Dissertação sobre compressores
100
UNIVERSIDADE FEDERAL DE SANTA CATARINA PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA FLUXO DE ENERGIA VIBRATÓRIA DO CONJUNTO MOTO- COMPRESSOR PARA A CARCAÇA DE UM COMPRESSOR HERMÉTICO ATRAVÉS DAS MOLAS DE SUSPENSÃO DISSERTAÇÃO SUBMETIDA À UNIVERSIDADE FEDERAL DE SANTA CATARINA PARA OBTENÇÃO DO GRAU DE MESTRE EM ENGENHARIA MECÂNICA. MICAEL GIANINI VALLE DO CARMO FLORIANÓPOLIS, MARÇO DE 2001
-
Upload
gustavo-myrria -
Category
Documents
-
view
7 -
download
0
description
Dissertação sobre o fluxo de energia em compressores
Transcript of Dissertação sobre compressores

UNIVERSIDADE FEDERAL DE SANTA CATARINA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICA
FLUXO DE ENERGIA VIBRATÓRIA DO CONJUNTO MOTO-
COMPRESSOR PARA A CARCAÇA DE UM COMPRESSOR HERMÉTICO
ATRAVÉS DAS MOLAS DE SUSPENSÃO
DISSERTAÇÃO SUBMETIDA À UNIVERSIDADE FEDERAL DE SANTA CATARINA
PARA OBTENÇÃO DO GRAU DE MESTRE EM ENGENHARIA MECÂNICA.
MICAEL GIANINI VALLE DO CARMO
FLORIANÓPOLIS, MARÇO DE 2001

ii
Catalogação na fonte pela Biblioteca Universitária da Universidade Federal de Santa Catarina
.
C287 Carmo, Micael Gianini Valle do
Fluxo de energia vibratória do conjunto interno moto-
compressor para a carcaça através das molas de suspensão
[dissertação] / Micael Gianini Valle do Carmo ; orientador,
Arcanjo Lenzi. - Florianópolis, SC, 2001.
99 f.: il., tabs., grafs.
Dissertação (mestrado) - Universidade Federal de Santa
Catarina, Centro Tecnológico. Programa de Pós-Graduação
em Engenharia Mecânica.
Inclui bibliografia
1. Engenharia mecânica. 2. Molas. 3. Compressores.
4. Energia vibratória. 5. Elementos finos. I. Lenzi,
Arcanjo. II. Universidade Federal de Santa Catarina.
Programa de Pós-Graduação em Engenharia Mecânica.
III. Título.
CDU 621

iii
FLUXO DE ENERGIA VIBRATÓRIA DO CONJUNTO INTERNO MOTO-
COMPRESSOR PARA A CARCAÇA ATRAVÉS DAS MOLAS DE SUSPENSÃO
MICAEL GIANINI VALLE DO CARMO
Esta dissertação foi julgada adequada para a obtenção do titulo de:
MESTRE EM ENGENHARIA
Especialidade Engenharia Mecânica, Área de concentração Vibrações e Acústica, e aprovada em
sua forma final pelo Programa de Pós-Graduação.
___________________________
Prof. Julio Cesar Passos, Dr
Coordenador
___________________________
Prof. Arcanjo Lenzi, Ph.D
Orientador
Banca Examinadora:
___________________________
Prof. Roberto Jordan, Dr
___________________________
Prof. Marcelo Krajnc Alves, Ph.D
___________________________
Prof. Jose Carlos Pereira, Dr

iv
Agradecimentos
Ao meu pai, pelo irrestrito apoio e forca a todas minhas decisões na minha vida.
A minha mãe e minha irmã pela compreensão nas horas mais difíceis.
Ao Professor Arcanjo Lenzi, ao Mineiro e ao Buba pelos preciosos ensinamentos, orientação
e amizade.
Ao Diesel pela importante ajuda.
Ao Eneias, Ueber, Artur, Piti e Ivar pelo incentivo constante.
Aos bolsistas Marcelo, Vick, Cabelo, Claudio, Olavo e Faísca pelo companheirismo e
importante contribuição nesta dissertação.
A MSC-Brasil Software pelas licenças e pela ajuda na parte final da dissertação.
Aos Engenheiros Eduardo Araujo e Andre de Jesus (MSC- Brasil Software) pela forca nos
momentos finais.

v
SUMÁRIO
LISTA DE SIMBOLOS.............................................................................................................vi
CONVENÇÕES........................................................................................................................vii
LISTA DE FIGURAS E TABELAS.......................................................................................viii
RESUMO.................................................................................................................................xiii
ABSTRACT.............................................................................................................................xiv
1. INTRODUÇÃO......................................................................................................................1
2. REVISÃO BIBLIOGRÁFICA...............................................................................................6
3. MODELOS NUMÉRICOS POR ELEMENTOS FINITOS.................................................14
3.1. Modelo da Carcaça.................................................................................................14
3.2. Modelo do Conjunto Mola-Batentes......................... ............................................32
3.3. Modelo do Conjunto Acoplado Carcaça com Molas.............................................44
4. Análises Numéricas e Experimentais do Fluxo De Energia
Vibratória Através das Molas...............................................................................................46
4.1.Quantificação Experimental do Fluxo de Energia
Através das Molas...............................................................................................................46
4.2. Quantificação Numérico-Experimental do Fluxo de
Potencia Através das Molas...............................................................................................57
4.3. Variabilidade dos Resultados.............................................................................................69
5. ANÁLISES DE VARIAÇÕES DE PARAMÊTROS DO MODELO NUMÉRICO............71
5.1. Análise da Influência de Variação da Espessura da
Carcaça na Velocidade Média Espacial.....................................................................71

vi
5.2. Analise da Influência de variação da espessura do assento
das molas na velocidade media espacial da carcaça..................................................77
6. CONCLUSÕES E SUGESTÕES PARA TRABALHOS FUTUROS.................................79
7. BIBLIOGRAFIA...................................................................................................................83

vii
LISTA DE SÍMBOLOS
F Força.
Gyy Densidade Espectral de Potência do sinal y;
Gij Densidade Espectral Cruzada entre sinais i e j;
Hi Função Resposta em Freqüência do sistema i;
H Resposta em Freqüência Harmônica;
NWS Nível de Potência Sonora
Wtrf Potência transmitida por Forças.
WtrM Potência transmitida por Momentos.
W Potência
P Potência transmitida através de um componente
V Força de cisalhamento ou velocidade translacional
θ’ Velocidade Angular
cp velocidade do som na placa;
E módulo de elasticidade;
f freqüência;

viii
CONVENÇÕES
O símbolo * indica número complexo conjugado.
O símbolo • sobre uma variável, indica derivada temporal.
O símbolo - sobre uma variável indica media temporal.
O símbolo < > indica media espacial do termo entre os sinais.
Os símbolos Re{ } e Im{ } indicam a parte real e imaginária, respectivamente, do termo entre
chaves;
O símbolo j representa imaginário puro, 1j −= .
Valores de referencia para calculo do nível de resposta, dB:
Pressão Sonora = 2x10-5 Pa
Potencia Sonora = 1x10-12 Watts
Velocidade Translacional = 1x10-9 m/s
Aceleração Translacional = lx10-6 m/s2
Inertancia = 1 g/N
Transmissibilidade (Forca/aceleração) = 1 N/g

ix
LISTA DE FIGURAS E TABELAS
Figura 1.1 Compressor hermético, visto em cortes...............................................................2
Figura 1.2 Nível de Potência Sonora média de compressores EG – EMBRACO...............................................................................................4
Figura 2.1 Sistema linear com múltiplas entradas e única saída...........................................8
Figura 2.2 Formas geométricas de molas : cilíndrica, barrica, hiperboloidal e cônica.......................................................................................10
Figura 3.1 Comparação de FRF’s experimentais pontuais na tampada carcaça com e sem óleo................................................................................15
Figura 3.2 Comparação de FRF’s experimentais pontuais no fundoda carcaça com e sem óleo................................................................................16
Figura 3.3 Comparação de FRF’s experimentais pontuais na lateral da carcaça com e sem óleo................................................................................16
Figura 3.4 Forças e momentos suportados pelo Elemento CQUAD4................................18
Figura 3.5 Carcaça de compressor EG mostrando região de alimentação elétrica.............19
Figura 3.6 Modelo de Elementos Finitos da carcaça..........................................................20
Tabela 3.1 Comparação Numérico Experimental dos modos da carcaça sem óleo...............................................................................................21
Tabela 3.2 Comparação Numérico Experimental dos modos da carcaça com óleo...............................................................................................22
Figura 3.7 Modos numérico de 2890 Hz e 3140 Hz da carcaça sem óleo............................................................................................................23
Figura 3.8 Modos numérico de 3260 Hz e 3290 Hz da carcaça sem óleo............................................................................................................23
Figura 3.9 Modos numérico de 3292 Hz e 3299 Hz da carcaça sem óleo............................................................................................................24
Figura 3.10 Modos numérico de 3428 Hz e 3658 Hz da carcaça sem óleo............................................................................................................24
Figura 3.11 Modos numérico de 3920 Hz e 4033 Hz da carcaça sem óleo...........................................................................................................25
Figura 3.12 Modos numérico de 4109 Hz e 4119 Hz da carcaça sem óleo............................................................................................................25
Figura 3.13 Modos numérico de 2672 Hz e 2685 Hz da carcaça com óleo............................................................................................................26

x
Figura 3.14 Modos numérico de 3200 Hz e 3230 Hz da carcaça com óleo............................................................................................................26
Figura 3.15 Modos numérico de 3262 Hz e 3271 Hz da carcaça com óleo............................................................................................................27
Figura 3.16 Modos numérico de 3367 Hz e 3473 Hz da carcaça com óleo............................................................................................................27
Figura 3.17 Modos numérico de 3645 Hz e 3734 Hz da carcaça com óleo............................................................................................................28
Figura 3.18 Modos numérico de 3949 Hz e 4054 Hz da carcaça com óleo............................................................................................................28
Figura 3.19 Modos numérico de 4114 Hz e 4174 Hz da carcaça com óleo............................................................................................................29
Figura 3.20 Comparação de FRF’s numérica e experimental da tampa da carcaça..........................................................................................................30
Figura 3.21 Comparação de FRF’s numérica e experimental da lateral da carcaça..........................................................................................................30
Figura 3.22 Comparação de FRF’s numérica e experimental do fundo da carcaça..........................................................................................................31
Figura 3.23 Esforços suportados pelo elemento CBEND.....................................................33
Figura 3.24 Modelo de Elementos Finitos do conjunto mola-batentes................................34
Figura 3.25 (a) Bloco de aço acoplado sobre as molas e (b) base inercial dos batentes inferiores............................................................36
Figura 3.26 Montagem do experimento para medição das FRF’s das molas................................................................................................36
Figura 3.27 Detalhes da montagem dos transdutores de força (a) posição longitudinal e (b) posição transversal.............................................37
Figura 3.28 Comparação de FRF’s experimentais com molas secas e molas mergulhadas em óleo...............................................37
Figura 3.29 Comparação de FRF’s numérica e experimental longitudinal.................................................................................38
Figura 3.30 Comparação de FRF’s numérica e experimental transversal...................................................................................38
Figura 3.31 Comparação de FRF’s do modelo de Elementos Finitos e analogia barra/mola..........................................................39
Figura 3.32 Modos numérico de 200, 388 e 458 Hz do conjunto
mola-batentes....................................................................................................40

xi
Figura 3.33 Modos numérico de 524, 538 e 740 Hz do conjunto mola-batentes....................................................................................................41
Figura 3.34 Modos numérico de 833, 880 e 909 Hz do conjunto mola-batentes....................................................................................................41
Figura 3.35 Modos numérico de 1062, 1198 e 1232 Hz do conjunto mola-batentes....................................................................................................42
Figura 3.36 Modos numérico de 1256, 1289 e 1316 Hz do conjunto mola-batentes....................................................................................................42
Figura 3.37 Modos numérico de 1360, 1564 e 1596 Hz do conjunto mola-batentes....................................................................................................43
Figura 3.38 Modelo de Elementos Finitos do conjunto acoplado carcaça com mola-batentes................................................................44
Figura 3.39 Detalhe do acoplamento de elementos rígidos da carcaça com as mola-batentes........................................................................................45
Figura 4.1 Detalhe da estrutura metálica usada na montagem do compressor sem molas......................................................................................46
Figura 4.2 Detalhe da fixação dos cabos metálicos com anéis deborracha no conjunto moto-compressor............................................................47
Figura 4.3 Comparação dos Níveis de Potência Sonora de compressores normais antes e após as alterações de retiradas das molas................................50
Figura 4.4 Comparação dos Níveis de Potência Sonora de compressores normais referência com compressores sem o caminho de transmissão das molas.......................................................................................51
Figura 4.5 Comparação dos Níveis de Potência Sonora de compressores normais referência com Potência Transmitida pelas molas..............................53
Figura 4.6 Sistema de coordenadas de medição da aceleração no topo das molas e identificação das mesmas. Direção x: direção axial do pistão; Direção y: direção vertical e Direção z: direção transversal.................53
Figura 4.7 Espectro de Aceleração em bandas de 1/3 de oitava nas três direções medidos no topo da mola 1.................................................................54
Figura 4.8 Espectro de Aceleração em bandas de 1/3 de oitava nas três direções medidos no topo da mola 2.................................................................54
Figura 4.9 Espectro de Aceleração em bandas de 1/3 de oitava nas três direções medidos no topo da mola 3.................................................................55
Figura 4.10 Espectro de Aceleração em 1/3 de oitava nas três direções medidos no topo da mola 4.................................................................56

