Dinâmica de Estruturas_Carlos Rebelo_2011-2012

of 145
-
Upload
alberto-araujo -
Category
Documents
-
view
215 -
download
0
Transcript of Dinâmica de Estruturas_Carlos Rebelo_2011-2012
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
1/145
FACULDADE DE CIÊNCIAS E TECNOLOGIA
DA
UNIVERSIDADE DE COIMBRA
DEPARTAMENTO DE E NGENHARIA CIVIL
inâmica e imensionamento Sísmico
Ano Lectivo 2011/12
Carlos A. Silva Rebelo
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
2/145
2
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
3/145
Conteúdo
1 Introdução 51.1 Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.1 Fontes de vibração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.2 Comportamento dinâmico das estruturas . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.1.3 Consequências da vibração estrutural e seu controle . . . . . . . . . . . . . . . . . . . . . 7
1.2 Formulação da equação diferencial de movimento . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.1 Segunda lei de Newton e princípio d’Alembert . . . . . . . . . . . . . . . . . . . . . . . . 81.2.2 Princípio dos trabalhos virtuais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.2.3 Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2 Oscilador Linear de 1 Grau de Liberdade 152.1 Vibração livre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.1.1 Oscilador com amortecimento nulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152.1.2 Oscilador com amortecimento crítico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.1.3 Oscilador com amortecimento sub-crítico . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.1.4 Determinação experimental dos parâmetros dinâmicos . . . . . . . . . . . . . . . . . . . . 182.2 Resposta a excitação harmónica simples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.2.1 Oscilador sem amortecimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.2.2 Oscilador com amortecimento viscoso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.2.3 Representação complexa - Função de Transferência . . . . . . . . . . . . . . . . . . . . . . 272.2.4 Identificação das características dinâmicas do oscilador . . . . . . . . . . . . . . . . . . . . 332.2.5 Aparelhos de medida - acelerómetros e sismógrafos . . . . . . . . . . . . . . . . . . . . . . 35
2.3 Resposta do oscilador a um impulso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.3.1 Resposta a impulsos de duração infinitesimal . . . . . . . . . . . . . . . . . . . . . . . . . 362.3.2 Resposta a impulsos de duração finita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.4 Resposta do oscilador a excitação geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.4.1 Análise no domínio da frequência . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.4.2 Análise no domínio do tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 462.5 Cálculo numérico da resposta do OL1GL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
2.5.1 Cálculo no domínio da frequência - Transformada discreta de Fourier . . . . . . . . . . . . 482.5.2 Cálculo no domínio do tempo - Integral de Duhamel . . . . . . . . . . . . . . . . . . . . . 512.5.3 Cálculo no domínio do tempo - Integração directa passo-a-passo . . . . . . . . . . . . . . 542.5.4 Exemplo de aplicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
3 Sistemas dinâmicos contínuos 613.1 Formulação da equação de movimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.1.1 Barra prismática em flexão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 613.1.2 Barra prismática em vibração axial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 623.1.3 Amortecimento em Barras prismáticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
3.1.4 Lajes finas em flexão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 643.2 Vibração livre sem amortecimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 643.2.1 Barras prismáticas em flexão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 643.2.2 Lajes finas em flexão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 673.2.3 Método de Rayleigh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 683.2.4 Propriedades dos modos de vibração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.3 Resposta dinâmica de barras prismáticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4 Controlo de Vibrações em Estruturas 774.1 OL2GL - Solução por Transformada de Laplace . . . . . . . . . . . . . . . . . . . . . . . . . . . . 774.2 Sistemas Auxiliares de Controlo de Vibrações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.2.1 Sistema auxiliar sem amortecimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.2.2 Sistema auxiliar com amortecimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 824.3 Isolamento da Base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
CONTEÚDO 3
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
4/145
5 Sistemas dinâmicos discretos lineares 875.1 Equações diferenciais do movimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 875.2 Cálculo dos coeficientes de influência para barras . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
5.2.1 Matriz de rigidez do elemento de barra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 885.2.2 Matriz de massa do elemento de barra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 895.2.3 Matriz dos amortecimentos do elemento de barra . . . . . . . . . . . . . . . . . . . . . . . 905.2.4 Vector da excitação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 905.2.5 Escolha da formulação adequada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.3 Vibração livre não amortecida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 905.3.1 Ortogonalidade dos modos de vibração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 915.3.2 Normalização dos modos de vibração . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
5.4 Cálculo numérico de valores e vectores próprios . . . . . . . . . . . . . . . . . . . . . . . . . . . . 935.4.1 Método de Stodola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 935.4.2 Método de Holzer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 985.4.3 Método de Rayleigh-Ritz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
5.5 Cálculo da resposta por sobreposição modal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
6 Caracterização da Acção Sísmica 105
6.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1056.2 Risco Sísmico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1056.3 Quantificação da acção sísmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
6.3.1 Características gerais da acção sísmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1076.3.2 Escalas de magnitude e Intensidade sísmica . . . . . . . . . . . . . . . . . . . . . . . . . . 108
6.4 Modelos Descritivos da acção sísmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1106.4.1 Quantificação através dos valores máximos . . . . . . . . . . . . . . . . . . . . . . . . . . 1116.4.2 Quantificação com base em Espectros de Resposta . . . . . . . . . . . . . . . . . . . . . . 1116.4.3 Quantificação com base em Espectros de Potência . . . . . . . . . . . . . . . . . . . . . . 1156.4.4 Quantificação com base em Acelerogramas . . . . . . . . . . . . . . . . . . . . . . . . . . . 1186.4.5 Construção de Espectros de Resposta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
7 Resposta Estrutural à Acção Sísmica 125
7.1 Cálculo sísmico com base em espectros de resposta . . . . . . . . . . . . . . . . . . . . . . . . . . 1257.1.1 Método de Rayleigh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
7.2 Modelos estruturais de edifícios para análise dinâmica . . . . . . . . . . . . . . . . . . . . . . . . 1307.2.1 Modelo de três Graus de Liberdade por Piso (3GL/P) . . . . . . . . . . . . . . . . . . . . 1307.2.2 Exemplo numérico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1357.2.3 Modelo simplificado plano – 1GL/Piso . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1387.2.4 Modelo Tridimensional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
4 CONTEÚDO
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
5/145
Capítulo 1 Introdução
1.1 Generalidades
É objectivo da Dinâmica das Estruturas estudar os efeitos produzidos nas estruturas (tensões, deformações,esforços ...) por acções dinâmicas, ou seja, acções cuja magnitude, direcção ou posição dependem do parâmetrotempo.
A análise dinâmica pode ser vista, de forma simplista, como uma análise estrutural que inclui, nas equaçõesde equilibrio da estática, as forças geradas pela existência de aceleração e velocidade das massas do sistema.No entanto, os métodos usados para a análise estática são por vezes diferentes dos usados numa correspondenteanálise dinâmica, sendo, por isso, recomendável separar o valor estático do valor dinâmico das acções aoproceder-se à análise das estruturas, desde que se possa considerar válido o princípio da sobreposição de efeitos.
Os problemas de vibrações podem surgir em qualquer tipo de estruturas de engenharia civil sendo, no entanto,mais comuns no caso de estruturas suportando máquinas que, durante o seu funcionamento, desenvolvem forçasdinâmicas ou estruturas que, pela sua concepção, são sensíveis às flutuações da velocidade do vento, como porexemplo pontes atirantadas ou edifícios altos, ou ainda em estruturas suportando trafego de pessoas ou veículos,como por exemplo pontes ou parques de estacionamento. As vibrações sísmicas constituem, porém, o tipo deacção dinâmica que pode originar os mais graves problemas de segurança em estruturas de engenharia civil.
Podemos agrupar os problemas que surgem na análise de vibrações em estruturas em três tipos:
1. identificação dos fenómenos físicos e idealização de modelos matemáticos das fontes de vibração por formaa caracterizar as respectivas acções dinâmicas;
2. construção de modelos físicos e matemáticos que traduzam com fiabilidade o comportamento dinâmicodas estruturas, incluindo a identificação dos parâmetros do modelo com base em ensaios;
3. análise da segurança e fiabilidade estrutural com base nos valores de resposta correspondentes aos estadoslimites, e tomadas de decisão relativamente à segurança estrutural.
O primeiro ponto indicado acima está relacionado com a definição do valor das acções a utilizar em projecto,
enquanto que no segundo ponto se incluem os problemas de verificação da segurança de estruturas existentesatravés de modelos numéricos e de testes in situ . No terceiro ponto há que realçar o problema da definição dosvalores de comparação a tomar para a verificação dos estados limites. Embora apenas o segundo ponto sejaaqui tratado com alguma profundidade, é importante conhecer alguns conceitos relacionados com os outros doistipos de problemas.
1.1.1 Fontes de vibração
A identificação e quantificação das fontes de vibração obtendo, como resultado, modelos de acções dinâmicas po-dem ser realizadas, sob um ponto de vista da sua variabilidade no tempo, com base determinística ou estocástica.O tipo de modelo de acção mais indicado depende das características dessas acções sendo no entanto os modelosdeterminísticos os mais usados no cálculo por se adaptarem razoávelmente aos métodos semi-probabilísticos
de verifi
cação da segurança e por necessitarem de um menor ”back-ground” teórico por parte do Engenheiroprojectista.Nos modelos determinísticos das acções, pressupõe-se o conhecimento do valor da acção para qualquer
valor do parâmetro tempo. Este tipo de modelos dividem as acções em:
• Periódicas, as quais apresentam um padrão de variação que se repete exactamente ao fim de um períodode tempo T. São exemplo deste tipo as acções originadas por maquinaria industrial.
• Não periódicas, as quais apresentam um padrão de variação com características únicas num certo períodode tempo T. Como exemplo podem ser indicadas as acções transientes originadas por explosões ou im-pactos.
Nos modelos estocásticos o valor da acção em cada instante não é conhecido a priori . A modelação é
feita considerando que esse valor é dado por uma variável aleatória possuindo uma determinada densidade deprobabilidade. Tem-se assim que, num modelo estocástico, não existe apenas um padrão de histórias de carga
Generalidades 5
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
6/145
t
Xn(t)
t
X3(t)
t
X2(t)
t
X1(t)
t1 t2
Realização 1
Realização 2
Realização 3
Realização n
t
Xn(t)
t
X3(t)
t
X2(t)
t
X1(t)
t1 t2
Realização 1
Realização 2
Realização 3
Realização n
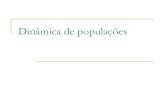
Figura 1 Representação de realizações de um campo estocástico
mas sim um conjunto infinito de histórias de carga que formam o campo estocástico e designadas realizações docampo estocástico (figura 1).
