
Controle Adaptativo com Desacoplamento Aplicado a um Sistema ...
89
UNIVERSIDADE DO RIO GRANDE DO NORTE FEDERAL UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE CENTRO DE TECNOLOGIA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA Controle Adaptativo com Desacoplamento Aplicado a um Sistema de Tanques Acoplados MIMO Thiago Ferreira Paulo Orientador: Prof. Dr. André Laurindo Maitelli Dissertação de Mestrado apresentada ao Programa de Pós-Graduação em En- genharia Elétrica e de Computação da UFRN (área de concentração: Automa- ção e Sistemas) como parte dos requisi- tos para obtenção do título de Mestre em Ciências. Número de Ordem do PPgEEC: M454 Natal, RN, julho de 2015
Transcript of Controle Adaptativo com Desacoplamento Aplicado a um Sistema ...

UNIVERSIDADE DO RIO GRANDE DO NORTEFEDERAL
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA ELÉTRICA
Controle Adaptativo com DesacoplamentoAplicado a um Sistema de Tanques
Acoplados MIMO
Thiago Ferreira Paulo
Orientador: Prof. Dr. André Laurindo Maitelli
Dissertação de Mestrado apresentadaao Programa de Pós-Graduação em En-genharia Elétrica e de Computação daUFRN (área de concentração: Automa-ção e Sistemas) como parte dos requisi-tos para obtenção do título de Mestre emCiências.
Número de Ordem do PPgEEC: M454Natal, RN, julho de 2015
UFRN / Biblioteca Central Zila Mamede
Catalogação da Publicação na Fonte.
Paulo, Thiago Ferreira.Controle adaptativo com desacoplamento aplicado a um sistema de
tanques acoplados MIMO / Thiago Ferreira Paulo - Natal, RN, 201565 f. : il.
Orientador: André Laurindo Maitelli
Dissertação (Mestrado) - Universidade Federal do Rio Grande doNorte. Centro de Tecnologia. Programa de Pós-Graduação em EngenhariaElétrica e de Computação.
1. Controle adaptativo – Dissertação. 2. Sistemas MIMO – Dissertação.3. Desacoplamento de sistemas – Dissertação. 4. Tanques acoplados –Dissertação. 5. Controlador MRAC – Dissertação. 6. Controlador GMV –Dissertação. I. Maitelli, André Laurindo. II. Universidade Federal do RioGrande do Norte. III. Título.
RN/UF/BCZM CDU 681.51
Controle Adaptativo com DesacoplamentoAplicado a um Sistema de Tanques
Acoplados MIMO
Thiago Ferreira Paulo
Dissertação de Mestrado aprovada em 31 de julho de 2015 pela banca examina-dora composta pelos seguintes membros:


Agradecimentos
Agradeço a Deus, por iluminar minha trajetória.
À minha mãe Elizabeth Ferreira Pires Paulo (in memoriam), em quem buscoforças sempre.
Ao meu pai, pela extrema dedicação, incentivo e orientação em todos os momen-tos da minha vida.
Aos meus irmãos e minha namorada pela união e companheirismo.
Ao professor André Maitelli pela orientação e apoio.
Aos professores do Programa de Pós-Graduação em Engenharia Elétrica e deComputação da UFRN pelo conhecimento transmitido.
Aos meus amigos do Laboratório de Automação em Petróleo pela ajuda e suporte.
Aos meus colegas de curso que foram de fundamental importância na minhaformação acadêmica e pessoal.
Aos meus amigos e familiares que estão sempre presentes.
Ao PRH-PB 20 pelo apoio financeiro
Ao Laboratório de Automação em Petróleo pelo espaço cedido para o desenvolvi-mento deste trabalho.


Resumo
O controle de sistemas MIMO (Multiple Input Multiple Output) é muitas vezesrealizado por vários controladores monovariáveis clássicos que operam comlimitações e apresentam baixo desempenho. Técnicas de controle adaptativosão uma alternativa interessante para aumentar o desempenho desses sistemas,como por exemplo os controladores MRAC (Model Reference Adaptive Control),que quando bem projetados, permitem que a dinâmica da planta seja alteradade maneira a seguir um modelo de referência. O presente trabalho apresentauma estratégia de desacoplamento para um sistema MIMO de três tanquesacoplados e o projeto de dois controladores adaptativos aplicados ao processo,sendo o primeiro um controlador MRAC, e o segundo um controlador auto-ajustável GMV (Generalized Minimum Variance). Os resultados foram obtidosatravés de simulações, nas quais o desacoplamento do sistema se mostrou umaalternativa interessante para facilitar o projeto de sistemas do tipo MIMO. Ambosos controladores implementados apresentaram o desempenho esperado, vistoque o controlador MRAC tende a atingir a dinâmica imposta por seu modelo dereferência, enquanto o controlador GMV rastreia a referência aplicada calculandoo sinal de controle ideal em cada intervalo de amostragem.
Palavras-chave: Controle Adaptativo, Sistemas MIMO, Desacoplamento deSistemas, Tanques Acoplados, Controlador MRAC, Controlador GMV.


Sumário
Sumário i
Lista de Figuras iii
Lista de Tabelas v
Lista de Abreviaturas e Símbolos vii
1 Introdução 1
2 Revisão Bibliográfica 3
3 Referencial Teórico 7
3.1 Controle Adaptativo . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1.1 Histórico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.1.2 Estrutura do Controlador . . . . . . . . . . . . . . . . . . . . 8
3.1.3 Controle Adaptativo Direto/Indireto . . . . . . . . . . . . . 9
3.2 Desacoplamento de Sistemas . . . . . . . . . . . . . . . . . . . . . . 10
3.2.1 Desacoplador Ideal . . . . . . . . . . . . . . . . . . . . . . . . 11
3.2.2 Desacoplador Simplificado . . . . . . . . . . . . . . . . . . . 12
3.2.3 Desacoplador Invertido . . . . . . . . . . . . . . . . . . . . . 12
3.3 MRAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.4 Controlador auto-ajustável GMV . . . . . . . . . . . . . . . . . . . . 16
3.4.1 Método dos Mínimos Quadrados Recursivo . . . . . . . . . 17
3.4.2 Implementação do controlador GMV . . . . . . . . . . . . . 19
4 Metodologia 23
4.1 Sistema de Tanques . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 Desacoplador Invertido . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2.1 Desacoplador Invertido Chaveado . . . . . . . . . . . . . . . 29
i

5 Resultados 335.1 Sistema Desacoplado . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.2 Controlador MRAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365.3 Controlador GMV . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435.4 Saturação do Sinal de Controle . . . . . . . . . . . . . . . . . . . . . 49
6 Conclusões 61
Referências Bibliográficas 62
A Matriz de Transferência do Sistema Desacoplado 65
B Funções de Transferência do Desacoplador Chaveado 67B.1 Elemento D21 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67B.2 Elemento D32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69B.3 Elemento D31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71

Lista de Figuras
3.1 Estrutura de um Controlador Adaptativo (ÅSTRöM; WITTEN-MARK, 1995) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.2 Estrutura de um Controlador Adaptativo Direto (IOANNOU;SUN, 1996) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
3.3 Estrutura de um Controlador Adaptativo Indireto (IOANNOU;SUN, 1996) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
3.4 Estrutura de um Desacoplador para um sistema TITO (GARRIDO;VáZQUEZ; MORILLA, 2011) . . . . . . . . . . . . . . . . . . . . . . 11
3.5 Estrutura de um Desacoplador Invertido para um sistema TITO(GARRIDO; VáZQUEZ; MORILLA, 2011) . . . . . . . . . . . . . . . 13
3.6 Arquitetura do controlador MRAC . . . . . . . . . . . . . . . . . . . 143.7 Arquitetura do controlador GMV . . . . . . . . . . . . . . . . . . . . 21
4.1 Sistema de Tanques Acoplados . . . . . . . . . . . . . . . . . . . . . 244.2 Representação de D(s) pelas matrizes Dd(s) e Do(s) (GARRIDO;
VáZQUEZ; MORILLA, 2011) . . . . . . . . . . . . . . . . . . . . . . 274.3 Disposição final dos elementos do desacoplador . . . . . . . . . . . 294.4 Divisão do tanque em diferentes pontos de operação . . . . . . . . 304.5 Esquema exemplo do elemento D21 do desacoplador chaveado . . 31
5.1 Comparativo para o sistema em malha aberta com desacoplador esem desacoplador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.2 Comparativo para o sistema em malha aberta entre o desacopladorPO 15 e o desacoplador chaveado . . . . . . . . . . . . . . . . . . . 36
5.3 Resposta do sistema com o controlador MRAC . . . . . . . . . . . . 395.4 Estimativas dos parâmetros do controlador MRAC . . . . . . . . . 405.5 Resposta do sistema com o controlador MRAC . . . . . . . . . . . . 415.6 Sinal de Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 425.7 Resposta do sistema com o controlador GMV para diferentes pe-
ríodos de amostragem . . . . . . . . . . . . . . . . . . . . . . . . . . 44
iii

5.8 Resposta do sistema com o controlador GMV . . . . . . . . . . . . 455.9 Resposta do sistema para os instantes iniciais da simulação . . . . 465.10 Sinal de Controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.11 Resposta do sistema com desacoplador amenizando o acoplamento
entre as variáveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.12 Comportamento das estimativas dos parâmetros do sistema (mé-
todo dos mínimos quadrados) . . . . . . . . . . . . . . . . . . . . . 495.13 Desempenho do sistema para os controladores com saturação no
sinal de controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.14 Resposta do sistema para o controlador MRAC anti-windup . . . . 525.15 Comparativo entre os controladores GMV e MRAC anti-windup . . 545.16 Sinal de controle para o controlador GMV . . . . . . . . . . . . . . 555.17 Sinal de controle para o controlador MRAC anti-windup . . . . . . 555.18 Comparativo entre os controladores GMV e MRAC . . . . . . . . . 575.19 Comparativo entre os controladores GMV e MRAC . . . . . . . . . 585.20 Sinal de controle para o controlador MRAC . . . . . . . . . . . . . . 595.21 Sinal de controle para o controlador GMV . . . . . . . . . . . . . . 60

Lista de Tabelas
5.1 Índices de desempenho Tanque 3 . . . . . . . . . . . . . . . . . . . . 355.2 Índices de desempenho Tanque 2 . . . . . . . . . . . . . . . . . . . . 425.3 Índices de desempenho Tanque 3 . . . . . . . . . . . . . . . . . . . . 425.4 Índices de desempenho Tanque 2 . . . . . . . . . . . . . . . . . . . . 485.5 Índices de desempenho Tanque 3 . . . . . . . . . . . . . . . . . . . . 485.6 Índices de desempenho Tanque 1 . . . . . . . . . . . . . . . . . . . . 535.7 Índices de desempenho Tanque 2 . . . . . . . . . . . . . . . . . . . . 535.8 Índices de desempenho Tanque 3 . . . . . . . . . . . . . . . . . . . . 535.9 Índices de desempenho Tanque 1 . . . . . . . . . . . . . . . . . . . . 585.10 Índices de desempenho Tanque 2 . . . . . . . . . . . . . . . . . . . . 595.11 Índices de desempenho Tanque 3 . . . . . . . . . . . . . . . . . . . . 59
v


Lista de Abreviaturas e Símbolos
MIMO - Multiple Input Multiple OutputMRAC - Model Reference Adaptive ControlGMV - Generalized Minimum VarianceSISO - Single Input Single OutputANFIS - Adaptive Neural Fuzzy Inference SystemM.I.T - Massachusetts Institute of TechnologyISE - Integrated Square ErrorIAE - Integrated Absolute ErrorITAE - Integrated of the Time multiplied by Absolute ErrorG(s) - Matriz de transferência do sistema
D(s) - Matriz de desacoplamento do sistema
Q(s) - Matriz do sistema desacoplado (processo aparente)
C(s) - Matriz de controladores
Do(s) - Matriz auxiliar do desacoplador invertido
Dd(s) - Matriz auxiliar do desacoplador invertido
I - Matriz identidade
r - Referência aplicada ao sistema
y - Saída do sistema
qit - Vazão de entrada do tanque
qot - Vazão de saída do tanque
Kmt - Constante da bomba
at - Área do orifício de saída dos tanque
At - Área do tanque
Lt - Nível dos tanque
Vpt - Tensão aplicada a bomba
g - Aceleração da gravidade
Lot - Ponto de operação do tanque
u - Sinal de controle
a - Parâmetro do sistema

b - Parâmetro do sistemaum - Sinal de controle do modelo de referênciaam - Parâmetro do modelo de referênciabm - Parâmetro do modelo de referênciaθ - Vetor de estimativasε - Erro de estimaçãoJ - Função objetivoγ - Vetor de ganhos adaptativosp - Operador diferencialx - Vetor de regressoresyre f - Referência aplicada ao sistemaρ - Fator de ponderação do sinal de controlee - Vetor erro

Capítulo 1
Introdução
Estratégias de controle adaptativo vêm ganhando destaque nos últimos anosem aplicações que envolvem não-linearidades significativas, variações paramé-tricas, ou pouco conhecimento a respeito das plantas tratadas. A necessidadede desenvolver sistemas com capacidade de aprendizagem e tomada de decisãoem situações de incerteza, principalmente nas áreas de controle de processos eaviação foi, segundo (ÅSTRöM, 1996), o que motivou os primeiros estudos sobreo tema no final da década de 1950. O MRAC (Model Reference Adaptive Control)é um exemplo de controlador adaptativo em que o desempenho desejado dosistema é expresso através de um modelo de referência, tendo como finalidadefazer com que o comportamento da planta seja similar ao do modelo para umdeterminado sinal de entrada. Para isso, é necessário um mecanismo de ajuste(ou lei adaptativa) que visa estimar os parâmetros do controlador, sendo essemecanismo usado para ajustar os parâmetros do controlador com base no erroentre a saída da planta e a do modelo de referência.
A proposta apresentada nesse trabalho é projetar e aplicar duas técnicasde controle adaptativo em um sistema de três tanques acoplados, tendo comoobjetivo controlar seus respectivos níveis. Além do controlador MRAC, umcontrolador auto-ajustável de mínima variância generalizado é implementado(Self tuning Generalized Minimum Variance Control - GMV). De acordo com (GOS-MANN, 2002) “ O processo de tanques acoplados é bastante adequado para serutilizado neste tipo de estudo, basicamente por dois motivos: primeiro, porqueé bastante comum em escala industrial, principalmente nos ramos químico, pe-troquímico, de celulose e de alimentos; e segundo, porque é de fácil construção ede modelagem relativamente simples, permitindo que diferentes controladorespossam ser projetados, implementados e testados de forma rápida e eficiente.”Por se tratar de uma planta que possui não-linearidades, os compensadores

