Faça Seu Automodelo Rádio Controlado – Com Pic 12f675 _ Larios.tecnologia
10
FAÇA SEU AUTOMODELO RÁDIO CONTROLADO – COM PIC 12F675 Gostaria de montar um pequeno carrinho de controle remoto? Com controle de direção, velocidade para frente/trás regulável a PWM? Com 2 botões para acionar uma ‘buzina’ e ‘iluminação’? Muitos leitores gostam de montar seus próprios veiculos controlados por RF. Muitos tem este hobby em alto grau de sofisticação. Este protótipo com certeza, não irá atender a quem já brinca a muitos anos com controle remoto. Mas, poderá ser uma iniciação a quem gostaria de começar com algo bem simples. Digamos que a simplicidade é marcante, apesar do muito que a montagem pode oferecer. Veja o esquema abaixo: Usando um pequeno pic 12F675 no TX e outro no RX, podemos controlar, graças ao programa carregado neles, um motor de tração, em modo pwm de tensão e também um servo motor (de padrão de pulso = 1 a 2 ms), para acionar a direção do carrinho. Não vamos entrar no carácter descritivo da montagem mecânica, como fixação de rodas, tirantes, instalação de motores,etc., mas sim na parte eletrônica do Escrito por Claudio Larios em 18 de novembro de 2013 Deixe um comentário (36) Ir para comentários larios.tecnologia.ws Sistemas e Tecnologia da informação Início Comentários recentes Fórum Portfólio Procurar
-
Upload
adriano-luiz -
Category
Documents
-
view
36 -
download
6
description
Esquema de radio controle p seu carrinho
Transcript of Faça Seu Automodelo Rádio Controlado – Com Pic 12f675 _ Larios.tecnologia

13/04/2015 FAÇA SEU AUTOMODELO RÁDIO CONTROLADO – COM PIC 12F675 | larios.tecnologia.ws
http://larios.tecnologia.ws/iBlog/archives/4892 1/10
FAÇA SEU AUTOMODELO RÁDIO CONTROLADO – COM PIC 12F675
Gostaria de montar um pequeno carrinho de controle remoto? Com controle de direção, velocidade para
frente/trás regulável a PWM? Com 2 botões para acionar uma ‘buzina’ e ‘iluminação’?
Muitos leitores gostam de montar seus próprios veiculos controlados por RF. Muitos tem este hobby em alto
grau de sofisticação. Este protótipo com certeza, não irá atender a quem já brinca a muitos anos com
controle remoto. Mas, poderá ser uma iniciação a quem gostaria de começar com algo bem simples.
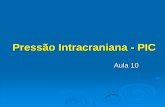
Digamos que a simplicidade é marcante, apesar do muito que a montagem pode oferecer. Veja o esquema
abaixo:
Usando um pequeno pic 12F675 no TX e outro no RX, podemos controlar, graças ao programa carregado
neles, um motor de tração, em modo pwm de tensão e também um servo motor (de padrão de pulso = 1 a
2 ms), para acionar a direção do carrinho. Não vamos entrar no carácter descritivo da montagem
mecânica, como fixação de rodas, tirantes, instalação de motores,etc., mas sim na parte eletrônica do
Escrito por Claudio Larios em 18 de novembro de 2013 Deixe um comentário (36)Ir para comentários
larios.tecnologia.ws Sistemas e Tecnologia da informação
Início Comentários recentes Fórum PortfólioProcurar

13/04/2015 FAÇA SEU AUTOMODELO RÁDIO CONTROLADO – COM PIC 12F675 | larios.tecnologia.ws
http://larios.tecnologia.ws/iBlog/archives/4892 2/10
dispositivo. Cada um poderá então escolher como fará seu próprio protótipo. Talvez possa aproveitar um
carrinho quebrado e refazer a parte eletrônica, ou começar do zero, fazendo um inteiro projeto da
estrutura e aparência.
Conforme pode ser observado, o Pic fornece 2 saídas separadas para PWM, modo tensão: 1 no pino 3 e
outra no pino 2. A ideia é fazer o acionamento para frente em uma e para trás em outra. No TX, quando o
potenciômetro se encontra na posição central de seu cursor, teremos a condição de desligado no motor de
tração. Acionando o potenciômetro para aumentar irá gerar PWM na saída do pino 2 proporcional ao
movimento do cursor. Em sentido contrário, irá gerar no pino 3. Portanto, no TX, teremos que manter o
potenciômetro centrado por molas para dar exatamente a metade da sua resistência ôhmica.
