CONTROLE DE PROCESSOS QUÍMICOS ENG – 009 de Processos Quimicos.pdf · (e) Elementos finais de...
175
CONTROLE DE PROCESSOS QUÍMICOS ENG – 009 Autor: Prof. Dr. Ricardo de Araújo Kalid – [email protected] Revisora: Eng a Grazziela Gomes Laboratório de Controle e Otimização de Processos Industriais - LACOI Departamento de Engenharia Química - DEQ Escola Politécnica - EP Universidade Federal da Bahia – UFBA Salvador, junho de 2004.
Transcript of CONTROLE DE PROCESSOS QUÍMICOS ENG – 009 de Processos Quimicos.pdf · (e) Elementos finais de...
-
CONTROLE DE PROCESSOS QUÍMICOS
ENG – 009
Autor: Prof. Dr. Ricardo de Araújo Kalid – [email protected]
Revisora: Enga Grazziela Gomes
Laboratório de Controle e Otimização de Processos Industriais - LACOI
Departamento de Engenharia Química - DEQ
Escola Politécnica - EP
Universidade Federal da Bahia – UFBA
Salvador, junho de 2004.
-
Página 1 de 1
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Í N D I C E G E R A L
CAPÍTULO 1. INTRODUÇÃO
CAPÍTULO 2. FUNÇÃO DE TRANSFERÊNCIA
CAPÍTULO 3. ANÁLISE DA DINÂMICA DE PROCESSOS
CAPÍTULO 4. IDENTIFICAÇÃO DA DINÂMICA DE PROCESSOS
CAPÍTULO 5. INSTRUMENTAÇÃO E VÁLVULAS DE CONTROLE
CAPÍTULO 6. SISTEMAS LINEARES EM MALHAS FECHADAS
CAPÍTULO 7. ESTABILIDADE DE SISTEMAS LINEARES
CAPÍTULO 8. ESTRATÉGIAS DE CONTROLE
CAPÍTULO 9. CONTROLE AVANÇADO
CAPÍTULO 10. TEORIA DE CONTROLE MODERNO: ABORDAGEM POR ESPAÇO DE
ESTADOS
-
Página 1-1 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Í N D I C E
CAPÍTULO 1. INTRODUÇÃO 1-2
1.1. MOTIVAÇÃO PARA IMPLANTAR UM SISTEMA DA CONTROLE 1-2 1.2. NORMAS UTILIZADAS EM INSTRUMENTAÇÃO 1-6
Í N D I C E D E T A B E L A S Tabela 1-1: Estratégias para o controle de temperatura de um tanque de aquecimento agitado. 1-5 Tabela 1-2: Sinais padrão de transmissão de informações. 1-7 Tabela 1-3: Exemplo de identificação de instrumento. 1-9
Í N D I C E D E F I G U R A S Figura 1-1: Exemplo de controle de processo. 1-3 Figura 1-2: Tanque de aquecimento com agitação. 1-4 Figura 1-3: Tanque de aquecimento agitado com controle feedback. 1-5 Figura 1-4: Símbolos gerais para instrumento ou função programada. 1-7 Figura 1-5: Letras de identificação de instrumento ou função programada. 1-8
-
Página 1-2 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
C A P Í T U L O 1 . I N T R O D U Ç Ã O
A finalidade do controle de processos é manter as variáveis de processo nas condições desejadas com um mínimo custo operacional.
Variáveis de processo são as propriedades intensivas ou extensivas de uma corrente ou substância.
Como exemplos de variáveis de processo temos:
• Temperatura;
• Pressão;
• Vazão;
• Composição;
• Viscosidade;
• Granulometria;
• Radioatividade;
• Condutividade;
• Dureza;
• Maleabilidade;
• Cor;
• Aroma;
• Sabor; etc.
1 . 1 . M o t i v a ç ã o p a r a i m p l a n t a r u m s i s t e m a d a c o n t r o l e
Mudança nas condições de alimentação do processo e no ambiente (perturbações) estão
sempre acontecendo e se nenhuma ação for tomada importantes variáveis do processo não
alcançarão as condições desejadas. Porém, esta ação deve ser estabelecida de modo que:
1. A segurança dos equipamentos e dos trabalhadores,
2. A qualidade do produto; e
3. A produção
sejam asseguradas com um mínimo custo de investimento e/ou operacional.
-
Página 1-3 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
√ Exemplo 01
F igura 1 -1 : Exemplo de cont ro le de p rocesso .
√ Exemplo 02 Seja um tanque agitado, aquecido pela condensação do vapor d’água, conforme mostra a
Figura 1-2. O objetivo deste processo é aquecer uma corrente de vazão w e temperatura T1 até
alcançar a temperatura T2.
-
Página 1-4 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
T2(t), w
T1(t), w
vapor condensado Figura 1 -2 : Tanque de aquec imento com ag i tação .
Vamos considerar duas perguntas:
Pergunta 1: Quanto de calor deve ser fornecido ao líquido no interior do tanque para
que atinja a temperatura desejada T2?
Considerando o tanque bem agitado não existem gradientes internos de temperatura e as
propriedades do fluido na saída do tanque são as mesmas do interior do tanque (tanque
perfeitamente agitado).
O balanço de energia em estado estacionário no tanque indica qual a quantidade de calor
que deve ser transferida é:
Equação 1 -1 ( )sssszpssss TTcwQ ,1,.. −=
Mas nas condições de projeto T2 é a temperatura de referência Tr ou temperatura desejada
(set point), então podemos escrever a equação de projeto para o aquecedor:
Equação 1 -2 ( )ssSPpssss TTcwQ ,1.. −=
Pergunta 2: Mas se as condições mudarem (a vazão de líquido aumentar ou diminuir, a
temperatura da alimentação oscilar ou se desejarmos uma temperatura na saída maior ou
menor que a estabelecida no projeto), como iremos atuar sobre o sistema para que a
temperatura na saída do tanque seja a temperatura desejada (T2 = Tr = TSP) ?
Existem algumas possibilidades, uma delas é medir a temperatura no interior do tanque (T),
comparar esta com a temperatura desejada (TSP) e atuar sobre a válvula de controle para que
esta aumente ou diminua o fluxo de vapor para a serpentina, incrementando ou não a
-
Página 1-5 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
transferência de energia para o fluido no tanque (veja Figura 1-3). Esta estratégia denomina-se
controle por retroalimentação (Feedback Control).
T
T2(t), w2(t)
T1(t), w1(t)
vapor
condensado
TT
TC
F igura 1 -3 : Tanque de aquec imento ag i tado com contro le feedback .
Na Tabela 1-1 vemos outras alternativas de estratégias de controle para este processo.
Tabe la 1 -1 : Es t ra tég ias para o cont ro le de tempera tura de um tanque de aquec imento ag i tado .
Método Variável Medida
Variável manipulada
Classificação
01 T Q Feedback
02 T1 Q Feedforward
03 T w Feedback
04 T1 w Feedforward
05 T1 e T Q Feedback / feedforward
06 T1 e T w Feedback / feedforward
Podemos ainda instalar um trocador de calor a montante do tanque de aquecimento para
diminuir ou eliminar a oscilação na temperatura T1 ou utilizar um tanque com um volume maior
de modo a diminuir a oscilação na temperatura de saída T.
Uma vez estabelecida a estratégia de controle é necessário determinar qual a lei ou
algoritmo de controle para o controlador. Uma possibilidade é utilizar o controlador proporcional, no qual a mudança no fluxo de calor é proporcional à diferença entre a temperatura desejada (TSP(t)) e a temperatura medida (T(t)):
-
Página 1-6 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 1 -3 [ ])()(.)( tTtTKQtQSPcss −+=
Onde Kc é denominado ganho do controlador, este parâmetro é ajustável e define a intensidade da correção a ser realizada sobre o processo.
Do discutido anteriormente deduz-se que para definir um sistema de controle é necessário:
(1) Conhecer o comportamento no estado estacionário do processo que desejamos
controlar;
(2) Conhecer o comportamento dinâmico do processo que desejamos controlar;
(3) Estabelecer quais as variáveis de processo que devem ser mantidas o mais
próximo possível dos valores desejados (set point), denomina-se de variáveis controladas;
(4) Estabelecer quais as variáveis de processo que devem ser monitoradas (variáveis
medidas) a fim de conhecer ou inferir os valores das variáveis controladas ou das
variáveis de processo que podem interferir no mesmo (perturbações).
(5) Estabelecer quais os fluxos de massa e energia que deverão ser modificados
(variáveis manipuladas) para manterem as variáveis controladas nos seus set point.
(6) Escolher e dimensionar os instrumentos necessários para o funcionamento do
sistema de controle:
(a) Sensores das variáveis de processo envolvidas ou elementos primários de
medição,
(b) Transmissores e / ou conversores de sinais,
(c) Indicadores e / ou registradores de sinais,
(d) Controladores,
(e) Elementos finais de controle (válvulas).
Para estabelecer com sucesso o sistema de controle de um processo temos que conhecer
seu comportamento dinâmico, realizando um estudo de processo em malha aberta, assunto
que é tratado de uma apostila deste autor, que deve ser consultada para maiores detalhes.
1 . 2 . N o r m a s U t i l i z a d a s e m I n s t r u m e n t a ç ã o
A ISA - The Instrumentation, Systems, and Automation Society estabelece normas e procedimentos para especificação e instalação de instrumentos para controle de processos,
-
Página 1-7 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
bem como a simbologia a ser adotada nos fluxogramas e documentos (veja “Standards and
Recommended Pratices for Instrumentation and Control” editado pela ISA).
2 . 1 . 1 . S i n a i s d e T r a n s m i s s ã o
Existem alguns tipos e faixas padronizadas para transmissão de sinais em sistemas de
controle:
Tabe la 1 -2 : S ina is padrão de t ransmissão de in fo rmações .
Tipo de sinal Valores Representação
Sinal pneumático
psig 27 a 3psig 30 a 6psig 15 a 3
representado por
Sinal elétrico ou eletrônico
V 10 a 0V 5 a 1
mA 20 a 4
representado por
Sinal digital ou discreto ou binário
, binário elétrico
, binário pneumático
As próximas páginas têm um pequeno resumo da simbologia empregada na confecção de
fluxogramas para instrumentação e controle de processos.
F igura 1 -4 : S ímbo los gera is para ins t rumento ou função programada .
-
Página 1-8 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
F igura 1 -5 : Le t ras de iden t i f i cação de ins t rumento ou função programada .
