Equações de Movimento - webx.ubi.ptwebx.ubi.pt/~pgamboa/pessoal/10375/apontamentos/02... · 1.4....
64
Equações de Movimento Vibrações e Ruído (10375) 2016 Pedro V. Gamboa Departamento de Ciências Aeroespaciais
Transcript of Equações de Movimento - webx.ubi.ptwebx.ubi.pt/~pgamboa/pessoal/10375/apontamentos/02... · 1.4....

Equações de Movimento
Vibrações e Ruído (10375)
2016
Pedro V. Gamboa Departamento de Ciências Aeroespaciais

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 2
Tópicos
• Abordagem Newtoniana.
• Princípio de d’Alembert.
• Abordagem energética.
• Princípio dos trabalhos virtuais.
• Equações de Lagrange.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 3
1. Formulação das Equações de
Movimento
Os sistemas físicos são representados através de modelos
matemáticos adequados constituídos por expressões que
definem os deslocamentos de coordenadas específicas associadas
à discretização desses sistemas.
A solução destas equações conduz-nos à resposta dinâmica do
sistema.
A formulação matemática pode ser feita por três processos
distintos: recorrendo à 2ª Lei de Newton, a uma abordagem
energética, ou então, ao princípio dos trabalhos virtuais.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 4
1. Formulação das Equações de Movimento
1.1. Formulação de Newton
Para uma partícula aplicam-se as 3 Leis de Newton:
• 1ª Lei: se o somatório das forças que atuam numa partícula é
nulo, esta está em repouso ou tem um movimento retilíneo
uniforme;
• 2ª Lei: (Lei Fundamental da Dinâmica) uma partícula sujeita
a uma força F fica sujeita a uma aceleração expressa pela
equação F=m.a, sendo m a massa da partícula;
• 3ª Lei: se uma partícula A exerce uma força sobre uma
partícula B, então esta reage exercendo sobre a partícula A
uma força com a mesma direção e magnitude mas com
sentido oposto.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 5
1. Formulação das Equações de Movimento
1.1. Formulação de Newton
Assim, para um corpo rígido em translação:
e para um corpo rígido em rotação:
onde I é o momento de inércia relativamente ao eixo de rotação
e a é a aceleração angular em torno desse mesmo eixo.
(7)
zz
yy
xx
cmext
amF
amF
amF
amF
(8) a IMext

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 6
1. Formulação das Equações de Movimento
1.1. Formulação de Newton
Usar a 2ª Lei de Newton para derivar as equações de movimento
O procedimento seguinte pode ser usado para derivar as
equações de movimento de um sistema de n DOF usando a
segunda lei de Newton:
• Definir coordenadas adequadas para descrever a posição de
vários pontos de massa e corpos rígidos no sistema. Assumir
sentidos positivos adequados para os deslocamentos,
velocidades e acelerações das massas e dos corpos rígidos;
• Determinar a configuração do equilíbrio estático do sistema e
medir os deslocamentos das massas e dos corpos rígidos a
partir da suas posições de equilíbrio estático;

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 7
1. Formulação das Equações de Movimento
1.1. Formulação de Newton
• Desenhar os diagramas do corpo rígido para cada massa ou
corpo rígido do sistema. Indicar a mola, amortecedor ou força
externa que atua em cada massa ou corpo rígido quando um
deslocamento ou uma velocidade positivos são dados à massa
ou ao corpo rígido;
• Aplicar a segunda lei de Newton a cada massa ou corpo rígido
mostrado pelo diagrama do corpo livre com
para a massa mi.
j
ijii Fxm

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 8
1. Formulação das Equações de Movimento
1.1. Formulação de Newton
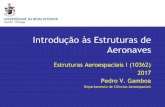
Por exemplo, relativamente ao sistema mola-massa-amortecedor
da figura abaixo pode desenhar-se o diagrama do corpo livre da
massa mi indicando as forças nela aplicadas.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 9
1. Formulação das Equações de Movimento
1.1. Formulação de Newton
Exemplo 2.01: Derive as equações de movimento do sistema
mola-massa-amortecedor mostrado na figura.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 10
1. Formulação das Equações de Movimento
1.1. Formulação de Newton
Exemplo 2.02: Derive as equações de movimento do sistema
mola-massa mostrado na figura.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 11
1. Formulação das Equações de Movimento
1.1. Formulação de Newton
Exemplo 2.03: Derive as equações de movimento livre do
sistema mola-massa mostrado na figura.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 12
1. Formulação das Equações de Movimento
1.2. Princípio de d’Alembert
Existe uma outra forma de encararmos a 2ª Lei de Newton.
Se considerarmos o efeito das forças aplicadas, F, e das forças
de reação, f, podemos escrever esta Lei como:
Esta expressão traduz o princípio de d’Alembert que nos diz
que se em cada instante, a cada uma das partículas do sistema
além das forças aplicadas e de reação, se juntarem as forças de
inércia correspondentes, o sistema de forças estará em
equilíbrio e, então, poderemos aplicar-lhe todas as equações de
estática.
(9) 0 amfF

