
CONTROLE DE VELOCIDADE DE MOTOR DE INDUÇÃO …
17
(1) Graduando em Engenharia Elétrica, FAESA. (2) Engenheiro Eletricista e Mestre, UFES. (3) Engenheiro Eletricista e Mestre, UFES. CONTROLE DE VELOCIDADE DE MOTOR DE INDUÇÃO UTILIZANDO PLATAFORMA DE BAIXO CUSTO LIGADA A UM INVERSOR DE FREQUÊNCIA. MATHEUS OLIVEIRA PEREIRA (1) MARCELO DE OLIVEIRA LIMA (2) FELIPE MACHADO LOBO (3) RESUMO O presente estudo tem como objetivo apresentar um sistema de controle automático de uma planta utilizando uma plataforma de baixo custo. A planta em questão é composta por um Arduino, que envia sinais de comando para um inversor de frequência que, por sua vez, aciona um motor de indução trifásico e configura sua velocidade. Utilizando um sensor de velocidade é possível monitorar a rotação do eixo do motor, para então transmiti-los para o Arduino. Portanto o Arduino realiza a leitura do sensor de velocidade no eixo do motor e atua sobre a tensão que o inversor envia ao motor, de acordo com a programação embarcada usando o Simulink. Palavras-chave: Controle automático, Arduino, Simulink. 1. INTRODUÇÃO Segundo Chapman (2013) até o advento dos acionamentos modernos de estado sólido, os motores de corrente alternada (CA) não eram em geral máquinas boas para aplicações que exigissem um controle considerável de velocidade. Os tipos de cargas mecânicas que podem ser acopladas a um motor de indução variam grandemente. Algumas cargas necessitam de acionamentos que permitam um controle de velocidade preciso e eficiente. Por décadas, os motores de corrente contínua (CC) foram utilizados para esse fim, apesar de apresentarem um alto custo de aquisição e manutenção. O grande avanço da eletrônica de potência tornou viável a aplicação de técnicas de controle de velocidade em Motores de Indução Trifásicos (MIT), através da variação da frequência e do valor eficaz da tensão estatórica aplicada no MIT por um Inversor de Frequência. Essa técnica proporciona um controle preciso e eficiente da rotação do MIT [2]. No que se refere ao controle de velocidade, os motores de indução trifásicos, através da alimentação via inversores de frequência, possuem menor consumo, produzem menos harmônicos e tem maior quantidade de recursos, permitindo
Transcript of CONTROLE DE VELOCIDADE DE MOTOR DE INDUÇÃO …

(1) Graduando em Engenharia Elétrica, FAESA. (2) Engenheiro Eletricista e Mestre, UFES. (3) Engenheiro Eletricista e Mestre, UFES.
CONTROLE DE VELOCIDADE DE MOTOR DE INDUÇÃO UTILIZANDO PLATAFORMA DE BAIXO CUSTO LIGADA A UM INVERSOR DE
FREQUÊNCIA.
MATHEUS OLIVEIRA PEREIRA (1) MARCELO DE OLIVEIRA LIMA (2)
FELIPE MACHADO LOBO (3)
RESUMO
O presente estudo tem como objetivo apresentar um sistema de controle automático de uma planta utilizando uma plataforma de baixo custo. A planta em questão é composta por um Arduino, que envia sinais de comando para um inversor de frequência que, por sua vez, aciona um motor de indução trifásico e configura sua velocidade. Utilizando um sensor de velocidade é possível monitorar a rotação do eixo do motor, para então transmiti-los para o Arduino. Portanto o Arduino realiza a leitura do sensor de velocidade no eixo do motor e atua sobre a tensão que o inversor envia ao motor, de acordo com a programação embarcada usando o Simulink.
Palavras-chave: Controle automático, Arduino, Simulink.
1. INTRODUÇÃO
Segundo Chapman (2013) até o advento dos acionamentos modernos de estado sólido, os motores de corrente alternada (CA) não eram em geral máquinas boas para aplicações que exigissem um controle considerável de velocidade. Os tipos de cargas mecânicas que podem ser acopladas a um motor de indução variam grandemente.
Algumas cargas necessitam de acionamentos que permitam um controle de velocidade preciso e eficiente. Por décadas, os motores de corrente contínua (CC) foram utilizados para esse fim, apesar de apresentarem um alto custo de aquisição e manutenção. O grande avanço da eletrônica de potência tornou viável a aplicação de técnicas de controle de velocidade em Motores de Indução Trifásicos (MIT), através da variação da frequência e do valor eficaz da tensão estatórica aplicada no MIT por um Inversor de Frequência. Essa técnica proporciona um controle preciso e eficiente da rotação do MIT [2].
No que se refere ao controle de velocidade, os motores de indução trifásicos, através da alimentação via inversores de frequência, possuem menor consumo, produzem menos harmônicos e tem maior quantidade de recursos, permitindo