2 CAPÍTULO 1. INTRODUÇÃO
adaptativos foram selecionados por apresentar bom desempenho em sistemasdessa natureza. Optou-se também pelo uso de uma estratégia de desacoplamento,visto que o processo é multivariável e as variáveis envolvidas possuem certoacoplamento. Com isso, a influência de uma variável nas outras é minimizada eo problema em questão pode ser visualizado como três problemas de controlepara o caso SISO (Single Input Single Output), sendo cada um referente a umtanque. A combinação das estratégias de desacoplamento e controle adaptativopermite simplificar a abordagem do problema, visto que o projeto de um contro-lador adaptativo MIMO é uma tarefa mais complexa do que a implementaçãorealizada, composta por três controladores SISO. A presença do desacopladortambém tende a aumentar a eficiência do controle, rejeitando as perturbaçõese otimizando a convergência das estimativas envolvidas. Para a obtenção dosresultados via simulação, a modelagem do sistema foi baseada em uma plantadidática da Quanser para controle de nível.
A estrutura desse documento encontra-se organizada por capítulos. O capí-tulo 1 traz um conteúdo introdutório dos temas que serão tratados, assim comoo objetivo do trabalho. O capítulo 2 apresenta o estado da arte, com a revisão dealguns trabalhos mais recentes na literatura relacionados ao controle adaptativode sistemas MIMO. O referencial teórico compõe o capítulo 3, contendo os princi-pais conceitos envolvidos nos temas de Controle Adaptativo, Desacoplamentode Sistemas, MRAC e GMV. O capítulo 4 expõe a modelagem fenomenológicado sistema de tanques e a metodologia utilizada na implementação do desaco-plador. Os resultados das simulações realizadas são expostos no capítulo 5 e asconsiderações finais estão contidas no capítulo 6.
Capítulo 2
Revisão Bibliográfica
Este capítulo apresenta a revisão de alguns trabalhos recentes na literaturarelacionados a estratégias de controle adaptativo em sistemas do tipo MIMO,visto que esse é o tema central do trabalho.
Em (SHAH; RASMUSSEN; ALLEYNE, 2004) é utilizada uma estratégia decontrole adaptativo multivariável para um sistema de ar condicionado automo-tivo. Sistemas desse tipo possuem uma dinâmica altamente não-linear devido àspropriedades do fluído e às relações termodinâmicas envolvidas. Inicialmente,um modelo físico do sistema validado experimentalmente é exposto, e sua identi-ficação é realizada de maneira recursiva através de um algoritmo de estimaçãode parâmetros para o caso MIMO. O algoritmo é baseado no método dos mí-nimos quadrados estendido. No seu estudo, um Regulador Linear Quadráticoé projetado com a finalidade de tratar problemas do tipo servo (seguidor dereferência) e de rejeição a perturbações. As variáveis de interesse são a pressãodo evaporador e temperatura do sistema, sendo essas variáveis controladas demaneira coordenada através da válvula de expansão e do fluxo de ar no eva-porador respectivamente. As perturbações são representadas por variações narotação do compressor, e no fluxo de ar no condensador, no intuito de simularcondições diferentes de dirigibilidade. Segundo o autor, a aproximação MIMOadaptativa demonstrada com sucesso provê condições favoráveis no que dizrespeito a qualquer futura validação do método utilizado em hardware.
(CARVALHO; HEMERLY, 2008) aplica e compara duas técnicas de controleadaptativo não-linear em um modelo de helicóptero com três graus de liberdade,incertezas paramétricas e dinâmicas não modeladas. As técnicas utilizadas são arealimentação de saída e a realimentação de estados, ambas em conjunto com ummodelo de referência e redes neurais artificiais linearmente parametrizadas. Deacordo com o autor, o uso de redes neurais na área de controle adaptativo não-

4 CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
linear tem recebido grande atenção especialmente nas últimas duas décadas. Essetipo de estrutura apresenta uma arquitetura de controle simples de implementar,sendo capaz de utilizar informações conhecidas do sistema, mas ao mesmo temponão depender fortemente dessas informações para apresentar um desempenhoaceitável. Um comparativo entre as metodologias adaptativas e os controladoresclássicos é exposto, sendo as estratégias de controle clássicas insuficientes paraatingir as especificações de desempenho associadas ao modelo de referência. Emrelação as técnicas adaptativas, elas se mostraram bem eficientes na compensaçãodas dinâmicas não-lineares, principalmente quando o sistema é submetido avariações nos parâmetros durante os testes.
Em (CARVALHO; HEMERLY; RIBEIRO, 2008), o método de realimentação desaída em conjunto com redes neurais é aplicado em um modelo de helicópterocom dois graus de liberdade. O objetivo do trabalho é a validação de uma dasestratégias de controle apresentadas por (CARVALHO; HEMERLY, 2008) comdados experimentais reais. O controle do sistema MIMO é simplificado em umaestrutura composta por dois sistemas SISO para os dois eixos de movimentoda planta. Um modelo de referência é utilizado em conjunto com a técnica delinearização entrada-saída. Sendo essa uma estratégia voltada para sistemasSISO, e por se tratar de um problema MIMO, o uso de um elemento adaptativo(rede neural multicamadas) faz com que os efeitos das dinâmicas não-linearesde cada canal sejam compensados, assim como o acoplamento entre as variáveis.Os resultados experimentais obtidos foram satisfatórios para a validação daestratégia de controle.
(COLóN; ROSA, 2012) traz a aplicação de um controlador do tipo self-tuningregulator (STR) em uma planta didática de três tanques comunicantes, sendoo objetivo controlar o nível de dois desses tanques. Trata-se de um sistemamultivariável com a presença de não-linearidades do tipo não suave, onde aconfiguração do sistema pode ser modificada por meio de válvulas, alterando adinâmica do sistema quando desejado. O método de estimação utilizado foi o demínimos quadrados recursivo normalizado e com fator de esquecimento. O autoroptou por não realizar uma análise multivariável do sistema, e sim considerarcada um dos tanques de interesse como um sistema SISO, deixando a cargo docontrolador adaptativo compensar as alterações na dinâmica do sistema. Umasérie de resultados é apresentada, verificando o comportamento da saída daplanta com alterações no fator de esquecimento, na taxa de aprendizagem e coma adição de distúrbios.

5
(FREITAS; BAUCHSPIESS, 2007) utiliza uma estratégia adaptativa neuro-fuzzy (ANFIS - adaptive neural fuzzy inference system) em um processo de controlede nível de um sistema de três tanques acoplados. O sistema apresenta caracterís-ticas não lineares, é de terceira ordem, e uma análise multivariável do problema érealizada considerando duas entradas (bombas) e duas saídas (nível dos tanques).A lógica fuzzy normalmente faz uso de um conhecimento prévio do sistema ou deum especialista para determinar o seu conjunto de regras, o que pode ser muitocomplexo em processos desse tipo para se obter um bom desempenho. A ideiado ANFIS é utilizar redes neurais artificiais para o treinamento das estruturasfuzzy a partir de um conjunto de dados do processo, facilitando o projeto docontrolador. Os resultados apresentados foram satisfatórios, sendo o desempenhodo controlador adaptativo neuro-fuzzy comparado a um controlador adaptativopor alocação de pólos. Além disso, foi realizada uma análise de sua robustez emrelação a alterações nos parâmetros do processo e nas constantes das válvulas.
(SILVA et al., 2015) projeta um controlador GMV para um sistema de dis-tribuição de água. O controle atua na variação de velocidade de rotação de umconjunto motor-bomba e a na variação da abertura de válvulas de controle. Seuobjetivo é racionalizar o uso da água e energia elétrica, na tentativa de aumentara eficiência energética dos conjuntos motor-bomba, e reduzir as perdas de águaenvolvidas no processo. Segundo o autor, a variação da demanda de água aopassar do tempo gera contínuas alterações nas condições de operação das redeshidráulicas. Além disso, o controle simultâneo de pressão em diversos pontos demedição da rede, utilizando equipamentos com características diferentes torna osistema complexo, justificando assim o fato de uma técnica adaptativa ser ado-tada. O projeto da estratégia GMV com estimação dos parâmetros pelo métododos mínimos quadrados recursivo é apresentado, assim como sua aplicação emuma planta experimental de distribuição de água. Os experimentos realizadosmostram a eficácia do controlador adaptativo para o sistema em diversas condi-ções de operação, enfatizando a economia de energia e água, que obteve reduçãode até 19,2% para o sistema atuando na condição mais desfavorável.
Os estudos citados nesse capítulo tem como ponto em comum o controlede processos multivariáveis que apresentam não-linearidades significativas. Aaplicação de estratégias de controle adaptativo em sistemas que possuem taiscaracterísticas vem sendo bem aceita nas últimas décadas, apresentando bonsresultados experimentais em diversas áreas, tais como indústria automotiva,aviação, processos químicos e hidráulicos. É interessante destacar que novas

6 CAPÍTULO 2. REVISÃO BIBLIOGRÁFICA
abordagens vem sendo desenvolvidas combinando técnicas adaptativas comoutros elementos como redes neurais e lógica f uzzy, intensificando ainda mais osestudos na área. O capítulo a seguir introduz um breve histórico e os principaisconceitos envolvidos no tema de Controle Adaptativo.

Capítulo 3
Referencial Teórico
3.1 Controle Adaptativo
De acordo com (ÅSTRöM; WITTENMARK, 1995) um controlador adapta-tivo é um controlador que pode modificar seu comportamento em função dasalterações na dinâmica do processo e de suas perturbações. Dessa maneira, osparâmetros do controlador são ajustáveis e existe um mecanismo de estrutura nãolinear responsável pelo ajuste desses parâmetros. (HASSAN, 2002) recomendao uso desse tipo de controle para sistemas que apresentam dinâmicas com va-riações ao longo do tempo, processos conhecidos com incerteza, ou até mesmodesconhecidos. Além de sistemas com a presença de atuadores não-lineares, esistemas que sofram alterações nas suas condições de operação, ou na naturezade suas perturbações.
3.1.1 Histórico
Pesquisas na área de controle adaptativo tiveram início na década de cin-quenta, tendo como motivação o projeto de pilotos automáticos para aeronavesque operavam em diversas velocidades e altitudes. Concluiu-se que um con-trolador de ganhos constantes não era suficiente para resolver o problema emquestão, e foi adotada como primeira solução o controle por escalonamento deganho (Gain Scheduling). Em seguida, as primeiras tentativas com esquemas pormodelo de referência e métodos de auto-sintonia (Self Tunning) dos parâmetrosdos controladores foram propostos. Assim como as regras de sensibilidade e aregra do "M.I.T", que apresentavam um bom desempenho sobre certas restrições.Em 1958, Kalman apresentou o conceito de um controlador auto-ajustável com aidentificação dos parâmetros de uma planta linear (SASTRY; BODSON, 1989).
Nos anos 60, haviam mais pesquisas na área de controle que contribuíram
8 CAPÍTULO 3. REFERENCIAL TEÓRICO
para o desenvolvimento do controle adaptativo. Teorias de espaço de estadose estabilidade foram introduzidas. Havia também resultados importantes nateoria de controle estocástico. A programação dinâmica, introduzida por Bellman,aumentou a compreensão dos processos adaptativos. No final dos anos 70 einicio dos anos 80, provas de estabilidade de sistemas adaptativos apareceram,embora sob várias suposições restritivas. O esforço de juntar ideias de controlerobusto e identificação de sistemas tinha uma relevância particular. A investiga-ção da necessidade dessas suposições geraram novas e interessantes pesquisas narobustez do controle adaptativo, assim como em controladores universalmenteestabilizáveis. Pesquisas no final da década de 80 e inicio da década de 90 derammaior percepção de robustez aos controladores adaptativos. Os avanços nosestudos de sistemas não lineares levaram também a um aumento significante dacompreensão do tema. Surgiram muitos experimentos em controle adaptativotanto em laboratórios, como na indústria. O rápido progresso em microeletrônicafoi de grande importância e a interação entre teoria e prática resultou em umvigoroso desenvolvimento em campo. Como resultado, controladores adapta-tivos começaram a aparecer comercialmente no começo dos anos oitenta. Essedesenvolvimento teve forte aceleração e técnicas adaptativas são aplicadas dediversas maneiras em grande parte dos controladores comercializados hoje emdia. (ÅSTRöM; WITTENMARK, 1995)
3.1.2 Estrutura do Controlador
A saída de um processo contém informações sobre seus estados e parâmetros.Um controlador adaptativo deve ser capaz de aprender sobre as variações queocorrerem na dinâmica da planta, processando sua saída e utilizando os ganhosapropriados para acomodar essas variações. A maneira como os ganhos docontrolador se adaptam em resposta às mudanças de dinâmica da planta ede suas pertrubações distingue cada um dos esquemas de controle adaptativo(IOANNOU; SUN, 1996). De maneira geral, um sistema adaptativo é compostopor duas malhas realimentadas. A primeira contém o processo e o controlador.Já a segunda, possui um mecanismo de ajuste dos parâmetros do controlador.Essa estrutura pode ser observada na figura 3.1.

