
com Mathematica - cmig.ufpa.br · Do mesmo modo que os pontos de um plano são caracterizados por...
262
Luiz Rijo Cálculo de com Mathematica Várias Variáveis X S 4 × F 3 6 n ! ds = X / S F 3 6 t ! dl
Transcript of com Mathematica - cmig.ufpa.br · Do mesmo modo que os pontos de um plano são caracterizados por...

Luiz Rijo
Cálculo de
com
Mathematica
Várias Variáveis
�S
� � F� � n� ds � ��S
F� � t� dl
CAPÍTULO 1
Vetores, Curvas e Superfícies no EspaçoIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
In[2]:= H∗ Pacote Add−on: Graphics`Arrow` traça setas ∗L<< Graphics`Arrow`
In[3]:= H∗ Pacote Add−on Graphics`ParametricPlot3D`traça gráficos parametrizados tridimensionais ∗L
<< Graphics`ParametricPlot3D`
1.1 Coordenadas cartesianas no espaço
Do mesmo modo que os pontos de um plano são caracterizados por pares ordenados de números reais (x, y), os pontos do espaço podem igualmente ser identificado com ternos de números reais (Fig. 1.1).

In[4]:= H∗ Desenha a Fig 1.1 ∗LShow@Plot@0, 8x, 0, 2<, Axes → False, Epilog → 8Text@"O", 8−0.1, .05<D,
Text@"y", 82, −.12<D, Text@"x", 8−.75, −.95<D, Text@"z", 8.1, 2<D,Text@"P=Hx,y,zL", 81.2, 1.2<D, Text@"Fig. 1.1", 81.5, −.95<D<,
DisplayFunction → IdentityD, Graphics@8Arrow@80, 0<, 82, 0<D, Arrow@80, 0<, 80, 2<D, Arrow@80, 0<, 8−1, −1<D<, DisplayFunction → IdentityD,
ListPlot@880, 0<, 8.6, −.6<, 8.6, 1.2<, 80, 1.7<<, PlotJoined → True,PlotStyle → [email protected]<D<, DisplayFunction → IdentityD,ListPlot@88−.6, −.6<, 8.6, −.6<, 81.2, 0<<, PlotJoined → True,PlotStyle → [email protected]<D<, DisplayFunction → IdentityD,[email protected], 1.2<<, PlotStyle → [email protected]<,DisplayFunction → IdentityD,AspectRatio → Automatic, DisplayFunction → $DisplayFunctionD;
Oy
x
z
P=Hx,y,zL
Fig. 1.1
EXEMPLO 1. (pág. 3)
A equação x2 + y2 + z2 = 0, representa o lugar dos pontos P = (x, y, z) tais que OP = 5, isto é, trata-se da superfície esférica de centro na origem e raio r = 5.
2 Cal 3 Capítulo 1.nb

In[5]:= H∗ Desenha a superfície esferica x2 + y2 + z2 = 25 ∗LParametricPlot3D@85 Cos@uD Cos@vD, 5 Sin@uD Cos@vD, 5 Sin@vD<,8u, 0, 2 Pi, Piê10<, 8v, 0, 2 Pi, Piê15<, AxesLabel → 8"x", "y", "z"<D;
-5-2.5
02.5
5x
-5-2.5
02.5
5y
-5
-2.5
0
2.5
5
z
-5-2.5
02.5x
5-2.5
02.5y
EXEMPLO 2. (pág. 3)
A equação Hx - 2L2 + Hy + 1L2 + Hz - 1L2 = 9, representa o lugar dos pontos P = (x, y, z) tais que OP = 3, isto é, trata-se da superfície esférica de centro nno ponto (2, -1, 1) e raio r = 3.
In[6]:= H∗ Desenha a superfície esferica Hx − 2L2 + Hy + 1L2 + Hz −1L2 = 9 ∗LParametricPlot3D@83 Cos@uD Cos@vD + 2, 3 Sin@uD Cos@vD − 1, 3 Sin@vD + 1<,8u, 0, 2 Pi, Piê10<, 8v, 0, 2 Pi, Piê15<, AxesLabel → 8"x", "y", "z"<D;
02
4x
-4
-20
2y
-2
0
2
4
z
02
4x
4
-20
y
EXEMPLO 3. (pág. 4)
Vamos mostrar que a equação 4 (x2 + y2 + z2 + x - 2 y + 2 z) - 7 = 0, representa a superfície esférica. De fato, usando a técnica de completar quadrado, temos
x2 + x = x + 2 x/2 = (x + 1 ê 2L2 - 1/4,
Cal 3 Capítulo 1.nb 3

y2 - 2 y = (y - 1L2 - 1,
z2 + 2 z = (z + 1L2 - 1.
Portanto, a equação anterior pode ser escrita na forma (x + 1 ê 2L2 - 1/4 + (y - 1L2 - 1 + (z + 1L2 - 1 - 7/4 = 0,
ou ainda (x + 1 ê 2L2 + (y - 1L2 + (z + 1L2 = 4.
Está claro, agora, que esta é a equação da superfície da esfera de raio r = 2 e centro C = (-1/2, 1, -1).
In[7]:= H∗ Desenha a superfície esferica Hx − 1ê2L2 + Hy−1L2 + Hz+1L2 = 4 ∗LParametricPlot3D@82 Cos@uD Cos@vD − 1ê2, 2 Sin@uD Cos@vD − 1, 2 Sin@vD + 1<,8u, 0, 2 Pi, Piê10<, 8v, 0, 2 Pi, Piê15<, AxesLabel → 8"x", "y", "z"<D;
-2-1
01x
-3-2
-10
1y
-1
0
1
2
3
z
-2-1
01x
3-2
-10y
EXEMPLO 4. (pág. 4)
A equação 2 y + 3 z - 6 = 0 representa uma reta no plano 0xz. Como ela não impõe qualquer restrição à variável x, ela representa, no espaço o plano que passa pela reta mencionada e é perpendicular ao plano 0xz (Fig 1.4).
4 Cal 3 Capítulo 1.nb

In[8]:= H∗ Desenha a Fig. 1.4 ∗LParametricPlot3D@8u, v, 2 − 2 vê3<, 8u, −1, 1<, 8v, −1, 1<,
AxesLabel → 8"x", "y", "z"<, PlotPoints → 5, ViewPoint → 82, 1, 2<D;-1
-0.50
0.5
1
x
-1-0.5
00.5
1y
1.5
2
2.5
z.5
2
Cal 3 Capítulo 1.nb 5

1.1.2 Exercícios (pág. 4)
1. Marque, num sistema de coordenadas, os pontos A = (2, 3, 4), B = (3, 2, -4), C = (-2, 1, 3), D = (-3, 2, -1), E = (-1, -2, 3), F = (-2, -1, -3).
In[1]:= H∗ Marca,num sistema de coordenadas, os pontos A, B, C, D, E e F.∗Lpontos = 8Point@81, 3, 4<D, Point@83, 2, −4<D, Point@8−2, 1, 3<D,Point@8−3, 2, −1<D, Point@8−1, −2, 3<D, Point@8−2, −1, −3<D<;
Show@Graphics3D@ [email protected], pontos, Text@"A", 81.4, 3, 4<D,Text@"B", 83.5, 2, −4<D, Text@"C", 8−1.6, 1, 3<D, Text@"D", 8−3.5, 2, −1.2<D,Text@"E", 8−1.4, −2, 3<D, Text@"F", 8−2.4, −1, −3<D<D,
Axes → True, AxesLabel → 8"x", "y", "z"<D;
-20
2
x
-2
0
2y
-4
-2
0
2
4
z
A
B
C
D
E
F
2
0
2y
Nos Exercícios 2 a 5, os pontos dados são vértices opostos de um paralelepípedo retângulo de arrestas paralelas aos eixos de coordenadas. Determine os outros seis vértices e faça gráficos em cada caso.
2. A = (1, 1, 1) e B = (3, 3, 3).
6 Cal 3 Capítulo 1.nb

In[2]:= H∗ Desenha o paralelepípedo do Exer. 2. ∗LShow@Graphics3D@Cuboid@81, 1, 1<, 83, 3, 3<D, Axes → TrueD,
AxesLabel → 8"x", "y", "z"<D;
11.5
22.5
3x
11.5
22.5
3y
1
1.5
2
2.5
3
z
11.5
22.5x
11.5
22.5y
3. A = (0, 1, 1) e B = (1, 0, -3).
Cal 3 Capítulo 1.nb 7

In[3]:= H∗ Desenha o paralelepípedo do Exer. 3. ∗LShow@Graphics3D@Cuboid@80, 1, 1 <, 81, 0, −3<D, Axes → TrueD,
AxesLabel → 8"x", "y", "z"<, TextStyle → 8FontSize → 7.0<D;
0 0.250.5
0.751
x
00.25
0.50.75
1
y
−3
−2
−1
0
1
z
250.50.75
1
4. A = (-2, 2, 3) e B = (1, -2, -1).
8 Cal 3 Capítulo 1.nb

In[4]:= H∗ Desenha o paralelepípedo do Exer. 4. ∗LShow@Graphics3D@Cuboid@8−2, 2, 3<, 81, −2, −1 <D, Axes → TrueD,
AxesLabel → 8"x", "y", "z"<D;
-2-1
01x
-2-1
01
2y
-1
0
1
2
3
z
-2-1
0x
-2-1
01y
5. A = (1, 2, 1) e B = (0, -3, -1).
In[5]:= H∗ Desenha o paralelepípedo do Exer. 5. ∗LShow@Graphics3D@Cuboid@81, 2, 1<, 80, −3, −1 <D, Axes → TrueD,
AxesLabel → 8"x", "y", "z"<D;
00.250.50.751x
-2
0
2
y
-1
-0.5
0
0.5
1
z
0.250 50 75
-2
0
2
y
Nos Exercícios 6 a 9, calcule a distância entre os dois pontos dados, em cada caso.
6. A = (1, 0, -2) e B = (-2, -3, -1).
Cal 3 Capítulo 1.nb 9

In[6]:= H∗ Solução do Exercício 6. ∗La = 81, 0, −2<;b = 8−2, 3, −1<;Sqrt@Total@Ha − bL^2DD
Out[8]=è!!!!!!19
7. A = (1/2, -1, -1/3) e B = (-1, 1/2, -3/2).
In[9]:= H∗ Solução do Exercício 7. ∗La = 81ê2, −1, −1ê3<;b = 8−1, 1ê2, −3ê2<;Sqrt@Total@Ha − bL^2DD
Out[11]=è!!!!!!!!!2116
8. A = (-1 + è!!!2 , 3, 0) e B = (-1, -1, 1).
In[12]:= H∗ Solução do Exercício 8 ∗La = 8−1 + Sqrt@2D, 3, 0<;b = 8−1, −1, 1<;Sqrt@Total@Ha − bL^2DD
Out[14]=è!!!!!!19
9. A = (a, b, c è!!!2 ) e B = (b, -a, 0).
In[15]:= H∗ Solução do Exercício 9. ∗LClear@a, b, cDu = 8a, b, c Sqrt@2D<;v = 8b, −a, 0<;Sqrt@Total@Hu − vL^2DD êê Simplify
Out[18]=è!!!2 è!!!!!!!!!!!!!!!!!!!!!!!!a2 + b2 + c2
10. Num levantamento topográfico, um observador num ponto A determinou que um ponto B está 700 m mais ao Leste, 500 m mais ao Sul e 200 m acima de sua posição. Determine a distância entre A e B e faça um gráfico.
In[19]:= H∗ Solução do Exercício 10. ∗La = 80, 0, 0<;b = 8700, 500, 200<;Sqrt@Total@Ha − bL^2DD
Out[21]= 100 è!!!!!!78
11. Demostre que os pontos A = (1. 0, 1), B = (0, 1, -1) e C = (3, 4, 2) são vértices de um triângulo retângulo. Faça o gráfico. .
10 Cal 3 Capítulo 1.nb

In[22]:= H∗ Solução do Exercício 11. ∗La = 81, 0, 1<;b = 80, 1, −1<;c = 83, 4, 2<;ab = Sqrt@Total@Ha − bL^2DDac = Sqrt@Total@Ha − cL^2DDbc = Sqrt@Total@Hb − cL^2DDbc^2 − ab^2 − ac^2
Out[25]=è!!!6
Out[26]=è!!!!!!21
Out[27]= 3 è!!!3Out[28]= 0
12. Determinar z de maneira que os pontos A = (-1. 1, z), B = (-1, 1, -z) e a origem O sejam vértices de um triângulo retângulo em O. Faça o gráfico. .
In[29]:= H∗ Solução do Exercício 12. ∗La = 8−1, 1, z<;b = 8−1, 1, −z<;[email protected] 0, 8z<D
Out[31]= 99z → −è!!!2 =, 9z →
è!!!2 ==
Verificação do resultado:
In[32]:= a = 9−1, 1,è!!!!2 =;
b = 9−1, 1, −è!!!!2 =;
c = 80, 0, 0<;ac = Sqrt@Total@Ha − cL^2DDbc = Sqrt@Total@Hb − cL^2DDab = Sqrt@Total@Hb − aL^2DDab^2 − ac^2 − bc^2
Out[35]= 2
Out[36]= 2
Out[37]= 2 è!!!2Out[38]= 0
Nos Exercícios 13 a 22, faça o gráfico ilustrando os planos de equações dadas.
13. 3 x - 2 y + 1 = 0.
Cal 3 Capítulo 1.nb 11

In[39]:= H∗ Desenho do Exercício 13 ∗LParametricPlot3D@8u, 1ê2 + 3ê2 u, v<, 8u, −1, 1<,8v, −1, 1<, AxesLabel → 8"x", "y", "z"<, PlotPoints → 5D;
-1-0.5
00.5
1x
-1
0
1
2
y
-1
-0.5
0
0.5
1
z
-1-0.5
00.5x
0
1
2
y
14. y = 2 z + 3.
In[40]:= H∗ Desenho do Exercício 14 ∗LParametricPlot3D@8u, 2 v + 3, v<, 8u, −1, 1<,8v, −1, 1<, AxesLabel → 8"x", "y", "z"<, PlotPoints → 5D;
-1-0.5
00.5
1x
1
2
3
4
5
y
-1
-0.5
0
0.5
1
z
-1-0.5
00 5
2
3
4
5
y
15. - x + z/2 = 1.
12 Cal 3 Capítulo 1.nb

In[41]:= H∗ Desenho do Exercício 15 ∗LParametricPlot3D@8uê2 − 1, v, u<, 8u, −1, 1<,8v, −1, 1<, AxesLabel → 8"x", "y", "z"<, PlotPoints → 5,TextStyle → 8FontSize → 7.0<, ViewPoint → 84, 4, 1<D;
−1.5−1.25−1−0.75−0.5 x
−1−0.5
00.5
1y
−1
−0.5
0
0.5
1
z
−1.−1.251
16. x = 2.
In[42]:= H∗ Desenho do Exercício 16 ∗LParametricPlot3D@82, u, v<, 8u, −1, 1<, 8v, −1, 1<,
AxesLabel → 8"x", "y", "z"<, PlotPoints → 5, TextStyle → 8FontSize → 7.0<D;
0
1
2
3
4
x
−1
−0.5
0
0.5
1
y
−1
−0.5
0
0.5
1
z
0
1
2
3x
−
−
17. y = -3.
Cal 3 Capítulo 1.nb 13

In[43]:= H∗ Desenho do Exercício 17 ∗LParametricPlot3D@8u, −3, v<, 8u, −1, 1<, 8v, −1, 1<,
AxesLabel → 8"x", "y", "z"<, PlotPoints → 5, TextStyle → 8FontSize → 7.0<D;
−1−0.5
00.5
1x
−6
−4
−2
0
y
−1
−0.5
0
0.5
1
z
1−0.5
00 5
−4
−2
0
y
18. z = - 2.
In[44]:= H∗ Desenho do Exercício 18 ∗LParametricPlot3D@8u, v, −2<, 8u, −1, 1<, 8v, −1, 1<,
AxesLabel → 8"x", "y", "z"<, PlotPoints → 5, TextStyle → 8FontSize → 7.0<D;
−1−0.5 0 0.5 1
x
−1−0.5
00.5
1y
−4
−3
−2
−1
0
z
1−0.5
00.5
19. x + y = 2.
14 Cal 3 Capítulo 1.nb

In[45]:= H∗ Desenho do Exercício 19 ∗LParametricPlot3D@8u, 2 − u, v<, 8u, −1, 1<,8v, −1, 1<, AxesLabel → 8"x", "y", "z"<, PlotPoints → 5,TextStyle → 8FontSize → 7.0<, ViewPoint → 82, 1, 1<D;
−1
−0.5
0
0.5
1
x11.5
22.5
3
y
−1
−0.5
0
0.5
1
z
−1
−0.5
0
0.5
1
x
−1
.5
0
5
20. x - z = 1.
In[46]:= H∗ Desenho do Exercício 20 ∗LParametricPlot3D@8u, v, u − 1<, 8u, −1, 1<, 8v, −1, 1<,
AxesLabel → 8"x", "y", "z"<, PlotPoints → 5, TextStyle → 8FontSize → 7.0<D;
−1−0.5
0
0.5
1
x
−1
−0.5
0
0.51
y
−2
−1.5
−1
−0.5
0
z
−1−0.5
0
0.5x
1
−0.5
0
0.5y
21. 4 z + 5 y = 0.
Cal 3 Capítulo 1.nb 15

In[47]:= H∗ Desenho do Exercício 21 ∗LParametricPlot3D@8u, v, −5 vê4<, 8u, −1, 1<,8v, −1, 1<, AxesLabel → 8"x", "y", "z"<, PlotPoints → 5,TextStyle → 8FontSize → 7.0<, ViewPoint → 82, 1, 1<D;
−1
−0.5
0
0.5
1
x−1−0.5
00.5
1y
−1
0
1
z
−1
−0.5
0
0.5
1
x
−1
0
21. 5 x = 4 z.
In[48]:= H∗ Desenho do Exercício 21 ∗LParametricPlot3D@8u, v, 5 uê4<, 8u, −1, 1<,8v, −1, 1<, AxesLabel → 8"x", "y", "z"<, PlotPoints → 5,TextStyle → 8FontSize → 7.0<, ViewPoint → 84, 4, 1<D;
−1−0.5
00.5
1 x
−1−0.5
00.5
1y
−1
0
1
z
−1−0.5
00 5
Nos Exercícios 23 a 27, determine a equação da esfera de centro e raio dados, em cada caso (Pág. 8).
23. C = (2, 1, 1), r = 2.
16 Cal 3 Capítulo 1.nb

In[49]:= H∗ Solução do Exercício 23. ∗L8a, b, c, r< = 82, 1, 1, 2<;Expand@Hx − aL^2 + Hy − bL^2 + Hz − cL^2D − r^2 0
Out[50]= 2 − 4 x + x2 − 2 y + y2 − 2 z + z2 0
24. C = (0, -2, 1), r = 5.
In[51]:= H∗ Solução do Exercício 24. ∗L8a, b, c, r< = 80, −2, 1, 5<;Expand@Hx − aL^2 + Hy − bL^2 + Hz − cL^2D − r^2 0
Out[52]= −20 + x2 + 4 y + y2 − 2 z + z2 0
25. C = (-1, 0, 4), r = 1.
In[53]:= H∗ Solução do Exercício 25. ∗L8a, b, c, r< = 8−1, 0, 4, 1<;Expand@Hx − aL^2 + Hy − bL^2 + Hz − cL^2D − r^2 0
Out[54]= 16 + 2 x + x2 + y2 − 8 z + z2 0
26. C = (1/2, -1/3, 1), r = 1/2.
In[55]:= H∗ Solução do Exercício 26. ∗L8a, b, c, r< = 81ê2, −1ê3, 1, 1ê2<;Expand@Hx − aL^2 + Hy − bL^2 + Hz − cL^2D − r^2 0
Out[56]=109
− x + x2 +2 y3
+ y2 − 2 z + z2 0
27. C = (0, -3, -2/3), r = 5.
In[57]:= H∗ Solução do Exercício 27. ∗L8a, b, c, r< = 80, −3, −2ê3, 5<;Expand@Hx − aL^2 + Hy − bL^2 + Hz − cL^2D − r^2 0
Out[58]= −1409
+ x2 + 6 y + y2 +4 z3
+ z2 0
Nos Exercícios 28 a 31, determine o centro e o raio da esfera de equação dada, em cada caso.
28. x2 + y2 + z2 - 2y + 4z + 4 = 0
In[59]:= H∗ Solução do Exercício 28. ∗LSimplify@x^2 + y^2 + z^2 − 2 y + 4 z + 4 D 0
Out[59]= x2 − 2 y + y2 + H2 + zL2 0
Completar os quadrados
y2 - 2 y = Hy - 1L2 - 1
z2 + 4 z = Hz + 2L2 - 4
Cal 3 Capítulo 1.nb 17

In[60]:= x^2 + Hy − 1L^2 − 1 + Hz + 2L^2 − 4 + 4 0
Out[60]= −1 + x2 + H−1 + yL2 + H2 + zL2 0
Centro = (0, 1, -2) e raio = 1.
Verificação do resultado:
In[61]:= Expand@x^2 + Hy − 1L^2 + Hz + 2L ^2 − 1D 0
Out[61]= 4 + x2 − 2 y + y2 + 4 z + z2 0
29. 4(x2 + y2 + z2 - x + y) - 26 = 0
In[62]:= H∗ Solução do Exercício 29. ∗LSimplify@4 x^2 + 4 y^2 + 4 z^2 − 4 x + 4 y − 26D 0
Out[62]= −26 − 4 x + 4 x2 + 4 y + 4 y2 + 4 z2 0
Completar os quadrados
4 x2 - 4 x = 4 Hx - 1 ê 2L2 - 1
4 y2 + 4 y = 4 Hy + 1 ê 2L2 - 1
In[63]:= 4 Hx − 1ê2L^2 − 1 + 4 Hy + 1ê2L^2 − 1 + 4 z^2 − 26 0
Out[63]= −28 + 4 J−12
+ xN2
+ 4 J 12
+ yN2
+ 4 z2 0
Dividindo por 4,
Centro = (1/2, -1/2, 0) e raio = è!!!7 .
Verificação do resultado:
In[64]:= Expand@Hx − 1ê2L^2 + Hy + 1ê2L^2 + z ^2 − 7D 0
Out[64]= −132
− x + x2 + y + y2 + z2 0
Multiplicando por 4,
4 Hx2 + y2 + z2 - x + yL - 26 = 0.
30. 9(x 2 + y2 + z2 ) - 12x + 24 z - 205 = 0
In[65]:= H∗ Solução do Exercício 30. ∗LSimplify@9 x^2 + 9 y^2 + 9 z^2 − 12 x + 24 z − 205D 0
Out[65]= −205 − 12 x + 9 x2 + 9 y2 + 24 z + 9 z2 0
Completar os quadrados
9 x2 - 12 x = H3 x - 2L2 - 4
9 z2 + 2 4 z = H3 z + 4L2 - 16
18 Cal 3 Capítulo 1.nb

In[66]:= H3 x − 2L^2 − 4 + 9 y^2 + H3 z + 4L^2 − 16 − 205 0
Out[66]= −225 + H−2 + 3 xL2 + 9 y2 + H4 + 3 zL2 0
Dividindo por 9,
Hx - 2 ê3L2 + y2 + Hz + 4 ê 3L2 = 25
Centro = (2/3, 0, -4/3) e raio = 5.
Verificação do resultado:
In[67]:= Expand@Hx − 2ê3L^2 + y^2 + Hz + 4ê3L^2 − 25D 0
Out[67]= −2059
−4 x3
+ x2 + y2 +8 z3
+ z2 0
Multiplicando por 9,
9 Hx2 + y2 + z2 L - 12 x + 24 z - 205 = 0.
31. 2(x 2 + y2 + z2 ) - 4x + 2y - 6 z + 5 = 0
In[68]:= H∗ Solução do Exercício 31. ∗LSimplify@2 x^2 + 2 y^2 + 2 z^2 − 4 x + 2 y − 6 z + 5D 0
Out[68]= 5 − 4 x + 2 x2 + 2 y + 2 y2 − 6 z + 2 z2 0
Multiplicando por 2,
2 Hx2 + y2 + z2 L - 4 x + 2 y - 6 z + 5 = 0.
Completar os quadrados
2 x2 - 4 x = 2 Hx - 1L2 - 2
2 y2 + 2 y = 2 Hy + 1 ê 2L2 - 1 ê 2
2 z2 - 6 z = 2 Hz - 3 ê 2L2 - 9 ê 2
In[69]:= 2 Hx − 1L^2 − 2 + 2 Hy + 1ê2L^2 − 1ê2 + 2 Hz − 3ê2L^2 − 9ê2 + 5 0
Out[69]= −2 + 2 H−1 + xL2 + 2 J 12
+ yN2
+ 2 J−32
+ zN2
0
Dividindo por 2,
Hx - 1L2 + Hy + 1 ê 2L2 + Hz - 3 ê 2L2 = 1
Centro = (1, -1/2, 3/2) e raio = 1.
Verificação do resultado:
In[70]:= Expand@Hx − 1L^2 + Hy + 1ê2L^2 + Hz − 3ê2L^2 − 1D 0
Out[70]=52
− 2 x + x2 + y + y2 − 3 z + z2 0
Multiplicando por 2,
2 Hx2 + y2 + z2 L - 4 x + 2 y - 6 z + 5 = 0.
Cal 3 Capítulo 1.nb 19

1.2 Vetores e Retas no Espaço
Um vetor no espaço é simplesmente um terno ordenado de números reais (x, y, z) simbolizado por uma letra em negrito v = (x, y, z) ou encimada por uma flexa v” = (x, y, z). Os números x, y, z são as componentes do vetor v.
Dados dois vetores quaisquer (x, y, z) e (x', y', z') e um número real r, definimos a soma e o produto por um escalar:
(x, y, z) + (x', y', z') = (x + x', y + y', z + z'),
r(x, y, z) = (rx, ry, rz).
Dado um vetor v = (x, y, z), seu oposto é o vetor
- v = (-1)v = (-x, -y, -z)
A diferença de dois vetores (x, y, z) e (x', y', z') é definida com a soma de v com -v':
v - v' = v + (- v') = (x - x', y - y', z - z' ).
O vetor 0 = (0, 0, 0) é camado vetor nulo.
Quaisquer que sejam os vetores u, v e w no espaço e os escalares r e s, as seguintes propriedades são verificadas:
u + v = v + u (cumitatividade)
(u + v) + w = u + (u + w) (associatividade)
u + 0 = u e u + (-u ) = 0 (vetor nulo)
(r + s)u = ru + su (distributividade da soma de escalares)
r(u + v) = ru + rv (distributividade da soma de vetores)
(rs)u = r(su) (distributividade do produto de escalares)
1. u = u
O módulo, norma ou comprimento de um vetor v = (x, y, z) é definido como sendo
|v| = è!!!!!!!!!!!!!!!!!!!!!!!!!!!!x2 + y2 + z2
Geometricamente, o módulo de um vetor
v = 0 X”÷÷÷÷÷÷÷ = B - A
é o comprimento dos segmentos 0X ou AB que representam o vetor (Fig 1.5).
Se r é um número real e v = (x, y, z) é um vetor qualquer, então
20 Cal 3 Capítulo 1.nb

|rv| = |r| |v|.
In[1]:= H∗ Desenha a Fig. 1.5 ∗LShow@Plot@0, 8x, 0, 2<, Axes → False, Epilog → 8Text@"O", 8−0.1, .05<D,
Text@"y", 82, −.12<D, Text@"x", 8−.75, −.95<D, Text@"z", 8.1, 2<D,Text@"X", 81.3, .7<D, Text@"A", 8.6, .8<D, Text@"B", 81.8, 1.4<D,Text@"Fig. 1.5", 81.5, −.95<D<, DisplayFunction → IdentityD,
Graphics@8Arrow@80, 0<, 81.2, 0.6<D, Arrow@80, 0<, 80, 2<D,Arrow@80, 0<, 8−1, −1<D, Arrow@80, 0<, 8−1, −1<D,[email protected], .7<, 81.8, 1.3<D<, DisplayFunction → IdentityD,
[email protected], −.6<, 81.2, .6<<, PlotJoined → True,PlotStyle → [email protected]<D<, DisplayFunction → IdentityD,ListPlot@88−.6, −.6<, 81.2, −.6<, 81.8, 0<<, PlotJoined → True,PlotStyle → [email protected]<D<, DisplayFunction → IdentityD,AspectRatio → Automatic, DisplayFunction → $DisplayFunctionD;
Oy
x
z
XA
B
Fig. 1.5
A equação vetorial da reta que passa pelo um ponto dado P0 = (x0 , y0 , z0 ) e é paralela a um vetor v = (a, b, c) ∫ 0 tem a forma
P = P0 + t(a, b, c)
equivalente às equações paramétricas da reta
x = x0 + at, y = y0 + bt, z = z0 + ct.
EXEMPLO 1. (pág. 8)
Vamos imaginar que um sistema de coordenadas Oxyz seja transladadopara uma nova posição O' x' y' z' HFig. 1.7L, de forma que os eixos o O' x',O' y' e O' z' permaneçam com a mesma direção e sentido que os eixos Ox,Oy, e Oz, respectivamente .
Cal 3 Capítulo 1.nb 21

Seja O' = Ha, b, cL a nova origem, Então
OP”÷÷÷÷ = OO'”÷÷÷÷÷÷÷
+ O' P”÷÷÷÷÷÷÷÷
onde P é um ponto qualquer. sejam, x, y,z coordenadas de P no sistema antigo Oxyz e x', y',z' as suas coordenadas no sistema novo O' x' y' z' . A equação anterior nos diz,precisamente, que
x = a + x', y = b + y', z = c + z'.
Estas são as fórmulas de transformação de um sisyema np outro.
EXEMPLO 2. (pág. 9)
O ponto médio de um dado segmento AB é o ponto X tal que AX”÷÷÷÷ = AX”÷÷÷÷ ,ou X − A = B − X . Daqui segue − se que
X =A − B2
.
A Fig. 1.8 ilustra o significado geométrico dessa fórmula.
EXEMPLO 3. (pág. 9)
A reta pelo ponto P0 = H3, −2, 1L, paralela ao vetor v = H−4, 2, 3L tem equação vetorialP = P0 + tv,
onde P = Hx, y, zL é o ponto genérico dareta. Essa equação equivale às seguintes equações paramétricas.
x = 3 − 4 t, y = −2 + 2 t, z = 1 + 3 t.
1.2.1 Exercícios (pág. 9)
Nos Exercícios 2 a 7, determine as equações paramétricas da reta pelos pontos dados.
2. A = (0, 1, 1) e B = (-1, 2, -3).
In[1]:= H∗ Solução do Exercício 2. ∗La = 80, 1, 1<;b = 8−1, 2, −3<;b − a
Out[3]= 8−1, 1, −4<
Equações paramétricas: x = -t, y = 1 + t, z = 1 - 4t.
3. A = (1, -2, -1) e B = (4, -1, 5).
22 Cal 3 Capítulo 1.nb

In[4]:= H∗ Solução do Exercício 3. ∗La = 81, −2, −1<;b = 84, −1, 5<;b − a
Out[6]= 83, 1, 6<
Equações paramétricas: x = 1 + 3t, y = -2 + t, z = -1 + 6t.
4. A = (6, -1, 0) e B = (0, -2, -3).
In[7]:= H∗ Solução do Exercício 4. ∗La = 86, −1, 0<;b = 80, −2, −3<;b − a
Out[9]= 8−6, −1, −3<
Equações paramétricas: x = 6 - 6t, y = -1 - t, z = - 3t.
5. A = (-2, 3, 1) e B = (-2, 0, 2).
In[10]:= H∗ Solução do Exercício 5. ∗La = 8−2, 3, 1<;b = 8−2, 0, 2<;b − a
Out[12]= 80, −3, 1<
Equações paramétricas: x = -2, y = 3 - 3t, z = 1 + t.
6. A = (0, 1, 4) e B = (5, -1, 4).
In[13]:= H∗ Solução do Exercício 6. ∗La = 80, 1, 4<;b = 85, −1, 4<;b − a
Out[15]= 85, −2, 0<
Equações paramétricas: x = 5t, y = 1 - 2t, z = 4.
7. A = (1, 7, 3) e B = (-1, 7, 5).
In[16]:= H∗ Solução do Exercício 7. ∗La = 81, 7, 3<;b = 8−1, 7, 5<;b − a
Out[18]= 8−2, 0, 2<
Equações paramétricas: x = 1 - 2t, y = 7, z = 3 + 2t.
8. Determine o ponto P tal que AP = 3 AB onde A = (10, 7, 3) e B = (2, -1, 5).
Cal 3 Capítulo 1.nb 23

In[19]:= H∗ Solução do Exercício 8. ∗La = 810, 7, 3<;b = 82, −1, 5<;a + 3 Hb − aL
Out[21]= 8−14, −17, 9<
9. Determine o ponto médio do segmento AP, onde A = (1, -1, 2) e B = (3, -5, -4).
In[22]:= H∗ Solução do Exercício 9. ∗La = 81, −1, 2<;b = 83, −5, −4<;Hb + aLê2
Out[24]= 82, −3, −1<
10. Determine os pontos M e N que divide o segmento AB em três partes iguais, sendo A = (2, 0, -1) e B = (4, 3, 4).
In[25]:= H∗ Solução do Exercício 10. ∗La = 82, 0, −1<;b = 84, 3, 4<;m = Hb − aLê3n = 2 Hb − aLê3
Out[27]= 9 23, 1,
53=
Out[28]= 9 43, 2, 10
3=
1.3 O Produto Escalar
Dados dois vetores
v1 = (x1 , y1 , z1 ) e v2 = (x2 , y2 , z2 ),
definimos seu produto escalar, ou produto interno, como no caso do plano
v1 · v2 = x1 x2 + y1 y2 + z1 z2 .
Quaisquer que sejam os vetores u, v, w e o escalar r, as seguintes propriedades são verificadas:
u· u = » u »2 ,
u· v = v· u ,
24 Cal 3 Capítulo 1.nb

u· (v + w ) = u· v + u· w ,
(ru)· v = r(u· v ) = u· (rv).
Geometricamente, dois vetores u e v são ortogonais ou perpendiculares se
| v + w | = | v - w |
ou equivalentemente,
u· v = 0.
In[1]:= H∗ Desenha a Fig. 1.9. ∗LShow@Plot@0, 8x, 0, 2<, PlotRange → 88−.1, 2.1<, 8−.1, 1<<, Axes → False,
Epilog → 8Text@"u", 81, −.05<D, Text@"v", 8−.05, .5<D, Text@"u + v",81.5, .6<D, Text@"u − v", 8.65, .8<D<, DisplayFunction → IdentityD,
Graphics@8Arrow@80, 0<, 82, 0<D, Arrow@80, 0<, 80, 1<D, Arrow@80, 0<, 82, 1<D,Arrow@82, 0<, 80, 1<D<, DisplayFunction → IdentityD,
ListPlot@882, 0<, 82, 1<, 80, 1<<, PlotJoined → True,PlotStyle → [email protected]<D<, DisplayFunction → IdentityD,AspectRatio → Automatic, DisplayFunction → $DisplayFunctionD;
u
vu + v
u − v
Dados os vetorres u e v e o escalar r
rv = u. vÅÅÅÅÅÅÅÅÅÅÅÅÅÅ»v »2 v = (u . vÅÅÅÅÅÅÅ»v» ) vÅÅÅÅÅÅÅ»v»
é chamado a projeção ortogonal de u sobre v. Se estes vetores são ambos não nulos e q é o angulo que eles formam, então é claro que
cos q = r»v»ÅÅÅÅÅÅÅÅÅ»u» = »v»ÅÅÅÅÅÅÅ»u» . u. vÅÅÅÅÅÅÅÅÅÅÅÅÅÅ»v »2 = uÅÅÅÅÅÅÅ»u» . vÅÅÅÅÅÅÅ»v» ,
donde segue-se que
u . v = |u| |v| cos q
A direção e o sentido de um vetor v = (x, y, z) são dados pelo vetor unitário
u = vÅÅÅÅÅÅÅ»v» = ( xÅÅÅÅÅÅ»v» , xÅÅÅÅÅÅ»v» , xÅÅÅÅÅÅ»v» ) = (a, b, c)
Em particular, os vetores unitários
Cal 3 Capítulo 1.nb 25

i = (1, 0, 0), j = (0, 1, 0) e k = (0, 0, 1),
são dois a dois ortogonais e caracterizam os sentidos positivos dos eixos Ox, Oy e Oz, respectivamente (Fig. 1.11). Eles formam o chamado triedro fundamental.
A desigualdade de Schwartz,
u . v § |u| |v|,
válida quaisquer que sejam os vetores u e v.
A desigualdade do trângulo,
|u + v| § |u| + |v|,
válida quaisquer que sejam os vetores u e v.
1.3.1 Exercícios (pág. 12)
Nos Exercícios 1 a 6, determine o vetor unitário com a mesma direção e sentido do vetir dado.
1. v = (2, -1, 2)
In[1]:= H∗ Solução do Exercício 1. ∗Lv = 82, −1, 2<;vê[email protected]
Out[2]= 9 23, −
13, 2
3=
2. v = (-2, 1, 3)
In[3]:= H∗ Solução do Exercício 2. ∗Lv = 8−2, 1, 3<;vê[email protected]
Out[4]= 9−$%%%%%%27,
1è!!!!!!14
,3
è!!!!!!14=
3. v = (0, -1, 2)
In[5]:= H∗ Solução do Exercício 3. ∗Lv = 80, −1, 2<;vê[email protected]
Out[6]= 90, −1è!!!5
,2è!!!5
=
26 Cal 3 Capítulo 1.nb

4. v = (4, 1/2, -1/3)
In[7]:= H∗ Solução do Exercício 4. ∗Lv = 84, 1ê2, −1ê3<;vê[email protected]
Out[8]= 9 24è!!!!!!!!!589
,3
è!!!!!!!!!589, −
2è!!!!!!!!!589
=
5. v = (2/3, -1/2, 0)
In[9]:= H∗ Solução do Exercício 5. ∗Lv = 82ê3, −1ê2, 0<;vê[email protected]
Out[10]= 9 45, −
35, 0=
6. v = (1, 6, -12)
In[11]:= H∗ Solução do Exercício 6. ∗Lv = 81, 6, −12<;vê[email protected]
Out[12]= 9 1è!!!!!!!!!181
,6
è!!!!!!!!!181, −
12è!!!!!!!!!181
=
Nos Exercícios 8 a 11, determine o ângulo entre os vetores dados.
8. u = (1, 1, 0) e v = (0, 1, 1)
In[13]:= H∗ Solução do Exercício 8. ∗Lu = 81, 1, 0<;v = 80, 1, 1<;[email protected]ê[email protected] [email protected]
Out[15]=π3
9. u = (1, 1, 1/2) e v = (1, 1, 4)
In[16]:= H∗ Solução do Exercício 9. ∗Lu = 81, 1, 1ê2<;v = 81, 1, 4<;[email protected]ê[email protected] [email protected]
Out[18]= ArcCosA 4 è!!!29
E
10. u = (-1, 2, 3) e v = (2, -1, 0)
Cal 3 Capítulo 1.nb 27

In[19]:= H∗ Solução do Exercício 10. ∗Lu = 8−1, 2, 3<;v = 82, −1, 0<;[email protected]ê[email protected] [email protected]
Out[21]= ArcCosA−2$%%%%%%%%%235
E
11. u = (-2, 1, 0) e v = (0, -3, 2)
In[22]:= H∗ Solução do Exercício 11. ∗Lu = 8−2, 1, 0<;v = 80, −3, 2<;[email protected]ê[email protected] [email protected]
Out[24]= ArcCosA−3
è!!!!!!65E
Nos Exercícios 12 a 14, determine o vetor projeção de u sobre v.
12. u = (1, 1, 1) e v = (1, 1, 0)
In[25]:= H∗ Solução do Exercício 12. ∗Lu = 81, 1, 1<;v = 81, 1, 0<;Hu.vêv.vL v
Out[27]= 81, 1, 0<
13. u = (2, 3, 4) e v = (1, -1, 0)
In[28]:= H∗ Solução do Exercício 13. ∗Lu = 82, 3, 4<;v = 81, −1, 0<;Hu.vêv.vL v
Out[30]= 9−12,
12, 0=
14. u = (-3, 1, -1) e v = (3, -1, 2)
In[31]:= H∗ Solução do Exercício 14. ∗Lu = 8−3, 1, 1<;v = 83, −1, 2<;Hu.vêv.vL v
Out[33]= 9−127
, 47, −
87=
28 Cal 3 Capítulo 1.nb

1.4 Retas e Planos
Usando o produto escalar, é fácil obter a equação de um plano por um ponto P0 = Hx0 , y0 , z0 ), perpendicular a um vetor v = (a, b, c). Um ponto P = (x, y, z) pertence ao referido plano, se, e somente se,
v . (P - P0 ) = 0.
Esta equação equivale a
a (x - x0 ) + b (y - y0 ) + c (z - z0 ) = 0,
ou ainda
a x + b y + c z + d = 0
onde d = - a x0 - b y0 - c z0 .
EXEMPLO 1. (pág. 14)
O plano de equaçãox + 3 y + 2 z − 6 = 0
é perpendicular ao vetor v = H1, 3, 2L e passa pelos pontos H6, 0, 0L,H0, , 2, 0L e H0, 0, 3L.
EXEMPLO 2. (pág. 15)
Os planos de equaçõesx + 2 y − 3 z − 10 = 0 e 2 x + 3 y − 4 z + 7 = 0
são perpendiculares ais vetores v1 = H1, 2, −3L e v2 = H2, 3, −4L,respectivamente. O ângulo entre os dois planos,que é o mesmo que o ângulo entre esses vetores, pode ser determinado pelo produto escalar
In[1]:= v1 = 81, 2, −3<;v2 = 82, 3, −4<;[email protected]ê[email protected] [email protected]
Out[3]= ArcCosA10$%%%%%%%%%%%2203
E
EXEMPLO 3. (pág. 16)
O plano de equações
x + 3 y + 2 z - 5 = 0
Cal 3 Capítulo 1.nb 29

x + 3 y + 2 z − 6 = 0é perpendicular ao vetor v = H1, 3, 2L e passa pelos pontos H6, 0, 0L,H0, , 2, 0L e H0, 0, 3L.
EXEMPLO 4. (pág. 16)
Dados os planos de equações
x + 3 y + 2 z - 5 = 0
é perpendicular ao vetor v = (1, 3, 2) e passa pelos pontos (6, 0, 0), (0, 2, 0), (0, 0, 3).
1.4.1 Exercícios (pág. 12)
1. Determine as equações paramétricas da reta pela origem, perpendicular ao plano
2 x - y + 3 z - 6 = 0
e faça o gráfico.
In[1]:= H∗ Solução do Exercício 1. ∗Lt 82, −1, 3<
Out[1]= 82 t, −t, 3 t<
Equações paramétricas: x = 2 t , y = - t , z = 3 t.
2. Determine as equações paramétricas da reta pelo ponto (2, -1, 3), perpendicular ao plano de equação x - y + z + 10 = 0.
In[2]:= H∗ Solução do Exercício 2. ∗Lt 81, −1, 1< + 82, −1, 3<
Out[2]= 82 + t, −1 − t, 3 + t<
Equações paramétricas: x = 2 + t , y = -1 - t , z = 3 + t.
4. Determine o vetor mais geral que é perpendicular aos vetores u = (1, -1, 2) e v = (2, 0,,-1).
In[3]:= H∗ Solução do Exercício 4. ∗Lv = 82, −1, 2<;vê[email protected]
Out[4]= 9 23, −
13, 2
3=
Nos Exercícios 9 a 19, determine equações paramétricas das retas interseções dos planos dados.
9. 2 x - y - z - 1 = 0 e x + y - 2 z + 7 = 0
30 Cal 3 Capítulo 1.nb

In[5]:= H∗ Solução do Exercício 9. ∗LClear@x, y, zDz = t;Solve@82 x − y 1 + z, x + y −7 + 2 z<, 8x, y<D
Out[7]= 88x → −2 + t, y → −5 + t<<
Equações paramétricas: x = t - 2, y = t - 5, z = t.
10. 3 x - 2 y - 7 = 0 e 2 y + 3 z + 7 = 0
In[8]:= H∗ Solução do Exercício 10. ∗LClear@x, y, zDy = t;Solve@83 x 7 + 2 y, 3 z −2 y − 7<, 8x, z<D
Out[10]= 99x →13H7 + 2 tL, z →
13H−7 − 2 tL==
Equações paramétricas: x = 2 t/3 + 7/3 , y = t , x = -2 t/3 - 7/3
Equações paramétricas: x = t - 2, y = t - 5, z = t.
11. x - 2 y + z + 1 = 0 e 2 y - x + z - 3 = 0
In[11]:= H∗ Solução do Exercício 11. ∗LClear@x, y, zDy = t;Solve@8x + z 2 y − 1, −x + z −2 y + 3<, 8x, z<D
Out[13]= 88x → 2 H−1 + tL, z → 1<<
Equações paramétricas: x = - 2 + 2 t + 7/3 , y = t , z = 1.
12. 3 x - 2 y + z - 2 = 0 e 3 x + 4 y + z + 1 = 0
In[14]:= H∗ Solução do Exercício 12. ∗LClear@x, y, zDz = t;Solve@83 x − 2 y −z + 2, 3 x + 4 y −z − 1<, 8x, y<D
Out[16]= 99x → −13H−1 + tL, y → −
12==
Equações paramétricas: x = -1/3 t + 1/3 , y = -1/2 , z = t.
13. 2 x - y + 5 z = 0 e x + y - 5 z = 1 0
In[17]:= H∗ Solução do Exercício 12. ∗LClear@x, y, zDz = t;Solve@82 x − y −5 z , x + y 5 z + 10<, 8x, y<D
Out[19]= 99x →103
, y →53H4 + 3 tL==
Cal 3 Capítulo 1.nb 31

Equações paramétricas: x = 10/3, y = 5 t + 20/3 , z = t.
14. x + 3 y = 5 e 2x - z - 1 = 0
In[20]:= H∗ Solução do Exercício 14. ∗LClear@x, y, zDx = t;Solve@83 y 5 − x , z 2 x − 1<, 8y, z<D
Out[22]= 99y →5 − t3
, z → −1 + 2 t==
Equações paramétricas: x = t, y = -1/3 t + 5/3 , z = 2 t - 1.
15. 2 x - y = 3 e 2 y + z = 0
In[23]:= H∗ Solução do Exercício 15. ∗LClear@x, y, zDz = t;Solve@82 x − y 3 , 2 y − z<, 8x, y<D
Out[25]= 99x → −14H−6 + tL, y → −
t2==
Equações paramétricas: x = 1/4 t + 3/2 , y = -1/2 t, z = t.
16. x = 3 e z = 2.
In[26]:= H∗ Solução do Exercício 16. ∗LClear@x, y, zDy = t;Solve@8 x 3 , z 2<, 8x, z<D
Out[28]= 88x → 3, z → 2<<
Equações paramétricas: x = 3 , y = t, z = 2.
Equações paramétricas: x = 1/4 t + 3/2 , y = -1/2 t, z = t.
17. x = - 4 e y = 5.
In[29]:= H∗ Solução do Exercício 17. ∗LClear@x, y, zDz = t;Solve@8 x −4 , y 5<, 8x, y<D
Out[31]= 88x → −4, y → 5<<
Equações paramétricas: x = - 4 , y = 5, z = t.
18. y = 2 e z = - 3.
32 Cal 3 Capítulo 1.nb

In[32]:= H∗ Solução do Exercício 18. ∗LClear@x, y, zDx = t;Solve@8 y 2 , z 5<, 8y, z<D
Out[34]= 88y → 2, z → 5<<
Equações paramétricas: x = t, y = 2, z = 5.
19. x + y = 0 e y + z = 0.
In[35]:= H∗ Solução do Exercício 19. ∗LClear@x, y, zDy = −t;Solve@8 x −y , z −y<, 8x, z<D
Out[37]= 88x → t, z → t<<
Equações paramétricas: x = t, y = - t, z = t.
1.5 O Produto Vetorial
Dados dois vetores v1 = (x1 , y1 , z1 ) e v2 = (x2 , y2 , z2 ), define-se o produto vetorial v1 × v2 mediante a expressão
w = v1 × v2 = (y1 z2 - z1 y2 , z1 x2 - x1 z2 , x1 y2 - y1 x2 ).
O produto vetorial w possui as seguintes propriedades:
(1) | w | = | v1 | | v2 | sen q, onde q ( 0 § q § p ) é o ângulo entre os vetores v1 e v2 , supostamente ambos não nulos;
(2) w é perpendicular a v1 e a v2 ;
(3) O sentido de w é tal que os três vetores v1 , v2 e w, nesta ordem, formam um triedro com orientação positiva. Isto significa que esses vetores obdecem à chamada regra da mão direita, assim descrita: com a mão direita semi-ab-erta, o dedo indicador representando o vetor v1 e o dedp médio representandpo o vetor v2 , o vetor w deve ser represen-tado pelo dedo polegar, dispostos perpandicularmente aos dois primeiros;
Alem disso o produto vetorial deve possuir as seguintes propriedades, quaisquer que sejam os vetores a, b e c e o escalar r,
a × ( b + c) = a × b + a × c;
(a + b) × c = a × c + b
(ra) × b = r (a × b).
Cal 3 Capítulo 1.nb 33