xii
Figura 4.11 Comparação numérica experimental da velocidade média quadrática da carcaça........................................................................................56
Figura 4.12 Fluxo Potência transmitida pela mola 1 para a carcaça pelos esforços tipo Força (Fx, Fy e Fz).............................................................58
Figura 4.13 Fluxo Potência transmitida pela mola 1 para a carcaça pelos esforços tipo Momento (Mx e Mz)..........................................................59
Figura 4.14 Fluxo Potência transmitida pela mola 2 para a carcaça pelos esforços tipo Força (Fx, Fy e Fz).............................................................59
Figura 4.15 Fluxo Potência transmitida pela mola 2 para a carcaça pelos esforços tipo Momento (Mx e Mz)..........................................................60
Figura 4.16 Fluxo Potência transmitida pela mola 3 para a carcaça pelos esforços tipo Força (Fx, Fy e Fz).............................................................60
Figura 4.17 Fluxo Potência transmitida pela mola 3 para a carcaça pelos esforços tipo Momento (Mx e Mz)..........................................................61
Figura 4.18 Fluxo Potência transmitida pela mola 4 para a carcaça pelos esforços tipo Força (Fx, Fy e Fz).............................................................61
Figura 4.19 Fluxo Potência transmitida pela mola 4 para a carcaça pelos esforços tipo Momento (Mx e Mz)..........................................................62
Figura 4.20 Velocidade média quadrática da carcaça região da tampa, fundo e corpo lateral devido ao fluxo de energia da mola 1..............................................................................................63
Figura 4.21 Velocidade média quadrática da carcaça região da tampa, fundo e corpo lateral devido ao fluxo de energia da mola 2..............................................................................................63
Figura 4.22 Velocidade média quadrática da carcaça região da tampa, fundo e corpo lateral devido ao fluxo de energia da mola 3..............................................................................................64
Figura 4.23 Velocidade média quadrática da carcaça região da tampa, fundo e corpo lateral devido ao fluxo de energia da mola 4..............................................................................................64
Figura 4.24 Resposta media espacial de toda a carcaça, < 2
V >, quando excitadas pelas vibrações no topo das quatro molas: somente na direção x; somente na direção y e somente na direção z...............66
Figura 4.25 Fluxo de Potencia transmitida por uma mola para a carcaça pelos esforços tipo Forca (Fx, Fy e Fz) excitada somente na direção longitudinal......................................................................................67

xiii
Figura 4.26 Velocidades medias quadráticas da carcaça devido as
excitações unitárias nas 3 direções separadas..................................................68
Figura 4.27 Velocidade media quadrática da carcaça devido às
excitações unitárias nas 3 direções simultâneas................................................68
Figura 4.28 Variação dos resultados da resposta media quadrada
espacial da carcaça, < 2
V >, quando excitadas pelas
vibrações no topo das molas medidas em três compressores diferentes...........70
Figura 5.1 Velocidade média espacial da carcaça para variaçõesda espessura da mesma como um todo.............................................................72
Figura 5.2 Velocidade média espacial da carcaça para variaçõesda espessura da mesma como um todo.............................................................72
Figura 5.3 Regiões consideradas como tampa em azul e fundo em rosa nas variações de espessura da carcaça.................................................73
Figura 5.4 Velocidade média espacial da carcaça para variaçõesda espessura da Tampa......................................................................................73
Figura 5.5 Velocidade média espacial da carcaça para variaçõesda espessura da Tampa......................................................................................74
Figura 5.6 Velocidade média espacial da carcaça para variaçõesda espessura do Fundo......................................................................................74
Figura 5.7 Velocidade média espacial da carcaça para variaçõesda espessura do Fundo......................................................................................75
Figura 5.8 Velocidade média espacial da carcaça para variaçõesda espessura do Fundo e da Tampa simultaneamente.......................................75
Figura 5.9 Velocidade média espacial da carcaça para variaçõesda espessura do Fundo e da Tampa simultaneamente.......................................76
Figura 5.10 Região dos batentes das molas (em vermelho) onde sevariou a espessura.............................................................................................78
Figura 5.11 Velocidade média espacial da carcaça para variações da espessura do assento das molas....................................................................78

xiv
RESUMO
A principal fonte de ruído e de vibrações em sistemas domésticos de refrigeração é o
compressor. Um grande esforço da industria e dos pesquisadores nesta área tem sido
direcionado visando à atenuação dos níveis de vibração e, conseqüentemente, de ruído destes
sistemas, nos quais o compressor continua sendo a principal fonte geradora de ruído e
vibrações.
Os compressores herméticos são geralmente constituídos de um conjunto interno, que
contem um motor elétrico e um compressor alternativo de único pistão, ligado a carcaça
através de uma suspensão de quatro molas, parcialmente mergulhadas em lamina de óleo
lubrificante, e através do tuba de descarga.
Pelos mecanismos básicos geradores de vibrações observa-se que os principais meios
de propagação de energia vibratória são o tubo de descarga, as molas de suspensão e o gás
que ocupa a cavidade. A carcaça e a irradiadora final do ruído.
A abordagem fundamental deste trabalho e o fluxo de energia vibratória do conjunto
moto-compressor para a carcaça através das molas de suspensão, utilizando-se o método dos
elementos finitos através do software comercial MSC/PATRAN 9.0 e MSC/NASTRAN 70.5.
As quantidades de energia total e por cada tipo de esforço que fluem através das molas
foram calculadas, e os efeitos das alterações na geometria da carcaça na sua media espacial
quadrática da velocidade foram analisados. As relações entre as excitações transversais e
longitudinais nas molas com as medias espaciais da velocidade da carcaça também são
apresentadas e analisadas.
A carcaça foi modelada por elementos de placa quadrangulares, as molas por
elementos de viga e o volume de óleo como uma matriz de massa acoplada a fronteira da
carcaça. Experimentos foram conduzidos de modo a validar os modelos.

xv
ABSTRACT
In domestic refrigeration systems the main noise source is the compressor. The
attenuation of the vibration levels and, therefore, noise in these systems are the principal
object study and optimization to researchers and manufacturers. To this, the motor pump
assembly is the main target of study in these systems.
The hermetic compressors consist in an internal kit, what is constituted in electric
motor and reciprocator compressor with one piston, the kit connects with the housing through
four suspension springs partially immersed in lubrication oil and through an outflow gas
manifold.
The main vibration and acoustic energy paths to the housing are the outflow manifold,
the suspension springs and the gas in internal cavity. The principal noise irradiator is the
housing.
This work deals with the vibration power flow from the internal kit to the housing
through the suspension springs, the finite element method is used to calculate the power flow
and the springs and housing was modelated using the softwares MSC/PATRAN 9.0 and
MSC/NASTRAN 70.5.
The power flows through springs in each force and each moments are calculated, the
influence of the alterations in housing geometry on its spacial mean velocity are studied. The
most important forces are determined and the influence on spacial mean squared velocity by
longitudinal and transversal forces are discussed.
The modeling of the housing is developed with shell elements, the springs with beam
elements and the oil volume as a mass matrix coupled on the housing. Experimental testing
has been. made in order to validate the Finite Element models; results show good agreement.
Measurements on operating compressor and results obtained by Finite Element model
of the spatial squared velocity were compared and discussed.

1
CAPÍTULO 1
1. INTRODUÇÃO
Os crescentes níveis de exigência aos produtos e projetos desenvolvidos em
engenharia, tais como: segurança, confiabilidade, durabilidade, bom desempenho, baixo
preço, baixos níveis de vibrações e ruídos, requerem acurados e amplos conhecimentos físicos
do comportamento e das características dinâmicas dos componentes mecânicos internos de
geração de ruído e vibrações e seus demais mecanismos.
Dentre esses produtos, os equipamentos domésticos têm recentemente sido alvo dessas
exigências devido ao longo período de proximidade dos usuários, tornando-se assim, umas
das principais causas de desconforto e stress relacionados principalmente à exposição ao
ruído.
Dentre os equipamentos domésticos principais responsáveis por estes efeitos estão os
sistemas de refrigeração/congelamento, quais são: refrigeradores de ar e de água, freezers,
geladeiras, e outros. A principal fonte de ruído e de vibrações desses sistemas é o compressor.
Como o objetivo principal é a atenuação dos níveis de vibração e, consequentemente, de ruído
dos sistemas de refrigeração domésticos, o conjunto moto-compressor continua sendo o
principal objeto de estudos e de otimização nestes sistemas.
Os compressores herméticos são geralmente constituídos de um conjunto interno, que
contem um motor elétrico e um compressor alternativo de único pistão, ligado à carcaça
através de uma suspensão de quatro molas inferiores, parcialmente mergulhadas em lâmina de
óleo lubrificante, e através do tubo de descarga.

2
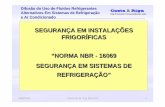
Um desenho de um compressor típico, a ser estudado nesta dissertação, modelo EG,
fabricado pela Empresa Brasileira de Compressores S/A, está mostrado na Figura 1.1.
Figura 1.1: Compressor hermético, visto em cortes.

3
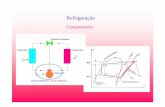
Um gráfico do Nível de Potência Sonora média em função da freqüência de
compressores EG é mostrado na Figura 1.2.
0
5
10
15
20
25
30
35
40
100
125
160
200
250
315
400
500
630
800
1000
1250
1600
2000
2500
3150
4000
5000
6300
8000
10000
Frequência (Hz )
Nív
el d
e P
otê
nci
a S
on
ora
(d
B)
Figura 1.2: Nível de Potência Sonora média de compressores EG - EMBRACO.
Dentre os mecanismos responsáveis pela geração de vibrações e ruído no compressor
destacam-se os seguintes:
• Excitações magnéticas causadas pelo fluxo magnético no motor elétrico que
produzem esforços no estator e rotor, e, consequentemente, geram vibrações no conjunto
moto-compressor.
• Folgas entre as partes móveis do compressor, principalmente no conjunto
pistão\biela\manivela as quais apresentam bruscas e grandes variações de aceleração,
provocando, assim, impactos geradores de vibrações no bloco.

4
• Fluxo intermitente de gás nas câmaras de sucção e sua pulsação causada pelo
movimento oscilatório na válvula de sucção, excitando acusticamente a massa de gás contida
no espaço entre a carcaça e o conjunto moto-compressor (cavidade).
• Variação brusca de pressão no fluxo de gás na descarga que ocorre quando a
válvula de descarga é aberta, condicionando o gás a uma rápida queda de pressão, com alta
velocidade de saída no orifício de descarga resultando em um fluxo altamente turbulento. Isto
proporciona conseqüentemente, excitação dos modos acústicos do sistema de tubos e câmaras
existentes na linha de descarga do compressor. Estas pulsações geram vibrações e ruído nos
sistemas de refrigeração. Estas grandes variações de pressão no cilindro excitam, também,
vibrações no conjunto moto-compressor.
Pelos mecanismos básicos geradores de vibrações observa-se que os principais meios
de propagação da energia vibratória são o tubo de descarga, as molas de suspensão e o gás
que ocupa a cavidade. A carcaça é a irradiadora do ruído e transmissora de vibrações para
outros componentes do sistema de refrigeração, quais são grade do condensador, carcaça e
base dos equipamentos domésticos.
O fluxo de energia vibratória do conjunto interno moto-compressor para a carcaça
ocorre predominantemente através das quatro molas de suspensão, pelo fato de
proporcionarem quatro pontos de transmissão de esforços dinâmicos. Por este motivo, o
objetivo principal deste trabalho de dissertação consiste em determinar os mecanismos de
transmissão de energia vibratória para carcaça através deste caminho. Para isto, o conjunto
molas/batentes/carcaça foi modelado pelo método de Elementos Finitos, usando os softwares
comerciais MSC-Nastran e MSC-Patran. Os modelos dos componentes isolados foram
validados experimentalmente e o comportamento do conjunto foi analisado. Foram analisados
os efeitos de variação da geometria e do amortecimento estrutural.