3.1. CONTROLE ADAPTATIVO 9
Figura 3.1: Estrutura de um Controlador Adaptativo (ÅSTRöM; WITTENMARK, 1995)
3.1.3 Controle Adaptativo Direto/Indireto
Um sistema de controle adaptativo pode ser classificado como direto ouindireto. Para uma estrutura direta, os parâmetros do controlador são estimadosdiretamente. Para isso se faz necessária uma etapa de parametrização dasvariáveis do controlador em função dos parâmetros da planta, sendo o mecanismode ajuste o único elemento responsável pela atualização do controlador. Aestrutura de um controlador adaptativo direto é demonstrada na figura 3.2. Parao caso indireto, o processo é composto por duas etapas. A primeira responsávelapenas pela estimação dos parâmetros da planta, e a segunda responsável pelocálculo dos parâmetros do controlador através das estimativas, apresentandoassim um elemento intermediário quando comparado com o caso direto. A figura3.3 apresenta o modelo de um sistema indireto.
Figura 3.2: Estrutura de um Controlador Adaptativo Direto (IOANNOU; SUN, 1996)

10 CAPÍTULO 3. REFERENCIAL TEÓRICO
Figura 3.3: Estrutura de um Controlador Adaptativo Indireto (IOANNOU; SUN, 1996)
3.2 Desacoplamento de Sistemas
Grande parte dos sistemas multivariáveis apresentam interações entre suasentradas e saídas. O controle eficiente desses sistemas é um problema com-plexo no contexto de controle de processos, visto que métodos de controle jáconsolidados para casos de sistemas SISO nem sempre podem ser estendidosdiretamente para o caso MIMO (CHEN; ZHANG, 2006). Uma das maneiras detratar o acoplamento entre as variáveis presentes em um sistema MIMO é atravésde métodos de desacoplamento. Tais métodos tendem a minimizar os efeitosque uma variável do sistema exerce sobre a outra, tornando possível realizarum estudo mais simples do problema para cada conjunto de entradas e saídas.Podemos por exemplo desenvolver controladores específicos para cada par deentrada e saída, ao invés de uma análise centralizada utilizando técnicas decontrole MIMO mais avançadas. Um sistema de controle descentralizado comuma matriz de desacoplamento pode ser projetado combinando um controladorC(s) com um bloco compensador D(s), de tal maneira que o controlador visua-lize o processo aparente Q(s) como um conjunto de processos completamenteindependentes. A essência desse método é introduzir dinâmicas que cancelemas interações existentes entre as variáveis do processo, permitindo que seja feitoum controle independente para cada uma das malhas do sistema (GARRIDO;

3.2. DESACOPLAMENTO DE SISTEMAS 11
VáZQUEZ; MORILLA, 2011). A figura 3.4 apresenta a estrutura convencionalde um desacoplador para um sistema TITO (Two Inputs and Two Outputs), sendod11, d12, d21, d22 os elementos de D(s), c1, c2 os elementos de C(s) e g11, g12, g21,g22 os elementos da matriz de transferência G(s) - Equação (3.1). A matriz D(s)deve ser projetada de maneira que G(s)D(s) resulte na matriz de transferênciadiagonal Q(s) - Equação (3.2).
D(s) =
(d11 d12
d21 d22
)G(s) =
(g11 g12
g21 g22
)
Q(s) =
(q11 00 q22
)C(s) =
(c11 00 c22
) (3.1)
Q(s) = G(s).D(s) (3.2)
Figura 3.4: Estrutura de um Desacoplador para um sistema TITO (GARRIDO; VáZQUEZ;MORILLA, 2011)
De maneira geral, as técnicas de desacoplamento convencionais são classifica-das em três tipos: desacoplador ideal (ideal decoupling), desacoplador simplificado(simplified decoupling) e desacoplador invertido (inverted decoupling). (GAGNON;POMERLEAU; DESBIENS, 1998) apresenta um estudo comparativo entre ostrês métodos, onde a estabilidade, robustez e implementação dos modelos sãoestudadas. Para o autor, a escolha do método de desacoplamento é uma ta-refa relativamente complexa, visto que cada técnica apresenta suas vantagens elimitações.
3.2.1 Desacoplador Ideal
Substituindo (3.1) em (3.2), temos:

12 CAPÍTULO 3. REFERENCIAL TEÓRICO
Q(s) = G(s).D(s)
D(s) = G(s)−1Q(s) =
(g22q11 −g12q22
−g21q11 g11q22
)(3.3)
A equação (3.3) define o desacoplador ideal (Ideal Decoupling) proposto por(LUYBEN, 1970). Tal método permite que os elementos do controlador c11 e c22
sejam sintonizados de acordo com os elementos atribuídos à matriz aparentedo processo Q(s). Apesar de seu esquema refletir em uma maior facilidade noprojeto e sintonia do controlador, sua estrutura na maioria das vezes pode levar aexpressões complexas de D(s), de difícil realização.
3.2.2 Desacoplador Simplificado
Um segundo método denominado simplified decoupling (LUYBEN, 1970) é vas-tamente utilizado na literatura, tendo como sua maior vantagem a simplicidadedos elementos envolvidos. Sua matriz de desacoplamento é descrita por:
D(s) =
(1 − g12
g11
− g21g22
1
)(3.4)
Resultando na seguinte matriz de transferência Q(s):
Q(s) = G(s).D(s) =
(g11 − g12g21
g220
0 g22 − g12g21g11
)(3.5)
O desacoplador simplificado permite uma maior facilidade no projeto damatriz de desacoplamento D(s), porém os elementos de Q(s) tornam-se maiscomplexos visto que são compostos por somas de funções de transferência. Talcaracterística muitas vezes dificulta a sintonia dos controladores.
3.2.3 Desacoplador Invertido
Na tentativa de evitar complexidade dos elementos de Q(s) na implementaçãodo desacoplador simplificado, a seguinte estrutura foi proposta (SHINSKEY, 1988)na disposição dos elementos do desacoplador (Figura 3.5), modificando aquelaapresentada na Figura 3.4:

3.3. MRAC 13
Figura 3.5: Estrutura de um Desacoplador Invertido para um sistema TITO (GARRIDO;VáZQUEZ; MORILLA, 2011)
A partir desta estrutura, (WADE, 1997) desenvolveu uma nova estratégiade desacoplamento denominada inverted decoupling que apresenta as mesmasfunções de transferência da matriz D(s) utilizadas no desacoplador simplificado(3.4) e uma matriz aparente do sistema mais simples, assim como o desacopladorideal (3.6). Diante do exposto, este método foi utilizado no presente trabalho poisoferece os benefícios de ambos os desacopladores citados anteriormente e umaimplementação mais simples e direta. Uma descrição matemática mais detalhadado desacoplador invertido é apresentada na seção 4.2 para um processo 3x3.
D(s)−1 = Q(s)−1G(s) =
(1 − g12
g11
− g21g22
1
)=
( g11q11− g12
q11g21q22
g22q22
)
Para q11 = g11 e q22 = g22:
Q(s)−1G(s) =
(1 − g12
g11
− g21g22
1
)(3.6)
3.3 MRAC
Inicialmente apresentado no trabalho de (WHITAKER; YAMRON; KEZER,1958), em estudos no campo da aviação. Os controladores MRAC tratam proble-mas do tipo servo através de um modelo de referência que especifica o comporta-mento a ser seguido pela planta. Tal comportamento pode ser atingido através
14 CAPÍTULO 3. REFERENCIAL TEÓRICO
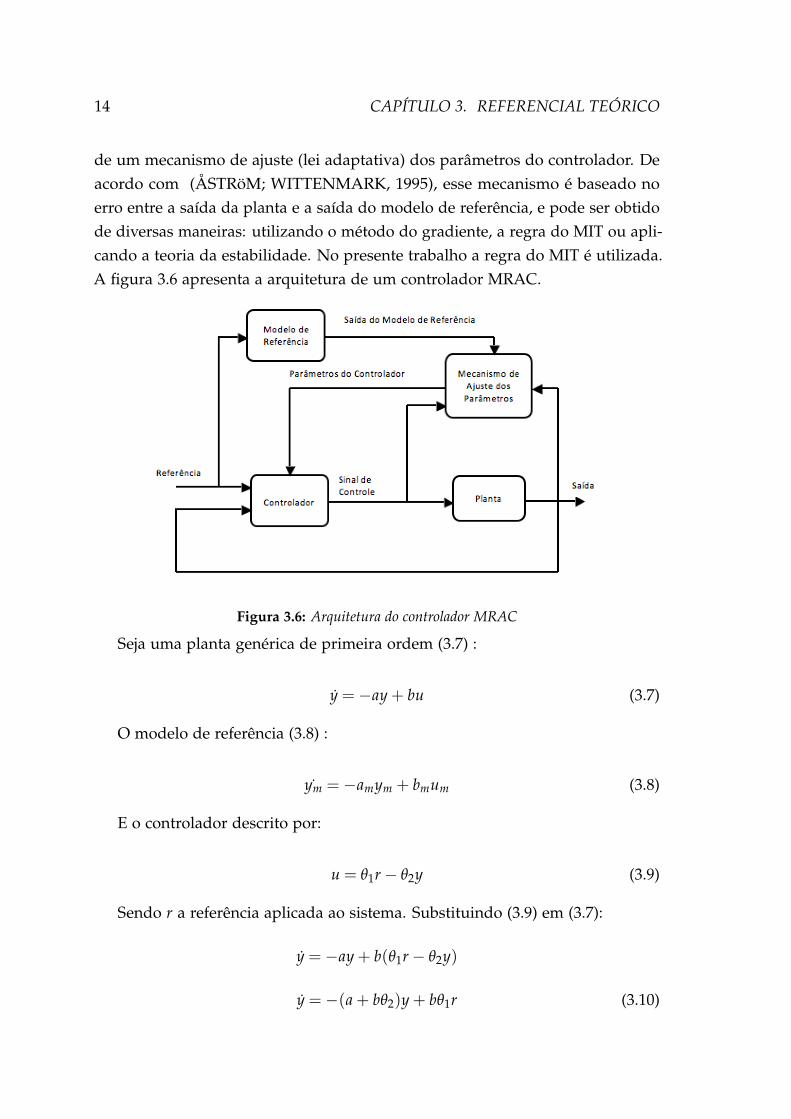
de um mecanismo de ajuste (lei adaptativa) dos parâmetros do controlador. Deacordo com (ÅSTRöM; WITTENMARK, 1995), esse mecanismo é baseado noerro entre a saída da planta e a saída do modelo de referência, e pode ser obtidode diversas maneiras: utilizando o método do gradiente, a regra do MIT ou apli-cando a teoria da estabilidade. No presente trabalho a regra do MIT é utilizada.A figura 3.6 apresenta a arquitetura de um controlador MRAC.
Figura 3.6: Arquitetura do controlador MRAC
Seja uma planta genérica de primeira ordem (3.7) :
y = −ay + bu (3.7)
O modelo de referência (3.8) :
˙ym = −amym + bmum (3.8)
E o controlador descrito por:
u = θ1r− θ2y (3.9)
Sendo r a referência aplicada ao sistema. Substituindo (3.9) em (3.7):
y = −ay + b(θ1r− θ2y)
y = −(a + bθ2)y + bθ1r (3.10)

3.3. MRAC 15
Comparando (3.10) e (3.8) e considerando que a planta deve se comportar comoo modelo de referência, temos que y = ym e um = r, logo:
θ1 =bm
b(3.11)
θ2 =am − a
b(3.12)
Para aplicar a regra do MIT, definimos o erro de estimação ε e a seguintefunção objetivo J:
ε = y− ym (3.13)
J(θ1,θ2) =12
ε2 (3.14)
A fim de realizarmos a estimação dos parâmetros do controlador, devemosminimizar a função objetivo na direção negativa de seu gradiente. Sendo γ oganho adaptativo e θ o vetor de parâmetros do controlador, temos:
θ = −γ∂J∂θ
= −γε∂ε
∂θ(3.15)
A equação (3.15) apresenta a regra do MIT. A taxa de convergência dasestimativas dos parâmetros do controlador está diretamente relacionada ao ganhoadaptativo γ. Quanto maior o valor de γ, maior a velocidade que as estimativasconvergem, porém para valores muito elevados o comportamento das estimativastorna-se imprevisível. A derivada parcial ∂ε
∂θ é denomida derivada de sensibilidadedo sistema. Tal derivada expressa como o erro ε é influenciado pelo vetor θ.Decorre da equação (3.10) que a saída do sistema em malha fechada é dada por:
y =bθ1
p + a + bθ2r (3.16)
sendo p = d/dt o operador diferencial. As equações de sensibilidade (3.17) e(3.18) são obtidas através das derivadas parciais do erro de estimação em relaçãoaos parâmetros do controlador θ1 e θ2:
∂ε
∂θ1=
bp + a + bθ2
r ≈ bp + am
r (3.17)
∂ε
∂θ2= − b2θ1
(p + a + bθ2)2 r = − bp + a + bθ2
y ≈ − bp + am
y (3.18)

16 CAPÍTULO 3. REFERENCIAL TEÓRICO
Essas equações não podem ser aplicadas diretamente pois os parâmetros daplanta a e b são desconhecidos. Por isso devemos utilizar aproximações, das quaisuma das possíveis é a seguinte: p + a + bθ2 ≈ p + am. Isso decorre da equação(3.12) quando consideramos que à medida que as estimativas dos parâmetrostendem a convergir, o comportamento do sistema deve acompanhar o modelode referência. Levando em consideração a aproximação citada e a equação dasestimativas dos parâmetros do controlador (3.15) temos :
θ1 = −γ∂J∂θ1
= −γε∂ε
∂θ1= −γ
(b
p + amr)
ε (3.19)
θ2 = −γ∂J∂θ2
= −γε∂ε
∂θ2= γ
(b
p + amy)
ε (3.20)
Combinando os parâmetros b, am e γ (3.21), podemos normalizar os filtrospara apresentarem ganho unitário, resultando em:
γ′ =γbam
(3.21)
θ1 = −γ′(
amp + am
r)
ε (3.22)
θ2 = γ′(
amp + am
y)
ε (3.23)
3.4 Controlador auto-ajustável GMV
Apresentado por (CLARKE; GAWTHROP, 1975), o controlador GMV é umaestratégia de controle adaptativo auto-ajustável para sistemas que apresentamparâmetros constantes porém desconhecidos. O controle é realizado em duasetapas, a primeira consiste na estimação dos parâmetros do sistema que é feitaatravés do método do mínimos quadrados recursivo, e a segunda por uma leide controle baseada na minimização de uma função de custo que incorporaas variações da saída, entrada e referência do sistema. O método em questãopossui várias vantagens sobre as primeiras estratégias auto-ajustáveis (ÅSTRöM;WITTENMARK, 1995): é permitida a ponderação do sinal de controle; a referênciapode ser perfeitamente seguida; não apresenta como requisito a escolha de umparâmetro relacionado ao sistema que assegure a convergência das estimações.