Lembrando que um determinante de segunda ordem é assim definido
ƒƒƒƒƒƒƒƒƒa bc d
ƒƒƒƒƒƒƒƒƒ = ab - bc,
podemos reescrever o produto vetorial dos vetores u = (x1 , y1 , z1 ) e v = (x2 , y2 , z2 ) na seguinte forma
u × v = ƒƒƒƒƒƒƒƒƒ
y1 z1
y2 z2
ƒƒƒƒƒƒƒƒƒ i -
ƒƒƒƒƒƒƒƒƒx1 z1
x2 z2
ƒƒƒƒƒƒƒƒƒ j +
ƒƒƒƒƒƒƒƒƒx1 y1
x2 y2
ƒƒƒƒƒƒƒƒƒ k.
Por outro lado, um determinante de terceira ordem desenvolve-se em termo de determinante de segunda ordem, de acordo com a regra:
ƒƒƒƒƒƒƒƒƒƒƒƒƒ
a b cx1 y1 z1x2 y2 z2
ƒƒƒƒƒƒƒƒƒƒƒƒƒ =
ƒƒƒƒƒƒƒƒƒy1 z1
y2 z2
ƒƒƒƒƒƒƒƒƒ a -
ƒƒƒƒƒƒƒƒƒx1 z1
x2 z2
ƒƒƒƒƒƒƒƒƒ b +
ƒƒƒƒƒƒƒƒƒx1 y1
x2 y2
ƒƒƒƒƒƒƒƒƒ c.
Comparando estas duas última expressões, podemos, simbolicamente, representar o produto vetorial na forma
u × v = ƒƒƒƒƒƒƒƒƒƒƒƒƒƒ
i j kx1 y1 z1x2 y2 z2
ƒƒƒƒƒƒƒƒƒƒƒƒƒƒ
O comando Det[m] calcula o determinante da matrix quadrada m.
Uma matriz m de terceira ordem é representada assim: {{a1 , a2 , a3 }, {b1 , b2 , b3 }, {c1 , c2 , c3 }}.
EXEMPLO 1. (pág. 20)
Vamos calcular o produto vetorial de u = (2, 4, 5) e v = (4, 3, 2).
In[1]:= H∗ Produto vetorial de u e v ∗Lu = 82, 4, 5<;v = 84, 3, 2<;Det@88i, j, k<, u, v<D
Out[3]= −7 i + 16 j − 10 k
Do mesmo modo, sendo u = (-2, 3, 2) e v = (3, -5, -4,) seu produto vetorial é dado por.
In[4]:= H∗ Produto vetorial de u e v ∗Lu = 8−2, 3, 2<;v = 83, −5, −4<;Det@88i, j, k<, u, v<D
Out[6]= −2 i − 2 j + k
É preferível usar o comando Cross[u, v] para calcular o produto vetorial dos vetores u e v.
34 Cal 3 Capítulo 1.nb

Repetindo o EXEMPLO 1 com o comando Cross[u, v],
Vamos calcular o produto vetorial de u = (2, 4, 5) e v = (4, 3, 2).
In[7]:= H∗ Produto vetorial de u e v ∗Lu = 82, 4, 5<;v = 84, 3, 2<;Cross@u, vD
Out[9]= 8−7, 16, −10<
Do mesmo modo, sendo u = (-2, 3, 2) e v = (3, -5, -4,) seu produto vetorial é dado por.
In[10]:= H∗ Produto vetorial de u e v ∗Lu = 8−2, 3, 2<;v = 83, −5, −4<;Cross@u, vD
Out[12]= 8−2, −2, 1<
EXEMPLO 2. (pág. 23)
Dados os planos 2 x - y -3 z - 3 = 0 e x - 3 y + z + 1 = 0, os vetores a = (2, -1, -3) e b = (1, -3, 1) são perpendiculares a esses dois planos, respectivamente. Então, o seu produto vetorial,
In[13]:= a = 82, −1, −3<;b = 81, −3, 1<;Cross@a, bD
Out[15]= 8−10, −5, −5<
define a direção da reta interseção dos planos dados. Para escrever as equações parametricas da reta precisamos determinar um de seus pontos, que é uma solução particular das equações dos dois planos. Por exemplo, considerando z = 1,
In[16]:= Clear@x, y, zDz = 1;Solve@82 x − y − 3 z 3, x − 3 y + z −1<, 8x, y<D
Out[18]= 88x → 4, y → 2<<
Portanto, as equações paramétricas da reta interseção dos planos são x = 4 - 10 t, y = 2 - 5t, z = 1 - 5 t.
Naturalmente, pode-se usar outra parametrização. Por exemplo, em vez do vetor c = (-10, -5, -5) podemos considerar o vetor v = c/5 = (2, 1, 1) e em vez de z = 1, fazer z = 0. Então,
In[19]:= z = 0;Solve@82 x − y − 3 z 3, x − 3 y + z −1<, 8x, y<D
Out[20]= 88x → 2, y → 1<<
Agora, as equações paramétricas da reta interseção dos planos são x = 2 + 2 t, y = 1 + t. t, z = t. A relação entre as duas parametrização é t = (1 - t)/5.
EXEMPLO 3. (pág. 23)
Cal 3 Capítulo 1.nb 35

Para determinar a equação do plano pelos três pontos A = (1, -2, -1), B = (-1, -1, 2) e C = (2, 3, 1), notemos que ele é perpendicular ao vetor AB”÷÷÷÷÷
× AC”÷÷÷÷÷÷. Portanto
In[21]:= a = 81, −2, −1<;b = 8−1, −1, 2<;c = 82, 3, 1<;Cross@b − a, c − aD
Out[24]= 8−13, 7, −11<
Então, a sua equação tem a forma -13 x + 7 y - 11 z + d = 0.
Para determinar d basta substituir, nesta equação, um dos pontos A, B, C, donde se conclui que d = - 16. Portanto, o plano considerado tem equação
13 x - 7 y + 11 z - 11 = 0.
Sabendo-se que » a »2 » a »2 sen2 q = » a »2 » a »2 (1 - cos2 q ) = » a »2 » a »2 - » a . b »2 é fácil provar que a × b = | a | | b | sen q. De fato,
In[25]:= a = 8a1, a2, a3<;b = 8b1, b2, b3<;axb = Cross@a, bD;axb.axb − Ha.aL Hb.bL + Ha.bL.Ha.bL êê Simplify
Out[28]= −Ha1 b1 + a2 b2 + a3 b3L2 + Ha1 b1 + a2 b2 + a3 b3L.Ha1 b1 + a2 b2 + a3 b3L
Estes dois termos se cancelam, portanto a × b = | a | | b | sen q.
Geometricamente a propriedade que acabamos de demostrar significa que |a × b| é a área do paralelogramo de lado a e b (Fig 1.19), pois | b | sen q = h é a altura desse paralelogramorelativa ao lado b.
36 Cal 3 Capítulo 1.nb

In[29]:= H∗ Desenha a Fig 1.19 ∗LShow@Plot@0, 8x, 0, 2<, PlotRange → 8−.1, 1.1<, Axes → False,
Epilog → 8Text@"a", 82, −0.07<D, Text@"b", 8.9, 1.03<D, Text@"θ", 8.2, .1<D,Text@"h", 81.1, .5<D, Text@"Fig 1.19.", 82.8, −.05<D<,
DisplayFunction → IdentityD, Graphics@8Arrow@80, 0<, 82, 0<D,Arrow@80, 0<, 81, 1<D<, DisplayFunction → IdentityD,
ListPlot@882, 0<, 83, 1<, 81, 1<<, PlotJoined → True,PlotStyle → [email protected]<D<, DisplayFunction → IdentityD,ListPlot@881, 0<, 81, 1<<, PlotJoined → True,PlotStyle → [email protected]<D<, DisplayFunction → IdentityD,AspectRatio → Automatic, DisplayFunction → $DisplayFunctionD;
a
b
θ
h
Fig 1.19.
1.5.1 Exercícios (pág. 24)
1. Verifique as propriedades:
i × j = - j × i = k; j × k = - k × j = i; k × i = - i × k = j; i × i = j × j = k × k = 0;
In[1]:= H∗ Mostra que j × k = −k × j = i. ∗Li := 81, 0, 0<;j := 80, 1, 0<;k := 80, 0, 1<;TrueQ@Cross@i, jD kDTrueQ@Cross@−j, iD kD
Out[4]= True
Out[5]= True
True[expr] retorna True se expr for verdadeira, e retorna False se expr for falsa.
Cal 3 Capítulo 1.nb 37

In[6]:= H∗ Mostra que j × k = −k × j = i. ∗Li := 81, 0, 0<;j := 80, 1, 0<;k := 80, 0, 1<;TrueQ@Cross@j, kD iDTrueQ@Cross@−k, jD iD
Out[9]= True
Out[10]= True
In[11]:= H∗ Mostra que k × i = −i × k = j. ∗Li := 81, 0, 0<;j := 80, 1, 0<;k := 80, 0, 1<;TrueQ@Cross@k, iD jDTrueQ@Cross@−i, kD jD
Out[14]= True
Out[15]= True
In[16]:= H∗ Mostra que i × i = j × j = k × k = 0. ∗Li := 81, 0, 0<;j := 80, 1, 0<;k := 80, 0, 1<;TrueQ@Cross@i, iD 80, 0, 0<DTrueQ@Cross@j, jD 80, 0, 0<DTrueQ@Cross@k, kD 80, 0, 0<D
Out[19]= True
Out[20]= True
Out[21]= True
2. Determine a equação do plano pelos pontos A = (2, 0, 1) e B = ( 0, 2, 1), paralelo ao vetor v = (-1, -2, 3).
In[22]:= H∗ Solução do Exercício 2 ∗LClear@x, y, zDa := 82, 0, 1<;b := 80, 2, 1<;v := 8−1, −2, 3<;Cross@8x, y, z< − a, b − aD.v êê Simplify
Out[26]= 6 H−3 + x + y + zL
A equação do plano é x + y + z - 3 = 0.
3. Determine a equação do plano pelo ponto A = (-1, 2, -3) paralelo às direções u = (1, 0, 1) e v = (1, 1, 0).
38 Cal 3 Capítulo 1.nb

In[27]:= H∗ Solução do Exercício 3 ∗LClear@x, y, zDa := 8−1, 2, −3<;u := 81, 0, 1<;v := 81, 1, 0<;Cross@u, vD.H8x, y, z< − aL êê Simplify
Out[31]= −x + y + z
A equação do plano é -x + y + z = 0.
4. Determine a equação do plano pela origem, perpendicular aos planos de equações 2 x - y + z = 1 e x + y - 2 z + 4 = 0.
In[32]:= H∗ Solução do Exercício 4 ∗LClear@x, y, zDa := 82, −1, 1<;b := 81, 1, −2<;Cross@a, bD.8x, y, z<
Out[35]= x + 5 y + 3 z
O plano considerado tem equação x + 5 y + 3 z = 0.
5. Determine a equação do plano pela ponto A = (0, 1, 2), perpendicular aos planos de equações x - y + z + 1 = 0 e 3 x + y - 2 z - 5 = 0.
In[36]:= H∗ Solução do Exercício 5 ∗LClear@x, y, zDa := 80, 1, 2<;b := 81, −1, 1<;c := 83, 1, −2<;Cross@b, cD.H8x, y, z< − aL êê Simplify
Out[40]= −13 + x + 5 y + 4 z
O plano considerado tem equação x + 5 y + 4 z - 13 = 0.
6. Determine a equação do plano pelos pontos A = (1, -1, 2), B = (-1, 0, 1), C = (2, 1, 3).
In[41]:= H∗ Solução do Exercício 6 ∗LClear@x, y, zDa := 81, −1, 2<;b := 8−1, 0, 1<;c := 82, 1, 3<;Cross@b − a, c − aD
Out[45]= 83, 1, −5<
Então a equação do plano tem a forma 3 x + y - 5 z + d = 0. Substituíndo o ponto A nesta equação se comclui que d = 8. Portanto o plano considerado tem equação 3 x + y - 5 z + 8 = 0.
Cal 3 Capítulo 1.nb 39

9. Desenvolva o determinante
ƒƒƒƒƒƒƒƒƒƒƒƒ
a1 a2 a3b1 b2 b3c1 c2 c3
ƒƒƒƒƒƒƒƒƒƒƒƒ.
In[46]:= H∗ Solução do Exercício 9 ∗LDet@88a1, a2, a3<, 8b1, b2, b3<, 8c1, c2, c3<<D
Out[46]= −a3 b2 c1 + a2 b3 c1 + a3 b1 c2 − a1 b3 c2 − a2 b1 c3 + a1 b2 c3
10. Um determinante não se altera quando trocamos suas linhas por suas colunas, isto é
ƒƒƒƒƒƒƒƒƒƒƒƒ
a1 a2 a3b1 b2 b3c1 c2 c3
ƒƒƒƒƒƒƒƒƒƒƒƒ =
ƒƒƒƒƒƒƒƒƒƒƒƒ
a1 b1 c1a2 b2 c2a3 b3 c3
ƒƒƒƒƒƒƒƒƒƒƒƒ.
In[47]:= H∗ Solução do Exercício 10 ∗Ldet1 = Det@88a1, a2, a3<, 8b1, b2, b3<, 8c1, c2, c3<<D;det2 = Det@88a1, b1, c1<, 8a2, b2, c2<, 8a3, b3, c3<<D;p = det2 − det1;TrueQ@p == 0D
Out[50]= True
11. Um determinante troca de sinal quando trocamos entre si duas de suas linhas (ou colunas)
In[51]:= H∗ Solução do Exercício 11 ∗Ldet1 = Det@88a1, a2, a3<, 8b1, b2, b3<, 8c1, c2, c3<<D;det2 = Det@88c1, c2, c3<, 8b1, b2, b3<, 8a1, a2, a3<<D;p = det1 + det2;TrueQ@p == 0D
Out[54]= True
12. Se todos os elementos de uma linha (ou coluna) são multiplicados por um mesmo número p, o determinante fica multiplicado por esse número.
In[55]:= H∗ Solução do Exercício 12 ∗LClear@pDdet1 = Det@88a1, a2, a3<, 8b1, b2, b3<, 8c1, c2, c3<<D;det2 = Det@8 8a1, a2, a3<, p 8b1, b2, b3<, 8c1, c2, c3<<D;q = p det1 − det2 êê Simplify;TrueQ@q == 0D
Out[59]= True
13. Um determinante é zero se todos os elementos de uma linha (ou coluna) são o produto, por um mesmo número p, dos elementos correspondentes de outra linha (ou coluna).
40 Cal 3 Capítulo 1.nb

In[60]:= H∗ Solução do Exercício 13 ∗LDet@88a1, a2, a3<, p 8a1, a2, a3<, 8c1, c2, c3<<D
Out[60]= 0
14. Um determinante é zero se todos os elementos de uma linha (ou coluna) são o produto, por um mesmo número p, dos elementos correspondentes de outra linha (ou coluna)
ƒƒƒƒƒƒƒƒƒƒƒƒ
a1 a2 a3b1 b2 b3c1 c2 c3
ƒƒƒƒƒƒƒƒƒƒƒƒ =
ƒƒƒƒƒƒƒƒƒƒƒƒ
c1 c2 c3a1 a2 a3b1 b2 b3
ƒƒƒƒƒƒƒƒƒƒƒƒ =
ƒƒƒƒƒƒƒƒƒƒƒƒ
b1 b2 b3c1 c2 c3a1 a2 a3
ƒƒƒƒƒƒƒƒƒƒƒƒIn[61]:= H∗ Solução do Exercício 14 ∗L
det1 = Det@88a1, a2, a3<, 8b1, b2, b3<, 8c1, c2, c3<<D;det2 = Det@88c1, c2, c3<, 8a1, a2, a3<, 8b1, b2, b3<<D;det3 = Det@88b1, b2, b3<, 8c1, c2, c3<, 8a1, a2, a3<<D;TrueQ@det2 − det1 == 0 DTrueQ@det3 − det2 == 0 D
Out[64]= True
Out[65]= True
Cal 3 Capítulo 1.nb 41
1.6 O Produto Misto e Produto Duplo Vetorial
O produto misto dos vetores a, b e c, nesta ordem, é, por definição, o produto a · (b × c) = a · b × c. Note-se que (a · b) × c não faz sentido: seria o "produto vetorial" de um escalar por um vetor!
Sejam
a = (a1 , a1 , a1 ), b = (b1 , b1 , b1 ) e c = (c1 , c1 , c1 ).
Então, como
b × c = ƒƒƒƒƒƒƒƒƒ
b2 b3
c2 c3
ƒƒƒƒƒƒƒƒƒ i -
ƒƒƒƒƒƒƒƒƒb1 b3
c2 c3
ƒƒƒƒƒƒƒƒƒ j +
ƒƒƒƒƒƒƒƒƒb1 b1
c2 c2
ƒƒƒƒƒƒƒƒƒ k,
obtemos
a · (b × c) = ƒƒƒƒƒƒƒƒƒ
b2 b3
c2 c3
ƒƒƒƒƒƒƒƒƒa1 -
ƒƒƒƒƒƒƒƒƒb1 b3
c2 c3
ƒƒƒƒƒƒƒƒƒ a2 +
ƒƒƒƒƒƒƒƒƒb1 b1
c2 c2
ƒƒƒƒƒƒƒƒƒ a3 .
Mas isso é precisamente o determinante de terceira ordem da matriz cujas primeira, segunda e terceira linhas são as componentes dos vetores a, b e c, respectivamente, ito é
a · (b × c) = ƒƒƒƒƒƒƒƒƒƒƒƒ
a1 a2 a3b1 b2 b3c1 c2 c3
ƒƒƒƒƒƒƒƒƒƒƒƒ.
Custuma-se escrever o produto misto a · b × c dos vetores a, b e c na forma abc.
Geometricamente, o produto misto
a · b × c = | a | | b × c | cos q
é o volume de um paralelepípedo formado com os vetores a, b e c, tomados com o sinal positivo ou negativo conforme o triedro a, b e c tenha ou não orientação positiva, respectivamente.
EXEMPLO 4. (pág. 27)
Dados dois vetores não colineares a = (a1 , a2 , a3 ) e b = (b1 , b2 , b3 ), a condição para que um ponto P = (x, y, z) esteja no plano desses vetores e passe por um dado ponto P0 = (x0 , y0 , z0 ) é que P - P0 seja ortogonal a a × b. Isto significa que o produto misto de P - P0 , a e b é zero, logo a equação do referido plano é
(P - P0 ) . a × b = ƒƒƒƒƒƒƒƒƒƒƒƒ
x − x0 y − y0 z − z0a1 a2 a3b1 b2 b3
ƒƒƒƒƒƒƒƒƒƒƒƒ = 0.
Para considerar uma situação concreta, sejam a = (2, -3, 1), b = (2, 1, 2) e P0 = (3, 5, 2). Portanto, a equação anterior fica sendo
In[1]:= Det@88x − 3, y − 5, z − 2<, 82, −3, 1<, 82, 1, 2<<D êê Simplify
Out[1]= 15 − 7 x − 2 y + 8 z
42 Cal 3 Capítulo 1.nb

Então, a equação do referido plano é 7 x + 2 y + 8 z - 13 = 0.
1.6.1 Exercícios (pág. 28)
1. Verifique que (a × b) × c = (a · c) b - (b · c) a.
In[2]:= H∗ Mostra que Ha × bL× c = Ha⋅cL b −Hb⋅cL a. ∗La = 8a1, a2, a3<;b = 8b1, b2, b3<;c = 8c1, c2, c3<;p = Cross@Cross@a, bD, cD − a.c b + b.c a êê Simplify;TrueQ@p == 80, 0, 0< D
Out[6]= True
2. Verifique que a × (b × c) + b × (c × a) + c × (a × b) = 0.
In[7]:= H∗ Mostra que a ×Hb × cL + b ×Hc × aL +c ×Ha × bL = 0. ∗La = 8a1, a2, a3<;b = 8b1, b2, b3<;c = 8c1, c2, c3<;p = Cross@a, Cross@b, cDD + Cross@b, Cross@c, aDD + Cross@c, Cross@a, bDD ;TrueQ@p == 80, 0, 0< D
Out[11]= True
3. Verifique que (a × b) . (c × d) = (a · c) (b · d) - (a · d) (b · c)
In[12]:= H∗ Mostra que Ha × bL.Hc × dL = Ha⋅cL Hb⋅dL − Ha⋅dL Hb⋅cL. ∗La = 8a1, a2, a3<;b = 8b1, b2, b3<;c = 8c1, c2, c3<;d = 8d1, d2, d3<;p = Cross@a, bD .Cross@c, dD − HHa.cL Hb.dL − Ha.dL Hb.cLL êê Simplify;TrueQ@p == 0 D
Out[17]= True
4. Determine x de forma que os vetores a = i - j + 2 k, b = - i + 2 j + k e a = x i + 3 j + 2 k sejam complanares.
Cal 3 Capítulo 1.nb 43

In[18]:= H∗ Solução do Exercício 4 ∗LClear@xDi := 81, 0, 0<;j := 80, 1, 0<;k := 80, 0, 1<;a := i − j + 2 k;b := −i + 2 j + k;c := x i + 3 j + 2 k;Solve@Cross@a, bD.c 0, 8x<D
Out[25]= 99x → −75==
5. Determine a equação do plano pelos pontos A = (0, 1, 1}, B = (2, 0, -1}, paralelo ao vetor v = i - 2 j + 3 k.
In[26]:= H∗ Solução do Exercício 5 ∗LClear@x, y, zDa := 80, 1, 1<;b := 82, 0, −1<;i := 81, 0, 0<;j := 80, 1, 0<;k := 80, 0, 1<;v := i − 2 j + 3 k;Cross@8x, y, z< − a, b − aD.v êê Simplify
Out[33]= 11 − 7 x − 8 y − 3 z
A equação do plano é 7 x + 8 y + 3 z - 11 = 0.
6. Verifique que (b × c) × (c × a) = (abc) c
In[34]:= H∗ Mostra que Hb × cL×Hc × aL = HabcL c. ∗La = 8a1, a2, a3<;b = 8b1, b2, b3<;c = 8c1, c2, c3<;p = Cross@Cross@b, cD , Cross@c, aDD − Ha . Cross@b, cDL c êê Simplify;TrueQ@p == 80, 0, 0< D
Out[38]= True
7. Verifique que (a × b) . (b × c) × (c × a) = HabcL2
44 Cal 3 Capítulo 1.nb

In[39]:= H∗ Mostra que Ha × bL.Hb × cL×Hc × aL = HabcL2 ∗La = 8a1, a2, a3<;b = 8b1, b2, b3<;c = 8c1, c2, c3<;p = Cross@a, bD . Cross@Cross@b, cD, Cross@c, aDD −
Ha . Cross@b, cDL^2 êê Simplify;TrueQ@p ==
0 DOut[43]= True
8. Verifique que os vetores b - a, b - c e a - c são complanares.
In[44]:= H∗ Solução do Exercício 8 ∗La = 8a1, a2, a3<;b = 8b1, b2, b3<;c = 8c1, c2, c3<;p = Cross@b − a, b − cD .Ha − cL êê Simplify;TrueQ@p == 0 D
Out[48]= True
9. Verifique que o vetor a × b + b × c + c × a é perpendicular ao plano dos vetores b - a e b - c.
In[49]:= H∗ Solução do Exercício 9 ∗La = 8a1, a2, a3<;b = 8b1, b2, b3<;c = 8c1, c2, c3<;p = HCross@a, bD + Cross@b, cD + Cross@c, aDL.Hb − aL êê Simplify;q = HCross@a, bD + Cross@b, cD + Cross@c, aDL.Hb − cL êê Simplify;TrueQ@p == 0 DTrueQ@q == 0 D
Out[54]= True
Out[55]= True
Cal 3 Capítulo 1.nb 45

@1.6.2 Exercícios
@1. Verifique que a equação do plano pelos pontos A = (a1 , a2 , a3 ), B = (b1 , b2 , b3 ) e C = (c1 , c2 , c3 ) tem a forma
ƒƒƒƒƒƒƒƒƒƒƒƒ
x − a1 y − a2 z − a3b1 − a1 b2 − a2 b3 − a3c1 − a1 c2 − a2 c3 − a3
ƒƒƒƒƒƒƒƒƒƒƒƒ = 0.
In[1]:= H∗ Solução do Exercício @1 ∗LClear@x, y, zDa = 8a1, a2, a3<;b = 8b1, b2, b3<;c = 8c1, c2, c3<;p = Det@88x − a1, y − a2, z − a3<,
8b1 − a1, b2 − a2, b3 − a3<, 8c1 − a1, c2 − a2, c3 − a3<<D êê Simplify;q = Cross@b − a, c − aD;r = q@@1DD x + q@@2DD y + q@@3DD z −
Hq@@1DD a1 + q@@2DD a2 + q@@3DD a3L êê Simplify;TrueQ@p −
r ==
0 DOut[8]= True
@1. Determine a equação do plano pelos pontos A = (1, -1, 2), B = (-1, 0, 1) e C = (2, 1, 3}.
In[9]:= H∗ Solução do Exercício @1 ∗LClear@x, y, zD8a1, a2, a3< = 81, −1, 2<;8b1, b2, b3< = 8−1, 0, 1<;8c1, c2, c3< = 82, 1, 3<;Det@88x − a1, y − a2, z − a3<,
8b1 − a1, b2 − a2, b3 − a3<, 8c1 − a1, c2 − a2, c3 − a3<<D êê Simplify
Out[13]= 8 + 3 x + y − 5 z
Portanto, o plano considerado tem equação 3 x + y - 5 z + 8 = 0. Compare este resultado com o do Exercício 6 da seção 1.5.1.
@2. Determine a equação do trângulo pelos pontos A = (0, 0, 1), B = (1, 0, 0) e C = (0, 1, 0} e traçe o gráfico.
46 Cal 3 Capítulo 1.nb

In[14]:= H∗ Solução do Exercício @2 ∗LClear@x, y, zD8a1, a2, a3< = 80, 0, 1<;8b1, b2, b3< = 81, 0, 0<;8c1, c2, c3< = 80, 1, 0<;Det@88x − a1, y − a2, z − a3<,
8b1 − a1, b2 − a2, b3 − a3<, 8c1 − a1, c2 − a2, c3 − a3<<D êê Simplify
Out[18]= −1 + x + y + z
Portanto, o triângulo considerado tem equação x + y + z = 1.
In[19]:= H∗ Desenho do plano do Exercício @2 ∗Ltriangulo := Polygon@88a1, a2, a3<, 8b1, b2, b3<, 8c1, c2, c3<<DShow@Graphics3D@trianguloD, Axes → True,
AxesLabel → 8"x", "y", "z"<, TextStyle → 8FontSize → 7.0<D;
00.25
0.50.75
1x
00.25
0.50.75
1y
0
0.25
0.5
0.75
1
z
00.25
0.50.75x
00.25
0.50.75y
@3. Determine a equação do trângulo pelos pontos A = (0, 0, 0), B = (1, 0, 1) e C = (0, 1, 0} e traçe o gráfico.
In[21]:= H∗ Solução do Exercício @3 ∗LClear@x, y, zD8a1, a2, a3< = 80, 0, 0<;8b1, b2, b3< = 81, 0, 1<;8c1, c2, c3< = 80, 1, 0<;Det@88x − a1, y − a2, z − a3<,
8b1 − a1, b2 − a2, b3 − a3<, 8c1 − a1, c2 − a2, c3 − a3<<D êê Simplify
Out[25]= −x + z
Portanto, o trângulo considerado tem equação - x + z = 0.
Cal 3 Capítulo 1.nb 47

In[26]:= H∗ Desenho do triângulo do Exercício @3 ∗Ltriangulo := Polygon@88a1, a2, a3<, 8b1, b2, b3<, 8c1, c2, c3<<DShow@Graphics3D@trianguloD, Axes → True,
AxesLabel → 8"x", "y", "z"<, TextStyle → 8FontSize → 7.0<D;
00.25
0.50.75
1x
00.25
0.50.75
1y
0
0.25
0.5
0.75
1
z
00.25
0.50.75x
00.25
0.50.75y
@4. Determine a equação do triângulo pelos pontos A = (0, 0, 0), B = (1, 0, 0) e C = (0, 1, 1} e traçe o gráfico.
In[28]:= H∗ Solução do Exercício @4 ∗LClear@x, y, zD8a1, a2, a3< = 80, 0, 0<;8b1, b2, b3< = 81, 0, 0<;8c1, c2, c3< = 80, 1, 1<;Det@88x − a1, y − a2, z − a3<,
8b1 − a1, b2 − a2, b3 − a3<, 8c1 − a1, c2 − a2, c3 − a3<<D êê Simplify
Out[32]= −y + z
Portanto, o triângulo considerado tem equação - y + z = 0.
48 Cal 3 Capítulo 1.nb

In[33]:= H∗ Desenho do triângulo do Exercício @4 ∗Ltriangulo := Polygon@88a1, a2, a3<, 8b1, b2, b3<, 8c1, c2, c3<<DShow@Graphics3D@trianguloD, Axes → True,
AxesLabel → 8"x", "y", "z"<, TextStyle → 8FontSize → 7.0<D;
00.25
0.50.75
1x
0
0.25
0.50.75
1y
0
0.25
0.5
0.75
1
z
00.25
0.50.75x
0
0.25
0.50.75y
@5. Determine a equação do triângulo pelos pontos A = (0, 0, 2), B = (1, 0, 1/4 ) e C = (0, 1, 1} e traçe o gráfico.
In[35]:= H∗ Solução do Exercício @5 ∗LClear@x, y, zD8a1, a2, a3< = 80, 0, 2<;8b1, b2, b3< = 81, 0, 1ê4<;8c1, c2, c3< = 80, 1, 1<;Det@88x − a1, y − a2, z − a3<,
8b1 − a1, b2 − a2, b3 − a3<, 8c1 − a1, c2 − a2, c3 − a3<<D êê Simplify
Out[39]= −2 +7 x4
+ y + z
Portanto, o triângulo considerado tem equação 33 x + 30 y + 4 z - 34 = 0.
Cal 3 Capítulo 1.nb 49

In[40]:= H∗ Desenho do triângulo do Exercício 3@ ∗Ltriangulo := Polygon@88a1, a2, a3<, 8b1, b2, b3<, 8c1, c2, c3<<DShow@Graphics3D@trianguloD, Axes → True, AxesLabel → 8"x", "y", "z"<,TextStyle → 8FontSize → 7.0<, ViewPoint → 82, 3, 4<D;
00.25
0.50.75
1
x 0
0.25
0.5
0.75
1
y
0.5
1
1.5
2
z
0
0.25
0.5
0.7
y
5
@6. Sejam as funções f1 = 1 - x - y, f2 = x e f3 = y. Trace o gráfico do triângulo de equação - 2 f1 - f2 /4 - f3 e cujas projeções dos vértices A, B e C no plano XY são, respectivamente, (0, 0), (1, 0) e (0, 1).
50 Cal 3 Capítulo 1.nb

In[41]:= H∗ Desenha o triângulo do Exercício @6 ∗LClear@x, y, zDf1 := 1 − x − y;f2 := x;f3 := y;8a1, a2, a3< = 8x, y, 2 f1 + f2ê4 + f3< ê. 8x → 0, y → 0<;8b1, b2, b3< = 8x, y, 2 f1 + f2ê4 + f3< ê. 8x → 1, y → 0<;8c1, c2, c3< = 8x, y, 2 f1 + f2ê4 + f3< ê. 8x → 0, y → 1<;triangulo := Polygon@88a1, a2, a3<, 8b1, b2, b3<, 8c1, c2, c3<<DShow@Graphics3D@trianguloD, Axes → True, AxesLabel → 8"x", "y", "z"<,TextStyle → 8FontSize → 7.0<, ViewPoint → 82, 3, 4<D;
00.25
0.50.75
1
x 0
0.25
0.5
0.75
1
y
0.5
1
1.5
2
z
0
0.25
0.5
0.7
y
5
O triangulo é idêntico ao do exercício anterior. Note-se que a equação deste triangulo é composta pela soma das equações dos três triângulos dos exercícios @2, @3 e @4, multiplicadas, respectivamente por 2, 1/4 e 1.
1.7 Curvas no Espaço. Função Vetorial
Uma curva no espaço é descrita dando-se as coordenadas de seu ponto genérico P como função de uma variável independente t:
x = x (t), y = y (t), z = z (t).
Estas são as equações paramétricas da curva e t é o parâmetro. Note-se que essas equações escalares equivalem à única equação vetorial. Este é o vetor posição P (t).
Cal 3 Capítulo 1.nb 51

Diz-se que P(t) tem limite P0 = (x0, y0, z0 ) quando t Ø t0 se x (t) Ø x0 , y (t) Ø y0 e z (t) Ø z0 . O vetor posição P(t) é função contínua em t = t0 se
limt Ø t0
P (t) = P (t0 ).
Isto significa que são contínuas, simultaneamente, as três componentes de P (t) em t = t0 .
P(t) é derivável em t = t0 se suas componentes forem deriváveis nesse ponto. Neste caso, a derivada de P(t) é definida por
P(t) = dPHtLÅÅÅÅÅÅÅÅÅÅÅÅdt = ( dxÅÅÅÅÅÅÅdt , dyÅÅÅÅÅÅÅdt , dzÅÅÅÅÅÅdt ).Isto equivale a definir derivada em termos da razão incremental,
PHt + Dt L - PHtLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅDt = DPÅÅÅÅÅÅÅÅDt = ( DxÅÅÅÅÅÅÅDt , DyÅÅÅÅÅÅÅDt , DzÅÅÅÅÅÅÅDt ).Quando P(t) é o vetor posição de uma partícula em movimento, então a derivada P '(t) é a sua velocidade vetorial e a derivada segunda P ''(t), é a aceleração.
Geometricamente, P(t) descreve uma curva no espaço e P(t + Dt ) é um ponto dessa curva que torna-se tão próximo de P(t) quanto menor for Dt.
Portanto, é natural considerar a derivada
dPHtLÅÅÅÅÅÅÅÅÅÅÅÅdt = limDt Ø 0
PHt + Dt L - PHtLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅDt
como definido a direção tangente à curva no ponto P(t), desde que essa derivada não seja zero. Veja figura abaixo.
In[50]:= << Graphics`Arrow`ShowAPlotA8x + .25, 1 − Hx − 1L^2<, 8x, 0, 2.3<, PlotRange → 80, 2<,
Epilog → 9TextA"P”HtL", 8.4, .9<E, TextA"P”Ht + ΛtL", 82, .7<E,TextA"P”'HtL", 81.1, 1.6<E=, Axes → False, DisplayFunction → IdentityE,
[email protected], .75<, 82, .5<<, PlotJoined → True,DisplayFunction → IdentityD, Graphics@[email protected], 0.75<, 81.25, 1.5<D<D,DisplayFunction → $DisplayFunctionE;
P”HtLP”Ht + ΛtL
P”'HtL
52 Cal 3 Capítulo 1.nb

O comprimento de arco de uma curva no espaço,
P = P(t) = (x (t), y (t), z (t)), a § t § b,
é dado pela fórmula
s = ‡a
b "####################################################x' HtL2 + y' HtL2 + z' HtL2 „ t ,
Evidentemente, temos de supor que P(t) seja derivável.
EXEMPLO 1.. (AG3, pág.31) A curva dada por P(t) = (r cos wt, r sen wt, vt) é chamda hélice cilíndrica circular. Interpret-ando o parâmetro t como tempo, vemos que a projeção de P(t) sobre o plano Oxy é o ponto Q(t) = r ( cos wt, sen wt) que descreve a circunferência de centro na origem e raio r, com velocidade angular w. Ao mesmo tempo, a projeção de P(t) sobre o eixo Oz desloca-se , sobre este eixo, com velocidade v.
In[99]:= H∗ Gráfico de uma hélice cilíndrica circular com r = 2, ω = 1 e v = 1ê3 ∗Lr = 2; ω = 1; v = 1ê3;p@tD = 8r Cos@ω tD, r Sin@ω tD, v t<;ParametricPlot3D@Evaluate@p@tDD, 8t, 0, 21<D;
-2 -1 0 1 2
-2-1
012
0
2
4
6
2-1
01
A velocida e a aceleração da partícula são dados por
In[60]:= H∗ Velocidade aceleração da partícula ∗LClear@t, r, ω , vDp@tD = 8r Cos@ω tD, r Sin@ω tD, v t<;D@p@tD, tDD@%, tD
Out[61]= 8−r ω Sin@t ωD, r ω Cos@t ωD, v<Out[62]= 8−r ω2 Cos@t ωD, −r ω2 Sin@t ωD, 0<
A derivada ds/dt, do comprimento de arco s com relação ao parâmetro t, é obtida pela fórmula è!!!!!!!!!!!!!!!!!!!!!!!!!!P ' HtL P ' HtL . Assim,
Cal 3 Capítulo 1.nb 53

In[129]:= H∗ A derivada dsêdt ∗LClear@t, r, ω , vDp@tD = 8r Cos@ω tD, r Sin@ω tD, v t<;dsdt = Sqrt@D@p@tD, tD.D@p@tD, tDD êê Simplify
Out[131]=è!!!!!!!!!!!!!!!!!!!!!v2 + r2 ω2
Portanto, contando o comprimento de arco a partir de t = 0, obtemos s = è!!!!!!!!!!!!!!!!!!!!!!!!r2 w2 + v2 t.
Agora, vamos calcular o comprimento da curva no intervalo 0 § t § 21.
In[132]:= H∗ Comprimento da curva no intervalo 0 ≤
t ≤ 21 usando a fórmula s =è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!r2 ω2 + v2 t ∗L
r = 2; ω = 1; v = 1ê3;Sqrt@r^2 ω^2 + v^2D 21
Out[133]= 7 è!!!!!!37
Podemos também usar a fórmula geral Ÿab è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
x' HtL2 + y ' HtL2 + z' HtL2 t para calcular o comprimento de arco. Nesse caso, teríamos
In[144]:= H∗ Comprimento da curva no intervalo 0 ≤ t ≤ 21 usando a fórmula s =
Ÿab è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
x' HtL2 + y' HtL2 + z' HtL2 t∗Lr = 2; ω = 1; v = 1ê3;p@tD = 8r Cos@ω tD, r Sin@ω tD, v t<;dpdt = D@p@tD, tD;Integrate@Sqrt@dpdt@@1DD^2 + dpdt@@2DD^2 + dpdt@@3DD^2D, 8t, 0, 21<D
Out[147]= 7 è!!!!!!37
A expressão s = è!!!!!!!!!!!!!!!!!!!!!!!!r2 w2 + v2 t pode ser usada para exprimoir P em termos de s:
P (s) = (r cos w sÅÅÅÅÅÅÅÅK , r sen w sÅÅÅÅÅÅÅÅK , v sÅÅÅÅÅÅÅK ) onde K = è!!!!!!!!!!!!!!!!!!!!!!!!r2 w2 + v2 .
Isto resulta num nova parametrização da hélice cilíndrica circular.
Exercícios1. Dada a curva P(t) = (t2 + 1)i + 8tj + (t2 - 3)k, ache o vetor unitário tangente em t = 1; calcule o comprimento da curva no trecho compreendido entre t = 0 e t = 1. Entendendo-se que P9t) representa o movimento de uma partícula, encontre a velocidade e a aceleração do movimento no instante t.
Primeiro, vamos traçar o gráfico da curva no intervalo 0 § t § 2 e o ponto na curva correspondente a t = 1.
54 Cal 3 Capítulo 1.nb

In[200]:= H∗ Gráfico da curva no intervalo 0 ≤ t ≤ 2 e o ponto P H1L ∗Lp@tD = 8t^2 + 1, 8 t, t^2 − 3<;Show@ParametricPlot3D@Evaluate@p@tDD,
8t, 0, 2<, DisplayFunction → IdentityD, Graphics3D@[email protected], Point@82, 8, −2<D<, DisplayFunction → IdentityD,DisplayFunction → $DisplayFunctionD;
12
34
5
0
5
10
15
-3
-2
-1
0
1
12
34
0
5
10
15
Agora vamos achar o vetor unitário tangente em t = 1.
In[234]:= H∗ Vetor unitário tangente curva em t = 1 ∗Lp@tD = 8Ht^2 + 1L, 8 t, Ht^2 − 3L<;v = D@p@tD, tD;vê[email protected] ê. t → 1
Out[236]= 9 13 è!!!2
,2 è!!!23
,1
3 è!!!2=
In[242]:= H∗ Vetor unitário tangente curva em t = 1 ∗Lp@tD = 8Ht^2 + 1L, 8 t, Ht^2 − 3L<;v = D@p@tD, tD ê. t → 1
Out[243]= 82, 8, 2<
O plano normal à curva no ponto P(1) é o plano normal ao vetor tangente (2, 8, 2). Portanto, a sua equação é dada por 2 x + 8 y + 2 z + d = 0. O valor de d é obtido substituindo t = 1 nas equaçõs paramétricas de x, y e z. Assim a equação do plano é x + 4 y + z - 32 = 0.
O comprimento da curva no trecho compreendido entre t = 0 e t =1.
Cal 3 Capítulo 1.nb 55

In[1]:= H∗ Comprimento da curva no intervalo 0 ≤ t ≤ 1 ∗Lp@tD = 8t^2 + 1, 8 t, t^2 − 3<;dpdt = D@p@tD, tD;Integrate@Sqrt@dpdt@@1DD^2 + dpdt@@2DD^2 + dpdt@@3DD^2D, 8t, 0, 1<D
Out[3]=è!!!2 H3 + Log@16DL
In[4]:= H∗ Velocidade aceleração da partícula ∗LClear@tDp@tD = 8t^2 + 1, 8 t, t^2 − 3<;D@p@tD, tDD@%, tD
Out[6]= 82 t, 8, 2 t<Out[7]= 82, 0, 2<
A velocidade é o vetor (2t, 8, 2t) e a acelaração é o vetor (2, 0, 2).
7. Determine os pontos em que a curva P(t) = (t2 - 1, t2 + 1, 3t) corta o plano 3x - 2y - z + 7 = 0.
Achar os pontos de interseção equivale a determinar os valores de t que satisfaçam simultaneamente as equações da curva e do plano. Assim, podemos escrever
In[25]:= H∗ Resolve a equação 3 Ht2−1L + 2 Ht2+1L − 3 t + 7 = 0 ∗L3 x − 2 y − z + 7 ê. 8x → t2 − 1, y −> t2 + 1, z → 3 t<;Solve@% 0, tD
Out[26]= 88t → 1<, 8t → 2<<
Os valores de t nos pontos de interseção são 1 e 2. Substituindo estes valores na equação paramétrica da curva, obtemos os pontos de interseçao da curva com o plano. Portanto,
In[29]:= H∗ Substitui os valres t = 1 e t = 2 na equação da curva. ∗L8 t2 − 1, t2 + 1, 3 t< ê. t → 1 êê Simplify8 t2 − 1, t2 + 1, 3 t< ê. t → 2 êê Simplify
Out[29]= 80, 2, 3<Out[30]= 83, 5, 6<
56 Cal 3 Capítulo 1.nb

1.8 Superfícies Quadráticas
Uma superfície quadrática ué o conjunto das soluções da equação de segundo grau em x, y e z,
Ax2 + By2 + Cz2 + Dxy + Exz + Fyz + Gx + Hy + Iz + J = 0 Vamos examinar vários casos particulares desta equação que são representativos da situação geral.
ElipsoidesConsideremos uma elípse no plano Oyz, de equação
y2ÅÅÅÅÅÅÅb2 + z2
ÅÅÅÅÅÅc2 = 1,
onde suponhamos b < c < 0. Quando giramos essa elipse em torno de seu eixo Oz, obtemos a superfície ilustrada na figura abaixo. Ela é chamada elipsóide de revolução do tipo achatado, oblato ou oblongo.
In[43]:= H∗ Elipsóide achatado ou oblato ∗LesferoideOblato = 82 Cos@uD Cos@vD, 2 Cos@uD Sin@vD, Sin@uD<;ParametricPlot3D@Evaluate@esferoideOblatoD, 8u, −Piê2, Piê2<,8v, 0, 2 Pi<, PlotPoints → 25, AxesLabel → 8"x", "y", "z"<D;
-2-1
01
2x
-2
-1
0
1
2
y
-1-0.5
00.51
z
-2-1
01x
A equação do elipsóide oblato a cima descrito é
x2ÅÅÅÅÅÅÅb2 + y2
ÅÅÅÅÅÅÅb2 + z2ÅÅÅÅÅÅc2 = 1,
com b > c.
No caso de b < c, tem-se o elipsóide alongado ou prolato.
Cal 3 Capítulo 1.nb 57

In[51]:= H∗ Elipsóide alongado ou prolato ∗LesferoideOblato = 8Cos@uD Cos@vD, Cos@uD Sin@vD, 2 Sin@uD<;ParametricPlot3D@Evaluate@esferoideOblatoD, 8u, −Piê2, Piê2<,8v, 0, 2 Pi<, PlotPoints → 25, AxesLabel → 8"x", "y", "z"<D;
-1-0.5 0 0.5 1
x
-1-0.5
00.5
1y
-2
-1
0
1
2
z
1-0.5
00.5y
Os elipsóides oblato e prolato são superfícies de revolução, e portanto, são elipsóides especiais. A equação do tipo mais geral de elipsóide é
x2ÅÅÅÅÅÅÅa2 + y2
ÅÅÅÅÅÅÅb2 + z2ÅÅÅÅÅÅc2 = 1,
com a, b e c diferentes de zero.
58 Cal 3 Capítulo 1.nb

In[61]:= H∗ Elipsóide do tipo geral ∗LesferoideOblato = 82 Cos@uD Cos@vD, 6 Cos@uD Sin@vD, 3 Sin@uD<;ParametricPlot3D@Evaluate@esferoideOblatoD, 8u, −Piê2, Piê2<,8v, 0, 2 Pi<, PlotPoints → 25, AxesLabel → 8"x", "y", "z"<D;
-2-1 0 1 2x
-5
0
5
y
-2
0
2
z
2-1 0 1
-5
0
5
y
ElipsoidesOs hiperbolóides de revoluçãosão obtidos por rotação de um hipérbole em redor de um dos seus eixos. Consideremos a hipérbole no plano Oyz, de equação
y2ÅÅÅÅÅÅÅb2 - z2
ÅÅÅÅÅÅc2 = 1,
A rotação dessa hiperbóle em volta do eixo Oz resulta na superfície chamada hiperbolóide de uma folha mostrada na figura abaixo.
Cal 3 Capítulo 1.nb 59

In[153]:= H∗ Elipsóide de uma folha ∗Lhiperboloide = 8HCos@uD − v Sin@uDLê2,HSin@uD + v Cos@uDLê2, v<;ParametricPlot3D@Evaluate@hiperboloideD, 8u, 0, 2 Pi, 2 Piê20<,8v, −2, 2<D;
-1-0.50 0.5 1
-1-0.5
00.5
1
-2
-1
0
1
2-1-0.5
00.5
A equação do hiperpolóide de um folha em torno do eixo Oz é
x2ÅÅÅÅÅÅÅb2 + y2
ÅÅÅÅÅÅÅb2 - z2ÅÅÅÅÅÅc2 = 1,
Se efetuarmos a rotação da hipérbole em volta do eixo Oy, obtemos o chamado hiperbilóide de duas folhas de equação
- x2ÅÅÅÅÅÅc2 + y2
ÅÅÅÅÅÅÅb2 - z2ÅÅÅÅÅÅc2 = 1.
Hiperbolóides mais gerais são obtidos dos hiperbolóides acima por contração ou dilatação ao longo do eixo Ox. Isto significa que as equações acima dão lugar às equações mais gerais,
x2ÅÅÅÅÅÅÅa2 + y2
ÅÅÅÅÅÅÅb2 - z2ÅÅÅÅÅÅc2 = 1 e - x2
ÅÅÅÅÅÅÅa2 + y2ÅÅÅÅÅÅÅb2 - z2
ÅÅÅÅÅÅc2 = 1,
respectivamente.
ParabolóidesConsideremos, no plano Oyz, a parábola de equação z = y2 ê b2. Quando girada em volta do eixo Oz ela dá origem à superfície chamada parabolóide de revolução como mostra a figura abaixo.
60 Cal 3 Capítulo 1.nb

In[123]:= << Graphics`ParametricPlot3D`CylindricalPlot3D@r^2, 8r, 0, 3<, 8θ, 0, 2 Pi<D;
-20
2
-20
2
0
2
4
6
8
-20
2
Um parabolóide mais geral é chamado parabolóide elíptico, e é obtido do parabolóide cilíndrico por contração ou dilatação ao longo do eixo Ox. Sua equação é
z = x2ÅÅÅÅÅÅÅa2 + y2
ÅÅÅÅÅÅÅb2 .
ConesConsideremos, no plano Oyz, a parábola de equação z = y2 ê b2. Quando girada em volta do eixo Oz ela dá origem à superfície chamada parabolóide de revolução como mostra a figura abaixo.
Cal 3 Capítulo 1.nb 61
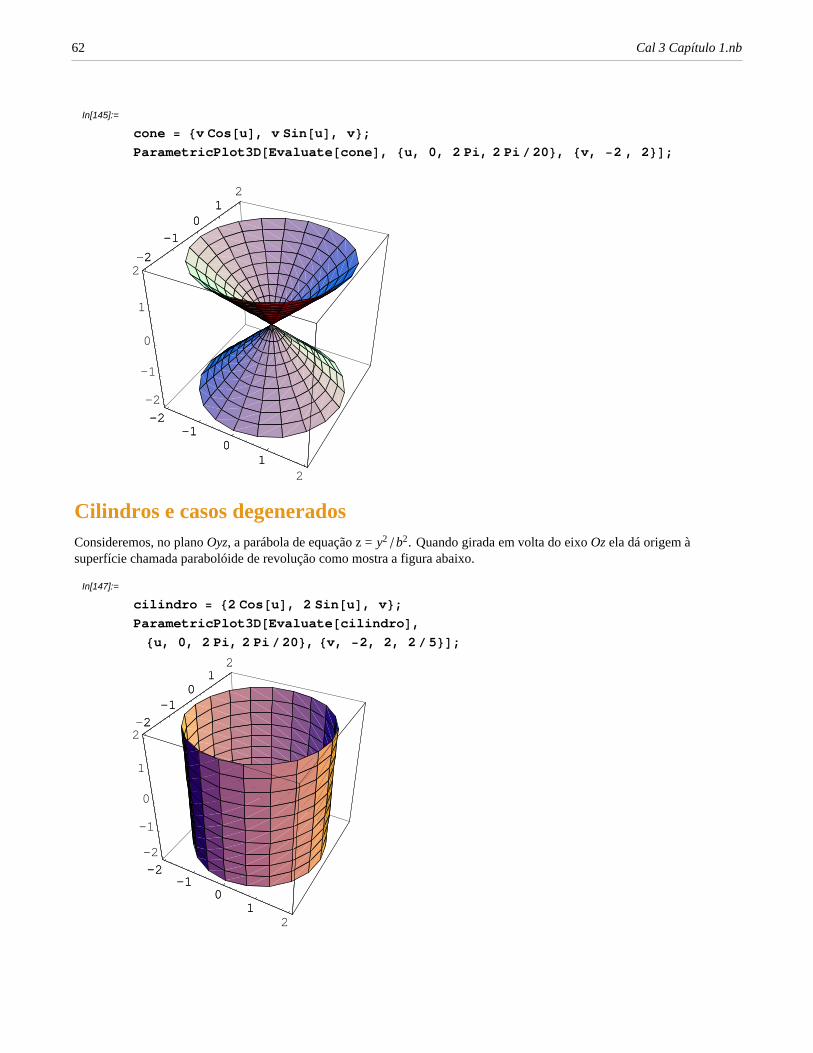
In[145]:=
cone = 8v Cos@uD, v Sin@uD, v<;ParametricPlot3D@Evaluate@coneD, 8u, 0, 2 Pi, 2 Piê20<, 8v, −2 , 2<D;
-2-1
01
2
-2-1
01
2
-2
-1
0
1
2
-2-1
01
-2-1
01
Cilindros e casos degeneradosConsideremos, no plano Oyz, a parábola de equação z = y2 ê b2. Quando girada em volta do eixo Oz ela dá origem à superfície chamada parabolóide de revolução como mostra a figura abaixo.
In[147]:=
cilindro = 82 Cos@uD, 2 Sin@uD, v<;ParametricPlot3D@Evaluate@cilindroD,8u, 0, 2 Pi, 2 Piê20<, 8v, −2, 2, 2ê5<D;
-2-1
01
2
-2-1
01
2
-2
-1
0
1
2
-2-1
01
2-1
01
62 Cal 3 Capítulo 1.nb

