
CONTROLADOR PI DIGITAL DE TEMPERATURA COM …livros01.livrosgratis.com.br/cp116878.pdf ·...
69
UNIVERSIDADE DE TAUBATÉ Masamori Kashiwagi CONTROLADOR PI DIGITAL DE TEMPERATURA COM RESISTOR DE 2 kW Dissertação apresentada para obtenção do Título de Mestre em Engenharia Mecânica pela Universidade de Taubaté. Área de Concentração: Automação Industrial e Robótica. Orientador: Prof. Dr. Samuel E. de Lucena Taubaté - SP 2006
Transcript of CONTROLADOR PI DIGITAL DE TEMPERATURA COM …livros01.livrosgratis.com.br/cp116878.pdf ·...

UNIVERSIDADE DE TAUBATÉ
Masamori Kashiwagi
CONTROLADOR PI DIGITAL DE TEMPERATURA COM
RESISTOR DE 2 kW
Dissertação apresentada para obtenção do Título de Mestre em Engenharia Mecânica pela Universidade de Taubaté. Área de Concentração: Automação Industrial e Robótica. Orientador: Prof. Dr. Samuel E. de Lucena
Taubaté - SP
2006

Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.

MASAMORI KASHIWAGI
CONTROLADOR PI DIGITAL DE TEMPERATURA COM RESISTOR DE 2 kW
Dissertação apresentada para obtenção do Título de Mestre em Engenharia Mecânica pela Universidade de Taubaté. Área de Concentração: Automação Industrial e Robótica.
Data:_______________
Resultado:___________
BANCA EXAMINADORA Prof. Dr. Samuel E. de Lucena Universidade Estadual Paulista/Guaratinguetá - Orientador
Assinatura ____________________________
Prof. Dr. João Sinohara da Silva Sousa Universidade de Taubaté
Assinatura ____________________________
Prof. Dr. Inácio Bianchi Universidade Estadual Paulista/Guaratinguetá
Assinatura ____________________________

Dedico este trabalho a minha esposa Kazuko e minhas filhas Kazumi, Naomi e Hiromi, pela
motivação, paciência, compreensão, incentivo e confiança, sem os quais este trabalho não se
transformaria em realidade.

AGRADECIMENTOS
Ao amigo e orientador, Prof. Dr. Samuel E. de Lucena, professor da
UNESP/Guaratinguetá, por colocar à disposição a estrutura de laboratórios da sua própria
sala para os testes, e pelas diretrizes seguras e permanente incentivo.
Ao meu pai, in memoriam, e aos meus irmãos, pelo amor e dedicação em minha
formação.
Aos amigos e companheiros de mestrado que, de uma forma direta ou indireta,
colaboraram na execução deste trabalho.

RESUMO
KASHIWAGI, M. (2006). Controlador PI Digital de Temperatura com Resistor de 2 kW. 2006. p. Dissertação (Mestrado) – Departamento de Engenharia Mecânica, Universidade de Taubaté, Taubaté. Este trabalho descreve o desenvolvimento de um controlador digital de temperatura para
um tanque com até 20 litros de água. O controlador é baseado em um microcontrolador de
8 bits, da família 8051, com conversor A/D externo de 8 bits. Usou-se um resistor de 2 kW
(em 220 V) como elemento aquecedor, ligado à rede elétrica por meio de um triac que,
por sua vez, é acionado pelo microcontrolador através de um opto-isolador no cruzamento
de zero (da rede). O microcontrolador atualiza o valor da temperatura da água do tanque,
medido por meio de sensor Pt-100 a cada segundo, em um mostrador de 3 dígitos. O valor
da temperatura desejada para a água é lido por meio de uma chave de painel de dois
dígitos. Para avaliar o controlador, desenvolveu-se um algoritmo de controle PI, e
sintonizou-se o controlador pelo método de Ziegler e Nichols. A resposta do controlador
ao degrau foi satisfatória, com tempo resposta de cerca de 40 minutos, erro de regime de
5% e uma oscilação de 3% em torno da temperatura de referência. Estes valores podem ser
diminuídos filtrando-se os ruídos presentes na referência de tensão do A/D e no sinal do
sensor.
Palavras-chave: Controlador PI, controle digital, controle de temperatura.

ABSTRACT
KASHIWAGI, M. (2006). 2-kW Resistance Digital PI Temperature Controller. 2006. p. Thesis (Master), – Department of Mechanical Engineering, Universidade de Taubaté, Taubaté. This work describes the development of a digital controller of temperature for a tank with
up to 20 liters of water. The controller is based on a 8-bit microcontroller 8051 family,
with external 8-bit A/D converter. An electrical resistance of 2 kW (in 220 V) was used as
heater element, connected to power-line voltage by means of a triac that it is set by the
microcontroller through an optoisolator in the zero crossing (from power-line voltage).
The microcontroller brings up to date the water temperature value of tank, measured by
means of Pt-100 sensor to each second, in a 3 digits display. The desired water
temperature value is read through two digits thumbwill. To evaluate the controller, an
algorithm of PI control has been developed, and was tuned the controller for the Ziegler
and Nichols method. The step response of the controller was satisfactory, with
approximately 40 minutes to time response, 5% error between set point and actual value
and 3% deviation around the reference temperature. These values can be reduced by
filtering the noises present on the A/D reference voltage and on the signal of the sensor.
Key-words: PI controller, digital control, temperature control.

Lista de figuras
Figura 1 - Configuração típica de um controlador de temperatura comercial ............................... 13 Figura 2 - A temperatura estabiliza depois de alguns overshootings ........................................... 14 Figura 3 - Resposta é lenta para alcançar set point..................................................................... 15 Figura 4 - Resposta apropriada ................................................................................................ 15 Figura 5 - Características de ação de controle ON/OFF ............................................................. 16 Figura 6 - Ação de controle proporcional ................................................................................. 17 Figura 7 - Ações de controle Proporcional e Integral utilizadas em combinação .......................... 18 Figura 8 - Ações de controle Proporcional e Derivativo utilizadas em combinação ...................... 19 Figura 9 - Ações de controle Proporcional, Integral e Derivativo utilizadas em combinação ........ 20 Figura 10 - Ciclo de controle e ação de controle de tempo proporcional ...................................... 21 Figura 11 - Controlador PID Digital.......................................................................................... 28 Figura 12 - Diagrama de Blocos de Equivalências ..................................................................... 28 Figura 13 - Característica da Resposta ao Degrau do Processo para o Ajuste de Ziegler-Nichols ... 31 Figura 14 - Diagrama de blocos do Controlador PI Digital de Temperatura ................................. 33 Figura 15 - Diagrama de blocos do Controlador de Temperatura em malha fechada ..................... 35 Figura 16 - Modelo de uma planta ............................................................................................ 36 Figura 17 - Diagrama de blocos do sistema térmico ................................................................... 38 Figura 18 - Característica da resposta ao degrau (parâmetros experimentais) ............................... 39 Figura 19 - Característica da resposta ao degrau próximo da origem (parâmetros experimentais) .. 39 Figura 20 - Diagrama de blocos da planta no sistema de malha fechada simplificado ................... 40 Figura 21 - Diagrama de blocos para controle PI da planta ......................................................... 41 Figura 22 - Diagrama de blocos do controlador digital ............................................................... 42 Figura 23 - Fluxograma para programação ................................................................................ 43 Figura 24 - Esquema elétrico do módulo digital do Controlador de Temperatura .......................... 45 Figura 25 - Esquema elétrico do conversor resistência-tensão ..................................................... 46 Figura 26 - Esquema elétrico do Zero Cross Optoisolator Triac Driver e TRIAC ........................ 46 Figura 27 - Esquema elétrico de fontes de alimentação ............................................................... 47 Figura 28 - Gráfico de resistência em função da temperatura do Pt-100 padrão e do projeto ......... 49 Figura 29 - Diagrama ilustrativo de conversão resistência-tensão ................................................ 50 Figura 30 - Display e Latch ...................................................................................................... 51 Figura 31 - Controle por duty cycle (ciclo de atividade) .............................................................. 52 Figura 32 - Controle de TRIAC por ângulo de condução ............................................................ 52 Figura 33 - Aspecto geral do protótipo ...................................................................................... 53 Figura 34 - Tanque de água ...................................................................................................... 54 Figura 35 - Mostrador e conversor resistência-tensão ................................................................. 54 Figura 36 - Microcontrolador ................................................................................................... 55 Figura 37 - Fontes de alimentação ............................................................................................ 56 Figura 38 - Transformadores para as fontes de alimentação ........................................................ 56 Figura 39 - Interface paralela para gravação da memória do microcontrolador ............................. 57 Figura 40 - Ambiente de desenvolvimento 3Vision2 da Keil ..................................................... 57 Figura 41 - Resposta ao degrau do controlador desenvolvido (usando rede com 110V)................. 59 Figura 42 - O momento de acionamento do sinal senoidal da rede elétrica sobre a carga resistiva . 60 Figura 43 - O momento de desligamento do sinal senoidal da rede elétrica sobre a carga resistiva . 61 Figura 44 - Sinal de saída do controlador (amarelo) e nível de tensão proporcional do Pt-100
(azul) ..................................................................................................................... 61

Figura 45 - Sinal de saída do controlador (amarelo) e nível de tensão proporcional do Pt-100 (azul) ..................................................................................................................... 62
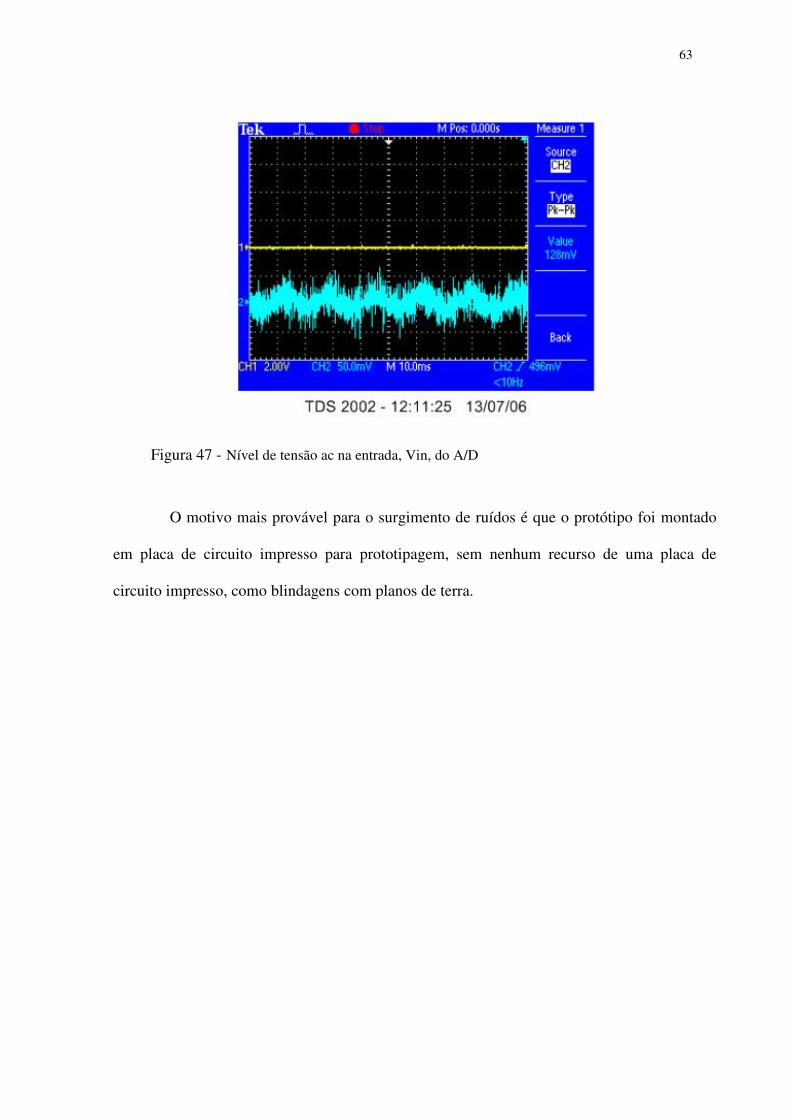
Figura 46 - Nível de tensão ac sobre tensão de referência (LM336) ............................................. 62 Figura 47 - Nível de tensão ac na entrada, Vin, do A/D .............................................................. 63

Lista de tabelas
Tabela - 1 Tabela de regra de sintonia de Ziegler e Nichols pelo método da resposta ao degrau da planta ................................................................................................................ 31
Tabela 2 Tabela de regra de sintonia de Ziegler e Nichols baseada no ganho crítico, Kcr, e no período crítico, Pcr .................................................................................................. 32
Tabela 3 Tabela da temperatura do tanque e tempo (110V) ...................................................... 59

