e.BOOK: QUESTÕES DO ENADE COMENTADAS Curso: … · analisar a capacidade mínima de carga...
59
e.BOOK: QUESTÕES DO ENADE COMENTADAS Curso: Engenharia de Controle e Automação Organizador(es): Vitor Hugo Martins e Resende
Transcript of e.BOOK: QUESTÕES DO ENADE COMENTADAS Curso: … · analisar a capacidade mínima de carga...
e.BOOK: QUESTÕES DO ENADE COMENTADAS
Curso: Engenharia de Controle e Automação
Organizador(es): Vitor Hugo Martins e Resende

SUMÁRIO
QUESTÃO D3
Autor(a): MARCOS LAJOVIC CARNEIRO
QUESTÃO D4
Autor(a): MARCOS LAJOVIC CARNEIRO
QUESTÃO D5
Autor(a): SANTIAGO MEIRELES ROCHA
QUESTÃO Nº 09
Autor(a): JOELMIR DIVINO CARLOS FELICIANO VILELA QUESTÃO Nº 10
Autor(a): CÁSSIO HIDEKI FUJISAWA QUESTÃO Nº 11
Autor(a): Mª XIMENA VÁZQUEZ F. LIMA
QUESTÃO Nº 12
Autor(a): FLÁVIO MARQUES DE CARVALHO QUESTÃO Nº 13
Autor(a): CLEBES ANDRÉ DA SILVA
QUESTÃO Nº 14
Autor(a): ANA FLÁVIA MARINHO DE LIMA GARROTE QUESTÃO Nº 15
Autor(a): CARLOS AUGUSTO G. MEDEIROS
QUESTÃO Nº 16
Autor(a): MARCILON FONSECA DE LIMA QUESTÃO Nº 17
Autor(a): JOELMIR DIVINO CARLOS FELICIANO VILELA
QUESTÃO Nº 18
Autor(a): CLEBES ANDRÉ DA SILVA
QUESTÃO Nº 19
Autor(a): CÁSSIO HIDEKI FUJISAWA
QUESTÃO Nº 20
Autor(a): MARCOS LAJOVIC CARNEIRO
QUESTÃO Nº 21
Autor(a): BRUNO QUIRINO DE OLIVEIRA
QUESTÃO Nº 22
Autor(a): WANDERSON RAINER HILARIO DE ARAUJO QUESTÃO Nº 23
Autor(a): MARCOS LAJOVIC CARNEIRO

QUESTÃO Nº 24
Autor(a): BRUNO QUIRINO DE OLIVEIRA
QUESTÃO Nº 25
Autor(a): BRUNO QUIRINO DE OLIVEIRA
QUESTÃO Nº 26
Autor(a): SANTIAGO MEIRELES ROCHA
QUESTÃO Nº 27
Autor(a): MARCOS LAJOVIC CARNEIRO
QUESTÃO Nº 28
Autor(a): BRUNO QUIRINO DE OLIVEIRA
QUESTÃO Nº 29
Autor(a): MIRIAN SANDRA ROSA GUSMAO
QUESTÃO Nº 30
Autor(a): BRUNO QUIRINO DE OLIVEIRA
QUESTÃO Nº 31
Autor(a): MARCOS LAJOVIC CARNEIRO QUESTÃO Nº 32
Autor(a): BRUNO QUIRINO DE OLIVEIRA
QUESTÃO Nº 33
Autor(a): BRUNO QUIRINO DE OLIVEIRA
QUESTÃO Nº 34
Autor(a): BRUNO QUIRINO DE OLIVEIRA
QUESTÃO Nº 35
Autor(a): BRUNO QUIRINO DE OLIVEIRA

QUESTÃO D3
Tipo de questão: Média
Conteúdo avaliado: Sistemas de Controle – Cap. 4, 7 e 9 - Nise
Autor(a): Marcos Lajovic Carneiro
Comentário: a) Para encontrar a função de transferência para este sistema de primeira ordem
podemos utilizar a fórmula:

Calculamos o ganho K dividindo a variação da saída (em graus) pela variação da
entrada (em volts):
A constante de tempo é o tempo relativo ao momento em que a função atinge 63% do
seu valor final, portanto:
Temos então que pelo gráfico a constante de tempo será de 5 segundos.
A função de transferência final será então:
b) O compensador integral tende a reduzir o erro de estado estacionário de um
sistema estável para uma entrada em degrau. O sistema em malha aberta
apresentado é classificado como do tipo 0. Com a inserção de um controlador PI e
uma malha de retroalimentação unitária ele se torna um sistema do tipo 1 e seu erro
de estado estacionário se torna zero para uma entrada em degrau.
Referências: Referências: Nise, N. S., Engenharia de Sistemas de Controle , Editora LTC, 6. ed., 2016.
QUESTÃO D4

Tipo de questão: Fácil
Conteúdo avaliado: Sistemas de Controle – Cap. 4 - Nise
Autor(a): Marcos Lajovic Carneiro

Comentário: a)
4 = 2���
��� = 2
�� = 4���
= 42 = 2
A balança apresentará o valor adequado após 2 segundos.
b) O caminhão foi multado de forma errada na segunda balança pois a medida de
peso ainda não havia estabilizado antes da leitura, apresentando assim um valor
acima do permitido de forma errada. É preciso considerar valores de peso somente
após 2 segundos pois é a partir deste tempo que o sistema se estabiliza com um valor
dentro da região de ±2% em torno do valor real.
Referências: Referências: Nise, N. S., Engenharia de Sistemas de Controle , Editora LTC, 6. ed., 2016.

QUESTÃO D5
Tipo de questão: Média
Conteúdo avaliado: Razões para automatizar; Trabalho manual no sistema de produção; Manuseio de materiais; Análise Econômica de Investimestos;
Autor(a): Santiago Meireles Rocha
Comentário: Questão A: Primeiro, vamos analisar o alcance mínimo necessário que o robe deve atender. Distância entre as estações: 160. O robô sendo instalado em uma reta entre as estações, temos alcance mínimo é de 160 cm / 2 = 80 cm. Em seguida, vamos analisar a capacidade mínima de carga requerida, que é a soma de 5 kgf (peça) + 1,5 kgf (garra) = 6,5 kgf. Dentre os modelos que atendem ambos os critérios, o mais econômico é o Modelo C. Questão B: Vantagens: Maior produtividade; Sem paradas para descanso; Pode funcionar 24h;
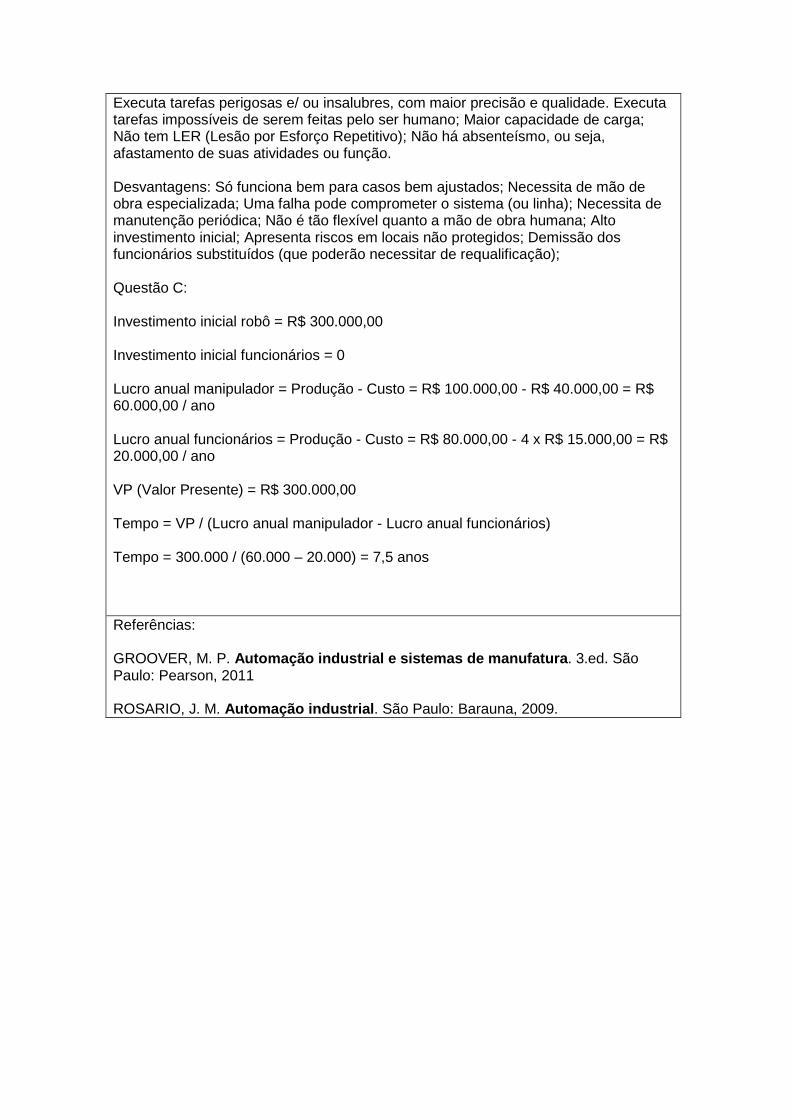
Executa tarefas perigosas e/ ou insalubres, com maior precisão e qualidade. Executa tarefas impossíveis de serem feitas pelo ser humano; Maior capacidade de carga; Não tem LER (Lesão por Esforço Repetitivo); Não há absenteísmo, ou seja, afastamento de suas atividades ou função. Desvantagens: Só funciona bem para casos bem ajustados; Necessita de mão de obra especializada; Uma falha pode comprometer o sistema (ou linha); Necessita de manutenção periódica; Não é tão flexível quanto a mão de obra humana; Alto investimento inicial; Apresenta riscos em locais não protegidos; Demissão dos funcionários substituídos (que poderão necessitar de requalificação); Questão C: Investimento inicial robô = R$ 300.000,00 Investimento inicial funcionários = 0 Lucro anual manipulador = Produção - Custo = R$ 100.000,00 - R$ 40.000,00 = R$ 60.000,00 / ano Lucro anual funcionários = Produção - Custo = R$ 80.000,00 - 4 x R$ 15.000,00 = R$ 20.000,00 / ano VP (Valor Presente) = R$ 300.000,00 Tempo = VP / (Lucro anual manipulador - Lucro anual funcionários) Tempo = 300.000 / (60.000 – 20.000) = 7,5 anos Referências: GROOVER, M. P. Automação industrial e sistemas de manufatura . 3.ed. São Paulo: Pearson, 2011 ROSARIO, J. M. Automação industrial . São Paulo: Barauna, 2009.

