Estado Arte Provisóriopaginas.fe.up.pt/~ee06166/documentos/Estado_Arte_Provisorio.pdf ·...
22
8 Capítulo 2 Estado da Arte 2.1 - Controlo de Produção 2.1.1 Introdução Hoje em dia mais de 40% do abastecimento de energia é feito através de combustíveis fósseis contribuindo, em grande escala, para as emissões de CO 2 [3]. Este facto aliado à crescente procura de energia tem levado a mudanças na indústria eléctrica sendo necessário implementar novas soluções. Desta forma, a produção deve ser aumentada mas simultaneamente o contributo de as emissões de gases de estufa devem ser reduzidos. Nos dias que correm, o modo de produção, transporte e consumo de energia eléctrica não é totalmente eficiente. Este facto leva a perdas na ordem dos 80% desde a fonte primária de energia até à carga consumidora [3]. Assim, é actualmente necessário pensar em novas fontes de energias “limpas”, ou seja, energias obtidas a partir de fontes naturais, consideradas inesgotáveis e que não contribuem activamente para a emissão de gases poluentes. Embora o investimento na produção de energia a partir de fontes renováveis seja significativo, a sua contribuição no sistema eléctrico é ainda relativamente pequena. Este tipo de energia, especialmente as de origem variável (solar e eólicas), impõem desafios adicionais como é o caso do factor disponibilidade. Assim, estes sistemas vêem sublinhar a necessidade de armazenamento de energia bem como de sistemas de supervisão e controlo que coordenem as diferentes fontes produtoras de energia com as variações do consumo. Desta forma, perante o objectivo de integrar a produção de energia de fontes renováveis e, simultaneamente, aumentar a eficiência da cadeia energética, o sistema eléctrico terá de ser repensado. Modificações na estrutura e operabilidade deste sistema devem ser implementadas. A reformulação de todo o conceito, estrutura e funcionamento do sistema eléctrico leva, portanto, a uma nova arquitectura de toda a cadeia eléctrica. Nasce assim o conceito de smart grid ou, em português, redes inteligentes.
Transcript of Estado Arte Provisóriopaginas.fe.up.pt/~ee06166/documentos/Estado_Arte_Provisorio.pdf ·...
8
Capítulo 2
Estado da Arte
2.1 - Controlo de Produção
2.1.1 Introdução
Hoje em dia mais de 40% do abastecimento de energia é feito através de combustíveis
fósseis contribuindo, em grande escala, para as emissões de CO2 [3]. Este facto aliado à
crescente procura de energia tem levado a mudanças na indústria eléctrica sendo necessário
implementar novas soluções. Desta forma, a produção deve ser aumentada mas
simultaneamente o contributo de as emissões de gases de estufa devem ser reduzidos.
Nos dias que correm, o modo de produção, transporte e consumo de energia eléctrica não
é totalmente eficiente. Este facto leva a perdas na ordem dos 80% desde a fonte primária de
energia até à carga consumidora [3].
Assim, é actualmente necessário pensar em novas fontes de energias “limpas”, ou seja,
energias obtidas a partir de fontes naturais, consideradas inesgotáveis e que não contribuem
activamente para a emissão de gases poluentes. Embora o investimento na produção de
energia a partir de fontes renováveis seja significativo, a sua contribuição no sistema
eléctrico é ainda relativamente pequena. Este tipo de energia, especialmente as de origem
variável (solar e eólicas), impõem desafios adicionais como é o caso do factor disponibilidade.
Assim, estes sistemas vêem sublinhar a necessidade de armazenamento de energia bem como
de sistemas de supervisão e controlo que coordenem as diferentes fontes produtoras de
energia com as variações do consumo. Desta forma, perante o objectivo de integrar a
produção de energia de fontes renováveis e, simultaneamente, aumentar a eficiência da
cadeia energética, o sistema eléctrico terá de ser repensado. Modificações na estrutura e
operabilidade deste sistema devem ser implementadas.
A reformulação de todo o conceito, estrutura e funcionamento do sistema eléctrico leva,
portanto, a uma nova arquitectura de toda a cadeia eléctrica. Nasce assim o conceito de
smart grid ou, em português, redes inteligentes.
9
2.1.2 Smart Grid
O conceito do futuro sistema eléctrico é relativamente recente pelo que, o termo smart
grid pode assumir diferentes definições consoante o local do mundo onde se encontre. De
acordo com o relatório da Comissão Europeia [6], uma smart grid é caracterizada da seguinte
forma:
· Flexível: Deve atender às necessidades dos clientes, respondendo às mudanças e
desafios que se avizinham.
· Acesso: Deve ser possível a ligação à rede de todos os utilizadores. Em particular,
a smart grid deve ser acessível a fontes de energia renováveis e a fontes locais de
produção de elevada eficiência com baixas ou nulas emissões de carbono.
· Confiável: A qualidade da oferta na rede deve ser assegurada bem como a sua
segurança. Deve ainda ser coerente com as exigências da era digital e resistente a
riscos e incertezas.
· Económica: O valor económico é garantido através da inovação, gestão de energia
eficiente e um tratamento equitativo em termos de concorrência e regulação.
A electricidade é a forma mais versátil e amplamente utilizada de energia no mundo. O
nível de consumo de energia eléctrica, confiabilidade e qualidade está intimamente ligado ao
nível de desenvolvimento económico de um país ou região. Estas razões levam a que a
sociedade actual seja cada vez mais exigente nas suas necessidades energéticas. A smart grid
deve, desta forma, ser projectada no sentido de dar resposta a estas exigências. Podem-se
destacar quatro exigências principais: capacidade, confiabilidade, eficiência e
sustentabilidade.
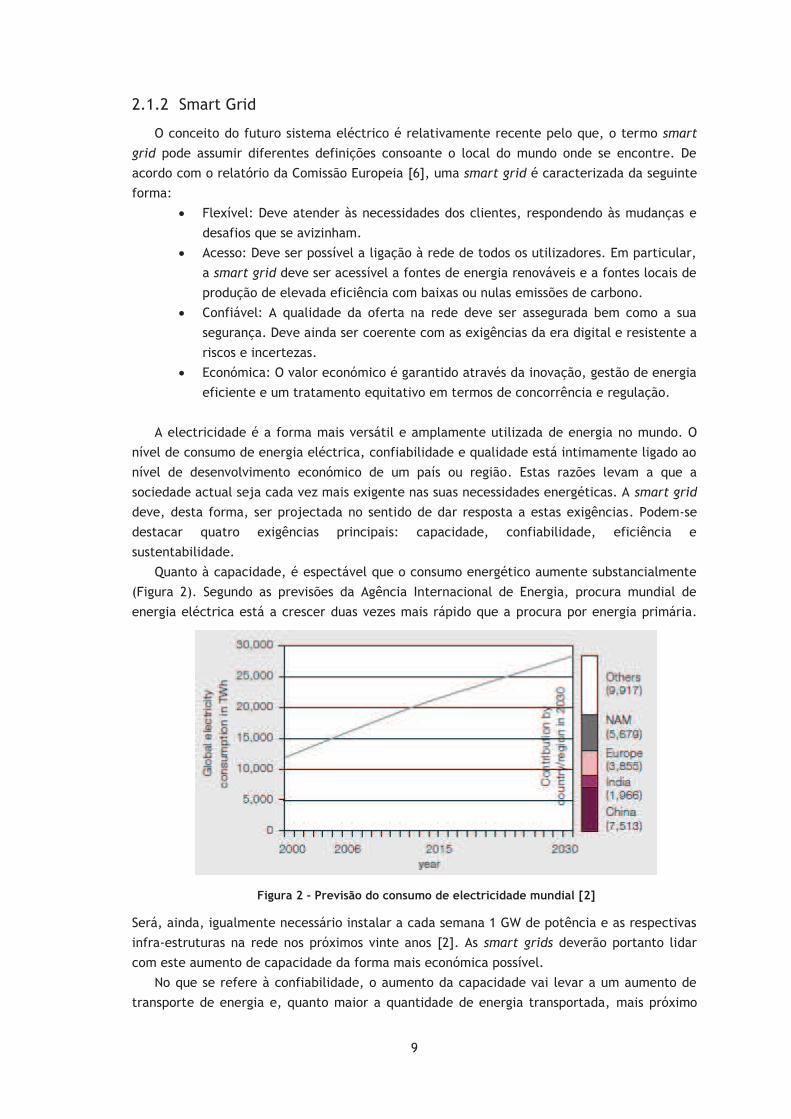
Quanto à capacidade, é espectável que o consumo energético aumente substancialmente
(Figura 2). Segundo as previsões da Agência Internacional de Energia, procura mundial de
energia eléctrica está a crescer duas vezes mais rápido que a procura por energia primária.
Será, ainda, igualmente necessário instalar a cada semana 1 GW de potência e as respectivas
infra-estruturas na rede nos próximos vinte anos [2]. As smart grids deverão portanto lidar
com este aumento de capacidade da forma mais económica possível.
No que se refere à confiabilidade, o aumento da capacidade vai levar a um aumento de
transporte de energia e, quanto maior a quantidade de energia transportada, mais próximo
Figura 2 - Previsão do consumo de electricidade mundial [2]
10
da instabilidade ficará o sistema. Nos dias que correm é inconcebível que possam existir
interrupções de abastecimento de energia (blackouts) ou perturbações na rede eléctrica.
A confiabilidade da rede, ou seja, a capacidade da rede operar normalmente sem
instabilidades, sempre foi uma prioridade dos engenheiros. Estas perturbações têm impactos
económicos significativos. Um estudo recente realizado nos Estados Unidos da América
comprovou que as perturbações no sistema eléctrico levam a prejuízos na ordem dos oitenta
biliões de dólares [7].
O novo conceito de sistema eléctrico de energia será tanto mais vantajoso se for possível
reduzir as instabilidades e, consequentemente, ser mais fiável que o conhecido actualmente.
Um sistema com maior confiabilidade para além de ser economicamente mais rentável, leva a
que se reduzam as emissões de gases poluentes uma vez que, diminuindo as perdas, a
produção de energia eléctrica será menor para uma mesma potencia consumida.
Outra das principais exigências da smart grid é uma maior eficiência. Todos os anos são
investidos cerca de $119 biliões de dólares em energias renováveis em todo o mundo mas
apenas $1.8 biliões no melhoramento da eficiência energética [8]. A relutância no
investimento para uma maior eficiência energética é surpreendente. Este tipo de
investimentos é, geralmente, recuperado em menos de dois anos e é feito através da
diminuição dos custos de energia. Noutro tipo de circunstâncias, este retorno rápido seria do
maior interesse das diversas empresas mas, a falta de conhecimento faz com que
investimentos nesta área sejam deixados para segundo plano. A falta de conhecimento
relativamente a equipamentos energeticamente eficientes agravado pela grande variedade de
opções disponíveis no mercado é o grande desafio que se coloca.
