circuito parecido com brawel-Construindo.pdf

of 8
-
Upload
wagner-garcia -
Category
Documents
-
view
216 -
download
0
Transcript of circuito parecido com brawel-Construindo.pdf
-
8/11/2019 circuito parecido com brawel-Construindo.pdf
1/8
Email: [email protected]
Visit us athttp://www.sunrom.com
Document: Datasheet Date: 6-Jul-12 Model #: 1168 Products Page: www.sunrom.com/p-85.html
Stepper Motor Driver - Bipolar
This stepper motor driver offers a compact, reliable stepper motor control system. An integratedchopper drive circuit safely provides the maximum motor torque for a given drive voltage, even onemany times over the manufacture-specified voltage, offering tremendous torque and speedimprovements over traditional stepper motor control circuits. Maximum coil current(2A) is easily setusing a potentiometer, and can be dynamically adjusted. The highly efficient design of the drivecircuitry makes it the ideal motor control solution for nearly any application.
Motor current for each phase is set using an on-board potentiometer and the controller is capable ofhandling motor winding currents of up to 2 Amps per phase. It operates from a DC supply voltage of9-24V. The drive provides all basic motor controls, including full or half stepping of bipolar steppersand direction control. All signals (Step, Direction, Enable) can be interfaced to external logic or amicrocontroller. You can easily control the motor from your computer's parallel port ormicrocontroller.
Stepper motors are rated by current and not by voltage. This is a chopper driver because it isswitching on and off current allows a set current to be fed to the coils and not be dependent on the
voltage of the power supply. The Chopper Driver also allows for the use of higher voltage powersupplies (up to 24V) overcoming the effects of the inductance of the coils giving better performanceand a higher top speed.
Full & half stepping, directional control, motor enable/disable, and automatic current regulationprovide a powerful, easy-to-use motion control system. The built-in chopper frequency generationand current sensing circuitry drives the motor at a presettable coil current.This controller is perfect for desktop CNC applications.
mailto:[email protected]://www.sunrom.com/http://www.sunrom.com/p-85.htmlhttp://www.sunrom.com/p-85.htmlhttp://www.sunrom.com/mailto:[email protected] -
8/11/2019 circuito parecido com brawel-Construindo.pdf
2/8
Sunrom Technologies Your Source for Embedded Systems Visit us at www.sunrom.com2
Features
Easily adjustable motor current (0.3A to 2A)
Full and Half stepping mode selection
Step and Direction inputs directly from parallel port or microcontroller
Enable input can be connected to ground to disable motor (Optional Input)
Connections via screw terminals
Develops maximum possible motor torque by using dual coil-current sensing & control loop
circuits
Allows use of drive voltage beyond rated motor specification for enhanced torque & speed
Diodes and large filter capacitors for enhanced noise suppression
Primary drive circuit thermal overload protection
Initial Setup
The Stepper Motor Driver can be used with a power supply up to 24V.Connect the power supply negative wire to a GND terminal and positive wire to the 9-24V terminal.
The bipolar stepper motor is connected to the A, /A, B and /B terminals. The stepper motor will havetwo separate phase windings and optionally a center tap wire. The center tap wire should be leftunconnected. The wiring phase of motor can be identified with multimeter and measuring resistanceof motor windings. From the two phase 1stphase has to be connected to A and /A terminal and 2ndphase of motor has to be connected to B and /B terminals. If incorrect wires are connected, motorwill not rotate properly. More about motor connections are on following pages.
Control signals are connected to the STEP and DIR terminals. Connect a GND terminal to the GNDterminal of the source of the signals as well.
The EN terminal is pulled high internally, when a connection is made to ground through this terminalcurrent is removed from the motors coils, allowing it to turn freely. This can be used as a kill switchinput. This is optional input can be left unconnected making it always enable.