5
Uma revisão da literatura técnica relacionada ao tema desta dissertação está
apresentada no Capítulo 2.
No Capítulo 3 serão apresentados os modelos de Elementos Finitos das molas e da
carcaça, juntamente com suas respectivas validações experimentais. Serão, também,
estendidos resultados experimentais mostrando a importância das molas como caminho de
transmissão de energia vibratória para a carcaça.
Uma análise do fluxo de energia vibratória através das molas é apresentada no
Capítulo 4, de modo a determinar quais tipos de esforços e quais direções de excitação são
mais importantes na transmissão e qual a região da carcaça é mais irradiadora de potência
sonora.
Análises de variação de espessura e amortecimento da carcaça são realizadas no
Capítulo 5.
O Capítulo 6 apresenta as conclusões e recomendações para trabalhos futuros.

6
CAPÍTULO 2
2. REVISÃO BIBLIOGRÁFICA
A grande maioria dos trabalhos desenvolvidos na área de ruído e vibrações em
compressores é publicada na conferência bianual na Universidade de Purdue desde 1972, o
que explica porque a maioria das referências aqui citadas é proveniente dessa conferência.
Há uma grande diversidade de tipos constitutivos e utilidades de compressores tais
como: compressores alternativos, de palhetas, de parafuso, rotativos helicoidais, e
centrífugos, podem ser divididos ainda em hermeticamente e não hermeticamente selados, de
pequeno e grande porte, e compressores de refrigeração e compressores de ar. Faz-se, assim,
necessária uma limitação da ampla bibliografia existente, restringindo a revisão bibliográfica
sobretudo aos trabalhos em compressores herméticos de refrigeração.
Uma vasta revisão bibliográfica, desde as primeiras conferências em Purdue até 1980,
foi feita por Soedel [1] mostrando o estado da arte de trabalhos sobre ruídos e vibrações em
compressores. Soedel [1] dividiu a vasta bibliografia em 4 categorias básicas, quais são:
fontes geradoras de ruído; caminhos de transmissão; irradiação e análise e projeto do muffler
confrontando e discutindo os trabalhos de cada categoria.
Administrador
Highlight
Administrador
Highlight

7
Soedel [1] concluiu que a maioria dos trabalhos até então desenvolvidos eram, na
grande maioria, baseados em estudos experimentais, faltando assim estudos fundamentados
em desenvolvimento e modelamento matemáticos e em simulações computacionais apoiados
paralelamente em experimentos controlados.
As duas regiões no espectro com maiores níveis de potência sonora irradiada (bandas
de 500 Hz e 2.000 Hz) de compressores alternativos de refrigeração foram investigadas por
Tojo [2]. Através de experimentos variando o tipo de gás e a temperatura deste na cavidade, e
por conseqüência a velocidade do som neste meio, concluiu que as ressonâncias da cavidade
proporcionam a principal fonte do ruído em torno de 500 Hz, gerada principalmente pela
pulsação do gás no muffler de sucção e pela vibração do conjunto moto-compressor, que
irradia ruído para a cavidade.
A irradiação de ruído na região de 2.000 Hz que é a mais importante do espectro
destes compressores foi estudado por Tojo [2] através da medição da pressão do gás no
cilindro e da vibração do conjunto moto-compressor, paralelamente à monitoração da abertura
da válvula de descarga. Tojo [2] concluiu que a abertura da válvula de descarga provoca
variações bruscas de pressão no cilindro, resultando em forças que excitam mecanicamente
vibrações no conjunto moto-compressor, chegando à carcaça através das molas e tubo de
descarga.
Equipando o compressor com silenciadores na sucção e com mudanças na geometria
da carcaça e do tubo de descarga, Tojo [2] conseguiu uma redução de 10 dB(A),
aproximadamente, na potência sonora.
Utilizando-se de um modelo de sistema mecânico linear de múltiplas entradas e única
saída (Figura 2.1), os caminhos de transmissão de energia vibratória de um compressor foram
investigados até 5 kHz por Crain [3]. Um compressor instrumentado com transdutores de
Administrador
Highlight
Administrador
Highlight
Administrador
Highlight

8
pressão, na cavidade, e de força, nas molas, foi utilizado para tal estudo. Crain [3] concluiu,
através da comparação do ruído predito sem o efeito de um dos caminhos, através da Equação
2.1, que as molas são os principais caminhos de transmissão de energia responsáveis pelo
ruído acima de 800 Hz.
��= =
=
k
i
k
j
jijiyy HGHG1 1
* .. (2.1)
Figura 2.1: Sistema linear com múltiplas entradas e única saída.
Um modelo de Elementos Finitos de um compressor hermético alternativo para
propósitos de predição de ruído foi feito por Ramani [4] . O modelo da carcaça, feito com
elementos de placa, foi reformulado várias vezes na sua espessura e densidade de malha até a
validação através da comparação das freqüências e modos extraídos por análise modal
experimental na região abaixo de 2 kHz. Erros menores que 5% entre as freqüências naturais,
respectivamente correlacionadas, foram conseguidos. O procedimento experimental de
Ramani para a obtenção dos modos consistia em excitar harmonicamente a carcaça com um

9
excitador eletro-dinâmico nas freqüências naturais e por meio de um vibrômetro a laser extrair
os modos. Assim, os modos obtidos são mais próximos dos verdadeiros, quais são os que a
estrutura vibra quando em operação. O conjunto moto-compressor foi modelado como um
corpo rígido através de um elemento pontual de massa com iguais propriedades de massa e
inércia, e o tubo de descarga modelado com elementos de viga.
Para o cálculo dos modos do modelo completo acoplado, uma técnica de
superestruturação foi utilizada e, assim, as contribuições de cada componente na energia de
deformação do modelo foram calculada. Os modos do modelo acoplado foram classificados
por Ramani [4] como: modos da suspensão (6 primeiros) devido à ação das molas de
suspensão; modos internos, sem nenhuma ou pouquíssima deformação da carcaça; modos
modificados, que se assemelham muito aos modos extraídos da carcaça mas ocorrendo em
freqüências ligeiramente deslocadas; e modos acoplados, para os quais os modos localizados
da carcaça estão acoplados aos modos das molas ou do tubo de descarga.
Em virtude da importância das molas não somente como elementos de compressores
mas também de várias outras máquinas, muitos trabalhos de investigação do comportamento
destas foram desenvolvidos fazendo-se necessária uma revisão particular deste assunto, o que
segue abaixo.
Zindeluk [5] estudou a performance de cilindros de borracha na atenuação de
propagação estrutural longitudinal de ruído em molas helicoidais. Usando o conceito de molas
atuando em paralelo a rigidez adicional na mola devido à ação do cilindro de elastômero foi
modelada matematicamente. O conjunto mola-cilindro foi modelado como um isolador de três
estágios, dispondo-se de mola cilindro central entre dois estágios de mola pura, usando a
teoria de parâmetros de quadripolo mecânico para vibrações longitudinais de viga.

10
Comparações entre resultados experimentais e os simulados numericamente da
transmissibilidade do conjunto mola-cilindro mostraram boa concordância.
Freqüências naturais de molas helicoidais de diferentes geometrias foram obtidas por
Yildrin [7] através do método da matriz de transferencia usando teoria de viga de Timoshenko
e modelo de massa distribuída. As formas geométricas de molas usadas neste estudo foram:
cônica, barril, hiperboloidal e cilíndrica (Figura 2.2 ). Bons resultados foram obtidos quando
em comparação com os resultados numéricos e experimentais, publicados anteriormente por
outros autores. A comparação das freqüências naturais das molas não cilíndricas concluiu que
a mola tipo barril possui freqüências muito próximas, diferentemente das outras molas cujas
freqüências divergem consideravelmente entre si. A influência do ângulo de hélice e do
número de espiras nas freqüências naturais também foi estudada e concluiu-se que um
aumento nos dois casos provoca uma queda nas freqüências devido ao aumento no
comprimento total da mola e uma conseqüente queda na rigidez. Um aumento na razão
Rmin/Rmax resultou também em queda nas freqüências de vibração livre de todas as molas.
Figura 2.2: Formas geométricas de molas : cilíndrica, barrica, hiperboloidal e cônica.

11
Para um mesmo Rmax a mola hiperboloidal mostrou-se ser a mais rígida entre os
modelos estudados. No estudo da influência dos efeitos de inércia de rotação, deformações
axial e cisalhante da mola, no cômputo das freqüências, concluiu-se que o efeito mais
importante é o da deformação cisalhante, seguido do de inércia de rotação.
As equações de movimento para molas helicoidais usando teoria de viga de
Timoshenko foram desenvolvidas e resolvidas por Ward [8] para a obtenção dos modos e
respectivas freqüências naturais. O método de modos assumidos foi utilizado para modelar
cada um dos seis deslocamentos dos pontos da mola.
As freqüências calculadas, quando comparadas com resultados de outros autores,
mostraram variações da ordem de 1,5%. Freqüências naturais experimentais extraídas da
resposta acústica medida através de microfone, após excitação de impacto das molas,
comparadas com as calculadas analiticamente apontaram erro em torno de 2,5%. A influência
do ângulo de passo e número de espiras na freqüência fundamental das molas também foi
mostrada.
Os primeiros 16 modos de uma mola helicoidal cilíndrica e de uma mola cônica foram
plotados e, através destes, uma classificação dos modos em longitudinal, torcional, transversal
e cisalhante foi sugerida. Ward [8] também mostrou que as freqüências naturais dentro de
cada classe de modos se aproximam muito de series harmônicas.
Crucq [9] descreve modelos analíticos relacionados às principais fontes geradoras de
ruído e vibrações em compressores herméticos. Após extenso trabalho experimental, o autor
lista as principais fontes de ruído, por ele encontradas:
a) irradiação do muffler de sucção para a cavidade.
Administrador
Highlight

12
b) vibrações do sistema pistão/biela/eixo, excitado pela pressão exercida pelo gás
durante a descarga.
O modelo do muffler de sucção desenvolvido pelo autor considerou o fluxo de massa,
m� (t) [kg/s], para o interior do cilindro como dado de entrada, calculado a partir de um
programa de simulação termodinâmica. O muffler foi modelado como um sistema de câmaras
unidas por tubos. A função transferência foi calculada até 2.000 Hz.
O sistema dinâmico formado somente pelas partes móveis, pistão/biela/eixo, foi
modelado como massas concentradas unidas por rigidez proporcionadas pela Teoria de Hertz
para contato e pelos filmes de óleo. Os valores usados para a rigidez foram:
− Mancal do olhal menor: k = 3×107 N/m
− Rigidez da biela: k = 5×107 N/m
− Olhal maior da biela: k = 2×108 N/m
− Mancal eixo/bloco: k = 2×108 N/m
O bloco foi considerado como um corpo rígido. O autor não apresenta resultados a
respeito da irradiação direta deste sistema de componentes móveis para a cavidade, bem como
das vibrações transmitidas através das molas.
Um estudo do problema do fluxo de energia vibratória entre bloco interno e carcaça
através das molas helicoidais em um compressor hermético, modelo FFE 8A, foi feito por
Barbosa [10]. O compressor foi modelado por dois subsistemas (conjunto interno e carcaça)
unidos por três molas, modeladas como barras uniformes, baseando-se na Análise Estatística
Energética. Barbosa concluiu para o tipo de montagem da suspensão usada que o aumento do
Administrador
Highlight

13
amortecimento das molas resulta em uma redução significativa na potência sonora, da ordem
de 2.0 dB, na região de médias e altas freqüências. Mostrou também a pouca importância do
tubo de descarga como caminho de transmissão de energia vibratória para a carcaça, do ponto
de vista de potência sonora total irradiada.
Um estudo da transmissibilidade e principais esforços transmitidos pelo conjunto de
suspensão à carcaça de um compressor hermético nas regiões de alta e baixa freqüência e sua
influência na potência sonora irradiada por este foram feitos por Bastos [11]. Neste, as molas
também foram modeladas por barras uniformes. Bastos mostrou que decréscimos nos níveis
de potência sonora irradiada pelo compressor podem ser conseguidos com o aumento do
amortecimento do sistema de suspensão do bloco, resultando, assim, em significativa redução
dos níveis de excitação da carcaça.
Assim, este trabalho tem como objetivo estudar a importância das molas como
caminho de transmissão de energia vibratória para a carcaça usando como ferramenta
simulação numérica por elementos finitos, o que tem sido pouco utilizada até aqui nas
investigações dos mecanismos de geração de ruído em compressores herméticos.