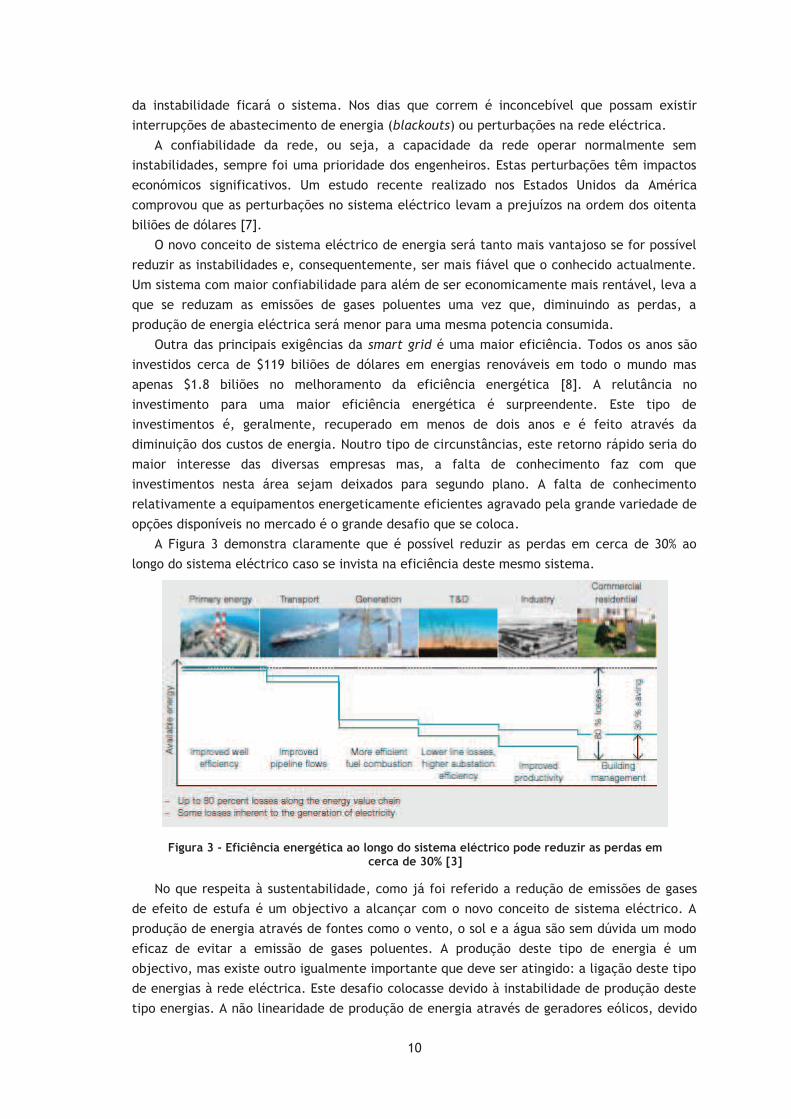
A Figura 3 demonstra claramente que é possível reduzir as perdas em cerca de 30% ao
longo do sistema eléctrico caso se invista na eficiência deste mesmo sistema.
No que respeita à sustentabilidade, como já foi referido a redução de emissões de gases
de efeito de estufa é um objectivo a alcançar com o novo conceito de sistema eléctrico. A
produção de energia através de fontes como o vento, o sol e a água são sem dúvida um modo
eficaz de evitar a emissão de gases poluentes. A produção deste tipo de energia é um
objectivo, mas existe outro igualmente importante que deve ser atingido: a ligação deste tipo
de energias à rede eléctrica. Este desafio colocasse devido à instabilidade de produção deste
tipo energias. A não linearidade de produção de energia através de geradores eólicos, devido
Figura 3 - Eficiência energética ao longo do sistema eléctrico pode reduzir as perdas em cerca de 30% [3]
11
à inconstância do vento, é outro obstáculo à estabilidade da rede e vem sublinhar a
necessidade de reservas adicionais. Armazenamento de energia pode ser uma solução.
O facto do consumidor final decidir o quanto e de que forma pretende consumir energia
vem colocar mais desafios, contudo, a constante monitorização da relação entre de produção
e consumo dá mais um contributo para o controlo de energia produzida. Assim sendo, as
smart grids têm capacidade de monitorizar esta relação de modo a optimizar a
produção/armazenamento de energia.
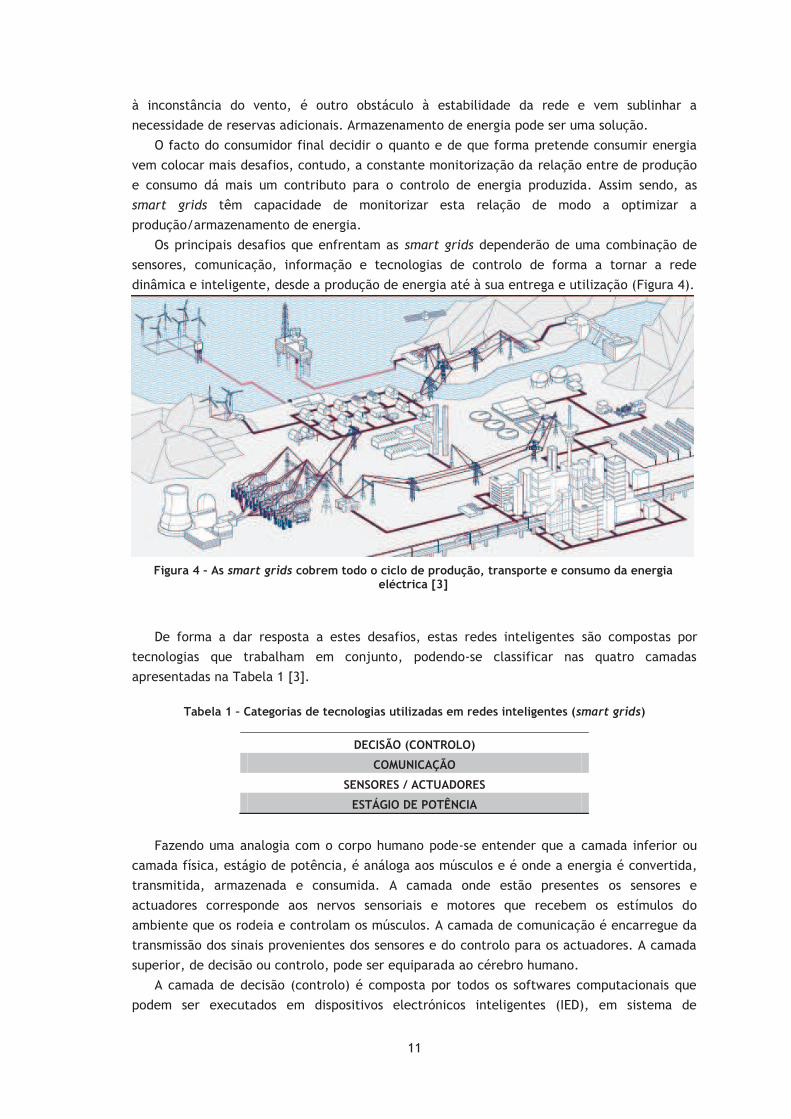
Os principais desafios que enfrentam as smart grids dependerão de uma combinação de
sensores, comunicação, informação e tecnologias de controlo de forma a tornar a rede
dinâmica e inteligente, desde a produção de energia até à sua entrega e utilização (Figura 4).
De forma a dar resposta a estes desafios, estas redes inteligentes são compostas por
tecnologias que trabalham em conjunto, podendo-se classificar nas quatro camadas
apresentadas na Tabela 1 [3].
Tabela 1 – Categorias de tecnologias utilizadas em redes inteligentes (smart grids)
DECISÃO (CONTROLO)
COMUNICAÇÃO
SENSORES / ACTUADORES
ESTÁGIO DE POTÊNCIA
Fazendo uma analogia com o corpo humano pode-se entender que a camada inferior ou
camada física, estágio de potência, é análoga aos músculos e é onde a energia é convertida,
transmitida, armazenada e consumida. A camada onde estão presentes os sensores e
actuadores corresponde aos nervos sensoriais e motores que recebem os estímulos do
ambiente que os rodeia e controlam os músculos. A camada de comunicação é encarregue da
transmissão dos sinais provenientes dos sensores e do controlo para os actuadores. A camada
superior, de decisão ou controlo, pode ser equiparada ao cérebro humano.
A camada de decisão (controlo) é composta por todos os softwares computacionais que
podem ser executados em dispositivos electrónicos inteligentes (IED), em sistema de
Figura 4 – As smart grids cobrem todo o ciclo de produção, transporte e consumo da energia eléctrica [3]
12
automação das subestações ou em centros de controlo. Estes softwares processam a
informação proveniente dos sensores ou da rede de comunicações e, com recurso a sistemas
computacionais, produzem directrizes de controlo apoiando decisões no processo. Estas
directrizes de controlo, quando executadas por actuadores, implementam alterações na
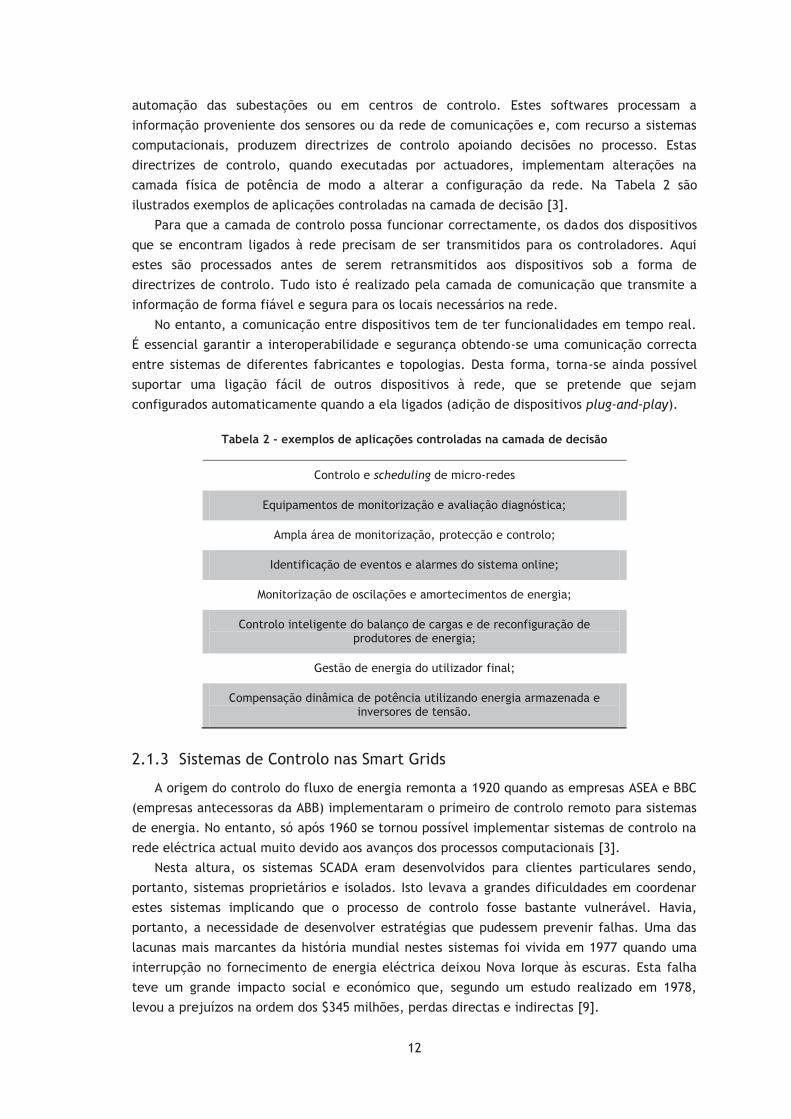
camada física de potência de modo a alterar a configuração da rede. Na Tabela 2 são
ilustrados exemplos de aplicações controladas na camada de decisão [3].
