.
Mas, pelo teorema da média para integrais, existe um ri ∈ [ti−1, ti] de modo que
∆si =∥
∥α′ (ri)∥
∥ . |ti+1 − ti| =∥
∥α′ (ri)∥
∥∆ti.
Quando n for grande ∆si é "pequeno", assim, f (x, y, z) pode ser considerada constanteem Ci e igual a f (α (ri)).
Portanto, a massa total m é aproximadamente
sn =n
∑i=1
f (α (ri))∥
∥α′ (ri)∥
∥∆ti.
O lado esquerdo dessa igualdade acima é a soma de Riemann da função
f (α (t))∥
∥α′ (t)∥
∥

no intervalo [a, b].
Por fim, se f (x, y, z) for contínua em C, então
m =∫ b
af (α (t))
∥
∥α′ (t)∥
∥dt.
Agora, aplicaremos para o caso geral, e temos a seguinte definição:
Seja C uma curva em R3, parametrizada por
α(t) = (x(t), y(t), z(t)) , t ∈ [a, b] ,
onde α (t) e α′ (t) são contínuas em [a, b], e seja f (x, y, z) uma função contínua em C.
A integral de linha ao longo de C é definida por
∫
Cf ds =
∫
Cf (x, y, z) ds =
∫ b
af (α (t))
∥
∥α′ (t)∥
∥dt.
Para f (x, y, z) = 1 para todo ponto (x, y, z) ∈ C, a integral de linha definida acima, sereduz a
∫
Cf ds =
∫
Cds =
∫ b
a
∥
∥α′ (t)∥
∥dt,
que é exatamente o comprimento da curva C.
Observação 4.29. Para uma curva C definida no plano R2, basta que na parametrização dada
acima de α (t), consideremos a coordenada z (t) nula, ou seja,
α (t) = (x (t) , y (t) , 0) , t ∈ [a, b] ,
ou mesmo considerarα (t) = (x (t) , y (t)) , t ∈ [a, b] .
A partir disso, tudo funciona normalmente.
Exemplo 4.30.
1. Vamos calcular a integral∫
Cxy2ds,
onde C é a semicircunferênciax2 + y2 = 1, y ≥ 0,
orientada no sentido anti-horário.
Solução
Para isto, vamos considerar a parametrização para C dada por
α (t) = (cost, sent) , t ∈ [0, π] .
Portanto,∫
C xy2ds =∫ π
0 costsen2t√
sen2t + cos2t dt
=∫ π
0 sen2tcost dt
=[
13 sen3t
]t=π
t=0= 0
2. Como no exemplo anterior, apenas trocando f (x, y) = xy2 por f (x, y) = 1. Neste caso,∫
Cds =
∫ π
0
√
sen2t + cos2t dt =∫ π
0dt = π,
que é exatamente o comprimento da metade da circunferência de raio 1.

3. Um arame delgado é envergado na forma de uma semicircunferência, C, de raio R. Vamosmostrar que se a densidade de massa linear em um ponto P (x, y) for diretamente proporcionalà sua distância à reta que contém as extremidades, então a massa do arame é 2kR2, onde k é aconstante de proporcionalidade.
Iniciemos a nossa tarefa, escolhendo um sistema de coordenadas xy, de modo que o aramecoincida com a semicircunferência de centro na origem, raio e y ≥ 0.
Assim, uma parametrização para curva C é dada por
α (t) = (Rcost, Rsent) , t ∈ [0, π]
e a densidade dada por f (x, y, z) = ky.
Portanto,m =
∫
C (ky) ds
=∫ π
0 (kRsent)√
R2sen2t + R2cos2t dt
= kR2∫ π
0 sentdt = kR2 [−cost]t=πt=0 = 2kR2
4. Vamos calcular a integral∫
C
(
x2 + y2 + z2)
ds,
onde C é a hélice definida parametricamente por
α (t) = (cost, sent, t) , 0 ≤ t ≤ 2π.
Calculemos inicialmente o vetor velocidade da curva C e também a sua velocidade escalar, quesão dados por
α′ (t) = (−sent, cost, 1) ⇒∥
∥α′ (t)∥
∥ =√
2.
Portanto,∫
C
(
x2 + y2 + z2)
ds =∫ 2π
0
(
cos2t + sen2t + t2)√
2 dt
=√
2∫ 2π
0
(
1 + t2)
dt
=√
2[
1 +t3
3
]t=2π
t=0=
2√
23
(
3 + 4π2)
.
Exercício 4.31.
1. Verifique que∮
Cxyds = 0,
onde C : |x|+ |y| = 1.
2. Verifique que∫
C
xds =(
5√
5 − 1)/
12,
onde C é dada por α (t) =(
t, t2) , 0 6 t 6 1.
3. A integral de linha de uma função escalar pode ser aplicada para o cálculo da massa de um fiodelgado com densidade linear (massa por unidade de comprimento) ρ (x, y, z) dada.
O fio no espaço pode ser interpretado como a imagem de uma curva C, parametrizada porα : [a, b] → R
3 e, a partir daí, a massa é dada por∫
C
ρ (x, y, z) ds.
Mostre que a massa do fio dado por
α (t) = (t, t, t) , 0 6 t 6 2
é igual a 4√
3 unidades de massa.

4. O momento de inércia em relação a um eixo fixo E de um fio visto como uma curva C, para-metrizada por α : [a, b] → R
3 é dado por
IE =∫
C
r2ρ (x, y, z) ds,
onde r é a distância do ponto (x, y, z) ao eixo E.
5. Mostre que o momento de inércia de um fio homogêneo com forma de uma circunferência deraio R em relação ao seu centro é igual a
IE = mR2,
onde m é a massa do fio.
6. Verifique que∫
C
xydx − xzdy + xyzdz = 5,
onde C é a poligonal ABCD que liga os pontos A (1, 1, 2) , B (2, 1, 1) , C (2, 2, 1) e D (2, 2, 2),nesta ordem.
7. Verifique se o campo
F =(
sen(xy) + xycosxy, x2cosxy)
é conservativo e calcule a integral∫
C
Fds, onde C é a curva dada por
α (t) =(
t2 − 1, t2 + 1)
, −1 6 t 6 1
8. Calcule a integral∫
Cxy2ds,
onde C é a parte da parábola y = x2 compreendida entre os pontos (0, 0) e (3, 9).
9. Calcular a integral∫
C
(
x2 − y2 − z2)
ds,
onde C é o arcoα (t) = (cost,−sent, 2t) , −π ≤ t ≤ 0.
10. Calcular a integral∫
Cxyds,
onde C é o arco da elipse b2x2 + a2y2 = a2b2, x ≥ 0, y ≥ 0.
4.5.2 Integral de Linha das Formas Diferenciais
Sejam o campo vetorial definido por
(x, y, z) → F (x, y, z) = (L (x, y, z) , M (x, y, z) , N (x, y, z)) ,
onde L, M e N são funções contínuas numa região R do espaço e C uma curva em R3,
imagem da função α, definida por
α : [a, b] → R3
t (x (t) , y (t) , z (t)) .
Definiremos a integral de linha da função F ao longo de C. Como motivação para tal,consideremos que F represente um campo de forças e pretendemos calcular o trabalhorealizado pela força F ao deslocar uma partícula ao longo da curva C.

