
Duas aplicações da Mecânica Estatística: Percolação … · Duas aplicações da Mecânica...
97
Tese de Doutorado Duas aplicações da Mecânica Estatística: Percolação em Grafos Infinitos e Lema Local de Lovász Algorítmico Rogério Gomes Alves
-
Upload
dangkhuong -
Category
Documents
-
view
216 -
download
0
Transcript of Duas aplicações da Mecânica Estatística: Percolação … · Duas aplicações da Mecânica...
Tese de Doutorado
Duas aplicações da Mecânica Estatística:Percolação em Grafos Infinitos e Lema Local de
Lovász Algorítmico
Rogério Gomes Alves

Universidade Federal de Minas Gerais
Instituto de Ciências Exatas
Departamento de Matemática
Tese de Doutorado
Duas aplicações da Mecânica Estatística:Percolação em Grafos Infinitos e Lema Local de
Lovász Algorítmico
Rogério Gomes Alves
Orientador: Prof. Dr. Aldo Procacci
Co-orientador: Prof. Dr. Rémy de Paiva Sanchis
Belo Horizonte, 03 de Dezembro 2013

Duas aplicações da Mecânica Estatística:Percolação em Grafos Infinitos e Lema Local de
Lovász Algorítmico
Esta tese contém alterações
sugeridas pela Comissão Julgadora.
Comissão Julgadora:
• Prof. Dr. Aldo Procacci (Matemática- UFMG)
• Prof. Dr. Bernardo Nunes Borges de Lima (Matemática-UFMG)
• Prof. Dr. Rémy de Paiva Sanchis (Matemática-UFMG)
• Prof. Dr. Roberto Imbuzeiro Oliveira (IMPA)
• Prof. Dr. Ronald Dickman (Física-UFMG)
Agradecimentos
Agradeço a minha família e amigos pelo apoio até aqui.
Agradeço a todos os professores, funcionários e amigos do departamento de Mate-
mática da UFMG que contribuiram de alguma forma com minha vida acadêmica.
Agradeço especialmente os professores Aldo Procacci e Rémy de Paiva Sanchis
pela orientação, suporte e ensinamentos durante os anos desse doutorado. Agradeço
também aos professores Bernardo N. B. de Lima e Sacha Friedli pela motivação em
sempre propor cursos de mecânica estatística, probabilidade e afins no departamento.
Por fim, agradeço minha esposa Emely por tornar tudo mais simples e possível
durante essa trajetória.
i

Resumo
Nesta tese mostramos um critério geral para que grafos infinitos de grau limi-
tado tenham uma transição de fase não trivial para o processo de Percolação de elos
independentes baseado em uma única desigualdade isoperimétrica, se o grafo possui
geodésicas bi-infinitas, ou duas desigualdades isoperimétricas, caso não as tenha. Mos-
tramos que nos grafos desta classe, sem geodésicas bi-infinitas, a conectividade finita
decai subexponencialmente na região altamente supercrítica, mesmo se p está arbitra-
riamente próximo de 1. Os grafos naquela classe, com geodésicas bi-infinitas, sempre
tem a função de conectividade finita decaindo exponencialmente se p está próximo de
1 o suficiente.
Estudamos também o Lema Local de Lovász construtivo de Moser e Tardos [59]
e mostramos que há uma relação entre o algoritmo proposto por estes autores e a
expansão em polímeros do gás de rede ao identificarmos a noção de ”witness trees” no
algoritmo com a noção de árvores de Penrose da expansão. Essa relação nos permite
concluir que o algoritmo de Moser-Tardos é eficiente se a expansão em polímeros é
convergente.
Palavras-chave: Percolação, transição de fase, função conectividade, expansão em
polímeros, Lema Local de Lovász algorítmico.
Abstract
ii

Abstract
In this work we show a general criterion for bounded degree graphs to exhibit a
non-trivial percolation threshold based either on a single isoperimetric inequality if
the graph has a biinfinite geodesic, or two isoperimetric inequalities if the graph has
not a bi-infinite geodesic. We also study the finite connectivity in graphs satisfying
the new general criterion and show that graphs in this class with a bi-infinite geodesic
always have finite connectivity functions with exponential decay when p is sufficiently
close 1. On the other hand, we show that there are graphs in the same class with no
bi-infinite geodesic for which the finite connectivity decays subexponentially (down to
polynomially) in the highly supercritical phase even for p arbitrarily close 1.
We also point out a close connection between the Moser−Tardos algorithmic version
of the Lovász local lemma [59] and the cluster expansion of the hard-core lattice gas
in statistical mechanics. We show that the notion of witness trees given by Moser and
Tardos is essentially coincident with that of Penrose trees in the Cluster expansion
scheme of the hard-core gas. Such an identification implies that the Moser−Tardos
algorithm is successful in a polynomial time if the cluster expansion converges.
Keywords: Percolation, phase transition, connectivity function, polymer expansion,
algorithmic Lovász Local Lemma.
iii
Sumário
Introdução 1
1 Percolação em grafos infinitos 5
1.1 Percolação independente em grafos infinitos . . . . . . . . . . . . . . . . 5
1.1.1 Percolação de elos independentes . . . . . . . . . . . . . . . . . . 5
1.1.2 O argumento de Peierls . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2 Desigualdades isoperimétricas e transição de fase em percolação . . . . 15
1.2.1 Quais grafos percolam? . . . . . . . . . . . . . . . . . . . . . . . . 15
1.2.2 Uma condição para percolar . . . . . . . . . . . . . . . . . . . . . 21
1.3 Desigualdades isoperimétricas e a conectividade finita de dois pontos . 29
1.3.1 A conectividade finita de dois pontos em grafos gerais . . . . . . 29
1.3.2 Decaimento exponencial/subexponencial da conectividade finita
de dois pontos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2 O gás com interação caroço duro e o Lema Local de Lovász algorítmico 37
2.1 O gás de rede com interação caroço duro . . . . . . . . . . . . . . . . . . 37
2.2 A expansão do gás auto-repulsivo com interação caroço duro em um grafo 39
2.3 O Lema Local de Lovász . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.4 A conexão com a Mecânica Estatística . . . . . . . . . . . . . . . . . . . . 51
2.5 O Lema Local de Lovász construtivo . . . . . . . . . . . . . . . . . . . . . 57
2.5.1 A versão algorítmica de Moser-Tardos do Lema Local de Lovász 58
2.6 O Lema Local de Lovász de Moser-Tardos e a Mecânica Estatística . . . . 67
2.6.1 Partições e a Identidade de Penrose . . . . . . . . . . . . . . . . . 69
2.6.2 Uma variação do esquema de Penrose . . . . . . . . . . . . . . . . 71
iv
v
2.6.3 A conexão entre as árvores de Moser-Tardos e Penrose . . . . . . 78
Referências Bibliográficas 84

Introdução
Os modelos e técnicas da Mecânica Estatística sempre estiveram relacionados a
Probabilidade e Combinatória. Embora estas áreas já estejam ligadas à Mecânica Esta-
tística quer sejam através de problemas enumerativos tais como o número de caminhos
auto-evitantes de um grafo ou pela interseção de alguns ramos, como Percolação em
Probabilidade, esta tese é sobre uma conexão mais direta entre essas áreas. A saber,
exploraremos as ideias e técnicas de métodos pertubativos da Mecânica Estatística cha-
mados de Cluster Expansion para estudar alguns problemas de Percolação e Método
Probabilístico.
Proposto na década de 50 por Broadbent e Harmmersley [16] como um modelo
probabilístico para a propagação de um fluido em meios porosos, o Modelo de Percolação
de elos independentes é formulado sobre um grafo infinito G (o meio poroso) em que
cada elo (canal de passagem do fluido) deste grafo está independentemente aberto com
probabilidade p ou fechado com probabilidade 1− p. Um dos primeiros resultados não
triviais, obtido em [16], é a existência de transição de fase paraZ2. Isto é, existe um valor
crítico do parâmetro p, denotado por pc(G), chamado de ponto crítico tal que acima
deste o fluido percola atingindo infinitos pontos do meio poroso e abaixo do mesmo este
comportamento não acontece. Um dos primeiros grafos em que o Modelo de Percolação
foi amplamente estudado é a redeZd e mais particularmente a rede bidimensionalZ2.
Sabe-se há bastante tempo que o modelo emZd para d ≥ 2 possui uma transição de fase
não trivial, ou seja, temos pc(Zd) ∈ (0, 1) se d ≥ 2. O estudo de Percolação em grafos mais
gerais que as redes regulares somente obteve maior atenção da comunidade acadêmica
a partir da década de 90. Destacamos aqui o marcante trabalho de Itai Benjamini e
Oded Schramm [10] no qual os autores propuseram interessantes conjecturas que ins
1
2
piraram parte dos resultados desta tese.
Embora haja uma representação em polímeros (ou aglomerados) da função de co-
nectividade de Percolação emZd, veja Braga, Procacci e Sanchis [14], [15], e do Modelo
de Aglomerado Aleatório∗ em alguns grafos mais gerais, veja Procacci e Scoppola [69],
os resultados sobre Percolação desta tese não são obtidos por meio da expansão em
polímeros. De fato, inspirado nas ideias dessas expansões, mostramos um critério geral
para grafos infinitos de grau limitado terem uma transição de fase não trivial para o
processo de Percolação de elos independentes baseado em uma única desigualdade
isoperimétrica, se o grafo possui geodésicas bi-infinitas, ou duas desigualdades isope-
rimétricas, caso o grafo não tenha geodésicas bi-infinitas. Este novo critério extende
alguns critérios anteriores de Procacci e Scoppola [68] incorporando, por exemplo,
grafos com constante de Cheeger igual a zero (redes regulares) assim como grafos
com constante de Cheeger positiva (árvores regulares). Discutimos também a relação
desses resultados com duas conjecturas feitas por Benjamini e Scharamm [10] sobre
transição de fase em grafos gerais. Estudamos também a função de conectividade
finita de dois pontos em grafos satisfazendo este novo critério e mostramos que grafos
nesta classe, com geodésicas bi-infinitas, sempre tem as funções de conectividade finita
decaindo exponencialmente se p está próximo de 1 o suficiente. Outro resultado é que
existem grafos nesta classe, aqueles sem geodésicas bi-infinitas, tais que conectividade
finita decai subexponencialmente na região altamente supercrítica, mesmo se p está
arbitrariamente perto de 1.
O Método Probabilístico desenvolvido por Paul Erdös [13], mais especificamente o
Lema Local de Lovász, obtido por Erdös e Lovász [29] em 1975 é uma poderosa técnica
não-construtiva amplamente utilizada em diversas áreas como Teoria dos Números,
Combinatória e Teoria do Grafos. Fixado um espaço de probabilidade qualquer e uma
coleção finita de eventos neste espaço, geralmente eventos que desejamos evitar, o
lema nos fornece um critério suficiente para que a probabilidade de nenhum desses
eventos ocorrerem seja positiva. Em particular, o lema nos garante a existência de uma
∗Em inglês o termo é Random Cluster Model

3
configuração na qual não ocorre os eventos ”indesejáveis”. O Lema Local de Lovász
possui uma inesperada ligação com o gás de rede. Essa relação, entre dois assuntos
aparentemente distintos, foi elucidada por Scott e Sokal [72] somente em 2005. Neste
trabalhos os autores exploraram o fato que a função partição do gás de rede em um grafo
finito G é simplesmente o polinômio de conjuntos independentes de G para relacionar
o gás de rede com um resultado de Shearer [74].
Embora o lema nos forneça um poderoso resultado que é a existência de uma
configuração com as propriedades desejáveis, em problemas aplicados geralmente
além da existência de tais configurações estamos interessados também em encontrá-
las. Desta foma um grande esforço para encontrar uma versão construtiva do Lema
Local de Lovász foi feito durante a última década do século passado e a primeira
década deste século. Tais esforços culminaram em 2010 na versão algorítmica de
Robin A. Moser e Garbor Tardos [59] num contexto mais específico porém de enorme
aplicabilidade. Moser e Tardos mostraram que não apenas existe um algoritmo que
encontra tal configuração como também a encontra em tempo polinomial.
Após os trabalhos de Scott e Sokal [72] e Moser e Tardos [59], surge a natural
pergunta se essa versão construtiva do Lema Loca de Lovász teria alguma relação com
a Mecânica Estatística, mais especificamente o gás de rede. Mostrar que de fato há
uma relação entre esses assuntos é o cerne da outra metade desta tese. Demonstramos
que há uma ligação muito próxima entre o algoritmo proposto por Moser-Tardos e
a expansão em polímeros do gás de rede ao mostrarmos que a noção de ”witness
trees” no algoritmo é essencialmente a noção de árvores de Penrose da expansão. Essa
identificação nos permite concluir que o algoritmo de Moser-Tardos é eficiente se a
expansão em polímeros é convergente.
Essa tese possui uma divisão muito simples: há dois capítulos que podem ser lidos
independentemente.
No Capítulo 1 estão os resultados sobre percolação desta tese. Lembramos que
nesta parte não usamos explicitamente a expansão em polímeros. Na Seção 1.1.1
introduzimos o modelo de percolação e o argumento de Peierls que é a principal

4
técnica para provarmos a existência de transição de fase. O resto do capítulo é dividido
entre os resultados sobre transição de fase, Seção 1.2, e sobre a conectividade finita de
dois pontos, Seção 1.3.
No Capítulo 2 abordamos os resultados sobre o Lema Local de Lovász algoritmo de
Moser-Tardos e o gás de rede. Nas Seções 2.1 e 2.2 damos uma pequena introdução ao
gás de rede e a expansão em aglomerados. Na Seção 2.3 introduzimos o Lema Local
de Lovász e na Seção 2.4 discutimos a relação deste com o gás de rede. Já na Seção
2.5 expomos o trabalho de Moser e Tardos. Por fim, na Seção 2.6 desse capítulo é que
mostramos nossos resultados que relacionam o Lema Local de Lovász construtivo com
o gás de rede.
Esta tese é baseada nos artigos [5] e [4].
Capítulo
1
Percolação em grafos infinitos
1.1 Percolação independente em grafos infinitos
1.1.1 Percolação de elos independentes
Durante todo o texto denotaremos por |X| a cardinalidade, às vezes chamada de
tamanho ou volume, de um conjunto X. Todos os grafos desta tese, salvo menção em
contrário, serão simples (sem "loops"ou múltiplos elos), não orientados e com conjunto
de vértices finito ou (infinito) enumerável.
Considere um grafo G = (V,E) com conjunto de vértices V e conjunto de elos E.
Um caminho em G é um subgrafo S = (VS,ES) em que VS = x1, . . . , xn são distintos e
ES = x1, x2, . . . , xn−1, xn ⊆ E; o tamanho de um caminho S é definido por |S| ≡ |ES|.
Dados x, y ∈ V, denotaremos por dG(x, y) ou simplesmente d(x, y) a métrica natural de
G dada pelo tamanho do menor caminho entre x e y. Se W ⊂ V, seja GW = (W,EW)
o subgrafo de G induzido por W em que EW ⊆ E consiste apenas de elos com pontos
finais em W. Um conjunto de vértices W ⊂ V é conexo em G se GW é conexo. Dizemos
que o conjunto de elos S ⊂ E é conexo se GVS é conexo, em que VS é o conjunto de
vértices de S.
A seguir definimos os conjuntos fronteira de W, a saber, definimos a fronteira de elos
de W como o subconjunto de elos ∂eW = e ∈ E : |e∩W| = 1, a fronteira interna de vértice
é o subconjunto de vértices ∂intv W = v ∈ W : dG(x,V \W) = 1 e a a fronteira externa de
vértice sendo o subconjunto de vétices ∂extv W = v ∈ V \W : dG(x,W) = 1. Podemos
5
6
ver que se G tem grau limitado com ∆(G) ≡ maxv∈V|∂ev| < ∞, então |∂eW| ≤ ∆(G)|∂int
v | e
|∂intv | ≤ ∆(G)|∂eW|. O fecho de W é definido por W = W ∪ ∂ext
v W.
Daqui em diante neste capítulo o par ordenado G = (V,E) sempre será um grafo
infinito (o conjunto de vértices V é enumerável), simples, não-orientado, conexo e
de grau limitado com grau máximo ∆(G). O subconjunto AG = W ⊂ V : |W| <
∞ e GW conexo é o conjunto de todas as componentes conexas e finitas de G. O grafo
cujo o conjunto de vértices é Zd e os elos são os pares ordenados de vértices com
distância euclidiana igual a 1 será denominado simplesmente de Zd ou rede Zd.
Daremos a seguir uma breve introdução ao modelo de percolação de elos indepen-
dentes em grafos infinitos tratados neste trabalho. Para uma estudo mais abrangente,
embora com maior ênfase em Zd, veja por exemplo Grimmett [38] ou Kesten [48].
Dado G = (V,E) e p ∈ [0, 1], definimos a família de variáveis aleatórias ωe : e ∈ E
independentes e identicamente distribuidas com distribuição comum de Bernoulli de
parâmetro p, isto é, para todo e ∈ E, ωe = 1 (ou dizemos que o elo e está aberto) com
probabilidade p, ou ωe = 0 (ou dizemos que o elo e está fechado) com probabilidade
1 − p. Uma configuração ω de G é uma função ω : E → 0, 1 em que ω(e) = ωe. Seja
ΩG o conjunto de todas as configurações e Pp a medida produto sobre configurações
de elos de G. Juntamente com a σ-álgebra P gerada pelos conjuntos cilíndricos de ΩG
temos o espaço de probabilidade (ΩG,P,Pp) do modelo de percolação independente de elos
com parâmetro p em G. Dado uma configuração ω ∈ ΩG, definimos o subconjunto de
elos de E que estão abertos em ω por A(ω) = e ∈ E : ωe = 1 e o subconjunto de elos de
E que estão fechados em ω por F(ω) = e ∈ E : ωe = 0.
Seja GN = (VN,EN) um subgrafo finito de G e ΩN o conjunto das configurações em
GN. Então dado ω ∈ ΩN, temos que
Pp(ω) = p|A(ω)|(1 − p)|F(ω)|. (1.1)
Dado uma configuração ω ∈ ΩG, um aglomerado aberto em ω é um subgrafo conexo
g = g(ω) = (Vg,Eg) tal que Eg ⊂ A(ω) e ∂eVg ⊂ F(ω). Para tornar a notação menos
carregada, escrevemos X ⊂ g se g é um aglomerado aberto e X é um subconjunto não
7
vazio de Vg. Como estamos interessados em estudar as propriedades de conectividade
de A(ω), definiremos a seguir a probabilidade de percolação e a conectividade finita de
dois pontos.
Definição 1.1. Considere o grafoG = (V,E) e dois vértices x, y ∈ V. A conectividade finita
de dois pontos φfp(x, y) é definida por
φfp(x, y) = Pp(ω ∈ ΩG : ∃ aglomerado aberto g = g(ω), x, y ⊂ g, |Eg| < ∞). (1.2)
A probabilidade de percolação θp(x) é definida por
θp(x) = Pp(ω ∈ ΩG : ∃ aglomerado aberto g = g(ω), x ⊂ g, |Eg| = ∞). (1.3)
Já que G é conexo, segue pela desigualdade FKG (veja, por exemplo, Seção 2.2 de
Grimmett [38]) que o fato de θp(x) > 0 não depende do vértice x ∈ V. Quando não for
necessário, escreveremos apenas θp. Assim, dizemos que o modelo percola ou que há
percolação, para p ∈ [0, 1], se θp = θp(x) > 0 para algum x ∈ V.
Note que podemos escrever a probabilidade de percolação em termos de uma função
de conectividade. Dado um vértice x ∈ V, podemos também definir a conectividade finita
de um ponto
φfp(x) = Pp(ω ∈ ΩG : ∃ aglomerado aberto g = g(ω), x ⊂ g, |Eg| < ∞). (1.4)
Assim,
θp(x) = 1 − φfp(x). (1.5)
É intuitivo o fato que se aumentamos a probabilidade dos elos estarem abertos então
temos uma maior chance de percolar. De fato, o acoplamento usual de vários modelos
de percolação com diferentes parâmetros mostra que a probabilidade de percolação θp
é uma função não decrescente em p . Veja a proposição a seguir.
8
Proposição 1.1. Considere o modelo de percolação independente de elos emG = (V,E). Então
existe um valor crítico pc(G) ∈ [0, 1] do parâmetro definido por
pc = pc(G) = supp∈[0,1]p : θp(x) = 0, (1.6)
tal que θP > 0 se p > pc e θP = 0 se p < pc.
Prova: Como θ0 = 0 e θ1 = 1, é suficiente mostrarmos que θp é uma função
não decrescente em p. Para isto, defina a família de variáveis aleatórias i.i.d. U =
Uee∈E, cada uma com distribuição uniforme no intervalo [0, 1]. Seja agora o modelo
de percolação definido a partir de U no qual dizemos que um elo está p-aberto, neste
modelo, se Ue < p. Note que θp é igual a probabilidade de percolar neste modelo de
elos p-abertos. Sendo assim, como neste modelo todo elo p-aberto está necessariamente
p′-aberto, com p < p′, temos que θp ≤ θp′ .
Isso que estabelece a existência de uma fase abaixo de pc em que não há percolação
e outra fase acima de pc em que há percolação. Se 0 < pc(G) < 1 então dizemos que há
transição de fase não-trivial ou simplesmente transição de fase no modelo de percolação de
elos em G. Dizemos também que o modelo está na fase subcrítica se p ∈ [0, pc) e na fase
supercrítica se p ∈ (pc, 1].
Podemos também definir o modelo de percolação declarando vértices abertos ao
invés de elos abertos. Tais modelos são usualmente chamados de percolação de sítios.
Vale apena ressaltar que em grafos de grau limitado, transição de fase no modelo de
percolação de elos é equivalente a transição de fase no modelo de percolação de sítios.
Veja Grimmet e Stacey [40].
1.1.2 O argumento de Peierls
Quando existe transição de fase em um grafo G?
Apresentaremos aqui nesta seção o argumento de Peierls que é a principal técnica
para mostrar que determinado grafo possui ponto crítico estritamente menor que 1.
Mostrar que determinado grafo G possui transição de fase para percolação em G,
9
isto é, que pc ∈ (0, 1) é uma das primeiras perguntas a serem feitas em um modelo de
percolação em um grafo. Como veremos a seguir, a parte não trivial é mostrar que
pc < 1. Vale a pena mencionar os marcantes trabalhos de H. Kesten na rede Z2 como
um dos primeiros nesta questão; em Kesten [46] é mostrado que pc(Z2) ≥ 12 e em Kesten
[47] que pc(Z2) = 12 .
Embora mostrar que pc < 1 seja uma questão com seu próprio interesse, ela se torna
ainda mais relevante se levarmos em conta que pc(G) < 1 implica também transição de
fase em vários outros modelos de mecânica estatística em G, como o modelo de Ising,
por exemplo. Veja Häggström [44].
Uma técnica geral para provar que pc < 1 pode ser obtida através do famoso argu-
mento de Peierls, cujo escopo aparece originalmente em Peierls [64], e posteriormente
em Griffiths [34] e Dobrushin [26], adaptado ao contexto de percolação em grafos mais
gerais que as redes regulares. Podemos ter uma ideia como é o argumento de Peierls
analisando o modelo de Ising em Z2. O modelo consiste de variáveis aleatórias inde-
xadas pelos vértices deZ2 que representam os spins de elétrons. Estes podem estar em
dois estados: + ou −. A baixa temperatura no modelo de Ising ferromagnético (spins
vizinhos tendem a se alinhar), espera-se que os spins tenham uma configuração similar
a um estado de temperatura zero, ou seja, um estado de baixa energia ∗. Isto nos leva a
uma figura geométrica bastante ilustrativa: os spins com a mesma configuração de um
estado de baixa energia formam um infinito oceano, enquanto os spins de configuração
diferente do estado de baixa energia ficam presos em ilhas finitas. Veja a figura 1.1 que
representa o estado + como o estado de baixa energia. As fronteiras dessas regiões
de baixa energia dão uma imagem a que referiremos de contornos. Os contornos, por
sua vez, tem sua energia proporcional ao seu tamanho que é tipicamente pequeno
quando estamos à temperatura baixa. Deste modo, o estado de baixa energia pode
eventualmente percolar.
Exibiremos a seguir o clássico resultado em que podemos ver como essa ideia pode
ser aplicada a percolação.
∗O termo baixa energia é usualmente denominado ground state na literatura acadêmica.