Exercícios Identifique e descreva as superfícies de equações dadas nos Exercícios 1 a 24.
1. x2 + y2 + z2 - 2 x + 4 y + 4 = 0.
Completando os quadrados , obtemos (x - 1L2 + (y + 2L2 + z2 = 1. Portanto, trata-se de uma esfera de centro (1, -2, 0) e raio 1.
2. 4 x2 + 4 y2 - 9 z2 - 8 y - 32 = 0.
Dividindo por 4 e completando os quadrados , obtemos x2 + (y - 4L2 + 9/4 z2 = 25. Dividindo os dois membros por 25, obtemos
x 2ÅÅÅÅÅÅÅÅ52 + Hy-4 L2ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ52 + z2
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅH10ê3L2 = 1.
Portanto, trata-se de um esferóide oblato de centro (0, -4, 0) e semi-eixos 5, 5, 10/3.
3. x2 + y2 - 2 y - z + 1 = 0.
Completando os quadrados , obtemos x2 + (y - 4L2 - z2 = 25. Dividindo os dois membros por 25, obtemos
x 2ÅÅÅÅÅÅÅÅ52 + Hy-4 L2ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ52 + z2
ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅH10ê3L2 = 1.
Portanto, trata-se de um esferóide oblato de centro (0, -4, 0) e semi-eixos 5, 5, 10/3.
Cal 3 Capítulo 1.nb 63

1.9 Espaço Euclidiano de n Dimensões
Até agora só consideramos vetores no plano e no espaço. Eles foram identificados por pares e ternos de números reais. Todas as operaç!oes com vetores -- soma, multiplicação por escalar, produto escalar foram definidos para esses pares e ternos de números. Essencialmente, as mesmas definições podem ser dadas para quádruplas, quíntuplas e, em geral, para ênuplas de números reais (x1, x2, . . . , xn ).
Assim, sendo
x = (x1, x2, . . . , xn ) e y = (y1, y2, . . . , yn ),
ênuplas quaisquer, definimos sua soma como sendo
x + y = (x1 + y1 , x2 + y2 ,. . . , xn + yn );
o produto da ênupla x por qualquer escalar r é a ênupla
rx = (rx1, rx2, . . . , rxn )
e o produto escalar de x e y é assim definido
x • y = x1 xy1 + x2 y2 + . . + xn yn .
Nestas definições, n é um inteiro positivo qualquer O conjunto de todas as ênuplas de números reais, com n fixo, com as operações adotadas acima, é o que chamamos espaço euclidiano de n dimensões e que indicaremos com o símbolo Rn . As ênuplas são chamadas pontos ou vetores desse espaço.
O comprimento, norma ou módulo de um vetor x = (x1, x2, . . . , xn ) é definido em termo do produto escalar:
|x| = è!!!!!!!!!!!x • x = "###################################x12 + x2
2 + . . . + xn2
Em termo desse conceito, introduzimos também a noção de distância de dois pontos x e y, que indicamos d(x, y):
d(x, y) = |x - y| = "########################################################################################Hx1 - y1L2 + Hx2 - y2L2 + . . . + Hxn - ynL2
64 Cal 3 Capítulo 1.nb

CAPÍTULO 2
Funções de Várias VariaveisIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
2.1 Funções e Gráficos
O conceito de função de várias variáveis reais é análogo ao de funções deuma variável real. Por exemplo, as equações
z = x2 + y2 e z = è!!!!!!!!!!!!!!!!!!!!!1 - x2 - y2
exprimem z como função de x e y. Em abos os casos, z é a variável dependente e x e y são as variáveis independente. O domínio da função do primeiro exemplo o conjunto de todos os pontos (x, y) do plano, ao passo que, no segundo exemplo, o domínio máximo da função é o círculo {(x, y): x2 + y2 § 1.
Em geral, z é uma função de x e y se existe uma correspondência f que a cada ponto P = (x, y) de um certo conjunto D do plano associa um valor z. D é o domínio da função f, x e y são as variáveis independentes e z é a variável depen-dente. Escreve-se z = f(x, y) ou z = f(P).
As funções de várias variáveis são introduzidas do mesmo modo que as fun;cões de duas variáveis. Assim, dizemos que az é função de x1 x2 , . . ., xn se a cada ponto P = (x1 x2 , . . ., xn ) de um domínio D do espaço n corresponde, segunda uma lei determinada f, um vlor z. Escreve-se
z = f (x1 x2 , . . ., xn ).
EXEMPLO 1. (pág. 46)
As funções mais simples são as funções lineare, ou seja, funções do tipo z = a x + b y + c onde a, b e c são constantes. Essa equação, que é equivalente a a x + b y - z = - c, representa, como sabemos, um plano perpendicular ã direção v = (x, y, - 1) e que passa pelo ponto

P0 = -cÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅa2 + b2 + 1 (a, b, - 1).
Este plano, representado na figura abaixo, é o gráfico da função.
In[2]:= H∗ Gráfico da função z = x + y + 1 ∗Ltriangulo := Polygon@881, 0, 0<, 80, 1, 0<, 80, 0, 1<<DShow@Graphics3D@trianguloD, Axes → True,
AxesLabel → 8"x", "y", "z"<, TextStyle → 8FontSize → 7.0<D;
00.25
0.50.75
1
x
0
0.25
0.50.75
1y
0
0.25
0.5
0.75
1
z
00.25
0.50.75x
0
0.25
0.50.75y
EXEMPLO 2. (pág. 46)
A equação x 2 + y2 + z2 = 1, quando resolvida em relação a z, nos permite definir duas funções, z = è!!!!!!!!!!!!!!!!!!!!!!!!!!1 - x2 - y2 e z = - è!!!!!!!!!!!!!!!!!!!!!!!!!!1 - x2 - y2 . Ambas têm por domínio o círculo de centro na origem e raio 1., x2 + y2 § 1. SEus gráficos são os hemisferos superior e inferior da esfera x 2 + y2 + z2 = .1, ilustrados abaixo.
In[10]:= H∗ Gráfico da função z =è!!!!!!!!!!!!!!!!!!!!!!!!!!!!1 − x2 − y2 ∗L
ParametricPlot3D@8Cos@uD Cos@vD, Sin@uD Cos@vD, Sin@vD<, 8u, 0, 2 Pi<,8v, 0, Pi<, PlotPoints → 17, AxesLabel → 8"x", "y", "z"<D;
-1-0.5
00.5
1x -1
-0.5
00.51
y0
0.250.5
0.751
z
-1-0.5
00.5x
2 Cal 3 Capítulo 2.nb

In[11]:= H∗ Gráfico da função z =−è!!!!!!!!!!!!!!!!!!!!!!!!!!!!1 − x2 − y2 ∗L
ParametricPlot3D@8Cos@uD Cos@vD, Sin@uD Cos@vD, Sin@vD<, 8u, 0, 2 Pi<,8v, Pi, 2 Pi<, PlotPoints → 17, AxesLabel → 8"x", "y", "z"<D;
-1-0.5
00.5
1x -1
-0.5
00.51
y-1
-0.75-0.5
-0.250
z
-1-0.5
00.5x
EXEMPLO 3. (pág. 47)
A função z = x2 + y2 , definida em todo o plano, tem por gráfico um parabolóide de revolução em torno do eixo Oz, ilustrado na figura abaixo.
In[12]:= << Graphics`ParametricPlot3D`H∗ Gráfico da função z = x2+ y2 ∗LCylindricalPlot3D@r^2, 8r, 0, 3<, 8θ, 0, 2 Pi<D;
-20
2
-20
2
0
2
4
6
8
-20
2
Toda função do tipo z = f Hx2 + y2L têm por gráficos uma superfície de revolução em torno do eixo Oz. Asim , osgr;aficos das funções
z = log(1 - è!!!!!!!!!!!!!!!!!!x2 + y2 ), z = (2 - è!!!!!!!!!!!!!!!!!!x2 + y2 )/(1 - x2 - y2 ), z = tgHx2 + y2L3ê2 e z = ex2 + y2 è!!!!!!!!!!!!!!!!!!!!!!!!!!x2 + y2 + 1 são todos
superfícies de revolução em torno do eixo Oz, como mostra as figuras abaixo.
Cal 3 Capítulo 2.nb 3

In[24]:= H∗ Gráfico da função z = logI1 −è!!!!!!!!!!!!!!!!!!x2 + y2 M ∗L
Clear@rD;CylindricalPlot3D@Log@1 − rD, 8r, 0, 3<, 8θ, 0, 2 Pi<D;
-0.5 0 0.5
-0.500.5
-2
-1
0
-0.500.5
Toda função z = x2 + y2 , definida em todo o plano, tem por gráfico um parabolóide de revolução em torno do eixo Oz, ilustrado na figura abaixo.
In[59]:= H∗ Gráfico da função z = I2 +è!!!!!!!!!!!!!!!!!!x2 + y2 MëH1 − x2 − y2L ∗L
Clear@rD;CylindricalPlot3D@H2 + rLêH1 − r^2L, 8r, 0, 3<, 8θ, 0, 2 Pi<, PlotPoints → 20D;
-2 0 2-2
02
-10
0
10
202
4 Cal 3 Capítulo 2.nb

In[71]:= H∗ Gráfico da função z = tgHx2 + y2 L3ê2 ∗LClear@rD;CylindricalPlot3D@Tan@r^3D,8r, 0, 3<, 8θ, 0, 2 Pi<, ViewPoint → 81.2, 1.2, 1.2<D;
-20
2
-20
2
-4
-2
0
2
4
02
Além da representação gráfica de uma função de duas variáveis, z = f(x, y), por uma superfície no espaço, outro modomuito conveniente de visualizar geometricamente a função consiste em representar, no plano Oxy, as chamadas curvasde nível desta função. Quando atribuimos a z um valor constante k, o conjunto dos pontos (x, y) que satisfazem aequação f(x, y), = k formam, em geral, uma curva Ck , que é chamada curva de nível da função f correspondente aovalor z = k. Quando consideramos várias curvas de nível de uma dada função f, podemos formar uma idéia da super-fície que é o gráfico dessa função. Na figura abaixo a função z = f(x, y) = 2 e-x2 - y2
Hx2 - y2L é ilustrada por estes doistipos de representação gráfica.
In[110]:= H∗ A função z = 2 e−x2 − y2 Hx2 − y2L ∗L
Clear@x, yD;f@x_, y_D := 2 Exp@−x^2 − y^2D Hx^2 − y^2 L
In[120]:= H∗ Gráficos da função z =
2 e−x2 − y2 Hx2 − y2L nas formas de superfície e mapa de curvas de níveis ∗L
p1 = Plot3D@f@x, yD, 8x, −2, 2<, 8y, −2, 2<, PlotPoints → 20,BoxRatios → 81, 1, 1<, DisplayFunction → IdentityD;
p2 = ContourPlot@f@x , yD, 8x, −2, 2<, 8y, −2, 2<, ContourShading → False,Contours → 10, DisplayFunction → Identity D;
p3 = ContourPlot@f@x , yD, 8x, −2, 2<, 8y, −2, 2<, ColorFunction → Hue,Contours → 10, DisplayFunction → Identity D;
Cal 3 Capítulo 2.nb 5

In[120]:= H∗ Gráficos da função z =
2 e−x2 − y2 Hx2 − y2L nas formas de superfície e mapa de curvas de níveis ∗L
Show@GraphicsArray@8p1, p2, p3<D, DisplayFunction → $DisplayFunctionD;
-2-1
01
2
-2-1
012
-0.5
0
0.5
-2-1
01
2-1
01
-2 -1 0 1 2-2
-1
0
1
2
-2 -1 0 1 2-2
-1
0
1
2
EXEMPLO 4. (pág. 48)
A função z = x2 - y2 tem por curvas de níveis as hiperbóles x2 - y2 = k. A figura abaixo mostra os gráficos da função z = x2 - y2 nas formas de superfície e de mapa de curva de níveis.
In[100]:= H∗ A função z = x2 − y2 ∗LClear@x, yD;f@x_, y_D := x^2 − y^2
In[106]:= H∗ Gráficos da função z =
x2 − y2 nas formas de superfície e mapa de curvas de níveis ∗Lp1 = Plot3D@f@x, yD, 8x, −2, 2<, 8y, −2, 2<, PlotPoints → 15,
BoxRatios → 81, 1, 1<, DisplayFunction → IdentityD;p2 = ContourPlot@f@x , yD, 8x, −2, 2<, 8y, −2, 2<, ContourShading → False,
Contours → 10, DisplayFunction → Identity D;p3 = ContourPlot@f@x , yD, 8x, −2, 2<, 8y, −2, 2<, ColorFunction → Hue,
Contours → 10, DisplayFunction → Identity D;
In[106]:= H∗ Gráficos da função z =
x2 − y2 nas formas de superfície e mapa de curvas de níveis ∗LShow@GraphicsArray@8p1, p2, p3<D, DisplayFunction → $DisplayFunctionD;
-2-1
01
2
-2-1
012
-4-20
2
4
-2-1
01
2-1
01
-2 -1 0 1 2-2
-1
0
1
2
-2 -1 0 1 2-2
-1
0
1
2
6 Cal 3 Capítulo 2.nb

2.2 Limite e Continuidade
Dado um ponto P0 = Hx0, y0L e um número d > 0, chama-se vizinhança d de P0 que se indica com o símboloVd (P0 ), ao conjunto dos pontos P = (x, y) cuja distância a P0 é menor que d:
Vd (P0 ), = {P: |P - P0 | < d,
ou |P - P0 | = "##############################################Hx - x0L2 + Hy - y0L2 < d.
No caso do espaço 3 , a vizinhança Vd (P0 ) é definida pela condição
|P - P0 | = "########################################################################Hx - x0L2 + Hy - y0L2 + Hz - z0L2 < d,
e por uma desigualdade análoga no caso de n .
Diz-se que um ponto P é ponto interior de um conjunto C se existe uma vizinhança de P toda contida em C. Diz-seque um ponto Q é ponto de fronteira de C se qualquer vizinhança de Q contém pontos de C e pontos fora de C. Afronteira de C é o conjunto de todos os seus pontos de fronteira. Um conjunto diz-se aberto se não contém qualquerponto da sua fronteira, e fechado se contém toda a fronteira.
Diz-se que uma função f, com domínio D, tem limite L com P tendendo a P0 se, dado e ? 0 existe d > 0 tal que
0 < |P - P0 | < d e P œ D fl | f(P) - L | < e
ou seja
P œ [Vd (P0 ) - 8P0<D › D fl » f HPL - L » < e .
EXEMPLO 1. (pág. 51)
A função f(x, y) = x y ê Hx2 + y2L, Hx, yL ∫ (0, 0), não tem limite com P = (x, y) Ø 0 = (0, 0) no sentido ordinário.
Cal 3 Capítulo 2.nb 7

2.3 Derivadas parciais
Seja f uma função de duas variáveis, definidas numa vizinhança de um ponto Hx0, y0L . Como já notamos, o gráfico de fé, em geral, uma superfície no espaço. Se fixarmos uma das variáveis, digamos, y = y0 , obtemos uma função z =fHx, y0L da única variável x. Sua derivada, que é o limite da razão incremental
f Hx + h, y0L - f Hx0, y0LÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅh
com h Ø 0, quando existe, é chamada derivada parcial de f em relação a x no ponto . Ela costuma ser indicada com ossímbolos
∑ fÅÅÅÅÅÅÅÅ∑x Hx0, y0L , fx Hx0, y0L , ∑zÅÅÅÅÅÅÅ∑x , f1 Hx0, y0L .
É importante observar que fx, ∑f/∑x, etc., significa a derivada de f em relação a primeira variável. Asim, quandoescrevemos
∑ fÅÅÅÅÅÅÅÅ∑x Hx2 + y2, yL
é preciso primeiro derivar fHx, yL em relação a x para depoissubstituir x por x2 + y2 .
Como a derivada é o declive do gráfico no caso de funções de uma variável., a derivada parcial fx Hx0, y0L é o declive,no ponto Hx0, y0L , da curva Cy0 , interseção do gráfico de f com o plano y = y0.
De maneira inteiramente análoga define-se a derivada parcial fy Hx0, y0L , que é o declive da curva Dx0 , interseção dográfico de f com o plano x = x0.
No Mathematica a deivada parcial de f(x, y) em relação a x é dada pelo comando D[f, x]. Analogamente, a deri-vada parcial em relação a y é dada pelo comando D[f, y].
EXEMPLO 1. (pág. 56)
Seja f(x, y) = x2 + y3 . Então,
In[81]:= H∗ A função f Hx,yL = x2 + y2 ∗LClear@x, y, fD;f@x_, y_D := x^2 + y^3
In[83]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD
Out[83]= 2 x
8 Cal 3 Capítulo 2.nb

In[84]:= H∗ Derivada parcial da função f
Hx,yL em relação a x no ponto Hx2 + y2, y2L ∗LD@f@x, yD, xD ê. x → x^2 + y^2
Out[84]= 2 Hx2 + y2L
In[90]:= H∗ A função g Hx,yL = Hx2 + y2L2+ y3 ∗L
Clear@x, y, gD;g@x_, y_D := Hx^2 + y^2L^2 + y^3
In[92]:= H∗ Derivada parcial da função g Hx,yL em relação a x ∗LD@g@x, yD, xD
Out[92]= 4 x Hx2 + y2L
Note que ∑ fÅÅÅÅÅÅÅÅ∑x Hx2 + y2, yL ∫ ∑ÅÅÅÅÅÅÅ∑x fHx2 + y2, yL .
EXEMPLO 2. (pág. 57)
Dada a função f(x, y) = cos x y + x2 y3 , temos
In[98]:= H∗ A função f Hx,yL = cos xy + x3 y3 ∗LClear@x, y, fD;f@x_, y_D := Cos@x yD + x^3 y^3
In[100]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD
Out[100]= 3 x2 y3 − y Sin@x yD
In[101]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD
Out[101]= 3 x3 y2 − x Sin@x yD
In[103]:= H∗ Derivada parcial segunda da função f Hx,yL em relação a x ∗LD@f@x, yD, 8x, 2<D
Out[103]= 6 x y3 − y2 Cos@x yD
In[104]:= H∗ Derivada parcial segunda da função f Hx,yL em relação a y ∗LD@f@x, yD, 8y, 2<D
Out[104]= 6 x3 y − x2 Cos@x yD
In[105]:= H∗ Derivada parcial mista da função f
Hx,yL em relação a x e em seguida em relação a y ∗LD@f@x, yD, x, yD
Out[105]= 9 x2 y2 − x y Cos@x yD − Sin@x yD
Cal 3 Capítulo 2.nb 9

In[106]:= H∗ Derivada parcial mista da função f
Hx,yL em relação a y e em seguida em relação a x ∗LD@f@x, yD, y, xD
Out[106]= 9 x2 y2 − x y Cos@x yD − Sin@x yD
Observe que, neste caso, as derivadas fxy e fyx são iguais. Isso ocorre na quase totalidade das funções com que lidamosna prática, mas não é uma propriedade evidente, em geral, como ilustra o exemplo seguinte.
EXEMPLO 3. (pág. 57)
Vamos mostrar que no caso da função f(x, y) = x y (x2 - y2 )/(x2 + y2 ), fxy (0, 0) ∫ fyx (0, 0)
In[107]:= H∗ A função f Hx,yL = x y Hx2 − y2LêHx2 + y2L ∗LClear@x, y, fD;f@x_, y_D := x y Hx^2 − y^2LêHx^2 + y^2L
In[127]:= H∗ Derivada parcial da função f Hx,yL em relação a x em x → 0 ∗LD@f@x, yD, xD ê. x → 0
Out[127]= −y
In[126]:= H∗ Derivada parcial da função f Hx,yL em relação a y em y → 0 ∗LD@f@x, yD, yD ê. y → 0
Out[126]= x
TEOREMA. Suponhamos que uma função f seja definida, contínua e tenha derivada contínuas, fx , fy e fxy numavizinhança Vd de um ponto P0 = Hx0, y0L . Então fxy Hx0, y0L ∫ fyx Hx0, y0L .
Exercícios (pág. 60)
Calcule as derivadas parciais ∑z/∑x e ∑z/∑y das funções dadas nos Exercícios 1 a 15.
1. z = 3 x2 y3 - 5 x3 y2 .
In[128]:= H∗ A função z = 3 x2 y3−5 x3 y2. ∗LClear@x, y, fD;f@x_, y_D := 3 x^2 y^3 − 5 x^3 y^2
In[130]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD
Out[130]= −15 x2 y2 + 6 x y3
10 Cal 3 Capítulo 2.nb
In[131]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD
Out[131]= −10 x3 y + 9 x2 y2
2. z = (x2 - y2 )/(1 + x2 + y2 ).
In[132]:= H∗ A função z = Hx2−y2LêH1+x2+y2L. ∗LClear@x, y, fD;f@x_, y_D := Hx^2 − y^2LêH1 + x^2 + y^2L
In[135]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD êê Simplify
Out[135]=2 Hx + 2 x y2LH1 + x2 + y2L2
In[136]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD êê Simplify
Out[136]= −2 Hy + 2 x2 yLH1 + x2 + y2L2
3. z = exêy .
In[137]:= H∗ A função e = exêy. ∗LClear@x, y, fD;f@x_, y_D := Exp@xêyD
In[139]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD
Out[139]=xêy
y
In[140]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD
Out[140]= −xêy xy2
4. z = esen x è!!!!y .
In[141]:= H∗ A função e = esen x è!!!!
y . ∗LClear@x, y, fD;f@x_, y_D := Exp@Sin@xD Sqrt@yDD
In[143]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD
Out[143]=è!!!!y Sin@xD è!!!y Cos@xD
Cal 3 Capítulo 2.nb 11

In[144]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD
Out[144]=
è!!!!y Sin@xD Sin@xD2 è!!!y
5. z = x3 ey2 .
In[145]:= H∗ A função e = x3 ey2 . ∗LClear@x, y, fD;f@x_, y_D := x^3 Exp@y^2D
In[147]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD
Out[147]= 3 y2 x2
In[148]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD
Out[148]= 2 y2 x3 y
6. z = yx .
In[149]:= H∗ A função z = yx. ∗LClear@x, y, fD;f@x_, y_D := y^x
In[151]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD
Out[151]= yx Log@yD
In[152]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD
Out[152]= x y−1+x
7. z = cos è!!!!!!!!!!!!!!!!!!!1 + x2 y4 .
In[153]:= H∗ A função z = cos è!!!!!!!!!!!!!!!!!!!!!!1 + x2 y4 . ∗L
Clear@x, y, fD;f@x_, y_D := Cos@Sqrt@1 + x^2 y^4DD
In[155]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD
Out[155]= −x y4 SinAè!!!!!!!!!!!!!!!!!!!1 + x2 y4 E
è!!!!!!!!!!!!!!!!!!!1 + x2 y4
12 Cal 3 Capítulo 2.nb

In[156]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD
Out[156]= −2 x2 y3 SinAè!!!!!!!!!!!!!!!!!!!1 + x2 y4 E
è!!!!!!!!!!!!!!!!!!!1 + x2 y4
8. z = log y2 è!!!!!x3 .
In[157]:= H∗ A função z = log y2 è!!!!!!x3 . ∗LClear@x, y, fD;f@x_, y_D := Log@y^2 Sqrt@x^3DD
In[159]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD
Out[159]=32 x
In[160]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD
Out[160]=2y
9. z = ( sin x2 è!!!!y )/(cos y2
è!!!x )
In[161]:= H∗ A função z = Isin x2 è!!!y MëIcos y2 è!!!x M. ∗L
Clear@x, y, fD;f@x_, y_D := Sin@x^2 Sqrt@yDDêCos@y^2 Sqrt@xDD
In[166]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD êê Simplify
Out[166]=
è!!!y SecAè!!!x y2E I4 x3ê2 CosAx2 è!!!y E + y3ê2 SinAx2 è!!!y E TanAè!!!x y2EM2 è!!!x
In[165]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD êê Simplify
Out[165]=
è!!!x SecAè!!!x y2E Ix3ê2 CosAx2 è!!!y E + 4 y3ê2 SinAx2 è!!!y E TanAè!!!x y2EM2 è!!!y
10. z = x2 è!!!!!!!!!!!!!!!!!x2 + y2
In[167]:= H∗ A função z = x2 è!!!!!!!!!!!!!!!!!!x2 + y2 . ∗L
Clear@x, y, fD;f@x_, y_D := x^2 Sqrt@x^2 + y^2D
Cal 3 Capítulo 2.nb 13

In[172]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD êê Simplify
Out[172]=3 x3 + 2 x y2è!!!!!!!!!!!!!!!x2 + y2
In[170]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD êê Simplify
Out[170]=x2 y
è!!!!!!!!!!!!!!!x2 + y2
In[1]:= 2 + 2
Out[1]= 4
11. z = arc sen è!!!!!!!!!!!!!!!!!x2 + y4
In[2]:= H∗ A função z = arc sen è!!!!!!!!!!!!!!!!!!x2 + y4 . ∗L
Clear@x, y, fD;f@x_, y_D := ArcSin@ Sqrt@x^2 + y^4DD
In[4]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD êê Simplify
Out[4]=x
è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!−H−1 + x2 + y4L Hx2 + y4L
In[5]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD êê Simplify
Out[5]=2 y3
è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!−H−1 + x2 + y4L Hx2 + y4L
12. z = arc tg x2 y3
In[6]:= H∗ A função z = arc tg x2 y3. ∗LClear@x, y, fD;f@x_, y_D := ArcTan@x^2 y^3D
In[8]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD êê Simplify
Out[8]=2 x y3
1 + x4 y6
In[9]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD êê Simplify
Out[9]=3 x2 y2
1 + x4 y6
14 Cal 3 Capítulo 2.nb

13. z = x3 cos xy2
In[10]:= H∗ A função z = x3 cos xy2 . ∗LClear@x, y, fD;f@x_, y_D := x^3 Cos@x y^2D
In[12]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD êê Simplify
Out[12]= x2 H3 Cos@x y2D − x y2 Sin@x y2DL
In[13]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD êê Simplify
Out[13]= −2 x4 y Sin@x y2D
14. z = sen(xy) log(x2 - y2 )
In[14]:= H∗ A função z = sen HxyL log Hx2 − y2L. ∗LClear@x, y, fD;f@x_, y_D := Sen@x yD Log@x^2 − y^2D
In[16]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD êê Simplify
Out[16]=2 x Sen@x yD
x2 − y2+ y Log@x2 − y2D Sen @x yD
In[17]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD êê Simplify
Out[17]=2 y Sen@x yD
−x2 + y2+ x Log@x2 − y2D Sen @x yD
15. z = x2ê3 tg (xy/(1 + x2 y4 )
In[151]:= H∗ A função z = x2ê3 tg HxyêH1 + x2 y4L. ∗LClear@x, y, fD;f@x_, y_D := x^H2ê3L Tan@x yêH1 + x^2 y^4LD
In[153]:= H∗ Derivada parcial da função f Hx,yL em relação a x ∗LD@f@x, yD, xD êê Simplify
Out[153]=Sec@ x y
1+x2 y4 D2 I3 x y − 3 x3 y5 + H1 + x2 y4L2 Sin@ 2 x y
1+x2 y4 DM3 x1ê3 H1 + x2 y4L2
In[155]:= H∗ Derivada parcial da função f Hx,yL em relação a y ∗LD@f@x, yD, yD êê Simplify
Out[155]= −x5ê3 H−1 + 3 x2 y4L Sec@ x y
1+x2 y4 D2
H1 + x2 y4L2
Cal 3 Capítulo 2.nb 15

Mostre que as funções dos Exercícios 34 a 40 satisfazem a equação deferencial parcial zxx + zyy = 0, chamada equação de Laplace
34. z = log è!!!!!!!!!!!!!!!!!!x2 + y2
In[133]:= H∗ A função z = logè!!!!!!!!!!!!!!!!!!x2 + y2 M. ∗L
Clear@x, y, fD;f@x_, y_D := Log@Sqrt@x^2 + y^2DD
In[135]:= H∗ Verificar se f satisfaz à equação de Laplace ∗LD@f@x, yD, 8x, 2<D + D@f@x, yD, 8y, 2<D 0 êê Simplify
Out[135]= True
35. z = arc tg(y/x)
In[136]:= H∗ A função z = arc tg HyêxL. ∗LClear@x, y, fD;f@x_, y_D := ArcTan@yêxD
In[138]:= H∗ Verificar se f satisfaz à equação de Laplace ∗LD@f@x, yD, 8x, 2<D + D@f@x, yD, 8y, 2<D 0 êê Simplify
Out[138]= True
36. z = x3 - 3 xy2.
In[139]:= H∗ A função z = x3 − 3 x y2. ∗LClear@x, y, fD;f@x_, y_D := x^3 − 3 x y^2
In[141]:= H∗ Verificar se f satisfaz à equação de Laplace ∗LD@f@x, yD, 8x, 2<D + D@f@x, yD, 8y, 2<D 0 êê Simplify
Out[141]= True
37. z = ex cos y
In[142]:= H∗ A função z = ex cos y. ∗LClear@x, y, fD;f@x_, y_D := Exp@xD Cos@yD
In[144]:= H∗ Verificar se f satisfaz à equação de Laplace ∗LD@f@x, yD, 8x, 2<D + D@f@x, yD, 8y, 2<D 0 êê Simplify
Out[144]= True
37. z = ex sen y
In[145]:= H∗ A função z = ex sen y. ∗LClear@x, y, fD;f@x_, y_D := Exp@xD Sin@yD
16 Cal 3 Capítulo 2.nb

In[147]:= H∗ Verificar se f satisfaz à equação de Laplace ∗LD@f@x, yD, 8x, 2<D + D@f@x, yD, 8y, 2<D 0 êê Simplify
Out[147]= True
39. z = y ê Hx2 + y2LIn[148]:= H∗ A função z = yêHx2 + y2L. ∗L
Clear@x, y, fD;f@x_, y_D := yêHx^2 + y^2L
In[150]:= H∗ Verificar se f satisfaz à equação de Laplace ∗LD@f@x, yD, 8x, 2<D + D@f@x, yD, 8y, 2<D 0 êê Simplify
Out[150]= True
40. z = x ê Hx2 + y2LIn[130]:= H∗ A função z = xêHx2 + y2L. ∗L
Clear@x, y, fD;f@x_, y_D := xêHx^2 + y^2L
In[132]:= H∗ Verificar se f satisfaz à equação de Laplace ∗LD@f@x, yD, 8x, 2<D + D@f@x, yD, 8y, 2<D 0 êê Simplify
Out[132]= True
41. Seja f uma função de uma variável, derivável até a segunda ordem. Demostre que z = f(x - ct) satisfaz a chamada equação da onda zxx - H1 ê cL zyy = 0, onde c é uma constante.
In[127]:= H∗ A função z = f Hx − ctL. ∗LClear@x, t, fD;f@x_, t_D := x − c t
In[129]:= H∗ Verificar se f satisfaz à equação da onda ∗LD@f@x, tD, 8x, 2<D − D@f@x, tD, 8t, 2<D 0 êê Simplify
Out[129]= True
42. Mostre que a função z = e-x2ê4 k t ëè!!t satisfaz a chamada equação da difusão ou equação do calor, zt = k zxx = 0, onde c é uma constante.
In[124]:= H∗ A função z = f Hx − ctL. ∗LClear@x, t, fD;f@x_, t_D := 1êSqrt@tD Exp@−x^2ê H4 k tLD
In[126]:= H∗ Verificar se f satisfaz à equação do calor ∗LD@f@x, tD, tD − k D@f@x, tD, 8x, 2<D 0 êê Simplify
Out[126]= True
Cal 3 Capítulo 2.nb 17
2.4 Diferenciabilidade
Quando uma função de um variável é derivável, ela é também contínua. Isto não é mais verdade em se tratando defunções de mais de uma variável, como mostra o exemplo seguinte.
EXEMPLO 1. (pág. 51)
Seja f a função dada por f(0, 0 ) = 0 e f(x, y) = x y ê Hx2 + y2L, se Hx, yL ∫ (0, 0). Vimoa na seção 2.2 que essa função é descontínua na origem. Não obstante isso, ela é derivável em relação a x e a y neste mesmo ponto. De fato, as duas derivadas parciais são iguais a zero no ponto (0, 0), como podemos ver:
In[158]:=
H∗ A função f Hx, yL = xyêHx2 + y2L ∗LClear@x, yD;f@x_, y_D := x y Hx2 + y2L
In[160]:= H∗ Derivadas parciais de f Hx,yL no ponto H0, 0L ∗LD@f@x, yD, xD ê. 8x −> 0, y −> 0<D@f@x, yD, yD ê. 8x −> 0, y −> 0<
Out[160]= 0
Out[161]= 0
Diz-se que uma função z = f(x, y) é diferenciável num ponto Hx0, y0L se existe um plano pelo pontoHx0, y0, f Hx0, y0L L , de equação
Z = f Hx0, y0L + A (x - x0 ) + B (y - y0 )
tal que a diferença de f(x, y) - Z seja um infinitésimo de ordem superior em comparação com r ="##############################################Hx - x0L2 + Hy - y0L2 quando r Ø 9,
O conceito de diferenciabilidade assegura a continuidade da função. De fato,
Uma função f, que é diferenciável num ponto Hx0, y0L é contínua nesse ponto. Ademais, f terá derivadas parciais deprimeira ordem neste ponto. Além disso, numa vizinhança do ponto (x0 , y0 ) o plano de equação
Z = f(x0 , y0 ) + fx Hx0, y0L Hx - x0L + fy Hx0, y0L Hy - y0Laproxima o gráfico de z = f(x, y) no sentido de que a diferença f(x, y) - Z é um diferencial de ordem superior emrelação a r com r Ø 0:
f(x, y) - Z = o(r) ou h = f Hx, yL - ZÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅr Ø 0 com r Ø 0.
18 Cal 3 Capítulo 2.nb

Geometricamente, o plano de equação Z = f(x0 , y0 ) + fx Hx0, y0L Hx - x0L + fy Hx0, y0L Hy - y0L e a superfície z = f(x, y) têm, no ponto Hx0, y0L , contato de ordem ¥ 1. Podemos dizer, então, que a distância f(x, y) - Z, entre a superfície e oplano ao longo das perpendiculares ao plano Oxy, tendem a zero mais depressa que r.
Determinar a equação do plano tangente ao hiperbolóide z = 10 - x2 - 2 y2 no ponto (1, 2). Esboçe o parabolóide e o plano tangente.
In[62]:= H∗ Equação do plano tangente ao hiperbolóide no ponto H1, 2L ∗LClear@x, yD;f@x_, y_D := 10 − x2 − 2 y2
fx = D@f@x, yD, xD ê. 8x → 1, y → 2<;fy = D@f@x, yD, yD ê. 8x → 1, y → 2<;z = f@1, 2D + fx Hx − 1L + fy Hy − 2L êê Expand
Out[66]= 19 − 2 x − 8 y
In[97]:= H∗ Gráfico hiperbolóide e do plano tangente no ponto H1, 2L ∗Lp1 = Plot3D@f@x, yD, 8x, −5, 5<, 8y, −5, 5<, DisplayFunction → IdentityD;p2 = Plot3D@z, 8x, −5, 5<, 8y, −5, 5<,
PlotPoints → 10, DisplayFunction → IdentityD;Show@8p1, p2<, ViewPoint → 82.3, −2.2, 0.8<,
DisplayFunction → $DisplayFunctionD;
-5-2.5
02.5
5-5-2.5
02.5
5-50
0
50
-5-2.5
02.5
In[30]:= Plot3D@Sqrt@Abs@x yDD, 8x, −10, 10<, 8y, −10, 10<, PlotPoints → 15D;
-10-5
05
10-10
-5
0
5
10
02.55
7.510
0-5
05
Cal 3 Capítulo 2.nb 19
Exercícios (pág. 69)
Calcule as diferenciais de cada uma das funções dadas nos Exercícios 1 a 10.
1. z = ex y2
In[162]:= H∗ A função z = ex y2 . ∗LClear@x, y, fD;f@x_, y_D := Exp@xD y2
In[173]:= H∗ Diferencial da função z = ex y2 . ∗Lfx = D@f@x, yD, xD;fy = D@f@x, yD, yD;df = fx dx + fy dy êê Simplify
Out[175]= x y H2 dy + dx yL
O diferencial da função dada é y2 ex dx + 2yex dy.
2. z = x2 è!!!!!!!!!!!!!!!!!1 + xy2
In[176]:= H∗ A função z = x2 è!!!!!!!!!!!!!!!!!!1 + xy2 . ∗L
Clear@x, y, fD;
f@x_, y_D := x2 è!!!!!!!!!!!!!!!!!!!
1 + x y2
In[178]:= H∗ Diferencial da função z = x2 è!!!!!!!!!!!!!!!!!!1 + xy2 . ∗L
fx = D@f@x, yD, xD;fy = D@f@x, yD, yD;df = fx dx + fy dy êê Simplify
Out[180]=x H2 dy x2 y + dx H4 + 5 x y2LL
2 è!!!!!!!!!!!!!!!!1 + x y2
O diferencial da função dada é 4 x + 5 x2 y2ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ2 è!!!!!!!!!!!!!!!!!1 + x y2
dx + 2 x3 yÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ2 è!!!!!!!!!!!!!!!!!1 + x y2
dy .
O diferencial da função dada é y2 ex dx + 2yex dy.
3. z = log è!!!!!!!!!!!!!!!!!x2 + y2
In[229]:= H∗ A função z = log è!!!!!!!!!!!!!!!!!!x2 + y2 . ∗L
Clear@x, y, fD;
f@x_, y_D := LogAè!!!!!!!!!!!!!!!!!x2 + y2 E
20 Cal 3 Capítulo 2.nb
In[231]:= H∗ Diferencial da função z = log è!!!!!!!!!!!!!!!!!!x2 + y2 . ∗L
fx = D@f@x, yD, xD;fy = D@f@x, yD, yD;df = fx dx + fy dy êê Simplify
Out[233]=dx x + dy yx2 + y2
O diferencial da função dada é xÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅx2 + y2 dx + yÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅx2 + y2 dy .
4. z = x2 y3 z4
In[200]:= H∗ A função z = x2 y3 z4 . ∗LClear@x, y, z, fD;f@x_, y_, z_D := x2 y3 z4
In[202]:= H∗ Diferencial da função z = x2 y3 z4 . ∗Lfx = D@f@x, y, zD, xD;fy = D@f@x, y, zD, yD;fz = D@f@x, y, zD, zD;df = fx dx + fy dy + fz dz êê Simplify
Out[205]= x y2 z3 H4 dz x y + 3 dy x z + 2 dx y zL
O diferencial da função dada é 2 x y3 z4 dx + 3 x 2 y2 z4 dy + 4 x 2 y3 z3 dz .
5. z = ex2 y2 z3
In[206]:= H∗ A função z = ex2 y2 z3 . ∗LClear@x, y, z, fD;f@x_, y_, z_D := Exp@xD2 y2 z3
In[208]:= H∗ Diferencial da função z = ex2 y2 z3 . ∗L
fx = D@f@x, y, zD, xD;fy = D@f@x, y, zD, yD;fz = D@f@x, y, zD, zD;df = fx dx + fy dy + fz dz êê Simplify
Out[211]= 2 x y z2 H3 dz y + 2 Hdy + dx yL zL
O diferencial da função dada é 2 y2 z3 e2 x dx + 2 y z3 e2 x dy + 3 y2 z2 e2 x dz .
6. z = x2 ê y
In[219]:= H∗ A função z = x2êy . ∗LClear@x, y, fD;f@x_, y_D := x2 êy
Cal 3 Capítulo 2.nb 21

In[221]:= H∗ Diferencial da função z = x2êy . ∗Lfx = D@f@x, yD, xD;fy = D@f@x, yD, yD;df = fx dx + fy dy êê Simplify
Out[223]=x H−dy x + 2 dx yL
y2
O diferencial da função dada é 2 x yÅÅÅÅÅÅÅÅÅÅÅy2 dx - x2ÅÅÅÅÅÅÅy2 dy .
7. z = x2 sen yÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅx2 + 1
In[224]:= H∗ A função z = x2 senHyêHx2 + 1LL . ∗LClear@x, y, fD;f@x_, y_D := x2 Sin@yêHx2 + 1LD
In[226]:= H∗ Diferencial da função z = x2 senHyêHx2 + 1LL . ∗Lfx = D@f@x, yD, xD;fy = D@f@x, yD, yD;df = fx dx + fy dy êê Simplify
Out[228]=x Ix Hdy + dy x2 − 2 dx x yL Cos@ y
1+x2 D + 2 dx H1 + x2L2 Sin@ y1+x2 DM
H1 + x2L2
8. z = arc tg è!!!!!!!!!!!!!!!!!!!!1 + x2 y2
In[234]:= H∗ A função z = arc tg è!!!!!!!!!!!!!!!!!!!!!!1 + x2 y2 . ∗L
Clear@x, y, fD;f@x_, y_D := ArcTan@1 + x2 y2D
In[236]:= H∗ Diferencial da função z = arc tg è!!!!!!!!!!!!!!!!!!!!!!1 + x2 y2 . ∗L
fx = D@f@x, yD, xD;fy = D@f@x, yD, yD;df = fx dx + fy dy êê Simplify
Out[238]=2 x y Hdy x + dx yL2 + 2 x2 y2 + x4 y4
9. z = xÅÅÅÅy + yÅÅÅÅx
In[239]:= H∗ A função z = xêy + yêx . ∗LClear@x, y, fD;f@x_, y_D := xêy + yêx
In[241]:= H∗ Diferencial da função z = xêy + yêx . ∗Lfx = D@f@x, yD, xD;fy = D@f@x, yD, yD;df = fx dx + fy dy êê Simplify
Out[243]= −Hdy x − dx yL Hx2 − y2L
x2 y2
22 Cal 3 Capítulo 2.nb

10. z = x - yÅÅÅÅÅÅÅÅÅÅÅÅx + y
In[249]:= H∗ A função z = Hx − yLêHx + yL . ∗LClear@x, y, fD;f@x_, y_D := Hx − yLêHx + yL
In[251]:= H∗ Diferencial da função z = Hx - yLêHx + yL . ∗Lfx = D@f@x, yD, xD;fy = D@f@x, yD, yD;df = fx dx + fy dy êê Simplify
Out[253]=−2 dy x + 2 dx y
Hx + yL2
2.5 Derivada direcional e Gradiente
Uma função diferenciável possui derivadas em todas as direções e não apenas nas direções i = (1, 0) e j = (0, 1), quesão as derivadas fx e fy , respectivamente.
Seja f uma função de duas variáveis e
a”÷ = (cos q, sen q) = cos q i + sen q j
uma direção qualquer no plano Oxy. Chama-se derivada de f na direção a”÷ , no ponto P = (x, y), ao seguinte limite,quando existe, indicado pelos símbolos ∑f/∑a”÷ , “a”÷ f ou Da”÷ f:
∑ fÅÅÅÅÅÅÅÅ∑a”÷ = (“a”÷ f )(P) = (Da”÷ f)(P) = limt Ø 0 f HP + t a”÷ L - f HPLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅt .
Fazendo t Ø 0, obtemos
(Da”÷ f)(x, y) = fx (x, y) cos q + fy (x, y) sen q
EXEMPLO 1. (pág. 71)
Vamos calcular a derivada da função f(x, y) = x2 y na direção (2, 1) no ponto (-1, 2). Como (2, 1) não é unitário, devemos primeiro normalizá-lo para encontrar o vetor unitário a”÷ com a mesma direção e sentido do vetor:
In[57]:= H∗ A função f Hx, yL = x2 y . ∗LClear@x, fD;f@x_, y_D := x2 y
Cal 3 Capítulo 2.nb 23

In[59]:= H∗ O vetor unitário α” . ∗Lv = 81, 2<;
α = v ëè!!!!!!!!!v.v
Out[60]= 9 1è!!!5
, 2è!!!5
=
In[61]:= H∗ Derivada direcional no ponto H−1, 2L na direção H1, 2L ∗L8x0, y0< = 8−1, 2<;D@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD ê. 8x → x0, y → y0<
Out[62]= −2è!!!5
EXEMPLO 2. (pág. 71)
Seja calcular a derivada da função f(x, y) = xy (x + y) na direção (2, -3) no ponto (x, y).
In[11]:= H∗ A função f Hx, yL = x y Hx + yL . ∗LClear@x, fD;f@x_, y_D := x y Hx + yL
In[13]:= H∗ O vetor unitário α” . ∗Lv = 82, −3<;
α = v ëè!!!!!!!!!v.v
Out[14]= 9 2è!!!!!!13
, −3
è!!!!!!13=
In[16]:= H∗ Derivada direcional no ponto H−1,2L ∗LD@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD êê Simplify
Out[16]=−3 x2 − 2 x y + 2 y2
è!!!!!!13
Gradiente
O gradiente de f, indicado por “ f ou grad f, é o vetor
“ f = grad f = ∑ fÅÅÅÅÅÅÅÅ∑x i”÷ + ∑ fÅÅÅÅÅÅÅÅ∑y j”÷÷
In[1]:= H∗ Pacote Add−on: Calculus`VectorAnalysis` ∗L<< Calculus`VectorAnalysis`
Grad[f, Cartesian[x, y, z]] fornece o gradiente da função escalar f[x, y, z] no sistema de coordena-das cartesiano.
24 Cal 3 Capítulo 2.nb

A fórmula da derivada dericional
(Da”÷ f)(x, y) = fx (x, y) cos q + fy (x, y) sen q
pode ser reescrita assim:
(Da”÷ f)(x, y) = ( fx (x, y)+ fy (x, y) ) . (cos q, sen q) = ( ∑ fÅÅÅÅÅÅÅÅ∑x , ∑ fÅÅÅÅÅÅÅÅ∑y ). a”÷
Como a”÷ é um vetor unitário podemos reescrever ainda
(Da”÷ f)(x, y) = (“ f). a”÷ = | “ f | cos f
onde f é o ângulo entre os vetores “ f e a”÷ , como ilusta a figura abaixo.
In[17]:= H∗ Pacote Add−on: Graphics`Arrow` traça setas ∗L<< Graphics`Arrow`
In[52]:= H∗ Direção do gradiente ∗LShow@Graphics@8Arrow@80, 0<, 81ê2, 2<D, Arrow@80, 0<, 81, 3ê2<D<,
Epilog → 8Text@"P", 80.01, .15<D, Text@"α”", 8.95, 1.6<D,Text@"∇f", 8.4, 1.9<D, Text@"φ", 80.13, .3<D<DD;
P
α”∇f
φ
A fórmula da derivada dericional
(Da”÷ f)(x, y) = fx (x, y) cos q + fy (x, y) sen q
pode ser reescrita assim:
(Da”÷ f)(x, y) = ( fx (x, y)+ fy (x, y) ) . (cos q, sen q) = ( ∑ fÅÅÅÅÅÅÅÅ∑x , ∑ fÅÅÅÅÅÅÅÅ∑y ). a”÷
Como a”÷ é um vetor unitário podemos reescrever ainda
(Da”÷ f)(x, y) = (“ f). a”÷ = | “ f | cos f
onde f é o ângulo entre os vetores “ f e a”÷ , como ilusta a figura abaixo.
Cal 3 Capítulo 2.nb 25

