
Estudo do Conceito e Construção de um Aeróstato Não Rígido ...
136
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO Departamento de Engenharia Mecânica e Gestão Industrial Estudo do Conceito e Construção de um Aeróstato Não Rígido por Evacuação de Ar por Luís Miguel Terra Pinto DISSERTAÇÃO DE MESTRADO ESPECIALIZAÇÃO EM PROJETO E CONSTRUÇÃO MECÂNICA MESTRADO INTEGRADO EM ENGENHARIA MECÂNICA Supervisionado por: Prof. Dr. António Torres Marques Prof. Dr. Marco Parente Porto, 3 de fevereiro de 2017
Transcript of Estudo do Conceito e Construção de um Aeróstato Não Rígido ...

FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Departamento de Engenharia Mecânica e Gestão Industrial
Estudo do Conceito e Construção de um Aeróstato Não Rígido por
Evacuação de Ar
por
Luís Miguel Terra Pinto
DISSERTAÇÃO DE MESTRADO ESPECIALIZAÇÃO EM PROJETO E CONSTRUÇÃO MECÂNICA
MESTRADO INTEGRADO EM ENGENHARIA MECÂNICA
Supervisionado por: Prof. Dr. António Torres Marques
Prof. Dr. Marco Parente
Porto, 3 de fevereiro de 2017

© Luís Miguel Terra Pinto, 2017
Resumo
Estudo do Conceito e Construção de um
Aeróstato Não Rígido por Evacuação de ar
por
Luís Miguel Terra Pinto
Dissertação apresentada em satisfação parcial dos requisitos para a obtenção do
grau de Mestre em Engenharia Mecânica, especialização em Projeto e Construção
Mecânica, da Faculdade de Engenharia da Universidade do Porto. Esta dissertação foi
supervisionada pelo Professor Catedrático Dr. António Torres Marques
Um aeróstato evacuado é considerado. A história de veículos mais leves que o ar
é discutida e novas abordagens alternativas são propostas. Métodos não rígidos para
suportar as forças do vácuo são introduzidos e diferentes materiais compósitos são
analisados para máxima segurança. É alcançado um equilíbrio estrutural carregando os
materiais à tração ao contrário de os carregar à compressão.
Abordagens por simulação numérica com software através do método de
elementos finitos são amplamente testadas e mostram que as estruturas propostas,
insufláveis com ar pressurizado, são capazes de suportar a pressão atmosférica e as forças
implosivas do vácuo, mas ultrapassam o peso do mesmo volume de ar,
independentemente do tamanho do dirigível. Foi provado que, se pressurizada com
hélio, a estrutura teria flutuabilidade positiva e apresentaria vantagens face aos outros
conceitos em uso.
Um método diferente é posteriormente analisado, baseando-se na repulsão
eletrostática, que é capaz de produzir uma força à distância sem o incremento excessivo
no peso. Algumas considerações eram necessárias e foram aqui apresentadas para
fundamentar a pesquisa e, por fim, uma nova simulação de software por elementos
finitos é explorada. Os resultados mostram que a estrutura pode ser construída
utilizando materiais e processos atuais, sendo o conceito viável, embora esteja ainda
pouco documentado. Mais pesquisa, principalmente trabalhos experimentais, é
necessária para confirmar as evidências teóricas e permitir a candidatura a uma patente
e a aplicação comercial do projeto.
Palavras-Chave Aeróstato. Dirigível. Mais Leve Que O Ar. Vácuo. Rigidez Pneumática. Repulsão
Eletrostática. Simulação por Elementos Finitos


i
Abstract
Study of the Concept and Construction of a
Soft-Structured Vacuum Airship
by
Luís Miguel Terra Pinto
A dissertation submitted in partial fulfillment of the requirements for the
Master’s Degree in Mechanical Engineering, specialization in Design and Mechanical
Construction, of the Faculty of Engineering of the University of Porto. This dissertation
was supervised by the Full Professor Dr. António Torres Marques
An air-evacuated airship is considered. The history of lighter than air vehicles is
discussed and alternative new approaches are proposed. Soft-Structured vacuum
methods are introduced and different composite materials are tested for maximum
reliability. It is reached an ideal structure equilibrium loading the chosen materials
under tension rather than compression.
Finite element numerical simulation approaches are extensively tested with
software and have shown that air pressurized inflatable structures are able to withstand
the atmospheric pressure and vacuum implosive forces, but surpass the weight of the
same volume of air regardless of the size of the airship. It is proven that, if inflated with
helium, the airship would be positively buoyant and offers advantages over other
concepts in use.
A different method is then analyzed regarding electrostatic repulsion, which can
deliver an action-at-a-distance without the excessive increment in weight. Some
considerations where requested, and were here presented in order to ground the
research, and a new finite element software simulation was then explored. The results
have shown that the concept can be constructed using state of art materials and
processes, and that the concept is feasible though still under documented. Further
research, especially experimental work, is needed to confirm the theoretical evidences
and allow for the patent application and the commercial use of the project.
Keywords
Airship. Lighter Than Air. Vacuum. Pneumatic Rigidity. Electrostatic Repulsion. Finite
Element Simulation.


iii
Agradecimentos
Ao Professor Doutor António Torres Marques, orientador desta dissertação,
desejo agradecer por toda a ajuda prestada na concretização deste estudo. Duvido que
conseguisse encontrar alguém mais versátil e experiente em me encaminhar nestas
análises tão díspares.
Ao Professor Doutor Marco Parente, coorientador e valiosa ajuda na modelação
da hipótese Pneumática. Aprendi métodos que para sempre me serão úteis.
Ao Professor Doutor Paulo Sá do Departamento de Engenharia Física, por todas
as fundamentais noções que precisei, especialmente nos tempos mais incertos da
hipótese Eletrostática.
Ao Engenheiro Victor Granados, estudante de doutoramento, agradeço por toda
a ajuda prestada quando um novo tipo de simulação foi requerido. E ademais pela
organização de uma conferência que se revelou fundamental para o problema.
Ao Professor Doutor Emilio Ruiz Reina, da Universidad de Málaga, pela sua
correspondência pese embora a distância.
Ao meu pai e à memória da minha mãe, que sempre lutaram por me dar o bom
futuro que estou certo de conseguir.
A todos os meus amigos e familiares que sempre acreditaram nos meus
devaneios.
À Tuna de Engenharia, que me formou enquanto estudante e me viu crescer
durante este longo caminho. Sem a música, boémia e bons amigos o meu percurso
académico não teria sentido.
Ao Sport Club do Porto, divisão de ginástica artística, por se certificarem que não
era apenas a minha mente a ficar cansada.
À Real República dos LyS.O.S. para onde volto todos os dias, e onde os avanços e
recuos deste conceito nunca passaram despercebidos.

iv
“One of the greatest discoveries a person makes, one of their great surprises, is to find
they can do what they were afraid they couldn't do.”
- Henry Ford

v
Índice
Resumo ................................................................................................................... iii
Abstract ..................................................................................................................... i
Agradecimentos ...................................................................................................... iii
Índice ....................................................................................................................... v
Índice de Figuras .................................................................................................... ix
Índice de Tabelas .................................................................................................... xi
Capítulo 1 ................................................................................................................. 1
Introdução ........................................................................................................... 1
1.1 Contextualização e o Problema ............................................................. 1
1.2 Motivação e Objetivos ........................................................................... 2
1.3 Metodologia ........................................................................................... 4
1.4 Estrutura do Documento ...................................................................... 5
Capítulo 2 ................................................................................................................ 7
Estado da Arte ..................................................................................................... 7
2.1 Balões ..................................................................................................... 8
2.1.1 História do Balonismo .................................................................... 8
2.1.2 Componentes de um Balão de Ar Quente Moderno ..................... 11
2.2 Dirigíveis .............................................................................................. 13
2.2.1 Dirigíveis Convencionais ............................................................... 13
2.2.1.1 Não Rígidos ............................................................................................. 16
2.2.1.2 Semi-Rígidos ........................................................................................... 17
2.2.1.3 Rígidos .................................................................................................... 18
2.2.2 Dirigíveis Não Convencionais .......................................................20
2.2.2.1 Geometrias Não Convencionais .............................................................20
2.2.2.2 Diferentes Gases de Sustentação ........................................................... 26
2.2.2.3 Métodos Adicionais de Sustentação ...................................................... 27
2.2.2.4 Outras Soluções Não Convencionais ..................................................... 29
Capítulo 3............................................................................................................... 30
A Abordagem por Vácuo ................................................................................... 30
3.1 Estudos com Casca Rígida .................................................................. 30
3.1.1 História e Princípio ....................................................................... 30

vi
3.1.2 Restrições dos Materiais ............................................................... 31
3.1.3 Aplicação em Condições Extraterrestres ...................................... 34
3.2 Estudos com Membrana Não Rígida .................................................. 34
3.3 Considerações Adicionais.................................................................... 35
3.3.1 Variação das Propriedades Físicas da Atmosfera com a Altitude 35
3.3.2 Expansão Isentrópica versus Expansão Isentálpica .................... 38
3.3.3 Falha do Sistema de Sustentação por Vácuo ................................ 39
Capítulo 4 ............................................................................................................. 40
A Solução por Rigidez Pneumática .................................................................. 40
4.1 Verificação Analítica do Conceito ....................................................... 41
4.1.1 Análise de Equilíbrio ..................................................................... 41
4.1.2 Análise de Flutuabilidade ............................................................. 43
4.1.3 Análise de Estabilidade ................................................................. 44
4.2 Simulação Numérica Assistida por Computador ............................... 48
4.3 Discussão dos Resultados ................................................................... 58
4.4 Métodos de Construção da Estrutura Proposta ................................. 61
4.5 Uso Alternativo da Estrutura Proposta .............................................. 65
4.6 Conclusões ........................................................................................... 67
Capítulo 5 ............................................................................................................... 69
A Solução Eletrostática ...................................................................................... 69
5.1 Introdução ........................................................................................... 69
5.2 Conceitos Teóricos e Análise Prévia ................................................... 70
5.2.1 Forças por Efeito das Cargas ........................................................ 70
5.2.2 Conservação da Carga ................................................................... 70
5.2.3 Propriedades do Campo Elétrico para Condutores ..................... 71
5.2.4 Análise da Densidade de Carga..................................................... 72
5.2.5 Análise pelo Tensor de Maxwell ................................................... 73
5.2.6 Teorema de Earnshaw................................................................... 73
5.3 Tipos de Materiais Empregues ........................................................... 74
5.4 Carregamento das Esferas de Repulsão ............................................. 75
5.5 Simulação Numérica Assistida por Computador ............................... 76
5.6 Discussão dos Resultados ................................................................... 79
5.7 Propostas Análogas ............................................................................ 80
5.8 Conclusões ........................................................................................... 83
Capítulo 6 .............................................................................................................. 85
Conclusões e Investigação Futura ..................................................................... 85

1.1 -Contextualização e o Problema vii
6.1 Conclusões ........................................................................................... 85
6.2 Investigação Futura ............................................................................. 86
Referências ............................................................................................................ 87
- Anexos - ............................................................................................................... 91
A.1 – Modelação Rigidez Pneumática - ΔR=100mm ................................... 92
A.2 – Modelação Rigidez Pneumática - ΔR=700mm ................................. 104
A.3 – Modelação Eletrostática ..................................................................... 113


ix
Índice de Figuras
Figura 1 – Velocidade atingida por cada veículo, a verde, vs o consumo de combustível
por capacidade de carga, a ponteado [1] ............................................................................ 2
Figura 2 – Metodologia do Projeto ..................................................................................... 4
Figura 3 – Estrutura do Documento .................................................................................. 5
Figura 4 – Representação da demonstração da passarola [3] ........................................... 8
Figura 5 – Representação do lançamento histórico do balão dos irmãos Montgolfier [5]
.............................................................................................................................................. 9
Figura 6 – Balões de então comparados aos primeiros aeróstatos dirigíveis, de uma
enciclopédia russa do virar do século XX [7] ................................................................... 10
Figura 7 – Esquema de um balão de ar quente moderno [8] .......................................... 12
Figura 8 – Fotografia do desastre do Hindenburg [12] ................................................... 14
Figura 9 – Cronologia do desenvolvimento dos dirigíveis [9] ......................................... 15
Figura 10 – Diferentes configurações de dirigíveis convencionais [13] .......................... 15
Figura 11 –Configuração típica de um dirigível não rígido [11] ....................................... 17
Figura 12 –Configuração típica de um dirigível semi-rígido [11] .................................... 18
Figura 13 –Configuração típica de um dirigível rígido [11] ............................................. 19
Figura 14 –Dirigível rígido Dragon Dream, do conceito à construção [18] ....................20
Figura 15 –Dirigível esférico da 21st Century Inc. [9] ..................................................... 21
Figura 16 –Esquema de um dirigível não-rígido para a exploração de florestas tropicais
[19] ..................................................................................................................................... 21
Figura 17 –Dirigível SkyShip rádio-controlado [22] ........................................................ 22
Figura 18 –Dirigível Alize [23] .......................................................................................... 22
Figura 19 – Representação de dirigíveis com asas [24] ................................................... 23
Figura 20 –Conceito Nautilus de um dirigível não tripulado [25] .................................. 23
figura 21 –Airlander 10 no seu voo inaugural [26] .......................................................... 24
Figura 22 – Representação do dirigível LMH1 da Lockheed, configuração e vantagens [1]
............................................................................................................................................ 25
Figura 23 – Dirigível deltoide Aereon 26 [27] ................................................................. 25
Figura 24 – Comparação da capacidade de elevação de diferentes gases de sustentação
[28] .................................................................................................................................... 27
Figura 25 – Dirigíveis de grande capacidade: (a)HeliStat de Piasecki, (b)Helitruck,
(c)Heliship, e (d)conceito Aerocrane [21] ........................................................................ 28
Figura 26 – Dirigível Metal-Clad ZMC-2 [30] ................................................................. 29
Figura 27 – Embarcação voadora de Francesco de Lana[33] .......................................... 30
Figura 28 – Pressão atmosférica e forças de simetria atuantes em meia casca esférica
[34] ..................................................................................................................................... 31
Figura 29 – Variação das propriedades físicas da atmosfera com a altitude [42] .......... 36
Figura 30 – Primeiro esboço e legenda da estrutura proposta por rigidez pneumática 40
Figura 31 – Secção da estrutura analisada por Barton [40] ............................................ 44
Figura 32 – Ilustração das células, vértices e respetivos graus de liberdade [40] .......... 45

x
Figura 33 – Célula unitária, ligações e respetivos valores de pré-tensão e rigidez [40] . 46
Figura 34 – Ilustração da deformação prevista por Barton [40] .................................... 47
Figura 35 – Logótipos da empresa produtora e software escolhidos [44] ...................... 48
Figura 36 – Metodologia adotada para a análise ............................................................. 49
Figura 37 – Tabela de introdução das propriedades do material elástico do tipo lamina
............................................................................................................................................ 51
Figura 38 – Representação do custo computacional em função do tamanho do modelo
para cada método [45] ...................................................................................................... 54
Figura 39 – Interface gráfica para a introdução das condições de fronteira .................. 56
Figura 40 – Diferentes perspetivas da malha final .......................................................... 56
Figura 41 – Página de entrada do software Femap .......................................................... 57
Figura 42 – Gráfico ∆𝑅 em função de p – geometria esférica [46] ................................. 58
Figura 43 – Gráfico ∆𝑅 em função de p – geometria cilíndrica [46] .............................. 59
Figura 44 – Comparação geometrias esférica e cilíndrica para 𝑅𝑖 = 1𝑚 [46] ................ 59
Figura 45 – Comparação geometrias aprox e não aprox, para 𝑅𝑖 = 1𝑚 [46] ................. 59
Figura 46 – Peso teórico vs resistência para cada material [47] ..................................... 62
Figura 47 – Configuração do compósito idealizado [47] ................................................. 62
Figura 48 – Configuração do compósito tecido com “crimp” (acima) e do não tecido
(abaixo). Comparação gráfica entre ambos [48] .............................................................. 63
Figura 49 – Esboço e legenda da estrutura proposta [43] ............................................... 64
Figura 50 – Esboço e legenda da estrutura proposta [43]............................................... 66
Figura 51 – Representação da estrutura eletrostática com o sentido das forças atuantes
............................................................................................................................................ 69
Figura 52 – Representação do campo elétrico numa esfera condutora [49] .................. 71
Figura 53 – Representação das etapas do carregamento por indução [56] .................... 76
Figura 54 – Logótipo do software escolhido .................................................................... 77
Figura 55 – Representação da dupla membrana insuflada electrostaticamente [58] .... 81
Figura 56 – Representação da aplicação pretendida por Porter [58] ............................. 81
Figura 57 – Representação das diferentes fases da insuflação eletrostática [59] ........... 82
Figura 58 –Insuflação eletrostática de uma estrutura teste, de 0 a 9 kV [59] ................ 82
xi
Índice de Tabelas
Tabela 1 – Parâmetros a considerar na determinação da densidade exterior .... 37
Tabela 2 - Sistema de unidades utilizado na simulação ...................................... 49
Tabela 3 - Código .inp para cada estudo das propriedades dos materiais ......... 51
Tabela 4 - Código .inp do Step para os vários tipos de estudo ............................ 55
Tabela 5 – Requisitos a confirmar pelos materiais .............................................. 61
Tabela 6 – Prós, contras e valores de resistência para vários materiais ............. 61


1
Capítulo 1
Introdução
Desde os tempos primordiais que a humanidade tem o sonho de copiar os
pássaros e dominar a terceira dimensão do espaço. Lendas como a grega de Dédalo e
Ícaro, entre outras originárias da Índia, China ou idade média europeia, alimentavam o
sonho. No entanto, durante este período inicial, as questões de elevação, estabilidade e
controlo não eram compreendidas, e a maioria das tentativas terminava em lesão grave
ou morte.
Felizmente, na era moderna, o mundo já não é o desconhecido de outrora e a
indústria de transporte aéreo, que rende anualmente 5 biliões de euros, é um enorme
campo de possibilidades para os audazes que anseiam alcançar novas fronteiras.
Crê o autor deste documento, que o paradigma da sustentação estática, principal
foco deste trabalho, encontra-se sub-explorado e, portanto, uma pesquisa fundamentada
e mais ambiciosa é necessária para encontrar novas possibilidades de contrariar a força
gravítica.
Colmatando esta falha, o autor propõe, por mérito próprio, as duas hipóteses
abordadas neste documento, e acredita que estas irão renovar o interesse neste ramo da
aviação, enriquecendo a tecnologia humana, com a esperança de aumentar o controlo
que a civilização tem sobre o mundo que a rodeia.
1.1 Contextualização e o Problema
Quando um objeto flutua num fluído, como um navio na água ou um balão no ar,
estes fazem-no porque estão sujeitos a uma força ascendente, a impulsão, de valor igual
ao peso do fluído deslocado. Assim ficou demonstrado por Arquimedes no seu princípio
da hidrostática. Aeróstato é a designação dada a veículos mais leves que o ar e que
funcionam segundo este conceito.
Um balão flutua se a sua densidade média for menor do que a densidade do
volume de ar equivalente. Tipicamente para este efeito opta-se por encher esse volume
com um gás de baixa densidade. Ao valor dessa impulsão deve-se retirar o peso da
membrana do balão, bem como o peso desse gás mais leve que o ar. Por norma, os
aeróstatos têm membranas flexíveis embora carcaças rígidas também sejam utilizadas.

2 Introdução
Os aeróstatos convencionais, em uso há mais de um século, provaram que a sua
exploração é de máximo interesse. Como a figura abaixo demonstra, estes situam-se num
ponto intermédio ideal, comparativamente a outros métodos de transporte, quando
avaliadas a velocidade e o consumo de combustível por capacidade de carga.
Figura 1 – Velocidade atingida por cada veículo, a verde, vs o consumo de combustível por
capacidade de carga, a ponteado [1]
Como será referido no capítulo seguinte, todas as atuais abordagens para a
sustentação de veículos no ar, através da redução da sua densidade, apresentam
desvantagens que, de uma forma ou de outra, têm atrasado a evolução deste meio de
transporte em detrimento de outros mais explorados. No entanto, é intuitivo pensar que,
caso fosse alcançada uma forma alternativa de tirar proveito da sustentação estática, o
mundo como existe e o transporte aéreo transformar-se-iam.
1.2 Motivação e Objetivos
Por proposta do autor, é objeto de estudo deste documento, a análise da
possibilidade de conseguir reduzir a densidade de aeróstatos, através da evacuação do ar
interno, controlando assim o seu peso e flutuabilidade de uma forma mais segura e
estável.
Partindo do conhecimento que a utilização de aeróstatos por evacuação de ar
nunca foi bem-sucedida, é objetivo deste documento esmiuçar as hipóteses propostas,
tendo por finalidade a obtenção de uma conclusão definitiva quanto à sua
empregabilidade.
1.2 -Motivação e Objetivos 3
Em jeito de motivação, referem-se alguns exemplos de aplicações diretas para
este conceito em análise:
Meio de transporte aéreo que necessitaria de propulsão horizontal, mas com fácil
e barata manobragem vertical, através de uma bomba de expulsão/admissão
capaz de fazer variar a densidade do aeróstato;
Coletor solar estratosférico com ligação direta à terra ou por armazenamento em
baterias, capaz de funcionar independentemente da meteorologia e com painéis
para diversos ângulos de incidência;
Emissor/refletor de frequência em altitude para telecomunicações;
Elevador vertical guiado, com o intuito de reduzir os custos da aterragem de
aviões comerciais, para aceder a locais altos de interesse ou como transporte de
material de construção para obras em altura;
Criação de linhas de transporte aéreas transcontinentais por mono carril,
sustentadas por conjuntos destes aeróstatos, que poderiam ser ancorados e
alimentados por energia solar;
Estação de combate a fogos não tripulada, em permanência sobre zonas de risco,
que poderia ou não estar conectada a reservatórios para diminuir o peso a
transportar;
Utilização para fins publicitários ou produção de espetáculos itinerantes, sem
necessidade da logística para a montagem/desmontagem.
Com a confirmação da viabilidade deste projeto, o desenvolvimento de diversos
dispositivos, bem como software para o controlo dos mesmos, seria possível e estaria
aberto a novas abordagens e pesquisas.
A fim dessa confirmação, serão documentados todos os passos dados neste
projeto e, para melhor compreensão do leitor, uma contextualização fundamentada é
dada aquando a introdução de cada tema.
De acordo com as regras académicas, a conduta ética e conforme é exigido, foram
citados e referenciados todos os materiais e resultados que não sejam originais deste
trabalho.
4 Introdução
1.3 Metodologia
Este documento é constituído por duas abordagens distintas para as quais, em
ambos os casos, foi seguida a metodologia abaixo descrita. Este processo aconteceu
individualmente para cada uma das hipóteses, visto que o autor desconhecia a
possibilidade eletrostática, em análise no capítulo 5, aquando do estudo da possibilidade
por rigidez pneumática, em análise no capítulo 4.
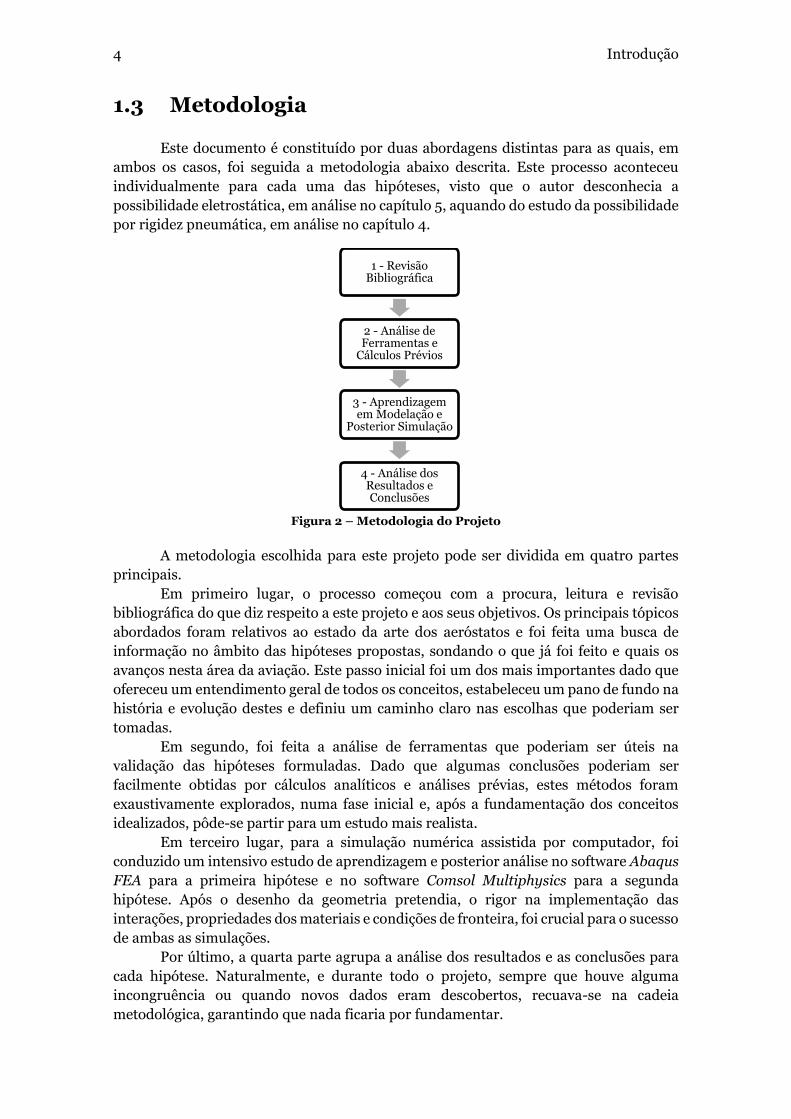
Figura 2 – Metodologia do Projeto
A metodologia escolhida para este projeto pode ser dividida em quatro partes
principais.
Em primeiro lugar, o processo começou com a procura, leitura e revisão
bibliográfica do que diz respeito a este projeto e aos seus objetivos. Os principais tópicos
abordados foram relativos ao estado da arte dos aeróstatos e foi feita uma busca de
informação no âmbito das hipóteses propostas, sondando o que já foi feito e quais os
avanços nesta área da aviação. Este passo inicial foi um dos mais importantes dado que
ofereceu um entendimento geral de todos os conceitos, estabeleceu um pano de fundo na
história e evolução destes e definiu um caminho claro nas escolhas que poderiam ser
tomadas.
Em segundo, foi feita a análise de ferramentas que poderiam ser úteis na
validação das hipóteses formuladas. Dado que algumas conclusões poderiam ser
facilmente obtidas por cálculos analíticos e análises prévias, estes métodos foram
exaustivamente explorados, numa fase inicial e, após a fundamentação dos conceitos
idealizados, pôde-se partir para um estudo mais realista.
Em terceiro lugar, para a simulação numérica assistida por computador, foi
conduzido um intensivo estudo de aprendizagem e posterior análise no software Abaqus
FEA para a primeira hipótese e no software Comsol Multiphysics para a segunda
hipótese. Após o desenho da geometria pretendia, o rigor na implementação das
interações, propriedades dos materiais e condições de fronteira, foi crucial para o sucesso
de ambas as simulações.
Por último, a quarta parte agrupa a análise dos resultados e as conclusões para
cada hipótese. Naturalmente, e durante todo o projeto, sempre que houve alguma
incongruência ou quando novos dados eram descobertos, recuava-se na cadeia
metodológica, garantindo que nada ficaria por fundamentar.
1 - Revisão Bibliográfica
2 - Análise de Ferramentas e
Cálculos Prévios
3 - Aprendizagem em Modelação e
Posterior Simulação
4 - Análise dos Resultados e Conclusões
1.4 -Estrutura do Documento 5
1.4 Estrutura do Documento
Para além da presente introdução, esta dissertação é composta por mais cinco
capítulos.
O segundo capítulo descreve o estado da arte dos objetos de estudo e dá alguma
visão histórica sobre a evolução dos aeróstatos ao longo do tempo, bem como diferentes
abordagens já em utilização.
O terceiro capítulo introduz a abordagem por evacuação do ar interno, como
forma de sustentação estática. Estudos prévios e considerações adicionais são analisados
para fundamentar o interesse em aprofundar este estudo e compreender as variáveis
envolvidas.
O quarto capítulo apresenta e discute a primeira abordagem - a solução por
rigidez pneumática, sendo composto por um enquadramento científico, uma verificação
analítica e outra com auxílio a software, comparando os resultados obtidos e discutindo-
os numa posterior conclusão.
O quinto capítulo, à semelhança do anterior, é composto por uma análise teórica
e verificação prévia, sendo seguido por nova simulação com auxílio a software, que é
comparada a outras abordagens já propostas, todas relativas à segunda abordagem – a
solução eletrostática.
O último capítulo apresenta as conclusões gerais do trabalho e propostas de
investigação futura, sendo seguido pelas referências consultadas, bem como pelos
anexos, que contêm informações auxiliares sobre os estudos realizados.
Figura 3 – Estrutura do Documento
Capítulo 1
•Introdução
Capítulo 2
•Estado da Arte
Capítulo 3
•A Abordagem por Vácuo
Capítulo 4
•A Solução por Rigidez Pneumática
Capítulo 5
•A Solução Eletrostática
Capítulo 6
•Conclusões e Investigação Futura


7
Capítulo 2
Estado da Arte
Veículos mais leves que o ar, conhecidos popularmente como balões, dirigíveis ou
zepelins, começaram como membranas preenchidas por ar quente e evoluíram para
aeronaves de diversas configurações, utilizando qualquer gás que permita a sustentação.
Estes podem estar conectados ou não à terra e possuir algum método de propulsão ou
permanecer estáticos.
Neste documento, a palavra aeróstato será usada como referência para todos os
veículos que obtêm sustentação devido à diferença positiva de pesos entre o ar deslocado
e a soma dos componentes da respetiva embarcação, nomeadamente o gás de
sustentação que possa ser utilizado e a combinação da carcaça, tripulação e outros
constituintes. Esta classificação inclui todos os tipos de aeronaves de sustentação estática
com ou sem sistemas de controlo e propulsão, contrastando com as aeronaves aladas que
alcançam o voo através de uma sustentação dinâmica.
Serão, logo desde o início, abordados separadamente os aeróstatos sem
propulsão, vulgo balões, e os aeróstatos com auxílio de propulsão, os dirigíveis.
No primeiro caso será descrita a génese e evolução do conceito, bem como os
vários componentes utilizados; no segundo, onde mais avanços foram feitos, discutir-se-
ão as diferenças construtivas entre cada modelo e a evolução histórica que moldou o
progresso destas aeronaves.
Os aeróstatos têm uma grande gama de possibilidades prontas a serem
exploradas. A sua maior vantagem parte do baixo custo energético devido ao facto de
conseguirem pairar por muito tempo sem reabastecer e os seus custos de operação serem
muito inferiores quando comparados aos convencionais aviões de asas fixas e
helicópteros. Estas aeronaves combinam as vantagens dos navios com as dos aviões. A
velocidade de um dirigível é superior à de um navio no mar, os seus níveis de vibração
são inferiores aos dos aviões e não são afetados pelos efeitos corrosivos da água marinha.
Adicionalmente, estes podem descolar sem a necessidade de longas pistas, o que lhes
permite o transporte de cargas de grandes dimensões até áreas remotas. O sistema de
transporte de um aeróstato causa baixa poluição e consegue completar requisitos para
os quais aviões e helicópteros não estão bem preparados. O baixo nível de ruído e
vibrações, bem como uma baixa aceleração, permite também que estes possam ser uma
plataforma ideal de vigilância e patrulha.
Neste documento a história e conhecimento base dos aeróstatos convencionais é
primeiramente analisada; de seguida é descrito o progresso alcançado no
desenvolvimento de aeronaves não convencionais bem como modelos mais recentes,
enquadrando-se tudo no estado da arte atual deste ramo da aviação. Assim, a modelação
estrutural, a análise e otimização do formato e diferentes soluções construtivas em
aeronaves híbridas e de grande capacidade serão discutidas em maior detalhe.

