Capítulo6 - Apostila de Mecânica das Vibrações
15
Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações Capítulo 6 - Medição de Vibrações 6.1 - Introdução Em engenharia mecânica, uma das principais aplicações das vibrações está na manutenção. A existência de vibrações em máquinas e equipamentos é, geralmente indicação de mal funcionamento. A manutenção preditiva tem como um dos seus pilares a análise qualitativa e quantitativa das vibrações. Basicamente, o estudo das vibrações requer três passos básicos: 1- a medição da vibração; 2- a análise do sinal vibratório medido; 3 - o controle da vibração, mediante algum procedimento de manutenção. A análise das vibrações exige que as mesmas sejam perfeitamente identificadas. Isto acontece por meio de um processo de medição. É extremamente importante a correta medição da vibração para que o processo de análise e a conseqüente correção não sejam comprometidos. A medição serve então para assegurar o bom funcionamento de uma máquina, confirmar suposições teóricas, auxiliar no projeto e operação de sistemas de isolamento ativos, identificação de sistemas através da medição de variáveis de entrada e saída, informação de vibrações originadas por terremotos, ação de turbulência fluida, ação de vento em estruturas, irregularidades de vias, e no acompanhamento do estado de máquinas no processo da manutenção preditiva. O processo de medição, ilustrado na Fig. 6.1, parte da identificação de uma característica do fenômeno vibratório que possa ser medida, geralmente uma variável mecânica (deslocamento, velocidade, aceleração ou força). O elemento que entra em contato com a máquina para medir esta variável é o transdutor que cumpre a função de converter o sinal mecânica em um sinal elétrico (corrente elétrica), este, por sua vez é amplificado e convertido em um sinal digital ou mostrado em um display. O sinal digital pode ser armazenado em um computador. Ainda antes de sofrer a conversão para sinal digital, o sinal pode ser gravado em um gravador especial. Após armazenados os dados estão disponíveis para a análise. Máquina ou estrutura vibratória Transdutor ou sensor de vibração Instrumento de conversão do sinal Unidade de apresentação ou armazenagem (display, gravador ou computador) Análise de dados Figura 6.1 - Esquema básico de medição de vibrações. Os principais instrumentos medidores de vibração são os medidores de deslocamentos, também chamados vibrômetros, os medidores de velocidade, os acelerômetros (medidores de aceleração), os medidores de fase e os medidores de frequência. Uma das aplicações mais freqüentes da medição de vibração se dá quando se pretende determinar as características de ressonância de um determinado sistema. A Fig. 6.2 apresenta um esquema em que se ilustra a utilização de instrumentos para determinação de características dinâmicas de um sistema. Nela um gerador de função manda a informação para um vibrador (que pode ser eletrodinâmico ou eletrohidráulico), produzindo uma vibração com características previamente definidas. A vibração gerada é analisada através de metodologia adequada a fim de determinar as características desejadas do sistema. 99
-
Upload
hussein-gazel -
Category
Documents
-
view
99 -
download
0
description
Apostila de Mecânica das Vibrações
Transcript of Capítulo6 - Apostila de Mecânica das Vibrações

Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações
Capítulo 6 - Medição de Vibrações
6.1 - Introdução
Em engenharia mecânica, uma das principais aplicações das vibrações está na manutenção. A existência de vibrações em máquinas e equipamentos é, geralmente indicação de mal funcionamento. A manutenção preditiva tem como um dos seus pilares a análise qualitativa e quantitativa das vibrações. Basicamente, o estudo das vibrações requer três passos básicos:
1- a medição da vibração;2- a análise do sinal vibratório medido;3 - o controle da vibração, mediante algum procedimento de manutenção.A análise das vibrações exige que as mesmas sejam perfeitamente identificadas. Isto acontece por meio de
um processo de medição. É extremamente importante a correta medição da vibração para que o processo de análise e a conseqüente correção não sejam comprometidos. A medição serve então para assegurar o bom funcionamento de uma máquina, confirmar suposições teóricas, auxiliar no projeto e operação de sistemas de isolamento ativos, identificação de sistemas através da medição de variáveis de entrada e saída, informação de vibrações originadas por terremotos, ação de turbulência fluida, ação de vento em estruturas, irregularidades de vias, e no acompanhamento do estado de máquinas no processo da manutenção preditiva.