-
Página 1-9 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Tabe la 1 -3 : Exemplo de iden t i f i cação de ins t rumento .
T RC 210 02 A
Variável Função Área de atividades Nº seqüencial
da malha
Identificação funcional Identificação da malha Sufixo
Identificação do instrumento
Onde:
T Variável medida ou iniciadora: temperatura;
R Função passiva ou de informação: registrador;
C Função ativa ou de saída: controlador;
210 Área de atividades, onde o instrumento ou função programada atua;
02 Número seqüencial da malha;
A Sufixo.
-
Página 2-1 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Í N D I C E
CAPÍTULO 2. FUNÇÃO DE TRANSFERÊNCIA 2-2
2.1. PROPRIEDADES DA FUNÇÃO DE TRANSFERÊNCIA 2-3 2.2. NATUREZA QUALITATIVA DAS RESPOSTAS DE UM SISTEMA 2-5 2.3. FUNÇÃO DE TRANSFERÊNCIA COM ENTRADAS E SAÍDAS MÚLTIPLAS 2-7
Í N D I C E D E T A B E L A S Tabela 2-1: Raízes da Função de Transferência. 2-6
Í N D I C E D E F I G U R A S Figura 2-1: Diagrama de blocos 01. 2-3 Figura 2-2: Diagrama de blocos 02. 2-4 Figura 2-3: Diagrama de blocos 03. 2-4 Figura 2-4: Localização das raízes da equação característica. 2-6 Figura 2-5: Função exponencial [(a) decrescente (b); crescente] e gráfico de oscilação [(a) crescente; (b)
decrescente; (c) amplitude constante]. 2-7 Figura 2-6: Diagrama de blocos 04. 2-7 Figura 2-7: Diagrama de blocos 05. 2-8
-
Página 2-2 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
C A P Í T U L O 2 . F U N Ç Ã O D E T R A N S F E R Ê N C I A
“... proporciona uma relação direta entre as entradas (distúrbios, variáveis manipuladas) e as
saídas (variáveis controladas) do processo.”
George Stephanoupolos
Vamos trabalhar com modelos lineares ou linearizados e variáveis desvio:
Equação 2 -1
==
==
ss
ss
X - X(t) X(0) -X(t) (t)XY - Y(t) Y(0) -Y(t) (t)Y
Generalizando, as equações diferenciais ordinárias com coeficientes constantes são da
forma:
Equação 2 -2 ∑∑=
−
−
−=
=++++=m
jj
j
jn
n
nn
n
n
n
ii
i
i dtXdbYa
dtYda
dtYda
dtYda
dtYda
0011
1
10
.........
Equação 2 -3 XbdtXdb
dtXda
dtXdb
dtXdbonde m
m
mm
m
m
m
jj
j
j ........ 0111
10
++++= −
−
−=∑
Onde, an, an -1, ..., a1, a0 e bm, bm -1, ..., b1, b0 são constantes.
Em sistemas fisicamente exeqüíveis n ≥ m.
Assumindo que inicialmente o sistema está relaxado:
Equação 2 -4 1000 −=== nkdtYd
tk
k,...,,
e
Equação 2 -5 1000 −=== nldtXd
tl
l,...,,
Ou seja, o termo relativo às condições iniciais I é nulo: I = 0
Equação transformada:
-
Página 2-3 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 2 -6 ( ) ( ) ( ) ( )∑ ∑ ∑∑= = ==
=⇒=m
j
n
i
m
j
jj
ii
jj
n
i
ii sXsbsYsasXsbsYsa
0 0 00)(..)(..).(..).(..
Equação 2 -7 ( )0.
.
)()()(
0
0 =+==⇒
∑
∑
=
= Isa
sb
sXsYsG
ii
n
i
m
j
jj
G(s) é chamada de função de transferência e é obtida apenas se I = 0.
Equação 2 -8 desviodeformaementradadaLaplacededaTransformadesviodeformaemsaídadaLaplacededaTransformasG
,,)( =
Em diagrama de blocos:
G(s)X(s) Y(s)
F igura 2 -1 : D iagrama de b locos 01 .
Em geral a função de transferência pode ser representada por uma divisão entre dois
polinômios em s:
Equação 2 -9 P(s)Q(s)G(s)=
2 . 1 . P r o p r i e d a d e s d a F u n ç ã o d e T r a n s f e r ê n c i a
P1. Descreve as características dinâmicas de um sistema. Se adotarmos uma função
perturbação X(t) na entrada, cuja transformada é X(s), a resposta do sistema é Y(s) dada por:
Equação 2 -10 )().()( sXsGsY =
P2. Se a função de transferência é a resposta do sistema a perturbação impulso unitário:
X(t) = δ(t), então X(s) = L{δ (t)} = 1, logo:
Equação 2 -11 )()().()( sGsXsGsY ==
P3. A equação diferencial do sistema pode ser obtida da função de transferência
substituindo s pelo operador diferencial D ≡ d/dt.
-
Página 2-4 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 2 -12 )(.1
1.2)(1
1.2)(:. 22 tXtYssssGex
+++
=⇒++
+=
DDD
Ou,
Equação 2 -13 XXYYY +=++ DDD .22
Equação 2 -14 )()(.)()()(""'" tXtXtYtYtY +=++⇒ 2
P4. O princípio da superposição é válido (operador linear) para:
Equação 2 -15 )()()( 21 sXsXsX +=
Equação 2 -16 )()()().()().()().()( 2121 sYsYsXsGsXsGsXsGsY +=+==
Em diagrama de blocos:
PROCESSO
X1(t)Y(t)
X2(t)
F igura 2 -2 : D iagrama de b locos 02 .
G(s)X1(s) Y1(s)
G(s)X2(s) Y2(s)
++
Y(s)
F igura 2 -3 : D iagrama de b locos 03 .
P5. O denominador de G(s) igualado a zero é denominado de equação característica. A estabilidade de um sistema linear invariante com o tempo pode ser determinada avaliando as
raízes da equação característica: se todas as raízes têm partes reais negativas o sistema é
estável, caso alguma raiz tenha parte real positiva o sistema é instável. Exemplo:
-
Página 2-5 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 2 -17 ).21().21(5.2
1)( 2 jC
jB
−−+
+−=
+−+
=ssss
ssG
Equação característica:
Equação 2 -18 0522 =+− ss
Raízes da equação característica:
Equação 2 -19 ( )jr .211 ++=
Equação 2 -20 ( )jr .212 +−=
Portanto, o sistema é instável pois as raízes do denominador da função de transferência tem parte real positiva.
P6. As raízes do denominador são os pólos do sistema e as raízes do numerador são os
zeros do sistema. Quando o número de zeros (nz) é menor que o número de pólos (np), diz-se
que existem (nz – np) zeros no infinito; a recíproca é válida. Para a Equação 2-17:
Equação 2 -21 2.j 1 P e 2.j 1 P :pólos 21 =+=
Equação 2 -22 ∞== z e 1- z :zeros z1
P7. Em sistemas físicos exeqüíveis: nz ≤ np.
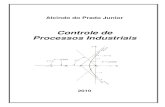
2 . 2 . N a t u r e z a Q u a l i t a t i v a d a s R e s p o s t a s d e u m S i s t e m a
Freqüentemente, estamos interessados apenas em determinar a estabilidade do sistema,
uma forma simples e adequada para os propósitos de controle de processos é encontrar as
raízes do denominador da função de transferência (pólos do sistema) e verificar sua
localização no plano complexo. Seja G(s) uma função de transferência que pode ser escrita por
uma razão de dois polinômios Q(s) e P(s):
Equação 2 -23
( )in
ips
sQsPsQsGsXsGsY
n −==⇒=
=0
)()()()()().()(
Na Tabela 2-1 vemos as diferentes formas das contribuições da função transferência para
as respostas dos sistemas. Enquanto que na Figura 2-4 podemos verificar a disposição das
raízes da equação característica no plano complexo.
-
Página 2-6 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Tabe la 2 -1 : Ra ízes da Função de T ransferênc ia .
Raízes Características Termos em ƒ (t) para t ≥ 0
p1 p2, p2* p3, p3* p4, p4*
p5
p6
Real, < 0 Complexa, Re < 0 Complexa, Re = 0 Complexa, Re > 0
Real, > 0 Real, = 0
C1. e-p1.t e-az.t [C1.cos(b2.t) + C2.sen(b2.t)]
C1.cos(b3.t) + C2.sen(b3.t) Ea4.t [C1.cos(b4.t) + C2.sen(b4.t)]
C1 ep5.t
C1
Observações:
1. Onde a1, a2, ..., b1, b2, ..., p1, p2, ..., são constantes positivas.
2. Se algumas dessas raízes são repetidas o termo referente a essa raiz é multiplicado por
uma série de potências de t:
K1 + K2.t + K3.t2 + ... + Kr.tr-1, onde r é o número de repetições.
3. C1 + C2 + K1 + K2, ... + KR são obtidas a partir das condições iniciais.
Na Figura 2-4 vemos a disposição dos pólos no plano complexo. Observe que as raízes
reais geram respostas não oscilatórias amortecidas (p1), não oscilatórias não amortecidas (p6)
e não oscilatórias com amplitude crescente (p5), portanto uma resposta instável; enquanto que
as raízes complexas originam respostas oscilatórias amortecidas (p2, p2*), não amortecidas (p3,
p3*) e com amplitudes crescentes (p4, p4*), isto é, a saída do sistema é instável. Em outras
palavras as raízes localizadas no semi-eixo direito geram respostas instáveis.
Eixoimaginário
Eixoreal
p4p3
p2
p1
p*2
p6 p5
p*3p*4
F igura 2 -4 : Loca l i zação das ra í zes da equação carac ter ís t ica .
À esquerda do eixo Im: f(t) decresce exponencialmente com t
-
Página 2-7 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
À direita do eixo Im: f(t) cresce exponencialmente com t
Sejam raízes múltiplas:
Na origem: f(t) = tn, cte. para n = 0, crescente para n > 0.
Figura 2-5: Função exponencial [(a) decrescente (b); crescente] e gráfico de oscilação [(a) crescente; (b) decrescente; (c) amplitude constante].
2 . 3 . F u n ç ã o d e T r a n s f e r ê n c i a c o m E n t r a d a s e S a í d a s M ú l t i p l a s
Considere a Figura 2-6:
PROCESSO
X1(t)Y1(t)
X2(t)Y2(t)
F igura 2 -6 : D iagrama de b locos 04 .