8 Estado da Arte
2.1 Balões-
Um balão é conceptualmente a mais simples de todas as máquinas voadoras. O
balão é constituído por uma membrana de tecido – o envelope - preenchida por um gás
que é mais leve do que a atmosfera circundante. Quando todo o balão é menos denso do
que o ar em seu redor, este sobe levando consigo uma cesta, anexada por baixo, que
transporta passageiros ou qualquer carga útil. Embora um balão não tenha sistema de
propulsão, é possível fazê-lo subir ou descer em altitude, encontrando direções de vento
favoráveis e obtendo assim algum grau de controlo direcional.
2.1.1 História do Balonismo
Os balões de ar quente não tripulados são populares na cultura chinesa. Desde o
século II, com Zhuge Liang na era dos três reinos, que estes eram usados como lanternas
para a sinalização militar. Estas lanternas são conhecidas como lanternas Kongming.
Embora não haja nenhuma evidência documental ou arqueológica direta de que
quaisquer voos tripulados ou não tripulados anteriores àqueles discutidos abaixo tenham
ocorrido usando estes métodos, Ege [2] analisa um relatório indireto de evidências de
que os chineses "resolveram o problema da navegação aérea" usando balões, centenas de
anos antes do século XVIII.
O primeiro voo de balão documentado na europa foi realizado por um padre
português nascido no Brasil, Bartolomeu de Gusmão. A 8 de Agosto de 1709, em Lisboa,
Bartolomeu de Gusmão conseguiu levantar um pequeno balão de papel cheio de ar
quente, cerca de quatro metros à frente do rei D. João V e da corte portuguesa [3]. Apesar
do espanto de todos os presentes, o conceito acabou por não ter seguimento e foi
esquecido.
Figura 4 – Representação da demonstração da passarola [3]

2.1 -Balões- 9
A primeira vez registada de um balão que tenha transportado passageiros foi
construída pelos irmãos Joseph-Michel e Jacques-Etienne Montgolfier, oriundos de uma
família de fabricantes de papel e que notaram a suspensão de cinzas em chamas de papel.
A 19 de setembro de 1783, o Aérostat Réveillon, levava os primeiros seres vivos
num voo controlado (uma ovelha, um pato e um galo), sendo estes transportados numa
cesta anexa ao balão. Esta demonstração foi realizada diante de uma multidão no palácio
real em Versalhes, incluindo o rei Luís XVI de França e a rainha Maria Antonieta. O voo
durou aproximadamente oito minutos, cobrindo 3 km e atingindo uma altura de
aproximadamente 460 m. Os animais desembarcaram em segurança depois da
aterragem.
O primeiro voo de balão amarrado com seres humanos a bordo ocorreu a 19 de
outubro de 1783 com o cientista Jean-François Pilâtre De Rozier, Jean-Baptiste
Réveillon e Giroud de Villette, no Folie Titon em Paris e o primeiro voo livre com
passageiros humanos acontecia a 21 novembro de 1783 também com De Rozier
juntamente com o marquês François d'Arlandes. O balão subiu quase 15 m e em 25
minutos os dois homens viajaram pouco mais de 8 km [4]. Estavam assim estabelecidas
as condições para a corrida à exploração aérea.
Figura 5 – Representação do lançamento histórico do balão dos irmãos Montgolfier [5]
10 Estado da Arte
Apenas alguns dias depois, a 1 de dezembro de 1783, e após a prova do conceito,
o professor Jacques Charles e os irmãos Robert lançaram o primeiro balão de hidrogénio
tripulado a partir do Jardin des Tuileries em Paris, no meio de grandes multidões
incluindo Benjamin Franklin, o representante diplomático dos Estados Unidos da
América e Joseph Montgolfier. O balão com 380 metros cúbicos de hidrogénio tinha o
envelope equipado com uma válvula de libertação de gás, e foi coberto com uma rede a
partir da qual a cesta estava suspensa. Lastros de areia foram usados para controlar a
altitude e o balão subiu a cerca de 550 m. Os tripulantes desembarcaram com sucesso
após um voo de 2 horas e 5 minutos, cobrindo 36 km [6].
Desde esta descoberta que os balonistas procuravam um meio para controlar a
direção dos balões. A partir da implementação dos dirigíveis e até à década de 1960, a
produção de balões sem propulsão caiu em forte declínio. Apenas balões de gás eram
utilizados até essa data em que os balões de ar aquecido foram revitalizados.
Figura 6 – Balões de então comparados aos primeiros aeróstatos dirigíveis, de uma
enciclopédia russa do virar do século XX [7]
Hoje em dia, a ocupação é usada principalmente para fins recreativos, embora o
balonismo também seja reconhecido como um desporto em numerosas competições por
todo o mundo. A sua utilidade é limitada pelo facto de que um balão só pode ser voado
em condições calmas e secas. O balão moderno, descrito na próxima secção, está muito
longe do design original dos Montgolfiers.

2.1 -Balões- 11
2.1.2 Componentes de um Balão de Ar Quente Moderno
Envelope
Esta é a parte colorida do balão. Em balões modernos é feito de um poliamida
reforçado, resistente ao calor. É revestido no interior com uma camada de poliuretano
ou silício que ajuda a reter calor e ar. Entre os voos o envelope é dobrado, enrolado e
armazenado num saco com cerca de 1,5 metros de diâmetro. O envelope é composto por
painéis entre as fitas de carga que passam através do envelope e o anexam ao cesto. As
fitas de carga suportam toda a tensão no envelope e os painéis essencialmente apenas
mantêm o ar quente para que este não escape do envelope.
Válvula paraquedas
No topo do balão há um grande buraco que é usado para esvaziar o balão na
aterragem ou quando se pretende perder elevação. Felizmente, durante o voo, este furo
é selado por uma válvula paraquedas, mantida no lugar pela pressão dentro do balão. O
piloto pode puxar o paraquedas para fora do buraco através de polias usando o cabo da
válvula paraquedas que cai para o cesto.
Cabo da válvula paraquedas
Isto permite ao piloto puxar a válvula paraquedas para esvaziar o balão.
Gomos
Estes são painéis de tecido cortado em ângulos específicos que, quando cosidos
em conjunto, formam a geometria do balão.
Painéis
Estes compõem os gomos.
Cesta
Este é o lugar onde os passageiros e piloto ficam durante o voo. Também contém
os tanques de propano que estão conectados aos queimadores em cima. As cestas do
balão são geralmente ainda feitas a partir dos ramos entrelaçados tradicionais, vulgo
vime, porque nenhum outro material moderno dá a mesma combinação de leveza, força
e flexibilidade. A flexibilidade é especialmente importante para absorver o impacto na
aterragem e salvar os joelhos dos passageiros. Cabos de aço muito fortes passam através
do cesto e por baixo do mesmo, estando ligados às fitas de carga do envelope. A cesta
também pode conter instrumentos como um altímetro e um rádio para ajudar o piloto
na navegação.
Queimador
O queimador é alimentado por tanques de propano abaixo e é geralmente feito de
aço inoxidável. É suportado por postes de suporte de plástico que se encaixam no cesto
e também é conectado ao cesto por meio de cabos de aço. Tanto o envelope como o cesto
estão ligados à armação do queimador, que deve ser forte.

12 Estado da Arte
Saia
A parte mais baixa do invólucro é feita a partir de um material especialmente
resistente ao calor e que serve para desviar qualquer vento da chama do queimador,
permitindo que esta seja dirigida para dentro do invólucro, ajudando assim o balão a
manter a sua forma.
Cilindros de propano
Os cilindros estão localizados na cesta. O propano é altamente comprimido nos
cilindros e assim que libertado flui rapidamente através de mangueiras para a bobina de
aquecimento. Ao acender o queimador, acende-se primeiro uma chama piloto e esta
acende o propano que está inicialmente na forma líquida. À medida que a chama queima,
esta aquece o metal na tubulação circundante que converte o propano para gás. O
propano na forma gasosa é um combustível mais eficiente e cria uma chama mais forte.
Figura 7 – Esquema de um balão de ar quente moderno [8]

2.2 -Dirigíveis 13
2.2 Dirigíveis
Os dirigíveis, aeróstatos com propulsão horizontal, podem ser classificados
consoante a configuração da sua carcaça (não rígidos, semi-rígidos e rígidos), a forma
como produzem sustentação vertical (convencional, alternativa e híbrida), e a sua
capacidade de carga (baixa, média ou alta). A quantidade de carga tradicionalmente
suportada por estes veículos é normalmente inferior a 30 toneladas, no entanto,
aeronaves de grande capacidade podem atingir valores capazes de sustentar 500
toneladas. Os dirigíveis serão seguidamente divididos entre tipos convencionais e não
convencionais.
De uma forma genérica, os dirigíveis convencionais têm um corpo axissimétrico,
geram impulsão através de um gás leve fechado por uma carcaça, têm baixa capacidade
de carga e usam combustíveis fósseis como fonte energética. Todos os outros são
categorizados de uma forma diferente.
Nos dirigíveis não convencionais deverá haver uma alteração de grande impacto
que fuja às tendências convencionais neste ramo da aviação. Esta alteração pode ser
devida à geometria e projeto dos componentes, ao gás de impulsão, a um método
alternativo de sustentação, à capacidade de carga ou ao método de alimentação
energética.
2.2.1 Dirigíveis Convencionais
Os primeiros exemplares de um dirigível tiveram origem em balões de ar quente
através da incorporação de sistemas de propulsão e controlo de direção. Este
desenvolvimento incluiu um processo iterativo o qual, ao longo da história, resultou num
conjunto de sucessos e tragédias.
O primeiro dirigível foi construído pelo engenheiro francês Henru Giffard em
1852. Esta aeronave tinha o comprimento de 43m e o diâmetro de 12m. Completou com
sucesso o seu primeiro voo com uma distância de 27km a uma velocidade de 8km/h [9].
A primeira aeronave rígida foi projetada e construída por David Schwarz, um
comerciante de madeira do império Austro-Húngaro, na década de 1890. Os principais
componentes estruturais desta aeronave (esqueleto e cobertura exterior) foram feitos de
alumínio. Em 1897, durante alguns testes controlados, a experiência acabou em desastre
devido a uma falha na hélice [10]. A Alemanha tomou a liderança no desenvolvimento de
dirigíveis antes da primeira guerra mundial. A companhia alemã Luftschiffbau Zeppelin
era a maior produtora de dirigíveis rígidos no início de século XX. O lendário pioneiro
Graf Ferdinand von Zeppelin desenvolveu o seu primeiro modelo de um dirigível, o LZ1,
em julho de 1900. Tinha um comprimento de 126m, um diâmetro de 12m e atingia uma
velocidade de 32km/h. Os dirigíveis rígidos produzidos por Zeppelin foram na sua
grande maioria utilizados durante a primeira guerra mundial. Entretanto, o trabalho de
Zeppelin produz uma grande variedade de dirigíveis. Os modelos Graf Zeppelin LZ127,
LZ129 e LZ130 conseguiam carregar cargas até 58 toneladas e incluíam compartimentos
luxuosos para passageiros, como nunca antes visto numa aeronave [11].
A França, Itália e Reino Unido também desenvolveram dirigíveis durante a
primeira guerra mundial. O Reino Unido era ativo na construção de dirigíveis rígidos e
não rígidos. Depois da guerra construíram dois modelos rígidos, R34 e R38, e em 1919

14 Estado da Arte
foi completada a primeira viagem transatlântica de ida e volta. Estes dois modelos
destruíram-se passados dois anos. Os esforços britânicos na construção de dirigíveis
pararam devido ao acidente da aeronave R101 a 4 de outubro de 1930 [10]. Tanto a
França como a Itália participaram na construção de modelos semi-rígidos como o Roma
e o Norge. A primeira aeronave americana, chamada California Arrow, foi construída
por Thomas Scott Baldwin em 1904, tinha um comprimento de 16m e era alimentada
por um motor de dois cilindros e 5 cavalos de potência. A indústria americana de
dirigíveis começou em 1911 com a Goodyear and Goodrich como a principal empresa. A
Goodyear construiu o primeiro modelo semi-rígido americano, o RS-1. Os Estados
Unidos abandonaram o uso de hidrogénio como gás de sustentação devido ao desastre
da aeronave italiana Roma em 1922. O primeiro dirigível rígido da marinha americana,
o Shenandoah ZR-1, foi construído segundo o projeto de Zeppelin, mas usaria hélio em
vez de hidrogénio para gerar impulsão. O seu voo inaugural foi a 4 de setembro de 1923.
Muitos dirigíveis semi-rígidos italianos, britânicos e americanos construídos entre 1924
e 1935 despenharam-se devido às mais variadas razões (fogo, nevoeiro, tempestades, etc)
poucos anos depois da sua construção. Ainda assim, foram cada vez mais usados até que
o dirigível LZ129 Hindenburg se despenhou em Lakehurst, Nova Jérsia a 6 de maio de
1937. Esta era a maior aeronave rígida construída até à data e ficou completamente
destruída em pouco mais de 30 segundos. Tinha 240m de comprimento, 40m de
diâmetro e uma velocidade máxima de 130km/h [11].
Figura 8 – Fotografia do desastre do Hindenburg [12]

2.2 -Dirigíveis 15
Apesar do grande abalo que a investigação e desenvolvimento aeronáutico
sofreram após o desastre do Hindenburg, o interesse pelos dirigíveis nunca desapareceu.
Após este acidente, a marinha americana focou-se no projeto e construção de dirigíveis
mais simples, não rígidos e preenchidos por hélio, durante mais de 3 décadas. Após a
segunda guerra mundial, a companhia Goodyear construiu diversas aeronaves não-
rígidas usando os mais recentes materiais e sistemas eletrónicos. Três modelos típicos
foram o Columbia II, o MayflowerIII e o America. Também foi construída a maior
aeronave não-rígida em 1961 – ZPG-3W. Embora a maior parte dos projetos de dirigíveis
desde o pós guerra usasse configurações não-rígidas, várias companhias exploravam
diferentes abordagens para os velhos conceitos [9].
Figura 9 – Cronologia do desenvolvimento dos dirigíveis [9]
Figura 10 – Diferentes configurações de dirigíveis convencionais [13]

16 Estado da Arte
2.2.1.1 Não Rígidos
Os dirigíveis não rígidos são muitas vezes referenciados na literatura de língua
inglesa como “blimps”. O formato de um dirigível não rígido é sustentado pelo diferencial
de pressão entre o gás interno de sustentação e a atmosfera. A figura 11 ilustra a
configuração habitual destes aeróstatos.
O envelope é a membrana que encerra o gás de sustentação, os balonetes e oferece
proteção do exterior. Os balonetes, bolsas internas, são cheios com ar por compressores
para manter uma pressão interna fixa à medida que a temperatura do gás de sustentação
ou a altitude da aeronave mudam. Os balonetes permitem que a pressão do envelope seja
controlada. O enchimento relativo entre o balonete posterior e o anterior estão
associados ao afundamento da cauda ou do nariz da aeronave. Ajustes no volume de ar
nos balonetes e no volume do gás no envelope leva a alterações na sustentação. O peso
da gôndola, compartimento de passageiros e tripulação, é suportado por um sistema de
suspensão interno ajustável por cabos, que é contido no envelope e vai desde o topo até
à gôndola. A principal função do sistema externo de suspensão, preso à parte inferior do
envelope, é a de transferir a componente horizontal da carga da gôndola para o envelope.
O tecido do envelope consiste num compósito laminado e é projetado para aguentar as
cargas de voo e as possíveis agressões do ambiente. O tecido escolhido deverá ter um
elevado rácio resistência-peso de forma a reduzir o peso geral, ter boa resistência à
fluência para manter o volume e geometria constantes, ter baixa permeabilidade para
assegurar a pureza do gás de sustentação e não perder conteúdo, ter elevada resistência
às condições ambientais de forma a proteger a aeronave da temperatura, humidade e
radiação ultravioleta, e ter uma elevada resistência à rutura e fadiga para garantir que
funciona adequadamente durante o tempo de vida estimado. Tecidos mais leves poderão
ser usados nos balonetes visto que estes estão sujeitos a requisitos menos exigentes.
Os dirigíveis não-rígidos têm estruturas mais simples e são mais fáceis de
projetar, construir e conservar. Em comparação com as versões rígidas, os custos de
fabricação são mais baixos e o tempo de produção é também mais baixo. Ainda
comparados com estas, têm também a vantagem do peso geral da carcaça ser inferior, no
entanto, existem contratempos na construção de aeronaves não-rígidas de grandes
dimensões [9]. Uma grande quantidade de tecidos exige costuras de grande
comprimento, uma vasta área de trabalho e métodos mecânicos específicos. O
armazenamento e transporte de hélio para uma grande aeronave pode também ser um
problema. Ademais, a insuflação do envelope e a instalação da estrutura frontal de
suporte e da gôndola devem ser tratadas com cuidado devido à possível interação
indesejada com a carcaça pressurizada.

2.2 -Dirigíveis 17
Figura 11 –Configuração típica de um dirigível não rígido [11]
2.2.1.2 Semi-Rígidos
Os dirigíveis semi-rígidos partilham características dos outros dois tipos. Uma
quilha rígida com um formato aerodinâmico percorre a face inferior desde o nariz até à
cauda. Em contraste face às configurações não-rígidas, o sistema de suspensão catenária
desempenha um papel muito menos significativo e a quilha suporta as cargas primárias.
Esta quilha é usada para eliminar a função principal dos cabos de suspensão e para
distribuir de forma uniforme o peso da cabine ao longo de todo o comprimento do
dirigível. A interação entre a quilha e o envelope poderá ser favorável ou desfavorável. O
suporte mútuo é bom para resistir e distribuir entre ambos os momentos de flexão,
enquanto que o mau encaixe poderá gerar tensões adicionais. Assim, uma análise
cuidada da interação entre a quilha e o envelope é crucial no projeto de dirigíveis semi-
rígidos. É também intuitivo que este tipo de aeronaves têm um peso intermédio entre os
outros dois, visto que a quilha induz cargas estruturais. A figura 12 ilustra a configuração
habitual destes aeróstatos.
Em tempos mais recentes, o desenvolvimento destes dirigíveis foi revitalizado. O
modelo alemão CargoLifter CL160 foi projetado para ter o comprimento de um Boeing
747s (256m) e a altura de um prédio de 27 andares (64m). Como estrutura chave desta
configuração, a quilha oferece suporte para a plataforma de carregamento, a cabine de
tripulação, a armação da carga, as principais unidades de propulsão e o convés interior.
O projeto aerodinâmico do CL160 atingiu uma sustentação ótima e elevados níveis de
eficiência de combustível. Uma inovação notável desta aeronave deve-se ao sistema de
carregamento e descarregamento de cargas que tem lugar em pequenas áreas, servindo-
se de uma grua enquanto o dirigível permanece estático no ar. Esta construção semi-
rígida seria capaz de carregar bens de grande peso e volume até 50 metros de
comprimento, no entanto a conclusão desde projeto foi adiada, em 2002, devido à falta
de fundos [14].

18 Estado da Arte
O Zeppelin NT-07 é um dirigível semi-rígido prestigiado que permitiu a viagem a
mais de 65000 passageiros desde a sua inauguração em 1997. Um exemplar é usado para
turismo na Alemanha, outro serve propósitos de publicidade e aventura no Japão, um
terceiro servia a prospeção de diamantes na África do Sul e o quarto foi produzido nos
Estados Unidos com o intuito de servir tanto propósitos de turismo como para missões
especiais [15].
Figura 12 –Configuração típica de um dirigível semi-rígido [11]
2.2.1.3 Rígidos
Em contraste face aos modelos não-rígidos, os dirigíveis de carcaça rígida podem
manter a sua geometria independentemente da pressão do envelope devido a este estar
suportado, por norma, por um esqueleto metálico. Todas as cargas externas são
suportadas por esta carcaça estrutural. As estruturas de suporte externo são compostas
por um conjunto de vigas transversas que formam armações aproximadamente
circulares e vigas longitudinais atravessadas ao comprimento. As travessas, geralmente
feitas de alumínio, são conectadas com as vigas longitudinais e são abraçadas por cabos
metálicos pré-tensionados de forma a aumentar a resistência estrutural. Muitas das
células que contêm o gás de sustentação são colocadas entre a armação transversal. A
divisão do gás por vários balonetes em aeronaves rígidas aumenta a segurança e evita a
perda súbita e substancial de sustentação em caso de emergência. O ajuste de
sustentação devido a alterações de altitude ou temperatura pode ser conseguido devido
à expansão e compressão individual de células de gás. Os requisitos mecânicos dos
materiais do envelope em aeronaves rígidas são inferiores quando comparados às
versões não-rígidas, uma vez que não existe uma grande suspensão de cargas aplicadas
ao envelope. Por norma, as aeronaves rígidas são construídas com uma armação capaz
de acomodar cargas de todos os tipos e magnitudes. A concentração de tensões nestas
aeronaves é produzida pelos principais elementos da gôndola, asas e motores, que
poderão estar interconectados por estruturas internas. Avanços recentes em novos
materiais e superiores técnicas de conexão permitiram o projeto e construção de
estruturas pressurizadas capazes de alta performance e baixo peso. A figura 13 ilustra a
configuração habitual destes aeróstatos.
O comprimento de aeronaves rígidas deverá ser grande o suficiente para justificar
uma estrutura rígida. É dito por Burgess [16] que este sistema não é apropriado para
volumes abaixo de 1 milhão de pés cúbicos (28316.85 m3). Na verdade, a maioria excede
o dobro deste valor. Embora as aeronaves não-rígidas sejam extensivamente utilizadas,
as carcaças rígidas mostram a sua eficiência e benefícios pois não existem restrições de
tamanho; porque conseguem ultrapassar o colapso do nariz a altas velocidades, que pode

2.2 -Dirigíveis 19
acontecer nas configurações não rígidas, e porque permitem o acesso a áreas internas
para inspeção e reparos. No entanto, o peso adicional deve ser cuidadosamente
analisado. Adicionalmente, as aeronaves rígidas incluem grandes dificuldades na
construção devido ao elevado custo das ferramentas e à alta complexidade estrutural
[17].
Figura 13 –Configuração típica de um dirigível rígido [11]
Atualmente, o mais evoluído exemplar desta solução construtiva é o Dragon
Dream (fig. 14), da empresa americana Worldwide Aeros Corp, que é um dirigível
produzido à escala, como prova de conceito, segundo um projeto apelidado de
Aeroscraft. O protótipo de 35 milhões de dólares, com 82.3 m de comprimento, é capaz
de velocidades na ordem dos 100 km/h e não transporta cargas, mas servirá com ponto
de partida para construções mais ambiciosas.
A verdadeira inovação deste conceito está no facto de serem usadas câmaras com
hélio pressurizado que, através de válvulas pneumáticas, ajustam a sustentação
enchendo câmaras de expansão que assim farão com que a densidade global do veículo
se reduza ou aumente. A estrutura é composta por vigas de alumínio com furos de
precisão para reduzir o peso, com um esqueleto em treliças de fibra de carbono. Também
tem pequenas asas para aumentar a estabilidade bem como quatro patas hovercraft,
para criar almofadas de ar tornando assim mais fácil deslizar por terrenos acidentados.
Para propulsão tem 6 motores de 300 cv cada, retráteis e rotativos, dispostos em pares
para minimizar as vibrações. O voo inaugural aconteceu com sucesso em 2013, embora
a companhia se encontre atualmente num processo judicial depois de o hangar ter
abatido por cima do veículo [18].

20 Estado da Arte
Figura 14 –Dirigível rígido Dragon Dream, do conceito à construção [18]
Como dito anteriormente, qualquer uma das configurações apresenta vantagens
e desvantagens. Na verdade, a escolha irá sempre depender do tamanho do veículo, do
tipo de materiais disponíveis e da aplicação a que se destina, entre vários outros fatores.
2.2.2 Dirigíveis Não Convencionais
Na segunda metade do último século houve um renascimento inesperado e
dramático no desenvolvimento de novos veículos de sustentação estática. Considerável
atenção tem sido prestada a aspetos fora do comum respeitantes à geometria, métodos
de operação híbridos, gases de sustentação inovadores ou grande capacidade de carga.
Em particular destaque encontram-se os dirigíveis híbridos e os veículos de grande
capacidade. Desenvolvimentos preliminares de alguns programas na fase de protótipo
foram alcançados, e muitos projetos agora a decorrer dirigem-se para um futuro
promissor.
2.2.2.1 Geometrias Não Convencionais
Dirigíveis Esféricos
Tradicionalmente, a geometria preferencial para um dirigível é a de um corpo
alongado, estreito e axissimétrico, que obtém um equilíbrio entre a máxima sustentação
e o mínimo de resistência ao ar. No entanto, adotando o formato de balões de ar quente,
as aeronaves modernas também podem ser esféricas. Uma companhia canadiana, a 21st

2.2 -Dirigíveis 21
Century Airships Inc., construiu 6 protótipos perfeitamente esféricos (fig. 15). Este tipo
de aeronave não está equipado com asas de controlo ou uma gôndola externa. De uma
forma alternativa, a gôndola encontra-se dentro do envelope no fundo da esfera e dois
motores são montados no lugar das asas, fora do envelope.
Embora as formas esféricas tragam grande arrasto aerodinâmico
comparativamente a outras configurações, estas também têm vantagens próprias. É
sabido que as geometrias esféricas oferecem a mínima área superficial para um dado
volume entre qualquer outra geometria. Como a área superficial é proporcional ao peso
do envelope, a forma esférica tem um peso mínimo e gera uma impulsão máxima. Além
disso, as formas esféricas trazem excelentes características para a operação e amarração:
o dirigível não precisa de velocidade para aterrar ou descolar como um dirigível
convencional faz e a sua forma esférica permite que este seja amarrado ao chão sem usar
um mastro de amarração [9].
Figura 15 –Dirigível esférico da 21st Century Inc. [9]
A forma esférica descrita e outras formas cónicas podem ser combinadas para
uma configuração otimizada [19], a figura 16 ilustra este projeto geométrico de aeronaves
não rígidas para a exploração de florestas tropicais. Pesquisas experimentais
demonstraram que o coeficiente de arrasto pode ser reduzido em cerca de 50%,
reduzindo-se a turbulência do escoamento, ao colocar um pequeno cone de menor
diâmetro à frente da esfera e, principalmente, outro mais longo e largo atrás [20].
Figura 16 –Esquema de um dirigível não-rígido para a exploração de florestas tropicais [19]
22 Estado da Arte
Dirigíveis Lenticulares
Os dirigíveis lenticulares têm características aerodinâmicas aproximando-os de
asas e, portanto, tornam possível a compensação de qualquer sobrepeso acidental (perda
de hélio, crosta de gelo, etc) através da geração de sustentação dinâmica. A forma
aerodinâmica dos dirigíveis lenticulares também é útil para o controlo em manobras de
voo.
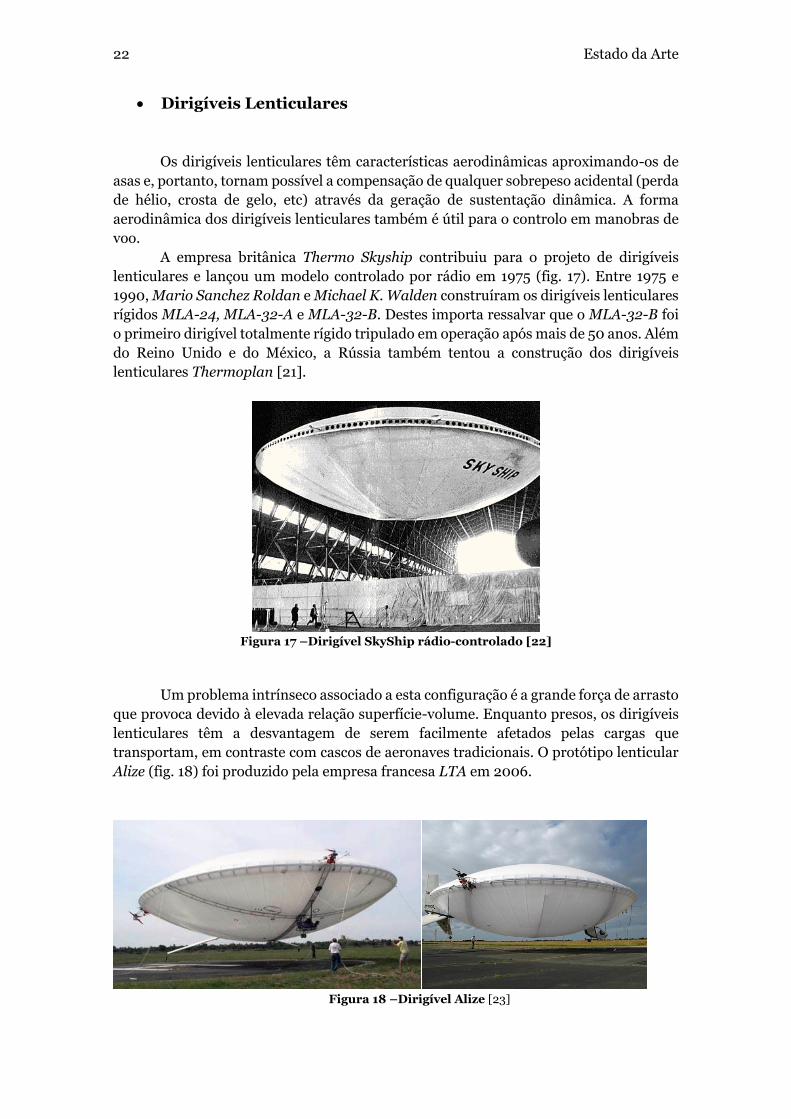
A empresa britânica Thermo Skyship contribuiu para o projeto de dirigíveis
lenticulares e lançou um modelo controlado por rádio em 1975 (fig. 17). Entre 1975 e
1990, Mario Sanchez Roldan e Michael K. Walden construíram os dirigíveis lenticulares
rígidos MLA-24, MLA-32-A e MLA-32-B. Destes importa ressalvar que o MLA-32-B foi
o primeiro dirigível totalmente rígido tripulado em operação após mais de 50 anos. Além
do Reino Unido e do México, a Rússia também tentou a construção dos dirigíveis
lenticulares Thermoplan [21].
Figura 17 –Dirigível SkyShip rádio-controlado [22]
Um problema intrínseco associado a esta configuração é a grande força de arrasto
que provoca devido à elevada relação superfície-volume. Enquanto presos, os dirigíveis
lenticulares têm a desvantagem de serem facilmente afetados pelas cargas que
transportam, em contraste com cascos de aeronaves tradicionais. O protótipo lenticular
Alize (fig. 18) foi produzido pela empresa francesa LTA em 2006.
Figura 18 –Dirigível Alize [23]
2.2 -Dirigíveis 23
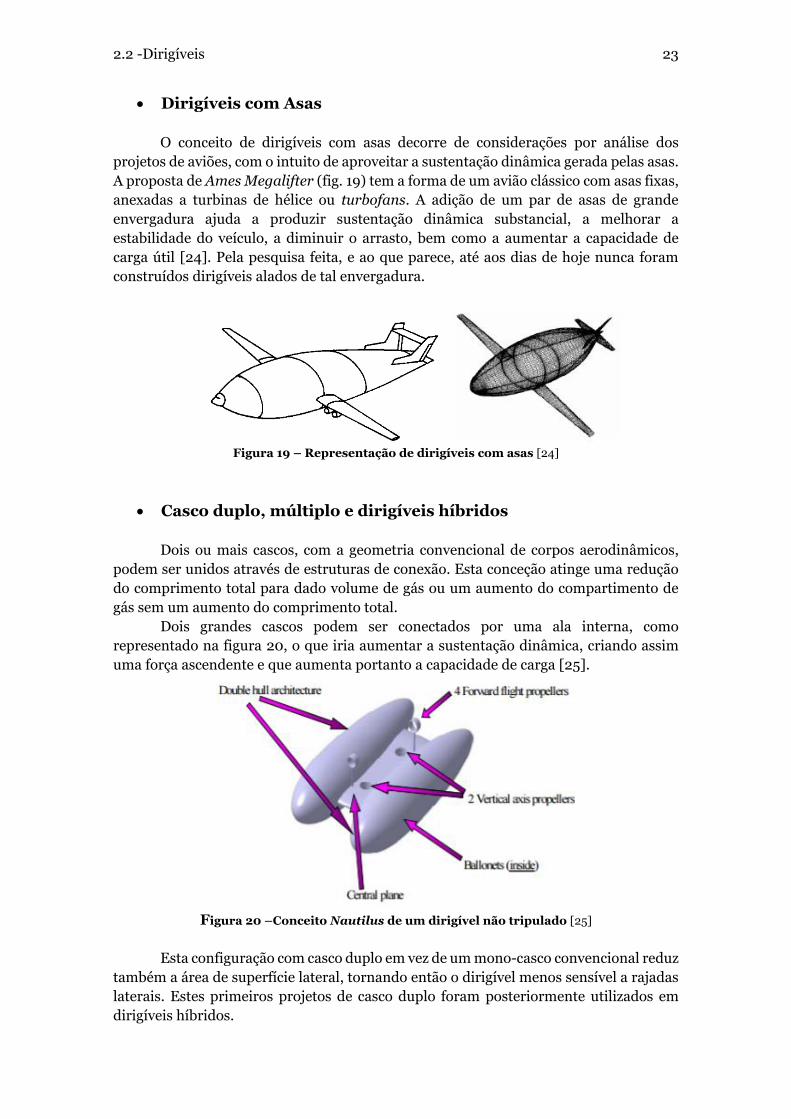
Dirigíveis com Asas
O conceito de dirigíveis com asas decorre de considerações por análise dos
projetos de aviões, com o intuito de aproveitar a sustentação dinâmica gerada pelas asas.
A proposta de Ames Megalifter (fig. 19) tem a forma de um avião clássico com asas fixas,
anexadas a turbinas de hélice ou turbofans. A adição de um par de asas de grande
envergadura ajuda a produzir sustentação dinâmica substancial, a melhorar a
estabilidade do veículo, a diminuir o arrasto, bem como a aumentar a capacidade de
carga útil [24]. Pela pesquisa feita, e ao que parece, até aos dias de hoje nunca foram
construídos dirigíveis alados de tal envergadura.
Figura 19 – Representação de dirigíveis com asas [24]
Casco duplo, múltiplo e dirigíveis híbridos
Dois ou mais cascos, com a geometria convencional de corpos aerodinâmicos,
podem ser unidos através de estruturas de conexão. Esta conceção atinge uma redução
do comprimento total para dado volume de gás ou um aumento do compartimento de
gás sem um aumento do comprimento total.
Dois grandes cascos podem ser conectados por uma ala interna, como
representado na figura 20, o que iria aumentar a sustentação dinâmica, criando assim
uma força ascendente e que aumenta portanto a capacidade de carga [25].
Figura 20 –Conceito Nautilus de um dirigível não tripulado [25]
Esta configuração com casco duplo em vez de um mono-casco convencional reduz
também a área de superfície lateral, tornando então o dirigível menos sensível a rajadas
laterais. Estes primeiros projetos de casco duplo foram posteriormente utilizados em
dirigíveis híbridos.

