Sistema Mestre-Escravo de uma mão mecânica atuada por liga de ...

DESENVOLVIMENTO DE JOELHO POLICÊNTRICO ATUADO POR PISTÃOMAGNETO-REOLÓGICO PARA PRÓTESE TRANSFEMURAL
Thiago Silva Rocha∗, Antônio Padilha Lanari Bó∗, Claudia Patricia Ochoa Diaz∗, FelipeShimabuko∗, Geovany Araújo Borges∗
∗Universidade de BrasíliaBrasília, Distrito Federal, Brasil
Emails: [email protected], [email protected],[email protected], [email protected], [email protected]
Resumo— Esse artigo descreve o desenvolvimento de um dispositivo protético transfemural com um joelhopolicêntrico de impedância variável. O protótipo consiste de uma estrutura de mecanismo de quatro barrasatuada por um amortecedor magneto-reológico. São apresentados o projeto do joelho bem como o protótiporecentemente fabricado. Resultados de análise estrutural também são apresentados. O protótipo já passou portestes preliminares realizados com voluntário amputado e as primeiras conclusões são discutidas.
Palavras-chave— Robôs assistivos e de reabilitação, prótese robótica, joelho policêntrico, atuador magneto-reológico
Abstract— This paper describes the design of a transfemoral prosthetic device with a variable impedancepolycentric knee joint. The prototype consists of a four-bar mechanism frame, which is actuated by a magne-torheological (MR) damper. We present the design of the knee as well as the prototype recently manufactured.Results of estructural analysis are also shown. The prototype has passed by preliminary tests performed with anamputee volunteer and the first conclusions are discussed.
Keywords— Assistive and rehabilitation robots, robotic prosthesis, polycentric knee, magnetorheological ac-tuator
1 Introdução
Estima-se que no Brasil a incidência anual de am-putações de membro inferior seja de 5,9 para cada100000 habitantes (Spichler, 2001)1, ocorridas porvariadas causas e com maior freqüência em decor-rência de insuficiência vascular periférica, traumasdiversos e tumores. Nesse contexto, o desenvolvi-mento de próteses inteligentes, que sejam capazesde detectar a intenção de movimento do usuárioe executar a tarefa pretendida, surge como umaexcelente alternativa para promover uma maiorqualidade de vida ao paciente amputado, já queestas podem permitir que o paciente execute tare-fas comuns como caminhar, subir e descer escadase rampas com maior facilidade.
É notável o crescimento da variedade de pró-teses inteligentes no mercado bem como o númerode trabalhos científicos em desenvolvimento, en-tretanto, devido a fatores como altos custos e difi-culdade de adaptação do paciente à prótese, aindaé muito incomum a utilização desse tipo de pró-tese, especialmente no Brasil. De fato, muito em-bora a maioria dos indivíduos amputados possater elevado benefício funcional ao utilizar uma pró-tese inteligente, a relação custo-benefício atual-mente não se justifica no Brasil. Dessa forma, al-guns amputados, sobretudo aqueles que não apre-sentam alto nível de atividade física, acabam poroptar por próteses mais simples, até mesmo base-adas em joelhos totalmente passivos.
Este artigo apresenta o desenvolvimento de1Dados obtidos para a cidade do Rio de Janeiro.
uma prótese robótica para amputações transfemu-rais, enfatizando o projeto mecânico do joelho po-licêntrico, projetado como um mecanismo de qua-tro barras, e a estratégia de atuação promovidapor um pistão magneto-reológico.
A seção 2 apresenta uma contextualização arespeito dos assuntos gerais envolvidos no pro-jeto de próteses. Em seguida, na seção 3, apre-sentamos o trabalho desenvolvido em foco nesseartigo, onde mostramos a movimentação policên-trica promovida pelo mecanismo de quatro bar-ras e suas características vantajosas; a atuaçãodo pistão magneto-reológico e a análise estrutu-ral do ponto de vista mecânico do dispositivo. Aseção 4 exibe os resultados de dois experimentospreliminares feitos com um voluntário amputadoutilizando a prótese. Por fim a seção 5 traz asconclusões do trabalho bem como as perspectivasde trabalhos futuros do projeto.