QUESTÃO Nº 09
Gabarito: E
Tipo de questão: Fácil/Média
Conteúdo avaliado: Distribuição Normal
Autor(a): JOELMIR DIVINO CARLOS FELICIANO VILELA
Comentário:

Essa questão está relaciona com a disciplina PROBABILIDADE E ESTATÍSTICA.
Esse tema é encontrado em todos os livros de PROBABILIDADE E ESTATÍSTICA e estudado com frequência pelos alunos das áreas de exatas e afins.
Vamos descrever as principais propriedades da DISTRIBUIÇÃO NORMAL e em seguida analisar individualmente cada uma das afirmações apresentadas acima.
1. Distribuição Normal
Definição : Dizemos que a variável aleatória tem Distribuição Normal com parâmetros � e ��, −∞ ≤ � ≤ ∞ e 0 ≤ �� ≤ ∞ se sua função densidade de probabilidade é dada por:
�(�; �, ��) = 1√2��� ��( �!)"
�#"
Assim, por definição a média da Distribuição Normal também conhecida por Esperança matemática e dada por $( ) = � e Variância é dada por %&'( ) = ��.
2. Propriedades da Distribuição Normal
a. A variável aleatória pode assumir todo e qualquer valor real. b. A representação gráfica da Distribuição Normal é uma curva em forma de
sino, simétrica em torno da Média � que Possui uma variabilidade em torno dessa média � para mais ou para menos denominado de desvio-padrão e representado pela letra grega � recebe o nome de curva normal.
c. A curva normal é assintótica em relação ao eixo das abscissas, isto é, aproxima-se indefinidamente do eixo das abscissas em, contudo, alcançá-lo.
d. Como a curva normal é simétrica em torno da média �, a probabilidade de ocorrer valor maior do que a média é igual a probabilidade de ocorrer valor menor do que a média, isto é, ambas as probabilidades são iguais a 0,5 e escrevemos:
(( > �) = (( < �) = 0,5.
Comentários e Resolução da Questão 09.

A partir de agora iremos comentar os itens de I à V detalhadamente. Item I - A velocidade média de cada treino é de -., / 01/3. Comentário: Por definição a média da distribuição é � = 25 45 e a duração média do treino é de 1h15mim dada pelo exercício. Neste caso precisamos transformar o tempo que é dado em horas e minutos para apenas horas. Assim:
1 ℎ → 60 59: � ℎ → 15 59:
Resolvendo a regra de três simples, temos:
60 min � ℎ = 15 min ℎ
� ℎ = 15 min ℎ60 59:
� ℎ = 0,25 ℎ
Portanto o tempo médio em horas será dado 1,25 ℎ>?@. Dividindo a média da distância percorrida pela média do tempo em horas, temos:
�ℎ = 25 45
1,25 ℎ = 20 45/ℎ
Que será a velocidade média percorrida por hora. Logo:
20 45/ℎ ≠ 21,7 45/ℎ Portanto o Item I é Falso . Item II - A distância média percorrida em cada trei no é de -C 01. Comentário: Por definição a média da distribuição é �, logo para exercício a média � = 25 45. Portanto o item II é Verdadeiro . Item III - A área média percorrida em cada tre ino é de -C 01-. Comentário: O exercício trata de um treinamento que é medido em distância percorrida e tempo gasto. Em nenhum momento se refere à área percorrida. Portanto o item III é Falso . Item IV - À distância percorrida de cada treino, em um desvio-padrão, está entre -D 01 e ED 01. Comentário: Por definição o desvio-padrão é dado pela raiz quadrada da variância. Neste caso, a variância é dada por �� = 25 45�. Assim, extraindo a raiz de ambos os lados, teremos o desvio-padrão dado por � = 5 45. Como a média � = 25 45 e a afirmação diz que se deseja a distância de um desvio-padrão, basta somarmos e subtrairmos o desvio-padrão � = 5 45 no valor da média.

O fato de somarmos e subtrairmos o desvio-padrão do valor da média é porque a Distribuição Normal é simétrica. Logo teremos o intervalo que corresponderá entre 20 45 e 30 45. Portanto o item IV é Verdadeiro . Item V - A velocidade média de cada treino, em um desvio-padrão, está entre .G 01/3 e -H 01/3. Comentário: No item I calculamos a velocidade média de cada treino que foi de 20 45/ℎ, assim nos resta calcular o desvio-padrão da velocidade. Por definição o desvio-padrão é dado pela raiz quadrada da variância. Neste caso, precisamos calcular o desvio-padrão da velocidade de cada treino. Então basta utilizarmos o desvio-padrão da distância percorrida que é � = 5 45 calculada no item IV e dividirmos pelo tempo médio em horas que é de 1,25 ℎ>?@ calculadas no item I. Dessa forma teremos:
Desvio da velocidade = I JKL,�I M = 445/ℎ .
Como a média da velocidade é 20 45/ℎ e a afirmação diz que se deseja a distância de um desvio-padrão, basta somarmos e subtrairmos o desvio-padrão da velocidade = 445/ℎ no valor da média da velocidade. Logo teremos um intervalo que corresponderá entre 16 45/ℎ e 20 45/ℎ. Portanto o Item V é Verdadeiro . A resposta correta para este exercício é a letra E , pois os Itens II, IV e V são verdadeiros. Referências: BUSSAB, Wilton O.; MORETTIN, Pedro A. Estatística Básica . 4. Ed. Atual. São Paulo, 1987. CRESPO, Antônio Arnot. Estatística Fácil . 17. Ed. Saraiva. São Paulo, 1999. HOFFMANN, Rodolfo; VIEIRA, Sônia. Análise de Regressão: uma introdução à econometria . 2. ed. HUCITEC. São Paulo, 1977. MEYER, Paul L. Probabilidade: aplicações à estatística . Tradução de Ruy de C. B. Lourenço Filho. 2. Ed. LTC. Rio de Janeiro, 1983. VIEIRA, Sônia; HOFFMANN, Rodolf. Estatística Experimental . Atlas. São Paulo, 1989.
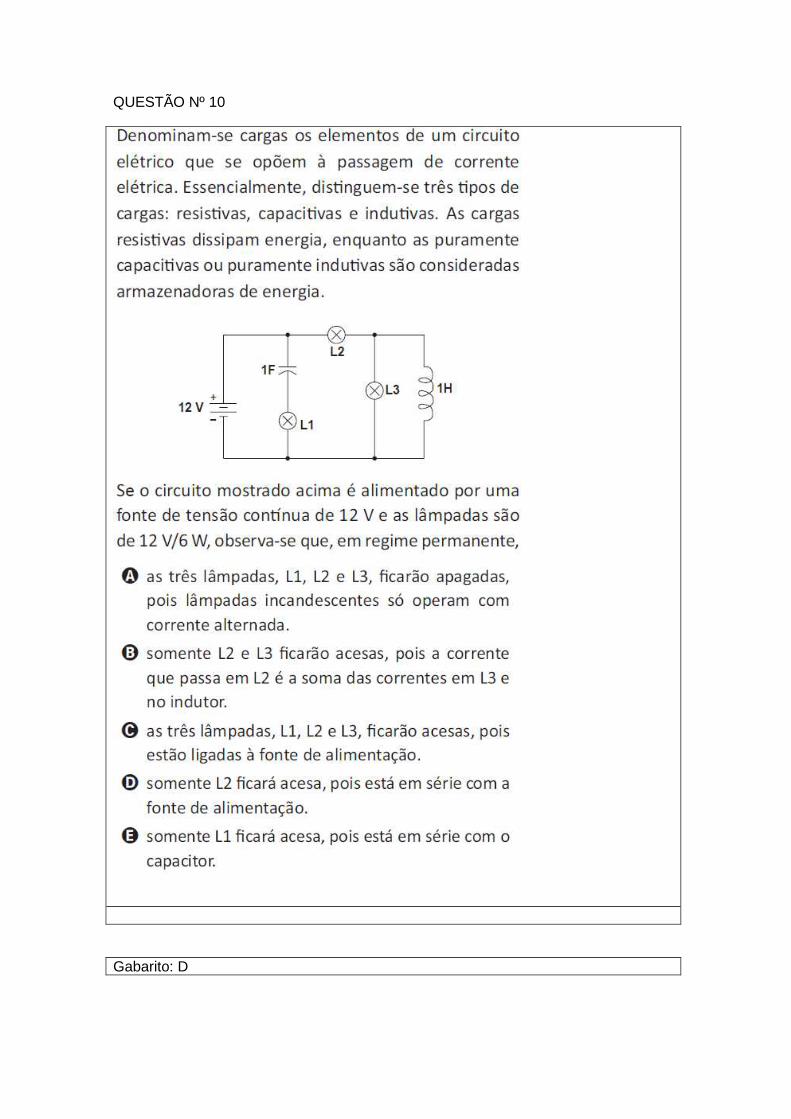
QUESTÃO Nº 10
Gabarito: D

