Controle de Processos Quimicos

of 175
Transcript of Controle de Processos Quimicos
-
8/3/2019 Controle de Processos Quimicos
1/175
CONTROLE DE PROCESSOS QUMICOS
ENG 009
Autor: Prof. Dr. Ricardo de Arajo Kalid [email protected]
Revisora: Enga Grazziela Gomes
Laboratrio de Controle e Otimizao de Processos Industriais - LACOI
Departamento de Engenharia Qumica - DEQ
Escola Politcnica - EP
Universidade Federal da Bahia UFBA
Salvador, junho de 2004.
-
8/3/2019 Controle de Processos Quimicos
2/175
Pgina 1 de 1
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
N D I C E G E R A L
CAPTULO 1. INTRODUO
CAPTULO 2. FUNO DE TRANSFERNCIA
CAPTULO 3. ANLISE DA DINMICA DE PROCESSOS
CAPTULO 4. IDENTIFICAO DA DINMICA DE PROCESSOS
CAPTULO 5. INSTRUMENTAO E VLVULAS DE CONTROLE
CAPTULO 6. SISTEMAS LINEARES EM MALHAS FECHADAS
CAPTULO 7. ESTABILIDADE DE SISTEMAS LINEARES
CAPTULO 8. ESTRATGIAS DE CONTROLE
CAPTULO 9. CONTROLE AVANADO
CAPTULO 10. TEORIA DE CONTROLE MODERNO: ABORDAGEM POR ESPAO DE
ESTADOS
-
8/3/2019 Controle de Processos Quimicos
3/175
Pgina 1-1 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
N D I C E
CAPTULO 1. INTRODUO 1-2
1.1. MOTIVAO PARA IMPLANTAR UM SISTEMA DA CONTROLE 1-2
1.2. NORMAS UTILIZADAS EM INSTRUMENTAO 1-6
N D I C E D E T A B E L A S
Tabela 1-1: Estratgias para o controle de temperatura de um tanque de aquecimento agitado. 1-5
Tabela 1-2: Sinais padro de transmisso de informaes. 1-7
Tabela 1-3: Exemplo de identificao de instrumento. 1-9
N D I C E D E F I G U R A SFigura 1-1: Exemplo de controle de processo. 1-3
Figura 1-2: Tanque de aquecimento com agitao. 1-4
Figura 1-3: Tanque de aquecimento agitado com controle feedback. 1-5
Figura 1-4: Smbolos gerais para instrumento ou funo programada. 1-7
Figura 1-5: Letras de identificao de instrumento ou funo programada. 1-8
-
8/3/2019 Controle de Processos Quimicos
4/175
Pgina 1-2 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
C A P T U L O 1 . I N T R O D U O
A finalidade do controle de processos manter as variveis de processo nas condies
desejadas com um mnimo custo operacional.
Variveis de processo so as propriedades intensivas ou extensivas de uma corrente ou
substncia.
Como exemplos de variveis de processo temos:
Temperatura;
Presso;
Vazo;
Composio; Viscosidade;
Granulometria;
Radioatividade;
Condutividade;
Dureza;
Maleabilidade;
Cor;
Aroma; Sabor; etc.
1 . 1 . M o t i v a o p a r a i m p l a n t a r u m s i s t e m a d a c o n t r o l e
Mudana nas condies de alimentao do processo e no ambiente (perturbaes) esto
sempre acontecendo e se nenhuma ao for tomada importantes variveis do processo no
alcanaro as condies desejadas. Porm, esta ao deve ser estabelecida de modo que:
1. A segurana dos equipamentos e dos trabalhadores,
2. A qualidade do produto; e
3. A produo
sejam asseguradas com um mnimo custo de investimento e/ou operacional.
-
8/3/2019 Controle de Processos Quimicos
5/175
Pgina 1-3 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Exemplo 01
F igura 1 -1 : Exemplo de cont ro le de processo .
Exemplo 02
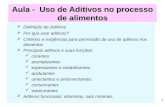
Seja um tanque agitado, aquecido pela condensao do vapor dgua, conforme mostra a
Figura 1-2. O objetivo deste processo aquecer uma corrente de vazo w e temperatura T 1 at
alcanar a temperatura T2.
-
8/3/2019 Controle de Processos Quimicos
6/175
Pgina 1-4 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
T2(t), w
T1(t), w
vapor condensado
F igura 1 -2 : Tanque de aquec imento com ag i tao .
Vamos considerar duas perguntas:
Pergunta 1: Quanto de calor deve ser fornecido ao lquido no interior do tanque para
que atinja a temperatura desejada T2?
Considerando o tanque bem agitado no existem gradientes internos de temperatura e as
propriedades do fluido na sada do tanque so as mesmas do interior do tanque (tanque
perfeitamente agitado).
O balano de energia em estado estacionrio no tanque indica qual a quantidade de calor
que deve ser transferida :
Equao 1 -1 )sssszpssss TTcwQ ,1,.. =
Mas nas condies de projeto T2 a temperatura de referncia Tr ou temperatura desejada
(set point), ento podemos escrever a equao de projeto para o aquecedor:
Equao 1 -2 )ssSPpssss TTcwQ ,1.. =
Pergunta 2: Mas se as condies mudarem (a vazo de lquido aumentar ou diminuir, a
temperatura da alimentao oscilar ou se desejarmos uma temperatura na sada maior ou
menor que a estabelecida no projeto), como iremos atuar sobre o sistema para que a
temperatura na sada do tanque seja a temperatura desejada (T2 = Tr= TSP) ?