Se C for um segmento de reta com extremidades nos pontos A e B, e F uma força cons-tante, o trabalho realizado por F ao deslocar uma partícula ao longo de C é dado peloproduto escalar (força x deslocamento),
W = F · (B − A).
Quando C não for um segmento de reta, podemos aproximá-la por uma poligonal comvértices em C, da seguinte forma:
dividimos o intervalo [a, b] em n subintervalos da forma
[ti−1, ti] , i = 1, 2, 3, ... , n,
onde t0 = a e tn = b.
Com isto, obtemos uma poligonal de vértices
α (ti) = (x (ti) , y (ti) , z (ti)) , i = 1, 2, 3, ... , n,
conforme ilustra a Figura 4.13.
x
y
z
α(t0)
α(ti)
α(ti+1)
α(tn)
t0 = at1
ti
ti+1
tn−1tn = b
α
Figura 4.13: Curva - a poligonal.
Quando n for grande, ∆ti = ti − ti−1 é pequeno, assim, o deslocamento da partícula deα (ti−1) a α (ti) é aproximadamente
∆si = α (ti) − α (ti−1)
e, neste segmento, F pode ser considerada constante e igual a F (α (ti)) no intervalo [ti−1, ti].
Mas, se existir α′ (t) para todo [a, b], então,
∆si ≈ α′ (t) ∆ti.
Portanto, o trabalho W realizado para deslocar uma partícula de α (ti−1) a α (ti) é apro-ximadamente
F (α (ti)) ∆si ≈ F (α (ti)) α′ (t) ∆ti.
Assim, o trabalho W realizado pela força F para deslocar uma partícula ao longo de C édado por,
W = limn→∞
n
∑i=1
F (α (ti)) α′ (t) ∆ti.
Se α′ (t) for contínua em [a, b] e como F é um campo contínuo, então,
W =∫ b
aF (α (ti)) α′ (t)dt.

Para o caso geral, daremos a definição:
Seja C uma curva em R3, parametrizada por
α (t) = (x (t) , y (t) , z (t)) , t ∈ [a, b] ,
onde α (t) e α′ (t) são contínuas em [a, b], e seja
F(x, y, z) = (L(x, y, z), M(x, y, z), N(x, y, z))
um campo vetorial contínuo em C.
A integral de linha de f ao longo de C é definida por
∫
CFds =
∫ b
aF (α (ti)) α′ (t)dt
ou, escrita na forma diferencial∫
C Fds =∫
C Ldx + Mdy + Ndz
=∫ b
a [L (α (t)) x′ (t) + M (α (t)) y′ (t) + N (α (t)) z′ (t) ] dt.
Quando a curva C é fechada, isto é, α(a) = α(b), a integral de linha normalmente édenotada por
∫
Fds =∮
CFds.
Exemplo 4.32.
1. Vamos calcular a integral do campo F (x, y, z) = (y,−x, z), ao longo da curva C, onde C é aparte da hélice
α(t) = (cost, sent, t), 0 ≤ t ≤ π/2.
Solução
Inicialmente, calculamos o vetor velocidade da curva C, ou seja temos que
α′ (t) = (−sent, cost, 1) .
Portanto,∫
CFds =
∫ b
aF (α (ti)) α′ (t) dt
=∫ π/2
0(sent, −cost, t) · (−sent, cost, 1) dt
=∫ π/2
0(−sen2t, −cost, t) · (−sent, cost, 1) dt
=∫ π/2
0
(
−sen2t − cos2t + t)
dt
=∫ π/2
0(t − 1) dt
=
[
t2
2− t]t=π/2
t=0
=π2
8− π
2

2. Vamos calcular o trabalho realizado pela força variável
F (x, y, z) =(
y − x2, z − y2, x − z2)
ao longo da curva α(t) = (t, t2, t3) para t ∈ [0, 1].
Temos que o trabalho é dado pela integral
W =∫ b
aF(α(ti))α′(t)dt.
Portanto,
W =∫ b
aF (α (ti)) α′ (t)dt
=∫ 1
0
(
t2 − t2, t3 − t4, t − t6)
·(
1, 2t, 3t2)
dt
=∫ 1
0
(
2t4 − 2t5 + 3t3 − 3t8)
dt =2960
.
4.5.3 Propriedades da Integral de Linha
Apresentamos agora propriedades relativas a integrais de linha.
Troca de parametrizações: Se α (t) e β (t) forem parametrizações da curva de integração Cque preservam a orientação, então
∫
Cα
Fds =∫
Cβ
Fds
e, se essas parametrizações inverterem a orientação, então∫
Cα
Fds = −∫
Cβ
Fds.
Linearidade: Se k1 e k2 são números reais e F e G forem campos vetoriais, então,∫
C(k1F + k2G) ds = k1
∫
CFds + k2
∫
CGds.
Aditividade: Se C puder ser decomposto em um número finito de curvas C1, C2, ... , Cn demodo que C = C1 ∪ C2 ∪ ... ∪ Cn, então,
∫
CFds =
n
∑i=1
∫
Ci
Fds.
Exercício 4.33.
1. Para calcular a integral de um campo F em uma sequência de caminhos, calcula-se a integralem cada um deles e soma-se os resultados. Calcule
∮
CFds,
onde F (x, y) = (−y, x) e C é o triângulo de vértices (0, 0) , (1, 0) e (1, 1), orientada nosentido anti-horário, fazendo
∮
CFds =
∮
C1
−ydx + xdy +∮
C2
−ydx + xdy +∮
C3
−ydx + xdy,
onde as curvas C1, C2 e C3 são dadas por
C1 :
x = ty = 0 , 0 ≤ t ≤ 1,

