CURUMIM HARDWAREv2 - xbot.com.br · Na Figura 2 é apresentado um diagrama de blocos da unidade...
23
1 APOSTILA DE HARDWARE V2.0 ABRIL 2012
Transcript of CURUMIM HARDWAREv2 - xbot.com.br · Na Figura 2 é apresentado um diagrama de blocos da unidade...

1
APOSTILA DE HARDWARE V2.0
ABRIL 2012

2
Sumário
Introdução 3
Hardware Curumim 4
Cuidados ao manusear o robô 5
1. Visão geral da unidade móvel 6
2. Rádio base 7
3. Transceiver 8
4. Alimentação 9
5. Locomoção 10
6. Sensor Infravermelho 11
7. Câmera e Receptor de vídeo 12
8. Placa mãe e Placa driver 13
9. Sistema de Indicação 14
10. Precauções com as baterias 15
Anexo A – Protocolo de comunicação do Curumim 18
Anexo B – Gravando o firmware do robô 21
Anexo C – Portas livres para extensões 22
Anexo D – Comunicação RS232 23

3
Introdução
Com o intuito de promover o desenvolvimento educacional e o aprendizado de
conceitos básicos de lógica por intermédio de um robô, foi elaborado o kit Curumim.
Esse kit é constituído de uma plataforma robótica, o robô Curumim, e um ambiente de
programação para esse robô, o software Curumim.
Este é um guia sobre o funcionamento do hardware do Curumim, o primeiro de
dois manuais que o auxiliará na utilização deste produto da XBot. O Curumim foi
elaborado com o intuito de promover o desenvolvimento educacional e o aprendizado
de conceitos gerais sobre eletrônica, mecânica, sistemas embarcados, sensoriamento,
programação, entre outros, por intermédio de um robô. Outro objetivo é facilitar
adaptações de novos protótipos baseados em plataformas robóticas, atuando como
ponto de partida para os mais diversos projetos de pesquisa.
Por se tratar de uma plataforma opensource, o usuário tem total liberdade para
desenvolver aplicações, com facilidade de utilizar as bibliotecas existentes para enviar
os comandos ao robô. Mas para tal, é necessário primeiramente conhecer com
melhores detalhes a estrutura física do Curumim. Ou seja, ter uma visão geral de sua
mecânica e como seu circuito eletrônico aciona cada uma de suas partes. Leia e não
hesite em entrar em contato com o nosso suporte para quaisquer esclarecimentos!
Bons estudos!

4
Hardware Curumim
O robô Curumim, apresentado na Figura 1, é uma plataforma robótica que tem
como objetivo ser uma ferramenta de auxílio ao ensino tecnológico, pois se relaciona
com as diversas áreas na educação, como a computação, mecânica, instrumentação,
controle, eletrônica, e várias outras áreas tornando-se um diferencial no meio
educacional.
O kit Curumim é composto por:
• 1 robô Curumim;
• 1 par de baterias para o robô;
• 1 carregador das baterias
• 1 fonte de alimentação de 24Vcc para o carregador de bateria;
• 1 rádio base e seu cabo USB;
• 1 receptor de imagem wireless da câmera do robô;
• 1 fonte de alimentação de 12Vcc para o receptor de imagem wireless;
• 1 cabo RCA para o receptor wireless.
Figura 1 – Robô Curumim

5
Cuidados ao manusear o robô
1. Não deixa-lo cair;
2. Não utilizá-lo em ambiente úmido;
3. Utilizá-lo apenas em ambiente planos. Recomendamos o uso de carpete-
forração;
4. Não colocar a bateria quente no robô. Após carregar as baterias, espere a
bateria esfriar para colocar no robô;
5. Não pressionar o robô contra o chão;
6. Não prender as rodas enquanto o robô estiver em movimento;
7. Utilizar o robô em ambiente limpo, sem pequenos obstáculos, pois pode
dificultar a sua locomoção;
8. Não colidir em superfícies duras;
9. Não molhar o robô com qualquer tipo de líquido, principalmente solventes, pois
pode danificar a pintura do robô;
10. Limpá-lo utilizando apenas um pano seco;
11. Não guardar o robô em baixas ou altas temperaturas;
12. Certificar que o robô tem espaço suficiente para movimentar-se;
13. Não mover o robô a força;
14. Ler, cuidadosamente, este manual de hardware e também o manual de
software para ter o uso adequado do robô.