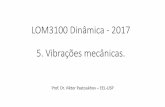
O processo de medição, ilustrado na Fig. 6.1, parte da identificação de uma característica do fenômeno vibratório que possa ser medida, geralmente uma variável mecânica (deslocamento, velocidade, aceleração ou força). O elemento que entra em contato com a máquina para medir esta variável é o transdutor que cumpre a função de converter o sinal mecânica em um sinal elétrico (corrente elétrica), este, por sua vez é amplificado e convertido em um sinal digital ou mostrado em um display. O sinal digital pode ser armazenado em um computador. Ainda antes de sofrer a conversão para sinal digital, o sinal pode ser gravado em um gravador especial. Após armazenados os dados estão disponíveis para a análise.
Máquina ouestruturavibratória
Transdutorou sensor de
vibração
Instrumentode conversão
do sinal
Unidade deapresentação ou
armazenagem(display, gravador
ou computador)
Análise dedados
Figura 6.1 - Esquema básico de medição de vibrações.
Os principais instrumentos medidores de vibração são os medidores de deslocamentos, também chamados vibrômetros, os medidores de velocidade, os acelerômetros (medidores de aceleração), os medidores de fase e os medidores de frequência.
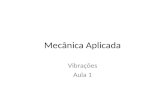
Uma das aplicações mais freqüentes da medição de vibração se dá quando se pretende determinar as características de ressonância de um determinado sistema. A Fig. 6.2 apresenta um esquema em que se ilustra a utilização de instrumentos para determinação de características dinâmicas de um sistema. Nela um gerador de função manda a informação para um vibrador (que pode ser eletrodinâmico ou eletrohidráulico), produzindo uma vibração com características previamente definidas. A vibração gerada é analisada através de metodologia adequada a fim de determinar as características desejadas do sistema.
Máquinavibratória
80
2.5
Gerador defunção
Shaker
SensorAmplificador
AnalisadorEspectral
Figura 6.2
99

Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações
6.2 - Escolha do instrumento de medição
Alguns aspectos devem ser considerados quando se escolhe o instrumento de medição.
1) Faixa de frequências e amplitudes
Um dos principais parâmetros determinantes da escolha do instrumento adequado é a faixa de frequências. Em baixas frequências a amplitude de deslocamento normalmente é alta o que faz com que os vibrômetros sejam adequados para medir as vibrações. Já em altas frequências as amplitudes de deslocamento são baixas e as amplitudes da aceleração são altas fazendo com que os acelerômetros apresentem maior sensibilidade. Os medidores de velocidade são de aplicação geral pois apresentam desempenho razoável tanto em baixa como em alta frequência. Os medidores de velocidade são também, largamente utilizados por serem de fácil e barata construção. Cada instrumento, por sua vez pode ter suas características adequadas (projeto) para medir faixas específicas de amplitudes e frequências.
2) Tamanho da máquina ou estrutura.
Os tamanhos de máquinas e estruturas são importantes pois instrumentos que possuam grandes massas comparativamente às dos objetos de medição podem influir na medição das vibrações medidas distorcendo-as.
3) Condição de operação da máquina.
Máquinas que operam sob condições de funcionamento severas, em ambientes corrosivos ou abrasivos por exemplo, podem impedir que instrumentos sofisticados sejam utilizados. É importante que os instrumentos não sejam danificados no ato da medição pois isto pode também distorcer os valores medidos.
4) Tipo de análise dos dados.
A forma com que os dados gerados serão analisados é fundamental para a escolha do instrumento de medição. Vários detalhes no processo de medição estão condicionados pela análise que será realizada. Isto pode fazer com que determinado instrumento possa ser escolhido, preterindo-se outro mais sofisticado, por apresentar os dados de uma forma mais apropriada para a análise pretendida.
6.3 - Transdutores
Os transdutores, como foi dito acima, transformam variáveis físicas em sinais elétricos equivalentes. Os tipos de transdutores depende, fundamentalmente, da variável que os mesmos transformam. São apresentados nesta seção os principais tipos de transdutores e o seu princípio de funcionamento.