24 Estado da Arte
A empresa britânica Advanced Technologies Group Ltd. (ATG) em Cardington
empregou um design de casco duplo pressurizado na sua série SkyCat de dirigíveis
híbridos. Em 2016, o modelo Airlander 10 (fig. 21) com 91m de comprimento e
atualmente o maior dirigível em uso, fez o seu voo inaugural, e poderá atingir os 4800
km de altitude [26]. Apesar de todas as evoluções no controlo e manobra empregues
neste veículo, logo no segundo voo foram sentidas complicações na aterragem e o
dirigível sofreu alguns danos, embora sem gravidade.
figura 21 –Airlander 10 no seu voo inaugural [26]
Uma configuração de triplo casco foi proposta pela empresa americana Aereon,
mas nunca foi construída. A empresa Lockheed Martin projetou o dirigível híbrido
experimental P-791 em 2004. Este protótipo com três lóbulos pressurizados foi testado
em voo na instalação da Lockheed Martin na Palmdale Air Force Plant 42 em 2006.
A mesma empresa recebeu recentemente luz verde por parte da US Federal Aviation
Administration para construir o seu novo dirigível híbrido LMH1 (fig. 22). O projeto
avaliado em 40 milhões de dólares, tem a capacidade de 60 toneladas, 21 lugares, atingirá
uma velocidade cruzeiro de 111km/h e será cheio com 36812 m3 de hélio, o equivalente a
15 piscinas olímpicas.
Este tipo de veículo aéreo híbrido poderá conseguir uma redução de 60% no custo
de transporte por tonelada-milha comparativamente com aeronaves de asas fixas [1].

2.2 -Dirigíveis 25
Figura 22 – Representação do dirigível LMH1 da Lockheed, configuração e vantagens [1]
Não há, até à data, geometrias de casco múltiplo com mais de três
compartimentos. Os projetos de casco múltiplo poderão igualmente dar lugar a
construções mais simples de várias unidades com menor tamanho. No entanto,
dependendo da forma escolhida para conexão desses vários cascos, irão certamente
surgir muitas questões na estabilidade e no controlo de voo.
Outras Geometrias Não Convencionais
Outras formas não convencionais incluem o deltoide, o dardo, com o corpo liso,
o toróide ou “donut” e diversas outras formas. Estas geometrias foram projetadas para
servir propósitos diferentes. O modelo Aereon 26 (fig. 23) com forma deltoide foi
projetado para ter um bom rácio entre a sustentação estática e a sustentação dinâmica.
A forma em dardo foi construída com o propósito de atingir alta eficiência de propulsão
[21].
Figura 23 – Dirigível deltoide Aereon 26 [27]

26 Estado da Arte
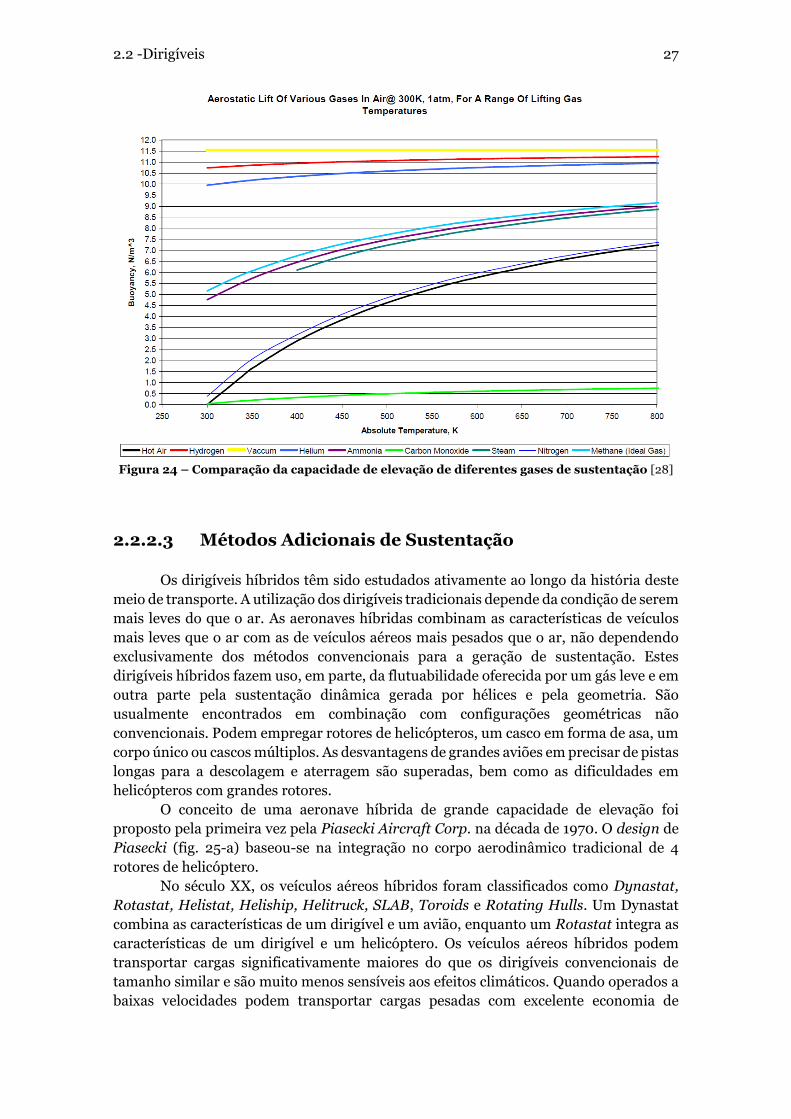
2.2.2.2 Diferentes Gases de Sustentação
Os gases de elevação para veículos aéreos de sustentação estática têm uma
densidade menor do que a do ar circundante. A capacidade de elevação de vários gases
leves e o vácuo são comparados na figura 24. O ar quente, o hidrogénio e o hélio são
tradicionalmente os mais usados.
O hidrogénio fornece a maior elevação, pois tem a menor densidade de todos os
elementos, no entanto requer cuidado extremo no seu manuseio para evitar incêndios
indesejados ou explosões. Este acontecimento é bastante provável se o hidrogénio atingir
a mistura estequiométrica correta quando em contacto com oxigénio, o que pode
acontecer em caso de fuga. Este gás foi usado extensivamente para a sustentação dos
primeiros projetos de aeróstatos, embora após o desastre do Hindenburg tenha sido
substituído pelo hélio, ainda que a sequência exata de todos os eventos presentes no fogo
do Hindenburg e as suas causas não tenham podido ser totalmente determinadas.
O hélio tem uma capacidade de elevação 7,3% menor do que a do hidrogénio, mas
tem também menor densidade que todos os outros tipos de gases. Ao contrário do
hidrogénio, o hélio, sendo um gás nobre, é inerte e incombustível. No entanto é bastante
mais caro do que o hidrogénio e a sua oferta é limitada, porque apesar de ser um
elemento muito abundante no universo, no planeta terra encontra-se apenas em algumas
jazidas e é considerado um recurso não renovável pois não existe uma forma rentável de
o sintetizar.
O metano é relativamente barato e a sua capacidade de elevação encontra-se
entre a do hélio e a do ar quente, no entanto é inflamável.
O amoníaco é corrosivo, mas tem sido considerado para servir como gás
secundário de sustentação. Ao gerar sustentação estática somente para a carga útil, o
amoníaco fornece uma maneira segura de resolver o problema da dificuldade que há em
manter o equilíbrio estático aquando do carregamento ou descarregamento de cargas.
Os métodos tradicionais usados para lidar com este problema incluem a recuperação da
água de exaustão, o impulso vetorizado ou a evacuação e compressão do gás de
sustentação primário. O amoníaco, como um gás de sustentação secundário fornece um
meio não convencional de abordar esta questão [28].
O vapor de água é não inflamável, não corrosivo, não nocivo, barato e sem odor.
Para além disso pode ser facilmente produzido em qualquer lugar. No entanto, para estar
na forma gasosa, a água necessita de estar a uma temperatura mínima de 100 ºC, e à
medida que esta vai condensando nas bordas do envelope terá que ser constantemente
reaquecida, o que fica muito dispendioso. Isto torna esta solução pouco interessante
quando comparada com os restantes gases de sustentação.
O ar quente a 120ºC tem apenas um terço da capacidade de elevação do
hidrogénio à temperatura de congelação da água. Portanto, e como o seu aquecimento
fica muito dispendioso para grandes volumes, é usado principalmente em balões sem
propulsão. No entanto, dirigíveis modernos podem usar o ar quente como gás de
sustentação, diminuindo assim consideravelmente os custos de manutenção
comparativamente à solução com hélio. O maior deste género foi produzido pela Per
Lindstrand Company em 1993.
2.2 -Dirigíveis 27
Figura 24 – Comparação da capacidade de elevação de diferentes gases de sustentação [28]
2.2.2.3 Métodos Adicionais de Sustentação
Os dirigíveis híbridos têm sido estudados ativamente ao longo da história deste
meio de transporte. A utilização dos dirigíveis tradicionais depende da condição de serem
mais leves do que o ar. As aeronaves híbridas combinam as características de veículos
mais leves que o ar com as de veículos aéreos mais pesados que o ar, não dependendo
exclusivamente dos métodos convencionais para a geração de sustentação. Estes
dirigíveis híbridos fazem uso, em parte, da flutuabilidade oferecida por um gás leve e em
outra parte pela sustentação dinâmica gerada por hélices e pela geometria. São
usualmente encontrados em combinação com configurações geométricas não
convencionais. Podem empregar rotores de helicópteros, um casco em forma de asa, um
corpo único ou cascos múltiplos. As desvantagens de grandes aviões em precisar de pistas
longas para a descolagem e aterragem são superadas, bem como as dificuldades em
helicópteros com grandes rotores.
O conceito de uma aeronave híbrida de grande capacidade de elevação foi
proposto pela primeira vez pela Piasecki Aircraft Corp. na década de 1970. O design de
Piasecki (fig. 25-a) baseou-se na integração no corpo aerodinâmico tradicional de 4
rotores de helicóptero.
No século XX, os veículos aéreos híbridos foram classificados como Dynastat,
Rotastat, Helistat, Heliship, Helitruck, SLAB, Toroids e Rotating Hulls. Um Dynastat
combina as características de um dirigível e um avião, enquanto um Rotastat integra as
características de um dirigível e um helicóptero. Os veículos aéreos híbridos podem
transportar cargas significativamente maiores do que os dirigíveis convencionais de
tamanho similar e são muito menos sensíveis aos efeitos climáticos. Quando operados a
baixas velocidades podem transportar cargas pesadas com excelente economia de

28 Estado da Arte
combustível e, portanto, são considerados como uma ferramenta de transporte eficiente
e económica para grandes cargas.
Na Universidade Técnica de Munique, Kuhn et al. [29] projetou um dirigível
híbrido cuja sustentação estática, pelo gás leve no casco, e sustentação dinâmica, pela
sua geometria alada, são usadas para um voo horizontal eficiente em energia; enquanto
que a sustentação estática e o impulso de rotores são usados para pairar eficientemente.
Na década de 1980 um veículo híbrido pesado chamado Aerocrane (fig. 25-d) foi
projetado com um corpo esférico, cheio de hélio e com asas giratórias montadas a partir
do centro do corpo esférico. Os motores giratórios foram instalados nas pontas das asas,
e uma gôndola foi colocada abaixo da esfera. Um modelo dinâmico à escala de um décimo
da carga útil de 50 toneladas foi construído para investigar as características de
estabilidade e controlo. Descobriu-se que a elevada razão impulsão / peso e a baixa
relação de aspeto destes dirigíveis de transporte híbridos, resultam em fortes interações
aerodinâmicas não-lineares entre os rotores e o casco, tornando os veículos aéreos
híbridos de grande carga bastante diferentes dos dirigíveis clássicos.
A Boeing Company e a SkyHook de Calgary, Alberta, começaram a desenvolver a
aeronave de carga pesada JHL-40 em março de 2008. A sua carga útil é suportada por
quatro rotores de helicóptero e o peso vazio do veículo é suportado pela flutuação neutra
do dirigível. Mais recentemente, a empresa canadiana Millennium Airship participou no
projeto e desenvolvimento da SkyFreighter, que é capaz de transportar uma grande
carga para qualquer parte com segurança, rapidez e baixo custo. Nesta solução, o
hidrogénio foi escolhido como um substituto para o combustível Jet A [17].
Figura 25 – Dirigíveis de grande capacidade: (a)HeliStat de Piasecki, (b)Helitruck,
(c)Heliship, e (d)conceito Aerocrane [21]

2.2 -Dirigíveis 29
2.2.2.4 Outras Soluções Não Convencionais
Os dirigíveis do tipo Metal-Clad, revestidos a metal, são dirigíveis que têm um
envelope em metal muito fino e hermético, em vez do envelope de tecido comum. Apenas
quatro dirigíveis deste tipo foram construídos e apenas dois chegaram a voar: o aeróstato
de alumínio contruído por Schwarz em 1893 entrou em colapso com a insuflação; a
segunda aeronave de Schwarz voou em Tempelhof, Berlim em 1897, aterrou em
segurança mas desabou em seguida; o ZMC-2 voou 752 vezes entre 1929 e a sua
destruição em 1941; enquanto que a aeronave Slate City de Glendale foi construída em
1929 mas nunca voou [30].
Figura 26 – Dirigível Metal-Clad ZMC-2 [30]
Tem havido várias tentativas de utilizar materiais não convencionais para
construir veículos de sustentação aérea. Materiais inteligentes ou ativos têm sido
empregues na construção de componentes para aeronaves. Os materiais ativos podem
detetar e responder a estímulos externos e do ambiente, o que é especialmente útil para
estruturas que requerem recuperação de uma deformação. Estes materiais inteligentes
incluem ligas de memória de forma, materiais piezoelétricos, elastómeros dielétricos, etc.
Quando adicionados a aeronaves, estes irão permitir a mudança de volume,
armazenamento e posterior recuperação. As ligas de memória de forma têm
características únicas de grande dissipação de energia, que asseguram a supressão do
choque e vibração, como por exemplo, a absorção e redução da energia de impacto
durante a aterragem. Os elastómeros dielétricos funcionam como atuadores para
fornecer as tensões ativas necessárias para deformações corporais específicas, como o
movimento de flap na cauda ou a deformação intencional do envelope [31].
Estruturas pneumáticas inovadoras foram propostas para construir aeróstatos
não convencionais cuja conexão ao envelope de tubos ocos rígidos pela pressão interna
tornou possível relacionar a pressão de ar com a deformação do envelope, reduzindo o
peso global e reforçando a integridade estrutural [32].
Pesquisas significativas também têm sido conduzidas para desenvolver aeronaves
de grande altitude movidas a energia solar e outros dirigíveis estratosféricos. A Lockheed
Martin Maritime Systems & Sensors projetou uma aeronave de grande altitude com um
comprimento de 150 m e um diâmetro de 45 m. Este modelo de dirigível estratosférico
foi testado a fim de demonstrar a viabilidade da engenharia e potencial utilidade militar
de um dirigível solar não tripulado e sem combustível flutuando a uma altitude de mais
de 18 km.

30 A Abordagem por Vácuo
Capítulo 3
A Abordagem por Vácuo
3.1 Estudos com Casca Rígida
3.1.1 História e Princípio
Apesar de todos os métodos acima descritos, a primeira sugestão de voo por
sustentação estática, dada pouco depois da natureza do vácuo ter sido descoberta, foi
proposta em 1670, por um monge jesuíta, Francesco Lana de Terzi, que sugeriu um
veículo aéreo por evacuação de ar no seu livro “Prodromo dell'Arte Maestra”, publicado
em Brescia na Itália.
O modelo pioneiro de Francesco (fig. 27) usava quatro esferas perfeitas de cobre,
que seriam evacuadas internamente, com cerca de 8 metros de diâmetro e um décimo de
milímetro de espessura. Embora tais estruturas nunca conseguissem aguentar a pressão
da atmosfera em condições reais, e que o seu projeto nunca tenha sido construído, todos
os cálculos hidrostáticos envolvidos eram válidos e o princípio muito pertinente.
Figura 27 – Embarcação voadora de Francesco de Lana[33]
A partir desta proposta e nos tempos modernos, as soluções encontradas usando
este princípio passam pela utilização de gases mais leves que o ar, analisados no capítulo
anterior, para conseguir a impulsão desejada. No entanto, como também já foi referido,
cada um tem as suas desvantagens e todos apresentam entraves ao uso pleno desta
tecnologia.

3.1 -Estudos com Casca Rígida 31
Os balões de vácuo, como solução alternativa, apresentam um poder elevatório
máximo (fig. 24), e poderiam permanecer a flutuar permanentemente através do
bombeamento do ar que se encontre dentro do volume limitado, utilizando também esse
sistema para regular a densidade total, e assim a sua cota vertical.
Outra grande vantagem desta abordagem é devida à mais fácil obtenção de
impermeabilidade no envelope da aeronave face à utilização de gases mais leves que o
ar. Isso dá-se devido ao tamanho molecular das partículas do ar ser maior que a de gases
mais leves e, portanto, é mais simples conter todo o gás sem que este escape.
Esta solução, como proposta por Francesco, exigiria para cada uma das esferas
uma casca rígida de forma a que o interior possa ser evacuado.
O problema principal com este conceito, no entanto, é que mesmo com um vácuo
relativo no interior da casca, a pressão atmosférica exerceria forças enormes sobre esta,
fazendo com que esta colapse caso não seja suportada. Embora seja possível reforçar a
casca com uma estrutura interna, é teorizado que qualquer estrutura à compressão, forte
o suficiente para suportar as cargas, iria pesar tanto que invariavelmente excederia a
capacidade total de elevação do aeróstato, impedindo o voo.
Tal conclusão, analisada nas próximas subsecções, afastou os intelectuais desta
ideia, e impediu o sucesso do projeto.
3.1.2 Restrições dos Materiais
Fazendo uma análise simplista às forças atuantes em meia casca esférica (fig. 28),
pode notar-se que a pressão atmosférica 𝑃𝑎, sendo independente da direção, é exercida
uniformemente na área da secção equatorial da esfera oca em estudo.
A força total aplicada na área superficial desta semi-esfera de raio r é, portanto,
dada por: 𝐹 = 𝑃𝑎 ∙ 𝐴 = 𝑃𝑎 ∙ 𝜋 ∙ 𝑟2 .
Figura 28 – Pressão atmosférica e forças de simetria atuantes em meia casca esférica [34]
Para a esfera se encontrar em equilíbrio estático, a força total em cada hemisfério
tem que se equilibrar ao longo do equador. Para calcular o esforço de compressão a que
o sistema estaria sujeito, divide-se esta força pela área da parede que suporta as pressões,
que para o caso de paredes finas se pode simplificar como sendo um retângulo de
comprimento 2𝜋𝑟 e largura h. A tensão compressiva é então dada por:

32 A Abordagem por Vácuo
𝜎 =𝜋𝑟2𝑃𝑎
2𝜋𝑟ℎ=
𝑟𝑃𝑎
2ℎ (1)
Onde h é a espessura da casca.
Sabendo que a casca será evacuada, o estado neutro de flutuação ocorre quando
o volume ocupado pela esfera tem a mesma densidade que o ar. Como o volume de ar
que a esfera desloca é dado por 4
3𝜋𝑟3, então a massa desse ar seria
4
3𝜋𝑟3 ∙ 𝜌𝑎, onde 𝜌𝑎 é a
densidade do ar. Fazendo a aproximação anterior para o volume da casca, este seria
4𝜋𝑟2ℎ e a respetiva massa será de 4𝜋𝑟2ℎ ∙ 𝜌𝑒, onde 𝜌𝑒 é a densidade da esfera assumida
como homogénea. Igualando e simplificando ambas as massas, resulta:
4
3𝜋𝑟3 ∙ 𝜌𝑎 = 4𝜋𝑟2ℎ ∙ 𝜌𝑒 ⟺
ℎ
𝑟=
𝜌𝑎
3𝜌𝑒 (2)
A combinação com a equação (1) resultou no valor da tensão de compressão na
secção equatorial da casca esférica:
𝜎 =3
2.𝜌𝑒
𝜌𝑎. 𝑃𝑎 (3)
Segundo Akhmeteli e Gavrilin [34], substituindo os valores para ligas de
alumínio, este cálculo poderia estimar um esforço inferior ou correspondente à
resistência à compressão deste material, validando assim o conceito. No entanto, como
também é referido por estes autores, esta análise é insuficiente para prever a resistência
de uma fina casca esférica quando evacuada.
Em 1915, R. Zoelly e A. Van der Neut realizaram um importante trabalho teórico
sobre cascas esféricas, usando a teoria clássica das pequenas deflexões e pela solução de
equações diferenciais. Com base neste trabalho, a pressão crítica de encurvadura elástica
para cascas esféricas, finas e completas é dada por
𝑃𝑐𝑟 =2𝐸ℎ2
√3(1 − 𝜗2).
1
𝑟2 (4)
Onde 𝐸 é o módulo de elasticidade e 𝜗 é o coeficiente de Poisson da casca.
Escrevendo a equação anterior na forma 2𝐸(
ℎ
𝑟 )2
√3(1−𝜗2) e substituindo para um valor
típico de 𝜗 = 0.3, a equação simplifica-se para:
𝑃𝑐𝑟 = 1.21𝐸( ℎ
𝑟 )2 (5)
Substituindo uma dedução da equação (2) na equação (4) é dada uma condição
necessária para uma casca ser viavelmente evacuada:
𝐸
𝜌𝑒2
=9𝑃𝑐𝑟√3(1 − 𝜇2)
2𝜌𝑎2
(6)
3.1 -Estudos com Casca Rígida 33
Se esta expressão for resolvida para a densidade atmosférica e for atribuído o
valor típico ao coeficiente de Poisson, obtém-se um requisito de cerca de 4.5 ∙
105𝑘𝑔−1𝑚5𝑠−2.
Akhmeteli e Gavrilin afirmam que esse valor nem sequer poderia ser alcançado
usando o diamante (𝐸
𝜌𝑠2 ≈ 1 ∙ 105), e recomendou que se deveria deixar cair a hipótese de
que a casca é um material homogéneo, propondo uma estrutura em ninho de abelha,
nunca tendo esta, porém, avançado do papel [34].
No momento do desenvolvimento desta teoria clássica, que levou à equação (4),
não havia trabalho experimental que a corroborasse e vários anos mais tarde, alguns
testes relatados no California Institute of Technology [35] mostraram que a pressão
crítica de encurvadura experimental poderia ser tão baixa quanto 25% do valor teórico
dado pela equação (4).
O valor obtido por meio desta equação foi então considerado como o limite
superior da encurvadura elástica clássica, enquanto vários investigadores iniciaram
estudos com o objetivo de explicar essas diferenças bastante drásticas entre a teoria e a
prática. Rapidamente se suspeitou que o efeito da curvatura e imperfeições na forma
esférica poderiam ter sido responsáveis pelas discrepâncias.
Depois de uma série de suposições simplificativas necessárias, von Kármán e
Tsien [35] desenvolveram uma fórmula para o limite de flexão elástica inferior da pressão
de colapso, que para o mesmo valor de 𝜗 resultou em:
𝑃𝑐𝑟 = 0.37𝐸( ℎ
𝑟 )2 (7)
Este valor da pressão de colapso pode dizer-se que corresponde à pressão teórica
mínima que mantem a forma geométrica da casca, com deformações finitas, em
equilíbrio. Esta equação pareceu comparar-se favoravelmente com resultados
experimentais, e na prática, a pressão crítica de encurvadura é mais próxima do valor
obtido pela equação (7), sendo esta fórmula frequentemente recomendada para projetar
estes sistemas.
Por outro lado, a pressão de encurvadura superior dada pela equação (4), apenas
poderá ser usada caso sejam tomadas precauções experimentais e de fabrico extremas.
De qualquer forma, e após esta correção, é verificado que o valor experimental da
pressão crítica de encurvadura para 𝜗 = 0.3 é 3.27 vezes inferior ao valor teórico,
representando assim um desafio ainda mais significativo no projeto de cascas esféricas
evacuadas, de modo que tal design ainda não se encontre disponível com os atuais
métodos de produção.

34 A Abordagem por Vácuo
3.1.3 Aplicação em Condições Extraterrestres
Um aeróstato evacuado deve, pelo menos, flutuar segundo a lei de Arquimedes e
resistir à pressão externa, dependendo da sua geometria.
Shikhovtsev [36], procura enquadrar estas duas condições em situações
extraterrestres, concluindo que de todos os planetas e luas conhecidos no sistema solar,
apenas a atmosfera venusiana tem a densidade grande o suficiente para, com a impulsão
gerada, ser capaz de superar o peso de uma casca rígida que consiga resistir à pressão
externa quando evacuada. De uma forma prática, isto seria possível empregando
materiais compósitos de alto desempenho, abaixo da altitude de cerca de 15 km.
Independentemente do seu peso, para qualquer que seja o material selecionado,
este teria também que sobreviver na atmosfera venusiana que é altamente corrosiva.
Shikhovtsev mostra também que planetas com atmosferas densas, frias e de alto peso
molecular são os mais adequados para estes aeróstatos de vácuo, mas este, no entanto, é
um tipo raro de atmosfera.
3.2 Estudos com Membrana Não Rígida
A história de aeróstatos ou câmaras evacuadas de membrana não rígida está um
pouco desconectada, havendo muito poucos estudos a este respeito e tendo sido
extremamente difícil para o autor encontrar bibliografia relativa a esta hipótese. Von
Guericke criou o primeiro vácuo artificial em 1654. As câmaras de vácuo tradicionais
eram cascas espessas e pesadas, tendo a espessura necessária para dar uma estabilidade
suficiente que evite a encurvadura. Em 1878, Tracy patenteou uma aeronave que visava
conseguir a flutuabilidade a partir de vácuo encerrado num recipiente leve, mas instável.
Em 1921, Armstrong [37] patenteou outro veículo semelhante, que reivindicou conseguir
estabilizar o seu volume de vácuo num compartimento insuflável e leve, mas que também
se provou instável. Mais recentemente, Michaelis e Forbes [38] discutiram as forças
básicas necessárias para alcançar o equilíbrio (não a estabilidade) num reservatório de
vácuo solicitado à tração e propuseram uma câmara de vácuo insuflável e leve. Lennon e
Pellegrino [39] discutiram a estabilidade de estruturas insufladas, porém foi Barton [40]
o primeiro a realizar uma análise de estabilidade de um reservatório de vácuo insuflável
e solicitado à tração.
Nos capítulos seguintes discutir-se-ão duas abordagens de aeróstatos não rígidos
evacuados internamente.

