Estatica Aplicada I
23
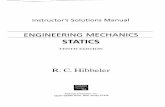
1 PARTE I F UNDAMENTOS DA ESTÁTICA VETORIAL O estudo da estática dos corpos rígidos requer a aplicação de operações com vetores. Estes entes matemáticos são definidos para representar as grandezas físicas que se comportam diferentemente das grandezas escalares. Estas operam como números reais, enquanto que as grandezas vetoriais são dependentes também da direção (reta suporte e sentido) em que atuam. 1.1 REGRA DO PARALELOGRAMO Todas as grandezas vetoriais têm sua regra de adição baseada no princípio do paralelogramo. Este princípio, cuja origem se dá em fatos experimentais, diz que a soma de dois vetores segue o procedimento mostrado na Figura 1.1. Figura 1.1 - Adição de dois vetores: C = A + B. Portanto, as características do vetor-soma C da equação B A C (1.1) A B + = A B C // A // B θ
-
Upload
rogerio-silva -
Category
Documents
-
view
227 -
download
1
description
estatica
Transcript of Estatica Aplicada I
-
1
PARTE I
FUNDAMENTOS DA ESTTICA VETORIAL
O estudo da esttica dos corpos rgidos requer a aplicao de operaes
com vetores. Estes entes matemticos so definidos para representar as grandezas
fsicas que se comportam diferentemente das grandezas escalares. Estas operam
como nmeros reais, enquanto que as grandezas vetoriais so dependentes tambm
da direo (reta suporte e sentido) em que atuam.
1.1 REGRA DO PARALELOGRAMO
Todas as grandezas vetoriais tm sua regra de adio baseada no princpio
do paralelogramo. Este princpio, cuja origem se d em fatos experimentais, diz
que a soma de dois vetores segue o procedimento mostrado na Figura 1.1.
Figura 1.1 - Adio de dois vetores: C = A + B.
Portanto, as caractersticas do vetor-soma C da equao
BAC (1.1)
A B
+ =
A
B C
// A
// B
-
2
podem ser obtidas utilizando as relaes geomtrica de um tringulo qualquer,
conforme mostrado na Figura (1.2).
Figura 1.2 - Adio dos vetores A e B.
Representando os mdulos dos vetores por a, b e c, podemos obter as
caractersticas do vetor soma atravs das leis do cosseno e do seno :
cos2cos2 22222 babababac (1.2)
e
ccba
sensensensen (1.3)
Atravs do princpio do paralelogramo podemos concluir que
i - AAA 2
ii - 0AAAA )(
1.2 DECOMPOSIO DE VETORES
Dado um vetor, deseja-se realizar sua decomposio em componentes, isto
, em parcelas cuja soma seja igual ao prprio vetor . H infinitas decomposies
possveis de um dado vetor. Para que a decomposio seja nica devemos procurar
o nmero mnimo de parcelas que fazem a composio . No plano a decomposio
de um vetor nica, dada duas direes independentes. Veja o resultado na Figura
1.3. A decomposio espacial nica quando dadas trs direes linearmente
independentes, conforme mostra a Figura 1.5.
B
A
C
-
3
Figura 1.3 - Componentes do vetor A nas direes u e v: Au + Av = A.
Frequentemente conveniente trabalhar com componentes em direes
ortogonais ou cartesianas. Veja a Figura 1.4.
Figura 1.4 - Componentes ortogonais do vetor A: Ax + Ay = A.
A decomposio de um vetor em trs componentes independentes pode
tambm ser obtida em componentes no ortogonais ou ortogonais, no espao tri-
dimensional. Veja as figuras 1.5 e 1.6.
u
Au
Av A
// u
// v
v
x Ax
Ay A
// x
// y
y
-
4
Figura 1.5 - Componentes do vetor a nas direes u, v e w: Au + Av + Aw = A.
Figura 1.6 - Componentes ortogonais do vetor A: Ax + Ay + Az = A.