6
1. Visão geral da Unidade Móvel
Na Figura 2 é apresentado um diagrama de blocos da unidade móvel, neste
diagrama é possível observar as partes e componentes que constituem o Curumim,
assim como a direção do fluxo da comunicação entre eles. Já a Figura 3 representa o
diagrama de blocos das placas de circuito impresso, onde se pode observar a ligação
e a direção do fluxo de dados entre as placas do robô.
Figura 2 - Diagrama de Bloco da Unidade Móvel

7
Figura 3 - Diagrama de Bloco das Placas de Circuito Impresso
Toda a unidade móvel possui uma proteção da alimentação para os dispositivos
controlados pela UPC que pode desativar todo o fornecimento de energia no circuito
ou individualmente para cada valor de tensão. A unidade móvel funciona com 4
valores de tensão diferentes, 12V usados pelos motores (proveniente diretamente da
bateria), 9V para alimentar a câmera, 5V responsável para alimentar os sensores infra-
vermelho e 3,3V que alimenta a UPC e o transceiver.
2. Rádio Base
O rádio base é um periférico essencial para que a comunicação entre os softwares
de controle e o robô seja estabelecida, e pode ser visto na Figura 4. É um rádio
wireless que trabalha na frequência de 2.4Ghz digitais e possuí dois LEDs de
indicação que informa quando ocorre o envio e o recebimento de informações.
Para ligação do rádio base deve-se conectar uma das pontas do cabo no rádio
base e a outra no computador, atentando que o formato das pontas são diferentes.

8
Figura 4 – Rádio Base
3. Transceiver
O Curumim possui dois transceivers, um localizado no robô e outro no rádio base,
e é responsável pela troca de informação entre a placa mãe da unidade móvel e o
rádio base conectado ao PC. Por meio deste chega os comandos do operador que é
enviado ao rádio base conectado no PC. O Transceiver pode ser observado na Figura
5, e na Figura 6 é apresentada sua posição no robô.
Figura 5 – Transceiver
Figura 6 – Posição do transceiver no robô

9
Lado A Lado B
4. Alimentação
O sistema de alimentação é composto por duas baterias, Figura 6, de Ni-Mh que
fornecem uma tensão de 14.4V e corrente nominal de 2500mA/h. As baterias são em
um total de duas para um robô Curumim, são posicionadas na parte inferior do robô,
são recarregáveis e são formadas por 12 pilhas de 1.2V em série.
O carregador de baterias, Figura 7, possui uma capacidade de carregamento
simultâneo ou independente, isto é, pode ser carregado tanto as duas baterias como
apenas uma. Possui também um sistema de monitoramento e controle da temperatura
das baterias enquanto ocorre o carregamento, portanto se durante o carregamento a
bateria esquentar demais, o carregador é desligado automaticamente. O LED central,
na cor vermelha, indica que o carregador está ligado. O LED à esquerda e o LED à
direita, ambos na cor verde, indicam quando uma bateria está conectada no
carregador. Após a bateria estiver carregada, ficará piscando o LED verde onde a
bateria está conectada. O tempo de carregamento de uma bateria é de,
aproximadamente, 3 a 4 horas. Tenha cuidado ao retirar a bateria do carregador, após
estiver com carga completa, pois a bateria estará morna. É necessário esperar que as
baterias esfriem para colocar no robô. Na Figura 8 podemos ver o local onde se insere
as baterias no robô.
Figura 6 – Baterias
Figura 7 – Carregador
ATENÇÃO: A fonte do carregador e a fonte do Recepto r Wireless são
diferentes, sendo que a do carregador tem um tamanh o maior que a do Receptor
e a tensão é de 24Vcc enquanto que a do Receptor é de 12Vcc.
Carregador ligado
Bateria conectada no lado B
Bateria conectada no lado A