Existem algumas possibilidades, uma delas medir a temperatura no interior do tanque (T),
comparar esta com a temperatura desejada (TSP) e atuar sobre a vlvula de controle para que
esta aumente ou diminua o fluxo de vapor para a serpentina, incrementando ou no a
-
8/3/2019 Controle de Processos Quimicos
7/175
Pgina 1-5 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
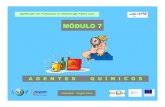
transferncia de energia para o fluido no tanque (veja Figura 1-3). Esta estratgia denomina-se
controle por retroalimentao (FeedbackControl).
T
T2(t), w
2(t)
T1(t), w1(t)
vapor
condensado
TT
TC
F igura 1 -3 : Tanque de aquec imento ag i tado com cont ro le feedback .
Na Tabela 1-1 vemos outras alternativas de estratgias de controle para este processo.
Tabe la 1 -1 : Es t ra tg ias para o cont ro le de tempera tura de um tanque de aquec imentoag i tado .
MtodoVarivel
Medida
Varivel
manipuladaClassificao
01 T Q Feedback
02 T1 Q Feedforward
03 T w Feedback
04 T1 w Feedforward
05 T1 e T Q Feedback / feedforward
06 T1 e T w Feedback / feedforward
Podemos ainda instalar um trocador de calor a montante do tanque de aquecimento para
diminuir ou eliminar a oscilao na temperatura T1 ou utilizar um tanque com um volume maior
de modo a diminuir a oscilao na temperatura de sada T.
Uma vez estabelecida a estratgia de controle necessrio determinar qual a lei ou
algoritmo de controle para o controlador. Uma possibilidade utilizar o controladorproporcional, no qual a mudana no fluxo de calor proporcional diferena entre a
temperatura desejada (TSP(t)) e a temperatura medida (T(t)):
-
8/3/2019 Controle de Processos Quimicos
8/175
Pgina 1-6 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Equao 1 -3 )()(.)( tTtTKQtQSP
css +=
Onde Kc denominado ganho do controlador, este parmetro ajustvel e define a
intensidade da correo a ser realizada sobre o processo.
Do discutido anteriormente deduz-se que para definir um sistema de controle necessrio:
(1) Conhecer o comportamento no estado estacionrio do processo que desejamos
controlar;
(2) Conhecer o comportamento dinmico do processo que desejamos controlar;
(3) Estabelecer quais as variveis de processo que devem ser mantidas o mais
prximo possvel dos valores desejados (set point), denomina-se de variveis
controladas;
(4) Estabelecer quais as variveis de processo que devem ser monitoradas (variveis
medidas) a fim de conhecer ou inferir os valores das variveis controladas ou das
variveis de processo que podem interferir no mesmo (perturbaes).
(5) Estabelecer quais os fluxos de massa e energia que devero ser modificados
(variveis manipuladas) para manterem as variveis controladas nos seus set point.
(6) Escolher e dimensionar os instrumentos necessrios para o funcionamento do
sistema de controle:(a) Sensores das variveis de processo envolvidas ou elementos primrios de
medio,
(b) Transmissores e / ou conversores de sinais,
(c) Indicadores e / ou registradores de sinais,
(d) Controladores,
(e) Elementos finais de controle (vlvulas).
Para estabelecer com sucesso o sistema de controle de um processo temos que conhecer
seu comportamento dinmico, realizando um estudo de processo em malha aberta, assunto
que tratado de uma apostila deste autor, que deve ser consultada para maiores detalhes.
1 . 2 . N o r m a s U t i l i z a d a s e m I n s t r u m e n t a o
A ISA - The Instrumentation, Systems, and Automation Society estabelece normas eprocedimentos para especificao e instalao de instrumentos para controle de processos,
-
8/3/2019 Controle de Processos Quimicos
9/175
Pgina 1-7 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
bem como a simbologia a ser adotada nos fluxogramas e documentos (veja Standards and
Recommended Pratices for Instrumentation and Control editado pela ISA).
2 . 1 . 1 . S i n a i s d e T r a n s m i s s o
Existem alguns tipos e faixas padronizadas para transmisso de sinais em sistemas de
controle:
Tabe la 1 -2 : S ina is padro de t ransmisso de in formaes .
Tipo de sinal Valores Representao
Sinal pneumtico
psig27a3
psig30a6
psig15a3
representado por
Sinal eltrico ou eletrnico
V10a0
V5a1
mA20a4
representado por
Sinal digital ou discreto oubinrio
, binrio eltrico
, binrio pneumtico
As prximas pginas tm um pequeno resumo da simbologia empregada na confeco de
fluxogramas para instrumentao e controle de processos.
F igura 1 -4 : S mbolos gera is para ins t rumento ou funo programada .
-
8/3/2019 Controle de Processos Quimicos
10/175
Pgina 1-8 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
F igura 1 -5 : Le t ras de ident i f i cao de ins t rumento ou funo programada .
-
8/3/2019 Controle de Processos Quimicos
11/175
Pgina 1-9 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Tabe la 1 -3 : Exemplo de ident i f i cao de ins t rumento .
T RC 210 02 A
Varivel Funorea de
atividadesN seqencial
da malha
Identificao funcional Identificao da malha
Sufixo
Identificao do instrumento
Onde:
T Varivel medida ou iniciadora: temperatura;
R Funo passiva ou de informao: registrador;
C Funo ativa ou de sada: controlador;
210 rea de atividades, onde o instrumento ou funo programada atua;
02 Nmero seqencial da malha;
A Sufixo.