3.3 -Considerações Adicionais 35
3.3 Considerações Adicionais
3.3.1 Variação das Propriedades Físicas da Atmosfera
com a Altitude
A Atmosfera Padrão Internacional ou ISA (International Standard
Atmosphere) é um modelo atmosférico que descreve como a pressão, temperatura,
densidade e viscosidade da atmosfera da Terra se comportam em função de uma ampla
gama de altitudes. Este padrão foi estabelecido para fornecer uma referência comum
para a temperatura e pressão, consistindo em tabelas com valores para várias altitudes,
bem como algumas fórmulas a partir das quais esses valores foram derivados. A
Organização Internacional de Normalização (ISO) publicou o ISA como a norma
internacional, ISO 2533: 1975 [41].
A pressão atmosférica é o valor total do peso do ar, por unidade de área, acima do
ponto onde a pressão é medida. Assim, a pressão do ar varia com a localização e com o
tempo.
Se toda a massa da atmosfera tivesse uma densidade uniforme a partir do nível
do mar, esta terminaria abruptamente a uma altitude de 8,5 km. No entanto, a sua
densidade diminui exponencialmente com a altitude, caindo para metade a cada 5,6 km
ou por um fator de 1
℮ a cada 7,64 km, sendo esta a altura de escala média da atmosfera
abaixo dos 70 km. Na verdade, as propriedades atmosféricas são mais precisamente
modeladas com uma equação específica para cada camada, tendo em conta variáveis de
temperatura, composição molecular, radiação solar e aceleração da gravidade.
Em resumo, a massa da atmosfera terrestre é distribuída aproximadamente por
50% abaixo dos 5.6 km, 90% abaixo dos 16 km e 99,99997% abaixo dos 100 km, a linha
Kármán.
Por convenção internacional, este último valor marca o início do espaço onde
viajantes humanos são considerados astronautas.
Em comparação, o cume do Monte Everest está a 8,848 m, os aviões comerciais
viajam tipicamente entre os 10 e os 13 km de altitude onde o ar rarefeito melhora a
economia de combustível, os balões meteorológicos atingem os 30 km ou mais e o voo
mais alto alguma vez realizado, em 1963 por um X-15, alcançou os 108 km. Acima da
linha de Kármán, efeitos significativos como auroras ou o brilho de meteoros ainda
ocorrem. As várias camadas da ionosfera da Terra, fundamentais para a vida terrestre,
começam abaixo dos 100 km e ultrapassam os 500 km. No limite superior, a Estação
Espacial Internacional e os vaivéns espaciais normalmente orbitam entre os 350 e os 400
km. Na figura seguinte encontram-se representadas estas variações nas propriedades em
função da altitude.
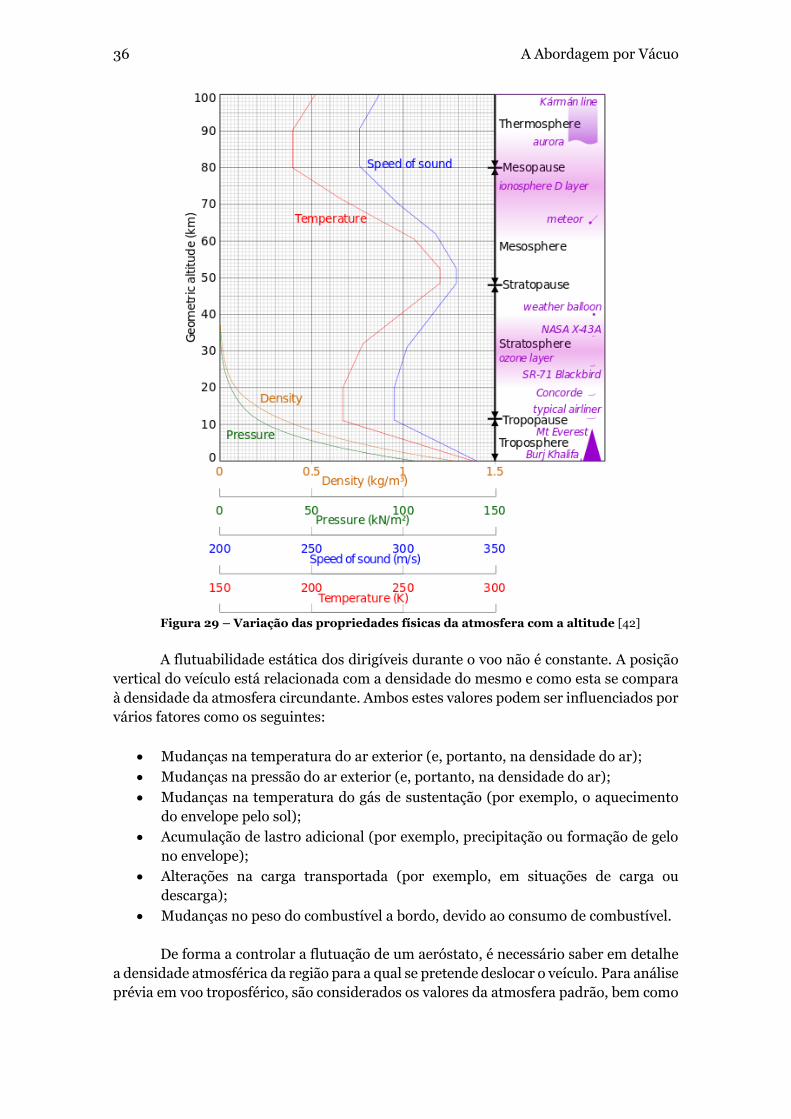
36 A Abordagem por Vácuo
Figura 29 – Variação das propriedades físicas da atmosfera com a altitude [42]
A flutuabilidade estática dos dirigíveis durante o voo não é constante. A posição
vertical do veículo está relacionada com a densidade do mesmo e como esta se compara
à densidade da atmosfera circundante. Ambos estes valores podem ser influenciados por
vários fatores como os seguintes:
Mudanças na temperatura do ar exterior (e, portanto, na densidade do ar);
Mudanças na pressão do ar exterior (e, portanto, na densidade do ar);
Mudanças na temperatura do gás de sustentação (por exemplo, o aquecimento
do envelope pelo sol);
Acumulação de lastro adicional (por exemplo, precipitação ou formação de gelo
no envelope);
Alterações na carga transportada (por exemplo, em situações de carga ou
descarga);
Mudanças no peso do combustível a bordo, devido ao consumo de combustível.
De forma a controlar a flutuação de um aeróstato, é necessário saber em detalhe
a densidade atmosférica da região para a qual se pretende deslocar o veículo. Para análise
prévia em voo troposférico, são considerados os valores da atmosfera padrão, bem como

3.3 -Considerações Adicionais 37
um rácio L de descida linear da temperatura. As equações e valores seguintes descrevem
o procedimento habitual.
𝑝 = 𝑝0(1 −𝐿ℎ
𝑇0)
𝑔𝑀𝑅𝐿 (8)
𝑇 = 𝑇0 − 𝐿ℎ (9)
𝜌𝑒𝑥𝑡 =𝑝𝑀
𝑅𝑇 (10)
Tabela 1 – Parâmetros a considerar na determinação da densidade exterior
Parâmetro Descrição Valor 𝑝0 Atmosfera padrão ao nível do mar 101325 Pa
𝐿 Rácio da descida de temperatura = g/𝑐𝑝 para
ar seco 0.0065 K/m
𝑇0 Temperatura padrão ao nível do mar 288.15 K
𝑔 Aceleração da gravidade 9.80665 m/s2
𝑀 Massa molar do ar seco 0.0289644 kg/mol
𝑅 Constante universal dos gases perfeitos 8.31447 J/(mol.K) h Altitude considerada -
Em pleno voo é fundamental conhecer o valor da densidade com o maior rigor
possível e, portanto, são usados aerómetros que, através de diferentes processos,
apresentam o valor real da densidade do ar circundante. Diferentes métodos de medição
de densidade apresentam-se de seguida:
Medidores de densidade de Coriolis - também conhecidos como medidores de
fluxo de massa ou medidores de fluxo inerciais, trabalham com base no princípio
de vibração para medir os desvios de fase na vibração de um tubo dobrado de
parede fina;
Medidores de densidade Nucleares - trabalham com base no princípio da
medição da radiação gama emitida por uma fonte. A densidade do meio é
inversamente proporcional à radiação capturada, o que é observado pelo
aparelho medidor;
Medidores de densidade Microondas - têm várias maneiras de medir os sólidos
que estão presentes na amostra, como medindo a mudança de velocidade na
propagação das ondas microondas, a redução da amplitude, alterações no
período, ou desvios de fase;
Medidores de densidade Ultrassónica - utilizam vários princípios para calcular a
densidade. No método conhecido como o princípio do tempo de trânsito, dois
transdutores são montados nos lados das paredes do tubo e alternam entre enviar
e receber sinais ultrassónicos. A partir desta medição do tempo de trânsito,
calcula-se a velocidade de fluxo e o caudal volúmico com base no diâmetro do
tubo;
Medidores de densidade gravítica - trabalham com base no princípio da
gravidade para calcular a densidade de uma amostra.
38 A Abordagem por Vácuo
3.3.2 Expansão Isentrópica versus Expansão Isentálpica
Ao calcular as mudanças de sustentação resultantes de um intencional
preenchimento do vácuo ou libertação do gás interno, a distinção entre expansão
isentrópica e expansão isentálpica deve ser tida em consideração. Quando um gás ideal
é expandido de tal maneira que a quantidade máxima de trabalho seja extraída (como
por exemplo num êmbolo) a temperatura do gás diminui e a entropia permanece
inalterada. Esta é a expansão isentrópica. De forma idêntica, a compressão isentrópica
de um gás ideal resulta em aquecimento. Alternativamente, quando um gás ideal é
expandido de uma maneira a que nenhum trabalho seja extraído (por exemplo através
de um tampão poroso), a temperatura e entalpia do gás mantêm-se (assumindo que a
velocidade e a energia cinética são desprezáveis). Esta expansão é isentálpica.
Considerando um reservatório evacuado que é aberto para a atmosfera (não
dentro de um dirigível, como se irá propor na subsecção 4.5), a expansão da atmosfera
circundante para dentro do reservatório pode ocorrer quer isentropicamente quer
isentalpicamente. Para qualquer caso, as energias térmica, cinética e potencial (a partir
do trabalho atmosférico) devem permanecer inalteradas, conforme requerido pela
conservação de energia. Para a expansão ser mais rápida, é aberto um orifício ou bocal
entre a atmosfera e o interior do tanque de vácuo. Neste caso, a energia de trabalho da
expansão isentrópica do gás acelera-o à medida que este passa através da abertura.
Assim, a temperatura do gás diminui, mas a sua velocidade aumenta. À medida que a
energia cinética se dissipa através da ação da viscosidade, esta é convertida de volta em
energia térmica e, assim, o estado final é o mesmo que se a expansão tivesse sido
isentálpica, em que as energias cinéticas são dissipadas à medida que são produzidas
dentro da abertura. Em qualquer dos casos, o trabalho que a atmosfera faz para empurrar
o gás através do orifício, bocal ou bujão poroso é finalmente encontrado no tanque de
vácuo na forma de energia térmica. Conforme mais gás vai entrando no tanque, aquele
que já lá se encontra será comprimido isentropicamente fazendo com que a sua
temperatura aumente. No estado final, quando as pressões dentro e fora do tanque forem
iguais, Barton [43] calcula que a energia potencial da atmosfera diminuiu numa
quantidade igual a 𝑝0∆𝑉𝑎𝑡𝑚, onde 𝑝0 é a pressão atmosférica, e ∆𝑉𝑎𝑡𝑚 é o volume da
atmosfera que se moveu para dentro do tanque de vácuo. No estado final, as
propriedades de gás perfeito da quantidade n de ar (em moles) que se encontra no
reservatório são:
𝑝0𝑉𝑟 = 𝑛𝑅𝑇𝑟 (11)
𝑈𝑟 =5
2𝑛𝑅𝑇𝑟 (12)
Este mesmo gás, no estado inicial, também obedece à lei dos gases perfeitos:
𝑝0∆𝑉𝑎𝑡𝑚 = 𝑛𝑅𝑇0 (13)
𝑈0 =5
2𝑛𝑅𝑇0 (14)
3.3 -Considerações Adicionais 39
No estado final, a sua energia interna deve aumentar pela quantidade de trabalho
desenvolvida pela pressão atmosférica. Assim resulta:
𝑈𝑟 = 𝑈0 + 𝑃0∆𝑉𝑎𝑡𝑚 (15)
Combinando as equações (11-16) resulta em:
𝑇𝑟 =7
5𝑇0 ∆𝑉𝑎𝑡𝑚 =
5
7𝑉𝑟 (16)
Assim, a mudança na flutuabilidade do reservatório de vácuo após a sua abertura
é apenas de cinco sétimos relativamente à quantidade de ar que entra e do seu respetivo
peso. Os dois sétimos restantes aparecem apenas quando o calor gerado pelo atrito se
dissipar para o ambiente. Numa atmosfera de hélio (um gás monatómico), essas frações
serão de três quintos e dois quintos, respetivamente.
Assim, para uma aeronave com um tanque de vácuo que é aberto à atmosfera e
encha, um total de 71% da diminuição da flutuação vêm imediatamente e os restantes
29% da diminuição vêm gradualmente durante 15 a 20 minutos. A temperatura média
no tanque de vácuo após todo este processo de enchimento é de sete quintos da
temperatura ambiente. Logicamente este valor irá sempre variar consoante o bocal
escolhido e este número nunca pode ser considerado como fixo.
3.3.3 Falha do Sistema de Sustentação por Vácuo
Quando exposto aos requisitos de funcionamento, a membrana ou casca de um
reservatório de vácuo pode falhar de duas maneiras principais: fuga e explosão. No
primeiro, a membrana impermeável aos gases que envolve o tanque de vácuo pode
falhar, por qualquer rompimento, permitindo que o gás circundante vaze para o volume
evacuado. No caso de fugas lentas, a bomba de ar pode extrair o ar do interior sem
nenhum efeito importante no dirigível. No entanto, quando o bombeamento e a
evacuação do ar não conseguem acompanhar o ritmo da fuga, este ganho de ar resultará
numa redução incontrolável da flutuabilidade.
Se a fuga for rápida ou resulta de uma rutura violenta do tecido do reservatório
de vácuo, as vias disponíveis para o ar que flui podem ser insuficientes para evitar uma
sobre-pressurização do dirigível e isto poderá resultar em danos estruturais relevantes.
Em antecipação a tais dificuldades, poder-se-ia potencialmente projetar o dirigível para
falhar de uma maneira específica quando sobre-pressurizado, de modo a que a pressão
seja rapidamente aliviada, sendo os danos confinados a uma única área, e assim
minimizando as perdas de elevação.
Após qualquer falha deste sistema de sustentação por vácuo, a função de controlo
de flutuação, necessária para movimentar o aeróstato, estará comprometida. Um
desembarque de emergência poderá então ser assegurado por meios adicionais que
garantam a segurança do veículo (alteração do efeito de elevação dinâmica, amarração,
impulsão vetorizada, descarga de algum gás de elevação, etc.).
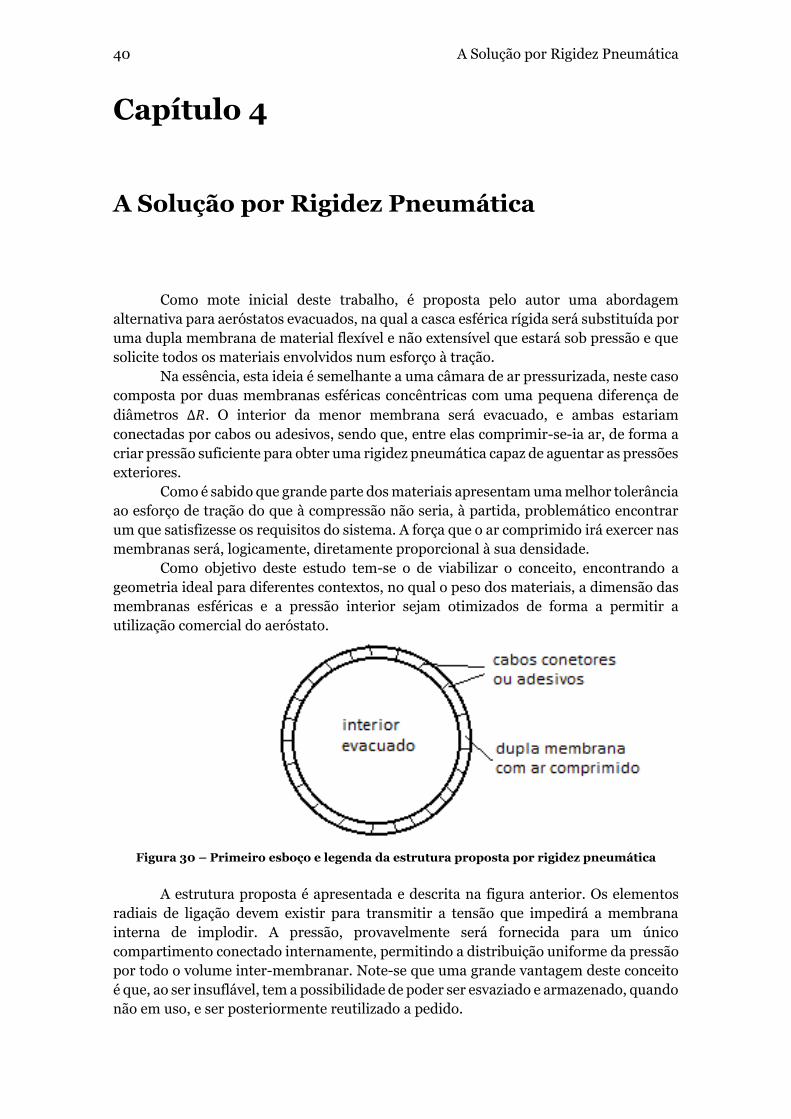
40 A Solução por Rigidez Pneumática
Capítulo 4
A Solução por Rigidez Pneumática
Como mote inicial deste trabalho, é proposta pelo autor uma abordagem
alternativa para aeróstatos evacuados, na qual a casca esférica rígida será substituída por
uma dupla membrana de material flexível e não extensível que estará sob pressão e que
solicite todos os materiais envolvidos num esforço à tração.
Na essência, esta ideia é semelhante a uma câmara de ar pressurizada, neste caso
composta por duas membranas esféricas concêntricas com uma pequena diferença de
diâmetros ∆𝑅. O interior da menor membrana será evacuado, e ambas estariam
conectadas por cabos ou adesivos, sendo que, entre elas comprimir-se-ia ar, de forma a
criar pressão suficiente para obter uma rigidez pneumática capaz de aguentar as pressões
exteriores.
Como é sabido que grande parte dos materiais apresentam uma melhor tolerância
ao esforço de tração do que à compressão não seria, à partida, problemático encontrar
um que satisfizesse os requisitos do sistema. A força que o ar comprimido irá exercer nas
membranas será, logicamente, diretamente proporcional à sua densidade.
Como objetivo deste estudo tem-se o de viabilizar o conceito, encontrando a
geometria ideal para diferentes contextos, no qual o peso dos materiais, a dimensão das
membranas esféricas e a pressão interior sejam otimizados de forma a permitir a
utilização comercial do aeróstato.
Figura 30 – Primeiro esboço e legenda da estrutura proposta por rigidez pneumática
A estrutura proposta é apresentada e descrita na figura anterior. Os elementos
radiais de ligação devem existir para transmitir a tensão que impedirá a membrana
interna de implodir. A pressão, provavelmente será fornecida para um único
compartimento conectado internamente, permitindo a distribuição uniforme da pressão
por todo o volume inter-membranar. Note-se que uma grande vantagem deste conceito
é que, ao ser insuflável, tem a possibilidade de poder ser esvaziado e armazenado, quando
não em uso, e ser posteriormente reutilizado a pedido.

4.1 -Verificação Analítica do Conceito 41
4.1 Verificação Analítica do Conceito
A maioria dos reservatórios de vácuo são construídos com paredes rígidas sujeitas
à compressão e não à tração. Este método de design intuitivo não consegue empregar
uma das melhores propriedades dos materiais: a alta resistência à tração, e solicita uma
das suas piores propriedades estruturais: a sua propensão a dobrar sob compressão e a
sofrer encurvadura. O princípio de reservatórios de vácuo sob tração é simples: duas
membranas ligadas, ambas sob tração em vez de uma sujeita à compressão, sendo a
tensão proporcionada pela pressurização do espaço intermédio.
Para considerações estruturais, o vácuo central será assumido como sendo
perfeito (pressão absoluta de exatamente zero atmosferas).
4.1.1 Análise de Equilíbrio
A força em cada membrana é dada pela diferença de pressão aplicada em cada
face multiplicada pela área. Se a força exercida na parede externa com direção “para fora”
for igual ou superior à força “para dentro” exercida na parede interior, o sistema
encontra-se em equilíbrio. Esta afirmação é verdade se se considerar que o sistema não
tem rigidez própria, que é o caso para membranas flexíveis. Inicialmente, analisa-se o
reservatório de vácuo tracionado mais simples, que se baseia na geometria esférica. Para
o equilíbrio, escreve-se:
Σ𝐹𝑒 = Σ𝐹𝑖 ⟺ 4𝜋(𝑝 − 𝑝0)𝑅𝑒2 = 4𝜋𝑝𝑅𝑖
2 (17)
Onde 𝑅𝑒, e 𝑅𝑖, são os raios exterior e interior, respetivamente, e 𝑝0 é a pressão
atmosférica. Assim:
𝑅𝑒 = 𝑅𝑖√𝑝
𝑝 − 𝑝0 (18)
Se se escrever ∆𝑅 = 𝑅𝑒 − 𝑅𝑖 para a espessura do espaço inter-membranar
e se 𝑝 ≫ 𝑝0 então pode-se aproximar (18) para:
𝑅𝑒 = 𝑅𝑖(1 +𝑝0
2𝑝) (19)
e
∆𝑅 = 𝑅𝑖
𝑝0
2𝑝 (20)
Se a equação (18) for considerada tendo em conta que 𝑝 ≫ 𝑝0, então é fácil prever
que 𝑝
𝑝−𝑝0→ 1 e portanto 𝑅𝑖 → 𝑅𝑒. Assim, no limite, obtém-se:

42 A Solução por Rigidez Pneumática
∆𝑅 = 𝑅𝑒
𝑝0
2𝑝 (21)
Isto ilustra um princípio lógico, confirmando que quanto maior for a pressão
intermédia menor será a espessura ∆𝑅 necessária.
Uma geometria mais tradicional para dirigíveis, e que também será agora
analisada, é uma forma cilíndrica, composta nesta solução por duas membranas coaxiais
de comprimento l, em equilíbrio:
Σ𝐹𝑒 = Σ𝐹𝑖 ⟺ (𝑝 − 𝑝0)2𝜋𝑅0𝑙 = 2𝜋𝑝𝑅𝑖𝑙 (22)
Onde
𝑅𝑒 = 𝑅𝑖 𝑝
𝑝 − 𝑝0 (23)
Se da mesma forma se considerar 𝑝 ≫ 𝑝0, pode-se aproximar (23) para:
𝑅𝑒 = 𝑅𝑖 1 + 𝑝0
𝑝 (24)
e
∆𝑅 = 𝑅𝑖 𝑝0
𝑝 (25)
Da mesma forma que para a geometria esférica, no limite obtém-se:
∆𝑅 = 𝑅𝑒 𝑝0
𝑝 (26)
Um valor de 𝑝=2 bar resulta em 𝑅𝑒 = 2𝑅𝑖. Se a pressão for alta, a espessura entre
ambas as membranas pode ser bastante pequena (tipicamente se 𝑝 ≈ 10 bar, ∆𝑅 =𝑅𝑒
10).
Neste caso de uma geometria cilíndrica, as forças atuantes nas extremidades
também devem ser tidas em conta. Estas forças são devidas à pressão intermédia que
atua “para fora” e à força atmosférica que atua “para dentro”.
𝐹𝑒𝑥𝑡𝑟𝑒𝑚𝑖𝑑𝑎𝑑𝑒 = (𝜋𝑅𝑒2 − 𝜋𝑅𝑖
2)(𝑝 − 𝑝0) − 𝜋𝑅𝑖2𝑝0 (27)
Se 𝐹𝑒𝑥𝑡𝑟𝑒𝑚𝑖𝑑𝑎𝑑𝑒 for definida positiva, considerando o balanço das pressões como
sendo sempre “para fora”, e utilizando a equação (23), a expressão simplifica-se para:
𝐹𝑒𝑥𝑡𝑟𝑒𝑚𝑖𝑑𝑎𝑑𝑒 = 𝜋𝑅𝑒2𝑝0(1 −
𝑝0
𝑝 ) (28)
4.1 -Verificação Analítica do Conceito 43
4.1.2 Análise de Flutuabilidade
Posto isto, é feita uma análise com a intenção de determinar se a estrutura
proposta poderá ter flutuabilidade positiva.
Considerando a dupla membrana esférica proposta, o volume 𝑉𝑚 inter-
membranar de ar pressurizado é de:
𝑉𝑚 =4
3𝜋(𝑅𝑒
3 − 𝑅𝑖3) (29)
Substituindo pela equação (18) e se p for agora expresso em bar, sendo o peso em
quilogramas aproximadamente pVg, tem-se então:
𝑝𝑉𝑚 ≈ 4[(𝑝
𝑝 − 𝑝0)
32
− 1]𝑅𝑖3𝑝 (30)
O peso total P do sistema é dado por:
𝑃 ≈ 𝑔(𝑝𝑉𝑚 − 𝑉𝑒) (31)
Onde 𝑉𝑒𝑔 =4
3𝜋𝑅𝑒
3𝑔 é o peso do ar em ambas as câmaras antes da evacuação.
Substituindo valores e com um pouco de álgebra, Michaelis e Forbes [38] calculam:
𝑃 ≈ 4𝑅𝑖3𝑔 [
𝑝32
(𝑝 − 𝑝0)12
− 𝑝] > 0 (32)
Para a membrana esférica dupla de espessura fina com 𝑝 ≫ 𝑝0 obtém-se 𝑃 =𝑉𝑖𝑔
2,
onde 𝑉𝑖 é o volume evacuado. Isto significa que há 1.5 vezes mais ar no sistema
pressurizado do que havia no espaço agora evacuado.
Um cálculo semelhante para um sistema cilíndrico dá 𝑃 = 𝑉𝑖𝑔. Neste caso há duas
vezes mais ar.
À primeira vista, a utilização desta configuração para um aeróstato com
membrana não rígida em equilíbrio por rigidez pneumática, não parece ser vantajosa
porque não consegue atingir uma densidade menor que a do ar. Este valor é ainda
agravado considerando que nas equações anteriores não foi tido em conta o peso dos
materiais da membrana.
De uma outra forma, a questão altera-se se o gás usado para pressurizar o espaço
intermediário for mais leve que o ar, como o hélio, permitindo a flutuabilidade positiva
com esta configuração e podendo ter aplicabilidade como um veículo mais leve que o ar.
No entanto, esta geometria seria mais dispendiosa a nível da quantidade de gás requerida
face a outros aeróstatos simples, preenchidos por algum gás leve. Desta forma, a
verdadeira vantagem desta configuração passa por introduzir um mecanismo alternativo
de controlo da flutuabilidade, através da expulsão ou admissão de ar, e
consequentemente de peso, de dentro da aeronave (ver secção 4.5).

44 A Solução por Rigidez Pneumática
4.1.3 Análise de Estabilidade
A análise de equilíbrio na secção 4.1.1, é estaticamente indeterminada ou
hiperestática, sendo as equações (20) e (25) insuficientes para descrever as forças
internas e reações envolvidas. Uma análise rigorosa de estabilidade, para reservatórios
de vácuo pressurizados cilíndricos, é realizada por Barton [40]. Neste estudo,
primeiramente discretizam-se os graus de liberdade do sistema, de seguida forma-se a
matriz que representa a segunda derivada da energia potencial em relação a esses graus
de liberdade e por fim diagonaliza-se a matriz para a confirmar como definida positiva e,
portanto, estável.
A pressão hidrostática do gás contribui positivamente e de igual forma para todos
os três valores próprios do tensor hidrostático, mas para qualquer cilindro circular
submetido a pressão hidrostática, o método das secções indica que os valores próprios
do tensor hidrostático na parede devem estar na proporção aproximada de 2, 1 e 0 nas
direções circunferencial, axial e radial respetivamente [40]. Assim, devem também
existir membros sob tração (as membranas) que contribuem negativamente para os
valores próprios correspondentes às direções radial e axial.
Para analisar o equilíbrio e a estabilidade do sistema, com secção representada
pela figura seguinte, analisa-se a forma mais geral deste sistema com N seções (N = 64
na fig. 31), compostas por elementos radiais de ligação e lóbulos curvos formados pela
pressão. Deve-se então escrever a sua energia potencial U em função da configuração ou
deformação que o sistema possa assumir.
Figura 31 – Secção da estrutura analisada por Barton [40]
A configuração do sistema é caracterizada pelas coordenadas 𝑥𝑛𝑖 especificando os
deslocamentos radiais e circunferenciais dos N vértices internos e dos N vértices
externos. Note-se que na figura seguinte o primeiro subíndice especifica qual a célula
unitária e o segundo indica qual o grau de liberdade dentro da célula unitária. Assim,
𝑥𝑛𝑖 = 0 caracteriza a configuração nominal ou não deformada, que corresponde a um

4.1 -Verificação Analítica do Conceito 45
extremo (mínimo local, máximo local ou ponto de sela) na energia potencial total para
dada pressão inter-membranar. Posteriormente, escreve-se U em função desses 𝑥𝑛𝑖.
Figura 32 – Ilustração das células, vértices e respetivos graus de liberdade [40]
Para o equilíbrio instantâneo das forças, basta confirmar que as primeiras
derivadas de U em relação ao 𝑥𝑛𝑖 são todas zero. Para a estabilidade, a segunda derivada
de U com respeito a qualquer e todas as combinações lineares do 𝑥𝑛𝑖 deve ser não-
negativa. As derivadas de terceira ordem e superior são desprezadas na análise de
estabilidade, uma vez que se supõe que os deslocamentos são pequenos. Por esta razão,
esta representação de U precisa apenas de ser válida para a derivada de segunda ordem
sobre a configuração nominal.
De forma a escrever uma expressão para U, considera-se que o sistema possui
duas formas de energia potencial: a energia sólida-elástica e a energia pressão-volume.
Para cada membrana tensionada, a energia sólida-elástica apresenta-se na forma:
∆𝑈𝑚𝑒𝑚𝑏𝑟𝑎𝑛𝑎 = 𝑇∆𝑙 +1
2𝑘∆𝑙2 (33)
Onde Δl é a mudança de comprimento da membrana em relação à configuração
de equilíbrio, T é o pré-tensionamento e k é a constante elástica. Esta equação é válida
apenas para a segunda ordem em Δl e, como mínimo exigido, a representação de Δl é
válida para a segunda ordem em 𝑥𝑛𝑖.
Para alcançar o equilíbrio, T será diferente para diferentes membranas escolhidas
e uma vez que a constante elástica k de uma membrana depende do seu comprimento,
espessura e módulo elástico, k será igualmente diferente para diferentes membranas.
Para cada volume sob pressão, a energia pressão-volume apresenta-se na forma:
∆𝑈𝑔𝑎𝑠 = −∆𝑝∆𝑉 (34)
Onde Δp é a diferença na pressão através da fronteira que define o volume e ΔV
é a mudança no volume relativamente à configuração de equilíbrio. Para que esta
equação seja válida para a segunda ordem em ΔV, deve-se fazer a suposição
simplificativa de que a pressão p é constante durante qualquer alteração de volume. Se
isto não for verdade, a pressão pode aumentar com uma diminuição no volume,
aumentando assim a estabilidade. Esta suposição pode levar a uma falsa conclusão de
que o sistema é instável, mas nunca pode levar a uma conclusão falsa de que o sistema é