6.3.1 - Transdutores de Resistência Variável
Este tipo de transdutor tem um princípio de funcionamento que se baseia na variação na resistência elétrica de um elemento produzida pelo movimento. O movimento gera a deformação de uma resistência elétrica, alterando suas características da forma a produzir uma variação da voltagem de saída do circuito elétrico do qual este elemento faz parte. O transdutor mais utilizado deste tipo é o extensômetro cuja esquema é mostrado na Fig. 6.3.
Papel fino
Arame fino
Massa
Filamentos
Papel fino
Arame fino X
X
Figura 6.3 - Extensômetro
Um extensômetro elétrico consiste de um arame fino cuja resistência varia quando o mesmo é submetido a uma deformação mecânica. Quando o extensômetro é colado a uma estrutura, sofre a mesma deformação que a estrutura e, portanto, a variação em sua resistência indica a deformação sofrida pela estrutura. O arame é montado entre duas lâminas de papel fino. O material com que mais comumente é construída a resistência é uma liga de cobre e níquel conhecida como Advance.
Quando a superfície em que o extensômetro foi montado sofre uma deformação normal , o extensômetro também sofre a mesma deformação e a variação em sua resistência é dada por
100

Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações
KR
RL
L
r
r
L
L
1 2 1 2
(6.1)onde K é o fator de ponte do arame, R a resistência inicial, R a variação da resistência, L o comprimento inicial do arame, L a variação no comprimento do arame, o coeficiente de Poisson do arame, r a resistividade do arame e r a variação na resistividade do arame.
O valor do fator K é dado pelo fabricante do extensômetro e, portanto, o valor de normal , pode ser determinado, medindo-se R e R, na forma
L
L
R
RK
(6.2)
Quando o transdutor é usado em conjunto com outros componentes que permitem o processamento e a transmissão do sinal, se transforma em um sensor (pickup). Em um sensor de vibração o extensômetro é montado em um elemento elástico de um sistema massa-mola como mostra a Fig. 6.4. A deformação em qualquer ponto do membro elástico (viga engastada-livre) é proporcional à deflexão da massa, x(t), a ser medida. A variação na resistência do arame R pode ser medida usando uma ponte de Wheatstone, um circuito potenciométrico e um divisor de voltagem. Uma ponte de Wheatstone típica, representando um circuito que é sensível a pequenas mudanças na resistência, é mostrado na Fig. 6.5. Aplica-se uma voltagem de alimentação d.c. V entre os pontos a e b.
m
FilamentosExtensômetro
Viga engastada
x ( t)
Base
R 1R 2
R 3R 4
E
V
d
a c
b
Figura 6.4 - Esquema do sensor. Figura 6.5 - Ponte de Wheatstone.
A voltagem resultante entre os pontos b e d é dada por
ER R R R
R R R RV
1 3 2 4
1 2 3 4
(6.3)
Inicialmente as resistências são balanceadas, de forma que a voltagem de saída é zero. Portanto, para balanço inicial, a eq. (6.3) produz
R R R R1 3 2 4 (6.4)
Quando as resistências (Ri) variam em pequenas quantidades (Ri), a variação na voltagem de saída pode ser expressa como
E V rR
R
R
R
R
R
R
R
0
1
1
2
2
3
3
4
4
(6.5)
onde
101

Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações
r
R R
R R
R R
R R0
1 2
1 2
2
3 4
3 4
2
(6.6)
Se os terminais do extensômetro são conectados entre os pontos a e b , R1 = Rg, R1 =Rg, e R2 =R3 = R4 = 0, e a eq. (6.5) nos dá
R
R
E
V rg
g
0
onde Rg, é a resistência inicial do arame. As equações (6.2) e (6.7) produzem
R
RK
E
V rg
g
0
ou
E KV r 0 (6.9)
e, como a voltagem de saída é proporcional à deformação, o instrumento pode ser calibrado para que a deformação possa ser lida diretamente.
6.3.2 - Transdutores Piezoelétricos
Transdutores piezoelétricos são aqueles que utilizam materiais naturais ou artificiais, como quartzo, turmalina, sulfato de lítio e sal de Rochelle, que geram carga elétrica quando submetidos a uma deformação (esta é chamada de propriedade piezoelétrica). A carga elétrica gerada no cristal devida a uma força Fx é dada por
Q K F K A px p x p x (6.10)
onde Kp é chamada de constante piezoelétrica (2,25x10 -12 Coulomb/Newton para o quartzo, quando a maior face está ao longo do eixo x do cristal, Fig. 6.6), A é a área em que atua a força Fx, e px é a pressão devida à mesma força. A voltagem de saída do cristal é
E t p x (6.11)
é a sensibilidade de voltagem (0,055 volt-metro/Newton para o quartzo, também quando a maior face está ao longo do eixo x do cristal, Fig. 6.6) e t a espessura do cristal.