-
8/3/2019 Controle de Processos Quimicos
12/175
Pgina 2-1 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
N D I C E
CAPTULO 2. FUNO DE TRANSFERNCIA 2-2
2.1. PROPRIEDADES DA FUNO DE TRANSFERNCIA 2-3
2.2. NATUREZA QUALITATIVA DAS RESPOSTAS DE UM SISTEMA 2-5
2.3. FUNO DE TRANSFERNCIA COM ENTRADAS E SADAS MLTIPLAS 2-7
N D I C E D E T A B E L A S
Tabela 2-1: Razes da Funo de Transferncia. 2-6
N D I C E D E F I G U R A S
Figura 2-1: Diagrama de blocos 01. 2-3Figura 2-2: Diagrama de blocos 02. 2-4
Figura 2-3: Diagrama de blocos 03. 2-4
Figura 2-4: Localizao das razes da equao caracterstica. 2-6
Figura 2-5: Funo exponencial [(a) decrescente (b); crescente] e grfico de oscilao [(a) crescente; (b)
decrescente; (c) amplitude constante]. 2-7
Figura 2-6: Diagrama de blocos 04. 2-7
Figura 2-7: Diagrama de blocos 05. 2-8
-
8/3/2019 Controle de Processos Quimicos
13/175
Pgina 2-2 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
C A P T U L O 2 . F U N O D E T R A N S F E R N C I A
... proporciona uma relao direta entre as entradas (distrbios, variveis manipuladas) e as
sadas (variveis controladas) do processo.
George Stephanoupolos
Vamos trabalhar com modelos lineares ou linearizados e variveis desvio:
Equao 2 -1
==
==
ss
ss
X-X(t)X(0)-X(t)(t)X
Y-Y(t)Y(0)-Y(t)(t)Y
Generalizando, as equaes diferenciais ordinrias com coeficientes constantes so da
forma:
Equao 2 -2 =
=
=++++=m
jj
j
jn
n
nn
n
n
n
ii
i
idt
XdbYa
dt
Yda
dt
Yda
dt
Yda
dt
Yda
0011
1
10
.........
Equao 2 -3 Xbdt
Xdb
dt
Xda
dt
Xdb
dt
Xdbonde
m
m
mm
m
m
m
jj
j
j ........ 011
1
10
++++=
=
Onde, an, an -1, ..., a1, a0 e bm, bm -1, ..., b1, b0 so constantes.
Em sistemas fisicamente exeqveis n m.
Assumindo que inicialmente o sistema est relaxado:
Equao 2 -4 1000 === nkdt
Ydtk
k
,...,,
e
Equao 2 -5 1000 === nldt
Xdtl
l,...,,
Ou seja, o termo relativo s condies iniciais I nulo: I = 0
Equao transformada:
-
8/3/2019 Controle de Processos Quimicos
14/175
Pgina 2-3 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Equao 2 -6 ( ) ( ) ( ) ( ) = = ==
==m
j
n
i
m
j
j
j
i
i
j
j
n
i
i
i sXsbsYsasXsbsYsa0 0 00
)(..)(..).(..).(..
Equao 2 -7 ( )0.
.
)(
)()(
0
0 =+==
=
=I
sa
sb
sX
sYsG
i
i
n
i
m
j
j
j
G(s) chamada de funo de transferncia e obtida apenas se I = 0.
Equao 2 -8desviodeformaementradadaLaplacededaTransforma
desviodeformaemsadadaLaplacededaTransformasG
,
,)( =
Em diagrama de blocos:
G(s)
X(s) Y(s)
F igura 2 -1 : D iagrama de b locos 01 .
Em geral a funo de transferncia pode ser representada por uma diviso entre dois
polinmios em s:
Equao 2 -9P(s)
Q(s)G(s)=
2 . 1 . P r o p r i e d a d e s d a F u n o d e T r a n s f e r n c i a
P1. Descreve as caractersticas dinmicas de um sistema. Se adotarmos uma funo
perturbao X(t) na entrada, cuja transformada X(s), a resposta do sistema Y(s) dada por:
Equao 2 -10 )().()( sXsGsY =
P2. Se a funo de transferncia a resposta do sistema a perturbao impulso unitrio:
X(t) = (t), ento X(s) = L{ (t)} = 1, logo:
Equao 2 -11 )()().()( sGsXsGsY ==
P3. A equao diferencial do sistema pode ser obtida da funo de transferncia
substituindo s pelo operador diferencial D d/dt.
-
8/3/2019 Controle de Processos Quimicos
15/175
Pgina 2-4 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Equao 2 -12 )(.1
1.2)(
1
1.2)(:.
22tXtY
ss
ssGex
++
+=
+++
=DD
D
Ou,
Equao 2 -13 XXYYY +=++ DDD .22
Equao 2 -14 )()(.)()()(""'" tXtXtYtYtY +=++ 2
P4. O princpio da superposio vlido (operador linear) para:
Equao 2 -15 )()()( 21 sXsXsX +=
Equao 2 -16 )()()().()().()().()( 2121 sYsYsXsGsXsGsXsGsY +=+==
Em diagrama de blocos:
PROCESSO
X1(t)
Y(t)
X2(t)
F igura 2 -2 : D iagrama de b locos 02 .