46 A Solução por Rigidez Pneumática
estável. A isto chama-se uma suposição "à prova de falhas". Como acontece com Δl, a
representação de ΔV deve ser válida para segunda ordem no 𝑥𝑛𝑖.
Na figura seguinte ilustra-se uma célula unitária do modelo idealizado do sistema
mostrando as pré-tensões a, b e c, as constantes de rigidez α, β e γ e as pressões a negrito.
Figura 33 – Célula unitária, ligações e respetivos valores de pré-tensão e rigidez [40]
Mais uma vez, para simplificar o cálculo, é assumido por Barton [40] que o
ângulo de espaçamento entre os lóbulos, as membranas curvas, , não permite a
interferência, não havendo contacto entre eles (que é dado como existente, na secção 4.2,
por simulação computorizada realizada pelo autor). Novamente, trata-se de uma
suposição "à prova de falhas". Se eles interferissem, a estabilidade seria melhorada, pois
gera uma restrição adicional ao sistema.
Por simetria rotacional e porque os vértices se conectam apenas com os vizinhos
mais próximos, obtém-se por fim uma equação para a energia:
𝑈 = ∑1
2𝑛𝑖𝑚𝑗
𝐾𝑛𝑖𝑚𝑗𝑥𝑛𝑖𝑥𝑚𝑗 (35)
Onde 𝐾𝑛𝑖𝑚𝑗 é a matriz em bloco com a rigidez de cada grau de liberdade, obtida
pelas contribuições de todas as molas hipotéticas e volumes sobre pressão.
Finalmente, e por processos não inteiramente descritos neste trabalho, Barton
[40] diagonaliza a matriz 𝐾𝑛𝑖𝑚𝑗 para a confirmar como definida positiva e, portanto,
estável. Conclui a seguinte expressão para a estabilidade em função da pressão e do raio
exterior.
𝑝
∆𝑅
𝑅≥
4(cos12
𝜃)4
1 + 2 cos 𝜃
(36)
O termo direito desta equação tende para 4
3 e nunca o excede para qualquer valor
razoável de N. Assim, o requisito geral para a estabilidade do sistema, que respeita as
condições e solicitações em jogo com as aproximações referidas é dado por:
𝑝 ≥4
3
𝑅
∆𝑅 (37)
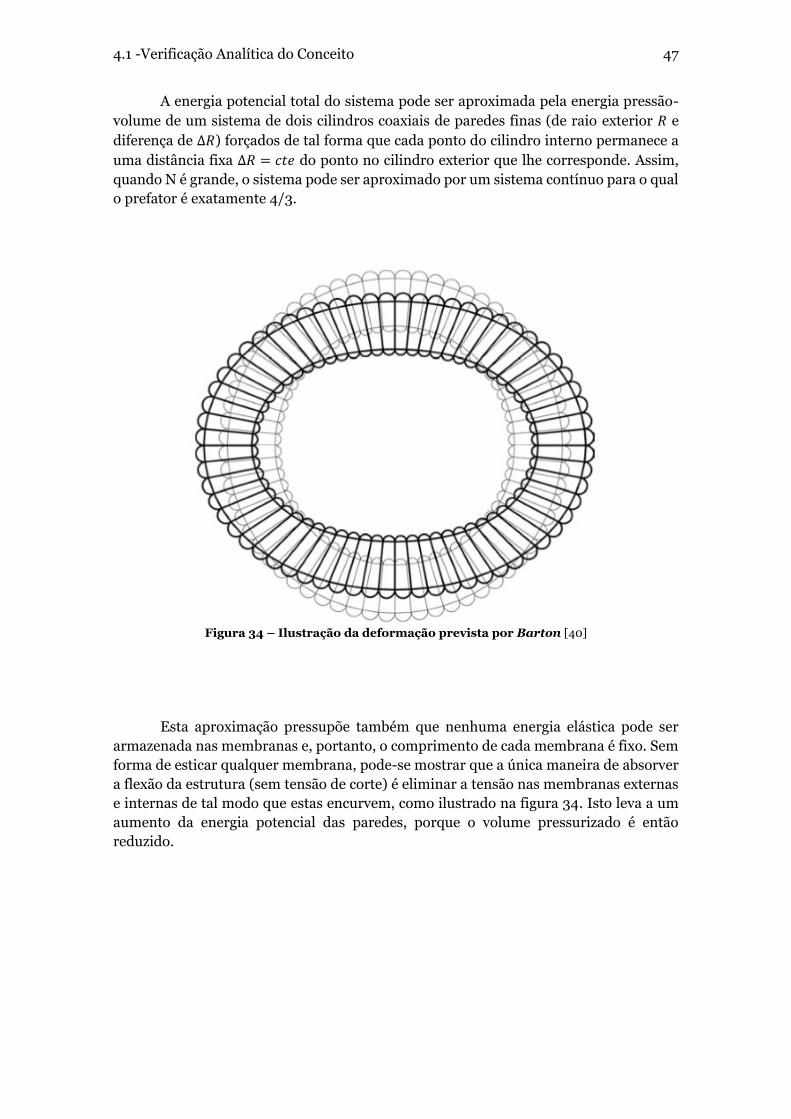
4.1 -Verificação Analítica do Conceito 47
A energia potencial total do sistema pode ser aproximada pela energia pressão-
volume de um sistema de dois cilindros coaxiais de paredes finas (de raio exterior 𝑅 e
diferença de ∆𝑅) forçados de tal forma que cada ponto do cilindro interno permanece a
uma distância fixa ∆𝑅 = 𝑐𝑡𝑒 do ponto no cilindro exterior que lhe corresponde. Assim,
quando N é grande, o sistema pode ser aproximado por um sistema contínuo para o qual
o prefator é exatamente 4/3.
Figura 34 – Ilustração da deformação prevista por Barton [40]
Esta aproximação pressupõe também que nenhuma energia elástica pode ser
armazenada nas membranas e, portanto, o comprimento de cada membrana é fixo. Sem
forma de esticar qualquer membrana, pode-se mostrar que a única maneira de absorver
a flexão da estrutura (sem tensão de corte) é eliminar a tensão nas membranas externas
e internas de tal modo que estas encurvem, como ilustrado na figura 34. Isto leva a um
aumento da energia potencial das paredes, porque o volume pressurizado é então
reduzido.
48 A Solução por Rigidez Pneumática
4.2 Simulação Numérica Assistida por
Computador
A simulação assistida por computador é aplicada ao problema em análise de uma
dupla membrana esférica e elástica perfeita, pressurizada entre as membranas e
evacuada centralmente. Note-se que esta etapa do presente estudo foi iniciada antes de
ter sido feita uma verificação analítica completa.
O software escolhido para a análise é o software Abaqus FEA, que é um pacote
comercial para análise por elementos finitos desenvolvido pela HKS Inc de Rhode Island,
Estados Unidos e agora comercializado sob a SIMULIA, marca da Dassault Systemes
S.A.
Esta aplicação software é usada nas indústrias automóvel, aeroespacial, e na
produção industrial. O produto é popular entre instituições académicas e de pesquisa,
devido à ampla capacidade de modelação de materiais e à capacidade de ser
personalizado, fornecendo uma boa coleção de capacidades multi-físicas.
Todo o trabalho de simulação desenvolvido para este documento passou
primeiramente por uma fase extensa de aprendizagem no manuseio e fiel interpretação
dos resultados.
Figura 35 – Logótipos da empresa produtora e software escolhidos [44]
No Abaqus, cada análise completa de elementos finitos consiste em 3 etapas
distintas:
Pré-processamento ou modelação: esta etapa envolve a criação de um ficheiro de
entrada “input” que contém o projeto de engenharia para a análise de elementos
finitos (também chamado de "solver");
Processamento ou análise de elementos finitos: esta etapa produz um ficheiro
gráfico de saída “output”;
Pós-processamento ou geração de relatório, imagem, animação, etc. a partir do
ficheiro de saída: esta etapa é uma fase de renderização gráfica.
O processo criativo da simulação de um modelo varia com a necessidade e
aplicação, mas para haver coerência nas conclusões, a seguinte metodologia foi adotada:

4.2 -Simulação Numérica Assistida por Computador 49
Figura 36 – Metodologia adotada para a análise
Sabendo que o software escolhido não inclui unidades fixas, estando a definição
destas a cargo do utilizador, foi necessário implementar um sistema de unidades
consistente. Tendo este ponto resolvido, a escrita e leitura de valores com coerência são
possíveis.
Tabela 2 - Sistema de unidades utilizado na simulação
Comprimento Tensão Tempo Força Massa Energia [mm] [MPa] [s] [N] [ton] [N.mm]
Desenho da Geometria
A criação da geometria fiel ao projeto e usando este software, foi um dos
principais desafios da simulação deste sistema.
Devido às condições de simetria existentes na geometria da dupla membrana
esférica, o modelo geométrico utilizado para este estudo foi um oitavo da esfera
completa.
Primeiramente foi necessário criar e definir a área de trabalho (Modeling Space)
como 3D do tipo deformável (Deformable), com uma geometria de casca (Shell) e de
revolução (Revolution).
Para isso, usando a interface gráfica do software Abaqus FEA foram criadas duas
membranas em que, para cada uma, as dimensões geométricas são de 𝑅𝑒 = 3𝑚 para a
membrana exterior e 𝑅𝑖 = 2.9𝑚 ou 𝑅𝑖 = 2.9𝑚 para a membrana interior. Note-se que os
dois valores escolhidos para a distância base entre membranas é de ∆𝑅 = 100𝑚𝑚 e
∆𝑅 = 700𝑚𝑚.
•Identificar as questões a serem abordadas•Planear o projeto•Desenvolver o modelo conceptual
Formulação do Problema e Desenho do
Modelo
•Escolher a abordagem de modelação•Construir e testar o modelo•Verificar e validar o modelo
Desenvolvimento
•Testar o modelo•Analisar os resultados•Implementar os resultados para a tomada de decisõesImplementação

50 A Solução por Rigidez Pneumática
Seleção do Tipo de Elemento Adequado
Após o dimensionamento da geometria, teve que se escolher o tipo de elemento
que mais se adequaria à análise em questão. Para as membranas foi usado um tipo de
elemento do género Membrane que transmite deslocamentos mas não transmite
momentos, sendo flexível como desejado, ao contrário do caso das cascas (Shell) que são
rígidas e transmitem deslocamentos e momentos. De seguida apresenta-se o código .inp
que é interpretado pelo software:
*Element, type=M3D4
Para os cabos que estabelecem a ligação na zona entre membranas, que será
pressurizada e aguentará os maiores esforços, foi escolhido um elemento do tipo Truss,
cujo o código se apresenta por:
*Element, type=T3D2
Abaixo deste código apresentado, para cada tipo de elemento, são colocados todos
os elementos do mesmo tipo, representados pelo seu número e identificação nodal. Essa
listagem será completa posteriormente quando a malha for criada.
Atribuição das Propriedades dos Materiais
Seguindo para a definição das propriedades do sistema sob análise, por
conveniência e para prova de conceito, foi escolhido o mesmo material tanto para as
membranas como para os cabos de ligação.
O material escolhido para a análise, sabendo que satisfaria largamente as
condições de carga e onde portanto poderia ser considerada uma menor secção,
poupando em peso, provém da fibra unidirecional de Polietileno de Ultra Alto Peso
Molecular (UHMW) de trademark Dyneema ou Spectra, que é composta num Tecido
Não Tecido por aglomeração das fibras, conferindo propriedades isotrópicas para que o
esforço seja distribuído de forma uniforme e os parâmetros das propriedades do material
possam ser expressos pelos mesmos valores, sem perda de validade. Mais detalhe sobre
os materiais escolhidos será discutido na secção 4.4.
Uma vez que, ao longo da elaboração deste documento, foi necessário averiguar
qual seria o tipo de estudo, dos disponibilizados pelo software, que mais se adequaria ao
sistema real alvo da simulação, apresentam-se na tabela abaixo os códigos .inp usados
para cada um dos tipos de análise efetuados.

4.2 -Simulação Numérica Assistida por Computador 51
Tabela 3 - Código .inp para cada estudo das propriedades dos materiais
Dos materiais acima descritos, o M1 e o MAT_BARRAS correspondem às
membranas e aos cabos, respetivamente. Os valores inseridos correspondem ao módulo
de Elasticidade (E), ao coeficiente de Poisson (𝜗) e ao módulo de corte (G), na disposição
a seguir descrita para o caso laminar.
Figura 37 – Tabela de introdução das propriedades do material elástico do tipo lamina
Análise Estática Material Isotrópico Material Laminar
** *Material,name=M1 *Elastic, type=ISOTROPIC 120000., 0.41 ** *Material, name=mat_barras *ELASTIC, TYPE=ISOTROPIC 120000., 0.41 **
** *Material, name=M1 *Elastic, type=LAMINA 120000.,120000., 0.41, 300., 300., 300. ** *Material, name=MAT_BARRAS *Elastic 120000., 0.41 **
Análise Quase-Estática Análise Dinâmica ** *Material, name=M1 *Density 9.65e-07, *Elastic 120000., 0.41 *No Compression ** *Material, name=MAT_BARRAS *Density 9.65e-07, *Elastic 120000., 0.41 *No Compression **
** *Material, name=M1 *Density 9.65e-07, *Elastic, type=LAMINA 120000.,120000., 0.41, 300., 300., 300. ** *Material, name=MAT_BARRAS *Density 9.65e-06, *Elastic 120000., 0.41 *No Compression **

52 A Solução por Rigidez Pneumática
De forma a ficar mais claro, seguem-se os valores correspondentes a estas três
propriedades:
E=120 000 MPa
𝜗 =0.41
G=300 MPa
ρ=9.65e-10 ton/mm3 = 965 kg/m3
Para materiais ortotrópicos, os módulos de elasticidade transversal são
independentes do módulo de Young e do coeficiente de Poisson (havendo 9 propriedades
independentes para definir o material), e cada propriedade teria de ser determinada por
ensaios experimentais. Se a lâmina for um composto unidirecional (fibra numa matriz),
as propriedades do material são normalmente assumidas como sendo transversalmente
isotrópicas, isto é: E22 = E33, Nu12 = Nu13, G12 = G13 e 𝐺23 = 𝐸22
2(1+𝑛𝑢23) originando
5 constantes independentes.
As secções foram criadas e a cada uma foram atribuídos um conjunto de pontos
com os quais se criam, posteriormente, os vários elementos que compõe cada superfície.
Ambas as membranas têm a espessura de 1𝑚𝑚 e cada cabo tem a secção de 100𝑚𝑚2. De
seguida apresentam-se os códigos .inp que permitiram definir as secções e superfícies
do sistema em estudo:
**
** Section: Section-1-INT_ELEMENTS
*Membrane Section, elset=INT_ELEMENTS, material=M1
1.,
** Section: Section-2-EXT_ELEMENTS
*Membrane Section, elset=EXT_ELEMENTS, material=M1
1.,
** Section: Section-3-ELEM_BARRAS
*Solid Section, elset=ELEM_BARRAS, material=MAT_BARRAS
100.,
**
**
*Surface, type=ELEMENT, name=EXT_SURF
_EXT_SURF_SPOS, SPOS
*Surface, type=ELEMENT, name=INT_SURF
_INT_SURF_SNEG, SNEG
**
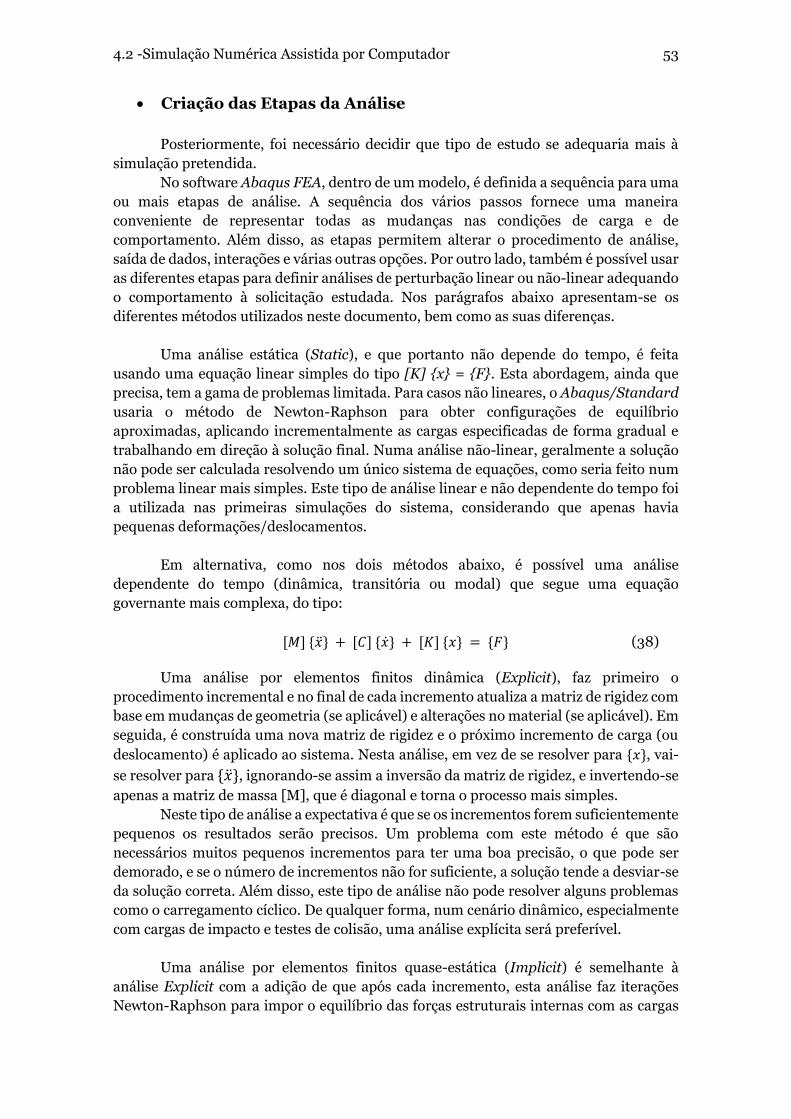
4.2 -Simulação Numérica Assistida por Computador 53
Criação das Etapas da Análise
Posteriormente, foi necessário decidir que tipo de estudo se adequaria mais à
simulação pretendida.
No software Abaqus FEA, dentro de um modelo, é definida a sequência para uma
ou mais etapas de análise. A sequência dos vários passos fornece uma maneira
conveniente de representar todas as mudanças nas condições de carga e de
comportamento. Além disso, as etapas permitem alterar o procedimento de análise,
saída de dados, interações e várias outras opções. Por outro lado, também é possível usar
as diferentes etapas para definir análises de perturbação linear ou não-linear adequando
o comportamento à solicitação estudada. Nos parágrafos abaixo apresentam-se os
diferentes métodos utilizados neste documento, bem como as suas diferenças.
Uma análise estática (Static), e que portanto não depende do tempo, é feita
usando uma equação linear simples do tipo [K] {x} = {F}. Esta abordagem, ainda que
precisa, tem a gama de problemas limitada. Para casos não lineares, o Abaqus/Standard
usaria o método de Newton-Raphson para obter configurações de equilíbrio
aproximadas, aplicando incrementalmente as cargas especificadas de forma gradual e
trabalhando em direção à solução final. Numa análise não-linear, geralmente a solução
não pode ser calculada resolvendo um único sistema de equações, como seria feito num
problema linear mais simples. Este tipo de análise linear e não dependente do tempo foi
a utilizada nas primeiras simulações do sistema, considerando que apenas havia
pequenas deformações/deslocamentos.
Em alternativa, como nos dois métodos abaixo, é possível uma análise
dependente do tempo (dinâmica, transitória ou modal) que segue uma equação
governante mais complexa, do tipo:
[𝑀] {�̈�} + [𝐶] {�̇�} + [𝐾] {𝑥} = {𝐹} (38)
Uma análise por elementos finitos dinâmica (Explicit), faz primeiro o
procedimento incremental e no final de cada incremento atualiza a matriz de rigidez com
base em mudanças de geometria (se aplicável) e alterações no material (se aplicável). Em
seguida, é construída uma nova matriz de rigidez e o próximo incremento de carga (ou
deslocamento) é aplicado ao sistema. Nesta análise, em vez de se resolver para {𝑥}, vai-
se resolver para {�̈�}, ignorando-se assim a inversão da matriz de rigidez, e invertendo-se
apenas a matriz de massa [M], que é diagonal e torna o processo mais simples.
Neste tipo de análise a expectativa é que se os incrementos forem suficientemente
pequenos os resultados serão precisos. Um problema com este método é que são
necessários muitos pequenos incrementos para ter uma boa precisão, o que pode ser
demorado, e se o número de incrementos não for suficiente, a solução tende a desviar-se
da solução correta. Além disso, este tipo de análise não pode resolver alguns problemas
como o carregamento cíclico. De qualquer forma, num cenário dinâmico, especialmente
com cargas de impacto e testes de colisão, uma análise explícita será preferível.
Uma análise por elementos finitos quase-estática (Implicit) é semelhante à
análise Explicit com a adição de que após cada incremento, esta análise faz iterações
Newton-Raphson para impor o equilíbrio das forças estruturais internas com as cargas
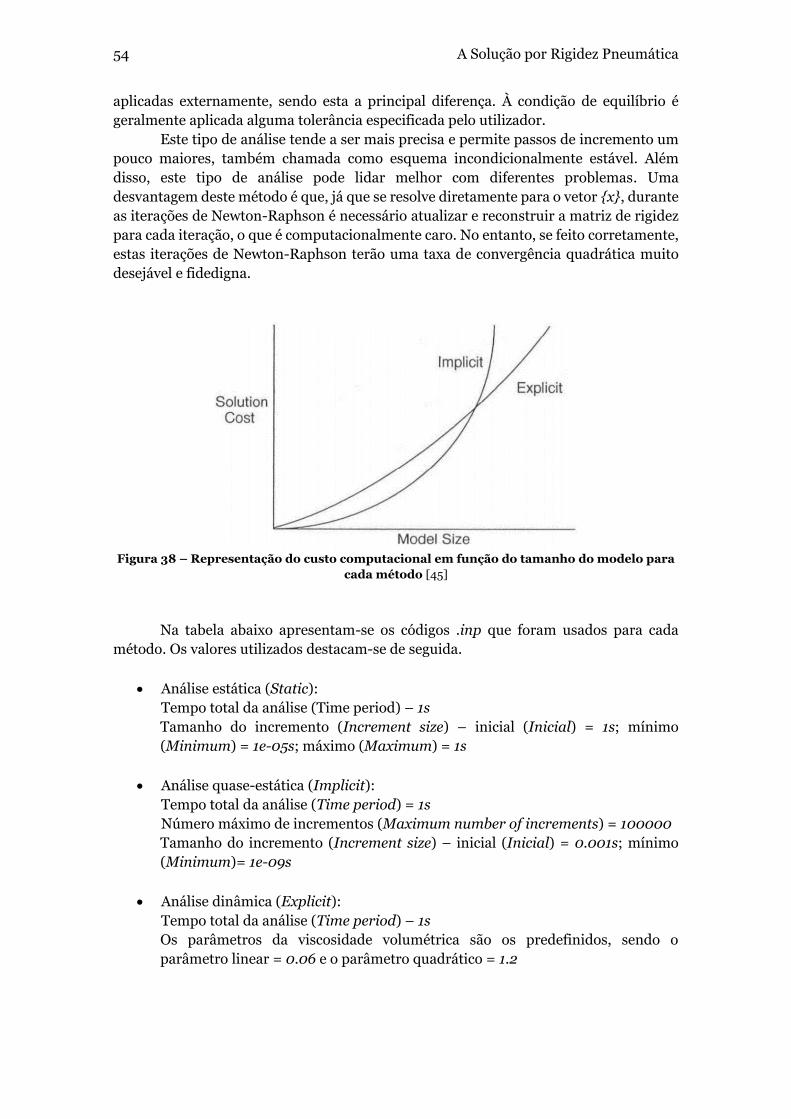
54 A Solução por Rigidez Pneumática
aplicadas externamente, sendo esta a principal diferença. À condição de equilíbrio é
geralmente aplicada alguma tolerância especificada pelo utilizador.
Este tipo de análise tende a ser mais precisa e permite passos de incremento um
pouco maiores, também chamada como esquema incondicionalmente estável. Além
disso, este tipo de análise pode lidar melhor com diferentes problemas. Uma
desvantagem deste método é que, já que se resolve diretamente para o vetor {x}, durante
as iterações de Newton-Raphson é necessário atualizar e reconstruir a matriz de rigidez
para cada iteração, o que é computacionalmente caro. No entanto, se feito corretamente,
estas iterações de Newton-Raphson terão uma taxa de convergência quadrática muito
desejável e fidedigna.
Figura 38 – Representação do custo computacional em função do tamanho do modelo para
cada método [45]
Na tabela abaixo apresentam-se os códigos .inp que foram usados para cada
método. Os valores utilizados destacam-se de seguida.
Análise estática (Static):
Tempo total da análise (Time period) – 1s
Tamanho do incremento (Increment size) – inicial (Inicial) = 1s; mínimo
(Minimum) = 1e-05s; máximo (Maximum) = 1s
Análise quase-estática (Implicit):
Tempo total da análise (Time period) = 1s
Número máximo de incrementos (Maximum number of increments) = 100000
Tamanho do incremento (Increment size) – inicial (Inicial) = 0.001s; mínimo
(Minimum)= 1e-09s
Análise dinâmica (Explicit):
Tempo total da análise (Time period) – 1s
Os parâmetros da viscosidade volumétrica são os predefinidos, sendo o
parâmetro linear = 0.06 e o parâmetro quadrático = 1.2

4.2 -Simulação Numérica Assistida por Computador 55
Tabela 4 - Código .inp do Step para os vários tipos de estudo
Análise Estática
** *Step, name=Step-1, nlgeom=NO *Static 1., 1., 1e-05, 1. **
Análise Quase-Estática Análise Dinâmica
** *Step, name=Step-1, nlgeom=YES, inc=100000 *Dynamic,application=QUASI-STATIC,initial=NO 0.001,1.,1e-09 **
** *Step, name=Step-1, nlgeom=YES *Dynamic, Explicit , 1. *Bulk Viscosity 0.06, 1.2 **
Criação dos Esforços
As condições de carga, para cada etapa, definem uma configuração específica de
carregamento segundo as solicitações do sistema.
Para o estudo pretendido, foi escolhida uma solicitação mecânica, uniforme e do
tipo pressão (P). Os valores de pressão abaixo apresentados em formato .inp têm a
direção associada à superfície escolhida. A título de exemplo, se fosse pretendido um
estudo em que a zona inter-membranar estivesse pressurizada com 3 bar, então, como
abaixo indicado, a membrana exterior estaria sujeita à pressão “de dentro para fora” de
0.2 MPa (0.3 MPa menos a pressão atmosférica) e a membrana interior estaria sujeita à
pressão de fora para dentro de 0.3 MPa. A amplitude de carregamento escolhida foi a de
uma solicitação em rampa, consistente com a introdução e compressão de ar num
volume fechado.
**
*Dsload, amplitude=Amp-1
EXT_SURF, P, -0.1
**
*Dsload, amplitude=Amp-1
INT_SURF, P, -0.3
**

56 A Solução por Rigidez Pneumática
Continuidade Geométrica da Simetria
Assumindo o par de parts membrana exterior - membrana interior como
emparelhados, em cada uma das 3 arestas do conjunto, foram criadas condições de
fronteira no submenu Load do software Abaqus e na secção Boundary Condition
Manager de forma que a não haja deslocamentos segundo o eixo normal ao plano de
simetria (Ux ou U1 na fig. 39) ou momentos segundo as duas outras coordenadas
(Uy, Uz ou U1, U2 na fig. 39).
Figura 39 – Interface gráfica para a introdução das condições de fronteira
Criação e Refinamento da Malha
O tipo de malha escolhida, com a qual são discretizadas as superfícies para o
cálculo através do método de elementos finitos, é constituída por elementos finitos
quadriláteros de 4 nós, sabendo que estes, quando em número suficiente, traduzem
corretamente as deformações individuais para cada elemento da membrana (M3D4).
A malha tem um total de 3750 elementos, cada um com a dimensão lateral de
85.7mm e compostos por 3902 nós.
Figura 40 – Diferentes perspetivas da malha final

4.2 -Simulação Numérica Assistida por Computador 57
Adição dos Cabos Conectores
Depois da dupla membranas ter sido criada, foi necessário criar os cabos de
conexão que impedem que, nesses pontos de contacto, uma membrana se desloque face
à outra. Para tal foi usado o software Femap (Finite Element Modeling And
Postprocessing) da empresa Siemens PLM Software, no qual foi criada uma numeração
organizada dos pontos da malha gerada no Software Abaqus FEA para que
posteriormente, e depois de uma análise cuidada, se pudesse criar a sequência a devolver
ao mesmo, em formato .inp. Para as análises efetuadas foram utilizados 61 cabos de
conexão.
Figura 41 – Página de entrada do software Femap
Terminadas todas as etapas de pré-processamento, o sistema é submetido para
análise e devolve vários resultados que se encontram nos anexos A.1, para ∆𝑅 = 100𝑚𝑚,
e A.2., para ∆𝑅 = 100𝑚𝑚, sendo discutidos nas secções seguintes.
As representações da estrutura no fim de cada Step, com e sem vácuo, apresentam
a distribuição das tensões, em MPa, segundo a tensão principal máxima no plano.
As soluções gráficas das tensões em função do tempo e do carregamento, em
MPa, foram obtidas traçando a evolução do comportamento do centroide de cada
elemento, permitindo uma boa observação do sistema.
As soluções gráficas das deformações em função do tempo e do carregamento, em
mm, foram obtidas traçando a evolução do comportamento de todos os nós existentes,
permitindo assim uma observação mais global do sistema.

58 A Solução por Rigidez Pneumática
4.3 Discussão dos Resultados
Para poder comparar os resultados do trabalho acima referido, foi aproveitada
uma dissertação de McKenzie [46] que construiu gráficos para vários valores de ∆R em
função da pressão e para diferentes 𝑅𝑖, representando como evoluem as condições de
equilíbrio deduzidas.
As equações (20) e (25), da secção 4.1.1 são ilustradas graficamente com as figuras
42, 43 e 44. Todos estes gráficos são de natureza assintótica. Isto ilustra que a variação
∆R é pequena à medida que p aumenta. Tanto a geometria esférica como a cilíndrica são
comparadas na figura 44, observando-se que a solução esférica consegue um menor ∆R
para dado valor de p, necessitando, portanto, de menor quantidade de ar (e peso) para o
equilíbrio.
Para determinar a precisão das aproximações feitas para 𝑝 ≫ 𝑝0, são
representadas tanto as expressões aproximadas (20) e (25), quanto as expressões exatas
(18) e (23). A figura 45 mostra que para o caso esférico, os valores são quase idênticos
para valores de p maiores que 6 bar. A discrepância só se torna crítica para valores
inferiores a 2 ou 3 bar. Isto significa que a aproximação é bastante realista para a maioria
dos reservatórios de vácuo com dupla membrana esféricos. No caso da geometria
cilíndrica onde os valores são quase idênticos para p superior a 9 bar, a discrepância
torna-se percetível para os valores de p que sejam inferiores a 3 ou 4 bar, sendo este caso,
portanto, pior aproximado por esta simplificação.
Figura 42 – Gráfico ∆𝑹 em função de p – geometria esférica [46]

4.3 -Discussão dos Resultados 59
Figura 43 – Gráfico ∆𝑹 em função de p – geometria cilíndrica [46]
Figura 44 – Comparação geometrias esférica e cilíndrica para 𝑹𝒊 = 𝟏𝒎 [46]
Figura 45 – Comparação geometrias aprox e não aprox, para 𝑹𝒊 = 𝟏𝒎 [46]
60 A Solução por Rigidez Pneumática
Nesta análise por simulação numérica assistida por computador, após serem
testados os vários métodos acima descritos, concluiu-se que o processo que obtinha
resultados mais aproximados à realidade é o método de resolução dinâmico (Explicit).
A resolução estática (Static), como o nome indica, não considerava o tempo como
variável. Inicialmente este método foi considerado, e visto que o deslocamento obtido
era na ordem dos milímetros, foi assumido que se poderia considerar a resposta como
linear. No entanto, após várias simulações com condições diferentes, revelou-se que o
comportamento da simulação não correspondia ao esperado e, portanto, este método foi
descartado, passando-se para outra avaliação.
Experimentando a análise que considera o comportamento como quase estático
(Implicit), foi tida em consideração a variável tempo, e ajustaram-se as propriedades das
membranas que, após várias tentativas, só se comportavam de acordo com o esperado
quando se selecionava a condição de ter a resistência a esforços de compressão igual a
zero. Ainda que este processo parecesse viável, o número de incrementos e a carga
computacional revelaram-se demasiado elevados para que a simulação decorresse até ao
equilíbrio. Assim, foi utilizado o método de Mass Scaling no qual se aumenta
artificialmente a densidade do material por um fator de f2 o que leva ao aumento do
incremento de tempo estável por um fator de f. Apesar desta técnica, a simulação quase
estática foi inviabilizada pois as forças de inércia que se criavam devido ao aumento da
massa conduziam a resultados não precisos e, portanto, não podiam ser ignoradas.
O método de resolução dinâmico (Explicit), foi então o processo escolhido e
aquele que resultava em soluções fidedignas comparativamente ao que seria esperado de
acordo com as propriedades do sistema e as solicitações externas. Para tal foram
conduzidos vários testes, com pressões e espessuras diferentes, de forma a se conseguir
tirar uma conclusão definitiva relativamente ao projeto.

