
CAPÍTULO 2 FORMULAÇÃO MATEMÁTICA DA HIDRODINÂMICA E ... · 2.1 Processos físicos em zonas...
77
CAPÍTULO 2 FORMULAÇÃO MATEMÁTICA DA HIDRODINÂMICA E DO TRANSPORTE DE ESCALARES EM ZONAS COSTEIRAS
Transcript of CAPÍTULO 2 FORMULAÇÃO MATEMÁTICA DA HIDRODINÂMICA E ... · 2.1 Processos físicos em zonas...
CAPÍTULO 2
FORMULAÇÃO MATEMÁTICA DA HIDRODINÂMICA E DO
TRANSPORTE DE ESCALARES EM ZONAS COSTEIRAS

2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
13
CAPÍTULO 2
FORMULAÇÃO MATEMÁTICA DA HIDRODINÂMICA E DO TRANSPORTE
DE ESCALARES EM ZONAS COSTEIRAS
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais.
2.1.1 Considerações gerais
Os oceanos desempenham um papel fundamental na regulação do clima do globo.
Ocupando aproximadamente 70% da sua superfície total, apresentam-se como uma das
principais vias de transportes comerciais no mundo (cerca de 70% dos transportes
comerciais são realizados por via marítima). Cerca de 70% da população mundial vive
em regiões litorais sendo ainda nestas regiões que se exploram a maior parte dos
recursos marinhos utilizados pelo homem.
Apesar das regiões costeiras apresentarem extensões relativamente pequenas quando
comparadas com as áreas terrestres, as informações relativas às suas alterações não
foram devidamente registadas no passado. Prevaleceu sempre o conceito de que a linha
de costa apresenta uma variabilidade que justifica a necessidade de intervenções
antropogénicas. Associando-se a estas últimas, o carácter dinâmico dos processos
naturais que ocorrem nas zonas costeiras torna-se muitas vezes difícil identificar as
causas das alterações sofridas por estas regiões.
Nos pontos que se seguem apresentam-se, de forma sintética, conceitos básicos
(passíveis de maior aprofundamento na bibliografia citada), com o objectivo de facilitar
a leitura dos capítulos subsequentes por leitores menos familiarizados com os temas que
são objecto deste trabalho. Para a introdução destes conceitos relacionados com os
Capítulo 2
14
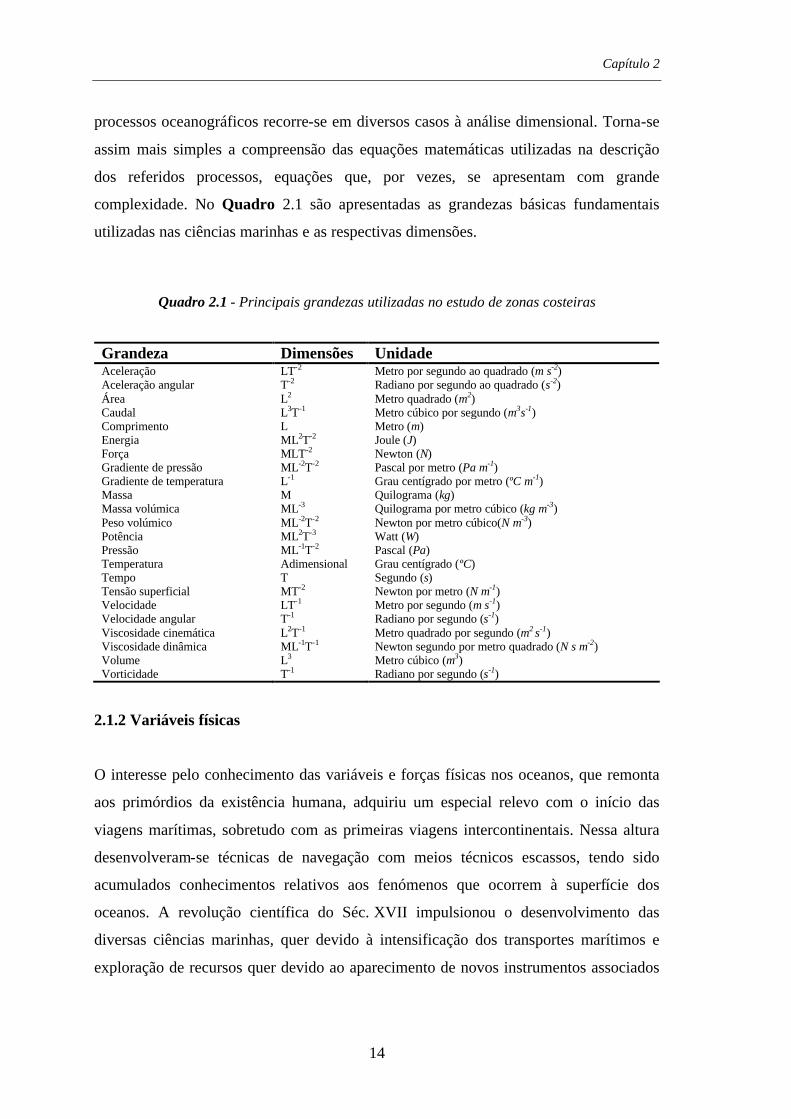
processos oceanográficos recorre-se em diversos casos à análise dimensional. Torna-se
assim mais simples a compreensão das equações matemáticas utilizadas na descrição
dos referidos processos, equações que, por vezes, se apresentam com grande
complexidade. No Quadro 2.1 são apresentadas as grandezas básicas fundamentais
utilizadas nas ciências marinhas e as respectivas dimensões.
Quadro 2.1 - Principais grandezas utilizadas no estudo de zonas costeiras
Grandeza Dimensões Unidade Aceleração LT-2 Metro por segundo ao quadrado (m s-2) Aceleração angular T-2 Radiano por segundo ao quadrado (s-2) Área L2 Metro quadrado (m2) Caudal L3T-1 Metro cúbico por segundo (m3s-1) Comprimento L Metro (m) Energia ML2T-2 Joule (J) Força MLT-2 Newton (N) Gradiente de pressão ML-2T-2 Pascal por metro (Pa m-1) Gradiente de temperatura L-1 Grau centígrado por metro (ºC m-1) Massa M Quilograma (kg) Massa volúmica ML-3 Quilograma por metro cúbico (kg m-3) Peso volúmico ML-2T-2 Newton por metro cúbico(N m-3) Potência ML2T-3 Watt (W) Pressão ML-1T-2 Pascal (Pa) Temperatura Adimensional Grau centígrado (ºC) Tempo T Segundo (s) Tensão superficial MT-2 Newton por metro (N m-1) Velocidade LT-1 Metro por segundo (m s-1) Velocidade angular T-1 Radiano por segundo (s-1) Viscosidade cinemática L2T-1 Metro quadrado por segundo (m2 s-1) Viscosidade dinâmica ML-1T-1 Newton segundo por metro quadrado (N s m-2) Volume L3 Metro cúbico (m3) Vorticidade T-1 Radiano por segundo (s-1)
2.1.2 Variáveis físicas
O interesse pelo conhecimento das variáveis e forças físicas nos oceanos, que remonta
aos primórdios da existência humana, adquiriu um especial relevo com o início das
viagens marítimas, sobretudo com as primeiras viagens intercontinentais. Nessa altura
desenvolveram-se técnicas de navegação com meios técnicos escassos, tendo sido
acumulados conhecimentos relativos aos fenómenos que ocorrem à superfície dos
oceanos. A revolução científica do Séc. XVII impulsionou o desenvolvimento das
diversas ciências marinhas, quer devido à intensificação dos transportes marítimos e
exploração de recursos quer devido ao aparecimento de novos instrumentos associados
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
15
à tecnologia marinha, que permitiram responder a diversas questões relacionadas com a
física dos oceanos (Fincham, 1984).
A primeira publicação sobre oceanografia física, abordando questões relativas a
temperatura, salinidade, correntes, sedimentos, flora e fauna no Mediterrâneo, foi
apresentada em 1725 por Marsigli. Uma das primeiras e mais importantes expedições
científicas, com o objectivo de investigar a química, a física e a biologia das zonas mais
profundas dos oceanos, ocorreu 150 anos depois da publicação dos trabalhos de
Marsigli. Esta expedição foi realizada a bordo do navio Challenger entre Dezembro de
1872 e Maio de 1876. A informação então recolhida permitiu a publicação de 50
volumes entre 1880 e 1895. Até aos nossos dias, multiplicaram-se as expedições
assistindo-se à sofisticação crescente dos meios de observação dos oceanos, sendo sem
dúvida, as observações contínuas efectuadas com o auxílio de satélites aquelas que têm
merecido maior atenção da comunidade científica.
2.1.2.1 Temperatura
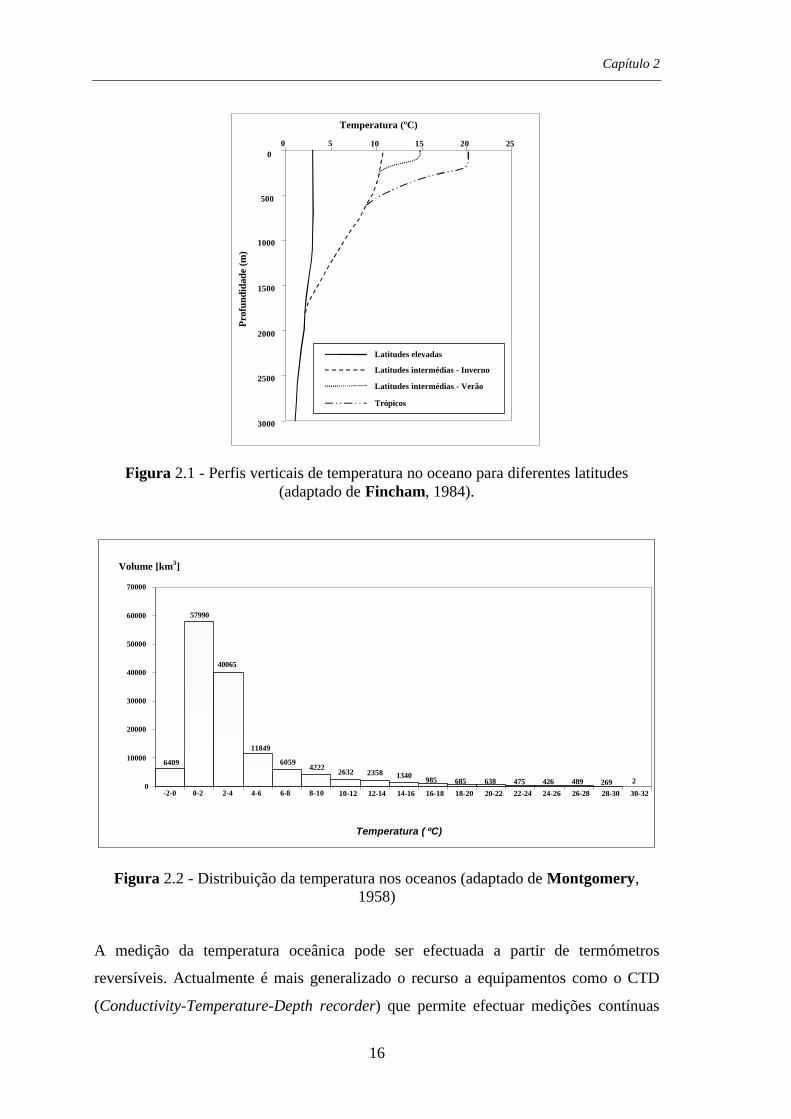
A variação da temperatura da água dos oceanos com a profundidade apresenta uma
certa regularidade permitindo afirmar que, de uma forma geral, a primeira decresce com
a segunda. Na Figura 2.1 apresentam-se perfis típicos de variação destas grandezas
para diferentes latitudes.
Um perfil típico de temperatura apresenta normalmente um trecho inicial (a partir da
superfície) que poderá atingir algumas dezenas de metros de profundidade e que é
normalmente designado por zona de mistura. Esta designação decorre do facto de a
camada correspondente se manter bem misturada devido à acção do vento, formando
assim uma zona de condições isotérmicas. Abaixo desta camada existe uma região com
variação rápida de temperatura que se designa habitualmente por termoclina. A maiores
profundidades, a variação da temperatura é muito lenta, podendo considerar-se que,
nestas zonas, o oceano apresenta novamente condições quase isotérmicas.
Aproximadamente 75% da água do oceano apresenta uma temperatura que varia entre 0
e 4 ºC conforme se poderá calcular a partir dos dados da Figura 2.2.
Capítulo 2
16
0 5 10 15 20 250
500
1000
1500
2000
2500
3000
Temperatura (ºC)
Prof
undi
dade
(m)
Latitudes elevadas
Latitudes intermédias - Inverno
Latitudes intermédias - Verão
Trópicos
Figura 2.1 - Perfis verticais de temperatura no oceano para diferentes latitudes (adaptado de Fincham, 1984).
6409
57990
40065
11849
60594222
2632 2358 1340 985 685 638 475 426 489 269 20
10000
20000
30000
40000
50000
60000
70000
-2-0 0-2 2-4 4-6 6-8 8-10 10-12 12-14 14-16 16-18 18-20 20-22 22-24 24-26 26-28 28-30 30-32
Temperatura ( ºC)
Volume [km3]
Figura 2.2 - Distribuição da temperatura nos oceanos (adaptado de Montgomery, 1958)
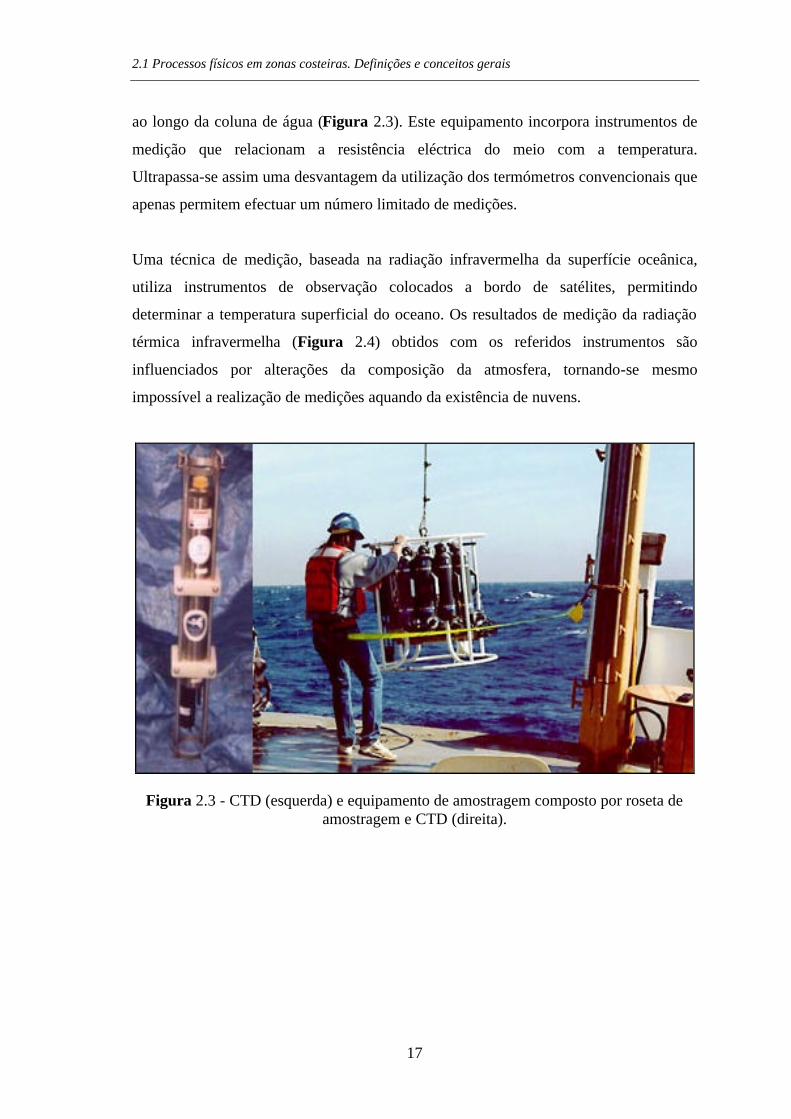
A medição da temperatura oceânica pode ser efectuada a partir de termómetros
reversíveis. Actualmente é mais generalizado o recurso a equipamentos como o CTD
(Conductivity-Temperature-Depth recorder) que permite efectuar medições contínuas
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
17
ao longo da coluna de água (Figura 2.3). Este equipamento incorpora instrumentos de
medição que relacionam a resistência eléctrica do meio com a temperatura.
Ultrapassa-se assim uma desvantagem da utilização dos termómetros convencionais que
apenas permitem efectuar um número limitado de medições.
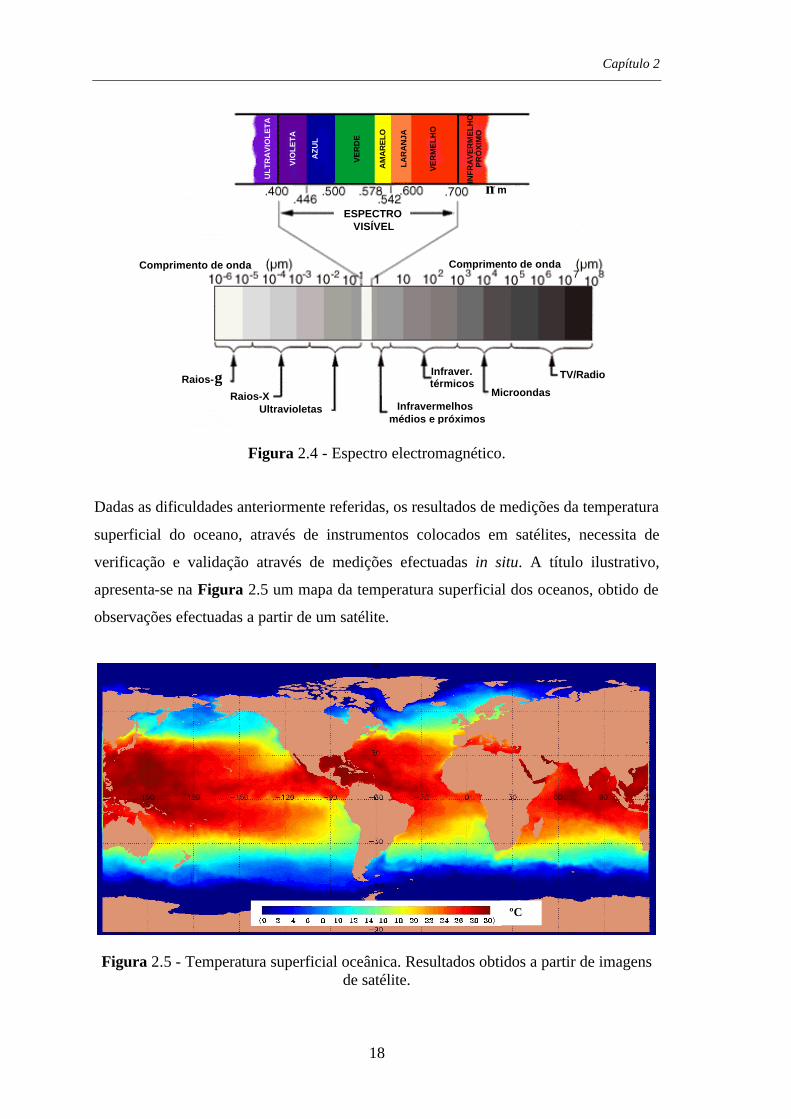
Uma técnica de medição, baseada na radiação infravermelha da superfície oceânica,
utiliza instrumentos de observação colocados a bordo de satélites, permitindo
determinar a temperatura superficial do oceano. Os resultados de medição da radiação
térmica infravermelha (Figura 2.4) obtidos com os referidos instrumentos são
influenciados por alterações da composição da atmosfera, tornando-se mesmo
impossível a realização de medições aquando da existência de nuvens.
Figura 2.3 - CTD (esquerda) e equipamento de amostragem composto por roseta de amostragem e CTD (direita).
Capítulo 2
18
Comprimento de onda Comprimento de onda
Raios-γ
Ultravioletas InfravermelhosMicroondas
TV/Radio
Raios-X
médios e próximos
Infraver.térmicos
ESPECTROVISÍVEL
µ m
UL
TR
AV
IOL
ET
A
VIO
LE
TA
AZ
UL
VE
RD
E
AM
AR
ELO
LA
RA
NJA
VE
RM
EL
HO
INF
RA
VE
RM
EL
HO
PR
ÓX
IMO
Figura 2.4 - Espectro electromagnético.
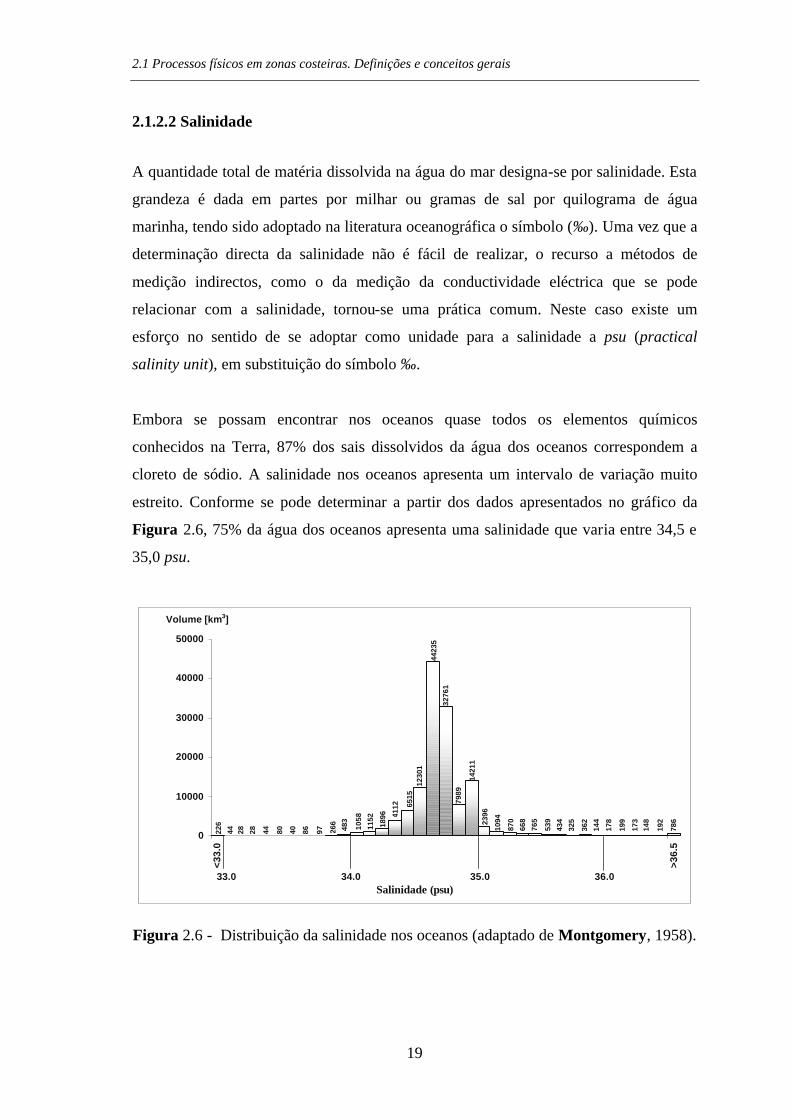
Dadas as dificuldades anteriormente referidas, os resultados de medições da temperatura
superficial do oceano, através de instrumentos colocados em satélites, necessita de
verificação e validação através de medições efectuadas in situ. A título ilustrativo,
apresenta-se na Figura 2.5 um mapa da temperatura superficial dos oceanos, obtido de
observações efectuadas a partir de um satélite.
ºC
Figura 2.5 - Temperatura superficial oceânica. Resultados obtidos a partir de imagens de satélite.
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
19
2.1.2.2 Salinidade
A quantidade total de matéria dissolvida na água do mar designa-se por salinidade. Esta
grandeza é dada em partes por milhar ou gramas de sal por quilograma de água
marinha, tendo sido adoptado na literatura oceanográfica o símbolo (‰). Uma vez que a
determinação directa da salinidade não é fácil de realizar, o recurso a métodos de
medição indirectos, como o da medição da conductividade eléctrica que se pode
relacionar com a salinidade, tornou-se uma prática comum. Neste caso existe um
esforço no sentido de se adoptar como unidade para a salinidade a psu (practical
salinity unit), em substituição do símbolo ‰.