Exercícios (pág.73)
Nos Exercícios 1 a 8 , determine as derivadas das funções dadas, nos pontos dados e nas dir�ções indicadas
1. z = x2 - 3y em P = (0, 0), na direção do vetor (1, 2).
In[53]:= H∗ A função f Hx, yL = x2 − 3 y . ∗LClear@x, fD;f@x_, y_D := x2 − 3 y
In[7]:= H∗ O vetor unitário α” . ∗Lv = 81, 2<;
α = v ëè!!!!!!!!!v.v
Out[8]= 9 1è!!!5
,2è!!!5
=
In[55]:= H∗ Derivada direcional no ponto H0,0L na direção H1, 2L ∗L8x0, y0< = 80, 0<;D@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD ê. 8x → x0, y → y0<
Out[56]=9
è!!!!!!13
2. z = sen x2 y + cos x y2 em P = (x, y), na direção do vetor (1, è!!!3 ).
In[63]:= H∗ A função f Hx, yL = sen x2 y + cos x y2 . ∗LClear@x, fD;f@x_, y_D := Sin@x2 yD + Cos@x y2D
In[65]:= H∗ O vetor unitário α” . ∗Lv = 91,
è!!!!3 =;
α = v ëè!!!!!!!!!v.v
Out[66]= 9 12,
è!!!32
=
In[70]:= H∗ Derivada direcional no ponto H0,0L na direção H1, 2L ∗LD@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD êê Simplify
Out[70]=12Ix Iè!!!3 x + 2 yM Cos@x2 yD − y I2 è!!!3 x + yM Sin@x y2DM
3. z = cos x y em P = (x, y), na direção do vetor (a1, a2).
26 Cal 3 Capítulo 2.nb

In[74]:= H∗ A função f Hx, yL = x2 − 3 y . ∗LClear@x, fD;f@x_, y_D := Cos@x yD
In[76]:= H∗ O vetor unitário α” . ∗Lα = 8α1, α2<
Out[76]= 8α1, α2<
In[79]:= H∗ Derivada direcional no ponto Hx,yL na direção Hα1, α2L ∗LD@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD
Out[79]= −y α1 Sin@x yD − x α2 Sin@x yD
4. z = sen è!!!!!!!!!!!!!!!x2 + y2 em P = (3, 4), na direção do vetor (-1, 1).
In[80]:= H∗ A função f Hx, yL = sen è!!!!!!!!!!!!!x2+y2 . ∗L
Clear@x, fD;f@x_, y_D := Sin@x2 + y2D
In[82]:= H∗ O vetor unitário α” . ∗Lv = 8−1, 1<;
α = v ëè!!!!!!!!!v.v
Out[83]= 9−1è!!!2
,1è!!!2
=
In[84]:= H∗ Derivada direcional no ponto H3,4L na direção H−1, 1L ∗L8x0, y0< = 83, 4<;D@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD ê. 8x → x0, y → y0<
Out[85]=è!!!2 Cos@25D
5. z = ex2-cos y em P = (x, y), na direção do vetor (2, 3).
In[86]:= H∗ A função f Hx, yL = ex2-cos y . ∗LClear@x, fD;f@x_, y_D := Exp@x2 − Cos@yDD
In[88]:= H∗ O vetor unitário α” . ∗Lv = 82, 3<;
α = v ëè!!!!!!!!!v.v
Out[89]= 9 2è!!!!!!13
, 3è!!!!!!13
=
In[90]:= H∗ Derivada direcional no ponto Hx,yL na direção H2, 3L ∗LD@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD êê Simplify
Out[90]=x2−Cos@yD H4 x + 3 Sin@yDL
è!!!!!!13
Cal 3 Capítulo 2.nb 27

6. w = x2 + 2 x y + z2 em P = (1, 0, -1), na direção do vetor (1, -1, 1).
In[91]:= H∗ A função f Hx, yL = x2 − 3 y . ∗LClear@x, y, z, fD;f@x_, y_, z_D := x2 + 2 x y + z2
In[93]:= H∗ O vetor unitário α” . ∗Lv = 81, −1, 1<;
α = v ëè!!!!!!!!!v.v
Out[94]= 9 1è!!!3
, −1è!!!3
,1è!!!3
=
In[95]:= H∗ Derivada direcional no ponto H1, 0, −1L na direção H1, −1, 1L ∗L8x0, y0, z0< = 81, 0, −1<;D@f@x, y, zD, xD α@@1DD + D@f@x, y, zD, yD α@@2DD + D@f@x, y, zD, zD α@@3DD ê.8x → x0, y → y0, z → z0<
Out[96]= −2è!!!3
7. w = x y2 z3 em P = (x, y, z), na direção do vetor (1, -2, 1).
In[101]:= H∗ A função f Hx, yL = x y2 z3 . ∗LClear@x, y, z, fD;f@x_, y_, z_D := x y2 z3
In[99]:= H∗ O vetor unitário α” . ∗Lv = 81, −2, 1<;
α = v ëè!!!!!!!!!v.v
Out[100]= 9 1è!!!6
, −$%%%%%%23,
1è!!!6
=
In[103]:= H∗ Derivada direcional no ponto H0,0L na direção H1, 2L ∗LD@f@x, y, zD, xD α@@1DD +
D@f@x, y, zD, yD α@@2DD + D@f@x, y, zD, zD α@@3DD êê Simplify
Out[103]=y z2 H3 x y − 4 x z + y zL
è!!!6
8. w = 2x2 y3 - 3 x3 y2 em P = (1, 2), na direção à tangente a curva y = x3 + 1.
In[191]:= H∗ A função f Hx, yL = 2 x2 y3 −3 x3 y2 . ∗LClear@x, y, fD;f@x_, y_D := 2 x2 y3 − 3 x3 y2
28 Cal 3 Capítulo 2.nb
In[193]:= H∗ Tangente a curva y = x3 + 1 . ∗Lm = D@x3 + 1, xD ê. x → 1;α = 8Cos@ArcTan@mDD, Sin@ArcTan@mDD<
Out[194]= 9 1è!!!!!!10
,3
è!!!!!!10=
In[195]:= H∗ Derivada direcional no ponto H1,2L à tangente a curva y=x3 + 1 ∗L8x0, y0< = 81, 2<;D@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD ê. 8x → x0, y → y0< êê Simplify
Out[196]= 16$%%%%%%25
In[197]:= H∗ Tangente a curva y = x3 + 1 . ∗Lm = D@x3 + 1, xD ê. x → 1;α = 8−Cos@ArcTan@mDD, −Sin@ArcTan@mDD<
Out[198]= 9−1
è!!!!!!10, −
3è!!!!!!10
=
In[199]:= H∗ Derivada direcional no ponto H1,2L à tangente a curva y = x3 + 1 ∗L8x0, y0< = 81, 2<;D@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD ê. 8x → x0, y → y0< êê Simplify
Out[200]= −16$%%%%%%25
Exercícios (pág.73)
Nos Exercícios 1 a 8 , determine as derivadas das funções dadas, nos pontos dados e nas dir�ções indicadas
1. z = x2 - 3y em P = (0, 0), na direção do vetor (1, 2).
In[53]:= H∗ A função f Hx, yL = x2 − 3 y . ∗LClear@x, fD;f@x_, y_D := x2 − 3 y
In[7]:= H∗ O vetor unitário α” . ∗Lv = 81, 2<;
α = v ëè!!!!!!!!!v.v
Out[8]= 9 1è!!!5
,2è!!!5
=
Cal 3 Capítulo 2.nb 29

In[55]:= H∗ Derivada direcional no ponto H0,0L na direção H1, 2L ∗L8x0, y0< = 80, 0<;D@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD ê. 8x → x0, y → y0<
Out[56]=9
è!!!!!!13
2. z = sen x2 y + cos x y2 em P = (x, y), na direção do vetor (1, è!!!3 ).
In[63]:= H∗ A função f Hx, yL = sen x2 y + cos x y2 . ∗LClear@x, fD;f@x_, y_D := Sin@x2 yD + Cos@x y2D
In[65]:= H∗ O vetor unitário α” . ∗Lv = 91,
è!!!!3 =;
α = v ëè!!!!!!!!!v.v
Out[66]= 9 12,
è!!!32
=
In[70]:= H∗ Derivada direcional no ponto H0,0L na direção H1, 2L ∗LD@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD êê Simplify
Out[70]=12Ix Iè!!!3 x + 2 yM Cos@x2 yD − y I2 è!!!3 x + yM Sin@x y2DM
3. z = cos x y em P = (x, y), na direção do vetor (a1, a2).
In[74]:= H∗ A função f Hx, yL = x2 − 3 y . ∗LClear@x, fD;f@x_, y_D := Cos@x yD
In[76]:= H∗ O vetor unitário α” . ∗Lα = 8α1, α2<
Out[76]= 8α1, α2<
In[79]:= H∗ Derivada direcional no ponto Hx,yL na direção Hα1, α2L ∗LD@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD
Out[79]= −y α1 Sin@x yD − x α2 Sin@x yD
4. z = sen è!!!!!!!!!!!!!!!x2 + y2 em P = (3, 4), na direção do vetor (-1, 1).
In[80]:= H∗ A função f Hx, yL = sen è!!!!!!!!!!!!!x2+y2 . ∗L
Clear@x, fD;f@x_, y_D := Sin@x2 + y2D
30 Cal 3 Capítulo 2.nb

In[82]:= H∗ O vetor unitário α” . ∗Lv = 8−1, 1<;
α = v ëè!!!!!!!!!v.v
Out[83]= 9−1è!!!2
, 1è!!!2
=
In[84]:= H∗ Derivada direcional no ponto H3,4L na direção H−1, 1L ∗L8x0, y0< = 83, 4<;D@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD ê. 8x → x0, y → y0<
Out[85]=è!!!2 Cos@25D
5. z = ex2-cos y em P = (x, y), na direção do vetor (2, 3).
In[86]:= H∗ A função f Hx, yL = ex2-cos y . ∗LClear@x, fD;f@x_, y_D := Exp@x2 − Cos@yDD
In[88]:= H∗ O vetor unitário α” . ∗Lv = 82, 3<;
α = v ëè!!!!!!!!!v.v
Out[89]= 9 2è!!!!!!13
,3
è!!!!!!13=
In[90]:= H∗ Derivada direcional no ponto Hx,yL na direção H2, 3L ∗LD@f@x, yD, xD α@@1DD + D@f@x, yD, yD α@@2DD êê Simplify
Out[90]=x2−Cos@yD H4 x + 3 Sin@yDL
è!!!!!!13
6. w = x2 + 2 x y + z2 em P = (1, 0, -1), na direção do vetor (1, -1, 1).
In[91]:= H∗ A função f Hx, yL = x2 − 3 y . ∗LClear@x, y, z, fD;f@x_, y_, z_D := x2 + 2 x y + z2
In[93]:= H∗ O vetor unitário α” . ∗Lv = 81, −1, 1<;
α = v ëè!!!!!!!!!v.v
Out[94]= 9 1è!!!3
, −1è!!!3
, 1è!!!3
=
Cal 3 Capítulo 2.nb 31

In[95]:= H∗ Derivada direcional no ponto H1, 0, −1L na direção H1, −1, 1L ∗L8x0, y0, z0< = 81, 0, −1<;D@f@x, y, zD, xD α@@1DD + D@f@x, y, zD, yD α@@2DD + D@f@x, y, zD, zD α@@3DD ê.8x → x0, y → y0, z → z0<
Out[96]= −2è!!!3
7. w = x y2 z3 em P = (x, y, z), na direção do vetor (1, -2, 1).
In[101]:= H∗ A função f Hx, yL = x y2 z3 . ∗LClear@x, y, z, fD;f@x_, y_, z_D := x y2 z3
In[99]:= H∗ O vetor unitário α” . ∗Lv = 81, −2, 1<;
α = v ëè!!!!!!!!!v.v
Out[100]= 9 1è!!!6
, −$%%%%%%23,
1è!!!6
=
In[103]:= H∗ Derivada direcional no ponto H0,0L na direção H1, 2L ∗LD@f@x, y, zD, xD α@@1DD +
D@f@x, y, zD, yD α@@2DD + D@f@x, y, zD, zD α@@3DD êê Simplify
Out[103]=y z2 H3 x y − 4 x z + y zL
è!!!6
14. Data a função f(x, y) = x y ( 3 x2 - 5 y2 ) calcule “ f no ponto (1, 1) e duas direções ao longo das quais a derivada direcional de f é zero.
In[234]:= H∗ A função f Hx, yL = x y H 3 x2 − 5 y2L . ∗LClear@x, y, z, fD;f@x_, y_, z_D := x y H3 x2 − 5 y2L
In[236]:= H∗ Gradiente de f Hx, yL = x y H 3 x2 − 5 y2L no ponto H1, 1L . ∗L8x0, y0< = 81, 1<;gradF = Grad@f@x, y, zD, Cartesian@x, y, zDD ê. 8x → x0, y → y0<
Out[237]= 84, −12, 0<
In[233]:= H∗ Direção ao longo do gradiente de f . ∗LgradFëè!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
gradF.gradF
Out[233]= 9 1è!!!!!!10
, −3
è!!!!!!10, 0=
A derivada de f é zero nas direções perpendiculares à direção do gradiente. Portamto, ± ( 3 ëè!!!!!!10 , 1 ëè!!!!!!10 ).
Nos Exercícios 15 a 24, determine para a função f dada, as curvas ao longo das quais a direção de “ f permanece con-stante. Faça um gáfico com várias curvas f(x, y) = constante, mostrando também as curvas a determinar.
32 Cal 3 Capítulo 2.nb
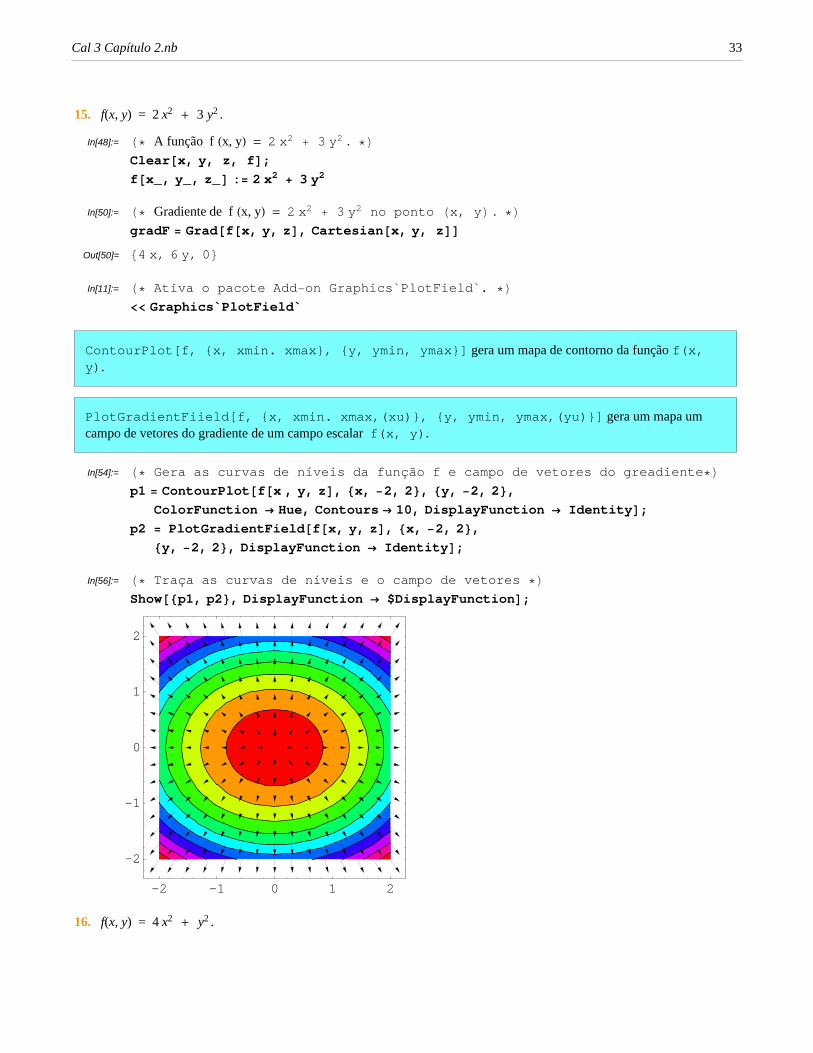
15. f(x, y) = 2 x2 + 3 y2 .
In[48]:= H∗ A função f Hx, yL = 2 x2 + 3 y2 . ∗LClear@x, y, z, fD;f@x_, y_, z_D := 2 x2 + 3 y2
In[50]:= H∗ Gradiente de f Hx, yL = 2 x2 + 3 y2 no ponto Hx, yL . ∗LgradF = Grad@f@x, y, zD, Cartesian@x, y, zDD
Out[50]= 84 x, 6 y, 0<
In[11]:= H∗ Ativa o pacote Add−on Graphics`PlotField`. ∗L<< Graphics`PlotField`
ContourPlot[f, {x, xmin. xmax}, {y, ymin, ymax}] gera um mapa de contorno da função f(x, y).
PlotGradientFiield[f, {x, xmin. xmax,(xu)}, {y, ymin, ymax,(yu)}] gera um mapa um campo de vetores do gradiente de um campo escalar f(x, y).
In[54]:= H∗ Gera as curvas de níveis da função f e campo de vetores do greadiente∗Lp1 = ContourPlot@f@x , y, zD, 8x, −2, 2<, 8y, −2, 2<,
ColorFunction → Hue, Contours → 10, DisplayFunction → IdentityD;p2 = PlotGradientField@f@x, y, zD, 8x, −2, 2<,
8y, −2, 2<, DisplayFunction → IdentityD;
In[56]:= H∗ Traça as curvas de níveis e o campo de vetores ∗LShow@8p1, p2<, DisplayFunction → $DisplayFunctionD;
-2 -1 0 1 2
-2
-1
0
1
2
16. f(x, y) = 4 x2 + y2 .
Cal 3 Capítulo 2.nb 33

In[57]:= H∗ A função f Hx, yL = 4 x2 + y2 . ∗LClear@x, y, z, fD;f@x_, y_, z_D := 4 x2 + y2
In[59]:= H∗ Gradiente de f Hx, yL = 4 x2 + y2 no ponto Hx, yL . ∗LgradF = Grad@f@x, y, zD, Cartesian@x, y, zDD
Out[59]= 88 x, 2 y, 0<
In[65]:= H∗ Gera as curvas de níveis da função f e campo de vetores do greadiente∗Lp1 = ContourPlot@f@x , y, zD, 8x, −2, 2<, 8y, −2, 2<,
ColorFunction → Hue, Contours → 10, DisplayFunction → IdentityD;p2 = PlotGradientField@f@x, y, zD, 8x, −2, 2<,
8y, −2, 2<, DisplayFunction → IdentityD;
In[67]:= H∗ Traça as curvas de níveis e o campo de vetores ∗LShow@8p1, p2<, DisplayFunction → $DisplayFunctionD;
-2 -1 0 1 2-2
-1
0
1
2
17. f(x, y) = y - x2 .
In[71]:= H∗ A função f Hx, yL = y − x2. ∗LClear@x, y, z, fD;f@x_, y_, z_D := y − x2
In[73]:= H∗ Gradiente de f Hx, yL = y − x2 no ponto Hx, yL . ∗LgradF = Grad@f@x, y, zD, Cartesian@x, y, zDD
Out[73]= 8−2 x, 1, 0<
In[74]:= H∗ Gera as curvas de níveis da função f e campo de vetores do greadiente∗Lp1 = ContourPlot@f@x , y, zD, 8x, −2, 2<, 8y, −2, 2<,
ColorFunction → Hue, Contours → 10, DisplayFunction → IdentityD;p2 = PlotGradientField@f@x, y, zD, 8x, −2, 2<,
8y, −2, 2<, DisplayFunction → IdentityD;
34 Cal 3 Capítulo 2.nb

In[76]:= H∗ Traça as curvas de níveis e o campo de vetores ∗LShow@8p1, p2<, DisplayFunction → $DisplayFunctionD;
-2 -1 0 1 2-2
-1
0
1
2
18. f(x, y) = y + x2 .
In[77]:= H∗ A função f Hx, yL = y + x2. ∗LClear@x, y, z, fD;f@x_, y_, z_D := y + x2
In[79]:= H∗ Gradiente de f Hx, yL = y + x2 no ponto Hx, yL . ∗LgradF = Grad@f@x, y, zD, Cartesian@x, y, zDD
Out[79]= 82 x, 1, 0<
In[80]:= H∗ Gera as curvas de níveis da função f e campo de vetores do greadiente∗Lp1 = ContourPlot@f@x , y, zD, 8x, −2, 2<, 8y, −2, 2<,
ColorFunction → Hue, Contours → 10, DisplayFunction → IdentityD;p2 = PlotGradientField@f@x, y, zD, 8x, −2, 2<,
8y, −2, 2<, DisplayFunction → IdentityD;
In[82]:= H∗ Traça as curvas de níveis e o campo de vetores ∗LShow@8p1, p2<, DisplayFunction → $DisplayFunctionD;
-2 -1 0 1 2-2
-1
0
1
2
Cal 3 Capítulo 2.nb 35

19. f(x, y) = x - y2 .
In[83]:= H∗ A função f Hx, yL = x − y2. ∗LClear@x, y, z, fD;f@x_, y_, z_D := x − y2
In[85]:= H∗ Gradiente de f Hx, yL = x − y2 no ponto Hx, yL . ∗LgradF = Grad@f@x, y, zD, Cartesian@x, y, zDD
Out[85]= 81, −2 y, 0<
In[86]:= H∗ Gera as curvas de níveis da função f e campo de vetores do greadiente∗Lp1 = ContourPlot@f@x , y, zD, 8x, −2, 2<, 8y, −2, 2<,
ColorFunction → Hue, Contours → 10, DisplayFunction → IdentityD;p2 = PlotGradientField@f@x, y, zD, 8x, −2, 2<,
8y, −2, 2<, DisplayFunction → IdentityD;
In[88]:= H∗ Traça as curvas de níveis e o campo de vetores ∗LShow@8p1, p2<, DisplayFunction → $DisplayFunctionD;
-2 -1 0 1 2-2
-1
0
1
2
20. f(x, y) = x + y2 .
In[89]:= H∗ A função f Hx, yL = x + y2. ∗LClear@x, y, z, fD;f@x_, y_, z_D := x + y2
In[91]:= H∗ Gradiente de f Hx, yL = x + y2 no ponto Hx, yL . ∗LgradF = Grad@f@x, y, zD, Cartesian@x, y, zDD
Out[91]= 81, 2 y, 0<
In[92]:= H∗ Gera as curvas de níveis da função f e campo de vetores do greadiente∗Lp1 = ContourPlot@f@x , y, zD, 8x, −2, 2<, 8y, −2, 2<,
ColorFunction → Hue, Contours → 10, DisplayFunction → IdentityD;p2 = PlotGradientField@f@x, y, zD, 8x, −2, 2<,
8y, −2, 2<, DisplayFunction → IdentityD;
36 Cal 3 Capítulo 2.nb

In[94]:= H∗ Traça as curvas de níveis e o campo de vetores ∗LShow@8p1, p2<, DisplayFunction → $DisplayFunctionD;
-2 -1 0 1 2
-2
-1
0
1
2
21. f(x, y) = x y .
In[95]:= H∗ A função f Hx, yL = xy. ∗LClear@x, y, z, fD;f@x_, y_, z_D := x y
In[97]:= H∗ Gradiente de f Hx, yL = xy no ponto Hx, yL . ∗LgradF = Grad@f@x, y, zD, Cartesian@x, y, zDD
Out[97]= 8y, x, 0<
In[98]:= H∗ Gera as curvas de níveis da função f e campo de vetores do greadiente∗Lp1 = ContourPlot@f@x , y, zD, 8x, −2, 2<, 8y, −2, 2<,
ColorFunction → Hue, Contours → 10, DisplayFunction → IdentityD;p2 = PlotGradientField@f@x, y, zD, 8x, −2, 2<,
8y, −2, 2<, DisplayFunction → IdentityD;
In[100]:= H∗ Traça as curvas de níveis e o campo de vetores ∗LShow@8p1, p2<, DisplayFunction → $DisplayFunctionD;
-2 -1 0 1 2
-2
-1
0
1
2
Cal 3 Capítulo 2.nb 37

22. f(x, y) = x2 - y2 .
In[101]:= H∗ A função f Hx, yL = x2 − y2. ∗LClear@x, y, z, fD;f@x_, y_, z_D := x2 − y2
In[103]:= H∗ Gradiente de f Hx, yL = x2 − y2 no ponto Hx, yL . ∗LgradF = Grad@f@x, y, zD, Cartesian@x, y, zDD
Out[103]= 82 x, −2 y, 0<
In[104]:= H∗ Gera as curvas de níveis da função f e campo de vetores do greadiente∗Lp1 = ContourPlot@f@x , y, zD, 8x, −2, 2<, 8y, −2, 2<,
ColorFunction → Hue, Contours → 10, DisplayFunction → IdentityD;p2 = PlotGradientField@f@x, y, zD, 8x, −2, 2<,
8y, −2, 2<, DisplayFunction → IdentityD;
In[106]:= H∗ Traça as curvas de níveis e o campo de vetores ∗LShow@8p1, p2<, DisplayFunction → $DisplayFunctionD;
-2 -1 0 1 2-2
-1
0
1
2
23. f(x, y) = x3 - y2 .
In[107]:= H∗ A função f Hx, yL = x3 − y2. ∗LClear@x, y, z, fD;f@x_, y_, z_D := x3 − y2
In[109]:= H∗ Gradiente de f Hx, yL = x3 − y2 no ponto Hx, yL . ∗LgradF = Grad@f@x, y, zD, Cartesian@x, y, zDD
Out[109]= 83 x2, −2 y, 0<
In[110]:= H∗ Gera as curvas de níveis da função f e campo de vetores do greadiente∗Lp1 = ContourPlot@f@x , y, zD, 8x, −2, 2<, 8y, −2, 2<,
ColorFunction → Hue, Contours → 10, DisplayFunction → IdentityD;p2 = PlotGradientField@f@x, y, zD, 8x, −2, 2<,
8y, −2, 2<, DisplayFunction → IdentityD;
38 Cal 3 Capítulo 2.nb

In[112]:= H∗ Traça as curvas de níveis e o campo de vetores ∗LShow@8p1, p2<, DisplayFunction → $DisplayFunctionD;
-2 -1 0 1 2-2
-1
0
1
2
24. f(x, y) = x2 - y3 .
In[113]:= H∗ A função f Hx, yL = x2 − y3. ∗LClear@x, y, z, fD;f@x_, y_, z_D := x2 − y3
In[115]:= H∗ Gradiente de f Hx, yL = x2 − y3 no ponto Hx, yL . ∗LgradF = Grad@f@x, y, zD, Cartesian@x, y, zDD
Out[115]= 82 x, −3 y2, 0<
In[116]:= H∗ Gera as curvas de níveis da função f e campo de vetores do greadiente∗Lp1 = ContourPlot@f@x , y, zD, 8x, −2, 2<, 8y, −2, 2<,
ColorFunction → Hue, Contours → 10, DisplayFunction → IdentityD;p2 = PlotGradientField@f@x, y, zD, 8x, −2, 2<,
8y, −2, 2<, DisplayFunction → IdentityD;
In[118]:= H∗ Traça as curvas de níveis e o campo de vetores ∗LShow@8p1, p2<, DisplayFunction → $DisplayFunctionD;
-2 -1 0 1 2
-2
-1
0
1
2
Cal 3 Capítulo 2.nb 39

Nos Exercícios 25 a 27, determine as direções em que f(x, y) crescem e decrescem mais rapidamente no ponto dado, bem como as componentes derivadas direcionais máxima e mínima respectivamente.
25. f(x, y) = x3 - y2 , P = (1, 1).
In[125]:= H∗ A função f Hx, yL = x2 − y3. ∗LClear@x, y, z, fD;f@x_, y_, z_D := x3 − y2
In[127]:= H∗ Gradiente de f Hx, yL = x2 − y3 no ponto H1, 1L . ∗L8x0, y0< = 81, 1<;gradF = Grad@f@x, y, zD, Cartesian@x, y, zDD ê. 8x → x0, y → y0<
Out[128]= 83, −2, 0<
In[129]:= H∗ O vetor unitário α” . ∗Lα = gradFëè!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
gradF.gradF
Out[129]= 9 3è!!!!!!13
, −2
è!!!!!!13, 0=
In[133]:= H∗ Derivada direcional máxima . ∗LD@f@x, y, zD, xD α@@1DD + D@f@x, y, zD, yD α@@2DD ê. 8x → x0, y → y0<
Out[133]=è!!!!!!13
In[134]:= H∗ Derivada direcional mínima . ∗LD@−f@x, y, zD, xD α@@1DD − D@f@x, y, zD, yD α@@2DD ê. 8x → x0, y → y0<
Out[134]= −è!!!!!!13
26. f(x, y) = x2 + 2 y2 , P = (1, -1).
In[138]:= H∗ A função f Hx, yL = x2 + 2 y2. ∗LClear@x, y, z, fD;f@x_, y_, z_D := x2 + 2 y2
In[140]:= H∗ Gradiente de f Hx, yL = x2 + 2 y2 no ponto H1, −1L . ∗L8x0, y0< = 81, −1<;gradF = Grad@f@x, y, zD, Cartesian@x, y, zDD ê. 8x → x0, y → y0<
Out[141]= 82, −4, 0<
In[142]:= H∗ O vetor unitário α” . ∗Lα = gradFëè!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
gradF.gradF
Out[142]= 9 1è!!!5
, −2è!!!5
, 0=
In[143]:= H∗ Derivada direcional máxima . ∗LD@f@x, y, zD, xD α@@1DD + D@f@x, y, zD, yD α@@2DD ê. 8x → x0, y → y0<
Out[143]= 2 è!!!5
40 Cal 3 Capítulo 2.nb

In[144]:= H∗ Derivada direcional mínima . ∗LD@−f@x, y, zD, xD α@@1DD − D@f@x, y, zD, yD α@@2DD ê. 8x → x0, y → y0<
Out[144]= −2 è!!!5
27. f(x, y, z) = x2 + 3 y2 + 4 z2 , P = (1, -1, 1).
In[154]:= H∗ A função f Hx, y, zL = x2 + 3 y2 + 4 z2. ∗LClear@x, y, z, fD;f@x_, y_, z_D := x2 + 3 y2 + 4 z2
In[156]:= H∗ Gradiente de f Hx, yL = x2 + 3 y2 + 4 z2. no ponto H1, −1, 1L . ∗L8x0, y0, z0< = 81, −1, 1<;gradF = Grad@f@x, y, zD, Cartesian@x, y, zDD ê. 8x → x0, y → y0, z → z0<
Out[157]= 82, −6, 8<
In[158]:= H∗ O vetor unitário α” . ∗Lα = gradFëè!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
gradF.gradF
Out[158]= 9 1è!!!!!!26
, −3
è!!!!!!26, 2$%%%%%%%%%2
13=
In[161]:= H∗ Derivada direcional máxima . ∗LD@f@x, y, zD, xD α@@1DD + D@f@x, y, zD, yD α@@2DD + D@f@x, y, zD, zD α@@3DD ê.8x → x0, y → y0, z −> z0<
Out[161]= 2 è!!!!!!26
In[162]:= H∗ Derivada direcional mínima . ∗LD@−f@x, y, zD, xD α@@1DD + D@−f@x, y, zD, yD α@@2DD + D@−f@x, y, zD, zD α@@3DD ê.8x → x0, y → y0, z −> z0<
Out[162]= −2 è!!!!!!26
Cal 3 Capítulo 2.nb 41

2.6 Regra da cadeia e Plano tangente
Seja a função f(x, y, z) diferenciável num ponto P = (x, y, z). Se esse ponto for função de um parâmetro t
P = (x(t), y(t), z(t)
verifica-se a regra da cadeia:
df HtLÅÅÅÅÅÅÅÅÅÅÅdt = dÅÅÅÅÅÅdt f(x(t), y(t), z(t)) = ∑ fÅÅÅÅÅÅÅÅ∑x ∑xÅÅÅÅÅÅÅ∑t + ∑ fÅÅÅÅÅÅÅÅ∑y ∑yÅÅÅÅÅÅÅ∑t + ∑ fÅÅÅÅÅÅÅÅ∑z ∑zÅÅÅÅÅÅÅ∑t
ou ainda
dÅÅÅÅÅÅdt f(P(t)) = “ f. P '(t)
As equações paramétricas do plano tangente à superfície f(x, y, z) = 0 que passa pelo ponto Hx0, y0, z0L são
x = x0 + t “ f Hx0, y0, z0L.i”
y = y0 + t “ f Hx0, y0, z0L. j”
z = z0 + t “ f Hx0, y0, z0L.k”÷
EXEMPLO (pág. 78)
Vamos considerar a superfície de equação f(x, y, z) = 3 x2 + y2 - 7z = 0 que passa pelo ponto P = (1, -2, 1).
In[203]:= H∗ A função f Hx, y, zL = 3 x2 + y2 + 7 z. ∗LClear@x, y, z, fD;f@x_, y_, z_D := 3 x2 + y2 − 7 z
In[214]:= H∗ Gradiente de f Hx, yL = 3 x2 + y2 + + 7 z. no ponto H1, −2, 1L . ∗L8x0, y0, z0< = 81, −2, 1<;gradF = Grad@f@x, y, zD, Cartesian@x, y, zDD ê. 8x → x0, y → y0, z → z0<
Out[215]= 86, −4, −7<
In[218]:= x x0 + t gradF.81, 0, 0<y y0 + t gradF.80, 1, 0<z z0 + t gradF.80, 0, 1<
Out[218]= x 1 + 6 t
Out[219]= y −2 − 4 t
Out[220]= z 1 − 7 t
As equações paramétricas do plano tangwnte são: x = 1 + 6 t, y = -2 - 4 t e z = 1 - 7 t.
42 Cal 3 Capítulo 2.nb

2.7 Regra da cadeia - continuação
Seja a função f(x, y, z) em que x = x(t, s, u), y = y(t, s, u), e z = z(t, s, u) vale a regra da cadeia
∑ fÅÅÅÅÅÅÅÅ∑t = ∑ fÅÅÅÅÅÅÅÅ∑x ∑xÅÅÅÅÅÅÅ∑t + ∑ fÅÅÅÅÅÅÅÅ∑y ∑yÅÅÅÅÅÅÅ∑t + ∑ fÅÅÅÅÅÅÅÅ∑z ∑zÅÅÅÅÅÅÅ∑t
∑ fÅÅÅÅÅÅÅÅ∑s = ∑ fÅÅÅÅÅÅÅÅ∑x ∑xÅÅÅÅÅÅÅ∑s + ∑ fÅÅÅÅÅÅÅÅ∑y ∑yÅÅÅÅÅÅÅ∑s + ∑ fÅÅÅÅÅÅÅÅ∑z ∑zÅÅÅÅÅÅÅ∑s
∑ fÅÅÅÅÅÅÅÅ∑u = ∑ fÅÅÅÅÅÅÅÅ∑x ∑xÅÅÅÅÅÅÅ∑u + ∑ fÅÅÅÅÅÅÅÅ∑y ∑yÅÅÅÅÅÅÅ∑u + ∑ fÅÅÅÅÅÅÅÅ∑z ∑zÅÅÅÅÅÅÅ∑u
EXEMPLO 1 (pág. 80)
Seja a função z = 3 x2 - 5 y2. Se tuvermos também x = st e y = s2 + t2 , então z será função de s e t através de x e y.
In[241]:= H∗ A função f Hx, y, zL = 3 x2 − 5 y2 ∗LClear@x, y, fD;f@x_, y_D := 3 x2 − 5 y2
x@s_, t_D := s ty@s_, t_D := s2 + t2
In[251]:= D@f@x, yD, xD D@x@s, tD, tD + D@f@x, yD, yD D@y@s, tD, tD ê.8x → s t, y → s2 + t2< êê Simplify
Out[251]= −2 H7 s2 t + 10 t3L
In[252]:= D@f@x, yD, xD D@x@s, tD, sD + D@f@x, yD, yD D@y@s, tD, sD ê.8x → s t, y → s2 + t2< êê Simplify
Out[252]= −2 H10 s3 + 7 s t2L
Cal 3 Capítulo 2.nb 43

CAPÍTULO 3
Fórmula de Taylor - Máximos e MínimosIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
3.1 Fórmula de Taylor
Seja f(x, y) uma função definidas num domínio aberto D, com derivadas parciais contínuas até a ordem n + 1.Neste caso, a função f pode ser aproximada numa vizinhança de qualquer ponto P0 = (x0 , y0 ) de D, por umpolinômio de grau n na variáveis Dx = x - x0 e Dy = y - y0. O polinômio é obtido a partir da fórmula de Taylor
f(x, y) = f (x0 , y0 ) + fx Dx + fy Dy + 1ÅÅÅÅÅÅ2! H fxx Dx2 + 2 DxDx fxy + fyy Dy2L
+ . . . + 1ÅÅÅÅÅÅn! @Dxn f Dxn + n Dx
n-1 DYn f Dxn-1 Dy + . . . + DY
n f DynD + Rn ,
onde todas as derivadas de f que ai aparecem são calculadas no ponto P0 = (x0 , y0 ): o resto Rn , por sua vez, édado por
Rn = 1ÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅHn + 1L! HDx Dx + Dy DyLn + 1 f ,
onde as derivadas são agora calculadas num ponto Pc = (x0 + cDx , y0 + cDy), sendo c um número compreen-dido entre 0 e 1.
A série de Maclaurin de um função f(x, y) é um caso particular da série de Taylor quando P0 = (0, 0).
Series[f[x, y], {x, x0, nx}, {y, y0, nt)] gera a série de Taylor da função f(x, y) em torno do ponto Hx0 , y0L de ordem n = nx + ny.
Normal[Series[f[x, y], {x, x0, nx}, {y, y0, nt)]] trunca a série de Taylor da função f(x, y) num polinômio de grau n = nx + ny.
EXEMPLO 1. (pág. 87)

Vamos obter o desenvolvimento de Taylor da função arc sen(x/y) até os termos de segunda ordem no ponto P0 = (0, 1):
In[7]:= H∗ A função f Hx,yL = arcsen HxêyL ∗LClear@x, y, fD;f@x_, y_D := ArcSin@xêyD
In[9]:= H∗ Desenvolvimento de Taylor de f Hx,yL de segunda ordem ∗LSeries@f@x, yD, 8x, 0, 1<, 8y, 1, 1<D
Out[9]= H1 − Hy − 1L + O@y − 1D2L x + O@xD2
In[10]:= H∗ Polinômio de Taylor de f Hx,yL de grau dois ∗LNormal@Series@f@x, yD, 8x, 0, 1<, 8y, 1, 1<DD
Out[10]= x − x H−1 + yL
EXEMPLO 2. (pág. 88)
Obter o desenvolvimento de Maclaurin da função f(x, y) = log(1 + x + y) até os termos de terceira ordem.
In[11]:= H∗ A função f Hx,yL = log H1 + x + yL ∗LClear@x, y, fD;f@x_, y_D := Log@1 + x + yD
In[27]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 0, 3<, 8y, 0, 3<DD êê Expand
Out[27]= x −x2
2+x3
3+ y − x y + x2 y − x3 y −
y2
2+
x y2 −3 x2 y2
2+ 2 x3 y2 +
y3
3− x y3 + 2 x2 y3 −
10 x3 y3
3
Exercícios (pág. 60)
Nos Exercícios 1 a 7, desenvolver a Fórmula de Taylor de cada função, no ponto indicado, até os termos de terceira ordem.
1. f(x, y) = exy , P0 = (1, -1)
In[28]:= H∗ A função f Hx, yL = exy. ∗LClear@x, y, fD;f@x_, y_D := Exp@x yD
In[34]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 1, 3<, 8y, −1, 3<DD êê Expand
Out[34]= −π4
−9 x4
+ 2 x2 −7 x3
12−9 y4
+7 x2 y4
−
3 x3 y4
− 2 y2 +7 x y2
4−x3 y2
4−7 y3
12+3 x y3
4−x2 y3
4
2 Rijo Cal 3 Cap 3.nb

2. f(x, y) = arctg(x/y), P0 = (1, 1)
In[31]:= H∗ A função f Hx, yL = arctg HxêyL ∗LClear@x, y, fD;f@x_, y_D := ArcTan@xêyD
In[35]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 1, 3<, 8y, 1, 3<DD êê Expand
Out[35]=π4
+9 x4
− 2 x2 +7 x3
12−9 y4
+7 x2 y4
−
3 x3 y4
+ 2 y2 −7 x y2
4+x3 y2
4−7 y3
12+3 x y3
4−x2 y3
4
3. f(x, y) = x2 y - cos xy , P0 = (1, p/2)
In[36]:= H∗ A função f Hx, yL = x2 y − cos xy. ∗LClear@x, y, fD;f@x_, y_D := x2 y − Cos@x yD
In[38]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 1, 3<, 8y, π ê2, 3<DD êê Expand
Out[38]= −π2
+π3
48+
π5
384−
π5 x96
+5 π5 x2
384−
π5 x3
192−
π4 y48
+ x y −18
π2 x y +564
π4 x y + x2 y −
332
π4 x2 y +7192
π4 x3 y +5 π3 y2
96−
316
π3 x y2 +14
π x2 y2 +732
π3 x2 y2 −
112
π3 x3 y2 −π2 y3
24+
748
π2 x y3 −16
π2 x2 y3 −x3 y3
6+
116
π2 x3 y3
4. f(x, y) = x - 3 x2 y + 2 y2 , P0 = (1, -1)
In[43]:= H∗ A função f Hx, yL = x − 3 x2 y + 2 y2. ∗LClear@x, y, fD;f@x_, y_D := x − 3 x2 y + 2 y2
In[45]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 1, 3<, 8y, −1, 3<DD êê Expand
Out[45]= x − 3 x2 y + 2 y2
5. f(x, y) = ey cosx, P0 = (p, 0)
In[46]:= H∗ A função f Hx, yL = ey cos x ∗LClear@x, y, fD;f@x_, y_D := Exp@yD Cos@xD
In[48]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, π, 3<, 8y, 0, 3<DD êê Expand
Out[48]= −1 +π2
2− π x +
x2
2− y +
π2 y2
− π x y +x2 y2
−y2
2+
π2 y2
4−12
π x y2 +x2 y2
4−y3
6+
π2 y3
12−16
π x y3 +x2 y3
12
6. f(x, y) = log(1 + xy), P0 = (1, 2)
Rijo Cal 3 Cap 3.nb 3

In[49]:= H∗ A função f Hx, yL = log H1 + xyL ∗LClear@x, y, fD;f@x_, y_D := Log@1 + x yD
In[51]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 1, 3<, 8y, 2, 3<DD êê Expand
Out[51]= −24402187
+16 x729
+104 x2
729−80 x3
2187+
8 y729
+259 x y243
−112 x2 y243
+64 x3 y729
+26 y2
729−
56 x y2
243+37 x2 y2
486−8 x3 y2
729−10 y3
2187+16 x y3
729−4 x2 y3
729+x3 y3
2187+ Log@3D
7. f(x, y) = xy P0 = (1, 0)
In[53]:= H∗ A função f Hx, yL = xy ∗LClear@x, y, fD;f@x_, y_D := xy
In[55]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 1, 3<, 8y, 0, 3<DD êê Expand
Out[55]= 1 −11 y6
+ 3 x y −3 x2 y2
+x3 y3
+ y2 −
5 x y2
2+ 2 x2 y2 −
x3 y2
2−y3
6+x y3
2−x2 y3
2+x3 y3
6
Nos Exercícios 8 a 14, determine o desenvolvimento de Maclaurin de cada função até os termos de segunda ordem.
8. f(x, y) = cos x ê cos y .
In[58]:= H∗ A função f Hx, yL = cos xêcos y. ∗LClear@x, y, fD;f@x_, y_D := Cos@xDêCos@yD
In[60]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 0, 2<, 8y, 0, 2<DD êê Expand
Out[60]= 1 −x2
2+y2
2−x2 y2
4
9. f(x, y) =è!!!!!!!!!!!!!!!!!!!!!!!!!!1 - x2 - y2 .
In[64]:= H∗ A função f Hx, yL =è!!!!!!!!!!!!!!!!!!!!!!!!!!!!1 − x2 − y2 . ∗L
Clear@x, y, fD;
f@x_, y_D :=è!!!!!!!!!!!!!!!!!!!!!!!!!!
1 − x2 − y2
In[66]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 0, 2<, 8y, 0, 2<DD êê Expand
Out[66]= 1 −x2
2−y2
2−x2 y2
4
10. f(x, y) = logH1 + x + yL ê H1 - x - yL .
In[67]:= H∗ A função f Hx, yL = log H1 + x + yLêH1 − x − yL . ∗LClear@x, y, fD;f@x_, y_D := Log@1 + x + yDêH1 − x − yL
4 Rijo Cal 3 Cap 3.nb

In[69]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 0, 2<, 8y, 0, 2<DD êê Expand
Out[69]= x +x2
2+ y + x y +
5 x2 y2
+y2
2+5 x y2
2+7 x2 y2
2
11. f(x, y) = arc tg(1 + x)/(1 - y).
In[70]:= H∗ A função f Hx, yL = arc tg H1 + xLêH1 − yL . ∗LClear@x, y, fD;f@x_, y_D := ArcTan@H1 + xLêH1 − yLD
In[72]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 0, 2<, 8y, 0, 2<DD êê Expand
Out[72]=π4
+x2
−x2
4+y2
−x2 y4
+y2
4−x y2
4
12. f(x, y) = Hx + 1Ly .
In[73]:= H∗ A função f Hx, yL = Hx + 1Ly. ∗LClear@x, y, fD;f@x_, y_D := Hx + 1Ly
In[75]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 0, 2<, 8y, 0, 2<DD êê Expand
Out[75]= 1 + x y −x2 y2
+x2 y2
2
13. f(x, y) = ex sen y
In[76]:= H∗ A função f Hx, yL = ex sen y ∗LClear@x, y, fD;f@x_, y_D := Exp@xD Sin@yD
In[78]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 0, 2<, 8y, 0, 2<DD êê Expand
Out[78]= y + x y +x2 y2
14. f(x, y) = ex log(1 - y).
In[79]:= H∗ A função f Hx, yL = ex log H1 − yL ∗LClear@x, y, fD;f@x_, y_D := Exp@xD Log@1 − yD
In[81]:= H∗ Polinômio de Taylor de f Hx,yL de grau 3 + 3 = 6 ∗LNormal@Series@f@x, yD, 8x, 0, 2<, 8y, 0, 2<DD êê Expand
Out[81]= −y − x y −x2 y2
−y2
2−x y2
2−x2 y2
4
Rijo Cal 3 Cap 3.nb 5

3.2 Máximos e Mínimos
Diz que um pontp P0 é ponto de máximo de uma função f se f(P) b f HP0L para todo ponto P no domínio de f. Analogamente, P0 é ponto de mínimo se f(P) r f HP0L para todo P no domínio de f.
Quando P0 é ponto inerior do domínio D da função f e f(P) b f HP0L para todo P de uma vizinhança Vd de P0 ,dizemos que P0 é um ponto de máximo local ou máximo relativo. DE maneira análoga define-se mínimo local ou mínimo relativo.
EXEMPLO 1. (pág. 89)
A função z = è!!!!!!!!!!!!!!!!!!!!!!!!!!1 - x2 - y2 / Hx2 + y2L definida no conjunto limitado D = {(x, y): x2 + y2 b 1, (x, y) ∫ (0, 0), não tem máximo, quando (x, y) aproxima a origem, z tende para ¶. Seu mínimo, zero, ocorre em todos os pontos da circunferência x2 + y2 = 1.
EXEMPLO 2. (pág. 89)
A função f(x, y) = x è!!!!!!!!!!!!!!!!!!!!!!!!!!1 - x2 - y2 / y com domínio D = {(x, y): x2 + y2 b 1, y >0 não tem máximo nem mínimo. DE fato, basta notar que, fazendo x ∫ 0, limyz0 f(x, y) = ± ¶, conforme seja x > 0 ou x < 0, respectivamente.
Teorema. Seja fuma função contínua com domínio fechado e limitado (compacto). Então f possui ao menos um ponto de máximo e ao menos um ponto de mínimo.
Teorema. Se P0 é ponto de máximo ou de mínimo local da função f e se esta for diferenciável nesse ponto, entãosuas derivadas parciais de primeira ordem se anulam em P0.
Um ponto P0 onde as derivadas de f se anulam é chamado ponto crítico ou ponto estacionário. da função. Umponto crítico que não é de máximo ou de mínimo é chamado de ponto de sela.
EXEMPLO 2. (pág. 90)
Vamos considerar a função f(x, y) = x y (3 - x - y), definida no domínio D = x r 0, y r 0, x + y b 3. Esta função tem um único ponto crítico em D. De fato:
In[82]:= H∗ A função f Hx, yL = xy H3 − x − yL ∗LClear@x, y, fD;f@x_, y_D := x y H3 − x − yL
In[84]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[84]= −x y + H3 − x − yL yOut[85]= x H3 − x − yL − x y
6 Rijo Cal 3 Cap 3.nb

In[86]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<D
Out[86]= 88x → 0, y → 0<, 8x → 0, y → 3<, 8x → 1, y → 1<, 8x → 3, y → 0<<
In[88]:= H∗ Os valores da função nos pontos críticos ∗Lf@x, yD ê. 8x → 0, y → 0<f@x, yD ê. 8x → 0, y → 3<f@x, yD ê. 8x → 1, y → 1<f@x, yD ê. 8x → 3, y → 0<
Out[88]= 0
Out[89]= 0
Out[90]= 1
Out[91]= 0
Exercícios (pág. 60)
Nos Exercícios 1 a 6, determine os pontos estacionários das funções dadas e verifique quais são de máximo e quais são de mínimo.
1. z = 5 - 2 x2 - 3 y2
In[94]:= H∗ A função z = 5 − 2 x2 − 3 y2. ∗LClear@x, y, fD;f@x_, y_D := 5 − 2 x2 − 3 y2
In[96]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[96]= −4 x
Out[97]= −6 y
In[98]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<D
Out[98]= 88x → 0, y → 0<<
In[99]:= H∗ O valor da função no ponto crítico ∗Lf@x, yD ê. 8x → 0, y → 0<
Out[99]= 5
O valor máximo da função é 5 no ponto (0, 0).
2. z = ex2 + 3 y2
Rijo Cal 3 Cap 3.nb 7

