DESENVOLVIMENTODESOFTWAREACADÊMICOPARAANÁLISEDE CURTO...
67
DESENVOLVIMENTO DE SOFTWARE ACADÊMICO PARA ANÁLISE DE CURTO-CIRCUITO EM SISTEMAS DE POTÊNCIA DE ’N’ BARRAS Douglas de Luna Montovaneli Projeto de Graduação apresentado ao Curso de Engenharia Elétrica da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro. Orientador: Karen Caino de Oliveira Salim, D.Sc. Rio de Janeiro Setembro de 2018
Transcript of DESENVOLVIMENTODESOFTWAREACADÊMICOPARAANÁLISEDE CURTO...

DESENVOLVIMENTO DE SOFTWARE ACADÊMICO PARA ANÁLISE DECURTO-CIRCUITO EM SISTEMAS DE POTÊNCIA DE ’N’ BARRAS
Douglas de Luna Montovaneli
Projeto de Graduação apresentado ao Cursode Engenharia Elétrica da Escola Politécnica,Universidade Federal do Rio de Janeiro, comoparte dos requisitos necessários à obtenção dotítulo de Engenheiro.
Orientador: Karen Caino de Oliveira Salim,D.Sc.
Rio de JaneiroSetembro de 2018

de Luna Montovaneli, DouglasDesenvolvimento de software acadêmico para análise
de curto-circuito em sistemas de potência de ’n’barras/Douglas de Luna Montovaneli. – Rio de Janeiro:UFRJ/ Escola Politécnica, 2018.
XIII, 54 p.: il.; 29, 7cm.Orientador: Karen Caino de Oliveira Salim, D.Sc.Projeto de Graduação – UFRJ/ Escola Politécnica/
Curso de Engenharia Elétrica, 2018.Referências Bibliográficas: p. 53 – 54.1. curto-circuito. 2. desenvolvimento de software. 3.
defeitos em sistemas de potência. I. Caino de OliveiraSalim, D.Sc., Karen. II. Universidade Federal do Rio deJaneiro, Escola Politécnica, Curso de Engenharia Elétrica.III. Título.
iii

Mãe, durante anos sofri vendoseu sacrifício por mim. Nasdificuldades, me privou dasagruras. Foi minha mãe e
também meu pai. Me dói lembrarque nunca comprou roupas ou
sapatos novos, pois só assim eupoderia tê-los. Felizmente, é
chegado o momento de tehonrar. Essa conquista não é
minha, mas exclusivamente sua.Você é a número um.
iv

Agradecimentos
Agradeço primeiramente a Deus, o Alfa e o Ômega, por tudo que tem me pro-porcionado. À minha mãe Cássia e meu pai Gilson, não tenho nem palavras paraagradecer o que fizeram por mim até hoje. Vocês são a minha base. Aos meus tiosPaulo e Rosângela Ormerod e minha prima-irmã Roberta Ormerod, agradeço portodo suporte, carinho e cuidado que recebo de vocês durante toda a minha vida.
À minha namorada Raquel Alves, pelo apoio e paciência em todos os momentose por me trazer inspiração e motivação para este trabalho, sempre me levando abuscar um patamar mais alto.
Aos amigos Brenno Mainente, Felipe Vianna, Lucas Moreira, Lucas Paiva eStan Houetola, por contribuírem para meu desenvolvimento intelectual e pessoal eproporcionarem os melhores momentos da minha formação acadêmica. Seus rostosestarão para sempre estampados nas melhores lembranças da nossa graduação.
Ao ilustríssimo Professor Vitor Chirity, sua esposa Iraneide e meu grande amigoVictor, agradeço pela oportunidade de cursar um ensino fundamental de excelênciano Colégio-Curso Equação quando minha família não tinha condições. Se hoje meformo engenheiro elétrico em uma faculdade federal, tenham certeza que foram peçasfundamentais nessa caminhada e que serei eternamente grato.
À minha orientadora, agradeço toda a orientação pessoal e acadêmica, confiança,liberdade e incentivo que forneceu durante a elaboração deste trabalho.
v

Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ comoparte dos requisitos necessários para a obtenção do grau de Engenheiro Eletricista.
DESENVOLVIMENTO DE SOFTWARE ACADÊMICO PARA ANÁLISE DECURTO-CIRCUITO EM SISTEMAS DE POTÊNCIA DE ’N’ BARRAS
Douglas de Luna Montovaneli
Setembro/2018
Orientador: Karen Caino de Oliveira Salim, D.Sc.
Curso: Engenharia Elétrica
O estudo de curto-circuito em sistemas de potência ocorre normalmente no pro-cesso de planejamento e projeto do sistema, bem como na ocorrência de ampliaçõese mudanças previstas. A finalidade desse estudo é, principalmente, a obtenção deinformações para dimensionamento de disjuntores, relés e demais equipamentos dechaveamento no caso de curto-circuito, os quais devem atuar rapidamente, de ma-neira a proteger o sistema elétrico contra os danos dessas pertubações.
Esse trabalho apresenta a teoria utilizada para o desenvolvimento do cálculocomputacional de curto-circuito, através do desenvolvimento de um programa com-putacional para analisar a resposta dos sistemas aos principais tipos de faltas simé-tricas e assimétricas. Desenvolvido na linguagem Python R© e com interface gráficaprópria, a ferramenta gratuita tem foco em utilização acadêmica.
O trabalho tem como objetivo apresentar de forma detalhada a parte teóricadesse assunto tão difundido na literatura, a fim de fornecer uma base para o códigoimplementado. A validação do programa é realizada através da simulação de umsistema teste de cinco barras e do estudo do sistema elétrico de Roraima no pe-ríodo que antecede a interligação de sua capital, Boa Vista, ao Sistema InterligadoNacional.
Por fim, são realizadas comparações entre os resultados das simulações utilizandoo Anafas, software indicado pelos procedimentos de rede do ONS para estudos decurto-circuito.
vi

Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillmentof the requirements for the degree of Engineer.
THESIS TITLE
Douglas de Luna Montovaneli
September/2018
Advisor: Karen Caino de Oliveira Salim, D.Sc.
Course: Electrical Engineering
The short-circuit study in power systems normally occurs in the system planningand design process, as well as in the occurrence of planned expansions and changes.The purpose of this study is mainly to obtain information for the design of circuitbreakers, relays and other switching equipment in the event of a short-circuit, whichmust act quickly, in order to protect the electrical system against the damages ofthese disturbances.
This paper presents the theory used for the development of computational short-circuit computation by developing a software to analyze the systems response tothe main types of symmetric and asymmetric faults. Developed in the Python R©
language and with its own graphical interface, the free tool focuses on academic use.The work aims to present in detail the theoretical part of this subject so
widespread in the literature, in order to provide a basis for the code implemented.The validation of the program is done through the simulation of a five buses examplenetwork and the study of the Roraima electric system in the period preceding theinterconnection of its capital, Boa Vista, to the National Interconnected System.
Finally, comparisons are made between the simulation results using the Anafas,designated software by the network procedures of the ONS for short circuit studies.
vii
Sumário
Lista de Figuras x
Lista de Tabelas xii
Lista de Abreviaturas xiii
1 Introdução 11.1 Estado da arte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Estrutura do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Fundamentação Teórica 52.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 Circuito equivalente por fase . . . . . . . . . . . . . . . . . . . . . . . 52.3 Representação em valor por unidade (p.u.) . . . . . . . . . . . . . . . 52.4 Teorema de Fortescue . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.4.1 Conversão entre os domínios de fase e componentes simétricas 82.4.2 Rotação cíclica das componentes simétricas . . . . . . . . . . . 10
2.5 Representação de máquinas síncronas . . . . . . . . . . . . . . . . . . 112.6 Representação de Transformadores . . . . . . . . . . . . . . . . . . . 12
2.6.1 Transformador de dois enrolamentos . . . . . . . . . . . . . . 122.6.2 Transformador de três enrolamentos . . . . . . . . . . . . . . . 14
2.7 Representação Linhas de transmissão . . . . . . . . . . . . . . . . . . 152.7.1 Impedâncias mútuas de sequência zero . . . . . . . . . . . . . 16
2.8 Representação de impedâncias shunt . . . . . . . . . . . . . . . . . . 172.9 Representação matricial de um sistema de potência . . . . . . . . . . 18
2.9.1 Relação entre o Teorema de Thévenin e Z-barra . . . . . . . . 192.9.2 Matriz Z-barra sem acoplamentos mútuos . . . . . . . . . . . 202.9.3 Matriz Z-barra com acoplamentos mútuos . . . . . . . . . . . 23
3 Cálculo de curto-circuito 253.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
viii

3.2 Curto-circuito Trifásico . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3 Curto-circuito Monofásico-Terra . . . . . . . . . . . . . . . . . . . . . 27
3.3.1 Considerações sobre as fases B e C . . . . . . . . . . . . . . . 283.4 Curto-circuito Bifásico . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.4.1 Considerações sobre as fases AB e AC . . . . . . . . . . . . . 303.5 Curto-circuito Bifásico-Terra . . . . . . . . . . . . . . . . . . . . . . . 31
3.5.1 Considerações sobre as fases AB e AC . . . . . . . . . . . . . 32
4 Desenvolvimento do programa 344.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.2 Linguagem escolhida . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.3 Interface gráfica e funcionalidades . . . . . . . . . . . . . . . . . . . . 354.4 Sistema-teste de cinco barras . . . . . . . . . . . . . . . . . . . . . . . 37
5 Estudo de caso 48
6 Considerações finais 516.1 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.2 Trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.3 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Referências Bibliográficas 53
ix

Lista de Figuras
2.1 Representações para um sistema de potência [1]. . . . . . . . . . . . 62.2 Interpretação gráfica das componentes simétricas de um sistema tri-
fásico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3 Representação esquemática de um gerador trifásico estrela-aterrado [2]. 112.4 Circuitos de sequência para um gerador trifásico [2]. . . . . . . . . . . 122.5 Representação esquemática do transformador de dois enrolamentos
[2]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.6 Circuito de sequência positiva e negativa do transformador de dois
enrolamentos [3]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.7 Circuito de sequência zero do transformador de dois enrolamentos [4]. 142.8 Representação de um transformador de três enrolamentos [3]. . . . . . 152.9 Circuito de sequência zero do transformador de três enrolamentos [4]. 162.10 Circuito de sequência positiva, negativa e zero de uma linha de trans-
missão. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.11 Circuito de sequência zero de uma linha de transmissão, com repre-
sentação de impedância mútua. . . . . . . . . . . . . . . . . . . . . . 172.12 Circuito equivalente de Thévenin visto pela barra k [3]. . . . . . . . . 20
3.1 Curto-circuito trifásico-terra em uma rede genérica [2]. . . . . . . . . 263.2 Representação do curto-circuito trifásico em componentes simétricas
[2]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263.3 Curto-circuito monofásico-terra em uma rede genérica [2]. . . . . . . . 273.4 Representação do curto-circuito monofásico em componentes simétri-
cas [2]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.5 Curto-circuito bifásico em uma rede genérica [2]. . . . . . . . . . . . . 293.6 Representação do curto-circuito bifásico em componentes simétricas
[2]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303.7 Curto-circuito bifásico-terra em uma rede genérica [2]. . . . . . . . . . 313.8 Representação do curto-circuito bifásico-terra em componentes simé-
tricas [2]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
x
4.1 Interface gráfica do programa PSFA. . . . . . . . . . . . . . . . . . . 354.2 Planilha para entrada de dados de geradores. . . . . . . . . . . . . . . 364.3 Relatório de saída do programa PSFA. . . . . . . . . . . . . . . . . . 364.4 Sistema de cinco barras [5]. . . . . . . . . . . . . . . . . . . . . . . . 374.5 Inserção de barras no programa PSFA. . . . . . . . . . . . . . . . . . 384.6 Inserção de geradores no programa PSFA. . . . . . . . . . . . . . . . 394.7 Rede exemplo após a inserção dos transformadores T1 e T2. . . . . . 404.8 Entrada de dados do transformador T1. . . . . . . . . . . . . . . . . . 414.9 Rede exemplo finalizada após inserção das linhas. . . . . . . . . . . . 424.10 Cálculo do curto monofásico-terra para todas as barras. . . . . . . . . 454.11 Relatório de saída em p.u. para a barra 3. . . . . . . . . . . . . . . . 464.12 Modelagem do arquivo .ana para a rede exemplo. . . . . . . . . . . . 464.13 Planilha contendo a matriz Z-Barra de sequência positiva. . . . . . . 474.14 Fluxograma do algoritmo do programa PSFA. . . . . . . . . . . . . . 47
5.1 Parte do sistema elétrico de Roraima onde está inserida a barra 1300[10]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
xi

Lista de Tabelas
4.1 Dados do sistema-exemplo de cinco barras [5]. . . . . . . . . . . . . . 37
5.1 Comparação entre simulações do primeiro caso na barra 1300 (Distrito). 505.2 Comparação entre simulações do segundo caso na barra 1300 (Distrito). 505.3 Comparação entre simulações do terceiro caso na barra 1300 (Distrito). 50
xii

Lista de Abreviaturas
ANAFAS Análise de Faltas Simultâneas, p. 2, 43, 46
Anafas Análise de Faltas Simultâneas, p. vi, vii
CEPEL Centro de Pesquisas de Energia Elétrica, p. 2
EPE Empresa de Pesquisa Energética, p. 2
ETAP Electrical Power System Analysis & Operation Software, p. 2
ONS Operador Nacional do Sistema Elétrico, p. vi, vii, 2
PSFA Power System Fault Analysis, p. vi, vii, 43
PyPSA Python for Power System Analysis, p. 2
SAPRE Sistema de Análise e Projeto de Redes Elétricas, p. 2
SE Subestações, p. 43
kA kilo-ampères, p. 43
xiii

Capítulo 1
Introdução
Os curtos-circuitos ocorrem em sistemas elétricos de potência, normalmente, quandoexiste falha devido à:
• Problemas na isolação: material isolante de má qualidade, problema de fabri-cação ou expiração da vida útil;
• Problemas elétricos: descargas atmosféricas, sobretensão no sistema ou rom-pimento de linhas de transmissão devido à sobrecarga;
• Problemas na manutenção: reposição não adequada de materiais, falta decontrole na qualidade ou falta de treinamento de pessoal;
• Problemas mecânicos: contaminação do material isolante causada pela névoasalina ou poluição, ação do vento e queda de árvores;
• Problemas de outra natureza: inundações, presença de animais silvestres naslinhas de transmissão ou vandalismo [4].
A corrente de curto-circuito, ou corrente de falta, é determinada pelas tensõesinternas das máquinas síncronas e pelas impedâncias equivalentes do sistema entreas máquinas e o ponto de falta. Estas correntes geralmente possuem magnitudesde ordem muito maiores que a corrente de operação nominal do sistema e, semuma ativação rápida da proteção isolando a falta, podem causar danos irreversíveisaos equipamentos e linhas de transmissão de um sistema elétrico [2]. As máquinasgirantes, o barramento das subestações e os equipamentos de chaveamento tambémpodem sofrer danos causados pela elevada interação magnética durante as faltas.Dessa forma, é necessário que a falta seja isolada do restante do sistema o maisrápido possível.
Usualmente, o cálculo de curto-circuito é realizado visando:
1