Embora se possam encontrar nos oceanos quase todos os elementos químicos
conhecidos na Terra, 87% dos sais dissolvidos da água dos oceanos correspondem a
cloreto de sódio. A salinidade nos oceanos apresenta um intervalo de variação muito
estreito. Conforme se pode determinar a partir dos dados apresentados no gráfico da
Figura 2.6, 75% da água dos oceanos apresenta uma salinidade que varia entre 34,5 e
35,0 psu.
0
10000
20000
30000
40000
50000
<33.
0
>36.
5
Salinidade (psu)33.0 34.0 35.0 36.0
226
44 28 28 44 80 40 86 97 266
483
1058
1152
1896 41
12 6515
1230
1
4423
5
3276
1
7989
1421
1
2396
1094
870
668
765
539
434
325
362
144
178
199
173
148
192
786
Volume [km3]
Figura 2.6 - Distribuição da salinidade nos oceanos (adaptado de Montgomery, 1958).
Capítulo 2
20
Os valores mais elevados de salinidade ocorrem em bacias oceânicas fechadas (como é
o caso do Mar Vermelho), onde o valor da evaporação é muito elevado. Os valores mais
reduzidos encontram-se nas proximidades de desembocaduras de rios de grande caudal
junto da zona costeira.
Até aos anos 60 quase todas as quantificações da salinidade eram feitas com base em
técnicas de medição essencialmente químicas. A partir daquela data, as observações de
salinidade passaram a ser efectuadas através de instrumentos de medição (Figura 2.3)
da conductividade eléctrica. Saliente-se, no entanto, que as técnicas utilizadas não
conduzem a valores da salinidade reais, o que levanta algumas dificuldades na
uniformização de resultados. Presentemente, a norma aceite internacionalmente consiste
em relacionar a conductividade da água marinha com a conductividade de uma solução
padrão de cloreto de potássio, com uma concentração de 35‰ (medição efectuada
através de técnicas químicas).
2.1.2.3 Massa volúmica
A massa volúmica da água marinha depende da temperatura, da salinidade e da pressão
a que se encontra. A massa volúmica aumenta com a diminuição da temperatura e com
o aumento da salinidade e da pressão. A pressão hidrostática aumenta cerca de 105 Pa
em cada 10 metros de profundidade. A água comprimida a uma profundidade de
4000 m, em condições de igual temperatura e salinidade, apresenta uma massa volúmica
de cerca de 1046 kg m-3 enquanto que, à superfície, o valor da massa volúmica seria de
1028 kg m-3. As pequenas diferenças de massa volúmica observadas (poderemos
classificar os oceanos como um fluido estratificado), apresentam uma importância
significativa em alguns dos processos que ocorrem nos oceanos.
Para a determinação da massa volúmica recorre-se normalmente a expressões analíticas
(equações de estado) que relacionam esta grandeza com a temperatura, a salinidade e a
pressão.
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
21
2.1.3 Circulação oceânica
As correntes oceânicas podem agrupar-se, de acordo com a fonte de energia que está na
sua origem, em correntes induzidas pelo vento, correntes termohalinas e correntes de
maré. As primeiras, tal como a sua designação indica têm origem na acção do vento,
enquanto que as segundas têm como principal fonte de energia o Sol. Todavia, sendo o
Sol a principal fonte de energia no processo de formação dos ventos atmosféricos, pode
afirmar-se que o Sol é a principal fonte de energia na formação das correntes oceânicas
induzidas pelo vento e nas correntes termohalinas. As correntes de maré são induzidas
pelas forças gravíticas astronómicas (incluindo o Sol), desempenhando a Lua uma acção
preponderante.
2.1.3.1 Correntes induzidas pelo vento
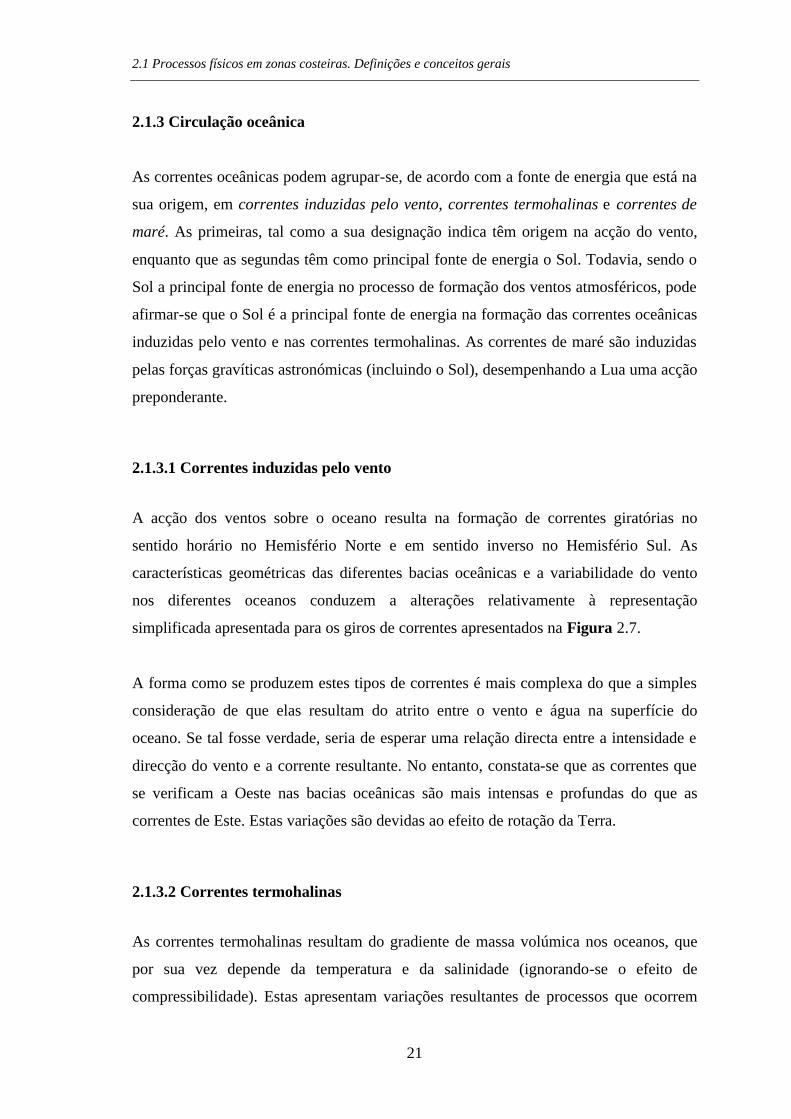
A acção dos ventos sobre o oceano resulta na formação de correntes giratórias no
sentido horário no Hemisfério Norte e em sentido inverso no Hemisfério Sul. As
características geométricas das diferentes bacias oceânicas e a variabilidade do vento
nos diferentes oceanos conduzem a alterações relativamente à representação
simplificada apresentada para os giros de correntes apresentados na Figura 2.7.
A forma como se produzem estes tipos de correntes é mais complexa do que a simples
consideração de que elas resultam do atrito entre o vento e água na superfície do
oceano. Se tal fosse verdade, seria de esperar uma relação directa entre a intensidade e
direcção do vento e a corrente resultante. No entanto, constata-se que as correntes que
se verificam a Oeste nas bacias oceânicas são mais intensas e profundas do que as
correntes de Este. Estas variações são devidas ao efeito de rotação da Terra.
2.1.3.2 Correntes termohalinas
As correntes termohalinas resultam do gradiente de massa volúmica nos oceanos, que
por sua vez depende da temperatura e da salinidade (ignorando-se o efeito de
compressibilidade). Estas apresentam variações resultantes de processos que ocorrem
Capítulo 2
22
nas camadas superficiais, e que resultam de interacções água-ar, tais como aquecimento
solar, evaporação e diluição devida à ocorrência de precipitação.
50º N
50º S
25º
0º
25º
VENTOSCORRENTESLATITUDE
Figura 2.7 - Correntes oceânicas induzidas pelo vento. O vento aplica momentos no sentido horário no Hemisfério Norte e no sentido anti-horário no Hemisfério Sul, que
induzem dois giros de correntes.
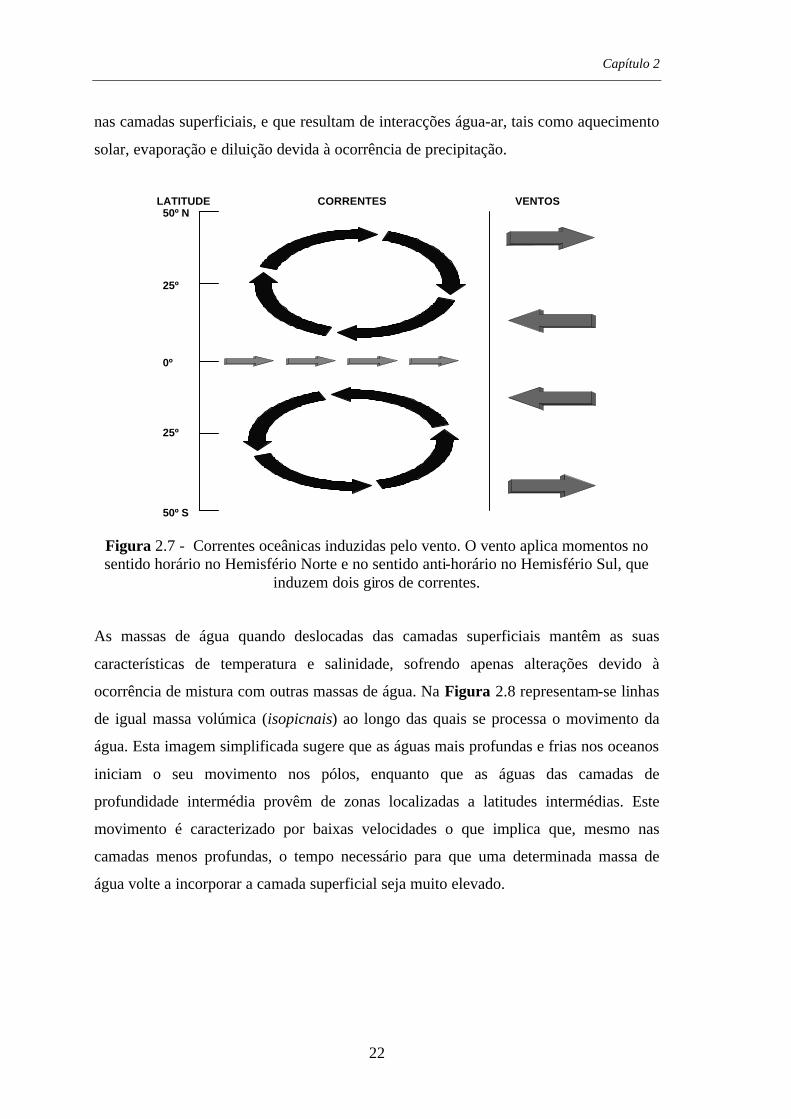
As massas de água quando deslocadas das camadas superficiais mantêm as suas
características de temperatura e salinidade, sofrendo apenas alterações devido à
ocorrência de mistura com outras massas de água. Na Figura 2.8 representam-se linhas
de igual massa volúmica (isopicnais) ao longo das quais se processa o movimento da
água. Esta imagem simplificada sugere que as águas mais profundas e frias nos oceanos
iniciam o seu movimento nos pólos, enquanto que as águas das camadas de
profundidade intermédia provêm de zonas localizadas a latitudes intermédias. Este
movimento é caracterizado por baixas velocidades o que implica que, mesmo nas
camadas menos profundas, o tempo necessário para que uma determinada massa de
água volte a incorporar a camada superficial seja muito elevado.
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
23
Água superficial fria(maior densidade)
Água superficial fria(maior densidade)
Água superficial fria(maior densidade)
Água superficial quente(menor densidade)
ρ1
ρ2
ρ3
ρ4
Figura 2.8 - Correntes termohalinas. As características de temperatura e salinidade da água marinha são determinadas à superfície. O movimento das massas de água ocorre
segundo linhas de igual densidade.
2.1.3.3 Ondas
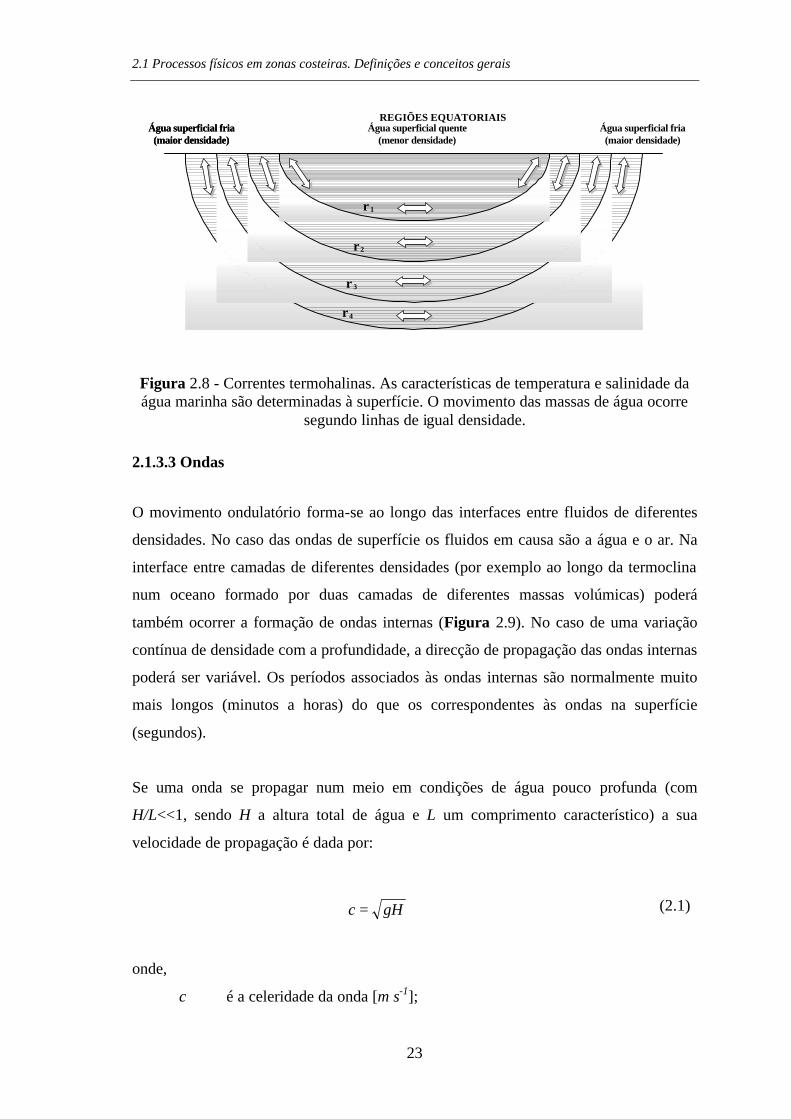
O movimento ondulatório forma-se ao longo das interfaces entre fluidos de diferentes
densidades. No caso das ondas de superfície os fluidos em causa são a água e o ar. Na
interface entre camadas de diferentes densidades (por exemplo ao longo da termoclina
num oceano formado por duas camadas de diferentes massas volúmicas) poderá
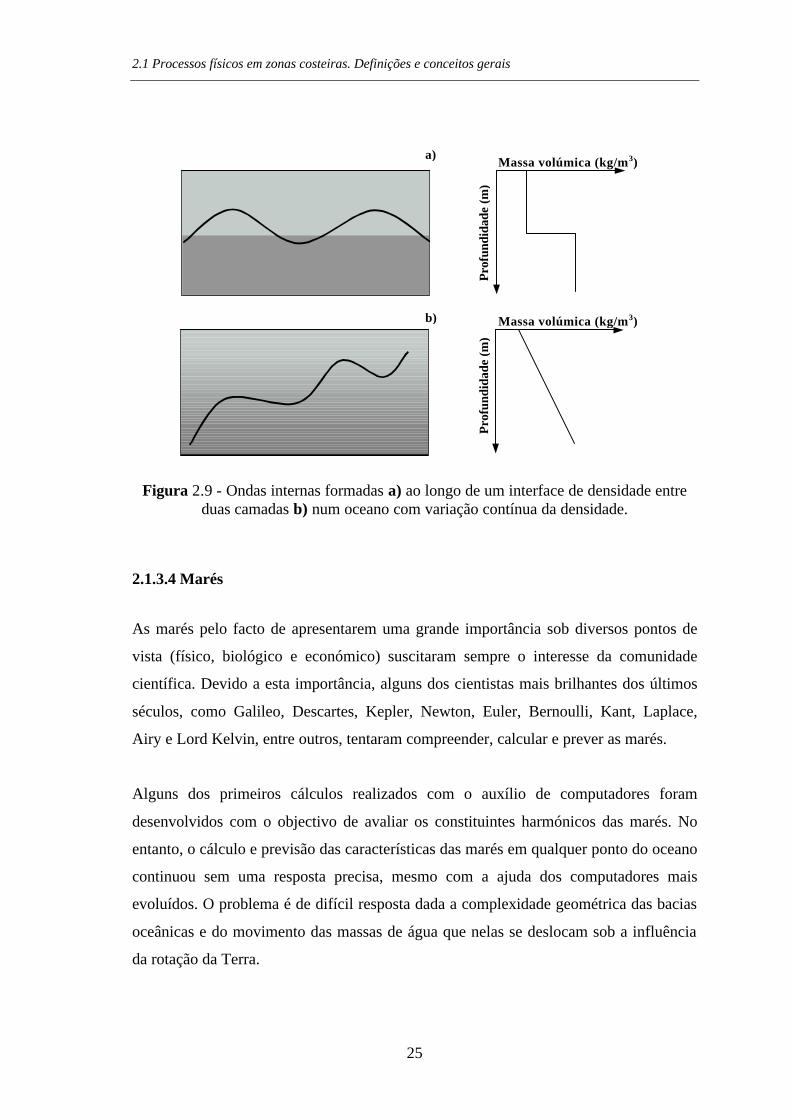
também ocorrer a formação de ondas internas (Figura 2.9). No caso de uma variação
contínua de densidade com a profundidade, a direcção de propagação das ondas internas
poderá ser variável. Os períodos associados às ondas internas são normalmente muito
mais longos (minutos a horas) do que os correspondentes às ondas na superfície
(segundos).
Se uma onda se propagar num meio em condições de água pouco profunda (com
H/L<<1, sendo H a altura total de água e L um comprimento característico) a sua
velocidade de propagação é dada por:
gHc = (2.1)
onde,
c é a celeridade da onda [m s-1];
REGIÕES EQUATORIAIS
Capítulo 2
24
g é a aceleração da gravidade [m2 s-1];
H é a altura de água total [m].
sendo, por conseguinte, a velocidade de propagação das marés, quando estas se
propagam ao longo da plataforma continental.
Se existir uma variação de massa volúmica com a profundidade, então o fenómeno
torna-se mais complexo. Neste caso, considerando-se um meio formado por duas
camadas, a aceleração da gravidade g é substituída pela aceleração da gravidade
reduzida g' definida pela relação:
gg1
12,
ρρρ −
= (2.2)
onde,
1ρ é a massa volúmica da camada superior [kg m-3];
2ρ é a massa volúmica da camada inferior [kg m-3].
Considerando-se a altura da camada superior H1, em vez da profundidade total, a
velocidade de propagação de uma onda será dada por:
1,' Hgc = (2.3)
Uma vez que os valores de g' são cerca de g/500 (para gradientes de massas volúmicas
habituais nos oceanos) e H1 é menor do que H/2, a velocidade de propagação desta onda
de grande comprimento em meio estratificado é muito menor do que a celeridade
correspondente à propagação em meio homogéneo.
Para valores da celeridade da ordem de 20 m s-1, em meio homogéneo, têm-se valores
correspondentes a cerca de 0.5 m s-1 para a celeridade em meio estratificado. Estas
velocidades, embora baixas, são importantes na dinâmica de ondas internas, as quais
desempenham um papel muito importante em diversas bacias oceânicas.
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
25
Massa volúmica (kg/m3)
Prof
undi
dade
(m)
a)
b) Massa volúmica (kg/m3)
Prof
undi
dade
(m)
Figura 2.9 - Ondas internas formadas a) ao longo de um interface de densidade entre duas camadas b) num oceano com variação contínua da densidade.
2.1.3.4 Marés
As marés pelo facto de apresentarem uma grande importância sob diversos pontos de
vista (físico, biológico e económico) suscitaram sempre o interesse da comunidade
científica. Devido a esta importância, alguns dos cientistas mais brilhantes dos últimos
séculos, como Galileo, Descartes, Kepler, Newton, Euler, Bernoulli, Kant, Laplace,
Airy e Lord Kelvin, entre outros, tentaram compreender, calcular e prever as marés.
Alguns dos primeiros cálculos realizados com o auxílio de computadores foram
desenvolvidos com o objectivo de avaliar os constituintes harmónicos das marés. No
entanto, o cálculo e previsão das características das marés em qualquer ponto do oceano
continuou sem uma resposta precisa, mesmo com a ajuda dos computadores mais
evoluídos. O problema é de difícil resposta dada a complexidade geométrica das bacias
oceânicas e do movimento das massas de água que nelas se deslocam sob a influência
da rotação da Terra.
Capítulo 2
26
No passado, os estudos mais precisos sobre marés restringiram-se a estações pontuais
localizadas próximas da linha de costa. Estes estudos, baseados na observação local e na
teoria das marés, permitiram a previsão da maré para esses locais, para períodos de
tempo significativos. A extrapolação destas previsões para pontos afastados dos pontos
iniciais não permite obter resultados com a mesma precisão dos valores correspondentes
aos dos pontos de observação.
Em termos absolutos todos os astros e em particular os do nosso sistema solar, exercem
a sua influência sobre as águas do mar. No entanto é à Lua e ao Sol que se deve a maior
contribuição, sendo lícito e usual desprezar a contribuição dos restantes. As marés
resultam fundamentalmente da acção das forças astronómicas devidas à atracção
gravitacional entre a Terra e a Lua e, de forma menos intensa, entre a Terra e o Sol.
Estas forças actuam sobre as massas de água à superfície terrestre (a Lua exerce uma
força de atracção sobre as águas do Atlântico que provoca uma elevação de cerca de
meio metro em relação ao seu nível médio, quer quando se encontra sobre ele quer
quando se encontra na posição oposta). Esta maré relativamente fraca e a equivalente
depressão (quando a Lua ocupa posições coincidentes com o horizonte), origina a
propagação de uma onda que acompanha o movimento de rotação da Terra.
Na análise que se segue admitem-se as seguintes hipóteses simplificativas: os astros são
considerados esféricos e as órbitas são circulares; a litosfera não é indeformável sob a
acção das forças de maré; a referida litosfera, é coberta por uma camada de água de
altura uniforme e de espessura considerável mas pequena relativamente ao raio da
Terra; a água desta camada é dotada de inércia e viscosidade desprezáveis, não havendo
que considerar atrito interno, atrito com a litosfera ou atrito com a atmosfera. O estudo
do sistema global constituido pela Terra e restantes astros, é conseguido à custa da
sobreposição dos sistemas isolados constituidos pela Terra e cada um daqueles astros.
Considere-se então o sistema Terra – Lua no espaço, admitindo-se que estes dois astros
estão unicamente sujeitos à sua interacção. Da Lei de Atracção Gravitacional conclui-se
que entre estes se irá desenvolver uma força de atracção cujo módulo (Ftl) é dado por:

2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
27
2tllttl dmGmF = (2.4)
em que,
G é a constante de atracção gravitacional universal (6,67x10-11 kg-1 m3 s-2);
mt é massa da Terra (5,97 x 1024 kg);
ml é massa da Lua (7,35 x 1022 kg);
dtl é a distância média entre o centro da Terra e o centro da Lua (38,44x107 m).
A Terra e a Lua poderão, a esta escala, ser assemelhados a pontos materiais, tal como se
representa no esquema apresentado na Figura 2.10.
mt ml1
2 3
1
23
CM
Figura 2.10 – Representação esquemática do sistema Terra – Lua (adaptado de Pugh, 1987)
A posição do centro massa (CM) do sistema em relação ao centro da Terra (dtc), para os
valores das massas e distância entre a Terra e a Lua apresentados anteriormente é de
46,75 x 105 m.
O período de rotação deste sistema, denominado período sideral (Tsd), pode ser
calculado de forma aproximada igualando-se a força centrípeta do sistema Terra – Lua,
Fct, à força de atracção, Ftl, obtendo-se de acordo com os valores apresentados
anteriormente, Tsd ≅ 27,3 dias.