Assim, em uso, mover a alavanca ligada ao potenciômetro para trás deverá produzir movimento do
carrinho para trás (ré) , soltando o acionamento tem que desligar o carrinho. Se acionarmos para frente,
deverá produzirá movimento para frente.
Com respeito a direção, o servo controle do tipo pwm 12ms, deverá acionar via tirante, a direção do
carrinho. No TX, deverá ter um potenciômetro também centrado, de maneira que acionando para
esquerda, o carrinho vá para esquerda. No meio, o carrinho deverá seguir em frente. E acionando para
direita no TX, deverá virar a direção para direita no carrinho.
Os potenciômetros poderão ser adaptados com uso de alavancas ou engrenagens, ou usar um comercial
retirado de carrinho de controle da sucata.
Os 2 botões poderão ser usados em modo ‘retenção’ para acionar leds que imitem os ‘faróis’ e também
ligar um pequeno ‘buzzer’ para imitar uma ‘buzina’, sendo este botão em modo ‘pulso’. O modo pode ser
trocado individualmente por alterar no arquivo c do receptor e recompilar.
Importante lembrar, que deverá ser separada a alimentação do PIC e receptor da alimentação do servo e
motor de tração, uma vez que estes produzem muita interferência e ruídos elétricos na alimentação de
tensão aos quais estão ligados. Isto pode ser feito usando pilhas grandes para o motor e uma pequena
bateria de 9 volts com um regulador de tensão 7805, para obter os 5 volts do PIC.
Com respeito aos transistores da saída do motor de tração, foi optado o par BC548/558 por serem
pequenos e de facil montagem. Mas se optar usar um motor de corrente maior que a corrente máxima
suportada por eles, então poderá substituilos por outros de maior potência, como os TIP41/42, por
exemplo.
Um detalhe importante, é que foi usado um número serial no TX que tem que ser igual no RX, para
funcionar. Isto impede que o receptor funcione com outro TX com a mesma montagem (exceto se tiver o
mesmo serial, ou seja, um ‘clone’). Mas não é garantia de funcionamento, se vários conjuntos forem
montados e ligados próximos. Poderão interferir entre si. Use canais de frequência diferentes se optar por
montar vários pares diferentes.
OBS. Esta montagem foi testada apenas em placa de protoboard, sujeita a bugs ainda não observados. Está
sendo fornecido os arquivos que poderão ser alterados conforme a necessidade do hobbysta.
Segue pasta zipada com os arquivos do TX e RX (em “C”), já atualizados ( em 30112013) com a nova
versão para o receptor. No anterior, o servo apresentava trepidações em algumas situações e o software
foi modificado para corrigir isto. Nesta pasta, encontraremos o arquivo ‘C’ com possibilidade de ser
compilado em modo normal para saída do servo ( 12ms , sendo 45° para esquerda e 45° graus para
direita) ou modo ‘estendido’ (7502750 useg, sendo 90º para esquerda e 90° para direita). Também ,
poderá obter os arquivos hex já compilado para as 2 versões e do transmissor:

13/04/2015 FAÇA SEU AUTOMODELO RÁDIO CONTROLADO – COM PIC 12F675 | larios.tecnologia.ws
http://larios.tecnologia.ws/iBlog/archives/4892 3/10
← RECEPTOR GENERICO FLEX – UM PROGRAMA PARAVARIAS OPÇÕES DE CIRCUITOS INTEGRADOS – COMPIC 12F675/629
FAÇA UM SIMPLES ALARME RESIDENCIAL – COMCONTROLE REMOTO RF E PIC 12F675 →
cr_automodelo_arquivos
Manuais:
ServoMotor
Modulação por Pulso
PIC12F675
Curiosidades:
O “endereço” perfeito da Terra
A arca de Noé e a arquitetura naval
O túnel rodoviário mais comprido do mundo
Quando a montanha tentou juntarse ao mar
Há algo de errado com o clima?
Use a tecnologia de modo respeitoso e econômico
Carros – no presente e no passado
Gás natural — energia para o lar
Outros assuntos:
Como ser feliz no casamento?
Como ser um bom ouvinte
Como lidar com as dívidas
Como resolver problemas no casamento
Aprenda a perdoar
Como lidar com os sogros
Como criar filhos responsáveis
Como administrar o seu dinheiro
Ensine valores morais a seus filhos
Como evitar ferir com palavras?
Como tratar seu cônjuge com respeito?
Até o próximo artigo!!!