10
Figura 1.1: Representação de uma configuração do modelo de Ising em contornos de elos duais emuma caixa finita de Z2 com condição de fronteira + [81].
Teorema 1.1. O ponto crítico pc(Zd) satisfaz a seguinte desigualdade se d ≥ 2:
12d − 1
≤ pc(Zd) ≤23
(1.7)
Prova: A prova da cota inferior é dada mais adiante na proposição 1.3. Para a
cota superior, é suficiente provarmos para d = 2, já que Z2 é um subgrafo de Zd.
Considere então Z2 e seu grafo dual Z2∗
(o grafo Z2∗
é simplesmente uma translação
de Z2 pelo vetor (1/2, 1/2)). Acople o modelo de percolação em Z2 com o modelo em
Z2∗
declarando um elo e∗ de Z2∗
aberto ou fechado se o elo e de Z2, que cruza e∗, está
aberto ou fechado respectivamente. Geometricamente, veja figura 1.2, podemos ver
que se o aglomerado aberto da origem é finito então existe um circuito de elos fechados
ao redor da origem. A demonstração deste fato pode ser encontrada em [48]. Deste
modo é suficiente mostrarmos que a probabilidade de haver um circuito de elos duais
fechados é estritamente menor que 1 se p está suficientemente próximo de 1.
Cada circuito na rede dual formado por n elos fechados tem probabilidade (1 − p)n
de ocorrer. Faremos agora uma estimativa do número de tais circuitos o suficiente para
nossos propósitos. Considere o elo mais a esquerda de um tal circuito que cruza o eixo-
x. Temos no máximo n possibilidades para este elo. Cada um dos n − 1 elos restantes
podem ser colocados de no máximo 3 maneiras diferentes. Assim há no máximo n3n−1
tais circuitos. Assim a probabilidade de haver um circuito de elos duais fechados é no
máximo

11
∑n≥4
n3
[3(1 − p)]n. (1.8)
Note que a série acima é uma função contínua e decrescente em p quando p > 2/3. Isto
nos garante apenas que existe p′ < 1 tal que a probabilidade de haver um circuito de
elos duais fechados é estritamente menor que 1 para p > p′.
Considere então o evento Qk em que todos os elos do quadrado de lado 2k + 1,
centrado na origem, estão abertos. Seja Ak o evento em que há um circuito de elos duais
fechados na rede dual que está fora do quadrado de lado 2k + 1 centrado na origem.
Analogamente a demonstração acima, temos
Pp(Ak) ≤∑
n≥8k+4
n3
[3(1 − p)]n. (1.9)
Portanto dado p > 2/3, seja k0 ∈N tal que Pp(Ak0) > 0. Como Qk e Ak são independentes,
pois dependem de conjuntos de elos disjuntos, e Pp(Qk0) > 0 , temos que
θp > Pp(Qk0 ∩ Ak0) = Pp(Qk0)Pp(Ak0) > 0. (1.10)
Figura 1.2: Um aglomerado aberto da origem de Z2 cercado por um circuito fechado no dual [38].
A seguir definimos os contornos desta tese. Veremos que este é o objeto natural para

12
definirmos em grafos mais gerais que a rede Zd em ordem de produzir o argumento
de Peierls na demostração do teorema acima.
Definição 1.2. Um conjunto de corte de um grafo G = (V,E) é um conjunto γ ⊂ E tal que
o grafo G\γ ≡ (V,E\γ) é desconexo.
Dado G = (V,E), um conjunto de corte finito γ ⊂ E é chamado de contorno se G\γ tem
exatamente uma componente conexa finita e é minimal com respeito a esta propriedade, ou seja,
para qualquer elo e ∈ γ o grafo (V,E\(γ\e)) não tem componente finita. Dizemos que FG é o
conjunto de todos os contornos de G.
Se γ é um contorno em G então denotamos por Gγ = (Iγ,Eγ) a única componente conexa
finita deG\γ. O conjunto Iγ ⊂ V é chamado de o interior de vértices de γ e o conjunto Eγ ⊂ E é
chamado de interior de elos de γ. O fecho de Gγ é o grafo Gγ = (Iγ, Eγ) com conjunto de vértices
Iγ = Iγ ∪ ∂extv Iγ e conjunto de elos Eγ = Eγ ∪ γ.
Observação 1. Quando G \ γ possui componentes conexas finitas então, de fato, só existirá
apenas uma única tal componte. Com efeito, pela minimalidade na definição de contorno, para
qualquer elo e ∈ γ o grafo (V,E\(γ\e)) não tem componente finita, logoG \γ não pode ter mais
de uma componente conexa finita.
A definição de contorno acima remonta ao artigo de Rudolf Peierls [64] no estudo
do modelo de Ising. Essa noção de contorno em grafos mais gerais que as clássicas
redes regulares já tem obtido atenção da comunidade acadêmica. Os contornos da
Definição 1.2 foram chamados de "(v,∞)-minimal cutset"em Babson Benjamini [7],
"Peierls contours"em Procacci e Scoppola [68] e "fences"em Procacci e Scoppola [69].
Considere um contorno γ em G = (V,E) e um conjunto finito de vértices X ⊂ V.
Dizemos que γ cerca X, denotamos por γ X, se X ⊂ Iγ. Dizemos que γ separa X, neste
caso escrevemos γ ⊗ X, se 0 < |X ∩ Iγ| < |X|.
Denotamos por F nG
o conjunto de todos os contornos com cardinalidade (ou tama-
nho) n, por FG(X) (F nG
(X)) o conjunto dos contornos γ ∈ FG (γ ∈ F nG
) que cercam X e,
com um pequeno abuso de notação, para e ∈ E, denotamos por F nG
(e) o conjunto dos
contornos γ ∈ F nG
que contem o elo e.

13
A Proposição 1.2 abaixo, a qual chamaremos de argumento de Peierls, diz que para
haver percolação é suficiente termos uma cota superior exponencial para o número de
contornos.
Proposição 1.2. (Argumento de Peierls) Considere o grafoG = (V,E). Se existe uma constante
positiva r e um vértice x ∈ V tal que, para todo n ∈N,
|FnG(x)| ≤ rn, (1.11)
então
pc(G) ≤ 1 −12r. (1.12)
Prova: A demonstração segue facilmente do fato que se g = (Vg,Eg) é um aglome-
rado aberto e finito com x ⊂ Vg, então existe um contorno γ tal que γ x e γ ⊂ ∂eg,
isto é, γ é constituido apenas de elos fechados. Portanto,
φfp(x) ≤
∑n≥1
∑γ∈F n
G(x)
(1 − p)|γ| =∑n≥1
[r(1 − p)]n < 1 (1.13)
se p > 1 − 12r ; logo a igualdade 1.5 implica pc ≤ 1 − 1
2r .
A seguir veremos a cota inferior para o ponto crítico de G em termos de seu grau
máximo ∆(G).
Proposição 1.3. Considere o grafo G = (V,E) com grau máximo ∆ = ∆(G). Então
pc(G) ≥1
∆ − 1. (1.14)
Prova: Se o vértice x ∈ V está em algum aglomerado aberto e infinito, então para
todo n ∈ N existe um caminho de elos abertos auto-evitante (cada elo é usado no
máximo uma vez) a partir de x de tamanho n. O número de tais caminhos é no máximo
∆(∆ − 1)n−1 e a probabilidade de tal caminho estar aberto é pn. Logo temos,
θp(x) ≤ ∆(∆ − 1)n−1pn (1.15)

14
A demonstração termina observando que a expressão (1.15) tende a 0 quando n
tende a infinito se p < 1∆−1 .
Não é difícil ver que alguns grafos possuem uma cota exponencial para o número
de contornos de tamanho n. Por exemplo, o grafo Z2 possui a cota |F nZ2((0, 0))| ≤ n3n−1.
De fato, cada elo de um contorno em Z2 cruza um elo de um circuito na rede dual.
Assim essa cota segue como vimos na demonstração do Teorema 1.1. Para a árvore
binária To com raiz o, temos que |F nTo
(o)| é menor que o número de elos entre os níveis
0 e n da árvore (a raiz está no nível 0) e esta quantidade é menor que 2n. Assim ambos
percolam pela Proposição 1.2. Há também o exemplo do grafo Z que possui infinitos
contornos de tamanho 2 cercando a origem. Deste modo, para todo p < 1, infinitos
desses contornos estão fechados quase certamente e assim θp = 0 se p < 1. Portanto
pc(Z) = 1.
Nem sempre é imediato mostrar tal cota para o número de contornos de tamanho n
em um grafo. De fato esta tarefa pode ser bem complicada como veremos na próxima
seção. A seguir daremos uma demostração, baseada em Babson-Benjamini [10], de que
grafos com constante de Cheeger positiva possuem uma cota (exponencial) superior
para o número de contornos de tamanho n.
Definição 1.3. A constante de Cheeger do grafo G = (V,E), CG, é definida por
CG = infS∈AG
|∂eS||S|
. (1.16)
Primeiro mostraremos o Lema 1.4 abaixo que é uma versão do Lema 6 em Babson-
Benjamini [10] e do Lema 2.1 em Timár [80]. Uma melhor cota que a dada pelo Lema
1.4 pode ser encontrada em [48]. Lembre que um multigrafo G é um grafo em que é
permitido ter múltiplos elos, isto é, elos que tem os mesmos vértices finais. Observe
que um grafo é um multigrafo. Um passeio em um grafo G é um sequência v0, v1, . . . , vk
de vértices adjacentes do grafo. Se G é um multigrafo, então um passeio será uma
sequência de vértices e elos v0, e1, v1, e2, . . . , ek, vk em que ei é um elo entre os vértices
vi−1 e vi. O passeio será euleriano se ele passa por todo elo exatamente uma vez. Um
dos resultados mais antigos sobre teoria de grafos, devido a Leonhard Euler, diz que
15
se um multigrafo (grafo) finito tem no máximo dois vértices de grau ímpar, então este
multigrafo possui um passeio euleriano.
Lema 1.1. Considere o grafoG = (V,E) com grau máximo ∆ e um vértice v ∈ V. Então existe
no máximo ∆2n subconjuntos deV de tamanho n que contem v e induzem um subgrafo conexo
de G.
Prova: Seja S ⊂ V de cardinalidade n que contém v e GS o subgrafo conexo induzido
por S. Seja PS um passeio euleriano de GS, caso GS tenha mais de dois vértices de grau
ímpar. Considere, ao invés de GS, o multigrafo em que "duplicamos"todos os elos de
GS. O passeio PS determina o subconjunto S. Para terminar, basta observar que temos
no máximo ∆2n passeios como este.
Proposição 1.4. Se CG > 0, então existe uma constante C > 0 tal que |F nG| ≤ Cn. Em
particular, pc(G) < 1.
Prova: Seja γ um contorno e v ∈ V um vértice tal que γ v. O número de vértices
na componente conexa finita de γ é no máximo nC−1G
. Note que o número de contornos
de tamanho n que cercam v é no máximo o número de componentes conexas contendo
v que possuem no máximo nC−1G
vértices. Finalizamos ao observar que, pelo Lema 1.1,
o número de tais componentes é no máximo ∆2nC−1G .
Vale lembrar que em [10] é provado que, de fato, pc(G) ≤ 11+CG
.
1.2 Desigualdades isoperimétricas e transição de fase em
percolação
1.2.1 Quais grafos percolam?
Percolação na redeZd, e suas conexões com a Mecânica Estatística, tem sido ampla-
mente estudada ao longo dos anos. No entanto, apenas nas últimas duas décadas é que
houve um aumento de interesse pelos matemáticos em estudar percolação em grafos
gerais. Podemos citar o estudo de percolação em árvores gerais em Lyons [52] e Lyons

16
[53] (em Lyons [52] é provado que o ponto crítico de qualquer árvore localmente finita T
é o inverso de seu número de ramificação br(T) †) como também o estudo de percolação
no produto cartesiano da árvore r-regular com Zd em Grimmett [39]. Entretanto, um
estudo sistemático de percolação em grafos gerais deu-se somente após o fundamental
artigo de I. Benjamini e O. Schramm em [10]. Neste trabalho os autores estudaram algu-
mas questões sobre percolação e propuseram duas conjecturas (Conjectura 2 e Questão
2 em Benjamini e Schramm [10]), ainda sem solução, sobre quais condições um grafo
deve ter de forma que pc < 1.
Conjectura 1.1. (I. Benjamini e O. Schramm) Se G = (V,E) tem dimensão isoperimétrica
maior que 1, isto é,
dim(G) ≡ supd > 0 : inf
S⊂AG
|∂eS|
|S| d−1d
> 0> 1, (1.17)
então pc(G) < 1.
Se dim(G) = d, então o tamanho da fronteira de elos |∂eS| é pelo menos de ordem
kd−1
d , para todo subconjunto de vértices S com |S| = k. E d é o menor número com esta
propriedade. É fácil ver que se G tem constante de Cheeger positiva, isto é, CG > 0,
então dim(G) = ∞. No entanto, não é imediato que dim(Zd) = d. Podemos encontrar
a demostração deste resultado no Capítulo 6 em Lyons e Peres [55]. É de se esperar,
como no Teorema 1.1 que, de fato, grafos que não são unidimensionais provavelmente
percolam.
Para a segunda conjectura, lembramos algumas definições. Dado W ⊂ V em um
grafo G, o diâmetro de W será denotado por diam(W) = maxx,y∈W
dG(x, y) e a bola de raio n
centrada no vértice x como o subconjunto B(x,n) ≡ v ∈ V : dG(x, v) ≤ n. Um grafo
G = (V,E) é transitivo se e somente se para quaisquer x, y ∈ V existe um automorfismo
que leva x em y e G é dito quase-transitivo se existe um subconjunto finito V0 ⊂ V tal
que qualquer v ∈ V é levado por algum automorfismo em V0. Dado um conjunto de
geradores S, simétrico (S = S−1), finito para um grupo Γ , o grafo de Cayley é o grafo
†Chamado em Lyons [52] como branching number.

17
G(Γ) = (V,E) com V = Γ e g, h ∈ E se e somente se g−1h ∈ S. Dizemos que as bolas
do grafo de Cayley G(Γ) tem pelo menos ordem d se existe uma constante k > 0 tal que
|B(id,n)| ≥ knd, sendo id ∈ Γ o elemento identidade do grupo. O grafo de Cayley G(Γ)
tem crescimento polinomial se existem k, d > 0 tais que |B(id,n)| ≤ k(n+1)d e tem crescimento
exponencial se |B(id,n)| ≥ Crn para algum k > 0 e r > 1. Seja U qualquer subgrafo finito
de um grafo de Cayley G(Γ) e ‖G(Γ)\U‖ ∈ N ∪ ∞ o número de componentes conexas
infinitas do complemento de U. O número de fins de G(Γ) é o supremo dos números
‖G(Γ)\U‖, dentre todos os subgrafos finitos U de G(Γ).
Conjectura 1.2. (I. Benjamini e O. Schramm) Seja G = (V,E) um grafo quase-transitivo tal
que existe x ∈ V em que |B(x,n)| é pelo menos de ordem n2. Então pc(G) < 1.
A Conjectura 1.2 pode ser vista como um diferente enunciado da Conjectura 1.1 no
caso de grafos de Cayley de grupos finitamente gerados. Neste caso, de acordo com
[82], o tamanho das bolas em G crescem mais do que linearmente se e somente se a
dim(G) > 1. A parte fácil desta equivalência pode ser vista na Proposição 1.5 abaixo.
Proposição 1.5. Seja G um grafo de Cayley de um grupo finitamente gerado com dim(G) = d.
Então |B(x,n)| é pelo menos de ordem nd.
Prova: Provamos por indução em n. Se n = 1, então |B(x, 1)| ≥ C com qualquer
C ≤ infx∈V |B(x, 1)| = |B(x, 1)|. Suponha verdadeiro para n − 1 ≥ 1. Observe que valem
as seguintes desigualdades
nd− (n − 1)d
≤ dnd−1≤ d(2(n − 1))d−1. (1.18)
Como dim(G) = d, temos para algum C∗ > 0,
|B(x,n)| ≥ |B(x,n − 1)| + |∂B(x,n − 1)|
≥ |B(x,n − 1)| + C∗|B(x,n − 1)|d−1
d
≥ C(n − 1)d + C∗Cd−1
d (n − 1)d−1
d
≥ Cnd + (C∗Cd−1
d − Cd2d−1)(n − 1)d−1
d .
18
Portanto a afirmação é verdadeira para n se escolhemos C de forma que C∗Cd−1
d ≥
Cd2d−1, ou seja, C ≤Cd∗
dd2d−1
d
.
Há um caso particular em que a Conjectura 1.2 está quase toda resolvida. Se
G é um grafo de Cayley de um grupo finitamente gerado que cresce no máximo
polinomialmente, então ou pc(G) = 1 (grafos que crescem linearmente) ou pc(G) < 1,
veja Lyons e Peres [55] Capítulo 7. Em Lyons [54] é provado que grafos de Cayley de
grupos finitamente gerados que crescem exponencialmente tem pc < 1. Apesar desses
resultados, a Conjectura 1.2 ainda não está totalmente resolvida pois existem grupos
com crescimento intermediário, isto é, grupos que crescem superpolinomialmente e
subexponecialmente. Os exemplos destes grupos construidos em Grigorchuk [35]
também tem pc < 1, veja Muchnik e Pak [61]. Todas demonstrações dos resultados
citados acima não usam o argumento de Peierls. A prova em Lyons [54] baseia-se
na existência de uma subárvore com crescimento exponencial (que tem número de
ramificação maior que 1), Muchnik e Pak [61] mostra a existência de um subgrafo,
do grafo de Cayley do grupo de Grigorchuk, isomorfo a Z2. Já o fato que grafos
de Cayley de grupos finitamente gerados que crescem no máximo polinomialmente
possivelmente percolam é baseado no famoso resultado de Gromov [41] que diz que
tais grafos possuem ou um subgrupo de índice finito isomorfo a Z, neste caso o grafo
de Cayley tem dois fins (veja Meier [56]), ou um subgrupo isomorfo a Z2 .
Um modo de abordar as Conjecturas 1.1 ou 1.2 seria usar o argumento de Peierls.
Para isto teríamos de provar que o número de contornos de tamanho n desses grafos
tem uma cota como em (1.11). G. Kozma [51] obtém uma tal cota para a classe de
grafos planares com crescimento polinomial e dimensão isoperimétrica maior que 1.
Demonstrar a cota 1.11 é uma questão de intrínseco interesse como pode ser visto em
Babson e Benjamini [7]. Neste artigo os autores introduziram um parâmetro J = JG do
grafo que é o menor j ∈ N tal que qualquer contorno é j-próximo, isto é, o contorno é
conexo no grafo G j = (V j,E j),(V j = V e E j = x, y ⊂ V : dG(x, y) ≤ j
). Por exemplo,
os elos dos contornos deZ2 distam no máximo 2. Assim o grafoZ2 tem JZ2 = 2. Babson
e Benjamini mostraram em [7] que os grafos que tem JG < ∞ possuem uma cota para
19
os contornos como em 1.11. De fato, a classe de grafos a qual eles mostram que J < ∞
é a classe dos grafos de Cayley de grupos finitamente representados. Depois Procacci
e Scoppola [68] provaram que J < ∞ é uma condição suficiente para termos uma cota
do tipo (1.11) (e portanto pc < 1) em uma maior classe de grafos de grau limitado, a
saber, grafos que possuem um raio geodésico bi-infinito ou tem a constante percolação,
definida em (1.23), positiva. O problema é que a condição J < ∞ não engloba todos
os grafos que percolam. As árvores d-regulares (d > 1), por exemplo, possuem J = ∞.
Babson e Benjamini conjecturaram em [7] que pelo menos os grafos transitivos com um
fim e Constante de Cheeger (1.16) igual a zero possuem J < ∞. No entanto, Timár [80]
mostrou que o grafo de Diestel-Leader, DL(2, 2), figura 1.3, é um exemplo de um grafo
transitivo com um fim que tem Constante de Cheeger igual a zero, percola, mas possui
J = ∞. Veja o Exemplo 1.2.1 abaixo.
Exemplo 1.2.1. [O grafo de Diestel-Leader DL(2,2)]
O grafo de Diestel-Leader DL(2,2) foi introduzido por Reinhard Diestel e Imre Leader em
2001 com o intuito de prover um exemplo de uma grafo quase-transitivo que não é quase-
isométrico ‡ a nenhum outro grafo de Cayley. Veja Diestel e Leader [25] para uma introdução
ao problema. Embora com esta intenção, apenas alguns anos depois é que Eskin, Fisher e Whyte
mostraram em [30] que de fato, tal afirmação é verdadeira.
O grafo de Diestel-Leader DL(2,2) é definido como segue. Sejam T e T′ duas árvores 3-
regulares e suponha que elas estão enraizadas no infinito de forma que os níveis de cada uma
corresponda aos inteiros. Isso é feito de forma que um vértice de T do nível i tem 2 filhos no nível
i+1 e um pai no nível i−1; um vértice de T′ do nível i tem 2 filhos no nível i−1 e um pai no nível
i + 1. Geometricamente podemos desenhá-las no plano lado a lado de forma que T está enraizada
em cima e T′está enraizada embaixo. Veja a Figura 1.3. Denote por hT(v) e hT′(v′) os níveis de
v ∈ T e v′ ∈ T′, respectivamente. O grafo de Diestel-Leader DL(2,2) é o grafo cujo conjunto de
vértices é dado por (v, v′) ∈ VT × VT′ : hT(v) = hT′(v′) e o conjunto de elos é definido como:
existe um elo entre (v, v′) e (x, x′) se e somente se v, x é um elo de T e v′, x′ é um elo de T′. O‡Dois espaços métricos (X, dX) e (Y, dY) são quase-isométricos se existem constantes A ≥ 1 e B ≥ 0
e uma função φ : X → Y tal que A−1dX(x, y) − A ≤ dY(φ(x), φ(y)) ≤ AdX(x, y) + A e para todo y ∈ YdY(φ(X), y) ≤ B.

20
desenho da ”mola” conectando o e o′ na Figura 1.3 serve para visualizarmos os elos: ao movê-la
para cima ou para baixo estamos percorrendo um elo de DL(2,2). Um fato bastante conhecido
é que o grafo de Cayley do grupo do acendedor de lâmpada §, com determinado conjunto de
geradores, é isomorfo ao grafo de Diestel-Leader DL(2,2). Para mais detalhes sobre DL(2,2) veja
[84].
Considere agora os vértices o ∈ VT e o′ ∈ VT′ tais que hT(o) = 0 e hT′(o′) = 0, isto é,
os vértices o e o′ estão no nível zero de suas respectivas árvores. Seja Tn a subárvore de T
formada por todos vértices de T que distam no máximo n de o. Do mesmo modo defina T′n.
Defimos então os tetraedros de tamanho n de DL(2, 2) como o subgrafo induzido pelo conjunto
de vértices Tn = (v, v′) ∈ VDL(2,2) : v ∈ Tn, v′ ∈ T′n. Veja que a fronteira de ∂eTn de Tn é a
união disjunta dos conjuntos Fn = (v, v′) ∈ VDL(2,2) : o grau em T de v é 1 e F′n = (v, v′) ∈
VDL(2,2) : o grau em T′ de v′ é 1. Note também que a distância entre Fn e F′n é n. Portanto
a fronteira dos tetraedros produz uma sequência de contornos que podem ficar arbitrariamente
separados, assim JDL(2,2) = ∞. Note que |Fn| + |F′n| = 2n+1 e que |Tn| = |VTn | |VT′n | = (2n+1− 1)2.
Assim, esta mesma sequência mostra que a constante de Cheeger de DL(2,2) é zero. Para ver
que há transição de fase em DL(2,2), veja o capítulo 7 de [55].
Figura 1.3: O grafo de Diestel Leader DL(2,2) [84].
§O termo em inglês é lamplighter group

21
1.2.2 Uma condição para percolar
Motivado por essas questões definimos abaixo as principais desigualdades isoperi-
métricas que aparecem neste trabalho.
Primeiro, definimos uma noção de conectividade chamada de distância em árvore.
Deixemos claro que tal conceito, embora com a palavra "distância"em seu nome, não é
uma métrica. Este conceito terá um papel relevante em todo este capítulo, já que este
sentido de conectividade será crucial nos resultados deste capítulo.
Definição 1.4. Seja G = (V,E) um grafo e W ∈ AG um conjunto conexo de vértices. Seja
T (GW) o conjunto de todas as árvores que são subgrafos de GW. Definimos a distância em
árvore dtG
(∂eW) da fronteira de elos ∂eW de W como
dtG(∂eW) = min
(V,E)∈T (GW )∂eW⊂E
|E|. (1.19)
Observação 2. Se W ∈ AG então dtG
(∂eW) é o número de elos da menor (em relação ao número
de elos) árvore que conecta e contém ∂eW.
Considere W ∈ AG. Note que se ∂intv W é conexa então conectamos a fronteira de elos usando
o menor número de elos possíveis. E no pior dos casos, temos que usar quase todos os vértices
de W para conectá-la. Deste modo temos a desigualdade
|∂eW| + |∂intv W| − 1 ≤ dt
G(∂eW) ≤ |∂eW| + |W| − 1 (1.20)
Observação 3. Se γ ∈ FG é um contorno, então Iγ ∈ AG e ∂eIγ = γ. Assim, a distância em
árvore dtG
(γ) do contorno γ pode ser escrita como
dtG(γ) = min
(V,E)∈T (Gγ)γ⊂E
|E| = `γ + |γ|, (1.21)
em que `γ é o número de elos de Eγ necessários para conectar ∂intv Iγ.
Exemplo 1.2.2. Seja To a árvore binária, com raiz o, e W ⊂ VTo o conjunto dos vértices que
distam no máximo n de o. Então a distância em árvore dtG
(∂eW) = 2n+2−2, pois temos que usar
todos os elos de W para conectar a fronteira de elos.