14
CAPÍTULO 3
3. MODELOS NUMERICOS POR ELEMENTOS FINITOS
3.1. Modelo da Carcaça
A carcaça é o recipiente envolvente de todo o conjunto moto-compressor. Funciona
como um receptáculo hermeticamente fechado e assim, impede a contaminação do gás
refrigerante e do óleo lubrificante e, consequentemente, a queda no rendimento térmico e na
vida útil dos elementos do compressor.
As principais características geométricas desse elemento já foram mostradas na
Figura 1.1, formada por duas partes soldadas (tampa e corpo) com uma seção transversal de
forma elíptica com diâmetro maior de 205 mm e diâmetro menor de 171 mm, altura de 204
mm e espessura de chapa de 3 mm, medidas para compressor modelo EG, fabricado pela
Empresa Brasileira de Compressores – EMBRACO S/A, usado neste estudo.
Por meio da base inferior da carcaça o conjunto moto-compressor é fixado nos
equipamentos domésticos, funcionando também como um caminho de transmissão de energia
vibratória para outros elementos como : grade do condensador, tubos de conexão, base e
carcaça dos equipamentos de refrigeração.
Um fator importante no modelamento da carcaça é o carregamento do óleo (350 ml)
sobre seu fundo alterando seus modos de vibrar por adição de massa, rigidez e
amortecimento. A visualização destas influencias pode ser vista através da comparações de

15
Funções Resposta em Freqüência (FRF) experimentais na tampa, fundo e lateral da carcaça
com e sem óleo, mostradas nas Figuras 3.1, 3.2 e 3.3. As Funções de resposta em freqüência
apresentadas são do tipo inertancia (aceleração/forca).
0 1000 2000 3000 4000 5000 600050
40
30
20
10
0
10
20
30
40
Sem ÓleoCom Óleo
Frequência [Hz]
F.R
.F. [
dB]
Figura 3.1: Comparação de FRF’s experimentais pontuais na tampa da carcaça com e sem óleo.
Estas respostas em freqüência foram obtidas utilizando uma excitação impulsiva,
através de um martelo de impacto. Ao martelo foi aparafusado um transdutor de forca,
modelo BK 8200. A resposta da carcaça, na forma de aceleração, foi medida com um pequeno
acelerômetro, modelo BK 4375, tendo dois gramas de massa. Os efeitos de adição da massa
do acelerômetro nas respostas medidas na carcaça são mais pronunciados nas latas
freqüências, já que aumentam com a freqüência. Entretanto, foram considerados desprezíveis
na faixa de freqüência avaliada, tendo em vista a espessura da carcaça (3 mm) e os efeitos de
rigidez proporcionados pelas curvaturas.

16
0 1000 2000 3000 4000 5000 600040
20
0
20
40
60
80
Sem ÓleoCom Óleo
Frequência [Hz]
F.R
.F. [
dB]
Figura 3.2: Comparação de FRF’s experimentais pontuais no fundo da carcaça com e
sem óleo.
0 1000 2000 3000 4000 5000 600040
30
20
10
0
10
20
30
Sem ÓleoCom Óleo
Frequência [Hz]
H(f
) [d
B]
Figura 3.3: Comparação de FRF’s experimentais pontuais na lateral da carcaça com e
sem óleo.

17
Pode-se observar na primeira comparação (Figura 3.1) o efeito nítido de adição da
massa do óleo principalmente no pico de 4.000 Hz deslocado para 3200 Hz, e na Figura 3.2
(fundo da carcaça) o mesmo efeito no pico de 3.600 Hz deslocado para 2.800 Hz. Estas
comparações mostram claramente a influência do óleo nos modos da carcaça mostrando ser
importante sua consideração no modelo numérico da carcaça.
Esta importância é ainda mais evidenciada posteriormente na comparação dos
resultados modais numéricos experimentais com óleo e sem óleo.
Outro fator considerado é a faixa de freqüência de interesse nas análises, aqui
considerará até 10 kHz. Devido as altas freqüências de análise ate altas freqüências , para as
quais o comprimento das ondas de flexão chega a ser menor que cinco vezes a espessura da
carcaça, as ondas de cizalhamento na estrutura tornam-se de grande importância para
obtenção de resultados satisfatórios em análise dinâmica. Deste modo, a carcaça foi modelada
usando elementos de placa semi espessa (Teoria de Mindlin) qual considera este tipo de
esforço. Assim, o elemento usado foi o CQUAD4 do software MSC/Nastran, definido por 4
nós com 5 graus de liberdade cada, usando opção de placa espessa, mostrado na Figura 3.4 com
respectivos esforços suportados.

18
Figura 3.4: Forças e momentos suportados pelo Elemento CQUAD4.
Para o modelagem do óleo usou-se a opção Virtual Mass do MSC/Nastran. Esta opção
gera uma matriz de massa que é acoplada aos elementos molhados pelo fluido. Nenhum efeito
de viscosidade, compressibilidade e de gravidade na superfície (sloshing) do fluido é levado
em consideração. Este método assume que o intervalo de freqüências de interesse é superior
aquela dos modos causados pelos efeitos de gravidade na superfície livre e abaixo dos modos
acústicos do fluído.
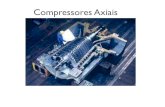
O modelo da carcaça (Figura 3.5) e a densidade da malha usada podem ser vistos na
Figura 3.6. A carcaça foi considerada de material isotrópico e de espessura uniforme de 3 mm
na maioria do seu corpo, com exceção na região de solda de conexão tampa-corpo, onde se
usou a espessura de 6,5 mm, região em cor rosa na Figura 3.6. Na região traseira, onde se faz
a alimentação elétrica do compressor usou-se espessura de 4 mm para a representação da
massa da chapa ali acoplada na carcaça original, mostrado na Figura 3.5 e região vermelha na
Figura 3.6.

19
Figura 3.5: Carcaça de compressor EG mostrando região de alimentação elétrica.
Para a validação do modelo de Elementos Finitos da carcaça usaram-se dois métodos,
quais são : comparação numérico experimental dos modos e freqüências naturais e
comparação com resultados também experimentais de Funções Resposta em Freqüência
pontuais em três regiões da carcaça, sendo essas lateral, fundo e tampa.

20
Figura 3.6: Modelo de Elementos Finitos da carcaça.
Para a comparação dos modos naturais usou-se resultados de análise modal
experimental realizados pela empresa. Estes resultados são comparados na Tabela 3.1, para
modelos sem óleo e Tabela 3.2, para modelos com óleo. Na análise modal experimental a
carcaça foi discretizada em 194 pontos, o tipo de excitação foi impulsiva, sendo que o ponto
de excitação foi mantido constante e o de resposta variável, o método de extração modal
utilizado foi o do ajuste do círculo de Nyquist nas proximidades das ressonâncias. Os modos
numéricos citados nas Tabelas 3.1 e 3.2 são plotados nas Figuras 3.7 a 3.12, para a carcaça
sem óleo e nas Figuras 3.14 a 3.19, para a carcaça com óleo.

21
As Tabelas 3.1 e 3.2 indicam, ainda , na ultima coluna (direita), denominada modo, a
região da carcaça que apresenta maiores amplitudes de deslocamento, sendo assim uma forma
de expressar o modo identificado.
Tabela 3.1: Comparação Numérico Experimental dos modos da carcaça sem óleo.
Modo FreqüênciaNumérica (Hz)
FreqüênciaExperimental (Hz)
Modo
Lateral Fusite
2890 2880 Lateral fusite
3036 Lateral
LateralFundo
Tampa
3140 3192 Lateral tampa fundo
LateralTampa
3260
LateralFundo Tampa
3290
LateralFundo
3292
Fundo Tampa
3299
Lateral Fundo
3428 3482 Lateral fundotampa
Lateral Fundo
3658
Lateral FundoTampa
3920 3709 Fundotampa
Lateral FundoTampa
4033
Lateral Fundo
Tampa
4109
Lateral Fundo tampa
4119 4207 Fundo tampa

22
Tabela 3.2: Comparação Numérico Experimental dos modos da carcaça com óleo.
Modo FreqüênciaNumérica (Hz)
FreqüênciaExperimental (Hz)
Modo
Lateral fusite
2672 2685 Lateral fusite
lateralfundo-
2865 2837 Lateral fundo
fundo tampa
3200
lateralfundo
3230
lateralfundo
3262
lateralfundo
3271
lateralfundo
3367
lateralfundo
3474 3488 Fundotampa
lateral fundo
3645 3582 Lateral fundotampa
lateralfundo tampa
3734 3949 3800 Lateralfundo tampa
lateral fundo tampa
4054 4114 4216 Lateral fundo tampa
lateral fundo tampa
4533 4511 Lateral fundo tampa
Devido ao amortecimento da carcaça, o que dificulta muito a identificação dos modos
experimentais que possuem freqüência próximas entre si, somente alguns modos puderam ser
identificados de forma clara a partir de uma análise modal experimental.

23
Figura 3.7: Modos numérico de 2890 Hz e 3140 Hz da carcaça sem óleo.
Figura 3.8: Modos numérico de 3260 Hz e 3290 Hz da carcaça sem óleo.

24
Figura 3.9: Modos numérico de 3292 Hz e 3299 Hz da carcaça sem óleo.
Figura 3.10: Modos numérico de 3428 Hz e 3658 Hz da carcaça sem óleo.

25
Figura 3.11: Modos numérico de 3920 Hz e 4033 Hz da carcaça sem óleo.
Figura 3.12: Modos numérico de 4109 Hz e 4119 Hz da carcaça sem óleo.

26
Figura 3.13: Modos numérico de 2672 Hz e 2685 Hz da carcaça com óleo.
Figura 3.14: Modos numérico de 3200 Hz e 3230 Hz da carcaça com óleo.

27
Figura 3.15: Modos numérico de 3262 Hz e 3271 Hz da carcaça com óleo.
Figura 3.16: Modos numérico de 3367 Hz e 3473 Hz da carcaça com óleo.

28
Figura 3.17 : Modos numérico de 3645 Hz e 3734 Hz da carcaça com óleo.
Figura 3.18: Modos numérico de 3949 Hz e 4054 Hz da carcaça com óleo.

29
Figura 3.19: Modos numérico de 4114 Hz e 4174 Hz da carcaça com óleo.
O tipo de amortecimento usado no modelo da carcaça foi amortecimento estrutural
modal determinado através do ajuste das curvas (F.R.F.) numéricas em relação à experimental
A comparação numérico experimental de FRF’s serve tanto para a validação do
amortecimento usado no modelo numérico quanto para a validação das respostas do mesmo;
estas comparações são mostradas nas Figuras 3.20 e 3.22. A excitação usada foi tipo
impulsiva e as FRF’s são pontuais.
Ressalta-se que outros modelos de carcaça foram testados, tais como: com malha mais
refinada e com outros tipos de elementos e espessuras. O modelo usado mostrou-se ser
computacionalmente mais barato e suficientemente preciso em relação aos outros modelos
testados.

30
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 1 .104
80
60
40
20
0
20
40
H(f) ExperimentalH(f) Numérica
Frequência [Hz]
H(f
) (d
B)
Figura 3.20: Comparação de FRF’s numérica e experimental da tampa da carcaça.
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 1 .104
80
60
40
20
0
20
40
H(f) ExperimentalH(f) Numérica
Frequência [Hz]
H(f
) [d
B]
Figura 3.21: Comparação de FRF’s numérica e experimental da lateral da carcaça.

31
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 1 .104
80
60
40
20
0
20
40
H(f) ExperimentalH(f) Numérica
frequencia [Hz]
H(f
) [
g/N
]
Figura 3.22: Comparação de FRF’s numérica e experimental do fundo da carcaça.

32
3.1. Modelo do Conjunto Mola-Batentes
A suspensão interna situada na porção inferior da carcaça é formada por um conjunto
de 4 molas, parcialmente mergulhadas em óleo lubrificante, fixadas na parte inferior da
carcaça apenas por encaixe em batente de plástico, que por sua vez, é encaixado em pino de
aço soldado a carcaça. Na parte superior da mola é apoiado o conjunto moto-compressor,
através do estator .
As características geométricas desse elemento são : número total de espiras de 15
enroladas a direita; número de espiras ativas de 9; passo de 3,5 mm; diâmetro médio da
espiral de 13,9 mm, diâmetro do arame de 1,7 mm e rigidez de 3400 N/m para compressor
EG. O material das molas é aço.
Como este conjunto de componente representa um dos caminhos principais de
transmissão para a carcaça da energia vibratória produzida, este será também um dos objetos
de estudo.
Para modelar o conjunto mola batente dois tipos de elementos foram usados elementos
tipo viga para o modelo da mola e tipo placa para o modelo dos batentes superior e inferior.
Como citado anteriormente, para simulações com altas freqüências de interesse é importante
que os elementos usados no modelo suportem esforços cisalhantes.
O modelo de mola foi construído utilizando elementos CBEND do MSC-Nastran,
elementos definidos por 2 nós com 6 graus de liberdade cada. São elementos de arco
circulares conectando 2 nós e levam em consideração o deslocamento do eixo neutro e o
aumento da rigidez a flexão da viga devido a curvatura dos mesmos. Como a mola foi

33
modelada por elementos unidimensionais para simular as espiras não ativas foi necessário
prendê-las umas as outras com elementos rígidos e escalares de rigidez.
A mola foi considerada de material isotrópico e de diâmetro uniforme sobre toda a sua
extensão. Os esforços que o elemento CBEND levam em consideração são mostrados na
Figura 3.23.
Figura 3.23: Esforços suportados pelo elemento CBEND.
Nos modelos dos batentes o elemento utilizado foi o CQUAD4, definido por 4 nós
com 5 graus de liberdade cada, usando opção de placa espessa. Este elemento esta mostrado
na Figura 3.4. Os batentes também foram considerados de material isotrópico. Para o
acoplamento da mola (elementos CBEND 6 Graus de liberdade) com os batentes (elementos
CQUAD4 5 Graus de liberdade) foram utilizados elementos rígidos (RBE2), ligando as
espiras finais da mola com os batentes.
O modelo do conjunto mola-batentes com seus respectivos detalhes de ligação e
densidade de malha podem ser vistos na Figura 3.24.