G(s)
X1(s) Y
1(s)
G(s)
X2(s)
Y2(s)
+
+
Y(s)
F igura 2 -3 : D iagrama de b locos 03 .
P5. O denominador de G(s) igualado a zero denominado de equao caracterstica. A
estabilidade de um sistema linear invariante com o tempo pode ser determinada avaliando as
razes da equao caracterstica: se todas as razes tm partes reais negativas o sistema
estvel, caso alguma raiz tenha parte real positiva o sistema instvel. Exemplo:
-
8/3/2019 Controle de Processos Quimicos
16/175
Pgina 2-5 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Equao 2 -17).21().21(5.2
1)(
2 j
C
j
B
+
+=
++
=ssss
ssG
Equao caracterstica:
Equao 2 -18 0522 =+ ss
Razes da equao caracterstica:
Equao 2 -19 ( )jr .211 ++=
Equao 2 -20 ( )jr .212 +=
Portanto, o sistema instvel pois as razes do denominador da funo de transferncia
tem parte real positiva.
P6. As razes do denominador so os plos do sistema e as razes do numerador so os
zeros do sistema. Quando o nmero de zeros (nz) menor que o nmero de plos (np), diz-se
que existem (nz np) zeros no infinito; a recproca vlida. Para a Equao 2-17:
Equao 2 -21 2.j1Pe2.j1P:plos 21 =+=
Equao 2 -22 == ze1-z:zeros z1
P7. Em sistemas fsicos exeqveis: nz np.
2 . 2 . N a t u r e z a Q u a l i t a t i v a d a s R e s p o s t a s d e u mS i s t e m a
Freqentemente, estamos interessados apenas em determinar a estabilidade do sistema,
uma forma simples e adequada para os propsitos de controle de processos encontrar as
razes do denominador da funo de transferncia (plos do sistema) e verificar sua
localizao no plano complexo. Seja G(s) uma funo de transferncia que pode ser escrita poruma razo de dois polinmios Q(s) e P(s):
Equao 2 -23
( )in
i
ps
sQ
sP
sQsGsXsGsY
n ===
=0
)(
)(
)()()().()(
Na Tabela 2-1 vemos as diferentes formas das contribuies da funo transferncia para
as respostas dos sistemas. Enquanto que na Figura 2-4 podemos verificar a disposio das
razes da equao caracterstica no plano complexo.
-
8/3/2019 Controle de Processos Quimicos
17/175
Pgina 2-6 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Tabe la 2 -1 : Ra zes da Funo de Transfernc ia .
Razes Caractersticas Termos em (t) para t 0
p1
p2, p2*
p3, p3*
p4, p4*
p5
p6
Real, < 0
Complexa, Re < 0
Complexa, Re = 0
Complexa, Re > 0
Real, > 0
Real, = 0
C1. e-p1.t
e-az.t [C1.cos(b2.t) + C2.sen(b2.t)]
C1.cos(b3.t) + C2.sen(b3.t)
Ea4.t [C1.cos(b4.t) + C2.sen(b4.t)]
C1 ep5.t
C1
Observaes:
1. Onde a1, a2, ..., b1, b2, ..., p1, p2, ..., so constantes positivas.2. Se algumas dessas razes so repetidas o termo referente a essa raiz multiplicado por
uma srie de potncias de t:
K1 + K2.t + K3.t2 + ... + Kr.t
r-1, onde r o nmero de repeties.
3. C1 + C2 + K1 + K2, ... + KR so obtidas a partir das condies iniciais.
Na Figura 2-4 vemos a disposio dos plos no plano complexo. Observe que as razes
reais geram respostas no oscilatrias amortecidas (p1), no oscilatrias no amortecidas (p6)
e no oscilatrias com amplitude crescente (p5), portanto uma resposta instvel; enquanto queas razes complexas originam respostas oscilatrias amortecidas (p2, p2*), no amortecidas (p3,
p3*) e com amplitudes crescentes (p4, p4*), isto , a sada do sistema instvel. Em outras
palavras as razes localizadas no semi-eixo direito geram respostas instveis.
Eixo
imaginrio
Eixo
real
p4
p3
p2
p1
p*2
p6
p5
p*3
p*4
F igura 2 -4 : Loca l i zao das ra zes da equao carac ter s t ica .
esquerda do eixo Im: f(t) decresce exponencialmente com t
-
8/3/2019 Controle de Processos Quimicos
18/175
Pgina 2-7 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
direita do eixo Im: f(t) cresce exponencialmente com t
Sejam razes mltiplas:
Na origem: f(t) = tn, cte. para n = 0, crescente para n > 0.
Figura 2-5: Funo exponencial [(a) decrescente (b); crescente] e grfico de oscilao [(a)
crescente; (b) decrescente; (c) amplitude constante].
2 . 3 . F u n o d e T r a n s f e r n c i a c o m E n t r a d a s e S a d a sM l t i p l a s
Considere a Figura 2-6:
PROCESSO
X1(t) Y1(t)
X2(t) Y2(t)
F igura 2 -6 : D iagrama de b locos 04 .