4.4 -Métodos de Construção da Estrutura Proposta 61
4.4 Métodos de Construção da Estrutura Proposta
De forma a se poder fazer uma seleção informada dos materiais que podem fazer
parte do compósito escolhido, é necessário fazer uma pesquisa prévia, analisando os
requisitos a serem confirmados e os critérios a avaliar. Posto isto, através da consulta de
bases de dados de diferentes materiais, foram medidos os prós e os contras de forma a
selecionar os mais vantajosos. A informação obtida encontra-se nas tabelas e gráfico
abaixo: Tabela 5 – Requisitos a confirmar pelos materiais
Requisitos Critérios
Estruturais Tensão de cedência e resistência ao corte Resistência a rasgões Peso
Tempo de vida útil Resistência ao ambiente (UV, ozono, temperatura, etc) Impermeabilidade ao gás de sustentação
Performance do material Flexibilidade, elasticidade, adesão inter camadas
Produção do material Consistência do processo de construção Percentagem de eficácia
Manufaturabilidade do envelope Coesão Manobrabilidade Resistência das ligações
Controlo térmico Absorção solar, α Emissão infravermelha, ε
Tabela 6 – Prós, contras e valores de resistência para vários materiais
Material Força
específica têxtil [g-f/den]
Prós Contras
M5 PIPD >40
Forte, boas propriedades à
compressão, excelente
durabilidade
Relatórios técnicos limitados e não
disponível comercialmente
Zylon PBO 42 Forte
Baixa resistência à flexão e pobre
resistência à humidade, UV e luz visível
Spectra UHMWPE 25-40 Forte, flexível e com
boa durabilidade
Baixo ponto de fusão, baixa resistência à
fluência e dificuldade na adesão
Thornel Carbono 30
Forte, resistente a altas temperaturas,
excelente durabilidade
Rígido, baixa resistência à flexão, difícil fabrico e
muito pouca elasticidade
Vectran LCP 23 Boas propriedades
em geral e excelente resistência ao corte
Não tão forte quanto Spectra ou Zylon.
Pobre resistência UV
Kevlar Aramida 22 Resistência
comparável ao Vectran
Pouca resistência à abrasão e dobras
Kosa PET 7-9 Duro, durável, barato Baixa resistência
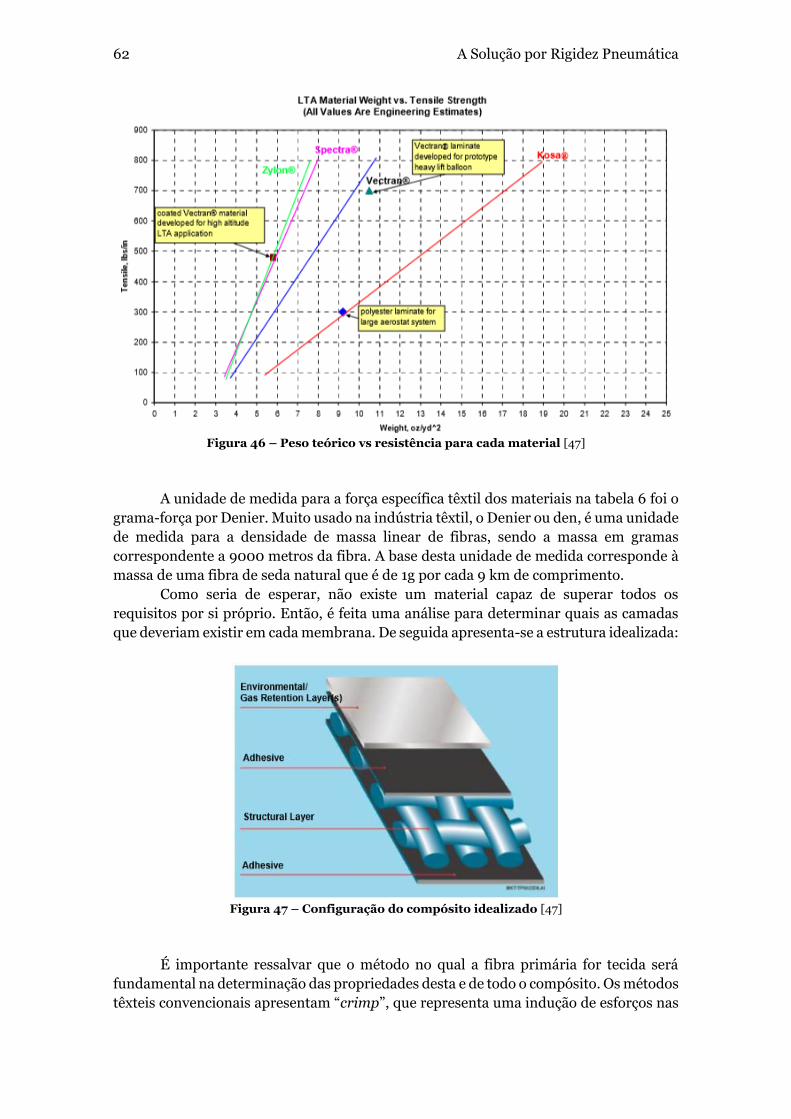
62 A Solução por Rigidez Pneumática
Figura 46 – Peso teórico vs resistência para cada material [47]
A unidade de medida para a força específica têxtil dos materiais na tabela 6 foi o
grama-força por Denier. Muito usado na indústria têxtil, o Denier ou den, é uma unidade
de medida para a densidade de massa linear de fibras, sendo a massa em gramas
correspondente a 9000 metros da fibra. A base desta unidade de medida corresponde à
massa de uma fibra de seda natural que é de 1g por cada 9 km de comprimento.
Como seria de esperar, não existe um material capaz de superar todos os
requisitos por si próprio. Então, é feita uma análise para determinar quais as camadas
que deveriam existir em cada membrana. De seguida apresenta-se a estrutura idealizada:
Figura 47 – Configuração do compósito idealizado [47]
É importante ressalvar que o método no qual a fibra primária for tecida será
fundamental na determinação das propriedades desta e de todo o compósito. Os métodos
têxteis convencionais apresentam “crimp”, que representa uma indução de esforços nas

4.4 -Métodos de Construção da Estrutura Proposta 63
fibras tracionadas segundo eixos que não o longitudinal. Este fenómeno irá alterar a
linearidade do comportamento. Na figura 48 ilustra-se o referido método de confeção.
Na simulação efetuada em 4.2, evitando este problema, idealizou-se uma
composição não tecida perfeitamente isotrópica, com as propriedades da fibra
unidirecional de trademark Spectra 1000 e com um aglomerante tal que assegure que o
sistema falha apenas pelas fibras, e não coesivamente. Esta abordagem, embora longe da
realidade atual de produção, pode ser tomada como uma boa aproximação de teste para
a solução pneumática proposta.
A figura seguinte apresenta algumas diferenças entre ambos os casos. Estudos
mais aprofundados deverão ser considerados futuramente.
Figura 48 – Configuração do compósito tecido com “crimp” (acima) e do não tecido
(abaixo). Comparação gráfica entre ambos [48]
A estrutura proposta por Barton [43] é formada por cinco camadas de tecido. As
camadas de tecido mais interna e externa (1 e 5, respetivamente) são impermeáveis aos
gases, isto é, o tecido foi impregnado com alguma resina impermeável a gases ou
laminado com alguma camada impermeável a gases. Estes cinco tecidos serão cosidos
através de uma máquina de costura com ponto em cadeia como exemplificado na fig. 49.
A estrutura é fechada ligando cada uma das cinco camadas de volta a si mesma com uma
junta de topo fixada por um adesivo. A estrutura é previamente insuflada a baixa pressão
para lhe dar forma. As linhas de vedante são então colocadas nas costuras entre os
lóbulos para retardar a fuga de gás que passa através dos orifícios criados pela agulha de
costura.
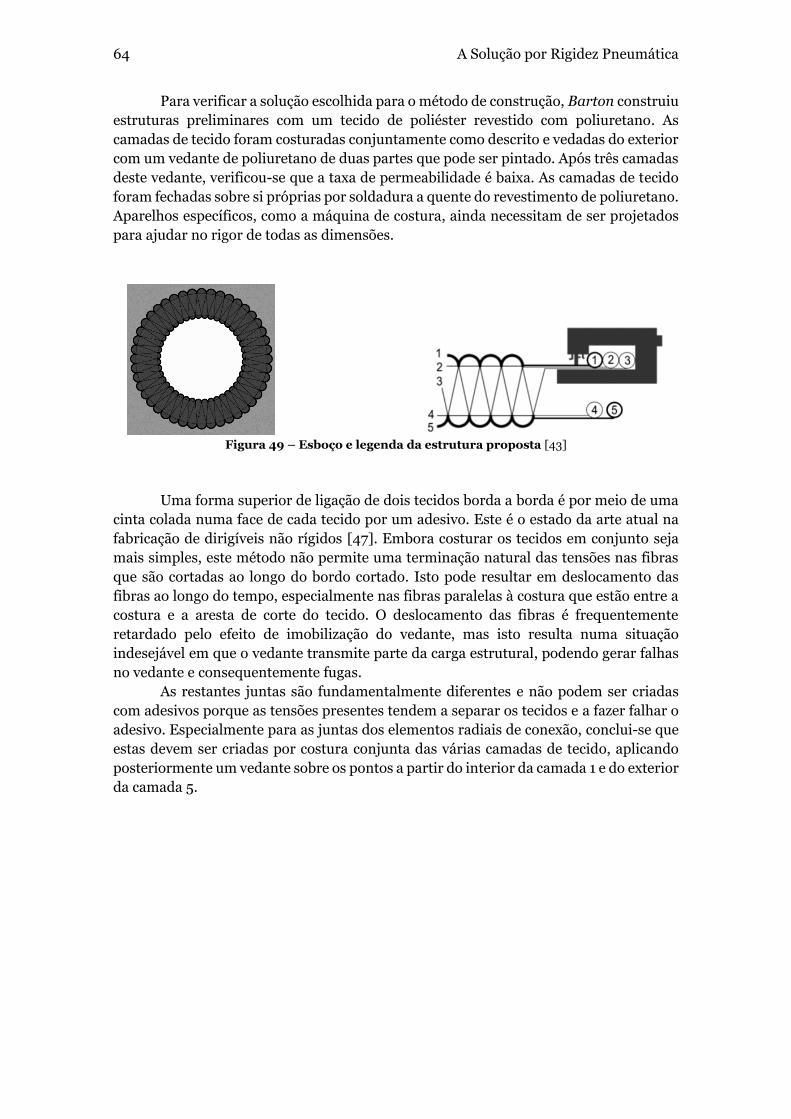
64 A Solução por Rigidez Pneumática
Para verificar a solução escolhida para o método de construção, Barton construiu
estruturas preliminares com um tecido de poliéster revestido com poliuretano. As
camadas de tecido foram costuradas conjuntamente como descrito e vedadas do exterior
com um vedante de poliuretano de duas partes que pode ser pintado. Após três camadas
deste vedante, verificou-se que a taxa de permeabilidade é baixa. As camadas de tecido
foram fechadas sobre si próprias por soldadura a quente do revestimento de poliuretano.
Aparelhos específicos, como a máquina de costura, ainda necessitam de ser projetados
para ajudar no rigor de todas as dimensões.
Figura 49 – Esboço e legenda da estrutura proposta [43]
Uma forma superior de ligação de dois tecidos borda a borda é por meio de uma
cinta colada numa face de cada tecido por um adesivo. Este é o estado da arte atual na
fabricação de dirigíveis não rígidos [47]. Embora costurar os tecidos em conjunto seja
mais simples, este método não permite uma terminação natural das tensões nas fibras
que são cortadas ao longo do bordo cortado. Isto pode resultar em deslocamento das
fibras ao longo do tempo, especialmente nas fibras paralelas à costura que estão entre a
costura e a aresta de corte do tecido. O deslocamento das fibras é frequentemente
retardado pelo efeito de imobilização do vedante, mas isto resulta numa situação
indesejável em que o vedante transmite parte da carga estrutural, podendo gerar falhas
no vedante e consequentemente fugas.
As restantes juntas são fundamentalmente diferentes e não podem ser criadas
com adesivos porque as tensões presentes tendem a separar os tecidos e a fazer falhar o
adesivo. Especialmente para as juntas dos elementos radiais de conexão, conclui-se que
estas devem ser criadas por costura conjunta das várias camadas de tecido, aplicando
posteriormente um vedante sobre os pontos a partir do interior da camada 1 e do exterior
da camada 5.
4.5 -Uso Alternativo da Estrutura Proposta 65
4.5 Uso Alternativo da Estrutura Proposta
Tendo agora o conhecimento que a ideia inicial de conceber um aeróstato com
paredes insufláveis que consiga garantir a flutuabilidade unicamente por evacuação foi
invalidada por cálculos e simulação computorizada, partiu-se para uma abordagem
alternativa de utilização que pudesse, ainda assim, tornar útil o conceito proposto.
Atualmente, há uma variedade de propostas para permitir que um dirigível, que
alcance sustentação por algum outro método, possa alterar reversivelmente o seu peso
durante o voo. Estas incluem a pressurização ou aquecimento de todo o conteúdo de gás
do dirigível, o armazenamento comprimido de ar ou gás de elevação e a liquefação do gás
de sustentação. Destas conclui-se que as técnicas envolvendo a pressurização ou
compressão parecem ser mais práticas do que aquelas envolvendo aquecimento ou
liquefação.
O novo dirigível Aeroscraft (Worldwide Eros Corporation), apresentado
anteriormente na fig. 14 e secção 2.2.1.3, utiliza o armazenamento de ar e hélio
comprimido para controlar a sua flutuabilidade de forma reversível. O Aeroscraft está
equipado com reservatórios de alta pressão para os quais o ar pode ser bombeado para
aumentar gradualmente o peso do veículo. Quando os tanques estão cheios, o peso pode
ser descarregado rapidamente por evacuação dos tanques. Este método consegue
auxiliar na compensação da perda de peso com a queima de combustível, à medida que
os reservatórios são pressurizados, bem como na descolagem vertical (em vez da
amarração) e no carregamento rápido de carga, quando estes são esvaziados. No entanto,
sem um método de aumento rápido de peso, as operações de pouso vertical e descarga
rápida de carga continuam difíceis. Estas operações não podem ser realizadas com um
tanque de ar comprimido, porque as bombas de ar são muito lentas ou muito pesadas.
Sabe-se, aliás, que se a bomba for do mesmo peso que o recipiente de armazenamento,
pode levar horas para encher o tanque, mas apenas segundos para o esvaziar. Deste
modo, a adição rápida e reversível de peso num aeróstato em pleno voo pode ser
conseguida com um tanque de pressão negativa. Infelizmente, as câmaras de vácuo
convencionais são impraticáveis para esta finalidade devido à sua grande massa (peso
elevado). No entanto, no desenvolvimento documentado neste trabalho, a câmara de
vácuo insuflável permite a criação de reservatórios de pressão negativa com baixo peso e
é, portanto, interessante explorar a aplicação potencial do vácuo no controlo de
sustentação de um dirigível.
Um recipiente de vácuo por rigidez pneumática pode funcionar como uma
câmara de vácuo e um recipiente de pressão. A sua eficiência de peso como tanque de
pressão é igual à dos recipientes sob pressão de conceções mais simples. No entanto, tem
a capacidade adicional de conter vácuo (para além da pressão) quando há pressão
suficiente entre a membrana dupla. Assim, tendo a mesma gama de controlo de
flutuabilidade que um sistema que apenas comprime os gases, apresenta também o
benefício de ser capaz de adicionar peso mais rapidamente, por abertura do tanque ao
exterior. Isto vem ao custo de ser necessário um recipiente de armazenamento com uma
geometria mais complexa.
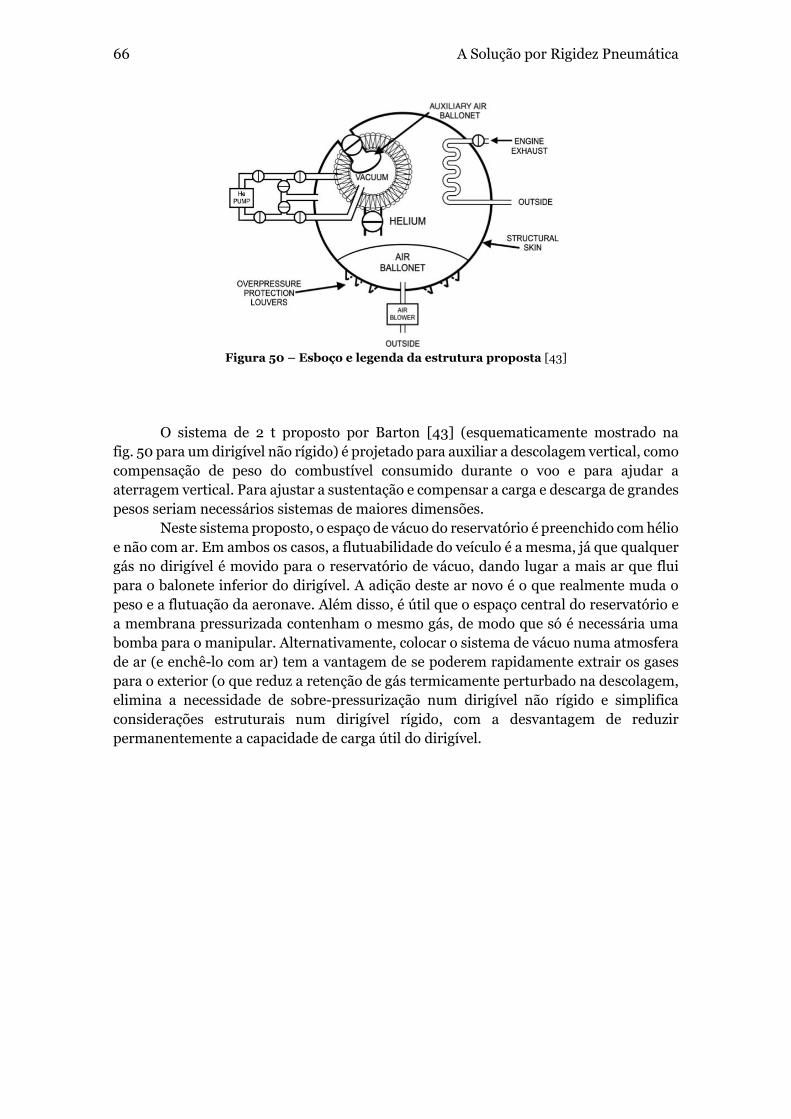
66 A Solução por Rigidez Pneumática
Figura 50 – Esboço e legenda da estrutura proposta [43]
O sistema de 2 t proposto por Barton [43] (esquematicamente mostrado na
fig. 50 para um dirigível não rígido) é projetado para auxiliar a descolagem vertical, como
compensação de peso do combustível consumido durante o voo e para ajudar a
aterragem vertical. Para ajustar a sustentação e compensar a carga e descarga de grandes
pesos seriam necessários sistemas de maiores dimensões.
Neste sistema proposto, o espaço de vácuo do reservatório é preenchido com hélio
e não com ar. Em ambos os casos, a flutuabilidade do veículo é a mesma, já que qualquer
gás no dirigível é movido para o reservatório de vácuo, dando lugar a mais ar que flui
para o balonete inferior do dirigível. A adição deste ar novo é o que realmente muda o
peso e a flutuação da aeronave. Além disso, é útil que o espaço central do reservatório e
a membrana pressurizada contenham o mesmo gás, de modo que só é necessária uma
bomba para o manipular. Alternativamente, colocar o sistema de vácuo numa atmosfera
de ar (e enchê-lo com ar) tem a vantagem de se poderem rapidamente extrair os gases
para o exterior (o que reduz a retenção de gás termicamente perturbado na descolagem,
elimina a necessidade de sobre-pressurização num dirigível não rígido e simplifica
considerações estruturais num dirigível rígido, com a desvantagem de reduzir
permanentemente a capacidade de carga útil do dirigível.

4.6 -Conclusões 67
4.6 Conclusões
Neste capítulo foi analisada a proposta de um aeróstato evacuado cujas
membranas se manteriam estáveis por rigidez pneumática.
Os gráficos na secção 4.3 ilustram claramente que, quanto maior for o
reservatório e menor a pressão na camada intermediária, mais provável será que a
câmara se torne "mais leve do que o ar". Isso significa que somente as câmaras de grandes
dimensões se poderiam tornar flutuantes. No entanto, foi verificado na secção 4.1.2, que
a sustentação positiva apenas pode existir caso se pressurizem as membranas com um
gás mais leve que o ar.
Foi conduzida uma análise de estabilidade e uma simulação numérica assistida
por software, que deixaram provado que esta estrutura pode ser utilizada como
reservatório de vácuo, tendo sido indicadas as suas vantagens e condições.
Relativamente às simulações assistidas por computador efetuadas, foram tiradas
as seguintes conclusões:
O método mais expedito através do software Abaqus FEA para calcular as tensões
e deformações na malha gerada é a análise dinâmica (Explicit) através da atribuição ao
material de propriedades elásticas do tipo lamina, que foi desenvolvido para solicitações
do tipo estado plano de tensão.
A primeira geometria testada, com ∆𝑅 = 100𝑚𝑚, só pode ser evacuada em
equilíbrio com pressões inter-membranares superiores a 10 vezes a pressão atmosférica.
As maiores tensões encontram-se nas regiões da membrana mais próximas dos
cabos de conexão.
Embora nos testes com maior pressão a tensão de cedência do compósito
utilizado tenha sido ultrapassada, este valor poderia ser diminuído aumentando o
número de cabos conectores.
Os esforços aplicados ao sistema reagem proporcionalmente à pressurização
inicial (Step-1), tendo uma distribuição linear e crescente. Durante o evacuamento (Step-
2), sofrem pequenas alterações na magnitude destes esforços, embora o sistema colapse
(tendo grande deslocamento) para os casos de menor pressão interna.
À medida que os valores da pressão interna aumentam, depois da pressurização
(Step-1), a membrana externa sofre cada vez menos alteração geométrica enquanto o
balão é evacuado internamente (Step-2), sendo possível confirmar a criação de uma
rigidez pneumática estável.
A segunda geometria testada, com ∆𝑅 = 700𝑚𝑚, só pode ser evacuada em
equilíbrio com pressões inter-membranares superiores a duas vezes a pressão
atmosférica.
As conclusões acima referidas são também válidas para a segunda geometria,
embora se possa afirmar que com a utilização de um maior espaçamento inter-
membranar, a pressão interna requerida para que o sistema possa ser evacuado de uma
forma estável é substancialmente menor. Isto acarreta, por um lado, uma menor adição
de peso devido à menor quantidade de gás comprimido e, por outro, um aumento do
volume pressurizado e, portanto, um aumento também de peso.
68 A Solução por Rigidez Pneumática
A teoria desenvolvida neste capítulo indica que os reservatórios de vácuo por rigidez
pneumática são alternativas viáveis aos reservatórios compressivos. Foram discutidos
métodos de construção da estrutura proposta, bem como usos alternativos, face à ideia
inicial. Infelizmente, ficou provado que a estrutura é invariavelmente mais densa que o
ar, independentemente do tamanho da embarcação. A sustentação foi dada como
possível, nesta configuração, apenas através do uso de um gás mais leve que o ar como
gás pneumático.
Conclui-se que esta abordagem, apesar de não comprovar algumas expectativas
iniciais, é uma mais valia para a indústria aeronáutica e pode ser empregue em diversas
circunstâncias.

5.1 -Introdução 69
Capítulo 5
A Solução Eletrostática
5.1 Introdução
Após a conclusão da secção anterior, que inviabilizava a solução por rigidez
pneumática para aeróstatos com flutuabilidade positiva, era necessário, em prol da
inovação tecnológica pretendida por este trabalho, formular uma hipótese distinta da
anterior, mas que pudesse servir o propósito do tema relativo a aeróstatos não rígidos
por evacuação de ar.
Pouco antes da data estipulada para a entrega deste documento, o autor formulou
a ideia, que agora propõe, como uma solução eletrostática para o problema em mãos.
Considerando noções básicas de campos elétricos, é sabido que cargas com igual
sinal se repelem, e cargas com sinais opostos se atraem. Atendendo a isto, foi idealizado
um sistema em que um número de pequenas esferas condutoras, todas carregadas com
a mesma polaridade e magnitude, é envolvido por uma membrana esférica dielétrica
(isoladora), de tal forma que a sobreposição das forças de repulsão criadas pela
contribuição de cada uma das esferas carregadas faça expandir essa membrana.
Quando o total da força de repulsão exercida na parede, por unidade de área, for
igual à pressão atmosférica, a membrana dielétrica poderia ser evacuada sem que esta
implodisse, alcançando-se por fim a flutuabilidade positiva. De seguida apresenta-se
uma imagem que ilustra o sistema proposto.
Figura 51 – Representação da estrutura eletrostática com o sentido das forças atuantes
Esferas
carregadas
Vácuo
Membrana
dielétrica

70 A Solução Eletrostática
5.2 Conceitos Teóricos e Análise Prévia
5.2.1 Forças por Efeito das Cargas
A carga é uma propriedade inerente de qualquer átomo, que é devida ao excesso
ou défice de eletrões face aos protões do núcleo. Existem dois tipos de cargas: a carga
positiva e a carga negativa. À medida que um átomo perde um eletrão, este adquire carga
positiva, se ganhar um eletrão adquire carga negativa.
É possível calcular a força entre quaisquer duas cargas pela lei de Coulomb. Esta
lei estabelece que dois corpos carregados se irão repelir ou atrair mutuamente, caso
tenham, respetivamente, a mesma ou diferentes polaridades. Na sua forma escalar, a lei
escreve-se:
𝐹 =1
4𝜋𝜀0
𝑞1𝑞2
𝑑2= 𝑘
𝑞1𝑞2
𝑑2 (39)
Onde a constante de permissividade do vácuo é 𝜀0 = 8.854 ∙ 10−12𝐶2𝑁−1𝑚−2 e a
constante de Coulomb é 𝑘 = 8.99 ∙ 109N𝑚2𝐶−2.
A força F, em Newtons, é diretamente proporcional ao produto das duas cargas,
𝑞1 𝑒 𝑞2, em Coulomb, e inversamente proporcional ao quadrado da distância entre elas
d, em metros. Às esferas são dadas cargas com a mesma polaridade, como descrito
anteriormente, colocando-as ao mesmo potencial elétrico.
Esta equação, no entanto, é apenas válida para casos com duas cargas. Quando
há mais cargas em jogo, é possível obter a força total atuante sobre uma carga introduzida
no sistema, calculando o vetor de todas as forças que atuam sobre essa carga, através da
teoria da sobreposição. Assim, a força que atua sobre uma carga pontual devido a
múltiplas cargas é dada pela soma vetorial de todas as forças individuais que atuam sobre
essa carga, como referido na seguinte expressão:
�⃗� = ∑ 𝐹𝑖𝑗⃗⃗⃗⃗⃗
𝑛
𝑗=1, 𝑐𝑜𝑚 𝑗 ≠ 𝑖 (40)
Este cálculo, devido à complexidade do sistema proposto, teria que ser resolvido
por processos computorizados. Essa análise será abordada na secção 5.5.
5.2.2 Conservação da Carga
A lei de conservação da carga afirma que a carga total de um sistema isolado
permanece constante. Segundo esta lei, se um sistema começa com um certo número de
cargas positivas ou negativas, a única forma de fazer variar este valor será introduzir ou
remover alguma carga do sistema. Na teoria eletromagnética, a equação de continuidade
é uma lei empírica que indica que a divergência da densidade de corrente elétrica J (em
amperes por metro quadrado) é igual à taxa negativa de variação da densidade de carga
ρ (em coulombs por metro cúbico). A expressão representa-se de seguida:
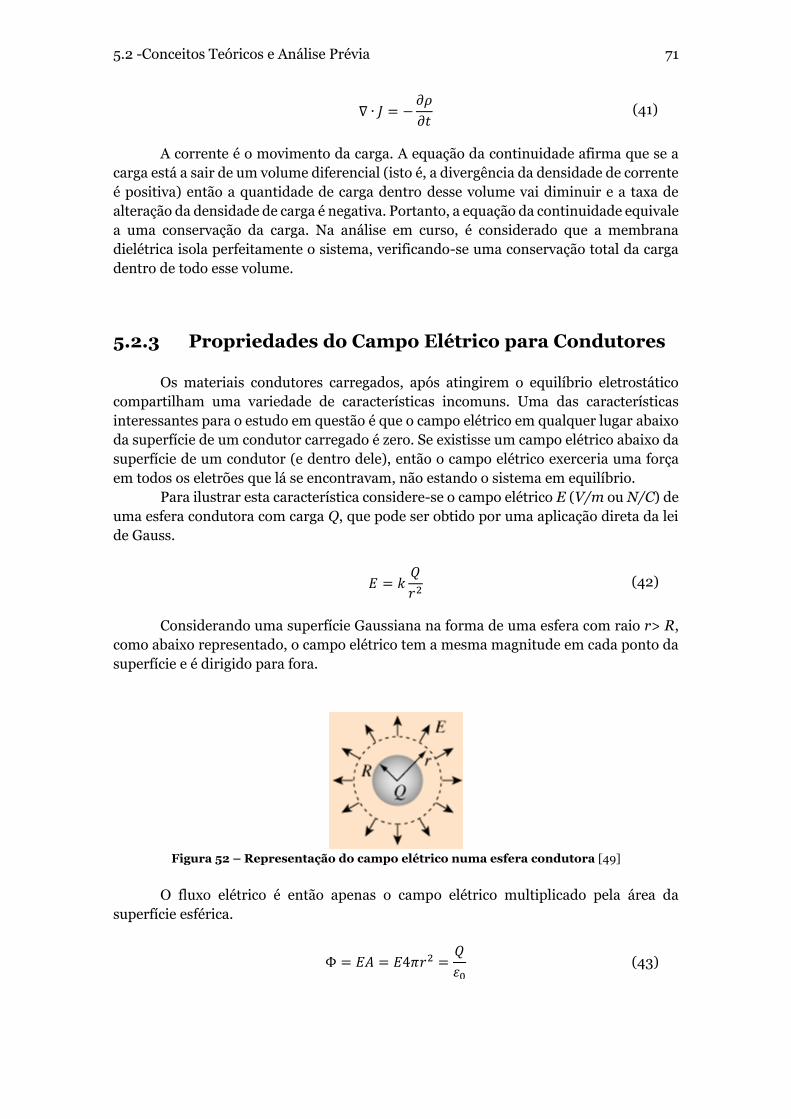
5.2 -Conceitos Teóricos e Análise Prévia 71
∇ ∙ 𝐽 = −𝜕𝜌
𝜕𝑡 (41)
A corrente é o movimento da carga. A equação da continuidade afirma que se a
carga está a sair de um volume diferencial (isto é, a divergência da densidade de corrente
é positiva) então a quantidade de carga dentro desse volume vai diminuir e a taxa de
alteração da densidade de carga é negativa. Portanto, a equação da continuidade equivale
a uma conservação da carga. Na análise em curso, é considerado que a membrana
dielétrica isola perfeitamente o sistema, verificando-se uma conservação total da carga
dentro de todo esse volume.
5.2.3 Propriedades do Campo Elétrico para Condutores
Os materiais condutores carregados, após atingirem o equilíbrio eletrostático
compartilham uma variedade de características incomuns. Uma das características
interessantes para o estudo em questão é que o campo elétrico em qualquer lugar abaixo
da superfície de um condutor carregado é zero. Se existisse um campo elétrico abaixo da
superfície de um condutor (e dentro dele), então o campo elétrico exerceria uma força
em todos os eletrões que lá se encontravam, não estando o sistema em equilíbrio.
Para ilustrar esta característica considere-se o campo elétrico E (V/m ou N/C) de
uma esfera condutora com carga Q, que pode ser obtido por uma aplicação direta da lei
de Gauss.
𝐸 = 𝑘𝑄
𝑟2 (42)
Considerando uma superfície Gaussiana na forma de uma esfera com raio r> R,
como abaixo representado, o campo elétrico tem a mesma magnitude em cada ponto da
superfície e é dirigido para fora.
Figura 52 – Representação do campo elétrico numa esfera condutora [49]
O fluxo elétrico é então apenas o campo elétrico multiplicado pela área da
superfície esférica.
Φ = 𝐸𝐴 = 𝐸4𝜋𝑟2 =𝑄
𝜀0 (43)

72 A Solução Eletrostática
Este campo elétrico é então visto como sendo idêntico ao de uma carga pontual Q
no centro da esfera. Uma vez que toda a carga residirá na superfície condutora, dado pela
condição de energia mínima em que as cargas unitárias se afastam o mais possível dentro
do condutor, uma superfície gaussiana com r <R não encerrará qualquer carga, e por
simetria, esta pode ser vista como sendo zero em todos os pontos dentro do condutor
esférico.
Esta conclusão é interessante para a análise em curso, na medida em que permite
que cada uma das esferas portadoras de carga, que se irão repelir e posteriormente fazer
expandir a membrana, possam ser simples cascas esféricas condutoras, ao revés de
necessitarem de ser sólidas, o que iria aumentar o peso total da estrutura.
5.2.4 Análise da Densidade de Carga
Existem algumas considerações importantes a ter em conta relativamente ao
carregamento de cascas esféricas condutoras ou eletretos com carga monopolar (ver
secção 5.3) para a criação de esforço de expansão numa membrana.
O livro Basic Electric Power Engineering de Elgerd [50] apresenta as seguintes
relações:
𝑉 =𝜌𝑠𝑑
𝜀𝑟𝜀0 (44)
𝐹
𝐴=
𝜌𝑠2
2𝜀𝑟𝜀0 (45)
A densidade de carga superficial calculada, 𝜌𝑠, é assim uma função quer da tensão
superficial desejada, V, como da força desejada por unidade de área, 𝐹
𝐴. Se a força por
unidade de área for ajustada para 1 ∙ 105 𝑃𝑎, a pressão atmosférica, então a densidade
de carga superficial calculada é aproximadamente de 1.93 𝑚𝐶/𝑚2. Esta densidade de
carga está bem dentro da atingida em eletretos, documentada na literatura [51].
Segundo Hilczer [52], a densidade de carga num eletreto é limitada por dois
efeitos: a rutura interna devido a um excesso elétrico na camada do eletreto e o escape
de eletrões (emissão catódica) pela superfície. A desagregação interna pode ser eliminada
carregando os eletretos com iões (geralmente eletrões) a profundidades selecionadas,
controlando o processo de implantação iónica, como normalmente já é usado para
carregar estes materiais. A emissão catódica é eliminada uma vez que todas as esferas
estão ao mesmo potencial e se considera a fronteira como isolada.
Os campos elétricos fortes entre as esferas de repulsão e o ambiente exterior não
devem exceder a resistência à rutura dielétrica da membrana de isolamento envolvente.
O campo elétrico calculado dentro das camadas de isolamento é de 104 MegaVolts por
metro (MV/m), para a pressão atmosférica e com a permissividade relativa dentro do
dielétrico de 2.1 (como para PTFE). Este nível de solicitação encontra-se dentro do limite
de rutura dielétrica de 160 MV/m obtido em membranas plásticas de acordo com
Kirjavainen [53]. Em membranas de dióxido de silício a rutura dielétrica é superior a
300 MV/m.