operar a máquina de diversas maneiras [3]. Geralmente o controle de velocidade é comandado por um Controlador Lógico Programável (CLP) que recebe os dados do sensor e envia um sinal para o atuador, no caso o inversor de frequência.
Portanto, visto as propriedades do CLP para controle automático de velocidade, o objetivo desse trabalho é desenvolver um sistema com uma plataforma versátil e de baixo custo que permita realizar o controle de velocidade que substitua o CLP. Propiciando ao sistema um desempenho que o permita seguir referência e o garanta robustez para rejeição de distúrbio.
2. DIAGRAMA DO SISTEMA
O diagrama do sistema, assim como mostrado na Figura 1, tem como objetivo apresentar a coordenação dos equipamentos, da mesma maneira que o modo de comunicação dos dispositivos e os requisitos para a funcionalidade do protótipo. Todos os componentes deste diagrama são explicados na seção Construção do Protótipo a seguir.
Figura 1 – Diagrama de blocos do sistema de controle de velocidade de um motor de indução utilizando plataforma de baixo custo ligada a um inversor de frequência
Para criar uma familiaridade com esse diagrama e também apresentar o protótipo na bancada de teste, a Figura 2 a seguir exibe uma visão macro do projeto.

Figura 2 – Protótipo em bancada
3. CONTRUÇÃO DO PROTÓTIPO
Nesta seção serão abordados aspectos para construção de um protótipo de controle de velocidade do motor de indução trifásico através e uma plataforma de baixo custo, tendo como objetivo descrever o método construtivo e a comunicação entre dispositivos. A comunicação de comando com o Arduino será feita via software, através de uma extensão do Matlab chamada Simulink Support Package for Arduino.
Para realizar o controle do atuador, foram utilizados o inversor de frequência CFW 09 ligado a um Arduino Mega 2560. Em complemento aos principais dispositivos, foram utilizados: uma fonte trifásica CA/CC ajustável, uma fonte monofásica CA/CC ajustável, um MIT, um gerador CC, um sensor infravermelho, um Arduino Nano e circuitos auxiliares.
3.1 Comunicação entre controlador e inversor
Um dos objetivos do Arduino Mega 2560 é comandar o inversor de frequência para que seja possível controlar o acionamento e a configuração de velocidade que será enviado para o inversor.
O inversor de frequência da WEG CFW09 dispõe em sua característica barramentos para comunicação com dispositivos de acionamento, controle e leitura. Um desses barramentos é o XC1, que trabalha com sinais digitais e analógicos; o outro é o XC1A cujo a funcionalidade é saída a relé; e o último é X0 que pode ser utilizado para aterramento de blindagem dos cabos de sinal e controle. (WEG INDUSTRIAS S.A., 2006)
Comando
Controlador
e circuitos
auxiliares
Gerador e motor Inversor de
frequência
Fontes
Cargas e
interruptor
Sensor e
disco de
encoder