Equao 2 -24
( )
( )
( )
( )
tY
t
t
t
2
1
2
1 Y
SADASX
X
ENTRADAS
MODELO MATEMTICO (variveis desvio ou sistema relaxado):
Equao 2 -25 2121112121111 XbXbYaYa
dt
dY... +++=
Equao 2 -26 2221212221122 XbXbYaYa
dt
dY... +++=
Condies iniciais:
-
8/3/2019 Controle de Processos Quimicos
19/175
Pgina 2-8 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Equao 2 -27 0(0)Y(0)Y 21 ==
Aplicando a Transformada de Laplace e resolvendo para Y1(s) e Y2(s):
Equao 2 -28 (s)XP(s)
]ba)ba[(s(s)X
P(s)
]ba)ba[(s(s)Y 2
221212221
211211221
++
+=
Equao 2 -29 (s)XP(s)
]ba)ba[(s(s)X
P(s)
]ba)ba[(s(s)Y 2
222122111
112121112
++
+=
Onde P(s) a equao caracterstica dada por:
Equao 2 -30 )().(P(s) 2211211222112 aaaasaas +=
Equao 2 -31
+=
+=
)().()().()(
)().()().()(
2221212
2121111
sXsGsXsGsY
sXsGsXsGsY
Ou em notao matricial:
Equao 2 -32
=
)(
)(.
)()(
)()(
)(
)(
2
1
2221
1211
2
1
sX
sX
sGsG
sGsG
sY
sY
O sistema de Equao 2-32 denominado Matriz das Funes de Transferncia.
Em diagramas de blocos:
X1(s)
X2(s)
G11(s)
G12(s)
G21(s)
G22(s)
+
+
+
+
Y2(s)
Y1(s)
F igura 2 -7 : D iagrama de b locos 05 .
Os sistemas podem ser:
SISO Single Input Single Output
SIMO Single Input Multiple Output
MISO - Multiple Input Single Output
-
8/3/2019 Controle de Processos Quimicos
20/175
Pgina 2-9 de 9
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
MIMO - Multiple Input Multiple Output
Obs.: Os processos qumicos so, na sua maioria, MIMO-NL.
-
8/3/2019 Controle de Processos Quimicos
21/175
Pgina 3-1 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
N D I C E
CAPTULO 3. ANLISE DA DINMICA DE PROCESSOS 3-3
3.1. ESTUDO DO COMPORTAMENTO DINMICO DE SISTEMAS DE PRIMEIRA ORDEM 3-6
3.2. ESTUDO DO COMPORTAMENTO DINMICO DE SISTEMAS CAPACITIVOS PUROS 3-22
3.3. ESTUDO DO COMPORTAMENTO DINMICO DE SISTEMAS DE SEGUNDA ORDEM 3-25
3.4. COMPORTAMENTO DINMICO DE PROCESSOS TIPO ATRASO-AVANO 3-45
3.5. COMPORTAMENTO DINMICO DE PROCESSOS COM TEMPO MORTO 3-48
3.6. EXERCCIOS 3-55
N D I C E D E T A B E L A S
Tabela 3-1: Constantes de tempo de elementos primrios de medio. 3-6
Tabela 3-2: Tempo (t) e valor alcanado pelo sistema PKAtY .)( . 3-11
Tabela 3-3: Tempo (t) e valor alcanado pelo sistema PKAtY .)( . 3-15
Tabela 3-4: Classificao dos Sistemas de 2 ordem. 3-27
Tabela 3-5: Tanques em srie com e sem interao. 3-40
N D I C E D E F I G U R A S
Figura 3-1: Desenho esquemtico de um termopoo / termopar. 3-3
Figura 3-2: Diagrama de blocos 01. 3-6
Figura 3-3: Diagrama de blocos 02. 3-8
Figura 3-4: Diagrama de blocos 03. 3-8
Figura 3-5: Funo degrau de amplitude A. 3-10
Figura 3-6: Resposta de um sistema de 1 ordem a perturbao degrau. 3-12
Figura 3-7: Comportamento dinmico de termopares sem (Ts) e com poo (Tc). 3-13Figura 3-8: Funo impulso de amplitude A. 3-14
Figura 3-9: Resposta de um sistema de 1 ordem a perturbao impulso de amplitude A. 3-15
Figura 3-10: Resposta real de um sistema de 1 ordem a perturbao impulso de amplitude A. 3-16
Figura 3-11: Funo pulso de amplitude A. 3-17
Figura 3-12: Resposta de sistema de 1 ordem a perturbao pulso de amplitude A. 3-19
Figura 3-13: Funo seno de amplitude A, freqncia e perodo T. 3-20Figura 3-14: Resposta de um sistema de 1 ordem a perturbao seno de amplitude A e freqncia w. 3-22
Figura 3-15: Diagrama de blocos de um sistema capacitivo. 3-23
-
8/3/2019 Controle de Processos Quimicos
22/175
Pgina 3-2 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Figura 3-16: Tanque com vazo de descarga constante. 3-23
Figura 3-17: Processo capacitivo submetido a perturbao degrau de amplitude A. 3-25
Figura 3-18: Diagrama de bloco para sistema de 2 ordem. 3-26
Figura 3-19: Resposta do sistema de 2 ordem superamortecido a perturbao degrau. 3-28
Figura 3-20: Influncia do fator de amortecimento e do perodo natural de oscilao de um sistema de 2ordem superamortecido a perturbao degrau. 3-29
Figura 3-21: Influncia do fator de amortecimento na resposta do sistema de 2 ordem subamortecido,submetido a perturbao de amplitude A. 3-30
Figura 3-22: Caractersticas do sistema de 2 ordem subamortecido submetido a perturbao degrau de
amplitude A. 3-32
Figura 3-23: Respostas dos sistemas de 2 ordem a perturbao impulso de amplitude A. 3-34
Figura 3-24: Dois tanques no-interativos em srie. 3-35