34
Figura 3.24: Modelo de Elementos Finitos do conjunto mola-batentes.
Para a simulação da dissipação de energia (amortecimento) no modelo do conjunto
mola-batente utilizaram-se elementos escalares de amortecimento, com amortecimento
variando com a freqüência. Os elementos escalares foram utilizados para que não houvesse
superposição dos amortecimentos no acoplamento final dos modelos, da carcaça mais mola-
batentes, evitando assim a necessidade de validação do modelo final acoplado.
A quantidade de amortecimento também foi determinada através do ajuste das
respostas em freqüência obtidas experimentalmente.

35
Os elementos de amortecimento foram colocados juntos as espiras não ativas, região
onde se da a maior parte da dissipação de energia por atrito, entre as espiras e entre as espiras
e os batentes. A quantidade de amortecimento também foi determinada através do ajuste
numérico das respostas em freqüência obtidas experimentalmente.
Para efeitos de validação do modelo numérico, foi realizado um experimento em que
um bloco de aço foi acoplado sobre as molas de forma similar a real, e a parte inferior das
molas encaixadas em um outro bloco de aço, simulando uma base inercial, isto tudo
utilizando-se dos mesmos batentes empregados no compressor real, mostrado na Figura 3.25.
Em baixo de uma das molas um transdutor de força foi fixado de forma que os pontos de
apoio de todas as molas tivessem a mesma altura. A montagem do experimento esta mostrado
na Figura 3.26.
Através da excitação do bloco superior, com excitador eletrodinâmico, os sinais das
forças longitudinais (Figura 3.27 a ) e transversal (Figura 3.27 b ) foram medidas por um
transdutor de forca (BK 8200) e as vibrações no topo das molas foram medidas nas direções
longitudinal e transversal, através de um acelerômetro BK4375. Veja a Figura 3.25 a. Estes
dados foram usados no calculo das funções resposta em freqüência, tipo transmissibilidade
forca/aceleração. As respostas em freqüência foram medidas tanto para molas secas como
para molas mergulhadas em óleo. A comparação destas duas respostas em freqüência, molas
secas e com óleo, está mostrada na Figura 3.28, pode-se observar a importância do
amortecimento e seu modelamento adicionado pelo óleo nas molas.
A única influencia do óleo adicionada ao modelo foi o amortecimento, o efeito de
adição de massa do mesmo foi simulado baixando as freqüências naturais da mola,
diminuindo a rigidez do modelo através do aumento do comprimento das espiras ativas. O
controle do comprimento ativo da mola foi feito através de elementos escalares de rigidez.

36
A comparação numérico experimental das respostas em freqüência longitudinal e
transversal estão mostradas nas Figuras 3.29 e 3.30.
Figura 3.25: (a) Bloco de aço acoplado sobre as molas e (b) base inercial dos batentes inferiores.
Figura 3.26: Montagem do experimento para medição das FRF’s das molas.

37
Figura 3.27: Detalhes da montagem dos transdutores de força (a) posição longitudinal
e (b) posição transversal.
400 600 800 1000 1200 1400 1600 1800 200080
60
40
20
0
Molas SecasMolas com Óleo
Frequência [Hz]
H(f
) [d
B]
Figura 3.28: Comparação de FRF’s experimentais com molas secas e molas mergulhadas em óleo.

38
500 1000 1500 2000 2500 3000 3500 4000 4500 500070
60
50
40
30
20
10
0
H(f) ExperimentalH(f) Numérica
Frequência [Hz]
H(f
) [d
B]
Figura 3.29: Comparação de FRF’s numérica e experimental longitudinal.
400 600 800 1000 1200 1400 1600 1800 2000 2200 240050
40
30
20
10
0
10
20
H(f) ExperimentalH(f) Numérica
Frequência [Hz]
H(f
) [d
B]
Figura 3.30: Comparação de FRF’s numérica e experimental transversal.

39
Neste experimento, um bloco de aço de 4 kg de massa foi posicionado sobre as molas, tendo
por objetivo simular o carregamento real estático que é aplicado pelo conjunto moto-
compressor. A forca da natureza aleatória foi aplicada, por um excitador eletrodinâmico,
diretamente ao bloco de aço, simulando, assim, as vibrações geradas no conjunto moto-
compressor durante a compressão do gás.
A grande massa exerce um efeito de filtro mecânico dificultando excitações nas latas
freqüências, principalmente. Estes efeitos foram refletidos na baixa razão sinal/ruído dos
sinais medidos. Nota-se nitidamente na Figura 3.29 contaminação de ruído de fundo,
provavelmente devido ao ruído do próprio sistema de medição.
Na Figura 3.31 esta plotada a comparação das FRF’s do modelo numérico e de uma
barra uniforme, feito a analogia barra mola, ou seja, uma barra com mesma rigidez axial e
massa da mola por unidade de conjunto para que as duas tenham mesmas características de
ressonâncias.
Como se pode ver a analogia barra/mola somente prediz as ressonâncias longitudinais
da mola e não prediz as ressonâncias transversais. A principal diferença entre a analogia
barra/mola e mola helicoidal são os efeitos de cizalhamento que são muito maiores nas molas,
o que significa que um elemento na mola helicoidal esta sujeito tanto a esforços longitudinais
quanto aos transversais. Deste modo verifica-se que somente o cômputo das ondas
longitudinais não é suficiente para modelar todos os fenômenos envolvidos em fluxo de
energia vibratória através de molas.
Os oitos primeiros modos do conjunto mola-batentes são plotados nas Figuras 3.32 a
3.37.

40
400 600 800 1000 1200 1400 1600 1800 2000
60
40
20
0
H(f) NuméricaH(f) Analogia barra/mola
Frequência [Hz]
H(f
) [d
B]
Figura 3.31: Comparação de FRF’s do modelo de Elementos Finitos e analogia
barra/mola.
Figura 3.32: Modos numérico de 200, 388 e 458 Hz do conjunto mola-batentes.

41
Figura 3.33: Modos numérico de 524, 538 e 740 Hz do conjunto mola-batentes.
Figura 3.34: Modos numérico de 833, 880 e 909 Hz do conjunto mola-batentes.

42
Figura 3.35: Modos numérico de 1062, 1198 e 1232 Hz do conjunto mola-batentes.
Figura 3.36: Modos numérico de 1256, 1289 e 1316 Hz do conjunto mola-batentes.

43
Figura 3.37: Modos numérico de 1360, 1564 e 1596 Hz do conjunto mola-batentes.

44
3.1. Modelo de Elementos Finitos do Conjunto Acoplado Carcaça com Molas
O acoplamento do modelo do conjunto mola-batentes com a carcaça foi feito através
de elementos rígidos, o tipo de elemento usado foi o RBE2 do MSC/Nastran. Os elementos
rígidos são equações lineares, relacionando graus de liberdade de vários nós, chamados nós
escravos, como função dos graus de liberdade de outro nó, chamado de mestre. O modelo
acoplado esta mostrado na Figura 3.38, os detalhes do acoplamento são mostrados na Figura
3.39.
Figura 3.38: Modelo de Elementos Finitos do conjunto acoplado carcaça com mola-batentes.

45
Figura 3.39: Detalhe do acoplamento de elementos rígidos da carcaça com as mola-batentes.

46
CAPÍTULO 4
4. ANÁLISES NUMÉRICAS E EXPERIMENTAIS DO FLUXO DE ENERGIA
VIBRATÓRIA ATRAVÉS DAS MOLAS
4.1. Quantificação experimental do fluxo energia através das molas.
A quantificação experimental do fluxo de energia através das molas foi efetuada por
comparação, através de alterações em protótipos de modo a eliminar somente o caminho
estudado, sendo mantidos os demais caminhos. O objetivo é a determinação da diferença
entre as potências sonoras irradiadas pelos compressores, medidas antes e após as
modificações. Estas diferenças permitem quantificar a importância deste caminho de fluxo de
energia vibratória gerada no conjunto interno moto-compressor para a carcaça, a qual irradia
na forma de energia sonora.
Figura 4.1: Detalhe da estrutura metálica usada na montagem do compressor sem
molas.

47
Figura 4.2: Detalhe da fixação dos cabos metálicos com anéis de borracha no
conjunto moto-compressor.
Para a eliminação do caminho de transmissão através das molas, o conjunto moto-
compressor foi suspenso por 3 cabos metálicos de 0,5 mm os quais foram mantidos
externamente por uma estrutura metálica, mostrada na Figura 4.1. Nos pontos de fixação dos
cabos ao conjunto moto-compressor utilizaram-se anéis de borracha, vide Figura 4.2, de
forma a isolar as vibrações geradas no conjunto. Os orifícios de passagem dos arames através
da tampa da carcaça foram construídos de forma a serem os menores possíveis, porém
suficientes para o não contato do arame com a carcaça. Os orifícios foram vedados com
silicone vulcanizado de forma a suportar a pressão interna da cavidade do compressor e isolar
os arames do contato com a carcaça. A altura relativa do fundo do conjunto moto-compressor
à carcaça também foi mantida a mesma.
Salienta-se que a consideração feita aqui é de que a potência sonora irradiada pelo
compressor pode ser decomposta pela soma linear das potências transmitidas por cada um dos
gustavo.myrria
Realce

48
caminhos, e que se elimina (quase que) completamente o caminho modificado no protótipo
sem a introdução de novos caminhos devido à modificação. Assim:
hosmincaoutrosmolasref PPNWS += (4.1)
hosmincaoutrosmolassem PNWS = (4.2)
sendo: NWSref Potência Sonora de Referência, obtida de medições em um lote de
compressores, em condições normais de teste.
NWSmolas Potência Sonora Medida no Teste do Compressor Sem Molas.
Pmola Potência Transmitida através das Molas.
Poutros Potência Transmitida através de todos os outros caminhos, que
não sejam as molas.
Assim, pode-se determinar a contribuição do caminho através das molas na irradiação
de potência do compressor após o cálculo da diferença entre as potências sonoras do
compressor normal e o modificado sem as molas. Ou seja:
molasrefmolas NWSNWSP −= (4.1)
Deve-se salientar também que estudos experimentais desta natureza requerem
cuidados extremos devido às influencias das variações que normalmente são encontrados nos
resultados de potencia sonora irradiada e devido ao fato de estes caminhos não serem

49
totalmente neutralizados. A suspensão do bloco do conjunto interno por fios finos, fixados a
um suporte externo faz com que exista uma pequena parcela do fluxo de energia vibratória
para a carcaça através dos fios de suspensão. Considerando todos os cuidados que foram
tomados na montagem deste experimento, acredita-se que esta parcela de fluxo de energia
seja significativamente menor, comparada ao fluxo através das molas, quando em montagem
e funcionamento normal de uso do compressor. E, conforme já citado, os problemas de
repetibilidade das condições normais de funcionamento do compressor também contribuem
para as incertezas inerentes aos resultados obtidos nestes tipos de ensaios. Por estes motivos,
estes experimentos foram repetidos varias vezes e os resultados, a serem mostrados a seguir,
representam valores médios obtidos de dois compressores.
Para se ter uma idéia da variação que se pode introduzir nestas medições, duas
medições de ruído de compressores normais, uma antes e outra depois da modificação do
compressor, de modo a analisar as modificações introduzidas no mesmo, foram realizadas e
estão mostradas na Figura 4.3. Assim, para uma quantificação realística, a medição de
potencia sonora tomada como referencia para a comparação citada anteriormente foi a
potencia sonora medida após a modificação do compressor.
A Figura 4.4 mostra o espectro de potência sonora, em dB, de compressores normais e
o espectro de potencia sonora, também em dB, de compressores sem molas, cujos blocos
internos foram suspensos por fios, como mostra a Figura 4.1. Este espectro representa,
portanto, a contribuição de todos os demais caminhos de fluxo de energia vibratória para a
carcaça.
Por subtração, pode-se determinar a contribuição do fluxo através das molas, através
das diferenças entre os espectros apresentados na Figura 4.4. Estes resultados estão mostrados
na Figura 4.5. Observa-se que as molas proporcionam fluxos consideráveis de energia nas

50
faixas de 400, 500, 800 e 1250 Hz, principalmente. Nas altas freqüências, na faixa de 2.000
Hz e 5.000 Hz, a contribuição das molas é significativa. Acima de 5.000 Hz, a contribuição
tende a ser de menor importância, talvez devido a contribuição proporcionada pelo mufler.
100 1 .103
1 .104
5
10
15
20
25
30
35
40
Pot Sonora Antes ModificaçãoPot Sonora Após Modificação
Frequência [Hz]
N.W
.S. [
dB]
Figura 4.3: Comparação dos Níveis de Potência Sonora de compressores normais
antes e após as alterações de retiradas das molas.