• dos equipamentos e componentes do sistema elétrico, tendo em vista os efeitostérmicos causados pelo curto-circuito;
• O dimensionamento adequado dos disjuntores e relés, através da previsão dacorrente máxima de curto-circuito em seus pontos de instalação;
• A coordenação dos elementos de proteção e manobra, através do cálculo dascorrentes e tempos de disparo;
• O dimensionamento e especificação de para-raio [4].
Com o advento da tecnologia, o estudo de curto-circuito evoluiu a partir dautilização de ferramentas computacionais de simulação de rede. Este trabalho temcomo objetivo o desenvolvimento de um programa acadêmico gratuito, simples econfiável para análise de curto-circuito em sistemas de potência.
O cálculo de correntes de curto-circuito tem papel fundamental no planejamentoda proteção, pois permite prever os danos e estudar os critérios necessários paramitigá-los. Este trabalho analisará quatro tipos de curto-circuito, considerando tam-bém a impedância de falta, os quais estarão disponíveis para simulação no programadesenvolvido. São eles: Trifásico, Monofásico-Terra, Bifásico e Bifásico-Terra.
1.1 Estado da arte
O programa computacional ANAFAS (Análise de Faltas Simultâneas), desenvolvidopelo CEPEL, é o software mais utilizado no Brasil para cálculo de curtos-circuitos narede elétrica. Ele permite o cálculo de diversos tipos de faltas, cálculo de equivalentese evolução dos níveis de curto-circuito [6].
Seu algoritmo está integrado ao SAPRE (Sistema de Análise e Projeto de RedesElétricas), que oferece uma interface gráfica para a entrada dos diagramas esquemá-ticos, permitindo maior versatilidade e produtividade.
Entre os principais usuários do ANAFAS estão: entidades setoriais, como o Ope-rador Nacional do Sistema Elétrico (ONS) e Empresa de Pesquisa Energética (EPE);empresas Eletrobras; agentes de geração, transmissão e distribuição; grandes consu-midores industriais; produtores independentes e universidades [6].
Outro software que merece destaque é o ETAP, desenvolvido pela OperationTechnology, Inc., um programa que possui soluções completas para modelagem,análise e otimização de sistemas de potência [7].
Entretanto, ambas as versões acadêmicas dos softwares apresentam importanteslimitações na dimensão da rede a ser estudada. Além disso, o acesso só é obtidoa partir de um contrato específico, e essas versões não podem ser utilizadas emprojetos ou estudos reais, mesmo no âmbito acadêmico.
2
Existem também alternativas gratuitas, como o MiPower [8] e o PyPSA [9].Entretanto, são necessários bons conhecimentos de programação para utilizar essessoftwares, muitas vezes demandando o aprendizado de uma nova linguagem, o quese torna um grande obstáculo para os graduandos.
1.2 Motivação
A maior motivação do desenvolvimento desse trabalho foi oferecer aos alunos deEngenharia Elétrica uma alternativa gratuita e intuitiva para o estudo de curto-circuito em sistemas elétricos de potência, com uma interface amigável e entrada dedados simples, o que reduz a necessidade dos conhecimentos em programação. Alémdisso, questões de análise de curto-circuito são geralmente extensas e não apresentamresolução. Dessa forma, o programa pode ser utilizado para um estudo elaboradoou apenas para a confirmação dos resultados quando utilizado para estudos, seja elasimples ou complexa, sendo de grande valia para o aprendizado.
1.3 Estrutura do trabalho
O presente trabalho está estruturado da seguinte forma:
O Capítulo 2 apresenta a fundamentação teórica da análise de curto-circuito emsistemas de potência, explicitando:
• O circuito equivalente por fase;
• A representação em valor por unidade (p.u.);
• A definição de componentes simétricas de Fortescue;
• A representação de máquinas síncronas;
• A representação de transformadores de dois e três enrolamentos;
• A representação das linhas de transmissão;
• A representação de elementos shunt de barra;
• Os tipos de representação matricial de um sistema de potência;
O Capítulo 3 apresenta o problema do cálculo de curto-circuito, descrevendo osmétodos de solução de faltas simétricas e assimétricas do tipo shunt.
3

O Capítulo 4 apresenta uma breve explicação sobre a linguagem de programaçãoutilizada e suas respectivas bibliotecas e apresenta a interface do programa desen-volvido. Além disso, são mostrados os recursos de entrada de dados dos diversoselementos de um sistema elétrico, a montagem de um sistema teste genérico e final-mente os relatórios de saída disponibilizados.
O Capítulo 5 expõe um estudo de caso referente ao sistema elétrico de Roraima noperíodo que antecede a interligação de Boa Vista ao Sistema Interligado Nacional[10], utilizado para a validação do software, comparando seus resultados com amesma rede sendo simulada no ANAFAS.
O Capítulo 6 apresenta uma breve descrição sobre objetivos alcançados e estudosfuturos, além da conclusão deste trabalho.
4

Capítulo 2
Fundamentação Teórica
2.1 Introdução
Este capítulo apresenta a fundamentação teórica necessária para representar um sis-tema elétrico de potência contendo um número ’N’ de barras. Destaca-se o Teoremade Fortescue (método das componentes simétricas) e o método da montagem da ma-triz de impedância como primordiais para uma análise de curto-circuito completa eotimizada.
2.2 Circuito equivalente por fase
Os sistemas elétricos de potência, normalmente, são trifásicos, pois a construçãode uma rede elétrica multifilar apresenta diversas vantagens em relação a uma redeelétrica monofásica no que tange aos custos de transmissão e distribuição, regulaçãode tensão e potência entregue às cargas do sistema elétrico [2].
Entretanto, para análises de fluxo de potência e curto-circuito, pode ser árduorepresentar o sistema de maneira multifilar, com grande número de componentesexistentes e também transformadores que dividem o sistema em diferentes níveis detensão.
Assim, é preferível representar o sistema através de um circuito equivalente porfase, com as magnitudes representadas em p.u.. A Figura 2.1 apresenta a compa-ração entre representação do circuito equivalente trifásico e do circuito equivalentepor fase.
2.3 Representação em valor por unidade (p.u.)
Em um sistema elétrico de potência, equipamentos com diferentes níveis de tensãoe potência são interligados, muitas vezes através de vários transformadores elevado-
5

Figura 2.1: Representações para um sistema de potência [1].
res e abaixadores. Entretanto, essa variedade de tensões e potências dificultam ocálculo agilizado das diversas variáveis elétricas em pontos distintos da rede estu-dada. Visando normalizar essa variedade de medições, todas as variáveis da redesão convertidas para uma mesma base, conhecida como sistema por unidade. Nocircuito equivalente por unidade, cada elemento do sistema tem suas variáveis nor-malizadas de acordo com sua própria base. A unidade dessa normalização é o valorpor unidade, abreviado como p.u.
Face ao exposto, observam-se as seguintes vantagens no emprego dos valores emp.u.:
• Facilita ao não precisar utilizar as diversas unidades de um sistema de potência;
• Impedâncias não precisam ser referidas ao mesmo nível de tensão;
6

• Protege contra erros grosseiros de cálculo ao referir valores do primário parao secundário de um transformador, ou vice-versa.
O valor por unidade é calculado de acordo com a equação 2.1,
Valor por unidade =Valor RealValor Base
(2.1)
onde o valor real é o valor na base do próprio componente [2].Para o cálculo do valor p.u. em sistemas de potência, escolhe-se arbitrariamente
dois valores de base independentes. Geralmente, os valores selecionados são a tensãofase-neutro em alguma barra e uma potência base para todo o sistema (usualmente,100 MVA). A partir dos valores adotados, pode-se também calcular outras impor-tantes grandezas de um sistema de potência:
IBase =Sbase√3 · Vbase
(2.2)
Zbase =V 2base
Sbase
(2.3)
Para o cálculo das impedâncias visando o diagrama equivalente de impedânciaspor fase em valor p.u., pode-se utilizar a Equação 2.1 em conjunto com a Equação2.3:
Zp.u. =Zreal
V 2base
Sbase
(2.4)
Entretanto, os dados dos principais elementos da rede são geralmente fornecidospelos fabricantes em valor p.u., usando como base os valores nominais de tensão epotência do elemento. Dessa forma, às vezes é necessário referir os elementos parauma nova base de tensão. A partir de manipulações algébricas na Equação 2.4,obtêm-se a Equação 2.5, utilizada para este fim [2]:
Zpunova = Zpuantiga
Snova
Santiga
· (VantigaVnova
)2 (2.5)
2.4 Teorema de Fortescue
A análise de sistemas trifásicos equilibrados e simétricos pode ser feita utilizandoo circuito equivalente por fase, seja em condições normais ou em ocorrências dedefeitos simétricos. Todavia, o mesmo não pode ser aplicado na condição de faltasassimétricas, dado que estas acarretam no desequilíbrio da rede.
As técnicas habituais para análise de circuitos, como as leis de Kirchoff, mostram-se complicadas para a resolução desses sistemas, além de não oferecerem ferramentas
7

para cálculo da influência de elementos não-estáticos da rede. É importante destacartambém que, fora do âmbito teórico, as cargas mostram-se naturalmente desbalan-ceadas, tornando onerosa a análise do circuito por fase.
Para simplificar esse tipo de análise, utiliza-se o Teorema de Fortescue, tam-bém conhecido como método das Componentes Simétricas. Seu principal conceitoé que um sistema desbalanceado com n fases pode ser representado por n sistemasequilibrados, denominados componentes simétricos dos fasores originais.
Visto que o estudo de componentes simétricas é muito extenso e aprofundado,este capítulo apresentará de forma resumida as principais contribuições do métodopara o estudo de sistemas trifásicos [11].
2.4.1 Conversão entre os domínios de fase e componentes si-
métricas
As correntes IA, IB e IC de um sistema trifásico qualquer podem ser convertidaspara o domínio das componentes simétricas de acordo com a Equação 2.6:IA0
IA1
IA2
=1
3
1 1 1
1 α α2
1 α2 α
·IAIBIC
(2.6)
Onde α é definido como 1∠120 e IA0, IA1 e IA2 são, respectivamente, as compo-nentes simétricas de sequência zero, positiva e negativa. Uma interpretação gráficados fasores de sequência é apresentada na Figura 2.2.
(a) Sequência positiva (b) Sequência negativa (c) Sequência zero
Figura 2.2: Interpretação gráfica das componentes simétricas de um sistema trifásico.
8

A partir da Equação 2.6, obtemos:
IA0 =1
3· (IA + IB + IC) (2.7)
IA1 =1
3· (IA + αIB + α2IC) (2.8)
IA2 =1
3· (IA + α2IB + αIC) (2.9)
Em um sistema trifásico balanceado, sabe-se que:
IA + IB + IC = IN = 0 (2.10)
Comparando-se as equações 2.7 e 2.10:
IN = 3IA0 (2.11)
Dessa forma, a corrente de neutro depende somente da componente simétrica desequência zero. Logo, para um circuito trifásico balanceado, não existe corrente desequência zero, pois a corrente de neutro é igual a zero.
Pode-se também converter os fasores do domínio das componentes simétricaspara o domínio das fases, de acordo com a Equação 2.12:IAIB
IC
=
1 1 1
1 α2 α
1 α α2
·IA0
IA1
IA2
(2.12)
A Equação 2.12 resulta em:
IA = IA0 + IA1 + IA2 (2.13)
IB = IA0 + α2IA1 + αIA2 (2.14)
IC = IA0 + αIA1 + α2IA2 (2.15)
As equações obtidas possibilitam analisar com mais facilidade um sistema desba-lanceado ou com ocorrência de defeito. Uma vez que as equações são solucionadas nodomínio das sequências, os resultados podem ser rapidamente transformados parao domínio das fases. Vale destacar também que quaisquer três fasores podem serdecompostos em componentes simétricas, e não somente as correntes apresentadas.
Considerando o sistema trifásico equilibrado com tensões de fase VAN = V ∠0,
9

VBN = V ∠−120 e VCN = V ∠120, um importante fato acerca de sistemas trifásicosequilibrados pode ser observado através da utilização das equações 2.7, 2.8 e 2.9,substituindo os fasores IA, IB e IC por VAN , VBN , VCN :
VA0 =1
3· (V ∠0 + V ∠− 120 + V ∠120) = 0 (2.16)
VA1 =1
3· (V ∠0 + V ∠0 + V ∠360) = V ∠0 (2.17)
VA2 =1
3· (V ∠0 + V ∠120 + V ∠240) = 0 (2.18)
Dessa forma, para um sistema trifásico balanceado com sequência de fases abc,a única componente simétrica existente é a de sequência positiva.
2.4.2 Rotação cíclica das componentes simétricas
É importante ressaltar que o método apresentado até aqui é válido quando a faseA é utilizada como base, ou seja, quando esta é o ponto de partida do sentido derotação angular das sequências.
Entretanto, para determinados tipos de curto-circuito, a utilização dessa basepode inviabilizar os cálculos, como será mostrado no Capítulo 3. Dessa forma, faz-se necessário uma mudança de base das componentes simétricas através de umarotação cíclica de seus fasores [12].
As Equações 2.19 e 2.20 apresentam o método das componentes simétricas uti-lizando como bases as Fases B e C, respectivamente.IBIC
IA
=
1 1 1
1 α2 α
1 α α2
·IB0
IB1
IB2
=
1 α2 α
1 α α2
1 1 1
·IA0
IA1
IA2
(2.19)
ICIAIB
=
1 1 1
1 α2 α
1 α α2
·IC0
IC1
IC2
=
1 α α2
1 1 1
1 α2 α
·IA0
IA1
IA2
(2.20)
Uma importante consideração pode ser feita utilizando o conceito de rotaçõescíclicas: As Equações 2.16, 2.17 e 2.18 podem apresentar resultados diferentes de-pendendo da escolha da fase base das componentes simétricas, conforme mostradona Equação 2.21:
10