Sob certas condições é possível obter uma estimativa das características da acção analisando apenas umtroço finito de uma qualquer daquelas realizações. Neste caso, a função mais importante na caracterização dasacções estocásticas - função de autocorrelação R(τ ) - é definida da seguinte forma:
R(τ ) = limT →∞
1
T
T 2Z
−T 2
xi(t) · xi(t + τ )dt (1.1)
em que xi(t) e xi(t + τ ) representam o valor da acção na realização i e nos instantes de tempo (t) e (t + τ ).Podem ser obtidas estimativas de R(τ ) calculando o integral para períodos finitos T da história de carga. A
equação (1.1) é apresentada, frequentemente, sob a forma de um espectro de potência S (ω) obtido pelatransformação de Fourier da função de autocorrelação:
S (ω) =
∞Z −∞
R(τ )e−iωτ dτ (1.2)
O Regulamento de Segurança e Acções (RSA), que quantifica algumas das acções mais comuns em estruturas,considera a acção sísmica como acção dinâmica fornecendo, no Anexo III, informação para o seu tratamento comoacção estocástica. Também o Eurocódigo 8 [10, EC8], mais recente, contém informação relativa à quantificaçãoda acção sísmica.
Informação adicional àcerca das acções dinâmicas no cálculo de estruturas, nomeadamente no que respeita àacção do vento, tráfego, maquinaria, impacto de veículos ou aeronaves, trânsito de veículos ou pessoas, trabalhos
realizados em obras de construção civil como sejam explosões, martelos hidráulicos, cravação de estacas, peneirosde crivagem podem ser encontradas em [8],[9].
1.1.2 Comportamento dinâmico das estruturas
A análise dinâmica de estruturas envolve a sua modelação com vista à obtenção dos valores da resposta em termosde deslocamentos que, por sua vez, se poderão transformar em esforços internos, tensões ou extensões. Como jáfoi referido, esta análise é feita considerando forças adicionais dependentes da velocidade e aceleração tornandoassim o problema mais geral que o mesmo problema estático e, por isso, também de maior complexidade. É,porém, possível, em certos casos, obter bons resultados práticos usando modelos de análise dinâmica que, doponto de vista de análise estática poderiam parecer grosseiros. Vejamos dois exemplos:
1. Uma estrutura como a indicada na fi
gura 2 pode ser modelada através de elementos de barra, viga e pilaressujeitas à acção dinâmica p(t), ou mais simplesmente por uma massa correspondente à concentração de
6 Introdução
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
7/145
Figura 2 Exemplo de modelação estrutural para cálculo estático ou dinâmico
Figura 3 Exemplo de modelação de laje espessa sujeita a carga de impacto
massas ao nível do piso, por uma mola elástica correspondente à rigidez transversal dos pilares e por umelemento de amortecimento viscoso, proporcional à velocidade de deformação, e que traduz a dissipação deenergia no sistema. Definida e resolvida a equação de equilíbrio dinâmico deste sistema podemos transferiros deslocamentos máximos para o modelo de análise estática e obter assim a distribuição de esforços.
2. No exemplo da fig.3, representando uma laje de betão armado sujeita a uma acção de impacto ou explosão,mostra-se o modelo utilizado para cáculo estático e os modelos simplificados que podem ser usados emcáculo dinâmico (fig.6-c) e que são constituidos por massas correspondentes às massas do sistema (fig.6-a)e por molas elásticas que ligam as partes do sistema. Também aqui o modelo de análise dinâmica podeser simplificado relativamente ao modelo habitual de análise estática.
Como se poderá concluir dos exemplos apresentados as simplificações mais usadas são relativas, por um
lado, à discretização das massas do sistema, as quais se consideram concentradas em determinados pontos daestrutura e, por outro lado, a admitir-se que partes da estrutura se comportam como corpos rígidos interligadospor molas elásticas e amortecedores viscosos.
1.1.3 Consequências da vibração estrutural e seu controle
As consequências das vibrações nas estruturas podem ir desde o incómodo provocado em pessoas utentes,condicionamentos à utilização como por exemplo na fabricação de material de precisão ou estragos ligeiros emestruturas, até à rotura por esforços ou deformações excessivas, fadiga ou estragos irreparáveis em equipamento.De acordo com as regras de verificação da segurança pressupostos no R.S.A. podemos identificar as primeirascom os Estados Limites de Utilização e as segundas com Estados Limites Últimos.
Em algumas situações é possível reduzir ou mesmo evitar a vibração das estruturas partindo de soluções
estruturais ou acabamento de superfícies pensadas de acordo com as possíveis acções dinâmicas como porexemplo:
Generalidades 7
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
8/145
• Edifícios sujeitos a acção sísmica possuem um melhor comportamento se a distribuição de massas eregidezes, tanto em planta como em altura, não possuir variações bruscas e os elementos de construçãoestruturais possuirem um comportamento ductil. Neste caso as acções sísmicas podem ser consideravel-mente diminuídas bem assim como o risco de rotura catastrófica durante sismos mais intensos que o sismode projecto.
• As estruturas sujeitas a acções harmónicas que não possuem as suas frequências naturais na zona doespectro em que as acções surgem com maior intensidade são menos sensíveis a essas acções, podendomesmo, em certos casos, ser dispensadas da respectiva verificação da segurança.
• Evitar irregularidades em pisos sujeitos a acções rolantes, como por exemplo as faixas de rodagem empontes rodoviárias ou os pisos de edifícios sujeitos ao trânsito de veículos, conduz a menores cargasdinâmicas.
1.2 Formulação da equação diferencial de movimento
1.2.1 Segunda lei de Newton e princípio d’Alembert
A segunda lei de Newton establece que a variação da quantidade de movimento de um corpo é igual àforça aplicada e tem a direcção dessa força, ou seja:
F (t) = ∂
∂t
µm
∂y
∂t
¶ (1.3)
ou, admitindo que a massa se mantém constante
F (t) − mÿ(t) = 0 (1.4)
em que F (t) representa o conjunto de forças exteriores aplicadas e ÿ(t) é a segunda derivada do deslocamento em
ordem ao tempo. As forças aplicadas incluem não só forças exteriores independentes do sistema mas tambémforças interiores tal como impedimentos elásticos opostos ao deslocamento e impedimentos viscosos opostos àvelocidade das massas do sistema.
O conceito de que uma massa em movimento desenvolve uma força de inércia proporcional e oposta àaceleração é designado por Princípio d’Alembert. As equações (1.3) e (1.4) traduzem o equilíbrio dinâmico dosistema, ou seja, a soma das forças conservativas e não conservativas do sistema é igual à força de inércia .
Tome-se como exemplo a formulação da equação diferencial de movimento de uma massa rígida restringidapor uma mola elástica e um amortecedor viscoso. Este sistema elementar é conhecido por oscilador linear de um grau de liberdade – OL1GL. Considerando o peso próprio da massa W e uma acção exterior p(t) a equaçãode equilibrio do sistema de acordo com a 2a lei de Newton vem dada por:
XF y = mÿ (1.5)
p + W − f s − f c = mÿ (1.6)em que o deslocamento y é medido a partir da situação de f s = 0. As forças na mola elástica e no amortecedorviscoso são representadas, respectivamente, por f s = ky e f c = cẏ. Da equação (1.5) resulta então uma equaçãodiferencial linear não homogénea de segunda ordem ,
ky + cẏ + mÿ = p(t) + W (1.7)
O valor do deslocamento total é dado pela soma de duas parcelas correspondentes ao deslocamento devidoao peso próprio e ao deslocamento dinâmico:
y = yest + yd(t) = W
k + yd(t) (1.8)
Tendo em conta que o valor W é independente do tempo, o deslocamento estático por ele provocado podeser subtraído ao valor total, obtendo-se assim:
8 Introdução
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
9/145
Figura 4 Oscilador em vibração de translação
Figura 5 Oscilador em vibração de rotação
mÿd + cẏd + kyd = p(t) (1.9)
Note-se que na expressão anterior foi possível eliminar a parte estática das acções. Isto é possível desde queo comportamento do oscilador seja elástico linear. Essa parte estática corresponde à média temporal da acçãodinâmica se essa média for independente do tempo. Por este motivo não serão considerados os valores estáticosdas forças presentes nos diversos exemplos que aqui trataremos, incluindo os valores de peso próprio das massasenvolvidas no cálculo, exceptuando os casos em que a geometria da estrutura e o tipo de graus de liberdadeconsiderados obriguem a essa consideração.
Outro exemplo de um oscilador linear de um grau de liberdade é o de um disco (fig.5) em rotação livre. Aequação do movimento é obtida da equação de equilíbrio de momentos dada por
M = I Gθ̈ (1.10)
em que M é o momento de torção na haste, I G o momento de inércia das massas e θ̈ a aceleração angular dodisco
Tendo em conta as seguintes relações
½ M = −GI pL θI G = γ .I p =
12mR2 (1.11)
e considerando que o momento polar de Inércia é dado por:
I p = I xx + I yy = πφ4
32 (1.12)
resulta finalmente a seguinte equação diferencial que rege o movimento:µ1
2mR2θ̈
¶
| {z } força de inércia
+
µπφ4G
32L θ
¶
| {z } força elástica
= 0 (1.13)
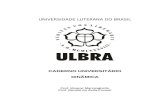
Na fi
gura 6 encontram-se, a titulo de exemplo, momentos de Inércia de massa de várias fi
guras geométricasconstituidas por material de massa volúmica γ .
Formulação da equação diferencial de movimento 9
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
10/145
Figura 6 Momento de Inércia da massa de várias figuras
Figura 7 Barra rígida com um grau de liberdade
1.2.2 Princípio dos trabalhos virtuais
A aplicação do princípio dos trabalhos virtuais para a obtenção da equação do movimento é a mais indicada nocaso em que o sistema dinâmico seja constituido por corpos rígidos ligados entre si. Este princípio aplicado àdinâmica das estruturas pode ser enunciado do seguinte modo: para qualquer conjunto de deslocamentosvirtuais consistentes com as condições de fronteira do sistema, a soma do trabalho realizado pelasforças aplicadas e pelas forças de inércia deve ser nulo.