102

Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações
E
F x
F x = A p x
t
Massa
Mola
Discospiezoelétricos
Filamentos
(a)
(b)
Figura 6.6 - Acelerômetro piezoelétrico.
A Fig. 6.6b mostra o esquema de um acelerômetro piezoelétrico. Uma pequena massa é pressionada contra um cristal piezoelétrico por meio de uma mola. Quando a base vibra, a carga exercida pela massa sobre o cristal varia com a aceleração e, portanto, a voltagem de saída gerada pelo cristal será proporcional à aceleração. Os acelerômetros piezoelétricos são compactos, resistentes, com alta sensibilidade e utilizáveis em altas faixas de frequência.
6.3.3 - Transdutores Eletrodinâmicos
Quando um condutor elétrico, na forma de um solenóide, se move um campo magnético, produzido por um imã permanente ou por um eletroimã, como mostra a Fig. 6.7, é gerada uma voltagem V neste mesmo condutor, dada por
V D l v (6.12)
onde D é a densidade de fluxo magnético (em Teslas), l é o comprimento do condutor (em metros), e v é a velocidade do condutor em relação ao campo magnético (em metros/segundo). Em virtude da proporcionalidade entre a velocidade relativa entre imã e solenóide e a voltagem de saída, os transdutores eletromagnéticos são freqüentemente utilizados em sensores de velocidade. A eq. (6.12) pode ser escrita na forma
D lV
v
F
I (6.13)
onde F é a força que age sobre o solenóide quando pelo mesmo passa uma corrente I. Desta forma este tipo de transdutor pode também ser utilizado como um excitador de vibrações (a partir de uma corrente elétrica introduzida gera-se uma força mecânica)
103

Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações
E
SSN
N
v
Figura 6.7 - Transdutor eletrodinâmico. Figura 6.8 - LVDT.
6.3.4 - Transformador Diferencial Linear Variável (LVDT)
A Fig. 6.8 mostra um LVDT que é um transdutor que transforma deslocamento em voltagem elétrica. Consiste de um enrolamento primário no centro, dois enrolamentos secundários nas extremidades, e um núcleo magnético que se move livremente dentro dos enrolamentos, na direção axial. Quando uma corrente alternada é aplicada no enrolamento primário, a voltagem de saída é igual à diferença entre as voltagens induzidas nos enrolamentos secundários. Esta voltagem depende do acoplamento magnético entre os enrolamentos e o núcleo, que, por sua vez, depende do deslocamento axial do núcleo. Os enrolamentos secundários estão conectados em oposição de fase de forma que, quando o núcleo magnético está exatamente na sua posição média, as voltagens nos dois enrolamentos serão iguais e em oposição de fase. Isto faz com que a voltagem de saída do LVDT seja zero. Quando o núcleo é movido para qualquer lado, o acoplamento magnético será aumentado em um enrolamento e diminuído no outro. A polaridade da saída depende, portanto, do sentido do movimento do núcleo magnético.
Os LVDTs disponíveis no mercado abrangem faixas de deslocamento entre 0,0002 cm a 40 cm, o que os torna de ampla aplicabilidade. Estes transdutores não sofrem influência de variações de temperatura mas têm limitação limitada em altas frequências por possuírem o núcleo magnético.
Desde que o núcleo não se mova demasiadamente do centro do enrolamento primário, a voltagem de saída varia linearmente com o deslocamento do núcleo, originando-se o nome de transformador diferencial variável linear.
6.4 - Sensores de Vibração (Pickups)
Um sensor de vibração é um instrumento constituído de um mecanismo medidor associado a um transdutor. A Fig. 6.9 apresenta um instrumento sísmico montado em um corpo vibratório. O movimento vibratório é medido achando-se o deslocamento da massa em relação à base na qual é montado.
x ( t)
y ( t)
ck T
m
Figura 6.9 - Instrumento sísmico.