Capítulo 2
28
A Terra e a Lua possuem um movimento de rotação em torno do seu próprio eixo, face
a um referencial absoluto. No entanto, considera-se a seguir que os dois astros não
possuem rotação sobre si mesmos. A influência desta rotação na geração das marés será
introduzida posteriormente.
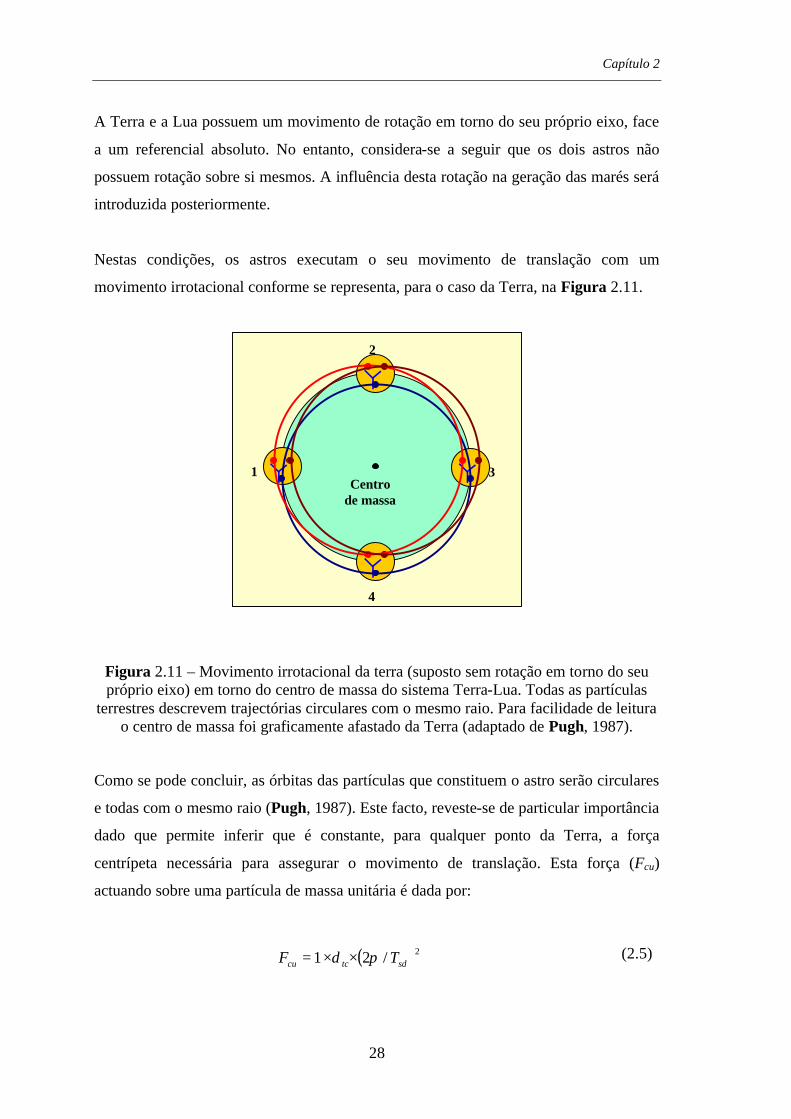
Nestas condições, os astros executam o seu movimento de translação com um
movimento irrotacional conforme se representa, para o caso da Terra, na Figura 2.11.
3Centro
de massa
1
2
4
Figura 2.11 – Movimento irrotacional da terra (suposto sem rotação em torno do seu próprio eixo) em torno do centro de massa do sistema Terra-Lua. Todas as partículas
terrestres descrevem trajectórias circulares com o mesmo raio. Para facilidade de leitura o centro de massa foi graficamente afastado da Terra (adaptado de Pugh, 1987).
Como se pode concluir, as órbitas das partículas que constituem o astro serão circulares
e todas com o mesmo raio (Pugh, 1987). Este facto, reveste-se de particular importância
dado que permite inferir que é constante, para qualquer ponto da Terra, a força
centrípeta necessária para assegurar o movimento de translação. Esta força (Fcu)
actuando sobre uma partícula de massa unitária é dada por:
( )2/21 sdtccu TdF π××= (2.5)
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
29
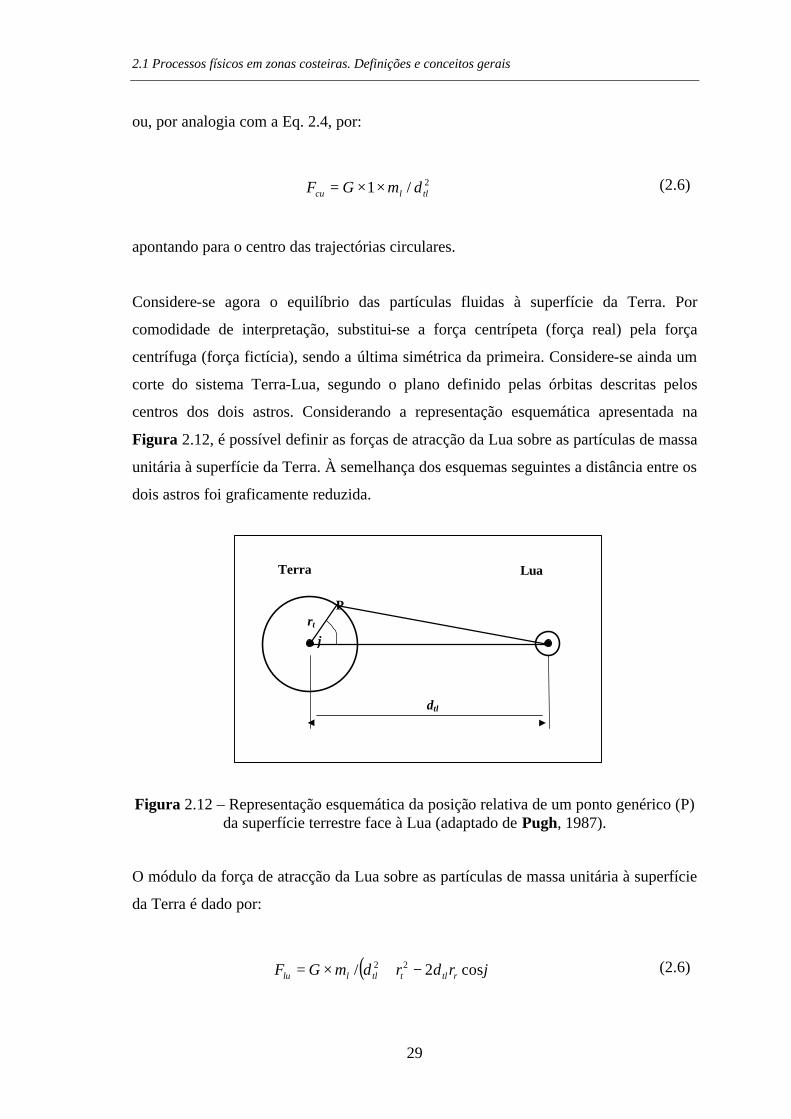
ou, por analogia com a Eq. 2.4, por:
2/1 tllcu dmGF ××= (2.6)
apontando para o centro das trajectórias circulares.
Considere-se agora o equilíbrio das partículas fluidas à superfície da Terra. Por
comodidade de interpretação, substitui-se a força centrípeta (força real) pela força
centrífuga (força fictícia), sendo a última simétrica da primeira. Considere-se ainda um
corte do sistema Terra-Lua, segundo o plano definido pelas órbitas descritas pelos
centros dos dois astros. Considerando a representação esquemática apresentada na
Figura 2.12, é possível definir as forças de atracção da Lua sobre as partículas de massa
unitária à superfície da Terra. À semelhança dos esquemas seguintes a distância entre os
dois astros foi graficamente reduzida.
LuaTerra
rt
dtl
P
ϕ
Figura 2.12 – Representação esquemática da posição relativa de um ponto genérico (P) da superfície terrestre face à Lua (adaptado de Pugh, 1987).
O módulo da força de atracção da Lua sobre as partículas de massa unitária à superfície
da Terra é dado por:
( )ϕcos2/ 22rtlttlllu rdrdmGF −+×= (2.6)
Capítulo 2
30
em que,
rt é o raio equatorial da Terra (63,78 x 105 m).
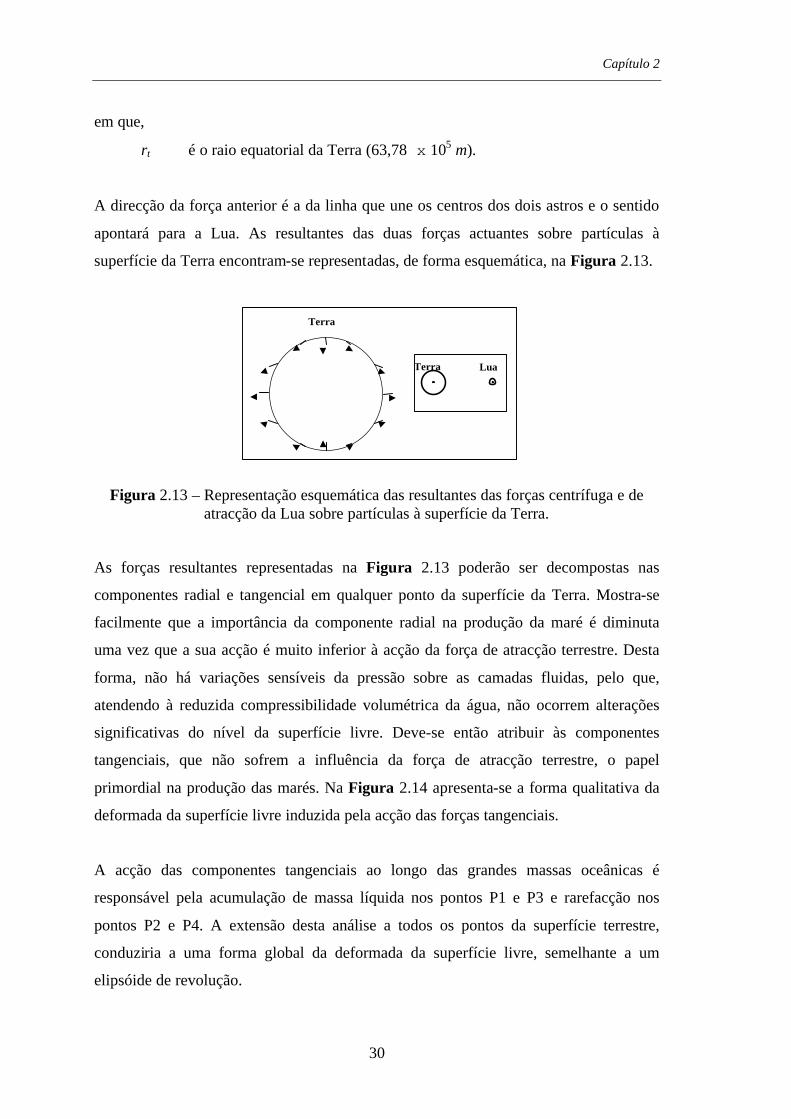
A direcção da força anterior é a da linha que une os centros dos dois astros e o sentido
apontará para a Lua. As resultantes das duas forças actuantes sobre partículas à
superfície da Terra encontram-se representadas, de forma esquemática, na Figura 2.13.
Terra
Terra Lua
Figura 2.13 – Representação esquemática das resultantes das forças centrífuga e de atracção da Lua sobre partículas à superfície da Terra.
As forças resultantes representadas na Figura 2.13 poderão ser decompostas nas
componentes radial e tangencial em qualquer ponto da superfície da Terra. Mostra-se
facilmente que a importância da componente radial na produção da maré é diminuta
uma vez que a sua acção é muito inferior à acção da força de atracção terrestre. Desta
forma, não há variações sensíveis da pressão sobre as camadas fluidas, pelo que,
atendendo à reduzida compressibilidade volumétrica da água, não ocorrem alterações
significativas do nível da superfície livre. Deve-se então atribuir às componentes
tangenciais, que não sofrem a influência da força de atracção terrestre, o papel
primordial na produção das marés. Na Figura 2.14 apresenta-se a forma qualitativa da
deformada da superfície livre induzida pela acção das forças tangenciais.
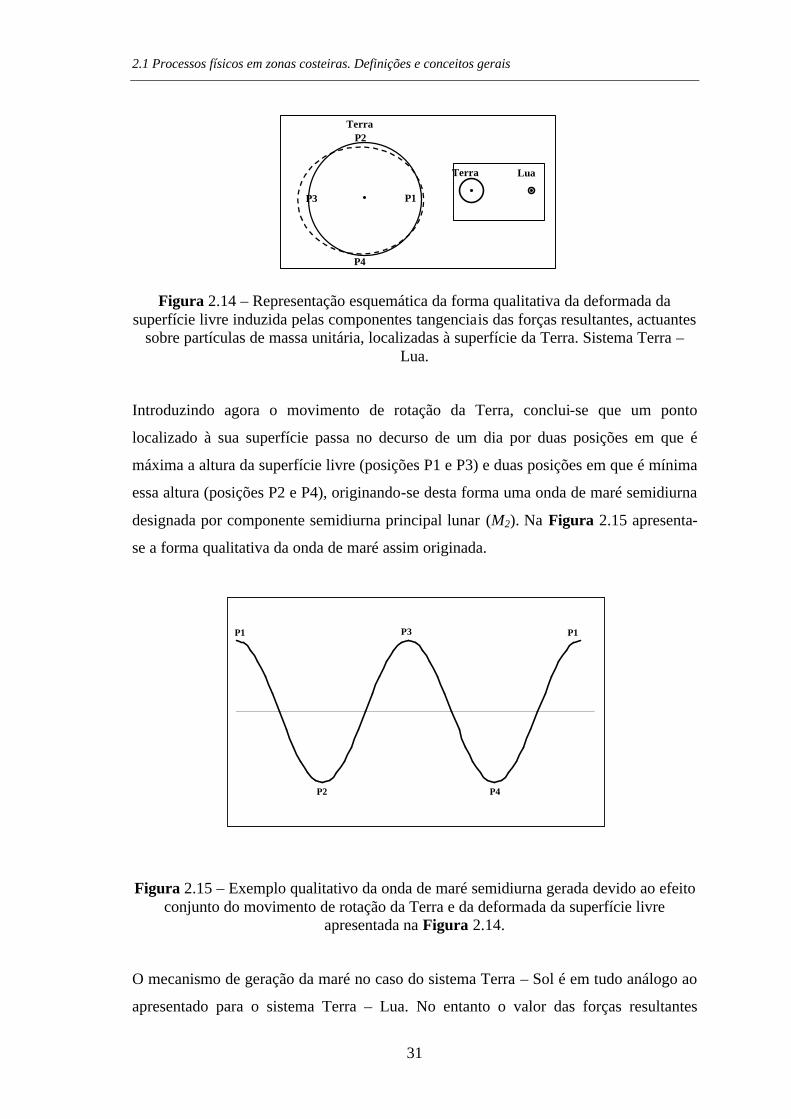
A acção das componentes tangenciais ao longo das grandes massas oceânicas é
responsável pela acumulação de massa líquida nos pontos P1 e P3 e rarefacção nos
pontos P2 e P4. A extensão desta análise a todos os pontos da superfície terrestre,
conduziria a uma forma global da deformada da superfície livre, semelhante a um
elipsóide de revolução.
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
31
Terra
Terra Lua
P4
P3
P2
P1
Figura 2.14 – Representação esquemática da forma qualitativa da deformada da superfície livre induzida pelas componentes tangenciais das forças resultantes, actuantes
sobre partículas de massa unitária, localizadas à superfície da Terra. Sistema Terra –Lua.
Introduzindo agora o movimento de rotação da Terra, conclui-se que um ponto
localizado à sua superfície passa no decurso de um dia por duas posições em que é
máxima a altura da superfície livre (posições P1 e P3) e duas posições em que é mínima
essa altura (posições P2 e P4), originando-se desta forma uma onda de maré semidiurna
designada por componente semidiurna principal lunar (M2). Na Figura 2.15 apresenta-
se a forma qualitativa da onda de maré assim originada.
0
P4
P3
P2
P1 P1
Figura 2.15 – Exemplo qualitativo da onda de maré semidiurna gerada devido ao efeito conjunto do movimento de rotação da Terra e da deformada da superfície livre
apresentada na Figura 2.14.
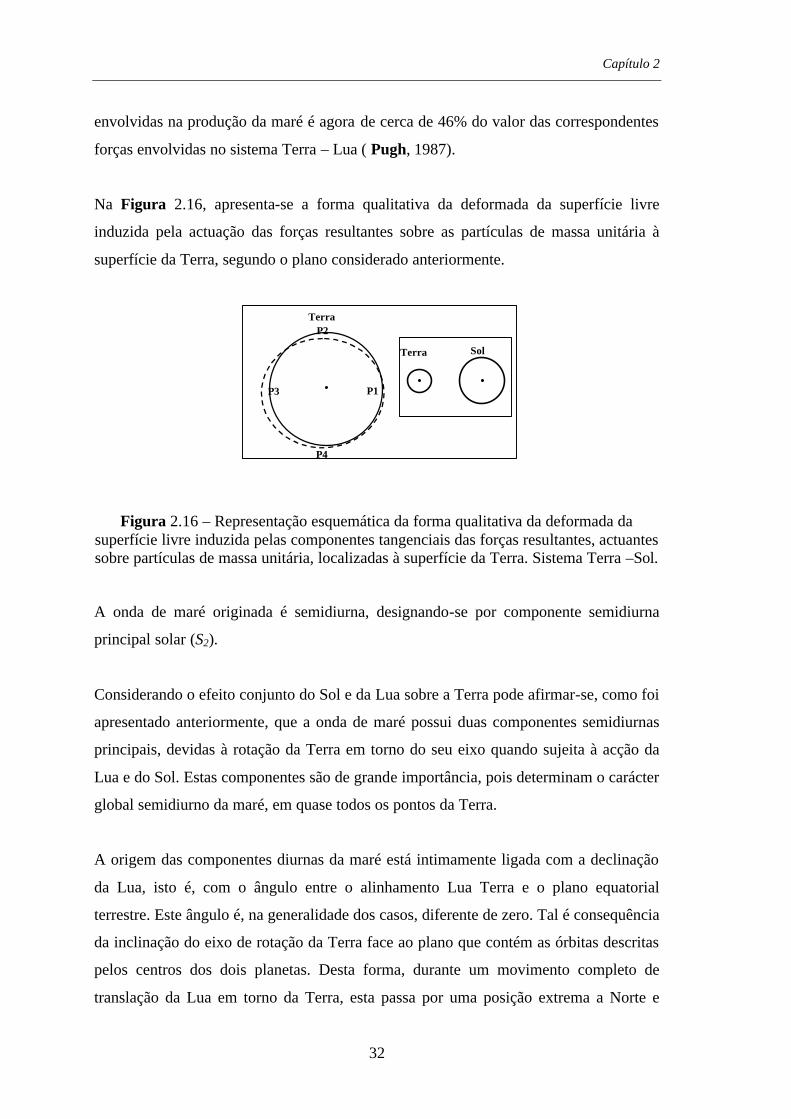
O mecanismo de geração da maré no caso do sistema Terra – Sol é em tudo análogo ao
apresentado para o sistema Terra – Lua. No entanto o valor das forças resultantes
Capítulo 2
32
envolvidas na produção da maré é agora de cerca de 46% do valor das correspondentes
forças envolvidas no sistema Terra – Lua ( Pugh, 1987).
Na Figura 2.16, apresenta-se a forma qualitativa da deformada da superfície livre
induzida pela actuação das forças resultantes sobre as partículas de massa unitária à
superfície da Terra, segundo o plano considerado anteriormente.
Terra
Terra Sol
P4
P3
P2
P1
Figura 2.16 – Representação esquemática da forma qualitativa da deformada da superfície livre induzida pelas componentes tangenciais das forças resultantes, actuantes sobre partículas de massa unitária, localizadas à superfície da Terra. Sistema Terra –Sol.
A onda de maré originada é semidiurna, designando-se por componente semidiurna
principal solar (S2).
Considerando o efeito conjunto do Sol e da Lua sobre a Terra pode afirmar-se, como foi
apresentado anteriormente, que a onda de maré possui duas componentes semidiurnas
principais, devidas à rotação da Terra em torno do seu eixo quando sujeita à acção da
Lua e do Sol. Estas componentes são de grande importância, pois determinam o carácter
global semidiurno da maré, em quase todos os pontos da Terra.
A origem das componentes diurnas da maré está intimamente ligada com a declinação
da Lua, isto é, com o ângulo entre o alinhamento Lua Terra e o plano equatorial
terrestre. Este ângulo é, na generalidade dos casos, diferente de zero. Tal é consequência
da inclinação do eixo de rotação da Terra face ao plano que contém as órbitas descritas
pelos centros dos dois planetas. Desta forma, durante um movimento completo de
translação da Lua em torno da Terra, esta passa por uma posição extrema a Norte e
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
33
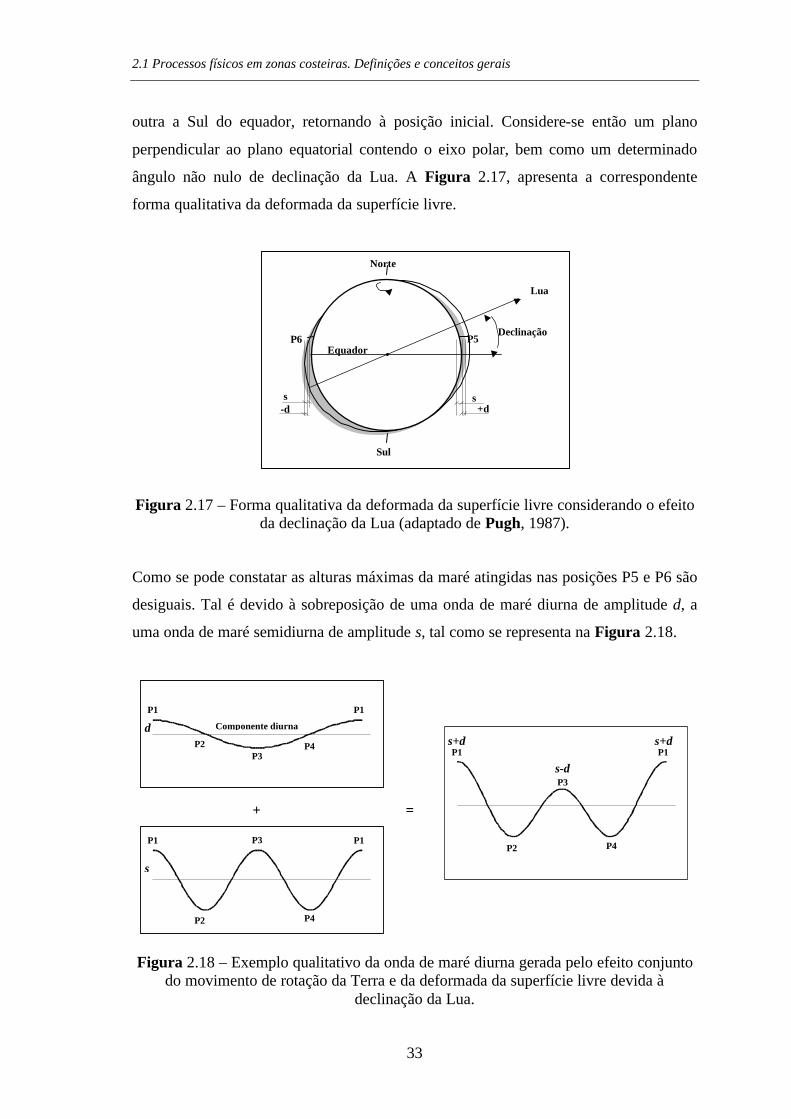
outra a Sul do equador, retornando à posição inicial. Considere-se então um plano
perpendicular ao plano equatorial contendo o eixo polar, bem como um determinado
ângulo não nulo de declinação da Lua. A Figura 2.17, apresenta a correspondente
forma qualitativa da deformada da superfície livre.
Lua
Norte
Sul
P6
s
DeclinaçãoP5
+ds
-d
Equador
Figura 2.17 – Forma qualitativa da deformada da superfície livre considerando o efeito da declinação da Lua (adaptado de Pugh, 1987).