3.4. CONTROLADOR AUTO-AJUSTÁVEL GMV 17
3.4.1 Método dos Mínimos Quadrados Recursivo
A identificação do sistema é uma etapa fundamental em estratégias de controleadaptativo indiretos. Métodos de identificação têm como objetivo desenvolverou aprimorar uma representação matemática de um sistema físico utilizandodados experimentais, como por exemplo suas entradas e saídas. Tais técnicassão largamente utilizadas para casos em que os parâmetros da planta sejampouco conhecidos, desconhecidos ou sofram variações ao longo do tempo. Nopresente trabalho o método dos mínimos quadrados recursivo é utilizado paraestimar os parâmetros do sistema desacoplado. A estimação é feita em temporeal enquanto o processo se encontrar operando, sendo assim considerado ummétodo "on-line"de estimação. Considerando o seguinte conjunto de entradas esaídas medidas:
{u(0) u(1) ... u(N)
}{y(0) y(1) ... y(N)
}(3.24)
Definimos as seguintes matrizes:
θ =
a1
a2...
an
· · ·b1
b2...
bm
y =
y(1)y(2)
...y(N)
e =
e1
e2...
en
x =
−y(0) ... −y(1− n)
... u(0) ... u(1−m)
−y(1) ... −y(2− n)... u(1) ... u(2−m)
......
......
...
−y(N − 1) ... −y(N − n)... u(N − 1) ... u(N −m)
(3.25)

18 CAPÍTULO 3. REFERENCIAL TEÓRICO
Temos que:y = xθ + e (3.26)
O problema consiste em encontrar o vetor θ que contém os parâmetros do sistema,dados os vetores x e y. Para isso, devemos escolher os valores de θ que minimizama seguinte função erro:
J =N
∑k=1
e2(k) = eTe = (y− xθ)T(y− xθ) (3.27)
Minimizamos J igualando a zero o seu gradiente em função de θ:
∂J∂θ
∣∣∣θ=θ
= 0
∂(yTy− yTxθ − θTxTy + θTxTxθ)
∂θ
∣∣∣θ=θ
= 0(3.28)
Resultando em:−2xTy + 2xTxθ = 0
θ = (xTx)−1xTy(3.29)
A equação (3.29) apresenta o cálculo das estimativas para o método os mínimosquadrados. Para a versão recursiva do estimador, ajustamos as equações (3.26) e(3.29) considerando N+1 amostras, resultando em (3.30) e (3.31) :
y(1)y(2)
...y(N)
y(N + 1)
=
−y(0) ... −y(1− n)... u(0) ... u(1−m)
−y(1) ... −y(2− n)... u(1) ... u(2−m)
......
......
...
−y(N − 1) ... −y(N − n)... u(N − 1) ... u(N −m)
... ... ...... ... ... ...
−y(N) ... −y(N + 1− n)... u(N + 1) ... u(N + 1−m)
θ +
e(1)e(2)
...e(N)
e(N + 1)
Y(N)
...y(N + 1)
=
X(N)
...xT(N + 1)
θ +
E(N)
...y(N + 1)
(3.30)

3.4. CONTROLADOR AUTO-AJUSTÁVEL GMV 19
θN+1 = (XTN+1XN+1)
−1XTN+1YN+1
θN+1 = (XTN+1XN+1)
−1XTN+1
YN
...yN+1
θN+1 =
[XTN
... xN+1
] XN
...xT
N+1
−1 [
XTN
... xN+1
] YN
...yN+1
θN+1 = (XT
NXN + xN+1xTN+1)
−1[XTNYN + xN+1yN+1]
(3.31)
Definimos a matriz de covariância:
PN+1 = (XTNXN + xN+1xT
N+1)−1 (3.32)
Utilizando o lema da inversão de matrizes, temos:
PN+1 = [I − (1 + xTN+1PNxN+1)
−1PNxN+1xTN+1]PN (3.33)
Substituindo (3.33) em (3.31) obtemos as equações do estimador:
KN = (1 + xTN+1PNxN+1)
−1PNxN+1
θN+1 = θN + KN(yN+1 − xTN+1θN)
PN+1 = [I − KNxTN+1]PN
(3.34)
3.4.2 Implementação do controlador GMV
Dado um sistema discreto de primeira ordem descrito por:
y(k + 1) = −ay(k) + bu(k) (3.35)
Podemos escrever y(k + 1) em função da variação do sinal de controle ∆u(k)subtraindo a equação (3.36) de (3.35):
y(k) = −ay(k− 1) + bu(k− 1) (3.36)

20 CAPÍTULO 3. REFERENCIAL TEÓRICO
Resultando em:
y(k + 1)− y(k) = −a[y(k)− y(k− 1)] + b[u(k)− u(k− 1)]
y(k + 1) = −ay(k) + y(k)− ay(k− 1) + b∆u(k)
y(k + 1) = (1− a)y(k) + ay(k− 1) + b∆u(k)
(3.37)
O sinal de controle pode ser calculado minimizando a função de custo J (3.38)em relação a variação do sinal de controle ∆u(k), sendo yre f a referência aplicadaao sistema e ρ o fator de ponderação de ∆u(k):
J = [y(k + 1)− yre f (k + 1)]2 + ρ∆u(k)2 (3.38)
Substituindo (3.37) em (3.38):
J = [(1− a)y(k) + ay(k− 1) + b∆u(k)− yre f (k + 1)]2 + ρ∆u(k)2 (3.39)
Minimizando J (3.39):
∂J∂∆u(k)
= 0
∂J∂∆u(k)
= 2[(1− a)y(k) + ay(k− 1) + b∆u(k)− yre f (k + 1)] + 2ρ∆u(k) = 0
∆u(k)(b2 + ρ) = b[(ay(k)− y(k)− ay(k− 1) + yre f (k + 1)]
∆u(k) =b
(b2 + ρ)[(ay(k)− y(k)− ay(k− 1) + yre f (k + 1)]
(3.40)
Como ∆u(k) = u(k)− u(k− 1), chegamos a expressão do sinal de controleaplicado a cada intervalo de tempo, onde os parâmetros do sistema a e b peloprincípio de equivalência a certeza (SIMON, 1956) (THEIL, 1957) devem sersubstituidos pelas estimativas obtidas através do método dos mínimos quadrados:
u(k) =1
1 + ρb
[(ay(k)− y(k)− ay(k− 1) + yre f (k + 1)
b
]+ u(k− 1) (3.41)
A figura 3.7 apresenta a arquitetura do controlador em questão:

3.4. CONTROLADOR AUTO-AJUSTÁVEL GMV 21
Figura 3.7: Arquitetura do controlador GMV

22 CAPÍTULO 3. REFERENCIAL TEÓRICO

Capítulo 4
Metodologia
Este capítulo apresenta a metodologia utilizada neste trabalho, incluindoalguns conceitos e a fundamentação matemática dos temas envolvidos. Na seção4.1 é feita uma descrição do sistema de tanques e sua modelagem fenomenológica.A seção 4.2 traz o equacionamento do desacoplador invertido para um sistema3x3 e sua aplicação no processo.
4.1 Sistema de Tanques
O sistema é composto por três tanques e três bombas (entradas), organizadosde maneira que a vazão de saída de um tanque seja despejada no segundo eassim por diante (Figura 4.1). Cada tanque possui uma altura de 30 cm e suasvazões são provenientes de um tanque de base para onde escoa o fluido do 3otanque. Durante o processo consideramos que pode-se tanto adicionar comoremover fluido de cada tanque, o que matematicamente pode ser representadopor um sinal de controle positivo ou negativo.

24 CAPÍTULO 4. METODOLOGIA
Figura 4.1: Sistema de Tanques Acoplados
Realizando uma modelagem fenomenológica do processo, a dinâmica daplanta pode ser representada da seguinte maneira:
• Tanque 1
qi1 = Km1Vp1 (4.1)
qo1 = a1√
2gL1 (4.2)
L1 =qi1 − qo1
A1= − a1
A1
√2gL1 +
Km1
A1Vp1 (4.3)
• Tanque 2
qi2 = Km2Vp2 + a1√
2gL1 (4.4)
qo2 = a2√
2gL2 (4.5)
L2 =a1
A2
√2gL1 −
a2
A2
√2gL2 +
Km2
A2Vp2 (4.6)

4.1. SISTEMA DE TANQUES 25
• Tanque 3
qi3 = Km3Vp3 + a2√
2gL2 (4.7)
qo3 = a3√
2gL3 (4.8)
L3 =a2
A3
√2gL2 −
a3
A3
√2gL3 +
Km3
A3Vp3 (4.9)
Sendo,
qit - vazão de entrada
qot - vazão de saída
Kmt - constante da bomba
at - área do orifício de saída
At - área do tanque
Lt - nível
Vpt - tensão aplicada a bomba
g− aceleração da gravidade
Para t = 1,2,3 referente a cada tanque.
Linearizando as equações (4.3), (4.6) e (4.9) por expansão em série de Taylor,considerando os pontos de operação Lo1,Lo2, Lo3 e as variáveis ∆L1 = L1 − Lo1,∆L2 = L2 − Lo2 e ∆L3 = L3 − Lo3, temos:
∆L1 = −a1
A1
√g
2Lo1∆L1 +
Km1
A1∆Vp1 (4.10)
∆L2 =a1
A2
√g
2Lo1∆L1 −
a2
A2
√g
2Lo2∆L2 +
Km2
A2∆Vp2 (4.11)
∆L3 =a2
A3
√g
2Lo2∆L2 −
a3
A3
√g
2Lo3∆L3 +
Km3
A3∆Vp3 (4.12)
Atribuindo valores às constantes do sistema de acordo com o manual dereferência dos tanques (QUANSER, ) para t=1,2,3 :

26 CAPÍTULO 4. METODOLOGIA
Kmt = 16.5cm3/s
at = 0.1781cm2
At = 60cm2
g = 978.07cm/s2
Lo1 = Lo2 = Lo3 = 15cm
A partir das equações linearizadas, considerando Lt as saídas do sistema eVpt as entradas, obtemos a seguinte matriz de transferência da planta:
Lt =
L1
L2
L3
Vpt =
Vp1
Vp2
Vp3
Lt = G(s)Vpt =
G11(s) G12(s) G13(s)G21(s) G22(s) G23(s)G31(s) G32(s) G33(s)
Vp1
Vp2
Vp3
(4.13)
G(s) =
0.275s+0.01695 0 0
0.004662s2+0.0339s+0.0002874
0.275s+0.01695 0
7.903 10−5
s3+0.05s2+0.0008s+4.872∗10−60.004662
s2+0.0339s+0.00028740.275
s+0.01695
A matriz de transferência é composta de maneira que cada elemento Gij cor-responde a função de transferência da saída i do sistema em relação a sua entradaj. Podemos observar claramente o acoplamento entre as variáveis envolvidas,pois a entrada do tanque 1 influencia as saídas dos tanques 2 e 3, e a entrada dotanque 2 influencia a saída do tanque 3.

4.2. DESACOPLADOR INVERTIDO 27
4.2 Desacoplador Invertido
(GARRIDO; VáZQUEZ; MORILLA, 2011) apresentam em seu trabalho asexpressões de um desacoplador invertido de uma maneira generalizada paraprocessos n×n, e suas condições para que seja realizável. Um desacoplador idealé dado pela equação (4.14), e tem como objetivo tornar a análise do sistema MIMOtão simples como uma matriz de transferência diagonal (não possue acoplamentoentre suas variáveis):
D(s) = G−1(s)Q(s) (4.14)
Sendo D(s) uma matriz nxn com os elementos do desacoplador e Q(s) umamatriz nxn com as funções de transferência do sistema desacoplado.
Dada a complexidade do cálculo de D(s), o método do desacoplador invertidopropõe que a estrutura dessa matriz seja representada pela equação (4.15). Dessemodo, D(s) é escrita em função das matrizes Do(s) e Dd(s) que compõem umamalha com realimentação positiva, ilustrada na figura 4.2.
Figura 4.2: Representação de D(s) pelas matrizes Dd(s) e Do(s) (GARRIDO; VáZQUEZ;MORILLA, 2011)
D(s) = Dd(s).(I − Do(s).Dd(s))−1 (4.15)

28 CAPÍTULO 4. METODOLOGIA
Considerando a inversa da matriz D(s) para simplificar a análise, temos:
D(s)−1 = (I − Do(s).Dd(s))Dd(s)−1
= Dd(s)−1 − Do(s)(4.16)
Invertendo a equação (4.14) e substituindo-a em (4.16), obtemos:
Dd(s)−1 − Do(s) = Q(s)−1G(s) (4.17)
A equação (4.17) pode ser utilizada para calcular os elementos do desacoplador.A matriz Dd(s) deve ser não singular e pode ser escolhida de maneira que sejauma matriz diagonal. Já a matriz Do(s) possui elementos nulos em sua diagonalvisto que uma determinada saída do desacoplador não influencia sua respectivaentrada. Dessa maneira as expressões (4.18) e (4.19) definem o desacoplador paraum sistema 3x3:
1
dd11−do12 −do13
−do211
dd22−do23
−do31 −do321
dd33
=
g11q1
g12q1
g13q1
g21q2
g22q2
g23q2
g31q3
g32q3
g33q3
(4.18)
Escolhendo os elementos da diagonal principal da matriz Dd unitários econsiderando que a matriz Q(s) deve apresentar os mesmos valores da diagonalprincipal de G(s):
dd11 = dd22 = dd33 = 1
q1 = g11 q2 = g22 q3 = g33(4.19)
1 −do12 −do13
−do21 1 −do23
−do31 −do32 1
=
1 g12
g11
g13g11
g21g22
1 g23g22
g31g33
g32g33
1
(4.20)
Substituindo os valores da matriz G(s) (4.13) na equação (4.20) temos osseguintes termos:
do12 = 0 (4.21)
do13 = 0 (4.22)