22
Considere agora o grafo Zd (d ≥ 2) e W ⊂ VZd como sendo a bola de raio n. Então a
distância em árvore dtG
(∂eW) é da ordem de |∂eW|, já que quaisquer dois vértices da fronteira
interna de vértices de W distam no máximo 2.
Agora definiremos as desigualdades isoperimétricas que terão um papel central em
nossos resultados.
Definição 1.5. Dado G = (V,E), seja
RG = R = infS∈AG
|∂eS|dtG
(∂eS)(1.22)
e
PG = P = infS∈AG
|∂eS|log(diam(S))
. (1.23)
Chamamos RG e PG de constante contorno e constante percolação de G, respectivamente.
Exemplo 1.2.3. Se To é a árvore binária, com raiz o, e W ⊂ VTo é o conjunto dos vértices que
distam no máximo n de o, então W é o subconjunto que produz a menor razão na definição das
constantes contorno e percolação acima. Logo, pelo Exemplo (1.2.2), RTo > 0 e PTo > 0.
Podemos ver também através do Exemplo (1.2.2) que RZd > 0 e PZd > 0.
A constante percolação PG foi introduzida em Procacci e Scoppola [68]. Semelhantes
desigualdades já têm sido estudadas em percolação como em Grimmett [36] e [37] e
Chayes e Chayes [21].
De acordo com nosso conhecimento, é a primeira vez que vemos a constante con-
torno na literatura. Uma quantidade relacionada a constante contorno foi introduzida
por Campari e Cassi [20] no estudo do modelo de Ising em grafos gerais. Em [20]
os autores definiram a constante LG tal que (de acordo com a Definição 1.2) qualquer
contorno de tamanho n é conectável com não mais que nLG vértices.
Observação 4. A constante LG definida acima é esencialmente o inverso de RG. Com efeito,
se RG > 0, então qualquer contorno γ é conectável (por uma árvore que contém γ) usando no
máximo 1RG|γ| elos. Assim, lembrando a Observação 3, a constante LG satisfaz a desigualdade
1RG− 1 ≤ LG ≤ 1
RG+ 1.
23
Podemos ver também pela definição que RG ≥CG
CG + 1. Assim grafos com constante de
Cheeger positiva possuem RG > 0.
Já a relação da constante contorno RG com o parâmetro de Babson - Benjamini JG pode ser
vista ao notarmos que |Iγ| ≤ JG|γ|. Assim se o grafo satisfaz JG < ∞ então, pela desigualdade
(1.20), temos
RG ≥1
1 + JG> 0. (1.24)
Podemos obsevar também que a condição RG > 0 é mais geral que JG < ∞, pois a árvore
d-regular Td (d > 1) é um exemplo em que JTd = ∞ e RTd > 0.
Um dos principais resultados deste trabalho é o Teorema 1.2 a seguir. Ele nos dá
um critério para grafos mais gerais percolarem. Esse resultado é de alguma maneira,
um passo na direção dos resultados e conjecturas discutidos até aqui.
Antes de enunciamos o Teorema 1.2, temos que definir o que chamaremos de geodé-
sica e geodésica bi-infinita. Uma geodésica ρ = (Vρ,Eρ) em G é um subgrafo infinito de
G tal que Vρ = x0, . . . , xn, . . . , Eρ = x0, x1, . . . , xn−1, xn, . . . e dG(x0, xn) = n para todo
n ∈ N. Sejam ρ e ρ′ dois raios geodésicos em G, ambos iniciando em x0, com conjunto
de vértices Vρ = x0, x1, . . . , xn, . . . e Vρ′ = x0, y1, . . . , yn, . . . respectivamente. Se Vρ Vρ′
são tais que dG(xn, ym) = n + m para qualquer n,m ⊂ N, então dizemos que a união
ρ∪ρ′ = (Vρ∪Vρ′ ,Eρ∪Eρ′) é uma geodésica bi-infinita emG. Ou seja, dados dois vértices
x e y em uma geodésica ou geodésica bi-infinita ρ, o caminho entre x e y em ρ é o menor
caminho. Essas definições nos levam pensar que grafos sem geodésicas bi-infinitas são
objetos parecidos como cunhas de Z2 como o Exemplo 1.2.5 mais adiante. Resultados
sobre a relação entre geodésicas, geodésicas bi-infinitas e os fins de um grafo podem ser
vistos em Watkins [83] e Thomassen e Woess [79]. Em [79], Proposição 5.2, os autores
mostraram que grafos quase-transitivos têm sempre uma geodésica bi-infinita.
Teorema 1.2. SejaG um grafo infinito com grau máximo ∆ e com constante contorno RG, como
definido em (1.22). Suponha que
i) RG > 0
ii) G tem uma geodésica bi-infinita
24
Então o ponto crítico de G satisfaz a desigualdade
pc(G) ≤ 1 −1
2(2e∆2)1/RG(1.25)
O Teorema 1.2 implica o seguinte corolário.
Corolário 1.2.1. Todo grafo transitivo G que possui RG > 0 tem pc < 1.
O Teorema 1.2 é uma extensão do Teorema 1 em Procacci e Scoppola [68], já que
a condição i) no Teorema 1.2 é mais geral que a finitude do parâmetro de Babson-
Benjamini, como ressaltado na Observação 4. Como o Teorema 1.2 contém uma enorme
classe de grafos que percolam tais como redes regulares com Constante de Cheeger
CG = 0, árvores regulares, talvez a condição RG > 0 tenha um papel similar ao da
hipótese dim(G) > 1 na Conjectura 1.1. Em particular, é de interesse a questão de
quando RG > 0 para grafos com dim(G) > 1.
Sobre o Corolário 1.2.1, é fato que grafos infinitos quase-transitivos possuem 1, 2
ou infinitos fins. Veja Proposições 6.1 e 6.2 em Mohar [57]. Se G tem 2 fins, então G
é essencialmente Z (veja [56]) e portanto pc = 1. Se G tem infinitos fins, então CG > 0
e assim pc < 1 pela Proposição 1.4 mais o argumento de Peierls ou pela Observação 4
mais o Teorema 1.2. Resta-nos então a pergunta se grafos quase-transitivos com 1 fim,
com RG > 0, tem pc < 1. Tal questão está relacionada com a cota do tipo (1.11) sobre o
número de contornos de determinado tamanho. Veremos na demostração do teorema
1.2 que obtemos é, de fato, uma cota como em (1.11). Como observado em Timar [80],
o grafo de Diestel- Leader DL(2, 2) é um exemplo de um grafo transitivo com um fim
que percola, com constante de Cheeger CG = 0, mas que possuem contornos, que são
fronteiras de subgrafos chamados tetraedros, que não são j-próximos para nenhum
j ∈ N. Lembre do Exemplo 1.2.1. Sendo assim, a Questão 3 colocada em Babson e
Benjamini [7] respondida negativamente em Timar [80] pode ser refeita pela questão a
seguir.
Questão 1. Existe um grafo G quase-transitivo com 1 fim e constante de Cheeger CG = 0 para
o qual RG = 0?
25
Exemplo 1.2.4. Aparentemente, o grafo de Diestel-Leader DL(2,2) tem constante contorno
positiva. Lembre que os tetraedros de DL(2,2) são os subgrafos induzidos por Tn = (v, v′) ∈
VDL(2,2) : v ∈ Tn, v′ ∈ T′n em que a fronteira de ∂eTn deTn é a união disjunta dos conjuntos Fn =
(v, v′) ∈ VDL(2,2) : o grau em T de v é 1 e F′n = (v, v′) ∈ VDL(2,2) : o grau em T′ de v′ é 1.
Os tetraedros parecem ser os subgrafos que produzem a pior razão na definição da constante
contorno (1.5). Vejamos que os tetraedros tem constante contorno positiva. Fixe (o, x′) ∈ Fn
e (x, 0′) ∈ F′n. Agora considere o menor caminho P em DL(2,2) que conecta (0, x′) e (x, o′).
Considere também os caminhos de PT e PT′ de Tn e T′n, respectivamente, tal que P = PT ×PT′ .
Observe que o grafo induzido pelos vértices Tn×PT′ ∪PT ×T′n∪Fn∪F′n é uma árvore minimal
que conecta a fronteira de vértices do tetraedro cuja a cardinalidade do seu conjunto de elos é
|ETn | + |ET′n | = 2(2n− 1). Como |Fn| + |F′n| = 2n+1, temos que o tetraedro Tn tem constante
contorno positiva.
O outro importante resultado deste trabalho, Teorema 1.3, refere-se a classe de
grafos sem geodésicas bi-infinitas a qual o Teorema 1.2 não se aplica.
Teorema 1.3. Seja G um grafo infinito com grau máximo ∆, com constantes contorno RG e
percolação PG, como definido em (1.22). Suponha que
i) RG > 0
ii) PG > 0
Então o ponto crítico de G satisfaz a desigualdade
pc(G) < 1 −1
2(2∆2)1/RGe1/PG. (1.26)
A seguir vemos um exemplo de um grafo G com dim(G) = 1, mas com PG > 0 e
RG > 0.
Exemplo 1.2.5. Considere o grafoG = (V,E) em que o conjunto de vérticesV é o subconjunto
deZ2 dado porV = (x, y) ∈ Z2 : x ≥ 0, 0 ≤ y ≤ log(1+x) e o conjunto de elosE = EV. Veja
a Figura 1.4. Note que os subgrafos finitos e conexos que têm menor fronteira em G em relação
ao interior são justamente aqueles induzidos por Wn = (x, y) ∈ V : x ≤ n. Temos apenas um

26
elo na fronteira de W1. Se n > 2 então diam(Wn) ≤ 2n e |∂eWn| = blog(1 + n)c > 1. Assim
temos que dim(G) = 1 e que |∂eWn|
log(diam(Wn)) ≥ blog(n + 1)c/ log(2n) > log 4/ log 6 > 0 para todo
n > 1. Portanto PG > 0. Como a árvore minimal que conecta a fronteira de Wn é justamente a
linha que conecta os vértices (n, 0) e (n, blog(n + 1)c), segue então que RG > 0.
Figura 1.4: O subgrafo de Z2 abaixo do gráfico de ln(1 + x) e acima do eixo-x.
Observação 5. O Teorema 1.3 pode ser comparado com os resultados obtidos por Campari e
Cassi [20], que podem ser resumidos como
Grafos com dimensão isoperimétrica maior do que 1 e contornos de tamanho n que
são conectáveis com não mais que nLG vértices (LG < ∞) tem uma cota superior
para o número de contornos de tamanho n do tipo Cn, para algum C > 0.
A condição dim(G) > 1 é muito mais forte que PG > 0. Com efeito, se dim(G) > 1
então existe ε > 0, tal que infS∈AG
|∂eS||S|ε
> 0. Basta agora notar que isto implica PG > 0
pois log(diam(S)) ≤ |S|ε para todo ε > 0 e |S| suficientemente grande. De acordo com a
discussão da Observação 4, a finitude de LG é equivalente a RG > 0.
Faremos agora as demostrações dos Teoremas 1.2 e 1.3.
Prova do Teorema 1.2: Lembre que se γ é um contorno emG = (V,E) e x ∈ Iγ, então
para qualquer geodésica ρ = (Vρ,Eρ) emG iniciando em x temos que Eρ∩γ , ∅. Então,
para x ∈ V, um contorno γ ∈ F nG
(x), e uma geodésica ρ iniciando em x, definimos
ex(ρ, γ) como o primeiro elo de Eρ, na ordem natural de ρ, que pertence a γ e, para
n ∈N, seja rn(x, ρ) o subconjunto de elos de ρ definido como segue.

27
rn(x, ρ) = e ∈ Eρ : ∃γ ∈ F nG(x) tal que e = ex(ρ, γ). (1.27)
Suponha que G tem uma geodésica bi-infinita δ. Escolha x, um vértice de δ, e sejam
ρ e ρ′ duas geodésicas iniciando em x tais que δ = ρ ∪ ρ′. Então, já que ρ é geodésica,
temos que |rn(x, ρ)| ≤ supγ∈F nG
dG(x, ex(ρ, γ)) e como ρ ∪ ρ′ é geodésica bi-infinita com ρ
e ρ′ iniciando em x, temos dG(x, ex(ρ, γ)) ≤ dG(ex(ρ′, γ), ex(ρ, γ)) para qualquer γ ∈ FG(x).
Além do mais, se e, e′ são dois elos quaisquer deγ ∈ FG, então temos que dG(e, e′) ≤ dtG
(γ)
e, por definição, dtG
(γ) ≤ |γ|/RG. No fim temos
|rn(x, ρ)| ≤ supγ∈F n
G(x)
dG(x, ex(ρ, γ)) ≤ supγ∈F n
G(x)
dG(ex(ρ′, γ), ex(ρ, γ))
≤ supγ∈F n
G(x)
dtG(γ) ≤
nRG≤ en/RG . (1.28)
Agora observe que
|FnG(x)| ≤
∑e∈rn(x,ρ)
|FnG(e)| ≤ |rn(x, ρ)| sup
e∈E|F
nG(e)|. (1.29)
Nós estimaremos |F nG
(e)|, i.e. o número de contornos de cardinalidade fixada n
contendo um elo fixado e. Para cada contorno γ de cardinalidade n tal que e ∈ γ,
defina como τ(γ) ⊂ G a árvore com conjunto de elos Eτ(γ) tal que |Eτ(γ)| = dtG
(γ). por
hipótese RG > 0. Isto implica que, para qualquer contorno γ com cardinalidade n,
|Eτ(γ)| = dtG
(γ) ≤ R−1G
n. Por definição γ ⊂ Eτ(γ), e existem no máximo(R−1G
nn
)≤ 2R−1
Gn
maneiras de escolher o conjunto γ em Eτ(γ). Então ficamos com
|FnG(e)| ≤
∑τ arvore em G|Eτ |=R−1
Gn, e∈τ
2R−1G
n. (1.30)
Usando o Lema 1.1 e que G tem grau máximo ∆, temos
|FnG(e)| ≤
[2∆2
]n/RG, (1.31)
28
uniformemente em e ∈ E. De (1.28) - (1.31) temos
|FnG(x)| ≤ rn, (1.32)
em que
r =[2e∆2
]1/RG(1.33)
Assim, pelo argumento de Peierls 1.2, o Teorema 1.2 está provado.
Prova do Teorema 1.3: Escolha agora um vértice x ∈ V. Já que G é conexo, infinito
e com grau limitado, existe uma geodésica ρ iniciando em x. Seja rn(x, ρ) subconjunto
de elos de ρ definido em (1.27). Como ρ é geodésica e, por hipótese PG > 0, nós temos
que para qualquer γ ∈ FG, que |γ| ≥ PG log[diam (Iγ)]. Então
|rn(x, ρ)| ≤ supγ∈F n
G(x)
diam (Iγ) ≤ en/PG . (1.34)
Como também RG > 0, nós podemos usar as cotas em (1.30) e (1.31) para concluir
que
|FnG(x)| ≤ rn, (1.35)
em que
r = e1/PG[2∆2
]1/RG. (1.36)
O Teorema 1.3 segue novamente do argumento de Peierls 1.2.
29
1.3 Desigualdades isoperimétricas e a conectividade finita
de dois pontos
1.3.1 A conectividade finita de dois pontos em grafos gerais
A afirmação abaixo é um resultado conhecido em percolação há bastante tempo.
SeG é um grafo com grau máximo ∆, então a conectividade finita de dois
pontos φfp(x, y) decai (pelo menos) exponencialmente quando dG(x, y)→∞,
se p for suficientemente pequeno.
A prova desta afirmação pode ser encontrada em Grimmett [36] (primeira parte do
Teorema 1.10). O argumento usado é para Zd, mas pode facilmente ser generalizado
para qualquer grafo de grau limitado. Essa afirmação vale para todo o regime subcrítico
em algumas classes de grafos. Podemos ver a prova deste fato para Zd na Seção 5.3
de Aizenman e Newman [1], para grafos quase-transitivos temos o Teorema 3 em
Antunovic e Veselic [6] e para grafos com Constante de Cheeger positiva veja o Teorema
5.3 em Schonmann [71].
Em Procacci e Scoppola [69], Teorema 4.1, os autores obtiveram uma cota superior
para a conectividade finita de dois pontos para o modelo de aglomerado aleatório
com parâmetros p ∈ [0, 1] e q > 0 em um grafo de grau limitado G, mostrando que a
mesma decai pelo menos exponencialmente para q fixado e p suficientemente próximo
de zero. Como o processo de percolação independente em G coincide com o modelo
de grafo aleatório no mesmo grafo, com q = 1, o Teorema 4.1 de [69] também implica a
afirmação acima. Neste mesmo trabalho, os autores estudaram também propriedades
de decaimento da conectividade de dois pontos, no modelo de aglomerado aleatório,
com parâmetros q > 0 e p ∈ [0, 1] perto de 1. No entanto, eles obtiveram uma cota
superior para a conectividade finita da forma,
C1 exp−C2 fG(x, y), (1.37)

30
em que C1 e C2 são constantes e fG(x, y) é o número definido abaixo.
Definição 1.6. Dado um grafo G = (V,E), seja x, y ∈ V. Definimos a distância contorno
fG(x, y) por
fG(x, y) = minγ∈FGγ⊙x,y
|γ|. (1.38)
Não é difícil ver que existem grafos em que a distância contorno se comporta da
seguinte maneira: fG(x, y)/dG(x, y) → 0 quando dG(x, y) → ∞, veja Exemplo 1.3.1
abaixo.
Exemplo 1.3.1. Considere o grafo G do Exemplo 1.2.5, ou seja, G = (V,E) é o grafo cujo
conjunto de vértices V é o subconjunto de Z2 dado por V = (x, y) ∈ Z2 : x ≥ 0, 0 ≤ y ≤
ln(1 + x) e o conjunto de elos E = EV. Note que fG((0, 0), (n, 0)) = |∂eWn| = bln(1 + n)c em
que Wn = (x, y) ∈ V : x ≤ n. Assim fG(x, y)/dG(x, y)→ 0 quando dG(x, y)→∞.
Definição 1.7. Dizemos que em um grafo G = (V,E) a conectividade finita de dois pontos
φ fp(x, y) decai subexponencialmente ou decai exponencialmente se
− log(φ fp(x, y))
dG(x, y)→
0
> 0(1.39)
quando dG(x, y)→∞, respectivamente.
Tendo em vista esse fato, os autores em [69] propuseram a seguinte questão.
Questão 2. Há grafos em que a conectividade finita decai subexponencialmente, mesmo quando
p está arbitrariamente próximo de 1? Isto é, podemos ter um decaimento da conectividade finita
mais lento que o decaimento exponencial?
Veremos adiante uma resposta afirmativa para essa questão, destacando assim a
relevância da distância contorno nas propriedades de decaimento da conectividade
finita de dois pontos.

31
1.3.2 Decaimento exponencial/subexponencial da conectividade finita
de dois pontos
Motivado pelas questões discutidas anteriormente, apresentaremos dois outros te-
oremas desta tese.
O primeiro deles, Teorema 1.4, nos mostra que o decaimento exponencial da conecti-
vidade finita também vale na fase supercrítica, quando p está suficientemente próximo
de 1, se nos restringimos a classe dos grafos que satisfazem a hipótese do Teorema 1.2.
Teorema 1.4. Seja G = (V,E) um grafo de grau limitado que satisfaz as hipóteses do teorema
1.2, isto é, possui geodésica bi-infinita e RG > 0. Se r =[2e∆2]1/RG , p ≥ 4r
4r+1 e x, y ∈ V são
vértices que pertencem a uma geodésica bi-infinita, então
φfp(x, y) ≤
43
[r(1 − p)
p
]RGdG(x,y)
. (1.40)
Observação 6. O decaimento exponencial da conectividade finita na fase supercrítica foi pro-
vado para Zd por Chayes, Chayes e Newman [22] (veja também [23]) e por Chen, Peres e Pete
[24] para grafos com constante de Cheeger positiva. Não é de nosso conhecimento uma prova
desse fato para grafos mais gerais que os mencionados no Teorema 1.4.
O segundo teorema, Teorema 1.5, diz respeito ao decaimento da conectividade finita
em grafos satisfazendo a hipótese do teorema 1.3. O Teorema 1.5, em particular, nos
dá uma cota inferior como (1.37) respondendo assim, afirmativamente, a Questão 2
levantada em Procacci e Scoppola [69].
Teorema 1.5. Seja G = (V,E) um grafo de grau limitado que satisfaz as hipóteses do Teorema
1.3, isto é, PG > 0 e RG > 0. Se r = e1/PG[2∆2]1/RG e p ≥ 4r
1+r , então para quaisquer x, y ∈ V
temos que13
[(1 − p)pR−1
G
] fG(x,y)≤ φ f
p(x, y) ≤43
[r(1 − p)
p
] fG(x,y)
. (1.41)
Observação 7. Note que o grafo G do Exemplo 1.3.1 é um exemplo em que a conectividade
finita em G decai subexponencialmente. De fato, o Teorema 1.5 nos diz que a conectividade

32
φ fp((0, 0), (n, 0)) em G possui a cota inferior 1
3 (1 + n)−α1(p) e a cota superior 43 (1 + n)−α2(p) com
α1(p) = | ln[(1 − p)pR−1G ]| e α2(p) = | ln[r(1 − p)p−1]|. Deste modo, o teorema acima nos diz que,
para p grande o suficiente log(φ fp(x, y))/dG(x, y)→ 0, quando dG(x, y)→∞.
Terminamos este capítulo com as demonstrações dos Teoremas 1.4 e 1.5, respecti-
vamente.
Prova do teorema 1.4: Dado um grafoG = (V,E), dizemos que a sequência VNN∈N
de subconjuntos finitos de V tende monotonicamente para V, e escrevemos VN V,
se para todo N ∈ N, VN é conexo, VN ⊂ VN+1, e ∪N∈NVN = V. Considere o grafo
GN = (VN,EN).
Sejam x, y dois vértices que pertencem a uma geodésica bi-infinita de G. Escolha
uma sequência VNN∈N que tende monotonicamente para V e suponha N grande o
suficiente para que x, y ∈ VN\∂intv VN. Podemos definir agora a conectividade finita de
dois pontos, a volume finito como
φf,Np (x, y) =
∑ω∈ΩN : ∃g aglomerado aberto
x,y⊂Vg , ∂g⊂EN
p|A(ω)|(1 − p)|F(ω)|, (1.42)
de modo que
φfp(x, y) = lim
N→∞φf,N
p (x, y), (1.43)
já que os eventos definidos nas probabilidadesφf,Np (x, y) crescem para o evento definido
em φfp(x, y).
Portanto, se obtivermos um cota superior paraφfp,N(x, y) uniformemente em N então
obteremos a mesma cota para φfp(x, y).
Denote
λ ≡ λ(p) =1 − p
p.
É imediato que podemos reescrever o lado direito de (1.42) como
33
φf,Np (x, y) =
1ZN(p)
∑ω∈ΩN : ∃g aglomerado aberto
x,y⊂Vg , ∂g⊂EN
λ|F(ω)|, (1.44)
em que
ZN(p) =∑ω∈ΩN
λ|F(ω)| = p−|EN |. (1.45)
Uma configuraçãoω ∈ ΩN é especificada se conhecemos o conjunto de elos fechados.
Se C = C(ω) é um conjunto de elos fechados em EN, nós escreveremos C x, y quando
existe um contorno γ ⊂ C tal que γx, y. Fixada uma configuraçãoω ∈ Ω, então existe
um único contorno γ contido na fronteira do aglomerado aberto (em ω) que contém
x, y. Com efeito, a fronteira do aglomerado aberto que contém x, y é um conjunto
de corte pela Definição 1.2. Se a fronteira não é um contorno, então existe um elo e da
fronteira tal queG\ (γ\e) ainda tem uma componente conexa finita que é o aglomerado
aberto de x, y. Deste modo defina γ como sendo a fronteira do aglomerado menos
esses elos. Suponha agora que exista dois contornos γ e γ′ para o aglomerado aberto
que contém x, y. Então existe um elo e ∈ γ′ tal que e < γ. Mas assim o grafo G \ γ
contém o elo e, logo G \ γ é conexo porque γ′ é contorno. Isso contradiz o fato de que
γ é contorno.
Sendo assim,
ZN(p) =∑
C⊂EN
λ|C| = p−|EN | (1.46)
e
φf,Np (x, y) =
1ZN(p)
∑C⊂ENCx,y
λ|C|. (1.47)
Portanto,
φf,Np (x, y) ≤
1ZN(p)
∑γ∈FGN (x,y)
λ|γ|∑
C⊂EN\γC∪γx,y
λ|C| ≤∑
γ∈FG(x,y)
λ|γ|. (1.48)
Usaremos agora o fato de que se x, y pertence a uma geodésica bi-infinita de G. Tal
34
geodésica bi-infinita pode ser vista como duas geodésicas ρ and ρ′, ambas iniciando
em x, tal que y < Vρ e y ∈ Vρ′ . Fixe agora um contorno γ x, y. Seja e(ρ, γ) o primeiro
elo de ρ que pertence a γ e seja e(ρ′, γ) o primeiro elo de ρ′ que pertence a γ.
Usando a hipótese RG > 0, temos
|γ| ≥ RG · dtG(γ) ≥ RG · dG(e(ρ, γ), e(ρ′, γ)) ≥ RG · dG(x, y) (1.49)
e usando (1.32) obtemos
φf,Np (x, y) ≤
∑n≥RGdG(x,y)
∑γ∈F n
G(x,y)
λ|γ| ≤∑
n≥RGdG(x,y)
λn|F
nG(x, y)|
≤
∑n≥RGdG(x,y)
λn supx∈V|F
nG(x)| ≤
∑n≥RGdG(x,y)
(rλ)n =(rλ)RGdG(x,y)
1 − rλ. (1.50)
Por fim, temos uniformemente em N,
φf,Np (x, y) ≤
43
(rλ)RGdG(x,y), para λ ≤14r
(1.51)
concluindo a demonstração do Teorema 1.4.
Prova do Teorema 1.5: Continuaremos trabalhando com a conectividade finita, a
volume finito, para obter as cotas superior e inferior da conectividade finita. Como em
(1.47) e (1.48) temos
φf,Np (x, y) ≤
1ZN(p)
∑γ∈FGN (x,y)
λ|γ|∑
C⊂EN\γC∪γx,y
λ|C| ≤∑
γ∈FG(x,y)
λ|γ|.
Lembrando a Definição 1.6 e seguindo o mesmo raciocínio em (1.50), com r definido
em (1.36) no lugar de r, temos para λ ≤ 14r e uniformemente em N,
φf,Np (x, y) ≤
∑n≥ fG(x,y)
∑γ∈F n
G(x,y)
λ|γ| ≤43
(rλ) fG(x,y). (1.52)

