Computer Control Problems · Problems - Computer Control Page 1 Computer Control – Problems 2016...
20
Problems - Computer Control Page 1 Computer Control – Problems 2016 J. Miranda Lemos 1 – Models in Computer Control P1 – Determine os primeiros 6 termos da solução da equação de diferenças , 3 , 2 ) 2 ( ) 1 ( ) ( k k y k y k y partindo das condições iniciais 1 ) 1 ( ) 0 ( y y (Estes números denominam-se números de Fibonacci). P2 – Considere o sistema com entrada u e saída y descrito pela equação de diferenças linear ) ( ) 1 ( ) ( ) 1 ( ) 2 ( 1 0 2 1 k u b k u b k y a k y a k y em que , 2 , 1 , 0 k é o tempo discreto, os i a , i b são parâmetros constantes e as condições iniciais são nulas. Por aplicação do Princípio de Sobreposição, mostre que se trata de um sistema linear. P3 – Considere o sistema discreto descrito pela equação de diferenças: ) 11 ( ) 10 ( 2 ) 2 ( ) 1 ( 5 . 0 ) ( k u k u k y k y k y a) Determine a função de transferência no operador atraso; b) Determine a função de transferência no operador avanço; c) Determine os pólos e os zeros (e a respectiva multiplicidade) e o atraso puro do sistema. P4. Corn producers in Brutopia (a country) have observed that the corn demand () in the marked, in a given year , is a linear function of the price () in the same year, given by () = 0 − (), (P4-1) where 0 and are known parameters.
Transcript of Computer Control Problems · Problems - Computer Control Page 1 Computer Control – Problems 2016...

Problems - Computer Control Page 1
Computer Control – Problems
2016
J. Miranda Lemos
1 – Models in Computer Control
P1 – Determine os primeiros 6 termos da solução da equação de diferenças
,3,2)2()1()( kkykyky
partindo das condições iniciais
1)1()0( yy
(Estes números denominam-se números de Fibonacci).
P2 – Considere o sistema com entrada u e saída y descrito pela equação de diferenças linear
)()1()()1()2( 1021 kubkubkyakyaky
em que ,2,1,0k é o tempo discreto, os ia , ib são parâmetros constantes e as condições
iniciais são nulas. Por aplicação do Princípio de Sobreposição, mostre que se trata de um
sistema linear.
P3 – Considere o sistema discreto descrito pela equação de diferenças:
)11()10(2)2()1(5.0)( kukukykyky
a) Determine a função de transferência no operador atraso;
b) Determine a função de transferência no operador avanço;
c) Determine os pólos e os zeros (e a respectiva multiplicidade) e o atraso puro do
sistema.
P4. Corn producers in Brutopia (a country) have observed that the corn demand 𝑑(𝑘) in the
marked, in a given year 𝑘, is a linear function of the price 𝑝(𝑘) in the same year, given by
𝑑(𝑘) = 𝑑0 − 𝑎𝑝(𝑘), (P4-1)
where 𝑑0 and 𝑎 are known parameters.

Problems - Computer Control Page 2
On the other way, it is also known that the corn production 𝑠(𝑘) in year 𝑘 is a function of the
price 𝑝(𝑘 − 1) of the previous year, given by
𝑠(𝑘) = 𝑠0 + 𝑏𝑝(𝑘 − 1), (P4-2)
where 𝑠0 and 𝑏 are known parameters, with 𝑏 > 0.
a) Assume that in a generic year 𝑘 the price is adjusted such that all the
available corn production is sold. Write a difference equation that relates
the corn price in two consecutive years (that is to say, that relates
𝑝(𝑘 − 1) with 𝑝(𝑘)).
b) Find, as a function of the parameters 𝑑0, 𝑎, 𝑠0 and 𝑏 what is the
equilibrium price of the corn. In other words, what is the price �̅� such
that, if it is valid in one year, it will be the same in subsequent years.
c) Let 𝐸(𝑘) be
𝐸(𝑘) = 𝑝(𝑘) − �̅� (P4-3)
Obtain a difference equation for 𝐸(𝑘).
d) Using the equation you have obtained in c) for 𝐸(𝑘), give a condition on
the parameters that ensures that 𝑝(𝑘) will approach the equilibrium �̅�
when 𝑘 increases.
e) When there are changes in the price 𝑝(𝑘), state wether these are
monotonous (always growing or alwayus decreasing) or if there are
oscillations. Justify.
P5 – Considere o sistema linear e invariante descrito pela equação de diferenças
)()1()()1()2( 1021 kubkubkyakyaky
a) Escreva a equação na forma em que a variável mais avançada é )(ky .
b) Determine a função de transferência, em potências de z e de 1z .
c) Diga qual o atraso puro do sistema.
d) Obtain an equivalent state-space model of the system.
P6 - Considere o sistema da figura seguinte.