Tipo de questão: Fácil.
Conteúdo avaliado: Circuito elétrico de corrente contínua aplicada ao indutor e capacitor.
Autor(a): Cássio Hideki Fujisawa
Comentário: Essa questão possui o conteúdo ministrado na disciplina CIRCUITOS ELÉTRICOS I Em regime permanente de um circuito elétrico de corrente contínua (CC), o capacitor de 1F se comporta como um circuito em aberto, portanto a lâmpada L1, que está em série com o capacitor, não terá corrente e ficará desligada. Para o mesmo circuito elétrico CC em regime permanente o indutor de 1H se comporta como um curto-circuito, portanto a lâmpada L3 estará em paralelo a um curto-circuito. Dessa forma toda corrente passará pelo indutor, e nenhuma corrente percorrerá a lâmpada L3 permanecendo desligada. Por isso, apenas a lâmpada L2 apresentará uma corrente, tendo 12 V aplicado em seus terminais. Referências: Dorf, Richard C. e Svoboda, James A. Introdução aos circuitos elétricos , Capítulo 7. Editora LTC, 8a edição, Rio de Janeiro – RJ, 2012.
QUESTÃO Nº 11
Gabarito: E
Tipo de questão: Objetiva
Conteúdo avaliado: Conversão de unidades
Autor(a): Mª Ximena Vázquez F. Lima
Comentário:
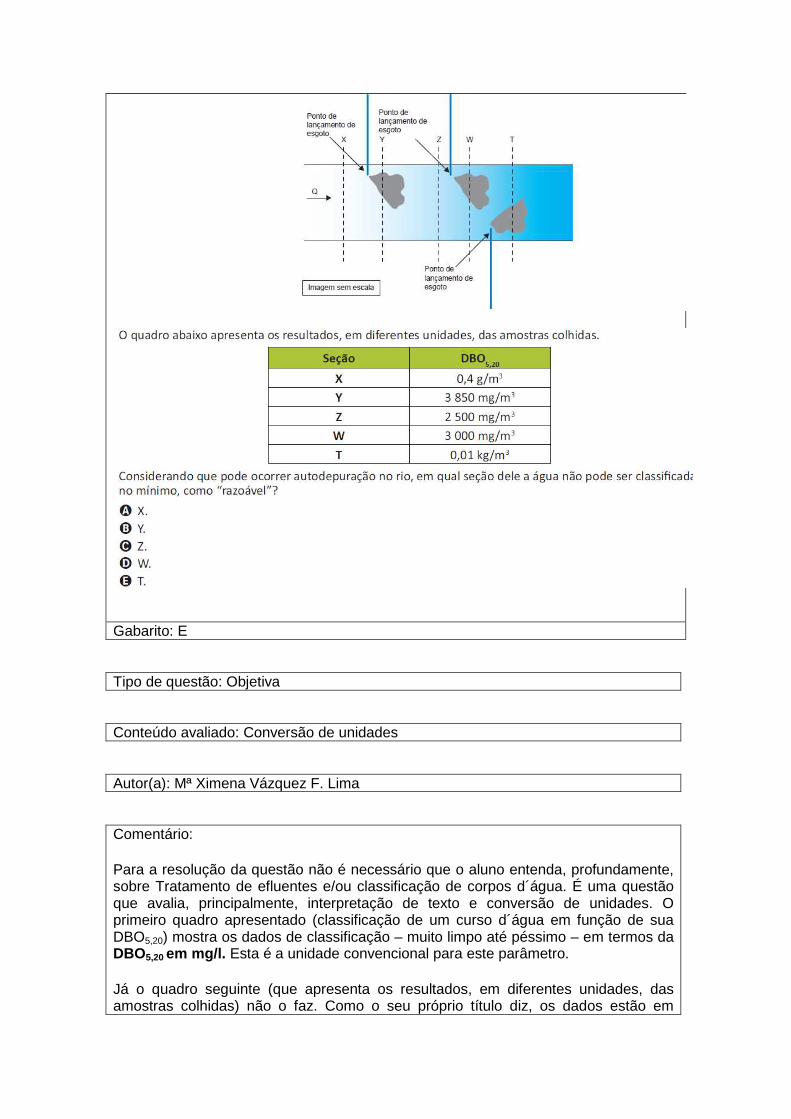
Para a resolução da questão não é necessário que o aluno entenda, profundamente, sobre Tratamento de efluentes e/ou classificação de corpos d´água. É uma questão que avalia, principalmente, interpretação de texto e conversão de unidades. O primeiro quadro apresentado (classificação de um curso d´água em função de sua DBO5,20) mostra os dados de classificação – muito limpo até péssimo – em termos da DBO5,20 em mg/l. Esta é a unidade convencional para este parâmetro.
Já o quadro seguinte (que apresenta os resultados, em diferentes unidades, das amostras colhidas) não o faz. Como o seu próprio título diz, os dados estão em

DIFERENTES UNIDADES (g/m3; mg/m3 e kg/m3).
Portanto, o estudante deve fazer a conversão de todos esses dados das amostras para mg/l.
Com esse valor ele deve descartar todos os resultados que se apresentem em valores de classificação muito limpo, limpo e razoável (até 1mg/l; maior que 1 até 2 mg/l e maior que 2 até 4 mg/l, respectivamente). Ou seja, todos com valores MENOR que 4 mg/l.
Resta então apenas a seção T (alternativa E) , cujo valor é 10 mg/l (ou 0,01kg/ m3). Referências:
JORDÃO, E. P.; PESSOA, C. A. Tratamento de esgotos domésticos. 6. ed. Rio de Janeiro: ABES, 2011.
VON SPERLING, M. Introdução à qualidade das águas e ao tratamento de esgotos . 2rev. Bambuí: Desa, 1996. 243 p.
QUESTÃO Nº 12

Gabarito: A
Tipo de questão: Fácil
Conteúdo avaliado: Transferência de Calor - Condução Regime permanente: equação geral da condução – lei de Fourier. Condição unidimensional em paredes planas
Autor(a): Flávio Marques de Carvalho
Comentário: A taxa de calor pode ser obtida multiplicando-se o fluxo de calor pela área
perpendicular à direção da transferência de calor, q cond = − kA dT/dx
O sinal negativo aparece porque o calor está sendo transferido na direção da temperatura decrescente. A lei de Fourier se aplica a todos os estados da matéria (sólidos, líquidos e gases), desde que estejam em repouso.

O gradiente de temperatura pode ser dado por:
O fluxo de calor é dado por:
A taxa de condução de calor pode ser obtida multiplicando-se o fluxo pela área
perpendicular à direção da transferência de calor, é dada por:
Resolvendo a questão com os dados fornecidos: Determinar a condutividade térmica (k) que permita atender as condições dadas no problema. Primeiramente deve-se converter as unidades dos dados fornecidos para o sistema internacional de unidades. q’’ = 105 W/m2, L = 20 cm = 0,2 m, T1=Text = 35 ºC + 273 = 308 K T2=Tint = 28 ºC + 273 = 293 K
[( 105). 0,2 / (293-308)] = - k -k = - 1,4 x (-1) k = 1,4 W/m.K o que nos leva a alternativa (A ) Referências:
Referências: BENNET, C. O.; MYERS, J. E. Fenômenos de transporte . São Paulo: McGraw Hill, 1978.
CREMASCO, M. A. Fundamentos de transferência de massa . 2. ed. Campinas: UNICAMP, 2002.