1.3 VETORES NO SISTEMA CARTESIANO
A escolha do sistema de projeo feita de forma a facilitar as operaes
matemticas com grandezas vetoriais. Por esta razo, o sistema de coordenadas
ortogonais xyz conveniente e ser utilizado.
Dado um vetor a pode-se decomp-lo em trs coordenadas ortogonais,
conforme visto no item anterior. Observemos que a decomposio espacial
equivale a duas decomposies ortogonais no plano.
u
Au
Aw
A
// u
// w
w
Av
// v
v
x Ax
Ay
a
// x
// y
z
Az
// z
y
-
5
Figura 1.7 - Componentes cartesianas do vetor A.
Da figura 1.7, podemos escrever a soma de componentes no plano xy como
yxxy AAA (1.4)
e a soma resultante, em outro plano,
zyxzxy AAAAAA (1.5)
Definimos o versor uA da direo de A como o vetor unitrio que tem a mesma
direo de A, ou seja
AA uAAA
Au (1.6)
onde o mdulo do vetor A dado por
2
z
2
y
2
x AAAA (1.7)
x
Ay
Ax
A
z
Az
y
Axy
-
6
Vamos agora definir como versores das direes x, y e z os vetores unitrios
nas direes positivas destes eixos, indicados respectivamente por i, j e k. Assim,
as componentes de um vetor A podem ser escritas como
iuA xxxx AA
juA yyyy AA (1.8)
kuA zzzz AA
Onde Ax, Ay e Az, so as intensidades das componentes, positivas se tem o mesmo
sentido do versor e negativas em caso contrrio. Logo , o vetor A pode ser escrito
em coordenadas cartesianas como
kjiA zyx AAA (1.9)
A direo deste vetor dada pelos ngulos diretores, cujos cossenos so:
AAA
zz
y
yx
x
AAAcoscoscos (1.10)
Figura 1.8 - ngulos diretores do vetor A.
Substituindo (1.10) em (1.9) obtemos facilmente
x
Ay Ax
A
z
Az
y y
z
x
-
7
)coscos(cos
coscoscos
kjiA
kAjAiAA
zyx
zyx (1.11)
Comparando (1.11) com (1.6), obtemos
kjiu zyxA coscoscos (1.12)
Portanto
1z2
y
2
x
2 coscoscos (1.13)
1.4 ADIO DE VETORES NO SISTEMA CARTESIANO
Sejam dados dois vetores A e B no sistema cartesiano,
kjiA z1y1x11 AAA
kjiA z2y2x22 AAA
Sua soma ou resultante R dada por
kji
kjikjiAAR
)()()( z2z1y2y1x2x1
z2y2x2z1y1x121
AAAAAA
AAAAAA (1.14)
Assim, a soma de vetores Ai sendo i = 1, 2, , n , pode ser escrita como
kjiARn
1i
z
n
1i
y
n
1i
x
n
1i
i AAA (1.15)
ou em componentes
n
1i
zz
n
1i
yy
n
1i
xx ARARAR (1.16)
-
8
1.5 VETOR POSIO
Define-se um vetor r como vetor posio de um ponto P(x,y,z), ao vetor
kjir zyx (1.17)
Figura 1.9 - Vetor posio r.
Assim para dois pontos quaisquer A e B os seus vetores posio so dados
por
kjir AAAA zyx e kjir BBBB zyx (1.18)
Podemos escrever o vetor posio de B em relao a A, ver figura 1.10, a partir
dos vetores posio de A e B fazendo,
ABAB rrr (1.19)
ou
kjirrr )()()( ABABABABAB zzyyxx (1.20)
x
r
z
xi
y yj
zk
P(x,y,z)
-
9
Figura 1.10 - Vetor posio de B em relao a A: rAB.