Problems - Computer Control Page 3
O A/D e o D/A operam sincronamente, com um intervalo de amostragem de 1 segundo.
Admita que o D/A se comporta como um retentor de amostras de ordem zero e que o A/D se
comporta como um amostrador ideal. Suponha que as condições iniciais do processo são
nulas. Suponha ainda que no ponto A é aplicado um escalão digital unitário. Nestas condições,
responda às perguntas seguintes:
a) Represente graficamente os sinais nos pontos A, B, C, D, E.
b) Escreva expressões para o sinal nos pontos C e E.
c) Obtenha o modelo discreto equivalente entre os pontos A e E, na forma de uma função de
transferência digital
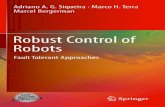
P7. The aim of this problem is to find a discrete time
model of a DC motor such as shown in the picture
attached. The relation between the electric tension
applied to the motor, 𝑢(𝑡), and the shaft angular
position, 𝑦(𝑡), in continuous time 𝑡, are related by the
transfer function
𝐺(𝑠) =1
𝑠(𝑠+1) . (P7-1)
Answer the following questions (show all the
computations):
a) Compute the equivalent discrete transfer function as seen between the
terminals of the D/A and A/D converters connected to the motor, that
operate synchronously, with a sampling interval of 1s.
b) Write the difference equation that relates the samples of the input with
the samples of the output in discrete time.
c) Write in matrix form the corresponding state model.
d) State, with a justification, wether a sampling interval of 1s is adequate for
this system.
D/A A/D1s e
-2sA B C D E
Processo

Problems - Computer Control Page 4
Ajuda: 1
)0,1(
z
zkparaZ
2)1()(
z
hzkhZ
Th
Tkh
ez
zeZ
/
/
1
𝑒≅ 0,37
P8.Considere o sistema cujo diagrama de blocos se mostra na figura seguinte.
Admita que o D/A se comporta como um retentor de amostras de ordem zero e que o A/D se
comporta como um amostrador ideal. Ambos os conversores operam sincronamente. As
condições iniciais do processo são nulas.
a) Calcule os polos do sistema contínuo e indique uma frequência de amostragem adequada
à discretização do sistema. Justifique.
b) Para essa frequência obtenha o modelo discreto equivalente entre os pontos A e D, na
forma de uma função de transferência digital.
P9. Considere o sistema contínuo cujo modelo é dado da seguinte forma:
)1()(
5.0)(
2
2
tudt
tdy
dt
tyd
O sinal {u} representa a entrada do sistema e {y} a sua saída. Note que a variável independente
do sinal de entrada está atrasada relativamente à do sinal de saída. Pretencde-se:
Determine um modelo discreto equivalente, na forma de uma função de transferência
discreta, quando este sistema é amostrado com um retentor de amostras de ordem zero e um
intervalo de amostragem de 1 segundo.
P10. Um sistema contínuo com função de transferência
G ss
e s( ) 1
é amostrado com um intervalo de amostragem h 1 , com um retentor de amostras de
ordem zero. Determine o seu equivalente discreto.
Note que a transformada Z do escalão unitário é
D/A 1/(s2+3s+2) A/D C D A
B
Processo