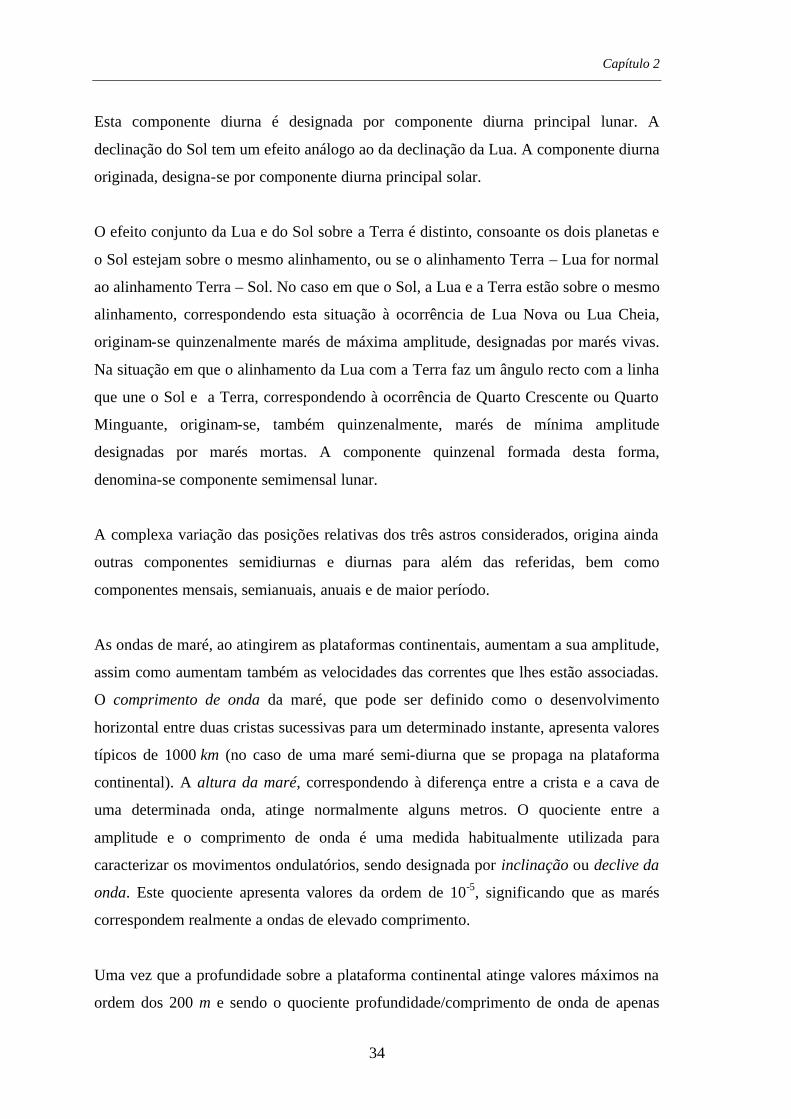
Como se pode constatar as alturas máximas da maré atingidas nas posições P5 e P6 são
desiguais. Tal é devido à sobreposição de uma onda de maré diurna de amplitude d, a
uma onda de maré semidiurna de amplitude s, tal como se representa na Figura 2.18.
P1
P2P3
P4
P1
P1
P2
P3
P4
P1
P1
P2
+
P4
P1
=
d
s
s+d
s-d
s+dComponente diurna
P3
Figura 2.18 – Exemplo qualitativo da onda de maré diurna gerada pelo efeito conjunto do movimento de rotação da Terra e da deformada da superfície livre devida à
declinação da Lua.
Capítulo 2
34
Esta componente diurna é designada por componente diurna principal lunar. A
declinação do Sol tem um efeito análogo ao da declinação da Lua. A componente diurna
originada, designa-se por componente diurna principal solar.
O efeito conjunto da Lua e do Sol sobre a Terra é distinto, consoante os dois planetas e
o Sol estejam sobre o mesmo alinhamento, ou se o alinhamento Terra – Lua for normal
ao alinhamento Terra – Sol. No caso em que o Sol, a Lua e a Terra estão sobre o mesmo
alinhamento, correspondendo esta situação à ocorrência de Lua Nova ou Lua Cheia,
originam-se quinzenalmente marés de máxima amplitude, designadas por marés vivas.
Na situação em que o alinhamento da Lua com a Terra faz um ângulo recto com a linha
que une o Sol e a Terra, correspondendo à ocorrência de Quarto Crescente ou Quarto
Minguante, originam-se, também quinzenalmente, marés de mínima amplitude
designadas por marés mortas. A componente quinzenal formada desta forma,
denomina-se componente semimensal lunar.
A complexa variação das posições relativas dos três astros considerados, origina ainda
outras componentes semidiurnas e diurnas para além das referidas, bem como
componentes mensais, semianuais, anuais e de maior período.
As ondas de maré, ao atingirem as plataformas continentais, aumentam a sua amplitude,
assim como aumentam também as velocidades das correntes que lhes estão associadas.
O comprimento de onda da maré, que pode ser definido como o desenvolvimento
horizontal entre duas cristas sucessivas para um determinado instante, apresenta valores
típicos de 1000 km (no caso de uma maré semi-diurna que se propaga na plataforma
continental). A altura da maré, correspondendo à diferença entre a crista e a cava de
uma determinada onda, atinge normalmente alguns metros. O quociente entre a
amplitude e o comprimento de onda é uma medida habitualmente utilizada para
caracterizar os movimentos ondulatórios, sendo designada por inclinação ou declive da
onda. Este quociente apresenta valores da ordem de 10-5, significando que as marés
correspondem realmente a ondas de elevado comprimento.
Uma vez que a profundidade sobre a plataforma continental atinge valores máximos na
ordem dos 200 m e sendo o quociente profundidade/comprimento de onda de apenas
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
35
2×10-4, as regiões oceânicas sobre as plataformas continentais podem considerar-se
pouco profundas. Uma das consequências desta constatação é que as correntes
associadas às marés deveriam ser virtualmente independentes da profundidade. Este
pressuposto poderá ser admitido no caso de previsões de níveis da maré. No entanto, na
quantificação das correntes que lhes estão associadas, é necessário considerar o atrito
entre a massa de água e o fundo oceânico.
Considerando-se que a pressão num determinado ponto depende apenas da altura de
água acima desse ponto (aproximação hidrostática), a pressão será neste caso
dependente apenas da elevação da superfície oceânica relativamente ao nível médio
(tomando este último como o nível de referência para a pressão). Desta forma, os
gradientes horizontais de pressão serão proporcionais à inclinação da superfície
oceânica. No equilíbrio dinâmico necessário para modelar o movimento da maré em
águas pouco profundas intervêm a aceleração das partículas de fluido, a aceleração de
Coriolis e o gradiente das forças de pressão, que é traduzido por uma inclinação da
superfície livre.
A resolução das equações que descrevem a propagação da maré em bacias oceânicas
necessita de um conhecimento rigoroso dos movimentos da Terra e da Lua em torno do
Sol, da batimetria do oceano, das características de rugosidade dos fundos oceânicos e
das variações de massa volúmica nos oceanos. Se as duas primeiras são conhecidas de
forma razoável, já as duas últimas características levantam algumas dificuldades de
quantificação.
Uma caracterização das marés à escala do globo passa pela sua medição rigorosa nas
regiões oceânicas mais profundas. Esta tarefa tem vindo a ser desenvolvida com o
auxílio de observações a partir de satélites (Figura 2.19), que permitem a quantificação
das marés com um rigor da ordem de 2 a 3 cm nas regiões oceânicas afastadas da costa
(JPL, 1996).
Capítulo 2
36
Figura 2.19 - Satélite TOPEX/POSEIDON utilizado na caracterização das marés.
a) b)
d)c)
-15 -10 -5 0-5 5 10 15 [cm]
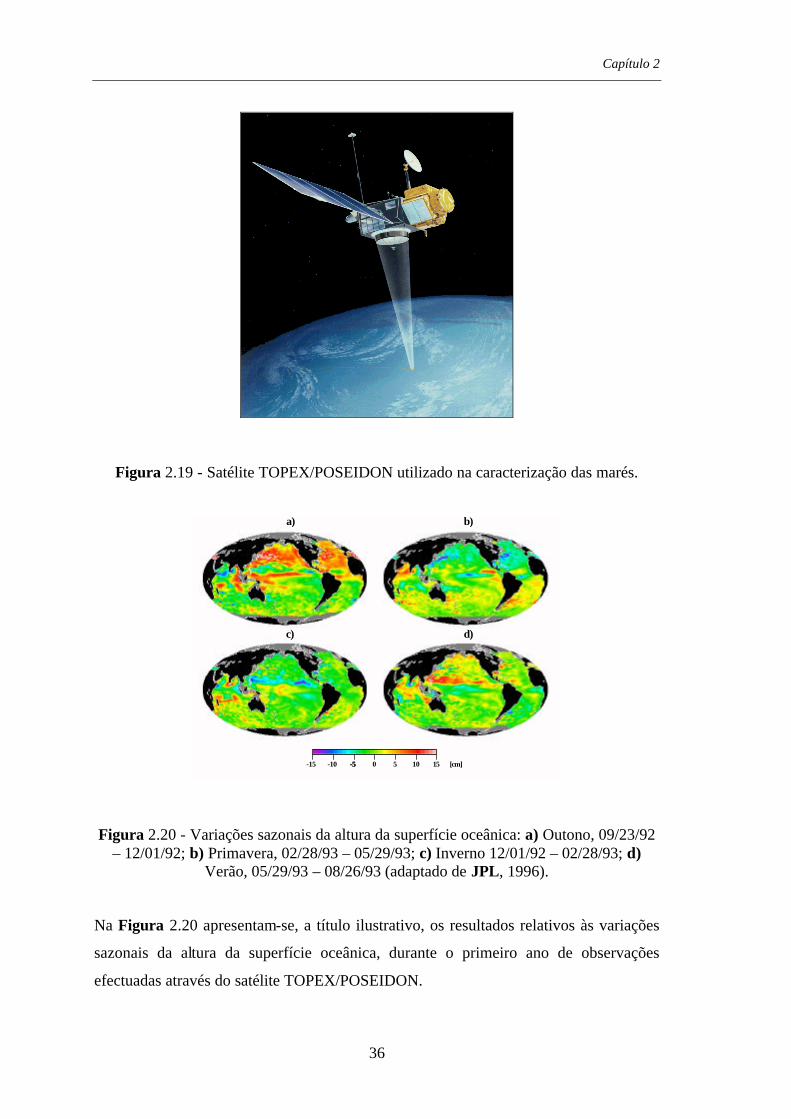
Figura 2.20 - Variações sazonais da altura da superfície oceânica: a) Outono, 09/23/92 – 12/01/92; b) Primavera, 02/28/93 – 05/29/93; c) Inverno 12/01/92 – 02/28/93; d)
Verão, 05/29/93 – 08/26/93 (adaptado de JPL, 1996).
Na Figura 2.20 apresentam-se, a título ilustrativo, os resultados relativos às variações
sazonais da altura da superfície oceânica, durante o primeiro ano de observações
efectuadas através do satélite TOPEX/POSEIDON.
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
37
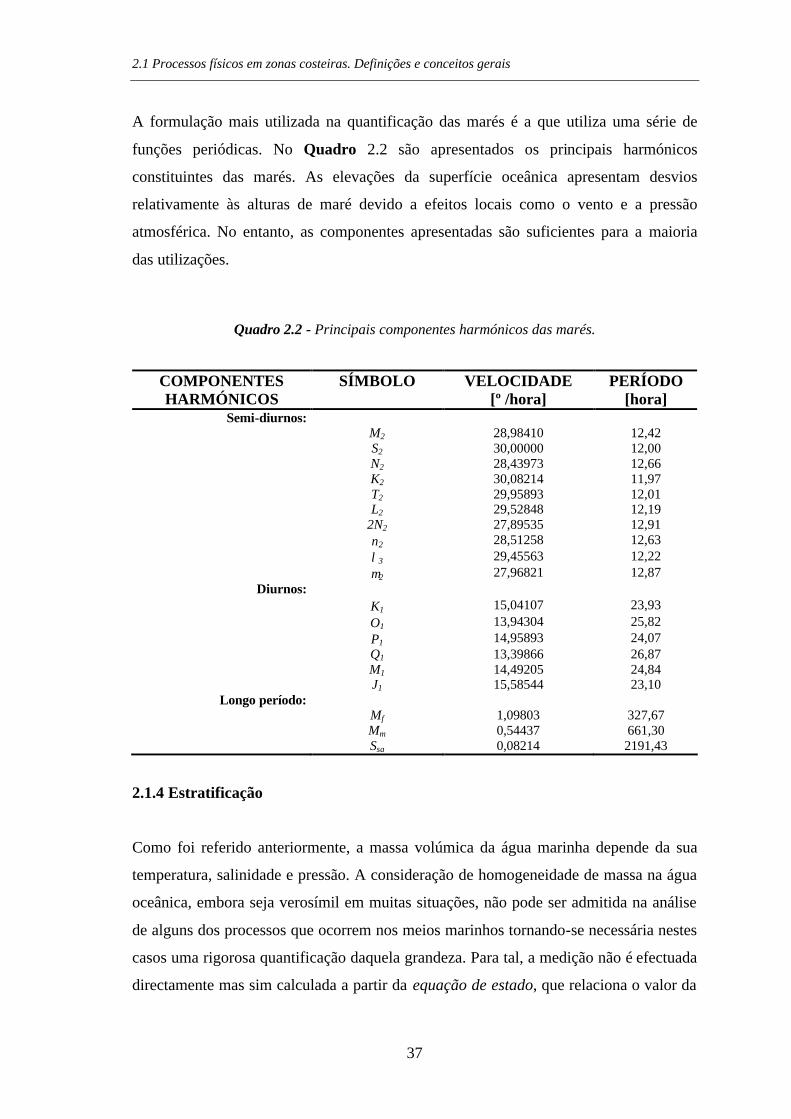
A formulação mais utilizada na quantificação das marés é a que utiliza uma série de
funções periódicas. No Quadro 2.2 são apresentados os principais harmónicos
constituintes das marés. As elevações da superfície oceânica apresentam desvios
relativamente às alturas de maré devido a efeitos locais como o vento e a pressão
atmosférica. No entanto, as componentes apresentadas são suficientes para a maioria
das utilizações.
Quadro 2.2 - Principais componentes harmónicos das marés.
COMPONENTES SÍMBOLO VELOCIDADE PERÍODO HARMÓNICOS [º /hora] [hora]
Semi-diurnos: M2 28,98410 12,42 S2 30,00000 12,00 N2 28,43973 12,66 K2 30,08214 11,97 T2 29,95893 12,01 L2 29,52848 12,19 2N2 27,89535 12,91 ν2 28,51258 12,63 λ3 29,45563 12,22 µ2 27,96821 12,87
Diurnos: K1 15,04107 23,93 O1 13,94304 25,82 P1 14,95893 24,07 Q1 13,39866 26,87 M1 14,49205 24,84 J1 15,58544 23,10
Longo período: Mf 1,09803 327,67 Mm 0,54437 661,30 Ssa 0,08214 2191,43
2.1.4 Estratificação
Como foi referido anteriormente, a massa volúmica da água marinha depende da sua
temperatura, salinidade e pressão. A consideração de homogeneidade de massa na água
oceânica, embora seja verosímil em muitas situações, não pode ser admitida na análise
de alguns dos processos que ocorrem nos meios marinhos tornando-se necessária nestes
casos uma rigorosa quantificação daquela grandeza. Para tal, a medição não é efectuada
directamente mas sim calculada a partir da equação de estado, que relaciona o valor da
Capítulo 2
38
massa volúmica com os valores da temperatura, salinidade e pressão medidos num
determinado local, como já foi referido anteriormente.
As zonas que separam regiões oceânicas de diferentes massas volúmicas apresentam
diferentes denominações: designa-se picnoclina a interface entre águas marinhas de
diferentes massas volúmicas; a termoclina, já definida anteriormente, é a interface entre
massas de água a diferentes temperaturas e a haloclina é a interface entre massas de
água de diferentes salinidades. Estas interfaces apresentam-se normalmente com
superfícies horizontais dividindo duas massas de água. As interfaces verticais são
normalmente designadas de frentes, podendo obviamente transformar-se numa
picnoclina e vice-versa. Junto destas interfaces surgem fortes variações das
componentes horizontais da velocidade com a profundidade. Conhecidas as variações
de massa volúmica com a profundidade, o respectivo gradiente dividido por um valor
médio ambiente permite obter uma medida daquela variação. O quociente (gradiente de
massa volúmica)/(massa volúmica ambiente) tem dimensões L-1. Considerando-se que o
oceano é formado por duas camadas, sendo a camada superficial a camada de mistura
que se sobrepõe à camada profunda, o quociente anteriormente apresentado toma a
forma: (diferença de massas volúmicas)/(massa volúmica ambiente). Se multiplicarmos
este quociente pela aceleração da gravidade (dimensões LT-2) obtemos uma quantidade
de dimensões T-2, que corresponde ao quadrado de uma frequência. Esta frequência é
proporcional à raiz quadrada do gradiente de massa volúmica, sendo representativa do
grau de estabilidade do oceano, ou seja, da tendência que um determinado volume de
água deslocado da sua posição equilíbrio apresenta para voltar a essa posição. Esta
frequência de estabilidade é usualmente representada pela letra N e é designada de
frequência de Brunt-Väisälä. O gradiente vertical das componentes horizontais da
velocidade (isto é, a forma como variam as correntes horizontais com a profundidade)
também tem dimensões de uma frequência, uma vez que se trata de um quociente entre
velocidade LT-1 e um comprimento L. Note-se que não se faz uma distinção entre as
escalas de comprimento vertical e horizontal, uma vez que se está perante um fenómeno
a que corresponde uma escala de comprimento relativamente pequena quando
comparada com a extensão oceânica. Considerando-se o quociente entre N e o gradiente
vertical das correntes horizontais (perfil vertical) obtemos uma quantidade adimensional
que compara a estabilidade da coluna de água com a grandeza do perfil vertical das

2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
39
correntes horizontais. Este quociente, elevado ao quadrado, permite obter um número
adimensional que é normalmente designado de número de Richardson, Ri (mais
correctamente gradiente do número de Richardson, uma vez que existe uma outra
definição ligeiramente diferente para este número obtida a partir de teorias da
turbulência). Salienta-se ainda que se Ri for menor que zero, as variações da massa
volúmica contribuem para o aumento da turbulência e, por outro lado, se Ri for positivo
as variações de massa volúmica terão tendência a reduzir a turbulência. As definições
anteriores serão retomadas mais adiante.
2.1.4.1 Equação de estado linear
Para a quantificação aproximada da massa volúmica pode utilizar-se uma equação linear
da forma:
( ) ( )[ ]pkSSbTTa +−−−=− 000ρρ (2.7)
em que,
ρ é a massa volúmica [kg m-3];
0ρ é a massa volúmica de referência [kg m-3];
a é o coeficiente médio de expansão térmica [kg m-3 ºC-1];
T é a temperatura [ºC];
0T é uma temperatura de referência [ºC];
b é o coeficiente médio de contracção salina [kg m-3 psu-1];
S é a salinidade [psu];
0S é uma salinidade de referência [psu];
k é um coeficiente médio de compressibilidade [kg m-3 dbar-1];
p é a pressão [dbar].
A massa especifica poderá ser calculada com uma precisão de ±0.5 kg m-3,
considerando-se os valores constantes de 0ρ =1027 kg m-3, 0T =10 ºC e 0S =35 psu, e os
Capítulo 2
40
valores dos coeficientes médios iguais a a = -0.15 kg m-3 ºC-1, b =0.78 kg m-3 psu-1 e
k =4.5×10-3 kg m-3 dbar-1.
2.1.4.2 Equação de estado completa
A equação de estado completa, obtida a partir do ajuste efectuado a dados
experimentais, permite quantificar a massa volúmica com uma precisão da ordem de
uma parte por milhão (Mellor, 1991):
ρ = 999.842594+6.793952E-2Θ- 9.095290E-3Θ2+1.001685E-4Θ3-1.120083E-6Θ4+
+6.536332E9Θ5+(0.824493-4.0899E-3Θ+7.6438E-5Θ2-8.2467E-7Θ3+5.3875E-9Θ4) S+
+(-5.72466E-3+1.0227E-4Θ-1.6546E-6Θ2)S1.5+4.8314E-4 S2+1.E5p/CR2(1-2p/CR
2)
(2.8)
onde,
p é a pressão [bar];
Θ é a temperatura potencial [K];
S é a salinidade [psu]
e em que CR é dado por:
CR=1449.1+0.0821p+4.55Θ-.045Θ2+1.34(S-35) (2.9)
2.1.5 Outras grandezas utilizadas em oceanografia
Uma vez que os dois primeiros algarismos significativos dos valores da massa volúmica
da água marinha são constantes, quando expressos em unidades do Sistema
Internacional (SI), é usual utilizarem-se apenas os algarismos correspondentes às
dezenas e unidades, representando-se este valor da massa volúmica pela letra grega
sigma:
1000−= S,T,pρσ (2.10)
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
41
onde ρ é expresso em kg m-3. Quando não se adopta qualquer índice assume-se que σ
corresponde ao valor da massa volúmica in situ. Normalmente a letra σ é afectada de
um índice que indica a pressão (milhares de dbar) a que é quantificada a massa
volúmica.
A caracterização do estado de estratificação de uma massa de água oceânica envolve a
quantificação de outras grandezas para além da massa volúmica. Assim, utiliza-se
frequentemente o inverso da massa volúmica ρα 1= . Tal como a massa volúmica é
substituída frequentemente pela diferença entre o seu valor real e 1000 kg m-3, no caso
do inverso da massa volúmica surgem duas grandezas obtidas a partir desta última: a
diferença dos inversos das massas volúmicas (δ ), que é obtida a partir da diferença
entre o inverso da massa volúmica correspondente a uma determinada salinidade e
temperatura e o inverso da massa volúmica correspondente a uma salinidade de 35 psu e
uma temperatura de 0 ºC e a diferença termoesterética ( TS ,∆ ) que resulta da diferença
entre o inverso da massa volúmica correspondente a uma determinada temperatura e
salinidade à superfície oceânica (pressão nula) e o inverso da massa volúmica
correspondente a uma salinidade de 35 psu, uma temperatura de 0 ºC e pressão nula.
Estas grandezas são dadas por:
ppTS ,0,35,, ααδ −= (2.11)
0,0,350,,, αα −=∆ TSTS (2.12)
Outro conceito frequente em oceanografia é o de temperatura potencial. Esta
distingue-se da temperatura in situ por corresponder à temperatura de um volume de
água que é deslocado da sua posição inicial (a uma determinada profundidade) até à
superfície, sem qualquer troca de energia com o fluido envolvente. Durante este
deslocamento o volume sofre uma expansão devida à diminuição da pressão que resulta
numa diminuição da temperatura. Assim, a temperatura potencial de um determinado
volume de água será sempre igual ou inferior à temperatura correspondente à pressão in
Capítulo 2
42
situ. A temperatura potencial é normalmente representada por θ e a massa volúmica
associada por θσ .
O valor normalizado do gradiente de massa volúmica, tal como já foi apresentado
anteriormente a partir de considerações da análise dimensional, representa uma medida
do trabalho necessário para deslocar um determinado volume de água na coluna de água
(de profundidade z em relação à superfície livre):
∂∂
=z
Eρ
ρ1
(2.13)
A esta grandeza atribui-se a designação de estabilidade. Uma vez que a massa volúmica
varia com a profundidade, na Eq. 2.13 utiliza-se muitas vezes o gradiente vertical de
massa volúmica potencial, θρ , que depende da salinidade e da temperatura potencial e é
independente da pressão, vindo:
∂∂
=z
E θρρ1
(2.14)
Todavia, uma vez que a compressibilidade depende da temperatura, esta forma de
quantificar a estabilidade E não é exacta. A formulação exacta é dada por:
2
1
scg
zE −
∂∂
=ρ
ρ
(2.15)
em que,
cs é a velocidade do som na água marinha [m s-1].
O movimento de um volume deslocado da sua posição de equilíbrio na coluna de água é
análogo ao movimento pendular, podendo neste caso determinar-se a frequência e o
período desse movimento oscilatório em função da estabilidade E:
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
43
gEN = (2.16)
NTN
π2=
(2.17)
Nas equações anteriores N é a frequência de Brunt-Väisälä definida anteriormente e NT
é o período do movimento oscilatório. Este apresenta valores da ordem dos minutos
(maior estabilidade) a horas (menor estabilidade associada a águas profundas).