Lista de abreviaturas, símbolos, siglas e significados
RTD Resistance Temperature Detector
SSR Solid State Relay
P Proporcional
I Integral
D Derivativo
PI Proporcional Integral
PID Proporcional Integral Derivativo
PLL Phase Locked Loop
A/D Analógico/Digital
PWM Pulse Width Modulation
DDC Direct Digital Control
TRIAC Triode for Alternating Current
CMOS Complementary Metal Oxide Semiconductor
DIP Dual In-line Package
EEPROM Electrically Erasable Programmable Read Only Memory
I/O Input/Output
BCD Binary Coded Decimal
INMETRO Instituto Nacional de Metrologia, Normalização e Qualidade
Industrial
SUMÁRIO
1 INTRODUÇÃO ................................................................................................................ 12 2 CONTROLADORES PID DIGITAL DE TEMPERATURA ....................................... 13 2.1 CONTROLE DE TEMPERATURA ............................................................................... 14 2.2 CARACTERÍSTICAS DO OBJETO CONTROLADO ................................................. 15 2.3 AÇÃO DE CONTROLE ON/OFF (LIGA/DESLIGA) .................................................. 16 2.4 AÇÃO P (PROPORCIONAL) ........................................................................................ 17 2.5 AÇÃO I (INTEGRAL) .................................................................................................... 18 2.6 AÇÃO D (DERIVATIVA) .............................................................................................. 19 2.7 CONTROLE PID (PROPORCIONAL, INTEGRAL E DERIVATIVO) ....................... 20 2.8 OUTROS CONTROLES ................................................................................................. 20 2.9 AÇÃO DE CONTROLE ................................................................................................. 21 2.10 SINAIS DE CONTROLE .............................................................................................. 21 2.10 REVISÃO DA LITERATURA ..................................................................................... 22 2.10.1 Controle de temperatura utilizando microcontrolador ........................................ 22 2.10.2 Controlador de temperatura programável baseado em microcontrolador ........ 23 2.10.3 Controlador de temperatura programável digitalmente baseado em PLL ........ 24 2.11 CONTROLE DIGITAL ................................................................................................. 25 2.11.1 Implementação digital .............................................................................................. 27 2.11.2 Métodos de ajuste ..................................................................................................... 30 2.11.3 Método da resposta ao degrau ................................................................................. 30 2.11.4 Método baseado no ganho crítico, Kcr, e no período crítico, Pr ........................... 32 3 DESCRIÇÃO DO DESENVOLVIMENTO DO CONTROLADOR PI DIGITAL .... 32 3.1 CONFIGURAÇÃO E DESCRIÇÃO GERAL DO FUNCIONAMENTO ..................... 33 3.2 MODELO DO CONTROLADOR DE TEMPERATURA ............................................. 35 3.2.1 Modelagem da planta ................................................................................................. 35 3.2.2 Modelagem do controlador de temperatura ............................................................ 40 3.2.3 Fluxograma para programação ................................................................................ 42 3.3 IMPLEMENTAÇÃO DO CONTROLADOR DE TEMPERATURA ............................ 44 3.3.1 Descrição de funcionamento ...................................................................................... 44 3.3.2 Implementação da função set point ........................................................................... 47 3.3.3 Medida de temperatura.............................................................................................. 47 3.3.4 Mostrador de temperatura ........................................................................................ 50 3.3.4 Zero cross optoisolator triac driver e TRIAC ............................................................ 51 3.3.5 Fontes de alimentação para o controlador de temperatura ................................... 52 3.3.5 Montagem do protótipo ............................................................................................. 53 4. RESULTADOS E DISCUSSÃO ..................................................................................... 58 5. CONCLUSÃO ................................................................................................................. 64 REFERÊNCIAS .................................................................................................................. 65 APÊNDICE A
12
1 INTRODUÇÃO
A temperatura, juntamente com a pressão, é a variável de processo mais medida e
controlada no mundo industrial de hoje e que motiva muitas empresas a desenvolver vários
tipos de controladores para atender as mais diversas faixas industriais (CASSIOLATO, 2005).
Apesar do meio industrial ter amplo domínio desta área, o desenvolvimento de um
controlador de temperatura requer conhecimentos interdisciplinares nas áreas de
termodinâmica, transmissão de calor, engenharia elétrica, eletrônica de potência,
microcontrolador, circuitos digitais, controle e programação. Tradicionalmente, estes
conteúdos são tratados separadamente nos cursos de graduação em engenharia, ficando a
tarefa da síntese completa de controladores para atividades de pós-graduação e, sobretudo,
para a prática industrial (OGATA, 2003; OMRON, 2004).
Este trabalho tem o objetivo de reunir os conhecimentos de termodinâmica,
transmissão de calor, engenharia elétrica, eletrônica de potência, microcontrolador, circuitos
digitais, controle e programação num único texto, e obter um projeto aberto, para
desenvolvimento e teste de algoritmos de controle.
No capítulo 2 é feita uma revisão da literatura a respeito dos controladores
comerciais de temperatura e de publicações tecno-científicas.
O capítulo 3 descreve o desenvolvimento, a modelagem, e a implementação do
controlador escolhido.
Os resultados e as discussões são apresentados no capítulo 4.
As conclusões do trabalho e as sugestões para trabalhos futuros são descritas no
capítulo 5.
13
2 CONTROLADORES PID DIGITAL DE TEMPERATURA
Neste capítulo foi feita uma revisão da literatura a respeito de controladores de
temperatura. A partir desta análise, é feita a escolha da configuração e da topologia que serão
abordadas no trabalho.
Em muitos processos, há necessidade de se manter um ou mais parâmetros estáveis ou
dentro de uma certa faixa de variação. Podem ser a pressão de um líquido ou de um gás, a
rotação de um motor, a temperatura de um líquido, etc.
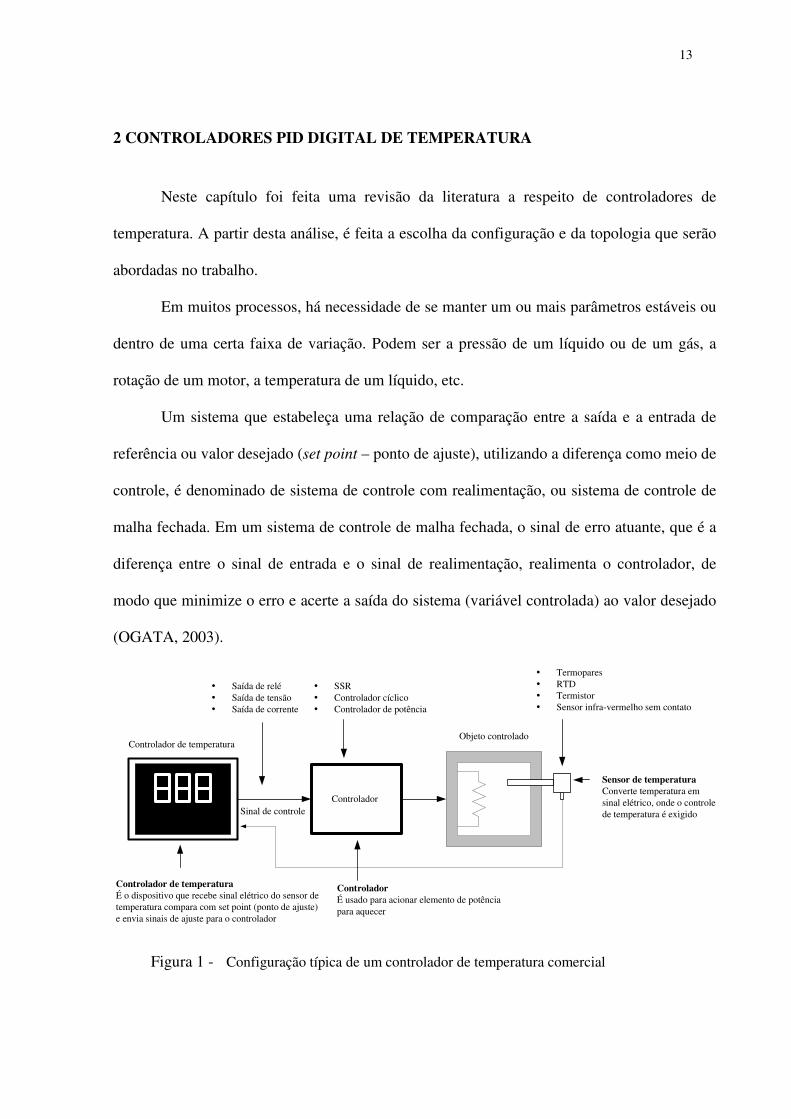
Um sistema que estabeleça uma relação de comparação entre a saída e a entrada de
referência ou valor desejado (set point – ponto de ajuste), utilizando a diferença como meio de
controle, é denominado de sistema de controle com realimentação, ou sistema de controle de
malha fechada. Em um sistema de controle de malha fechada, o sinal de erro atuante, que é a
diferença entre o sinal de entrada e o sinal de realimentação, realimenta o controlador, de
modo que minimize o erro e acerte a saída do sistema (variável controlada) ao valor desejado
(OGATA, 2003).
Controlador
Controlador de temperaturaObjeto controlado
Sensor de temperaturaConverte temperatura emsinal elétrico, onde o controlede temperatura é exigido
� Termopares� RTD� Termistor� Sensor infra-vermelho sem contato
� SSR� Controlador cíclico� Controlador de potência
� Saída de relé� Saída de tensão� Saída de corrente
Sinal de controle
Controlador de temperaturaÉ o dispositivo que recebe sinal elétrico do sensor detemperatura compara com set point (ponto de ajuste)e envia sinais de ajuste para o controlador
ControladorÉ usado para acionar elemento de potênciapara aquecer
Figura 1 - Configuração típica de um controlador de temperatura comercial

14
A Figura 1 mostra uma configuração típica de um controlador comercial de
temperatura baseando-se no controle de malha fechada para minimizar o erro e acertar a saída
do sistema (variável controlada) ao valor desejado (set point), cujo mecanismo de
funcionamento está descrito nos itens 2.1 e 2.2 a seguir (OMRON, 2004).
2.1 CONTROLE DE TEMPERATURA
O set point é o valor de entrada do controlador de temperatura para operar o
controlador. O tempo necessário para controle de temperatura estável varia com o objeto
controlado. A tentativa de reduzir o tempo de resposta, usualmente resultará em overshooting
(subida de temperatura em excesso em relação ao set point) ou hunting (a oscilação da
temperatura em torno do set point) de temperatura. Quando se reduz o overshooting ou
hunting de temperatura, o tempo de resposta não deve encurtar. Há aplicações que exigem
rapidez, com controle estável ilustrado na resposta da Figura 2, apesar do overshooting. Há
outras aplicações que exigem eliminação de overshooting, como mostra a resposta da Figura
3, apesar de necessitar de um longo tempo para estabilizar a temperatura. Em outras palavras,
o tipo de controle de temperatura varia com a aplicação e proposta. O tipo de resposta
mostrado na Figura 4 é usualmente considerado melhor para aplicações padrões (OMRON,
2004).
Figura 2 - A temperatura estabiliza depois de alguns overshootings
Temperatura
Tempo (min)
Set point
overshooting
5

15
Figura 3 - Resposta é lenta para alcançar set point
Figura 4 - Resposta apropriada
2.2 CARACTERÍSTICAS DO OBJETO CONTROLADO
Antes de selecionar o controlador de temperatura e modelos de sensores de
temperatura, é importante entender as características térmicas do objeto controlado, para
controlar a temperatura apropriadamente.
A capacidade térmica, que é definida como a relação de pequena quantidade de calor
somado ao corpo, e o correspondente aumento de pequena quantidade de temperatura, varia
com a capacidade do forno.
A característica estática, na qual indica a eficiência de aquecimento, varia com a
capacidade do aquecedor.
A característica dinâmica, na qual indica a característica inicial de aquecimento, varia
com as capacidades do aquecedor e do forno que os afetam entre si em um processo
complexo.
Temperatura
Tempo (min) 5
Set point
Temperatura
Tempo (min) 5
Set point

16
Os distúrbios externos são as causas da variação da temperatura. Por exemplo,
abertura ou fechamento da porta de um forno de temperatura constante será uma causa do
distúrbio externo, desta forma, produz uma variação de temperatura.
As três primeiras características serão consideradas neste trabalho.
2.3 AÇÃO DE CONTROLE ON/OFF (LIGA/DESLIGA)
Esta é a forma mais simples de controle eletrônico, usualmente empregada em
controladores menos caros. Se o valor do processo é menor do que o set point, a saída é ligada
(ON) fornecendo a energia para o aquecedor (Figura 5). Se o valor do processo é maior que o
set point, desliga-se a saída (OFF) cortando a energia do aquecedor. O método de controle é
chamado de ação de controle ON/OFF (liga/desliga), a saída é ligada e desligada baseada no
set point, para manter a temperatura constante. Nesta operação, a temperatura é controlada
com dois valores (0% e 100% do set point). Por esta razão, a operação é também chamada de
ação de controle de duas posições.
Saída de controle D: Histerère
OFF
ON
Temperatura SP-D SP
Figura 5 - Características de ação de controle ON/OFF
Na prática existe uma zona diferencial de liga e desliga (histerese) que se deve às
características mecânicas do próprio controlador, bem como às necessidades de se evitar
manobras freqüentes, que poderiam desgastar elementos do sistema de controle
(KEMPENICH, s.d.).
Set point
Histerese
Tempo
Aquecedor

17
2.4 AÇÃO P (PROPORCIONAL)
Para controle mais estável, é necessário reduzir a taxa de subida da temperatura,
quando esta se aproxima do set point, para evitar overshoot. Modificando o modelo de
chaveamento ON/OFF, os picos e as depressões são suavizados, e assim se mantém a
temperatura estável (Figura 6). A ação P, ou ação de controle proporcional, é usada para obter
a saída proporcional à entrada. O controlador de temperatura em ação P tem a banda
proporcional incluindo o set point. A saída de controle varia proporcionalmente ao desvio na
banda proporcional. Em operação normal, a saída de controle estará 100% em ON, se o valor
do processo for menor do que a banda proporcional. A saída de controle decrescerá
gradualmente, em proporção ao desvio, se o valor do processo estiver dentro da banda
proporcional, e 50% da saída de controle estará ON, se o set point coincidir com o valor do
processo, isto é, sem desvio. Isto significa que a ação P garante controle suave comparada
com a forma de hunting da ação de controle ON/OFF (OMRON, 2004).
Sa
ída d
e
co
ntr
ole
ON
OFF
temperatura
Banda
proporcional
Set point
0%
50%
100%
Figura 6 - Ação de controle proporcional
É ajustada banda proporcional estreita
É ajustada banda proporcional larga
É ajustada banda proporcional estreita
É ajustada banda proporcional larga
Tempo
Saída de controle