4.2. DESACOPLADOR INVERTIDO 29
do21 =−0.0046s− 7.9 10−5
0.275s2 + 0.0093s + 7.9 10−5 (4.23)
do23 = 0 (4.24)
do31 =−7.9 10−5s− 1.34 10−6
0.275s3 + 0.013s2 + 0.00023s + 1.34 10−6 (4.25)
do32 =−0.0046s− 7.9 10−5
0.275s2 + 0.0093s + 7.9 10−5 (4.26)
A disposição final dos elementos do desacoplador incorporados ao sistemapode ser observada na figura 4.3.
Figura 4.3: Disposição final dos elementos do desacoplador
A matriz de transferência final do sistema desacoplado Q(s) está exposta noApêndice A. Como esperado os elementos da diagonal principal de Q(s) corres-pondem aos mesmos elementos da diagonal principal da matriz G(s), enquantoseus demais elementos apresentam funções de transferência com coeficientes devalores muito próximos a zero.
4.2.1 Desacoplador Invertido Chaveado
As equações (4.21) a (4.26) descrevem uma solução de desacoplamento emtorno do ponto de operação de 15cm. Para valores de referências afastadasdeste ponto de operação, o desacoplador apresenta uma perda de desempenho,resultando em um maior acoplamento entre as variáveis. A estratégia utilizadapara minimizar esse problema foi implementar desacopladores em diferentes

30 CAPÍTULO 4. METODOLOGIA
pontos de operação e realizar o chaveamento destes de acordo com a situação emque o sistema se encontrar. Considerando que os sinais de referência do sistemaexcursionem na faixa de 0 a 20cm, foram definidos para cada um dos tanquesquatro pontos de operação. Para os intervalos entre 0-5cm, 5-10cm, 10-15cm,15-20cm temos respectivamente os seguintes médios de operação 2,5cm, 7,5cm,12,5cm e 17,5cm (Figura 4.4).
Figura 4.4: Divisão do tanque em diferentes pontos de operação
Os elementos da matriz de desacoplamento foram então calculados levandoem conta as diversas possibilidades em que os níveis dos tanques possam seencontrar. Por exemplo, para o elemento D21 que compensa a influência daentrada 1 no tanque 2, consideramos 16 funções de transferências distintas,visto que tanto o tanque 1 como o tanque 2 podem operar em quatro pontosde operação diferentes. O mesmo ocorre para os elementos D31 e D32 queapresentam 16 possibilidades cada (no caso de D31, foram considerados osdiferentes pontos de operação para os tanques 1 e 3, enquanto a condição deoperação do tanque 2 foi fixada em 15cm). O sistema foi linearizado para cada umdos casos citados com os devidos pontos de operação, e o cálculo dos elementosdo desacoplador foi realizado da mesma maneira apresentada na seção 4.2,totalizando 48 elementos que são chaveados de acordo com os níveis em que ostanques se encontram em cada instante de tempo. O chaveamento é realizado
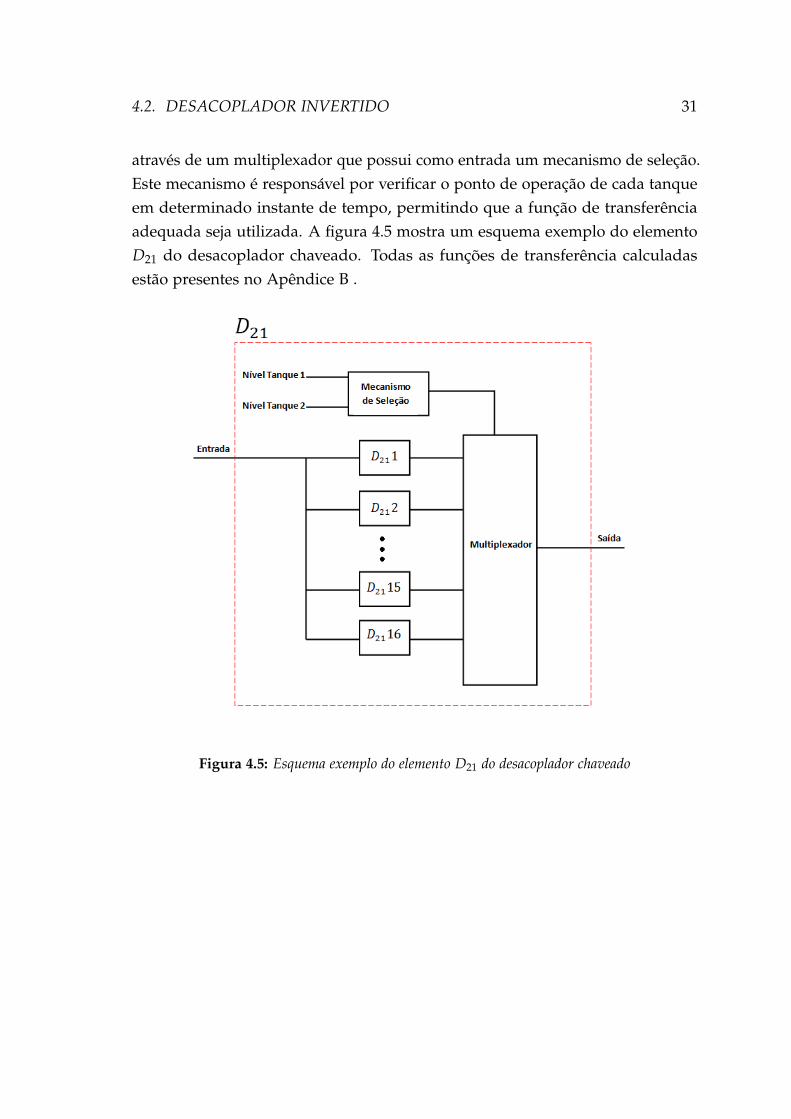
4.2. DESACOPLADOR INVERTIDO 31
através de um multiplexador que possui como entrada um mecanismo de seleção.Este mecanismo é responsável por verificar o ponto de operação de cada tanqueem determinado instante de tempo, permitindo que a função de transferênciaadequada seja utilizada. A figura 4.5 mostra um esquema exemplo do elementoD21 do desacoplador chaveado. Todas as funções de transferência calculadasestão presentes no Apêndice B .
Figura 4.5: Esquema exemplo do elemento D21 do desacoplador chaveado

32 CAPÍTULO 4. METODOLOGIA

Capítulo 5
Resultados
Algumas simulações no Matlab/Simulink foram realizadas para verificarmoso comportamento do sistema desacoplado e o desempenho dos controladoresimplementados.
5.1 Sistema Desacoplado
Considerando que o acoplamento entre as variáveis da planta deve ser mini-mizado com a presença do desacoplador, aplicamos uma entrada no sistema emmalha aberta que mantenha o nível do tanque 1 no ponto de operação em queo desacoplador (4.21-26) foi projetado (15 cm). A tensão aplicada foi de 1.85V.A figura 5.1 apresenta os resultados obtidos realizando um comparativo entre osistema com desacoplamento e sem desacoplamento. Para o caso em que o sis-tema não possui desacoplamento, os níveis dos tanques 2 e 3 não permaneceramno estado inicial (0 cm), apresentando valores que tendem a 15 cm em regimepermanente. Isto ocorre devido ao acoplamento das variáveis envolvidas, onde asaída de um tanque influencia diretamente os níveis daqueles que estão abaixo.Para o sistema desacoplado, a presença do desacoplador minimiza esse efeito epermite que os vasos 2 e 3 permaneçam em 0 cm.
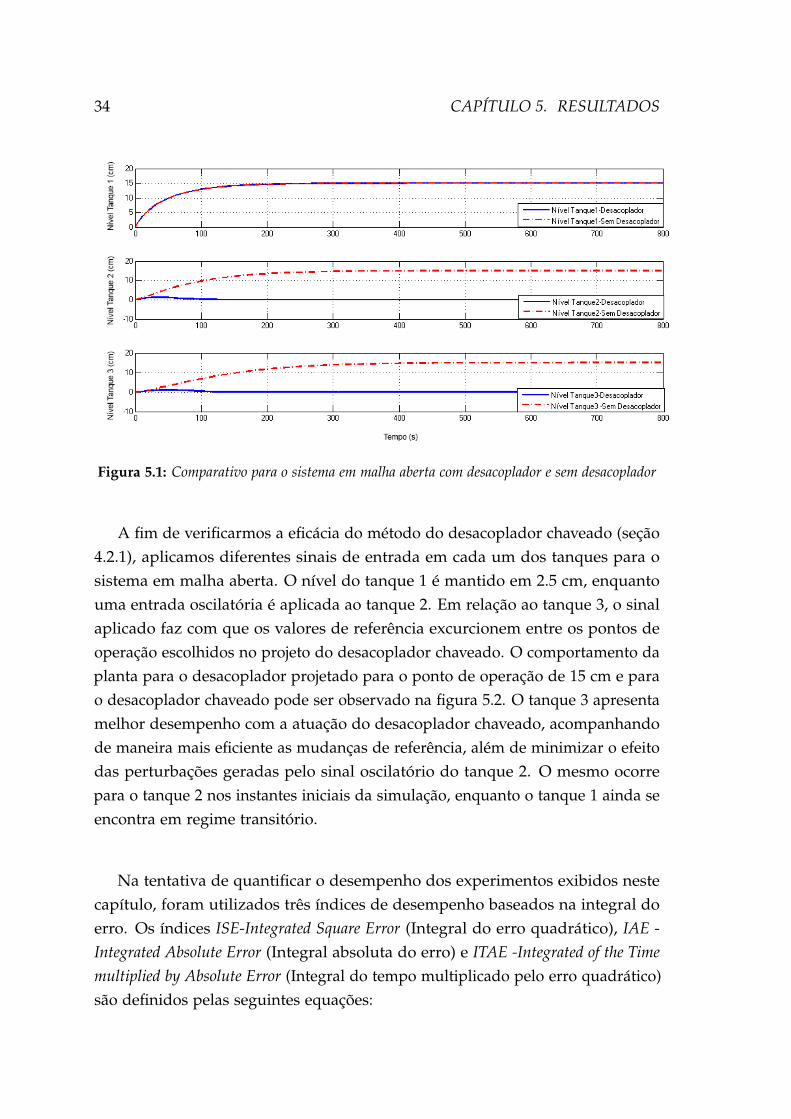
34 CAPÍTULO 5. RESULTADOS
Figura 5.1: Comparativo para o sistema em malha aberta com desacoplador e sem desacoplador
A fim de verificarmos a eficácia do método do desacoplador chaveado (seção4.2.1), aplicamos diferentes sinais de entrada em cada um dos tanques para osistema em malha aberta. O nível do tanque 1 é mantido em 2.5 cm, enquantouma entrada oscilatória é aplicada ao tanque 2. Em relação ao tanque 3, o sinalaplicado faz com que os valores de referência excurcionem entre os pontos deoperação escolhidos no projeto do desacoplador chaveado. O comportamento daplanta para o desacoplador projetado para o ponto de operação de 15 cm e parao desacoplador chaveado pode ser observado na figura 5.2. O tanque 3 apresentamelhor desempenho com a atuação do desacoplador chaveado, acompanhandode maneira mais eficiente as mudanças de referência, além de minimizar o efeitodas perturbações geradas pelo sinal oscilatório do tanque 2. O mesmo ocorrepara o tanque 2 nos instantes iniciais da simulação, enquanto o tanque 1 ainda seencontra em regime transitório.
Na tentativa de quantificar o desempenho dos experimentos exibidos nestecapítulo, foram utilizados três índices de desempenho baseados na integral doerro. Os índices ISE-Integrated Square Error (Integral do erro quadrático), IAE -Integrated Absolute Error (Integral absoluta do erro) e ITAE -Integrated of the Timemultiplied by Absolute Error (Integral do tempo multiplicado pelo erro quadrático)são definidos pelas seguintes equações:

5.1. SISTEMA DESACOPLADO 35
ISE =∫ ∞
0e(t)2 dt
IAE =∫ ∞
0|e(t)| dt
ITAE =∫ ∞
0t|e(t)| dt
(5.1)
A tabela 5.1 exibe os valores das métricas do erro de rastreamento no tanque3 para o sistema com o desacoplador chaveado e para o sistema com o desaco-plador no ponto de operação 15cm. O desacoplador chaveado, como esperado,proporciona um melhor desempenho ao sistema, visto que os índices devem serminimizados. Sendo assim, esta será a estratégia utilizada para as simulaçõesapresentadas nas próximas seções.
Tabela 5.1: Índices de desempenho Tanque 3
Índices Desacoplador Chaveado Desacoplador PO15ISE 453.4 1371IAE 298.6 520.8
ITAE 3.144 104 5.636 104
O sistema desacoplado nos permite tratar um sistema MIMO de três entradase três saídas como três sistemas SISO, tornando possível projetar e aplicar umcontrolador SISO para cada um desses. A seguir, o projeto dos controladoresadaptativos é detalhado nas seções 5.2 e 5.3.

36 CAPÍTULO 5. RESULTADOS
Figura 5.2: Comparativo para o sistema em malha aberta entre o desacoplador PO 15 e o desaco-plador chaveado
5.2 Controlador MRAC
O projeto do controlador MRAC se resume a obter um modelo de referênciacom o comportamento desejado, atribuir valores iniciais para as estimativas,

5.2. CONTROLADOR MRAC 37
e valores para os ganhos adaptativos. Em relação ao modelo de referência,considerando uma planta de primeira ordem, para um sistema com constante detempo τ = 1s e ganho unitário temos a seguinte função de transferência:
Gm(s) =1
s + 1(5.2)
A constante de tempo deve ser um valor não muito alto, pois consequen-temente tornaria lento o desempenho do controlador. Assim como não podeser um valor muito pequeno, pois tende a gerar um sinal de controle elevado.Após a realização de alguns testes, a constante de tempo τ = 1s foi atribuída. Talconstante resulta em um tempo de estabilização do sistema de aproximadamente4τ = 4s para um critério de erro de 2%.
Por tratarmos de uma planta cujos parâmetros são conhecidos, podemoscalcular os parâmetros do controlador a partir dos da planta:
θ1 =bm
b=
10.275
= 3.6364 (5.3)
θ2 =am − a
b=
1− 0.016950.275
= 3.5793 (5.4)
Foram considerados os seguintes valores iniciais das estimativas θ1 e θ2:
θ1inicial = 1,5 (5.5)
θ2inicial = 1,5 (5.6)
Os ganhos adaptativos foram atribuídos empiricamente para cada um dos tan-ques. Ganhos altos apesar de diminuir em tempo necessário para as estimativasconvergirem, podem levar o sistema a oscilar e não seguir o modelo de referência.Já valores pequenos de ganhos tendem a tornar a convergencia das estimativasmuito lenta:
γ′1tanque1= 0.01 (5.7)
γ′2tanque1= 0.01 (5.8)
γ′1tanque2= 0.05 (5.9)
γ′2tanque2= 0.05 (5.10)

38 CAPÍTULO 5. RESULTADOS
γ′1tanque3= 0.5 (5.11)
γ′2tanque3= 0.5 (5.12)
Aplicando a mesma configuração do modelo de referência e estimativasiniciais nos três controladores, para valores de referência não constantes temos ocomportamento apresentado na figura 5.3. A análise é feita para o sistema semdesacoplador (legenda: MRAC) e com o desacoplador chaveado (legenda: MRACDesacoplador). Observamos que o desempenho dos controladores melhora com opassar do tempo, sendo esse o tempo necessário para que as estimativas comecema convergir.