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 13
1. Formulação das Equações de Movimento
1.2. Princípio de d’Alembert
As vantagens desta interpretação são:
• Encaram-se as forças de inércia como forças ativas de modo a
reduzir o problema dinâmico a um estático;
• Quando se formulam as equações vetoriais de equilíbrio
dinâmico, as forças de inércia são incluídas nos diagramas de
corpo livre como forças exteriores aplicadas;
• Podemos aplicar o Princípio dos Trabalhos Virtuais ao caso
dinâmico.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 14
1. Formulação das Equações de Movimento
1.3. Formulação Energética
Contrariamente à abordagem Newtoniana, esta formulação usa
quantidades escalares relacionando duas quantidades
fundamentais: o trabalho das forças e a energia cinética do
sistema.
• Teorema da Variação da Energia Cinética
A variação da energia cinética de um sistema resulta do trabalho
das forças externas ao sistema ou do trabalho das forças
internas, tal como representado na figura abaixo. As forças
internas podem produzir uma dissipação de energia cinética pelo
efeito do atrito dinâmico (de rolamento ou de escorregamento)

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 15
1. Formulação das Equações de Movimento
1.3. Formulação Energética
Assim, o teorema da energia cinética indica que
(10) dt
dW
dt
dW
dt
dT ext int

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 16
1. Formulação das Equações de Movimento
1.3. Formulação Energética
A energia cinética é uma quantidade escalar positiva dada, para
um corpo em translação, por
e para um corpo em rotação dada por
Desta forma, para um corpo a deslocar-se num plano tem-se
(11) 2
2
1mVT
(12) 2
2
1IT
(13) 22
2
1
2
1CMCM ImVT

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 17
1. Formulação das Equações de Movimento
1.3. Formulação Energética
• Teorema da Variação da Energia Mecânica:
Já vimos anteriormente que a energia potencial acumulada por
uma mola é dada por:
Por outro lado, a energia potencial associada a um corpo sujeito
a um campo gravítica é
Assim, a soma da Energia Potencial com a Energia Cinética é
denominada como a Energia Mecânica
(14) 2
2
1kxV
(15) mghV
VTU

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 18
1. Formulação das Equações de Movimento
1.3. Formulação Energética
Atentemos na figura
Como vemos, podem ocorrer transferências de Energia do
exterior para o sistema, sob a forma de calor ou trabalho.
O trabalho altera a Energia Mecânica, enquanto que o calor
altera a energia interna do corpo.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 19
1. Formulação das Equações de Movimento
1.3. Formulação Energética
Dentro do sistema, pode ocorrer transformação de energia
mecânica em energia interna por dissipação de energia causada
por atrito.
Assim, podemos dizer que a variação instantânea da energia
mecânica de um sistema é
onde Wext,nc é o trabalho das forças externas não conservativas
(isto é, todas as forças exteriores com exceção do peso e das
forças exercidas por molas)
e Wint é o trabalho das forças internas associado à dissipação de
energia mecânica.
(16) dt
dW
dt
dW
dt
dU ncext int,

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 20
1. Formulação das Equações de Movimento
1.3. Formulação Energética
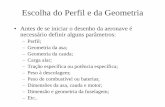
Exemplo: Vejamos um exemplo de aplicação do teorema da
energia mecânica aplicado ao movimento vibratório do corpo da
figura abaixo em torno do seu ponto de equilíbrio:
Do teorema da variação da Energia Mecânica vem
dt
dW
dt
dW
dt
VTd ncext int,

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 21
1. Formulação das Equações de Movimento
1.3. Formulação Energética
Note-se que neste caso sendo o corpo rígido, o trabalho das
forças internas é nulo, não havendo dissipação interna de
energia.
O trabalho das forças externas, com a exceção do peso e da
força da mola, e desprezando o atrito, é
pois a força N é perpendicular ao deslocamento do corpo.
Daqui resulta que a variação da energia total é
Integrando esta expressão em ordem ao tempo obtem-se U.
0, Nncext dWdW
0
dt
VTd

