Escalonamento em Sistemas de Transporte AGV: Estudo Caso · AGVs existente atualmente na EMBRACO ....
6
Escalonamento de Ordens em Sistemas de Transporte por AGV: Estudo de um Caso Carla Brandão Sartor I Carlos Fernando Marfins' José Eduardo Ribeiro Cury' Laboratório de Controle e Microinformática - LCMI Departamento de Engenharia Elétrica - EEL Universidade Federal de Santa Catarina - UFSC Caixa Postal 476 88040-900 Florianópolis SC - Brazil 1 [email protected] . [email protected] 3[email protected] Abstract: This paper aims at developing an analysis and a comparison of diferents scheduling policies for transport orders. The system under study is an industrial transport system by Automated Guided Vehicles , AGVs , of EMBRACO 's factory located at Joinville - SC Brazil. This system was already modeled for simulation purposes. Therefore this simulation model is used to the analysis of each implemented scheduling policy. Resumo: Este artigo tem como objetivo e análise e a comparação de diferentes políticas de escalonamento de ordens de transporte. O sistema a ser estudado é um sistema de transporte industrial por Veículos Guiados Automaticamente, os AGVs, da fábrica da EMBRACO localizada em Joinville - SC Brasil. Este sistema já foi modelado para fins de simulação, modelo este que é utilizado para realizarmos a análise para cada política de escalonamento implementada. 1. Introdução Dentre os subsistemas que compõem um sistema de manufatura, o sistema de transporte é de grande importância para a organização da 'produção, sendo responsável pela movimentação de materiàis entre os diferentes setores de uma fábrica [I]. Nos sistemas de manufatura atuais , o transporte por veículos guiados automaticamente, AGVs, encontra grande aplicabilidade devido 'a sua adequação aos requisitos de produtividade e flexibilidade a que estes sistemas estão sujeitos [2]. O projeto de um sistema de transporte por AGVs inclui a consideração de aspectos tecnológicos, estruturais e de gerenciamento, e cujas definições influenciam de forma decisiva no resultado obtido. No que diz respeito ao aspecto gerencial, uma função básica é a definição da política de escalonamento de ordens de transporte. Uma política de escalonamento em sistema de transporte por AGVs envolve a escolha da ordem a ser atendida e a alocação de veículos às ordens, e deve atender aos objetivos de otimização do fluxo de materiais através da produção [3]. 229 Neste trabalho, se faz uma análise comparativa de diferentes políticas de escalonamento para sistemas de transporte por AGVs . A plataforma sobre a qual a análise é feita é o da Empresa Brasileira de Compressores, EMBRACO, e se utiliza um modelo de simulação do sistema em estudo . Este artigo está organizado como segue . A seção 2 descreve os principais elementos e as principais características do sistema de transporte por AGVs existente atualmente na EMBRACO. Na seção 3 são apresentadas as políticas de escalonamento implementadas no modelo de simulação do sistema de AGVs, através de uma descrição informa l de cada uma delas. A seção 4 descreve brevemente o modelo de simulação no qual o sistema em questão foi implementado, assim como a ferramenta utilizada para construí-lo. Na seção 5 são apresentados os resultados obtidos das 4 simulações realizadas, sendo que cada uma destas é caracterizada pela política de escalonamento implementada. Os resultados foram baseados na análise de uma única variável que dá uma medida da eficiência das políticas de escalonamento através do atendimento das ordens pelo sistema de AGVs.
Transcript of Escalonamento em Sistemas de Transporte AGV: Estudo Caso · AGVs existente atualmente na EMBRACO ....

Escalonamento de Ordens em Sistemas deTransporte por AGV: Estudo de um Caso
Carla Brandão Sartor I
Carlos Fernando Marfins'José Eduardo Ribeiro Cury'
Laboratório de Controle e Microinformática - LCMIDepartamento de Engenharia Elétrica - EEL
Universidade Federal de Santa Catarina - UFSCCaixa Postal 476 88040-900 Florianópolis SC - Brazil
[email protected] [email protected]@lcmi.ufsc.br
Abstract: This paper aims at developing an analysis and a comparison of diferents schedulingpolicies for transport orders. The system under study is an industrial transport system by AutomatedGuided Vehicles , AGVs , of EMBRACO 's factory located at Joinville - SC Brazil. This system wasalready modeled for simulation purposes. Therefore this simulation model is used to the analysis ofeach implemented scheduling policy .