No decorrer desse artigo, dos barramentos citados anteriormente, somente o XC1 será utilizado. Desse barramento, serão utilizados os bornes 1, 7, 9, 10, 12 e 13 para a comunicação com o Arduino Mega. O borne 1 comanda o acionamento, o 7 é o ponto comum da fonte de 24V, o 9 é a fonte de 24V, o 10 a referência de 0V, e o 12 e 13 são para comando de velocidade, conforme mostrados na Figura 2.
Inicialmente, foi necessário implementar a comunicação entre o Arduino Mega e o Inversor de Frequência. Para essa comunicação acontecer foi necessária a implementação de um circuito eletrônico para enviar os sinais de comando do Arduino para o inversor. A Figura 3 a seguir demonstra o esquemático de ligação entre eles.
Figura 3 – Esquemático de ligação entre os dispositivos e o sensor infravermelho
Para o circuito de acionamento do inversor, foi configurada na saída digital do Arduino (pino digital 9) para o envio do sinal, e como já é estabelecido de fábrica do inversor CFW 09, foi utilizada a porta D1 localizada no borne 01 para recebimento do sinal de acionamento.
O Arduino possui range de operação de 0 a 5V e em contrapartida o range da porta de entrada D1 do inversor de 0 a 24V. Portanto foi necessária a implementação de um driver de corrente utilizando um transistor BC 337 para adequar o range de operação, como mostrado anteriormente na Figura 3.
Após a etapa de acionamento, o próximo passo é a atuação sobre a velocidade do motor a partir da comunicação entre Arduino e inversor. A comunicação é realizada pela saída digital (pino digital 9) do Arduino para o envio de referência de velocidade. E para recebimento do sinal do Arduino, foram utilizadas as portas analógicas do inversor A1+ e A1-, localizadas nos bornes 12 e 13 do inversor de frequência, também mostradas na Figura 3. Para tal, foi implementado um

circuito baseado em amplificador operacional (LM358) para adequar o range de 0 a 5 V do Arduino para 0 a 10 V do inversor.
3.2 Acionamento do motor de indução
Com a comunicação estabelecida e o inversor ligado a fonte trifásica ajustável, é possível ligar o motor ao inversor para a variação da velocidade utilizando o Arduino.
O motor de indução trifásico utilizado nesse trabalho tem como características técnicas: tensão de 220 ou 380V, que deve ser ligado em delta (∆) ou em estrela (Y) respectivamente; potência de 370W; velocidade nominal de 3350 rotações por minuto (rpm); e uma corrente de 1,7 e 0,98 A. Esses dados devem ser configurados no inversor de frequência, através dos parâmetros P400 a P404, vide manual do inversor de frequência CFW 09.
Com os dados de placa do motor configurados, também deve ser ajustado no inversor de frequência a referência de velocidade (P001) para a quantidade de polos existentes no motor. Nesse trabalho será utilizado um motor, de 2 polos, isso é, com velocidade síncrona de 3600 rpm.
O inversor de frequência possui uma programação intrínseca que não permite que seja enviado um valor de tensão e/ou frequência que possam danificar o motor. O valor mínimo de velocidade é ajustável para que um motor utilizado não opere a menos de 3 Hertz (Hz), portanto a velocidade mínima configurada foi de 180 rpm através do parâmetro P133 do inversor de frequência. E a máxima é através da frequência 60Hz e a quantidade de polos, isso é, 3600 rpm no parâmetro P001.
3.3 Acoplamento de cargas no sistema
Como um dos objetivos caracteriza-se pelo controle de velocidade com carga, um gerador CC foi acoplado no eixo do motor para esse fim. O uso de cargas no eixo do motor desenvolve a variação de velocidade do mesmo. Essas cargas serão cargas elétricas acionadas a partir do gerador CC.
A adaptação de cargas no motor foi através da inserção resistores no circuito de geração de energia elétrica do gerador. Nesse trabalho, as cargas consistem em lâmpadas incandescentes.
A Figura 4 e Figura 5 mostram o esquemático elétrico de potência de todo o sistema e o acoplamento mecânico entre motor e gerador.