2 Aspectos Gerais do Projeto
"Marcha ou deambulacão é um tipo de locomoçãode padrão bípede gerado pelo sistema sensório-motor" (Saad, 1997), esta é definição bastanteaceita para essa que é uma tarefa funcional hu-mana. Da definição formal, é importante enten-dermos que o conceito de marcha inclui todo tipode locomoção bípede. Andar, correr, subir esca-das, saltar, são diferentes padrões de marcha. Amaioria dessas tarefas envolve um padrão repeti-tivo chamado ciclo de marcha, que compreendeuma passada completa (Perry, 1992), no caso do

Figura 1: Ciclo de marcha com eventos característicos (contato inicial, resposta à carga, apoio médio,apoio terminal, pré-balanço e balanço).
andar. O ciclo de marcha, por sua vez, é caracte-rizado por duas fases distintas funcionalmente, àsaber, o suporte e o balanço, cada qual compostade uma seqüência de eventos bem definidos queindicam o estado do ciclo de marcha. A figura1 mostra um diagrama com as fases e os even-tos caracterizantes da marcha vistos em seqüên-cia: contato inicial, destacado pelo instante emque o calcanhar toca o chão; resposta à carga, omomento em que o pé se aplaina com a superfície;apoio médio, quando o peso do indivíduo se des-carrega totalmente sobre uma perna; apoio termi-nal, instante em que o calcanhar deixa o solo; pré-balanço, instante da máxima impulsão com des-prendimentos dos dedos do solo; balanço, períodoem que a perna está livre de carga, indo até o con-tato inicial da nova passada reiniciando o ciclo.
Uma prótese transfemural típica possui qua-tro componentes principais: o soquete (ou outrosistema de suspensão), joelho, canela (ou extensorde tíbia) e sistema tornozelo-pé . O soquete é ocomponente responsável pela conexão entre usuá-rio e prótese, que deve ser finamente ajustado aopaciente de forma que haja distribuição uniformede pressão, elimine esforço cisalhante e tenha di-mensões precisas (Trower, 2006). O joelho proté-tico, deve ser o mais semelhante possível ao joelhonatural evitando assim assimetrias durante a mar-cha. A canela é o componente estrutural de liga-ção entre o joelho e o sistema tornozelo-pé. Assimcomo o joelho, o sistema tornozelo-pé protético éo equivalente ao tornozelo e ao pé humanos e, por-tanto, devem possuir similaridade funcional.
No caso de indivíduos com amputações tran-femurais requer-se de uma prótese que ela garantacondições para que o índividuo seja capaz de se lo-comover com segurança, exercendo esforços com-patíveis com a intensidade da marcha, com o mí-nimo desconforto e cosmeticamente aceitável pelousuário. A intensidade do esforço que o pacienteexercerá para se locomover depende diretamentedo alinhamento dos componentes da prótese trans-femural. Como podemos ver em (Schmalz, 2002)um alinhamento equivocado pode provocar au-mento de 13% no consumo de energia pelo usuá-rio. Da mesma maneira um sistema inadequadode suspensão pode trazer riscos de falhas de se-gurança, como a soltura da prótese, além de au-mentar o esforço promovido pelo usuário da pró-tese. Em (Trower, 2006) vemos que um socket mal
ajustado pode causar problemas graves à saúde dopaciente.
3 Projeto da Prótese
A prótese transfemural de que trata esse traba-lho é composta pelo mecanismo do joelho em de-senvolvimento, além de componentes comerciais:pé de carbono 1C30 Trias R© Ottobock R©, Alema-nha, extensor tibial, acessórios de fixação e so-quete para coto femural. A figura 2 exibe a pró-tese montada.
Figura 2: Prótese montada
3.1 Mecanismo do joelho
O joelho desenvolvido foi projetado para se movi-mentar de modo policêntrico, ou seja, uma combi-nação entre movimento rotacional e translacionalentre a tíbia e o femur no caso, onde existe umcentro instantâneo de rotação que varia ao longode uma trajetória de acordo com a posição an-gular (Greene, 1983). Existem diversos arranjosmecânicos que permitem essa característica poli-cêntrica. Nesse trabalho foi utilizado o mecanismo

de quatro barras, onde o comprimento das bar-ras determina a trajetória do centro instantâneode rotação, localizado na intersecção dos prologa-mentos das barras que unem a peça superior dojoelho, ligada à coxa, à peça inferior, ligada à ca-nela. Nas figuras 3 e 4 podemos ver em detalheo mecanismo do joelho em um desenho CAD e noprotótipo real, com destaque para as quatro bar-ras (teóricas) e o percurso do centro de rotaçãoconforme a variação do ângulo do joelho.