35
Provaremos agora a cota inferior de φf,Np (x, y). Seja γ0 um contorno tal que γ0x, y,
isto é, |γ0| = fG(x, y), e γ0 ⊂ EN (sempre podemos supor que N é suficientemente grande
para incluir este contorno). Lembre que pela definição de contorno, o conjunto EN \ γ0
é particionado em dois conjuntos disjuntos Eγ0 (o interior de elos de γ0) e EN \ (γ0∪Eγ0)
(o exterior de elos de γxy) com GIγ0= (Iγ0 ,Eγ0) sendo um grafo conexo. Seja τ0 ⊂ Eγ0 a
árvore como o número mínimo de elos em Eγ0 conectando o contorno γ0. Por hipótese,
temos |τ0| ≤ R−1G|γ0|.
Agora observe que dentre todas as configurações C de elos fechados em que Cx, y,
existem aquelas que C ⊃ γ0 e nenhum subconjunto de C pode separar x, y, e C ∩ τ0 =
∅ (ou seja, todos os elos de τ0 estão abertos). Então, somando apenas sobre estas
configurações, obtemos a seguinte cota inferior
φf,Np (x, y) ≥
λ|γ0|
ZN(p)
∑C⊂EN\γ0
C∩τ0=∅, C∪γ0x,y
λ|C|. (1.53)
Como EN \γ0 é a união disjunta de EN \ (γ0 ∪Eγ0) e Eγ0 e, observando que não existe
restrição sobre a soma de elos fechados em EN \ (γ0 ∪ Eγ0), temos
∑C⊂EN\γ0
C∩τ0 =∅, C∪γ0x,y
λ|C| = ZEN\(γ0∪Eγ0 )
∑C⊂Eγ0
C∩τ0=∅, C∪γ0x,y
λ|C|
= p|γ0|ZN
ZEγ0
∑C⊂Eγ0
C∩τ0=∅, C∪γ0x,y
λ|C| = p|γ0|ZN
ZEγ0
∑C⊂Eγ0 \τ0C∪γ0x,y
λ|C|
= p|γ0|ZN
ZEγ0
[ZEγ0\τ0 −
∑C⊂Eγ0 \τ0
C⊗x,y
λ|C|],
em que C ⊗ x, y significa que C contem algum contorno γ tal que γ ⊗ x, y.
Deste modo,
φf,Np (x, y) ≥
(λp)|γ0|
ZEγ0
[ZEγ0\τ0 −
∑C⊂Eγ0 \τ0
C⊗x,y
λ|C|]

36
= (λp)|γ0|p|τ0|
[1 −
1ZEγ0\τ0
∑C⊂Eγ0 \τ0
C⊗x,y
λ|C|]
≥
[λp1+R−1
G
]|γ0|
(1 − Kλ),
em que
Kλ =1
ZEγ0\τ0
∑C⊂Eγ0 \τ0
C⊗x,y
λ|C|.
Uma cota superior para Kλ pode ser facilmente obtida da seguinte maneira: já que
τ0 é aberto em Eγ0 e conecta o contorno γ0, a configuração C de elos fechados pode
separar x, y apenas se existe pelo menos um contorno cercando ou x ou y. Assim,
Kλ ≤1
ZEγ0\τ0
∑γ∈FG :γ⊗x,yγ⊂Eγ0 \τ0
λ|γ|∑
C⊂Eγ0 \τ0C∩γ=∅
λ|C| ≤∑γ∈FGγ⊗x,y
λ|γ|
≤ 2 supx∈V
∑γ∈FG(x)
λ|γ| ≤ 2∑n≥1
λn supx∈V|F
nG(x)|.
Utilizando agora as hipóteses RG > 0 e PG > 0 e a cota superior (1.35),
Kλ ≤ 2∑n≥1
(rλ)n = 2rλ
1 − rλ.
com isto Kλ ≤23 se λ < 1
4r .
Finalmente, temos uniformemente em N,
φf,Np (x, y) ≥
13
[λp1+R−1
G
] fG(x,y),
se λ < 14r .
Capítulo
2
O gás com interação caroço duro e o
Lema Local de Lovász algorítmico
2.1 O gás de rede com interação caroço duro
Um dos modelos mais estudados em Mecânica Estatística é o modelo do gás de rede
com interação caroço duro ∗ [8] [70] [50] [42] [19] [72] [73] [32] [65] [67] [33] [27] [17]. Este
modelo descreve os modos de alocar um gás de partículas puntuais sobre os vértices de
um grafo. Originalmente, o grafo em questão era a rede Zd. Daí o nome gás de rede, já
que este gás estaria em um ambiente espacial. As configurações da partícula possuem
duas restrições: cada vértice pode ser ocupado por no máximo uma partícula (gás auto-
repulsivo) e se há uma partícula em um vértice então todos os vértices vizinhos devem
estar desocupados (interação do tipo caroço duro entre vértices vizinhos). Assim, os
vértices deste grafo ocupados por partículas em uma configuração do modelo formam
um conjunto independente de vértices, isto é, um conjunto de vértices não-vizinhos. De
um modo geral, considere um grafo G = (X,E) que sempre será conexo e finito, no qual
cada vértice é ocupado por no máximo uma partícula e não há duas partículas ocupando
vértices vizinhos. Chamaremos nesta tese este modelo de gás de rede auto-repulsivo com
interação caroço duro em G ou gás de rede com interação caroço duro em G simplesmente gás
de rede. Cada partícula ocupando um vértice x ∈ X possui uma ”atividade” ou wx ∈ C.
∗A nomenclatura usual em inglês é the hard core lattice gas.
37

38
Podemos interpretar fisicamente atividades positivas como uma densidade, ”a priori”,
das partículas em X. Denotamos todas as atividades de G = (X,E) por w = wxx∈X.
Daqui em diante sempre identificaremos w como um elemento de CX ((0,∞)X), isto é,
uma função w : X→ C ( w : X→ (0,∞)). As operações entre estas funções serão entre
as coordenadas: por exemplo, a expressãow < ρ significa que wx < ρx para todo x ∈ X.
Geralmente atividades positivas, ou seja, o contra-domínio de w é o intervalo (0,∞),
tem interesse em aplicações físicas ou quando estamos interessados em questões sobre
a convergência de séries como (2.2), por exemplo.
Para w ∈ C, a função partição grande canônica do gás de rede em G é definida por
ΞX(w) =∑
I⊂XI independente
∏x∈I
wx, (2.1)
ou seja, ΞX(w) coincide com o polinômio de conjuntos independentes de G.
O modelo do gás de rede (auto-repulsivo) com interação caroço duro pode ser visto
em um contexto mais geral conhecido como o modelo do gás de polímeros abstratos. Ori-
ginalmente proposto por Gruber e Kunz [42], em que os polímeros eram subconjuntos
finitos da rede Zd, o modelo do gás de polímeros abstratos proposto por Kotechý e
Preiss [50] define os polímeros como objetos abstratos de um conjunto enumerável P,
ao invés de partículas em subconjuntos independentes de vértices do grafo (gás de
rede) ou subconjuntos finitos disjuntos de Zd (Gruber e Kunz [42]). O conjunto dos
polímeros P possui uma relação reflexiva e simétrica / chamada relação de incompatibi-
lidade . Dizemos que os polímeros γ, γ′ ∈ P são incompatíveis se γ / γ′. Caso contrário,
quando γ ∼ γ′, dizemos que γ e γ′ são compatíveis. Note que o gás de rede em um grafo
G = (X,E) pode ser visto como um gás de polímeros abstratos em G, em que o conjunto
de polímeros P é o conjunto de vértices X e dois polímeros x, y ∈ X são incompatíveis
se x = y ou x, y ∈ E. Como será importante vermos o gás de rede como um gás de
polímeros abstratos, escrevemos a seguir a função partição grande canônica do gás de
rede em G em termos da relação de incompatibilidade.
Para w ∈ C,
39
ΞX(w) = 1 +
∞∑n=1
1n!
∑(x1,...,xn)∈Xn
wx1 . . . wxn
∏1≤i< j≤n
1xi∼x j. (2.2)
Observe que ΞX(w) é uma função inteira em CX em que vale |ΞX(w)| ≤ e∑
x∈X |wx|.
A pressão do gás de polímeros, a volume finito, é definida por
PX(w) =log(ΞX(w))|X|
. (2.3)
Transições de fase tais como a não analiticidade de potenciais termodinâmicos
ocorrem no limite termodinâmico, isto é, o modelo em um grafo infinito G obtido
como um limite de modelos em grafos finitos Gn tais que G = ∪Gn. Assim o objetivo é
controlar a série da pressão uniformemente em X. Uma das principais técnicas que nos
dão grande conhecimento sobre os coeficientes de tais séries é a expansão em aglomerados
ou expansão em polímeros †. A seguir discutiremos a expansão do gás de rede sobre um
grafo finito G.
2.2 A expansão do gás auto-repulsivo com interação caroço
duro em um grafo
Nos concentraremos daqui em diante no modelo do gás de polímeros em um grafo
finito G = (X,E). Ou seja, nosso conjunto de polímeros é o conjunto de vértices de G
e dois vértices x e y são incompatíveis se x, y ∈ E ou x = y e que x e y são compatíveis
se x, y < E e x , y. Vale a pena lembrar que a nossa notação para dois vértices x, y
vizinhos em G (x e y são incompatíveis), x / y, amplamente utilizada pelos Físico-
Matemáticos, é o oposto da usual notação em teoria dos grafos.
A principal função que estudaremos neste capítulo é definida abaixo.
Πx0(w) =∂∂wx0
log ΞX(w). (2.4)
†A nomenclatura usual em inglês é cluster expansion.

40
A quantidade wxΠx(w) pode ser interpretada do ponto de vista físico, pelo menos
para atividades positivas, como a função de correlação de um ponto do gás de rede
com interação caroço duro, ou seja, a probabilidade de ver a partícula no vértice x
desconsiderando onde estão as outras partículas. Veremos mais adiante que Πx0(w)
tem um importante papel na convergência da pressão do gás de rede.
Um resultado amplamente conhecido e utilizado em Mecânica Estatística é o fato
que a função log ΞX(w), e portanto PX(w) e Πx0(w), pode ser escrita em termos de séries
formais. Tais séries são conhecidas como a expansão em aglomerados do gás de rede ou
séries de Mayer.
Teorema 2.1. (Série de Mayer) [70] [8] [17] [75] [66] Seja Gn o conjunto de todos os grafos
conexos com conjunto de vértices In = 1, . . . ,n. Para (x1, . . . , xn) ∈ Xn, denotamos por
g(x1, . . . , xn) o grafo com conjunto de vértices In e conjunto de elos Eg(x1,...,xn) = i, j : xi /
x j (xi, x j ∈ E) . Seja g ∈ Gn um grafo com conjunto de elos denotado por Eg.
Então,
log ΞX(w) =
∞∑n=1
1n!
∑(x1,...,xn)∈Xn
φT(x1, . . . , xn) wx1 . . . wxn , (2.5)
em que φT(x1, . . . , xn) é definido por
φT(x1, . . . , xn) =
1, se n = 1,∑g∈Gn
g⊂g(x1 ,...,xn)
(−1)|Eg|, se n ≥ 2 e g(x1, . . . , xn) ∈ Gn,
0, se n ≥ 2 e g(x1, . . . , xn) < Gn.
(2.6)
Os coeficientes cn(X) de Mayer da expansão são dados por
cn(X) =1n!
∑(x1,...,xn)∈Xn
φT(x1, . . . , xn). (2.7)
Prova: Temos que
ΞX(w) = 1 +
∞∑n=1
1n!
∑(x1,...,xn)∈Xn
wx1 . . .wxn
∏1≤i< j≤n
1xi∼x j =

41
= 1 +
∞∑n=1
1n!
∑(x1,...,xn)∈Xn
wx1 . . .wxn
∏1≤i< j≤n
[(1xi∼x j − 1
)+ 1
]. (2.8)
Desenvolvemos agora o produto
∏1≤i< j≤n
[(1xi∼x j − 1
)+ 1
]. (2.9)
Podemos ver que o produto acima pode ser reescrito como
∏1≤i< j≤n
[(1xi∼x j − 1
)+ 1
]=
∑g∈Gn
∏i, j∈Eg
[1xi∼x j − 1
](2.10)
Em queGn é o conjunto de todos os grafos, conexos ou não, com conjunto de vértices
In = 1, 2 . . . ,n. Em Gn nós também incluimos o grafo vazio , isto é, o grafo g tal que
Eg = ∅. Sua contribuição é o fator 1 no desenvolvimento do produto.
Agora nós reorganizamos a soma sobre Gn.
Para 1 ≤ k ≤ N, seja I1, I2, . . . , Ik uma partição do conjunto In = 1, 2 . . . ,n. Deno-
tamos por xI j o conjunto de coordenadas xi com i ∈ I j.Também denotamos por Πn o
conjunto de todas as partições do conjunto 1, 2 . . . ,n. Podemos então ver que
∑g∈Gn
∏i, j∈g
[1xi∼x j − 1
]=
n∑k = 1
∑I1,I2,...,Ik∈Πn
k∏j = 1
φT(xI j) (2.11)
em que
φT(xI j) =
∑
g∈GI j
∏i, j∈Eg
[1xi∼x j − 1
]se |I j| ≥ 2
1 se |I j| = 1
e GI j é o grafo conexo cujo conjunto de vértices é I j.
Portanto,
ΞX(w) = 1 +
∞∑n=1
1n!
∑x1∈X
wx1 · · ·
∑xn∈X
wxn
n∑k = 1
∑I1,I2,...,Ik∈Πn
k∏j = 1
φT(xI j). (2.12)
Observe que cada φT(xI j) depende apenas do conjunto de coordenadas xi com i ∈ I j. Já

42
que I1, . . . , Ik é uma partição de 1, . . . ,n, nós podemos escrever
∑x1∈X
· · ·
∑xn∈X
=∑
x∈X|I1 |
· · ·
∑x∈X|Ik |
. (2.13)
Assim,
ΞX(w) = 1 +
∞∑n=1
1n!
n∑k = 1
∑I1,I2,...,Ik∈Πn
k∏j = 1
∑x∈X|I j |
wxI jφT(xI j). (2.14)
Observe que o fator
∑x∈X|I j |
wxI jφT(xI j) =
∑x1∈X
wx1 · · ·
∑x|I j |∈X
wx|I j |φT(x1, . . . , x|I j|). (2.15)
depende apenas de |I j| e não mais de xi ou mesmo I j, já que i ∈ I j são índices relacionados
a variáveis mudas. Sendo assim escrevemos,
Φ(|I j|) =∑
x∈X|I j |
wxI jφT(xI j). (2.16)
Note que os números |I j| são inteiros positivos sob a condição∑n
j = 1 |I j| = n. Portanto,
ΞX(w) = 1 +
∞∑n=1
1n!
n∑k = 1
∑I1,I2,...,Ik∈Πn
k∏j = 1
Φ(|I j|). (2.17)
Veja agora que
∑I1,I2,...,Ik∈ΠN
k∏j = 1
Φ(|Ii|) =1k!
∑m1 ,...,mk : mi≥1mi+···+mk = n
∑I1 ,...,Ik :
|I1 |=m1 ,...,|Ik |=mk
k∏j = 1
Φ(mi) =
=1k!
∑m1 ,...,mk : mi≥1mi+···+mk = n
k∏j = 1
Φ(mi)∑I1 ,...,Ik :
|I1 |=m1 ,...,|Ik |=mk
1 =
=1k!
∑m1 ,...,mk : mi≥1mi+···+mk = n
k∏j = 1
Φ(m j)n!
m1! . . .mk!

43
pois ∑I1 ,...,Ik :
|I1 |=m1 ,...,|Ik |=mk
1 =n!
m1! . . .mk!,
isto é, n!/(m1! . . .mk!) é o número de partições de In em k subconjuntos I1, ..., Ik tais que
|I1| = m1, ..., |Ik| = mk, respectivamente. Note também que dividimos por k! pois a mesma
partição I1, . . . Ik de In aparece exatamente k! vezes na soma abaixo
∑m1 ,...,mk : mi≥1mi+···+mk=n
k∏j=1
∑I1 ,...,Ik :
|I1 |=m1 ,...,|Ik |=mk
(2.18)
Portanto podemos escrever
ΞX(w) = 1 +
∞∑n=1
1n!
n∑k = 1
1k!
∑m1 ,...,mk : mi≥1m1+···+mk = n
n!m1! . . .mk!
k∏j = 1
Φ(n j) =
= 1 +
∞∑n = 1
n∑k = 1
1k!
∑m1 ,...,mk : mi≥1m1+···+mk = n
1m1! . . .mk!
k∏j = 1
Φ(m j) =
= 1 +
∞∑k = 1
1k!
k∏j = 1
∑m j≥1
Φ(m j)m j
= 1 +
∞∑k = 1
1k!
∞∑m = 1
Φ(m)m!
k
,
ou seja, encontramos que
ΞX(w) = 1 +
∞∑k = 1
1k!
∞∑n = 1
Φ(n)n!
k
= exp
∞∑
n = 1
Φ(n)n!
.
Deste modo,
log ΞX(w) =
∞∑n = 1
Φ(n)n!
=
∞∑n = 1
1n!
∑x1∈X
wx1 · · ·
∑xn∈X
wxnφT(x1, . . . xn) =
=
∞∑n=1
1n!
∑(x1,...,xn)∈Xn
φT(x1, . . . , xn) wx1 . . . wxn .
o que conclui a prova do teorema.
44
Uma importante propriedade dos números φT(x1, . . . , xn) definidos em (2.6) é
φT(x1, . . . , xn) = (−1)n−1|φT(x1, . . . , xn)|. (2.19)
A prova desta propriedade, amplamente conhecida na literatura como "alternating sign
property", será uma consequência da Identidade de Penrose. Veremos a demonstração
na Proposição 2.4, Corolário 2.6.2.
A propriedade (2.19) nos permite investigar questões sobre a convergência da série
de Mayer e da função definida em (2.23). Com efeito, primeiro observe que
∑(x1 ,x2 ,...,xn)∈Xn
∃ i:xi=x0
1 =∑
(x1=x0,x2,...,xn)∈Xn
nmx0(x1, . . . , xn)
, (2.20)
em que mx0(x1, . . . , xn) = |i ∈ In : xi = x0|. Sejaw = wxx∈X, com wx ∈ C para todo x ∈ X.
Temos pelo Teorema 2.1 que
log ΞX(w) =
∞∑n=1
1n!
∑(x1,...,xn)∈Xn
φT(x1, . . . , xn) wx1 . . . wxn . (2.21)
Assim,
∂∂wx0
log ΞX(w) =
∞∑n=1
1n!
∑(x1,...,xn)∈Xn
φT(x1, . . . , xn)∂∂wx0
[ wx1 . . . wxn] =
=
∞∑n=1
1n!
∑(x1 ,...,xn)∈Xn
∃ i:xi=x0
φT(x1, . . . , xn)∂∂wx0
[ wx1 . . . wxn] =
=
∞∑n=1
1n!
∑(x1=x0,...,xn)∈Xn
nmx0(x1, . . . , xn)
φT(x1, . . . , xn)mx0(x1, . . . , xn) wx2 . . . wxn =
=
∞∑n=1
1(n − 1)!
∑(x1=x0,...,xn)∈Xn
φT(x1, . . . , xn) wx2 . . . wxn =
=
∞∑n=0
1n!
∑(x1,...,xn)∈Xn
φT(x0, . . . , xn) wx1 . . . wxn . (2.22)

45
Portanto temos que
Πx0(w) =∂∂wx0
log ΞX(w) =
∞∑n=0
1n!
∑(x1,...,xn)∈Xn
φT(x0, x1, . . . , xn)wx1 . . .wxn . (2.23)
As igualdades (2.21) e (2.23) fazem sentido apenas para aqueles w ∈ CX em que as
séries formais do lado direito de (2.21) e (2.23) convergem absolutamente.
Para obtermos uma cota sobre a pressão do gás de rede, observe que
| log ΞX(w)| ≤∞∑
n=1
1n!
∑(x1,...,xn)∈Xn
|φT(x1, . . . , xn)| |wx1 . . . wxn | ≤
≤
∑x0∈X
|w0|
∞∑n=1
1n!
∑(x1,...,xn)∈Xn
|φT(x0, x1, . . . , xn)| |wx1 . . . wxn | =
=∑x0∈X
|w0|
∞∑n=0
1(n + 1)!
∑(x0,x1,...,xn)∈Xn
|φT(x0, x1, . . . , xn)| |wx1 . . . wxn | ≤
≤
∑x0∈X
|w0|
∞∑n=0
1n!
∑(x0,x1,...,xn)∈Xn
|φT(x0, x1, . . . , xn)| |wx1 . . . wxn | ≤ |X| |wx0 |Πx0(w). (2.24)
Veja agora que através da ”alternating sign property” (2.19) temos, para ρ ∈ (0,∞)X,
que
Πx0(−ρ) =
∞∑n=0
1n!
∑(x1,...,xn)∈Xn
|φT(x0, x1, . . . , xn)|ρx1 . . . ρxn . (2.25)
Logo, se Πx0(−ρ) converge para algumρ ∈ (0,∞)X então Πx0(w) converge absolutamente
no polidisco |w| < ρ e a pressão definida em (2.3) possui a cota uniforme em X
|PX(w)| =| log ΞX(w)||X|
≤ supx0∈X
ρx0 Πx0(−ρ). (2.26)
Definição 2.1. O conjunto
R(G) = ρ ∈ [0,∞)|X| : Πx0(−ρ) < +∞ (2.27)
46
é chamado a região de convergência da expansão em aglomerados. Note que R(G) possui a
propriedade que se ρ ∈ R(G) e ρ′ ≤ ρ então ρ′ ∈ R(G).
Cotas sobre R(G) tem sido um tema bastante estudado nas últimas décadas em
Mecânica Estatística. Veja por exemplo [19], [42], [50], [32], [73], [33] e [17]. Um dos
resultados mais importantes nessa direção é o critério de Dobrushin [27], que pode ser
posto da maneira a seguir.
Teorema 2.2 ( Dobrushin). Seja G = (X,E) um grafo finito. Para cada x ∈ X, seja ΓG(x) o
conjunto dos vértices adjacentes ao vértice x em G e Γ∗G(x) = ΓG(x) ∪ x. Seja R(G) a região
de convergência da expansão em polímeros do gás de rede com interação caroço duro em G. Seja
µ = (µx)x∈X números reais não negativos. Se ρ = (ρx)x∈X é tal que , para todo x ∈ X
ρx ≤µx∏
y∈Γ∗G(x)(1 + µy)(2.28)
então ρ ∈ R(G) e
ρxΠx(−ρ) ≤ µx.
O critério de Dobrushin tem grande relevância devido a simplicidade da prova
indutiva proposta por Dobrushin em relação às demonstrações precedentes.
Em 2007, Fernández e Procacci mostraram em [32] uma cota melhor que a de
Dobrushin para a região de convergência da expansão em polímeros. Neste trabalho,
com uma abordagem distinta à de Dobrushin, os autores utilizaram identidades do
tipo grafo-árvore para estudar a convergência da expansão em polímeros. A seguir,
enunciamos o critério de Fernández-Procacci.
Teorema 2.3 (Fernández-Procacci). Sobre as mesmas hipóteses do Teorema 2.2, seρ = (ρx)x∈X
é tal que, para todo x ∈ X
ρx ≤µx∑
R⊆Γ∗G(x)
R indep in G
∏x∈R µx
(2.29)
então ρ ∈ R(G) e
ρxΠx(−ρ) ≤ µx.