Figura 4 – Esquemático elétrico de ligação do gerador CC e do motor CA.
Figura 5 – Esquemático mecânico de acoplamento do gerador CC e do motor CA.
O acionamento dessas cargas é feito por meio de um interruptor, criando o seccionamento das cargas e permitindo o acionamento e desligamento da carga. Diante da produção de energia elétrica, é possível então fazer a variação de carga através do interruptor.
3.4 Sensoriamento da velocidade
O gerador possui um eixo que se estende em duas extremidades, uma delas é o ponto que foi acoplado ao eixo do motor, e a outra extremidade é o local onde foi locado o disco de encoder, como mostrado anteriormente na Figura 5. O disco de encoder tem o objetivo de propiciar a leitura da velocidade através do sensor infravermelho, como mostrada na Figura 6 a seguir.
Figura 6 – Disco de encoder acoplado ao eixo do gerador.
O disco de encoder foi construído em acrílico preto e possui 12 ranhuras, como na figura anterior. O sensoriamento de velocidade é feito pela leitura de posição das ranhuras do disco de encoder utilizando um sensor infravermelho.
Disco de encoder
Sensor
infravermelho

O sensor infravermelho trabalha de acordo com a rotação do motor e com as ranhuras do disco de encoder, que passam entre os dois terminais do sensor infravermelho, o receptor e o emissor. A interrupção do sinal do emissor ou não geram valores 0 e 1 respectivamente. Deste modo, a saída do sensor gera um sinal de onda quadrada que possui frequência proporcional a velocidade de rotação do eixo.
O esquemático na Figura 7 abaixo mostra a ligação do sensor de infravermelho com o Arduino Mega 2560 e o Nano. A ligação do sensor é feita através do Arduino Mega, fornecendo tensão de 5V para o pino 𝑉𝑐𝑐 do sensor.
Figura 7 – Esquemático de ligação entre o sensor, Arduino Nano e Mega.
O sistema do motor apresenta altas velocidades de rotação, deste modo apenas a saída analógica do sensor é sensibilizada. Tornando assim necessária a inclusão de uma etapa de amplificação do sinal de tensão, assim como torná-lo um sinal digital. A Texas Instruments (2014) aborda que para conversão de um sinal analógico deve ser empregado um LM358 para conversão do sinal analógico para um sinal digital com amplitude de 5V.
A comunicação de envio dos sinais do Arduino nano para o Mega 2560 é realizada através das portas A4 e A5 do Arduino nano e das portas SCL e SDL do Arduíno Mega. Essas portas são para uso do protocolo de comunicação Inter-Integrated Circuit (I2C), que é uma comunicação de coordenação de informações através de um mestre e um escravo.
O Arduino nano executa a função de leitura e processamento do sinal emitido pelo sensor, executando a função de escravo. O Arduino Mega exerce a função

de mestre, no qual solicita a informação do escravo a partir de um tempo de amostragem selecionado.
A comunicação entre placas é via software, desenvolvida no Simulink. Contudo, no intermédio entre essa comunicação ainda há a necessidade de um código para a leitura e processamento dos dados recebidos do sensor.
A captação e envio dos dados do Arduino Nano para o Arduino Mega 2560 dá-se pela programação elaborada e embarcada para o Arduino Nano. A Figura 8 abaixo mostra como é feito o fluxograma de processamento do sinal recebido do sensor.
Figura 8 – Fluxograma de processamento do código implementado no Arduino Nano
O fluxograma elaborado acima, traz a lógica da programação embarcada do código no Nano. Segundo Lobo (2017) o sinal de onda quadrada enviado pelo sensor e recebido pelo Arduino Nano. Desde modo, para fins de cálculos do valor do período são levadas em consideração a velocidade síncrona no motor de 3600 rpm e as 12 ranhuras do disco de encoder.
A máxima frequência de saída do sensor de velocidade pode ser dada pelo produto da máxima rotação do motor (em rotações por segundo - rps) e a quantidade de ranhuras do disco (12). O resultado é de 720 Hz, convertendo para tempo, temos o valor de T igual a 1,39 mili segundos (ms).
A aplicação de um debounce serve para limitação do sinal recebido, delimitando-o através do início de cada borda de subida durante o período T, eliminando falsos pulsos que podem ser gerados pela vibração do motor ou ruído do sinal. O sinal após o debounce é utilizado para calcular uma média entre as últimas 10 amostras e assim enviado ao Arduino Mega através do protocolo I2C.
4. SIMULINK CODER
O Simulink Coder é um complemento do Simulink que gera e executa o código do modelo de blocos do Simulink e funções do MATLAB. Também gera o código fonte que permite ser usado para aplicações de tempo real ou não. Possibilitando sintonizar e monitorar o código usado no Simulink ou executar e interagir com o código fora do MATLAB ou Simulink (MATHWORKS, 2019).
T
T
T