Figura 3: Desenho CAD e protótipo real do meca-nismo do joelho com destaque para as barras emverde
Figura 4: Evolução do centro instantâneo de ro-tação em função do ângulo do joelho
Essa configuração policêntrica proporcionavantagens funcionais ao paciente amputado. Em(Greene, 1983) e (Pfeifer, 2012) podemos ver que
na fase de apoio a linha de carga - linha teóricaque centra os esforços devidos à reação no soloao peso do indivíduo, que coincide com a linhaentre o trocânter (protuberância óssea na partesuperior do fêmur) e o tornozelo durante o apoio -quando posicionada anteriormente ao centro ins-tantâneo de rotação garante maior estabilidade esegurança. Não é difícil perceber essa referida se-gurança ao se observar que nessa situação o pesodo paciente tende a hiperextender o joelho, mo-vimento impedido pelo travamento mecânico dojoelho. Um efeito adicional é que o travamentomecânico do joelho dispensa esforço muscular ouesforço de atuação para se manter durante o apoioestático. A figura 5 ilustra a situação.
Figura 5: Foto de um paciente amputado utili-zando o protótipo ilustrando o posicionamento dalinha de carga (em verde) em relação ao centroinstantâneo de rotação (ponto de encontro entreas linhas pontilhadas em vermelho).
Outra vantagem é o efeito de encurtamento docomprimento da prótese durante a fase de balanço(Gard, 1996), permitindo uma maior liberação deespaço entre o pé e o chão, o que é importantedurante o balanço da perna suspensa. A explica-ção ilustrativa desse efeito é mostrada na figura6. Esse efeito é considerado especialmente impor-tante para dispositivos que não dispõem de ne-nhum atuador que promova um dorsiflexão no pé.Sem o efeito de encurtamento, o paciente deveriapromover flexão extra no joelho durante o balançopara evitar o choque do pé protético com o solodurante o período final do balanço.
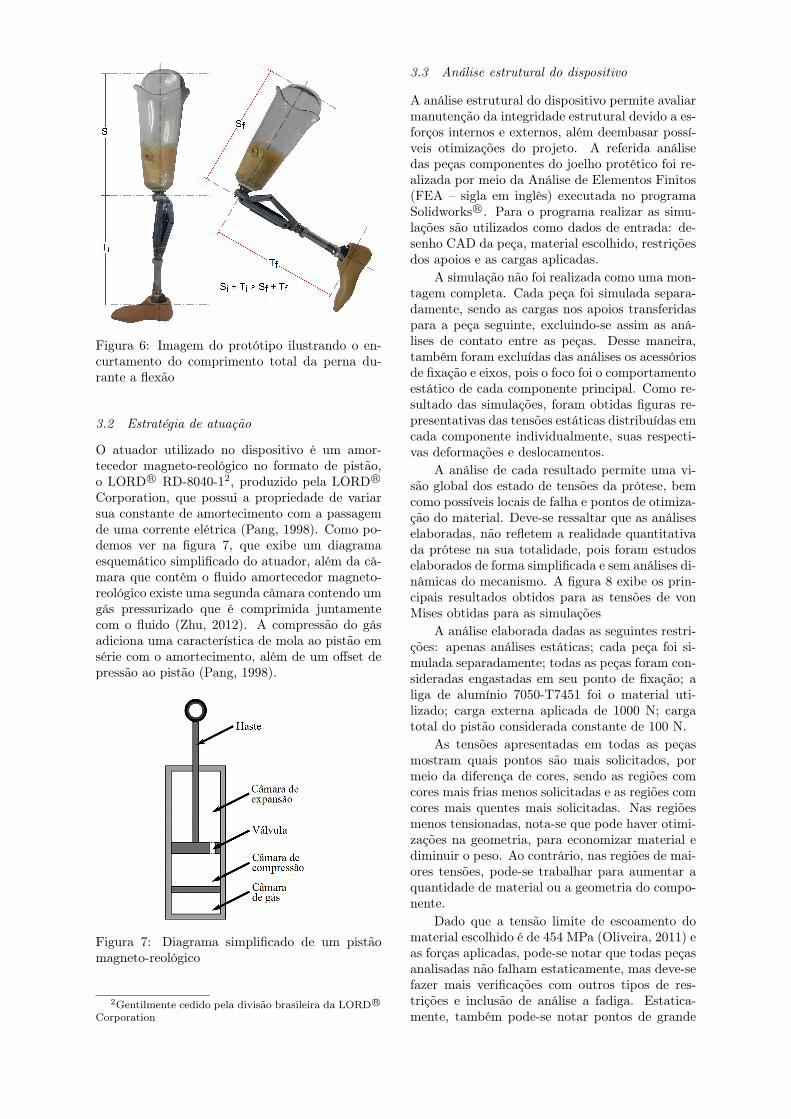
Figura 6: Imagem do protótipo ilustrando o en-curtamento do comprimento total da perna du-rante a flexão
3.2 Estratégia de atuação
O atuador utilizado no dispositivo é um amor-tecedor magneto-reológico no formato de pistão,o LORD R© RD-8040-12, produzido pela LORD R©
Corporation, que possui a propriedade de variarsua constante de amortecimento com a passagemde uma corrente elétrica (Pang, 1998). Como po-demos ver na figura 7, que exibe um diagramaesquemático simplificado do atuador, além da câ-mara que contém o fluido amortecedor magneto-reológico existe uma segunda câmara contendo umgás pressurizado que é comprimida juntamentecom o fluido (Zhu, 2012). A compressão do gásadiciona uma característica de mola ao pistão emsérie com o amortecimento, além de um offset depressão ao pistão (Pang, 1998).