Este princípio é traduzido pela seguinte equação:
W p + W I = 0 (1.14)
em que W p e W I representam o trabalho virtual, respectivamente, das forças aplicadas e das forças de inércia.
O trabalho virtual de uma qualquer força Qi é defi
nido pelo produto da força pelo deslocamento virtual nasua direcção δ qi, ou seja, W = Qi.δ qiComo exemplo de aplicação considere-se a estrutura da figura 7 constituída por uma barra rígida com uma
das extremidades fixa e ligada ao exterior por uma mola elástica e um amortecedor viscoso.
Para a aplicação do teorema dos trabalhos virtuais considere-se que a barra, numa qualquer posição defor-mada sofre uma rotação adicional virtual δθ (fig.8). Admitindo que o ângulo θ é pequeno podem escrever-se asseguintes relações: ½
y(x, t) = xθ(t)δy = x · δθ
(1.15)
O conjunto de forças que, na posição deformada se encontra em equilíbrio é constituído por uma força de
inércia e um momento de inércia da massa, ambos aplicados no centro de gravidade, por uma força elástica namola, por uma força de amortecimento no amortecedor e pela resultante da acção aplicada. O valor de cada uma
10 Introdução
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
11/145
Figura 8 Deslocamentos virtuais (a) e forças existentes (b) no sistema em estudo
destas forças é calculado com base nos deslocamentos, velocidades e acelerações da massa da seguinte forma:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
f k = k · a · θ
f c = c · L · θ̇
f p = p0L2 f (t)
f i =R L0
mL ÿdx =
R L0
mL θ̈xdx =
mL2 θ̈ (inércia de translacção)
M i = I Gθ̈ = mL2
12 θ̈ (inércia de rotação)
(1.16)
A equação dos trabalhos virtuais vem dada por:
−f kaδθ − f cLδθ + f pµ
2L
3 δθ
¶ | {z } trabalho das forças exteriores
−M iδθ − f iL
2δθ
| {z } trabalho das forças de inércia= 0 (1.17)
Simplificando e tendo em atenção que δθ pode tomar qualquer valor obtem-se a equação do movimento:
mL2
3θ̈ | {z }
força de inércia
+ cL2θ̇ |{z } força de
amortecimento
+ ka2θ |{z } força
elástica
= p0L2
3 f (t) | {z }
acção aplicada
(1.18)
1.2.3 Exemplos
1.2.3.1 Sistema de dois graus de liberdade com deslocamentos da base
Deduzir as equações de movimento de um sistema de duas massas , duas molas e um amortecedor que se desloca
com velocidade constante sobre uma trajetória sinusoidal (figura 9).Sendo a velocidade constante a distância percorrida depende linearmente do tempo x = vt e obtem-se paradeslocamento vertical da base do sistema:
y(x) = h0 sin 2πx
L ⇒ y(t) = h0 sin
2πvt
vT = h0 sin (2πf t)
Establecendo as equações de equilíbrio vertical, usando a 2a lei de Newton, para cada uma das massasobtem-se: ½
−k1(y1 − y2) − c1(ẏ1 − ẏ2) = m1ÿ1k1(y1 − y2) + c1(ẏ1 − ẏ2) − k2(y2 − y) = m2ÿ2
Em notação matricial o sistema de equações de moviemnto é o seguinte
∙ m1 0
0 m2¸½ ÿ1
ÿ2¾+ ∙ c1 −c1−c1 c1 ¸½ ẏ1ẏ2 ¾+ ∙ k1 −k1−k1 (k1 + k2) ¸½ y1y2 ¾ = ½ 0k2h0 sin (2πf t) ¾
Formulação da equação diferencial de movimento 11
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
12/145
Figura 9 Sistema de dois graus de liberdade com deslocamentos da base
k 1
c
y
x
m
M, IG2a
s(t)
k 2 f 1f 3
f 2
f 4
f 5
θ
Mg
f 1
f 3 f 2
Figura 10 Edifício sujeito a deslocamentos na fundação. Forças actuantes nos corpos 1 e 2.
ou, de forma mais compactaMÿ + Cẏ + Ky = p(t)
1.2.3.2 Sistema de 2GL composto por edifício e fundação
Deduzir as equações de movimento de um sistema composto por um edifício de massa M fundado em fun-dação de massa m (figura 10), considerando que as rotações do edifício são pequenas. A excitação provém dedeslocamentos horizontais s(t) ao nível da fundação.
Trata-se também de um sistema de dois graus de liberdade: translacção do conjunto edifício-fundação erotação do edifício. As forças actuantes em cada corpo rígido estão representadas na figura 10
As equações de equilibrio dinâmico para o corpo 1, de acordo com a 2a lei de Newton escrevem-se da seguinteforma: ⎧⎨
⎩P
M = I Gθ̈PV = M ẍPH = M (ÿ + aθ̈)
⎧⎪⎨
⎪⎩
−k2θ − f 1a cos θ + f 3a sin θ = I Gθ̈f 3 − Mg = M ẍ ' 0f 1 = M ³ÿ + aθ̈´O corpo 2 só tem movimento horizontal, pelo que a única equação de equilíbrio se escreve da seguinte forma:
12 Introdução
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
13/145
k1
k2
k3
c1
c2
c3
m1
m2
m3
p1
p2
p3
y1
y2
y3
p1
f 1 f’1
f 2 f’2
Figura 11 Oscilador linear de três graus de liberdade
XH = M ÿ
−f 4 − f 5 − f 1 = mÿO cálculo das forças elásticas e de amortecimento é feito de acordo com o deslocamento imposto na base,
s(t), e o deslocamento da fundação y(t): ½ f 4 = (y − s)cf 5 = (ẏ − ṡ)k1
Das equações atrás expostas resulta o sistema de duas equações diferenciais que descreve o movimento dooscilador: ½ M ÿ + M aθ̈ + mÿ + cẏ + k1y = cṡ + k1s
M aÿ + Ma2θ̈ + I Gθ̈ + (k2 − Mga)θ = 0Usando notação matricial obtemos finalmente:∙
(M + m) M aMa (M a2 + I G)
¸½ ÿ
θ̈
¾+
∙ c 00 0
¸½ ẏ
θ̇
¾+
∙ k1 0
0 (k2 − Mga)¸½
yθ
¾ =
½ cṡ + k1s
0
¾1.2.3.3 Sistema de três graus de liberdade
Determinar as equações de movimento do sistema de 3GL da figura 11.Do diagrama de forças indicado na figura 11 podemos escrever a primeira das equações de equilíbrio que se
seguem, obtendo-se as restantes de forma semelhante:⎧⎨⎩
−f 1 − f 01 + f 2 + f 02 + p1 = m1ÿ1−f 2 − f 02 + f 3 + f 03 + p2 = m2ÿ2−f 3 − f 03 + p3 = m3ÿ3
As forças relacionam-se com as rigidezes e amortecimentos da seguinte forma:½ f 1 = k1y1f 01 = c1 ẏ1
;½
f 2 = k2(y2 − y1)f 02 = c2(ẏ2 − ẏ1)
;½
f 3 = k3(y3 − y2)f 03 = c3(ẏ3 − ẏ2)
pelo que, substituindo nas equações de equilíbrio dinâmico tem-se:
⎧⎨⎩k1y1 − k2(y2 − y1) + c1 ẏ1 − c2(ẏ2 − ẏ1) + m1ÿ1 = p1k2(y2 − y1) − k3(y3 − y2) + c2(ẏ2 − ẏ1) − c3(ẏ3 − ẏ2) + m2ÿ2 = p2k3(y3 − y2) + c3(ẏ3 − ẏ2) + m3ÿ3 = p3
Formulação da equação diferencial de movimento 13
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
14/145
y1
y2
y3
m1
m2
m3
k 1, c1
k 2, c2
k 3, c3
E i x o d e R e f e r ê n c i a
yGdeslocamentos
mi
f i+1
f i
Figura 12 Pórtico com três graus de liberdade
Este sistema de equações é escrito em forma matricial da seguinte maneira:⎡
⎣
m1 0 00 m2 00 0 m3
⎤
⎦
⎧⎨
⎩
ÿ1ÿ2ÿ3
⎫⎬
⎭+
⎡
⎣
(c1 + c2) −c2 0−c2 (c2 + c3) −c3
0
−c3 c3
⎤
⎦
⎧⎨
⎩
ẏ1ẏ2ẏ3
⎫⎬
⎭+
+
⎡⎣ (k1 + k2) −k2 0−k2 (k2 + k3) −k3
0 −k3 k3
⎤⎦⎧⎨⎩
y1y2y3
⎫⎬⎭ =
⎧⎨⎩
p1 p2 p3
⎫⎬⎭
1.2.3.4 Pórtico de Edifício sujeito a acelerações sísmicas ÿG
Determinar as equações de movimento do sistema de 3GL da figura 12.Do diagrama de forças indicado na figura 12 podemos escrever a seguinte equação de equilíbrio genérica:
−f i + f i+1 = mi (ÿi + ÿG)As forças exteriores envolvidas são dadas por:
½ f i = ki(yi − yi−1) + ci(ẏi − ẏi−1)f i+1 = ki+1(yi+1 − yi) + ci+1(ẏi+1 − ẏi)Para um pórtico de três pisos o sistema de equações escreve-se em forma matricial da seguinte maneira:
⎡⎣ m1 0 00 m2 0
0 0 m3
⎤⎦⎧⎨⎩
ÿ1ÿ2ÿ3
⎫⎬⎭+
⎡⎣ (c1 + c2) −c2 0−c2 (c2 + c3) −c3
0 −c3 c3
⎤⎦⎧⎨⎩
ẏ1ẏ2ẏ3
⎫⎬⎭+
+
⎡⎣ (k1 + k2) −k2 0−k2 (k2 + k3) −k3
0 −k3 k3
⎤⎦⎧⎨⎩
y1y2y3
⎫⎬⎭ =
⎧⎨⎩
−ÿGm1−ÿGm2−ÿGm3
⎫⎬⎭
ou, em notação mais compacta:Mÿ + Cẏ + Ky = −ÿGM1 | {z } acção do sísmo
14 Introdução
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
15/145
Capítulo 2 Oscilador Linear de 1 Grau de Liberdade O sistema dinâmico elementar é constituido por uma massa e uma mola elástica a que se pode associar aindaum elemento de amortecimento viscoso, e designa-se por oscilador linear de um grau de liberdade – OL1GL.A equação de movimento deste sistema dinâmico foi deduzida no capítulo anterior e é a seguinte:
mÿ + cẏ + ky = p(t) (2.1)
A solução desta equação diferencial é da seguinte forma:
y(t) = y p(t) + yc(t) (2.2)
em que y p(t) e yc(t) representam respectivamente a solução particular e a solução complementar da equação.A primeira traduz a vibração forçada , dependente de p(t), e a segunda a vibração livre , calculada para p(t) = 0.