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 22
1. Formulação das Equações de Movimento
1.3. Formulação Energética
Assim
Pode ver-se, desta expressão, que a energia mecânica total
permanece constante ao longo do tempo.
O movimento do corpo pode ser obtido derivando a expressão
anterior em ordem ao tempo:
constkxxmconstVT 22
2
1
2
1
022
12
2
1
02
1
2
1 22
dt
dxxk
dt
xdxm
kxxmdt
d
0 kxxm

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 23
1. Formulação das Equações de Movimento
1.3. Formulação Energética
Exemplo 2.04: Derive as equações de movimento do sistema
mola-massa mostrado na figura.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 24
1. Formulação das Equações de Movimento
1.4. Princípio dos Trabalhos Virtuais
Este é, também, um método que envolve apenas quantidades
escalares.
O princípio dos trabalhos virtuais (PTV) pode ser traduzido
matematicamente pela seguinte equação
Esta equação estabelece que a condição necessária e suficiente
para que o sistema esteja em equilíbrio estático é que o
trabalho realizado por todas as forças aplicadas ao longo de
deslocamentos virtuais arbitrários, mas que sejam compatíveis
com os constrangimentos de ligação, seja igual a zero.
(17) 01
n
i
ii rFW

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 25
1. Formulação das Equações de Movimento
1.4. Princípio dos Trabalhos Virtuais
A partir do Princípio de d’Alembert podemos estender o
princípio dos trabalhos virtuais ao caso dinâmico.
Para que uma partícula i esteja em equilíbrio dinâmico, ter-se-á
que verificar
Fazendo o produto interno por obtemos a condição de
equilíbrio da partícula em termos de trabalhos virtuais:
Como se viu anteriormente, o trabalho das forças de reação é
nulo
(18)
ir
0 iiii rmfF
(19) 0 iiiii rrmfF
0 ii rf

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 26
1. Formulação das Equações de Movimento
1.4. Princípio dos Trabalhos Virtuais
Então, para n partículas,
Daqui se conclui que
(21) 0 inérciaforçasreaisforças WWW
(20) 01
n
i
iiii rrmF

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 27
1. Formulação das Equações de Movimento
1.5. Equação Geral da Dinâmica
Segundo o Princípio de d’Alembert, os métodos da estática
podem ser utilizados para analisar o movimento dos sistemas.
Pode, então, aplicar-se o Princípio dos Trabalhos Virtuais ao
estudo do movimento de um sistema mecânico ideal.
Assim, pode dizer-se que o trabalho virtual de todas as forças,
incluindo as de inércia, é nulo para qualquer deslocamento
virtual do sistema:
onde W representa o trabalho, os sobrescritos (a), (r) e (i)
representam as forças ativas, as reativas e as de inércia,
respetivamente, e qj representa o deslocamento virtual de qj.
(22) jira qWWW 0)()()(

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 28
1. Formulação das Equações de Movimento
1.5. Equação Geral da Dinâmica
Para um sistema ideal W(r)=0, portanto:
Assim, em qualquer instante do movimento de um sistema
mecânico ideal, o trabalho virtual de forças ativas e forças de
inércia é nulo para qualquer deslocamento virtual do sistema.
A equação (23) é chamada Equação Geral da Dinâmica.
Utilizando a equação (17), é possível escrever
e
(23) jia qWW 0)()(
n
j
ja
ja qQW
1
)()(
n
j
ji
ji qQW
1
)()(

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 29
1. Formulação das Equações de Movimento
1.5. Equação Geral da Dinâmica
Aqui, Qj(a) e Qj
(i) representam as forças generalizadas ativas e de
inércia, respetivamente.
Portanto, a Equação Geral da Dinâmica pode ser também escrita
na forma
ou então
jj
n
j
ij
aj qqQQ
01
)()(
(24) njQQ ij
aj ,1;0)()(

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 30
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
As equações de movimento de translação de um sitema em
coordenadas cartezianas toma a forma
onde m1, m2 e m3 tomam o valor da massa da primeira partícula,
m4, m5 e m6 são iguais à massa da segunda partícula e assim
sucessivamente.
A energia cinética do sistema é
Agora, sabendo que,
(25) njFxm jjj ,1;
(26) njxmTn
j
jj ,1;2
1
1
2
tqqqqxx nijj ,,,,,, 21