In[104]:= H∗ A função z = ex2 + 3 y2 . ∗LClear@x, y, fD;f@x_, y_D := Exp@x2 + 3 y2D
In[109]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[109]= 2 x2+3 y2 x
Out[110]= 6 x2+3 y2 y
In[111]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<D
Out[111]= 88x → 0, y → 0<<
In[112]:= f@x, yD ê. 8x → 0, y → 0<Out[112]= 1
O valor máximo da função é 1 no ponto (0, 0).
3. z = x2 = 5 y2 +7
In[113]:= H∗ A função z = x2 + 5 y2 +7. ∗LClear@x, y, fD;f@x_, y_D := x2 + 5 y2 + 7
In[115]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[115]= 2 x
Out[116]= 10 y
In[117]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<D
Out[117]= 88x → 0, y → 0<<
In[118]:= f@x, yD ê. 8x → 0, y → 0<Out[118]= 7
O valor máximo da função é 7 no ponto (0, 0).
4. z = e1 - 3 x2 - 5 y2
In[119]:= H∗ A função z = e1 − 3 x2 5 y2 . ∗LClear@x, y, fD;f@x_, y_D := Exp@1 − 3 x2 − 5 y2D
8 Rijo Cal 3 Cap 3.nb

In[121]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[121]= −6 1−3 x2−5 y2 x
Out[122]= −10 1−3 x2−5 y2 y
In[123]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<D
Out[123]= 88y → 0, x → 0<<
In[124]:= f@x, yD ê. 8x → 0, y → 0<Out[124]=
O valor máximo da função é ‰ no ponto (0, 0).
O valor máximo da função é 7 no ponto (0, 0).
5. z =è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!3 - 2 x2 - 5 y2
In[125]:= H∗ A função z =è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!3 − 2 x2 − 5 y2 . ∗L
Clear@x, y, fD;
f@x_, y_D :=è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
3 − 2 x2 − 5 y2
In[127]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[127]= −2 x
è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!3 − 2 x2 − 5 y2
Out[128]= −5 y
è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!3 − 2 x2 − 5 y2
In[129]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<D
Out[129]= 88x → 0, y → 0<<
In[130]:= f@x, yD ê. 8x → 0, y → 0<Out[130]=
è!!!3
O valor máximo da função é è!!!3 no ponto (0, 0).
6. z = x2 y2
In[131]:= H∗ A função z = x2 y2. ∗LClear@x, y, fD;f@x_, y_D := x2 y2
Rijo Cal 3 Cap 3.nb 9

In[133]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[133]= 2 x y2
Out[134]= 2 x2 y
In[135]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<DSolve::svars :
Equations may not give solutions for all "solve" variables. More…
Out[135]= 88x → 0<, 8x → 0<, 8y → 0<, 8y → 0<<
In[136]:= f@x, yD ê. 8x → 0, y → 0<Out[136]= 0
7. Determinar a distância mínima da origem ao plano 2x - 3y -z +2 = 0
In[391]:= H∗ A função z =è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!x2 + y2 + z2 ∗L
Clear@x, y, fD;z = 2 x − 3 y + 2;
f@x_, y_D :=è!!!!!!!!!!!!!!!!!!!!!!!!!!!!
x2 + y2 + z2
In[394]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[394]=2 x + 4 H2 + 2 x − 3 yL
2è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!x2 + H2 + 2 x − 3 yL2 + y2
Out[395]=−6 H2 + 2 x − 3 yL + 2 y
2è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!x2 + H2 + 2 x − 3 yL2 + y2
In[396]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<D
Out[396]= 99x → −27, y →
37==
In[397]:= f@x, yD ê. 8x → −2ê7, y → 3ê7<
Out[397]= $%%%%%%27
8. Determinar a distância mínima da origem ao plano a x + b y + c z + d = 0
In[398]:= H∗ A função z =è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!x2 + y2 + z2 ∗L
Clear@x, y, fD;z = H−a x − b y − dLêc;
f@x_, y_D :=è!!!!!!!!!!!!!!!!!!!!!!!!!!!!
x2 + y2 + z2
10 Rijo Cal 3 Cap 3.nb

In[409]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[409]=2 x − 2 a H−d−a x−b yL
c2
2"############################################x2 + y2 + H−d−a x−b yL2c2
Out[410]=2 y − 2 b H−d−a x−b yL
c2
2"############################################x2 + y2 + H−d−a x−b yL2c2
In[403]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<D
Out[403]= 99x → −a d
a2 + b2 + c2, y → −
b da2 + b2 + c2
==
In[406]:= f@x, yD ê. 9x → −a d
a2 + b2 + c2, y → −
b d
a2 + b2 + c2= êê Simplify
Out[406]= $%%%%%%%%%%%%%%%%%%%%%%%%%%%d2a2 + b2 + c2
9. Ache a menor distância da origem à superfície z = x y + 2
In[421]:= H∗ A função z =è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!x2 + y2 + z2 ∗L
Clear@x, y, fD;z = x y + 2;
f@x_, y_D :=è!!!!!!!!!!!!!!!!!!!!!!!!!!!!
x2 + y2 + z2
In[424]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[424]=2 x + 2 y H2 + x yL
2è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!x2 + y2 + H2 + x yL2
Out[425]=2 y + 2 x H2 + x yL
2è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!x2 + y2 + H2 + x yL2
In[426]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<D
Out[426]= 98x → −1, y → 1<, 8x → 0, y → 0<, 8x → 1, y → −1<,9x → − è!!!3 , y → − è!!!3 =, 9x → è!!!3 , y → è!!!3 ==
In[427]:= f@x, yD ê. 8x → −1, y → 1<f@x, yD ê. 8x → 0, y → 0<f@x, yD ê. 8x → 1, y → −1<
Out[427]=è!!!3
Out[428]= 2
Out[429]=è!!!3
11. Calcule a menor distância entre a parábola y = x2 + 1 e a reta y = x - 2
Rijo Cal 3 Cap 3.nb 11

In[438]:= H∗ A função z =è!!!!!!Hx ∗L
Clear@x, y, fD;
f@x_, y_D :="##################################################################Hx − yL2 + Hx2 + 1 − y + 2L2
In[440]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[440]=2 Hx − yL + 4 x H3 + x2 − yL2"#################################################Hx − yL2 + H3 + x2 − yL2
Out[441]=−2 Hx − yL − 2 H3 + x2 − yL2"#################################################Hx − yL2 + H3 + x2 − yL2
In[442]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<D
Out[442]= 99y →158
, x →12==
In[444]:= f@x, yD ê. 8x → 1ê2, y → 15ê8<
Out[444]=11
4 è!!!2
In[449]:= Show@Plot@8x2 + 1, x − 2<, 8x, −2, 2<, DisplayFunction → IdentityD,ListPlot@881ê2, 5ê4<, 815ê8, −1ê8<<, PlotJoined → True,
PlotStyle −> 8RGBColor@1, 0, 0D<, DisplayFunction → IdentityD,DisplayFunction → $DisplayFunctionD;
-2 -1 1 2
-4
-2
2
4
12 Rijo Cal 3 Cap 3.nb

3.3 Caracterização de máximos e mínimos locais
Teorema. Seja z = f(x, y) uma função contínua, com derivadas contínuas até a terceira ordem, numa vizinhsmçade P0 = Hx0, y0L , onde fx = fy = 0. Então, se o discriminante D = fxy
2 - fxx fyy for negativo e fxx < 0 no pontoP0 (quando teremos também fyy < 0), P0 será um ponto de máximo da função f; se D < 0 e fxx > 0 em P0(quando teremos também fyy < 0), então P0 será então ponto de mínimo. Ao contrário, se D > 0 em P0 , este seráum ponto de sela da função f.
Veja a demostração no GA3, pág. 94.
EXEMPLO 1. (pág. 95)
Determinar os pontos críticos da função f(x, y) = x y (3 - x - y) definida no plano xy.
In[142]:= H∗ A função f Hx, yL = xy H3 − x − yL ∗LClear@x, y, fD;f@x_, y_D := x y H3 − x − yL
In[144]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[144]= −x y + H3 − x − yL yOut[145]= x H3 − x − yL − x y
In[146]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<D
Out[146]= 88x → 0, y → 0<, 8x → 0, y → 3<, 8x → 1, y → 1<, 8x → 3, y → 0<<
In[147]:= H∗ Os valores da função nos pontos críticos ∗Lf@x, yD ê. 8x → 0, y → 0<f@x, yD ê. 8x → 0, y → 3<f@x, yD ê. 8x → 1, y → 1<f@x, yD ê. 8x → 3, y → 0<
Out[147]= 0
Out[148]= 0
Out[149]= 1
Out[150]= 0
Rijo Cal 3 Cap 3.nb 13

In[170]:= H∗ Calculo do discriminante ∗Lfxx = D@f@x, yD, 8x, 2<D;fxy = D@D@f@x, yD, xD, yD;fyy = D@f@x, yD, 8y, 2<D;desc = fxy^2 − fxx fyy
Out[173]= H3 − 2 x − 2 yL2 − 4 x y
In[174]:= H∗ Os valores do discriminante nos pontos críticos ∗Ldesc ê. 8x → 0, y → 0<desc ê. 8x → 0, y → 3<desc ê. 8x → 1, y → 1<desc ê. 8x → 3, y → 0<
Out[174]= 9
Out[175]= 9
Out[176]= −3
Out[177]= 9
Os pontos (0, 0), (0, 3), (3, 0) são pontos de sela. O ponto (1, 1) é um ponto de máximo ou de mínimo da função.
In[179]:= H∗ Teste se o ponto crítico é de máximo ou de mínimo. ∗Lfxx ê. 8x → 1, y → 1<fyy ê. 8x → 1, y → 1<
Out[179]= −2
Out[180]= −2
O ponto (1, 1) é um ponto de máximo da função.
In[195]:= Plot3D@f@x, yD, 8x, −4, 4<, 8y, −4, 4<, PlotRange → 8−200, 200<D;
-4
-2
0
2
4 -4
-2
0
2
4
-200
-100
0
100
200
-4
-2
0
2
EXEMPLO 2. (pág. 98)
Determinar os pontos críticos da função f(x, y) = Hx - 2L2 y + y2 - y no domínio D = x ¥ 0, y ¥ 0, x + y b 4.
14 Rijo Cal 3 Cap 3.nb

In[196]:= H∗ A função f Hx, yL = Hx − 2L2 + y2 − y ∗LClear@x, y, fD;f@x_, y_D := Hx − 2L2 y + y2 − y
In[198]:= H∗ Calculo das derivadas parciais fx e fy ∗Lfx = D@f@x, yD, xDfy = D@f@x, yD, yD
Out[198]= 2 H−2 + xL yOut[199]= −1 + H−2 + xL2 + 2 y
In[200]:= H∗ Determinação dos pontos críticos ∗LSolve@8fx 0, fy 0<, 8x, y<D
Out[200]= 98y → 0, x → 1<, 8y → 0, x → 3<, 9y →12, x → 2==
In[201]:= H∗ Os valores da função nos pontos críticos ∗Lf@x, yD ê. 8x → 1, y → 0<f@x, yD ê. 8x → 3, y → 0<f@x, yD ê. 8x → 2, y → 1ê2<
Out[201]= 0
Out[202]= 0
Out[203]= −14
In[204]:= H∗ Calculo do discriminante ∗Lfxx = D@f@x, yD, 8x, 2<D;fxy = D@D@f@x, yD, xD, yD;fyy = D@f@x, yD, 8y, 2<D;desc = fxy^2 − fxx fyy
Out[207]= 4 H−2 + xL2 − 4 y
In[208]:= H∗ Os valores do discriminante nos pontos críticos ∗Ldesc ê. 8x → 2, y → 1ê2<
Out[208]= −2
O ponto (2, 1/2) é um ponto de máximo ou de mínimo da função.
In[209]:= H∗ Teste se o ponto crítico é de máximo ou de mínimo. ∗Lfxx ê. 8x → 1, y → 1<fyy ê. 8x → 1, y → 1<
Out[209]= 2
Out[210]= 2
Como fyy > 0, o ponto (2, 1/2) é um ponto de mínimo da função.
Rijo Cal 3 Cap 3.nb 15

3.4 Método dos multiplicadores de Lagrange.
Em muitas aplicações o problema de achar os extremos de uma função f(x, y, z) apresenta-se sujeito a certas condições, por exemplo g(x, y, z) = 0, nas variáveis independentes. Estas condições são chamadas vínculos e o problema correspondente é um problema de extremos vinculados ou extremos condicionados.
EXEMPLO 1. (pág. 98)
Determinar o paralelepípedo retângulo de maior volume cujos vertices jazem no elipsóide de equação x2 ê a2 + y2 ê b2 + z2 ê c2 = 1.
In[311]:= Clear@x, y, zD;f@x_, y_, z_D := 8 x y z
In[313]:= Clear@x, y, gD;g@x_, y_, z_D := x2 êa2 + y2 ê b2 + z2 êc2 − 1
In[315]:= dfdx = D@f@x, y, zD, xD;dfdy = D@f@x, y, zD, yD;dfdz = D@f@x, y, zD, zD;dgdx = D@g@x, y, zD, xD;dgdy = D@g@x, y, zD, yD;dgdz = D@g@x, y, zD, zD;
16 Rijo Cal 3 Cap 3.nb

In[321]:= Solve@8dfdx − λ dgdx 0, dfdy − λ dgdy 0,dfdz − λ dgdz 0, g@x, y, zD 0<, 8x, y, z, λ<D
Out[321]= 98λ → 0, x → 0, y → 0, z → −c<, 8λ → 0, x → 0, y → 0, z → c<,8λ → 0, x → 0, y → −b, z → 0<, 8λ → 0, x → 0, y → b, z → 0<,8λ → 0, x → −a, y → 0, z → 0<, 8λ → 0, x → a, y → 0, z → 0<,9λ → −
4 a b cè!!!3
, x → −aè!!!3
, y → −bè!!!3
, z → −cè!!!3
=,
9λ → −4 a b cè!!!3
, x → −aè!!!3
, y →bè!!!3
, z →cè!!!3
=,
9λ → −4 a b cè!!!3
, x →aè!!!3
, y → −bè!!!3
, z →cè!!!3
=,
9λ → −4 a b cè!!!3
, x →aè!!!3
, y →bè!!!3
, z → −cè!!!3
=,
9λ →4 a b cè!!!3
, x → −aè!!!3
, y → −bè!!!3
, z →cè!!!3
=,
9λ →4 a b cè!!!3
, x → −aè!!!3
, y →bè!!!3
, z → −cè!!!3
=,
9λ →4 a b cè!!!3
, x →aè!!!3
, y → −bè!!!3
, z → −cè!!!3
=,
9λ →4 a b cè!!!3
, x →aè!!!3
, y →bè!!!3
, z →cè!!!3
==
In[322]:= f@x, y, zD ê. 9x →a
è!!!!3
, y →b
è!!!!3
, z →c
è!!!!3=
Out[322]=8 a b c3 è!!!3
EXEMPLO 2. (pág. 98)
Encontrar a menor distância da origem à curva y = x3 + 1.
In[336]:= Clear@x, y, fD;f@x_, y_D := x2 + y2
In[348]:= Clear@x, y, gD;g@x_, y_D := y − x3 − 1
In[350]:= dfdx = D@f@x, yD, xD;dfdy = D@f@x, yD, yD;dgdx = D@g@x, yD, xD;dgdy = D@g@x, yD, yD;
In[357]:= Solve@8dfdx − λ dgdx 0, dfdy − λ dgdy 0, g@x, yD 0<, 8x, y, λ<D êê N
Out[357]= 88y → −0.175865 − 0.259309 ,λ → −0.351731 − 0.518618 , x → 0.597146 − 0.880478 <,8y → −0.175865 + 0.259309 , λ → −0.351731 + 0.518618 ,x → 0.597146 + 0.880478 <, 8y → 0.393875, λ → 0.787749, x → −0.846293<,8y → 0.957856, λ → 1.91571, x → −0.347999<, 8λ → 2., y → 1., x → 0.<<
Rijo Cal 3 Cap 3.nb 17

In[359]:= f@x, yD ê. 8y → 1., x → 0.<f@x, yD ê. 8y → 0.787749, x → −0.846293<f@x, yD ê. 8y → 0.957856, x → −0.347999<
Out[359]= 1.
Out[360]= 1.33676
Out[361]= 1.03859
In[366]:= Plot@x3 + 1, 8x, −1, 1<, PlotRange → 80, 2<D;
-1 -0.5 0.5 1
0.25
0.5
0.75
1
1.25
1.5
1.75
2
EXEMPLO 3. (pág. 102)
Calcular a distância mínima da origem à curva g(x, y) = H1 - xL3 + y2 , x r 1.
In[369]:= Clear@x, y, fD;f@x_, y_D := x2 + y2
In[371]:= Clear@x, y, gD;g@x_, y_D := H1 − xL3 + y2
In[373]:= dfdx = D@f@x, yD, xD;dfdy = D@f@x, yD, yD;dgdx = D@g@x, yD, xD;dgdy = D@g@x, yD, yD;
In[377]:= Solve@8dfdx − λ dgdx 0, dfdy − λ dgdy 0, g@x, yD 0<, 8x, y, λ<D
Out[377]= 99y → −13$%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%2
3I7 − è!!!5 M , λ → 1, x →
13I2 + è!!!5 M=,
9y →13$%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%2
3I7 − è!!!5 M , λ → 1, x →
13I2 + è!!!5 M=,
9y → −13$%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%2
3I7 + è!!!5 M , λ → 1, x →
13I2 − è!!!5 M=,
9y →13$%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%2
3I7 +
è!!!5 M , λ → 1, x →13I2 −
è!!!5 M==
18 Rijo Cal 3 Cap 3.nb

In[299]:= dfdx = D@f@x, y, zD, xD;dfdy = D@f@x, y, zD, yD;dfdz = D@f@x, y, zD, zD;dgdx = D@g@x, y, zD, xD;dgdy = D@g@x, y, zD, yD;dgdz = D@g@x, y, zD, zD;
In[305]:= Solve@8dfdx − λ dgdx 0, dfdy − λ dgdy 0,dfdz − λ dgdz 0, g@x, y, zD 0<, 8x, y, z, λ<D
Out[305]= 98λ → 1, z → 2, x → 0, y → 0<, 9λ →1è!!!3
, z → 1, x → −1, y → 1=,
9λ →1è!!!3
, z → 1, x → 1, y → −1=, 9λ → è!!!5, z → −1, x → − è!!!3 , y → − è!!!3 =,
9λ → è!!!5, z → −1, x → è!!!3 , y → è!!!3 ==
In[306]:= f@x, y, zD ê. 8x → 0, y → 0, z → 2<f@x, y, zD ê. 8x → −1, y → 1, z → 1<f@x, y, zD ê. 8x → 1, y → −1, z → 1<
Out[306]= 2
Out[307]=è!!!3
Out[308]=è!!!3
Rijo Cal 3 Cap 3.nb 19

3.5 Extensão do método dos multiplicadores de Lagrange.
O método dos multiplicadores de Lagrange se estende a funções de várias variáveis e aos casos em que vários vínculos devem ser considerados simultaneamemte.
Consideremos uma função f Hx1, x2, . . ., xnL , cujos pontos esrtacionáriosse desejam encontrar, sujeitos a r víncu-los (r < n) dados pelas equações
g1Hx1, x2, . . ., xnL = 0,
g2Hx1, x2, . . ., xnL = 0,
. . . . . . . . . . . . . . . . . . .
grHx1, x2, . . ., xnL = 0,
Para isso introduzimos os parâmetros l1 , l1 , . . ., lr e formemos a função de n + r variáveis
F(x1, x2, . . ., xn ; l1 , l1 , . . ., lr ) = f - l1 g1 - l1 g1 - . . . - lr gr .
Em seguida determinamos seus pontos estacionários, rersolvendo as n + r equações
∑FÅÅÅÅÅÅÅÅ∑xi = 0, i = 1, 2, . . . n; gi = 0, j = 1, 2, . . . ,r.
. .
20 Rijo Cal 3 Cap 3.nb

CAPÍTULO 4
Funções Implícitas e TransformaçõesIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
4.1 Funções implícitas de uma variável
Teorema das Funções Implícitas. Seja F(x, y) uma função com derivadas Fx e Fy contínuas num domínio abertoD. Suponhamos que F se anula num ponto P0 = Hx0, y0L de D, onde Fy ∫ 0. Então existe um retângulo
R : x0 - d < x < x0 + d, y0 - m < y < y0 + u,
todo contido em D, e uma única função f, com domínio
Vd = 8x : x0 - d < x < x0 + d<, tal que Hx, f HxLL œ R e FHx, f HxLL = 0 para todo x0 œ Vd . Além disso, f é derivável e
f ´HxL = -FxÅÅÅÅÅÅÅÅFy
(4.1)
EXEMPLO 1. (pág. 108)
A equação FHx, yL = x2 + y2 - 1 = 0 está satisfeita em todos os pontos da circunferência de centro na origem e raio 1. A condição Fy = 2 y ∫ 0 também está satisfeita em todos os pontos dessa circunferência, exceto em A≤ = H≤1, 0L. Então, numa vizinhança de cada ponto P0 ∫ A≤ , a equação define y0 = f HxL , com derivada
f ´HxL = -FxÅÅÅÅÅÅÅÅFy
= -xÅÅÅÅÅy .
Se a função F(x, y) tiver derivadas segundas contínuas, a Eq. 4.1 nos mostra que f ´será derivável. Para calcularf ´´tanto podemos derivar essa equação ou sua equivalente, a identidade
FxHx, f HxLL + FyHx, f HxLL f ´HxL = 0.
Derivando esta identidade, obtemos
Fxx + Fxy f ` + Fyx f ´ + Fyy f ´2 + Fy f ´´ = 0.
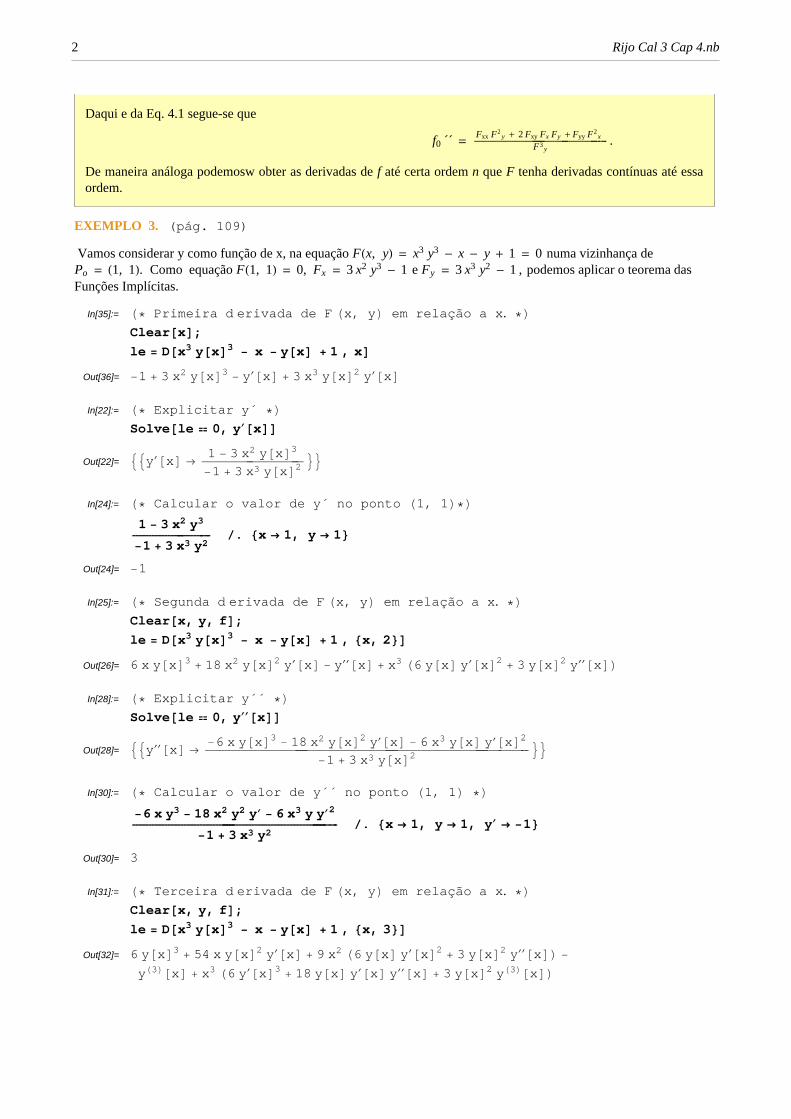
Daqui e da Eq. 4.1 segue-se que
f0 ´´ = Fxx F2y + 2 Fxy Fx Fy + Fyy F2
xÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅF3 y.
De maneira análoga podemosw obter as derivadas de f até certa ordem n que F tenha derivadas contínuas até essaordem.
EXEMPLO 3. (pág. 109)
Vamos considerar y como função de x, na equação FHx, yL = x3 y3 - x - y + 1 = 0 numa vizinhança de Po = H1, 1L. Como equação FH1, 1L = 0, Fx = 3 x2 y3 - 1 e Fy = 3 x3 y2 - 1 , podemos aplicar o teorema das Funções Implícitas.
In[35]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@xD;le = D@x3 y@xD3 − x − y@xD + 1 , xD
Out[36]= −1 + 3 x2 y@xD3 − y @xD + 3 x3 y@xD2 y @xD
In[22]:= H∗ Explicitar y´ ∗LSolve@le 0, y @xDD
Out[22]= 99y @xD →1 − 3 x2 y@xD3
−1 + 3 x3 y@xD2 ==
In[24]:= H∗ Calcular o valor de y´ no ponto H1, 1L∗L1 − 3 x2 y3
−1 + 3 x3 y2ê. 8x → 1, y → 1<
Out[24]= −1
In[25]:= H∗ Segunda d erivada de F Hx, yL em relação a x. ∗LClear@x, y, fD;le = D@x3 y@xD3 − x − y@xD + 1 , 8x, 2<D
Out[26]= 6 x y@xD3 + 18 x2 y@xD2 y @xD − y @xD + x3 H6 y@xD y @xD2 + 3 y@xD2 y @xDL
In[28]:= H∗ Explicitar y´´ ∗LSolve@le 0, y @xDD
Out[28]= 99y @xD →−6 x y@xD3 − 18 x2 y@xD2 y @xD − 6 x3 y@xD y @xD2
−1 + 3 x3 y@xD2 ==
In[30]:= H∗ Calcular o valor de y´´ no ponto H1, 1L ∗L−6 x y3 − 18 x2 y2 y − 6 x3 y y 2
−1 + 3 x3 y2ê. 8x → 1, y → 1, y → −1<
Out[30]= 3
In[31]:= H∗ Terceira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, fD;le = D@x3 y@xD3 − x − y@xD + 1 , 8x, 3<D
Out[32]= 6 y@xD3 + 54 x y@xD2 y @xD + 9 x2 H6 y@xD y @xD2 + 3 y@xD2 y @xDL −
yH3L@xD + x3 H6 y @xD3 + 18 y@xD y @xD y @xD + 3 y@xD2 yH3L@xDL
2 Rijo Cal 3 Cap 4.nb

In[33]:= H∗ Explicitar yH3L ∗LSolve@le 0, yH3L@xDD
Out[33]= 99yH3L@xD →1
−1 + 3 x3 y@xD2 H−6 y@xD3 − 54 x y@xD2 y @xD − 6 x3 y @xD3 −
18 x3 y@xD y @xD y @xD − 9 x2 H6 y@xD y @xD2 + 3 y@xD2 y @xDLL==
In[34]:=
H∗ Calcular o valor de yH3L no ponto H1, 1L ∗L−6 y3 − 54 x y2 y − 6 x3 y 3 − 18 x3 y y y − 9 x2 H6 y y 2 + 3 y2 y L
−1 + 3 x3 y2ê.
8x → 1, y → 1, y → −1, y → 3<
Out[34]= −272
Estes valores nos permitem escrever o polinômio de Taylor de terceiro grau da função y = f HxL relativo ao ponto x = 1.
p3 = 1 - Hx - 1L + 3ÅÅÅÅ2 Hx - 1L2 - 11ÅÅÅÅÅÅÅ4 Hx - 1L3.
Exercícios (pág. 60)
Nos Exercícios 1 a 7, desenvolver a Fórmula de Taylor de cada função, no ponto indicado, até os termos de terceira ordem.
1. f(x, y) = exy , P0 = (1, -1)
In[28]:= H∗ A função f Hx, yL = exy. ∗LClear@x, y, fD;f@x_, y_D := Exp@x yD
Rijo Cal 3 Cap 4.nb 3

4.2 Funçâo implícita de várias variáveis
Do mesmo modo que uma equação FHx, yL = 0 pode determinar uma das variáveis como função da outra,também uma equação envolvendo três ou mais variáveis determina, sob certa condições, uma das variáveis comofun;cão das outras. Assim, se FHx0, y0, z0L = 0 e se as derivadas parciais Fx , Fy , Fz são funções contínuas emtodo um conjunto aberto D, contendo o ponto P0 = Hx0, y0, z0L , onde Fz ∫ 0, então a equação FHx, y, z L = 0de-termina uma função z = f Hx, yL , definida numa vizinhança V conveniente do ponto Hx0, y0L em 2 , tal que,para Hx, yL em V Hx, y, f Hx, yLL está em D e
FHx, y, f Hx, yLL = 0(4.2)
identicamente. Além disso, f possui derivada parciais fx e fy , que são calculadas por derivação da identidade(4.2), usando a regra da cadeia:
∑ fÅÅÅÅÅÅÅÅ∑x = - FxÅÅÅÅÅÅÅFy e ∑ fÅÅÅÅÅÅÅÅ∑y = - FyÅÅÅÅÅÅÅFx
.
EXEMPLO 1. (pág. 112)
A equação função FHx, y, zL = 2 sen z - x z + y2 - 1 está satisfeita no ponto (1, 1, 0), onde Fz = 1 ∫ 0, logo ela define z como função de x e y numa vizinhança do ponto (1, 1).
In[4]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@2 Sin@z@xDD − x z@xD + y3 − 1 , xD
Out[5]= −z@xD − x z @xD + 2 Cos@z@xDD z @xD
In[3]:= H∗ Explicitar y´ ∗LSolve@le 0, z @xDD
Out[3]= 99z @xD → −z@xD
x − 2 Cos@z@xDD ==
In[9]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@2 Sin@z@yDD − x z@yD + y3 − 1 , yD
Out[10]= 3 y2 − x z @yD + 2 Cos@z@yDD z @yD
In[11]:= H∗ Explicitar y´ ∗LSolve@le 0, z @yDD
Out[11]= 99z @yD →3 y2
x − 2 Cos@z@yDD ==
In[12]:= H∗ Calcular o valor de fx H1, 1L ∗L−
z
x − 2 Cos@zDê. 8x → 1, y → 1, z → 0<
Out[12]= 0
4 Rijo Cal 3 Cap 4.nb

In[13]:= H∗ Calcular o valor de fy H1, 1L ∗L3 y2
x − 2 Cos@zDê. 8x → 1, y → 1, z → 0<
Out[13]= −3
Exercícios (pág. 112)
Nos Exercícios 1 a 6, ache em termos de x , y, z , as derivadas parciais de primeira ordem das funções implícitas z = f Hx, yL , determinadas pelas equações dadas
1. x2 + y2 + z2 = 1
In[14]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@x2 + y2 + z@xD2 , xD
Out[15]= 2 x + 2 z@xD z @xD
In[16]:= H∗ Explicitar y´ ∗LSolve@le 0, z @xDD
Out[16]= 99z @xD → −x
z@xD ==
In[17]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@x2 + y2 + z@yD2 , yD
Out[18]= 2 y + 2 z@yD z @yD
In[19]:= H∗ Explicitar y´ ∗LSolve@le 0, z @yDD
Out[19]= 99z @yD → −y
z@yD ==
Resultado: fx = -x ê z e fy = - y ê z .
2. x yH1 + x + yL - z2 = 0
In[20]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@x y H1 + x + yL − z@xD2 , xD
Out[21]= x y + y H1 + x + yL − 2 z@xD z @xD
In[22]:= H∗ Explicitar y´ ∗LSolve@le 0, z @xDD
Out[22]= 99z @xD →y + 2 x y + y2
2 z@xD ==
Rijo Cal 3 Cap 4.nb 5

In[23]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@x y H1 + x + yL − z@yD2 , yD
Out[24]= x y + x H1 + x + yL − 2 z@yD z @yD
In[25]:= H∗ Explicitar y´ ∗LSolve@le 0, z @yDD
Out[25]= 99z @yD →x + x2 + 2 x y
2 z@yD ==
Resultado: fx = Hy + 2 x y + y2L ê H2 zL e fy = Hx + 2 x y + x2L ê H2 zL .
Resultado: fx = -x ê z e fy = - y ê z .
3. log x y z + ez = 1
In[28]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@Log@x y z@xDD + Exp@z@xDD − 1, xD
Out[29]= z@xD z @xD +y z@xD + x y z @xD
x y z@xD
In[30]:= H∗ Explicitar y´ ∗LSolve@le 0, z @xDD
Out[30]= 99z @xD → −z@xD
x H1 + z@xD z@xDL ==
In[31]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@Log@x y z@yDD + Exp@z@yDD − 1, yD
Out[32]= z@yD z @yD +x z@yD + x y z @yD
x y z@yD
In[33]:= H∗ Explicitar y´ ∗LSolve@le 0, z @yDD
Out[33]= 99z @yD → −z@yD
y H1 + z@yD z@yDL ==
Resultado: fx = - z ê Hx + x z ezL e fy = - z ê Hy + y z ezL .
4. x2 z + y x2 - arc sen z = 0
In[34]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@x2 z@xD + y x2 − ArcSin@z@xDD, xD
Out[35]= 2 x y + 2 x z@xD + x2 z @xD −z @xD
è!!!!!!!!!!!!!!!!!!!!!1 − z@xD2
In[37]:= H∗ Explicitar y´ ∗LSolve@le 0, z @xDD êê Simplify
Out[37]= 99z @xD → −2 x Hy + z@xDL è!!!!!!!!!!!!!!!!!!!!!1 − z@xD2
−1 + x2è!!!!!!!!!!!!!!!!!!!!!1 − z@xD2
==
6 Rijo Cal 3 Cap 4.nb

In[38]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@x2 z@yD + y x2 − ArcSin@z@yDD, yD
Out[39]= x2 + x2 z @yD −z @yD
è!!!!!!!!!!!!!!!!!!!!!1 − z@yD2
In[41]:= H∗ Explicitar y´ ∗LSolve@le 0, z @yDD êê Simplify
Out[41]= 99z @yD →x2
è!!!!!!!!!!!!!!!!!!!!!1 − z@yD2
1 − x2è!!!!!!!!!!!!!!!!!!!!!1 − z@yD2
==
Resultado: fx = - 2 x Hy + z L è!!!!!!!!!!!!!!1 - z2 ë Ix2 è!!!!!!!!!!!!!!1 - z2 - 1M e fx = x2 è!!!!!!!!!!!!!!1 - z2 ë Ix2 è!!!!!!!!!!!!!!1 - z2 - 1M .
Resultado: fx = - z ê Hx + x z ezL e fy = - z ê Hy + y z ezL .
5. x z2 - 3 y z + cos z = 0
In[44]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@x z@xD2 − 3 y z@xD + Cos@z@xDD, xD
Out[45]= z@xD2 − 3 y z @xD − Sin@z@xDD z @xD + 2 x z@xD z @xD
In[48]:= H∗ Explicitar y´ ∗LSolve@le 0, z @xDD êê Simplify
Out[48]= 99z @xD →z@xD2
3 y + Sin@z@xDD − 2 x z@xD ==
In[49]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@x z@yD2 − 3 y z@yD + Cos@z@yDD, yD
Out[50]= −3 z@yD − 3 y z @yD − Sin@z@yDD z @yD + 2 x z@yD z @yD
In[53]:= H∗ Explicitar y´ ∗LSolve@le 0, z @yDD
Out[53]= 99z @yD →3 z@yD
−3 y − Sin@z@yDD + 2 x z@yD ==
Resultado: fx = z2 ê H3 y + sen z - 2 x zL e fx = - 3 z ê H3 y + sen z - 2 x zL .
6. x2 - y2 + z2 = 1
In[54]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@x2 − y2 + z@xD2 − 1, xD
Out[55]= 2 x + 2 z@xD z @xD
In[56]:= H∗ Explicitar y´ ∗LSolve@le 0, z @xDD êê Simplify
Out[56]= 99z @xD → −x
z@xD ==
Rijo Cal 3 Cap 4.nb 7

In[57]:= H∗ Primeira d erivada de F Hx, yL em relação a x. ∗LClear@x, y, zD;le = D@x2 − y2 + z@yD2 − 1, yD
Out[58]= −2 y + 2 z@yD z @yD
In[59]:= H∗ Explicitar y´ ∗LSolve@le 0, z @yDD
Out[59]= 99z @yD →y
z@yD ==
Resultado: fx = - x ê z e fx = y ê z .
4.3 Funçôes implícitas de várias variáveis
Os resultados anteriores se estendem mesmo ao caso em que lidamos com sistema de equações envolvendo váriasvariáveis. Assim, duas equações em várias variáveis,
FHx1, x2, . . . , xnL = 0 e GHx1, x2, . . . , xnL = 0 (4.3)
podem, em geral, ser resolvidas em relação a duas dessas variáveis como função das outras.
Vamos considerar, em seguida, duas equações
FHu, v, x, yL = 0 e GHu, v, x, yL = 0 (4.4)
que desejamos resolver para exprimir, digamos, u e v como função de x e y. Para isso devemos introduuzir odeterminante
J =
ƒƒƒƒƒƒƒƒƒƒƒƒ
∑FÅÅÅÅÅÅÅÅ∑u∑GÅÅÅÅÅÅÅÅ∑u
∑FÅÅÅÅÅÅÅÅ∑v∑GÅÅÅÅÅÅÅÅ∑v
ƒƒƒƒƒƒƒƒƒƒƒƒ = ∑FÅÅÅÅÅÅÅÅ∑u
∑GÅÅÅÅÅÅÅÅ∑v - ∑FÅÅÅÅÅÅÅÅ∑v∑GÅÅÅÅÅÅÅÅ∑u
chamado o jacobiano das funções F e G em relação a u e v. Ele costuma ser indicado pelos símbolos
∑HF, GLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑Hu, vL ou DHF, GLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅDHu, vL
Teorema. Sejam FHu, v, x, yL e GHu, v, x, yL funções contínuas com derivadas contínuas num domínio D de4 . Se as Eqs. (4.4) estão satisfeitas num ponto P0 = Hu0, v0, x0, y0L de D e se nesse ponto o jacobiano édiferente de zero, então existe um único par de funções, u = f Hx, yL e v = g(x, y), definidas numa vizinhança Vconveniente do ponto Q0 = Hx0, y0L em 2 , tal que o ponto H f Hx, yL, gHx, yL, x, yL está em D, o jacobiano J édiferente de zero e
FH f Hx, yL, gHx, yL, x, yL e F(f(x, y), g(x, y), x, y)
identicamente para Hx, yL em V. Além disso, as funções f e g são diferenciáveis e suas derivadas são dadas por
8 Rijo Cal 3 Cap 4.nb

∑ fÅÅÅÅÅÅÅÅ∑x =
ƒƒƒƒƒƒƒƒƒƒƒƒƒ
∑FÅÅÅÅÅÅÅÅ∑v∑GÅÅÅÅÅÅÅÅ∑v
∑FÅÅÅÅÅÅÅÅ∑x∑GÅÅÅÅÅÅÅÅ∑x
ƒƒƒƒƒƒƒƒƒƒƒƒƒÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅJ ∑gÅÅÅÅÅÅÅ∑x = -
ƒƒƒƒƒƒƒƒƒƒƒƒƒ
∑FÅÅÅÅÅÅÅÅ∑u∑GÅÅÅÅÅÅÅÅ∑u
∑FÅÅÅÅÅÅÅÅ∑x∑GÅÅÅÅÅÅÅÅ∑x
ƒƒƒƒƒƒƒƒƒƒƒƒƒÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅJ
∑ fÅÅÅÅÅÅÅÅ∑y =
ƒƒƒƒƒƒƒƒƒƒƒƒƒƒ
∑FÅÅÅÅÅÅÅÅ∑v∑GÅÅÅÅÅÅÅÅ∑v
∑FÅÅÅÅÅÅÅÅ∑y∑GÅÅÅÅÅÅÅÅ∑y
ƒƒƒƒƒƒƒƒƒƒƒƒƒƒÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅJ ∑gÅÅÅÅÅÅÅ∑y = -
ƒƒƒƒƒƒƒƒƒƒƒƒƒƒ
∑FÅÅÅÅÅÅÅÅ∑u∑GÅÅÅÅÅÅÅÅ∑u
∑FÅÅÅÅÅÅÅÅ∑x∑GÅÅÅÅÅÅÅÅ∑y
ƒƒƒƒƒƒƒƒƒƒƒƒƒƒÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅJ
Exercícios (pág. 115)
1. Resolver explicitamente as equações x + y + sen u v = 0 e 3 x + 2 y + u2 + v2 = 0 para obter x e y como funções de u e v.
In[1]:= H∗ Explicitar x e y ∗LClear@x, y, fD;Solve@8x + y + Sin@ u vD 0, 3 x + 2 y + u2 + v2 0<, 8x, y<D
Out[2]= 88x → −u2 − v2 + 2 Sin@u vD, y → u2 + v2 − 3 Sin@u vD<<
2. Determinar as derivadas parciais de primeira ordem de u e v como funções de x e y, definidas implicitamente pela equações x u2 + y2 v = 1 e u v - x2 + y 2 u2 = 0.
In[5]:= H∗ Calcular o jacobiano ∗LClear@x, y, u, vD;f@x_, y_, u_, v_D := x u2 + y2 v2 − 1g@x_, y_, u_, v_D := u v − x2 + y2 u2
In[9]:= j = Det@88D@f@x, y, u, vD, uD, D@g@x, y, u, vD, uD<,8D@f@x, y, u, vD, vD, D@g@x, y, u, vD, vD<<D
Out[9]= 2 u2 x − 2 v2 y2 − 4 u v y4
In[26]:= dfdx = Det@88D@f@x, y, u, vD, vD, D@g@x, y, u, vD, vD<,8D@f@x, y, u, vD, xD, D@g@x, y, u, vD, xD<<Dêj êê Simplify
Out[26]=u3 + 4 v x y2
−2 u2 x + 2 v2 y2 + 4 u v y4
In[25]:= dgdx = −Det@88D@f@x, y, u, vD, uD, D@g@x, y, u, vD, uD<,8D@f@x, y, u, vD, xD, D@g@x, y, u, vD, xD<<Dêj êê Simplify
Out[25]=u Hu v + 4 x2 + 2 u2 y2L2 u2 x − 2 v2 y2 − 4 u v y4
In[24]:= dfdy = Det@88D@f@x, y, u, vD, vD, D@g@x, y, u, vD, vD<,8D@f@x, y, u, vD, yD, D@g@x, y, u, vD, yD<<Dêj êê Simplify
Out[24]=u v y H−v + 2 u y2L
u2 x − v2 y2 − 2 u v y4
Rijo Cal 3 Cap 4.nb 9

In[23]:= dgdy = −Det@88D@f@x, y, u, vD, uD, D@g@x, y, u, vD, uD<,8D@f@x, y, u, vD, yD, D@g@x, y, u, vD, yD<<Dêj êê Simplify
Out[23]=y Hv3 − 2 u3 x + 2 u v2 y2Lu2 x − v2 y2 − 2 u v y4
4.4 Transformações e suas inversas. Transformações lineares
Um sistema de duas funções
u = uHx, yL e v = vHx, yLdefinidas num mesmo domínio D constitui o que chamamos de transformação ou aplicação, visto que cada ponto P = Hx, yL e transformado (aplicado) num outro ponto Q = Hu, vL . Podemos indicar essa aplicação com o símbolo f, escrevendo
f HPL = HuHPL, vHPLL = Q
f : Hx, yL Ø Hu, vL , f : P Ø f HPL ou f : D œ 2 Ø 2
A idéia de aplicação não se restringe apenas ao plano, ele pode ser generalizada para espaços de três ou mais dimensões. Nesse caso, teríamos
f : D œ m Ø n
Uma aplicação desse tipo é também chamada de campo vetorial.
EXEMPLO 1. (pág. 117)
Vamos considerar a transformação f dada pelas equações
z = a x + b y,
w = c x + d y,
onde a, b, c, d são constantes não todas nulas. Esta aplicação tem a interessante propriedade de transformar retas em retas. Por esta razão este tipo de transformação é chamada transformação linear.
Essa transformação linear é inversível se D = a d - b c ∫ 0. Neste caso, teremos
x = Hd z - b wL ê D,
y = Ha w - c zL ê D,
EXEMPLO 2. (pág. 118)
Uma aplicação linear f no espaço 3 é dada pela fórmulas de transformação
u = a1 x + b1 y + c1 z,
v = a2 x + b2 y + c2 z,
w = a3 x + b3 y + c3 z.
Como no exemplo anterior, essa aplicação transforma reta em retas e planos em planos.
10 Rijo Cal 3 Cap 4.nb

Aplicações lineares satisfazem as seguintes propriedades
f Hu + vL = f HuL + f HvL, f Ht uL = t f HuL .
EXEMPLO 3. (pág. 119)
A transformação por reflexão no círculo unitário, também chamada transformação de Kelvin é dada pela fórmulas de transformação
u = x ê Hx2 + y2L e v = y ê Hx2 + y2L Essa transformação f leva o exterior do círculo unitário de centro na origem no seu interior e vice-versa. Ela deixa invariantes os pontos da circunferência desse círculo. Além disso f HPL Ø 0 com P Ø ¶ e f HPL Ø ¶ com P Ø 0.
De forma análoga, a transformação inversa é dada por
x = u ê Hu2 + v2L e y = v ê Hu2 + v2L .
Exercícios (pág. 119)
4. Determine as equações de transformação da aplicação linear f dada por f(1, 1) = (1, 2) e f(-1, 2) = (0, 7)
In[2]:= H∗ Calcular a, b, c, d ∗LSolve@8a + b 1, c + d 2, −a + 2 b == 0, −c + 2 d == 7<, 8a, b, c, d<D
Out[2]= 99a →23, b →
13, c → −1, d → 3==
z = H 2 x + yL ê 3, w = - x + 3 y
In[6]:= H∗ Transformação inversa ∗LSolve@8H2 x + yLê3 == z, −x + 3 y w<, 8x, y<D
Out[6]= 99x → −17Hw − 9 zL, y → −
17H−2 w − 3 zL==
x = H 9 z - wL ê 7, y = H 3 z + 2 wL ê 7
7. Determine as equações de transformação da aplicação linear f : 3 Ø 3 tal que
f(1, 0, 0) = (0, 1, 2), f(1, 1, 0) = (1, 1, 1), f(1, 1, 1) = (2, -1, 1),
In[4]:= H∗ Calcular a, b, c, d ∗LSolve@8a1 0, a2 1, a3 2, a1 + b1 1, a2 + b2 1, a3 + b3 1,
a1 + b1 + c1 2, a2 + b2 + c2 −1, a3 + b3 + c3 1<,8a1, b1, c1, a2, b2, c2, a3, b3, c3<D
Out[4]= 88a1 → 0, b1 → 1, c1 → 1, a2 → 1, b2 → 0, c2 → −2, a3 → 2, b3 → −1, c3 → 0<<
u = y + z, v = x - 2 z, w = 2 x - y.
Rijo Cal 3 Cap 4.nb 11

In[5]:= H∗ Transformação inversa ∗LSolve@8y + z == u, x − 2 z v, 2 x − y w<, 8x, y, z<D
Out[5]= 99x → −15H−2 u − v − 2 wL, y → −
15H−4 u − 2 v + wL, z → −
15H−u + 2 v − wL==
4.5 Mudança de Coordenadas
Teorema: Suponhamos que as funções u = u(x, y) e v = v(x, y) sejam contínuas e tenham derivadas primeira contínuas numa vizinhança V de um ponto Hx0, y0L onde o jacobiano é sempre diferente de zero, isto é,
J0 = ∑Hu, vLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑Hx, yL = ux vy - uy vx ∫ 0 em V.
Então u = u(x, y) e v = v(x, y) podem ser resolvidas, ao menos inplicitamente, e as funções inversas u = u(x, y) e v = v(x, y) são contínuas e possuem derivadas primeirascont;inuas numa vizinhança do ponto Hx0, y0L , onde u0 = uHx0, y0L e v0 = vHx0, y0L . Além disso, as derivadas dessas funções são dadas por
xu = vy ê J , yu = -vx ê J , xv = -uy ê J , yv = ux ê J .
12 Rijo Cal 3 Cap 4.nb

CAPÍTULO 5
Integrais MúltiplasIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
5.1 Integrais que dependem de um parâmetro
Dada a função a função
F(x) = Ÿu1HxL
u2HxLf Hx, yL „ y.
A derivada de F0HxL é dada por
dÅÅÅÅÅÅÅdx Ÿu1HxL
u2HxLf Hx, yL „ y = Ÿu1HxL
u2HxL∑ f Hx, yLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑x „ y + f Hx, u2HxLL u2 ' HxL - f Hx, u1HxLL u1 ' HxL
EXEMPLO 1. Derivar a função
FHxL = Ÿx2
è!!!!x‰-y2
„ y
In[1]:= H∗ Derivada de f HxL ∗Lf@x_D := IntegrateAExp@−y2D, 9y, x2,
è!!!!x =E
D@f@xD, xD êê Simplify
Out[2]=−x
2 è!!!x− 2 −x4
x
EXEMPLO 2. Derivar a função
FHxL = Ÿ0
1logHx2 + y2L „ y