Controle Remoto PWM, Microcontroladores, Programas PIC em "C", Recreativos
36 Comentários.Deixe um Comentário
Ata 24 de março de 2015 em 09:09
Oi Larios, pode, se você tem tempo para escrever software em .asm !?.
Obrigado pela resposta.
Faça login para responder

13/04/2015 FAÇA SEU AUTOMODELO RÁDIO CONTROLADO – COM PIC 12F675 | larios.tecnologia.ws
http://larios.tecnologia.ws/iBlog/archives/4892 4/10
Claudio Larios 24 de março de 2015 em 16:19
Olá Ata!Escrever código em asm é pelo menos 10 vezes mais demorado. Os compiladores ‘c’geram um arquivo chamado ‘list’ que mostra como foi montado em assembly.Talvez isto possa ajudar você a entender o código gerado.Cláudio
Faça login para responder
Ata 24 de março de 2015 em 18:18
Obrigado. Vou tentar.
Faça login para responder
gelmir pomatti 17 de fevereiro de 2015 em 22:22
larios tudo bem eu quero adaptar esse progeto em uma cadeira de rodas de um deficientemas sem controle remoto tem como fazer os comandos direto no pic
Faça login para responder
Claudio Larios 18 de fevereiro de 2015 em 15:54
Olá Gelmir!Na realidade, o que você necessita seria um sistema de controle de motor de tração(com reversão) incluindo um sistema de direção esquerda e direita. O sistema em sídependerá do tipo de motor a ser usado (DC,AC,com escovas, sem escovas…) epara projetálo exigirá conhecimentos de mecânica, elétrica e eletrônica. Existemmuitas empresas que fornecem kits para adaptar motores as cadeiras convencionais,de uma forma rápida e sem os estresses de um projeto mau sucedido.Cláudio
Faça login para responder
gelmir pomatti 1 de março de 2015 em 20:13
ola tudo bem eu so tecnico em eletronica e professor de eletronica senaitenho o progeto pronto com motor dc o mesmo de limpador de motor depasso
Faça login para responder
Claudio Larios 10 de março de 2015 em 21:46
Olá Gelmir!Como funciona este seu projeto? Com 2 motores? Ou 1 único motor?Motor de corrente continua com escovas? Qual tensão de trabalho? Usajoystick para controlar (dois potenciômetros para função frente/tras eesquerda/direita)? Velocidades por contatores e resistor de velocidadesou pwm? Tenho curiosidade em conhecer o sistema.Cláudio
Faça login para responder
Ata 28 de janeiro de 2015 em 18:28
Parabéns, excelente trabalho. Parabéns a todos.
Faça login para responder
jose luiz 26 de dezembro de 2014 em 06:28
lario tudo bem? rapaz de todos o projeto seu que montei todos funcionaram bem,inclusivefiz uma adaptação deste automodelo usando uma ponte h com fet e um motor de levantarvidro de carro como surperservo para a direção e outra ponte h para tração e para teste dousei o testa servo com poteciometro para calibrar,resultado o automodelo ficou showmesmo.lario muito obrigado pelos projetos que desenvolvem que nos ajudam tornamosprofissionais.proximo desafio agora é montar o relogio para deficiente visual e aplicar norobô educativo valeu pelo seu esforço e bons trabalhos.
Faça login para responder
Claudio Larios 26 de dezembro de 2014 em 10:05Faça login para responder

13/04/2015 FAÇA SEU AUTOMODELO RÁDIO CONTROLADO – COM PIC 12F675 | larios.tecnologia.ws
http://larios.tecnologia.ws/iBlog/archives/4892 5/10
Olá José!Muito legal a sua utilização! É isto mesmo! Achar aplicações interessantes para asidéias deste e de outros sites realmente pode ajudar no desenvolvimento profissionalde quem deseja aprender a trabalhar com microcontroladores ou mesmo, comohobistas.Obrigado
Claudio
Joseanascimento 26 de agosto de 2014 em 11:56
Galera por enquanto funcional. Vou dar uma carga na bateria e botar para lenhar.Valeu
Faça login para responder
Joseanascimento 26 de agosto de 2014 em 11:59
Ah só complementando, utilizei os indutores no motor e também o capacitor de100nF na alimentação. isto é de supra importância para não resetar o PIC. Vai ai adica.O indutor para o servo até coloquei mais ele fritou e também não funcionava legal.