18
2.5 AÇÃO I (INTEGRAL)
A ação I (ação de controle Integral) ajuda o controlador a alcançar o set point e é
usada para obter a saída em proporção ao valor da integral do erro no tempo. A ação P causa
um offset (Figura 7). Portanto, se as ações de controle proporcional e integral são utilizadas
em combinação, o offset será reduzido até que a temperatura de controle coincida com o set
point e o offset deixe de existir (OMRON, 2004).
Figura 7 - Ações de controle Proporcional e Integral utilizadas em combinação
Saída de controle
É ajustado tempo integral pequeno
É ajustado tempo integral grande
Tempo
Tempo
Ações proporcional e integral
Somente ação proporcional
É ajustado tempo integral pequeno
Tempo
É ajustado tempo integral grande
19
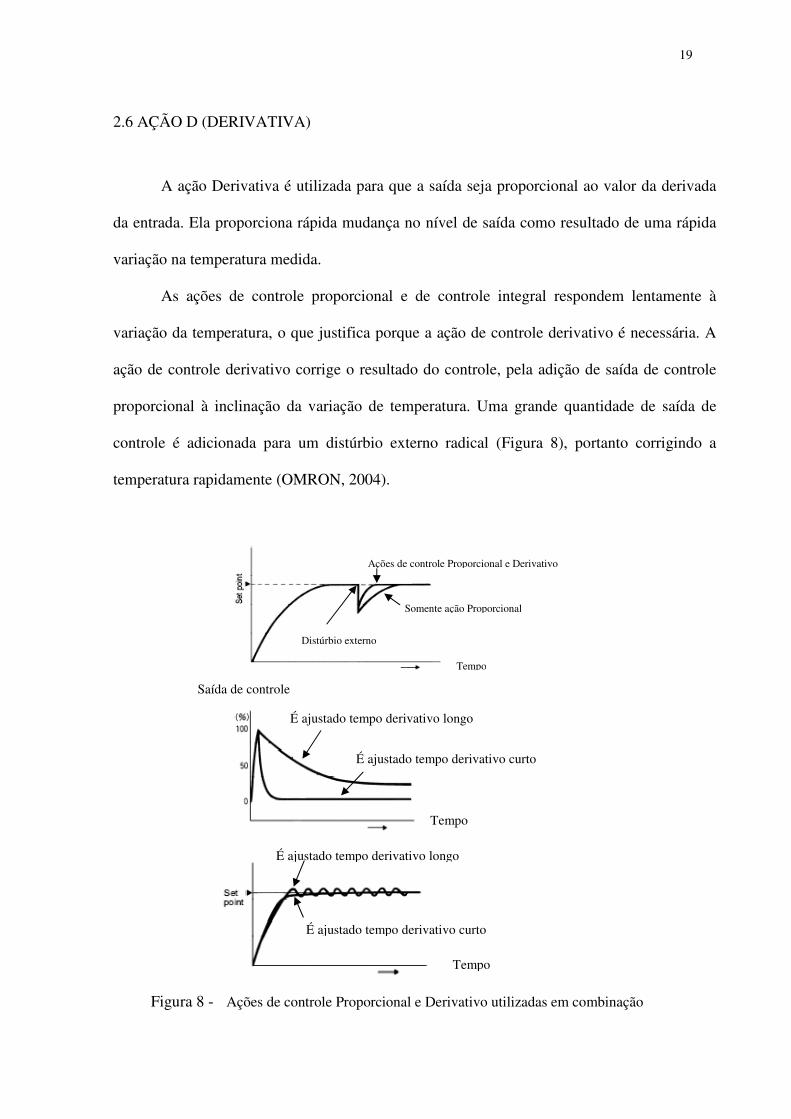
2.6 AÇÃO D (DERIVATIVA)
A ação Derivativa é utilizada para que a saída seja proporcional ao valor da derivada
da entrada. Ela proporciona rápida mudança no nível de saída como resultado de uma rápida
variação na temperatura medida.
As ações de controle proporcional e de controle integral respondem lentamente à
variação da temperatura, o que justifica porque a ação de controle derivativo é necessária. A
ação de controle derivativo corrige o resultado do controle, pela adição de saída de controle
proporcional à inclinação da variação de temperatura. Uma grande quantidade de saída de
controle é adicionada para um distúrbio externo radical (Figura 8), portanto corrigindo a
temperatura rapidamente (OMRON, 2004).
Figura 8 - Ações de controle Proporcional e Derivativo utilizadas em combinação
Tempo
Ações de controle Proporcional e Derivativo
Somente ação Proporcional
Distúrbio externo
Tempo
É ajustado tempo derivativo longo
É ajustado tempo derivativo curto
Saída de controle
Tempo
É ajustado tempo derivativo curto
É ajustado tempo derivativo longo

20
2.7 CONTROLE PID (PROPORCIONAL, INTEGRAL E DERIVATIVO)
O controle PID é uma combinação das ações de controle Proporcional, Integral e
Derivativo (Figura 9) em que a temperatura é controlada suavemente pela ação de controle
proporcional sem hunting, ajuste automático de offset feito pela ação de controle integral, e
resposta rápida a um distúrbio externo feita pela ação de controle derivativo (OMRON, 2004).
Controle PID
Proporcional + integral + derivativo
Set point
Figura 9 - Ações de controle Proporcional, Integral e Derivativo utilizadas em combinação
2.8 OUTROS CONTROLES
Controle PID avançado e controle PID com controle FUZZY (controle nebuloso) são
outros controles PID que encontram-se no mercado e na literatura. Segundo catálogo de um
fabricante, estes controles respondem rapidamente a distúrbio externo (OMRON, 2004). No
entanto, seu funcionamento está fora do escopo desta dissertação.

21
2.9 AÇÃO DE CONTROLE
A saída de controle será ligada intermitentemente de acordo com o ciclo pré-fixado, se
a ação P for usada com um relé ou um SSR, Figura 10. Este ciclo pré-fixado é chamado ciclo
de controle e este método de controle é chamado de ação de controle de tempo proporcional
(OMRON, 2004).
Figura 10 - Ciclo de controle e ação de controle de tempo proporcional
Para um período de controle T, com TON sendo o tempo em que o relé está ligado, e
TOFF o tempo em que o relé está desligado, a saída de controle é:
%100.OFFON
ON
TT
TcontroledeSaída
+= (1)
2.10 SINAIS DE CONTROLE
Há dois grupos de sinais de controle: saída ON/OFF e saída linear.
Saída ON/OFF:
• Relé eletromecânico: para métodos de controle com baixa freqüência de
chaveamento.
• SSR: para chaveamento de no máximo 1 A.
Temperatura Banda proporcional
Temperatura atual
A maior temperatura é o menor período ON
22
• Tensão: saída chaveada de 5, 12, ou 24Vcc externamente conectada a SSR de
alta capacidade.
Saída linear:
• Saída de corrente: saída contínua de 4 a 20 mAcc ou 0 a 20 mAcc para acionar
controladores de potência e válvulas eletromagnéticas. Este tipo é ideal para
controle de alta precisão.
• Saída de tensão: saída contínua de 0 a 5 Vcc ou 0 a 10Vcc utilizada para
acionar controladores de pressão. Este tipo é ideal para controle de alta
precisão (OMRON, 2004).
2.10 REVISÃO DA LITERATURA
2.10.1 Controle de temperatura utilizando microcontrolador
(MACDONALD, 1997) desenvolveu um sistema de controle de temperatura de um
secador de lâmina de microscópio. A temperatura da câmara é sentida utilizando um termistor
pré-calibrado que é ligado na entrada A/D (analógico/digital) do microcontrolador MC
68HC705B16 e o set point, por meio de quatro chaves ligadas na entrada PA0 a PA3. Para
ligar o aquecedor, aciona-se o relé, por meio de saída PWM do microcontrolador.
A idéia básica do projeto é de substituir a parte funcional relevante de um controlador
de temperatura, Omega CN-390, utilizando um sistema de projeto próprio, com a mesma
funcionalidade e com custo reduzido. As principais características deste sistema são:
Permite ajustar temperatura desejada, set point.
Permite mostrar por meio do mostrador tanto o valor de set point quanto o valor de
temperatura real.

23
Rastreamento na variação de temperatura até o set point com tempo de subida
aceitável, erro de estado estável, e overshoot.
O objetivo deste artigo foi descrever um projeto inter-disciplinar cujo sistema de
controle de temperatura é baseado em microcontrolador com entrada digital de set-point, e
mostrador de valor de set-point e de valor vigente. Realização de modelamento do sistema
físico a nível introdutório, projeto de controle de malha fechada, execução de experimento e
também de simulação.
Este sistema adotou-se o controle de potência do aquecedor por meio de relé, sem
empregar a técnica de acionamento da tensão da rede no momento do cruzamento de zero,
propiciando geração de ruído de chaveamento.
2.10.2 Controlador de temperatura programável baseado em microcontrolador
O trabalho de (KALIYUGAVARADAN, 1997) descreve o desenvolvimento de um
controlador de temperatura baseado em microcontrolador, com o uso de sensor RTD. É
empregado o conversor resistência-tempo, para obter um intervalo de tempo variando
linearmente com a resistência do sensor. Utilizando um contador do microcontrolador e
software apropriado, a temperatura sob controle é determinada e comparada com a
temperatura alvo. O erro, através da implementação DDC (“Direct Digital Control”) do
algoritmo PID, é utilizado para controlar o ângulo de disparo de um SCR, para controlar a
potência aplicada ao aquecedor.
Este trabalho mostra uma técnica para controle de temperatura utilizando um RTD
como elemento de sensor. Embora o protótipo do controlador feito experimentalmente para
confirmar o fundamento, em uma extensão de faixa de 300 K, podem ser feitas modificações
apropriadamente no controlador para prover uma faixa mais ampla de temperatura, para a
qual o RTD é útil como sensor de temperatura. Substituindo o RTD por transdutor resistivo
24
como sensores strain gauge /piezo-resistivo e incorporando alterações convenientes em várias
partes, a técnica adotada no presente controlador pode ser aplicável para controle de outras
variáveis de processos tais como fluxo, nível e pressão.
Como desvantagem, o controle da potência feita ao aquecedor, por meio de ângulo de
disparo de um SCR que deve acarretar na geração de harmônicas na rede elétrica.
2.10.3 Controlador de temperatura programável digitalmente baseado em PLL
Para alcançar um controlador de temperatura altamente sensível, foram desenvolvidos
muitos poderosos controladores nos quais usaram computador como unidade central, com um
conversor A/D de alta precisão para fazer interface entre sensor e unidade central. Além do
mais, alguns controladores requerem um conversor A/D para obter o atuador de acordo com
algoritmo de controle. Vários formatos de saída são possíveis, mas a codificação de
freqüência é considerada o melhor meio para rígida transmissão de dados e com circuito de
interface simples.
(MOHAMED; SHOJI; WATANABE, 1988) desenvolveram um controlador de
temperatura baseado em phase-lock loop, PLL. A temperatura sob controle é sentida em
forma de freqüência e comparada com a freqüência de referência correspondente à
temperatura alvo no detector de fase, para obter o atuador. A diferença de freqüência é
também detectada por um microcontrolador, que varia a freqüência de referência de acordo
com a ação Proporcional, Integral e Derivativa. O estágio de saída de potência é do tipo SSR
de cruzamento de zero que comuta 100Vac ou não conforme a saída do detector de fase.
O protótipo do controlador estabiliza a temperatura da água, numa banheira de água,
próxima a da temperatura de set-point, e os valores de overshoot e undershoot são bem
reduzidos e erro no estado estável está dentro de 0,1°C.