In[3]:= H∗ Derivada de f HxL ∗Lf@x_D := Integrate@Log@x2 + y2D, 8y, 0, 1<DD@f@xD, xD êê Simplify
Out[4]= IfARe@x2D > 0, −2
H1 + 1x2 L x3
−2
I1 + H 1x L
2M x+
2 xx2 + 2 ArcTanA 1
xE,
IntegrateA 2 xx2 + y2 , 8y, 0, 1<, Assumptions → Re@x2D ≤ 0EE
In[27]:= −2
H1 + 1x2 L x3
−2
I1 + H 1xL2M x
+2 x
x2êê Simplify
Out[27]= 0
EXEMPLO 3. Derivar a função
FHxL = Ÿx
è!!!!x‰xy2 ê y „ y
In[5]:= f@x_, y_D := Exp@x y2Dêyu1@x_D := x
u2@x_D :=è!!!!
xIntegrate@D@f@x, yD, xD, 8y, u1@xD, u2@xD<D +
f@x, u2@xDD D@u2@xD, xD − f@x, u1@xDD D@u1@xD, xD êê Simplify
Out[8]=2 x2
− 3 x3
2 x
Exercícios (pág. 60)
Calcule as derivadas das funções dadas nos Exercícios 1 a 13.
1. FHxL = Ÿ1x2
log y „ y
In[57]:= H∗ Derivada de f HxL ∗LClear@x, yD;f@y_D := Log@yDu1@x_D := 1u2@x_D := x2
In[61]:= f@u2@xDD D@u2@xD, xD − f@u1@xDD D@u1@xD, xDOut[61]= 2 x Log@x2D
Calcule as derivadas das funções dadas nos Exercícios 1 a 13.
2. FHxL = Ÿ1‰x
log y „ y
2 Rijo Cal 3 Cap 5.nb

In[62]:= H∗ Derivada de f HxL ∗LClear@x, yD;f@y_D := Log@yDu1@x_D := 1u2@x_D := x
In[66]:= f@u2@xDD D@u2@xD, xD − f@u1@xDD D@u1@xD, xDOut[66]= x Log@ xD
3. FHxL = Ÿ-è!!!x
1 1 êè!!!!!!!!!!!!!!!y2 + 1 „ y
In[68]:= H∗ Derivada de f HxL ∗LClear@x, yD;
f@y_D := 1 ëè!!!!!!!!!!!!!!!y2 + 1
u1@x_D := −è!!!!
xu2@x_D := 1
In[72]:= f@u2@xDD D@u2@xD, xD − f@u1@xDD D@u1@xD, xD
Out[72]=1
2 è!!!x è!!!!!!!!!!!1 + x
4. FHxL = Ÿ-è!!!x
1 y è!!!!!!!!!!!!1 - y „ y
In[73]:= H∗ Derivada de f HxL ∗LClear@x, yD;
f@y_D := y è!!!!!!!!!!!!!
1 − yu1@x_D := xu2@x_D := x2
In[78]:= f@u2@xDD D@u2@xD, xD − f@u1@xDD D@u1@xD, xD êê Simplify
Out[78]= −è!!!!!!!!!!!1 − x x + 2 x3 è!!!!!!!!!!!!!1 − x2
5. FHxL = Ÿ-è!!!x1
‰y „ y
In[84]:= H∗ Derivada de f HxL ∗LClear@x, yD;f@y_D := Sin@1êyDu1@x_D :=
è!!!!x
u2@x_D := x
In[88]:= f@u2@xDD D@u2@xD, xD − f@u1@xDD D@u1@xD, xD êê Simplify
Out[88]= SinA 1xE −
SinA 1è!!!!x E2 è!!!x
6. FHxL = Ÿ-è!!!x1
‰y „ y
Rijo Cal 3 Cap 5.nb 3

In[31]:= H∗ Derivada de f HxL ∗LClear@x, yD;f@y_D := y
u1@x_D := x2
u2@x_D := Log@xDf@u2@xDD D@u2@xD, xD − f@u1@xDD D@u1@xD, xD êê Simplify
Out[35]= 1 − 2 x2x
5.2 Integrais duplas. Áreas e Volume
Seja f Hx, yL uma função definida num domínio D do plano. Vamos supor que ekle seja limitado, de sorte que eleestará todo contido num retângulo
R : a § x § b, c § y § d
A integral dupla da função f Hx, yL é o resultado de se integrar primeiro em y e depois em x:
Ÿ ŸDf Hx, yL „ x „ y = Ÿa
b AŸu1HxL
u2HxLf Hx, yL „ yE „ x
ou primeiro em x e depois em y:
Ÿ ŸDf Hx, yL „ x „ y = Ÿc
d AŸu1HyL
u2HyLf Hx, yL „ xE „ y
EXEMPLO 1. Vamos calcular a integral
Ÿ ŸD
è!!!x cos Iy è!!!x M „ x „ y
onde D é o domínio delineado pelas retas y = 0, x = p/4 e pela curva y = è!!!x .
In[28]:= H∗ O gráfico do domínio D ∗Lp1 = PlotAè!!!!
x , 8x, 0, 1<, DisplayFunction → IdentityE;
p2 = [email protected], LineA98t, 0<, 9t,
è!!!!t ==E=E, 8t, 0, π ê4, .001<E,
DisplayFunction → IdentityE;
Show@8p1, p2, p1<, DisplayFunction → $DisplayFunctionD;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
4 Rijo Cal 3 Cap 5.nb

In[89]:= H∗ Cálculo da integral da função f Hx, yL ∗Lf@x_, y_D :=
è!!!!x CosAy
è!!!!x E
IntegrateAIntegrateAf@x, yD, 9y, 0,è!!!!
x =E, 8x, 0, π ê4<E
Out[90]= 1 −1è!!!2
EXEMPLO 1. Vamos calcular a integral
Ÿ ŸDx è!!!!y „ x „ y
onde D é o domínio delineado pelas retas y = 0, x + y = 2 e e a parábola x = y2 .
In[42]:= H∗ O gráfico do domínio D ∗Lp1 = PlotA9è!!!!
x , 2 − x=, 8x, 0, 2<, DisplayFunction → IdentityE;
p2 = [email protected], LineA98t, 0<, 9t,
è!!!!t ==E=E, 8t, 0, 1, .001<E,
DisplayFunction → IdentityE;
p3 = Show@Table@Graphics@[email protected], Line@88t, 0<, 8t, 2 − t<<D<D, 8t, 1, 2, .001<D,DisplayFunction → IdentityD;
Show@8p1, p2, p3, p1<, DisplayFunction → $DisplayFunctionD;
0.5 1 1.5 2
0.5
1
1.5
2
In[91]:= H∗ Cálculo da integral da função f Hx, yL ∗Lf@x_, y_D := x
è!!!!y
Integrate@Integrate@f@x, yD, 8x, y2, 2 − y<D, 8y, 0, 1<D
Out[92]=676
1155
Rijo Cal 3 Cap 5.nb 5

5.3 Propriedades da integral
A linearidade da integral se expressa através das seguintes equações:
Ÿ ŸDc f Hx, yL „ x „ y = c Ÿ ŸD
f Hx, yL „ x „ y
ou primeiro em x e depois em y:
Ÿ ŸD@ f Hx, yL + gHx, yLD „ x „ y = Ÿ ŸD
f Hx, yL „ x „ y + Ÿ ŸDgHx, yL „ x „ y .
Se D = D1 ‹ D2 , onde D1 e D2 são domínios disjuntos ou se têm em comum um número finito de arcos regulares,então
Ÿ ŸD1 ‹ D2f Hx, yL „ x „ y = Ÿ ŸD1
f Hx, yL „ x „ y + Ÿ ŸD2f Hx, yL „ x „ y
5.4 Mudança de variáveis nas integrais duplas
Seja a integral
Ÿ ŸDf Hx, yL „ x „ y.
Vamos supor que o domínio D do plano x, y seja transformado num domínio D ' do plano u, v por uma aplicaçãobiunívoca dada pela equações de transformação
x = xHu, vL e y = yHu, vLSupomos ainda que essas funções sejam contínuas, com derivadas contínuas e jacobiano diferente de zero em D '.
J = ∑Hx, yLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑Hu, vL =
ƒƒƒƒƒƒƒƒƒƒƒƒ
∑xÅÅÅÅÅÅÅ∑u∑yÅÅÅÅÅÅÅ∑u
∑xÅÅÅÅÅÅÅ∑v∑yÅÅÅÅÅÅÅ∑v
ƒƒƒƒƒƒƒƒƒƒƒƒ∫ 0
Ÿ ŸDf Hx, yL „ x „ y = Ÿ ŸD '
f Hx@u, vL, yHu, vLL À J À „ u „ v
EXEMPLO 1. Vamos calcular a integral
Ÿ ŸD
è!!!!!!!!!!!!!!!!!x2 + y2 „ x „ y
onde D é o círculo x2 + y2 § R .
In[76]:= f@x_, y_D :=è!!!!!!!!!!!!!!!!!
x2 + y2
6 Rijo Cal 3 Cap 5.nb

In[69]:= Clear@x, y, r, θD;x = r Cos@θD;y = r Sin@θD;
In[83]:= jacobiano = Det@88D@x, rD, D@y, rD<, 8D@x, θD, D@y, θD<<D êê Simplify
Out[83]= r
In[84]:= H∗ Cálculo da integral da função f Hx, yL ∗LIntegrate@Integrate@f@x, yD Abs@jacobianoD, 8r, 0, R<D, 8θ, 0, 2 π<D
Out[84]=23
π HR2L3ê2
EXEMPLO 2. Vamos calcular a integral
Ÿ ŸDI x2
ÅÅÅÅÅÅÅa2 + y2ÅÅÅÅÅÅÅb2 M „ x „ y
onde D = 9Hx, yL : x2ÅÅÅÅÅÅÅa2 + y2
ÅÅÅÅÅÅÅb2 § 1= .
In[85]:= f@x_, y_D := x2 êa2 + y2 ê b2
In[86]:= Clear@x, y, r, θD;x = a u;y = b v;
In[90]:= f@x, yDOut[90]= u2 + v2
In[91]:= Clear@u, v, r, θD;u = r Cos@θD;v = r Sin@θD;
In[94]:= jacobiano = Det@88D@u, rD, D@v, rD<, 8D@u, θD, D@v, θD<<D êê Simplify
Out[94]= r
In[96]:= H∗ Cálculo da integral da função f Hx, yL ∗La b Integrate@Integrate@f@x, yD Abs@jacobianoD, 8r, 0, 1<D, 8θ, 0, 2 π<D
Out[96]=a b π
2
EXEMPLO 3. Vamos calcular a integral
Ÿ ŸDÀ Hx + yL Hx - yL À „ x „ y
ondeD = 8Hx, yL : » x » + » y » § 1<
In[110]:= f@x_, y_D :="#######################################HHx + yL Hx − yLL2
In[111]:= Clear@x, y, u, vD;x = Hu + vLê2;y = Hu − vLê2;
Rijo Cal 3 Cap 5.nb 7

In[114]:= jacobiano = Det@88D@x, uD, D@y, uD<, 8D@x, vD, D@y, vD<<D êê Simplify
Out[114]= −12
In[119]:= H∗ Cálculo da integral da função f Hx, yL ∗LIntegrate@
Integrate@Evaluate@f@x, yDD Abs@jacobianoD, 8u, −1, 1<D, 8v, −1, 1<D
Out[119]=12
5.5 Integrais impróprias
5.6 Integrais triplas
O cálculo de uma integral tripla, em geral, é efetuado por redução a uma integral simples, seguida de uma inte-gração dupla. Por exemplo, vamos considerar um domínio D, cuja fronteira seja constituída de duas superfícies
z = g1Hx, yL e z = g2Hx, yLonde g1 e g2 são definidas no mesmo domínio D do plano x, y, g1Hx, yL § g2Hx, yL . Então
Ÿ Ÿ ŸDf Hx, y, zL „ x „ y „ z = Ÿ ŸR
„ x „ yŸg1HxL
ug2HxLf Hx, y, zL „ z
EXEMPLO 1. Vamos usar a integração tripla para calcular o volume do sólido D, delineado pelos parabolóides
z = x2 + y2 e z = 12 - x2 - 3 y2.
8 Rijo Cal 3 Cap 5.nb

In[210]:= p1 = Plot3D@x2 + y2, 8x, −3, 3<, 8y, −3, 3<,BoxRatios → 81, 1, 1<, DisplayFunction → IdentityD;
p2 = Plot3D@12 − x2 − 3 y2, 8x, −3, 3<, 8y, −3, 3<,BoxRatios → 81, 1, 1<, DisplayFunction → IdentityD;
Show@8p1, p2<, DisplayFunction → $DisplayFunctionD;
-2
0
2
-2
0
2
-20
-10
0
10
-2
0
2
-2
0
2
In[154]:= H∗ Interseção dos dois parabolóides ∗Lx2 + y2 − 12 + x2 + 3 y2 0 êê Simplify
Out[154]= x2 + 2 y2 6
In[157]:= Solve@2 y2 6, yDOut[157]= 99y → −
è!!!3 =, 9y →è!!!3 ==
In[161]:= H∗ Cálculo da integral da função f Hx, y, zL = 1 em D ∗LClear@x, y, zD;f@x_, y_, z_D := 1IntegrateAIntegrateAIntegrate@f@x, y, zD, 8z, x2 + y2, 12 − x2 − 3 y2<D,
9x, −è!!!!!!!!!!!!!!!!
6 − 2 y2 ,è!!!!!!!!!!!!!!!!
6 − 2 y2 =E, 9y, −è!!!!
3 ,è!!!!
3 =E
Out[163]= 18 è!!!2 π
1. ‡0
πê2
x ‡0
x
y ‡0
y
cos Hx + y + zL z
Exercícios (pág. 60)
Calcule as integrais repetidas nos Exercícios 1 a 5.
Rijo Cal 3 Cap 5.nb 9

1. ‡0
πê2
x ‡0
x
y ‡0
y
cos Hx + y + zL z
In[164]:= H∗ Derivada de f HxL ∗LClear@x, y, zD;Integrate@
Integrate@Integrate@Cos@x + y + zD, 8z, 0, y<D, 8y, 0, x<D, 8x, 0, π ê2<D
Out[165]= −13
2. ‡0
πê2
y ‡0
y
z ‡0
z
sen Hx + y + zL z
In[168]:= H∗ Derivada de f HxL ∗LClear@x, y, zD;Integrate@
Integrate@Integrate@Sin@x + y + zD, 8x, 0, z<D, 8z, 0, y<D, 8y, 0, π ê2<D
Out[169]=13
3. ‡0
1
x ‡0
x
y ‡0
y yx
z
In[177]:= H∗ Derivada de f HxL ∗LClear@x, y, zD;Integrate@Integrate@Integrate@ y êx, 8z, 0, y<D, 8y, 0, x<D, 8x, 0, 1<D
Out[178]=19
4. ‡0
π
z ‡0
z
y ‡0
yz
cos Hxêy L x
In[183]:= H∗ Derivada de f HxL ∗LClear@x, y, zD;Integrate@
Integrate@Integrate@ Cos@xêyD, 8x, 0, y z<D, 8y, 0, z<D, 8z, 0, π<D
Out[184]=12H−4 + π2L
5. ‡0
πê4
z ‡z
2 z
y ‡y
Cos@yDx x
In[189]:= H∗ Derivada de f HxL ∗LClear@x, y, zD;Integrate@
Integrate@Integrate@ x, 8x, Cos@yD, y <D, 8y, z, 2 z<D, 8z, 0, π ê4<D
Out[190]=π2 H−48 + 7 π2L
6144
10 Rijo Cal 3 Cap 5.nb

5.7 Mudanças de variáveis
O problema de mudança de variáveis numa integral tripla é inteiramente análogo ao mesmo problema, já tratadono caso das integrais duplas.
Seja a integral
Ÿ Ÿ ŸDf Hx, yL „ x „ y.
Vamos supor que o domínio D do espaço x, y, z seja transformado num domínio D ' do espaço u, v, w por umaaplicação biunívoca dada pela equações de transformação
x = xHu, v, wL , y = yHu, v, wL , z = z (u, v, w)
Supomos ainda que essas funções sejam contínuas, com derivadas contínuas e jacobiano diferente de zero em D '.
J = ∑Hu, v, wLÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅÅ∑Hx, y, zL =
ƒƒƒƒƒƒƒƒƒƒƒƒƒƒƒƒƒƒƒƒ
∑xÅÅÅÅÅÅÅ∑u∑xÅÅÅÅÅÅÅ∑v
∑xÅÅÅÅÅÅÅÅ∑w∑yÅÅÅÅÅÅÅ∑u
∑yÅÅÅÅÅÅÅ∑v∑yÅÅÅÅÅÅÅÅ∑w
∑zÅÅÅÅÅÅÅ∑u∑zÅÅÅÅÅÅÅ∑v
∑zÅÅÅÅÅÅÅÅ∑w
ƒƒƒƒƒƒƒƒƒƒƒƒƒƒƒƒƒƒƒƒ
∫ 0
Ÿ Ÿ ŸDf Hx, yL „ x „ y = Ÿ Ÿ ŸD '
f Hx@u, v, wL, yHu, v, wL, zHu, v, wLL À J À „ u „ v „ w
Coordenadas cilíndricaIn[191]:= x = r Cos@θD;
y = r Sin@θD;z = z;
In[195]:= jacobiano = Det@88D@x, rD, D@x, θD, D@x, zD<, 8D@y, rD, D@y, θD, D@y, zD<,8D@z, rD, D@z, θD, D@z, zD<<D êê Simplify
Out[195]= r
Coordenadas esféricasIn[197]:= Clear@x, y, z, r, θ, φD;
x = r Sin@θD Cos@φD;y = r Sin@θD Sin@φD;z = r Cos@θD;
In[202]:= jacobiano = Det@88D@x, rD, D@x, θD, D@x, φD<, 8D@y, rD, D@y, θD, D@y, φD<,8D@z, rD, D@z, θD, D@z, φD<<D êê Simplify
Out[202]= r2 Sin@θD
EXEMPLO 1. Calculo da massa de um cilindro contido num cilindro circular reto de raio R e altuta h, supondo que a densidade de massa r = r0 r 0nde r0 é uma constante e r é a distância ao eixo do cilindro.
Rijo Cal 3 Cap 5.nb 11

In[214]:= << Graphics`Shapes`
In[215]:= Show@Graphics3D@Cylinder@DDD;
In[208]:= Clear@r, θ, zD;Integrate@Integrate@Integrate@ρ0 r2, 8z, 0, h<D, 8r, 0, R<D, 8θ, 0, 2 π<D
Out[209]=23
h π R3 ρ0
12 Rijo Cal 3 Cap 5.nb

CAPÍTULO 6
Integrais de LinhaIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
6.1 Arcos e Regiões
Um arco de curva ou caminho no espaço é uma aplicação de I Õ em 3 especificada por três equaçõesparamétricas
x = x HtL, y = y HtL, z = z HtL.Um arco C(t) = x HtL i + y HtL j + z HtL k é contínuo se as funções paramétricas forem contínuas.
Um arco é dito liso ou regular se C ' (t) = x ' HtL i + y ' HtL j + z ' HtL k ∫ 0. Um arco é seccionalmente regular sesuas funções paramétricas forem contínuas no intervalo de definição, porém cujas derivadas sejam seccionalmentecontínuas nesse intervalo.
A representação paramétrica de um arco C(t), a § t § b ordena os pontos de C de acordo com os valorescrescentes de t, de sorte que C é um conjunto ordenado ou orientado. A orientação é direta ou positiva quando tcresce de a a b, a orientação é oposta ou negativa quando t decresce de b a a. Os pontos C(a) e C(b) são chamadosa origem e a extremidade de C, respectivamente. Diz-se que um arco é simples quando t1 ∫ t2 fl CHt1L ∫ CHt2L .Diz-se que o arco é fechado quando suas extremidades são coincidentes: C(a) = C(b). O arco é fechado simples setodos os seus pontos, à exceção das extremidades, forem simples. Um arco fechado simples é chamado decontorno.
Um conjunto aberto é todo conjunto cujos pontos são interiores, nenhum deles pertencem à sua fronteira. Diz-seque um conjunto aberto é conexo se quaisquer dois de seus pontos podem ser ligados por uma linha poligonal todacontida no conjunto.
Chamanos região a todo conjunto aberto e conexo. É comum indicar a fronteira de um conjunto qualquer A com osímpolo ∑A. Dada um região R, chamamos região fechada Rêêê ao conjunto R ‹ ∑R, que se obtém juntando-se a Ros pontos de sua fronteira.

Uma região R é simplesmente conexa se qualquer curva (arco, caminho) fechada em R pode ser deformada comcontinuidade até reduzir-se a um ponto sem sair de R.
Exercícios
Identifique os arcos nos Exercícios 1 a 12, faça gráficosa e indique suas orientações
1. P(t) = t i + H1 - tL j , 0 § t § 1
In[228]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := ty@t_D := 1 − tParametricPlot@8x@tD, y@tD<, 8t, 0, 1<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
2. P(t) = 2 t i + t2 j , -1 § t § 0
In[232]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := 2 ty@t_D := t2
ParametricPlot@8x@tD, y@tD<, 8t, −1, 0<D;
-2 -1.5 -1 -0.5
0.2
0.4
0.6
0.8
1
3. P(t) = Ht2 + 1L i + 3 t j , -1 § t § 1
2 Rijo Cal 3 Cap 6.nb

In[236]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := t2 + 1y@t_D := −3 tParametricPlot@8x@tD, y@tD<, 8t, −1, 1<D;
1.2 1.4 1.6 1.8 2
-3
-2
-1
1
2
3
4. P(t) = t i + 2 t j + H1 - tL k , 0 § t § 2
In[240]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, z, tD;x@t_D := ty@t_D := 2 tz@t_D := 1 − tParametricPlot3D@8x@tD, y@tD, z@tD<, 8t, 0, 2<D;
00.5
11.5
2
0
1
2
3
4
-1
-0.5
0
0.5
1
00.5
11 5
1
2
3
4
5. P(t) = cos t i + sen t j + t k , 0 § t § 2p
Rijo Cal 3 Cap 6.nb 3

In[245]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, z, tD;x@t_D := Cos@tDy@t_D := Sin@tDz@t_D := tParametricPlot3D@8x@tD, y@tD, z@tD<, 8t, 0, 2 π<D;
-1-0.50 0.5 1
-1-0.5
00.5
1
0
2
4
6
500.5
1
6. P(t) = sen t i - cos t j - 2 t k , 0 § t § p
4 Rijo Cal 3 Cap 6.nb

In[250]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, z, tD;x@t_D := Sin@tDy@t_D := −Cos@tDz@t_D := −2 tParametricPlot3D@8x@tD, y@tD, z@tD<, 8t, 0, π<D;
00.250.50.751
-1-0.500.51
-6
-4
-2
0
7. P(t) = 1 ê t i + t j , 1 § t § ¶
In[253]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := 1êty@t_D := tParametricPlot@8x@tD, y@tD<, 8t, 0, 70<, PlotRange → 80, 10<D;
0.5 1 1.5 2 2.5 3
2
4
6
8
10
8. P(t) = t i + 2 ê t j , ¶ § t § 0
Rijo Cal 3 Cap 6.nb 5

In[269]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := ty@t_D := 2êtParametricPlot@8x@tD, y@tD<, 8t, 0, 2<, PlotRange → 80, 40<D;
0.5 1 1.5 2
510152025303540
9. P(t) = t i +è!!!!!!!!!!!!!!!1 - t2 j , -1 § t § 1
In[263]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := t
y@t_D :=è!!!!!!!!!!!!!!!!
1 − t2
ParametricPlot@8x@tD, y@tD<, 8t, −1, 1<D;
-1 -0.5 0.5 1
0.2
0.4
0.6
0.8
1
10. P(t) = t i -è!!!!!!!!!!!!!!!1 - t2 j , -1 § t § 1
In[267]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := t
y@t_D := −è!!!!!!!!!!!!!!!!
1 − t2
ParametricPlot@8x@tD, y@tD<, 8t, −1, 1<D;
-1 -0.5 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
6 Rijo Cal 3 Cap 6.nb

11. P(t) = è!!!!!!!!!!!!!!!1 - t2 i + t j , -1 § t § 1
In[271]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;
x@t_D :=è!!!!!!!!!!!!!!!!
1 − t2
y@t_D := tParametricPlot@8x@tD, y@tD<, 8t, −1, 1<D;
0.2 0.4 0.6 0.8 1
-1
-0.5
0.5
1
12. P(t) = -cos i + sen t j , 0 § t § p/2;
P(t) = Ht - p ê 2L j , p/2 § t § 1 + p/2;
P(t) = Ht - 1 - p ê 2L i + (2 - t + p/2) j , 1+p/2 § t § 2 + p/2;
In[179]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := − Cos@tD ê; 0 ≤ t ≤ π ê2y@t_D := Sin@tD ê; 0 ≤ t ≤ π ê2x@t_D := 0 ê; π ê2 ≤ t ≤ 1 + π ê2y@t_D := t − π ê2 ê; π ê2 ≤ t ≤ 1 + π ê2x@t_D := t − 1 − π ê2 ê; 1 + π ê2 ≤ t ≤ 2 + π ê2y@t_D := 2 − t + π ê2 ê; 1 + π ê2 ≤ t ≤ 2 + π ê2ParametricPlot@8x@tD, y@tD<,8t, 0, 2 + π ê2<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
-1 -0.5 0.5 1
0.2
0.4
0.6
0.8
1
11. P(t) = t i + t 3 j + sen 1 ê t k , 0 < t § 1
Rijo Cal 3 Cap 6.nb 7

In[280]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := ty@t_D := t3
z@tD := Sin@1êtDParametricPlot3D@8x@tD, y@tD, z@tD<, 8t, 0, 1<D;
0 0.250.50.75 1
00.25
0.50.75
1
-2
-1.5
-1
-0.5
000.25
0.50.75
In[209]:= H∗ Limite do arco P' HtL no ponto t = 0 ∗LLimit@x'@tD, t → 0DLimit@y'@tD, t → 0D
Out[209]= 1
Out[210]= 0
O arco dado é regular.
11. P(t) = t i + t 2 sen 1 ê t j , 0 < t § 1
In[309]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := ty@t_D := t2 Sin@1êtDParametricPlot@8x@tD, y@tD<, 8t, 0, 1<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.1 0.2 0.3 0.4 0.5
-0.04-0.02
0.020.040.060.08
8 Rijo Cal 3 Cap 6.nb

In[203]:= H∗ Limite do arco P' HtL no ponto t = 0 ∗LLimit@x'@tD, t → 0DLimit@y'@tD, t → 0D
Out[203]= 1
Out[204]= Interval@8−1, 1<D
O arco dado não é regular em t = 0..
6.2 Integral de linha de primeira espécie.
Sejam C (s) = (x(s), y(s), z(s)) um arco de curva e s o comprimento, ao longo de C, contando positivamente a partirde uma de suas extremidades. Os pontos (x, y, z) desse arco são, então, caracterizados pelo parâmetro s, que variade 0 a L, onde L é o comprimento total de C.
Seja f (C) uma função contínua definida nos pontos de C. A integral
Ÿ0
L
f (C (s)) ds
é chamada integral de linha de primeira espécie de f sobre C..
Em virtude de d s = è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!d x2 + d y2 + d z2 podemos reescrever a integral de linha de primeira espécie na seguinteforma
Ÿa
b
f (x (t), y(t), z(t)) "###############################################################Hx ' HtLL2 + Hy ' HtL L2 + Hz' HtLL2 d t
onde C (t) = (x(t), y(t), z(t)) , a § t § b , é uma nova parametrização do arco C. Do ponto de vista computacio-nal esta fórmula é muito mais simples que a anterior.
EXEMPLO 1. Vamos calcular a integral da função f Hx, yL = x sobre o contorno fechado 0AB0, formado pelas retas x = 0, y = 1 e a parábola y = x2, x ¥ 0.
Rijo Cal 3 Cap 6.nb 9

In[32]:= H∗ Gráfico do contorno C ∗Lp1 = Plot@x2, 8x, 0, 1<, PlotStyle −> 8RGBColor@1, 0, 0D<,
Epilog → 8Text@"A", 8.9, .92<D, Text@"B", 8.06, .92<D<,DisplayFunction → IdentityD;
p2 = ListPlot@880, 0<, 80, 1<, 81, 1<<, PlotJoined → True,PlotStyle −> 8RGBColor@1, 0, 0D<, DisplayFunction → IdentityD;
Show@8p1, p2<, DisplayFunction → $DisplayFunctionD;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1AB
In[299]:= H∗ Integral no trecho 0 B ∗LClear@x, y, tD;x@t_D := 0y@t_D := t
int0B = IntegrateAx@tD "######################################x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[302]= 0
In[307]:= H∗ Integral no trecho BA ∗LClear@x, y, tD;x@t_D := ty@t_D := 1
intBA = IntegrateAx@tD "######################################x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[310]=12
In[317]:= H∗ Integral no trecho A0 ∗LClear@x, y, tD;x@t_D := ty@t_D := t2
intA0 = IntegrateAx@tD "######################################x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[320]=112
I−1 + 5 è!!!5 M
In[321]:= int0B + intBA + intA0 êê Simplify
Out[321]=512
I1 +è!!!5 M
10 Rijo Cal 3 Cap 6.nb

Exercícios
Calcule as integrais indicadas nos Exercícios 1 a 10.
1. ŸC
Hx - yL ds, onde C é o contorno do trângulo de vértices (0, 0), (1, 2) e (2, 1).
In[48]:= H∗ Gráfico do contorno C ∗LListPlot@880, 0<, 81, 2<, 82, 1<, 80, 0<<,
PlotJoined → True, PlotStyle −> 8RGBColor@1, 0, 0D<, Epilog →
8Text@"A", 8.2, .2<D, Text@"B", 81.05, 1.8<D, Text@"C", 81.85, 1<D<D;
0.5 1 1.5 2
0.5
1
1.5
2
A
B
C
In[217]:= H∗ Integral no trecho AB ∗LClear@x, y, tD;x@t_D := ty@t_D := 2 t
intAB = IntegrateAHx@tD − y@tDL "######################################
x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[220]= −è!!!52
In[221]:= H∗ Integral no trecho BC ∗LClear@x, y, tD;x@t_D := ty@t_D := − t + 3
intBC = IntegrateAHx@tD − y@tDL "######################################
x'@tD2 + y'@tD2 , 8t, 1, 2<EOut[224]= 0
Rijo Cal 3 Cap 6.nb 11
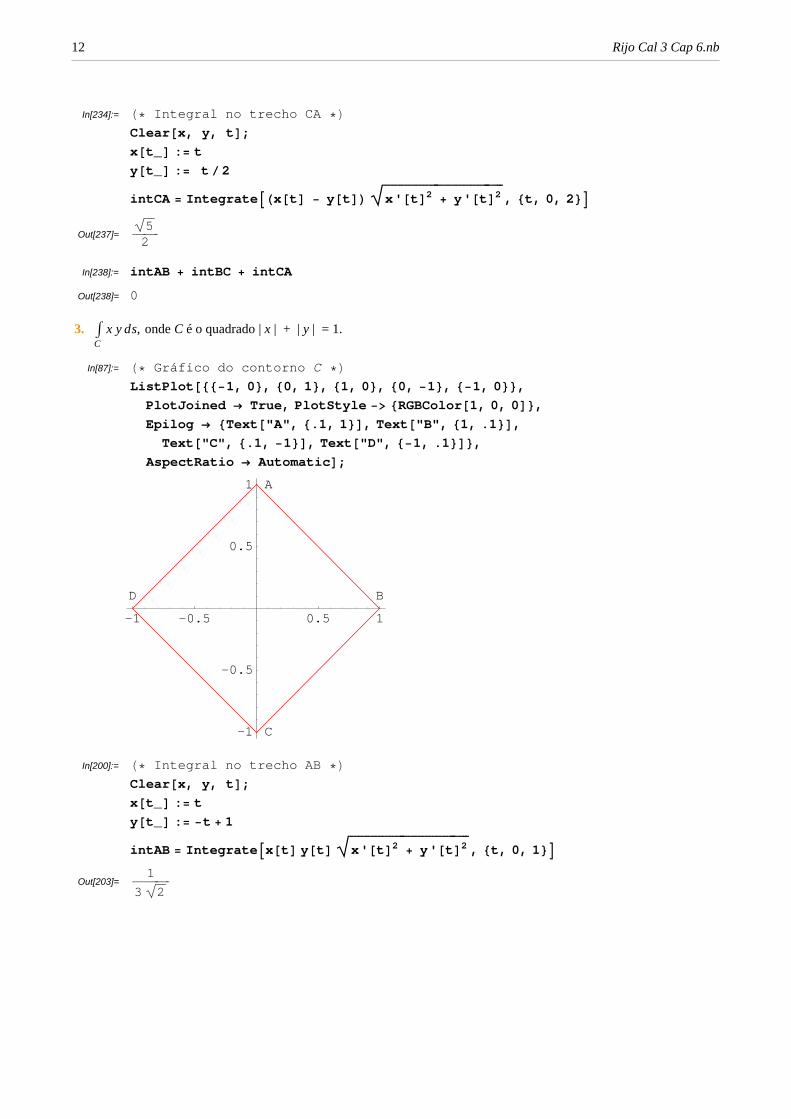
In[234]:= H∗ Integral no trecho CA ∗LClear@x, y, tD;x@t_D := ty@t_D := tê2
intCA = IntegrateAHx@tD − y@tDL "######################################
x'@tD2 + y'@tD2 , 8t, 0, 2<E
Out[237]=è!!!52
In[238]:= intAB + intBC + intCA
Out[238]= 0
3. ŸC
x y ds, onde C é o quadrado | x | + | y | = 1.
In[87]:= H∗ Gráfico do contorno C ∗LListPlot@88−1, 0<, 80, 1<, 81, 0<, 80, −1<, 8−1, 0<<,
PlotJoined → True, PlotStyle −> 8RGBColor@1, 0, 0D<,Epilog → 8Text@"A", 8.1, 1<D, Text@"B", 81, .1<D,
Text@"C", 8.1, −1<D, Text@"D", 8−1, .1<D<,AspectRatio → AutomaticD;
-1 -0.5 0.5 1
-1
-0.5
0.5
1 A
B
C
D
In[200]:= H∗ Integral no trecho AB ∗LClear@x, y, tD;x@t_D := ty@t_D := −t + 1
intAB = IntegrateAx@tD y@tD "######################################
x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[203]=1
3 è!!!2
12 Rijo Cal 3 Cap 6.nb

In[204]:= H∗ Integral no trecho BC ∗LClear@x, y, tD;x@t_D := ty@t_D := t − 1
intBC = IntegrateAx@tD y@tD "######################################x'@tD2 + y'@tD2 , 8t, 1, 0<E
Out[207]=1
3 è!!!2
In[208]:= H∗ Integral no trecho CD ∗LClear@x, y, tD;x@t_D := ty@t_D := −t − 1
intCD = IntegrateA x@tD y@tD "######################################
x'@tD2 + y'@tD2 , 8t, 0, −1<E
Out[211]= −1
3 è!!!2
In[212]:= H∗ Integral no trecho DA ∗LClear@x, y, tD;x@t_D := ty@t_D := t + 1
intDA = IntegrateAx@tD y@tD "######################################
x'@tD2 + y'@tD2 , 8t, −1, 0<E
Out[215]= −1
3 è!!!2
In[216]:= intAB + intBC + intCD + intDA
Out[216]= 0
5. ŸC
x ds, onde C é o arco C (t) = Ht, t2L , 0 § t § 1
In[125]:= H∗ Gráfico do caminho C ∗LParametricPlot@8t, t2<, 8t, 0, 1<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
Rijo Cal 3 Cap 6.nb 13

In[239]:= H∗ Integral no caminho C ∗LClear@x, y, tD;x@t_D := ty@t_D := t2
IntegrateAx@tD "#####################################
x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[242]=112
I−1 + 5 è!!!5 M
7. ŸC
x ds, onde C é o arco C (t) = Hq, q sen q, q cos qL , 0 § q § a
In[131]:= H∗ Gráfico do contorno C ∗LParametricPlot3D@8θ, θ Sin@θD, θ Cos@θD<, 8θ, 0, 4 π<D;
05
10
-10
-5
0
5
-10
-5
0
5
10
05
10
-10
-5
0
5
In[243]:= x@θ_D := θ
y@θ_D := θ Sin@θDz@θ_D := θ Cos@θD
IntegrateAx@θD "###########################################################x'@θD2 + y'@θD2 + z'@θD2 , 8θ, 0, a<E
Out[246]=13I−2 è!!!2 + H2 + a2L3ê2M
9. ŸC
y coa z ds, onde C é o arco C (t) = Ht, t2L , 0 § t § 1
14 Rijo Cal 3 Cap 6.nb

In[125]:= H∗ Gráfico do caminho C ∗LParametricPlot@8t, t2<, 8t, 0, 1<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
In[283]:= H∗ Integral no caminho C ∗LClear@x, y, tD;x@t_D := ty@t_D := t2
IntegrateAy@tD "#####################################
x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[286]=164
I18 è!!!5 − ArcSinh@2DM
6.2 Integral de linha das formas diferenciais
Sejam L (x, y, z), M (x, y, z), N (x, y, z) funções definidas e contínuas numa região R do espaço e seja C um arcoregular, todo contido em R, com representação paramétrica
C (t) = (x (t), y (t), z (t)), a § t § b.
Vamos definir a integral de linha da expressão
L dx + M dy + N dz
ao longo do arco C , como sendo
Ÿa
b
[L (x (t), y(t), z(t)) x' (t) + M (x (t), y(t), z(t)) y' (t) + N (x (t), y(t), z(t)) z' (t)] dt
A expressão
L dx + M dy + N dz
é chamada forma diferencial. Ela pode ser interpretada como produto escalar do vetor F”÷÷ = L i + M j + N k como vetor \
d P”÷÷ = d x i + d y j + d z k. Então, a integral de linha ao logo do arco C toma a forma
ŸC
F”÷÷ (x, y, z) . d P”÷÷
Rijo Cal 3 Cap 6.nb 15

Como d P”÷÷ = t ds, onde o vetor unitário t é paralelo à tangente ao arco no ponto (x, y, z), podemos reescrever aintegral de linha da seguinte maneira
ŸC
F”÷÷ (x, y, z) . t ds
EXEMPLO 1. Calcular a integral da forma diferencial
y d x - x d y + z d z
ao logo do arco de hélice C : x = cos t, y = sen t, z = t, 0 § t § p/2,
In[324]:= H∗ Gráfico do contorno C ∗LParametricPlot3D@8Cos@tD, Sin@tD, t<, 8t, 0, π ê2<D;
00.25
0.50.75
1
00.25
0.50.75
1
0
0.5
1
1.5
00.25
0.50.75
In[325]:= H∗ Integral no caminho C ∗Lx@t_D := Cos@tDy@t_D := Sin@tDz@t_D := tIntegrate@y@tD x'@tD − x@tD y'@tD + z@tD z'@tD, 8t, 0, π ê2<D
Out[328]=18H−4 + πL π
EXEMPLO 2. Calcular a integral da forma diferencial
x z d z
ao logo do arco de hélice C : x = cos t, y = sen t, z = t, 0 § t § p/2,
16 Rijo Cal 3 Cap 6.nb

In[333]:= H∗ Integral no caminho C ∗Lx@t_D := Cos@tDy@t_D := Sin@tDz@t_D := tIntegrate@x@tD y@tD z'@tD, 8t, 0, π ê2<D
Out[336]=12
EXEMPLO 3. Consideremos a forma
x y d x + y2 d y,
que será integrada ao logo dos arcos C e C ',
C : y = x2 , 0 § x § 1,
C ': x = y2 , 0 § y § 1.
In[117]:= H∗ Gráfico dos arcos C e C' ∗LPlotA9x2,
è!!!!x =, 8x, 0, 1<,
PlotStyle −> 8RGBColor@1, 0, 0D, RGBColor@0, 0, 1D<,Epilog → 8Text@"C", 8.6, .45<D, Text@"â", 8.4, .2<D,
Text@"C'", 8.6, .8<D, Text@"â", 8.2, .5<D<,AspectRatio → AutomaticE;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
C
â
C'
â
In[2]:= H∗ Integral no caminho C ∗Lx@t_D := ty@t_D := t2
Integrate@x@tD y@tD x'@tD + y@tD2 y'@tD, 8t, 0, 1<D
Out[4]=712
In[5]:= H∗ Integral no caminho C' ∗Lx@t_D := t2
y@t_D := tIntegrate@x@tD y@tD x'@tD + y@tD2 y'@tD, 8t, 0, 1<D
Out[7]=1115
Rijo Cal 3 Cap 6.nb 17

EXEMPLO 4. A integral da forma
y x d x - x z d y + x y z d z ,
ao logo do polígono P1 P2 P3 P4 onde,
P1 = H1, 1, 1L , P2 = H2, 1, 1L, P3 = H2, 2, 1L, P4 = H2, 2, 2L.
In[116]:= H∗ Gráfico dos arcos C e C' ∗LPlotA9x2,
è!!!!x =, 8x, 0, 1<,
PlotStyle −> 8RGBColor@1, 0, 0D, RGBColor@0, 0, 1D<,Epilog → 8Text@"C", 8.6, .45<D, Text@"â", 8.4, .2<D,
Text@"C'", 8.6, .8<D, Text@"â", 8.2, .5<D<,AspectRatio → AutomaticE;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
C
â
C'
â
In[34]:= H∗ Integral no caminho P1 P2 ∗Lx@t_D := ty@t_D := 1z@t_D := 1intP1P2 =
Integrate@y@tD x@tD x'@tD − x@tD z@tD y'@tD + x@tD y@tD z@tD z'@tD, 8t, 1, 2<D
Out[37]=32
In[38]:= H∗ Integral no caminho P2 P3 ∗Lx@t_D := 1y@t_D := tz@t_D := 1intP2P3 =
Integrate@y@tD x@tD x'@tD − x@tD z@tD y'@tD + x@tD y@tD z@tD z'@tD, 8t, 1, 2<DOut[41]= −1
18 Rijo Cal 3 Cap 6.nb

In[42]:= H∗ Integral no caminho P3 P4 ∗Lx@t_D := 1y@t_D := 1z@t_D := tintP3P4 =
Integrate@y@tD x@tD x'@tD − x@tD z@tD y'@tD + x@tD y@tD z@tD z'@tD, 8t, 1, 2<D
Out[45]=32
In[46]:= H∗ Integral no arco C total ∗LintP1P2 + intP2P3 + intP3P4
Out[46]= 2
Exercícios
Calcule as integrais indicadas nos Exercícios 1 a 11. Faça gráficos dos caminhos de intrgração em cada caso, sempre que possível.
1. ŸC
x y d x - d y, onde C é o arco y = x2, 0 § x § 1.
In[110]:= H∗ Gráfico do caminho C ∗LParametricPlot@8t, t2<, 8t, 0, 1<,
Epilog → 8Text@"â", 80.75, .47<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
â
In[51]:= H∗ Integral no trecho AB ∗LClear@x, y, tD;x@t_D := ty@t_D := t2
Integrate@x@tD y@tD x'@tD − y'@tD, 8t, 1, 2<D
Out[54]=34
2. ŸC
x y d x - d y, onde C é o arco x = y2, 0 § y § 1.
Rijo Cal 3 Cap 6.nb 19

In[114]:= H∗ Gráfico do caminho C ∗LParametricPlot@8t2, t<, 8t, 0, 1<,
Epilog → 8Text@"â", 8.2, .5<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
â
In[56]:= H∗ Integral no trecho AB ∗LClear@x, y, tD;x@t_D := t2
y@t_D := tIntegrate@x@tD y@tD x'@tD − y'@tD, 8t, 1, 2<D
Out[59]=575
3. ŸC
x y d x - d y, onde C é o segmento 0 § x § 1, y = 0, seguido do segmento x = 1, 0 § y § 1,
In[99]:= H∗ Gráfico do caminho C ∗LListPlot@880, 0<, 81, 0<, 81, 1<<,
PlotJoined → True, PlotRange → 88−.1, 1.1<, 8−.1, 1.1<<,Epilog → 8Text@"z", 8.5, .07<D, Text@"↑", 81.05, .45<D<,PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
z
↑
In[79]:= H∗ Integral no trecho 0 ≤ x ≤ 1, y = 0 ∗LClear@x, y, tD;x@t_D := ty@t_D := 0int1 = Integrate@x@tD y@tD x'@tD − y'@tD, 8t, 0, 1<D
Out[82]= 0
20 Rijo Cal 3 Cap 6.nb

In[74]:= H∗ Integral no trecho x = 1, 0 ≤ y ≤ 1 ∗LClear@x, y, tD;x@t_D := 1y@t_D := tint2 = Integrate@x@tD y@tD x'@tD − y'@tD, 8t, 0, 1<D
Out[77]= −1
In[83]:= H∗ Integral no arco C total∗Lint1 + int2
Out[83]= −1
5. ŸC
x2 y d x + y d y, onde C é o segmento x = 1/2, y = 1 a y = 1/2 seguido do segmento y = 1/2, x =1/2 a x =1,
In[96]:= H∗ Gráfico do caminho C ∗[email protected], 1<, 8.5, .5<, 81, .5<<,
PlotJoined → True, PlotRange → 880, 1<, 80, 1<<,Epilog → 8Text@"↓", 8.45, .75<D, Text@"z", 8.75, .55<D<,PlotStyle −> 8RGBColor@1, 0, 0D<, PlotRange → 880, 1<, 80, 1<<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
↓
z
In[122]:= H∗ Integral no trecho 0 ≤ x ≤ 1, y = 0 ∗LClear@x, y, tD;x@t_D := 1ê2y@t_D := tint1 = Integrate@x@tD2 y@tD x'@tD + y@tD y'@tD, 8t, 1, 1ê2<D
Out[125]= −38
In[126]:= H∗ Integral no trecho x = 1, 0 ≤ y ≤ 1 ∗LClear@x, y, tD;x@t_D := ty@t_D := 1ê2int2 = Integrate@x@tD2 y@tD x'@tD + y@tD y'@tD, 8t, 1ê2, 1<D
Out[129]=748
In[130]:= H∗ Integral no arco C total∗Lint1 + int2
Out[130]= −1148
7. ŸC
sen y d x - cos y d y + z d z, onde C é o arco Ht2, -2 t, sen tL , 0 § t § p/2.
Rijo Cal 3 Cap 6.nb 21
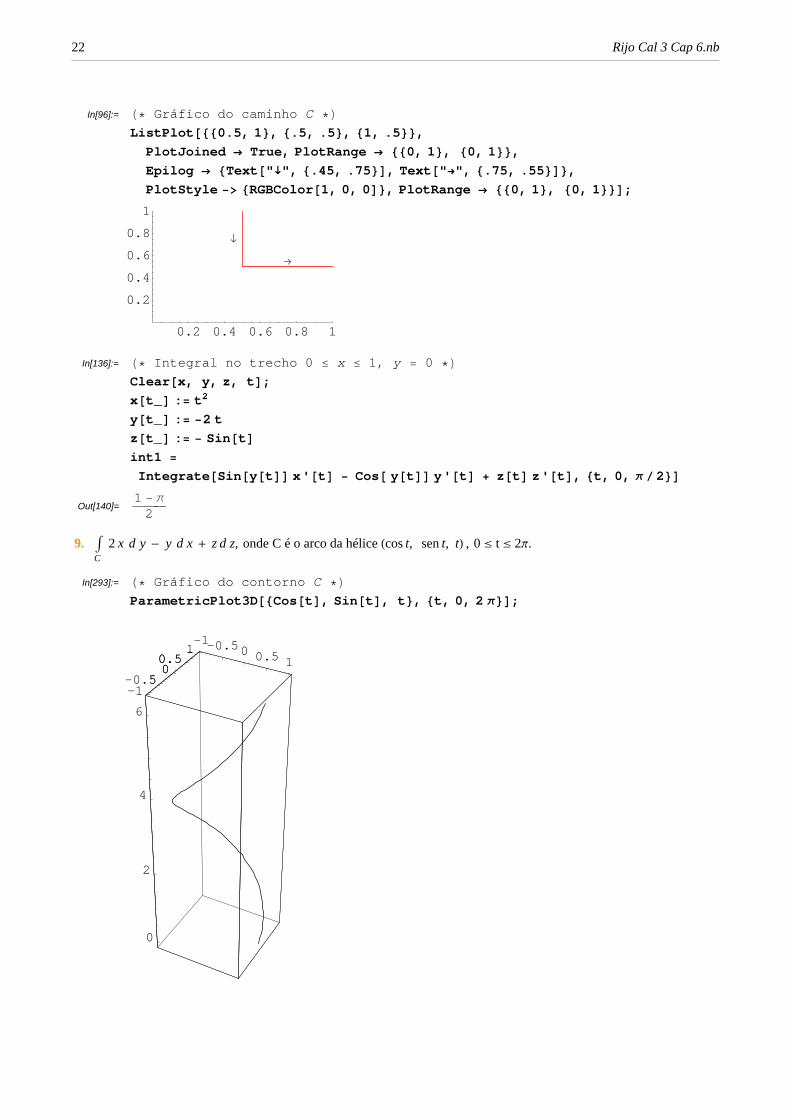
In[96]:= H∗ Gráfico do caminho C ∗[email protected], 1<, 8.5, .5<, 81, .5<<,
PlotJoined → True, PlotRange → 880, 1<, 80, 1<<,Epilog → 8Text@"↓", 8.45, .75<D, Text@"z", 8.75, .55<D<,PlotStyle −> 8RGBColor@1, 0, 0D<, PlotRange → 880, 1<, 80, 1<<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
↓
z
In[136]:= H∗ Integral no trecho 0 ≤ x ≤ 1, y = 0 ∗LClear@x, y, z, tD;x@t_D := t2
y@t_D := −2 tz@t_D := − Sin@tDint1 =
Integrate@Sin@y@tDD x'@tD − Cos@ y@tDD y'@tD + z@tD z'@tD, 8t, 0, π ê2<D
Out[140]=1 − π2
9. ŸC
2 x d y - y d x + z d z, onde C é o arco da hélice Hcos t, sen t, tL , 0 § t § 2p.
In[293]:= H∗ Gráfico do contorno C ∗LParametricPlot3D@8Cos@tD, Sin@tD, t<, 8t, 0, 2 π<D;
-1-0.50 0.5 1
-1-0.5
00.5
1
0
2
4
6
500.5
1
22 Rijo Cal 3 Cap 6.nb