STEPPER MOTOR
9 to 24V DC -Power Supply +
PCParallelPort/MCU
+5V outfor othercircuits ifrequired
http://www.sunrom.com/http://www.sunrom.com/ -
8/11/2019 circuito parecido com brawel-Construindo.pdf
3/8
Sunrom Technologies Your Source for Embedded Systems Visit us at www.sunrom.com3
Setting the Bipolar Stepper Current
The current that will be passed through the motors coils is set using thepreset VREF and Multi-meter. The voltage in volts at the test point labeledTP VREF will be half the current in the motors coils in amps. That means1V will give 2A, 0.5V will give 1A and so on. For a given motor, higherdriver current will make the motor to output more torque, but at the sametime causes more heating in the motor and driver. Therefore, output
current is generally set to be such that the motor will not overheat for long time operation. Sinceparallel and serial connections of motor coils will significantly change resulting inductance andresistance, it is therefore important to set driver output current depending on motor phase current,motor leads and connection methods. Phase current rating supplied by motor manufacturer isimportant in selecting driver current, however the selection also depends on leads and connectionswhich is covered in later pages.
Full and Half Stepping
When the jumper labeled STEP is in the F position the motor will move one stepfor each pulse on the STEP input if the jumper is set to H the motor will move halfa step for each pulse on the STEP input. This jumper should be set before poweris applied to the circuit. Half step produces a much smoother performance andless motor resonance.
Motor Connections
The driver can drive any 2-phase and 4-phase hybrid stepping motors.
Connections to 4-lead Motors4 lead motors are the least flexible but easiest to wire. Speed andtorque will depend on winding inductance. In setting the driver output
current, multiply the specified phase current by 1.4 to determine thepeak output current.
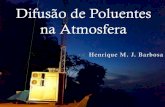
Connections to 6-lead MotorsLike 8 lead stepping motors, 6 lead motors have two configurationsavailable for high speed or high torque operation. The higher speedconfiguration, or half coil, is so described because it uses one half of
the motors inductor windings. The higher torque configuration, or fullcoil, uses the full windings of the phases.
Half Coil Configurations - Higher Speed Low TorqueAs previously stated, the half coil configuration uses 50% of the motorphase windings. This gives lower inductance, hence, lower torqueoutput. Like the parallel connection of 8 lead motor, the torque outputwill be more stable at higher speeds. This configuration is also referred
FIGURE 1STEPPER MOTOR -4LEAD
FIGURE 2 STEPPER MOTOR 6LEAD HAL F COIL
http://www.sunrom.com/http://www.sunrom.com/ -
8/11/2019 circuito parecido com brawel-Construindo.pdf
4/8
Sunrom Technologies Your Source for Embedded Systems Visit us at www.sunrom.com4
to as half chopper. In setting the driver output current multiply the specified per phase current ratingby 1.4 to determine the peak output current.
Full Coil Configurations Higher Torque Lower SpeedThe full coil configuration on a six lead motor should be used inapplications where higher torque at lower speeds is desired. Thisconfiguration is also referred to as full copper. In full coil mode, the
motors should be run at only 70% of their rated current to preventoverheating.
Connections to 8-lead Motors8 lead motors offer a high degree of flexibility to the system designer in that they may be connectedin series or parallel, thus satisfying a wide range of applications.
Series Connections Higher Torque Low SpeedA series motor configuration would typically be used inapplications where a higher torque at lower speeds is required.Because this configuration has the most inductance, theperformance will start to degrade at higher speeds. In seriesmode, the motors should also be run at only 70% of their ratedcurrent to prevent overheating.
Parallel Connections Low Torque at Low Speed/High Torque at High SpeedAn 8 lead motor in a parallel configuration offers a morestable, but lower torque at lower speeds. But because of thelower inductance, there will be higher torque at higher speeds.Multiply the per phase current rating by 1.96, or the bipolarcurrent rating by 1.4, to determine the peak output current.
FIGURE 3 STEPPER MOTOR 6 LEADFULL COIL
FIGURE 4 STEPPER MOTOR 8 LEAD FULL
COIL
FIGURE 5 STEPPER MOTOR 8 LEADPARALLEL COIL
http://www.sunrom.com/http://www.sunrom.com/ -
8/11/2019 circuito parecido com brawel-Construindo.pdf
5/8
Sunrom Technologies Your Source for Embedded Systems Visit us at www.sunrom.com5
Heat
The Stepper Motor Driver is provided with a Heatsink. Care should be taken when using the driverto ensure that the driver IC on heatsink does not overheat. When the driver is first used monitor thetemperature of the heatsink. If it begins to get too hot to touch a fan or larger heatsink will berequired. This is quite important if the motor is turning slowly or is stopped for long periods.