Portanto, o vetor unitrio da direo AB, de A para B, ser dado por:
2
AB
2
AB
2
AB
ABABAB
AB
ABAB
zzyyxx
zzyyxx
)()()(
)()()( kji
r
ru (1.21)
Observe-se que
ABBA uu (1.22)
1.6 PRODUTO ESCALAR
Define-se o produto escalar entre dois vetores A e B como o escalar c, tal
que
Figura 1.11 - Vetores A e B.
y
x
rAB
z
A
B
rA
rB
xA
yA
zA
xB
yB
zB
A
B
-
10
cosBABAc para 1800 (1.23)
A partir desta definio podemos observar que esta operao satisfaz as
seguintes propriedades:
1 - Comutativa: ABA
2 - Distributiva: CABACBA )(
3 - Produto por escalar: aaaa )()()()( BABABABA
O produto escalar de dois vetores A e B em coordenadas cartesianas, na
forma geral, dado por:
)()()(
)()()(
)()()(
)()(
kkjkik
kjjjij
kijiii
kjikjiBA
zzyzxz
zyyyxy
zxyxxx
zyxzyx
BABABA
BABABA
BABABA
CBBAAA
(1.24)
Sabendo que
100
010
001
kkjkik
kjjjij
kijiii
(1.25)
o produto escalar (1.24) fica igual a
zzyyxx BABABABA (1.26)
Uma das aplicaes importantes do produto escalar a sua utilizao para
determinar o ngulo entre dois vetores. Outra aplicao tambm bastante utilizada
a obteno das projees ortogonais de um vetor em direes dadas.
-
11
1.7 PRODUTO VETORIAL
Sejam dados dois vetores A e B. Define-se o produto vetorial de A por B ao
vetor C, tal que
BAC (1.27)
onde
senBAC para 1800 (1.28)
Sua direo dada pelo vetor unitrio uC, ou seja,
C
CuC versor normal ao plano de A e B (1.29)
Figura 1.12 - Produto vetorial: C = A x B.
Assim, as caractersticas do vetor C so dadas por:
senBAC o mdulo do vetor C
o ngulo entre os vetores A e B
Cu o versor da direo do vetor C, perpendicular ao plano de A e B, dado
pela regra da mo direita, ver figura 1.12.
A partir da definio de produto vetorial pode-se concluir que:
i) ABBA
ii) BABABA aaa )(
iii) CABACBA )(
B A
C
-
12
Quando os vetores esto apresentados na forma cartesiana, o produto
vetorial pode ser feito usando as seguintes propriedades dos vetores unitrios:
0kkijkjik
ikj0jjkij
jkikji0ii
(1.30)
Sejam os vetores A e B escritos em suas componentes
kjiB
kjiA
zyx
zyx
BBB
AAA (1.31)
O produto vetorial de A por B ser dado por
)()()(
)()()(
)()()(
)()(
kkjkik
kjjjij
kijiii
kjikjiBA
zzyzxz
zyyyxy
zxyxxx
zyxzyx
BABABA
BABABA
BABABA
BBBAAA
(1.32)
ou, aplicando os produtos de versores dados em (1.30) obtemos
kjiBA )()()( xyyxzxxzyzzy BABABABABABA (1.33)
Este resultado tambm pode ser obtido a partir do seguinte determinante
kjiC
kji
BAC
)()()( xyyxzxxzyzzy
zyx
zyx
BABABABABABA
BBB
AAA
(1.34)
-
13
1.8 MOMENTO DE UMA FORA EM RELAO A UM PONTO
Vamos definir a grandeza vetorial denominada momento de uma fora em
relao a um ponto. Sejam dados uma fora F e um ponto O. O momento desta
fora em relao a um ponto O definido por
FrMO (1.35)
onde r o vetor posio de um ponto qualquer da reta suporte da fora F em
relao ao ponto O.
Figura 1.13 - Momento de uma fora F em relao a O.