10
ATENÇÃO: Após desligar o robô e não for mais utiliz á-lo, retire as baterias do
robô, pois elas descarregam. Retirar as baterias do carregador após carregar,
pois pode acontecer o mesmo.
É altamente recomendável ler mais informações impor tantes sobre as baterias que se encontra na Sessão 10.
Figura 8 – Local para inserir as baterias
5. Locomoção
O sistema de locomoção do robô consiste em 3 motoredutores e 6 rodas
omnidirecionais, sendo que cada motoredutor é independente e possui 2 rodas, como
visto na Figura 9. Dependendo da combinação de acionamento entre elas, bem como
o sentido de rotação, é possível executar qualquer tipo de manobra.
Seu principal componente é a roda omnidirecional, que possui roletes em toda
a sua volta, fazendo com que ela possa se deslocar na direção perpendicular ao
eixo do motor, sem se arrastar, o que geraria um grande atrito.
Na Figura 10 podem-se observar os motoredutores e as rodas montadas em suas
devidas posições no robô.
Figura 9 – Motoredutor e as rodas omnidirecionais

11
Figura 10 – Rodas e os Motoredutores montados
6. Sensor Infravermelho
Os sensores de proximidade são cinco e são do tipo infravermelho reflexivo, como
pode ser visto um na Figura 11. Estão alocados na parte superior do robô e possuem
um alcance de, aproximadamente, 800mm, abrangendo toda a região ao redor do
robô. O sensor de distância analógico detecta um objeto entre 10 e 80 centímetros e
fornece uma tensão de saída não-linear em relação à distância do objeto, como pode-
se observar na Figura 12. Na Figura 13 podemos observar o circuito elétrico do
sensor.
Figura 11 – Sensor de Infravermelho
Figura 12 – Gráfico de Voltagem vs. Distância

12
Figura 13 – Circuito Elétrico do Sensor
7. Câmera e Receptor de Vídeo
É instalada de modo independente da placa mãe da unidade móvel, sem qualquer
controle direto. Ela tem a função de servir de realimentação visual ao operador através
do receptor sem fio que vai conectado no PC. A câmera de vídeo do robô é colorida e
possuí uma resolução de 380 linhas, a forma de transmissão é wireless e trabalha na
frequência de 1.2 Ghz analógicos.
O receptor de vídeo é necessário para que a imagem da câmera seja capturada. O
sinal possui um alcance de até 200 metros em locais abertos.
Atenção: É necessária uma placa de captura de vídeo para a utilização desse
recurso, pois não é fornecida junto ao kit.
Figura 14 – Câmera e Receptor de Vídeo
Atenção: A fonte do carregador e a fonte do Recepto r Wireless são
diferentes!
Câmera
wireless
Cabo RCA
Fonte do
receptor Receptor de
vídeo wireless

13
8. Placa Mãe e Placa Driver
A placa mãe é responsável por centralizar todo o controle da unidade móvel. É
onde se encontra o processador central. Ela reúne e organiza toda informação
proveniente dos sensores, tomando decisões baseadas nelas; troca informações com
o transceiver, a placa de acionamento dos motoredutores (placa Driver) e lê os
encoders. Na Figura 15 pode ser visto o local de ligação dos componentes.
A placa driver é responsável pelo acionamento de potência dos motoredutores e
também pelo recebimento das informações dos encoders, podendo ser vista na Figura
16. Sua localização no robô pode ser vista na Figura 17.
Figura 15 – Placa Mãe

14
Figura 16 – Placa Driver
Figura 17 – Localização da Placa Driver
9. Sistema de Indicação
O sistema de indicação luminoso no robô indica quando o robô está ligado ou
desligado e também se a carga da bateria está alta (de 10V a 14V) ou baixa (de 6V a
10V); quando tem algum problema no hardware e quando o robô recebe um comando.
Podemos ver esse sistema na Figura 18. Na mesma figura, podemos observar
também a localização do botão para ligar e desligar o robô. O procedimento para ligar
o robô é pressionando esse botão até que os LEDs pisquem e mantém ligado o LED

15
ON/OFF e
Status da bateria:
Verde = carga alta
Vermelho = carga baixa Problema no
hardware
Recebimento de
comando
Botão para ligar e desligar
central. O procedimento para desligar o robô é pressionando o botão até que o LED
central desligue.
Figura 18 – Sistema de indicação
10. Precauções com as baterias
• Informações importantes: � As baterias tem uma vida útil de 500 ciclos, se forem bem utilizadas; � As baterias têm auto-descarga, ou seja, se deixadas sozinhas descarregam
naturalmente; � As baterias já vão devidamente formatadas, ou seja, já está com potencial
completo; � A partir do momento que a bateria vai descarregando, o desempenho do robô
vai caindo também. Caso o robô diminua consideravelmente o seu desempenho, significa dizer que as baterias estão fracas e que é necessário carregá-las.
• Cuidados que se deve ter:
� Recomenda-se carregar e descarregar periodicamente se elas forem ficar
muito tempo paradas, devido a auto-descarga; � Devido a auto-descarga, recomenda-se que as baterias sejam guardadas
carregadas; � Após carregar as baterias elas estarão um pouco quentes. Esperar um pouco
elas esfriarem para colocar no robô; � Não esquecer as baterias dentro do robô, pois pode estragar a bateria e todos
os fios no caminho dela até o interruptor do robô, podendo causar problemas ainda piores se ela vazar dentro do robô;