25
Esta nova técnica para controle de temperatura baseada na técnica de PLL foi proposta
e confirmada experimentalmente por protótipo de controlador. Os princípios de controle são
compatíveis com os sensores inteligentes que agora estão sendo desenvolvidos e aplicáveis ao
controle de outras variáveis de processo tais como umidade, pressão e fluxo.
O protótipo apresentado neste trabalho tem como características baixo custo, alta
precisão, programável, adaptável, mas sua faixa é limitada a 100 °C pelo conversor
temperatura-freqüência. Para expandir a faixa de controle, está em desenvolvimento o
conversor temperatura-freqüência usando um termômetro de resistência de platina.
2.11 CONTROLE DIGITAL
Para implementar uma lei de controle de tempo contínuo, tal como controle PID em
um microcontrolador ou em computador digital, pode ser feita fazendo-se aproximações
numéricas da derivada e da integral que aparecem na lei de controle.
A combinação das ações proporcional, integral e derivativa para gerar um só sinal de
controle dá origem ao que chamamos de controlador proporcional integral derivativo ou
simplesmente PID. O objetivo é aproveitar as características particulares de cada uma destas
ações a fim de se obter uma melhora significativa do comportamento transitório e em regime
permanente do sistema controlado. O sinal de controle gerado pelo controlador PID é assim
genericamente dado como:
++= ∫ dt
tdeTdtte
TteKtu d
t
i
)()(
1)()(
0 (2)
Na qual u(t) é a variável de controle e e(t) é o erro de controle. A variável de controle
é a soma de três termos: termo P (que é proporcional ao erro), o termo I (que é proporcional à
26
integral do erro), e termo D (que é proporcional à derivada do erro). Os parâmetros do
controlador são o ganho proporcional K, o tempo integral Ti, e o tempo derivativo Td
(ÅSTRÖM; HÄGGLUND, 1994).
Os requisitos sobre um sistema de controle PID podem incluir muitos fatores, tais
como respostas aos sinais de comando, insensibilidade a ruído e variações de processo, e
rejeição de distúrbios de carga. O projeto do sistema de controle também envolve aspectos de
processos dinâmicos, saturação do atuador, e características de distúrbios. Pode parecer
surpreendente que um controlador tão simples quanto um controlador PID possa trabalhar tão
bem. Em geral, muitos processos industriais podem ser controlados razoavelmente bem com
controle PID, dado que as exigências no desempenho do controlador não sejam altas. No
próximo parágrafo, fazem-se algumas considerações sobre onde o controle PID é suficiente e
onde é aconselhável o controle mais sofisticado (ÅSTRÖM; HÄGGLUND, 1994).
A ação derivativa não é freqüentemente utilizada. É uma observação interessante que
muitos controladores industriais tenham somente a ação PI e que em outros controladores a
ação derivativa pode ser desligada. Pode-se mostrar que o controle PI é adequado para todos
os processos onde as dinâmicas são essencialmente de primeira ordem. É fácil descobrir se
este é o caso, observando-se a resposta ao degrau do processo. Se a resposta ao degrau
assemelha-se a de um sistema de primeira ordem, então, o controle PI é suficiente. Uma outra
razão é quando o processo é projetado para que sua operação não exija controle fino, mesmo
se o processo tem dinâmica de alta ordem, necessita apenas de uma ação integral, para
eliminar o erro de regime, e de uma resposta transiente adequada, proporcionada pela ação
proporcional (ÅSTRÖM; HÄGGLUND, 1994).
Similarmente, o controle PID é suficiente para processos onde a dinâmica dominante
é de segunda ordem. Para tais processos, não há ganho de benefício usando um controlador
mais complexo. Um caso típico de melhoramento da ação derivativa é quando as dinâmicas
27
são caracterizadas por constante de tempo que diferem em amplitude. A ação derivativa pode
ser usada para acelerar a resposta. Controle de temperatura é um caso típico. O controle
derivativo é também benéfico quando se exige controle fino de um sistema de ordem superior.
As dinâmicas de ordem superior limitariam o resultado do ganho proporcional para o bom
controle. Com uma ação derivativa, a evolução da oscilação amortecida é evitada, daí um
ganho proporcional alto pode ser usado para aumentar a resposta transiente (ÅSTRÖM;
HÄGGLUND, 1994).
Os benefícios dos controladores mais sofisticado que o PID são citados em alguns
exemplos: Processos de ordem superior, mais que dois; Sistemas com tempo morto longo;
Sistemas com modos oscilatórios (ÅSTRÖM; HÄGGLUND, 1994).
2.11.1 Implementação digital
Neste trabalho foi escolhido o controle PI devido a resposta ao degrau assemelha-se a
de um sistema de primeira ordem, como mostra na equação 23 e comentado no item 2.11.
A implementação do controlador PI pode ser feita fazendo-se aproximações
numéricas da derivada e da integral que aparecem na lei de controle (ÅSTRÖM;
HÄGGLUND, 1994). Desta forma, é possível descrever cada uma das ações por uma equação
de diferenças. A equação de diferenças descreve a operação matemática a ser programada no
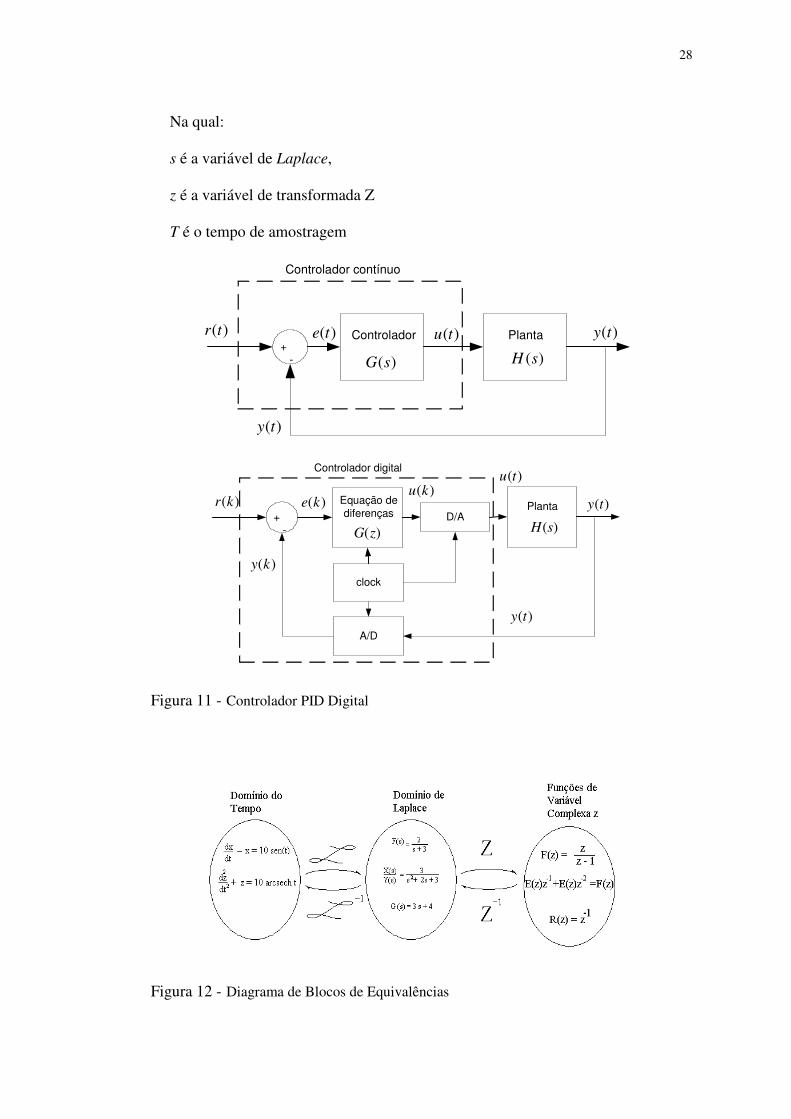
microcontrolador onde será implementado o PI digital conforme a Figura 11 (CAMPO, 2004).
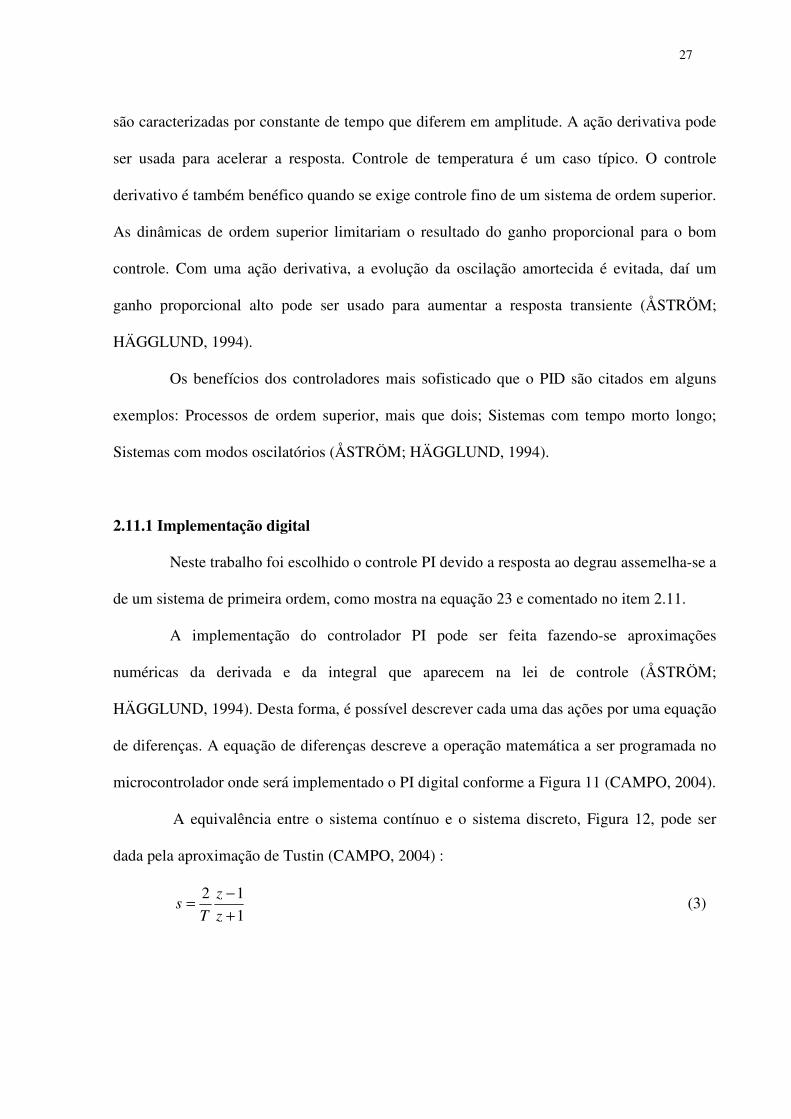
A equivalência entre o sistema contínuo e o sistema discreto, Figura 12, pode ser
dada pela aproximação de Tustin (CAMPO, 2004) :
112
+
−=
z
z
Ts (3)
28
Na qual:
s é a variável de Laplace,
z é a variável de transformada Z
T é o tempo de amostragem
+ -
PlantaControlador
)(sH
)(te )(tu
)(sG
)(ty)(tr
Controlador contínuo
)(ty
)(ke
)(tu
)(ty)(kr
Controlador digital
)(ky
Planta
)(sH
Equação de
diferenças
)(zG
+ -
clock
D/A
A/D
)(ty
)(ku
Figura 11 - Controlador PID Digital
Figura 12 - Diagrama de Blocos de Equivalências

29
A função do controlador PI no domínio de Laplace é:
+=
sTKsEsU
i
p
11)()( (4)
Na qual:
U(s) é a saída do controlador
E(s) é o erro
Kp é o ganho proporcional
Ti é o tempo integral
Utilizando a aproximação de Tustin:
+
−+=
112
11)()(
z
z
T
TKzEzU
i
p (5)
Reescrevendo a função de transferência do controlador PI:
−
+−+
+
=1
2
2
2
2
)()(z
T
TTz
T
TT
KzEzUi
i
i
i
p 6)
( )
+−+
+=−
i
i
p
i
i
pT
TTKzEz
T
TTKzEzUz
2
2)(
2
2)()(1 (7)
+−+
+=−
i
i
p
i
i
pT
TTKzEz
T
TTKzEzUzzU
2
2)(
2
2)()()( (8)
dividindo por z, temos:
)(2
2)(
2
2)()( 11 zUz
T
TTKzEz
T
TTKzEzU
i
i
p
i
i
p
−−+
+−+
+= (9)
A equação de diferenças do controle PI é:
)1(2
2)1(
2
2)()( −+
+−−+
+= ku
T
TTKke
T
TTKkeku
i
i
p
i
i
p (10)

30
2.11.2 Métodos de ajuste
Vários métodos de ajuste de controladores PID são conhecidos e utilizados na
prática de sistemas de controle. Cada um destes métodos requer algum tipo de informação
sobre a dinâmica do processo a ser controlado e a natureza desta informação é que caracteriza
cada um destes métodos. A fim de obter um método prático de ajuste, deve ser possível obter
estas informações a partir de ensaios simples sobre o processo, ao mesmo tempo em que estas
informações devem ser suficientes para possibilitar um ajuste adequado do controlador. Logo,
a quantidade adequada de informação a ser obtida do processo deve ser selecionada de forma
a obter um compromisso entre simplicidade e desempenho do controlador.
O método mais simples, na prática industrial de ajuste de controladores PID, é o
método da resposta ao degrau apresentado a seguir. O sucesso deste método deve-se
essencialmente ao fato de ter um compromisso adequado entre desempenho e simplicidade.
O método da resposta ao degrau, ou método do domínio do tempo, requer o
conhecimento de duas grandezas que caracterizam a resposta ao degrau de um processo. Uma
vez obtidas estas informações, basta recorrer às fórmulas para calcular os ganhos do
controlador. Estas fórmulas foram determinadas de maneira empírica, por meio de ensaios de
processos industriais típicos.
2.11.3 Método da resposta ao degrau
A resposta típica de um processo industrial a um degrau unitário na sua entrada é
apresentada na Figura 13.
u(t)
Planta
c(t)

31
Figura 13 - Característica da Resposta ao Degrau do Processo para o Ajuste de Ziegler-Nichols
Esta resposta pode ser caracterizada por dois parâmetros: o atraso L e a constante de
tempo T. Estes parâmetros são obtidos traçando-se uma reta tangente à curva de resposta, no
seu ponto de inflexão, ou seja, o ponto em que a taxa de variação da resposta é máxima. Os
parâmetros são dados então pela interseção desta reta com a linha K, conforme indicado na
Figura 13. Um degrau de amplitude diferente da unidade pode ser usado, sendo neste caso
necessário normalizar o ganho integral equivalente dividindo-o pela amplitude deste degrau.
Ziegler e Nichols propuseram as fórmulas mostradas na tabela 1, para cálculo dos
parâmetros do controlador, a partir dos parâmetros T e L (OGATA, 2003):
Tabela - 1 Tabela de regra de sintonia de Ziegler e Nichols pelo método da resposta ao degrau da planta
Tipo de Kp Ti Td
T L
K
Linha tangente no ponto de inflexão
t 0