C2 :
x = 1y = t
, 0 ≤ t ≤ 1 e
C3 :
x = 1 − ty = 1 − t
, 0 ≤ t ≤ 1.
2. Mostre que∫
CFds =
52
,
onde F (x, y) = (x, y) e C é a poligonal de vértices (0, 0) , (2, 0) e (2, 1), orientada no sentidoanti-horário.
3. Faça o que se pede:
(a) Esboce, em um mesmo sistema de coordenadas, as curvas
C1 : y = x2, 0 ≤ x ≤ 1 e C2 : x = y2, 0 ≤ y ≤ 1.
(b) Calcule as integrais∫
C1
xydx + y2dy e∫
C2
xydx + y2dy.
(c) Faça comentários sobre o fato das integrais serem diferentes.
4. Mostre que∫
CFds, onde
F (x, y) =(
3x2 + 2xy, x2 + 3y2)
e C é uma curva qualquer que liga o ponto (0, 0) ao ponto (2, 2), orientado de (0, 0) para(2, 2).
Em geral, a integral de linha de um campo vetorial F ao longo de uma curva C, queliga os pontos A e B, depende da curva, conforme podemos ver no Exercício 3 acima.Entretanto, para uma grande quantidade de campos, esta dependência não existe, a integraldependerá apenas dos pontos A e B e não da curva que os liga.
Tais campos serão caracterizados a seguir.
Definição 4.34. Se F é um campo definido em um conjunto aberto U ⊂ R3 para o qual existe uma
função f : U → R tal que F = ∆ f em U, então f é chamada função potencial para F. Neste caso,dizemos que o campo F é campo gradiente ou conservativo.
Assim, o campo F = (L, M, N) é conservativo, se existir f (x, y, z), tal que
∂ f∂x
= L,∂ f∂y
= M e∂ f∂z
= N.
Exemplo 4.35. A função f (x, y, z) = xyz é função potencial para
F(x, y, z) = (yz, xz, xy) ,
pois F = ∆ f .
Se F for um campo contínuo e conservativo em um aberto U ⊂ R3 e se C é uma curva
em U com ponto inicial A e final B, parametrizada por uma função contínua, juntamentecom sua derivada α′ (t), então
∫
CFds =
∫
C(∆ f ) ds = f (B) − f (A) .
Pela tamanha importância deste resultado, mostraremos uma prova dele agora:

Se a, b ∈ R de modo que α (a) = A e α (b) = B, então
∫
CFds =
∫ b
a∆ f (α (t)) α′ (t) dt.
Fazendo g (t) = f (α (t)) , a ≤ t ≤ b, temos
g′ (t) = f ′ (α (t)) α′ (t) .
Daí,∫
CFds =
∫ b
a∆ f (α (t)) α′ (t) dt
=∫ b
ag′ (t) dt
= g (b) − g (a)
= g (α (b)) − g (α (a)) = f (B)− f (A) .
Uma conseqüência imediata desse resultado é que se F for um campo conservativo,então a integral ao longo de qualquer curva fechada C é nula, ou seja,
∮
CFds = 0.
Exemplo 4.36 (Exemplo de aplicação desse resultado). Como o campo
F (x, y, z) = (yz, xz, xy)
tem função potencial f (x, y, z) = xyz, então, a integral∫
C(yz, xz, xy)ds = f (2, 1, 9) − f (1, 3, 7) = 2 · 1 · 9 − 1 · 3 · 7 = −3,
onde C é uma curva que liga os pontos A (0, 0, 0) ao ponto B (2, 1, 9).
No caso particular do plano, um campo F = (L, M) é conservativo, se existir f (x, y), talque
∂ f∂x
= L e∂ f∂y
= M.
Alguns fatos interessantes para esses casos:
(1) Se as funções L e M forem contínuas juntamente com suas derivadas primeiras, então,uma condição necessária para que o campo seja conservativo é que
∂L∂y
=∂M∂x
.
pois,
∂ f∂x
= L ⇒ ∂2 f∂y∂x
=∂L∂y
∂ f∂y
= M ⇒ ∂2 f∂x∂y
=∂M∂x
⇒ ∂L∂y
=∂M∂x
.
Na verdade, sabemos mais, pois dependendo da região U em que o campo é definido,estas condições são também suficientes. Entretanto, esta parte não será mostradaaqui.