51
100 1 .103
1 .104
10
15
20
25
30
35
40
Pot Sonora Sem MolasPot Sonora Referência Após Modificação
Frequência [Hz]
N.W
.S. [
dB]
Figura 4.4: Comparação dos Níveis de Potência Sonora de compressores normais
referência com compressores sem o caminho de transmissão das molas.
100 1 .103
1 .104
10
15
20
25
30
35
40
Pot Sonora Referência Após ModificaçãoPot Transmitida através das Molas
Frequência [Hz]
N.W
.S. [
dB]
Figura 4.5: Comparação dos Níveis de Potência Sonora de compressores normais
referência com Potência Transmitida pelas molas.

52
As potências sonoras citadas foram medidas na câmara reverberante do Laboratório de
Vibrações e Acústica, da UFSC, pelo Método da Comparação. Este método consiste em
medir, no campo reverberante da câmara, o nível de pressão sonora através de média espacial
gerado pela máquina no interior da câmara, cuja potência deseja-se medir e comparar à
pressão sonora média espacial medida nas mesmas posições do campo reverberante causada
por uma fonte sonora de referência, devidamente calibrada. A pressão sonora foi medida ao
longo de uma trajetória circular de 1,10 m de raio, situada em um plano inclinado em relação
às paredes da câmara. O procedimento de medição baseou-se na norma ISO 3742 –
Determination of Sound Power Levels of Noise Sources – Precision Methods for Discrete
Frequency and Narrow Band Sources in Reverberation Rooms.
Todas as medições foram realizadas sob as mesmas condições de pressão de sucção e
descarga, e temperaturas de sucção do compressor estabilizadas.
Para a quantificação numérica do fluxo de energia através das molas, no modelo
numérico foram considerados como excitação os espectros de aceleração no topo das quatro
molas, nas três direções translacionais. Estes espectros, nas três direções, foram medidos nos
batentes das molas (topo das molas) com o compressor em funcionamento normal, operando
nas condições de teste. Os espectros das acelerações medidas estão mostrados em bandas de
1/3 oitava nas Figuras 4.7 a 4.10 para as quatro molas, de acordo com o sistema de
coordenadas e identificação das molas mostradas na Figura 4.6. Ressalta-se que os espectros
apresentados representam valores resultantes de 150 médias, de modo a minimizar variações
instantâneas das condições de funcionamento do compressor e a minimizar também os erros
aleatórios do sistema de medição. O tempo total de aquisição dos sinais era superior a dois
minutos.

53
Assumiu-se também, que as acelerações rotacionais são bem inferiores que as
translacionais, de modo a serem desprezadas.
Assim, a resposta da carcaça foi calculada numericamente, na forma de media
quadrada espacial, < 2
V >, em faixas de 1/3 de oitava. Foram considerados 40 pontos
uniformemente distribuídos ao longo da carcaça para o calculo da media espacial.
Foram considerados como excitações, os valores de aceleração no topo das quatro
molas, obtidas experimentalmente, e nas três direções ortogonais em cada mola.
Os resultados da média espacial da velocidade da carcaça assim obtidos
(numericamente) foram comparados aos valores médios medidos na carcaça de compressores
em funcionamento normal, e mostrados na Figura 4.11.
Figura 4.6: Sistema de coordenadas de medição da aceleração no topo das molas e identificação das
mesmas. Direção x: direção axial do pistão; Direção y: direção vertical e Direção z:
direção transversal.
Observa-se que os picos de 800 Hz e 1.250 Hz estão em grande concordância com os
mesmos picos encontrados no espectro da Figura 4.6. De uma forma geral, pode-se concluir

54
que as tendências dos espectros de fluxo de potencia obtidos numérica (Figura 4.11) e
experimentalmente (Figura 4.6) são razoavelmente concordantes, tendo em vista as
dificuldades experimentais de isolar totalmente o fluxo de energia através das molas. Pode-se
constatar ainda o pico na região de 400 Hz a 500 Hz, que são atribuídos as primeiras
ressonâncias longitudinal e transversal nas molas. Nesta região, é possível que a pulsação do
muffler de sucção tenha uma contribuição maior que a constatada através dos testes em
compressores sem molas. A mesma conclusão pode ser tirada em relação aos resultados de
altas freqüências.
Os valores mostrados na Figura 4.11 representam níveis de vibração, na forma de
velocidade, em dB.
100 1 .103
1 .104
100
110
120
130
140
150
160
Acel Direção XAcel Direção YAcel Direção Z
Mola 1
Frequencia [Hz]
Ace
l(f)
[dB
]
Figura 4.7: Espectro de Aceleração em bandas de 1/3 de oitava nas três direções medidos no topo
da mola 1.

55
100 1 .103
1 .104
100
110
120
130
140
150
160
Acel Direção XAcel Direção YAcel Direção Z
Mola 2
Frequencia [Hz]
Ace
l(f)
[dB
]
Figura 4.8: Espectro de Aceleração em bandas de 1/3 de oitava nas três direções medidos no topo
da mola 2.
100 1 .103
1 .104
100
120
140
160
180
Acel Direção XAcel Direção YAcel Direção Z
Mola 3
Frequencia [Hz]
Ace
l(f)
[dB
]
Figura 4.9: Espectro de Aceleração em bandas de 1/3 de oitava nas três direções medidos no topo
da mola 3.

56
100 1 .103
1 .104
100
110
120
130
140
150
160
Acel Direção XAcel Direção YAcel Direção Z
Mola 4
Frequencia [Hz]
Ace
l(f)
[dB
]
Figura 4.10: Espectro de Aceleração em 1/3 de oitava nas três direções medidos no topo
da mola 4.
100 1 .103
1 .104
40
50
60
70
80
90
100
Vel Média Espacial Quadr NuméricaVel Média Espacial Quadr Experimental
Frequencia [Hz]
V(f
) [d
B]
Figura 4.11: Comparação numérica experimental da velocidade média quadrática da carcaça.

57
4.2. Quantificação Numérico-Experimental do Fluxo de Potência através das Molas.
Quando se deseja conhecer os mecanismos de propagação de energia de forma a
reduzir posteriormente a resposta estrutural, a análise do fluxo de potência ao longo de
componentes é de grande importância. Caracterizando a potência transmitida em função da
freqüência por cada tipo de esforço, os caminhos de transmissão são identificados e, desta
forma, modificações na estrutura podem ser feitas de forma a reduzir os esforços mais
importantes.
A potência média representa a taxa média de trabalho realizado, ou de energia
fornecida, para um sistema mecânico. A potência transferida por um determinado tipo de
esforço em função da freqüência pode ser calculada em função da respectiva velocidade de
vibração. Como exemplo, as potências transferidas por uma força F e por um momento M,
são dadas por .
)}().(Re{21
)(
)}().(Re{2
1)(
*
*
ffMfW
fVfFfW
ii
M
tr
ii
F
tr
θ�=
=
(4.1a)
sendo V(f) e θ’(f) as velocidades correspondentes de translação e de rotação, e * representa o
complexo conjugado.
Para o cálculo das potências transmitidas através das molas, modelos numéricos com
apenas uma das molas por vez acopladas à carcaça foram construídos de forma a analisar os

58
fluxos de potência entre mola e carcaça. As excitações usadas foram as acelerações medidas
nos topos das molas, citadas anteriormente.
As potências transmitidas através de cada uma das quatro molas e para cada tipo de
esforço, em função da freqüência, foram calculadas de acordo com as expressões (4.1) e estão
mostradas nas Figuras 4.12 a 4.19. Os esforços estão de acordo com o sistema de coordenadas
mostrado na Figura 4.5. As velocidades médias quadráticas nas regiões da tampa, corpo
lateral e fundo também foram calculadas para fluxos de energia por cada uma das molas, e
estão mostradas nas Figuras 4.20 e 4.23.
100 1 .103
1 .104
1 .1014
1 .1013
1 .1012
1 .1011
1 .1010
1 .109
1 .108
1 .107
1 .106
1 .105
Potência Força XPotência Força YPotência Força ZPotência Total
Mola 1
Frequencia [Hz]
W(f
) [W
att]
Figura 4.12: Fluxo Potência transmitida pela mola 1 para a carcaça pelos esforços tipo Força (Fx, Fy e Fz).

59
100 1 .103
1 .104
1 .1017
1 .1016
1 .1015
1 .1014
1 .1013
1 .1012
1 .1011
Potência Momento XPotência Momento Z
Mola 1
Frequencia [Hz]
W(f
) [W
att]
Figura 4.13: Fluxo Potência transmitida pela mola 1 para a carcaça pelos esforços tipo Momento (Mx e Mz).
100 1 .103
1 .104
1 .1015
1 .1014
1 .1013
1 .1012
1 .1011
1 .1010
1 .109
1 .108
1 .107
1 .106
Potência Força XPotência Força YPotência Força ZPotência Total
Mola 2
Frequencia [Hz]
W(f
) [W
att]
Figura 4.14: Fluxo Potência transmitida pela mola 2 para a carcaça pelos esforços tipo Força (Fx, Fy e Fz).

60
100 1 .103
1 .104
1 .1018
1 .1017
1 .1016
1 .1015
1 .1014
1 .1013
1 .1012
1 .1011
Potência Momento XPotência Momento Z
Mola 2
Frequencia [Hz]
W(f
) [W
att]
Figura 4.15: Fluxo Potência transmitida pela mola 2 para a carcaça pelos esforços tipo Momento (Mx e Mz).
100 1 .103
1 .104
1 .1015
1 .1014
1 .1013
1 .1012
1 .1011
1 .1010
1 .109
1 .108
1 .107
1 .106
1 .105
Potência Força XPotência Força YPotência Força ZPotência Total
Mola 3
Frequencia [Hz]
W(f
) [W
att]
Figura 4.16: Fluxo Potência transmitida pela mola 3 para a carcaça pelos esforços tipo Força (Fx, Fy e Fz).

61
100 1 .103
1 .104
1 .1017
1 .1016
1 .1015
1 .1014
1 .1013
1 .1012
1 .1011
Potência Momento XPotência Momento Z
Mola 3
Frequencia [Hz]
W(f
) [W
att]
Figura 4.17: Fluxo Potência transmitida pela mola 3 para a carcaça pelos esforços tipo Momento (Mx e Mz).
100 1 .103
1 .104
1 .1015
1 .1014
1 .1013
1 .1012
1 .1011
1 .1010
1 .109
1 .108
1 .107
1 .106
Potência Força XPotência Força YPotência Força ZPotência Total
Mola 4
Frequencia [Hz]
W(f
) [W
att]
Figura 4.18: Fluxo Potência transmitida pela mola 4 para a carcaça pelos esforços tipo Força (Fx, Fy e Fz).

62
100 1 .103
1 .104
1 .1017
1 .1016
1 .1015
1 .1014
1 .1013
1 .1012
1 .1011
1 .1010
1 .109
Potência Momento XPotência Momento Z
Mola 4
Frequencia [Hz]
W(f
) [W
att]
Figura 4.19: Fluxo Potência transmitida pela mola 4 para a carcaça pelos esforços tipo Momento (Mx e Mz).
Quanto ao fluxo de potência das molas 1, 2, 3 e 4 pode-se observar a predominância
do fluxo transmitido pelas forças, bem maiores em relação ao fluxo transmitido pelos
momentos. Dentre os fluxos devido às forças o fluxo das forças transversais Fx e Fz sobressai
em toda faixa do espectro em relação ao fluxo devido a força longitudinal Fy. Dentre os
fluxos transversais o fluxo devido a Fx se sobressai pouco em relação a Fz. Na mola 1 há
exceção na banda de 2,5 kHz e na mola 3 e 4 há exceção na banda de 5 kHz onde a fluxo
devido a forca longitudinal Fy é maior que os fluxos devido as forcas transversais.
A velocidade média quadrática da carcaça produzida devido ao fluxo pelas molas é
maior para o corpo e tampa da carcaça em baixas freqüências e maior para o fundo e tampa da
carcaça em altas freqüências. Nas molas 1, 2 e 3 a predominância da velocidade média
quadrática do corpo e da tampa estende-se até 250 Hz e na mola 4, até 1 kHz.