2.1 Vibração livreA solução da equação diferencial homogénea, mÿ + cẏ + ky = 0, correspondente a vibração livre é do tipo:
y(t) = Ḡ1es̄1t + Ḡ2e
s̄2t (2.3)
excepto no caso de existirem raízes múltiplas em que a solução passa a ser
y(t) =¡
Ḡ1 + Ḡ2t¢
es̄t (2.4)
podendo as constantes Ḡ e s̄ tomar valores complexos. A determinação daquelas constantes é feita substituindoa solução geral y (t) = Ḡes̄t na equação diferencial para obter a seguinte equação:
¡ms̄2 + cs̄ + k¢ Ḡes̄t = 0 (2.5)Dividindo seguidamente por mḠes̄t e utilizando a notação
ω2n = km ; ξ =
c2mωn
(2.6)
em que ωn é designada por frequência própria, ξ por factor de amortecimento viscoso, obtem-se umaequação algébrica do segundo grau em s̄
s̄2 + 2ξωns̄ + ω2n = 0 (2.7)
a que se convencionou chamar equação característica ou equação de frequências do sistema , e cujasraízes são dadas por:
s̄ = −ξωn ± ωnqξ 2 − 1 (2.8)Na figura 1 estão representadas,no plano complexo, as soluções possíveis para a eq.(2.8). No caso de ξ = 0
as soluções são imaginárias, no caso de ξ > 1 a solução é real e dupla e no caso intermédio as soluções sãocomplexas.
2.1.1 Oscilador com amortecimento nulo
No caso de não existir amortecimento a eq.(2.8) virá:
s̄ = ±ωn√
−1 = ±iωn (2.9)
e substituindo este valor na solução geral (2.3) teremos:
y(t) = Ḡ1eiωnt + Ḡ2e
−iωnt (2.10)
Vibração livre 15
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
16/145
Figura 1 Representação das raízes da equação característica no plano complexo.
Figura 2 Resposta livre não amortecida de um OL1GL.
Tendo em conta a equação de Euler
e±iωnt
= cos(ωnt) ± isin(ωnt) (2.11)a eq.(2.10)pode ser escrita na seguinte forma:
y(t) = ( Ḡ1 + Ḡ2)cos ωnt + i( Ḡ1 − Ḡ2)sin ωnt (2.12)
Tendo em conta que o deslocamento y(t) é um valor real podemos escrever esta equação usando constantes reaisA1 e A2,
y(t) = A1 cos ωnt + A2 sin ωnt (2.13)
ou, escrita em termos de amplitude A e ângulo de fase φ:
y(t) = A cos(ωnt − φ) (2.14)As constantes A1 e A2 são determinadas pelas condições iniciais da equação de movimento, ou seja,
y(0) ≡ y0 = A1 (deslocamento inicial)ẏ(0) ≡ ẏ0 = A2ωn (velocidade inicial)
A eq.(2.13) virá então:
y(t) = y0 cos ωnt + ẏ0ωn
sin ωnt (2.15)
A determinação dos valores da amplitude e do ângulo de fase é imediata se utilizarmos a representação vectorialno plano complexo (fig3). Assim A é a amplitude do vector resultante dos vectores ortogonais cuja componenteno eixo dos reais é, respectivamente, y0 cos ωnt e
ẏ0ωn
sin ωnt, enquanto que (ωnt − φ) representa o ângulo queesse mesmo vector resultante faz com o eixo dos reais. Assim, tem-se:
( A = qy20 + ẏ20ω2ntan φ = ẏ0ωny0 (2.16)16 Oscilador Linear de 1GL
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
17/145
Imag
Real
n
y
ω
0
0 y
A
t nω
Figura 3 Representação alternativa no plano complexo para a resposta livre não amortecida de um OL1GL
Figura 4 Resposta do OL1GL com amortecimento crítico
Por vezes, é conveniente usar notação mais condensada pelo que se pode apresentar a resposta na formacomplexa,ȳ(t) = Aei(ωnt−φ) = A [cos(ωnt − φ)) + i sin(ωnt − φ)] (2.17)
identificando-se o sinal de y (t) com a parte real ou com a parte imaginária da eq.(2.17)
2.1.2 Oscilador com amortecimento crítico
Define-se amortecimento crítico ccr = 2mωn, aquele que conduz ao factor de amortecimento unitário ξ = 1,obtendo-se assim uma raíz dupla na eq.(2.7) com valor real dado pela frequência própria do oscilador, s̄1 = s̄2 =−ωn.
Como já tinha sido indicado nas equações (2.6), a resposta vem dada, neste caso, por:
y(t) = ( Ḡ1
+ Ḡ2
.t)e−ωnt (2.18)
As constantes são calculadas a partir de condições iniciais de deslocamento e velocidade:½ y(0) = Ḡ1ẏ(0) = −ωn Ḡ1 + Ḡ2 ⇒
½ Ḡ1 = y0Ḡ2 = ẏ0 + ωny0
(2.19)
Usando estas constantes obtem-se finalmente a resposta no domínio do tempo, do oscilador com amorteci-mento crítico em vibração livre:
y(t) = [y0(1 + ωnt) + ẏ0t] e−ωnt (2.20)
e que se encontra representada na figura4.Note-se que um sistema com amortecimento crítico ou sobre-crítico (ξ > 1) não chega a oscilar em
torno da posição de equilibrio estática. O estudo deste tipo de sistemas não tem interesse prático, pois envolve
coefi
cientes de amortecimento muito mais elevados do que aqueles que se encontram na prática nas estruturasde Engenharia Civil.
Vibração livre 17
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
18/145
Figura 5 Relação entre ωDωn e o factor de amortecimento ξ
2.1.3 Oscilador com amortecimento sub-crítico
Se o coeficiente de amortecimento c for inferior ao crítico, c < ccr = 2mωn, a eq.(2.8) pode ser escrita daseguinte forma:
s̄ = −ξ.ωn ± i.ωD (2.21)
em que ωD é definida como frequência própria amortecida para o sistema e é dada por:
ωD = ωn
q1 − ξ 2 (2.22)
Repare-se que a eq.(2.22) fornece uma relação circular entre o quociente ωDωn e o factor de amortecimento ξ (ver figura5).
Para factores de amortecimento usuais em estruturas de Engenharia Civil, ou seja, ξ
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
19/145
Figura 6 Vibração amortecida do OL1GL
Tabela 2.1 Valores médios do coeficiente de amortecimento em percentagem(%)Materiais/estruturas ξ (%)Aço 0.03 - 0.15Betão 0.15 - 1.0
Pontes de aço 0.2 - 1.0Pontes de aço-betão 0.3 - 1.6Pontes de betão armado ou pré-esforçado 0.3 - 1.6Chaminés de aço 0.3 - 0.8Chaminés de betão 0.5 - 1.0Torres de aço 0.3 - 2.9Edifícios de vários andares 0.7 - 2.9Edifícios de um ou dois andares 1.0 - 5.0
Devido à grande variedade de mecanismos de dissipação de energia nas estruturas, principalmente em ed-ifícios onde a presença de elementos não estruturais é significativa, torna-se difícil fornecer valores precisosdo amortecimento viscoso equivalente. Na tabela 2.1 encontram-se alguns valores médios do coeficiente deamortecimento ξ .
Um método frequentemente utilizado para a determinação experimental das características dinâmicas dossistemas, frequências próprias e factores de amortecimento, baseia-se na sua resposta livre a um deslocamentoou/e velocidade inicial. Da figura 6 e da equação (2.24) pode concluir-se que a equação da curva envolventeda resposta de deslocamentos é e−ξωnt. Admitindo que a frequência própria pode ser determinada de formasuficientemente exacta medindo o período T e calculando ωn = 2πT , o valor do coeficiente de amortecimentopode ser calculado de forma aproximada calculando o expoente da função exponencial que passa pelos pontosmáximos da resposta medida.
2.1.4.1 Método do decremento logarítmico
É possível simplifi
car o processo de determinação do coefi
ciente de amortecimento calculando os valores máximossucessivos da resposta no caso de se introduzir no sistema um deslocamento inicial admitindo velocidade inicialnula. Para o efeito comece-se por calcular os valores de t para os quais se tem valores máximos da resposta eque são dados pelo anulamento da derivada do deslocamento em ordem ao tempo:
dy
dt = 0 ⇒ d
dt
£Ae−ξωntcos(ωDt − φ)
¤ = 0 (2.28)
em que A = y0
r ³1 + ξ
2ω2nω2D
´. Daqui se obtém a seguinte equação:
Ae−ξωnt [−ξωn cos(ωDt − φ) − ωD sin(ωDt − φ)] = 0 (2.29)
que admite como raízes os seguintes valores:
t = ∞ (solução trivial)Vibração livre 19
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
20/145
solução não trivial dada por:ξωn cos(ωDt − φ) + ωD sin(ωDt − φ) = 0 (2.30)
Nesta equação podem ser calculados os valores de t que a anulam e a que simultaneamente correspondemvalores y(t) positivos. Estes valores são dados pela seguinte equação:
tα = 1ωDµ− arctan ξωnωD + φ ± 2απ¶ com α = 1, 2, 3, . . . (2.31)
Usando o resultado expresso na segunda das equações (2.27) considerando que apenas existe deslocamentoinicial, ou seja, φ = arctan ξωnωD , a eq.(2.31) simplifica-se para dar:
tα = 2απ
ωD= α
1
f D(2.32)
Se definirmos um decremento de amplitude δ dado pelo logaritmo da razão entre dois máximos consecutivos:
δ = ln yαyα+1
= ln e−ξωntα cos(ωDtα − φ)e−ξωntα+1 cos(ωDtα+1 − φ)
(2.33)
e fazendo a substituição tα = 2απωD na função cosseno, podemos obter, por simplificação,
δ = ln e−ξωn(tα−tα+1) = ξωn(tα+1 − tα) = ξωn2π
ωD(2.34)
O coeficiente de amortecimento pode assim ser obtido em função dos deslocamentos máximos consecutivosatravés da seguinte expressão:
ξ = ωD2πωn
ln
µ yαyα+1
¶ (2.35)
Repare-se que, no caso de termos pequenos amortecimentos, o valor ωD ' ωn, o que, introduzido na eq.(2.35),permite obter:
ξ =
1
2π lnµ yαyα+1¶ = δ 2π (2.36)A determinação da frequência própria é imediata, se tivermos em conta que a distância entre dois picos
consecutivos é definida como o período próprio do sistema T D = 2π/ωD o que fornece imediatamente a frequêciaprópria amortecida:
f D = ωD
2π =
1
T D[Hz] (2.37)