5.2. CONTROLADOR MRAC 39
Figura 5.3: Resposta do sistema com o controlador MRAC
A mesma referência apresentada na figura 5.3 é aplicada a cada intervalo de500 segundos a fim de verificarmos o comportamento das estimativas para ambosos casos (figura 5.4).

40 CAPÍTULO 5. RESULTADOS
Figura 5.4: Estimativas dos parâmetros do controlador MRAC
O sistema desacoplado possui estimativas que se aproximam bastante dosvalores reais dos parâmetros do controlador θ1 e θ2. No caso do sistema aco-plado, as estimativas não convergiram para os valores reais, visto que estamosprojetando controladores de primeira ordem para plantas de segunda ordemcom acoplamento (tanques 2 e 3). Apesar das estimativas não convergirem parao sistema sem a presença do desacoplador, este permaneceu estável durante asimulação. Porém, muitas vezes a trajetória do modelo de referência não foiseguida. Podemos observar um exemplo deste fato na figura 5.5, onde o controledo tanque 3 sem desacoplador não consegue acompanhar bem o modelo dereferência.

5.2. CONTROLADOR MRAC 41
Figura 5.5: Resposta do sistema com o controlador MRAC
As tabelas 5.2 e 5.3 exibem as métricas de desempenho dos controladoresMRAC sem desacoplamento, com o desacoplador projetado no ponto de operação15cm e no desacoplador chaveado. O erro de estimação (4.33) foi levado emconsideração no cálculo dos índices visto que o objetivo do controlador MRAC éfazer com que a planta acompanhe o modelo de referência. Apenas os resultadosdos tanques 2 e 3 são apresentados, visto que o tanque 1 apresenta o mesmocomportamento para os 3 casos pois não possui acoplamento. A simulação paraobtenção dos índices teve duração de 10.000s.
Os índices indicam que o Desacoplador Chaveado introduz uma grandemelhoria no MRAC, quando comparado ao mesmo aplicado no sistema acoplado.Para o tanque 2 o erro é reduzido cerca de 3-4 vezes e para o tanque 3 cerca de 10

42 CAPÍTULO 5. RESULTADOS
Tabela 5.2: Índices de desempenho Tanque 2
Índices MRAC MRAC Desacoplador PO15 MRAC Desacoplador ChaveadoISE 230.50 88.43 67.43IAE 798.8 346.4 276.4
ITAE 40.71 105 14.04 105 9.66 105
Tabela 5.3: Índices de desempenho Tanque 3
Índices MRAC MRAC Desacoplador PO15 MRAC Desacoplador ChaveadoISE 330.6 9.596 8.351IAE 742.9 74.94 72.22
ITAE 37.43 105 3.288 105 3.171 105
vezes para os critérios IAE e ITAE e 40 vezes para o critério ISE. Uma comparaçãoentre o desacoplador projetado no ponto de operação 15cm e o desacopladorchaveado pode ser realizada, mostrando que o segundo minimiza os índicesprincipalmente em relação ao segundo tanque. A figura 5.6 apresenta o sinal decontrole no teste realizado para o sistema com desacoplamento.
Figura 5.6: Sinal de Controle
5.3. CONTROLADOR GMV 43
5.3 Controlador GMV
O projeto do controlador GMV consiste em definir o valor inicial para amatriz de covariância P (3.32), o fator de ponderação do sinal de controle(ρ) eperíodo de amostragem para a discretização do sistema. Usualmente, a matrizde covariância deve ser inicializada com valores elevados. Portanto, após algunstestes o seguinte valor foi escolhido:
Pinicial = 1015 I (5.13)
O comportamento do sistema com ponderação do sinal de controle nãoapresentou resultados satisfatórios, logo o controlador foi projetado com fator deponderação nulo:
ρ = 0 (5.14)
Em relação ao período de amostragem, alguns testes foram realizados paradefinirmos o valor em questão. De acordo com (ÅSTRöM; WITTENMARK,1995), as propriedades do sinal de controle quando um controlador por mínimavariância é utilizado depende criticamente do intervalo de amostragem do sistema.Intervalos pequenos resultam em grandes variações no sinal de controle quetornam a saída da planta oscilatória, enquanto intervalos grandes na maioria dasvezes geram sinais de controle insuficientes para levar o sistema à saída desejadaem um tempo hábil. A figura 5.7 apresenta o comportamento do tanques com ocontrolador GMV para intervalos de amostragem de 0,1s, 1s e 6s.

44 CAPÍTULO 5. RESULTADOS
Figura 5.7: Resposta do sistema com o controlador GMV para diferentes períodos de amostragem
Para um intervalo de amostragem de 6s o controlador não consegue seguir areferência, levando o sistema para a instabilidade nos tanques 1 e 2. Já os períodosde 1s e 0.1s apresentam resultados similares, porém uma taxa de amostragemmuito pequena representa um esforço maior nos atuadores resultando em sinaisde controle elevados, além de exigir um esforço computacional maior. Com basenessas considerações, podemos concluir que o período de amostragem de 1s éum valor interessante a ser atribuído para um bom desempenho do controlador.Os sinais aplicados ao sistema foram discretizados através método do seguradorde ordem zero (Zero Order Hold). A figura 5.8 mostra o desempenho da plantacom os controladores atuando para diferentes valores de referência aplicados acada um dos tanques.

5.3. CONTROLADOR GMV 45
Figura 5.8: Resposta do sistema com o controlador GMV
Nos instantes iniciais o sistema apresenta um comportamento oscilatório paraos três tanques. Isso ocorre pois as estimativas dos parâmetros da planta aindanão convergiram (Figura 5.9). Passado o período transitório da convergênciadas estimativas, observamos que as referências são seguidas a cada intervalo deamostragem.
Os controladores calculam e aplicam no sistema os sinais de controle quelevam as saídas dos tanques para os valores desejados de set-points a cada 1s.Uma consequência disto é que podem ser gerados sinais de controle elevados(Figura 5.10), sendo esse um aspecto importante a considerado na implementaçãodo controle no processo real. Por exemplo, podemos observar ainda na figura 5.9que o nível do tanque 2 ultrapassa o valor limite de 30cm, o que na prática significao transbordamento do tanque. Esse efeito pode ser compensado introduzindo

46 CAPÍTULO 5. RESULTADOS
um saturador ao sinal de controle para limitar seus valores, estudo que serádemonstrado na seção 5.4.
Figura 5.9: Resposta do sistema para os instantes iniciais da simulação
Continuando a análise da mesma simulação, pode ser feito um comparativodo desempenho do controlador GMV aplicado ao sistema acoplado (legenda:GMV) e ao sistema desacoplado (legenda: GMV Desacoplador). As tabelas 5.4e 5.5 apresentam as métricas de desempenho para este caso. É observado queao contrário do controlador MRAC, o GMV não depende do desacoplador paraque as estimativas convirjam, apresentando um resultado similar nos dois casos.Porém, é importante percerber que o acoplamento entre as variáveis continuasendo amenizado com a presença do desacoplador. Tal fato pode ser observadona figura 5.11, quando a mudança de referência do tanque 2, afeta diretamente asaída do tanque 3.

5.3. CONTROLADOR GMV 47
Figura 5.10: Sinal de Controle
Figura 5.11: Resposta do sistema com desacoplador amenizando o acoplamento entre as variáveis

48 CAPÍTULO 5. RESULTADOS
Tabela 5.4: Índices de desempenho Tanque 2
Índices GMV GMV DesacopladorISE 944.4 927.5IAE 98.16 92.57
ITAE 1.394 104 1.27 104
Tabela 5.5: Índices de desempenho Tanque 3
Índices GMV GMV DesacopladorISE 156.2 191.9IAE 43.68 43.4
ITAE 6614 5971
A fim de identificar o comportamento das estimativas dos parâmetros θ1 e θ2
obtidos através do método dos mínimos quadrados recursivo, discretizamos afunção de transferência G11 (4.13) pelo método do segurador de ordem zero comperíodo de amostragem 1s, obtendo:
G(z) =0.2729
z− 0.9844(5.15)
A função de transferência discreta (5.14) representa o comportamento dos3 tanques para o sistema desacoplado, visto que G11 = G22 = G33(4.13). Apesarde (4.13) definir a modelagem para o sistema linearizado em torno do ponto deoperação 15cm, a variação dos parâmetros quando o sistema é linearizado emtorno de outros pontos de operação é pequena. Portanto comparando a equação(5.14) com os parâmetros a serem estimados a e b da equação (3.35), concluímosque os valores reais de θ1 e θ2 correspondem a:
θ1real = 0.2729 (5.16)
θ2real = −0.9844 (5.17)
Considerando os valores iniciais das estimativas nulos, a figura 5.12 apresentao comportamento das estimativas do sistema que tendem a convergir para osvalores reais de maneira rápida nos primeiros segundos da simulação.
θ1inicial = 0 (5.18)

5.4. SATURAÇÃO DO SINAL DE CONTROLE 49
θ2inicial = 0 (5.19)
Figura 5.12: Comportamento das estimativas dos parâmetros do sistema (método dos mínimosquadrados)
5.4 Saturação do Sinal de Controle
Nesta seção estão expostos os resultados das simulações para o sistema comsaturação no sinal de controle. É de fundamental importância esta análise poistodo processo real apresenta uma limitação em relação ao sinal gerado peloatuador. De acordo com (QUANSER, ), a tensão máxima aceita pelas bombas(atuadores) é de 22V. Como consideramos que os atuadores do sistema podemalém de adicionar, remover fluido dos tanques, um valor de saturação negativode −22V também foi adotado. Visto que os sinais de controle (5.6) e (5.10)ultrapassam em vários momentos os limites estabelecidos, um saturador sem

50 CAPÍTULO 5. RESULTADOS
histerese foi aplicado na saída dos controladores implementados, atuando demaneira limitar as tensões entre -22V e 22V. A figura 5.13 apresenta o desempenhodos controladores MRAC e GMV para o sistema desacoplado e com a presençado saturador.
Figura 5.13: Desempenho do sistema para os controladores com saturação no sinal de controle
A introdução do saturador pode ocasionar um erro na estimação dos parâ-metros de um controlador adaptativo fazendo com que o sistema se comportede uma maneira inesperada, apresentando oscilações na variável de processo epodendo até mesmo levá-lo a instabilidade. Tal efeito é denominado wind up epode ser observado na figura 5.13, onde controlador MRAC em vários instantesnão consegue seguir o modelo de referência. Quanto ao controlador GMV, ofenômeno de wind up não foi observado e as estimativas permanecerem corretas.
(KANAMORI; TOMIZUKA, 2004) propõe o projeto de um controlador MRAC

5.4. SATURAÇÃO DO SINAL DE CONTROLE 51
com uma lei anti-windup para sistemas assintoticamente estáveis. A idéia consisteem não levar em consideração as variações nas estimativas para os seguintes casos:
Se
u > umax e εam
p + am< 0 , ou u < umin e ε
amp + am
> 0 (5.20)
Fazerθ1 = 0 θ2 = 0 (5.21)
Senãoθ1 = −γ′
(am
p + amr)
ε θ2 = γ′(
amp + am
y)
ε (5.22)
Foi realizada uma alteração nos ganhos adaptativos dos tanques 1 e 2 para queas estimativas apresentem uma convergência mais rápida, visto que a estratégiaanti-windup não atualiza as estimativas em momentos que o sinal de controleesteja saturado.
γ′1tanque1= 0.1
γ′2tanque1= 0.1
γ′1tanque2= 0.2
γ′2tanque2= 0.2
(5.23)
Aplicando a lei em questão para controlador implementado na seção 5.2 com osganhos adaptativos(5.23), podemos comparar os resultados obtidos (figura 5.14).

52 CAPÍTULO 5. RESULTADOS
Figura 5.14: Resposta do sistema para o controlador MRAC anti-windup
O controlador MRAC anti-windup tende a minimizar as oscilações da saídaquando o sinal de controle permanece saturado. A saturação leva o sistema emalguns casos a não acompanhar o modelo de referência devido ao limite físico doatuador. A estratégia anti-windup permite que o nível dos tanques recomponhaa trajetória do modelo de referência de maneira mais suave. Os índices dedesempenho para o controlador MRAC com e sem a estratégia anti-windup sãoobservados nas tabelas 5.6, 5.7 e 5.8 para uma simulação de 1500s. Percebemosque as métricas são reduzidas em aproximadamente 50% para os tanques 1 e 2,enquanto os valores para o tanque 3 são próximos, visto que não há saturação do

5.4. SATURAÇÃO DO SINAL DE CONTROLE 53
sinal de controle para atingir a referência aplicada neste tanque.
Após as devidas considerações, podemos comparar o desempenho do contro-lador GMV em relação ao controlador MRAC anti-windup na figura 5.15. Ambosos controladores apresentam o desempenho esperado. O controlador GMV per-mite ao sistema acompanhar as referências no menor intervalo de tempo possíveldada a saturação dos atuadores, enquanto o MRAC segue a trajetória do modelode referência de uma maneira a não apresentar tantas oscilações quando o sinalde controle permanece saturado por um intervalo de tempo considerável.
Tabela 5.6: Índices de desempenho Tanque 1
Índices MRAC Desacoplador MRAC Desacoplador Anti-WindupISE 2035 1152IAE 990.3 550.3
ITAE 6.667 105 3.917 105
Tabela 5.7: Índices de desempenho Tanque 2
Índices MRAC Desacoplador MRAC Desacoplador Anti-WindupISE 430.3 207.5IAE 199.6 99.29
ITAE 1.309 105 0.545 105
Tabela 5.8: Índices de desempenho Tanque 3
Índices MRAC Desacoplador MRAC Desacoplador Anti-WindupISE 7.158 6.842IAE 18.89 18.62
ITAE 6915 6984

54 CAPÍTULO 5. RESULTADOS
Figura 5.15: Comparativo entre os controladores GMV e MRAC anti-windup
Os sinais de controle saturados aplicados ao sistema na simulação da figura5.15 podem ser observados nas figuras 5.16 e 5.17.