Para que a camada de controlo possa funcionar correctamente, os dados dos dispositivos
que se encontram ligados à rede precisam de ser transmitidos para os controladores. Aqui
estes são processados antes de serem retransmitidos aos dispositivos sob a forma de
directrizes de controlo. Tudo isto é realizado pela camada de comunicação que transmite a
informação de forma fiável e segura para os locais necessários na rede.
No entanto, a comunicação entre dispositivos tem de ter funcionalidades em tempo real.
É essencial garantir a interoperabilidade e segurança obtendo-se uma comunicação correcta
entre sistemas de diferentes fabricantes e topologias. Desta forma, torna-se ainda possível
suportar uma ligação fácil de outros dispositivos à rede, que se pretende que sejam
configurados automaticamente quando a ela ligados (adição de dispositivos plug-and-play).
Tabela 2 - exemplos de aplicações controladas na camada de decisão
Controlo e scheduling de micro-redes
Equipamentos de monitorização e avaliação diagnóstica;
Ampla área de monitorização, protecção e controlo;
Identificação de eventos e alarmes do sistema online;
Monitorização de oscilações e amortecimentos de energia;
Controlo inteligente do balanço de cargas e de reconfiguração de produtores de energia;
Gestão de energia do utilizador final;
Compensação dinâmica de potência utilizando energia armazenada e inversores de tensão.
2.1.3 Sistemas de Controlo nas Smart Grids
A origem do controlo do fluxo de energia remonta a 1920 quando as empresas ASEA e BBC
(empresas antecessoras da ABB) implementaram o primeiro de controlo remoto para sistemas
de energia. No entanto, só após 1960 se tornou possível implementar sistemas de controlo na
rede eléctrica actual muito devido aos avanços dos processos computacionais [3].
Nesta altura, os sistemas SCADA eram desenvolvidos para clientes particulares sendo,
portanto, sistemas proprietários e isolados. Isto levava a grandes dificuldades em coordenar
estes sistemas implicando que o processo de controlo fosse bastante vulnerável. Havia,
portanto, a necessidade de desenvolver estratégias que pudessem prevenir falhas. Uma das
lacunas mais marcantes da história mundial nestes sistemas foi vivida em 1977 quando uma
interrupção no fornecimento de energia eléctrica deixou Nova Iorque às escuras. Esta falha
teve um grande impacto social e económico que, segundo um estudo realizado em 1978,
levou a prejuízos na ordem dos $345 milhões, perdas directas e indirectas [9].
13
Nos anos 80 evidenciou-se um grande desenvolvimento no que diz respeito à tecnologia
computacional. Foram desenvolvidos métodos standard que modelizaram redes de
distribuição em grande escala. Da mesma forma, os sistemas SCADA (Supervisory Control and
Data Acquisition) e EMS (Energy Management Systems) tornaram-se mais sofisticados,
proporcionando aos operadores de rede melhores ferramentas para controlar fluxos de
energia.
No mundo empresarial, a década de 80 foi uma época de liberalização. Com as
companhias aéreas, telecomunicações e indústrias de gás natural a serem liberalizadas,
começou a estudar-se a possibilidade do sector energético o ser também. Tal movimento
exigiria novos tipos de sistemas de computacionais, bem como melhorias na tecnologia
existente SCADA/EMS. Coincidência ou não, em 1990 surgiu uma nova geração de sistemas de
controlo capaz de cumprir estas exigências.
A monitorização clássica da rede de distribuição e o seu controlo era relativamente low-
tech. A monitorização não passava de um quadro de parede que exibia o estado do sistema.
Muitas vezes, esse quadro enchia-se de anotações relativas a alterações pontuais. Este facto,
demonstrava as dificuldades em controlar o sistema originando grandes problemas de
segurança. Os circuitos da rede de distribuição, utilizados para trabalhos de manutenção,
eram baseados em papel e anotados, muitas vezes, manualmente. Assim, estes circuitos
corriam o risco de se desactualizarem muito facilmente. Nesta época, a comunicação com as
equipas técnicas presentes no terreno era baseada em radiocomunicações. As equipas tinham
de informar os centros operacionais da sua localização e a coordenação das diferentes
operações a realizar eram feitas verbalmente [3].
No entanto, os centros de controlo da rede não pararam no tempo. De acordo com as
exigências da sociedade foram evoluindo. Nos dias de hoje, os sistemas de distribuição de
energia estão a tornar-se cada vez mais “inteligentes” e mais seguros pelo que, os centros de
operações que os controlam estão a assumir novos papéis na gestão da rede. Os sistemas
computacionais utilizados nos centros de controlo são cada vez mais dinâmicos e a
coordenação entre recursos é assegurada proporcionando, por isso, um acompanhamento
preciso do sistema. Aplicações avançadas fornecem análises abrangentes do sistema
permitindo a realização de operações automatizadas. Estes centros de controlo para além de
tornarem a rede mais controlável (“inteligente”), ajudam a melhorar o apoio às operações,
manutenção e planeamento.
Actualmente, a utilização crescente das energias renováveis e da produção dispersa
exigem novas abordagens na gestão da rede. O aumento do custo de produção e transmissão
de energia, tanto em termos de infra-estruturas como em termos do combustível obriga,
também, a repensar a sua gestão. Vendo pelo lado competitivo, as empresas do sector
energético vêem as smart grids como meio a manter ou melhorar a confiabilidade, lidar com
o envelhecimento da infra-estrutura e a reduzir o impacto da perda de conhecimento.
Outro factor que facilitou o desenvolvimento das redes inteligentes (smart grids) foi a
tecnologia: muitas das ferramentas e recursos necessários não estavam disponíveis há alguns
anos atrás. Um desses recursos é a comunicação. As empresas distribuidoras podem agora
escolher entre diversos meios de comunicação. Podem, portanto, usar uma rede dedicada
proprietária (por exemplo, redes de rádio SCADA), ou utilizar infra-estruturas de terceiros
(por exemplo, comunicações satélite). São vários os factores que podem influenciar essa
decisão, porém uma tendência é definitiva, a importância da comunicação está a aumentar.
14
O funcionamento global dos sistemas de distribuição tornar-se-á certamente mais
complexo. O crescimento da produção dispersa e o armazenamento de energia afectará o
fluxo de energia. Além disso, há uma tendência crescente para implementar inteligência
adicional em dispositivos da rede de distribuição. Este facto, implicará mais acções de
controlo local, aumentando ainda mais a complexidade da operação de sistemas de
distribuição [3].
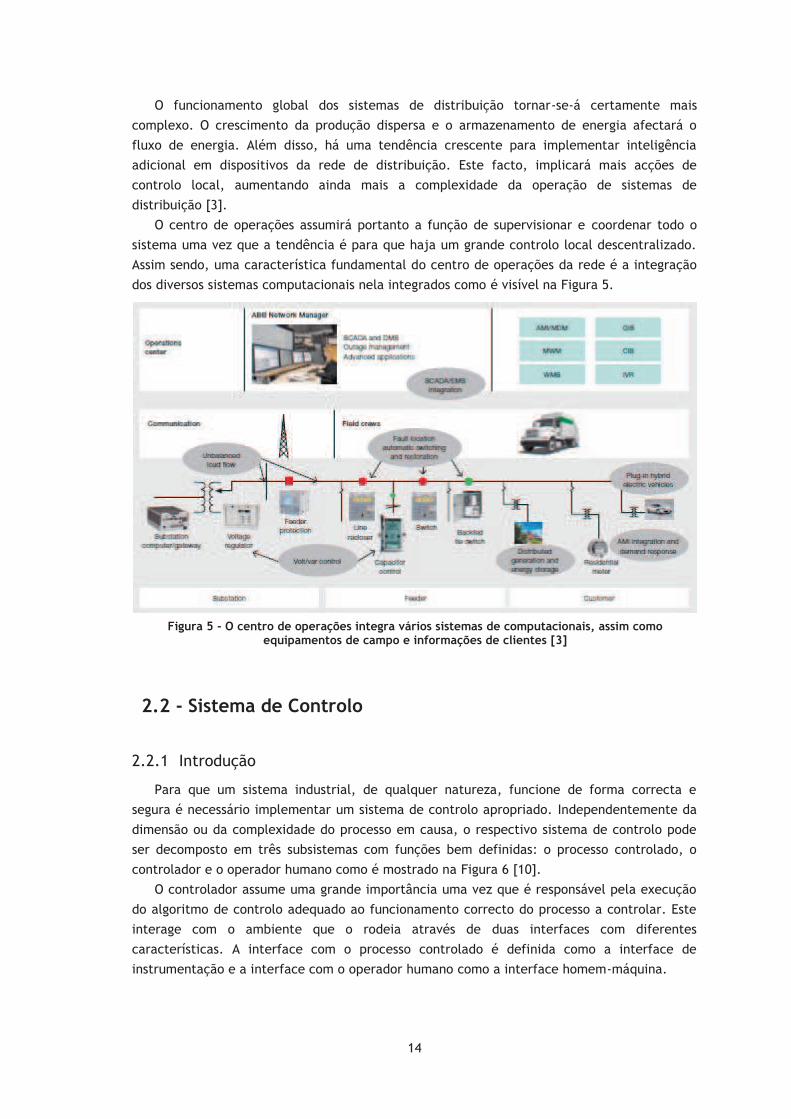
O centro de operações assumirá portanto a função de supervisionar e coordenar todo o
sistema uma vez que a tendência é para que haja um grande controlo local descentralizado.
Assim sendo, uma característica fundamental do centro de operações da rede é a integração
dos diversos sistemas computacionais nela integrados como é visível na Figura 5.