Figura 3-25: Dois tanques interativos em srie. 3-38
Figura 3-26: Respostas de sistemas e perturbao degrau de amplitude A. 3-40
Figura 3-27: Reator CSTR submetido a perturbao na composio e temperatura da alimentao. 3-41
Figura 3-28: Resposta do sistema (Equao 3-184). 3-47
Figura 3-29: Diagrama plo-zero para o sistema (Equao 3-184) X: localizao do plo, : localizao do
zero. 3-47
Figura 3-30: Resposta ao degrau de um sistema superamortecido com um zero. 3-48
Figura 3-31: Transporte de fluido por uma tubulao em escoamento pisto. 3-49
Figura 3-32: (a) Resposta ao degrau das aproximaes de Pad de 1 e 2 ordem de um tempo morto puro. (b)
Resposta ao degrau de um sistema de 1 ordem com tempo morto (m = 0.25P) utilizando aproximaesde Pad de 1 e 2 ordem para
sme
. 3-51
Figura 3-33: Reator gotejante com reciclo. 3-52
Figura 3-34: Reator com reciclo submetido a perturbao degrau na composio da alimentao: (a) resposta
completa; (b) detalhe nos instantes iniciais. 3-55
Figura 3-35: Tanque para alivio de presso. 3-55
Figura 3-36: Tanque no interativos em srie. 3-57
Figura 3-37: Tanque de aquecimento. 3-60
Figura 3-38: Grfico exerccio (7). 3-60
Figura 3-39: Grfico para exerccio (9). 3-62
Figura 3-40: Grfico do exerccio (10). 3-63
Figura 3-41: Grfico do exerccio (11). 3-63
Figura 3-42: Grfico do exerccio (12). 3-64
Figura 3-43: Esquema do exerccio (13). 3-64
-
8/3/2019 Controle de Processos Quimicos
23/175
Pgina 3-3 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
C A P T U L O 3 . A N L I S E D A D I N M I C A D EP R O C E S S O S
No captulo anterior, verificamos que a modelagem matemtica de processos conduz a
sistemas de equaes diferenciais. Estas equaes podem ser resolvidas pelo mtodo da
Transformada de Laplace que conduz s suas respectivas funes de transferncia. Neste
captulo, estudaremos com mais detalhes alguns tipos de funes de transferncia (1 ordem e
2 ordem) e a resposta desses sistemas a diversos tipos de perturbaes (degrau, rampa,
impulso, pulso, seno).
Prosseguindo com a metodologia adotada, sempre partiremos de um sistema fsico de
interesse no controle de processos qumicos.Elementos de medio, linhas de transmisso e elementos finais de controle introduzem
atrasos (lag) dinmicos no sistema de controle. Por exemplo, a Figura 3-1 mostra um termopar
(thermocouple) inserido em poo de termopar (termopoo, termowell) de massa m e calor
especfico C.
Termopoo
Termopar
Fluido atemperatura T(t)
F igura 3 -1 : Desenho esquemt ico de um termopoo / t e rmopar .
O atraso dinmico introduzido pela combinao termopar/termopoo pode ser estimado seassumimos algumas hipteses simplificadoras:
a. O termopar e o termopoo esto sempre na mesma temperatura Tm(t), que pode ser
diferente da temperatura do fluido T(t) que envolve o poo;
b. No existe perda de calor pela extremidade do poo exposta ao meio ambiente;
c. A resistncia transferncia de calor determinada pelo inverso do coeficiente global
de troca trmica R = 1/(UG.A);
d. Toda capacidade trmica se concentra na massa de metal que compe o poo.
-
8/3/2019 Controle de Processos Quimicos
24/175
Pgina 3-4 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Balano de Energia no Poo1
Equao 3 -1 { } { } { }saientraacumula =
Equao 3 -2{ } ( )[ ]tT
dt
dCmacumula m..=
Equao 3 -3 { } { } { } { } { }radiaoconduoconvecosaientra ++=
Equao 3 -4{ } { } ( ) ( )[ ]tTtTAUsaientra mG = .
Onde,
Equao 3 -5
[ ] ( )2../111 mSCJhU iG
=+= iR
Substituindo a Equao 3-2 e a Equao 3-4 na Equao 3-1, obtemos
Equao 3 -6( )[ ] ( ) ( )[ ]tTtTAUtT
dt
dCm mGm = ...
ou
Equao 3 -7( )[ ] ( ) ( )tTtTtT
dt
dmmT =+
Onde T a constante de tempo do termopoo no estado estacionrio.
Equao 3 -8
[ ] ( )[ ] 00.
.=== m
G
T Tdt
ds
AU
Cm
Equao 3 -9 ssm,ss TT =
Subtraindo a Equao 3-7 da Equao 3-9:
Equao 3 -10( )[ ] ( ) ( ) ssm,ssmm,ssmT TtTTtTTtTdt
d=+ .
Definindo as variveis desvio:
1 Devido s hipteses adotadas este modelo denomina-se Modelo de Parmetros
Concentrados, um modelo mais preciso conduziria a um Sistema de Equaes Diferenciais
Parciais (SEDP).
-
8/3/2019 Controle de Processos Quimicos
25/175
Pgina 3-5 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Equao 3 -11( ) ( ) m,ssmm TtTtT =
e
Equao 3 -12( ) ( ) ssTtTtT =
Ento:
Equao 3 -13( )[ ] ( ) ( )tTtTtT
dt
dmmT =+ ..