Exemplo 4.37. O campo
F =(
3x2 + 2xy, x2 + 3y2)
satisfaz as condições anteriores, e
∂
∂y
(
3x2 + 2xy)
=∂
∂x
(
x2 + 3y2)
= 2x.
Determinando uma função potencial para um campo: Seja o campo F = (L, M), o qual éconservativo.
Portanto, existe z = f (x, y), tal que
∂ f∂x
= L e∂ f∂y
= M.
Da primeira igualdade, obtemos uma função f , integrando-a em relação a x, conside-rando y constante, ou seja
∂ f∂x
= L ⇒ f (x, y) =∫
L (x, y) dx + g (y) .
Agora derivando f em relação a y para podermos utilizar a segunda igualdade acima,temos que
∂ f∂y
=∂
∂y
∫
L (x, y) dx + g′ (y) .
Utilizando este resultado e a segunda igualdade acima, obtemos uma expressão parag′. Assim,
∂ f∂y
= M ⇒ M =∂
∂y
∫
L (x, y) dx + g′ (y) ,
ou ainda
g′ (y) = M − ∂
∂y
∫
L (x, y) dx.
Portanto, para obtermos uma expressão para a função f , basta determinarmos a fun-ção g.
Vejamos um exemplo.
Exemplo 4.38. Se F = (L, M) =(
3x2 + 2xy, x2 + 3y2), então,
∂ f∂x
= L = 3x2 + 2xy ⇒ f (x, y) = x3 + x2y + g (y) ,
mas,∂ f∂y
= M = x2 + g′ (y) .
Portanto,
∂ f∂y
= M = x2 + 3y2 = x2 + g′ (y) ⇒ g′ (y) = 3y2 ⇒ g (y) = y3 + k.
Logo,f (x, y) = x3 + x2y + y3 + k, k ∈ R.
Verificação: ∆ f = F =(
3x2 + 2xy, x2 + 3y2).
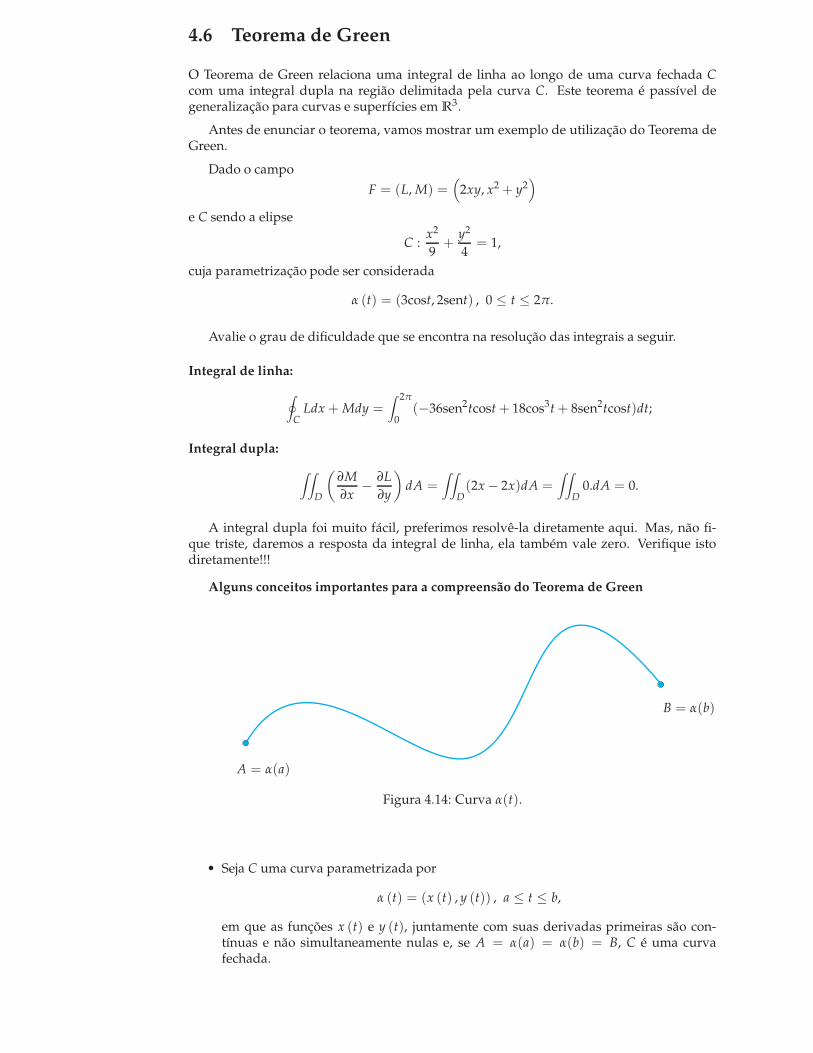
4.6 Teorema de Green
O Teorema de Green relaciona uma integral de linha ao longo de uma curva fechada Ccom uma integral dupla na região delimitada pela curva C. Este teorema é passível degeneralização para curvas e superfícies em R
3.
Antes de enunciar o teorema, vamos mostrar um exemplo de utilização do Teorema deGreen.
Dado o campo
F = (L, M) =(
2xy, x2 + y2)
e C sendo a elipse
C :x2
9+
y2
4= 1,
cuja parametrização pode ser considerada
α (t) = (3cost, 2sent) , 0 ≤ t ≤ 2π.
Avalie o grau de dificuldade que se encontra na resolução das integrais a seguir.
Integral de linha:
∮
CLdx + Mdy =
∫ 2π
0(−36sen2tcost + 18cos3t + 8sen2tcost)dt;
Integral dupla:
∫∫
D
(
∂M∂x
− ∂L∂y
)
dA =∫∫
D(2x − 2x)dA =
∫∫
D0.dA = 0.
A integral dupla foi muito fácil, preferimos resolvê-la diretamente aqui. Mas, não fi-que triste, daremos a resposta da integral de linha, ela também vale zero. Verifique istodiretamente!!!
Alguns conceitos importantes para a compreensão do Teorema de Green
A = α(a)
B = α(b)
Figura 4.14: Curva α(t).
• Seja C uma curva parametrizada por
α (t) = (x (t) , y (t)) , a ≤ t ≤ b,
em que as funções x (t) e y (t), juntamente com suas derivadas primeiras são con-tínuas e não simultaneamente nulas e, se A = α(a) = α(b) = B, C é uma curvafechada.

• Se C não se auto intercepta entre os pontos A = α (a) e B = α (b), então C é umacurva simples. Circunferências e elipses são exemplos de curvas suaves, simples efechadas.
• Uma curva fechada simples parcialmente suave é aquela que pode ser decompostaem um número C finito de curvas suaves Ck de modo que, quando t varia de a até b,o ponto α (t) obtido com as parametrizações de Ck percorrem C uma única vez e comapenas a exceção α (a) = α (b). Veja a Figura 4.14.
• Uma curva como a descrita no item anterior é a fronteira C = ∂D de uma região doplano xy, a qual, dizemos, está orientada C positivamente se, a região D permaneceà esquerda, ao percorrer a fronteira ∂D C. É como andar nas linhas laterais de umcampo de futebol no sentido anti-horário, conforme Figura 4.15.
12
Figura 4.15: Curvas fechadas simples: (1) suave e (2) parcialmente suave.
Teorema 4.39 (Teorema de Green). Seja C uma curva fechada simples parcialmente suave e sejaD a região constituída de C e seu interior. Se C está orientada positivamente e se as funções L (x, y)e M (x, y) são contínuos, com derivadas parciais primeiras contínuas, então
∮
CLdx + Mdy =
∫∫
D
(
∂M∂x
− ∂L∂y
)
dA.
Esboço da prova:
Sem perder a generalização, vamos considerar que a região D pode ser descrita dasseguintes formas:
D = (x, y) ∈ R2 : a ≤ x ≤ b, y1(x) ≤ y ≤ y2(x) ou
D = (x, y) ∈ R2 : c ≤ y ≤ d, x1(y) ≤ x ≤ x2(y),
onde as funções y1 (x) , y2 (x) , x1 (y) e x2 (y) são contínuas. Veja a Figura 4.16.
xx
yy
a b
c
d
y = g1(x)
y = g2(x)
x = f1(y) x = f2(y)
Região 1 Região 2
Figura 4.16: Regiões 1 e 2 para a integração dupla.