16
� Evite temperaturas muito altas ou muito baixas, assim como deixá-las onde possam ter os contatos colocados em curto;
� Mantenha as baterias em um local fresco e em uma área de armazenamento seca;
� Sempre utilizar o carregador que acompanha no kit; � Não inverter a polaridade da bateria quando colocá-las em carga; � Não exponha as baterias ao fogo;
� Não sobrecarregue as baterias ou descarregue-as completamente;
� Não exponha as baterias à radioatividade;
� Ao manusear as baterias, procure manter as temperaturas abaixo:
o Temperatura de carga: 0 a 45ºC; o Temperatura de descarga: -20 a 50ºC; o Temperatura de armazenamento: -20 a 35ºC.
• Recomendações:
� Caso as baterias não estejam mais aceitando carga, é necessário dar uma
carga alta corrente de uns 2C (a corrente máxima que a bateria pode fornecer é de 2.000mA) por menos de 1 segundo. Isso ajuda a dissolver os cristais formados no eletrólito, diminuindo a resistência interna e fazendo-a aceitar carga novamente. Este procedimento deve ser feito com muito cuidado, pois pode causar facilmente superaquecimento da bateria ou do fio, portanto não faça se não tiver experiência com eletricidade e use equipamento de proteção;

17
� Em caso de explosões ou vazamento dos elementos químicos (principalmente eletrólito), jogue água, imediatamente, na bateria. Evite o contato dos elementos químicos nos olhos ou a ingestão dos mesmos. Em caso de contato nos olhos, lave-os por 15 minutos e consulte um médico.

18
Anexo A: Protocolo de Comunicação do Curumim
O protocolo do Curumim é baseado em pacotes, com um total de 30 octetos
(tamanho fixo), no seguinte formato:
5 octetos, endereço do dispositivo fonte
5 octetos, endereço do dispositivo destino
1 octeto, canal de rádio utilizado
1 octeto, tamanho dos dados úteis
2 octetos, comando
0 a 14 octetos, argumentos do comando
1 octeto, digito verificador de integridade (checksum)
1 octeto, package-ID
demais octetos: preenchidos com zero (não utilizados)
O campo “checksum” possibilita que o receptor do pacote verifique se os dados
recebidos conferem com os que foram transmitidos. Tanto os pacotes de solicitação,
quanto os de resposta seguem o mesmo padrão acima descrito. Uma resposta quando
comparada a uma solicitação, tem os campos destino e fonte trocados entre si, e o
comando e package-ID permanecem o mesmo.
O campo “package-ID” é um identificador sequencial do pacote, e tem a função de
auxilio no caso de comunicação com falhas e em casos de retransmissão.
A retransmissão ocorre por “timeout”, ou seja, se após um tempo, o PC não obteve
uma resposta bem sucedida, ele retransmite o pacote. Após algumas falhas
sucessivas, o PC indica o estado de “falha de comunicação”. O tempo de timeout e o
número de falhas consecutivas é configurável no driver do PC, uma ideia da ordem de
grandeza destes valores é de 50ms para o timeout e de 3 falhas sucessivas.
O hardware do rádio base consiste em:
• micro-controlador da família MSP430 da Texas Instruments
• circuito integrado ASIC – conversor USB para UART da FTDI-Chip
• circuito integrado ASIC – transceiver de rádio da Nordic Radio Inc.
• demais componentes de apoio ao funcionamento