2.1.4.2 Exemplo
1. Deduzir uma expressão para o número de ciclos necessário à redução de 50% de amplitude de oscilaçãolivre de um OL1GL.
2. Um pórtico constituido por dois pilares ligados na parte superior por um elemento rígido com a massa
de 5000Kg e encastrado na base foi testado da seguinte maneira: Utilizando uma estrutura de apoiofoi introduzido um deslocamento de 1cm na extremidade superior do pórtico e foi registada a históriade deslocamentos quando se cortou a ligação. Ao fim de 5 ciclos completos o tempo decorrido foi det∆ = 6.0seg e o deslocamento medido foi de y (t∆) = 0.44cm
Calcule os seguintes elementos relativos à estrutura:
a) a frequência própria amortecida do sistema.
b) o factor de amortecimento ξ .
c) módulo de elasticidade do material, sabendo que a altura do pórtico é de 8 metros e a secção dospilares é 0.20 × 0.20m2.
d) a lei do movimento.
Resolução:
20 Oscilador Linear de 1GL
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
21/145
Figura 7 Correcção do factor de amortecimento [Clough]
1. Considere-se a relação entre a amplitude da curva envolvente em dois pontos de tempo p e r tal que:yr =
yp2 . A curva é dada pela eq.(2.26), em que as condições iniciais nas equações(2.27) são definidas por
uma deformação imposta y0 e velocidade inicial nula. Assim sendo, a relação entre as ordenadas y p e yrda envolvente da resposta é calculada da seguinte forma:
y pyr
= e−ξωntp
e−ξωntr= eξωn(tr−tp) = 2 (2.38)
ou seja,
ξ = ln 2
ωn(tr − t p) (2.39)
em que a frequência não amortecida ωn pode ser considerada aproximadamente igual à frequência amorte-cida ωD = 2πf D. Desta forma obtem-se, para factor de amortecimento,
ξ = ln 2
2πf D(tr − t p) =
0.11
∆ (2.40)
em que
∆ = tr − t pT D
(2.41)
2. a) f D = 1T D = 56 = 0.833 Hz
b) No caso de valores baixos de amortecimento tem-se ωD ' ωn, o que, introduzido na eq.(2.35), permiteobter:
yαyα+1
= e2πξaprox (2.42)
Esta expressão que pode ser expandida em série da qual iremos reter apenas os dois primeiros termos:
yαyα+1
= 1 + 2πξ aprox +(2πξ aprox)
2
2! + . . . (2.43)
por forma a obter-se finalmente uma expressão aproximada que permite, de forma prática, estimaro factor de amortecimento:
ξ aprox = yα − yα+1
2πyα+1(2.44)
Na figura 7 indica-se a relção ξξaprox em função de ξ aprox. O erro cometido pode ser significativo paravalores de amortecimento alto. No entanto, deve ser tido em atenção que as variações no amortec-imento medido em estruturas reais é, em muitos casos, superior ao erro cometido por utilização daequação (2.44).No caso de sistemas com fraco amortecimento o erro de leitura dos valores yα e yα+1pode ser importante, sendo, por isso conveniente fazer a leitura, não de máximos sucessivos, mas demáximos mais afastados, realizando, se possível, várias leituras. Obtem-se assim a seguinte expressãopara o cálculo do factor de amortecimento no caso dos valores máximos yα e yα+n corresponderemrespectivamente a tα e tα+n
ξ aprox = yα − yα+n2nπyα+n= 1.0 − 0.44
2 × 5π × 0.44 = 0.0405 (2.45)
Vibração livre 21
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
22/145
Usando a correcção dada pela figura 7, ou seja, ξξaprox = 0.91, tem-se cerca de 3.7% para valor doamortecimento.
c) Partindo da definição de frequência própria ωn =q
km =
ωD√ 1−ξ2
tem-se:
k = mω2D(1 − ξ 2) = 5000
(2π × 0.833)2
1 − 0.04052 = 137193N/m
A rigidez de translação no topo do pórtico é dada por k = 212EI L3 , donde resulta:
k = 137193 = 24 × 0.24
12 × 83 E ⇒ E =22 × 109N/m2 = 22GP a
d) A equação do movimento é dada pela eq.(2.26) com as seguintes constantes:
A =
s y20 +
µ ẏ0 + ξωny0
ωD
¶2'p
1 + 0.04052 ' 1.0
φ = arctan ẏ0 + ξωny0
ωDy0' 0.0405rad ' 0
ωD ' ωn ' 2πf D = 2π × 0.833 = 5.23rad
pelo que se obtém:y(t) = e−0.212t cos(5.23t)[cm]
53.752.51.250
1
0.5
0
-0.5
-1
y(t)y(t)
Vibração livre do oscilador amortecido e respectiva envolvente
2.2 Resposta a excitação harmónica simples
Tal como já foi indicado no início do capítulo a solução da equação diferencial de movimento é composta pelasoma da solução geral, correspondente à vibração livre, e da solução particular, correspondente à vibraçãoforçada pela acção exterior p(t). É esta solução que iremos estudar seguidamente para uma acção harmónicasimples.
2.2.1 Oscilador sem amortecimento
A equação diferencial escreve-se, neste caso, da seguinte forma:
mÿ + ky = p0 cosΩt (2.46)
22 Oscilador Linear de 1GL
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
23/145
cuja solução particular é da forma:y p(t) = A p cosΩt (2.47)
A amplitude do movimento A p é calculada substituindo (2.47) em (2.46) obtendo-se:
A p =
p0
k − mΩ2 (2.48)Este resultado só é possível desde que o denominador se não anule, ou seja, k − mΩ2 6= 0. Note-se que a
situação de se ter um denominador nulo corresponde à ressonância no sistema,
k − mΩ2 = 0 ⇒ Ω2 = ω2n
o que, teóricamente, em sistemas não amortecidos leva a deslocamentos infinitos, ou seja, A p = ∞.Usando as seguintes notações:
A0 = p0k
β = ΩωnD = ApA0 =
11
−β2
para: β 6= 1(2.49)
em que A0 corresponde ao deslocamento estático correspondente à acção p0, β é a relação de frequências e D éo factor de amplificação dinâmica das amplitudes de vibração.
A eq.(2.47) pode então ser reescrita da seguinte forma:
y p(t) = DA0 cosΩt (2.50)
A solução da equação diferencial vem dada pela soma das soluções (2.13) e (2.50):
y(t) = y p + yc = DA0 cosΩt + (A1 cos ωnt + A2 sin ωnt) (2.51)
A determinação das constantes A1 e A2 é feita introduzindo as condições iniciais do movimento.
2.2.1.1 Exemplo – Acção directa
Um OL1GL é sujeito a uma acção de p(t) = 45 cos(10t) [N ]. Considerando que a massa é de m = 17.5Kg, aconstante elástica da mola é de k = 7KN/m, o amortecimento é nulo e que o oscilador se encontra em repousopara t = 0 determinar a equação de movimento do sistema.
Resolução:
A equação de movimento é dada pela eq.(2.51) para a qual se devem calcular as constantes de integração A1e A2 considerando as condições iniciais do movimento dadas por y(0) = 0 e ẏ(0) = 0. Daí resultam os seguintesvalores: ⎧⎨
⎩A1 = −DA0
A2 = 0
e a seguinte equação:
y(t) = DA0 (cosΩt − cos ωnt) = 1
1 − β 245
7000 (cos 10t − cos ωnt)
Calculando a frequência própria e a relação entre frequências,
ωn =
r 7000
17.5 = 20rad/s → β = Ω
ωn=
10
20 = 0.5
obtem-se o valor da equação do movimento,
y(t) = 8.6 × 10−3 [cos(10t) − cos(20t)]Excitação harmónica simples 23
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
24/145
a qual se encontra representada na figura seguinte, conjuntamente com cada uma das duas componentes har-mónicas que a constituem.
10.750.50.250
0.005
0
-0.005
-0.01
-0.015
x
y
x
y
Resposta de deslocamento (a cheio) e das respectivas componenetes harmónicas (a tracejado) .
2.2.1.2 Exemplo – Acção indirecta por movimento do apoio
Considerando o oscilador do exemplo 2.2.1.1 sujeito a deslocamentos do ponto de apoio dados por yG(t) =y0 cosΩt sendo y0 = 0.01metros e Ω = 10rad/s, pretende-se determinar a equação de movimento do sistema,bem como a eauqção dos deslocamentos totais do oscilador.
Resolução:A equação diferencial escreve-se, neste caso, da seguinte forma:
mÿ + ky = ky0 cosΩt (2.52)
em que y(t) é o deslocamento total da massa. A solução particular é da forma:
y p(t) = A p cosΩt (2.53)
A amplitude do movimento A p é calculada substituindo (2.47) em (2.46) obtendo-se:
A p = ky0
k − mΩ2 = Dy0 (2.54)
A solução da equação diferencial vem dada pela soma das soluções particular e complementar:
y(t) = y p + yc = Dy0 cosΩt + A1 cos ωnt + A2 sin ωnt
Considerando as condições iniciais dadas por y(0) = 0 e ẏ(0) = 0 obtem-se, para valores das constantes deintegração A1 e A2, os seguintes valores: ½
A1 = −Dy0A2 = 0
pelo que a equação do movimento é dada por:
y(t) = Dy0 (cosΩt − cos ωnt) = 1. 33 × 10−2 (cos 10t − cos20t)a qual se encontra representada na figura seguinte, conjuntamente com cada uma das duas componentes har-
mónicas que a constituem.