.
VB0 = VC0 = VB2 = VC2 = 0
VB1 = V ∠− 120
VC1 = V ∠120
(2.21)
Ao escolher-se a fase B como base, a tensão de sequência positiva em um sistemaequilibrado abc apresentará valor V ∠ − 120. Da mesma forma, escolhendo a faseC como base, a tensão de sequência positiva possuirá valor V ∠120.
Assim, percebe-se que a escolha da fase base corresponde a uma rotação cíclicadas linhas da matriz de transformação referida a fase A, que é a usual.
2.5 Representação de máquinas síncronas
Dado o estudo de componentes simétricas, pode-se representar os principais elemen-tos de um sistema de potência de acordo com suas sequências positiva, negativa ezero.
A Figura 2.3 apresenta o diagrama esquemático de um gerador estrela, aterradoatravés de uma impedância de neutro Zn.
Figura 2.3: Representação esquemática de um gerador trifásico estrela-aterrado [2].
As máquinas síncronas trifásicas são projetadas para produzir tensões internasbalanceadas. Dessa forma, conforme apresentado nas Equações 2.16, 2.17 e 2.18,somente a sequência positiva possuirá fonte de tensão. Além disso, a partir daEquação 2.11, observa-se que a sequência zero possuirá uma impedância igual a 3Zn
em série com a impedância de sequência zero do gerador.Como as máquinas síncronas são elementos não-estáticos da rede, é importante
salientar que suas impedâncias de sequência não compartilham de um mesmo valor[5]. Quando um gerador síncrono possui correntes balanceadas de sequência positiva
11

abc, a força magnetomotriz produzida por essas correntes giram na velocidade dorotor síncrono na mesma direção do rotor. Dessa forma, um fluxo magnético degrande magnitude penetra no rotor, e a impedância de sequência positiva possui umvalor alto.
Quando um estator de gerador síncrono tem correntes balanceadas de sequênciaacb, a força magnetomotriz produzida por essas correntes gira em velocidade sín-crona na direção oposta à do rotor. Nessas condições, as correntes são induzidas nosenrolamentos do rotor, impedindo o fluxo magnético de penetrar no rotor. Assim,observa-se que a impedância de sequência negativa é menor que a impedância desequência positiva.
Finalmente, quando um gerador síncrono possui apenas correntes de sequência-zero, a força magnetomotriz produzida é, teoricamente, igual a zero. Dessa forma, aimpedância de sequência zero do gerador é a menor das impedâncias de sequência.
A Figura 2.4 apresenta respectivamente os circuitos de sequência positiva, nega-tiva e zero.
(a) Sequência positiva (b) Sequência negativa (c) Sequência zero
Figura 2.4: Circuitos de sequência para um gerador trifásico [2].
2.6 Representação de Transformadores
2.6.1 Transformador de dois enrolamentos
A Figura 2.5 apresenta o diagrama esquemático de um transformador ideal estrela-estrela, com ambos os enrolamentos aterrados através das impedâncias ZN e Zn,respectivamente. Quando correntes de sequência positiva ou negativa são aplicadasao transformador, a corrente de neutro é igual a zero e, dessa forma, não há quedade tensão através da impedância de neutro. Por esse motivo, as impedâncias desequência positiva e negativa apresentam o mesmo valor da impedância nominal dotransformador, em valor por unidade [2].
Entretanto, ao aplicar-se correntes de sequência zero no enrolamento de alta dotransformador, uma corrente de neutro circula através da impedância ZN1. Essacorrente possui valor IN = 3I0, conforme demonstrado na Equação 2.11. Além
12

Figura 2.5: Representação esquemática do transformador de dois enrolamentos [2].
disso, dado o funcionamento do transformador, uma corrente de sequência zero coma mesma magnitude da corrente aplicada ao primário, em p.u., circula através daimpedância de neutro do secundário do transformador.
É importante notar que, se um dos lados do transformador possui neutro aberto,a corrente de sequência zero não flui nos enrolamentos de alta e baixa. Assim, otransformador pode adquirir característica de circuito aberto em sua representaçãode sequência zero.
A Figura 2.6 apresenta a representação de sequência positiva e negativa de umtransformador de dois enrolamentos. Já a Figura 2.7 [4] apresenta as diferentesrepresentações da componente de sequência zero, dependendo do tipo de ligação deseus enrolamentos primário e secundário.
Figura 2.6: Circuito de sequência positiva e negativa do transformador de doisenrolamentos [3].
13
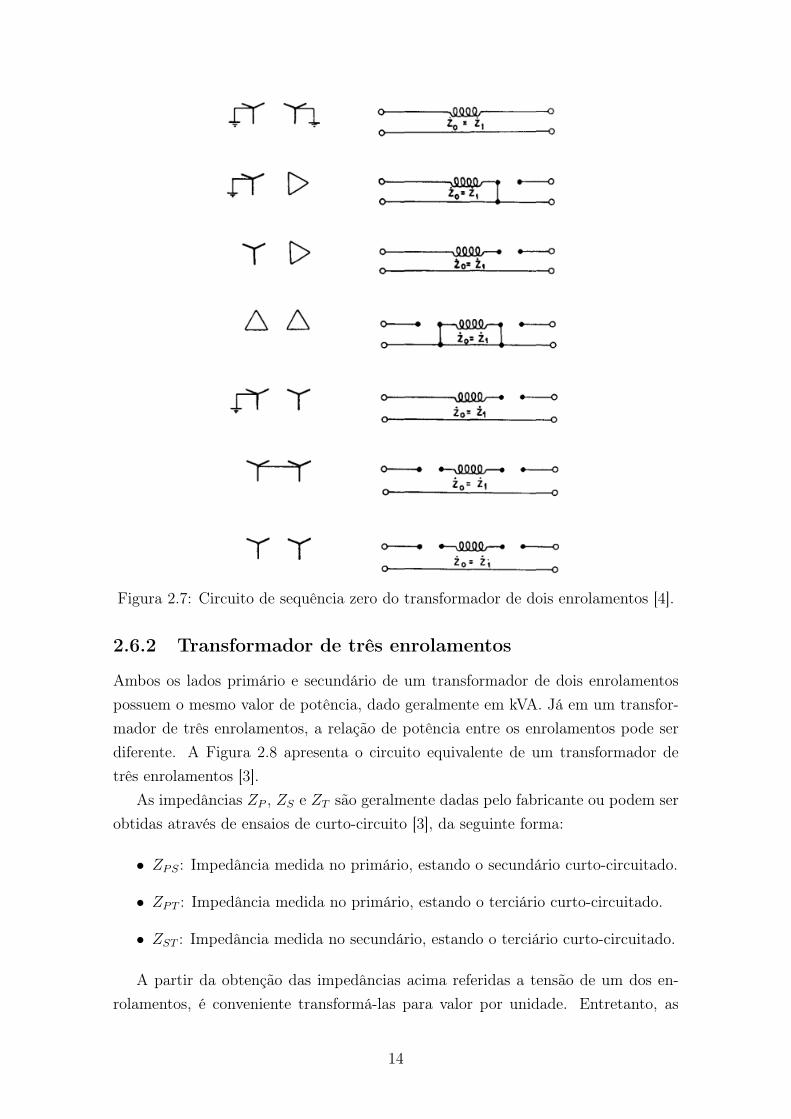
Figura 2.7: Circuito de sequência zero do transformador de dois enrolamentos [4].
2.6.2 Transformador de três enrolamentos
Ambos os lados primário e secundário de um transformador de dois enrolamentospossuem o mesmo valor de potência, dado geralmente em kVA. Já em um transfor-mador de três enrolamentos, a relação de potência entre os enrolamentos pode serdiferente. A Figura 2.8 apresenta o circuito equivalente de um transformador detrês enrolamentos [3].
As impedâncias ZP , ZS e ZT são geralmente dadas pelo fabricante ou podem serobtidas através de ensaios de curto-circuito [3], da seguinte forma:
• ZPS: Impedância medida no primário, estando o secundário curto-circuitado.
• ZPT : Impedância medida no primário, estando o terciário curto-circuitado.
• ZST : Impedância medida no secundário, estando o terciário curto-circuitado.
A partir da obtenção das impedâncias acima referidas a tensão de um dos en-rolamentos, é conveniente transformá-las para valor por unidade. Entretanto, as
14

Figura 2.8: Representação de um transformador de três enrolamentos [3].
impedâncias obtidas são uma soma da impedância independente de cada enrola-mento que participou da medição. Assim:
ZPS = ZP + ZS
ZPT = ZP + ZT
ZST = ZS + ZT
(2.22)
Através de manipulações algébricas na Equação 2.22, obtêm-se isoladamente aimpedância de cada enrolamento:
ZP =1
2· (ZPS + ZPT − ZST )
ZS =1
2· (ZPS + ZST − ZPT )
ZT =1
2· (ZPT + ZST − ZPS)
(2.23)
As considerações acerca da representação de sequências para o transformador dedois enrolamentos também são pertinentes ao transformador de três enrolamentos.A Figura 2.9 [4] apresenta a representação em sequência zero desses transformadores,dependente do tipo de ligação dos enrolamentos.
2.7 Representação Linhas de transmissão
Linhas de transmissão também devem ser representadas no domínio das sequênciaspara um estudo completo de curto-circuito. Por se tratar de um assunto extenso ecom diversas ramificações, serão apresentadas somente as principais equações utili-zadas em linhas de transmissão trifásicas completamente transpostas, além de suasrelações com as componentes de sequência. O leitor mais interessado pode obter
15

Figura 2.9: Circuito de sequência zero do transformador de três enrolamentos [4].
explicações minuciosas em [2], [3] e [13].Para um linha de transmissão trifásica completamente transposta, a matriz de
impedâncias que representa esse sistema é dada por:
Z =
Zaa Zab Zac
Zab Zbb Zbc
Zac Zbc Zcc
(2.24)
Onde Zaa, Zbb e Zcc representam a impedância própria de cada fase. Já oselementos fora da diagonal principal representam as impedâncias mútuas entre aslinhas correspondentes.
Considerando a linha idealmente transposta, assim, pode-se assumir que as im-pedâncias mútuas possuem o mesmo valor e que as impedâncias próprias tambémsão iguais. Através da transformação em componentes simétricas da Equação 2.24,obtêm-se:
Z0 = Zaa + 2 · Zab
Z1 = Z2 = Zaa − Zab
(2.25)
Face ao exposto, a Figura 2.10 apresenta o diagrama de sequência por fase deuma linha de transmissão completamente transposta.
2.7.1 Impedâncias mútuas de sequência zero
A influência do acoplamento mútuo de sequência zero entre linhas de transmissãodistintas de uma rede é extremamente relevante para o cálculo de curto-circuito.
16

Figura 2.10: Circuito de sequência positiva, negativa e zero de uma linha de trans-missão.
Devido a simetria dada pela transposição dos condutores ao longo da linha de trans-missão, os acoplamentos mútuos de sequência positiva e negativa possuem valoresínfimos e podem ser desprezados [14].
A Figura 2.11 ilustra o diagrama esquemático de impedâncias entre duas linhasde transmissão com acoplamento mútuo. Os cálculos referentes a essa importanteinfluência serão apresentados na Seção 2.9.3 desse Capítulo.
Figura 2.11: Circuito de sequência zero de uma linha de transmissão, com represen-tação de impedância mútua.
2.8 Representação de impedâncias shunt
As impedâncias shunt do barramento de uma subestação também devem ser apre-sentadas em função de suas sequências positiva, negativa e zero. Esses elementosagem na compensação de reativos da rede, além de auxiliar o controle de tensão nasbarras.
Nesse trabalho, serão consideradas somente as impedâncias shunt estáticas(banco de capacitores ou reatores), conectadas em algum barramento de subestaçãorepresentado na rede a ser estudada.
É interessante ressaltar que, por terem uma relação muito forte com o aterra-mento do sistema, as impedâncias shunt, geralmente, são representadas apenas pelassuas impedâncias de sequência zero.
17

2.9 Representação matricial de um sistema de po-
tência
Após a obtenção da representação de todos os elementos da rede em função de suascomponentes de sequência positiva, negativa e zero, já em valores por unidade, opróximo passo é a montagem dessas três distintas redes, para, depois disso, começara análise de curto-circuito nas barras.
Entretanto, ao se estudar sistemas de potência com grande número de barras,esse trabalho manual mostra-se extenso e penoso. Um dos métodos utilizados para aanálise de uma rede extensa é a representação matricial de suas sequências positiva,negativa e zero. A partir dessa representação, o cálculo de curto-circuito, foco destetrabalho, torna-se sistemático. Atrelado a isso, a representação matricial possibilitaa utilização computacional para a realização dos diversos cálculos.
Existem dois principais tipos de representação matricial utilizados para sistemasde potência. São eles:
• Matriz de Admitância (Y-barra);
• Matriz de Impedância (Z-barra).
Y-barra é a matriz de admitância nodal da rede. É uma matriz quadrada de di-mensão n×n, onde n é o número de barras do sistema (exceto a barra de referência),simétrica e esparsa (mais de 95% de seus elementos são nulos). Essa matriz possuigrande destaque em estudos de fluxo de potência. Os elementos de sua diagonalprincipal, Ykk, são o somatório das admitâncias que estão conectadas diretamente àbarra k. Já os elementos fora da diagonal, Ykj (k 6= j), são a soma das admitânciasque interligam as barras k e j com sinal trocado [15].
Z-barra é a matriz de impedância nodal, podendo ser calculada a partir da inver-são da matriz Y-barra. Entretanto, para uma rede de larga escala, essa inversão éraramente utilizada, devido ao seu alto custo computacional. Na prática, a inversãoda matriz Y-barra é feita usando técnicas de fatoração matricial, como a decompo-sição LU (Lower-Upper) [16] e técnicas de armazenamento matricial considerandosua esparsidade [17].
A matriz Z-barra também pode ser construída a partir de uma sequência dealgoritmos que fazem uma incorporação de um elemento por vez na estrutura matri-cial. O ônus desse método é que esses algoritmos são muito mais complexos que osalgoritmos de Y-barra. Entretanto, os elementos da matriz Z-barra fornecem muitomais informações sobre o sistema do que Y-barra. Os elementos da diagonal prin-cipal da matriz Z-barra, por exemplo, representam a impedância de Thévenin vistapela barra correspondente, informação crucial para o cálculo de curto-circuito.
18