47
Observe que o Teorema 2.3 de Fernández e Procacci é de fato um critério melhor
que o de Dobrushin. Com efeito, a desigualdade
∏y∈Γ∗G(y)
(1 + µy) =∑
R⊆Γ∗G(x)
∏x∈R
µx ≥
∑R⊆Γ∗G(x)
R indep in G
∏x∈R
µx.
nos fornece um intervalo maior no qual a expansão de polímeros é convergente, já que
a soma do lado direito da igualdade acima é sobre conjuntos independentes de Γ∗G(x).
2.3 O Lema Local de Lovász
O "Método de Erdös"ou Método Probabilístico [3] é um dos principais assuntos
desenvolvidos por Paul Erdös no século passado. O método probabilístico é uma
importante ferramenta em mostrar a existência de certos objetos em combinatória. A
ideia é baseada na construção de apropriados espaços de probabilidade de forma que
tais objetos tenham probabilidade positiva de ocorrer. Um dos principais resultados
nesta direção é o Lema Local de Lovász, obtido por Erdös e Lovász em [29].
Usualmente, no contexto do Lema Local de Lovász, temos uma coleção finita de
eventos ”ruins” ou ”indesejáveis” A1, . . . ,An. Denote Ai o evento complementar de
Ai. O objetivo é mostrar que P(A1 ∩ · · · ∩ An) > 0, ou seja, nenhum dos eventos
indesejáveis ocorrem com probabilidade positiva. Problemas em colorações de grafos
em que proibimos certas configurações são um clássico exemplo em que aplicamos
o lema. Neste caso as "configurações proibidas"são os "eventos ruins"que queremos
evitar.
Há dois casos triviais em que podemos garantir isso. Se∑n
1 P(Ai) < 1, então fa-
cilmente a probabilidade de nenhum dos eventos ruins acontecerem é positiva pois
P(A1 ∩ · · · ∩ An) = 1−P(∪ni=1Ai) ≥ 1−
∑n1 P(Ai). O outro caso trivial é quando os eventos
A1, . . . ,An são independentes, não-vazios com P(Ai) < 1 para todo i ∈ 1, . . . ,n. Neste
caso, facilmente também temos P(A1 ∩ · · · ∩ An) =∏n
i=1[1 − P(Ai)] > 0.
Sendo assim, pode-se perguntar se algum resultado similar vale quando permitimos
certas dependências. De fato, o Lema Local de Lovász é a ferramenta que trata as

48
situações entre os casos triviais discutidos acima. Discutiremos até o fim desta seção
o Lema Local de Lovász e a prova de sua versão mais geral devido a Joel Spencer em
[77].
Definição 2.2. Considere (Ω,P,P) um espaço de probabilidade e G = (X,E) um grafo finito.
Seja ΓG(x) o conjunto dos vértices adjacentes ao vértice x ∈ X e Γ∗G(x) = ΓG(x) ∪ x. Dizemos
que o grafo G é um grafo de depêdencia para a família de eventosA = Axx∈X se, para cada
x ∈ X, o evento Ax é mutuamente independente da coleção Ay ∈ A : y ∈ X \ Γ∗(x).
Note que o grafo de dependência não é único. Por exemplo, o grafo obtido ao
adicionarmos um elo no grafo de dependência para uma família de eventos ainda é um
grafo de dependência para esta família.
Lembre que A sempre denotará o complementar de um evento A.
Teorema 2.4 (Erdös-Lovász). Seja G = (X,E) uma grafo de dependência para a coleção de
eventosA = Axx∈X. Seja ∆ o grau máximo de G e P(Ax) = px para todo x ∈ X. Se 4px∆ < 1,
para todo x ∈ X, então P(⋂
x∈X Ax) > 0.
Tanto a demonstração do teorema acima quanto a demostração da versão mais geral
em Spencer [77] são por indução. Apresentaremos a seguir esta versão mais geral do
Lema Local de Lovász e sua demonstração.
Teorema 2.5 (Lema Local de Lovász). Seja G = (X,E) uma grafo de dependência para a
coleção de eventosA = Axx∈X e suponha que existam números rxx∈X em [0, 1) tais que, para
cada x ∈ X,
P(Ax) = px ≤ rx
∏y∈Γ(x)
(1 − ry). (2.30)
Então P(⋂
x∈X Ax
)≥
∏x∈X(1 − rx) > 0.
Prova: Sem perda de generalidade, seja X = 1, . . . ,n. A ideia é que a ocorrência de
alguns eventos A j podem atrapalhar a ocorrência de algum evento Ai. Como queremos
que nenhum dos eventos em A ocorra, precisamos então de limitar superiormente a
probabilidade de Ai ocorrer condicionado a outros eventos não ocorrerem.
Primeiro provamos a seguinte afirmação.

49
Afirmação 2.3.1. Para todo subconjunto S ⊆ X, com i < S, temos
P(Ai
∣∣∣⋂j∈S
A j
)≤ ri. (2.31)
A demonstração é por indução. Se S = ∅, então a afirmação segue diretamente
da hipótese. Suponha então que a afirmação vale para todo subconjunto S′ ⊂ S, com
S′ , S. Defina os subconjuntos S1 = S ∩ Γ(i) e S2 = S \ S1, ou seja, temos S = S1 ∪ S2.
Observe que a afirmação vale se S1 = ∅, pois neste caso Ai é independente dos eventos
A j j∈S. Deste modo, suponha que S1 , ∅. Temos que
P(Ai
∣∣∣⋂j∈S
A j
)=
P(Ai ∩
⋂l∈S1
Al
∣∣∣⋂k∈S2Ak
)P(⋂
l∈S1Al
∣∣∣⋂k∈S2Ak
) (2.32)
Como Ai é independente dos eventos⋂
k∈S2Ak, o numerador pode ser limitado por
P(Ai ∩
⋂l∈S1
Al
∣∣∣⋂k∈S2
Ak
)≤ P
(Ai|
⋂k∈S2
Ak
)= P(Ai) ≤ ri
∏j∈Γ(i)
(1 − r j). (2.33)
Para a cota sobre o denominador, suponha que S1 = j1, . . . , jl. Então, pela hipótese
de indução temos
P(A j1 ∩ · · · ∩ A jl
∣∣∣⋂k∈S2
Ak
)= P
(A j1
∣∣∣⋂k∈S2
Ak
)P(A j2
∣∣∣A j1 ∩
⋂k∈S2
Ak
)× . . .
· · · × P(A jr
∣∣∣A j1 ∩ · · · ∩ A jl−1 ∩
⋂k∈S2
Ak
)≥ (1 − r j1)(1 − r j2) . . . (1 − r jl)
≥
∏j∈Γ(i)
(1 − r j). (2.34)
A afirmação então está provada a partir das desigualdades 2.33 e 2.34.
A prova do lema agora segue facilmente, já que
P( n⋂
i=1
Ai
)= P(A1)P(A2|A1) . . .P(An|A1 ∩ · · · ∩ An−1) ≥
n∏i=1
(1 − ri). (2.35)

50
Geralmente uma versão mais simples do teorema acima é utilizada na maioria das
vezes. Chamada às vezes de versão simétrica do Lema Local de Lovász, ela caracteriza-
se supondo que todos os eventos tem a mesma probabilidade p = supx∈X P(Ax) e que
o grafo de dependência G possui grau máximo ∆. Isso nos permite ignorar, de certa
forma, as nuances do grafo de dependência e assim aplicar de maneira imediata o
teorema.
Corolário 2.3.1 (Lema Local de Lovász simétrico). Seja G = (X,E) uma grafo de dependên-
cia para a coleção de eventos A = Axx∈X, com grau máximo ∆ e P(Ax) = p = supx∈X P(Ax)
para todo x ∈ X. Se p(∆ + 1)e < 1 então P(⋂
x∈X Ax
)≥
∏x∈X(1 − rx) > 0.
Prova: Tome rx = 1∆+1 para todo x ∈ X. O resultado segue do fato que os números
rxx∈X satisfazem a hipótese (2.30) do Lema Local de Lovász 2.5. Com efeito, pela
hipótese do corolário,
P(Ax) = p ≤1
(∆ + 1)e≤
1∆ + 1
(1 +
1∆
)−∆=
1∆ + 1
( ∆
∆ + 1
)∆≤ rx
∏y∈Γ(x)
(1 − ry). (2.36)
Note que na demonstração do Lema Local de Lovász, o fato que Ai não depende
dos eventos com índices em S2 nos permite generalizar o Lema Local de Lovász na
situação em que temos alguma dependência de Ai com estes eventos.
Terminamos essa seção dando um exemplo de como podemos aplicar o Lema Local
de Lovász.
Exemplo 2.3.1. Lembre que um hipergrafo H = (X,E) é um par em que X é o conjunto
de vértices e E, o conjunto dos hiperelos, é um conjunto de subconjuntos não-vazios de X.
Dizemos que H é 2-colorido se podemos colorir os vértices de H com 2 cores e nenhum elo é
monocromático.
Proposição 2.1. SejaH = (X,E) um hipergrafo finito no qual todo hiperelo tem pelo menos k
vértices e intercepta no máximo ∆ outros hiperelos. Se e(∆ + 1) < 2k−1 entãoH é 2-colorido.
Prova: Vamos colorir independentemente cada vértice de H de azul ou branco, com pro-
babilidade 12 . Para cada hiperelo g de H , seja Ag o evento que o hiperelo g é monocromático.

51
Note que os eventos Agg∈E são os eventos ruins que queremos evitar e que o evento bom, isto é,
o evento que nenhum deles ocorrem é ∩g∈EAg. Claramente a probabilidade de Ag é no máximo
p = 21−k. Como os eventos Ag são independentes de todos A f , exceto daqueles (no máximo)
∆ eventos que f intercepta g e ep(∆ + 1) < 1, o Lema Local de Lovász 2.3.1 implica que a
probabilidade do evento bom ocorrer é positiva.
2.4 A conexão com a Mecânica Estatística
O Lema Local de Lovász 2.5 em Spencer [77] foi independentemente descoberto
por Dobrushin em [27], [28]. De fato, o critério de Dobrushin no Teorema 2.2 para a
convergência da expansão em polímeros coincide com as hipóteses do Lema Local de
Lovász. Com a mudança de variáveis
µx =rx
1 − rx, µx ∈ [0,∞) ou rx =
µx
1 + µx, rx ∈ [0, 1), ∀x ∈ X, (2.37)
é facil ver que a condição de Dobrushin
px ≤µx∑
R⊆Γ∗G(x)
∏x∈R µx
=µx∏
y∈Γ∗G(x)(1 + µy)(2.38)
é equivalente a condição do Lema Local de Lovász 2.5
px ≤ rx
∏y∈ΓG(x)
(1 − ry). (2.39)
Apesar de, a priori, a única relação entre o critério de Dobrushin e o Lema Local
de Lovász seja apenas essa relação entre as respectivas hipóteses, as relações aqui de
fato vão mais além. Scott e Sokal em [72] elucidaram essa questão. Neste trabalho
os autores perceberam que o antigo resultado de Shearer [71] sobre o Lema Local de
Lovász pode ser escrito como o critério de convergência de Dobrushin. Tal fato ficará
claro ao expormos o resultado de Shearer.
A seguir definimos a medida de Shearer.

52
Definição 2.3 (Medida de Shearer). Seja G = (X,E) um grafo finito e ΩX = 0, 1X. Para
S ⊆ X, denote o conjunto Z ∈ ΩX : Zk = 1 ∀i ∈ S, Z j = 0 ∀ j ∈ X \ S ≡ ZS = 1,ZX\S = 0.
Seja p ∈ [0, 1]X. A medida de Shearer em ΩX é a medida com sinal PX,p definida na
σ-álgebra das partes de ΩX, dada por,
PX,p(ZS = 1,ZX\S = 0) ≡ P(S) =∑
S⊆T⊆X:T independente
(−1)|T|−|S|∏i∈T
pi. (2.40)
para todo S ⊆ X. Aqui convencionamos que a soma e o produto de zero parcelas é igual a 0 e 1
respectivamente.
Proposição 2.2. A medida de Shearer tem massa total 1 e pode ser escrita como
P(S) = PX,p(ZS = 1,ZX\S = 0) = (−1)|S|ΞX(−p; S). (2.41)
em que ΞX(−p; S) =∑
S⊆T⊆X:T independente
(−1)|T|∏i∈T
pi.
Prova: Temos facilmente que
P(S) =∑
S⊆T⊆X:T independente
(−1)|T|−|S|∏i∈T
pi = (−1)|S|ΞX(−p; S).
Lembrando que∑
S: S⊆T(−1)|S| = 1 ou 0 se T = ∅ ou T , ∅, respectivamente, temos que a
massa total
∑S⊆X
P(S) =∑S⊆X
∑S⊆T⊆X:
T independente
(−1)|T|−|S|∏i∈T
pi
=∑
T⊆X independente
(−1)|T|∏i∈T
pi
∑S:S⊆T
(−1)−|S| = 1.
Note que se P(S) ≥ 0 para todo S ⊆ X na proposição acima, então temos que a
medida de Shearer é uma medida de probabilidade.
Apresentaremos agora o Teorema 1 de Shearer [71] que foi reformulado por Scott e
Sokal em [72]. A prova da parte a) segue como em [72] e a demonstração da parte b) é

53
inspirada em [78]. O Teorema de Shearer 2.6 abaixo nos diz que a medida de Shearer
2.3 com parâmetro p é uma probabilidade se p está dentro da região de convergência
da expansão em polímeros.
Teorema 2.6 (Shearer). Considere A = Axx∈X uma família de eventos em algum espaço
de probabilidade e G = (X,E) o grafo de dependência como na definição 2.2. Suponha que
p = px∈X ∈ [0, 1]X são tais que para todo x ∈ X, temos
P(Ax) ≤ px. (2.42)
a) Se p ∈ R(G), então
P(∩x∈X Ax
)≥ PX,p(ZX = 0) = ΞX(−p) > 0. (2.43)
b) Se p < R(G), então existe um espaço de probabilidade (ΩX,P(ΩX), P) , tal que G é grafo
de dependência para a família de eventos Zx = 1x∈X deste espaço e P(ZX = 0) = 0.
Prova de a): Veja que se R ⊆ X é independente, então
PX,p(ZR = 1) =∑R⊆S
P(S) =∑R⊆S
∑S⊆T:
T independente
(−1)|T|−|S|∏i∈T
pi =
=∑R⊆T:
T independente
(−1)|T|∏i∈T
pi
∑R⊆S⊆T
(−1)|S| =∏i∈R
pi,
em que∑
R⊆S⊆T(−1)|S| = 1 ou 0, se T = R ou T , R respectivamente. Deste modo, se a
medida de Shearer é uma probabilidade, então G também é um grafo de dependência
para a família de eventos Zx = 1x∈X em ΩX.
Para K ⊆ X, defina
PK = P(∩x∈K Ax
)(2.44)
e
PK = PX,p(ZK = 0). (2.45)

54
Note que podemos escrever PK como
PK =∑S⊆K
P(S) =
=∑S⊆K
∑S⊆T:
T independente
(−1)|T|−|S|∏i∈T
pi =∑
T independente
(−1)|T|(∏
i∈T
pi
)( ∑S⊆K∩T
(−1)|S|)
=
=∑
T independente:K∩T=∅
(−1)|T|∏i∈T
pi =∑
T independente:T⊆K
(−1)|T|∏i∈T
pi ≡ ΞX(−p1K). (2.46)
Assim, já que por hipótese p ∈ R(G), temos que PK > 0 para todo K poisR(G) possui
a propriedade de conter todos os p′ ≤ p.
Provaremos por indução em |K| que PK/PK é não decrescente em K. Convencio-
namos que P∅/P∅ = 1, e temos que Px/Px = 1. Se y < K, então por (2.42) temos
que
PK∪y = PK − P(Ay ∩
⋂j∈K
A j
)≥ PK − P
(Ay ∩
⋂j∈K\Γ(y)
A j
)= PK − pyPK\Γ(y). (2.47)
Na última igualdade usamos o fato que y < K é independente de K \ Γ(y) em G, logo os
eventos Ay e ∩ j∈K\Γ(y)A j são independentes. Temos também, pela igualdade (2.46), que
PK∪y =∑
S⊆K∪y:S independente
(−1)|S|∏x∈S
px = PK − py
∑S⊆K\Γ(y):
S independente
(−1)|S|∏x∈S
px = PK − pyPK\Γ(y). (2.48)
Pela hipótese de indução temos que
PK
PK≥PK\Γ(y)
PK\Γ(y). (2.49)
Sendo assim, pela desigualdade (2.47) e a identidade (2.48),

55
PK∪yPK−PK∪yPK ≥ (PK−pyPK\Γ(y) )PK−( PK−pyPK\Γ(y) )PK = py(PKPK\Γ(y)−PKPK\Γ(y) ) ≥ 0,
(2.50)
isto é,
PK∪y
PK∪y≥PK
PK. (2.51)
Portanto, PX/PX ≥ P∅/P∅ = 1 e assim, PX = P(∩x∈X Ax
)≥ PX = PX,p(ZX = 0)
Prova de b): Seja p < R(G). Como 0 ∈ R(G), o segmento de reta entre 0 e p
deve cruzar a fronteira de R(G) em algum vetor λ. Dentre várias propriedades sobre
R(G) provadas na seção 2.4 em [72], temos que um delas é ΞX(−λ) = 0. Seja então
r ∈ [0, 1]X que satisfaz 1 − r = (1 − λ)(1− p). Seja Y ∈ ΩX = 0, 1X com medida PX,λ e,
independentemente de Y, defina W ∈ ΩX cuja a distribuição é o produto de variáveis
aleatórias de Bernoulli independentes de parâmetro px para cada x ∈ X. Defina agora
um acoplamento destes modelos como Z = Y ∨ W, isto é, para cada x ∈ X, temos
Zx = maxYx,Wx.
Veja que
P(ZX = 0) = P(YX = 0,WX = 0) = PX,λ(YX = 0)∏x∈X
(1 − px)
= ΞX(−λ)∏x∈X
(1 − px) = 0. (2.52)
Para terminar, vejamos que P é uma probabilidade, definida na σ-álgebra P(ΩX) das
partes de ΩX, com grafo de dependência G para os eventos Zx = 1x∈X. Note que
P(Zx = 1) = 1− (1− λx)(1− px) = rx e que se e = x, y é um elo de G então P(Ze = 1) = 0.
Portanto, como observado em [78], isto caracteriza PX,r(ZS = 1,ZX\S = 0) = P(ZS =
1,ZX\S = 0) ≥ 0 e assim P(S) ≡ P(ZS = 1,ZX\S = 0) tem massa total 1 pela Proposição
2.2. O fato que G é grafo de dependência para P(S) segue da definição da medida de
Shearer e da independência do modelo W.

56
Corolário 2.4.1. Considere A = Axx∈X uma família de eventos em algum espaço de proba-
bilidade e G = (X,E) o grafo de dependência com P(Ax) = px para todo x ∈ X. Se a série de
Taylor de log ΞX(w) centrada em 0 é absolutamente convergente para |w| ≤ p = pxx∈X então
P(∩x∈XAx) ≥ ΞX(−p) > 0.
Prova: Mostraremos aqui a prova diretamente do resultado de Shearer como em
Bissacot, Fernández, Procacci e Scoppola [11] ou Bissacot [12].
A restrição de ΞX(w) ao conjunto Rp =∏
x∈X[−px, px] é um polinômio real que
é positivo em R+p =
∏x∈X[0, px]. Além do mais, como log ΞX(w) centrada em 0 é
absolutamente convergente para |w| ≤ p, a função partição ΞX(w) não se anula no
mesmo polidisco |w| ≤ p. Assim ΞX(w) não se anula em todo Rp e, em particular,
ΞX(−p) > 0. Portanto, pelo Teorema de Shearer P(∩x∈XAx) ≥ ΞX(−p) > 0.
Este corolário nos mostra como é a relação do gás de rede com o Lema Local de
Lovász. Se p = pxx∈X satisfaz a condição de Dobrushin (2.28) então o corolário acima
é o Lema Local de Lovász (2.5). Lembre que o teorema de Fernandéz e Procacci 2.3
possui uma melhora na cota sobre o intervalo de convergência de Dobrushin. Deste
modo, se p = pxx∈X satisfaz a condição de Fernández-Procacci (2.29) então o Corolário
2.4.1 produz a seguinte melhora do Lema Local de Lovász.
Teorema 2.7 (Bissacot-Fernández-Procacci-Scoppola). ConsidereA = Axx∈X uma família
de eventos em algum espaço de probabilidade e G = (X,E) o grafo de dependência com P(Ax) = px
para todo x ∈ X. Se p ∈ [0, 1]X é tal que
px ≤µx∑
R⊆Γ∗G(x)
R indep em G
∏x∈R µx
(2.53)
para todo x ∈ X, então
P(⋂x∈X
Ax) > 0.
O teorema acima já tem sido aplicado para obter novas cotas sobre problemas de
57
coloração em grafos. Veja [18] e [62].
2.5 O Lema Local de Lovász construtivo
Todas as versões do Lema Local de Lovász discutidas até agora nesta tese nos ga-
rantem a existência de uma configuração na qual ocorre o evento "bom" ∩x∈XAx, a saber,
elas nos dão condições suficientes para a probabilidade que nenhum dos eventos inde-
sejáveis ocorram seja positiva. Isto implica que existe uma boa configuração, ou seja,
existe uma configuração que ocorre o evento bom. Tais versões são não-construtivas
pois não fornecem nenhum algoritmo para encontrar uma boa configuração.
Em várias aplicações do Lema Local de Lovász há naturalmente uma questão al-
gorítmica: queremos não apenas mostrar a existência de uma configuração boa, mas
desejamos encontrá-la. Sendo assim vários esforços tem sido feito em encontrar uma
versão algorítmica, ou construtiva, do lema. Em [9], József Beck iniciou a procura de
versões algorítmicas ao demonstrar que existem versões construtivas do Lema Local
de Lovász. Em sua análise, Beck forneceu um algoritmo para encontrar uma coloração,
utilizando duas cores, dos vértices de um hipergrafo sem hiperelos monocromáticos.
Veja Exemplo 2.3.1. Em [9] é mostrado que um hipergrafo no qual cada elo tem pelo
menos k vértices e intercepta no máximo 2k
48 outros elos, então um algoritmo encontra,
em tempo polinomial no número de elos, uma configuração na qual os vértices estão
2-coloridos e sem elos monocromáticos. Como vimos no Exemplo 2.3.1, a versão não-
construtiva nos dá uma margem maior de interseções dos hiperelos: todo elo pode
compartilhar no máximo 2k/e vértices com outros elos. Vários trabalhos subsequentes
foram realizados com o objetivo de melhorar essa diferença entre a versão construtiva
e não-construtiva. Podemos citar, por exemplo, os trabalhos de Alon [2], Molloy e Reed
[58] e Moser [60]. Em 2010, após três décadas da versão não-construtiva de Erdös e
Lovász [29], as tentativas de encontrar uma versão algorítmica geral do Lema Local de
Lovász terminaram no artigo de Robin A. Moser e Garbor Tardos [59].
58
2.5.1 A versão algorítmica de Moser-Tardos do Lema Local de Lovász
A versão construtiva de Moser-Tardos é restrita a uma classe de eventos menos
ampla que a classe considerada nas versões não-construtivas. Apesar disso, a versão
de Moser e Tardos tem uma enorme aplicabilidade pois ela engloba praticamente todas
as aplicações conhecidas do lema.
Os eventos de Moser-Tardos são definidos da seguinte forma.
Definição 2.4. Considere um conjunto finito de variáveis aleatórias discretas mutuamente
independentes Ψ em um espaço de probabilidade fixado, em que ψ ∈ Ψ é tal que ψ : Ω → Vψ
e Vψ um subconjunto finito ‡. Uma coleção de eventos de Moser-Tardos de Ψ é uma família
finita de eventos A tal que todo evento A ∈ A é mensurável pela σ-álgebra gerada por algum
subconjunto S ⊂ Ψ. Neste caso dizemos que S determina o evento A. Como a menor σ-
álgebra que torna A ∈ A mensurável é dada pela interseção de todas as σ-álgebras que contém
A, definimos vbl(A) ∈ Ψ o menor (com respeito à inclusão) e único subconjunto de Ψ que
determina A ∈ A.
Todos os eventos desta seção serão eventos de Moser-Tardos.
Temos também um noção de grafo de dependência para os eventos de Moser-Tardos.
Definição 2.5. Seja X um conjunto finito e A = AXx∈X uma família de eventos de Moser-
Tardos. O grafo de dependência de Moser-Tardos paraA é o grafo G = (X,E) com conjunto
de vértices X e conjunto de elos E formado por pares x, x′ ⊂ X tais que vbl(Ax)∩ vbl(Ax′) , ∅.
Note que se x, y ∈ X e vbl(Ax)∩vbl(Ay) , ∅ então ou x, y ∈ E ou x = y. Pela analogia
com o gás de rede, denotamos isto por x / y e dizemos que x e y são incompatíveis.
Logo x e y são compatíveis, em que denotamos x ∼ y como anteriormente, se x, y < E,
ou seja, vbl(Ax) ∩ vbl(Ay) = ∅.
Observação 8. Veja que para uma famíliaA de eventos de Moser-Tardos, a definição de grafo
de dependência dada pela Definição 2.2 é equivalente a de grafo de dependência de Moser-Tardos
em 2.5. Com efeito, seja G um grafo de dependência de Moser-Tardos para a família de eventos
‡De fato, ψ ∈ Ψ é um elemento aleatório.