32
Controlador
P L
T ∞ 0
PI L
T9,0
3,0L
0
PID L
T2,1 L2
2L
2.11.4 Método baseado no ganho crítico, Kcr, e no período crítico, Pr
Definimos primeiro Ti = ≡ e Td = 0, e utilizando somente a ação de controle
proporcional, aumenta-se Kp de 0 ao valor crítico Kcr, no qual a saída exibe uma oscilação
sustentada pela primeira vez. Portanto, o ganho crítico, Kcr, e o correspondente período, Pcr,
são determinados experimentalmente, usando-se as formulações mostradas na tabela 2
(OGATA, 2003):
Tabela 2 Tabela de regra de sintonia de Ziegler e Nichols baseada no ganho crítico, Kcr, e no período crítico, Pcr
Tipo de
Controlador
Kp
Ti
Td
P crK5,0
PI crK45,0
crP2,1
1
PID crK6,0 crP5,0 crP125,0
3 DESCRIÇÃO DO DESENVOLVIMENTO DO CONTROLADOR PI DIGITAL
Um circuito composto por TRIAC (Triode for Alternating Current) e o seu acionador
Zero-Cross Opotoisolator Triac Driver para acionamento do elemento de potência

33
(resistência elétrica do aquecedor) e, como controlador, um microcontrolador da família 8051
foi a configuração escolhida para o Controlador PI Digital de Temperatura com resistor de 2
kW. A seguir é apresentada a configuração e descrição geral de funcionamento, modelo e
implementação do controlador de temperatura.
3.1 CONFIGURAÇÃO E DESCRIÇÃO GERAL DO FUNCIONAMENTO
A Figura 14 apresenta o diagrama de blocos do controlador PI Digital de
Temperatura.
Conversor
A/D
Microcontrolador
(89S8252)
Mostrador
Set point
(thumb wheel)
Conversor
resistência
tensão
Zero-cross
Optoisolator
Triac driver
TRIAC
P1
P2
P1
P0
P1.4
Rede elétrica
Sensor RTD
(PT-100)Resistência
elétrica
(2kW)
Tanque
Figura 14 - Diagrama de blocos do Controlador PI Digital de Temperatura
A função deste controlador é realizar o aquecimento de até 20 litros de água até o set
point (ponto de ajuste), num tanque de alumínio cilíndrico (diâmetro = 310 mm, altura = 270
mm e espessura da parede = 2 mm) sem isolação térmica, e aberto na parte superior.
34
O estabelecimento do valor da temperatura, chamado de set point, é feito por meio
de uma chave thumbwheel, e, uma vez atingida a temperatura de set point, esta deverá manter-
se dentro da faixa de tolerância.
Para monitorar a temperatura da água, é inserido no tanque um sensor RTD, do tipo
Pt-100, com as características previamente levantadas em relação ao Pt-100 padrão
(calibrado). A partir do valor da resistência do Pt-100, em função da temperatura da água,
converte-se este valor da resistência para um nível de tensão.
Este nível de tensão será convertido em valor binário e que será a variável de
processo para o microcontrolador. Esta conversão analógica/digital (A/D) é realizada por
meio do circuito integrado ADC0820 (NATIONAL, 2001). O microcontrolador fará a leitura
das amostras numa taxa de amostragem em torno de 1 amostra por segundo.
Depois de obtida a informação da temperatura da água na porta P4, compara-se esta
com o set point, e o microcontrolador processa o erro e envia a informação necessária para o
acionador do TRIAC. O resistor de aquecimento dissipará potência conforme acionamento do
TRIAC, elevando a temperatura da água do tanque até o set point. Os circuitos de controle e
de potência estão isolados eletricamente pelo dispositivo Zero-Cross Opotoisolator Triac
Driver que garante a proteção do módulo de controle. O controlador digital de temperatura
permite monitorar os valores de set point e da temperatura da água (variável de processo), por
meio de três mostradores de dígitos do tipo display de sete segmentos. Os três displays
permitem mostrar até 99,9 °C, porém a especificação da temperatura máxima de controle será
limitada a 90 °C.

35
3.2 MODELO DO CONTROLADOR DE TEMPERATURA
O diagrama de blocos da Figura 15 mostra os elementos básicos do controlador de
temperatura em malha fechada. A planta e o controlador são conectados em um elo de
realimentação negativa.
+ -
Planta(processo)
Elemento decorreção(atuador)
Elemento decontrole
Medição
Entrada Saída
Comparação
Sinal deerro
Controlador
Realimentação
valor dereferência
Variávelcontrolada
Figura 15 - Diagrama de blocos do Controlador de Temperatura em malha fechada
3.2.1 Modelagem da planta
O modelo de uma planta de controle de temperatura supõe que o líquido de
temperatura T deixa o tanque a uma determinada taxa e é reposto por um líquido de
temperatura Ti, onde Ti < T (Figura 16). O líquido no interior do tanque é aquecido por um
aquecedor elétrico e agitado por um misturador, de forma que o conteúdo pode ser
considerado na temperatura T que, em geral, varia com o tempo (PHILIPS; HARBOR, 1996).
Definem-se os fluxos de calor envolvidos neste sistema conforme segue:
eq : Fluxo de calor fornecido pelo aquecedor
lq : Fluxo de calor no líquido
oq : Fluxo de calor que sae do tanque com o líquido de saída
iq : Fluxo de calor que entra no tanque com o líquido de chegada

36
sq : Fluxo de calor através da superfície do tanque
Fluxo de entrada
na temperatura Ti
Aquecedor
Misturador
Temperatura dolíquidoT
Fluxo de saída na
temperatura T
Temperatura do ar
ambiente: Ta
Figura 16 - Modelo de uma planta
Pelo princípio da conservação da energia, o calor adicionado ao tanque deve ser igual
ao calor transferido por ele mais o calor que permanece no interior:
solie qqqqq ++=+ (11)
onde:
dt
dTCql = (12)
C é a capacidade térmica do líquido, e é parâmetro do sistema. Fazendo V igual ao
fluxo de entrada e de saída do tanque (considerados iguais), e H igual ao calor específico do
líquido, podemos escrever:
ii VHTq = (13)
e
VHTqo = (14)

37
Se R é a resistência térmica para o fluxo através da superfície do tanque e Ta é a
temperatura ambiente, então:
R
TTq a
s
−= (15)
Substituindo (12) a (15) em (11), tem-se:
R
TTVHT
dt
dTCVHTq a
ie
−++=+ (16)
Esta é a equação diferencial linear de primeira ordem com qe, Ti e Ta como as funções
da excitação. Em termos de um sistema de controle, a entrada de controle é a saída do
aquecedor elétrico qe. Os termos Ti e Ta são distúrbios, e são entradas sobre as quais não se
tem controle e que causam respostas indesejáveis. Normalmente, um dos requisitos principais
de um projeto de sistema de controle é minimizar os efeitos dos distúrbios no sistema.
A temperatura T é a variável a ser controlada, considerada como saída, e o fluxo V é
uma função do tempo e, para simplificar a análise, considera-se iguais e constantes os fluxos
de entrada e de saída. Aplicando a transformada de Laplace na expressão (16) tem-se:
R
sTsTsVHTsCsTsVHTsQ a
ie
)()()()()()(
−++=+ (17)
Resolvendo para a temperatura T(s), tem-se:
( )
RVHCs
sTR
RVHCs
sVHT
RVHCs
sQsT
aie
1
)(1
1)(
1)(
)(++
+++
+++
= (18)
Uma das configurações do diagrama de blocos da transformada de Laplace de T(s) é
dada na Figura 17.

38
11
+s
K
τ
12
+s
K
τ
13
+s
K
τ
)(sQe
)(sTi
)(sTa
+
+
+ )(sT
Figura 17 - Diagrama de blocos do sistema térmico
Fazendo-se
1+=
VHR
RCτ (19)
11+
=VHR
RK (20)
12+
=VHR
VHRK (21)
11
3+
=VHR
K (22)
e ignorando-se os distúrbios, a função de transferência será dada por:
1)()(
)( 1
+==
s
K
sQ
sTsG
e τ (23)
Uma função de transferência deste tipo é chamada “atraso de primeira ordem”. Na
equação 23 os termos do distúrbio foram ignorados, entretanto em algum estágio do projeto
eles devem ser considerados.
Na equação 23 considera-se a energia calorífica do aquecedor elétrico como a
entrada do sistema. Entretanto, esta energia é normalmente controlada pelo ajuste da tensão
39
aplicada ao aquecedor. Se o aquecedor é adequadamente modelado como uma resistência, a
energia elétrica por unidade de tempo (potência) é dada por:
P=V2/R (24)
onde P é a potência, em watts, V é a tensão eficaz (rms), em volts, aplicada ao aquecedor e R
é a resistência de aquecimento, em ohms. Portanto, a energia elétrica, que é convertida em
calor, é uma função não linear da tensão aplicada (PHILIPS; HARBOR, 1996).
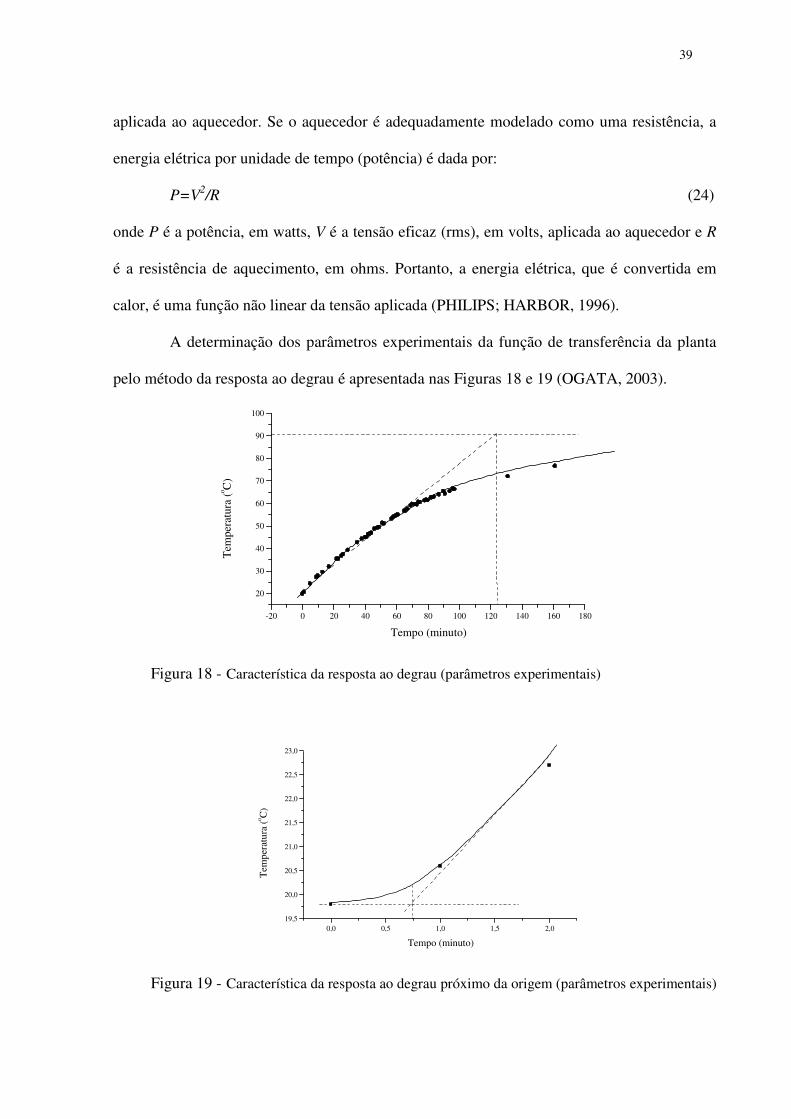
A determinação dos parâmetros experimentais da função de transferência da planta
pelo método da resposta ao degrau é apresentada nas Figuras 18 e 19 (OGATA, 2003).
-20 0 20 40 60 80 100 120 140 160 180
20
30
40
50
60
70
80
90
100
Tem
pera
tura
(o C)
Tempo (minuto)
Figura 18 - Característica da resposta ao degrau (parâmetros experimentais)
0,0 0,5 1,0 1,5 2,019,5
20,0
20,5
21,0
21,5
22,0
22,5
23,0
Tem
pera
tura
(o C)
Tempo (minuto)
Figura 19 - Característica da resposta ao degrau próximo da origem (parâmetros experimentais)

40
Usando-se as Figuras 18 e 19, obtém-se: T=125 minutos, K=(90-19,8)=70,2 oC e
L=0,75 minutos. Substituindo-se na função de transferência da planta abaixo (OGATA, 2003)
1)()(
)(+
==
−
Ts
eK
sQ
sTsG
Ls
e
(25)
tem-se:
1125
2,70
)()(
)(75,0
+==
−
s
e
sQ
sTsG
s
e
(26)
que está mostrado no sistema de malha fechada simplificada da Figura 20.
+ -
Planta
ControladorEntrada
(Valor de referência)
Sinal de erro
Saída
(Variável controlada)1+
−
Ts
eK Ls
Figura 20 - Diagrama de blocos da planta no sistema de malha fechada simplificado
3.2.2 Modelagem do controlador de temperatura
A Figura 21 mostra o diagrama de blocos do controlador PI da planta, para fins de
sintonia. Sintonizar o controlador é selecionar parâmetros do controlador que garantam uma
dada especificação de desempenho. Neste trabalho foi adotada a regra de Ziegler e Nichols
para sintonia do controlador PI.
De acordo com a Tabela 1, para controlador PI, L
TK p
9,0= e
3,0L
Ti = . Substituindo-
se os valores dos parâmetros da Figuras 18 e 19, tem-se:
15075,0125.9,0
==pK
e