63
100 1 .103
1 .104
30
40
50
60
70
80
90
Vel Média Quadr CorpoVel Média Quadr TampaVel Média Quadr Fundo
Mola 1
Frequencia [Hz]
V(f
) [d
B]
Figura 4.20: Velocidade média quadrática da carcaça região da tampa, fundo e corpo lateral devido ao fluxo de energia da mola 1.
100 1 .103
1 .104
30
40
50
60
70
80
90
Vel Média Quadr CorpoVel Média Quadr TampaVel Média Quadr Fundo
Mola 2
Frequencia [Hz]
V(f
) [d
B]
Figura 4.21: Velocidade média quadrática da carcaça região da tampa, fundo e corpo lateral devido ao fluxo de energia da mola 2.

64
100 1 .103
1 .104
40
50
60
70
80
90
Vel Média Quadr CorpoVel Média Quadr TampaVel Média Quadr Fundo
Mola 3
Frequencia [Hz]
V(f
) [d
B]
Figura 4.22: Velocidade média quadrática da carcaça região da tampa, fundo e corpo lateral devido ao fluxo de energia da mola 3.
100 1 .103
1 .104
20
30
40
50
60
70
80
90
Vel Média Quadr CorpoVel Média Quadr TampaVel Média Quadr Fundo
Mola 4
Frequencia [Hz]
V(f
) [d
B]
Figura 4.23: Velocidade média quadrática da carcaça região da tampa, fundo e corpo lateral devido ao fluxo de energia da mola 4.
A Figura 4.24 mostra os resultados da resposta da carcaça na forma de velocidade
media quadrada espacial obtidos para cada direção das vibrações medidas no topo de cada

65
uma das quatro molas. No modelo numérico foram simuladas as excitações agindo
isoladamente, isto é, somente a componente vertical (y) das vibrações do topo das molas;
somente a componente na direção axial do pistão (x) e somente a componente da direção
transversal (z).
Observa-se, da Figura 4.24, que a contribuição para a resposta da carcaça originada
das vibrações longitudinais das molas (em cor azul) é significativa nas faixas de freqüência de
400 Hz, 800 Hz e 1.250 Hz. Nestas faixas estão localizadas, respectivamente, as primeiras 3
ressonâncias longitudinais das molas.
Na faixa de 500 Hz, esta localizada a primeira ressonância transversal. Isto se reflete
na grande contribuição das excitações transversais, nas direções x e z, comparada a excitação
na direção vertical (y) das molas.
Nas altas freqüências, os modos de vibração são bastante complexos, sendo difíceis ate
de serem visualizados. Pode-se concluir que as excitações longitudinais das molas
predominam nas faixas de 4 k, 6,3 k e 8 kHz, enquanto que os modos transversais
predominam nas faixas de 2,5 k e 3,15 kHz, onde se localizam os primeiros modos de
vibração da carcaça. Estes modos possuem grande importância da irradiação de ruído do
compressor.
Apesar do fluxo de potência mais importante ser o de forças transversais, como vimos
anteriormente, a excitação mais importante em boa faixa do espectro é a longitudinal, nota-se
aqui o acoplamento dos esforços longitudinais com os de cisalhamento nas molas, ou seja,
apesar da excitação ser na direção longitudinal das molas os esforços transmitidos para a
carcaça são predominantes na direção transversal.

66
100 1 .103
1 .104
20
40
60
80
100
Vel Média Espacial Esp NormalVel Média Espacial Acel Mola Dir XVel Média Espacial Acel Mola Dir YVel Média Espacial Acel Mola Dir Z
Frequencia [Hz]
V(f
) [d
B]
Figura 4.24: Resposta media espacial de toda a carcaça, < 2
V >, quando excitadas pelas vibrações no topo das quatro molas: somente na direção x;
somente na direção y e somente na direção z.
Para a confirmação do fenômeno de acoplamento, um modelo de carcaça acoplado
com apenas uma mola excitada na direção longitudinal foi rodado e procedeu-se com o
calculo das potencias como anteriormente. O calculo das potencias para as forcas
longitudinais e transversais estão mostrados na Figura 4.25.
A Figura 4.25 mostra que apesar da excitação longitudinal o fluxo mais importante eh
o devido a forca transversal Fx, explicando assim a Figura 4.24 e confirmando o fenômeno do
acoplamento das ondas longitudinais com as transversais.

67
Para a avaliação de quais regiões de freqüência as molas e a carcaça influenciam sem o
mascaramento da excitação, um modelo de carcaça acoplado com as quatro molas foi rodado
com excitações unitárias nas três direções primeiramente separadas e depois simultâneas.
A Figura 4.26 mostra as velocidades medias quadráticas devido as excitações unitárias
em cada direção separadas. Mais uma vez, a excitação longitudinal mostra-se a mais
importante seguida pela excitação na direção X.
A velocidade media quadrática devido as excitações unitárias nas três direções
simultâneas é mostrada na Figura 4.27. É mostrado que as bandas de 160, 200, 400, 800, 1000
e 1250 Hz são fortemente influenciadas pelas molas, regiões de ressonâncias da mesma, e
acima de 400 Hz influenciadas também pela carcaça, devido as suas ressonâncias a partir de
3200 Hz.
Figura 4.25: Fluxo de Potencia transmitida por uma mola para a carcaça pelos esforços
tipo Forca (Fx, Fy e Fz) excitada somente na direção longitudinal.
100 1 .103
1 .104
1 .1015
1 .1014
1 .1013
1 .1012
1 .1011
1 .1010
1 .109
1 .108
1 .107
1 .106
Potência Força X Exc YPotência Força Y Exc YPotência Força Z Exc Y
Mola 2
Frequencia [Hz]
W(f
) [W
att]

68
Figura 4.26: Velocidades medias quadráticas da carcaça devido as excitações unitárias nas 3
direções separadas.
Figura 4.27: Velocidade media quadrática da carcaça devido às excitações unitárias nas 3
direções simultâneas.
100 1 .103
1 .104
20
0
20
40
Vel Média Quadr Exc Unit XVel Média Quadr Exc Unit YVel Média Quadr Exc Unit Z
Frequencia [Hz]
V(f
) [d
B]
100 1 .103
1 .104
10
0
10
20
30
40
Vel Média Quadr Exc Unit XYZ
Frequencia [Hz]
V(f
) [d
B]

69
4.3. Variabilidade dos Resultados
Para se ter uma idéia de variação da velocidade média espacial da carcaça em função
de dados de aceleração medida no topo das molas de compressores diferentes, medições
foram realizadas no topo das molas de 3 compressores, sendo os dados usados no mesmo
modelo numérico. Essa comparação é importante pois fornece um indicativo da variação da
velocidade da resposta da carcaça, mostrando faixas de freqüências nas quais as variações são
bastante grandes e requerem cuidados extremos na preparação dos experimentos e na
observância da repetibilidade dos resultados. A Figura 4.28 mostra resultados calculados a
partir de dados de 3 compressores diferentes.
Observa-se que as variações (vide Figura 4.28), neste caso, são atribuídas as variações
tipicamente encontradas nas geometrias dos componentes fabricados, nos contatos entre
batentes da mola/estator e nas variações de pressão de sucção e descarga de compressor. As
variações atribuídas ao sistema de medição das vibrações são consideradas muito pequenas,
quando comparadas as variações encontradas na Figura 4.28. os resultados mostram-se
bastante consistentes ate 2 kHz. Entretanto, a variação é acentuada para freqüências a partir de
2.5 kHz.
Essas variações mostram claramente a importância de se fazer análises estatísticas
usando, ao invés de apenas um compressor, amostras de compressores que possam representar
com mais precisão essa variação. Isto permitira tirar conclusões finais mais seguras destas
analises.

70
100 1 .103
1 .104
40
50
60
70
80
90
100
Vel Média Espacial Numérica Acel Comp Nro1Vel Média Espacial Numérica Acel Comp Nro2Vel Média Espacial Numérica Acel Comp Nro3Medição Experimental
Frequencia [Hz]
V(f
) [d
B]
Figura 4.28: Variação dos resultados da resposta media quadrada espacial da carcaça, < 2
V >, quando excitadas pelas vibrações no topo das molas medidas em três compressores diferentes.

71
CAPÍTULO 5
5. ANÁLISES DE VARIAÇÕES DE PARAMÊTROS DO MODELO NUMÉRICO
5.1. Análise de Influência da Variação da Espessura da Carcaça na Velocidade Média
Espacial
Para o estudo da influência da espessura da carcaça na velocidade média espacial da
mesma, várias análises numéricas com diferentes espessuras foram feitas. Primeiramente,
aumentou-se a espessura da carcaça normal (3 mm) (Figura 3.6) como um todo. Casos
numéricos foram rodados nos quais a espessura da carcaça foi aumentada em 0,5; 1,0; 1,5;
2,0; 2,5 e 3,0 mm e foi diminuída em 1,0 mm. Os resultados de variação de espessura estão
mostradas nas Figuras 5.1 e 5.2.
Além disso, foram rodados casos onde aumentou-se somente a espessura da tampa ou
do fundo da carcaça, e de ambos simultaneamente, mantendo as outras regiões da carcaça
com espessura original, as regiões consideradas como fundo e tampa estão mostradas na
Figura 5.3. Nas Figuras 5.4 e 5.5 estão mostrados os resultados de velocidade média espacial
quanto a variação de espessura da tampa. Nas Figuras 5.6 e 5.7 estão mostradas as análises de
velocidade média espacial quanto a variação de espessura do fundo. As análises de variação
de espessura da tampa e do fundo estão mostradas nas Figuras 5.8 e 5.9.

72
100 1 .103
1 .104
30
40
50
60
70
80
90
100
Vel Média Espacial Esp NormalVel Média Espacial Esp Normal -1 mmVel Média Espacial Esp Normal +0,5 mmVel Média Espacial Esp Normal +1,0 mmVel Média Espacial Esp Normal +1,5 mm
Frequencia [Hz]
V(f
) [d
B]
Figura 5.1: Velocidade média espacial da carcaça para variações da espessura da mesma como um todo (Vide Legenda).
100 1 .103
1 .104
30
40
50
60
70
80
90
100
Vel Média Espacial Esp NormalVel Média Espacial Esp Normal +2 mmVel Média Espacial Esp Normal +2,5 mmVel Média Espacial Esp Normal +3 mm
Frequencia [Hz]
V(f
) [d
B]
a
Figura 5.2: Velocidade média espacial da carcaça para variações da espessura da mesma como um todo (Vide Legenda).

73
Figura 5.3: Regiões consideradas como tampa em azul e fundo em rosa nas variações de espessura da carcaça.
100 1 .103
1 .104
40
50
60
70
80
90
100
Vel Média Espacial Esp NormalVel Média Espacial Esp Tampa 3,5 mmVel Média Espacial Esp Tampa 4,0 mmVel Média Espacial Esp Tampa 4,5 mm
Frequencia [Hz]
V(f
) [d
B]
Figura 5.4: Velocidade média espacial da carcaça para variações da espessura da Tampa. (Vide Legenda).

74
100 1 .103
1 .104
40
50
60
70
80
90
100
Vel Média Espacial Esp NormalVel Média Espacial Esp Tampa 5,0 mmVel Média Espacial Esp Tampa 5,5 mmVel Média Espacial Esp Tampa 6,0 mm
Frequencia [Hz]
V(f
) [d
B]
Figura 5.5: Velocidade média espacial da carcaça para variações da espessura da Tampa. (Vide Legenda).
100 1 .103
1 .104
30
40
50
60
70
80
90
100
Vel Média Espacial Esp NormalVel Média Espacial Esp Fundo 3,5 mmVel Média Espacial Esp Fundo 4,0 mmVel Média Espacial Esp Fundo 4,5 mm
Frequencia [Hz]
V(f
) [d
B]
Figura 5.6: Velocidade média espacial da carcaça para variações da espessura do Fundo. (Vide Legenda).