Uma das consequências mais evidente da estratificação no oceano relaciona-se com a
sua influência nos processos de mistura. Quanto mais intensa for a estratificação, maior
é a energia necessária para misturar a água na direcção vertical. O vento intenso permite
normalmente a criação de uma camada superficial bem misturada. Os processos de
mistura na direcção horizontal requerem energias muito inferiores às que são
necessárias para se conseguir misturas na direcção normal à das superfícies isopicnais.
2.1.6 Transferência de calor através da superfície oceânica
A temperatura do oceano resulta essencialmente das trocas de calor realizadas através
da sua superfície (as trocas de calor através do fundo entre a crosta terrestre e a coluna
de água são, em geral, muito inferiores às que ocorrem através da superfície). Os
principais processos de troca de calor são: radiação recebida directamente do Sol, troca
de radiação infra-vermelha entre o oceano e a atmosfera, perdas de calor associadas à
evaporação, e trocas por condução entre a atmosfera e a superfície.
A variação anual da temperatura do oceano pode ser considerada nula, pelo que o calor
absorvido ao longo do ano deverá igualar as perdas através da superfície. A equação de
balanço pode ser escrita da seguinte forma:
cers QQQQ ++= (2.18)
em que,
Capítulo 2
44
sQ energia média recebida directamente do sol [W m-2];
rQ energia média reflectida pelo oceano [W m-2];
eQ energia média libertada por evaporação [W m-2];
cQ energia média libertada por condução para a atmosfera [W m-2].
A equação anterior é válida em termos médios para intervalos de tempo múltiplos do
ano e em termos espaciais corresponde a uma média global. De facto, a energia recebida
na camada superficial durante o Verão, com o consequente aumento de temperatura, é
perdida durante o Inverno e a maior intensidade de energia recebida nas regiões
tropicais é compensada por perdas nas regiões polares.
A quantificação dos diferentes termos da Eq. 2.18 levanta algumas dificuldades apesar
de serem conhecidos os diversos processos físicos que controlam as trocas de energia
entre o oceano e a atmosfera. A energia irradiada pelo Sol é atenuada durante o seu
percurso pela atmosfera através de reflexão e absorção. Apenas cerca de metade da
energia total irradiada pelo Sol efectua o seu percurso através atmosfera sendo
absorvida pela terra ou pelo oceano. Parte desta energia é reflectida pelo oceano. Esta
energia é absorvida pelo ar e vapor de água da atmosfera, sendo posteriormente
irradiada novamente para a superfície oceânica. A energia perdida através da
evaporação corresponde à maior das parcelas presentes na Eq. 2.18. Esta parcela de
energia é a que apresenta maiores dificuldades de quantificação. A evaporação é tanto
mais intensa quanto maior for o gradiente de temperatura entre a camada superficial
oceânica e o ar e depende ainda das características de turbulência da camada de ar em
contacto com o oceano. As estimativas destas perdas variam de acordo com os
pressupostos utilizados para a sua quantificação. Finalmente, as perdas por convecção e
condução de calor são determinadas por processos de turbulência na camada de
fronteira oceano-atmosfera e a formulação utilizada para a sua quantificação é análoga à
utilizada para a quantificação das perdas por evaporação.
2.1.7 Balanços globais
A quantidade de água, a temperatura e a salinidade médias dos oceanos permanecem
constantes ao longo de intervalos de tempo suficientemente longos. A invariabilidade
2.1 Processos físicos em zonas costeiras. Definições e conceitos gerais
45
destas grandezas permite estabelecer as equações de conservação, que se traduzem
normalmente numa igualdade entre as entradas e saídas através das fronteiras.
2.1.7.1 Balanço de calor
Para escalas temporais adequadas a temperatura da Terra pode ser considerada
constante, pelo que a energia total absorvida deverá ser igual à energia que é libertada
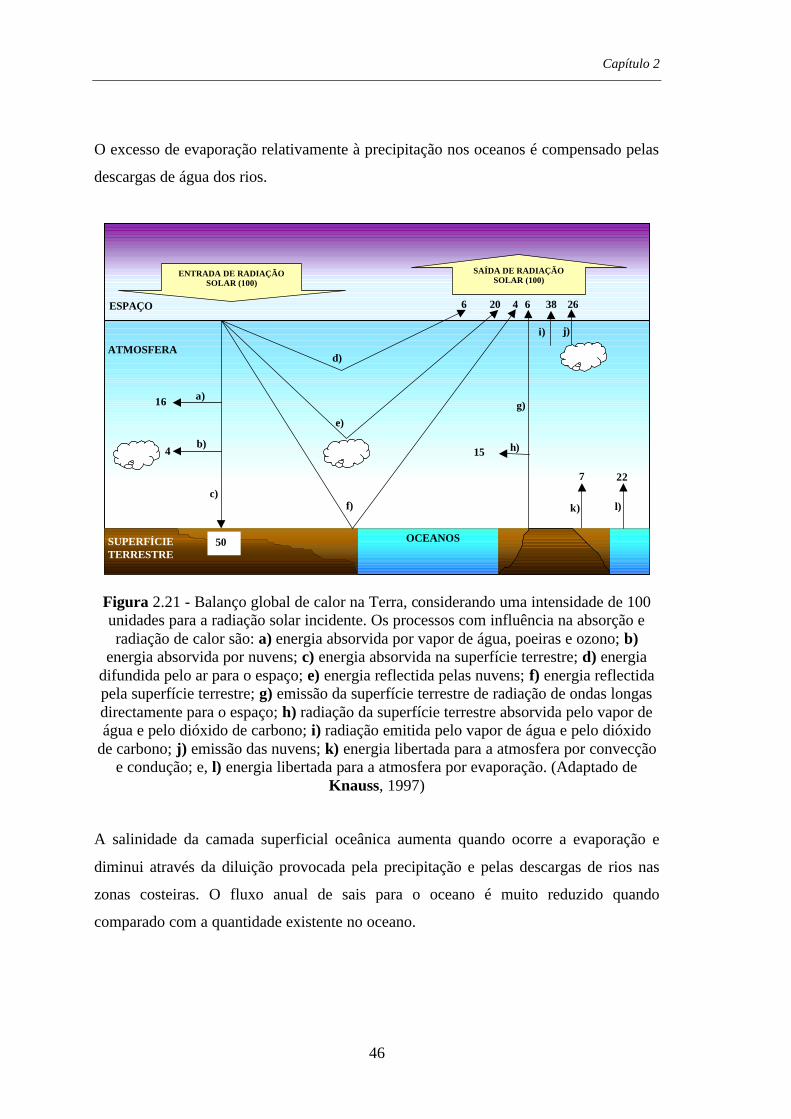
para o espaço. Na Figura 2. 21 apresenta-se um esquema relativo ao balanço de calor
na Terra, admitindo-se uma intensidade de energia solar incidente na camada superior
da atmosfera igual a 100 unidades. Os números apresentados permitem avaliar a
importância relativa dos processos com influência nas trocas de calor.
Da análise da Figura 2.21 é interessante constatar que a principal fonte de energia para
o aquecimento da atmosfera é recebida indirectamente do Sol a partir da Terra,
evidenciando o efeito regulador da Terra em geral e dos oceanos em particular. Da
totalidade de energia solar só 20 unidades correspondem a energia absorvida
directamente na atmosfera enquanto que 44 unidades resultam das emissões da
superfície terrestre.
2.1.7.2 Balanços de água e sais
Cerca de 97 % da água do globo encontra-se nos oceanos, 2 % corresponde a água no
estado sólido nos pólos, glaciares e icebergs e menos de 1% corresponde ao somatório
das águas subterrâneas, águas de lagos e rios e água sob a forma de vapor na atmosfera.
A água entra nos oceanos através das descargas de rios e da precipitação e sai através da
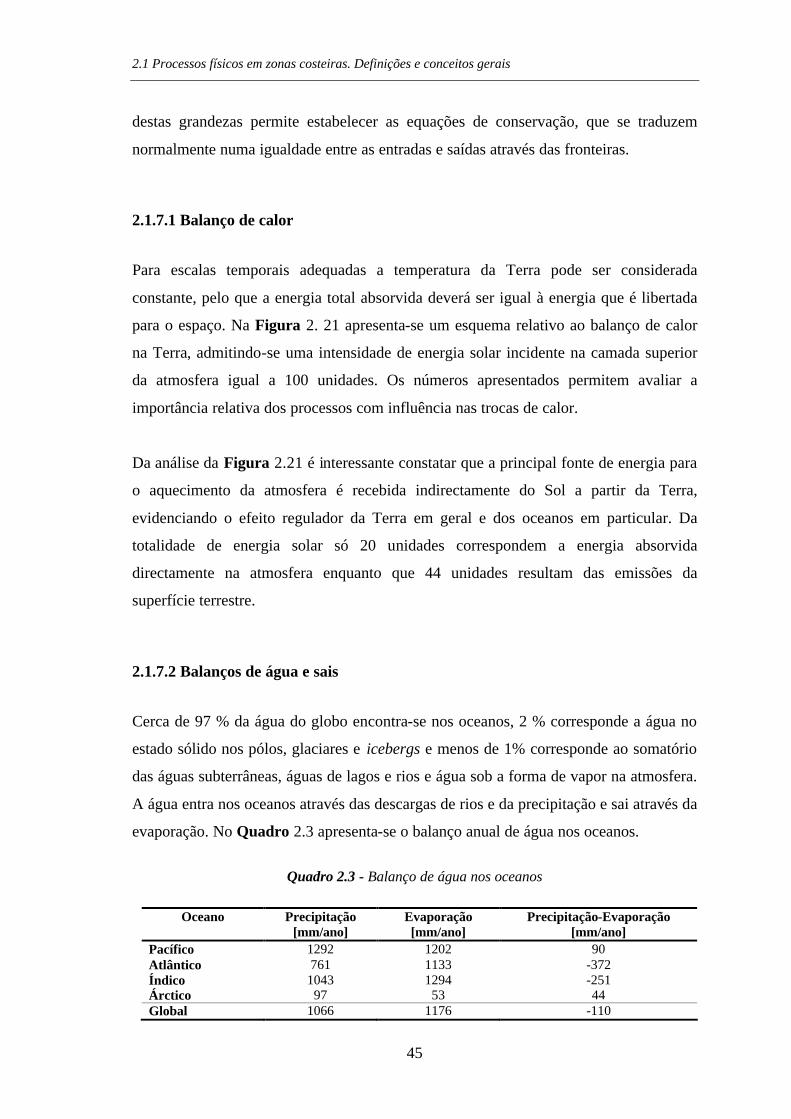
evaporação. No Quadro 2.3 apresenta-se o balanço anual de água nos oceanos.
Quadro 2.3 - Balanço de água nos oceanos
Oceano Precipitação
[mm/ano] Evaporação [mm/ano]
Precipitação-Evaporação [mm/ano]
Pacífico 1292 1202 90 Atlântico 761 1133 -372 Índico 1043 1294 -251 Árctico 97 53 44 Global 1066 1176 -110
Capítulo 2
46
O excesso de evaporação relativamente à precipitação nos oceanos é compensado pelas
descargas de água dos rios.
ENTRADA DE RADIAÇÃOSOLAR (100)
SAÍDA DE RADIAÇÃOSOLAR (100)
b)
a)16
c)
50
4
g)
d)
e)
f)
15
227
263864206
i) j)
k) l)
h)
ESPAÇO
ATMOSFERA
SUPERFÍCIETERRESTRE
OCEANOS
Figura 2.21 - Balanço global de calor na Terra, considerando uma intensidade de 100 unidades para a radiação solar incidente. Os processos com influência na absorção e radiação de calor são: a) energia absorvida por vapor de água, poeiras e ozono; b)
energia absorvida por nuvens; c) energia absorvida na superfície terrestre; d) energia difundida pelo ar para o espaço; e) energia reflectida pelas nuvens; f) energia reflectida pela superfície terrestre; g) emissão da superfície terrestre de radiação de ondas longas directamente para o espaço; h) radiação da superfície terrestre absorvida pelo vapor de água e pelo dióxido de carbono; i) radiação emitida pelo vapor de água e pelo dióxido
de carbono; j) emissão das nuvens; k) energia libertada para a atmosfera por convecção e condução; e, l) energia libertada para a atmosfera por evaporação. (Adaptado de
Knauss, 1997)
A salinidade da camada superficial oceânica aumenta quando ocorre a evaporação e
diminui através da diluição provocada pela precipitação e pelas descargas de rios nas
zonas costeiras. O fluxo anual de sais para o oceano é muito reduzido quando
comparado com a quantidade existente no oceano.
2.2 Equações do movimento
47
2.2 Equações de movimento
2.2.1 Considerações gerais
Já decorreram cerca de 300 anos desde que Isaac Newton formulou os princípios
básicos da mecânica. Apesar dos recentes desenvolvimentos da física, que conduziram
ao aparecimento de novas teorias do movimento, quase todos os objectos conhecidos
seguem as leis estabelecidas por Newton. As leis da mecânica podem ser aplicadas em
todas as escalas espaciais e temporais envolvidas nos problemas das ciências marinhas.
A adaptação da 2ª lei de Newton aos fluidos ocorreu no séc. XVIII com os trabalhos de
Euler e Bernoulli. Contudo, a sua reformulação não mudou as equações básicas que
Newton formulou como
força= massa × aceleração (2.19)
no caso dos fluidos
força por unidade de massa = aceleração (2.20)
O contributo de Bernoulli foi o de converter a equação do movimento dos fluidos para a
forma de equação de conservação da energia mecânica.
A aceleração apresenta dimensões LT-2 (metros por segundo ao quadrado). Em ciências
marinhas, particularmente em meteorologia, mas também noutros ramos da
oceanografia, a rotação da Terra tem um papel fundamental. A velocidade angular de
rotação da Terra é de cerca 7.29 x 10-5 radianos por segundo e tem dimensões T-1.
Assim, a velocidade multiplicada pela velocidade angular da Terra apresenta dimensões
LT-1.T-1=LT-2, que coincidem com as dimensões da aceleração. Esta aceleração
resultante da rotação da Terra é designada de aceleração de Coriolis e desempenha um
papel fundamental na dinâmica dos oceanos. Dividindo o quadrado do módulo da
velocidade, U, pelo comprimento obtemos também uma aceleração. De facto U2L-1=LT-
2, já que a velocidade tem dimensões LT-1. A aceleração resultante unicamente da
velocidade e do comprimento pode ser totalmente independente do tempo (se a
Capítulo 2
48
velocidade for constante). Um escoamento em regime permanente num rio constitui um
exemplo ilustrativo da aceleração advectiva, no caso do seu leito apresentar zonas em
curva. À medida que a água percorre o trecho em curva com velocidade constante, terá
que existir uma aceleração já que a posição relativa de quaisquer duas partículas varia
ao longo do tempo. Este é talvez o exemplo mais simples da aceleração advectiva que
está sempre presente no movimento dos fluidos. Um outro exemplo é o de um
escoamento condicionado pela proximidade de uma fronteira sólida, como é o caso de
uma costa ou fundo oceânico. Neste caso, duas quaisquer partículas verão a sua posição
relativa variar ao longo do tempo uma vez que a que estiver mais próxima da fronteira
sólida move-se mais lentamente. O escoamento pode ser considerado permanente sendo
no entanto acelerado sobre a influência da aceleração advectiva. Podemos então definir
aceleração advectiva, como sendo a aceleração devida à variação das posições relativas
das partículas de fluido. A aceleração pontual, ou local, é simplesmente a taxa de
variação temporal da velocidade.
Resumindo, podemos dizer que temos fundamentalmente três tipos de aceleração. A
aceleração total de uma corrente oceânica, maré ou outro escoamento oceânico, é
essencialmente a soma destes três efeitos:
Aceleração=aceleração local+aceleração advectiva+aceleração de Coriolis (2.21)
Em termos dimensionais a forma usual de representar as três parcelas do 2º membro da
expressão anterior é (UT-1)+(U2L-1)+(ΩU), onde U é o módulo da velocidade, L é um
comprimento, T é o tempo e Ω tem o valor de 10-4 rad s-1 (ordem de grandeza da
velocidade angular de rotação da Terra). Uma simples análise das dimensões permite
efectuar algumas deduções. Se considerarmos a aceleração local (UT-1) e a aceleração
de Coriolis (ΩU) verificamos que a sua grandeza será semelhante no caso de
Ω=Τ−1, isto é, no caso de estarmos em presença de escalas temporais da ordem de um
dia. Nesta escala temporal encontram-se as marés; o que permite deduzir que quer a
aceleração pontual quer a aceleração de Coriolis são importantes se pretendermos
modelar as marés. Para fenómenos associados a escalas temporais da ordem de meses
(como por exemplo nas correntes do Golfo), de uma forma geral a aceleração local
2.2 Equações do movimento
49
poderá ser desprezada quando comparada com a aceleração de Coriolis. Por outro lado,
em fenómenos com escalas temporais da ordem dos segundos (ondas de superfície) a
aceleração de Coriolis poderá ser desprezada em relação à aceleração local. Existem no
entanto algumas excepções relativamente às generalizações anteriores. No caso de
ondas de superfície de elevado comprimento de onda, a aceleração de Coriolis poderá
ter um efeito não desprezável; noutras situações, a física do fenómeno poderá conter
factores mais complexos em que existam mais do que uma velocidade característica, o
que poderá acontecer junto de interfaces de massas de água de diferentes densidades.
Considere-se agora a equação relativa ao equilíbrio de forças (conceito Euleriano).
Existem três forças bem distintas que actuam num determinado volume de fluido. A
primeira e mais evidente é a força da gravidade. A gravidade aparente resulta da
combinação da força de gravidade com a força centrípeta devida à rotação da Terra que
tende a afastar o fluido da superfície terrestre. No entanto, a gravidade e a gravidade
aparente são aproximadamente iguais, pelo facto da força centrípeta apresentar uma
grandeza da ordem de um milésimo da força da gravidade. Assim, a gravidade pode ser
considerada constante em oceanografia, com um valor de 9.81 m s-2 dirigida para o
centro da Terra. A segunda força resulta das pressões exercidas pelo fluido vizinho
sobre um determinado volume de controlo. A força de pressão resulta na verdade da
variação da pressão ao longo de um determinado volume de controlo. Quanto maior for
a diferença de pressões maior é a resultante das forças que actua sobre o referido
volume. Esta força é habitualmente designada de força resultante do gradiente de
pressão. Finalmente existe uma força que resulta do atrito entre o volume de controlo e
o fluido vizinho e com as fronteiras de outros meios. Em laboratório estas forças de
atrito podem resultar quer pela acção molecular, designada por efeitos de viscosidade,
quer pelo movimento aleatório designado de turbulência. A turbulência continua a ser
um dos aspectos menos compreendidos do movimento dos fluidos. Corresponde a um
movimento irregular do fluido que proporciona uma mistura contínua entre o fluido de
um determinado volume de controlo e o fluido vizinho, em contraste com o movimento
laminar em que tal mistura não ocorre e em que as linhas de corrente são bem definidas.
Infelizmente, nos oceanos ou na atmosfera, todos os efeitos de atrito resultam da
turbulência uma vez que esta é muito mais importante do que o atrito molecular.
Capítulo 2
50
Resumindo, existem quatro forças que actuam sobre os fluidos: a força da gravidade,
que pode ser sempre considerada como dirigida para o centro da Terra; a força devida
ao gradiente de pressão; a força resultante de efeitos viscosos e a força de atrito do
contacto com fronteiras de outros meios. As dimensões de força por unidade de massa
são LT-2. A gravidade é uma aceleração pelo que tem como dimensões LT-2. À força
resultante do gradiente de pressão correspondem as dimensões ML-2T-2÷ML-3=LT-2. O
termo relativo à turbulência apresenta-se mais complexo. De facto, na sua forma mais
simples, é usual considerar os efeitos da turbulência por um coeficiente global no termo
que representa os efeitos da viscosidade cinemática. As tensões turbulentas resultam da
multiplicação do coeficiente de viscosidade pela massa volúmica e pelo gradiente de
velocidade. As dimensões das tensões turbulentas serão L2T-1.ML-3.LT-1.L-1=ML-1T-2. A
força por unidade de massa resultante destas tensões é igual ao gradiente das tensões
dividido pela massa volúmica. Esta igualdade conduz, como seria de esperar, às
dimensões L-1.ML-1T-2M-1L3=LT-2.
A força associada à turbulência merece mais algumas considerações. A força por
unidade de massa devida à turbulência quando expressa em termos de um coeficiente de
viscosidade turbulenta, νt, e de uma escala de comprimento Lt é dada por νtLt-2.LT-1
(relembre-se que νt tem dimensões L2T-1; o último grupo, LT-1, é interpretado como uma
velocidade típica). Em ciências marinhas existe uma diferença significativa na ordem de
grandeza das quantidades horizontais e verticais. Esta diferença resulta da relação
existente entre a profundidade e o desenvolvimento horizontal (em média a razão entre
estas duas dimensões é da ordem de um milhar). Esta diferença é reduzida em sistemas
como estuários e zonas costeiras. As componentes das forças relativas às tensões
turbulentas são dadas por νtULt-2 ou νtUDt
-2, dependendo da dimensão espacial
(dimensão típica Lt para direcção horizontal e Dt para a direcção vertical) em que se
pretende caracterizar o fenómeno.
Nesta fase pode estabelecer-se o equilíbrio de forças (segunda lei de Newton) em
termos dimensionais. A comparação de vários pares de termos permitirá a apresentação
de números adimensionais utilizados frequentemente em oceanografia.
2.2 Equações do movimento
51
forças de pressão +forças gravíticas + forças de origem viscosa +
+ forças de atrito nas fronteiras entre meios com diferentes características =
= aceleração local + aceleração advectiva + aceleração de Coriolis
(2.22)
Em primeiro lugar analisa-se o balanço entre as aceleração de Coriolis e a turbulência.
Para tal terão que ser definidos os quocientes entre νtULt-2 (ou νtUDt-2 ) e ΩU:
UUD
UUL tttt
ΩΩ
−− 22
ou νν
(2.23)
isto é,
22 ou t
t
t
t
DL ΩΩνν
(2.24)
Os números adimensionais ) (ou 22tttt DL ΩΩ νν são denominados números de Ekman.
O primeiro é o número de Ekman horizontal e o segundo o vertical. Um outro equilíbrio
importante ocorre quando a aceleração de Coriolis (ΩU) apresenta uma grandeza
semelhante à da aceleração advectiva (U2/Lt). Para se compararem estes dois termos terá
que se definir o quociente:
t
t
LU
ULU
=−12
(2.26)
Este número adimensional é designado por número de Rossby. Saliente-se, no entanto,
que a velocidade angular da Terra, Ω, é normalmente substituída por f=2Ωsin(latitude),
o qual é duplo da componente vertical da velocidade angular da Terra e é uma
quantidade de maior utilização na modelação de zonas costeiras. O número de Rossby
será assim definido por tfLU .
Existem outras quantidades, que não sendo adimensionais, são no entanto de grande
importância na caracterização dos processos oceânicos. Considere-se uma bacia
Capítulo 2
52
oceânica ilimitada. Se um determinado corpo flutuante se deslocar com uma velocidade
U, à medida que se move, o corpo sofrerá a influência da aceleração de Coriolis que
tenderá a deslocá-lo para a direita relativamente ao seu movimento inicial (no
hemisfério Sul o deslocamento seria para a esquerda). Se forem desprezados os efeitos
de atrito, então o corpo desloca-se segundo uma trajectória circular. O raio deste circulo
será dado por U/f, onde f é o valor local do parâmetro de Coriolis (2Ωsin(latitude)).
Esta escala de comprimento é fundamental. Trata-se do comprimento característico
associado ao movimento horizontal num mar homogéneo e é designado por raio de
deformação de Rossby ou simplesmente raio de Rossby. O círculo descrito pelo corpo
flutuante fictício é designado por círculo de inércia cujo raio é o raio de Rossby.
Considere-se agora uma corrente oceânica. Admita-se que esta corrente possui uma
escala característica de comprimento Lt a qual é determinada pelo mecanismo que está
na sua origem (por exemplo a tensão induzida pelo vento). Se o raio de Rossby for
comparado com o comprimento Lt obtemos assim por outro processo a quantidade
adimensional (U/f)/Lt: o número de Rossby.