Pela definio de produto vetorial, este momento tem as seguintes
propriedades:
senO FrM o mdulo do momento e
o ngulo entre os vetores r e F
A direo do momento perpendicular ao plano de r e F, cujo sentido
dado pela regra da mo direita, ver figura 1.13.
Podemos observa que
dsenO FFrM (1.36)
onde d a distncia da reta suporte de F ao ponto O.
F
r
MO
O
d
-
14
1.9 MOMENTO DE UMA FORA EM RELAO A UM EIXO
Vamos definir a grandeza vetorial denominada momento de uma fora em
relao a um eixo. Sejam dados uma fora F, um eixo a e suas componentes
ortogonais Fa e Fb, onde Fa a componente paralela ao eixo a. O momento desta
fora em relao ao eixo a definido por
abaaa dM uFuM (1.37)
Atravs da figura 1.14 podemos observar como so obtidas as componentes Fa e
Fb da fora F e a distncia d entre a reta suporte da fora F e o eixo a.
Figura 1.14 - Momento de uma fora F em relao ao eixo a.
Este clculo nem sempre fcil atravs da geometria. Podemos verificar
que tomando o momento de F em relao a um ponto P qualquer do eixo a:
FrMP (1.38)
e fazendo a projeo deste momento neste eixo, ou seja,
)()( FruuFruM aaaPaM (1.39)
o resultado obtido igual a Ma ou seja
F
Ma a
a
b a
d
Fa
Fb
-
15
dM baPa FuM (1.40)
Portanto, de (1.37) e (1.40) temos
aaPa uuMM )( (1.41)
Observemos que a projeo do momento MP sobre o eixo a, equao (1.39), pode
ser calculada facilmente atravs do determinante
zyx
zyx
azayax
aaPa
FFF
rrr
uuu
M )( FruuM (1.42)
1.10 MOMENTO DE UM BINRIO
O sistema de foras mostrado na figura 1.15 um denominado binrio se
estas foras so paralelas, de mesmo mdulo e com sentidos contrrios,
21 FF (1.43)
Calculando o momento deste binrio em relao a um ponto P qualquer obtemos
2211P FrFrM (1.44)
Figura 1.15 - Momento de um binrio.
Sendo um binrio, FF1 e FF2 , podemos escrever
r2
P
r F2
F1
r1
-
16
FrrFrFrM )( 2121P (1.45)
ou
FrMP (1.46)
Conclumos ento que o momento do binrio no depende do ponto P tomado para
o clculo dos momentos de cada uma de suas foras. Logo
FrMB (1.47)
O momento do binrio tem as seguintes caractersticas
dB FM o mdulo do momento do binrio, onde
d a distncia entre as retas suportes das foras do binrio.
A direo do momento perpendicular ao plano que contm F1 e F2, com
sentido dado pela regra da mo direita, ver figura 1.16.
Figura 1.16 - Direo do vetor do momento de um binrio.
1.11 SISTEMAS EQUIVALENTES - DEFINIO
Seja um corpo rgido com vrias foras e binrios a ele aplicados. A fora
resultante dada por
n
1i
iR FF (1.48)
e o momento resultante em relao a um ponto O dado por
F2
F1
MB
-
17
m
1j
Bj
n
1i
iiBRFRORO r MFMMM ,, (1.49)
Figura 1.17 - Foras e binrios aplicados a um corpo rgido.
Dois sistemas de foras e binrios so ditos equivalentes quando ambos tm
a mesma fora resultante e o mesmo momento em relao a qualquer ponto. fcil
observar que um sistema de foras e binrios possui infinitos sistemas
equivalentes, embora todos tenham a mesma fora resultante. Assim o sistema
mostrado na figura 1.17 tem como um de seus sistemas equivalentes aquele cuja
resultante aplicada no ponto O seja igual FR dada na (1.48) e cujo binrio seja
igual MRO dado por (1.49).
O binrio aplicado a um corpo rgido um vetor livre, mas o momento
resultante dado por (1.49) depende do ponto de referncia escolhido O.