In[141]:= H∗ Integral no arco C ∗LClear@x, y, z, tD;x@t_D := Cos@tDy@t_D := Sin@tDz@t_D := tint1 = Integrate@−y@tD x'@tD + 2 x@tD y'@tD + z@tD z'@tD, 8t, 0, 2 π<D
Out[145]= π H3 + 2 πL
11. ŸC
y z d x + x z d x + x y d z, onde A = (1, 0, 0), B = (0, 1, 0), C = (0, 0, 1).
In[158]:= H∗ Integral no trecho AB ∗LClear@x, y, z, tD;x@t_D := ty@t_D := −t + 1z@t_D := 0int1 =
Integrate@y@tD z@tD x'@tD + x@tD z@tD y'@tD + x@tD y@tD z'@tD, 8t, 0, 1<DOut[162]= 0
In[163]:= H∗ Integral no trecho BC ∗LClear@x, y, z, tD;x@t_D := 0y@t_D := tz@t_D := −t + 1int2 =
Integrate@y@tD z@tD x'@tD + x@tD z@tD y'@tD + x@tD y@tD z'@tD, 8t, 0, 1<DOut[167]= 0
In[168]:= H∗ Integral no arco C completo ∗Lint1 + int2
Out[168]= 0
12. ŸC
y d x - x d y, ao longo do semicírculo (cos q, sen q), 0 § q § p.
In[169]:= H∗ Integral no arco C ∗LClear@x, y, tD;x@t_D := Cos@tDy@t_D := Sin@tDIntegrate@y@tD x'@tD − x@tD y'@tD , 8t, 0, π<D
Out[172]= −π
13. ŸC
y d x - x d y, ao longo do semicírculo parametrizado por y = è!!!!!!!!!!!!!!!1 - x2 , -1 § x § 1.
Rijo Cal 3 Cap 6.nb 23

In[177]:= H∗ Integral no arco C ∗LClear@x, y, tD;x@t_D := t
y@t_D :=è!!!!!!!!!!!!!!!
1 − t2
Integrate@y@tD x'@tD − x@tD y'@tD , 8t, 1, −1<DOut[180]= −π
Nos Exercícios 15 a 18 calcule o trabalho da força F”÷÷ dada ao longo do deslocamento dado.
15. F”÷÷ = j / H1 + x2L ; C é o arco de parábola y = x2 + 1, de x = 0 a x = 1.
In[183]:= H∗ Gráfico do caminho C ∗LParametricPlot@8t, 1 + t2<, 8t, 0, 1<, PlotRange → 80, 2<,
Epilog → 8Text@"â", 80.75, 1.47<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.250.50.75
11.251.51.75
2
â
In[184]:= H∗ Integral no arco C ∗LClear@x, y, tD;x@t_D := ty@t_D := 1 + t2
Integrate@ 1êH1 + x@tD2L y'@tD , 8t, 0, 1<DOut[187]= Log@2D
16. F”÷÷ = j / H1 - x2L ; C é o arco de parábola y = - è!!!!!!!!!!!!!!!1 - x2 , de x = 0 a x = 1 ê 2.
In[183]:= H∗ Gráfico do caminho C ∗LParametricPlot@8t, 1 + t2<, 8t, 0, 1<, PlotRange → 80, 2<,
Epilog → 8Text@"â", 80.75, 1.47<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.250.50.75
11.251.51.75
2
â
24 Rijo Cal 3 Cap 6.nb

In[188]:= H∗ Integral no arco C ∗LClear@x, y, tD;x@t_D := t
y@t_D := −è!!!!!!!!!!!!!!
1 − t2
Integrate@ 1êH1 − x@tD2L y'@tD , 8t, 0, 1ê2<D
Out[191]= −1 +2è!!!3
17. F”÷÷ = y i + z j + x k ; C é o arco de hélice (cos q, sen q, -q ), 0 § q § 2p
In[289]:= H∗ Gráfico do contorno C ∗LParametricPlot3D@8Cos@θD, Sin@θD, −θ<, 8θ, 0, 2 π<D;
-1-0.50 0.5 1
-1-0.5
00.5
1
-6
-4
-2
0500.5
1
In[192]:= H∗ Integral no arco C ∗LClear@x, y, z, tD;x@t_D := Cos@tDy@t_D := Sin@tDz@t_D := −tIntegrate@ y@tD x'@tD + z@tD y'@tD + x@tD z'@tD, 8t, 0, 2 π<D
Out[196]= −π
Nos Exercícios 19 a 22 calcule o trabalho da força F”÷÷ dada ao longo de dois caminhos.
a) C1 é o arco (t, t3, t5 ), 0 § t § 1;
b) C2 é poligonal 0 P1 P2 P3, onde 0 = (0, 0, 0), P1 = (1, 0, 0), P2 = (1, 1, 0), P3 = (1, 1, 1).
19. F”÷÷ = x i + y j + z k
Rijo Cal 3 Cap 6.nb 25

In[296]:= H∗ Gráfico do caminho C1 ∗LParametricPlot3D@88t, 0, 0<, 81, t, 0<, 81, 1, t<, 8t, t3, t5<<, 8t, 0, 1<D;
00.25
0.50.75
1
00.25
0.50.75
1
0
0.25
0.5
0.75
1
00.25
0.50.75
00.25
0.50.75
In[197]:= H∗ Integral no arco C1 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := t3
z@t_D := t5
Integrate@ x@tD x'@tD + y@tD y'@tD + z@tD z'@tD, 8t, 0, 1<D
Out[201]=32
In[202]:= H∗ Integral no trecho 0 P1 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := 0z@t_D := 0int0P1 = Integrate@ x@tD x'@tD + y@tD y'@tD + z@tD z'@tD, 8t, 0, 1<D
Out[206]=12
In[207]:= H∗ Integral no trecho P1 P2 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := tz@t_D := 0intP1P2 = Integrate@ x@tD x'@tD + y@tD y'@tD + z@tD z'@tD, 8t, 0, 1<D
Out[211]=12
26 Rijo Cal 3 Cap 6.nb

In[212]:= H∗ Integral no trecho P2 P3 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := 1z@t_D := tintP2P3 = Integrate@ x@tD x'@tD + y@tD y'@tD + z@tD z'@tD, 8t, 0, 1<D
Out[216]=12
In[217]:= H∗ Integral no caminho C2 completo ∗Lint0P1 + intP1P2 + intP2P3
Out[217]=32
20. F”÷÷ = è!!!z i - x j
In[218]:= H∗ Integral no arco C1 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := t3
z@t_D := t5
IntegrateA è!!!!!!!!!!!z@tD x'@tD − x@tD y'@tD , 8t, 0, 1<E
Out[222]= −1328
In[223]:= H∗ Integral no trecho 0 P1 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := 0z@t_D := 0
int0P1 = IntegrateA è!!!!!!!!!!!z@tD x'@tD − x@tD y'@tD , 8t, 0, 1<E
Out[227]= 0
In[228]:= H∗ Integral no trecho P1 P2 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := tz@t_D := 0
intP1P2 = IntegrateA è!!!!!!!!!!!z@tD x'@tD − x@tD y'@tD , 8t, 0, 1<E
Out[232]= −1
In[233]:= H∗ Integral no trecho P2 P3 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := 1z@t_D := t
intP2P3 = IntegrateA è!!!!!!!!!!!z@tD x'@tD − x@tD y'@tD , 8t, 0, 1<E
Out[237]= 0
Rijo Cal 3 Cap 6.nb 27

In[238]:= H∗ Integral no caminho C2 completo ∗Lint0P1 + intP1P2 + intP2P3
Out[238]= −1
21. F”÷÷ = z i - è!!!x k
In[244]:= H∗ Integral no arco C1 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := t3
z@t_D := t5
IntegrateA z@tD x'@tD −è!!!!!!!!!!!
x@tD z'@tD , 8t, 0, 1<E
Out[248]= −4966
In[249]:= H∗ Integral no trecho 0 P1 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := 0z@t_D := 0
int0P1 = IntegrateA z@tD x'@tD −è!!!!!!!!!!!
x@tD z'@tD , 8t, 0, 1<EOut[253]= 0
In[254]:= H∗ Integral no trecho P1 P2 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := tz@t_D := 0
intP1P2 = IntegrateA z@tD x'@tD −è!!!!!!!!!!!
x@tD z'@tD , 8t, 0, 1<EOut[258]= 0
In[259]:= H∗ Integral no trecho P2 P3 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := 1z@t_D := t
intP2P3 = IntegrateA z@tD x'@tD −è!!!!!!!!!!!
x@tD z'@tD , 8t, 0, 1<EOut[263]= −1
In[264]:= H∗ Integral no caminho C2 completo ∗Lint0P1 + intP1P2 + intP2P3
Out[264]= −1
22. F”÷÷ = y j + z k
28 Rijo Cal 3 Cap 6.nb

In[265]:= H∗ Integral no arco C1 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := t3
z@t_D := t5
Integrate@ y@tD y'@tD + z@tD z'@tD , 8t, 0, 1<DOut[269]= 1
In[270]:= H∗ Integral no trecho 0 P1 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := 0z@t_D := 0int0P1 = Integrate@ y@tD y'@tD + z@tD z'@tD , 8t, 0, 1<D
Out[274]= 0
In[275]:= H∗ Integral no trecho P1 P2 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := tz@t_D := 0intP1P2 = Integrate@ y@tD y'@tD + z@tD z'@tD , 8t, 0, 1<D
Out[279]=12
In[280]:= H∗ Integral no trecho P2 P3 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := 1z@t_D := tintP2P3 = Integrate@ y@tD y'@tD + z@tD z'@tD , 8t, 0, 1<D
Out[284]=12
In[285]:= H∗ Integral no caminho C2 completo ∗Lint0P1 + intP1P2 + intP2P3
Out[285]= 1
Rijo Cal 3 Cap 6.nb 29

6.4 Teorema de Green no plano
Teorema de Green. Seja R uma região do plano, quesupomos simples ou que possa ser decomposta em umnúmero finito de regões simples por meio de um número finito de arcos regulares. Sejam L(x, y) e M(x, y) funçõescontínuas, com derivadas primeiras contínuas em Rêêê = R ‹ ∑R. Então
ŸR
I ∑MÅÅÅÅÅÅÅÅÅ∑x - ∑LÅÅÅÅÅÅÅ∑y M d x d y = Ÿ∑R
L d x + M d y
EXEMPLO 1. Vamos calcular a integral da forma função LHxL + M HyL = Hy + x2 cos xL d x + H2 x - y2L d y ao longo da circunferência x2 + y2 = 1, no sentido anti-horário.
In[32]:= H∗ Gráfico do contorno C ∗L
In[321]:= H∗ Gráfico do círculo de raio 1 ∗LParametricPlot@8Cos@tD, Sin@tD<, 8t, 0, 2 π<, AspectRatio → AutomaticD;
-1 -0.5 0.5 1
-1
-0.5
0.5
1
In[317]:= Integrate@ Hy@tD + x@tD2 Cos@x@tDDL x'@tD , 8t, 0, 2 π<D êê Timing
Out[317]= 8148.544 Second, −π<
In[318]:= Integrate@ H2 x@tD − y@tD2 Sin@y@tDDL y'@tD , 8t, 0, 2 π<D êê Timing
Out[318]= 81.231 Second, 2 π<
In[305]:= H∗ Integral de linha do teorema de Green ∗LClear@x, y, tD;x@t_D := Cos@tDy@t_D := Sin@tDIntegrate@ Hy@tD + x@tD2 Cos@x@tDDL x'@tD +
H2 x@tD − y@tD2 Sin@y@tDDL y'@tD , 8t, 0, 2 π<DOut[308]= $Aborted
30 Rijo Cal 3 Cap 6.nb

In[331]:= H∗ Integral de superfície do teorema de Green ∗LIntegrate@Integrate@HD@2 x − y2 Sin@yD, xD − D@y + x2 Cos@xD, yDL r, 8r, 0, 1<D, 8θ, 0, 2 π<D
Out[331]= π
O teorema de Green pode ser usado para se obter a área de uma região R o plano. De fato, fazendo-se L = 0 e M =x, obtemos
A(R) = ŸR
d x d y = ٷR
x d y
Analogamente, fazendo-se L = -y e M = 0, encontramos
A(R) = ŸR
d x d y = - ٷR
y d x
Portanto, podemostambém escrever
A(R) = ŸR
d x d y = 1ÅÅÅÅ2 Ÿ∑R
x d y - y d x
EXEMPLO 1. Vamos calcular a área encerrada pela hipociclóide x2ê3 + y2ê3 = a2ê3.
In[313]:= H∗ Gráfico do círculo da hipociclóide ∗LParametricPlot@8Cos@tD3, Sin@tD3<, 8t, 0, 2 π<,
PlotStyle −> 8RGBColor@1, 0, 0D<, AspectRatio → AutomaticD;
-1 -0.5 0.5 1
-1
-0.5
0.5
1
In[341]:= H∗ Integral de linha do teorema de Green ∗LClear@x, y, tD;x@t_D := a Cos@tD3
y@t_D := a Sin@tD3
1ê2 Integrate@ x@tD y'@tD − y@tD x'@tD , 8t, 0, 2 π<D
Out[344]=3 a2 π8
EXEMPLO 2. Vamos calcular a área encerrada pela elipsóide b2 x2 + a2 y2 = a2 b2.
Rijo Cal 3 Cap 6.nb 31

In[314]:= H∗ Gráfico do círculo da hipociclóide ∗LClear@ θD;ParametricPlot@82 Cos@θD, Sin@θD<, 8θ, 0, 2 π<,
PlotStyle −> 8RGBColor@1, 0, 0D<, AspectRatio → AutomaticD;
-2 -1 1 2
-1
-0.5
0.5
1
In[358]:= H∗ Integral de linha do teorema de Green ∗LClear@x, y, tD;x@t_D := a Cos@tDy@t_D := b Sin@tD1ê2 Integrate@ x@tD y'@tD − y@tD x'@tD , 8t, 0, 2 π<D
Out[361]= a b π
Exercícios
Use a fórmula de Green para calcular as integrais dadas nos Exercícios 1 a 10.
1. ŸC
x y d x + Hy2 - x2L d y, onde C é o quadrado de vértices (0, 0), (0,1), (1,0), (1,1).
In[363]:= H∗ Gráfico do caminho C ∗LListPlot@880, 0<, 81, 0<, 81, 1<, 80, 1<, 80, 0<<,
Epilog → 8Text@"â", 80.75, .47<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
â
In[412]:= H∗ Integral dupla do teorema de Green no quadrado ∗LIntegrate@Integrate@D@y2 − x2, xD − D@x y, yD , 8x, 0, 1<D, 8y, 0, 1<D
Out[412]= −32
32 Rijo Cal 3 Cap 6.nb

In[380]:= H∗ Integral no trecho H0, 0L a H1,0L ∗LClear@x, y, tD;x@t_D := ty@t_D := 0int1 = Integrate@x@tD y@tD x'@tD + Hy@tD2 − x@tD2L y'@tD, 8t, 0, 1<D
Out[383]= 0
In[384]:= H∗ Integral no trecho H1, 0L a H1,1L ∗LClear@x, y, tD;x@t_D := 1y@t_D := tint2 = Integrate@x@tD y@tD x'@tD + Hy@tD2 − x@tD2L y'@tD, 8t, 0, 1<D
Out[387]= −23
In[397]:= H∗ Integral no trecho H1, 1L a H0,1L ∗LClear@x, y, tD;x@t_D := ty@t_D := 1int3 = Integrate@x@tD y@tD x'@tD + Hy@tD2 − x@tD2L y'@tD, 8t, 1, 0<D
Out[400]= −12
In[401]:= H∗ Integral de linha no trecho H0, 1L a H0,0L ∗LClear@x, y, tD;x@t_D := 0y@t_D := tint4 = Integrate@x@tD y@tD x'@tD + Hy@tD2 − x@tD2L y'@tD, 8t, 1, 0<D
Out[404]= −13
In[405]:= H∗ Integral de linha do teorema de Green ao longo do quadrado ∗Lint1 + int2 + int3 + int4
Out[405]= −32
In[412]:= H∗ Integral dupla do teorema de Green no quadrado ∗LIntegrate@Integrate@D@y2 − x2, xD − D@x y, yD , 8x, 0, 1<D, 8y, 0, 1<D
Out[412]= −32
3. ŸC
x y2 d x - x2 y d y, onde C é o retângulo determinado pelas retas x = 1, x = 3, y = -1, y = 3.
Rijo Cal 3 Cap 6.nb 33

In[363]:= H∗ Gráfico do caminho C ∗LListPlot@880, 0<, 81, 0<, 81, 1<, 80, 1<, 80, 0<<,
Epilog → 8Text@"â", 80.75, .47<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
â
In[413]:= H∗ Integral dupla do teorema de Green no quadrado ∗LIntegrate@Integrate@D@ −x2 y, xD − D@x y2, yD , 8x, 1, 3<D, 8y, −1, 3<D
Out[413]= −64
In[414]:= H∗ Integral no trecho H1, −1L a H3, −1L ∗LClear@x, y, tD;x@t_D := ty@t_D := −1int1 = Integrate@x@tD y@tD2 x'@tD − x@tD2 y@tD y'@tD, 8t, 1, 3<D
Out[417]= 4
In[418]:= H∗ Integral no trecho H3, −1L a H3, 3L ∗LClear@x, y, tD;x@t_D := 3y@t_D := tint2 = Integrate@x@tD y@tD2 x'@tD − x@tD2 y@tD y'@tD, 8t, −1, 3<D
Out[421]= −36
In[422]:= H∗ Integral no trecho H3, 3L a H1, 3L ∗LClear@x, y, tD;x@t_D := ty@t_D := 3int3 = Integrate@x@tD y@tD2 x'@tD − x@tD2 y@tD y'@tD, 8t, 3, 1<D
Out[425]= −36
In[426]:= H∗ Integral de linha no trecho H0, 1L a H0,0L ∗LClear@x, y, tD;x@t_D := 1y@t_D := tint4 = Integrate@x@tD y@tD2 x'@tD − x@tD2 y@tD y'@tD, 8t, 3, −1<D
Out[429]= 4
In[430]:= H∗ Integral de linha do teorema de Green ao longo do quadrado ∗Lint1 + int2 + int3 + int4
Out[430]= −64
34 Rijo Cal 3 Cap 6.nb

5. ŸC
è!!!!y d x +è!!!!x d y, onde C é o retângulo determinado pelas retas x = 1, x = 3, y = -1, y = 3.
In[363]:= H∗ Gráfico do caminho C ∗LListPlot@880, 0<, 81, 0<, 81, 1<, 80, 1<, 80, 0<<,
Epilog → 8Text@"â", 80.75, .47<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
â
In[413]:= H∗ Integral dupla do teorema de Green no quadrado ∗LIntegrate@Integrate@D@ −x2 y, xD − D@x y2, yD , 8x, 1, 3<D, 8y, −1, 3<D
Out[413]= −64
In[435]:= H∗ Integral no trecho H1, −1L a H3, −1L ∗LClear@x, y, tD;x@t_D := ty@t_D := t2
int1 = IntegrateAè!!!!!!!!!!!y@tD x'@tD +
è!!!!!!!!!!!x@tD y'@tD, 8t, 0, 1<E
Out[438]=1310
In[439]:= H∗ Integral no trecho H3, −1L a H3, 3L ∗LClear@x, y, tD;x@t_D := ty@t_D := 1
int2 = IntegrateAè!!!!!!!!!!!y@tD x'@tD +
è!!!!!!!!!!!x@tD y'@tD, 8t, 1, 0<E
Out[442]= −1
In[443]:= H∗ Integral no trecho H3, 3L a H1, 3L ∗LClear@x, y, tD;x@t_D := 0y@t_D := t
int3 = IntegrateAè!!!!!!!!!!!y@tD x'@tD +
è!!!!!!!!!!!x@tD y'@tD, 8t, 1, 0<E
Out[446]= 0
In[447]:= H∗ Integral de linha do teorema de Green ao longo do quadrado ∗Lint1 + int2 + int3
Out[447]=310
7. ŸC
Hx2 - y tan yL d y, onde C é a circunferência Hx - aL2 + y2 = R2 com R < p/2
Rijo Cal 3 Cap 6.nb 35
In[496]:= H∗ Gráfico do caminho C ∗LParametricPlot@82 + Cos@tD, Sin@tD<,8t, 0, 2 π<, Epilog → 8Text@"â", 82.7, −0.6<D<,PlotStyle −> 8RGBColor@1, 0, 0D<, AspectRatio → AutomaticD;
1.5 2 2.5 3
-1
-0.5
0.5
1
â
In[413]:= H∗ Integral dupla do teorema de Green no quadrado ∗LIntegrate@Integrate@D@ −x2 y, xD − D@x y2, yD , 8x, 1, 3<D, 8y, −1, 3<D
Out[413]= −64
In[456]:= H∗ Integral no trecho H1, −1L a H3, −1L ∗LClear@x, y, tD;x@t_D := a + R Cos@tDy@t_D := R Sin@tDint1 = Integrate@H x@tD2 − y@tD Tan@y@tDDL y'@tD, 8t, 0, 2 π<D
Out[459]= 2 a π R2
9. ŸC
x3 d y , onde C é a circunferência x 2 + y2 = 1.
In[495]:= H∗ Gráfico do caminho C ∗LParametricPlot@8Cos@tD, Sin@tD<,8t, 0, 2 π<, Epilog → 8Text@"â", 80.7, −0.6<D<,PlotStyle −> 8RGBColor@1, 0, 0D<, AspectRatio → AutomaticD;
-1 -0.5 0.5 1
-1
-0.5
0.5
1
â
36 Rijo Cal 3 Cap 6.nb

In[474]:= H∗ Integral dupla do teorema de Green no círculo x2 + y2 < 1 ∗Lx@θ_D := Cos@θDIntegrate@Integrate@r D@x@θD3, x@θDD, 8r, 0, 1<D, 8θ, 0, 2 π<D
Out[475]=3 π2
In[484]:= H∗ Integral dupla do teorema de Green no círculo x2 + y2 < 1 ∗Lx@θ_D := Cos@θDIntegrate@Integrate@r 3 Cos@θD2, 8θ, 0, π<D, 8r, 0, 1<D
Out[485]=3 π4
In[476]:= H∗ Integral de linha do teorema de Green na circunferência x2 + y2 =
1 ∗LClear@x, y, tD;x@t_D := Cos@tDy@t_D := Sin@tDIntegrate@ x@tD3 y'@tD, 8t, 0, 2 π<D
Out[479]=3 π4
6.5 Teorema da Divergência e Fórmula de Green no plano
O divergente de um vetor F”÷÷ = L i + M j , indicado com os símbolos div F”÷÷ e “ . F”÷÷ é o escalar
div F”÷÷ = “ . F”÷÷ = ∑LÅÅÅÅÅÅÅ∑x + ∑MÅÅÅÅÅÅÅÅÅ∑y
<<Calculus`VectorAnalysis` carrega o pacote de análise vetorial
In[8]:= << Calculus`VectorAnalysis`
Div[f, coordsys] calcula o divergente da função vetorial f no sistema de coordenadas coordsys(Carte-sian, Cylindrical, Spherical)
Teorema da Divergência. Sejam R uma região que possa ser dividida em um número finito de regiões simples esejam L e M em F”÷÷ = L i + M j , funções contínuas, com derivadas primeiras contínuas em R. Então
ŸR
div F”÷÷ d x d y = Ÿ∑R
F”÷÷ . n d s
onde n é normal externa a ∑R.
In[318]:= << Graphics`ImplicitPlot`
Rijo Cal 3 Cap 6.nb 37

In[321]:= H∗ Gráfico do círculo de raio 1 ∗LImplicitPlot@Hy − 1L2 x3 H2 − xL,8x, 0, 2<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.5 1 1.5 2
0.5
1
1.5
2
EXEMPLO 1. Vamos calcular a seguinte integral
ŸC
rÅÅÅÅÅÅr2 . n d s,
onde r = x i + y j, r2 = x2 + y2, C é um contorno fechado simples que não passa pela origem e n é a normal externa a C.
Vamos calcular o divergente de rÅÅÅÅÅÅr2 = r = Hx ê Hx2 + y2L i + y ê Hx2 + y2L jL e aplicar o teorema de Green.
In[13]:= H∗ Divergente da função dada ∗Lf@x_, y_, z_D := 8xêHx2 + y2L, yêHx2 + y2L, 0<Div@f@x, y, zD, Cartesian@x, y, zDD êê Simplify
Out[14]= 0
Como o divergente de rÅÅÅÅÅÅr2 é igual a zero, a integral dada também é zero em virtude do teorema de Green.
Exercícios
1. Mostre que ŸC
Hx i - y j L . n d s = 0, qualquer que seja o contorno fechado simples.
Vamos calcular o divergente de (x i - y j ) e aplicar o teorema de Green.
In[15]:= H∗ Divergente da função dada ∗Lf@x_, y_, z_D := 8x, −y, 0<Div@f@x, y, zD, Cartesian@x, y, zDD êê Simplify
Out[16]= 0
38 Rijo Cal 3 Cap 6.nb

Como o divergente de Hx i - y jL é igual a zero, a integral dada também é zero em virtude do teorema de Green.
3. Mostre que div@HHx - 3L i + y jL ê HHx - 3L2 + y2LD = 0.
In[17]:= H∗ Divergente da função dada ∗Lf@x_, y_, z_D := 8Hx − 3L, y, 0<êHHx − 3L2 + y2LDiv@f@x, y, zD, Cartesian@x, y, zDD êê Simplify
Out[18]= 0
5. Mostre que div@HHx - 3L i + y jL ê HHx - 3L2 + y2LD = 0.
Fazendo-se r - r0 igual a v, podemos escrever
In[27]:= H∗ Divergente da função dada ∗Lf@v_, θ_, φ_D := 81êv2 , 0, 0<Div@f@v, θ, φD, Spherical@v, θ, φDD êê Simplify
Out[28]= 0
6.6 Integração de diferenciais exatas
Diz-se que a forma diferencial
L d x + M d y + N d z = F”÷÷ (P) . dP
onde F”÷÷ = L i + M j + N k e dP = d x i + d y i + d x i ,
é exata se existe uma função U(x, y, z) tal que
∑UÅÅÅÅÅÅÅÅÅ∑x = L , ∑UÅÅÅÅÅÅÅÅÅ∑y = M , ∑UÅÅÅÅÅÅÅÅÅ∑z = N ,
ou seja,
d U = L d x + M d y + N d z
O teorema a seguir é fundamental sobre forma diferencial exata.
Teorema. Se L, M e N são funções contínuas numa região R, então as seguintes condições são iquivalentes:
1) a forma diferencial L d x + M d y + N d z é exata.
2) a integral da forma L d x + M d y + N d z ao longo de qualquer caminho C indo do ponto A até oponto B só depende dos pontos A e B e não do caminho C.
3) a integral da forma L d x + M d y + N d z ao longo de qualquer caminho fechado C contido em R ézero.
Satisfeita qualquer dessas condições, existe uma função U(x, y, z) tal que
ŸA
B
F”÷÷ (P) . dP = ŸA
B
F”÷÷ (P) . t ds = U(B) - U(A).
Rijo Cal 3 Cap 6.nb 39

Se um campo vetorial F”÷÷ deriva de um potencial U, esse potencial é determinado a menos de uma constantearbitrária. Ademais,
F”÷÷ = grad U = “ U = ∑UÅÅÅÅÅÅÅÅÅ∑x i + ∑UÅÅÅÅÅÅÅÅÅ∑y j
EXEMPLO 1. O campo vetorial F”÷÷ = x i + y j é de fácil visualização com o Mathematica.
<<Graphics`PlotField` carrega o pacote que traça gráficos de campos vetoriais bidimensionais.
In[29]:= << Graphics`PlotField`
PlotVectorField[f, {x, x0, x1}, {y, y0, y1}, options] traça o gráfico do campo vetorial bidimensiona f.
In[131]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8x, y<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
EXEMPLO 2. O análogo do campo vetorial anterior no espaço é o campo F”÷÷ = x i + y j + z k que pode também ser facilmente visualizado o Mathematica como campo de vetores radiais.
<<Graphics`PlotField3D` carrega o pacote que traça gráficos de campos vetoriais tridimensionais.
In[194]:= << Graphics`PlotField3D`
PlotVectorField3D[f, {x, x0, x1}, {y, y0, y1}, options] traça o gráfico do campo vetorial tridimensiona f.
40 Rijo Cal 3 Cap 6.nb

In[231]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, z, fD;f@x_, y_, z_D := 8x, y, z<PlotVectorField3D@f@x, y, zD, 8x, −2, 2<,8y, −2, 2<, 8z, −2, 2<, PlotPoints → 5, VectorHeads → TrueD;
EXEMPLO 2. A diferencial H3 x2 + 2 x yL d x + Hx2 + 3 y2L d y é exata para todo ponto (x, y).
In[355]:= Clear@x, y, fD;f@x_, y_D := 83 x2 + 2 x y, x2 + 3 y2<
In[358]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[358]= 0
In[412]:= H∗ Calcula o potencial ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[415]= c + y3 + x2 Hx + yL
In[410]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[410]= x H3 x + 2 yL
In[411]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[411]= x2 + 3 y2
Rijo Cal 3 Cap 6.nb 41

Exercícios
Nos Exercícios 9 a 24, verifique se a forma diferencial dada é xatae, em caso afirmativo, encontre a função potencial U da qual ela deriva.
9. y d x + x d y
In[416]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8y, x<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[45]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[46]= 0
In[419]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[422]= c + x y
In[423]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[423]= y
42 Rijo Cal 3 Cap 6.nb

In[424]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[424]= x
10. x d x + y d y
In[425]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8x, y<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[56]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[56]= 0
In[428]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[431]= c +x2
2+y2
2
In[432]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[432]= x
In[433]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[433]= y
11. x d x - y d y
Rijo Cal 3 Cap 6.nb 43

In[434]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8x, −y<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2-2
-1
0
1
2
In[53]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[53]= 0
In[437]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[440]= c +x2
2−y2
2
In[441]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[441]= x
In[442]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[442]= −y
12. 3 Hx2 d x - y2L d y
44 Rijo Cal 3 Cap 6.nb

In[452]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 3 8x2, − y2<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[59]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[59]= 0
In[455]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[458]= c + x3 − y3
In[459]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[459]= 3 x2
In[460]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[460]= −3 y2
13. H2 x - 3 yL d x + H 2 y - 3 xL d y
Rijo Cal 3 Cap 6.nb 45

In[461]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 82 x − 3 y, 2 y − 3 x<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[62]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[62]= 0
In[464]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[467]= c + x Hx − 3 yL + y2
In[468]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[468]= 2 x − 3 y
In[469]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[469]= −3 x + 2 y
14. Hy2 - 2 x yL d x + H 2 y - 3 xL d y
46 Rijo Cal 3 Cap 6.nb

In[470]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8y2 − 2 x y , 2 x y − x2<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[325]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[325]= 0
In[473]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[476]= c + x y H−x + yL
In[477]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[477]= y H−2 x + yL
In[478]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[478]= −x Hx − 2 yL
15. Hy2 - 3 x L d x + H 2 xy + cos yL d y
Rijo Cal 3 Cap 6.nb 47

In[479]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8y2 − 3 x , 2 x y + Cos@yD<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[68]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[68]= 0
In[482]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[485]= c −3 x2
2+ x y2 + Sin@yD
In[486]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[486]= −3 x + y2
In[487]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[487]= 2 x y + Cos@yD
16. Hx2 y + 3 y2L d x - H x3 - 3 y2L d y
48 Rijo Cal 3 Cap 6.nb

In[488]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8x2 y + 3 y2 , −x3 + 3 y2<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2-2
-1
0
1
2
In[74]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[74]= 4 x2 + 6 y
A forma diferencial dada nãi é exata.
17. Hcos x y L Hy d x + x d yL
In[491]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := Cos@x yD 8y, x<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[77]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[77]= 0
Rijo Cal 3 Cap 6.nb 49

In[494]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[497]= c + Sin@x yD
In[498]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[498]= y Cos@x yD
In[499]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[499]= x Cos@x yD
18. H‰ x y Hy d x + x d yL
In[500]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := Exp@x yD 8y, x<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[80]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[80]= 0
In[503]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[506]= −1 + c + x y
50 Rijo Cal 3 Cap 6.nb

In[507]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[507]= x y y
In[508]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[508]= x y x
19. ‰x yHsen y d x + sen x d yL
In[182]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := Exp@x yD 8Sin@yD, Sin@xD<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[84]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD êê Simplify
Out[84]= x y H−Cos@xD + Cos@yD − y Sin@xD + x Sin@yDL
20. H 4 x3 - 6 x y3L d x + H2 y - 9 x2 y2L d y
A forma diferencial dada não é exata.
Rijo Cal 3 Cap 6.nb 51

In[509]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 84 x3 − 6 x y3, 2 y − 9 x2 y2<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[87]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[87]= 0
In[512]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[515]= c + x4 + y2 − 3 x2 y3
In[516]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[516]= 4 x3 − 6 x y3
In[517]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[517]= y H2 − 9 x2 yL
21. H‰x cos y + 2 yL d x + H‰x sen y - 2 xL d y
52 Rijo Cal 3 Cap 6.nb

In[518]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8Exp@xD Cos@yD + 2 y, −Exp@xD Sin@yD + 2 x<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[90]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[90]= 0
In[525]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD êê Simplify
Out[528]= −1 + c + 2 x y + x Cos@yD
In[529]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[529]= 2 y + x Cos@yD
In[530]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[530]= 2 x − x Sin@yD
24. 3 è!!!!!!!!!!!!!!!!!!!x2 + y2 Hx d x + y d yL
Rijo Cal 3 Cap 6.nb 53

In[531]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;
f@x_, y_D := 3 è!!!!!!!!!!!!!!!!!
x2 + y2 8x, y<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[93]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[93]= 0
In[551]:= H∗ O potencial U ∗LpotU@x_, y_D := Hx2 + y2L3ê2
In[552]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[552]= 3 x è!!!!!!!!!!!!!!!x2 + y2
In[553]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[553]= 3 y è!!!!!!!!!!!!!!!x2 + y2
Usando o cálculo do exercício anterior, identifique os potenciais das formas ou camps dados nos Exercícios 26 a 28.
26. F”÷÷ = 6 Hx2 + y2L Hx i + y jL
In[561]:= H∗ O potencial U ∗LpotU@x_, y_D := Hx2 + y2L3
In[562]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[562]= 6 x Hx2 + y2L2
In[563]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[563]= 6 y Hx2 + y2L2
54 Rijo Cal 3 Cap 6.nb

O potencial U(x, y) = Hx2 + y2L3
27. F”÷÷ = 5 Hx2 + y2L3ê2 Hx i + y jL
In[564]:= H∗ O potencial U ∗LpotU@x_, y_D := Hx2 + y2L5ê2
In[565]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[565]= 5 x Hx2 + y2L3ê2
In[566]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[566]= 5 y Hx2 + y2L3ê2
O potencial U(x, y) = Hx2 + y2L5ê2
28. d U = Hx d x + y d yL ë Hx2 + y2L2ê3
In[580]:= H∗ O potencial U ∗LpotU@x_, y_D := 3ê2 Hx2 + y2L1ê3
In[581]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[581]=x
Hx2 + y2L2ê3
In[579]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[579]=y
Hx2 + y2L2ê3
O potencial U(x, y) = 3ê2 Hx2 + y2L1ê3
Rijo Cal 3 Cap 6.nb 55

CAPÍTULO 7
Teoremas da Divergência e de StokesIniciar o MathKernel
In[1]:= 2 + 2
Out[1]= 4
7.1 Integrais de superfícies
Um arco de curva ou caminho no espaço é uma aplicação de I Õ em 3 especificada por três equaçõesparamétricas
x = x HtL, y = y HtL, z = z HtL.Um arco C(t) = x HtL i + y HtL j + z HtL k é contínuo se as funções paramétricas forem contínuas.
Um arco é dito liso ou regular se C ' (t) = x ' HtL i + y ' HtL j + z ' HtL k ∫ 0. Um arco é seccionalmente regular sesuas funções paramétricas forem contínuas no intervalo de definição, porém cujas derivadas sejam seccionalmentecontínuas nesse intervalo.
A representação paramétrica de um arco C(t), a § t § b ordena os pontos de C de acordo com os valorescrescentes de t, de sorte que C é um conjunto ordenado ou orientado. A orientação é direta ou positiva quando tcresce de a a b, a orientação é oposta ou negativa quando t decresce de b a a. Os pontos C(a) e C(b) são chamadosa origem e a extremidade de C, respectivamente. Diz-se que um arco é simples quando t1 ∫ t2 fl CHt1L ∫ CHt2L .Diz-se que o arco é fechado quando suas extremidades são coincidentes: C(a) = C(b). O arco é fechado simples setodos os seus pontos, à exceção das extremidades, forem simples. Um arco fechado simples é chamado decontorno.
Um conjunto aberto é todo conjunto cujos pontos são interiores, nenhum deles pertencem à sua fronteira. Diz-seque um conjunto aberto é conexo se quaisquer dois de seus pontos podem ser ligados por uma linha poligonal todacontida no conjunto.
Chamanos região a todo conjunto aberto e conexo. É comum indicar a fronteira de um conjunto qualquer A com osímpolo ∑A. Dada um região R, chamamos região fechada Rêêê ao conjunto R ‹ ∑R, que se obtém juntando-se a Ros pontos de sua fronteira.

Uma região R é simplesmente conexa se qualquer curva (arco, caminho) fechada em R pode ser deformada comcontinuidade até reduzir-se a um ponto sem sair de R.
Exercícios
Identifique os arcos nos Exercícios 1 a 12, faça gráficosa e indique suas orientações
1. P(t) = t i + H1 - tL j , 0 § t § 1
In[228]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := ty@t_D := 1 − tParametricPlot@8x@tD, y@tD<, 8t, 0, 1<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
2. P(t) = 2 t i + t2 j , -1 § t § 0
In[232]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := 2 ty@t_D := t2
ParametricPlot@8x@tD, y@tD<, 8t, −1, 0<D;
-2 -1.5 -1 -0.5
0.2
0.4
0.6
0.8
1
3. P(t) = Ht2 + 1L i + 3 t j , -1 § t § 1
2 Rijo Cal 3 Cap 7.nb

In[236]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := t2 + 1y@t_D := −3 tParametricPlot@8x@tD, y@tD<, 8t, −1, 1<D;
1.2 1.4 1.6 1.8 2
-3
-2
-1
1
2
3
4. P(t) = t i + 2 t j + H1 - tL k , 0 § t § 2
In[240]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, z, tD;x@t_D := ty@t_D := 2 tz@t_D := 1 − tParametricPlot3D@8x@tD, y@tD, z@tD<, 8t, 0, 2<D;
00.5
11.5
2
0
1
2
3
4
-1
-0.5
0
0.5
1
00.5
11 5
1
2
3
4
5. P(t) = cos t i + sen t j + t k , 0 § t § 2p
Rijo Cal 3 Cap 7.nb 3

In[245]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, z, tD;x@t_D := Cos@tDy@t_D := Sin@tDz@t_D := tParametricPlot3D@8x@tD, y@tD, z@tD<, 8t, 0, 2 π<D;
-1-0.50 0.5 1
-1-0.5
00.5
1
0
2
4
6
500.5
1
6. P(t) = sen t i - cos t j - 2 t k , 0 § t § p
4 Rijo Cal 3 Cap 7.nb

In[250]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, z, tD;x@t_D := Sin@tDy@t_D := −Cos@tDz@t_D := −2 tParametricPlot3D@8x@tD, y@tD, z@tD<, 8t, 0, π<D;
00.250.50.751
-1-0.500.51
-6
-4
-2
0
7. P(t) = 1 ê t i + t j , 1 § t § ¶
In[253]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := 1êty@t_D := tParametricPlot@8x@tD, y@tD<, 8t, 0, 70<, PlotRange → 80, 10<D;
0.5 1 1.5 2 2.5 3
2
4
6
8
10
8. P(t) = t i + 2 ê t j , ¶ § t § 0
Rijo Cal 3 Cap 7.nb 5

In[269]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := ty@t_D := 2êtParametricPlot@8x@tD, y@tD<, 8t, 0, 2<, PlotRange → 80, 40<D;
0.5 1 1.5 2
510152025303540
9. P(t) = t i +è!!!!!!!!!!!!!!!1 - t2 j , -1 § t § 1
In[263]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := t
y@t_D :=è!!!!!!!!!!!!!!!!
1 − t2
ParametricPlot@8x@tD, y@tD<, 8t, −1, 1<D;
-1 -0.5 0.5 1
0.2
0.4
0.6
0.8
1
10. P(t) = t i -è!!!!!!!!!!!!!!!1 - t2 j , -1 § t § 1
In[267]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := t
y@t_D := −è!!!!!!!!!!!!!!!!
1 − t2
ParametricPlot@8x@tD, y@tD<, 8t, −1, 1<D;
-1 -0.5 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
6 Rijo Cal 3 Cap 7.nb

11. P(t) = è!!!!!!!!!!!!!!!1 - t2 i + t j , -1 § t § 1
In[271]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;
x@t_D :=è!!!!!!!!!!!!!!!!
1 − t2
y@t_D := tParametricPlot@8x@tD, y@tD<, 8t, −1, 1<D;
0.2 0.4 0.6 0.8 1
-1
-0.5
0.5
1
12. P(t) = -cos i + sen t j , 0 § t § p/2;
P(t) = Ht - p ê 2L j , p/2 § t § 1 + p/2;
P(t) = Ht - 1 - p ê 2L i + (2 - t + p/2) j , 1+p/2 § t § 2 + p/2;
In[179]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := − Cos@tD ê; 0 ≤ t ≤ π ê2y@t_D := Sin@tD ê; 0 ≤ t ≤ π ê2x@t_D := 0 ê; π ê2 ≤ t ≤ 1 + π ê2y@t_D := t − π ê2 ê; π ê2 ≤ t ≤ 1 + π ê2x@t_D := t − 1 − π ê2 ê; 1 + π ê2 ≤ t ≤ 2 + π ê2y@t_D := 2 − t + π ê2 ê; 1 + π ê2 ≤ t ≤ 2 + π ê2ParametricPlot@8x@tD, y@tD<,8t, 0, 2 + π ê2<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
-1 -0.5 0.5 1
0.2
0.4
0.6
0.8
1
11. P(t) = t i + t 3 j + sen 1 ê t k , 0 < t § 1
Rijo Cal 3 Cap 7.nb 7

In[280]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := ty@t_D := t3
z@tD := Sin@1êtDParametricPlot3D@8x@tD, y@tD, z@tD<, 8t, 0, 1<D;
0 0.250.50.75 1
00.25
0.50.75
1
-2
-1.5
-1
-0.5
000.25
0.50.75
In[209]:= H∗ Limite do arco P' HtL no ponto t = 0 ∗LLimit@x'@tD, t → 0DLimit@y'@tD, t → 0D
Out[209]= 1
Out[210]= 0
O arco dado é regular.
11. P(t) = t i + t 2 sen 1 ê t j , 0 < t § 1
In[309]:= H∗ O gráfico do arco P HtL ∗LClear@x, y, tD;x@t_D := ty@t_D := t2 Sin@1êtDParametricPlot@8x@tD, y@tD<, 8t, 0, 1<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.1 0.2 0.3 0.4 0.5
-0.04-0.02
0.020.040.060.08
8 Rijo Cal 3 Cap 7.nb

In[203]:= H∗ Limite do arco P' HtL no ponto t = 0 ∗LLimit@x'@tD, t → 0DLimit@y'@tD, t → 0D
Out[203]= 1
Out[204]= Interval@8−1, 1<D
O arco dado não é regular em t = 0..
6.2 Integral de linha de primeira espécie.
Sejam C (s) = (x(s), y(s), z(s)) um arco de curva e s o comprimento, ao longo de C, contando positivamente a partirde uma de suas extremidades. Os pontos (x, y, z) desse arco são, então, caracterizados pelo parâmetro s, que variade 0 a L, onde L é o comprimento total de C.
Seja f (C) uma função contínua definida nos pontos de C. A integral
Ÿ0
L
f (C (s)) ds
é chamada integral de linha de primeira espécie de f sobre C..
Em virtude de d s = è!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!d x2 + d y2 + d z2 podemos reescrever a integral de linha de primeira espécie na seguinteforma
Ÿa
b
f (x (t), y(t), z(t)) "###############################################################Hx ' HtLL2 + Hy ' HtL L2 + Hz' HtLL2 d t
onde C (t) = (x(t), y(t), z(t)) , a § t § b , é uma nova parametrização do arco C. Do ponto de vista computacio-nal esta fórmula é muito mais simples que a anterior.
EXEMPLO 1. Vamos calcular a integral da função f Hx, yL = x sobre o contorno fechado 0AB0, formado pelas retas x = 0, y = 1 e a parábola y = x2, x ¥ 0.
Rijo Cal 3 Cap 7.nb 9

In[32]:= H∗ Gráfico do contorno C ∗Lp1 = Plot@x2, 8x, 0, 1<, PlotStyle −> 8RGBColor@1, 0, 0D<,
Epilog → 8Text@"A", 8.9, .92<D, Text@"B", 8.06, .92<D<,DisplayFunction → IdentityD;
p2 = ListPlot@880, 0<, 80, 1<, 81, 1<<, PlotJoined → True,PlotStyle −> 8RGBColor@1, 0, 0D<, DisplayFunction → IdentityD;
Show@8p1, p2<, DisplayFunction → $DisplayFunctionD;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1AB
In[299]:= H∗ Integral no trecho 0 B ∗LClear@x, y, tD;x@t_D := 0y@t_D := t
int0B = IntegrateAx@tD "######################################x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[302]= 0
In[307]:= H∗ Integral no trecho BA ∗LClear@x, y, tD;x@t_D := ty@t_D := 1
intBA = IntegrateAx@tD "######################################x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[310]=12
In[317]:= H∗ Integral no trecho A0 ∗LClear@x, y, tD;x@t_D := ty@t_D := t2
intA0 = IntegrateAx@tD "######################################x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[320]=112
I−1 + 5 è!!!5 M
In[321]:= int0B + intBA + intA0 êê Simplify
Out[321]=512
I1 +è!!!5 M
10 Rijo Cal 3 Cap 7.nb

Exercícios
Calcule as integrais indicadas nos Exercícios 1 a 10.
1. ŸC
Hx - yL ds, onde C é o contorno do trângulo de vértices (0, 0), (1, 2) e (2, 1).
In[48]:= H∗ Gráfico do contorno C ∗LListPlot@880, 0<, 81, 2<, 82, 1<, 80, 0<<,
PlotJoined → True, PlotStyle −> 8RGBColor@1, 0, 0D<, Epilog →
8Text@"A", 8.2, .2<D, Text@"B", 81.05, 1.8<D, Text@"C", 81.85, 1<D<D;
0.5 1 1.5 2
0.5
1
1.5
2
A
B
C
In[217]:= H∗ Integral no trecho AB ∗LClear@x, y, tD;x@t_D := ty@t_D := 2 t
intAB = IntegrateAHx@tD − y@tDL "######################################
x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[220]= −è!!!52
In[221]:= H∗ Integral no trecho BC ∗LClear@x, y, tD;x@t_D := ty@t_D := − t + 3
intBC = IntegrateAHx@tD − y@tDL "######################################
x'@tD2 + y'@tD2 , 8t, 1, 2<EOut[224]= 0
Rijo Cal 3 Cap 7.nb 11

In[234]:= H∗ Integral no trecho CA ∗LClear@x, y, tD;x@t_D := ty@t_D := tê2
intCA = IntegrateAHx@tD − y@tDL "######################################
x'@tD2 + y'@tD2 , 8t, 0, 2<E
Out[237]=è!!!52
In[238]:= intAB + intBC + intCA
Out[238]= 0
3. ŸC
x y ds, onde C é o quadrado | x | + | y | = 1.
In[87]:= H∗ Gráfico do contorno C ∗LListPlot@88−1, 0<, 80, 1<, 81, 0<, 80, −1<, 8−1, 0<<,
PlotJoined → True, PlotStyle −> 8RGBColor@1, 0, 0D<,Epilog → 8Text@"A", 8.1, 1<D, Text@"B", 81, .1<D,
Text@"C", 8.1, −1<D, Text@"D", 8−1, .1<D<,AspectRatio → AutomaticD;
-1 -0.5 0.5 1
-1
-0.5
0.5
1 A
B
C
D
In[200]:= H∗ Integral no trecho AB ∗LClear@x, y, tD;x@t_D := ty@t_D := −t + 1
intAB = IntegrateAx@tD y@tD "######################################
x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[203]=1
3 è!!!2
12 Rijo Cal 3 Cap 7.nb

In[204]:= H∗ Integral no trecho BC ∗LClear@x, y, tD;x@t_D := ty@t_D := t − 1
intBC = IntegrateAx@tD y@tD "######################################x'@tD2 + y'@tD2 , 8t, 1, 0<E
Out[207]=1
3 è!!!2
In[208]:= H∗ Integral no trecho CD ∗LClear@x, y, tD;x@t_D := ty@t_D := −t − 1
intCD = IntegrateA x@tD y@tD "######################################
x'@tD2 + y'@tD2 , 8t, 0, −1<E
Out[211]= −1
3 è!!!2
In[212]:= H∗ Integral no trecho DA ∗LClear@x, y, tD;x@t_D := ty@t_D := t + 1
intDA = IntegrateAx@tD y@tD "######################################
x'@tD2 + y'@tD2 , 8t, −1, 0<E
Out[215]= −1
3 è!!!2
In[216]:= intAB + intBC + intCD + intDA
Out[216]= 0
5. ŸC
x ds, onde C é o arco C (t) = Ht, t2L , 0 § t § 1
In[125]:= H∗ Gráfico do caminho C ∗LParametricPlot@8t, t2<, 8t, 0, 1<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
Rijo Cal 3 Cap 7.nb 13