41
5,23,0
75,0==iT minutos
+ -
Planta
controlador
Entrada
(Valor de referência)
Sinal de erro
Saída
(Variável controlada)
)1
1(sT
Ki
p +
Figura 21 - Diagrama de blocos para controle PI da planta
Substituindo-se na função de transferência do controlador abaixo (OGATA, 2003)
)1
1()(sT
KsGi
pc += (27)
tem-se:
)5,21
1(150)1
1()(ssT
KsGi
pc +=+= (28)
A implementação do controlador PI pode ser feita fazendo-se aproximações
numéricas da derivada e da integral que aparecem na lei de controle (Figura 22) (ÅSTRÖM;
HÄGGLUND, 1994). Desta forma, é possível descrever cada uma das ações por uma equação
de diferenças. As equações de diferenças descrevem as operações matemáticas a serem
programadas no microcontrolador onde será implementado o PI digital. Substituindo-se os
parâmetros Kp=150, Ti=2,5 min e 601
=T min na equação 10,
)1(2
2)1(
2
2)()( −+
+−−+
+= ku
T
TTKke
T
TTKkeku
i
i
p
i
i
p , tem-se:
)1(150)1(150)()( −+−+= kukekeku (29)

42
+ -
Planta
ControladorEntrada
(Valor de referência)
Saída
(Variável controlada)
)(ke )(ku
)1(150)1(150)()( −+−+= kukekeku
1+
−
Ts
eKLs
Figura 22 - Diagrama de blocos do controlador digital
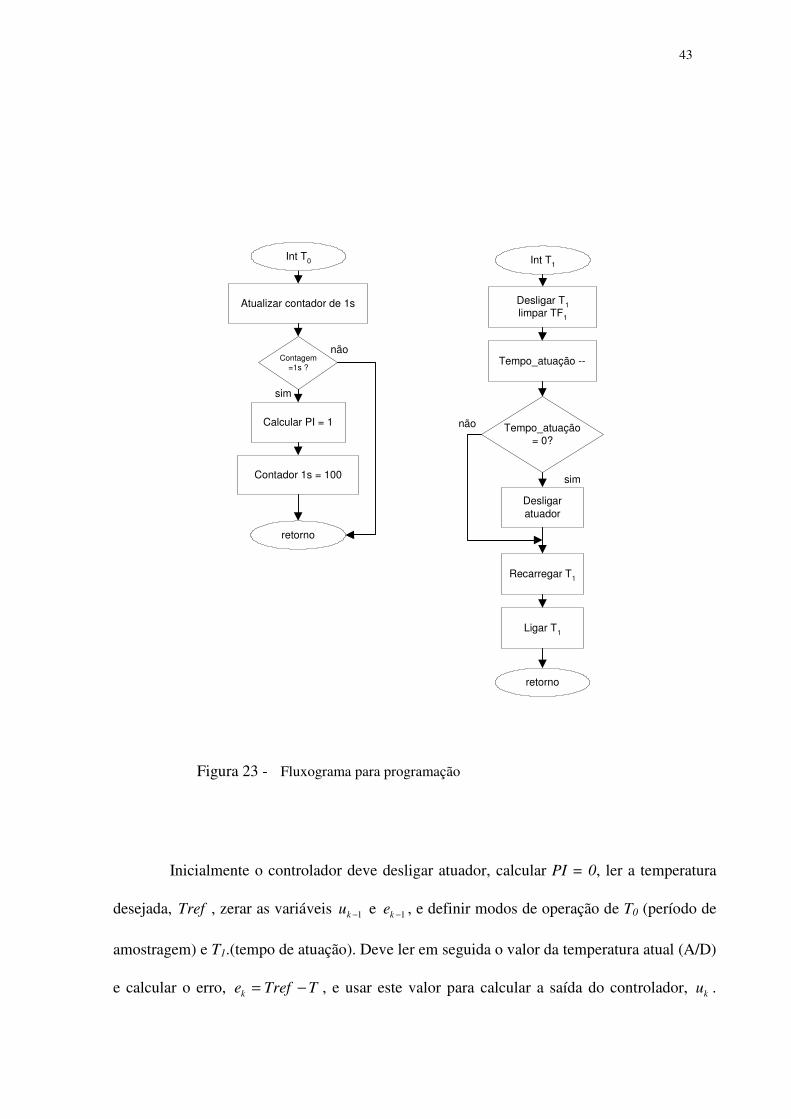
3.2.3 Fluxograma para programação
A Figura 23 apresenta o fluxograma para programação do microcontrolador com a
função de controle PI. O apêndice A contém a listagem do programa.
Principal
Desligar o atuador,
calcular PI=0
Tref
= 45oC
uk-1
= 0
ek-1
= 0
Definir modos de
opearação de T0
e T1
Inicializar T0
Ligar T0
Calcular
PI=1
sim
não
Calcular PI=0
T = ler AD;
ek = T
ref - T
1
2
uk = u
k-1 + 150(e
k - e
k-1)
1
uk-1
= uk
ek-1
= ek
uk > 0 ?
Desligar
atuador
2
não
sim
Ligar
atuador
T1 � u
k.8ms
Ligar T1, habilitar int T
1
43
Int T1
Desligar T1
limpar TF1
Tempo_atuação
= 0?
sim
não
Desligar
atuador
Ligar T1
Tempo_atuação --
retorno
Recarregar T1
Atualizar contador de 1s
Contagem=1s ?
não
sim
Calcular PI = 1
Contador 1s = 100
Int T0
retorno
Figura 23 - Fluxograma para programação
Inicialmente o controlador deve desligar atuador, calcular PI = 0, ler a temperatura
desejada, Tref , zerar as variáveis 1−ku e 1−ke , e definir modos de operação de T0 (período de
amostragem) e T1.(tempo de atuação). Deve ler em seguida o valor da temperatura atual (A/D)
e calcular o erro, TTrefek −= , e usar este valor para calcular a saída do controlador, ku .

44
Num próximo passo, preparam-se as variáveis 1−ku e 1−ke para a próxima alteração.
Finalmente, se 0>ku , o atuador deve aplicar tensão da rede sobre resistor de 2 kW; caso
contrário, a temperatura da água deve estar maior do que a temperatura desejada, portanto o
atuador deve desligar o resistor de 2 kW. O tempo de atuação do controlador é calculado com
base no resultado da equação 29.
3.3 IMPLEMENTAÇÃO DO CONTROLADOR DE TEMPERATURA
3.3.1 Descrição de funcionamento
O controlador de temperatura baseia-se no microcontrolador da Atmel, AT89S8252,
da família 8051, de baixa potência, tecnologia CMOS de alto desempenho, microcontrolador
de 8 bit, 8 kbytes de memória Flash (uma evolução da EEPROM que permite ser programada
eletricamente), 2 kbytes de EEPROM, com encapsulamento DIP (Dual In-Line Package),
com clock (freqüência do oscilador) de 12MHz (ATMEL, 2006) (NICOLOSI; BRONZERI,
2005).
O microcontrolador dispõe de quatro portas de I/O (input/output). A porta 2 foi
escolhida para acionamento do Mostrador (Displays), e a porta 0 é a entrada digitalizada da
variável de controle; a porta 3 serve para leitura dos dados da entrada (set point). A porta 1
controla as centenas, dezenas e unidades dos lathes 74LS373, controla o conversor A/D, e o
acionamento do Zero-Cross Opotoisolator Triac Driver, conforme o esquema elétrico
mostrado na Figura 24.

45
P2.7
P2.6
P2.5
P2.4
P2.3
P2.2
P2.1
P2.0
28
27
26
25
24
23
22
21 4 3 2 1
18
17
14
13 8 7 4 3
D7
D6
D5
D4
D3
D2
D1
D0 E O
E G
ND
11 1 10
74L
S373
18
17
14
13 8 7 4 3
D7
D6
D5
D4
D3
D2
D1
D01
9
16
15
1
2
9
6
5
2
.
g
f
e
d
c
b
a
Q7
Q6 Q
5 Q
4 Q
3 Q
2 Q
1 Q
0
E
O
E
GN
D
11
1
10
74L
S373
Ce
nte
na
Unid
ad
e+
5V
18
17
14
13 8 7 4 3
D7
D6
D5
D4
D3
D2
D1
D01
9 1
6
15
1
2
9
6
5
2
.
g
f
e
d
c
b
a
Q7 Q
6 Q
5 Q
4 Q
3 Q
2 Q
1 Q
0
E O
E G
ND
11 1 10
74L
S373Vcc
20
Vcc
20
Vcc
20
Vcc
__
EA
ALE
_____
PS
EN
XT
AL1
XT
AL2
GN
D
RS
T
NC
NC
40
31
30
29
19
18
20 9
+5V
reset
10k�
1 �
F
P1.4
5p/ B
C547
P0.7
P0.6
P0.5
P0.4
P0.3
P0.2
P0.1
P0.0
P1.0
P3.7
P3.6
P3.5
P3.4
P3.3
P3.2
P3.1
P3.0
P1.3
P1.2
P1.1
18 p
F
12 M
Hz
18 p
F
100 �
F
10
0 n
F
D7
D6
D5
D4
D3
D2
D1
D0
___sssss
WR
/RD
Y
32
33
34
35
36
37
38
39
17
16
15
14 5 4 3 2
89S
8252
Vcc
MO
DE
GN
D_
_R
D_
_C
SV
ref-
Vin
Vre
f+
+5V
do c
onve
rsor
resis
tência
-tensã
o
LM
33
6
2,2
k�
19
16
15
1
2
9
6
5
2
.
g
f
e
d
c
b
a
Q7 Q
6 Q
5 Q
4 Q
3 Q
2 Q
1 Q
0
De
zena
8
4
2
1
8
4
2
1
Unid
ade
45
ccDezena
+5V
Thu
mb
whe
el
(set
po
int)
AD
C082
0
8X
10
0 k�
8X
330 �
8X
330
�8X
33
0 �
para
4,7
k�
do
convers
or
resis
tên
cia
-tensão
17
16
15
14
13
12
11
10
Figura 24 - Esquema elétrico do módulo digital do Controlador de Temperatura

46
Os esquemas elétricos das interfaces conversor de resistência-tensão, Zero Cross
Optoisolator Triac Driver e TRIAC e das fontes de alimentação do controlador de
temperatura são apresentados respectivamente nas Figuras 25, 26 e 27.
para VinADC0820
+12V
de LM336
+5V
-5V
+
--
+
+5V
-5V
PT-100
BC327
BZX79C6V21,2 k�
1,2 k�
1,2 k�
4,7 k� 1 k�
1 k�
12 k�
4,7 k�
4,7 k�
12 k�1 k�
LM741LM741
Figura 25 - Esquema elétrico do conversor resistência-tensão
De P1.4
+5V
Zerocrossing
circuit4,7 k�
330 �
MOC3041M
BC547
1
2
6
4Rede CA
220V
BT138360 �
330 �
39 �
10 nF
Resistência do
aquecedor
2 kW
Figura 26 - Esquema elétrico do Zero Cross Optoisolator Triac Driver e TRIAC

47
+1000 �F
+12V
7812
100 nF
7805
100 nF
+5V
7905
100 nF
-5V
470 �F
4X 1N4007Transformador
110/12+12 V
Rede CA
110 V
+
Figura 27 - Esquema elétrico de fontes de alimentação
3.3.2 Implementação da função set point
A implementação da função set point é feita por meio de dois thumbwheels BCD
(Binary Coded Decimal) que tem na parte frontal uma chave rotativa com mostrador em
decimal (0, 1, 2, ......9), e na parte traseira a respectiva conversão binária (8, 4, 2, 1). Estes
valores binários serão dados de entrada da porta 3 e com a resolução de 1C.
3.3.3 Medida de temperatura
A medida de temperatura pode ser muito simples ou muito complexa, dependendo
das aplicações e requisitos.
Os termopares têm como ponto forte a simplicidade, a eficiência e preços acessíveis,
características que fizeram com que estes sensores fossem mais utilizados para a medição de
temperatura em processos industriais. Podem ser utilizadas na faixa de temperatura de –184 a
1705 C com limite de erro < !2,2 C (ECIL, s.d.).