Equação 2 -24
( )( )
( )( )
tYt
tt
2
1
2
1 Y SAÍDAS XX
ENTRADAS
MODELO MATEMÁTICO (variáveis desvio ou sistema relaxado):
Equação 2 -25 2121112121111 XbXbYaYa
dtdY ... +++=
Equação 2 -26 2221212221122 XbXbYaYa
dtdY ... +++=
Condições iniciais:
-
Página 2-8 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 2 -27 0 (0)Y (0)Y 21 ==
Aplicando a Transformada de Laplace e resolvendo para Y1(s) e Y2(s):
Equação 2 -28 (s)XP(s)
]ba)ba[(s(s)X
P(s)]ba)ba[(s
(s)Y 222121222
121121122
1+−
++−
=
Equação 2 -29 (s)XP(s)
]ba)ba[(s(s)X
P(s)]ba)ba[(s
(s)Y 222212211
111212111
2+−
++−
=
Onde P(s) é a equação característica dada por:
Equação 2 -30 )().(P(s) 2211211222112 aaaasaas −−+−=
Equação 2 -31
+=+=
⇒)().()().()(
)().()().()(
2221212
2121111
sXsGsXsGsYsXsGsXsGsY
Ou em notação matricial:
Equação 2 -32
=
)()(
.)()()()(
)()(
2
1
2221
1211
2
1
sXsX
sGsGsGsG
sYsY
O sistema de Equação 2-32 é denominado Matriz das Funções de Transferência.
Em diagramas de blocos:
X1(s)
X2(s)
G11(s)
G12(s)
G21(s)
G22(s)
++
++
Y2(s)
Y1(s)
F igura 2 -7 : D iagrama de b locos 05 .
Os sistemas podem ser:
SISO – Single Input Single Output
SIMO – Single Input Multiple Output
MISO - Multiple Input Single Output
-
Página 2-9 de 9
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
MIMO - Multiple Input Multiple Output
Obs.: Os processos químicos são, na sua maioria, MIMO-NL.
-
Página 3-1 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Í N D I C E
CAPÍTULO 3. ANÁLISE DA DINÂMICA DE PROCESSOS 3-3
3.1. ESTUDO DO COMPORTAMENTO DINÂMICO DE SISTEMAS DE PRIMEIRA ORDEM 3-6 3.2. ESTUDO DO COMPORTAMENTO DINÂMICO DE SISTEMAS CAPACITIVOS PUROS 3-22 3.3. ESTUDO DO COMPORTAMENTO DINÂMICO DE SISTEMAS DE SEGUNDA ORDEM 3-25 3.4. COMPORTAMENTO DINÂMICO DE PROCESSOS TIPO ATRASO-AVANÇO 3-45 3.5. COMPORTAMENTO DINÂMICO DE PROCESSOS COM TEMPO MORTO 3-48 3.6. EXERCÍCIOS 3-55
Í N D I C E D E T A B E L A S Tabela 3-1: Constantes de tempo de elementos primários de medição. 3-6
Tabela 3-2: Tempo (t) e valor alcançado pelo sistema PKAtY .)( . 3-11
Tabela 3-3: Tempo (t) e valor alcançado pelo sistema PKAtY .)( . 3-15
Tabela 3-4: Classificação dos Sistemas de 2ª ordem. 3-27 Tabela 3-5: Tanques em série com e sem interação. 3-40
Í N D I C E D E F I G U R A S Figura 3-1: Desenho esquemático de um termopoço / termopar. 3-3 Figura 3-2: Diagrama de blocos 01. 3-6 Figura 3-3: Diagrama de blocos 02. 3-8 Figura 3-4: Diagrama de blocos 03. 3-8 Figura 3-5: Função degrau de amplitude A. 3-10 Figura 3-6: Resposta de um sistema de 1ª ordem a perturbação degrau. 3-12 Figura 3-7: Comportamento dinâmico de termopares sem (τTs) e com poço (τTc). 3-13 Figura 3-8: Função impulso de amplitude A. 3-14 Figura 3-9: Resposta de um sistema de 1ª ordem a perturbação impulso de amplitude A. 3-15 Figura 3-10: Resposta real de um sistema de 1ª ordem a perturbação impulso de amplitude A. 3-16 Figura 3-11: Função pulso de amplitude A. 3-17 Figura 3-12: Resposta de sistema de 1ª ordem a perturbação pulso de amplitude A. 3-19 Figura 3-13: Função seno de amplitude A, freqüência ω e período T. 3-20 Figura 3-14: Resposta de um sistema de 1ª ordem a perturbação seno de amplitude A e freqüência w. 3-22 Figura 3-15: Diagrama de blocos de um sistema capacitivo. 3-23
-
Página 3-2 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Figura 3-16: Tanque com vazão de descarga constante. 3-23 Figura 3-17: Processo capacitivo submetido a perturbação degrau de amplitude A. 3-25 Figura 3-18: Diagrama de bloco para sistema de 2ª ordem. 3-26 Figura 3-19: Resposta do sistema de 2ª ordem superamortecido a perturbação degrau. 3-28 Figura 3-20: Influência do fator de amortecimento ζ e do período natural de oscilação τ de um sistema de 2ª
ordem superamortecido a perturbação degrau. 3-29 Figura 3-21: Influência do fator de amortecimento ζ na resposta do sistema de 2ª ordem subamortecido,
submetido a perturbação de amplitude A. 3-30 Figura 3-22: Características do sistema de 2ª ordem subamortecido submetido a perturbação degrau de
amplitude A. 3-32 Figura 3-23: Respostas dos sistemas de 2ª ordem a perturbação impulso de amplitude A. 3-34 Figura 3-24: Dois tanques não-interativos em série. 3-35 Figura 3-25: Dois tanques interativos em série. 3-38 Figura 3-26: Respostas de sistemas e perturbação degrau de amplitude A. 3-40 Figura 3-27: Reator CSTR submetido a perturbação na composição e temperatura da alimentação. 3-41 Figura 3-28: Resposta do sistema (Equação 3-184). 3-47 Figura 3-29: Diagrama pólo-zero para o sistema (Equação 3-184) – X: localização do pólo, □ : localização do
zero. 3-47 Figura 3-30: Resposta ao degrau de um sistema superamortecido com um zero. 3-48 Figura 3-31: Transporte de fluido por uma tubulação em escoamento pistão. 3-49 Figura 3-32: (a) Resposta ao degrau das aproximações de Padé de 1ª e 2ª ordem de um tempo morto puro. (b)
Resposta ao degrau de um sistema de 1ª ordem com tempo morto (τm = 0.25τP) utilizando aproximações
de Padé de 1ª e 2ª ordem para sme τ− . 3-51
Figura 3-33: Reator gotejante com reciclo. 3-52 Figura 3-34: Reator com reciclo submetido a perturbação degrau na composição da alimentação: (a) resposta
completa; (b) detalhe nos instantes iniciais. 3-55 Figura 3-35: Tanque para alivio de pressão. 3-55 Figura 3-36: Tanque não interativos em série. 3-57 Figura 3-37: Tanque de aquecimento. 3-60 Figura 3-38: Gráfico exercício (7). 3-60 Figura 3-39: Gráfico para exercício (9). 3-62 Figura 3-40: Gráfico do exercício (10). 3-63 Figura 3-41: Gráfico do exercício (11). 3-63 Figura 3-42: Gráfico do exercício (12). 3-64 Figura 3-43: Esquema do exercício (13). 3-64
-
Página 3-3 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
C A P Í T U L O 3 . A N Á L I S E D A D I N Â M I C A D E P R O C E S S O S
No capítulo anterior, verificamos que a modelagem matemática de processos conduz a
sistemas de equações diferenciais. Estas equações podem ser resolvidas pelo método da
Transformada de Laplace que conduz às suas respectivas funções de transferência. Neste
capítulo, estudaremos com mais detalhes alguns tipos de funções de transferência (1ª ordem e
2ª ordem) e a resposta desses sistemas a diversos tipos de perturbações (degrau, rampa,
impulso, pulso, seno).
Prosseguindo com a metodologia adotada, sempre partiremos de um sistema físico de
interesse no controle de processos químicos.
Elementos de medição, linhas de transmissão e elementos finais de controle introduzem
atrasos (lag) dinâmicos no sistema de controle. Por exemplo, a Figura 3-1 mostra um termopar
(thermocouple) inserido em poço de termopar (termopoço, termowell) de massa m e calor
específico C.
Termopoço
Termopar
Fluido atemperatura T(t)
F igura 3 -1 : Desenho esquemát ico de um termopoço / t e rmopar .
O atraso dinâmico introduzido pela combinação termopar/termopoço pode ser estimado se
assumimos algumas hipóteses simplificadoras:
a. O termopar e o termopoço estão sempre na mesma temperatura Tm(t), que pode ser
diferente da temperatura do fluido T(t) que envolve o poço;
b. Não existe perda de calor pela extremidade do poço exposta ao meio ambiente;
c. A resistência à transferência de calor é determinada pelo inverso do coeficiente global
de troca térmica R = 1/(UG.A);
d. Toda capacidade térmica se concentra na massa de metal que compõe o poço.
-
Página 3-4 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Balanço de Energia no Poço1
Equação 3 -1 { } { } { }saientraacumula −=
Equação 3 -2 { } ( )[ ]tT
dtdCmacumula m..=
Equação 3 -3 { } { } { } { } { }radiaçãoconduçãoconvecçãosaientra ++=−
Equação 3 -4 { } { } ( ) ( )[ ]tTtTAUsaientra mG −=− .
Onde,
Equação 3 -5 [ ] ( )2..º/111 mSCJ
hU iG=+= ∑∑
iR
Substituindo a Equação 3-2 e a Equação 3-4 na Equação 3-1, obtemos
Equação 3 -6 ( )[ ] ( ) ( )[ ]tTtTAUtT
dtdCm mGm −= ...
ou
Equação 3 -7 ( )[ ] ( ) ( )tTtTtT
dtd
mmT =+τ
Onde τT é a constante de tempo do termopoço no estado estacionário.
Equação 3 -8 [ ] ( )[ ] 00
..
=→== mG
T Tdtds
AUCmτ
Equação 3 -9 ssm,ssTT =⇒
Subtraindo a Equação 3-7 da Equação 3-9:
Equação 3 -10 ( )[ ] ( ) ( ) ssm,ssmm,ssmT TtTTtTTtTdt
d−=−+−τ .