Problems - Computer Control Page 5
z
z 1
P11. Considere o sistema descrito na figura seguinte.
Admita que o D/A se comporta como um retentor de ordem zero e que o A/D se comporta
como um amostrador ideal. Ambos os conversores operam sincronamente à frequência de
amostragem fs = 1Hz. As condições iniciais do processo são nulas, e no instante t = 0 é aplicado
um escalão unitário em x1.
c) Esboce os sinais x1, x2, x3, x4 e x5, ao longo do tempo, identificando claramente os que são
contínuos e os que são discretos. Não é necessário fazer um esboço rigoroso dos
transitórios.
d) Obtenha o modelo discreto equivalente.
e) Verifique se a frequência de amostragem dada é adequada à obtenção de um equivalente
discreto que seja uma boa aproximação do sistema contínuo. Caso contrário, escolha uma
frequência adequada.
f) Faça agora fs = 10Hz. Calcule os polos e zeros do equivalente discreto e indique o que lhes
acontece se aumentarmos ainda mais a frequência de amostragem.
Nota: 3
22
)1(2
)1()(
2
1
z
zzhkhZ
P12. Considere um veículo submarino tipo torpedo com propulsão eléctrica que se mostra na
figura seguinte.
Este veículo desloca-se em linha recta, sendo a força de propulsão devida à rotação da hélice
accionada por um motor eléctrico. Os dois incrementos u (variável manipulada,
correspondente à variação da velocidade da hélice em torno do equilíbrio) e v (saída do
sistema, correspondente ao incremento da velocidade do torpedo em relação ao equilíbrio)
estão aproximadamente relacionados, para valores pequenos, pelo modelo linear:
vFp
D/A A/D x4 x5 x1 x2 x3

Problems - Computer Control Page 6
uvdt
dv
1 (2)
Por forma a realizar o controlo por computador da velocidade do torpedo por actuação em u ,
é utilizado o esquema que se mostra na figura seguinte.
O A/D e o D/A operam sincronamente, com um intervalo de amostragem h . Admita que o D/A
se comporta como um retentor de amostras de ordem zero e que o A/D se comporta como um
amostrador ideal. Suponha que as condições iniciais são nulas (isto é, quer a força de
propulsão, quer a velocidade do torpedo se encontram inicialmente nos seus valores de
equilíbrio). Nestas condições, responda às perguntas seguintes (considere apenas os
incrementos em relação ao equilíbrio):
a) Obtenha o modelo discreto equivalente entre os pontos A e D, na forma de uma função de
transferência discreta. Considere h , e genéricos.
b) Escreva a equação de diferenças equivalente à função de transferência que obteve em b).
c) Recorrendo ao método dos mínimos quadrados para estimar parâmetros no modelo
discreto, diga como poderia estimar os parâmetros e a partir de registos de
observações experimentais para o comando do motor u e a velocidade v .
Ajudas úteis:
as
eTL at
1
1
1
z
zTZ (degrau)
Th
Tkh
ez
zeTZ
/
/
P13. Considere o sistema contínuo cujo modelo de estado é
x x
x u
y x
1 2
2
1 0
Determine um modelo discreto equivalente, na forma de uma função de transferência
discreta, quando este sistema é amostrado com um retentor de amostras de ordem zero e um
intervalo de amostragem de 2 segundos.
Nota:
Z khh z z
z
1
2
1
2 1
22
3( )
( )
( )
u(kh)D/A
u(t) v(t)A/D
v(kh)
A B C D
Dinâmica incrementaldo torpedo