Faça login para responder
Joseanascimento 25 de agosto de 2014 em 19:00
Uhm, comprei agora a tarde os indutores. Espetei no circuito. Um muito bom porenquanto. Só o de 220uH é que saiu fumaça, ai retirei. Mesmo assim o PIC não resetou.farei teste com o carro montado e depois se ele por acaso continuar resetando ai usareiuma outra alimentação exclusiva para o PIC e para o RX. Vamos ver no que dá qq coisadepois posto o resultado.Cláudio onde podemos inserir fotos (imagens) no blog ? Valeu galera
Faça login para responder
Claudio Larios 26 de agosto de 2014 em 11:51
Olá Joseanascimento! Que bom, não é mesmo! Quanto ao indutor sair fumaça, vocêdeve lembrar que indutores são classificados pela indutância e também pelacorrente de trabalho. Os pequenos não suportam mais que 100 mA e se aquecem secolocados em circuitos com alto consumo e podem até interromper. Verei com oadministrador do site sobre o assunto de inserir fotos e imagens.Cláudio
Faça login para responder
Fernando Ventura 25 de agosto de 2014 em 09:32
Caro Carlos Larios, seria possível usar o sinal tx e rx na própria rede que alimenta oscircuitos por exemplo, em uma maquete de ferreomodelismo a alimentação são nospróprios trilhos, o tx ficaria em um painel e o rx na maquete, simulei no proteussubstituindo os rádios por um fio e funcionou, mas se eu pudesse utilizar os própriostrilhos então poderia colocar dentro das locomotivas. Agradeço sua atenção.
Faça login para responder
Claudio Larios 25 de agosto de 2014 em 17:11
Olá Fernando! Parece que você deseja mandar o sinal junto com a alimentação dobrinquedo. Eu não tenho nenhum circuito ou ideia para isto. Em todo caso, teráque ter uma frequência moduladora (talvez 100khz) e bobinas que isolem a rf até olocal onde será captado. Mas o grande problema será a interferência dos motores naalimentação. Vai ter uma tarefa difícil, eu suponho!Cláudio
Faça login para responder
Joseanascimento 24 de agosto de 2014 em 20:31
Segunda parte do comentário:Inseri uma bateria de 7,4V no receptor, claro para o pic e o RX baixei (7805) para 5V.
Faça login para responder

13/04/2015 FAÇA SEU AUTOMODELO RÁDIO CONTROLADO – COM PIC 12F675 | larios.tecnologia.ws
http://larios.tecnologia.ws/iBlog/archives/4892 6/10
Funciona quase tudo, só o motor que só vai para uma posição. Coloquei um motor menore ele a principio girou uma vez e depois parou só gira para um lado. O resto está bacana,liga os leds, (canal 6 e 7) controla a direção através do joystick mais o motor esta medando dor de cabeça.Bom a princípio havia usado o BC 556 (segundo datasheet tensão um pouco maior naalimentação). Não estou usando o capacitor de 100nF no pino 1 e em paralelo com omotor e também o indutor de 10uH. Será isto ? Dois testes que fiz e que me levaram aconfirmar que o circuito está correto. Retirei o PIC da placa. Peguei um jamper e inseri sinal(5V) no pino 2 (motor girou para esquerda). Inseri sinal no pino 3 (motor direita).Conclusão erro na montagem da ponte não é. Segundo teste. Coloquei o PIC ma placa einterliguei os pinos 1, 8 e 4. Depois peguei somente do pino 2 somente e ele girou paraesquerda. Depois o pino 3 ele girou para direita. Conclusão: Está gerando as duas PWM(pino 2 e 3). Descobri uma agora mesmo. Regravei o PIC, coloquei na placa de novo e funcionou para os dois lados. Quando espetei o servo e agora é falta mesmo do indutor? será que o PIC está resetando. Ajuda please. Valeu galera.
Claudio Larios 25 de agosto de 2014 em 17:16
Olá Joseanascimento!Você deverá usar alimentação separada para os motores e para o pic, pois produzreset com os picos induzidos no motor. Poderá tentar usar filtros LC na alimentação,para melhorar a emissão de interferência conforme sugerido no esquema.
Cláudio
Faça login para responder
Joseanascimento 24 de agosto de 2014 em 19:49
Boa noite Claudio,
Este projeto será embasado no meu carro RC.Já arranquei toda parte elétrica, deixando só o motor principal.Vamos aos comentários.