Por esses motivos, este trabalho utiliza o método de construção de Z-barra sema necessidade da utilização Y-barra. É importante notar que deve-se montar trêsmatrizes Z-barra distintas, uma para cada componente de sequência. Neste trabalho,decidiu-se utilizar dois métodos para a obtenção da matriz Z-barra: o método semacoplamento mútuo, usado para a construção das matrizes de sequência positiva enegativa; e o método com acoplamentos mútuos, para a sequência zero.
2.9.1 Relação entre o Teorema de Thévenin e Z-barra
Considerando um sistema de potência contendo n barras, onde o vetor contendo ascorrentes iniciais de cada barra é denotado por I0 e o vetor das tensões iniciais entrecada barra e a referência é denotado po V0, pode-se escrever [3]:
V0 = Zbarra · I0 (2.26)
A partir de uma variação ∆I nas correntes, a Equação 2.26 pode ser escritacomo:
V0 = Zbarra · (I0 + ∆I) = Zbarra · I0 + Zbarra ·∆I (2.27)
A segunda parcela do lado direito da Equação 2.27 representa a variação detensão ∆V do sistema. Considerando agora uma injeção de corrente na barra k,obtem-se:
∆V1
∆V2
∆V3...
∆Vk...
∆Vn
=
Z11 Z12 . . . Z1k . . . Z1n
Z21 Z22 . . . Z2k . . . Z2n
Z31 Z32 . . . Z3k . . . Z3n
...... . . . ... . . . ...
Zk1 Zk2 . . . Zkk . . . Zkn
...... . . . ... . . . ...
Zn1 Zn2 . . . Znk . . . Znn
·
0
0
0...
∆Ik...0
(2.28)
Fazendo a multiplicação matricial da Equação 2.28:
∆V1
∆V2
∆V3...
∆Vk...
∆Vn
=
Z1k
Z2k
Z3k
...Zkk
...Znk
·∆Ik (2.29)
19
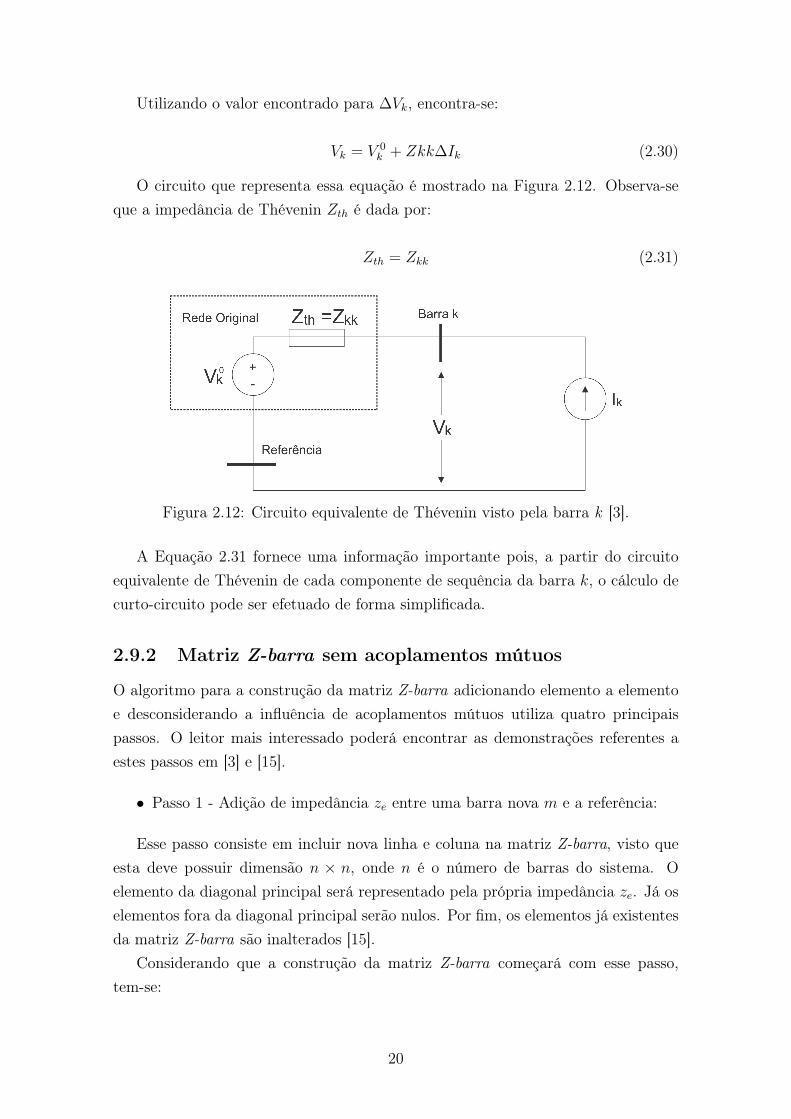
Utilizando o valor encontrado para ∆Vk, encontra-se:
Vk = V 0k + Zkk∆Ik (2.30)
O circuito que representa essa equação é mostrado na Figura 2.12. Observa-seque a impedância de Thévenin Zth é dada por:
Zth = Zkk (2.31)
Figura 2.12: Circuito equivalente de Thévenin visto pela barra k [3].
A Equação 2.31 fornece uma informação importante pois, a partir do circuitoequivalente de Thévenin de cada componente de sequência da barra k, o cálculo decurto-circuito pode ser efetuado de forma simplificada.
2.9.2 Matriz Z-barra sem acoplamentos mútuos
O algoritmo para a construção da matriz Z-barra adicionando elemento a elementoe desconsiderando a influência de acoplamentos mútuos utiliza quatro principaispassos. O leitor mais interessado poderá encontrar as demonstrações referentes aestes passos em [3] e [15].
• Passo 1 - Adição de impedância ze entre uma barra nova m e a referência:
Esse passo consiste em incluir nova linha e coluna na matriz Z-barra, visto queesta deve possuir dimensão n × n, onde n é o número de barras do sistema. Oelemento da diagonal principal será representado pela própria impedância ze. Já oselementos fora da diagonal principal serão nulos. Por fim, os elementos já existentesda matriz Z-barra são inalterados [15].
Considerando que a construção da matriz Z-barra começará com esse passo,tem-se:
20

Zbarra =[ 1
1 ze
](2.32)
Considerando agora a modificação de uma rede já existente com três barras, aadição da impedância ze entre a barra nova m = 4 e a referência resulta em:
Zbarra =
1 2 3 4
1 Z11 Z12 Z13 0
2 Z21 Z22 Z23 0
3 Z31 Z32 Z33 0
4 0 0 0 ze
(2.33)
• Passo 2 - Adição de impedância ze entre uma barra nova m e a barra jáexistente n:
Esse passo consiste em novamente incluir nova linha e coluna na matriz Z-barra,diante do exposto anteriormente. O elemento da diagonal principal será representadopor ze + Znn. Os outros elementos da nova linha e da nova coluna possuirão osmesmos valores que os elementos da linha k e da coluna k, respectivamente. Porfim, esse passo também mantém inalterados os elementos já existentes.
Considerando a modificação de uma rede já existente com três barras, a adiçãoda impedância ze entre a barra nova m = 4 e a barra existente n = 3 resulta em:
Zbarra =
1 2 3 4
1 Z11 Z12 Z13 Z13
2 Z21 Z22 Z23 Z23
3 Z31 Z32 Z33 Z33
4 Z31 Z32 Z33 ze + Z33
(2.34)
• Passo 3 - Adição de impedância ze entre uma barra existente n e a referência:
Esse passo consiste em incluir a impedância ze entre uma barra nova fictícia me a barra existente n, utilizando o processo apresentado no passo 2. Em seguida,é necessário executar um algoritmo para eliminar a linha e a coluna referentes àbarra fictícia m. Essa técnica é chamada redução de Kron [18], que elimina nósde uma rede quando a tensão ou corrente desse nó são iguais a zero. A Equação2.35 apresenta o algoritmo para a redução de uma matriz A com dimensão n × n,eliminando-se a linha e coluna k:
A′ij = Aij −Aik · Akj
Akk
(2.35)
onde i, j 6= k.
21

Considerando a modificação de uma rede já existente com três barras, a adiçãoda impedância ze entre a barra existente n = 3 e a referência resulta em:
Zbarra =
1 2 3 4 (fictícia)
1 Z11 Z12 Z13 Z13
2 Z21 Z22 Z23 Z23
3 Z31 Z32 Z33 Z33
4 (fictícia) Z31 Z32 Z33 ze + Z33
(2.36)
Aplicando o algoritmo da redução de Kron na Equação 2.36, obtem-se a matrizZ-barra após a eliminação da linha e coluna referente à barra fictícia:
Zbarra =
Z11 Z12 Z13
Z21 Z22 Z23
Z31 Z32 Z33
−Z13 · Z31 Z13 · Z32 Z13 · Z33
Z23 · Z31 Z23 · Z32 Z23 · Z33
Z33 · Z31 Z33 · Z32 Z33 · Z33
· 1
ze + Z33
(2.37)
• Passo 4 - Adição de impedância ze entre uma barra existente m e a uma barraexistente n:
Esse passo consiste em incluir a impedância ze entre uma barra nova fictíciak e a barra existente m, utilizando novamente o processo apresentado no passo 2.Em seguida, é necessário efetuar algumas manipulações matriciais para que a linhareferente à barra fictícia possa ser eliminada pela redução de Kron.
Considerando a modificação de uma rede já existente com três barras, a adiçãoda impedância ze entre a barra existente m = 2 e barra existente n = 3 resulta em:
Zbarra =
1 2 3 4 (fictícia)
1 Z11 Z12 Z13 Z12 − Z13
2 Z21 Z22 Z23 Z22 − Z23
3 Z22 Z32 Z33 Z32 − Z33
4 (fictícia) Z21 − Z31 Z22 − Z32 Z23 − Z33 ze + Z22 + Z33 − Z32 − Z23
(2.38)
Aplicando o algoritmo da redução de Kron na Equação 2.38, obtem-se a matrizZ-barra após a eliminação da linha e coluna referente à barra fictícia:
Zbarra =
Z11 Z12 Z13
Z21 Z22 Z23
Z31 Z32 Z33
−
Z14 · Z41 Z14 · Z42 Z14 · Z43
Z24 · Z41 Z24 · Z42 Z24 · Z43
Z34 · Z41 Z34 · Z42 Z34 · Z43
ze + Z22 + Z33 − Z32 − Z23
(2.39)
22

Dessa maneira, a partir desses quatro passos, é possível montar a matriz Z-barra(desconsiderando acoplamentos mútuos) sem a necessidade de inversão da matrizY-barra.
2.9.3 Matriz Z-barra com acoplamentos mútuos
A incorporação de impedâncias considerando seus acoplamentos mútuos na matrizZ-barra apresenta três passos, similares aos apresentados anteriormente. Entretanto,a demonstração destes é mais extensa e trabalhosa [3].
• Passo 1 - Adição de impedância própria zb entre a barra já existente p e umabarra nova q, onde zb possui acoplamento mútuo zm com a impedância za,inserida entre as barras m e n:
Esse passo consiste em incluir nova linha e coluna na matriz Z-barra, referentesà barra nova q. Os elementos já existentes continuam inalterados. Já os elementosfora da diagonal principal precisam ser calculados previamente, a partir da Equação2.40:
Zjq = Zqj = Zpj −zmza· (Zmj − Znj) (2.40)
onde p, q, m e n, são conhecidos. O algoritmo iterativo deve variar o índice j entretodas as barras do sistema, exceto a barra q.
Por fim, calcula-se o elemento da diagonal principal, a partir da Equação 2.41:
Zqq = Zpq −zmza· (Zmq − Znq)− (
z2mza− zb) (2.41)
• Passo 2 - Adição de impedância própria zb entre a barra já existente p e areferência, onde zb possui acoplamento mútuo zm com a impedância za, inseridaentre as barras m e n:
Esse passo consiste em executar o passo 1, onde q será uma barra fictícia. Emseguida, deve-se realizar a redução de Kron para remover a linha e coluna q.
• Passo 3 - Adição de impedância própria zb entre a barra já existente p e abarra já existente k, onde zb possui acoplamento mútuo zm com a impedânciaza, inserida entre as barras m e n:
Esse passo consiste em executar o passo 1, onde q será uma barra fictícia. Emseguida, deve-se realizar algumas manipulações matriciais, obtendo a Equação ??:
23