Definindo as variáveis desvio: 1 Devido às hipóteses adotadas este modelo denomina-se Modelo de Parâmetros
Concentrados, um modelo mais preciso conduziria a um Sistema de Equações Diferenciais
Parciais (SEDP).
-
Página 3-5 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -11 ( ) ( ) m,ssmm TtTtT −=
e
Equação 3 -12 ( ) ( ) ssTtTtT −= Então:
Equação 3 -13 ( )[ ] ( ) ( )tTtTtT
dtd
mmT =+τ ..
Aplicando a Transformada de Laplace na Equação 3-13:
Equação 3 -14 ( ) ( ) ( )sTsTTsTs mmmT =+− 0..τ
Mas,
Equação 3 -15 ( ) ( ) 000 =−=−= ssmssmssmmm TTTTT ,,,
Então:
Equação 3 -16
( )( ) 1.
1+
=ssT
sT
T
m
τ
Portanto, para que a temperatura indicada/transmitida pelo termopar esteja o mais próximo
possível da temperatura do fluido, ou seja, Tm(t) = T(t), a constante de tempo do conjunto
termopar/termopoço deve ser minimizada, para isto acontecer a capacitância térmica dos
sistema ( )Cm . deve ser mínima, enquanto a facilidade à transferência de calor (UG*A) deve ser máxima (resistência mínima).
A Equação 3-16 define a função transferência de primeira ordem de ganho unitário e
constante de tempo τT, entre a entrada do sistema – temperatura do fluido, perturbação T(t) –
e a saída do sistema – temperatura medida Tm(t).
Podemos representar a função de transferência (da Equação 3-16) através de um diagrama
de bloco:
-
Página 3-6 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
1/ τTs + 1T(s) Tm(s)
F igura 3 -2 : D iagrama de b locos 01 .
Na Tabela 3-1 vemos valores típicos de constantes de tempo de alguns elementos primários
de medição.
Tabe la 3 -1 : Constan tes de tempo de e lementos pr imár ios de med ição .
Tipo Ordem de τm
Termômetro de vidro Minutos
Termômetro bimetálico < 1 minuto
Termômetro a expansão Minutos
Termopar em bainha Segundos
Termopar com poço Minutos
Termômetro a resistência Segundos a minutos
Transmissão pressão absoluta 0.2 - 1.7 segundos
Transmissão pressão diferencial 0.2 - 1.7 segundos
Turbina 0.03 segundos
Vortex 2.5 segundos
Em geral, as constantes de tempo dos elementos de medição e transmissão devem ser
menores que um décimo da constante de tempo do processo.
3 . 1 . E s t u d o d o C o m p o r t a m e n t o D i n â m i c o d e S i s t e m a s d e P r i m e i r a O r d e m
Genericamente, um sistema de 1ª ordem2 é definido pela seguinte situação diferencial:
Equação 3 -17 ( )[ ] ( ) ( )txbtyatydtda ...1 =+ ο
Se ao ≠ 0, então podemos dividir a Equação 3-17 por ao e obtemos:
2 A literatura também denomina o sistema de 1ª ordem de atraso de primeira ordem (first
order lag) ou atraso linear (linear lag).
-
Página 3-7 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -18 ( )[ ] ( ) ( )txKtytydtd
PP Χ=+ ..τ
onde
Equação 3 -19 οτ
aa
P1=
Equação 3 -20 o
P abK =
Observe que aplicando a Equação 3-18 no estado estacionário:
Equação 3 -21 ss.Χ= Pss KY
E substituindo as variáveis desvio:
Equação 3 -22
( ) ( )( ) ( )
−=
−=
ss
ss
XtXtX
YtYtY
Obtemos:
Equação 3 -23 ( )[ ] ( ) ( )tKtYtYdtd
PP Χ=+ ..τ
O novo estado estacionário alcançado após o sistema sofrer a perturbação X(t) será:
Equação 3 -24 ∞Χ=∞ .pKY
logo
Equação 3 -25
( ) ( )( ) ( ) ss
ss
-00
Χ∞Χ−∞
=Χ−∞Χ
−∞=
∞Χ∞
=ΚYYYYY
p
ou
Equação 3 -26 entradaiosestacionárestadossaídaiosestacionárestados
p ∆∆
=Κ
Portanto, o ganho do processo determina o estado estacionário que o sistema irá atingir
após sofrer uma perturbação.
Aplicando a Transformada de Laplace na Equação 3-23.
-
Página 3-8 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -27 ( ) ( ) ( )ssYsYs pp ΧΚ=− ...τ
mas
Equação 3 -28 ( ) ( ) 000 =−=−= ssssss YYYYY
Então a função de transferência de um sistema de 1ª ordem é dada por:
Equação 3 -29
( ) ( )( ) 1. +
Κ=
Χ=
sssysG
p
p
τ
E a resposta do sistema ( )sY a uma perturbação ( )sX é
Equação 3 -30
( ) ( ) ( ) ( )ss
ssGsYp
p Χ+
Κ=Χ= .
1..
τ
Em diagramas de blocos:
G(s)( )sX ( )sY
F igura 3 -3 : D iagrama de b locos 02 .
ou
1. +Κ
spp
τ
( )sX ( )sY
F igura 3 -4 : D iagrama de b locos 03 .
√ Resistência e Capacitância Os sistemas de 1ª ordem são caracterizados pelo ganho KP, que estabelece o seu estado
estacionário, e pela sua constante de tempo τP, que determina o seu comportamento
transitório.
A constante de tempo pode ser obtida se identificamos a capacitância C e a resistência R do processo de 1ª ordem. Por definição estas propriedades são:
-
Página 3-9 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -31 processodomotrizforçadovariaçãoprocessodocapacidadedavariaçãoC =
Equação 3 -32 resultantefluxodovariaçãoprocessodomotrizforçadavariaçãoR =
Por definição, a constante de tempo de um processo de 1ª ordem é o produto da
capacitância do processo vezes sua resistência:
Equação 3 -33 R.Cp =τ
Nos exemplos estudados:
Nível de um tanque
( ) ( )
[ ]
[ ][ ] sRARC
mAdhhAd
dhdvC
msRdqdh
qRhRhqarlaescoamentopara
qghhqmasdqdhR
p ===
====
==
=⇒=
=⇒==
..
.
/
.min
f,
2
2
τ
Tanque de aquecimento
[ ]
( ) [ ]
[ ] sqV
CqCV
RC
sJC
CqdHdTRTTCq
CJCVCmdTCmH
dTd
dTdHC
p
pT
pp
pp
T
T p
====
===⇒−=∆Η
===
+== ∫
....
.
.º
..1
'º...'
º....º
º
ρρ
τ
ρρ
ρ
[ ]
[ ]
[ ] sAUCmRC
sJC
AUdQdRdAUQ
CJCm
ddCm
G
GG
===
==Τ
=⇒Τ=∆
==Τ
Τ=
Τ=
Τ ...
.º
.1
'..'
º...
ddQC
τ
-
Página 3-10 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
3 . 1 . 1 . C o m p o r t a m e n t o d e u m S i s t e m a d e P r i m e i r a O r d e m a P e r t u r b a ç ã o D e g r a u
A função degrau pode ser descrita matematicamente das seguintes formas:
Equação 3 -34 ( ) ( )οο t-t.uA+=− ssXttX
Onde,
A Amplitude de perturbação
u(t – to) Função degrau unitário
Equação 3 -35 ( ) ( )tXtX ss οt.uA+= Onde, uto(t) ≡ u(t – to)
Equação 3 -36
≥=+=
∞ o,,
o,
t , t ,
)(tparaXAXtparaX
tXssoss
oss p
Graficamente a função degrau corresponde a Figura 3-5:
F igura 3 -5 : Função degrau de ampl i tude A.
Aplicando a variável desvio ( ) ( ) ssXtXtX −= na Equação 3-34 e em seguida a transformada de Laplace, obtemos a função perturbação no domínio de Laplace:
-
Página 3-11 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -37 ( ) ( ).stο.
s−= esX A
Substituindo a Equação 3-37 na Equação 3-30:
Equação 3 -38
( ) ( ) ( )s.tPPs.t οο .1s.s
.1.
.s
−−
+
Κ=
+Κ
= ees
sYP
P
τ
ττ
.AA
Expandindo em frações parciais:
Equação 3 -39
( ) ( )s.t
P
PP
P
P ο.1
. −
+
−
Κ= e
ss
sY
τ
τττ.A
Aplicando a Transformada Inversa de Laplace:
Equação 3 -40
( ) ( )oP t-t.exp1 u
−−−Κ=
P
tttY
το.A
Ou
Equação 3 -41
( ) ( )oP t-t.exp1 u
−−−Κ+=
Pss
ttYtY
το.A
Calculando a razão PKAtY .)( para alguns valores de τP construímos a Tabela 3-2:
Tabe la 3 -2 : Tempo ( t ) e va lor a lcançado pe lo s is tema PKAtY .)( .
t – to 0.0 10Pτ
5Pτ
2Pτ
τP 2*τP 3*τP 4*τP ∞
( )pΚ.AtY
0.000 0.095 0.181 0.394 0.632 0.865 0.950 0.982 1.000
A partir da curva Pt τ versus PKAtY .)( , conforme a Figura 3-6, concluímos que todo
sistema de 1ª ordem é caracterizado por:
(a) O sistema alcança 63.2% do valor do estado estacionário após decorrer o espaço de
tempo de uma constante de tempo τP, isto é:
-
Página 3-12 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -42
( )632.0
p
=Κ.ApY τ
(b) No instante inicial a inclinação da curva é unitária, isto é:
Equação 3 -43
( ) 0.10p
=
Κ=t
tYdtd
.A
(c) A interseção da tangente da curva no instante inicial com a assíntota da função no
estado estacionário acontece no ponto (1.0, τP).
(d) Para fins práticos, admite-se que o estado estacionário foi atingido quando um espaço
de tempo equivalente a 3 ou 4 vezes a constante de tempo τP.
F igura 3 -6 : Resposta de um s is tema de 1 ª o rdem a per tu rbação degrau .
Observação: Curva vermelha (A) entrada X(t) e curva azul (B) resposta Y(t).
Comparando a resposta de um termopar sem e com poço, verificamos que o poço introduz
um atraso dinâmico que, a depender do sistema em estudo, não pode ser negligenciado. Veja
Figura 3-7.
-
Página 3-13 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
F igura 3 -7 : Compor tamento d inâmico de te rmopares sem (τ T s ) e com poço (τ T c ) .