QUESTÃO Nº 13

Gabarito: Letra E
Tipo de questão: Difícil
Conteúdo avaliado: Compósitos - fibras de carbono
Autor(a): Clebes André da Silva
Comentário: As fibras de carbono, como as fibras de vidro, foram os primeiros reforços utilizados para aumentar a rigidez e resistência de materiais compósitos avançados leves, comumente utilizados em aeronaves, equipamentos de recreação e aplicações industriais. A expressão “fibra de carbono” geralmente se refere a uma variedade de produtos filamentares compostos por mais de 90% de carbono e filamentos de 5 a 15 µm de diâmetro, produzidos pela pirólise da poliacrilonitrila (PAN). Fibras de carbono são referidas normalmente como fibras de grafite, entretanto somente fibras de carbono de elevado módulo de elasticidade com estrutura de grafite tridimensional podem ser denominadas propriamente fibras de grafite. Em virtude de as fibras de carbono possuírem elevados valores de resistência à tração, módulo de elasticidade extremamente elevado e baixa massa específica, comparadas com outros materiais de engenharia, são utilizadas predominantemente em aplicações críticas envolvendo redução de massa. As fibras de carbono comercialmente disponíveis podem duplicar seus valores de módulo de elasticidade em relação às outras fibras de reforço, tais como aramida e vidro S, e exceder os metais em resistência à tração. Quando se utilizam materiais compósitos de fibras de carbono, a sua resistência e módulo de elasticidade podem ser orientados de modo otimizado para minimizar a massa final. Além da resistência e rigidez, as fibras de carbono possuem excelente resistência à fadiga, características de amortecimento de vibrações, resistência térmica e estabilidade dimensional. As fibras de carbono possuem também boa resistência elétrica e térmica e são quimicamente inertes, exceto quanto à oxidação. Referências: ASKELAND, Donald R. Ciência e engenharia dos materiais. São Paulo: Cengage Learning, c2008. 594 p. ISBN 9788522105984 (broch.). CALLISTER, William D. Ciência e engenharia de materiais: uma introdução. Rio de Janeiro: LTC, c2008. xx, 705 p. ISBN 9788521615958 (broch.). SHACKELFORD, James F. Ciência dos materiais. São Paulo: Pearson, 2008. 556 p. ISBN 9788576051602 (broch.).

QUESTÃO Nº 14
Gabarito: B
Tipo de questão: Média
Conteúdo avaliado: Fluxogramas e algoritmos – Disciplina: Informática e Computação
Autor(a): ANA FLÁVIA MARINHO DE LIMA GARROTE

Comentário: Na construção de algoritmos estruturados, a ordem dos passos são: 1º - Início do algoritmo; 2º - Entrada de dados - atribuição de valores às variáveis; 3º - Processamento – resolução de cálculo/fórmula/expressão/tomada de decisão/desvio; 4º - Saída – visualização do resultado. 5º - Término do algoritmo. Os símbolos normatizados para a construção de fluxogramas, representam: 1 e 9 – Início e Término , respectivamente; 2 ao 5 – Entrada de dados ; 6 e 10; 7 – Processamento de cálculos ; decisão ; 8 – Saída. Para a solução do problema proposto, dá-se início ao algoritmo e em seguida atribui-se os valores às variáveis K, D, Re, f0, para que seja possível determinar o valor de f1.
A iteração foi representada pela a tomada de decisão, a qual foi dada pela condição | f0 - f1|< 0,00001 e o processo f0 = f1. Tem-se a saída com a visualização do resultado da equação e o término do algoritmo. Referências: LOPES, Anita; GARCIA, Guto. Introdução à programação . Rio de Janeiro: Campus, 2002. FARRELL, Joyce. Lógica e Design de Programação . São Paulo: Cengage Learning, 2010. FARRER, H.et al. Programação estruturada de computadores: algoritmos estruturados . 3.ed. Rio de Janeiro: LTC, 1999. FORBELLONE, André Luiz Villar; EBERSPACHER, Henri Frederico. Lógica de Programação: a construção de algoritmos e estrutura s de dados . 3.ed. São Paulo: Pearson Prentice Hall, 2005. MANZANO, André Luiz N. G.; Oliveira, Jayr Figueiredo. Algoritmos: lógica para desenvolvimento de programação de computadores . 27.ed São Paulo: Érica, 2015.
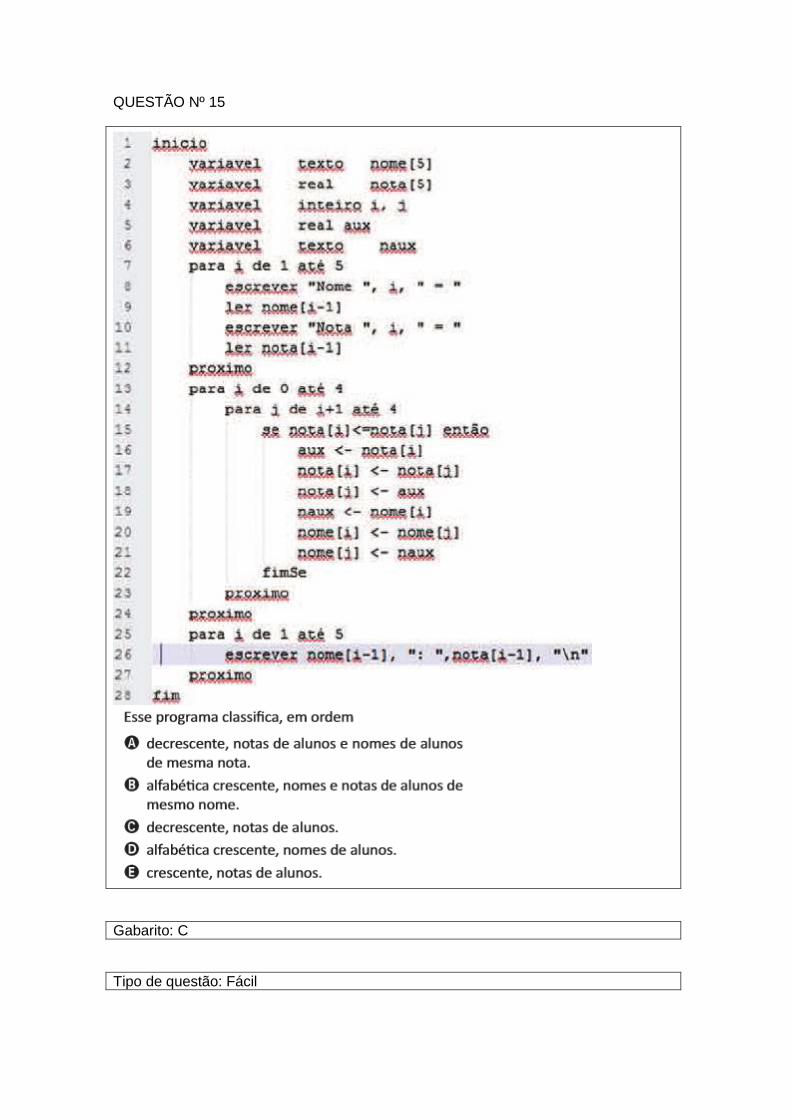
QUESTÃO Nº 15
Gabarito: C
Tipo de questão: Fácil