Aplicando a Transformada de Laplace na Equao 3-13:
Equao 3 -14 ( ) ( ) ( )sTsTTsTs mmmT =+ 0..
Mas,
Equao 3 -15( ) ( ) 000 === ssmssmssmmm TTTTT ,,,
Ento:
Equao 3 -16
( )
( ) 1.1
+=
ssT
sT
T
m
Portanto, para que a temperatura indicada/transmitida pelo termopar esteja o mais prximo
possvel da temperatura do fluido, ou seja, Tm(t) = T(t), a constante de tempo do conjunto
termopar/termopoo deve ser minimizada, para isto acontecer a capacitncia trmica dos
sistema ( )Cm . deve ser mnima, enquanto a facilidade transferncia de calor (UG*A) deve
ser mxima (resistncia mnima).
A Equao 3-16 define a funo transferncia de primeira ordem deganho unitrio e
constante de tempoT, entre a entrada do sistema temperatura do fluido, perturbao T(t) e a sada do sistema temperatura medida Tm(t).
Podemos representar a funo de transferncia (da Equao 3-16) atravs de um diagrama
de bloco:
-
8/3/2019 Controle de Processos Quimicos
26/175
Pgina 3-6 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
1/ Ts + 1
T(s) Tm(s)
F igura 3 -2 : D iagrama de b locos 01 .
Na Tabela 3-1 vemos valores tpicos de constantes de tempo de alguns elementos primrios
de medio.
Tabe la 3 -1 : Constan tes de tempo de e lementos pr imr ios de med io .
Tipo Ordem de m
Termmetro de vidro Minutos
Termmetro bimetlico < 1 minuto
Termmetro a expanso Minutos
Termopar em bainha Segundos
Termopar com poo Minutos
Termmetro a resistncia Segundos a minutos
Transmisso presso absoluta 0.2 - 1.7 segundos
Transmisso presso diferencial 0.2 - 1.7 segundosTurbina 0.03 segundos
Vortex 2.5 segundos
Em geral, as constantes de tempo dos elementos de medio e transmisso devem ser
menores que um dcimo da constante de tempo do processo.
3 . 1 . E s t u d o d o C o m p o r t a m e n t o D i n m i c o d e S i s t e m a s
d e P r i m e i r a O r d e m
Genericamente, um sistema de 1 ordem2 definido pela seguinte situao diferencial:
Equao 3 -17 ( )[ ] ( ) ( )txbtyatydt
da ...1 =+
Se ao 0, ento podemos dividir a Equao 3-17 por ao e obtemos:
2A literatura tambm denomina o sistema de 1 ordem de atraso de primeira ordem (first
order lag) ou atraso linear (linear lag).
-
8/3/2019 Controle de Processos Quimicos
27/175
Pgina 3-7 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Equao 3 -18 ( )[ ] ( ) ( )txKtytydt
dPP =+ ..
onde
Equao 3 -19
a
aP
1=
Equao 3 -20o
Pa
bK =
Observe que aplicando a Equao 3-18 no estado estacionrio:
Equao 3 -21 ss.= Pss KY
E substituindo as variveis desvio:
Equao 3 -22
( ) ( )
( ) ( )
=
=
ss
ss
XtXtX
YtYtY
Obtemos:
Equao 3 -23
( )[ ] ( ) ( )tKtYtYdtd
PP =+..
O novo estado estacionrio alcanado aps o sistema sofrer a perturbao X(t) ser:
Equao 3 -24= .pKY
logo
Equao 3 -25
( ) ( )( ) ( ) ss
ss
-0
0
=
=
=
YYYYYp
ou
Equao 3 -26entradaiosestacionrestados
sadaiosestacionrestadosp
=
Portanto, o ganho do processo determina o estado estacionrio que o sistema ir atingir
aps sofrer uma perturbao.
Aplicando a Transformada de Laplace na Equao 3-23.
-
8/3/2019 Controle de Processos Quimicos
28/175
Pgina 3-8 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Equao 3 -27( ) ( ) ( )ssYsYs pp = ...
mas
Equao 3 -28( ) ( ) 000 === ssssss YYYYY
Ento a funo de transferncia de um sistema de 1 ordem dada por:
Equao 3 -29
( )( )( ) 1. +
=
=
ss
sysG
p
p
E a resposta do sistema ( )sY a uma perturbao ( )sX
Equao 3 -30
( ) ( ) ( ) ( )ss
ssGsYp
p +
== .
1..
Em diagramas de blocos:
G(s)
( )sX ( )sY
F igura 3 -3 : D iagrama de b locos 02 .
ou
1. +
sp
p
( )sX ( )sY
F igura 3 -4 : D iagrama de b locos 03 .
Resistncia e Capacitncia
Os sistemas de 1 ordem so caracterizados pelo ganho KP, que estabelece o seu estado
estacionrio, e pela sua constante de tempo P, que determina o seu comportamento
transitrio.
A constante de tempo pode ser obtida se identificamos a capacitncia C e a resistncia R
do processo de 1 ordem. Por definio estas propriedades so:
-
8/3/2019 Controle de Processos Quimicos
29/175
Pgina 3-9 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Equao 3 -31processodomotrizforadovariao
processodocapacidadedavariaoC =
Equao 3 -32resultantefluxodovariao
processodomotrizforadavariaoR =
Por definio, a constante de tempo de um processo de 1 ordem o produto da
capacitncia do processo vezes sua resistncia:
Equao 3 -33R.Cp =
Nos exemplos estudados: Nvel de um tanque
( ) ( )
[ ]
[ ][ ] sRARC
mAdh
hAd
dh
dv
C
msRdq
dh
qRhR
hqarlaescoamentopara
qghhqmasdq
dhR
p =======
==
==
===
..