In[239]:= H∗ Integral no caminho C ∗LClear@x, y, tD;x@t_D := ty@t_D := t2
IntegrateAx@tD "#####################################
x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[242]=112
I−1 + 5 è!!!5 M
7. ŸC
x ds, onde C é o arco C (t) = Hq, q sen q, q cos qL , 0 § q § a
In[131]:= H∗ Gráfico do contorno C ∗LParametricPlot3D@8θ, θ Sin@θD, θ Cos@θD<, 8θ, 0, 4 π<D;
05
10
-10
-5
0
5
-10
-5
0
5
10
05
10
-10
-5
0
5
In[243]:= x@θ_D := θ
y@θ_D := θ Sin@θDz@θ_D := θ Cos@θD
IntegrateAx@θD "###########################################################x'@θD2 + y'@θD2 + z'@θD2 , 8θ, 0, a<E
Out[246]=13I−2 è!!!2 + H2 + a2L3ê2M
9. ŸC
y coa z ds, onde C é o arco C (t) = Ht, t2L , 0 § t § 1
14 Rijo Cal 3 Cap 7.nb

In[125]:= H∗ Gráfico do caminho C ∗LParametricPlot@8t, t2<, 8t, 0, 1<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
In[283]:= H∗ Integral no caminho C ∗LClear@x, y, tD;x@t_D := ty@t_D := t2
IntegrateAy@tD "#####################################
x'@tD2 + y'@tD2 , 8t, 0, 1<E
Out[286]=164
I18 è!!!5 − ArcSinh@2DM
6.2 Integral de linha das formas diferenciais
Sejam L (x, y, z), M (x, y, z), N (x, y, z) funções definidas e contínuas numa região R do espaço e seja C um arcoregular, todo contido em R, com representação paramétrica
C (t) = (x (t), y (t), z (t)), a § t § b.
Vamos definir a integral de linha da expressão
L dx + M dy + N dz
ao longo do arco C , como sendo
Ÿa
b
[L (x (t), y(t), z(t)) x' (t) + M (x (t), y(t), z(t)) y' (t) + N (x (t), y(t), z(t)) z' (t)] dt
A expressão
L dx + M dy + N dz
é chamada forma diferencial. Ela pode ser interpretada como produto escalar do vetor F”÷÷ = L i + M j + N k como vetor \
d P”÷÷ = d x i + d y j + d z k. Então, a integral de linha ao logo do arco C toma a forma
ŸC
F”÷÷ (x, y, z) . d P”÷÷
Rijo Cal 3 Cap 7.nb 15

Como d P”÷÷ = t ds, onde o vetor unitário t é paralelo à tangente ao arco no ponto (x, y, z), podemos reescrever aintegral de linha da seguinte maneira
ŸC
F”÷÷ (x, y, z) . t ds
EXEMPLO 1. Calcular a integral da forma diferencial
y d x - x d y + z d z
ao logo do arco de hélice C : x = cos t, y = sen t, z = t, 0 § t § p/2,
In[324]:= H∗ Gráfico do contorno C ∗LParametricPlot3D@8Cos@tD, Sin@tD, t<, 8t, 0, π ê2<D;
00.25
0.50.75
1
00.25
0.50.75
1
0
0.5
1
1.5
00.25
0.50.75
In[325]:= H∗ Integral no caminho C ∗Lx@t_D := Cos@tDy@t_D := Sin@tDz@t_D := tIntegrate@y@tD x'@tD − x@tD y'@tD + z@tD z'@tD, 8t, 0, π ê2<D
Out[328]=18H−4 + πL π
EXEMPLO 2. Calcular a integral da forma diferencial
x z d z
ao logo do arco de hélice C : x = cos t, y = sen t, z = t, 0 § t § p/2,
16 Rijo Cal 3 Cap 7.nb

In[333]:= H∗ Integral no caminho C ∗Lx@t_D := Cos@tDy@t_D := Sin@tDz@t_D := tIntegrate@x@tD y@tD z'@tD, 8t, 0, π ê2<D
Out[336]=12
EXEMPLO 3. Consideremos a forma
x y d x + y2 d y,
que será integrada ao logo dos arcos C e C ',
C : y = x2 , 0 § x § 1,
C ': x = y2 , 0 § y § 1.
In[117]:= H∗ Gráfico dos arcos C e C' ∗LPlotA9x2,
è!!!!x =, 8x, 0, 1<,
PlotStyle −> 8RGBColor@1, 0, 0D, RGBColor@0, 0, 1D<,Epilog → 8Text@"C", 8.6, .45<D, Text@"â", 8.4, .2<D,
Text@"C'", 8.6, .8<D, Text@"â", 8.2, .5<D<,AspectRatio → AutomaticE;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
C
â
C'
â
In[2]:= H∗ Integral no caminho C ∗Lx@t_D := ty@t_D := t2
Integrate@x@tD y@tD x'@tD + y@tD2 y'@tD, 8t, 0, 1<D
Out[4]=712
In[5]:= H∗ Integral no caminho C' ∗Lx@t_D := t2
y@t_D := tIntegrate@x@tD y@tD x'@tD + y@tD2 y'@tD, 8t, 0, 1<D
Out[7]=1115
Rijo Cal 3 Cap 7.nb 17
EXEMPLO 4. A integral da forma
y x d x - x z d y + x y z d z ,
ao logo do polígono P1 P2 P3 P4 onde,
P1 = H1, 1, 1L , P2 = H2, 1, 1L, P3 = H2, 2, 1L, P4 = H2, 2, 2L.
In[116]:= H∗ Gráfico dos arcos C e C' ∗LPlotA9x2,
è!!!!x =, 8x, 0, 1<,
PlotStyle −> 8RGBColor@1, 0, 0D, RGBColor@0, 0, 1D<,Epilog → 8Text@"C", 8.6, .45<D, Text@"â", 8.4, .2<D,
Text@"C'", 8.6, .8<D, Text@"â", 8.2, .5<D<,AspectRatio → AutomaticE;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
C
â
C'
â
In[34]:= H∗ Integral no caminho P1 P2 ∗Lx@t_D := ty@t_D := 1z@t_D := 1intP1P2 =
Integrate@y@tD x@tD x'@tD − x@tD z@tD y'@tD + x@tD y@tD z@tD z'@tD, 8t, 1, 2<D
Out[37]=32
In[38]:= H∗ Integral no caminho P2 P3 ∗Lx@t_D := 1y@t_D := tz@t_D := 1intP2P3 =
Integrate@y@tD x@tD x'@tD − x@tD z@tD y'@tD + x@tD y@tD z@tD z'@tD, 8t, 1, 2<DOut[41]= −1
18 Rijo Cal 3 Cap 7.nb

In[42]:= H∗ Integral no caminho P3 P4 ∗Lx@t_D := 1y@t_D := 1z@t_D := tintP3P4 =
Integrate@y@tD x@tD x'@tD − x@tD z@tD y'@tD + x@tD y@tD z@tD z'@tD, 8t, 1, 2<D
Out[45]=32
In[46]:= H∗ Integral no arco C total ∗LintP1P2 + intP2P3 + intP3P4
Out[46]= 2
Exercícios
Calcule as integrais indicadas nos Exercícios 1 a 11. Faça gráficos dos caminhos de intrgração em cada caso, sempre que possível.
1. ŸC
x y d x - d y, onde C é o arco y = x2, 0 § x § 1.
In[110]:= H∗ Gráfico do caminho C ∗LParametricPlot@8t, t2<, 8t, 0, 1<,
Epilog → 8Text@"â", 80.75, .47<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
â
In[51]:= H∗ Integral no trecho AB ∗LClear@x, y, tD;x@t_D := ty@t_D := t2
Integrate@x@tD y@tD x'@tD − y'@tD, 8t, 1, 2<D
Out[54]=34
2. ŸC
x y d x - d y, onde C é o arco x = y2, 0 § y § 1.
Rijo Cal 3 Cap 7.nb 19

In[114]:= H∗ Gráfico do caminho C ∗LParametricPlot@8t2, t<, 8t, 0, 1<,
Epilog → 8Text@"â", 8.2, .5<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
â
In[56]:= H∗ Integral no trecho AB ∗LClear@x, y, tD;x@t_D := t2
y@t_D := tIntegrate@x@tD y@tD x'@tD − y'@tD, 8t, 1, 2<D
Out[59]=575
3. ŸC
x y d x - d y, onde C é o segmento 0 § x § 1, y = 0, seguido do segmento x = 1, 0 § y § 1,
In[99]:= H∗ Gráfico do caminho C ∗LListPlot@880, 0<, 81, 0<, 81, 1<<,
PlotJoined → True, PlotRange → 88−.1, 1.1<, 8−.1, 1.1<<,Epilog → 8Text@"z", 8.5, .07<D, Text@"↑", 81.05, .45<D<,PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
z
↑
In[79]:= H∗ Integral no trecho 0 ≤ x ≤ 1, y = 0 ∗LClear@x, y, tD;x@t_D := ty@t_D := 0int1 = Integrate@x@tD y@tD x'@tD − y'@tD, 8t, 0, 1<D
Out[82]= 0
20 Rijo Cal 3 Cap 7.nb

In[74]:= H∗ Integral no trecho x = 1, 0 ≤ y ≤ 1 ∗LClear@x, y, tD;x@t_D := 1y@t_D := tint2 = Integrate@x@tD y@tD x'@tD − y'@tD, 8t, 0, 1<D
Out[77]= −1
In[83]:= H∗ Integral no arco C total∗Lint1 + int2
Out[83]= −1
5. ŸC
x2 y d x + y d y, onde C é o segmento x = 1/2, y = 1 a y = 1/2 seguido do segmento y = 1/2, x =1/2 a x =1,
In[96]:= H∗ Gráfico do caminho C ∗[email protected], 1<, 8.5, .5<, 81, .5<<,
PlotJoined → True, PlotRange → 880, 1<, 80, 1<<,Epilog → 8Text@"↓", 8.45, .75<D, Text@"z", 8.75, .55<D<,PlotStyle −> 8RGBColor@1, 0, 0D<, PlotRange → 880, 1<, 80, 1<<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
↓
z
In[122]:= H∗ Integral no trecho 0 ≤ x ≤ 1, y = 0 ∗LClear@x, y, tD;x@t_D := 1ê2y@t_D := tint1 = Integrate@x@tD2 y@tD x'@tD + y@tD y'@tD, 8t, 1, 1ê2<D
Out[125]= −38
In[126]:= H∗ Integral no trecho x = 1, 0 ≤ y ≤ 1 ∗LClear@x, y, tD;x@t_D := ty@t_D := 1ê2int2 = Integrate@x@tD2 y@tD x'@tD + y@tD y'@tD, 8t, 1ê2, 1<D
Out[129]=748
In[130]:= H∗ Integral no arco C total∗Lint1 + int2
Out[130]= −1148
7. ŸC
sen y d x - cos y d y + z d z, onde C é o arco Ht2, -2 t, sen tL , 0 § t § p/2.
Rijo Cal 3 Cap 7.nb 21

In[96]:= H∗ Gráfico do caminho C ∗[email protected], 1<, 8.5, .5<, 81, .5<<,
PlotJoined → True, PlotRange → 880, 1<, 80, 1<<,Epilog → 8Text@"↓", 8.45, .75<D, Text@"z", 8.75, .55<D<,PlotStyle −> 8RGBColor@1, 0, 0D<, PlotRange → 880, 1<, 80, 1<<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
↓
z
In[136]:= H∗ Integral no trecho 0 ≤ x ≤ 1, y = 0 ∗LClear@x, y, z, tD;x@t_D := t2
y@t_D := −2 tz@t_D := − Sin@tDint1 =
Integrate@Sin@y@tDD x'@tD − Cos@ y@tDD y'@tD + z@tD z'@tD, 8t, 0, π ê2<D
Out[140]=1 − π2
9. ŸC
2 x d y - y d x + z d z, onde C é o arco da hélice Hcos t, sen t, tL , 0 § t § 2p.
In[293]:= H∗ Gráfico do contorno C ∗LParametricPlot3D@8Cos@tD, Sin@tD, t<, 8t, 0, 2 π<D;
-1-0.50 0.5 1
-1-0.5
00.5
1
0
2
4
6
500.5
1
22 Rijo Cal 3 Cap 7.nb
In[141]:= H∗ Integral no arco C ∗LClear@x, y, z, tD;x@t_D := Cos@tDy@t_D := Sin@tDz@t_D := tint1 = Integrate@−y@tD x'@tD + 2 x@tD y'@tD + z@tD z'@tD, 8t, 0, 2 π<D
Out[145]= π H3 + 2 πL
11. ŸC
y z d x + x z d x + x y d z, onde A = (1, 0, 0), B = (0, 1, 0), C = (0, 0, 1).
In[158]:= H∗ Integral no trecho AB ∗LClear@x, y, z, tD;x@t_D := ty@t_D := −t + 1z@t_D := 0int1 =
Integrate@y@tD z@tD x'@tD + x@tD z@tD y'@tD + x@tD y@tD z'@tD, 8t, 0, 1<DOut[162]= 0
In[163]:= H∗ Integral no trecho BC ∗LClear@x, y, z, tD;x@t_D := 0y@t_D := tz@t_D := −t + 1int2 =
Integrate@y@tD z@tD x'@tD + x@tD z@tD y'@tD + x@tD y@tD z'@tD, 8t, 0, 1<DOut[167]= 0
In[168]:= H∗ Integral no arco C completo ∗Lint1 + int2
Out[168]= 0
12. ŸC
y d x - x d y, ao longo do semicírculo (cos q, sen q), 0 § q § p.
In[169]:= H∗ Integral no arco C ∗LClear@x, y, tD;x@t_D := Cos@tDy@t_D := Sin@tDIntegrate@y@tD x'@tD − x@tD y'@tD , 8t, 0, π<D
Out[172]= −π
13. ŸC
y d x - x d y, ao longo do semicírculo parametrizado por y = è!!!!!!!!!!!!!!!1 - x2 , -1 § x § 1.
Rijo Cal 3 Cap 7.nb 23

In[177]:= H∗ Integral no arco C ∗LClear@x, y, tD;x@t_D := t
y@t_D :=è!!!!!!!!!!!!!!!
1 − t2
Integrate@y@tD x'@tD − x@tD y'@tD , 8t, 1, −1<DOut[180]= −π
Nos Exercícios 15 a 18 calcule o trabalho da força F”÷÷ dada ao longo do deslocamento dado.
15. F”÷÷ = j / H1 + x2L ; C é o arco de parábola y = x2 + 1, de x = 0 a x = 1.
In[183]:= H∗ Gráfico do caminho C ∗LParametricPlot@8t, 1 + t2<, 8t, 0, 1<, PlotRange → 80, 2<,
Epilog → 8Text@"â", 80.75, 1.47<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.250.50.75
11.251.51.75
2
â
In[184]:= H∗ Integral no arco C ∗LClear@x, y, tD;x@t_D := ty@t_D := 1 + t2
Integrate@ 1êH1 + x@tD2L y'@tD , 8t, 0, 1<DOut[187]= Log@2D
16. F”÷÷ = j / H1 - x2L ; C é o arco de parábola y = - è!!!!!!!!!!!!!!!1 - x2 , de x = 0 a x = 1 ê 2.
In[183]:= H∗ Gráfico do caminho C ∗LParametricPlot@8t, 1 + t2<, 8t, 0, 1<, PlotRange → 80, 2<,
Epilog → 8Text@"â", 80.75, 1.47<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.250.50.75
11.251.51.75
2
â
24 Rijo Cal 3 Cap 7.nb

In[188]:= H∗ Integral no arco C ∗LClear@x, y, tD;x@t_D := t
y@t_D := −è!!!!!!!!!!!!!!
1 − t2
Integrate@ 1êH1 − x@tD2L y'@tD , 8t, 0, 1ê2<D
Out[191]= −1 +2è!!!3
17. F”÷÷ = y i + z j + x k ; C é o arco de hélice (cos q, sen q, -q ), 0 § q § 2p
In[289]:= H∗ Gráfico do contorno C ∗LParametricPlot3D@8Cos@θD, Sin@θD, −θ<, 8θ, 0, 2 π<D;
-1-0.50 0.5 1
-1-0.5
00.5
1
-6
-4
-2
0500.5
1
In[192]:= H∗ Integral no arco C ∗LClear@x, y, z, tD;x@t_D := Cos@tDy@t_D := Sin@tDz@t_D := −tIntegrate@ y@tD x'@tD + z@tD y'@tD + x@tD z'@tD, 8t, 0, 2 π<D
Out[196]= −π
Nos Exercícios 19 a 22 calcule o trabalho da força F”÷÷ dada ao longo de dois caminhos.
a) C1 é o arco (t, t3, t5 ), 0 § t § 1;
b) C2 é poligonal 0 P1 P2 P3, onde 0 = (0, 0, 0), P1 = (1, 0, 0), P2 = (1, 1, 0), P3 = (1, 1, 1).
19. F”÷÷ = x i + y j + z k
Rijo Cal 3 Cap 7.nb 25

In[296]:= H∗ Gráfico do caminho C1 ∗LParametricPlot3D@88t, 0, 0<, 81, t, 0<, 81, 1, t<, 8t, t3, t5<<, 8t, 0, 1<D;
00.25
0.50.75
1
00.25
0.50.75
1
0
0.25
0.5
0.75
1
00.25
0.50.75
00.25
0.50.75
In[197]:= H∗ Integral no arco C1 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := t3
z@t_D := t5
Integrate@ x@tD x'@tD + y@tD y'@tD + z@tD z'@tD, 8t, 0, 1<D
Out[201]=32
In[202]:= H∗ Integral no trecho 0 P1 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := 0z@t_D := 0int0P1 = Integrate@ x@tD x'@tD + y@tD y'@tD + z@tD z'@tD, 8t, 0, 1<D
Out[206]=12
In[207]:= H∗ Integral no trecho P1 P2 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := tz@t_D := 0intP1P2 = Integrate@ x@tD x'@tD + y@tD y'@tD + z@tD z'@tD, 8t, 0, 1<D
Out[211]=12
26 Rijo Cal 3 Cap 7.nb

In[212]:= H∗ Integral no trecho P2 P3 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := 1z@t_D := tintP2P3 = Integrate@ x@tD x'@tD + y@tD y'@tD + z@tD z'@tD, 8t, 0, 1<D
Out[216]=12
In[217]:= H∗ Integral no caminho C2 completo ∗Lint0P1 + intP1P2 + intP2P3
Out[217]=32
20. F”÷÷ = è!!!z i - x j
In[218]:= H∗ Integral no arco C1 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := t3
z@t_D := t5
IntegrateA è!!!!!!!!!!!z@tD x'@tD − x@tD y'@tD , 8t, 0, 1<E
Out[222]= −1328
In[223]:= H∗ Integral no trecho 0 P1 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := 0z@t_D := 0
int0P1 = IntegrateA è!!!!!!!!!!!z@tD x'@tD − x@tD y'@tD , 8t, 0, 1<E
Out[227]= 0
In[228]:= H∗ Integral no trecho P1 P2 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := tz@t_D := 0
intP1P2 = IntegrateA è!!!!!!!!!!!z@tD x'@tD − x@tD y'@tD , 8t, 0, 1<E
Out[232]= −1
In[233]:= H∗ Integral no trecho P2 P3 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := 1z@t_D := t
intP2P3 = IntegrateA è!!!!!!!!!!!z@tD x'@tD − x@tD y'@tD , 8t, 0, 1<E
Out[237]= 0
Rijo Cal 3 Cap 7.nb 27

In[238]:= H∗ Integral no caminho C2 completo ∗Lint0P1 + intP1P2 + intP2P3
Out[238]= −1
21. F”÷÷ = z i - è!!!x k
In[244]:= H∗ Integral no arco C1 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := t3
z@t_D := t5
IntegrateA z@tD x'@tD −è!!!!!!!!!!!
x@tD z'@tD , 8t, 0, 1<E
Out[248]= −4966
In[249]:= H∗ Integral no trecho 0 P1 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := 0z@t_D := 0
int0P1 = IntegrateA z@tD x'@tD −è!!!!!!!!!!!
x@tD z'@tD , 8t, 0, 1<EOut[253]= 0
In[254]:= H∗ Integral no trecho P1 P2 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := tz@t_D := 0
intP1P2 = IntegrateA z@tD x'@tD −è!!!!!!!!!!!
x@tD z'@tD , 8t, 0, 1<EOut[258]= 0
In[259]:= H∗ Integral no trecho P2 P3 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := 1z@t_D := t
intP2P3 = IntegrateA z@tD x'@tD −è!!!!!!!!!!!
x@tD z'@tD , 8t, 0, 1<EOut[263]= −1
In[264]:= H∗ Integral no caminho C2 completo ∗Lint0P1 + intP1P2 + intP2P3
Out[264]= −1
22. F”÷÷ = y j + z k
28 Rijo Cal 3 Cap 7.nb

In[265]:= H∗ Integral no arco C1 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := t3
z@t_D := t5
Integrate@ y@tD y'@tD + z@tD z'@tD , 8t, 0, 1<DOut[269]= 1
In[270]:= H∗ Integral no trecho 0 P1 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := ty@t_D := 0z@t_D := 0int0P1 = Integrate@ y@tD y'@tD + z@tD z'@tD , 8t, 0, 1<D
Out[274]= 0
In[275]:= H∗ Integral no trecho P1 P2 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := tz@t_D := 0intP1P2 = Integrate@ y@tD y'@tD + z@tD z'@tD , 8t, 0, 1<D
Out[279]=12
In[280]:= H∗ Integral no trecho P2 P3 do caminho C2 ∗LClear@x, y, z, tD;x@t_D := 1y@t_D := 1z@t_D := tintP2P3 = Integrate@ y@tD y'@tD + z@tD z'@tD , 8t, 0, 1<D
Out[284]=12
In[285]:= H∗ Integral no caminho C2 completo ∗Lint0P1 + intP1P2 + intP2P3
Out[285]= 1
Rijo Cal 3 Cap 7.nb 29

6.4 Teorema de Green no plano
Teorema de Green. Seja R uma região do plano, quesupomos simples ou que possa ser decomposta em umnúmero finito de regões simples por meio de um número finito de arcos regulares. Sejam L(x, y) e M(x, y) funçõescontínuas, com derivadas primeiras contínuas em Rêêê = R ‹ ∑R. Então
ŸR
I ∑MÅÅÅÅÅÅÅÅÅ∑x - ∑LÅÅÅÅÅÅÅ∑y M d x d y = Ÿ∑R
L d x + M d y
EXEMPLO 1. Vamos calcular a integral da forma função LHxL + M HyL = Hy + x2 cos xL d x + H2 x - y2L d y ao longo da circunferência x2 + y2 = 1, no sentido anti-horário.
In[32]:= H∗ Gráfico do contorno C ∗L
In[321]:= H∗ Gráfico do círculo de raio 1 ∗LParametricPlot@8Cos@tD, Sin@tD<, 8t, 0, 2 π<, AspectRatio → AutomaticD;
-1 -0.5 0.5 1
-1
-0.5
0.5
1
In[317]:= Integrate@ Hy@tD + x@tD2 Cos@x@tDDL x'@tD , 8t, 0, 2 π<D êê Timing
Out[317]= 8148.544 Second, −π<
In[318]:= Integrate@ H2 x@tD − y@tD2 Sin@y@tDDL y'@tD , 8t, 0, 2 π<D êê Timing
Out[318]= 81.231 Second, 2 π<
In[305]:= H∗ Integral de linha do teorema de Green ∗LClear@x, y, tD;x@t_D := Cos@tDy@t_D := Sin@tDIntegrate@ Hy@tD + x@tD2 Cos@x@tDDL x'@tD +
H2 x@tD − y@tD2 Sin@y@tDDL y'@tD , 8t, 0, 2 π<DOut[308]= $Aborted
30 Rijo Cal 3 Cap 7.nb
In[331]:= H∗ Integral de superfície do teorema de Green ∗LIntegrate@Integrate@HD@2 x − y2 Sin@yD, xD − D@y + x2 Cos@xD, yDL r, 8r, 0, 1<D, 8θ, 0, 2 π<D
Out[331]= π
O teorema de Green pode ser usado para se obter a área de uma região R o plano. De fato, fazendo-se L = 0 e M =x, obtemos
A(R) = ŸR
d x d y = ٷR
x d y
Analogamente, fazendo-se L = -y e M = 0, encontramos
A(R) = ŸR
d x d y = - ٷR
y d x
Portanto, podemostambém escrever
A(R) = ŸR
d x d y = 1ÅÅÅÅ2 Ÿ∑R
x d y - y d x
EXEMPLO 1. Vamos calcular a área encerrada pela hipociclóide x2ê3 + y2ê3 = a2ê3.
In[313]:= H∗ Gráfico do círculo da hipociclóide ∗LParametricPlot@8Cos@tD3, Sin@tD3<, 8t, 0, 2 π<,
PlotStyle −> 8RGBColor@1, 0, 0D<, AspectRatio → AutomaticD;
-1 -0.5 0.5 1
-1
-0.5
0.5
1
In[341]:= H∗ Integral de linha do teorema de Green ∗LClear@x, y, tD;x@t_D := a Cos@tD3
y@t_D := a Sin@tD3
1ê2 Integrate@ x@tD y'@tD − y@tD x'@tD , 8t, 0, 2 π<D
Out[344]=3 a2 π8
EXEMPLO 2. Vamos calcular a área encerrada pela elipsóide b2 x2 + a2 y2 = a2 b2.
Rijo Cal 3 Cap 7.nb 31

In[314]:= H∗ Gráfico do círculo da hipociclóide ∗LClear@ θD;ParametricPlot@82 Cos@θD, Sin@θD<, 8θ, 0, 2 π<,
PlotStyle −> 8RGBColor@1, 0, 0D<, AspectRatio → AutomaticD;
-2 -1 1 2
-1
-0.5
0.5
1
In[358]:= H∗ Integral de linha do teorema de Green ∗LClear@x, y, tD;x@t_D := a Cos@tDy@t_D := b Sin@tD1ê2 Integrate@ x@tD y'@tD − y@tD x'@tD , 8t, 0, 2 π<D
Out[361]= a b π
Exercícios
Use a fórmula de Green para calcular as integrais dadas nos Exercícios 1 a 10.
1. ŸC
x y d x + Hy2 - x2L d y, onde C é o quadrado de vértices (0, 0), (0,1), (1,0), (1,1).
In[363]:= H∗ Gráfico do caminho C ∗LListPlot@880, 0<, 81, 0<, 81, 1<, 80, 1<, 80, 0<<,
Epilog → 8Text@"â", 80.75, .47<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
â
In[412]:= H∗ Integral dupla do teorema de Green no quadrado ∗LIntegrate@Integrate@D@y2 − x2, xD − D@x y, yD , 8x, 0, 1<D, 8y, 0, 1<D
Out[412]= −32
32 Rijo Cal 3 Cap 7.nb

In[380]:= H∗ Integral no trecho H0, 0L a H1,0L ∗LClear@x, y, tD;x@t_D := ty@t_D := 0int1 = Integrate@x@tD y@tD x'@tD + Hy@tD2 − x@tD2L y'@tD, 8t, 0, 1<D
Out[383]= 0
In[384]:= H∗ Integral no trecho H1, 0L a H1,1L ∗LClear@x, y, tD;x@t_D := 1y@t_D := tint2 = Integrate@x@tD y@tD x'@tD + Hy@tD2 − x@tD2L y'@tD, 8t, 0, 1<D
Out[387]= −23
In[397]:= H∗ Integral no trecho H1, 1L a H0,1L ∗LClear@x, y, tD;x@t_D := ty@t_D := 1int3 = Integrate@x@tD y@tD x'@tD + Hy@tD2 − x@tD2L y'@tD, 8t, 1, 0<D
Out[400]= −12
In[401]:= H∗ Integral de linha no trecho H0, 1L a H0,0L ∗LClear@x, y, tD;x@t_D := 0y@t_D := tint4 = Integrate@x@tD y@tD x'@tD + Hy@tD2 − x@tD2L y'@tD, 8t, 1, 0<D
Out[404]= −13
In[405]:= H∗ Integral de linha do teorema de Green ao longo do quadrado ∗Lint1 + int2 + int3 + int4
Out[405]= −32
In[412]:= H∗ Integral dupla do teorema de Green no quadrado ∗LIntegrate@Integrate@D@y2 − x2, xD − D@x y, yD , 8x, 0, 1<D, 8y, 0, 1<D
Out[412]= −32
3. ŸC
x y2 d x - x2 y d y, onde C é o retângulo determinado pelas retas x = 1, x = 3, y = -1, y = 3.
Rijo Cal 3 Cap 7.nb 33

In[363]:= H∗ Gráfico do caminho C ∗LListPlot@880, 0<, 81, 0<, 81, 1<, 80, 1<, 80, 0<<,
Epilog → 8Text@"â", 80.75, .47<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
â
In[413]:= H∗ Integral dupla do teorema de Green no quadrado ∗LIntegrate@Integrate@D@ −x2 y, xD − D@x y2, yD , 8x, 1, 3<D, 8y, −1, 3<D
Out[413]= −64
In[414]:= H∗ Integral no trecho H1, −1L a H3, −1L ∗LClear@x, y, tD;x@t_D := ty@t_D := −1int1 = Integrate@x@tD y@tD2 x'@tD − x@tD2 y@tD y'@tD, 8t, 1, 3<D
Out[417]= 4
In[418]:= H∗ Integral no trecho H3, −1L a H3, 3L ∗LClear@x, y, tD;x@t_D := 3y@t_D := tint2 = Integrate@x@tD y@tD2 x'@tD − x@tD2 y@tD y'@tD, 8t, −1, 3<D
Out[421]= −36
In[422]:= H∗ Integral no trecho H3, 3L a H1, 3L ∗LClear@x, y, tD;x@t_D := ty@t_D := 3int3 = Integrate@x@tD y@tD2 x'@tD − x@tD2 y@tD y'@tD, 8t, 3, 1<D
Out[425]= −36
In[426]:= H∗ Integral de linha no trecho H0, 1L a H0,0L ∗LClear@x, y, tD;x@t_D := 1y@t_D := tint4 = Integrate@x@tD y@tD2 x'@tD − x@tD2 y@tD y'@tD, 8t, 3, −1<D
Out[429]= 4
In[430]:= H∗ Integral de linha do teorema de Green ao longo do quadrado ∗Lint1 + int2 + int3 + int4
Out[430]= −64
34 Rijo Cal 3 Cap 7.nb

5. ŸC
è!!!!y d x +è!!!!x d y, onde C é o retângulo determinado pelas retas x = 1, x = 3, y = -1, y = 3.
In[363]:= H∗ Gráfico do caminho C ∗LListPlot@880, 0<, 81, 0<, 81, 1<, 80, 1<, 80, 0<<,
Epilog → 8Text@"â", 80.75, .47<D<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.2 0.4 0.6 0.8 1
0.2
0.4
0.6
0.8
1
â
In[413]:= H∗ Integral dupla do teorema de Green no quadrado ∗LIntegrate@Integrate@D@ −x2 y, xD − D@x y2, yD , 8x, 1, 3<D, 8y, −1, 3<D
Out[413]= −64
In[435]:= H∗ Integral no trecho H1, −1L a H3, −1L ∗LClear@x, y, tD;x@t_D := ty@t_D := t2
int1 = IntegrateAè!!!!!!!!!!!y@tD x'@tD +
è!!!!!!!!!!!x@tD y'@tD, 8t, 0, 1<E
Out[438]=1310
In[439]:= H∗ Integral no trecho H3, −1L a H3, 3L ∗LClear@x, y, tD;x@t_D := ty@t_D := 1
int2 = IntegrateAè!!!!!!!!!!!y@tD x'@tD +
è!!!!!!!!!!!x@tD y'@tD, 8t, 1, 0<E
Out[442]= −1
In[443]:= H∗ Integral no trecho H3, 3L a H1, 3L ∗LClear@x, y, tD;x@t_D := 0y@t_D := t
int3 = IntegrateAè!!!!!!!!!!!y@tD x'@tD +
è!!!!!!!!!!!x@tD y'@tD, 8t, 1, 0<E
Out[446]= 0
In[447]:= H∗ Integral de linha do teorema de Green ao longo do quadrado ∗Lint1 + int2 + int3
Out[447]=310
7. ŸC
Hx2 - y tan yL d y, onde C é a circunferência Hx - aL2 + y2 = R2 com R < p/2
Rijo Cal 3 Cap 7.nb 35

In[496]:= H∗ Gráfico do caminho C ∗LParametricPlot@82 + Cos@tD, Sin@tD<,8t, 0, 2 π<, Epilog → 8Text@"â", 82.7, −0.6<D<,PlotStyle −> 8RGBColor@1, 0, 0D<, AspectRatio → AutomaticD;
1.5 2 2.5 3
-1
-0.5
0.5
1
â
In[413]:= H∗ Integral dupla do teorema de Green no quadrado ∗LIntegrate@Integrate@D@ −x2 y, xD − D@x y2, yD , 8x, 1, 3<D, 8y, −1, 3<D
Out[413]= −64
In[456]:= H∗ Integral no trecho H1, −1L a H3, −1L ∗LClear@x, y, tD;x@t_D := a + R Cos@tDy@t_D := R Sin@tDint1 = Integrate@H x@tD2 − y@tD Tan@y@tDDL y'@tD, 8t, 0, 2 π<D
Out[459]= 2 a π R2
9. ŸC
x3 d y , onde C é a circunferência x 2 + y2 = 1.
In[495]:= H∗ Gráfico do caminho C ∗LParametricPlot@8Cos@tD, Sin@tD<,8t, 0, 2 π<, Epilog → 8Text@"â", 80.7, −0.6<D<,PlotStyle −> 8RGBColor@1, 0, 0D<, AspectRatio → AutomaticD;
-1 -0.5 0.5 1
-1
-0.5
0.5
1
â
36 Rijo Cal 3 Cap 7.nb

In[474]:= H∗ Integral dupla do teorema de Green no círculo x2 + y2 < 1 ∗Lx@θ_D := Cos@θDIntegrate@Integrate@r D@x@θD3, x@θDD, 8r, 0, 1<D, 8θ, 0, 2 π<D
Out[475]=3 π2
In[484]:= H∗ Integral dupla do teorema de Green no círculo x2 + y2 < 1 ∗Lx@θ_D := Cos@θDIntegrate@Integrate@r 3 Cos@θD2, 8θ, 0, π<D, 8r, 0, 1<D
Out[485]=3 π4
In[476]:= H∗ Integral de linha do teorema de Green na circunferência x2 + y2 =
1 ∗LClear@x, y, tD;x@t_D := Cos@tDy@t_D := Sin@tDIntegrate@ x@tD3 y'@tD, 8t, 0, 2 π<D
Out[479]=3 π4
6.5 Teorema da Divergência e Fórmula de Green no plano
O divergente de um vetor F”÷÷ = L i + M j , indicado com os símbolos div F”÷÷ e “ . F”÷÷ é o escalar
div F”÷÷ = “ . F”÷÷ = ∑LÅÅÅÅÅÅÅ∑x + ∑MÅÅÅÅÅÅÅÅÅ∑y
<<Calculus`VectorAnalysis` carrega o pacote de análise vetorial
In[8]:= << Calculus`VectorAnalysis`
Div[f, coordsys] calcula o divergente da função vetorial f no sistema de coordenadas coordsys(Carte-sian, Cylindrical, Spherical)
Teorema da Divergência. Sejam R uma região que possa ser dividida em um número finito de regiões simples esejam L e M em F”÷÷ = L i + M j , funções contínuas, com derivadas primeiras contínuas em R. Então
ŸR
div F”÷÷ d x d y = Ÿ∑R
F”÷÷ . n d s
onde n é normal externa a ∑R.
In[318]:= << Graphics`ImplicitPlot`
Rijo Cal 3 Cap 7.nb 37

In[321]:= H∗ Gráfico do círculo de raio 1 ∗LImplicitPlot@Hy − 1L2 x3 H2 − xL,8x, 0, 2<, PlotStyle −> 8RGBColor@1, 0, 0D<D;
0.5 1 1.5 2
0.5
1
1.5
2
EXEMPLO 1. Vamos calcular a seguinte integral
ŸC
rÅÅÅÅÅÅr2 . n d s,
onde r = x i + y j, r2 = x2 + y2, C é um contorno fechado simples que não passa pela origem e n é a normal externa a C.
Vamos calcular o divergente de rÅÅÅÅÅÅr2 = r = Hx ê Hx2 + y2L i + y ê Hx2 + y2L jL e aplicar o teorema de Green.
In[13]:= H∗ Divergente da função dada ∗Lf@x_, y_, z_D := 8xêHx2 + y2L, yêHx2 + y2L, 0<Div@f@x, y, zD, Cartesian@x, y, zDD êê Simplify
Out[14]= 0
Como o divergente de rÅÅÅÅÅÅr2 é igual a zero, a integral dada também é zero em virtude do teorema de Green.
Exercícios
1. Mostre que ŸC
Hx i - y j L . n d s = 0, qualquer que seja o contorno fechado simples.
Vamos calcular o divergente de (x i - y j ) e aplicar o teorema de Green.
In[15]:= H∗ Divergente da função dada ∗Lf@x_, y_, z_D := 8x, −y, 0<Div@f@x, y, zD, Cartesian@x, y, zDD êê Simplify
Out[16]= 0
38 Rijo Cal 3 Cap 7.nb

Como o divergente de Hx i - y jL é igual a zero, a integral dada também é zero em virtude do teorema de Green.
3. Mostre que div@HHx - 3L i + y jL ê HHx - 3L2 + y2LD = 0.
In[17]:= H∗ Divergente da função dada ∗Lf@x_, y_, z_D := 8Hx − 3L, y, 0<êHHx − 3L2 + y2LDiv@f@x, y, zD, Cartesian@x, y, zDD êê Simplify
Out[18]= 0
5. Mostre que div@HHx - 3L i + y jL ê HHx - 3L2 + y2LD = 0.
Fazendo-se r - r0 igual a v, podemos escrever
In[27]:= H∗ Divergente da função dada ∗Lf@v_, θ_, φ_D := 81êv2 , 0, 0<Div@f@v, θ, φD, Spherical@v, θ, φDD êê Simplify
Out[28]= 0
6.6 Integração de diferenciais exatas
Diz-se que a forma diferencial
L d x + M d y + N d z = F”÷÷ (P) . dP
onde F”÷÷ = L i + M j + N k e dP = d x i + d y i + d x i ,
é exata se existe uma função U(x, y, z) tal que
∑UÅÅÅÅÅÅÅÅÅ∑x = L , ∑UÅÅÅÅÅÅÅÅÅ∑y = M , ∑UÅÅÅÅÅÅÅÅÅ∑z = N ,
ou seja,
d U = L d x + M d y + N d z
O teorema a seguir é fundamental sobre forma diferencial exata.
Teorema. Se L, M e N são funções contínuas numa região R, então as seguintes condições são iquivalentes:
1) a forma diferencial L d x + M d y + N d z é exata.
2) a integral da forma L d x + M d y + N d z ao longo de qualquer caminho C indo do ponto A até oponto B só depende dos pontos A e B e não do caminho C.
3) a integral da forma L d x + M d y + N d z ao longo de qualquer caminho fechado C contido em R ézero.
Satisfeita qualquer dessas condições, existe uma função U(x, y, z) tal que
ŸA
B
F”÷÷ (P) . dP = ŸA
B
F”÷÷ (P) . t ds = U(B) - U(A).
Rijo Cal 3 Cap 7.nb 39

Se um campo vetorial F”÷÷ deriva de um potencial U, esse potencial é determinado a menos de uma constantearbitrária. Ademais,
F”÷÷ = grad U = “ U = ∑UÅÅÅÅÅÅÅÅÅ∑x i + ∑UÅÅÅÅÅÅÅÅÅ∑y j
EXEMPLO 1. O campo vetorial F”÷÷ = x i + y j é de fácil visualização com o Mathematica.
<<Graphics`PlotField` carrega o pacote que traça gráficos de campos vetoriais bidimensionais.
In[29]:= << Graphics`PlotField`
PlotVectorField[f, {x, x0, x1}, {y, y0, y1}, options] traça o gráfico do campo vetorial bidimensiona f.
In[131]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8x, y<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
EXEMPLO 2. O análogo do campo vetorial anterior no espaço é o campo F”÷÷ = x i + y j + z k que pode também ser facilmente visualizado o Mathematica como campo de vetores radiais.
<<Graphics`PlotField3D` carrega o pacote que traça gráficos de campos vetoriais tridimensionais.
In[194]:= << Graphics`PlotField3D`
PlotVectorField3D[f, {x, x0, x1}, {y, y0, y1}, options] traça o gráfico do campo vetorial tridimensiona f.
40 Rijo Cal 3 Cap 7.nb

In[231]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, z, fD;f@x_, y_, z_D := 8x, y, z<PlotVectorField3D@f@x, y, zD, 8x, −2, 2<,8y, −2, 2<, 8z, −2, 2<, PlotPoints → 5, VectorHeads → TrueD;
EXEMPLO 2. A diferencial H3 x2 + 2 x yL d x + Hx2 + 3 y2L d y é exata para todo ponto (x, y).
In[355]:= Clear@x, y, fD;f@x_, y_D := 83 x2 + 2 x y, x2 + 3 y2<
In[358]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[358]= 0
In[412]:= H∗ Calcula o potencial ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[415]= c + y3 + x2 Hx + yL
In[410]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[410]= x H3 x + 2 yL
In[411]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[411]= x2 + 3 y2
Rijo Cal 3 Cap 7.nb 41

Exercícios
Nos Exercícios 9 a 24, verifique se a forma diferencial dada é xatae, em caso afirmativo, encontre a função potencial U da qual ela deriva.
9. y d x + x d y
In[416]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8y, x<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[45]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[46]= 0
In[419]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[422]= c + x y
In[423]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[423]= y
42 Rijo Cal 3 Cap 7.nb

In[424]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[424]= x
10. x d x + y d y
In[425]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8x, y<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[56]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[56]= 0
In[428]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[431]= c +x2
2+y2
2
In[432]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[432]= x
In[433]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[433]= y
11. x d x - y d y
Rijo Cal 3 Cap 7.nb 43

In[434]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8x, −y<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2-2
-1
0
1
2
In[53]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[53]= 0
In[437]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[440]= c +x2
2−y2
2
In[441]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[441]= x
In[442]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[442]= −y
12. 3 Hx2 d x - y2L d y
44 Rijo Cal 3 Cap 7.nb

In[452]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 3 8x2, − y2<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[59]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[59]= 0
In[455]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[458]= c + x3 − y3
In[459]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[459]= 3 x2
In[460]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[460]= −3 y2
13. H2 x - 3 yL d x + H 2 y - 3 xL d y
Rijo Cal 3 Cap 7.nb 45

In[461]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 82 x − 3 y, 2 y − 3 x<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[62]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[62]= 0
In[464]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[467]= c + x Hx − 3 yL + y2
In[468]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[468]= 2 x − 3 y
In[469]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[469]= −3 x + 2 y
14. Hy2 - 2 x yL d x + H 2 y - 3 xL d y
46 Rijo Cal 3 Cap 7.nb

In[470]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8y2 − 2 x y , 2 x y − x2<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[325]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[325]= 0
In[473]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[476]= c + x y H−x + yL
In[477]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[477]= y H−2 x + yL
In[478]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[478]= −x Hx − 2 yL
15. Hy2 - 3 x L d x + H 2 xy + cos yL d y
Rijo Cal 3 Cap 7.nb 47

In[479]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8y2 − 3 x , 2 x y + Cos@yD<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[68]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[68]= 0
In[482]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[485]= c −3 x2
2+ x y2 + Sin@yD
In[486]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[486]= −3 x + y2
In[487]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[487]= 2 x y + Cos@yD
16. Hx2 y + 3 y2L d x - H x3 - 3 y2L d y
48 Rijo Cal 3 Cap 7.nb

In[488]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8x2 y + 3 y2 , −x3 + 3 y2<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2-2
-1
0
1
2
In[74]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[74]= 4 x2 + 6 y
A forma diferencial dada nãi é exata.
17. Hcos x y L Hy d x + x d yL
In[491]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := Cos@x yD 8y, x<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[77]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[77]= 0
Rijo Cal 3 Cap 7.nb 49

In[494]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[497]= c + Sin@x yD
In[498]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[498]= y Cos@x yD
In[499]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[499]= x Cos@x yD
18. H‰ x y Hy d x + x d yL
In[500]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := Exp@x yD 8y, x<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[80]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[80]= 0
In[503]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[506]= −1 + c + x y
50 Rijo Cal 3 Cap 7.nb

In[507]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[507]= x y y
In[508]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[508]= x y x
19. ‰x yHsen y d x + sen x d yL
In[182]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := Exp@x yD 8Sin@yD, Sin@xD<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[84]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD êê Simplify
Out[84]= x y H−Cos@xD + Cos@yD − y Sin@xD + x Sin@yDL
20. H 4 x3 - 6 x y3L d x + H2 y - 9 x2 y2L d y
A forma diferencial dada não é exata.
Rijo Cal 3 Cap 7.nb 51

In[509]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 84 x3 − 6 x y3, 2 y − 9 x2 y2<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[87]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[87]= 0
In[512]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD
Out[515]= c + x4 + y2 − 3 x2 y3
In[516]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[516]= 4 x3 − 6 x y3
In[517]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[517]= y H2 − 9 x2 yL
21. H‰x cos y + 2 yL d x + H‰x sen y - 2 xL d y
52 Rijo Cal 3 Cap 7.nb

In[518]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;f@x_, y_D := 8Exp@xD Cos@yD + 2 y, −Exp@xD Sin@yD + 2 x<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[90]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[90]= 0
In[525]:= H∗ Calcula o potencial U Hx, yL ∗LClear@x, y, w, potUD;w@x_, y_D := Integrate@f@u, yD@@1DD, 8u, 0, x<DpotU@x_, y_D :=
w@x, yD + Integrate@f@x, vD@@2DD − D@w@x, vD, vD, 8v, 0, y<D + cpotU@x, yD êê Simplify
Out[528]= −1 + c + 2 x y + x Cos@yD
In[529]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[529]= 2 y + x Cos@yD
In[530]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[530]= 2 x − x Sin@yD
24. 3 è!!!!!!!!!!!!!!!!!!!x2 + y2 Hx d x + y d yL
Rijo Cal 3 Cap 7.nb 53

In[531]:= H∗ Gráfico do campo vetorial da função dada ∗LClear@x, y, fD;
f@x_, y_D := 3 è!!!!!!!!!!!!!!!!!
x2 + y2 8x, y<PlotVectorField@f@x, yD, 8x, −2, 2<,8y, −2, 2<, ScaleFactor → .5, Frame → TrueD;
-2 -1 0 1 2
-2
-1
0
1
2
In[93]:= H∗ Mostra que a forma diferencial é exata ∗LD@f@x, yD@@1DD, yD − D@f@x, yD@@2DD, xD
Out[93]= 0
In[551]:= H∗ O potencial U ∗LpotU@x_, y_D := Hx2 + y2L3ê2
In[552]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[552]= 3 x è!!!!!!!!!!!!!!!x2 + y2
In[553]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[553]= 3 y è!!!!!!!!!!!!!!!x2 + y2
Usando o cálculo do exercício anterior, identifique os potenciais das formas ou camps dados nos Exercícios 26 a 28.
26. F”÷÷ = 6 Hx2 + y2L Hx i + y jL
In[561]:= H∗ O potencial U ∗LpotU@x_, y_D := Hx2 + y2L3
In[562]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[562]= 6 x Hx2 + y2L2
In[563]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[563]= 6 y Hx2 + y2L2
54 Rijo Cal 3 Cap 7.nb

O potencial U(x, y) = Hx2 + y2L3
27. F”÷÷ = 5 Hx2 + y2L3ê2 Hx i + y jL
In[564]:= H∗ O potencial U ∗LpotU@x_, y_D := Hx2 + y2L5ê2
In[565]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[565]= 5 x Hx2 + y2L3ê2
In[566]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[566]= 5 y Hx2 + y2L3ê2
O potencial U(x, y) = Hx2 + y2L5ê2
28. d U = Hx d x + y d yL ë Hx2 + y2L2ê3
In[580]:= H∗ O potencial U ∗LpotU@x_, y_D := 3ê2 Hx2 + y2L1ê3
In[581]:= H∗ Verifica que ∂Uê∂x = L ∗LD@potU@x, yD, xD êê Simplify
Out[581]=x
Hx2 + y2L2ê3
In[579]:= H∗ Verifica que ∂Uê∂y = M ∗LD@potU@x, yD, yD êê Simplify
Out[579]=y
Hx2 + y2L2ê3
O potencial U(x, y) = 3ê2 Hx2 + y2L1ê3
Rijo Cal 3 Cap 7.nb 55
![com Mathematica - cmig.ufpa.brcmig.ufpa.br/livros_online/luiz_rijo_calculo_de_uma_variavel_com... · ... xmax}] calcula o valor numérico aproximado da integral de f com respeito](https://static.fdocumentos.com/doc/165x107/5c15924809d3f2340f8d85d3/com-mathematica-cmigufpa-xmax-calcula-o-valor-numerico-aproximado.jpg)














![Tutorial Mathematica v5.0 para Windowsmarcio/tut2005/mathematica/043576Filipe.pdfVersão para MacOS X (4.1.5 – lançada em 2001); ... Cos[x] Cosseno Tan[x] Tangente ... Para as funções](https://static.fdocumentos.com/doc/165x107/5ae8d4307f8b9a8b2b90792d/tutorial-mathematica-v50-para-marciotut2005mathematica043576filipepdfverso.jpg)