10.750.50.250
0.01
0
-0.01
-0.02
x
y
x
y
Resposta de deslocamento (a cheio) e das respectivas componenetes harmónicas (a tracejado) .
24 Oscilador Linear de 1GL
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
25/145
Imag
Real
0P
pkA
p AcΩ
p Am
2Ω
t Ω
α
Figura 8 Diagrama de Argand (vectores circulantes) para as componentes das forças presentes na equação demovimento
2.2.2 Oscilador com amortecimento viscoso
A equação do movimento é dada por:
mÿ + cẏ + ky = p0 cosΩt (2.55)
cuja solução complementar é dada por (2.26) e podendo a solução particular ser escrita na seguinte forma:
y p(t) = A p cos(Ωt − α) (2.56)
As constantes A p e α são determinadas substituindo (2.56) em (2.55). Assim, obtem-se a seguinte equação:
−m.Ω2.A p cos(Ωt
−α) | {z } componente real
da força de inércia
−c.Ω.A p sin(Ωt
−α) | {z } componente real
da força de amortecimento
+k.A p cos(Ωt−
α) | {z } componente realda força elástica
= P 0 cos(Ωt) | {z } componente realdo vector de excitação
(2.57)
em que as diversas parcelas podem ser identificadas como as projecções num mesmo eixo dos vectores corre-spondentes às forças envolvidas no equilíbrio. Utilizando o plano complexo definido pelo eixo dos reais e peloeixo dos imaginários (figura 8), para a representação da eq.(2.57) pode identificar-se o eixo de projecção com oeixo dos reais, já que o resultado terá que ser um valor real. Assim, fácilmente se chega às seguintes relações:
⎧⎨⎩
p20 =¡
kA p − mΩ2A p¢2
+ (cΩA p)2
tan α = cΩk−mΩ2=⇒
⎧⎪⎨⎪⎩
A p =q
p20(k−mΩ2)2+(cΩ)2
tan α = cΩk−mΩ2
(2.58)
Utilizando a relação entre a frequência de excitação e a frequência própria β = Ωωn e o factor de amortecimentoξ = c2mωn , a primeira das equações (2.58) pode ser escrita na seguinte forma:
A p = D p0k
(2.59)
em que D =£
(1 − β 2)2 + (2ξβ )2¤−1/2
é o factor de amplificação dinâmica. O ângulo de fase vem dadopor tan α = 2ξβ1−β2 .
Tanto o factor de amplificação dinâmica como o ângulo de fase podem ser representados em função darelação de frequência β para diversos valores do factor de amortecimento ξ (ver figura). Para sistemas comfraco amortecimento o factor de amplificação toma valores elevados nas proximidades de β = 1 traduzindo
assim a situação crítica de ressonância no sistema. A variação do ângulo de fase é, para o caso de fracoamortecimento bastante brusca nas proximidades da frequência própria do sistema.
Excitação harmónica simples 25
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
26/145
7550250
5
0
-5
y(t)y(t)
ξ = 0.05 ; Ω = 1; β = 1
1.51.2510.750.50.250
20.09
7.389
2.718
1
beta
D
beta
D
Amplificação dinâmica: ξ = [0.01 ; 0.05; 0.1; 0.2]
Note-se que tanto o factor de amplificação como o ângulo de fase podem ser usados para detectar experi-mentalmente a frequência própria do sistema, desde que seja possível variar a frequência Ω da excitação.
A solução da eq.(2.55) é então dada pela soma de (2.26) com (2.56),
y(t) = Ace−ξωnt cos(ωDt − φ) + D p0
k cos(Ωt − α) (2.60)
ou, o que é o mesmo,
y(t) = Ace−ξωnt cos(ωDt − φ) + D2
p0k
£¡1 − β 2
¢cosΩt + 2ξβ sinΩt
¤ (2.61)
Nestas equações as constantes Ac e φ são calculadas de acordo com as condições iniciais do movimento.Note-se que a primeira parcela, correspondente ao efeito dessas condições inicias, tende para zero com valorescrescentes de tempo.A sua importância depende do tempo decorrido e do amortecimento do sistema, ficandoapenas a segunda parcela com valores significativos depois de decorridos alguns ciclos. Esta traduz a respostaestacionária do sistema2 .
2.2.2.1 Exemplo
Considere-se o OL1GL do exemplo em 2.2.1.1 admitindo um factor de amortecimento ξ = 0.02. A equação demovimento é dada pela eq.(2.61):
y(t) = Ace−ξωnt cos(ωDt − φ) +
1
(1 − β 2)2 + (2ξβ )245
7000 cos (10t − α)
em que:
ωn =
r 7000
17.5 = 20rad/s ; β =
Ω
ωn= 0.5 ; α = tan−1
µ 2ξβ
1 − β 2¶
= 0.02666 ; ωD = ωn2
q¡1 − ξ 2
¢ = 19.996
obtendo-se a equação:
y(t) = Ace−0.4t cos(−19. 996t + φ) + 0.01142cos(10t − 0.026 66)
Considerando as condições iniciais dadas por y(0) = 0 e ẏ(0) = 0 obtem-se, para valores das constantes deintegração φ e Ac, os seguintes valores:
⎧⎪⎨⎪⎩
φ = tan−1³7. 6106×10−3
0.22827
´ = 3.3328 × 10−2
Ac = −1. 1416×10−2cosφ = −1.1422 × 10−2
conduzindo à seguinte equação do movimento,
2 Nas condições de amortecimento usuais das estruturas de betão armado pode considerar-se que depois de cinco ciclos apenasa parte estacionária da resposta é significativa.
26 Oscilador Linear de 1GL
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
27/145
y(t) = −1.1422 × 10−2e−0.4t cos¡
19.996t − 3.3328 × 10−2¢
+ 0.01142 cos (10t − 0.02666)
a qual se encontra representada na figura seguinte, conjuntamente com cada uma das duas componentes har-mónicas que a constituem.
53.752.51.250
0.01
0.005
0
-0.005
-0.01
-0.015
-0.02
x
y
x
y
Resposta de deslocamento (a cheio) e das respectivas componentes harmónicas (a tracejado).
2.2.3 Representação complexa - Função de Transferência
A função de excitação foi considerada no ponto anterior como dada por um cosseno. Adoptando a função senopara excitação apenas teríamos que substituir em (2.56), o cosseno pelo seno. Podemos, por isso, utilizar umanotação mais geral para a equação diferencial de movimento, se considerarmos que a excitação vem dada poruma exponencial complexa,
¯ p(t) = p0(cosΩt + i sinΩt) = p0eiΩt (2.62)
podendo assim tomar apenas a parte real ou a parte imaginária da resposta estacionária dada por:
ȳ(t) = yRe + iyIm = A p cos (Ωt − α) + iA p sin (Ωt − α) = Ā peiΩt (2.63)
com o consequente valor para a constante complexa dado por Ā p = A pe−iα. Tendo em conta a equação (2.59)esta constante toma a forma
Ā p = p0 |H (iΩ)| e−iα = p0H (iΩ) (2.64)
A função H (iΩ) é designada por Função de Transferência3 e pode ser posta na seguinte forma,
H (iΩ) = 1
−mΩ2 + c(iΩ) + k = 1/k
(1 − β 2) + i(2ξβ ) (2.65)
tendo em conta que o ângulo de fase continua a ser dado por:
α = arctan 2ξβ
1 − β 2 (2.66)
3 Esta função, tal como se encontra aqui definida, relaciona forças e deslocamentos. Na literatura são definidas funções detransferência que relacionam diversos tipos de quantidades, tais como força-aceleração, deslocamento da base-aceleração, etc. Paraalém da dada no texto a relação mais importante relaciona deslocamentos, velocidades e acelerações na base com os respectivos
valores totais da massa, e designa-se por transmissibilidade H (iΩ) = 1−mΩ2+c(iΩ)+k
T (ξ, β) = (2ξβ)2+1
(1−β2)2+(2ξβ)2
Excitação harmónica simples 27
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
28/145
21.510.50
10
7.5
5
2.5
0
x
y
x
y
Amplitude (a preto) e Ângulo de Fase (a tracejado) da Função de Transferência ( ξ = 0.05)
21.510.50
10
7.5
5
2.5
0
-2.5
x
y
x
y
Partes Real (a preto) e Imaginária (a vermelho) da Função de Transferência (ξ = 0.05)
A demonstração da equação (2.65) pode ser feita usando-a para obter a resposta a uma excitação harmónicadada por um cosseno (eq.2.56). Substituindo (2.65) em (2.64) e o resultado em (2.63) podemos pôr a soluçãoda equação de movimento na seguinte forma:
ȳ(t) = p0
k
(1 − β 2) − i(2ξβ )(1 − β 2)2 + (2ξβ )2
[cos(Ωt) + i sin(Ωt)] (2.67)
Considerando apenas a parte real obtem-se a seguinte equação:
ȳRe(t) = p0
k
∙ 1 − β 2
(1
−β 2)2 + (2ξβ )2
cos(Ωt) + 2ξβ
(1
−β 2)2 + (2ξβ )2
sin(Ωt)
¸ (2.68)
que pode ser escrita na forma que aparece na equação (2.60),
ȳRe(t) = p0
k
" 1¡
1 − β 2¢2
+ (2ξβ )2
# 12
cos(Ωt − α) (2.69)
ou na forma em que aparece na equação (2.61),
ȳRe(t) = p0
k
1
(1 − β 2)2 + (2ξβ )2£¡
1 − β 2¢
cos(Ωt) + 2ξβ sin(Ωt)¤
(2.70)
Pode ainda concluir-se, que o factor de amplificação dinâmica atrás definido se encontra relacionado coma função de transferência aqui exposta pela seguinte relação: D = k |H (iΩ)| = q 1(1−β2)2+(2ξβ)2 . Na figura(??) encontram-se representados os valores de amplitude k |H (iΩ)| e de fase α para um oscilador com 5% de28 Oscilador Linear de 1GL
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
29/145
k c
m
y
3sin01.0)(
x x yG π =
x
yG(x)
Figura 9
amortecimento. Verifica-se que o valor máximo da amplitude é de aproximadamente 12ξ = 10, para β = 1, valoreste cuja precisão varia com o factor de amortecimento.