Recorrendo à análise dimensional e à equação de conservação da massa conclui-se que
a velocidade média vertical é dada por UDtLt-1, onde U é uma velocidade média
horizontal, Dt a profundidade e Lt um comprimento característicos. De facto, quando se
considera um volume paralelepipédico cujas dimensões em planta são Lt e com
dimensão vertical Dt o escoamento através das faces laterais é dado por UDt, enquanto
que o escoamento através das faces superior e inferior terá a grandeza WLt (em que W é
a velocidade média vertical). Como UDt é da mesma ordem de grandeza de WLt (pelo
princípio de conservação de massa), então W será igual a UDtLt-1. Nos oceanos, o
quociente DtLt-1 é da ordem de 10-3. Conclui-se portanto que a componente vertical da
velocidade é cerca de um milésimo das componentes horizontais. Isto não significa, no
entanto, que as correntes verticais poderão ser sempre desprezadas. Existem correntes
verticais que desempenham um papel fundamental nos ciclos biológicos e em processos
relacionados com a produção primária nas zonas costeiras.
2.2 Equações do movimento
53
2.2.2 Equações de Navier-Stokes
O movimento de um volume elementar de fluido incompressível e isotérmico, quando
expresso em termos de valores instantâneos das componentes das velocidades u, v e w e
da pressão p, é caracterizado pelas equações de Navier-Stokes a seguir apresentadas e
cuja dedução é desenvolvida no Apêndice I:
ρ∂∂
∂∂
∂∂
∂∂
ρ∂∂
µ∂∂
∂∂
∂∂
ut
uux
vuy
wuz
Fpx
ux
uy
uzx+ + +
= − + + +
2
2
2
2
2
2 (2.27)
ρ∂∂
∂∂
∂∂
∂∂
ρ∂∂
µ∂∂
∂∂
∂∂
vt
uvx
vvy
wvz
Fpy
vx
vy
vzy+ + +
= − + + +
2
2
2
2
2
2 (2.28)
ρ∂∂
∂∂
∂∂
∂∂
ρ∂∂
µ∂∂
∂∂
∂∂
wt
uwx
vwy
wwz
Fpz
wx
wy
wzz+ + +
= − + + +
2
2
2
2
2
2 (2.29)
onde,
Fx, Fy e Fz são as componentes das forças de volume por unidade de massa [N kg-1];
p é a pressão [Pa];
µ é o coeficientes de viscosidade dinâmico [kg m-1 s-1].
2.2.3 Equações de Reynolds
As equações de Reynolds, obtidas a partir das equações de Navier-Stokes apresentadas
no ponto anterior (substituindo-se o valor instantâneo da velocidade pela soma de um
valor médio temporal com uma flutuação aleatória), caracterizam o movimento médio
(média temporal) de uma partícula de fluido. A dedução destas equações apresenta-se
no Apêndice I:
Capítulo 2
54
( ) ( ) ( )
∂∂
+∂∂
+∂∂
−
−
+++−=
+++
,,,,,,
2
2
2
2
2
2
1
ˆˆˆˆˆˆˆˆˆˆˆ
wuz
vuy
uux
zu
yu
xu
xp
Fzwu
yvu
xuu
tu
x
ρ
∂∂
∂∂
∂∂
µ∂∂
ρ∂
∂∂
∂∂
∂∂∂
ρ
(2.30)
( ) ( ) ( )
∂∂
+∂∂
+∂∂
−
−
+++−=
+++
,,,,,,
2
2
2
2
2
2
1
ˆˆˆˆˆˆˆˆˆˆˆ
wvz
vvy
uvx
zv
yv
xv
yp
Fzwv
yvv
xuv
tv
y
ρ
∂∂
∂∂
∂∂
µ∂∂
ρ∂
∂∂
∂∂
∂∂∂
ρ
(2.31)
( ) ( ) ( )
∂∂
+∂∂
+∂∂
−
−
+++−=
+++
,,,,,,
2
2
2
2
2
2
1
ˆˆˆˆˆˆˆˆˆˆˆ
wwz
vwy
uwx
zw
yw
xw
zp
Fzww
yvw
xuw
tw
z
ρ
∂∂
∂∂
∂∂
µ∂∂
ρ∂
∂∂
∂∂
∂∂∂
ρ
(2.32)
onde,
wvu ˆ e ˆ,ˆ são médias temporais das componentes da velocidade [m s-1];
p é a média temporal da pressão [Pa];
,,, e , wvu são flutuações das componentes da velocidade [m s-1].
O sistema de equações anterior poderá ser ampliado com equações de transporte escalar.
O balanço de massa de um constituinte passivo A, misturado num fluido que se
apresenta em escoamento turbulento, é caracterizado pela seguinte equação:
( ) ( ) ( )
+
+
+
+
++=+++
zc
zyc
yxc
x
zxc
yc
xc
zwc
yvc
xuc
tc
tztytx
m
∂∂
ε∂∂
∂∂
ε∂∂
∂∂
ε∂∂
∂∂∂
∂∂
ε∂
∂∂
∂∂
∂∂∂
ˆˆˆ
ˆˆˆˆˆˆˆˆˆˆ2
2
2
2
2
2
(2.33)
onde se admite que:
( ) ( ) ( ) , ˆ
, ˆ
, ˆ ,,,,,, cw
zc
cvyc
cuxc
tztytx =−=−=−∂∂
ε∂∂
ε∂∂
ε (2.34)
2.2 Equações do movimento
55
e em que,
c é a concentração média do constituinte passivo A [mg L-1];
,c é a flutuação da concentração relativamente à média temporal [mg L-1];
εm coeficiente de viscosidade molecular [m2 s-1];
εti coeficiente de viscosidade turbulenta segundo a direcção i [m2 s-1];
A difusividade mássica molecular, que é uma propriedade do fluido, mantém-se
constante, Ctem =ε . A difusividade mássica turbulenta, ( )tztytxt εεεε ,,rr
- aqui um tensor
diagonal - depende das propriedades locais do escoamento sendo o seu valor o mesmo,
tztytx εεε == , no caso da turbulência poder ser considerada isotrópica.
As parcelas que envolvem produtos das flutuações das componentes da velocidade
relativamente à média denominam-se tensões de Reynolds e podem ser identificadas
com a transferência de quantidade de movimento associada a essas mesmas flutuações.
Em escoamentos turbulentos, as tensões de Reynolds são predominantes em
comparação com as tensões relacionadas com a viscosidade cinemática, à excepção das
camadas junto das fronteiras onde o gradiente das velocidades médias é elevado e as
flutuações transversais praticamente se anulam.
Por analogia com as tensões viscosas num escoamento em regime laminar é usual
adoptar-se a hipótese de Boussinesq, que estabelece que as tensões de Reynolds são
proporcionais aos gradientes das velocidades médias, escrevendo-se em notação
tensorial:
3,2,1, ;32,, =−
∂∂
+∂∂
=− jiKxu
xu
uu iji
j
j
itji δν
(2.35)
em que ijδ é o símbolo de Kronecker e ( )2,2,2,21 wvuK ++= é a energia cinética
turbulenta por unidade de massa.
Capítulo 2
56
As equações de Reynolds na forma tridimensional e a equação da continuidade
estabelecidas em termos de valores médios de cpwvu ˆ e ˆ ,ˆ,ˆ,ˆ , são o ponto de partida
para o estudo de escoamentos reais. Em domínios como as zonas costeiras, estas
equações deverão sofrer as adaptações necessárias para a consideração das
particularidades que lhes são inerentes: fundos pouco profundos predominantes e
consideração de outras forças aplicadas, como sejam, forças de Coriolis devidas à
rotação da Terra, variações da pressão atmosférica, atrito na superfície devido ao vento
e a influência de gradientes de massa volúmica provocados pela presença de substâncias
tais como o sal e poluentes.
2.3 Equação de convecção-difusão-reacção de escalares
Na modelação da qualidade da água recorre-se, na generalidade dos casos, à
caracterização da distribuição no meio fluido de grandezas consideradas como
indicativas dessa qualidade. A evolução espaço-temporal da referida distribuição resulta
da combinação de dois efeitos principais: o seu transporte no meio fluido e as reacções a
que está sujeita em função das condições ambientais.
Em muitas situações considera-se que o transporte dos escalares se faz apenas por
advecção. No entanto, verifica-se na prática que, mesmo na ausência de movimento
perceptível nos fluidos, os escalares são transportados. Este transporte, verifica-se a
diferentes escalas espaciais indo desde a escala molecular, em que o processo de
transporte é bem caracterizado, até escalas mais largas em que a sua quantificação
apresenta maiores dificuldades. À escala molecular o transporte é proporcional ao
gradiente da respectiva grandeza escalar e é tanto maior quanto mais acentuado for este
último.
A mistura nos oceanos é favorecida por processos de agitação como a rebentação de
ondas (de superfície e internas), a acção do vento na camada superficial, ou correntes
junto ao fundo irregular. Muitos destes processos que são fonte de energia para a
agitação nos oceanos, são designados genericamente por turbulência.
2.3 Equação de convecção-difusão-reacção de escalares
57
Frequentemente faz-se uma analogia entre o movimento dos turbilhões e o movimento
molecular, quantificando-se o transporte por difusão turbulenta de acordo com
expressões do mesmo tipo que são utilizadas para a difusão molecular. Os movimentos
turbulentos nos oceanos podem ter escalas espaciais que vão desde as dezenas de
centímetros a dezenas de quilómetros. Assim o valor dos coeficientes de difusão
turbulenta nos oceanos apresenta um intervalo de variação bastante largo: os valores dos
coeficientes verticais variam entre 10-4 a 10-3 m2 s-1 e os coeficientes horizontais de 10-1
a 103 m2 s-1. A diferença entre os valores horizontais e verticais dos coeficientes de
difusão deve-se ao facto de, em geral, o oceano apresentar uma estratificação que
favorece a mistura na direcção das superfícies de igual massa volúmica e dificulta o
movimento em direcções normais àquelas superfícies.
No caso do constituinte apresentar variações devidas a reacções físicas, químicas ou
biológicas, deverá ser acrescentado um termo no segundo membro da Eq. 2.33 que
permita quantificar as referidas variações, sendo, neste caso, a equação de
convecção-difusão-reacção expressa em coordenadas cartesianas da seguinte forma:
( )czc
zyc
yxc
x
zxc
yc
xc
zc
wyc
vxc
utc
tztytx
m
β∂∂
ε∂∂
∂∂
ε∂∂
∂∂
ε∂∂
∂∂∂
∂∂
ε∂∂
∂∂
∂∂
∂∂
+
+
+
+
+
++=+++ 2
2
2
2
2
2
(2.36)
onde,
( )cβ é uma função que representa a parcela de constituinte produzida e/ou
transformada através de reacções [mg L-1 s-1].
A equação anterior serve de base à análise de muitos dos problemas de transporte de
matéria (solúvel) nos cursos de água. A maior dificuldade na sua utilização reside no
facto de as soluções desta equação serem de difícil obtenção. Só em determinadas
condições simplificadas é que é possível obter soluções analíticas. As diferentes formas
da Eq. 2.36 são apresentadas no Apêndice II de acordo com diversas simplificações
consideradas. No Quadro 2.4 apresentam-se algumas das referidas soluções.
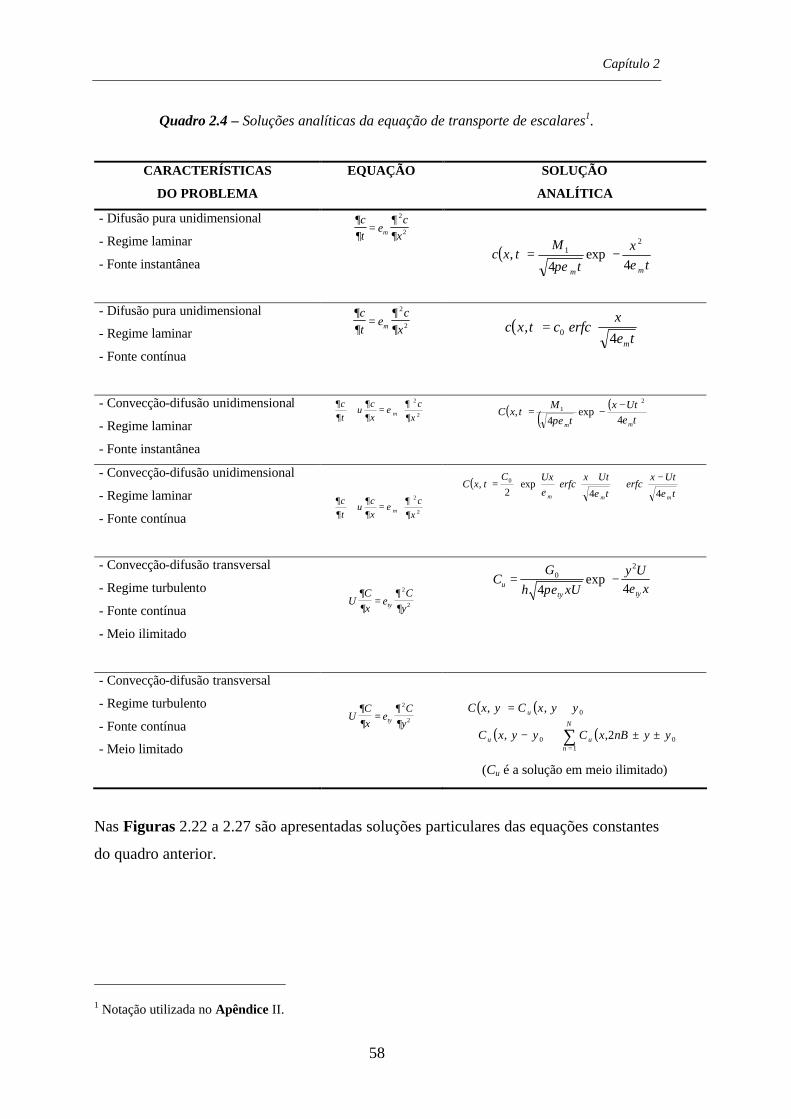
Capítulo 2
58
Quadro 2.4 – Soluções analíticas da equação de transporte de escalares1.
CARACTERÍSTICAS EQUAÇÃO SOLUÇÃO
DO PROBLEMA ANALÍTICA
- Difusão pura unidimensional
- Regime laminar
- Fonte instantânea
∂∂
ε∂∂
ct
cxm=2
2
( )
−=
tx
t
Mtxc
mmεπε 4
exp4
,2
1
- Difusão pura unidimensional
- Regime laminar
- Fonte contínua
∂∂
ε∂∂
ct
cxm=2
2 ( )c x t c erfc
xtm
, =
0 4
ε
- Convecção-difusão unidimensional
- Regime laminar
- Fonte instantânea
=+
2
2
xc
xc
utc
m ∂∂
ε∂∂
∂∂
( ) ( )( )
−−=
tUtx
tM
txCmm επε 4
exp4
,2
1
- Convecção-difusão unidimensional
- Regime laminar
- Fonte contínua
=+
2
2
xc
xc
utc
m ∂∂
ε∂∂
∂∂
( )
−+
+
=
t
Utxerfc
t
Utxerfc
UxCtxC
mmm εεε 44exp
2, 0
- Convecção-difusão transversal
- Regime turbulento
- Fonte contínua
- Meio ilimitado
UCx
Cyty
∂∂
ε∂∂
=2
2
CG
h xUy U
xuty ty
= −
02
4 4πε εexp
- Convecção-difusão transversal
- Regime turbulento
- Fonte contínua
- Meio limitado
UCx
Cyty
∂∂
ε∂∂
=2
2
( ) ( )
( ) ( )∑=
±±+−+
++=N
nuu
u
yynBxCyyxC
yyxCyxC
100
0
2,,
,,
(Cu é a solução em meio ilimitado)
Nas Figuras 2.22 a 2.27 são apresentadas soluções particulares das equações constantes
do quadro anterior.
1 Notação utilizada no Apêndice II.
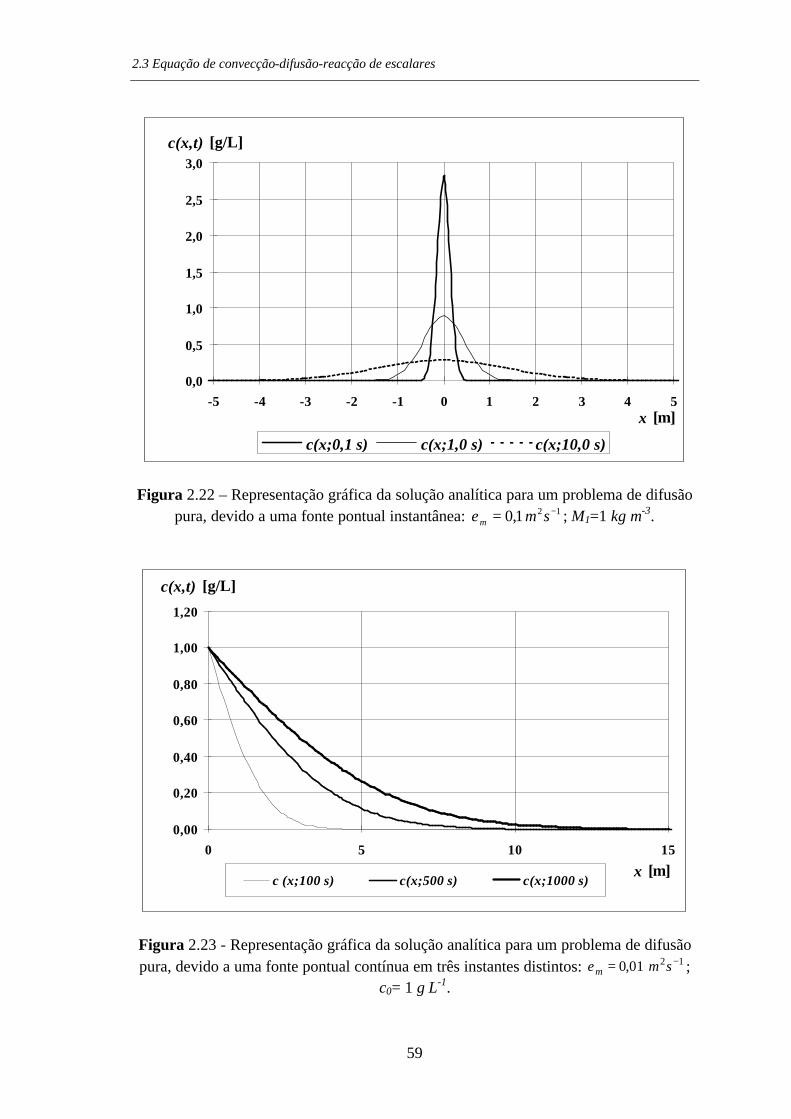
2.3 Equação de convecção-difusão-reacção de escalares
59
0,0
0,5
1,0
1,5
2,0
2,5
3,0
-5 -4 -3 -2 -1 0 1 2 3 4 5x [m]
c(x,t) [g/L]
c(x;0,1 s) c(x;1,0 s) c(x;10,0 s)
Figura 2.22 – Representação gráfica da solução analítica para um problema de difusão pura, devido a uma fonte pontual instantânea: 12 1,0 −= smmε ; M1=1 kg m-3.
0,00
0,20
0,40
0,60
0,80
1,00
1,20
0 5 10 15
x [m]
c(x,t) [g/L]
c (x;100 s) c(x;500 s) c(x;1000 s)
Figura 2.23 - Representação gráfica da solução analítica para um problema de difusão pura, devido a uma fonte pontual contínua em três instantes distintos: 12 01,0 −= smmε ;
c0= 1 g L-1.
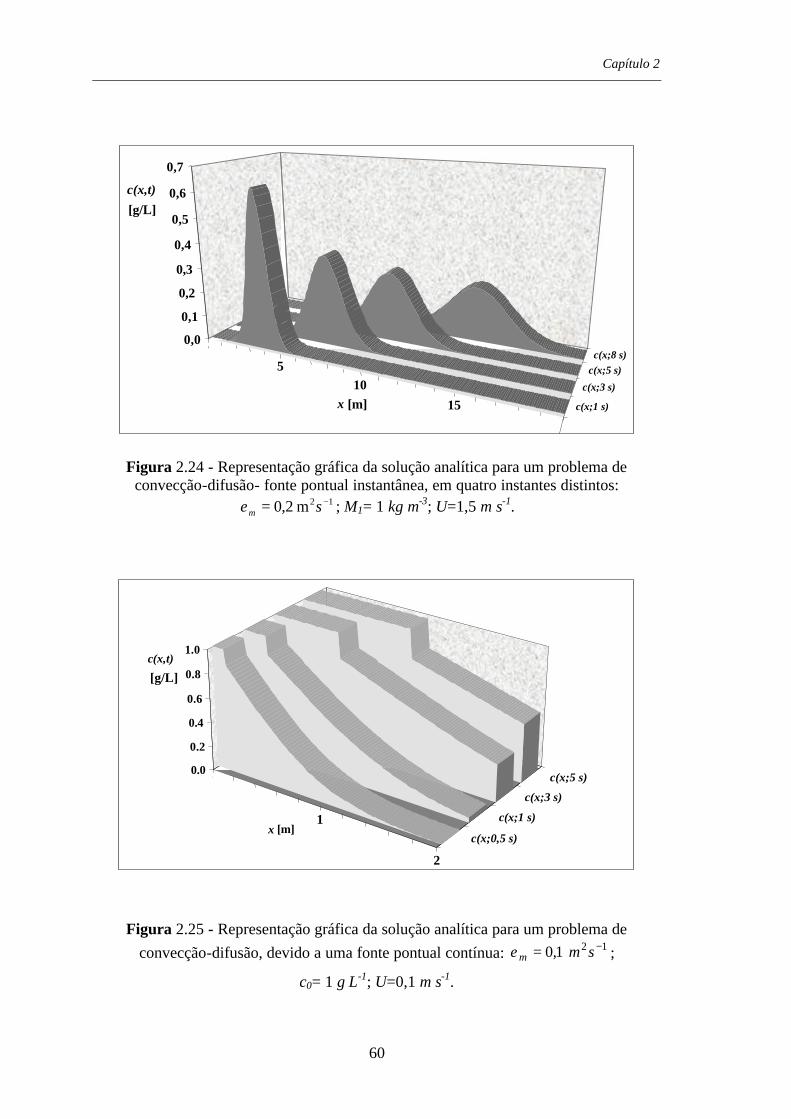
Capítulo 2
60
1
c(x;1 s)
c(x;3 s)
c(x;5 s)c(x;8 s)
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
c(x,t)
x [m]
[g/L]
510
15
Figura 2.24 - Representação gráfica da solução analítica para um problema de convecção-difusão- fonte pontual instantânea, em quatro instantes distintos:
12m 2,0 −= smε ; M1= 1 kg m-3; U=1,5 m s-1.
1
c(x;0,5 s)
c(x;1 s)
c(x;3 s)
c(x;5 s)0.0
0.2
0.4
0.6
0.8
1.0c(x,t)
x [m]
[g/L]
1
2
Figura 2.25 - Representação gráfica da solução analítica para um problema de convecção-difusão, devido a uma fonte pontual contínua: 12 1,0 −= smmε ;
c0= 1 g L-1; U=0,1 m s-1.