O instrumento consiste de uma massa m, uma mola de rigidez k e de um amortecedor de constante de amortecimento c, colocados dentro de uma caixa, que é ligada ao elemento vibratório. Com este arranjo, as extremidades da mola e do amortecedor executarão o mesmo movimento que a caixa (movimento y) e a sua vibração excita a massa dentro da caixa. O movimento da massa em relação à caixa é z = x - y, em que x é o movimento absoluta da massa m.
Assume-se que o movimento vibratório é harmônico, possuindo a forma
y t Y t sen (6.14)
104

Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações
A equação do movimento da massa m pode ser escrita como
mx c x y k x y 0 (6.15)
Definindo o movimento relativo como
z x y (6.16)
a equação (6.15) é escrita como
mz cz kz my (6.17)
e as equações (6.14) e (6.17) conduzem a
mz cz kz m Y t sen 2 (6.18)
Esta equação é idêntica à eq. 3.66 e a solução de regime é
z t Z t sen( ) (6.19)
onde Z e são dados por
Z
Y
k m c
r Y
r r
2
2 2 21
2
2
2 2 21
2
1 2
(6.20)
tan tan1
2
1
2
2
1
c
k m
r
r
(6.21)
com rn
e
c
m n2.
As Figuras 6.10 e 6.11 mostram as curvas correspondentes às equações (6.20) e (6.21), respectivamente. O tipo de instrumento é determinado pela faixa mais adequada de frequências da curva mostrada na Fig. 6.10.
Razão de frequências ( r)0 1
1
2
2
3
3
4
4 5
Faixa do vibrômetroFaixa doacelerômetro
z = 0,7z = 1,0
z = 0,5
z = 0,25
z = 0
Z/Y
Relaç
ão d
e am
plitu
des
0 1 2 3 4 5
30 o
60 o
90 o
120 o
150 o
180 o
Razão de frequências ( r )
Âng
ulo
de fa
se (
)
= 0
= 0,25
= 0,5
= 0,7
= 1,0
= 1,0
= 0,7
= 0,5
= 0,25
= 0
Figura 6.10 - Resposta de um instrumento sísmico. Figura 6.11 - Ângulo de fase.
6.4.1 - Vibrômetro
Um vibrômetro, também chamado de sismômetro é um instrumento que mede o deslocamento de um corpo
vibratório. A Fig. 6.10 mostra que ZY 1 para n
3 . Nesta faixa de frequências a amplitude do deslocamento
relativo entre a massa e a base é igual à amplitude do deslocamento da base. Este deslocamento é identificado pelo transdutor. Para uma análise exata, consideremos a eq. (6.20). Para esta faixa de frequências pode-se escrever
105

Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações
z t Y t sen( ) (6.22)
se
r
r r
2
2 2 21
2
1 21
(6.23)
Uma comparação da eq. (6.22) com (6.14) mostra que z(t) representa diretamente o deslocamento y(t) com uma defasagem dada por . O deslocamento registrado z(t), então está atrasado t’= em relação ao deslocamento que deve ser medido y(t). Este tempo de atraso não é importante se o deslocamento da base y(t) consiste de um único componente harmônico.
Como r = n, deve ser grande e depende da vibração medida, a frequência natural do sistema massa-mola-amortecedor deve ser baixa. Isto implica em que a massa deve ser grande e a mola deve possuir uma rigidez baixa. O instrumento resultante pode ser demasiado grande e pesado.
6.4.2 - Acelerômetro
Um acelerômetro é um instrumento que mede a aceleração de um corpo vibratório (Fig. 6.12). Os acelerômetros são amplamente utilizados em medições de vibrações industriais e terremotos. Uma das vantagens da medição da aceleração é que a velocidade e o deslocamento podem ser obtidos por integração, o que é computacionalmente fácil. A equação (6.19) combinada com (6.20), pode ser escrita na forma
n z tr r
Y t2
2 2 21
2
21
1 2
sen
(6.24)
Se
1
1 21
2 2 21
2
r r
(6.25)
eq. (6.24) se torna
n z t Y t2 2 sen
(6.26)
Como a segunda derivada em relação ao tempo de (6.14) é dada por
seny t Y t 2 (6.27)
a amplitude da função harmônica expressa na eq. (6.26) é igual à da eq. (6.27). Então, nestas condições, o deslocamento relativo z(t) expressa a aceleração da base, com o sinal invertido, um atraso que é função do ângulo de fase , e com um fator de escala determinado pela frequência natural ao quadrado.