Resumo: Este artigo tem como objetivo e análise e a comparação de diferentes políticas deescalonamento de ordens de transporte. O sistema a ser estudado é um sistema de transporte industrialpor Veículos Guiados Automaticamente, os AGVs, da fábrica da EMBRACO localizada em Joinville- SC Brasil. Este sistema já foi modelado para fins de simulação, modelo este que é utilizado pararealizarmos a análise para cada política de escalonamento implementada.
1. IntroduçãoDentre os subsistemas que compõem um sistema demanufatura, o sistema de transporte é de grandeimportância para a organização da 'produção, sendoresponsável pela movimentação de materiàis entreos diferentes setores de uma fábrica [I]. Nossistemas de manufatura atuais , o transporte porveículos guiados automaticamente, AGVs, encontragrande aplicabilidade devido ' a sua adequação aosrequisitos de produtividade e flexibilidade a queestes sistemas estão sujeitos [2].
O projeto de um sistema de transporte porAGVs inclui a consideração de aspectostecnológicos, estruturais e de gerenciamento, ecujas definições influenciam de forma decis iva noresultado obtido. No que diz respeito ao aspectogerencial, uma função básica é a definição dapolítica de escalonamento de ordens de transporte.
Uma política de escalonamento em sistema detransporte por AGVs envolve a escolha da ordem aser atendida e a alocação de veículos às ordens, edeve atender aos objetivos de otimização do fluxode materiais através da produção [3].
229
Neste trabalho, se faz uma análise comparativade diferentes políticas de escalonamento parasistemas de transporte por AGVs . A plataformasobre a qual a análise é feita é o da EmpresaBrasileira de Compressores, EMBRACO, e seutiliza um modelo de simulação do sistema emestudo .
Este artigo está organizado como segue . Aseção 2 descreve os principais elementos e asprincipais características do sistema de transportepor AGVs existente atualmente na EMBRACO. Naseção 3 são apresentadas as políticas deescalonamento implementadas no modelo desimulação do sistema de AGVs, através de umadescrição informa l de cada uma delas. A seção 4descreve brevemente o modelo de simulação noqual o sistema em questão foi implementado, assimcomo a ferramenta utilizada para construí-lo. Naseção 5 são apresentados os resultados obtidos das 4simulações realizadas, sendo que cada uma destas écaracterizada pela política de escalonamentoimplementada. Os resultados foram baseados naanálise de uma única variável que dá uma medidada eficiência das políticas de escalonamento atravésdo atendimento das ordens pelo sistema de AGVs.

2. . Sistema de Transporte AGVs daEMBRACOA EMBRACO Empresa Brasileira deCompressores - localizada em Joinville - SC, é umaimportante indústria no ramo de compressoresherméticos para refrigeração, se caracterizandocomo a segunda maior produtora mundial.
Devido à concorrência de mercado , técnicasmodernas para gerenciamento da manufatura estãosendo implementadas, entre elas a política jus/-in-lime, FMS utilizando células de manufaturaintegradas por um sistema de informação e umsistema de transporte altamente flexível , os AGVs.
O seu sistema de AGVs é constituído por 4veículos de acionamento elétrico, diversas estaçõesde carregamento e desca rregamento de peças,portas automáticas, um CLP e um PC, com todaesta tecnologia desenvolvida pela empresa alemãEisemannn.