A integral
I =∫∫
D
(
∂M∂x
− ∂L∂y
)
dA =∫∫
D
∂M∂x
dA −∫∫
D
∂L∂y
dA.
Calculando-as uma a uma, podemos escrever,
I1 =∫∫
D
∂L∂y
dA =∫ b
a
∫ y2(x)
y1(x)
∂L∂y
dydx
=∫ b
a[L(x, y2(x))− L(x, y1(x))] dx
=∫ b
aL(x, y2(x))dx −
∫ b
aL(x, y1(x))dx
= −∫ a
bL(x, y2(x))dx −
∫ b
aL(x, y1(x))dx
= −∫
C2
Ldx −∫
C1
Ldx
= −∮
CLdx.
Portanto,∮
CLdx = −
∫∫
D
∂L∂y
dA.
Este resultado é uma parte do que precisamos, mas a outra, ou seja,
∮
CMdy =
∫∫
D
∂M∂x
dA
é obtida de modo similar, bastando para isto integrar ∂M/∂x primeiro em relação a x e aseguir, em relação a y e considerando a região D na segunda forma acima, ou seja
D = (x, y) ∈ R2 : c ≤ y ≤ d, x1(y) ≤ x ≤ x2(y).
E combinando esses dois resultados, segue o Teorema de Green.
Se a região D não for simples, decompomos em uma união finita de regiões simples, demodo que
D = D1 ∪ D2 ∪ D3 ∪ ...Dn,
em que cada uma dessas regiões simples tem fronteira ∂Di, i = 1, 2, ... , n, contínuas e,aplicamos o Teorema de Green a cada uma delas, obtemos assim que o Teorema é válidopara regiões mais gerais.
4.6.1 Aplicações do Teorema de Green
A seguir apresentaremos alguns exemplos de aplicação do Teorema de Green. Este teo-rema é sem dúvida muito importante. Vamos a elas!!!
Exemplo 4.40.
1. De acordo com as notações do Teorema de Green, na integral de linha∮
C2xydx +
(
x2 + y2)
dy,

identificamos as funções F = 2xy, M = x2 + y2 e
∂L∂y
= 2x =∂M∂x
.
Portanto, se C for uma curva fechada, para a qual o Teorema de Green é aplicável, então∮
C2xydx +
(
x2 + y2)
dy =∫∫
D(2x − 2x)dA =
∫∫
D0 dA = 0.
2. Podemos observar que se C for a circunferência
x2 + y2 = 1
orientada no sentido anti-horário. Uma parametrização para C pode ser
α (t) = (cost, sent) , 0 6 t 6 2π.
Verifique!
Assim, temos a igualdade:∮
C
(
x4 − y3)
dx +(
x3 + y5)
dy = 3∫∫
D
(
x2 + y2)
dA =3π
2.
Confira isto!!!
3. A área de uma região D, delimitada por uma "boa"curva C é dada pela integral dupla∫∫
DdA.
Por outro lado, aplicando o Teorema de Green às funções
(a) L = 0 e M = x, temos
A (D) =∫∫
DdA =
∮
C0 dx + x dy =
∮
Cx dy;
(b) L = −y e M = 0, temos
A (D) =∫∫
DdA =
∮
C−y dx + 0 dy =
∮
C−y dx.
E, somando as igualdades acima, temos que
2A (D) = 2∫∫
DdA =
∮
Cxdy − y dx.
Como uma aplicação imediata, calcularemos a área da elipse
x2
a2 +y2
b2 = 1.
Resolução:
A elipse pode ser parametrizada pela função
α (t) = (acost, bsent) , 0 6 t 6 2π.
Aplicando a igualdade∫∫
DdA =
12
∮
Cxdy − y dx,
segue que∫∫
DdA =
12
∫ 2π
0[(acost) (bcost) dt − (bsent) (−asent) dt]
=12
∫ 2π
0abdt
= πab.

Exercício 4.41.
1. Seja C a elipsex2
9+
y2
4= 1
orientada no sentido anti-horário.
(a) Verifique queα (t) = (3cost, 2sent) , 0 6 t 6 2π
é uma parametrização para a curva C.
(b) Calcule a integral∮
C2xydx +
(
x2 + y2)
dy.
2. Mostre que∮
C
(
x2 − y2)
dx +(
x2 + 2y4)
dy =73
,
onde C é a fronteira do conjunto
(x, y) ∈ R2 : 1 6 x2 + y2 6 4, x > 0, y > 0
,
orientada no sentido anti-horário.
3. Esboce a curva dada pela equação
x2/3 + y2/3 = a2/3.
Essa curva se chama hipociclóide.
Verifique que ela pode ser parametrizada pela função
α (t) = a(
cos3t, sen3t)
, 0 6 t 6 2π.
Mostre que ela tem área igual a3πa2
8.
4. Seja C uma curva fechada simples cuja área por ela delimitada mede A e possui o centro demassa em (x0, y0). Mostre que
∮
Cx2dy = 2Ax0 e
∮
Cxy dy = Ay0.
5. Sabemos que a área da região fechada D é dada por
A (D) =∫∫
DdA
e que, pelo Teorema de Green, a igualdade∫∫
DdA =
12
∮
Cxdy − y dx
é válida.
Se r e θ são as coordenadas polares, então
dx = cosθ dr − rsenθ dθ e dy = senθ dr + rcosθ dθ,
e assim temos,
A (D) =12
∮
Cr2dθ.
Utilize esta fórmula para mostrar que a área da cardióide
r = a (1 − cosθ) , 0 6 θ 6 2π
é igual a A = 3πa2
2 . Esboce a cardióide.