Noise
The switching of currents to the motor can radiate electromagnetic interference. To reduce radiatednoise the motor leads should be shielded and as short as possible. The motor body should begrounded and a grounded metal housing for the PCB can be used.
Power Supply Selection
The stepper driver can match medium and small size stepping motors (from NEMA frame size 17 to43) from motor manufactures around the world. To achieve good driving performances, it isimportant to select supply voltage and output current properly. Generally speaking, supply voltagedetermines the high speed performance of the motor, while output current determines the output
torque of the driven motor (particularly at lower speed). Higher supply voltage will allow highermotor speed to be achieved, at the price of more noise and heating. If the motion speedrequirement is low, its better to use lower supply voltage to decrease noise, heating and improvereliability.
Regulated or Unregulated Power SupplyBoth regulated and unregulated power supplies can be used to supply the driver. However,unregulated power supplies are preferred due to their ability to withstand current surge. If regulatedpower supplies (such as most switching supplies.) are indeed used, it is important to have largecurrent output rating to avoid problems like current clamp, for example using 3A supply for 2Amotor-driver operation. On the other hand, if unregulated supply is used, one may use a power
supply of lower current rating than that of motor (typically 50%
70% of motor current). The reasonis that the driver draws current from the power supply capacitor of the unregulated supply onlyduring the ON duration of the PWM cycle, but not during the OFF duration. Therefore, the averagecurrent withdrawn from power supply is considerably less than motor current. For example, two 2Amotors can be well supplied by one power supply of 3A rating.
Multiple DriversIt is recommended to have multiple drivers to share one power supply to reduce cost, if the supplyhas enough capacity. To avoid cross interference, DO NOT daisy-chain the power supply input pinsof the drivers. (Instead, please connect them to power supply separately.)
Selecting Supply VoltageThe motor driver IC can actually operate within +9 ~ +30VDC, including power input fluctuation andback EMF voltage generated by motor coils during motor shaft deceleration. Higher supply voltagecan increase motor torque at higher speeds, thus helpful for avoiding losing steps. However, highervoltage may cause bigger motor vibration at lower speed, and it may also cause over-voltageprotection or even driver damage. Therefore, it is suggested to choose only sufficiently high supplyvoltage for intended applications, and it is suggested to use power supplies with theoretical outputvoltage of +9 ~ +24VDC, leaving room for power fluctuation and back-EMF.
http://www.sunrom.com/http://www.sunrom.com/ -
8/11/2019 circuito parecido com brawel-Construindo.pdf
6/8
Sunrom Technologies Your Source for Embedded Systems Visit us at www.sunrom.com6
Control Signals Step and Direction
The requirement of control signals to drive stepper motor through this driver are DIRECTION andSTEP signals. These signals are of 3 to 5V level signals. The signals can come from varioussources. You can also input from parallel port running software like Mach3. Most CNC software thatoutput STEP and DIR signals on parallel port can generate these control signals.
DIR signal: In single-pulse mode, this signal has low/high voltage levels, representing two directionsof motor rotation; For reliable motion response, DIR signal should be ahead of STEP signal by 5sat least. Please note that motion direction is also related to motor-driver wiring match. Exchangingthe connection of two wires for a coil to the driver will reverse motion direction. Making DIR signalhigh will make motor rotate one side and making DIR low will make motor rotate other side.Direction signal input is internally pulled high so it can be left unconnected if only one direction isrequired from the motor.
Enable signal: This signal is used for enabling/disabling the driver. High level for enabling the driverand low level for disabling the driver. It is internally pulled high. Usually left UNCONNECTED(ENABLED).
Using LM555 as Step InputTo test the driver or have a stand alone application you can simply use a simple square waveoscillator based on LM555. The preset can be used to vary the frequency of step signal. The higherthe frequency the higher speed.
Using Microcontroller/PC Parallel Port as Control Signals InputSince control signals requirement are at 3~5V level you can use any microcontroller to generateHIGH/LOW pulses for step and direction. Step pulse is a square wave signal like HIGH and LOW.Each high going pulse will advance the motor one step.For parallel port most PC software has options to set as to which pin to make STEP/DIR signals.