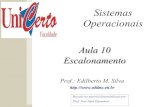
Os AGVs são guiados por meio de camposmagnéticos gerados por uma corrente elétrica I quepassa por fios condutores enterrados no piso dafábrica . Um campo magn ético B é índuzido pelascorrentes que circulam nos fios com freqüênciasdiferentes e é captado por antenas colocadas sob osAGVs . Dispositivos chamados /ranceivers sãolocal izados junto ao teto da fábrica e trocam sinaisinfravermelhos com outros destes localizados naparte superior dos AGVs permitindo comunicaçãocom o CLP que comanda o sistema.
Transceiver
/Leitor do pontode ident ificação
Antena traseirasob o veículo
Antena dianteirasob o veículo
Ponto de identificação
Figura I - Representação esquemática do AGV
230
Os veículos possuem 2 posiçoes paratransporte. Cada posição pode transportar 2 pilhasde cestos metálicos ou de plásticos. A alimentação érealizada por meio de baterias que permi tem umtempo médio de operação de I hora .
No layout do sistema de AGVs ex istemvários pontos de identificação. Linhas contínuas,que na verdade são fios embutidos sob o piso dafábrica , passam sobre estes pontos representando oscaminhos dos AGVs . Na figura (I ), sãorepresentados esquematicamente os principaiscomponentes dos AGVs.
Nos pontos de decisão, que coincidem comos pontos de identificação de onde partem mais deum caminho, a programação dos AGVs decide qualcaminho que o AGV deve rá seguir. Através dasdiferentes freqüências das correntes dos fioscondutores, os AGVs podem ser guiados pelaseleção dos caminhos para que os mesmosa lcancem o destino final.
Todo o controle de tráfego é realizado peloCLP baseado na técnicas de controle por zonas .Cada par de pontos de identificação da posição doAGV limita uma zona que pode ser ocupada porapena s um AGV . Se um outro AGV tentar acessaresta zona ainda ocupada, ele é automaticamenteparado ao passar pelo ponto de identificaçãoanterior à zona ocupada permanecendo neste estadoaté que a zona seja liberada pelo AGV , ou pelapassagem de uma ordem pelo CLP para desviar oseu caminho. Desse modo , sempre existe umgerenciamento por zonas para evitar possíveiscolisões.
Quando um AGV ocioso, ou seja, sem ordensde transporte, bloqueia a passagem de um outro .AGV que possui uma ordem sendo executada emum ponto da fábrica, o CLP envia um sinal decomando para o AGV ocioso para que ele se dirijapara uma outra posição na fábrica, permitindoass im a passagem do outro AGV.
O objetivo do sistema de AGVs daEMBRACO é transportar peças da produção,composta pela usinagem e soldagem, para as 2linhas de montagem de peças (compressores)util izando os caminhos pré-definidos. Estas linhasde montagem são separadas da produção por portasautomáticas que abrem-se para permitir a passagemdos AGVs, fechado-se em segu ida.
As peças não são transportadas isoladamente.Estas são colocadas em cestos metálicos formandogrupos com um número variando entre 8 e 99peças , dependendo do tamanho das mesmas. Estescestos podem ser empilhados por uma empilhadeiraaté uma altura máxima de 4 cestos. Umaobservação importante é que os cestos sãotransportados sempre aos pares, ou seja, a estação

deve conter 2 cestos alinhados, independendo doempilhamento vertical, -mesmo porque este tipo deempilhamento não é realizado em todas as estações.
Cada estação na linha de montagem estáligada logicamente a alguma estação da produção .Os cestos carregados em uma estação da produçãosão transportados pelos AGVs até uma estaçãoespecífica das linhas de montagem , onde sãodescarregados.
O mesmo processo de transporte ocorre parao transporte de cestos vazios de uma estação daslinhas de montagem de volta para a sua estaçãocorrespondente da produção. Em alguns casos, umaestação da produção pode estar logicamenteconectada a duas estações da montagem e vice-versa .