59
(de Moser-Tardos)A = AXx∈X. Se, para x, y ∈ X, temos vbl(Ax)∩vbl(Ay) = ∅ então os valores
das variáveis em vbl(Ax) não afeta os valores assumidos pelas variáveis em vbl(Ay), logo as σ-
álgebras geradas por vbl(Ax) e vbl(Ay) são independentes e assim, como Ax e Ay são mensuravéis
em relação a essas σ-álgebras, temos que P(Ax ∩ Ay) = P(Ax)P(Ay). Reciprocamente, se Ax e
Ay são independentes então não podemos ter vbl(Ax) ∩ vbl(Ay) , ∅.
Podemos agora definir o algoritmo de Moser e Tardos.
Algoritmo de Moser-Tardos. Inicialmente, no passo 0 do algoritmo, escolha
aleatoriamente um valor para cada uma das variáveisψ ∈ Ψ, de acordo com
suas distribuições. No passo s ∈ N, se algum evento A ∈ A ocorre, então
selecione um destes eventos (aleatoriamente ou por uma regra determinís-
tica), digamos Ax e sorteamos um novo valor apenas para cada variável em
vbl(Ax). Às vezes denominaremos esta tarefa de reamostragem do evento Ax
e assim dizemos também que Ax foi reamostrado pelo algoritmo. O processo
agora continua e o algoritmo para quando alcança-se um valor observado
das variáveis ou uma configuração das variáveis tal que nenhum evento emA
acontece.
O evento reamostrado pelo algoritmo em cada passo é o evento "ruim"que queremos
evitar pelo Lema Local de Lovász.
Teorema 2.8 (Moser-Tardos). Seja Ψ um conjunto finito de variáveis aleatórias mutuamente
independentes em um espaço de probabilidade fixado. Seja A = Axx∈X uma coleção finita
de eventos determinados por estas variáveis, isto é, eventos de Moser-Tardos, cada um com
probabilidade P(Ax) = px, e com grafo de dependência de Moser-Tardos G = (X,E). Seja
µ = (µx)x∈X uma sequência de números reais em [0,∞). Se, para cada x ∈ X,
px ≤µx∏
y∈Γ∗G(x)(1 + µy), (2.54)
então existe uma configuração das variáveis em Ψ tal que nenhum dos eventos em A ocorre.
Além do mais, o algoritmo de Moser-Tardos descrito acima reamostra um evento Ax ∈ A no

60
máximo um número médio de vezes µx antes de encontrar tal configuração. Assim o algoritmo
termina com um número médio total de passos (reamostrados) de no máximo∑
x∈X µx.
Observação 9. Ressaltamos que, como em grande parte da literatura, o Lema Local de Lovász
de Moser-Tardos é originalmente enunciado em [59] com a hipótese
px ≤ rx
∏y∈ΓG(x)
(1 − ry). (2.55)
Lembre que as desigualdades (2.54) e (2.55) estão relacionadas através da mudança de variáveis
µx =rx
1 − rx, rx ∈ (0, 1).
Exemplo 2.5.1. Note que a partir do enunciado do Teorema de Moser-Tardos nós já temos uma
ideia de como podemos aplicá-lo em alguns exemplos. Problemas de coloração de grafos talvez
seja um dos mais diretos de como podemos fazer isso. Lembre que no Exemplo 2.3.1, temos
um hipergrafo finito H = (V,E) no qual cada hiperelo tem pelo menos k vértices e intercepta
no máximo ∆ outros elos. Se colorimos cada vértice independentemente e uniformemente de
azul ou branco, então nossa família variáveis aleatórias Ψ é, claramente, uma família i.i.d. de
variáveis aleatórias de Bernoulli de parâmetro 1/2 indexadas pelos vértices. Os eventos ruins
que queremos evitar é a coleção A f f∈E, em que A f é o evento no qual o hiperelo f ∈ E é
monocromático. Isto é, recolorimos aleatoriamente um hiperelo quando ele é monocromático
de acordo com o algoritmo. Deste modo, se e(∆ + 1) < 2k−1, então colocando µ f = 1/∆ para
todo f ∈ E na hipótese teorema de Moser-Tardos, temos que não apenas existe uma coloração
dos vértices em azul e branco sem hiperelos monocromáticos, mas o teorema também diz que
o algoritmo de Moser-Tardos encontra essa configuração com número médio de recolorações
(reamostragens) de no máximo |E|/∆.
A análise do algoritmo de Moser-Tardos é baseada nos eventos reamostrados pelo
algoritmo em cada passo. Moser e Tardos definiram em cada passo do algoritmo
uma árvore enraizada no evento reamostrado, que chamaremos de árvore de Moser-
Tardos§, que servem como uma justificativa para que algoritmo reamostre aquele evento.
Veremos que, em cada passo reamostrado, uma árvore de Moser-Tardos contém todos§A nomenclatura original no artigo original de Moser e Tardos [59] é witness tree.
61
os eventos reamostrados até este passo. Para achar uma cota superior para o número de
vezes que um evento é reamostrado será, então, suficiente encontrar uma cota superior
para o número de árvores enraizadas neste evento.
Em cada passo o algoritmo reamostra algum evento que ocorreu. O registro dos
eventos reamostrados pelo algoritmo é uma lista dos eventos reamostrados até aquele
passo. Moser e Tardos chamaram esta lista em [59] de Log of the algorithm. Essa lista,
a qual denominaremos de função registro ou apenas registro é uma função C : N →
X : s 7→ C(s) tal que se o evento reamostrado pelo algoritmo no passo s foi Ax ∈ A
então C(s) = x. Observe que a função registro C não está definida em todoN, já que o
algoritmo possivelmente termina.
Precisamos agora de algumas definições. Um grafo finito, conexo e sem ciclos
em que um vértice foi designado a raiz é chamado de árvore enraizada não-rotulada
ou simplesmente árvore enraizada. Usaremos a letra t para representar uma árvore
enraizada e Θ para o conjunto de todas as árvores enraizadas. Uma árvore t ∈ Θ possui
uma ordem parcial sobre o conjunto de seus vértices que chamaremos de ordem árvore.
A saber, dados dois vértices u e v de uma árvore enraizada, dizemos que v é maior que ou
descendente de u, ou u é um ancestral de v, se o caminho da raiz ao vértice v passa por u.
Se v,u é um elo da árvore enraizada então v é descendente de u ou vice-versa. De fato,
todo elo u, v em uma árvore enraizada é direcionado, isto é, é um par ordenado (u, v)
(v é um descendente de u) em que u é chamado de pai de v e obviamente, chamamos
v de filho de u. Note que todo vértice diferente da raiz de uma árvore enraizada tem
apenas um pai e a raiz não tem pai. Para um vértice v de uma árvore enraizada t,
denote por d(v) a distância de v à raiz de t. Veja que se v é descendente de u, então
d(v) > d(u).
Definição 2.6. Seja X um conjunto finito. Uma árvore X-rotulada é um par τ = (t, σ) em
que t ∈ Θ é uma árvore enraizada com conjunto de vértices Vt e σ : Vt → X uma função. O
conjunto X é chamado de conjunto dos rótulos da árvore.
Definição 2.7. Seja X o conjunto de vértices de um grafo finito G. Uma árvore de Moser-
Tardos é uma árvore X-rotulada τ = (t, σ) em que t ∈ Θ é uma árvore enraizada com conjunto
62
de vértices Vt e a função σ : Vt → X tem a propriedade que os filhos de um vértice u ∈ Vt
recebe rótulos somente de Γ∗(σ(u)) e estes rótulos são distintos. O conjunto de todas as árvores
de Moser-Tardos τ = (t, σ) com raiz rotulada em x ∈ X é denotado por TxX.
Com essas definições, veremos agora como Moser e Tardos associaram a cada passo
do algoritmo uma árvore de Moser-Tardos dada pela Definição 2.7. Considere as
hipótese do Teorema de Moser-Tardos 2.8 e G = (X,E) o grafo de dependência de
Moser-Tardos dado pelo enunciado do teorema. A cada passo s ∈N do algoritmo, com
função registro C fixada, definimos uma árvore de Moser-Tardos τ(s) = τC(s) ∈ TC(s)X
com vértices em X e raiz rotulada com C(s). A árvore τ(s) é obtida construindo uma
sequência τs(s), τs−1(s), . . . , τ1(s) de árvores de Moser-Tardos e definindo τ(s) = τ1(s). A
árvore de Moser-Tardos τs(s) é formada apenas por um único vértice, ou seja, apenas
a raiz com rótulo C(s). Para cada i ∈ 1, . . . , s − 1, a árvore τi(s) é obtida a partir de
τi+1(s) adicionando um novo vértice a τi+1(s) com rótulo C(i) do seguinte modo. Seja
Wi o conjunto dos vértices de τi+1(s) tais que seus rótulos são incompatíveis com o
evento C(i), isto é, o conjunto Wi é formado por vértices que são vizinhos ao vértice
rotulado com C(s) no grafo de dependência G. Se Wi é vazio, isto é, todos os vértices
em τi+1(s) tem rótulos em X compatíveis com C(i), então defina τi(s) = τi+1(s) e vá para
o próximo passo. Se Wi não é o conjunto vazio então, de acordo com Moser-Tardos,
escolha dentre os vértices de Wi o vértice de maior distância (em τi+1(s)) da raiz C(i + 1)
e adicione um novo filho u deste vértice colocando o rótulo de u igual a C(i). Se existe
mais de um vértice que possui a mesma distância máxima à raiz, então escolha um
deles arbitrariamente para adicionar o novo filho u. Esta nova árvore é definida como
τi(s).
Dizemos que a árvore τ de Moser-Tardos ocorre no registro C se existe s ∈N tal que
τ = τ(s).
Observação 10. Note que a árvore de Moser-Tardos associada ao passo s ∈ N do algoritmo,
definida acima, é tal que os filhos de um vértice são independentes.
Observe também que se s1 < s2 < s com C(s1) = x e C(s2) = y, isto é, o evento Ax foi
reamostrado antes do evento Ay, e x / y em G, então o vértice x é maior que o vértice y na
63
ordem árvore em τ(s), isto é, x está mais longe da raiz C(s) do que y. Isso é um fato importante
na análise do tempo médio em que o algoritmo termina, como veremos no lema abaixo.
A demonstração do Teorema de Moser-Tardos 2.8 é fundamentalmente baseada na
parte b) do Lema 2.1 em [59]. Seguindo [59], mostraremos a seguir esta parte da prova.
Lema 2.1. Dado uma função registro C, a probabilidade de uma árvore de Moser-Tardos
τ = (t, σ) com conjunto de vértices Vt e rótulos σ(v)v∈Vt ocorrer em C é no máximo
P(τ) ≤∏v∈Vt
P(Aσ(v)) ≡∏v∈Vτ
pσ(v). (2.56)
Prova: Seja τ = (t, σ) uma árvore de Moser-Tardos que ocorre em um registro C,
ou seja, existe s ∈ N tal que τ = τ(s). Pela observação acima vemos que se v e u são
dois vértices de τ com σ(v) = x e σ(u) = y tais que x / y no grafo de dependência
de Moser-Tardos G e o evento Ax foi reamostrado antes do evento Ay, então d(y) <
d(x). Temos também que se v e u estão à mesma distância da raiz, então Ax e Ay
são independentes em G. Veja que, de certo modo, nós podemos ter uma ideia do
resultado do lema pois eventos reamostrados pelo algoritmo, mesmo dependentes,
aparecem em τ independentemente já que em cada passo observamos valores das
variáveis de modo independente do passo anterior. Reproduzimos a seguir com mais
detalhes o argumento de Moser e Tardos que nos permite concluir esse fato.
Agora fixe a fonte aleatória que o algoritmo usa e para cada variável ψ ∈ Ψ, a fonte
aleatória produz uma lista infinita de observações independentes ψ0, ψ1, . . .. Toda vez
que o algoritmo precisa de um novo valor observado deψ ele pega o próximo valor não
usado desta sequência. Definimos agora um procedimento denominado por Moser e
Tardos de "τ-check": em ordem decrescente da distância à raiz visite todos os vértices
de τ e para um vértice v com σ(v) = x, tome uma configuração das variáveis em vbl(Ax)
de acordo com suas distribuições (e independentes de observações anteriores) e teste
se a configuração resultante produz a ocorrência de Ax. Dizemos que o τ-check passa
se todos os eventos ocorreram quando foram testados.
É facil ver que a probabilidade do τ-check passar é∏
v∈Vτpσ(v). A demostração do
lema segue do fato que quando τ ocorre e nós fazemos o τ-check na mesma fonte

64
aleatória, ele passa. Resta provar então que se τ aparece no registro então o τ-check
passa.
Suponha que τ = (t, σ) = τ(s) ocorreu no registro C. Queremos mostrar que para
todo vértice v de τ com σ(v) = x, ao tomarmos um valor observado das variáveis em
vbl(Ax), temos que está configuração destas variáveis faz Ax ocorrer. Para cada variável
ψ ∈ vbl(AX), seja S(ψ) o conjunto de todos os vértices u, com rótulo y = σ(u), tais que
ψ ∈ vbl(Ay) e d(y) > d(x). Lembre agora que o τ-check testa os vértices em ordem
decrescente da distância e os eventos à mesma distância da raiz são independentes.
Sendo assim, antes de testar Ax o τ-check já testou todos os eventos Ay com y = σ(u) e
u ∈ S(ψ) descritos anteriormente. Assim, quando o τ-check testa o evento Ax, a fonte
aleatória fornece a amostra ψ|S(ψ)|.
Quando o algoritmo reamostra um evento é porque esse evento ocorreu antes desta
reamostragem. Então o valor de ψ ∈ vbl(Ax) quando Ax ocorreu é exatamente ψ|S(ψ)|.
Com efeito, a variável ψ já foi amostrada para todos os eventos Ay reamostrados antes
de Ax tais que ψ ∈ vbl(Ay).
Portanto, como o τ-check tem o mesmo valor para as variáveis em vbl(Ax) quando
o vértice com rótulo x é considerado, ele então conclui que Ax ocorreu.
Para x ∈ X, seja Nx a variável aleatória que conta quantas vezes o evento Ax é
reamostrado durante a execução do algoritmo. Observe que Nx é o número de vezes
que ocorreu o evento Ax e também o número de árvores de Moser-Tardos distintas que
ocorrem no registro C e tem a raiz rotulada com rótulo x. Sendo assim, podemos usar
a cota dada pelo lema cima para cotar a esperança de Nx. De fato,
E(Nx) =∑τ∈Tx
X
P(τ ocorrer no registro C) ≤∑
(t,σ)∈TxX
∏v∈Vt
pσ(v) ≡ Φx(p). (2.57)
Deste modo, para concluir a demostração do Teorema de Moser-Tardos 2.8 temos
que mostrar que a série acima é convergente. Para tal Moser e Tardos definiram um
processo de ramificação que produz as árvores de Moser-Tardos. Mostramos a seguir
este processo.
Para um evento Ax fixado, considere o processo de ramificação que gera uma árvore

65
de Moser-Tardos em que a raiz é rotulada com x ∈ X. No primeiro passo produzimos
a raiz, rotulada com x ∈ X. Em cada passo, considere cada vértice v com σ(v) = z
produzido no passo anterior independentemente e, de modo independente, para cada
y ∈ Γ∗(z) anexamos a v um filho com rótulo y com probabilidadeµy
1 + µyou não anexamos
com probabilidade1
1 + µy.
Lema 2.2. Seja τ = (t, σ) ∈ TxX uma árvore de Moser-Tárdos enraizada em x ∈ X. A
probabilidade do processo de ramificação acima produzir τ é
pτ =1µx
∏v∈Vt
µσ(v)
1 + µσ(v)
∏y∈Γ(σ(v))
11 + µy
. (2.58)
Prova: Lembre que a raiz com rótulo x ∈ X é sempre produzida. Se, para v ∈ Vt,
definimos como Ov ⊂ Γ∗(σ(v)) o conjunto dos rótulos dos vértices que não são filhos de
v em τ, então
pτ =1 + µx
µx
∏v∈Vt
µσ(v)
1 + µσ(v)
∏y∈Ov
11 + µy
. (2.59)
Portanto,
pτ =1 + µx
µx
∏v∈Vt
µσ(v)
1 + µσ(v)
∏y∈Γ∗(σ(v)
11 + µy
∏y∈Γ∗(σ(v))\Ov
1 + µy = (2.60)
=1µx
∏v∈Vt
µσ(v)
∏y∈Γ∗(σ(v))
11 + µy
=1µx
∏v∈Vt
µσ(v)
1 + µσ(v)
∏y∈Γ(σ(v))
11 + µy
. (2.61)
Terminamos agora a prova do teorema de Moser-Tardos 2.8. Sobre as hipóteses do
teorema, a função Φx(p) definida em (2.57) é limitada por,
Φx(p) =∑
(t,σ)∈TxX
∏v∈Vt
pσ(v) ≤
∑(t,σ)∈Tx
X
∏v∈Vt
µσ(v)∏y∈Γ∗(σ(v)) 1 + µy
=
=∑
(t,σ)∈TxX
∏v∈Vt
µσ(v)
1 + µσ(v)
∏y∈Γ(σ(v))
11 + µy
. (2.62)
Como o processo de ramificação acima produz uma árvore de Moser-Tardos com a
66
mesma probabilidade que esta árvore ocorre no registro C do algoritmo, temos pela
desigualdade (2.62) acima que
Φx(p) ≤∑τ∈Tx
X
µxpτ = µx
∑τ∈Tx
X
pτ ≤ µx. (2.63)
A última desigualdade em (2.63) se deve ao fato que, embora o processo de rami-
ficação possa crescer infinitamente ou mesmo parar antes de construir uma árvore de
Moser-Tardos, ele produzirá uma única árvore por vez que pode ser igual a no máximo
uma árvore em TxX.
Vimos anteriormente na Seção 2.4, Teorema 2.7, que Bissacot, Fernandéz, Procacci
e Scoppola obtiveram em [11] uma nova versão do Lema Local de Lovász. Esta nova
versão tinha a característica de nos permitir uma maior probabilidade para os eventos
ruins. De fato, esta melhora do lema é pelo fato que a soma que aparece na cota em
(2.53) é sobre os subconjuntos independentes (ao invés de todos os subconjuntos) na
vizinhança de um evento no grafo de dependência. Desta forma, é natural perguntar
se o algoritmo de Moser e Tardos é eficiente dentro dos parâmetros do Lema Local de
Lovász de Bissacot et. al.. De fato, uma resposta afirmativa a essa questão foi dada
por W. Pegden em [63]. Neste trabalho o autor, com a intenção de usar a cota de
Bissacot et. al., definiu um outro processo de ramificação. Observando que as árvores
na soma que caracteriza a esperança de Nx em (2.57) são de fato árvores que possuem
filhos independentes (assim podemos refinar a cota em (2.57) ao somar apenas sobre
estas árvores) Pegden define um processo de ramificação igual ao de Moser e Tardos,
exceto pelo fato que agora os filhos nascem independentes, isto é, anexa-se a um vértice
v somente vértices cujos os rótulos pertencem a conjuntos independentes de Γ(σ(v)).
Analogamente ao Lema 2.2, e ao que se segue depois deste, prova-se então em [63] que
a cota obtida pelo Teorema de Moser-Tardos ainda vale ao usarmos a hipótese (2.53).

67
2.6 O Lema Local de Lovász de Moser-Tardos e a Mecânica
Estatística
Após o trabalhos de Shearer e Scott-Sokal discutidos na Seção 2.4 surge naturalmente
a questão se podemos relacionar a Mecânica Estatística, mais especificamente o gás de
rede, e a versão algorítmica de Moser-Tardos do Lema Local de Lovász. À primeira
vista, tal conexão não é imediata, pois como vimos na seção anterior a demonstração
de Moser-Tardos do Lema Local de Lovász não possui nenhuma relação com as provas
não construtivas do Lema Local de Lovász mostradas nesta tese ou na literatura de
forma geral.
Recentemente os trabalhos de Pegden [63] e Kolipaka e Szededy [49] indicaram
que possivelmente o gás de rede teria alguma relação com o Lema Local de Lovász
algorítmico. Em [49] os autores relacionam o algoritmo de Moser-Tardos ao conjunto
das condições de Shearer através de um algoritmo auxiliar por eles denominado "ge-
neralized resample". A análise deste algoritmo em [49] é feita de modo distinto à de
Moser-Tardos [59], já que Kolipaka e Szededy não usam as árvores de Moser-Tardos.
Veja a seção 5 em [49]. Entretando, nenhuma melhora explícita no teorema de Moser-
Tardos, geralmente baseada na relação entre a medida de de Shearer e a convergência
da expansão em aglomerados, é mostrada. A melhora, posteriormente encontrada, é
devido a Pegden [63] usando um método diferente. Como mencionado anteriormente,
Pegden modificou o processo de ramificação de Moser-Tardos de forma a adaptar a
condição do Teorema 2.7.
Nesta seção mostraremos um dos principais resultados desta tese, o Teorema 2.9.
Este teorema nos mostra a direta conexão entre a versão algorítmica de Moser-Tardos do
Lema Local de Lovász e o gás de rede com interação caroço duro sem usar a formulação
de Shearer do Lema Local de Lovász como feito em [72].
Teorema 2.9. Seja Ψ um conjunto finito de variáveis aleatórias mutuamente independentes
em um espaço de probabilidade fixado. Considere A = Axx∈X uma coleção finita de eventos
de Moser-Tardos de Ψ, cada um com probabilidade P(Ax) = px, e com grafo de dependência

68
de Moser-Tardos G = (X,E). Seja ΞX(w) a função de partição do gás de rede com interação
caroço duro em G com atividades w ∈ Cd e seja R(G) a região de convergência da expansão em
polímeros do gás de rede em G.
Se p = pxx∈X ∈ R(G), então existe uma configuração das variáveis Ψ tal que nenhum dos
eventos emA ocorrem. Além do mais, o algoritmo de Moser-Tardos encontra esta configuração
reamostrando um evento Ax ∈ A um número médio de vezes de no máximo
px
[∂ log ΞX(w)
∂wx
] ∣∣∣∣∣∣w=−p
(2.64)
e assim o número médio total de reamostragens dos eventos é no máximo
∑x∈X
px
[∂ log ΞX(w)
∂w
] ∣∣∣∣∣∣w=−p
≤ |X||PX(w = −p)| (2.65)
em que PX(w) é a pressão do gás de rede com interação caroço duro em G.
O Teorema 2.9 junto com o Teorema 2.3 produz o seguinte corolário obtido por
Pegden [63].
Corolário 2.6.1. Sob as hipóteses do teorema 2.9, se µ = µxx∈X é uma sequência de números
reais não negativos tal que, para cada x ∈ X
px ≤µx∑
R⊆Γ∗G(x)
R indep in G
∏y∈R µy
então o algoritmo reamostra um evento Ax ∈ A no máximo µx vezes antes de encontrar uma
configuração das variáveis em que nenhum dos eventos ocorre. O número total de passos
reamostrados é no máximo∑
x∈X µx.
Observação 11. Se ρ está fora do região de convergência da expansão em aglomerados, então
nós não podemos dizer nada a respeito sobre a eficiência do algoritmo pois a série que limita o
tempo médio do algoritmo diverge. No contexto de variáveis de Moser-Tardos, há interessantes
variações do algoritmo de Moser-Tardos que podem ser mais eficientes e com número de reamos-
tragens finito mesmo para tais ρ < R(G). Interessantes resultados podem ser vistos em [43] e

69
[31].
A demonstração do Teorema 2.9 é o assunto das próximas subseções. Em 2.6.1
discutiremos uma identidade obtida por Oliver Penrose em [65] relacionando os coefi-
cientes da expansão de Mayer a uma família de árvores determinada pelas relações de
compatibilidade. Já em 2.6.2 veremos uma pequena modificação do esquema de Pen-
rose que o torna mais geral. Finalmente em 2.6.3 mostramos que este novo esquema de
Penrose será capaz de estabelecer a principal conexão entre a versão algorítmica Moser-
Tardos e o gás de rede, a saber, a noção das árvores de Moser-Tardos coincide com a das
árvores de Penrose na expansão do gás de rede com interação caroço duro no grafo de
dependência de Moser-Tardos. Tal relação fornecerá as ferramentas necessárias para a
prova do Teorema 2.9.
2.6.1 Partições e a Identidade de Penrose
A identidade obtida por Penrose em [65] trata-se sobre o um modo de particionar
o conjunto dos grafos conexos. Ela e sua variação, obtida na Seção 2.6.2, é um ponto
chave para a demostração do Teorema 2.9 pois, deste modo, teremos uma melhor
compreensão dos coeficientes de Mayer. A Identidade de Penrose obtida a seguir
também tem um importante papel na prova do critério de Fernández-Procacci 2.3.
Considere o modelo do gás de rede em um grafo finito G = (X,E). Lembre que
denotamos por Gn o conjunto de todos os grafos conexos com conjunto de vértices
In = 1, . . . ,n) e para dois vértices i, j de g ∈ Gn denotamos por d(i, j) a distância em g
entre i e j.
O esquema de Penrose é definido da seguinte forma. Primeiro definimos um mapa m
que associa a cada grafo g ∈ Gn uma única árvore m(g) = τ1(g) enraizada, no vértice
vértice 1 ∈ In por exemplo, chamada árvore de Cayley por Penrose em [65] . Definimos a
árvore τ1(g) como:
(1) Deletamos todos os elos i, j tais que d(i, o) = d( j, o).
(2) Deletamos agora todos os elos i, j, do grafo resultante após o passo (1), tais que
d( j, o) = d(i, o) − 1 exceto o que possui o menor j.
70
Observe que τ1(g) é por construção um elemento de Gn e não tem ciclos.
Agora, para cada árvore τ ∈ Gn, associamos um único grafo R(τ) ao adicionarmos
elos i, j entre os vértices i, j de τ tais que
(1) d(i, o) = d( j, o).
(2) d( j, o) = d(i, o) − 1, com j > i′, em que i′, j < E(τ).
Observe que o grafo R(τ) ∈ Gn é maximal em relação ao número de elos e define
um mapa R no subconjunto Tn das árvores de Gn de forma que obtemos uma partição
de Gn. De fato, temos que Gn é a união disjunta ]τ∈Tng ∈ Gn : τ ⊆ g ⊆ R(τ), em que
a inclusão entre os grafos é dada pela inclusão sobre os respectivos conjuntos de elos.
Veja [72] a discussão sobre mapas R mais gerais com essa mesma propriedade.
Fixado uma n-upla (x1, . . . , xn) ∈ Xn lembre que o grafo g(x1, . . . , xn) ∈ Gn é com
conjunto de elos dado por Eg(x1,...,xn) = i, j : xi / x j. Dado g ∈ Gn, seja Eg o conjunto
de elos de g.
Definimos a seguir as Árvores de Penrose .
Definição 2.8 (Árvore de Penrose de g(x1, . . . , xn) ). Fixe uma n-upla (x1, . . . , xn) ∈ Xn, o
grafo g(x1, . . . , xn) e, digamos o vértice 1 de g(x1, . . . , xn). Seja τ uma árvore com conjunto de
vértices In = 1, . . . ,n e d(i) a distância do vértice i ao vértice 1 em τ. O conjunto das árvores
de Penrose de g(x1, . . . , xn), denotado por P(x1, . . . , xn), é formado pelas árvores τ tais que
(t0) se i, j ∈ Eτ então i, j ∈ Eg(x1,...,xn) ⇐⇒ xi / x j
(t1) se dois vértices i e j são tais que d(i) = d( j), então i, j < Eg(x1,...,xn) ⇐⇒ xi ∼ x j;
(t2) se dois vértices i e j são tais que d( j) = d(i) − 1 e i∗ < j, então i, j < Eg(x1,...,xn) (isto é,
xi ∼ x j).
Observe que com as condições (t0), (t1) e (t(2) o grafo maximal R(τ), como dado
anteriormente, é tal que o conjunto das árvores de Penrose de g(x1, . . . , xn) é dado por
P(x1, . . . , xn) = τ ∈ Tn : τ ⊆ g(x1, . . . , xn), R(τ) = τ.
A seguir mostramos a Identidade de Penrose.