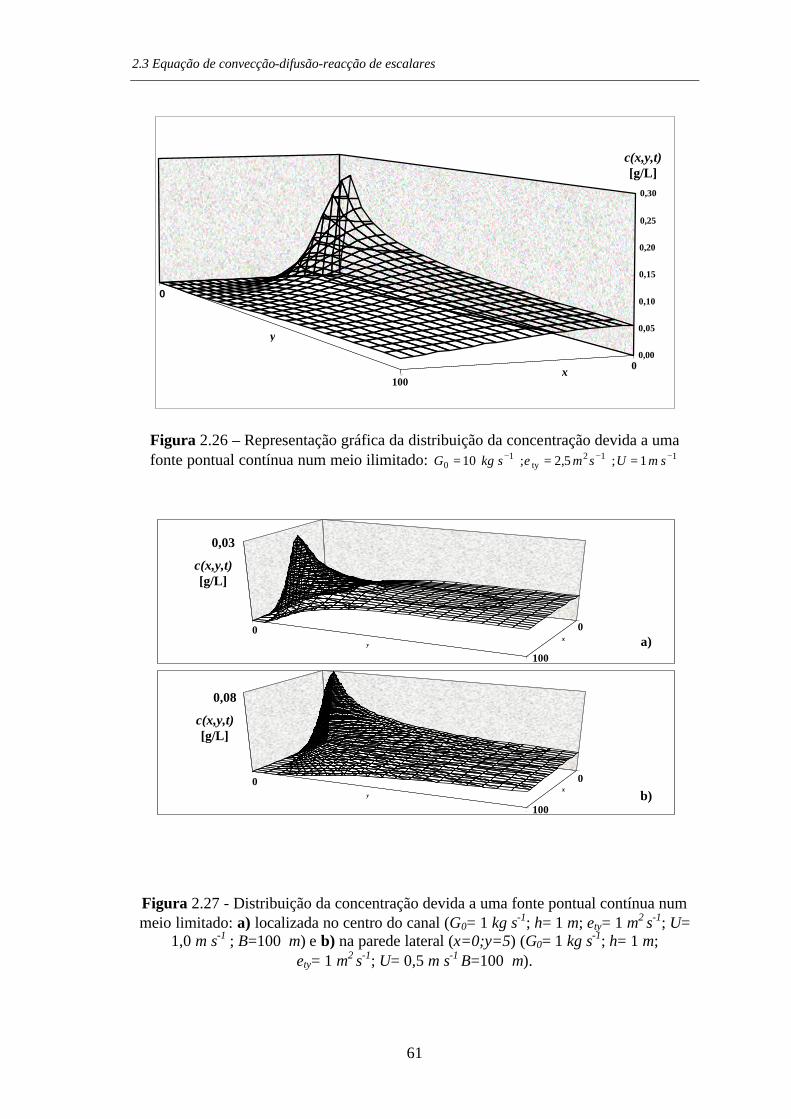
2.3 Equação de convecção-difusão-reacção de escalares
61
0100
0
100
0,00
0,05
0,10
0,15
0,20
0,25
0,30
x
y
c(x,y,t)[g/L]
Figura 2.26 – Representação gráfica da distribuição da concentração devida a uma fonte pontual contínua num meio ilimitado: 112
ty1
0 1= ; 5,2; 10 −−− == smUsm kg sG ε
0
1 0 0
0
1 0 0
xy a)
0
1 0 0
0
1 0 0
xy b)
c(x,y,t)[g/L]
0,08
c(x,y,t)[g/L]
0,03
0
100
0
0
100
0
Figura 2.27 - Distribuição da concentração devida a uma fonte pontual contínua num meio limitado: a) localizada no centro do canal (G0= 1 kg s-1; h= 1 m; εty= 1 m2 s-1; U=
1,0 m s-1 ; B=100 m) e b) na parede lateral (x=0;y=5) (G0= 1 kg s-1; h= 1 m; εty= 1 m2 s-1; U= 0,5 m s-1 B=100 m).

Capítulo 2
62
2.4 Formulação matemática dos modelos 2DH
Integrando segundo a vertical as equações fundamentais da Mecânica dos Fluidos,
incluindo a equação da continuidade, é possível eliminar os termos em que consta a
componente vertical da velocidade e obter um sistema de equações que poderá ser
resolvido em termos das componentes horizontais da velocidade e dos níveis em cada
ponto.
Para tal é necessário começar por definir as condições de fronteira na superfície livre e
no fundo. Considerando a equação genérica da fronteira dada por ( )B x y z t, , , = 0 , esta
deverá obedecer à seguinte condição em todos os pontos da fronteira:
DBDt
Bt
uBx
vBy
wBz
= + + + =∂∂
∂∂
∂∂
∂∂
0 (2.37)
Na superfície (Figura 2.28), teremos ( ) ( )tyxztzyxBS ,,,,, η−= e, consequentemente:
0=+−−−= SSSS w
yv
xu
tDtDB
∂∂η
∂∂η
∂∂η
(2.38)
A Eq. 2.38 é a condição cinemática na superfície livre. A correspondente condição para
o fundo, será definida através de:
( ) ( )yxhzzyxBb ,,, += (2.39)
vindo:
DBDt
uhx
vhy
wbb b b= + + =
∂∂
∂∂
0 (2.40)
A Eq. 2.40 traduz que a velocidade é tangencial à superfície do fundo, ou, o que
fisicamente é equivalente, a assumir um fundo impermeável.
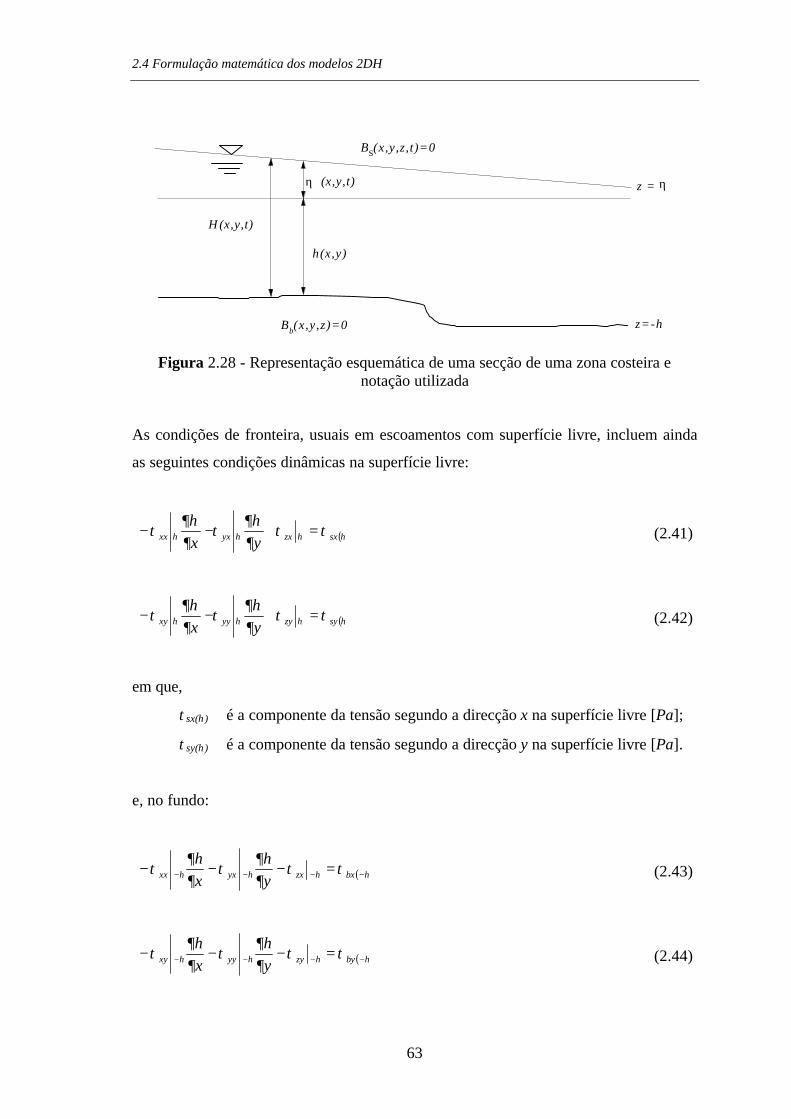
2.4 Formulação matemática dos modelos 2DH
63
H (x,y,t)
h(x,y)
(x,y,t) z =
z=-h
B (x,y,z,t)=0S
B (x,y,z)=0b
ηη
Figura 2.28 - Representação esquemática de uma secção de uma zona costeira e notação utilizada
As condições de fronteira, usuais em escoamentos com superfície livre, incluem ainda
as seguintes condições dinâmicas na superfície livre:
( )ηηηη ττ∂∂η
τ∂∂η
τ sxzxyxxx yx=+−− (2.41)
( )ηηηη ττ∂∂η
τ∂∂η
τ syzyyyxy yx=+−− (2.42)
em que,
τsx(η) é a componente da tensão segundo a direcção x na superfície livre [Pa];
τsy(η) é a componente da tensão segundo a direcção y na superfície livre [Pa].
e, no fundo:
( )hbxhzxhyxhxx yh
xh
−−−− =−−− ττ∂∂
τ∂∂
τ (2.43)
( )hbyhzyhyyhxy yh
xh
−−−− =−−− ττ∂∂
τ∂∂
τ (2.44)

Capítulo 2
64
em que,
τbx(-h) é a componente da tensão segundo a direcção x no fundo [Pa];
τby(-h) é a componente da tensão segundo a direcção y no fundo [Pa].
Integrando a equação da continuidade segundo a vertical, obtém-se:
0=++ ∫ ∫∫ − −−
η ηη
∂∂
∂∂
∂∂
h hhdz
zw
dzyv
dzxu
(2.45)
Aplicando a regra de Leibnitz2 aos dois primeiros termos e calculando o terceiro,
poderemos escrever a seguinte equação:
0=−+−−+−− ∫∫ −−
ηη
∂∂
∂∂η
∂∂
∂∂
∂∂η
∂∂
h bsbsbshww
yh
vy
vvdzyx
hu
xuudz
x
(2.46)
ou:
0=
++−
−−++ ∫∫ −− y
hv
xh
uwy
vx
uwvdzy
udzx bbbh sssh ∂
∂∂∂
∂∂η
∂∂η
∂∂
∂∂ ηη
(2.47)
Substituindo as Eq.s 2.38 e 2.40 na Eq. 2.47 resulta:
0=++ ∫∫ −−
ηη
∂∂
∂∂
∂∂η
hhvdz
yudz
xt
(2.48)
Definindo as velocidades médias verticais (U e V) como sendo:
( ) ∫−+=
η
η hudz
hU
1
(2.49)
2 Regra de Leibnitz: ( )( )( )∂
∂∂∂
∂∂
∂∂x
f x x x dxfx
dx fhx
fhxh x x
h x x
h
h
h h1
1 2 3 31
32
1
1
11 1 2
2 1 2
1
2
2 1, ,
,
,
∫ ∫= + −
2.4 Formulação matemática dos modelos 2DH
65
( ) ∫−+=
η
η hvdz
hV
1
(2.50)
A substituição destas igualdades na Eq. 2.48 conduz finalmente a:
( )[ ] ( )[ ]0=
++
++
yVh
xUh
t ∂η∂
∂η∂
∂∂η
(2.51)
Como já foi referido, para os escoamentos típicos de zonas costeiras com águas pouco
profundas e desprezando-se o efeito das ondas de superfície, as componentes verticais
da velocidade média são muito pequenas. As acelerações verticais e as tensões
tangenciais quando comparadas com o efeito da gravidade e com o gradiente vertical de
pressões, poderão ser desprezadas. Assim a equação do movimento na direcção vertical
reduz-se a:
01
=+ gzp
∂∂
ρ
(2.52)
que corresponde a assumir uma lei hidrostática de distribuição de pressões.
Procedendo-se à integração entre um ponto genérico à profundidade z e a superfície,
η=z , obtém-se:
0=+−=+ ∫∫∫ηηη
ρρ∂∂
zzz
dzgpgdzdzzp
(2.53)
A variação horizontal de pressão será dada, por conseguinte, pela seguinte expressão:
∫=η
ρ∂∂
∂∂
zii
dzx
gxp
(2.54)
Aplicando a regra de Leibnitz2 ao último termo da equação anterior, virá:

Capítulo 2
66
∫+=η
∂∂ρ
∂∂η
ρ∂∂
z iii
dzx
gx
gxp
(2.55)
Considerando ρ constante ao longo da profundidade z, pode obter-se a relação:
( )i
zi x
gzdzx
g∂∂ρ
η∂∂ρη
−=∫ (2.56)
Procedendo-se agora à integração segundo a vertical da equação da quantidade de
movimento, segundo a direcção x, vem:
( ) ( ) ( )
( )
01
=
+++
+−−−=
=+++
∫∫∫
∫∫∫
∫∫∫∫
−−−
−−−
−−−−
dzz
dzy
dzx
dzzx
gdz
xgdzfv
dzz
wudz
yvu
dzxuu
dztu
h
zx
h
yx
h
xx
hhh
hhhh
ηηη
ηηη
ηηηη
∂∂τ
∂∂τ
∂∂τ
ρ
η∂∂ρ
ρ∂∂η
∂∂
∂∂
∂∂
∂∂
(2.57)
Resolvendo os integrais, e tendo em consideração as condições fronteira deduzidas
anteriormente, obtém-se para o primeiro membro da Eq. 2.57
( ) ( ) ( )
( )
( )
∫∫∫
∫∫∫
∫
∫ ∫
∫∫∫∫
−−−
−−−
−
− −
−−−−
++=
=
++−
+−−−+++=
=−+−−+
+−−+−−=
=+++
ηηη
ηηη
η
η η
ηηηη
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂η
∂∂η
∂∂η
∂∂
∂∂
∂∂
∂∂
∂∂η
∂∂
∂∂
∂∂η
∂∂
∂∂
∂∂η
∂∂
∂∂
∂∂
∂∂
∂∂
hhh
bbbb
sssshhh
bbssbbssh
bbssh hbs
hhhh
vudzy
uudzx
udzt
wyh
vxh
uu
wy
vx
ut
uvudzy
uudzx
udzt
uwuwyh
uvy
uvdzvuy
xh
uux
uudzuuxt
hu
tuudz
t
dzz
wudz
yvu
dzxuu
dztu
(2.58)
e para o segundo membro tem-se:
2.4 Formulação matemática dos modelos 2DH
67
( ) ( )hbxsxhyxyxh yx
hxxxxh xx
h
zx
h
yx
h
xx
yh
ydz
y
xh
xdz
x
dzz
dzy
dzx
−−−
−−
−−−
−+−−+
+−−=
=++
∫
∫
∫∫∫
ττ∂∂
τ∂∂η
ττ∂∂
∂∂
τ∂∂η
ττ∂∂
∂∂τ
∂∂τ
∂∂τ
ηη
η
η
η
ηηη
(2.59)
Considerando as condições dinâmicas na superfície livre e no fundo, a Eq. 2.57 pode ser
escrita finalmente como:
( ) ( )
−+++−
−−=++
−−−
−−−−
∫∫
∫∫∫∫
hbxsxh yxh xx
hhhh
dzy
dzx
Hx
g
xgHdzfvdzvu
ydzuu
xdzu
t
τττ∂∂
τ∂∂
ρ∂∂ρ
ρ
∂∂η
∂∂
∂∂
∂∂
η
ηη
ηηηη
12
2
(2.60)
O perfil vertical das velocidades pode ser expresso por funções de distribuição, φu e φv ,
de acordo com as seguintes relações:
( )[ ]u U z tu= +1 φ , (2.61)
e
( )[ ]v V z tv= +1 φ , (2.62)
em que se verificam as seguintes propriedades:
( ) ( ) 0,, == ∫∫ −−
ηηφφ
h vh u dztzdztz (2.63)
( ) ( )( ) ( )( )∫−++=
ηφφα
h jiij dztztzH
t ,1,11
(2.64)

Capítulo 2
68
Introduzindo estas condições na Eq. 2.60, tem-se:
( ) ( ) ( )
( ) ( )
−+++−
−−=++
−−− ∫∫ hbxsxh yxh xx
uvuu
dzy
dzx
Hx
g
xgHfHVHUV
yHUU
xtHU
τττ∂∂
τ∂∂
ρ∂∂ρ
ρ
∂∂η
α∂∂
α∂∂
∂∂
η
ηη12
2
(2.65)
O termo ( )hbx −τ está relacionado com a resistência ao escoamento provocada pelo atrito
no fundo. Em escoamentos permanentes o equilíbrio entre forças de gravidade e forças
de resistência é dado por:
τ ρ= gHI (2.66)
onde,
I representa a inclinação da linha de energia.
Esta expressão constitui ainda uma boa aproximação no estudo de escoamentos
gradualmente variados, como aqueles que se relacionam com a propagação de ondas de
grande comprimento em águas pouco profundas.
Substituindo a Eq. 2.66 na fórmula de Chézy, Q C HI= , obtém-se:
2CQQ
gρτ = (2.67)
em que,
Q representa as componentes da velocidade média segundo a vertical, U ou V [m s-1];
|Q| é o módulo da velocidade média dado por 22 VU + [m s-1];
C é o coeficiente de Chézy [ 121 −sm / ].
Assim,
2.4 Formulação matemática dos modelos 2DH
69
2, CQQ
ghybx ρτ =
−
(2.68)
Por outro lado, na superfície livre:
( ) ( ) ϕρτϕρτ ηη senkWkW vasyvasx22 cos == (2.69)
onde,
Wv é a velocidade do vento [m s-1];
ρa é a massa volúmica do ar [kg m-3];
k é um coeficiente de forma;
ϕ é a direcção do vento [rad].
A análise de casos empíricos mostra que k cresce com o aumento da velocidade do
vento.
Os termos ∫∫ −−
ηητ
∂∂
τ∂∂
h yxh xx dzy
dzx
e representam o transporte lateral de quantidade de
movimento segundo a vertical. Estes termos poderão ser calculados, admitindo-se a
hipótese de Boussinesq expressa pela Eq. 2.35 (ou uma forma simplificada daquelas
relações). Na prática, é usual considerarem-se coeficientes médios segundo a vertical (εx
e εy), dos coeficientes de viscosidade turbulenta, vindo:
xU
Hdzxu
dz xh th xx ∂∂
ε∂∂
ντηη
== ∫∫ −−
ˆ2
(2.70)
yU
Hdzxv
yu
dz yh th yx ∂∂
ε∂∂
∂∂
ντηη
=
+= ∫∫ −−
ˆˆ
(2.71)
A influência destes termos é em geral reduzida, tendo no entanto a propriedade de
melhorar a estabilidade da solução, quando as equações são resolvidas por métodos
numéricos. Esta influência deve ser tida em consideração, quando se analisam soluções
obtidas numericamente, averiguando-se se não contêm erros numéricos associados a
excessivos coeficientes de viscosidade.
Capítulo 2
70
Podem agora escrever-se as equações dos escoamentos bem misturados de águas pouco
profundas, válidas para correntes e para a propagação de ondas de elevado comprimento
de onda, como é o caso da maré:
( ) ( ) ( )
+
+
+−+−
−−=++
yU
Hyx
UH
xCVUgU
kWH
xg
xgHfHVHUV
yHUU
xtHU
yxva
uvuu
∂∂
ε∂∂
ρ∂∂
ε∂∂
ρϕρ
∂∂ρ
ρ
∂∂η
α∂∂
α∂∂
∂∂
11cos
2 2
222
2
(2.72)
( ) ( ) ( )
+
+
+−+−
−−−=++
yV
Hyx
VH
xCVUgV
kWH
yg
ygHfHUHVV
yHUV
xtHV
yxva
vvuv
∂∂
ε∂∂
ρ∂∂
ε∂∂
ρϕρ
∂∂ρ
ρ
∂∂η
α∂∂
α∂∂
∂∂
11sin
2 2
222
2
(2.73)
( )[ ] ( )[ ]0=
++
++
yVh
xUh
t ∂η∂
∂η∂
∂∂η
(2.74)
Em alguns modelos matemáticos o efeito da distribuição vertical de velocidades (não
uniforme) nas forças de inércia não é considerado, isto é 2,1, ,1 == jiijα . Esta
simplificação pode ser justificada pelo facto dos termos de aceleração convectiva serem
de ordem de grandeza inferior à aceleração local. Na prática mesmo em condições
extremas, os valores de α variam entre 0,5 e 1,5; assim, em média, estes efeitos serão
desprezáveis quando comparados com os valores dos termos da aceleração local.
Os coeficientes médios de viscosidade turbulenta poderão, na generalidade dos casos,
ser considerados invariáveis no espaço e iguais segundo cada uma das direcções. Assim,
considerando-se a equação da continuidade, as equações 2.72 a 2.74 poderão
escrever-se de forma simplificada, do seguinte modo:
2.5 Formulação matemática dos modelos quasi-3D
71
( )
++
++
−+
+
++
−−=++
2
2
2
2
2
222 cos
2
yU
xU
ChVUgU
hkW
hx
gx
gfVyU
VxU
Ut
U
va
∂∂
∂∂
ρε
ηηϕρ
η∂∂ρ
ρ∂∂η
∂∂
∂∂
∂∂
(2.75)
( )
++
++
−+
+
++
−−−=++
2
2
2
2
2
222
2
yV
xV
ChVUgV
hsenkW
hy
gy
gfUyV
VxV
UtV
va
∂∂
∂∂
ρε
ηηϕρ
η∂∂ρ
ρ∂∂η
∂∂
∂∂
∂∂
(2.76)
( )[ ] ( )[ ]0=
++
++
yVh
xUh
t ∂η∂
∂η∂
∂∂η
(2.77)
2.5 Formulação matemática dos modelos quasi-3D
Será introduzida neste ponto a formulação matemática dos modelos hidrodinâmicos
quasi-tridimensionais (quasi-3D) aplicáveis a bacias oceânicas e zonas costeiras.
Apresenta-se a formulação das variáveis termodinâmicas e a formulação de um modelo
de turbulência.
2.5.1 Adaptação das equações fundamentais da Mecânica dos Fluidos
Separando os termos das tensões de Reynolds referentes à direcção vertical dos
relacionados com a direcção horizontal, as equações fundamentais da Mecânica dos
Fluidos podem escrever-se na seguinte forma simplificada:
( ) ( ) ( )∂∂
∂∂
∂∂
∂∂ ρ
∂∂
∂τ∂
∂τ
∂∂∂
∂∂
ut
uux
vuy
wuz
fvpx x y z
Kuz
xx yxM+ + + = + − + +
+
1
0
(2.78)
( ) ( ) ( )∂∂
∂∂
∂∂
∂∂ ρ
∂∂
∂τ
∂
∂τ
∂∂∂
∂∂
vt
uvx
vvy
wvz
fupy x y z
Kvz
xy yyM+ + + = − − + +
+
1
0
(2.79)
Capítulo 2
72
e admitindo válida a hipótese da hidrostaticidade vem:
ρρ ρ
∂∂0 0
1g
pz
= − (2.80)
em que τ τ τxx xy yy, e são as componentes do tensor de tensões de Reynolds no plano
horizontal, sendo neste modelo aproximadas por:
τ∂∂xx MAux
= 2 (2.81)
τ∂∂
∂∂
τxy M yxAuy
vx
= +
=
(2.82)
τ∂∂yy MAvy
= 2 (2.83)
A quantidade AM é o coeficiente de difusão turbulenta horizontal (também designado
por coeficiente de mistura horizontal), enquanto que KM representa o coeficiente de
difusão turbulenta vertical (também designado de coeficiente de mistura vertical).
Ambas as quantidades são determinadas pela mistura turbulenta na coluna de água.
Note-se que a Eq. 2.80 resulta da consideração da aproximação hidrostática e poderá ser
facilmente integrada na vertical para se obter a pressão p para qualquer profundidade.
Note-se ainda que os termos de Coriolis se apresentam na forma geral, não sendo
efectuada nenhuma aproximação como a do plano-f ou plano- β . Na primeira
aproximação ignora-se a variação de f com a latitude, enquanto que na última se
efectua uma aproximação linear f f y= +0 β , onde β é igual a ∂ ∂f y e y é a
coordenada na direcção da latitude igual a Rφ , sendo R é o raio da Terra e φ a latitude.
2.5 Formulação matemática dos modelos quasi-3D
73
2.5.2 Variáveis termodinâmicas
As variações da massa volúmica no oceano são de grande importância na determinação
da circulação oceânica. A massa volúmica ρ é uma função complexa da temperatura T,
da salinidade S e da pressão (ou, de forma equivalente, da profundidade z). É habitual
considerarem-se os efeitos da pressão considerando que ρ é a massa volúmica
potencial, a qual depende apenas da temperatura potencial Θ e da salinidade S. A
temperatura potencial Θ é usualmente referida à pressão atmosférica, significando que
é a temperatura conseguida por uma parcela de fluido à temperatura T e salinidade S (in
situ) deslocada adiabaticamente desde a profundidade z até à superfície. Os termos
correspondentes aos gradientes de pressão baroclínicos nas equações de conservação da
quantidade de movimento e a estabilidade vertical da coluna de água podem ser
avaliados de forma correcta usando-se gradientes horizontais e verticais da massa
volúmica potencial ρ , a qual poderá expressar-se apenas em função de Θ e S:
( )ρ ρ= Θ, S (2.84)
Esta equação de estado é habitualmente expressa em termos de uma série de potências
de Θ e S, podendo ser facilmente quantificada de forma numérica. A mais popular
equação de estado de uso generalizado nos modelos oceânicos é devida a Fofonoff
(1962). Mais recentemente, surgiu uma expressão proposta pela UNESCO que tem
vindo a ser implementada na sua forma original ou em formas ligeiramente alteradas
(Eq. 2.5) em quase todos os modelos.
A temperatura potencial Θ e a salinidade S são governadas por relações de conservação
da forma:
( ) ( ) ( )S
Qz
Kzy
Ayx
Axz
wyv
xu
tS
VHH ∂∂
∂∂
∂∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
+
Θ
+
∂Θ
+
Θ
=Θ
+Θ
+Θ
+Θ (2.85)
( ) ( ) ( )
+
∂
+
=+++
zS
Kzy
SA
yxS
Axz
wSyvS
xuS
tS
VHH ∂∂
∂∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂ (2.86)
Capítulo 2
74
onde KV é a difusividade turbulenta vertical e AH a difusividade turbulenta horizontal
devidas à mistura turbulenta de calor e sal na coluna de água. O último termo da Eq.