.
/
.min
f,
2
2
Tanque de aquecimento
[ ]
( ) [ ]
[ ] sqV
Cq
CVRC
sJ
C
CqdH
dTRTTCq
C
JCVCmdTCmH
dT
d
dT
dHC
p
p
T
p
p
pp
T
Tp
====
====
===
+==
..
...
.
..
1
'...'
....
[ ]
[ ]
[ ] sAU
CmRC
sJ
C
AUdQ
dRdAUQ
C
JCm
d
dCm
G
G
G
===
==
==
==
=
=
.
..
.
.
1
'..'
.
..
d
dQC
-
8/3/2019 Controle de Processos Quimicos
30/175
Pgina 3-10 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
3 . 1 . 1 . C o m p o r t a m e n t o d e u m S i s t e m a d e P r i m e i r a Or d e m aP e r t u r b a o D e g r a u
A funo degrau pode ser descrita matematicamente das seguintes formas:
Equao 3 -34( ) ( ) t-t.uA+= ssXttX
Onde,
A Amplitude de perturbao
u(t to) Funo degrau unitrio
Equao 3 -35( ) ( )tXtX ss t.uA+=
Onde, uto(t) u(t to)
Equao 3 -36
=+=
o,,
o,
t,
t,)(
tparaXAX
tparaXtX
ssoss
oss p
Graficamente a funo degrau corresponde a Figura 3-5:
F igura 3 -5 : Funo degrau de ampl i tude A.
Aplicando a varivel desvio ( ) ( ) ssXtXtX = na Equao 3-34 e em seguida a
transformada de Laplace, obtemos a funo perturbao no domnio de Laplace:
-
8/3/2019 Controle de Processos Quimicos
31/175
Pgina 3-11 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Equao 3 -37( ) ( ).st.
s
= esXA
Substituindo a Equao 3-37 na Equao 3-30:
Equao 3 -38
( ) ( ) ( )s.tPPs.t .1
s.s
.1.
.s
+
=
+
= ees
sYP
P
.AA
Expandindo em fraes parciais:
Equao 3 -39
( ) ( )s.t
P
PP
P
P.
1.
+
= e
ss
sY
.A
Aplicando a Transformada Inversa de Laplace:
Equao 3 -40
( ) ( )oP t-t.exp1 u
=
P
tttY
.A
Ou
Equao 3 -41
( ) ( )oP t-t.exp1 u
+=
Pss
ttYtY
.A
Calculando a razo PKAtY .)( para alguns valores de P construmos a Tabela 3-2:
Tabe la 3 -2 : Tempo ( t ) e va lo r a lcanado pe lo s is tema PKAtY .)( .
t to 0.010
P
5
P
2
P
P 2*P 3*P 4*P
( )
p.AtY
0.000 0.095 0.181 0.394 0.632 0.865 0.950 0.982 1.000
A partir da curva Pt versus PKAtY .)( , conforme a Figura 3-6, conclumos que todo
sistema de 1 ordem caracterizado por:
(a) O sistema alcana 63.2% do valor do estado estacionrio aps decorrer o espao de
tempo de uma constante de tempo P, isto :
-
8/3/2019 Controle de Processos Quimicos
32/175
Pgina 3-12 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
Equao 3 -42
( )632.0
p
=.ApY
(b) No instante inicial a inclinao da curva unitria, isto :
Equao 3 -43
( )0.1
0p
=
=t
tY
dt
d
.A
(c) A interseo da tangente da curva no instante inicial com a assntota da funo no
estado estacionrio acontece no ponto (1.0, P).
(d) Para fins prticos, admite-se que o estado estacionrio foi atingido quando um espao
de tempo equivalente a 3 ou 4 vezes a constante de tempo P.
F igura 3 -6 : Resposta de um s is tema de 1 o rdem a per tu rbao degrau .
Observao: Curva vermelha (A) entrada X(t) e curva azul (B) resposta Y(t).
Comparando a resposta de um termopar sem e com poo, verificamos que o poo introduz
um atraso dinmico que, a depender do sistema em estudo, no pode ser negligenciado. Veja
Figura 3-7.
-
8/3/2019 Controle de Processos Quimicos
33/175
Pgina 3-13 de 65
C o n t r o l e d e P r o c e s s o s- R i c a r d o d e A r a j o K a l i d k a l i d @ u f b a . b r
F igura 3 -7 : Compor tamento d inmico de te rmopares sem ( T s ) e com poo ( T c ) .Observao: Curva A perturbao; Curva B termopar sem poo Tms(t); Curva C termopar com poo
Tmc(t).
3 . 1 . 2 . C o m p o r t a m e n t o d e u m S i s t e m a d e P r i m e i r a O r d e m aP e r t u r b a o I m p u l s o
A funo impulso pode ser descrita matematicamente das seguintes formas:
Equao 3 -44( ) ( ) ( ) t-t.t. AA +=+= sstoss XXtX
Onde A a amplitude da perturbao e (t) denominada Funo Impulso Unitrio ou
Funo Delta de Dirac.
Equao 3 -45
>
=+
=+