Conteúdo avaliado: Compreensão de pseudocódigo e lógica em algoritmos estruturados.
Autor(a): Carlos Medeiros
Comentário Comentário: a questão aborda um algoritmo básico de classificação. No início são declaradas as variáveis tipo literal (texto) e numérica (real), sendo que as variáveis nome e nota são estruturas de dados homogêneas conhecidas como vetores (variáveis compostas de uma dimensão). No primeiro laço de repetição “para de”, entra-se com cinco nomes e cinco notas de alunos correspondentes. As variáveis nome e nota começam na posição 0 e são preenchidas até a posição 4. Em seguida, nos dois laços de repetição “para de” se percorrem as posições da variável nota e se realiza a classificação por notas e de maneira decrescente pois: - o laço “para i de 0 até 4” faz uma varredura da variável nota, sendo que para cada valor de i, a variável j do próximo laço de repetição assume i+1 até 4; - por exemplo, começando com i = 0, a variável j assumirá os valores 1, 2, 3 e 4; o algoritmo compara se nota[i] <= nota[j], ou seja, se o valor de nota[j] for maior ou igual ao valor de nota[i], então os valores destas posições são trocados, usando a variável aux para não perder a informação de nota[i]; o maior valor de todas as notas será colocado na posição 0 da variável nota; a variável nome é apenas atualizada de forma análoga, mantendo sua correspondência com cada nota de aluno; - sendo agora i = 1, j assumirá 2, 3 e 4, e o segundo maior valor será armazenado na posição 1 da variável nota e a variável nome acompanha essa mudança. E assim sucessivamente. A questão é considerada fácil, particularmente por causa do trecho a seguir, que revela a comparação de valores e sua troca de posição para obter a ordenação decrescente de notas: se nota[i] <= nota[j] então aux <- nota[i] nota[i] <- nota[j] nota[j] <- aux É mais fácil entender e resolver rascunhando um exemplo. Suponha que as variáveis tenham sido inicialmente preenchidas com: nota: 5,0 4,0 3,0 7,0 10,0 nome: “Pedro” “José” “João” “Maria” “Davi” Com i = 0 e ao final de j = 1, 2, 3 e 4, tem-se: nota: 10,0 4,0 3,0 5,0 7,0 nome: “Davi” “José” “João” “Pedro” “Maria” E ao final desse exemplo, as variáveis ficariam assim: nota: 10,0 7,0 5,0 4,0 3,0 nome: “Davi” “Maria” “Pedro” “José” “João” Referências: FARRER, H., e outros, Algoritmos Estruturados – Programação Estruturada d e Computadores , LTC, 3a edição, Rio de Janeiro, 1999.
QUESTÃO Nº 16
Uma indústria de blocos cerâmicos pretende utilizar queima de biomassa resultante de resíduos de madeira, para gerar energia térmica para seus fornos, que, atualmente, utilizam gás natural. Tal iniciativa poderá reduzir o consumo de combustível, porém será necessário um investimento no valor de 20% do consumo/ano atual de combustível, visando à adaptação dos fornos. Além disso, o transporte anual dos resíduos da fonte geradora até a indústria irá custar 5% do consumo/ano atual de combustível, de 10% ao ano. A partir da situação descrita, avalie as afirmações a seguir. I – A partir do quinto ano, a indústria começaria a ter benefícios econômicos. II – Na proposta apresentada, a indústria substituiria o combustível atual por uma fonte de energia com menor produção e emissão de partículas devido ao processo de combustão (particulados). III – Na proposta apresentada, a indústria substituiria o combustível atual por uma fonte renovável de energia. IV – O valor do investimento supera os benefícios promovidos com a economia de combustível durante os 5 primeiros anos.
Gabarito: D- itens I e III corretos
Tipo de questão: fácil
Conteúdo avaliado: interdisciplinar – ciência do ambiente e análise de viabilidade
Autor(a): Prof. Marcilon Fonseca de Lima
Comentário: A questão aborda conhecimentos básicos de emissão de poluentes, energia renovável e elementos fundamentais de matemática financeira. A queima por biomassa a partir de resíduos de madeira gera material particulado ao contrário do gás natural, porém a biomassa é uma fonte renovável. Economicamente falando, como os valores são todos referentes ao valor atual do gasto, é possível fazer uma conta como valor presente. O valor de economia será de 10% menos o custo de 5%, ou seja de 5% ao ano. Como o investimento é de 20% ao ano, em 4 anos ter-se-á pago o investimento:
20%5% = 4 @:>
Isso implica em um benefício a partir do 5º ano. Referências: SAMANEZ, C. P. Engenharia econômica . São Paulo: Ed. Prentice Hall, 2009.

TORRES, O.F.F. Fundamentos de Engenharia Econômica . São Paulo: Thomson Pioneira, 2006. CASAROTTO e KOPITTKE. Análise de investimentos . 9ª edição. São Paulo: Editora Atlas, 2000.
QUESTÃO Nº 17
Existem controvérsias acerca da magnitude os fatores que influenciam o voto do eleitor. Embora, atualmente, as pesquisas eleitorais possam ver divulgadas próximo ao dia da eleição, durante muito tempo essa divulgação não era permitida sob a alegação de que as mesmas influenciavam a decisão de um tipo particular de eleitor, o qual desejava “votar no candidato ganhador” e tendia a votar nos candidatos cuja suposta probabilidade de vitória é maior, independentemente do conteúdo da proposta política apresentada.
Considerando que o Candidato B esteja interessado no voto do tipo de eleitor mencionado no texto e esteja examinando os dois gráficos acima para apresentar, em seu material de propaganda, os resultados de uma pesquisa eleitoral, avalie as afirmações que se seguem.
I. Os dois gráficos apresentam resultados diferentes. II. Em relação aos objetivos do Candidato B, o gráfico I é mais adequado que o II.
III. A decisão a ser tomada apresenta implicações de natureza ética, além das de natureza técnica.
É correto o que se afirma em

Gabarito: B
Tipo de questão: Fácil
Conteúdo avaliado: Gráficos
Autor(a): JOELMIR DIVINO CARLOS FELICIANO VILELA
Comentário: Essa questão está relaciona com a disciplina PROBABILIDADE E ESTATÍSTICA.
Esse tema é encontrado em todos os livros de PROBABILIDADE E ESTATÍSTICA
e estudado com frequência pelos alunos das áreas de exatas e afins.
Vamos analisar individualmente cada uma das afirmações apresentadas acima. 3. Gráficos para variáveis qualitativas
Uma variável qualitativa é aquela que recebe nomes ou atributos como, por exemplo: sexo, raça, cor, grau de instrução, condição do ar e etc. Os gráficos dessas variáveis são construídos usando o plano cartesiano, onde o eixo X representa a variável em estudo e o eixo Y representa a quantidade ou porcentagem da variável em estudo. Existem dois tipos de variáveis qualitativas.
a. Variáveis qualitativas Nominais que recebem apenas um nome ou atributo sem se importar com a ordem como, por exemplo: sexo, raça, cor e etc.
b. Variáveis qualitativas Ordinais que recebem um nome ou atributo, porém a ordem é considerada como, por exemplo: condição do ar, estado clínico do paciente, patente militar e etc.
Este exercício se trata de uma variável qualitativa Nominal e sua resolução só depende da análise dos gráficos acima, sem a necessidade de alguma teoria aprofundada.
Comentários e Resolução da Questão 17. A partir de agora iremos comentar os itens de I à III detalhadamente. Item I - Os dois gráficos apresentam resultado s diferentes. Comentário: Os dois gráficos apresentam resultados iguais. A diferença entre eles é a escala da porcentagem representada no eixo Y que no gráfico I varia de 0 (zero) à 60 (sessenta) por cento. Por lado o gráfico II varia de 40 (quarenta) à 60 (sessenta) por cento. Portanto o Item I é Falso . Item II - Em relação aos objetivos do Candidato B, o gráfico I é mais adequado que o II. Comentário: Conforme o próprio enunciado do problema revela que o eleitor tem a predisposição de “votar no candidato ganhador e tendia a votar nos candidatos cuja suposta probabilidade de vitória é maior, independentemente do conteúdo da proposta política apresentada”. Assim, pelas pretensões do candidato B, o gráfico I é

mais adequado que o II. Portanto o item II é Verdadeiro . Item III - A decisão a ser tomada apresenta implica ções de natureza ética, além das de natureza técnica. Comentário: Em nenhum momento o texto relaciona alguma natureza ética ou natureza técnica. Portanto o item III é Falso. A resposta correta para este exercício é a letra B , pois somente o item II é verdadeiro. Referências: BUSSAB, Wilton O.; MORETTIN, Pedro A. Estatística Básica . 4. Ed. Atual. São Paulo, 1987. CRESPO, Antônio Arnot. Estatística Fácil . 17. Ed. Saraiva. São Paulo, 1999. HOFFMANN, Rodolfo; VIEIRA, Sônia. Análise de Regressão: uma introdução à econometria . 2. ed. HUCITEC. São Paulo, 1977. MEYER, Paul L. Probabilidade: aplicações à estatística . Tradução de Ruy de C. B. Lourenço Filho. 2. Ed. LTC. Rio de Janeiro, 1983. VIEIRA, Sônia; HOFFMANN, Rodolf. Estatística Experimental . Atlas. São Paulo, 1989.
QUESTÃO Nº 18
Gabarito: A
Tipo de questão: Fácil
Conteúdo avaliado: Ligas não ferrosas - Liga de Alumínio
Autor(a): Clebes André da Silva