48
Termoresistências são os sensores de temperatura mais estáveis e precisos que
existem, sendo o seu uso indicado especialmente em aplicações onde a alta precisão e
confiabilidade da medição sejam fatores fundamentais (ECIL, s.d.).
Apesar das características dos termopares serem adequadas para o nível de controle
de temperatura da água, para implementação deste trabalho foi escolhido um sensor do tipo
RTD (Resistance Temperature Detectors).
Os termômetros de resistência são sensores de temperatura que operam baseados no
princípio da variação da resistividade elétrica de um metal, em função da temperatura, sendo
confeccionados de platina, níquel ou cobre. Suas principais características são a alta
estabilidade mecânica e térmica, resistência à contaminação, relação resistência/temperatura
praticamente linear, desvio com uso e envelhecimento desprezíveis, além de alto sinal elétrico
de saída. O termômetro de resistência de platina, de modelo industrial, é um sensor de
inigualável precisão, sensibilidade e estabilidade. Os valores de resistência são padronizados a
uma temperatura fixa, por exemplo de 100 � a 0 C (Pt-100).
O sensor (Pt-100) utilizado para o controlador de temperatura foi calibrado com
relação ao sensor padrão, certificado de calibração INMETRO sob o número DIMCI
1632/2004, no laboratório de Termometria da Minipa Indústria e Comércio Ltda, credenciada
pela Rede Brasileira de Calibração, certificado LTR-457/04 de 26/01/2004 (Figura 28).
O Pt-100 do projeto monitorará a temperatura da água do tanque sob a forma de
variação de resistência. Como o sinal de entrada para digitalização no conversor A/D é de
tensão, o conversor resistência-tensão transformará a variação da resistência em variação de
tensão (Figura 29).
Inicialmente, o circuito da fonte de corrente constante formado pelo BC327,
resistência do emissor de 1,2 k� e diodo zener de 6,2 V injetará uma corrente de
aproximadamente 4,6 mA no Pt-100. A tensão desenvolvida pelo Pt-100 será ajustada por

49
meio de dois estágios de amplificador operacional para um nível máximo de 2,5 V
correspondente ao máximo valor da temperatura, conforme diagrama elétrico da Figura 25,
tendo em vista que 2,5 V é o valor de referência (Vref+) do conversor A/D proveniente da
polarização da referência de precisão LM336.
A relação entre saída de dados e as tensões Vin e Vref do conversor A/D é dada por
(NATIONAL, 2001):
255Vref
VinDado = (30)
-20 0 20 40 60 80 10095
100
105
110
115
120
125
130
135
140
Temperatura (oC)
PT100projeto PT100padrão
Res
istê
ncia
(oh
m)
Figura 28 - Gráfico de resistência em função da temperatura do Pt-100 padrão e do projeto

50
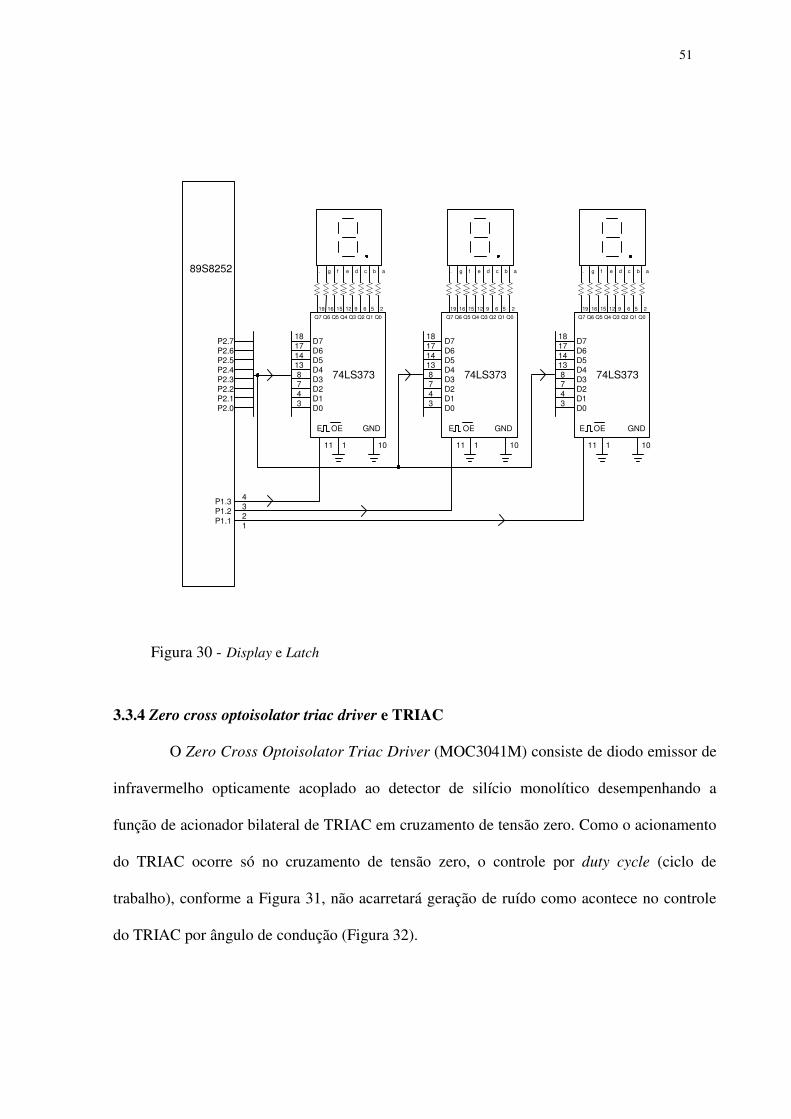
3.3.4 Mostrador de temperatura
Um conjunto de 3 mostradores (display) foi utilizado para mostrar a temperatura que
pode indicar temperaturas de 0 ºC a 99,9 ºC. Os mostradores são formados por um conjunto
de 8 LEDs, que podem ser acesos sozinhos ou em grupo (Figura 30).
Ligados assim as informações para os mostradores podem ser transferidas usando-se
apenas 11 pinos da porta 2 e da porta 1 do microcontrolador. Nos latches 74LS373 as entradas
de controle Latch Enable (P1.3, P1.2, P1.1) permitem que o microcontrolador escreva a
informação no dígito do display de centena, dezena ou de unidade, conforme o caso.
Tensão
proporcional
à resistência
corrente
constante
PT-100 Ajuste daTensão
em relação
à tensão de
referência
Amplificador
Figura 29 - Diagrama ilustrativo de conversão resistência-tensão
51
P2.7P2.6P2.5P2.4P2.3P2.2P2.1P2.0
4321
1817
14138743
D7D6D5D4D3D2D1D0
E OE GND
11 1 10
74LS373
1817
14138743
D7D6D5D4D3D2D1D0
19 16 15 12 9 6 5 2
. g f e d c b a
Q7 Q6 Q5 Q4 Q3 Q2 Q1 Q0
E OE GND
11 1 10
74LS373
1817
14138743
D7D6D5D4D3D2D1D0
19 16 15 12 9 6 5 2
. g f e d c b a
Q7 Q6 Q5 Q4 Q3 Q2 Q1 Q0
E OE GND
11 1 10
74LS373
P1.3P1.2
P1.1
89S8252
19 16 15 12 9 6 5 2
. g f e d c b a
Q7 Q6 Q5 Q4 Q3 Q2 Q1 Q0
Figura 30 - Display e Latch
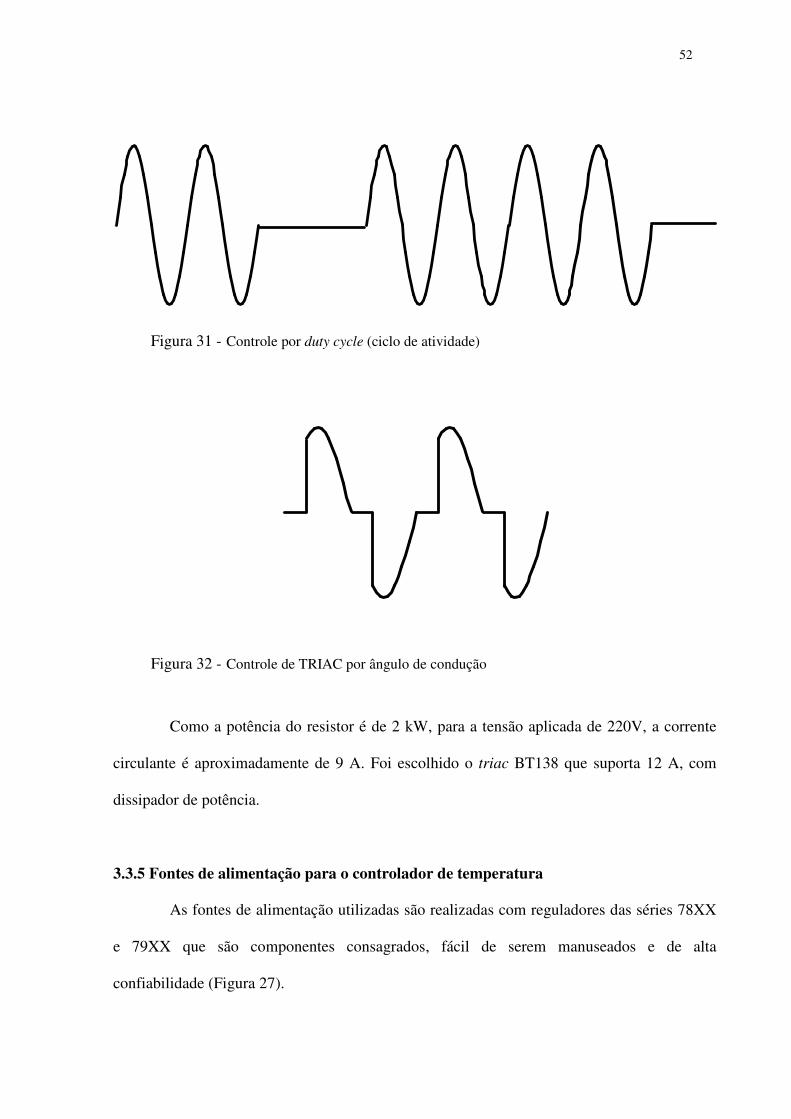
3.3.4 Zero cross optoisolator triac driver e TRIAC
O Zero Cross Optoisolator Triac Driver (MOC3041M) consiste de diodo emissor de
infravermelho opticamente acoplado ao detector de silício monolítico desempenhando a
função de acionador bilateral de TRIAC em cruzamento de tensão zero. Como o acionamento
do TRIAC ocorre só no cruzamento de tensão zero, o controle por duty cycle (ciclo de
trabalho), conforme a Figura 31, não acarretará geração de ruído como acontece no controle
do TRIAC por ângulo de condução (Figura 32).
52
Figura 31 - Controle por duty cycle (ciclo de atividade)
Figura 32 - Controle de TRIAC por ângulo de condução
Como a potência do resistor é de 2 kW, para a tensão aplicada de 220V, a corrente
circulante é aproximadamente de 9 A. Foi escolhido o triac BT138 que suporta 12 A, com
dissipador de potência.
3.3.5 Fontes de alimentação para o controlador de temperatura
As fontes de alimentação utilizadas são realizadas com reguladores das séries 78XX
e 79XX que são componentes consagrados, fácil de serem manuseados e de alta
confiabilidade (Figura 27).
53
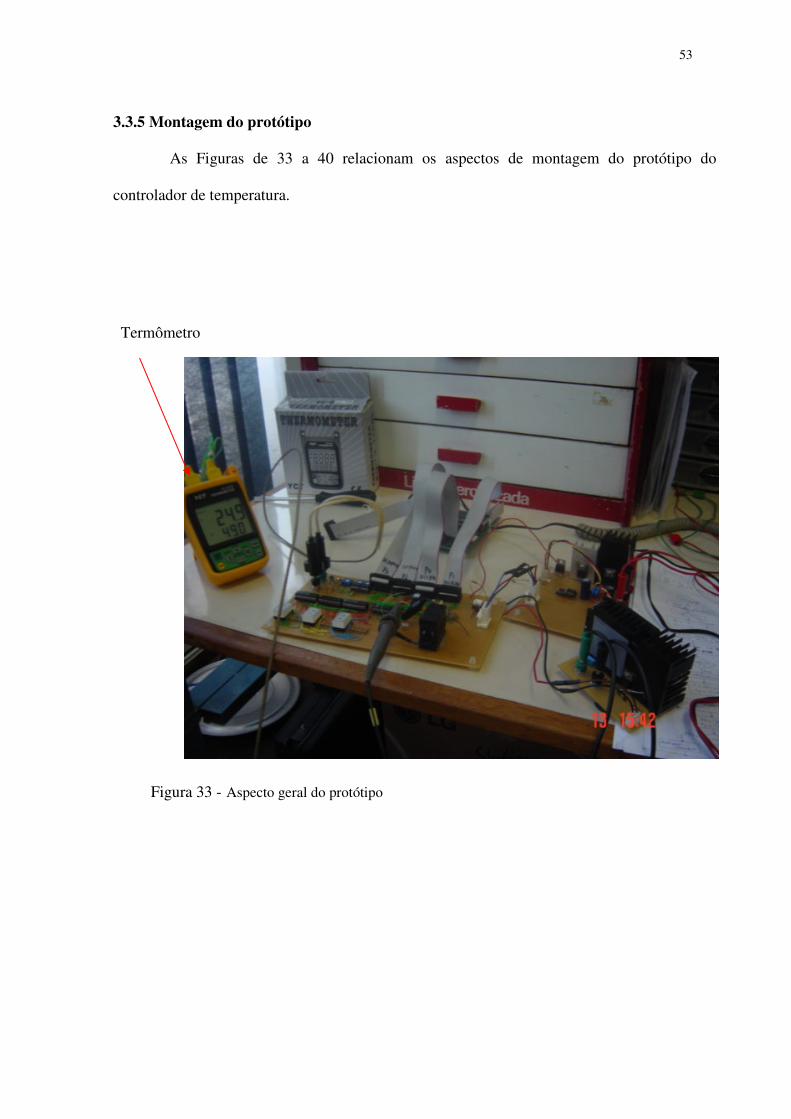
3.3.5 Montagem do protótipo
As Figuras de 33 a 40 relacionam os aspectos de montagem do protótipo do
controlador de temperatura.
Figura 33 - Aspecto geral do protótipo
Termômetro