Juntamente com as ferramentas e componentes da MathWorks, o Simulink Coder permite: gerar código automático para diversas plataformas diferentes; desenvolvimento rápido e direto para implementação de sistemas; integração do Matlab com o Simulink; interface gráfica simples para o usuário; arquitetura aberta e de possível implementação de novas extensões. Ao operar no modo externo, o codificador do Simulink gera um algoritmo referente ao diagrama de blocos que irá operar no PC e o no Arduino. Esse algoritmo gera um programa executável Matlab executable (MEX). Usando a terminologia de computação cliente/servidor, o Simulink é o cliente e o programa externo é o servidor. Ao utilizar o Arduino como target hardware, a conexão é feita de forma serial através de um cabo USB. A imagem Figura 9 abaixo mostra como é feita a comunicação do Simulink com os dispositivos.
Figura 9 – Comunicação Simulink Coder com dispositivos.
Portanto, o modo externo cria um serviço de comunicação entre o computador e o Arduino. O modo externo permite: aquisição de sinais possibilitando capturar e mostrar os sinais da aplicação em tempo real que está operando no hardware ligado ao PC; sintonia de parâmetros possibilitando modificar parâmetros do diagrama de blocos do Simulink que a aplicação em tempo real atualiza automaticamente os valores dentro da rotina que está rodando dentro do hardware externo durante a execução do programa.
Para esse trabalho, é necessário comandar duas saídas distintas do Arduino Mega: uma para o acionamento do inversor e outra para o método de controle de velocidade. O seguinte diagrama foi utilizado para o acionamento do inversor, conforme mostrado na Figura 10.

Figura 10 – Acionamento do Inversor através do software
O bloco do interruptor pode selecionar um dos blocos de constante, 0 ou 1, permitindo o chaveamento através de níveis digitais baixo e alto respectivamente do Arduino Mega.
A seleção de velocidade de operação e a leitura de velocidade atual caracterizam-se nos passos seguintes após o acionamento do inversor. A Figura 11 mostra o diagrama de blocos criado para essas finalidades.
Figura 11 – Diagrama de blocos de controle de velocidade
O primeiro bloco, da esquerda para a direita, indica o percentual de velocidade (%v) enviado para o Arduino Mega 2560. O sinal de %v será trabalhado na faixa de operação de 0 a 100 de %v, esta faixa caracteriza o valor de indicação de velocidade mínima e máxima que o inversor deverá acionar o motor. O bloco de ganho traz ao diagrama a conversão de unidades, de modo a transformar o %v para um range de 0 a 255.
A leitura de velocidade é realizada através do bloco I2C, na qual ele recebe a informação de velocidade enviada pelo Arduino Nano. Utilizando um tacômetro no eixo do motor, é possível fazer a aferição da medida para o valor adequado em rpm.
Após a conversão do sinal gerado para rpm, um bloco de escopo foi incluído para a visualização do sinal de saída de leitura feita pelo sensor e o sinal de entrada enviado pelo bloco constante. Sendo assim possível monitorar tais variáveis a fim de comparar o sinal de entrada com o de saída.
5. MODELAGEM, VALIDAÇÃO E CONTROLE DA PLANTA
Nessa etapa, será feita uma coleta dos dados necessários para a modelagem do sistema de controle de velocidade. Com a construção do sistema concluído, o próximo passo se identificasse como objetivo na coleta de dados, validação e controle do sistema em planta.