19
ASIC – USB/UART
Este circuito integrado é um conversor USB para UART. Ele implementa um slave
USB, simulando uma porta serial para o computador PC, e implementa uma UART,
deste modo a transmissão fica transparente, como se estivéssemos utilizando uma
porta serial comum no PC.
ASIC – Transceiver de rádio
Este circuito integrado implementa uma solução completa de comunicação para
pequenas distâncias a rádio. Ele utiliza 127 canais de rádio-freqüência na faixa de
2.4GHz e baixas potências. Seu alcance é adequado ao uso do robô, e em nossos
testes, funciona normalmente em um raio de 10 metros.
O transceiver da Nordic possui um protocolo próprio de comunicação, onde os
pacotes tem tamanho fixo e são transmitidos com um checksum gerado pelo próprio
ASIC, garantindo a integridade dos dados. Em caso de perda ou troca em alguma
parte do pacote, o receptor rejeita o pacote completamente. O receptor apenas avisa o
micro-controlador da presença de dados se os mesmos forem válidos.
Considerações sobre EMS (imunidade eletromagnética): algumas fontes de ruído
influenciaram o alcance e a taxa de erros de transmissão. Em testes práticos, este
transceiver não funciona bem se posicionado bem próximo a um monitor de
computador (CRT). Mantendo o rádio base a mais de 60 cm do monitor, esta
interferência torna-se não significativa.
Detalhes da implementação do rádio base
A comunicação entre o conversor USB é feita por meio de uma interface UART. A
comunicação com o transceiver de rádio é feita por meio de uma interface SPI.
O micro-controlador do rádio base possui apenas um módulo de comunicação
USART, portanto o circuito multiplexa este módulo entre o modo UART e o modo SPI
com os dois ASIC. Para evitar conflitos, foram utilizados os pinos RTS e CTS do
mesmo, ou seja, o PC é avisado para aguardar enquanto a USART do micro-
controlador está sendo utilizada pela SPI.
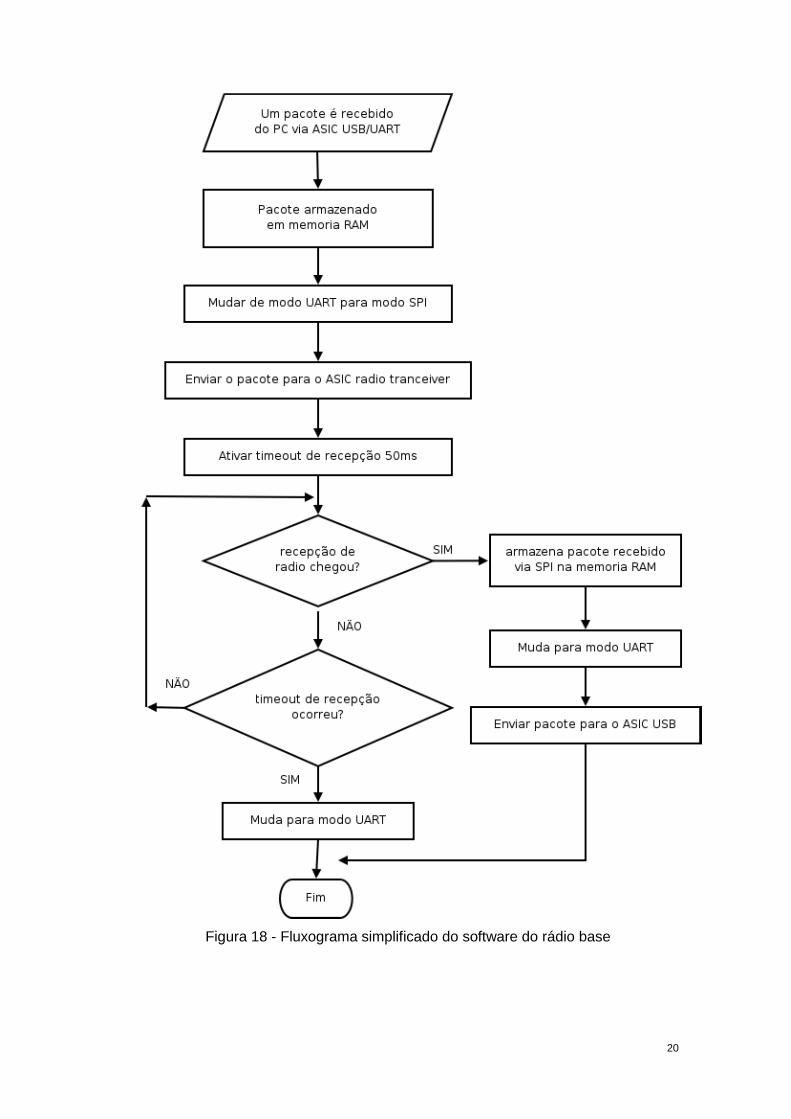
Um fluxograma simplificado do software interno do rádio base é apresentado na
Figura 18. Este fluxograma é apenas didático, ele não leva em conta muitos aspectos,
como watchdog, chaveamento de clock, interrupções, timers, etc. Demais informações
sobre os comandos transmitidos estão disponíveis na apostila de software do
Curumim.
20
Figura 18 - Fluxograma simplificado do software do rádio base