71
Proposição 2.3 (Identidade de Penrose).
∑g∈Gn :
g⊆g(x1 ,...,xn)
(−1)|Eg| = (−1)n−1∑
τ∈P(x1,...,xn)
1 (2.66)
Prova: Veja que
∑g∈Gn :
g⊆g(x1 ,...,xn)
(−1)|Eg| =∑τ∈Tn :
τ⊆g(x1 ,...,xn)
(−1)|Eτ|∑g∈Gn :
g⊆g(x1 ,...,xn), m(g)=τ
(−1)|Eg\Eτ| (2.67)
= (−1)n−1∑τ∈Tn :
τ⊆g(x1 ,...,xn)
(1 − 1)|ER(τ)|−|Eτ| = (−1)n−1∑
τ∈P(x1,...,xn)
1. (2.68)
2.6.2 Uma variação do esquema de Penrose
Nosso objetivo agora é reogarnizar a série Πx0(−ρ), definida em (2.23), em termos
de certas árvores que chamaremos de novas árvores de Penrose, Definição 2.9.
Dado um vértice v , 0 em uma árvore enraizada t, com raiz por 0 ∈ Vt, lembre que
d(v) é o número de elos do único caminho que conecta r à v, ou seja, a distância em τ
entre v e 0. Dado um vértice v em uma árvore com raiz, definimos v∗ como o pai de v,
ou seja, o vértice v∗ satisfaz d(v∗) = d(v)− 1 e sv o número de filhos de v. A raiz não tem
pai. Chamaremos os filhos do mesmo pai de irmãos. Os vértices w que estão a mesma
distância do pai de v à raiz, isto é, w , v∗ tais que d(w) = d(v)− 1 serão chamados de tios
de v e aqueles vértices w , v em que d(w) = d(v), mas que não são irmãos de v, serão
chamados de primos de v.
Uma árvore plana é uma árvore enraizada t na qual uma ordem é dada para os filhos
de cada vértice. Uma ordem dos filhos em uma árvore enraizada t é equivalente a
um desenho de t no plano. Por exemplo, colocando os pais à esquerda dos filhos os
quais ordenamos de cima a baixo. Daqui em diante tal desenho de t no plano será
útil ao lidarmos com árvores planas. Observe que o número de árvores planas com n
vértices é maior que o número de árvores enraizadas com n vértices. Por exemplo, há
5 árvores planas com n = 4 e 4 árvores enraizadas com o mesmo número de vértices.
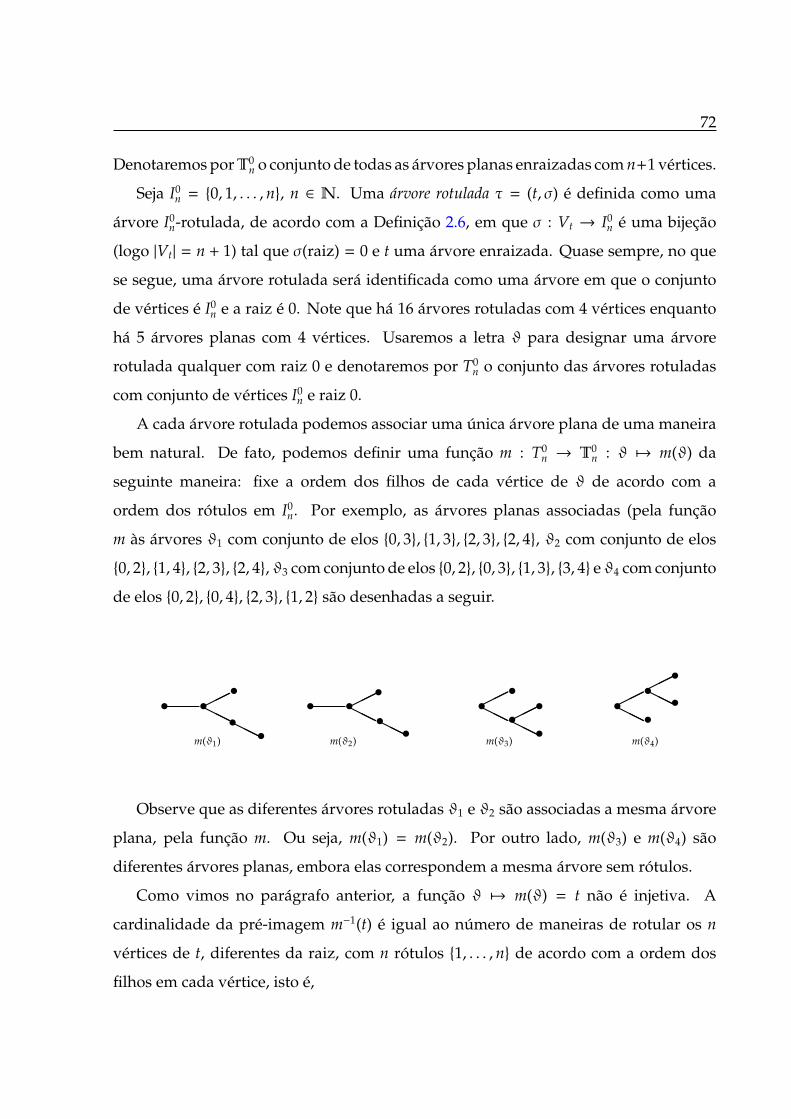
72
Denotaremos porT0n o conjunto de todas as árvores planas enraizadas com n+1 vértices.
Seja I0n = 0, 1, . . . ,n, n ∈ N. Uma árvore rotulada τ = (t, σ) é definida como uma
árvore I0n-rotulada, de acordo com a Definição 2.6, em que σ : Vt → I0
n é uma bijeção
(logo |Vt| = n + 1) tal que σ(raiz) = 0 e t uma árvore enraizada. Quase sempre, no que
se segue, uma árvore rotulada será identificada como uma árvore em que o conjunto
de vértices é I0n e a raiz é 0. Note que há 16 árvores rotuladas com 4 vértices enquanto
há 5 árvores planas com 4 vértices. Usaremos a letra ϑ para designar uma árvore
rotulada qualquer com raiz 0 e denotaremos por T0n o conjunto das árvores rotuladas
com conjunto de vértices I0n e raiz 0.
A cada árvore rotulada podemos associar uma única árvore plana de uma maneira
bem natural. De fato, podemos definir uma função m : T0n → T0
n : ϑ 7→ m(ϑ) da
seguinte maneira: fixe a ordem dos filhos de cada vértice de ϑ de acordo com a
ordem dos rótulos em I0n. Por exemplo, as árvores planas associadas (pela função
m às árvores ϑ1 com conjunto de elos 0, 3, 1, 3, 2, 3, 2, 4, ϑ2 com conjunto de elos
0, 2, 1, 4, 2, 3, 2, 4, ϑ3 com conjunto de elos 0, 2, 0, 3, 1, 3, 3, 4 eϑ4 com conjunto
de elos 0, 2, 0, 4, 2, 3, 1, 2 são desenhadas a seguir.
m(ϑ1)
• ••
HHH•HHH• m(ϑ2)
• ••
HHH•HHH• m(ϑ3)
••
HHH•HHH
•
•
m(ϑ4)
••
HHH•
HHH•
•
Observe que as diferentes árvores rotuladas ϑ1 e ϑ2 são associadas a mesma árvore
plana, pela função m. Ou seja, m(ϑ1) = m(ϑ2). Por outro lado, m(ϑ3) e m(ϑ4) são
diferentes árvores planas, embora elas correspondem a mesma árvore sem rótulos.
Como vimos no parágrafo anterior, a função ϑ 7→ m(ϑ) = t não é injetiva. A
cardinalidade da pré-imagem m−1(t) é igual ao número de maneiras de rotular os n
vértices de t, diferentes da raiz, com n rótulos 1, . . . ,n de acordo com a ordem dos
filhos em cada vértice, isto é,

73
|m−1(t)| = | ϑ ∈ T0n : m(ϑ) = t | =
n!∏v∈Vt
sv!. (2.69)
Lembre que sv é o número de filhos do vértice v.
Podemos também definir uma função injetiva θ : T0n → T0
n : t 7→ θ(t) = ϑt da
seguinte maneira. A raiz terá rótulo 0 e os s0 ∈ 0 ∪N filhos da raiz serão rotulados
1, 2, . . . , s0 de cima a baixo, ou seja, obedecendo a ordem (desenho no plano) dos filhos
em t. Agora dizemos que os filhos da raiz com rótulos 1, 2, . . . s0 tem s1, s2, . . . , ss0 ∈ 0∪N
filhos, respectivamente. Aquele filho da raiz com rótulo 1 (o filho mais alto no desenho
de t) terá seus s1 filhos com rótulos s0 + 1, s0 + 2, . . . , s0 + s1, o filho da raiz com rótulo i
terá seus si filhos rotulados com s0 + s1 + · · · + si−1 + 1, . . . , s0 + s1 + · · · + si−1 + si. Deste
modo interativo definimos ϑt.
O mapa θ, definido no parágrafo anterior, nos fornece um modo de rotularmos
uma árvore plana t ∈ T0n. O chamaremos de rótulo natural da árvore plana t. Seja Vt o
conjunto de vértices de uma árvore plana t ∈ T0n. Com o rótulo natural de t podemos
definir uma ordem total em Vt, a qual designaremos por ≺, chamada de ordem árvore
plana do seguinte modo: dados dois vértices distintos u e v de t, temos que v ≺ u e
dizemos que v é mais velho que u ou u é mais novo que v, se o rótulo natural de v é menor
que o rótulo natural de u. Em outas palavras, v ≺ u se ou d(v) < d(u) ou d(v) = d(u),
mas v está acima de u no desenho de t.
Considere uma árvore rotulada ϑ = (t, σ) ∈ T0n. Lembre que o conjunto de vértices
de ϑ é I0n = 0, 1, . . . ,n, a distância do vértice i à raiz é designada por d(i) e que ϑ é
uma árvore I0n-rotulada em que σ : Vt → I0
n é uma bijeção entre o conjunto de vértices
Vt da árvore (sem rótulos) enraizada t e I0n tal que σ(raiz) = 0. Seja X um conjunto
finito e (x0, x1, . . . , xn) ∈ Xn+1 um n + 1-upla ordenada. A cada árvore rotulada ϑ = (t, σ)
associamos uma única árvore X-rotulada τ = (t, σ σ) em que σ : I0n → X : i 7→ xi dada
pelo par (ϑ; (x0, . . . , xn)). Suponha que os vértices do par (ϑ; (x0, . . . , xn)) são ordenados
de acordo com alguma ordem escolhida em X, isto é, xi < x j ou xi = x j e i < j.
Agora podemos definir um mapaµque associa a cada árvore X-rotulada (ϑ; (x0, . . . , xn))
a uma única árvore plana t = µ((ϑ; (x0, . . . , xn))) ∈ T0n. Este mapa é análogo ao mapa

74
m definido anteriormente, mas com a diferença que agora usamos a ordem em X ao
invés da ordem em I0n. A árvore plana t = µ((ϑ; (x0, . . . , xn))) é obtida fixando dos filhos
de cada vértice de ϑ de acordo com a ordem dos rótulos em X. Isto induz automati-
camente uma ordem, também denotada por ≺, sobre os vértices da árvore X-rotulada
(ϑ; (x0, . . . , xn)). Com efeito, dado dois vértices u e v em (ϑ; (x0, . . . , xn)) com rótulos xi e
x j, respectivamente, dizemos que u ≺ v se µ(u) ≺ µ(v). Para simplificar, denotaremos
isto por xi ≺ x j.
Finalmente podemos definir as nossas árvores de Penrose. Como nosso objetivo
reescrever os coeficientes de Mayer, e por sua vez, a série (2.23), seja G = (X,E) um
grafo finito no qual definimos o modelo do gás de rede em G. Novamente lembre que
vértices x, y ∈ X tais que ou x, y ∈ E ou x = y são denotados por x / y (x e y são
incompatíveis), e se x, y < E, nós denotamos por x ∼ y (x e y são compatíveis). Para
uma n + 1-upla fixada (x0, x1, . . . , xn) ∈ Xn+1, lembre também que g(x0, x1, . . . , xn) é um
elemento de Gn+1 (o conjunto do grafos conexos com vértices Ion) com conjunto de elos
Eg(x0,x1,...,xn) = i, j ⊂ In0 : xi / x j . Na definição a seguir, o símbolo ≺ denota a ordem
árvore rotulada.
Definição 2.9 (nova árvore de Penrose). O par (ϑ; (x0, x1, . . . , xn)), em que ϑ ∈ T0n e
(x0, x1, . . . , xn) ∈ Xn+1, é chamado de nova árvore de Penrose se vale as afirmativas abaixo.
(p0) se i, j ∈ Eϑ então i, j ∈ Eg(x0,x1,...,xn) ⇐⇒ xi / x j
(p1) se dois vértices i e j são tais que d(i) = d( j), então i, j < Eg(x0,x1,...,xn) ⇐⇒ xi ∼ x j;
(p2) se dois vértices i e j são tais que d( j) = d(i) − 1 e xi∗ ≺ x j, então i, j < Eg(x0,x1,...,xn) (isto é,
xi ∼ x j).
Denotamos por P(x0, x1, . . . , xn) o subconjunto de T0n formado pelas árvores ϑ ∈ T0
n as quais o
par (ϑ; (x0, x1, . . . , xn)) é nova árvore de Penrose.
Observação 12. A propriedade (p0) diz que os rótulos dos filhos são sempre incompatíveis
com os rótulos dos pais, já (p1) diz que rótulos dos filhos e primos são compatíveis. Por fim a
propriedade (p3) diz que os rótulos dos filhos são sempre compatíveis com os rótulos de seus tios
75
mais jovens que o pai, isto é, aqueles que estão abaixo do pai no desenho da árvore plana (ou
maiores que o pai na ordem árvore rotulada).
A Definição 2.9 das novas árvores de Penrose é ligeiramente distinta das árvores de Penrose
em [65], dada pela Definição 2.8, que por sua vez, também foi utilizada em [32], [76] e [45]. A
Definição 2.9 tem a vantagem de depender apenas da árvore plana subjacente t = µ(ϑ). Com
efeito, já que a condição (p2) garante que vértices irmãos possuem rótulos distintos em X, então
a ordem em X é suficiente para garantirmos que xi∗ ≺ x j.
Proposição 2.4.
φT(x0, x1, . . . , xn) = (−1)n∑ϑ∈T0
n
1P(x0,x1,...,xn)(ϑ) (2.70)
em que 1P(x0,x1,...,xn) é a função indicadora do conjunto P(x0, x1, . . . , xn) em T0n.
Prova. Fixe (x0, x1, . . . , xn) ∈ Xn+1 e, portanto, o grafo g(x0, x1, . . . , xn) com conjunto
de vértices I0n e conjunto de elos Eg(x0,x1,...,xn) = i, j ⊂ In
0 : xi / x j. Sem perda
de generalidade podemos assumir que g(x0, x1, . . . , xn) é conexo, pois caso contrário
φT(x0, x1, . . . , xn) = 0. Denote por G0n o conjunto de todos os grafos conexos com conjunto
de vértices I0n,
Gg(x0,x1,...,xn) = g ∈ G0n : g ⊂ g(x0, x1, . . . , xn),
e
Tg(x0,x1,...,xn) = ϑ ∈ T0n : ϑ ⊂ g(x0, x1, . . . , xn).
Dado g ∈ Gg(x0,x1,...,xn), seja Eg o conjunto de elos de g. Consideraremos também o
grafo g como sendo enraizado em 0. Assim, para qualquer vértice j de g, denotaremos
por dg( j) sua distancia à raiz 0 em g.
Defina a função q : Gg(x0,x1,...,xn) → Tg(x0,x1,...,xn) que associa cada g ∈ Gg(x0,x1,...,xn) uma
única árvore rotulada q(g) ∈ Tg(γ0,γ1,...,γn) da seguinte maneira.
1) Delete todos os elos i, j ∈ Eg em que dg(i) = dg( j). Após esta operação temos um
grafo conexo g′ tal que dg′(i) = dg(i) para todos os vértices i = 0, 1, . . . ,n. Além do mais,
cada elo i, j de g′ é tal que |dg′(i) − dg′( j)| = 1.
76
2) Seja i1, . . . , is0 os vértices a distância 1 da raiz 0 em g′ ordenados de forma que
i1 < i2 < · · · < is0 (note que identificamos os vértices com seus rótulos, assim i1, . . . , is0 é
um subconjunto de 0, 1, 2, . . . ,n). Agora tome o menor destes vértices, que designamos
i1, e seja ji11 , . . . , ji1
si1os vértices conectados a i1 por elos de Eg′ , isto é, aqueles vértices
à distância 2 da raiz 0. Ordene-os de acordo com seus rótulos inteiros e delete todos
elos de g′ conectando os vértices ji11 , . . . , ji1
si1a vértices do conjunto i2, . . . , is0. O grafo
obtido g′1 é tal que quaisquer um dos vértices ji11 , . . . , ji1
si1está conectado apenas a i1 e a
vértices cuja distância é maior que 2. Tome agora o vértice i2 (o menor depois de i1) e seja
ji21 , . . . , ji2
si2os vértices, à distância 2 da raiz, conectados a i2 em g′1. Delete todos os elos de
g′1 que conectam os vértices ji21 , . . . , ji2
si2a vértices no conjunto i3, . . . , is0. O grafo obtido
g′2 é tal que quaisquer um dos vértices ji21 , . . . , ji2
si1está conectado apenas a i2 e a vértices
cuja distância é maior que 2. Procedendo interativamente, após s0 passos, o grafo
resultante g′s0tem a propriedade de não ter ciclos entre vértices a distância no máximo 2
da raiz. Continue este procedimento até todos os vértices de g serem exauridos, sempre
respeitando a ordem dos rótulos. Ou seja, tome o vértice com menor rótulo entre
ji11 , . . . , ji1
si1, isto é, o vértice ji1
1 e considere os vértices a distância 3 que estão conectados
a ji11 e delete todos os elos que conectam estes vértices a algum vértice do conjunto
ji12 , . . . , ji1
si1, ji2
1 , . . . , ji2si2, . . . , j
is01 , . . . , ji2
sis0. Terminamos esse procedimento quando todos os
vértices forem exauridos.
O grafo resultante do procedimento acima, o qual denotamos g′′ q(g), é por cons-
trução um subgrafo conexo gerador de g(x0, x1, . . . , xn), isto é, temos q(g) ∈ Gg(x0,x1,...,xn).
Note também que o grafo q(g) não tem ciclos, isto é, temos q(g) ∈ Tg(x0,x1,...,xn). Observe
que a função q é sobrejetiva.
Reciprocamente, seja p a função que a cada árvore ϑ ∈ TG(x0,x1,...,xn) associa o único
grafo p(ϑ) ∈ Gg(x0,x1,...,xn) formado ao adicionarmos a ϑ todos os elos i, j ∈ Eg(x0,x1,...,xn) \Eϑ
tais que ou dϑ(i) = dϑ( j), ou dϑ( j) = dϑ(i) − 1 e xi∗ ≺ x j.
Observe agora que o conjunto Gg(x0,x1,...,xn) é parcialmente ordenado pela inclusão
dos elos, isto é, se g, g ∈ Gg(x0,x1,...,xn) e Eg ⊂ Eg′ , então g ⊂ g′ . Dados dois grafos
g, g′ ∈ Gg(x0,x1,...,xn), denote por [g, g′] o subconjunto de Gg(x0,x1,...,xn) formados por aqueles

77
grafos tais que g ⊂ g ⊂ g′. Se ϑ ∈ Tg(x0,x1,...,xn) e g ∈ [ϑ, p(ϑ)], então, por construção da
função q, temos que q(g) = ϑ, isto é, entre aqueles grafos g ∈ Gg(x0,x1,...,xn) tais que q(g) = ϑ,
o grafo ϑ é o minimal e o grafo p(ϑ) é o maximal, em relação a ordem parcial ⊂ em
Gg(x0,x1,...,xn). Assim Gg(x0,x1,...,xn) é particionado na união disjunta dos conjuntos [ϑ, p(ϑ)],
com ϑ ∈ Tg(x0,x1,...,xn). Isso mostra que a função p nos fornece um esquema de Penrose, como
na subseção 2.6.1, para Gg(x0,x1,...,xn). Note agora que, pela Definição 2.9, se ϑ ∈ Tg(x0,x1,...,xn)
então p(ϑ) = ϑ ⇐⇒ ϑ ∈ P(x0, x1, . . . , xn).
Por fim temos,
∑g∈Gg(x0 ,x1 ,...,xn)
(−1)|Eg| =∑
ϑ∈Tg(x0 ,x1 ,...,xn)
(−1)|Eϑ|∑
g∈Gg(x0 ,x1 ,...,xn)q(g)=ϑ
(−1)|Eg|−|Eϑ| =
= (−1)n∑
ϑ∈Tg(x0 ,x1 ,...,xn)
[1 + (−1)]|Ep(ϑ)|−|Eϑ| = (−1)n∑
ϑ∈Tg(x0 ,x1 ,...,xn)p(ϑ)=ϑ
1 =
= (−1)n∑ϑ∈T0
n
1ϑ∈P(x0,x1,...,xn).
A proposição está provada.
Corolário 2.6.2 ("Alternating sign property").
φT(x0, x1, . . . , xn) = (−1)n|φT(x0, x1, . . . , xn) |. (2.71)
Com a Proposição 2.4 nós podemos reescrever a série formal (2.23) como
Πx0(−ρ) =
∞∑n=0
1n!
∑ϑ∈T0
n
∑(x1,...,xn)∈Xn
1ϑ∈P(x0,x1,...,xn) ρx1 . . . ρxn =
=
∞∑n=0
1n!
∑ϑ∈T0
n
φx0(ϑ,ρ), (2.72)
em que
φx0(ϑ,ρ) =∑
(x1,...,xn)∈Xn
1ϑ∈P(x0,x1,...,xn) ρx1 . . . ρxn . (2.73)
Observação 13. A equação (2.72) mostra o relevante fato que a série formal (2.23) pode

78
ser organizada como uma soma sobre termos associados às árvore rotuladas. Porém, o fator
φx0(ϑ,ρ) não depende dos rótulos de ϑ ∈ T0n e sim apenas da árvore plana associada a ϑ, definida
anteriormente pelo mapa m : T0n → T
0n.
Sendo assim, podemos escrever para todo ϑ ∈ T0n tal que m(ϑ) = t ∈ T0
n
φx0(ϑ,ρ) = φx0(ϑt,ρ) (2.74)
em que ϑt denota a árvore rotulada associada (pelo mapa θ : T0n → T0
n) à árvore plana
t, isto é, a árvore plana t juntamente com seu rótulo natural. Portanto,
φx0(ϑ,ρ) =∑
(x1,...,xn)∈Xn
1ϑt∈P(x0,x1,...,xn) ρx1 . . . ρxn (2.75)
e
Πx0(−ρ) =
∞∑n=0
1n!
∑ϑ∈T0
n
φx0(ϑ,ρ) =∑n≥0
1n!
∑t∈T0
n
∑ϑ∈T0
nm(ϑ)=t
φx0(ϑt,ρ) = (2.76)
=∑n≥0
1n!
∑t∈T0
n
φx0(ϑt,ρ)∑ϑ∈T0
nm(ϑ)=t
1 =∑n≥0
1n!
∑t∈T0
n
φx0(ϑt,ρ)|m−1(t)| = (2.77)
=∑n≥0
∑t∈T0
n
[∏v∈Vt
1sv!
] ∑(x1,...,xn)∈Xn
1ϑt∈P(x0,x1,...,xn)
n∏i=1
ρxi . (2.78)
Finalmente temos
Πx0(−ρ) =∑n≥0
∑t∈T0
n
[∏v∈Vt
1sv!
] ∑(x1,...,xn)∈Xn
1ϑt∈P(x0,x1,...,xn)
n∏i=1
ρxi . (2.79)
2.6.3 A conexão entre as árvores de Moser-Tardos e Penrose
Agora estamos prontos para reinterpretar as árvores de Moser-Tardos modificando-
as de um jeito completamente determinístico. Explorando o fato que no algoritmo
original de Moser-Tardos temos uma certa "liberdade" para construir as árvores, ve-
remos que uma mudança na regra de criação das mesmas nos mostrará que, de fato,