6. Seja w (x, y) uma função contínua, juntamente com suas derivadas de primeira e de segundaordens em uma região D do plano xy, onde D é uma região em que se aplica o Teorema deGreen cuja fronteira é a curva C. Fazendo
f = −∂w/
∂y e g = ∂w/
∂x,
temos que∂M∂x
− ∂L∂y
=∂2w∂x2 +
∂2w∂y2 = ∇2w,
é o Laplaciano de w (x, y), além disso, temos
∮
C(Ldx + Mdy) =
∮
C
(
Ldxds
+ Mdyds
)
ds =∮
C
(
−∂w∂y
dxds
+∂w∂x
dyds
)
ds,
onde s é o comprimento da curva C orientada no sentido anti-horário.
Por outro lado, como
∆w =
(
∂w∂x
,∂w∂y
)
é o gradiente de w (x, y) e n =(
− dyds , dx
ds
)
é o vetor normal à curva C e que é unitário.
Portanto,
∆w. n = −∂w∂y
dxds
+∂w∂x
dyds
=∂w∂n
é a derivada direcional de w (x, y) na direção n. É fácil observar que
n =
(
−dyds
,dxds
)
tem direção exterior à curva C. Com essas notações e utilizando o Teorema de Green, justifiquea igualdade
∮
C
∂w∂n
ds =∫∫
D
(
∇2w)
dxdy.
7. Tomando o campo G = (M, L) , você pode mostrar que o Teorema de Green pode ser escritona forma
∫∫
D(div G) dA =
∮
CG. n ds,
onde n é vetor normal à curva C e
div G =∂M∂x
+∂L∂y
.
Verifique a identidade para G = xi + yj e C a circunferência de centro na origem e raio 1.
8. Mostre que o Teorema de Green pode ser escrito também na forma∫∫
D(rot G) · k dxdy =
∮
CG. u ds,
onde
rot G =
(
0, 0,∂M∂x
− ∂L∂y
)
,
k é um vetor unitário perpendicular ao plano xy, u é um vetor unitário tangente a C e s é ocomprimento de C.
Verifique a identidade para G = −yi + xj e C é dado pelos lados do triângulo de vértices(0, 0) , (1, 0) e (1, 1).

4.7 Teoremas de Gauss e de Stokes
As Leis do Eletromagnetismo podem ser expressas em quatro equações, denominadasEquações de Maxwell, em homenagem a James C. Maxwell. Físico escocês nascido em 1831,Maxwell conseguiu unificar as leis do eletromagnetismo, pela introdução da corrente de des-locamento, que corrige a Lei de Ampère. São elas, as quatro leis do eletromagnetismo naforma integral:
∮
SE.dA =
1ε0
QS Lei de Gauss
∮
S B.dA = 0 Lei de Gauss para o magnetismo
∮
CE.ds = − ∂
∂t
∫
S(C)B.dA Lei de Faraday
∮
CB.ds = µ0 IC + µ0ε0
∂
∂t
∫
S(C)E.dA Lei de Ampère–Maxwell
A forma integral destas equações implica sempre considerar um volume delimitado poruma superfície, ou ainda, uma superfície delimitada por uma curva fechada ou circuito. NaLei de Gauss, o fluxo do campo elétrico, através de uma superfície fechada, é proporcionalà carga elétrica contida dentro do volume delimitado pela superfície fechada. Na lei deAmpère, a circuitação do vetor indução magnética B ao longo de um circuito fechado éproporcional à corrente total que flui através de uma superfície, na área delimitada pelocircuito.
Esta forma de apresentar as leis do eletromagnetismo, embora de maior transparênciaem seu conteúdo, mostra-se restritiva, quando tentamos desenvolvê-las na solução de umproblema prático. Melhor é dispor destas equações na forma diferencial quando podem seraplicadas a um ponto do espaço. A transformação é até bastante simples quando dispomosde duas ferramentas matemáticas poderosas, que são os Teoremas de Gauss e de Stokes.
Nesta seção iremos apresentá-los e dar algumas aplicações.
Antes de apresentarmos os Teoremas de Gauss e Stokes, precisamos de algumas defi-nições em relação a operadores para campos vetoriais que são básicos nas aplicações docálculo vetorial. São operadores diferenciais, que resultam, um em campo escalar e o outroem um campo vetorial.
Consideremos o operador diferencial vetorial ∇ definido do espaço de funções diferen-ciais f : R
n → R em Rn dado por
∇ =n
∑i=1
ei∂
∂xi,
onde e1, e2, . . . , en são os vetores canônicos usuais e x = (x1, x2, . . . , xn).
Em R3 temos
∇ = ~i∂
∂x+ ~j
∂
∂y+ ~k
∂
∂z,
onde e1 =~i = (1, 0, 0), e2 =~j = (0, 1, 0) e e3 =~k = (0, 0, 1).
Observe que quando aplicamos ∇ a uma função escalar f : R3 → R, obtemos o gradi-
ente de f , ou
∇ f = ~i∂ f∂x
+ ~j∂ f∂y
+ ~k∂ f∂z
=∂ f∂x
~i +∂ f∂y
~j +∂ f∂z
~k
.
Consideremos, agora, um campo vetorial
F = M~i + N ~j + P~k

em R3. Podemos escrever, simbolicamente, o produto escalar de ∇ por F, e chamamos a
esta função de divergente ou ainda
divF = ∇F =∂M∂x
+∂N∂y
+∂P∂z
.
Exemplo 4.42. Para o campo vetorial
F (x, y, z) = (xz, xyz,−y2),
determine div F.
Solução:
Basta calcularmos diretamente e obtemos
div F = ∇F =∂M∂x
+∂N∂y
+∂P∂z
= z + xz − 0 = z(1 + x).
Consideremos agora o produto vetorial formal entre ∇ e F. Obtemos assim um vetorque é chamado de rotacional de F, ou
rot F = ∇× F.
Calculando o produto vetorial obtemos
rot F = ∇× F
=
∣
∣
∣
∣
∣
∣
~i ~j ~k∂/∂x ∂/∂y ∂/∂z
M N P
∣
∣
∣
∣
∣
∣
=
(
∂P∂y
− ∂N∂z
)
~i +
(
∂M∂z
− ∂P∂x
)
~j +(
∂N∂x
− ∂M∂y
)
~k.
Exemplo 4.43. ParaF(x, y, z) = (xz, xyz,−y2),
determine rot F.
Solução:
Temos que calcular rot F = ∇× F.
Assim,
rot F =
∣
∣
∣
∣
∣
∣
~i ~j ~k∂/∂x ∂/∂y ∂/∂z
xz xyz −y2
∣
∣
∣
∣
∣
∣
= (−2y − xy, x − 0, yz − 0)
= (−y(2 + x), x, yz)
Teorema da Divergência de Gauss Seja Q um sólido simples e seja S = ∂Q a superfícieque limita Q, ou seja, sua fronteira que está orientada positivamente (para fora). Se F éum campo vetorial cujas funções componentes têm derivadas parciais contínuas em umaregião aberta que contém Q, então:
∫∫
S
F .→n dS =
∫∫∫
Q
div F dV.
Exemplo 4.44. Determine o fluxo do campo vetorial F (x, y, z) = (z, y, x)) sobre a esfera unitária
S1 : x2 + y2 + z2 = 1.