54
Figura 34 - Tanque de água
Figura 35 - Mostrador e conversor resistência-tensão
Pt-100
Sensor termopar do termômetro
Resistor de 2kW

55
Figura 36 - Microcontrolador

56
Figura 37 - Fontes de alimentação
Figura 38 - Transformadores para as fontes de alimentação
57
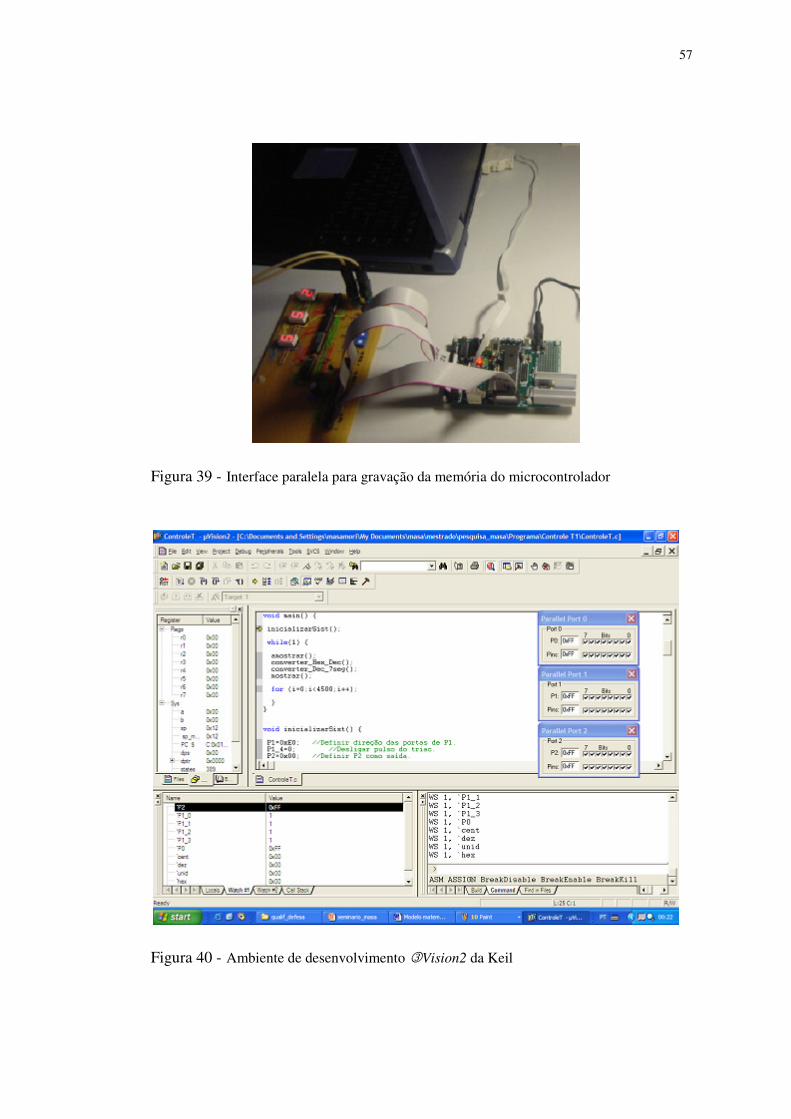
Figura 39 - Interface paralela para gravação da memória do microcontrolador
Figura 40 - Ambiente de desenvolvimento 3Vision2 da Keil

58
4. RESULTADOS E DISCUSSÃO
Este item apresenta os ensaios realizados com o controlador de temperatura
desenvolvido neste trabalho.
Ensaios realizados:
• Temperatura da água do tanque (10 litros) em função do tempo, durante um
ensaio de resposta ao degrau.
• Aplicação da tensão senoidal da rede elétrica sobre a carga resistiva.
• Desligamento da tensão senoidal da rede elétrica sobre a carga resistiva.
• Sinal de acionamento e desligamento do controlador e sinal de tensão do circuito
de condicionamento do Pt-100.
• Comportamento ac sobre a tensão de referência (LM336).
• Nível de tensão ac na entrada, Vin, do A/D (ADC0820).
Para levantar a resposta do controlador ao degrau, foi escolhido como set point a
temperatura de 45 oC, e anotada a temperatura do tanque a cada 5 minutos. Para registrar a
temperatura da água, utilizou-se um termômetro digital de três dígitos com termopar tipo K.
Para registrar o sinal de saída do controlador e da tensão na carga, foi utilizado um
osciloscópio digital com memória.
A Figura 41 mostra a resposta ao degrau do controlador de temperatura num período
de 100 minutos. Este gráfico foi construído com os valores de temperatura do tanque e tempo
anotados manualmente e mostrados na tabela 3 a seguir:

59
Tabela 3 Tabela da temperatura do tanque e tempo (110V)
tempo [min] Temperatura [0C]
0 19,8
5 23,3
10 27,2
15 30,8
20 34,8
25 38,0
30 41,8
35 44,9
40 47,5
45 47,3
50 47,9
55 46,2
60 46,3
65 46,4
70 47,9
75 48,0
80 48,9
85 48,1
90 49,3
95 47,5
100 48,0
0 20 40 60 80 10015
20
25
30
35
40
45
50
Tem
pera
ura
[o C]
Tempo [min]
Set-point
Figura 41 - Resposta ao degrau do controlador desenvolvido (usando rede com 110V)
A elevação inicial mais rápida da temperatura se dá porque o controlador aplica a
tensão da rede (110V) sobre o resistor do tanque, por um longo período, pois o erro é elevado.

60
Quando a variável controlada atinge o set point, o controlador retira a tensão aplicada sobre o
resistor e permanece neste estado até que a temperatura da água caia abaixo de set point.
Neste momento, o controlador é acionado novamente, mas por intervalo de tempo de
acionamento menor, suficiente para atingir novamente a temperatura de set point. Este
processo é descrito no fluxograma para programação do item 3.2.3 e o sinal de saída do
controlador é registrado no osciloscópio digital, nas Figuras 42 e 43. Verifica-se pela Figura
41 que o controlador funcionou conforme previsto, conseguindo manter a temperatura da água
relativamente próxima da temperatura de set point.
A Figura 42 mostra o momento de acionamento do sinal senoidal da rede elétrica
sobre a carga resistiva. Nota-se que o sinal começa exatamente no cruzamento de zero, que é
característica do Zero Cross Optoisolator Triac Driver, evitando ruído de chaveamento.
A Figura 43 mostra o momento de desligamento do sinal senoidal da rede elétrica
sobre a carga resistiva. Nota-se que o sinal se extingue exatamente no cruzamento de zero,
que é a propriedade de desligamento do TRIAC, evitando assim o ruído de chaveamento.
Figura 42 - O momento de acionamento do sinal senoidal da rede elétrica sobre a carga resistiva

61
Figura 43 - O momento de desligamento do sinal senoidal da rede elétrica sobre a carga resistiva
Figura 44 - Sinal de saída do controlador (amarelo) e nível de tensão proporcional do Pt-100 (azul)
Como o sinal do controlador (amarelo) está ligando e desligando (Figuras 44 e 45),
isto mostra que o controlador não está fornecendo a potência total para a carga, portanto, a
variável controlada deve estar variando em torno do nível de set point. Se a variável
controlada estiver com o valor muito abaixo do set point, a saída do sinal do controlador
deverá estar constante no nível alto, como de fato foi verificado em teste de bancada.

62
Figura 45 - Sinal de saída do controlador (amarelo) e nível de tensão proporcional do Pt-100 (azul)
Figura 46 - Nível de tensão ac sobre tensão de referência (LM336)
O nível de ruído da tensão de referência, mostrado na Figura 47 está por volta de 25
mV pico a pico, está provocando erro na conversão análogo/digital. Outra fonte de erro na
medição da temperatura é a contaminação do sinal proveniente do sensor com ruído da rede
elétrica como ilustra a Figura 47.
63
Figura 47 - Nível de tensão ac na entrada, Vin, do A/D
O motivo mais provável para o surgimento de ruídos é que o protótipo foi montado
em placa de circuito impresso para prototipagem, sem nenhum recurso de uma placa de
circuito impresso, como blindagens com planos de terra.

64
5. CONCLUSÃO
O processo de modelagem do controlador a partir dos parâmetros extraídos da
característica da resposta ao degrau da planta, e a implementação do controlador PI, pode ser
feita fazendo-se aproximações numéricas da derivada e da integral que aparecem na lei de
controle. Desta forma, é possível descrever cada uma das ações por uma equação de
diferenças. A equação de diferenças descreve a operação matemática que é programada no
microcontrolador que realiza o algoritmo de controle digital.
Neste trabalho foi adotada a regra de Ziegler e Nichols para sintonia do controlador
PI projetado. Os resultados dos ensaios práticos efetuados com o protótipo desenvolvido
mostraram que de forma geral os objetivos propostos foram alcançados, principalmente com
relação à qualidade da resposta ao degrau do controlador.
A aplicação e a retirada da tensão da rede elétrica na carga resistiva somente no
cruzamento de zero deixa de gerar ruído de chaveamento (e também harmônicas), tornando o
controlador mais atraente.
Sugere-se para trabalhos futuros, já que a plataforma de sistema de controle de
temperatura está pronta, o desenvolvimento de software para controle PID avançado, como
PID com controle nebuloso, e com auto-sintonia.

65
REFERÊNCIAS ÅSTRÖM, K. J.; HÄGGLUND, T. PID controllers: theory, design, and tuning. Research Triangle Park: ISA-The Instrumentation, Systems and Automation Society, 1994.
ATMEL. 8-bit microcontroller with 8 kbytes flash. 2006. Disponível em <http://www.atmel.com> data de acesso, junho, 2006.
CAMPO, A. B. Tópicos sobre a teoria de controle. CEFET/SP, Apostila de curso, 2004.
CASSIOLATO, C. Transmissores de pressão: sensores, tendências, mercados e aplicações. InTech, n. 74, p. 10-17, 2005.
ECIL, temperatura industrial. s.d. Disponível em <http://www.ecil.com.br> data de acesso, junho, 2006.
KALIYUGAVARADAN, S. A Microcontroller-based Programmable Temperature Controller. In: IEEE 23RD INTERNATIONAL CONFERENCE ON INDUSTRIAL ELECTRONICS, CONTROL AND INSTRUMENTATION, v. 1, 9-14 Nov., 1997. p. 155-158.
KEMPENICH, G. Curso de Projetos de Instrumentação. Instituto Mauá de Tecnologia, São Caetano do Sul, SP. Apostila, 22 p., s.d.
MCDONALD, J. S. Temperature Control Using a Microcontroller: An Interdisciplinary Undergraduate Engineering Design Project. In: FRONTIERS IN EDUCATION CONFERENCE IEEE, session S34H, 1997. p.1620-1624.
MOHAMED, O. I.; SHOJI, S.; WATANABE, K. A Digitally Programmable Controller based on Phase-Lock Loop. In: 5th IEEE INSTRUMENTATION AND MEASUREMENT TECHNOLOGY CONFERENCE, IMTC-88, conference record, San Diego, CA, 20-22 April, 1988. p.164-167.
NATIONAL SEMICONDUCTOR. 8-bit High speed 3333P compatible A/D converter with track/Hold function. Data sheet 2001.
NICOLOSI, D. E. C.; BRONZERI, R. B. Microcontrolador 8051 com Linguagem C: prático e didático - família AT89S8252 Atmel. São Paulo: Editora Érica Ltda, 2005. 222 p.

66
OGATA, K. Engenharia de Controle Moderno. São Paulo: Prentice Hall, 2003. 788 p.
OMRON ELECTRONICS LLC. Temperature and Process Control Instrumentation. Catalog H301-E3-1, p. E-1 – E-23, 2004.
PHILIPS L. C.; HARBOR, R. D. Sistemas de Controle e Realimentação. São Paulo: Makron Books, 1996. 558 p.

Livros Grátis( http://www.livrosgratis.com.br )
Milhares de Livros para Download: Baixar livros de AdministraçãoBaixar livros de AgronomiaBaixar livros de ArquiteturaBaixar livros de ArtesBaixar livros de AstronomiaBaixar livros de Biologia GeralBaixar livros de Ciência da ComputaçãoBaixar livros de Ciência da InformaçãoBaixar livros de Ciência PolíticaBaixar livros de Ciências da SaúdeBaixar livros de ComunicaçãoBaixar livros do Conselho Nacional de Educação - CNEBaixar livros de Defesa civilBaixar livros de DireitoBaixar livros de Direitos humanosBaixar livros de EconomiaBaixar livros de Economia DomésticaBaixar livros de EducaçãoBaixar livros de Educação - TrânsitoBaixar livros de Educação FísicaBaixar livros de Engenharia AeroespacialBaixar livros de FarmáciaBaixar livros de FilosofiaBaixar livros de FísicaBaixar livros de GeociênciasBaixar livros de GeografiaBaixar livros de HistóriaBaixar livros de Línguas

Baixar livros de LiteraturaBaixar livros de Literatura de CordelBaixar livros de Literatura InfantilBaixar livros de MatemáticaBaixar livros de MedicinaBaixar livros de Medicina VeterináriaBaixar livros de Meio AmbienteBaixar livros de MeteorologiaBaixar Monografias e TCCBaixar livros MultidisciplinarBaixar livros de MúsicaBaixar livros de PsicologiaBaixar livros de QuímicaBaixar livros de Saúde ColetivaBaixar livros de Serviço SocialBaixar livros de SociologiaBaixar livros de TeologiaBaixar livros de TrabalhoBaixar livros de Turismo


