Usei um servo motor para fazer a direção (até aí tudo tranquilo).Os faróis traseiro e a milha ficarão no pino 7 (L/D), utilizei um resistor e um BC548 parachavear o sinal, estava com medo do PIC não suportar uma vez que utilizei 2 leds piranha e2 led vermelho retangular (até ai beleza).Para o farol usei o pino 6 (flash) ou pulso (beleza).Vamos ao transmissor depois comentamos o motor (que tem algum gato).O receptor desmontei um joystick do PS2, deixandoo inteiro porém com uma grandemudança interna. Usei uma bateria de 9V recarregável e com uma chave alavanca tenhocarregamento e utilização. Outra hora explico melhor aos amigos do fórum. Alimentei com9V porém usei um 78L05 para regular a tensão para o PIC. alimentei os potenciômetros(um fará o controle do servo e o outro do motor). Tentarei postar as fotos e depois agrande dor de cabeça, mais devo admitir está ficando show.
José Antonio
Faça login para responder
jose luiz 4 de julho de 2014 em 07:55
lario muito bom dia espero está gosando de muitas alegrias.lario por ventura voce não possui algo relacionado ao circuito eletronico interno deservomotor utilizando pic? ou algo parecido?obrigado.
Faça login para responder
Claudio Larios 4 de julho de 2014 em 13:28
Olá José! Infelizmente não tenho. Mas deve haver muita informação na Internetsobre isto. Já fez uma pesquisa?Claudio
Faça login para responder
niiniis 4 de julho de 2014 em 01:48
Claudio! ah como alterar o pot para valores maiores do tipo10,30,50k? pois aki em minhacidade com esse valor é bem dificil
Faça login para responder

13/04/2015 FAÇA SEU AUTOMODELO RÁDIO CONTROLADO – COM PIC 12F675 | larios.tecnologia.ws
http://larios.tecnologia.ws/iBlog/archives/4892 7/10
Claudio Larios 4 de julho de 2014 em 14:02
Olá Niiniis! Experimente! “Quem não tem cão caça com gato”. De preferência avalores entre 2k a 50k.Cláudio
Faça login para responder
jose luiz 25 de junho de 2014 em 14:40
cleber boa tarde:obrigado pelo esforço e enteresse de me ajudar,visto que estou querendoutilizar este motor para funcionar como servomotor de potencia mais elevada,é um circuitoque na verdade ainda não fiz caso voce tenha algo desta natureza e queira humildimenteme ajudar ficarei aguardando.no mais um forte abraço.
Faça login para responder
jose luiz 22 de junho de 2014 em 15:11
lario boa tarde: tenho usado este circuito pwm com reversão com otimos resultado,e surgiuuma nova ideiaeu gostaria de controlar um motor de levantar vidro que deve ser em torno de uns 20amppretendo utilizar cerca de 12 mosfet há alguma restriçao neste caso? e quanto a usar omesmo circuito?como se fosse um módulo pwm com reversão!não irei usar o radio tx nemrx vou ligar um pic direto no outro.desde ja agradeço pela vossa atenção.
Faça login para responder
Claudio Larios 23 de junho de 2014 em 09:29
Olá José Luis!Você disse ’12 Mosfets’? Vai ficar enorme sua montagem! Experimente adquirir osMosfet com baixa resistência de drenosupridouro (ex. 2sk3703) que suportam altascorrentes. Você monta e testa. E se der certo, retorna com um comentário.Cláudio
Faça login para responder
cleber 24 de junho de 2014 em 14:16
Boa tarde José, esses motores do levantador de vidro dependendo da carga aplicadaele pode chagar até 22Amp, mas isso com 12Nm em seu eixo e para 6Nm acorrente será por volta de 12 Amp.E´so para lhe dar uma base sobre a corrente encima desses motores. espero quetenha lhe ajudado.
Faça login para responder
cleber 24 de junho de 2014 em 14:19
Ah outra coisa esses motores geralmente tem uma chave termica dentro deles,para evitar que se queime com temperaturas altas,então se for para usalos paraficar funcionando por longo tempo ele vai parar de funcioar em algummomento, mas a chave termica retorna ao fechamento assim que esfria.