Observação: Curva A perturbação; Curva B termopar sem poço Tm’s(t); Curva C termopar com poço
Tm’c(t).
3 . 1 . 2 . C o m p o r t a m e n t o d e u m S i s t e m a d e P r i m e i r a O r d e m a P e r t u r b a ç ã o I m p u l s o
A função impulso pode ser descrita matematicamente das seguintes formas:
Equação 3 -44 ( ) ( ) ( )οδδ t-t.t. AA +=+= sstoss XXtX
Onde A é a amplitude da perturbação e δ(t) é denominada Função Impulso Unitário ou
Função Delta de Dirac.
Equação 3 -45
>
≥=+
<
= ∞
o,
o,,
o,
t , t , t ,
)(tparaXtparaXAXtparaX
tX
oss
ssoss
oss
Graficamente a função impulso correspondente ao Figura 3-8:
-
Página 3-14 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
F igura 3 -8 : Função impu lso de ampl i tude A.
Aplicando a variável desvio ( ) ( ) ssXtXtX −= na Equação 3-44 e em seguida a Transformada de Laplace, obtemos a função perturbação no domínio de Laplace:
Equação 3 -46 ( )( )stoeAsX −= .
Substituindo a Equação 3-46 na Equação 3-30:
Equação 3 -47 ( ) ( ) ( ).st
P
PP.st οο .1s.s
.1.
−−
+
Κ=
+Κ
= ees
sYP
P
τ
ττ
.A.A
Expandindo em frações parciais:
Equação 3 -48
( ) ( )s.t
p
pp
p
p ο.1
. −
+
−
Κ= e
ss
sY
τ
τττ.A
Aplicando a Transformada Inversa de Laplace:
Equação 3 -49
( ) ( )opp
p t-tttexptY u..
τ−
−
τ
Κ= ο
.A
e
-
Página 3-15 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -50
( ) ( )opp
pss t-t
ttexpYtY u..
τ−
−
τ
Κ+= ο
.A
Calculando a razão PKAtY .)( para alguns valores de τP, construímos a Tabela 3-3:
Tabe la 3 -3 : Tempo ( t ) e va lor a lcançado pe lo s is tema PKAtY .)( .
t – to 0.0 10Pτ
5Pτ
2Pτ
τP 2*τP 3*τP 4*τP ∞
( )pΚ.AtY
0.0 0.905 0.819 0.606 0.368 0.135 0.050 0.018 0.0
A partir da curva Pt τ versus PKAtY .)( , conforme a Figura 3-9, concluímos que todo
sistema de 1ª ordem, quando submetido a uma perturbação tipo impulso tem uma resposta
inicial muito rápida, mas decorrido um espaço de tempo equivalente a 3 ou 4 vezes, sua
constante de tempo retorna ao estado estacionário anterior à perturbação.
Figura 3-9: Resposta de um sistema de 1ª ordem a perturbação impulso de amplitude A.
Porém, um sistema físico real responderá a uma perturbação impulso conforme mostra a
Figura 3-10, pois é impossível que ele saia do seu estado de repouso Xss e alcance
instantaneamente o valor A.
-
Página 3-16 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Figura 3-10: Resposta real de um sistema de 1ª ordem a perturbação impulso de amplitude A.
3 . 1 . 3 . C o m p o r t a m e n t o d e u m S i s t e m a d e P r i m e i r a O r d e m a P e r t u r b a ç ã o P u l s o
A função pulso pode ser descrita matematicamente das seguintes formas:
Equação 3 -51
>
≤≤=+
<
= ∞
1,
1,,
o,
t , t t ,
t , )(
tparaXtparaXAXtparaX
tX
oss
ossoss
oss
Equação 3 -52 ( ) ( ) ( )[ ]ttXtX
1o ttss uu −+= .A
Equação 3 -53 ( ) ( ) ( )[ ]ttXtX
1o ttss uu −+= .A
Graficamente a função impulso correspondente a Figura 3-11:
-
Página 3-17 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
F igura 3 -11 : Função pu lso de ampl i tude A.
Aplicando a variável desvio ( ) ( ) ssXtXtX −= na Equação 3-54 e em seguida a Transformada de Laplace, obtemos a função perturbação no domínio de Laplace:
Equação 3 -54 ( ) ( ) ( ){ }1t-tut-tu −= οL.AsX
ou
Equação 3 -55 ( ) ( ){ } ( ){ }[ ]1t-tut-tu −= οL.AsX
Equação 3 -56 ( ) ( ){ }( ) ( ){ } ( )[ ]stst eesX .. .. οο −− −= tutu LL.A
Equação 3 -57
( )( ) ( )
=
−−
se
sesX
stst .. 1-
ο
.A
Substituindo a Equação 3-57 na Equação 3-30:
Equação 3 -58
( )( ) ( )
+
Κ=
−−
se
se
ssX
stst ..
p
p1
-1.
ο
τ.A
Expedindo em frações parciais:
-
Página 3-18 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -59
( )( )
( )
+
−−
+
−
Κ=
−
−
st
p
ppst
p
pp
e
ss
e
sssY
.
.
p
p
1
.1
.1
τ
ττ
τ
ττ
τ
ο.A
Ou
Equação 3 -60
( )( )
( )
+
−−
+
−Κ=
−
−
st
p
st
p
e
ss
e
sssY
.
.
p
p
1
1
11.1
11
τττ
ο.A
Aplicando a Transformada Inversa de Laplace:
Equação 3 -61
( ) ( ) ( )
−−−−
−−−
Κ= oot-tut-tu
pp
o tttttY ττ
1
p
exp1.exp1.A
ou
Equação 3 -62
( ) ( ) ( )
−−−−
−−−
Κ+= oot-tut-tu
pp
o
ss
ttttYtY ττ
1
p
exp1.exp1.A
Na Figura 3-12, Pt τ versus PKAtY .)( , observamos o comportamento dinâmico de um
sistema de 1ª ordem quando submetido a uma perturbação tipo pulso de amplitude A:
-
Página 3-19 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
F igura 3 -12 : Resposta de s is tema de 1 ª o rdem a per tu rbação pu lso de ampl i tude A.
3 . 1 . 4 . C o m p o r t a m e n t o d e u m S i s t e m a d e P r i m e i r a O r d e m a P e r t u r b a ç ã o S e n o i d a l
A função seno pode ser descrita matematicamente da seguinte forma:
Equação 3 -63 ( ) ( )( ) ( )οοω+= t-tt-t.XtX ss u.sen.A
Onde, ω = 2πƒ.
Graficamente a função seno correspondente a Figura 3-13:
-
Página 3-20 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
F igura 3 -13 : Função seno de ampl i tude A, f reqüênc ia ω e per íodo T .
Aplicando a variável desvio ( ) ( ) ssXtXtX −= na Equação 3-63 e em seguida a Transformada de Laplace, obtemos a função perturbação no domínio de Laplace:
Equação 3 -64 ( ) 22s
.ωω
+=
AsX
Substituindo a Equação 3-64 na Equação 3-30, expandindo em frações parciais e aplicando
a Transformada Inversa de Laplace L-1:
Equação 3 -65
( ) ( )( ) ( )( ) ( )( )[ ] ( )ooo22 p t-tt-tt-t.1.K
usencos ωωτωτωωτ
τ +−+
= −− ptt
pp
poetY.A
Lembrando da seguinte identidade trigonométrica:
Equação 3 -66 ( ) ( ) ( )θ+ω=ω+ω t.rt.qt.p sen.cos.sen.
onde
-
Página 3-21 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -67 ( )qp22 arcig=+= θeqpr
Equação 3 -68
( )( )( )
( )( ) ( )oo22p
22 t-tt-t1..
1...
usen
+
+
Κ+
+=
−−
θωωτωτ
τω τ
pp
ttpp
poeKtY
AA
Equação 3 -69 ( )t.-ω=θ arcig
Ou
Equação 3 -70 ( ) ( ) ( )tYtYtY estdin +=
Onde,
Equação 3 -71
( )( )( )
( )op
ttp
p t-te.
tYpo
u..
...din 122 +ωτ
τωΚ=
τ−−A
E,
Equação 3 -72
( ) ( )( ) ( )oop
pest t-tt-t.
KtY u.sen.
.
.θ+ω
+ωτ=
122A.
Observe que a resposta à perturbação seno é composta de duas partes: uma diminui a
medida que o tempo aumenta Ydin(t) e a outra é uma função periódica Yest(t). Portanto, no
estado estacionário a resposta de um sistema de 1ª ordem a uma perturbação seno é uma
função periódica, veja Figura 3-14, dada por:
Perturbação:
Equação 3 -73 ( ) ( ) ( )tt..XtX ss u.sen ω+= A
Resposta ( t → ∞ )
Equação 3 -74
( ) ( )[ ]θ+ω+ωτ
+= t.K
YtYp
pss sen..
.
122A.
Comparando Equação 3-63 com Equação 3-74, veja Figura 3-14, concluímos que:
(a) A amplitude da resposta do sistema é menor que a amplitude da perturbação, ou seja, o
sistema amortece a entrada;
(b) A resposta do sistema é uma onda senoidal com a mesma freqüência de entrada;
-
Página 3-22 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
(c) A resposta está defasada de um ângulo de fase θ em relação ao estímulo, neste caso
está atrasada pois θ é menor que zero.
F igura 3 -14 : Respost a de um s is tema de 1 ª o rdem a per tu rbação seno de ampl i tude A e f reqüênc ia w .
3 . 2 . E s t u d o d o C o m p o r t a m e n t o D i n â m i c o d e S i s t e m a s C a p a c i t i v o s P u r o s
Se a constante ao da Equação 3-17 for zero, então:
Equação 3 -75 ( )[ ] ( )txbtY
dtda .. =1
Dividindo por a1:
Equação 3 -76 ( )[ ] ( ) ( )tXKtX
abtY
dtd .. ′==
1
Onde
Processos definidos pela Equação 3-75 são denominados capacitivos ou integradores.
Utilizando variáveis desvio e aplicando a Transformada de Laplace na Equação 3-76:
-
Página 3-23 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -77 ( ) ( )sXsYs .. Κ′=
Então a função de transferência de um sistema capacitivo é dada por:
Equação 3 -78 ( ) ( )
( ) ssXsYsG Κ
′==
Em diagramas de blocos:
s'Κ( )sX ( )sY
F igura 3 -15 : D iagrama de b locos de um s is tema capac i t i vo .