Problems - Computer Control Page 7
P14 – Considere o sistema contínuo
cxy
buaxx
Suponha que a entrada u é constante durante intervalos de tempo de duração h . Amostre o
sistema em instantes síncronos com as variações em u e discuta como é que os pólos do
sistema discreto variam com o intervalo de amostragem h .
P15 – As equações de diferenças seguintes são supostas descrever sistemas em tempo
contínuo, amostrados com um retentor de amostras de ordem zero e um intervalo de
amostragem h . Determine, se existirem, os correspondentes sistemas em tempo contínuo:
a) )(6)(5.0)( hkhuhkhykhy
b)
)(11)(
)(7.0
5.0)(
3.00
15.0)(
khxkhy
khukhxhkhx
c) )(6)(5.0)( hkhuhkhykhy
P16 – Determine a função de transferência discreta do sistema
)(01)(
)(1
2)(
00
2.05.0)(
khxkhy
khukhxhkhx
P17. Consider the continuous system with transfer function
𝐺(𝑠) =0,2
𝑠 + 0.1
a) Compute the equivalent discrete transfer function 𝐺𝐷(𝑧) when this
system is sampled with a zero-order sample and hold, with a sampling
interval of 1 s.
b) Write the difference equation that corresponds to the discrete transfer
function that you have obtained in a).
Useful Z and Laplace transforms:

Problems - Computer Control Page 8
1)0,1(
z
zkparaZ
2)1()(
z
hzkhZ
Th
Tkh
ez
zeZ
/
/
aseL at
1
P18. Consider the unit step responses shown on figure P2-1, that are identified by the letters
A, B, C, D and E. Furthermore, consider also the discrete systems numbered from 1 to 5, that
are described by the following transfer functions:
𝐺1(𝑧) =1
𝑧−0.5 𝐺2(𝑧) =
0,2
𝑧−0,8 𝐺3(𝑧) =
0,35𝑧+0,3
𝑧2−𝑧+0.7
𝐺4(𝑧) =1,5
𝑧+0,5 𝐺5(𝑧) =
0,5
𝑧−0,5
a) State which number of the transfer functions correspond to each time
response. Justify your answer.
b) Write the matrices of a linear state model that corresponds to 𝐺3(𝑧).
0 5 10 15 20
0
0.5
1
1.5
2
(A)
k
y(k
)
0 5 10 15 20
0
0.5
1
1.5
2
(B)
k
y(k
)
0 5 10 15 20
0
0.5
1
1.5
2
(C)
k
y(k
)
0 5 10 15 20
0
0.5
1
1.5
2
(D)
k
y(k
)

Problems - Computer Control Page 9
Figure P2-1. Problem P2. Time responses to the unit step input of 5 different linear discrete
systems.
P19 – Considere o sistema contínuo estável
as
bssG
)(
em que ba . Determine a função de transferência discreta do sistema amostrado com um
intervalo de amostragem h . Obtenha condições para que o sistema amostrado tenha um
inverso estável (isto é, para que não tenha zeros fora do círculo unitário).
P20. Considere o sistema discreto cuja função de transferência é
𝐺1(𝑧) =0,5𝑧 + 1
𝑧2 − 0,8𝑧 + 0,5
a) Escreva a equação de diferenças correspondente à função de
transferência discreta 𝐺1.
b) Escreva um modelo de estado correspondente à função de transferência
discreta 𝐺1.
c) Obtenha um modelo de estado para a associação em série de 𝐺1 e 𝐺2
que se mostra na figura P1-1, em que uma parte do estado do sistema
global é o estado do modelo de 𝐺1 que obteve na alínea b). A função de
transferência 𝐺2 é
𝐺2 =3
𝑧 − 0,7
0 2 4 6 8 10 12 14 16 18 20
0
0.5
1
1.5
2
(E)
k
y(k
)

Problems - Computer Control Page 10
Fig. P1-1. Associação de dois sistemas em série.
2 – Identification
P1 - Dadas duas grandezas físicas X e Y, pretende-se estimar o parâmetro a no modelo linear
que as relaciona, e que é da forma
Y aX
em que é uma variável que traduz a existência de erros experimentais. Em 5 experiências em
que se mediu o valor de X e o correspondente valor de Y, obtiveram-se os seguintes
resultados:
i X Y
1 10 9
2 20 21
3 30 32
4 40 38
5 50 51
Na tabela acima, I representa o número da experiência realizada.
Determine uma estimativa do parâmetro a recorrendo aos método dos mínimos quadrados,
indicando:
a) A funcional de mínimos quadrados;
b) A equação satisfeita pela estimativa;
c) O valo da estimativa.
P2.Sabe-se que a grandeza Y tem uma variação polinomial no tempo, sendo modelada por um
polinómio de segundo grau, da forma:
Y t at t( ) ( ) 2
G1G2