106

Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações
Anel de pré-cargaElemento
triangular central
Elementopiezoelétrico
Massasísmica
Razão de frequências ( r)
1,25
1,00
0,750,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,00
1
1 22 2 2 r r
= 1
= 0,7
= 0,5
= 0,25
= 0
Figura 6.12 - Acelerômetros Figura 6.13 - Curvas de linearidade do acelerômetro.
A Fig. 6.13 mostra o gráfico da expressão (6.25). Pode-se observar que a função assume valores entre 0,96 e 1,04 para 0 0 6 r , , se o fator de amortecimento é da ordem de 0,65 a 0,7, produzindo a melhor faixa linear de funcionamento do instrumento. Como a relação de frequências r é pequena, a frequência natural do instrumento deve ser grande em comparação com a frequência que deve ser medida. Desta maneira os acelerômetros devem possuir massa pequena e grande rigidez, o que permite a construção de instrumentos compactos e resistentes, com alta sensibilidade. Na prática são os melhores instrumentos para se medir vibrações, tendo contra si apenas o custo, que, em virtude da necessidade de se utilizar um elemento piezoelétrico e amplificadores (além da tecnologia construtiva), é maior que o custo de outros instrumentos de construção mais simples.
6.4.3 - Sensor de velocidade
Este sensor mede a velocidade do corpo vibratório. Derivando a eq. (6.14) obtém-se a velocidade do corpo vibratório como
cosy t Y t (6.28)e a derivada da eq. (6.19), considerando a eq. (6.20), leva a
cosz tr Y
r rt
2
2 2 21
2
1 2
(6.29)
Se a eq. (6.23) é satisfeita, então (6.29) torna-se
cosz t Y t (6.30)
que, comparada com a eq. (6.28) mostra que a velocidade do movimento relativo é igual à velocidade do movimento da base, com um atraso determinado pelo ângulo de fase. Como nesta situação o valor de r deve ser grande, o instrumento deve possuir uma frequência natural baixa.
Os sensores de velocidade são largamente utilizados em medição de vibração na manutenção em indústrias, porque são normalmente de baixo custo por serem de fácil construção (transdutores eletromagnéticos).
6.5 - Medidores de Frequência
107

Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações
A maioria dos medidores de frequência são mecânicos e baseados no princípio da ressonância.
l
(a) (b)
Figura 6.14 - Medidores de frequência.
6.5.1 - Tacômetro de Fullarton
Consiste de uma fita cantilever com uma massa em sua extremidade livre. A outra extremidade da fita é presa por um parafuso de forma que o seu comprimento pode ser alterado facilmente, como mostra a Fig. 6.14a. Como cada comprimento da fita corresponde a uma frequência natural diferente, é marcada uma escala ao longo do comprimento em termos de sua frequência natural. Na prática, a extremidade presa é ligada a um corpo vibratório, e o mecanismo do parafuso é manipulado alterando o comprimento da fita até que a extremidade livre atinja a maior amplitude de vibração, quando a frequência da excitação é praticamente igual à frequência natural do instrumento, podendo ser lida diretamente da escala.
6.5.2 - Tacômetro de Frahm
Consiste de várias fitas cantilever com pequenas massas em suas extremidades livres (Fig. 6.14b). Cada fita tem uma frequência natural diferente. Quando o instrumento é montado sobre um corpo vibratório, a fita cuja frequência natural mais se aproxima da frequência da vibração, vibrará com a maior amplitude.
6.5.3 - Estroboscópio
Um estroboscópio é um instrumento que produz pulsos luminosos intermitentes. A frequência com que a luz pulsa pode ser alterada e lida no instrumento. Quando um ponto específico do objeto vibratório é observado através do estroboscópio, este parece parado se a frequência dos pulsos luminosos coincidir com a frequência da vibração. O estroboscópio é especialmente indicado para corpos rotativos pois não é necessário o contato do instrumento com o elemento vibratório. Devido à persistência da visão, e menor frequência que pode ser medida com um estroboscópio é de aproximadamente 15 Hz. A Fig. 6.15 mostra um estroboscópio típico.