Figura 7: Diagrama simplificado de um pistãomagneto-reológico
2Gentilmente cedido pela divisão brasileira da LORDR©
Corporation
3.3 Análise estrutural do dispositivo
A análise estrutural do dispositivo permite avaliarmanutenção da integridade estrutural devido a es-forços internos e externos, além deembasar possí-veis otimizações do projeto. A referida análisedas peças componentes do joelho protético foi re-alizada por meio da Análise de Elementos Finitos(FEA – sigla em inglês) executada no programaSolidworks R©. Para o programa realizar as simu-lações são utilizados como dados de entrada: de-senho CAD da peça, material escolhido, restriçõesdos apoios e as cargas aplicadas.
A simulação não foi realizada como uma mon-tagem completa. Cada peça foi simulada separa-damente, sendo as cargas nos apoios transferidaspara a peça seguinte, excluindo-se assim as aná-lises de contato entre as peças. Desse maneira,também foram excluídas das análises os acessóriosde fixação e eixos, pois o foco foi o comportamentoestático de cada componente principal. Como re-sultado das simulações, foram obtidas figuras re-presentativas das tensões estáticas distribuídas emcada componente individualmente, suas respecti-vas deformações e deslocamentos.
A análise de cada resultado permite uma vi-são global dos estado de tensões da prótese, bemcomo possíveis locais de falha e pontos de otimiza-ção do material. Deve-se ressaltar que as análiseselaboradas, não refletem a realidade quantitativada prótese na sua totalidade, pois foram estudoselaborados de forma simplificada e sem análises di-nâmicas do mecanismo. A figura 8 exibe os prin-cipais resultados obtidos para as tensões de vonMises obtidas para as simulações
A análise elaborada dadas as seguintes restri-ções: apenas análises estáticas; cada peça foi si-mulada separadamente; todas as peças foram con-sideradas engastadas em seu ponto de fixação; aliga de alumínio 7050-T7451 foi o material uti-lizado; carga externa aplicada de 1000 N; cargatotal do pistão considerada constante de 100 N.
As tensões apresentadas em todas as peçasmostram quais pontos são mais solicitados, pormeio da diferença de cores, sendo as regiões comcores mais frias menos solicitadas e as regiões comcores mais quentes mais solicitadas. Nas regiõesmenos tensionadas, nota-se que pode haver otimi-zações na geometria, para economizar material ediminuir o peso. Ao contrário, nas regiões de mai-ores tensões, pode-se trabalhar para aumentar aquantidade de material ou a geometria do compo-nente.
Dado que a tensão limite de escoamento domaterial escolhido é de 454 MPa (Oliveira, 2011) eas forças aplicadas, pode-se notar que todas peçasanalisadas não falham estaticamente, mas deve-sefazer mais verificações com outros tipos de res-trições e inclusão de análise a fadiga. Estatica-mente, também pode-se notar pontos de grande

(a) (b)
(c) (d)
Figura 8: Imagem em escala de cores para astensões de von Mises para as peças do joelho.(a)Tensões de 0,02 MPA a 7,3 MPa. (b)Tensõesde 0,05 MPA a 372 MPa. (c)Tensões de 0,13 MPAa 65 MPa. (d)Tensões de 0,02 MPA a 53 MPa.
concentração de tensão, que podem ser devido ageometria ou as restrições escolhidas.
4 Experimentos Preliminares
Para avaliar melhor o comportamento do protó-tipo, foram executados dois experimentos qualita-tivos com o auxílio de um voluntário com ampu-tação transfemural. O experimentos, aprovadospelo comitê de ética da Faculdade de Ciências daSaúde da Universidade de Brasília, consistiram emum primeiro momento da utilização do dispositivoem modo passivo pelo voluntário, ou seja, sem ne-nhum controle do atuador. A figura 9 mostra opaciente caminhando com a prótese.