Problems - Computer Control Page 11
Nesta equação, t é o tempo contado a partir do início da experiência, a é um parâmetro a
estimar e (t) é um resíduo que traduz a existência de erros experimentais, o qual se assume
pequeno. Por forma a estimar a constante a, efectua-se uma experiência ao longo da qual se
regista o valor de Y, bem como os instantes de medida contados desde o início. Obtiveram-se
os resultados que se mostram na tabela seguinte:
t (segundo) Y
5 0.49
10 1.01
15 1.45
20 2.05
Recorrendo ao método dos mínimos quadrados e aos dados indicados na tabela, determine
uma estimativa do parâmetro a. Indique sucessivamente:
a)A funcional de mínimos quadrados;
b)A equação satisfeita pela estimativa;
c)O valor da estimativa;
P3. Pretende-se estimar por mínimos quadrados não recursivos o parâmetro a no modelo
)1()1()( tutyaty
para o que se observaram séries de observações das variáveis )(tu e )(ty , com 1000 pontos
cada. Designam-se estas observações experimentais por 1iu e iy , 1000,,1 Ni .
a) Determine uma fórmula para a estimativa não recursiva de mínimos quadrados do
parâmetro a em função dos dados, indicando sucessivamente: i) O funcional de mínimos
quadrados; ii) A equação satisfeita pela estimativa; iii) Uma fórmula para o cálculo da
estimativa.
b) Para estimar o mesmo parâmetro, no mesmo modelo, recorreu-se ao método dos mínimos
quadrados recursivos com esquecimento exponencial. Na experiência efectuada o parâmetro
a tem inicialmente o valor de 0.95 e, depois de 500t , assume o valor -0.5. Fizeram-se duas
experiências com factores de esquecimento com o valor 98.0 e 995.0 . Os
resultados destas experiências mostram-se nas figuras P4-1 e P4-2.

Problems - Computer Control Page 12
Pretende-se: Diga a qual das figuras corresponde qual dos valores do factor de esquecimento.
Justifique.
Fig. P4-1 Fig. P4-2
P4. Considere o sistema modelado por
)()1()1()( tetbutayty
em que e é um sinal branco, gaussiano, de média nula e variância unitária. É efectuada uma
experiência no sistema para estimar os parâmetros a e b . Com os dados obtidos para u e y
calcularam-se as seguintes quantidades:
30)(999
1
2 i
iy 50)(999
1
2 i
iu 1)()1(999
1
i
iyiy 20)()(999
1
i
iuiy 36)()1(999
1
i
iuiy
Determine a estimativa de mínimos quadrados dos parâmetros a e b .
P5 - Considere o sistema descrito pela seguinte equação às diferenças:
)()2()1()( ttbutayty
Nesta equação, ba, , são parâmetros a estimar, t é o número do ensaio realizado e (t) é um
resíduo que traduz a existência de erros experimentais, o qual se assume pequeno. Por forma
a estimar as constantes ba, , efectua-se uma experiência desde t=1 até t=1000, estando o
sistema inicialmente em repouso, ao longo da qual se registam os seguintes valores:
4.1)1(1000
1
2 t
ty , 7.0)1()(1000
1
t
tyty , 4.0)2()(1000
1
t
tyty
0 500 1000 1500 2000-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Est
imati
va
Tempo [número de amostras]
0 500 1000 1500 2000-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Est
imati
va
Tempo [número de amostras]