5.4. SATURAÇÃO DO SINAL DE CONTROLE 55
Figura 5.16: Sinal de controle para o controlador GMV
Figura 5.17: Sinal de controle para o controlador MRAC anti-windup
O último teste implementado também realiza um comparativo entre os con-troladores MRAC e GMV, atribuindo uma constante de tempo mais lenta para omodelo de referência (τ = 10s). O controlador MRAC foi projetado da seguintemaneira:
Gm(s) =0.1
s + 0.1(5.24)
56 CAPÍTULO 5. RESULTADOS
θ1real =bm
b=
10.275
= 0.363 (5.25)
θ2real =am − a
b=
1− 0.016950.275
= 0.302 (5.26)
θ1inicial = 0.15 (5.27)
θ2inicial = 0.15 (5.28)
γ′1tanque1= 2 (5.29)
γ′2tanque1= 2 (5.30)
γ′1tanque2= 2 (5.31)
γ′2tanque2= 2 (5.32)
γ′1tanque3= 2 (5.33)
γ′2tanque3= 2 (5.34)
Neste teste, foi considerado como set-point do controlador GMV a saída domodelo de referência (5.24). Isto permite comparar o desempenho dos controlado-res de uma maneira mais igualitária, visto que nos testes anteriores o controladorGMV tende a seguir a referência da maneira mais rápida possível, enquanto ocontrolador MRAC tende a seguir o modelo de referência que possui dinâmicamais lenta. Os mesmos valores no projeto do controlador GMV da seção 5.3 foramutilizados. Os resultados para uma referência não constante são apresentados nafigura 5.18.

5.4. SATURAÇÃO DO SINAL DE CONTROLE 57
Figura 5.18: Comparativo entre os controladores GMV e MRAC
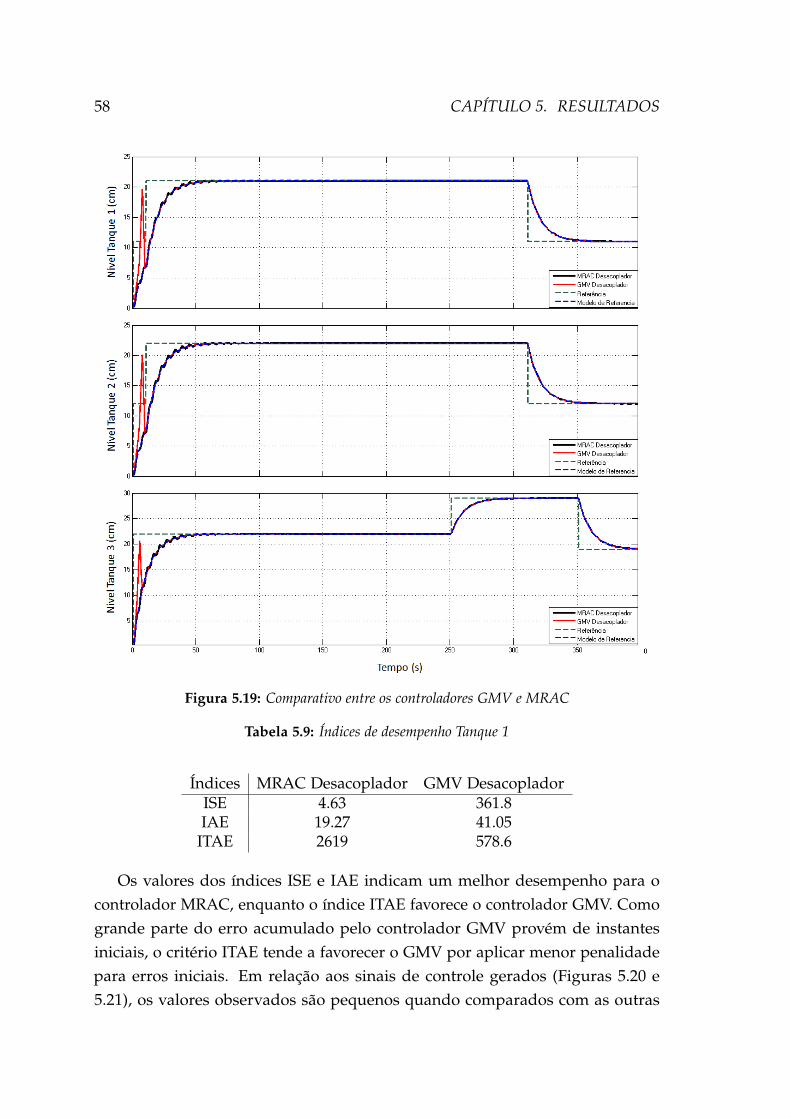
É observado que ambos os controladores apresentam desempenho similar.Os dois seguem o modelo de referência, apesar do GMV apresentar uma certaoscilação nos primeiros segundos, sendo esse o tempo necessário para as estima-tivas convergirem (Figura 5.19). As tabelas 5.10, 5.11 e 5.12 trazem os valores dasmétricas de desempenho dos controladores.
58 CAPÍTULO 5. RESULTADOS
Figura 5.19: Comparativo entre os controladores GMV e MRAC
Tabela 5.9: Índices de desempenho Tanque 1
Índices MRAC Desacoplador GMV DesacopladorISE 4.63 361.8IAE 19.27 41.05
ITAE 2619 578.6
Os valores dos índices ISE e IAE indicam um melhor desempenho para ocontrolador MRAC, enquanto o índice ITAE favorece o controlador GMV. Comogrande parte do erro acumulado pelo controlador GMV provém de instantesiniciais, o critério ITAE tende a favorecer o GMV por aplicar menor penalidadepara erros iniciais. Em relação aos sinais de controle gerados (Figuras 5.20 e5.21), os valores observados são pequenos quando comparados com as outras

5.4. SATURAÇÃO DO SINAL DE CONTROLE 59
Tabela 5.10: Índices de desempenho Tanque 2
Índices MRAC Desacoplador GMV DesacopladorISE 5.912 359.9IAE 23.74 41.31
ITAE 4397 636.7
Tabela 5.11: Índices de desempenho Tanque 3
Índices MRAC Desacoplador GMV DesacopladorISE 7.109 240.6IAE 26.04 31.3
ITAE 4697 435.9
simulações realizadas. Isto ocorre devido a alteração na constante de tempo domodelo de referência, tornando a dinâmica sistema menos agressiva e resultandoem um menor esforço dos atuadores. Nesse contexto, a saturação do sinal decontrole foi observada apenas nos instantes iniciais para o controlador GMV.
Figura 5.20: Sinal de controle para o controlador MRAC

60 CAPÍTULO 5. RESULTADOS
Figura 5.21: Sinal de controle para o controlador GMV

Capítulo 6
Conclusões
No presente trabalho os projetos de um desacoplador invertido e dos con-troladores MRAC e GMV são propostos para o controle de nível de um sistemaMIMO com três tanques acoplados. Uma modelagem fenomenológica do sis-tema é apresentada, assim como os conceitos principais que envolvem os temasde Desacoplamento de Sistemas e Controle Adaptativo. Os resultados foramobtidos através de simulações, nas quais o desacoplador invertido mostra-seuma alternativa interessante para facilitar o projeto de sistemas do tipo MIMO,reduzindo o acoplamento das variáveis da planta, aumentando o desempenhodos controladores e contribuindo para convergência das estimativas no caso docontrolador MRAC.
Em relação ao controlador MRAC, a dinâmica imposta por seu modelo de refe-rência foi atingida. Para o caso em que a saturação atua no sinal de controle, umalei anti-windup foi aplicada ao controlador, tornando viável sua implementaçãono processo real. O controlador GMV também apresentou um bom desempenho,rastreando as referências aplicadas calculando o sinal de controle ideal para cadaintervalo de amostragem. Comparando os dois controladores implementados, aestratégia GMV possui a vantagem de não ser necessário aplicar o desacopladorao sistema para que o estimador dos mínimos quadrados convirja. Além disso,o saturador foi introduzido ao sinal de controle sem a necessidade de nenhumajuste no projeto do controlador.
Como proposta de trabalhos futuros, um desacoplador adaptativo pode serimplementado, onde os elementos do desacoplador são atualizados constan-temente através das estimativas dos parâmetros do sistema. Uma técnica decontrole adaptativo centralizada para o caso MIMO pode ser aplicada para efeitode comparação, assim como validar os resultados obtidos neste trabalho porsimulações no processo real de tanques acoplados.

62 CAPÍTULO 6. CONCLUSÕES

Referências Bibliográficas
CARVALHO, F. G. M. de; HEMERLY, E. M. Adaptive elevation control of a threedegrees-of-freedom model helicopter using neural networks by state and outputfeedback. In: ABCM Symposium Series in Mechatronics. [S.l.: s.n.], 2008. v. 3, p.106–113.
CARVALHO, F. G. M. de; HEMERLY, E. M.; RIBEIRO, M. P. Controle adaptativodescentralizado de um modelo de helicóptero com dois graus de liberdadeutilizando realimentação de saÍda e redes neurais artificiais. In: CongressoBrasileiro de Automática. [S.l.: s.n.], 2008.
CHEN, P.; ZHANG, W. Improvement on an inverted decoupling technique for aclass of stable linear multivariable processes. In: ISA Transactions. [S.l.: s.n.], 2006.v. 46, p. 199–210.
CLARKE, D. W.; GAWTHROP, P. J. Self-tuning controller. In: Proc. of theInstitution of Electrical Engineers. [S.l.: s.n.], 1975. v. 122, p. 929–934.
COLóN, D.; ROSA, M. B. Controle adaptativo para um sistema de três tanques.In: Anais do XIX Congresso Brasileiro de Automática, CBA. [S.l.: s.n.], 2012.
FREITAS, A. A.; BAUCHSPIESS, A. Controle neuro-fuzzy de processo de nívelmultivariável. In: Anais do VIII Simpósio Brasileiro de Automação Inteligente, SBAI.[S.l.: s.n.], 2007.
GAGNON, E.; POMERLEAU, A.; DESBIENS, A. Simplified, ideal or inverteddecoupling? In: ISA Transactions. [S.l.: s.n.], 1998. v. 37, p. 265–276.
GARRIDO, J.; VáZQUEZ, F.; MORILLA, F. An extended approach of inverteddecoupling. Journal of Process Control, v. 21, 2011.
GOSMANN, H. L. Um Sistema Multivariável de Tanques Acoplados para Avaliaçãode Técnicas de Controle. Dissertação (Mestrado) — Faculdade de Tecnologia daUniversidade de Brasília, Brasília, DF, 2002.
HASSAN, M. Y. Notes of lecture course in adaptive control for the 4th class ofcontrol engineering in the control and systems engineerings. Notas de Aula. 2002.
IOANNOU, P. A.; SUN, J. Robust Adaptive Control. [S.l.]: Prentice-Hall, 1996.
63

64 REFERÊNCIAS BIBLIOGRÁFICAS
KANAMORI, M.; TOMIZUKA, M. Model reference adaptive systems with inputcontrol of linear saturation. In: Proceedings of the 2004 IEEE. [S.l.: s.n.], 2004. p.1318–1323.
LUYBEN, W. L. Distillation decoupling. AIChE Journal, v. 16(2), p. 198–203, 1970.
PAULO, T.; MAITELLI, A. Controle adaptativo com desacoplamento aplicado aum sistema de tanques mimo. In: Congresso Rio Automação. [S.l.: s.n.], 2015. p.1–10.
QUANSER. Quanser Coupled Water Tank Experiments. Disponível em:http://engineering.nyu.edu/mechatronics/Control_Lab/Water_Tank_Manual.pdf.Acesso em: 16 de julho de 2015.
SASTRY, S.; BODSON, M. Adaptive Control - Stability, Convergence, and Robustness.[S.l.]: Prentice-Hall, 1989.
SHAH, R.; RASMUSSEN, B. P.; ALLEYNE, A. G. Application of a multivariableadaptive control strategy to automotive air conditioning systems. Int. J. Adapt.Control Signal Process, v. 18, n. 2, p. 199–221, 2004.
SHINSKEY, F. Process Control Systems: Application, Design and Adjustment. [S.l.]:McGraw-Hill, 1988.
SILVA, M. J. G. et al. Generalized minimum variance control for waterdistribution system. IEEE Latin America Transactions, v. 13, n. 3, p. 651–658, 2015.
SIMON, H. A. Dynamic programming under uncertainty with a quadraticcriterion function. Econometrica, v. 24, p. 74–81, 1956.
ÅSTRöM, K. J. Adaptive control around 1960. IEEE Control Systems, 1996.
ÅSTRöM, K. J.; WITTENMARK, B. Adaptive Control. [S.l.]: Addison-WesleyPublishing Company, 1995.
THEIL, H. A note on certainty equivalence in dynamic planning. Econometrica,v. 25, p. 346–349, 1957.
WADE, H. L. Inverted decoupling: a neglected technique. ISA Transactions, v.36(1), p. 3–10, 1997.
WHITAKER, H.; YAMRON, J.; KEZER, A. Design of model-reference adaptivecontrol systems for aircraft. Technical Report, Instrumentation Laboratory, 1958.
Apêndice A
Matriz de Transferência do SistemaDesacoplado
Neste apêndice é apresentada a matriz de transferência do sistema desaco-plado Q(s) para o ponto de operação 15cm. Os elementos Q21, Q31 e Q32 devempossuir valor nulo pois o sistema encontra-se desacoplado, sendo Q(s) uma ma-triz diagonal. Os cálculos realizados no MATLAB apresentaram elementos nãonulos porém com coeficientes de valores muito próximos a zero, provavelmentedevido a erros de arredondamento, visto que divisões polinomiais complexasestão envolvidas. A seguir estão expostos os elementos da matriz no formato delinha de comando do MATLAB.
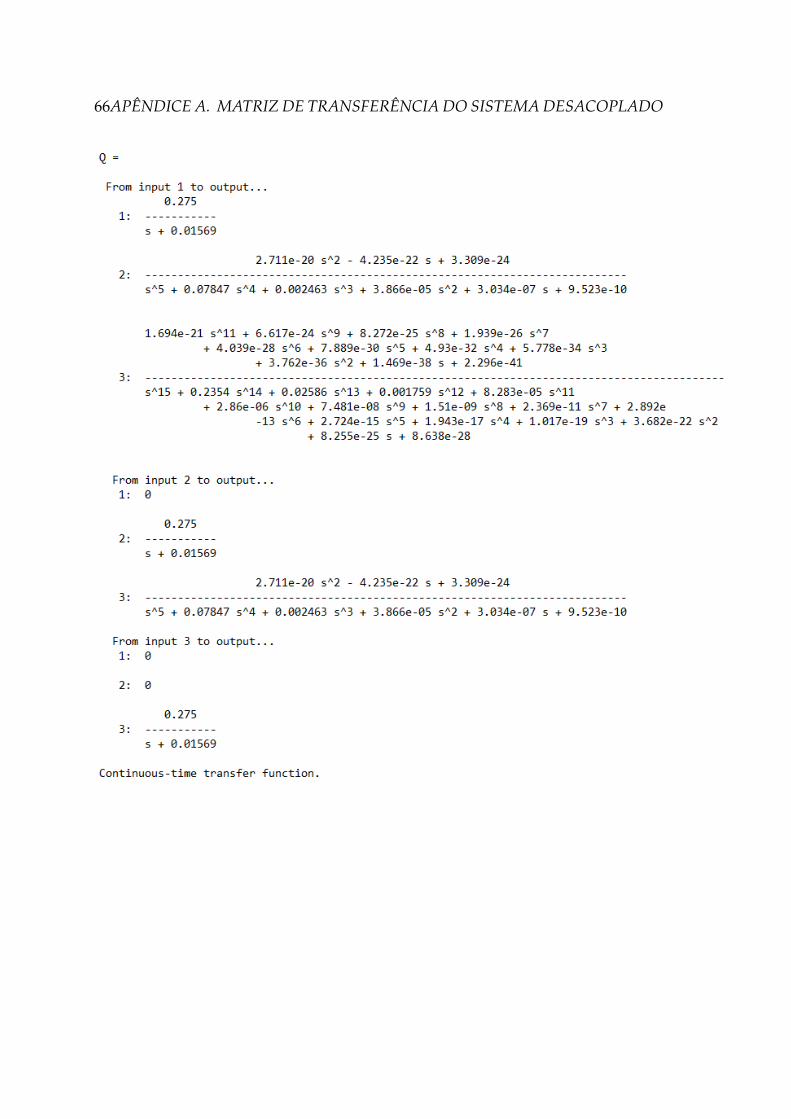
66APÊNDICE A. MATRIZ DE TRANSFERÊNCIA DO SISTEMA DESACOPLADO