2.2 - Sistema de Controlo
2.2.1 Introdução
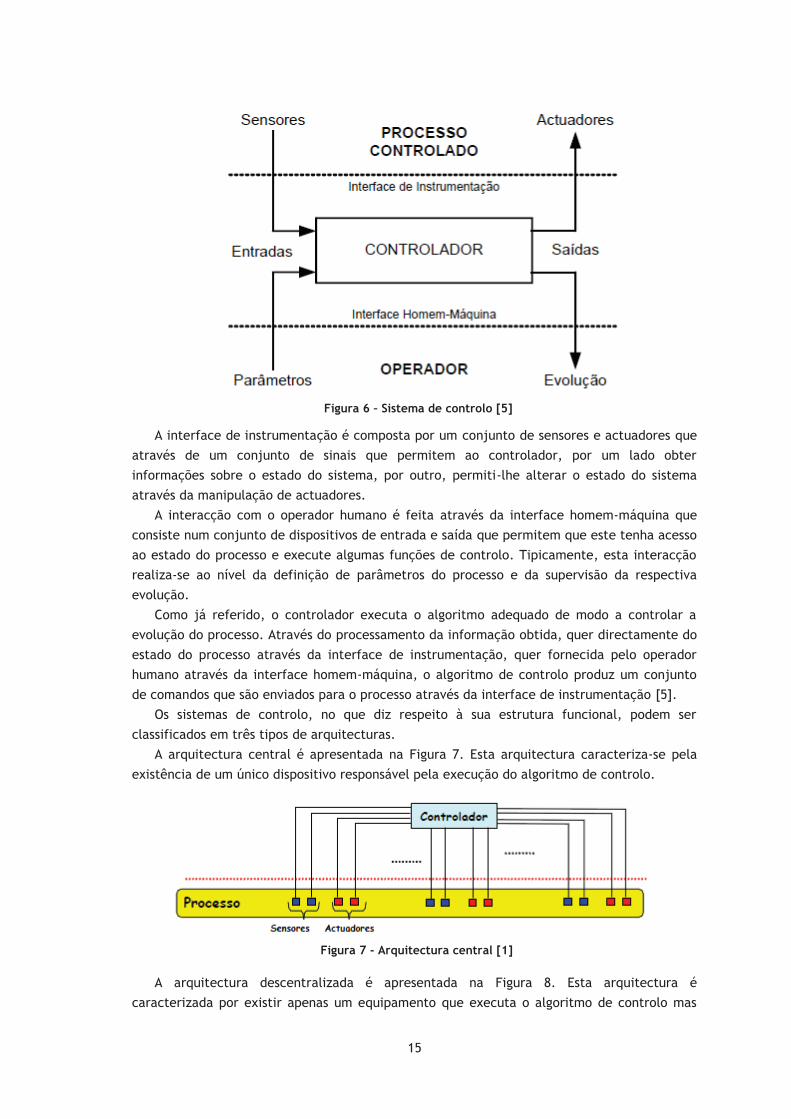
Para que um sistema industrial, de qualquer natureza, funcione de forma correcta e
segura é necessário implementar um sistema de controlo apropriado. Independentemente da
dimensão ou da complexidade do processo em causa, o respectivo sistema de controlo pode
ser decomposto em três subsistemas com funções bem definidas: o processo controlado, o
controlador e o operador humano como é mostrado na Figura 6 [10].
O controlador assume uma grande importância uma vez que é responsável pela execução
do algoritmo de controlo adequado ao funcionamento correcto do processo a controlar. Este
interage com o ambiente que o rodeia através de duas interfaces com diferentes
características. A interface com o processo controlado é definida como a interface de
instrumentação e a interface com o operador humano como a interface homem-máquina.
Figura 5 - O centro de operações integra vários sistemas de computacionais, assim como equipamentos de campo e informações de clientes [3]
15
A interface de instrumentação é composta por um conjunto de sensores e actuadores que
através de um conjunto de sinais que permitem ao controlador, por um lado obter
informações sobre o estado do sistema, por outro, permiti-lhe alterar o estado do sistema
através da manipulação de actuadores.
A interacção com o operador humano é feita através da interface homem-máquina que
consiste num conjunto de dispositivos de entrada e saída que permitem que este tenha acesso
ao estado do processo e execute algumas funções de controlo. Tipicamente, esta interacção
realiza-se ao nível da definição de parâmetros do processo e da supervisão da respectiva
evolução.
Como já referido, o controlador executa o algoritmo adequado de modo a controlar a
evolução do processo. Através do processamento da informação obtida, quer directamente do
estado do processo através da interface de instrumentação, quer fornecida pelo operador
humano através da interface homem-máquina, o algoritmo de controlo produz um conjunto
de comandos que são enviados para o processo através da interface de instrumentação [5].
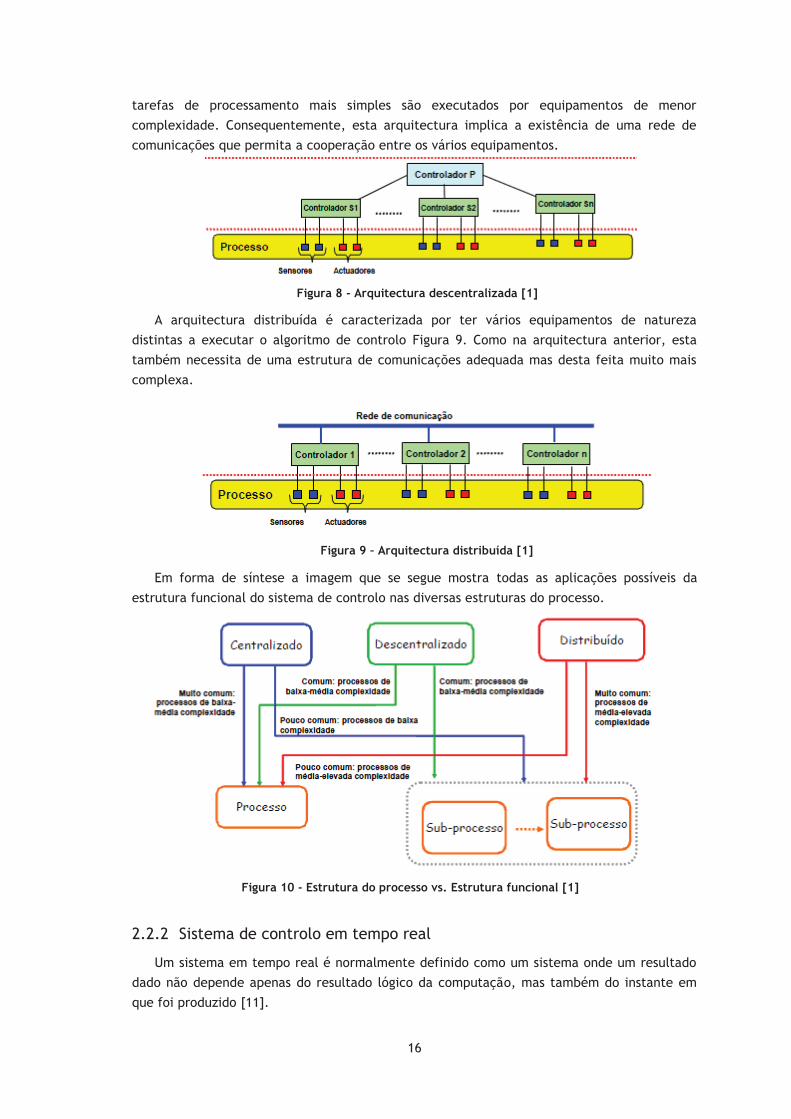
Os sistemas de controlo, no que diz respeito à sua estrutura funcional, podem ser
classificados em três tipos de arquitecturas.
A arquitectura central é apresentada na Figura 7. Esta arquitectura caracteriza-se pela
existência de um único dispositivo responsável pela execução do algoritmo de controlo.
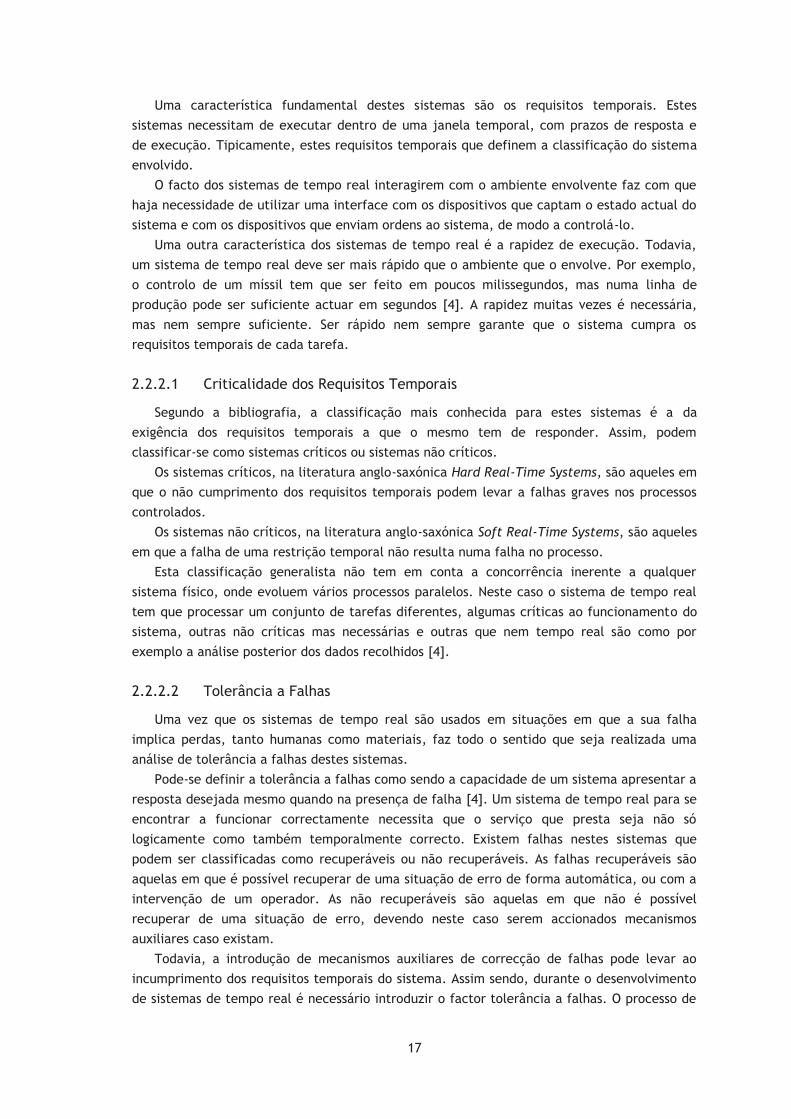
A arquitectura descentralizada é apresentada na Figura 8. Esta arquitectura é
caracterizada por existir apenas um equipamento que executa o algoritmo de controlo mas
Figura 6 – Sistema de controlo [5]
Figura 7 - Arquitectura central [1]
16
tarefas de processamento mais simples são executados por equipamentos de menor
complexidade. Consequentemente, esta arquitectura implica a existência de uma rede de
comunicações que permita a cooperação entre os vários equipamentos.
A arquitectura distribuída é caracterizada por ter vários equipamentos de natureza
distintas a executar o algoritmo de controlo Figura 9. Como na arquitectura anterior, esta
também necessita de uma estrutura de comunicações adequada mas desta feita muito mais
complexa.
Em forma de síntese a imagem que se segue mostra todas as aplicações possíveis da
estrutura funcional do sistema de controlo nas diversas estruturas do processo.
2.2.2 Sistema de controlo em tempo real
Um sistema em tempo real é normalmente definido como um sistema onde um resultado
dado não depende apenas do resultado lógico da computação, mas também do instante em
que foi produzido [11].
Figura 8 - Arquitectura descentralizada [1]
Figura 9 – Arquitectura distribuída [1]
Figura 10 - Estrutura do processo vs. Estrutura funcional [1]
17
Uma característica fundamental destes sistemas são os requisitos temporais. Estes
sistemas necessitam de executar dentro de uma janela temporal, com prazos de resposta e
de execução. Tipicamente, estes requisitos temporais que definem a classificação do sistema
envolvido.