√ Exemplo de um processador integrador: Seja um tanque aberto no qual sua descarga é dada por uma bomba dosadora que mantém
a vazão constante, conforme a Figura 3-16:
q1(t)
h(t)q2 = cte.
Figura 3 -16 : Tanque com vaz ão de descarga constan te .
Realizando o balanço de massa no tanque, obtemos:
Equação 3 -79 ( )[ ] ( ) 21 qtqthdt
dA −=.
No estado estacionário:
Equação 3 -80 ( ) 2,2,121 00 qqqqq ssss ==⇒=−
Utilizando as variáveis desvio:
Equação 3 -81 ( )[ ] ( )tqth
dtdA 1=.
Aplicando a Transformada de Laplace e rearranjando:
-
Página 3-24 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -82
( ) ( )( ) ssAsqshsG Κ
′===
.1
1
3 . 2 . 1 . C o m p o r t a m e n t o d e u m S i s t e m a C a p a c i t i v o a P e r t u r b a ç ã o D e g r a u
Função de Transferência:
Equação 3 -83 ( ) ( )
( ) ssXsYsG Κ
′==
Função Perturbação:
Equação 3 -84 ( ) stesX ..
sο−=
A
Resposta:
Equação 3 -85 ( ) stesY ..
s.2
Ο−Κ′=A
Equação 3 -86 ( ) ( ) ( )ΟΟΚ′+= t-tt-t..YtY ss u.A
Analisando a Equação 3-86 observamos que o sistema tende para +∞ se a amplitude da
perturbação for positiva (A > 0), ou tende para -∞ se a amplitude da perturbação for negativa (A
< 0). Na Figura 3-17 está plotado o comportamento dinâmico do processo capacitivo a
perturbação degrau.
-
Página 3-25 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
F igura 3 -17 : Processo capac i t i vo submet ido a per tu rbação degrau de ampl i tude A.
Podemos constatar que:
(a) Processos integradores são instáveis e de difícil controle e são não auto-regulados (enquanto que os sistemas de 1ª ordem são auto-regulados);
(b) No exemplo, pequenas diferenças entre vazões da alimentação q1(t) e da descarga
q2(t), levarão o tanque a transbordar ou secar.
3 . 3 . E s t u d o d o C o m p o r t a m e n t o D i n â m i c o d e S i s t e m a s d e S e g u n d a O r d e m
Genericamente, um sistema de 2ª ordem é definido pela seguinte equação diferencial:
Equação 3 -87 ( )[ ] ( )[ ] ( ) ( )tXbtYatY
dtdatY
dtdaZ .... 12
2
=++ Ο
Se ao ≠ 0 então podemos dividir a Equação 3-87 por ao e obtemos:
Equação 3 -88 ( )[ ] ( )[ ] ( ) ( )tXtYtY
dtdty
dtd
p ..... Κ=+ζτ+τ 222
2
Onde,
oaa 2=τ
Período natural de oscilação
-
Página 3-26 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
ζ Fator de amortecimento (Damping Factor)
Ο
=Κab
P
Ganho do processo
e Ο=ζτ
aa12 .
Utilizando variáveis desvio e aplicando a Transformada de Laplace na Equação 3-88,
obtemos a função de transferência do sistema de 2ª ordem:
Equação 3 -89 ( ) ( )
( ) 1...2. 22 ++Κ
==sssX
sYsG Pζττ
Sistemas de 2ª ordem podem surgir devido a:
(1) Processos multiplicativos (sistemas de 1ª ordem em série), por exemplo: 2 tanques em
série;
(2) Sistemas intrinsecamente de 2ª ordem (raros em processos químicos), por exemplo:
válvula de controle;
(3) Sistema de controle feedback (malha fechada), por exemplo: sistema de 1ª ordem com
controlador P + I.
A resposta do sistema ( )sY a uma perturbação ( )sX é:
Equação 3 -90 ( ) ( ) ( ) ( )sX
sssXsGsY P .
1...2.. 22 ++
Κ==
ζττ
Em diagramas de blocos:
1..222 ++Κ
ssP
ζττ
( )sX ( )sY
F igura 3 -18 : D iagrama de b loco para s is t ema de 2 ª o rdem.
Logo:
Equação 3 -91 ( ) ( ) ( ) ( )sXpsps
KsY P .. 21
2
−−=
τ
Onde p1 e p2 são as raízes da função de transferência, pólos do sistema:
-
Página 3-27 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -92 2
4.4.222
2
1ττ
ζτζ
−+−=p
e 2
4.4.222
2
2ττ
ζτζ
−−−=p
Os parâmetros KP e τ tem o mesmos significados dos sistemas de 1ª ordem: KP é o ganho
do processo, enquanto que τ determina a velocidade da resposta dos sistema.
A Tabela 3-4 mostra a classificação dos sistemas de 2ª ordem a depender dos valores do
fator de amortecimento ζ.
Tabe la 3 -4 : C lass i f i cação dos S is temas de 2 ª o rdem.
Fator de amortecimento Pólos p1 e p2
Classificação
ζ > 1 Reais e distintos parte real negativa
Superamortecido
ζ = 1 Reais iguais parte real negativa
Criticamente amortecido
0 < ζ > 1 Complexos conjugados parte real negativa
Subamortecido
ζ = 0 Complexas iguais parte real nula
Oscilatório com amplitude cte.
ζ < 0 Complexos conjugados parte real positiva
instável
3 . 3 . 1 . C o m p o r t a m e n t o d e u m S i s t e m a d e S e g u n d a O r d e m a P e r t u r b a ç ã o D e g r a u
Função degrau de amplitude A
Equação 3 -93 ( ) ( )Ο+= t-t.tX uAssX
Transformada de Laplace da função perturbação utilizando variáveis desvio:
Equação 3 -94 ( ) stesX ..
sΟ−=
A
Substituindo a Equação 3-94 na Equação 3-91:
-
Página 3-28 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -95 ( ) ( ) ( )
stP epsps
KsY .21
2
.s
..
Ο−
−−=
Aτ
Expandindo em frações parciais a Equação 3-95 e aplicando a Transformada Inversa de
Laplace, encontramos soluções diferentes a depender do valor do fator de amortecimento ζ.
√ Perturbação Degrau de Amplitude A e Sistema Superamortecido ζ > 1
Equação 3 -96
( ) ( )Ο−
−
−+
−−Κ= t-t
1.
1
11 *
2
2
*2.
P
*
usenhhcos ttetYt
τζ
ζ
ζτ
ζτ
ζ
A
onde,
Equação 3 -97 t * = t - t o
Na Figura 3-19, Pt τ versus ( ) PKAtY . observamos que a resposta de um sistema de 2ª ordem superamortecido a uma perturbação degrau é semelhante a resposta do sistema de 1ª
ordem, mas note que existe um ponto de inflexão em ti e que a resposta inicialmente é lenta
(derivada pequena), depois aumenta de velocidade derivada máxima no ponto de inflexão, ou
segunda derivada igual a zero) e então o sistema reage como se fosse de 1ª ordem.
F igura 3 -19 : Resposta do s is tema de 2 ª o rdem superamor tec ido a per tu rbação degrau .
No Figura 3-20, Pt τ versus ( ) PKAtY . observamos que a medida que o fator de amortecimento ζ aumenta, o sistema torna-se mais lento, isto é, o parâmetro ζ determina a
suavidade e rapidez da resposta do sistema a perturbação; percebemos também que, a
medida que o período natural de oscilação τ diminui, a resposta fica mais rápida.
-
Página 3-29 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
F igura 3 -20 : In f luênc ia do fa to r de amor tec imento ζ e do per íodo natura l de osc i lação τ de um s is tema de 2 ª o rdem superamor tec i do a per tu rbação degrau .
Observação: Curva A – perturbação; Curva B - τ = 1.0 e ζ = 1.0; Curva C - τ = 1.5 e ζ = 1.0; Curva D - τ
= 1.0 e ζ = 1.5.
√ Perturbação Degrau e Sistema Criticamente Amortecido ζ = 1
Equação 3 -98
( ) ( )Οτ−
τ+−Κ= t-tet.tY tp u...
**11A
Veja na Figura 3-20 a resposta do sistema de 2ª ordem criticamente amortecido a
perturbação degrau de amplitude A.
√ Perturbação Degrau e Sistema Superamortecido 0 < ζ < 1
Equação 3 -99
( ) ( )Ο−
−+
−Κ= t-t
- 1
1
- 11 *
2
2
*2
p
*
usencos ttetY tτζ
ζ
ζτζτA
Uma amostra mais conveniente de escrever a Equação 3-99 é:
-
Página 3-30 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -100
( ) ( ) ( )Ο−
+
−−Κ= t-t.t...
111.. *
.
2P
*
usen θωζ
τζ t
etY A
Onde,
Equação 3 -101 τζ−
=ω21
e
Equação 3 -102
ζζ
=θ2-1
arcig
Portanto, observamos que a resposta de um sistema de 2ª ordem subamortecido a
perturbação degrau é uma senoide de amplitude decrescente (devido ao termo exponencial
eζ.t/τ), de freqüência ω e ângulo de fase θ.
Na Figura 3-21, Pt τ versus ( ) PKAtY . observamos que a resposta desse sistema perturbação degrau é uma curva oscilatória que gradativamente tende a atingir A.KP,
diminuindo a amplitude da oscilação.
Através da Figura 3-21 percebemos que a medida que o amortecimento diminui, isto é, ζ
diminui, a oscilação aumenta, porém a rapidez da resposta também (maior derivada da curva
no ponto de inflexão, e este acontece em um menor intervalo de tempo).
F igura 3 -21 : In f luência do fa to r de amor tec imento ζ na resposta do s is tema de 2 ª o rdem subamor tec ido , submet ido a per tu rbação de ampl i tude A.
Algumas características importantes devem ser observadas nos sistemas subamortecidos
submetidos a perturbação degrau:
-
Página 3-31 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
C1. Tempo de ascensão (Rise Time) tr: Tempo necessário para atingir pela primeira vez o
novo estado estacionário.
C2. Tempo do Primeiro Pico (Time to First Peak) tp: Tempo requerido para atingir o primeiro
máximo da curva.
C3. Tempo de resposta (Setting Time) ts: Tempo decorrido até que a saída oscilatória do
sistema esteja dentro da faixa de +/- 5% do estado estacionário. Também se utiliza o valor ±1%
para determinar o ts.
C4. Sobre-elevação (Overshoot) OS: Razão entre o valor da função no pico máximo e o
valor do novo estado estacionário:
Equação 3 -103
Π=
Κ==
2P -1
.-exp.