A função de transferência, tal como se encontra definida acima (equação 2.65), relaciona forças e desloca-
mentos. Podem ser definidas funções de transferência que relacionam diversos tipos de quantidades, tais comoforça-aceleração, deslocamento da base-aceleração, etc. Para além da dada acima, a função de transferênciamais importante relaciona deslocamentos, velocidades e acelerações na base com os respectivos valores totaisda massa, e designa-se por transmissibilidade. No quadro seguinte apresentam-se as funções de transferênciacomplexas (H (iΩ) ou H (iβ )) bem como o respectivo valor em módulo (|H (iΩ)|2) para as transformações deforça exterior aplicada em resposta total (deslocamento, velocidade ou aceleração) do osclilador.
Transformação H (iΩ) H (iβ ) |H (iΩ)|2
p → y 1−mΩ2+c(iΩ)+k 1k 11−β2+i2ξβ 1k2 1(1−β2)2+(2ξβ)2 p → ẏ iΩ−mΩ2+c(iΩ)+k ωnk iβ1−β2+i2ξβ
ω2nk2
β2
(1−β2)2+(2ξβ)2
p → ÿ −Ω2−mΩ2+c(iΩ)+kω2nk
−β21−β2+i2ξβ
ω4nk2
β4
(1−β2)2+(2ξβ)2
As transformações de movimentos na base (yG, ẏG, ÿG), em movimentos da massa, totais (y, ẏ, ÿ) e relativosà base (yR, ẏR, ÿR) estão transcritas nos quadros que se seguem, em termos do respectivo valor em módulo(|H (iΩ)|2).
Valores de Resposta Totaly ẏ ÿ
yG1+(2ξβ)2
(1−β2)2+(2ξβ)2 ω2n
β2+(2ξβ2)2
(1−β2)2+(2ξβ)2 ω4n
β4+(2ξβ3)2
(1−β2)2+(2ξβ)2
ẏG ω−2n
β−2+(2ξ)2
(1−β2)2+(2ξβ)21+(2ξβ)2
(1−β2)2+(2ξβ)2 ω2n
β2+(2ξβ2)2
(1−β2)2+(2ξβ)2
ÿG ω−4n
β−4+(2ξβ−2)2
(1−β2)2+(2ξβ)2 ω−2n
β−2+(2ξ)2
(1−β2)2+(2ξβ)21+(2ξβ)2
(1−β2)2+(2ξβ)2Valores de Resposta Relativos à base
yR ẏR ÿR
yGβ4
(1−β2)2+(2ξβ)2 ω2n
β6
(1−β2)2+(2ξβ)2 ω4n
β8
(1−β2)2+(2ξβ)2
ẏG ω−2nβ2
(1−β2)2+(2ξβ)2β4
(1−β2)2+(2ξβ)2 ω2n
β6
(1−β2)2+(2ξβ)2
ÿG ω−4n1
(1−β2)2+(2ξβ)2 ω−2n
β2
(1−β2)2+(2ξβ)2β4
(1−β2)2+(2ξβ)2
2.2.3.1 Exemplo - OL1GL com deslocamentos na base
Considere-se um veículo modelado por um OL1GL (m = 1ton; k = 400KN/m; c = 20KNs/m) que se desloca avelocidade constante num piso inicialmente plano e, seguidamente, ondulado (yG(x) = 0.01sin πx3 ). Calcular ovalor máximo de deslocamento vertical do veículo em função da velocidade, bem como a resposta do osciladorquando transita da superfície plana para a superfície ondulada à velocidade de 60km/h. Para que valores de
velocidade o deslocamento vertical estacionário total máximo do veículo é inferior a 5 × 10−3
m?Resolução:
Excitação harmónica simples 29
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
30/145
As características do Oscilador são as seguintes:ωn =
√ 400 = 20rad/seg =⇒ f = 3.18Hz
ξ = 0.5Ao se deslocar a velocidade constante o percurso varia linearmente com o tempo pelo que se tem: yG(t) =
h sinΩt = 0.01 sin π3 vtA equação diferencial do movimento é dada por:
mÿ + c(ẏ − ẏG) + k(y − yG) = 0
ou seja,mÿ + cẏ + ky = cẏG + kyG
ou ainda,mÿ + cẏ + ky = hcΩ cos(Ωt) + hk sin(Ωt)
A accção dinâmica que integra a equação anterior pode ser representada num diagrama de Argand semelhanteao da figura 3, do qual se pode facilmente concluir a seguinte representação alternativa da referida acçãodinâmica, tendo em conta a projecção das forças no eixo real do referido diagrama:
mÿ + cẏ + ky = q(hcΩ)2 + (hk)2 cos(Ωt − θ)A resposta estacionária do oscilador vem dada directamente pela equação 2.69 que, para o presente exemplo,
se escreve da seguinte forma:
y(t) = h
k
v uut (cΩ)2 + (k)2¡1 − β 2
¢2+ (2ξβ )2
cos(Ωt − θ − α) = hv uut (2ξβ )2 + 1¡
1 − β 2¢2
+ (2ξβ )2 cos(Ωt − θ − α)
em que arctan θ = hcΩhk = 12ξβ e arctan α =
2ξβ1−β2 .
Para valor máximo de deslocamento em fase estacioária do movimento tem-se, então,
ymax(v) = hv uut (2ξβ )2 + 1¡1 − β 2¢2 + (2ξβ )2 = 0.01s 2.742 × 10−
3v2 + 1
(1 − 2.742 × 10−3v2)2 + 2.742 × 10−3v2
equação esta que se encontra representada no gráfico da figura.
5037.52512.50
0.0125
0.01
0.0075
0.005
V m/s
Ymax
V m/s
Ymax
Deslocamento máximo em função da velocidade
A parte da equação correspondente ao factor de amplificação,
q (2ξβ)2+1
(1−β2)2+(2ξβ)2 , também se designa por
Factor de Transmissibilidade, T (ξ, β ) e representa a relação entre a amplitude do deslocamento na basee a amplitude do deslocamento vertical total da massa. Note-se, ainda, que esta relação é a mesma se em
30 Oscilador Linear de 1GL
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
31/145
vez de deslocamentos considerarmos velocidades ou acelerações totais, já que as amplitudes destas se obtêmmultiplicando as amplitudes dos deslocamentos por, respectivamente Ω ou Ω2.
O cálculo da resposta do oscilador a partir do momento (t = 0) em que entra na zona ondulada é feito apartir da equação (2.60), tendo em conta a não existência anterior de movimentos verticais do oscilador. Tem-se,então, para resposta do oscilador,
y(t) = Ace−ξωnt cos(ωDt − φ) + ymax|v=16.7 cos(Ωt − 12ξβ −
2ξβ 1 − β 2 )
cujas constantes Ac e φ são calculadas a partir das condições iniciais de movimento,( y(0) ≡ Ac cos(φ) + ymax|v=16.7 cos(1−β
2+4ξ2β2
2ξβ(1−β2) ) = 0 (deslocamento inicial)
ẏ(0) ≡ −Ac [ξωn cos φ − ωD sin φ] + Ω ymax|v=16.7 sin 1−β2+4ξ2β2
2ξβ(1−β2) = 0 (velocidade inicial)
obtendo-seAc = 9.4 × 10−3
φ = 1.4253
A equação de movimento incluindo a parte transiente e estacionária é, então a seguinte:
y(t) = 0.009e−10t cos (17.321t − 1.425) + 1.467 × 10−2 cos (17.453t − 4.805)
10.750.50.250
0.01
0.005
0
-0.005
-0.01
x
y
x
y
Respostas transiente (verde), estacionária (azul) e total (preto)
Para limitar os deslocamentos estacionários verticais a 5 mm tem-se a seguinte equação
ymax(v) = 0.01
s 2.742 × 10−3v2 + 1
(1 − 2.742 × 10−3v2)2 + 2.742 × 10−3v2≤ 0.005
ou seja, v
≥45m/s (162km/h).
2.2.3.2 Exemplo - Pórtico com acelerações na base
Considere-se um pórtico simples, em que a massa se encontra concentrada ao nível da travessa com rigidez muitosuperior aos montantes, sujeito a acelerações nas fundações dadas por ÿG(t) = ÿ0 sin(Ωt), em que ÿ0 = 250cm/s2.Este sistema estrutural pode ser modelado por um OL1GL (m = 1ton; k = 400KN/m; c = 2KNs/m). Calcularo valor máximo de deslocamento horizontal da travessa do pórtico. Qual seria esse valor para um amortecimentoc = 10KNs/m
Resolução:As características do Oscilador são : ωn = 20rad/s e ξ = 0.05(0.25). A equação diferencial do movimento é
dada por:m (ÿ + ÿG) + cẏ + ky = 0
ou seja, mÿ + cẏ + ky = −mÿGExcitação harmónica simples 31
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
32/145
m
k, c
y
E i x o d e R e f e r ê n c i a
yG
ÿG
t
Figura 10
em que a variável y representa os deslocamentos relativos e ÿG(t) = ÿ0 sin(Ωt) as acelerações na base.A resposta estacionária do oscilador vem dada directamente pela equação 2.69 que, para o presente exemplo,
se escreve da seguinte forma:
y(t) = −mÿ0
k
s 1¡
1 − β 2¢2
+ (2ξβ )2 sin(Ωt − α) = − ÿ0
ω2n
s 1¡
1 − β 2¢2
+ (2ξβ )2 sin(Ωt − α)
em que arctan θ = ω2n
2ξωnΩ = 12ξβ e arctan α =
2ξβ1−β2 . Tendo em conta os valores numéricos da aceleração na base
e da frequência própria do oscilador tem-se, para deslocamento máximo em função da relação de frequências β e do amortecimento ξ a seguinte equação:
ymax(β, ξ ) = 6.25 × 10−4s
1¡1 − β 2
¢2+ (2ξβ )2
cuja representação gráfica para os dois valores de amortecimento ξ = 0.05 e ξ = 0.25 é feita na figura seguinte.