2.85 resulta da consideração do aquecimento devido à penetração da radiação solar (de
pequeno comprimento de onda). Enquanto os valores dos coeficientes de difusão
turbulenta horizontal AM e AH poderão ser também influenciados por questões
numéricas resultantes da necessidade de reduzir o “ruído” associado a escalas inferiores
às da discretização do domínio computacional, os coeficientes de difusão turbulenta
verticais KM e KV são principalmente determinados pela mistura turbulenta de pequena
escala na coluna de água. Contudo a parametrização adequada de AM , AH , KM e KV é
uma questão ainda não resolvida, da maior importância na modelação oceânica, uma
vez que os fundamentos teóricos que estão na base da sua quantificação são geralmente
discutíveis.
2.5.3 Modelo de turbulência
Em Carmo (1995) encontra-se uma excelente revisão sobre os tipos de modelos de
turbulência aplicáveis na modelação de escoamentos com superfície livre.
É usual o recurso aos modelos de fecho de zero-equações para a determinação dos
coeficientes de difusão turbulenta. Este procedimento constitui uma aproximação
grosseira, uma vez que, mesmo intuitivamente, é evidente que os seus valores são
função do campo de turbulência do fluido e deveriam ser quantificados a partir das
características da mistura turbulenta. Contudo, fora das camadas de mistura turbulenta
próximas do fundo e da superfície do oceano, pouco é conhecido sobre os processos de
mistura intermitente que ocorre no interior do oceano. Tradicionalmente, AM , AH , KM
e KV são impostos a priori como valores constantes e posteriormente corrigidos de
forma a obterem-se os resultados pretendidos. Todavia, dada a enorme dependência dos
resultados dos modelos em relação aos valores assumidos para as constantes anteriores,
o procedimento indicado revela-se inadequado, tendo vindo a ser substituído por
relações de fecho de ordem superior. Em vários modelos, utiliza-se um fecho de uma-
equação para AM e HA , relacionando-se estas variáveis com as taxas médias de
deformação no fluido, enquanto que KM e KV são obtidos através de uma relação de duas

2.5 Formulação matemática dos modelos quasi-3D
75
equações para a mistura turbulenta de pequena escala, que determina principalmente os
coeficientes de difusão turbulenta verticais nas camadas de mistura superior e inferior.
No interior do oceano, KM e KV continuam ainda a ser considerados constantes, embora
exista uma nítida evidência de que KM e KV devam ser função da estratificação vertical
da coluna de água; por outro lado, o valor de KV para o calor deve ser diferente do valor
considerado para a salinidade.
Os coeficientes de mistura vertical KM e KV poderão ser obtidos pelo modelo de
turbulência de duas-equações proposto por Mellor e Yamada (1974,1982). O modelo
de turbulência é caracterizado por duas quantidades, a energia cinética turbulenta q 2 2
e a macroescala turbulenta l . Este modelo de turbulência é caracterizado pelas duas
seguintes equações:
( ) ( ) ( ) ( )
+
+
+
−+
+
=+++
zq
Kzy
qA
yxq
Ax
lBq
zg
Kzv
zu
Kz
wqy
vqx
uqtq
qHH
VM
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂ρ
ρ∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
222
1
3
0
222222
222
(2.87)
( ) ( ) ( ) ( )
( ) ( ) ( )
+
+
+
+−
+
+
=+++
zlq
Kzy
lqA
yxlq
AxL
lE
Bq
zg
lEKzv
zu
lEKz
lwqy
lvqx
luqt
lq
qHH
VM
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
κ
∂∂ρ
ρ∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
2222
21
3
03
22
1
2222
1
(2.88)
As relações de fecho de duas-equações estabelecem os valores dos coeficientes de
mistura vertical KM, KV e Kq em função das escalas de turbulência q l e :
qqHVMM lqSKlqSKlqSK === e , (2.89)
onde qHM SSS e , são funções de estabilidade determinadas a partir de relações
algébricas deduzidas analiticamente através de simplificações efectuadas no modelo
completo de fecho de duas equações:
Capítulo 2
76
( )( )S A
AB
C A A S G
A A GM
H H
H
=− −
+ +
−
1
1
11 1 2
1 2
16
3 9 2
1 9
(2.90)
( )( )S A
AB
A G A BH
H
=−
− +
2
1
1
2 1 2
16
1 3 6
(2.91)
Sq = 02. (2.92)
onde Glq
gzH =
2
20ρ
∂ρ∂
; A A B B1 2 1 2 , e , são constantes que permitem quantificar várias
razões entre escalas de comprimento de turbulência e a macroescala de turbulência l . O
fecho de turbulência assume que todas as escalas de comprimento de turbulência são
proporcionais a uma outra.
O termo que multiplica q B31 na Eq. 2.88 é uma função de proximidade de parede
inserido empiricamente para assegurar um comportamento logarítmico perto das
fronteiras sólidas e L é dado por:
( ) 111 −−− ++= zHzL (2.93)
onde H é a profundidade da coluna de água. Os termos C1, E1, E2 e E3 são constantes
empíricas resultantes de trabalhos experimentais laboratoriais em turbulência, tal como
as constantes A1, A2, B1 e B2:
(A1, A2, B1, B2, C1, E1, E2, E3 = (0,92; 0,74; 16,6; 10,1; 0,08; 1,8; 1,33; 1,0) (2.94)
κ é a conhecida constante de von Karman (=0.4) que surge quando se ajusta uma lei
logarítmica ao perfil de velocidade adjacente a uma fronteira de uma camada turbulenta.

2.5 Formulação matemática dos modelos quasi-3D
77
2.5.4 Condições de fronteira
2.5.4.1 Superfície livre
O escoamento deve satisfazer determinadas condições de fronteira na superfície livre
( )z x y= η , . Dado que a superfície livre é uma superfície material, w deverá satisfazer a
relação:
wt
ux
vy
= + +∂η∂
∂η∂
∂η∂
(2.95)
Adicionalmente, os fluxos na superfície livre deverão satisfazer as seguintes relações:
( )Kuz
vzM x y
∂∂
∂∂ ρ
τ τ, ,
=
1
00 0
(2.96)
( )Kz
Sz
Q QM H S
∂∂
∂∂ ρ
Θ, ,
=
1
0
(2.97)
onde τ0x e τ0y são as componentes das tensões devidas ao vento, e QH e QS são os
fluxos de calor e sal na superfície. QH resulta do balanço de energia na superfície
envolvendo a radiação solar incidente (ondas longas e curtas), a radiação que ocorre a
partir do oceano e os fluxos de calor latente e sensível do oceano para a atmosfera:
( ) LSSoWWH HHTLSQ −−−+−= 41 σεαβ (2.98)
onde,
SW é o fluxo de radiação solar de ondas curtas [W m-2];
LW é o fluxo de radiação solar de ondas longas [W m-2];
α é o albedo ou reflectividade da superfície da água para a radiação solar;
Capítulo 2
78
oε é a emissividade da superfície do oceano;
σ é a constante de Stefan-Boltzmann [W m-2 K-4];
TS é a temperatura da superfície do oceano [K];
HS e HL são fluxos de calor sensível e latente [W m-2];
β é a fracção de fluxo de ondas curtas absorvido à superfície.
Se β for considerado igual à unidade, então QS na Eq. 2.85 deverá ser considerado
nulo, implicando que toda a radiação de ondas curtas incidente é absorvida à superfície
e que não existe libertação de calor do oceano. Um cenário mais realista considera a
absorção na superfície das componentes de infravermelhos enquanto que as
componentes de ondas longas são absorvidas no corpo de fluido, numa extensão de
penetração que dependente da claridade óptica das camadas superiores. Esta prescrição
mais geral é fundamental do ponto de vista da produtividade biológica da camada
superior do oceano. Aqui β =0 e
( ) ( )Q S z LH i W ii
N
= −=∑β α1
1exp
(2.99)
onde 11
=∑=
N
iiβ .
Li representa a escala do comprimento de atenuação da componente i de ondas curtas, a
qual contribui na fracção βi do fluxo de ondas curtas incidente. Note-se que a
componente correspondente às ondas de comprimento longo LW é totalmente absorvida
numa espessura muito reduzida da camada superficial do oceano. Normalmente a
consideração de cerca de 5-6 bandas espectrais é adequada para efeitos de modelação,
embora um número mais elevado de N seja necessário para a modelação das
características ópticas e a produtividade biológica da camada superficial do oceano
(Sathyendranath e Platt, 1988). Em muitos casos, a decomposição do fluxo de ondas
curtas em duas componentes, onde uma componente é absorvida próximo da superfície
(pequena escala de atenuação) e a outra a maior profundidade (escala de atenuação da

2.5 Formulação matemática dos modelos quasi-3D
79
ordem das dezenas de metros) revela-se adequada (Dickey e Simpson, 1981). É óbvio
que as escalas de atenuação dependem fortemente da claridade óptica da água. Águas
com elevadas concentrações de sólidos em suspensão junto da costa e/ou águas com
uma elevada produção biológica têm escalas de atenuação mais curtas quando
comparadas com as águas claras nos desertos biológicos dos giros centrais oceânicos.
O fluxo de sal QS na superfície oceânica é dado por:
Q S E PS S= −
• •
(2.100)
onde E•
representa a taxa de evaporação, P•
a taxa de precipitação na superfície e SS a
salinidade à superfície. Como é evidente, E•
está relacionada com o fluxo de calor
latente HL .
Uma alternativa às Eq.s 2.99 e 2.100 é fixar a temperatura e salinidade superficiais,
quando conhecidas:
( ) ( )Θ, ,S T SS S= (2.101)
Uma outra alternativa consiste em considerar os valores de Θ e S superficiais com um
atraso de tempo t l :
( ) ( ) ( )[ ]∂∂t
St
T S Sl
S SΘ Θ, ,= − −1
(2.102)
As condições para q2 e l na superfície livre são:
,0 e 20*
321
2 == luBq (2.103)
onde u*0 é a velocidade de atrito na superfície ( )[ ] 4120
20
20 ρττ yx +=
Capítulo 2
80
Na Eq. 2.103 assume-se que as ondas de superfície não contribuem para a turbulência
junto da superfície livre. Contudo quando a camada de mistura superior é pouco
profunda e os ventos são fracos, as contribuições das ondas de superfície não podem ser
ignoradas e poderão ser incluídas parametrizando-se o fluxo de energia cinética devido
às ondas, sendo este prescrito na superfície livre. Similarmente, l pode ser imposto
como uma função da amplitude das ondas. Todavia, a turbulência induzida pelas ondas
diminui rapidamente com a profundidade.
2.5.4.2 Fundo oceânico
No fundo oceânico, z = -h, não poderá existir qualquer fluxo de calor ou sal:
( )∂∂
∂∂
Θz
Sz b
, ,
= 0 0
(2.104)
Também não deverá existir qualquer fluxo de massa através do fundo conduzindo a
yh
vxh
uw bb ∂∂
∂∂
−−= (2.105)
As restantes condições de fronteira são:
( )
0
,1
,
2*
321
2
0
==
=
luBq
zv
zu
K
b
bybxM ττρ∂
∂∂∂
(2.106)
onde bxτ e byτ são as componentes das tensões de atrito no fundo e
( )[ ] 4120
22* / ρττ bybxbu += é a velocidade de atrito no fundo. As tensões no fundo são
determinadas aproximando-se as velocidades bu , bv do ponto da grelha mais próximo
do fundo, à distância zb , a uma lei de parede logarítmica:
2.5 Formulação matemática dos modelos quasi-3D
81
( ) [ ] ( )bbbbDbybx vuvuC ,,2122
0 += ρττ (2.107)
onde o coeficiente de atrito CD é determinado a partir da lei logarítmica:
2
0
ln1
−
=
zz
C bD κ
(2.108)
z0 é a escala de rugosidade, sendo a sua grandeza da ordem de um centímetro para um
fundo moderadamente rugoso. O seu valor poderá ser estimado a partir das
características granulométricas do fundo (d50) utilizando-se a expressão:
305.2 50
0d
z ≈ (2.109)
Nas condições 2.107 e 2.108 assume-se que o ponto da malha mais próximo do fundo se
encontra na camada logarítmica. Se a resolução vertical do modelo não for adequada
para satisfazer esta condição, o coeficiente de atrito é considerado igual a 0,0025, pelo
que coincide com a convencional lei de atrito quadrática.
2.5.4.3 Fronteiras laterais
Numa bacia fechada, as condições a impor nas fronteiras laterais são simples. As
condições de fluxos nulos de massa, quantidade de movimento, calor, sal e turbulência
deverão ser satisfeitas nos pontos da fronteira lateral sólida. Contudo, nas fronteiras
abertas, a influência da região exterior ao domínio do modelo terá de ser especificada.
As condições de fronteira lateral aberta são por conseguinte as que envolvem maior
dificuldade no seu estabelecimento, uma vez que as condições exteriores não são
normalmente conhecidas. No caso de existir uma quantidade suficiente de dados
resultantes de observações na fronteira aberta ou de serem conhecidas as condições
resultantes de outros modelos que contenham a região exterior, não haverá dificuldade
em estabelecer as condições de fronteira lateral aberta. No entanto, isto só raras vezes se
Capítulo 2
82
verifica, sendo necessário efectuar várias aproximações, umas mais reais que outras.
Geralmente os resultados obtidos com um determinado modelo são tão fiáveis quanto as
condições impostas nas fronteiras laterais abertas, pelo que deverá ser dada especial
atenção no estabelecimento destas condições de fronteira, por forma a que conduzam a
resultados razoáveis. Todavia é possível estabelecer várias regras gerais. No que se
refere aos escalares Θ, ,S q l2 e , as formas das condições de fronteira laterais são
estabelecidas a partir do sentido do escoamento nessa fronteira. Quando existe uma
entrada através da fronteira os valores de Θ e S terão que ser estabelecidos, enquanto
que, se existir uma saída, Θ e S terão que ser transportados para o exterior:
( ) ( )∂∂
∂∂t
S un
SnΘ Θ, ,+ = 0 (2.110)
onde n representa a normal à fronteira lateral. No que se refere ao q l2 e é suficiente
considerar que não existe qualquer advecção através das fronteiras laterais.
A prescrição da massa e da quantidade de movimento nas fronteiras laterais abertas é
mais difícil dado que estas dependem efectivamente da interacção com o exterior, a qual
é a priori desconhecida quando se modela uma região limitada. No entanto, o
escoamento através das fronteiras tem que ser estabelecido como uma função do tempo.
O requisito mais importante a satisfazer é o balanço de massa. Assim as condições de
fronteira abertas terão que ser especificadas de forma a que não exista nenhuma
alteração de massa durante um determinado intervalo de tempo. Para os cálculos de
maré (barotrópicos), a elevação da superfície livre ( )η t deverá ser imposta na fronteira.
Muitas vezes é utilizada uma condição de radiação de Sommerfeld da forma:
0~ =+n
ct ∂
φ∂∂φ∂
(2.111)
onde φ é qualquer quantidade como ,...,uη e c~ é a velocidade de fase de uma
perturbação que se aproxima da fronteira desde o interior do domínio. A Eq. 2.111 é
definida por forma a não conter perturbações transitórias geradas no interior. Contudo, a
sua aplicação nem sempre é clara, especialmente desde que a velocidade de fase da
2.5 Formulação matemática dos modelos quasi-3D
83
perturbação não seja conhecida a priori, sendo difícil decidir quais as perturbações que
deverão ser propagadas para o exterior. Uma estratégia possível para resolver a primeira
questão é calcular a velocidade de fase na região interior adjacente à fronteira aberta a
partir das soluções do interior e usar o valor calculado na Eq. 2.111. É importante
lembrar que condições como a que é traduzida pela Eq. 2.111 não substituem a
necessidade de se conhecer como a região exterior afecta as condições de fronteira
laterais abertas.
2.5.5 Transformação para coordenadas sigma
Um sistema de coordenadas vertical, conforme topograficamente, tem muitas vantagens
quando se modelam bacias oceânicas ou zonas costeiras com grandes variações de
relevo do seu fundo. Estas apresentam, no entanto, um custo adicional em termos de
agravamento da complexidade das equações a resolver. Procede-se neste ponto à
transformação das equações em coordenadas verticais z para coordenadasσ , com:
ηη
σ+−
=hz
(2.112)
Formalmente, procede-se à transformação das equações de um sistema de coordenadas
( )x y z t, , , para um sistema de coordenadas ( )x y t, , ,σ onde x x= , y y= e t t= . Seja
φ uma variável dependente que representa uma quantidade qualquer relacionada com
uma determinada propriedade oceânica. As derivadas desta quantidade estão
relacionadas nos dois sistemas de coordenadas pelas seguintes expressões:
+−=
=
+−=
+−=
tHtH
Htt
Hz
yHyH
Hyy
xHxH
Hxx
∂∂η
∂∂σ
∂σφ∂
∂φ∂
∂φ∂
∂σφ∂
∂φ∂
∂∂η
∂∂σ
∂σφ∂
∂φ∂
∂φ∂
∂∂η
∂∂σ
∂σφ∂
∂φ∂
∂φ∂
1
1
1
1
(2.113)
(2.114)
(2.115)
(2.116)
Capítulo 2
84
onde η+= hH é a profundidade total da coluna de água. Note-se que σ tal como foi
definido na Eq. 2.112, varia desde 0 na superfície livre z = η até -1 no fundo hz −= (é
também possível definir σ de forma que a sua variação seja entre -1 e +1). Utilizando
as Eq. 2.113 a 2.116 e esquecendo as barras sobre as coordenadas x, y e t para uma
maior clareza, a equação de continuidade, as equações de conservação da quantidade de
movimento, as equações de conservação de temperatura potencial e salinidade e as
equações da energia cinética e da macro escala da turbulência poderão ser escritas na
seguinte forma:
( ) ( ) 0=+++∂σ∂
∂∂
∂∂
∂∂η w
vHy
uHxt
(2.117)
( ) ( ) ( ) ( ) 11 DFu
HK
DPfvHwuy
vuHx
uuHuH
tM +
+−=−+++
∂σ∂
∂σ∂
∂σ∂
∂∂
∂∂
∂∂
(2.118)
( ) ( ) ( ) ( ) 22 DFv
HK
DPfuHwvy
vvHx
uvHvH
tM +
+−=−+++
∂σ∂
∂σ∂
∂σ∂
∂∂
∂∂
∂∂
(2.119)
( ) ( ) ( ) ( ) Θ+
Θ
=Θ+Θ
+Θ
+Θ DFHK
wy
Hvx
HuH
tV
∂σ∂
∂σ∂
∂σ∂
∂∂
∂∂
∂∂
(2.120)
( ) ( ) ( ) ( ) SV DF
SHK
wSy
vSHx
uSHSH
t+
=+++
∂σ∂
∂σ∂
∂σ∂
∂∂
∂∂
∂∂
(2.121)
( ) ( ) ( ) ( )
qVM
q
DFlBHqg
Kvu
HK
qH
Kwq
yHvq
xHuq
Hqt
+−+
+
+
+
=+++
1
322
22
222
222
∂σ∂ρ
ρ∂σ∂
∂σ∂
∂σ∂
∂σ∂
∂σ∂
∂∂
∂∂
∂∂
(2.122)
e

2.5 Formulação matemática dos modelos quasi-3D
85
( ) ( ) ( ) ( ) ( )
lVM
q
DFLl
EB
HqglEK
vuHl
EK
lqH
Klwq
ylHvq
xlHuq
lHqt
+
+−+
+
+
+
=+++
2
21
3
3
22
1
22
222
1κ∂σ
∂ρρ∂σ
∂∂σ∂
∂σ∂
∂σ∂
∂σ∂
∂∂
∂∂
∂∂
(2.123)
onde lqS DFDFDFDFDFDF e ,,,, 21 Θ representam os termos de difusão horizontal para
a quantidade de movimento e para as grandezas escalares lqqS 22 e ,,Θ
respectivamente, e 21 e DPDP representam os gradientes horizontais de pressão.
Salienta-se que a barra de w não é apresentada nas equações anteriores, a qual
representa uma pseudo-velocidade vertical no novo sistema de coordenadas, dada por:
+−+−+−=
ttH
yv
yH
vx
ux
Huww
∂∂η
∂∂
σ∂∂η
∂∂
σ∂∂η
∂∂
σ (2.124)
esta relação simplifica quer as equações anteriores quer as condições de fronteira a
satisfazer na superfície livre e no fundo:
1 ou 0para 0 −=== σσw (2.125)
Os termos relacionados com o gradiente de pressões DP DP1 2 e são dados por:
σ∂σ∂ρ
σ∂∂
ρ
∂∂η
∂∂σ
ρσρ∂∂
ρ∂∂η
∂∂
ρ
σ
σ
dxHgH
xHxH
Hd
xgH
xgH
xpH
DP a
∫
∫
−
−
+−++=
0
''
0
'0
0
2
01
1
(2.126)
'0
''
0
'0
0
2
02
1
σ∂σ∂ρ
σ∂∂
ρ
∂∂η
∂∂σ
ρσρ∂∂
ρ∂∂η
∂∂
ρ
σ
σ
dyHgH
yHyH
Hd
ygH
ygH
ypH
DP a
∫
∫
−
−
+−++=
(2.127)
Os termos relativos à viscosidade (difusão) horizontal 21 e DFDF são dados por:
Capítulo 2
86
+−+
+−= yxyxxx
xx
yHyH
HyxHxH
HxDF τ
∂∂η
∂∂σ
∂σ∂
τ∂∂
τ∂∂η
∂∂σ
∂σ∂
∂∂τ 11
1
(2.128)
+−+
+−= yyyyxy
xy
yHyH
HyxHxH
HxDF τ
∂∂η
∂∂σ
∂σ∂
τ∂∂
τ∂∂η
∂∂σ
∂σ∂
∂∂τ 11
2
(2.129)
onde:
( )
( ) ( )
( )
+−=
+−+
+−=
+−=
yyH
vvHx
A
xxH
vvHxyy
HuuH
yA
xxH
uuHx
A
Myy
Mxy
Mxx
∂∂η
∂∂
σ∂σ∂
∂∂
τ
∂∂η
∂∂
σ∂σ∂
∂∂
∂∂η
∂∂
σ∂σ∂
∂∂
τ
∂∂η
∂∂
σ∂σ∂
∂∂
τ
2
2
2
(2.130)
O termo de difusão horizontal ΘDF é dado por:
( ) ( )
+−+
+−=Θ yyxx q
yHyH
Hq
yq
xHxH
Hq
xDF
∂∂η
∂∂σ
∂σ∂
∂∂
∂∂η
∂∂σ
∂σ∂
∂∂ 11
(2.131)
onde:
( )
Θ
+−Θ=
xxH
Hx
Aq Hx ∂∂η
∂∂
σ∂σ∂
∂∂
(2.132)
e
( )
Θ
+−Θ=
yyH
Hy
Aq Hy ∂∂η
∂∂
σ∂σ∂
∂∂
(2.133)
2.5 Formulação matemática dos modelos quasi-3D
87
Os termos de difusão horizontal DFS, DFq e DFl das Eq.s 2.121 a 2.123 são dados por
expressões similares às representadas pelas Eq. 2.118 a 2.119, substituindo-se Θ por
lqqS 22 e , , respectivamente.
As expressões anteriores, para quantidades relativas a difusões horizontais, são
expressões gerais. É possível simplificar estas expressões desprezando-se os termos
∂η∂
∂η∂x y
e , uma vez que em regra yH
<< e xH
<<∂∂
∂∂η
∂∂
∂∂η
yx, com excepção de zonas
costeiras muito pouco profundas, podendo ainda considerar-se hH ≅ .
No entanto, mesmo considerando as simplificações anteriores, as equações apresentadas
para os termos relacionados com a difusão horizontal são ainda complicados e de
cálculo difícil. Existe portanto uma necessidade de se efectuarem mais simplificações.
Por outro lado, existe ainda uma grande incerteza no que se refere à quantificação dos
coeficientes de mistura A AM H e . São mais frequentes os casos em que se considera que
a difusão horizontal aparece como necessidade de controlar o processo numérico,
definindo-se os coeficientes A AM H e de uma forma ad-hoc, do que aqueles em que
estes coeficientes são estabelecidos tendo por base as características físicas do problema
a resolver.


