21
Anexo B: Gravando o firmware do robô
O Curumim é controlado por um microcontrolador MSP430. Seu firmware pode ser
regravado através do conector JTAG em destaque na placa mãe, conforme Figura 19
abaixo:
Figura 19 – Localização do conector JTAG para gravação do firmware
Outras informações sobre gravadores JTAG podem ser encontradas no link Documentos também no endereço www.xbot.com.br/externo.
22
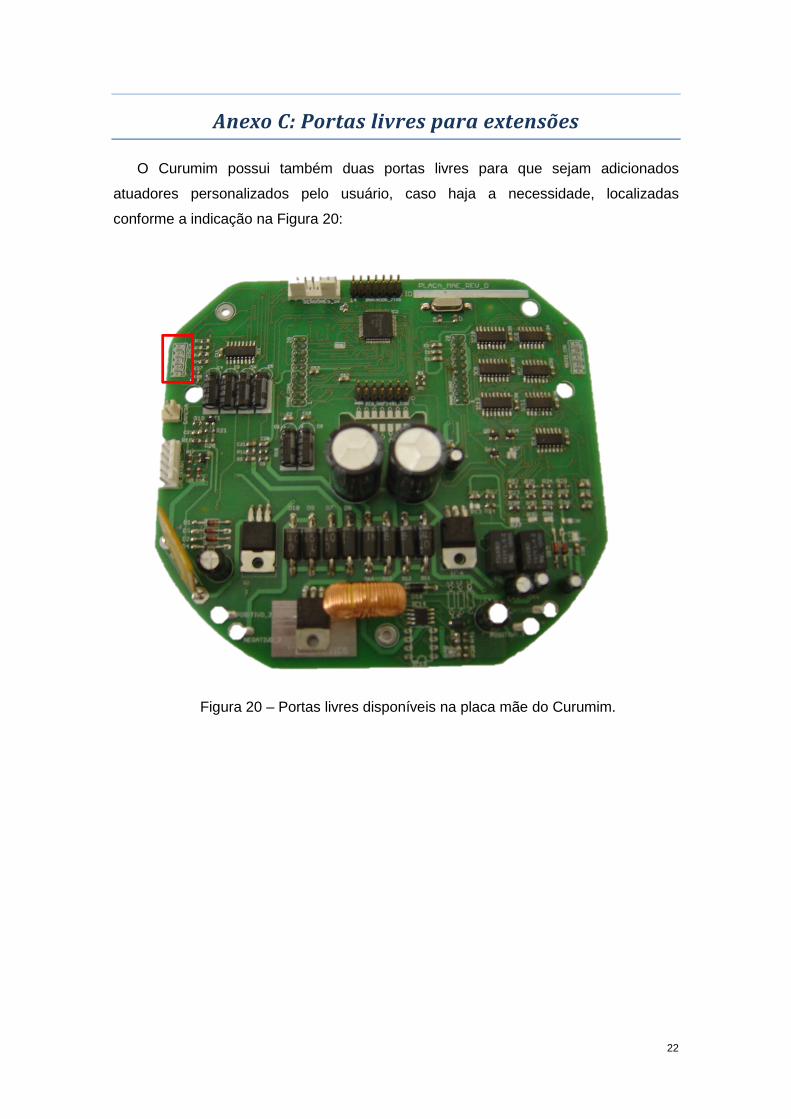
Anexo C: Portas livres para extensões
O Curumim possui também duas portas livres para que sejam adicionados
atuadores personalizados pelo usuário, caso haja a necessidade, localizadas
conforme a indicação na Figura 20:
Figura 20 – Portas livres disponíveis na placa mãe do Curumim.

23
Anexo D: Comunicação RS232
Porta disponível para comunicação via protocolo RS232 entre um computador e o
microcontrolador.
Figura 21 – Porta disponível para comunicação via protocolo RS232.