Figura 6.15 - Estroboscópio.
6.6 - Excitadores de Vibrações
108

Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações
x ( t) = r sen t
F ( t) = m 2r sen t
F ( t) = kr sen t
k
(a) (b) Figura 6.16 - Excitadores mecânicos.
Conhecidos em laboratórios como shakers, ou mais popularmente como vibradores, são, normalmente, transdutores que funcionam na forma inversa dos medidores: transformam uma grandeza elétrica em uma grandeza mecânica. São utilizados para provocar a vibração com amplitude e frequência controladas em um sistema, e com isto, determinar características dinâmicas dos mesmos sistemas e realizar testes de fadiga em materiais. Podem ser mecânicos, eletromagnéticos, eletrodinâmicos ou hidráulicos.
6.6.1 - Excitadores Mecânicos
A Fig. 6.16 ilustra a aplicação de transdutores mecânicos. Constitui-se de um mecanismo biela-manivela que pode ser utilizado para aplicar na estrutura uma força de inércia harmônica (Fig. 6.16a) ou uma força elástica harmônica (Fig. 6.16b). São normalmente usados para produzir vibração de baixa frequência (até 30 Hz) e pequenas cargas (até 700 N).
Outro tipo de excitador mecânico, mostrado na Fig. 6.17, produz vibração originada pela força centrífuga criada por duas massas excêntricas girando com a mesma velocidade de rotação em sentidos opostos. Este tipo de excitador pode gerar cargas de 250 N a 25000 N. Se as duas massas m, girando com velocidade angular com uma excentricidade R, a força vertical gerada é
F t mR t2 2 cos (6.31)
As componentes horizontais das duas massas se cancelam. A força F(t) será aplicada à estrutura em que o excitador for fixado.
m
R
m
R
F ( t) = 2 mR 2 cos t
Viga
Colunas
Excitador
Figura 6.17 - Excitador de vibrações com massas excêntricas.
6.6.2 - Excitador Eletrodinâmico
109

Apostila de Mecânica das Vibrações - Capítulo 6 - Medição de Vibrações
O excitador eletrodinâmico, ilustrado na Fig. 6.18, funciona de forma inversa ao transdutor eletrodinâmico. Quando a corrente elétrica passa em um enrolamento de comprimento l, imerso em um campo magnético, é gerada uma força F, proporcional à corrente I e à intensidade de fluxo magnético D, acelerando a base do excitador.
F DIl (6.32)
Mesaexcitadora
Suporteflexível
Elementomóvel
Solenóide Imã
(a)
AceleraçãoFrequência natural do
suporte flexívelFrequência natural do
elemento móvel
Aceleraçãoconstante
Faixa de operação
Frequência
(b) Figura 6.18 - Excitador eletrodinâmico e características. Figura 6.19 - Excitador eletrodinâmico.
O campo magnético é produzido por um imã permanente em excitadores pequenos e por um eletroimã em grandes excitadores. A magnitude da aceleração da mesa depende da corrente máxima e das massas da mesa e do elemento móvel do excitador. Se a corrente que passa no enrolamento varia harmonicamente (corrente alternada), a força produzida também varia harmonicamente. Por outro lado, se for utilizada uma corrente contínua, será gerada uma força constante. Os excitadores eletrodinâmicos também podem ser utilizados com uma inércia ou uma mola, para fazer vibrar a estrutura, como nos casos da Fig. 6.16.
Como o enrolamento e o elemento móvel devem executar um movimento linear, devem ser suspensos por um suporte flexível (com uma rigidez pequena), como mostra a Fig. 6.18a. Então o excitador eletromagnético possui duas frequências naturais: uma correspondente à frequência natural do suporte flexível e a outra correspondente à frequência natural do elemento móvel, que pode ser tornada bastante grande. Estas duas frequências de ressonância são mostradas na Fig. 5.18b. A faixa de frequências de operação do excitador deve ficar entre estas duas frequências de ressonância.
Os excitadores eletrodinâmicos são usados para gerar forças até 30 kN, deslocamentos até 25 mm, e frequências na faixa entre 5 Hz a 20 kHz. A Fig. 6.19 mostra uma foto de um excitador eletrodinâmico utilizado na prática.
110