75
100 1 .103
1 .104
30
40
50
60
70
80
90
100
Vel Média Espacial Esp NormalVel Média Espacial Esp Fundo 5,0 mmVel Média Espacial Esp Fundo 5,5 mmVel Média Espacial Esp Fundo 6,0 mm
Frequencia [Hz]
V(f
) [d
B]
Figura 5.7: Velocidade média espacial da carcaça para variações da espessura do Fundo. (Vide Legenda).
100 1 .103
1 .104
30
40
50
60
70
80
90
100
110
Vel Média Espacial Esp NormalVel Média Espacial Esp Tampa e Fundo 3,5 mmVel Média Espacial Esp Tampa e Fundo 4,0 mmVel Média Espacial Esp Tampa e Fundo 4,5 mm
Frequencia [Hz]
V(f
) [d
B]
Figura 5.8: Velocidade média espacial da carcaça para variações da espessura do Fundo e da Tampa simultaneamente (Vide Legenda).

76
100 1 .103
1 .104
40
60
80
100
120
Vel Média Espacial Esp NormalVel Média Espacial Esp Tampa e Fundo 5,0 mmVel Média Espacial Esp Tampa e Fundo 5,5 mmVel Média Espacial Esp Tampa e Fundo 6,0 mm
Frequencia [Hz]
V(f
) [d
B]
Figura 5.9: Velocidade média espacial da carcaça para variações da espessura do Fundo e da Tampa simultaneamente (Vide Legenda).
As análises de variação da espessura da carcaça mostraram que a velocidade média da
carcaça é mais sensível nas regiões de baixa frequência bandas de 100 até 250 Hz e de altas
frequências bandas acima de 2,5 kHz. Nessas regiões ao contrário das outras regiões do
espectro o aumento da espessura da carcaça pode não levar a uma queda na velocidade média
espacial, dependendo dos casos há um aumento nessa velocidade espacial. Esse aumento da
velocidade média espacial é causado pelo acoplamento de modos da carcaça agora
modificados com modos das molas, resultando assim em um maior fluxo de potência das
molas para a carcaça.

77
5.2. Análise de Influência da Variação da Espessura do Assento das Molas na
Velocidade Média Espacial da Carcaça
Para o estudo da influência da espessura do assento do topo das molas na velocidade
média espacial da carcaça, foram calculados quatro casos, com espessuras de 4 mm, 5 mm, 6
mm e 8 mm no assento das molas.
A região no batente das molas onde se variou a espessura mantendo o restante do
modelo inalterado esta mostrada na Figura 5.10. Os resultados estão mostrados na Figura
5.11, juntamente com o caso base de comparação.
Pretende-se com esta analise, determinar a influencia sobre o fluxo de energia
vibratória para a carcaça, do aumento de impedância da carcaça através da adição de massas
concentradas nas regiões onde os reforços são transmitidos das molas para a carcaça.
Observam-se reduções significativas na resposta da carcaça, principalmente acima de
2 kHz, onde reduções medias da ordem de 5 dB forma calculadas.

78
Figura 5.10: Região dos batentes das molas (em vermelho) onde se variou a espessura.
100 1 .103
1 .104
30
40
50
60
70
80
90
100
110
Vel Média Espacial Esp NormalVel Média Espacial Esp Batente 4 mmVel Média Espacial Esp Batente 5 mmVel Média Espacial Esp Batente 6 mmVel Média Espacial Esp Batente 8 mm
Frequencia [Hz]
V(f
) [d
B]
Figura 5.11: Velocidade média espacial da carcaça para variações da espessura do assento das molas.

79
CAPÍTULO 6
6. CONCLUSÕES E SUGESTÕES PARA TRABALHOS FUTUROS
A seguir serão feitos alguns comentários e conclusões acerca do que foi apresentado
ao longo do trabalho.
Do modelamento da carcaça do compressor o óleo mostrou-se, através das
comparações das FRF experimentais com e sem óleo da mesma, ser de importância
fundamental no comportamento dinâmico da carcaça e, conseqüentemente, nos estudos de
irradiação da mesma.
O modelo da carcaça foi o mais difícil de ser validado experimentalmente devido,
principalmente, a sua complexidade e particularidades geométricas, tais como: linha de solda,
regiões de variação de espessura nos assentos das molas e curvaturas. Vários modelos foram
testados e várias revisões no modelo final escolhido foram feitas. Os resultados finais de
comparação das FRF numéricas e experimentais apresentarem boa concordância. As
freqüências naturais e modos do modelo de carcaça também se mostraram bastante sensíveis à
densidade de malha.
Quanto ao modelo das molas, a dificuldade de validação deveu-se à dificuldade de
obtenção de resultados experimentais e não numéricas. Resultados experimentais confiáveis
foram conseguidos apenas até freqüências da ordem de 2 kHz. Este foi o procedimento mais
viável encontrado para a validação do modelo numérico. A comparação entre as
transmissibilidades das molas e a de uma viga, feita a analogia barra-mola, mostrou que o

80
acoplamento dos esforços longitudinais com os de cisalhamento na mola invalida o
modelamento da mesma como uma barra simples. Devido a este acoplamento, o
comportamento dinâmico das molas mostrou-se bastante complexo, como pode ser visto pela
forma complexa dos modos de vibração obtidos.
O resultado de velocidade média espacial da carcaça nas análises com o modelo
acoplado molas-carcaça apresentou também sensibilidade quanto ao tipo de acoplamento
entre molas e carcaça. O acoplamento físico real entre o batente de mola e a carcaça é por
encaixe, sob pressão, do batente em um pino soldado a carcaça. Evidencia-se, aqui, que as
excitações usadas foram acelerações obtidas experimentalmente através de medições no topo
das molas. Assim, as predições de velocidade da carcaça, devido ao caminho das molas, são
conseqüência de efeitos combinados dos modelos elementos finitos e medições experimentais.
Ou seja, se as medições experimentais apresentarem ressonâncias de componentes internos
essas freqüências estarão sobrepondo o resultado final de predição da velocidade da carcaça,
falsificando o comportamento das molas. Isto mostra a importância de se analisar em
isoladamente os outros componentes do compressor.
Estas análises mostraram que as molas contribuem de forma muito significativa para a
resposta da carcaça, e conseqüentemente de geração de ruído, nas bandas de 400 Hz, 500 Hz,
800 Hz, 1.250 Hz e acima de 4.000 Hz. Além disso, mostram também que o fluxo de potência
mais importante das molas para a carcaça é devido às forças transversais exercidas sobre a
carcaça.
As analises referentes as direções individuais das vibrações medidas no topo das molas
mostraram que as componentes verticais (sentido longitudinal nas molas) proporcionam
maiores níveis de vibração media espacial da carcaça, causado pelo forte acoplamento entre
as ondas longitudinais e as cisalhantes presentes na mola.

81
Com relação as analises de variação de espessura da carcaça conclui-se que, de forma
geral. Aumentando a espessura os níveis de vibração da carcaça são reduzidos. Isto é causado
pelo aumento da impedância da carcaça na região onde os reforços das molas são transmitidos
a carcaça, bem como pelo aumento da sua massa.
Os resultados referentes à adição de massa localizada também nos pontos onde os
esforços das molas são transmitidos a carcaça, conclui-se que estas massas proporcionam um
aumento significativo da impedância, conforme vista pelas molas, resultando em reduções de
vários decibéis nos níveis de vibração da carcaça. Este resultado possui grande importância
pratica já que indica reduções consideráveis neste caminho de fluxo de energia através de um
pequeno aumento na massa total do compressor.
Por último, deve-se ressaltar que em todas as análises feitas na presente dissertação,
todos os modelos foram considerados com homogeneidade e linearidade de material e da
estrutura de modo a tornar a análise computacionalmente menos dispendiosa.
Para uma continuidade do trabalho apresentado aqui se sugere:
• Análise de sensibilidade do modelo numérico da carcaça com outros elementos,
tais como placas finas e sólidos.
• Utilização de resultados experimentais para realimentação do modelo de carcaça.
• Utilização de técnicas de otimização na variação da espessura da carcaça para um
mínimo de velocidade média espacial da carcaça.
• Análises de fluxo de potência com outros tipos de molas, tais como barril e
cônicas, apresentadas na revisão bibliográficas.
• Validação do modelo acoplado das molas com a carcaça através de experimentos
controlados.

82
• Análises com variação da geometria da carcaça.
• Análises com variação na posição do acoplamento das molas com a carcaça.
• Utilização de modelos numéricos das outras partes do compressor acoplados aos
mostrados aqui.

83
CAPITULO 7
7. BIBLIOGRAFIA
[1] SOEDEL, W., ROYS,B., On the Acoustics of Small High Speed Compressors : A
Review and Discussion, Noise Control Engineering Journal, Vol. 32, 1989, pg 25.
[2] TOJO, K. ,SAEGUSA, S., SUDO, M., TAGAWA, S., Noise Reduction of Refrigerator
Compressors, Proceedings of 1980 Purdue Compressor Thecnology Conference, 1980,
pg 235.
[3] CRAUN, M. A. , MITCHELL, L. D., Identification of Sound Propagation Paths within
a Reciprocating Compressor via Mutltiple-input/Single-output Modeling, Proceedings
of the 1994 International Compressor Engineering Conference at Purdue, 1994, pg 1.
[4] RAMANI, A., ROSE, C., KNIGHT, C. E., MITCHELL, L. D., Finite Modeling of a
Refrigeration Compressor for Sound Prediction Purposes, Proceedings of the 1994
International Compressor Engineering Conference at Purdue, 1994, pg 7.
[5] ZINDELUK, M., Performance de Cilindros de Borracha em Molas Helicoidais como
Atenuadores das Frequências Audíveis, 17o Encontro da SOBRAC – 1996, 1996, pg 41
[6] YILDRIN, V., INCE, N., Natural Frequencies of Helical Springs of Arbitrary Shape,
Journal of Sound and Vibration, 1997, pg 311.
[8] WARD, A., TOWERS, M. S., BAKKER,H. A., Dynamic Analysis of Helical Springs
by the Assumed Mode Method, Journal of Sound and Vibration, 1987, pg 305.
[9] CRUCQ, J., Modelling of Noise Sources in Refrigerant Compressors, InterNoise 88, pg.
817.

84
[10] BARBOSA, W. A.; Estudo do Fluxo de Energia Vibratória entre o Conjunto Moto-
Compressor e a Carcaça de um Compressor Hermético por Análise Estatística
Energética, Dissertação de Mestrado em Engenharia Mecânica, UFSC, Florianópolis -
SC 1983.
[11] BASTOS, A. A.; Isolamento de Vibrações em Alta Freqüência em Sistemas com
Múltiplos Graus de Liberdade, Dissertação de Mestrado em Engenharia Mecânica,
UFSC, Florianópolis - SC 1984.
[12] HERTING, D. N. , MSC/Nastran Advanced Dynamic Analysis, User's Guide, 1997.
[13] BLAKELY, Ken, MSC/Nastran Basic Dynamic Analysis, User's Guide, 1993.
[14] PETYT, M. , Introduction to Finite Element Vibration Analysis, Cambridge University
Press, Cambridge, 1990.
[15] CAFFEY, F. P. & LEE, J. M. , MSC/Nastran Linear Static Analysis, User's Guide,
1994.
[16] COOK, RD., MALKUS, D. S., PLESHA, M. E., Concepts and Applications of Finite
Element Analysis, John Wiley & Sons, 1989.
[17] KILROY, K , MSC/Nastran Quick Reference Guide, version 70.7,1998.
[18] MILLER, M P., Getting Started with MSC/Nastran, User's Guide, Second Edition,
1996.
[19] EWINS, D. J. , Modal Testing .- Theory and Practice, Research Studies Press Ltda.,
Letchworth, Hertfordshire, John Wiley & Sons,Inc., England, 1986.
[20] BERANEK, L. L. & Ver, I. L. .Noise and Vibration Control Engineering, Principles
and Applications, John Wiley & Sons, Inc. USA, 1992.
[21] CREMER, L., HECKL, M., UNGAR, E. E., Structure-Born Sound, Second Edition,
Springer Verlag, Germany, 1998.
[22] HAMILTON, J. F., Measurement and Control of Compressor Noise, School of
Mechanical Engineering, Purdue University, West Lafayette, Indiana, USA, 1998.

85
[23] SANGOI, R, Estudo de Identificação de Fontes de Ruído e Vibrações em um
Compressor Hermético, Dissertação de Mestrado em Engenharia Mecânica, UFSC,
Florianópolis - SC 1983.
[24] RAO, S. S., Mechanical Vibrations, Third Edition, Addison Wesley Publishing
Company, USA, 1995.
[25] LAZAN, B. J., Damping of Materials and Members in Structural Mechanics, First
Edition, Pergamon Press, England, 1968.
[26] NORTON, M. P., Fundamentals of Noise and Vibration Analysis for Engineers,
Cambridge University Press, Cambridge, 1989.
[27] POPOV, E. P., Introdução a Mecânica dos Sólidos, Editora Edgard Blucher, São Paulo,
1978.