5.1 Modelagem
A etapa de modelagem consiste em fazer o levantamento da velocidade em rpm, isso é, a velocidade na qual o motor está operando em relação ao respectivo valor inicial de referência de %v. Objetivando a comprovação ou validação do sistema a fins de controle, essa etapa também foi desenvolvida no Simulink para seleção de uma desejada velocidade, e foi acompanhado a resposta do sistema em relação essa configuração de velocidade.
A Figura 12 abaixo mostra o diagrama de blocos usado para a modelagem do sistema em malha aberta.
Figura 12 – Diagrama do sistema a um sinal de degrau na entrada.
Aplicando degraus sucessivos na entrada com amplitude 10, é possível verificar a resposta de saída do sistema para então obter as funções de transferência de cada ponto de operação do sistema, conforme mostrado na Figura 13.
Figura 13 – Resposta do sistema a um sinal de sucessivos degraus na entrada.
5.2 Validação do sistema
A validação do sistema consistiu no levantamento de cada função transferência com referência aos degraus aplicados. Como as funções de transferência de cada ponto de operação possuem proximidade em seus valores de constante de tempo, ganho e atraso, o sistema é aproximadamente linear. A Eq. 01 a seguir mostra a mesma calculada com base nos degraus.
𝐺1(𝑠) =
36,5
1,4𝑠 + 1ℯ−0,12𝑠
Eq. 01
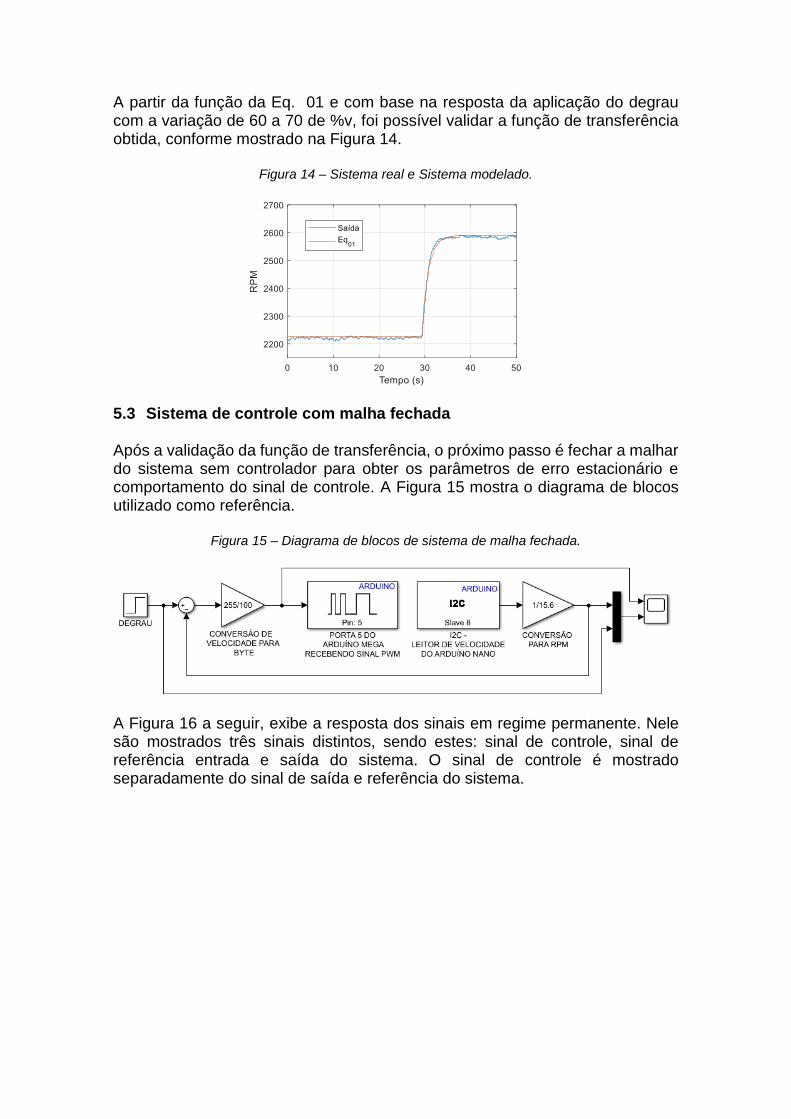
A partir da função da Eq. 01 e com base na resposta da aplicação do degrau com a variação de 60 a 70 de %v, foi possível validar a função de transferência obtida, conforme mostrado na Figura 14.
Figura 14 – Sistema real e Sistema modelado.
5.3 Sistema de controle com malha fechada
Após a validação da função de transferência, o próximo passo é fechar a malhar do sistema sem controlador para obter os parâmetros de erro estacionário e comportamento do sinal de controle. A Figura 15 mostra o diagrama de blocos utilizado como referência.
Figura 15 – Diagrama de blocos de sistema de malha fechada.
A Figura 16 a seguir, exibe a resposta dos sinais em regime permanente. Nele são mostrados três sinais distintos, sendo estes: sinal de controle, sinal de referência entrada e saída do sistema. O sinal de controle é mostrado separadamente do sinal de saída e referência do sistema.