O facto dos sistemas de tempo real interagirem com o ambiente envolvente faz com que
haja necessidade de utilizar uma interface com os dispositivos que captam o estado actual do
sistema e com os dispositivos que enviam ordens ao sistema, de modo a controlá-lo.
Uma outra característica dos sistemas de tempo real é a rapidez de execução. Todavia,
um sistema de tempo real deve ser mais rápido que o ambiente que o envolve. Por exemplo,
o controlo de um míssil tem que ser feito em poucos milissegundos, mas numa linha de
produção pode ser suficiente actuar em segundos [4]. A rapidez muitas vezes é necessária,
mas nem sempre suficiente. Ser rápido nem sempre garante que o sistema cumpra os
requisitos temporais de cada tarefa.
2.2.2.1 Criticalidade dos Requisitos Temporais
Segundo a bibliografia, a classificação mais conhecida para estes sistemas é a da
exigência dos requisitos temporais a que o mesmo tem de responder. Assim, podem
classificar-se como sistemas críticos ou sistemas não críticos.
Os sistemas críticos, na literatura anglo-saxónica Hard Real-Time Systems, são aqueles em
que o não cumprimento dos requisitos temporais podem levar a falhas graves nos processos
controlados.
Os sistemas não críticos, na literatura anglo-saxónica Soft Real-Time Systems, são aqueles
em que a falha de uma restrição temporal não resulta numa falha no processo.
Esta classificação generalista não tem em conta a concorrência inerente a qualquer
sistema físico, onde evoluem vários processos paralelos. Neste caso o sistema de tempo real
tem que processar um conjunto de tarefas diferentes, algumas críticas ao funcionamento do
sistema, outras não críticas mas necessárias e outras que nem tempo real são como por
exemplo a análise posterior dos dados recolhidos [4].
2.2.2.2 Tolerância a Falhas
Uma vez que os sistemas de tempo real são usados em situações em que a sua falha
implica perdas, tanto humanas como materiais, faz todo o sentido que seja realizada uma
análise de tolerância a falhas destes sistemas.
Pode-se definir a tolerância a falhas como sendo a capacidade de um sistema apresentar a
resposta desejada mesmo quando na presença de falha [4]. Um sistema de tempo real para se
encontrar a funcionar correctamente necessita que o serviço que presta seja não só
logicamente como também temporalmente correcto. Existem falhas nestes sistemas que
podem ser classificadas como recuperáveis ou não recuperáveis. As falhas recuperáveis são
aquelas em que é possível recuperar de uma situação de erro de forma automática, ou com a
intervenção de um operador. As não recuperáveis são aquelas em que não é possível
recuperar de uma situação de erro, devendo neste caso serem accionados mecanismos
auxiliares caso existam.
Todavia, a introdução de mecanismos auxiliares de correcção de falhas pode levar ao
incumprimento dos requisitos temporais do sistema. Assim sendo, durante o desenvolvimento
de sistemas de tempo real é necessário introduzir o factor tolerância a falhas. O processo de
18
desenvolvimento tem que garantir a previsibilidade, mesmo durante possíveis situações de
detecção de falhas, em que se realiza o seu isolamento, a reconfiguração do sistema e a
recuperação, [12].
Destacam-se dois tipos diferentes de sistemas tolerantes a falhas, o fail-safe systems e o
fail-operational systems. Os fail-safe systems são sistemas onde a recuperação pode ser
realizada através da paragem deste num estado conhecido e seguro equanto que os fail-
operational systems são aqueles que obrigam a que o controlo continue operacional pois a
paragem implicaria perda de vidas humanas, ou de bens materiais muito importantes [10].
O método mais utilizado para a correcção de falhas é o de introduzir redundância no
sistema. Esta pode ser espacial, em que certos componentes são replicados, ou temporal em
que computações podem ser repetidas, [12].
Mas o mais difícil é a tolerância a falhas durante o funcionamento normal do sistema.
Para isso é necessário detectá-las e se possível corrigi-las. Existe, então necessidade de
hardwares ou softwares especializados que permitam realizar testes durante a execução de
modo a detectar falhas.
2.2.3 Modelos de comunicação para controlo distribuído
Como analisado anteriormente, a distribuição dos sistemas de controlo exige uma
coordenação muito sofisticada entre os vários controladores. Assim, na definição de uma
arquitectura deve ter-se em especial atenção a forma como os dados circulam no sistema e
são utilizados pelos nós, pois tal tem reflexos no seu funcionamento e desempenho.
Assim sendo, existe a necessidade de utilizar um modelo de comunicações que garanta o
correcto fluxo de dados, e o respectivo controlo entre os diversos nós. Além disso, esse
modelo deve ser capaz de garantir a correcta sincronização das diferentes tarefas tais como
sensorização, execução do algoritmo de controlo e actuação.
Existem vários modelos de comunicação dos quais se destacam os seguintes: Mestre-
Escravo, Cliente-Servidor, Produtor-Consumidor.
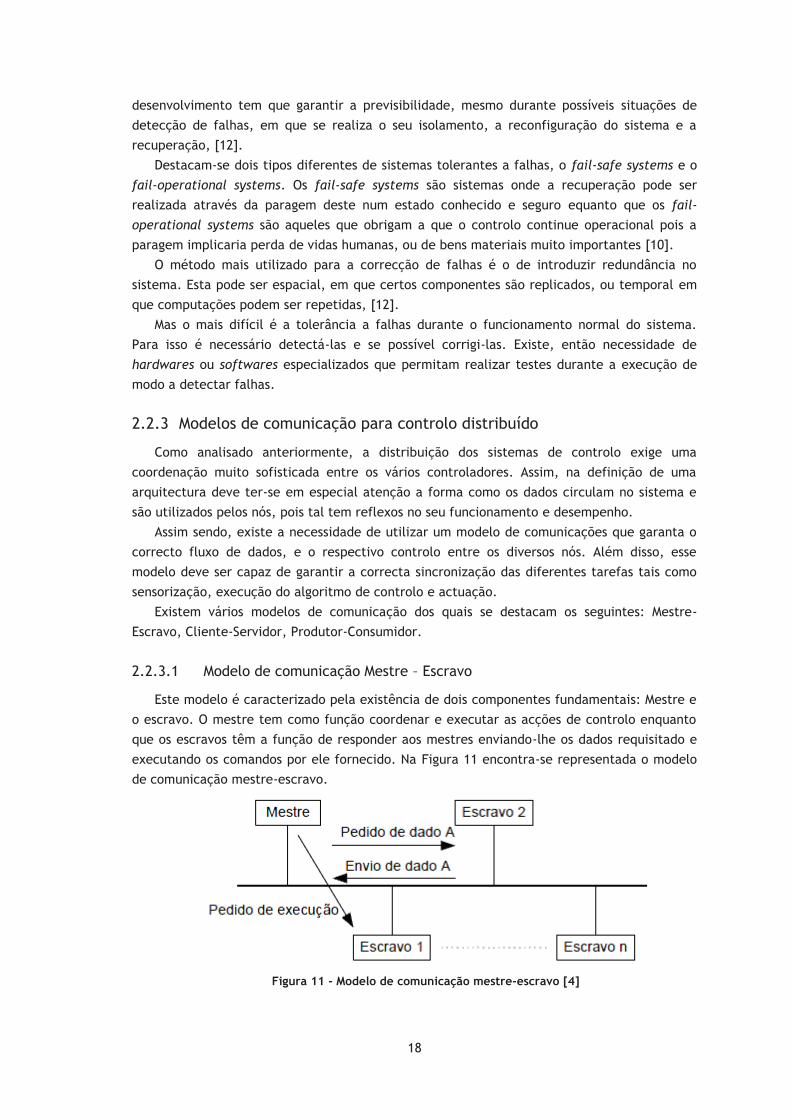
2.2.3.1 Modelo de comunicação Mestre – Escravo
Este modelo é caracterizado pela existência de dois componentes fundamentais: Mestre e
o escravo. O mestre tem como função coordenar e executar as acções de controlo enquanto
que os escravos têm a função de responder aos mestres enviando-lhe os dados requisitado e
executando os comandos por ele fornecido. Na Figura 11 encontra-se representada o modelo
de comunicação mestre-escravo.
Figura 11 - Modelo de comunicação mestre-escravo [4]
19
A comunicação neste modelo de comunicação, é sempre iniciada pelo mestre através do
envio de um pedido (dados ou execução de uma ordem) a um dos escravos. Ao receber o
pedido do mestre, o escravo responde, fornecendo os dados pedidos ou executando a ordem.
Visto que as tarefas são distribuídas por vários escravos, torna-se possível estimar os
tempos de atraso na realização de uma determinada tarefa. Consequentemente, este modelo
de comunicação é considerado temporalmente previsível.
2.2.3.2 Modelo de comunicação Cliente – Servidor
Este modelo é o mais amplamente utilizado em processos de controlo distribuídos e é
caracterizado por ter dois componentes fundamentais, o servidor e o cliente [4]. O servidor é
caracterizado por implementar um conjunto de tarefas de interesse geral para outros
componentes que lhes podem aceder remotamente. O cliente é caracterizado por poder
realizar parte das aplicações localmente e aceder remotamente a serviços dos servidores para
executarem as tarefas mais complexas de manipulação de dados, cálculos, …
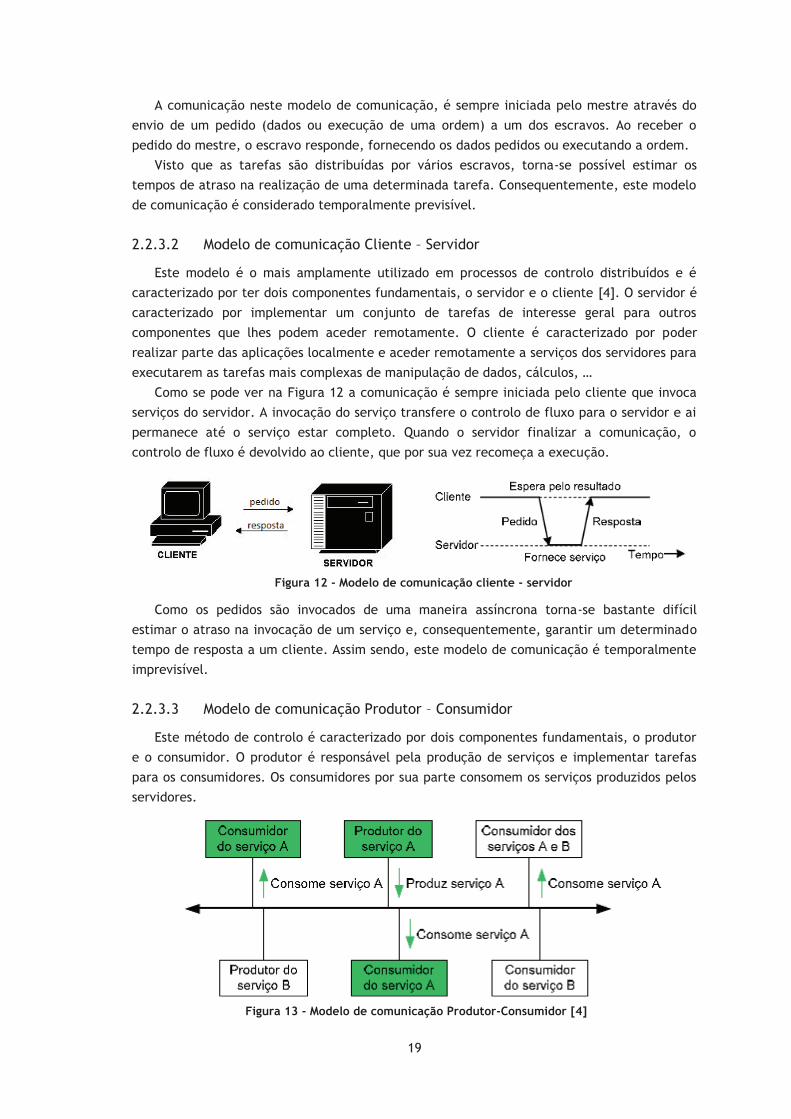
Como se pode ver na Figura 12 a comunicação é sempre iniciada pelo cliente que invoca
serviços do servidor. A invocação do serviço transfere o controlo de fluxo para o servidor e ai
permanece até o serviço estar completo. Quando o servidor finalizar a comunicação, o
controlo de fluxo é devolvido ao cliente, que por sua vez recomeça a execução.