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 31
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
pode escrever-se
Daqui, vê-se que
Da equação (27) pode escrever-se
onde qj e qj são tratadas como variáveis independentes.
(27) njt
xq
q
xx
jn
i
i
i
j
j ,1;1
tqqqqqqqqxx ninijj ,,,,,,,,,,,, 2121
(28) i
j
i
j
q
x
q
x

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 32
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
Também se podia ter usado a regra de L’Hôpital que diz que
Então, usando a definição de derivada
tem-se
i
j
qi
j
q q
x
q
x
ii
00limlim
i
j
i
j
q
x
q
x
i
j
qi
j
q
x
q
x
i
0lim
i
j
qi
j
q
x
q
x
i
0lim

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 33
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
Multiplicando a equação (28) por xj e derivando em ordem ao
tempo obtém-se
Agora, sabe-se que
e que
(29)
i
j
j
i
j
j
i
j
j
i
j
jq
x
dt
dx
q
xx
q
xx
dt
d
q
xx
dt
d
(30) tq
xq
x
q
x
dt
d
i
j
k
n
k ki
j
i
j
2
1
2
i
j
j
i
j
j
i
j
jjj
ii
j
q
xx
q
xx
q
xxxx
x
2
1
2
1
2
1
2
12

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 34
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
pelo que, da relação (28), se obtém
Logo, usando as equações (27) e (30) obtém-se
(31) i
j
j
i
j
j
i
j
q
xx
q
xx
q
x
2
2
1
(32)
i
j
j
i
j
k
n
k ki
j
j
j
k
n
k k
j
i
j
i
j
j
i
j
q
x
dt
dx
tq
xq
xx
t
xq
q
x
qx
q
xx
q
x
2
1
2
1
2
2
1
(30)
tq
xq
x
q
x
dt
d
i
j
k
n
k ki
j
i
j
2
1
2
(27)
t
xq
q
xx
jn
i
i
i
j
j
1

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Substituindo as equações (31) e (32) na equação (29)
tem-se
35
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
(33) i
j
i
j
j
i
j
q
x
q
xx
q
x
dt
d
22
2
1
2
1
i
j
j
i
j
j
i
j
j
i
j
jq
x
dt
dx
q
xx
q
xx
dt
d
q
xx
dt
d
i
j
j
i
j
q
xx
q
x
2
2
1
(31)
i
j
j
i
j
q
x
dt
dx
q
x
2
2
1
(32)

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Pegando na equação anterior, multiplicando por mj e somando
para todos os j tem-se
Podemos observar que o termo da esquerda é a derivada em
ordem ao tempo da derivada da energia cinética em ordem à
variável qi.
O segundo termo da direita é a derivada da energia cinética em
ordem à variável qi.
Assim, usando a equação (25) e a (26) fica-se com
36
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
n
j i
j
j
n
j i
j
jj
n
j i
j
jq
xm
q
xxm
q
xm
dt
d
1
2
11
2
2
1
2
1
(34) i
n
j i
j
j
i q
T
q
xF
q
T
dt
d
1

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Daqui, usando a equação das forças generalizadas
e sabendo que, para um sistema dinâmico conservativo,
então
Substituindo a equação (35) na equação (34) fica-se com
37
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
n
j i
j
jiq
xFQ
1
(38) i
i
i q
TQ
q
T
dt
d
(35)
jj
jx
V
x
WF
(36)
i
n
j i
j
j
iq
V
q
x
x
VQ
1
(37)

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
e substituindo a equação (36) na anterior obtém-se
É conveniente, agora, introduzir a função de Lagrange L, ou a
Lagrangiana, que é definida como a diferença entre a energia
cinética e a energia potencial do sistema dinâmico:
Uma vez que V é claramente independente de qi, a equação (39)
pode ser reescrita na forma
38
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
(39) iii q
T
q
V
q
T
dt
d
VTL (40)
ii q
VT
q
VT
dt
d

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
ou ainda como
Esta é a Equação de Lagrange.
De acordo com a derivação acima, se pudermos expressar a
energia cinética e a energia potencial do sistema dinâmico
apenas em função das coordenadas generalizadas e as suas
derivadas, então pode escrever-se imediatamente as equações
de movimento do sistema expressas em termos das coordenadas
generalizadas usando a equação de Lagrange.
Infelizmente estas equação só funciona para sistemas
conservativos.
39
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
(41) 0
ii q
L
q
L
dt
d