79
elas são novas árvores de Penrose. Tal fato conectará o processo de ramificação destas
árvores com a série (2.79) possibilitando assim, a análise do tempo médio em que o
algoritmo encontra uma configuração boa das variáveis no Lema Local de Lovász de
Moser-Tardos.
Seja X um conjunto finito ordenado por uma relação de ordem indicada por < e
A = Axx∈X uma família de eventos de Moser-Tardos.
Definição 2.10. Seja t ∈ T0n uma árvore plana com conjunto de vértices Vt e elos Et eσ : Vt → X
uma função. Dizemos que σ é um X-rótulo bom para t se v,w ∈ Et ⇐⇒ σ(v) / σ(w), e além
do mais, se v e w são irmãos e v ≺ w (de acordo com a ordem árvore plana) então σ(v) < σ(w)
(na ordem introduzida em X).
Proposição 2.5. Seja X o conjunto de vértices de um grafo G. Uma árvore X-rotulada τ = (t, σ)
é uma árvore de Moser-Tardos 2.7 se e somente se é uma árvore plana t = (Vt,Et) ∈ T0n
juntamente com um X-rótulo bom.
Prova: Mostraremos primeiro que uma árvore plana t = (Vt,Et) ∈ T0n com um X-
rótulo bom é uma árvore de Moser-Tardos 2.7. De fato, v, v′ ∈ Et ⇐⇒ σ(v) / σ(v′)
é equivalente ao dizermos que filhos de um vértice u ∈ Vt recebem apenas rótulos
de Γ∗(σ(u)). Além disso, já que os rótulos de irmãos devem respeitar a ordem árvore
plana, esses rótulos são necessariamente distintos. Agora é simples construir uma
injeção entre o conjunto das árvores planas que possuem um X-rótulo bom e o conjunto
das árvores enraizadas t tais que os vértices são rotulados por uma função σ : Vt → X
de acordo com a regra que filhos são sempre incompatíveis com os pais e recebem
rótulos distintos. Com efeito, toda árvore plana com um X-rótulo bom pode ser vista
como uma árvore enraizada t com essa regra. Reciprocamente, a toda árvore enraizada
em que os vértices tem rótulos em X de acordo com a regra em que os (rótulos dos)
filhos são sempre incompatíveis com os pais e recebem rótulos diferentes, podemos
associar uma única árvore plana t com um X-rótulo bom: apenas ordene os filhos da
árvore enraizada t de acordo com a ordem dos rótulos em X, obtendo assim uma única
árvore plana t com um X-rótulo bom.
80
Definição 2.11. Dizemos que uma árvore de Moser-Tardos τ = (t, σ), com X-rótulo bom, é
uma nova árvore de Penrose se
(t1) se dois vértices v e w são tais que d(v) = d(w), então σ(v) ∼ σ(w),
(t2) se dois vértices v e w são tais que d(w) = d(v) − 1 e v∗ ≺ w, então σ(v) ∼ σ(w).
Seja SxX o conjunto das árvores de Moser-Tardos τ = (t, σ), com X-rótulo bom e enraizadas
em x ∈ X, que são novas árvores de Penrose.
Observação 14. Note que a definição acima coincide com a definição de novas árvores de
Penrose P(x0, . . . , xn), 2.9, no sentido em que há uma bijeção entre estas árvores e SxX. De fato,
se τ = (t, σ) ∈ SxX, então t sendo uma árvore plana, define uma (única) árvore rotulada ϑt ∈ T0
n
vista previamente. Além do mais, a função σ define de modo único uma n + 1-upla (x0, . . . , xn)
tal que σ(i) = xi para cada i ∈ I0n (aqui estamos identificando os vértices Vt com o conjunto
I0n). Assim, já que σ é um X-rótulo bom, nós temos que µ((ϑt; x0, . . . , xn)) = t e deste modo o
par (ϑt; x0, . . . , xn) é uma nova árvore de Penrose, isto é, ϑt ∈ P(x0, . . . , xn). Reciprocamente,
se (ϑ; x0, . . . , xn) é uma nova árvore de Penrose, seja t = µ((ϑ; x0, . . . , xn)) e π uma permutação
de 1, . . . ,n tal que x0 ≺ xπ(1) ≺ xπ(2) ≺ · · · ≺ xπ(n). Identificando os vértices de Vt com I0n,
definimos σ(0) = x0 e σ(i) = xπ(i). Então (t, σ) ∈ SxX.
Faremos agora uma modificação na análise do algoritmo de Moser-Tardos.
Em cada passo s do algoritmo associaremos uma árvore de Moser-Tardos própria
(que abreviaremos por árvore MTP) dada pela Definição 2.10. Isto será crucial para
relacionarmos estas árvores com as novas árvores de Penrose. Analogamente a Seção
2.5.1, a cada passo s do algoritmo, com função registro C, definimos uma árvore MTP
τ(s) ∈ TC(s)X (com vértices em X e raiz rotulada com C(s)). A árvore τ(s) é obtida
construindo uma sequência τs(s), τs−1(s), . . . , τ1(s) de árvores MTP e definindo τ(s) =
τ1(s). Seja τs(s) a árvore MTP formada apenas por um único vértice, ou seja, apenas
a raiz com rótulo C(s). Para cada i ∈ 1, . . . , s − 1, a árvore τi(s) é obtida a partir
de τi+1(s) adicionando um novo vértice a τi+1(s) com rótulo C(i) do seguinte modo.
Seja Wi o conjunto dos vértices de τi+1(s) tais que seus rótulos são incompatíveis com
o evento C(i). Se Wi é vazio, isto é, todos os vértices em τi+1(s) têm rótulos em X
compatíveis com C(i), então defina τi(s) = τi+1(s) e vá para o próximo passo. Se Wi não
81
é o conjunto vazio então, ainda como em Moser-Tardos, escolha dentre os vértices de
Wi o vértice de maior distância (em τi+1(s)) da raiz C(i + 1) e adicione um novo filho u
deste vértice colocando o rótulo de u igual a C(i). Esta nova árvore é definida como
τi(s). Observe que se temos mais de um vértice à distância máxima da raiz então o
algoritmo original de Moser-Tardos não nos diz uma regra determinística para escolher
um desses vértices, ou seja, quando há pelo menos dois vértices à distância máxima da
raiz escolha um aleatoriamente. Ao invés disso, daremos uma regra determinística. De
fato, é o que nós precisamos se estamos lidando com árvores planas e não com apenas
árvores enraizadas. Seja Wi ⊂Wi o subconjunto formado por aqueles vértices que estão
à distância máxima da raiz, isto é, os vértices de Wi são os vértices de Wi que possuem
a mesma distância da raiz e esta é máxima em Wi. Anexe agora um novo filho u, com
rótulo C(i), ao vértice v mais abaixo em Wi, ou seja, o vértice v é o vértice mais novo na
ordem árvore plana em Wi. Caso este vértice v já tenha filhos, anexe u respeitando a
ordem dos filhos de v para obter um rótulo bom. Defina essa nova árvore como τi(s).
Seguindo Moser-Tardos [59], dizemos que uma árvore de Moser-Tardos τ aparece
no registro C do algoritmo se existe um número natural s tal que τ(s) = τ. Provaremos
a seguir um dos principais ingredientes da demostração do Teorema 2.9. O Lema 2.3
abaixo nos diz que as árvores de Moser-Tardos são novas árvores de Penrose e além
disso ela é uma generalização do Lema 2.1 em [59].
Lema 2.3. 1) Seja τ = (t, σ) uma árvore de Moser-Tardos própria e C o registro produzido pelo
algoritmo. Se τ aparece em C, então τ é uma nova árvore de Penrose.
2) Dado um evento Ax ∈ A, seja Nx o número de vezes que o evento Ax foi reamostrado pelo
algoritmo de Moser-Tardos com a modifcação desta seção. Então a esperança de Nx é no máximo
E(Nx) ≤ pxΠx(−p), (2.80)
em que Πx(−p) é dado por (2.79).
Prova de 1): Se τ aparece no registro C, então existe um s ∈N tal que τ(s) = τ = (t, σ).
Por construção, a árvore plana t é tal que qualquer vértice v ∈ Vt, com rótulo σ(v), é
compatível com todos os outros rótulos que estão à mesma distância da raiz. Com

82
efeito, suponha que v e w são dois vértices de τ(s) = τ à mesma distância da raiz, isto
é, d(v) = d(w) e que o rótulo de v é incompatível com o rótulo de w. Suponha, sem
perda de generalidade, que w é colocado depois de v em τ(s). Já que o rótulo de w é
incompatível com o rótulo de v, temos que d(w) ≥ d(v) + 1, o que contraria a hipótese
que d(v) = d(w). Assim se d(v) = d(w) então σ(v) ∼ σ(w).
Suponha agora que v e w são vértices de τ tais que w é um tio de v que é mais novo
que o pai v∗ de v, ou seja, um tio de v que está abaixo do pai v∗ no desenho de τ no
plano. Temos que mostrar que σ(v) ∼ σ(w). Novamente, suponha por absurdo que w
é um tio de v mais novo que o pai e que σ(v) / σ(w). Considere dois casos. Primeiro
considere o caso que v foi colocado depois de w para formar τ(s) = τ. Como σ(v) / σ(w)
e w está abaixo de v∗, então de acordo com a nossa regra determinística descrita acima,
o vértice v não pode ser anexado em v∗: ele deve ser anexado a w ou a outro tio abaixo
de w, contrariando a hipótese que v esta anexado a v∗. Considere agora o caso que w
foi colocado depois de v. Neste caso temos que d(w) ≥ d(v) + 1, contrariando a hipótese
que w é tio de v ( e portanto d(w) = d(v) − 1).
Prova de 2): Lembrando que TxX é o conjunto de todas as árvores de Moser-Tardos,
enraizadas em x ∈ X, que podem ser geradas pelo algoritmo de Moser-Tardos, a parte
1) acima basicamente afirma que TxX ⊂ S
xX. Portanto o número médio de vezes que um
evento A foi reamostrado pelo algoritmo é limitado por
E(Nx) ≤ Φx(p), (2.81)
em que
Φx(p) =∑
τ=(t,σ)∈SxX
∏v∈Vtv,r
pσ(v). (2.82)
Observe que a soma do lado direito de (2.82) pode também ser reescrita. Seja Sx,nX o
subconjunto de SxX formado pelas árvores com n + 1 vértices em que a raiz r está com
o rótulo x ∈ X. Então

83
Φx(p) = px
∞∑n=0
∑τ∈Sx,n
X
n∏v∈Vtv,r
pσ(v). (2.83)
Lembre que se τ = (t, σ) ∈ Sx,nX , em que t é uma árvore plana e σ é um rótulo bom,
então o par (ϑt; x0, x1, . . . , xn) com σ(i) = xi é tal que a n-upla (x1, . . . , xn) é bem ordenada
em t, isto é, x1 ≺ x2 ≺ · · · ≺ xn. Dizer que uma árvore τ = (t, σ) ∈ Sx,nX é equivalente a
dizer que o par (ϑt; x0, x1, . . . , xn) é tal que ϑt ∈ P(x0, x1, . . . , xn), pela observação 14.
Deste modo,
∑τ∈Sx,n
X
n∏v∈Vtv,r
pσ(v)) =∑t∈T0
n
∑σ=(x1 ,...,xn)∈Xn :
bem ordenado em t
1ϑt∈P(x0,x1,...,xn)
n∏i=1
pxi . (2.84)
.
Portanto,
∑n≥0
∑τ∈Sx,n
X
n∏v∈Vtv,r
pσ(v) =∑n≥0
∑t∈T0
n
∑σ=(x1 ,...,xn)∈Xn
bem ordenado em t
1ϑt∈P(x0,x1,...,xn)
n∏i=1
ρxi = (2.85)
=∑n≥0
∑t∈T0
n
[∏v∈Vt
1sv!
] ∑σ=(x1,...,xn)∈Xn
1ϑt∈P(x0,x1,...,xn)
n∏i=1
ρxi = Πx0(−ρ). (2.86)
Portanto,
lembrando a cota (2.81) e a Definição 2.82, obtemos que
E(Nx) ≤ Φx(p) = pxΠx(−p). (2.87)
Por fim, lembrando a definição de Πx(−p) em 2.4, temos que este último lema conclui
a prova do Teorema 2.9.
Referências Bibliográficas
[1] M. Aizenman and M. Newman. Tree graphs inequalities and critical behavior inpercolation models. J. Statist. Phys., 36(1-2):107–143, 1984.
[2] N. Alon. A parallel algorithmic version of the local lemma. Random Structures andAlgorithms, 2 (4):367–378, 1991.
[3] N. Alon and J. Spencer. The Probabilistic Method. Third Edition. New York, Wiley-Interscience, 2008.
[4] R. G. Alves and A. Procacci. Witness tress in the Moser-Tardos algorithmic Lovászlocal lemma and Penrose trees in the hard core lattice gas. J. Statist. Phys., 156:877-895, 2014.
[5] R. G. Alves, A. Procacci, and R. Sanchis. Percolation on infinite graphs andisoperimetric inequalities. J. Statist. Phys., 149:831–845, 2012.
[6] T. Antunovic and I. Veselic. Sharpness of the phase transition and exponentialdecay of the subcritical cluster size for percolation on quasi-transitive graphs. J.Statist. Phys., 130(5):963–1009, 2008.
[7] E. Babson and I. Benjamini. Cut sets and normed cohomology with applicationsto percolation. Proc. Amer. Math. Soc., 127:589–597, 1999.
[8] R. J. Baxter. Exactly solved models in statistical mechanics. Academic Press Inc.[Harcourt Brace Jovanovich Publishers], London, 1989 (Reimpressão do original,1982).
[9] J. Beck. An algorithmic approach to the Lovász Local Lemma. Random Structuresand Algorithms, 2 (4):342–365, 1991.
[10] I. Benjamini and O. Schramm. Percolation beyond Zd, many questions and a fewanswers. Elect. Comm. in Probab., 1:71–82, 1996.
[11] R. Bissacot, R. Fernández, and A. Procacci. An improvement of the Lovász locallemma via cluster expasion. Combin. Probab. Comput., 20(5):709–719, 2011.
[12] Rodrigo Bissacot. Técnicas para convergência da Expansão do Gás de Polímeros e umaaplicação ao Método Probabilístico. Tese de doutorado.
84
85
[13] B. Bollobas. Bollobas, b.: Paul erdos, 1913-1996. journal of the royal statisticalsociety. series d (the statistician),48, no. 2 (1999), 271-273. J. Royal Statist. Soc. Ser.D, 48 No. 2:271–273, 1999.
[14] G. A. Braga, A. Procacci, and R. Sanchis. Analyticity of the d-dimensional boundpercolation probability around p = 1. J. Statist. Phys., 107:1267–1282, 2002.
[15] G. A. Braga, A. Procacci, and R. Sanchis. Ornstein-Zernike behavior for the ber-noulli bound percolation on ζd in the supercritical regime. Comm. on Pure Appl.Analysis, 3:581–606, 2004.
[16] S. R. Broadbent and J. M. Hammersley. Percolation process I. Crystals and mazes.Proc. Camb. Phil. Soc., 53:62–641, 1957.
[17] D. Brydges. A short course on Cluster Expasion. North Hollad Press, 1986.
[18] J. Böttcher, Y. Kohayakawa, and A. Procacci. Properly coloured copies and rain-bow copies of large graphs with small maximum degree. Random Structures andAlgorithms, 40:425–436, 2012.
[19] C. Cammarota. Decay of correlations for infinite range interactions in unboundedspin systems. Comm. Math. Phys., 85:517–28, 1982.
[20] R. Campari and D. Cassi. Generalization of the Peierls-Griffiths theorem for theIsing model on graphs. Phys. Rev. E, 81(021108), 2010.
[21] J. T. Chayes and L. Chayes. Critical points and intermediate phase on wedges ofZd. J. Phys. A: Math. Gen., 19:3033–3048, 1986.
[22] J. T. Chayes, L. Chayes, and C. M. Newman. Bernoulli percolation above the-reshold: an invasion percolation analysis. Ann. Probab., 15(4):1272–1287, 1987.
[23] J.T. Chayes, L. Chayes, G. R. Grimmett, H. Kesten, and R. H. Schonmann. Thecorrelation length for the high-density phase of bernoulli percolation. Ann. Probab.,17(4):1277–1302, 1989.
[24] D. Chen, Y. Peres, and G. Pete. Anchored expansion, percolation and speed. Ann.Probab., 32:2978–2995, 2004.
[25] R. Diestel and I. Leader. A conjecture concerning a limit of non-cayley graphs.Journal of algebraic combinatorics., 14:17–25, 2001.
[26] R. L. Dobrushin. Existence of a phase transition in two and three dimensionalising models. Th. Prob. Appl., 10:193–213, 1965.
[27] R. L. Dobrushin. Perturbation methods of the theory of Gibbsian fields. In Lectures onprobability theory and statistics (Saint- Flour, 1994), volume 1648 of Lecture Notesin Math., pages 1-66. Springer, Berlin., 1986.

86
[28] R. L. Dobrushin. Estimates of semi-invariants for the ising model at low tempe-ratures. In Topics in Statistical and Theoretical Physics, Amer. Math. Soc. Translations,Ser. 2, 177:59–81, 1996.
[29] P. Erdös and L. Lovász. Problems and results on 3-chromatic hypergraphs and somerelated questions, in Infinite and finite sets. Vol. II, Colloq. Math. Soc. Janos Bolyai,Vol. 10, pp. 609-627. North-Holland, Amsterdam, 1975.
[30] A. Eski, D. Fisher, and K. Whyte. Quasi-isometries and rigidity of solvable groups.Pure Appl. Math. Q., 3:927–947, 2007.
[31] L. Esperet and A. Parreau. Ayclic edge-coloring using entropy compression. Eu-ropean Journal of Combinatorics, 34, In. 6:1019–1027, 2013.
[32] R. Fernández and A. Procacci. Cluster expansion for abstract polymer models.new bounds from an old approach. Comm. Math. Phys., 274(1):123–140, 2007.
[33] J. Glimm and A. Jaffe. Quantum Physics. A functional integral point of view. SpringerVerlag, New York, 1987.
[34] R. B. Griffiths. Peierls’ proof of spontaneous magnetization in a two-dimensionalising ferromagnet. Phys. Rev., 136A:437–439, 1964.
[35] R. I. Grigorchuk. On the Milnor problem of group growth. Dokl. Akad. Nauk SSSR,271:3033, 1983.
[36] G. R. Grimmett. Critical sponge dimensions in percolation theory. Adv. in Appl.Probab., 13(2):314–324, 1981.
[37] G. R. Grimmett. Bond percolation on subsets of the square lattice, and the thresholdbetween one-dimensional and two-dimensional behavior. J. Phys. A: Math. Gen.,16:599–604, 1983.
[38] G. R. Grimmett. Percolation, segunda edição. Springer Verlag, New York, 1999.
[39] G. R. Grimmett and C. M. Newman. Percolation in ∞ +1 dimensions. Disorder inPhysical Systems, volume 18. Oxford University Press, 1990.
[40] G. R. Grimmett and A. M. Stacey. Critical probabilities for site and bond percola-tion. Ann. Probab., 26:788–1812, 1998.
[41] M. Gromov. Groups of polynomial growth and expanding maps. Inst. Hautes ´Etudes Sci. Publ. Math., pages 53–73, 1981.
[42] C. Gruber and H. Kunz. General properties of polymer systems. Comm. Math.Phys., 22:133–61, 1971.
[43] J. Grytczuk, J. Kozik, and P. Micek. New approach to nonrepetitive sequences.Random Structures and Algorithms, 42:214–225, 2013.
87
[44] O. Häggström. Markov random fields and percolation on general graphs. Adv. inAppl. Probab., 32:39–66, 2000.
[45] B. Jackson, A. Procacci, and A. D. Sokal. Complex zero-free regions at large |q| formultivariate tutte polynomials (alias potts-model partition functions) with generalcomplex edge weigths. J. Comb. Theory, Ser. B, 103:21–45, 2013.
[46] H. Kesten. A lower bound for the critical probability in a certain percolationprocess. Proc. Camb. Phil. Soc., 56:13–20, 1960.
[47] H. Kesten. The critical probability of bond percolation on the square lattice equals1/2. Comm. Math. Phys., 74:41–59, 1980.
[48] H. Kesten. Percolation Theory for Mathematicians. Bikhäuser, Boston, 1982.
[49] K. B. R. Kolipaka and M. Szegedy. Moser and tardos meet lovász. Proceedings ofthe 43rd annual ACM symposium on Theory of computing ACM New York, NY, USA .,pages 235–244, 2011.
[50] R. Kotecký and D. Preiss. Cluster expansion for abstract polymer models. Comm.Math. Phys., 103:491–498, 1986.
[51] G. Kozma. Percolation, perymetry, planarity. Rev. Mat. Iberoamericana, 23:671–676,2007.
[52] R. Lyons. Random walks and percolation on trees. Ann. Probab., 18:931–958, 1990.
[53] R. Lyons. Random walks, capacity, and percolation on trees. Ann. Probab., 20:2043–2088, 1992.
[54] R. Lyons. Random walks and the growth of groups. C. R. Acad. Sci. Paris S´er. IMath., 320:1361–1366, 1995.
[55] R. Lyons and Y. Peres. Probability on Trees and Networks. In preparation. Currentversion available at http://mypage.iu.edu/~rdlyons/, 2013.
[56] John Meier. Groups, Graphs and Trees. An introduction to the geometry of infinite groups.Cambridge University Press, 2008.
[57] B. Mohar. Some relations between analytic and geometric properties of infinitegraphs. Discrete Math., 95:193–219, 1991.
[58] M. Molloy and Bruce Reed. Further algorithmic aspects of the local lemma. InProceedings of the 30th Annual ACM Symposium on the Theory of Computing, pages524–529, 1998.
[59] R. A. Moser and G. Tardos. A constructive proof of the Lovász local lemma. J.ACM, 57 Article 11, 2010.

88
[60] Robin A. Moser. A constructive proof of the Lovász local lemma. Proceedings of the40st annual ACM Symposium on Theory of Computing., pages 343–350, 2009.
[61] R. Muchnik and I. Pak. Percolation on grigorchuk groups. Comm. Algebra, 29:661–671, 2001.
[62] S. Ndreca, A. Procacci, and B. Scoppola. Improved bouns on colorings of graphs.European Journal of Combinatorics, 33:592–609, 2012.
[63] W. Pegden. An extension o the moser-tardos algorithmic local lemma. SIAM J.Discrete Math. (a aparecer) preprint em http://arxiv.org/abs/1102.2853., 2013.
[64] R. Peierls. On ising’s model of ferromagnetism. Proc. Camb. Phil. Soc., 32(03):477–481, 9 1936.
[65] O. Penrose. Convergence of fugacity expansions for classical systems. In statisticalmechanics: foundations and applications. A. Bak (ed.), Benjamin, New York., 1967.
[66] A. Procacci. Cluster expansion methods in rigorous statistical mechanics.www.mat.ufmg.br/ aldo/papers/book.pdf.
[67] A. Procacci and B. Scoppola. The gas phase of continuous systems of hard spheresinteracting via n-body potential. Comm. Math. Phys., 211 n. 2:487–496, 2000.
[68] A. Procacci and B. Scoppola. Infinite graphs with a nontrivial bond percolationthreshold: some sufficient conditions. J. Statist. Phys., 115(3-4):1113–1127, 2004.
[69] A. Procacci and B. Scoppola. Convergent expansions for random cluster modelwith q > 0 on infinite graphs. Comm. on Pure Appl. Analysis, 5:1145–1178, 2008.
[70] D. Ruelle. Statistical mechanics: Rigorous results. W. A. Benjamin, Inc., New York-Amsterdam., 1969.
[71] R. H. Schonmann. Multiplicity of phase transitions and mean-field criticality onhighly non-amenable graphs. Commun. Math. Phys., 219(2):271–322, 2001.
[72] A. Scott and A. D. Sokal. The repulsive lattice gas, the independent-set polynomial,and the lovász local lemma. J. Statist. Phys., 118 no5-6:1151–1261, 2005.
[73] A. Scott and A. D. Sokal. On dependence graphs and the lattice gas. Combin.Probab. Comput., 15:253–279, 2006.
[74] J. B. Shearer. On a problem of Spencer. Combinatorica, 5:241–245, 1985.
[75] B. Simon. The Statistical Mechanics of Lattice Gases. Princeton University Press.,1993.
[76] A. D. Sokal. Bounds on the complex zeros of (di)chromatic polynomials and pottsmodel partition functions. Combin. Probab. Comput., 10(1):41–77, 2001.

89
[77] J. Spencer. Asymptotic lower bounds for Ramsey functions. Discrete Math., 20:69–76, 1977.
[78] C Temmel. Shearer’s measure and stochastic domination of product measures.Journal of Theoretical Probability, 2012.
[79] C. Thomassen and W. Woess. Vertex-transitive graphs and accessibility. J. Comb.Theory, Ser. B, 58(2):248–268, 1991.
[80] A. Timár. Cutsets in infinite graphs. Combin. Probab. Comput., 16(1):159–166, 2007.
[81] D. Ueltschi. Introduction to Statistical Mechanics. Lecture Notes.
[82] N. Varopoulos, L. Saloff-Coste, and T. Coulhon. Analysis and Geometry on Groups,volume 100. Cambridge Tracts in Mathematics, 1993.
[83] M. E. Watkins. Infinite paths that contain only shortest paths. J. Comb. Theory, Ser.B, 41:341–355, 1986.
[84] W. Woess. Lamplighters, Diestel-Leader graphs, random walks, and harmonicfunctions. Combin. Probab. Comput., 14:415–433, 2005.

















![PERCOLAÇÃO EM BARRAGENS DE TERRA EM REGIME … · Percolação em Barragens de Terra em Regime Permanente e Transien te com o Método dos Elementos de Contorno. [Rio de Janeiro]](https://static.fdocumentos.com/doc/165x107/604d7717fb5830730b7077fd/percolafo-em-barragens-de-terra-em-regime-percolao-em-barragens-de-terra.jpg)