Zoriginal col. q − col. k
lin. q − lin. k Zqq + Zkk − Zqk − Zkq
(2.42)
Finalmente, procede-se com a redução de Kron para obter a matriz Z-barracompleta considerando acoplamentos mútuos.
24
Capítulo 3
Cálculo de curto-circuito
3.1 Introdução
Os estudos de curto-circuito são realizados a fim de fornecer informações para ocorreto dimensionamento dos dispositivos de proteção e manobra, visando a robustezdo sistema. O curto-circuito ocorre geralmente por conta de falhas no isolamentodos condutores, descargas atmosféricas, centelhas proveniente de queimadas e atémesmo por erro humano. As faltas podem ser simétricas, envolvendo todas as fases,ou assimétricas, onde geralmente somente um ou dois condutores estão envolvidos.Elas podem ocorrer através do contato de um condutor ou de uma carcaça metálicacom a terra, do fechamento de curto entre condutores ou pelo rompimento de fases.
A ocorrência de curtos-circuitos é mais frequente em linhas de transmissão (emmédia 89% dos casos) [4]. A falta que envolve as três fases condutoras é a causadorade maiores danos ao sistema elétrico, muito por conta de sua elevada corrente decurto, sendo responsável por aproximadamente 6% das ocorrências de falta. Já afalta que envolve uma fase e a terra é a mais usual, com aproximadamente 63% dasocorrências [19] [4].
Na prática, o cálculo de curto-circuito depende somente da determinação dastensões e impedâncias de sequência vistas pela fonte no momento exatamente antesda ocorrência da falta. Neste trabalho, a tensão pré-falta de sequência positivaserá sempre considerada com o valor de 1,0 p.u. Já as impedâncias são facilmentedeterminadas através do teorema de Thevènin em conjunto com a representação darede utilizando o método Z-barra para cada sequência, conforme apresentado naSeção 2.9 do Capítulo 2.
Este capítulo apresenta o cálculo de quatro tipos de curto-circuito em barras:trifásico, monofásico-terra, bifásico e bifásico-terra.
25
3.2 Curto-circuito Trifásico
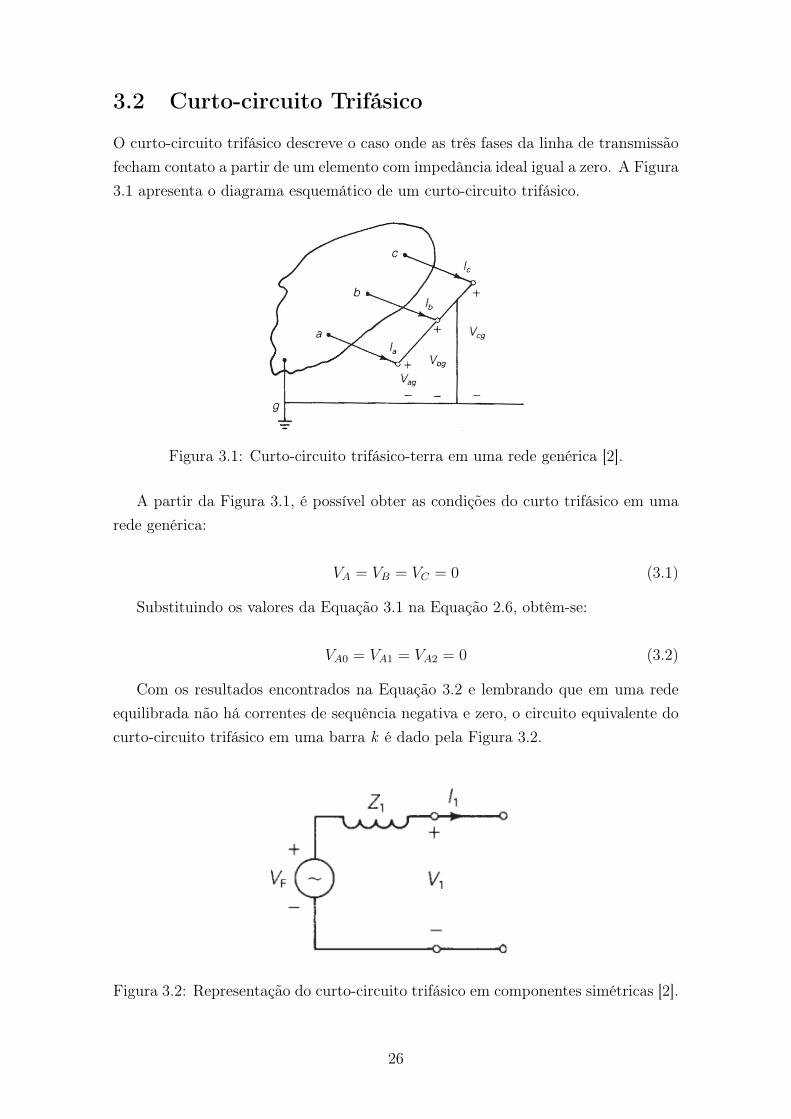
O curto-circuito trifásico descreve o caso onde as três fases da linha de transmissãofecham contato a partir de um elemento com impedância ideal igual a zero. A Figura3.1 apresenta o diagrama esquemático de um curto-circuito trifásico.
Figura 3.1: Curto-circuito trifásico-terra em uma rede genérica [2].
A partir da Figura 3.1, é possível obter as condições do curto trifásico em umarede genérica:
VA = VB = VC = 0 (3.1)
Substituindo os valores da Equação 3.1 na Equação 2.6, obtêm-se:
VA0 = VA1 = VA2 = 0 (3.2)
Com os resultados encontrados na Equação 3.2 e lembrando que em uma redeequilibrada não há correntes de sequência negativa e zero, o circuito equivalente docurto-circuito trifásico em uma barra k é dado pela Figura 3.2.
Figura 3.2: Representação do curto-circuito trifásico em componentes simétricas [2].
26

Dessa forma, observa-se que:
IA1 =VA1
Zkk+
(3.3)
onde Zkk+ é a impedância de sequência positiva vista pela barra k, dada peloelemento da posição kk na matriz Z-barra correspondente.
Finalmente, as correntes do curto trifásico-terra em cada fase são encontradassubstituindo as componentes de sequência na Equação 2.12.
3.3 Curto-circuito Monofásico-Terra
O curto-circuito monofásico-terra descreve o caso onde uma das fases da linha detransmissão fecha contato com a terra através de uma impedância de falta Zf . AFigura 3.3 apresenta o diagrama esquemático de um curto-circuito monofásico-terrana fase A.
Figura 3.3: Curto-circuito monofásico-terra em uma rede genérica [2].
A partir da análise da Figura 3.3, é possível obter as condições do curto-circuitomonofásico-terra na fase A de uma rede genérica:
VA = ZF · IA (3.4)
IB = IC = 0 (3.5)
Substituindo as correntes da Equação 3.5 na Equação 2.6, obtêm-se:
I0 = I1 = I2 =IA3
(3.6)
Além disso, utilizando as Equações 3.6 e 2.13 em conjunto com a Equação 3.4:
27

(V0 + V1 + V2) = 3ZF · I1 (3.7)
Ambas as Equações 3.6 e 3.7 são satisfeitas através da conexão em série das redesde sequência, como ilustrado na Figura 3.4.
Figura 3.4: Representação do curto-circuito monofásico em componentes simétricas[2].
Dessa forma, as componentes de sequência são dadas pela Equação 3.8:
I0 = I1 = I2 =VF
Zkk0 + Zkk1 + Zkk2 + 3ZF
(3.8)
Retornando para o domínio das fases a partir da Equação 2.12, é possível en-contrar as correntes IA, IB e IC . Como era de se esperar, IB = IC = 0, visto que ocurto monofásico foi considerado na fase A. Finalmente, a corrente de curto-circuitomonofásico IA1 é dada pela Equação 3.9:
IA1 = I0 + I1 + I2 =3VF
Zkk0 + Zkk1 + Zkk2 + 3ZF
(3.9)
onde Zkk1, Zkk2 e Zkk0 são, respectivamente, as impedâncias de sequência posi-tiva, negativa e zero vistas pela barra k e ZF é a impedância de falta. Já a tensãoVF representa a tensão de fase pré-falta.
3.3.1 Considerações sobre as fases B e C
Utilizando as rotações cíclicas apresentadas nas equações 2.19 e 2.20, percebe-se queas demonstrações algébricas realizadas para a fase A acontecem da mesma forma
28
tomando as fases B ou C como referência. A única diferença ocorre devido à tensãopré-falta apresentar defasagem em relação a tensão VFA, como visto na equação 2.21.Dessa forma, as correntes na ocorrência de curto monofásico-terra nas fases B e Csão dadas pela Equação 3.10:
.IB1 = IA1 · 1∠− 120
IC1 = IA1 · 1∠120(3.10)
3.4 Curto-circuito Bifásico
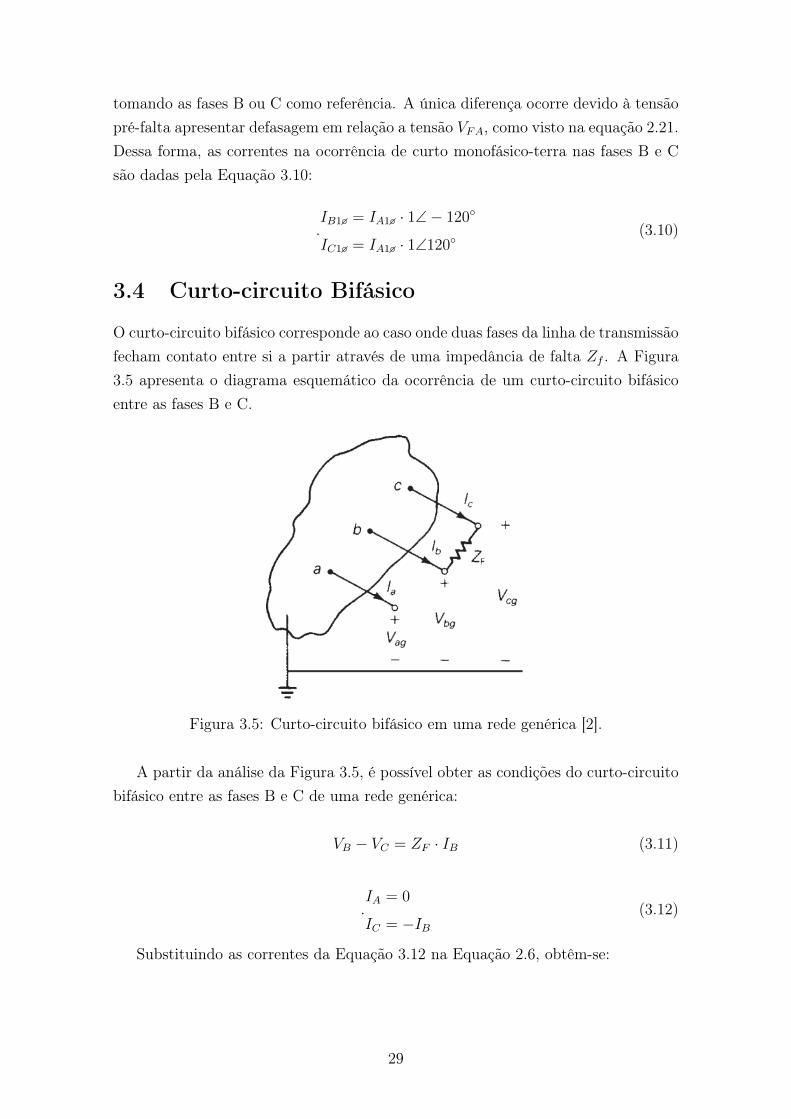
O curto-circuito bifásico corresponde ao caso onde duas fases da linha de transmissãofecham contato entre si a partir através de uma impedância de falta Zf . A Figura3.5 apresenta o diagrama esquemático da ocorrência de um curto-circuito bifásicoentre as fases B e C.
Figura 3.5: Curto-circuito bifásico em uma rede genérica [2].
A partir da análise da Figura 3.5, é possível obter as condições do curto-circuitobifásico entre as fases B e C de uma rede genérica:
VB − VC = ZF · IB (3.11)
.IA = 0
IC = −IB(3.12)
Substituindo as correntes da Equação 3.12 na Equação 2.6, obtêm-se:
29

.
I0 = 0
I1 =1
3(α− α2)IB
I2 =1
3(α2 − α)IB = −I1
(3.13)
Além disso, utilizando as Equações 3.13 e 2.13 em conjunto com a Equação 3.11:
V1 − V2 = ZF · I1 (3.14)
Ambas as Equações 3.13 e 3.14 são satisfeitas através da conexão das redes desequência positiva e negativa através da impedância de falta ZF , como mostrado naFigura 3.6.
Figura 3.6: Representação do curto-circuito bifásico em componentes simétricas [2].
Dessa forma, as componentes de sequência são dadas pela Equação 3.15:
.
I0 = 0
I1 = −I2 =VF
Zkk1 + Zkk2 + ZF
(3.15)
Retornando para o domínio das fases a partir da Equação 2.12, é possível en-contrar as correntes IA, IB e IC . Verifica-se que IA = 0, visto que o curto-circuitobifásico foi considerado entre as barras B e C. Finalmente, a corrente de curto-circuito bifásico IB2 = −IC2 é dada pela Equação 3.16:
IB2 = −IC2 =−j√
3VFZkk1 + Zkk2 + ZF
(3.16)
onde Zkk1, Zkk2 e Zkk0 são, respectivamente, as impedâncias de sequência posi-tiva, negativa e zero vistas pela barra k. Já a tensão VF representa a tensão de fasepré-falta.
3.4.1 Considerações sobre as fases AB e AC
Utilizando a fase C e a fase B como base para as componentes simétricas, os pa-res AB e AC, respectivamente, respeitam as demonstrações algébricas realizadas
30

para um curto bifásico no par BC. Utilizando a Equação 2.21 em conjunto com aEquação 3.16, obtêm-se as correntes de curto-circuito bifásico dos pares AB e AC,apresentadas na Equação 3.17.
.
Fases A e B
IA2 = −IB2 =−j√
3VFZkk1 + Zkk2 + ZF
· 1∠120
Fases A e C
IC2 = −IA2 =−j√
3VFZkk1 + Zkk2 + ZF
· 1∠− 120
(3.17)
3.5 Curto-circuito Bifásico-Terra
O curto-circuito bifásico-terra descreve o caso onde duas fases da linha de trans-missão fecham contato entre si e com a terra a partir através de uma impedânciade falta Zf . A Figura 3.7 apresenta o diagrama esquemático de um curto-circuitobifásico-terra na fases B e C.
Figura 3.7: Curto-circuito bifásico-terra em uma rede genérica [2].
A partir da análise da Figura 3.7, é possível obter as condições do curto-circuitobifásico-terra na fases B e C de uma rede genérica:
IA = 0 (3.18)
VB = VC (3.19)
VB = ZF (IB + IC) (3.20)
31