Como os pedidos são invocados de uma maneira assíncrona torna-se bastante difícil
estimar o atraso na invocação de um serviço e, consequentemente, garantir um determinado
tempo de resposta a um cliente. Assim sendo, este modelo de comunicação é temporalmente
imprevisível.
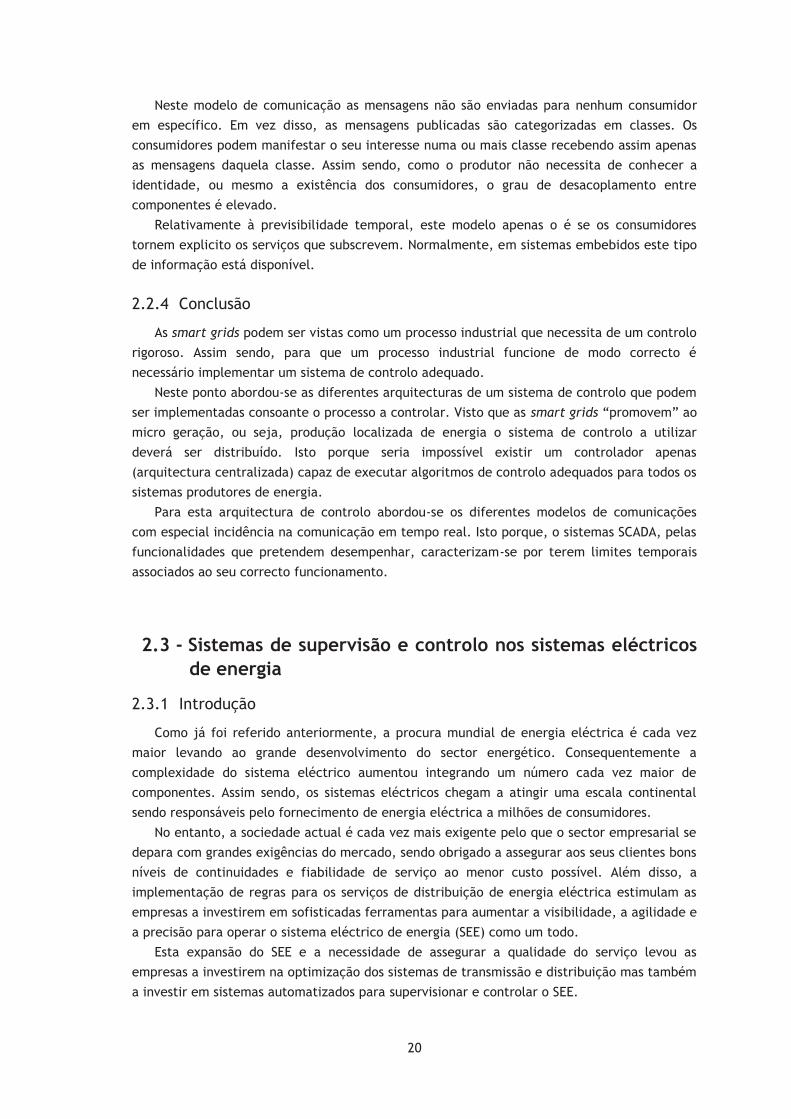
2.2.3.3 Modelo de comunicação Produtor – Consumidor
Este método de controlo é caracterizado por dois componentes fundamentais, o produtor
e o consumidor. O produtor é responsável pela produção de serviços e implementar tarefas
para os consumidores. Os consumidores por sua parte consomem os serviços produzidos pelos
servidores.
Figura 12 - Modelo de comunicação cliente - servidor
Figura 13 - Modelo de comunicação Produtor-Consumidor [4]
20
Neste modelo de comunicação as mensagens não são enviadas para nenhum consumidor
em específico. Em vez disso, as mensagens publicadas são categorizadas em classes. Os
consumidores podem manifestar o seu interesse numa ou mais classe recebendo assim apenas
as mensagens daquela classe. Assim sendo, como o produtor não necessita de conhecer a
identidade, ou mesmo a existência dos consumidores, o grau de desacoplamento entre
componentes é elevado.
Relativamente à previsibilidade temporal, este modelo apenas o é se os consumidores
tornem explicito os serviços que subscrevem. Normalmente, em sistemas embebidos este tipo
de informação está disponível.
2.2.4 Conclusão
As smart grids podem ser vistas como um processo industrial que necessita de um controlo
rigoroso. Assim sendo, para que um processo industrial funcione de modo correcto é
necessário implementar um sistema de controlo adequado.
Neste ponto abordou-se as diferentes arquitecturas de um sistema de controlo que podem
ser implementadas consoante o processo a controlar. Visto que as smart grids “promovem” ao
micro geração, ou seja, produção localizada de energia o sistema de controlo a utilizar
deverá ser distribuído. Isto porque seria impossível existir um controlador apenas
(arquitectura centralizada) capaz de executar algoritmos de controlo adequados para todos os
sistemas produtores de energia.
Para esta arquitectura de controlo abordou-se os diferentes modelos de comunicações
com especial incidência na comunicação em tempo real. Isto porque, o sistemas SCADA, pelas
funcionalidades que pretendem desempenhar, caracterizam-se por terem limites temporais
associados ao seu correcto funcionamento.
2.3 - Sistemas de supervisão e controlo nos sistemas eléctricos de energia
2.3.1 Introdução
Como já foi referido anteriormente, a procura mundial de energia eléctrica é cada vez
maior levando ao grande desenvolvimento do sector energético. Consequentemente a
complexidade do sistema eléctrico aumentou integrando um número cada vez maior de
componentes. Assim sendo, os sistemas eléctricos chegam a atingir uma escala continental
sendo responsáveis pelo fornecimento de energia eléctrica a milhões de consumidores.
No entanto, a sociedade actual é cada vez mais exigente pelo que o sector empresarial se
depara com grandes exigências do mercado, sendo obrigado a assegurar aos seus clientes bons
níveis de continuidades e fiabilidade de serviço ao menor custo possível. Além disso, a
implementação de regras para os serviços de distribuição de energia eléctrica estimulam as
empresas a investirem em sofisticadas ferramentas para aumentar a visibilidade, a agilidade e
a precisão para operar o sistema eléctrico de energia (SEE) como um todo.
Esta expansão do SEE e a necessidade de assegurar a qualidade do serviço levou as
empresas a investirem na optimização dos sistemas de transmissão e distribuição mas também
a investir em sistemas automatizados para supervisionar e controlar o SEE.
21
A segurança e eficiência do SEE são asseguradas pelos actuais sistemas de supervisão e
controlo. Estes sistemas são conhecidos por SCADA e permitem a monitorização e a
transferência de dados e informações para o centro de operações. Essas informações são
transmitidas aos operadores do centro de operações através de gráficos animados com
informação em tempo real e com alarmes que informam violações de limites das grandezas
monitorizadas. Esta informação disponibilizada pelos sistemas de supervisão e controlo
permite aos operadores do centro de operações tomar decisões e intervir no sistema quando
necessário, com o intuito de manter os níveis de segurança, qualidade e economia na
operação do SEE. Para além disso, os sistemas de controlo são capazes de realizar a
coordenação automática das funções de controlo sobre os SEE [13]:
· Operação económica (através de controlo óptimo) – despacho económico;
· Monitorização/segurança;
· Previsão (short-term forecasting);
· Qualidade do serviço;
· AGC (Automatic Generation Control);
· Escalonamento e planeamento operacional;
· Controlo de emergências.
As telecomunicações assumem nestes sistemas uma importância fulcral. Graças ao
desenvolvimento das comunhões torna-se possível a transferência de grandes quantidades de
dados entre pontos distantes.
Conclui-se portanto que a expansão do SEE bem como a obrigatoriedade de garantir uma
adequada qualidade de serviço obriguem à introdução de sistemas automatizados para
supervisionar e controlar o SEE. Foi então que a evolução tecnológica levou ao aparecimento
de sistamas SCADA (Supervisory Control and Data Acquisitions) e posteriormente aos sistemas
EMS (Energy Management Systems) e DMS (Distribuition Management Systems).
2.3.2 Sistemas SCADA
O SCADA é um sistema integrado de software e hardware que permite a monitorização e
controlo de sistemas distribuídos geograficamente [14]. Este sistema possibilita, ainda, a
comunicação de unidades remotas e o centro de controlo, permitindo a troca de dados e
comandos importantes para o processo controlado, sendo por isso uma estrutura complexa.
Os requisitos que este sistema impõe são a instalação de circuitos de aquisição de dados e
actuadores, uma plataforma de comunicações e uma “central” que permita a interacção com
operadores qualificados. Assim sendo, é possível aos operadores actuar remotamente sobre o
processo a partir desta “central”.
Estes sistemas exibem também o estado de funcionamento do processo pelo que, falhas
ou perturbações anómalas no processo, levam ao disparo de alarmes que avisam os
operadores.
Em suma, as principais funções de um sistema SCADA são:
· Aquisição de dados: Permite a aquisição de dados a partir de equipamentos
instalados (por exemplo sensores) nas unidades remotas. Permite portanto
adquirir o estado do sistema, medindo e indicando valores de grandezas através
de um scan cíclico.
· Monitorização e processamento de eventos: Nesta função, processa-se a
monitorização do estado, a monitorização de tendência, monitorização de limites

22
e processamento de limites onde todos os acontecimentos detectados são
processados e armazenados na base de dados [15].
· Tarefas de controlo: Esta função permite controlar individualmente cada
equipamento controlado a partir do centro de controlo.