Faça login para responder
jose luiz 30 de novembro de 2013 em 16:46
lario agora fiquei alegre com os resultados que obtivo,fiz varios testes e não apresentarammais a trepidaçao gravei tanto hex de 45g como o de 90g ambos apresentaram os mesmosresultados otimos.o desempenho de partida são exelentes,o angulo de abertura do servotambem muito bacana. valeu lario muito thanks rsrsrsr
Faça login para responder
Claudio Larios 30 de novembro de 2013 em 21:28
Olá José! Obrigado por retornar os resultados e suas observações.Cláudio
Faça login para responder
jose luiz 28 de novembro de 2013 em 15:00Faça login para responder

13/04/2015 FAÇA SEU AUTOMODELO RÁDIO CONTROLADO – COM PIC 12F675 | larios.tecnologia.ws
http://larios.tecnologia.ws/iBlog/archives/4892 8/10
Deixe um Comentário
Você precisa fazer o login para publicar um comentário.
lario boa tarde.quero informar que montei este circuito de automodelo,que por sinal temum bom desenpenho na partida em ambos sentido frente e ré,setas e buzina tambemresponde muito bem.somente o servo está trepidando.eu fiz teste com os 2 hex doreceptor,em um o servo abre cerca 45g para cada lado o outro abre o dobro 9og de cadalado porem em ambos os casos ele trepida help us.
Claudio Larios 29 de novembro de 2013 em 06:41
Olá José! Obrigado pelo retorno. Assim que tiver uma oportunidade, irei ver isto.Cláudio
Faça login para responder
Claudio Larios 29 de novembro de 2013 em 16:54
Olá José! Sobre a questão de trepidar , experimente colocar um pequeno indutor de220 microHenrys em série com a alimentação do servo. Lembrese de usar umaalimentação separada para o pic/ receptor e outra para o servo/ motores, visto queestes causam picos que resetam o pic e causam a ‘ trepidação’.Cláudio
Faça login para responder
Claudio Larios 30 de novembro de 2013 em 13:22
Olá José! Por favor, use o novo código já corrigido no artigo, com link aqui. Oanterior código, em algumas posições do potenciômetro, realmente apresentavatrepidação exagerada no servo. Aguardo o seu retorno…Cláudio
Faça login para responder
edmilson 22 de novembro de 2013 em 12:19
Olá Claudio ainda nw montei este controle remoto mas fika ai uma dica que tbm é minhaduvida ao invez de usar a ponte com transistor nw poderiamos usar o CI L293.
Obrigado e parabens pelo projeto
Faça login para responder
Claudio Larios 22 de novembro de 2013 em 15:35
Olá Edimilson! Fica a critério do hobista esta escolha.Cláudio
Faça login para responder
Categorias
Selecionar categoria
Licenciamento
Este obra de http://blog.larios.tecnologia.ws estálicenciado com uma Licença Creative CommonsAtribuiçãoCompartilhaIgual 4.0 Internacional.
Feed RSS

13/04/2015 FAÇA SEU AUTOMODELO RÁDIO CONTROLADO – COM PIC 12F675 | larios.tecnologia.ws
http://larios.tecnologia.ws/iBlog/archives/4892 9/10
Mapa de visitas
Muito obrigado a todos os que nos ajudaramcom doações no ano de 2014. Conseguimosquase 50% da meta.
Temos um custo aproximado de R$350 por anopara manter este site.No ano corrente de 2015, nós já conseguimosR$50 em doações.
Obrigado mais uma vez!
Temas comuns
12F629 12F675 16F628A64bits Alarme ASP.NET ATMEGA8 C#CAML Consultoria Content Types CURSOR DataGridDimmer DSN ECM Empregos error code 3621Fechadura GED Groupping
JavaScript Lexmark MOSS2007 O.O PeopleEditor Rollup
Sharepoint Sharepoint DesignerSorocaba Soundex SPList SPQuery SQLSERVER STORED PROCEDURE SYSWOW64VB.NET VS2008 Webservice Windows XPWorkflow WSS 3.0 x656de XML FrameworkXOML
Últimas atividades do Fórum
Re: Fonte para bancada by: Fernando Ventura
April 4, 2015, 16:42
Re: Fonte para bancada by: Fernando Ventura
April 1, 2015, 15:15
7159 visitssince 14 Mar 2015

13/04/2015 FAÇA SEU AUTOMODELO RÁDIO CONTROLADO – COM PIC 12F675 | larios.tecnologia.ws
http://larios.tecnologia.ws/iBlog/archives/4892 10/10
Re: Fonte para bancada by: Guest
March 31, 2015, 13:58
Fonte para bancada by: Fernando Ventura
March 31, 2015, 09:31
Re: tone control by: Guest
March 1, 2015, 11:58
Re: tone control by: Guest
February 21, 2015, 17:04
Meta
Registrarse
Login
Posts RSS
RSS dos comentários
WordPress.org
Copyright © 2015 larios.tecnologia.ws | Powered by zBench and WordPress