3. Políticas de Escalonamento de Ordens deTransporteO sistema de atendimento às estações da fábricapelos AGVs funciona baseado no critério de ordensde transporte. Uma ordem de transporte é definidapara uma estação de carga (origem) e uma dedescarga (destino). As condições para uma ordemser gerada são:
• Estação de carga deve possuir 2 pilhashorizontais de cestos prontos para otransporte
• Estação de descarga deve possuir nomínimo 2 posições vazias
• Não deve existir AGV transportandocestos para a referida estação de descarga
Se ás condições acima forem satisfeitas, aordem _é inserida em um buffer de ordenscontrolado pelo CLP. A cada IOms ocorre umavarredura deste bufJer, sendo que a ordem de leituraé realizada na seqüência em que as mesmas foramge-radas. Assim, o CLP procura alocar ou executarestas ordens para os AGVs da fábrica.
A forma como esta alocação é realizadacaracteriza a política de escalonamento das ordens.Juntamente com as políticas de escalonamento aserem -estudadas, iremos assumir que as seguintesregras comuns são aplicadas:
(i) Como os AGVs possuem 2 posições detransporte, eles podem receber até 2 ordens aomesmo tempo sendo que a parte da frente é semprecarregada primeiro, por default, com exceção se aestação requerendo a parte de trás do AGV estiverna rotado mesmo .
(ii .) O descarregamento de cestos irá dependerda distância do AGV para as estações de descarga;a e-staçãomais próxima receberá os cestos primeiro.
-(iii) As ordens referentes aos setores onde osAqVs -se encontram são prioritárias. Desse modo,
231
procura-se fazer com que os AGVs circulemsempre com 2 pilhas de cestos (carregados ouvazios) entre a produção e a montagem.
A seguir, apresentamos diferentes políticas deescalonamento para o sistema.
3.1. Política implementada na EMBRACOCada ordem de transporte possui uma estação decarga que pode pertencer ao setor de soldagem,usinagem ou montagem. A partir desta estaçãoespecificada na ordem, inicia-se um processo deprocura por um AGV com pelo menos uma posiçãode transporte livre ao longo dos caminhos pré-definidos dos AGVs no chão da fábrica .
Como já foi dito, estes caminhos possuemvários pontos de identificação que delimitam zonasde comprimento variável. Para cada ordem, aprocura se realiza primeiramente da estação decarga até o primeiro ponto de identificação nosentido do movimento do AGV durante 10segundos. Se o caminho for bidirecional, a procurase realiza em ambos sentidos. Se não for encontradoAGV disponível neste intervalo de tempo, há umincremento de prioridade desta ordem, ou seja, napróxima varredura do buffer, a procura se estenderáaté o segundo ponto de identificação mais próximoda estação de carga durante mais 10 segundos paraaquelas ordens não executadas anteriormente. Esteprocesso de busca continua e cada vez que umAGV for encontrado, a ordem correspondente éexecutada para o AGV e retirada do buffer .
Considerando que os AGVs estão na maiorparte do tempo em movimento, a pesquisa ao longodos caminhos não se estende por distâncias muitograndes.
3.2. Política mistaEsta política se refere a uma combinação da políticaimplementada na EMBRACO com uma política queaIoca o AGV mais próximo, sendo esta aplicada aossetores da produção (usinagem e soldagem) eaquela às linhas de montagem. A implementação dapolítica AGV mais próximo na fábrica inteira é nãorealizável devido à que a mesma possibilita aocorrência de bloqueios nos cruzamentos doscaminhos dos AGVs nas linhas de montagem.
A política do AGV mais próximo consiste emalocar as ordens contidas no buffer seguindo umapolítica FIFO, para o AGV que possuir a menordistância da estação de carga da ordem a serexecutada.
Para isso, a fábrica foi dividida em 3 setores:usinagem, que possui os AGVs I _e' 3 a sua

disposição; soldagem, que possui os AGVs 2 e 4, cmontagem que é atendida por todos os AGVs.
No momento da varredura do buffer de ordensgeradas, o CLP verifica a estação de carga (e osetor) e se existe AGV disponível, ou seja, compelo menos uma posição de transporte livre no setorda estação de carga. Se houver apenas um AGV, aordem é executada para este AGVindependentemente da distância que ele se encontrada estação. Porém se existirem 2 AGVs disponíveisno mesmo setor, a ordem será executada para oAGV que se encontrar mais próximo da estação de.carga determinada.