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa
Se no sistema dinâmico em questão houver forças dissipativas,
então a equação de Lagrange tem que ser alterada para incluir o
seu efeito.
Assim
onde D é a função dissipativa dada por
40
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
(42) 0
iii q
D
q
L
q
L
dt
d
(43) njqcDn
j
jj ,1;2
1
1
2

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 41
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
Exemplo 2.05: Derive as equações de movimento do sistema
mola-massa mostrado na figura usando a equação de Lagrange.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 42
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
Exemplo 2.06: Derive as equações de movimento do sistema
ilustrado na figura, desprezando o atrito entre o bloco e a mesa.
A massa do bloco A é M, a massa do ponto B é m e o
comprimento do fio é l.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 43
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
Exemplo 2.07: A máquina de Atwood consiste em 2 massas, m1
e m2, ligadas por um fio inextensível e leve de comprimento l,
que passa por uma roldana de raio a (muito inferior a l) e
momento de inércia I. Derive as equações de movimento do
sistema, desprezando o atrito na roldana.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 44
1. Formulação das Equações de Movimento
1.6. Equações de Lagrange
Exemplo 2.08: Considere o caso de uma massa m a deslizar por
um plano inclinado liso de massa M que, por sua vez, é livre de
deslizar numa superfície horizontal lisa. Este sistema tem 2DOF.
Derive as equações de movimento do sistema.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 45
2. Movimento Harmónico
O movimento harmónico é um movimento oscilatório simples do
tipo periódico, podendo ser representado por funções circulares
do tipo seno ou cosseno, assim, o movimento harmónico simples
pode ser representado como a projeção do movimento de um
ponto que se desloca com velocidade constante sobre uma
circunferência de raio A, tal como vísivel na figura abaixo.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 46
2. Movimento Harmónico
Como se vê, T corresponde ao período constante definido como
o mínimo intervalo de tempo ao fim do qual o movimento se
repete, de tal forma que
Portanto, a lei de variação do movimento harmónico é dada por
Da figura anterior, vemos que este movimento pode ser expresso
em função da velocidade re rotação resultando na expressão
)()( Ttxtx
(44)
t
TAx
2sin
(45) fT
comtAx
22
sin

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 47
2. Movimento Harmónico
onde é a frequência circular em [rad/s] e f em [Hz].
Note-se que qualquer combinação das funções seno ou cosseno
pode ser utilizada para representar um movimento harmónico
simples.
De facto, se
Então, com
obtém-se
(45)
t
X
Xt
X
XXtXtXtx cossincossin)( 21
21
aaa tXttXtx sinsincoscossin)(
1
222
21 arctan;
X
XXXX a

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 48
2. Movimento Harmónico
A partir da função x(t) podemos obter a velocidade e a
aceleração da massa do sistema, calculando, respetivamente, as
derivadas de primeira e segunda ordem.
Assim, por exemplo,
Deslocamento:
Velocidade:
Aceleração:
Relembrar da trigonometria:
sin(a+b)=sina.cosb+cosa.sinb
(46)
tXtXtx
tXtXtx
tXtx
coscos)(
2cossin)(
cos)(
22

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 49
2. Movimento Harmónico
Como se vê, a velocidade e a aceleração são também
“movimentos” harmónicos com a mesma frequência, embora
tenham uma amplitude diferente (através do fator =constante)
e apresentem um desfazamento de 90º e 180º, respetivamente,
em relação ao deslocamento.
Combinando as expressões do deslocamento e da aceleração,
obtém-se a expressão que descreve, de uma forma genérica, um
movimento harmónico simples:
ou
xx 2
(47) 02 xx

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 50
2. Movimento Harmónico
Note-se que a soma de duas funções harmónicas com a mesma
frequência mas com diferentes ângulos de fase é também uma
função harmónica da mesma frequência, como se vê através do
seguinte exemplo.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 51
2. Movimento Harmónico
Exemplo 2.09: Considere dois movimentos harmónicos
representados por
a) Verificar que a soma dos dois movimentos resulta num
movimento harmónico de frequência .
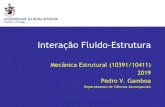
b) Representar graficamente os três movimentos sabendo que
X1=1, X2=2, =2 rad/s e a=/4 rad.
a
tXx
tXx
cos
cos
22
11
Relembrar da trigonometria:
cos(a+b)=cosa.cosb-sina.sinb