Figura 3.8: Representação do curto-circuito bifásico-terra em componentes simétri-cas [2].
Substituindo a Equação 3.18 na Equação 2.6, obtêm-se:
I0 = I1 = I2 = 0 (3.21)
Além disso, utilizando as Equações 3.19 e 2.13:
V0 + αV1 + α2V2 = V0 + α2V1 + αV2
V2 = V1(3.22)
Transformando os termos da Equação 3.20 para suas componentes de sequência:
.V0 + α2V1 + αV2 = ZF (I0 + α2I1 + αI2 + I0 + αI1 + α2I2)
V0 − V1 = 3ZF I0(3.23)
As Equações 3.21, 3.22 e 3.23 são satisfeitas através da conexão em paralelo dasredes de sequência, como mostrado na Figura 3.8.
Dessa forma, as Equações 3.24, 3.25 e 3.26 representam as componentes desequência positiva, negativa e zero, respectivamente:
I1 =VF
Zkk1 + [Zkk2 // (Zkk0 + 3ZF )](3.24)
I2 = (−I1)(Zkk0 + 3ZF
Zkk0 + 3ZF + Zkk2
) (3.25)
I0 = (−I1)(Zkk2
Zkk0 + 3ZF + Zkk2
) (3.26)
Retornando para o domínio das fases a partir da Equação 2.12, é possível encon-trar as correntes IA, IB e IC .
3.5.1 Considerações sobre as fases AB e AC
Utilizando a fase C e a fase B como base para as componentes simétricas, os paresAB e AC, respectivamente, respeitam as demonstrações algébricas realizadas para
32
um curto-circuito bifásico no par BC. Utilizando a Equação 2.21 em conjunto coma Equação 3.24, a única diretamente dependente de VF , obtêm-se as correntes desequência positiva de curto-circuito bifásico dos pares AB e AC, apresentadas naEquação 3.27.
.
Fases A e B:
I1 =VF
Zkk1 + [Zkk2 // (Zkk0 + 3ZF )]· 1∠120
Fases A e C:
I1 =VF
Zkk1 + [Zkk2 // (Zkk0 + 3ZF )]· 1∠− 120
(3.27)
33
Capítulo 4
Desenvolvimento do programa
4.1 Introdução
Este Capítulo apresenta o programa para cálculo de curto-circuito desenvolvido,chamado de Power System Fault Analyser (PSFA), onde é apresentada a linguagemde programação utilizada e as respectivas bibliotecas, suas funcionalidades, interfacegráfica e a formatação de entrada e saída de dados. Além disso, a partir da montagempasso a passo de uma sistema-teste composto por cinco barras, a conexão entre ainterface desenvolvida e o algoritmo responsável pela formulações matemáticas éexplicitada através da utilização de fluxogramas e pseudocódigos.
4.2 Linguagem escolhida
O programa foi desenvolvido na linguagem Python, na versão 2.7. Essa escolharealizou-se devido à grande quantidade de pacotes e bibliotecas disponíveis na co-munidade opensource, facilitando a solução de problemas através da consulta emfóruns e tópicos. As seguintes bibliotecas foram utilizadas neste trabalho:
• NumPy: Permite operar vetores e matrizes com maior facilidade a partir devárias funções otimizadas.
• SciPy: Complementa a biblioteca NumPy trazendo funções ainda mais robus-tas, aumentando a performance de execução dos algoritmos matriciais.
• PyQt: Auxilia na criação da interface gráfica, com uma grande quantidade decomponentes e uma engine robusta.
• Openpyxl: Permite a leitura e escrita de planilhas .xls ou .xlsx através dediversas funções pré-compiladas, facilitando a criação de relatórios de saídaamigáveis.
34
4.3 Interface gráfica e funcionalidades
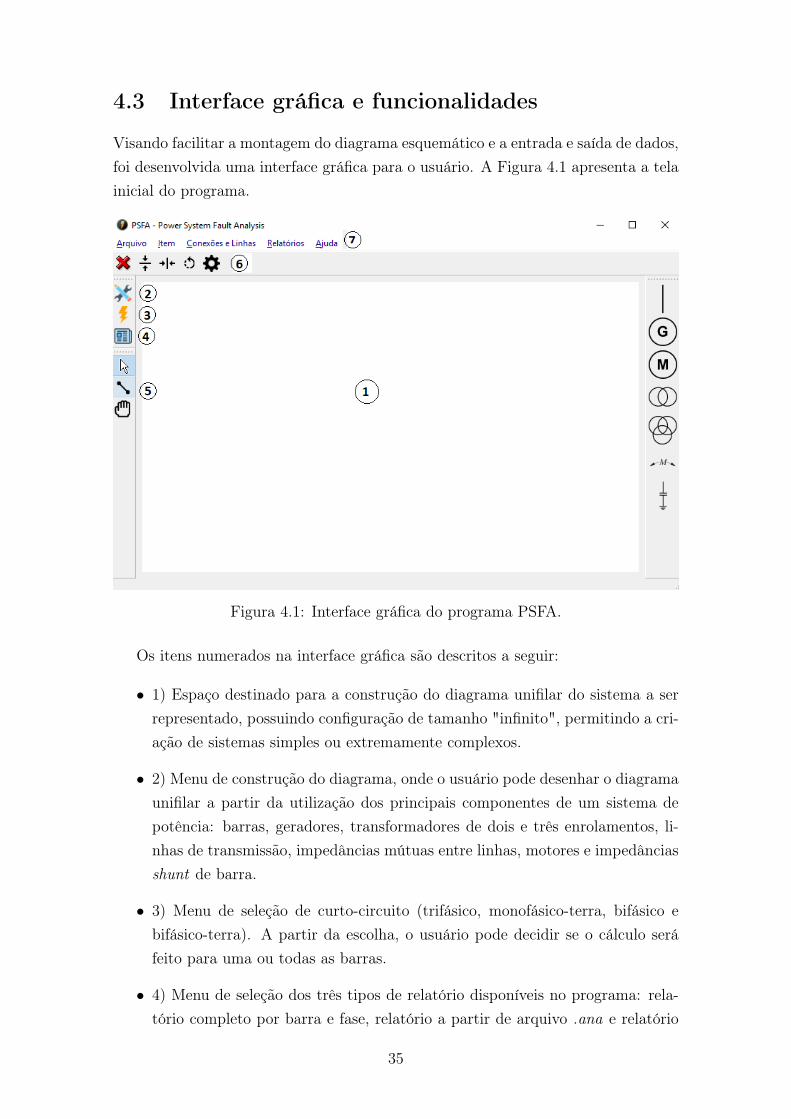
Visando facilitar a montagem do diagrama esquemático e a entrada e saída de dados,foi desenvolvida uma interface gráfica para o usuário. A Figura 4.1 apresenta a telainicial do programa.
Figura 4.1: Interface gráfica do programa PSFA.
Os itens numerados na interface gráfica são descritos a seguir:
• 1) Espaço destinado para a construção do diagrama unifilar do sistema a serrepresentado, possuindo configuração de tamanho "infinito", permitindo a cri-ação de sistemas simples ou extremamente complexos.
• 2) Menu de construção do diagrama, onde o usuário pode desenhar o diagramaunifilar a partir da utilização dos principais componentes de um sistema depotência: barras, geradores, transformadores de dois e três enrolamentos, li-nhas de transmissão, impedâncias mútuas entre linhas, motores e impedânciasshunt de barra.
• 3) Menu de seleção de curto-circuito (trifásico, monofásico-terra, bifásico ebifásico-terra). A partir da escolha, o usuário pode decidir se o cálculo seráfeito para uma ou todas as barras.
• 4) Menu de seleção dos três tipos de relatório disponíveis no programa: rela-tório completo por barra e fase, relatório a partir de arquivo .ana e relatório
35

contendo as matrizes Z-barra de componentes simétricas.
• 5) Seleção de ponteiro ou criação de conexão entre elementos, além da funçãode arraste de tela, imprescindível para a construção de redes extensas.
• 6) Funções de alteração de componente: deletar, alinhamento horizontal evertical, girar e alterar os dados.
• 7) Barra de ferramentas contendo opções de abrir ou salvar caso, carregarplanilhas de dados ou arquivo .ana, alterar componentes ou sair do programa.
O usuário tem a opção de construir a rede a ser estudada a partir da inserçãodos componentes disponíveis ou utilizando uma planilha .xlsx pré-configurada, quefacilita a entrada de dados de redes maiores. A escolha do arquivo tipo .xlsx emvez do arquivo tipo texto ocorreu pela facilidade de identificar linhas e colunasna hora do preenchimento das informações, diferentemente do método tabular dosarquivos texto, que pode dificultar e desmotivar a criação da estrutura da rede.Sobre os valores decimais, estes podem ser digitados utilizando ponto ou vírgula, eo algoritmo se encarregará das transformações necessárias. A Figura 4.2 apresentaa planilha utilizada para entrada de dados de geradores via arquivo do programaPSFA.
Figura 4.2: Planilha para entrada de dados de geradores.
Os relatórios de saída também utilizam planilhas amigáveis pré-configuradas,contando com uma lista suspensa de escolha de barra, exibindo todos os tipo defalta shunt em kA e p.u.. A Figura 4.3 ilustra o modelo de relatório de saída doprograma PSFA.
Figura 4.3: Relatório de saída do programa PSFA.
36

4.4 Sistema-teste de cinco barras
Para demonstrar o funcionamento completo do programa, desde a montagem darede até a obtenção do relatório de saída, será utilizado o sistema de cinco barras daFigura 4.4 [5]. Os dados referentes aos elementos desse sistema estão apresentadosna Tabela 4.1.
Figura 4.4: Sistema de cinco barras [5].
Tabela 4.1: Dados do sistema-exemplo de cinco barras [5].
Item Potência (MVA) Tensão (kV) X1 (p.u.) X2 (p.u.) X0 (p.u.)G1 100 20 0, 15 0, 15 0, 05G2 100 20 0, 15 0, 15 0, 05T1 100 20/220 0, 10 0, 10 0, 10T2 100 220/20 0, 10 0, 10 0, 10L24 100 220 0, 125 0, 125 0, 30L23 100 220 0, 15 0, 15 0, 35L34 100 220 0, 25 0, 25 0, 7125
A construção do sistema no PSFA é iniciada a partir da inserção das barras.Uma dessas barras deve ser designada como a barra que apresenta a tensão base dosistema a ser estudado. A Figura 4.5 ilustra as cinco barras do sistema inseridas naárea de construção e a janela responsável pela entrada de dados da barra 1, escolhidacomo barra base. Após a entrada completa das informações via interface gráfica, oprograma instancia um novo objeto da classe Barra:
class Barra:
def __init__(self, id, barra_base, v):
self.id = id # Id da barra;
self.barra_base = barra_base # Se verdadeiro, barra responsavel pela
tensao de base;
self.v = v # Tensao de base.
37
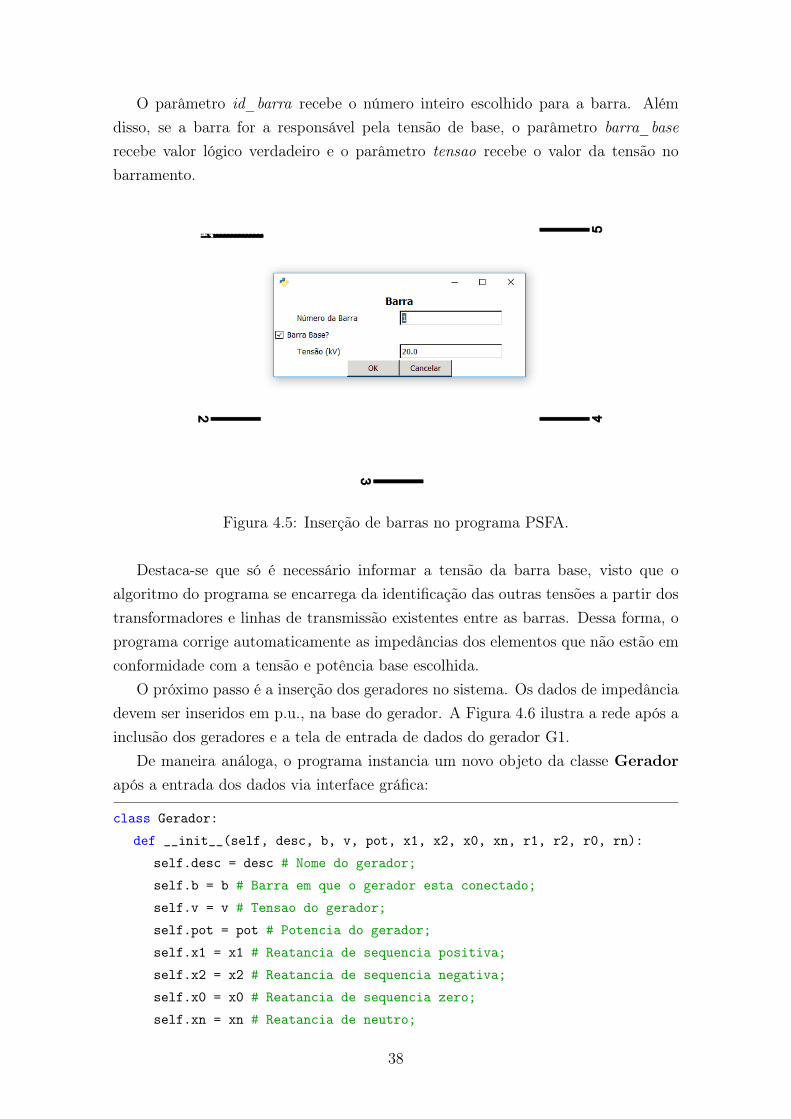
O parâmetro id_barra recebe o número inteiro escolhido para a barra. Alémdisso, se a barra for a responsável pela tensão de base, o parâmetro barra_baserecebe valor lógico verdadeiro e o parâmetro tensao recebe o valor da tensão nobarramento.
Figura 4.5: Inserção de barras no programa PSFA.
Destaca-se que só é necessário informar a tensão da barra base, visto que oalgoritmo do programa se encarrega da identificação das outras tensões a partir dostransformadores e linhas de transmissão existentes entre as barras. Dessa forma, oprograma corrige automaticamente as impedâncias dos elementos que não estão emconformidade com a tensão e potência base escolhida.
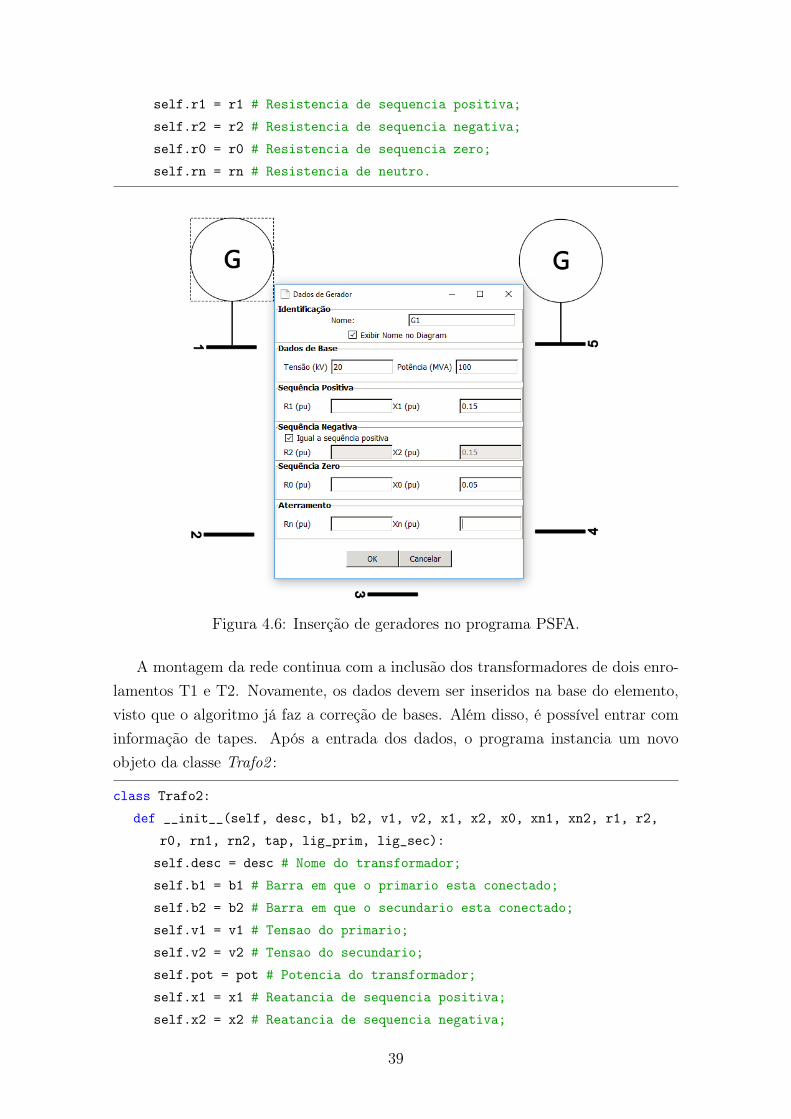
O próximo passo é a inserção dos geradores no sistema. Os dados de impedânciadevem ser inseridos em p.u., na base do gerador. A Figura 4.6 ilustra a rede após ainclusão dos geradores e a tela de entrada de dados do gerador G1.
De maneira análoga, o programa instancia um novo objeto da classe Geradorapós a entrada dos dados via interface gráfica:
class Gerador:
def __init__(self, desc, b, v, pot, x1, x2, x0, xn, r1, r2, r0, rn):
self.desc = desc # Nome do gerador;
self.b = b # Barra em que o gerador esta conectado;
self.v = v # Tensao do gerador;
self.pot = pot # Potencia do gerador;
self.x1 = x1 # Reatancia de sequencia positiva;
self.x2 = x2 # Reatancia de sequencia negativa;
self.x0 = x0 # Reatancia de sequencia zero;
self.xn = xn # Reatancia de neutro;
38
self.r1 = r1 # Resistencia de sequencia positiva;
self.r2 = r2 # Resistencia de sequencia negativa;
self.r0 = r0 # Resistencia de sequencia zero;
self.rn = rn # Resistencia de neutro.
Figura 4.6: Inserção de geradores no programa PSFA.
A montagem da rede continua com a inclusão dos transformadores de dois enro-lamentos T1 e T2. Novamente, os dados devem ser inseridos na base do elemento,visto que o algoritmo já faz a correção de bases. Além disso, é possível entrar cominformação de tapes. Após a entrada dos dados, o programa instancia um novoobjeto da classe Trafo2 :
class Trafo2:
def __init__(self, desc, b1, b2, v1, v2, x1, x2, x0, xn1, xn2, r1, r2,
r0, rn1, rn2, tap, lig_prim, lig_sec):
self.desc = desc # Nome do transformador;
self.b1 = b1 # Barra em que o primario esta conectado;
self.b2 = b2 # Barra em que o secundario esta conectado;
self.v1 = v1 # Tensao do primario;
self.v2 = v2 # Tensao do secundario;
self.pot = pot # Potencia do transformador;
self.x1 = x1 # Reatancia de sequencia positiva;
self.x2 = x2 # Reatancia de sequencia negativa;
39