5.2 -Conceitos Teóricos e Análise Prévia 73
5.2.5 Análise pelo Tensor de Maxwell
O tensor das tensões de Maxwell (nomeado por James Maxwell) é um tensor de
segunda ordem usado no eletromagnetismo clássico para representar a interação entre
as forças eletromagnéticas e o momento mecânico.
Calculando a força eletromagnética total para dado volume V:
�⃗� = ∫ (�⃗⃗� + �⃗�𝑋�⃗⃗�)𝜌𝑑𝜏𝑉
= ∫ (𝜌�⃗⃗� + 𝐽𝑋�⃗⃗�)𝑑𝜏𝑉
(46)
Pela formulação deduzida por Griffiths [54], isto é equivalente a:
�⃗� = ∮ 𝑇𝑆
𝑑𝑆 − 𝜀0𝜇0
𝑑
𝑑𝑡∫ 𝑆𝑑𝜏
𝑉
(47)
Em que 𝑆 é o vetor de Poynting que representa a densidade direcional do fluxo de
energia (ou a quantidade de energia transferida por unidade de área, em Watts por metro
quadrado) de um campo eletromagnético e é equivalente a:
𝑆 ≡1
𝜇0(�⃗⃗�𝑋�⃗⃗�) (48)
Sabendo que nesta análise eletrostática as variáveis não se alteram em função do
tempo, pode-se simplificar a equação (46) para:
�⃗� = ∮ 𝑇𝑆
𝑑𝑆 (49)
Esta equação será usada na secção 5.4 para determinar a pressão que é exercida
sobre a membrana, aquando da simulação assistida por computador.
5.2.6 Teorema de Earnshaw
O Teorema de Earnshaw afirma que um conjunto de cargas pontuais não se pode
manter em estado de equilíbrio mecânico estacionário exclusivamente pela interação
eletrostática das cargas. Este teorema foi provado em 1842 pela primeira vez pelo
matemático britânico Samuel Earnshaw. Geralmente refere-se a campos magnéticos
mas originalmente foi aplicada aos campos elétricos.
A consideração deste teorema é pertinente porque devido a esta impossibilidade
de equilíbrio estacionário, o sistema estará sujeito a vibrações causadas pelas esferas
carregadas que não estabilizam a sua posição. Considerações adicionais terão que ser
tomadas para neutralizar estas vibrações.

74 A Solução Eletrostática
5.3 Tipos de Materiais Empregues
O material selecionado para a membrana isoladora envolvente terá de preferência
uma elevada resistência mecânica e uma resistência elétrica muito elevada, tipicamente
de 1018𝑎 1025𝑂ℎ𝑚 ∙ 𝑚, sendo também flexível. É também importante que bloqueie os
campos magnéticos e para tal necessita de uma permissividade elevada.
Um outro requisito desta configuração é que este material não permita a
passagem de gases ambientais para a camada interior. De acordo com Weston [55], a
quantidade de gás que passa através de uma parede sólida é proporcional a uma
"constante de permeabilidade" e inversamente proporcional à espessura da parede. A
constante de permeabilidade varia com a temperatura, o gás em particular e o material
da parede. Somente os metais combinam baixa permeabilidade com flexibilidade.
Geralmente, somente os gases que são solúveis no metal conseguem passar através deste.
Como exemplo tem-se o hidrogénio e o oxigénio na maioria dos metais e o vapor de água
em aço macio.
Os materiais que satisfazem estes requisitos e que também têm baixa densidade
incluem preferencialmente polímeros termoplásticos como: poliolefinas, tais como
polietileno, polipropileno e politereftalato de etileno (PET); poliésteres, tais como
politereftalato de etileno (PET) e politereftalato de butileno (PBT); poliamidas, tais como
nylon 6 e nylon 66; bem como fluoropolímeros, tais como etileno propileno fluorado
(FEP) e politetrafluoroetileno (PTFE). Tais materiais podem também incluir elastómeros
(borrachas ou látex), estando nestes compreendidos a borracha de butadieno, a borracha
de butilo, a borracha de nitrilo-butadieno e silicones.
Para as esferas carregadas são impostos diferentes requisitos. Se o material for
condutor, tal como os metais, sabe-se pela condição apresentada na secção 5.2.3, que
apenas é necessária uma casca esférica metálica, podendo o volume interno ser
preenchido por ar. Neste caso, como as cargas estão livres, estas irão migrar para a
superfície, o que pode limitar a carga máxima total capaz de se introduzir em cada esfera.
Segundo Bell [51], os materiais preferenciais para efeitos de repulsão são
eletretos, definidos como materiais eletricamente isolantes capazes de reter cargas
elétricas monopolares neles introduzidas, durante períodos de tempo prolongados. Estas
cargas, que dependendo da resistividade do material podem permanecer durante
centenas de anos, são implantadas através do arrefecimento de um material dielétrico
num forte campo elétrico, após a sua fusão prévia, ou através de um acelerador de
partículas ou descarga por arco elétrico.
Tais materiais incluem fluoropolímeros, tais como FEP e PTFE, bem como outros
polímeros como policarbonato (PC), poliimida (PI), polietileno (PE), polipropileno (PP)
e politereftalato de etileno (PET). Alguns materiais inorgânicos também podem ser bons
eletretos, como é o caso do dióxido de silício e do óxido de alumínio, sendo estes mais
úteis quando as propriedades de flexibilidade não são necessárias.

5.4 -Carregamento das Esferas de Repulsão 75
5.4 Carregamento das Esferas de Repulsão
O processo para fornecer ou fazer perder carga elétrica a um objeto é chamado de
carregamento. De seguida exemplificam-se as formas que este processo pode tomar:
Carregamento por fricção
Quando um objeto é esfregado contra outro objeto, os eletrões são transferidos
de um para o outro. Essa transferência ocorre devido ao atrito entre os dois corpos, mas
a polaridade e a magnitude das cargas produzidas diferem de acordo com os materiais, a
rugosidade das superfícies, a temperatura e o esforço, bem como outras propriedades. O
objeto que transfere eletrões perde carga negativa e o objeto que aceita eletrões ganha
carga negativa, ficando ambos carregados positiva e negativamente, de forma respetiva.
Desta forma, os dois objetos são carregados por fricção. Este método de carregamento é
também chamado de carregamento triboelétrico e é aquele com menor controlo sobre a
carga transferida.
Carregamento por condução
O processo de carregar um corpo colocando-o em contacto com outro objeto
carregado é chamado carregamento por condução. Um objeto carregado tem um número
desigual de cargas negativas e cargas positivas. Assim, quando este é posto em contacto
com um material condutor não carregado, as cargas em excesso são transferidas do corpo
carregado para o condutor, de forma a que se equilibrem.
Carregamento por indução
O processo de carregar um objeto trazendo outro carregado para a proximidade,
mas não lhe tocando, é chamado carregamento por indução. Considerando uma esfera
de metal não carregada e uma vareta carregada negativamente como mostrado na figura
abaixo (fig. 53), as cargas positivas da esfera são atraídas para a vareta e movem-se para
uma extremidade da esfera que está mais próxima dessas cargas negativas. Da mesma
forma, as cargas negativas são repelidas e movem-se para a outra extremidade da esfera.
Assim, as cargas na esfera reorganizam-se na forma de mínima energia.
Posteriormente, se esta esfera for conectada à terra através de um fio como o
mostrado na figura, os eletrões livres da esfera no extremo mais distante fluem para o
chão. Assim, a esfera torna-se positivamente carregada por indução, só a perdendo por
um dos processos descritos.

76 A Solução Eletrostática
Figura 53 – Representação das etapas do carregamento por indução [56]
Na estrutura proposta, tanto o carregamento por condução como o carregamento
por indução seriam exequíveis. De todos os métodos, o mais simples seria o
carregamento por condução. Um método híbrido de carregamento poderia ser um
carregamento por condução no qual não há contacto, mas a carga é transferida por um
arco elétrico (descarga corona), criado por um campo elétrico forte o suficiente para
vencer a resistência dielétrica do ar.
É, no entanto, necessário refletir sobre a forma como se carregaria
individualmente cada esfera e como se poderia introduzi-la dentro da membrana
isoladora sem a fazer perder carga. Um método que poderia contornar este problema
passa por ter ligadas todas as esferas por um cabo condutor muito fino e flexível que, ao
lhe ser fornecida carga por algum método, este a pudesse transmitir para todas as esferas
ao mesmo tempo e de forma uniforme. Neste caso, embora a carga transferida
necessitasse de ser maior, a densidade superficial de carga não seria alterada. Na secção
5.7 apresenta-se uma experiência que confirma esta possibilidade de insuflar
eletrostaticamente uma estrutura.
5.5 Simulação Numérica Assistida por
Computador
A simulação numérica por elementos finitos assistida por computador é de novo
empregue, aplicando-a agora ao problema eletrostático em análise, composto por uma
membrana dielétrica esférica, preenchida por diferentes arranjos de esferas condutoras,
todas carregadas com o mesmo sinal e magnitude. O objetivo desta análise é o de
determinar qual o número de esferas mínimo e/ou a carga mínima em cada uma, de
forma a que a sobreposição das forças por interação repulsiva entre as esferas, crie uma
pressão superficial na parede da membrana igual à pressão atmosférica, para que desta
forma o sistema possa ser evacuado e tenha flutuabilidade positiva.
O software escolhido para a análise é o software Comsol Multiphysics, que é um
pacote comercial para análise por elementos finitos desenvolvido na Suécia. Este produto
possui um ambiente de interface integrado, projetado para o desenvolvimento e análise

5.5 -Simulação Numérica Assistida por Computador 77
multidisciplinar, com uma sequência unificada para aplicações elétricas, mecânicas,
químicas e de escoamento.
Todo o trabalho de simulação desenvolvido para este documento passou
primeiramente por uma extensa fase de aprendizagem no manuseio e fiel interpretação
dos resultados. A metodologia seguida é a mesma da simulação anterior e está descrita
na figura 36.
Figura 54 – Logótipo do software escolhido
Criação do Modelo
Para o estudo descrito nesta secção, o módulo utilizado foi o AC/DC, que é
empregue para simular campos elétricos, magnéticos e eletromagnéticos em aplicações
estáticas e de baixa frequência.
Dentro deste módulo, foi usada a interface Eletrostática (Electrostatics) que serve
para calcular o campo elétrico, o campo de deslocamento elétrico e distribuições de
potencial em dielétricos em condições onde a distribuição da carga elétrica está
explicitamente prescrita. A interface física resolve a lei de Gauss para o campo elétrico
usando o potencial elétrico escalar como a variável dependente.
Para o caso em análise, é escolhido um tipo de estudo estacionário (Stationary),
usado quando as variáveis de campo não mudam ao longo do tempo, condição que se
verifica para o presente estudo.
Desenho da Geometria e Atribuição das Propriedades dos
Materiais
A geometria necessária para a representação fiel deste sistema é composta por
vários elementos.
Primeiramente tem-se a membrana dielétrica que envolve todas as esferas,
isolando o sistema. Para tal foi criada uma membrana esférica com dimensões variáveis,
governadas pelo parâmetro do raio. Para assegurar o total isolamento da membrana foi

78 A Solução Eletrostática
escolhido um material com 𝜀𝑟 = 100 e uma espessura de 100mm. Naturalmente este
valor é exagerado, mas desta forma garante-se que não há fuga de cargas para o exterior.
De seguida foi criada uma esfera modelo, com 10mm de raio, e que
posteriormente foi sujeita a diferentes transformações em arranjos lineares ou angulares
para representar o sistema da forma como funcionaria intuitivamente. Isto é, foi criado
um arranjo destas esferas junto à membrana, como se todas a empurrassem para fora,
estando todas em contacto com esta e outro, no qual para além desta distribuição
superficial, estão distribuías uniformemente mais um conjunto de esferas na zona central
de forma a aumentar o total da pressão exercida para fora. O material escolhido para
estes elementos não é condicionante, visto que, ao considera-lo condutor, as cargas
alojam-se na superfície de cada esfera, não sendo relevante a sua constante dielétrica.
Os valores das densidades superficiais de carga utilizadas para a análise são de
0.002; 0.005; 0.02 𝑒 0.05 𝐶/𝑚2. Este valor, quando multiplicado pela superfície exterior
total de cada esfera - 0.000314 𝑚2, devolve a carga total em cada esfera de acordo com a
densidade escolhida - 6.28 ∙ 10−7; 1.57 ∙ 10−6; 6.28 ∙ 10−6 𝑒 1.57 ∙ 10−6 𝐶𝑜𝑢𝑙𝑜𝑚𝑏.
Por fim, a todo o volume delimitado pela membrana, à exceção das esferas, foram
atribuídas propriedades similares às do ar, com 𝜀𝑟 = 1.
Atribuição das Condições da Análise
Para a simulação decorrer segundo as leis da física, têm que ser estabelecidas
algumas proposições que condicionam o sistema.
Para tal, a partir do Comsol foi considerado que:
A carga é conservada;
O sistema começa em equilíbrio, com o potencial a zero;
A densidade superficial de carga é a estabelecida pelo parâmetro 𝜌𝑠;
A membrana envolvente age como um dielétrico, com as respetivas constante
dielétrica e espessura;
Os pontos com o potencial estabelecido 𝑉 = 0 encontram-se 100mm ao largo da
membrana dielétrica;
A força atuante na membrana será calculada segundo a equação (49).
Criação da Malha e Pós-processamento
Após todo o mecanismo do sistema estar explícito, é criada uma malha calibrada
para a análise eletrostática, constituída, por definição, por elementos triangulares de três
nós.
Posta a computação do comportamento do sistema, são criadas várias interfaces
de pós-processamento, incluindo o cálculo de valores, e a representação de imagens e
gráficos que são anexadas na secção A.3. Note-se que as imagens 3D resultantes da
computação através do Comsol são muito confusas quando representadas em formato
papel e, portanto, optou-se por não as incluir.
5.6 -Discussão dos Resultados 79
5.6 Discussão dos Resultados
Depois de realizadas as simulações numéricas com auxílio ao software Comsol
Multiphysics, foram conseguidas, através de um pós-processamento cuidado, várias
representações gráficas dos resultados obtidos.
As representações 2D que constam nos anexos, na secção A.3, ilustram a
orientação do campo elétrico, a preto, e a orientação do tensor de Maxwell, a branco.
Todas estas imagens foram criadas através da simulação de uma membrana com 2m de
raio, em contacto com esferas carregadas distribuídas uniformemente. A segunda e a
terceira imagem derivam da inclusão de um conjunto adicional de esferas internas, sendo
um total de 27 para a segunda imagem e de 37 para a terceira. Note-se que estas
representações em corte são fieis ao arranjo do campo elétrico para configurações
semelhantes com maiores dimensões. Para todas foi escolhido 𝜌𝑠 = 0.02 𝐶/𝑚2.
A partir destas representações, é possível compreender o arranjo do campo
elétrico em função das cargas vizinhas, e confirmar a direção “para fora” do tensor de
Maxwell.
Nas representações gráficas seguintes é feito variar o raio da membrana, para a
mesma combinação de esferas, proporcionalmente espaçadas, à exceção do primeiro
caso que apenas possui esferas junto à membrana. Com estas simulações pôde-se retirar
um conjunto de gráficos que ilustram a variação do potencial e do campo elétrico ao
longo de uma linha que atravessa o centro do sistema.
É possível notar, através da observação dos gráficos da variação do potencial, que
independentemente da distância entre os pontos carregados, este não decresce
totalmente, mantendo uma polaridade base constante por todo o sistema. Os gráficos
relativos à variação do campo elétrico, por outro lado, denotam um decréscimo
acentuado sempre que a distância entre pontos carregados ultrapassa um valor limite.
No último grupo de gráficos, construídos no Microsoft Excel com valores
calculados no Comsol, representa-se a variação das propriedades físicas: potencial
elétrico, campo elétrico e tensor de Maxwell em função do raio, para os dois primeiros, e
em função da densidade superficial de carga para o último. No primeiro caso, calculado
para construções sem esferas centrais, pode-se notar que a pressão exercida na
membrana “para fora” decresce à medida que o raio aumenta. Isto é facilmente explicado
por um aumento da área superficial da membrana sem um aumento correspondente do
número de esferas ou da densidade superficial de carga, como se veio a verificar no
terceiro destes gráficos. É importante salientar que os valores utilizados para a
representação do potencial e do campo elétrico correspondem a valores máximos
atingidos e não um valor médio.
Como é possível observar, para quase todas as configurações apresentadas, o
valor do tensor de Maxwell na superfície da membrana envolvente excede o número de
1 ∙ 105𝑃𝑎, ou seja, este atua para contrariar e consegue vencer a pressão atmosférica. O
valor deste tensor irá finalmente variar em função do número e quantidade de cargas
existentes, bem como o raio escolhido para a geometria da membrana.
Uma conclusão mais concreta, obtida pelo último gráfico, indica que ao aumentar
a densidade superficial de carga em uma ordem de grandeza, o campo elétrico e o
potencial elétrico aumentam também em uma ordem de grandeza, já o tensor de Maxwell
aumenta um total de duas ordens de grandeza.
80 A Solução Eletrostática
5.7 Propostas Análogas
Segundo a pesquisa realizada, a primeira pessoa a descrever o fenómeno da
repulsão eletromagnética para superar a pressão atmosférica foi Dakhin na sua patente
[57] relativa a uma dupla membrana isoladora de som, onde descreve uma estrutura
evacuada composta por duas paredes, cada uma com ímanes internos em forma de
cubos, com a intenção de criar forças que atuem para vencer as forças de colapso, sem
contacto físico entre eles. No entanto, estes ímanes são pesados e volumosos, exigindo
que o painel de Dakhin seja espesso. Além disso, todos os materiais magnéticos
permanentes perdem o seu magnetismo quando sujeitos a uma temperatura acima da
temperatura de Curie para cada material, limitando as aplicações para esses isoladores.
Por outro lado, Bell [51] propõe uma membrana termicamente isoladora, que
reduz a perda de calor. Isso ocorre porque é criado um intervalo de vácuo que bloqueia
toda a transferência de calor por condução e convecção, invariavelmente de quão
pequeno é. Esta estrutura usa forças eletrostáticas para resistir ao colapso, estabelecendo
e mantendo assim um espaço de vácuo e uma carga elétrica sem uma fonte de
alimentação externa constante. Esta membrana leve e flexível, como é não magnética,
não perde a sua eficácia a temperaturas elevadas. A condutividade térmica desta
membrana é determinada por três fatores: a condução nos bordos, a ligeira condução
através de qualquer gás remanescente e a irradiação de calor.
É de salientar que na abordagem de Bell, adicionalmente à dupla membrana
carregada com a mesma polaridade, é proposta uma camada adicional com a polaridade
oposta, com a finalidade de ser colocada sobre a membrana evacuada, de forma a servir
de compensação para evitar que sejam atraídas cargas “compensadoras” de polaridade
oposta a partir da atmosfera. Este conceito é interessante considerar, visto que na
abordagem proposta por este documento é assumido que a membrana isoladora
conseguirá bloquear toda a atração de cargas das imediações do sistema.
Uma aplicação da membrana isoladora eletrostaticamente evacuada foi proposta
por Porter [58]. Este conceito é composto por um envelope para uma aeronave mais leve
que o ar, tendo esta membrana a envolver todo o gás do balão. Os esforços são
transferidos desse invólucro por um conjunto de fitas de carga, de modo a que todas as
cargas adicionais na membrana estejam sob tração.
Os balões de ar quente atuais perdem quantidades prodigiosas de energia através
dos seus envelopes não isolantes, exigindo constante adição de energia por queima de
combustível; quando o combustível se esgota, o balão tem que aterrar. A utilização deste
invólucro isolante evacuado eletrostaticamete permite uma perda de calor muito baixa,
requerendo pouca energia externa para manter uma grande diferença de temperatura
entre o interior e o exterior. Tipicamente, a perda de calor através deste envelope é de
um décimo a um centésimo dos envelopes atuais, dando correspondentemente mais
tempo de voo para a mesma quantidade de combustível.
A figura seguinte ilustra uma célula unitária da membrana idealizada por Porter.

5.7 -Propostas Análogas 81
Figura 55 – Representação da dupla membrana insuflada electrostaticamente [58]
Neste projeto proposto por Porter, a superfície inferior do balão é também
refletora para microondas e feixes de laser. Desta forma, Porter imagina uma disposição
uniforme composta por muitos destes balões, mantidos a uma altitude elevada, e
utilizados para facilitar as comunicações a nível global. A figura seguinte ilustra este
conceito.
Figura 56 – Representação da aplicação pretendida por Porter [58]
Numa abordagem distinta, o conceito proposto por Laura Stiles [59], introduz o
uso de forças eletrostáticas para a atuação de estruturas espaciais compostas por
membranas leves. Estas estruturas leves e finas de seu nome “gossamer” fornecem uma
alternativa aos sistemas mecânicos tradicionais que são tipicamente mais caros, maciços
e complexos. De igual forma, poderia também ser empregue para este género de
estruturas a insuflação por gás pressurizado. No entanto, este conceito fará uso do
carregamento eletrostático para auto-repelir membros estruturais para a implantação da
construção e de forma a aumentar a sua rigidez estrutural. O conceito de insuflação
eletrostática está ilustrado na figura 57.

82 A Solução Eletrostática
Figura 57 – Representação das diferentes fases da insuflação eletrostática [59]
Experiências laboratoriais realizadas por Biles mostram que a insuflação
eletrostática é viável mesmo em ambiente terrestre, concluindo que os potenciais para
insuflar uma estrutura no espaço podem ser significativamente mais baixos do que os
9 kV requeridos em laboratório. A figura seguinte demonstra a experiência realizada.
Figura 58 –Insuflação eletrostática de uma estrutura teste, de 0 a 9 kV [59]

5.8 -Conclusões 83
5.8 Conclusões
Neste capítulo foi analisada a proposta de um aeróstato evacuado cuja membrana
envolvente se manteria estável devido à repulsão eletrostática de esferas interiores.
Considerando condições ideais de funcionamento, as leis da física discutidas
preveem que se as esferas forem carregadas com a mesma polaridade, haverá uma força
de repulsão entre elas e, se isolada, a carga no sistema permanecerá constante.
Na análise prévia foi estimado um valor para a densidade superficial necessária
para vencer as forças atmosféricas, sendo este um valor próximo do utilizado na
simulação por software e, segundo as fontes consultadas, encontra-se dentro dos valores
de carga possíveis de transferir para um objeto, tendo sido estabelecida a distinção entre
um material condutor e um eletreto.
Foram explorados diferentes métodos de carregamento das esferas e por fim,
realizou-se uma simulação numérica por elementos finitos, com o objetivo de modelar o
conceito proposto.
Estudos análogos considerados por outros autores foram revistos e deram maior
fundamento à solução proposta.
Os resultados mostram que é possível criar uma pressão “para fora” na
membrana dielétrica, contrária à pressão atmosférica e que varia em função do número
e quantidade de cargas existentes. Esta quantidade, segundo o que as simulações
indicam, pode ser regulada para vencer a pressão atmosférica, podendo assim permitir
que o veículo atinja flutuabilidade positiva, como previsto.

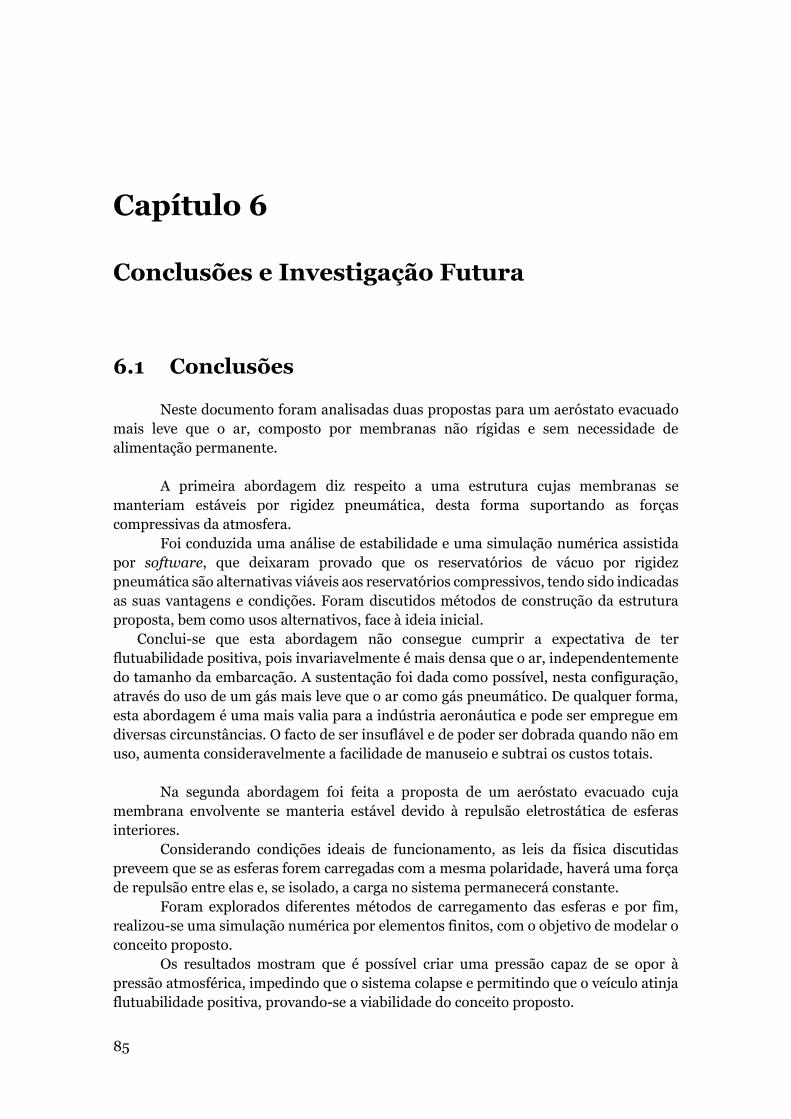
85
Capítulo 6
Conclusões e Investigação Futura
6.1 Conclusões
Neste documento foram analisadas duas propostas para um aeróstato evacuado
mais leve que o ar, composto por membranas não rígidas e sem necessidade de
alimentação permanente.
A primeira abordagem diz respeito a uma estrutura cujas membranas se
manteriam estáveis por rigidez pneumática, desta forma suportando as forças
compressivas da atmosfera.
Foi conduzida uma análise de estabilidade e uma simulação numérica assistida
por software, que deixaram provado que os reservatórios de vácuo por rigidez
pneumática são alternativas viáveis aos reservatórios compressivos, tendo sido indicadas
as suas vantagens e condições. Foram discutidos métodos de construção da estrutura
proposta, bem como usos alternativos, face à ideia inicial.
Conclui-se que esta abordagem não consegue cumprir a expectativa de ter
flutuabilidade positiva, pois invariavelmente é mais densa que o ar, independentemente
do tamanho da embarcação. A sustentação foi dada como possível, nesta configuração,
através do uso de um gás mais leve que o ar como gás pneumático. De qualquer forma,
esta abordagem é uma mais valia para a indústria aeronáutica e pode ser empregue em
diversas circunstâncias. O facto de ser insuflável e de poder ser dobrada quando não em
uso, aumenta consideravelmente a facilidade de manuseio e subtrai os custos totais.
Na segunda abordagem foi feita a proposta de um aeróstato evacuado cuja
membrana envolvente se manteria estável devido à repulsão eletrostática de esferas
interiores.
Considerando condições ideais de funcionamento, as leis da física discutidas
preveem que se as esferas forem carregadas com a mesma polaridade, haverá uma força
de repulsão entre elas e, se isolado, a carga no sistema permanecerá constante.
Foram explorados diferentes métodos de carregamento das esferas e por fim,
realizou-se uma simulação numérica por elementos finitos, com o objetivo de modelar o
conceito proposto.
Os resultados mostram que é possível criar uma pressão capaz de se opor à
pressão atmosférica, impedindo que o sistema colapse e permitindo que o veículo atinja
flutuabilidade positiva, provando-se a viabilidade do conceito proposto.

86 Conclusões e Investigação Futura
Embora ainda falte um longo caminho para se poder dar esta hipótese como
totalmente comprovada, pode-se afirmar, por ora, que este último estudo foi um sucesso,
motivando a uma análise mais extensa e a uma aposta de investigação para o futuro.
6.2 Investigação Futura
Relativamente à abordagem por rigidez pneumática não será dada muito ênfase
por agora, visto esta não ter concretizado o projeto primeiramente idealizado.
Relativamente à abordagem eletrostática, o estudo realizado ainda carece de
muitos dados que corroborem o projeto proposto. Mais testes por elementos finitos, com
diferentes configurações, são necessários para compreender todas as variáveis
envolvidas. De igual forma, é fundamental um estudo mais cuidado de todos os materiais
e processos existentes.
Ao longo desta fase final do trabalho, têm sido solicitados diversos contactos de
entidades nacionais com condições para a realização de alguns ensaios experimentais de
forma a validar certas assunções teóricas. Tal procura tem, até à data, sido infrutífera
devido à especificidade dos estudos pretendidos. Após a conclusão desta dissertação,
será levado a cabo pelo autor, um extensivo e mais aprofundado estudo nesta matéria,
estando prevista para breve a candidatura a uma patente e a exploração futura deste
conceito.