1.12 SISTEMAS EQUIVALENTES - UMA FORA APLICADA
Vamos tomar um corpo com uma fora F aplicada no ponto P. Desejamos
encontrar o sistema equivalente num ponto O, que est na linha de ao da fora.
O que fazemos e acrescentar ao sistema inicial, duas foras cuja resultante nula.
Seja este sistema agora formado por F, F1=F e F2= -F. Como podemos facilmente
observar o sistema equivalente resultar numa translao de F de P para O.
MB1
O
F2
F1
Fn
MBm
MB2
r1
r2 rn
-
18
Figura 1.18 - Sistema equivalente em O a uma fora - O na reta de ao da fora.
Figura 1.19 - Sistema equivalente em O a uma fora - O qualquer.
Vamos encontrar o sistema equivalente num ponto O, que est em qualquer
posio. O que fazemos acrescentar novamente ao sistema inicial, duas foras
cuja resultante nula. Seja este sistema agora formado por F, F1=F e F2= -F.
Como podemos facilmente observar o sistema equivalente resultar numa
translao de F de P para O e um momento do binrio formado por F e F2 = -F.
Observe que este o binrio do sistema equivalente em O. Para qualquer outro
ponto temos outro binrio, uma vez que o vetor posio r ser diferente.
O
F1= F
F
P
F2= -F
O
F
F
P
F2= -F
O
F1= F
F
P
F2= -F
O
F1= F
F
P
F2= -F
MFO = r F
r
-
19
1.13 SISTEMAS EQUIVALENTES - VRIAS FORAS E BINRIOS APLICADOS
Seguindo o procedimento da figura 1.19, o sistema equivalente em O ao
sistema formado pelo conjunto de n foras e m binrios mostrado na figura 1.20,
obtido usando o procedimento mostrado acima para cada uma das n foras. O
resultado final corresponde a um sistema equivalente com uma fora igual a ( 1.48)
aplicada em O e um binrio igual a (1.49), ou seja:
n
1i
iE FF e m
1i
Bi
n
1i
iiEO r MFM (1.50)
Figura 1.20 - Sistema equivalente em O.
1.14 REDUO DE SISTEMAS EQUIVALENTES
FORA E BINRIO PERPENDICULARES
Vamos analisar uma situao onde o sistema equivalente dado por (1.50)
tal que os vetores de fora FE e do momento do binrio ME so perpendiculares
entre si. Neste caso possvel sempre encontrar outro sistema equivalente num
ponto G cujo binrio MEG nulo e, portanto, um sistema equivalente com uma
fora igual resultante FE aplicada no ponto G. H uma exceo bvia, quando a
fora resultante FE nula. Neste caso no existe tal ponto G e o sistema original
se reduz a um sistema equivalente a um binrio, ou seja, se reduz a duas foras.
MB1
O
F2
F1
Fn
MBm
MB2
r1
r2 rn
O
FE
MEO
-
20
Figura 1.21 - Sistema equivalente com uma fora em G.
Neste caso o ponto G deve ser obtido de tal maneira que
0EEOEG FrMM (1.51)
ou seja
0EGOEO FrM (1.52)
Para os sistemas planos de foras, a condio de perpendicularidade entre a
fora FE e o momento do binrio ME sempre observada, desde que FE no seja
nula. Quando a fora resultante nula o sistema plano se reduz a um binrio, ou
seja, a um par de foras de mesma intensidade, direes paralelas e sentidos
contrrios.
Observemos que para um sistema de n foras, no qual todas as foras so
concorrentes num nico ponto P, o sistema equivalente neste ponto reduzido a
uma nica fora, igual resultante de todas as foras aplicadas.