Na montagem, a única modificação emrelação à política implementada na EMBRACO foia alteração do intervalo de tempo de procura emcada zona, que passou para 5segundos.
3.3. Caso mista com timeoutUma outra alternativa proposta para as políticas deescalonamento é a implementação da políticaanterior - AGV mais próximo na soldagem eusinagem e por procura nos caminhos nas linhas demontagem - utilizando um mecanismo de timeoutnos setores onde é aplicada a política do AGV maispróximo. Isto para oferecer uma oportunidade amais para que os 'AGVs passem da produção para amontagem com as suas 2 posições de transporteocupadas por cestos de peças.
o timeout é implementado por um relógio quecomeça a contar a partir do momento que o AGVestiver com o primeiro cesto de peças carregado. OAGV fica então parado esperando uma segundaordem ser executada para ele; se transcorrer otempo estabelecido, o AGV segue para a montagemcom apenas uma posição carregada. Porém se umasegunda ordem for executada enquanto o AGVestiver a caminho da montagem, o mesmo voltarápara carregar a sua segunda posição de transportecom os cestos da estação de carga requisitadora.
4. O Modelo de Simulação para a Análisedas PolíticasAs políticas de escalonamento propostas para osistema de AGVs da EMBRACO, foram testadasusando um modelo de simulação implementado na\linguagem SIMAN. A descrição detalhada dodesenvolvimento deste modelo de simulação, podeser encontrada em [I] , [2]. A figura (2) apresenta olayout do sistema de transporte de AGVs daEMBRACO.
O simulador contém 2 arquivos que sãoescritos pelo usuário, o modelo e o experimento.Estes são compilados separadamente e depoislinkados para que se crie o arquivo executável. Aexecução deste arquivo gera um relatório contendovários conjuntos de variáveis previamenteespecificados pelo usuário no arquivo experimento,como resultado de saída do modelo de simulação.
232

De posse destes conjuntos de variáveis desaída , o usuário pode verificar as característicasquantitativas e qualitativas do sistema realmodelado.
O relatório de saída da simulação no caso daEMBRACO, informa por exemplo a quantidade depeças produzidas; o tempo que cada componente oucesto vazio espera nas suas respectivas estações decarga ; o tempo que as estações da montagem ficamociosas, ou seja, sem cestos para o número decestos de cada componente que foram entregues namontagem; o percentual de utilização dos AGVs,entre outras variáveis de interesse.
Uma ferramenta de grande importância nodesenvolvimento de um modelo de simulação é opacote gráfico CINEMA, que suporta um processode animação dos modelos de simulaçãoimplementados no SIMAN. Através do CINEMA, olayout do sistema de AGVs (caso EMBRACO)pode ser "animado", permitindo a visualização doscomponentes estáticos, por exemplo os caminhosdos AGVs , e dinâmicos, por exemplo as entidades(oscestos) e os AGVs.
5. ResultadosForam gerados resultados através de simulaçõespara 4 casos diferentes: (I) EMBRACO ; (2) mista ;(3) mista com timeout de 5segundos e (4) mistacom timeout de 30segundos.
As simulações foram executadas para umaprodução horária da fábrica de 400 peças , pois jáfoi comprovado em [4] que o sistema de AGVsutilizando a política (I) pode suportar estaprodução. Na sistema real, esta ' é a capacidadenominal da fábrica . Pode-se observar pelosconjuntos de variáveis obtidos como resultado dassimulações, que pelas políticas (2) , (3) e (4) osistema de AGVs também consegue suportar estaprodução.
O conjunto de variáveis consideradoprincipal para a avaliação da política deescalonamento do sistema de AGVs é aquele quemarca o tempo que um cesto ou pilha de cestospermanecem nas estações de carga .