Investigação Futura Conclusões e Investigação Futura 87
Referências
[1] “Lockheed’s airship.” [Online]. Available:
http://www.dailymail.co.uk/sciencetech/article-3326046/Lockheed-s-airship-
gets-green-light-approves-massive-hybrid-vehicle-launch-2018.html. [Accessed:
30-Dec-2016].
[2] L. A. T. Ege and K. Munson, Balloons and Airships, 1783-1973. Blandford Press,
1973.
[3] “Passarola.” [Online]. Available: https://pt.wikipedia.org/wiki/Passarola.
[Accessed: 27-Dec-2016].
[4] C. Gillispie, The Montgolfier brothers and the invention of aviation 1783-1784.
Princeton University Press, 1983.
[5] “Montgolfier Balloon.” [Online]. Available: https://s-media-cache-
ak0.pinimg.com/originals/4e/ca/b5/4ecab575000cdc2182983f2c91787f2a.jpg.
[Accessed: 30-Dec-2016].
[6] “Charles Hydrogen Balloon.” [Online]. Available:
http://www.fiddlersgreen.net/models/Aircraft/Balloon-Charles.html. [Accessed:
27-Dec-2016].
[7] “Airship.” [Online]. Available:
https://en.wikipedia.org/wiki/Airship#/media/File:Brockhaus-
Efron_Aeronavtika.jpg. [Accessed: 30-Dec-2016].
[8] “Como funcionam os balões de ar quente.” [Online]. Available:
http://ciencia.hsw.uol.com.br/baloes-de-ar-quente.htm. [Accessed: 27-Dec-2016].
[9] L. L. Ã and I. Pasternak, “Progress in Aerospace Sciences A review of airship
structural research and development,” Progress in Aerospace Sciences, vol. 45, no.
4–5, pp. 83–96, 2009.
[10] “The Era of the Dirigible.” [Online]. Available:
http://www.centennialofflight.net/essay/Lighter_than_air/dirigibles/LTA9.htm.
[Accessed: 29-Dec-2016].
[11] J. W. Lancaster, Feasibility study of modern airships. National Technical
Information Service, 1975.
[12] “Hinderburg Disaster.” [Online]. Available:
https://upload.wikimedia.org/wikipedia/commons/1/1c/Hindenburg_disaster.jpg.
[Accessed: 30-Dec-2016].
[13] “Dirigíveis.” [Online]. Available:
http://laboratorio.jornalismojunior.com.br/2016/07/01/dirigiveis-um-sonho-que-
supera-sua-epoca/. [Accessed: 30-Dec-2016].
[14] J. Grimmelt, “Floating concrete units- lighter than air opportunities of the new
CargoLifter technology,” Betonwerk und Fertigteil-Technik, 2002.
[15] N. Mayer, “Lighter-than-air systems,” Aerospace America, no. December, 2008.
[16] C. P. Burgess, Airship Design. Ronald Press Company, 1927.
[17] M. Chandrala and A. Choubley, “A REVIEW OF AIRSHIP RESEARCH &
Development,” JOURNAL OF INFORMATION, KNOWLEDGE AND

88 Conclusões e Investigação Futura
RESEARCH, pp. 138–142.
[18] “Aeroscraft.” [Online]. Available: http://aeroscraft.com. [Accessed: 31-Dec-
2016].
[19] G. E. Dorrington, “Development of an airship for tropical rain forest canopy
exploration,” no. 2981, pp. 361–372, 2005.
[20] G. E. Dorrington, “Drag of Spheroid-Cone Shaped Airship,” vol. 43, no. 2, 2006.
[21] G. A. Khroury, Airship Technology, 2nd ed. Cambridge University Press, 2012.
[22] “Sky Ship.” [Online]. Available:
http://smg.photobucket.com/user/muzzleflash5588/media/skyship.gif.html.
[Accessed: 30-Dec-2016].
[23] “BUOYANT LIFT.” [Online]. Available:
http://www.laesieworks.com/ifo/how/buoyant_lift.html. [Accessed: 30-Dec-
2016].
[24] D. Fink, “Hybrid heavy lift vehicle under study,” Aviation Week, 1974.
[25] M. Battipede, M. Lando, and P. A. Gili, “Peculiar Performance of a New Lighter-
Than-Air Platform for Monitoring,” no. September, pp. 1–14, 2004.
[26] “Airlander 10.” [Online]. Available:
http://www.nbcnews.com/news/world/airlander-10-worlds-largest-airship-
dubbed-flying-bum-takes-maiden-n633031. [Accessed: 31-Dec-2016].
[27] “Aereon 26.” [Online]. Available: http://aviadejavu.ru/Images6/JS/Janes76/1/239-
2.jpg. [Accessed: 23-Jan-2017].
[28] D. P. Horkheimer, “Ammonia – A Solution for Airships Demanding Rapid,” no.
September, 2005.
[29] T. Kuhn and H. Baier, “Multidisciplinary Design Methods for the Hybrid
Universal Ground Observing Airship ( HUGO ),” no. September, pp. 1–9, 2007.
[30] “ZMC-2.” [Online]. Available: https://en.wikipedia.org/wiki/ZMC-2. [Accessed:
24-Jan-2017].
[31] D. Graziosi, “Inflatable and Rigidizable Wing Components for Unmanned Aerial
Vehicles,” no. April, pp. 1–8, 2003.
[32] D. Fodaro, “Employ of the pneumatic structures in the Unconventional Airship
design,” no. May, pp. 1–7, 2007.
[33] “Aeronautics.” [Online]. Available:
http://www.1902encyclopedia.com/A/AER/aeronautics-06.html. [Accessed: 03-
Dec-2017].
[34] A. M. Akhmeteli and A. V. Gavrilin, “Layered Shell Vacuum Balloons,” US Patent
Application 11/517915, 2006.
[35] T. von Kármán and H. S. Tsien, “The buckling of thin cylindrical shells under axial
compression,” Journal of Aeronautical Sciences, no. 8, 1941.
[36] “FLanar.” [Online]. Available: http://mir.k156.ru/aeroplan/de_bausset_aeroplane-
03-1.html#a03-1-2016. [Accessed: 24-Jan-2017].
[37] L. M. Armstrong, “Aircraft of the lighter-than-air type,” US Patent 1.390.745,
1921.
[38] M. Michaelis and A. Forbes, “Vacuum vessels in tension,” vol. 45, no. 4, pp. 57–

Investigação Futura Conclusões e Investigação Futura 89
60, 1993.
[39] B. Lennon and S. Pellegrino, “Stability of Lobed Inflatable Structures,” American
Institute of Aeronautics & Astronautics, 2000.
[40] S. A. Barton, “Stability Analysis of an Inflatable Vacuum Chamber,” pp. 1–18,
2009.
[41] “Standard Atmosphere.” International Organization for Standardization. ISO
2533:1975, 1975.
[42] “Atmosphere of Earth.” [Online]. Available:
https://en.wikipedia.org/wiki/Atmosphere_of_Earth#/media/File:Comparison_US
_standard_atmosphere_1962.svg. [Accessed: 20-Jan-2017].
[43] S. A. Barton, “Airship Buoyancy Control Using Inflatable Vacuum Chambers,”
vol. 50, no. 4, 2013.
[44] “Dassault Systemes.” [Online]. Available:
https://en.wikipedia.org/wiki/Dassault_Systèmes. [Accessed: 09-Dec-2017].
[45] “Comparison of implicit and explicit procedures.” [Online]. Available:
http://mashayekhi.iut.ac.ir/sites/mashayekhi.iut.ac.ir/files/u32/presentation4.pdf.
[Accessed: 09-Jan-2017].
[46] E. McKENZIE, “Vacuum Vessels in Tension,” Durban, 1999.
[47] H. Zhai and A. Euler, “Material Challenges for Lighter-Than-Air Systems in High
Altitude Applications,” no. September, pp. 1–12, 2005.
[48] K. Mcdaniels, R. J. Downs, H. Meldner, C. Beach, and C. Adams, “High Strength-
to-Weight Ratio Non-Woven Technical Fabrics for Aerospace Applications,” no.
May, pp. 1–9, 2009.
[49] “Electric Field.” [Online]. Available: http://hyperphysics.phy-
astr.gsu.edu/hbase/electric/elesph.html. [Accessed: 02-Feb-2017].
[50] O. Elgerd, Basic Electric Power Engineering. Addison-Wesley, 1977.
[51] D. Bell, “Electrostatic Evascuated Insulating Sheet,” US Patent 5,284,692, 1994.
[52] B. Hilczer, Electrets. Elsevier Science Publishing Co, 1986.
[53] K. Kirjavainen, “Electromechanical film and procedure for manufacturing same,”
US Patent 4,654,546, 1987.
[54] D. Griffiths, Introduction to Electrodynamics. Prentice-Hall, 1999.
[55] G. Weston, Ultrahigh Vacuum Practice. Butterworth & Co., 1985.
[56] “Charging by induction.” [Online]. Available:
https://openclipart.org/detail/232784/physic-diagram-charging-by-induction.
[Accessed: 02-Feb-2017].
[57] Dakhin, “Multi-layer sound insulation barrier,” US Patent 5,111,616, 1980.
[58] D. R. Porter and V. Ferguson, “Method and Apparatus for Stratospheric and Space
Structures,” US Patent 7,913,948 B2, 2011.
[59] L. A. Stiles and H. Schaub, “Electrostatic Inflation of Membrane Space
Structures,” no. August, pp. 1–15, 2010.


91
- Anexos -

92
A.1 – Modelação Rigidez Pneumática - ΔR=100mm
Geometria Não Deformada

A.1 – Modelação Rigidez Pneumática - ΔR=100mm 93
[MPa]
p=3bar
s/ vácuo
p=3bar
c/ vácuo
p=3bar
s/ vácuo
[MPa]
[MPa]

94
p=5bar
s/ vácuo
p=5bar
s/ vácuo
p=5bar
c/ vácuo
[MPa]
[MPa]
[MPa]
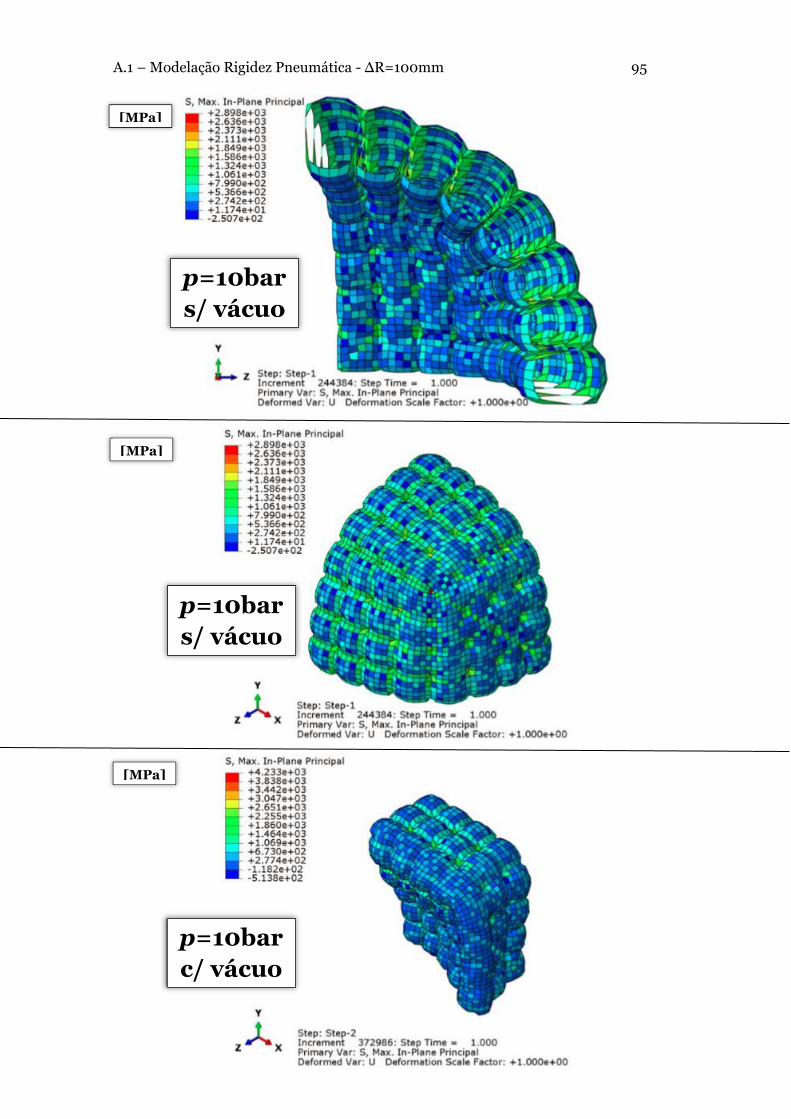
A.1 – Modelação Rigidez Pneumática - ΔR=100mm 95
p=10bar
s/ vácuo
p=10bar
c/ vácuo
p=10bar
s/ vácuo
[MPa]
[MPa]
[MPa]

96
p=11bar
s/ vácuo
p=11bar
s/ vácuo
p=11bar
c/ vácuo
[MPa]
[MPa]
[MPa]

A.1 – Modelação Rigidez Pneumática - ΔR=100mm 97
p=11bar
c/ vácuo
p=15bar
s/ vácuo
p=15bar
s/ vácuo
[MPa]
[MPa]
[MPa]
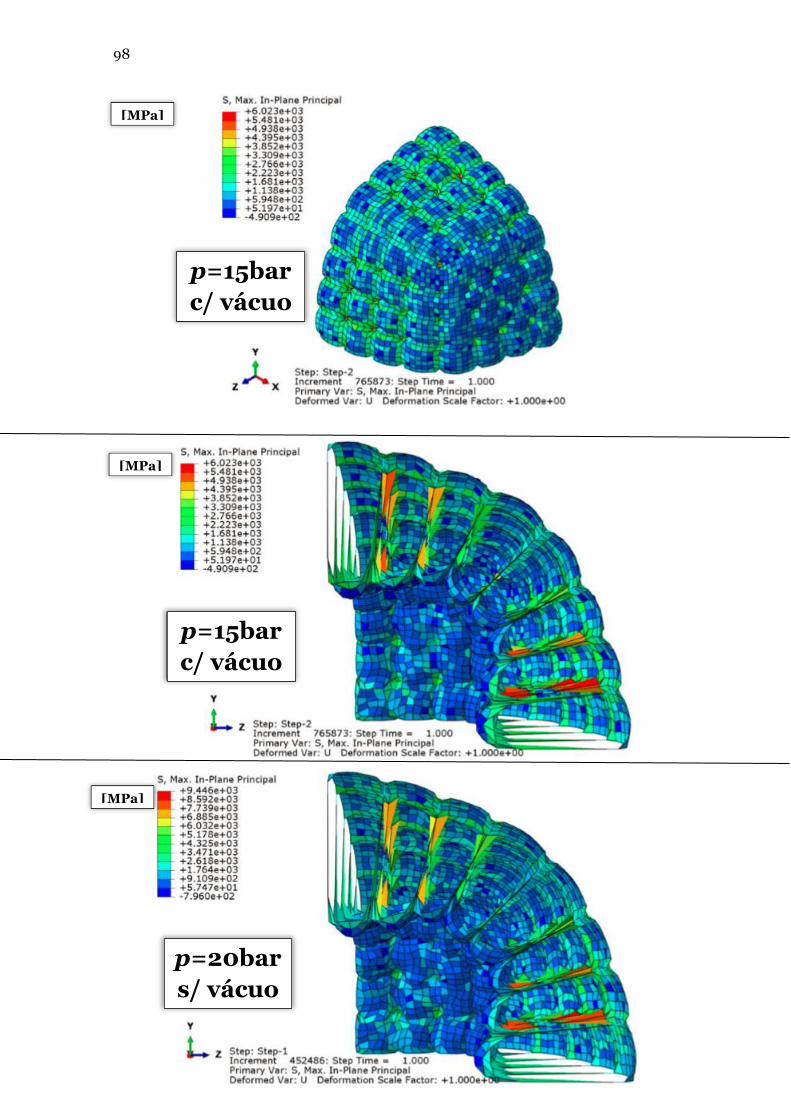
98
p=15bar
c/ vácuo
p=15bar
c/ vácuo
p=20bar
s/ vácuo
[MPa]
[MPa]
[MPa]

A.1 – Modelação Rigidez Pneumática - ΔR=100mm 99
p=20bar
s/ vácuo
p=20bar
c/ vácuo
p=20bar
c/ vácuo
[MPa]
[MPa]
[MPa]

100
p=3bar [MPa]
p=5bar [MPa]
p=10bar [MPa]

A.1 – Modelação Rigidez Pneumática - ΔR=100mm 101
p=11bar [MPa]
p=15bar [MPa]
p=20bar [MPa]

102
p=3bar [mm]
p=5bar [mm]
p=10bar [mm]

A.1 – Modelação Rigidez Pneumática - ΔR=100mm 103
p=15bar [mm]
p=20bar [mm]
p=11bar [mm]

104
A.2 – Modelação Rigidez Pneumática - ΔR=700mm
Geometria Não Deformada
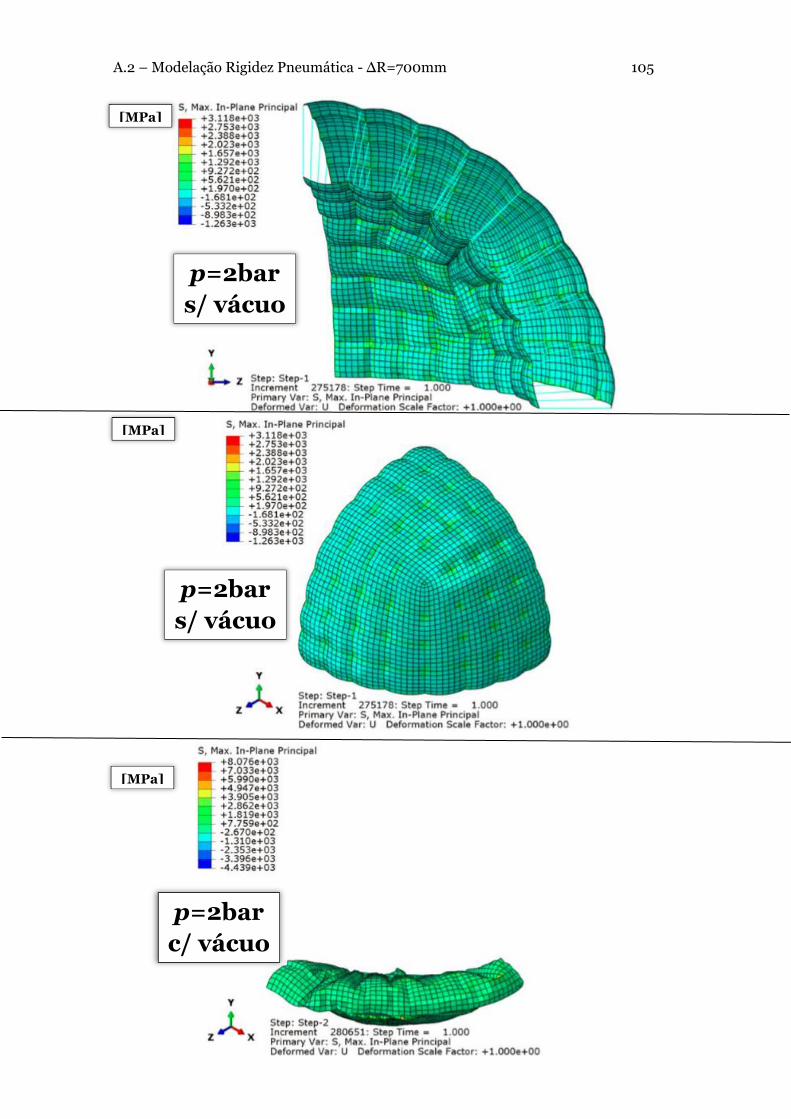
A.2 – Modelação Rigidez Pneumática - ΔR=700mm 105
p=2bar
s/ vácuo
p=2bar
c/ vácuo
p=2bar
s/ vácuo
[MPa]
[MPa]
[MPa]

106
p=3bar
s/ vácuo
p=3bar
s/ vácuo
p=3bar
c/ vácuo
[MPa]
[MPa]
[MPa]
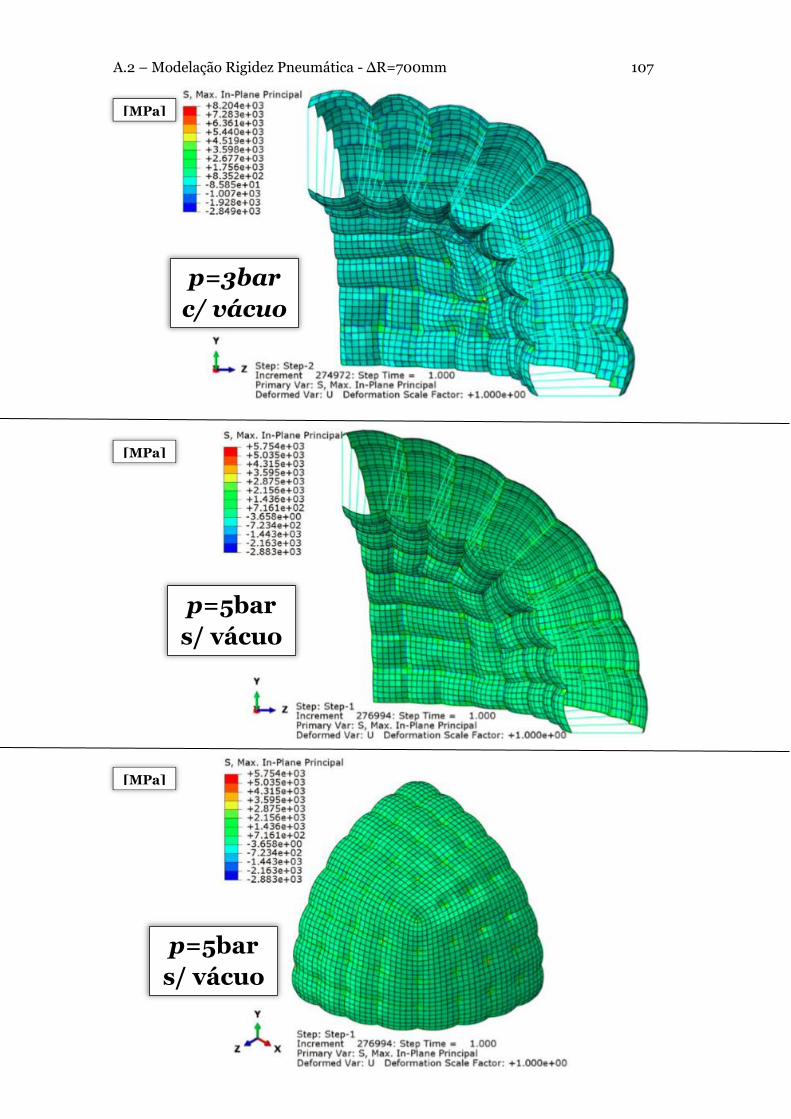
A.2 – Modelação Rigidez Pneumática - ΔR=700mm 107
p=5bar
s/ vácuo
p=5bar
s/ vácuo
p=3bar
c/ vácuo
[MPa]
[MPa]
[MPa]
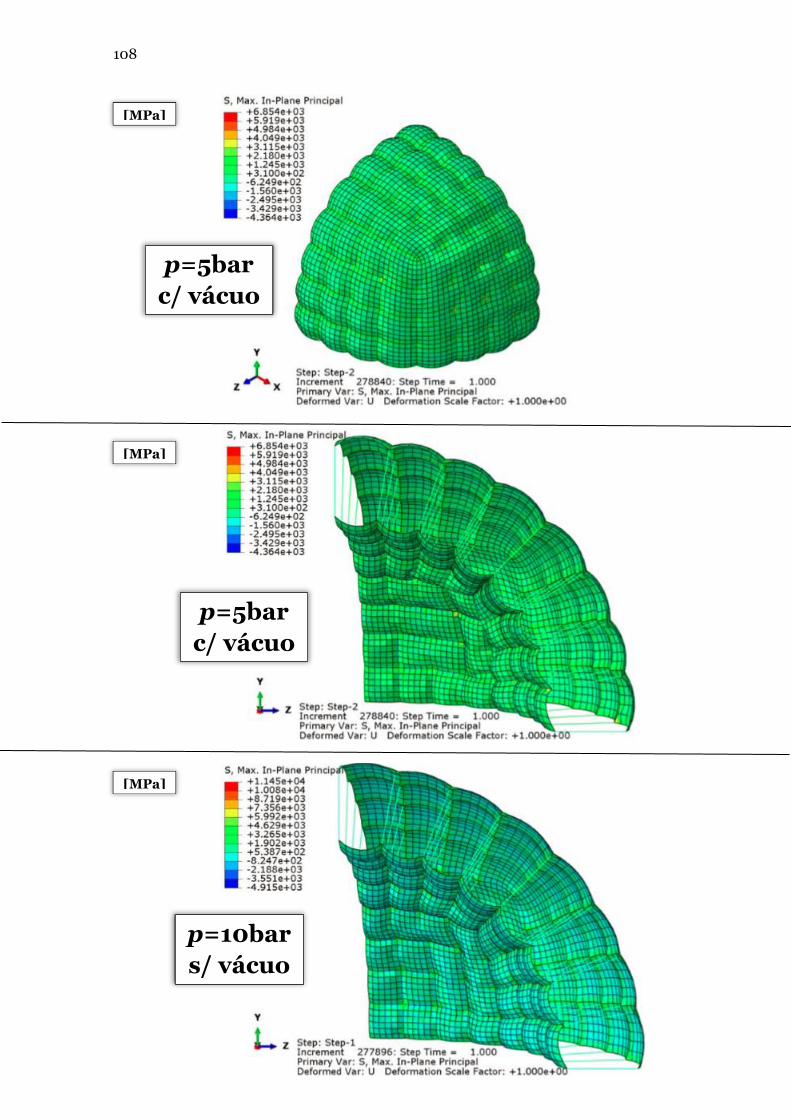
108
p=5bar
c/ vácuo
p=5bar
c/ vácuo
p=10bar
s/ vácuo
[MPa]
[MPa]
[MPa]

A.2 – Modelação Rigidez Pneumática - ΔR=700mm 109
p=10bar
s/ vácuo
p=10bar
c/ vácuo
p=20bar
c/ vácuo
[MPa]
[MPa]
[MPa]

110
p=2bar [MPa]
p=3bar [MPa]
p=5bar [MPa]

A.2 – Modelação Rigidez Pneumática - ΔR=700mm 111
p=10bar [MPa]
p=2bar [mm]
p=3bar [mm]

112
p=5bar [mm]
p=10bar [mm]

A.3 – Modelação Eletrostática 113
A.3 – Modelação Eletrostática

114
s/esferas
centrais
c/27
esferas
centrais
c/36
esferas
centrais

A.3 – Modelação Eletrostática 115
R=2, s/
esferas
centrais
R=2, c/27
esferas
centrais

116
R=6, c/27
esferas
centrais
R=4, c/27
esferas
centrais
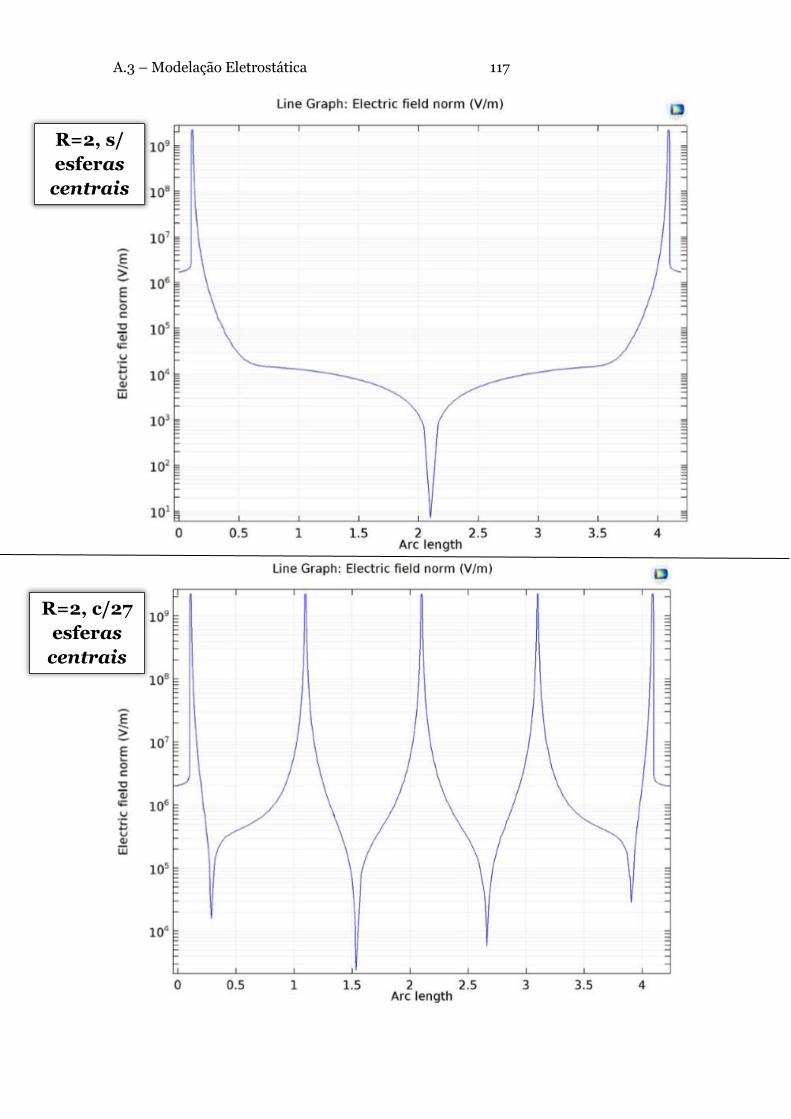
A.3 – Modelação Eletrostática 117
R=2, c/27
esferas
centrais
R=2, s/
esferas
centrais
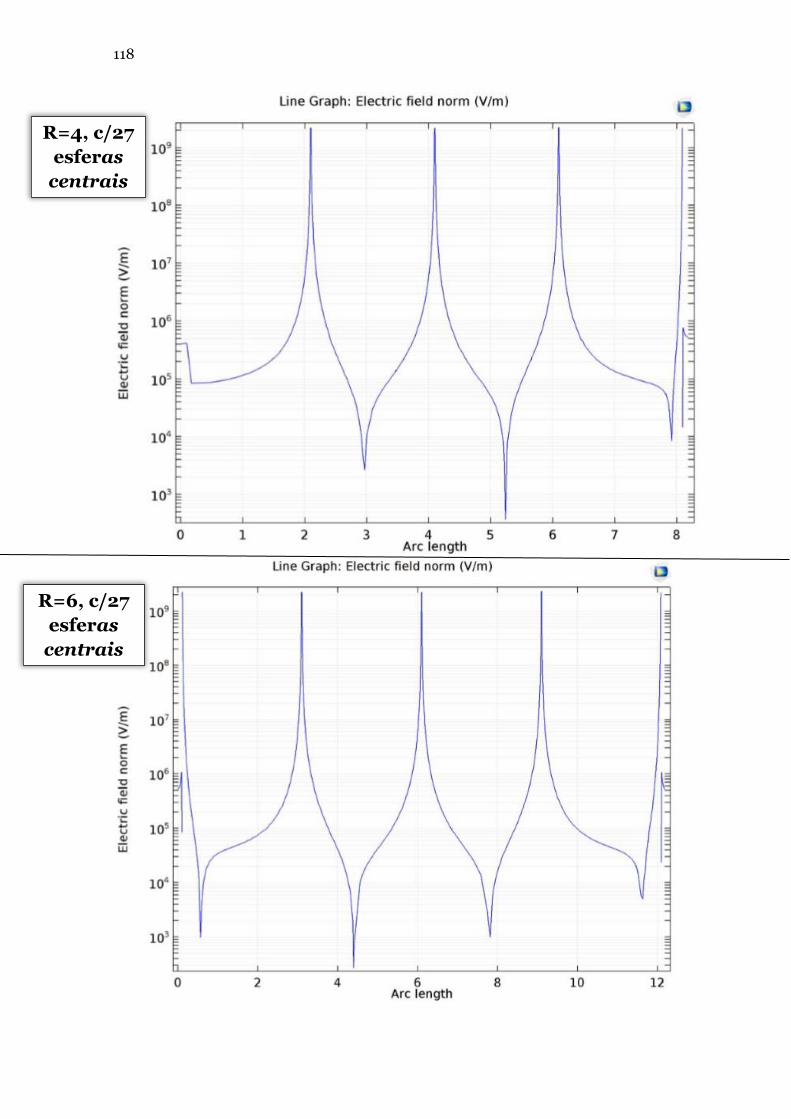
118
R=6, c/27
esferas
centrais
R=4, c/27
esferas
centrais

A.3 – Modelação Eletrostática 119
120


