0ζ
ζAa
baS
C5. Razão de Decaimento (Decay Ratio) DR: razão entre o valor do segundo pico e do
primeiro pico:
Equação 3 -104
ζ
ζΠ===
2-1-exp
acSDR ..20 2
C6. Período de oscilação (Period of oscilation) T1: Período de tempo transcorrido entre dois
máximos:
Equação 3 -105 21 1
2
ζ−
τΠ=
..T
Lembre que em uma senoide a freqüência em ciclos por unidade de tempo ft é dada por:
Equação 3 -106 Πω
=.2t
f
E que o período de oscilação é o inverso da freqüência:
Equação 3 -107 ωΠ
==Τ.21
tt f
Onde a freqüência angular ω é dada pela Equação 3-101.
C7. Período Natural de Oscilação (Natural Period of oscilation) τ: período do sistema
quando o amortecimento é nulo, isto é, ζ = 0:
-
Página 3-32 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -108 nn
nf... Π
=ω
=Π
Τ=τ
211
2
Onde ωn é a freqüência natural de oscilação do sistema não amortecido ζ = 0.
Veja na Figura 3-22 a indicação das características discutidas anteriormente.
F igura 3 -22 : Carac t e r ís t icas do s is tema de 2 ª o rdem subamor tec ido submet ido a per tu rbação degrau de ampl i tude A.
Quando um sistema refere uma perturbação o desejável é ter uma resposta sem oscilações
que atinja rapidamente o novo estado estacionário. Porém, estes objetivos são excludentes
entre si, pois para garantir uma resposta não oscilatória ζ ≥ 1 temos que sacrificar a rapidez da
resposta; por outro lado, se desejarmos uma resposta muito rápida, não podemos escolher um
fator de amortecimento muito pequeno, pois a mesma seria muito oscilatória com uma sobre-
elevação grande.
Os projetistas de sistemas de controle, freqüentemente, trabalham com um fator de
amortecimento na faixa de 0.4 a 0.8, isto é, 0.4 ≥ ζ ≤ 0.8, desta forma, consegue-se um
compromisso entre velocidade de resposta, sobre-elevação, tempo de resposta e oscilação
adequado para a maioria dos casos.
3 . 3 . 2 . C o m p o r t a m e n t o d e u m S i s t e m a d e S e g u n d a O r d e m a P e r t u r b a ç ã o I m p u l s o
A função impulso pode ser descrita matematicamente da seguinte forma:
Equação 3 -109 ( ) ( )Ο−δ+= tt.XtX ss A
Ou em variável no domínio de Laplace:
Equação 3 -110 ( )ssX .t-e. Ο= A
Substituindo a Equação 3-110 na Equação 3-91:
-
Página 3-33 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -111 ( ) ( ) ( )
sP
pspssX .t-
21
2
e..
Ο
−−Κ
= .Aτ
Expandindo em frações parciais a Equação 3-111 e aplicando a Transformada Inversa de
Laplace, encontramos soluções diferentes a depender do valor do fator de amortecimento ζ.
√ Perturbação Impulso de Amplitude A e Sistema Superamortecido ζ > 1
Equação 3 -112
( ) ( )**2.
2Pt
1.
111..
*
uenh
−
−Κ=
−tsetY
t
τζ
ζττ
ζ
A
√ Perturbação Impulso e Sistema Criticamente amortecido ζ = 1:
Equação 3 -113 ( ) ( )*2
*
P t....*
uττ
t
ettY−
Κ=A
√ Perturbação Impulso e Sistema Subamortecido 0 < ζ < 1:
Equação 3 -114
( ) ( )*t
p tte.tY u..sen....*
. *
τζ−
ζ−τΚ= τ
ζ− 2
2
1
1
11A
Na Figura 3-23 vemos a resposta do sistema de 2ª ordem a perturbação impulso. Observe
que o sistema retorna ao antigo estado estacionário depois de decorrido algum tempo
(processo auto-regulado). As características observadas para a perturbação degrau também
são aplicáveis para perturbação impulso (tp, ts, OS, DR).
-
Página 3-34 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
F igura 3 -23 : Respos tas dos s is temas de 2 ª o rdem a per t u rbação impu lso de ampl i tude A.
3 . 3 . 3 . P r o c e s s o s M u l t i c a p a c i t i v o s c o m o S i s t e m a s d e S e g u n d a O r d e m
Processos de ordem superior podem ser o resultado da associação em série de processos
de primeira ordem. Por exemplo, dois tanques (cada tanque é um sistema de 1ª ordem) em
série constituem um sistema de 2ª ordem, que podem ser não-interativos ou interativos.
Outro exemplo de sistemas multiplicativos são:
Tanque de aquecimento com agitação no qual a vazão e temperatura da corrente de alimentação variam: o balanço de massa constitui um sistema de 1ª ordem, mas o balanço de energia é de 2ª ordem em relação a vazão e de 1ª ordem em relação a temperatura de alimentação; Torre de destilação, pois cada prato acumula massa e energia, constituindo,
segundo um modelo de parâmetros concentrados, cada um deles um tanque agitado; Reatores de mistura perfeita (CSTR) com variação na composição e temperatura
de alimentação: as duas equações diferenciais (balanço molar e de energia), constituem um sistema de equações diferenciais interativas.
Estudaremos neste item os tanques em série e o reator CSTR.
√ Tanques não interativos em série
-
Página 3-35 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Sejam dois tanques conforme a Figura 3-24, a descarga do primeiro tanque alimenta o
segundo, na saída de cada um existe uma válvula que impõe ao escoamento uma resistência
R1 e R2.
q1(t)
Tanque 1 h1(t)
Tanque 2 h2(t)q3(t)
R2
q2(t)
R1
F igura 3 -24 : Do is tanques não- in te ra t i vos em sér ie .
Realizando o balanço de massa nos dois tanques, assumindo escoamento laminar,
obtemos:
1º tanque
Equação 3 -115 ( )[ ] ( ) ( )tqthth
dtd
PP 11111 .. Κ=+τ
2º tanque
Equação 3 -116 ( )[ ] ( ) ( )tqthth
dtd
PP 21222 .. Κ=+τ
Onde
Equação 3 -117 11111 ,. RRA PP =Κ=τ
Equação 3 -118 22222 ,. RRA PP =Κ=τ
e
-
Página 3-36 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -119 ( ) ( )
1
12 R
thtq =
Substituindo a Equação 3-119 na Equação 3-116 e utilizando variáveis desvio, temos:
Equação 3 -120 ( )[ ] ( ) ( )tqthth
dtd
PP 11111 .. Κ=+τ
Equação 3 -121 ( )[ ] ( ) ( )
1
11222 .. R
thththdtd
PP Κ=+τ
Aplicando a Transformada de Laplace e escrevendo as funções de transferências:
Equação 3 -122
( ) ( )( ) 1.1
1
1
11 +
Κ==
ssqshsG
P
P
τ
Equação 3 -123
( ) ( )( ) 1.2
2
2
22 +
Κ==
ssqshsG
P
P
τ
Mas,
Equação 3 -124 ( ) ( )
1
12 R
shsq =
Então,
Equação 3 -125 ( ) ( )
( ) 1.1. 212
2
12
1
2*2 +
=+
==sKK
sRK
shshsG
P
PP
P
P
ττ
Podemos escrever a função da transferência global do sistema Gg(s), isto é, com a saída do
processo (h2(t)) varia com a perturbação inicial (q1(t)):
Equação 3 -126
( ) ( ) ( ) ( )( )
( )( )
( )( )sqsh
shsh
sqshsGsGsGg
1
2
1
2
1
1*21 .. ===
Equação 3 -127 ( )
)1.(.)1.()1.(.
)1.( 212
2
12
1
1
++Κ
=+ΚΚ
+Κ
=ssss
sGPP
P
P
PP
P
Pg ττττ
Ou
Equação 3 -128
( ) ( )( ) 1...2. 221
2
++Κ
==sssq
shsG Pg ζττ
Onde,
-
Página 3-37 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
KP = KP2 = R2 21. PP τττ = e
( )21
21
.2 PPPP
ττττ
ζ+
=
Portanto, da Equação 3-126 concluímos que dois tanques em série formam um sistema de
2ª ordem.
Algumas particularidades são pertinentes a sistemas de 1ª ordem em série não-interativa:
(a) Os sistemas são sempre criticamente amortecidos ζ = 1 (quando τP1 = τP2) ou
superamortecidos ζ ≥ 0 (quando τP1 ≠ τP2) pois:
Equação 3 -129
( ) ( ) 212121
21 ..21..2 PPPPPPPP ττττττττ
ζ ≥+⇒≥+
=
Elevando ambos os membros da Equação 3-129 ao quadrado:
Equação 3 -130 212
2212
1 ..4..2 PPPPPP ττττττ ≥++
Equação 3 -131 0..22
2212
1 ≥+− PPPP ττττ
Equação 3 -132 ( ) 02
21 ≥− PP ττ
Conforme queríamos demonstrar:
(b) As conclusões do item (a) podem ser estendidas para n tanques em série.
(c) Devido ao fato do sistema ser não-interativo, podemos resolver primeiro a Equação
3-120, conhecer o comportamento do nível do 1º tanque (h1(t)) a perturbação (q1(t)) e então
utilizar este resultado para resolver a Equação 3-121, obtendo a variação de h2(t) com h1(t),
√ Tanques interativos em série Seja dois tanques conforme a Figura 3-25, a descarga do primeiro tanque alimenta o
segundo, na saída de cada um existe uma válvula que impões ao escoamento uma resistência
R1 e R2, porém ao contrário do sistema não interativo, o nível de segundo tanque influência no
nível do primeiro.
-
Página 3-38 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
q1(t)
Tanque 1 h1(t) Tanque 2 h2(t)q2(t)
R1
q3(t)
R2 F igura 3 -25 : Do is tanques in te ra t i vos em sér ie .
Realizando os balanços de massa nos dois tanques, assumindo escoamento laminar,
obtemos:
1º tanque
Equação 3 -133 ( )[ ] ( ) ( )tqtqth
dtdA 2111 .. =
2º tanque
Equação 3 -134 ( )[ ] ( ) ( )tqtqth
dtdA 2322 .. =
Mas,
Equação 3 -135 ( ) ( ) ( )
1
212 R
ththtq −=
E,
Equação 3 -136 ( ) ( )
2
23 R
thtq =
Substituindo a Equação 3-135 e Equação 3-136 na Equação 3-133 e Equação 3-134 e
rearranjando:
Equação 3 -137 ( )[ ] ( ) ( ) ( )thtqRthth
dtdRA 2111111 +=+ ...