Figura 16 – Resposta do sistema de malha fechada.
Como esperado, o sistema é do tipo 0, ou seja, não possui polos na origem. Portanto o sistema apresenta erro estacionário quando não há um controlador em malha fechada.
Como o sinal de controle está sendo medido na entra do bloco de saída PWM do Arduino, ele possui range de operação de 0 a 255. Entretanto é possível verificar que o sistema satura desde o início da operação.
5.4 Controlador com malha fechada.
Devido ao elevado erro estacionário que o sistema apresenta em malha fechada, se faz necessária a inclusão de uma estratégia de controle que o torne robusto suficiente. Segundo Astron (1995), a função principal da ação Integral é ter certeza que a saída do processo terá segmentação de referência em estado estável. O controlador PI como citado por Isermann (1989) é melhor para esforços pequenos, rapidez de estabelecimento e com baixo sobressinal, visto que a planta possui todas essas características.
Kuo (2010) descreve que a parcela da integral de um controlador PID produz um sinal que é proporcional à integral no tempo da entrada do controlador. O que claramente traz efeito imediato de adição de um polo na origem da função transferência. Portanto o erro é melhorado quando o erro do regime estacionário referente a uma entrada é constante, assim o controlador PI reduz a zero o erro.
Após definido o uso do PI, é preciso definir qual método de sintonia mais adequado utilizar para obtenção dos parâmetros do controlador. Aström (1995) cita que os métodos de sintonia são desenvolvidos para aplicação de maneira a propiciar o sinal de entrada igual ao de saída, mesmo com os dois problemas recorrentes ao sistema de controle: a configuração de entrada e a capacidade de rejeição de distúrbios do sistema.
A Tabela 1 mostra os métodos de sintonia utilizados, e de acordo com o tipo de controlador escolhido acima, o PI, foi também inserido os valores para o Kp e Ki do sistema do controlado.

Tabela 1 – Valores de Kp e Ki para cada controlador.
Sintonia Kp Ki
Ziegler e Nichols 0,2877 0,7199 CHR 0,1119 0,8037 CHR 20 0,1918 0,137 Cohen e Coon 0,2899 0,8569 Lambda (0,9) 0,0444 0,03044
A Figura 18 abaixo mostra o diagrama elaborado para aplicar o controle de malha fechada com o controlador PI com as sintonias da Tabela 1
Figura 17 – Diagrama de blocos de sistema de malha fechada com controlador PI em planta real.
Devido a extrapolação dos valores do controlador em malha fechada, houve a necessidade inserir de um limitador de saturação para que a saída do controlador não ultrapasse a faixa de 0 a 255.
Com o objetivo de comparar qual o método de sintonia traz o melhor resultado, foi utilizado o método IAE (Integral do Erro Absoluto). O IAE é um critério de erro criado para medir desempenho de determinada sintonia de um controlador PID, ou seja, é um número que indica a qualidade de comportamento do sistema. Quanto menor for IAE, melhor é a resposta do sistema. Rivera (1986) cita que para um específico ponto de referência ou mudanças nos distúrbios, o IAE serve para comparar a performance de diferentes controladores.
A partir do diagrama elaborado acima, foi escolhido o melhor método de sintonia com base no menor IAE. A Tabela 2 a seguir mostra o comparativo entre os valores de IAE mensurados no diagrama.
Tabela 2 – Critério de IAE para as sintonias.
Sintonia IAE
Ziegler e Nichols 3152 CHR ∞ CHR 20 1839 Cohen e Coon 3874 Lambda (0,9) 1321
A partir da Tabela 2 é possível definir que o melhor resultado é verificado usando o critério de sintonia lambda. A Figura 18 a seguir mostra os resultados desse diagrama em regime permanente com a sintonia lambda.