self.x0 = x0 # Reatancia de sequencia zero;
self.xn1 = xn1 # Reatancia do neutro do primario;
self.xn2 = xn2 # Reatancia do neutro do secundario;
self.r1 = r1 # Resistencia de sequencia positiva;
self.r2 = r2 # Resistencia de sequencia negativa;
self.r0 = r0 # Resistencia de sequencia zero;
self.rn1 = rn1 # Resistencia do neutro do primario;
self.rn2 = rn2 # Resistencia do neutro do secundario;
self.tap = tap # Tap do transformador;
self.lig_prim = lig_prim # Tipo de ligacao do primario;
self.lig_sec = lig_sec # Tipo de ligacao do secundario.
Os parâmetros lig_prim e lig_sec recebem o tipo de ligação do enrolamento pri-mário e secundário, respectivamente, dado por ’YN’ (estrela-aterrado), ’Y’ (estrela)ou ’D’ (delta).
A Figura 4.7 ilustra a rede após a inclusão dos transformadores. Já a tela deconfiguração do transformador T1 é apresentada na Figura 4.8.
Figura 4.7: Rede exemplo após a inserção dos transformadores T1 e T2.
40
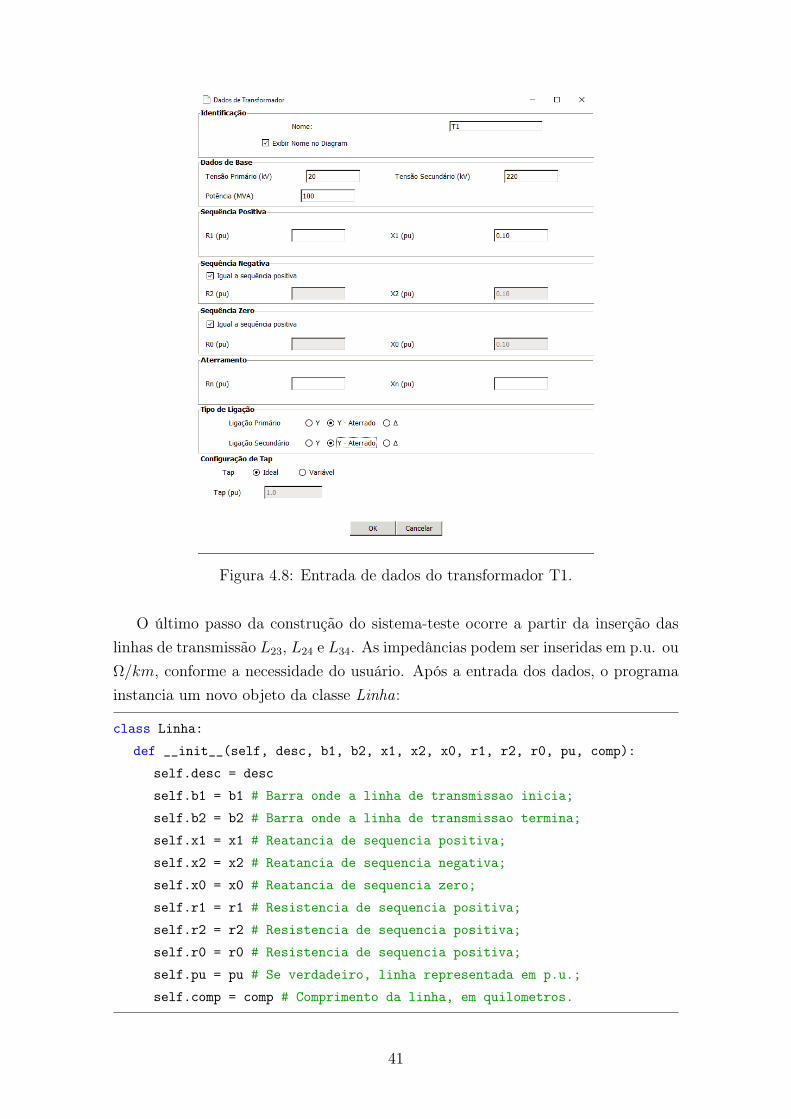
Figura 4.8: Entrada de dados do transformador T1.
O último passo da construção do sistema-teste ocorre a partir da inserção daslinhas de transmissão L23, L24 e L34. As impedâncias podem ser inseridas em p.u. ouΩ/km, conforme a necessidade do usuário. Após a entrada dos dados, o programainstancia um novo objeto da classe Linha:
class Linha:
def __init__(self, desc, b1, b2, x1, x2, x0, r1, r2, r0, pu, comp):
self.desc = desc
self.b1 = b1 # Barra onde a linha de transmissao inicia;
self.b2 = b2 # Barra onde a linha de transmissao termina;
self.x1 = x1 # Reatancia de sequencia positiva;
self.x2 = x2 # Reatancia de sequencia negativa;
self.x0 = x0 # Reatancia de sequencia zero;
self.r1 = r1 # Resistencia de sequencia positiva;
self.r2 = r2 # Resistencia de sequencia positiva;
self.r0 = r0 # Resistencia de sequencia positiva;
self.pu = pu # Se verdadeiro, linha representada em p.u.;
self.comp = comp # Comprimento da linha, em quilometros.
41
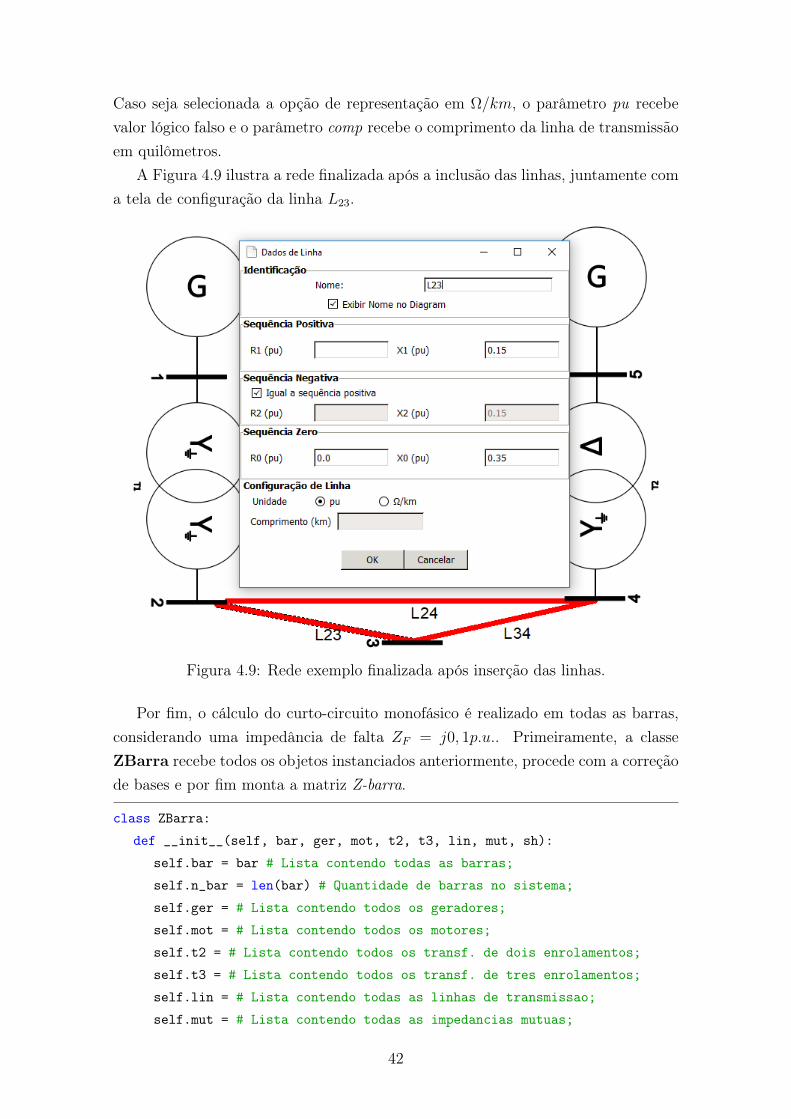
Caso seja selecionada a opção de representação em Ω/km, o parâmetro pu recebevalor lógico falso e o parâmetro comp recebe o comprimento da linha de transmissãoem quilômetros.
A Figura 4.9 ilustra a rede finalizada após a inclusão das linhas, juntamente coma tela de configuração da linha L23.
Figura 4.9: Rede exemplo finalizada após inserção das linhas.
Por fim, o cálculo do curto-circuito monofásico é realizado em todas as barras,considerando uma impedância de falta ZF = j0, 1p.u.. Primeiramente, a classeZBarra recebe todos os objetos instanciados anteriormente, procede com a correçãode bases e por fim monta a matriz Z-barra.
class ZBarra:
def __init__(self, bar, ger, mot, t2, t3, lin, mut, sh):
self.bar = bar # Lista contendo todas as barras;
self.n_bar = len(bar) # Quantidade de barras no sistema;
self.ger = # Lista contendo todos os geradores;
self.mot = # Lista contendo todos os motores;
self.t2 = # Lista contendo todos os transf. de dois enrolamentos;
self.t3 = # Lista contendo todos os transf. de tres enrolamentos;
self.lin = # Lista contendo todas as linhas de transmissao;
self.mut = # Lista contendo todas as impedancias mutuas;
42

self.sh = # Lista contendo todas as impedancias shunt;
self.data_seq_pos = [] # Lista a ser preenchida com as impedancias de
sequencia positiva;
self.data_seq_neg = [] # Lista a ser preenchida com as impedancias de
sequencia negativa;
self.data_seq_zero = [] # Lista a ser preenchida com as impedancias
de sequencia zero;
self.id_bar_base = None # Id da barra que possui a informacao da
tensao de base;
self.v_bar_base = 0.0 % Tensao de base;
self.vb = [0.0] * n_bar # Vetor a ser preenchido com a tensao de cada
barra;
self.zpos = None # Matriz Z-barra de sequencia positiva;
self.zneg = None # Matriz Z-barra de sequencia negativa;
self.zzero = None # Matriz Z-barra de sequencia zero.
self.tensao_base()
self.correcao()
self.monta_zbar()
def tensao_base(self):
# Metodo que encontra a barra base e monta o vetor de tensoes do
sistema eletrico
def correcao(self):
# Metodo que corrige a base dos elementos para a base do sistema e
escreve nas listas de impedancias de sequencia
def monta_zbar(self):
# Metodo que monta as matrizes Z-barra de sequencia positiva,
negativa e zero.
Por fim, a classe CalcCurto inicia a classe ZBarra e utiliza as matrizes criadaspara proceder com o cálculo de curto-circuito.
class CalcCurto:
def __init__(self, zf):
self.zf = zf # Impedancia de falta, quando houver;
self.zbar = Zbarra(bar, ger, mot, t2, t3, lin, mut, sh) # Instancia a
classe Zbarra.
def CurtoTrifasico(self):
43

result_curto_trif = [0.0] * self.zbar.n_bar # Inicia vetor que
recebera o resultado do curto-circuito trifasico em cada
barramento;
for i in range (0, self.zf.n_bar):
zth = zpos[i,i]
result_curto_trif[i] = 1 / (zth + 1j * self.zf)
return result_curto_trif
def CurtoMonofasico(self):
result_curto_mono = [0.0] * self.zbar.n_bar # Inicia vetor que
recebera o resultado do curto-circuito monofasico em cada
barramento;
for i in range (0, self.zf.n_bar):
zth = self.zbar.zpos[i, i] + self.zbar.zneg[i, i] +
self.zbar.zzero[i, i]
icc = 3 / (zth + 3 * 1j * self.zf)
return result_curto_mono
def CurtoBifasico(self):
result_curto_bif = [0.0] * self.zbar.n_bar # Inicia vetor que
recebera o resultado do curto-circuito bifasico em cada
barramento;
for i in range (0, self.zf.n_bar):
zth = (self.zbar.zpos[i, i] + self.zbar.zneg[i, i])
icc = -1j * np.sqrt(3.0) / (zth + 1j * self.zf)
return result_curto_bif
def CurtoBifasicoTerra(self):
result_curto_bift = [0.0] * self.zbar.n_bar # Inicia vetor que
recebera o resultado do curto-circuito bifasico-terra em cada
barramento;
for i in range (0, self.zf.n_bar):
zpar = paralelo(self.zbar.zneg[i, i], (self.zbar.zzero[i, i] + 3 *
1j * self.zf))
44

zth = 1j * (self.zbar.zpos[i, i] + zpar)
icc = -1.0 / zth
icc *= 3 * (self.zbar.zneg[i, i]) / (self.zbar.zzero[i, i] + 3 *
1j * self.zf + self.zbar.zneg[i][i])
return result_curto_bift
O programa exibe na própria tela a forma polar da corrente de curto-circuito emcada base, em kA, conforme apresentado na Figura 4.10. Já a Figura 4.11 apresentao relatório de saída em p.u. para a barra 3, considerando a mesma impedância defalta para todos os tipos de curto-circuito.
Figura 4.10: Cálculo do curto monofásico-terra para todas as barras.
A entrada de dados para a mesma rede também foi realizada utilizando o arquivo.ana correspondente. A Figura 4.12 apresenta o modelo do arquivo utilizado paraa rede exemplo. Após a leitura, foi gerado o relatório final com a informação decurto-circuito em todas as barras, sendo seus resultados completamente iguais aosda rede criada utilizando os componentes da interface gráfica.
Para a correta leitura do arquivo .ana pelo programa PSFA, este deve ser cri-ado conforme descrito em [20]. A única ressalva ocorre nas colunas 81 a 82 e 95 a96, que se referem, respectivamente, ao tipo de conexão do primário e secundário
45