2.3.2.1 Evolução dos sistemas SCADA
Nos anos 20, a evolução da meteorologia e da indústria aeronáutica trouxe a necessidade
de recolha de grandes quantidades de dados. Muitas vezes a recolha destes dados era feita de
forma bastante perigosa colocando em risco vidas humanas. Exemplo disso era a utilização de
aviões ou foguetões cujos voos iniciais acabavam muitas vezes na destruição destes
equipamentos. A questão que se colocava era como se poderia transportar uma dose elevada
de dados para uma estação central onde pudessem ser processadas. A resposta surgiu através
do sistema de controlo ferroviário que controlava o trajecto dos comboios quando se
aproximavam a bifurcações. Estes sistemas baseavam-se em comunicações por fio ligadas a
uma estação central que manipulavam indicadores luminosos indicando se existia algum
comboio em aproximação a uma bifurcação e o seu estado. Esta comunicação era feita
através da introdução de interruptores eléctricos junto da linha. Este sistema poderá ser
considerado o primeiro sistema de telemetria que posteriormente deu origem a sistemas
SCADA [16].
Este método de monitorização e controlo cumpria de forma satisfatória as suas funções
para processos fixos, ou seja, que não exigiam mobilidade mas péssimo para processos
móveis. Com o passar do tempo, a tecnologia foi-se desenvolvendo e as tecnologias rádio não
foram excepção. Estas tornaram-se cada vez mais fiáveis permitindo, assim, a transmissão de
maiores quantidades de dados. Mas o facto de as comunicações rádio apenas permitirem a
comunicação unidireccional de dados, na altura, levava a que estes sistemas fossem limitados
e apenas usados para aquisição de dados [16].
Simultaneamente, as comunicações por fio evoluíram. Essa evolução levou a que fosse
possível bidireccionalidade da comunicação. Esta evolução permitiu, não só, a recolha de
dados remotamente mas também a possibilidade de efectuar algumas funções de controlo.
Assim sendo, a evolução dos sistemas de telemetria centrou-se na aplicação da comunicação
bidireccional à tecnologia rádio.
Nos anos 60, o aparecimento dos computadores digitais revolucionou por completo as
estações centrais dos sistemas de telemetria. Antes do aparecimento dos computadores e
para suportar o desenvolvimento dos sistemas de comunicação, as estações centrais tinham-
se tornado complexas e grandes [16]. Os computadores digitais possibilitaram a centralização
de todos os dados recolhidos no terreno, tornando estes sistemas mais simples e eficazes.
A designação de sistema SCADA foi utilizada pela primeira vez nos inícios dos anos 70. A
evolução ao nível dos softwares levou a melhores interfaces com o operador, começando a
aparecer os primeiros sistemas de produção de relatórios de funcionamento dos sistemas,
importantes para se obter toda a informação pretendida sobre o sistema.
Com a evolução dos computadores os sistemas SCADA foram-se tornando cada vez mais
sofisticados. Além disso, com a tecnologia computacional a proliferar-se e os seus custos a
baixaram, estes sistemas puderam deixar de ser centralizados, havendo agora a hipótese de
se distribuir o controlo dos processos [16].
Até aos dias de hoje, a evolução das tecnologias computacionais e das comunicações
permitiram que os sistemas SCADA aumentassem as suas funcionalidades. No que diz respeito

23
aos sistemas de comunicação, o aparecimento das LANs (Local Area Network) fez com que as
velocidades de transmissão aumentassem permitindo a interligação e cooperação destes
sistemas com outros (por exemplo ferramentas financeiras e de gestão da empresas). Estas
redes permitiram, ainda, a ligação a de base de dados o que fez com que os registos
históricos se tornassem cada vez mais eficazes. O desenvolvimento das tecnologias à Web
levou a um aumento do alcance dos SCADAs, fazendo com que seja possível a um operador ter
acesso às informações disponibilizadas pelo sistema, independentemente do local onde se
encontre, através do uso da Internet. No entanto, estas novas capacidades levantaram
questões ao nível da segurança. Estes problemas advêm do facto dos sistemas SCADA terem
sido implementados num meio externo e aberto o que implica que, caso não haja um bom
sistema de seguranças nas redes internas, pessoas estranhas e não autorizadas possam aceder
a informações importantes, colocando assim em risco o funcionamento do processo [17].
2.3.2.2 Arquitectura de um Sistema SCADA
A arquitectura básica de um sistema SCADA é apresentada na seguinte figura.
A interface homem-máquina (HMI, Human Machine Inerface) é responsável pela interface
entre o sistema SCADA e o exterior. Nas HMI são compreendidos os sinópticos de controlo e os
sistemas de apresentação gráfica. A função de um painel sinóptico e a de representar de
forma simples e perceptível o sistema [15]. As HMI permitem, na maioria das vezes, que o
operador para além visualizar o estado do sistema manipule, também, determinadas variáveis
deste, permitindo assim o controlo supervisionado.
Figura 14 – Arquitectura de um sistema SCADA
24
Relativamente à unidade remota (RTU, Remote Terminal Unit), esta pode ser vista como
o conjunto de elementos dedicados a executar controlo e/ou supervisão de um sistema
distante do centro de controlo [15]. São, também, responsáveis pela interacção com os
sensores e actuadores do sistema. É nestas estações que são implementados os algoritmos de
controlo locais existentes nos sistemas de SCADA. Dentro desta classificação podemos
encontrar diversos elementos com características diferentes:
· RTU (Remote Terminal Unit): especializada em comunicação;
· PLC (Programmable Logic Controller): tarefas gerais de controlo;
· IED (Intelligent Electronic Device): tarefas especificas de controlo.
A unidade central (MTU, Master Terminal Unit) centraliza o comando do sistema [15]. A
MTU é responsável pela interface entre as RTUs e as interfaces homem-máquina funcioando
muitas vezes como gateway de comunicações. Estas lêem os dados provenientes RTUs e
convertem-nos de forma perceptível para o contexto do sistema de modo a poderem ser
usadas nas HMI. A comunicação é bidireccional pelo que é responsável pela comunicação dos
comandos dados pelo operador para as RTUs de modo a activarem da forma desejadas os
actuadores. Uma outra funcionalidade desta unidade é a possibilidade de ligação e
armazenamento de dados numa base de dados. Assim, a informação recolhida ao longo do
tempo pode ser armazenada e posteriormente consultada pela HMI [17].
2.3.2.3 Sistemas de comunicações
A troca de informação entre servidores e clientes baseia-se no modelo produtor-
consumidor [15].
Os servidores de dados interrogam de maneira cíclica os elementos de campo (polling)
recolhendo os dados provenientes de sensores autómatos, …
Graças aos controladores de diferentes fabricantes e à sua compatibilidade com os
protocolos de comunicação (leia-se redes de campo), é possível estabelecer qualquer tipo de
comunicação entre um servidor de dados e qualquer equipamento de campo.
Um servidor de dados pode comunicar através de vários protocolos de comunicações de
forma simultânea estando, apenas, limitado pela sua capacidade física de suportar as
interfaces de hardware exigidas pelo protocolo [15]. Estas permitem a troca de dados
bidireccional entre as unidades centrais (MTUs) e as unidades remotas (RTUs) mediante um
protocolo de comunicações e um sistema de transporte de informação que mantenha a
ligação entre os diferentes elementos da rede (por exemplo: cabo coaxial, fibra óptica, GPRS;
UMTS, rádio, …).
2.3.2.3.1 Sistemas de transmissão de sinal
As ligações físicas em ambiente industrial realizam-se mediante interfaces série
normalizadas pela EIA (Electronic Industries Alliance) [15].
Relativamente à transmissão de sinais por diferentes níveis de tensão, alguns standards
recomendados (RS, Recommended Standard) mais utilizados são:
· RS-232: Nesta tecnologia, os sinais binários são transmitidos mediante níveis de
tensão positiva e negativa relativamente a um ponto de potencial comum. Este
tipo de transmissão é susceptível de introduzir falhas na comunicação devido a
perturbações eléctricas.
25
· RS-422A: baseia-se na transmissão de sinais de tensão diferenciais através de dois
fios sem ponto de referência ou massa. Os sinais binários são transmitidos através
da diferença das tensões entre os dois condutores, apresentando uma grande
imunidade a ruídos eléctricos. Permitem, portanto maiores distâncias.
· RS-485: é uma evolução do RS-422 permitindo a ligação de 32 equipamentos a um
só cabo de comunicação. Este standard é um dos mais usados em ambientes
industrias sendo o profibus o expoente máximo deste standard [15].
· TTL: baseia-se na tecnologia CMOS e na transmissão de sinais binários a níveis de
tensão TTL (5V).
No que diz respeito à transmissão de sinais em loop de corrente o standard utilizado era o
4-20mA. Este tecnologia transmite sinais baseados nos níveis de corrente na linha de
transmissão. Permite a transmissão de sinais a longas distâncias e é bastante imune a
interferências eléctricas. Mas para se realizar uma transmissão com esta tecnologia são
necessários quatro elementos fundamentais: O emissor, fonte DC para alimentação da
tecnologia, cabo e o receptor.
2.3.2.3.2 Protocolos de comunicações
O protocolo de comunicações engloba todas as regras e convenções que os equipamentos
devem seguir para conseguirem proceder às trocas de comunicações.
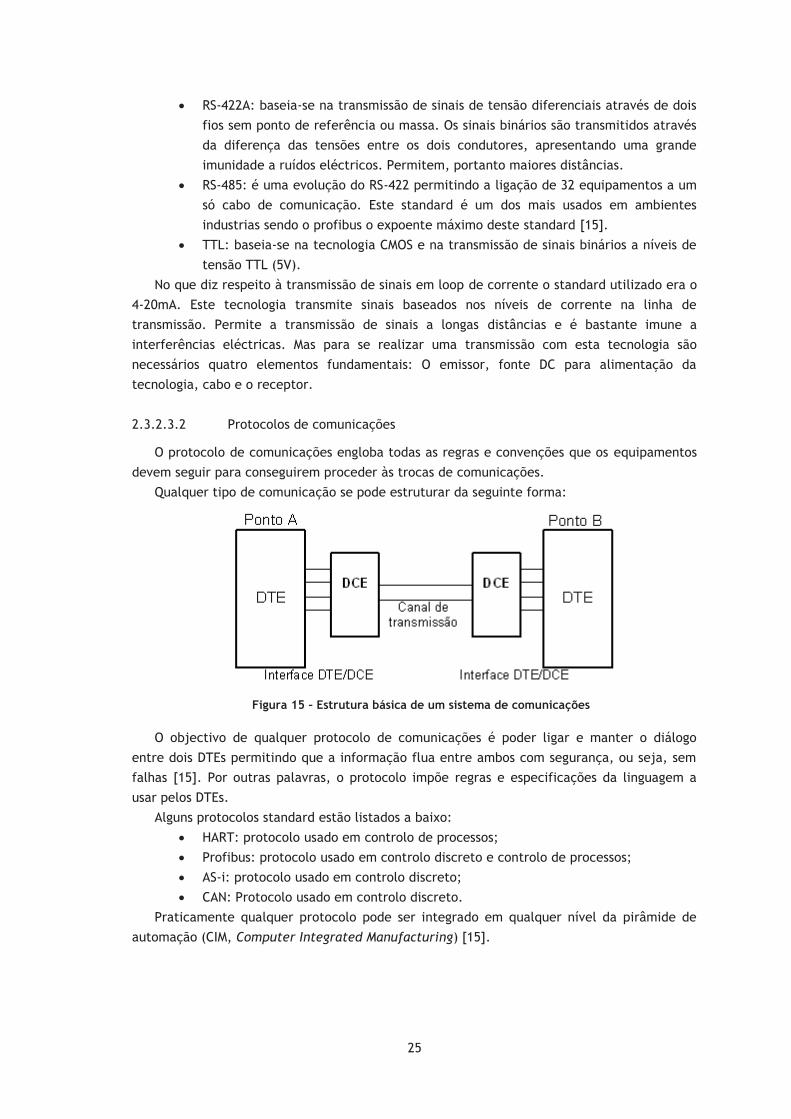
Qualquer tipo de comunicação se pode estruturar da seguinte forma:
O objectivo de qualquer protocolo de comunicações é poder ligar e manter o diálogo
entre dois DTEs permitindo que a informação flua entre ambos com segurança, ou seja, sem
falhas [15]. Por outras palavras, o protocolo impõe regras e especificações da linguagem a
usar pelos DTEs.