Problems - Computer Control Page 13
1)2(1000
1
2 t
tu , 0)2()1(1000
1
t
tutu , 0)2()(1000
1
t
tutu
1)2()(1000
1
tutyt
, 0)2()1(1000
1
t
tuty , 0)2()2(1000
1
tutyt
a) Recorrendo ao método dos mínimos quadrados calcule a estimativa dos parâmetros do
sistema (a, b).
b) Qual das estimativas (de a ou de b) tem maior precisão? Justifique.
c) Diga que condições deverá satisfazer a sequência de ruído para que a estimativa dos
parâmetros seja centrada.
P6 – Show that, whenever the indicated inverses exist, the following identity is true:
1111111 DACBDABAABCDA
Suggestion: Use the fact that if 𝑀 = 𝑁−1, then 𝑀𝑁 = 𝑁𝑀 = 𝐼.
P7 - Deduza as equações que permitem estimar recursivamente o vector de parâmetros
dadas N observações de y(t) e de (t-1), admitindo válido o modelo
y t t v t( ) ' ( ) ( ) 1
em que v(t) é um resíduo pequeno (escalar para cada t). O estimador não pode implicar a
inversa de uma matriz, e minimiza o critério de mínimos quadrados com factor de
esquecimento, dado por
J y t tN t
t
N
( ) ( ( ) '( ) )^
1 2
1
sendo um escalar positivo e menor do que 1.
Sugestão: 1111111 DACBDABAABCDA .
Use the fact that the batch least squares estimate with forgetting factor can be computed
using
𝜃(𝑡) = Λ−1(𝑡) ∑ 𝜆𝑡−𝑘𝜑(𝑘 − 1)𝑦(𝑘)𝑡𝑘=1 ,
where the information matrix Λ verifies the recursive equation
Λ(𝑡) = 𝜆Λ(𝑡 − 1) + 𝜑(𝑡 − 1)𝜑𝑇(𝑡 − 1).

Problems - Computer Control Page 14
P8. Considere o processo estável descrito pela equação de diferenças
y k ay k u k v k( ) ( ) ( ) ( ) 1 1
em que v(k) é um resíduo não mensurável, modelado por
v k e k ce k( ) ( ) ( ) 1
e as sequências u(k), e(k) são sequências brancas, independentes, de média nula e variância
unitária. Supõe-se que apenas estão acessíveis para medida directa os sinais y, u, não sendo o
sinal e acessível. Suponha válida a aproximação das médias estatísticas por médias na amostra.
Exprima a estimativa de mínimos quadrados da constante a em função de a e de c.
Sugestão: Dado o modelo linear
y t t to( ) ' ( ) ( ) 1
a estimativa de mínimos quadrados do vector o é dada por
( ) ' ( ) ( ) ( )
k k y k kk
N
k
N
1 1 11
1
1
Para obter a variância da saída y em regime estacionário, comece por obter uma equação de
diferenças para ela.
P9. Pretende-se medir um parâmetro , para o que se dispõe de dois sensores que produzem
medidas y1 e y2 tal como se mostra na figura.
Pretende-se estudar o problema de fusão sensorial, isto é, de combinar as medidas dos dois
sensores. Admite-se que o sensor i produz uma medida yi relacionada com o valor
verdadeiro do parâmetro por
e
e
y
y
1
2
1
2
sensor 1
sensor 2

Problems - Computer Control Page 15
y ei i
tal que
p e eei i i( ) exp
1
2
1
2
2
sendo e1 e e2 mutuamente independentes e independentes de .
a)Determine a estimativa de máxima verosimilhança do parâmetro , designada por
calculada a partir de um par de medidas y1 e y2 .
b)Pretende avaliar-se da vantagem da utilização dos dois sensores em relação a um único.
Admita que o parâmetro é uma variável aleatória gaussiana com uma certa média e uma
certa variância. Determine a variância do erro:
i)Quando usa apenas um sensor, E y 1
2
ii)Quando usa a estimativa de máxima verosimilhança baseada nos dois
sensores, E MV 2
.
O que conclui?
P10. Para a instalação de uma antena num prédio elevado, pretende-se caracterizar a força
exercida pelo vento na estrutura. Como a força exercida é proporcional à velocidade do vento,
efectuam-se medições diárias do módulo da velocidade do vento (independentemente da
orientação) através de um anemómetro: vi, i=1…N. Admite-se que o módulo da velocidade
segue uma distribuição de Rayleigh1 de parâmetro :
1 A distribuição de Rayleigh modela processos 2D cujas componentes ortogonais (neste caso
vx e vy) têm distribuição Gaussiana de média nula e variância 2.
2
2
2 2exp)|(
vvvp