1.2510.750.50.2500.006738
0.004087
0.002479
0.001503
0.0009119
0.0005531
beta
Ymax
beta
Ymax
Deslocamento máximo da travessa do pórtico para ξ = 0.05 e ξ = 0.25.
Os valores máximos de deslocamento são dados por
½ ymax(β )|ξ=0.05 = 6.3 × 10−3m para β = 0.998ymax(β )|ξ=0.25 = 1.3 × 10−3m para β = 0.93532 Oscilador Linear de 1GL
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
33/145
Atente-se a que os valores máximos não se atingem para β = 1. Neste exemplo ter-se-ia, para valoresmáximos calculados com base em β = 1 os seguintes valores e respectivo erro:½
ymax(β = 1)|ξ=0.05 = 12ξ
6.25 × 10−4 = 6.25 × 10−3m erro de 0.8%ymax(β = 1)|ξ=0.25 =
12ξ6.25 × 10
−4 = 1.25 × 10−3m erro de 0.4%
2.2.4 Identificação das características dinâmicas do oscilador
O uso da vibração livre dos sistemas vibratórios para a identificação das características dinâmicas – frequêncianatural e amortecimento – foi já abordada aquando do estudo da vibração livre. É também possivel utilizar aresposta a uma excitação harmónica para proceder a essa identificação. Um dos métodos mais frequentementeusados consiste na excitação da estrutura através de uma máquina rotativa excêntrica, a qual é capaz deproduzir uma excitação harmónica em várias frequências, sendo registadas as amplitudes da excitação e daresposta estacionária.
Como se pode deduzir das eq.(2.63) e (2.64) a razão entre a amplitude da excitação e da resposta é dadapela função de frequência H (iΩ). Da análise da representação gráfica da parte imaginária e parte real, ouem alternativa, da amplitude e da fase é possível estimar o valor da frequência própria e do amortecimento
viscoso (figuras ?? e ??).Para o cálculo do factor de amortecimento a partir da função de transferência pode ser usado o método da
meia-potência. Este método baseia-se no facto de a largura do pico no diagrama das amplitudes |H (iΩ)| sepoder relacionar directamente com o factor de amortecimento ξ . Para o efeito calcula-se o factor de amorteci-mento usando a largura do pico espectral nos pontos correspondentes ao valor máximo da resposta dividido por√
2, ou seja, o valor dado por:
max[y(Ω)]√ 2
' p0|H (iΩ)|β=1√
2=
1√ 2
p0k
1
2ξ (2.71)
Aos pontos do espectro de resposta cujo valor é dado por esta expressão correspondem dois valores de β , β 1 eβ 2, cujos valores são calculados resolvendo a seguinte equação:
1√ 2
p0k
1
2ξ =
p0k
∙ 1
(1 − β 2)2 + (2ξβ )2¸ 12
(2.72)
Elevando ao quadrado ambos os membros e desprezando os termos em ξ 2 obtêm-se os quadrados das raízesdados por: ½
β 21 = 1 − 2ξ β 22 = 1 + 2ξ
(2.73)
Tendo em conta a expansão em série binomial dada por:
β i = (1 ± 2ξ )
12
= 1 ±
1
2 (2ξ ) ± . . . (2.74)
e considerando apenas os dois primeiros termos, fácilmente se conclui que:
β 2 − β 1 ' (1 + ξ ) − (1 − ξ ) = 2ξ (2.75)
o que nos permite calcular o factor de amortecimento viscoso pela expressão
ξ ' β 2 − β 1
2 (2.76)
Esta é uma expressão simples para o cálculo do amortecimento mas que envolve a determinação, com elevado
grau de precisão, da curva de resposta em frequência na zona de ressonância, o que se revela normalmentebastante moroso. Este procedimento é ilustrado na figura seguinte.
Excitação harmónica simples 33
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
34/145
2
4
6
8
10
D
0 0.2 0.4 0.6 0.8 1 1.2 1.4
2
max y
max y
1 β 2 β
Figura 11
Figura 12 Configuração típica de Acelerómetros frequentemente usados.
m
k c
y(t)
yG(t)
Figura 13 Modelo de 1GL para o acelerómetro.
34 Oscilador Linear de 1GL
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
35/145
2.2.5 Aparelhos de medida - acelerómetros e sismógrafos
Os sensores usados para medir vibrações baseiam-se no OL1GL. A medição efectua-se através da conversãoem sinal eléctrico da vibração de uma massa relativamente ao invólucro do sensor. Essa conversão é feita, nossistemas recentes, por um cristal piezoeléctrico que funciona como uma mola elástica e emite um sinal eléctricoproporcional à deformação sofrida (ver figura )
A equação diferencial que rege a vibração relativa da massa, £..y(t); .y(t); y(t)¤, quando, ao invólucro do sensorsolidário com a estrutura a medir, é imposta uma aceleração harmónica dada por
..yG(t) = ÿ0 sin(Ωt) escreve-se
da seguinte forma:mÿ + cẏ + ky = −mÿG
em que as características do sensor [m,c,k] são estabelecidas pelo fabricante. A resposta em frequência dosensor, ou seja, o valor máximo relativo de deslocamento da massa a vibrações harmónicas de frequência Ω doinvólucro, vem dado por
ymax = m |H (iΩ)| ÿ0 = k
ω2n|H (iΩ)| ÿ0 =
D
ω2nÿ0
Conclui-se, assim, que, a menos de uma constante própria do sensor, os deslocamentos, e por conseguinte osinal eléctrico do sensor, fornecem directamente a aceleração do ponto da estrutura em que este é colocado. Da
figura seguinte, que representa a amplificação dinâmica de um acelerómetro para vários amortecimentos, podeconcluir-se que, se a frequência própria do sensor for suficientemente alta a sua resposta é linear, ou seja, aamplificação é unitária. Nessa gama de frequências, a aceleração medida é dada por ÿG(t) = ω2ny(t), sendo y(t)o sinal medido pelo cristal piezoeléctrico.
10.36790.13530.049790.01832
1
0.8825
0.7788
0.6873
0.6065
0.5353
x
y
Teóricamente seria possível medir acelerações até frequências muito próximas de zero. Na prática issodepende da sensibilidade do acelerómetro e da cadeia de medição, dado que o sinal emitido pelo acelerómetrotem de ser amplificado. Sinais muito fracos são, no entanto, sensíveis ao ruído eléctrico inerente aos aparelhosde medida, o que dificulta a sua posterior análise. A principal vantagem dos medidores de acelerações é asua pequena massa e dimensões, o que os torna muito versáteis para utilização tanto em pequenos modelosestruturais como em grandes protótipos.
Os sismómetros ou sismógrafos são aparelhos de medida semelhantes aos acelerómetros, mas em que oobjectivo é medir deslocamentos em vez de acelerações. Se tivermos em consideração o deslocamento yG(t) =y0 sin(Ωt) e, por conseguinte a segunda derivada
..yG(t) = Ω
2y0 sin(Ωt), podemos concluir que a amplitude deaceleração vem dada por
..y0 = Ω
2y0. Substituindo na equação anterior obtem-se:
ymax = k
ω2n|H (iΩ)|Ω2y0 =
Ω2
ω2nDy0 = y0
v uut β 4¡1 − β 2
¢2+ (2ξβ )2
A relação ymax/y0 encontra-se representada na figura seguinte, podendo concluir-se que toma valores pratica-mente constantes e iguais à unidade para relações de frequência β = Ωωn altas. Pode pois concluir-se que os
acelerómetros com frequência própria inferior a cerca de 1
10 da frequência do sinal a medir funcionam comosismómetros. este tipo de transdutores apresenta massa bastante elevada, o que os impede de serem usados em
Excitação harmónica simples 35
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
36/145
situações em que seja difícil de os ligar à estrutura ou em que a sua massa possa influenciar os resultados, comoé o caso de pequenas estruturas ou modelos estruturais.
33.1220.0912.187.3894.4822.7181.6491
1
0.8825
0.7788
0.6873
0.6065
0.5353
Beta
Relação ymax/y0 de um acelerómetro para diferentes amortecimentos (ξ = 0.6; ξ = 0.67; ξ = 0.7; ξ = 1.0)
2.3 Resposta do oscilador a um impulso
2.3.1 Resposta a impulsos de duração infinitesimal
A resposta de um OL1GL sujeito a uma excitação de impulso de duração td, cuja intensidade é dada porI =
R td0 p(t)dt, é regido pela seguinte equação diferencial de movimento
mÿ + cẏ + ky ==½ p(t) para 0 ≤ t ≤ td0 para t > td (2.77)No caso da duração do impulso tender para zero admitindo que o impulso mantem um valor finito, I =
limtd→0
R td0 p(t)dt, a função p(t) pode ser relacionada com a função de Dirac δ (t), escrevendo-se p(t) = I δ (t).
A solução da equação diferencial de movimento,
mÿ + cẏ + ky = I δ (t) (2.78)
continua a ser dada, tal como no caso da excitação harmónica, pela soma das soluções complementar e particular:
y(t) = Bce−ξωnt cos(ωDt − φ) + y p(t) (2.79)
em que a primeira parte, correspondente à vibração livre, tem a mesma forma da eq.(2.60).Supondo que o sistema está em repouso imediatamente antes da aplicação do impulso, a constante Bc pode
ser considerada nula. Imediatamente a seguir ao impulso a massa adequire um valor de quantidade demovimento igual ao impulso, não havendo no entanto ainda tempo para que possa haver deslocamento. Emseguida o sistema permanece sem excitação, ou seja, a resposta do oscilador é livre obedecendo às condiçõesiniciais seguintes: ⎧⎪⎨
⎪⎩y p(0) = 0
m dypdt
¯̄̄t=0
= I (2.80)
De acordo com as considerações feitas a resposta forçada y p(t) terá a mesma forma que a resposta livre
y p(t) = B pe−ξωntcos(ωDt − φ) (2.81)
36 Oscilador Linear de 1GL
-
8/16/2019 Dinâmica de Estruturas_Carlos Rebelo_2011-2012
37/145
P(t)
t
P0t pt P Ω= sin)(
0
Figura 14 Impulso sinusoidal
com as condições de fronteira dadas por (2.80), ou seja,
⎧⎪⎨⎪⎩
y p(0) = B p cos φ = 0 ⇒ φ = (2α − 1)π2 com α = 1, 2, 3, . .