Alguns protocolos standard estão listados a baixo:
· HART: protocolo usado em controlo de processos;
· Profibus: protocolo usado em controlo discreto e controlo de processos;
· AS-i: protocolo usado em controlo discreto;
· CAN: Protocolo usado em controlo discreto.
Praticamente qualquer protocolo pode ser integrado em qualquer nível da pirâmide de
automação (CIM, Computer Integrated Manufacturing) [15].
Figura 15 – Estrutura básica de um sistema de comunicações
26
2.3.2.4 Vulnerabilidades do sistema SCADA
Na concepção inicial dos sistemas SCADA, o objectivo era criar um sistema de controlo e
monitorização de alto desempenho e fácil de usar onde a segurança não era uma exigência.
Nos últimos anos, os sistemas SCADA têm evoluído e têm sido implementados sistemas de
computacionais de uso geral, com base em protocolos de comunicações abertos e acessíveis a
partir da Internet.
Os dois pontos acima referidos, juntamente com o facto das infra-estruturas críticas do
país serem controladas por estes sistemas tornam essencial a análise da sua segurança.
As principais vulnerabilidades dos sistemas SCADA são apresentadas a seguir e podem ser
classificadas da seguinte forma [18] [19]:
· Deficiências na Arquitectura de Rede
Estas vulnerabilidades vêm do facto dos sistemas SCADA terem sido, originalmente,
concebidos como sistemas isolados. Agora isso mudou e os sistemas industriais estão
interligados através de redes de empresas e até mesmo da Internet. Os factores mais
importantes que afectam a segurança são:
a) Interligações
As redes corporativas e industriais estão cada vez mais interligadas o que leva a
vulnerabilidades. Por exemplo, um servidor de base de dados ou um servidor Web pode ser
explorado na mesma rede sendo possível aceder e controlar uma RTU. Isto se feito por
pessoas estranhas pode ter consequência catastróficas.
b) Acesso Remoto
Os sistemas industriais são normalmente encontrados em locais remotos. O HMI e a MTU
estão normalmente localizados no centro de processamento de dados, enquanto as RTUs e os
sensores correspondentes encontram-se a quilómetros, realizando o controlo do sistema
remotamente.
c) Redes sem fio
O problema da implementação de redes sem fios em ambientes industriais encintra-se
intimamente relacionado com o ponto anterior. Estas redes foram a solução mais económica e
eficiente de resolver o problema dos sistemas móveis que muitas vezes existem em ambientes
industriais como em armazéns. Nestas redes sem fios nem sempre é assegurada a
autenticação ou criptografia de dados entre o cliente e o ponto de acesso o que torna esta
tecnologia vulnerável.
· Vulnerabilidades a nível de software e hardware
a) Vulnerabilidades em sistemas operacionais e aplicativos
A adopção de sistemas operativos de propósito geral pelos sistemas SCADA, implica herdar
as vulnerabilidades do mesmo. Assim sendo os sistemas SCADA ficam expostos, por exemplo, a
vírus informáticos que podem correr no sistema operativo onde se encontram implementados.
b) Criptografia
Antigamente os sistemas SCADA eram desenvolvidos de forma isolada e, assim sendo,
ninguém externo e sem autorização podia aceder-lhe. Por esta razão não era necessário
criptografar a informação. Essa premissa foi herdada até os dias de hoje onde os sistemas
SCADA encontram-se ligados a redes corporativas e à Internet. A informação é transmitida
através de canais abertos e torna-se, portanto, necessário protegê-la principalmente contra
alterações maliciosas que podem colocar em risco todo o processo industrial.
c) Dificuldade em realizar análise de vulnerabilidade
27
A análise de vulnerabilidades num sistema deste género é bastante complicada. As acções
de teste (por exemplo teste de intrusão) devem ser conduzidas com muito cuidado pois
podem causar mau funcionamento o que pode levar a consequências catastróficas,
dependendo da infra-estrutura que os sistemas SCADA controlam.
2.3.3 Energy Management Systems (EMS)
Os sistemas SCADA são do ponto de vista do esforço de cálculo elementares. No entanto,
com o crescimento e aumento de complexidade do SEE, tornou-se necessário agregar funções
matemáticas de análise mais complexa aos sistemas SCADA. Obteve-se assim o sistema EMS.
Estes sistemas estão associados à exploração da rede de transporte de sistemas de produção
de energia. As funções de aplicação destes sistemas implicam um grande número de cálculos.
Como exemplo de algumas funções desempenhadas por estes sistemas existem o
processamento de topologia, estimação de estado, análise de segurança, controlo de
emergência, controlo de segurança estática, funcionalidades no âmbito do sistema integrado
e hierarquizado de planeamento e controlo da produção (estudos de despacho, AGC), entre
muitas outras [14].
2.3.4 Distribution Management Systems (DMS)
Com o aparecimento do EMS, surgiram sistemas similares mas com o intuito de facilitar a
exploração e gestão das redes de distribuição de energia. Esses sistemas são os DMS.
O DMS pode incluir funções de análise de topologias e programas de fluxo de cargas ao
nível da distribuição de energia, de forma a detectar eventuais problemas e proceder ao
rápido restabelecimento do serviço [14].
2.4 - Conclusão
Neste capítulo apresentam-se vários conceitos associados a redes de comunicações de
dados integradas com a rede.
Num primeiro momento, foram apresentados aspectos subjacentes à definição de smart
grids com o objectivo de introduzir os conceitos a estudar nos pontos seguintes. Além disso,
explicou-se as necessidades de implementar uma nova ideologia de rede de distribuição e as
vantagens da mesma.
Posteriormente apresentou-se sistemas de controlo, tendo em conta que qualquer sistema
industrial necessita de um sistema de controlo apropriado para que funcione de forma
correcta e segura. Procedeu-se à explicação de sistemas de controlo em tempo real e
modelos de comunicações em sistemas de controlo distribuídos. Desta discussão conclui-se
que para o presente projecto, dever-se-á utilizar um sistema de controlo com arquitectura
distribuída. Esta arquitectura implica a concepção de uma rede de comunicações que permita
a cooperação entre os vários equipamentos. Assim sendo, para que a comunicação entre
sistemas distribuídos funcione de modo correcto, utilizar-se-á modelo de comunicação
Mestre-Escravo.
Num último ponto abordou-se os sistemas de supervisão e controlo no sistema eléctrico de
energia. Uma vez que estes são baseados em sistemas SCADA, apresentou-se a sua
arquitectura típica, os modelos de comunicações e as suas vulnerabilidades. Posteriormente

28
mencionou-se os sistemas EMS e DMS. Após a abordagem efectuada neste ponto, conclui-se
que a tecnologia SCADA será a mais adequada e com a possibilidade de a implementar na Web
de modo a um operador autorizado poder aceder ao estado da unidade eólica
independentemente do lugar em que se encontre, logo que tenha acesso à internet.
29
Referências
1. Portugal, P., Tecnologias de Automação, in Slides de suporte às aulas teóricas de TAUT.
2. International Energy Agency World Energy. Outlook 2008 and 2009 editions, 2009. 3. Terwiesch, P., ABB Review. Smart Grids, 2010. 4. Pereira, M.A.F., Desenvolvimento de uma arquitectura distribuída para controlo de
potência. 2005, [s. n.]: Porto. p. XXIII, 149 p.-XXIII, 149 p. 5. Portugal, P.J.L.M., Avaliação da confiança no funcionamento de redes de campo
contribuição no domínio dos sistemas industriais de controlo. 2004, [s.n.]: Porto. p. XXVIII, 436 f.-XXVIII, 436 f.
6. European Commission report. 2006 [cited 2011 Fevereiro]; Available from: www.smartgrids.eu.
7. Berkeley Lab Study Estimates $80 Billion Annual Cost of Power Interruptions. 2005 [cited 2011 Fevereiro]; Available from: http://www.lbl.gov/Science-Articles/Archive/EETD-power-interruptions.html.
8. Global trends in sustainable energy investment 2009. 2009 [cited 2011 Fevereiro]; Available from: http://www.unep.org/pdf/Global_trends_report_2009.pdf.
9. Corwin, J.L. and W.T. Miles, Impact Assessment of the 1977 New York City Blackout. 1978, U.S. Department of Energy.
10. Kopetz, H., Real-time systems design principles for distributed embedded applications. <<The>> Kluwer International series in engineering and computer science. 1997, Boston: Kluwer Academic Publishers. XIV, 338 p.-XIV, 338 p.
11. Wellings, A., Special Issue on Real-Time Systems. Software Engineering Journal, 1991. 12. Shin, K.G. and P. Ramanathan, Real-time computing: a new discipline of computer
science and engineering. Proceedings of the IEEE, 1994. 82. 13. Bernardo, A.J.d.C.M., Arquitecturas para sistemas SCADA distribuídos. 1993, [s.n.]:
Porto. p. XIV, 174 f.-XIV, 174 f. 14. Santos, B.A.d.O., I.R.F. Araújo, and N.M.G.d. Silva (2009) Sistemas de supervisão
SCADA, EMS e DMS. 15. Rodriguez Penin, A., Sistemas Scada. Vol. 2.ª ed. 2007, Barcelona: Marcombo,
Ediciones Técnicas. XV, 448 p.-XV, 448 p. 16. Boyer, S., Scada supervisory control and data acquisition. Vol. 2nd. 1999, North
Carolina: Instrument Society of America. XI, 215 p.-XI, 215 p. 17. Ferreira, I.A.P.F., Sistemas de controlo e supervisão de sistemas embebidos tipo
SCADA. 2008, [s. n.]: Porto. p. 87 f.-87 f. 18. Security for Critical Infrastructure SCADA Systems. 2005; Available from:
http://www.sans.org/reading_room/whitepapers/warfare/security-critical-infrastructure-scada-systems_1644.
19. 21 Steps to Improve Cyber Security of SCADA Networks. Available from: http://www.oe.netl.doe.gov/docs/prepare/21stepsbooklet.pdf.