Comentário: O Alumínio e suas ligas constituem um dos materiais metálicos mais versáteis, econômicos e atrativos para uma vasta série de aplicações. Sua aplicação como metal estrutural só é menor que a dos aços. O alumínio possui uma densidade de 2,7 g/cm³, aproximadamente 1/3 da do aço, o que somado à sua elevada resistência mecânica o torna bastante útil na construção de estruturas móveis, como veículos e aeronaves. O Alumínio não é ferromagnético, possui elevadas condutividades térmica e elétrica, e é não-tóxico. Outra vantagem do alumínio é a sua resistência à oxidação progressiva, já que os átomos da sua superfície se combinam com o oxigênio da atmosfera, formando uma camada de óxido protetor que impede a progressão da deterioração do material. Além disso, o alumínio com determinados tratamentos e/ou elementos de liga se torna resistente à corrosão em meios mais agressivos. Referências: ASKELAND, Donald R. Ciência e engenharia dos materiais . São Paulo: Cengage Learning, c2008. 594 p. ISBN 9788522105984 (broch.). CALLISTER, William D. Ciência e engenharia de materiais: uma introdução. Rio de Janeiro: LTC, c2008. xx, 705 p. ISBN 9788521615958 (broch.). SHACKELFORD, James F. Ciência dos materiais. São Paulo: Pearson, 2008. 556 p. ISBN 9788576051602 (broch.).
QUESTÃO Nº 19
Um detector de fumaça é uma câmara formada por dois compartimentos nos quais são inseridas duas células fotocondutoras, que são elementos cuja resistência varia com a luminosidade, e uma fonte de luz, conforme ilustra a figura l. Em condições normais, os raios de luz provenientes da fonte atingem as duas células igualmente. Na ocorrência de um incêndio, apenas a câmara inferior será preenchida pela fumaça e, assim, a luminosidade na célula será alterada, causando mudança na sua resistência.
O circuito do detector de fumaça é mostrado na figura ll, no qual existe uma ponte de Wheatstone. Em condições normais, as resistências das duas células são iguais e o

circuito está equilibrado, de modo que a tensão Vab é nula. Na presença de fumaça, as resistências das células fotocondutivas tornam-se diferentes e, assim, surge uma diferença de potencial entre os pontos a e b. Se essa tensão for maior que um valor pré-estabelecido, um relé será acionado, o que por sua vez, disparará um alarme.
Considerando o circuito e os dados da figura ll, em que valor deverá ser ajustada a resistência variável R1 para que, em condições normais, a tensão Vab seja nula?
Gabarito: A
Tipo de questão: Fácil.
Conteúdo avaliado: Divisor de tensão.
Autor(a): Cássio Hideki Fujisawa
Comentário: A fonte CC de 12V está ligada na lâmpada e também no circuito dos quatro resistores. Analisando apenas o circuito de resistores, pode-se notar dois

ramos em paralelo. O primeiro ramo tem em série R2 e R4 com o nó “a” entre esses dois componentes. Já o segundo ramo tem em série R1 e R3 com o nó “b” entre os dois componentes. Quando se tem resistores em série ligados a uma fonte, tem-se um divisor de tensão, na qual a tensão aplicada em um resistor será proporcional a razão desse resistor pela resistência total. Pode-se constatar essa regra de divisão de tensão pela Figura II do próprio enunciado
%NO = '4'2 + '4 ⋅ %RS�TU
8 = 20 ⋅ 10W10 ⋅ 10W + 20 ⋅ 10W ⋅ 12
A partir disso, pode-se constatar que a queda de tensão sobre o resistor R2 é de 4V, pois a soma de tensão sobre os resistores R2 e R4 tem que ser 12V. Analisando agora o outro ramo (R1 e R3), deseja-se que o nó “b” tenha o mesmo potencial do ná “a” para que o alarme não dispare em condições normais, por isso o nó “b” deve ter os mesmos 8V do resistor R4. Então, R3 deve ter 8V. Aplicando a regra da divisão de tensão sobre o R3, tem-se
%NW = '3'1 + '3 ⋅ %RS�TU
8 = 10 ⋅ 10W'1 + 10 ⋅ 10W ⋅ 12
'1 + 10 ⋅ 10W = 10 ⋅ 10W8 ⋅ 12
'1 = 128 ⋅ 10 ⋅ 10W − 10 ⋅ 10W = 5 ⋅ 10W = 54X
Referências: Dorf, Richard C. e Svoboda, James A. Introdução aos circuitos elétricos , Capítulo 3. Editora LTC, 8a edição, Rio de Janeiro – RJ, 2012.
QUESTÃO Nº 20

Gabarito: B
Tipo de questão: Média
Conteúdo avaliado: Sistemas de Controle – Cap. 9 - Nise
Autor(a): Marcos Lajovic Carneiro
Comentário: A ação derivativa é ruidosa portanto sua ação somente sobre o percurso de retroação resolverá o problema do pulso elevado imediatamente após a aplicação do degrau. Referências: Nise, N. S., Engenharia de Sistemas de Controle, Editora LTC, 6. ed., 2016.

QUESTÃO Nº 21
Gabarito: A
Tipo de questão: Média
Conteúdo avaliado: Medição de nível
Autor(a): Bruno Quirino de Oliveira
Comentário: Para a resolução desta questão são necessários conhecimento acerca das definições sobre a medição de nível. Nos livros indicados na bibliografia básica e complementar da disciplina, este tópico é, usualmente, encontrado nos capítulos finais. Analisando a questão, as afirmações que são verdadeiras são I e IV. A explicação se encontra na no tópico 2.2.7.2 da apostila da SMAR e no tópico 13.3.6 do livro do Balbinot. Referências:

BALBINOT, A. Instrumentação e Fundamentos de Medidas - Vol. 2 . Rio de Janeiro: LTC, 2010. PESSA, Rogério. Manual de Treinamento SMAR: Instrumentação Básica p ara Controle de Processo. Rev. 2.10. SMAR, 2004.
QUESTÃO Nº 22

Gabarito: C
Tipo de questão: Fácil
Conteúdo avaliado: Sistemas Microprocessados
Autor(a): Wanderson Rainer
Comentário: Nesta questão, um sistema microprocessado foi proposto para automatizar uma residência baseado em sensores analógicos e digitais, além da atuação sobre um motor CC. A questão apresenta 03 afirmações: - a primeira afirmação é verdadeira, pois estabelece que o MCU empregado deve ter, no mínimo, uma entrada com interrupção externa. Esse é um requisito realmente necessário no projeto uma vez que o sensor de chuva, que é digital, possui prioridade sobre qualquer outra atividade no programa; - a segunda afirmação é verdadeira, uma vez que para acionar um motor CC, sobretudo de 30W, o MCU necessita de um circuito externo de acionamento, normalmente denominado driver de acionamento, pois a corrente liberada pelos I/Os é insuficiente para acionar uma carga de tal potência; - a terceira afirmação é falsa, pois, usando um ADC com resolução de 10 bits, tem-se 1024 diferentes níveis de conversão, pois a resolução envolve 2N, onde N é o número de bits do ADC. Logo, para apenas 10 níveis de detecção, não são necessários 10 bits. Referências:

OLIVEIRA, A. S. O.; ANDRADE, F. S. Sistemas embarcados: hardware e firmware na prática . 2.ed. São Paulo: Érica, 2006.
QUESTÃO Nº 23
Gabarito: E
Tipo de questão: Fácil
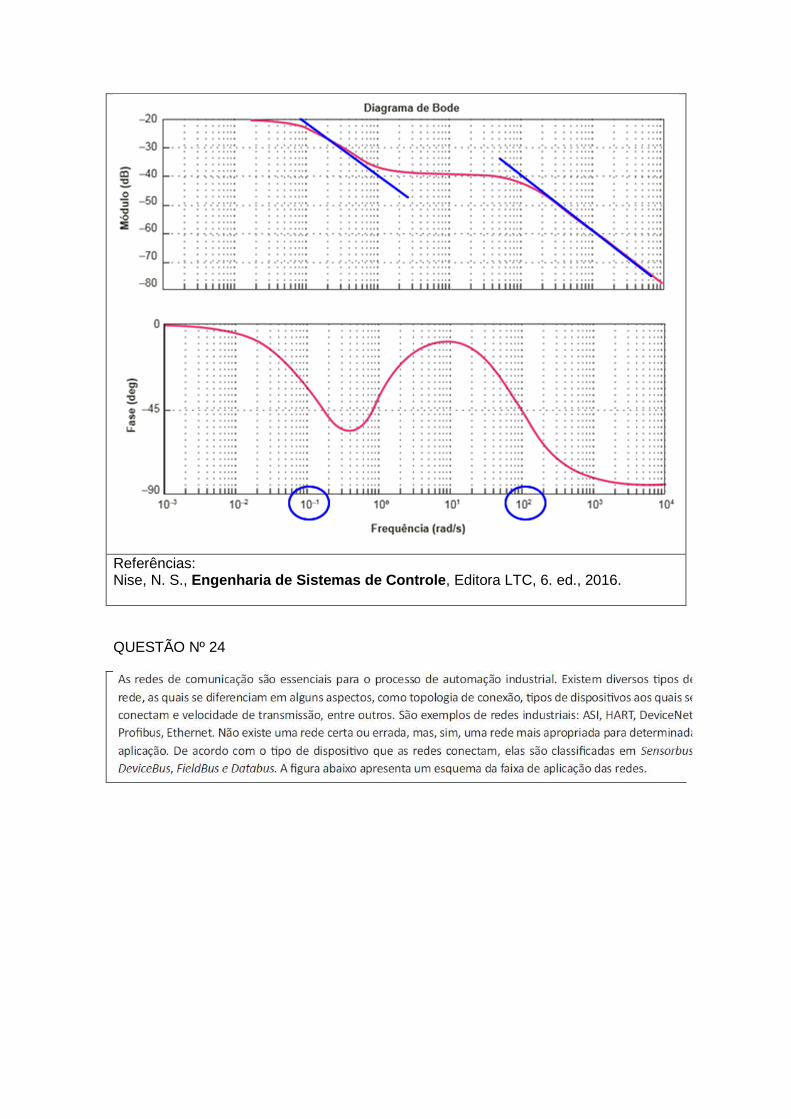
Conteúdo avaliado: Sistemas de Controle – Cap. 10 - Nise Autor(a): Marcos Lajovic Carneiro Comentário Traçando as assíntotas observamos que a função se inicia constante, em seguida desce com a inclinação de -20dB/década com ponto de quebra em 0,1 rad/s (portanto existe um termo (s/0,1+1) no denominador), depois a função se torna constante com ponto de quebra em 1 rad/s (termo s+1 no numerador), em seguida a função desce novamente com inclinação de -20dB/década com ponto de quebra em 100 rad/s (termo (s/100+1) no denominador). Com esta análise o função de transferência assume a forma normalizada:
Y() = . ( + 1)( 0.1 + 1)(
100 + 1)
Que é equivalente a forma não normalizada:
Y() = 0.10.1 . 100
100 . . ( + 1)( 0.1 + 1)(
100 + 1)
Y() = 10. . ( + 1)( + 0.1)( + 100)
O termo 10.X representa o ponto de início em -20dB em baixas frequências mas que não precisa ser calculado pois o cálculo intermediário acima já define como resposta a letra e) eliminando todas as demais.
Referências: Nise, N. S., Engenharia de Sistemas de Controle , Editora LTC, 6. ed., 2016.
QUESTÃO Nº 24

Gabarito: C
Tipo de questão: Fácil
Conteúdo avaliado: Classificação de redes industriais
Autor(a): Bruno Quirino de Oliveira
Comentário: Para a resolução desta questão são necessários conhecimento acerca das definições básicas de classificação de redes industriais. As redes industriais são classificadas pelo tipo de equipamento conectado a elas e o tipo de dados que trafega pela rede. Os dados podem ser bits, bytes ou blocos. Assim, classificam-se as redes: Redes de campo de baixo nível (Sensorbus) e Redes de campo efetivas (Devicebus e

Fieldbus). Na rede Sensorbus os equipamentos deste tipo de rede necessitam de comunicação rápida em níveis discretos, por exemplo: sensores e atuadores de baixo custo. Estas redes não almejam cobrir grandes distâncias e visam manter os custos de conexão bem baixos. Na rede Devicebus os equipamentos conectados a esta rede terão mais pontos discretos, alguns dados analógicos ou uma mistura de ambos. Podem permitir a transferência de blocos em uma menor prioridade se comparado aos dados no formato de bytes. Por fim, a rede Fieldbus interliga os equipamentos de entrada e saídas mais inteligentes e pode cobrir distâncias maiores. Os equipamentos acoplados a esta rede possuem inteligência para desempenhar funções específicas de controle tais como loops PID, controle de fluxo de informações e processos. Referências: MORAES, Cícero Couto de; CASTRUCCI, Plínio de Lauro. Engenharia de Automação Industrial. 2. ed. Rio de Janeiro: LTC, 2012. CAMARGO, V. L. A.; FRANCHI, C. M. Controladores lógicos programáveis: Sistemas Discretos . 2. ed. São Paulo: Érica, 2012.
QUESTÃO Nº 25

Gabarito: B
Tipo de questão: Fácil
Conteúdo avaliado: Classes e características de instrumentos e medição de vazão
Autor(a): Bruno Quirino de Oliveira
Comentário: Para resolução do exercício é necessário saber conceitos das classes e caraterísticas de instrumentos e também sobre medição de vazão. Nas duas configurações o Span (20 m3 /h) e o Range são o mesmo (0-20 m3 /h), com o sinal de 4-20mA tem-se mais confiança devido a possibilidade de identificação de erros de ligação ou desconexão. O sentido do fluxo interfere na medição de vazão. Referências: ALVES, J. L. L. Instrumentação, controle e automação de processos . 2. ed. Rio de Janeiro: LTC, 2010. PESSA, Rogério. Manual de Treinamento SMAR: Instrumentação Básica p ara Controle de Processo. Rev. 2.10. SMAR, 2004.

QUESTÃO Nº 26

Gabarito: Alternativa C
Tipo de questão: Fácil
Conteúdo avaliado: Sistemas da manufatura: Conceito, componentes e classificação;
Autor(a): Santiago Meireles Rocha
Comentário: I – Verdadeiro – Sistemas dedicados, também conhecidos como automação rígida, para que seu custo de implementação seja justificado, devem atender a altos volumes de produção e com baixa variedade dos produtos produzidos. II – Falso – Sistemas Flexíveis de Manufatura atendem às necessidades de projetos variados, mas não conseguem alcançar alto volume de produção. III – Verdadeiro – Os custos de sistemas CNC que suportam variabilidades nos projetos, inviabilizam a implantação em casos de alta demanda produtiva. Referências: GROOVER, M. P. Automação industrial e sistemas de manufatura. 3.ed. São Paulo: Pearson, 2011 ROSARIO, J. M. Automação industrial. São Paulo: Barauna, 2009.

QUESTÃO Nº 27
Gabarito: D
Tipo de questão: Fácil
Conteúdo avaliado: Sistemas de Controle – Cap. 8 - Nise
Autor(a): Marcos Lajovic Carneiro

Comentário: Primeiro calculamos a função de transferência em malha fechada:
�() =Z
( + 1)( + 5)1 + Z
( + 1)( + 5)
�() = ZW + 6� + 5 + Z
Aplicamos o critério de Routh e zeramos uma linha para encontrar o ganho para o sistema com raízes sobre o eixo imaginário:
W 1 5 � 6 K L − [1 5
6 Z[6
0
\ − ] 6 Z5 − Z/6 0]5 − Z/6
W 1 5 � 6 K L 5 − Z/6 0 \ 5Z − Z�/6
5 − Z/6
Fazendo a linha de L igual a zero: 5 − ^
_ = 0 .: K=30 Analisando as alternativas: A afirmação I está correta pois o sistema será estável de 0 até 30. A afirmação II está errado pois com K=60 o sistema será instável. A afirmação III está certa pois existe um valor de K que torna o sistema marginalmente estável, que é K=30. A afirmação IV está certa pois com K=30 o sistema é marginalmente estável e sua resposta no tempo será uma senoidal com amplitude constante. Alternativa correta: D) I, III e IV. Referências: Nise, N. S., Engenharia de Sistemas de Controle , Editora LTC, 6. ed., 2016.

QUESTÃO Nº 28
Gabarito: B
Tipo de questão: Fácil
Conteúdo avaliado: Controladores lógicos programáveis, sistemas supervisórios, sensoriamento e controle de malha fechada.

Autor(a): Bruno Quirino de Oliveira
Comentário:
Para resolução do exercício é necessário saber conceitos básicos de controlador lógico programável e sistemas supervisórios. Nos livros indicados na bibliografia básica e complementar da disciplina, estes tópicos são encontrados nos capítulos iniciais. A resolução da aquisição da temperatura é (150-20) /28 resultando em 0,508oC.
Referências: MORAES, Cícero Couto de; CASTRUCCI, Plínio de Lauro. Engenharia de Automação Industrial . 2. ed. Rio de Janeiro: LTC, 2012. CAMARGO, V. L. A.; FRANCHI, C. M. Controladores lógicos programáveis: Sistemas Discretos. 2. ed. São Paulo: Érica, 2012.
QUESTÃO Nº 29
O estudo de cinemática direta de um manipulador robótico tem como objetivo obter equações para o cálculo da posição e da orientação do efetuador do robô em relação à sua base como função das variáveis das juntas. Para determinar as equações de cinemática direta de manipuladores robóticos de cadeia aberta, usualmente são utilizados os parâmetros de Denavit-Hartenberg. O quadro abaixo traz esses parâmetros para um robô comercial específico. Parâmetros de Denavit-Hartenberg
Junta i ai (graus) ai (cm) d i Ɵi (graus)
1 0 0 50 Ɵ1 2 90 0 d2 90 3 0 0 d3 0 4 0 0 150 Ɵ4 5 0 0 10 Ɵ5
Com base na situação descrita, avalie as asserções a seguir e a relação proposta entre elas.
I. O robô comercial apresentado possui cinco graus de liberdade, sendo classificado como robô do tipo polar.
PORQUE II. Das cinco variáveis do robô, as que correspondem às três primeiras juntas
são: uma rotação e duas de translação, respectivamente. A respeito dessas asserções, assinale a opção correta.