Problems - Computer Control Page 16
Admitindo que as medições em dias consecutivos são independentes, calcule a estimativa do
valor do parâmetro 2 pelo método da máxima verosimilhança (considere um número
arbitrário N de medições).
P11 – Antes de uma partida de futebol é necessário verificar se a moeda a utilizar na escolha
de campo está ou não viciada. Para isso recorre-se a uma experiência em que se efectuam n
lançamentos independentes e se regista o número de “faces” e “coroas” obtidas:
},...,,{ 21 nyyy ; yi = 1 se “face” e yi = 0 se “coroa”
Seja p a probabilidade de um lançamento da moeda em questão resultar em “face”. A moeda
será não viciada se p for próximo de 0.5.
a) Mostre que a função de verosimilhança para a experiência referida é dada pela distribuição
de Bernoulli:
knk
n pppyyyL
1)|,...,,( 21
sendo k o número de faces saídas (
n
i
iyk1
).
b) Obtenha o estimador de máxima verosimilhança do parâmetro p.
P12. Pretende-se caracterizar o ruído de um sensor utilizando o método da máxima
verosimilhança. Para isso dimensiona-se uma experiência onde se obtêm N observações do
sensor (yi, i=1…N), com entrada nula. Admita que o ruído do sensor é branco, gaussiano, de
média nula, e as observações são independentes.
Mostre que a estimativa de máxima verosimilhança da variância do ruído é:
N
yN
i
i 1
2
2̂
Notas: 2
2
2
1
2
2
2
1),0(
y
e
; x
xdx
d 1)log(

Problems - Computer Control Page 17
P13. Consider the situation of figure P3-1, in which a sensor yields a measure yi of a
parameter that corresponds to the parameter value added to a random error ie , where 𝑖
represents the index of the measurement (measurement 𝑖 = 1, measurement 𝑖 = 2, etc.) and,
for each 𝑖, ie is a Gaussian random variable with zero mean and unit variance, meanin g that
its probability density function is given by
p e eei i i( ) exp
1
2
1
2
2
.
It is known that ie and je are independent random variables for 𝑖 ≠ 𝑗.
Fig. P3-1. A sensor that measures a paratemer with additive gaussian noise.
For each index 𝑖, the measure obtained, 𝑦𝑖, and the true value of the parameter, 𝜃, are related
by the expression
𝑦𝑖 = 𝜃 + 𝑒𝑖
Answer the following questions:
a) Find the maximum likelihood estimate 𝜃𝑀𝑉 of parameter 𝜃 when only 1 observation
𝑦1.is performed.
b) Compute the variance of the estimation error, 𝐸 [(𝜃 − 𝜃𝑀𝑉)2
] in the case of a), in
which only one observation is made.
c) Find the maximum likelihood estimate 𝜃𝑀𝑉 of parameter 𝜃 when 2 observations 𝑦1 e
𝑦2 are made.
d) Compute the variance of the estimation error, 𝐸 [(𝜃 − 𝜃𝑀𝑉)2
] in the case of b), ), in
which two observations are made.
e) What is the minimum number 𝑁 of observations that must be done such that the
variance of the estimation error yielded by maximum likelihood is smaller than 0,1?
Justify your answer.
ei
yi+
Sensor
Observationnoise
Parameterto estimate
Observation