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 52
2. Movimento Harmónico
Exemplo 2.09: Gráfico: x=Xcos(t+b), X=2.789, b=0.53rad.
-3.00
-2.00
-1.00
0.00
1.00
2.00
3.00
0.00 0.20 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80 2.00
x1
x2
x

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 53
3. Funções Sinusoidais
As funções sinusoidais podem ser relacionadas com a função
exponencial tratando-as como funções complexas na forma de
Euler:
Usando uma representação vetorial no plano de Argand-Gauss, o
vetor girante Z, com uma amplitude A, é rodado a uma
velocidade angular e assume a forma
(48) sincos iei
(49) tAitAAeZ ti sincos

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 54
3. Funções Sinusoidais
A utilização da forma exponencial oferece várias vantagens,
sendo relativamente simples proceder à operação de números
complexos, tais como:
Multiplicação:
Divisão:
Potência:
Diferenciação:
21
2211 e ii
eAZeAZ
2111
11
2
1
2
1
2121
1
1
21
21
i
innn
i
i
eAZ
eAZ
eA
A
Z
Z
eAAZZ

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 55
3. Funções Sinusoidais
Desta forma, considerando que um movimento harmónico é dado
por
ou na forma exponencial
então, as expressões para a velocidade e a aceleração são
obtidas por derivação
tiAeZ
(50) tAtx sin
2sincossin
tAtAtA
dt
dtx (51)
2
ti
eAZ

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 56
3. Funções Sinusoidais
e
tAtAtAdt
dtx sinsincos 22 (52)
tieAZ 2

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 57
4. Equivalência de Sistemas
Por forma a poder-se analisar sistemas elásticos complexos,
normalmente estruturas, por meio da redução dos graus de
liberdade é conveniente encontrar constantes elásticas
equivalentes.
A rigidez de um sistema vibratório pode ser calculada para uma
mola por
Mk
x
Fk
deslocamento linear
deslocamento angular

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 58
4. Equivalência de Sistemas
Vamos considerar uma viga encastrada numa extremidade
sujeita à flexão com uma massa M na outra extremidade.
A rigidez deste sistema vibratório pode ser calculada aplicando
uma força F na ponta livre e obtendo a deflexão correspondente.
Sabe-se que a deflexão máxima da viga é dada por
onde
L é o comprimento da viga
E é o módulo de Young
I é o segundo momento de área em torno de um eixo
perpendicular à força F
EI
FLy
3
3
max

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 59
4. Equivalência de Sistemas
Portanto, a constante elástica equivalente da viga à flexão é
dada por
Também se sabe que o ângulo de torção máximo da viga é dado
por
onde
G é o módulo elástico de corte
J é o momento de área polar
T é o momento torsor
33max
3
3
L
EI
EI
FL
F
y
Fk
GJ
TLmax

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 60
4. Equivalência de Sistemas
Portanto, a constante elástica equivalente da viga à torção é
dada por
O cálculo da rigidez equivalente keq pode também efetuar-se
igualando a energia potencial do modelo de parâmetros
concentrados com o somatório da energia potencial de todos os
componentes do sistema real.
Assim
L
GJ
GJ
TL
TTk
max
j
j
i
iieq jkxkxkV 222
2
1
2
1
2
1

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 61
4. Equivalência de Sistemas
Resumindo algumas constantes elásticas:
Tipo de mola Constante da mola
Barra à tração
Mola helicoidal
d – diâmetro do varão
D – diâmetro médio da mola
N – nº de espiras
Viga à flexão
Viga à torção

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 62
4. Equivalência de Sistemas
Exemplo 2.10: Determine a constante elástica equivalente de
uma viga encastrada numa extremidade e livre noutra quando
sujeita a uma força uniformemente distribuída ao longo do seu
comprimento.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 63
4. Equivalência de Sistemas
Exemplo 2.11: Determine a rigidez equivalente do sistema da
figura usando o deslocamento da massa como coordenada
generalizada.

Faculdade de Engenharia
Universidade da Beira Interior
Vibrações e Ruído – 2014-2016
Departamento de Ciências Aeroespaciais
Pedro V. Gamboa 64
4. Equivalência de Sistemas
Exemplo 2.12: Tendo em consideração o sistema da figura, e
recorrendo a uma abordagem energética, determine os
parâmetros equivalentes do sistema, i.e., meq, keq e ceq. Use a
coordenada x associada ao movimento do centro de rotação do
disco de massa m (que roda sem escorregar) como coordenada
generalizada.