Equação 3 -138
( )[ ] ( ) ( )thRRth
RRth
dtdRA 1
1
22
1
2222 1 .... =
++
Observe que a Equação 3-137 e a Equação 3-138 dependem ao mesmo tempo de h1(t) e
h2(t) portanto, temos que resolvê-las simultaneamente, utilizando variáveis desvio e aplicando a
Transformada de Laplace, obtemos:
-
Página 3-39 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -139 ( ) ( ) ( )tqRshshshsRA 1121111 .... =−+
Equação 3 -140
( ) ( ) ( )shRR
shRR
shsRA 11
22
1
2222 ..1... =
++
Definindo τ1 = A1R1 e τ2 = A2R2 e resolvendo para ( )sh1 e ( )sh2 :
Equação 3 -141 ( ) ( ) ( )sqsRAs
RRsRsh 1
21212
21
21121
1......
++++++
=ττττ
τ
Equação 3 -142 ( ) ( ) ( )sqsRAs
Rsh 1
21212
21
22
1.... ++++=
ττττ
Observe que τ1 e τ2 não são constantes de tempo, embora possuam unidade de tempo.
Escrevendo as funções de transferência:
Equação 3 -143
( ) ( )( ) 1...2.
..22
2112
1
11 ++
++==
ssRRsR
sqshsG
ζτττ
Equação 3 -144
( ) ( )( ) 1...2. 22
2
1
22 ++
==ss
RsqshsG
ζττ
Onde,
Equação 3 -145 21 ττ=τ .
E,
Equação 3 -146
( )21
2121
2 ττ+τ+τ
=ζ..
.RA
Portanto, da Equação 3-143 e da Equação 3-144 concluímos que dois tanques em série
formam um sistema de 2ª ordem e que os denominadores das funções de transferências são
os mesmos. Algumas particularidades são pertinentes a sistemas de 1ª ordem em série
interativa:
(a) Os sistemas são sempre superamortecidos ζ > 1, pois:
Equação 3 -147
( ) ( ) 12
12 21
2121
21
21 >ττ
+τ+τ⇒≥
τττ+τ
...
..RAse
(b) As conclusões do item (a) podem ser estendidas para n tanques em série
-
Página 3-40 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
(c) “Sistemas capacitivos interativos são sempre superamortecidos, exceto quando ocorre
produção de substâncias ou absorção/liberação de energia”.
Da Tabela 3-5, concluímos que o amortecimento nos sistemas interativos é maior do que
nos não interativos, pois o produto A1*R2 denominado fator de interação é sempre maior que 1, quanto maior A1*R2 mais intensa é a interação.
Tabe la 3 -5 : Tanques em sér ie co m e sem in te ração .
Não-interativo Interativo
τ 21 . PP ττ 21 ττ .
ζ ( )
21
21
.2 PPPP
ττττ +
( )21
21212 ττ
+τ+τ..
RA
( )( )sqsh
1
1
( )1.1 +
ΚsPP
τ ( ) 1..
21212
21
211.2
+++++
++
sRAsRRsR
τττττ
( )( )sqsh
1
2
( ) 1... 21221
2
+++Κ
ss PPPPP
ττττ ( ) 1... 21212
21
2
+++++ sRAsRτττττ
Da Figura 3-26, concluímos que a associação de capacitâncias torna a resposta do sistema
mais lenta e que os sistemas interativos são mais amortecidos que os não interativos.
Figura 3-26: Respostas de sistemas e perturbação degrau de amplitude A.
Observação: Curva A – tanque; Curva B – 2 tanques não interativos; Curva C – 2 tanques interativos;
Curva D – 4 tanques não interativos.
√ Reator de Mistura Perfeita Uma configuração de reator bastante utilizada em processos químicos é o reator de mistura
perfeita (Continuos Stirred Tank Reacion) ou CSTR. O estudo desse sistema é interessante
-
Página 3-41 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
pois este reator submetido a uma perturbação na carga, isto é, na composição e temperatura
da alimentação constitui um sistema multiplicativo de 2ª ordem.
Seja um CSTR adiabático, conforme a Figura 3-27, no entanto acontece uma reação de
isomerização irreversível e exotérmica:
Equação 3 -148 B A →
Com equação da taxa:
Equação 3 -149 ( ) ( ) ( )tCtt A.ℜ=Γ
Onde,
Equação 3 -150 ( )( )( )tTRgEet .. −Οℜ=ℜ
CA(t)T(t)
h = cte.
q2T2(t)CA2(t)
q1T1(t)
CA1(t)
F igura 3 -27 : Reator CSTR submet ido a per tu rbação na composição e tempera tura da a l imentação .
Balanço molar no reator:
Equação 3 -151
( ) ( ) ( ) ( )tVtCqtCqdt
tdCV AAAA Γ+−= .... 2211
Onde,
Equação 3 -152 ( ) ( ) ( )tCtt AAA ..v ℜ−=Γ−=Γ=Γ
Balanço de energia no reator:
Equação 3 -153
( ) ( )( ) ( )( ) ( )tVTtTCpqTtTCpqdttdTCV rp Γ∆Η−−−−=
°° ........ 222111 ρρρ
Por hipótese:
-
Página 3-42 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -154 cteqqq === 21
E
Equação 3 -155 cteCCC ppp === 21
Substituindo a Equação 3-154 e a Equação 3-155 na Equação 3-153 e rearranjando:
Equação 3 -156
( ) ( ) ( )( ) ( )tVtTtTCqdttdTCV rpp Γ∆Η−−= ........ 21ρρ
Onde
Equação 3 -157 ( )( )( ) ( )tCet AtTRgE .. .−Οℜ=Γ
Lembrando que o reator está perfeitamente agitado [CA2(t) = CA(t) e T2(t) = T(t)], então:
Equação 3 -158
( ) ( ) ( ) ( )( ) ( )tCeVtCqtCqdt
tdCV AtTRgE
AAA ...... .−Οℜ−−= 1
E
Equação 3 -159
( ) ( ) ( ) ( )( ) ( )tCeVtTCqtTCqdttdTCV A
tTRgErppp .............
.1
−Οℜ∆Η−−= ρρρ
A Equação 3-158 e a Equação 3-159 constituem um sistema de equações diferenciais não-
lineares interativas. Portanto, antes de aplicar a Transformada de Laplace, devemos linearizar
os termos não-lineares:
Equação 3 -160 ( )( ) ( )tCe AtTRgE ..−
Expandindo a Equação 3-160 em série de Taylor e truncando no segundo termo:
Equação 3 -161
( )( ) ( ) ( ) ( ) ( )( )( ) ( )( )ssssATRgE
ss
ssAATRgE
ssATRgE
AtTRgE
TtTCeTRgE
CtCeCetCe
SS
SSSS
−
+−+≅
−
−−
.,.
2
,.
,..
...
...
Substituindo a Equação 3-161 na Equação 3-158 e na Equação 3-159 e rearranjando:
Equação 3 -162
( ) ( ) ( ) ( )
( ) ( )( ) ( ) ( )( )ssssATRgEss
ssAATRgE
ssATRgE
AAA
TtTCeTRgEVCtCeV
CeVtCqtCqdttdC
V
SSss
SS
−ℜ−−ℜ−
+ℜ−−=
−−
−
,.
2,.
,.
1
.
.....
οο
ο
e
-
Página 3-43 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -163
( ) ( ) ( )( ) ( ) ( )( )
( ) ( )( )ssssATRgEssAA
TRgErssA
TRgEr
ppp
TtTCeV
CtCeVCeV
tTCqtTCqdttdTCV
SS
SSSS
−ℜ−
+−ℜ∆Η−ℜ∆Η−
+−=
−Ο
−Ο
−Ο
,.
,.
,.
1
..
..
......... ρρρ
Utilizando as variáveis desvio:
Equação 3 -164
( ) ( )[ ] ( ) ( )( ) ( )tTCe
TRgEV
tCqtCeVqdttCdV
ssATRgE
ss
AATRgEA
ss
ss
,.
2
1.
...
.
..
−Ο
−Ο
ℜ−
+=ℜ++
e
Equação 3 -165
( ) ( ) ( )
( ) ( ) ( )tCeTRgEVtTCq
tTCeTRgEVCq
dttTdCV
ATRgE
ssrp
ssATRgE
ssrpp
ss
ss
...
......
.......
.21
,.
2
−Ο
−Ο
ℜ∆Η−
=
ℜ∆Η++
ρ
ρρ
Definindo os seguintes ganhos e constantes de tempo:
Equação 3 -166 ( )ssTRgEc eVq
V... −Οℜ+
=τ
Equação 3 -167 ( )ssTRgECC eVq
q... −Οℜ+
=Κ
Equação 3 -168
( )
( )ss
ss
TRgE
TRgE
ssCT eVq
eTRgEV
.
.2
..
..
..
−Ο
−Ο
ℜ+
ℜ=Κ
e
-
Página 3-44 de 65
C o n t r o l e d e P r o c e s s o s - R i c a r d o d e A r a ú j o K a l i d – k a l i d @ u f b a . b r
Equação 3 -169
( )ssA
TRgE
ssrp
p
T
CeTRgEVCq
CV
ss,
.2 ...
.....
..
−Οℜ∆Η+
=ρ
ρτ
Equação 3 -170
( )ssA
TRgE
ssrp
p
TT
CeTRgEVCq
CV
SS,
.2 ..
....
..
−Οℜ∆Η+
=Κρ
ρ
Equação 3 -171
( ) ( )( )
ssATRgE
ssrp
TRgEr
TC
CeTRgEVCq
eV
SS
ss
,.
2
.
..
....
...−
Ο
−Ο
ℜ∆Η+
ℜ∆Η−=Κρ
Substituindo da Equação 3-166 a Equação 3-171 na Equação 3-164 e na Equação 3-165:
Equação 3 -172
( ) ( ) ( ) ( )tTtCtCdt
tCdCTACCA
Ac ... Κ−Κ=+τ 1
Equação 3 -173
( )











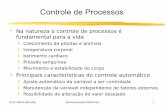



![Controle de Processos[1]](https://static.fdocumentos.com/doc/165x107/563db7de550346aa9a8eb9b7/controle-de-processos1.jpg)