1.15 REDUO DE SISTEMAS EQUIVALENTES
FORA E BINRIO NO PERPENDICULARES
Para um sistema qualquer de foras e binrios como o mostrado na figura
1.21 podemos encontrar um sistema equivalente em O, conforme ali mostrado. Se
tomarmos agora as projees do momento equivalente MEO nas direes paralela e
perpendicular fora FE, MEO1 e MEO2 respectivamente, obtemos o sistema
equivalente mostrado na figura 1.22.
O
FE
MEO
FE
G
-FE
rGO O
FE
MEO
G
-
21
Figura 1.22 - Sistema equivalente em O - componentes de MEO.
Podemos agora obter outro sistema equivalente num ponto G para a fora FE e o
componente MOE2 do binrio, perpendiculares entre si, aplicando a (1.52).
Portanto, o sistema resultante num determinado ponto G, tal que
0EGO2EO FrM (1.53)
equivalente a uma fora igual a FE e um momento do binrio MEOa , paralelos
entre si, ver figura 1.23. Neste caso usual se dizer que o sistema foi reduzido a
uma fora e um torsor, nomenclatura inadequada, pois pode -se confundir com o
esforo interno denominado momento torsor, que ser visto em captulo posterior.
Figura 1.23 - Sistema equivalente em G - fora e torsor.
O G
FE
MEOa
O
FE
MEO
G O
FE
MEO
G
MEO2
MEO1
-
22
1.16 SISTEMAS EQUIVALENTES CARGAS DISTRIBUDAS
At aqui as foras foram consideradas uma grandeza vetorial de ao
pontual, isto , aplicadas num determinado ponto do corpo rgido. De fato, estas
foras so modelos matemticos das foras reais, que atuam de forma distribuda
ao longo de uma superfcie ou que correspondem ao de campos que atuam
sobre o volume todo de um corpo. Vamos considerar aqui as distribuies de carga
sobre superfcies.
A ao de ventos, escoamentos de fludos ou mesmo peso de materiais
suportados por superfcies so modeladas atravs da grandeza presso p, que tem
unidades de fora sobre rea, por exemplo, N/m2 ou lb/ft
2. Em muitas aplicaes
de elementos estruturais lineares, com espessura constante e, esta grandeza
substituda pela grandeza fora distribuda w, que corresponde a
epw (1.54)
cujas unidades so, por exemplo, N/m ou lb/ft.
Seja uma fora distribuda w(x), conforme mostra a figura 1.24.
Figura 1.24 - Carga distribuda w(x) e concentrada dF = w(x)dx.
Pelo que foi visto sobre sistemas equivalentes, a fora equivalente a este sistema
de fora distribuda a resultante da fora distribuda w(x). Esta resultante dada
pela soma de todas as foras paralelas elementares dF aplicadas ao longo de x. O
resultado desta soma igual a:
L
0E dxxwF )( (1.55)
O
dF = w(x)dx
x
x dx
y
O
w(x) = p(x) e
x
x dx
y L
-
23
Para se encontrar o sistema equivalente num ponto qualquer, por exemplo
no ponto O, alm da fora resultante precisamos aplicar a condio de momento
equivalente. Calculando o momento da fora dF em relao O, obtemos
dxxwxdFxdM )( (1.56)
Portanto, o momento equivalente em O igual soma de todos os momentos
elementares dM , cujo resultado
L
0EO dxxwxM )( (1.57)
Figura 1.25 - Fora w(x) e sistema equivalente em O.
Assim, o sistema equivalente no ponto O aquele mostrado na figura 1.25. Como
FE e MEO so perpendiculares entre si, podemos tambm encontrar a posio C de
outro sistema equivalente na qual o momento equivalente nulo. Neste caso a
fora equivalente FE se localizar numa posio tal que, ver figura 1.26,
0xFMM CEEOE (1.58)
ou
E
EOC
F
Mx (1.59)
Figura 1.26 - Sistemas equivalentes em O e no centro C da distribuio.
O
FE
xC
C
O
FE
MEO
w(x)
O
FE
MEO