Apêndice B
Funções de Transferência doDesacoplador Chaveado
O desacoplador chaveado é composto por 48 funções de transferência que sãochaveadas de acordo com o nível atual de cada tanque. Cada um dos elementosdo desacoplador possui 16 funções de transferência obtidas em diferentes pontosde operação que serão apresentadas neste apêndice.
B.1 Elemento D21
PO Tanque1 = 2.5cm / PO Tanque2 = 2.5cm:
do211 =−0.01142s− 0.0004742
0.275s2 + 0.02284s + 0.0004742(B.1)
PO Tanque1 = 2.5cm / PO Tanque2 = 7.5cm:
do212 =−0.01142s− 0.0002738
0.275s2 + 0.01801s + 0.0002738(B.2)
PO Tanque1 = 2.5cm / PO Tanque2 = 12.5cm:
do213 =−0.01142s− 0.0002121
0.275s2 + 0.01653s + 0.0002121(B.3)
PO Tanque1 = 2.5cm / PO Tanque2 = 17.5cm:
do214 =−0.01142s− 0.0001792
0.275s2 + 0.01574s + 0.0001792(B.4)
68APÊNDICE B. FUNÇÕES DE TRANSFERÊNCIA DO DESACOPLADOR CHAVEADO
PO Tanque1 = 7.5cm / PO Tanque2 = 2.5cm:
do215 =−0.006593s− 0.0002738
0.275s2 + 0.01801s + 0.0002738(B.5)
PO Tanque1 = 7.5cm / PO Tanque2 = 7.5cm:
do216 =−0.006593s− 0.0001581
0.275s2 + 0.01319s + 0.0001581(B.6)
PO Tanque1 = 7.5cm / PO Tanque2 = 12.5cm:
do217 =−0.006593s− 0.0001224
0.275s2 + 0.0117s + 0.0001224(B.7)
PO Tanque1 = 7.5cm / PO Tanque2 = 17.5cm:
do218 =−0.006593s− 0.0001035
0.275s2 + 0.01091s + 0.0001035(B.8)
PO Tanque1 = 12.5cm / PO Tanque2 = 2.5cm:
do219 =−0.005107s− 0.0002121
0.275s2 + 0.01653s + 0.0002121(B.9)
PO Tanque1 = 12.5cm / PO Tanque2 = 7.5cm:
do2110 =−0.005107s− 0.0001224
0.275s2 + 0.0117s + 0.0001224(B.10)
PO Tanque1 = 12.5cm / PO Tanque2 = 12.5cm:
do2111 =−0.005107s− 9.484 10−05
0.275s2 + 0.01021s + 9.484 10−05 (B.11)
PO Tanque1 = 12.5cm / PO Tanque2 = 17.5cm:
do2112 =−0.005107s− 8.015 10−05
0.275s2 + 0.009423s + 8.015 10−05 (B.12)
PO Tanque1 = 17.5cm / PO Tanque2 = 2.5cm:
do2113 =−0.004316s− 0.0001792
0.275s2 + 0.01574s + 0.0001792(B.13)

B.2. ELEMENTO D32 69
PO Tanque1 = 17.5cm / PO Tanque2 = 7.5cm:
do2114 =−0.004316s− 0.0001035
0.275s2 + 0.01091s + 0.0001035(B.14)
PO Tanque1 = 17.5cm / PO Tanque2 = 12.5cm:
do2115 =−0.004316s− 8.015 10−05
0.275s2 + 0.009423s + 8.015 10−05 (B.15)
PO Tanque1 = 17.5cm / PO Tanque2 = 17.5cm:
do2116 =−0.004316s− 6.774 10−05
0.275s2 + 0.008632s + 6.774 10−05 (B.16)
B.2 Elemento D32
PO Tanque2 = 2.5cm / PO Tanque3 = 2.5cm:
do321 =−0.01142s− 0.0004742
0.275s2 + 0.02284s + 0.0004742(B.17)
PO Tanque2 = 2.5cm / PO Tanque3 = 7.5cm:
do322 =−0.01142s− 0.0002738
0.275s2 + 0.01801s + 0.0002738(B.18)
PO Tanque2 = 2.5cm / PO Tanque3 = 12.5cm:
do323 =−0.01142s− 0.0002121
0.275s2 + 0.01653s + 0.0002121(B.19)
PO Tanque2 = 2.5cm / PO Tanque3 = 17.5cm:
do324 =−0.01142s− 0.0001792
0.275s2 + 0.01574s + 0.0001792(B.20)
PO Tanque2 = 7.5cm / PO Tanque3 = 2.5cm:
do325 =−0.006593s− 0.0002738
0.275s2 + 0.01801s + 0.0002738(B.21)

70APÊNDICE B. FUNÇÕES DE TRANSFERÊNCIA DO DESACOPLADOR CHAVEADO
PO Tanque2 = 7.5cm / PO Tanque3 = 7.5cm:
do326 =−0.006593s− 0.0001581
0.275s2 + 0.01319s + 0.0001581(B.22)
PO Tanque2 = 7.5cm / PO Tanque3 = 12.5cm:
do327 =−0.006593s− 0.0001224
0.275s2 + 0.0117s + 0.0001224(B.23)
PO Tanque2 = 7.5cm / PO Tanque3 = 17.5cm:
do328 =−0.006593s− 0.0001035
0.275s2 + 0.01091s + 0.0001035(B.24)
PO Tanque2 = 12.5cm / PO Tanque3 = 2.5cm:
do329 =−0.005107s− 0.0002121
0.275s2 + 0.01653s + 0.0002121(B.25)
PO Tanque2 = 12.5cm / PO Tanque3 = 7.5cm:
do3210 =−0.005107s− 0.0001224
0.275s2 + 0.0117s + 0.0001224(B.26)
PO Tanque2 = 12.5cm / PO Tanque3 = 12.5cm:
do3211 =−0.005107s− 9.484 10−05
0.275s2 + 0.01021s + 9.484 10−05 (B.27)
PO Tanque2 = 12.5cm / PO Tanque3 = 17.5cm:
do3212 =−0.005107s− 8.015 10−05
0.275s2 + 0.009423s + 8.015 10−05 (B.28)
PO Tanque2 = 17.5cm / PO Tanque3 = 2.5cm:
do3213 =−0.004316s− 0.0001792
0.275s2 + 0.01574s + 0.0001792(B.29)
PO Tanque2 = 17.5cm / PO Tanque3 = 7.5cm:
do3214 =−0.004316s− 0.0001035
0.275s2 + 0.01091s + 0.0001035(B.30)

B.3. ELEMENTO D31 71
PO Tanque2 = 17.5cm / PO Tanque3 = 12.5cm:
do3215 =−0.004316s− 8.015 10−05
0.275s2 + 0.009423s + 8.015 10−05 (B.31)
PO Tanque2 = 17.5cm / PO Tanque3 = 17.5cm:
do3216 =−0.004316s− 6.774 10−05
0.275s2 + 0.008632s + 6.774 10−05 (B.32)
B.3 Elemento D31
PO Tanque1 = 2.5cm / PO Tanque2 = 15cm / PO Tanque3 = 2.5cm:
do311 =−0.0001936s− 8.039 10−06
0.275s3 + 0.0275s2 + 0.0008614s + 8.039 10−06 (B.33)
PO Tanque1 = 2.5cm / PO Tanque2 = 15cm / PO Tanque3 = 7.5cm:
do312 =−0.0001936s− 4.641 10−06
0.275s3 + 0.02267s2 + 0.0005791s + 4.641 10−06 (B.34)
PO Tanque1 = 2.5cm / PO Tanque2 = 15cm / PO Tanque3 = 12.5cm:
do313 =−0.0001936s− 3.595 10−06
0.275s3 + 0.02119s2 + 0.0004922s + 3.595 10−06 (B.35)
PO Tanque1 = 2.5cm / PO Tanque2 = 15cm / PO Tanque3 = 17.5cm:
do314 =−0.0001936s− 3.038 10−06
0.275s3 + 0.0204s2 + 0.000446s + 3.038 10−06 (B.36)
PO Tanque1 = 7.5cm / PO Tanque2 = 15cm / PO Tanque3 = 2.5cm:
do315 =−0.0001118s− 4.641 10−06
0.275s3 + 0.02267s2 + 0.0005791s + 4.641 10−06 (B.37)
PO Tanque1 = 7.5cm / PO Tanque2 = 15cm / PO Tanque3 = 7.5cm:
do316 =−0.0001118s− 2.68 10−06
0.275s3 + 0.01785s2 + 0.0003816s + 2.68 10−06 (B.38)

72APÊNDICE B. FUNÇÕES DE TRANSFERÊNCIA DO DESACOPLADOR CHAVEADO
PO Tanque1 = 7.5cm / PO Tanque2 = 15cm / PO Tanque3 = 12.5cm:
do317 =−0.0001118s− 2.076 10−06
0.275s3 + 0.01636s2 + 0.0003208s + 2.076 10−06 (B.39)
PO Tanque1 = 7.5cm / PO Tanque2 = 15cm / PO Tanque3 = 17.5cm:
do318 =−0.0001118s− 1.754 10−06
0.275s3 + 0.01557s2 + 0.0002884s + 1.754 10−06 (B.40)
PO Tanque1 = 12.5cm / PO Tanque2 = 15cm / PO Tanque3 = 2.5cm:
do319 =−8.657 10−05s− 3.595 10−06
0.275s3 + 0.02119s2 + 0.0004922s + 3.595 10−06 (B.41)
PO Tanque1 = 12.5cm / PO Tanque2 = 15cm / PO Tanque3 = 7.5cm:
do3110 =−8.657 10−05s− 2.07 10−06
0.275s3 + 0.01636s2 + 0.0003208s + 2.076 10−06 (B.42)
PO Tanque1 = 12.5cm / PO Tanque2 = 15cm / PO Tanque3 = 12.5cm:
do3111 =−8.657 10−05s− 1.608 10−06
0.275s3 + 0.01488s2 + 0.000268s + 1.608 10−06 (B.43)
PO Tanque1 = 12.5cm / PO Tanque2 = 15cm / PO Tanque3 = 17.5cm:
do3112 =−8.657 10−05s− 1.359 10−06
0.275s3 + 0.01408s2 + 0.0002399s + 1.359 10−06 (B.44)
PO Tanque1 = 17.5cm / PO Tanque2 = 15cm / PO Tanque3 = 2.5cm:
do3113 =−7.317 10−05s− 3.038 10−06
0.275s3 + 0.0204s2 + 0.000446s + 3.038 10−06 (B.45)
PO Tanque1 = 17.5cm / PO Tanque2 = 15cm / PO Tanque3 = 7.5cm:
do3114 =−7.317 10−05s− 1.754 10−06
0.275s3 + 0.01557s2 + 0.0002884s + 1.754 10−06 (B.46)
PO Tanque1 = 17.5cm / PO Tanque2 = 15cm / PO Tanque3 = 12.5cm:
do3115 =−7.317 10−05s− 1.359 10−06
0.275s3 + 0.01408s2 + 0.0002399s + 1.359 10−06 (B.47)

B.3. ELEMENTO D31 73
PO Tanque1 = 17.5cm / PO Tanque2 = 15cm / PO Tanque3 = 17.5cm:
do3116 =−7.317 10−05s− 1.148 10−06
0.275s3 + 0.01329s2 + 0.0002141s + 1.148 10−06 (B.48)


