Figura 18 – Resposta do sistema de malha fechada com controlador PI com o método lambda.
A resposta gráfica mostrada acima mostra que o erro do sistema foi eliminado pelo controlador PI e o sistema conseguiu estabelecer um seguimento de referência.
Avançando a um dos objetivos deste trabalho, caracteriza-se no controle de
velocidade quando houver uma variação de carga que o motor estará
suportando. Abaixo mostra a resposta do sistema de controle PI com malha
fechada com variação de carga na Figura 19.
Figura 19 – Resposta do sistema de malha fechada com controlador PI em planta real com a
variação de carga.

A resposta do sistema mostra que o motor sofre a ação da carga, mas o controlador é robusto para rejeitar o distúrbio tanto na inclusão como em sua retirada.
6. CONCLUSÃO
O desenvolver desse artigo mostrou o que o sistema de controle de velocidade
com uma plataforma de baixo custo de um motor de indução com o auxílio de
um inversor de frequência traz uma nova área a ser explorada.
O experimento por meio do protótipo desenvolvido mostrou que o controle de
velocidade pode ser embarcado através de uma placa Arduino. Essa placa
consegue trabalhar com ajuda de alguns circuitos auxiliares que promovem a
comunicação com o inversor de frequência, acionando-o e controlando a
velocidade que será enviada para o motor.
A comunicação via software também teve exímio na atuação do sistema,
propiciando uma nova linguagem ao sistema de controle automático, com o
auxílio da diagramação de blocos. No qual permitiu que pelo Simulink Coder a
conversão automática desse diagrama em linguagem estruturada C/C++,
eliminando um problema pertinente à comunicação.
A eficácia do controlador demostrou êxito na capacidade de rejeição de
distúrbios a uma determinada referência de configurada. O auxílio do método
lambda no controlador permitiu a segmentação de referência e de mesmo modo
mostrou a capacidade de robustez do sistema com a inserção das cargas.
7. BIBLIOGRAFIA
CHAPMAN, S. J. Fundamentos de Máquinas Elétricas. 5 ed. Porto Alegre:
AMGH, 2013, 381 p.
FRANCHI, C. M. Inversores de Frequência: Teoria e Aplicações. 2 ed. São Paulo: Érica, 2009. 192p.
FRANCHI, C. M. Acionamentos elétricos. 2 ed. São Paulo: Érica, 2007. 250 p.
WEG INDÚSTRIAS S.A. Manual do Inversor de Frequência. 2006. 328 p.
TEXAS INSTRUMENTS. Datasheet: LMx58-N Low-Power, Dual-Operational Amplifiers. Publicação Eletrônica, 2014.
LOBO, F.M. Contribuições ao Ensino de Controle Usando Matlab, Arduino e Hardware de Baixo Custo. 2017. 84f. Dissertação (Mestrado em Engenharia Elétrica) – Faculdade de Engenharia Elétrica, Universidade Federal do Espírito Santo, Espírito Santo, 2017.
MATHWORKS, T. Simulink Code Getting Started Guide. 2019. 48p.

ÅSTRÖM, K.J. PID Controllers: Theory, Design and Tunning. Nova York: Instrument Socienty of America, 1994. 354p.
ISERMANN, R. Digital control systems. Nova York: Springer-Verlag Berlin Heidelberg, 1989. 351 p.
KUO, B.C., GOLNARAGHI, F. Automatic Control Systems. Estados Unidos da América:WILEY, 2010. 786p.
RIVERA, D.E., MORARI, M., SKOGESTAD, S. Internal Model Control. V.25. 1986. 252-255p


