Gabarito: letra D
Tipo de questão: Segundo INEP – Difícil Segundo Professora - Médio
Conteúdo avaliado: Configuração de robôs industriais e cinemática dos manipuladores pelo Método de Denavit-Hartenberg
Autor(a): Profa. Mírian Sandra Rosa Gusmão
Comentário: A notação Denavit-Hartenberg é uma ferramenta utilizada para sistematizar a descrição cinemática de sistemas mecânicos articulados com n graus de liberdade. Os parâmetros ai determinam a estrutura do e os parâmetros de junta di e Ɵi
determinam a posição relativa de links vizinhos.Conforme a tabela dada, a primeira junta é angular (Ɵ1), a segunda e terceira juntas são prismáticas (d2 e d3), a quarta e quinta juntas são angulares (Ɵ4 e Ɵ5).
Os robôs industriais podem ser classificados, segundo a geometria de sua área de trabalho, em 5 categorias: cartesiano, polar, cilíndrico, articulado e SCARA. O robô representado na tabela é RPP ( rotacional-prismático-prismático), formando um cilindro em sua uma área de trabalho, sendo classificado como robô do tipo cilíndrico. Portanto, a asserção I é falsa quando diz que o robô é classificado como robô do tipo polar. Com essa informação, as alternativas A, B e C estão eliminadas, visto que afirmam que a primeira asserção é verdadeira, o que não é correto. A asserção II é verdadeira quando diz que o robô tem cinco variáveis, as quais correspondem as três primeiras juntas: uma rotação e duas de translação. Conclui-se que a alternativa D é a correta, pois a alternativa E diz que a segunda asserção é falsa. Referências:
MORAES, C. C.; CASTRUCCI, P. B. L. Engenharia de automação industrial . 2. ed. Rio de Janeiro: LTC, 2007.
SIMHON, M. S. Robótica industrial . 1. ed. Moussa Salen Simhon, 2011.

QUESTÃO Nº 30
Gabarito: A
Tipo de questão: Fácil
Conteúdo avaliado: Interfaces de entradas e saídas
Autor(a): Bruno Quirino de Oliveira

Comentário: Para resolução do exercício é necessário saber conceitos sobre as interfaces de entradas e saídas dos controladores lógicos programáveis. Nos livros indicados na bibliografia básica e complementar da disciplina, estes tópicos são encontrados nos capítulos iniciais. As duas afirmações são verdadeiras e a II justifica a I. O padrão 4-20mA é mais utilizado devido a possibilidade de identificação de erros de ligação, pois caso ocorra erro o sinal será de 0mA, identificando assim um erro de ligação ou desconexão do CLP. Referências: MORAES, Cícero Couto de; CASTRUCCI, Plínio de Lauro. Engenharia de Automação Industrial . 2. ed. Rio de Janeiro: LTC, 2012. CAMARGO, V. L. A.; FRANCHI, C. M. Controladores lógicos programáveis: Sistemas Discretos. 2. ed. São Paulo: Érica, 2012.
QUESTÃO Nº 31
Gabarito: A
Tipo de questão: fácil

Conteúdo avaliado: Eletrônica de Potência e Máquinas Elétricas
Autor(a): Marcos Lajovic Carneiro
Comentário: A afirmação III está errada pois é recomendável utilizar o circuito apresentado para o controle de velocidade apenas por curtos intervalos de tempo devido à grande distorção na corrente e a grande variação de torque durante este controle. A afirmação IV está errada pois o circuito deste equipamento não varia a frequência da tensão aplicada no motor, o equipamento que realiza esta ação é o inversor de frequência. Resposta: A) Referências: Hart, D. W., Eletrônica de Potência – análise e projetos de circuitos, McGraw Hill, AMGH ed. Ltda., 2012.
QUESTÃO Nº 32



Gabarito: E
Tipo de questão: Dificuldade média
Conteúdo avaliado: Linguagem ladder
Autor: Bruno Quirino de Oliveira
Comentário: Para resolução do exercício é necessário saber conceitos de Controlador Lógico Programável (CLP), linguagem de programação ladder (programação por lógica de contatos). Para resolução do exercício é necessário observar a condição inicial (se NA – Normalmente Aberto ou NF – Normalmente Fechado) das entradas físicas e dos contatos representados no diagrama ladder. E também as saídas (bobinas set ou reset), A instrução set liga uma saída e a mantém ligada mesmo que o contato da entrada deixe de conduzir. Para desligar a saída é utilizada a instrução reset. Para o correto funcionamento do sistema a linha 3 deve setar C1 e resetar E2 quando a esteira 2 estiver acionada e o sensor do cilindro estiverem acionados. Essa possibilidade se encontra na letra E. Referências: MORAES, Cícero Couto de; CASTRUCCI, Plínio de Lauro. Engenharia de Automação Industrial . 2. ed. Rio de Janeiro: LTC, 2012. CAMARGO, V. L. A.; FRANCHI, C. M. Controladores lógicos programáveis: Sistemas Discretos. 2. ed. São Paulo: Érica, 2012.
QUESTÃO Nº 33

Gabarito: A
Tipo de questão: Dificuldade fácil
Conteúdo avaliado: Tipos de sensores
Autor(a): Bruno Quirino de Oliveira
Comentário: Para a resolução desta questão são necessários conhecimento acerca das definições tipos de sensores. Analisando a questão, a afirmação que é verdadeira é o item I. O acelerômetro é um instrumento para medir aceleração ou para detectar e medir vibrações. O giroscópio tem a função de orientação, ou seja, o giroscópio serve como referência de direção, mas não de posição. Referências: BALBINOT, A. Instrumentação e Fundamentos de Medidas - Vol. e Vol. 2 . Rio de Janeiro: LTC, 2010. PESSA, Rogério. Manual de Treinamento SMAR: Instrumentação Básica p ara Controle de Processo. Rev. 2.10. SMAR, 2004.
QUESTÃO Nº 34

Gabarito: D
Tipo de questão: Dificuldade fácil
Conteúdo avaliado: Controlador lógico programável (CLP) e linguagem ladder.
Autor: Bruno Quirino de Oliveira
Comentário: Para resolução do exercício é necessário saber conceitos de Controlador Lógico Programável (CLP), linguagem de programação ladder, sensores e esquema elétrico das entradas e saída digitais de um CLP. Para o desligamento seguro o botão desliga deve ficar após o botão liga e do selo. A letra D é a correta, pois o botão desliga no programa estão Normalmente Aberto (NA), mais fisicamente na ligação está Normalmente Fechado (NF), caracterizando assim no programa como NF e assim quando for acionado o mesmo abrirá e desligará K1.

Referências: MORAES, Cícero Couto de; CASTRUCCI, Plínio de Lauro. Engenharia de Automação Industrial . 2. ed. Rio de Janeiro: LTC, 2012. CAMARGO, V. L. A.; FRANCHI, C. M. Controladores lógicos programáveis: Sistemas Discretos. 2. ed. São Paulo: Érica, 2012.
QUESTÃO Nº 35
Gabarito: E
Tipo de questão: Dificuldade média
Conteúdo avaliado: Conceitos básicos de instrumentação e controle, variáveis de processo e terminologia ISA-05 e fluxogramas de processo.
Autor(a): Bruno Quirino de Oliveira
Comentário:
Para resolução do exercício é necessário saber conceitos de básicos de instrumentação e controle, variáveis de processo, terminologia ISA-05 e fluxogramas de processo. Através do fluxograma, da terminologia e dos tipos de sinais podemos identificar as variáveis manipuladas e variáveis de processo. Temos no tanque o transmissor de nível (LT) e o controlador indicador de nível (LIC) que forme informação para modular a válvula MV, controlados assim a vazão na entrada. Nesta parte do processo temos a variável de processo o nível e a variável manipulada a vazão de entrada. Tem-se outra variável de processo temperatura verificada pela nomenclatura do demais dispositivos e com a variável manipulada tensão na resistência R. Referências: ALVES, J. L. L. Instrumentação, controle e automação de processos . 2. ed. Rio de Janeiro: LTC, 2010. PESSA, Rogério. Manual de Treinamento SMAR: Instrumentação Básica p ara Controle de Processo. Rev. 2.10. SMAR, 2004.










![[HQ MS] Magali Jovem - 01 - Coração e garra](https://static.fdocumentos.com/doc/165x107/55cf9bb2550346d033a70d7e/hq-ms-magali-jovem-01-coracao-e-garra.jpg)