Problems - Computer Control Page 18
P14. Considere um veículo que se desloca ao longo de uma recta com velocidade constante.
No sistema de coordenadas associado à recta, o movimento do veículo é descrito pelo modelo
𝑥(𝑡) = 𝑥0 + 𝑣0𝑡 + 𝑤(𝑡), (2-1)
em que 𝑥 é a posição do alvo no instante de tempo contínuo 𝑡, 𝑥0 é a posição inicial do
veículo, 𝑣0 é a velocidade do veículo, e 𝑤 é um erro de modelação dado por uma variável
aleatória de média nula. Pretende-se estimar a posição inicial e a velocidade inicial do veículo a
partir da observação da sua posição em alguns instantes.
Fig. 2-1. Observations of the vehicle position as a function of time.
a) Por forma a estimar 𝑥0 e 𝑣0, são feitas 10 observações da posição 𝑥(𝑡𝑖)
do veículo em instantes 𝑡𝑖 conhecidos (fig. 2.1). Escreva
sucessivamente:
a. O funcional de mínimos quadrados para a estimativa de 𝑥0 e 𝑣0;
b. A equação verificada pelas estimativas em termos dos dados.
c. O valor numérico das estimativas, sabendo que ∑ 𝑡𝑖10𝑖=1 = 55,
∑ 𝑡𝑖210
𝑖=1 = 385, ∑ 𝑥(𝑡𝑖) = 4510𝑖=1 e ∑ 𝑥(𝑡𝑖)𝑡𝑖 = 28910
𝑖=1 .
b) Calcule a matriz de covariância do erro de estimação e diga qual a
estimativa mais precisa.
c) Suponha agora que a posição inicial é conhecida exactamente, sendo
𝑥0 = 0, e que pretendemos analisar o método dos mínimos quadrados
quando são feitas muitas observações. Para tal, assume-se válida a
1 2 3 4 5 6 7 8 9 102
2.5
3
3.5
4
4.5
5
5.5
6
6.5
7
t [s]
x [m
]

Problems - Computer Control Page 19
aproximação da estimativa de mínimos quadrados em termos da
esperança matemática, que se encontra na “ajuda” abaixo. São feitas
observações em sequência, tal que 𝑡𝑘 = 𝑘ℎ, em que ℎ é o intervalo de
amostragem e assume-se que o ruído é colorido, sendo o modelo das
observações 𝑥(𝑘) = 𝑣0𝑘ℎ + 𝑒(𝑘) + 𝑐𝑒(𝑘 − 1), em que 𝑒 é uma sequência
de ruído branco. Exprima a estimativa 𝑣0 em termos do valor verdadeiro
da velocidade e, se necessário, de outros parâmetros do sistema. Que
conclusão tira?
Ajuda: Dado o modelo de regressão linear
)()(')( kkky o
a estimativa de mínimos quadrados do vector o é aproximada, em termos da esperança
matemática, por
𝜃 = [𝐸[𝜑(𝑘)𝜑′(𝑘)]]−1
𝐸[𝑦(𝑘)𝜑(𝑘)]
P15. Consider the stable process described by the difference equation
)1(9,0)()1()1()( kekekukayky
where )(ke is a white noise sequence of zero mean and unit variance. It is assumed that the
only signal accessible to direct measure is y and that 𝑒 cannot be measured. Signal 𝑢 is a
system manipulated input (meaning that we can selected at our will). In the situation
considered, the signal 𝑢 is selected as a white sequence, with zero mean and 𝜎𝑢2 = 𝐸[𝑢2(𝑘)],
that is independent from the noise )(ke that affects the system.
d) Consider the situation in which the variance of the manipulated 𝑢is one,
meaning that 𝜎𝑢2 = 𝐸[𝑢2(𝑘)] = 1. Express the least squares estimate of
the const parameter a as a function of that same parameter and of the
steady state variance of 𝑦(𝑘), represented by 𝜎𝑦2 (meaning that 𝜎𝑦
2 =
𝐸[𝑦2(𝑘)] when 𝑘 grows “a lot”). Use the approximation of the least
squares estimate in terms of the mathematical expectation such as in the
“help” below.
e) Consider now the situation in which the variance of the manipulated
signal is bigger, 𝜎𝑢2 = 10. Explain whether this is advantageous for
estimating parameter a . Justify your answer quantitatively.
Help: Given the linear regression model

Problems - Computer Control Page 20
)()(')( kkky o
The least squares estimate of parameter o is approximated, in terms of mathematical
expectation, by
𝜃 = [𝐸[𝜑(𝑘)𝜑′(𝑘)]]−1
𝐸[𝑦(𝑘)𝜑(𝑘)]