Este tempo é contado desde a geração daordem, ou seja, instante que a ordem é inserida nobuffer de ordens do CLP, até o momento que oAGV chega na estação e carrega-os. Esta variáveldá uma medida de efic iência no atendimento dasordens pelo sistema de AGVs.
A média ponderada dos tempos médios deespera (em minutos) dos componentes da cada setorpara cada política além do número de ordensexecutadas durante o tempo das simulações (3100minutos) estão apresentados na tabela (1).
A montagem 1é composta por 12 estações quedevolvem e recebem os cestos da usinagem; amontagem 11 é composta por 8 estações quedevolvem e recebem os cestos da soldagem. Ausinagem é composta por 14 estações e a soldagempor 5 estações.
Pela tabela (I), notamos que a política queobteve o melhor conjunto de resultados foi a (2). Asdiferenças em relação ao caso da políticaimplementada na EMBRACO são mostradas natabela (2) em termos percentuais.
Setor f (2) (3) (4)PolíticaUsinagem -33 -41 -28Soldagem -32 -27 -26Montagem 1 +1 +2 +21Montagem 11 -41 -23 -2
Tabela (2) - Comparação percentual com apolítica(l )
Analisando os setores de uma maneira geral,podemos comprovar a eficiência da política (2)através das significativas diminuições dos temposem que os cestos ficam esperando nas estações decarga. Pode-se verificar a partir da igualdade donúmero de ordens executadas, que apesar dodecréscimo do tempo de espera nas estações, não seobservou uma modificação da produção doscomponentes. Isto significa que o sistema absorve aprodução nominal de 400 peças para todas aspolíticas e que o mesmo está trabalhando com umacerta folga.
Setor f Política (I) (2) (3) (4)Usinagem 5,49 3,69 3,21 3,95Soldagem 1,76 1,18 1,28 1,30Montagem I 4,60 4,64 4,69 5,59Montagem 11 5,74 3,39 4,43 5,62
Ordens Executadas 4236 4237 4232 4240Tabela(l) - Resultados obtidos
233

and Y. Narahari ,of Automated
Prentice-Hall , USA.
6. ConclusãoEste trabalho mostrou que a implementação dediferentes políticas de escalonamento podem alterarde maneira substancial a eficiência que um sistemade transporte por AGVs pode apresentar.
Através dos resultados obtidos, pudemosverificar uma alteração significativa dos tempos emque os cestos aguardam nas estações de carga econseqüentemente na ociosidade das linhas demontagem, para as diferentes políticas testadas.
Na situação atual de produção com folga , estasdiferenças de tempo não se fazem sentir naprodutividade do sistema. No entanto, numasituação de aumento de carga de produção decomponentes, a melhoria do sistema de transportepelo uso de uma política de escalonamentoeficiente, seria certamente de relevância para odesempenho do sistema global.
Devemos ainda citar o uso da ferramenta desimulação para a análise das políticas deescalonamento realizada neste artigo, verificando aversatilidade do uso da mesma para a resolução deuma grande variedade de problemas . Obviamente.seria inviável a realização do estudo das pol íticasapresentadas neste artigo no sistema real de AGVsda EMBRACO.
7. Referências Bibliográficas[I] M. P. Groover, "Autornation. Production
Systems and Computer Integrated Manu faturing" .Prentice-Hall , USA , 1987 .
[2] N . Viswanadham"Performance ModelingManufacturing Systems",1992.
[3] R. E. King and C. Wilson, "A Rev iew ofAutomated Guided-Vehicle Systern Design andScheduling", Production Plan and Control , 1991.páginas 44-5 .
[4] C. F. Martins, "Modelagem e Avaliação deDesepenho por Simulação de Sistema de Transportepor AGVs : O Caso da EMBRACO" , Dissertaçãode Mestrado, UFSC, 1997.
[5] C. F. Martins , J. E. R. Cury and M. C. L.Braga, "Using Sirnulation to the Analysis of a RealIndustrial Systern", submetido ao IFAC-IFIPMCPL'97, Campinas - SP Brazil, 1997 .
234