Figura 4.11: Relatório de saída em p.u. para a barra 3.
do transformador de dois enrolamentos. Essas colunas devem ser obrigatoriamentepreenchidas, utilizando os valores YN, Y ou D, para estrela-aterrado, estrela e delta,respectivamente, pois o programa não aceitará a antiga representação de transfor-madores em ramos série e shunt, podendo acarretar até na não-convergência doalgoritmo.
Figura 4.12: Modelagem do arquivo .ana para a rede exemplo.
Por fim, através do menu de relatórios, é possível exportar as matrizes Z-Barrade componentes simétricas calculadas. A Figura 4.13 ilustra a planilha de saída emformato .xlsx, estando seus valores em p.u. na base 100 MVA e com dois algarismossignificativos.
46

Figura 4.13: Planilha contendo a matriz Z-Barra de sequência positiva.
A Figura 4.14 ilustra o fluxograma funcional do algoritmo, explicitando as etapassequenciais da simulação de uma rede elétrica no programa desenvolvido.
Figura 4.14: Fluxograma do algoritmo do programa PSFA.
47

Capítulo 5
Estudo de caso
Para validação do algoritmo do programa PSFA, decidiu-se realizar o estudo decurto-circuito do sistema elétrico de Roraima no período que antecede a interligaçãode Boa Vista ao Sistema Interligado Nacional, utilizando dados públicos fornecidospela EPE [10]. Esse estudo é um dos importantes passos para a expansão do sistemade Roraima até o ano de 2021, contando com a inserção de geração térmica e comdespacho máximo a partir da sincronização de todas as unidades das subestações deFloresta, Jatapú e Novo Paraíso.
Três casos distintos foram considerados utilizando esse cenário:
• Caso com número mínimo de máquinas sincronizadas no ano de 2021:Configuração sincronizando unidades para compor a geração contratada e umaunidade de contingência, contendo: 149 barras, 36 linhas de transmissão, 153transformadores, 153 geradores e 3 elementos shunt de barra.
• Caso com número máximo de máquinas e despacho máximo no ano de 2021:Configuração sincronizando todas as unidades atualmente instaladas nas SEFloresta, Novo Paraíso e Jatapú, contendo: 158 barras, 36 linhas, 156 trans-formadores, 161 geradores e 3 elementos shunt de barra.
• Caso adaptado: Configuração baseada no caso anterior, porém adicionandoimpedâncias mútuas de sequência zero Zm = 0, 05 + j0, 1 p.u. entre 5 pares delinhas, visando a validação do algoritmo de Z barra com elementos mútuos.
Foram realizadas simulações para os três cenários no ANAFAS e no programadesenvolvido neste trabalho, a fim de comparar os resultados encontrados para ocálculo de todos os tipo de curto-circuito presentes neste trabalho.
Desta maneira, as Tabelas 5.1, 5.2, 5.3 apresentam, respectivamente, as correntesde curto-circuito em kA calculadas em cada um dos três casos para a barra de número1300 (Distrito). Percebe-se que os resultados obtidos para todos os casos foramidênticos nos dois programas, considerando uma aproximação com dois algarismos
48

signficativos, tanto em magnitude quanto em fase. A Figura 5.1 ilustra parte darede onde a barra 1300 está inserida.
Figura 5.1: Parte do sistema elétrico de Roraima onde está inserida a barra 1300[10].
49
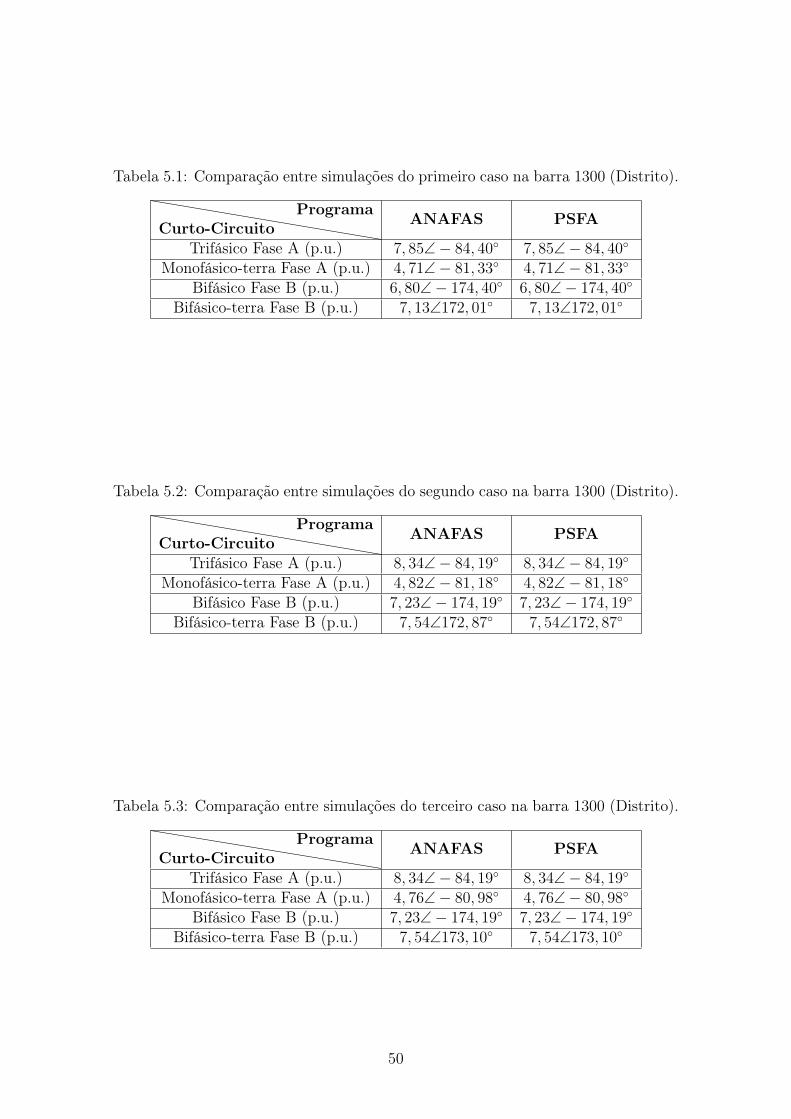
Tabela 5.1: Comparação entre simulações do primeiro caso na barra 1300 (Distrito).
Curto-CircuitoPrograma ANAFAS PSFA
Trifásico Fase A (p.u.) 7, 85∠− 84, 40 7, 85∠− 84, 40
Monofásico-terra Fase A (p.u.) 4, 71∠− 81, 33 4, 71∠− 81, 33
Bifásico Fase B (p.u.) 6, 80∠− 174, 40 6, 80∠− 174, 40
Bifásico-terra Fase B (p.u.) 7, 13∠172, 01 7, 13∠172, 01
Tabela 5.2: Comparação entre simulações do segundo caso na barra 1300 (Distrito).
Curto-CircuitoPrograma ANAFAS PSFA
Trifásico Fase A (p.u.) 8, 34∠− 84, 19 8, 34∠− 84, 19
Monofásico-terra Fase A (p.u.) 4, 82∠− 81, 18 4, 82∠− 81, 18
Bifásico Fase B (p.u.) 7, 23∠− 174, 19 7, 23∠− 174, 19
Bifásico-terra Fase B (p.u.) 7, 54∠172, 87 7, 54∠172, 87
Tabela 5.3: Comparação entre simulações do terceiro caso na barra 1300 (Distrito).
Curto-CircuitoPrograma ANAFAS PSFA
Trifásico Fase A (p.u.) 8, 34∠− 84, 19 8, 34∠− 84, 19
Monofásico-terra Fase A (p.u.) 4, 76∠− 80, 98 4, 76∠− 80, 98
Bifásico Fase B (p.u.) 7, 23∠− 174, 19 7, 23∠− 174, 19
Bifásico-terra Fase B (p.u.) 7, 54∠173, 10 7, 54∠173, 10
50

Capítulo 6
Considerações finais
6.1 Resultados
Seguindo as etapas concebidas, a interface gráfica final apresenta-se amigável, faci-litando a utilização pelo usuário desprovido de conhecimentos de programação. Osrelatórios de saída, da mesma forma, são gerados a partir de uma pré-formataçãosimples e objetiva, auxiliando a análise dos resultados do estudo.
Além disso, o algoritmo implementado mostrou-se robusto, podendo simular sis-temas elétricos de maior porte, como o sistema do estudo de caso apresentado. Avalidação do programa com o ANAFAS teve completo êxito na simulação de curto-circuito de um sistema elétrico real, conforme apresentado na Seção anterior.
Vale também salientar que, apesar do código principal não ter sido desenvolvidocom foco em máxima otimização, já que usa matrizes cheias, sua performance écompletamente aceitável para fins acadêmicos. Para os estudos apresentados, aleitura do arquivo, o processamento do cálculo e a impressão do relatório completoem .xlsx de cada caso levaram juntos, em média, menos de dois segundos para aconfiguração de maior porte do estudo de caso, contendo 158 barras.
Por fim, o código-fonte do programa desenvolvido e todas as bibliotecas necessá-rias para instalação estão disponíveis através do link https://drive.google.com/
drive/folders/1LRlFLrLS5aovEqsW7bRazoy1njyWbNJz?usp=sharing.
6.2 Trabalhos futuros
O tema deste trabalho possui uma vasta gama para expansão, podendo ser utilizadocomo base para um programa de fluxo de potência e fluxo de potência ótimo. Alémdisso, também é possível expandir a quantidade de componentes do sistema elétricoe adicionar opções como cálculo de curtos-circuitos série ou simultâneos. Por fim,pode-se também otimizar o algoritmo através da utilização do método Y-barra com
51

técnicas de esparsidade.
6.3 Conclusão
O objetivo principal deste trabalho foi alcançado com sucesso. Após a validação,o programa está pronto para ser utilizado a nível acadêmico de forma gratuita,auxiliando no estudo de curto-circuito através de uma interface amigável, além decontar com relatórios de fácil entendimento.
O desenvolvimento de um programa de cálculo de curto-circuito envolve, alémde conhecimentos computacionais, a necessidade do conhecimento sólido sobre aformulação matemática que compõe o tema. Dessa forma, o aprendizado com osdiversos desafios encontrados durante a concepção deste trabalho foi imensurável.
52
Referências Bibliográficas
[1] “Representação de Sistemas Elétricos de Potência”. Disponível em: <https://slideplayer.com.br/slide/10519562/>.
[2] GLOVER, J., SARMA, M., OVERBYE, T. Power System Analysis & Design.Cengage Learning, 2012.
[3] GRAINGER, J., STEVENSON, W. Power System Analysis. McGraw-Hill, 1994.
[4] KINDERMANN, G. Curto Circuito. Sagra Luzzatto, 1998.
[5] SAADAT, H. Power System Analysis. PSA Publishing, 2010.
[6] “ANAFAS - Análise de Faltas Simultâneas”. Disponível em:<http://www.cepel.br/produtos/anafas-analise-de-faltas-simultaneas.htm>.
[7] “ETAP - Power System Modeling, Analysis and Optimization Software”. Dispo-nível em: <https://etap.com/software/product-overview-main>.
[8] DE, D., MISHRA, S.A., KAR, A., et al. “Short Circuit Analysis of a PowerGrid using MiPower Software”, Advance in Electronic and Electric En-gineering, v. 4, n. 3, pp. 253–258, 2014. Disponível em: <https://www.ripublication.com/aeee_spl/aeeev4n3spl_05.pdf>.
[9] BROWN, T., HÖRSCH, J., SCHLACHTBERGER, D. “PyPSA: Python forPower System Analysis”, Journal of Open Research Software, v. 6, n. 4,2018. doi: 10.5334/jors.188. Disponível em: <https://doi.org/10.5334/jors.188>.
[10] “Base de Dados do Sistema Elétrico de Roraima – Fluxo de Potênciae Curto-Circuito (2016-2021)”. Disponível em: <www.epe.gov.br/pt/publicacoes-dados-abertos/publicacoes/base-de-dados-
do-sistema-eletrico-de-roraima-fluxo-de-potencia-e-curto-
circuito-2016-2021>.
53
[11] FORTESCUE, C. “Method of symmetrical coordinates applied to the solutionof polyphase networks”, AIEE Trans., v. 37, pp. 1027–1140, 1918.
[12] MARX, S., BENDER, D. An Introduction to Symmetrical Components, SystemModeling and Fault Calculation.
[13] ZANETTA, L. Fundamentos de Sistemas Elétricos de Potência. Livaria daFísica.
[14] FUCHS, R. Transmissão de Energia Elétrica - Linhas Aéreas. Livros Técnicose Científicos Editora.
[15] BORGES, C. L. T. Análise de Sistemas de Potência. DEE - UFRJ, 2005.
[16] SOMAN, S., KHAPARDE, S., PANDIT, S. Computational Methods for LargeSparse Power Systems Analysis: An Object Oriented Approach. SpringerUS, 2012.
[17] PAI, M. Computer Techniques In Power System Analysis. McGraw-Hill, 2005.
[18] KRON, G. Tensor Analysis of Networks. J. Wiley and Sons, 1965.
[19] “Recommended Practice for Calculating AC Short-Circuit Currents in Indus-trial and Commercial Power Systems”, IEEE Std 551-2006 [The VioletBook], pp. 1–308, Nov 2006. doi: 10.1109/IEEESTD.2006.248693.
[20] ROMÉRO, S. ANAFAS - Manual do Usuário. CEPEL - Centro de Pesquisasde Energia Elétrica, 2017.
54