Solução:
Como a esfera S1 é uma superfície que limita a bola Q : x2 + y2 + z2 ≤ 1, podemos usar oTeorema de Gauss, obtendo assim
∫∫
S
F .→n dS =
∫∫∫
Q
div F dV =∫∫∫
Q
1dV =4π
3.
Observe que div F = 0 + 1 + 0 = 1.
Exemplo 4.45. Calcule∫∫
S
F .→n dS,
ondeF (x, y, z) = (xy, y2 + exz2
, sen(xy))
e a fronteira é a superfície do sólido Q limitado pelo cilindro parabólico z = 1 − x2 e pelos planosz = 0, y = 0 e y + z = 2. Veja a Figura 4.17.
Figura 4.17: Exemplo 4.45: Cilindro parabólico e planos.
Para calcularmos a integral de superfícies diretamente, teríamos que fazê-lo considerando partesda superfície e calculando a integral sobre elas. Este processo é trabalhoso!!!
Entretanto, vamos usar o Teorema de Gauss para transformar a integral de superfície em umaintegral tripla, e para isto precisamos calcular o divergente de F que é dado por
divF =
(
∂
∂x(xy) +
∂
∂y(y2 + exz2
) +∂
∂x(sen(xy))
)
= y + 2y = 3y.
Agora, escreveremos o sólido Q na forma
Q = (x, y, z)| − 1x1, 0z1− x2, 0y2− z.

Assim,∫∫
S F.ndS =∫∫∫
Qdiv F dV
=∫∫∫
Q3ydV
= 3∫ 1
−1
∫ 1−x2
0
∫ 2−z
0ydydzdx
= 3∫ 1
−1
∫ 1−x2
0
(2 − z)2
2dzdx
=32
∫ 1
−1
[
− (2 − z)3
3
]1−x2
0dx
= −12
∫ 1
−1
[
(x2 + 1)3 − 8]
dx
= −12
∫ 1
−1(x6 + 3x4 + 3x2 − 7)dx
=18435
Teorema de Stokes
Seja S uma superfície orientada suave por partes, cuja fronteira é formada por umacurva C simples, fechada, suave por partes, com orientação positiva.
N
S
C
Figura 4.18: Teorema de Stokes: Superfície S e a curva C.
Seja F um campo vetorial cujas componentes têm derivadas parciais contínuas em umaregião aberta do R
3 que contém S. Então,∫
C
F . d→r =
∫∫
Srot F . ndS
O Teorema de Stokes é uma generalização do Teorema de Green. Observemos queenquanto o Teorema de Green relaciona uma integral dupla sobre uma região plana D comuma integral de linha ao redor de sua curva fronteira, o Teorema de Stokes relaciona umaintegral de superfície sobre uma superfície S com uma integral ao redor da fronteira de S,a curva no espaço, C.
Na Figura 4.18 esboçamos uma superfície orientada S e seu vetor normal n. A orienta-ção de S induz a orientação positiva da curva fronteira C. Isso significa que, se você andar

na direção positiva ao redor de C, com sua cabeça na direção de n, então a superfície estarásempre a sua esquerda.
Exemplo 4.46. Calcule∫
C F.dr, onde F(x, y, z) = (−y2, x, z2) e C é a curva da intersecção doplano y + z = 2 com o cilindro x2 + y2 = 1. Lembremos que temos que orientar C para ter osentido anti-horário quando olhado de cima.
Solução:
A curva C que é uma elipse está representada na Figura 4.19. Apesar da integral poder sercalculada diretamente, é mais simples usar o Teorema de Stokes, e vamos fazê-lo!!!
Figura 4.19: Exemplo 4.46: Cilindro e o plano.
O rotacional de F é rotF = (0, 0, 1 + 2y) e dentre as muitas superfícies com fronteira C, vamosescolher uma mais conveniente, que é a região elíptica S no plano y + z = 2 cuja fronteira é C.
Se orientarmos S para cima, então a orientação induzida em C será positiva. A projeção D de Ssobre o plano xy é o disco T : x2 + y2 ≤ 1 e, assim, fazendo z = 2 − y, temos
S :
x = uy = vz = 2 − v
, (u, v) ∈ T : u2 + v26 1 .
Obtemos assim o vetor normal à superfície
n =
∣
∣
∣
∣
∣
∣
~i ~j ~k1 0 00 1 −1
∣
∣
∣
∣
∣
∣
= (0, 1, 1)
Portanto,rotF.n = 1 + 2y.
Finalmente,∫
CF.dr =
∫∫
Srot F.ndS
=∫∫
D(1 + 2y)dA
=∫ 2π
0
∫ 1
0(1 + 2rsenθ)rdrdθ
=∫ 2π
0
[
r2
2+ 2
r3
3senθ
]1
0dθ
=∫ 2π
0
(
12
+23
senθ
)
dθ =12
2π + 0 = π.

Exemplo 4.47. Usando o o Teorema de Stokes calcule a integral∫∫
Srot F . ndS,
onde F(x, y, z) = (yz, xz, xy) e S é a parte da esfera x2 + y2 + z2 = 4 que está dentro do cilindrox2 + y2 = 1 e acima do plano xy.
Solução:
Para determinar a curva fronteira C, resolvemos as equações
x2 + y2 + z2 = 4 e x2 + y2 = 1.
Delas obtemos z2 = 3 ou z =√
3, uma vez que z > 0.
Assim, C é o círculo dado pelas equações x2 + y2 = 1 e z =√
3 e consideremos a parametrizaçãopara C dada por
C(t) = (cost, sent,√
3), 0 ≤ t ≤ 2π.
O vetor tangente a C é C′(t) = (−sent, cost, 0).
Temos ainda queF(C(t)) = (
√3sent,
√3cost, cost sen t).
Portanto, pelo Teorema de Stokes, segue que∫∫
Srot F . ndS =
∫
CF.dC
=∫ 2π
0F (C(t)) . C′(t)dt
=∫ 2π
0
(
−√
3sen2t +√
3cos2t)
dt
=√
32π∫
0
cos2tdtdt = 0
Exercício 4.48.
1. Calcule∫∫
Srot F . ndS,
onde F(x, y, z) = (2z, 3x, 5y) e S é a porção do parabolóide
z = 4 − x2 − y2, z ≥ 0
e considerando o vetor normal unitário n acima da superfície.
Resp.: 12π.
2. Determine o trabalho realizado por F(x, y, z) = (y2, z2, x2) para deslocar uma partícula aolongo do contorno da parte do plano x + y + z = 2, no 1º octante, no sentido anti-horário,olhando de cima.
Resp.: −8.
3. Determinar o momento de inércia em relação ao eixo z dado por
Iz =∫∫∫
D
(
x2 + y2)
dV,
de uma distribuição de massa homogênea em uma região D do espaço, sendo
(a) o cubo 0 6 x 6 a, 0 6 y 6 a e 0 6 z 6 a.Resp.: 2a5/3