Square Wave OscillatorYou can use following board as stepinput to the stepper driver.
http://www.sunrom.com/p-1050.html
MCU/PC PP
DIRSTEPGND
Stepper Motor Driver
DIRSTEPGND
http://www.sunrom.com/http://www.sunrom.com/p-1050.htmlhttp://www.sunrom.com/p-1050.htmlhttp://www.sunrom.com/ -
8/11/2019 circuito parecido com brawel-Construindo.pdf
7/8
Sunrom Technologies Your Source for Embedded Systems Visit us at www.sunrom.com7
Wiring Notes
In order to improve anti-interference performance of the driver, it is recommended to usetwisted pair shield cable.
To prevent noise incurred in STEP/DIR signal, pulse/direction signal wires and motor wiresshould not be tied up together. It is better to separate them by at least 10 cm, otherwise thedisturbing signals generated by motor will easily disturb pulse direction signals, causingmotor position error, system instability and other failures.
If a power supply serves several drivers, separately connecting the drivers is recommendedinstead of daisy-chaining.
Typical Applications
Suitable for a wide range of stepping motors, from NEMA size 17 to 43. It can be used in variouskinds of machines, such as X-Y tables, labeling machines, laser cutters, engraving machines, pick-place devices, and so on. Particularly adapt to the applications desired with low noise, low heating,high speed and high precision.
CNC / Milling Machines
Robotics Industrial Equipment
Remote-Positioning Equipment
Scientific Apparatus
Valve Controls
Troubleshooting
In the event that your driver doesnt operate properly, the first step is to identify whether the problemis electrical or mechanical in nature. The next step is to isolate the system component that iscausing the problem. As part of this process you may have to disconnect the individual componentsthat make up your system and verify that they operate independently. It is important to document
each step in the troubleshooting process. You may need this documentation to refer back to at alater date, and these details will greatly assist our Technical Support staff in determining theproblem should you need assistance.
Many of the problems that affect motion control systems can be traced to electrical noise, controllersoftware errors, or mistake in wiring.
http://www.sunrom.com/http://www.sunrom.com/ -
8/11/2019 circuito parecido com brawel-Construindo.pdf
8/8
Sunrom Technologies Your Source for Embedded Systems Visit us at www.sunrom.com8
Dimensions
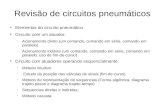
Board Schematic
U3L298
IN15
IN27IN3
10
IN412
OUT12
OUT2 3OUT3
13
OUT414
GND
8
ENA6
ENB11
SENA1
SENB15
VCC
9
VDD4
U2L297
INH15
C7
EN10
RESET20
HOME3
SEN213SEN114
B 6
CNTRL11
SYN1
H/F19
D9
A4
INH28OSC
16
CLOCK18
CW/CCW17
VCC
12
GND
2
VREF15
CN5PBT3
VCC
D3BY399
D4BY399
D5BY399
D6BY399
D7BY399
D9BY399
D8BY399
D10BY399
Current
Control
VCC
INOUT
GND
U1LM7805
13
2
R30R47 3W
R40R47 3W
R222K
C73n3C6
100n
Stepper Motor
STEP
DIR
P110K Preset
+5V
ENB
CN1PBT2
GND
CN3PBT2
CN6
PBT2
TitleCode RevDate: Sheet of
1168 1Bipolar Stepper Motor Driver based on L297/L298
Sunrom Technologies http://www.sunrom.com
1 1Friday, March 18, 2011
B
A
D
C
J1JUMPER3P
D11N4007
CN2TP2
12
VCC
HALF
FULL
+
C4100uF 25V
Imax=VREF/0.5
C3100nF
TP
C2100nF
D2LED
R1470R
C8100nF
C5100nF
9-24V DC
Ground+
C1100uF 25V
CN4PBT2
RA1
10K R-ARRAY
9 8 7 6 5 4 3 2
1
http://www.sunrom.com/http://www.sunrom.com/http://www.sunrom.com/http://www.sunrom.com/