Qualitativamente a impressão dada pelo vo-luntário era de que a prótese promovia um ca-minhar tão seguro e confortável quanto a prótesepassiva que ele habitualmente usa, exceto pela altavelocidade que ela promove, principalmente de ex-tensão, caracterizado pelo visível “chute” que odispositivo apresenta no final da fase de balanço.Dado o fato dessa característica ter sido notadaemmodo passivo, podemos avaliá-la como positivajá que quando em modo controlado, essa veloci-dade de extensão poderá amortecida tanto quantofor mais confortável para o usuário.
Em um segundo momento o voluntário cami-nhou com a prótese ligada a um controlador decorrente em uma esteira e o nível de corrente apli-cado pelo controlador foi ajustado manualmenteatravés de um potenciômetro conforme o voluntá-
Figura 9: Fotografia de voluntário amputado ca-minhando com a prótese em modo passivo
rio caminhava. A figura 10 retrata essa situação.
Figura 10: Voluntário caminhando em uma esteiracom a prótese em modo controle manual
Apesar das claras limitações de um experi-mento com controle manual em tempo real comoesse, foi possível observar uma maior naturalidadee conforto no caminhar do voluntário, que chegavaa referir como “perfeito” determinados momentosdo experimento.
Os experimentos executados, mesmo que bemsimples e de caráter apenas qualitativo, demons-tram o potencial de uso e segurança ainda emmodo passivo, um requisito importante visto queem caso de pane nos sistemas eletrônico, compu-tacional ou até mesmo de atuação, a prótese secomporta no mínimo como uma prótese passivaconvencional.

5 Conclusões
Este artigo apresenta o desenvolvimento de umaprótese transfemural com foco no projeto dojoelho policêntrico atuado por pistão magneto-reológico. O trabalho desenvolvido até aqui per-mite concluir a viabilidade e usabilidade do dispo-sitivo proposto.
Como próximos trabalhos será feita a inte-gração do sistema sensorial, contando com sen-sores inerciais de movimento, encoders e célu-las de carga; a integração dos módulos eletrô-nico/computacionais e a implementação dos algo-ritmos de extração de informção dos sensores e decontrole no computador embarcado.
Por fim agradecemos à FINEP - Agência Bra-sileira da Inovação pelo financiamento do projeto,à LORD R© Corporation por ter cedido o atuadormagneto-reológico e ao voluntário que vêm traba-lhando conosco nos testes de validação da prótese.
Referências
Gard, S. A., C. D. S. e. U. J. E. (1996). The in-fluence of four-bar linkage knees on prosthe-tic swing-phase floor clearance, Journal ofProsthetics and Orthotics 8(2): 34–40.
Greene, M. P. (1983). Four bar linkage knee analy-sis, Orthotics Prosthetics 37(1): 15–24.
Oliveira, R. R. (2011). Avaliação da tensão resi-dual em alumínio 7050 conformado pelo pro-cesso Peen Forming, PhD thesis, Instituto dePesquisas Energéticas e Nucleares - Autar-quia associada a Universidade de São Paulo,São Paulo, Brasil.
Pang, L., K. G. M. e. W. N. M. (1998). Analysisand testing of a linear stroke magnetorheolo-gical damper, AIAA/ASME/AHS AdaptiveStructures Forum .
Perry, J. (1992). Gait Analysis: Normal andPathological Function, 2 edn, Slack Incorpo-rated.
Pfeifer, S., R. R. e. V. H. (2012). An ac-tuated transfemoral prosthesis with optimi-zed polycentric knee joint, The Fourth IEEERAS/EMBS International Conference on Bi-omedical Robotics and Biomechatronics .
Saad, M. e. a. (1997). Sinais clínicos associadosa prognóstico de marcha em paralisia cere-bral espástica, Revista Brasileira de Posturae Movimento 1(1): 5112–5116.
Schmalz, T., B. S. e. J. R. (2002). Energy ex-penditure and biomechanical characteristicsof lower limb amputee gait: The influence ofprosthetic alignment and different prostheticcomponents, Gait & Posture 16(3): 225–263.
Spichler, E. R. S., S. D. L. I. F. A. C. e. F. L. J.(2001). Capture-recapture method to esti-mate lower extremity amputation rates in riode janeiro, brazil, Revista Panamericana deSalud Publica pp. 334–340,.
Trower, T. A. (2006). Changes in lower extre-mity prosthetic practice, Physical Medicineand Rehabilitation Clinics of North America- New Advances in Prosthetics and Orthotics17(1): 23–30.
Zhu, X., J. X. e. C. L. (2012). Magnetorheologicalfluid dampers: A review on structure designandanalysis, Journal of Intelligent MaterialSystems and Structures 23(8): 839–873.