(b) o cone x2 + y2 6 a2, 0 6 z 6 h.Resp.: πh5/10
4. Utilizando o Teorema da Divergência, mostre que o volume de uma região D limitada por umasuperfície S, é
∫∫
Sxdydz =
∫∫
Sydzdx =
∫∫
Szdxdy =
13
∫∫
Sxdydz + ydzdx + zdxdy.
Referências Bibliográficas
[1] Ávila, G. S. S. Cálculo 3 – Funções de Várias Variáveis. 5ª Ed.. LTC 2005.
[2] Anton, H. Cálculo – um novo horizonte. 6ª edição. Bookman 2000, Volume 2.
[3] CAMARGO, M. A. e MEDRADO, J. C. R. Fundamentos de Matemática, in: Curso delicenciatura em física/Universidade Católica de Goiás, Universidade Estadual deGoiás, Universidade Federal de Goiás – Goiânia: UCG/UEG/UFG, Consórcio Seten-trional: educação a distância, 2007.
[4] CAMARGO, M. A. e MEDRADO, J. C. R., Cálculo I, in: Curso de licenciatura em fí-sica/Universidade Católica de Goiás, Universidade Estadual de Goiás, UniversidadeFederal de Goiás, Goiânia: UCG/UEG/UFG Consórcio Setentrional: educação a dis-tância, 2008.
[5] FLEMING, D. M. e GONÇALVES, M. B. Cálculo A Makron, 1992.
[6] GUIDORIZZI, H. L. Um Curso de Cálculo 5ª Ed. LTC 2002, Volumes 2 e 3.
[7] HUGLES-HALLETT, D. et al Cálculo Aplicado LTC 2005.
[8] LEITHOLD, L. O Cálculo com Geometria Analítica Harbra 1994 Volume 1.
[9] MACHADO, A. S. Matemática: Funções e Derivadas Atual 1988, Coleção Temas e Metas,Volume 6.
[10] REIS, G. L. e SILVA, V. V. Geometria Analítica LTC 2007.
[11] PINTO, D. e MORGADO, M. C. F. Cálculo Integral – Funções de Duas e Três Variáveis.Rio de Janeiro: UFRJ 1989, Estudos e Comunicações.
[12] RESNICK, R. e HALLIDAY, D. Física 1 Livros Técnicos e Científicos Editora, 1983.
[13] STEWART, J. Cálculo 5a edição. Thompson Learnig 2007, volume II,.
[14] SWOKOWSKI, E.W. Cálculo com Geometria Analítica 2ª edição. Makron 2004, Volume 2.
[15] THOMAS, G. B., Cálculo Pearson Education do Brasil 2002, Volume 1.
[16] ROGÉRIO, M. U. et al, Cálculo Diferencial e Integral - funções de uma variável, Goiânia:CEGRAF, ufg, 1992 (Coleção didática n. 9).
152
Índice Remissivo
Área de superfície, 126
Cálculo de massa de um fio, 131Centro de massa, 124Curva no plano
Aceleração, 29Velocidade, 29
Distância no espaçoPonto e plano, 39Ponto e reta, 40Retas reversas, 40
divergente, 146
Função de três variáveisExtremo
Multiplicadores de Lagrange, 97Integração, 101
Aplicações, 123Definição, 102Dupla, 102Integrais de linha, 128, 132Integrais repetidas, 103Mudança de variáveis, 110, 111, 118Propriedades, 108Teorema de Green, 139Tripla, 114Volume, 102, 103
Função de Várias Variáveis, 56Continuidade, 67Curva de nível, 61Definição, 58Derivada, 68
Direcional, 83Direcional ⊥ Gradiente, 84Ordem superior, 71Parcial, 69
Diferenciabilidade, 74, 77Domínio, 58Extremo
Ponto de sela, 95Teste do Hessiano, 95
Extremo absoluto, 91Existência, 91
Extremo local, 90Gráfico, 59Imagem, 58Limite, 63
Propriedades, 66Plano tangente à superfície, 92Pontos críticos, 93
Regra da Cadeia, 77Versão 1, 77Versão 2, 81
Superfície de nível, 87Vetor Gradiente, 80
Função Vetorial, 26Continuidade, 27Curva no plano, 26Derivada, 28Integração, 30Limite, 26Operações, 28
Funções Vetoriais no espaçoAceleração, 53Comprimento de arco, 53Continuidade, 48Curvas no espaço, 47Derivabilidade, 48Integração, 51Limite, 48Operações, 49
hipociclóide, 143
Integral de superfície, 127
Lei de Ampere–Maxwell, 145Lei de Faraday, 145Lei de Gauss, 145Lei de Gauss para o magnetismo, 145
Marcando pontos no espaço, 33Momento de Inércia, 124Momento de massa, 124
PlanoEquação Cartesiana, 38Equações Paramétricas, 38Osculador, 54
Reta, 18Equação cartesiana, 22Equações paramétricas, 18
Retas no espaçoParamétricas, 37
rotacional, 146
Sólido homogêneo, 123Superfície, 40
Cilindro, 40Cilindro de Revolução, 46
153

Cone, 45de Revolução, 42Elipsóide, 43Hiperbolóide, 44Parabolóide, 44
Teorema da Divergência de Gauss, 146Teorema de Stokes, 148
Vetor no plano, 12ângulo entre, 23Aceleração, 29Definição, 12deslocamento, 11Operações, 12Paralelos, 15perpendicular, 21Produto escalar, 19Projeção ortogonal, 25Propriedades, 20unitário, 17Velocidade, 29
Vetores no espaço, 32Ângulo entre, 34Aceleração, 50Nulo, 34Operações, 33Perpendiculares, 34Produto Vetorial, 35
Área do paralelogramo, 36Propriedades, 35Torque, 36
Unitário, 34